
SIMATIC Software di base per S7-300/400 PID...
42
Prefazione, Indice Introduzione 1 Parametrizzazione 2 Blocchi funzionali 3 Bibliografia A Indice analitico C79000-G7072-C516-01 Software di base per S7-300/400 PID Control Manuale SIMATIC
Transcript of SIMATIC Software di base per S7-300/400 PID...
Prefazione, Indice
Introduzione 1
Parametrizzazione 2
Blocchi funzionali 3
BibliografiaA
Indice analitico
C79000-G7072-C516-01
Software di base perS7-300/400PID Control
Manuale
SIMATIC
Il presente manuale contiene avvertenze tecniche relative alla sicurezza delle persone e allaprevenzione dei danni materiali che vanno assolutamente osservate. Le avvertenze sonocontrassegnate da un triangolo e, a seconda del grado di pericolo, rappresentate nel modoseguente:
!Pericolo di morte
significa che la non osservanza delle relative misure di sicurezza provoca la morte, gravilesioni alle persone e ingenti danni materiali.
!Pericolo
significa che la non osservanza delle relative misure di sicurezza può causare la morte, gravilesioni alle persone e ingenti danni materiali.
!Attenzione
significa che la non osservanza delle relative misure di sicurezza può causare leggere lesionialle persone o lievi danni materiali.
Avvertenza
è una informazione importante sul prodotto, sull’uso dello stesso o su quelle parti delladocumentazione su cui si deve prestare una particolare attenzione.
Interventi sul dispositivo vanno effettuati esclusivamente da personale qualificato.Personale qualificato ai sensi delle avvertenze di sicurezza contenute nella presente documen-tazione è quello che dispone della qualifica a inserire, mettere a terra e contrassegnare,secondo gli standard della tecnica di sicurezza, apparecchi, sistemi e circuiti elettrici.
Osservare quanto segue:
!Pericolo
Il dispositivo deve essere impiegato solo per l’uso previsto nel catalogo e nella descrizionetecnica e solo in connessione con apparecchiature e componenti esterni omologati dallaSiemens.
Per garantire un funzionamento ineccepibile e sicuro del prodotto è assolutamente necessarioun trasporto, immagazzinaggio, una installazione ed un montaggio conforme alle regolenonché un uso accurato ed una manutenzione appropriata.
SIMATIC� e SINEC� sono marchi di prodotto della SIEMENS AG.
Tutte le altre sigle qui riportate possono corrispondere a marchi, il cui uso da parte di terzi,può violare i diritti dei possessori.
Abbiamo controllato che il contenuto della presente documenta-zione corrisponda all’hardware e al software descritti. Non potendotuttavia escludere eventuali differenze, non garantiamo una concor-danza totale. Il contenuto della presente documentazione vienetuttavia verificato regolarmente, e le correzioni o modifiche eventual-mente necessarie sono contenute nelle edizioni successive.Saremo lieti di ricevere qualunque tipo di proposta di miglioramento.
Esclusione della responsabilitàCopyright � Siemens AG 1996 All rights reserved
La duplicazione e la cessione della presente documentazione sonovietate, come pure l’uso improprio del suo contenuto, se non dietroautorizzazione scritta. Le trasgressioni sono possibili di risarcimentodei danni. Tutti i diritti sono riservati, in particolare quelli relativi aibrevetti e ai modelli di utilità.
Siemens AGDivisione AutomazioneSistemi per l’automazione industrialePostfach 4848, D-90327 Nürnberg
� Siemens AG 1996Ci riserviamo eventuali modifiche tecniche.
Siemens Aktiengesellschaft C79000-G7072-C516
Avvertenze tecnichedi sicurezza
Personale qualificato
Uso conforme alledisposizioni
Marchio di prodotto
iiiPID ControlC79000-G7072-C516-01
Prefazione
Questo manuale aiuta a lavorare con i blocchi di regolazione del PID Control.
Ci si può così familiarizzare con il funzionamento dei blocchi di regolazione e conil richiamo della superficie di parametrizzazione relativa ai blocchi. Alla superficiedi parametrizzazione è collegata una guida online che è di ausilio nella parametriz-zazione dei blocchi.
Il manuale si rivolge ai seguenti utilizzatori:
– programmatori S7
– programmatori della regolazione
– operatori
– personale del service
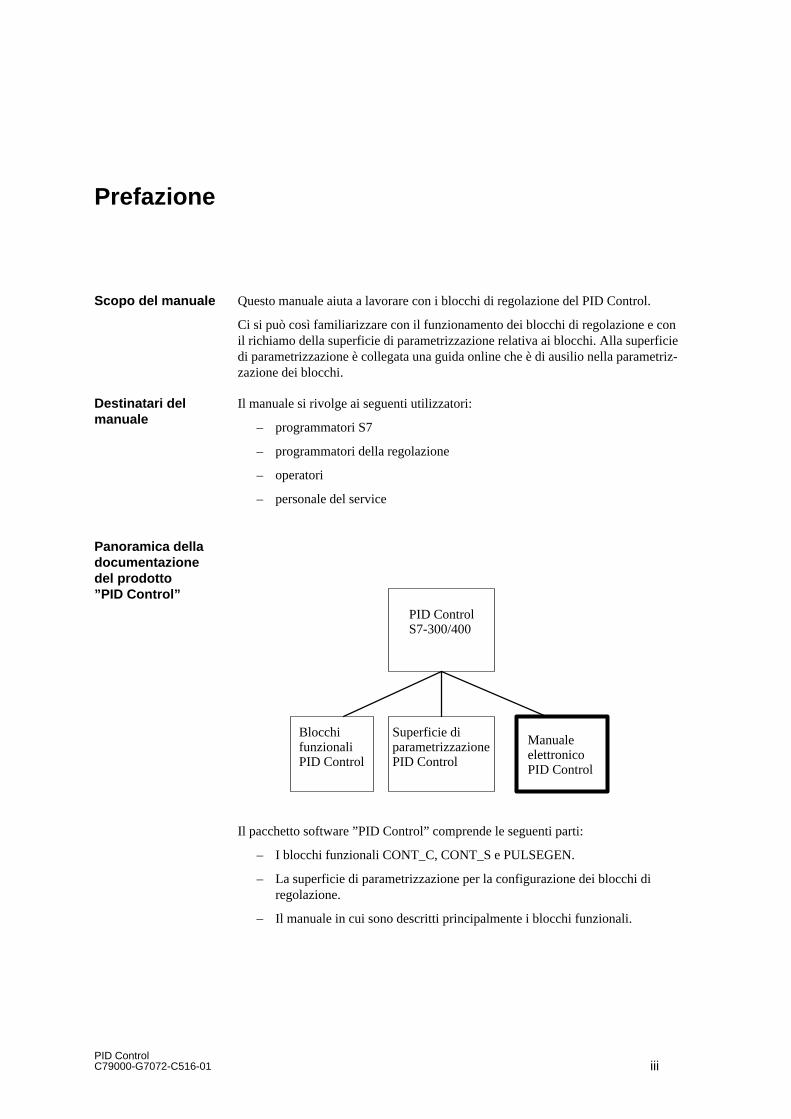
PID ControlS7-300/400
BlocchifunzionaliPID Control
Superficie diparametrizzazionePID Control
Manualeelettronico PID Control
Il pacchetto software ”PID Control” comprende le seguenti parti:
– I blocchi funzionali CONT_C, CONT_S e PULSEGEN.
– La superficie di parametrizzazione per la configurazione dei blocchi diregolazione.
– Il manuale in cui sono descritti principalmente i blocchi funzionali.
Scopo del manuale
Destinatari delmanuale
Panoramica delladocumentazionedel prodotto”PID Control”
ivPID Control
C79000-G7072-C516-01
fornisce una panoramica sul PID ControlCap. 1
mostra come si richiama la superficie di parametrizzazioneCap. 2
descrive i blocchi funzionali FB 41 ”CONT_C”, FB 42 ”CONT_S”e FB 43 ”PULSEGEN”
Cap. 3
Per facilitare la ricerca degli argomenti desiderati il presente manuale è stato redattoin forma sintetica e rimanda talvolta a informazioni contenute nei manuali /70/, /71/,/100/, /101/, /231/, /232/, /234/.
Se si desiderano ulteriori informazioni sulle possibilità di impiego di PID Control, siconsiglia di rivolgersi alla filiale Siemens di competenza. Gli indirizzi si trovano p.e. nell’appendice ”Siemens nel mondo” del manuale ”Si-stemi di automazione S7-400, M7-400, Configurazione”.
Per osservazioni, domande, proposte di correzione riguardanti il presente manuale,si prega di compilare il modulo inserito alla fine del manuale stesso, rispedendoloall’indirizzo indicato. Si prega inoltre di voler fornire una valutazione sul manuale.
Per facilitare l’approccio con il sistema d’automazione SIMATIC, sono disponibilicorsi specifici. Per maggiori informazioni rivolgersi alla ”Scuola automazione in-dustriale” della Siemens al seguente indirizzo:
Scuola Automazione Industriale20127 MilanoTel. 02.6676.2256Fax 02.6676.2270
Contenuto delmanuale
Ulterioriinformazioni
Ulteriore supporto
Prefazione
vPID ControlC79000-G7072-C516-01
Indice
1 Introduzione 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Parametrizzazione 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Blocchi funzionali 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Regolazione continua con l’FB 41 ”CONT_C” 3-2. . . . . . . . . . . . . . . . . . . . . . . .
3.2 Regolazione a passi con l’FB 42 ”CONT_S” 3-9. . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Forme di impulsi con l’FB 43 ”PULSEGEN” 3-15. . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Esempio con il blocco PULSEGEN 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Bibliografia A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Indice analitico Indice-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

viPID Control
C79000-G7072-C516-01
1-1PID ControlC79000-G7072-C516-01
Introduzione
Gli FB del PID Control sono costituiti dai blocchi regolatore per una regolazionecontinua (CONT_C) e una regolazione a impulsi (CONT_S) e dall’FB per la modu-lazione dell’ampiezza degli impulsi (PULSEGEN).
Con i blocchi di regolazione si ottiene una regolazione puramente software, in cuiun blocco contiene tutte le funzionalità di un regolatore. I dati necessari per ilcalcolo ciclico sono depositati nel blocco dati corrispondente. Gli FB possonoquindi essere richiamati più volte.
L’FB PULSEGEN viene utilizzato insieme all’FB CONT_S onde ottenere unregolatore con uscita ad impulsi per un attuatore proporzionale.
Il regolatore ottenuto con l’impiego degli FB è costituito da una serie di funzioniparziali che possono essere parametrizzate. Inoltre, al regolatore vero e proprio conil suo algoritmo PID sono collegate funzioni per la preparazione del valore diriferimento e del valore istantaneo e per l’elaborazione della grandezza regolantecalcolata.
Una regolazione ottenuta con i blocchi regolatore è in linea di principioindipendente dal tipo di impiego. La potenza della regolazione e quindi la velocitàdell’elaborazione dipende esclusivamente dalla potenza della CPU utilizzata.Per la CPU utilizzata occorre trovare un compromesso tra il numero di regolatori ela frequenza di elaborazione dei singoli regolatori. Quanto più veloce è il circuito daregolare collegato, cioè quanto più spesso le grandezze regolanti devono esserecalcolate nell’unità di tempo, tanto minore è il numero dei regolatori installabili.Limitazioni per quel che riguarda il tipo di processi regolabili non esistono. Possonoessere regolati sia circuiti lenti (temperature, livelli, ecc.) sia circuitiparticolarmente veloci (portate, numeri di giri, ecc.).
Avvertenza
Il comportamento statico (amplificazione) e le caratteristiche dinamiche (ritardo,tempo morto, costante di integrazione, ecc.) del circuito regolato hannoun’importanza decisiva nella realizzazione o nello sviluppo del regolatore e neldimensionamento dei suoi parametri statici (azione P) e dinamici (azioni I e D).
La conoscenza esatta del tipo e dei dati caratteristici del circuito regolato è quindiindispensabile.
PID Control
Funzioni di base
Possibilità diimpiego
Analisi delcircuito regolato
1
1-2PID Control
C79000-G7072-C516-01
Avvertenza
Le caratteristiche del circuito di regolazione sono definite da condizioni di processooppure tecniche della macchina e sono poco influenzabili. Un risultato ottimale diuna regolazione può essere quindi ottenuto con la scelta del tipo di regolatore piùadatto per il circuito da regolare e dal suo adattamento al comportamento nel tempodel circuito.
La progettazione di una regolazione, dalla strutturazione tramite laparametrizzazione fino al corretto richiamo temporale tramite il programma disistema può avvenire senza alcuna programmazione. E’ necessaria tuttavia laconoscenza di STEP 7.
Anche nella guida online dello STEP 7 si trovano informazioni relative aisingoli FB.
PID Control rappresenta una parte della Regolazione standard. Ulterioriinformazioni sull’argomento Regolazione standard sono contenute nel manuale/350/.
Scelta delregolatore
Progettazione
Guida online
Ulterioriinformazioni
Introduzione

2-1PID ControlC79000-G7072-C516-01
Parametrizzazione
La superficie di parametrizzazione del PID Control si richiama sotto Windows 95con i comandi di menù:
� Avvio � SIMATIC � STEP 7 V3 � Parametrizza PID Control
Nella prima maschera si può aprire un DB di istanza già esistente relativo all’FB 41”CONT_C” o FB 42 ”CONT_S” o creare un nuovo DB come DB di istanza. Se sicrea un nuovo DB di istanza, viene richiesto a quale FB esso debba essere attribuito.
L’FB 43 ”PULSEGEN” non ha superficie di parametrizzazione. I suoi parametridevono essere definiti con STEP 7.
Avvertenza
Con la superficie di parametrizzazione del PID Control si può parametrizzare anchela regolazione integrata della CPU 314 IFM. A tal fine si creano i DB di istanza chevengono poi attribuiti agli SFB 41 o 42.
Alla superficie di parametrizzazione corrisponde una guida online che aiuta aparametrizzare i blocchi regolatore. La guida online si può richiamare:
� tramite il comando di menù Guida � Argomenti...
� premendo il tasto F1
� con un clic su ? nelle diverse maschere.
Richiamo dellasuperficie diparametrizzazione
Guida online
2

2-2PID Control
C79000-G7072-C516-01
Parametrierung
3-1PID ControlC79000-G7072-C516-01
Blocchi funzionali
Avvertenza
Gli FB 41 ... 43 descritti in questo capitolo sono ammessi solo nelle CPU conlivello di interrupt di schedulazione orologio:
Capitolo Argomento trattato Pagina
3.1 Regolazione continua con l’FB 41 ”CONT_C” 3-2
3.2 Regolazione a passi con l’FB 42 ”CONT_S” 3-9
3.3 Forme di impulsi con l’FB 43 ”PULSEGEN” 3-15
3.4 Esempio con il blocco PULSEGEN 3-24
Sommario delcapitolo
3
3-2PID Control
C79000-G7072-C516-01
3.1 Regolazione continua con l’FB 41 ”CONT_C”
L’FB 41 ”CONT_C” serve per controllare processi tecnici con grandezze di ingressoed uscita continue per il sistema di automazione SIMATIC S7. Tramite laparametrizzazione è possibile inserire o disinserire funzioni parziali del regolatorePID e adattarlo così ai requisiti del sistema regolato.
