Sommario - users2.unimi.itusers2.unimi.it/lzzmsm/TIE testi sensori.pdf · CORSO TIE – PROF....
48
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI GENERALITA’ SUI SENSORI IMPIEGATI PER IL MONITORAGGIO E CONTROLLO DELLE PRODUZIONI AGRICOLO-ZOOTECNICHE Sommario GENERALITA’ SUI SENSORI IMPIEGATI PER IL MONITORAGGIO E CONTROLLO DELLE PRODUZIONI AGRICOLO-ZOOTECNICHE ................................................................................................................................. 1 1 – I SENSORI NELLO SPAZIO DELL’INFORMAZIONE ...................................................................................... 2 2 - DEFINIZIONI .............................................................................................................................................. 4 3 - TARATURA, OFFSET, RANGE DEI SENSORI ................................................................................................ 9 4 - ACCURATEZZA E PRECISIONE ................................................................................................................. 12 5 – DIVERSI ESEMPIO DI CLASSIFICAZIONE DEI SENSORI ............................................................................ 15 6 – ALCUNI SENSORI COMUNI ..................................................................................................................... 19 6.1 – Sensori resistivi ............................................................................................................................... 19 6.2 – Sensori di temperatura ................................................................................................................... 22 6.3 – Sensori termografici........................................................................................................................ 25 6.4 – Sensori induttivi .............................................................................................................................. 26 6.5 – Sensori capacitivi ............................................................................................................................ 28 6.6 – Sensori fotoelettrici ........................................................................................................................ 30 6.7 – Encoder ........................................................................................................................................... 31 6.8 – Dinamo tachimetriche .................................................................................................................... 32 6.9 – Sensori piezoelettrici ...................................................................................................................... 33 6.10 – Sensori ad ultrasuoni .................................................................................................................... 34 6.11 – Sensori elettrochimici ................................................................................................................... 36 7 - SCHEDE DI ALCUNI SENSORI INSERITI IN DOMINI INFORMATIVI SPECIFICI ........................................... 38 7.1 - Sensori misura posizione su video touch-screen ............................................................................ 38 7.2 - Sensori misura contenuti gas scarico .............................................................................................. 40 7. 3 - Sensori misura numero giri singole ruote ...................................................................................... 41 7.4 - Sensori misura pressione pneumatici ............................................................................................. 41 7.5 - Sensori misura flusso per irroratrici ................................................................................................ 42 7.6 - Sensori misura distanza da terra barre da diserbo ......................................................................... 43 7.7 - Sensori misura volume parete fogliare ........................................................................................... 44 7.8 - Sensori misura del grado di riempimento delle barre nelle mietitrebbiatrici per colture erbacee 44 7.9 - Sensori misura produzioni sulle mietitrebbiatrici ........................................................................... 45 7.10 - Sensori misura umidità per colture erbacee ................................................................................. 46
Transcript of Sommario - users2.unimi.itusers2.unimi.it/lzzmsm/TIE testi sensori.pdf · CORSO TIE – PROF....
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
GENERALITA’ SUI SENSORI IMPIEGATI PER IL MONITORAGGIO E CONTROLLO DELLE
PRODUZIONI AGRICOLO-ZOOTECNICHE
Sommario GENERALITA’ SUI SENSORI IMPIEGATI PER IL MONITORAGGIO E CONTROLLO DELLE PRODUZIONI
AGRICOLO-ZOOTECNICHE ................................................................................................................................. 1
1 – I SENSORI NELLO SPAZIO DELL’INFORMAZIONE ...................................................................................... 2
2 - DEFINIZIONI .............................................................................................................................................. 4
3 - TARATURA, OFFSET, RANGE DEI SENSORI ................................................................................................ 9
4 - ACCURATEZZA E PRECISIONE ................................................................................................................. 12
5 – DIVERSI ESEMPIO DI CLASSIFICAZIONE DEI SENSORI ............................................................................ 15
6 – ALCUNI SENSORI COMUNI ..................................................................................................................... 19
6.1 – Sensori resistivi ............................................................................................................................... 19
6.2 – Sensori di temperatura ................................................................................................................... 22
6.3 – Sensori termografici........................................................................................................................ 25
6.4 – Sensori induttivi .............................................................................................................................. 26
6.5 – Sensori capacitivi ............................................................................................................................ 28
6.6 – Sensori fotoelettrici ........................................................................................................................ 30
6.7 – Encoder ........................................................................................................................................... 31
6.8 – Dinamo tachimetriche .................................................................................................................... 32
6.9 – Sensori piezoelettrici ...................................................................................................................... 33
6.10 – Sensori ad ultrasuoni .................................................................................................................... 34
6.11 – Sensori elettrochimici ................................................................................................................... 36
7 - SCHEDE DI ALCUNI SENSORI INSERITI IN DOMINI INFORMATIVI SPECIFICI ........................................... 38
7.1 - Sensori misura posizione su video touch-screen ............................................................................ 38
7.2 - Sensori misura contenuti gas scarico .............................................................................................. 40
7. 3 - Sensori misura numero giri singole ruote ...................................................................................... 41
7.4 - Sensori misura pressione pneumatici ............................................................................................. 41
7.5 - Sensori misura flusso per irroratrici ................................................................................................ 42
7.6 - Sensori misura distanza da terra barre da diserbo ......................................................................... 43
7.7 - Sensori misura volume parete fogliare ........................................................................................... 44
7.8 - Sensori misura del grado di riempimento delle barre nelle mietitrebbiatrici per colture erbacee 44
7.9 - Sensori misura produzioni sulle mietitrebbiatrici ........................................................................... 45
7.10 - Sensori misura umidità per colture erbacee ................................................................................. 46
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
7.10 - Sensori misura qualità carne ......................................................................................................... 46
1 – I SENSORI NELLO SPAZIO DELL’INFORMAZIONE
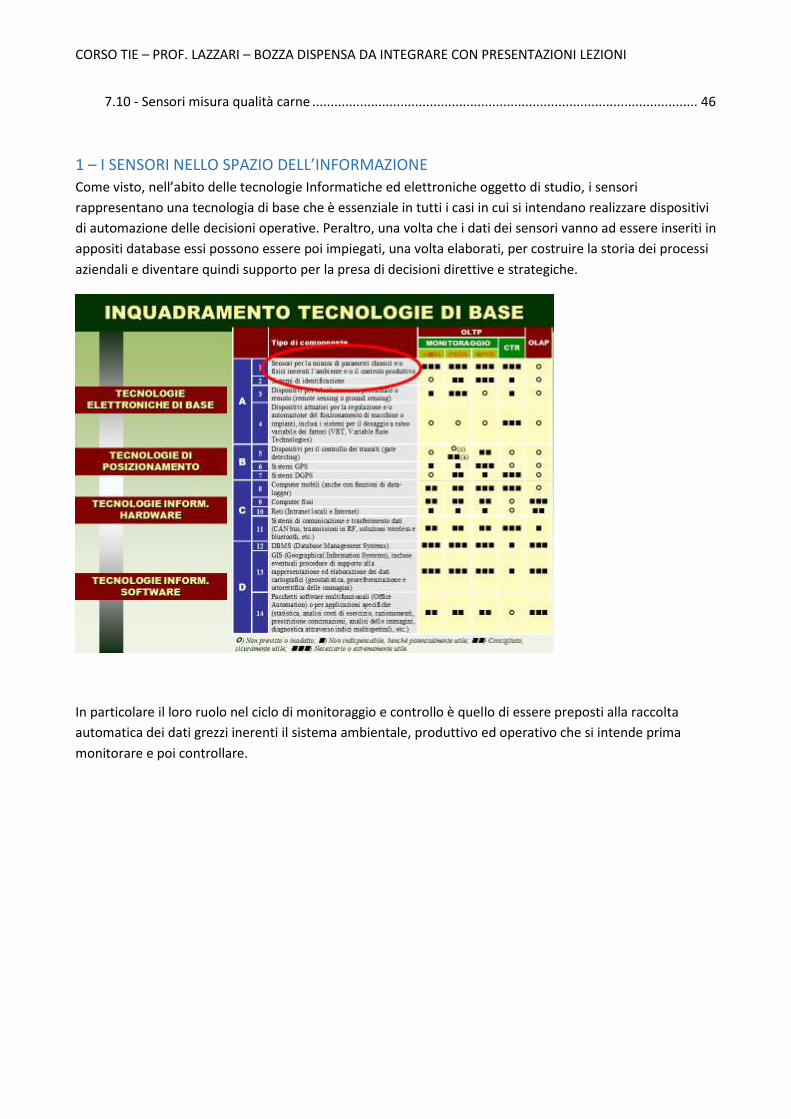
Come visto, nell’abito delle tecnologie Informatiche ed elettroniche oggetto di studio, i sensori
rappresentano una tecnologia di base che è essenziale in tutti i casi in cui si intendano realizzare dispositivi
di automazione delle decisioni operative. Peraltro, una volta che i dati dei sensori vanno ad essere inseriti in
appositi database essi possono essere poi impiegati, una volta elaborati, per costruire la storia dei processi
aziendali e diventare quindi supporto per la presa di decisioni direttive e strategiche.
In particolare il loro ruolo nel ciclo di monitoraggio e controllo è quello di essere preposti alla raccolta
automatica dei dati grezzi inerenti il sistema ambientale, produttivo ed operativo che si intende prima
monitorare e poi controllare.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
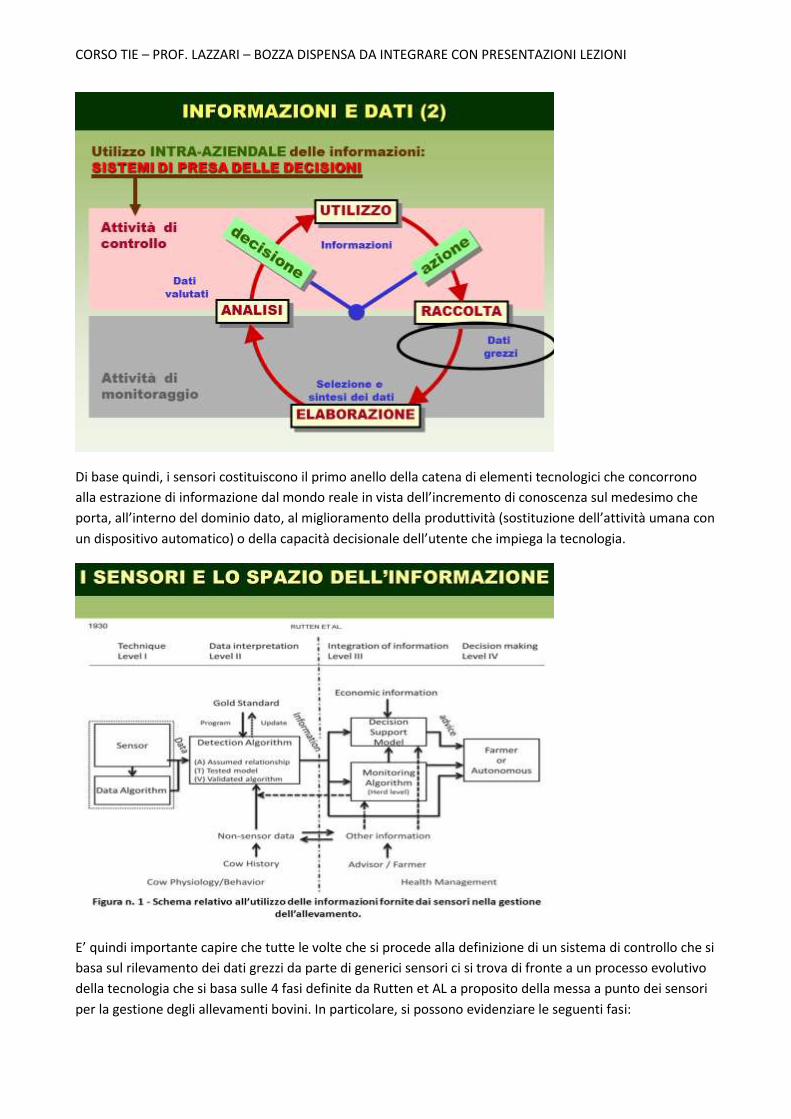
Di base quindi, i sensori costituiscono il primo anello della catena di elementi tecnologici che concorrono
alla estrazione di informazione dal mondo reale in vista dell’incremento di conoscenza sul medesimo che
porta, all’interno del dominio dato, al miglioramento della produttività (sostituzione dell’attività umana con
un dispositivo automatico) o della capacità decisionale dell’utente che impiega la tecnologia.
E’ quindi importante capire che tutte le volte che si procede alla definizione di un sistema di controllo che si
basa sul rilevamento dei dati grezzi da parte di generici sensori ci si trova di fronte a un processo evolutivo
della tecnologia che si basa sulle 4 fasi definite da Rutten et AL a proposito della messa a punto dei sensori
per la gestione degli allevamenti bovini. In particolare, si possono evidenziare le seguenti fasi:
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
1 Implementazione tecnica. Riguarda la scelta del parametro fisico o chimico che deve essere misurato e
la definizione degli algoritmi associati alla restituzione di tale misura con frequenza, caratteristiche
elettriche e modalità che rappresentino le variazioni che nel tempo intervengono nel fenomeno che
deve essere sottoposto a dominio conoscitivo. L’uscita di sottosistema che si realizza a questo livello è
ancora costituita da DATI
2 Elaborazione dei dati e loro trasformazione in informazioni. I dati in uscita da 1 sono confrontati con
dati standard che rappresentano il comportamento ORDINARIO del sistema in via di controllo. Per fare
ciò in molti casi possono essere impiegate misure o osservazioni effettuate con sensori/strumenti che
assumono la funzione di GOLD STANDARD. Taratura e validazione sono le tecniche principali che si
impiegano in questa fase.
3 Integrazione delle informazioni
4 Messa in essere dell’azione decisionale
2 - DEFINIZIONI
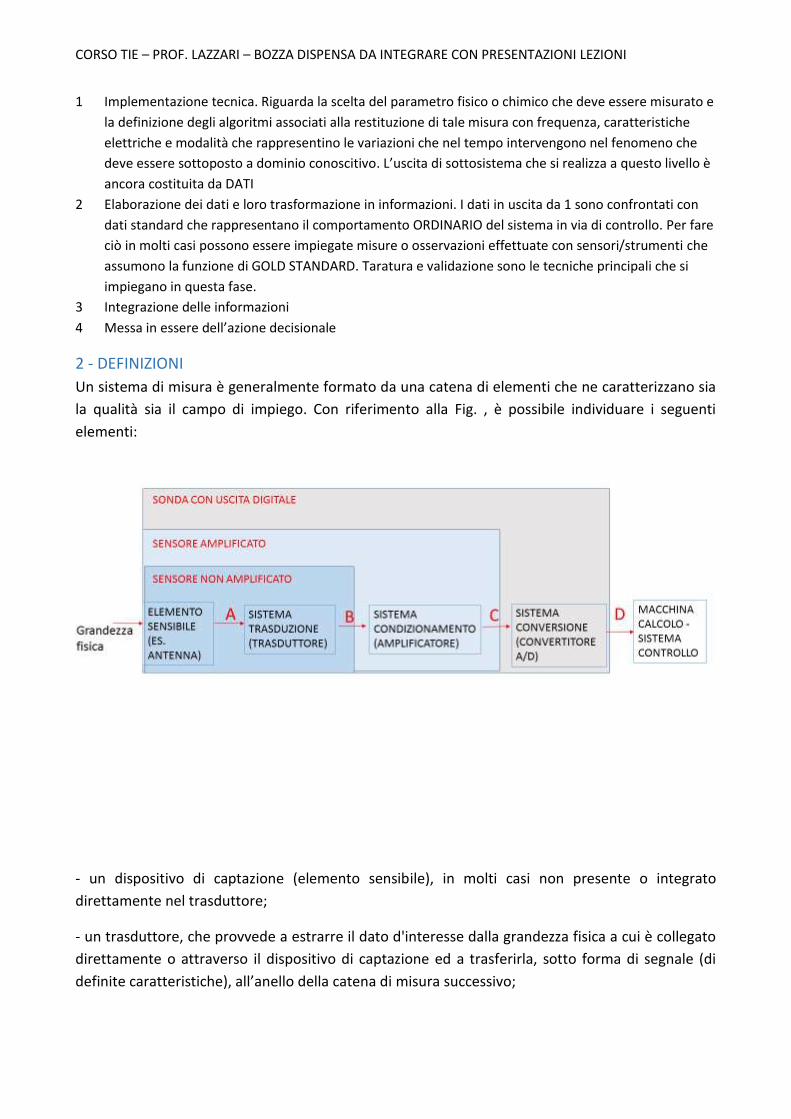
Un sistema di misura è generalmente formato da una catena di elementi che ne caratterizzano sia
la qualità sia il campo di impiego. Con riferimento alla Fig. , è possibile individuare i seguenti
elementi:
- un dispositivo di captazione (elemento sensibile), in molti casi non presente o integrato
direttamente nel trasduttore;
- un trasduttore, che provvede a estrarre il dato d'interesse dalla grandezza fisica a cui è collegato
direttamente o attraverso il dispositivo di captazione ed a trasferirla, sotto forma di segnale (di
definite caratteristiche), all’anello della catena di misura successivo;
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
- un sistema di condizionamento, che provvede a modificare ed ottimizzare le caratteristiche del
segnale proveniente dal trasduttore/sensore per renderlo conforme all’impiego che verrà messo in
essere dall’anello successivo della catena di misura;
- un sistema di conversione, che provvede a trasformare la natura dell'informazione da analogica a
numerica, in modo che, sotto quest'ultima forma, venga trasferita all’esterno della catena di misura
verso la macchina calcolatrice;
- una macchina calcolatrice, che provvede a memorizzare od elaborare il dato in forma numerica
per ottenere l'informazione da impiegare nel dispositivo di controllo vero e proprio.
