Parte del corso di Calcolatori Elettronici -...
60
Parte del corso di Calcolatori Elettronici su: Assembler e linguaggio Assembly Anno Accademico 2011-2012 A cura di Simona Rombo
Transcript of Parte del corso di Calcolatori Elettronici -...

Parte del corso di Calcolatori Elettronicisu:
Assembler e linguaggio Assembly
Anno Accademico 2011-2012
A cura di Simona Rombo

Il linguaggio e il programma
Questa parte del corso e dedicata allo studio del linguaggio assemblatore, meglio conosci-
uto come Assembly, che rappresenta il linguaggio di programmazione piu vicino al lin-
guaggio macchina vero e proprio, sebbene non sia coincidente con quest’ultimo. Uno
degli errori piu diffusi e quello di identificare l’Assembly, ovvero il linguaggio di pro-
grammazione, con l’Assembler, che e invece il programma utilizzato per convertire il
linguaggio Assembly in linguaggio macchina.
Per poter affrontare adeguatamente lo studio del linguaggio Assembly, e bene richia-
mare alcune nozioni basilari relative al funzionamento dei microprocessori.
Ciascun microprocessore possiede un certo set di istruzioni, cioe puo eseguire un
numero piu o meno grande (ma comunque finito) di operazioni. Un programma e cos-
tituito da una sequenza di istruzioni che permette al microprocessore di assolvere un
particolare compito di calcolo e/o controllo. Le istruzioni che il microprocessore deve
leggere ed eseguire sono immagazzinate nella memoria in forma di codice binario, ovvero,
sono codificate proprio in linguaggio macchina. Ogni istruzione e costituita da un certo
numero di byte ed il programma, nel suo insieme, non e altro che una successione di
byte che va ad occupare una certa porzione di memoria.
Redigere un programma direttamente in codice binario non e, come possiamo im-
maginare, la piu agevole delle soluzioni possibili, inoltre in tal modo verrebbero generati
con elevata probabilita numerosi errori. L’utilizzo del linguaggio Assembly consente di
superare tali difficolta attraverso l’adozione di una forma simbolica (codice mnemonico)
che richiama con una notazione sintetica il modo di operare di ogni istruzione. Possiamo
quindi considerare Assembly come un linguaggio piu orientato verso l’utilizzo umano di
quanto non lo sia il linguaggio macchina, poiche puo essere utilizzato piu agevolmente e,
tuttavia, ne conserva i principali vantaggi in termini di sintesi e velocita di esecuzione.
Infatti, ad ogni istruzione in linguaggio Assembly corrisponde una sola istruzione in
linguaggio macchina, diversamente dai linguaggi ad alto livello in cui ad una singola
istruzione possono corrispondere piu istruzioni in linguaggio macchina. D’altro canto,
i linguaggi ad alto livello permettono di scrivere programmi in modo piu semplice ed
intuitivo.
La corrispondenza uno ad uno fra istruzione in linguaggio Assembly ed istruzione in
linguaggio macchina fa sı che non ci sia un unico linguaggio Assembly ma che esso sia
diverso da microprocessore a microprocessore. Noi ci concentreremo su quella che viene
chiamata Architettura ×86, di cui richiameremo di seguito dei brevi cenni storici. In
particolare, faremo riferimento alla CPU dell’i386 in tutta la trattazione di questa parte
del corso.
1

Architettura ×86: qualche cenno storico
Architettura ×86 e un’espressione usata in senso ampio, per designare l’architettura
di una famiglia di microprocessori che derivano dall’originale CPU 8086, inizialmente
introdotta da Intel. Al momento, questa architettura e la piu diffusa nel mercato dei PC
desktop, portatili, e server economici. Nel corso degli anni, piu di una ditta ha introdotto
processori compatibili con l’architettura ×86, ponendosi in concorrenza con Intel. Un
altro grande costruttore di microprocessori che si inquadrano in questa architettura e, ad
esempio, AMD (Advanced Micro Devices). In origine, AMD aveva un accordo con Intel
per lo sviluppo e la produzione della CPU 8086. Poi le due societa hanno proseguito
separatamente, e AMD ha iniziato a produrre CPU compatibili e concorrenziali con
quelle prodotte da Intel, seguendo una propria tecnologia.
L’obiettivo dichiarato da Intel al momento dell’introduzione della CPU 8086 era
la realizzazione di un microprocessore che migliorasse, di un ordine di grandezza, le
prestazioni del precedente microprocessore a 8 bit 8080/8085. L’8086 fu il primo micro-
processore di seconda generazione, basato su un’architettura a 16 bit e con uno spazio
degli indirizzi di almeno 1M , ad essere disponibile sul mercato gia dal 1978, precedendo
cosı di circa un anno i diretti concorrenti, quali lo Z8000 (Zilog) eil 68000 (Motorola).
In tal modo, l’Intel fu in grado di conquistare una larga fetta del mercato professionale
e industriale.
La famiglia ×86 si impose in modo schiacciante con l’8088, introdotto circa un anno
dopo l’8086. Tale microprocessore era completamente compatibile con l’8086, a cui era
identico dal punto di vista software, aveva un parallelismo interno di 16 bit, capace di
indirizzare fino a 1 MB di memoria, ed un bus dati esterno ridotto a 8 bit, che lo rendeva
compatibile con l’hardware sviluppato per le macchine a 8 bit di allora. La principale
caratteristica che distingueva in modo apprezzabile l’8088 da 8085, Z80, 6800 e da tutti
gli altri microprocessori a 8 bit della precedente generazione, consisteva nel fatto che
questi ultimi avevano uno spazio di indirizzamento limitato a 64 KB. L’8088 era il primo
microprocessore a 8 bit a sfondare tale confine, mettendo a disposizione uno spazio
di memoria che avrebbe consentito lo sviluppo di programmi e applicazioni adeguate
al soddisfacimento delle esigenze dell’utente generico. L’8088 aveva le prestazioni di
una CPU a 16 bit, ma il fatto di avere un bus dati a 8 bit permetteva di ridurre i
costi dell’elettronica, senza contare che le periferiche dell’epoca impiegabili su personal
computer erano esclusivamente a 8 bit.
Nel 1981, l’IBM introdusse un personal computer, il PC IBM (Figura 1 (a)), basato
su CPU 8088, con frequenza di clock pari a 4, 77 MHz. Il PC IBM non era il primo
personal computer apparso sul mercato. Da anni, infatti, era in commercio una varieta
2

di calcolatori personali basati su microprocessori a 8 bit come ad esempio l’8085 o lo
Z80. Queste macchine impiegavano di solito il sistema operativo CP/M, che risultava
essere il punto di riferimento per l’epoca e sembrava non temere alcuna concorrenza.
Nello stesso periodo, la societa Apple procedeva lungo un percorso proprio e par-
allelo rispetto a quello degli altri produttori, distribuendo il personal computer Apple
II (Figura 1 (b)) che era basato su microprocessore 6502 (Rockwell), anch’esso a 8 bit,
dotato di un proprio sistema operativo. L’Apple II nacque nel 1977 e fu proprio il primo
computer per il quale fu usata l’espressione personal computer, nonche il primo modello
di successo di tale categoria prodotto su scala industriale. Steve Jobs e Steve Wozniak
nel 1976 avevano gia costruito nel loro garage l’Apple I, un computer che pero poteva
essere appetibile solo ad un pubblico di appassionati di elettronica. Jobs desiderava
rendere l’informatica accessibile a tutti, pertanto, il progetto dell’Apple I venne rielab-
orato mettendo tutta la parte elettronica in una scatola di plastica beige comprensiva
di tastiera, dando cosı forma al personal computer che utilizziamo ancora oggi. Il mi-
croprocessore utilizzato per l’Apple II fu il 6502, un microprocessore a 8 bit distribuito
negli stessi anni dello Z80.
(a)(b)
Figura 1: (a) PC IBM (b) Apple II
Quando l’IBM introdusse il PC, per il grande pubblico americano fu come se il PC
nascesse in quel momento. Infatti, fino agli inizi degli anni ottanta, il mercato dei cal-
colatori era rappresentato in modo quasi esclusivo dagli USA, dove la sigla “IBM” e
la parola “calcolatore” venivano considerati come sinonimi, identificando il marchio di
fabbrica con il prodotto realizzato. Grandi utenti quali industrie, banche e apparati
statali, fino ad allora piuttosto refrattari nell’utilizzo dei calcolatori, iniziarono a uti-
lizzare il PC IBM, che vide in tal modo la sua prima, ampia, diffusione. Si pensi che
la rivista Time, la quale per tradizione dedica la copertina dell’ultimo numero di ogni
annata al personaggio maggiormente distintosi sul pianeta nel corso dell’anno, nel 1981,
con grande sorpresa dei lettori, dedico la copertina al PC invece che ad una persona.
3

Nessuno avrebbe mai sospettato a quei tempi il successo che avrebbe avuto il PC
IBM, nemmeno la societa stessa, che addirittura aveva progettato e sviluppato il prodot-
to in una sede periferica dell’azienda, situata in Florida, invece che nella vasta area del
Nord dello stato di New York dove la societa aveva i principali centri di progettazione
e produzione. Inoltre, l’IBM avrebbe voluto una versione propria del sistema operati-
vo CP/M in voga a quei tempi, con caratteristiche che la distinguessero dal resto dei
produttori. Tuttavia, sembra che il produttore del CP/M (la societa Digital Research),
forte della sua posizione di predominanza sul mercato dei sistemi operativi per personal
computer, abbia tenuto una posizione alquanto “distaccata” nei confronti dell’IBM. I
responsabili del colosso informatico si rivolsero allora a una piccola ditta, la Microsoft,
nota allora per un diffuso interprete BASIC per i microprocessori a 8 bit dell’epoca.
La Microsoft accetto di buon grado di lavorare per IBM. Iniziava cosı il percorso che
avrebbe portato la Microsoft a contendere il primato alla stessa IBM, mentre un certo
Bill Gates, a quei tempi, era solo poco piu che un ragazzino.
Il successo di IBM non passo inosservato: le industrie informatiche delle “tigri ori-
entali” (Taiwan, Singapore, etc.) si misero subito al lavoro per clonare il PC IBM. La
clonazione, cioe la duplicazione, fu possibile poiche IBM forniva assieme al PC anche gli
schemi elettrici, ed il listato del sistema operativo era facilmente ottenibile, i componenti
utilizzati, chip di memoria, processore, unita a disco erano “standard” e disponibili per
tutti.
Il passo per la produzione industriale dei cloni fu brevissimo. In pochi anni il mondo
fu invaso da enormi quantita di PC clonati, dalle prestazioni sempre piu brucianti e
dai costi sempre piu bassi. Contemporaneamente, la Microsoft controllava il mondo dei
sistemi operativi per la famiglia di tutti i microprocessori Intel, diventando nel tempo
la piu potente software house del mondo. Il duopolio Microsoft e Intel ha suggerito la
coniazione del termine WinTel dall’unione di Windows e Intel.
Nel 1982 Intel introdusse il microprocessore 80286 a 16bit della famiglia ×86. Il
suo predecessore, l’80186, fu poco venduto e poco diffuso, fatta eccezione per il mondo
dell’automazione industriale. L’80286 fu il primo microprocessore Intel ad avere una
modalita protetta e diversi livelli di privilegio per il codice da eseguire. Aveva un bus
dati a 16 bit e un bus indirizzi a 20 bit, che lo rendeva in grado di indirizzare fino a 16 MB
di memoria. Restava pero ancorato al vecchio schema di indirizzamento segmento/offset,
troppo rigido, e non non supportava in hardware nessuno schema di memoria virtuale.
Inoltre non era possibile tornare alla modalita reale una volta entrati in modo protetto.
Altra caratteristica innovativa era il prefetching delle istruzioni, che lo rendeva molto
piu veloce, anche a parita di clock, dell’8086.
Nel 1984 Microsoft inizio ad annunciare l’arrivo di Windows, un’interfaccia grafica
4

