Obiettivi del corsowebuser.unicas.it/arrichiello/file_didattica/1_TIA_Intro.pdf · Linguaggi di...
18
1 Università degli Studi di Cassino e del Lazio Meridionale Corso di Laurea in Ingegneria Informatica e delle Telecomunicazioni III anno II semestre 6 CFU www.docente.unicas.it/giuseppe_fusco [email protected] Prof. Giuseppe Fusco webuser.unicas.it/arrichiello [email protected] Ing. Filippo Arrichiello Università degli Studi di Cassino e del Lazio Meridionale Obiettivi del corso Il corso è volto ad illustrare le principali problematiche di progettazione ed utilizzo di tecnologie informatiche per l’automazione industriale
Transcript of Obiettivi del corsowebuser.unicas.it/arrichiello/file_didattica/1_TIA_Intro.pdf · Linguaggi di...
1
Università degli Studi di Cassino e del Lazio Meridionale
Corso di Laurea in Ingegneria Informatica e delle
Telecomunicazioni
III anno II semestre 6 CFU
www.docente.unicas.it/giuseppe_fusco
Prof. Giuseppe Fusco
webuser.unicas.it/arrichiello
Ing. Filippo Arrichiello
Università degli Studi di Cassino e del Lazio Meridionale
Obiettivi del corso
Il corso è volto ad illustrare le principali problematiche di progettazione ed utilizzo di tecnologie informatiche per l’automazione industriale
2
Università degli Studi di Cassino e del Lazio Meridionale
Programma del corso
� Problematiche di controllo per l’automazione industriale� Dispositivi di controllo
� Regolatori industriali PID� Controllo di sistemi con ritardo tramite predittore di Smith� Architettura dei dispositivi di controllo.
� Controllori a Logica Programmabile (PLC)� Linguaggi di programmazione per PLC (standard IEC 61131-3) � Ladder Diagram� Sequential Functional Chart
� Controllo distribuito � Produzione integrata� Bus di campo � Sistemi SCADA per la supervisione
� Automi e reti di Petri
Università degli Studi di Cassino e del Lazio Meridionale
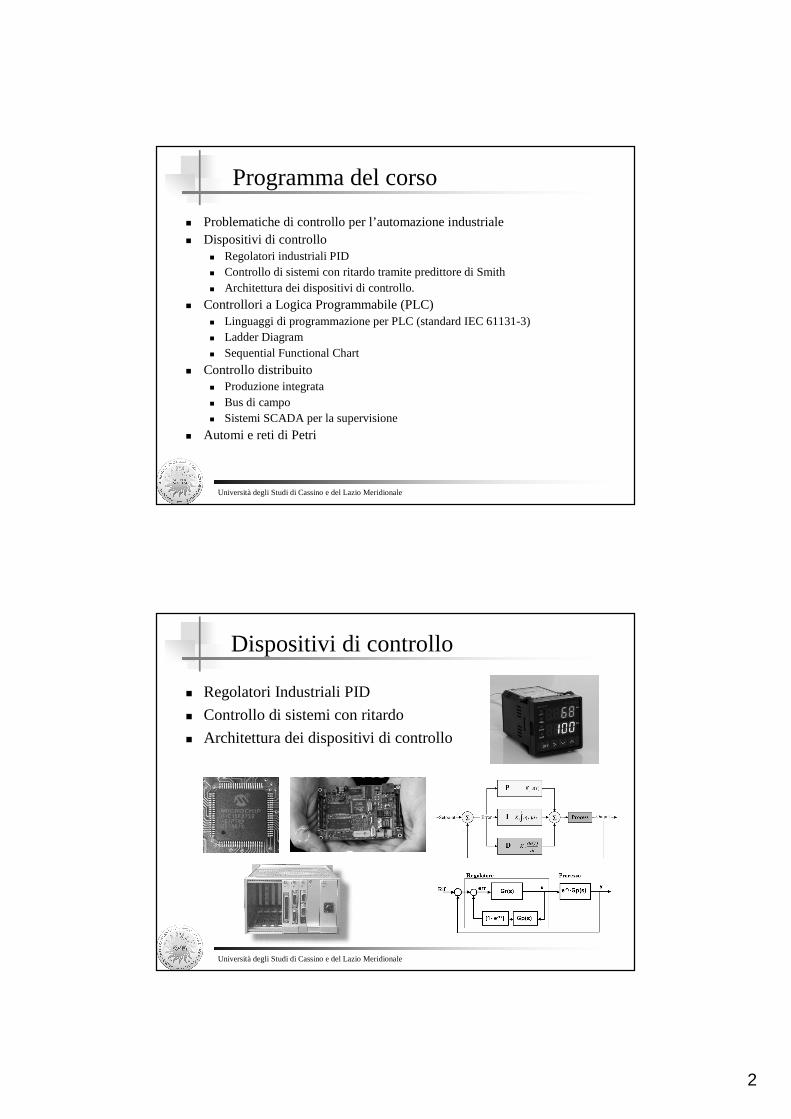
Dispositivi di controllo
� Regolatori Industriali PID
� Controllo di sistemi con ritardo
� Architettura dei dispositivi di controllo
3
Università degli Studi di Cassino e del Lazio Meridionale
Programmable logic controller (PLC)
� Architettura dei PLC
� Linguaggi di programmazione � Standard IEC 61131-3
� Ladder Diagram
� Sequential Functional Chart
Università degli Studi di Cassino e del Lazio Meridionale
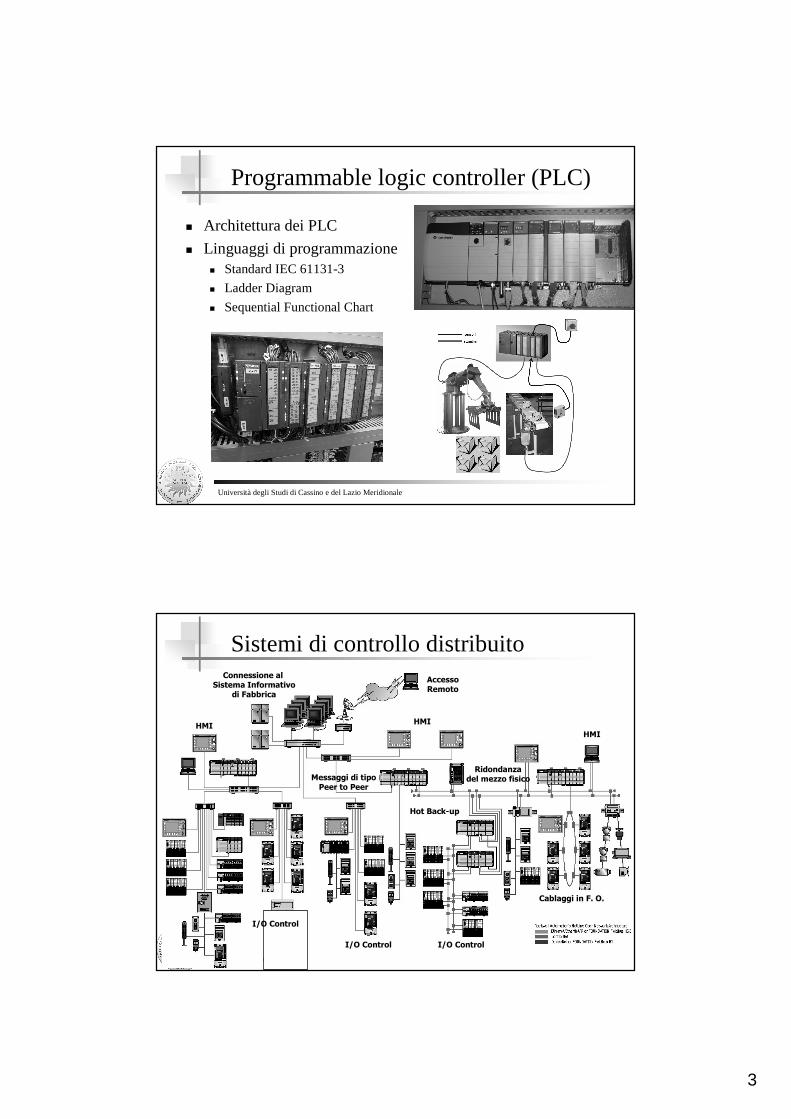
Sistemi di controllo distribuito
HMIHMI
HMI
Messaggi di tipoPeer to Peer
Ridondanzadel mezzo fisico
Cablaggi in F. O.
