Studio della sensibilità dei sistemi OFDM/OQAM agli errori ... · ... della parte reale e della...
33
Scuola Politecnica e delle Scienze di Base Corso di Laurea in Ingegneria Informatica Elaborato finale in Trasmissione Numerica Studio della sensibilità dei sistemi OFDM/OQAM agli errori di timing 2013/2014 Candidato Nicola Auricchio matr. N46000181
Transcript of Studio della sensibilità dei sistemi OFDM/OQAM agli errori ... · ... della parte reale e della...
Scuola Politecnica e delle Scienze di BaseCorso di Laurea in Ingegneria Informatica
Elaborato finale in Trasmissione Numerica
Studio della sensibilità dei sistemi OFDM/OQAM agli errori di timing
2013/2014
Candidato
Nicola Auricchio
matr. N46000181
Alla mia famiglia.
Indice
Indice .................................................................................................................................................. III
Introduzione .......................................................................................................................................... 4
Capitolo 1: Generalità sui sistemi multiportante .................................................................................. 6
1.1 OFDM ........................................................................................................................................ 7
Capitolo 2: OFDM/OQAM ................................................................................................................ 13
2.1 Trasmettitore frequency-spreading ........................................................................................... 14
2.2 Ricevitore frequency-despreading su canale AWGN .............................................................. 18
2.3 Ricevitore frequency-despreading su canale multipath ............................................................ 21
Capitolo 3: Sensibilità all'errore di timing ......................................................................................... 26
Conclusioni ......................................................................................................................................... 32
Bibliografia ......................................................................................................................................... 33
Introduzione
Le tecniche di modulazione multiportante risultano particolarmente adatte alla trasmissione
a banda larga su canali selettivi di frequenza. L'esempio più famoso è la modulazione
Orthogonal Frequency Division Multiplexing (OFDM), che è stata adottata in diversi
standard di comunicazione, come ad esempio in ADSL, DAB-T, DVB-T, IEEE 802.11, e
ancora, recentemente, nella trasmissione 3GPP/LTE in downlink.
Tuttavia, la tecnica OFDM porta con se alcuni svantaggi, come la scarsa tolleranza agli
errori di sincronizzazione e soprattutto l'utilizzo del prefisso ciclico per far fronte
all'interferenza intersimbolica, il quale comporta una perdita in termini di efficienza
spettrale.
Al fine di ottenere un migliore sfruttamento dello spettro e una maggiore robustezza agli
errori di sincronizzazione, sono state proposte alcune alternative all'OFDM. Tra queste
ritroviamo la tecnica OFDM/OQAM, appartenente alla famiglia dei sistemi FBMC (Filter
Bank Multicarrier). Tale tecnica è basata sulla trasmissione separata, a distanza di mezzo
periodo di simbolo multiportante l'una dall'altra, della parte reale e della parte immaginaria
dei simboli di informazioni sulle diverse sottoportanti. Diversamente da OFDM, il vincolo
sull'ortogonalità delle sottoportanti è presente solo nel campo reale, il che lascia spazio
all'introduzione di filtri prototipo che possono non essere rettangolari. Pertanto, mediante
l'utilizzo di filtri prototipo opportunamente progettati, è possibile far fronte a dispersioni
nel dominio del tempo e nel dominio della frequenza senza l'utilizzo del prefisso ciclico.
La migliore compressione spettrale e la maggiore robustezza agli asincronismi rendono il
sistema OFDM/OQAM particolarmente adatto al contesto della radio cognitiva, nel quale
le comunicazioni tra trasmettitore e ricevitore avvengono utilizzando porzioni di spettro
lasciate temporaneamente libere da un utente primario, e quindi nel quale è necessario
utilizzare in modo efficiente i frammenti di banda lasciati liberi evitando di provocare
interferenze sulle sezioni dello spettro adiacenti, sulle quali la comunicazione potrebbe
avere maggiore priorità. La prima struttura implementativa presentata per il sistema viene
detta struttura convenzionale e si avvale di una serie di filtri sui sottocanali ottenuti
mediante modulazione complessa di un singolo filtro, chiamata rete polifase (PPN).
In questo lavoro di tesi è stata analizzata una struttura introdotta successivamente a quella
convenzionale, detta frequency-spreading, che sui canali piatti è equivalente in termini di
relazioni ingresso-uscita, ma a differenza di essa, nel caso di canali multipath, permette di
4

operare un'equalizzazione nel dominio della frequenza ad alte prestazioni e senza
incremento della complessità.
Inoltre sono state valutate le prestazioni del sistema considerando un'espressione che
consente di effettuare un confronto tra alcuni filtri prototipo in presenza di timing offset,
ovvero assenza di sincronizzazione nel dominio del tempo, che può verificarsi quando
l'istante di campionamento sul lato ricevitore non è quello ottimale.
5
Capitolo 1: Generalità sui sistemi multiportante
La diffusione sempre più capillare di dispositivi connessi alla rete, il progressivo sviluppo
e l'aumento della fruzione di servizi telematici hanno determinato la necessità di progettare
e realizzare sistemi di telecomunicazioni capaci di trasmettere a velocità sempre più
elevate. Soddisfare tale esigenza mediante tradizionali tecniche di modulazione a singola
portante comporterebbe un allargamento significativo della banda del segnale informativo
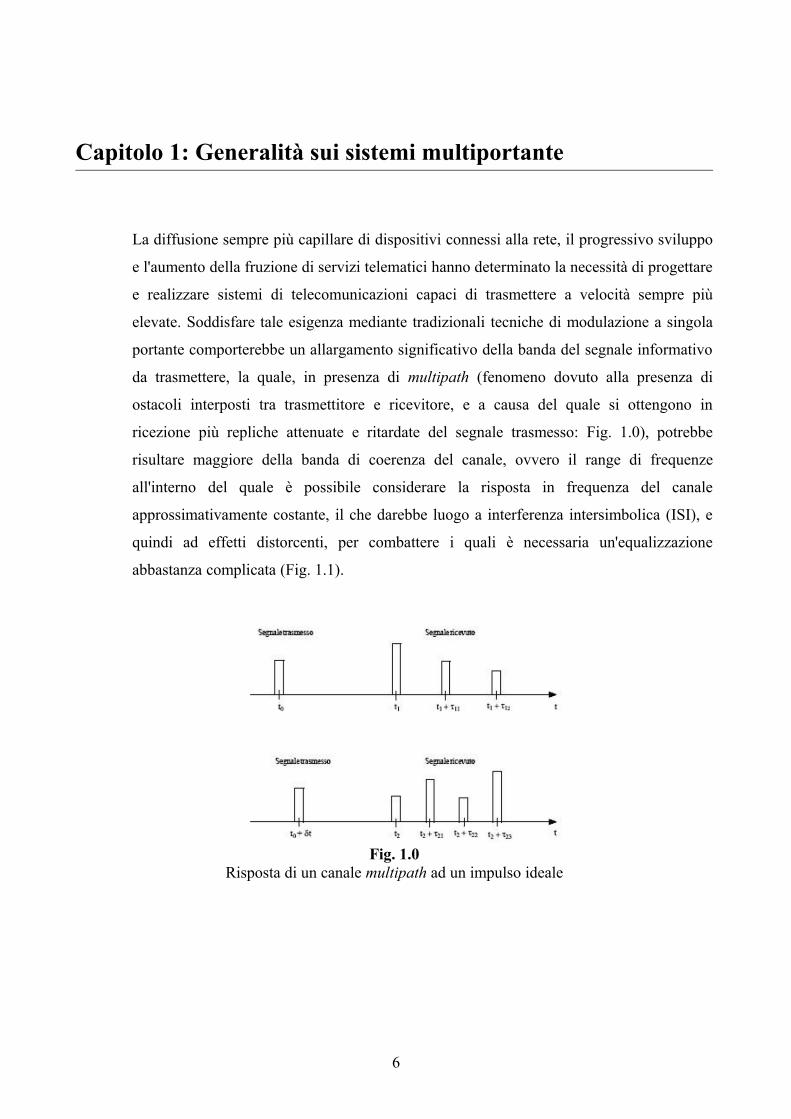
da trasmettere, la quale, in presenza di multipath (fenomeno dovuto alla presenza di
ostacoli interposti tra trasmettitore e ricevitore, e a causa del quale si ottengono in
ricezione più repliche attenuate e ritardate del segnale trasmesso: Fig. 1.0), potrebbe
risultare maggiore della banda di coerenza del canale, ovvero il range di frequenze
all'interno del quale è possibile considerare la risposta in frequenza del canale
approssimativamente costante, il che darebbe luogo a interferenza intersimbolica (ISI), e
quindi ad effetti distorcenti, per combattere i quali è necessaria un'equalizzazione
abbastanza complicata (Fig. 1.1).
