Rilevatore di Movimento | Per Esterni | Impostazioni Tempo ...

Capitolo 1
Spazio, tempo e movimento
1.1 Lo spazio-tempo e i riferimenti spazio-temporali
La Meccanica studia i fenomeni collegati a quei mutamenti che gli oggetti materialisubiscono nella loro forma e nella loro posizione, cui ci riferiamo, in sintesi, con iltermine moto. La Meccanica Razionale, in particolare, affronta tale studio a parti-re da un limitato numero di assiomi, coerenti con le osservazioni fenomenologiche,deducendone le implicazioni con l’ausilio degli strumenti forniti dalla matematica.
Poiche il moto di un sistema ne traduce i cambiamenti della collocazione spa-ziale allo scorrere del tempo, lo studio della Meccanica presuppone l’introduzionedelle strutture primitive atte a descrivere lo spazio geometrico ed il tempo.
Definizione 1.1.1 (di spazio-tempo)Si definisce spazio-tempo il prodotto cartesiano
M = E× T
di uno spazio puntuale euclideo E orientato e di dimensione 3, lo spazio, per unospazio puntuale T orientato e di dimensione 1, l’asse dei tempi.
Gli elementi dello spazio-tempo prendono il nome di eventi, quelli dello spaziosi denominano posizioni ed infine gli elementi dell’asse dei tempi prendono il nomedi istanti. Dunque, ogni evento e una coppia (P, τ) costituita da una posizione eda un istante.
Gli eventi si rappresentano, di fatto, in forma coordinata, introducendo in T edE altrettanti sistemi di riferimento. L’asse dei tempi, in particolare, e uno spaziodi dimensione 1 e pertanto i suoi elementi potranno rappresentarsi attraverso sca-lari. A questo scopo e necessario, innanzi tutto, identificare su T un istante o daassumere quale origine del tempo; tale istante corrisponde al numero 0 e dunquela sua scelta equivale all’individuazione dell’istante iniziale a partire dal quale simisura il tempo.
1

2
ou
τu T
Figura 1.1.1: l’asse dei tempi.
Compiuta tale scelta, per completare la determinazione di un riferimento oc-corre fissare un vettore positivo u nello spazio delle traslazioni di T. Tale vettoreindividua l’istante τu = o+u cui compete il valore 1: la sua assegnazione equivaledunque alla scelta dell’unita di misura del tempo.
Ogni riferimento (o, u) di T sara d’ora in avanti chiamato orologio. A ciascunorologio resta associata un’applicazione di T in R che ad ogni istante τ associa loscalare t univocamente determinato dalla relazione
τ = o+ tu.
Tale applicazione risulta essere biunivoca e bicontinua, ovvero, sinteticamente, unomeomorfismo tra T ed R.
Analogamente a quanto appena illustrato riguardo l’asse dei tempi, l’introdu-zione di un riferimento di E richiede, in primo luogo, la scelta di un punto O daassumere quale origine. Una volta fissata l’origine, ogni punto P e individuato dalsuo vettore posizione
x = P −O.
x3
x2x1
x
O
e3
e2
e1
E
Figura 1.1.2: le coordinate cartesiane di un punto.
Introduciamo poi, nello spazio vettoriale E delle traslazioni di E, una base(e1, e2, e3) che, salvo avviso contrario, supporremo essere ortonormale e positiva.In tale base il vettore x si esprime nella forma
x = x1e1 + x2e2 + x3e3.

3
Le tre componenti (x1, x2, x3) del vettore posizione definiscono le coordinate car-tesiane del punto P nel sistema di riferimento O, (e1, e2, e3). L’applicazioneche ad ogni punto associa le sue coordinate cartesiane in un assegnato sistema diriferimento costituisce un omeomorfismo tra E ed R3.
La coppia formata da un orologio e da un sistema di riferimento spaziale de-finisce un riferimento spazio-temporale. In un riferimento spazio-temporale ognievento e caratterizzato da quattro coordinate (x1, x2, x3, t) di cui le prime trerappresentano la posizione mentre la quarta ne individua l’istante.
1.2 Moto, velocita, accelerazione di un punto
La Meccanica abbraccia una ampia classe di fenomeni che comprende, ad esempio,il moto dei pianeti, quello delle masse d’aria coinvolte nei fenomeni meteorologici,le deformazioni elastiche di strutture architettoniche, le evoluzioni di una trottolaposta in rapida rotazione. In ogni caso, l’oggetto di indagine puo essere descritto,in termini matematici, come un insieme, eventualmente corredato di strutture piuo meno complesse. D’altra parte noi percepiamo i sistemi della Meccanica in quan-to essi occupano regioni dello spazio, posseggono delle dimensioni, una forma: inuna parola, attraverso le loro configurazioni. Queste possono eventualmente mo-dificarsi nel corso del fenomeno, come accade quando una trave si flette, quandouna nuvola si sposta nel cielo, quando dell’aria si comprime o si espande. In alcunicasi, pero, un corpo si muove senza che la sua forma vari apprezzabilmente e senzache le posizioni relative delle sue parti si alterino: e il caso, a titolo di esempio, diuna palla di boowling che corre verso i birilli. Quando si realizza tale circostanza,si dice che il corpo si muove in maniera rigida e cio comporta una drastica semplifi-cazione nella descrizione delle sue configurazioni, in quanto e sufficiente conoscerela posizione di tre suoi punti non allineati per poter determinare quella di tutti glialtri. Se poi un corpo si muove rigidamente senza entrare mai in diretto contattocon altri corpi, allora si puo spesso prescindere completamente dalla sua forma edescriverne la configurazione semplicemente individuando la posizione di un suopunto. Si perviene cosı al modello del punto materiale, che costituira l’oggettodi larga parte di queste lezioni. In tale schema un corpo perde ogni strutturainterna e puo dunque rappresentarsi per mezzo di un insieme costituito di un soloelemento, mentre le sue configurazioni sono semplicemente dei punti.
Definizione 1.2.1 (di particella)Una particella e un insieme p composto da un solo elemento. Una configura-zione di una particella nello spazio E e un’applicazione che alla particella stessaassocia un punto P di E.
Una particella in moto e una particella che cambia la propria configurazioneda istante ad istante. Diamo pertanto la

4
Definizione 1.2.2 (di moto di una particella)Siano I un intervallo dell’asse dei tempi e p una particella. Un moto di p inE nell’intervallo I e un’applicazione
χ : I→ E
che a ciascun istante di I associa una configurazione di p.
Il moto di una particella si rappresenta dunque intrinsecamente per mezzo diun’equazione della forma
P = χ(τ), τ ∈ I.
D’altra parte, fissato un orologio, l’intervallo I si trasforma in un intervallo I di Re l’equazione del moto di una particella si esprime nella forma
P = χ(t), t ∈ I, (1.2.1)
in cui χ e la funzione che si ottiene componendo χ con l’omeomorfismo tra R eT generato dall’orologio prescelto. Fissato poi un riferimento spaziale, il moto diuna particella si rappresenta per mezzo di una funzione vettoriale
x = x(t) (1.2.2)
ovvero, equivalentemente, mediante tre equazioni scalari
x1 = x1(t), x2 = x2(t), x3 = x3(t). (1.2.3)
Le equazioni (1.2.1), (1.2.2), (1.2.3) costituiscono le diverse rappresentazioni —rispettivamente, intrinseca, vettoriale, coordinata — dell’equazione finita del mo-to. Nel seguito, faremo uso quasi esclusivamente delle rappresentazioni vettorialee coordinata, le quali risultano tra di loro legate dalla relazione
x(t) = x1(t)e1 + x2(t)e2 + x3(t)e3. (1.2.4)
Assumeremo, inoltre, che un moto sia di classe C2 nel suo insieme di definizione.
Seguendo una convenzione introdotta da Newton, a partire da questo punto,le derivate rispetto alla variabile temporale saranno indicate con uno o piu puntisovrapposti alla funzione da derivare. Scriveremo cosı
f , f , . . .
in luogo di
df
dt,
d2f
dt2, . . . .