Connessione al Sistema Informativo
di Fabbrica
AccessoRemoto
I/O Control I/O Control
Hot Back-up
I/O Control
4
Università degli Studi di Cassino e del Lazio Meridionale
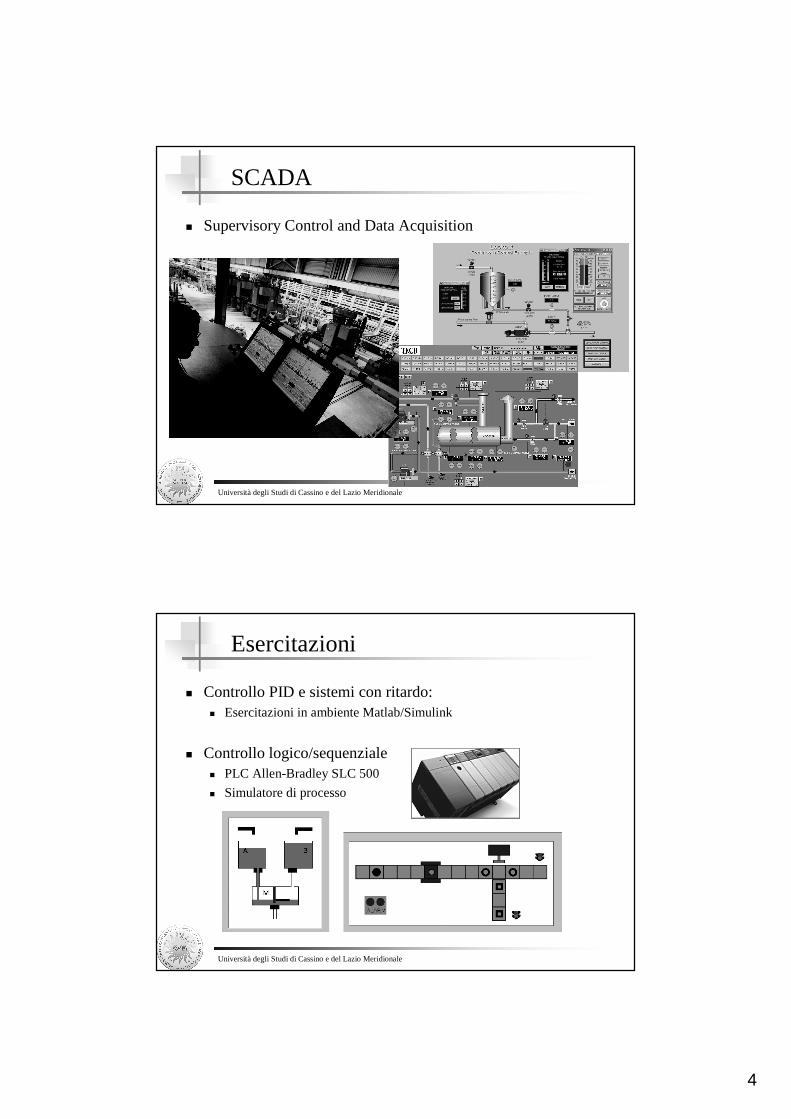
SCADA
� Supervisory Control and Data Acquisition
Università degli Studi di Cassino e del Lazio Meridionale
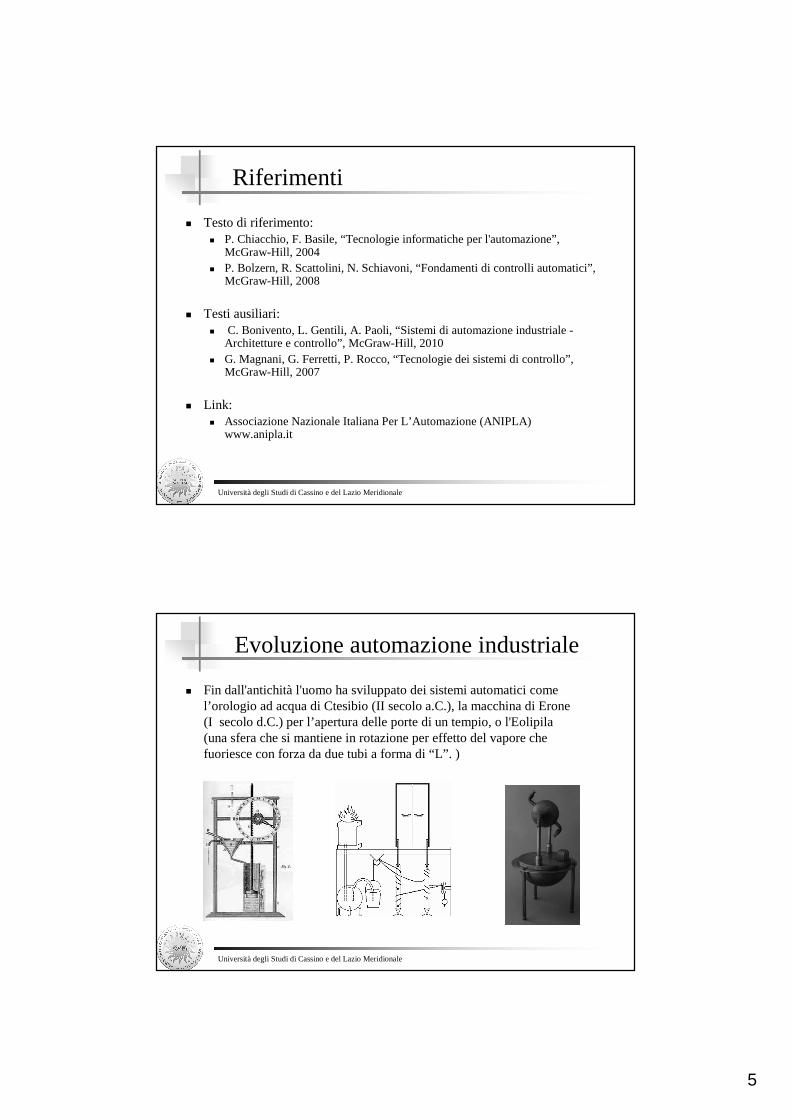
Esercitazioni
� Controllo PID e sistemi con ritardo:� Esercitazioni in ambiente Matlab/Simulink
� Controllo logico/sequenziale� PLC Allen-Bradley SLC 500
� Simulatore di processo
5
Università degli Studi di Cassino e del Lazio Meridionale
Riferimenti
� Testo di riferimento:� P. Chiacchio, F. Basile, “Tecnologie informatiche per l'automazione”,
McGraw-Hill, 2004� P. Bolzern, R. Scattolini, N. Schiavoni, “Fondamenti di controlli automatici”,
McGraw-Hill, 2008
� Testi ausiliari:� C. Bonivento, L. Gentili, A. Paoli, “Sistemi di automazione industriale -
Architetture e controllo”, McGraw-Hill, 2010� G. Magnani, G. Ferretti, P. Rocco, “Tecnologie dei sistemi di controllo”,
McGraw-Hill, 2007
� Link:� Associazione Nazionale Italiana Per L’Automazione (ANIPLA)
www.anipla.it
Università degli Studi di Cassino e del Lazio Meridionale
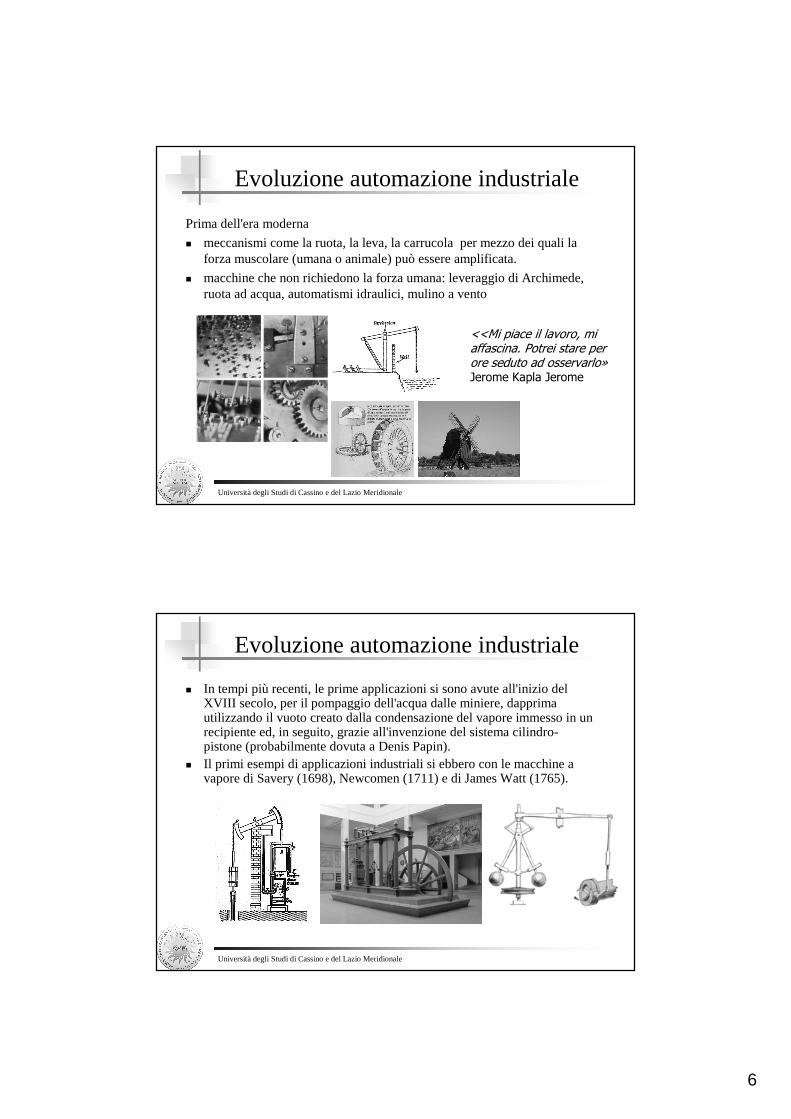
Evoluzione automazione industriale