Fig. 1.0Risposta di un canale multipath ad un impulso ideale
6
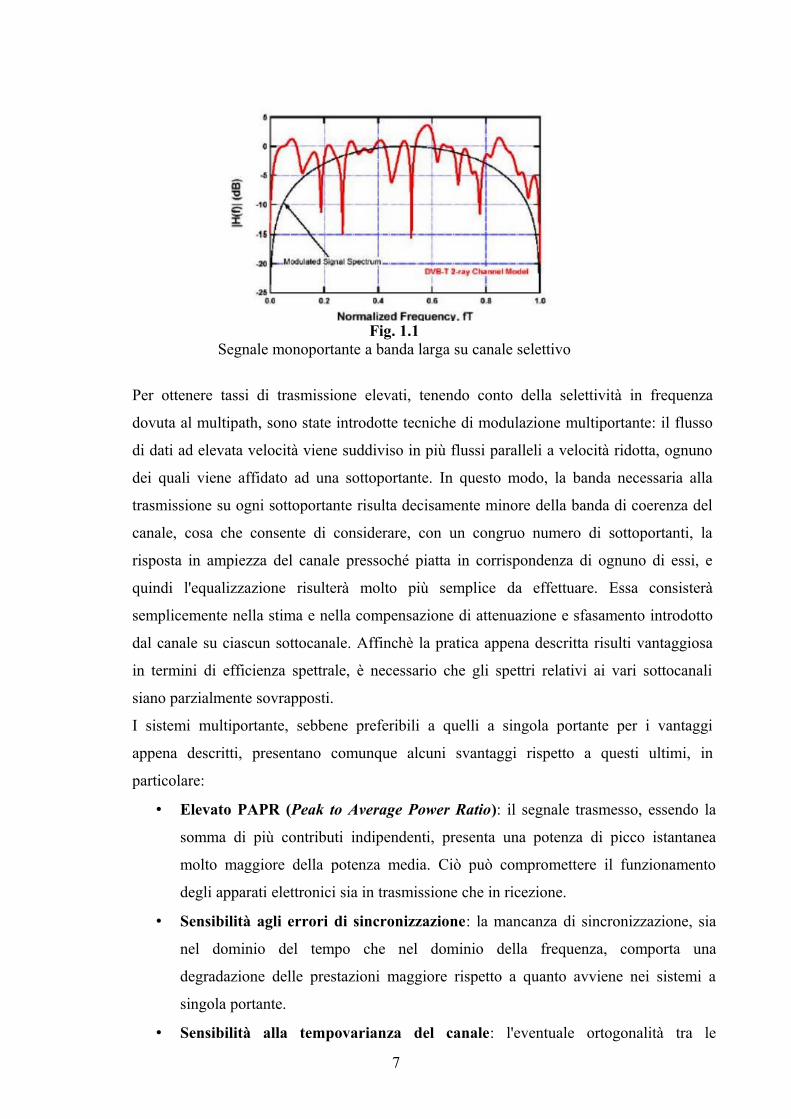
Fig. 1.1Segnale monoportante a banda larga su canale selettivo
Per ottenere tassi di trasmissione elevati, tenendo conto della selettività in frequenza
dovuta al multipath, sono state introdotte tecniche di modulazione multiportante: il flusso
di dati ad elevata velocità viene suddiviso in più flussi paralleli a velocità ridotta, ognuno
dei quali viene affidato ad una sottoportante. In questo modo, la banda necessaria alla
trasmissione su ogni sottoportante risulta decisamente minore della banda di coerenza del
canale, cosa che consente di considerare, con un congruo numero di sottoportanti, la
risposta in ampiezza del canale pressoché piatta in corrispondenza di ognuno di essi, e
quindi l'equalizzazione risulterà molto più semplice da effettuare. Essa consisterà
semplicemente nella stima e nella compensazione di attenuazione e sfasamento introdotto
dal canale su ciascun sottocanale. Affinchè la pratica appena descritta risulti vantaggiosa
in termini di efficienza spettrale, è necessario che gli spettri relativi ai vari sottocanali
siano parzialmente sovrapposti.
I sistemi multiportante, sebbene preferibili a quelli a singola portante per i vantaggi
appena descritti, presentano comunque alcuni svantaggi rispetto a questi ultimi, in
particolare:
• Elevato PAPR (Peak to Average Power Ratio): il segnale trasmesso, essendo la
somma di più contributi indipendenti, presenta una potenza di picco istantanea
molto maggiore della potenza media. Ciò può compromettere il funzionamento
degli apparati elettronici sia in trasmissione che in ricezione.
• Sensibilità agli errori di sincronizzazione: la mancanza di sincronizzazione, sia
nel dominio del tempo che nel dominio della frequenza, comporta una
degradazione delle prestazioni maggiore rispetto a quanto avviene nei sistemi a
singola portante.
• Sensibilità alla tempovarianza del canale: l'eventuale ortogonalità tra le
7
sottoportanti può essere compromessa in presenza di canali tempovarianti.
1.1 OFDM
Tra i sistemi multicarrier più diffusi troviamo certamente quello OFDM (Orthogonal
Frequency Division Multiplexing), esso è stato adottato, ad esempio, all'interno degli
standard per le reti WLAN, come 802.11a\g, HIPERLAN2, nell'ADSL, nelle trasmissioni
digitali terrestri video e audio: DVB-T e DAB-T e nello standard di telefonia mobile
cellulare 3GPP/LTE.
Nonostante fosse stato teorizzato già negli anni 60, la sua implementazione è avvenuta
solo a partire dagli anni 80, grazie all'introduzione dell'elettronica digitale e degli algoritmi
FFT/IFFT (Fast Fourier Transform e Inverse Fast Fourier Transform) che ne hanno
consentito una realizzazione più efficiente.
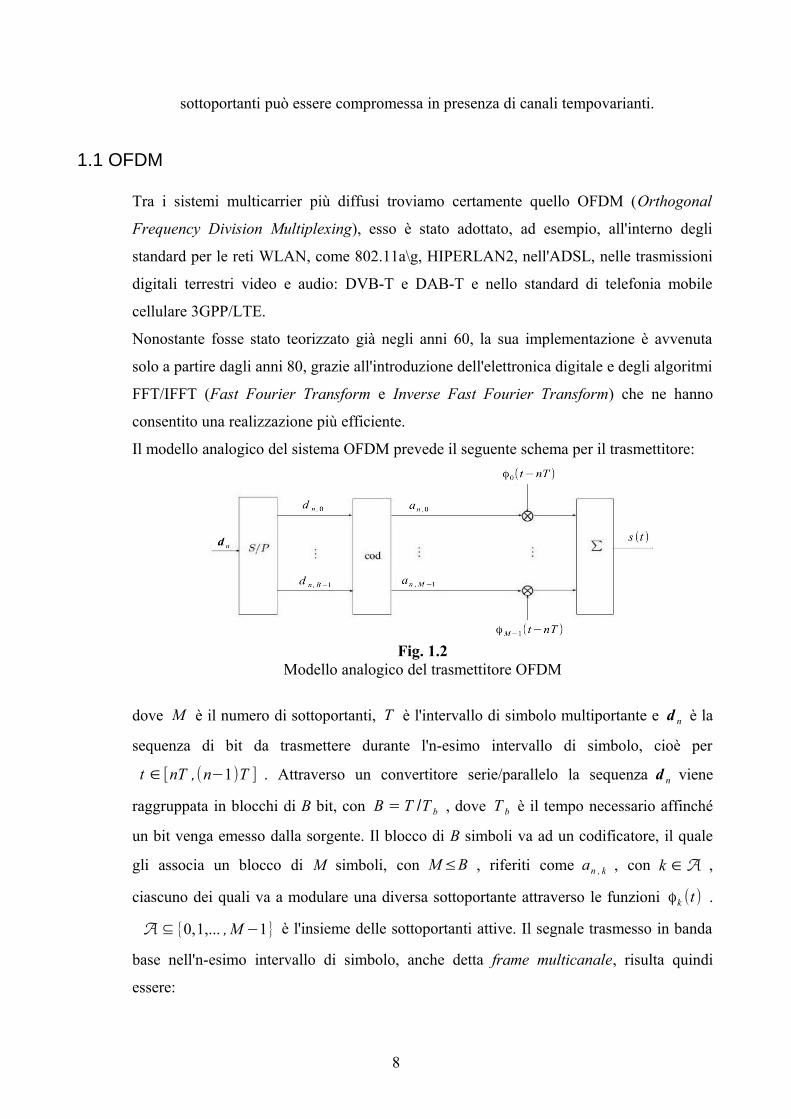
Il modello analogico del sistema OFDM prevede il seguente schema per il trasmettitore:
Fig. 1.2Modello analogico del trasmettitore OFDM
dove M è il numero di sottoportanti, T è l'intervallo di simbolo multiportante e d n è la
sequenza di bit da trasmettere durante l'n-esimo intervallo di simbolo, cioè per
t ∈ [nT ,(n−1)T ] . Attraverso un convertitore serie/parallelo la sequenza d n viene
raggruppata in blocchi di B bit, con B = T /T b , dove T b è il tempo necessario affinché
un bit venga emesso dalla sorgente. Il blocco di B simboli va ad un codificatore, il quale
gli associa un blocco di M simboli, con M≤B , riferiti come an , k , con k ∈ A ,
ciascuno dei quali va a modulare una diversa sottoportante attraverso le funzioni ϕk (t) .
A⊆ {0,1,... ,M−1} è l'insieme delle sottoportanti attive. Il segnale trasmesso in banda
base nell'n-esimo intervallo di simbolo, anche detta frame multicanale, risulta quindi
essere:
8
f n(t )=∑k∈A
an , k ϕk ( t−nT ) (1.0)
Quindi, complessivamente, il segnale trasmesso sarà
s (t )= ∑n=0
N S−1
f n(t) = ∑n=0
N S−1
∑k∈A
an , k ϕk (t−nT ) (1.1)
dove N S è il numero di simboli multiportante da trasmettere.