che avrebbe applicato al suo sistema operativo MS-DOS che era venduto con i PC IBM
e compatibili dal 1981. Microsoft aveva creato l’interfaccia utente, all’inizio conosciuta
col nome Interface Manager, seguendo i prototipi di interfaccia grafica della Xerox e
seguı la strada intrapresa dalla Apple con il suo Macintosh.
Nell’ottobre del 1985 Intel presento la pietra miliare nell’evoluzione della serie di
processori ×86, l’80386. L’80386 fu il primo microprocessore di Intel con architettura a
32 bit e modalita protetta con supporto hardware alla memoria virtuale paginata. Fu
usato come CPU per personal computer dal 1986 al 1994 e anche in seguito. Durante la
fase di progettazione fu chiamato “P3”, essendo la terza generazione di processori Intel
con architettura ×86, ma viene indicato anche come i386.
Rispetto al suo predecessore, l’Intel 80286, il 80386 aveva un’architettura a 32, un bus
indirizzi e dati a 32 bit, in grado di gestire fino a 4G di RAM, ed una unita di paginazione
della memoria che rese piu semplice adottare sistemi operativi dotati di gestione della
memoria virtuale. Anche se successivamente la Intel sviluppo e introdusse molti altri
modelli, per molto tempo nessuno di questi introdusse novita di portata analoga, fino
all’impiego dell’EM64T nel 2004, in netto ritardo rispetto ad altre architetture, come
ad esempio DEC Alpha, che gia dal 1992 aveva il supporto per i 64 bit. Il i386 viene
dunque considerato come capostipite di una nuova famiglia, l’“architettura i386”. Il set
di istruzioni di questa architettura e noto come IA-32. L’80386 era compatibile con i
vecchi processori Intel: la maggior parte delle applicazioni che giravano sui precedenti
PC dotati di processori ×86 (8086 e 80286) funzionavano ancora sulle macchine 80386,
e perfino piu velocemente.
L’80386 fu il primo processore ad essere distribuito in maniera esclusiva dalla Intel
e tale esclusivita diede un grande controllo alla Intel sullo sviluppo di questo micropro-
cessore, garantendo all’azienda profitti ancora crescenti. Tuttavia, nel marzo 1991 la
AMD, dopo aver superato alcuni ostacoli legali, introdusse il suo processore compatibile
Am386, facendo cosı venir meno il monopolio della Intel. Il successo e il basso costo dei
PC con i386 permisero la diffusione dei primi sistemi operativi in modalita protetta su
personal computer. L’80386 fu anche il processore su cui nacque il kernel Linux.
Dopo l’i386 Intel introdusse l’i486, ultimo a seguire la denominazione ×86. Da un
punto di vista software, l’80486 era molto simile al predecessore 80386, se non per l’ag-
giunta di alcune istruzioni. Da un punto di vista hardware, invece, questo processore
fu molto innovativo, avendo una memoria cache di 8 kb unificata per dati e istruzioni,
un’ulteriore unita di calcolo in virgola mobile (FPU) (opzionale, inclusa solo nella ver-
sione DX, DX2 e DX4), una bus interface unit migliorata, e le caratteristiche di Power
management e l’SMM (System Management Mode) che divennero standard nel proces-
sore. In condizioni ottimali, questo processore poteva eseguire un’istruzione per ciclo di
5

clock. Questi miglioramenti permisero all’i486 di offrire prestazioni quasi doppie rispet-
to a quelle del predecessore, a parita di clock. Cio nonostante, alcuni dei modelli di
fascia piu bassa, specialmente le prime versioni SX a 16 e 25 MHz, erano effettivamente
inferiori rispetto agli 80386DX piu veloci (33 e 40 MHz).
Il 22 marzo del 1993, come successore dell’Intel 80486, venne introdotto sul merca-
to il Pentium (Figura 2), appartenente alla quinta generazione di microprocessori con
architettura ×86. Inizialmente Intel pensava di continuare la numerazione progressiva
indicando questo processore come Intel 80586, o i586. Tuttavia, poiche i numeri non
possono essere registrati come trademark (ovvero marchio registrato), mentre le parole
sı, nel 1992 Intel affido ad una societa specializzata, la Lexicon Branding (famosa per
aver creato anche i nomi commerciali del PowerBook di Apple, del Blackberry di RIM,
Tungsten e Zire di Palm, e InDesign di Adobe), il compito di coniare un nuovo nome per
il processore di quinta generazione. Volendo rimarcare anche nel nome la generazione
del processore, questo divenne efficacemente “Pentium” (dato che il prefisso pent- in
greco significa proprio cinque).
Rispetto all’i486, il Pentium possedeva un’architettura superscalare con due pipeline
che gli permettevano di completare piu di una operazione per ciclo di clock. Inoltre,
aveva un data path a 64 bit, caratteristica che raddoppiava la quantita di informazioni
prelevate dalla memoria in ogni operazione di fetch. E importante sottolineare pero che
questo aspetto non consentiva assolutamente al Pentium di poter eseguire codice a 64
bit, dato che i suoi registri continuavano ad essere 32 bit. I Pentium, potendo eseguire
piu istruzioni per singolo ciclo di clock, offrivano prestazioni di poco inferiori al doppio
di quelle di un i486 di pari frequenza. Gli ultimi Am486 di AMD,con frequenze di
133 MHz, raggiungevano nel calcolo sugli interi le prestazioni di un Pentium 75 MHz,
risultando comunque piu lenti nelle operazioni in virgola mobile.
Figura 2: Microprocessore Pentium
6

Il processore 80386
L’i386 presenta i seguenti modi operativi:
• Real Mode: emulazione 8086/8088, 1 Mb di memoria gestibile, 20 bit per gli
indirizzi, 16 bit per i dati, MS-DOS.
• Protected Mode: sono abilitate tutte le protezioni e le priorita dell’i386; da
questo ambiente possono essere selezionate, a loro volta, le seguenti due modalita
operative.
– 80286 Protected Mode: (i286 emulation): emula il 286 con 24 bit per gli
indirizzi e 16 bit per i dati.
– Virtual Mode 8086: uno o piu task possono essere eseguiti in questa modalita;
ogni task utilizza una macchina 8086 virtuale in cui puo operare il DOS
(modalita usata da alcuni sistemi operativi per attivare finestre DOS). Le
istruzioni eseguite dal task vengono interpretate secondo lo stile 8086, quindi
senza protezioni all’interno del task, ma al di fuori di questo ci sono tutte le
protezioni del 386.
Di seguito descriveremo alcuni aspetti dell’ambiente di programmazione del 386 nel
caso in cui il processore si trovi in modalita protetta (protected mode). Questa modalita
di funzionamento fornisce direttamente dal lato hardware un supporto alla multipro-
grammazione, impedendo che un programma possa accedere per errore all’area di memo-
ria assegnata ad un altro programma. Il programma “vede” la memoria disponibile in
modo trasparente all’utente, ma quale porzione di memoria fisica stia effettivamente
utilizzando e nascosto all’utente.
Organizzazione della Memoria
Nel modello di Von Neumann la memoria centrale contiene sia le istruzioni che i dati.
Spetta poi alla logica della CPU leggere correttamente le istruzioni dalla memoria, de-
codificarle e generare i comandi (segnali) che fanno eseguire le azioni previste da ogni
specifica istruzione sui dati considerati. L’elaborazione dell’informazione avviene all’in-
terno della CPU, facendo sı che i dati vengano letti dalla memoria, manipolati nella
CPU ed, eventualmente, tornino (magari in forma diversa) ad essere scritti in memoria
(fetch-decode-execute).
In generale, la memoria si compone di celle o locazioni, ciascuna delle quali e a sua
volta composta da un numero prefissato di bit. Per poter leggere o scrivere informazioni
7

in memoria e necessario associare un nome, ovvero un indirizzo, a ciascuna di queste
locazioni. L’indirizzo e un numero che varia nel range [0,M − 1], se M rappresenta
l’estensione della memoria.
La memoria fisica di un i386 e organizzata come una sequenza di byte, ovvero,
ciascuna locazione di memoria contiene esattamente 8 bit. E possibile indirizzare 232−1
bytes (ovvero 4G). I programmi dell’80386, tuttavia, sono indipendenti dallo spazio di
indirizzamento fisico. Questo vuol dire, come accennato in precedenza, che i programmi
possono essere scritti senza avere conoscenza di quanta memoria fisica sia effettivamente
disponibile, e senza sapere dove istruzioni e dati vengano allocati nella memoria fisica. Il
modello di organizzazione della memoria visto dai programmatori puo variare a seconda
dell’applicazione, tra due diversi casi:
• modello “flat”, che consiste di un singolo array con al massimo 4G,
• modello “segmentato” che consiste di una collezione di al piu 16,383 spazi di
indirizzi lineari, ciascuno di 4G.
Nel modello di organizzazione della memoria “flat”, il programmatore vede la memo-
ria come un unico array di 4G. Sebbene la memoria fisica possa contenere al massimo
4G, in genere essa e molto piu piccola. Il processore dovra quindi mappare i 4G di spazio
flat nello spazio di indirizzi fisico, senza che cio sia visibile al programmatore.
Nel modello di organizzazione della memoria “segmentato”, lo spazio degli indirizzi
visto dal programmatore (e chiamato spazio di indirizzi logici e uno spazio di 64 terabytes
(246 bytes). Il processore mappa questo spazio di 64 terabytes nello spazio di 4G degli
indirizzi fisici, ancora una volta senza che il programmatore sia a conoscenza dei dettagli
del mapping. Quello che vede il programmatore e uno spazio di indirizzi logici che
corrisponde ad una collezione di 16,383 sottospazi monodimensionali, ciascuno dei quali
viene chiamato segmento. Un segmento e dunque costituito da un insieme di indirizzi di
memoria contigui. La dimensione di un segmento puo variare da un byte a un massimo
di 4G.
Tipi di dato
Come gia detto, la memoria puo essere vista come un insieme contiguo di celle e cias-
cuna cella di memoria occupa un byte. Quando e necessario memorizzare dati che
occupano piu di un byte, qual’e l’ordine con il quale i byte che costituiscono il dato da
immagazzinare vengono memorizzati?
Esistono due metodi differenti, denominati big-endian e little-endian, i cui termini
derivano dai racconti di Jonathan Swift nel romanzo I viaggi di Gulliver. Si diceva
8

infatti che questi fossero i nomi di due popolazioni che abitavano nelle isole di Lilliput e
Blefuscu, entrate in rivalita per il modo in cui bisognava rompere le uova: dalla punta o
dal fondo. In particolare, a Lilliput una volta il figlio dell’imperatore si taglio aprendo
un uovo dall’estremita piu grande, percio da quel giorno fu ordinato di aprire le uova
dall’estremita piu corta, da cui little endians. Gli oppositori che volevano conservare la
tradizione di rompere le uova dall’estremita piu grande si rifugiarono a Blefuscu: big
endians. A causa di questa differenza (Figura 3) e della sua legittimazione imperiale,
era scoppiata tra le due isole una guerra sanguinosa.
Figura 3: Causa del conflitto tra Lilliput e Blefuscu
Tornando al nostro studio dell’immagazzinare dati in memoria, in analogia alla storia
fiabesca, little-endian e la memorizzazione che inizia dal byte meno significativo per
finire col piu significativo, e viene utilizzata dai processori Intel. Invece big-endian
e la memorizzazione che inizia dal byte piu significativo per finire con quello meno
significativo e viene utilizzata ad esempio dai processori Motorola. Le due Figure 4 (a)
e (b) mostrano alcuni esempi di memorizzazione nelle due diverse modalita.
(a) (b)
Figura 4: (a) Little-endian (b) Big-endian
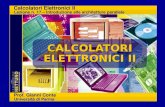
Nell’80386 i tipi di dato fondamentali per gli operandi sono byte, word e doubleworld.
9

