Modello matematico e numerico bidimensionale per lo studio ... · 3.3.1 Prove di laboratorio su...
264
Quaderni del Dipartimento IDR 2 Stefano De Toni, Paolo Scotton e Enrico Bertolazzi Modello matematico e numerico bidimensionale per lo studio delle valanghe di neve densa
Transcript of Modello matematico e numerico bidimensionale per lo studio ... · 3.3.1 Prove di laboratorio su...

Quaderni del DipartimentoIDR 2
Stefano De Toni, Paolo Scotton
e Enrico Bertolazzi
Modello matematico e numerico
bidimensionale per lo studio
delle valanghe di neve densa
Universita degli Studi di TrentoDipartimento di Ingegneria Civile e AmbientaleDirettore: prof. Alberto Bellinwww.ing.unitn.it/dica
c© Stefano De Toni, Paolo Scotton e Enrico Bertolazzi, 2004
Quaderni del DipartimentoIDR 2
In copertina: Simulazione di una prova di slump su piano oriz-zontale; sullo sfondo Canalone Lavina Granda, Vigolana, Trento,2004.
De Toni, Stefano.
Modello matematico e numerico bidimensionale per lo studio dellevalanghe di neve densa / Stefano De Toni, Paolo Scotton e EnricoBertolazzi. - Trento : Universita degli studi di Trento. Diparti-mento di ingegneria civile e ambientale, c2004. - p. 238; cm 24(Quaderni del Dipartimento IDR; 2).ISBN 88-8443-056-9
1. Valanghe - Movimenti - Modelli di simulazione I. Scotton, PaoloII. Bertolazzi, Enrico
551.56848011 CDD21
CIP - SBA.TN

Indice
Elenco dei Simboli . . . . . . . . . . . . . . . . . . . . . xix
1 Introduzione 11.1 Classificazione delle valanghe . . . . . . . . . . . . 11.2 Interventi di protezione nelle aree a rischio . . . . . 41.3 Strumenti di indagine . . . . . . . . . . . . . . . . . 5
1.3.1 Le analisi di tipo statistico . . . . . . . . . . 51.3.2 L’analisi della vegetazione . . . . . . . . . . 51.3.3 I modelli dinamici . . . . . . . . . . . . . . . 61.3.4 Un modello dinamico bidimensionale . . . . 7
1.4 Il quadro delle ipotesi . . . . . . . . . . . . . . . . . 10
2 Il modello monodimensionale in coordinate globali 132.1 Il modello matematico monodimensionale . . . . . . 13
2.1.1 Le equazioni del moto . . . . . . . . . . . . 132.1.2 Il tensore degli sforzi: la reologia . . . . . . 152.1.3 Le equazioni del moto mediate sulla verticale 192.1.4 L’effetto dell’attrito di parete . . . . . . . . 21
2.2 Il modello numerico monodimensionale . . . . . . . 222.2.1 Condizioni di stabilita del modello. . . . . . 252.2.2 Il codice di calcolo . . . . . . . . . . . . . . 27
2.3 Verifiche sperimentali del modello monodimensionale 282.3.1 Prove di laboratorio su piano orizzontale . . 282.3.2 Prove di laboratorio su canaletta inclinata . 35
3 Il modello bidimensionale in coordinate globali 513.1 Il modello matematico bidimensionale . . . . . . . . 51
3.1.1 Il tensore degli sforzi . . . . . . . . . . . . . 52
i

3.1.2 Le equazioni del moto nel riferimento tridi-mensionale . . . . . . . . . . . . . . . . . . . 59
3.1.3 Le equazioni del moto mediate sulla verticale 653.2 Il modello numerico bidimensionale . . . . . . . . . 67
3.2.1 Lo schema numerico lagrangiano . . . . . . 673.2.2 Condizioni di avvio e di arresto . . . . . . . 713.2.3 Le condizioni di stabilita . . . . . . . . . . . 723.2.4 Il codice di calcolo . . . . . . . . . . . . . . 73
3.3 Verifiche sperimentali del modello bidimensionale . 743.3.1 Prove di laboratorio su piano orizzontale . . 743.3.2 Prove di laboratorio su piano inclinato . . . 93
3.4 Applicazione del modello numerico a casi che simu-lano situazioni reali. . . . . . . . . . . . . . . . . . 115
4 Conclusioni. 123
Allegati: Derivazioni matematiche 127
A Il modello monodimensionale 129A.1 Il modello monodimensionale nel riferimento locale 129A.2 Il modello monodimensionale nel riferimento assoluto 138
A.2.1 Le equazioni del moto rispetto al riferimentoassoluto . . . . . . . . . . . . . . . . . . . . 138
A.2.2 Le condizioni al contorno di tipo cinematico 143A.2.3 Il tensore degli sforzi . . . . . . . . . . . . . 144A.2.4 L’operazione di media sulla verticale . . . . 147
A.3 Il modello numerico monodimensionale . . . . . . . 152A.3.1 Il calcolo della funzione integranda f . . . . 152A.3.2 Le condizioni di avvio e di arresto . . . . . . 156A.3.3 Condizioni di stabilita del modello . . . . . 157A.3.4 Il termine diffusivo nel modello numerico mo-
nodimensionale . . . . . . . . . . . . . . . . 159
B Modello bidimensionale 165B.1 Il modello bidimensionale nel riferimento assoluto . 165
B.1.1 Gli strumenti forniti dall’analisi tensoriale . 165B.1.2 La distribuzione idrostatica delle pressioni . 182B.1.3 I coefficienti di spinta . . . . . . . . . . . . . 192
ii

B.1.4 La trasformazione del riferimento . . . . . . 195B.1.5 Le equazioni del moto mediate sulla verticale 198
B.2 Il modello numerico bidimensionale . . . . . . . . . 204B.2.1 Il calcolo dei termini noti delle equazioni di-
scretizzate . . . . . . . . . . . . . . . . . . . 204B.2.2 Le condizioni di stabilita . . . . . . . . . . . 220B.2.3 Il termine diffusivo . . . . . . . . . . . . . . 224
iii

iv

Elenco delle figure
1.1 Nube polverosa di una valanga a lastroni (Tratto dahttp://www.cs.umd.edu/class/spring2001/cmsc838b/
Project/Parija_Spacco/images/avalanche.jpg). 3
1.2 Esempio di Carta di Localizzazione Probabile del-le Valanghe (Tratto da http://www.provincia.tn.
it/meteo/images/clpv.gif). . . . . . . . . . . . . 6
1.3 Deposito valanghivo, in cui sono visibili le palle di ne-ve, prodotte durante il processo di granulazione, cheinterviene nelle fasi iniziali del moto della valanga.(Tratto da [35]) . . . . . . . . . . . . . . . . . . . . 8
2.1 Sistemi di riferimento assoluto e curvilineo. . . . . . 17
2.2 La griglia di calcolo del modello numerico monodi-mensionale. . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Confronto tra i dati sperimentali di D’Accordi, re-lativi alle zeoliti, ed i risultati delle simulazioni coni modelli monodimensionali, scritti nel riferimentoassoluto e nel riferimento curvilineo. L’altezza he la coordinata x sono adimensionalizzate con l’al-tezza iniziale (17 cm) e la proiezione nella direzioneorizzontale della lunghezza della paratoia (11.9 cm). 30
v
2.4 Confronto tra i dati sperimentali di D’Accordi, re-lativi alle zeoliti, ed i risultati delle simulazioni conil modello monodimensionale, scritto nel riferimentoassoluto, al variare dell’angolo d’attrito interno φ (siveda Tabella 2.1). L’altezza h e la coordinata x sonoadimensionalizzate con l’altezza iniziale (17 cm) e laproiezione nella direzione orizzontale della lunghezzadella paratoia (11.9 cm). . . . . . . . . . . . . . . . 30
2.5 Confronto tra i dati sperimentali di D’Accordi edi risultati delle simulazioni ottenute con il model-lo monodimensionale, scritto in coordinate assolute,nei casi 1, 2, 3, 4 (si veda Tabella 2.2). L’altezza he la coordinata x sono adimensionalizzate con l’al-tezza iniziale (17 cm) e la proiezione nella direzioneorizzontale della lunghezza della paratoia (11.9 cm). 34
2.6 Confronto tra i dati sperimentali di D’Accordi edi risultati delle simulazioni ottenute con il model-lo monodimensionale, scritto in coordinate assolute,nei casi 2, 5, 6 (si veda Tabella 2.2). L’altezza he la coordinata x sono adimensionalizzate con l’al-tezza iniziale (17 cm) e la proiezione nella direzioneorizzontale della lunghezza della paratoia (11.9 cm). 34
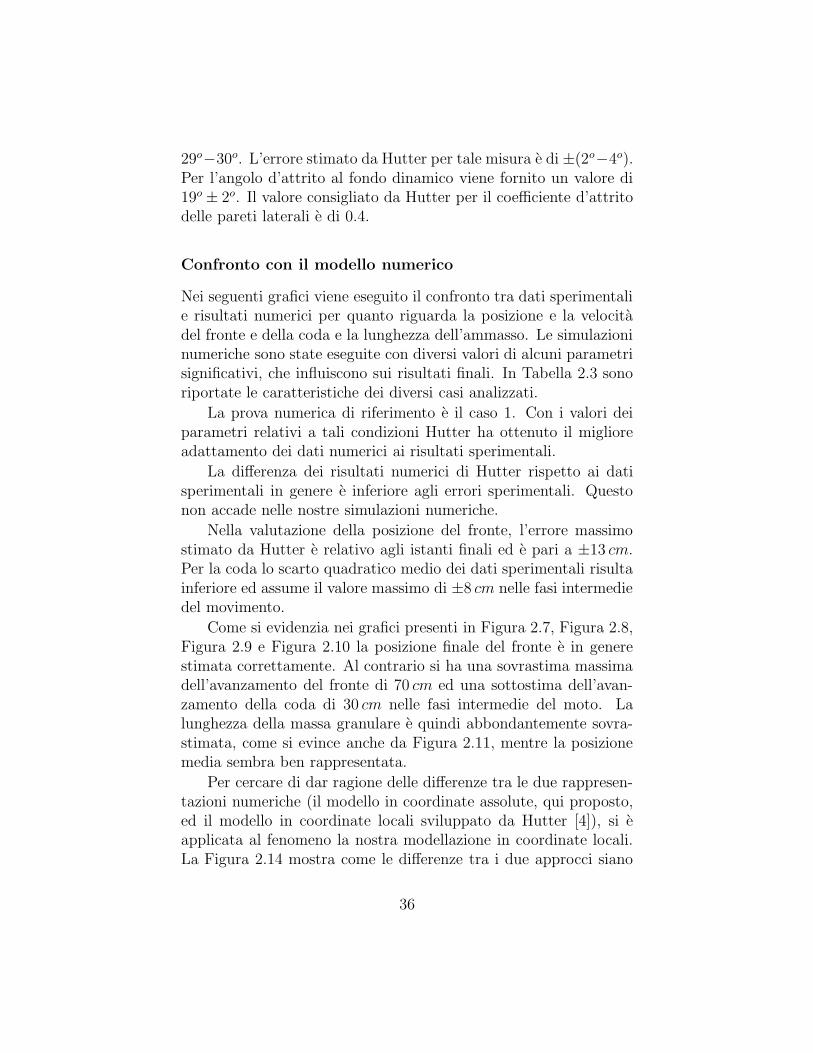
2.7 Posizione del fronte e della coda. Confronto tra idati sperimentali di Hutter ed i risultati delle simu-lazioni con il modello monodimensionale, scritto nelriferimento assoluto, al variare di φ. La coordinataξ e adimensionalizzata con la lunghezza iniziale del-l’ammasso Ls, pari a 14.9 cm, il tempo t con il valorescala Ts =
√
Ls/g. . . . . . . . . . . . . . . . . . . 38
vi

2.8 Posizione del fronte e della coda. Confronto tra idati sperimentali di Hutter ed i risultati delle simu-lazioni con il modello monodimensionale, scritto nelriferimento assoluto, al variare dei parametri che in-fluiscono sull’attrito esercitato dal fondo e dalle pa-reti laterali. In grafico sono riportati solo i valoridei parametri, che differiscono rispetto al caso 1 diriferimento, in cui δ = 19.5o e k = 0. La coordinataξ e adimensionalizzata con la lunghezza iniziale del-l’ammasso Ls, pari a 14.9 cm, il tempo t con il valorescala Ts =
√
Ls/g. . . . . . . . . . . . . . . . . . . 39
2.9 Posizione del fronte e della coda. Confronto tra i datisperimentali di Hutter ed i risultati delle simulazionicon il modello monodimensionale, scritto nel riferi-mento assoluto, al variare del volume iniziale. Lacoordinata ξ e adimensionalizzata con la lunghezzainiziale dell’ammasso Ls, pari a 14.9 cm, il tempo tcon il valore scala Ts =
√
Ls/g. . . . . . . . . . . . 40
2.10 Posizione del fronte e della coda. Confronto tra idati sperimentali di Hutter ed i risultati delle simu-lazioni con il modello monodimensionale, scritto nelriferimento assoluto, al variare della geometria del-la massa iniziale e del fondo. Nel grafico vengonoriportati, per le diverse curve, solo i valori dei pa-rametri che differiscono dal caso 1 di riferimento, incui la forma e triangolare, Hs/Ls = 0.84 e il numerodi punti per la definizione del pendio e Np = 100. Lacoordinata ξ e adimensionalizzata con la lunghezzainiziale dell’ammasso Ls, pari a 14.9 cm, il tempo tcon il valore scala Ts =
√
Ls/g. . . . . . . . . . . . 41
2.11 Lunghezza dell’ammasso. Confronto tra i dati speri-mentali di Hutter ed i risultati delle simulazioni conil modello monodimensionale, scritto nel riferimentoassoluto. La lunghezza l e adimensionalizzata con lalunghezza iniziale dell’ammasso Ls, pari a 14.9 cm,il tempo t con il valore scala Ts =
√
Ls/g. . . . . . 42
vii
2.12 Velocita del fronte. Confronto tra i dati sperimentalidi Hutter ed i risultati delle simulazioni ottenute conil modello monodimensionale, scritto in coordinateassolute. In grafico vengono riportati, per le diversecurve, solo i valori dei parametri che differiscono daquelli del caso 1 di riferimento, in cui dilat. = 0%,Np = 100, δ = 19.5o. La velocita U e adimensiona-lizzata con il valore scala Us =
√g Ls, il tempo t con
il valore scala Ts =√
Ls/g, dove Ls = 14.9 cm. . . . 43
2.13 Velocita della coda. Confronto tra i dati sperimentalidi Hutter ed i risultati delle simulazioni ottenute conil modello monodimensionale, scritto in coordinateassolute. In grafico vengono riportati, per le diver-se curve, solo i valori dei parametri che differisconoda quelli del caso 1 di riferimento, in cui φ = 29o,δ = 19.5o. La velocita U e adimensionalizzata conil valore scala Us =
√g Ls, il tempo t con il valore
scala Ts =√
Ls/g, dove Ls = 14.9 cm. . . . . . . . 43
2.14 Evoluzione del profilo dell’ammasso granulare. Con-fronto tra i risultati delle simulazioni numeriche otte-nute con i modelli monodimensionali, scritti in coor-dinate locali ed in coordinate assolute. La coordi-nata ξ e l’altezza h sono adimensionalizzate con lalunghezza iniziale dell’ammasso Ls, pari a 14.9 cm. . 44
2.15 Evoluzione del profilo dell’ammasso granulare. Con-fronto tra i risultati delle simulazioni numeriche nelcaso di forma iniziale rettangolare (caso 10) e in uncaso di forma iniziale triangolare (caso 1). La coor-dinata ξ e l’altezza h sono adimensionalizzate con lalunghezza iniziale dell’ammasso Ls, pari a 14.9 cm. . 44
3.1 Sistema di riferimento locale legato al vettore velocita. 55
3.2 Convenzione dei segni per il tensore degli sforzi. . . 56
3.3 Altezza verticale e spessore normale della neve nel do-
minio tridimensionale . . . . . . . . . . . . . . . . . 62
3.4 I triangoli di base della mesh di calcolo del modellonumerico bidimensionale. . . . . . . . . . . . . . . . 67
viii
3.5 Visione d’insieme del piano d’appoggio e dell’appa-rato di sollevamento del cono. . . . . . . . . . . . . 75
3.6 Visione d’insieme dell’attrezzatura sperimentale do-po l’esecuzione di una prova di slump. . . . . . . . 76
3.7 La misura con idrometro del profilo della massa dizeoliti dopo l’esecuzione della prova di slump. . . . 77
3.8 Regolatore di pressione e partitore di flusso. . . . . 78
3.9 Zeoliti. . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.10 La scatola di taglio utilizzata per la misura degli an-goli d’attrito. Nell’immagine sono presenti entrambele semi-scatole. . . . . . . . . . . . . . . . . . . . . 80
3.11 Risultati delle prove sperimentali per la misura del-l’angolo d’attrito al fondo δ. In ascissa σ, la ten-sione normale applicata, in ordinata τ , la tensionetangenziale esercitata a rottura. . . . . . . . . . . . 80
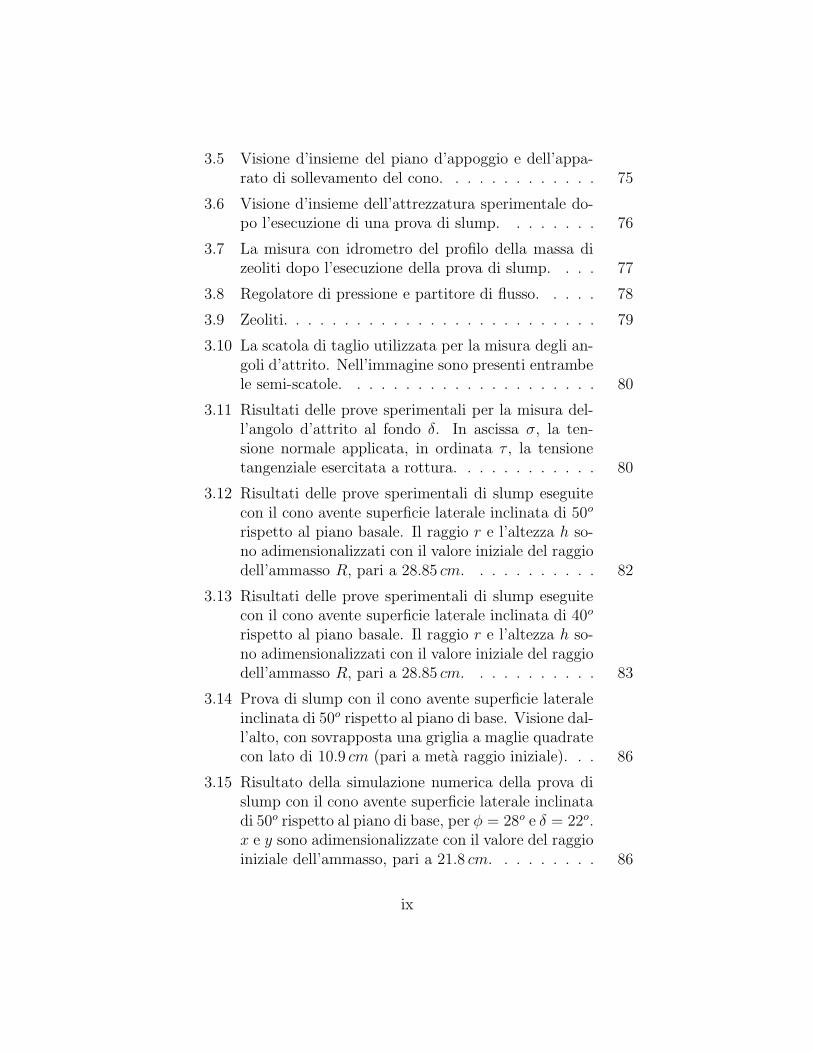
3.12 Risultati delle prove sperimentali di slump eseguitecon il cono avente superficie laterale inclinata di 50o
rispetto al piano basale. Il raggio r e l’altezza h so-no adimensionalizzati con il valore iniziale del raggiodell’ammasso R, pari a 28.85 cm. . . . . . . . . . . 82
3.13 Risultati delle prove sperimentali di slump eseguitecon il cono avente superficie laterale inclinata di 40o
rispetto al piano basale. Il raggio r e l’altezza h so-no adimensionalizzati con il valore iniziale del raggiodell’ammasso R, pari a 28.85 cm. . . . . . . . . . . 83
3.14 Prova di slump con il cono avente superficie lateraleinclinata di 50o rispetto al piano di base. Visione dal-l’alto, con sovrapposta una griglia a maglie quadratecon lato di 10.9 cm (pari a meta raggio iniziale). . . 86
3.15 Risultato della simulazione numerica della prova dislump con il cono avente superficie laterale inclinatadi 50o rispetto al piano di base, per φ = 28o e δ = 22o.x e y sono adimensionalizzate con il valore del raggioiniziale dell’ammasso, pari a 21.8 cm. . . . . . . . . 86
ix

