REPORT SOLAR DRONI 08 07 2015 -FINAL - core.ac.uk · 5.1 Scelta del Data Link fisico ... autonoma...
33
RAPPORTO TECNICO Prototipi di sistemi semi‐autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino‐costiere Ennio Marsella 1 , Laura Giordano 1 , Lorenza Evangelista 1 , Antonio Iengo 1 , Rosanna Ferraro 1 Alessandro Di Filippo 1 , Aniello Coppola 1 1 IAMC ‐ CNR (Istituto per l'Ambiente Marino Costiero, Napoli) LUGLIO 2015
Transcript of REPORT SOLAR DRONI 08 07 2015 -FINAL - core.ac.uk · 5.1 Scelta del Data Link fisico ... autonoma...

RAPPORTOTECNICOPrototipidisistemisemi‐autonomiapilotaggioremotoper
ilmonitoraggioambientaleinareemarino‐costiere
EnnioMarsella1,LauraGiordano1,LorenzaEvangelista1,AntonioIengo1,RosannaFerraro1AlessandroDiFilippo1,AnielloCoppola1
1IAMC‐CNR(Istitutoperl'AmbienteMarinoCostiero,Napoli)
LUGLIO2015

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
1
1.Introduzione..................................................................................................................................................2
2.Sistemiautonomiesemi‐autonomiapilotaggioremoto:statodell’arte.................................4
3.PrototipodiUnmannedAerialVehicle(UAV)....................................................................................83.1IngegnerizzazionedelPayload.........................................................................................................................9
4.PrototipodiUnmannedSurfaceMarineVehicle(UMV)..............................................................144.1IngegnerizzazionedelPayload.......................................................................................................................15
5.GroundControlStation...........................................................................................................................195.1 SceltadelDataLinkfisico..........................................................................................................................22
6.Conclusioni..................................................................................................................................................23
Appendice.........................................................................................................................................................24
Riferimenti.......................................................................................................................................................32

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
2
1.IntroduzioneIlpresenterapportosintetizzailprogettoelosviluppodinuovetecnologie,finalizzateallarealizzazionediunSistemaIntegratodiprototipidiveicolisemi‐autonomi(UnmannedVehicles,UVs,ovverodroni)perilrilevamentoeilmonitoraggioavanzatodiparametrigeofisiciedambientaliinareemarino‐costiere.Talesistemaè stato sviluppatopresso l'Istitutoper l'AmbienteMarinoCostierodelConsiglioNazionaledelle Ricerche (IAMC‐CNR), nell’ambito di due progetti PON (Programma Operativo Nazionale 2007‐2013): “Piattaforma tecnologica avanzata per rilievi di parametri geofisici ed ambientali in mare(PON01_02812PITAM)”e“SistemieTecnologieIntegrateperilrilevamentoemonitoraggioavanzatodiparametrigeofisiciedambientaliinareemarino‐costiere(PON01_02848STIGEAC)”.L’aspetto innovativo di tale sistema risiede nello sviluppo di una architettura tecnologica, cheintegra un Unmanned Aerial Vehicle (UAV) e due Unmanned Surface Marine Vehicles (UMV)(drone aereo e drone marino rispettivamente). Tali prototipi si inseriscono in una piattaformatecnologica più ampia e multi‐purporse per indagini ed attività di monitoraggio lungo costa, checomprende anche un jack‐upbarge (piattaforma autosollevante) ed una fastcargovessel (Figura 1.1).Questiultiminonsarannooggettodidiscussionenelpresenterapportotecnico.Nell’ambitodeidueprogetti,sonostaterealizzateleseguentiattività:1. Ingegnerizzazioneecustomizzazionediunprototipodidroneaereoconpayloadmassimodi26kg;2. Progetto,ingegnerizzazioneerealizzazionedidueprototopididronimarini;3. Modellazione, sviluppo ed integrazione di una architettura hardware/software per la gestione ed il
controllodellasensoristicascientificaimpiegatasuidronieperilgovernodeglistessi(pianificazionedimissione).
Molte delle attività di progettazione e sviluppo hanno riguardato lamodellazione funzionale e relativaingegnerizzazione,suidroni,deipayloaddestinatiadaccoglierelastrumentazionescientificasceltaperleoperazionidirilevamentoemonitoraggioambientale.Sonostatirealizzati,inoltre,sistemiinformaticiperlagestionecomplessivadeidronicolfinedirenderlidifacileutilizzoedirapidoimpiegoanchedapersonalenonformato.Inquestoscenario,glioperatoriaterrapossonopianificareegestirelamissione(siaaereachemarina)assistitidalsoftwarecheconsenteancheilcontrollo del corretto svolgimento della stessa e la visualizzazione in tempo reale dei dati scientificiacquisiti.I sistemi informatici di gestione e controllo sono logicamente collocati in una “stazione base” a terra(conosciutacomeGroundControlStation‐GCS),compostadadiversimoduli,siahardwaresiasoftware,che permette quindi il controllo delle manovre e la guida a distanza sia in modalità completamenteautonoma(mediantel’indicazionediwaypointgeoreferenziati)siainmodalitàsemi‐autonoma(governormodeperildroneaereo)oconl’interventodirettodeglioperatori(piloti).Dopounabreve introduzionesullostatodell’arte inmateriadi sistemiUVs(§2), il rapporto illustraneldettaglio l’ingegnerizzazione di ciascun veicolo per operazioni di monitoraggio ambientale (§3;4) e leprincipalicaratteristichedellaGCS(§5).

