Organi di trasmissione flessibili CINGHIE
27
Organi di trasmissione flessibili CINGHIE Organi flessibili propriamente detti per la trasmissione del moto da una puleggia motrice ad una puleggia condotta montate su alberi relativamente lontani tra loro. L’avanzamento avviene per l’aderenza della cinghia sulle pulegge.
Transcript of Organi di trasmissione flessibili CINGHIE

Organi di trasmissione flessibili
CINGHIE
Organi flessibili propriamente detti per la trasmissione del moto da
una puleggia motrice ad una puleggia condotta montate su alberi
relativamente lontani tra loro. L’avanzamento avviene per l’aderenza
della cinghia sulle pulegge.
Organi di trasmissione flessibili
CINGHIE
Organi flessibili propriamente detti per la trasmissione del moto da
una puleggia motrice ad una puleggia condotta montate su alberi
relativamente lontani tra loro. L’avanzamento avviene per l’aderenza
della cinghia sulle pulegge.
VANTAGGI:
• Funzionamento silenzioso; assorbimento elastico e
smorzamento urti
• Semplice e versatile costruzione
• Trasmissione di potenza con elevati interassi
• Elevato rapporto potenza/peso
• Assenza lubrificazione e manutenzione ridotta
• Possibilità di brevi sovraccarichi
• Buon sincronismo a regime
Slittamento in funzione della forza periferica, del
precarico e del coefficiente d’attrito
Limite nella temperatura di funzionamento (secondo la
cinghia: –50°C … 60 °C; - 20°C … 80 °C)
Rendimento non elevato per cinghie trapezoidali (0.85 ÷
0.89)
Sensibilità ad agenti corrosivi (acidi, benzine, olio e
vapore d’acqua)