5
Definizione 1.2.3 (di velocita e di accelerazione di una particella)Si definiscono velocita e accelerazione di una particella p nel moto di equazionefinita x(t) le due funzioni vettoriali
v(t) = x(t),
a(t) = x(t),(1.2.5)
derivata prima e seconda, rispettivamente, dell’equazione finita del moto.
Derivando una prima ed una seconda volta la (1.2.4) si determinano imme-diatamente l’espressione coordinata della velocita,
x(t) = x1(t)e1 + x2(t)e2 + x3(t)e3, (1.2.6)
e quella dell’accelerazione,
x(t) = x1(t)e1 + x2(t)e2 + x3(t)e3. (1.2.7)
Un caso particolare di moto si realizza quando l’equazione finita e costante:
x(t) = x∗, ∀t ∈ I. (1.2.8)
Quando si verifica una tale circostanza si dice che, nell’intervallo di tempo I, laparticella e in quiete nella posizione x∗.
Derivando l’equazione (1.2.8), si verifica immediatamente che una particella inquiete in un intervallo I ha velocita identicamente nulla in tale intervallo. D’altraparte, se si ha v = 0 in I, integrando tale identita si verifica che la particella e inquiete in quell’intervallo. Le precedenti considerazioni provano il
Teorema 1.2.1Condizione necessaria e sufficiente affinche una particella sia in quiete in unintervallo temporale I e che, in tale intervallo, si annulli identicamente la suavelocita.
1.3 Traiettoria e legge oraria nel moto di una particella
Il luogo delle configurazioni che un punto occupa durante un moto, ovvero l’imma-gine dell’intervallo I attraverso la (1.2.1), e la traiettoria della particella nel motoconsiderato.
La traiettoria di una particella puo ridursi ad un unico punto; cio accade se esolamente se la particella e in quiete.
Se la particella non e in quiete, sia t∗ un istante in cui la sua velocita non si an-nulla; in particolare, risulta |v(t∗)| > 0 e dunque, per il Teorema della permanenzadel segno, esiste un intorno completo di t∗ in cui risulta |v(t)| > 0 e, conseguente-mente, v(t) 6= 0. In tale intorno l’equazione finita del moto e la rappresentazione

6
parametrica di un arco di curva regolare. Nel seguito, per semplicita, limiteremola nostra attenzione a moti per i quali l’intera traiettoria sia una curva regolare diequazione
x = ξ(s) (1.3.1)
dove s rappresenta un’ascissa curvilinea lungo la traiettoria.La (1.3.1) contiene tutte le informazioni di carattere geometrico concernenti il
moto di p. Al fine di completare la descrizione del moto anche nei suoi aspetticinematici e necessario assegnare la relazione
s = s(t) (1.3.2)
che intercorre tra il generico istante di tempo t ∈ I e l’ascissa curvilinea dellaposizione che la particella occupa in quell’istante. La (1.3.2) prende il nome dilegge oraria del moto. Componendo l’equazione della traiettoria con la leggeoraria, si perviene alla forma naturale dell’equazione finita del moto:
x(t) = ξ(s(t)). (1.3.3)
La circostanza piu elementare, dal punto di vista geometrico, si realizza quandola traiettoria del moto di una particella p e contenuta su una retta r, nel qual casosi dice che p compie un moto rettilineo. L’equazione finita di un moto rettilineo e
x = x0 + s(t)t, (1.3.4)
nella quale t e un versore di r, x0 e il vettore posizione del punto di r assuntoquale origine dell’ascissa sulla retta stessa e
s =√
(x1 − x01)2 + (x2 − x02)2 + (x3 − x03)2
e l’ascissa su r. Derivando l’equazione del moto (1.3.4) si ricavano le espressioni
v = s(t) t,
a = s(t) t
per la velocita e l’accelerazione in un moto rettilineo.
• Osservazione 1.3.1
Nello studio dei moti rettilinei e opportuno far coincidere la retta contenente latraiettoria con uno degli assi coordinati, ad esempio il primo, di modo che duranteil moto le restanti due coordinate siano identicamente nulle. Se si assume didenotare con x la coordinata non nulla della particella, l’equazione finita del moto(1.2.4) si riduce a
x = x(t)e1.

7
Quest’ultima espressione si identifica con quella naturale, quando si osservi chex0 = 0, s = x ed e1 = t.
Consideriamo adesso il caso dei moti non rettilinei ed assumiamo senz’altro chela traiettoria sia una curva biregolare dello spazio. Derivando la (1.3.3) rispettoal tempo, si ha
x =dξ
dss
e dunque, ricordando la (??) ed in virtu della definizione di velocita,
v = st. (1.3.5)
La (1.3.5) costituisce l’espressione della velocita di p nel triedro di Frenet relativoal punto della traiettoria per il quale p transita nell’istante considerato. Da essa sievince come la velocita abbia direzione sempre tangente alla traiettoria e intensitapari al valore assoluto della velocita scalare s.
Al fine di stabilire l’espressione dell’accelerazione nel triedro di Frenet, deri-viamo nuovamente la (1.3.5) rispetto al tempo. Ricordando la formula di Frenet
dt
ds=
1
Rn
si ottiene
a = st+s2
Rn. (1.3.6)
La (1.3.6) mostra che l’accelerazione di una particella in moto su una traiettoriacurvilinea e contenuta ad ogni istante nel piano osculatore relativo al punto dellacurva in cui la particella sta transitando. Il componente tangente alla curva hamodulo pari al valore assoluto dell’accelerazione scalare s. Il componente normales2
Rn di a si chiama accelerazione centripeta e non puo annullarsi se non negliistanti in cui e nulla la velocita della particella.
• Esempio 1.3.1
Un moto si dice uniforme se la velocita scalare s assume un valore costante v. Lalegge oraria di un moto uniforme si determina integrando l’identita s = v ed hal’espressione
s(t) = s0 + vt, (1.3.7)
nella quale s0 rappresenta l’ascissa della particella all’istante iniziale. Vale lapena di osservare che in un moto uniforme l’accelerazione tangenziale si annulla epertanto il vettore accelerazione si riduce al suo componente normale.
Un moto si dice uniformemente accelerato se l’accelerazione scalare s assumeun valore costante a. In tal caso, la legge oraria e
s(t) = s0 + v0t+1
2at2 (1.3.8)

8
dove s0 e v0 rappresentano i valori dell’ascissa e della velocita scalare all’istanteiniziale.
Un moto la cui traiettoria e interamente contenuta in un piano si denomina,per l’appunto, moto piano. Per descrivere un tale moto e senz’altro preferibilescegliere un riferimento con i versori e1 e e2 contenuti nel piano del moto, di modoche si abbia x3 = 0 identicamente.
Un moto piano puo pure descriversi assegnando la legge oraria in coordinatepolari per mezzo di due funzioni r(t) e φ(t) che individuano, a ciascun istante,la distanza della particella dall’origine dei raggi vettori e l’anomalia del suo raggiovettore. In questo caso e opportuno esprimere il moto, la velocita e l’accelerazionenella base fisica relativa a quelle coordinate. Tale base e costituita dai due vettori
er = cosφ e1 + sinφ e2,
eφ = − sinφ e1 + cosφ e2
(1.3.9)
i quali cambiano al variare della posizione del punto secondo la legge
er = φ eφ, eφ = −φ er. (1.3.10)
E subito visto che il moto si esprime, in forma vettoriale, attraverso la legge
x = r er.
Derivando una prima volta e tenendo conto della (1.3.10)1 si ottiene
v = r er + rφ eφ. (1.3.11)
Una seconda derivazione da poi, in virtu delle (1.3.10),
a = (r − rφ2) er +1
r
d
dt(r2φ) eφ. (1.3.12)
• Esempio 1.3.2
Il moto di un punto p si dice circolare se la traiettoria e contenuta su una circonfe-renza γ. Fissiamo un riferimento con origine nel centro di γ e con il terzo versoree3 perpendicolare al piano contenente γ; con tale scelta, la terza coordinata x3 eidenticamente nulla e la rappresentazione parametrica di γ si riduce alla coppia diequazioni
x1 = R cosφ,
x2 = R sinφ,
nelle quali il parametro φ e legato all’ascissa curvilinea s su γ dalla relazione
s = Rφ