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
3
Percompletezza,inappendicesarannorichiamatiiprincipaliarticolidelregolamentoENACattualmenteinvigoreperiSAPR(SistemiAereomobiliaPilotaggioRemoto).
Figura1.1:Sistemaditecnologieintegrateperilrilevamentoeilmonitoraggioavanzatodiparametrigeofisiciedambientaliinareemarino‐costiere.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
4
2. Sistemi autonomi e semi‐autonomi a pilotaggio remoto: statodell’arteDallaricognizioneintempodiguerraalleoperazionidiprevenzioneeinterventodacatastrofinaturali,gliUVs stannotrovandosempremaggiorediffusioneanche invirtùdelrapidosviluppo tecnologicoedellesoluzioniavanzatecheloaccompagnano.L’usodipiattaformeUVssoprattuttonelsettoredellageomatica,starappresentandounnotevolepassoinavantiinterminidivelocitàdiacquisizioniedicompletezzadelrisultato, fornendodatiaccuratiedettagliati.Leapplicazionipiùrichieste, infatti, sononel settoredellescienze forestali (calcolo di biomasse o monitoraggio), nell’archeologia e nei beni culturali(documentazione e modellazione 3D), nell’agricoltura, geologia ed ambiente (dissesti, volumi di cava,ecc.), nel controllo in ambienti cittadini (dispersioni termiche, potenziale fotovoltaico, manifestazioni,sicurezza),ecc. Inoltre ildroneèunostrumentodi ispezioneutilea fornire, conunsupportovisivo, lostatodisitidifficilidaispezionarepercollocazioneedimensioni.Adesempio,essoèingradodieffettuaremonitoraggidisitipericolosisiaperlapresenzadisostanzetossicheoperladifficoltadiraggiungimentoacausadiavversecondizioniambientalioperl’asperitàdelterreno.Laproceduradiispezionecondrone,quindi, permette di valutare preventivamente le condizioni di pericolosità e nocività ambientali,consentendoun’eventualeinterventodellepersonesoloincondizionidisicurezza.Sebbene nella comunità scientifica il termine drone sia comunemente utilizzato per indicare unqualsivoglia velivolo a pilotaggio remoto, sia esso aereo che marino, il primo antenato del drone varicercatonelvelivoloaereoAerialTarget(1916)controllatotramiteonderadioesubitoseguitodalaereoHewitt–Sperrynotocomela“bombavolante”,comandatoattraversogiroscopi.Con fini prettamente militari, durante la prima guerra mondiale si cercarono nuove soluzioni peraffermare i velivoli senza pilota, ma solo nel secondo conflitto mondiale Reginald Denny (attore eappassionatomodellista)sviluppòiprimielicotteriradiocontrollatisulargascala.Nelcorsodellasecondaguerramondiale,negliUSA, idronivenneroprodotti in largascala (circa15.000modelli),mentreènelperiododellaguerra freddache ledimensioni iniziaronoa ridursi con l’usodi tecnologiemanoamanosemprepiùspinte.DuranteilconflittoinVietnam,latecnologiadeidronidivennesemprepiùsofisticata,perconoscereunosvilupposenzapariconilconflittoinAfghanistan.Attualmenteesistonodiversetipologiedidroniaerei(denominatiancheAeromobileaPilotaggioRemoto,APR), classificati in funzione delle dimensioni, peso, motore, carico trasportabile (‘payload’), massimadistanzapercorribileequotadivolo.L’UVSInternational(www.uvs‐international.org) individua,infunzionedell’impiego,leseguenticategorie:• UAV tattici: velivoli con caratteristiche molto diverse fra loro per massa (1‐1000 kg), distanzapercorribile (1‐500 km), quota (100‐5000 m) e autonomia di volo (da un’ora a 2‐3 giorni). Le duesottocategorie ‘mini‐‘ (<20 kg) e ‘micro‐UAV’ (<2 kg) sono quelle a cui appartengono la grandemaggioranzadeivelivoliincommercioutilizzatiperfinigeomatici.•UAV strategici: mezzi utilizzati per missioni nella stratosfera e nella troposfera (fino a 20000m diquota)incuiladuratadelvolopuòarrivarea2‐4giorni.•UAVperscopispeciali:mezziutilizzatiperfinalitàbelliche.Per ciascuna categoria, l’EuropeanAssociationofUnmannedVehicles Systems (EUROUVS,AssociazioneEuropeadegliUAV)fornisceunaulterioreclassificazione,riportatainTabella1.1.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
5
Tabella2.1.ClassificazioneUAVpropostadall’EuropeanAssociationofUnmannedVehiclesSystems
Daunpuntodivistapuramentemeccanico,èpossibiledistinguereidronia:• Struttura a eliche (multi‐rotori): si caratterizza per la presenza di una o più eliche, solitamentemontate su bracci estraibili, che permettono al drone di comportarsi comeun elicottero. In tale classericadono gli ottocotteri, esacotteri e quadrocotteri. Tali droni possonomantenere ferma la posizione amezz’aria,effettuareviraterepentine,volareindirezioneobliqua.•Strutturaplanare:piùsimiliagliaeroplanicheaglielicotteri,questivelivolihannoalmassimo2elicheegrandiali.Servonosoprattuttoperlelunghedistanze,perchépossonosfruttarecorrentieflussid’aria•Ibridi:sisteminonsolopensatipervolare,maanchepermuoversisul terrenograzieallapresenzadidueoquattroruotemotriciocingoli.Allostessomodo,esistonodronicapacidieffettuarepiccolisalti,cosìdasuperareagilmentescaleoaltriostacoli.Infigura2.1,siriportanoalcuneimmaginideidroniciviliattualmenteincommercio.
Figura2.1:Esempididroniaereiattualmenteincommercio
L’interesseperidronicivilièoggicrescentealivelloglobale.Sistimachevisiano32Paesiimpegnatiinprogrammidisviluppoediperfezionamentodellatecnologia,mentre43Paesisianoeffettiviutilizzatoridi velivoli UAV.Uno studio condotto nel 2007dalla commissione europea (Frost& Sullivan) riporta le

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
6
previsioni di sviluppo ed impiego dei droni aerei fino al 2017. Come si può vedere dall’istogrammariportatoin Figura 2.2, in Italia il picco di diffusione degli UAV è previsto proprio nel 2015 ed interessaprincipalmenteiMUAVperfinigeomatici.
Figura2.2:PrevisionidisviluppodeidroniaereiinItalia(Frost&Sullivan,2007)
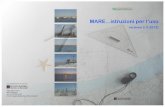
Sebbene ilmaggiore sviluppo sia rivoltoaidroniaerei, èpossibile trovare anchedroni concepitiper lanavigazione superficiale (UMV o anche detti Unmanned Surface Vessel Vehicle). Uno dei primi dronimarini sviluppati è stato ARTEMIS (MIT) (Figura 2.3); lungo circa 1.37m, è munito di un sistema dipropulsioneformatodaduemotorielettriciconuntimoneservo‐attuato.Taledroneèstatounodeiprimiad avere un controllo automatico e capacità di navigazione autonoma per punti di riferimento(waypoints),oltreallapossibilitàdioperareinautonomiaperl’acquisizionedidatiidrografici.Seguironodroniaformadicatamarano,perincrementarelastabilitàtrasversale,peraverepiùcapacitàdipayloaderidondanzaperquantoriguardalagalleggiabilità.Fraquestisiannoveranol’AutoCAT,ilDelfimsviluppato dell'Istituto Superiore Tecnico (Portogallo) negli anni 1997‐2000 nell’ambito del progettoASIMOV (Advanced System Integration for Managing the coordinated operation of robotic OceanVehicles), il ROAZ ed infine l’HydroNET realizzato nell’ambito dell’omonimo progetto Europeo FP7, dilunghezzacomplessivaparia1.9melalarghezzadi1.1m.
Di recente sviluppo sono invece i droni Swordfish, Messin e Springer. Il drone Swordfish, progettatodall’Istituto Superiore di Ingegneria di Porto, é un catamaranoformatodaduescafidipolietileneadaltadensità , connessidadue tubi in alluminio. La struttura centrale è fissata ai due tubi e serve pertrasportare il payload oltre che tutta l’elettronica, sistemata all’interno di custodie a tenuta stagnaresistenti all’acqua, alla sabbia e alla polvere. Il drone Messin è stato sviluppato dall’Università diRostock; è un catamarano dedicato a trasportare sensori per operazioni di campionamento di tipooceanografico,idrologicoocartografico.Ilveicoloèadattoadoperareinacquemoltobasse,senzaavereeffetti distruttivi sull’ambientemarino. Il sistema di navigazione autonoma permette di seguire rottepre‐programmate in maniera efficiente. Per quanto riguarda le caratteristiche tecniche, Messin è uncatamarano formatodaduescafi invetroresinadi lunghezza3,3m, larghezza1.8meconunpescaggiomassimodi40cm.LoSpringerè statosviluppatonel2004dalgruppoMarineand IndustrialDynamicAnalysis(MIDAS)dell’UniversitàdiPlymouthperil trackingdiagenti inquinanti,pereffettuaresurveyidrogeografiche in fiumi, riserve idriche e acque costiere. Come piattaformamarina, Springer è statoprogettato per essere utilizzato anche come test‐bed per ricerca in ambito di sistemi di navigazione