3.16 Risultati delle prove numeriche di slump eseguite conil cono avente superficie laterale inclinata di 50o ri-spetto al piano basale, per φ pari a 28o. Il raggior e l’altezza h sono adimensionalizzati con il valoreiniziale del raggio dell’ammasso R, pari a 28.85 cm. 87
3.17 Risultati delle prove numeriche di slump eseguite conil cono avente superficie laterale inclinata di 50o ri-spetto al piano basale, per φ pari a 24o. Il raggior e l’altezza h sono adimensionalizzati con il valoreiniziale del raggio dell’ammasso R, pari a 28.85 cm. 88
3.18 Prova di slump con il cono avente superficie lateraleinclinata di 40o rispetto al piano di base. Visionedall’alto, con sovrapposta una griglia a maglie qua-drate con lato di 11.54 cm (pari a 0.40 volte il raggioiniziale). . . . . . . . . . . . . . . . . . . . . . . . . 90
3.19 Risultato della simulazione numerica della prova dislump con il cono avente superficie laterale inclinatadi 40o rispetto al piano di base, per φ = 24o e δ = 18o.x e y sono adimensionalizzate con il valore del raggioiniziale dell’ammasso, pari a 28.85 cm. . . . . . . . 90
3.20 Risultati delle prove numeriche di slump eseguite conil cono avente superficie laterale inclinata di 40o ri-spetto al piano basale, per φ pari a 28o. Il raggior e l’altezza h sono adimensionalizzati con il valoreiniziale del raggio dell’ammasso R, pari a 28.85 cm. 91
3.21 Risultati delle prove numeriche di slump eseguite conil cono avente superficie laterale inclinata di 40o ri-spetto al piano basale, per φ pari a 24o. Il raggior e l’altezza h sono adimensionalizzati con il valoreiniziale del raggio dell’ammasso R, pari a 28.85 cm. 92
3.22 Apparato sperimentale per le prove su piano inclina-to. Prova 3. . . . . . . . . . . . . . . . . . . . . . . 94
3.23 Effetti di fingering evidenziati dall’aspetto lobato deldeposito. Prova 7. . . . . . . . . . . . . . . . . . . . 96
x
3.24 Confronto tra i dati sperimentali per le prove 2 e 3,caratterizzate dai parametri definiti in Tabella 3.3.Vista dall’alto. Le coordinate orizzontali x ed y sonoadimensionalizzate con il raggio R del cono pari a288.5 mm. . . . . . . . . . . . . . . . . . . . . . . . 97
3.25 Confronto tra i dati sperimentali per le prove 2 e 3,caratterizzate dai parametri definiti in Tabella 3.3.Sezione longitudinale di mezzeria. Le coordinate xed h sono adimensionalizzate con il raggio R del conopari a 288.5 mm. . . . . . . . . . . . . . . . . . . . 97
3.26 Confronto tra le sezioni longitudinali di mezzeria re-lative alle prove 2 e 3, caratterizzate dai parametridefiniti in Tabella 3.3. Le coordinate x ed h sonoadimensionalizzate con il raggio R del cono pari a288.5 mm. La scala verticale e amplificata di 10 volterispetto a quella orizzontale . . . . . . . . . . . . . 98
3.27 Confronto tra i dati sperimentali per le prove 4 e 5,caratterizzate dai parametri definiti in Tabella 3.3.Vista dall’alto. Le coordinate orizzontali x ed y sonoadimensionalizzate con il raggio R del cono pari a218 mm. . . . . . . . . . . . . . . . . . . . . . . . . 99
3.28 Confronto tra i dati sperimentali per le prove 2 e 3,caratterizzate dai parametri definiti in Tabella 3.3.Sezione longitudinale di mezzeria. Le coordinate xed h sono adimensionalizzate con il raggio R del conopari a 218 mm. . . . . . . . . . . . . . . . . . . . . 99
3.29 Confronto tra le sezioni longitudinali di mezzeria re-lative alle prove 4 e 5, caratterizzate dai parametridefiniti in Tabella 3.3. Le coordinate x ed h sonoadimensionalizzate con il raggio R del cono pari a218 mm. La scala verticale e amplificata di 10 volterispetto a quella orizzontale . . . . . . . . . . . . . 100
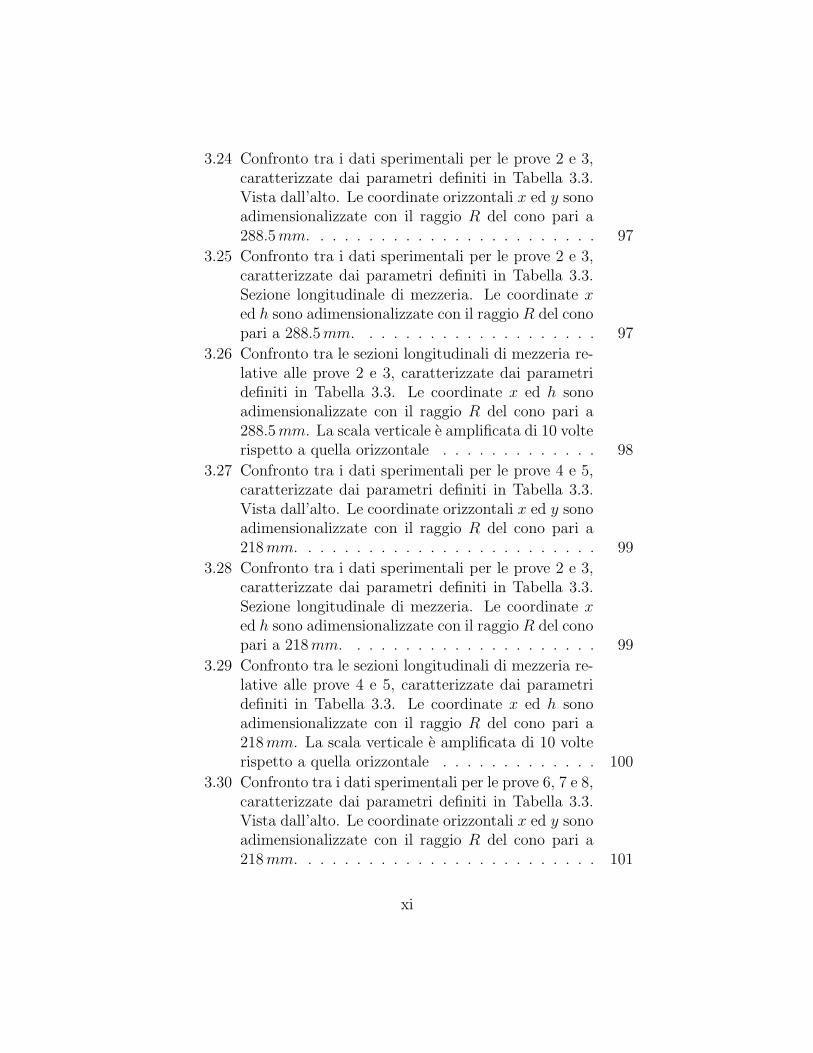
3.30 Confronto tra i dati sperimentali per le prove 6, 7 e 8,caratterizzate dai parametri definiti in Tabella 3.3.Vista dall’alto. Le coordinate orizzontali x ed y sonoadimensionalizzate con il raggio R del cono pari a218 mm. . . . . . . . . . . . . . . . . . . . . . . . . 101
xi
3.31 Confronto tra i dati sperimentali per le prove 6, 7 e 8,caratterizzate dai parametri definiti in Tabella 3.3.Sezione longitudinale di mezzeria. Le coordinate xed h sono adimensionalizzate con il raggio R del conopari a 218 mm. . . . . . . . . . . . . . . . . . . . . 101
3.32 Confronto tra le sezioni longitudinali di mezzeria re-lative alle prove 6, 7 e 8, caratterizzate dai parametridefiniti in Tabella 3.3. Le coordinate x ed h sonoadimensionalizzate con il raggio R del cono pari a218 mm. La scala verticale e amplificata di 5 volterispetto a quella orizzontale . . . . . . . . . . . . . 102
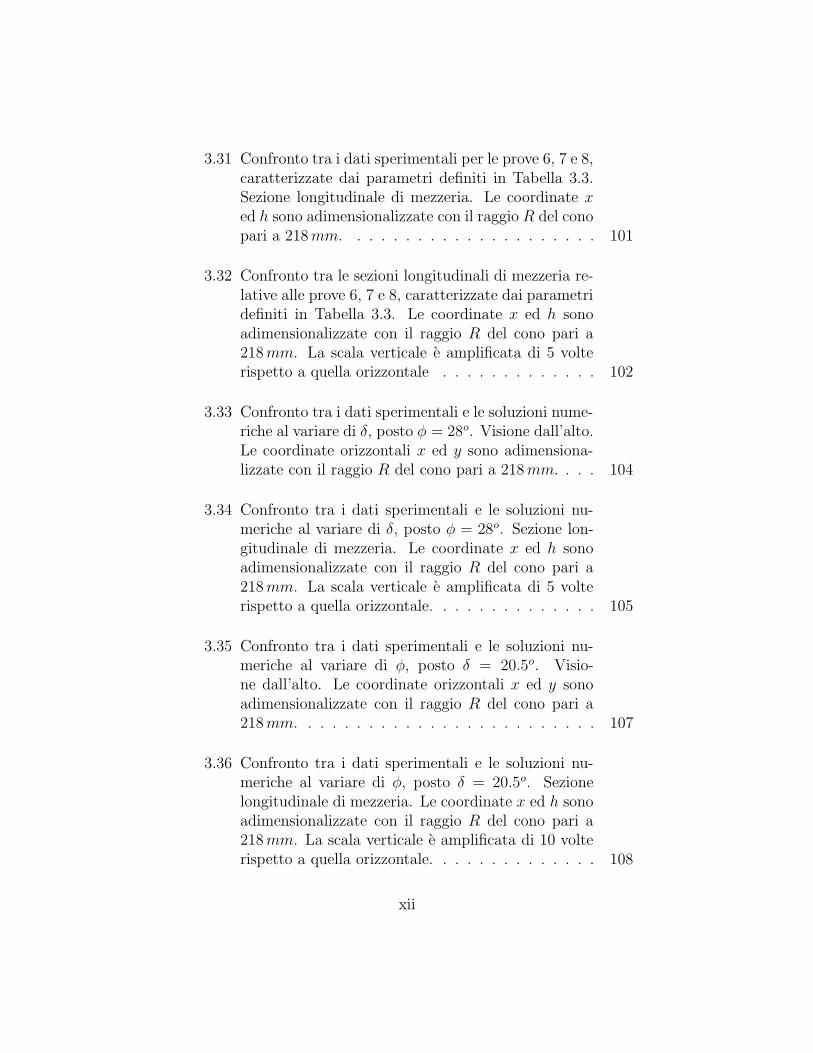
3.33 Confronto tra i dati sperimentali e le soluzioni nume-riche al variare di δ, posto φ = 28o. Visione dall’alto.Le coordinate orizzontali x ed y sono adimensiona-lizzate con il raggio R del cono pari a 218 mm. . . . 104
3.34 Confronto tra i dati sperimentali e le soluzioni nu-meriche al variare di δ, posto φ = 28o. Sezione lon-gitudinale di mezzeria. Le coordinate x ed h sonoadimensionalizzate con il raggio R del cono pari a218 mm. La scala verticale e amplificata di 5 volterispetto a quella orizzontale. . . . . . . . . . . . . . 105
3.35 Confronto tra i dati sperimentali e le soluzioni nu-meriche al variare di φ, posto δ = 20.5o. Visio-ne dall’alto. Le coordinate orizzontali x ed y sonoadimensionalizzate con il raggio R del cono pari a218 mm. . . . . . . . . . . . . . . . . . . . . . . . . 107
3.36 Confronto tra i dati sperimentali e le soluzioni nu-meriche al variare di φ, posto δ = 20.5o. Sezionelongitudinale di mezzeria. Le coordinate x ed h sonoadimensionalizzate con il raggio R del cono pari a218 mm. La scala verticale e amplificata di 10 volterispetto a quella orizzontale. . . . . . . . . . . . . . 108
xii