Fattore di attrito dipendente dalle condizioni operative
Maggiore carico agente sugli alberi
Possibilità di cariche elettrostatiche per attrito
SVANTAGGI:

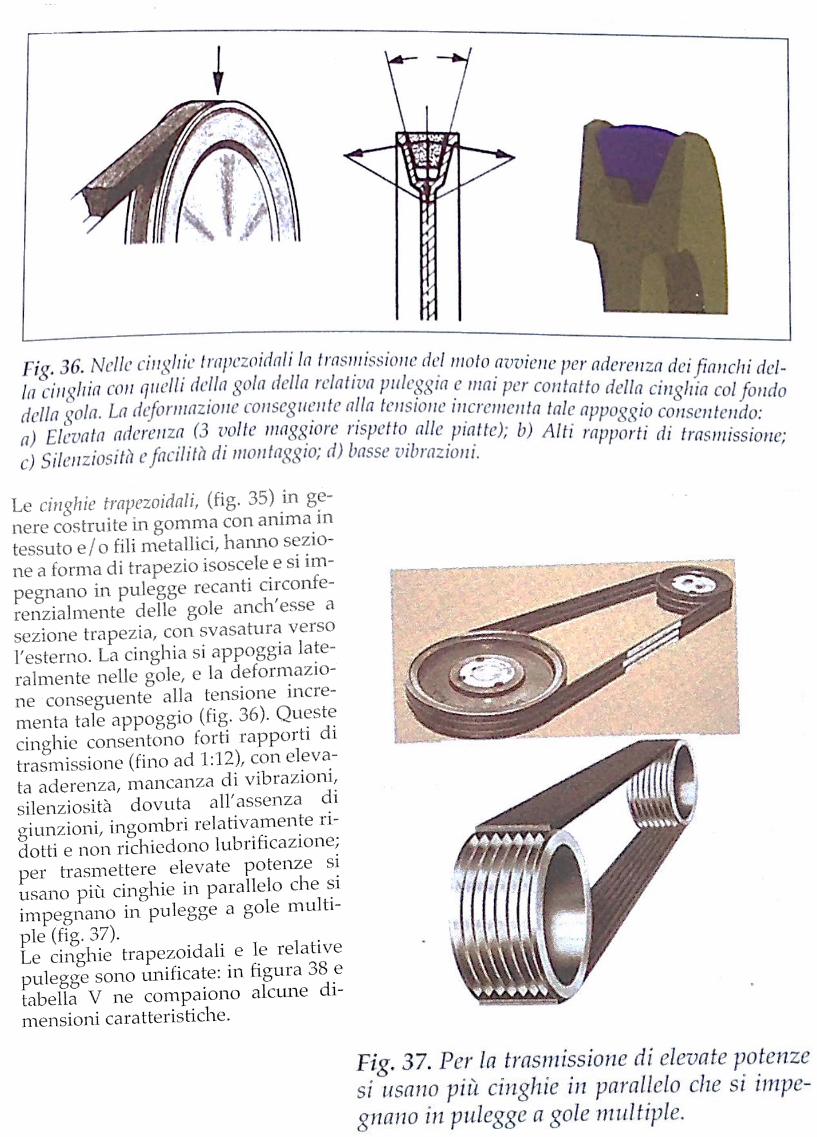
TIPO DI CINGHIE
PIATTE
TRAPEZOIDALI
DENTATE
SPECIALI: SEZIONE CIRCOLARE
SEZIONE TRIANGOLARE
SEZIONE QUADRANGOLARE
(per piccole forze e comandi di
precisione)
f
g
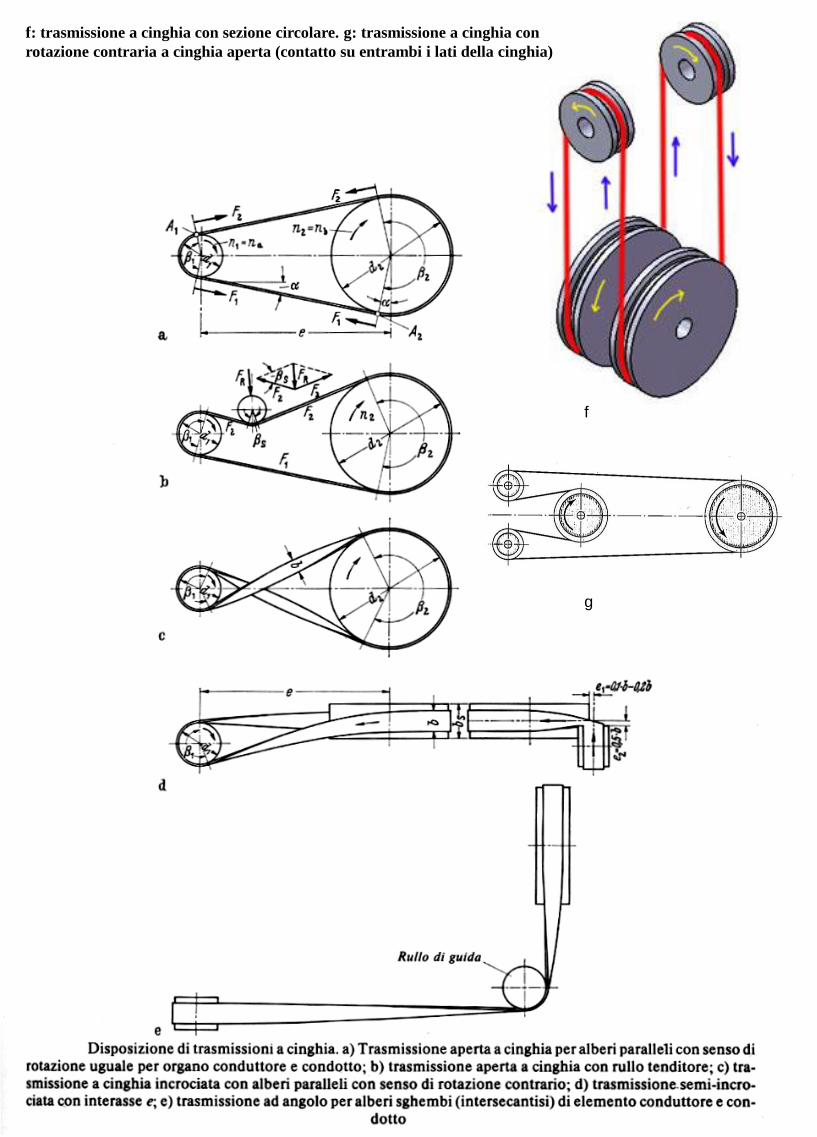
f: trasmissione a cinghia con sezione circolare. g: trasmissione a cinghia con
rotazione contraria a cinghia aperta (contatto su entrambi i lati della cinghia)
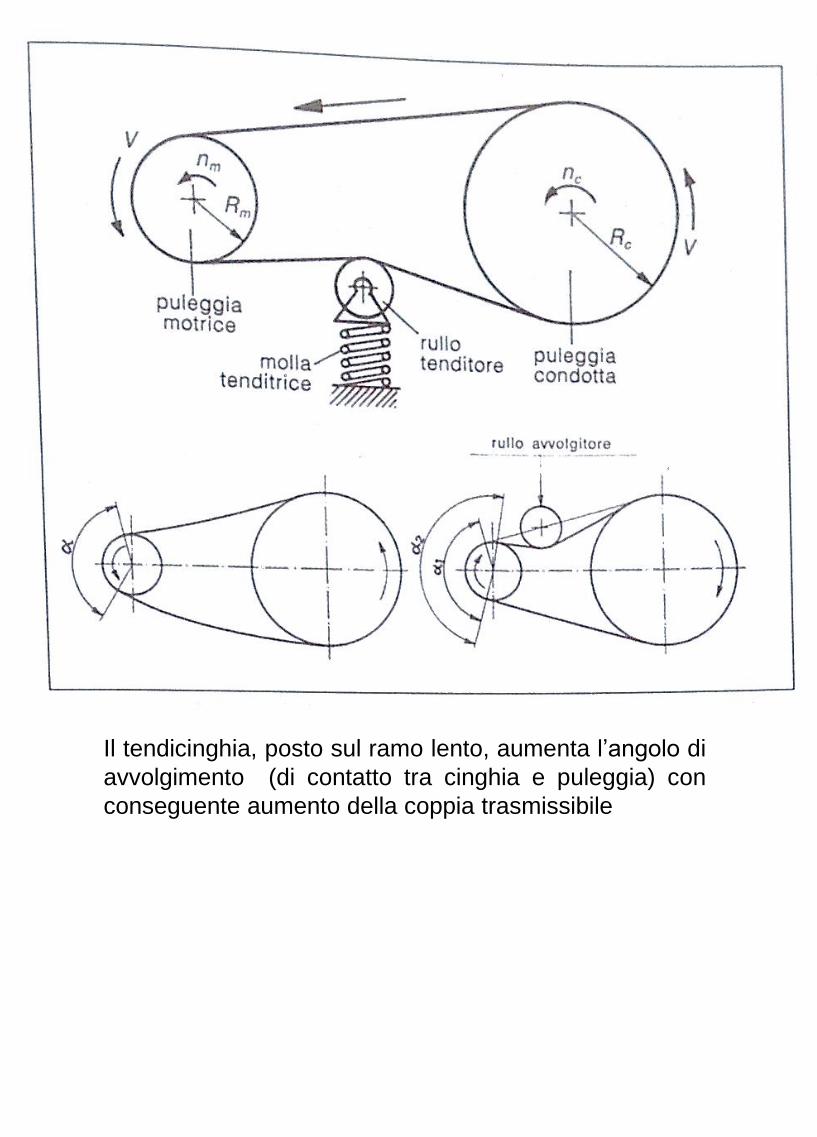
Il tendicinghia, posto sul ramo lento, aumenta l’angolo di
avvolgimento (di contatto tra cinghia e puleggia) con
conseguente aumento della coppia trasmissibile
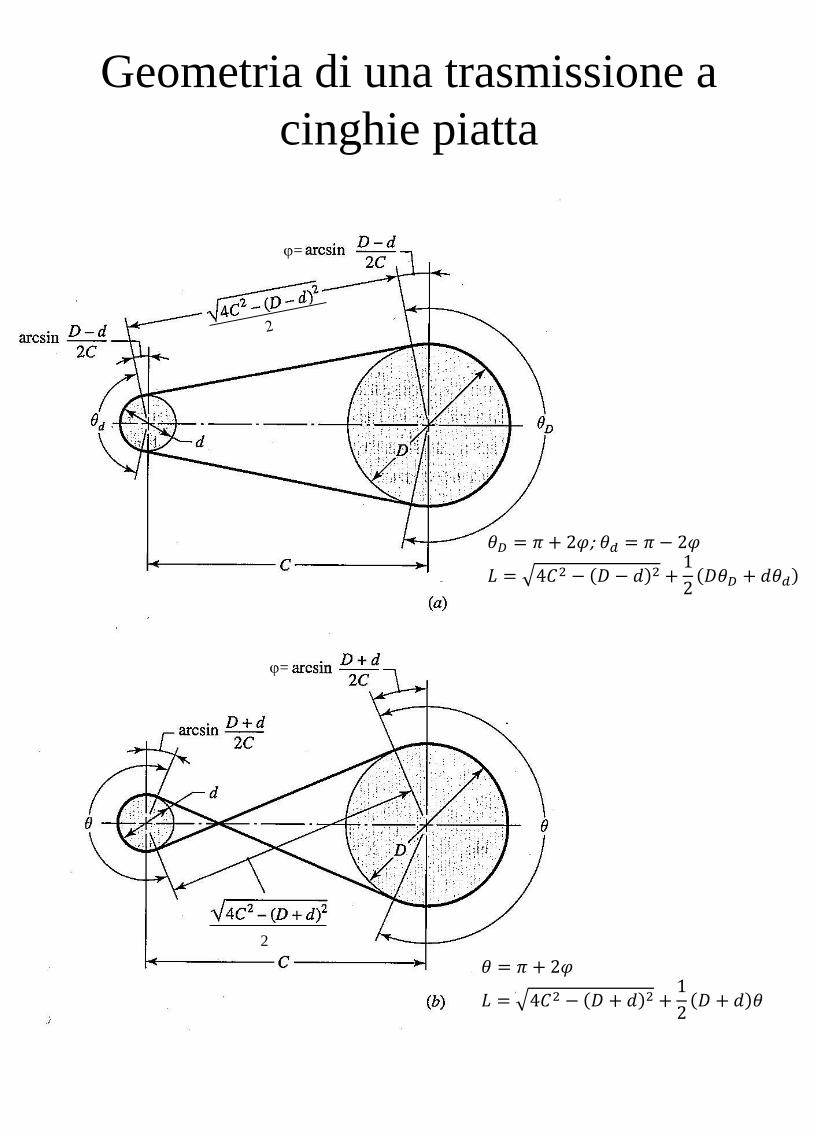
Geometria di una trasmissione a
cinghie piatta
j=
2
j=
𝜃𝐷 = 𝜋 + 2𝜑; 𝜃𝑑 = 𝜋 − 2𝜑
𝐿 = 4𝐶2 − 𝐷 − 𝑑 2 +1
2𝐷𝜃𝐷 + 𝑑𝜃𝑑
𝜃 = 𝜋 + 2𝜑
𝐿 = 4𝐶2 − 𝐷 + 𝑑 2 +1
2𝐷 + 𝑑 𝜃

M1
1 d1/2
d2/2
T1
T0
dj
T
T+dT
j
Il flessibile si definisce ideale quando è schematizzabile mediante una linea
rappresentante l’asse geometrico, è inestensibile secondo tale asse, e può
disporsi in un piano secondo una qualsiasi configurazione senza variazione
di energia interna.
Si possono individuare due condizioni di funzionamento:
• la prima in assenza di scorrimento in cui le forze di trasmissione
tangenziale tra puleggia e flessibile sono trasmesse per aderenza.
• La seconda quando è presente lo scorrimento che, per l’inestensibilità
del flessibile è globale e le forze tangenziali al contatto vengono
trasmesse per attrito.
