Sistemi dinamici discreti: le applicazioni che non ti...
8
Sistemi dinamici discreti: le applicazioni che non ti aspetti Andrea Bacciotti Dipartimento di Scienze Matematiche, Politecnico di Torino C.so Duca degli Abruzzi, 24 - 10129 Torino - Italy [email protected] C’` e un punto di vista comune sotto il quale si possano reinterpretare la costruzione della scala musicale secondo Pitagora e il problema della riproduzione dei conigli di Fibonacci? Dal momento che questo non ` e un romanzo poliziesco, il lettore non avr` a bisogno di aspettare l’ultima pagina per avere la risposta. Il punto di vista comune ` e quello della teoria dei sistemi dinamici discreti. La teoria dei sistemi dinamici discreti ha molte e ben note applicazioni (per esempio alla dinamica delle popolazioni) ed ` e abbordabile, almeno fino ad un certo punto, con strumenti matematici elementari: in buona parte, i sistemi di cui ci occuperemo sono di tipo lineare. Questo articolo si propone di illustrare esempi di problemi la cui interpretazione in termini di sistemi dinamici discreti, bench´ e poco nota, mette in luce aspetti che sarebbe difficile far emergere con gli approcci pi` u tradizionali. Oltre ai due gi`a citati, ci occuperemo anche del paradosso di Achille e la tartaruga. Per comodit`a del lettore e per fissare l’uso di termini e notazioni, sono state inserite nel testo due sezioni contenenti un minimo indispensabile di nozioni di base. Maggiori dettagli e sviluppi sono facilmente reperibili nella letteratura esistente, per esempio [1, 3, 4, 7]. 1 La scala musicale secondo Pitagora Come ben noto, la costruzione della prima scala musicale ` e attribuita alla scuola pitagorica. La struttura matematica delle scale musicali ` e un soggetto ricorrente nella letteratura divulgativa (basti qui ricordare le recenti pubblicazioni [5], [6] e [8] pag. 264) per cui possiamo limitarci ad un breve cenno. 1.1. Immaginiamo una corda tesa tra due estremi fissi. Messa in vibrazione, la corda produce un suono la cui frequenza dipende dalla sua lunghezza. Se si dimezza la lunghezza della corda, la frequenza del suono prodotto raddoppia. I musicisti definiscono “ottava” l’intervallo tra una frequenza e il suo doppio (nella scala diatonica composta dalle tradizionali sette note, la nota che ha frequenza doppia della prima prende lo stesso nome e segna l’inizio di un nuovo intervallo: per questo si qualifica come “ottava” nota). Costruire una scala significa identificare, all’interno di un intervallo di ottava, i sottointervalli corrispondenti a sequenze di suoni gradevoli (naturalmente il concetto di “sequenza gradevole” non ha una natura scientifica: l’intreccio tra aspetti fisico- matematici e aspetti soggettivo-culturali ` e una caratteristica molto affascinante della musica). Nella scala pitagorica, il primo sottointervallo corrisponde al suono prodotto da una corda la cui lunghezza ` e un terzo di quella della corda iniziale, e la cui frequenza ` e quindi tripla. Tale frequenza per`o cade fuori dall’ottava: per rientraci, ` e necessario dimezzarla (o, se si preferisce, dividere in tre la lunghezza di una corda doppia di quella iniziale). Si identifica cos` ı il rapporto 3/2 come l’elemento chiave della costruzione pitagorica. 1
Transcript of Sistemi dinamici discreti: le applicazioni che non ti...

Sistemi dinamici discreti: le applicazioni che non ti aspetti
Andrea BacciottiDipartimento di Scienze Matematiche, Politecnico di Torino
C.so Duca degli Abruzzi, 24 - 10129 Torino - [email protected]
C’e un punto di vista comune sotto il quale si possano reinterpretare la costruzione della scalamusicale secondo Pitagora e il problema della riproduzione dei conigli di Fibonacci? Dal momentoche questo non e un romanzo poliziesco, il lettore non avra bisogno di aspettare l’ultima paginaper avere la risposta. Il punto di vista comune e quello della teoria dei sistemi dinamici discreti.La teoria dei sistemi dinamici discreti ha molte e ben note applicazioni (per esempio alla dinamicadelle popolazioni) ed e abbordabile, almeno fino ad un certo punto, con strumenti matematicielementari: in buona parte, i sistemi di cui ci occuperemo sono di tipo lineare.
