
REGOLATORI PID Modello dei regolatori PID …laura.giarre/corso/sli_14_caI.pdf · CONTROLLI...
39
CONTROLLI AUTOMATICI I Prof. Francesco BASILE REGOLATORI PID Modello dei regolatori PID Realizzazione dei regolatori PID Metodi di taratura automatica Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1
Transcript of REGOLATORI PID Modello dei regolatori PID …laura.giarre/corso/sli_14_caI.pdf · CONTROLLI...
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
REGOLATORI PID
Modello dei regolatori PID
Realizzazione dei regolatori PID
Metodi di taratura automatica
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 1
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
MODELLO DEI REGOLATORI PID
� Larga diffusione in ambito industriale� controllo soddisfacente di un’ampia gamma di processi� semplici regole di taratuta automatica� realizzazione con tecnologie varie (meccaniche, pneumati-
che, idrauliche, elettroniche analogiche e digitali)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 2

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Variabile di controllo � generata come somma di tre contributi:� proporzionale all’errore ��������� proporzionale all’integrale di � (valor medio): errore nullo
asintoticamente per segnali di riferimento o disturbi additivicostanti
� proporzionale alla derivata di � : previsione dell’andamentodell’errore
� Struttura ideale (sistema dinamico SISO lineare stazionario atempo continuo, inproprio)
�� ������������ ������������� �� � �"!#�$����% !&�� ���!#�
� ����'�( : coefficiente dell’azione proporzionale (banda pro-porzionale )+* � ,-(.(#/0��� )
� ���1'2( : coefficiente dell’azione integrale� � % '2( : coefficiente dell’azione derivativa
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 3
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
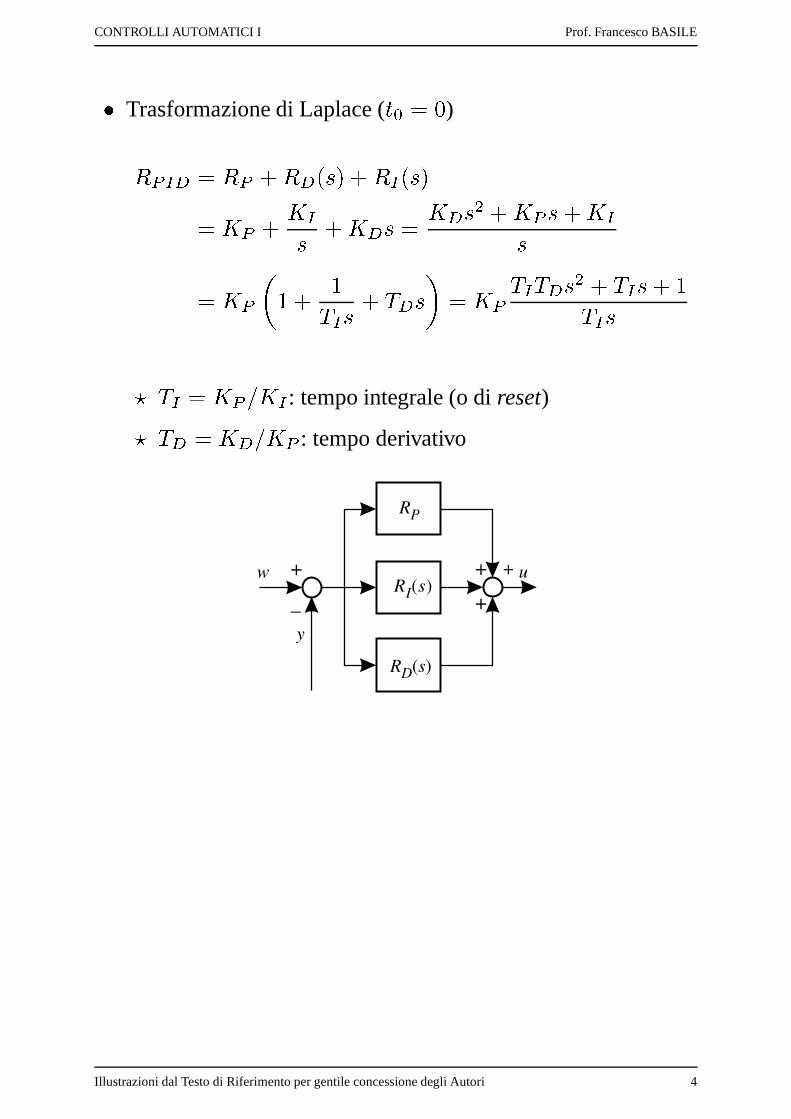
� Trasformazione di Laplace ( ��� � ( )
� � � %�� � � � � %+�� � � � � �� ������ � ���� ����%�� � ��%���� � ����� � ���������
, � , � � � %������ ���
� %���� � ��� � , � �� � ��� � /0� � : tempo integrale (o di reset)� % ��� % /0� � : tempo derivativo
+
–
+
+
R sD( )
RP
R sI( )+w u
y
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 4
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
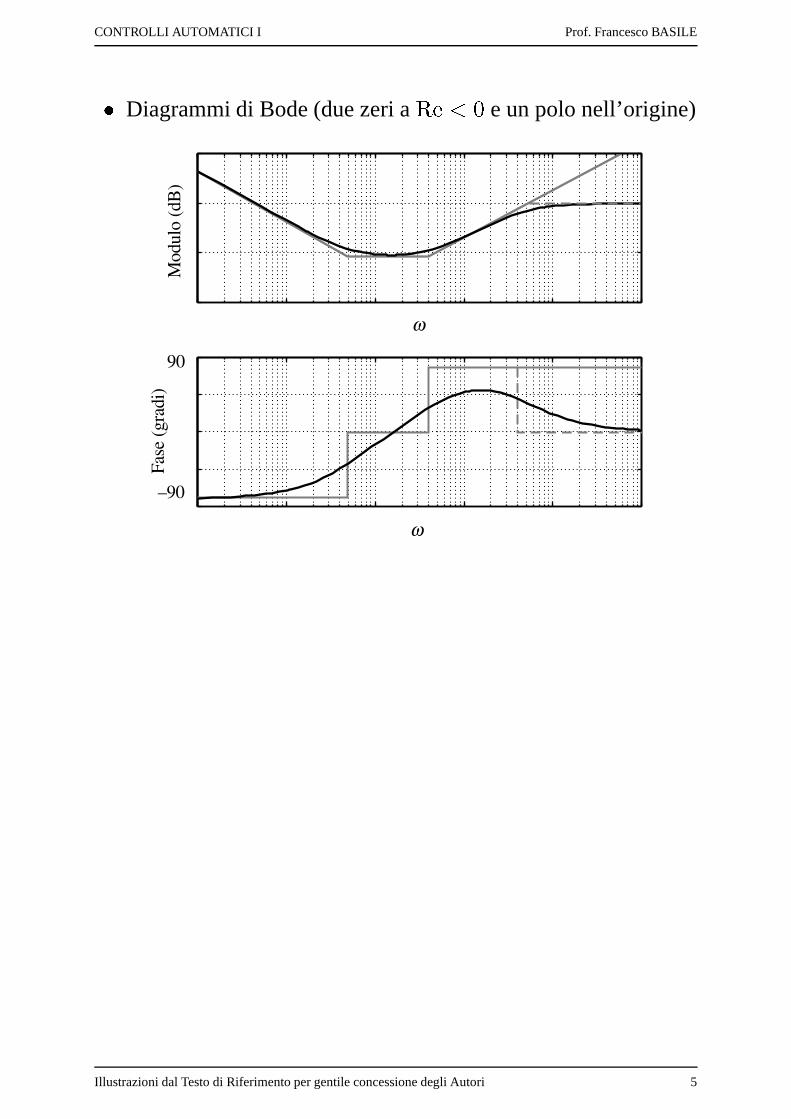
� Diagrammi di Bode (due zeri a �����2( e un polo nell’origine)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 5
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Azione derivativa realizzabile
���% �� ��� � � % �, �
%� � � � % �, � � %
��� � �� � � ( : il polo � � � � / % all’esterno della banda di
frequenza di interesse nel controllo (� � ���� ( )
� PID in forma reale
� � � %�������� , � , � � �
%, �
%� � � ���
��� � � � �� � � % �, � � %
��� � �� zeri praticamente inalterati (per
�sufficientemente grande)
� diagrammi di Bode asintotici (linea grigia a tratti prece-dente)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 6

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Combinazione delle varie azioni tranne:� sola azione derivativa (zero nell’origine!)� azione integrale e derivativa (buco in frequenza!)