Il regolatore può essere utilizzato come regolatore PID con setpoint fisso inregolazioni singole o a più loop come regolatore in cascata, di miscela o di rapporto.Il modo di funzionamento si basa sull’algoritmo di regolazione PID del regolatore acampionamento con segnale di uscita analogico, eventualmente completato da ungeneratore di impulsi per la generazione di segnali di uscita modulati sulla duratadell’impulso per controlli a 2 o 3 punti con attuatori proporzionali.
Oltre alle funzioni nel ramo del valore di riferimento e valore istantaneo, l’FBrealizza un regolatore PID completo con uscita continua per grandezze regolanti epossibilità di condizionamento manuale del valore regolante.Segue la descrizione delle funzioni parziali:
Ramo del valore di riferimentoIl valore di riferimento viene introdotto sull’ingresso SP_INT in formato di virgolamobile.
Ramo del valore istantaneoIl valore istantaneo può essere letto nel formato della periferia o in virgola mobile.La funzione CRP_IN converte il valore di periferia PV_PER in un formato divirgola mobile da -100 ... +100 % secondo la regola seguente:
Uscita di CPR_IN = PV_PER �100
27648
La funzione PV_NORM normalizza l’uscita di CRP_IN secondo la regola seguente:
Uscita di PV_NORM = (uscita di CPR_IN) � PV_FAC + PV_OFF
PV_FAC è preassegnato 1 e a PV_OFF 0.
Calcolo dello scarto di regolazioneIl risultato della differenza tra il valore di riferimento e il valore istantaneo è rappre-sentato dallo scarto di regolazione. Per sopprimere la piccola oscillazione continuacausata da una quantizzazione della grandezza regolante (ad es.con una modula-zione di durata degli impulsi con PULSEGEN lo scarto della regolazione viene fattopassare attraverso una banda morta (DEADBAND). Se DEADB_W = 0, la bandamorta è disinserita.
Algoritmo PIDL’algoritmo PID opera con un algoritmo di posizione. I componenti proporzionali,integrale (INT) e derivativo (DIF) sono collegati in parallelo e possono essere inse-riti o disinseriti singolarmente. In questo modo è possibile parametrizzare iregolatori P, PI, PD e PID. Sono tuttavia possibili anche solo regolatori I e D.
Introduzione
Impiego
Descrizione
Blocchi funzionali
3-3PID ControlC79000-G7072-C516-01
Elaborazione manuale dei valoriÈ possibile commutare tra il funzionamento manuale e quello automatico. Con ilfunzionamento manuale, la grandezza regolante viene pilotata da un valoremanuale.L’integratore (INT) viene settato internamente a LMN - LMN_P - DISV e ilderivatore (DIF) a 0 e quindi aggiustato internamente. La commutazione sul funzio-namento automatico avviene quindi senza scosse.
Elaborazione del valore regolanteIl valore regolante viene limitato con la funzione LMNLIMIT a valoripreassegnabili. Il superamento dei limiti viene indicato con bit di segnalazione.La funzione LMN_NORM normalizza l’uscita di LMNLIMIT secondo la regolaseguente:
LMN = (uscita di LMNLIMIT) � LMN_FAC + LMN_OFF
LMN_FAC è preassegnato 1, a LMN_OFF 0.
Il valore regolante è disponibile anche in formato di periferia. La funzioneCRP_OUT trasforma il valore in virgola mobile LMN in un valore di periferia inbase alla regola seguente:
LMN_PER = LMN �100
27648
Inserzione segnale disturboAll’ingresso DISV può essere inserito come somma algebrica un segnale didisturbo.
Nuovo avviamento/Riavviamento
L’FB 41 ”CONT_C” dispone di una routine di nuovo avviamento che verrà eseguitaquando il parametro di ingresso COM_RST = TRUE è settato.
Con l’avviamento, l’integratore viene settato internamente sul valore diinizializzazione I_ITVAL. Con un richiamo a livello di schedulazione orologio, essocontinua ad operare a partire da questo valore.
Tutte le altre uscite vengono settate sui valori preassegnati corrispondenti.
Il blocco non esegue nessun controllo interno degli errori. La parola di segnalazionedi errore RET_VAL non viene utilizzata.
Stati difunzionamento
Informazioni dierrore
Blocchi funzionali
3-4PID Control
C79000-G7072-C516-01
PV_PER
SP_INT
CRP_IN
%
PV_NORM
DEADBANDPV_IN
PV_FAC,PV_OFF
PVPER_ON
-+
PV
DEADB_W
X
GAIN
ER
�0
1
INT
DIF
�
�
�
+ +
��
�
�
�
� TI, INT_HOLD,I_ITL_ON,I_ITLVAL
TD, TM_LAG
P_SELLMN_P
I_SEL DISV
LMN_I
LMN_DD_SEL
0
1
0
1
0
1
0
1 LMNLIMIT
QLMN_HLMQLMN_LLM
LMN
LMN_PER
CRP_OUT
%
LMN_NORM�
� �
�
MANMAN_ON
LMN_HLM,LMN_LLM
LMN_FAC,LMN_OFF
�
�
�0.0
0.0
0.0
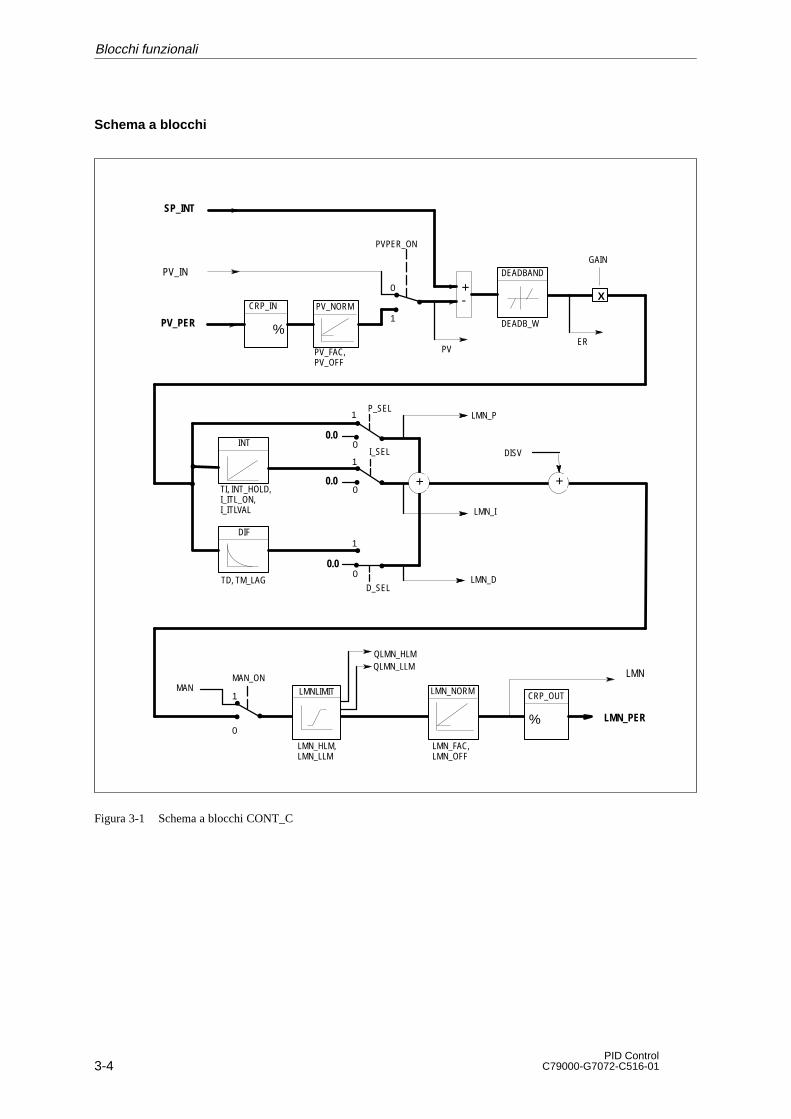
Figura 3-1 Schema a blocchi CONT_C
Schema a blocchi
Blocchi funzionali
3-5PID ControlC79000-G7072-C516-01
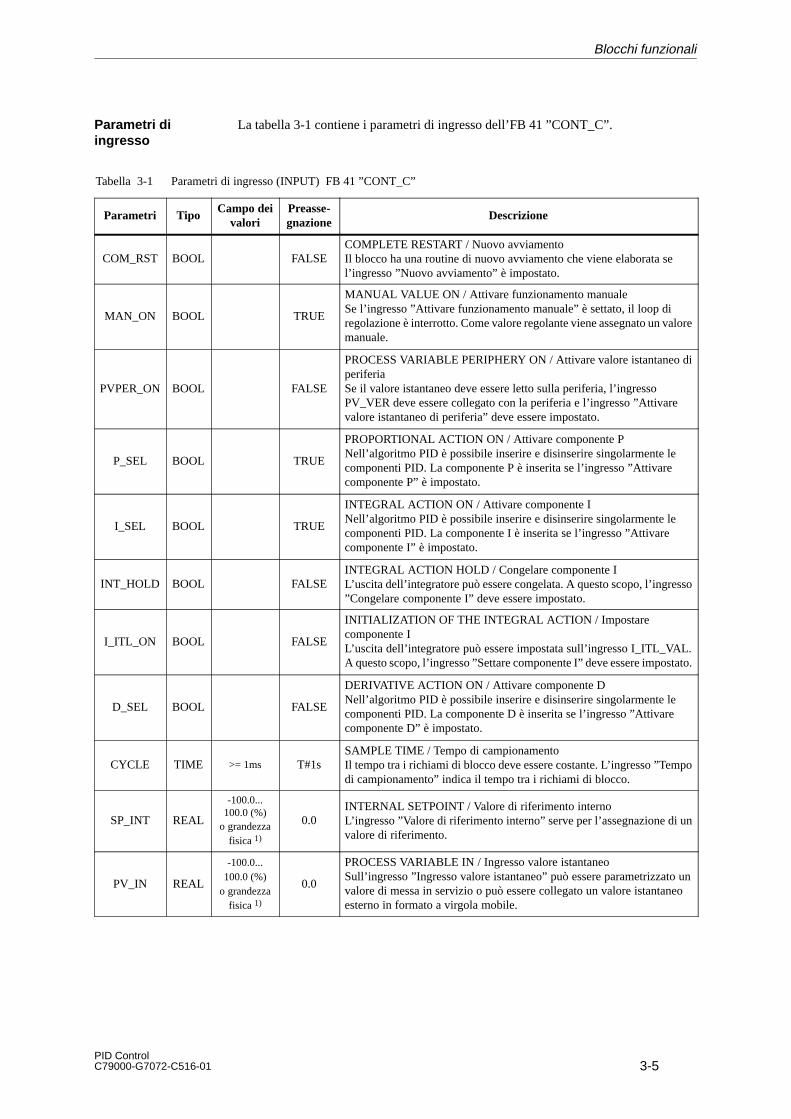
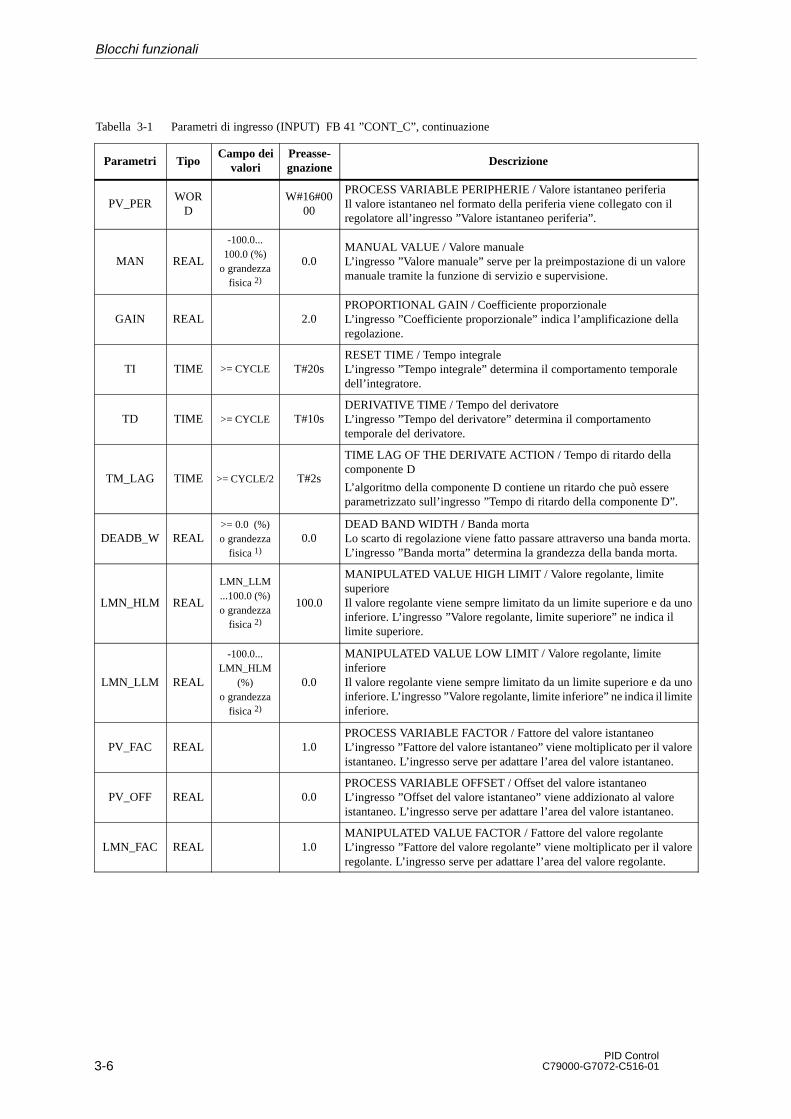
La tabella 3-1 contiene i parametri di ingresso dell’FB 41 ”CONT_C”.
Tabella 3-1 Parametri di ingresso (INPUT) FB 41 ”CONT_C”
Parametri TipoCampo dei
valoriPreasse-gnazione
Descrizione
COM_RST BOOL FALSECOMPLETE RESTART / Nuovo avviamentoIl blocco ha una routine di nuovo avviamento che viene elaborata sel’ingresso ”Nuovo avviamento” è impostato.
MAN_ON BOOL TRUE
MANUAL VALUE ON / Attivare funzionamento manualeSe l’ingresso ”Attivare funzionamento manuale” è settato, il loop diregolazione è interrotto. Come valore regolante viene assegnato un valoremanuale.
PVPER_ON BOOL FALSE
PROCESS VARIABLE PERIPHERY ON / Attivare valore istantaneo diperiferiaSe il valore istantaneo deve essere letto sulla periferia, l’ingressoPV_VER deve essere collegato con la periferia e l’ingresso ”Attivarevalore istantaneo di periferia” deve essere impostato.
P_SEL BOOL TRUE
PROPORTIONAL ACTION ON / Attivare componente PNell’algoritmo PID è possibile inserire e disinserire singolarmente lecomponenti PID. La componente P è inserita se l’ingresso ”Attivarecomponente P” è impostato.
I_SEL BOOL TRUE
INTEGRAL ACTION ON / Attivare componente INell’algoritmo PID è possibile inserire e disinserire singolarmente lecomponenti PID. La componente I è inserita se l’ingresso ”Attivarecomponente I” è impostato.
INT_HOLD BOOL FALSEINTEGRAL ACTION HOLD / Congelare componente IL’uscita dell’integratore può essere congelata. A questo scopo, l’ingresso”Congelare componente I” deve essere impostato.