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
7
intelligenteeperiltestingdinuovetecnologieperisensori.Ladifferenzaprincipaleconuncatamaranoè che la parte che garantisce la galleggiabilità del veicolo è praticamente totalmente immersa, ed ilveicolo presenta un profilomolto ridotto a livello della linea di galleggiamento. Se da un lato questodesignpermettediaverediavereunamaggiorestabilitàadaltevelocitàeancheincondizionidimareagitato, dall’altro lato richiede un sistema di controllo più complesso, un pescaggio e costi dimanutenzionepiù elevati. Il droneè lungo circa4m, largo2.3m, epesa circa600Kg.Ciascuno scafoèdiviso in tre compartimenti stagni. Il sistemadi comando, navigazione e controllo è alloggiatodentrocustodieatenutastagnae fissatonellapartesuperiore, inmododa facilitarne larimozionedurante leoperazioniinporto.
Figura2.3:Esempididronimariniincommercio

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
8
3.PrototipodiUnmannedAerialVehicle(UAV)IlprototipodiUAVingegnerizzatodall’IAMC‐CNRèmossodaunmotoreaduetempidi19.5Hpdipotenzaalimentato a benzina (miscela conolio lubrificante al 2%) che aziona due rotori sincronizzati cui sonoapplicatelepale.Talirotorisonocostruitiinmododaesseresolidaliaduealberidivergentil’unorispettoall’altro(perevitareinterferenzanelletraiettorie).Questaconfigurazioneditipo"sincrottero"conferiscealdronealtastabilitàeottimecapacitàdisollevamento.Lesceltetecnichechehannoportatoall’ingegnerizzazionedelprototipobasatosuquestapiattaformasonomotivatedadiverseconsiderazioni,alcunedellequalipossoesseresintetizzatein: capacitàdivolototalmenteautonomodaldecollo finoall'atterraggio,conpossibilitàdi interventoda
partedell'operatoreinqualsiasifasedellamissione; elevata stabilità durante il volo a punto fisso (hovering) grazie alla caratteristica dell’approccio a
“sincrottero”(senzarotoreanticoppiadicoda); capacità di atterrare in sicurezzamediante lamanovra di autorotazione, in completa autonomia, in
casodigraveavaria(enginefault).In figura3.1 si riportano alcune immagini del drone,mentre le specifiche tecniche sono sintetizzate intabella3.1:
Tabella3.1:Specifichetecnichedelsincrottero,prototipodell’IAMC
Dimensioni(LxWxH) 2170x700x980mmDiametroMR 2x2800mmPeso 37kgCapacitàcarburate 6Litri(max20Litri)Autonomiacon6Litri(20Litri) 50min(200min)Payloadcon6Litri(20Litri) 26kg(18kg)Velocitàmassima 80km/hTipodicarburante Benzina(2%oliolubrificante)Generatore 200WOAT "‐10°C/+35°C"MaxCrosswind 24Km/hAreaatterraggio 5x5VoloCompletamenteautonomo SI
Il sistemapermette la gestionedella telemetria completa,ovvero il controllodelle coordinate, livellodicarburante,energiabatterie,altitudine,velocitàalsuolo,etc.E’predispostounsistemadidatalinkconfrequenzeoperativedi400‐450Mhzchepermetteunadistanzateoricadicontrollofinoa50km.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
9
Figura3.1:Immaginideldroneaereosviluppatodell’IAMC‐CNR
3.1IngegnerizzazionedelPayloadIlpayloadinstallatosuldroneaereoèfinalizzatoadattivitàdimonitoraggioambientaleedispezionedelterritorio.Inparticolare, losviluppotecnologiconell'ambitodellasensoristica,permettediequipaggiaredroniaereiconmolteplicicarichi,nellospettrodelvisibile(lecameredigitalicompattee/oprofessionali),dell'infrarosso (camere termiche), cameremulti spettrali finoadarrivarea sensoripiùevoluti comeadesempiosensoriLidaroperilmonitoraggiodellaqualitàdell'aria.Isensoriinstallatisuldroneaereosono,quindi,iseguenti:
unLaserScannercontecnologiaLIDARperl’esecuzionedirilievitopograficiadaltarisoluzione; un sistema con termo‐sensore integrato per rilievi ambientali capace di analizzare le proprietà
termichedellasuperficieterrestreedeglioggettipresentisudiessa; unsistemaconcamerareflexperripreseescattiaerei. unsistemaconvideocameregiroscopicheadaltarisoluzioneperacquisiretredifferentipuntidi
vistaduranteilvoloLa scelta dello specifico modello per ogni sensore è stata soggetta ad una verifica della compatibilitàmeccanicaedelettrica(Figura3.2).Per i rilievi topografici il laser scanner RIEGL VUX1–SYS, leggero e compatto, è caratterizzato da unaaccuratezza e precisione pari a 25mm a 150mt di distanza, una velocità di scansione fino a 200scansioni/secondoeunavelocitàdiacquisizionefinoa500.000punti/sec.Laquotadivologarantitaèdi1000piedi,mentreilcampodivistafinoa300°consenteognitipodiacquisizione.LaconfigurazioneSYS

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
10
prevedelapresenzadiunaIMUApplanix(InertialMeasurementUnit)diunafotocameraNIKOND500conottica fissa e mounting frame dedicato e di una Control Unit proprietaria per i collegamenti deicomponenti,l’alimentazioneelostoragedeidatiacquisiti.Latermocamerasceltaè laFLIRA655SCconrisoluzionedi640x480pixelesensibiliàtermica<50mK,che permette di catturare anche i minimi dettagli e le informazioni sulle più piccole differenze ditemperatura.Inoltre,lacaratteristicadelwindowingadaltavelocitàdell'infrarossoconsentediacquisireimmaginiconfrequenzefinoa200Hz.Infine,ilsistemaperripreseescattiaereiècompostodatrevideocamereGoProHero4+tregimbalH3‐3DdellaZENMUSEeunafotocamerareflexCANON5DMarkIII+gimbalMKHiSightSLR2.
(a) (b) (c)
Figura3.2:Payloaddroneaereo:(a)laserscanner,(b)termocamerae(c)videocamera.
LevideocamereGoProHero4sonoingradodiregistrarevideoin4Ka30fpse2.7Ka50fps.E’possibilecatturareimmaginiadunarisoluzionedi12MP,conrafficheda30fotoalsecondo.Lamodalitàtime‐lapsepermettediscattarefotogrammicontinuiadunacostantediscattoogni0.5,1,2,5,10,30o60secondi.LaCANON5DMarkIIIèunafotocamerareflexconmessaafuocoautomaticaa61puntiescatticontinuia6fps. Ilsensoreapienoformatoèda22,3megapixel,videoFullHD,modalitàHDRperunpesodicirca0.95Kg.IlprototipoUAVrisultaparticolarmenteversatiledalpuntodivistadiimpiegooperativo:ilpayload,l’elettronicadicontrolloelebatteriepossonoessereinstallatesecondodueconfigurazioni,inragionedellatipologiadimissionedacompiere.
Configurazione1:RieglVuxSys(compostoda:LidarVux‐1;ControlUnit;Imu,FotocameraNikonD800);Numero2GoProHero4efotocameraCANON5DMARKIII(Figura3.3,3.4)