� Regolatori P ( � � � ��%2� ( o ��� � ,
%���( )
� � ��� �
� controllo di processi asintoticamente (o semplicemente) sta-bili
� prestazioni statiche non richiedono l’inserimento diun’azione integrale
� Regolatori I ( � � ��� % � ( )
� � �� ��� � ��� reti ritardatrici con polo nell’origine e zero all’infinito (re-
stringimento della banda passante per compensare il contri-buto di fase negativo)
� requisito stringente sulle prestazioni statiche, ma non sulleprestazioni dinamiche
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 7

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Regolatori PI ( � % � ( o % ��( )
� � � �� ��� ��� � ������ ����� , � ��� � �
� reti ritardatrici con polo nell’origine e zero in � � �+, / �� azione integrale per prestazioni statiche, con banda passante
piu ampia grazie alla presenza dello zero� molto diffusi nel controllo di processi industriali, descrivi-
bili come la serie di una funzione di trasferimento del primoordine e di un eventuale ritardo (la presenza di un ulteriorezero di un PID completo porterebbe a un allargmaneto ec-cessivo della banda passante, nonche a difficolta di taratura)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 8

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Regolatori PD ( � � ��( )
� � % �� ����� � ��� % � � � � , � % � �� rete anticipatrice con zero in �� � � � /0��% � �+, / %
e polo all’infinito (polo aggiuntivo in alta frequenza per larealizzabilita)
� non vi sono problemi di stabilita o di prestazioni statiche� necessario ottenere la banda passante piu ampia possibile
� Regolatori PID� polo nell’origine e due zeri in
� � � � ��� � � ��� % �� � %(polo aggiuntivo in alta frequenza: zeri praticamente inva-riati)
� zeri: reali per � ' � % , coincidenti in � � �+, / � % per � ��� % (per semplificare la taratura)
� rete a sella� controllo per vaste classi di sistemi
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 9
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
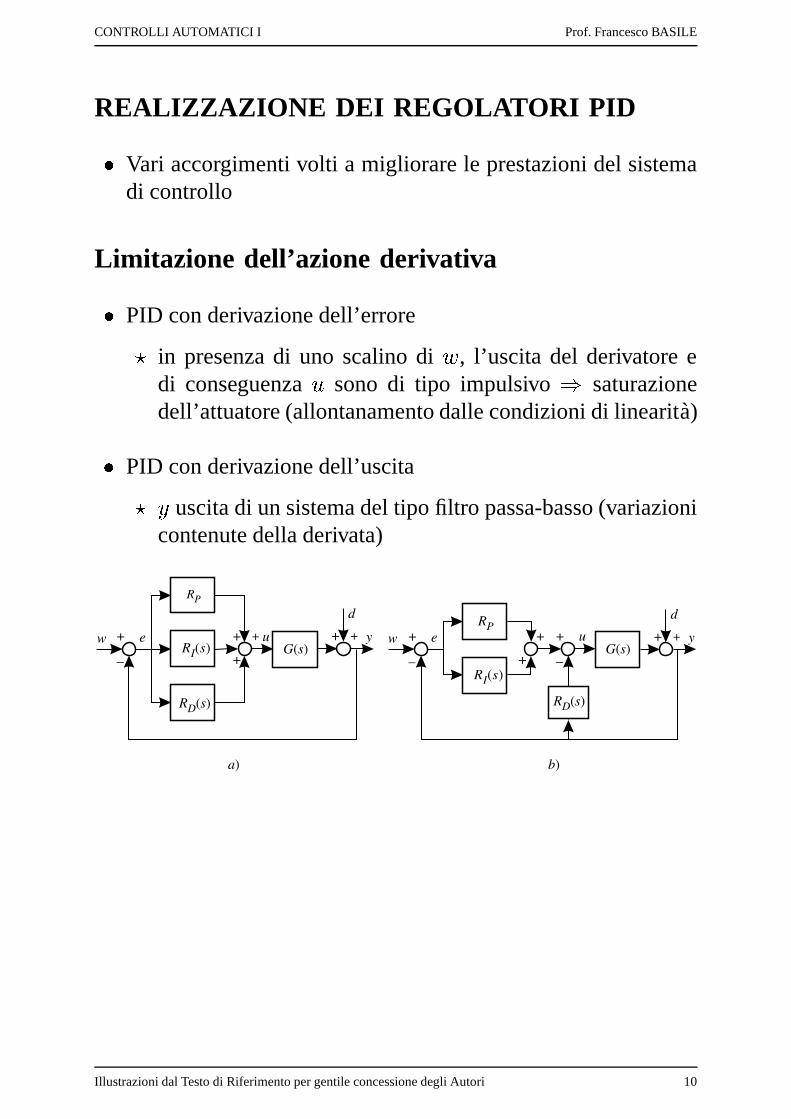
REALIZZAZIONE DEI REGOLATORI PID
� Vari accorgimenti volti a migliorare le prestazioni del sistemadi controllo
Limitazione dell’azione derivativa
� PID con derivazione dell’errore� in presenza di uno scalino di � , l’uscita del derivatore e