T+dT
Tdj
dFc, dN
fdN

j
jdf
qv)(T
dT
2
j
j
jj
f
T
T
eqvT
qvTdf
qvT
dT
2
0
2
0
2
0
)(
Nell’ipotesi di attrito costante lungo tutto l’arco di avvolgimento
(incipiente slittamento):
Trascurando le forze di volume:j feTT 0
02
dsendT)(T
2
dsen)(TdNdFc
jj
jj
02
dcosdT)(T
2
dcos)(TfdN
jj
jj
jj d)(TdNdFc
dTfdN jj dvq4
ddq
2
ddmdF 2
21212
c
jjj d)(Tf
dTdvq 2
jj dfqv)(TdT 2
j d2
dqdm 1
T+dT
Tdj
dFc, dN
fdN
Equilibrio in direzione normale e tangenziale:
02
dT
2
dTM 1
01
11
11
01112
dTTMP
Equilibrio alla rotazione:
Potenza:
Si considera la
seconda
condizione di
funzionamento
q: densità lineare
(1)
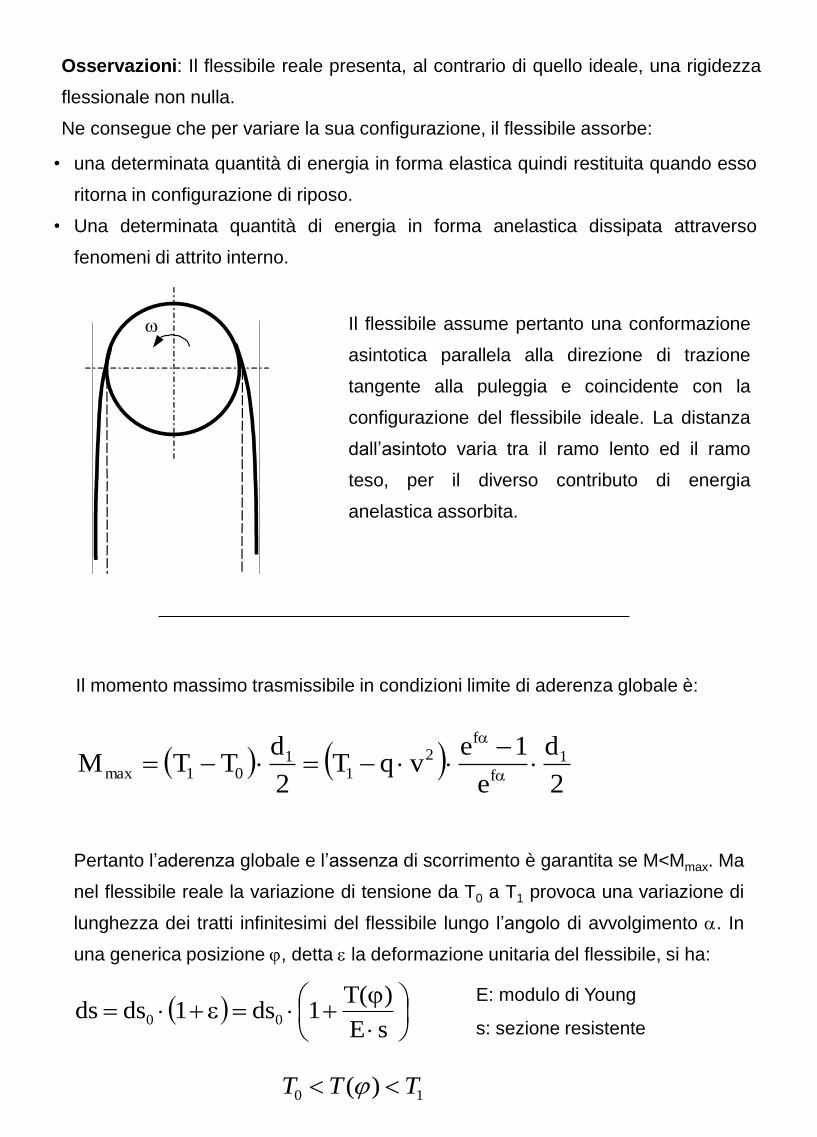
Pertanto l’aderenza globale e l’assenza di scorrimento è garantita se M<Mmax. Ma
nel flessibile reale la variazione di tensione da T0 a T1 provoca una variazione di
lunghezza dei tratti infinitesimi del flessibile lungo l’angolo di avvolgimento . In
una generica posizione j, detta la deformazione unitaria del flessibile, si ha:
j
sE
)(T1ds1dsds 00
E: modulo di Young
s: sezione resistente
Osservazioni: Il flessibile reale presenta, al contrario di quello ideale, una rigidezza
flessionale non nulla.
Ne consegue che per variare la sua configurazione, il flessibile assorbe:
• una determinata quantità di energia in forma elastica quindi restituita quando esso
ritorna in configurazione di riposo.
• Una determinata quantità di energia in forma anelastica dissipata attraverso
fenomeni di attrito interno.
Il flessibile assume pertanto una conformazione
asintotica parallela alla direzione di trazione
tangente alla puleggia e coincidente con la
configurazione del flessibile ideale. La distanza
dall’asintoto varia tra il ramo lento ed il ramo
teso, per il diverso contributo di energia
anelastica assorbita.
2
d
e
1evqT
2
dTTM 1
f
f2
11
01max
Il momento massimo trasmissibile in condizioni limite di aderenza globale è:
10 )( TTT j
100 T)(TTcon
sE
)(T1
dt
ds
dt
ds)(v j
jj
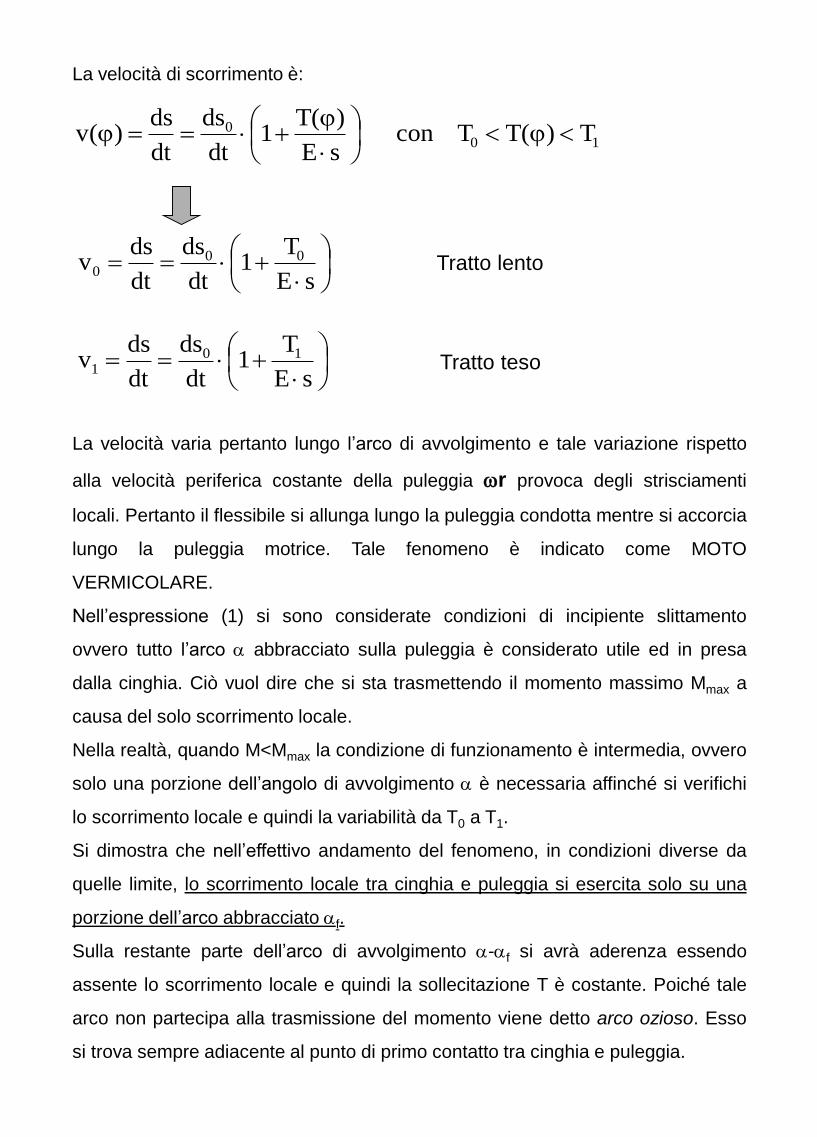
La velocità di scorrimento è:
sE
T1
dt
ds
dt
dsv 00
0
sE
T1
dt
ds
dt
dsv 10
1
Tratto lento
Tratto teso
La velocità varia pertanto lungo l’arco di avvolgimento e tale variazione rispetto
alla velocità periferica costante della puleggia r provoca degli strisciamenti
locali. Pertanto il flessibile si allunga lungo la puleggia condotta mentre si accorcia
lungo la puleggia motrice. Tale fenomeno è indicato come MOTO
VERMICOLARE.