3.37 Confronto tra le soluzioni numeriche ottenute con di-versi schemi di calcolo del coefficiente di spinta cor-rispondente alla direzione trasversale al moto k2 (siveda Tabella 3.6). I parametri del modello numericosono quelli del caso 1. Visione dall’alto. Le coordi-nate x ed h sono adimensionalizzate con il raggio Rdel cono pari a 288.5 mm. . . . . . . . . . . . . . . 111
3.38 Confronto tra le soluzioni numeriche ottenute con di-versi schemi di calcolo del coefficiente di spinta cor-rispondente alla direzione trasversale al moto k2 (siveda Tabella 3.6). Sezione longitudinale di mezzeria.I parametri del modello numerico sono quelli del ca-so 1. Le coordinate x ed h sono adimensionalizzatecon il raggio R del cono pari a 288.5 mm. . . . . . . 112
3.39 Confronto tra le soluzioni numeriche ottenute con di-versi schemi di calcolo del coefficiente di spinta cor-rispondente alla direzione trasversale al moto k2 (siveda Tabella 3.6). Visione dall’alto. I parametri delmodello numerico sono quelli del caso 1. Le coordi-nate x ed h sono adimensionalizzate con il raggio Rdel cono pari a 288.5 mm. . . . . . . . . . . . . . . 113
3.40 Confronto tra le soluzioni numeriche ottenute con di-versi schemi di calcolo del coefficiente di spinta cor-rispondente alla direzione trasversale al moto k2 (siveda Tabella 3.6). Sezione longitudinale di mezzeria.I parametri del modello numerico sono quelli del ca-so 1. Le coordinate x ed h sono adimensionalizzatecon il raggio R del cono pari a 288.5 mm. . . . . . . 114
3.41 Canale inclinato di 45o con sbocco su piano inclinatodi 10o. . . . . . . . . . . . . . . . . . . . . . . . . . 117
3.42 Deformazione della mesh durante il moto all’internodi un canale. Le coordinate x e y sono state adi-mensionalizzate, rispettivamente, con la lunghezza(50 m) e la semilarghezza (7 m) dell’ammasso nellaconfigurazione iniziale. . . . . . . . . . . . . . . . . 117
xiii
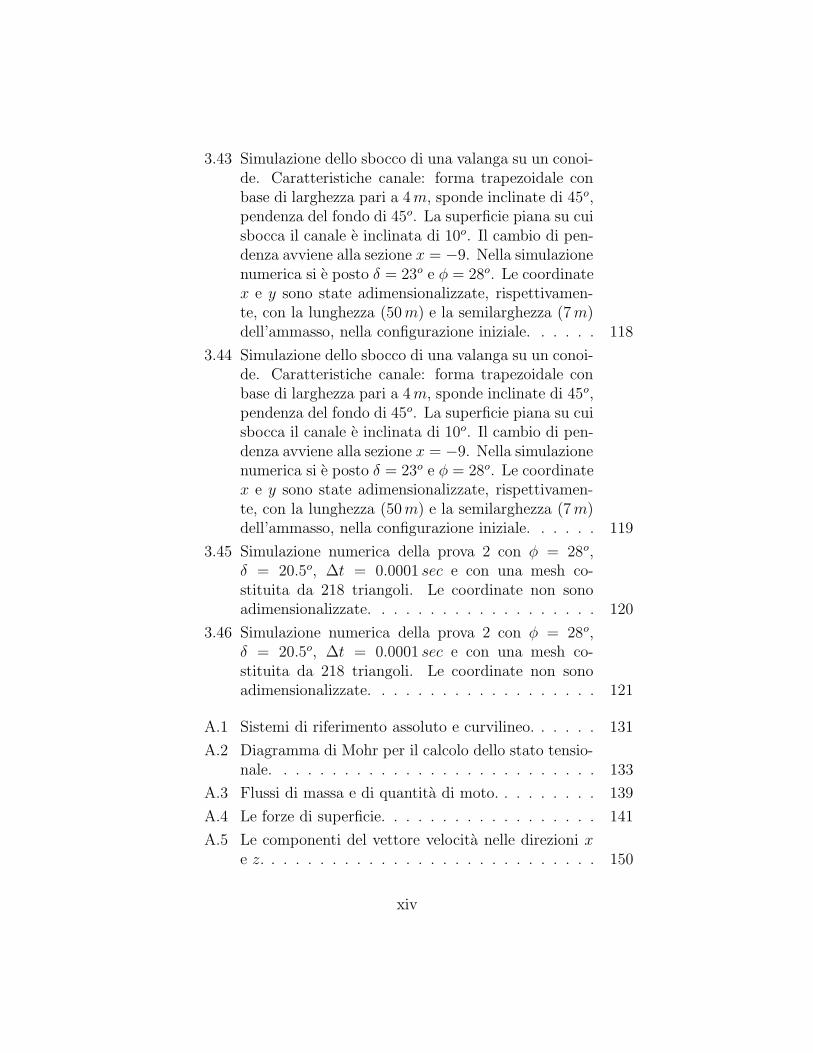
3.43 Simulazione dello sbocco di una valanga su un conoi-de. Caratteristiche canale: forma trapezoidale conbase di larghezza pari a 4 m, sponde inclinate di 45o,pendenza del fondo di 45o. La superficie piana su cuisbocca il canale e inclinata di 10o. Il cambio di pen-denza avviene alla sezione x = −9. Nella simulazionenumerica si e posto δ = 23o e φ = 28o. Le coordinatex e y sono state adimensionalizzate, rispettivamen-te, con la lunghezza (50 m) e la semilarghezza (7 m)dell’ammasso, nella configurazione iniziale. . . . . . 118
3.44 Simulazione dello sbocco di una valanga su un conoi-de. Caratteristiche canale: forma trapezoidale conbase di larghezza pari a 4 m, sponde inclinate di 45o,pendenza del fondo di 45o. La superficie piana su cuisbocca il canale e inclinata di 10o. Il cambio di pen-denza avviene alla sezione x = −9. Nella simulazionenumerica si e posto δ = 23o e φ = 28o. Le coordinatex e y sono state adimensionalizzate, rispettivamen-te, con la lunghezza (50 m) e la semilarghezza (7 m)dell’ammasso, nella configurazione iniziale. . . . . . 119
3.45 Simulazione numerica della prova 2 con φ = 28o,δ = 20.5o, ∆t = 0.0001 sec e con una mesh co-stituita da 218 triangoli. Le coordinate non sonoadimensionalizzate. . . . . . . . . . . . . . . . . . . 120
3.46 Simulazione numerica della prova 2 con φ = 28o,δ = 20.5o, ∆t = 0.0001 sec e con una mesh co-stituita da 218 triangoli. Le coordinate non sonoadimensionalizzate. . . . . . . . . . . . . . . . . . . 121
A.1 Sistemi di riferimento assoluto e curvilineo. . . . . . 131
A.2 Diagramma di Mohr per il calcolo dello stato tensio-nale. . . . . . . . . . . . . . . . . . . . . . . . . . . 133
A.3 Flussi di massa e di quantita di moto. . . . . . . . . 139
A.4 Le forze di superficie. . . . . . . . . . . . . . . . . . 141
A.5 Le componenti del vettore velocita nelle direzioni xe z. . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
xiv

B.1 Sistemi di riferimento assoluto e curvilineo nel domi-nio tridimensionale. . . . . . . . . . . . . . . . . . . 166
B.2 Calcolo del coefficiente di amplificazione lungo la coor-dinata curvilinea η. . . . . . . . . . . . . . . . . . . 168
B.3 Calcolo del coefficiente di amplificazione nella dire-zione ξ. . . . . . . . . . . . . . . . . . . . . . . . . 172
B.4 Calcolo della derivata dξ/dx. . . . . . . . . . . . . . 180B.5 Lo stato di sforzo in corrispondenza del piano Ξζ,
rappresentato nel piano di Mohr. . . . . . . . . . . 192B.6 La griglia a maglie rettangolari utilizzata per l’inter-
polazione delle funzioni b = b(x, y) e δ = δ(x, y). . . 205B.7 La mesh ausiliaria per i vertici di contorno, costituita
dai triangoli simmetrici rispetto al vertice analizzatodei triangoli a questo adiacenti. . . . . . . . . . . . 216
B.8 La mesh ausiliaria per i nodi di contorno apparte-nenti ad un solo triangolo di base. . . . . . . . . . . 217
B.9 La mesh ausiliaria per i vertici di contorno, costituitadai triangoli di contorno simmetrici rispetto ai latidel contorno che convergono al nodo di calcolo. . . 218
B.10 Interpretazione geometrica che sottende il calcolo del∆t che garantisce le condizioni di stabilita. . . . . . 220
B.11 Il calcolo del ∆t che consente di annullare la compo-nente di velocita nella direzione originaria del moto. 222
B.12 Il “covolume” sul quale viene integrato il terminediffusivo. . . . . . . . . . . . . . . . . . . . . . . . . 225
B.13 Nel caso di vertici di contorno, il calcolo dei flussiattraverso i lati di contorno. . . . . . . . . . . . . . 227
B.14 Calcolo di dµθ in funzione di dx e dy. . . . . . . . . 231
xv

xvi

Elenco delle tabelle
2.1 Valori di alcuni parametri significativi utilizzati nellediverse simulazioni numeriche delle prove di labora-torio eseguite con le zeoliti: φ e δ sono gli angoli d’at-trito interno ed al fondo; k e il coefficiente d’attritodelle pareti laterali; ∆t e ∆x sono il passo temporalee spaziale. . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Valori di alcuni parametri significativi, utilizzati nel-le diverse simulazioni numeriche delle prove eseguitecon la ghiaia: φ e δ sono gli angoli d’attrito internoed al fondo, k e il coefficiente d’attrito delle paretilaterali, ∆t e ∆x sono il passo temporale e spaziale. 32
2.3 Valori di alcuni parametri significativi, utilizzati nel-le diverse simulazioni numeriche della prova di labo-ratorio no 29, eseguita da Hutter [4]: Np e il numerodi punti utilizzati per definire il pendio; φ e δ sono gliangoli d’attrito interno ed al fondo, k e il coefficien-te d’attrito delle pareti laterali; Forma definisce laforma e Hs/Ls rappresenta il rapporto tra l’altezzae la lunghezza dell’ammasso nelle condizioni iniziali;Dilatazione e la variazione relativa di volume; Nm
e il numero di celle della griglia di calcolo, ∆t e ilpasso temporale. . . . . . . . . . . . . . . . . . . . 37
xvii
3.1 Valori dei parametri significativi utilizzati nelle di-verse simulazioni numeriche delle prove di labora-torio, eseguite con il cono avente suparficie lateraleinclinata di 50o rispetto al piano basale. φ e δ sonogli angoli d’attrito interno ed al fondo; ∆t e il pas-so temporale; Nt e il numero di triangoli in cui esuddivisa la griglia di calcolo. . . . . . . . . . . . . 84
3.2 Valori dei parametri significativi utilizzati nelle di-verse simulazioni numeriche delle prove di labora-torio, eseguite con il cono avente superficie lateraleinclinata di 40o rispetto al piano basale. φ e δ sonogli angoli d’attrito interno ed al fondo; ∆t e il pas-so temporale; Nt e il numero di triangoli in cui esuddivisa la griglia di calcolo. . . . . . . . . . . . . 89
3.3 Valori dei parametri che definiscono la geometria delsistema nelle 7 prove valide, realizzate su piano incli-nato. α e la pendenza del piano, Xc e Yc rappresen-tano le coordinate orizzontali del centro della basedel cono, R e il raggio del cono e β l’inclinazionedelle falde rispetto al piano basale. . . . . . . . . . 95
3.4 Valori dei parametri significativi utilizzati nelle di-verse simulazioni numeriche della prova numero 6,eseguita con il cono con falde inclinate di 50o, conuna pendenza del fondo di 22o. φ e δ sono gli angolid’attrito interno ed al fondo; ∆t e il passo tempora-le; Nt e il numero di triangoli in cui e suddivisa lagriglia di calcolo. . . . . . . . . . . . . . . . . . . . 103
3.5 Valori dei parametri significativi utilizzati nelle di-verse simulazioni numeriche della prova numero 4,eseguita con il cono con falde inclinate di 50o, conuna pendenza del fondo di 27o. φ e δ sono gli angolid’attrito interno ed al fondo; ∆t e il passo tempora-le; Nt e il numero di triangoli in cui e suddivisa lagriglia di calcolo. . . . . . . . . . . . . . . . . . . . 106
3.6 Schemi di valutazione del coefficiente di spinta tra-sversale k2. . . . . . . . . . . . . . . . . . . . . . . 109
xviii

Elenco dei simboli
t tempo [s];
g = (0, g) vettore accelerazione di gravita con le rispettive compo-nenti in direzione x e z [m/s2];
φs angolo d’attrito interno statico del materiale granulare [o];
φd = φ angolo d’attrito interno dinamico del materiale granulare[o];
δ angolo d’attrito al fondo [o];
ρ densita del materiale granulare [kg/m3];
ν concentrazione della frazione solida [m3/m3];
u vettore velocita [m/s];
P tensore degli sforzi [N/m2];
Φf (x, t) = 0 equazione implicita della superficie libera;
nf versore normale alla superficie libera;
Φb(x, t) = 0 equazione implicita della superficie del fondo;
nb versore normale al fondo;
|v| modulo del vettore v;
δij δ di Kronecker;
(a)b la grandezza a (scalare, vettore o tensore) valutata sul fondo;
xix
(a)f la grandezza a (scalare, vettore o tensore) valutata in superfi-cie libera;
a la grandezza a adimensionalizzata;
a la grandezza a nel riferimento locale;
a la variabile a nel riferimento mobile, solidale con la massa inmovimento;
xx

MODELLO MATEMATICO MONODIMENSIONALE
ζ pendenza del fondo [o];
χ curvatura del fondo [1/m];
r raggio di curvatura del fondo [m];
(x, z) coordinate del sistema di riferimento assoluto, cartesiano,ortogonale, con asse z verticale [m];
(ξ, η) coordinate del sistema di riferimento locale, con asse η nor-male al fondo e asse ξ parallelo al fondo [m];
(ux, uz) componenti del vettore velocita nel riferimento assoluto[m/s];
(uξ, uη) componenti del vettore velocita nel riferimento locale [m/s];
h spessore del manto nevoso normalmente al fondo [m];
H spessore del manto nevoso lungo la vericale [m].
MODELLO NUMERICO MONODIMENSIONALE
i + 12
semi–intero indicante la cella tra i nodi i e i+1;
Hni+ 1
2
spessore verticale medio del manto nevoso nella cella i + 12
all’istante tn [m];
∀i+ 1
2
volume di neve contenuto nella cella i + 12
[m3];
i identificativo del nodo i;
xni posizione della faccia verticale i all’istante tn;
Uxni velocita orizzontale, mediata sulla verticale, in corrispondenza
della faccia i, all’istante tn [m/s];
Uzni velocita verticale, mediata sulla verticale, in corrispondenza
della faccia i, all’istante tn [m/s];
xxi

MODELLO MATEMATICO BIDIMENSIONALE
(x, y, z) coordinate del sistema di riferimento assoluto, cartesiano,ortogonale, con asse z verticale [m];
(ξ, η, ζ) coordinate del riferimento locale con base non ortonormale,asse ζ normale al pendio, assi ξ ed η tangenti al fondo erispettivamente normali a y e x [m];
(Ξ, H, ζ) coordinate del riferimento locale cartesiano ortogonalecon ζ normale al fondo, Ξ diretto come la proiezione del vetto-re velocita sulla superficie del pendio, H normale ai precedenti[m];
ei i-esimo versore “cellar” di una base ortonormale;
ei i-esimo versore “roof” di una base ortonormale;
gi i-esimo vettore “cellar” di una base non ortonormale;
gi i-esimo vettore “roof” di una base non ortonormale;
ai i-esima componente “cellar” del vettore a;
ai i-esima componente “roof” del vettore a;
a(i) i-esima componente fisica del vettore a;
aij componente “cellar” (i, j) del tensore A;
aij componente “roof” (i, j) del tensore A;
a(ij) componente fisica (i, j) del tensore A;
aji aj
·i componenti miste (i, j) del tensore A;
∇i derivata covariante rispetto alla coordinata i;
Γkij coefficiente di Christoffel.
xxii

MODELLO NUMERICO BIDIMENSIONALE
Hni spessore verticale medio del manto nevoso nella cella i all’istan-
te tn [m];
∀i volume di neve contenuto nella cella i [m3];
Ani area di base della cella i all’istante tn [m2];(
xnj , yn
j
)
coordinate del nodo j della griglia di calcolo, all’istante tn
[m];(
Uxnj , Uy
nj
)
componenti orizzontali della velocita mediata sulla ver-ticale, nel nodo j della griglia di calcolo, all’istante tn [m/s];
Uznj velocita verticale, mediata sulla verticale, in corrispondenza
del nodo j, all’istante tn [m/s];
f = (fx, fy) termini integrandi delle equazioni di conservazione del-la quantita di moto, nelle direzioni x e y [m2/s].
xxiii

xxiv

Capitolo 1
Introduzione
Negli ultimi decenni si e assistito nelle aree montane ad un evidentecambiamento nella modalita di insediamento nel territorio.
1.1 Classificazione delle valanghe
Il tipo di valanga che puo interessare un certo sito dipende dasvariati fattori.
Le caratteristiche del materiale dipendono dal tipo di neve ca-duta e dai processi metamorfici a cui e stata sottoposta al suolo.L’evoluzione meteorologica (temperature, precipitazioni, umidita,irragiamento solare, scambi termici, etc.) e le caratteristiche topo-grafiche del pendio (esposizione, altitudine, pendenza, etc.) influi-scono in maniera determinante sui cambiamenti che avvengono al-l’interno del manto nevoso e sulla redistribuzione della neve (azionedel vento).
I volumi di neve che possono essere messi in movimento dipen-dono dalle caratteristiche climatiche della regione, ma anche dallamorfologia del pendio ed in particolare dalla pendenza, dalla pre-senza o meno di ampi versanti aperti, etc. La presenza di vegetazio-ne produce delle discontinuita all’interno del manto, riducendo lapossibilita che si producano valanghe di grosse dimensioni, e, nellazona di scorrimento, puo esercitare un’azione frenante.
Il volume iniziale, le caratteristiche del materiale, la geometria
1

del pendio e la scabrezza del fondo determinano l’evoluzione delmoto della massa avviata.
Classificazione in base ai meccanismi di distacco
In relazione alle caratteristiche iniziali del manto nevoso, si possonodistinguere due tipi di valanghe.
Le valanghe a debole coesione si producono quando i legami trale particelle all’interno dell’ammasso sono deboli. In questi casi, ingenere, il movimento si origina da un punto in cui l’azione della forzapeso prevale sull’attrito interno del materiale. Nei casi di valanghea debole coesione difficilmente vengono messi in movimento grandivolumi.
Se il manto presenta strati fortemente consolidati, possono in-nescarsi valanghe a lastroni. In questo caso l’avvio della valanga hauna meccanica piu complessa. In un punto all’interno del mantoper diverse possibili cause scatenanti, viene meno la resistenza altaglio sul fondo o su uno strato debole. Si produce una fratturache si propaga attraverso il lastrone. La valanga si avvia quandoun volume di neve sufficientemente grande si trova in condizioni dirottura.
Classificazione in base alla modalita di scorrimento
In relazione alla modalita di scorrimento le valanghe si distinguonoin valanghe di neve polverosa e valanghe di neve densa.
Nelle valanghe di neve polverosa si verifica un moto di tipoturbolento, di particelle di piccole dimensioni. La massa avanza aforma di nube con velocita molto elevate (60 m/s) e basse densita(10 kg/m3). In questo tipo di valanghe le forze di impatto sonorelativamente basse, ma la loro velocita e dimensione (le nubi pos-sono raggiungere altezze di svariate decine di metri), le rendonoincontrollabili.
Le valanghe di neve densa possono presentare delle velocita del-l’ordine di 30 m/s − 40 m/s. La densita della massa in movimentoraggiunge valori decisamente piu elevati che nel caso precedente(anche 400 − 500 kg/m3 nel caso di neve bagnata). Le forze di im-
2

Figura 1.1: Nube polverosa di una valanga a lastroni (Trattoda http://www.cs.umd.edu/class/spring2001/cmsc838b/Project/
Parija_Spacco/images/avalanche.jpg).
patto e la capacita erosiva, risultano nettamente superiori, rispettoalle valanghe di neve polverosa.
Molto spesso le due tipologie di valanghe descritte si presentanocontemporaneamente. Quando in una valanga di neve densa sisuperano velocita dell’ordine dei 10 m/s, le particelle piu superficialipassano da un moto di tipo laminare ad un moto turbolento. Sisviluppa cosı una nube polverosa, che nasconde alla vista il nucleoradente, il quale in genere non ha spessori superiori a 5 m. InFigura 1.1 viene rappresentata la nube polverosa di una valanga alastroni.
Oltre che dalla velocita di scorrimento, la possibilita che si formila nube polverosa dipende anche dal contenuto d’acqua. Durantela fase iniziale di destabilizzazione, la presenza di acqua intersizia-le nell’ammasso nevoso induce la formazione di particelle (anche di
3

grosse dimensioni) per fenomeni di capillarita. L’ammasso particel-lare che ne deriva e ad alta densita e scorre in prossimita del fondo.Solo nel caso di valanghe di neve fradicia si riscontra la presenza diacqua libera nella massa in movimento. Si manifesta in tali casi uncomportamento di natura viscosa.
1.2 Interventi di protezione nelle aree
a rischio
Diverse sono le strategie di difesa degli insediamenti dai fenomenivalanghivi.
Si puo intervenire con l’obiettivo di impedire il distacco dellavalanga. Si tratta in questo caso di tecniche di protezione attiva.Si realizzano opere che hanno la funzione di consolidare il man-to nevoso nella zona di distacco (barriere da neve, terrazzamenti,rimboschimenti), limitando le deformazioni di natura viscosa. Conbarriere frangivento o tettoie acceleratrici si puo impedire l’accumu-lo della neve in zone pericolose dal punto di visto dell’innesco dellevalanghe. Gli esplosivi possono essere utilizzati in questo campoper produrre distacchi artificiali, impedendo l’accumulo di volumidi neve eccessivi, che potrebbero dar luogo ad eventi di notevolidimensioni.
Tra le strategie di protezione passiva si comprendono interventiprovvisori, quali la chiusura temporanea delle strade o dei compren-sori sciistici, oppure, nei casi piu estremi, l’evacuazione delle zonea rischio. Si possono poi costruire opere di protezione nella zonadi scorrimento e di arresto. Si utilizzano cunei o muri per deviarela valanga, argini e fossati di arresto, opere in terra per dissiparel’energia della massa in movimento, gallerie paravalanghe.
Tutte queste sono opere che implicano dei costi anche consi-derevoli ed il cui comportamento non e chiaro nel caso di eventieccezionali. Ovviamente il migliore intervento di protezione dal ri-schio valanghe e evitare di realizzare infrastrutture ed insediamentinelle zone soggette al fenomeno.
4