di conseguenza � sono di tipo impulsivo � saturazionedell’attuatore (allontanamento dalle condizioni di linearita)
� PID con derivazione dell’uscita� � uscita di un sistema del tipo filtro passa-basso (variazioni
contenute della derivata)
+
R sD( )
RP
R sI( ) G s( )+ +w u +
–
+
–
+
+
RP
R sI( )
G s( )+
–
w u
R sD( )
a b) )
+ + y
d
+ + y
d
ee
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 10

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� PID con derivazione dell’errore
� �� ��� � � � %+�� ��� �� �, � � � � % �� ��� �� � � �� � � ,
, � � � � % �� ��� �� � � �� �� �� ��� � � � % �� �
, � � � � %+�� ��� �� � � �� � � � � � % �� �, � � � � %+�� ��� �� � � �� �
� PID con derivazione dell’uscita
� �� ��� � � �#�� ��� �� �, � � � � % �� ��� �� � � �� � � ,
, � � � � % �� ��� �� � � �� �� �� ��� � � � �� �
, � � � � %+�� ��� �� � � �� � � � � � % �� �, � � � � %+�� ��� �� � � �� �
� stessa equazione caratteristica (proprieta di stabilita identi-che)
, � � � � % �� ��� �� ����(� stesse funzioni di trasferimento tra ! e � ( � �� � ), tra ! e �
( ��� �� � )� � �� ��/ � �� � hanno entrambe guadagno unitario (azione in-
tegrale sull’errore), � �� � ha uno zero nell’origine � erroreprodotto da � o ! costanti asintoticamente nullo (asintoticastabilita del sistema retroazionato)
� diversi zeri delle funzioni di trasferimento tra � e � , tra � e�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 11
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
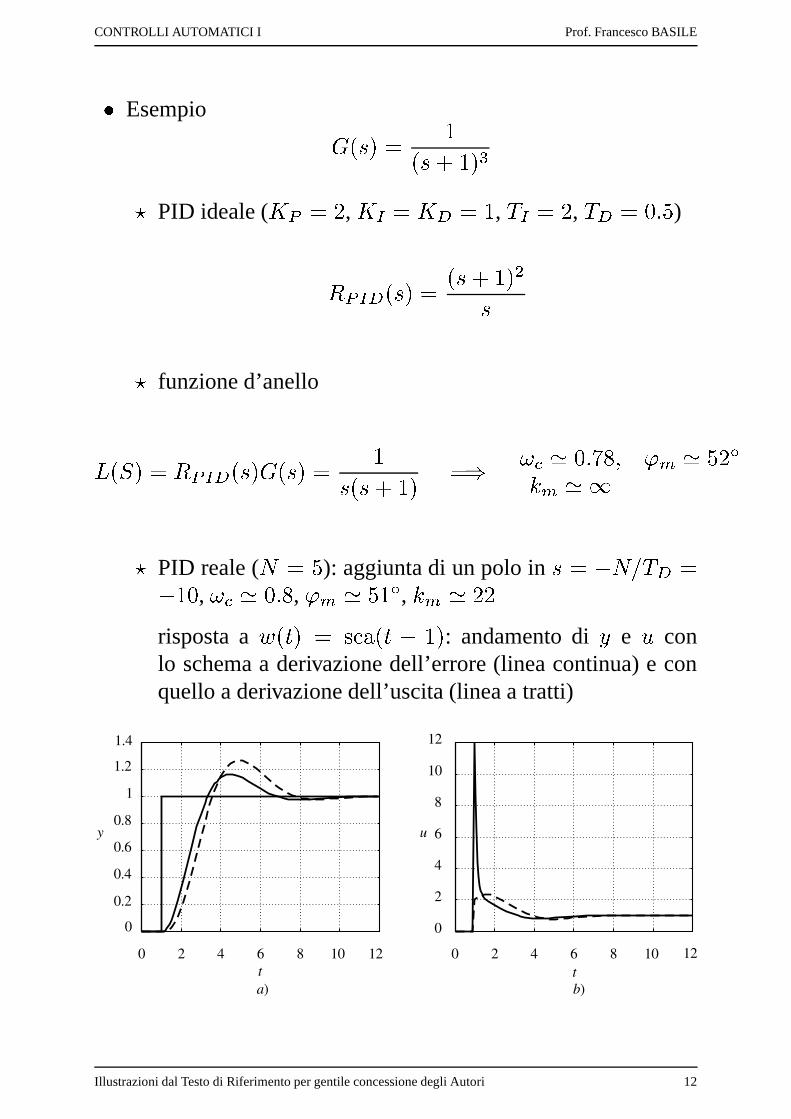
� Esempio
� �� ��� ,�� ��, ���
� PID ideale ( ��� � � , ��� ����%�� , , � � � , %�� (�� � )� � � %+�� ��� �� ��, � ��
� funzione d’anello
� ����� � � � % �� ��� �� ��� ,�#�� � , � � ����� (��� ��� ��� � � ���� � � �
� PID reale (� � � ): aggiunta di un polo in �+� � � / %��
�+,-( , ����� (���� , ��� � � ,�� , � � � � �risposta a � ��� � ����� � � , � : andamento di � e � conlo schema a derivazione dell’errore (linea continua) e conquello a derivazione dell’uscita (linea a tratti)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 12
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
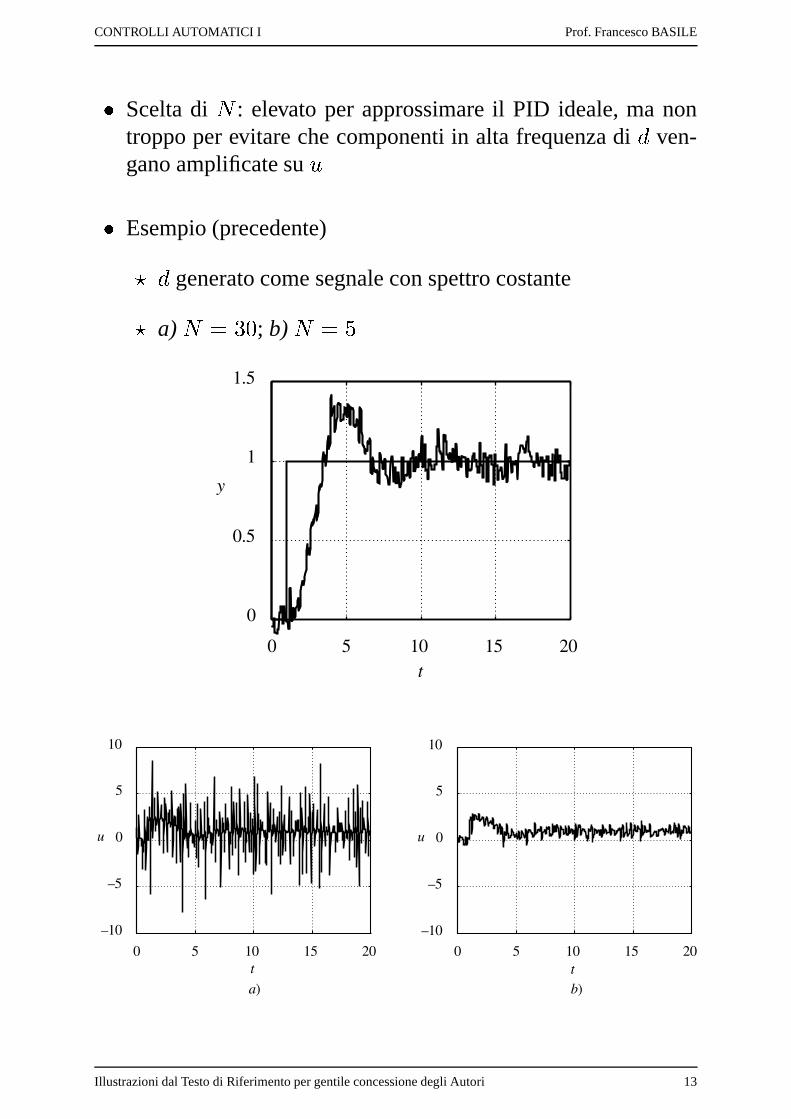
� Scelta di�
: elevato per approssimare il PID ideale, ma nontroppo per evitare che componenti in alta frequenza di ! ven-gano amplificate su �
� Esempio (precedente)