9
e1
e2
er
eφ
x
v
Figura 1.3.1: la velocita in un moto piano.
cosicche la legge oraria del moto si puo esprimere attraverso la funzione φ(t) lecui derivate φ e φ si denominano velocita angolare ed accelerazione angolare nelmoto circolare. Evidentemente, si ha
s = Rφ e s = Rφ;
pertanto alla (1.3.5) e alla (1.3.6) puo darsi la forma
v = Rφ t,
a = Rφ t+Rφ2 n.
Se, in particolare, la velocita angolare assume un valore costante ω, le precedentiespressioni divengono
v = Rω t,
a = Rω2 n
e l’accelerazione e allora puramente normale.
1.4 Riferimenti in moto relativo
Definizione 1.4.1 (di riferimento mobile)Un sistema di riferimento mobile e una coppia O′(t), (e′1(t), e′2(t), e′3(t)) il cui

10
primo elemento identifica l’equazione finita del moto di un punto — l’origine delriferimento — mentre il secondo denota una terna di vettori variabili soggetti alvincolo di costituire ad ogni istante una base ortonormale positiva.
L’assegnazione degli elementi di un riferimento mobile va concretamente rife-rita ad un sistema fisso O, (e1, e2, e3), che chiameremo sistema di riferimentoassoluto e indicheremo con R, laddove quello mobile sara anche detto sistema diriferimento relativo e denotato con R′.
Il moto dell’origine diR′ si esprime attraverso la sua rappresentazione vettorialexO′(t) rispetto all’origine O ovvero, equivalentemente, mediante la rappresenta-zione scalare (xO′1(t), xO′2(t), xO′3(t)) nella base (e1, e2, e3). Gli elementi dellabase ortonormale si assegnano invece dandone, ad ogni istante, le componenti nellabase fissa; se indichiamo con Qij l’i-sima componente del j-simo vettore, i vettoridella base mobile si esprimono attraverso le relazioni
e′1(t) = Q11(t)e1 +Q21(t)e2 +Q31(t)e3,
e′2(t) = Q12(t)e1 +Q22(t)e2 +Q32(t)e3,
e′3(t) = Q13(t)e1 +Q23(t)e2 +Q33(t)e3.
(1.4.1)
Disponendo le componenti dei tre vettori della base mobile in tre colonne affianca-te, e tralasciando di esplicitare la dipendenza dal tempo, si perviene alla definizionedella matrice
Q =
Q11 Q12 Q13
Q21 Q22 Q23
Q31 Q32 Q33
(1.4.2)
caratteristica della trasformazione nel passaggio dalla base (e1, e2, e3) alla base(e′1, e
′2, e′3).
Tale matrice non puo peraltro assegnarsi in modo arbitrario; infatti, il vincoloche il sistema (e′1, e
′2, e′3) definisca una base ortonormale si traduce nelle condizioni
e′i · e′j = δij , i, j ∈ 1, 2, 3 (1.4.3)
le quali, in virtu delle (1.4.1), si scrivono
3∑h=1
QhiQhj = δij , i, j ∈ 1, 2, 3. (1.4.4)
Queste ultime nove relazioni equivalgono all’uguaglianza matriciale
QQT = 1 (1.4.5)
la quale, a sua volta, comporta l’identita
−1
Q = QT (1.4.6)

11
tra le matrici inversa e trasposta di Q.La proprieta (1.4.6) caratterizza le matrici ortogonali, il cui insieme denoteremo
con il simbolo Orth(R3). E opportuno ricordare che Orth(R3) e un gruppo rispettoall’operazione di prodotto riga per colonna, il cui elemento neutro e la matriceidentica. Dalla (1.4.5) segue poi banalmente che il determinante di un elementodi Orth(R3) puo assumere solo uno dei valori ±1; d’altra parte, entrambe le basi(e1, e2, e3) e (e′1, e
′2, e′3) sono positive e pertanto deve risultare det Q > 0. La
matrice di trasformazione Q appartiene pertanto al sottogruppo Orth+(R3) diOrth(R3) costituito dalle matrici ortogonali con determinante positivo.
Le considerazioni sin qui svolte possono dunque sintetizzarsi affermando che perdeterminare un sistema di riferimento mobile e necessario assegnare una funzionevettoriale del tempo, che individua il moto dell’origine, e una funzione del tempoa valori nell’insieme delle matrici ortogonali positive, che descrive come gli assicambiano la propria orientazione (ovvero ruotano) rispetto a quelli della ternafissa.
Le formule (1.4.1), oltre a descrivere la trasformazione dalla base fissa a quellamobile, definiscono ad ogni istante t l’endomorfismo Q dello spazio E univoca-mente individuato dalle condizioni
e′i = Qei. (1.4.7)
Tale endomorfismo e certamente invertibile, poiche trasforma una base in unabase; esso inoltre conserva l’orientamento della base ed il prodotto scalare dei suoielementi e, dunque, di ogni coppia di vettori. In definitiva, l’endomorfismo Q eortogonale e positivo.
Il gruppo degli endomorfismi ortogonali positivi di E si denotera con il simboloOrth+(E) ed i suoi elementi si chiameranno rotazioni di E. La matrice (1.4.2) none altro che la matrice delle componenti di Q nella base ortonormale (e1, e2, e3) ele due relazioni (1.4.5) e (1.4.6) esprimono in componenti le condizioni
QQT = 1 e−1
Q = QT . (1.4.8)
Alla luce di queste ultime considerazioni possiamo riformulare una precedenteaffermazione dicendo che un riferimento mobile e determinato da due funzioni deltempo, la prima a valori in E, la seconda a valori nel gruppo delle rotazioni di E.
L’assegnazione degli elementi che individuano un riferimento mobile rispettoa uno fisso consente di esprimere, ad ogni istante, le formule di trasformazionedelle coordinate di un medesimo punto nei due riferimenti. Sia infatti P un gene-rico punto; le sue coordinate nel riferimento fisso sono le componenti nella base(e1, e2, e3) del vettore x = P −O, ovvero i tre numeri x1, x2 e x3 tali che
x = x1e1 + x2e2 + x3e3.
Similmente, le coordinate di P nella base mobile sono le componenti in (e′1, e′2, e′3)
del vettore x′ = P −O′, ovvero i numeri x′1, x′2 e x′3 tali che
x′ = x′1e′1 + x′2e
′2 + x′3e
′3.

12
D’altra parte, si ha P −O = (O′ −O) + (P −O′) e cioe
x = xO′ + x′. (1.4.9)
Sostituendo ai vettori le loro espressioni in componenti ed esprimendo i vettori dellabase mobile tramite le (1.4.1), si perviene immediatamente alle seguenti identita
xi = xO′i +
3∑j=1
Qijx′j , i ∈ 1, 2, 3, (1.4.10)
che costituiscono le formule di trasformazione cercate.
1.5 Rotazioni dello spazio tridimensionale
Il seguente teorema illustra le principali proprieta delle rotazioni di uno spaziovettoriale tridimensionale.
Teorema 1.5.1Una rotazione non identica Q dello spazio euclideo E ammette sempre l’autovalorereale e semplice λ = 1 e cioe esiste un sottospazio unidimensionale A invarianteper Q. Inoltre, indicando con Q⊥ la restrizione di Q al complemento ortogonalebidimensionale A⊥ di A, se Q⊥ 6= −1 allora λ = 1 e l’unico autovalore di Q.
Dimostrazione - L’equazione agli autovalori per Q in una base ortonormale (ei) siscrive
3∑j=1
Qijxj = λxi
dove la matrice Q e ortogonale. L’equazione caratteristica, che si determina an-nullando il determinante della matrice di coefficienti Qij − λδij , si esplicita nellaforma
−λ3 + J1λ2 − J2λ+ J3 = 0,
conJ1 = Q11 +Q22 +Q33,
J2 =
∣∣∣∣Q22 Q23
Q32 Q33
∣∣∣∣+
∣∣∣∣Q11 Q13
Q31 Q33
∣∣∣∣+
∣∣∣∣Q11 Q12
Q21 Q22
∣∣∣∣ ,J3 =
∣∣∣∣∣∣Q11 Q12 Q13
Q21 Q22 Q23
Q31 Q32 Q33
∣∣∣∣∣∣ = 1.
Si osservi che i determinanti che compaiono in J2 sono i minori complementari diQ11, Q22 e Q33, rispettivamente. Ora, indicato con Aij il minore complementare