I_ITL_ON BOOL FALSE
INITIALIZATION OF THE INTEGRAL ACTION / Impostarecomponente IL’uscita dell’integratore può essere impostata sull’ingresso I_ITL_VAL.A questo scopo, l’ingresso ”Settare componente I” deve essere impostato.
D_SEL BOOL FALSE
DERIVATIVE ACTION ON / Attivare componente DNell’algoritmo PID è possibile inserire e disinserire singolarmente lecomponenti PID. La componente D è inserita se l’ingresso ”Attivarecomponente D” è impostato.
CYCLE TIME >= 1ms T#1sSAMPLE TIME / Tempo di campionamentoIl tempo tra i richiami di blocco deve essere costante. L’ingresso ”Tempodi campionamento” indica il tempo tra i richiami di blocco.
SP_INT REAL
-100.0...100.0 (%)
o grandezzafisica 1)
0.0INTERNAL SETPOINT / Valore di riferimento internoL’ingresso ”Valore di riferimento interno” serve per l’assegnazione di unvalore di riferimento.
PV_IN REAL
-100.0...100.0 (%)
o grandezzafisica 1)
0.0
PROCESS VARIABLE IN / Ingresso valore istantaneoSull’ingresso ”Ingresso valore istantaneo” può essere parametrizzato unvalore di messa in servizio o può essere collegato un valore istantaneoesterno in formato a virgola mobile.
Parametri diingresso
Blocchi funzionali
3-6PID Control
C79000-G7072-C516-01
Tabella 3-1 Parametri di ingresso (INPUT) FB 41 ”CONT_C”, continuazione
Parametri DescrizionePreasse-gnazione
Campo deivaloriTipo
PV_PERWOR
DW#16#00
00
PROCESS VARIABLE PERIPHERIE / Valore istantaneo periferiaIl valore istantaneo nel formato della periferia viene collegato con ilregolatore all’ingresso ”Valore istantaneo periferia”.
MAN REAL
-100.0...100.0 (%)
o grandezzafisica 2)
0.0MANUAL VALUE / Valore manualeL’ingresso ”Valore manuale” serve per la preimpostazione di un valoremanuale tramite la funzione di servizio e supervisione.
GAIN REAL 2.0PROPORTIONAL GAIN / Coefficiente proporzionaleL’ingresso ”Coefficiente proporzionale” indica l’amplificazione dellaregolazione.
TI TIME >= CYCLE T#20sRESET TIME / Tempo integraleL’ingresso ”Tempo integrale” determina il comportamento temporaledell’integratore.
TD TIME >= CYCLE T#10sDERIVATIVE TIME / Tempo del derivatoreL’ingresso ”Tempo del derivatore” determina il comportamentotemporale del derivatore.
TM_LAG TIME >= CYCLE/2 T#2s
TIME LAG OF THE DERIVATE ACTION / Tempo di ritardo dellacomponente D
L’algoritmo della componente D contiene un ritardo che può essereparametrizzato sull’ingresso ”Tempo di ritardo della componente D”.
DEADB_W REAL>= 0.0 (%)o grandezza
fisica 1)0.0
DEAD BAND WIDTH / Banda mortaLo scarto di regolazione viene fatto passare attraverso una banda morta.L’ingresso ”Banda morta” determina la grandezza della banda morta.
LMN_HLM REAL
LMN_LLM...100.0 (%)o grandezza
fisica 2)
100.0
MANIPULATED VALUE HIGH LIMIT / Valore regolante, limitesuperioreIl valore regolante viene sempre limitato da un limite superiore e da unoinferiore. L’ingresso ”Valore regolante, limite superiore” ne indica illimite superiore.
LMN_LLM REAL
-100.0...LMN_HLM
(%)o grandezza
fisica 2)
0.0
MANIPULATED VALUE LOW LIMIT / Valore regolante, limiteinferioreIl valore regolante viene sempre limitato da un limite superiore e da unoinferiore. L’ingresso ”Valore regolante, limite inferiore” ne indica il limiteinferiore.
PV_FAC REAL 1.0PROCESS VARIABLE FACTOR / Fattore del valore istantaneoL’ingresso ”Fattore del valore istantaneo” viene moltiplicato per il valoreistantaneo. L’ingresso serve per adattare l’area del valore istantaneo.
PV_OFF REAL 0.0PROCESS VARIABLE OFFSET / Offset del valore istantaneoL’ingresso ”Offset del valore istantaneo” viene addizionato al valoreistantaneo. L’ingresso serve per adattare l’area del valore istantaneo.
LMN_FAC REAL 1.0MANIPULATED VALUE FACTOR / Fattore del valore regolanteL’ingresso ”Fattore del valore regolante” viene moltiplicato per il valoreregolante. L’ingresso serve per adattare l’area del valore regolante.
Blocchi funzionali
3-7PID ControlC79000-G7072-C516-01
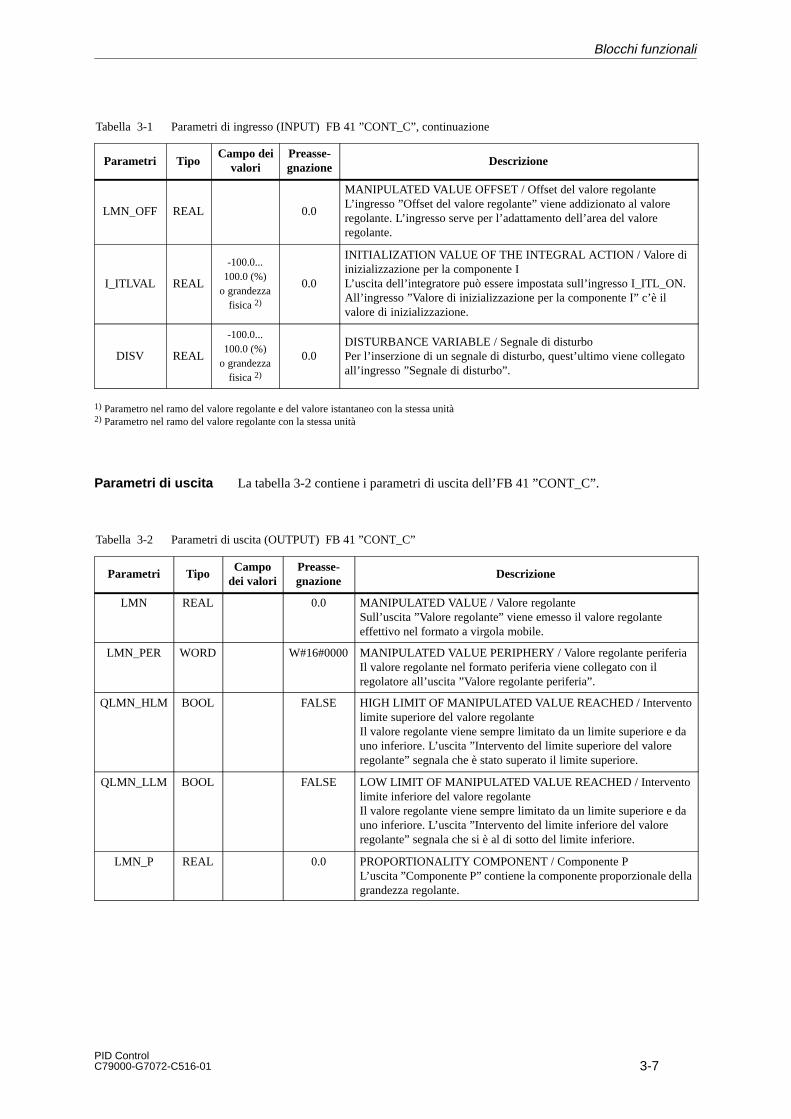
Tabella 3-1 Parametri di ingresso (INPUT) FB 41 ”CONT_C”, continuazione
Parametri DescrizionePreasse-gnazione
Campo deivaloriTipo
LMN_OFF REAL 0.0
MANIPULATED VALUE OFFSET / Offset del valore regolanteL’ingresso ”Offset del valore regolante” viene addizionato al valoreregolante. L’ingresso serve per l’adattamento dell’area del valoreregolante.
I_ITLVAL REAL
-100.0...100.0 (%)
o grandezzafisica 2)
0.0
INITIALIZATION VALUE OF THE INTEGRAL ACTION / Valore diinizializzazione per la componente IL’uscita dell’integratore può essere impostata sull’ingresso I_ITL_ON.All’ingresso ”Valore di inizializzazione per la componente I” c’è ilvalore di inizializzazione.
DISV REAL
-100.0...100.0 (%)
o grandezzafisica 2)
0.0DISTURBANCE VARIABLE / Segnale di disturboPer l’inserzione di un segnale di disturbo, quest’ultimo viene collegatoall’ingresso ”Segnale di disturbo”.
1) Parametro nel ramo del valore regolante e del valore istantaneo con la stessa unità2) Parametro nel ramo del valore regolante con la stessa unità
La tabella 3-2 contiene i parametri di uscita dell’FB 41 ”CONT_C”.
Tabella 3-2 Parametri di uscita (OUTPUT) FB 41 ”CONT_C”
Parametri TipoCampo
dei valoriPreasse-gnazione
Descrizione
LMN REAL 0.0 MANIPULATED VALUE / Valore regolanteSull’uscita ”Valore regolante” viene emesso il valore regolanteeffettivo nel formato a virgola mobile.
LMN_PER WORD W#16#0000 MANIPULATED VALUE PERIPHERY / Valore regolante periferiaIl valore regolante nel formato periferia viene collegato con ilregolatore all’uscita ”Valore regolante periferia”.
QLMN_HLM BOOL FALSE HIGH LIMIT OF MANIPULATED VALUE REACHED / Interventolimite superiore del valore regolanteIl valore regolante viene sempre limitato da un limite superiore e dauno inferiore. L’uscita ”Intervento del limite superiore del valoreregolante” segnala che è stato superato il limite superiore.
QLMN_LLM BOOL FALSE LOW LIMIT OF MANIPULATED VALUE REACHED / Interventolimite inferiore del valore regolanteIl valore regolante viene sempre limitato da un limite superiore e dauno inferiore. L’uscita ”Intervento del limite inferiore del valoreregolante” segnala che si è al di sotto del limite inferiore.
LMN_P REAL 0.0 PROPORTIONALITY COMPONENT / Componente PL’uscita ”Componente P” contiene la componente proporzionale dellagrandezza regolante.
Parametri di uscita
Blocchi funzionali
3-8PID Control
C79000-G7072-C516-01
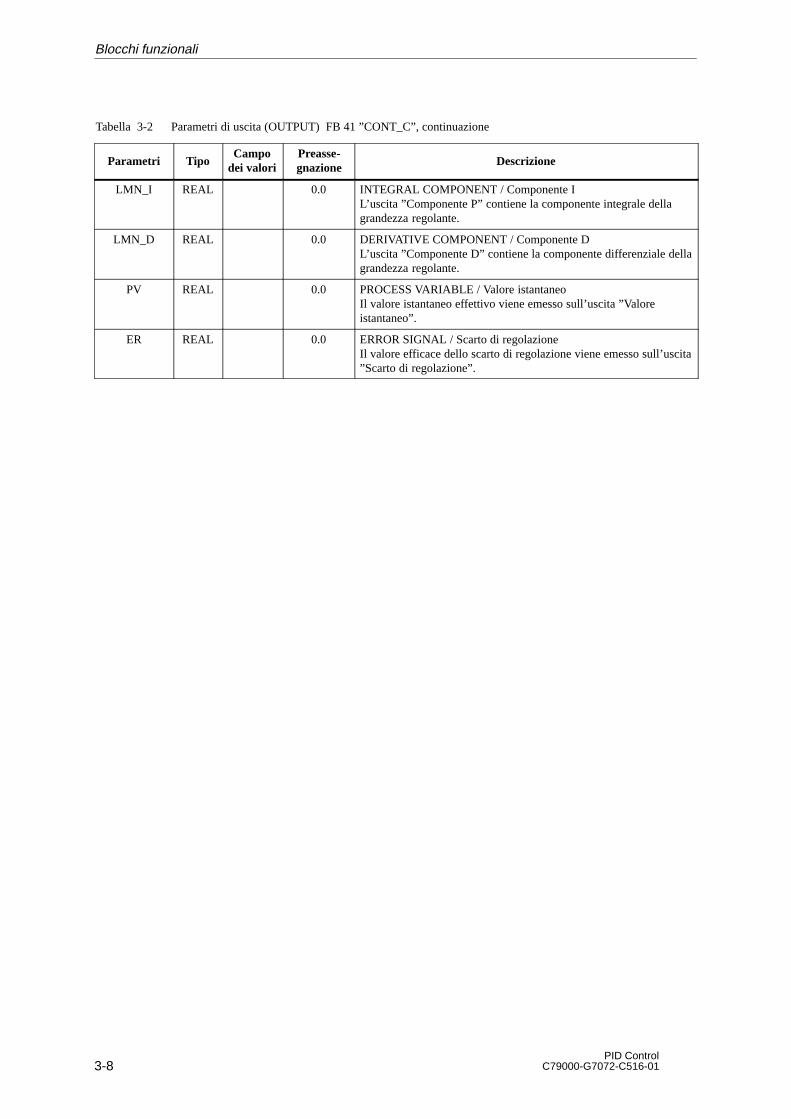
Tabella 3-2 Parametri di uscita (OUTPUT) FB 41 ”CONT_C”, continuazione
Parametri DescrizionePreasse-gnazione
Campodei valoriTipo
LMN_I REAL 0.0 INTEGRAL COMPONENT / Componente IL’uscita ”Componente P” contiene la componente integrale dellagrandezza regolante.
LMN_D REAL 0.0 DERIVATIVE COMPONENT / Componente DL’uscita ”Componente D” contiene la componente differenziale dellagrandezza regolante.
PV REAL 0.0 PROCESS VARIABLE / Valore istantaneoIl valore istantaneo effettivo viene emesso sull’uscita ”Valoreistantaneo”.
ER REAL 0.0 ERROR SIGNAL / Scarto di regolazioneIl valore efficace dello scarto di regolazione viene emesso sull’uscita”Scarto di regolazione”.
Blocchi funzionali
3-9PID ControlC79000-G7072-C516-01
3.2 Regolazione a passi con l’FB 42 ”CONT_S”
L’FB 42 ”CONT_S” serve per controllare processi tecnici con segnali binari diuscita del valore regolante per attuatori nel sistema di automazione SIMATIC S7.Tramite la parametrizzazione è possibile inserire o disinserire funzioni parziali delregolatore a passi PI e adattarlo così ai requisiti del sistema regolato.
Il regolatore può essere utilizzato singolarmente come regolatore PI con setpointfisso o in loop sottoordinati come regolatore in cascata, di miscela o di rapporto, manon come regolatore pilota. Il modo di funzionamento si basa sull’algoritmo diregolazione PI del regolatore di campionamento e viene completato dalle unitàfunzione per la generazione del segnale di uscita binario derivato dal segnale diregolazione analogico.
Oltre alle funzioni relative al ramo del valore istantaneo, l’FB realizza un regolatorePI completo con uscita binaria regolante e possibilità di condizionamento manualedel valore regolante. Il regolatore a passi opera senza segnalazione di risposta diposizione.Segue la descrizione delle funzioni parziali:
Ramo del valore di riferimentoIl valore di riferimento viene introdotto sull’ingresso SP_INT nel formato a virgolamobile.