� ! generato come segnale con spettro costante
� a)� ���.( ; b)
� � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 13
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� taratura parametri sulla base di modello accurato, altrimentil’azione derivativa puo produrre una variabile di controlloeccessivamente sollecitata (regolatori PI preferiti in campoindustriale)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 14

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Azione proporzionale applicata solo sull’uscita (variazionimeno brusche della variabile di controllo)
� �� ��������� � �� � � � �� ���� � � ��%���� %+�� ����� ��� � �� ��� � �� �� � �� ����� � �� � � � �� �� %+�� ����� � �� � � � �� �
� � e � scelti in modo da migliorare le prestazioni del si-stema retroazionato (variano solo gli zeri delle funzioni ditrasferimento
� �� ��/ � �� � e� �� ��/ � �� � )
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 15
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
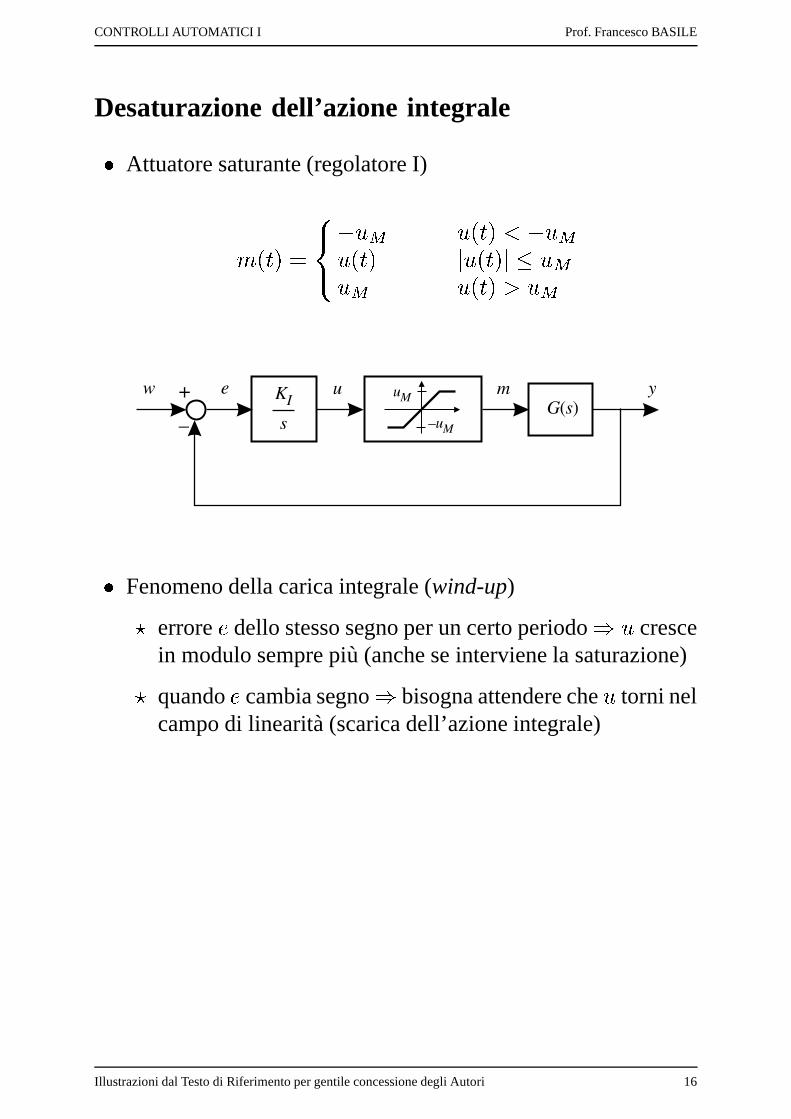
Desaturazione dell’azione integrale
� Attuatore saturante (regolatore I)
� ��������� � ��� �� ��� � � ����� ��� � �� ����� ������ �� ��� � ���
� Fenomeno della carica integrale (wind-up)� errore � dello stesso segno per un certo periodo � � cresce
in modulo sempre piu (anche se interviene la saturazione)� quando � cambia segno � bisogna attendere che � torni nel
campo di linearita (scarica dell’azione integrale)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 16
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
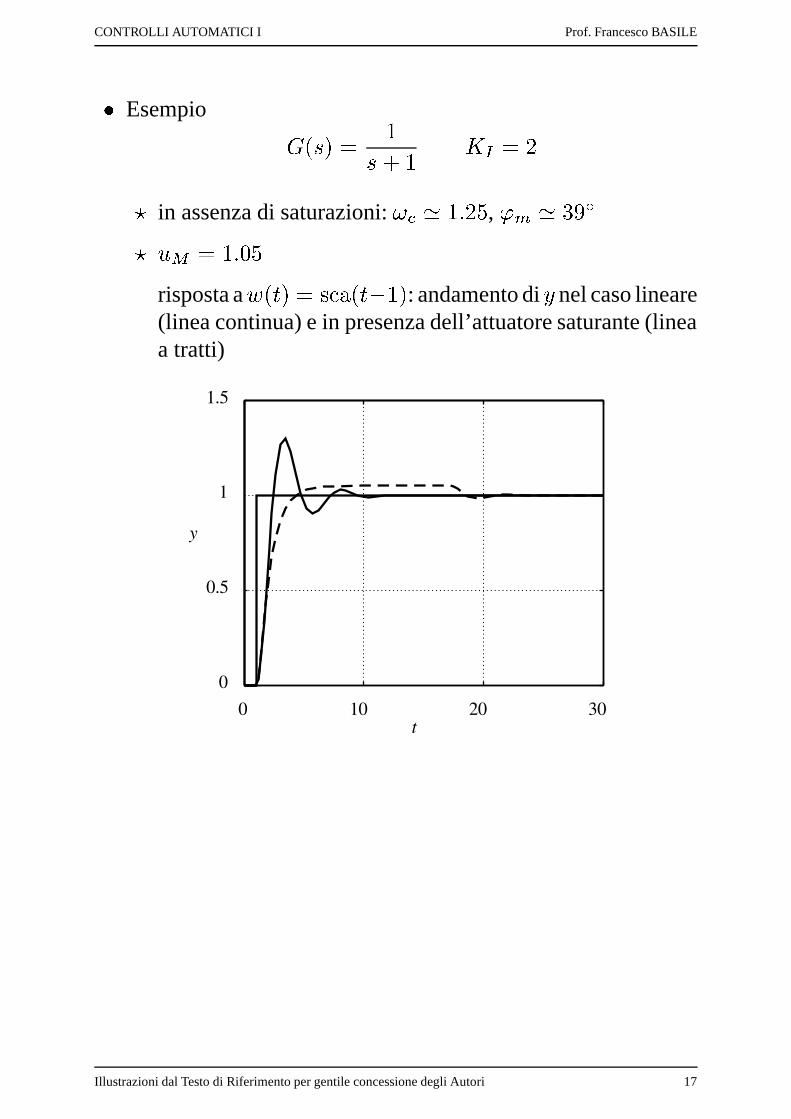
� Esempio
� �� ��� ,� � , ��� � �� in assenza di saturazioni: � � � , � � � , � � � ��� �� ��� � , � ( �
risposta a � ����� ����� � � , � : andamento di � nel caso lineare(linea continua) e in presenza dell’attuatore saturante (lineaa tratti)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 17
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
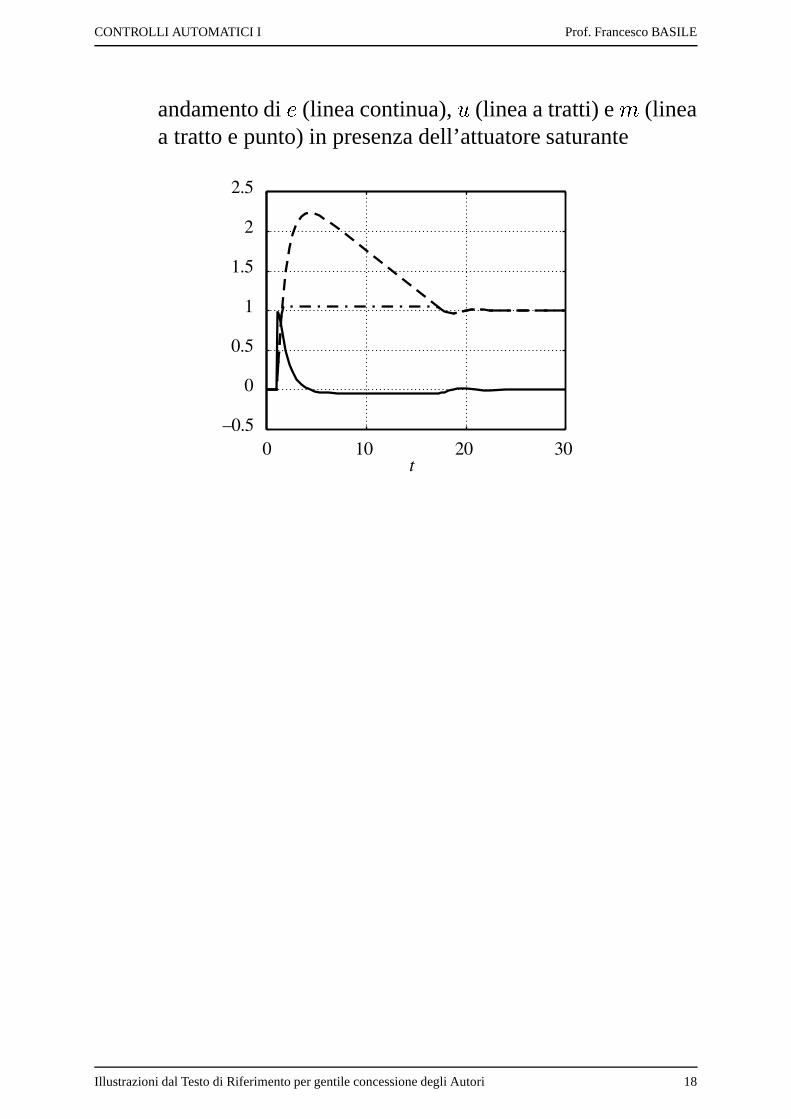
andamento di � (linea continua), � (linea a tratti) e � (lineaa tratto e punto) in presenza dell’attuatore saturante
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 18
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
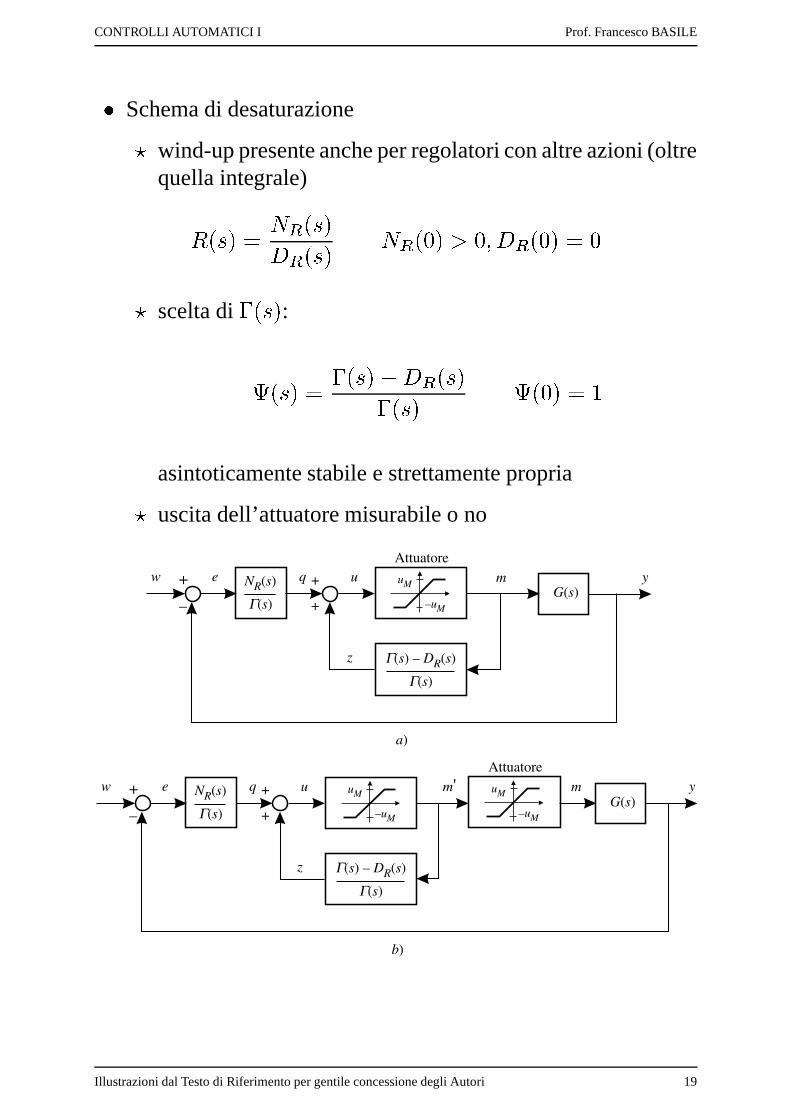
� Schema di desaturazione� wind-up presente anche per regolatori con altre azioni (oltre