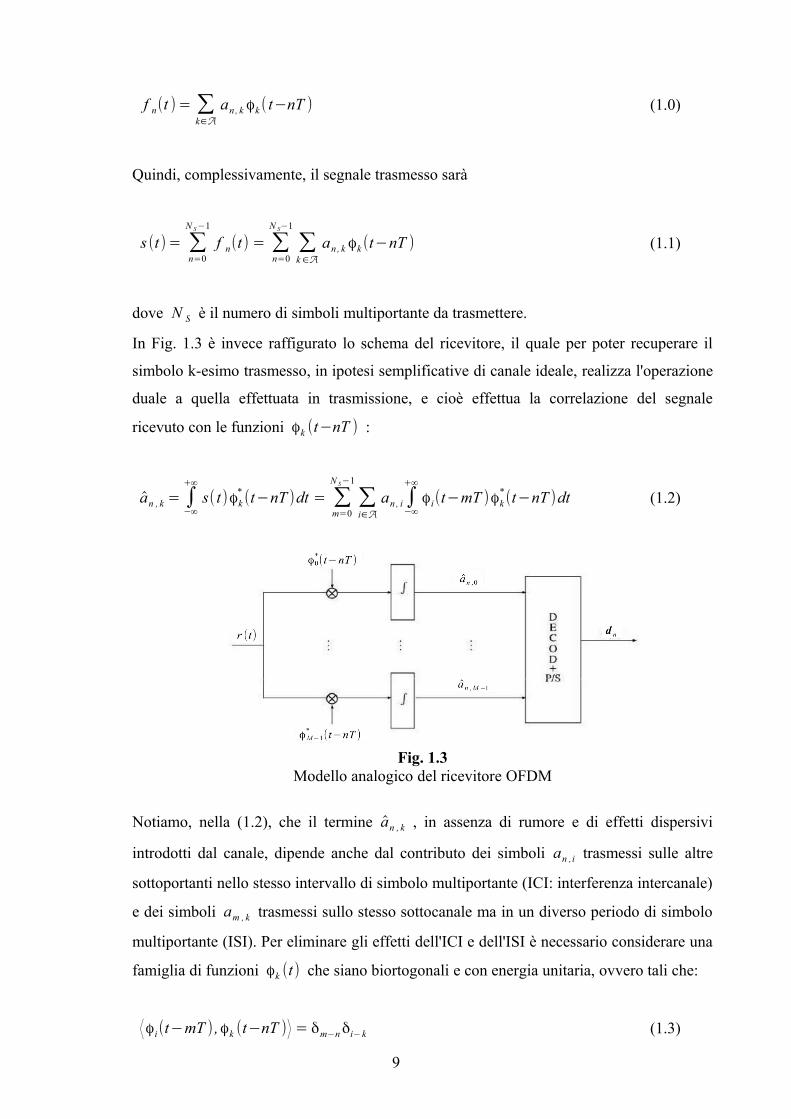
In Fig. 1.3 è invece raffigurato lo schema del ricevitore, il quale per poter recuperare il
simbolo k-esimo trasmesso, in ipotesi semplificative di canale ideale, realizza l'operazione
duale a quella effettuata in trasmissione, e cioè effettua la correlazione del segnale
ricevuto con le funzioni ϕk (t−nT ) :
an , k= ∫−∞
+∞
s( t)ϕk*(t−nT )dt = ∑
m=0
N S−1
∑i∈A
an , i∫−∞
+∞
ϕi(t−mT )ϕk*(t−nT )dt (1.2)
Fig. 1.3Modello analogico del ricevitore OFDM
Notiamo, nella (1.2), che il termine an , k , in assenza di rumore e di effetti dispersivi
introdotti dal canale, dipende anche dal contributo dei simboli an ,i trasmessi sulle altre
sottoportanti nello stesso intervallo di simbolo multiportante (ICI: interferenza intercanale)
e dei simboli am , k trasmessi sullo stesso sottocanale ma in un diverso periodo di simbolo
multiportante (ISI). Per eliminare gli effetti dell'ICI e dell'ISI è necessario considerare una
famiglia di funzioni ϕk (t) che siano biortogonali e con energia unitaria, ovvero tali che:
⟨ϕi(t−mT ) ,ϕk (t−nT )⟩= δm−nδi− k (1.3)
9

di modo che l'integrale nella (1.2) sia nullo per m≠ n e per k ≠ i , recuperando
perfettamente il simbolo desiderato.
Una famiglia di funzioni che soddisfa tale condizione è la seguente:
ϕk (t)= g (t)e j 2π f k t k ∈ {0,1,...M−1} (1.4)
con g ( t)=1
√Trect( t−T /2
T )dove la separazione interportante f k – f i =
lT
, con l ∈ℤ , l≠0 .
Nella fattispecie, per ottenere la massima efficienza spettrale, si utilizza l = 1 , e quindi
una separazione intercarrier di1T
. Pertanto, in definitiva, si utilizzano le seguenti
funzioni:
ϕk (t)= g (t)ej k 2π
Tt
k ∈ {0,1,...M−1} (1.5)
con g ( t)=1
√Trect( t−T /2
T )
g ( t) è detto filtro prototipo e la sua funzione è quella di sagomare gli spettri sulle
sottoportanti.
Per quanto riguarda la densità spettrale di potenza, si può dimostrare che, ipotizzando i
simboli statisticamente indipendenti e identicamente distribuiti (sia tra sottoportanti
diverse che tra intervalli di simbolo diversi), a media nulla e varianza σa2 , essa ha la
seguente espressione:
S s( f ) =∑k=0
M−1
σa2 sinc2( fT−k ) (1.6)
Pertanto, la banda impegnata nel caso null to null (si considera il lobo principale di tutte le
sinc), è W OFDM =M−1
T+
2T=
M+1T
≃MT
, dove M−1
Trappresenta la somma delle
spaziature tra le portanti, mentre2T
rappresenta il contributo delle due portanti esterne.
10
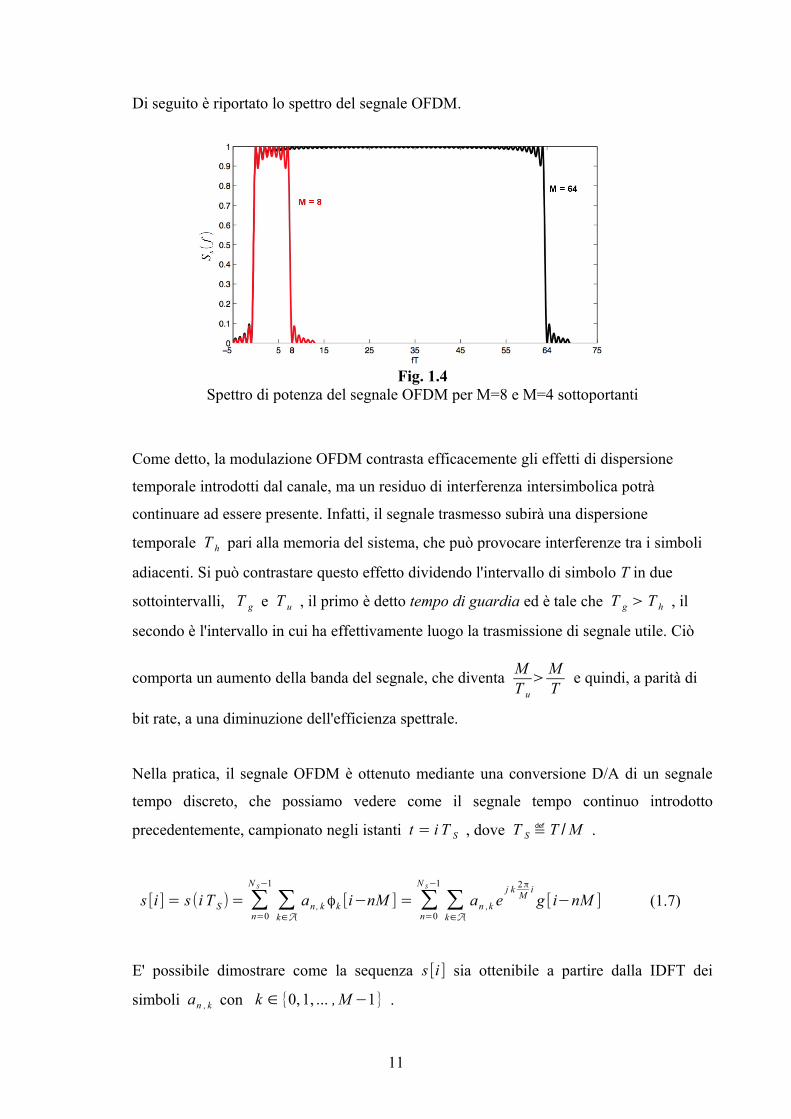
Di seguito è riportato lo spettro del segnale OFDM.
Fig. 1.4Spettro di potenza del segnale OFDM per M=8 e M=4 sottoportanti
Come detto, la modulazione OFDM contrasta efficacemente gli effetti di dispersione
temporale introdotti dal canale, ma un residuo di interferenza intersimbolica potrà
continuare ad essere presente. Infatti, il segnale trasmesso subirà una dispersione
temporale T h pari alla memoria del sistema, che può provocare interferenze tra i simboli
adiacenti. Si può contrastare questo effetto dividendo l'intervallo di simbolo T in due
sottointervalli, T g e T u , il primo è detto tempo di guardia ed è tale che T g > T h , il
secondo è l'intervallo in cui ha effettivamente luogo la trasmissione di segnale utile. Ciò
comporta un aumento della banda del segnale, che diventaMT u
>MT
e quindi, a parità di
bit rate, a una diminuzione dell'efficienza spettrale.
Nella pratica, il segnale OFDM è ottenuto mediante una conversione D/A di un segnale
tempo discreto, che possiamo vedere come il segnale tempo continuo introdotto
precedentemente, campionato negli istanti t = i T S , dove T S ≝ T /M .
s [i ] = s (i T S )= ∑n=0
N S−1
∑k∈A
an , k ϕk [i−nM ] = ∑n=0
N S−1
∑k∈A
an ,k ej k 2π
Mig [ i−nM ] (1.7)
E' possibile dimostrare come la sequenza s [i ] sia ottenibile a partire dalla IDFT dei
simboli an , k con k ∈ {0,1,… , M−1} .
11
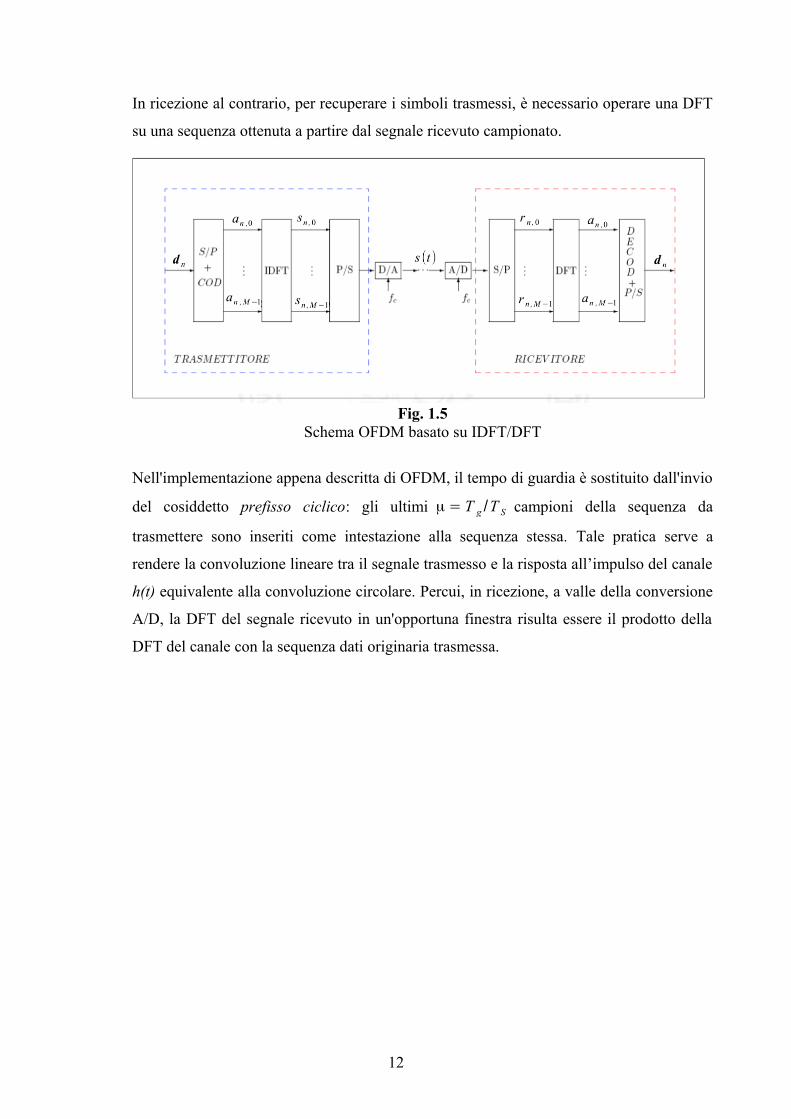
In ricezione al contrario, per recuperare i simboli trasmessi, è necessario operare una DFT
su una sequenza ottenuta a partire dal segnale ricevuto campionato.