Questo articolo si propone di illustrare esempi di problemi la cui interpretazione in termini disistemi dinamici discreti, benche poco nota, mette in luce aspetti che sarebbe difficile far emergerecon gli approcci piu tradizionali. Oltre ai due gia citati, ci occuperemo anche del paradosso diAchille e la tartaruga. Per comodita del lettore e per fissare l’uso di termini e notazioni, sono stateinserite nel testo due sezioni contenenti un minimo indispensabile di nozioni di base. Maggioridettagli e sviluppi sono facilmente reperibili nella letteratura esistente, per esempio [1, 3, 4, 7].
1 La scala musicale secondo Pitagora
Come ben noto, la costruzione della prima scala musicale e attribuita alla scuola pitagorica. Lastruttura matematica delle scale musicali e un soggetto ricorrente nella letteratura divulgativa(basti qui ricordare le recenti pubblicazioni [5], [6] e [8] pag. 264) per cui possiamo limitarci ad unbreve cenno.
1.1. Immaginiamo una corda tesa tra due estremi fissi. Messa in vibrazione, la corda produceun suono la cui frequenza dipende dalla sua lunghezza. Se si dimezza la lunghezza della corda,la frequenza del suono prodotto raddoppia. I musicisti definiscono “ottava” l’intervallo tra unafrequenza e il suo doppio (nella scala diatonica composta dalle tradizionali sette note, la nota cheha frequenza doppia della prima prende lo stesso nome e segna l’inizio di un nuovo intervallo: perquesto si qualifica come “ottava” nota). Costruire una scala significa identificare, all’interno diun intervallo di ottava, i sottointervalli corrispondenti a sequenze di suoni gradevoli (naturalmenteil concetto di “sequenza gradevole” non ha una natura scientifica: l’intreccio tra aspetti fisico-matematici e aspetti soggettivo-culturali e una caratteristica molto affascinante della musica).Nella scala pitagorica, il primo sottointervallo corrisponde al suono prodotto da una corda la cuilunghezza e un terzo di quella della corda iniziale, e la cui frequenza e quindi tripla. Tale frequenzapero cade fuori dall’ottava: per rientraci, e necessario dimezzarla (o, se si preferisce, dividere intre la lunghezza di una corda doppia di quella iniziale). Si identifica cosı il rapporto 3/2 comel’elemento chiave della costruzione pitagorica.
1

Se chiamiamo DO la nota di partenza, quella ottenuta col procedimento descritto e il SOL,cioe la quinta nota della scala diatonica. Per questa ragione, l’intervallo DO-SOL viene detto daimusicisti un intervallo di “quinta”. Gli ulteriori sottointervalli vengono poi determinati ripetendola costruzione, con l’unica attenzione al fatto che in qualche caso, per rientrare nell’ottava, bisognadividere per 4 invece che per 2. Procedendo cosı per quinte e riduzioni d’ottava, si generanonell’ordine seguente le 12 note
DO, SOL, RE, LA, MI, SI, SOL♭, RE♭, LA♭, MI♭, SI♭, FA
che, rilette in ordine di frequenza crescente, formano la scala cromatica. Secondo le convenzioniattuali, la frequenza del DO iniziale viene stabilita in modo che la frequenza del LA risulti di 440Hz. La costruzione puo essere applicata naturalmente anche a ritroso e le varie ottave vengonoidentificate con un numero (quella a cui appartiene il LA di 440 Hz e la quarta).
Questo processo di generazione delle note musicali puo essere rappresentato come un sistemadinamico discreto. A tal fine, abbiamo bisogno di un po’ di formalismo matematico e di qualchedefinizione.
1.2 Sia X un insieme non vuoto e sia f una funzione definita su X, tale che f(X) ⊂ X. Unsistema dinamico discreto (del primo ordine) si rappresenta come una relazione
xn+1 = f(xn) , n = 0, 1, 2, . . . . (1)
Per ogni x ∈ X, la (1) applicata ricorsivamente, genera in modo unico una successione
x0 = x , x1 = f(x0) , x2 = f(x1) = f(f(x0)) , . . . .