1.3 Strumenti di indagine
Sia nella realizzazione degli interventi di difesa, sia per una razionalepianificazione dello sviluppo degli insediamenti, e necessario avereuna conoscenza approfondita degli eventi che possono realizzarsinella zona di studio. E importante ottenere delle informazioni il piupossibile attendibili, riguardo alla frequenza ed all’intensita deglieventi che interessano la zona considerata. Si deve poter individuarei volumi che possono essere movimentati, le aree di scorrimento edi deposito, la forza di impatto sulle strutture.
1.3.1 Le analisi di tipo statistico
La Provincia Autonoma di Trento (Ufficio Neve e Valanghe) si occu-pa della stesura e dell’aggiornamento delle Carte di LocalizzazioneProbabile delle Valanghe (C.L.P.V.). Queste sono un importantestrumento di analisi di tipo statistico per l’individuazione delle zo-ne di distacco, scorrimento e deposito (si veda Figura 1.2) e per lavalutazione dei tempi di ritorno. La raccolta sistematica dei datie iniziata pero da troppo poco tempo. Spesso il numero di dati adisposizione e troppo piccolo per poter fare delle analisi statisticheattendibili. Inoltre gli eventi che possono creare piu problemi sonoquelli piu rari, per i quali possono non esservi del tutto informazionidi tipo quantitativo.
1.3.2 L’analisi della vegetazione
La dendrocronologia e, piu in generale, l’osservazione delle forma-zioni vegetali nelle zone interessate dalla valanga possono dare utiliinformazioni riguardo agli eventi che possono verificarsi. In parti-colare, la distribuzione spaziale delle piante, la loro eta e specie, lapresenza e la posizione di piante abbattute e di cicatrici su quel-le in piedi, riflettono le caratteristiche peculiari degli eventi che sirealizzano nella zona.
5

Figura 1.2: Esempio di Carta di Localizzazione Probabile delle Valanghe(Tratto da http://www.provincia.tn.it/meteo/images/clpv.gif).
1.3.3 I modelli dinamici
Un altro strumento di indagine molto importante e rappresentatodai modelli matematici che studiano la dinamica delle valanghe.Data la massa iniziale, le caratteristiche del materiale nevoso e lageometria e la scabrezza del pendio, tali modelli consentono di ri-costruire il moto della valanga e di stimare i parametri dinamicidella massa in movimento. E possibile valutare le forze di impattosu strutture che ostacolino la discesa dell’ammasso, ricorrendo alconcetto di pressione di ristagno. In questo modo pero si sotto-stimano le azioni effettivamente esercitate. Infatti, come osservaDecker [14], durante l’urto non si ha semplicemente la conversionedell’energia cinetica in energia potenziale. Si producono delle on-de dinamiche che incrementano notevolmente le pressioni massimesviluppate.
Si utilizzano diversi tipi di modello per il nucleo denso radentee per la componente polverosa. La seconda viene trattata comeuna corrente di densita. Invece per la componente densa sono stati
6
sviluppati modelli di due tipi differenti.I modelli particellari immaginano l’ammasso costituito da un
insieme di particelle in movimento soggette agli urti reciproci edall’interazione con il suolo e con l’aria.
Vi sono poi modelli che trattano la neve come un mezzo con-tinuo. Vengono utilizzate in questo caso le equazioni proprie del-la dinamica dei fluidi. Le difficolta consistono, soprattutto, nel-la definizione della legge reologica che descriva correttamente ilcomportamento del materiale.
1.3.4 Un modello dinamico bidimensionale
Il presente lavoro illustra un modello matematico bidimensionale.
Sono gia stati realizzati in passato vari modelli che simulano ilmoto delle valanghe in una dimensione. Hutter e Savage [19] hannoproposto ad esempio un modello, scritto rispetto ad un riferimentocurvilineo legato alla geometria del pendio. La neve viene tratta-ta come un mezzo continuo, incomprimibile, caratterizzato da unacomportamento reologico di tipo Coulombiano.
Si suppone che non vi sia acqua tra le particelle e che quindinon vi siano comportamenti viscosi. Non vengono presi in conside-razione gli aspetti termodinamici del processo. Durante lo scorri-mento della valanga si genera calore per attrito al fondo. I flussi dienergia associati possono modificare le caratteristiche del materialegranulare.
Di questo non si tiene conto, cosı come non si considerano al-cuni fondamentali processi che si realizzano negli istanti iniziali.Tra questi il processo di granulazione che determina la progressivafrantumazione dei lastroni, nel caso di valanghe a lastrone, e la suc-cessiva formazione di compatte palle di neve di varia granulometria(si veda Figura 1.3).
Nei primissimi istanti, inoltre, si ha un effetto di dilatazione efluidizzazione, con un rapido incremento della distanza media trale particelle.
Infine vengono trascurate le variazioni di massa lungo il percor-so indotte da depositi e erosioni.
D’Accordi [35] ha eseguito delle verifiche di laboratorio di un
7

Figura 1.3: Deposito valanghivo, in cui sono visibili le palle di neve,prodotte durante il processo di granulazione, che interviene nelle fasiiniziali del moto della valanga. (Tratto da [35])
modello basato sulla reologia proposta da Hutter e Savage. Quindine ha testato il funzionamento su un caso reale.
Il modello monodimensionale e adatto a descrivere il moto dellevalanghe incanalate. Non e in grado di rappresentare con dettaglioil comportamento delle valanghe di versante e di quelle incanalatequando sboccano sul conoide.
Di qui l’esigenza di sviluppare un modello bidimensionale. Loschema concettuale alla base di questo lavoro e rappresentato an-cora dalla teoria di Hutter e Savage, per mezzi granulari secchi. Glistessi autori hanno elaborato un modello bidimensionale valido sulpiano o su superfici che poco si discostano dalla geometria piana[6].
Quando la geometria del pendio diviene piu articolata, e pro-blematico lavorare con un riferimento curvilineo legato al fondo,come si e potuto fare nel caso monodimensionale. Le equazioni si
8

complicano e non si riesce a trovare una relazione semplice che le-ghi coordinate assolute e coordinate relative. Si e pensato percio discrivere il modello in coordinate assolute.
Questo passaggio ha richiesto delle ulteriori semplificazioni ri-spetto al modello originario di Hutter e Savage.
9

1.4 Il quadro delle ipotesi
Le ipotesi alle quali ci si appoggia nella definizione del modello,sono quelle proposte da Hutter e Savage [5], [6], [19]:
hp. 1: si analizza la dinamica delle valanghe di neve densa;
hp. 2: la massa nevosa viene trattata come un ammasso granularesecco, privo di acqua negli interstizi;
hp. 3: si descrive l’ammasso come un mezzo continuo; questa ipo-tesi e giustificabile fintantoche la profondita, la lunghezzae la larghezza della massa nevosa sono grandi rispetto alledimensioni delle particelle;
hp. 4: la densita dell’intero ammasso viene supposta costante;
hp. 5: si suppone che valga la condizione di “acque basse”, checioe lo spessore della valanga sia piccolo rispetto alle suedimensioni caratteristiche in senso longitudinale e trasversale.
Savage e Hutter nel 1989 [5] hanno eseguito degli esperimenti,studiando il comportamento in cella di taglio anulare di particelledi vetro e di plastica. Aumentando la velocita di rotazione si ha uneffetto dilatante e di fluidizzazione. Il trasferimento della quantitadi moto tra le particelle avviene tramite urti di breve durata e difrequenza decrescente con la velocita. Si e osservato che viene man-tenuta una legge di proporzionalita diretta tra gli sforzi tangenzialipxy e gli sforzi normali pyy, con un angolo d’attrito che dipende dal-la concentrazione della frazione solida ν e dal gradiente di velocitadu
dy:
tanφ =pxy
pyy=
ps(ν) tan φs(ν) + f2(ν)ρpσ2
(
du
dy
)2
ps(ν) + f1(ν)ρpσ2
(
du
dy
)2 ,
dove ps e il contributo quasi-statico allo sforzo normale pyy, σ e ρp
sono il diametro e la densita delle particelle.
10

Quandodu
dye piccolo, tan φ ≈ tan φs(ν).
Quandodu
dye molto grande tan φ ≈ f2(ν)
f1(ν)= tan φd(ν), cioe l’angolo
d’attrito tende ad assumere un valore che non dipende piu dai gra-dienti di velocita, ma che e differente dall’angolo d’attrito statico,in quanto e differente la concentrazione solida: e l’angolo d’attritodinamico.Nel 1995 Hutter ed altri [4] hanno realizzato una serie di esperi-menti in canaletta a sezione rettangolare, con un tratto iniziale apendenza costante ed una zona di arresto orizzontale. Hanno fat-to delle prove con delle particelle di plastica di forma lenticolare,con diametro di 4 mm, spessore di 2.5 mm, densita di 950 kg/m3.Hanno osservato che il moto e di tipo laminare al centro del cor-po dell’ammasso in movimento. La massa inoltre tende a muoversisenza forti gradienti di velocita lungo la normale al fondo. Un piuviolento movimento di saltazione si produce invece sul fronte e sullacoda, dove vi sono minori spessori e di conseguenza un maggiore ef-fetto di dilatanza e fluidizzazione. Gia in precedenza (1984) Hungre Morgenstern [10] avevano realizzato delle prove in canaletta conl’obiettivo di verificare se, in presenza di forti velocita, continuaa valere la legge frizionale coulombiana. Infatti ad interazioni dicontatto quasi-statiche si sostituiscono interazioni collisionali tra igrani. Incollando al fondo della canaletta delle particelle di granu-lometria simile a quella del materiale usato per le prove, avevanoottenuto un angolo d’attrito statico al fondo pari all’angolo d’attri-to interno del materiale. Si era verificato che, per basse velocita, ilprofilo verticale di velocita risultava lineare.
Nel caso di moti a velocita superiore veniva osservato:
- un flusso ancora di natura non turbolenta;
- un evidente fenomeno di scivolamento alla base, dove si con-centravano le deformazioni;
- al di sopra un profilo verticale di velocita pressoche uniforme(plug-flow);
11
- un rapporto tra tensione tangenziale e sforzo normale al fondocostante e quindi ancora una legge frizionale di tipo coulom-biano, ma con un angolo d’attrito inferiore rispetto all’angolod’attrito statico.
I risultati ricavati da Hungr e Morgenstern sono analoghi aquelli di Hutter e Savage e corroborano le ipotesi fatte per descriverela reologia del materiale.
hp. 6: Sul fondo si ha scivolamento:
- i gradienti di velocita si concentrano al fondo. Al disopra il profilo di velocita e praticamente uniforme;
- lungo la superficie di scorrimento il legame tra sforzi tan-genziali e sforzi normali e descritto da una legge d’attritocoulombiana, con un angolo d’attrito al fondo δ minorerispetto all’angolo d’attrito interno φ.
hp. 7: Viene aggiunta l’ipotesi che si raggiungano le condizionidi rottura anche all’interno del materiale. Lo stato di sforzointerno viene percio rappresentato ricorrendo ad un criteriodi rottura di tipo Coulombiano, per un materiale privo dicoesione e con un angolo d’attrito interno φ.
12

Capitolo 2
Il modellomonodimensionale incoordinate globali
2.1 Il modello matematico monodimen-
sionale
Con questo modello ci si propone di simulare il comportamento dellevalanghe di neve densa (hp. 1, pag. 10). Si suppone che il mezzopossa essere trattato come un ammasso di materiale granulare secco(hp. 2, pag. 10), incomprimibile (hp. 4, pag. 10) e rappresentabilecome un mezzo continuo (hp. 3, pag. 10).
2.1.1 Le equazioni del moto
Le equazioni del moto vengono scritte rispetto ad un sistema diriferimento cartesiano, piano, ortogonale con asse z verticale edasse x diretto nel verso del moto. Il vettore velocita viene indicatocome segue:
u = (ux, uy)
13

mentre il tensore degli sforzi e dato da:
P =
(
pxx pxz
pzx pzz
)
.
L’equazione di continuita, essendo il mezzo incomprimibile, sitraduce nell’annullamento della divergenza del vettore velocita:
∂ux
∂x+
∂uz
∂z= 0 . (2.2)
Le equazioni di conservazione della quantita di moto nelle dire-zioni x e z sono date da:
∂ux
∂t+ ux
∂ux
∂x+ uz
∂ux
∂z=
1
ρ
(
∂pxx
∂x+
∂pzx
∂z
)
(2.3)
∂uz
∂t+ ux
∂uz
∂x+ uz
∂uz
∂z=
1
ρ
(
∂pxz
∂x+
∂pzz
∂z
)
− g . (2.4)
Dall’equilibrio alla rotazione rispetto al baricentro si ricava lasimmetria del tensore degli sforzi:
pxz = pzx. (2.5)
Avendo definito le equazioni esplicite della superficie libera edel fondo come:
z = f(x, t) e z = b(x).
si ricavano le condizioni al contorno di tipo cinematico in superficielibera ed al fondo:
−∂f
∂t− ux
∂f
∂x+ uz = 0 per z = f . (2.7)
−ux∂b
∂x+ uz = 0 per z = b. (2.9)
Si rimanda all’Appendice A.2 per il dettaglio dei passaggi.
14

2.1.2 Il tensore degli sforzi: la reologia
Per poter mediare lungo la verticale le equazioni del moto, e ne-cessario ricavare una legge funzionale che descriva come variano lecomponenti del tensore degli sforzi all’interno del materiale.
In Appendice A.1 e stata ricavata l’espressione per il tensoredegli sforzi al fondo, in un riferimento curvilineo di coordinate η,normale al fondo, e ξ, ad essa ortogonale:
P =
(
pξξ pξη
pηξ pηη
)∣
∣
∣
∣
∣
z=b
=
(
ka/p −sgn((uξ)b) tan δ
−sgn((uξ)b) tan δ 1
)
(pηη)b .
(2.10)
dove il coefficiente di spinta ka/p vale (Eq. (A.12)):
kp
ka
}
=2
cos2 φ
[
1 ±√
1 − cos2 φ
cos2 δ
]
− 1, per∂uξ
∂ξ< 0> 0
.
sgn((uξ)b) e il segno della componente tangenziale al fondo del vet-tore velocita e (pηη)b rappresenta la componente normale al fon-do dello sforzo che si sviluppa lungo l’interfaccia tra la neve ed ilpendio.
A questo risultato si e pervenuti avendo fatto alcune ipotesi. Sie supposto che il materiale granulare si trovi in condizione di rotturae che quindi il cerchio di Mohr che descrive lo stato tensionale alfondo sia tangente all’inviluppo di rottura. E stato assunto per ilmateriale un comportamento a rottura di tipo coulombiano (hp. 7,pag. 12), con coesione nulla e con un angolo d’attrito interno paria φ. Si e supposto inoltre che vi sia scivolamento al fondo e chela legge che descrive la relazione tra sforzo tangenziale e sforzonormale lungo la superficie di scorrimento sia di tipo frizionale conun angolo d’attrito pari a δ (hp. 6, pag. 12).
Per ricavare un’espressione per pηη|z=b e stata fatta l’analisi di-mensionale delle equazioni del moto, ottenute per un mezzo granu-lare secco (hp. 2, pag. 10), continuo (hp. 3, pag. 10), incomprimibile
15