Ramo del valore istantaneoIl valore istantaneo può essere letto nel formato della periferia o a virgola mobile.La funzione CRP_IN converte il valore di periferia PV_PER in un formato a virgolamobile da -100 ... +100 % secondo la regola seguente:
Uscita di CPR_IN = PV_PER �100
27648
La funzione PV_NORM normalizza l’uscita di CRP_IN secondo la regola seguente:
Uscita di PV_NORM = (uscita di CPR_IN) � PV_FAC + PV_OFF
PV_FAC è preassegnato 1 e a PV_OFF 0.
Calcolo dello scarto di regolazioneIl risultato della differenza tra il valore di riferimento e il valore istantaneo è rappre-sentato dallo scarto di regolazione. Per sopprimere la piccola oscillazione continuacausata da una quantizzazione della grandezza regolante (risoluzione limitata delvalore regolante tramite la valvola di regolazione) lo scarto di regolazione vienefatto passare attraverso una banda morta (DEADBAND). Se DEADB_W = 0, labanda morta è disinserita.
Introduzione
Uso
Descrizione
Blocchi funzionali

3-10PID Control
C79000-G7072-C516-01
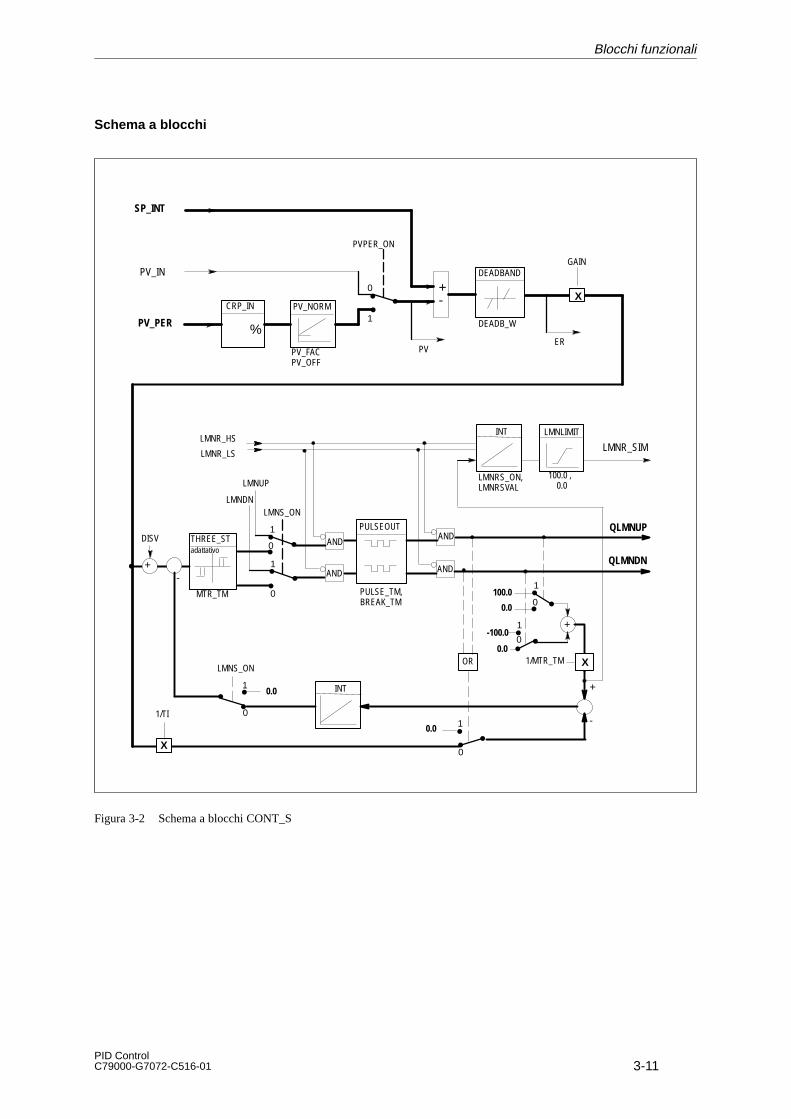
Algoritmo di passo PIL’FB opera senza segnalazione di risposta di posizione. La componente I dell’algo-ritmo PI e la segnalazione di risposta di posizione prevista vengono calcolate in ununico integratore (INT) e confrontati sotto forma di valore di ritorno con il compo-nente P rimasta. La differenza va ad un’unità a tre punti (THREE_ST) e a ungeneratore di impulsi (PULSEOUT) che genera gli impulsi per la valvola diregolazione. La frequenza delle manovre del regolatore viene ridotta mediante unadattamento della soglia di risposta dell’unità a 3 punti.
Inserzione segnale disturboAll’ingresso DISV può essere inserito come somma algebrica un segnale didisturbo.
Nuovo avviamento/RiavviamentoL’FB 42 ”CONT_S” dispone di una routine di nuovo avviamento che viene eseguitaquando il parametro di ingresso COM_RST = TRUE è settato.
Tutte le uscite vengono impostate sui valori preassegnati corrispondenti.
Il blocco non esegue nessun controllo interno degli errori. La parola di segnalazionedi errore RET_VAL non viene utilizzata.
Stati difunzionamento
Informazioni dierrore
Blocchi funzionali
3-11PID ControlC79000-G7072-C516-01
��
+
�
�
�
�
PV_PER
SP_INT
CRP_IN
%
PV_NORM
DEADBANDPV_IN
PV_FACPV_OFF
PVPER_ON
-+
PV
DEADB_W
X
GAIN
ER
0
1�
THREE_ST
INT
LMNR_SIM
LMNS_ON
LMNUP
LMNDN
PULSEOUT
AND
AND
AND
AND
LMNR_HS
LMNR_LS
QLMNDN
QLMNUP
100.0
0.0
-100.0
0.01/MTR_TM X
INT
LMNLIMIT
OR
10.0
+
-
0.0
LMNS_ON
0 �
1�
0
�
1
�
�
�
0�
��0�
1
1
�
0X
1/TI
1�
0
�
�
+
DISV
�
-
adattativo
LMNRS_ON,LMNRSVAL
100.0 , 0.0
MTR_TM PULSE_TM,BREAK_TM
Figura 3-2 Schema a blocchi CONT_S
Schema a blocchi
Blocchi funzionali
3-12PID Control
C79000-G7072-C516-01
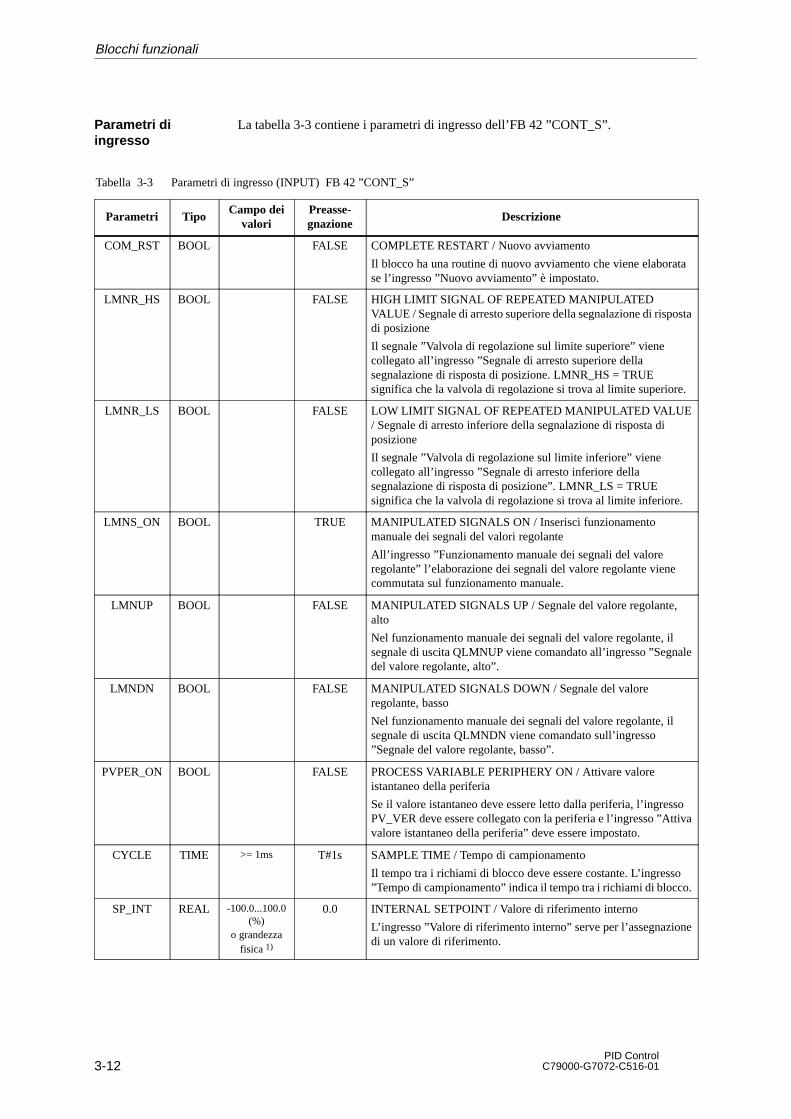
La tabella 3-3 contiene i parametri di ingresso dell’FB 42 ”CONT_S”.
Tabella 3-3 Parametri di ingresso (INPUT) FB 42 ”CONT_S”
Parametri TipoCampo dei
valoriPreasse-gnazione
Descrizione
COM_RST BOOL FALSE COMPLETE RESTART / Nuovo avviamento
Il blocco ha una routine di nuovo avviamento che viene elaboratase l’ingresso ”Nuovo avviamento” è impostato.
LMNR_HS BOOL FALSE HIGH LIMIT SIGNAL OF REPEATED MANIPULATEDVALUE / Segnale di arresto superiore della segnalazione di rispostadi posizione
Il segnale ”Valvola di regolazione sul limite superiore” vienecollegato all’ingresso ”Segnale di arresto superiore dellasegnalazione di risposta di posizione. LMNR_HS = TRUEsignifica che la valvola di regolazione si trova al limite superiore.
LMNR_LS BOOL FALSE LOW LIMIT SIGNAL OF REPEATED MANIPULATED VALUE/ Segnale di arresto inferiore della segnalazione di risposta diposizione
Il segnale ”Valvola di regolazione sul limite inferiore” vienecollegato all’ingresso ”Segnale di arresto inferiore dellasegnalazione di risposta di posizione”. LMNR_LS = TRUEsignifica che la valvola di regolazione si trova al limite inferiore.
LMNS_ON BOOL TRUE MANIPULATED SIGNALS ON / Inserisci funzionamentomanuale dei segnali del valori regolante
All’ingresso ”Funzionamento manuale dei segnali del valoreregolante” l’elaborazione dei segnali del valore regolante vienecommutata sul funzionamento manuale.
LMNUP BOOL FALSE MANIPULATED SIGNALS UP / Segnale del valore regolante,alto
Nel funzionamento manuale dei segnali del valore regolante, ilsegnale di uscita QLMNUP viene comandato all’ingresso ”Segnaledel valore regolante, alto”.
LMNDN BOOL FALSE MANIPULATED SIGNALS DOWN / Segnale del valoreregolante, basso
Nel funzionamento manuale dei segnali del valore regolante, ilsegnale di uscita QLMNDN viene comandato sull’ingresso”Segnale del valore regolante, basso”.
PVPER_ON BOOL FALSE PROCESS VARIABLE PERIPHERY ON / Attivare valoreistantaneo della periferia
Se il valore istantaneo deve essere letto dalla periferia, l’ingressoPV_VER deve essere collegato con la periferia e l’ingresso ”Attivavalore istantaneo della periferia” deve essere impostato.
CYCLE TIME >= 1ms T#1s SAMPLE TIME / Tempo di campionamento
Il tempo tra i richiami di blocco deve essere costante. L’ingresso”Tempo di campionamento” indica il tempo tra i richiami di blocco.
SP_INT REAL -100.0...100.0(%)
o grandezzafisica 1)
0.0 INTERNAL SETPOINT / Valore di riferimento interno
L’ingresso ”Valore di riferimento interno” serve per l’assegnazionedi un valore di riferimento.
Parametri diingresso
Blocchi funzionali
3-13PID ControlC79000-G7072-C516-01
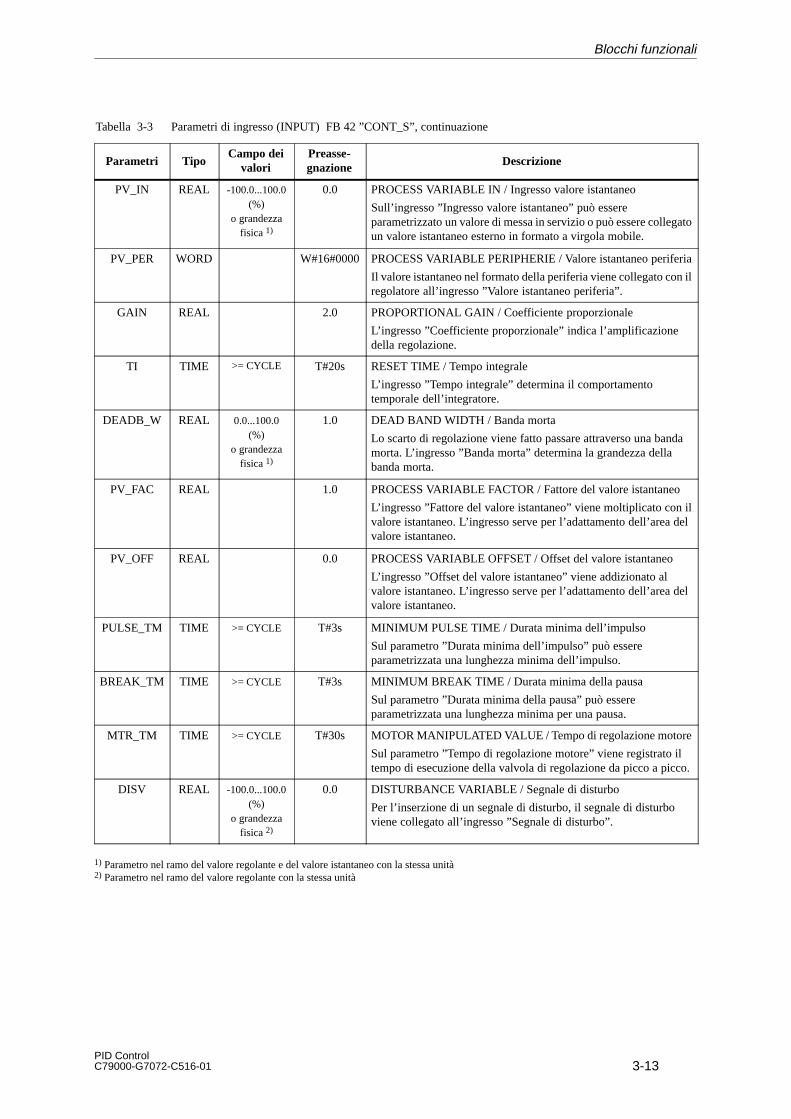
Tabella 3-3 Parametri di ingresso (INPUT) FB 42 ”CONT_S”, continuazione
Parametri DescrizionePreasse-gnazione
Campo deivaloriTipo
PV_IN REAL -100.0...100.0(%)
o grandezzafisica 1)
0.0 PROCESS VARIABLE IN / Ingresso valore istantaneo
Sull’ingresso ”Ingresso valore istantaneo” può essereparametrizzato un valore di messa in servizio o può essere collegatoun valore istantaneo esterno in formato a virgola mobile.