� Fin dall'antichità l'uomo ha sviluppato dei sistemi automatici come l’orologio ad acqua di Ctesibio (II secolo a.C.), la macchina di Erone(I secolo d.C.) per l’apertura delle porte di un tempio, o l'Eolipila(una sfera che si mantiene in rotazione per effetto del vapore che fuoriesce con forza da due tubi a forma di “L”. )
6
Università degli Studi di Cassino e del Lazio Meridionale
Evoluzione automazione industriale
Prima dell'era moderna
� meccanismi come la ruota, la leva, la carrucola per mezzo dei quali la forza muscolare (umana o animale) può essere amplificata.
� macchine che non richiedono la forza umana: leveraggio di Archimede, ruota ad acqua, automatismi idraulici, mulino a vento
<<Mi piace il lavoro, mi affascina. Potrei stare per ore seduto ad osservarlo»Jerome Kapla Jerome
Università degli Studi di Cassino e del Lazio Meridionale
Evoluzione automazione industriale
� In tempi più recenti, le prime applicazioni si sono avute all'inizio del XVIII secolo, per il pompaggio dell'acqua dalle miniere, dapprima utilizzando il vuoto creato dalla condensazione del vapore immesso in un recipiente ed, in seguito, grazie all'invenzione del sistema cilindro-pistone (probabilmente dovuta a Denis Papin).
� Il primi esempi di applicazioni industriali si ebbero con le macchine a vapore di Savery (1698), Newcomen (1711) e di James Watt (1765).