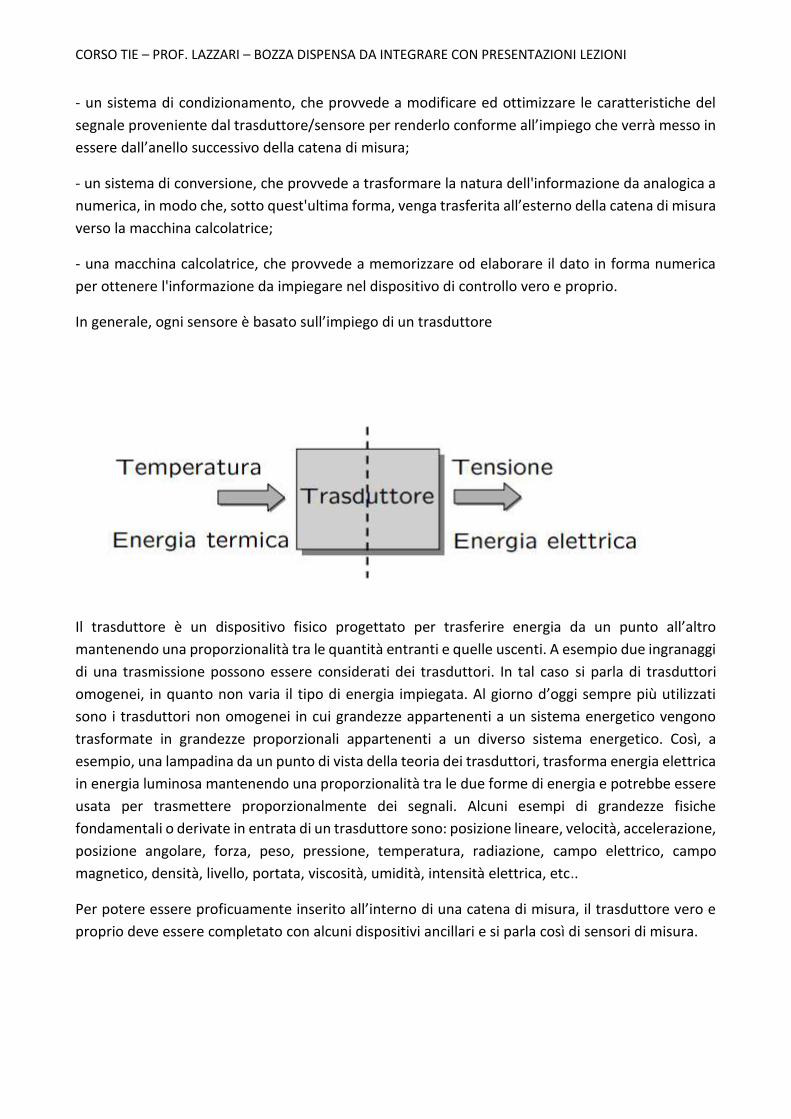
In generale, ogni sensore è basato sull’impiego di un trasduttore
Il trasduttore è un dispositivo fisico progettato per trasferire energia da un punto all’altro
mantenendo una proporzionalità tra le quantità entranti e quelle uscenti. A esempio due ingranaggi
di una trasmissione possono essere considerati dei trasduttori. In tal caso si parla di trasduttori
omogenei, in quanto non varia il tipo di energia impiegata. Al giorno d’oggi sempre più utilizzati
sono i trasduttori non omogenei in cui grandezze appartenenti a un sistema energetico vengono
trasformate in grandezze proporzionali appartenenti a un diverso sistema energetico. Così, a
esempio, una lampadina da un punto di vista della teoria dei trasduttori, trasforma energia elettrica
in energia luminosa mantenendo una proporzionalità tra le due forme di energia e potrebbe essere
usata per trasmettere proporzionalmente dei segnali. Alcuni esempi di grandezze fisiche
fondamentali o derivate in entrata di un trasduttore sono: posizione lineare, velocità, accelerazione,
posizione angolare, forza, peso, pressione, temperatura, radiazione, campo elettrico, campo
magnetico, densità, livello, portata, viscosità, umidità, intensità elettrica, etc..
Per potere essere proficuamente inserito all’interno di una catena di misura, il trasduttore vero e
proprio deve essere completato con alcuni dispositivi ancillari e si parla così di sensori di misura.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
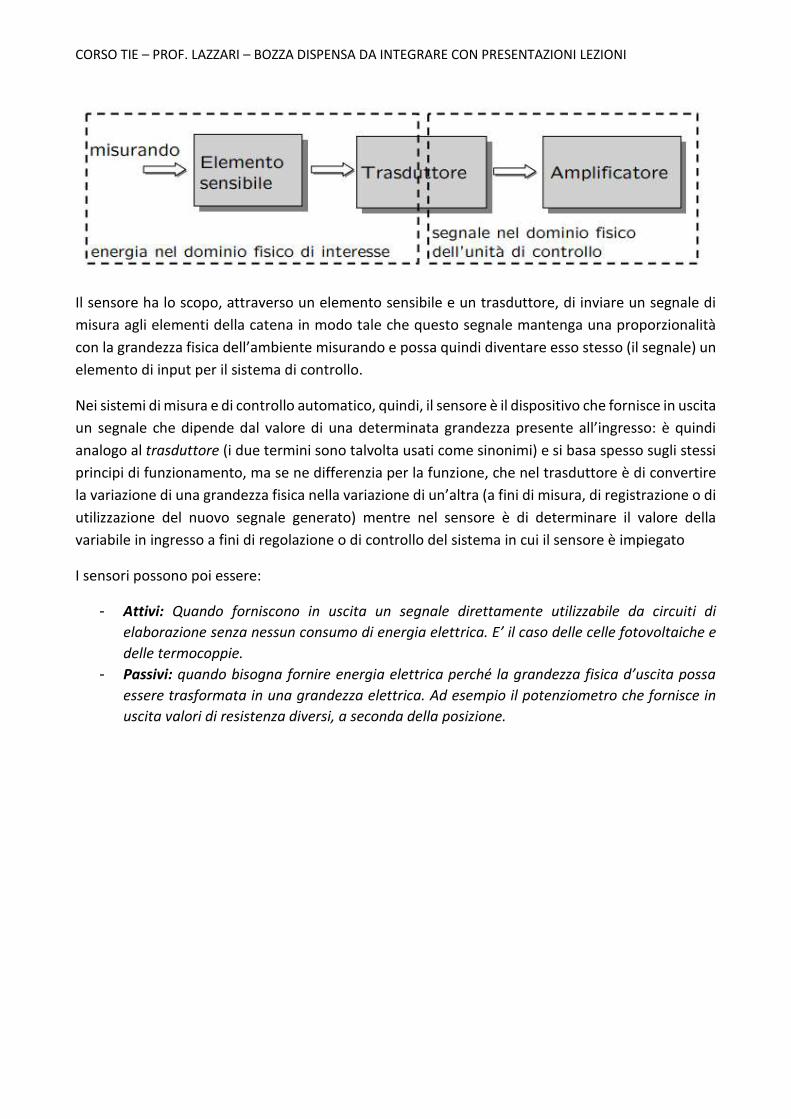
Il sensore ha lo scopo, attraverso un elemento sensibile e un trasduttore, di inviare un segnale di
misura agli elementi della catena in modo tale che questo segnale mantenga una proporzionalità
con la grandezza fisica dell’ambiente misurando e possa quindi diventare esso stesso (il segnale) un
elemento di input per il sistema di controllo.
Nei sistemi di misura e di controllo automatico, quindi, il sensore è il dispositivo che fornisce in uscita
un segnale che dipende dal valore di una determinata grandezza presente all’ingresso: è quindi
analogo al trasduttore (i due termini sono talvolta usati come sinonimi) e si basa spesso sugli stessi
principi di funzionamento, ma se ne differenzia per la funzione, che nel trasduttore è di convertire
la variazione di una grandezza fisica nella variazione di un’altra (a fini di misura, di registrazione o di
utilizzazione del nuovo segnale generato) mentre nel sensore è di determinare il valore della
variabile in ingresso a fini di regolazione o di controllo del sistema in cui il sensore è impiegato
I sensori possono poi essere:
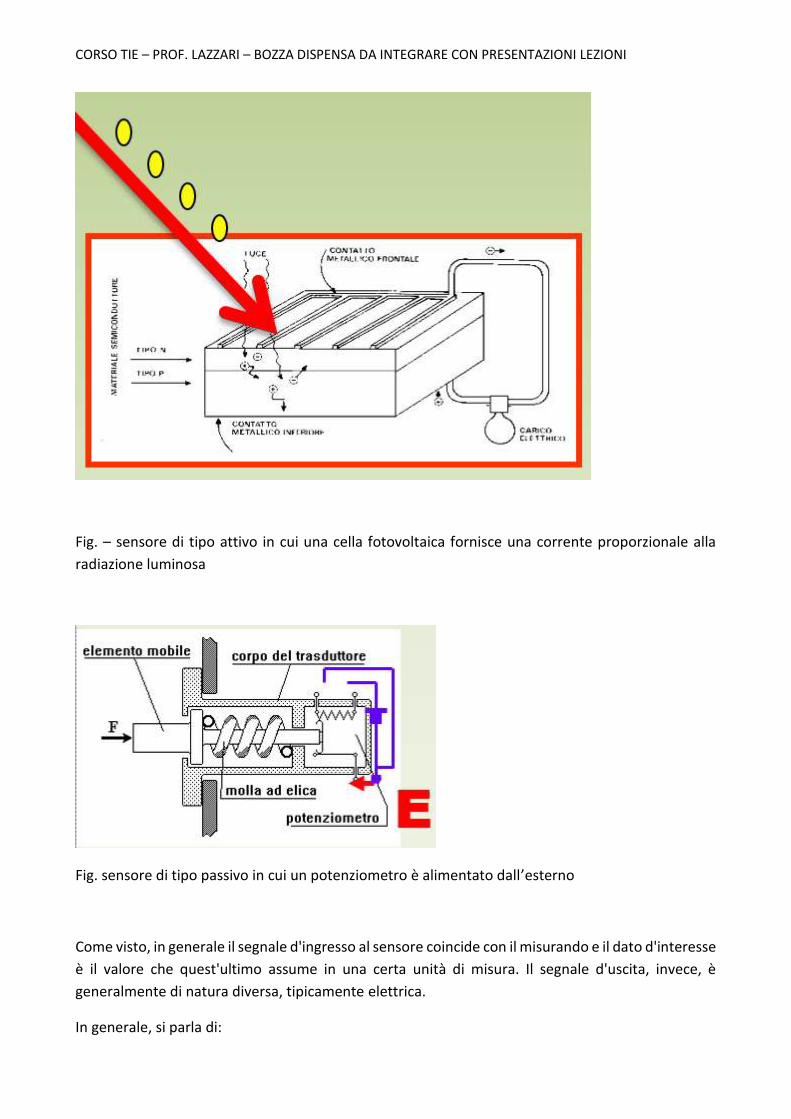
- Attivi: Quando forniscono in uscita un segnale direttamente utilizzabile da circuiti di
elaborazione senza nessun consumo di energia elettrica. E’ il caso delle celle fotovoltaiche e
delle termocoppie.
- Passivi: quando bisogna fornire energia elettrica perché la grandezza fisica d’uscita possa
essere trasformata in una grandezza elettrica. Ad esempio il potenziometro che fornisce in
uscita valori di resistenza diversi, a seconda della posizione.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Fig. – sensore di tipo attivo in cui una cella fotovoltaica fornisce una corrente proporzionale alla
radiazione luminosa
Fig. sensore di tipo passivo in cui un potenziometro è alimentato dall’esterno
Come visto, in generale il segnale d'ingresso al sensore coincide con il misurando e il dato d'interesse
è il valore che quest'ultimo assume in una certa unità di misura. Il segnale d'uscita, invece, è
generalmente di natura diversa, tipicamente elettrica.
In generale, si parla di:
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
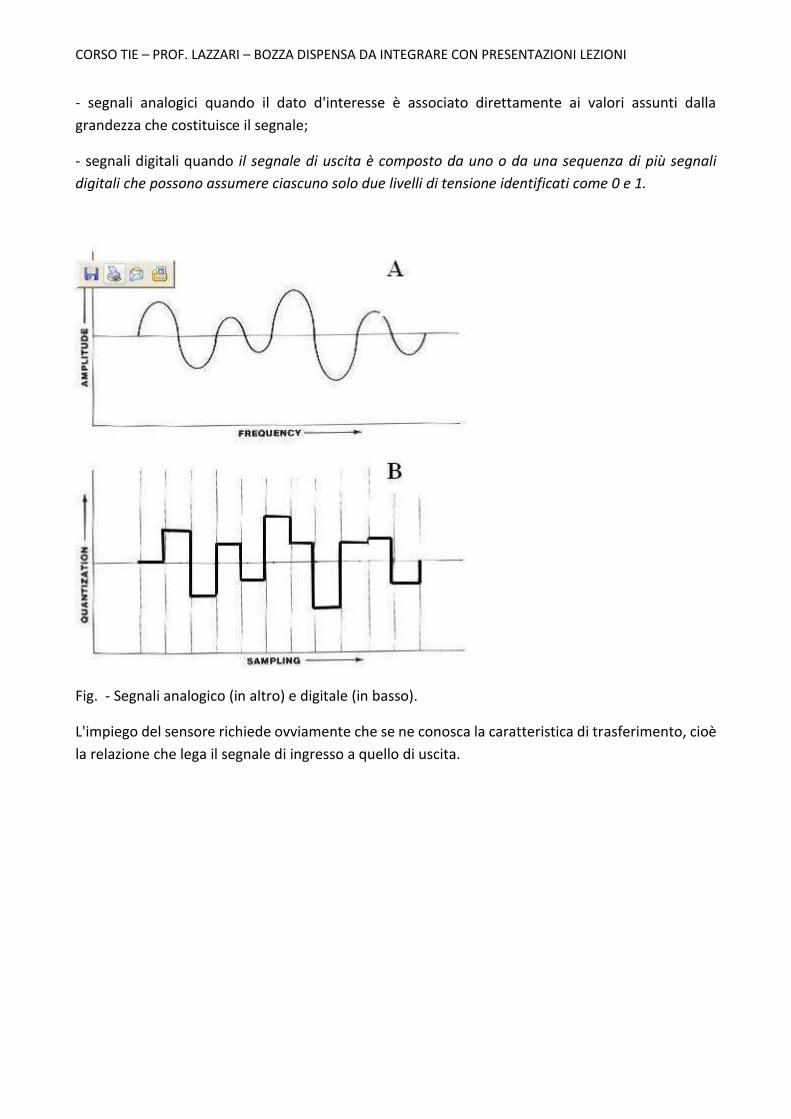
- segnali analogici quando il dato d'interesse è associato direttamente ai valori assunti dalla
grandezza che costituisce il segnale;
- segnali digitali quando il segnale di uscita è composto da uno o da una sequenza di più segnali
digitali che possono assumere ciascuno solo due livelli di tensione identificati come 0 e 1.
Fig. - Segnali analogico (in altro) e digitale (in basso).
L'impiego del sensore richiede ovviamente che se ne conosca la caratteristica di trasferimento, cioè
la relazione che lega il segnale di ingresso a quello di uscita.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Fig. Caratteristica di un sensore
3 - TARATURA, OFFSET, RANGE DEI SENSORI
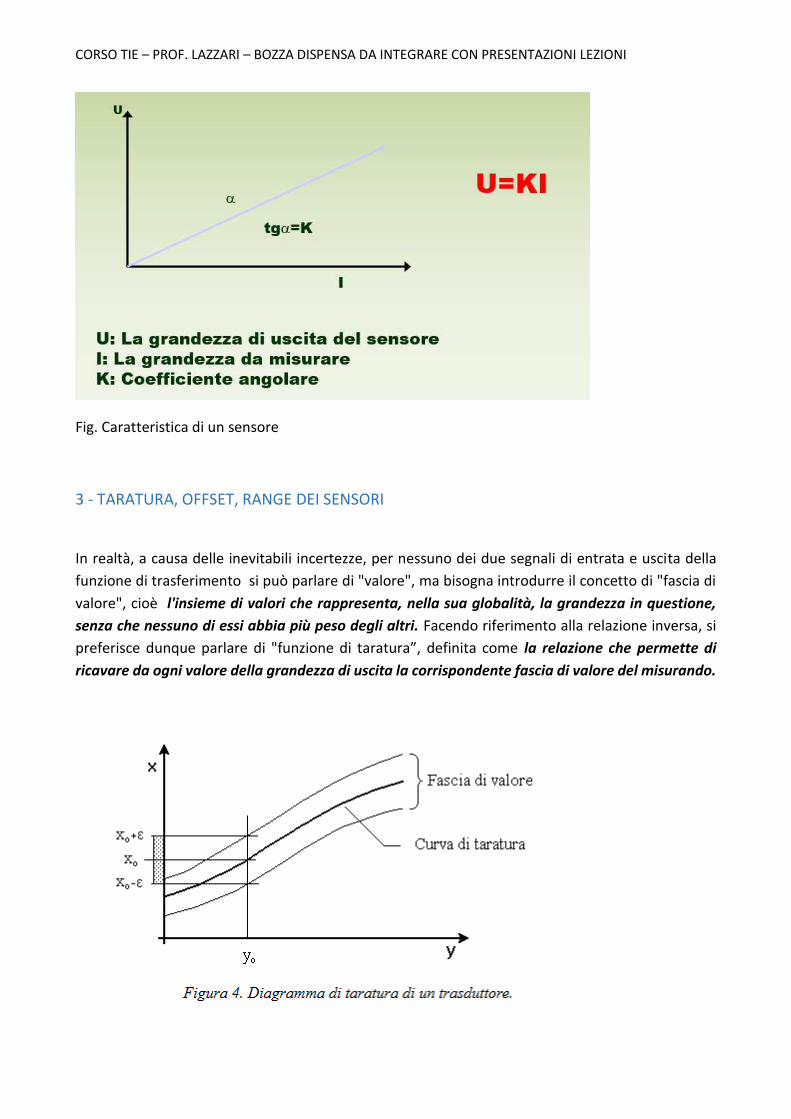
In realtà, a causa delle inevitabili incertezze, per nessuno dei due segnali di entrata e uscita della
funzione di trasferimento si può parlare di "valore", ma bisogna introdurre il concetto di "fascia di
valore", cioè l'insieme di valori che rappresenta, nella sua globalità, la grandezza in questione,
senza che nessuno di essi abbia più peso degli altri. Facendo riferimento alla relazione inversa, si
preferisce dunque parlare di "funzione di taratura”, definita come la relazione che permette di
ricavare da ogni valore della grandezza di uscita la corrispondente fascia di valore del misurando.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Per l’utilizzazione di un generico sensore, quindi, viene di solito fornita una specifica tecnica (in
forma grafica o tabulare) che riporta l'ampiezza della fascia stessa il che permette di individuare,
misura dopo misura, dove si colloca il valore del misurando mediante un punto situato in posizione
intermedia nella fascia. In questo contesto si può parlare anche di Curva di taratura (o curva di
calibrazione) intendendo con ciò la relazione biunivoca tra ogni valore della grandezza di uscita e il
corrispondente valore da assegnare al punto centrale della fascia di valore relativa al misurando.
Quando la curva di taratura è rettilinea, cioè esiste una relazione di proporzionalità fra uscita e
misurando, essa viene espressa di regola con un il coefficiente angolare K, chiamato anche costante
di taratura (fattore di calibrazione).
A valori di K elevati si hanno valori di sensibilità elevati.