Un byte e costituito da otto bit contigui numerati da 0 a 7. Il bit 0 e quello meno
significativo.
Una word e fatta di due byte contigui e contiene 16 bit, numerati da 0 a 15. Il bit 0
e di nuovo quello meno significativo. Il byte che contiene il bit 0 di una word e chiamato
low byte, mentre quello che contiene il bit 15 e chiamato high byte. Ciascun byte di una
word ha un proprio indirizzo in memoria, il piu piccolo dei due indirizzi e l’indirizzo
della word e contiene i bit meno significativi.
Una doubleword e fatta di due word contigue e contiene 32 bit, numerati da 0 a 31,
dove come al solito lo 0 e il bit meno significativo. Analogamente al caso precedente, la
word che contiene il bit 0 e chiamata low word, quella contenente il bit 31 e la high word
e il piu piccolo degli indirizzi delle due word coincide con l’indirizzo della doubleword.
La Figura 5 illustra i tipi di dato descritti finora, mentre la Figura 6 mostra come
questi vengano arrangiati in memoria.
Figura 5: Tipi di dato byte, word e doubleword
Quelli descritti sopra sono i tpi fondamentali degli operandi. Gli operandi possono,
in generale, essere interpretati in diversi modi dal processore. Vediamo quali sono le
principali possibili interpretazioni supportate dall’i386.
Integer: un valore numerico binario con segno contenuto in una doubleword, in una
word o in un byte. Tutte le operazioni che coinvolgono interi assumono la rappresen-
tazione in complemento a 2. Il bit segno e collocato sempre nell’ultimo bit (7, 15 o
31) e vale zero per gli interi positivi, uno per i negativi. Quindi con un byte posso
rappresentare interi nel range −128,+127, con una word da −32, 768 a +32, 767, con
una doubleword il range e −231,+231 − 1.
10

Figura 6: Tipi di dato byte, word e doubleword in memoria
Ordinal: Un valore numerico binario senza segno contenuto in una doubleword, in
una word o in un byte. Nei tre casi, i range sono, rispettivamente, 0 − 255, 65, 535 e
0, 232 − 1.
Near Pointer: Un indirizzo logico a 32 bit.
String: Una sequenza contigua di of bytes, words, o doublewords. Una stringa puo
contenere da 0 a (232 − 1) bytes (4G).
11

Bit field: Una sequenza contigua di bit, che comincia alla posizione iniziale di un byte
e puo contenere al massimo 32 bit.
Registri
Il processore 80386 contiene in tutto 16 registri che il programmatore puo utilizzare.
Tali registri possono essere raggruppati in tre principali categorie:
• Registri ad uso generico. Sono 8 registri di 32 bit utilizzati per scopi gener-
ali, tra cui soprattutto quello di contenere operandi per operazioni aritmetiche e
logiche.
• Registri segmento. Sono 6 registri speciali che permettono ai progettisti di siste-
mi software di scegliere tra organizzazione di memoria flat o segmentata, determi-
nando, in un certo istante di tempo, quali segmenti di memoria sono correntemente
indirizzabili.
• Registri istruzione e di stato. Sono due registri usati per gestire e/o modificare
alcuni aspetti relativi allo stato del processore i386.
Ci concentreremo solo sui registri ad uso generico, che sono quelli che andremo a
utilizzare per programmare in Assembly. Come illustrato in Figura 7, gli 8 registri ad
uso generico a 32 bit a disposizione sono: EAX, EBX, ECX, EDX, EBP, ESP, ESI,
ed EDI. Questi registri possono essere utilizzati in modo interscambiabile per contenere
operandi di operazioni logiche e aritmetiche, come anche per contenere operandi relativi
a operazioni di indirizzamento (fatta eccezione per ESP in quest’ultimo caso).
Osservando bene la Figura 7, ci si accorgera che la word che occupa i 16 bit meno
significativi di ciascuno dei registri generali ha un proprio nome e puo essere considerata
un’unita a se stante. Questa caratteristica e particolarmente utile sia per gestire even-
tuali dati a 16 bit, che per garantire compatibilita con i processori 8086 e 80286. Tali 8
registri di 16 bit ciascuno prendono i nomi: AX, BX, CX, DX, BP, SP, SI, e DI.
Analogamente, ciascuno dei due byte che compone uno dei quattro registri a 16
bit AX, BX, CX, e DX, ha un proprio nome e puo essere utilizzato come registro a
se per manipolare caratteri e altri dati a 8 bit. In particolare, facendo riferimento al
byte piu significativo, abbiamo: AH, BH, CH e DH; considerando, invece, il byte meno
significativo, abbiamo: AL, BL, CL e DL.
Oltre alle operazioni di indirizzamento e di calcolo, alcuni dei registri generali possono
essere utilizzati per delle funzioni dedicate. Nell’architettura dell’i386, i registri utiliz-
zati a tal fine sono scelti implicitamente. Questo fa sı che le istruzioni possano essere
12

Figura 7: Registri generali dell’i386
codificate in modo piu compatto. Le istruzioni che utilizzano specifici registri includono:
divisione a precisione doppia e multipla, I/O, istruzioni che riguardano stringhe, loop,
istruzioni che coinvolgono lo stack. A titolo di esempio, piu avanti vedremo che per
gestire lo stack si fa uso dei due registri ESP ed EBP.
Noi utilizzeremo la modalita protected mode – flat model dell’i386. L’uso del modo
protetto richiede un estensivo intervento del S.O., ad esempio MS-DOS non e in grado di
gestirlo, Linux lo ha sempre supportato e Windows NT e stato il primo dei sistemi oper-
ativi Microsoft a gestirlo. In questa modalita i registri segmento sono considerati parte
del S.O. e non sono modificabili dai programmi applicativi, possono essere considerati
protetti. In particolare, il programma “vede” 4G di memoria in modo trasparente al-
l’utente, ovvero, quale porzione di memoria fisica stia effettivamente usando e nascosto
all’utente.
13

Assemblatore, Linker e Debugger
Il processo di produzione di uno strumento software si articola in diverse fasi:
1. Analisi del problema da risolvere e sua scomposizione in sottoproblemi.
2. Progettazione di un opportuno programma.
3. Scrittura del programma.
La fase che ci interessa maggiormente in questo momento e la numero 3 e, in parti-
colare, ci interessa capire in maggiore dettaglio quali sono i passaggi attraverso i quali
l’uomo riesce a far sı che la macchina risolva in modo automatico il problema di partenza.
Un programma, per come il calcolatore elettronico puo interpretarlo, e una sequenza
di istruzioni. Il calcolatore e in grado pero di interpretare ed eseguire istruzioni molto
semplici, che tipicamente sono codificate in linguaggio macchina. Ovviamente, il pro-
grammatore pero non scrivera mai il suo programma in linguaggio macchina, sia perche
questo potrebbe comportare numerosi errori, sia perche dovrebbe in tal caso parlare la
stessa lingua della macchina, ovvero, in binario.
Invece i programmatori sviluppano i loro programmi, che implementano algoritmi di
risoluzione talvolta anche molto complessi, in quelli che vengono chiamati linguaggi ad
alto livello, come ad esempio Java e C++. In genere, sebbene cio non necessariamente
costituisca una regola, tanto piu semplice, intuitiva e sintetica risulta per il program-
matore la scrittura di un programma, altrettanto meno efficiente sara la sua esecuzione
da parte del calcolatore. Questo dipende sempre dal fatto che l’uomo e il calcolatore
parlano due lingue molto diverse e, tanto piu un programma e facilmente comprensibile
dall’uomo, tanto piu vuol dire che e lontano dalla lingua che parla la macchina.
La forma piu rudimentale di linguaggio di programmazione in cui l’uomo possa ci-
mentarsi senza essere troppo lontano da cio che il calcolatore debba interpretare, prende
il nome di Assembly. In particolare, utilizzando l’Assembly e possibile scrivere un pro-
gramma fatto di istruzioni in forma simbolica, ciascuna delle quali corrisponde ad una
specifica istruzione in linguaggio macchina. Questa corrispondenza stretta tra istruzione
in forma simbolica e istruzione in binario e garanzia dell’efficienza notevolmente supe-
riore rispetto alla scrittura di un linguaggio ad alto livello. Vedremo, infatti, come
una singola istruzione di un linguaggio ad alto livello corrisponda talvolta a un elevato
numero di istruzioni in Assembly (e, quindi, in linguaggio macchina).
Sebbene le istruzioni in Assembly siano molto vicine a cio che un calcolatore puo in-
terpretare, esse tuttavia devono essere tradotte in linguaggio macchina per poter essere
14

eseguite. Compito dell’assemblatore, o assembler, e proprio quello di fungere da tradut-
tore tra cio che il programmatore ha scritto e cio che il calcolatore puo interpretare.
L’assemblatore non e altro che un programma che si comporta come il compilatore dei
linguaggi ad alto livello, ovvero, individua eventuali errori presenti nel modulo sorgente
e lo traduce in linguaggio macchina.
Il modulo sorgente, in genere stilato attraverso un opportuno editor di testo, rappre-
senta l’input dell’assembler, che restituisce in output un modulo oggetto che solitamente
viene inserito in un file. La versione eseguibile del modulo oggetto viene costruita dal
programma linker, che mette insieme i diversi moduli oggetto componenti nel caso in cui
siano piu di uno. Un modulo oggetto in generale puo contenere riferimenti a procedure
esterne, variabili interne o esterne, il codice del programma, eventuali informazioni di
debug e/o utili per facilitare il linking.
Infine, spesso risulta conveniente utilizzare un opportuno programma debugger, che
consente di controllare l’esecuzione del programma prodotto. Questa azione di controllo
viene esercitata sia nel senso di stabilire e/o modificare le modalita con cui far procedere
l’esecuzione del programma controllato, sia nel senso di verificare la correttezza delle
operazioni che esso esegue. Ad esempio, il debugger puo agevolare nell’individuazione
di eventuali cause di risultati errati dovuti ad una inesatta definizione degli algoritmi
oppure a sviste nella scrittura che non hanno dato luogo ad errori sintattici e non sono
state, pertanto, rilevate in fase di assemblaggio.
In Figura 8 viene illustrato un workflow relativo ai programmi appena descritti. Si
osservi che le operazioni che portano dalla scrittura all’esecuzione di un programma fun-
zionante in modo corretto prevedono percorsi ciclici che spesso possono essere intrapresi
anche piu volte prima di raggiungere l’obiettivo. Infatti, puo essere necessario tornare
alla fase di editing per apportare modifiche al modulo sorgente sia durante la fase di
traduzione che durante l’esecuzione, per esempio, ed anche il linker puo in alcuni casi
segnalare eventuali errori.
Istruzioni
Le istruzioni possono essere rappresentate in forma simbolica come costituite dai seguenti
campi:
• un’etichetta, o label, ovvero un identificativo seguito dai due punti;
• un prefisso, che e opzionale e in genere e un nome riservato;
• uno mnemonico, che e un nome riservato per identificare la funzione di una certa
istruzione (ovvero l’operazione che deve compiere);
15

Figura 8: Workflow
• gli (eventuali) operandi, che nella CPU considerata possono essere da zero a tre e
sono separati da virgole.
Gli operandi di una certa istruzione possono essere memorizzati all’interno del-
l’istruzione stessa, nel caso di operandi immediati, in un registro della CPU, in una
locazione di memoria. E possibile anche gestire opportunamente lo scambio di dati con
l’I/O, che tuttavia richiede una trattazione piu complessa.
Segue un esempio di istruzione.
Esempio 1 Consideriamo la seguente istruzione:
LOADREG: MOV EAX, SUBTOTAL
In particolare, LOADREG e l’etichetta, MOV e lo mnemonico, in EAX e memorizzato l’operan-
do destinazione, in cui cioe verra inserito il risultato, SUBTOTAL contiene l’operando sor-
gente, da cui viene prelevato il contenuto. L’effetto dell’operazione MOV, come vedremo
piu avanti in maggiore dettaglio, e quello di spostare il contenuto dalla sorgente alla
destinazione.
16