13
dell’elemento Qij , la condizione det Q = 1 comporta Aij =−1
Q ji = QTji = Qij dacui, in particolare,
A11 = Q11, A22 = Q22 A33 = Q33. (1.5.1)
L’equazione caratteristica si scrive dunque
−λ3 + J1λ2 − J1λ+ 1 = 0
ed ammette la radice semplice λ = 1. La molteplicita di questo autovalore di Qvale 3−p se p e il rango della matrice Q− I; e chiaro che i valori possibili per p sono0, 1 e 2. Il valore 0 e da escludere perche comporterebbe Q = I contro l’ipotesiche Q non e la trasformazione identica. Se risultasse p = 1 dovrebbero annullarsitutti i minori del 2o ordine di Q− I; in particolare dovrebbe aversi∣∣∣∣Q11 − 1 Q12
Q21 Q22 − 1
∣∣∣∣ = A33 −Q11 −Q22 + 1 = 0,∣∣∣∣Q11 − 1 Q13
Q31 Q33 − 1
∣∣∣∣ = A22 −Q11 −Q33 + 1 = 0,∣∣∣∣Q22 − 1 Q23
Q32 Q33 − 1
∣∣∣∣ = A11 −Q22 −Q33 + 1 = 0
ovvero, per le (1.5.1), Q11 = Q22 = Q33 = 1. D’altra parte le condizioni diortogonalita
(Q11)2 + (Q21)2 + (Q31)2 = 1,
(Q12)2 + (Q22)2 + (Q32)2 = 1,
(Q13)2 + (Q23)2 + (Q33)2 = 1,
quando vi si introducano i valori determinati per gli elementi della diagonale prin-cipale, comportano Qij = 0 per i 6= j. Si ricade allora nel caso Q = I precedente-mente escluso e pertanto non puo essere che p = 2 cosicche l’autovalore λ = 1 esemplice.
Sia A lo spazio vettoriale unidimensionale associato a tale autovalore ed A⊥il suo complemento ortogonale bidimensionale; si denoti con (e1, e2) una baseortonormale di A⊥ e con e3 un elemento unitario di A. Il sistema (e1, e2, e3)forma una base ortonormale di E3. Poiche Q conserva il prodotto scalare si ha
Qe1 = Q11e1 + Q21e2,
Qe2 = Q12e1 + Q22e2,
Qe3 = e3,
e quindi la matrice Q rappresentativa di Q nella nuova base ha la forma∣∣∣∣∣∣Q11 Q12 0Q21 Q22 0
0 0 1
∣∣∣∣∣∣

14
mentre le condizioni di ortogonalita comportano
(Q11)2 + (Q21)2 = 1,
(Q12)2 + (Q22)2 = 1,
Q11Q12 + Q21Q22 = 0.
Queste relazioni consentono di affermare l’esistenza di un angolo φ ∈ (0, 2π) taleche
Q =
cosφ − sinφ 0sinφ cosφ 0
0 0 1
(i casi φ = 0 e φ = 2π possono escludersi perche si e supposto Q 6= 1). L’equazionecaratteristica nella base (e1, e2, e3) si scrive nella forma
P3(λ) = (1− λ)(λ2 − 2λ cosφ+ 1) = 0
ed e evidente che, se Q⊥ 6= −1 (cioe φ 6= π) l’unico autovalore reale e λ = 1.
Una matrice ortogonale di uno spazio tridimensionale e individuata da 9 com-ponenti tra le quali esistono 6 condizioni indipendenti di ortogonalita e pertantoessa resta univocamente determinata quando si specifichino 3 opportuni parame-tri. Questa circostanza e evidenziata dalla considerazione che una rotazione risultadeterminata dal suo autovettore unitario e3, per il quale e necessario assegnare 2componenti indipendenti, e dal valore di φ. Il sottospazio A associato all’autova-lore λ = 1 si denominera nel seguito asse di rotazione mentre l’angolo φ prenderail nome di angolo di rotazione.
1.6 Angoli di Eulero
Le funzioni xO′(t) eQ(t) che caratterizzano il moto di un riferimento rispetto a unofisso si assegnano, concretamente, per mezzo delle loro componenti, le tre funzionixO′i(t) piu le nove funzioni Qij(t). Queste ultime, in particolare, devono soddisfarele condizioni di ortogonalita (1.4.4) delle quali solo sei sono indipendenti. Pertanto,possiamo pensare di assegnare arbitrariamente tre componenti indipendenti dellamatrice Q e di determinare le sei rimanenti imponendo le (1.4.4).
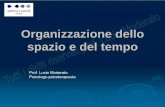
In alternativa, si puo descrivere una rotazione esprimendo tutte e nove le com-ponenti di Q in funzione di tre opportuni parametri di modo che le condizioni diortogonalita siano automaticamente soddisfatte. In questa sezione illustriamo unaclassica rappresentazione parametrica di Q le cui variabili posseggono un evidentesignificato geometrico. Consideriamo a tal proposito una rotazione Q il cui assesia diverso da e3; allora il piano individuato dai versori e′1 e e′2 e quello individua-to dai versori e1 e e2 si intersecano in una retta, la linea dei nodi, il cui versoreindicheremo con n. Denotiamo con ψ, θ e φ, rispettivamente, gli angoli formati

15
da e1 e n, da e3 e e′3, da n e e′1 (figura 1.6.1). I tre parametri θ, ψ e φ sonochiamati angoli di Eulero; piu precisamente, θ e l’angolo di nutazione, ψ l’angolodi precessione, φ l’angolo di rotazione propria.
φψ
θ
e′3
e′2
e′1
e3
e2
e1
Figura 1.6.1: gli angoli di Eulero.
Una prima rotazione Qψ di angolo ψ e asse e3 trasforma la terna (e1, e2, e3)in quella
n = cosψ e1 + sinψ e2,
i = − sinψ e1 + cosψ e2,
e3 = e3
(1.6.1)
il cui primo asse coincide con la linea dei nodi (figura 1.6.2a).
Si esegua ora una rotazione Qθ di angolo θ attorno alla direzione di n; questatrasforma la terna (n, i, e3) in quella
n = n,
j = cos θ i+ sin θ e3,
e′3 = − sin θ i+ cos θ e3
(1.6.2)
il cui terzo asse coincide con quello della terna mobile in quanto perpendicolarealla linea dei nodi (figura 1.6.2b).