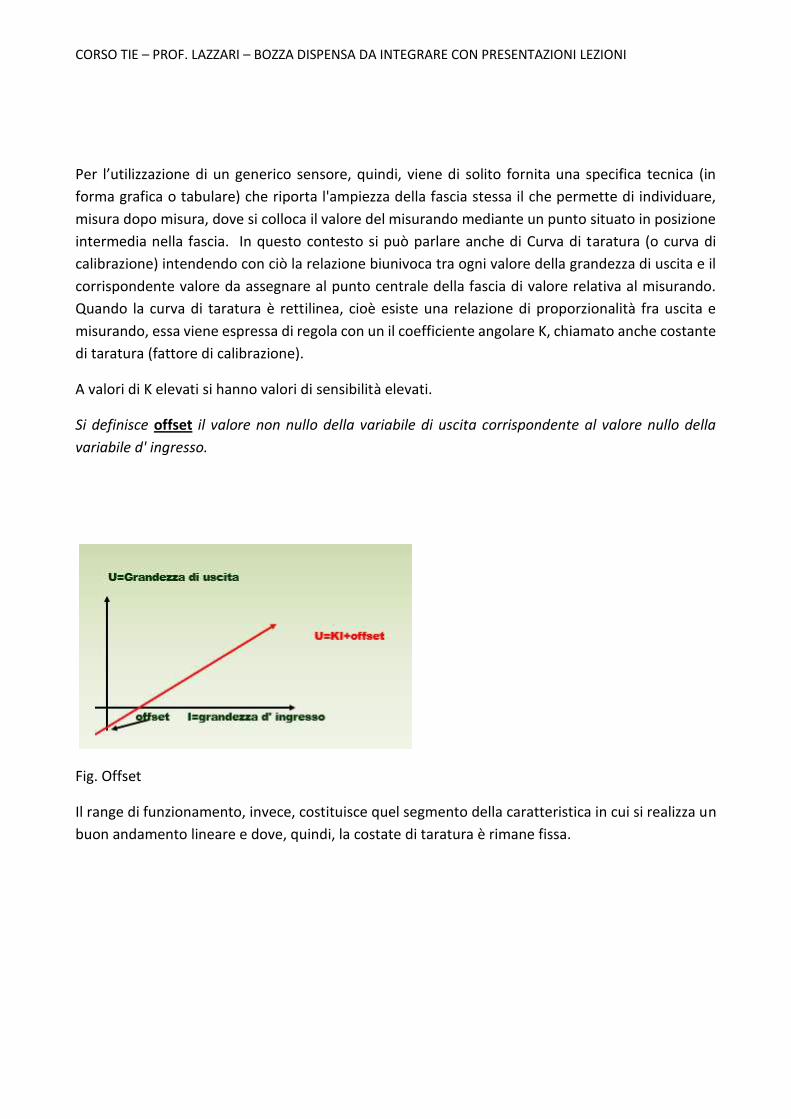
Si definisce offset il valore non nullo della variabile di uscita corrispondente al valore nullo della
variabile d' ingresso.
Fig. Offset
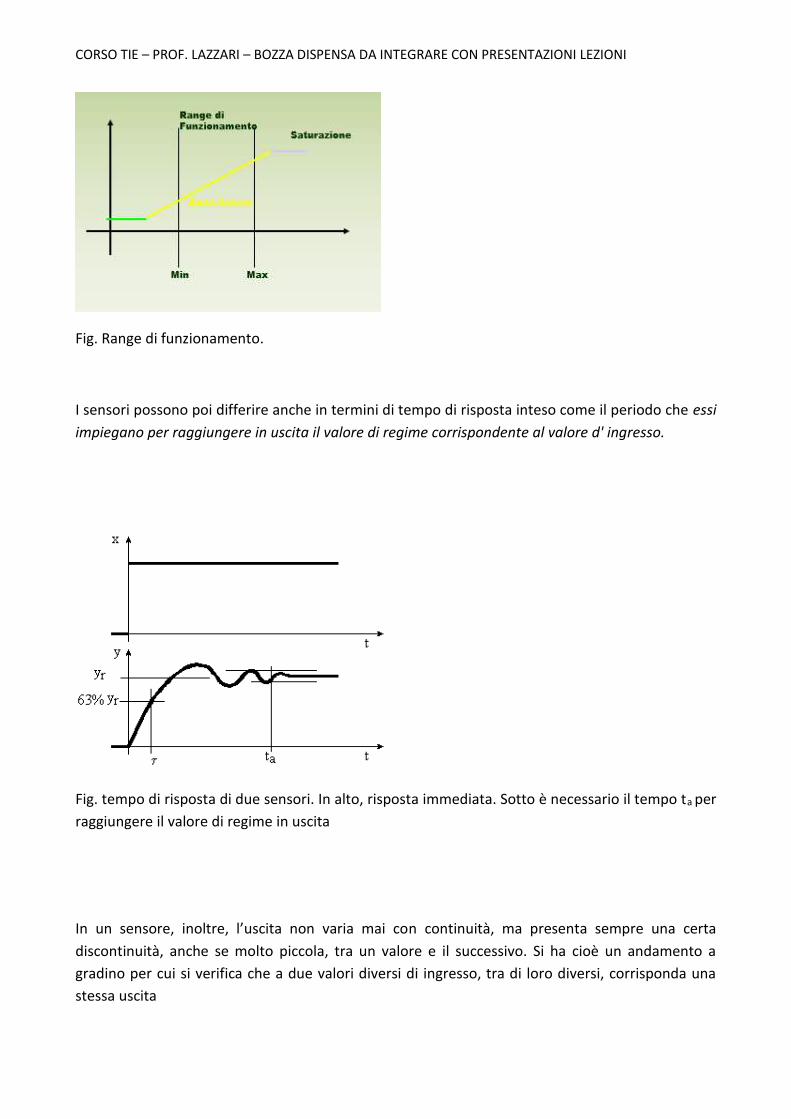
Il range di funzionamento, invece, costituisce quel segmento della caratteristica in cui si realizza un
buon andamento lineare e dove, quindi, la costate di taratura è rimane fissa.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Fig. Range di funzionamento.
I sensori possono poi differire anche in termini di tempo di risposta inteso come il periodo che essi
impiegano per raggiungere in uscita il valore di regime corrispondente al valore d' ingresso.
Fig. tempo di risposta di due sensori. In alto, risposta immediata. Sotto è necessario il tempo ta per
raggiungere il valore di regime in uscita
In un sensore, inoltre, l’uscita non varia mai con continuità, ma presenta sempre una certa
discontinuità, anche se molto piccola, tra un valore e il successivo. Si ha cioè un andamento a
gradino per cui si verifica che a due valori diversi di ingresso, tra di loro diversi, corrisponda una
stessa uscita
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
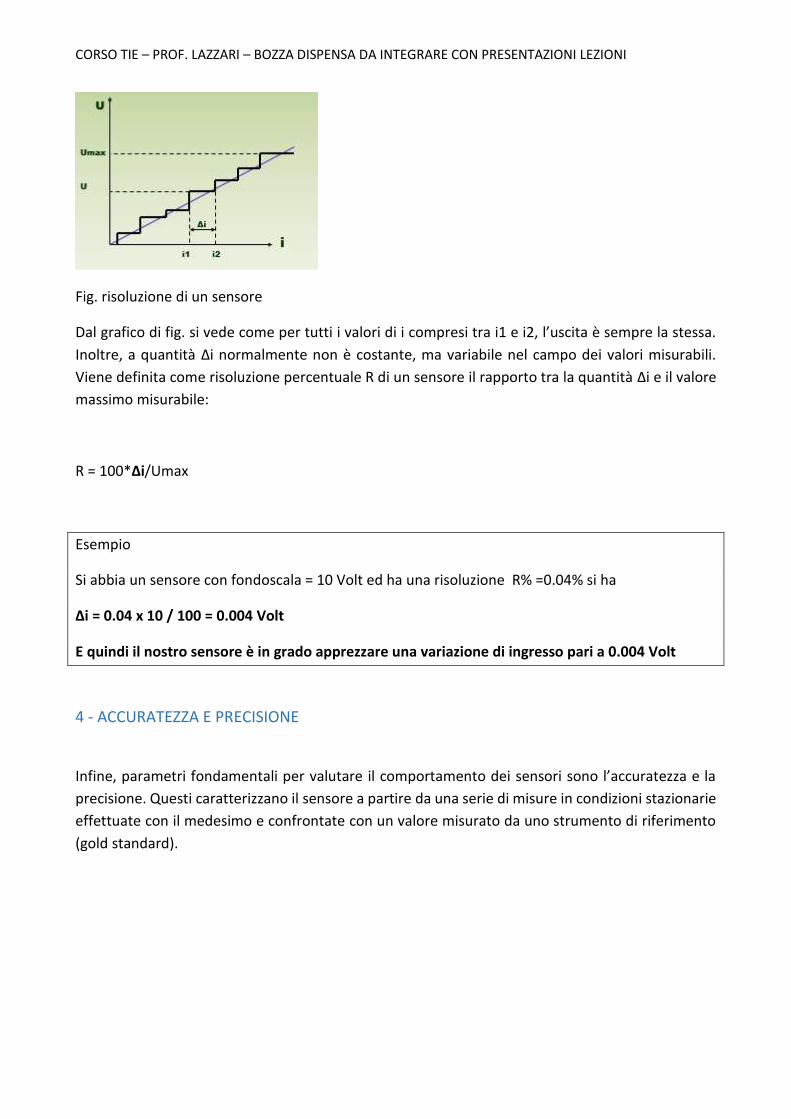
Fig. risoluzione di un sensore
Dal grafico di fig. si vede come per tutti i valori di i compresi tra i1 e i2, l’uscita è sempre la stessa.
Inoltre, a quantità Δi normalmente non è costante, ma variabile nel campo dei valori misurabili.
Viene definita come risoluzione percentuale R di un sensore il rapporto tra la quantità Δi e il valore
massimo misurabile:
R = 100*Δi/Umax
Esempio
Si abbia un sensore con fondoscala = 10 Volt ed ha una risoluzione R% =0.04% si ha
Δi = 0.04 x 10 / 100 = 0.004 Volt
E quindi il nostro sensore è in grado apprezzare una variazione di ingresso pari a 0.004 Volt
4 - ACCURATEZZA E PRECISIONE
Infine, parametri fondamentali per valutare il comportamento dei sensori sono l’accuratezza e la
precisione. Questi caratterizzano il sensore a partire da una serie di misure in condizioni stazionarie
effettuate con il medesimo e confrontate con un valore misurato da uno strumento di riferimento
(gold standard).
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
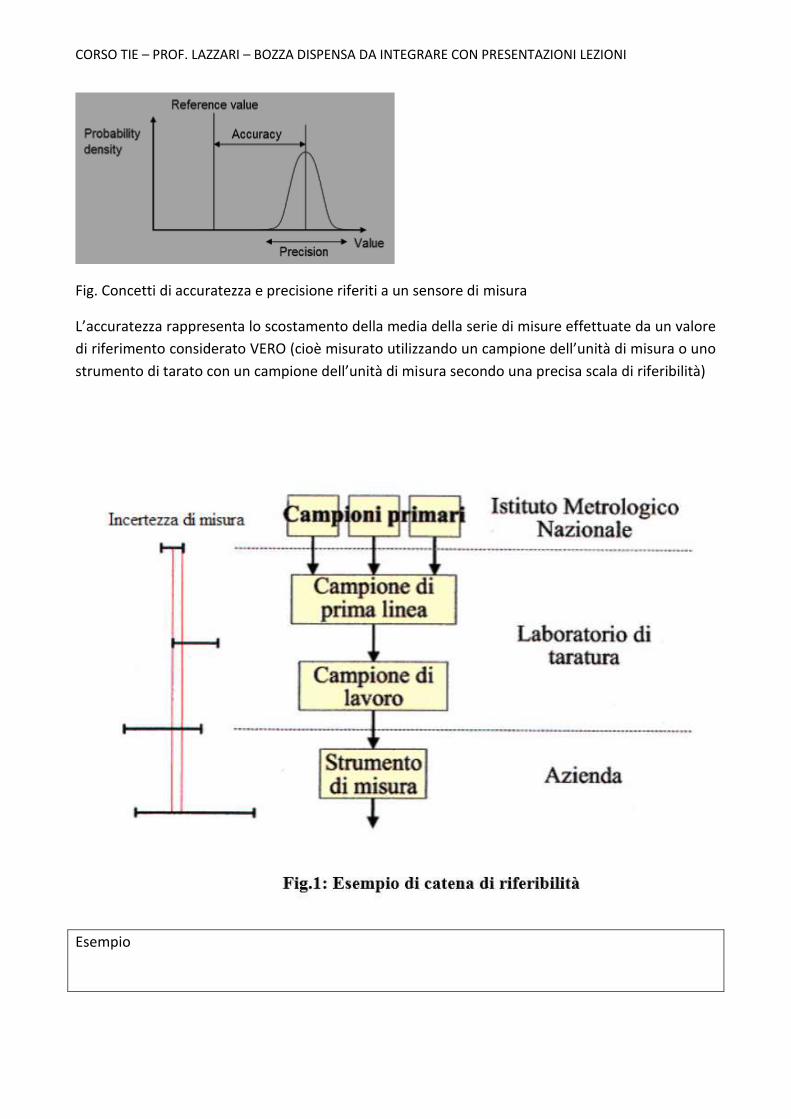
Fig. Concetti di accuratezza e precisione riferiti a un sensore di misura
L’accuratezza rappresenta lo scostamento della media della serie di misure effettuate da un valore
di riferimento considerato VERO (cioè misurato utilizzando un campione dell’unità di misura o uno
strumento di tarato con un campione dell’unità di misura secondo una precisa scala di riferibilità)
Esempio
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
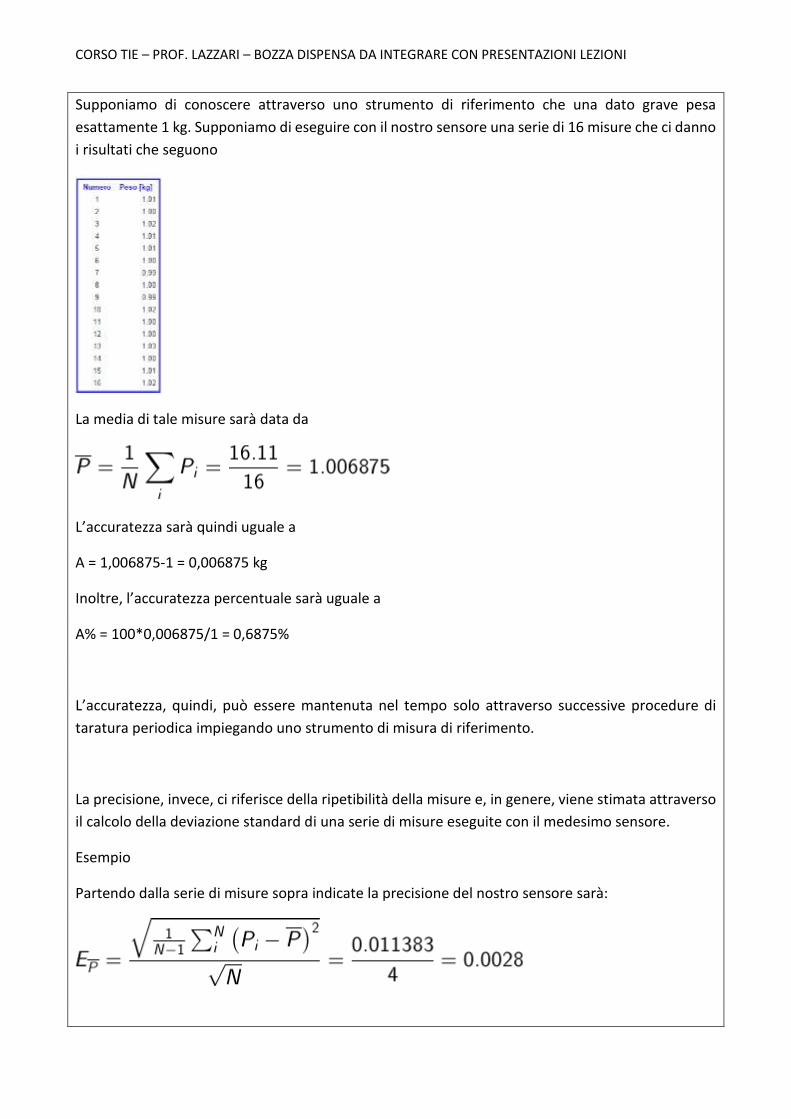
Supponiamo di conoscere attraverso uno strumento di riferimento che una dato grave pesa
esattamente 1 kg. Supponiamo di eseguire con il nostro sensore una serie di 16 misure che ci danno
i risultati che seguono
La media di tale misure sarà data da
L’accuratezza sarà quindi uguale a
A = 1,006875-1 = 0,006875 kg
Inoltre, l’accuratezza percentuale sarà uguale a
A% = 100*0,006875/1 = 0,6875%
L’accuratezza, quindi, può essere mantenuta nel tempo solo attraverso successive procedure di
taratura periodica impiegando uno strumento di misura di riferimento.
La precisione, invece, ci riferisce della ripetibilità della misure e, in genere, viene stimata attraverso
il calcolo della deviazione standard di una serie di misure eseguite con il medesimo sensore.
Esempio
Partendo dalla serie di misure sopra indicate la precisione del nostro sensore sarà:
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Ricordando che la media delle pesate 1,006875 In termini percentuali essa risulterà pari a:
P% = 100 * 0,028/1,006875 = 2,78%
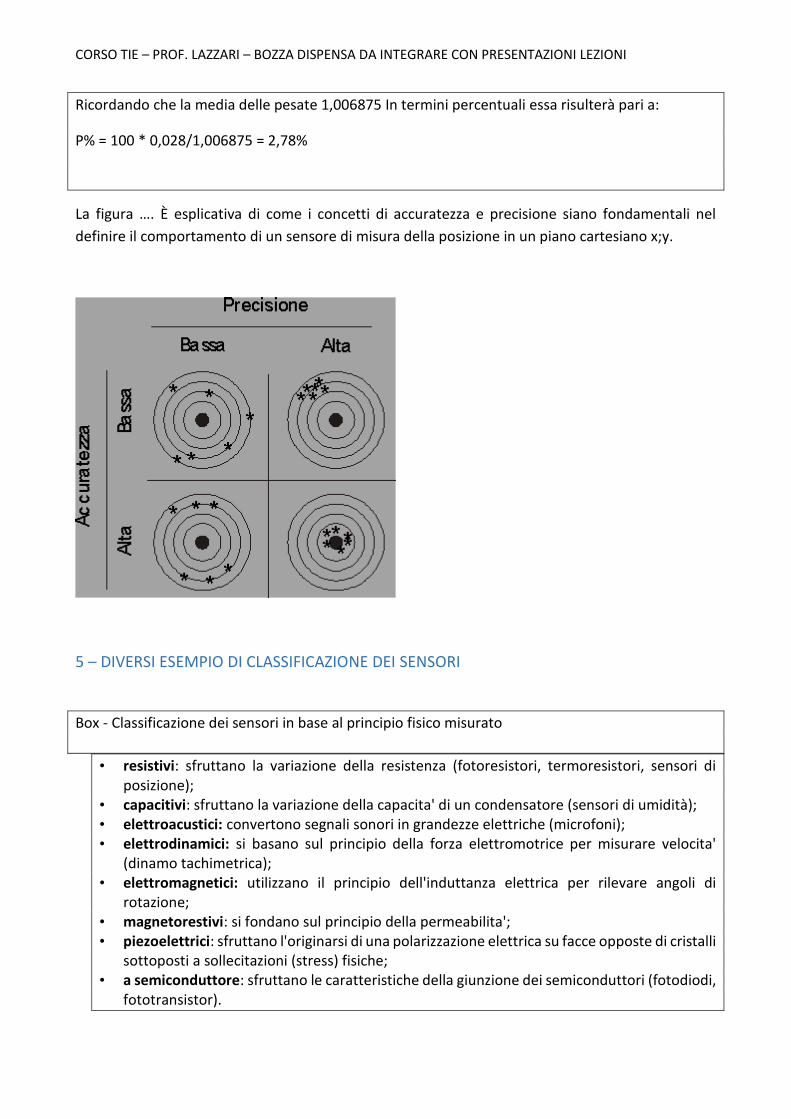
La figura …. È esplicativa di come i concetti di accuratezza e precisione siano fondamentali nel
definire il comportamento di un sensore di misura della posizione in un piano cartesiano x;y.