Nell’espressione (1) si sono considerate condizioni di incipiente slittamento
ovvero tutto l’arco abbracciato sulla puleggia è considerato utile ed in presa
dalla cinghia. Ciò vuol dire che si sta trasmettendo il momento massimo Mmax a
causa del solo scorrimento locale.
Nella realtà, quando M<Mmax la condizione di funzionamento è intermedia, ovvero
solo una porzione dell’angolo di avvolgimento è necessaria affinché si verifichi
lo scorrimento locale e quindi la variabilità da T0 a T1.
Si dimostra che nell’effettivo andamento del fenomeno, in condizioni diverse da
quelle limite, lo scorrimento locale tra cinghia e puleggia si esercita solo su una
porzione dell’arco abbracciato f.
Sulla restante parte dell’arco di avvolgimento -f si avrà aderenza essendo
assente lo scorrimento locale e quindi la sollecitazione T è costante. Poiché tale
arco non partecipa alla trasmissione del momento viene detto arco ozioso. Esso
si trova sempre adiacente al punto di primo contatto tra cinghia e puleggia.
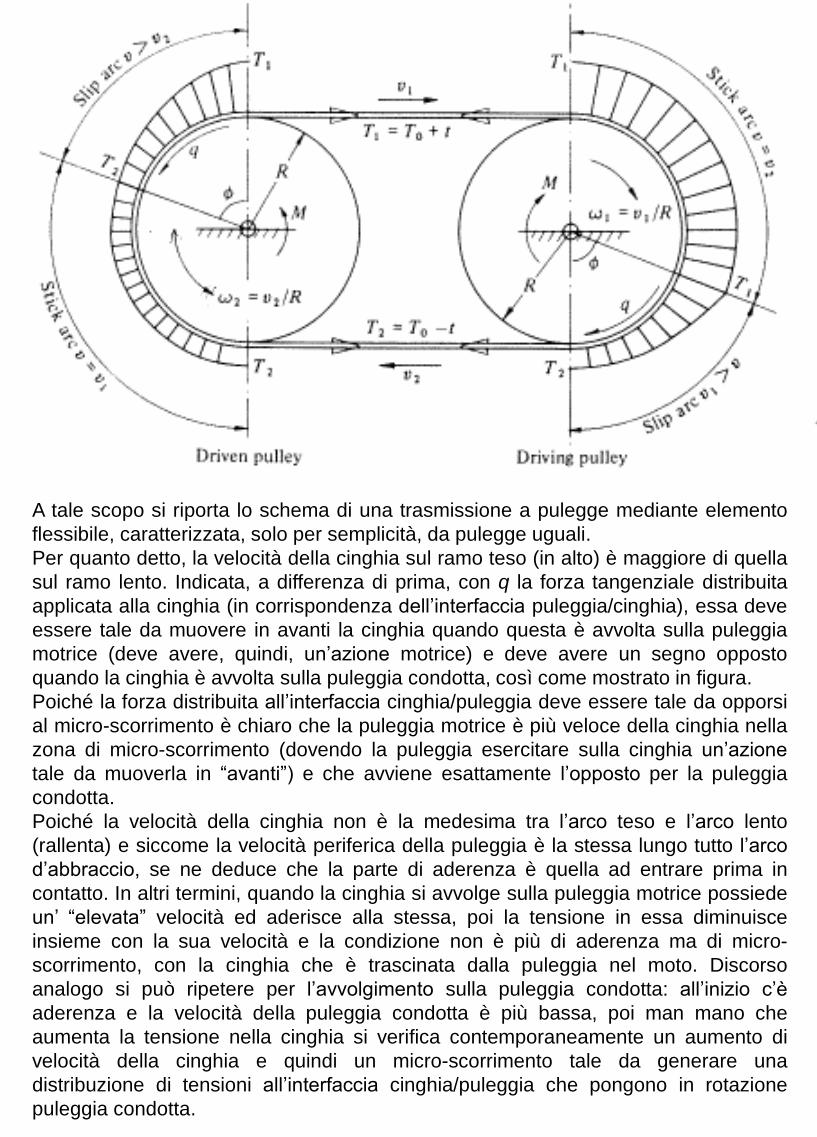
A tale scopo si riporta lo schema di una trasmissione a pulegge mediante elemento
flessibile, caratterizzata, solo per semplicità, da pulegge uguali.
Per quanto detto, la velocità della cinghia sul ramo teso (in alto) è maggiore di quella
sul ramo lento. Indicata, a differenza di prima, con q la forza tangenziale distribuita
applicata alla cinghia (in corrispondenza dell’interfaccia puleggia/cinghia), essa deve
essere tale da muovere in avanti la cinghia quando questa è avvolta sulla puleggia
motrice (deve avere, quindi, un’azione motrice) e deve avere un segno opposto
quando la cinghia è avvolta sulla puleggia condotta, così come mostrato in figura.
Poiché la forza distribuita all’interfaccia cinghia/puleggia deve essere tale da opporsi
al micro-scorrimento è chiaro che la puleggia motrice è più veloce della cinghia nella
zona di micro-scorrimento (dovendo la puleggia esercitare sulla cinghia un’azione
tale da muoverla in “avanti”) e che avviene esattamente l’opposto per la puleggia
condotta.
Poiché la velocità della cinghia non è la medesima tra l’arco teso e l’arco lento
(rallenta) e siccome la velocità periferica della puleggia è la stessa lungo tutto l’arco
d’abbraccio, se ne deduce che la parte di aderenza è quella ad entrare prima in
contatto. In altri termini, quando la cinghia si avvolge sulla puleggia motrice possiede
un’ “elevata” velocità ed aderisce alla stessa, poi la tensione in essa diminuisce
insieme con la sua velocità e la condizione non è più di aderenza ma di micro-
scorrimento, con la cinghia che è trascinata dalla puleggia nel moto. Discorso
analogo si può ripetere per l’avvolgimento sulla puleggia condotta: all’inizio c’è
aderenza e la velocità della puleggia condotta è più bassa, poi man mano che
aumenta la tensione nella cinghia si verifica contemporaneamente un aumento di
velocità della cinghia e quindi un micro-scorrimento tale da generare una
distribuzione di tensioni all’interfaccia cinghia/puleggia che pongono in rotazione
puleggia condotta.

Nella definizione di rendimento, tali velocità possono essere imputate a
quelle relative alla puleggia motrice ed alla puleggia condotta.
In tal caso sarebbe
In condizioni correnti il valore sopra riportato vale circa 2-3 %. Il valore così
basso rende lecito trascurare, a livello globale, la variazione di velocità,
assumendo quindi:
22
21
11 v2
d
2
dv
2
1
1
2
d
d
È interessante definire un
rendimento della trasmissione,
imputabile alla variazione di
velocità e trascurando l’energia
anelastica assorbita dal
flessibile.
1 0 1 0
1 1
v v T T1
v E s T
11
f
f2
1f
f2
12
d
e
1evqTv
e
1evqTP
Potenza massima trasmissibile:
sE
T
dt
dsv 00
2 1
sE
T
dt
dsv 10
1 1
2
1 12
1max
d
e
evqTM
f
f
1 1 1 0 2 2 1 0 1 01 2 1 2
1 1 1 1 0 1 1
d 2 (T T ) d 2 (T T ) T TP P v v1
P d 2 (T T ) v E s T

0ve
1eqv2T
e
1evqT
v
Pf
f
1f
f2
1
q3
T
q3
Tv max1
max
Velocità che rende massima la potenza trasmessa in funzione di T1, massima
sollecitazione ammissibile nella cinghia (Tmax).
