Sistemi del I° e del II° ordine Ing. Giuseppe Fedele Dip. Elettronica, Informatica e Sistemistica...
47
Sistemi del I° e del II° ordine Ing. Giuseppe Fedele Dip. Elettronica, Informatica e Sistemistic Università degli Studi della Calabria Email: [email protected] Tel : 0984-494720
-
Upload
agostino-rosi -
Category
Documents
-
view
214 -
download
0
Transcript of Sistemi del I° e del II° ordine Ing. Giuseppe Fedele Dip. Elettronica, Informatica e Sistemistica...

Sistemi del I° e del II° ordine
Ing. Giuseppe FedeleDip. Elettronica, Informatica e SistemisticaUniversità degli Studi della Calabria
Email: [email protected] : 0984-494720

Sistemi del I° ordine
Considerando un ingresso causale e trasformando secondo Laplace l’equazione differenziale che modella il sistema con condizioni iniziali nulle, si ottiene la relazione tra le trasformate di Laplace dell’uscita forzata e dell’ingresso:

Esempio: circuito RC

Esempio: circuito RC
Trasformando secondo Laplace l’equazione differenziale con condizioni iniziali nulle (v0=0, il condensatore è supposto inizialmente scarico) si ha:
La funzione di trasferimento del sistema ha m=0 zeri e n=1 polo, il sistema è del primo ordine (infatti tale è l’ordine dell’equazione differenziale che lo descrive).

Esempio: sistema meccanico
quindi la risposta all’impulso vale

Sistemi del I° ordine
Calcoliamo ora la risposta al gradino del sistema.

Sistemi del I° ordine

Sistemi del I° ordine

Sistemi del I° ordine
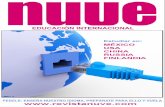
15.0
1)(
ssG
15.1
1)(
ssG
25.0
1p
667.05.1
1p
Im
Re-0.667-2

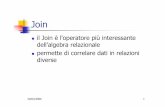
Sistemi del I° ordine
15.0
1)(
ssG 2
5.0
1p
Im
Re2

Sistemi del I° ordine

Tempo di assestamento

Tempo di assestamento

Tempo di assestamento

Tempo di assestamento

Tempo di assestamento

Errore alla risposta al gradino

Mappa poli-zeri

Risposta alla rampa

Errore alla risposta alla rampa

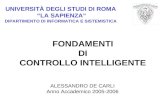
Sistemi del I° ordine
td : tempo di ritardo – tempo necessario perché la risposta raggiunga il 50% del valore finale
tr : tempo di salita – tempo necessario perché la risposta passi dal 10% al 90% del valore finale

Sistemi del I° ordine

Sistemi del II° ordine

Sistemi del II° ordine

Sistemi del II° ordine

Sistemi del II° ordine

Sistemi del II° ordine

Sistemi del II° ordine
djp 1 djp 2
Posizioni:
2221 dn pp Pulsazione naturale
n
p
1Re
Coefficiente di smorzamento
(quantità positiva per poli conparte reale negativa)
np 1Re
cosRe 1 np
0cos1- ,2
,0Re se
1cos0 ,2
,0Re se
1
1
p
p

np 1Re
cosRe 1 np
Sistemi del II° ordine
cosnn
cos
10 Per poli stabili.

Sistemi del II° ordine
22
2
2)(
nn
n
sssG
)(sGs
EsU )( )(sY
22
2
11sin
1)( arctgte
EEty n
tn 10

Sistemi del II° ordine
10
1
1
n
E

Sistemi del II° ordine
tneE
Ety
221
)(
tneE
Ety
211
)()()()( 21 tytyty

Sistemi del II° ordine
tnEeEty )(2
tnEeEty )(1

Sistemi del II° ordine
Verifica risposta al gradino

Sistemi del II° ordine
Verifica risposta al gradino

Sistemi del II° ordine

Sistemi del II° ordine
Consideriamo come tempo di assestamento quello in cui gliesponenziali entrano nella fascia:
05.011 tne
05.0 tne
Fissato TAAA
n TT
305.0ln
Poiché pn Re
05.0ln tn
AT
p05.0ln
Re

Sistemi del II° ordine

Sistemi del II° ordine
21
1
A
generalità di perdere senza 1
1
1
2
2
E
arctg
n
22
2
11sin
1
11)( arctgtety n
tn
tAety tn sin1)(

Sistemi del II° ordine
tAety tn sin1)(
0cossin)( tAeteAtydt
d ttn
nn
0cossin
tteAn
tn
n
0cos1sin 2 tteA tn
n
21ttg

21ttg
Sistemi del II° ordine
nnarctgt
21
nt
ntn 21 21
n
nt
Istanti in cui si ha un massimoo un minimo.

21max 1
ey211
n
t
Sistemi del II° ordine
21100
eS Massima sovraelongazione

Sistemi del II° ordine

Sistemi del II° ordine

Sistemi del II° ordine
21100
eS

Sistemi del II° ordine
tAety tn sin1)(
1)( rTy 0sin r
t TAe n
0sin rT
0sin rT
kTr
2
2
1
1
n
r
arctgkkT

Sistemi del II° ordine
2
2
1
1
n
r
arctgkT