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
11
Figura3.3:Layoutconfigurazione1vistaISO
CANON5DMarkIII
Riegl VUX‐1
GimbalTAROT+GoProHero4
NikonD800

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
12
Figura3.4Layoutconfigurazione1vistasotto
Configurazione2:RieglVuxSys(compostodaLidarVux‐1;ControlUnit;Imu;FotocameraNikonD800);Numero3GoProHero4;TermocameraFlirA655sc(Figura3.5)
Figura3.5:Layoutconfigurazione2vistaISO
GimbalTAROT+GoProHero4
GimbalTAROT+GoProHero4
IMU
PCJetwayNF9I2550
FlirA655sc
GoPro
RieglVUX‐
GimbalTAROT+GoProHero4

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
13
Stantelasensoristicainstallatasull’UAV,iprincipalicampidiapplicazionepossonoessereilmonitoraggioambientale,iltelerilevamento,lafotogrammetria,lapubblicasicurezza,nonchélagestionediemergenze.Nell’ambito della pubblica sicurezza e della gestionedi emergenze si pensadi far ricorso a sistemi piùsofisticatichepermettono,intemporeale,diprenderedelledecisionigraziealleimmaginioaivideochevengonotrasmessiaduncentrodigestioneoperativo(ControlRoom).Perquantoriguarda,invece,ilmonitoraggioambientale,telerilevamentoefotogrammetria,sièpensatodiinstallarepiù sensori contemporaneamente chepermettonodi rilevareadesempio le concentrazionidisostanze nocive, ma allo stesso tempo di catturare immagini a lunghezza d’onda differenti (RGB, IR etermico).Esempiparticolariinquestiultimiambitipossonoessereladeterminazionedellabiomassadiunbosco, la valutazione della crescita di una coltura, la misurazione della concentrazione di sostanzeinquinanti, il monitoraggio di vulcani, la creazione di modelli 3D per rilievi archeologici ed eventualeproduzione cartografica, ma anche l’aggiornamento mappe catastali ed infine il monitoraggio di abusiedilizi.In figura3.6 è riportata unaprevisionedella segmentazione delmercato dei droni nelmondo (Frost eSullivan)
Figura3.6:PrevisioneapplicazioniUAV2008‐2020nelmondoedapplicazionitecniche

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
14
4.PrototipodiUnmannedSurfaceMarineVehicle(UMV)
Lo sviluppo del prototipo di UMV ha riguardato sia le attività di progettazione che quelle diingegnerizzazione.La progettazione dello scafo, in particolare, è stata guidata dall’esigenza di ottenere un UMV dalledimensionicontenutechenepermettessel’impiegoancheinmancanzadispecifichestrutturedisupportologistico a terra. La configurazione a catamarano e le dimensioni ottenute sono il risultato delle scelteoperatesullabasedellecaratteristichedelpayload,conparticolareriguardoalladistribuzioneealpesodellostesso.Icalcolieleelaborazioni,tenutocontoquindidelleproblematicherelativeallagalleggiabilità,stabilità,resistenzaalmotoemanovrabilità,hannocondottoalladeterminazionedelpayloadutentepariacirca35kg.Dall’analisi dello stato dell’arte (§2), sono stati individuati i seguenti elementi utili ai fini dellaprogettazionedell’UMVnelsuocomplesso:
1. QuasituttigliUMVsonosprovvistiditimone,utilizzandoinveceunacoppiadipropulsoriconazionedi tipoazimutale,ovverocon leelicheche forniscono laspintapropulsivamodulabilesulpiano orizzontale. Ogni gruppo propulsivo è montato sul singolo scafo ed è controllabile inmaniera autonoma. Questa sistemazione aumenta in particolar modo le capacità di manovra abassa velocità dell’UMV e allo stesso tempo consente di evitare l’installazione dei timoni e deirelativimeccanismiperilcomandodiessi,riducendocosìlepartimobilisoggetteadusura.
2. LamaggiorpartedegliUMV impiega imotorielettrici accoppiati direttamente ai propulsoriazimutali,eliminandoiproblemiconnessiall'usodegliassicheattraversanogliscafipercollegareilsingolomotoreall'elica.
3. LamaggiorpartedegliUMVèequipaggiataconmotoridotatiallorointernodell'opportunaelettronica di potenza e housing protettivo. Il collegamento con l’elettronica di controlloavvienecosìmedianteunsolocavo.
4. L'elettronica di controllo può essere collocata all'interno dei due scafi oppure esserecontenuta inappositecustodiestagne, a lorovolta fissateall'esternodegli scafi sulpontedelcatamarano. La scelta più idonea risulta essere quella di utilizzare appositi contenitori stagni,resistentiall’acqua,allasabbiaeallapolvere.Questascelta,effettuataanchedaROAZII,Sword_sh,MESSINeSpringerhadiversivantaggi:
L'elettronica risulta alloggiata sul ponte del UMV all'interno delle custodie stagne e perciòagevolmenteraggiungibileperleoperazionidimanutenzione.
Le custodie stagne possono essere facilmente rimosse dal ponte durante il trasporto delcatamarano.
Nonènecessariocrearealloggiamentistagniall'internodegliscafiaccessibilidall'esterno.
Avallediquantodescritto, sièdecisodidotare l’UMVdiduegruppipropulsivi–dettianche thruster–direttamente collegati ciascuno ai motori elettrici, allocati uno per scafo, e di non prevedere i timonitradizionali. In questomodo è possibile effettuare le virate sfruttando il controllo differenziale dei duemotori, consentendo ampia libertà di manovra all’UMV. Questo tipo di governo consente all’UMV dioperaremanovredi rotazione conun raggiodi curvaturamolto ridotto. La soluzione elimina inoltre lanecessitàdiprovvedere,attraversol’installazionedialtricomponenti,all’attuazionedelmovimentodelle