5 – DIVERSI ESEMPIO DI CLASSIFICAZIONE DEI SENSORI
Box - Classificazione dei sensori in base al principio fisico misurato
• resistivi: sfruttano la variazione della resistenza (fotoresistori, termoresistori, sensori di posizione);
• capacitivi: sfruttano la variazione della capacita' di un condensatore (sensori di umidità); • elettroacustici: convertono segnali sonori in grandezze elettriche (microfoni); • elettrodinamici: si basano sul principio della forza elettromotrice per misurare velocita'
(dinamo tachimetrica); • elettromagnetici: utilizzano il principio dell'induttanza elettrica per rilevare angoli di
rotazione; • magnetorestivi: si fondano sul principio della permeabilita'; • piezoelettrici: sfruttano l'originarsi di una polarizzazione elettrica su facce opposte di cristalli
sottoposti a sollecitazioni (stress) fisiche; • a semiconduttore: sfruttano le caratteristiche della giunzione dei semiconduttori (fotodiodi,
fototransistor).
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
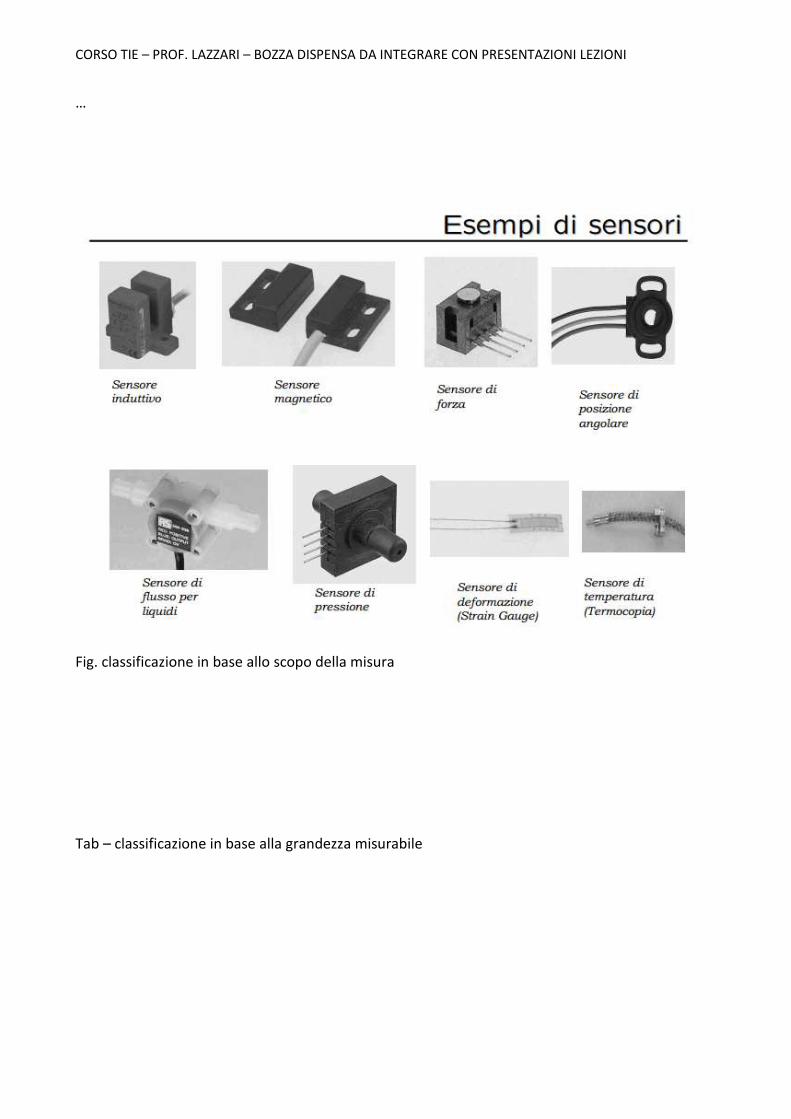
…
Fig. classificazione in base allo scopo della misura
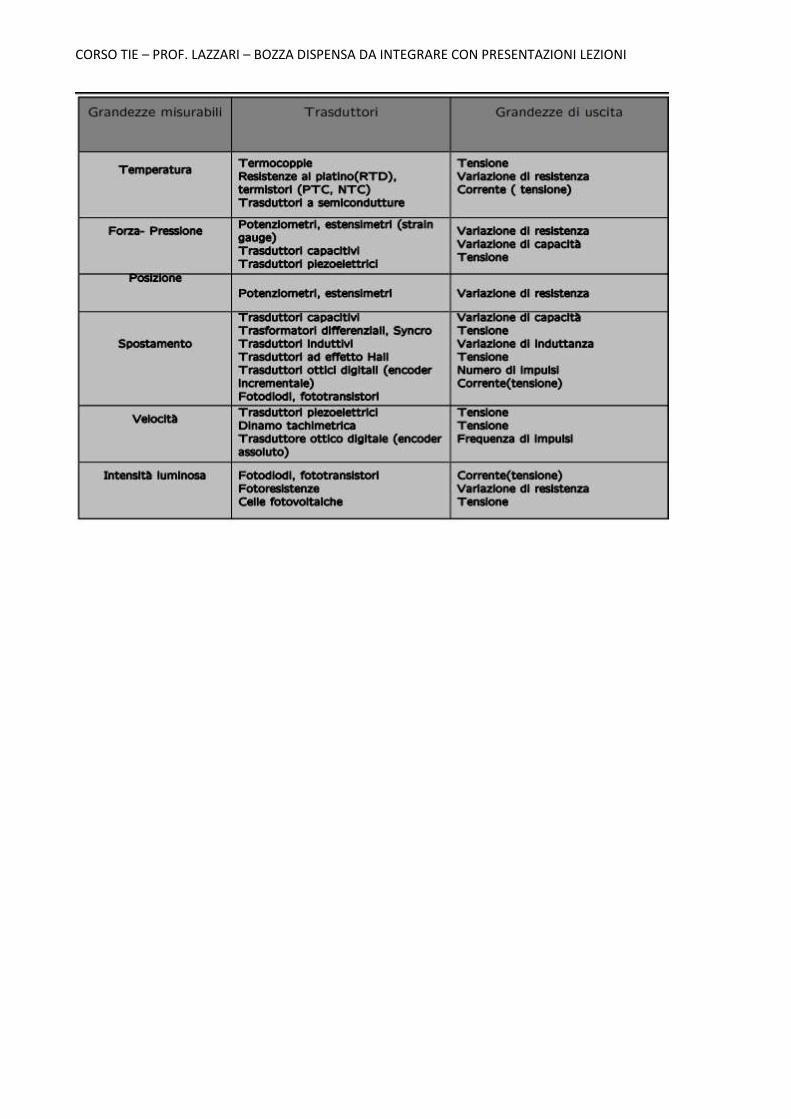
Tab – classificazione in base alla grandezza misurabile
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
6 – ALCUNI SENSORI COMUNI
6.1 – Sensori resistivi
I sensori resistivi (per es., conduttori metallici) sfruttano la relazione costitutiva della resistenza di un
conduttore metallico, data da R=ϱ l/S, ove ϱ è la resistività del materiale conduttore, l la sua lunghezza, S la
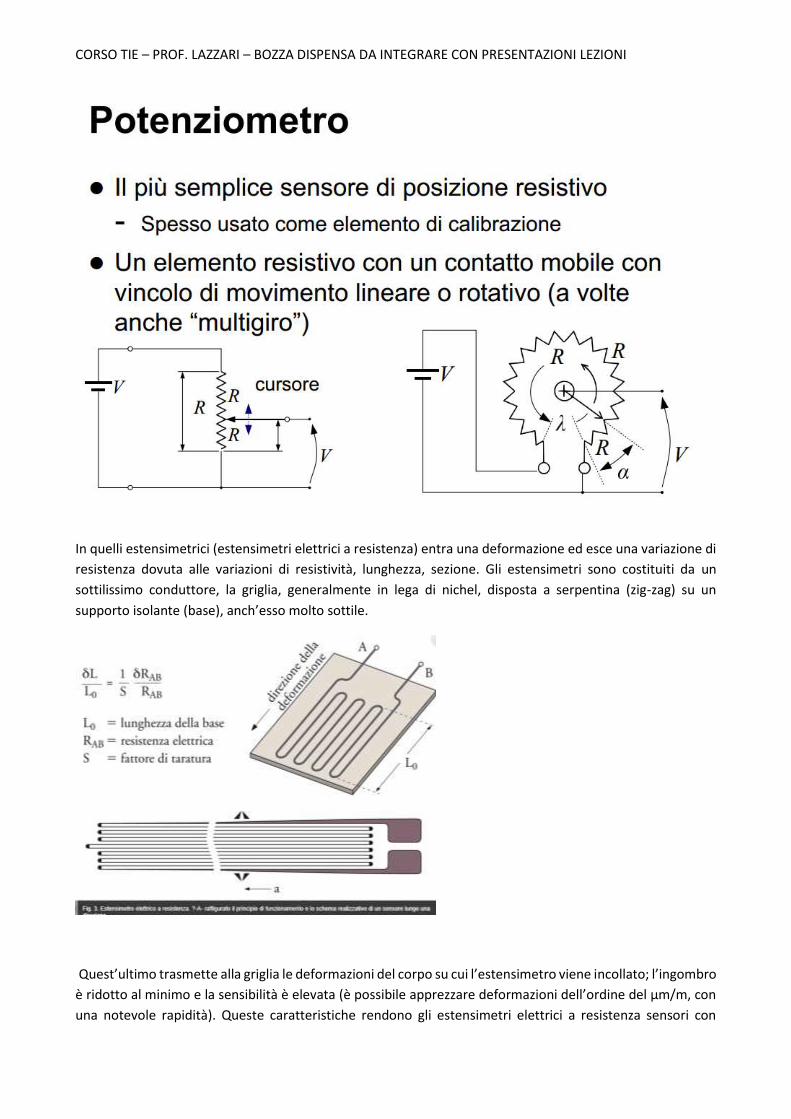
sua sezione. Diverse sono le cause che possono far variare la resistenza di un conduttore. Nei sensori
potenziometrici (potenziometri lineari e angolari) entra uno spostamento lineare o angolare ed esce una
variazione di resistenza dovuta alla diversa lunghezza del conduttore impegnata da un elemento di contatto
strisciante.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
In quelli estensimetrici (estensimetri elettrici a resistenza) entra una deformazione ed esce una variazione di
resistenza dovuta alle variazioni di resistività, lunghezza, sezione. Gli estensimetri sono costituiti da un
sottilissimo conduttore, la griglia, generalmente in lega di nichel, disposta a serpentina (zig-zag) su un
supporto isolante (base), anch’esso molto sottile.
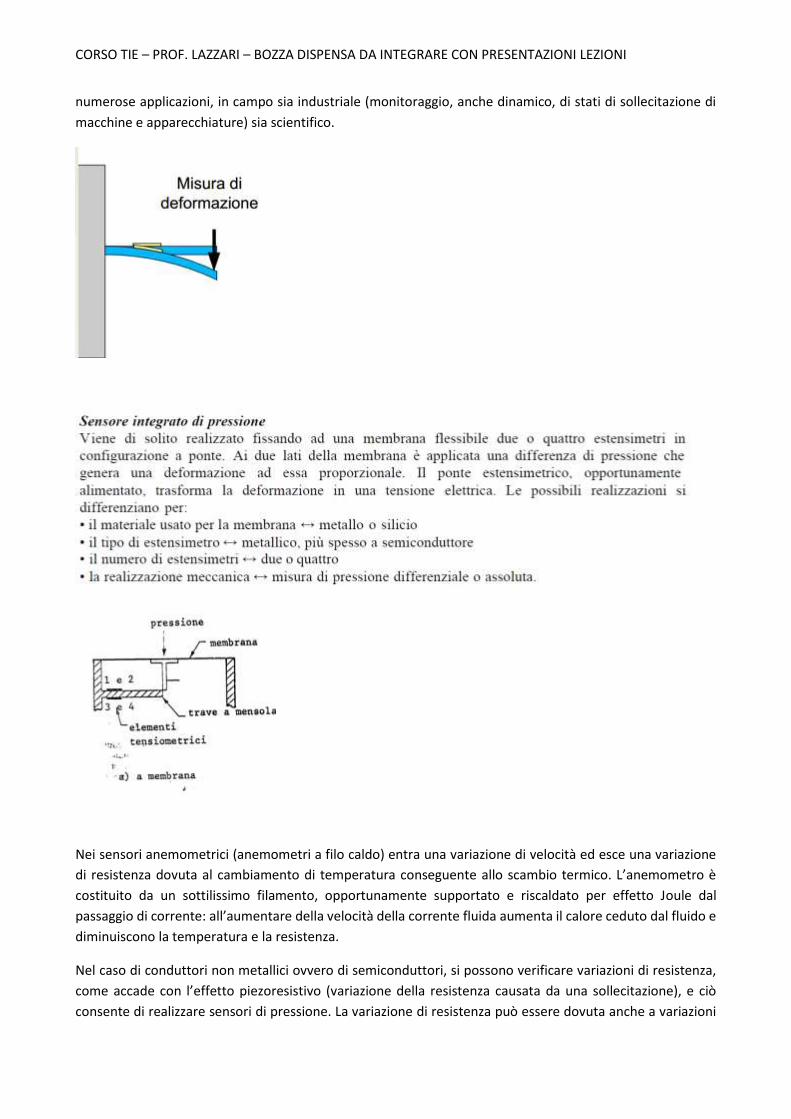
Quest’ultimo trasmette alla griglia le deformazioni del corpo su cui l’estensimetro viene incollato; l’ingombro
è ridotto al minimo e la sensibilità è elevata (è possibile apprezzare deformazioni dell’ordine del μm/m, con
una notevole rapidità). Queste caratteristiche rendono gli estensimetri elettrici a resistenza sensori con
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
numerose applicazioni, in campo sia industriale (monitoraggio, anche dinamico, di stati di sollecitazione di
macchine e apparecchiature) sia scientifico.
Nei sensori anemometrici (anemometri a filo caldo) entra una variazione di velocità ed esce una variazione
di resistenza dovuta al cambiamento di temperatura conseguente allo scambio termico. L’anemometro è
costituito da un sottilissimo filamento, opportunamente supportato e riscaldato per effetto Joule dal
passaggio di corrente: all’aumentare della velocità della corrente fluida aumenta il calore ceduto dal fluido e
diminuiscono la temperatura e la resistenza.
Nel caso di conduttori non metallici ovvero di semiconduttori, si possono verificare variazioni di resistenza,
come accade con l’effetto piezoresistivo (variazione della resistenza causata da una sollecitazione), e ciò
consente di realizzare sensori di pressione. La variazione di resistenza può essere dovuta anche a variazioni
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
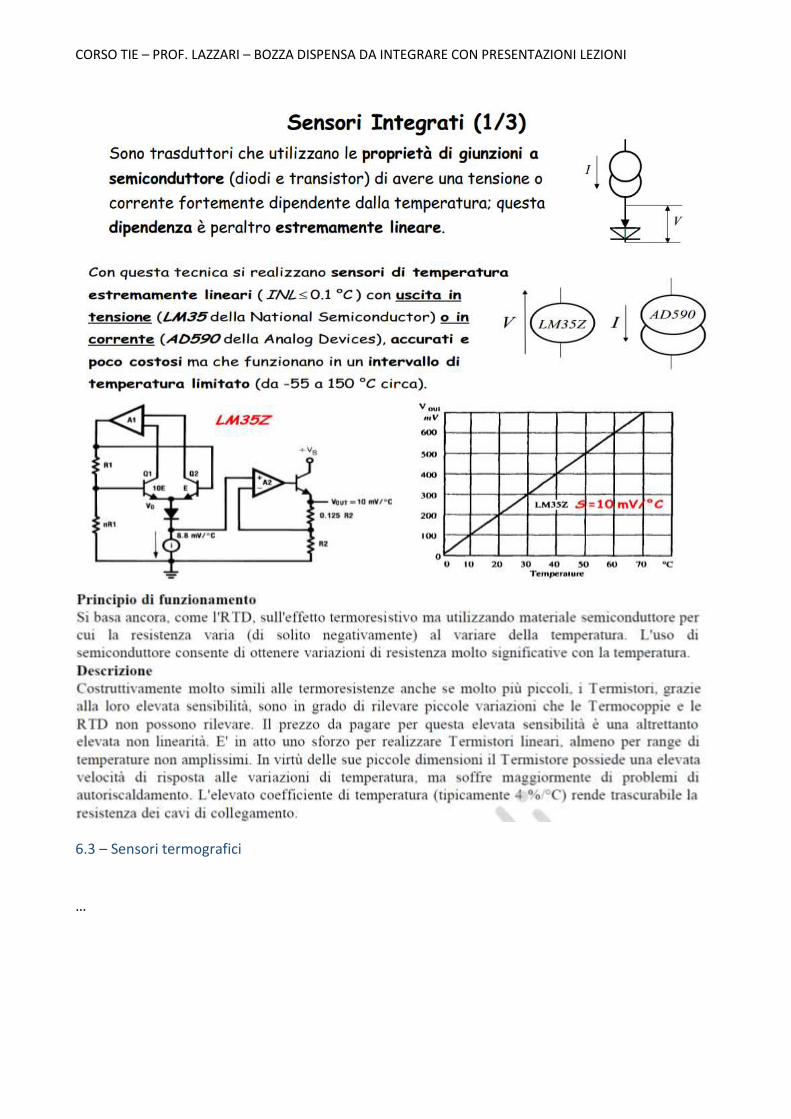
di temperatura, come avviene nei termometri a semiconduttore (termistori), oppure può essere causata da
una radiazione luminosa o infrarossa (cellule fotoconduttive).