(hp. 4, pag. 10) e sviluppate rispetto ad un riferimento curvilineo.Nell’equazione scritta in direzione normale al fondo sono stati tra-scurati i termini di ordine uguale o maggiore di ε = Hs/Ls, sullabase dell’ipotesi di acque basse (hp. 5, pag. 10). Si e cosı ottenuta ladistribuzione idrostatica delle pressioni (Eq. (A.23) e Eq. (A.25)),che, espressa in termini dimensionali, e data da:
pηη = −ρ(
χ (uξ)2b + g cos ζ
)
(h − η) , (2.11)
dove χ e ζ sono rispettivamente la curvatura e la pendenza delfondo e h e lo spessore della valanga, misurato normalmente allasuperficie del pendio.
La componente pηη risulta quindi distribuita linearmente lungola direzione normale al fondo.
Il tensore degli sforzi va scritto rispetto al riferimento assolutoper poi poter mediare sulla verticale le equazioni del moto.
Per il dettaglio dei calcoli si veda Appendice A.2.3.
Si applica un’opportuna matrice di rotazione R al tensore deglisforzi valutato al fondo P.
Si suppone poi che la distribuzione delle pressioni pηη sia linearenon lungo la normale al fondo, come in Eq. (2.11), ma lungo laverticale. L’approssimazione e accettabile nel caso in cui (uξ)b, ζ,δ e h possano essere ritenuti costanti lungo il pendio per tratti dilunghezza confrontabile con la proiezione sul fondo dello spessoreverticale della massa nevosa H(x, t) = f(x, t) − b(x). Alle stessecondizioni si puo porre (vedi Figura 2.1):
h(x, t) ∼= H(x, t) cos ζ(x) = (f(x, t) − b(x)) cos ζ(x) .
Il successivo passo e quello di ipotizzare che le componenti deltensore degli sforzi si mantengano proporzionali a pηη sull’interoprofilo dell’ammasso.
Si ricava pertanto che:
P(x, z, t) = ρ A′(x, t)
(
B(x, t) C(x, t)
C(x, t) D(x, t)
)
(f(x, t) − z) (2.12)
16
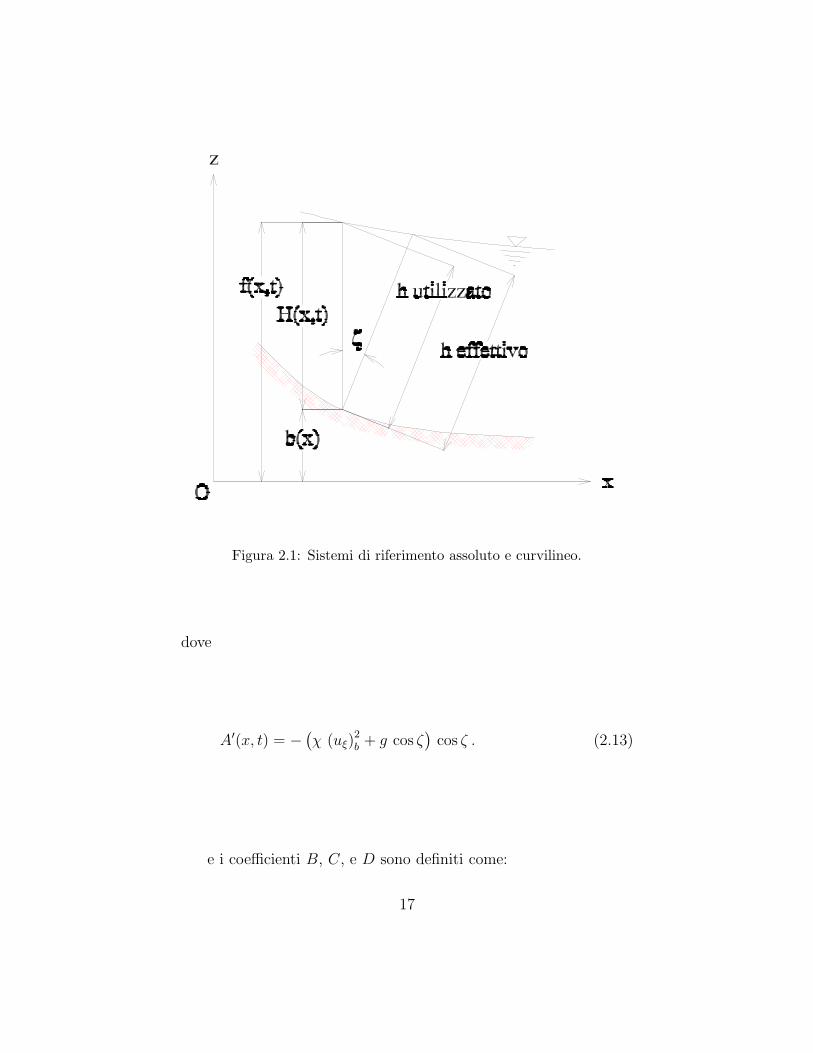
Figura 2.1: Sistemi di riferimento assoluto e curvilineo.
dove
A′(x, t) = −(
χ (uξ)2b + g cos ζ
)
cos ζ . (2.13)
e i coefficienti B, C, e D sono definiti come:
17

B(x, t) = 1 − 1 − ka/p
2(1 + cos 2 ζ) − sgn
(
(uξ)b
)
·
· tan δ sin 2 ζ , (2.14)
C(x, t) =1 − ka/p
2sin 2 ζ − sgn
(
(uξ)b
)
tan δ cos 2 ζ , (2.15)
D(x, t) = 1 − 1 − ka/p
2(1 − cos 2 ζ) + sgn
(
(uξ)b
)
·
· tan δ sin 2 ζ , (2.16)
18

2.1.3 Le equazioni del moto mediate sulla ver-
ticale
Le espressioni delle componenti del tensore degli sforzi, ricavate nelprecedente paragrafo, vanno sostituite nelle equazioni del moto. Aquesto punto e possibile integrare sulla verticale l’equazione di con-tinuita (2.2) e l’equazione di conservazione della quantita di motonella direzione x (2.3). In Appendice A.2.4 sono riportati tutti ipassaggi.
Definite le componenti medie del vettore velocita sulla verticale:
Ux =1
H
∫ f
b
ux dz , (2.17)
Uz =1
H
∫ f
b
uz dz . (2.18)
si integra lungo z tra b(x) ed f(x, t) l’equazione di continuita (2.2)e, ricorrendo alle condizioni al contorno cinematiche in superficielibera ed al fondo si perviene all’espressione finale:
∂H
∂t+
∂(Ux H)
∂x= 0 . (2.20)
Per mediare lungo z le equazioni del moto si richiamano le con-dizioni al contorno di tipo cinematico e si ricorre all’ipotesi di sci-volamento (hp. 6, pag. 12), imponendo l’ulteriore condizione cheil profilo di velocita sia costante non solo sulla normale, ma anchelungo la verticale.
Le equazioni di conservazione della quantita di moto mediatesulla verticale e scritte in forma non conservativa sono date da:
19

∂H
∂t+
∂ (Ux H)
∂x= 0 , (2.21)
∂Ux
∂t+ Ux
∂Ux
∂x=
=H
2
∂ (A′ B)
∂x− A′
(
B
(
tan ζ − ∂H
∂x
)
+ C
)
, (2.23)
∂Uz
∂t+ Ux
∂Uz
∂x=
=H
2
∂ (A′ C)
∂x− A′
(
C
(
tan ζ − ∂H
∂x
)
+ D
)
− g (2.24)
Assumendo che sia (uξ)b∼= Uξ, dove Uξ rappresenta il valore
medio sulla verticale della componente tangenziale di velocita, leespressioni per A′ (Eq. (2.13)), B (Eq. (2.14)), C (Eq. (2.15)) e D(Eq. (2.16)) diventano:
A′(x, t) = −(
χ Uξ2 + g cos ζ
)
cos ζ . (2.25)
B(x, t) = 1 − 1 − ka/p
2(1 + cos 2 ζ) +
−sgn (Uξ) tan δ sin 2 ζ , (2.26)
C(x, t) =1 − ka/p
2sin 2 ζ − sgn (Uξ) tan δ cos 2 ζ , (2.27)
D(x, t) = 1 − 1 − ka/p
2(1 − cos 2 ζ) +
+sgn (Uξ) tan δ sin 2 ζ . (2.28)
20

2.1.4 L’effetto dell’attrito di parete
Il modello matematico proposto non e in grado di tener conto dellaresistenza offerta al moto dall’attrito che si sviluppa lungo le paretilaterali di contenimento. Hutter ed altri [4], nella verifica nume-rica di prove sperimentali realizzate in una canaletta di sezionerettangolare, ricorrono ad una formula sviluppata da Roberts:
tan δeff =
(
1 + kHs
Ws
h
)
. (2.29)
Hs e Ws sono i valori scala per lo spessore e la larghezza del-l’ammasso; h e lo spessore adimensionalizzato; k e il coefficiented’attrito per le pareti laterali; δeff e il coefficiente d’attrito corret-to. Hutter riporta, nell’articolo precedentemente citato, il rangeentro cui tendono a ricadere i valori di k, per diverse combinazionidi materiali granulari e superfici di scorrimento. Si passa da un va-lore massimo di 0.453 ad un valore minimo di 0.324. Nel medesimoarticolo gli autori consigliano di utilizzare un valore medio, pari a0.4.
21
2.2 Il modello numerico monodimensio-
nale
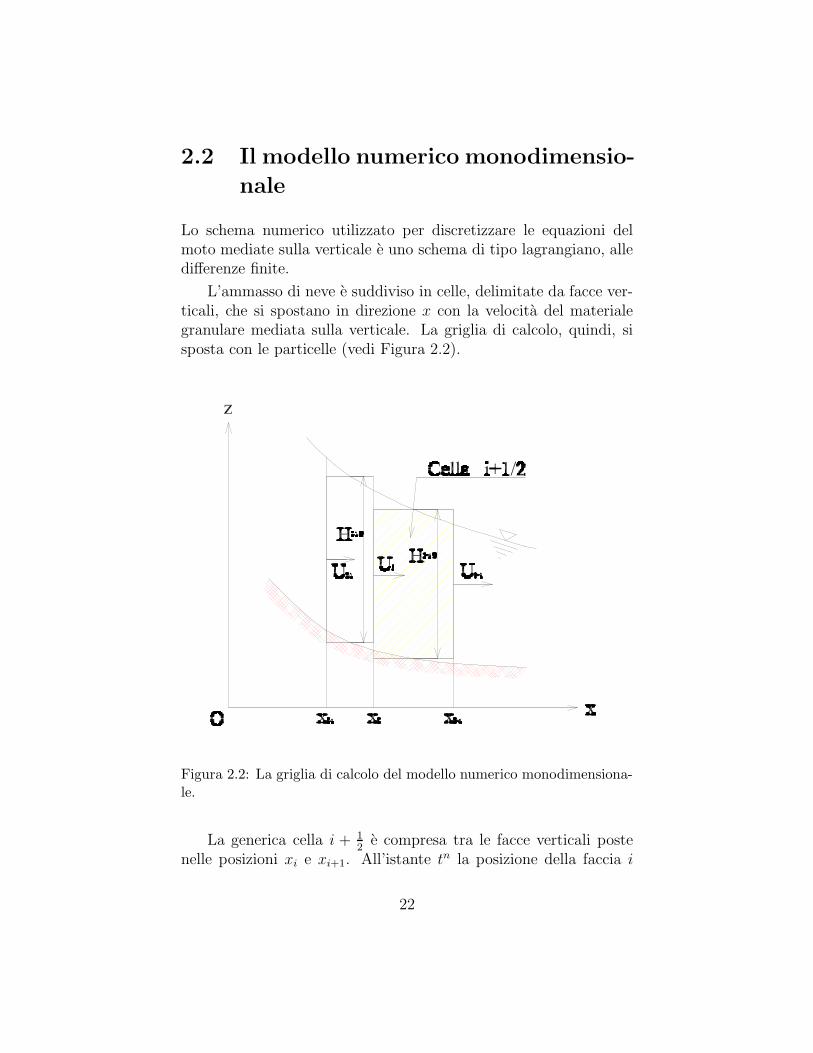
Lo schema numerico utilizzato per discretizzare le equazioni delmoto mediate sulla verticale e uno schema di tipo lagrangiano, alledifferenze finite.
L’ammasso di neve e suddiviso in celle, delimitate da facce ver-ticali, che si spostano in direzione x con la velocita del materialegranulare mediata sulla verticale. La griglia di calcolo, quindi, sisposta con le particelle (vedi Figura 2.2).
PSfrag replacements
x
Figura 2.2: La griglia di calcolo del modello numerico monodimensiona-le.
La generica cella i + 12
e compresa tra le facce verticali postenelle posizioni xi e xi+1. All’istante tn la posizione della faccia i
22

viene aggiornata, conoscendone la velocita all’istante tn− 1
2 :
xni = xn−1
i + Uxn− 1
2
i ∆t , (2.30)
dove xni e la posizione della faccia i all’istante tn, ∆t = tn − tn−1 e
Uxn− 1
2
i e la velocita del nodo i della griglia, all’istante tn− 1
2 , mediata
sulla verticale. Uxn− 1
2
i e calcolata, dopo aver valutato Uxni , come:
Uxn− 1
2
i =Ux
ni + Ux
n−1i
2.
La conservazione della massa viene rispettata, imponendo che ilvolume di neve ∀i+ 1
2
contenuto nella generica cella i+ 12
sia costante.
L’altezza della neve all’istante tn nella cella i + 12
viene calcolatacome:
Hni+ 1
2
=∀i+ 1
2
xni+1 − xn
i
. (2.31)
Per ottenere Ux si integra l’equazione di conservazione dellaquantita di moto in direzione orizzontale, ricorrendo al metodo diCollatz (o di Eulero modificato) [36]. E uno schema di risoluzionedelle equazioni differenziali ordinarie, esplicito, ad un passo, delsecondo ordine. Se ci si pone nell’ottica lagrangiana Ux dipendesolo dal tempo:
Ux = Ux (x(t), t) = Ux(t) .
L’equazione del moto in direzione x assume allora la forma diun’equazione differenziale ordinaria del primo ordine, del tipo:
dUx
dt= f(t, Ux) . (2.32)
Lo schema di Collatz prevede che, ad ogni passo temporale, la
23

funzione f , definita in Eq. (2.32), sia calcolata due volte:
Uxn+1i = Ux
ni + ∆t f
(
tn+ 1
2 , Ux
n+ 1
2
i
)
, dove
Uxn+ 1
2
i = Uxni +
∆t
2f (tn, Ux
ni ) , essendo
∆t =(
tn+1 − tn)
.
(2.33)
In Appendice A.3.1 si trovano tutti i passaggi per il calcolo dellafunzione integranda f .
24
2.2.1 Condizioni di stabilita del modello.
Affinche sia garantita la stabilita del modello, l’intervallo temporaledi calcolo ∆t viene valutato ad ogni passo, in maniera tale che nonvi siano sovrapposizioni tra le celle. Nel modello numerico si fain modo che, nel generico passo, lo spostamento di ciascuna delledue facce di ogni cella non sia maggiore di un’opportuna frazioneα della lunghezza della cella stessa.
Lo schema e stato poi ulteriormente raffinato, tenendo contoanche delle celerita di propagazione delle piccole perturbazioni gra-vitazionali all’interno dell’ammasso nevoso. Il calcolo della celeritadi propagazione di tali onde, rispetto ad un osservatore che si muo-ve con la massa (approccio lagrangiano), e riportato in AppendiceA.3.4 e fornisce l’espressione (Eq. (A.72)):
c =√−A′ B H . (2.34)
E una condizione di stabilita tipo Courant–Friedrichs–Levy: sivuole impedire che le informazioni relative a variazioni del cam-po di moto, che interessano il generico nodo i, possano percorrerenell’intervallo ∆t, uno spazio maggiore della lunghezza delle celleadiacenti. In particolare si impone che lo spazio percorso da taliperturbazioni nell’intervallo temporale di calcolo, non sia maggioredi una opportuna frazione α della lunghezza della cella.
Applicando queste correzione a ∆t, si e osservato un miglio-ramento delle condizioni di stabilita, specie in alcune situazioniparticolari; per esempio nella fase di arresto su tratti orizzontalio suborizzontali e in presenza di bruschi cambi di pendenza e quin-di di elevate curvature, in quanto in tali situazioni e maggiore lacelerita di propagazione.
E stata introdotta un’ulteriore condizione sull’intervallo ∆t,per impedire che, all’interno di un unico passo temporale, si abbial’inversione del moto.
Questa condizione interviene specialmente nella fase di arresto.Impedisce l’insorgere di instabilita dovute alle continue variazionidi segno del vettore velocita.
In Appendice A.3.3 si trovano le espressioni utilizzate per cor-reggere il valore dell’intervallo temporale di integrazione ∆t.
25

Nonostante tutti questi controlli sull’intervallo temporale di cal-colo, il modello, in alcune situazioni particolari, continua a presen-tare delle instabilita. Questo e dovuto al fatto che, quando il motoavviene in condizioni supercritiche, se vi e un brusco rallentamento,prodotto da un ostacolo o da un cambio di pendenza, si produceuno shock che si propaga verso monte. Questi fronti di disconti-nuita sono stati osservati durante le prove eseguite nel laboratoriodi idraulica per testare il modello bidimensionale. Tai [42] confermache uno schema lagrangiano, applicato al modello di Hutter e Sa-vage scritto in forma non conservativa, presenta evidenti instabilitain presenza di fronti d’onda.
Per attenuare tali instabilita e stato introdotto un termine dif-fusivo, descritto in Appendice A.3.4.
26

2.2.2 Il codice di calcolo
Il codice di calcolo e stato scritto con il linguaggio C + +. Si efatto uso della classe HINT, sviluppata dal dott. Enrico Bertolazzie disponibile nel sito http://www.ing.unitn.it/~bertolaz. Taleclasse consente di trattare i semi interi, cioe i numeri che possonoessere espressi come la somma di un intero e della costante 1/2.
27

2.3 Verifiche sperimentali del modello
monodimensionale
L’analisi del modello monodimensionale, scritto nel riferimento as-soluto, viene eseguita confrontandone i risultati con quelli ottenutida D’Accordi [35] con il modello numerico monodimensionale, scrit-to in coordinate locali, e con i dati sperimentali relativi a due casisimulati in laboratorio. Il primo caso e stato studiato da D’Accor-di presso il Laboratorio di Idraulica dell’Universita degli Studi diTrento e riproduce una situazione quasi-statica. I dati sperimentalirelativi al secondo caso, in cui il moto del materiale e pienamentesviluppato, sono stati estratti da un articolo scritto da Hutter etalii [4] nel 1995.
2.3.1 Prove di laboratorio su piano orizzontale
Il caso studiato da D’Accordi simula un processo di slump su pia-no orizzontale, in condizioni monodimensionali. All’interno di unacanaletta di forma rettangolare larga 30 cm, una paratoia inclinatadi 55o rispetto all’orizzontale, trattiene il materiale nella posizio-ne iniziale. Le pareti ed il fondo della canaletta sono realizzati inperspex, un materiale plastico trasparente. Una volta sollevata laparatoia, e stata rilevata la disposizione finale del materiale nellacanaletta.
Sono stati utilizzati due tipi di materiale: zeoliti e ghiaia.Le zeoliti sono resine anioniche, di forma sferica e granulometria
compresa tra 0.1 e 2 mm e con diametro medio di circa 1 mm.La ghiaia ha forme piuttosto irregolari. I grani hanno una su-
perficie scabra e dimensioni comprese tra i 3 ed i 5 mm. Per talimateriali sono stati misurati i valori statici dell’angolo d’attritointerno φ e dell’angolo d’attrito al fondo δ. Le misure sono stateeseguite mediante scatola di taglio descritta in §3.3.1. In particolarein [35] si riportano i seguenti valori:
zeoliti
φ = 28o ± 0.75o;
28