PV_PER WORD W#16#0000 PROCESS VARIABLE PERIPHERIE / Valore istantaneo periferia
Il valore istantaneo nel formato della periferia viene collegato con ilregolatore all’ingresso ”Valore istantaneo periferia”.
GAIN REAL 2.0 PROPORTIONAL GAIN / Coefficiente proporzionale
L’ingresso ”Coefficiente proporzionale” indica l’amplificazionedella regolazione.
TI TIME >= CYCLE T#20s RESET TIME / Tempo integrale
L’ingresso ”Tempo integrale” determina il comportamentotemporale dell’integratore.
DEADB_W REAL 0.0...100.0(%)
o grandezzafisica 1)
1.0 DEAD BAND WIDTH / Banda morta
Lo scarto di regolazione viene fatto passare attraverso una bandamorta. L’ingresso ”Banda morta” determina la grandezza dellabanda morta.
PV_FAC REAL 1.0 PROCESS VARIABLE FACTOR / Fattore del valore istantaneo
L’ingresso ”Fattore del valore istantaneo” viene moltiplicato con ilvalore istantaneo. L’ingresso serve per l’adattamento dell’area delvalore istantaneo.
PV_OFF REAL 0.0 PROCESS VARIABLE OFFSET / Offset del valore istantaneo
L’ingresso ”Offset del valore istantaneo” viene addizionato alvalore istantaneo. L’ingresso serve per l’adattamento dell’area delvalore istantaneo.
PULSE_TM TIME >= CYCLE T#3s MINIMUM PULSE TIME / Durata minima dell’impulso
Sul parametro ”Durata minima dell’impulso” può essereparametrizzata una lunghezza minima dell’impulso.
BREAK_TM TIME >= CYCLE T#3s MINIMUM BREAK TIME / Durata minima della pausa
Sul parametro ”Durata minima della pausa” può essereparametrizzata una lunghezza minima per una pausa.
MTR_TM TIME >= CYCLE T#30s MOTOR MANIPULATED VALUE / Tempo di regolazione motore
Sul parametro ”Tempo di regolazione motore” viene registrato iltempo di esecuzione della valvola di regolazione da picco a picco.
DISV REAL -100.0...100.0(%)
o grandezzafisica 2)
0.0 DISTURBANCE VARIABLE / Segnale di disturbo
Per l’inserzione di un segnale di disturbo, il segnale di disturboviene collegato all’ingresso ”Segnale di disturbo”.
1) Parametro nel ramo del valore regolante e del valore istantaneo con la stessa unità2) Parametro nel ramo del valore regolante con la stessa unità
Blocchi funzionali
3-14PID Control
C79000-G7072-C516-01
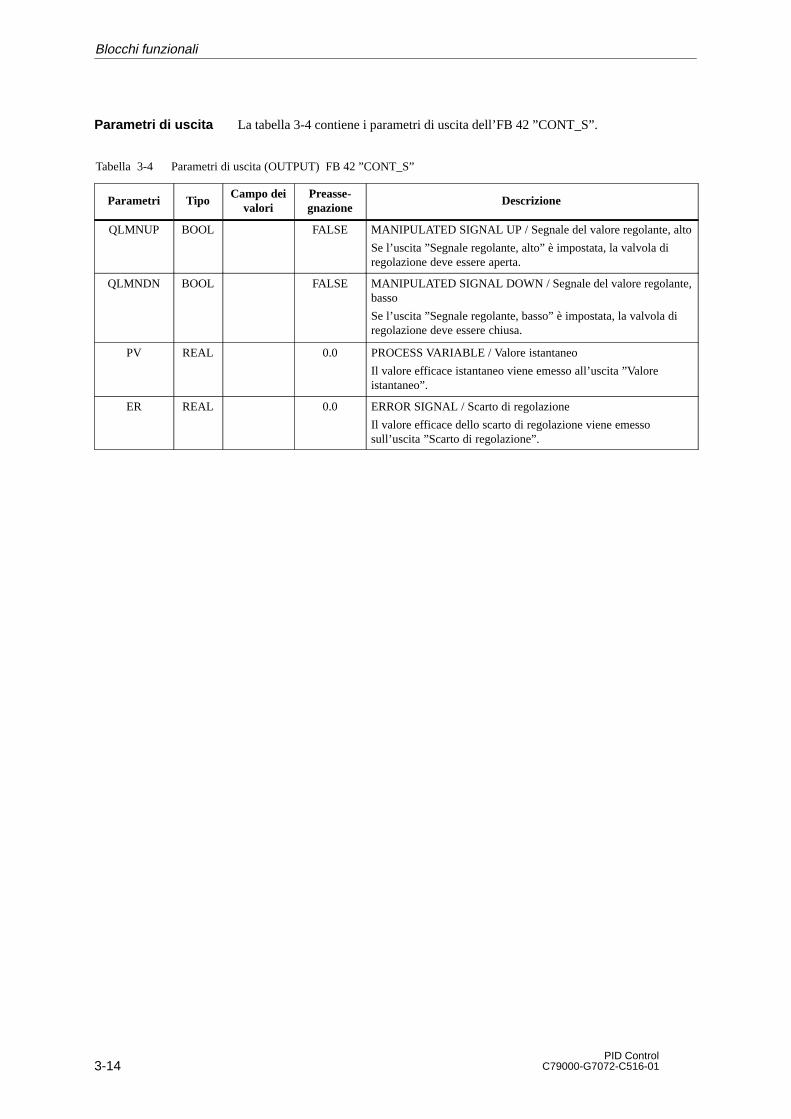
La tabella 3-4 contiene i parametri di uscita dell’FB 42 ”CONT_S”.
Tabella 3-4 Parametri di uscita (OUTPUT) FB 42 ”CONT_S”
Parametri TipoCampo dei
valoriPreasse-gnazione
Descrizione
QLMNUP BOOL FALSE MANIPULATED SIGNAL UP / Segnale del valore regolante, alto
Se l’uscita ”Segnale regolante, alto” è impostata, la valvola diregolazione deve essere aperta.
QLMNDN BOOL FALSE MANIPULATED SIGNAL DOWN / Segnale del valore regolante,basso
Se l’uscita ”Segnale regolante, basso” è impostata, la valvola diregolazione deve essere chiusa.
PV REAL 0.0 PROCESS VARIABLE / Valore istantaneo
Il valore efficace istantaneo viene emesso all’uscita ”Valoreistantaneo”.
ER REAL 0.0 ERROR SIGNAL / Scarto di regolazione
Il valore efficace dello scarto di regolazione viene emessosull’uscita ”Scarto di regolazione”.
Parametri di uscita
Blocchi funzionali
3-15PID ControlC79000-G7072-C516-01
3.3 Forme di impulsi con l’FB 43 ”PULSEGEN”
L’FB 43 ”PULSEGEN” serve per la creazione di un regolatore PID con uscita aimpulsi per attuatori proporzionali.
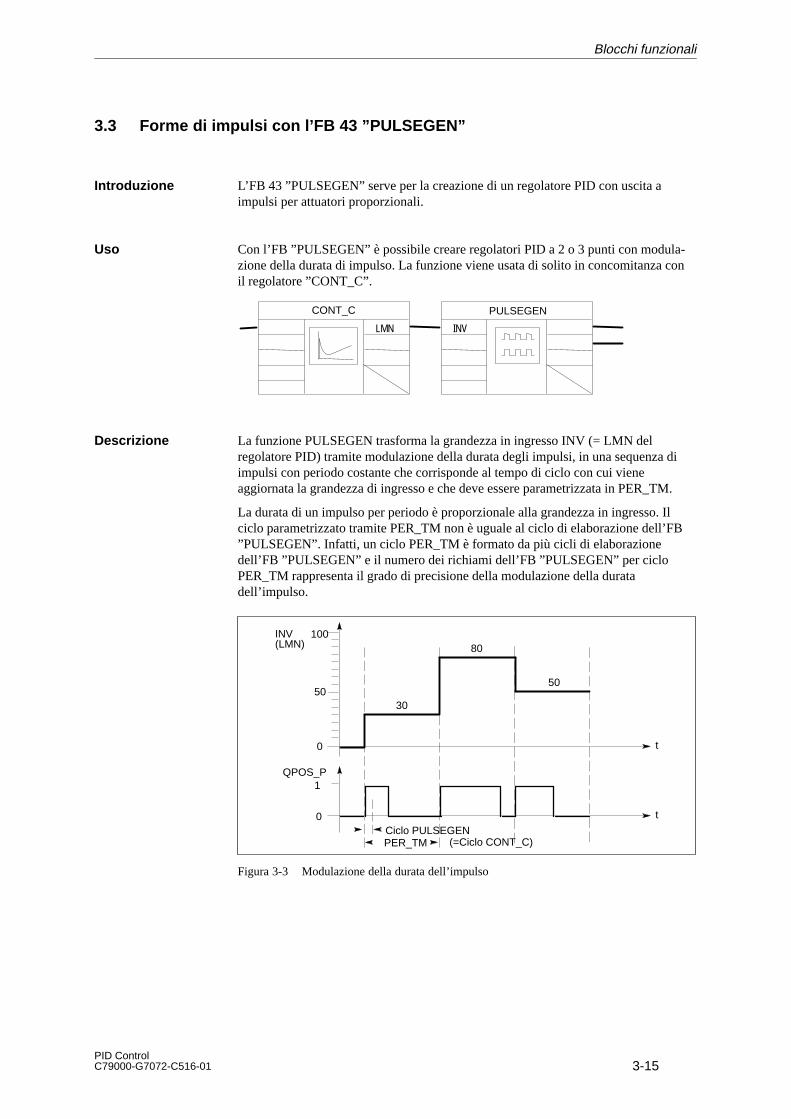
Con l’FB ”PULSEGEN” è possibile creare regolatori PID a 2 o 3 punti con modula-zione della durata di impulso. La funzione viene usata di solito in concomitanza conil regolatore ”CONT_C”.
LMN
PULSEGEN
INV
CONT_C
La funzione PULSEGEN trasforma la grandezza in ingresso INV (= LMN delregolatore PID) tramite modulazione della durata degli impulsi, in una sequenza diimpulsi con periodo costante che corrisponde al tempo di ciclo con cui vieneaggiornata la grandezza di ingresso e che deve essere parametrizzata in PER_TM.
La durata di un impulso per periodo è proporzionale alla grandezza in ingresso. Ilciclo parametrizzato tramite PER_TM non è uguale al ciclo di elaborazione dell’FB”PULSEGEN”. Infatti, un ciclo PER_TM è formato da più cicli di elaborazionedell’FB ”PULSEGEN” e il numero dei richiami dell’FB ”PULSEGEN” per cicloPER_TM rappresenta il grado di precisione della modulazione della duratadell’impulso.
t
INV
QPOS_P
(LMN)
0
50
100
1
0 t
PER_TM
30
50
80
Ciclo PULSEGEN(=Ciclo CONT_C)
Figura 3-3 Modulazione della durata dell’impulso
Introduzione
Uso
Descrizione
Blocchi funzionali
3-16PID Control
C79000-G7072-C516-01
Una grandezza di ingresso 30% e 10 richiami FB ”PULSEGEN” per ogni PER_TMsignificano pertanto:
– ”uno” sull’uscita QPOS per i primi tre richiami dell’FB ”PULSEGEN(30% di 10 richiami)
– ”zero” sull’uscita QPOS per sette altri richiami dell’FB ”PULSEGEN”(70% di 10 richiami)
�
�
�
�
�
0
�
1#
QPOS_P
QNEG_P
MAN_ON
NEG_P_ON
POS_P_ON
INV
SYN_ON,STEP3_ON,ST2BI_ON
PER_TM,P_B_TM,
RATIOFAC
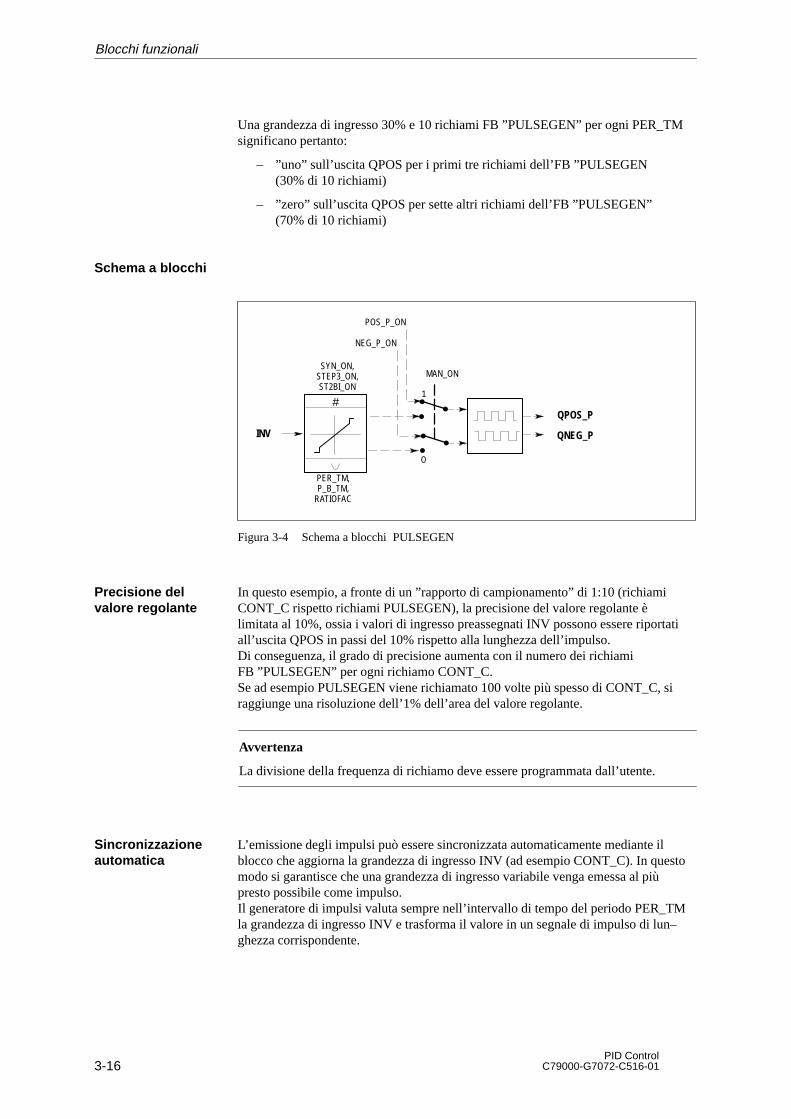
Figura 3-4 Schema a blocchi PULSEGEN
In questo esempio, a fronte di un ”rapporto di campionamento” di 1:10 (richiamiCONT_C rispetto richiami PULSEGEN), la precisione del valore regolante èlimitata al 10%, ossia i valori di ingresso preassegnati INV possono essere riportatiall’uscita QPOS in passi del 10% rispetto alla lunghezza dell’impulso.Di conseguenza, il grado di precisione aumenta con il numero dei richiamiFB ”PULSEGEN” per ogni richiamo CONT_C.Se ad esempio PULSEGEN viene richiamato 100 volte più spesso di CONT_C, siraggiunge una risoluzione dell’1% dell’area del valore regolante.