Fig. 1.5Schema OFDM basato su IDFT/DFT
Nell'implementazione appena descritta di OFDM, il tempo di guardia è sostituito dall'invio
del cosiddetto prefisso ciclico: gli ultimi μ = T g /T S campioni della sequenza da
trasmettere sono inseriti come intestazione alla sequenza stessa. Tale pratica serve a
rendere la convoluzione lineare tra il segnale trasmesso e la risposta all’impulso del canale
h(t) equivalente alla convoluzione circolare. Percui, in ricezione, a valle della conversione
A/D, la DFT del segnale ricevuto in un'opportuna finestra risulta essere il prodotto della
DFT del canale con la sequenza dati originaria trasmessa.
12
Capitolo 2: OFDM/OQAM
OFDM/Offset-QAM è un sistema di modulazione multiportante basato sui banchi di filtri
(FBMC), il quale offre un valido approccio alternativo all'OFDM.
Rispetto a quest'ultimo non viene utilizzato il prefisso ciclico, il che favorisce una
maggiore efficienza spettrale, e in più i flussi di informazione sono trasmessi utilizzando
impulsi a banda limitata sovrapposti nel tempo (overlap in time). Ciò comporta vari
vantaggi, come la minore sensibilità all'interferenza a banda stretta e la maggiore
flessibilità nell'allocazione dei sottocanali.
In concreto, e di seguito saranno esposti i dettagli, la tecnica OFDM/OQAM è realizzata
trasmettendo separatamente, a distanza di mezzo periodo di simbolo multiportante l'una
dall'altra la parte reale e la parte immaginaria dei simboli di informazione inviate sulle
diverse sottoportanti.
Come per OFDM i sistemi FBMC soffrono di una scarsa tolleranza, anche se in misura
minore, nei confronti degli errori di sincronizzazione. Inoltre rispetto a OFDM, le
operazioni effettuate in ricezione sono caratterizzate da una maggiore complessità
computazionale.
Il sistema OFDM/OQAM è stato originariamente implementato mediante quella che
possiamo chiamare struttura convenzionale. Essa si avvale della cascata di un blocco che
opera la IFFT su numero di punti pari al numero di sottoportanti e di una rete polifase
(PPN) in trasmissione, e della cascata di PPN e FFT sullo stesso numero di punti in
ricezione. In questo lavoro di tesi è trattata l'implementazione del sistema OFDM/OQAM
mediante la struttura frequency-spreading. Le due strutture sono equivalenti in termini di
relazioni ingresso-uscita, se consideriamo il canale AWGN, e inoltre la seconda introduce
maggiore complessità computazionale, a causa della maggiore dimensione delle IFFT e
FFT effettuate in trasmissione e ricezione. Su canale multipath, invece, la struttura
frequency-spreading consente di effettuare un'equalizzazione nel dominio della frequenza
ad alte prestazioni e senza nessun ritardo aggiuntivo, a differenza della struttura
convenzionale che necessita di un'equalizzazione multi-tap, e quindi di un notevole
incremento sia della complessità che della latenza rispetto al caso AWGN.
13

2.1 Trasmettitore frequency-spreading
Fig. 2.1Trasmettitore frequency-spreading
Il segnale passa basso trasmesso s (t ) può essere scritto come
s (t)= sR(t)+ j sI
(t−T /2) (2.1)
con
sR( t)= ∑
n=0
N S –1
∑k∈A
an, kR e
jk(2πTt+π
2 )g ( t−nT ) (2.2)
e
sI(t) = ∑
n=0
N S – 1
∑k∈A
an , kI e
jk(2πTt+π
2 )g (t−nT ) (2.3)
dove T è l'intervallo di simbolo multicarrier, A ⊆ {0,1, ... , M−1} è l'insieme delle
sottoportanti attive, le sequenze an , kR e an , k
I indicano rispettivamente la parte reale e
immaginaria del simbolo trasmesso sulla k-esima sottoportante durante l'n-esimo
intervallo di simbolo OFDM/OQAM, N S è il numero di simboli da trasmettere e g ( t) è
il filtro prototipo che soddisfa la seguente proprietà:
g ( t)≡ 0 t∉[ 0, KT ) (2.4)
dove K è detto parametro di overlap. Si assume che i simboli dati an , kR e an , k
I siano
statisticamente indipendenti, a media nulla e varianza σa2 .
14

La versione a tempo discreto s [i ] ≝ s (t) |t=iT Sdel segnale trasmesso (con T S ≝ T /M
intervallo di campionamento) può essere scritta come
s [i ] = s R(iT S)+ j sI
((i−M /2)T S) (2.5)
Nel seguito è riportata la derivazione di una procedura di generazione efficiente del
segnale sR( t) . La derivazione per il segnale sI(t) può essere ottenuta in maniera del
tutto analoga.
Poichè il segnale tempo continuo è generato a partire da una conversione D/A ,
consideriamo la generazione dei suoi campioni a tempo discreto
sR[ i ] ≝ sR
(iT S )= ∑n=0
N S−1
∑k∈A
an ,kR e
jk(2πMi+π
2 )g [ i−nM ] (2.6)
con g [i ] ≝ g ( iT S) .
La generazione della sequenza sR( t) è equivalente alla generazione della sequenza di
vettori di dimensioni Mx1 d m(R) , di cui ciascun elemento p-esimo d m, p
(R ) è pari a
sR[mM+p] , con p ∈ {0,1, ... , M−1} .
Tale elemento p-esimo può essere scritto come:
d m, p(R )≝ s [mM+p ]= hm, p+ hm−1 p+M + hm−2, p+2M+ ... + hm−(K−1) , p+(K−1)M (2.7)
dove
hn , k ≝ g [k ]∑k '∈A
cn , k '(R ) e
j 2πM
k k '
k ∈ {0,1,... ,KM −1} (2.8)
e
cn ' ,k '(R)
≝ { jk ' an ' ,k 'R n ' ∈{0,1,... , N S−1} e k '∈A
0 n ' ∉{0,1, ... ,+N S−1} e ∀ k '(2.9)
Una volta definito il seguente vettore KMx1
15
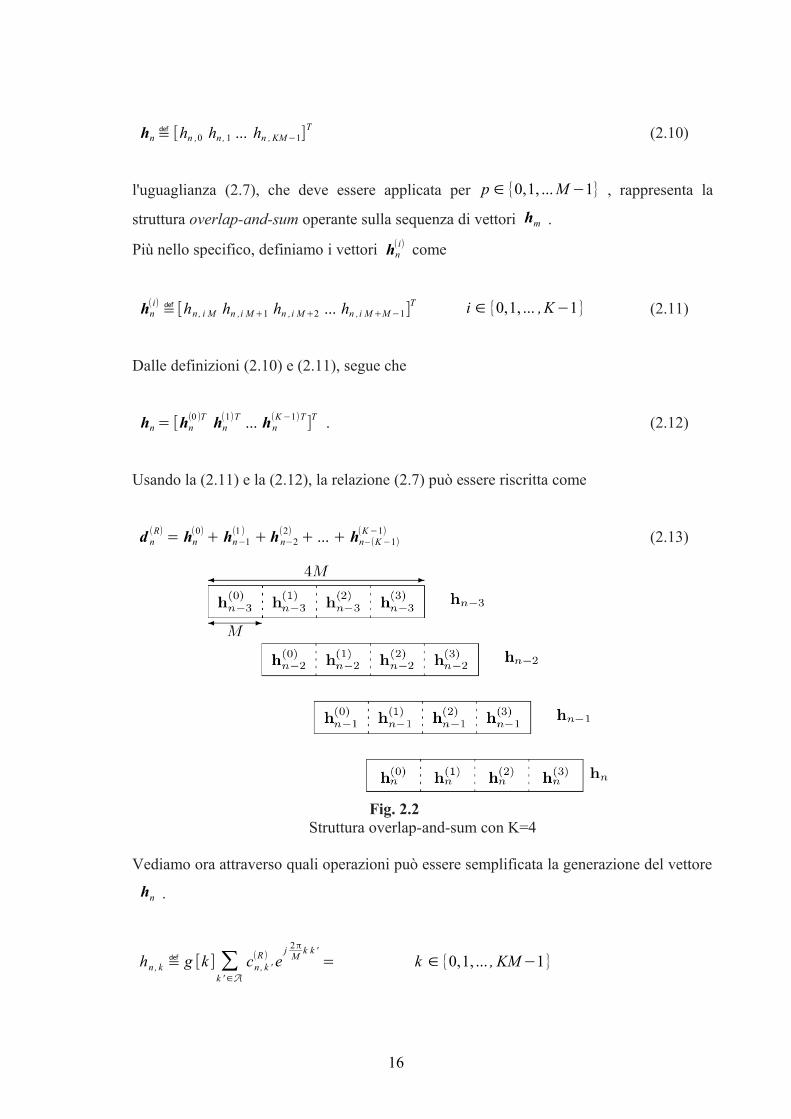
hn≝ [hn ,0 hn , 1 ... hn , KM−1]T (2.10)
l'uguaglianza (2.7), che deve essere applicata per p ∈ {0,1, ...M−1} , rappresenta la
struttura overlap-and-sum operante sulla sequenza di vettori hm .
