XSLT (eXtensible Stylesheet Language Transformation) Laurea Magistrale in Informatica.
description

Università di Milano-BicoccaLaurea Magistrale in Informatica
Corso di
APPRENDIMENTO E APPROSSIMAZIONE
Lezione 6 - Reinforcement Learning
Prof. Giancarlo Mauri

Agenda
Reinforcement Learning Scenario Dynamic Programming Monte-Carlo Methods Temporal Difference Learning

Reinforcement Learning Scenario
Agent
Environment
state st
st+
1
rt+
1
reward rt action at
s0a0
r1s1
a1
r2
s2a2
r3Goal: Learn to choose actions at that
maximize future rewards r1+r2+ 2r3+…
where 0< <1 is a discount factor
s3

Reinforcement Learning Scenario
Some application domains Learning to choose actions Robot learning to dock to a battery station Learning to choose actions to optimize a factory output
Learning to play Backgammon Characteristics
Delayed reward No direct feedback (error signal) for good and bad actions
Opportunity for active exploration Possibility that state is only partially observable

Markov Decision Process (MDP)
Finite set of states S Finite set of actions A At each time step the agent observes state stS and
chooses action atA(st) Then receives immediate reward rt+1
And state changes to st+1
Markov assumption : st+1 = (st,at) and rt+ 1= r(st,at) Next reward and state only depend on current state st and action at
Functions (st,at) and r(st,at) may be non-deterministic
Functions (st,at) and r(st,at) not necessarily known to agent

Learning Task
Execute actions in the environment, observe results and Learn a policy
t(s,a) : S A
from states stS to actions atA that maximizes the expected reward
E[rt+rt+1+ 2rt+2+…]
from any starting state st
NOTE: 0<<1 is the discount factor for future rewards Target function is t(s,a) : S A But there are no direct training examples of the form <s,a>
Training examples are of the form <<s,a>,r>

State Value Function
Consider deterministic environments, namely (s,a) and r(s,a) are deterministic functions of s and a.
For each policy (s,a) : S A the agent might adopt we define an evaluation function:
V(s) = rt+rt+1+ rt+2+…= i=0 rt+ii
where rt, rt+1,… are generated by following the policy from start state s
Task: Learn the optimal policy * that maximizes V(s)
* = argmax V(s) ,s

Action Value Function
State value function denotes the reward for starting in state s and following policy
V(s) = rt+rt+1+ rt+2+…= i=0 rt+ii
Action value function denotes the reward for starting in state s, taking action a and following policy afterwards
Q(s,a)= r(s,a) + rt+1+ rt+2+…= r(s,a) +V((s,a))

Bellman Equation (Deterministic Case)
V(s) = rt+ rt+1+ rt+2+…
= a(s,a) (r(s,a) + +V((s,a)))
s
V(s)
s’’s’’=(s,a2)
V(s’’)r=r(s,a2)
s’s’=(s,a1)
V(s’)r=r(s,a1)
(s,a2)
(s,a1)
Set of |s| linear equations, solve it directly or by policy evaluation

Example
G: terminal state, upon entering G agent obtains a reward of +100, remains in G forever and obtains no further rewards
Compute V(s) for equi-probable policy (s,a) = 1/|a|:
V(s3) = ½ V(s2) + ½ (100 + V(s6))
G
+100
+100s3s2
s6

Iterative Policy Evaluation
Instead of solving the Bellman equation directly one can use iterative policy evaluation by using the Bellman equation as an update rule
Vk+1(s) = a(s,a) (r(s,a) +Vk
((s,a))) The sequence Vk
is guaranteed to converge to V
V0=0V
0=0V0=0
V0=0 V
0=0 V0=0
V1=0V
1=33V1=0
V1=0 V
1=0 V1=50
V2=0V
2=33V2=15
V2=0 V
2=25 V2=50
V3=0V
3=45V3=15
V3=18 V
3=25 V3=61
V4=0V
4=45V4=29
V4=18 V
4=38 V4=61
V50=0V
50=66V50=52
V50=49 V
50=57 V50=76
=0.9

Bellman Equation (Deterministic Case)
Q(s,a) = r(s,a) + a’((s,a),a’) Q((s,a),a’)
sQ(s,a)
s’s’=(s,a)
Q((s,a),a3)
r=r(s,a)Q((s,a),a2)
Q((s,a),a1)