Il punto x, necessario per innescare il processo ricorsivo, viene detto dato o punto iniziale.Definita l’iterata n-esima
f [n] = f ◦ . . . ◦ f
(composizione di f con se stessa ripetuta n volte) si ha xn = f [n](x0). Per uniformita, scriveremoanche x0 = f [0](x0). L’immagine di una successione generata dal sistema (1) si chiama traiettoriao orbita. In questo articolo ci interessano i casi:
1. X = I, dove I e un intervallo di numeri reali, eventualmente non limitato;
2. X = C, dove C e una circonferenza.
Un elemento x ∈ X si dice un punto fisso del sistema (1) se f(x) = x. Se x e un punto fisso,la successione generata a partire da x e costante. Un elemento x ∈ X tale che f [k](x) = x maf [m](x) = x per ogni m = 1, 2, . . . , k − 1 (k ≥ 2), si dice punto periodico di periodo k. Vediamoalcuni primi semplici, ma utili, esempi.
1. Sistemi dinamici discreti della forma
xn+1 = xn + a (2)
con X = R e a numero reale fissato, generano progressioni aritmetiche, cioe successioni della formaxn = x+ na.
2. Sistemi dinamici discreti della forma
xn+1 = axn , (3)
2

-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
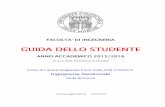
Figura 1: p/q = 1/12 p/q = 3/10 p/q = 1/(2√2)
dove, come prima, X = R e a e un numero reale fissato, generano invece progressioni geometriche,cioe successioni della forma xn = anx. Sistemi dinamici del tipo (3) si dicono lineari e sono moltoimportanti. A seconda del valore scelto per la costante a, si hanno i seguenti casi:
• se a = 1 tutti i punti x ∈ R sono fissi• se a = 1 l’unico punto fisso e l’origine• se a = −1 tutti i punti sono periodici di periodo 2• se |a| < 1 per tutte le soluzioni generate si ha limn→∞ xn = 0• se |a| > 1 per tutte le soluzioni generate si ha limn→∞ |xn| = ∞• Se a > 0 le orbite hanno un andamento monotono, se invece a < 0 hanno un andamento
oscillante.Si attribuisce a T.R. Malthus (1766-1834), pastore anglicano interessato alla sociologia, l’ipotesi
che la crescita di una popolazione possa essere descritta da un modello matematico del tipo (3)con X = [0,+∞), e la costante a dipendente dai tassi di nascita e di mortalita.
3. Consideriamo il sistema dinamico con X = C definito dalla regola seguente: il punto xn+1 si ot-tiene a partire dal punto xn con una rotazione in senso antiorario di un angolo fissato (indipendenteda n). Se indichiamo con θ ∈ [0, 2π) la misura in radianti degli angoli, possiamo rappresentare ilsistema dinamico mediante la relazione
θn+1 = (θn + α)mod 2π (4)
(ricordiamo che a = bmod 2π se e solo se esiste un numero k ∈ Z tale che a−b = 2kπ). Si riconosceuna certa analogia col sistema (2). Tuttavia la diversa natura geometrica dello spazio C complicale cose e rende la dinamica piu ricca. Al variare di α si distinguono i casi seguenti:
• se α = 2π/q con q ∈ N, dopo q iterazioni si torna esattamente al punto iniziale: tutti i puntisono periodici di periodo q;
• se α = 2pπ/q con p, q ∈ N (relativamente primi), tutti i punti sono periodici di periodo q,ma per tornare al punto iniziale bisogna fare p giri;
• se α/2π non e un numero razionale, non esistono punti periodici, e i punti di ogni successionegenerata sono densi in C.
Tra queste, l’unica affermazione non immediata e la terza (per una dimostrazione, si veda[2]. pag. 21). La presenza di un’orbita densa e una delle caratteristiche del caos deterministico.Come noto, ci sono varie definizioni di dinamica caotica. Una delle piu accreditate richiede, oltreall’orbita densa, l’esistenza di infinite orbite periodiche che, nel sistema (4), evidentemente non cisono. Un esempio molto semplice di sistema caotico su C e dato da θn+1 = 2θnmod 2π (si vedaancora ancora [2]).
3

1.3. Possiamo adesso riprendere il problema della scala musicale. Normalizzato a 1 il valore dellafrequenza iniziale, ci si accorge subito che il procedimento precedentemente descritto corrispondealle prime undici iterazioni del sistema dinamico con X = [1, 2]
ωn+1 =
(3
2ωn
)modexp 2 (5)
dove si intende, per a, b > 0,
b = a modexp 2 ⇐⇒ ∃k ∈ Z tale cheb
a= 2k .