Più nello specifico, definiamo i vettori hn(i) come
hn(i)≝[hn , i M hn ,i M+1 hn ,i M+2 ... hn ,i M+M−1]
T i ∈ {0,1, ... ,K−1} (2.11)
Dalle definizioni (2.10) e (2.11), segue che
hn= [hn(0 )T hn
(1)T ... hn(K−1)T
]T . (2.12)
Usando la (2.11) e la (2.12), la relazione (2.7) può essere riscritta come
d n(R)= hn
(0)+ hn−1
(1 )+ hn−2
(2)+ ... + hn– (K−1)
(K−1) (2.13)
Fig. 2.2Struttura overlap-and-sum con K=4
Vediamo ora attraverso quali operazioni può essere semplificata la generazione del vettore
hn .
hn , k ≝ g [k ]∑k '∈A
cn , k '(R ) e
j 2πM
k k '= k ∈ {0,1, ... , KM−1}
16

= { ∑k ' =−(K−1)
K−1
G k ' ej 2π
KMk k '}{∑k '∈A
cn, k '(R ) e
j 2πKM
k k '}= (2.14)
= { ∑k ' =−(K−1)
K−1
G k ' ej 2π
KMk k '}{∑
m= 0
KM−1
cn ,m(KR)e
j 2πKM
k m}
dove
G k ≝1
K MG(F ) |
F= kKM
∀k (2.15)
cn ,m(KR)≝ {cn , k
(R) m= kK0 altrimenti
(2.16)
Dalla (2.14) segue che
hn= IDFT [G ] x IDFT [cn] = IDFT [z n] (2.17)
dove l'operatore “ x ” indica il prodotto componente per componente e i vettori G e cn
sono definiti come segue:
G ≝ [G0 G1 G2 ... GKM−1]T (2.18)
cn ≝ [cn ,0(R ) 01xK−1 cn ,1
(R ) 01x K−1 cn ,2(R) 01xK−1 ... cn , M−1
(R) 01x K−1 ]T
(2.19)
e il vettore zn nella (2.17) è, per la nota proprietà degli operatori DFT e IDFT, la
convoluzione circolare dei due vettori KMx1 G e cn .
Se il filtro prototipo è quello progettato attraverso un campionamento in frequenza in [4],
si ha
G k = 0 k ∈ {K , K+1,... KM−1} (2.20)
e la generica componente z n ,l del vettore zn può essere scritta nella seguente forma, con
17
p ∈ {0,1,... ,M−1} e k ∈ {0,1,... ,K−1}
z n , pK+ k= j p[an , p
R Gk+ j an , mod M ( p+1)R G k−K(1−δk )] (2.21)
Dove l'operatore mod M (α) = α+βM , con β tale che mod M (α)∈ {0, 1,... , M−1} .
Dalla precedente espressione notiamo che il generico simbolo in input an ,qR è disperso su
2K−1 dei componenti del vettore zn : quando p= q , ∀k ∈ [1, K−1] ( K−1
campioni), e quando p= mod M (q−1) , ∀k ∈ [0, K−1] ( K campioni).
Pertanto, ricapitolando, la struttura frequency-spreading in trasmissione richiede:
1) di usare i simboli in input an , kR per calcolare le componenti z n ,l (con
l ∈ {0,1, ... , KM−1} ) di zn .
2) di determinare hn a partire da zn effettuando la IDFT su KM punti;
3) di valutare d n attraverso l'elaborazione overlap-and-sum definita nelle (2.12) e
(2.13)
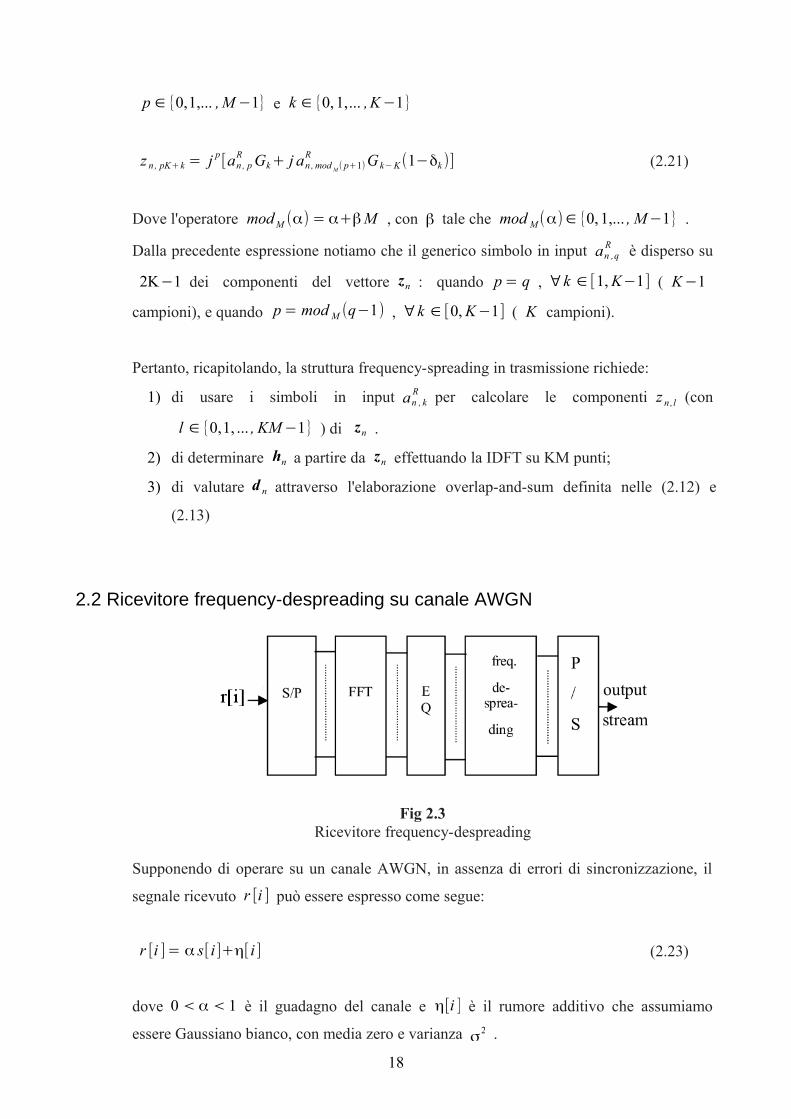
2.2 Ricevitore frequency-despreading su canale AWGN
Fig 2.3Ricevitore frequency-despreading
Supponendo di operare su un canale AWGN, in assenza di errori di sincronizzazione, il
segnale ricevuto r [i ] può essere espresso come segue:
r [i ]= α s[ i ]+η[ i ] (2.23)
dove 0 <α < 1 è il guadagno del canale e η[i ] è il rumore additivo che assumiamo
essere Gaussiano bianco, con media zero e varianza σ2 .
18

Cosideriamo le variabili di decisione:
an , kR= ℜ[Dn , k
( R) ] D n , k(R )≝
1A ∑i=−∞
+∞
r [ i ]e− jk(2π
Mi+π
2 )g [i−nM ] (2.24)
an , kI = ℜ [Dn , k
( I) ] D n , k(I )≝− jA ∑i=−∞
+∞
r [ i ](−1)k e− jk (2π
Mi+π
2 )g [i−nM−M /2] (2.25)
dove
A=αℇg =α ∑i=−∞
+∞
g2[ i ] = α ∑i=0
KM−1
g2[ i ] (2.26)
Si può dimostrare [3] che le variabili di decisione nella (2.24) e nella (2.25), operando su
un canale AWGN, in assenza di errori di sincronizzazione, sono ottime (nel senso della
massima verosimiglianza) per stimare i simboli di informazione statisticamente
indipendenti, a patto che valgano le seguenti condizioni di ortogonalità:
ℜ[e j lπ2∑
i
ej 2π
Mil
g [ i ] g [ i−qM ]]= ℇg δlδq (2.27)
ℑ[e j lπ2∑
i
ej 2πM
ilg [ i ] g [ i−qM−M /2]]= 0 ∀ l , q (2.28)
Inoltre, se queste condizioni sono rispettate, nel caso di canale ideale, si ottiene una
ricostruzione perfetta, ovvero an , kR= an , k
R e an , kI= an , k
R ∀ n , k .
I filtri prototipo presi in esame nel capitolo successivo, mediante l'utilizzo dei quali viene
condotta un'analisi delle prestazioni del sistema, soddisfano in maniera approssimata tali
condizioni di ortogonalità, giacché in ipotesi di canale ideale non assicurano una totale
assenza di interferenza, tuttavia assicurano che essa sia trascurabile.
Consideriamo la trasformata di Fourier del filtro prototipo
G(F )≝ ∑i=0
KM−1
g [i ]e− j 2π F i (2.29)
19
e i coefficienti della sua sua rappresentazione in serie discreta di Fourier (DFS)
G p≝1
K MG(F ) |
F= pKM
(2.30)
Dalla (2.24), (2.4), e (2.30) segue che
D n , k(R ) =
1A
j−k ∑p=0
KM −1
G p* ∑
i=0
KM−1
r [nM+i ]e− j 2π
KMi (kK+ p)
= (2.31)
dove abbiamo portato in conto che il filtro prototipo è reale ( G− p=G p* ).
