Robotica - Intranet DEIBhome.deib.polimi.it/restelli/MyWebSite/pdf/Lezione4.pdf · 27/10/2006 Corso...
82
Transcript of Robotica - Intranet DEIBhome.deib.polimi.it/restelli/MyWebSite/pdf/Lezione4.pdf · 27/10/2006 Corso...
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
22
TodayToday
● What is a feature?● Some useful information● The world of features:
– Detectors● Edges detection● Corners/Points detection
– Descriptors ?!?!?
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
33
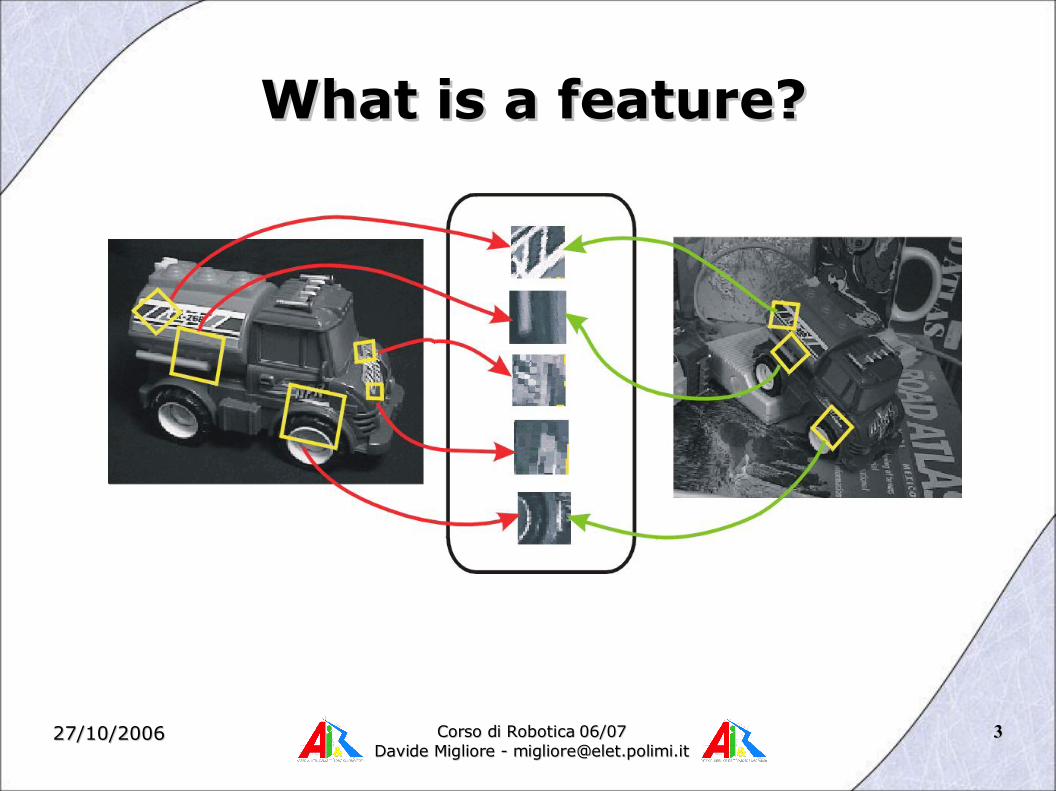
What is a feature?What is a feature?

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
44
ImagesImages
● An image is a matrix of pixels ● Resolution
– Digital cameras: 1600 X 1200 at a minimum– Video cameras: ~640 X 480
● Grayscale: generally 8 bits per pixel – Intensities in range [0…255]
● RGB color: 3 8-bit color planes
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
55
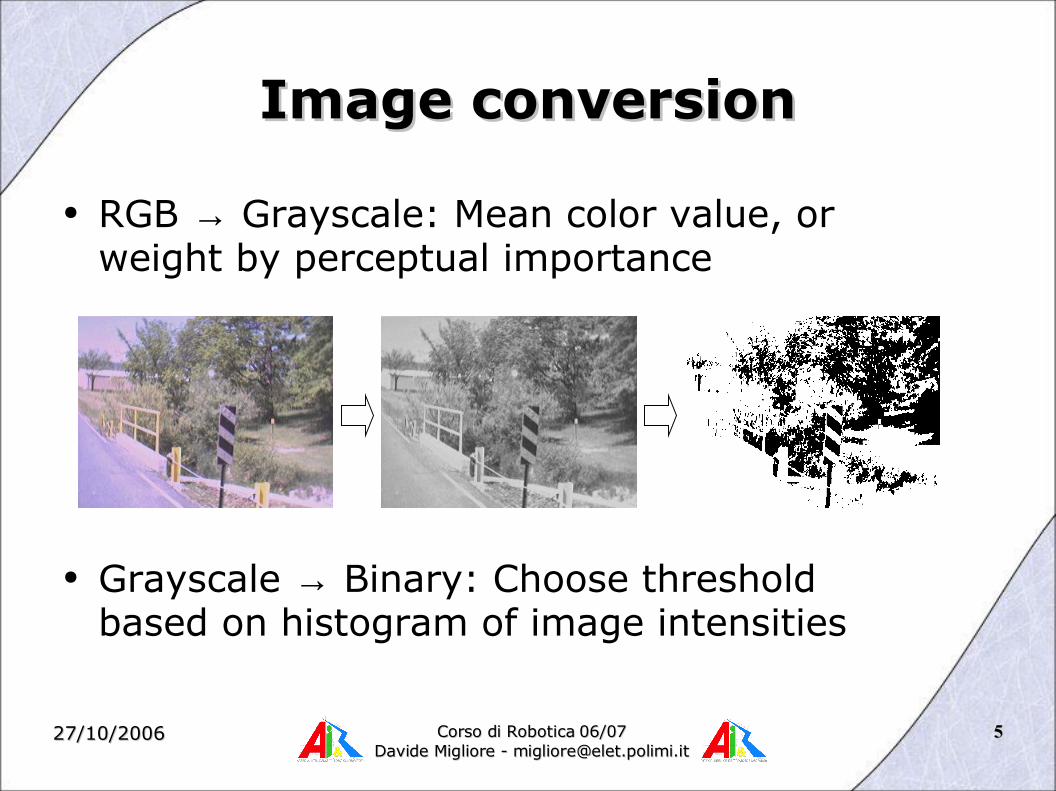
Image conversionImage conversion
● RGB → Grayscale: Mean color value, or weight by perceptual importance
● Grayscale → Binary: Choose threshold based on histogram of image intensities

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
66
Color representationColor representation
● RGB, HSV (hue, saturation, value), YUV, etc.● Luminance: Perceived intensity● Chrominance: Perceived color
– HS(V), (Y)UV, etc.– Normalized RGB removes some illumination
dependence:

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
77
Binary OperationsBinary Operations
● Dilation, erosion – Dilation: All 0’s next to a 1 → 1 (Enlarge foreground)– Erosion: All 1’s next to a 0 → 0 (Enlarge background)
● Connected components– Uniquely label each n-connected region in binary image– 4- and 8-connectedness
● Moments: Region statistics– Zeroth-order: Size– First-order: Position (centroid)– Second-order: Orientation
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
88
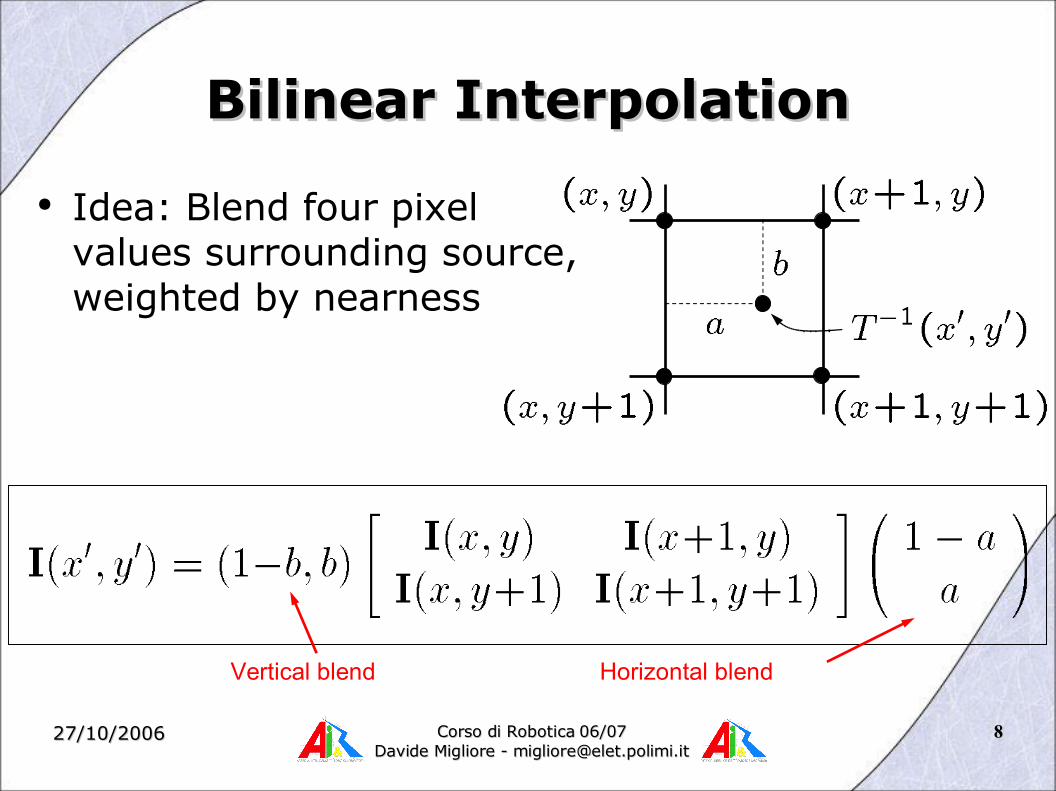
● Idea: Blend four pixel values surrounding source, weighted by nearness
Vertical blend Horizontal blend
Bilinear InterpolationBilinear Interpolation
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
99
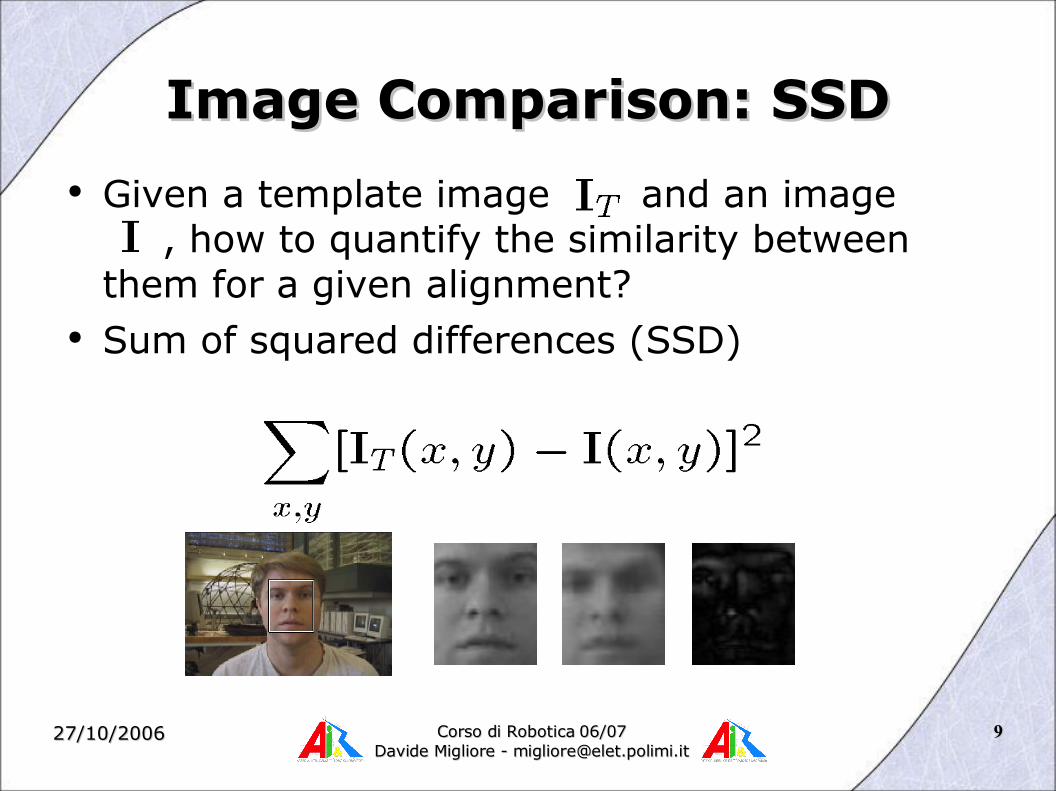
Image Comparison: SSDImage Comparison: SSD● Given a template image and an image
, how to quantify the similarity between them for a given alignment?
● Sum of squared differences (SSD)
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1010
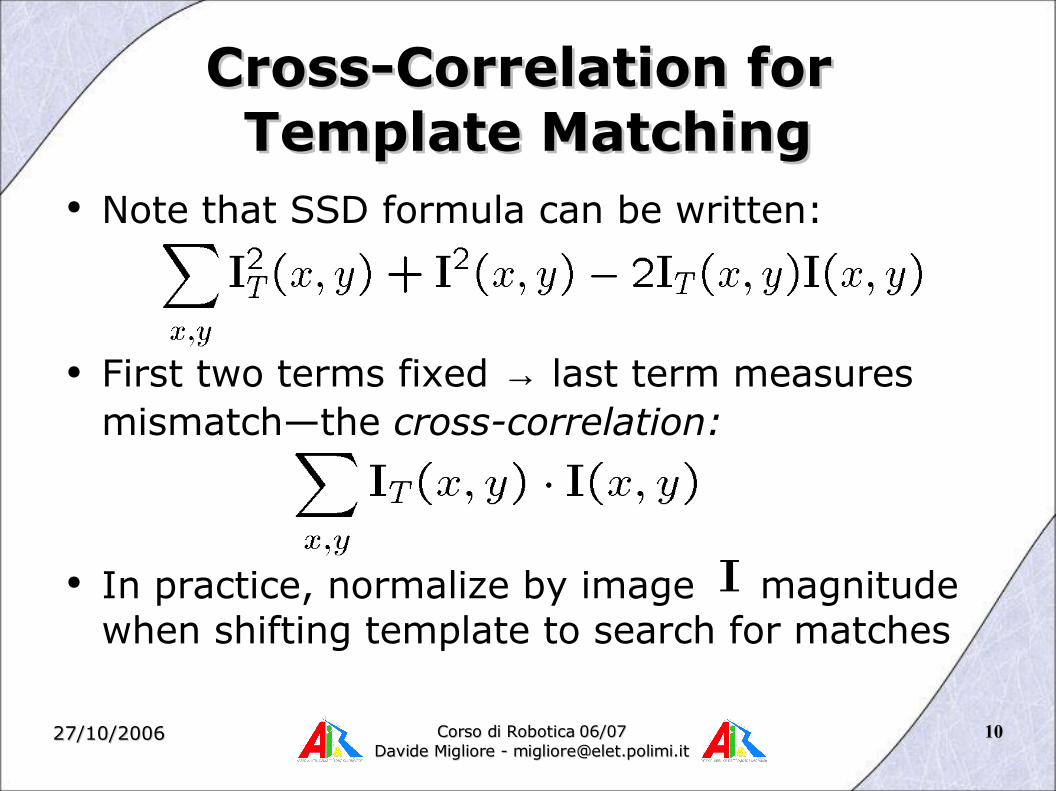
Cross-Correlation for Cross-Correlation for Template MatchingTemplate Matching
● Note that SSD formula can be written:
● First two terms fixed → last term measures mismatch—the cross-correlation:
● In practice, normalize by image magnitude when shifting template to search for matches
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1111
FilteringFiltering
● Idea: Analyze neighborhood around some point in image with filter function ; put result in new image at corresponding location
● System properties– Shift invariance: Same inputs give same outputs,
regardless of location– Superposition: Output on sum of images = – Sum of outputs on separate images– Scaling: Output on scaled image = Scaled output on
image● Linear shift invariance → Convolution

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1212
Discrete FilteringDiscrete Filtering
● Linear filter: Weighted sum of pixels over rectangular neighborhood—kernel defines weights
● Think of kernel as template being matched by correlation
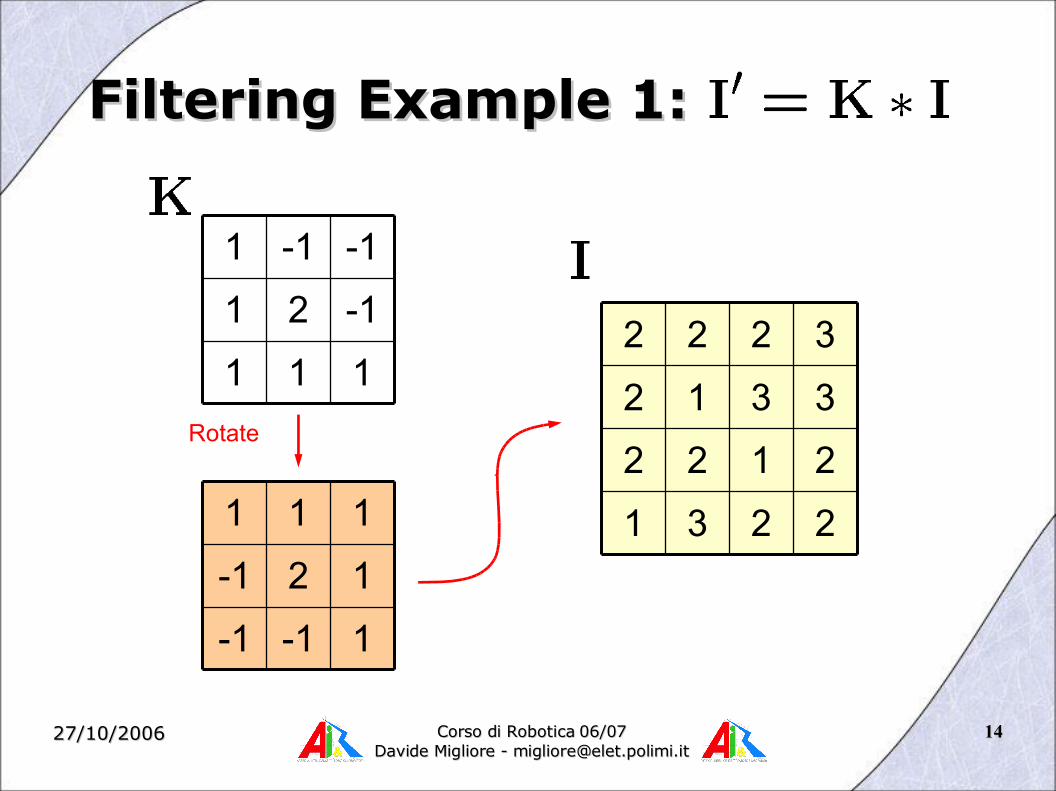
● Convolution: Correlation with kernel rotated 180°
● Dealing with image edges– Zero-padding– Border replication
111-121-1-11