7
Università degli Studi di Cassino e del Lazio Meridionale
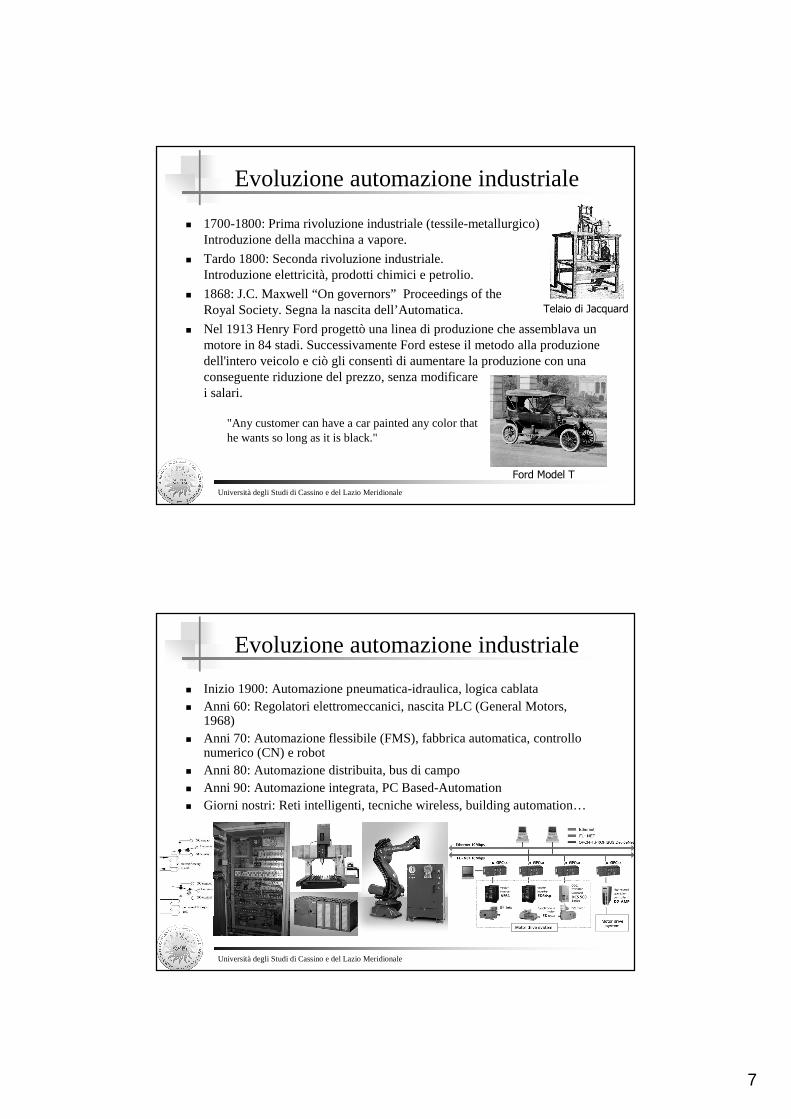
Evoluzione automazione industriale
� 1700-1800: Prima rivoluzione industriale (tessile-metallurgico) Introduzione della macchina a vapore.
� Tardo 1800: Seconda rivoluzione industriale.Introduzione elettricità, prodotti chimici e petrolio.
� 1868: J.C. Maxwell “On governors” Proceedings of the Royal Society. Segna la nascita dell’Automatica.
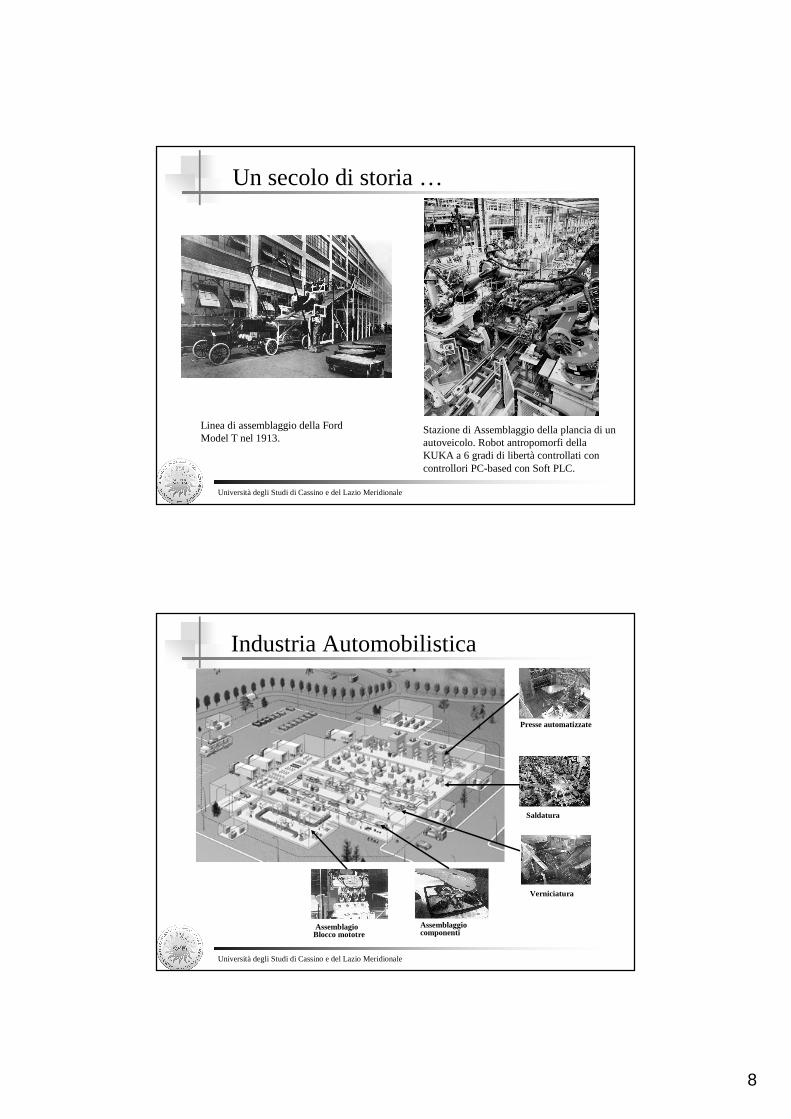
� Nel 1913 Henry Ford progettò una linea di produzione che assemblava un motore in 84 stadi. Successivamente Ford estese il metodo alla produzione dell'intero veicolo e ciò gli consentì di aumentare la produzione con una conseguente riduzione del prezzo, senza modificare i salari.
"Any customer can have a car painted any color thathe wants so long as it is black."
Telaio di Jacquard
Ford Model T
Università degli Studi di Cassino e del Lazio Meridionale
Evoluzione automazione industriale
� Inizio 1900: Automazione pneumatica-idraulica, logica cablata� Anni 60: Regolatori elettromeccanici, nascita PLC (General Motors,
1968)� Anni 70: Automazione flessibile (FMS), fabbrica automatica, controllo
numerico (CN) e robot� Anni 80: Automazione distribuita, bus di campo� Anni 90: Automazione integrata, PC Based-Automation� Giorni nostri: Reti intelligenti, tecniche wireless, building automation…
8
Università degli Studi di Cassino e del Lazio Meridionale
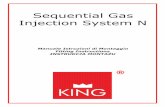
Stazione di Assemblaggio della plancia di un autoveicolo. Robot antropomorfi della KUKA a 6 gradi di libertà controllati con controllori PC-based con Soft PLC.
Linea di assemblaggio della Ford Model T nel 1913.