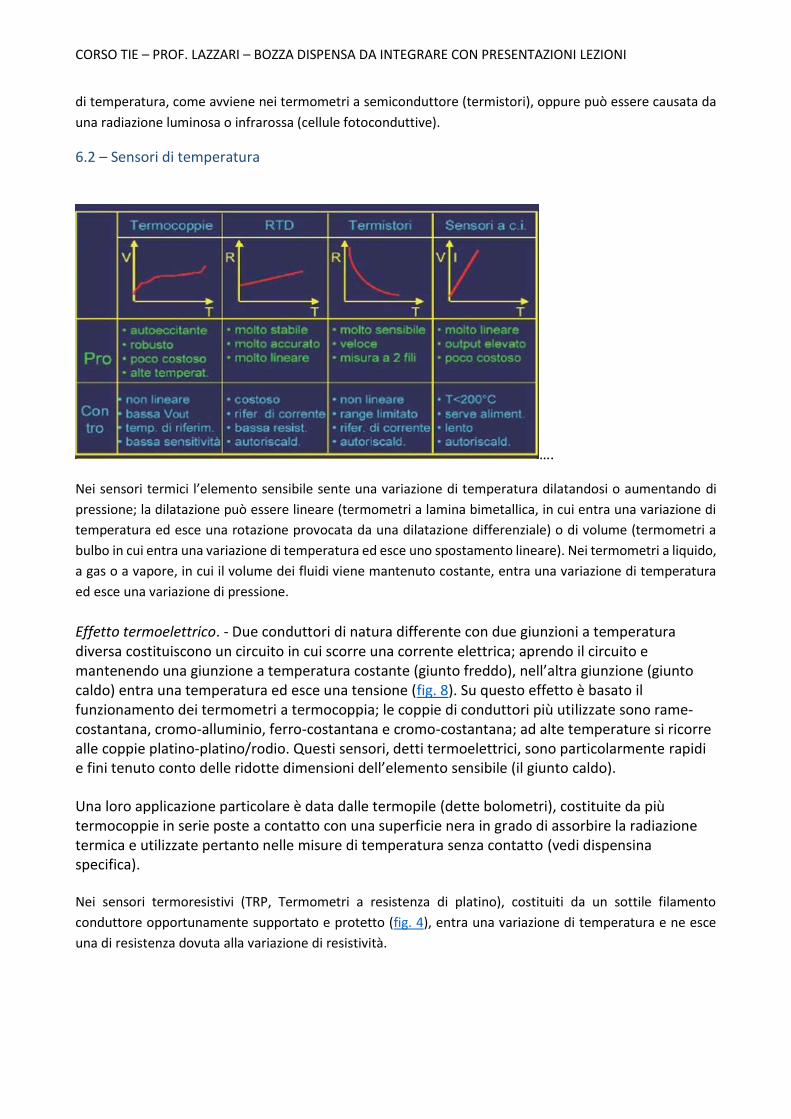
6.2 – Sensori di temperatura
….
Nei sensori termici l’elemento sensibile sente una variazione di temperatura dilatandosi o aumentando di
pressione; la dilatazione può essere lineare (termometri a lamina bimetallica, in cui entra una variazione di
temperatura ed esce una rotazione provocata da una dilatazione differenziale) o di volume (termometri a
bulbo in cui entra una variazione di temperatura ed esce uno spostamento lineare). Nei termometri a liquido,
a gas o a vapore, in cui il volume dei fluidi viene mantenuto costante, entra una variazione di temperatura
ed esce una variazione di pressione.
Effetto termoelettrico. - Due conduttori di natura differente con due giunzioni a temperatura diversa costituiscono un circuito in cui scorre una corrente elettrica; aprendo il circuito e mantenendo una giunzione a temperatura costante (giunto freddo), nell’altra giunzione (giunto caldo) entra una temperatura ed esce una tensione (fig. 8). Su questo effetto è basato il funzionamento dei termometri a termocoppia; le coppie di conduttori più utilizzate sono rame-costantana, cromo-alluminio, ferro-costantana e cromo-costantana; ad alte temperature si ricorre alle coppie platino-platino/rodio. Questi sensori, detti termoelettrici, sono particolarmente rapidi e fini tenuto conto delle ridotte dimensioni dell’elemento sensibile (il giunto caldo).
Una loro applicazione particolare è data dalle termopile (dette bolometri), costituite da più termocoppie in serie poste a contatto con una superficie nera in grado di assorbire la radiazione termica e utilizzate pertanto nelle misure di temperatura senza contatto (vedi dispensina specifica).
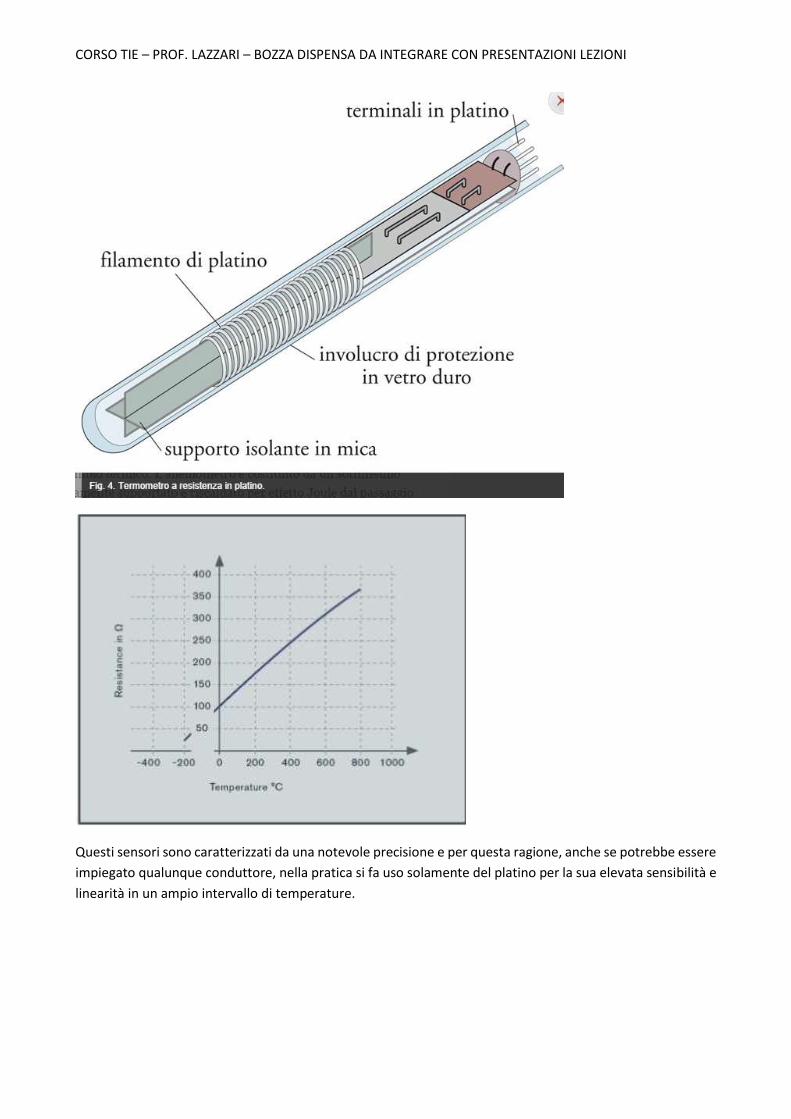
Nei sensori termoresistivi (TRP, Termometri a resistenza di platino), costituiti da un sottile filamento
conduttore opportunamente supportato e protetto (fig. 4), entra una variazione di temperatura e ne esce
una di resistenza dovuta alla variazione di resistività.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Questi sensori sono caratterizzati da una notevole precisione e per questa ragione, anche se potrebbe essere
impiegato qualunque conduttore, nella pratica si fa uso solamente del platino per la sua elevata sensibilità e
linearità in un ampio intervallo di temperature.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
6.3 – Sensori termografici
…

CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Vedi dispensina dedicata.
6.4 – Sensori induttivi
…
Nei sensori induttivi si tiene conto del fatto che il valore dell’induttanza di una bobina è fornito dalla formula
L=μ0μrn2S/l, dove μ0 è la permeabilità magnetica nel vuoto, μr quella nel mezzo, n è il numero di spire della
bobina, l la sua lunghezza e S la sua sezione. È così possibile realizzare sensori in cui un nucleo ferromagnetico
si muove all’interno di una bobina: entra uno spostamento lineare ed esce una variazione di induttanza
dovuta al diverso numero di spire concatenate con la bobina. Altri tipi di sensori, quali i sensori di prossimità,
sono quelli in cui una bobina è posta in prossimità della superficie di un elemento ferromagnetico: cambiando
la distanza relativa fra superficie dell’elemento ferromagnetico e bobina si verifica una variazione di
induttanza dovuta alla variazione del flusso magnetico concatenato con la bobina stessa (ovvero alla
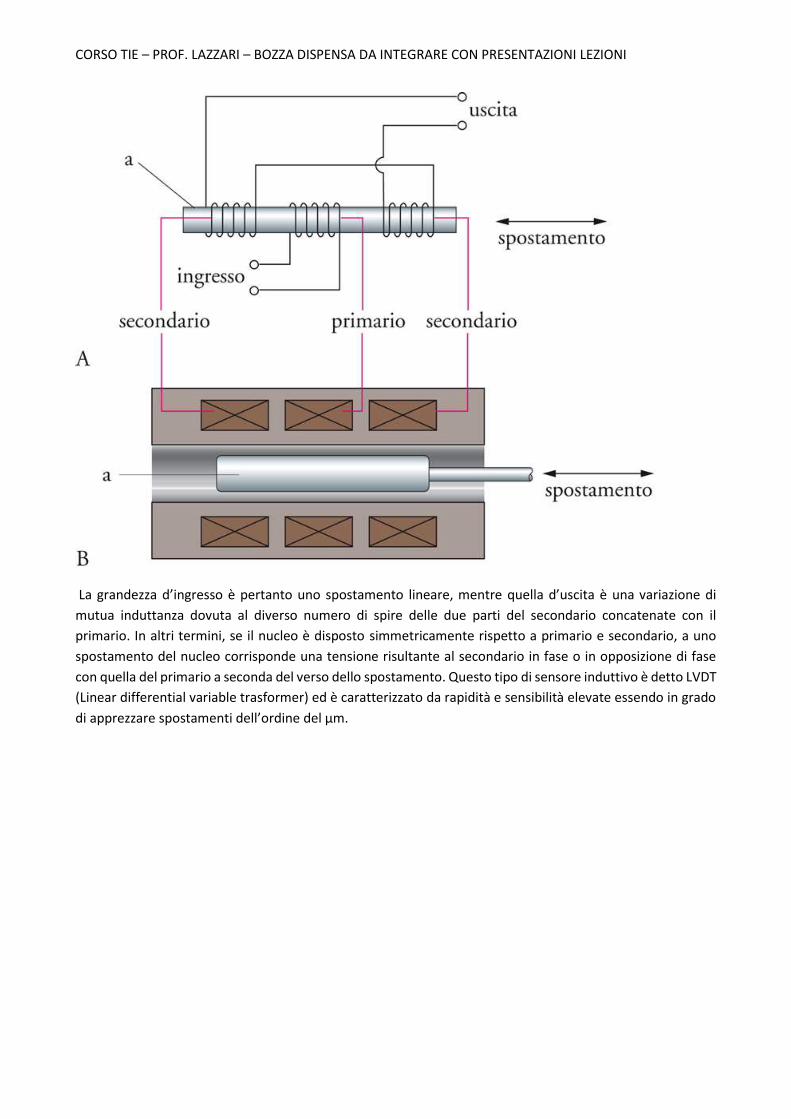
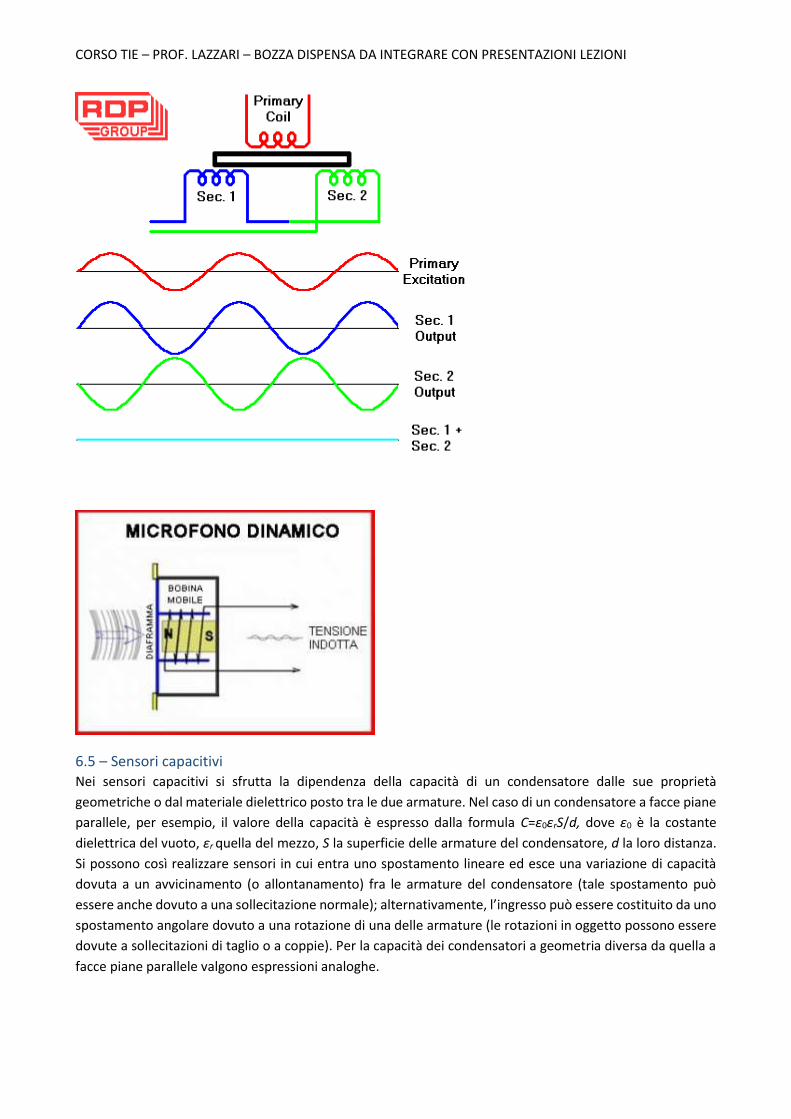
variazione di riluttanza del circuito magnetico). Da ultimo menzioniamo i sensori in cui due bobine sono
accoppiate induttivamente da un nucleo ferromagnetico mobile: il primario è alimentato ad altissima
frequenza (5÷10 kHz), mentre il secondario è costituito da due parti disposte simmetricamente rispetto al
primario, perfettamente identiche salvo che per il verso dell’avvolgimento (fig. 6).
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
La grandezza d’ingresso è pertanto uno spostamento lineare, mentre quella d’uscita è una variazione di
mutua induttanza dovuta al diverso numero di spire delle due parti del secondario concatenate con il
primario. In altri termini, se il nucleo è disposto simmetricamente rispetto a primario e secondario, a uno
spostamento del nucleo corrisponde una tensione risultante al secondario in fase o in opposizione di fase
con quella del primario a seconda del verso dello spostamento. Questo tipo di sensore induttivo è detto LVDT
(Linear differential variable trasformer) ed è caratterizzato da rapidità e sensibilità elevate essendo in grado
di apprezzare spostamenti dell’ordine del μm.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
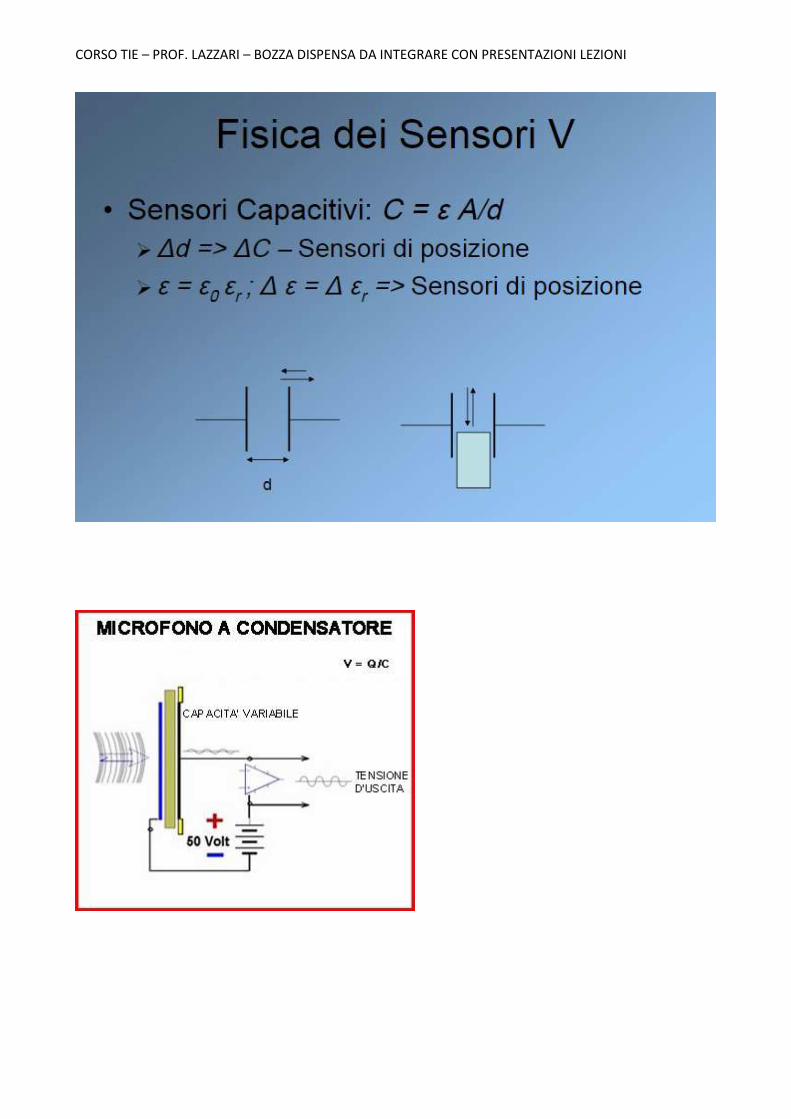
6.5 – Sensori capacitivi Nei sensori capacitivi si sfrutta la dipendenza della capacità di un condensatore dalle sue proprietà
geometriche o dal materiale dielettrico posto tra le due armature. Nel caso di un condensatore a facce piane
parallele, per esempio, il valore della capacità è espresso dalla formula C=ε0εrS/d, dove ε0 è la costante
dielettrica del vuoto, εr quella del mezzo, S la superficie delle armature del condensatore, d la loro distanza.