Se si effettua un’ulteriore iterazione, ci si aspetterebbe di tornare alla nota iniziale: di trovarecioe alla dodicesima iterazione ω12 = 1. E invece non e cosı. Infatti, il processo iterativo generafrazioni che hanno al numeratore potenze di 3 e al denominatore potenze di 2: quindi non cisono semplificazioni possibili. Facendo i calcoli (magari con l’aiuto del computer), si scopre che ladifferenza tra ω0 e ω12 risulta, in termini di frequenza, pari a circa 7.1 Hz. Poco, ma abbastanzaper essere avvertita come una stonatura anche da un orecchio non esperto. Questa differenza edetta comma pitagorico. Il comma pitagorico costituı un grosso problema nel canto polifonico enelle tecniche di accordatura degli strumenti. La questione fu risolta con l’introduzione della scalatemperata equabile (quella ancor oggi in uso) che costruisce le note in progressione geometricasecondo il sistema dinamico discreto
ωn+1 =12√2 ωn .
Ma torniamo al sistema dinamico (5). Applicando la trasformazione θ = 2π log2 ω, l’intervallo[1, 2] si trasforma nell’intervallo [0, 2π] e il sistema diventa
θn+1 =
(θn +
log 3
log 2
)mod 2π
che e un sistema del tipo (4). Poiche α e irrazionale, l’orbita θn e densa. Cio significa che se sicontinuasse a iterare all’infinito il procedimento, per effetto del comma pitagorico si otterrebbeuna “scala” formata da un insieme di suoni le cui frequenze sono dense all’interno di un’ottava.
E interessante osservare che il numero log 3/ log 2 interviene in varie altre situazioni: si veda[8], pag. 246.
2 I conigli di Fibonacci
Il maggior contributo dato dal Fibonacci alla matematica e stato, come noto, l’introduzione inEuropa delle cifre indo-arabe. La sua grande popolarita e invece legata alla successione numerica
1, 1, 2, 3, 5, 8, 13, 21, . . . (6)
in cui ogni numero (a partire dal terzo) e la somma dei due che lo precedono. Per inciso, ricordiamoche Fibonacci arriva alla (6) partendo dal problema di descrivere la numerosita di una colonia diconigli che si riproducono secondo regole precise (francamente, molto rigide e poco realistiche).Ma e davvero cosı unica questa successione?
Gia verso la fine dell’Ottocento, il matematico francese E. Lucas (1842-1891), si era accortoche mantenendo invariata la regola di riproduzione ma cambiando i valori iniziali si ottengonosuccessioni diverse. Per esempio cominciando con 1 e 3 si ottiene 1, 3, 4, 7, 11, 18, . . . (numeri diLucas).
4

Figura 2: I numeri di Fibonacci in una istallazione di M. Merz sulla mole antonelliana (Torino)
Anche in questo caso, per capire, possiamo chiedere aiuto alla matematica dei sistemi dinamicidiscreti. Ma ci serve qualche nozione in piu.
2.1. L’ambientazione naturale per rappresentare la regola immaginata da Fibonacci sarebbe R2,ma per semplicita noi la interpreteremo come un sistema del secondo ordine. Cio significa che,proprio come nel nostro caso, il valore di ciascun elemento della successione generata dal sistemadipende dai due che lo precedono. In particolare, si chiamano lineari quei sistemi dinamici delsecondo ordine che si presentano nella forma
xn+2 = pxn+1 + qxn (7)
dove p e q sono costanti reali fissate. Evidentemente, per innescare il processo ricorsivo, adesso enecessario assegnare due dati iniziali. Ragionando per analogia, e naturale aspettarsi che, comenel caso dei sistemi lineari del primo ordine, il sistema (7) generi successioni della forma xn = an.Ma quale valore attribuire ad a? Sostituendo e semplificando, si vede subito che la successionexn = an e generata dal sistema (7) se e solo se a e soluzione dell’equazione di secondo grado
a2 − pa− q = 0 . (8)
Limitandoci per semplicita al caso in cui quest’ultima abbia radici reali e distinte a1, a2, e anchepoi facile concludere che tutte e sole le successioni generate da (7) si possono scrivere come
xn = c1an1 + c2a
n2 .