L’assemblatore NASM
Il Netwide Assembler, NASM, e un assembler 80 × 86 progettato sulla base di principi
quali la portabilita e la modularita. Il NASM supporta numerosi formati di file oggetto,
tra cui Linux e ∗BSD a.out, ELF, COFF, Mach−O, Microsoft 16−bit OBJ, Win32 and
Win64. Puo anche generare in output file binari piani. La sua sintassi e progettata per
essere semplice e facile da capire, simile a quella Intel ma meno complessa. Il NASM
supporta tutte le estensioni architetturali note ×86 e fornisce supporto anche per le
macro. La pagina ufficiale di NASM e http://www.nasm.us/.
Di seguito vengono spiegate le principali modalita di installazione e utilizzo.
Installazione sotto Windows
Una volta ottenuto l’archivio appropriato per NASM, ad esempio nasm−XXX−win32.zip
(dove XXX indica il numero di versione di NASM contenuto nell’archivio), scompattar-
lo nella propria directory (ad esempio c:\NASM). L’archivio conterra una serie di file
eseguibili: nasm.exe e l’eseguibile dell’assemblatore NASM, ndisasm.exe e quello del
disassemblatore NDISASM; inoltre potranno esserci eventuali programmi di utilita per
gestire il formato di file RDOFF.
Solo l’eseguibile di NASM dovra essere lanciato, quindi e necessario copiare il file
nasm.exe in una directory del proprio PATH, o in alternativa modificare autoexec.bat
per aggiungere la directory NASM al PATH (per fare questo in Windows XP, andare
su Start > Pannello di controllo > sistema > Avanzate > variabili d’ambiente; queste
istruzioni possono andar bene anche per altre versioni di Windows).
Installazione sotto Unix
Una volta ottenuto l’archivio appropriato per NASM, nasm−XXX.tar.gz (dove XXX
indica il numero di versione di NASM contenuto nell’archivio), scompattarlo in una
directory, ad esempio /usr/local/src. Quando l’archivio verra estratto, creera la sua
sottodirectory nasm-XXX.
NASM e un pacchetto auto-configurante: dopo essere stato scompattato, bastera fare
cd nella directory in cui e stato scompattato e lanciare ./configure. In tal modo verra
trovato il migliore compilatore C da utilizzare per il build di NASM e per impostare
opportunamente i Makefile. Una volta che NASM e stato configurato, digitando make
verranno compilati i file binari NASM e NDISASM, mentre attraverso make install li
si potra installare in /usr/local/bin e, allo stesso modo, i manuali nasm.1 e ndisasm.1
verranno installati in /usr/local/man/man1.
17

Nei sistemi Debian-based, in alternativa a quanto sopra, si puo utilizzare diretta-
mente il comando: sudo apt-get install nasm.
Utilizzare NASM
Per assemblare un file, va utilizzato un comando della forma:
nasm −f <format> <filename> [−o <output>]
L’opzione -f <format> specifica il formato del file oggetto, che di solito e elf32 per le
versioni piu recenti di Linux ed e obj per Windows. L’output di default e <filename>.o
per Linux, <filename>.obj per Windows. Ad esempio, il comando:
nasm −f elf32 myfile.asm
assembla il file myfile.asm in un file oggetto di tipo ELF (Executable and Linking
Format), il formato binario standard per Linux, che si chiamera myfile.o.
Analogamente, il comando:
nasm −f bin myfile.asm −o myfile.com
assembla myfile.asm in un file binario raw myfile.com.
Consideriamo adesso il seguente comando:
nasm -f elf32 -g -F stabs <filename>.asm
L’opzione -g serve per abilitare le informazioni di debug, mentre l’opzione -F <format>
specifica il formato delle informazioni di debug. Oltre al formato STABS, piu in voga
quando anche sotto Linux i file oggetto erano nel formato OBJ piuttosto che il piu
recente ELF, un altro formato piu recente per i file di debug e il formato DWARF.
L’opzione -v consente di conoscere la versione di NASM che si sta utilizzando,
digitando nasm -v.
Altre due opzioni utili sono -Z, che consente di inviare ad un file eventuali errori
generati a partire da un file sorgente e -s, che serve ad inviare invece tali errori ad
stdout. Seguono due esempi di utilizzo.
nasm −Z myfile.err −f obj myfile.asm
nasm −s −f obj myfile.asm | more
18

In particolare, myfile.err e il file dove verranno stampati gli errori relativi al file
myfile.asm nel primo caso, mentre nel secondo caso il file myfile.asm verra assemblato
e i suoi output saranno impilati nel programma more.
Dopo che il file oggetto viene creato, e necessario effettuare il linking per poter generare
l’eseguibile. Linux fornisce come linker nativo ld (abbreviazione di load). Ad esempio,
il comando:
ld -m elf i386 <filename>.o -o <filename>
permette di specificare il tipo di emulazione, attraverso l’opzione -m, e di generare
l’eseguibile <filename>. Invece sotto Windows si puo utilizzare alink:
alink.exe <filename>.obj -o <filename>.exe
Dopo aver assemblato un file, e anche possibile disassemblarlo, per riottenere dal file
eseguibile (binario) un file in Assembly. Vediamo come:
objdump -d <filename>
dove l’opzione -d serve per abilitare il disassemblatore. Usato in questo modo, objdump
disassembla il programma e mostra anche le istruzioni nel linguaggio macchina vero
e proprio, con gli indirizzi di memoria virtuale che verrebbero utilizzati durante il
funzionamento.
Per richiedere espressamente di disassemblare utilizzando una notazione Intel:
objdump -d -M intel <filename>
Scrivere programmi in Assembly
Per scrivere un programma in Assembly e poi utilizzare NASM per assemblarlo e neces-
sario seguire delle precise regole nella stesura del listato, in modo tale che NASM possa
interpretarlo correttamente. Ad esempio, i commenti vengono sempre preceduti da un
; mentre il listato puo essere suddiviso in tre specifiche sezioni:
1) .data
Questa sezione contiene la definizione dei dati inizializzati, ossia i dati che hanno un
valore prima che il programma venga eseguito. I valori sono scritti nell’eseguibile insieme
al codice e assegnati dal loader, nessun ciclo macchina viene speso per l’inizializzazione
e la dimensione dell’eseguibile cresce all’aumentare del numero di dati inizializzati. La
direttiva .data avverte l’assemblatore dell’inizio della zona usata per descrivere l’uso
della memoria.
19

2) .bss (Block Started by Symbol)
Questa sezione contiene la definizione dei dati non inizializzati e, pertanto, puo anche
essere vuota (nel qual caso specificarla o non specificarla non influisce sulla dimensione
del file eseguibile).
3) .text
Qui sono contenute le istruzioni che compongono il programma. In questa sezione non
vanno definiti dati e vengono utilizzati simboli di dati definiti precdentemente o simboli
che identifcano label (ad esempio, per gestire i salti).
Sebbene l’ordine con cui le tre sezioni si susseguono non sia importante, per conven-
zione di solito si segue l’ordine indicato sopra.
Nel seguito di questa dispensa, assumeremo di usare NASM sotto una distribuzione
Debian di Linux (alcuni approfondimenti per Windows sono disponibili in Appendice).
Le etichette (o labels) sono dei “segnaposti” che identificano una riga di codice che
ha un significato speciale (ad esempio, una label e rappresentativa di una operazione o
di un gruppo di operazioni) e possono essere richiamate in diverse parti del programma.
Sono case sensitive. Un’etichetta deve cominciare per lettera oppure con il simbolo “ ”
e, quando viene definita, deve essere seguita da “:” (dove viene referenziata invece i
due punti non vanno usati). Dopo i due punti vanno inserite le operazioni associate
a quella particolare etichetta. Se si vuole rendere una label visibile all’esterno deve
essere dichiarata global. Qualunque programma in Assembly deve presentare un’etichet-
ta start, che individua l’indirizzo della prima istruzione del programma. L’etichet-
ta start deve essere resa pubblica, perche ld deve sapere da che parte si comincia
(soprattutto quando piu file oggetto devono essere fusi in un unico file eseguibile).
In Figura 9 e mostrato il listato di un programma molto semplice.
1. ;
2. ; Primo esempio semplice
3. ;
4. section .data
5. section .text
6. global start
7. ;
8. start:
9. mov eax, 1
10. mov ebx, 7
11. int 0x80
Figura 9: Esempio di programma in Assembly
20

Le prime tre righe e le righe 3 e 7 sono dei commenti. La quarta riga contiene la
direttiva che indica l’inizio della zona usata per descrivere l’uso della memoria (che in
questo caso non viene usata affatto); la quinta riga avverte l’assemblatore dell’inizio del
codice del programma. La riga 6 serve ad avvisare l’assemblatore che il simbolo rappre-
sentato dall’etichetta denominata start individua l’indirizzo dell’istruzione iniziale da
rendere pubblica, pertanto deve rimanere rintracciabile nel file oggetto generato dalla
compilazione. L’ottava riga dichiara l’etichetta start.
Prima di spiegare in dettaglio le ultime tre istruzioni del programma illustrato in
Figura 9, dobbiamo aprire una parentesi sulle chiamate a funzioni del Sistema Operativo.
Per interagire con le componenti della macchina, e necessario effettuare la richiesta
di un servizio al Sistema Operativo, che offre un’apposita interfaccia per richiamare
determinate funzioni attraverso l’utilizzo delle interruzioni. E presente un vettore delle
interruzioni nelle prime 1,024 locazioni di memoria cui non e possibile accedere ne in
lettura ne in scrittura. Esiste un gestore dei servizi che si chiama service dispatcher e
che si trova all’indirizzo 8016 (Figura 10). Per comunicare con il service dispatcher e,
dunque, per interfacciarsi con il Sistema Operativo, Assembly mette a disposizione il
comando int.
Figura 10: Gestione delle interruzioni
In particolare, e necessario prima di tutto specificare quale dei circa 200 servizi a
disposizione si vuole richiedere. Per fare cio, bisogna memorizzare il numero del servizio
21

desiderato all’interno del registro EAX. Se il servizio richiede altri parametri, questi
andranno specificati in appositi registri, a seconda del servizio in considerazione.
Tornando al nostro esempio di programma, nella riga 9 si assegna il valore uno
al registro EAX, per individuare una particolare funzione del Sistema Operativo che
corrisponde all’EXIT dal programma. Questa funzione richiede che il parametro rapp-
resentato dal valore di uscita venga collocato nel registro EBX (il valore 0 indica uscita
senza errori). Nella decima riga del programma, assegnamo il valore sette al registro
EBX. Infine, nell’ultima riga, si esegue un’interruzione all’indirizzo 8016 per effettuare
la chiamata a funzione desiderata.
Il programma generato si limita a chiamare una funzione del sistema operativo, con
la quale conclude il suo lavoro restituendo il valore numerico sette. Lo si puo verificare
ispezionando il parametro $? della shell1, dopo aver lanciato l’eseguibile del programma,
come illustato di seguito.
nasm -f elf32 -o echo7.o echo7.asm
ld -o echo7 echo7.o
echo $?
In generale, e buona norma terminare i programmi che scriveremo in Assembly con le
seguenti istruzioni:
mov ebx,0; exit code, 0=normal
mov eax,1; exit command to kernel
int 0x80; interrupt 80 hex, call kernel
in modo da esplicitare l’uscita, dicendo al kernel che il programma e terminato e puo es-
sere rimosso dallo scheduling di esecuzione (anche se un buon Sistema Operativo termina
comunque un programma in corrispondenza dell’ultima istruzione dello stesso).
Quando si programma in Assembly spesso e conveniente utilizzare un debugger,
ovvero uno strumento che permette di eseguire passo per passo il proprio programma,
consentendo di verificare lo stato dei registri ed eventualmente della memoria. Infatti,
con un linguaggio assemblatore, operazioni “semplici” come l’emissione di informazioni
attraverso lo schermo diventano invece molto complicate.
Nei sistemi GNU e disponibile GDB (GNU debugger). Per capire come utilizzarlo,
si modofichi il programmino analizzato come illustrato in Figura 11.
1La shell di Linux ha la variabile d’ambiente speciale $? che viene settata al codice d’uscitadell’ultimo programma eseguito.
22