Si possono così realizzare sensori in cui entra uno spostamento lineare ed esce una variazione di capacità
dovuta a un avvicinamento (o allontanamento) fra le armature del condensatore (tale spostamento può
essere anche dovuto a una sollecitazione normale); alternativamente, l’ingresso può essere costituito da uno
spostamento angolare dovuto a una rotazione di una delle armature (le rotazioni in oggetto possono essere
dovute a sollecitazioni di taglio o a coppie). Per la capacità dei condensatori a geometria diversa da quella a
facce piane parallele valgono espressioni analoghe.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
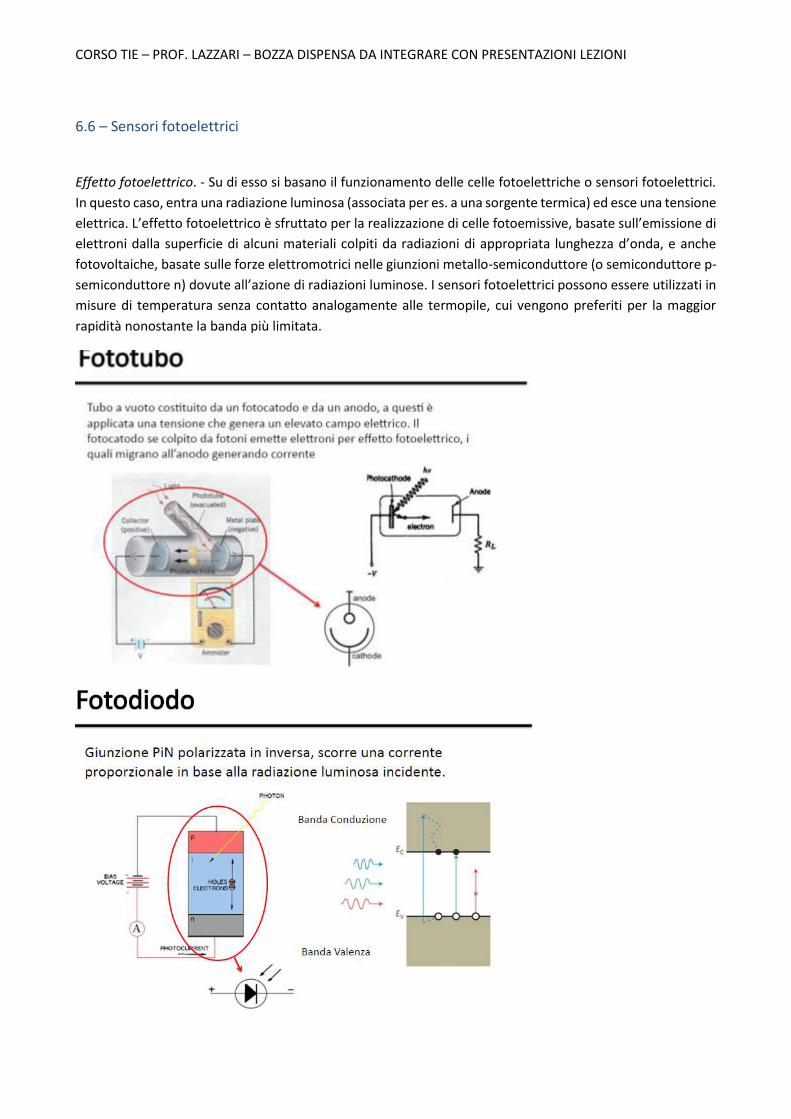
6.6 – Sensori fotoelettrici
Effetto fotoelettrico. - Su di esso si basano il funzionamento delle celle fotoelettriche o sensori fotoelettrici.
In questo caso, entra una radiazione luminosa (associata per es. a una sorgente termica) ed esce una tensione
elettrica. L’effetto fotoelettrico è sfruttato per la realizzazione di celle fotoemissive, basate sull’emissione di
elettroni dalla superficie di alcuni materiali colpiti da radiazioni di appropriata lunghezza d’onda, e anche
fotovoltaiche, basate sulle forze elettromotrici nelle giunzioni metallo-semiconduttore (o semiconduttore p-
semiconduttore n) dovute all’azione di radiazioni luminose. I sensori fotoelettrici possono essere utilizzati in
misure di temperatura senza contatto analogamente alle termopile, cui vengono preferiti per la maggior
rapidità nonostante la banda più limitata.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
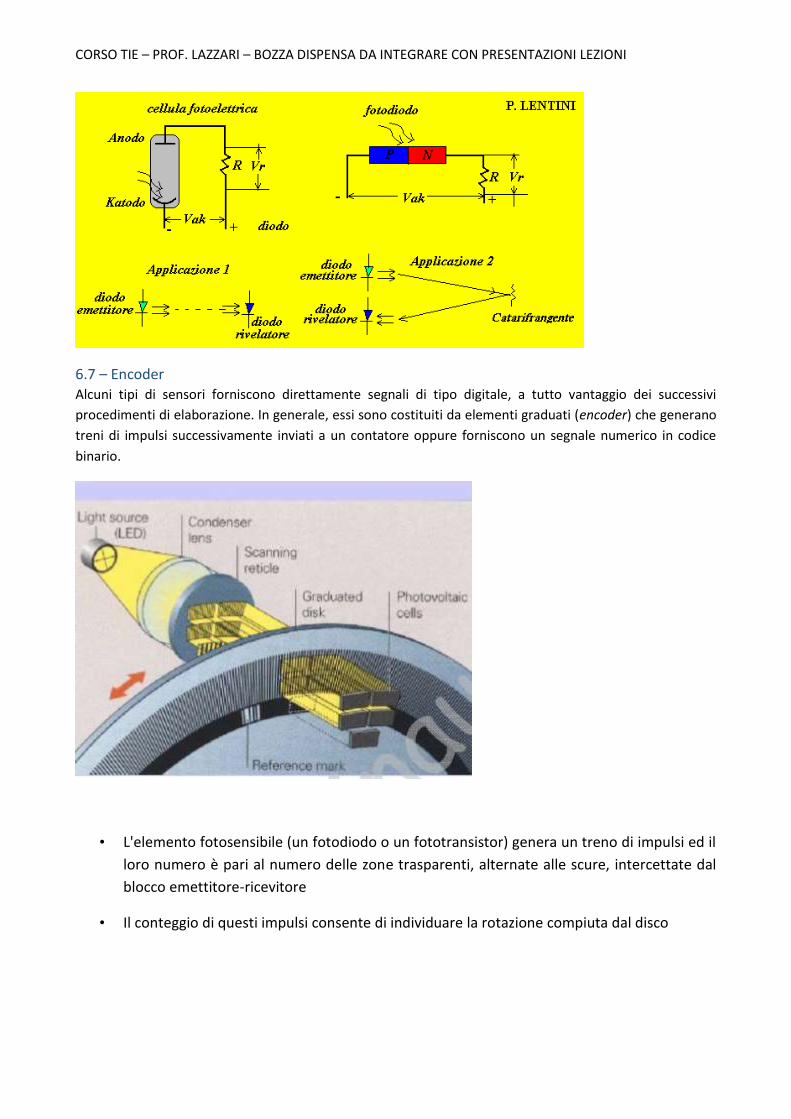
6.7 – Encoder Alcuni tipi di sensori forniscono direttamente segnali di tipo digitale, a tutto vantaggio dei successivi
procedimenti di elaborazione. In generale, essi sono costituiti da elementi graduati (encoder) che generano
treni di impulsi successivamente inviati a un contatore oppure forniscono un segnale numerico in codice
binario.
• L'elemento fotosensibile (un fotodiodo o un fototransistor) genera un treno di impulsi ed il
loro numero è pari al numero delle zone trasparenti, alternate alle scure, intercettate dal
blocco emettitore-ricevitore
• Il conteggio di questi impulsi consente di individuare la rotazione compiuta dal disco
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
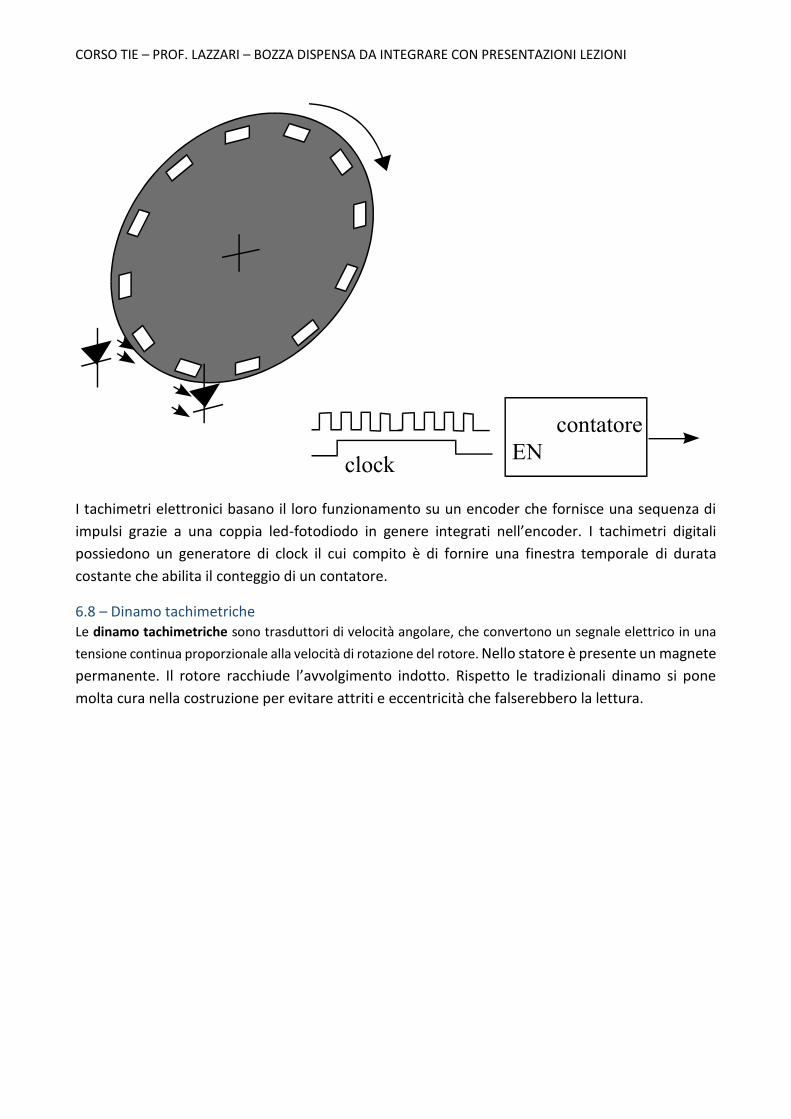
I tachimetri elettronici basano il loro funzionamento su un encoder che fornisce una sequenza di
impulsi grazie a una coppia led-fotodiodo in genere integrati nell’encoder. I tachimetri digitali
possiedono un generatore di clock il cui compito è di fornire una finestra temporale di durata
costante che abilita il conteggio di un contatore.
6.8 – Dinamo tachimetriche Le dinamo tachimetriche sono trasduttori di velocità angolare, che convertono un segnale elettrico in una
tensione continua proporzionale alla velocità di rotazione del rotore. Nello statore è presente un magnete
permanente. Il rotore racchiude l’avvolgimento indotto. Rispetto le tradizionali dinamo si pone
molta cura nella costruzione per evitare attriti e eccentricità che falserebbero la lettura.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
+ -+
++
+
N
S
+ ++
+
6.9 – Sensori piezoelettrici
….
Effetto piezoelettrico. - In presenza di sollecitazioni meccaniche, cristalli di particolari sostanze (per es., il
quarzo) si caricano elettricamente; entra pertanto una sollecitazione (normale o di taglio) ed esce una carica
che viene convertita in una tensione mediante un condensatore. Sull’effetto piezoelettrico è basato il
funzionamento di vari tipi di sensori (di accelerazione, di pressione, di forza, di vibrazione) che sono
caratterizzati da elevatissima rapidità. I microfoni per misure di livello sonoro, per esempio, sono basati su
questo effetto.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
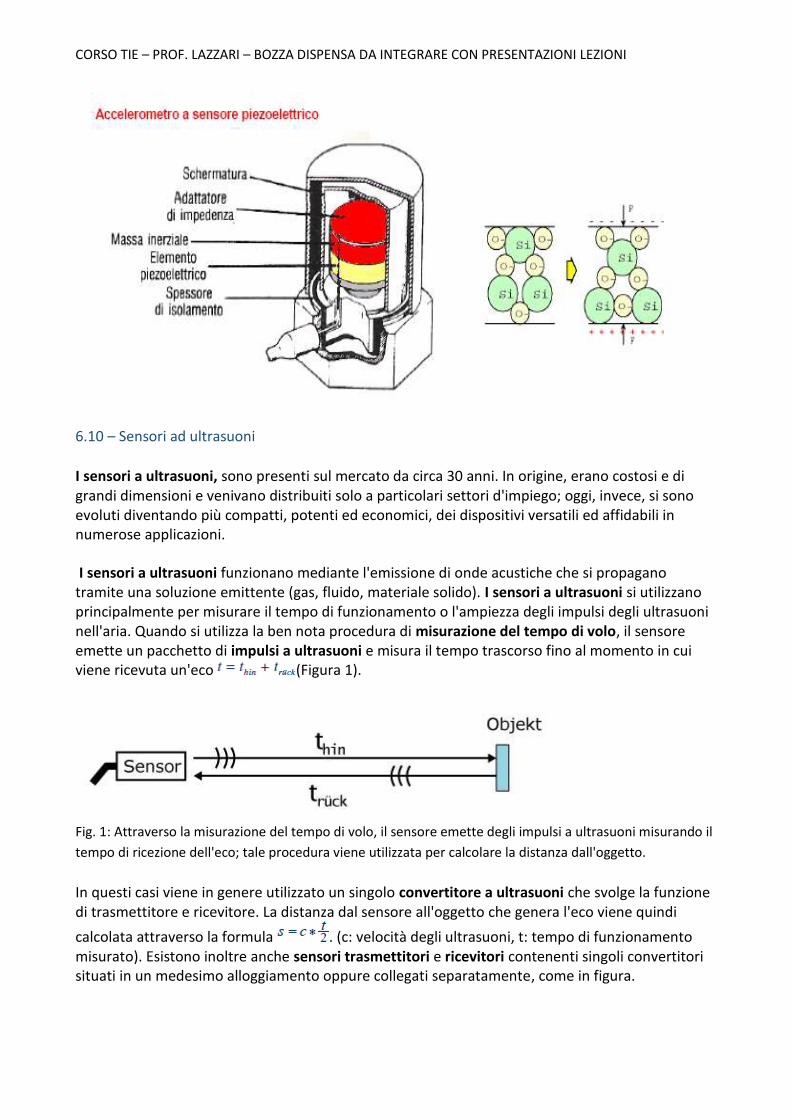
6.10 – Sensori ad ultrasuoni
I sensori a ultrasuoni, sono presenti sul mercato da circa 30 anni. In origine, erano costosi e di grandi dimensioni e venivano distribuiti solo a particolari settori d'impiego; oggi, invece, si sono evoluti diventando più compatti, potenti ed economici, dei dispositivi versatili ed affidabili in numerose applicazioni.
I sensori a ultrasuoni funzionano mediante l'emissione di onde acustiche che si propagano tramite una soluzione emittente (gas, fluido, materiale solido). I sensori a ultrasuoni si utilizzano principalmente per misurare il tempo di funzionamento o l'ampiezza degli impulsi degli ultrasuoni nell'aria. Quando si utilizza la ben nota procedura di misurazione del tempo di volo, il sensore emette un pacchetto di impulsi a ultrasuoni e misura il tempo trascorso fino al momento in cui viene ricevuta un'eco (Figura 1).
Fig. 1: Attraverso la misurazione del tempo di volo, il sensore emette degli impulsi a ultrasuoni misurando il
tempo di ricezione dell'eco; tale procedura viene utilizzata per calcolare la distanza dall'oggetto.
In questi casi viene in genere utilizzato un singolo convertitore a ultrasuoni che svolge la funzione di trasmettitore e ricevitore. La distanza dal sensore all'oggetto che genera l'eco viene quindi
calcolata attraverso la formula . (c: velocità degli ultrasuoni, t: tempo di funzionamento misurato). Esistono inoltre anche sensori trasmettitori e ricevitori contenenti singoli convertitori situati in un medesimo alloggiamento oppure collegati separatamente, come in figura.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
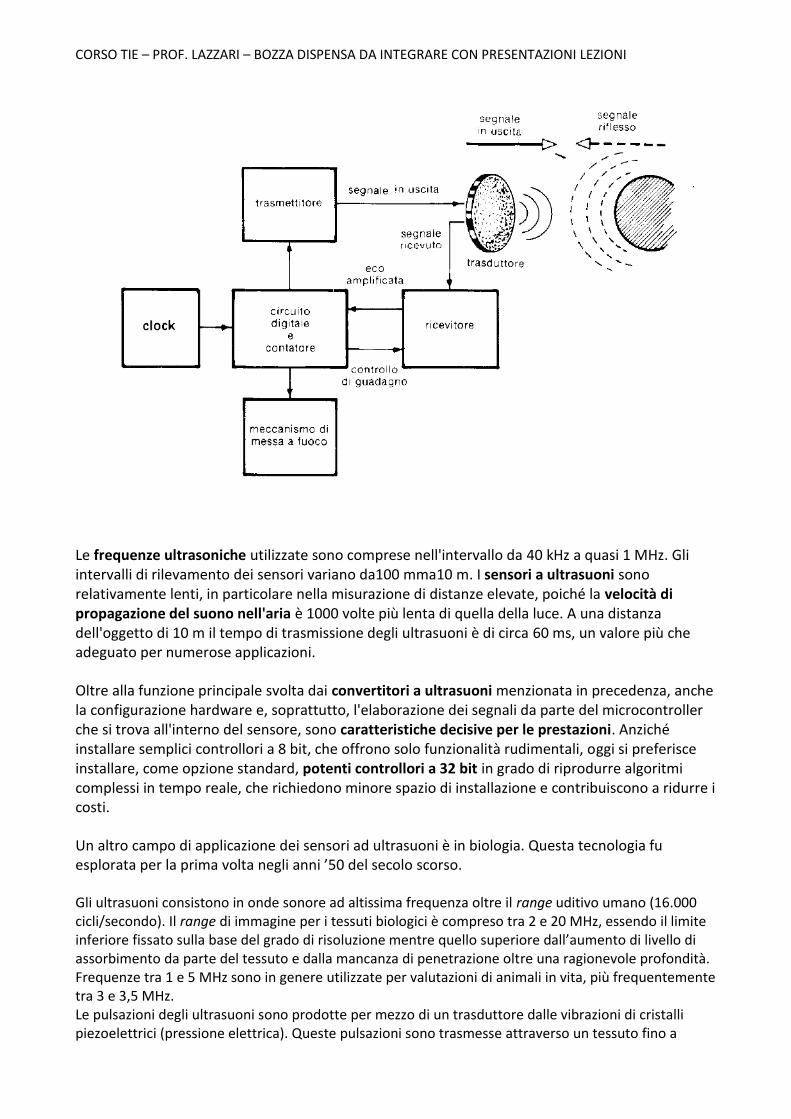
Le frequenze ultrasoniche utilizzate sono comprese nell'intervallo da 40 kHz a quasi 1 MHz. Gli intervalli di rilevamento dei sensori variano da100 mma10 m. I sensori a ultrasuoni sono relativamente lenti, in particolare nella misurazione di distanze elevate, poiché la velocità di propagazione del suono nell'aria è 1000 volte più lenta di quella della luce. A una distanza dell'oggetto di 10 m il tempo di trasmissione degli ultrasuoni è di circa 60 ms, un valore più che adeguato per numerose applicazioni.