quella integrale)
� �� ��� ��� �� �� � �� � � � (#� � (�� � � (#��� (
� scelta di� �� � :� �� ��� � �� � � ��� �� �
� �� � � (#��� ,
asintoticamente stabile e strettamente propria� uscita dell’attuatore misurabile o no
G( ) – ( )s D sR
G( )s
N sR( )
G( )s
+
–
+
+
ywG s( )
e q
z
u
a)
uM
–uM
Attuatore
G( ) – ( )s D sR
G( )s
N sR( )
G( )s
+
–
+
+
ywG s( )
e q
z
u
b)
uM
–uM
uM
–uM
Attuatorem' m
m
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 19
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Funzionamento� in zona di linearita: funzione di trasferimento tra � e �
invariata� errore costante positivo: dopo un transitorio di durata dipen-
dente da� �� � � � positiva; � ��� � : � � � � (
� (#� � , )con dinamica funzione di
� �� �� quando � cambia segno � � negativa, � ��� ��� al di sotto di��� (funzionamento lineare ripristinato, quanto piu rapidoe il transitorio dovuto a
� �� � )
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 20
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
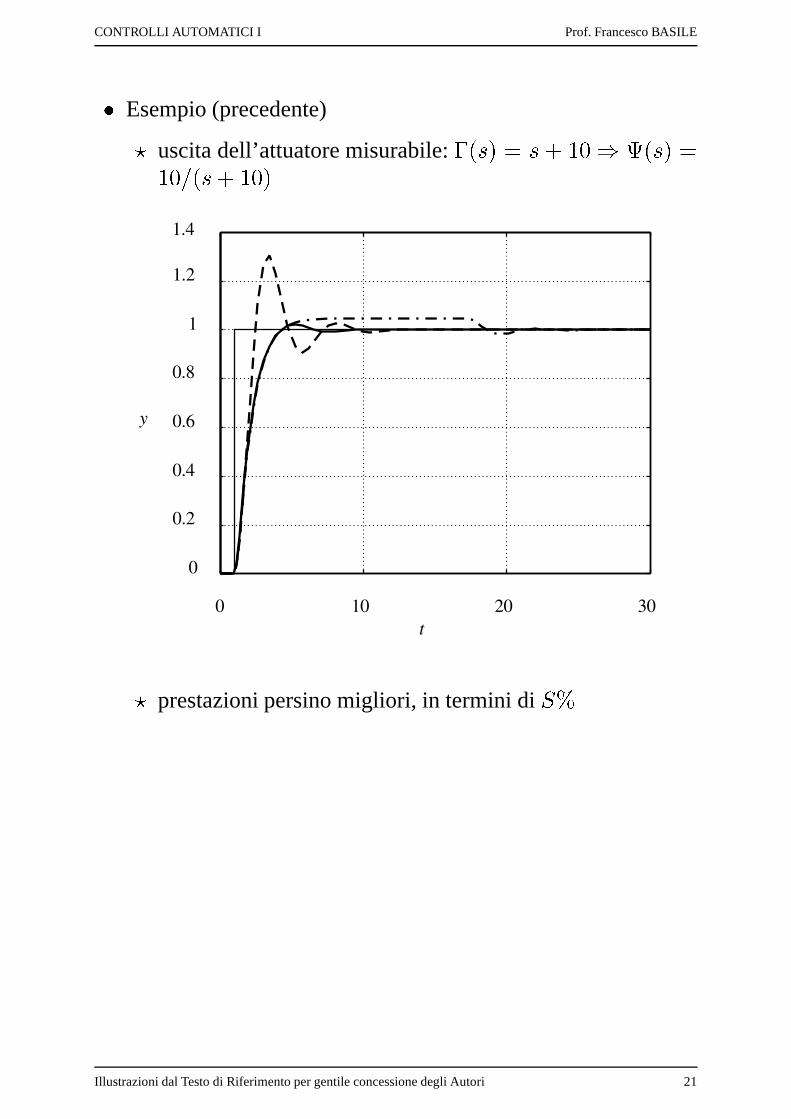
� Esempio (precedente)� uscita dell’attuatore misurabile:
� �� � � � ��,-( �� �� � �
,-(#/ �� ��,-(#�
� prestazioni persino migliori, in termini di ���
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 21
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
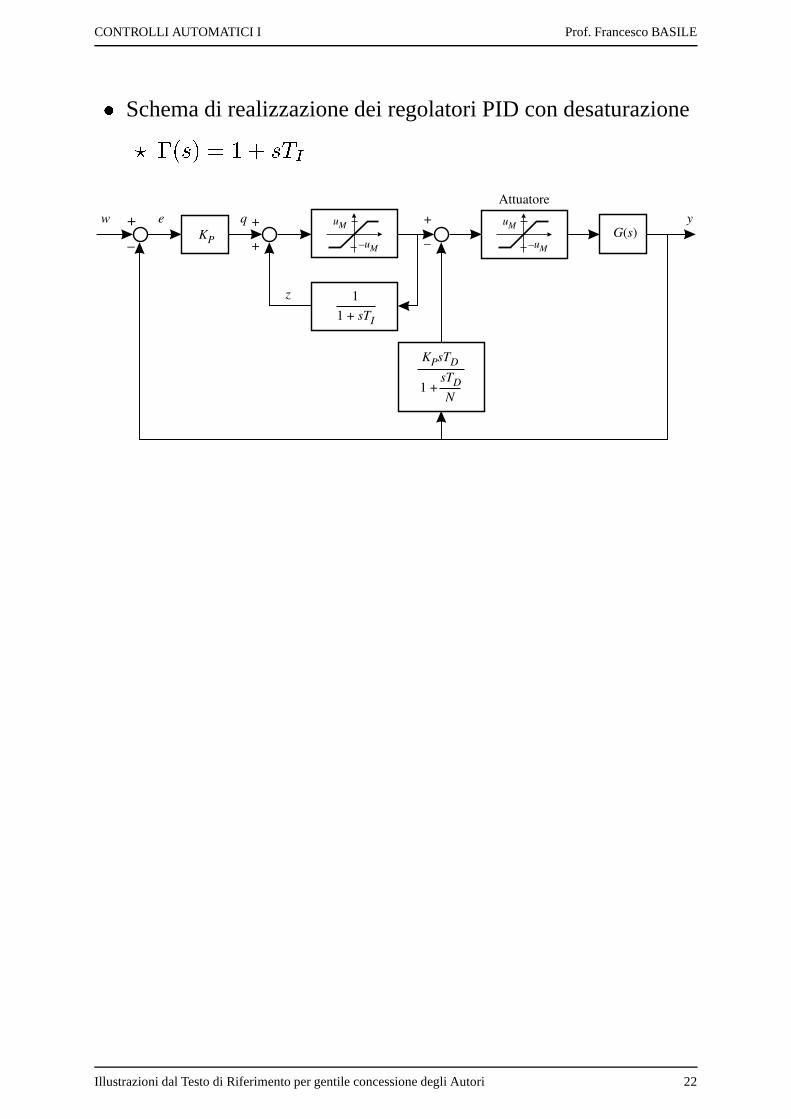
� Schema di realizzazione dei regolatori PID con desaturazione� � �� ��� , � � �
+
–KP
+
+
+
–
ywG s( )
uM
–uM
uM
–uM
1
1 + sTI
K sTP D
1 +sTD
N
e q
z
Attuatore
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 22
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
Inserimento “morbido” della regolazioneautomatica
� Sistema di controllo operante nell’intorno di un punto di fun-zionamento nominale
� ipotesi non verificata in molte applicazioni industriali, du-rante la fase di avviamento dell’impianto (ad es. regola-zione di livello a partire da condizione iniziale con serbatoiovuoto) �
� Opportunita di controllare inizialmente il sistema con altretecniche, ad es. controllo manuale, per poi commutare sullaregolazione automatica quando si e raggiunto un intorno delpunto di funzionamento nominale