Introduciamo il vettore KMx1 rn(K ) la cui k-esima componente r n , k
(K) è definita come
r n , k(K )≝ r [nM+k ] k ∈ {0,1,... KM−1} (2.32)
e il vettore Rn , la cui componente k-esima è indicata con Rn , k , definita com la DFT
sulle KM componenti del vettore rn(K ) :
Rn≝ DFT [r n(K )] (2.33)
Usando tale definizione, la relazione (2.31) può essere scritta nel modo seguente:
D n , k(R ) =
1A
j−k KM ∑l=0
KM−1
G l−kK* Rn ,l k ∈ A (2.34)
In maniera del tutto analoga possiamo ricavare la seguente espressione per la (2.25):
D n , k(I )=
1A
j−k−1 KM ∑l=0
KM−1
Gl−kK* Rn ,l
(I ) k ∈ A (2.35)
Dove Rn ,l(I ) è la l-esima componente della DFT su KM campioni
RnI≝ DFT [r n
(I , K )] (2.36)
20

del vettore rn( I , K ) , la cui i-esima componente r n , i
( I , K) è
r n , i( I , K)
≝ r [nM+M /2+i ] i ∈ {0,1, ... ,KM −1} (2.37)
Se il filtro prototipo utilizzato è tale per cui valga la (2.20), nelle somme in (2.34) e (2.35)
solo P = 2K−1 coefficienti sono non nulli e quindi per ottenere il dato trasmesso deve
essere effettuato un despreading combinando solo P componenti del vettore Rn definito
nella (2.33) o RnI definito nella (2.36).
Comunque, le espressioni generali (2.34) e (2.35) saranno considerate nel seguito per
ottenere risultati che possono essere usati per qualsiasi filtro prototipo.
2.3 Ricevitore frequency-despreading su canale multipath
Assumiamo che il segnale utile sia trasmesso su canale multipath. Il segnale ricevuto sarà
esprimibile in questo modo:
r [i ]= α∑l=0
Lh
h [l ] s [i−l ]+η[i ] (2.38)
dove Lh+1 è la lunghezza della risposta all'impulso del canale.
La q-esima componente Rn , q del vettore Rn≝ DFT [r n(K )] , con r n , k
(R)≝ r [nM+k ]
( k ∈ {0,1,... KM−1} ), trascurando il rumore, può essere esplicitata come segue [3]:
Rn , q=1
KM∑p=0
KM−1
r [nM+ p]e− j 2π
KMpq=
= αKM∑n1=0
N S−1
∑k1∈A
an1 k1
R ej k1π2 ∑
p=0
KM −1
Z [ p+(n−n1)M ]e− j 2π
KMp (q+K k1)
+ (2.39)
+ j αKM∑n1=0
N S−1
∑k1∈A
an1 k 1
I(−1)k1 e
j k1π2 ∑
p=0
KM−1
Z [ p+(n−n1)M−M2 ]e
− j 2πKM
p(q+K k1)
dove
21

Z [ p] ≝∑l=0
Lh
h [ l ]e− j 2π
Mk1 l
g [ p−l ] = (h1∗ g )[ p ] (2.40)
è la convoluzione lineare tra h1[l ] ≝h[ l ]e− j 2π
Mk1 l
e il filtro prototipo.
In riferimento alle (2.34) e (2.35),
Rn , mod KM (k K+u )=α
KM∑n1=0
N S−1
∑k1∈A
an1 k1
R ej k1π2 ∑
p=0
KM−1
Z [ p+(n−n1)M ]e− j 2π
KMp[u+(k−k1)K ]
+
+ j αKM∑n1=0
N S−1
∑k 1∈A
an1 k1
I(−1)k1e
j k1π2 ∑
p=0
KM −1
Z [ p+(n−n1)M−M2 ]e
− j 2πKM
p [u+(k− k1)K ]
(2.41)
Inoltre possiamo scrivere [3]
∑p=0
KM−1
Z [ p+(n – n1)M ]e− j 2π
KMp [u+(k+ k1)K ]
=
= ∫−1/2
1 /2
G(F )H (F+ k 1
M )e j 2π(n−n1)MFDKM* (F−u+(k−k 1)K
KM )dF (2.42)
dove H (F ) è la trasformata di Fourier della risposta all'impulso del canale, e
DN (F ) è definita come segue:
DN (F ) ≝∑p=0
N−1
e− j 2π pF= e− jπ(N−1) F sin (π N F )
sin(π F )(2.43)
A questo punto possiamo riscrivere la variabile di decisione definita nella (2.24) come
segue [3]:
an , kR=
1ℇg∑n1=0
N S−1
∑k1∈A
ℜ[an1, k1
R ej(k1−k) π
2 ∫−1 /2
1/2
G (F )H (F+ k1
M )e j 2π(n−n1)M F W *(F− k−k 1
M )dF+
+ j an1, k1
I(−1)k1 e
j(k1− k) π2 ∫−1/2
1 / 2
G (F )H (F+ k1
M )e j 2π(n−n1−1/2)M F W *(F− k−k 1
M )dF ](2.44)
dove
22

W (F ) ≝ ∑u=0
KM−1
GuDKM (F –uM ) (2.45)
Attraverso le definizioni di IDFT e di trasformata di Fourier di una sequenza, si può
facilmente verificare che W (F ) =G(F ) .
In un canale AWGN ( H(F) = 1 ), considerando W (F ) =G(F ) , la variabile di decisione
risulta
an , kR=
1ℇg∑n1=0
N b+N S−1
∑k1∈A
ℜ[an1,k 1
R ej (k1−k ) π
2 ∫−1/2
1 /2
G(F )e j 2π(n−n1)M F G*(F− k−k 1
M )dF+
+ j an1, k1
I (−1)k1ej (k1−k ) π
2 ∫−1/2
1 /2
G(F )e j 2π(n−n1−1/2)M F G*(F− k−k1
M )dF ] (2.46)
In questo modo, le condizioni di ortogonalità che assicurano la perfetta ricostruzione dei
simboli operando su un canale AWGN, equivalenti alle (2.27) e (2.28) ricavate nel
dominio del tempo, sono [3]:
ℜ[e j lπ2 ∫−1/2
1 /2
G (F )e j 2πq MF G *(F+lM )dF ]= ℇgδ l δq (2.47)
ℑ[e j lπ2 ∫−1 /2
1/2
G(F )e j 2π(q−1 /2 )MF G*(F+lM )dF ]= 0 ∀ l , q (2.48)
Pertanto, tali condizioni di ortogonalità continuano a valere nella (2.44) se la funzione
W (F ) è sostituita da una nuova funzione che dipende dall'indice k e soddisfa la
seguente condizione [3]:
W k*(F )H (F+ k
M )=G *(F ) (2.49)
23

La precedente condizione può essere approssimativamente soddisfatta se [3] i coefficienti
G u nella (2.45) vengono sostituiti da dei coefficienti F uk dati da
F uk=
G( uKM )
H*(u+kKKM )
u = 0,1 , ... KM−1 (2.50)
Infatti, in questo caso la funzione [3]
W k (F )= ∑u=0
KM−1
F ukDKM (F− u
KM ) (2.51)
può essere vista come ottenuta da un interpolazione nel dominio della frequenza con passo
1/KM della versione campionata della funzione desiderata. Chiaramente, tale
interpolazione è una buona approssimazione della funzione desiderata solo se nel dominio
del tempo replicando con passo KM la funzione desiderata non si verifica aliasing.
Questo è vero se l'antitrasformata di Fourier della funzione H−1(F+ kM ) ha durata
sufficientemente minore a quella del filtro prototipo.
24
Capitolo 3: Sensibilità all'errore di timing
In ricezione, il segnale multiportante, una volta traslato in banda base, viene processato da
un filtro adattato e campionato con lo stesso periodo T S utilizzato in trasmissione. Se la
procedura di campionamento ha luogo con un certo ritardo τ , detto timing offset, tra i
KM campioni sui quali effettuare la DFT per recuperare un dato simbolo saranno esclusi
nτ ≝ τ/T S campioni utili, mentre saranno inclusi nτ campioni relativi al simbolo
successivo (ISI). Tale fenomeno, anche adottando contromisure in fase di equalizzazione,
può degradare le prestazioni del sistema.
Tali prestazioni saranno analizzate nel seguito considerando l'espressione del SIR [6] su
una generica sottoportante (Signal to Interference Ratio), un parametro che consiste nel
rapporto tra la potenza media del segnale utile e la potenza media del segnale di
interferenza ricevuti sulla sottoportante in esame.
Supponiamo di operare su canale AWGN. In presenza di timing offset, il segnale ricevuto
sarà:
r [i ]= α s[ i−nτ]+η[i ] (3.1)
L'uscita sulla k-esima sottoportante durante l'n-esimo intervallo di simbolo è rappresentata
dalla (2.31). Per far fronte al ritardo introdotto dal canale viene effettuata un'equalizzazione
in frequenza, la quale fornisce in uscita sulla k-esima sottoportante durante l'n-esimo
intervallo di simbolo.
yn ,k = KM ∑p=0
KM−1
G p* Q kK+ p Rn ,mod KM (kK+ p) (3.2)
Dove abbiamo trascurato il fattore di scala 1/A e il termine di fase j−ke usiamo la
seguente definizione per Ql , il generico coefficiente dell'equalizzatore
Ql ≝ ej 2π
KMl nτ
(3.3)
25
Nonostante tale contromisura, non si riesce ad ottenere un'equalizzazione perfetta, in
quanto i campioni sui quali viene effettuata la DFT subiscono uno scostamento di nτ ,
pertanto nτ campioni relativi al simbolo desiderato non vengono coinvolti nella DFT, che
invece include nτ campioni relativi al simbolo successivo.