16
φ
e′2
e′1
e′3
j
n
c
θ
e′3
j
e3
i
n
b
ψ
i
n
e3
e2
e1
a
Figura 1.6.2: gli angoli di Eulero.
Infine, una terza rotazione Qφ di angolo φ e asse e′3 (figura 1.6.2c) porta laterna (n, j, e′3) in quella mobile:
e′1 = cosφn+ sinφ j,
e′2 = − sinφn+ cosφ j,
e′3 = e′3.
(1.6.3)
In conclusione, risultaQ = QφQθQψ. (1.6.4)
D’altra parte, la rotazione Qψ e rappresentata dalla matrice
Qψ =
cosψ − sinψ 0sinψ cosψ 0
0 0 1
nella base (e1, e2, e3), quella Qθ dalla matrice
Qθ =
1 0 00 cos θ − sin θ0 sin θ cos θ
nella base (n, i, e3) e, infine, quella Qφ dalla matrice
Qφ =
cosφ − sinφ 0sinφ cosφ 0
0 0 1
nella base (n, j, e′3). Eseguendo il prodotto di matrici QψQθQφ si ottiene
Q =
(cosφ cosψ − sinφ sinψ cos θ − sinφ cosψ − cosφ sinψ cos θ sinψ sin θcosφ sinψ + sinφ cosψ cos θ − sinφ sinψ + cosφ cosψ cos θ − cosψ sin θ
sinφ sin θ cosφ sin θ cos θ
). (1.6.5)

17
• Osservazione 1.6.1
Invertendo le prime due relazioni (1.6.3), si ottiene l’espressione del versore n nellabase ruotata,
n = cosφ e′1 − sinφ e′2, (1.6.6)
che sara nel seguito richiamata.
Esplicitando le (1.4.1) attraverso le (1.6.5), si ottengono le seguenti espressionidei vettori della base mobile in quella fissa:
e′1 = (cosφ cosψ − sinφ sinψ cos θ)e1
+ (cosφ sinψ + sinφ cosψ cos θ)e2 + sinφ sin θe3,
e′2 = −(sinφ cosψ + cosφ sinψ cos θ)e1
+ (− sinφ sinψ + cosφ cosψ cos θ)e2 + cosφ sin θe3,
e′3 = sinψ sin θe1 − cosψ sin θe2 + cos θe3.
(1.6.7)
Tenendo poi presente che la matrice inversa di sQ coincide con la sua trasposta, sideterminano immediatamente le formule inverse:
e1 = (cosφ cosψ − sinφ sinψ cos θ)e′1− (sinφ cosψ + cosφ sinψ cos θ)e′2 + sinψ sin θe′3,
e2 = (cosφ sinψ + sinφ cosψ cos θ)e′1+ (− sinφ sinψ + cosφ cosψ cos θ)e′2 − cosψ sin θe′3,
e3 = sinφ sin θe′1 + cosφ sin θe′2 + cos θe′3.
(1.6.8)
Sia ora u un generico vettore e consideriamone le rappresentazioni nella base fissae in quella mobile:
u = u1e1 + u2e2 + u3e3
= u′1e′1 + u′2e
′2 + u′3e
′3.
(1.6.9)
Le componenti del vettore nelle due basi sono legate dalle formule di trasformazione
u′j =
3∑j=1
Qijui, i ∈ 1, 2, 3 (1.6.10)
e da quelle inverse
ui =
3∑j=1
Qiju′j , i ∈ 1, 2, 3 (1.6.11)

18
L’espressione precedentemente determinata della matrice Q consente di esplicitarele (1.6.10) nella forma
u′1 = (cosφ cosψ − sinφ sinψ cos θ)u1
+ (cosφ sinψ + sinφ cosψ cos θ)u2 + sinφ sin θu3,
u′2 = −(sinφ cosψ + cosφ sinψ cos θ)u1
+ (− sinφ sinψ + cosφ cosψ cos θ)u2 + cosφ sin θu3,
u′3 = sinψ sin θu1 − cosψ sin θu2 + cos θu3
(1.6.12)
e le (1.6.11) nella forma
u1 = (cosφ cosψ − sinφ sinψ cos θ)u′1− (sinφ cosψ + cosφ sinψ cos θ)u′2 + sinψ sin θu′3,
u2 = (cosφ sinψ + sinφ cosψ cos θ)u′1+ (− sinφ sinψ + cosφ cosψ cos θ)u′2 − cosψ sin θu′3,
u3 = sinφ sin θu′1 + cosφ sin θu′2 + cos θu′3.
(1.6.13)
1.7 Velocita angolare
In Sezione 1.4 abbiamo mostrato che la definizione di un sistema di riferimentomobile richiede l’assegnazione di una funzione xO′(t) a valori nello spazio vettorialeE e di una Q(t) a valori nel gruppo degli endomorfismi ortogonali positivi di E.Dal punto di vista delle proprieta analitiche si richiede che tali funzioni siano diclasse C2 in R. Le due derivate
vO′(t) = xO′(t), aO′(t) = xO′(t)
della funzione che rappresenta il moto dell’origine del sistema mobile si interpre-tano naturalmente come la velocita e l’accelerazione di quel punto.
La funzione
Ω(t) = Q(t)
esprime la rapidita con cui gli assi del riferimento mobile cambiano orientamentorispetto a quello fisso e si annulla se e solo se tali direzioni sono costanti; dunqueessa puo assumersi come una misura della velocita di rotazione relativa delle dueterne.
La funzione Ω(t) non puo assegnarsi in modo arbitrario; infatti, derivandorispetto al tempo ambo i membri della condizione di compatibilita (1.4.8)1 cuideve soddisfare ad ogni istante la funzione Q(t), si determina l’identita
ΩQT +QΩT = 0. (1.7.1)

19
Dunque, un’applicazione lineare Ω puo assumersi come velocita di rotazione di unaterna mobile rispetto a una fissa ad un dato istante t se e solamente se soddisfa inquell’istante la condizione (1.7.1).
La verifica concreta di tale condizione richiede la conoscenza dell’orientamentodella terna mobile rispetto a quella fissa espresso dall’applicazione Q. Risultapertanto conveniente assumere quale indicatore della velocita di rotazione non gial’applicazione Ω bensı lo spin, definito come
W (t) = Q(t)QT (t). (1.7.2)
In termini di tale nuova quantita, la (1.7.1) si traduce nella relazione
W = −W T , (1.7.3)
che esprime l’antisimmetria di W . Dunque, un endomorfismo di E costituisce unvalore ammissibile per lo spin di una terna mobile rispetto a una fissa se e solo see antisimmetrico.
L’insieme degli endomorfismi antisimmetrici di E e un sottospazio tridimen-sionale dello spazio di tutti gli endomorfismi di E. Tale considerazione costituiscela premessa per la costruzione di un isomorfismo tra lo spazio degli endomorfismiantisimmetrici di E ed E stesso che ci consentira di rappresentare lo spin per mez-zo di un opportuno vettore. A tal fine, si osservi in primo luogo che la matricerappresentativa W di W nella base ortonormale (e1, e2, e3) e antisimmetrica:
W =
0 −W21 W13
W21 0 −W32
−W13 W32 0
.
Associamo allora allo spin W il vettore velocita angolare ω le cui componenti ω1,ω2, ω3 coincidono, ordinatamente, con le tre componenti indipendenti W32, W13 eW21 di W:
ω = ω1e1 + ω2e2 + ω3e3 = W32e1 +W13e2 +W21e3. (1.7.4)
Il vettore velocita angolare individua biunivocamente lo spin — e con esso lavelocita di rotazione relativa di due riferimenti — e costituisce pertanto un buonindicatore della rapidita di rotazione relativa delle due terne. Esso permette inoltredi fornire un’espressiva rappresentazione dell’azione dello spin sui vettori di E.Infatti, le componenti dell’immagine attraverso W di un vettore x si determinanoeseguendo il prodotto riga per colonna della matrice W per il vettore colonna dellecomponenti x1, x2, x3 di x e valgono, rispettivamente
W13x3 −W21x2, W21x1 −W32x3, W32x2 −W13x1.
Tenendo allora conto della definizione di ω, si stabilisce l’identita
Wx = ω × x (1.7.5)
per ogni vettore dello spazio.