� all’atto della commutazione: regolatore in grado di fornireistantaneamente un valore della variabile di controllo moltosimile a quello impiegato sino a quel momento (inserimentomorbido)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 23
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
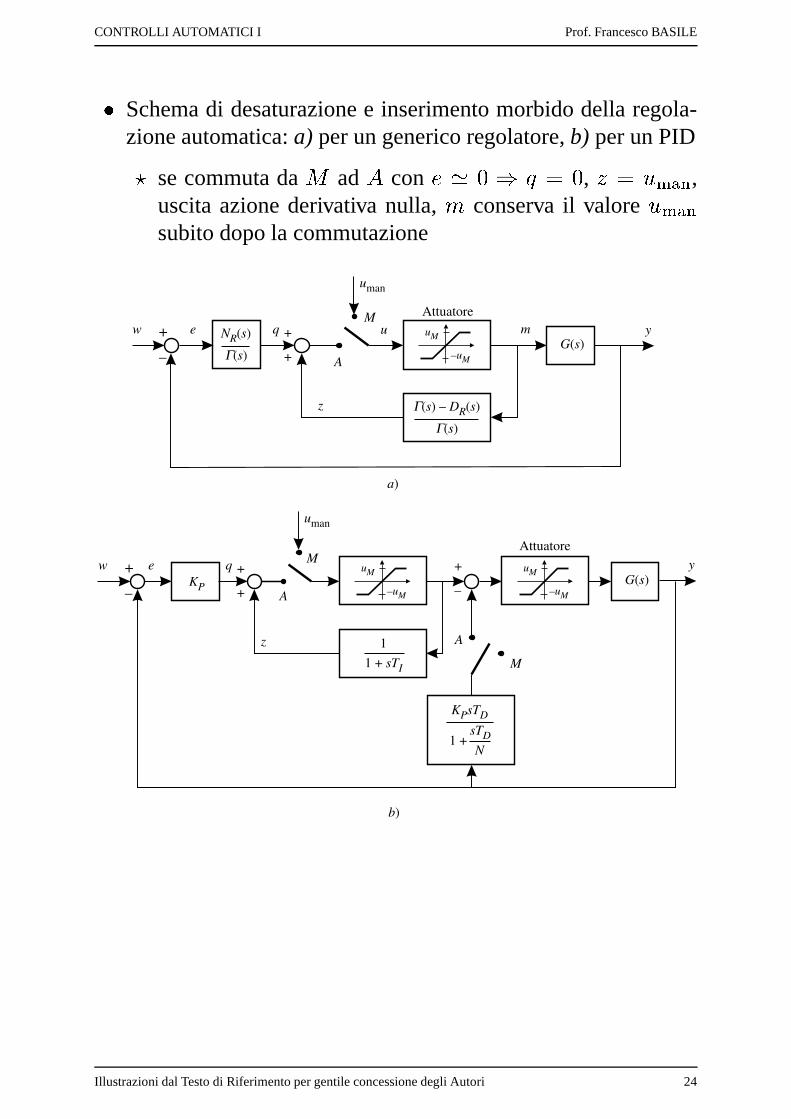
� Schema di desaturazione e inserimento morbido della regola-zione automatica: a) per un generico regolatore, b) per un PID
� se commuta da � ad � con � � ( � � � ( , � � ������� ,uscita azione derivativa nulla, � conserva il valore � �����subito dopo la commutazione
+
–KP
+
+
+
–
ywG s( )
uM
–uM
1
1 + sTI
K sTP D
1 +sTD
N
e q
z
G( ) – ( )s D sR
G( )s
N sR( )
G( )s
+
–
+
+
ywG s( )
e q
z
u
a)
uM
–uM
Attuatore
uman
uman
m
A
M
A
A
M
b)
M
uM
–uM
Attuatore
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 24
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
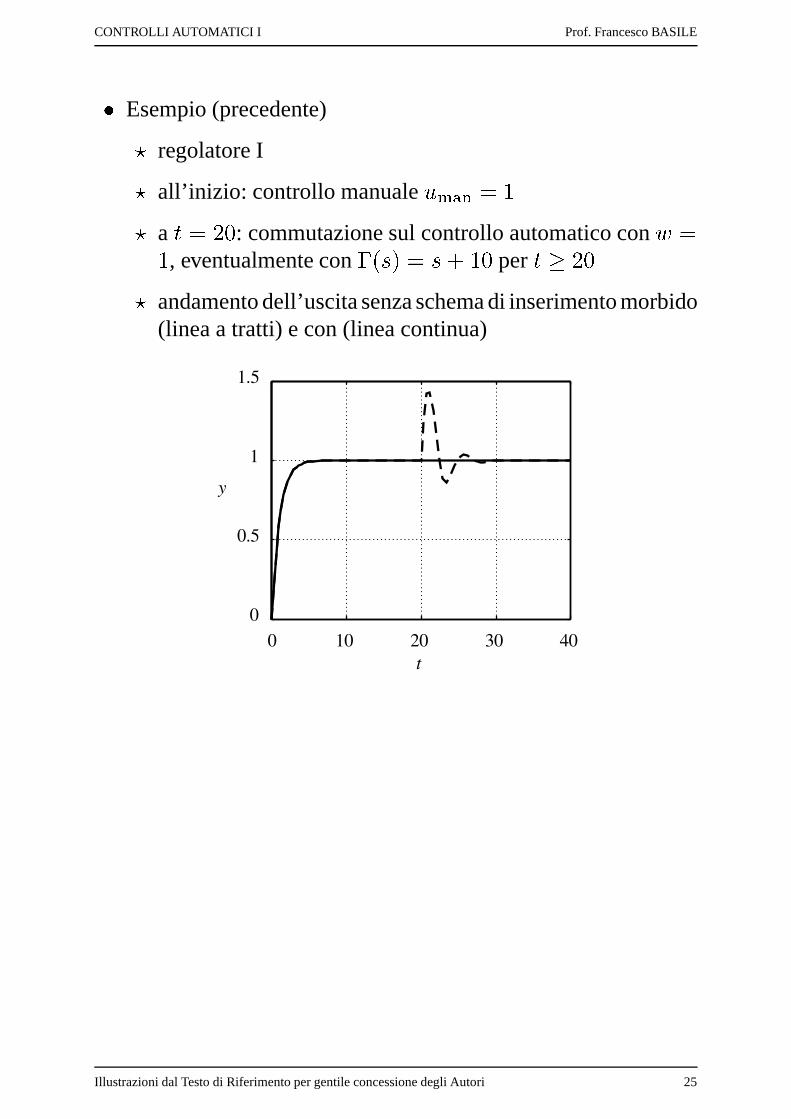
� Esempio (precedente)� regolatore I� all’inizio: controllo manuale � �����+� ,� a � � � ( : commutazione sul controllo automatico con � �, , eventualmente con
� �� ��� � ��,-( per � ' � (� andamento dell’uscita senza schema di inserimento morbido
(linea a tratti) e con (linea continua)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 25
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
METODI DI TARATURA AUTOMATICA
� Funzione di trasferimento del sistema controllato nota� parametri del PID tarati per mezzo di tecniche di sintesi
� Determinazione onerosa del modello rispetto all’esigenza diprogettare un regolatore in grado di fronire prestazioni accetta-bili
� metodi automatici di taratura che consentono di perveniredirettamente alla sintesi del regolatore a partire da specificheprove effettuate sul processo
� sistema controllato assunto asintoticamente stabile e conguadagno positivo
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 26
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
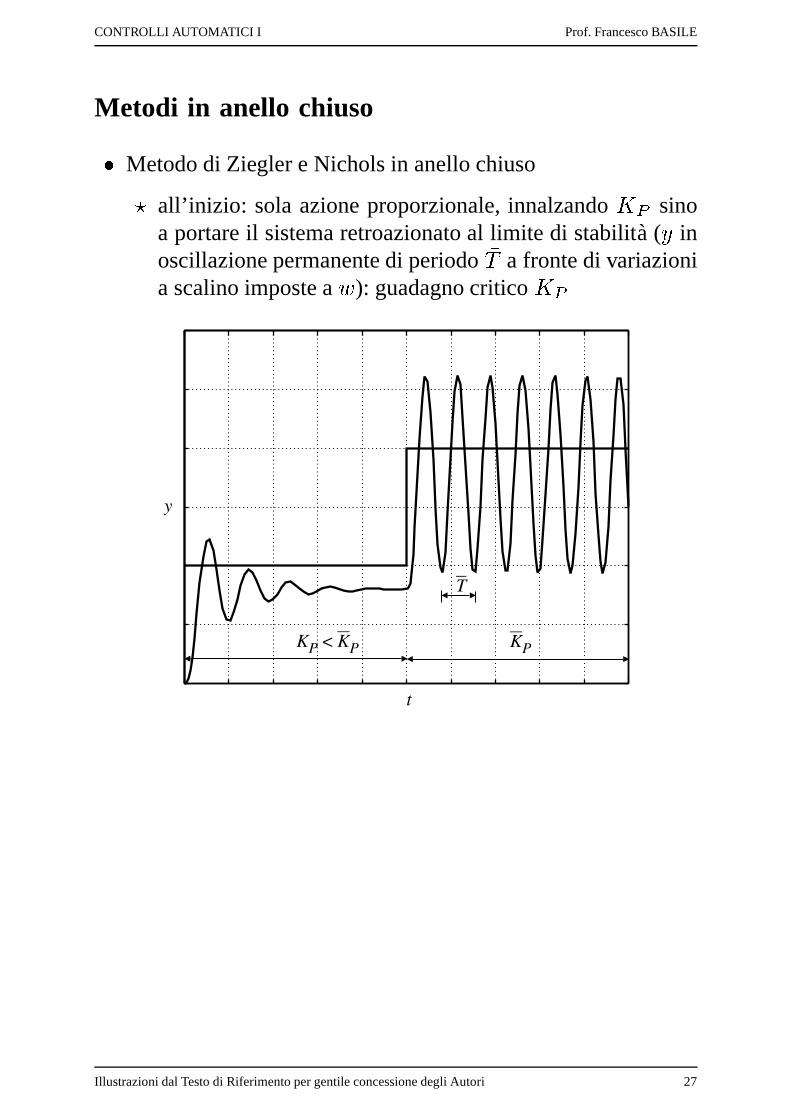
Metodi in anello chiuso
� Metodo di Ziegler e Nichols in anello chiuso� all’inizio: sola azione proporzionale, innalzando � � sino
a portare il sistema retroazionato al limite di stabilita ( � inoscillazione permanente di periodo
�a fronte di variazioni
a scalino imposte a � ): guadagno critico�� �
KP P< K KP
T
t
y
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 27