Nello specifico, nel caso in cui 1≤nτ≤KM−1 , trascurando il termine di rumore, si può
mostrare che [6]
KM Rn ,mod KM (kK+ p)=∑i=0
nτ−1
e [ i ]e− j 2π
KMi (kK+p)
+e− j 2π
KMnτ(kK+ p)
∑i=0
KM−1
s [nM+i ]e− j 2π
KMi (kK+ p)
(3.4)
dove
e [ i ] ≝ s [(n−1)M+KM +i−nτ ]−s [nM+KM+i−nτ ] (3.5)
Dalle (3.3) e (3.4) segue che
Q kK+ p KM Rn , mod KM (kK+p )= ej 2π
KMn τ(kK+ p)
∑i=0
nτ−1
e [ i ]e− j 2π
KMi(kK+ p )
+ ∑i=0
KM−1
s[ nM+i ]e− j 2π
KMi(kK+ p)
(3.6)
Dalle (3.2) e (3.6) segue che yn ,k = yn ,k(U )+ yn ,k
(I ) con
yn ,k(U )= ∑
p=0
KM−1
G p* ∑
i=0
KM−1
s [nM+i ]e− j 2π
KMi (kK+p)
(3.7)
yn ,k(I ) = ∑
p=0
KM−1
G p* e
j 2πKM
nτ(kK+ p )
∑i=0
n τ−1
e [i ]e− j 2π
KMi(kK+ p)
(3.8)
yn ,k(U ) rappresenta l'uscita dell'equalizzatore in assenza di rumore su un canale ideale con
nτ = 0 . Siccome in questo caso ci aspettiamo un SIR molto elevato (dell'ordine dei 60
dB), possiamo trascurare i termini di interferenza presenti in yn ,k(U ) , e quindi approssimare
la potenza del termine utile con quello di yn ,k(U ) ; di conseguenza la potenza dei termini di
interferenza consisterà nella potenza di yn ,k(I ) e sarà possibile esprimere il SIR come
segue [6]:
26

SIR =⟨E [∣yn , k
(U )∣2]⟩
P INT+⟨E [∣yn , k( I)∣
2]⟩ (3.9)
dove P INT è un termine costante che rappresenta la potenza dei termini di interferenza
presenti per nτ = 0 il cui contributo è necessario per assicurare un'approssimazione
ragionevole per piccoli valori di nτ ; infatti ⟨E [∣yn , k(I )∣
2]⟩ è nullo per nτ = 0 e in assenza
di P INT si avrebbe SIR infinito.
E' possibile dimostrare che [6]
⟨E [∣yn , k(I )∣
2]⟩ = 4σa2
M∑i=1
n τ
g 2[i ] (3.10)
⟨E [∣yn , k(U )∣
2]⟩ = 2σa2
M∑i=1
KM−1
g2[ i ] (3.11)
Per scrivere la (3.10) e la (3.11) è stato usato il risultato
⟨E [e [ i1]e*[ i2]]⟩ = 2 r s[ i1−i2]−r s[ i1−i2−M ]−r s[ i1−i 2+M ] dove r s[m ] , la media
temporale dell'autocorrelazione del segnale trasmesso s [i ] , può essere scritta come
r s[m ] =2σMδ[m ] . Difatti la densità spettrale di potenza del segnale s [i ] risulta essere
S s(F )=2σa
2
M∑q=0
M−1
∣G(F− qM )∣
2
dove G(F ) è la trasformata di Fourier del filtro
prototipo che assicura ∑q=0
M−1
∣G(F− qM )∣
2
≃ 1 .
Usando la (3.10) e la (3.11), la (3.9) può essere riscritta come [6]:
SIR =∑i=0
KM−1
g 2[i ]
MP INT
2σa2+2∑
i=1
nτ
g 2[i ]
(3.12)
27
Dove il valore diP INT
σ a2 è determinato al fine di ottenere il corretto valore del SIR per
nτ = 0 a seconda del filtro prototipo utilizzato.
Utilizzando la (3.12), di seguito sono tracciate le curve che descrivono l'andamento del
SIR del sistema al variare dell'errore di timing normalizzato al numero delle sottoportanti
nτM
, utilizzando due filtri prototipo: il filtro Phydyas e il filtro IOTA, proposti
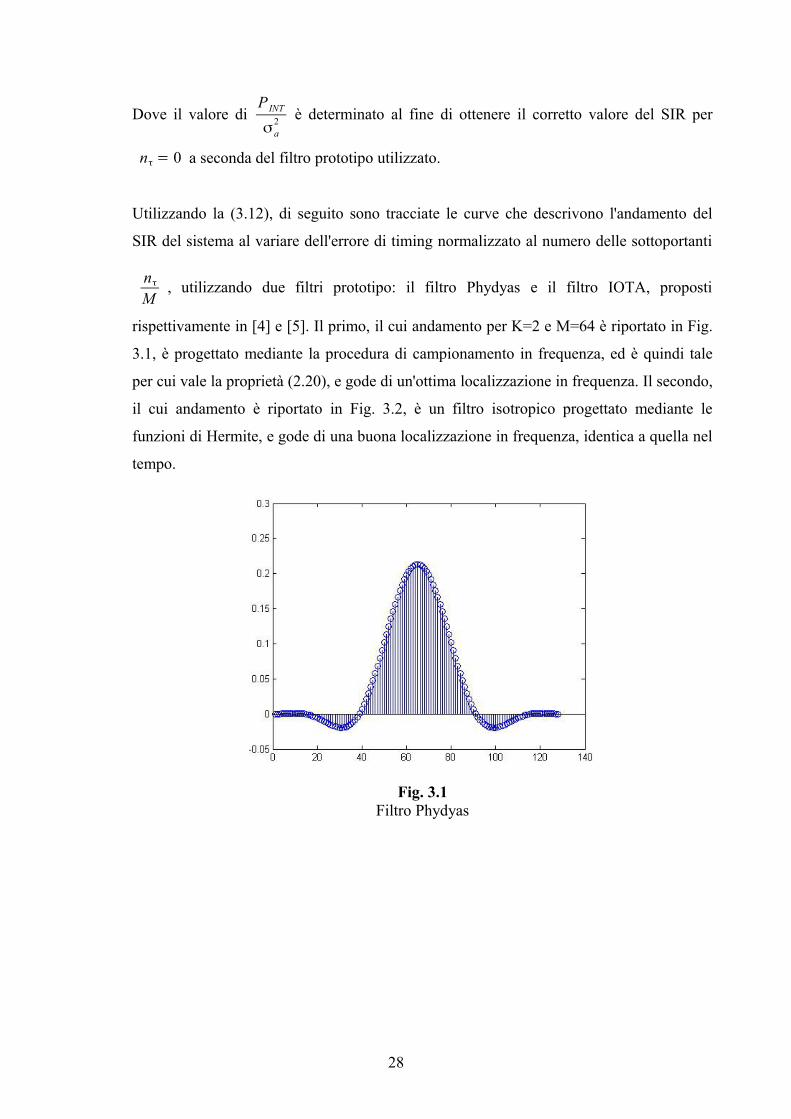
rispettivamente in [4] e [5]. Il primo, il cui andamento per K=2 e M=64 è riportato in Fig.
3.1, è progettato mediante la procedura di campionamento in frequenza, ed è quindi tale
per cui vale la proprietà (2.20), e gode di un'ottima localizzazione in frequenza. Il secondo,
il cui andamento è riportato in Fig. 3.2, è un filtro isotropico progettato mediante le
funzioni di Hermite, e gode di una buona localizzazione in frequenza, identica a quella nel
tempo.
Fig. 3.1Filtro Phydyas
28
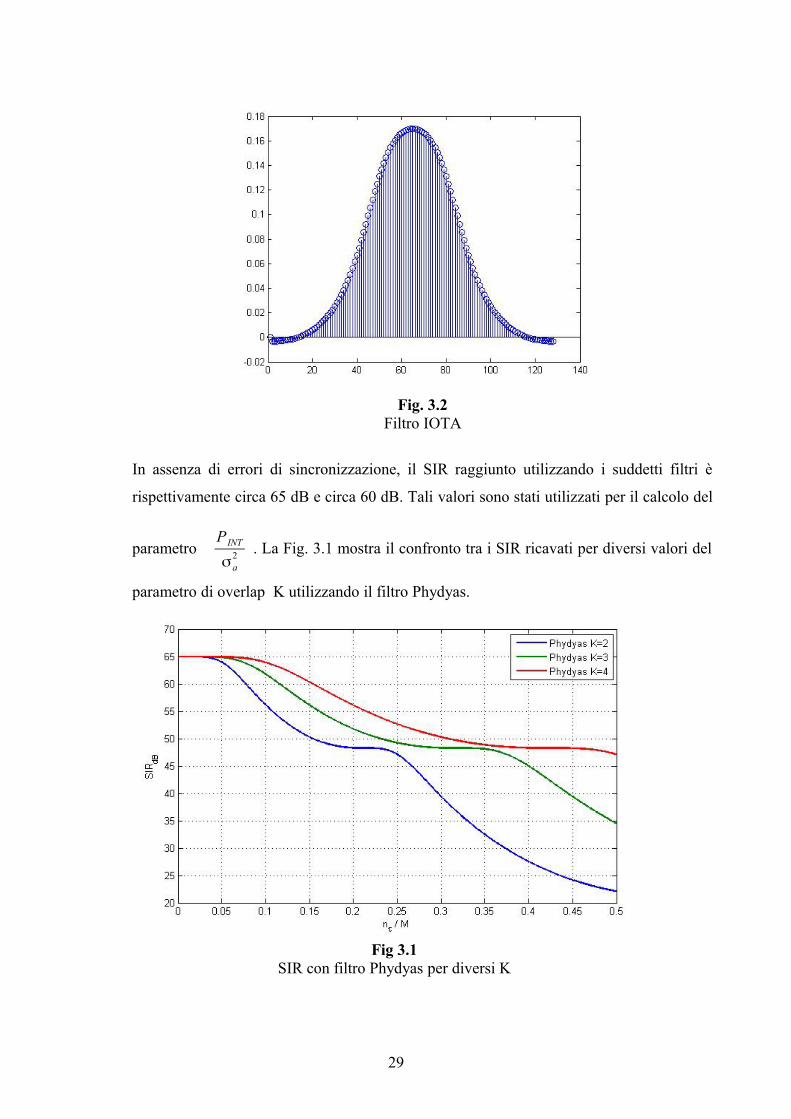
Fig. 3.2Filtro IOTA
In assenza di errori di sincronizzazione, il SIR raggiunto utilizzando i suddetti filtri è
rispettivamente circa 65 dB e circa 60 dB. Tali valori sono stati utilizzati per il calcolo del
parametro P INT
σa2 . La Fig. 3.1 mostra il confronto tra i SIR ricavati per diversi valori del
parametro di overlap K utilizzando il filtro Phydyas.