Un secolo di storia …
Università degli Studi di Cassino e del Lazio Meridionale
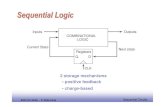
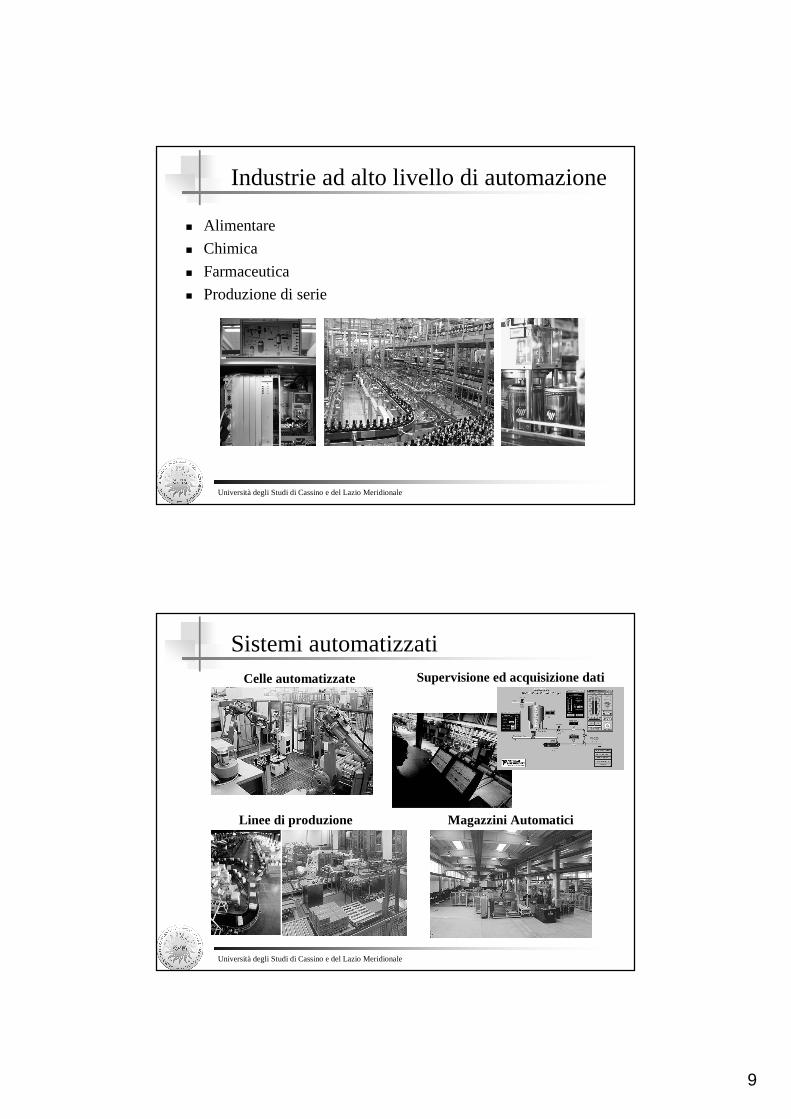
AssemblagioBlocco mototre
Presse automatizzate
Saldatura
Verniciatura
Assemblaggiocomponenti
Industria Automobilistica
9
Università degli Studi di Cassino e del Lazio Meridionale
Industrie ad alto livello di automazione
� Alimentare
� Chimica
� Farmaceutica
� Produzione di serie
Università degli Studi di Cassino e del Lazio Meridionale
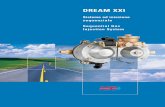
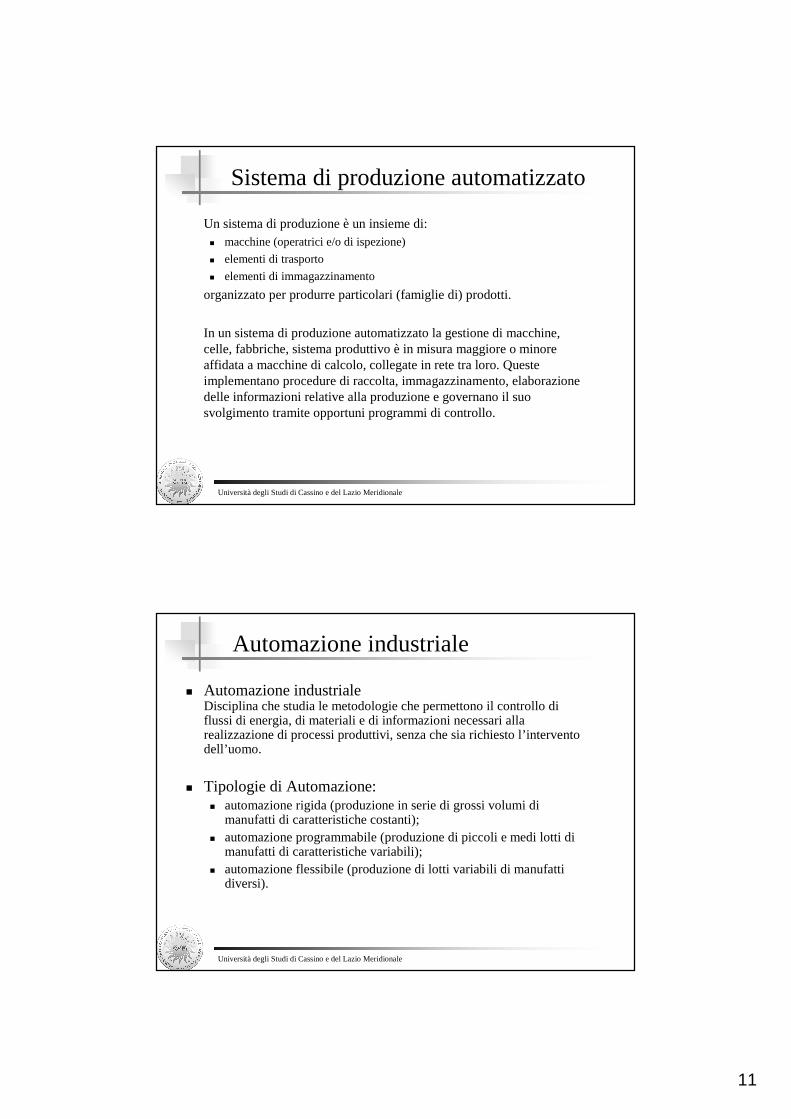
Sistemi automatizzati
Linee di produzione Magazzini Automatici
Celle automatizzate Supervisione ed acquisizione dati
10
Università degli Studi di Cassino e del Lazio Meridionale
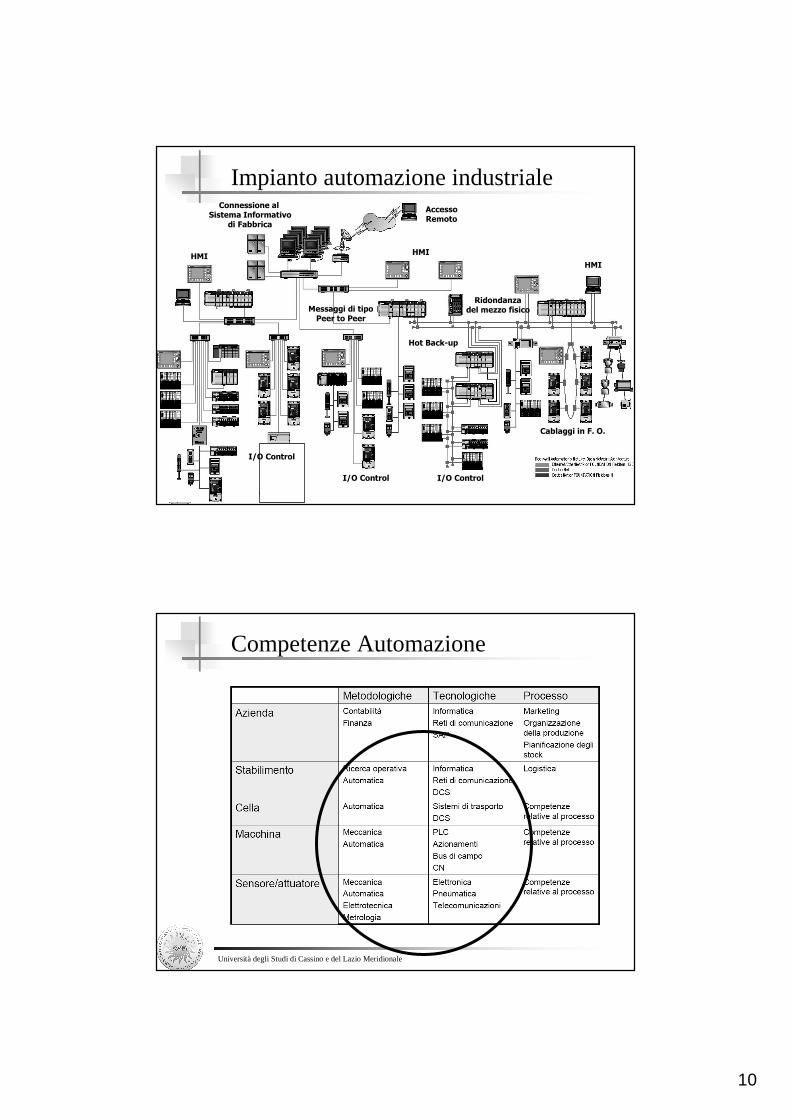
Impianto automazione industriale
HMIHMI
HMI
Messaggi di tipoPeer to Peer
Ridondanzadel mezzo fisico
Cablaggi in F. O.