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
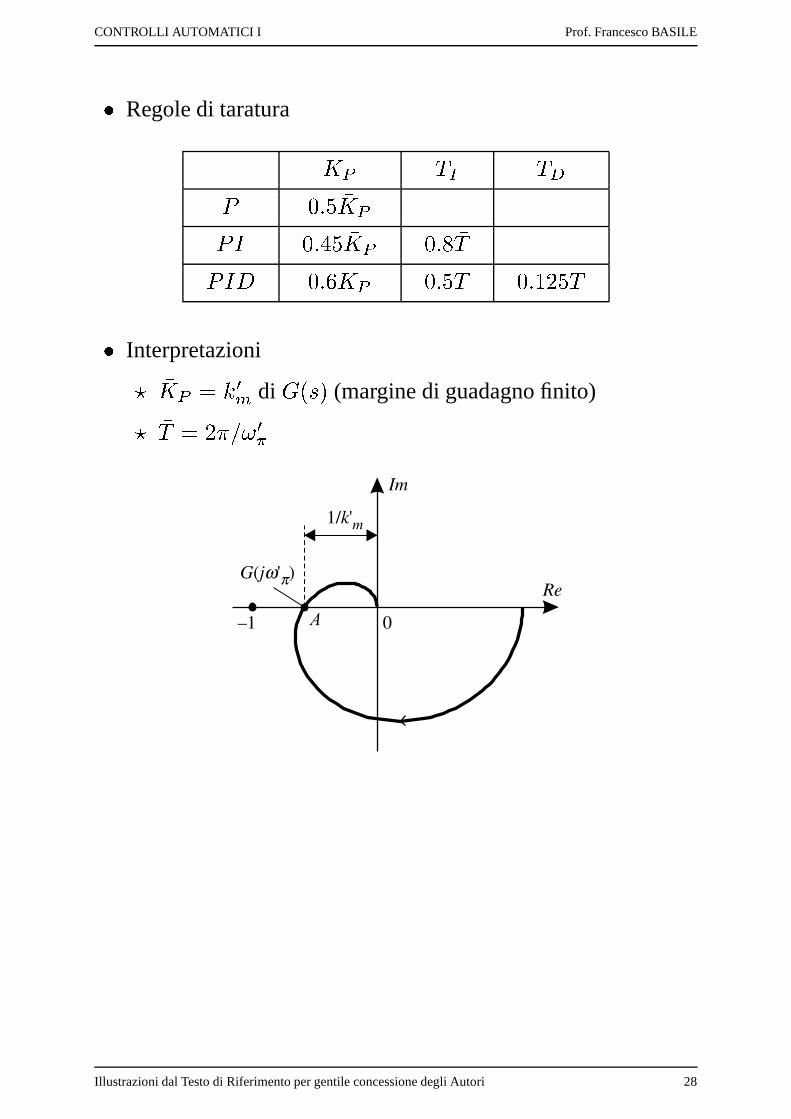
� Regole di taratura
� � � %) (�� � �� �) � (�� � � ���� (���� �) � � (���� �� � (�� � � (�� , � � �
� Interpretazioni�
�� � � ���� di � �� � (margine di guadagno finito)�
� � ��� / � ��
0–1
Im
ReG j( ' )w p
1/ 'k m
A
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 28

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Esempio
� �� ��� , , � � ���
� � �� � �� ,���� � � �
�� � � � ,� � ����� �
� PI: � � � ����� , � � � � � � ��� � , � � , � � , � � , � � � , � �
(prestazioni poco soddisfacenti)� PID (
� � ,-( ): ��� � � ��� , ��� , ��� , � , % � (�� � � � �
� � � � � � , � � , � � , � � � � (prestazioni migliori, zeri delPID coincidenti in � � �+, � , e prossimi ai poli di � �� � )
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 29
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
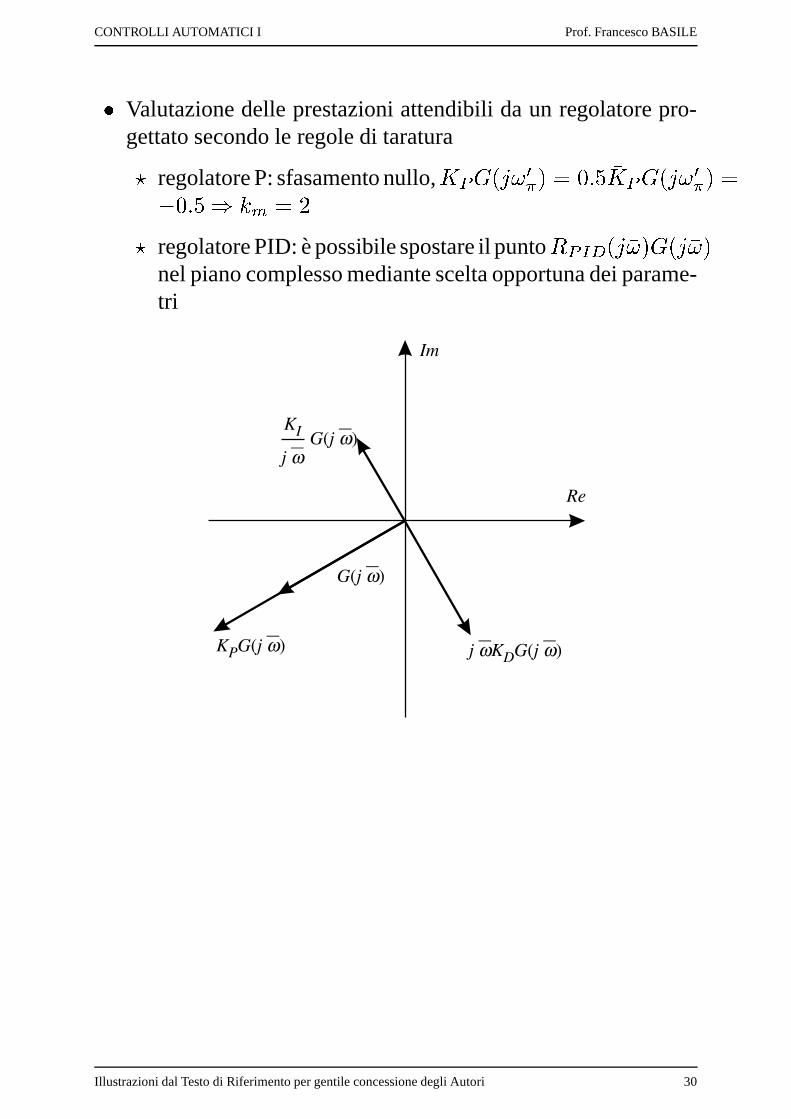
� Valutazione delle prestazioni attendibili da un regolatore pro-gettato secondo le regole di taratura
� regolatore P: sfasamento nullo, � � � �� � �� ��� (�� � �� � � �� � �� ���� (�� � �
� � � �� regolatore PID: e possibile spostare il punto
� � � % �� �� ��� �� �� �nel piano complesso mediante scelta opportuna dei parame-tri
Im
Re
j K G jw wD ( )K G jP ( )w
G j( )w
G j( )wK
j
I
w
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 30
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
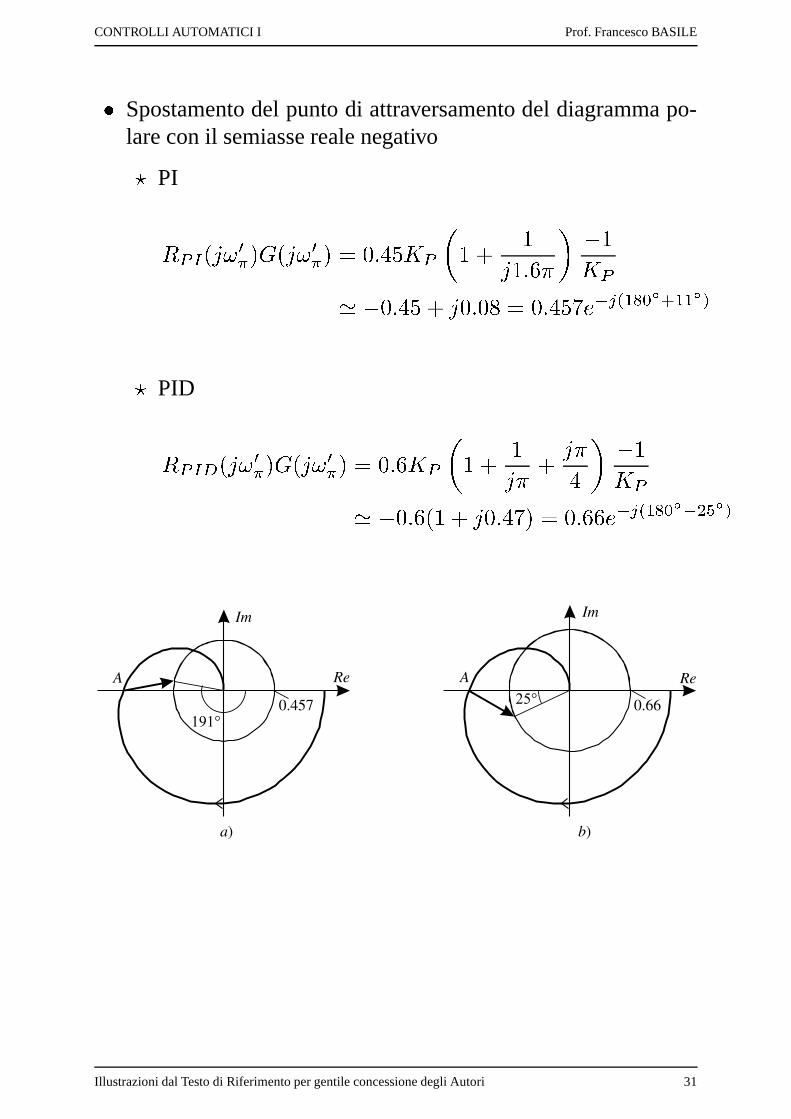
� Spostamento del punto di attraversamento del diagramma po-lare con il semiasse reale negativo
� PI
� � � �� � �� ��� �� � �
� ����(�� � � �� �, � ,
� , ��� � � �+,� �
� � (�� � � � ��(�� ( � � (�� � ��0� � ������� ��� ��� �
� PID
� � � %+�� � �� ��� �� � �
� ����(���� ����, � ,
� � � � �� � �+,
� �� � (���� , � ��(�� � .����(���� �.� � ������� � � ��� �
A A
Im
Re
Im
Re
0.660.457191°
25°
a b) )
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 31
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Limiti di applicabilita� sistemi particolarmente delicati o potenzialmente pericolosi
(limite di stabilita)� sistemi del primo o del secondo ordine con margine di gua-
dagno infinito
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 32
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
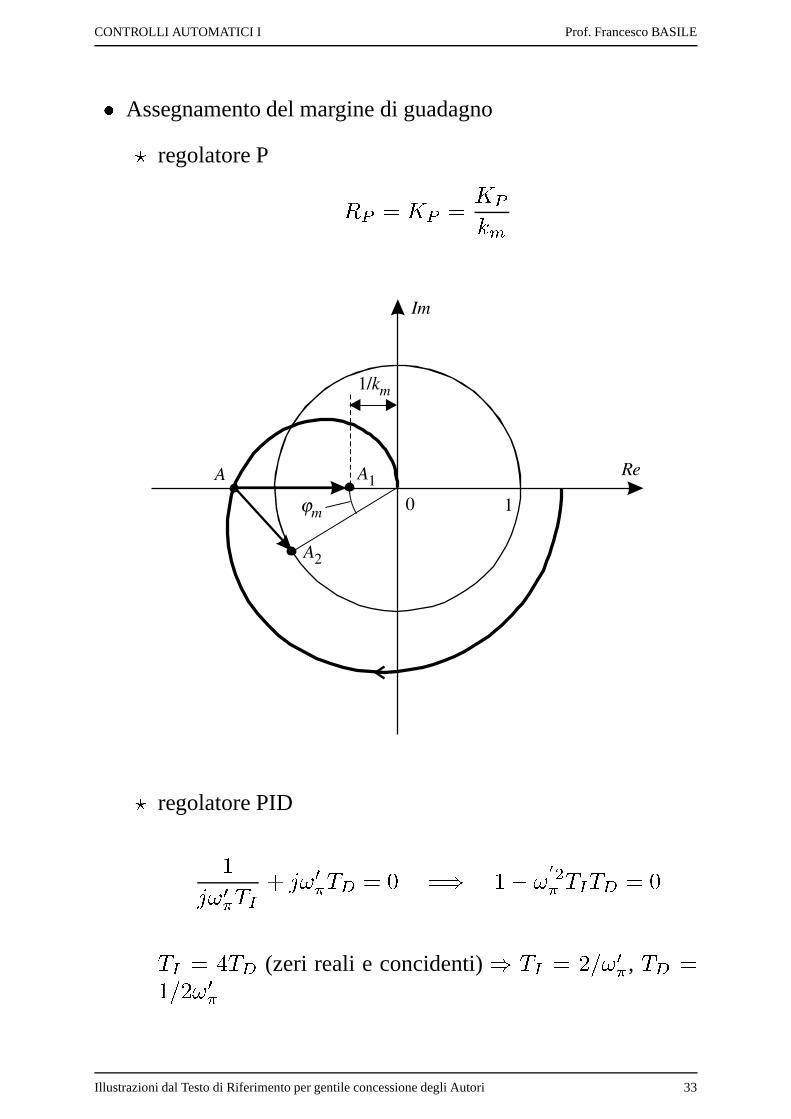