1. ;
2. ; Primo esempio semplice
3. ;
4. section .data
5. section .text
6. global start
7. ;
8. start:
9. mov eax, 1
10. bp1:11. mov ebx, 7
12. bp2:13. int 0x80
Figura 11: Modifiche per utilizzare un debugger (righe 10 e 12)
In particolare, sono state aggiunte due etichette sulle righe 10 e 12 opportunamente
collocate tra le istruzioni che si traducono in codici del linguaggio macchina. I nomi delle
etichette non sono importanti, li abbiamo scelti in modo da ricordare la parola breakpoint.
Riassemblando (meglio se si usano le opzioni -g e -F viste prima) e linkando nuovamente
il file, e possibile avviarlo all’interno di GDB attraverso il comando gdb echo7, che
permettera di entrare in una modalita da cui e possibile inserire dei comandi in modo
interattivo all’interno della shell. Se si vogliono aprire piu finestre contemporaneamente
si puo usare gdb -tui echo7.
La prima cosa da fare e associare dei breakpoint alle etichette aggiunte sulle righe 10
e 12 del sorgente, per stabilire dove l’esecuzione del programma deve essere sospesa auto-
maticamente. Lo faremo digitando prima break bp1 e poi break bp2, rispettivamente
(Figura 12).
Una volta fissati gli stop, si puo avviare il programma digitando run. Il programma
verra sospeso in corrispondenza del primo dei due breakpoint, come illustrato in Figura
13.
Digitando info registers si potranno ispezionare i registri, verificando che il reg-
istro EAX contiene il valore uno, come dovrebbe effettivamente essere a questo punto
dell’esecuzione. Per far proseguire il programma fino al prossimo stop si usa il comando
continue. Ispezionando nuovamente i registri si vedra che a questo punto il registro
EBX risulta impostato con il valore previsto (ovvero il valore 7). Si puo dunque lascire
concludere il programma (continue) e terminare l’attivita con GDB attraverso il co-
mando quit. In generale, per eseguire il programma con GDB eseguendo un’istruzione
alla volta si puo usare il comando stepi.
23

Figura 12: Fissare i breakpoint
Esistono diversi programmi frontali che sono basati su GDB ma mettono a dis-
posizione un’interfaccia grafica che consente di tenere sotto controllo piu cose, simul-
taneamente. Tra questi, ricordiamo ad esempio DDD e KDBG. Per utilizzarli, e suffi-
ciente installarli con ad esempio sudo apt-get install ddd e poi lanciare l’eseguibile
analogamente a quanto fatto per GDB (e.g. ddd echo7).
Variabili
All’interno della sezione .data vengono dichiarate le variabili inizializzate (defined) per
le quali e necessario specificare quanto spazio occupano:
db 8 bit (1 byte)dw 16 bit (1 word)dd 32 bit (1 doubleword)dq 64 bit (1 quadword, ovvero 2 doubleword)
Anche per le variabili non inizializzate (reserved) dichiarate nella sezione .bss bisogna
specificare la dimensione al momento della dichiarazione:
resb 8 bit (1 byte)resw 16 bit (1 word)resd 32 bit (1 doubleword)resq 64 bit (1 quadword, ovvero 2 doubleword)
Una stringa e rappresentata da una sequenza di caratteri in memoria, e puo essere
definita associando un’etichetta a dove inizia la stringa. Le stringhe possono essere
24

Figura 13: Stop al primo breakpoint bp1
racchiuse tra apici e/o virgolette, ed e possibile concatenarle interponendo una virgola
tra due stringhe. Un numero concatenato verra interpretato come codice ASCII.
Per definire una costante si utilizza la direttiva equ, mentre il simbolo $ e un token
speciale che indica here, ovvero, segna il punto dove l’assemblatore e arrivato.
Segue qualche esempio di dichiarazione.
section .datavar1 db 10; dichiariamo la variabile var1 che occupa 1 byte ed e
; inizializzata con il valore 10
NumMesi equ 12; dichiariamo una costante
Message db ‘‘ciao mondo!’’,10; dichiariamo una stringa e la
; concateniamo con il codice ASCII del numero 10
MsgLen equ $-Message
section .bssvar2 resd; dichiariamo la variabile non inizializzata var2 che occupa
; 1 doubleword
25

Programmare in Assembly
Iniziamo adesso ad entrare piu in dettaglio sulla programmazione in assembly. A tal
fine, ci servira studiare le operazioni fondamentali che ci permetteranno di scrivere i
nostri programmi.
Una prima operazione che gia abbiamo accennato e che adesso andremo ad anal-
izzare meglio e la MOV. La MOV e un’operazione a due operandi, e serve a trasferire il
contenuto del secondo operando (sorgente) nel primo (destinazione). Non tutte le cop-
pie di operandi pero sono lecite: ad esempio, due variabili non possono essere utilizzate
contemporaneamente come operandi della MOV. Infatti questa operazione non puo essere
utilizzata per effettuare spostamenti da memoria a memoria.
Vediamo quali sono i trasferimenti leciti:
- da registro a registro
mov di, ax; 16 bit
mov ecx, edx; 32 bit
- da registro a memoria
mov [Msg], eax
mov [eax], ebx
- da memoria a registro
mov eax, [ebx]
mov eax, [Msg]; spostamento dati (contenuto di Msg)
mov eax, Msg; spostamento indirizzi (indirizzo di Msg)
- da immediato a registro
mov eax, 42h
- da immediato a memoria
mov [eax], byte 42h
mov [eax], dword Msg
Va osservato che il nome di una variabile rappresenta sempre l’indirizzo della cella in
memoria dove inizia quella variabile. Per accedere a una cella di memoria, si utilizzano
le parentesi quadre. Ad esempio [eax] fa sı che si acceda alla cella di memoria che si
26

trova all’indirizzo contenuto dentro il registro EAX. Ricordiamo che stiamo assumendo
che le celle di memoria siano ad 8 bit mentre gli indirizzi siano a 32 bit. Per prelevare
il contenuto di una variabile va dunque usato [nome variabile], ad esempio [Msg].
Osserviamo che quando si effettua uno spostamento verso un registro, la dimensione
di cio che si sposta e dettata dalla dimensione del registro destinazione. In particolare,
il numero di bit della sorgente deve essere inferiore alla dimensione del registro desti-
nazione. Analogamente, quando si effettua un trasferimento verso la memoria, bisogna
specificare (se cio non e chiaro) quanti byte bisognera spostare in memoria. In parti-
colare se, in tal caso, la sorgente e un registro, la dimensione dei dati e implicitamente
nota. Altrimenti sara necessario esplicitarla utilizzando byte, word, dword, qword.
Vediamo qualche esempio di trasferimento non consentito:
mov ax, ebx
mov eax, bx
In entrambi i casi, le dimensioni dei registri sorgente e destinazione non coincidono.
mov [eax], [ebx]
In questo caso c’e un doppio passaggio in memoria, che non e consentito.
mov Msg, eax
Msg e un indirizzo, non un contenitore. Il seguente esempio conclude la trattazione della
MOV.
Esempio 2 Consideriamo il seguente programma in Assembly.
section .data
temp dq 1612
section .text
global start
start:
mov eax, [temp]
mov [temp], dword 12
mov ecx, temp
mov edx, [temp]
exit:
mov ebx, 0
27

mov eax, 1
int 0x80
Inserendo un breakpoint su exit, la Figura 14 illustra lo stato dei registri quando
l’esecuzione arriva in tale punto del programma.
Figura 14: Esempi di utilizzo di MOV
Stampa su video (write to stdout)
Per effettuare la stampa su video, in generale, e necessario come gia accennato richia-
mare un’interruzione. In particolare, nel primo programma che abbiamo analizzato ci
limitavamo a stampare un numero che avevamo scritto nel registro EBX, sovrascrivendo
il parametro della funzione EXIT dal programma.
Supponiamo di voler stampare su video una stringa, che si trova dentro la variabile
Msg. In tal caso, il servizio da richiedere al Sistema Operativo e il numero 4 e riceve tre
argomenti, come illustrato nel seguente listato.
mov edx, Len; arg3, length of string to print
mov ecx, Msg; arg2, pointer to string
mov ebx, 1; arg1, where to write, screen
mov eax, 4; write sysout command to int 80h
int 0x80 (80h); interrupt 80 hex, call kernel
Siamo pronti adesso per scrivere, finalmente, il nostro programma Hello world in As-
sembly, illustrato in Figura 15.
28

1. ;
2. ; Hello world program
3. ;
4. section .bss; bss section
5. section .data; data section
6. Msg: db ‘Hello World!’, 10; the string
7. Len: equ $ - Msg
8. section .text; code section
9. global start; make label available to linker
10. start:
11. mov edx, Len; arg3, length of string to print
12. mov ecx, Msg; arg2, pointer to string
13. mov ebx, 1; arg1, where to write, screen
14. mov eax, 4; write sysout command to int 80h
15. int 0x80; interrupt 80 hex, call kernel
16. exit:
17. mov ebx, 0; exit code, 0=normal
18. mov eax, 1; exit command to kernel
19. int 0x80; interrupt 80 hex, call kernel
Figura 15: Programma Hello World
Le prime tre righe sono dei commenti. La quarta e quinta riga definiscono le sezioni
dei dati non inizializzati (vuota) e inizializzati. Tra questi ultimi, abbiamo una variabile
Msg che contiene la stringa da stampare, concatenata con il numero 10 che rappresenta
il codice ASCII dello ‘\n’. Invece che il numero 10 avremmo potuto usare ‘\n’, usandocome apici quelli che si ottengono digitando contemporaneamente sulla tastiera il tasto
Alt Gr e il tasto apice.
La seconda dichiarazione presente nella sezione .data e una costante Len, che rap-
presenta la lunghezza della stringa intesa come numero di byte che questa occupa in
memoria. Infatti, all’indirizzo corrente, su cui si trova cioe il cursore subito dopo aver
aver scritto la stringa in memoria, sottraiamo l’indirizzo della prima cella in memoria
a partire dalla quale la stringa viene memorizzata. Ovviamente cio funziona solo se lo
facciamo in questo punto del programma.
Il resto del programma riprende porzioni di codice che gia conosciamo, in particolare
la stampa su video e l’uscita dal programma.
29

Istruzioni di confronto, di salto, aritmetiche e shift
In questa sezione vediamo alcune delle istruzioni piu importanti per effettuare confronti,
saltare in punti precisi di un programma ed effettuare operazioni aritmetiche.
In generale, possiamo dire che vale di gran lunga la regola che due passaggi in
memoria nell’ambito della stessa operazione non sono consentiti, quindi nelle operazioni
a piu operandi solo uno di essi puo rappresentare una specifica locazione di memoria,
esattamente come gia introdotto per l’operazione MOV.
Prima di procedere, e bene sottolineare che nell’architettura ×86 e presente un ul-
teriore registro a 32 bit oltre a quelli gia considerati, che si chiama EFLAGS. Un flag
e un singolo bit di informazione il cui valore e fissato indipendentemente dagli altri bit.
Alcuni bit del registro EFLAGS sono indefiniti, altri sono riservati al Sistema Operativo,
altri ancora sono direttamente utilizzabili dal programmatore. La Figura 16 mostra in
che modo vengono utilizzati i bit interni dell’EFLAGS.
L’operazione:
CMP OP1, OP2
sottrae OP2 da OP1 e altera i bit di EFLAGS a seconda del risultato di questo confron-
to, senza alterare in alcun modo gli operandi. E necessario che i due operandi abbiano
lo stesso numero di bit per poter essere confrontati, sia che si tratti di valori immediati,
registri o memoria.
L’operazione:
NEG OP1
sottrae OP1 da zero, invertendo cosı il segno dell’operando (complemento a 2).
Spesso e utile raggruppare alcune istruzioni del programma riferendosi ad esse at-
traverso un’etichetta. All’occorrenza, sara possibile saltare a quel gruppo di istruzioni
utilizzando un’operazione di salto individuata dallo mnemonico JMP. Questa oper-
azione ha come operando un’etichetta. Esiste anche la possibilita di effettuare un salto
condizionato, ovvero, saltare a quella porzione del programma solo se una specifica con-
dizione e verificata. A questo livello, la verifica di una condizione puo essere fatta ad
esempio attraverso l’ispezione dei bit di EFLAGS che sono stati alterati a seguito di
un’operazione di confronto. La Figura 17 illustra le istruzioni di salto di quest’ultima
categoria. Si osserva che di solito gli Unsigned Conditional Transfers sono meno utiliz-
zati, poiche servono quando si sa di lavorare con interi positivi cosı grandi che 31 bit
non sono sufficienti ed e necessario guadagnare un ulteriore bit.
Segue un esempio di utilizzo.
30