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1313
ConvolutionConvolution
● Definition:
● Shorter notation: ● Properties
– Commutative– Associative
● Fourier theorem: Convolution in spatial domain = Multiplication in frequency domain
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1414
Filtering Example 1: Filtering Example 1:
111
-121
-1-11
3
2
1
2
2
1
3
2
32
21
22
32
Rotate
1-1-1
12-1
111
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1515
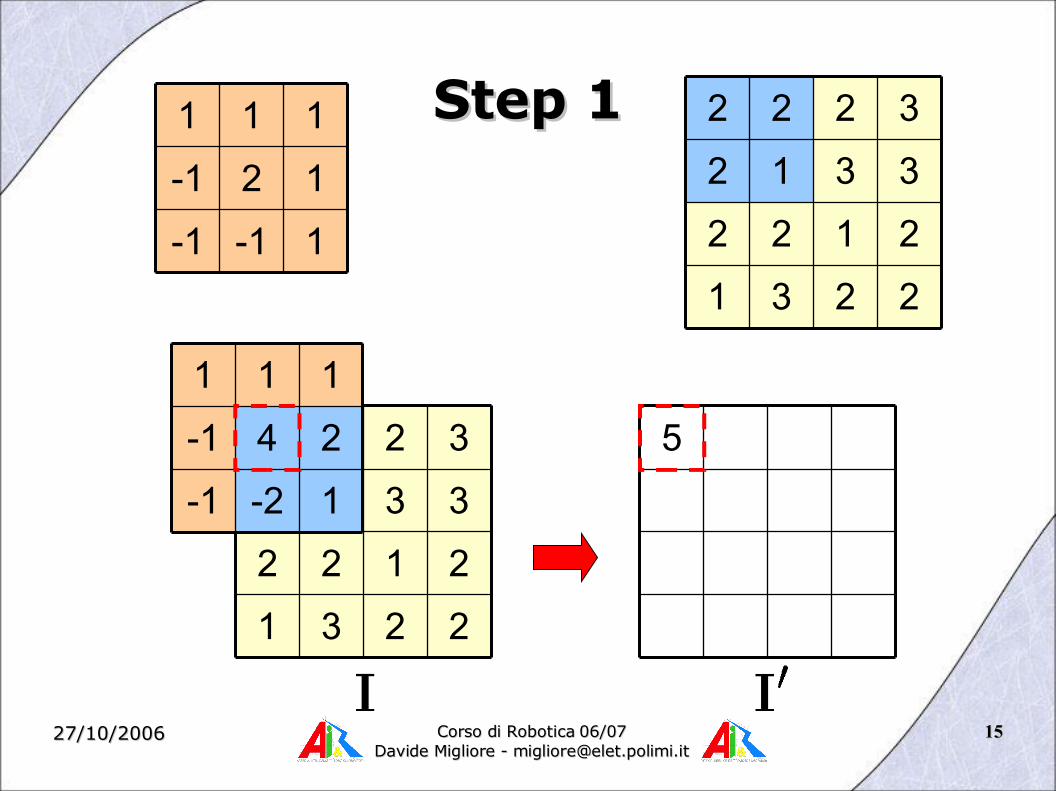
Step 1Step 1
3
2
1
2
2
1
3
2
32
21
22
32 5
3
2
1
2
2
1
3
2
32
21
22
32
1-2-1
24-1
111
1-1-1
12-1
111

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1616
Step 2Step 2
32
1
2
21
3
2 3
2
21
2
2
3
2
1-1-1
12-1
111
3
2
1
2
2
1
3
2
32
21
22
32
3
2
1
2
2
1
3
2
32
21
22
32
3-1-2
24-2
111
45

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1717
Step 3Step 3
1-1-1
12-1
111
3
2
1
2
2
1
3
2
32
21
22
32
3-3-1
34-2
111
4 45
3
2
1
2
2
1
3
2
32
21
22
32

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1818
Step 4Step 4
1-1-1
12-1
111
3
2
1
2
2
1
3
2
32
21
22
32 4 4 -25
1-3-3
16-2
111
3
2
1
2
2
1
3
2
32
21
22
32

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
1919
Step 5Step 5
1-1-1
12-1
111
3
2
1
2
2
1
3
2
32
21
22
32
3
2
1
2
2
1
3
2
32
21
22
32
3
2
1
2
2
1
3
2
32
21
22
32 4 4
9
-25
2-2-1
14-1
221

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2020
Step 6Step 6
1-1-1
12-1
111
3
2
1
2
2
1
3
2
32
21
22
32
3
2
1
2
2
1
3
2
32
21
22
32
6
4 4
9
-25
1-2-2
32-2
222

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2121
Final ResultFinal Result
12
7
6
4
8
6
14
4
59
59
511
-25
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2222
SeparabilitySeparability
● Definition: 2-D kernel can be written as convolution of two 1-D kernels
● Advantage: Efficiency—Convolving image with kernel requires
multiplies vs. for non-separable kernel
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2323
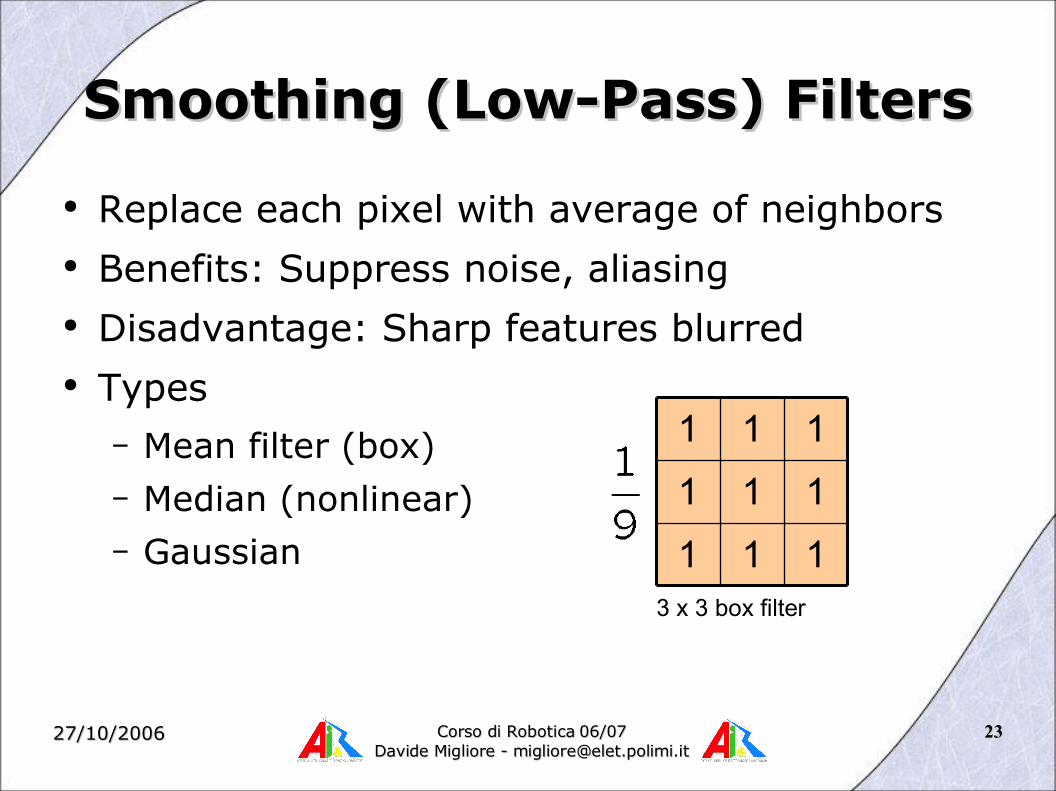
Smoothing (Low-Pass) FiltersSmoothing (Low-Pass) Filters
● Replace each pixel with average of neighbors● Benefits: Suppress noise, aliasing● Disadvantage: Sharp features blurred● Types
– Mean filter (box)– Median (nonlinear)– Gaussian 111
111
111
3 x 3 box filter

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2424
Box Filter: SmoothingBox Filter: Smoothing
7 x 7 kernelOriginal image

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2525
Gaussian KernelGaussian Kernel
● Idea: Weight contributions of neighboring pixels by nearness

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2626
Gaussian: BenefitsGaussian: Benefits
● Rotational symmetry treats features of all orientations equally (isotropy)
● Smooth roll-off reduces “ringing”● Efficient: Rule of thumb is kernel width ≥ 5σ
– Separable
– Cascadable: Approach to large σ comes from identity

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2727
Gaussian: SmoothingGaussian: Smoothing
σ = 1 σ = 3
7 x 7kernel
Originalimage