La (8) si chiama equazione caratteristica della (7). I valori della costanti c1, c2 si determinanoimponendo i dati iniziali.
2.2. Adesso si riconosce facilmente che la successione di Fibonacci e generata da un sistemadinamico della formula (7) con p = q = 1, e cioe dal sistema
xn+2 = xn+1 + xn (9)
in corrispondenza dei dati iniziali x0 = x1 = 1. Una delle proprieta dei numeri di Fibonacci su cuiinsiste frequentemente la letteratura divulgativa e che
5

limn→∞
xn+1
xn=
1 +√5
2= 1.618... (10)
(costante aurea). Si da il caso che anche i numeri di Lucas godono della stessa proprieta. E unacoincidenza o c’e sotto qualcosa? Per scoprirlo, non ci resta che scrivere l’equazione caratteristicadella (9) che e
a2 − a− 1 = 0 . (11)
Si notano immediatamente due cose: la prima e che le soluzioni di questa equazione sono
a1 =1 +
√5
2= 1.618... , a2 =
1−√5
2= −0.618... (12)
(la prima positiva e maggiore di 1, la seconda negativa e minore di 1 in valore assoluto). Lesuccessioni generate sono quindi tutte della forma
xn = c1
(1 +
√5
2
)n
+ c2
(1−
√5
2
)n
.
Per esempio
5 +√5
10
(1 +
√5
2
)n
+5−
√5
10
(1−
√5
2
)n
(13)
produce, per n = 0, 1, 2... la successione originale di Fibonacci.La seconda osservazione e che la (11) coincide con l’equazione che si deve risolvere per trovare la
lunghezza a del segmento medio proporzionale tra il segmento di lunghezza unitaria e il segmentodi lunghezza uguale a 1 + a (parte aurea). In cio consiste il collegamento tra i due problemi. Ecomunque chiaro che la proprieta (10) non e caratteristica dei numeri di Fibonacci, ma del sistemache li genera. Infatti (quasi) tutte le successioni generate da (9) divergono e soddisfano la (10)(quelle che fanno eccezione sono le successioni per cui c1 = 0, che tendono a zero oscillando.
3 Achille e la tartaruga
La nostra terza e ultima applicazione riguarda il celebre paradosso dovuto a Zenone di Elea.Eccone una possibile formulazione. Su una pista rettilinea (che supponiamo dotata di un sistemadi ascisse), Achille (da questo momento in poi indicato con A) e la tartaruga (da questo momentoin poi indicata con T ), si sfidano a una corsa. Poiche la velocita di A e doppia di quella di T ,A concede un certo vantaggio a T . Per esempio, A parte dall’origine, mentre T parte dal puntodi ascissa 1. Zenone afferma che: A non raggiunge mai T . Infatti, nel tentativo di raggiungereT , A deve cominciare a portarsi nel punto di ascissa x = 1. Ma nel frattempo T non e rimastaferma: poiche la sua velocita e la meta di quella di A, nel tempo che A impiega a raggiungere ilpunto x = 1, T si sara portata in x = 1+ 1/2. Per raggiungere T , A deve quindi ancora coprire ladistanza tra x = 1 e x = 1 + 1/2 (pari a 1/2). Nel frattempo pero, T si sara spostata nel puntox = 1 + 1/2 + 1/4. Il ragionamento si puo ripetere all’infinito, e quindi A non raggiunge mai T .
La semplicita dell’argomento contrasta talmente con l’implausibilita della conclusione che, findall’antichita, innumerevoli sono stati i tentativi di interpretare il senso del paradosso e di di-mostrarne l’infondatezza. Esiste oggi un’enorme letteratura in proposito, sia sui versanti della
6

matematica e della fisica sia su quello filosofico, che si arricchisce continuamente di nuovi contri-buti. Chi volesse farsene un’idea anche molto superficiale, puo dare un’occhiata alla pagina diWikipedia (quella in italiano ma anche quella in inglese) intitolata Paradossi di Zenone.
Non e nostra intenzione entrare in questo dibattito. In fondo il nostro scopo e solo quello di“giocare” con i sistemi dinamici. Non esiteremo quindi a commettere la scorrettezza di deconte-stualizzare il problema riproponendolo da un punto di vista che non poteva certo essere quello diZenone.