Tensioni presenti nella cinghia
Flessione:R
yE
J
y
R
JE
W
M
f
ff
y: massima distanza dall’asse neutro,
ipotizzato nel centro dello spessore
della cinghia
1
maxmax
R
yE
s
T
1
amm
1
ammmaxR
yE
3
1
R
yE
q3
sv
s
q densità
materiale
Velocità massima compatibile con le caratteristiche del materiale costituente la cinghia
ve
1esP
f
f
centfamm
Potenza massima compatibile con le caratteristiche del materiale
v
s
s
vqR
yE
2
cent
f
amm tensione ammissibile (fatica)
effetto flessione
effetto centrifugo
sezione cinghia
velocità periferica
2sen
ff *
cinghia
trapezoidale
v
e
evqTP
f
f
12
1

Equilibrio cinghia
trapezoidale
Equilibrio in direzione radiale: 𝑑𝐹𝑐 + 2𝑑𝑁𝑠𝑖𝑛𝛾
2+ 2𝑓𝑑𝑁𝑐𝑜𝑠
𝛾
2= 𝑇𝑑𝜑
Equilibrio in direzione tangenziale: 𝑑𝑇 = 2𝑓𝑑𝑁
Con 2dN dalla seconda, la prima diventa: 𝑞𝑣2𝑑𝜑 +𝑑𝑇
𝑓𝑠𝑖𝑛
𝛾
2+ 𝑓𝑐𝑜𝑠
𝛾
2= 𝑇𝑑𝜑
Si possono quindi riottenere le stesse equazioni di Eulero e ripetere anche le
considerazioni successive viste prima usando come coefficiente d’attrito la quantità:
𝑓∗ =𝑓
𝑠𝑖𝑛𝛾
2+𝑓𝑐𝑜𝑠
𝛾
2
In realtà, ad incuneamento avvenuto della cinghia sulla puleggia, si riscontra che il
coefficiente di attrito equivalente diviene semplicemente: 𝑓∗ =𝑓
𝑠𝑖𝑛𝛾
2
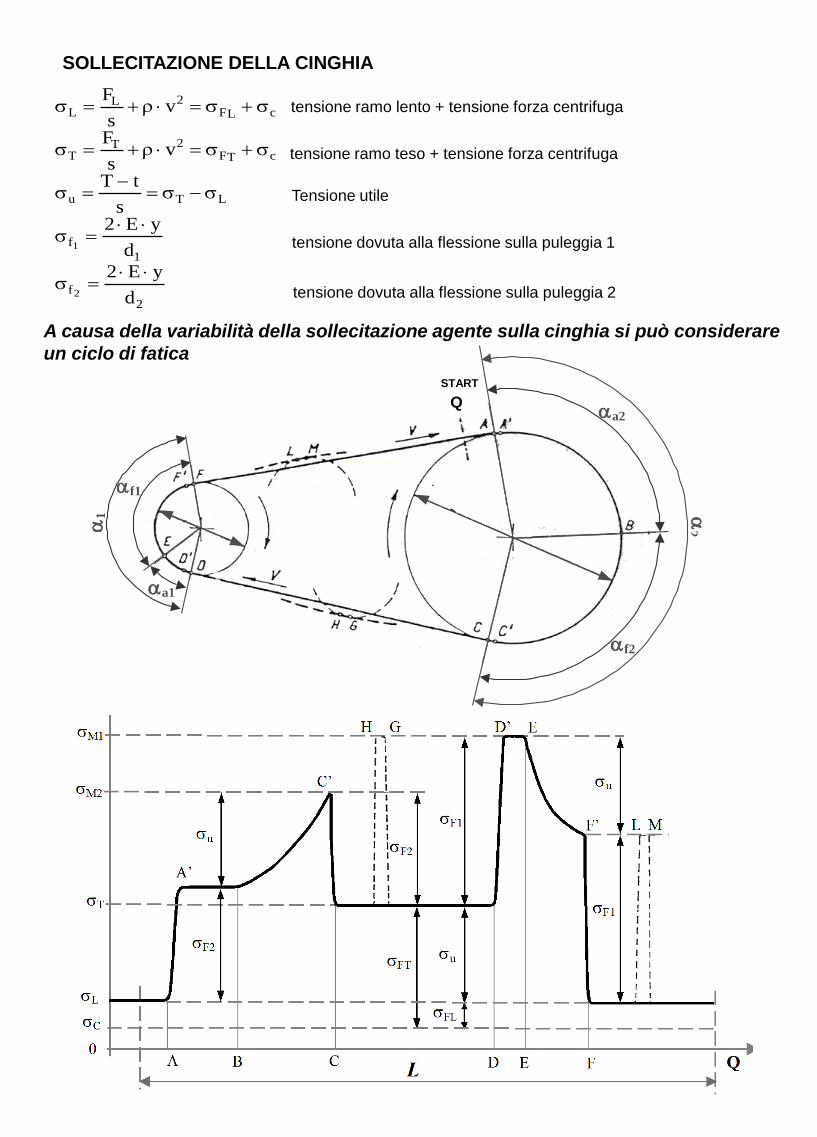
SOLLECITAZIONE DELLA CINGHIA
2
f
1
f
LTu
cTF2T
T
cLF2L
L
d
yE2
d
yE2s
tT
vs
F
vs
F
2
1
tensione ramo lento + tensione forza centrifuga
tensione dovuta alla flessione sulla puleggia 1
tensione dovuta alla flessione sulla puleggia 2
tensione ramo teso + tensione forza centrifuga
A causa della variabilità della sollecitazione agente sulla cinghia si può considerare
un ciclo di fatica
Q
START
2
f2
a2
1
a1
f1
Tensione utile
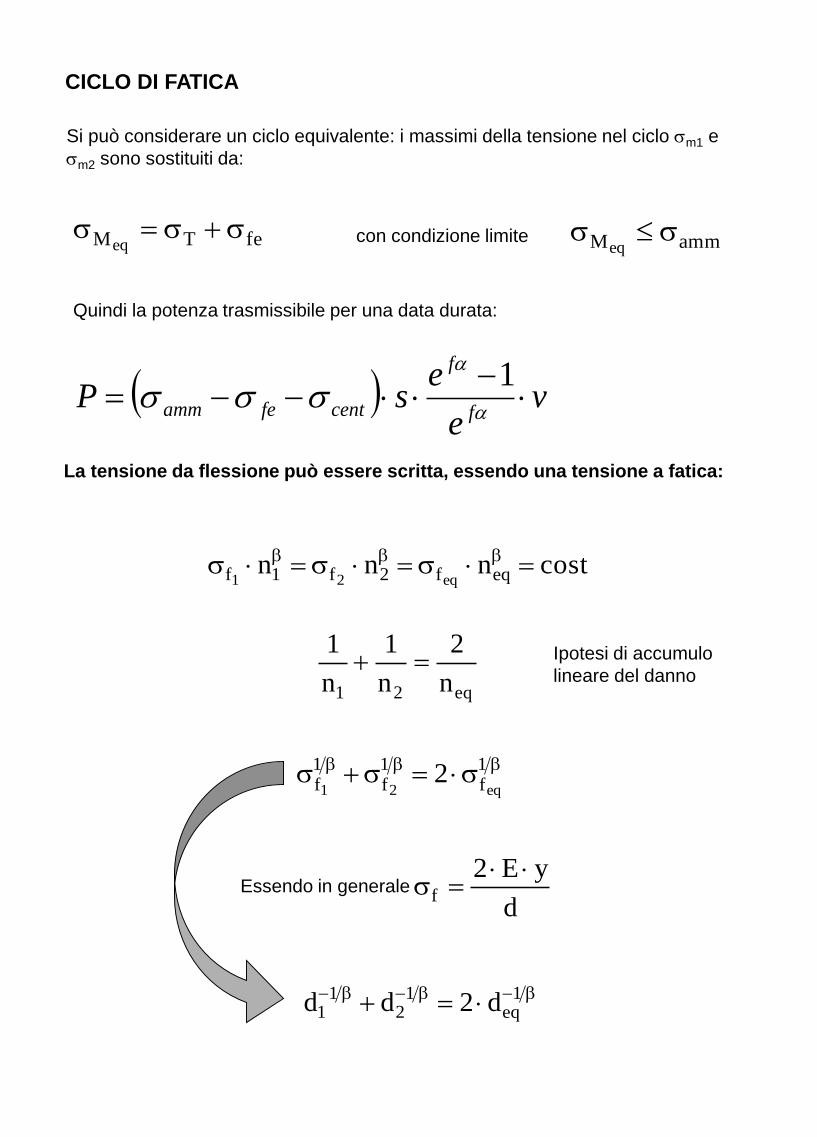
CICLO DI FATICA
Si può considerare un ciclo equivalente: i massimi della tensione nel ciclo m1 e
m2 sono sostituiti da:
feTMeq con condizione limite ammMeq
Quindi la potenza trasmissibile per una data durata:
ve
esP
f
f
centfeamm
1
La tensione da flessione può essere scritta, essendo una tensione a fatica:
tcosnnn eqf2f1f eq21
eq21 n
2
n
1
n
1 Ipotesi di accumulo
lineare del danno
1f
1f
1f eq21
2
1eq
12
11 d2dd
d
yE2f
Essendo in generale

12
11
1eq d
1
d
1
d
2
12
11
12
111
eqdd
dd2d
11eq d1
2d
ponendo ;2
1
d
d
11
2c
16.0
20.0 cinghie a sezione larga
cinghie a sezione stretta
15.112.1c
Si può quindi scrivere
1
fdc
yE2eq
e quindi la potenza
ve
1es
dc
yE2P
f
f
cent
1
amm
1dcdeq
con

Si può valutare anche il valore della tensione ammissibile:
knamm
067.0
09.0con
cinghie a sezione larga
cinghie a sezione stretta
Il valore limite di amm per 107 cicli è compreso tra 9 e 14 MPa, pertanto k è
compreso tra 39 e 60 MPa per cinghie a sezione larga e tra 26 e 41 MPa per
cinghie a sezione stretta.