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2828
The Features worldThe Features world
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
2929
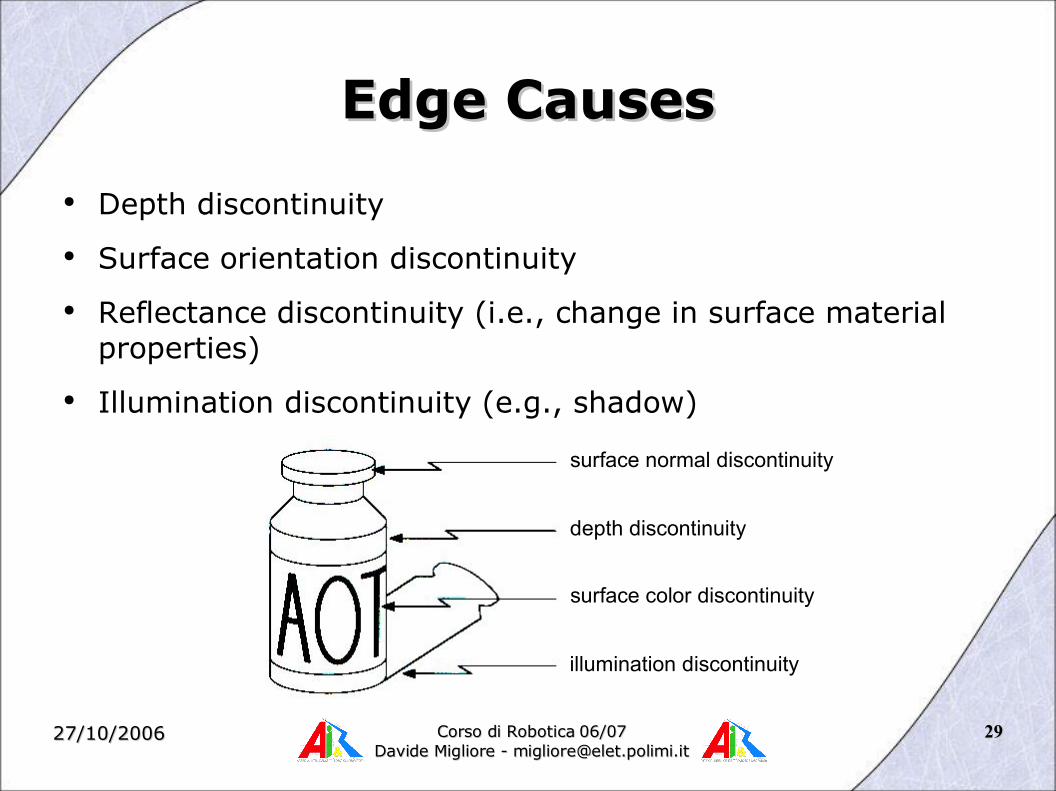
Edge CausesEdge Causes
● Depth discontinuity
● Surface orientation discontinuity
● Reflectance discontinuity (i.e., change in surface material properties)
● Illumination discontinuity (e.g., shadow)
depth discontinuity
surface color discontinuity
illumination discontinuity
surface normal discontinuity
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3030
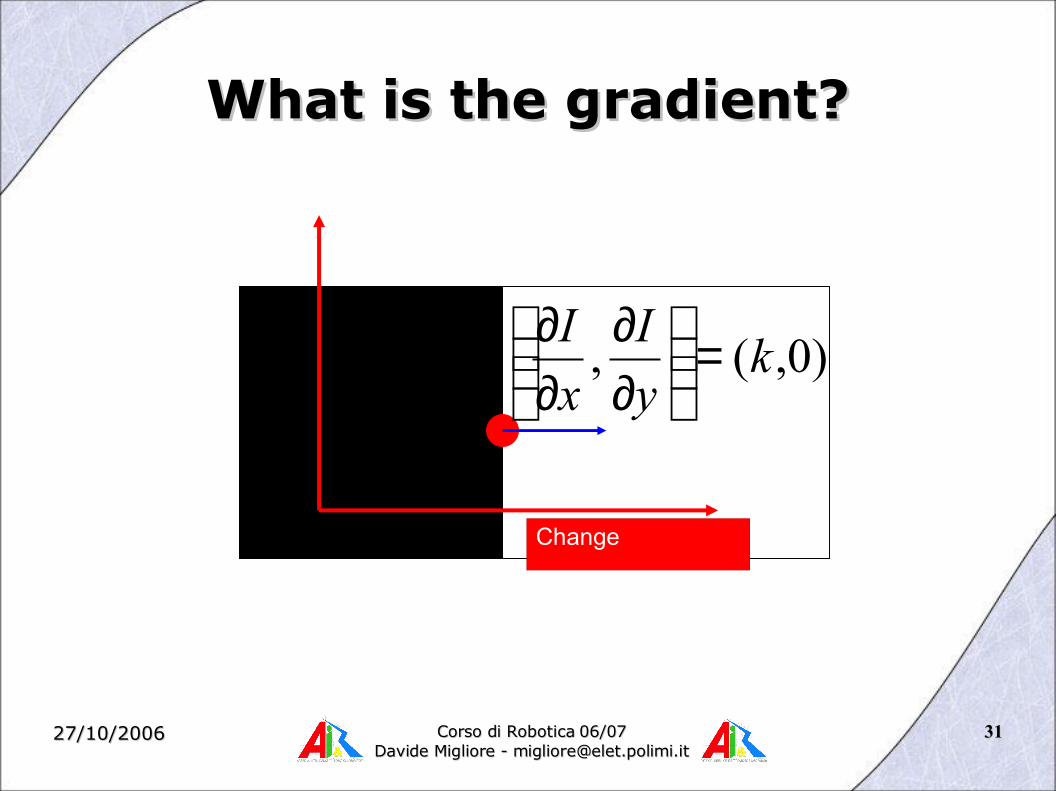
GradientGradient
● Think of image intensities as a function . Gradient of image is a vector
field as for a normal 2-D height function:
● Edge: Place where gradient magnitude is high; orthogonal to gradient direction
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3131
What is the gradient?What is the gradient?
)0,(, ky
I
x
I =
∂∂
∂∂
Change
No Change
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3232
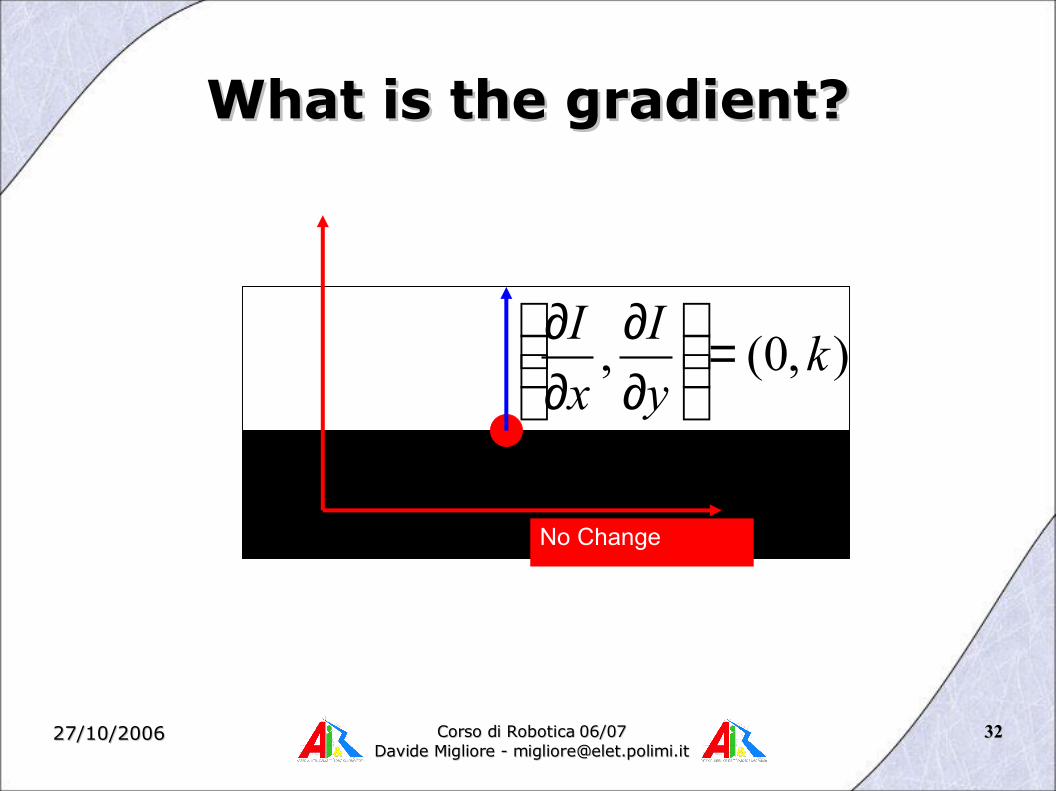
What is the gradient?What is the gradient?
),0(, ky
I
x
I =
∂∂
∂∂
No Change
Change
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3333
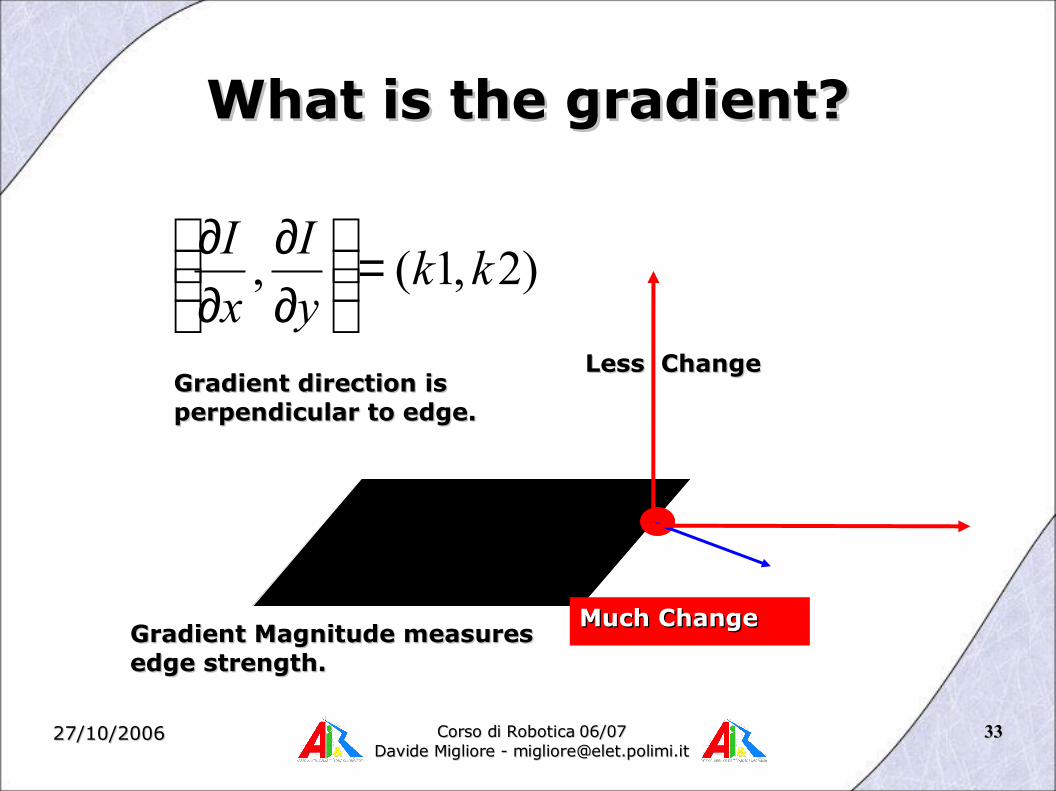
What is the gradient?What is the gradient?
)2,1(, kky
I
x
I =
∂∂
∂∂
Much ChangeMuch Change
Less ChangeLess ChangeGradient direction is Gradient direction is perpendicular to edge.perpendicular to edge.
Gradient Magnitude measures Gradient Magnitude measures edge strength.edge strength.
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3434
Edge DetectionEdge Detection
● Edge Types– Step edge (ramp)– Line edge (roof)
● Searching for Edges:– Filter: Smooth image– Enhance: Apply numerical derivative approximation– Detect: Threshold to find strong edges– Localize/analyze: Reject spurious edges, include
weak but justified edges