0 CF Carry Flag 0: no carry1: carry
1 *** Udefined2 PF Parity Flag 0: # of 1s is odd
1: # of 1s is even (last 8 bit)3 *** Udefined4 AF Auxiliary Carry Flag 0: no carry in BCD
1: carry in BCD5 *** Udefined6 ZF Zero Flag 0: op not zero
1: operand became zero7 SF Sign Flag 0: non-negative
1: negative8 TF Trap Flag Reserved9 IF Interrupt Enable Flag Reserved10 DF Direction Flag 0: autoincrement is up-memory
1: down11 OF Overflow Flag 0: no overflow
1: overflow12 IOPL I/O Privilege Flag Lev 0 Reserved13 IOPL I/O Privilege Flag Lev 1 Reserved14 NT Nested Task Flag Reserved15 *** Udefined16 RF Resume Flag Reserved17 VM Virtual-86 Mode Flag Reserved18 AC Alignment Check Flag Reserved19 VIF Virtual Interrupt Flag Reserved20 VIP Virtual Interrupt Pending Reserved21 ID CPU ID 0: CPUID not available
1: CPUID available22-31 *** Udefined
Figura 16: Utilizzo bit dell’EFLAGS
31

Unsigned Conditional Transfers
Mnemonic Condition Tested Jump If...
JA/JNBE (CF or ZF) = 0 above/not below nor equalJAE/JNB CF = 0 above or equal/not belowJB/JNAE CF = 1 below/not above nor equalJBE/JNA (CF or ZF) = 1 below or equal/not aboveJC CF = 1 carryJE/JZ ZF = 1 equal/zeroJNC CF = 0 not carryJNE/JNZ ZF = 0 not equal/not zeroJNP/JPO PF = 0 not parity/parity oddJP/JPE PF = 1 parity/parity even
Signed Conditional Transfers
Mnemonic Condition Tested Jump If...
JG/JNLE ((SF xor OF) or ZF) = 0 greater/not less nor equalJGE/JNL (SF xor OF) = 0 greater or equal/not lessJL/JNGE (SF xor OF) = 1 less/not greater nor equalJLE/JNG ((SF xor OF) or ZF) = 1 less or equal/not greaterJNO OF = 0 not overflowJNS SF = 0 not sign (positive, including 0)JO OF = 1 overflowJS SF = 1 sign (negative)
Figura 17: Istruzioni di salto
32

Esempio 3 Supponiamo di voler scambiare i valori contenuti in EAX ed EBX, utiliz-
zando una variabile temp, solo se il valore contenuto in EAX e piu piccolo di quello
contenuto in EBX. A tal fine, potremo utilizzare il seguente codice.
section .data
temp dw 0
section .text
global start
start:
cmp eax,ebx
jl switch
jmp exit
switch:
mov [temp], eax
mov eax, ebx
mov ebx, [temp]
exit:
mov ebx, 0
mov eax, 1
int 0x80
Per verificare che il programma sia corretto, ad esempio possiamo aggiungere come
prima istruzione dell’etichetta start la seguente:
mov ebx, 1
e quindi inserire subito dopo un’etichetta bp1, per fissare su di essa un breakpoint. A
questo punto, in fase di debug, fisseremo due breakpoint, uno sull’etichetta bp1 e l’altro
su exit: ispezionando per ciascuno dei due lo stato dei registri potremo verificare che
il programma fa quello che noi vogliamo.
Vediamo adesso le piu importanti operazioni aritmetiche a disposizione nell’i386. Sia
ADD che SUB ricevono due operandi OP1, OP2 e restituiscono OP1 +/- OP2, rispettiva-
mente. Invece INC e DEC hanno l’effetto di incrementare e decrementare, rispettivamente,
di uno l’unico operando che ricevono. Di seguito un esempio.
Esempio 4 Date due variabili word x e y, memorizzare nel registro EDX il numero
di variazioni (incrementi o decrementi) che bisogna apportare ad x per ottenere y. Si
assuma di non voler utilizzare a tal fine le operazioni ADD e SUB ma solo INC e DEC.
33

section .data
x dw 8
y dw 3
section .text
global start
start:
mov edx, 0
mov eax,[x]
cmp eax,[y]
jl somma
je fine
sottrai:
dec eax
inc edx
cmp eax, [y]
jg sottrai
je fine
somma:
inc eax
inc edx
cmp eax,[y]
jl somma
je fine
fine:
mov ebx, 0
mov eax, 1
int 0x80
Moltiplicazioni e divisioni possono essere effettuate sia con segno che senza segno,
attraverso le operazioni MOV, DIV e IMOV, IDIV, rispettivamente. La Tabella 1 illustra
l’utilizzo degli operandi per queste quattro operazioni.
Le operazioni logiche AND, OR e XOR ricevono due operandi OP1 e OP2 e restituiscono
il risultato in OP1. L’operazione logica NOT riceve un operando di cui nega i bit (comple-
mento a 1). Per tutte le operazioni logiche, gli operandi possono essere registri generali,
variabili o immediati.
Vediamo adesso le istruzioni di shift, o scorrimento. I bit di un byte, di una word
o di una doubleword possono essere shiftati aritmeticamente o logicamente, fino a un
34

Istruzione Numero bit Risultato Operando1 Operando2
byte AX AL r/m(8)MUL / IMUL word DX:AX AX r/m(16)(1 operando) dword EDX:EAX EAX r/m(32)
IMUL word r(16) r(16) r/m(16),imm(8,16)(2 operandi) dword r(32) r(32) r/m(32),imm(8,16,32)
IMUL word r(16) r/m(16) imm(8,16)(3 operandi) dword r(32) r/m(32) imm(8,16,32)
byte AL (q) AH (r) AX r/m(8)DIV / IDIV word AX (q) DX (r) DX:AX r/m(16)(3 operandi) dword EAX (q) EDX (r) EDX:EAX r/m(32)
Tabella 1: Moltiplicazioni e divisioni con e senza segno
massimo di 31 bit. Un’istruzione di shift serve a shiftare i bit di un numero verso destra
o verso sinistra, di un posto o di piu posti. Se non viene specificato di quanto shiftare, lo
shift e di un bit. Altrimenti, si puo specificare di quanto shiftare o attraverso un valore
immediato, o utilizzando i 5 bit meno significativi del registro CL. L’ultimo bit che e
stato shiftato finisce sempre in CF.
Lo shift aritmetico verso sinistra SAL coincide con l’analogo shift logico SHL, e cor-
risponde a una moltiplicazione per due in binario, per ciascuno dei bit shiftati. La
Figura 18 ne illustra il funzionamento.
Figura 18: Operazioni di shift verso sinistra SAL e SHL
Lo scorrimento aritmetico verso destra SAR e invece diverso da quello logico SHR,
poiche quest’ultimo riempie i bit lasciati vuoti a sinistra con degli zeri, il primo invece
ripete il segno del numero da shiftare. Questa volta l’operazione associata e la divisione
per due in binario. Le due Figure 19 e 20 illustrano il funzionamento di queste due
operazioni.
35

Figura 19: Operazione di shift aritmetico verso destra SAR
Figura 20: Operazione di shift logico verso destra SHR
Consideriamo adesso l’operazione individuata dallo mnemonico LOOP. LOOP riceve un
operando che e un’etichetta, e decrementa un registro contatore, senza cambiare nes-
suno dei flag, controllando che sia verificata una specifica condizione. Se la condizione
e verificata, salta all’etichetta che riceve come operando. In particolare, questa oper-
azione serve qualora si voglia eseguire un ciclo di n passi: se n e a 16 bit, allora verra
inserito dentro il registro CX, altrimenti dentro il registro ECX. Seguono degli esempi
di funzionamento.
Esempio 5 Contare il numero di bit che sono on (cioe uguali ad uno) nel registro EAX.
section .data
section .text
global start
start:
mov bl, 0; bl conterra il numero di bit on
36

mov cx, 32; cx e il contatore del ciclo
count loop:
shl eax, 1; sposta i bit nel carry flag
jnc skip inc; se CF == 0, vai a skip inc
inc bl
skip inc:
loop count loop
exit:
mov ebx, 0
mov eax, 1
int 0x80
Esempio 6 Si definiscano una variabile x di tipo word in cui inserire il valore di EAX∗5e una variabile y in cui inserire il valore dato dalla cella che sta all’indirizzo contenuto
in EBX. Se il valore di y e maggiore di x − 2, saltare a un’etichetta eti1, altrimenti
all’etichetta eti2. L’etichetta eti1 prevede (y−x+2) passi, durante i quali si incrementa
di uno il valore di y. L’etichetta eti2 prevede di incrementare x finche non e uguale a
y + 2.
section .data
x dw 10
y dw 15
z dd 0; anche se non richiesta, questa variabile ci serve per inserire
un indirizzo in ebx
section .text
global start
start:
mov ebx, z; l’indirizzo da inserire in ebx deve essere riservato
per i dati
mov ecx, [x]
imul ecx, eax, 5;
mov [x], ecx
mov edi, ecx; conservo anche in edi il valore di x
mov eax, [ebx]
mov [y], eax
mov edx, eax; conservo in edx il valore di [y] che e uguale a
quello di eax
37

sub ecx, 2; dentro ecx ho il valore x-2
cmp edx, ecx
jg eti1
jle eti2
eti1:
sub eax, ecx
mov ecx, eax; ho inserito l’n del for in cx
inizio ciclo for:
inc edx
mov [y], edx
loop inizio ciclo for
jmp fine
eti2:
add edx, 2
cmp edi, edx
je fine
inc edi
mov [x], edi
jmp eti2
fine:
mov ebx, 0
mov eax, 1
int 0x80
Se, nell’esercizio precedente, avessimo voluto moltiplicare il contenuto di EAX ad
esempio per quattro invece che per cinque, avremmo potuto utilizzare SHL invece di
IMUL.
Array
In Assembly il nome di un vettore o di una matrice rappresenta l’indirizzo della cella di
memoria (di 8 bit) a partire dalla quale e memorizzato il contenuto dell’array. Nel 386
esiste un meccanismo efficiente per gestire l’indicizzazione del vettore.
In particolare, e possibile effettuare spostamenti da e/o verso la memoria utilizzando
un <effective address> cosı composto:
BASE + (INDICE * SCALA) + SPIAZZAMENTO = <registro base> + <registro indice>
* 1,2,4,8 + <offset>.
38