Iterative Policy Evaluation Bellman equation as an update rule for action-value function:
Qk+1(s,a) = r(s,a) + a’((s,a),a’) Qk
((s,a),a’)
=0.9 0
G
0
0
0
00
0
0
0
0
0 00
0
G
100
100
0
00
0
0
0
0
0 00
0
G
100
100
0
450
0
0
30
0
0 300
0
G
100
100
23
4523
0
0
30
13
13 3023
0
G
100
100
23
5523
16
16
41
13
13 4123
0
G
100
100
34
5534
16
16
41
26
26 4134
0
G
100
100
52
6952
44
44
60
47
47 6052

Optimal Value Functions
V*(s) = max V(s)
Q*(s,a) = max Q(s,a)
Bellman optimality equations V(s) = maxa Q*(s,a)
= maxa ( r(s,a) +V((s,a)) ) Q(s,a) = r(s,a) + V*((s,a)))
= r(s,a) +maxa’ Q((s,a),a’)

Policy Improvement
Suppose we have determined the value function V for an arbitrary deterministic policy .
For some state s we would like to know if it is better to choose an action a(s).
Select a and follow the existing policy afterwards gives us reward Q(s,a)
If Q(s,a) > V then a is obviously better than (s)
Therefore choose new policy ’ as
’(s)=argmaxa Q(s,a) = argmaxa r(s,a)+V((s,a))

Example
’(s)=argmaxa r(s,a)+V((s,a))
V=0V=71V=63
V=56 V=61 V=78r=100
r=100
(s,a)=1/|a|
V’=0
V’=100
V’=90V’=81
V’=90
V’=100

Example
’(s)=argmaxa Q(s,a)
0
G
100
100
52
6952
44
44
60
47
47 6052

Generalized Policy Iteration
Intertwine policy evaluation with policy improvement
0 V0 1 V1 2 V2 … * V*
E I E I E I … I E
V
evaluation
improvement
V V
greedy(V)

Value Iteration (Q-Learning)
Idea: do not wait for policy evaluation to converge, but improve policy after each iteration.
Vk+1(s) = maxa(r(s,a) + Vk
((s,a)))
or
Qk+1(s,a) = r(s,a) + maxa’ Qk
((s,a),a’)
Stop when s |Vk+1
(s)- Vk(s)| <
or s,a |Qk+1(s,a)- Qk
(s,a)| <

Non-Deterministic Case
State transition function (s,a) no longer deterministic but probabilistic given by
P(s’|s,a) = Pr{st+1=s’|st=s, at=a}
Transition probability that given a current state s and action a the next state is s’.
Reward function r(s,a) no longer deterministic but probabilistic given by
R(s’,s,a) = E{rt+1|st=s, at=a, st+1=s’}
P(s’|s,a) and R(s’,s,a) completely specify MDP.

Bellman Equation (Non-Deterministic Case)
Q(s,a) = s’ P(s’|s,a) [R(s’,s,a) + V(s’)]
V(s) = a(s,a) s’ P(s’|s,a) [R(s’,s,a) +V(s’)]
Q(s,a) = s’ P(s’|s,a) [R(s’,s,a)+ a’(s’,a’) Q(s’,a’)]
Bellman optimality equations:
V(s) = maxas’ P(s’|s,a) [R(s’,s,a) +V(s’)]
Q(s,a) = s’ P(s’|s,a) [R(s’,s,a)+ maxa’Q(s’,a’)]

Value Iteration (Q-Learning)
Vk+1(s) = maxas’ P(s’|s,a) [R(s’,s,a) +Vk
(s’)]
or
Qk+1(s,a) = s’ P(s’|s,a) [R(s’,s,a) + maxa’Qk
(s’,a’)]
Stop when
s (|Vk+1(s) -Vk
(s)| <
or
s,a (|Qk+1(s,a) -Qk
(s,a)| <

Example
P(s’|s,a)=0
P(s’|s,a)=0
P(s’|s,a)=(1-p)/3
P(s’|s,a)=(1-p)/3 s P(s’|s,a)=
p+(1-p)/3
Now assume that actions a are non-deterministic, with probability p agent moves to the correct square indicated by a, with probability (1-p) agent moves to a random neighboring square.