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3535
Effects of noiseEffects of noise
● Consider a single row or column of the image– Plotting intensity as a function of position gives a signal

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3636
Effects of noise: solutionEffects of noise: solution

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3737
Step edge detectionStep edge detection
● First derivative edge detectors: Look for extrema– Sobel operator
– Prewitt, Roberts cross
– Derivative of Gaussian
● Second derivative: Look for zero-crossings– Laplacian : Isotropic
– Second directional derivative
– Laplacian of Gaussian/Difference of Gaussians
-1-2-1000121
-101-202-101
Sobel x Sobel y
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3838
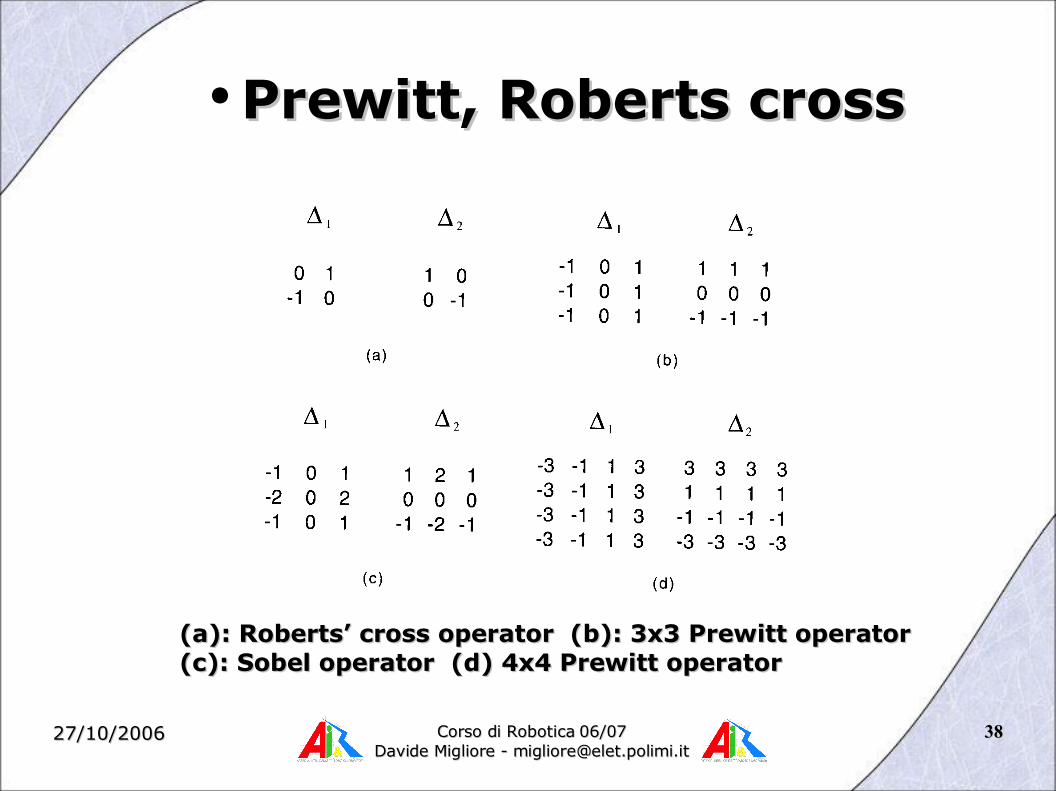
● Prewitt, Roberts crossPrewitt, Roberts cross
(a): Roberts’ cross operator (b): 3x3 Prewitt operator(a): Roberts’ cross operator (b): 3x3 Prewitt operator(c): Sobel operator (d) 4x4 Prewitt operator(c): Sobel operator (d) 4x4 Prewitt operator

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
3939
Derivative of GaussianDerivative of Gaussian

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4040
Derivative of GaussianDerivative of Gaussian
Derivative theorem of convolution
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4141
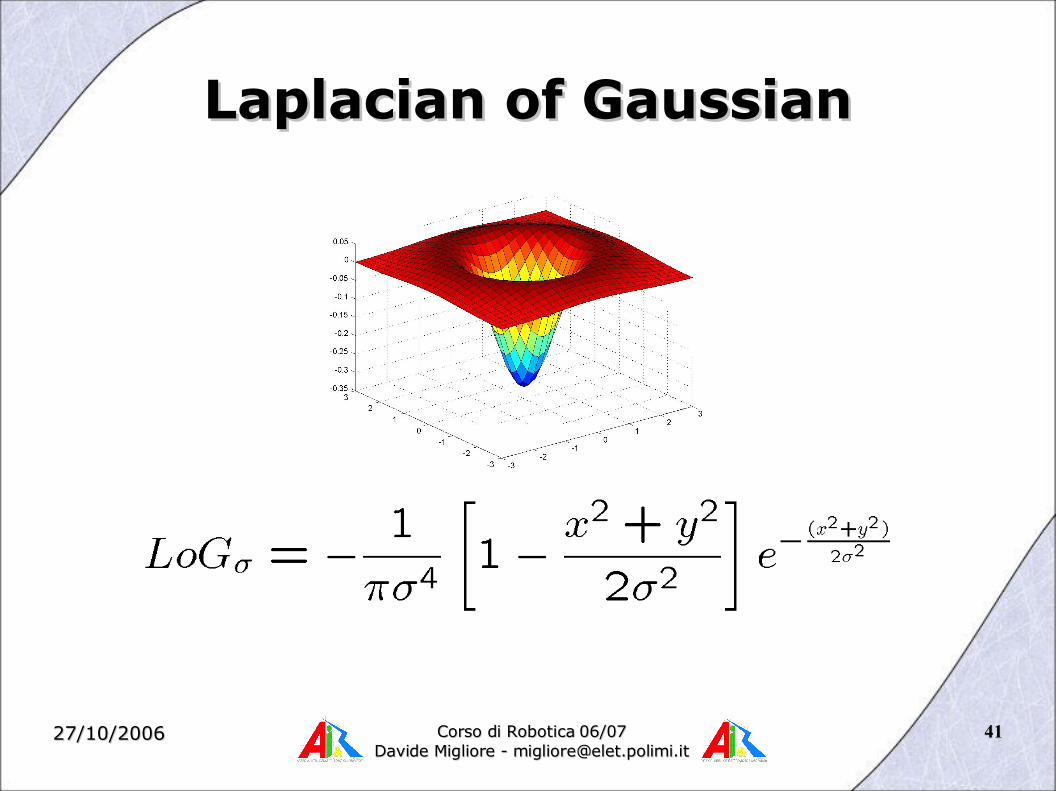
Laplacian of GaussianLaplacian of Gaussian

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4242
Laplacian of GaussianLaplacian of Gaussian
Consider
Laplacian of Gaussianoperator

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4343
-101
-202
-101
0
0
0
0
2
2
2
2
20
20
20
20
Rotate
10-1
20-2
10-1
Edge Filtering ExampleEdge Filtering Example

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4444
Step 1Step 1
0
0
1
2
2
1
2
2
22
20
20
22 0
0
0
0
0
2
2
2
2
20
20
20
20
00-1
00-2
10-1
10-1
20-2
10-1
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4545
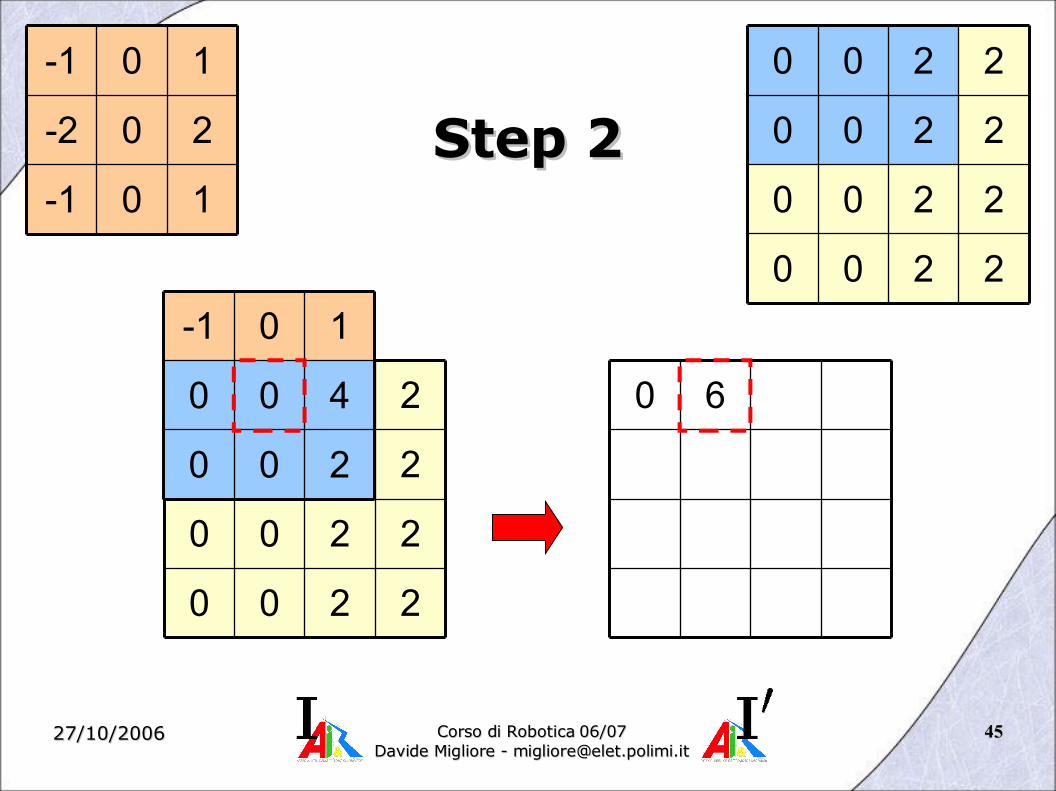
Step 2Step 2
0
0
1
2
2
2
3
2
22
20
20
22 60
0
0
0
0
2
2
2
2
20
20
20
20
200
400
10-1
10-1
20-2
10-1