Indichiamo con An e Tn i rilevamenti simultanei delle successive posizioni di A e T : A0 = 0,A1 = 1, A2 = 1 + 1/2, T0 = 1, T1 = 1 + 1/2 ecc.. Per ogni n = 0, 1, 2, . . . si ha:
An+1 = Tn e Tn+1 = Tn +Tn −An
2=
3
2Tn − 1
2An
dalle quali si ricava
An+2 =3
2An+1 −
1
2An (14)
che e un sistema dinamico del secondo ordine. L’equazione caratteristica e
r2 − 3
2r +
1
2= 0
le cui soluzioni sono r = 1, r = 1/2. La soluzione generale si scrive nella forma
An = c1 + c21
2n
Imponendo le condizioni iniziali A0 = 0, A1 = 1, si ricava c1 = 2, c2 = −2, e quindi
An = 2− 1
2n−1, Tn = An+1 = 2− 1
2n
Ne concludiamo che limn→∞ An = limn→∞ Tn = 2. Pertanto, Achille raggiunge sı la Tartaruganel punto di ascissa x = 2, ma comunque attraverso un’infinita di passaggi intermedi.
L’interpretazione del problema in termini dinamici tuttavia non e del tutto inutile. Riflettendoun po’, ci si rende infatti conto che la formulazione proposta all’inizio del paragrafo e incompleta, senon addirittura equivoca. Tanto per cominciare, nella costruzione del modello, abbiamo ragionatosolo sullo spazio, mentre l’avverbio “mai” suggerisce implicitamente di riferire la conclusione altempo. In secondo luogo, noi abbiamo utilizzato l’informazione che “tra due rilevamenti consecutividelle relative posizioni, la velocita di A si mantiene doppia della velocita di T”, ma non abbiamoprecisato se tali velocita si mantengano costanti o no. In effetti il modello (14) e compatibile condue diversi scenari.
a. I rilevamenti delle posizioni si effettuano a intervalli di tempo uguali: per esempio, supponiamoche tali intervalli siano tutti uguali a un’unita di tempo. Poiche spazio = velocita moltiplicatotempo, e la distanza (nello spazio) tra le posizioni rilevate a due istanti consecutivi tende azero, necessariamente la velocita deve variare intervallo dopo intervallo e tendere a zero. Lasomma dei tempi 1 + 1 + 1 + . . . tende a infinito. Il quadro adesso appare piu coerente el’affermazione: “A non raggiunge mai T” appare piu convincente.
b. La velocita si mantiene costante: allora devono necessariamente tendere a zero i tempi dipercorrenza tra due rilevamenti successivi: l’ordine di infinitesimo sara anzi lo stesso. Piuprecisamente, fatta per esempio uguale a 2 la velocita di A, e indicato con t1 il tempo
7

impiegato da A per percorrere il primo intervallo [0, 1], t2 il tempo impiegato da A perpercorrere il secondo intervallo [1, 3/2] ecc., avremo: t1 = 1/2, t2 = 1/4, . . ., tn = 1/2n, . . .,e quindi
1
2+
1
4+
1
8+ . . . = 1 .
In tal caso quindi, A raggiunge T dopo esattamente 1 unita di tempo (si veda anche [3] pag.146, dove pero l’argomento della convergenza della serie e riferito allo spazio).
Riferimenti bibliografici
[1] Bischi G.I, Carini R., Gardini L., Tenti P., Sulle orme del caos. Comportamenti complessi inmodelli matematici semplici, Bruno Mondadori, 2004
[2] Devaney R.L., An introduction to chaotic dynamical systems, Addison- Wesley, 1989
[3] Geymonat L., Lezioni di Matematica, Vol. 1, Levrotto e Bella Torino, 1981
[4] Luenberger D.G., Introduction to dynamic systems, Wiley and Sons, New York, 1979
[5] Isola S., Su alcuni rapporti tra matematicae scale musicali, Matematica, Cultura e Societa,Rivista dell’UMI, Serie I, vol. 1, n. 1, 2016, pagg. 31-50
[6] Maor E., La musica dai numeri, Codice Edizioni, 2018
[7] Salinelli E., Tomarelli F., Modelli dinamici discreti, Springer Unitext, 2013
[8] Stewart I., Numeri incredibili, Bollati Boringhieri, 2016
8