Oltre alla funzione principale svolta dai convertitori a ultrasuoni menzionata in precedenza, anche la configurazione hardware e, soprattutto, l'elaborazione dei segnali da parte del microcontroller che si trova all'interno del sensore, sono caratteristiche decisive per le prestazioni. Anziché installare semplici controllori a 8 bit, che offrono solo funzionalità rudimentali, oggi si preferisce installare, come opzione standard, potenti controllori a 32 bit in grado di riprodurre algoritmi complessi in tempo reale, che richiedono minore spazio di installazione e contribuiscono a ridurre i costi.
Un altro campo di applicazione dei sensori ad ultrasuoni è in biologia. Questa tecnologia fu esplorata per la prima volta negli anni ’50 del secolo scorso.
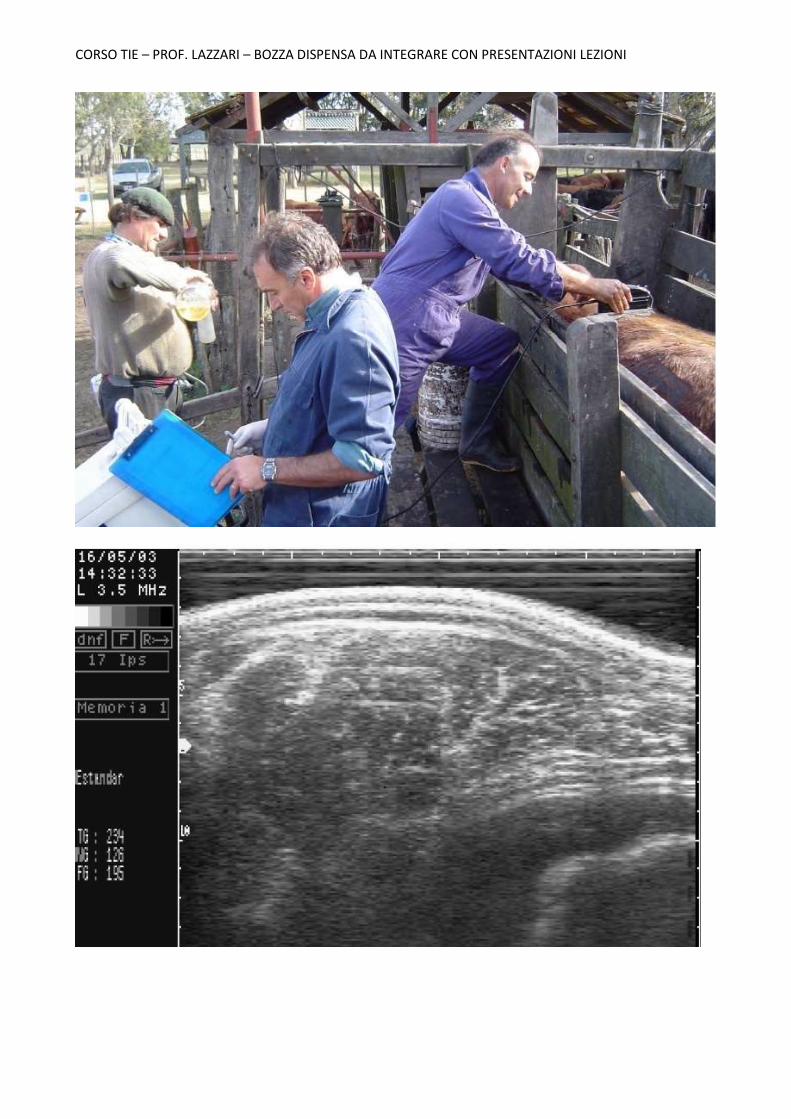
Gli ultrasuoni consistono in onde sonore ad altissima frequenza oltre il range uditivo umano (16.000 cicli/secondo). Il range di immagine per i tessuti biologici è compreso tra 2 e 20 MHz, essendo il limite inferiore fissato sulla base del grado di risoluzione mentre quello superiore dall’aumento di livello di assorbimento da parte del tessuto e dalla mancanza di penetrazione oltre una ragionevole profondità. Frequenze tra 1 e 5 MHz sono in genere utilizzate per valutazioni di animali in vita, più frequentemente tra 3 e 3,5 MHz. Le pulsazioni degli ultrasuoni sono prodotte per mezzo di un trasduttore dalle vibrazioni di cristalli piezoelettrici (pressione elettrica). Queste pulsazioni sono trasmesse attraverso un tessuto fino a
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
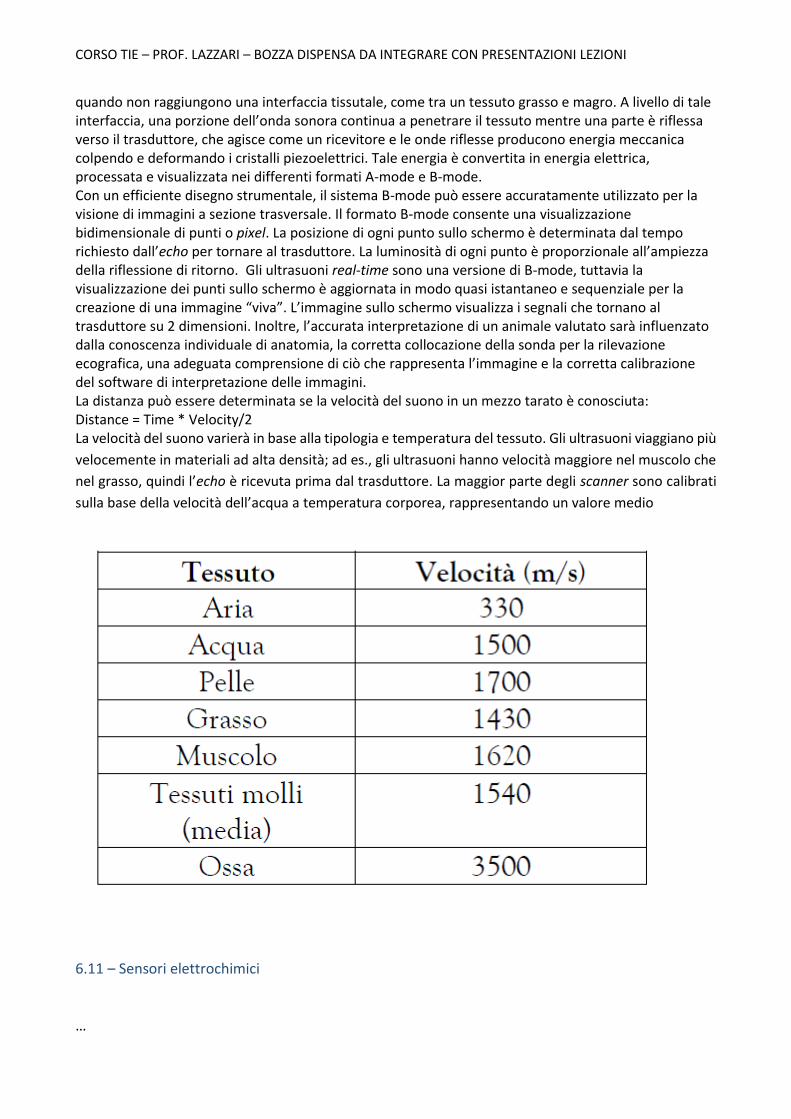
quando non raggiungono una interfaccia tissutale, come tra un tessuto grasso e magro. A livello di tale interfaccia, una porzione dell’onda sonora continua a penetrare il tessuto mentre una parte è riflessa verso il trasduttore, che agisce come un ricevitore e le onde riflesse producono energia meccanica colpendo e deformando i cristalli piezoelettrici. Tale energia è convertita in energia elettrica, processata e visualizzata nei differenti formati A-mode e B-mode. Con un efficiente disegno strumentale, il sistema B-mode può essere accuratamente utilizzato per la visione di immagini a sezione trasversale. Il formato B-mode consente una visualizzazione bidimensionale di punti o pixel. La posizione di ogni punto sullo schermo è determinata dal tempo richiesto dall’echo per tornare al trasduttore. La luminosità di ogni punto è proporzionale all’ampiezza della riflessione di ritorno. Gli ultrasuoni real-time sono una versione di B-mode, tuttavia la visualizzazione dei punti sullo schermo è aggiornata in modo quasi istantaneo e sequenziale per la creazione di una immagine “viva”. L’immagine sullo schermo visualizza i segnali che tornano al trasduttore su 2 dimensioni. Inoltre, l’accurata interpretazione di un animale valutato sarà influenzato dalla conoscenza individuale di anatomia, la corretta collocazione della sonda per la rilevazione ecografica, una adeguata comprensione di ciò che rappresenta l’immagine e la corretta calibrazione del software di interpretazione delle immagini. La distanza può essere determinata se la velocità del suono in un mezzo tarato è conosciuta: Distance = Time * Velocity/2 La velocità del suono varierà in base alla tipologia e temperatura del tessuto. Gli ultrasuoni viaggiano più
velocemente in materiali ad alta densità; ad es., gli ultrasuoni hanno velocità maggiore nel muscolo che
nel grasso, quindi l’echo è ricevuta prima dal trasduttore. La maggior parte degli scanner sono calibrati
sulla base della velocità dell’acqua a temperatura corporea, rappresentando un valore medio
6.11 – Sensori elettrochimici
…
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
I componenti base di un sensore elettrochimico sono un elettrodo di lavoro (o sensibile) (working o sensing), un controelettrodo (counter) e, solitamente, un elettrodo di riferimento (reference). Questi elettrodi sono in contatto con un elettrolita che può essere liquido o solido. Il gas diffonde nel sensore all’elettrodo di lavoro e avviene una reazione elettrochimica (ossidazione o riduzione a seconda della natura del gas). Ad esempio CO può essere ossidato a CO2 e O2 può essere ridotto ad H2O. Se avviene una reazione di ossidazione si ha un flusso di elettroni dall’elettrodo di lavoro al contro-elettrodo attraverso il circuito esterno, mentre se si ha una reazione di riduzione si produce un flusso di elettroni dal contro elettrodo all’elettrodo di lavoro. Questo flusso di elettroni costituisce una corrente che è proporzionale alla concentrazione di gas (Equazione di Nernst). La parte elettronica dello strumento rivela e amplifica la corrente e la pone in scala rispetto a una curva di calibrazione.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
7 - SCHEDE DI ALCUNI SENSORI INSERITI IN DOMINI INFORMATIVI SPECIFICI
7.1 - Sensori misura posizione su video touch-screen
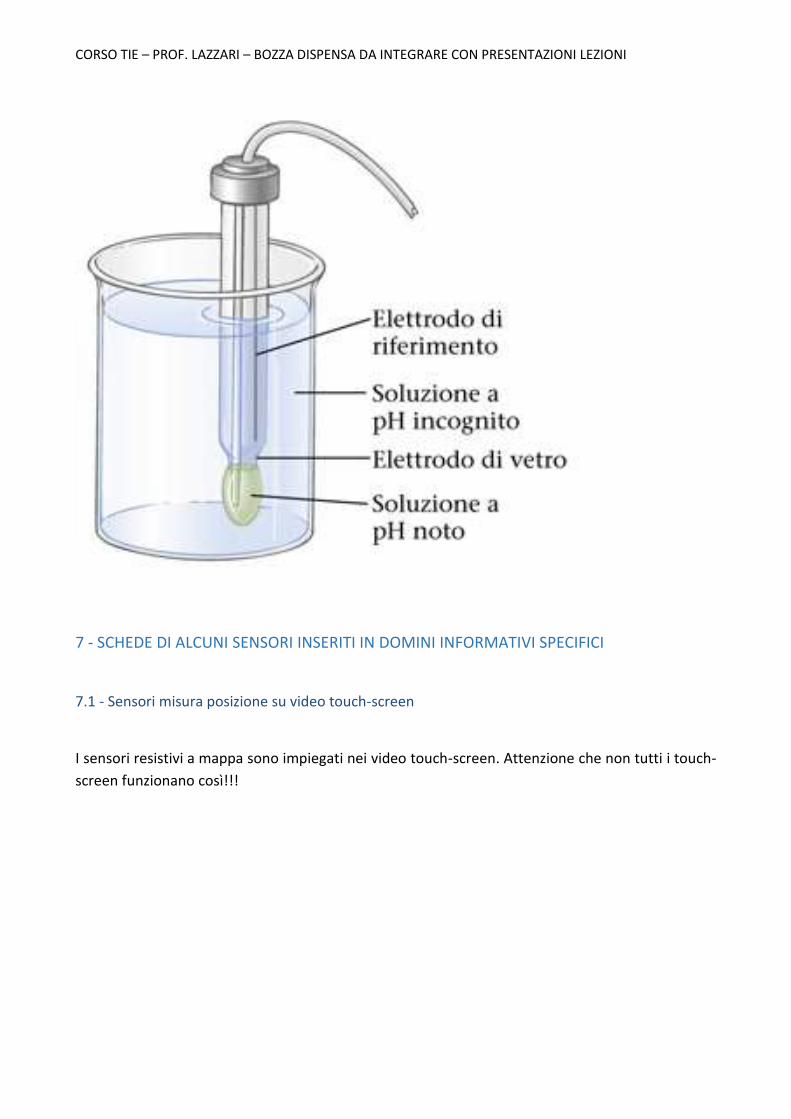
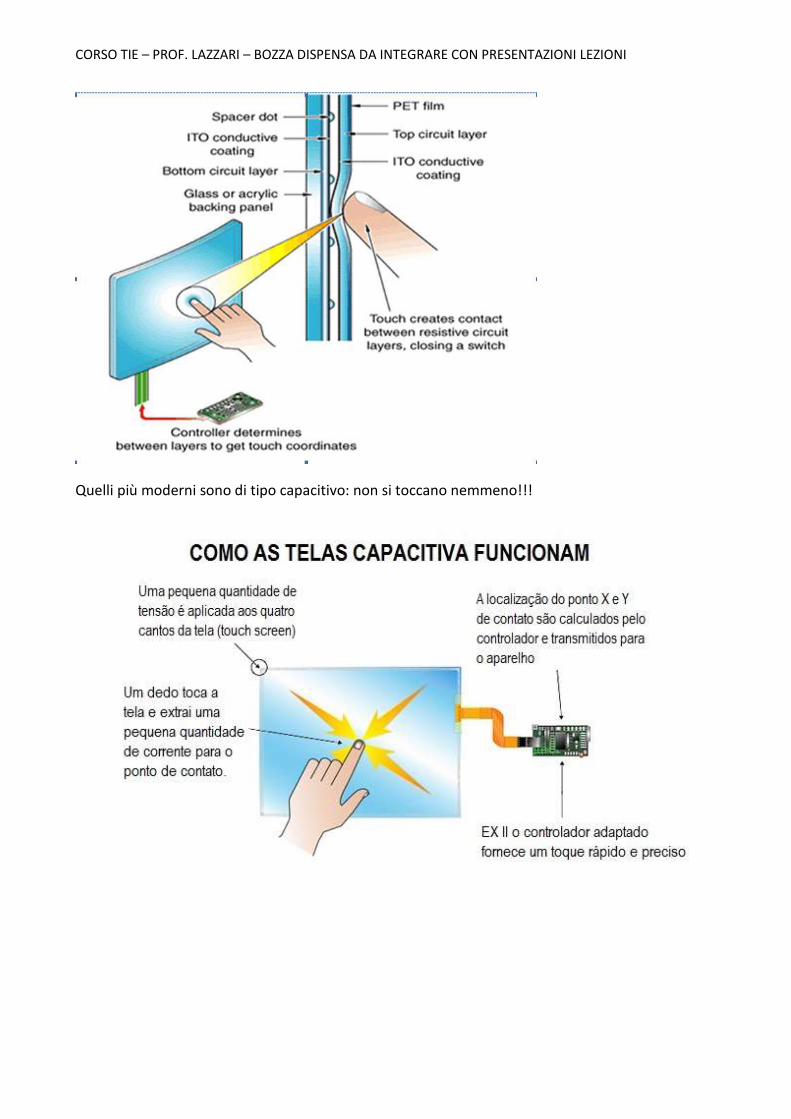
I sensori resistivi a mappa sono impiegati nei video touch-screen. Attenzione che non tutti i touch-
screen funzionano così!!!
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
Quelli più moderni sono di tipo capacitivo: non si toccano nemmeno!!!