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4646
Step 3Step 3
0
0
1
2
2
2
3
2
30
20
20
30 6 60
0
0
0
0
2
2
2
2
20
20
20
20
200
400
10-1
10-1
20-2
10-1

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4747
Step 4Step 4
0
0
0
0
2
2
3
2
30
20
20
30 6 6 -60
0
0
0
0
2
2
2
2
20
20
20
20
10-2
20-4
10-1
10-1
20-2
10-1
edgeeffect

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4848
Sobel Edge Detection: Sobel Edge Detection: Gradient ApproximationGradient Approximation
Horizontal Vertical

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
4949
Sobel vs. LoG Edge DetectionSobel vs. LoG Edge Detection
Sobel LoG

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5050
Canny Edge DetectionCanny Edge Detection
● Derivative of Gaussian● Non-maximum suppression
– Thin multi-pixel wide “ridges” down to single pixel
● Thresholding– Low, high edge-strength thresholds
– Accept all edges over low threshold that are connected to edge over high threshold
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5151
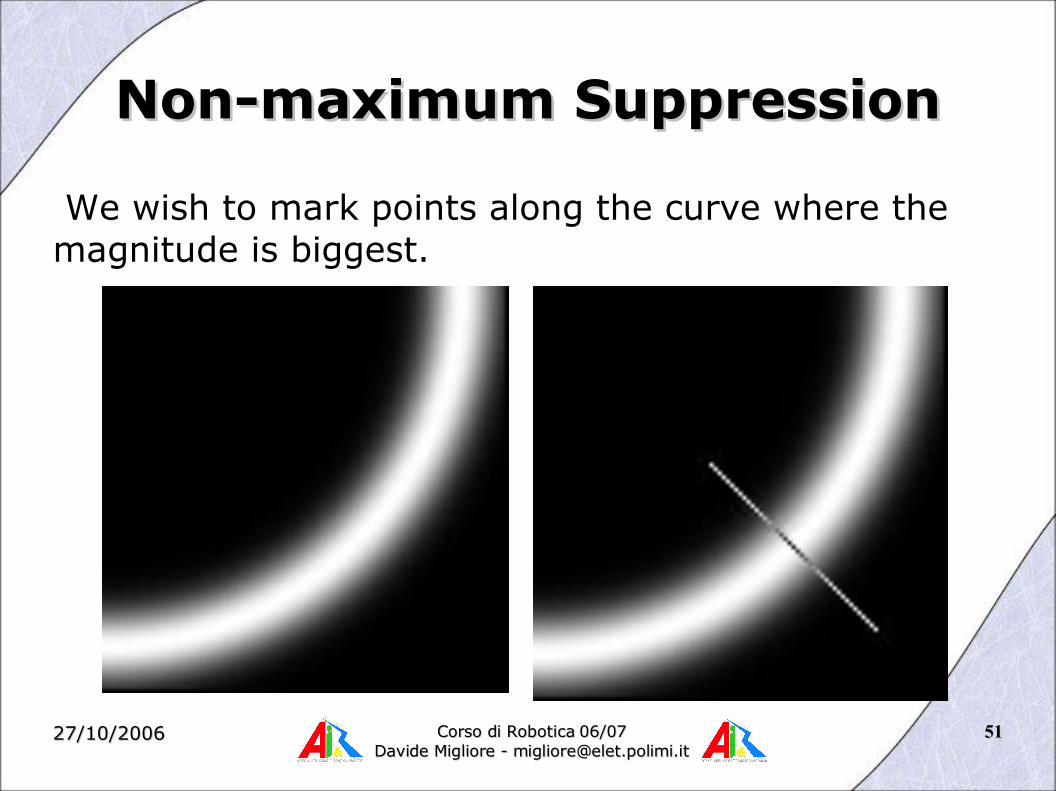
Non-maximum SuppressionNon-maximum Suppression
•We wish to mark points along the curve where the magnitude is biggest.
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5252
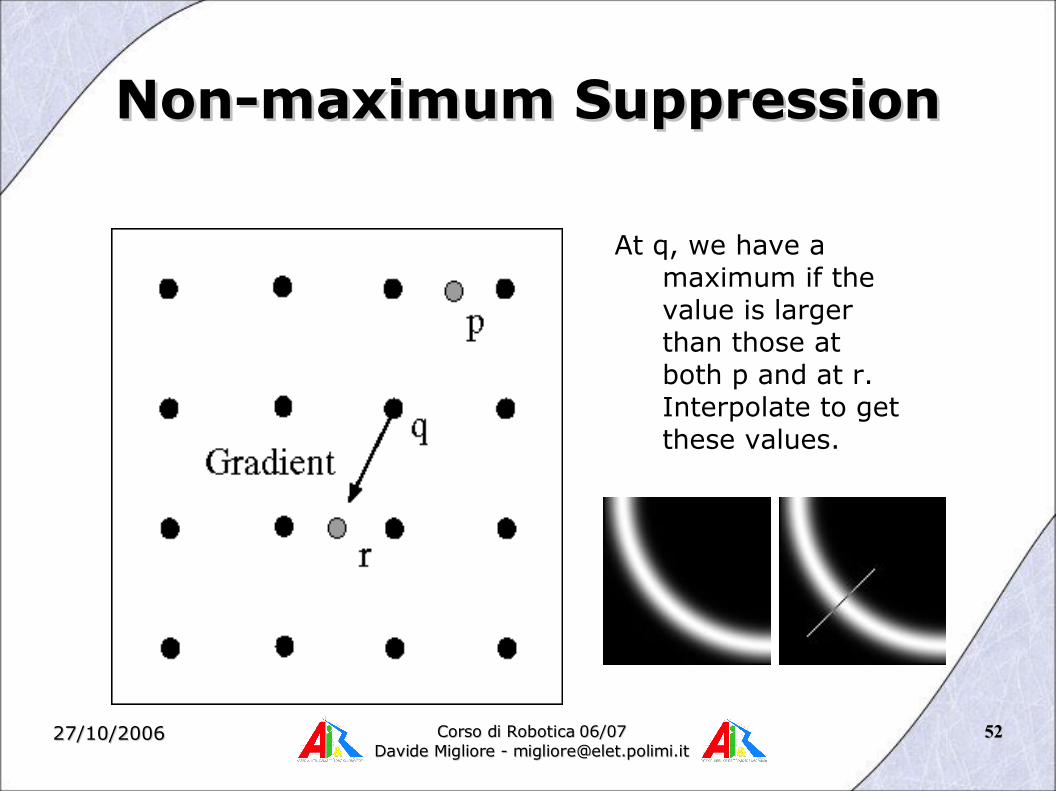
Non-maximum SuppressionNon-maximum Suppression
At q, we have a maximum if the value is larger than those at both p and at r. Interpolate to get these values.

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5353
Non-maximum SuppressionNon-maximum Suppression
Assume the marked point is an edge point. Then we construct the tangent to the edge curve (which is normal to the gradient at that point) and use this to predict the next points (here either r or s).

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5454
Non-maximum SuppressionNon-maximum Suppression
courtesy of G. Loy
Original image Gradient magnitudeNon-maxima suppressed

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5555
Edge HysteresisEdge Hysteresis
● Hysteresis: A lag or momentum factor
● Idea: Maintain two thresholds khigh and klow– Use khigh to find strong edges to start edge
chain
– Use klow to find weak edges which continue edge chain
● Typical ratio of thresholds is roughly
khigh / klow = 2

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5656
Edge HysteresisEdge Hysteresis
courtesy of G. Loy
gap is gone
Originalimage
Strongedges
only
Strong +connectedweak edges
Weakedges
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5757
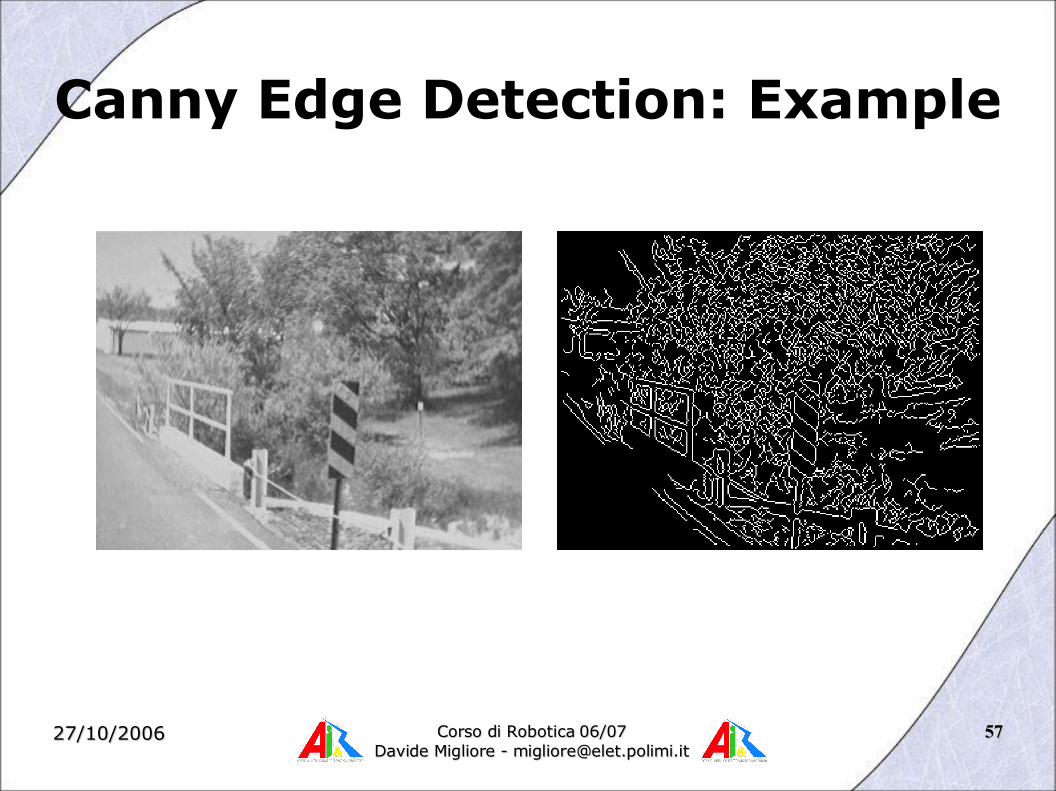
Canny Edge Detection: Example
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5858
original
Edge detection by subtraction
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
5959
smoothed (5x5 Gaussian)
Edge detection by subtraction

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6060
smoothed – original(scaled by 4, offset +128)
Why doesthis work?
Edge detection by subtraction

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6161
Laplacian of Gaussian
Gaussian delta function
Gaussian - image filter

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6262
How can we detect lines ?
An edge is not a line...