δ = 18o ± 0.75o;
ghiaia
φ = 38o ± 0.75o;
δ = 28o ± 0.75o;
Prova con resina anionica granulare su superficie orizzon-tale in perspex
In Tabella 2.1 sono indicati i valori dei parametri utilizzati nellediverse simulazioni numeriche, i cui risultati sono rappresentati informa sintetica in Figura 2.3 e in Figura 2.4.
Caso φ[o] δ[o] k ∆t[s] ∆x[m]
1 28 18 0.4 0.0005 0.01
2 26 18 0.4 0.0005 0.01
3 24 18 0.4 0.0005 0.01
Tabella 2.1: Valori di alcuni parametri significativi utilizzati nelle diversesimulazioni numeriche delle prove di laboratorio eseguite con le zeoliti: φe δ sono gli angoli d’attrito interno ed al fondo; k e il coefficiente d’attritodelle pareti laterali; ∆t e ∆x sono il passo temporale e spaziale.
In Figura 2.3 si sono messi a confronto i dati sperimentali con irisultati delle simulazioni numeriche eseguite con il modello mono-dimensionale, scritto nel riferimento curvilineo e con quello scrittonel riferimento assoluto. I parametri utilizzati sono quelli del Caso2 descritto in Tabella 2.1. Si osserva la sostanziale coincidenza deirisultati ottenuti con i due diversi modelli numerici. Si puo infattidimostrare che, nel caso di fondo piano orizzontale, i due model-li, sviluppati nel riferimento locale e nel riferimento assoluto, sonoperfettamente coincidenti.
In Figura 2.4 invece si confrontano i dati sperimentali con irisultati numerici, ottenuti con il modello scritto nel riferimentoassoluto. Sono tenuti fissi l’angolo d’attrito al fondo, pari al valore
29

12 13 14 15 16 17 18 19 200
0.10.20.30.40.50.60.70.80.9
11.1
12 13 14 15 16 17 18 19 200
0.10.20.30.40.50.60.70.80.9
11.1
PSfrag replacements h
x
Istante iniziale
D’Accordi
1D locale
1D assoluto
Figura 2.3: Confronto tra i dati sperimentali di D’Accordi, relativi allezeoliti, ed i risultati delle simulazioni con i modelli monodimensionali,scritti nel riferimento assoluto e nel riferimento curvilineo. L’altezza he la coordinata x sono adimensionalizzate con l’altezza iniziale (17 cm)e la proiezione nella direzione orizzontale della lunghezza della paratoia(11.9 cm).
12 13 14 15 16 17 18 19 200
0.10.20.30.40.50.60.70.80.9
11.1
12 13 14 15 16 17 18 19 200
0.10.20.30.40.50.60.70.80.9
11.1PSfrag replacements
hx
Istante iniziale
D’Accordi
1D locale
1D assoluto
h
Caso 1: φ = 28o
Caso 2: φ = 26o
Caso 3: φ = 24o
x
Figura 2.4: Confronto tra i dati sperimentali di D’Accordi, relativi allezeoliti, ed i risultati delle simulazioni con il modello monodimensionale,scritto nel riferimento assoluto, al variare dell’angolo d’attrito internoφ (si veda Tabella 2.1). L’altezza h e la coordinata x sono adimen-sionalizzate con l’altezza iniziale (17 cm) e la proiezione nella direzioneorizzontale della lunghezza della paratoia (11.9 cm).
30

statico di 18o, ed il coefficiente d’attrito relativo alle pareti lateralik, assunto uguale a 0.4. Viene variato il valore dell’angolo d’attritointerno φ, tra il valore statico di 28o ed il valore di 24o, che dovrebbecorrispondere alle condizioni dinamiche [10].
Al calare di φ, diminuisce la capacita del materiale di sostener-si: aumenta il valore del coefficiente di spinta attiva ka. Si osservache le condizioni di migliore adattamento dei risultati numerici aidati sperimentali si ottengono utilizzando un angolo d’attrito in-terno “dinamico” compreso tra 24o e 26o. La capacita del modellomatematico–numerico di rappresentare il fenomeno appare buona.Questo anche in considerazione degli errori sperimentali (±1 mmnella misura del tirante) e della quasi–staticita del fenomeno, chepone dei dubbi sulla realizzazione completa del processo di fluidiz-zazione del materiale granulare e sulla modalita di scivolamento sulfondo.
Nel caso di slump orizzontale sorge il dubbio se sia lecita l’ipote-si di scivolamento al fondo (hp. 6, pag. 12). Infatti i movimenti nonsi concentrano al fondo, ma si sviluppano all’interno dell’ammasso.
Prova con ghiaia su superficie orizzontale in perspex
Nel caso delle prove con la ghiaia e stata piu laboriosa la ricerca deivalori di φ, δ e k che danno le condizioni di fitting ottimali. In Ta-bella 2.2 vengono riportati i valori di tali parametri, utilizzati nellediverse simulazioni numeriche, i cui risultati sono rappresentati inFigura 2.5 e in Figura 2.6.
In Figura 2.5 si puo osservare l’effetto dell’angolo d’attrito in-terno φ e quello dell’angolo d’attrito al fondo δ.
Come si e gia detto nel caso delle zeoliti, al diminuire dell’ango-lo d’attrito interno, la massa si disperde maggiormente nel piano.L’effetto di φ, nelle condizioni quasi-statiche proposte, non e pic-colo. Esso compare nelle equazioni del moto (A.31) all’interno delcoefficiente di spinta ka/p, in un termine di ordine ε = Hs/Ls, chenel caso presente e di ordine 1.
Confrontando la configurazione finale del caso 1 con quella delcaso 3, e quella del caso 2 con quella del caso 4, emerge come,al diminuire dell’angolo d’attrito al fondo, si verifichi una minore
31

Caso φ[o] δ[o] k ∆t[s] ∆x[m]
1 38 28 0.4 0.0005 0.01
2 34 28 0.4 0.0005 0.01
3 38 24 0.4 0.0005 0.01
4 34 24 0.4 0.0005 0.01
5 34 28 1 0.0005 0.01
6 34 28 1.4 0.0005 0.01
Tabella 2.2: Valori di alcuni parametri significativi, utilizzati nelle di-verse simulazioni numeriche delle prove eseguite con la ghiaia: φ e δ sonogli angoli d’attrito interno ed al fondo, k e il coefficiente d’attrito dellepareti laterali, ∆t e ∆x sono il passo temporale e spaziale.
dispersione dell’ammasso. La cosa non appare ovvia, dato che, al-l’aumentare della resistenza al fondo, ci si aspetterebbe un maggioreffetto di contenimento. Il motivo e ancora da ricercarsi nel fattoche ε non e piccolo. Nell’equazione del moto, scritta rispetto allecoordinate curvilinee (A.31), δ non e presente solo nel termine cherappresenta l’attrito al fondo. Lo si trova anche nel termine chedescrive l’azione motrice legata al gradiente della quota del pelolibero, in cui compare all’interno del coefficiente di spinta. Duranteil processo di slump, la massa si trova sempre in condizioni di esten-sione. Quindi il coefficiente di spinta assume il valore relativo allecondizioni di spinta attiva. Se δ diminuisce a φ costante, il coeffi-ciente di spinta attiva cala. Questo effetto prevale sulla riduzionedella resistenza per attrito al fondo.
In Figura 2.6 si evidenzia l’effetto legato all’attrito sulle paretilaterali. Aumentando il coefficiente k, aumenta l’azione di conteni-mento del materiale. Se k cresce, si incrementa il valore dell’angolod’attrito δ e quindi, per quanto visto in Figura 2.5, il materiale do-vrebbe spargersi piu liberamente sul piano. Va pero osservato chel’entita dell’incremento di δ dipende localmente dall’altezza del-
32

l’ammasso. All’aumentare dello spessore di materiale, aumenta lasuperficie di contatto in rapporto al volume e quindi e piu intensal’azione frenante. A conferma che, comunque, l’effetto di k, comequello di δ, non e univoco, si osserva che nel caso 6 (k maggiore)l’unghia del deposito sopravanza la posizione che raggiungerebbenel caso 5.
33
13 14 15 16 17 180
0.10.20.30.40.50.60.70.80.9
11.1
13 14 15 16 17 180
0.10.20.30.40.50.60.70.80.9
11.1
PSfrag replacements
Istante iniziale
D’Accordi
Caso 1: φ = 38o, δ = 28o
Caso 2: φ = 34o, δ = 28o
Caso 3: φ = 38o, δ = 24o
Caso 3: φ = 34o, δ = 24o
h
x
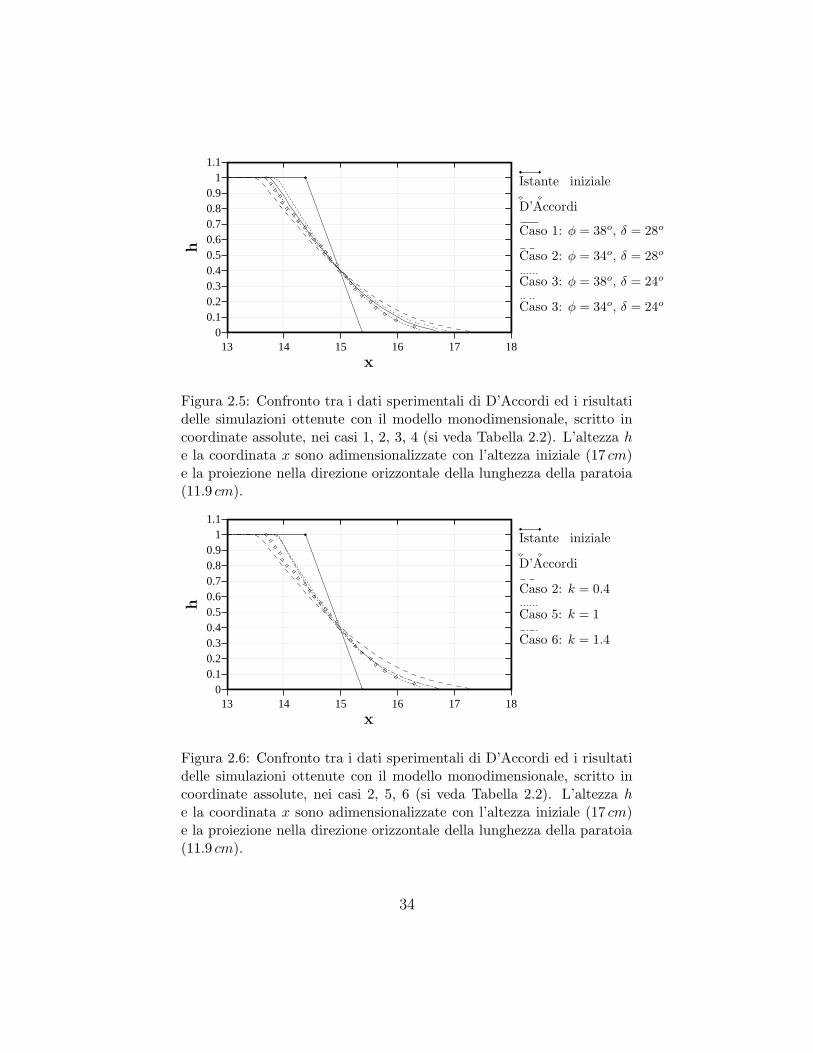
Figura 2.5: Confronto tra i dati sperimentali di D’Accordi ed i risultatidelle simulazioni ottenute con il modello monodimensionale, scritto incoordinate assolute, nei casi 1, 2, 3, 4 (si veda Tabella 2.2). L’altezza he la coordinata x sono adimensionalizzate con l’altezza iniziale (17 cm)e la proiezione nella direzione orizzontale della lunghezza della paratoia(11.9 cm).
13 14 15 16 17 180
0.10.20.30.40.50.60.70.80.9
11.1
13 14 15 16 17 180
0.10.20.30.40.50.60.70.80.9
11.1
PSfrag replacements
Istante iniziale
D’AccordiCaso 1: φ = 38o, δ = 28o
Caso 2: φ = 34o, δ = 28o
Caso 3: φ = 38o, δ = 24o
Caso 3: φ = 34o, δ = 24o
h
x
Caso 2: k = 0.4
Caso 5: k = 1
Caso 6: k = 1.4
Figura 2.6: Confronto tra i dati sperimentali di D’Accordi ed i risultatidelle simulazioni ottenute con il modello monodimensionale, scritto incoordinate assolute, nei casi 2, 5, 6 (si veda Tabella 2.2). L’altezza he la coordinata x sono adimensionalizzate con l’altezza iniziale (17 cm)e la proiezione nella direzione orizzontale della lunghezza della paratoia(11.9 cm).
34

2.3.2 Prove di laboratorio su canaletta inclinata
Descrizione delle condizioni sperimentali
Hutter et alii [4] hanno realizzato prove dinamiche in una canalettalarga 10 cm comprendente due tratti rettilinei, uno inclinato, a pen-denza regolabile, l’altro orizzontale, raccordati con un tratto curvo,con raggio di curvatura costante pari a 24.6 cm. La canaletta e rea-lizzata in plexiglass; le pareti laterali ed il fondo sono stati rivestiticon diversi materiali, per analizzare il comportamento della massagranulare in moto con differenti condizioni di resistenza.
Le prove sono state eseguite con biglie di vetro e con particellein Vestolen, un materiale plastico. I dati sperimentali con i qua-li si e confrontato il modello numerico sono relativi ad una provarealizzata con le particelle in Vestolen. Queste hanno forma lenti-colare, con diametro di 4 mm e spessore di 2.5 mm. La densita e di950 kg/m3, mentre la densita di volume nelle condizioni di massimoaddensamento e di 540 kg/m3.
L’angolo d’attrito interno statico φs e stato misurato da Hut-ter come l’angolo a riposo di un deposito a forma di cono su pianoorizzontale. L’angolo d’attrito interno dinamico φ e stato ottenutoriducendo di circa 4o l’angolo d’attrito statico, basandosi sui risul-tati ricavati da Morgenstern e Hungr [10] da prove in cella di taglioanulare. L’angolo d’attrito al fondo δ e stato calcolato come segue.E stato realizzato un cilindro di carta di diametro 7 cm, senza fon-do. E stato appoggiato sul piano inclinabile e riempito di materiale.Quindi si e aumentata la pendenza del fondo fino al punto in cui,in seguito ad una debole spinta, il cilindro, riempito di materiale, simanteneva in movimento. Come angolo d’attrito al fondo dinamicoe stata assunta la pendenza del piano inclinato.
Il modello monodimensionale e stato verificato facendo riferi-mento all’esperimento 29 eseguito da Hutter et al. [4].
La massa utilizzata e di 500 g. Essa viene trattenuta nella posi-zione iniziale da una paratoia ortogonale al fondo. La forma inizialee triangolare, con la superficie libera disposta secondo un piano oriz-zontale. Il rivestimento della canaletta e in PVC. La pendenza edi 40o. L’angolo d’attrito interno statico del materiale granulare epari a 33o − 34o, al quale corrisponderebbe un valore dinamico di
35
29o−30o. L’errore stimato da Hutter per tale misura e di ±(2o−4o).Per l’angolo d’attrito al fondo dinamico viene fornito un valore di19o ± 2o. Il valore consigliato da Hutter per il coefficiente d’attritodelle pareti laterali e di 0.4.
Confronto con il modello numerico
Nei seguenti grafici viene eseguito il confronto tra dati sperimentalie risultati numerici per quanto riguarda la posizione e la velocitadel fronte e della coda e la lunghezza dell’ammasso. Le simulazioninumeriche sono state eseguite con diversi valori di alcuni parametrisignificativi, che influiscono sui risultati finali. In Tabella 2.3 sonoriportate le caratteristiche dei diversi casi analizzati.
La prova numerica di riferimento e il caso 1. Con i valori deiparametri relativi a tali condizioni Hutter ha ottenuto il miglioreadattamento dei dati numerici ai risultati sperimentali.
La differenza dei risultati numerici di Hutter rispetto ai datisperimentali in genere e inferiore agli errori sperimentali. Questonon accade nelle nostre simulazioni numeriche.
Nella valutazione della posizione del fronte, l’errore massimostimato da Hutter e relativo agli istanti finali ed e pari a ±13 cm.Per la coda lo scarto quadratico medio dei dati sperimentali risultainferiore ed assume il valore massimo di ±8 cm nelle fasi intermediedel movimento.
Come si evidenzia nei grafici presenti in Figura 2.7, Figura 2.8,Figura 2.9 e Figura 2.10 la posizione finale del fronte e in generestimata correttamente. Al contrario si ha una sovrastima massimadell’avanzamento del fronte di 70 cm ed una sottostima dell’avan-zamento della coda di 30 cm nelle fasi intermedie del moto. Lalunghezza della massa granulare e quindi abbondantemente sovra-stimata, come si evince anche da Figura 2.11, mentre la posizionemedia sembra ben rappresentata.
Per cercare di dar ragione delle differenze tra le due rappresen-tazioni numeriche (il modello in coordinate assolute, qui proposto,ed il modello in coordinate locali sviluppato da Hutter [4]), si eapplicata al fenomeno la nostra modellazione in coordinate locali.La Figura 2.14 mostra come le differenze tra i due approcci siano
36