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
15
partimobili‐itimoni‐convantaggiinterminidipesofinaleediaffidabilitàneltempo,avendoridottoalminimo le parti inmovimento. L’elettronica di controllo è contenuta all’internodi custodie stagne, conelevatecaratteristichedirobustezzaeresistentiall’acqua,allasabbiaeallapolvere.Latabella4.1elencaleprincipalicaratteristichedell’UMV(Figura4.1).
Tabella4.1:CaratteristichetecnichedegliUMVdell’IAMC
Lunghezza 2.00mLarghezza 1.50mAltezzascafi 0.70mAltezza(conrollbarinposizione) 1.20mPescaggio 0.4m@120kgMassascafo 35kgMassathrusters 10kgMassaboxcontrollo 10kgMassaboxbatterie 30kgMassapayloadinstallabile 35kgPotenzaMotori 2x300WSpintaMotoriinavanti 2x13kgfSpintaMotoriinreverse 2x12.8kgfTensionedialimentazione(min‐max) 35‐55VTensionedialimentazione(nominale) 46.8VCapacità 69.6AhTempodiricarica 12ore
Figura4.1Immaginideldronemarinosviluppatodall’IAMC‐CNR
4.1IngegnerizzazionedelPayloadNelleapplicazionimarino‐costiereoltreallavalutazionedellecorrentiperlostudiodelladiffusionedegliinquinanti,unabrancaimportanteèlabatimetria,ovverolamisuradelleprofonditàdeifondalimariniedella loromorfologia. Rilevare le variazioni batimetriche in prossimità delle aree costiere è di estremarilevanzanellaprogettazionedioperediingegneriamarina,maanchenellostudiodellageologiamarinaeperglistudidicarattereambientale.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
16
Pertanto,isensoriinstallatisuidronimarinisono:
unsistemadiAcusticDopplerCurrentProfiler(ADCP)perlamisuradellavelocitàdellacorrentemarina;
unsistemaMultiBeam/SideScanperlostudiogeomorfologicodelfondalemarino; unsistemaperMicrobatteria3Dperlaricostruzionetridimensionaledistrutturesommerse.
Ancheper idronimarinicosìcomeper ildroneaereo, lasceltadellospecificostrumento(Figura4.2)èstata fortemente guidata e caratterizzata dalle prestazioni in termini di potenza assorbita, di peso e ditrasmissionedeidatiacquisti.
(a) (b) (c)
Figura4.2:Payloaddronemarino:(a)ADCP,(b)Multibeame(c)Microbatimetria3D.Ilmodellodicorrentometro,sceltoperleapplicazioniambientali, e ilSONTEKAD500(AcousticDopplerProfiler). Il sistema ha elevate prestazioni e, pur essendo semplice da usare, permette di tracciare unprofilotridimensionaledellacorrentemarinaedemoltoutilizzatoinoceanografiaedidrografia.Il sistemaMultiBeam/SideScanè ilKONGSBERGGeoSwathPlusROV in gradodi eseguireun efficienterilievo batimetrico e side scan simultaneo con accuratezze superiori agli standard IHO per i rilieviidrografici,garantendolamassimaefficienzadirilievoinacquebasse.Ilsistemaecostituitodaundoppiotrasduttorecheconsenteopzioniversatilidiinstallazioneedaun'unitadi controllo contenente tutta l'elettronica, unitamente ad un PC ad elevate prestazioni con installato ilpacchettosoftwaredigestionedelrilievodelGeoSwathPlus. Itrasduttoripossonoesseremontatisuuntelaiodiforniturachepuoalloggiaredeisensoriausiliari.Infine,perbatimetrie3DadelevatissimarisoluzioneestatosceltoilTELEDYNEBlueviewMB2250.Al finediottimizzare ilbilanciamentodello scafoe tenendocontodelmassimopesoprevisto in fasediprogettazionedellostesso,sonostatedefiniteleseguenticonfigurazionidiinstallazione:
Configurazione1:AD500SontekeBlueViewMB2250Teldyne(Figura4.3)

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
17
(a)
(b)
(c)
Figura4.3:LayoutConfigurazione1:(a)vistaISO,(b)vistalateralee(c)vistafrontale

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
18
Configurazione2:GeoSwatPlusROV(Figura4.4)
(a)
(b)
(c)
Figura4.4:LayoutConfigurazione1:(a)vistaISO,(b)vistalateralee(c)vistafrontale

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
19
5.GroundControlStationL’architettura concettuale della Ground Control Station (GCS) riflette inmaniera sostanziale ilmodelloconsolidato in letteratura, con l’aggiuntadi alcuni aspetti e funzionipropriedell’innovatività scientificadei progetti PITAM e STIGEAC. La GCS, quindi, risulta strutturata in aree logiche a cui corrispondonorelative aree funzionali che permettono una precisa operatività ed interscambio di informazioni sianell’ambito dei processi operativi e decisionali propri degli scenari di impiego, sia verso l’esternogarantendodisseminazionescientificadaidatiraccoltisulcampo,oltrecheperfinalitàdielaborazioneedinferenzaancheperlasuccessivadivulgazionealpubblico.Ad un livello di astrazione più alto possibile, l’impostazione funzionale del sistema è sostanzialmentesemplice:laGCSèdefinitacomehubdidati,dispositivi,funzionalitàecomportamentiicuiobiettivisonosiailcontrollodimissionesialaraccoltadeidatiacquisitidallasensoristicainstallatasuidroni.Nel dettaglio, la GCS è un’architettura hardware e softwaremodulare i cui componenti si integrano edinteragisconoalfinediimplementareleseguentifunzionalità:
pianificazioneecontrollodelmotoconguidaadistanzasiainmodalitàcompletamenteautonoma(mediante l’indicazione di waypoint georeferenziati) sia in modalità semi‐autonoma (governormodeperildroneaereo);
gestionesemi‐autonomadeldroneaereoattraversocomandoremoto(joystick); controlloautonomoesemi‐autonomoperlagestionedeidronimarini; supervisioneecontrolloglobaleconcapacitàdivisualizzazione,monitoraggioearchiviazionedei
datisensorialiescientificiacquisitidallastrumentazioneinpayload; strutturaapertaafutureintegrazionidisistemi,sensorie/oveicoliaddizionali.
ImoduliprincipalidellaGCSpossonoesseresintetizzatiin:
1. UVs Control System: il sistema informatico che permette la gestione e il controllo dellefunzionalitàvitaliedimotodeidroni;
2. Communication System: l’insieme di tutti i componenti, hardware e software, deputati almantenimentoegestionedellecomunicazionitraloUVsControlSystemeidroni.
LaconfigurazionedelsistemacomplessivoperlagestioneintegratadeisistemiautonomiUAVedUMVèriportatainfigura5.1.Al fine di disaccoppiare le specifiche dei veicoli autonomi e la specificità del data link, si è scelto diutilizzare un protocollo di comunicazione di “alto livello” per l’invio dei comandi di missione e per laricezionedeidatiditelemetria.E’importantesottolineareche,inconformitàallenormativediriferimentoapplicabili, le operazioni devono avvenire sempre in modalità LineOfSight (LOS) e cioè sempre nellacondizionecheognisingoloveicolosiadirettamentevisibiledall’operatore.Le politiche di comunicazione ed interscambio dei dati di governo e navigazione utilizzanoun’implementazione del protocollo MAVLink (Micro Aerial Vehicle link), molto diffuso ed affermatonell’ambitodeidronicivili.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
20
Oltreallinkdatiperilcontrollodellamissioneegovernodeidroni,esisteunsecondodatalinkrealizzatoperpermetterelagestionedellasensoristicainpayload.Taledatalinkèditipoconnectionless,utilizzandola trasmissionedidatagrammiUDPsu link IP.Questoapprocciopermettedi separareeparzializzare ilrischiodiunconnectionfaultcheriguardiallostessotempogovernoedacquisizionedati.
Figura5.1:ConfigurazioneGCS
Figura5.2:DatalinkCommunication

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
21
Figura5.3:RaccoltaeGestioneDatiPayload
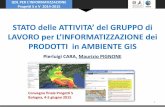
AvendoindividuatoMAVLinkcomeprotocollodicomunicazioneecontrollo(esceltoilsistemaArdupilot+PX4perlesimulazioniinlaboratorio)èstatoopportunoutilizzare,inotticadiriuso,unprogettoOpenSourcegiàdisponibilecheimplementassetaleprotocollo.PerquestoèstatosceltoilsoftwareMissionPlanner(dicuiunoscreenshotinFigura5.3)sviluppatoinlinguaggioC#,cheimplementaunaseriedifunzionalitàperilsetupdelveicolo,ilmonitoraggiodurantelanavigazione, l’analisi di file di log e soprattutto possiede una serie di avanzate funzionalità dipianificazione che ben si adattano alle necessità operative di missioni con waypoint georeferenziati.L’interfacciagraficadelsoftwareèstatapersonalizzata inaccordoallespecifichediprogettoenecessitàfunzionali.
Figura5.3:EsempiodischermatadiMissionPlanner(http://planner.ardupilot.com/)
La Ground Station possiede un’interfaccia utente attraverso cui l’operatore esegue tutte le attività diconfigurazione,diautopilotaggioediguidaattivadeiveicoli.Unmodulosoftwareèinoltrededicatoalla