Avvertenza
La divisione della frequenza di richiamo deve essere programmata dall’utente.
L’emissione degli impulsi può essere sincronizzata automaticamente mediante ilblocco che aggiorna la grandezza di ingresso INV (ad esempio CONT_C). In questomodo si garantisce che una grandezza di ingresso variabile venga emessa al piùpresto possibile come impulso.Il generatore di impulsi valuta sempre nell’intervallo di tempo del periodo PER_TMla grandezza di ingresso INV e trasforma il valore in un segnale di impulso di lun–ghezza corrispondente.
Schema a blocchi
Precisione delvalore regolante
Sincronizzazioneautomatica
Blocchi funzionali
3-17PID ControlC79000-G7072-C516-01
Dato però che INV viene di solito calcolato in un livello di schedulazione orologiopiù lento, dopo l’aggiornamento di INV il generatore di impulsi dovrebbecominciare il più rapidamente possibile con la trasformazione del valore discreto inun segnale di impulso.
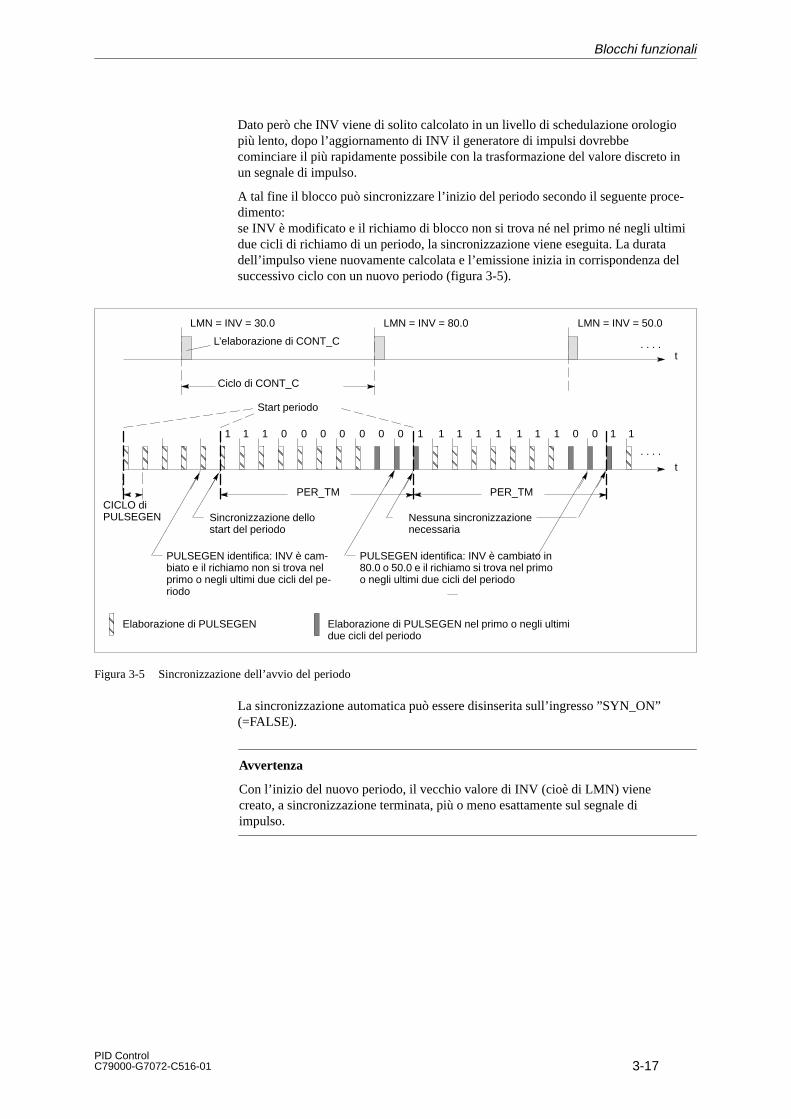
A tal fine il blocco può sincronizzare l’inizio del periodo secondo il seguente proce-dimento:se INV è modificato e il richiamo di blocco non si trova né nel primo né negli ultimidue cicli di richiamo di un periodo, la sincronizzazione viene eseguita. La duratadell’impulso viene nuovamente calcolata e l’emissione inizia in corrispondenza delsuccessivo ciclo con un nuovo periodo (figura 3-5).
CICLO diPULSEGEN
t
0ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇ
ÇÇÇÇ
t
ÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇ
LMN = INV = 30.0 LMN = INV = 80.0 LMN = INV = 50.0
Ciclo di CONT_C
ÇÇÇÇ
PER_TM PER_TM
00 0 01 1 0 0 11 1 11 1 1 11 0 0 11
. . . .
. . . .
Start periodo
Sincronizzazione dellostart del periodo
PULSEGEN identifica: INV è cam-biato e il richiamo non si trova nelprimo o negli ultimi due cicli del pe-riodo
PULSEGEN identifica: INV è cambiato in80.0 o 50.0 e il richiamo si trova nel primoo negli ultimi due cicli del periodo
ÇÇ
Elaborazione di PULSEGEN Elaborazione di PULSEGEN nel primo o negli ultimi due cicli del periodo
L’elaborazione di CONT_C
Nessuna sincronizzazionenecessaria
Figura 3-5 Sincronizzazione dell’avvio del periodo
La sincronizzazione automatica può essere disinserita sull’ingresso ”SYN_ON”(=FALSE).
Avvertenza
Con l’inizio del nuovo periodo, il vecchio valore di INV (cioè di LMN) vienecreato, a sincronizzazione terminata, più o meno esattamente sul segnale diimpulso.
Blocchi funzionali
3-18PID Control
C79000-G7072-C516-01
A seconda di come è stato parametrizzato il generatore di impulsi, i regolatori PIDpossono essere configurati o a tre punti o con un’uscita a due punti bipolare o unipo-lare. La tabella seguente illustra l’impostazione delle combinazioni degli interruttoriper i vari tipi di funzionamento possibili.
Tipo di funzionamentoInterruttori MAN_ON STEP3_ON ST2BI_ON
Regolazione a tre punti FALSE TRUE a scelta
Regolazione a due punti con campo diregolazione bipolare (-100% ... +100%)
FALSE FALSE TRUE
Regolazione a due punti con campo diregolazione unipolare (0% ... +100%)
FALSE FALSE FALSE
Funzionamento manuale TRUE a scelta a scelta
Nel tipo di funzionamento ”Regolazione a tre punti”, possono essere generati trestati del segnale di regolazione. A questo scopo, i valori di stato dei segnali binari diuscita QPOS_P e QNEG_P vengono assegnati ai relativi stati di funzionamentodell’attuatore: la tabella illustra l’esempio di una regolazione di temperatura:
Segnali di uscita
Attuatore Riscaldamento off Raffredda-mento
QPOS_P TRUE FALSE FALSE
QNEG_P FALSE FALSE TRUE
Sulla base della grandezza di ingresso viene calcolata la durata dell’impulsomediante una curva caratteristica. La forma di tale caratteristica viene definita dalladurata minima dell’impulso o dalla durata della pausa e dal fattore di rapporto(vedere figura 3-6).Il valore normale per il fattore di rapporto è 1.Le flessioni sulle caratteristiche sono dovute alla durata minima dell’impulso e dellapausa.
Durata minima dell’impulso e della pausaSe la durata minima dell’impulso e della pausa P_B_TM è parametrizzata corretta-mente, è possibile evitare brevi tempi di attivazione e disattivazione, che potrebberocompromettere la durata degli organi di comando e dei dispositivi di regolazione.
Avvertenza
I valori assoluti di piccola entità della grandezza di ingresso LMN, che potrebberogenerare una durata dell’impulso minore di P_B_TM, vengono soppressi. I valori diingresso di grande entità invece, che potrebbero generare una durata dell’impulsomaggiore di PER_TM - P_B_TM), vengono impostati a 100% o rispettivamente-100%.
La durata degli impulsi positivi o negativi si calcola sulla base della grandezza diingresso (in %) moltiplicata per la durata del periodo:
Durata dell’impulso =100INV
� PER_TM
Tipi difunzionamento
Regolazione a trepunti
Blocchi funzionali

3-19PID ControlC79000-G7072-C516-01
-100 %
100 %
PER_TM
PER_TM - P_B_TM
P_B_TM
Durata dell’im-pulso positivo
Off permanente
On permanente
Durata dell’impulso negativo
Figura 3-6 Curva caratteristica simmetrica del regolatore a tre punti (fattore di rapporto = 1)
Il rapporto della durata degli impulsi positivi rispetto a quelli negativi può esseremodificata mediante il fattore di rapporto RATIOFAC. Nel caso di un processotermico ad esempio, è possibile tener conto di costanti di tempo del sistema regolatodifferenti utilizzate per il riscaldamento e il raffreddamento.Il fattore di rapporto influenza anche la durata minima dell’impulso e della pausa.Un fattore di rapporto < 1 significa che il valore di intervento per gli impulsinegativi viene moltiplicato per il fattore di rapporto.
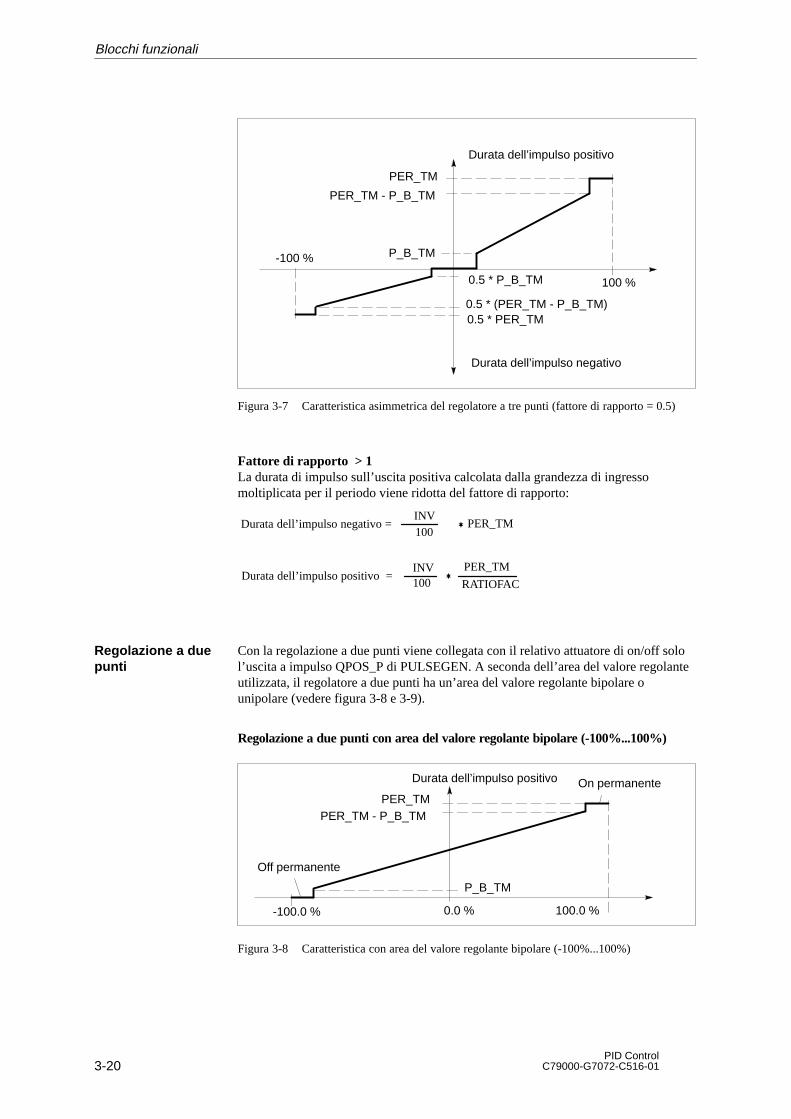
Fattore di rapporto < 1La durata di impulso sull’uscita negativa calcolata dalla grandezza di ingressomoltiplicata per il periodo viene ridotta del fattore di rapporto (vedere figura 3-7).
Durata dell’impulso positivo =100INV
� PER_TM
Durata dell’impulso negativo =100INV
� PER_TM � RATIOFAC
Regolazione a trepunti, asimmetrica
Blocchi funzionali
3-20PID Control
C79000-G7072-C516-01
-100 %
100 %
PER_TM
PER_TM - P_B_TM
P_B_TM
0.5 * PER_TM0.5 * (PER_TM - P_B_TM)
0.5 * P_B_TM
Durata dell’impulso positivo
Durata dell’impulso negativo
Figura 3-7 Caratteristica asimmetrica del regolatore a tre punti (fattore di rapporto = 0.5)
Fattore di rapporto > 1La durata di impulso sull’uscita positiva calcolata dalla grandezza di ingressomoltiplicata per il periodo viene ridotta del fattore di rapporto:
Durata dell’impulso negativo =100INV
� PER_TM
INV PER_TM
� RATIOFACDurata dell’impulso positivo =
100�
Con la regolazione a due punti viene collegata con il relativo attuatore di on/off solol’uscita a impulso QPOS_P di PULSEGEN. A seconda dell’area del valore regolanteutilizzata, il regolatore a due punti ha un’area del valore regolante bipolare ounipolare (vedere figura 3-8 e 3-9).
Regolazione a due punti con area del valore regolante bipolare (-100%...100%)
-100.0 % 100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %
Durata dell’impulso positivo
Off permanente
On permanente
Figura 3-8 Caratteristica con area del valore regolante bipolare (-100%...100%)
Regolazione a duepunti
Blocchi funzionali
3-21PID ControlC79000-G7072-C516-01
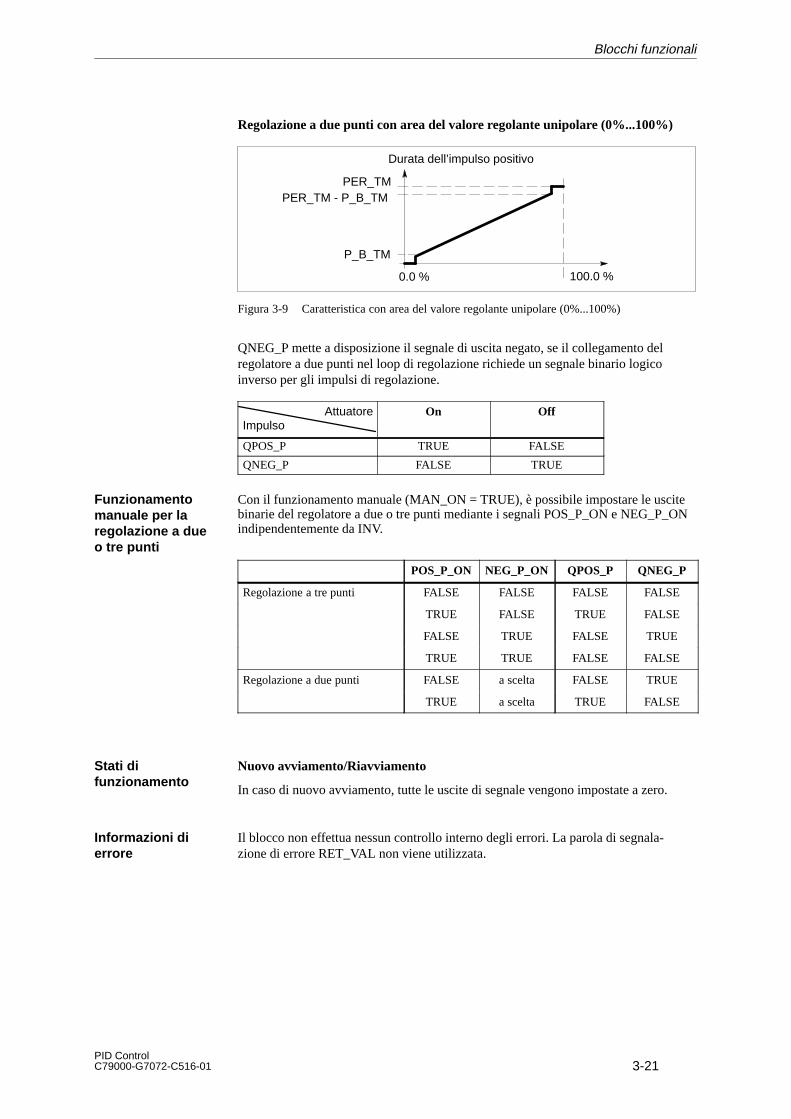
Regolazione a due punti con area del valore regolante unipolare (0%...100%)
100.0 %
PER_TMPER_TM - P_B_TM
P_B_TM
0.0 %
Durata dell’impulso positivo
Figura 3-9 Caratteristica con area del valore regolante unipolare (0%...100%)
QNEG_P mette a disposizione il segnale di uscita negato, se il collegamento delregolatore a due punti nel loop di regolazione richiede un segnale binario logicoinverso per gli impulsi di regolazione.