� Assegnamento del margine di guadagno
� regolatore P � � ����� ��� �� �
� regolatore PID
,� � �� � � � � �
� % ��( � � , � ��� �� � % ��(
� � � % (zeri reali e concidenti) � � � � / � �� ,
% �, / � � ��
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 33
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Esempio (precedente)� � � � � : � � � (������ ,
� � , � , � , % � (�� � � � ��� � � � � ,���� (�� � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 34
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
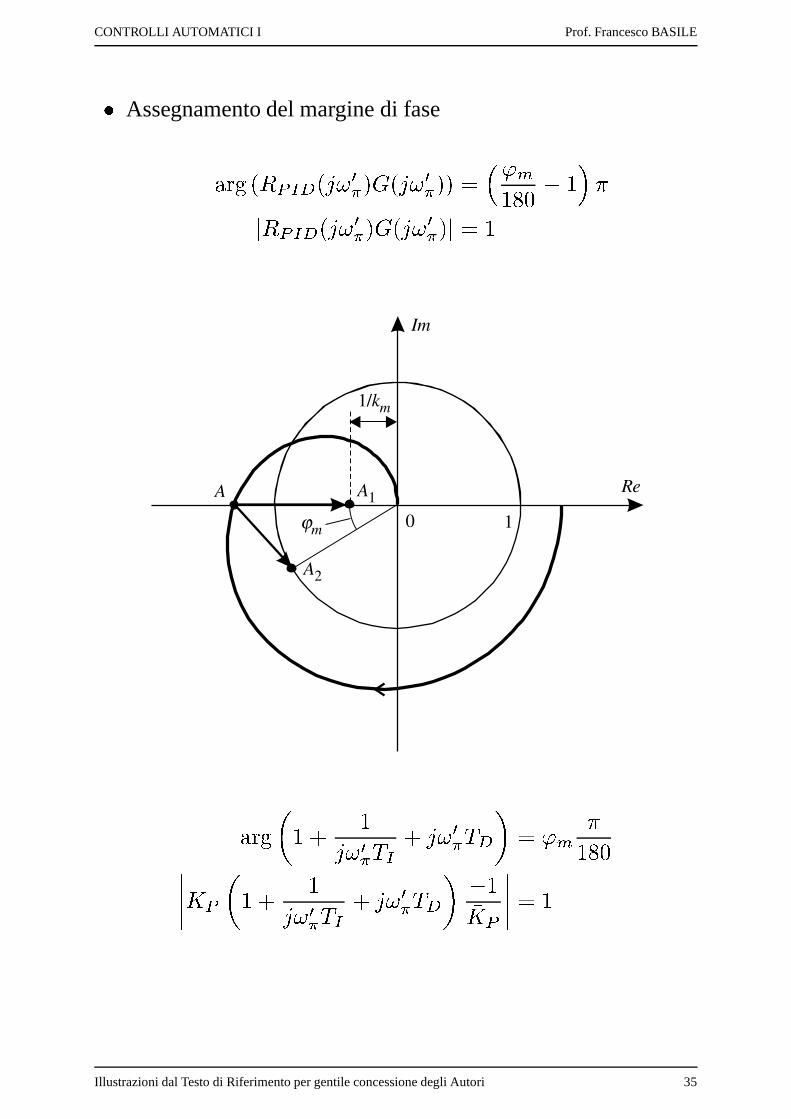
� Assegnamento del margine di fase
� ��� � � � %+�� � �� ��� �� � �
� ������ � �, �.( � ,�� �
� � � � %+�� � �� ��� �� � �
� ��� � ,
� ��� , � ,
� � �� � � � � �� % ��� � � �
, �.(���� � �, � ,
� � �� � � � � �� % � �+,
�� ����� � ,
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 35

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� �� � ,
� �� � ��� ���+ � � �� � � �� � ����� ���+�
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 36
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
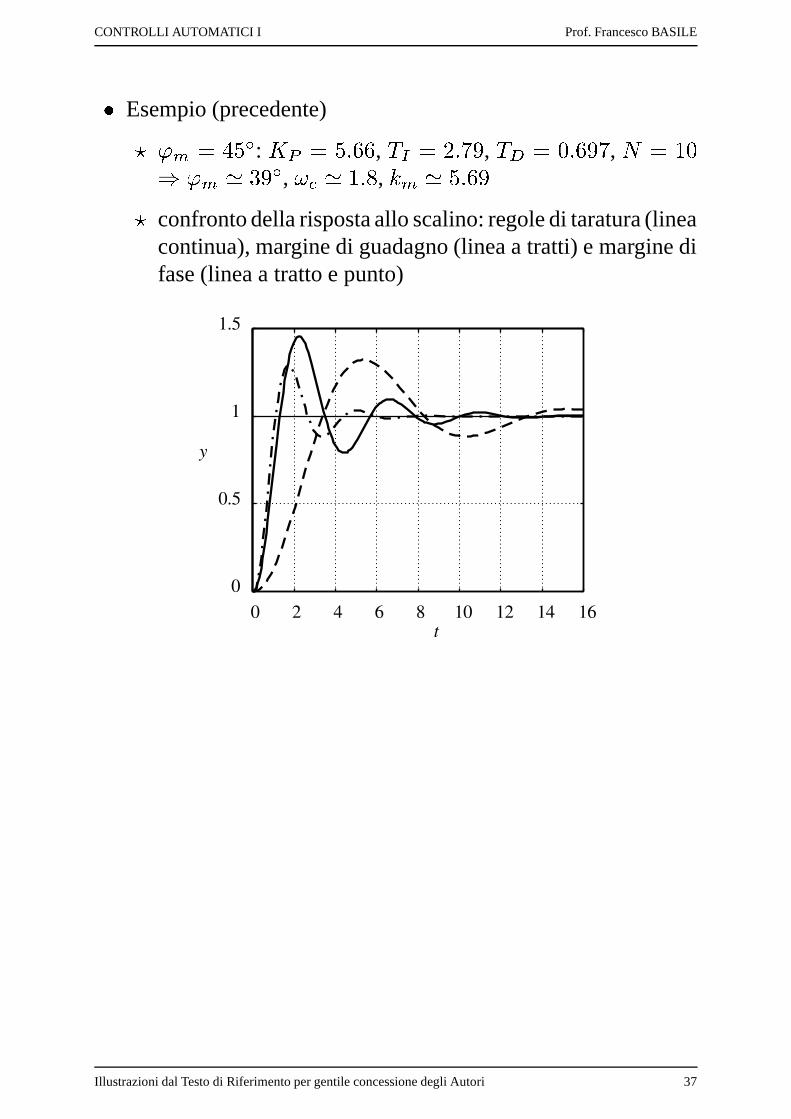
� Esempio (precedente)� ��� � � ��� : � � � � ��� � ,
� � � �� � , % � (������ ,
� � ,-(� ��� � ��� � , ����� , ��� ,
� � � � ������ confronto della risposta allo scalino: regole di taratura (linea
continua), margine di guadagno (linea a tratti) e margine difase (linea a tratto e punto)
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 37

CONTROLLI AUTOMATICI I Prof. Francesco BASILE
Metodi in anello aperto
� Metodo di Ziegler e Nichols in anello aperto� modello approssimato del sistema da controllare
� � �� ��� �, � � � �����
� Regole di taratura
��� � %)
� �
) � (�� � � � �0�
) � � , � � � � � � (�� � �� regolatore PI, � / ��� (�� , � ,�
��� � ��� � � ��, � � � � �� � ��(���� � ��, � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 38
CONTROLLI AUTOMATICI I Prof. Francesco BASILE
� Esempio (precedente)� modello approssimato: � � , , � , ��� � , ��� , � ,�� regolatore PI: � � � , � � , , � � ��� � , � ��� � � � � ,� � � (�� � � ,
� � � � � , �� regolatore PID: ��� � , ��� ,
� � � � � � , % � (�� � � ,� �
,-( � ��� � � � � ��� , ����� (��� � , � � � � , � �
Illustrazioni dal Testo di Riferimento per gentile concessione degli Autori 39


