Example
V=0
V=100
V*=90V=81
V=90
V=100
Deterministic optimalvalue function
Non-deterministic optimalvalue function p=0.5
V=0
V=90
V*=77V=71
V=80
V=93

Example
BA
B’
A’
actions
+10 +5Reward : +10 for AA’+5 for BB’-1 for falling off the grid0 otherwise
Infinite horizon no terminal state1. Compute V for equi-probable policy2. Compute V* and * using policy or value iteration3. Compute V* and * using policy or value iteration but assume that with 1-p=0.3 the agent moves to a random neighbor state

Reinforcement Learning
What if the transition probabilities P(s’|s,a) and reward function R(s’,s,a) are unknown?
Can we still learn V(s), Q(s,a) and identify and optimal policy (s,a)?
The answer is yes. Consider the observed rewards rt and state transitions st+1as training samples drawn from the true underlying probability functions R(s’,s,a) and P(s’|s,a).
Use approximate state V(s) and action value Q(s,a) functions

Monte Carlo Method
Initialize: policy to be evaluated V(s) an arbitrary state-value function Return(s) an empty list, for all sS
Repeat forever Generate an epsiode using For each state s appearing in the epsiode:R return following the first occurence of s
Append R to Returns(s)V(s) average(Returns(s))

Monte Carlo Method
V(st) V(st) + [Rt-V(st)]
where Rt = rt+1+ rt+2 + 2 rt+3+…
is the observed reward after time t and is a constant step-size parameter
V=0V=60V=30
V=30 V=40 V=70
V(st) 30 + 0.1 [0 + 0.9*0 +0.92 *100 - 30] = 35.1

Temporal Difference Learning
Monte-Carlo: V(st) V(st) + [Rt-V(st)]
target for V(s) : E {Rt | st=s}
Must wait until the end of the episode to update V Temporal Difference (TD):
V(st) V(st) + [rt+1 + V(st+1)- V(st)]
target for V(s) : E {rt+1 + V(st+1) | st=s}
TD method is bootstrapping by using the existing estimate of the next state V(st+1) for updating V(st)

TD(0) : Policy Evaluation
Initialize policy to be evaluated V(s) an arbitrary state-value function
Repeat for each episode Initialize s
Repeat for each step of episodea action given by for sTake action a, observe reward r, and next state s’
V(s) V(st) + [r + V(s’)- V(s)]s s’
Until s is terminal

TD(0): Policy Iteration
Q(st,at) Q(st,at) + [rt+1 + Q(st+1,at+1)- Q(st,at)]
st st+1
rt+1
st,at
st+2
rt+2
st+1,at+1 st+2,at+2
Q(st,at) Q(st,at) + [rt+1 + Q(st+1,at+1)- Q(st,at)]
The update rule uses a quintuple of events (st,at,rt+1,st+1,at+1), therefore called SARSA
Problem: Unlike in the deterministic case we cannot choose a completely greedy policy (s) = maxa Q(s,a), as due to the unknown transition and reward functions (s,a) and r(s,a) we cannot be sure if another action might eventually turn out to be better

-greedy policy
Soft policy(s,a) > 0 for all sS, aA(s)
Non-zero probability of choosing every possible action
-greedy policy Most of the time with probability (1-) follow the optimal policy
(s) = maxa Q(s,a) but with probability e pick a random action:
(s,a) /|A(s)| Let 0 go to zero as t (for example =1/t) so that -greedy policy converges to the optimal deterministic policy

SARSA Policy Iteration
Initialize Q(s,a) arbitrarily:Repeat for each episode Initialize s Choose a from using -greedy policy derived from Q
Repeat for each step of episodeTake action a, observe reward r, and next state s’
Q(s,a) Q(s,a) + [r + Q(s’,a’)- Q(s,a)]s s’, a a’
Until s is terminal

SARSA Example
BA
B’
A’
+10 +5

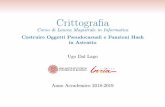
SARSA Example V(s)
V(s) after 100, 200, 1000, 2000, 5000, 10000 SARSA steps

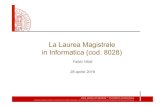
SARSA Example Q(s,a)
Q(s,a) after 100, 200, 1000, 2000, 5000, 10000 SARSA steps

Q-Learning (Off-Policy TD)
Approximates the optimal value functions V*(s) or Q*(s,a) independent of the policy being followed.
The policy determines which state-action pairs are visited and updated
Q(st,at) Q(st,at) + [rt+1 + maxa’ Q(st+1,a’)-Q(st,at)]

Q-Learning Off-Policy Iteration
Initialize Q(s,a) arbitrarily:Repeat for each episode Initialize s Choose a from s using -greedy policy derived from Q
Repeat for each step of episodeTake action a, observe reward r, and next state s’
Q(s,a) Q(s,a) + [r + maxa’Q(s’,a’)- Q(s,a)]s s’
Until s is terminal