AttuatoreImpulso
On Off
QPOS_P TRUE FALSE
QNEG_P FALSE TRUE
Con il funzionamento manuale (MAN_ON = TRUE), è possibile impostare le uscitebinarie del regolatore a due o tre punti mediante i segnali POS_P_ON e NEG_P_ONindipendentemente da INV.
POS_P_ON NEG_P_ON QPOS_P QNEG_P
Regolazione a tre punti FALSE FALSE FALSE FALSE
TRUE FALSE TRUE FALSE
FALSE TRUE FALSE TRUE
TRUE TRUE FALSE FALSE
Regolazione a due punti FALSE a scelta FALSE TRUE
TRUE a scelta TRUE FALSE
Nuovo avviamento/Riavviamento
In caso di nuovo avviamento, tutte le uscite di segnale vengono impostate a zero.
Il blocco non effettua nessun controllo interno degli errori. La parola di segnala-zione di errore RET_VAL non viene utilizzata.
Funzionamentomanuale per laregolazione a dueo tre punti
Stati difunzionamento
Informazioni dierrore
Blocchi funzionali
3-22PID Control
C79000-G7072-C516-01
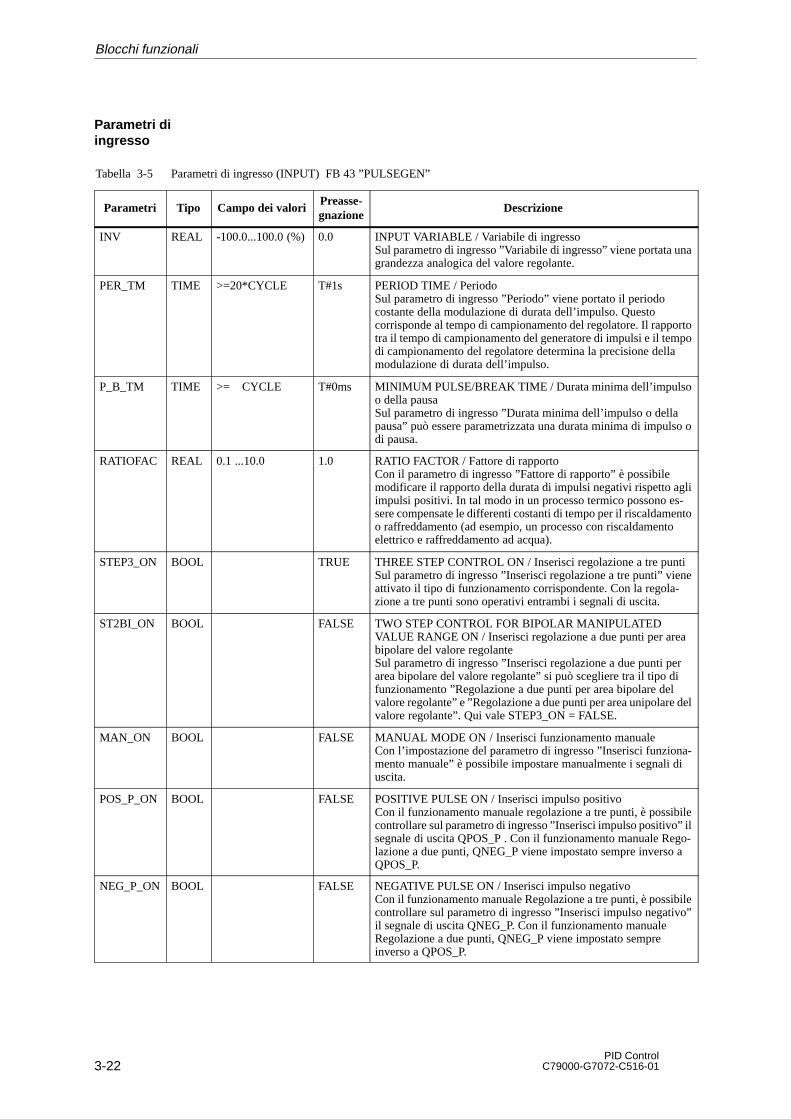
Tabella 3-5 Parametri di ingresso (INPUT) FB 43 ”PULSEGEN”
Parametri Tipo Campo dei valoriPreasse-gnazione
Descrizione
INV REAL -100.0...100.0 (%) 0.0 INPUT VARIABLE / Variabile di ingressoSul parametro di ingresso ”Variabile di ingresso” viene portata unagrandezza analogica del valore regolante.
PER_TM TIME >=20*CYCLE T#1s PERIOD TIME / PeriodoSul parametro di ingresso ”Periodo” viene portato il periodocostante della modulazione di durata dell’impulso. Questocorrisponde al tempo di campionamento del regolatore. Il rapportotra il tempo di campionamento del generatore di impulsi e il tempodi campionamento del regolatore determina la precisione dellamodulazione di durata dell’impulso.
P_B_TM TIME >= CYCLE T#0ms MINIMUM PULSE/BREAK TIME / Durata minima dell’impulsoo della pausaSul parametro di ingresso ”Durata minima dell’impulso o dellapausa” può essere parametrizzata una durata minima di impulso odi pausa.
RATIOFAC REAL 0.1 ...10.0 1.0 RATIO FACTOR / Fattore di rapportoCon il parametro di ingresso ”Fattore di rapporto” è possibilemodificare il rapporto della durata di impulsi negativi rispetto agliimpulsi positivi. In tal modo in un processo termico possono es-sere compensate le differenti costanti di tempo per il riscaldamentoo raffreddamento (ad esempio, un processo con riscaldamentoelettrico e raffreddamento ad acqua).
STEP3_ON BOOL TRUE THREE STEP CONTROL ON / Inserisci regolazione a tre puntiSul parametro di ingresso ”Inserisci regolazione a tre punti” vieneattivato il tipo di funzionamento corrispondente. Con la regola-zione a tre punti sono operativi entrambi i segnali di uscita.
ST2BI_ON BOOL FALSE TWO STEP CONTROL FOR BIPOLAR MANIPULATEDVALUE RANGE ON / Inserisci regolazione a due punti per areabipolare del valore regolanteSul parametro di ingresso ”Inserisci regolazione a due punti perarea bipolare del valore regolante” si può scegliere tra il tipo difunzionamento ”Regolazione a due punti per area bipolare delvalore regolante” e ”Regolazione a due punti per area unipolare delvalore regolante”. Qui vale STEP3_ON = FALSE.
MAN_ON BOOL FALSE MANUAL MODE ON / Inserisci funzionamento manualeCon l’impostazione del parametro di ingresso ”Inserisci funziona-mento manuale” è possibile impostare manualmente i segnali diuscita.
POS_P_ON BOOL FALSE POSITIVE PULSE ON / Inserisci impulso positivoCon il funzionamento manuale regolazione a tre punti, è possibilecontrollare sul parametro di ingresso ”Inserisci impulso positivo” ilsegnale di uscita QPOS_P . Con il funzionamento manuale Rego-lazione a due punti, QNEG_P viene impostato sempre inverso aQPOS_P.
NEG_P_ON BOOL FALSE NEGATIVE PULSE ON / Inserisci impulso negativoCon il funzionamento manuale Regolazione a tre punti, è possibilecontrollare sul parametro di ingresso ”Inserisci impulso negativo”il segnale di uscita QNEG_P. Con il funzionamento manualeRegolazione a due punti, QNEG_P viene impostato sempreinverso a QPOS_P.
Parametri diingresso
Blocchi funzionali
3-23PID ControlC79000-G7072-C516-01
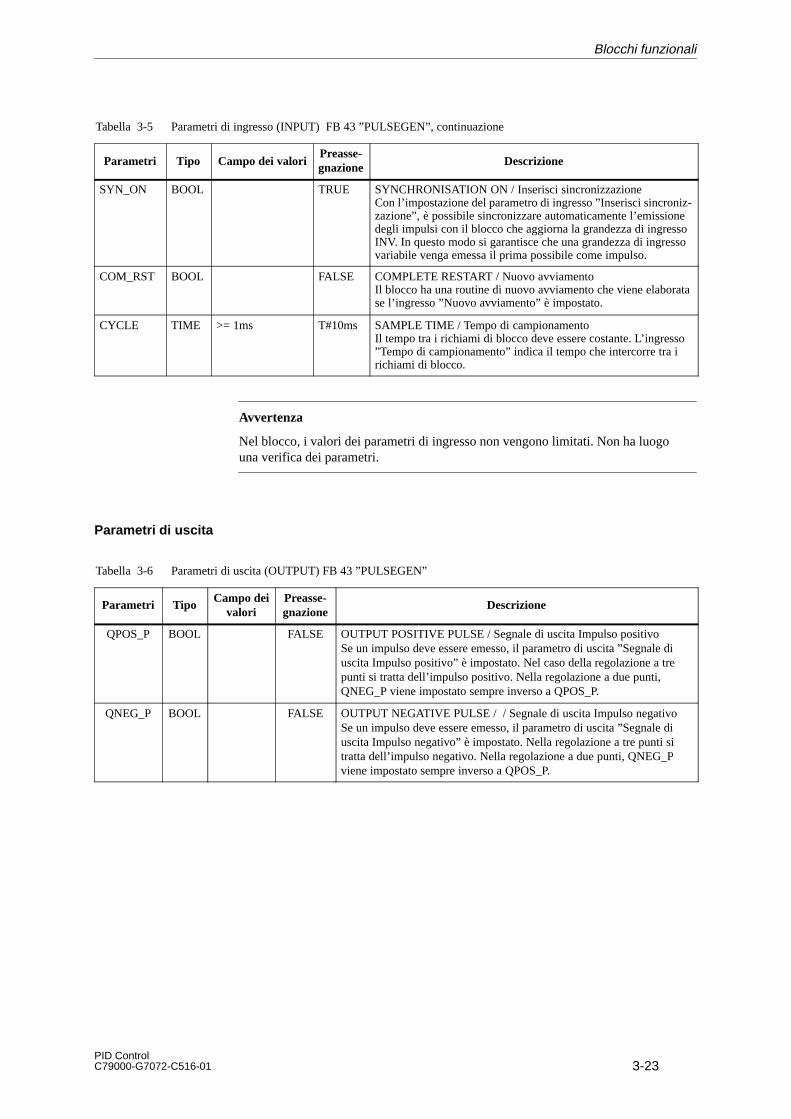
Tabella 3-5 Parametri di ingresso (INPUT) FB 43 ”PULSEGEN”, continuazione
Parametri DescrizionePreasse-gnazioneCampo dei valoriTipo
SYN_ON BOOL TRUE SYNCHRONISATION ON / Inserisci sincronizzazioneCon l’impostazione del parametro di ingresso ”Inserisci sincroniz-zazione”, è possibile sincronizzare automaticamente l’emissionedegli impulsi con il blocco che aggiorna la grandezza di ingressoINV. In questo modo si garantisce che una grandezza di ingressovariabile venga emessa il prima possibile come impulso.
COM_RST BOOL FALSE COMPLETE RESTART / Nuovo avviamentoIl blocco ha una routine di nuovo avviamento che viene elaboratase l’ingresso ”Nuovo avviamento” è impostato.
CYCLE TIME >= 1ms T#10ms SAMPLE TIME / Tempo di campionamentoIl tempo tra i richiami di blocco deve essere costante. L’ingresso”Tempo di campionamento” indica il tempo che intercorre tra irichiami di blocco.
Avvertenza
Nel blocco, i valori dei parametri di ingresso non vengono limitati. Non ha luogouna verifica dei parametri.
Tabella 3-6 Parametri di uscita (OUTPUT) FB 43 ”PULSEGEN”
Parametri TipoCampo dei
valoriPreasse-gnazione
Descrizione
QPOS_P BOOL FALSE OUTPUT POSITIVE PULSE / Segnale di uscita Impulso positivoSe un impulso deve essere emesso, il parametro di uscita ”Segnale diuscita Impulso positivo” è impostato. Nel caso della regolazione a trepunti si tratta dell’impulso positivo. Nella regolazione a due punti,QNEG_P viene impostato sempre inverso a QPOS_P.
QNEG_P BOOL FALSE OUTPUT NEGATIVE PULSE / / Segnale di uscita Impulso negativoSe un impulso deve essere emesso, il parametro di uscita ”Segnale diuscita Impulso negativo” è impostato. Nella regolazione a tre punti sitratta dell’impulso negativo. Nella regolazione a due punti, QNEG_Pviene impostato sempre inverso a QPOS_P.