20
1.8 Derivata assoluta e derivata relativa
Un generico vettore u di E puo esprimersi attraverso le sue componenti nella basefissa (e1, e2, e3) ovvero in quella mobile (e′1, e
′2, e′3) per mezzo delle (1.6.9). Le
formule (1.6.10) e (1.6.11), che esprimono il legame tra le componenti nelle duebasi, evidenziano che quand’anche tali componenti risultassero costanti in una delledue basi non lo sarebbero nell’altra in quanto le Qij dipendono dal tempo. Neconsegue che una quantita vettoriale che appare costante all’osservatore mobile,risulta dipendere dal tempo per quello fisso e viceversa. Nasce dunque l’esigenzadi stabilire una formula che colleghi il modo di variare nel tempo di una stessagrandezza rispetto a due diversi osservatori.
Consideriamo dunque una quantita vettoriale che supporremo dipendere daltempo per entrambi gli osservatori, nel senso che assumeremo che le sue compo-nenti in entrambe le basi possano dipendere dal tempo. La funzione che esprimeil tasso di variazione di u rispetto all’osservatore fisso e
u = u1e1 + u2e2 + u3e3
e prende il nome di derivata assoluta della funzione u. Analogamente, il tasso divariazione di u rispetto all’osservatore mobile e espresso dalla derivata relativa,di u, definita come
u = u′1e′1 + u′2e
′2 + u′3e
′3.
Derivando rispetto al tempo la (1.6.9), si ha
u =
3∑i=1
uiei
=
3∑j=1
u′je′j +
3∑j=1
u′j e′j
= u+
3∑j=1
u′j e′j
(1.8.1)
Al fine di determinare la derivata assoluta dei vettori della base mobile, deriviamorispetto al tempo la (1.4.7); tenendo conto che, in virtu della (1.4.8)2, risulta
ej =−1
Qe′j = QTe′j , si ha
e′j = Qej = QQTe′j = We′j
e quindi, per la (1.7.5)e′j = ω × e′j . (1.8.2)
Le (1.8.2) sono le formule di Poisson. Introducendo tali relazioni nell’ultimomembro della (1.8.1) si ottiene immediatamente
u = u+ ω × u. (1.8.3)

21
E questa la relazione cercata tra la derivata assoluta e quella relativa di unafunzione vettoriale.
In particolare, se un vettore u e costante nel riferimento mobile, e cioe se lasua derivata relativa si annulla, allora la (1.8.3) si riduce a
u = ω × u (1.8.4)
Concludiamo osservando che, applicando la (1.8.3) al caso in cui u sia il vettorevelocita angolare, si ottiene
ω = ω, (1.8.5)
ovvero la derivata assoluta e relativa della velocita angolare coincidono.
1.9 Velocita di trascinamento e accelerazione di trascinamento
Torniamo alla relazione (1.4.9) che esprime, a un dato istante, il legame tra ivettori posizione di un medesimo punto relativi a due riferimenti. In tale relazioneassumiamo che il vettore x′ individui, al variare del tempo, un punto fisso nelriferimento mobile, ovvero, in altri termini, che x′ abbia derivata relativa nulla.Per quanto visto nella sezione precedente, la derivata assoluta di x′ non si annullama vale
x′ = ω × x′ (1.9.1)
e dunque x′ risulta essere, dal punto di vista del riferimento fisso, una funzionedel tempo. Riscriviamo dunque la (1.4.9) nella forma
x(t) = xO′(t) + x′(t) (1.9.2)
esplicitando la dipendenza dal tempo.La (1.9.2) rappresenta l’equazione finita del moto del punto x′, solidale al
riferimento mobile, rispetto al riferimento fisso, il moto di trascinamento. Lecorrispondenti velocita e accelerazione si denominano, rispettivamente, velocitadi trascinamento e accelerazione di trascinamento di x′ nel moto (1.9.2).
Per deteminare le espressioni di tali quantita, deriviamo la (1.9.2) rispetto altempo; si ha
x = xO′ + x′.
Il primo membro rappresenta la velocita di trascinamento v di x′ ed il primo ad-dendo al secondo membro e, in particolare, la velocita di trascinamento dell’originedi R′, che denoteremo con vO′ . Tenendo allora conto della (1.9.1), si ottiene
v = vO′ + ω × x′ (1.9.3)
La (1.9.3) di denomina forma lagrangiana della velocita di trascinamento. Unadiversa rappresentazione della stessa funzione si stabilisce operando un cambia-mente della variabile spaziale. Invertendo la (1.9.2), si ha
x′ = −xO′ + x. (1.9.4)

22
In questa relazione occorre riguardare x come un vettore costante nel riferimentofisso, ovvero un vettore di componenti costanti in quel riferimento. Essa esprimeallora il punto solidale al riferimento mobile che transita, ad un istante fissato, perla posizione x. Introducendo la (1.9.4) nella (1.9.3), si ottiene
v = vO′ + ω × (x− xO′).
Quest’ultima relazione esprime la velocita di trascinamento del punto solidale alriferimento mobile che transita in x all’istante considerato. In particolare, ponendoin essa x = 0, si determina la velocita di trascinamento del punto che transita perl’origine del riferimento fisso:
vO = vO′ − ω × xO′ .
Sottraendo membro a membro le due ultime relazioni si ottiene, in definitiva,
v = vO + ω × x. (1.9.5)
La (1.9.5) costituisce la forma euleriana della velocita di trascinamento.In maniera analoga si determinano le diverse rappresentazioni dell’accelerazione
di trascinamento. Derivando rispetto al tempo la (1.9.3) si ha
v = vO′ + ω × x′ + ω × x′
e dunquea = aO′ + ω × x′ + ω × ω × x′. (1.9.6)
Questa relazione fornisce la forma lagrangiana dell’accelerazione di trascinamento.Per determinare la forma euleriana, operiamo il cambiamento di variabile (1.4.9);ragionando come per la velocita si ottiene, in definitiva,
a = aO + ω × x+ ω × ω × x. (1.9.7)
1.10 Moti relativi particolari
In questa sezione ci soffermiamo sullo studio di alcune speciali classi di moti re-lativi sia per il loro intrinseco interesse, sia perche — come vedremo nelle sezionesuccessiva — i moti generici risultano decomponibili sempre in un piccolo numerodi moti appartenenti a tali classi.
Definizione 1.10.1 (di moto traslatorio)Un riferimento mobile si dice in moto traslatorio rispetto ad uno fisso quando ilvettore congiungente una qualsiasi coppia di punti solidali ad esso e costante nelriferimento fisso.
Il seguente teorema fornisce una espressiva caratterizzazione dei moti traslatori.

23
Teorema 1.10.1Condizione necessaria e sufficiente affinche il moto relativo di due riferimenti siatraslatorio e che si annulli identicamente la velocita angolare.
Dimostrazione - Indichiamo con x′ ed y′ i vettori rappresentativi di due puntisolidali al riferimento mobile; in un moto traslatorio la derivata assoluta del vettorex′ − y′ deve essere nulla per ogni scelta dei vettori x′ ed y′. Osservando che ivettori x′ ed y′ hanno per ipotesi derivata relativa nulla e ricordando la (1.8.4) siottiene allora
ω × (x′ − y′) = 0.
Stante l’arbitrarieta dei vettori x′ ed y′, questa relazione puo essere soddisfatta see solo se
ω = 0. (1.10.1)
Il teorema e dunque provato.
Se il Teorema appena dimostrato caratterizza i moti traslatori in termini dellequantita che determinano la velocita di trascinamento, e immediato pervenire aduna diversa caratterizzazione in termini delle grandezze che intervengono nellarappresentazione del moto stesso. Infatti, per la sua stessa definizione, la velocitaangolare si annulla se e solo se la matrice Q e costante e dunque questa divieneuna nuova condizione necessaria e sufficiente affinche un moto sia traslatorio.
D’altra parte, la matrice Q e costruita con le componenti dei vettori della basedel riferimento mobile; pertanto la condizione che caratterizza i moti traslatoripuo esprimersi nella indipendenza dal tempo, rispetto al riferimento fisso R, deivettori che costituiscono la base del riferimento mobile R′.
Piu in generale, combinando la (1.10.1) con la (1.8.3), si verifica che, in unmoto traslatorio, la derivata assoluta e quella relativa coincidono cosicche ognivettore costante nel riferimento fisso e tale anche in quello mobile e viceversa.Senza perdita di generalita, si puo quindi assumere la base mobile coincidente conquella fissa, di modo che la matrice Q si riduca a quella identica. Un moto trasla-torio e allora completamente determinato dalla sola funzione xO′(t) che esprimel’equazione finita del moto dell’origine.
L’equazione finita del moto del punto x′ si pone nella forma
x(t) = xO′(t) + x′
con x′ costante rispetto a R′ e dunque anche a R. Quest’ultima relazione mostrache, in un moto traslatorio, la traiettoria di un qualsiasi punto coincide con quelladell’origine a meno di una traslazione.
Riguardo la velocita di trascinamento in un moto traslatorio, in virtu della(1.10.1) l’espressione (1.9.5) si riduce a v = vO e dunque tutti i punti solidali alsistema di riferimento mobile si muovono con la stessa velocita. Denotando conτ (t) la funzione del tempo che esprime tale velocita, scriveremo
v = τ (t). (1.10.2)