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
22
configurazione sia degli aspetti di layout della stessa interfaccia sia dei parametri di interazione ecomunicazioneconiveicoli.Lefunzionidiconfigurazioneincludono:
parametriinzialiqualiunitàdimisuraedesteticadell’interfacciastessa; connessioneaiveicoli(modalità,velocitàdiconnessione,etc.); impostazionedelpuntodiHomePosition; creazionedellamissionemedianteimpostazionepoint&clickdeiwaypoint; creazionedellamissionemedianteimportazionedifilecontenentewaypoint; calibrazionedituttiisensoriutiliallatelemetriaedalcontrollodeidroni.
Tutti i dati della missione e quelli di telemetria devono essere disponibili alla Ground Station sia permotividigestionedellamissionestessa(variazionediparametri)chepeririscontrisuccessivi.Infasedipreparazione è necessario configurare quali e quanti dati visualizzare tramite la Ground Station e lamodalitàdivisualizzazione.Il sistema utilizza mappe quali GoogleMap, Google Earth and OpenStreetView con la possibilità dicostruire lamissione(attraverso l’indicazionediwaypoint)emodificarlaeventualmenteintemporeale,nonché la possibilità di seguire in tempo reale i movimenti del veicolo rappresentando quindi glispostamentiricevutitramitetelemetria.Perognipuntodellamissioneèpossibileindicare,acorredodelleinformazionidipercorso,unospecificoevento(adesempiofermotemporaneopernsecondi,decollonelcasodeldroneaereo,etc.).E’importantesaperechel’ultimowaypointsaràilpuntodidestinazione:sequindiènecessariocheilveicoloritornialpuntodipartenzabisogneràchel’ultimopuntosiaespressamentecreatonellostessopuntoincuisitrovail punto Home o nelle sue prossimità. Il sistema prevede anche la possibilità di comandare il droneattraversospecificohardwarededicatoincasodinecessità(joystickoradiocomando).
5.1 SceltadelDataLinkfisicoTutti i sistemi di comunicazione sono garantiti attraverso l’utilizzo di datalink commerciali per usoprofessionaledellaMicrohard,adiversivaloridifrequenza(secondoquantoconsentitodallanormativaedalpianonazionaledellefrequenze)inrelazioneall’utilizzoeallaquantitàdidatidatrasmettere.Essendo l'attenuazione (path loss) direttamente proporzionale al quadrato della frequenza, risultaopportunolavorareafrequenzepiùbassealfinedimassimizzareladistanzaditrasmissione.IldispositivoNanoIPn920forniscelapossibilitàdilavorarenellabanda869.4‐869.65MHze,traleopzionianalizzate,soddisfamaggiormenteleesigenzedicopertura.Per il drone aereo si è scelto di utilizzare un NanoIPn920 a 1200 kbps in virtù delle esigenze dimassimizzare la distanza di trasmissione. Per i dronimarini si è scelto di lavorare intorno ai 2.4 GHz(NanoIPn2420a1200kbps)perevitareinterferenzeconildatalinkdeldroneaereo(nelcasodiutilizzosimultaneodituttiiveicoli)egarantirecomunqueunabuonacopertura.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
23
6.ConclusioniNell’ambito dei progetti PITAM (Piattaforma tecnologica avanzata per rilievi di parametri geofisici edambientali in mare PON01_02812) e STIGEAC (Sistemi e tecnologie integrate per il rilevamento emonitoraggio avanzato di parametri geofisici ed ambientali in aree marino‐costiere PON01_02848),l’Istitutoperl’AmbienteMarinoeCostiero(IAMC)delConsiglioNazionalediRicerche(CNR)harealizzatosistemiprototipalimulti‐purposediveicolisemi‐autonomiperlaricerca,ilmonitoraggioel’acquisizionedidatasetmultidisciplinariconcaratteristichecostruttiveefunzionali innovative.Talisistemisonostatiopportunamente progettati ed ingegnerizzati per integrarsi nell’ambito di un sistema di piattaformegalleggianti con caratteristiche innovative permodularità, operatività, funzionalità e trasportabilità. Sitratta di sistemi attualmente disponibili in versione prototipale e tra i primi sul territorio italiano concaratteristicheesplorativespecifiche.I sistemihardware sviluppati constanodi undrone aereo e duedronimarini, ingegnerizzati inbase airequisiti del payload necessari per l’esecuzione dimissioni in ambienti eterogenei nel settoremarino‐costiero ed in aree logisticamente complesse. Il drone aereo è un sincrottero con payload di 26 kg,ingnerizzato con videocamera, termocamera e laser‐scanner. Tale sensoristica è rivolta ad attivitàgeomaticarivoltaalmonitoraggioedallatuteladelterritoriodarischinaturali,qualiadesempioirischiidrogeologiciedambientali.I droni marini, invece, sono due catamarani con payload di 35 kg, ingegnerizzati con correntometro,multibeam e microbatimentria 3D. La sensoristica scelta è finalizzata principalmente a indagini lungocostaequindiinacquebasse.La finalità complessiva raggiunta è stataquelladi creareun sistema integratoper il campionamento, ilmonitoraggio e l’analisi di parametri ambientali inmatrici differenti (acqua‐aria‐sedimenti) ad elevatacapacitàd’interventoinambienticostieri,fluvialielagunari,compreseleterreemersedidifficileaccesso.Tali strumenti risultano, quindi, competitivi per lo svolgimento di attività di ricerca scientifica etecnologica,per lavalorizzazionedeibeniculturaliamare,per losviluppodell’attività industrialeeperinterventidiemergenzalegatiacrisiambientali.Attualmente,sonoincorsocampagnedimostrativedellacapacitàdeisistemiprototipalidioperareinsimultaneacollaborazione,ovveroacquisendoetrasferendoopportunamenteidataset,inmododapoternetestarelacapacitàanchecomestrumentodisupportoalledecisioniincasodicriticitàambientaleoemergenza.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
24
AppendiceNormativaperl’utilizzodeiSistemiAereiaPilotaggioRemoto(SAPR)Ilricorsoavelivoliapilotaggioremotoinambitocivileèsemprepiùfrequentepernumeroseapplicazioniedèquindi soggetto a specifiche regolamentazioni. IlRegolamento (CE)N. 216/2008affidò all’AgenziaEuropeaperlaSicurezzaAerea(EASA)ilcompitodiregolamentarel’utilizzodeiSistemiAereiaPilotaggioRemoto(SAPR)inparticolareperapplicazioniciviliconunamassaoperativaaldecollofinoa150Kg.Perquantoriguardalaregolamentazioneitaliana,l’ENAC(EnteNazionaleperl’AviazioneCivile)hastilatoundocumentoperl’usoprivatodeimezziapilotaggioremoto.AisensidelRegolamentodelParlamentoEuropeoedelConsiglio(CE)n.216/2008,sonodicompetenzaENACiSAPRdimassamassimaaldecollonon superiore a 150 kg e tutti quelli progettati o modificati per scopi di ricerca, sperimentazione oscientifici.Di seguitosi riportanoalcuniestrattidel regolamentoENAC“Mezziaereiapilotaggioremoto”Edizionen°1 del 16/12/2013 e successive integrazioni (Disposizione 4/DG del 14 febbraio 2014 ‐ Modificadell'articolo 26 del Regolamento ENAC "Mezzi Aerei a Pilotaggio Remoto" e Disposizione 8/DG del 16marzo2015‐ModifichealRegolamentoENAC"MezziAereiaPilotaggioRemoto"). Sezione1‐GeneralitàArt.1“Premessa/Introduzione”,comma4GliAeromodellinonsonoconsideratiaeromobiliaifinidelloroassoggettamentoalleprevisionidelCodicedella Navigazione e possono essere utilizzati esclusivamente per impiego ricreazionale e sportivo. Purtuttavia,ilpresenteRegolamentocontienespecifichedisposizioniapplicabiliall’impiegodegliaeromodelliagaranziadellasicurezzadicoseepersonealsuoloedeglialtrimezziaerei.Art.2“Applicabilità”,comma2AisensidelRegolamentodelParlamentoEuropeoedelConsiglio(CE)n.216/2008,sonodicompetenzaENACiSAPRdimassamassimaaldecollononsuperiorea150kgetuttiquelliprogettatiomodificatiperscopidiricerca,sperimentazioneoscientifici.Art.2“Applicabilità”,comma3NonsonoaltresìassoggettatialleprevisionidelpresenteRegolamento:a)iSAPRdiStatodicuiagliarticoli744,746e748delCodicedellaNavigazione;b)iSAPRchehannocaratteristichediprogettotalipercuiilpilotanonhalapossibilitàdiintervenirenelcontrollodelvolo;c)iSAPRchesvolgonoattivitàinspaziochiuso(spazioindoor);d)iSAPRcostituitidapalloniutilizzatiperosservazioniscientificheodapallonifrenati.Art.6“ImpiegodeiSAPR”,comma2L’impiegodeiSAPRèsoggettoalpossessodiappropriateautorizzazionirilasciatedall’ENACall’operatoreoallapresentazionedapartedell’operatoredidichiarazioneall’ENACneiterminiindicatinelleSezioniIIeIIIdelpresenteRegolamento.Art.7“ClassificazionedeiSAPR”,comma1SAPR,dicompetenzaENAC,sonoclassificatiinbaseallamassamassimaaldecollodelmezzoin:a.Sistemiconmezziaereidimassamassimaaldecollominoredi25kgb.Sistemiconmezziaereidimassamassimaaldecollougualeomaggioredi25kg.SezioneIII‐SistemiAeromobiliaPilotaggioRemotoconmezziaereidimassamassimaaldecollomaggioreougualea25kgArt.10“Aeronavigabilità”,comma2