Parametri di uscita
Blocchi funzionali
3-24PID Control
C79000-G7072-C516-01
3.4 Esempio con il blocco PULSEGEN
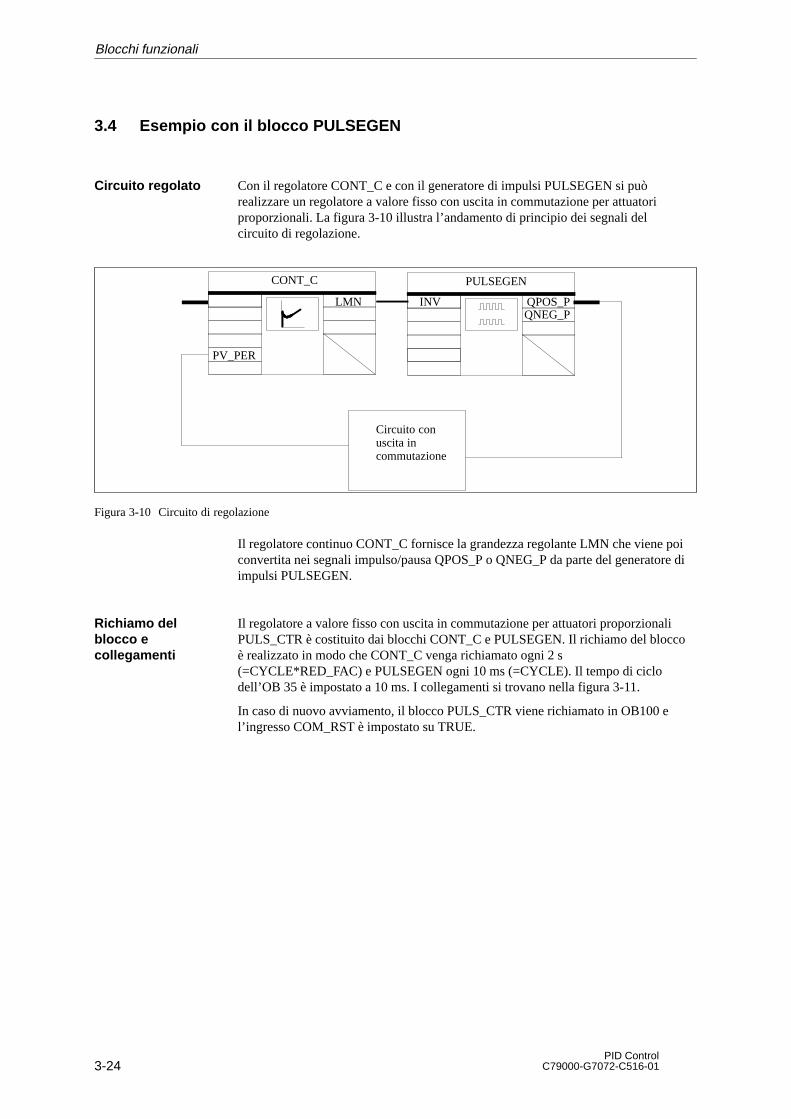
Con il regolatore CONT_C e con il generatore di impulsi PULSEGEN si puòrealizzare un regolatore a valore fisso con uscita in commutazione per attuatoriproporzionali. La figura 3-10 illustra l’andamento di principio dei segnali delcircuito di regolazione.
Circuito conuscita incommutazione
PULSEGENCONT_C
LMN
PV_PER
INV QPOS_PQNEG_P
Figura 3-10 Circuito di regolazione
Il regolatore continuo CONT_C fornisce la grandezza regolante LMN che viene poiconvertita nei segnali impulso/pausa QPOS_P o QNEG_P da parte del generatore diimpulsi PULSEGEN.
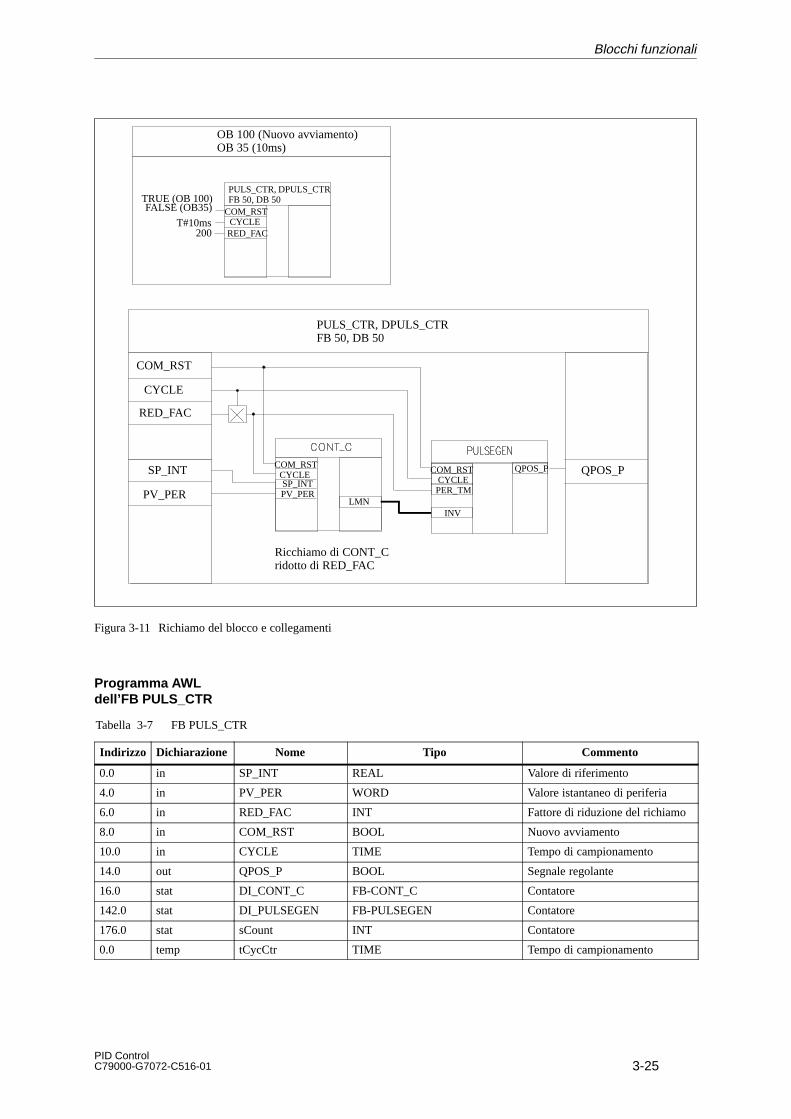
Il regolatore a valore fisso con uscita in commutazione per attuatori proporzionaliPULS_CTR è costituito dai blocchi CONT_C e PULSEGEN. Il richiamo del bloccoè realizzato in modo che CONT_C venga richiamato ogni 2 s(=CYCLE*RED_FAC) e PULSEGEN ogni 10 ms (=CYCLE). Il tempo di ciclodell’OB 35 è impostato a 10 ms. I collegamenti si trovano nella figura 3-11.
In caso di nuovo avviamento, il blocco PULS_CTR viene richiamato in OB100 el’ingresso COM_RST è impostato su TRUE.
Circuito regolato
Richiamo delblocco ecollegamenti
Blocchi funzionali
3-25PID ControlC79000-G7072-C516-01
OB 100 (Nuovo avviamento)OB 35 (10ms)
TRUE (OB 100)FALSE (OB35)
T#10ms200
PULS_CTR, DPULS_CTRFB 50, DB 50
PULS_CTR, DPULS_CTRFB 50, DB 50
COM_RSTCYCLERED_FAC
COM_RST
CYCLE
RED_FAC
SP_INT
PV_PER
COM_RSTCYCLE
COM_RSTCYCLE
PER_TM
INV
QPOS_P
SP_INTPV_PER
LMN
QPOS_P
Ricchiamo di CONT_Cridotto di RED_FAC
Figura 3-11 Richiamo del blocco e collegamenti
Tabella 3-7 FB PULS_CTR
Indirizzo Dichiarazione Nome Tipo Commento
0.0 in SP_INT REAL Valore di riferimento
4.0 in PV_PER WORD Valore istantaneo di periferia
6.0 in RED_FAC INT Fattore di riduzione del richiamo
8.0 in COM_RST BOOL Nuovo avviamento
10.0 in CYCLE TIME Tempo di campionamento
14.0 out QPOS_P BOOL Segnale regolante
16.0 stat DI_CONT_C FB-CONT_C Contatore
142.0 stat DI_PULSEGEN FB-PULSEGEN Contatore
176.0 stat sCount INT Contatore
0.0 temp tCycCtr TIME Tempo di campionamento
Programma AWLdell’FB PULS_CTR
Blocchi funzionali
3-26PID Control
C79000-G7072-C516-01
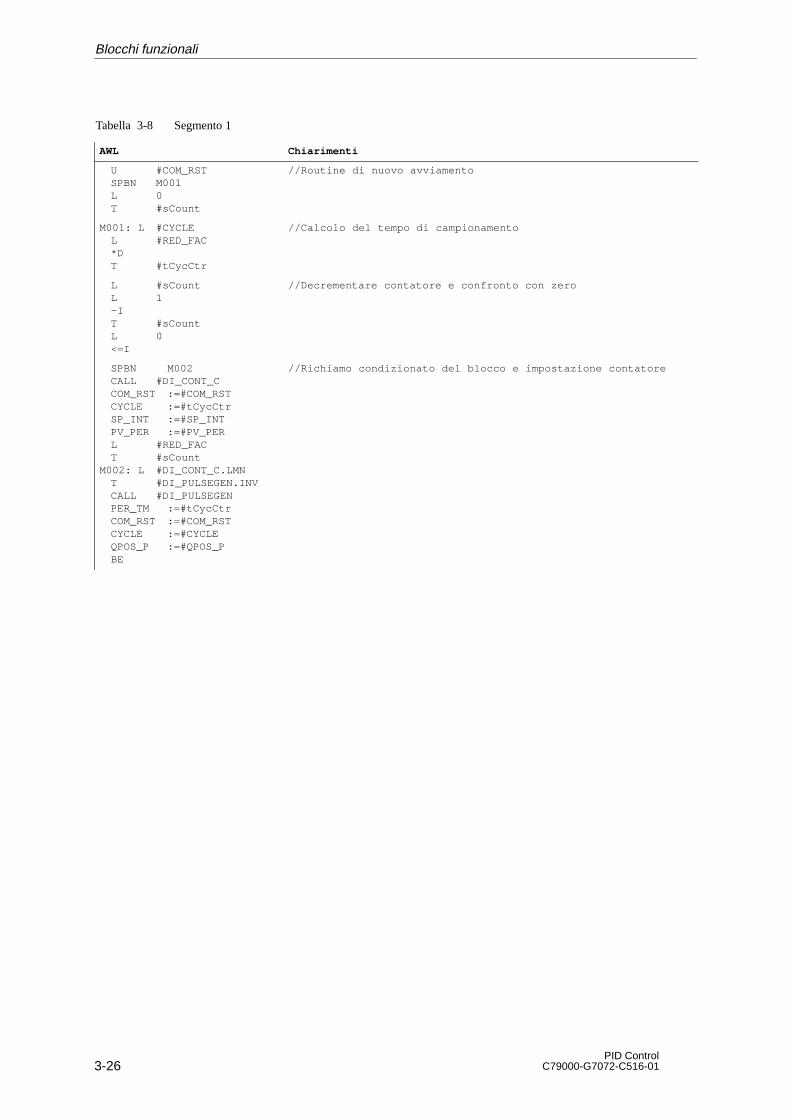
Tabella 3-8 Segmento 1
AWL Chiarimenti
U #COM_RSTSPBN M001L 0T #sCount
//Routine di nuovo avviamento
M001: L #CYCLEL #RED_FAC*DT #tCycCtr
//Calcolo del tempo di campionamento
L #sCountL 1-IT #sCountL 0<=I
//Decrementare contatore e confronto con zero
SPBN M002CALL #DI_CONT_CCOM_RST :=#COM_RSTCYCLE :=#tCycCtrSP_INT :=#SP_INTPV_PER :=#PV_PERL #RED_FACT #sCount
M002: L #DI_CONT_C.LMNT #DI_PULSEGEN.INVCALL #DI_PULSEGENPER_TM :=#tCycCtrCOM_RST :=#COM_RSTCYCLE :=#CYCLEQPOS_P :=#QPOS_PBE
//Richiamo condizionato del blocco e impostazione contatore
Blocchi funzionali

A-1PID ControlC79000-G7072-C516-01
Bibliografia
/70/ Manuale: Sistema di automazione S7-300, Installazione, configurazione e dati della CPU
/71/ Manuale di riferimento: Sistemi di automazione S7-300, M7-300 Caratteristiche delle unità modulari
/100/ Manuale: Sistemi di automazione S7-400, M7-400, Configurazione
/101/ Manuale di riferimento: Sistemi di automazione S7-400, M7-400 Caratteristiche delle unità modulari
/231/ Manuale utente: Software di base per S7 e M7,STEP 7
/232/ Manuale: AWL per S7-300/400, Programmazione di blocchi
/234/ Manuale di programmazione: Software di sistema per S7-300/400Sviluppo di programmi
/350/ Manuale utente: SIMATIC 7, Regolazione standard (solo in lingua inglese)
A

A-2PID Control
C79000-G7072-C516-01
Indice-1PID ControlC79000-G7072-C516-01
Indice analitico
AAnalisi del circuito regolato, 1-1
CCONT_C, 3-2CONT_S, 3-9CPU 314 IFM, 2-1
FFB 41 ”CONT_C”, 3-2
schema a blocchi, 3-4FB 42 ”CONT_S”, 3-9
schema a blocchi, 3-11FB 43 ”PULSEGEN”, 3-15
schema a blocchi, 3-16Forme di impulso con l’FB 43, 3-15
GGuida online, 1-2, 2-1
IImpulsi, modulazione dell’ampiezza, 1-1
PPID Control, iinformazioni di base, 1-1Possibilità di impiego, 1-1PULSEGEN, 3-15
RRegolazione a impulsi, 1-1Regolazione a passi con l’FB 42, 3-9Regolazione continua, 1-1Regolazione continuativa con l’FB 41, 3-2Regolazione integrata, 2-1
SScelta del regolatore, 1-2SFB 43 ”PULSEGEN”
regolazione a due punti, 3-20regolazione a tre punti, 3-18regolazione a tre punti, asimmetrica, 3-19sincronizzazione automatica, 3-16
Superficie di parametrizzazioneguida online, 2-1richiamo, 2-1

Indice-2PID Control
C79000-G7072-C516-01
Indic
1PID ControlC79000-G7072-C516-01
✄
Mittente :
Nome:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Funzione:__ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Ditta:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Via:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
C.A.P.:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Località: _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Paese:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Telefono:_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Indicare il corrispondente ramo industriale:
❒ Industria automobilistica
❒ Industria chimica
❒ Industria elettrotecnica
❒ Industria alimentare
❒ Tecnica di controllo e strumentazione
❒ Industria meccanica
❒ Petrolchimica
❒ Industria farmaceutica
❒ Industria di materie plastiche
❒ Industria cartaria
❒ Industria tessile
❒ Impresa di trasporti
❒ Altre _ _ _ _ _ _ _ _ _ _ _
Siemens AG
AUT E 146
Östliche Rheinbrückenstr. 50
D-76181 Karlsruhe
Rep. federale di Germania

2PID Control
C79000-G7072-C516-01
Se avete riscontrato dei problemi di ordine pratico, Vi preghiamo di delucidarli nelle se-guenti righe:
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Critiche/suggerimenti
Vi preghiamo di volerci comunicare critiche e suggerimenti atti a migliorare la qualitàe a facilitare l’uso della documentazione. Vi saremmo quindi grati se vorreste compilaree spedire alla Siemens il seguente questionario.
Servendosi di una scala di valori da 1 per buono a 5 per insufficiente, Vi preghiamo didare una valutazione sulla qualità del manuale rispondendo alle seguenti domande.
1. Corrisponde alle Vostre esigenze il contenuto del manuale?
2. È facile trovare le informazioni necessarie?
3. Chiarezza del testo?
4. Corrisponde alle Vostre esigenze il livello dei particolari tecnici?
5. Come valutate la qualità delle illustrazioni e delle tabelle?

![BANCA CENTRALE EUROPEA 01 12014 5 /D UHDWWLYLWj GHOOH FRPSRQHQWL GHOOR ,$3& DOOH YDULD]LRQL GHO JUDGR di sottoutilizzo della capacità produttiva 69 4 La produzione, la domanda e il](https://static.fdocumenti.com/doc/165x107/5c678b1709d3f22d638c0427/banca-centrale-europea-01-5-d-uhdwwlylwj-ghooh-frpsrqhqwl-ghoor-3-dooh-yduldlrql.jpg)