Come registro base, si possono utilizzare i registri EAX, EBX, ECX, EDX, ESI e
EDI. Come registro indice, i registri EAX, EBX, ECX, EDX, ESI e EDI. Infine, lo
spiazzamento e un indirizzo in memoria (ad esempio, il nome del vettore). In tal modo
si puo ad esempio indicizzare il vettore V di doubleword inizializzando a zero il valore di
EAX, e considerando l’indirizzo in memoria [V + EAX * 4]. In tal caso stiamo usando
V come spiazzamento, EAX come indice (che verra incrementato sempre di una unita
per scorrere il vettore) e il valore 4 come scala, dal momento che un elemento del vettore
e composto da quattro celle di memoria.
Quello indicato sopra non e l’unico modo di gestire lo scorrimento degli array, come
vedremo anche dagli esercizi proposti di seguito. Nel caso in cui si ha a che fare con
delle matrici (array bidimensionali) il registro base puo essere comodo per memorizzare
il numero di righe gia analizzate, in modo che attraverso un utilizzo opportuno di indice
e scala si possa scorrere la riga corrente muovendosi lungo le colonne.
Esempio 7 Dato un vettore di doubleword, contenente un numero di elementi memo-
rizzabile con 16 bit, inserire in una variabile max il massimo del vettore.
section .data
V dd 72, 54, 89, 21, 0, 12
n equ 6
section .bss
max resd 1
section .text
global start
start:
mov eax, 0; usiamo eax come indice per scorrere il vettore
mov ebx, [V]; usiamo ebx per tenere il massimo temporaneo
mov cx, n; mettiamo in ecx la n del ciclo for
dec cx; poiche partiamo dall’elemento 1 e non da quello 0
jmp lp
change max:
mov ebx, [V+eax*4]
loop lp
lp:
inc eax
cmp ebx, [V+eax*4]
jl change max
39

loop lp
return max:
mov [max], ebx
exit:
mov ebx, 0
mov eax, 1
int 0x80
Esempio 8 Dato un vettore array1 di byte composto da cinque elementi, per cias-
cun elemento i di array1 copiare la somma del prodotto tra array1[i] e array1[n-1-i]
nell’elemento i di un altro vettore di 5 byte.
section .data
array1 db 5, 4, 3, 2, 1 ;array di 5 byte
section .bss
n equ 5
array2 resb n
section .text
global start
start:
mov esi, 0; registro da usare come indice
mov ecx, n;
mov edi, n;
lp:
mov al, [array1+esi]
dec edi; adesso n-1-i si trova in edi
mov dl, [array1+edi]
imul dl
mov [array2+esi], ax
inc esi
loop lp
fine:
mov ebx, 0
mov eax, 1
int 0x80
40

Esempio 9 Trovare il secondo minimo di un vettore di quadword contenente solo nu-
meri positivi e stampare su video “vero” se il minimo e minore di un valore (anch’esso
positivo) memorizzato in una variabile k, “falso” altrimenti.
section .data
k dq 55
V dq 72, 54, 89, 21, 0, 12
n equ 6
vero db ‘‘VERO’’, 10
len vero equ $ - vero
falso db ‘‘FALSO’’, 10
len falso equ $ - falso
section .text
global start
start:
mov eax, V; in eax teniamo l’indirizzo del minimo
mov ebx, eax;
add ebx, 8; in ebx teniamo l’indirizzo del secondo minimo
mov edx, ebx; dobbiamo verificare che il primo e il secondo elemento
siano nell’ordine corretto (min e sec min)
mov ecx, 1; usiamo ecx come indice
compare min:
mov esi, [eax+4]
mov edi, [edx+4]
cmp esi, edi; confrontiamo le parti alte di minimo ed elemento
corrente
jg switch min
jl compare sec min
mov esi, [eax]
mov edi, [edx]
cmp esi, edi; confrontiamo le parti basse di minimo ed elemento
corrente
jg switch min
jl compare sec min
jmp lp
compare sec min:
mov esi, [ebx+4]
41

mov edi, [edx+4]
cmp esi, edi; confrontiamo le parti alte di secondo minimo ed elemento
corrente
jg switch sec min
jl lp
mov esi, [ebx]
mov edi, [edx]
cmp esi, edi; confrontiamo le parti basse di secondo minimo ed elemento
corrente
jg switch sec min
lp:
inc ecx
cmp ecx, n
jge compare k; e l’ultimo passo
mov edx, ecx
shl edx, 3
add edx, V; in edx mettiamo l’indirizzo dell’elemento successivo,
cioe [V+ecx*8]
jmp compare min
switch min:
mov esi, eax
mov eax, edx
mov edx, esi
switch sec min:
mov esi, ebx
mov ebx, edx
mov edx, esi
jmp lp
compare k:
mov edx, k
mov esi, [ebx+4]
mov edi, [edx+4]
cmp esi, edi; confrontiamo le parti alte di secondo minimo ed elemento
all’indirizzo k
jg print false
jl print true
mov esi, [ebx]
42

mov edi, [edx]
cmp esi, edi; confrontiamo le parti basse di secondo minimo ed elemento
all’indirizzo k
jge print false
jl print true
print true:
mov edx, len vero; arg3, lunghezza stringa da stampare
mov ecx, vero; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
jmp exit
print false:
mov edx, len falso; arg3, lunghezza stringa da stampare
mov ecx, falso; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
exit:
mov ebx, 0
mov eax, 1
int 0x80
Esempio 10 Data una matrice quadrata M di interi a 16 bit e un numero k, scrivere un
programma Assembly che stampi “vero” se il numero di occorrenze di k in M e uguale
o superiore a k e stampi “falso” altrimenti.
section .data
M dw 2, 2, 89, 21, 0, 2, 39, 15, 0
dim equ $-M
n equ 3
vero db ‘‘VERO’’, 10
len vero equ $ - vero
falso db ‘‘FALSO’’, 10
len falso equ $ - falso
section .text
43

global start
start:
mov eax, 0; in eax teniamo lo spazio occupato dalle righe
mov ebx, 0; in ebx teniamo l’indice di colonna
mov ecx, 0; in ecx teniamo il numero di occorrenze di k in M
mov esi, n
shl esi, 1; in esi teniamo n*2
jmp scan row
inc occ:
inc ecx
scan row:
cmp ebx, n
jge change row
mov dx, [eax+ebx*2+M]
inc ebx
cmp dx, k
je inc occ
jmp scan row
change row:
cmp eax, dim
je compare
add eax, esi; se siamo qui dobbiamo aggiungere al contenuto di eax
n elementi di 16 bit, ovvero n byte per 2
mov ebx, 0
jmp scan row
compare:
cmp ecx, k
jl print false
print true:
mov edx, len vero; arg3, lunghezza stringa da stampare
mov ecx, vero; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
jmp exit
print false:
mov edx, len falso; arg3, lunghezza stringa da stampare
44

mov ecx, falso; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
exit:
mov ebx, 0
mov eax, 1
int 0x80
Esempio 11 Data una matrice quadrata M di interi a 32 bit, scrivere un programma
Assembly che stampi “vero” se la somma degli elementi della diagonale principale e
maggiore della somma degli elementi delle diagonali sopra e sotto la diagonale principale,
stampi “falso” altrimenti.
section .data
M dd 50, 2, 9, 21, 10, 12, 9, 15, 25
n equ 3
vero db ‘‘VERO’’, 10
len vero equ $ - vero
falso db ‘‘FALSO’’, 10
len falso equ $ - falso
section .text
global start
start:
mov ebx, 4;
mov ecx, [M]; in ecx teniamo la somma degli elementi della
diagonale principale
mov edx, [M+ebx]; in edx teniamo la somma degli elementi
delle altre due diagonali
mov ebx, 0
mov eax, n
shl eax, 2
mov edi, n
dec edi
scan diagonals:
mov esi, [eax+ebx*4+M]
45

add edx, esi
inc ebx
mov esi, [eax+ebx*4+M]
add ecx, esi
inc ebx
cmp ebx, edi
jge compare
mov esi, [eax+ebx*4+M]
dec ebx
mov esi, n
shl esi, 2
add eax, esi
jmp scan diagonals
compare:
cmp ecx, edx
jle print false
print true:
mov edx, len vero; arg3, lunghezza stringa da stampare
mov ecx, vero; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
jmp exit
print false:
mov edx, len falso; arg3, lunghezza stringa da stampare
mov ecx, falso; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
exit:
mov ebx, 0
mov eax, 1
int 0x80
46

Gestione dei sottoprogrammi e dello Stack
Un sottoprogramma e una unita indipendente di codice che puo essere usata da parti
diverse del programma. E quello che, nei linguaggi ad alto livello, viene chiamato
funzione o procedura.
Un sottoprogramma puo essere invocato con una istuzione di salto, ma ci sono due
importanti problemi da tenere in considerazione:
1. Come effettuare il passaggio dei parametri?
2. Come gestire il ritorno al programma chiamante?
Se il sotto programma viene usato da diverse parti del programma, deve necessari-
amente esserci la possibilita di tornare alla sezione del codice che lo ha invocato. Cosı
il salto indietro dal sottoprogramma non puo essere semplicemente collegato ad una
etichetta.
Puo essere utile un supporto integrato di memoria denominato stack, che funziona
come una una pila, seguendo una politica di tipo di tipo LIFO (Last-In First-Out, l’ul-
timo elemento inserito e il primo ad essere prelevato). Lo stack e un’area di memoria
organizzata in questo modo. In particolare, esistono due operazioni per gestire inseri-
mento e prelievo di un elemento dallo stack, PUSH e POP. Il registro ESP contiene l’indi-
rizzo della parola di memoria corrispondente agli otto bit meno significativi dell’ultimo
elemento inserito nello stack (questo vale per il 386).
L’istruzione PUSH aggiunge i dati allo stack, l’istruzione POP li rimuove. I dati ri-
mossi sono sempre gli ultimi dati aggiunti (da qui deriva il tipo LIFO dello stack).
L’istruzione PUSH inserisce una doubleword nello stack, prima sottraendo 4 da ESP e
poi memorizzando la double word in [ESP]. L’istruzione POP legge una double word in
[ESP] e poi somma a ESP, 4. Data la compatibilita con i precedenti processori a sedici
bit, e possibile inserire o prelevare dallo stack anche delle word (ma non un singolo byte).
Lo stack puo essere utilizzato come luogo conveniente dove memorizzare tempo-
raneamente i dati. Viene anche utilizzato per gestire le chiamate a sottoprogrammi,
passandovi parametri e variabili locali. L’80× 86 inoltre fornisce l’istruzione PUSHA che
mette i valori dei registri EAX, EBX, ECX, EDX, ESI, EDI e EBP (non in questo or-
dine) nello stack. L’istruzione POPA viene invece utilizzata per recuperare questi registri
dallo stack.
Il 386 fornisce due istruzioni che usano lo stack per rendere le chiamate a sottopro-
grammi facili e veloci. L’istruzione CALL riceve come operando un’etichetta ed effettua
un salto incondizionato al sottoprogramma collegato a quell’etichetta, inserendo inoltre
47

nello stack l’indirizzo della istruzione successiva alla CALL nel programma chiamante
(indirizzo di ritorno). L’istruzione RET preleva l’elemento puntato da ESP (cima dello
stack) e lo interpreta come indirizzo a cui saltare (indirizzo di ritorno), per ritornare al
programma chiamante. Specificando un intero come operando della RET, ESP verra in-
crementato di un numero di celle pari a tale operando. E in tal modo possibile svuotare
lo stack dei parametri inseriti prima della chiamata ad un sottoprogramma.
Alcuni esercizi illustreranno di seguito l’utilizzo dello stack.
Esempio 12 Scrivere un programma che richiama una procedura verifica somma che
riceve un vettore V di interi a 32 bit e una variabile k di 32 bit e che restituisce uno se
la somma degli elementi di V e minore di k, zero altrimenti.
section .data
V dd 4, -2, 7, 0, 15
n equ $-V
k dd 5
section .text
global start
start:
sub esp, 2
push dword [k]
push dword n
push V
call verifica somma
pop ebx
exit:
mov ebx, 0
mov eax, 1
int 80h
verifica somma:
push ebp
mov ebp, esp
add ebp, 8
mov ecx, [ebp+4]
shr ecx, 2; mettiamo in ecx il numero di elementi del vettore
mov eax, 0; usiamo eax come registro indice
mov ebx, 0; in ebx teniamo la somma
48