Connessione al Sistema Informativo
di Fabbrica
AccessoRemoto
I/O Control I/O Control
Hot Back-up
I/O Control
Università degli Studi di Cassino e del Lazio Meridionale
Competenze Automazione
11
Università degli Studi di Cassino e del Lazio Meridionale
Sistema di produzione automatizzato
Un sistema di produzione è un insieme di:� macchine (operatrici e/o di ispezione)
� elementi di trasporto
� elementi di immagazzinamento
organizzato per produrre particolari (famiglie di) prodotti.
In un sistema di produzione automatizzato la gestione di macchine, celle, fabbriche, sistema produttivo è in misura maggiore o minore affidata a macchine di calcolo, collegate in rete tra loro. Queste implementano procedure di raccolta, immagazzinamento, elaborazione delle informazioni relative alla produzione e governano il suo svolgimento tramite opportuni programmi di controllo.
Università degli Studi di Cassino e del Lazio Meridionale
Automazione industriale
� Automazione industrialeDisciplina che studia le metodologie che permettono il controllo di flussi di energia, di materiali e di informazioni necessari allarealizzazione di processi produttivi, senza che sia richiesto l’intervento dell’uomo.
� Tipologie di Automazione:� automazione rigida (produzione in serie di grossi volumi di
manufatti di caratteristiche costanti);� automazione programmabile (produzione di piccoli e medi lotti di
manufatti di caratteristiche variabili);� automazione flessibile (produzione di lotti variabili di manufatti
diversi).
12
Università degli Studi di Cassino e del Lazio Meridionale
Automazione industriale
� L’introduzione delle tecniche di automazione nei processi produttivi moderni ha comportato:� il miglioramento della qualità dei prodotti
� la possibilità di usare lo stesso impianto per più prodotti (concetto di flessibilità della produzione)
� la riduzione dei tempi di produzione
� la possibilità di ridurre i magazzini in ingresso e in uscita
� la riduzione degli scarti di lavorazione
� il minor costo di produzione
� la necessità di conformarsi a leggi o regolamenti che impedirebbero la produzione manuale (industria farmaceutica o alimentare)