Fig 3.1SIR con filtro Phydyas per diversi K
29
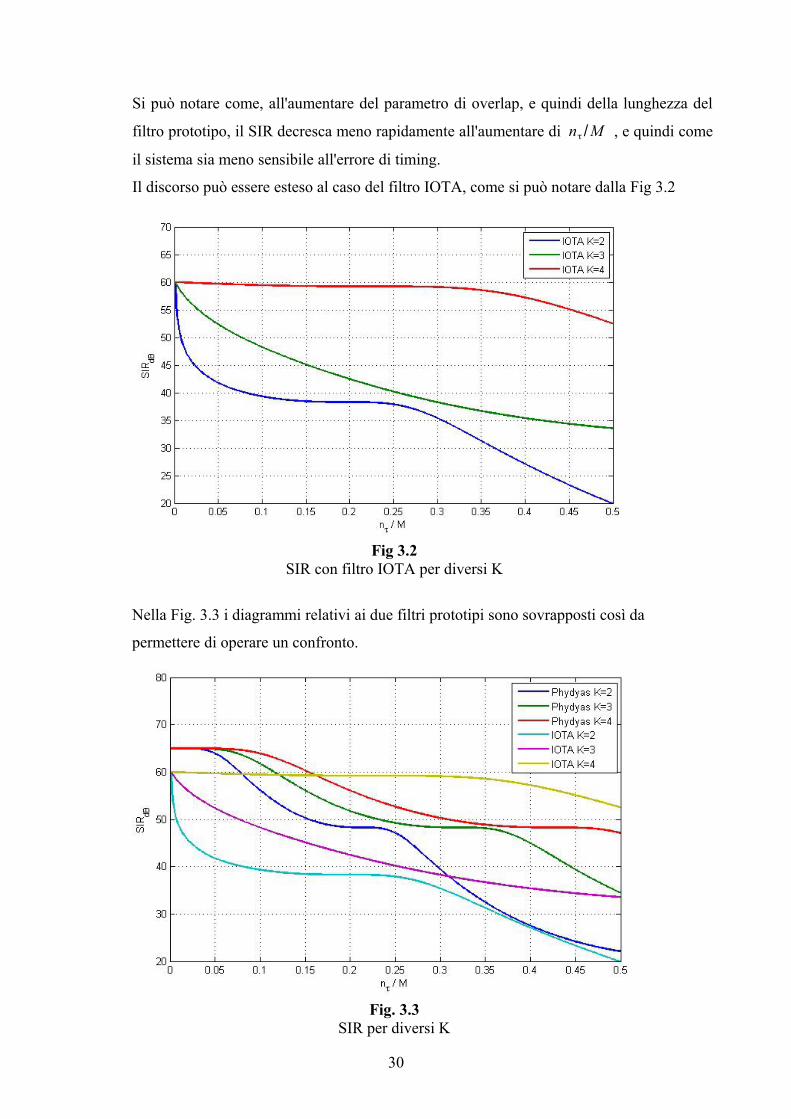
Si può notare come, all'aumentare del parametro di overlap, e quindi della lunghezza del
filtro prototipo, il SIR decresca meno rapidamente all'aumentare di nτ /M , e quindi come
il sistema sia meno sensibile all'errore di timing.
Il discorso può essere esteso al caso del filtro IOTA, come si può notare dalla Fig 3.2
Fig 3.2SIR con filtro IOTA per diversi K
Nella Fig. 3.3 i diagrammi relativi ai due filtri prototipi sono sovrapposti così da
permettere di operare un confronto.
Fig. 3.3SIR per diversi K
30
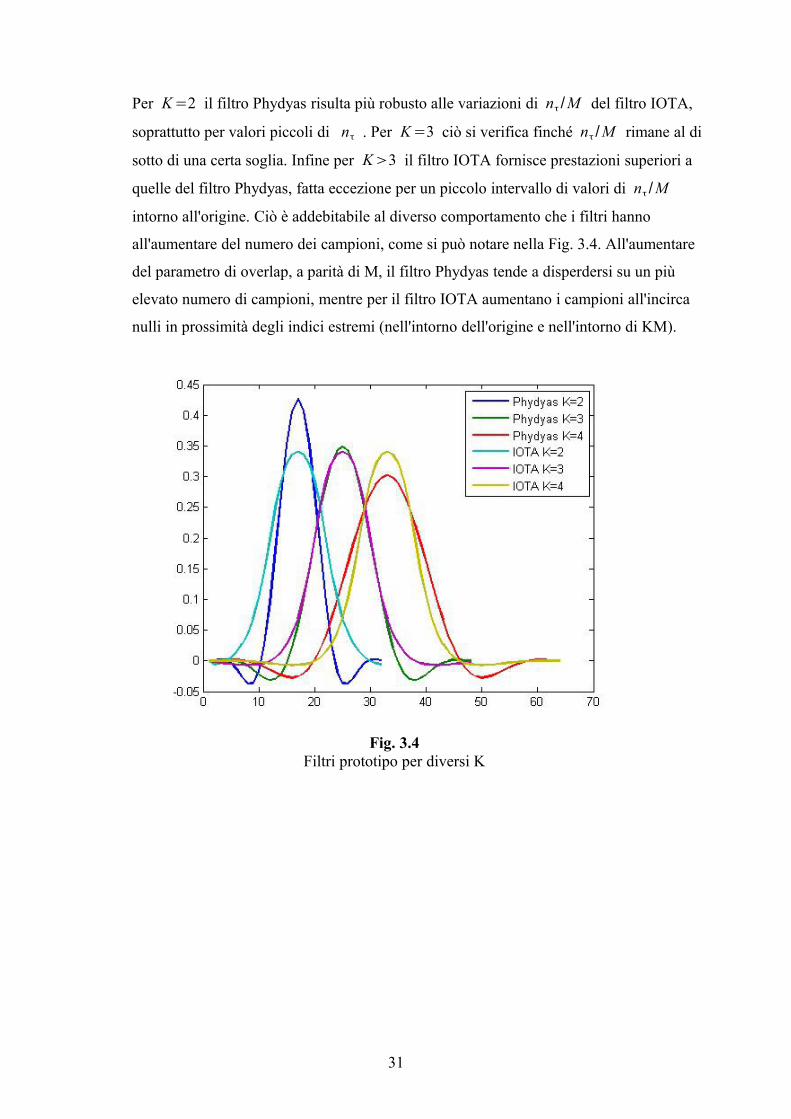
Per K=2 il filtro Phydyas risulta più robusto alle variazioni di nτ /M del filtro IOTA,
soprattutto per valori piccoli di nτ . Per K=3 ciò si verifica finché nτ /M rimane al di
sotto di una certa soglia. Infine per K>3 il filtro IOTA fornisce prestazioni superiori a
quelle del filtro Phydyas, fatta eccezione per un piccolo intervallo di valori di nτ /M
intorno all'origine. Ciò è addebitabile al diverso comportamento che i filtri hanno
all'aumentare del numero dei campioni, come si può notare nella Fig. 3.4. All'aumentare
del parametro di overlap, a parità di M, il filtro Phydyas tende a disperdersi su un più
elevato numero di campioni, mentre per il filtro IOTA aumentano i campioni all'incirca
nulli in prossimità degli indici estremi (nell'intorno dell'origine e nell'intorno di KM).
Fig. 3.4Filtri prototipo per diversi K
31

Conclusioni
In questo lavoro di tesi è stata analizzata la sensibilità dei sistemi OFDM/OQAM,
implementati mediante struttura frequency-spreading, agli errori di timing.
Dapprima è stata fatta una panoramica generale sui sistemi multiportante e in particolare
sui sistemi OFDM.
Successivamente sono stati descritti trasmettitore e ricevitore OFDM/OQAM. Le
operazioni effettuate in ricezione sono state descritte sia in ipotesi di canale AWGN che in
ipotesi di canale multipath.
Sono state valutate, mediante ambiente MATLAB, le prestazioni del sistema in presenza
di errore di timing, ovvero errore di sincronizzazione tra trasmettitore e ricevitore nel
dominio del tempo. In particolare, è stato evidenziato come il SIR, parametro attraverso il
quale sono state misurate tali prestazioni, relativo al timing offset, dipenda dal filtro
prototipo utilizzato, oltre che dal numero di sottoportanti e dal parametro di overlap K. I
filtri prototipo presi in esame in questo lavoro sono i filtri Phydyas e IOTA. Fissato il
numero di sottoportanti, per ciascuno dei due è stato tracciato il SIR al variare del timing
offset e per diversi valori del parametro di overlap. Attraverso diagrammi ricavati è stata
evidenziata una maggiore robustezza al timing offset in entrambi i casi al crescere di K.
Infine, confrontando i due filtri si è potuto constatare una maggiore robustezza del filtro
Phydyas per valori di K contenuti, e, al contrario, una maggiore robustezza del filtro IOTA
per valori di K maggiori di una certa soglia.
32
Bibliografia[1] D. Mattera, M. Tanda, M. Bellanger, Frequency-spreading implementation of
OFDM/OQAM systems, Proc. of the Ninth International Symposium on Wireless Communication Systems (ISWCS 2012), Paris, August 2012. [url: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6328353]
[2] H. Lin, M. Gharba, P. Siohan, Impact of time and carrier frequency offsets on theFBMC/OQAM modulation scheme, Signal Processing 102 (2014) 151-162.[url: http://www.sciencedirect.com/science/article/pii/S0165168414001121]
[3] D. Mattera, M. Tanda, M. Bellanger, Frequency domain CFO compensation for FBMC systems, accettato per la pubblicazione su Signal Processing (2014).
[4] M. Bellanger, Specification and design of a prototype filter for filter bank basedmulticarrier transmissions, Proc. of Int. Conf. on Acoustics, Speech and SignalProcessing (ICASSP) 2001.[url: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=940488]
[5] B. Le Floch, M. Alard, C. Berrou, Coded Orthogonal Frequency Division Multiplex Proc. IEEE 83 (1995)[url: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=387096]
[6] D. Mattera, M. Tanda, M. Bellanger Performance analysis of some timing offset equalizers for OFDM/OQAM systems, Signal Processing 108 (2015) 167-182.[url: http://www.sciencedirect.com/science/article/pii/S0165168414004137]
[7] M. Bellanger, FS-FBMC: An alternative scheme for filter bank based multicarrier transmission, 5th International Symposium on Communications Control and Signal Processing (ISCCSP), 2012.[url: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6217776]
33