mov esi, [ebp]; spostiamo in esi l’indirizzo del vettore
lp:
add ebx, dword [esi+eax*4]
inc eax
loop lp
cmp ebx, [ebp+8]
jnle ret2
ret1:
mov [ebp+12], dword 1
jmp fine
ret2:
mov [ebp+12], dword 0
fine:
pop ebp
ret 12
Esempio 13 Scrivere un programma che richiama una procedura verifica somma che
riceve un vettore V di interi a 32 bit e una variabile k di 32 bit, chiama un’altra funzione
somma che riceve il vettore V e la sua dimensione e restituisce la somma degli elementi
del vettore, e che restituisce uno se la somma degli elementi di V e minore di k, zero
altrimenti.
section .data
V dd 4, 2, 7, 0, 15
n equ $-V
k dd 1
section .text
global start
start:
sub esp, 2
push dword [k]
push dword n
push V
call verifica somma
pop ebx
jmp exit
49

exit:
mov ebx, 0
mov eax, 1
int 80h
verifica somma:
push ebp
mov ebp, esp
add ebp, 8
;chiamata a funzione somma
sub esp, 4
push dword [ebp+4]
push dword [ebp]
call somma
pop edx
cmp edx, [ebp+8]
jnle ret2
ret1:
mov [ebp+12], dword 1
jmp fine
ret2:
mov [ebp+12], dword 0
fine:
pop ebp
ret 12
somma:
push ebp
mov ebp, esp
add ebp, 8
mov ecx, [ebp+4]
shr ecx, 2; mettiamo in ecx il numero di elementi del vettore
mov eax, 0; usiamo eax come registro indice
mov ebx, 0; in ebx teniamo la somma
mov esi, [ebp]; spostiamo in esi l’indirizzo del vettore
lp:
add ebx, [esi+eax*4]
inc eax
loop lp
50

mov [ebp+8], ebx
pop ebp
ret 8
Esempio 14 Sia dato un vettore contenente informazioni riguardanti le temperature
rilevate in alcune citta. In particolare, per ogni citta, nel vettore sono memorizzati
l’iniziale della citta (1 byte) e due interi a 16 bit indicanti, rispettivamente, la tem-
peratura minima e quella massima. Scrivere una programma assembly che, dato tale
vettore, memorizzi l’iniziale della citta con il piu alto valore di escursione termica (dif-
ferenza tra temperatura massima e minima) e, a parita di escursione, la prima citta in
ordine alfabetico.
section .data
m: db ‘m’, 2, 0, 7, 0, ’b’, 2, 0, 8, 0, ’r’, 2, 0, 8, 0, ’p’, 6, 0,
6, 0
nr equ ($-m)/5
section .bss
res resb 1
section .text
global start
start:
; calling procedure find city(m, nr)
sub ESP, 2
push dword nr
push m
call find city
pop AX
mov [res], AL
print:
mov edx, 1; arg3, length of string to print
mov ecx, res; arg2, pointer to string
mov ebx, 1; arg1, where to write, screen
mov eax, 4; write sysout command to int 80 hex
int 80h; interrupt 80 hex, call kernel
exit:
mov ebx,0; exit code, 0=normal
51

mov eax,1; exit command to kernel
int 80h; interrupt 80 hex, call kernel
find city:
push EBP
mov EBP, ESP
add EBP, 8
pusha
mov EAX, [EBP]; indirizzo della matrice
mov ESI, [EBP+4]; numero di righe
mov BX, -1; Escursione termica precedente
mov CL, 0; Iniziale citta con max escursione termica
mov EDI, 0; riga i-esima
ciclo righe:
cmp EDI, ESI
je end
mov DX, [EAX + 3]
sub DX, [EAX + 1]; EDX contiene l’escursione termica corrente
cmp DX, BX
jl next righe
jne update max
mov DL, [EAX]
cmp DL, CL
jge next righe
update max:
mov DX, [EAX + 3]
sub DX, [EAX + 1]; EDX contiene l’escursione termica corrente
mov BX, DX
mov CL, [EAX]
next righe:
inc EDI
add EAX, 5
jmp ciclo righe
end:
mov [EBP+8], CX
popa
pop EBP
ret 8
52

Esempio 15 Data una matrice quadrata M di interi a 16 bit e un numero k, scrivere
un programma Assembly che stampi “vero” se il numero di occorrenze di k in M e
uguale o superiore a k e stampi “falso” altrimenti. Il programma deve contenere e
invocare opportunamente una procedura Assembly che, data una matrice M e un intero
k, restituisca il numero di occorrenze di k in M.
section .data
M dw 12, 2, 89, 2, 2, 12, 39, 15, 0
dim equ $-M
k equ 2
n equ 3
vero db ‘‘VERO’’, 10
len vero equ $-vero
falso db ‘‘FALSO’’, 10
len falso equ $-falso
section .text
global start
start:
sub esp, 4
push k
push dword n
push dword dim
push M
call calcola occorrenze
pop ecx
compare:
cmp ecx, k
jl print false
print true:
mov edx, len vero; arg3, lunghezza stringa da stampare
mov ecx, vero; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
jmp exit
print false:
mov edx, len falso; arg3, lunghezza stringa da stampare
53

mov ecx, falso; arg2, indirizzo in memoria della stringa
mov ebx, 1; arg1, stampa su schermo
mov eax, 4; numero del servizio
int 0x80; chiamata al SO
exit:
mov ebx, 0
mov eax, 1
int 0x80
calcola occorrenze:
push ebp
mov ebp, esp
add ebp, 8
mov edi, [ebp]; in edi teniamo M, poi aggiungeremo lo spazio
delle righe
mov eax, 0; in eax teniamo lo spazio occupato dalle righe
mov ebx, 0; in ebx teniamo l’indice di colonna, che ogni volta
incrementeremo di due
mov ecx, 0; in ecx teniamo il numero di occorrenze di k in M
mov esi, [ebp+8]; spostiamo n in esi
shl esi, 1; in esi teniamo n*2
scan row:
cmp ebx, esi
je change row
mov dx, [edi+ebx]
add ebx, 2
cmp dx, [ebp+12]
je inc occ
jmp scan row
inc occ:
inc ecx
jmp scan row
change row:
cmp eax, [ebp+4]
je fine
add eax, esi; se siamo qui dobbiamo aggiungere al contenuto
di eax n elementi di 16 bit, ovvero n byte per 2
add edi, eax
54

mov ebx, 0
jmp scan row
fine:
mov [ebp+16], ecx
pop ebp
ret 16
55

Approfondimenti
1 Giacomo Bucci. Architettura e organizzazione dei calcolatori elettronici – Fonda-
menti. McGraw-Hill Companies, 2005.
2 Sergio Congiu. Architettura degli elaboratori – Organizzazione dell’hardware e
programmazione in linguaggio assembly. Patron, 2007.
3 Intel 80386. Programmer’s reference manual, 1986.
4 Daniele Giacomini. Appunti di informatica libera. http://informaticalibera.net/
5 Fabio Fassetti. Compendio Istruzioni per il 386, A.A. 2010 – 2011.
56

Appendice
Se si utilizza il Sistema Operativo Windows, e possibile stampare su video attraverso il
seguente insieme di istruzioni:
push cs
pop ds
mov ah, 9
mov dx, Msg; Stringa terminata da $
int 21h
Per uscire dal programma invece bisogna utilizzare:
mov al, 0; exit code, 0=norma
mov ah, 09h; exit command to kernel
int 21h; interrupt 80 hex, call kernel
57

Prove d’esame 6CFU
• Sia dato un vettore contenente informazioni riguardanti le temperature rilevate in
alcune citta. In particolare, per ogni citta, nel vettore sono memorizzati l’iniziale
della citta (1 byte) e due interi a 16 bit indicanti, rispettivamente, la temperatura
minima e quella massima. Scrivere un programma assembly che, dato tale vettore,
memorizzi l’iniziale della citta con il piu alto valore di escursione termica (differen-
za tra temperatura massima e minima) e, a parita di escursione, la prima citta in
ordine alfabetico.
• Scrivere una programma assembly che, data una matrice quadrata, stampi “vero”
se la somma degli elementi della diagonale principale e maggiore della somma
degli elementi delle diagonali sopra e sotto la diagonale principale; stampi “falso”
altrimenti.
• Scrivere una programma assembly che, dato un intero X (a 16 bit) e una matrice
quadrata di interi a 16 bit, verifichi che la somma in valore assoluto degli elementi
negativi posti in posizione [i,j], tale che o i e j sono entrambi indici dispari o i e j
sono entrambi indici pari, sia inferiore ad X. Memorizzare l’esito della verifica in
una variabile (memorizzare “1” per “vero” e “0” per “falso”).
• Data una matrice quadrata M di interi a 16 bit e un numero k, scrivere un pro-
gramma assembly che stampi “vero” se la somma degli elementi della matrice
triangolare inferiore della matrice ad esclusione della diagonale e superiore a k e
stampi “falso” altrimenti.
• Sia dato un intero k a 32 bit e un vettore V contenente n indirizzi di memoria,
a partire da ciascuno dei quali e memorizzata una matrice 4 × 4 di interi a 16
bit. Una matrice e considerata valida se la somma degli elementi sulla diagonale
secondaria e inferiore a k. Scrivere un programma assembly che stampi “vero” se
tutte le matrici il cui indirizzo e in V sono valide, stampi “falso” altrimenti.
58

Prove d’esame 9CFU
• Sia dato un vettore contenente informazioni riguardanti le temperature rilevate in
alcune citta. In particolare, per ogni citta, nel vettore sono memorizzati l’iniziale
della citta (1 byte) e due interi a 16 bit indicanti, rispettivamente, la temper-
atura minima e quella massima. Scrivere una procedura assembly che, dato tale
vettore, stampi l’iniziale della citta con il piu alto valore di escursione termica
(differenza tra temperatura massima e minima) e, a parita di escursione, la prima
citta in ordine alfabetico. Si scriva, inoltre, un programma principale che invochi
correttamente la procedura.
• Scrivere una procedura assembly “somma diagonale” che, data una matrice quadra-
ta, calcoli la somma degli elementi sulle diagonali sopra e sotto la diagonale prin-
cipale. Scrivere, inoltre, un programma principale che stampi “vero” se la som-
ma degli elementi della diagonale principale e maggiore della somma degli ele-
menti sulle diagonale sopra e sotto la diagonale principale (ottenuta chiamando
opportunamente la procedura); stampi “falso” altrimenti.
• Scrivere una procedura assembly che, data una matrice quadrata di interi a 16 bit,
restituisca la somma in valore assoluto degli elementi negativi posti in posizione
[i,j], tale che i e j o sono entrambi indici dispari o sono entrambi indici pari.
Scrivere, inoltre, un programma principale che, data una matrice quadrata e un
intero X, invochi opportunamente la procedura e stampi a video “true” se la somma
restituita e inferiore ad X, “false” altrimenti.
• Data una matrice quadrata M di interi a 16 bit e un numero k, scrivere un pro-
gramma assembly che stampi “vero” se la somma degli elementi della matrice
triangolare inferiore della matrice ad esclusione della diagonale e superiore a k
e stampi “falso” altrimenti. Il programma deve contenere e invocare opportuna-
mente una procedura assembly che, data una matrice M, restituisca la somma degli
elementi nella matrice triangolare inferiore di M ad esclusione della diagonale.
• Sia dato un intero k a 32 bit e un vettore V contenente n indirizzi di memoria,
a partire da ciascuno dei quali e memorizzata una matrice 4 × 4 di interi a 16
bit. Una matrice e considerata valida se la somma degli elementi sulla diagonale
secondaria e inferiore a k. Scrivere un programma assembly che stampi “vero” se
tutte le matrici il cui indirizzo e in V sono valide, stampi “falso” altrimenti. In
particolare, il programma deve contenere una procedura assembly che, data una
matrice M e un intero k, restituisca l’informazione circa la validita di M.
59