24
Un moto traslatorio e detto moto traslatorio uniforme se la velocita nondipende dal tempo. In tal caso scriveremo la (1.10.2) nella forma
v = τ n (1.10.3)
avendo denotato con τ > 0 l’intensita della velocita e con n il versore che neindividua la direzione. In un moto traslatorio uniforme tutti i punti solidali alriferimento mobile descrivono rette parallele al versore n.
Definizione 1.10.2 (di moto sferico)Un riferimento mobile si dice in moto sferico se esiste un punto ad esso solidaleche rimane in quiete rispetto al riferimento fisso.
Poiche in un moto sferico esiste un punto che e fisso rispetto a entrambi iriferimenti, e lecito scegliere tale punto quale loro origine comune. In virtu di talescelta risulta identicamente
xO′(t) = 0
e dunquevO = vO′ = 0
di modo che l’espressione della velocita di trascinamento diventa semplicemente
v = ω × x. (1.10.4)
Similmente, il campo di accelerazione assume la forma
a = ω × x+ ω × ω × x. (1.10.5)
Una sottoclasse particolarmente notevole di moti sferici e quella dei moti rota-tori. Alla definizione di tali moti premettiamo il seguete
Teorema 1.10.2Se in un moto relativo sono fissi due punti del riferimento mobile, sono allora fissitutti i punti della retta che li contiene.
Dimostrazione - Denotiamo con O e N i due punti in quiete; scegliamo il primoquale origine dei vettori posizione, e indichiamo con N il vettore posizione delsecondo, la cui derivata assoluta e, per ipotesi, nulla. Sia ora x il vettore posizionedel generico punto della retta contenente O e N ; deve aversi
x = αN
per un qualche α ∈ R, e dunque
x = αN = 0,
cio che prova l’asserto.

25
Definizione 1.10.3 (di moto rotatorio)Un riferimento mobile si dice in moto rotatorio se durante tale moto i punti diuna sua retta restano in quiete rispetto al riferimento fisso.
In un moto rotatorio, la retta che contiene i punti in quiete prende il nome diasse di rotazione.
I moti rotatori sono dunque particolari moti sferici e pertanto si puo assumereper essi la rappresentazione materiale (1.10.4), nella quale l’origine comune deidue sistemi di riferimento e un qualsiasi punto dell’asse di rotazione.
La descrizione di un moto rotatorio risulta particolarmente agevolata se si facoincidere in entrambi i riferimenti uno dei versori, ad esempio il terzo, con quellon individuante l’asse di rotazione:
e3 = e′3 = n.
In virtu di tale scelta, la matrice rappresentativa di Q(t) risulta allora essere
Q(t) =
cosφ(t) − sinφ(t) 0sinφ(t) cosφ(t) 0
0 0 1
.
Derivando tale espressione rispetto al tempo si ha poi
Q(t) =
−φ(t) sinφ(t) −φ(t) cosφ(t) 0
φ(t) cosφ(t) −φ(t) sinφ(t) 00 0 0
.
Eseguendo il prodotto QQT si determina la seguente espressione per la matricerappresentativa dello spin:
W(t) =
0 −φ(t) 0
φ(t) 0 00 0 0
.
In definitiva, il vettore velocita angolare in un moto rotatorio ha la forma
ω = φn. (1.10.6)
Sostituendo la (1.10.6) nella (1.10.4), la velocita di trascinamento in un motorotatorio si pone nella forma
v = φn× x. (1.10.7)
Similmente, l’accelerazione di trascinamento e data da
a = φn× x+ φ2n× n× x. (1.10.8)

26
Se, in particolare, φ assume un valore costante ω, il moto della terna mobilesi dice moto rotatorio uniforme. In un tale moto il vettore velocita angolare ecostante e vale
ω = ωn.
In tale circostanza la velocita di trascinamento diventa
v = ωn× x. (1.10.9)
e l’accelerazione di trascinamento prende la forma
a = ω2n× n× x. (1.10.10)
1.11 Composizione di moti relativi
I moti relativi di due riferimenti, quando non siano direttamente catalogabili inuna delle classi particolari analizzate nella precedente sezione, possono sempreriguardarsi come composizione di piu moti elementari.
Consideriamo dunque il generico moto di un riferimento R′ = O′, (e′1, e′2, e′3)rispetto a R = O, (e1, e2, e3), descritto dalle formule di trasformazione (1.4.10).Consideriamo poi un terzo riferimento R′′ = O′′, (e′′1 , e′′2 , e′′3); il moto di R′′
rispetto a R si esprime, nella base (e1, e2, e3), per mezzo di tre relazioni dellaforma
xi = xO′′i +
3∑k=1
Q′′ikx′′k , i ∈ 1, 2, 3. (1.11.1)
D’altra parte, anche i due riferimenti R′ e R′′ sono, in generale, in moto relativo;assumendo R′′ quale riferimento fisso, il moto di R′ rispetto ad esso e descrittodalle tre equazioni scalari
x′′k = x′′O′k +
3∑j=1
Q′kjx′j , j ∈ 1, 2, 3. (1.11.2)
Il moto di R′ rispetto ad R e la composizione del moto di R′ rispetto ad R′′ conquello di R′′ rispetto a R.
Sostituendo le (1.11.2) nelle (1.11.1) si ottiene
xi = xO′′i +
3∑k=1
Q′′ikx′′O′k +
3∑j,k=1
Q′′ikQ′kjx′j , i ∈ 1, 2, 3.

27
Confrontando queste ultime relazioni con le (1.4.10) si trova
xO′i = xO′′i +
3∑j=1
Q′′ijx′′O′j , i ∈ 1, 2, 3,
Qij =
3∑k=1
Q′′ikQ′kj , i, j ∈ 1, 2, 3.
(1.11.3)
Le (1.11.3)1 esprimono l’identita
O′ −O = (O′′ −O) + (O′ −O′′)
nella base (e1, e2, e3). Le (1.11.3)2 equivalgono invece alla identita matriciale
Q = Q′′Q′ (1.11.4)
che si traduce nell’affermazione che la matrice di rotazione in un moto compostoe il prodotto delle matrici di rotazione dei moti componenti.
Una immediata conseguenza di questa proprieta e che la velocita angolare inun moto composto e la somma delle velocita angolari dei moti componenti; si hainfatti
W = QQT
= (Q′′Q′ + Q′′Q′)Q′TQ′′T
= Q′′Q′′T + Q′′Q′Q′TQ′′T .
Il prodotto W′′ = Q′′Q′′T rappresenta le componenti in R dello spin di R′′ rispettoa R. Analogamente, il prodotto Q′Q′T da la matrice rappresentativa dello spindi R′ rispetto a R′′ nel riferimento R′′; pertanto la matrice W′ = Q′′Q′Q′TQ′′T
individua le componenti di quello stesso spin in R. In definitiva, le precedentiidentita si esprimono, in forma intrinseca, nella relazione
W = W ′ +W ′′
ovvero, equivalentemente,ω = ω′ + ω′′. (1.11.5)
• Esempio 1.11.1
Consideriamo un riferimento R′ = O′, (e′1, e′2, e′3) in moto generico rispetto aR = O, (e1, e2, e3) e sia R′′ = O′, (e1, e2, e3). Il moto generico di R′ rispettoa R puo sempre riguardarsi come la composizione di quello di R′ rispetto a R′′, chee sferico poiche i due riferimenti hanno la stessa origine, con quello di R′′ rispettoa R, che e traslatorio, in quanto i due riferimenti hanno la base in comune. Inconclusione, ogni moto relativo e la composizione di un moto traslatorio e di unosferico.