TD versus Monte-Carlo
So far TD uses one-step look-ahead but why not use 2-steps or n-steps look-ahead to update Q(s,a).
2-step look-ahead
Q(st,at) Q(st,at) + [rt+1 + rt+2 +2 Q(st+2,at+2)-Q(st,at)] N-step look-ahead
Q(st,at) Q(st,at) + [rt+1 + rt+2 + … + n-1 rt+n + n
Q(st+n,at+n)-Q(st,at)] Monte-Carlo method
Q(st,at) Q(st,at) + [rt+1 + rt+2 + … + N-1 rt+N -Q(st,at)]
(compute total reward RT at the end of the episode)

Temporal Difference Learning
Drawback of one-step look-ahead: Reward is only propagated back to the successor
state (takes long time to finally propagate to the start state)
st st+1
r=0st+2
r=0sT-2
r=0sT
r=100sT-1…
V(s)=0 V(s)=0 V(s)=0 V(s)=0 V(s)=0Initial V:
After first epsiode:V(s)=0 V(s)=0 V(s)=0 V(s)=0 V(s)=*100
After second epsiode:V(s)=0 V(s)=0 V(s)=0 V(s)=*100V(s)=*100+..

Monte-Carlo Method
Drawback of Monte-Carlo method Learning only takes place after an episode terminated
Performs a random walk until goal state is discovered for the first time as all state-action values seem equal
It might take long time to find the goal state by random walk
TD-learning actively explores state space if each action receives a small default penalty

N-Step Return
Idea: blend TD learning with Monte-Carlo method
Define:
Rt(1) = rt+1 + Vt(st+1)
Rt(2) = rt+1 + rt+2 + Vt(st+2)
…
Rt(n) = rt+1 + rt+2 + … + n-1rt+n + nVt(st+n)
The quantity Rt(n) is called the n-step return
at time t.

TD()
n-step backup : Vt(st) Vt(st) + [Rt(n)-Vt(st)]
TD() : use average of n-step returns for backup
Rt= (1-) n=1
n-1 Rt(n)
Rt= (1-) n=1
T-t-1 n-1 Rt(n) + T-t-1 Rt
(if sT is a terminal state)
The weight of the n-step return decreases with a factor of
TD(0): one-step temporal difference method
TD(1) : Monte-Carlo method

Eligibility Traces
Practical implementation of TD():With each state-action pair associate an eligibility trace et(s,a)
On each step, the eligibility trace for all state-action pairs decays by a factor and the eligibility trace for the one state and action visited on the step is incremented by 1.
et(s,a) = et-1(s,a) + 1 if s=st and a=at
= et-1(s,a) otherwise

On-line TD()
Initialize Q(s,a) arbitrarily and e(s,a)=0 for all s,a:Repeat for each episode Initialize s,a Repeat for each step of episode
Take action a, observe r, s’ Choose a’ from s’ using policy derived from Q (-
greedy) r + Q(s’,a’) – Q(s,a) e(s,a) e(s,a) +1 For all s,a: Q(s,a) Q(s,a)+ e(s,a) e(s,a) e(s,a) s s’, a a’
Until s is terminal

Function Approximation
So far we assumed that the action value function Q(s,a) is represented as a table.
Limited to problems with a small number of states and actions
For large state spaces a table based representation requires large memory and large data sets to fill them accurately
Generalization: Use any supervised learning algorithm to estimate Q(s,a) from a limited set of action value pairs Neural Networks (Neuro-Dynamic Programming) Linear Regression Nearest Neighbors

Function Approximation
Minimize the mean-squared error between training examples Qt(st,,at) and the true value function Q(s,a)
sS P(s) [Q(s,a)- Qt(st,,at)]2
Notice that during policy iteration P(s) and Q(s,a) change over time
Parameterize Q(s,a) by a vector =(1,…, n)
for example weights in a feed-forward neural network

Stochastic Gradient Descent
Use gradient descent to adjust the parameter vector in the direction that reduces the error for the current example
t+1 = t + [Q(st,at) – Qt(st,at)]t Qt(st,at)
The target output qt of the t-th training example is not the true value of QP but some
approximation of it.
t+1 = t + [vt – Qt(st,at)]t Qt(st,at)
Still converges to a local optimum if E{vt}=Q(st,at)
if a0 for t