� il miglioramento della competitività dell’azienda nel suo complesso
Università degli Studi di Cassino e del Lazio Meridionale
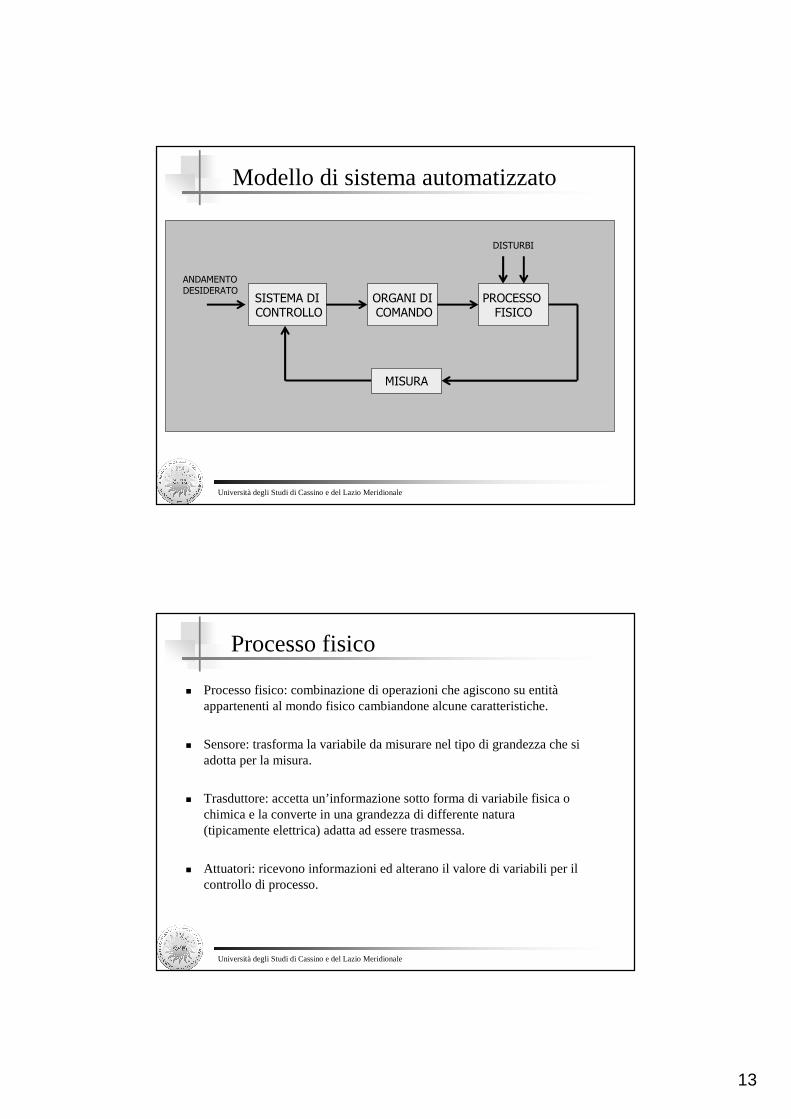
Modello di sistema automatizzato
PROCESSO FISICO
sensori attuatori
materiali
energia
materiali
energia
SISTEMA DI CONTROLLO
disturbi
informazioni
informazioni informazioni
informazioni
13
Università degli Studi di Cassino e del Lazio Meridionale
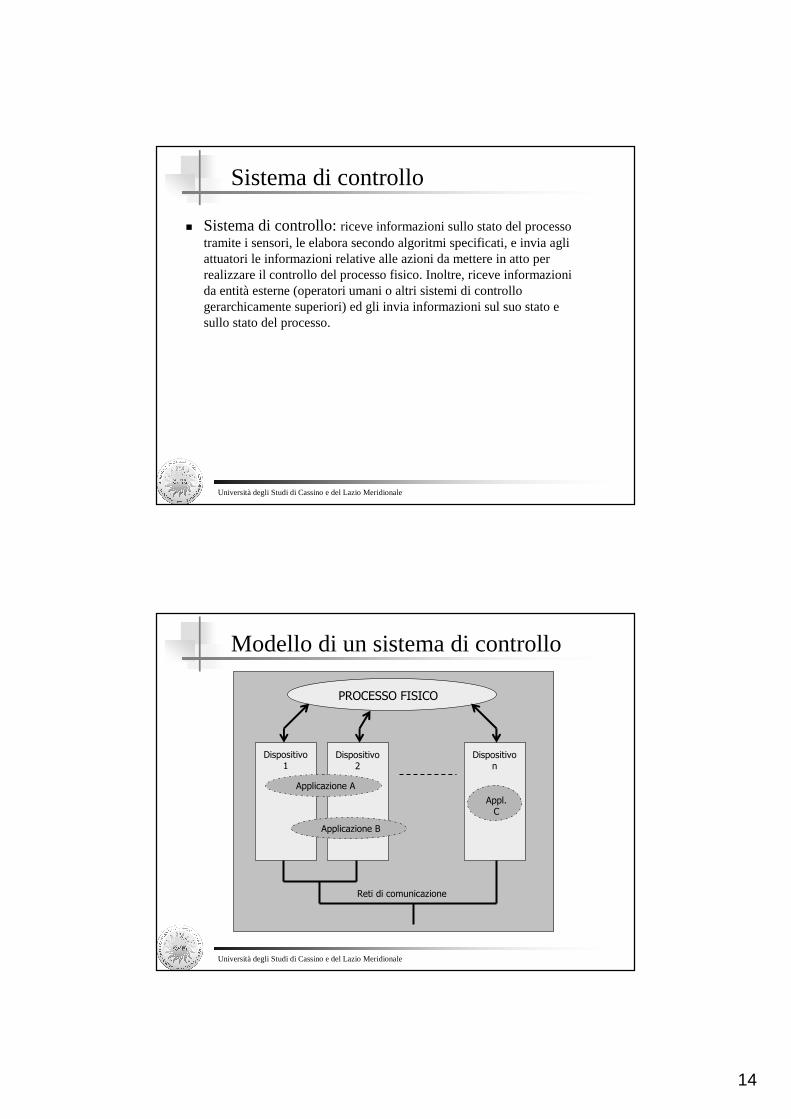
Modello di sistema automatizzato
SISTEMA DICONTROLLO
ANDAMENTO DESIDERATO
DISTURBI
ORGANI DICOMANDO
PROCESSO FISICO
MISURA
Università degli Studi di Cassino e del Lazio Meridionale
Processo fisico
� Processo fisico: combinazione di operazioni che agiscono su entitàappartenenti al mondo fisico cambiandone alcune caratteristiche.
� Sensore: trasforma la variabile da misurare nel tipo di grandezza che siadotta per la misura.
� Trasduttore: accetta un’informazione sotto forma di variabile fisica o chimica e la converte in una grandezza di differente natura (tipicamente elettrica) adatta ad essere trasmessa.
� Attuatori: ricevono informazioni ed alterano il valore di variabili per ilcontrollo di processo.
14
Università degli Studi di Cassino e del Lazio Meridionale
Sistema di controllo
� Sistema di controllo:riceve informazioni sullo stato del processo tramite i sensori, le elabora secondo algoritmi specificati, e invia agli attuatori le informazioni relative alle azioni da mettere in atto per realizzare il controllo del processo fisico. Inoltre, riceve informazioni da entità esterne (operatori umani o altri sistemi di controllo gerarchicamente superiori) ed gli invia informazioni sul suo stato e sullo stato del processo.
Università degli Studi di Cassino e del Lazio Meridionale
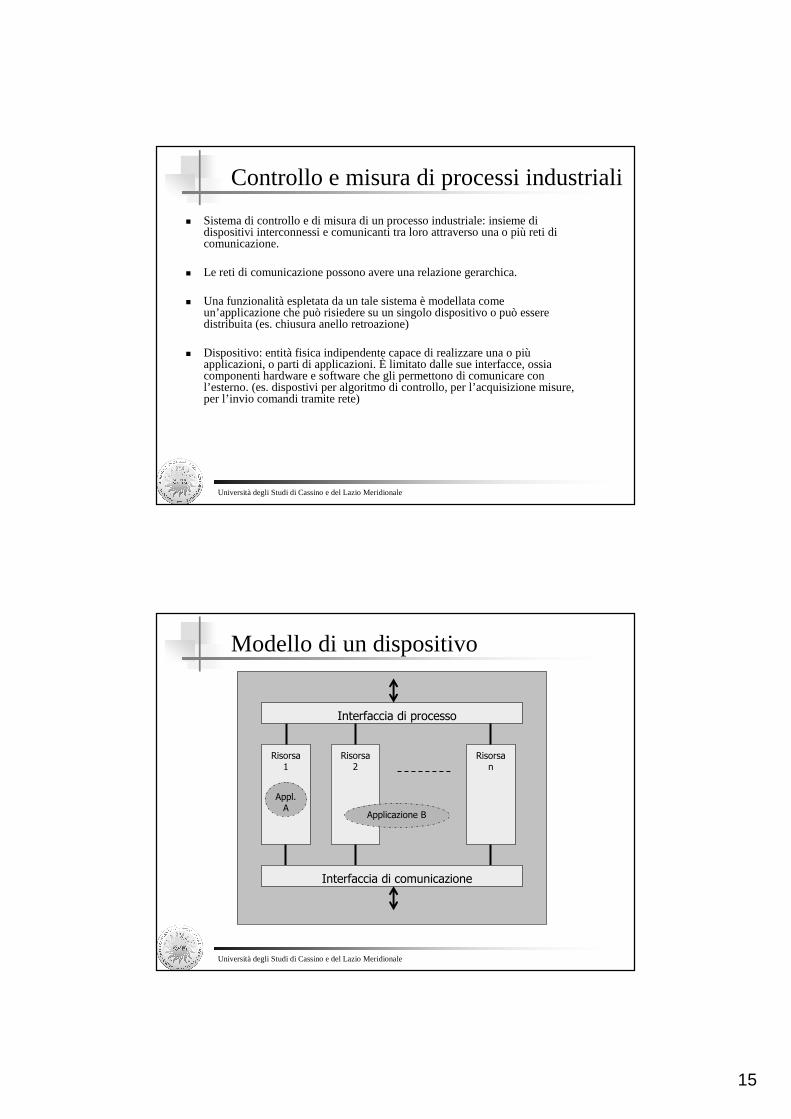
Modello di un sistema di controllo
Dispositivo 2
PROCESSO FISICO
Dispositivo 1
Reti di comunicazione
Applicazione A
Dispositivo n
Applicazione B
Appl. C
15
Università degli Studi di Cassino e del Lazio Meridionale
Controllo e misura di processi industriali
� Sistema di controllo e di misura di un processo industriale: insieme di dispositivi interconnessi e comunicanti tra loro attraverso una o più reti di comunicazione.