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
25
IlPermessodiVolopuòessererilasciato:a.pereffettuarelasperimentazionealloscopodiricercaesviluppoodidimostrazionedirispondenzaallabasedicertificazionenelcasodiSAPRperiqualièstatorichiestouncertificatoditiporistretto;b. per operazioni specializzate nel caso di SAPR non costruiti in serie e quindi non in possesso dicertificazioneditiporistretto.Art.10“Aeronavigabilità”,comma4Per ottenere il Permesso di Volo per l’attività sperimentale di cui al comma 2a, il richiedente devepresentare domanda all’ENAC fornendo la documentazione necessaria per sostanziare la capacità delsistema di svolgere l’attività sperimentale in sicurezza: L’attività sperimentale deve essere condotta inareenonpopolateespaziaereisegregatidapilotiinpossessodiautorizzazionerilasciatadall’ENAC[……].Art.10“Aeronavigabilità”,comma7Il Permesso di Volo per operazioni specializzate è rilasciato dall’ENAC al termine positivo degliaccertamentinecessariaverificare che leoperazioniprevistepossonoessere condotteconun livellodisicurezzaadeguato[…..].Art.16“Regoledell’Aria”,comma11.L’ammissioneallospazioaereonazionaleèsoggettaallacapacitàdirispettareleregoledell’aria,nonchéglialtriRegolamentiemanatidall'ENACapplicabiliaglispaziaereiimpegnati. Art.16“Regoledell’Aria”,comma22.LeoperazioniinspazioaereononcontrollatodevonoesserecondotteincondizionidiVLOSeinaccordoalle regoledell’ariaapplicabilialvolumedi spazioaereo interessatocomedi seguito specificato, senondiversamenteautorizzatodall’ENAC. Art.16“Regoledell’Aria”,comma3Leoperazionisonocondottenelvolumedispazio“V70”o“V150”enell’ambitodelleseguenticondizioni:a.adunadistanzaorizzontaledisicurezzaadeguatadalleareecongestionate,noninferiorea150m,eadunadistanzadialmeno50mdapersoneecose,chenonsonosottoildirettocontrollodell’operatore;b.incondizionidilucediurna;c.fuoridalleATZecomunqueaunadistanzadialmeno8kmdalperimetrodiunaeroporto,edaisentieridiavvicinamento/decollodi/daunaeroportoSezioneIV‐DisposizioniGeneraliperiSistemiAeromobiliaPilotaggioRemotoArt.17,“Pilota”,comma11.IlpilotadelSAPR,aisensidelCodicedellaNavigazione,èresponsabiledellacondottainsicurezzadelvolo.Vienedesignatodall’operatoreedeveavereun’etàminimadi18anni.Art.17,“Pilota”,comma22. Al pilota è richiesta la conoscenza delle regole dell’aria applicabili. Tale conoscenza può essereasseverata dal possesso di una licenza di volo civile o di un attestato di volo sportivo di cui al DPR n.133/2010.Art.20,“Assicurazione”,comma11. Non è consentito operare un SAPR se non è stata stipulata e in corso di validità un’assicurazioneconcernentelaresponsabilitàversoterzi,adeguataalloscopoenoninferioreaimassimaliminimidicuiallatabelladell’articolo7delRegolamento(CE)n.785/2004.Diseguitosiriportaunatabellasequenzialeabeneficiodeglioperatoricheintendonosvolgereoperazionispecializzate*,orelativaattivitàdisperimentazioneconSAPRdipesominoredi25kg.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
26
FASE1 Operatore PilotaOrganizzazione(Società,Azienda,Associazione,Ente)
SottoscrizionedellaDichiarazionediRispondenza
alRegolamentoENAC“Mezzi
AereiaPilotaggioRemoto”
1) Attestare diaververificatol‘idoneitàdelmezzoedell’organizzazione,nonchélaqualificazionedell’equipaggio
2) Ilsistemadeveessereidentificatointuttelesuecomponentipertantovannoriportati,qualoradifferentiinumeridiseriedell’aeromobile(APR)edellastazionediterra(SPR).
2) Identificareeverificarelaconsistenzaelatipologiadellaflottaasuadisposizioneperleattivitàprofessionali.
FASE2
Predisposizionedocumentazionenecessaria
alleattività
1) Deveavereun’organizzazionetecnicaeoperativaadeguataall’attivitàcheintendeeffettuare
1) FirmareladichiarazionedirispondenzaalregolamentoENACo,nelcasodioperazionicritiche,l’attestazionedirispondenzaalregolamento
2) Individuareun
responsabiledellagestionedelleoperazioniedell’aeronavigabilitàcontinua;
3) Predisporreil“ManualedelleOperazioni”efornirloatuttoilpersonalecoinvoltonelleattività;
4) Addestramento
sullo/gliAPRdapilotare
4) Qualificarel’equipaggio
FASE3
Individuazionecriticitàdelle
operazioni
1) Determinareseleoperazionispecializzatesonocriticheonon