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6363
Option 1:– Search for the line at every possible
position/orientation– What is the cost of this operation?
Option 2:– Use a voting scheme: Hough transform
Finding lines in an image
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6464
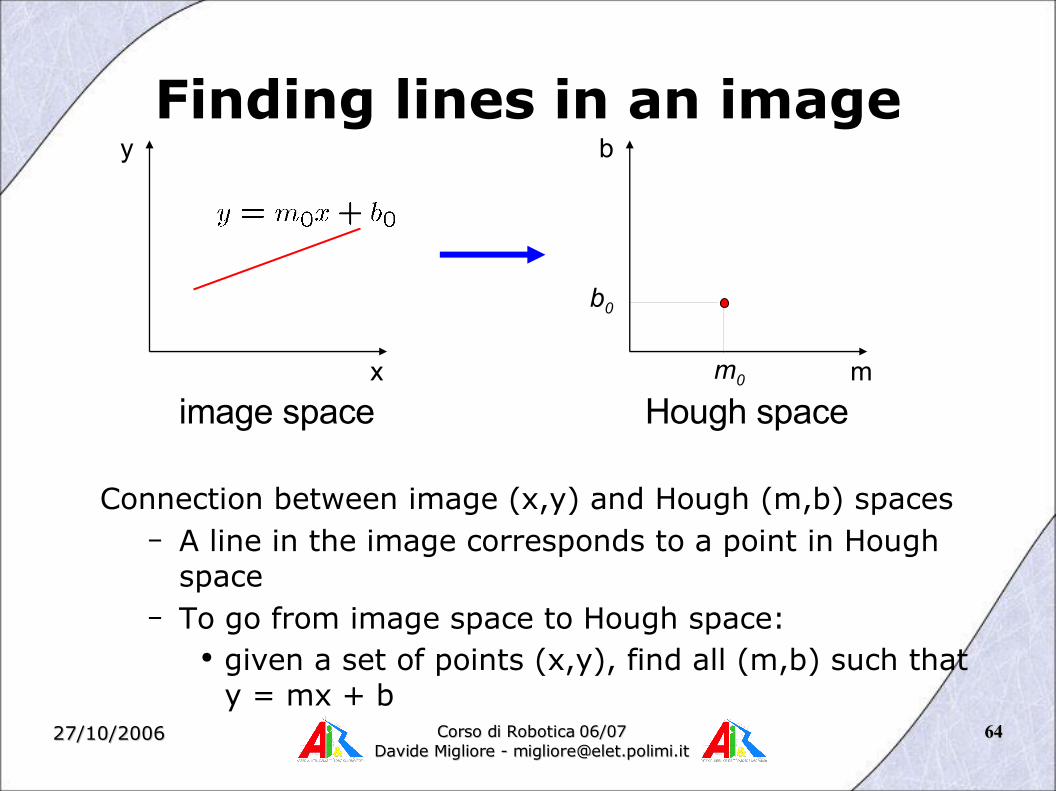
Connection between image (x,y) and Hough (m,b) spaces– A line in the image corresponds to a point in Hough
space– To go from image space to Hough space:
● given a set of points (x,y), find all (m,b) such that y = mx + b
x
y
m
b
m0
b0
image space Hough space
Finding lines in an image

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6565
Connection between image (x,y) and Hough (m,b) spaces– A line in the image corresponds to a point in Hough space– To go from image space to Hough space:
● given a set of points (x,y), find all (m,b) such that y = mx + b
– What does a point (x0, y0) in the image space map to?
x
y
m
b
image space Hough space
– A: the solutions of b = -x0m + y0
– this is a line in Hough space
x0
y0
Finding lines in an image
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6666
Hough transform algorithmHough transform algorithmTypically use a different parameterization
• d is the perpendicular distance from the line to the origin∀ θ is the angle this perpendicular makes with the x axis• Why?
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6767
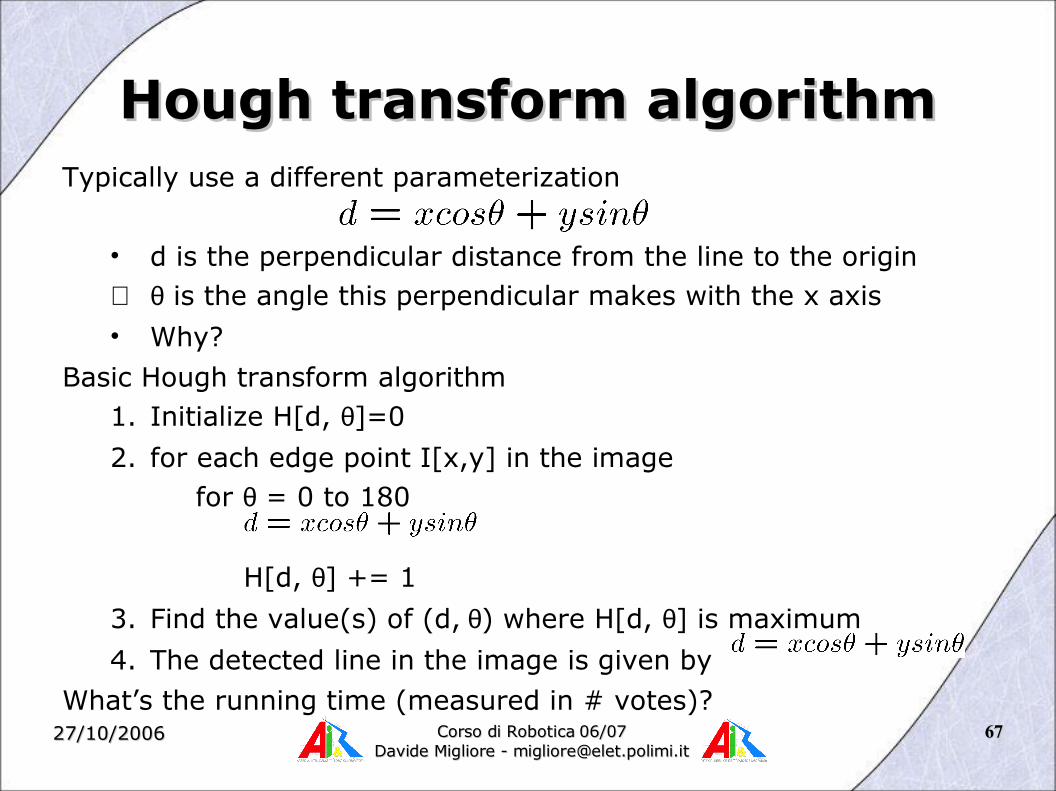
Hough transform algorithmHough transform algorithmTypically use a different parameterization
• d is the perpendicular distance from the line to the origin∀ θ is the angle this perpendicular makes with the x axis• Why?
Basic Hough transform algorithm1. Initialize H[d, θ]=0
2. for each edge point I[x,y] in the image for θ = 0 to 180
H[d, θ] += 1
3. Find the value(s) of (d, θ) where H[d, θ] is maximum
4. The detected line in the image is given by
What’s the running time (measured in # votes)?
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6868
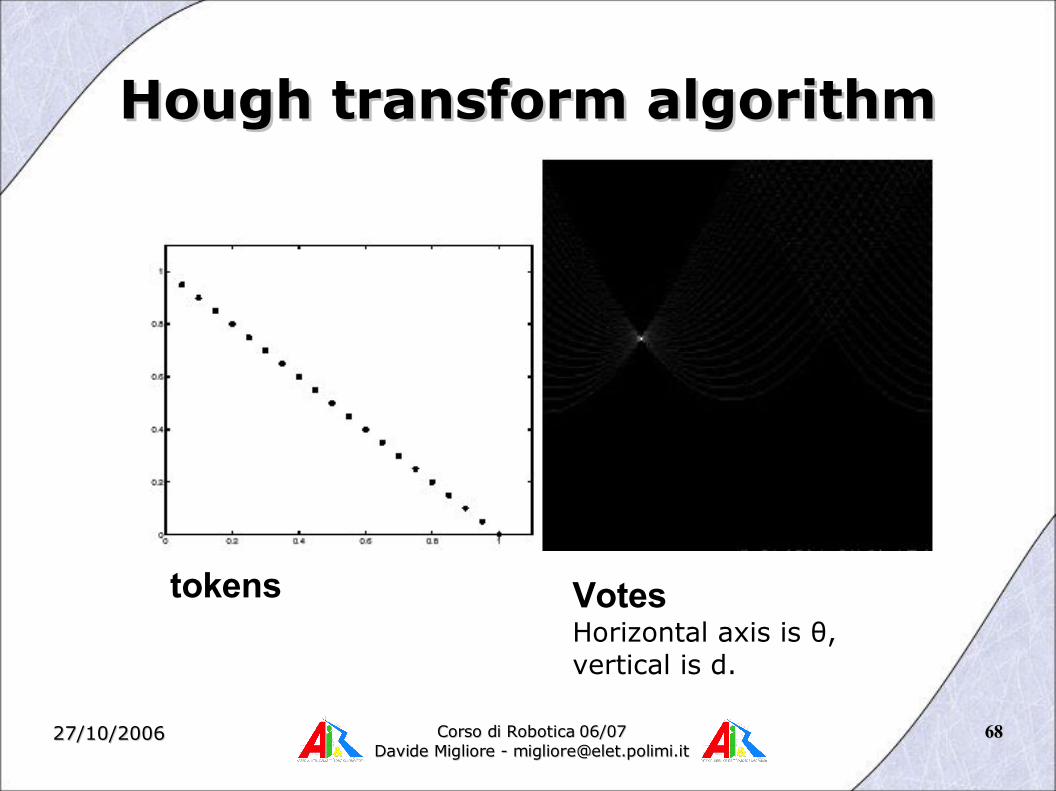
tokens VotesHorizontal axis is θ, vertical is d.
Hough transform algorithmHough transform algorithm