� Le reti di comunicazione possono avere una relazione gerarchica.
� Una funzionalità espletata da un tale sistema è modellata come un’applicazione che può risiedere su un singolo dispositivo o può essere distribuita (es. chiusura anello retroazione)
� Dispositivo: entità fisica indipendente capace di realizzare una o piùapplicazioni, o parti di applicazioni. È limitato dalle sue interfacce, ossia componenti hardware e software che gli permettono di comunicare con l’esterno. (es. dispostivi per algoritmo di controllo, per l’acquisizione misure, per l’invio comandi tramite rete)
Università degli Studi di Cassino e del Lazio Meridionale
Modello di un dispositivo
Risorsa2
Risorsa1
Risorsan
Applicazione B
Interfaccia di processo
Appl. A
Interfaccia di comunicazione
16
Università degli Studi di Cassino e del Lazio Meridionale
Controllo e misura di processi industriali
� Risorsa: suddivisione logica della struttura software (ed eventualmente hardware) di un dispositivo la quale abbia un controllo indipendente delle sue operazioni.
� Interfaccia di processo: mette in relazione le risorse contenute nel dispositivo con il processo fisico, comunicando con sensori ed attuatori.
� Interfaccia di comunicazione: mette in relazione le risorse con quelle appartenenti ad altri dispositivi, per lo scambi di informazioniattraverso una rete di comunicazione.
Università degli Studi di Cassino e del Lazio Meridionale
Controllo e misura di processi industriali
� Una risorsa determina le risposte a eventi interni, di processo o di comunicazione mediante le relazioni causali specificate dall’applicazione
� Un’applicazione specifica le operazioni che devono essere svolte sui dati come conseguenza degli eventi.
� Dati: rappresentazione di fatti o concetti espresse in maniera formalizzata adatta alla comunicazione, all’interpretazione o al trattamento da parte della risorsa
� Gli eventi rappresentano l’occorrenza di particolari condizioni.
17
Università degli Studi di Cassino e del Lazio Meridionale
Controllo e misura di processi industriali
� Un sistema di controllo e di misura di processi industriali risulta quindi costituito da un insieme di dispositivi interconnessi che possono essere di diversa natura:� collegati direttamente alle macchine da controllare (requisiti specifici:
sistemi operativi real-time multi-tasking, interfacce di processo, struttura adatta ad ambienti industriali, e.g. controllori a logica programmabile o PLC)
� dedicati ad interfaccia uomo-macchina (requisiti specifici: capacitàgrafiche e di comunicazione con altri dispositivi, e.g. normali personal computer)
� dedicati al controllo di macchine complesse (controllori di robot industriali e CNC)
� dedicati alla gestione di basi di dati
Università degli Studi di Cassino e del Lazio Meridionale
Differenziazione sistemi dinamici
Sistemi ibridi
Sistemi ad Eventi Discreti (SED)
Sistemi ad Avanzamento
Temporale (SAT)
SAT a tempo continuo
SAT a tempo discreto
SED logici
SED temporizzati
18
Università degli Studi di Cassino e del Lazio Meridionale
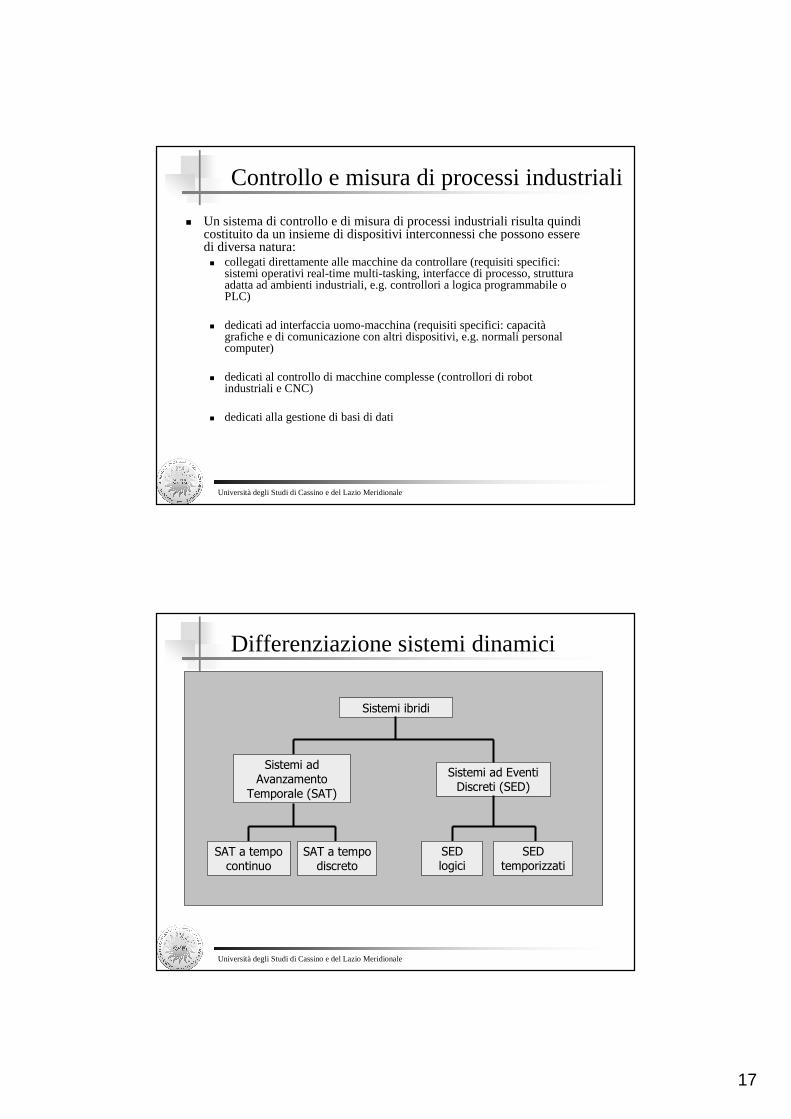
Differenziazione sistemi dinamici
� Sistemi ad Avanzamento temporale (SAT)� le grandezze d’interesse sono funzioni reali della variabile tempo t
(continua o discreta)� il controllo viene realizzato facendo uso delle metodologie classiche dei
Controlli Automatici (Teoria dei Sistemi, Controlli Automatici, Controllo Digitale, Controllo non-lineare…)
� Sistemi ad eventi discreti (SED):� il comportamento del sistema è caratterizzato dall’occorrenza di
eventi istantanei con un cadenzamento irregolare non necessariamente noto
� il controllo viene realizzato secondo le più recenti strategie di Controllo Logico/Sequenziale