Il modulo di Young E vale:
MPa155125
MPa11060 cinghie a sezione larga
cinghie a sezione stretta
La densità varia tra 1200 e 1350 Kg/m3

PROCEDIMENTI DI PROGETTO E VERIFICA
DATI:
• potenza da trasmettere (solitamente di targa del motore)
• n1
•
• (interasse)
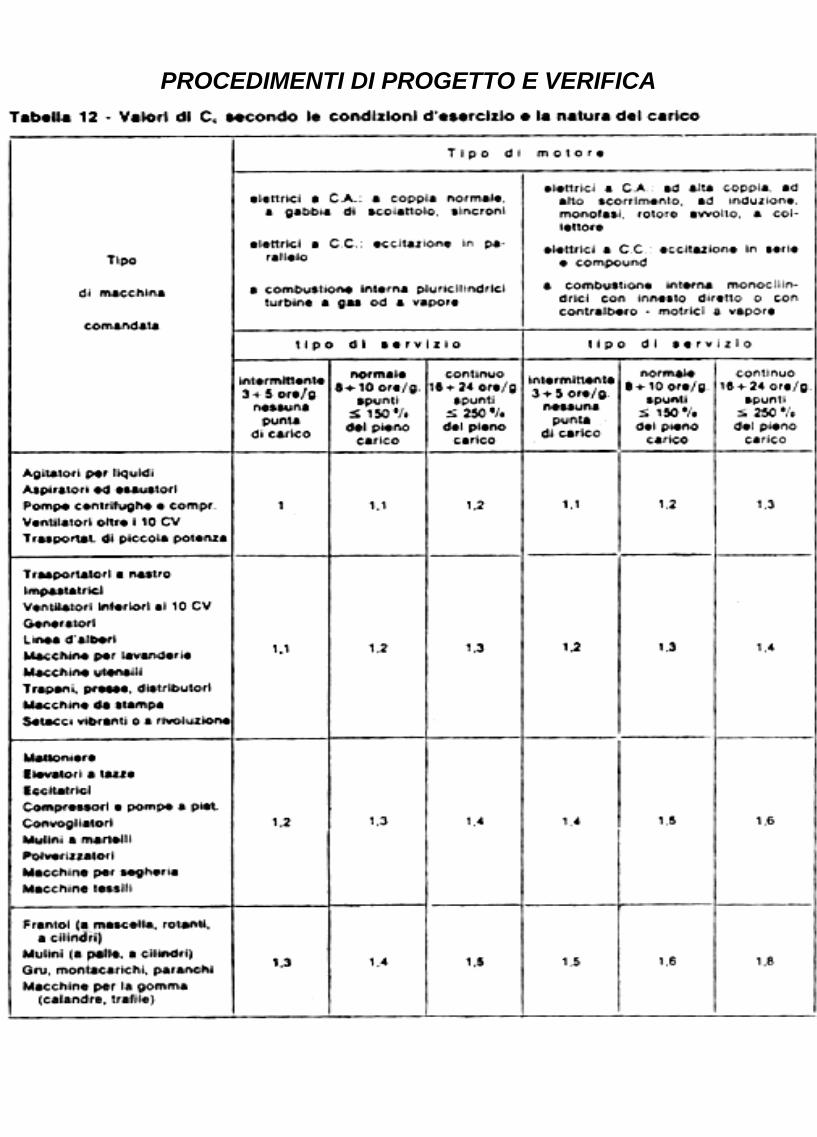
• condizioni di esercizio, natura del carico e tipo di motore
1. Determinazione potenza di calcolo
:CPCP ssC coefficiente di servizio secondo la
natura del carico
PROCEDIMENTI DI PROGETTO E VERIFICA
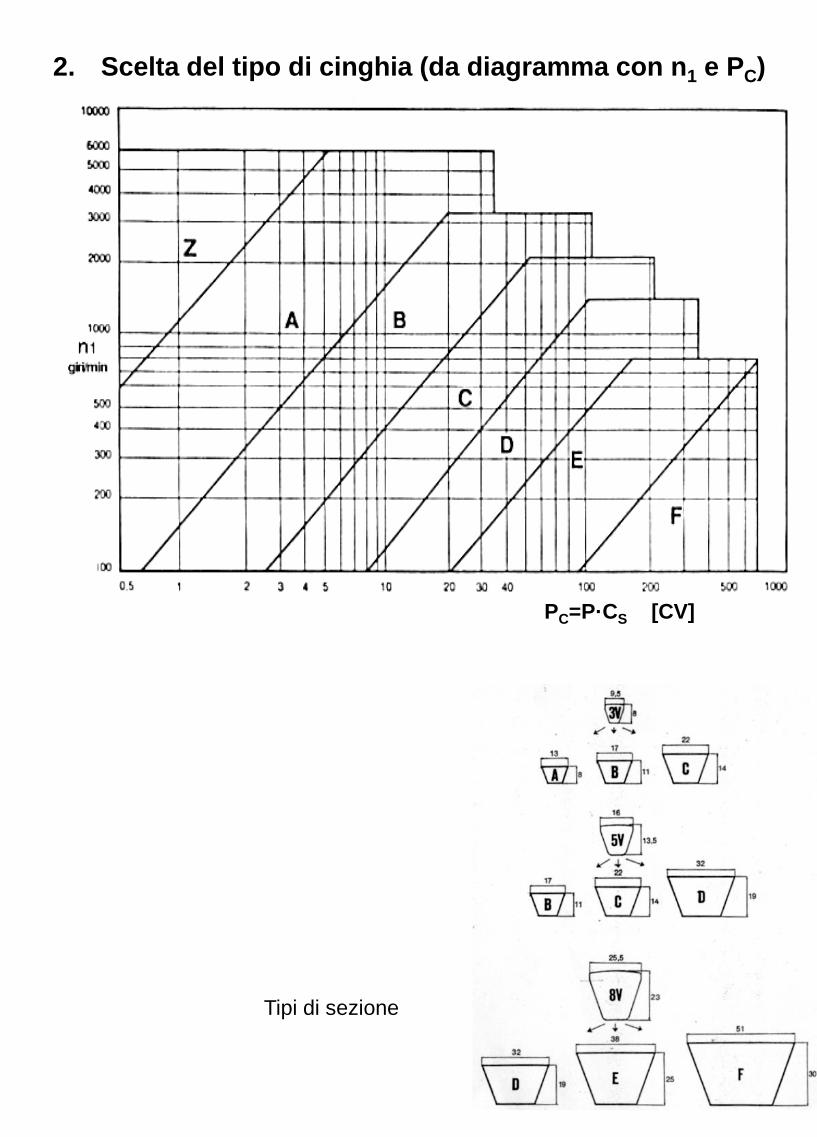
2. Scelta del tipo di cinghia (da diagramma con n1 e PC)
Tipi di sezione
PC=P·CS [CV]