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
27
criticheFASE4
Attivitàsperimentale
1) Puòesseresvoltasullabasedelladichiarazioneemessadall’organizzazionedopoaverricevutoinformativadapartediENAC
2) Indicarel’arearegolamentatasededelleattivitàsperimentaliopresentaredomandadiassegnazionediSpazioAereoaENAC
3) Specificarenelladichiarazionel’areaofareriferimentoaldocumentochelaidentifica;
4) Predisporreladocumentazionenecessariaperdeterminarechel’attivitàpuòesseresvoltaconunlivellodirischioaccettabile;
5) Determinarelelimitazioniecondizioniapplicabiliallasperimentazione;
6) Predisporreunprogrammadiprovedivolo;
7) PredisporrelaDichiarazione;
8) Inviareladichiarazioneall’ENAC
9) Svolgel’attivitàsperimentale**
9) SioccupadelpilotaggioedellagestionetecnicadegliAPR

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
28
FASE5
Operazionispecializzatecritiche
1) PresentaredomandadiautorizzazioneaENAC;
2) Presentare
domandadiassegnazionediSpazioAereoaENAC(seapplicabile);
3) Predisporrela
documentazionenecessariaperdeterminarechel’attivitàpossaesseresvoltaconunlivellodirischioaccettabile;
4) Individuarelo
scenarioelatipologiadell’areadelleoperazioniedellospazioaereo(compresoeventualebuffer);
5) Presentare
all’ENACdomandadiriconoscimentodellaqualificazionedell’equipaggio;
6) Predisporre
l’attestazionedirispondenzaalregolamento;
7) Interfacciarsiconl’organizzazioneperlaverificadellecondizionidivoloapplicabilialleoperazioni
7) Determinarelelimitazioniecondizioniapplicabilialleoperazionispecializzateches’intendonoeffettuare.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
29
FASE6
Operazionispecializzatenoncritiche
1) Predisporreladocumentazionenecessariaperdeterminarechel’attivitàpuòesseresvoltaconunlivellodirischioaccettabile;
2) Determinarelelimitazioniecondizioniapplicabilialleoperazionispecializzateches’intendonoeffettuare;
3) Individuareloscenarioelatipologiadell’areadelleoperazioniedellospazioaereo(compresoilbuffer);
4) PredisporrelaDichiarazione;
5) Inviarela
dichiarazioneall’ENAC
FASE7
Equipaggio
1) LacompetenzateoricasiintendeacquisitaquandoinpossessodilicenzaFCLincorsodivalidità,attestatodivolosportivoaisensidelDPRNo133/2010odiattestatorilasciatodaun’organizzazionericonosciutadall’ENAC
2) Lacompetenzapraticasiintendeacquisitaquandoilpilotapropostoèinpossessodi

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
30
certificatodiaddestramentocheattestidiaversuperatouncorsopressoilcostruttoredelSAPR,pressoun’organizzazionericonosciutadaENACodapilotariconosciutodalcostruttoreacondurrel’addestramento.
3) L’IdoneitàpsicofisicasiintendeacquisitaquandoilpilotapropostoèinpossessodicertificatomedicodisecondaclasseinaccordoalRegolamentoENAC
*Peroperazionispecializzatesiintendonoancheleattivitàsvolteperlaconduzionediprogrammidiricerca.**L’attività sperimentale non è richiesta se il SAPR è in possesso di un Certificato di Omologazione/Certificato diNavigabilità Ristretto/Permesso di Volo rilasciato dall’ENAC o nel caso sia già stata effettuata da altri soggetti, peresempiodalcostruttoredelSAPR.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
31
Unmanned Surface Marine Vehicles (UMV): procedura per la navigazionemarittimaDi seguito si riporta la tabella relativa alla procedura per l’utilizzo di sistemi prototipali marini apilotaggioremoto.AttualmentenonèpresenteinItaliaunaspecificanormativaperlaregolamentazionesull’utilizzodeisuddettisistemiinambitomarino.Pertantosifariferimentoallaproceduraclassicaperlarichiestadiautorizzazioniaifiniprofessionali.
FASE Operatore Capitaneria
FASE1IdentificazionedellaCapitaneriadiPortodi
competenzadellospecchiod'acquaincuisideveoperare
FASE2
Preparazionedellaistanzarelativaaltipodirilievo/attivitàdasvolgerecontenente:specifichetecniche,caratteristichedeimezzi,coordinatedellospecchiod'acquainteressato,periododisvolgimentodelleattività,personaleimpiegato.
FASE3 ConsegnadelladocumentazionepressogliufficidellaCapitaneriadiPortocompetente
FASE4 IlpersonaleaddettodellaCapitaneriaprocedeconl'analisidelladocumentazionetrasmessa
FASE5 LaCapitaneriatrasmetteun'ordinanzaconlaqualesiautorizzanoleattivitàesifornisconoleindicazioniutiliperlosvolgimentodellestesse
FASE6 Svolgimentodelleattività
FASE7 Trasmissionedelladichiarazionedifinelavoriallacapitaneriadiporto
Per quanto riguarda la procedura per l’utilizzo di sistemi prototipali marini a pilotaggio remoto neldominio delle acque interne (laghi, specchi d’acqua, fiumi, ecc.), la richiesta di autorizzazione varia asecondadell’areaoggettodell’indagine.Ad ogni modo, se si svolesse identificare un soggetto di riferimento per gli specchi d’acqua lacustri efluviali,nonafferentiadareeprotetteoaparchinazionali/provinciali,ènecessarioriferirsiall’armadeiCarabinieripersegnalarelosvolgimentodelleattivitàdiindaginepressoilsitoidentificato.Inalcuneregioni,comeadesempionelLazio,ilrilasciodiautorizzazioniallosvolgimentodiattivitànelleacque interne, limitatamente ad aspetti connessi con la sicurezza della navigazione, è attualmentedelegatoalleProvincie.Perottenere taliautorizzazioniè infattinecessario inoltrareapposita istanzadiautorizzazionecorredatadalladocumentazioneprevista.

Prototipi di sistemi semi autonomi a pilotaggio remoto per il monitoraggio ambientale in aree marino-costiere
IAMC - CNR
32
Riferimenti [1]EuropeanCivilUAVMarket–UAVNET/Frost&Sullivan;2007.[2]RegolamentoENAC“Mezziaereiapilotaggioremoto”Edizionen°1del16/12/2013.[3] Disposizione 4/DG del 14 febbraio 2014 ‐ Modifica dell'articolo 26 del Regolamento ENAC "MezziAereiaPilotaggioRemoto".[4] Disposizione 8/DG del 16marzo 2015 ‐Modifiche al Regolamento ENAC "Mezzi Aerei a PilotaggioRemoto".[5]http://www.guardiacostiera.gov.it[6]www.enac.gov.it