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
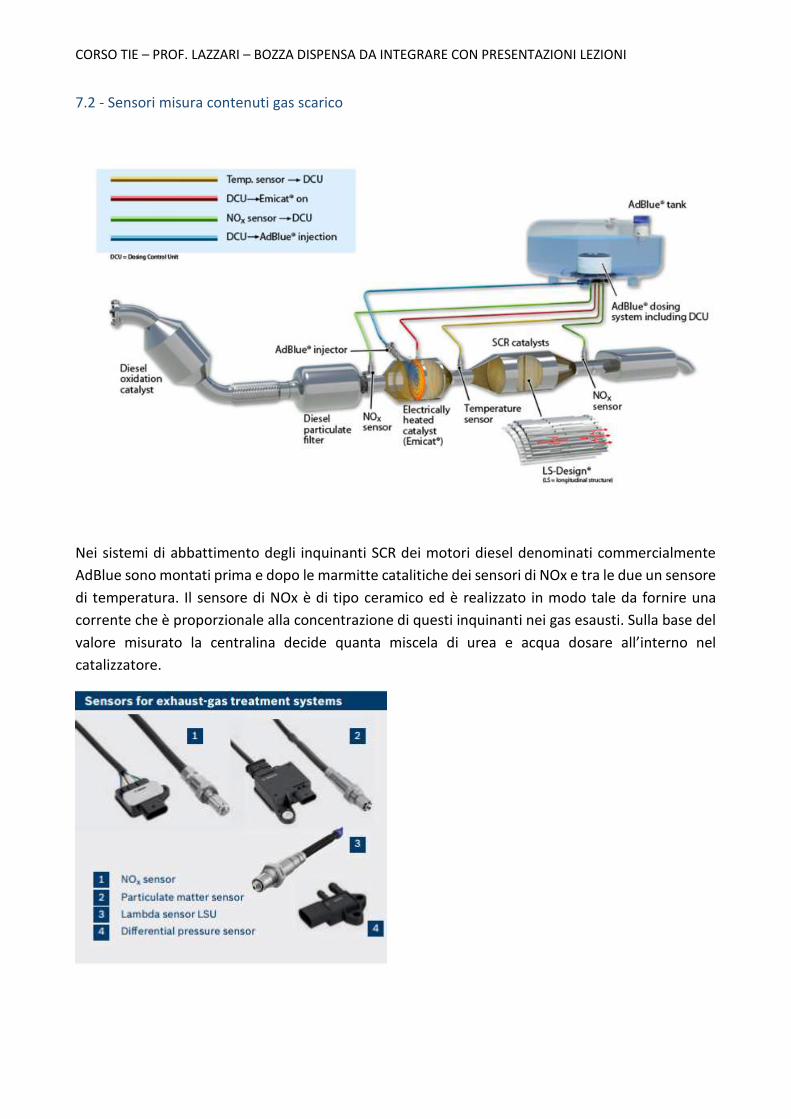
7.2 - Sensori misura contenuti gas scarico
Nei sistemi di abbattimento degli inquinanti SCR dei motori diesel denominati commercialmente
AdBlue sono montati prima e dopo le marmitte catalitiche dei sensori di NOx e tra le due un sensore
di temperatura. Il sensore di NOx è di tipo ceramico ed è realizzato in modo tale da fornire una
corrente che è proporzionale alla concentrazione di questi inquinanti nei gas esausti. Sulla base del
valore misurato la centralina decide quanta miscela di urea e acqua dosare all’interno nel
catalizzatore.

CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
7. 3 - Sensori misura numero giri singole ruote
Anche sui trattori si stanno diffondendo i moduli ABS che basano il loro funzionamento su sensori
di misura della velocità angolare di ogni singola ruota (encoder). Se la velocità di una ruota dovesse
essere troppo bassa, l‘ABS rilascia il rispettivo freno per evitare il bloccaggio della stessa. In alcune
soluzioni, poiché le ruote del trattore possiedono una notevole inerzia dovuta alle loro dimensioni
e al loro peso elevato, il modulo ABS comunica inoltre con la centralina del trattore. Quest’ultima
può comandare la rispettiva ruota anche tramite il cambio se il rilascio del freno non è sufficiente a
mantenere la velocità necessaria.
7.4 - Sensori misura pressione pneumatici
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
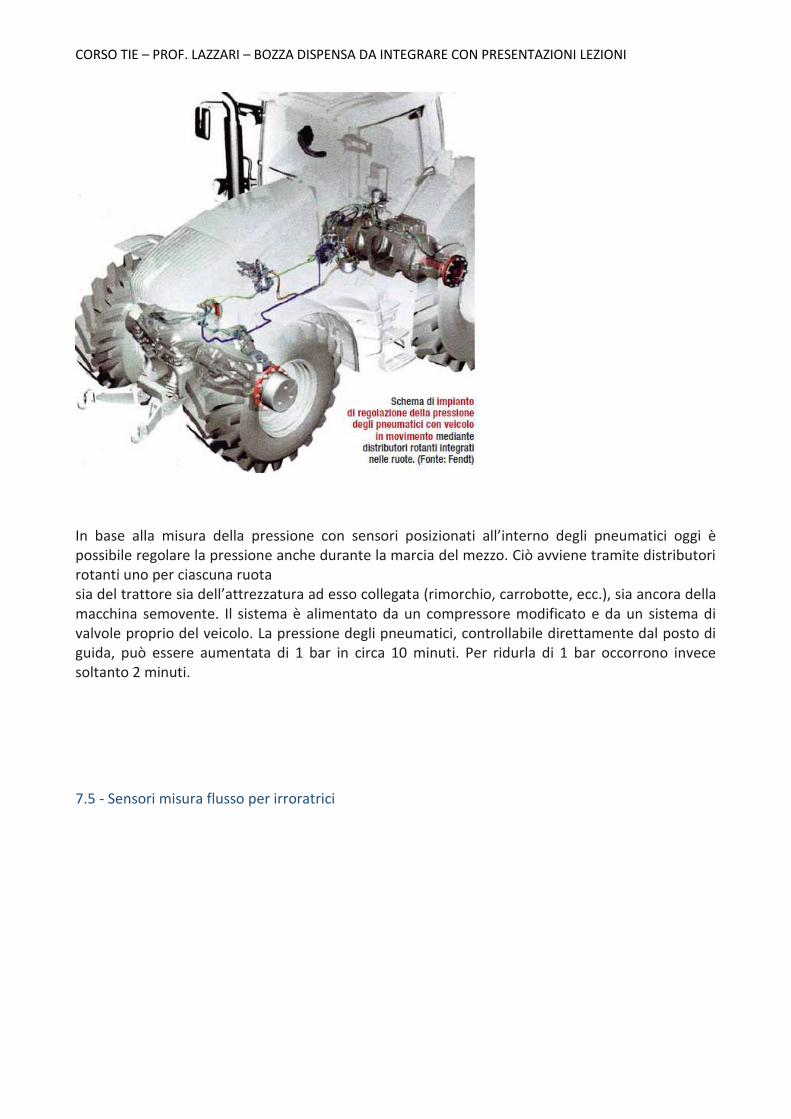
In base alla misura della pressione con sensori posizionati all’interno degli pneumatici oggi è possibile regolare la pressione anche durante la marcia del mezzo. Ciò avviene tramite distributori rotanti uno per ciascuna ruota sia del trattore sia dell’attrezzatura ad esso collegata (rimorchio, carrobotte, ecc.), sia ancora della macchina semovente. Il sistema è alimentato da un compressore modificato e da un sistema di valvole proprio del veicolo. La pressione degli pneumatici, controllabile direttamente dal posto di guida, può essere aumentata di 1 bar in circa 10 minuti. Per ridurla di 1 bar occorrono invece soltanto 2 minuti.
7.5 - Sensori misura flusso per irroratrici

CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
La misura della portata delle miscele di prodotti liquidi (per trattamenti fitosanitari, per
concimazioni, per fitoregolazioni etc.) è essenziale ai fini della messa in essere di specifici controlli
delle medesime. Per questa funzione vengono come sensori i flussimetri (o flussometri). Essi
possono basarsi su diversi principi di funzionamento anche se i più diffusi sono quelli a induzione
elettromagnetica. Il limite principale di questi dispositivi è relativo al fatto che qualsiasi
modificazione fisica del liquido impiegato nel circuito modifica le prestazioni del sensore e richiede
quindi delle onerose operazioni di taratura.
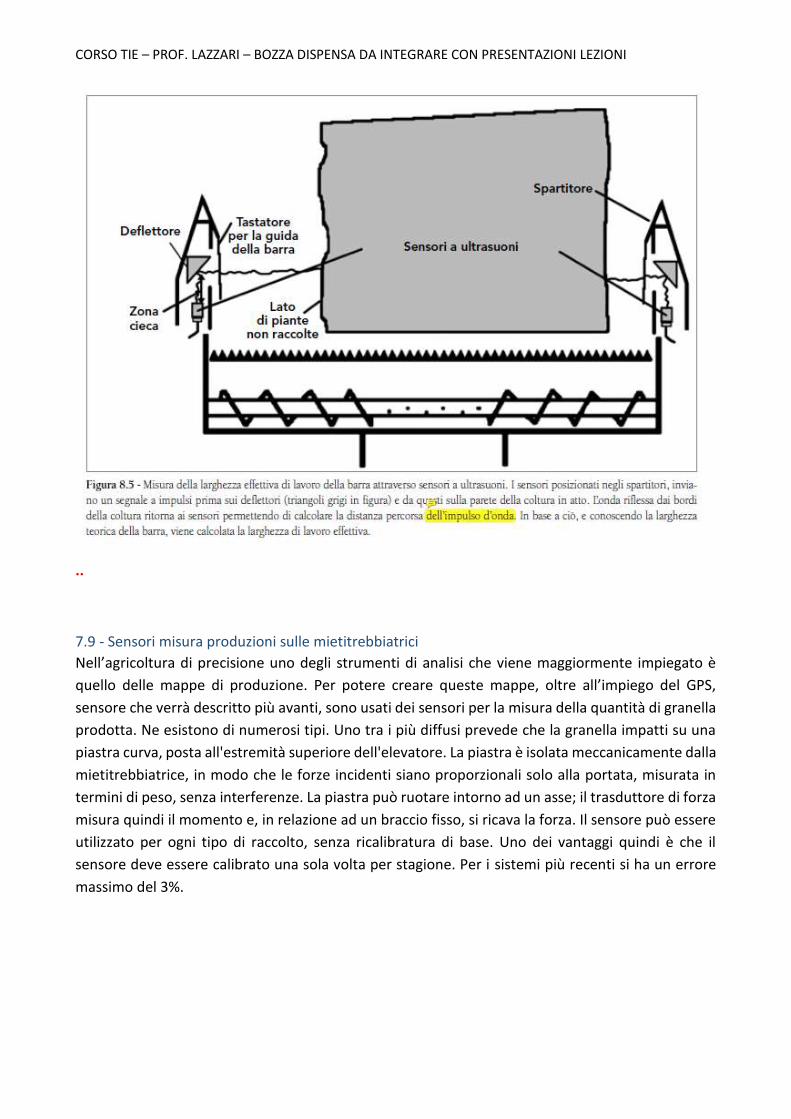
7.6 - Sensori misura distanza da terra barre da diserbo
Le irroratrici di prodotti liquidi (per diserbo, concimazione, fitoregolazione etc.) sono sempre più
spesso caratterizzate dalla presenza di barre di larghezza molto elevata (fino a 24 m). Il fatto che
sulle barre siano montati ugelli che sono caratterizzati da un angolo di distribuzione costante fa sì
che queste barre siano in grado di garantire una copertura omogenea a terra solo quando hanno
una distanza dal suolo corretta. I sensori ad ultrasuoni sono in grado di misurare detta distanza e
sono quindi diffusamente impiegati per costruire sistemi di controllo della medesima. Essi sono
caratterizzati da un emettitore, che invia un segnale verso la superficie del suolo, e da un ricevitore,

CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
in grado di misurare il tempo che il segnale impiega per percorrere il tragitto di andata e ritorno. In
base a detto tempo e alla velocità del segnale viene calcolata la distanza.
7.7 - Sensori misura volume parete fogliare
I sensori ad ultrasuoni possono essere impiegati per stimare il volume delle pareti vegetative nelle
colture arboree. In genere infatti, le coltivazioni arboree sono attuate con le piante disposte in filari
con interfilare a distanza costante. Supponendo che l’operatrice segua una traiettoria che sta nel
mezzo dell’interfilare e misurando la distanza tra parete vegetativa e sensori si risale alla forma della
parete vegetativa. Utilizzando questa misura come input di un sistema di controllo, la distruzione
può essere regolata in base al volume fogliare presente.
7.8 - Sensori misura del grado di riempimento delle barre nelle mietitrebbiatrici per colture
erbacee
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
..
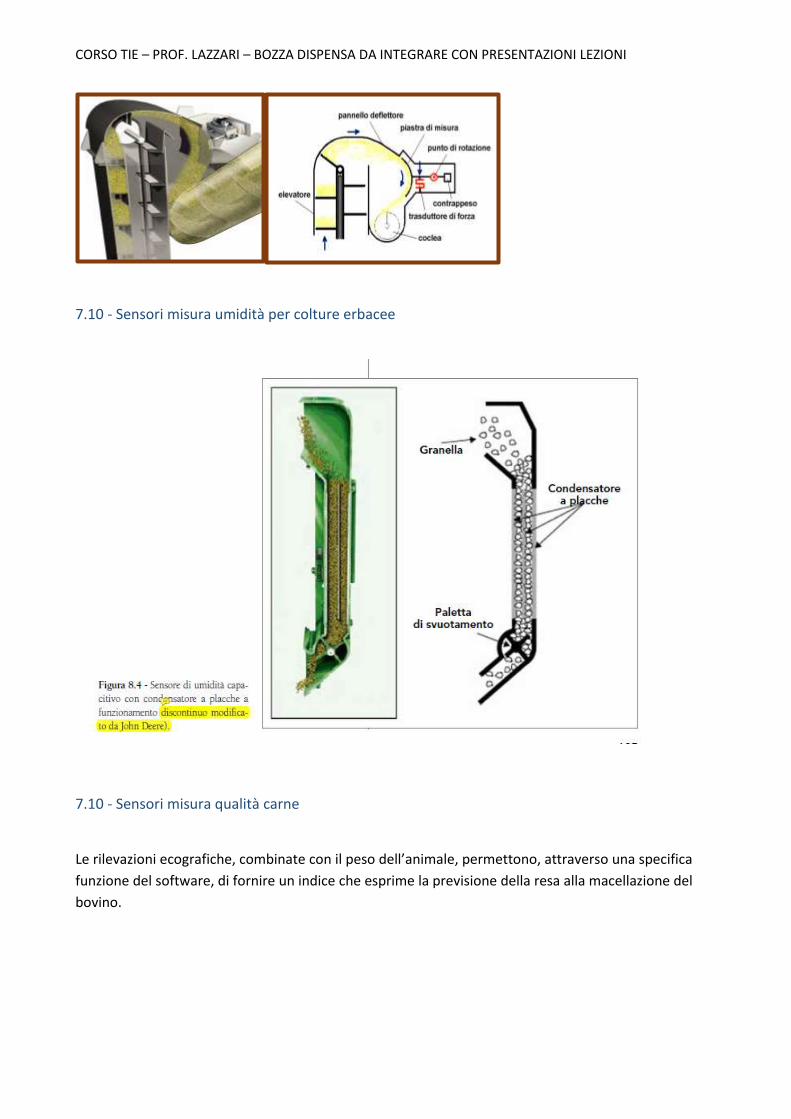
7.9 - Sensori misura produzioni sulle mietitrebbiatrici
Nell’agricoltura di precisione uno degli strumenti di analisi che viene maggiormente impiegato è
quello delle mappe di produzione. Per potere creare queste mappe, oltre all’impiego del GPS,
sensore che verrà descritto più avanti, sono usati dei sensori per la misura della quantità di granella
prodotta. Ne esistono di numerosi tipi. Uno tra i più diffusi prevede che la granella impatti su una
piastra curva, posta all'estremità superiore dell'elevatore. La piastra è isolata meccanicamente dalla
mietitrebbiatrice, in modo che le forze incidenti siano proporzionali solo alla portata, misurata in
termini di peso, senza interferenze. La piastra può ruotare intorno ad un asse; il trasduttore di forza
misura quindi il momento e, in relazione ad un braccio fisso, si ricava la forza. Il sensore può essere
utilizzato per ogni tipo di raccolto, senza ricalibratura di base. Uno dei vantaggi quindi è che il
sensore deve essere calibrato una sola volta per stagione. Per i sistemi più recenti si ha un errore
massimo del 3%.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
7.10 - Sensori misura umidità per colture erbacee
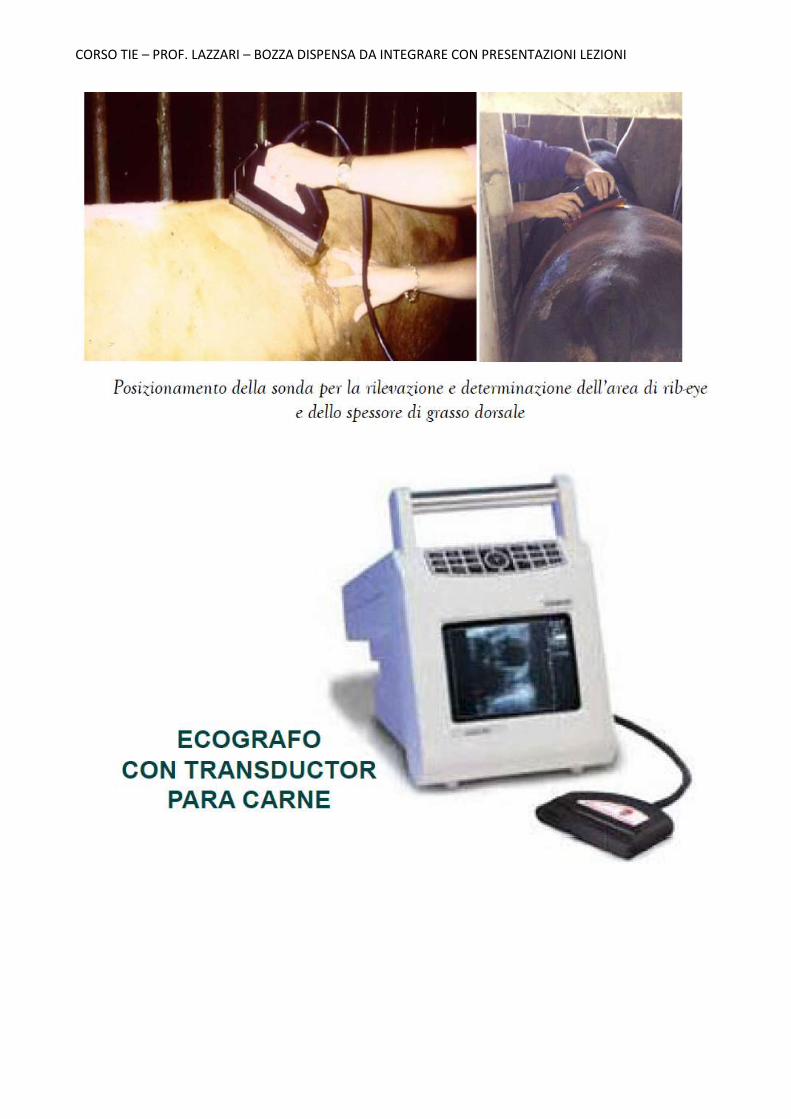
7.10 - Sensori misura qualità carne
Le rilevazioni ecografiche, combinate con il peso dell’animale, permettono, attraverso una specifica
funzione del software, di fornire un indice che esprime la previsione della resa alla macellazione del
bovino.
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI
CORSO TIE – PROF. LAZZARI – BOZZA DISPENSA DA INTEGRARE CON PRESENTAZIONI LEZIONI

![340]) - users2.unimi.itusers2.unimi.it/lzzmsm/013 - 2 sedimentazione 2008.pdf · tempi di sedimentazione accettabili nel campo del trattamento degli scarichi. La velocità di sedimentazione,](https://static.fdocumenti.com/doc/165x107/5c65c89f09d3f252168b4e7b/340-2-sedimentazione-2008pdf-tempi-di-sedimentazione-accettabili-nel.jpg)