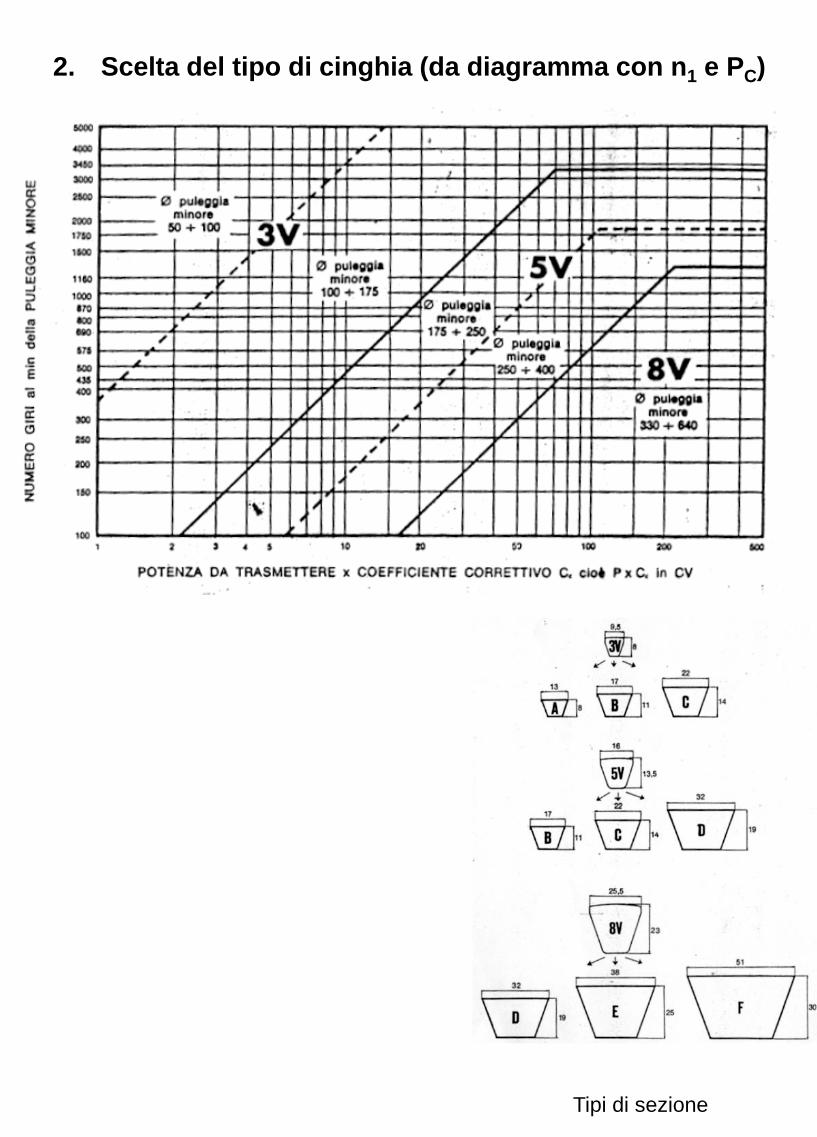
2. Scelta del tipo di cinghia (da diagramma con n1 e PC)
Tipi di sezione
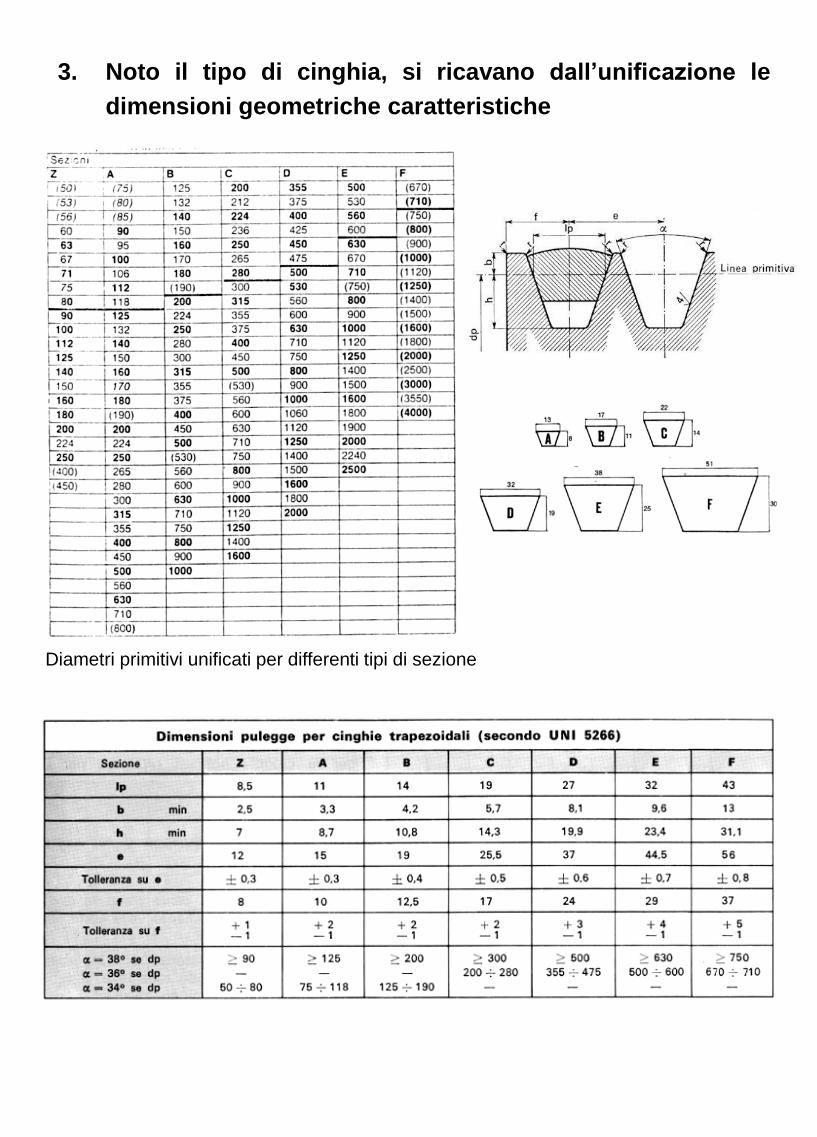
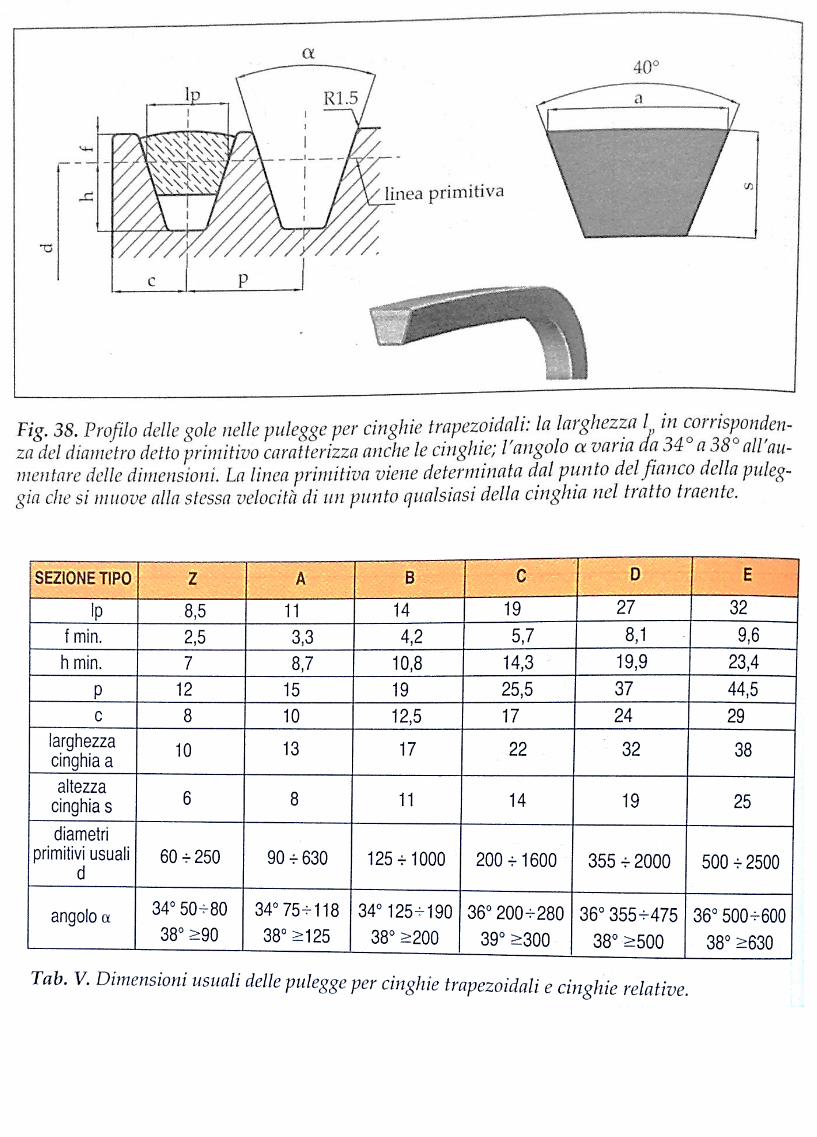
3. Noto il tipo di cinghia, si ricavano dall’unificazione le
dimensioni geometriche caratteristiche
Diametri primitivi unificati per differenti tipi di sezione
vse
1ev
dc
yE2v
h2
LkP
f
f2
1
00
knamm
n
kamm
0L
vh2n
v
1
h2
Lk 0
amm
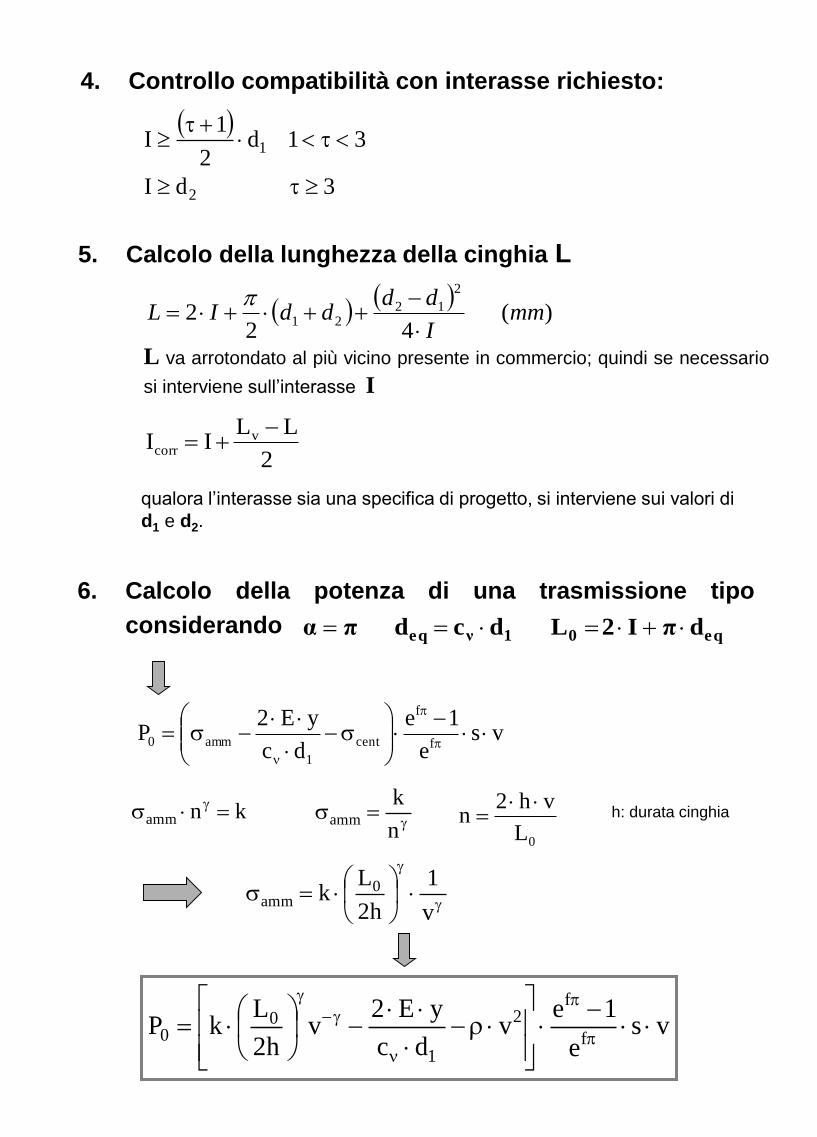
5. Calcolo della lunghezza della cinghia L
)(42
2
2
1221 mm
I
ddddIL
L va arrotondato al più vicino presente in commercio; quindi se necessario
si interviene sull’interasse I