Caso Np φ[o] δ[o] k Forma Hs
LsDilatazione Nm ∆t[s] Note
1 100 29 19.5 0 triangolare 0.84 0 49 0.0001
2 100 33 19.5 0 triangolare 0.84 0 49 0.0001
3 100 36 19.5 0 triangolare 0.84 0 49 0.0001
4 100 29 19.5 0.4 triangolare 0.84 0 49 0.0001
5 100 29 19.5 0 triangolare 0.84 0 49 0.0001 δ variabile
6 100 29 19.5 0 triangolare 0.84 0.15 42 0.0001
7 100 29 19.5 0 triangolare 0.84 0.30 53 0.0001
8 100 29 19.5 0 triangolare 1.5 0 55 0.0001
9 100 29 19.5 0 rettangolare 0.84 0 49 0.0001
10 15 29 19.5 0 triangolare 0.84 0 49 0.0001
11 100 29 21 0 triangolare 0.84 0 49 0.0001
Tabella 2.3: Valori di alcuni parametri significativi, utilizzati nelle diverse simulazioni numeriche della prova dilaboratorio no 29, eseguita da Hutter [4]: Np e il numero di punti utilizzati per definire il pendio; φ e δ sono gliangoli d’attrito interno ed al fondo, k e il coefficiente d’attrito delle pareti laterali; Forma definisce la forma eHs/Ls rappresenta il rapporto tra l’altezza e la lunghezza dell’ammasso nelle condizioni iniziali; Dilatazione e lavariazione relativa di volume; Nm e il numero di celle della griglia di calcolo, ∆t e il passo temporale.
37
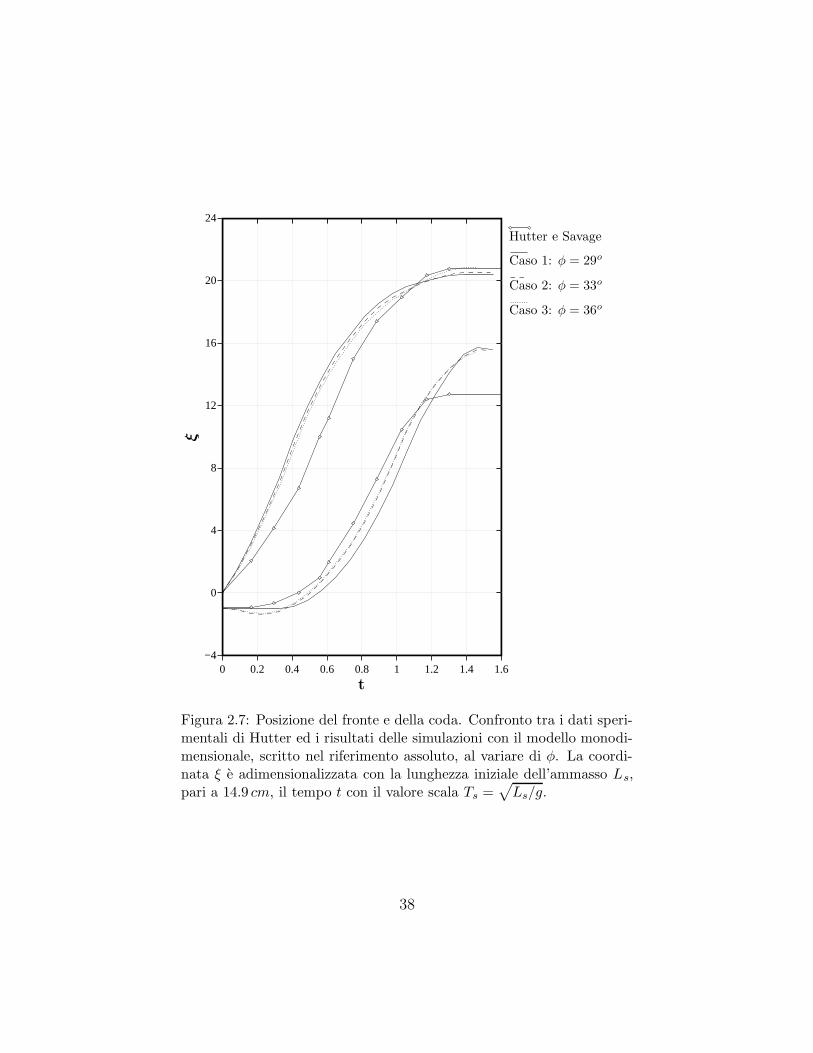
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
PSfrag replacements
Hutter e Savage
Caso 1: φ = 29o
Caso 2: φ = 33o
Caso 3: φ = 36o
ξ
t
Figura 2.7: Posizione del fronte e della coda. Confronto tra i dati speri-mentali di Hutter ed i risultati delle simulazioni con il modello monodi-mensionale, scritto nel riferimento assoluto, al variare di φ. La coordi-nata ξ e adimensionalizzata con la lunghezza iniziale dell’ammasso Ls,pari a 14.9 cm, il tempo t con il valore scala Ts =
√
Ls/g.
38
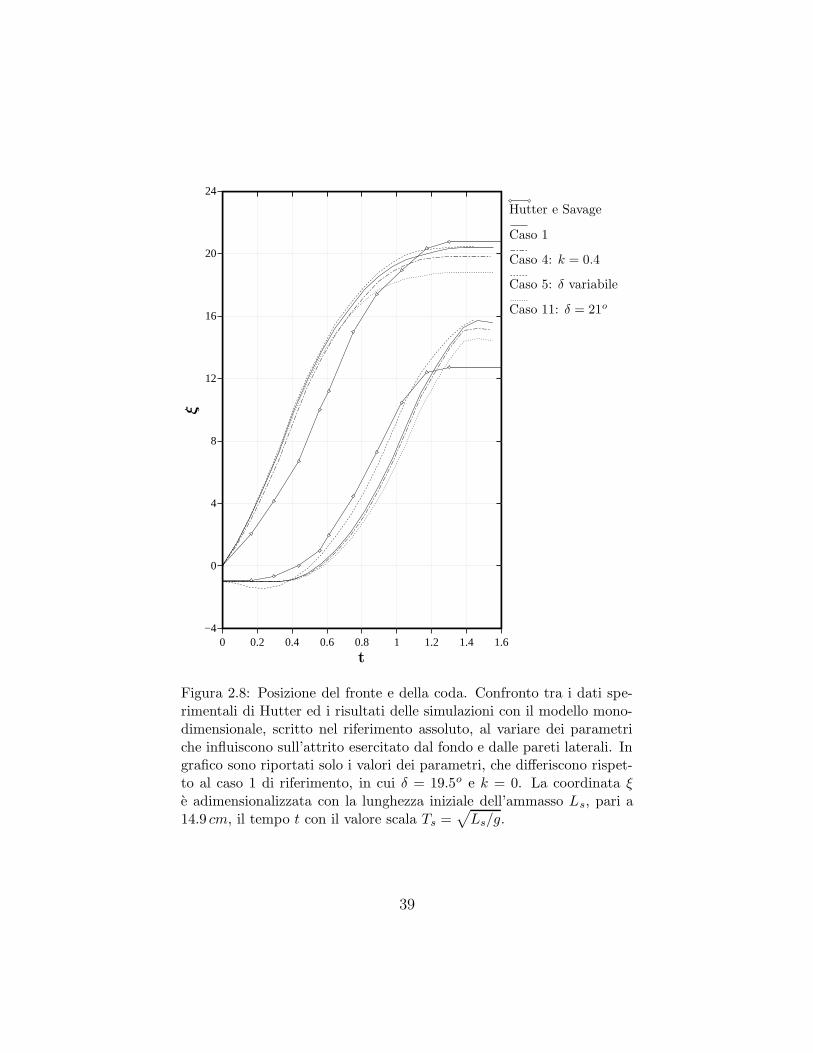
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
PSfrag replacements
ξ
t
Hutter e Savage
Caso 1
Caso 4: k = 0.4
Caso 5: δ variabile
Caso 11: δ = 21o
Figura 2.8: Posizione del fronte e della coda. Confronto tra i dati spe-rimentali di Hutter ed i risultati delle simulazioni con il modello mono-dimensionale, scritto nel riferimento assoluto, al variare dei parametriche influiscono sull’attrito esercitato dal fondo e dalle pareti laterali. Ingrafico sono riportati solo i valori dei parametri, che differiscono rispet-to al caso 1 di riferimento, in cui δ = 19.5o e k = 0. La coordinata ξe adimensionalizzata con la lunghezza iniziale dell’ammasso Ls, pari a14.9 cm, il tempo t con il valore scala Ts =
√
Ls/g.
39

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
PSfrag replacements
Hutter e Savage
ξ
t
Caso 1: dilat. = 0%
Caso 6: dilat. = 15%
Caso 7: dilat. = 30%
Figura 2.9: Posizione del fronte e della coda. Confronto tra i dati spe-rimentali di Hutter ed i risultati delle simulazioni con il modello mo-nodimensionale, scritto nel riferimento assoluto, al variare del volumeiniziale. La coordinata ξ e adimensionalizzata con la lunghezza ini-ziale dell’ammasso Ls, pari a 14.9 cm, il tempo t con il valore scalaTs =
√
Ls/g.
40
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−4
0
4
8
12
16
20
24
PSfrag replacements
Hutter e Savageξ
t
Caso 1
Caso 8: Hs/Ls = 1.5
Caso 9: rettangolare
Caso 10: Np = 15
Figura 2.10: Posizione del fronte e della coda. Confronto tra i da-ti sperimentali di Hutter ed i risultati delle simulazioni con il modellomonodimensionale, scritto nel riferimento assoluto, al variare della geo-metria della massa iniziale e del fondo. Nel grafico vengono riportati,per le diverse curve, solo i valori dei parametri che differiscono dal caso1 di riferimento, in cui la forma e triangolare, Hs/Ls = 0.84 e il nume-ro di punti per la definizione del pendio e Np = 100. La coordinata ξe adimensionalizzata con la lunghezza iniziale dell’ammasso Ls, pari a14.9 cm, il tempo t con il valore scala Ts =
√
Ls/g.
41
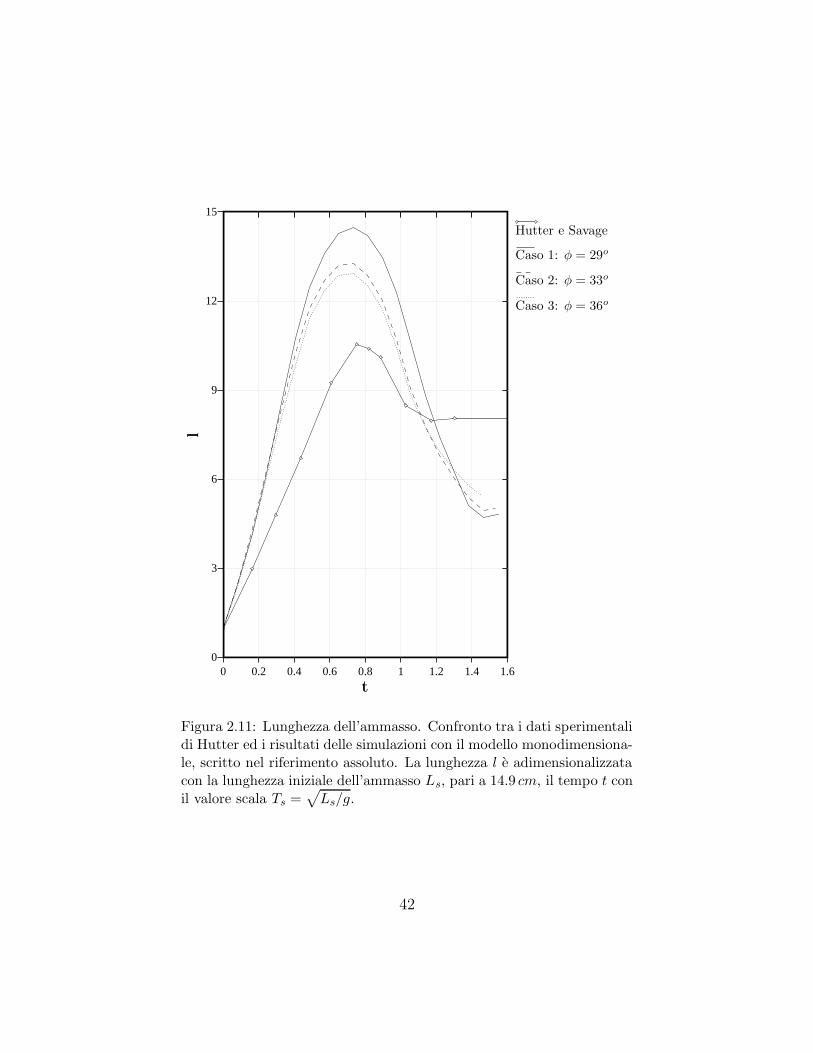
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
3
6
9
12
15
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
3
6
9
12
15
PSfrag replacements
Hutter e Savage
l
t
Caso 1: φ = 29o
Caso 2: φ = 33o
Caso 3: φ = 36o
Figura 2.11: Lunghezza dell’ammasso. Confronto tra i dati sperimentalidi Hutter ed i risultati delle simulazioni con il modello monodimensiona-le, scritto nel riferimento assoluto. La lunghezza l e adimensionalizzatacon la lunghezza iniziale dell’ammasso Ls, pari a 14.9 cm, il tempo t conil valore scala Ts =
√
Ls/g.
42
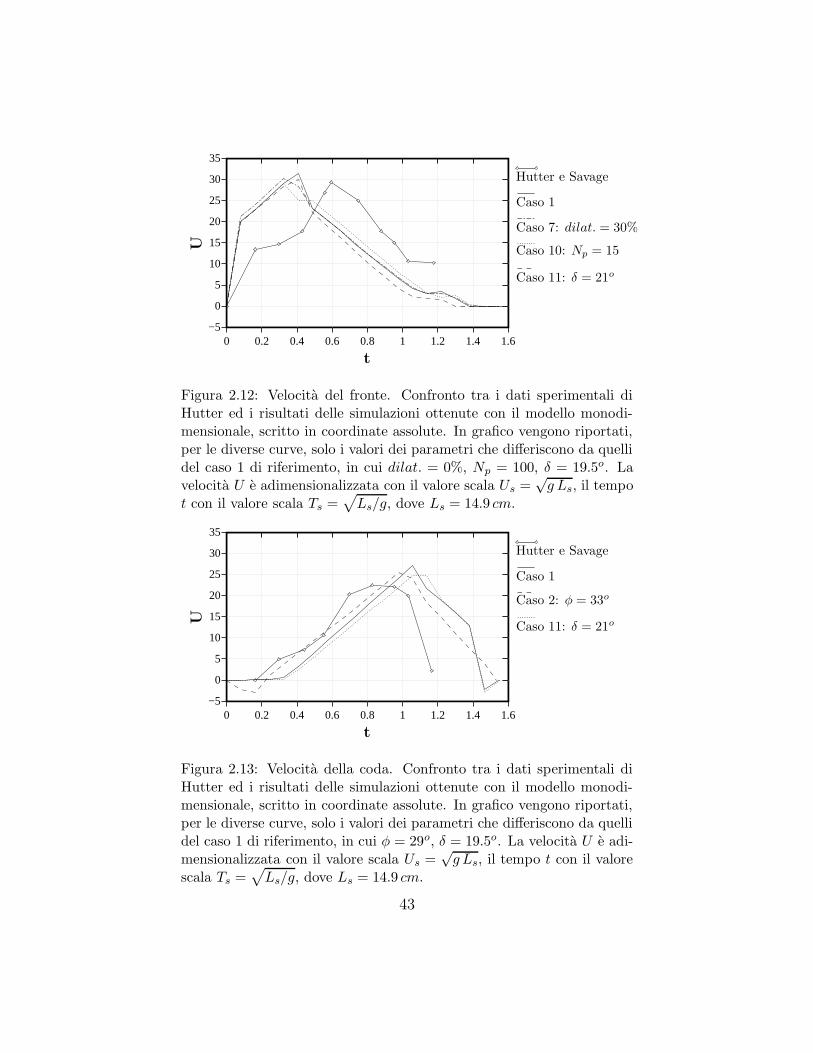
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−5
0
5
10
15
20
25
30
35
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−5
0
5
10
15
20
25
30
35
PSfrag replacements
Hutter e Savage
U
t
Caso 1
Caso 7: dilat. = 30%
Caso 10: Np = 15
Caso 11: δ = 21o
Figura 2.12: Velocita del fronte. Confronto tra i dati sperimentali diHutter ed i risultati delle simulazioni ottenute con il modello monodi-mensionale, scritto in coordinate assolute. In grafico vengono riportati,per le diverse curve, solo i valori dei parametri che differiscono da quellidel caso 1 di riferimento, in cui dilat. = 0%, Np = 100, δ = 19.5o. Lavelocita U e adimensionalizzata con il valore scala Us =
√g Ls, il tempo
t con il valore scala Ts =√
Ls/g, dove Ls = 14.9 cm.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−5
0
5
10
15
20
25
30
35
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−5
0
5
10
15
20
25
30
35PSfrag replacements
Hutter e Savage
U
t
Caso 1
Caso 7: dilat. = 30%Caso 10: Np = 15
Caso 11: δ = 21o
Caso 1
Caso 2: φ = 33o
Caso 11: δ = 21o
Figura 2.13: Velocita della coda. Confronto tra i dati sperimentali diHutter ed i risultati delle simulazioni ottenute con il modello monodi-mensionale, scritto in coordinate assolute. In grafico vengono riportati,per le diverse curve, solo i valori dei parametri che differiscono da quellidel caso 1 di riferimento, in cui φ = 29o, δ = 19.5o. La velocita U e adi-mensionalizzata con il valore scala Us =
√g Ls, il tempo t con il valore
scala Ts =√
Ls/g, dove Ls = 14.9 cm.
43