28
• Esempio 1.11.2
Si consideri un riferimento R′ in moto traslatorio uniforme con velocita
τ = τ n
rispetto a un riferimento R′′ il quale, a sua volta, ruota rispetto ad R attorno adun asse r con velocita angolare costante
ω = ωn.
Il moto risultante di R′ rispetto ad R si dice allora moto rototraslatorio.Assumiamo un punto O ∈ r quale origine comune dei riferimenti R e R′′ e
scegliamo i versori e3 ed e′′3 coincidenti con l’asse di rotazione n. Ancora, pren-diamo i versori di R′ coincidenti con quelli di R′′ e fissiamo l’origine O′ di R′ inun punto di r. In virtu di tale scelta, il punto O′ avanza lungo r con legge oraria
xO′ = τtn
mentre la matrice che esprime la rotazione di R′ rispetto a R si identifica conquella che esprime la rotazione di R′′ e ha la forma
Q =
cosωt − sinωt 0sinωt cosωt 0
0 0 1
.
Il campo delle velocita in un moto rototraslatorio prende dunque la forma
v = τ + ω × x
doveτ = τ n, ω = ωn
con τ e ω costanti.
Nella Sezione 1.6 abbiamo mostrato come ogni rotazione possa decomporsi intre rotazioni elementari, individuate dai tre angoli di Eulero. Di conseguenza,ogni moto rotatorio puo senz’altro riguardarsi come la composizione di tre motirotatori, il primo attorno all’asse fisso e3, descritto dalla funzione ψ(t), il secondoattorno alla linea dei nodi, descritto dalla funzione θ(t), il terzo attorno all’asse e′3,descritto dalla funzione φ(t). In virtu della proprieta di additivita precedentementemostrata, la veloctia angolare si esprime allora nella forma
ω = ψ e3 + θn+ φ e′3. (1.11.6)
D’altra parte, denotando con ω1, ω2 e ω3 le componenti di ω nel riferimento fisso,si ha
ω = ω1 e1 + ω2 e2 + ω3 e3. (1.11.7)

29
Esprimendo allora nella (1.11.6) i versori n e e′3 nella base fissa per mezzo della(1.6.1)1 e delle (1.6.7)3 e uguagliando le componenti cosı ottenute a ω1, ω2 e ω3,si ottiene
ω1 = θ cosψ + φ sinψ sin θ,
ω2 = θ sinψ − φ cosψ sin θ,
ω3 = φ cos θ + ψ.
(1.11.8)
Le (1.11.8) esprimono il legame tra le componenti della velocita nella base fissa egli angoli di Eulero e le loro derivate.
In modo del tutto analogo, posto
ω = ω′1 e′1 + ω′2 e
′2 + ω′3 e
′3. (1.11.9)
e tenuto conto della (1.6.6) e della (1.6.8)3, si ottengono le seguenti espressionilagrangiane delle componenti del vettore velocita angolare nella base solidale:
ω′1 = θ cosφ+ ψ sinφ sin θ,
ω′2 = −θ sinφ+ ψ cosφ sin θ,
ω′3 = φ+ ψ cos θ.
(1.11.10)
E un facile esercizio verificare che le (1.11.10), si invertono nella seguente forma:
ψ =1
sin θ(ω′1 sinφ+ ω′2 cosφ),
θ = ω′1 cosφ− ω′2 sinφ,
φ = −(ω′1 sinφ+ ω′2 cosφ) cot θ + ω′3.
(1.11.11)
• Esempio 1.11.3
Consideriamo un riferimento R′′ in moto rotatorio uniforme rispetto ad R attornoa una retta k di versore k con velocita angolare
ω1 = µk.
Sia poi R′ a sua volta in moto rotatorio uniforme rispetto a R′′ attorno a una rettaincidente k in un punto O e avente versore κ con velocita angolare
ω2 = νκ.
Il moto risultante di R′ rispetto a R si denomina precessione regolare. La velocitaangolare in tale moto e
ω = µk + ν κ (1.11.12)
e risulta dunque essere la somma di un vettore costante nel riferimento fisso e diuno costante in quello mobile.

30
Se si assume il versore e3 del riferimento fisso coincidente con k e quello e′3 delriferimento mobile coincidente con κ, dal confronto tra la (1.11.6) e la (1.11.12)mostra che in una precessione regolare l’angolo di nutazione θ resta costante neltempo e gli angoli di precessione ψ e di rotazione propria φ variano con leggelineare:
ψ = µt+ ψ0, φ = νt+ φ0.
1.12 Formule di trasformazione di moto, velocita e accelerazione
In questa sezione ci poniamo il problema di confrontare la descrizione del motodi un medesimo punto rispetto a due riferimenti in moto relativo. Consideriamodunque una particella p il cui moto sia descritto dall’equazione finita (1.2.4).La velocita e l’accelerazione durante tale moto sono definiti dalle (1.2.5) che siesprimono in componenti per mezzo della (1.2.6) e della (1.2.7).
Il moto della stessa particella rispetto a un sistema di riferimento mobile edescritto da un’equazione della forma
x′(t) = x′1(t)e′1(t) + x′2(t)e′2(t) + x′3(t)e′3(t). (1.12.1)
La velocita e l’accelerazione rispetto al sistema di riferimento mobile si definisco-no derivando la (1.12.1) come se i vettori della base mobile fossero costanti e siidentificano pertanto con le derivate relative prima e seconda di tale espressione,
v′(t) = x′(t),
a′(t) =˚x′(t),(1.12.2)
ovvero, in componenti,
v′(t) = x′1(t)e′1(t) + x′2(t)e′2(t) + x′3(t)e′3(t),
a′(t) = x′1(t)e′1(t) + x′2(t)e′2(t) + x′3(t)e′3(t).(1.12.3)
Chiameremo le (1.12.2) velocita relativa ed accelerazione relativa mentre, incontrapposizione, le (1.2.5) si diranno velocita assoluta e accelerazione assoluta.
Al fine di stabilire le formule che legano la velocita e l’accelerazione relativealle corrispondenti quantita assolute partiamo dalla considerazione che ad ogniistante il legame tra le rappresentazioni del moto nei due riferimenti e fornitodalla relazione
x(t) = xO′(t) + x′(t). (1.12.4)
Derivando ambo i membri rispetto al tempo ed esprimendo la derivata dellafunzione x′(t) per mezzo della (1.8.3) si ottiene
x = xO′ + ω × x′ + x′,

31
ovverov = vO′ + ω × x′ + v′ (1.12.5)
La (1.12.5) traduce il principio dei moti relativi e si enuncia affermando che lavelocita assoluta v e la somma di quella relativa v′ e della velocita di trascinamento
vT = vO′ + ω × x′ (1.12.6)
che compete, nel moto relativo di R′ in R, al punto solidale a R′ nel quale statransitando p all’istante considerato.
Derivando ulteriormente la (1.12.5) rispetto al tempo si ottiene
v = vO′ + ω × x′ + ω × ω × x′ + ω × x′ + ω × v′ + v′
dalla quale segue facilmente
a = aO′ + ω × x′ + ω × ω × x′ + 2ω × v′ + a′. (1.12.7)
La (1.12.7) fornisce la legge di trasformazione dell’accelerazione. Definendol’accelerazione di Coriolis o accelerazione complementare con la posizione
aC = 2ω × v′, (1.12.8)
possiamo esprimere la (1.12.7) nella forma
a = aT + aC + a′ (1.12.9)
nella qualeaT = aO′ + ω × x′ + ω × ω × x′ (1.12.10)
e l’accelerazione di trascinamento del punto solidale a R′ nel quale transita laparticella all’istante considerato. La (1.12.9) e la formula di Coriolis e si enunciaaffermando che l’accelerazione assoluta a di p in R ad un dato istante e la sommadi quella relativa a′, dell’accelerazione di trascinamento aT che spetta, nel motorelativo di R′ in R, al punto di R′ che occupa, allo stesso istante, la medesimaposizione di p, e dell’accelerazione di Coriolis. I tre addendi che compongonol’accelerazione di trascinamento si denominano, rispettivamente, accelerazione ditraslazione, accelerazione di rotazione, accelerazione centrifuga.

32