6. Calcolo della potenza di una trasmissione tipo
considerandoeq01νeq dπI2Ldcdπα
vse
1e
dc
yE2P
f
f
cent
1
amm0
3dI
31d2
1I
2
1
4. Controllo compatibilità con interasse richiesto:
qualora l’interasse sia una specifica di progetto, si interviene sui valori di
d1 e d2.
2
LLII v
corr
h: durata cinghia
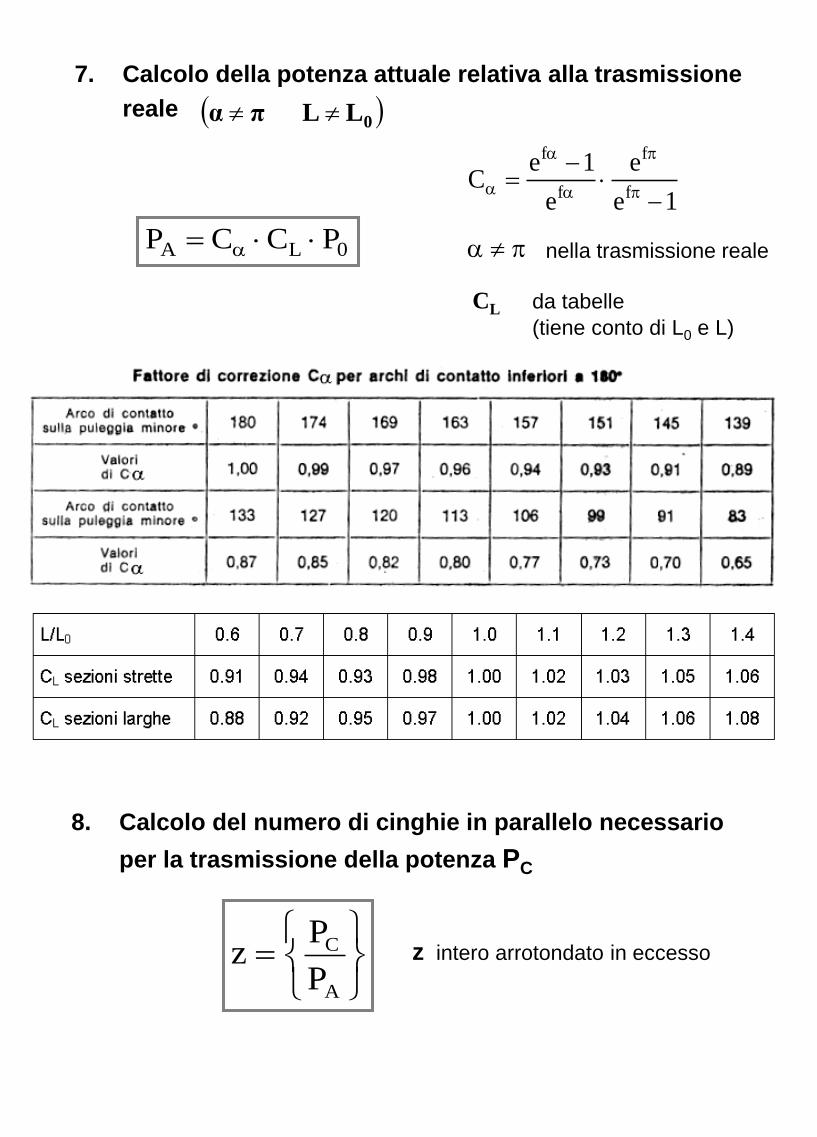
7. Calcolo della potenza attuale relativa alla trasmissione
reale 0LLπα
0LA PCCP
1e
e
e
1eC
f
f
f
f
nella trasmissione reale
CL da tabelle
(tiene conto di L0 e L)
8. Calcolo del numero di cinghie in parallelo necessario
per la trasmissione della potenza PC
A
C
P
Pz z intero arrotondato in eccesso