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
6969
tokens votes
Hough transform algorithmHough transform algorithm

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7070
Hough transform algorithmHough transform algorithm
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7171
ExtensionsExtensionsExtension 1: Use the image gradient
1. same2. for each edge point I[x,y] in the image
compute unique (d, θ) based on image gradient at (x,y)
H[d, θ] += 1
3. same4. same
What’s the running time measured in votes?
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7272
ExtensionsExtensionsExtension 1: Use the image gradient
1. same2. for each edge point I[x,y] in the image
compute unique (d, θ) based on image gradient at (x,y)
H[d, θ] += 1
3. same4. same
What’s the running time measured in votes?
Extension 2• give more votes for stronger edges
Extension 3• change the sampling of (d, θ) to give more/less resolution
Extension 4• The same procedure can be used with circles, squares, or any
other shape
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7373
Edge detectors perform poorly at corners.
Corners provide repeatable points for matching, so are worth detecting.
Idea:
• Exactly at a corner, gradient is ill defined.
• However, in the region around a corner, gradient has two or more different values.
Finding CornersFinding Corners
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7474
Corner DetectionCorner Detection● Basic idea: Find points where two edges meet
—i.e., high gradient in orthogonal directions● Examine gradient over window (Shi & Tomasi,
1994)
● Edge strength encoded by eigenvalues ; corner is where over threshold
● Harris corners (Harris & Stephens, 1988), Susan corners (Smith & Brady, 1997)

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7575
The Harris corner detectorThe Harris corner detector
=
∑∑∑∑
2
2
yyx
yxx
III
IIIC
Form the second-moment matrix:
Sum over a small region around the hypothetical corner
Gradient with respect to x, times gradient with respect to y
Matrix is symmetricSlide credit: David Jacobs
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7676
Simple CaseSimple Case
=
=
∑∑∑∑
2
12
2
0
0
λλ
yyx
yxx
III
IIIC
First, consider case where:
This means dominant gradient directions align with x or y axis
If either λ is close to 0, then this is not a corner, so look for locations where both are large.

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7777
General CaseGeneral Case
It can be shown that since C is symmetric:
RRC
= −
2
11
0
0
λλ
So every case is like a rotated version of the one on last slide.

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7878
So, to detect cornersSo, to detect corners
● Filter image with Gaussian to reduce noise● Compute magnitude of the x and y gradients at
each pixel● Construct C in a window around each pixel
(Harris uses a Gaussian window – just blur)● Solve for product of λs (determinant of C)
● If λs are both big (product reaches local maximum and is above threshold), we have a corner (Harris also checks that ratio of λs is not too high)
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
7979
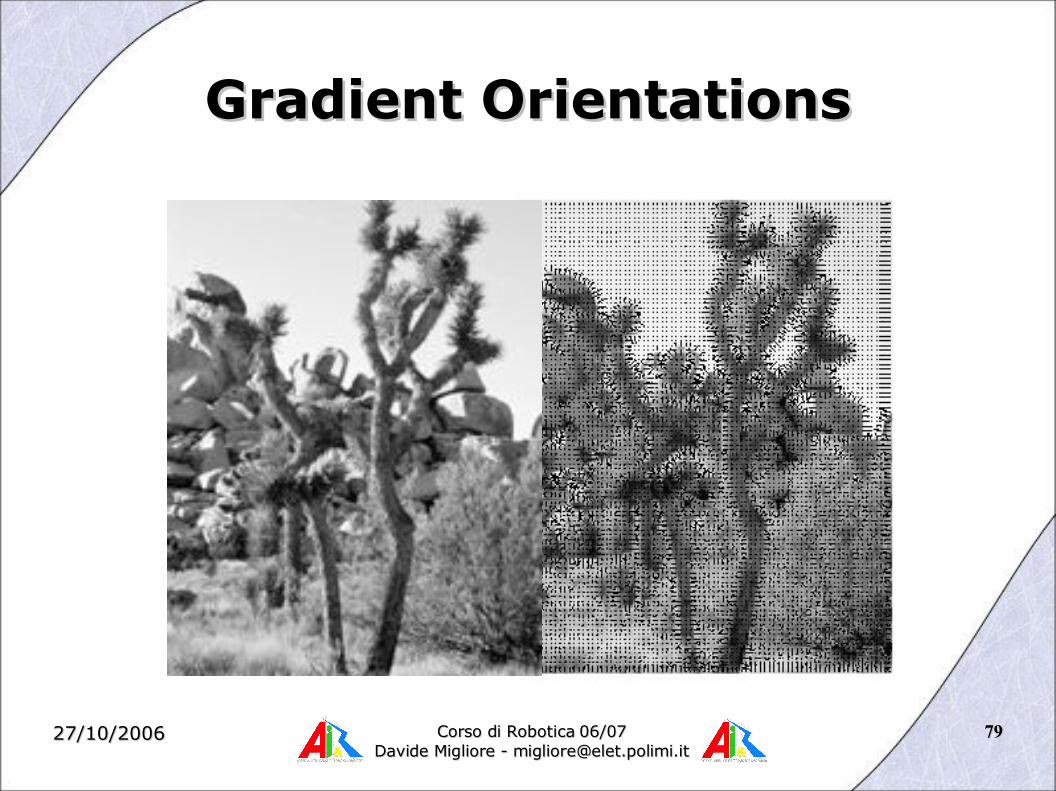
Gradient OrientationsGradient Orientations

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
8080
Step 1: Gradient OrientationsStep 1: Gradient Orientations
27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
8181
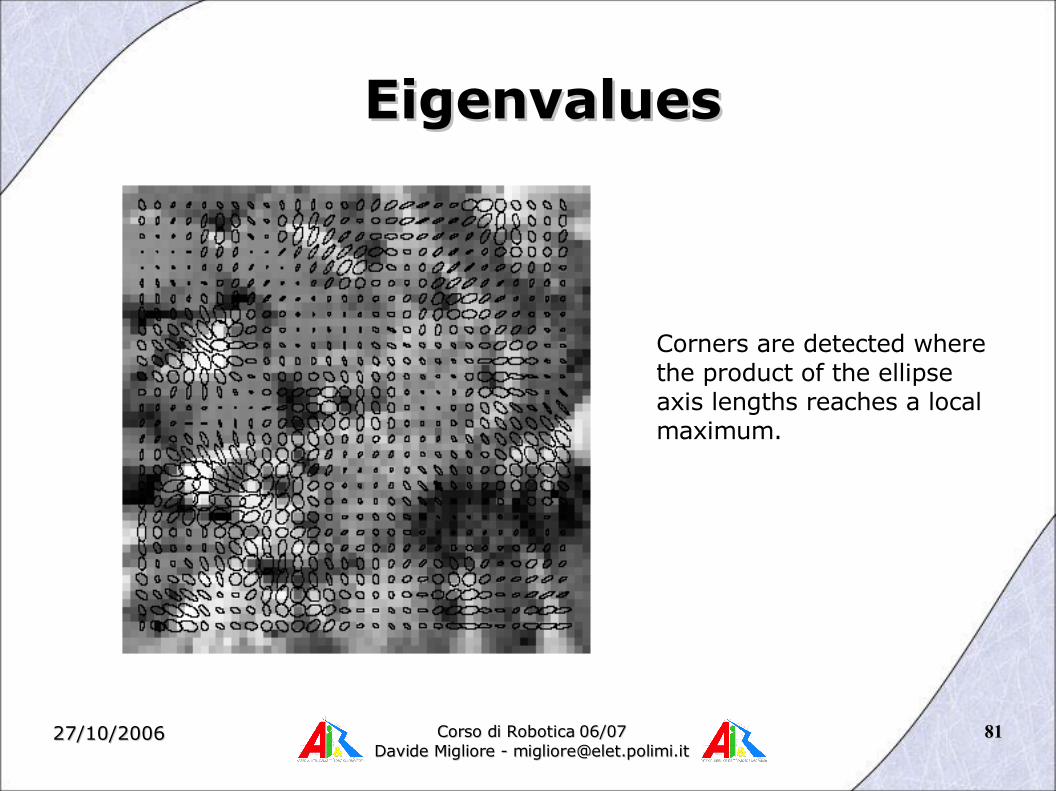
EigenvaluesEigenvalues
Corners are detected where the product of the ellipse axis lengths reaches a local maximum.

27/10/200627/10/2006 Corso di Robotica 06/07Corso di Robotica 06/07Davide Migliore - [email protected] Migliore - [email protected]
8282
Example: Corner DetectionExample: Corner Detection
courtesy of S. Smith
SUSAN corners