4 8 12 16 20 24 280
0.05
0.1
0.15
4 8 12 16 20 24 280
0.05
0.1
0.15
t=0s
t=0.5s
t=1s
arresto
PSfrag replacements
1D assoluto
1D localeh
ξ
Figura 2.14: Evoluzione del profilo dell’ammasso granulare. Confrontotra i risultati delle simulazioni numeriche ottenute con i modelli mo-nodimensionali, scritti in coordinate locali ed in coordinate assolute.La coordinata ξ e l’altezza h sono adimensionalizzate con la lunghezzainiziale dell’ammasso Ls, pari a 14.9 cm.
4 8 12 16 20 24 280
0.05
0.1
0.15
4 8 12 16 20 24 280
0.05
0.1
0.15
t=0s
t=0.4s
t=0.8s
arresto
PSfrag replacements
1D assoluto
1D locale
h
ξ
Caso 1
Caso 10
Figura 2.15: Evoluzione del profilo dell’ammasso granulare. Confrontotra i risultati delle simulazioni numeriche nel caso di forma iniziale ret-tangolare (caso 10) e in un caso di forma iniziale triangolare (caso 1).La coordinata ξ e l’altezza h sono adimensionalizzate con la lunghezzainiziale dell’ammasso Ls, pari a 14.9 cm.
44

quasi trascurabili. D’altra parte, nell’articolo di Hutter et alii [4],si fa riferimento a gravi difficolta nella simulazione della fase di av-vio, che ha spinto gli autori a definire le condizioni iniziali per lasimulazione numerica a pochi istanti dall’avviamento della massagranulare, a moto gia sviluppato.
Si puo presumere che la discrepanza tra risultati numerici esperimentali sia legata alle ipotesi semplificative del modello. Inparticolare sembra si debba porre l’attenzione sull’ipotesi di “acquebasse” (hp. 5, pag. 10). Nella configurazione iniziale il rapporto traspessore e lunghezza e tuttaltro che piccolo. Hs/Ls e pari a 0.84.
Considerando le equazioni scritte nel riferimento curvilineo, siosserva che tutti i termini che sono stati trascurati nell’equazionedel moto in direzione longitudinale (si veda Eq. (A.14)) sono inquesto caso particolare nulli, poiche la curvatura e pari a 0. I pro-blemi riguardano l’equazione scritta in direzione normale al fondo(Eq. (A.15)). Non sono trascurabili i termini inerziali, dato che sihanno delle componenti di velocita normali al fondo, che produ-cono il rapido appiattimento dell’ammasso. Non si puo neppuretralasciare la variazione lungo ξ della resistenza esercitata dal fon-do. Questi contributi modificano il profilo di pressione rispetto allecondizioni idrostatiche, specie sul fronte, e quindi intervengono inmaniera indiretta nella determinazione delle velocita delle particel-le. In Figura 2.12 si osserva come sia soprattutto nei primi decimidi secondo che il modello numerico fallisce nella stima dell’evolu-zione temporale delle velocita del fronte. L’accelerazione reale eminore di quella calcolata. Per quanto riguarda la coda, sia la fasedi accelerazione che quella di decelerazione sono ritardate rispettoal dati sperimentali.
Nei risultati numerici la massa si ferma sempre in ritardo rispet-to al caso sperimentale. Come suggerisce Hutter, questo potrebbeessere dovuto al fatto che durante l’arresto, riducendosi le velocitadelle particelle, si riduce la porosita, con conseguente brusco incre-mento dell’angolo d’attrito al fondo, dal valore dinamico al valorestatico.
Nelle simulazioni numeriche la coda tende ad avanzare moltorispetto ai dati sperimentali. Il deposito finale risulta molto piucompattato. Anche Hutter ha osservato questa anomalia, motivan-
45

dola col fatto che lo schema di interpretazione del processo fisiconon e adatto a descrivere quanto accade sulla coda negli istanti fi-nali. Quando il fronte si e ormai fermato, la massa granulare chesoppraggiunge, anziche comprimere il deposito formatosi, tende asormontarlo.
E comunque confortante il fatto che la posizione finale del frontee valutata con sufficiente accuratezza. Infatti nella simulazione dieventi reali e la distanza di arresto il principale parametro che siintende stimare. Inoltre nei casi di valanghe reali la forma inizialedel volume di neve che si mette in movimento e piu allungata.La condizione di “acque basse” e in genere rispettata. Ci si puoaspettare dei risultati numerici piu aderenti al caso reale.
Attraverso delle riprese fotografche Hutter ha potuto osserva-re anche l’evoluzione della forma dell’ammasso durante il moto. Ilpunto di massimo spessore dell’ammasso si mantiene in posizionearretrata fino al momento in cui raggiunge il tratto piano. Quin-di, per effetto della compressione indotta dall’arresto del fronte, siha un rapido avanzamento, che si esaurisce in poche decimi di se-condo. Infine il colmo tende a riportarsi piu lentamente verso lacoda. Il modello numerico riproduce bene questo fenomeno, comesi evidenzia in Figura 2.14.
Le immagini fotografiche evidenziano l’aumento di volume del-l’ammasso particellare, che accompagna l’iniziale processo di flui-dizzazione. Hutter ha osservato che durante il movimento dell’am-masso granulare si produce al suo interno uno strato basale, in cui siconcentrano le deformazioni al taglio e che presenta una dilatazio-ne verticale. Se la pendenza del fondo e grande rispetto all’angoloa riposo del materiale e l’ammasso ha il tempo di accelerare, talestrato puo assumere nel tempo uno spessore consistente, determi-nando globalmente una riduzione di densita della massa in movi-mento. La dilatazione volumetrica stimata da Hutter varia dal 3%al 30%. Molto dipende dalle caratteristiche meccaniche delle parti-celle e dallo spessore. Tanto maggiore e l’elasticita delle particelle,tanto piu il processo di fluidizzazione e marcato. All’aumentaredello spessore aumenta il peso esercitato sulle particelle dispostesul fondo dagli strati sovrastanti. Viene cosı limitata la liberta dimovimento delle particelle.
46

Sono state fatte delle prove numeriche incrementando il volumeiniziale del 15% e del 30% (caso 6 e caso 7). I risultati sono mostratiin Figura 2.9.
Si ha una migliore rappresentazione della posizione del fronte edun maggiore arretramento della coda nell’istante finale. I risultaticomunque differiscono di poco da quelli ottenuti senza dilatazio-ne. Inoltre non si tiene conto del fatto che, una volta arrestata, lamassa tende a recuperare il volume iniziale. Dai risultati numericisembrerebbe emergere quindi una scarsa influenza del processo difluidizzazione iniziale sull’evoluzione del moto dell’ammasso.
Con delle simulazioni numeriche si e cercato di capire quantocontano sul movimento della massa particellare i diversi parametridel modello.
Rispetto al caso 1 di riferimento, nei casi 2 e 3 si modifica ilcoefficiente di attrito interno φ. Il valore del caso 2 corrispondeall’angolo d’attrito a riposo. In Figura 2.7 si vede che, durante loscorrimento, la massa si mantiene piu compatta. Invece il depositofinale risulta piu allungato. Infatti il coefficiente di spinta attiva einferiore, mentre il coefficiente di spinta passiva e maggiore. Co-munque, anche aumentando considerevolmente il valore di φ (caso3), la configurazione finale dell’ammasso si modifica poco. Fincheviene rispettata la condizione di “acque basse” il termine in ka/p
(l’unico in cui compare φ) e piccolo.Sono piu pronunciati gli effetti che si ottengono intervenendo
sull’angolo d’attrito al fondo (si veda Figura 2.8).Nel caso 4 si introduce l’attrito sulle pareti laterali, portando
il coefficiente k da 0 a 0.4. L’attrito laterale frena l’ammasso. Laposizione del fronte e della coda sono arretrati di circa una decinadi centimetri rispetto al caso di riferimento, nel deposito finale.
Nel caso 5, δ viene fatto variare con la velocita, secondo l’equa-zione di Buggisch e Stadler, riproposta da Hutter in [4]:
tan δ = 1.25 tan δ0
(
1 − 0.2 exp
(
−0.94 uξ√
ε h
))
, (2.35)
dove uξ e h sono la velocita e l’altezza adimensionali, δ0 e l’ango-lo d’attrito al fondo dinamico, che si sviluppa quando la velocita
47

tende a 0. Tale espressione consente di considerare l’incrementodell’angolo d’attrito che si manifesta ad elevate velocita. E statoutilizzato un valore di δ0 tale per cui il valore asintotico di δ, peruξ → ∞, fosse pari a 29o.
Nelle prime fasi del moto, specie nella coda dove le velocita sonoinferiori, la massa sperimenta una resistenza per attrito inferiore,per cui avanza piu rapidamente. Tuttavia al crescere della velocital’angolo d’attrito tende ad assumere il valore asintotico e la posizio-ne finale del fronte e della coda sono praticamente coincidenti conquelle del caso 1 di riferimento.
Nel caso 11, δ e posto pari a 21o pari al valore medio stima-to piu lo scarto quadratico medio. Si osserva che l’accelerazionee piu lenta nel fronte e ritardata nella coda. Si ha poi un rallen-tamento repentino nella fase d’arresto (si veda Figura 2.12 e Fi-gura 2.13). La distanza di arresto e di 30 cm inferiore rispetto alvalore sperimentale.
La geometria iniziale della massa non influisce in maniera signi-ficativa sulla configurazione finale del deposito (si veda Figura 2.10).
Nel caso 8 si aumenta il rapporto tra spessore e lunghezza ini-ziali della massa fino al valore 1.5, conservando il volume e la formatriangolare. La coda mantiene la sua posizione avanzata rispetto alcaso 1 fin quasi all’istante finale. Il fronte presenta una maggioreaccelerazione iniziale, per la maggiore spinta legata ai gradienti del-lo spessore della massa, ma la posizione finale e avanzata di menodi 10 cm.
Nel caso 9 invece si mantiene il rapporto Hs/Ls pari a 0.84mentre la disposizione iniziale dell’ammasso e rettangolare. Comesi evidenzia in Figura 2.15, e molto differente l’evoluzione temporaledella forma dell’ammasso. Soprattutto si nota come la coda tendaa retrocedere nei primi istanti del moto. In questo caso, infatti,si presentano elevati gradienti del tirante anche sulla coda dellamassa granulare. Tuttavia la posizione delle estremita del depositocoincide con quella del caso di forma triangolare.
Il dettaglio con cui viene definita la geometria del fondo in-fluisce pesantemente sul moto della massa granulare. Nel caso 10si e ridotto il numero di punti che definiscono il fondo. Quandole celle della griglia di calcolo raggiungono il tratto di raccordo,
48
sperimentano una curvatura minore. Risulta percio inferiore an-che la pressione normale al fondo e quindi la resistenza per attrito.Sia il fronte che la coda presentano percio una posizione finale piuavanzata.
49
50

Capitolo 3
Il modello bidimensionalein coordinate globali
3.1 Il modello matematico bidimensio-
nale
Per ottenere le equazioni di conservazione della quantita di motodel modello bidimensionale, mediate sulla verticale, si segue unaprocedura simile a quella vista per il modello monodimensionale.
Viene definito un sistema di riferimento cartesiano ortogonale,con asse z verticale e assi x e y sul piano orizzontale. Si cercano delleleggi funzionali che descrivano la dipendenza delle componenti deltensore degli sforzi dalle coordinate spaziali del riferimento assoluto.Vengono scritte le equazioni del modello tridimensionale rispettoal riferimento assoluto, sostituendovi le espressioni ricavate per lecomponenti del tensore degli sforzi. Si esegue l’operazione di mediasulla verticale.
La simbologia utilizzata in quanto segue, relativamente all’ana-lisi tensoriale, e derivata dal testo “A Brief on Tensor Analysis” diJ.G.Simmonds [24].
51

3.1.1 Il tensore degli sforzi
Il tensore degli sforzi viene inizialmente ricavato rispetto ad unsistema di riferimento curvilineo, legato alla superficie del fondo.Una volta definite le basi “roof” e “cellar” del riferimento curvilineo,e possibile scrivere l’equazione del moto in direzione normale alfondo. Applicando l’ipotesi di acque basse (hp. 5, pag. 10) si ottienela distribuzione idrostatica delle pressioni. Ricorrendo quindi aduna reologia di tipo coulombiano (hp. 7, pag. 12) e supponendo chesi abbia scivolamento al fondo (hp. 6, pag. 12), si ricavano tutte lecomponenti del tensore degli sforzi rispetto al riferimento curvilineo.Per passare alle componenti nel riferimento assoluto si utilizzano leformule di trasformazione fornite dall’analisi tensoriale.
La distribuzione idrostatica delle pressioni
La distribuzione idrostatica delle pressioni in direzione normale alfondo viene ottenuta scrivendo le equazioni del moto in un sistemadi riferimento curvilineo, non ortonormale. Viene definito un asseζ normale al fondo e si suppone che le linee coordinate ξ ed η sisviluppino lungo la superficie del pendio ortogonalmente all’asse ye all’asse x del riferimento assoluto (vedi Figura B.1).
Le equazioni vengono sviluppate sfruttando gli strumenti messia disposizione dall’analisi tensoriale.
L’equazione del moto scritta in direzione ζ si semplifica conside-revolmente nell’ipotesi di “acque basse” (hp. 5, pag. 10). Essa vieneadimensionalizzata introducendo dei valori scala per le grandezzecaratteristiche del fenomeno: Ls per le dimesioni dell’ammasso nel-le direzioni x, y, ξ, e η, Hs per lo spessore del manto nevoso, Ps
per i termini di pressione, Ts per i tempi, Us per le velocita lungoil pendio e Uζs per la velocita in direzione normale.
Si suppone che il massimo dislivello sul quale si sviluppa lamassa di neve sia confrontabile con Ls, (la cosa e ragionevole pen-sando alle pendenze tipiche del fenomeno studiato). Si definisce ilrapporto:
ε =Hs
Ls
52

e si suppone che sia piccolo.Si assume che sia:
Ts ≈Ls
Us≈ Hs
Uζs
e che quindi Uζs ≈ ε Us.Infine si fa l’ipotesi che i termini di pressione e le forze inerziali
abbiano lo stesso peso della gravita:
Ps ≈ ρ g Hs e
U2s ≈ g Ls
Se si integra, imponendo che il profilo di velocita sia uniformein direzione normale al fondo (hp. 6, pag. 12), si ottiene che il valoredella pressione al fondo e:
(
pζζ)
b= − ρ h
√
1 + b2,x + b2
,y
(
g +b,xx
1 + b2,x
(
U (ξ))2
+
+b,xy
√
1 + b2,x
√
1 + b2,y
U (ξ) U (η) +
+b,yy
1 + b2,y
(
U (η))2
)
,
(3.1)
dove U (ξ) e U (η) rappresentano i valori medi delle componenti fisichedel vettore velocita lungo la normale. Il profilo delle pressioni lungola normale risulta lineare:
pζζ =(
pζζ)
b
(
1 − ζ
h
)
. (3.2)
Per i passaggi completi si rimanda a Appendice B.1.2.y
La reologia
Per definire le altre componenti del tensore degli sforzi, viene fattal’ipotesi che vi sia scivolamento rispetto al fondo e che lo sforzo
53

tangenziale con cui il terreno frena la neve sia descrivibile con unlegge frizionale (hp. 6, pag. 12). Si suppone inoltre che la neve sitrovi in condizioni di rottura. Il criterio di rottura utilizzato e quellodi Mohr-Coulomb (hp. 7, pag. 12). Trattando con le equazioni nelriferimento tridimensionale, si sono rese necessarie delle ulterioriipotesi, per riuscire a ricostruire il tensore degli sforzi al fondo.Infatti con le tre equazioni di equilibrio e l’equazione che fornisceil criterio di rottura non si riescono a calcolare le sei componentiincognite del tensore degli sforzi. Il problema e indeterminato edoccorrono due ulteriori condizioni.
Si assume che all’interfaccia tra neve e terreno, il cerchio diMohr tangente all’inviluppo di rottura sia quello che descrive lostato di sforzo nel piano contenente la normale al fondo ed il vettorevelocita. In quest’ottica risulta opportuno definire il tensore deglisforzi rispetto ad un nuovo riferimento. Si e scelto un sistema diriferimento cartesiano, ortogonale, di coordinate Ξ, H e ζ. Quandola neve e in movimento l’asse ζ e preso normale alla superficie delpendio, Ξ diretto come il vettore velocita al fondo, H ortogonaleai precedenti e quindi, in generale, non tangente al fondo (vediFigura 3.1).
Nell’ipotesi di scivolamento (hp. 6, pag. 12), se si definisce δl’angolo d’attrito lungo la superficie di slittamento, risulta:
pζΞ = − tan δ pζζ ,
dove il segno − e conseguenza del fatto di considerare positivi glisforzi normali di trazione sulla neve (si veda Figura 3.2).
Supponendo che si abbia rottura all’interno dell’ammasso, pΞΞ
risulta pari a:
pΞΞ = ka/p pζζ , (3.3)
dove
kp
ka
}
=2
cos2 φ
[
1 ±√
1 − cos2 φ
cos2 δ
]
− 1, per∂uξ
∂ξ< 0> 0
. (3.4)
I dettagli del calcolo vengono sviluppati in Appendice B.1.3.
54

Figura 3.1: Sistema di riferimento locale legato al vettore velocita.
Nel riferimento scelto, il cerchio di Mohr tangente all’inviluppodi rottura e quello che descrive lo stato di sforzo nel piano Ξζ.Ne consegue che la direzione H e una direzione principale. Comeconseguenza si ha che:
pΞH = pHΞ = 0 e pζH = pHζ = 0
Inoltre pHH sara certamente compresa tra la tensione principalemassima σ1 e la tensione principale minima σ3 del cerchio tangenteall’inviluppo di rottura. La seconda ipotesi e quella che consentedi definire la tensione principale intermedia. Nella teoria di Hutteret al. [6], nel caso in cui ∂UH
∂Hsia negativo, si assume σ2 pari alla
tensione principale massima σ1. Quando ∂UH
∂He positivo si pone
σ2 = σ3. In Appendice B.1.3 vengono riportati i calcoli:
55

Figura 3.2: Convenzione dei segni per il tensore degli sforzi.
in condizioni di spinta attiva, cioe per ∂UΞ
∂Ξ> 0, si ha:
k2 =k1
k3
}
=1 ± sin φ
cos2 φ
(
1 −√
1 − cos2 φ
cos2 δ
)
per∂UH
∂H< 0> 0
.
(3.5)
in condizioni di spinta passiva, cioe per ∂UΞ
∂Ξ< 0, si ha:
k2 =k1
k3
}
=1 ± sin φ
cos2 φ
(
1 +
√
1 − cos2 φ
cos2 δ
)
per∂UH
∂H< 0> 0
.
(3.6)
Ci possono essere anche altre modalita di descrizione della ten-sione principale intermedia. Per esempio si puo assumere k2 pari alcoefficiente di spinta attiva o passiva in base al gradiente trasversa-le della componente trasversale del vettore velocita. Oppure si puoporre k2 = k3 o ancora σ2 pari alla tensione corrispondente al cen-tro del cerchio di Mohr. In §3.3.2 le simulazioni numeriche eseguite
56

con queste diverse opzioni vengono confrontate con i risultati delleprove sperimentali.
Ricapitolando, il tensore degli sforzi al fondo, nel riferimento diassi Ξ, H e ζ, puo essere scritto come:
P =
pΞΞ pHΞ pζΞ
pΞH pHH pζH
pΞζ pHζ pζζ
=
=
ka/p 0 − tan δ
0 k2 0
− tan δ 0 1
pζζ .
(3.7)
La trasformazione del riferimento
Il passo successivo e quello di passare dal riferimento locale di coor-dinate (Ξ, H, ζ) al riferimento assoluto di coordinate (x, y, z). Perfarlo si ricorre agli strumenti offerti dall’analisi tensoriale [24].
Il tensore E che descrive la trasformazione del riferimento puoessere ricostruito note le componenti dei versori che definiscono laterna di coordinate (Ξ, H, ζ) rispetto al riferimento assoluto.
Il versore eζ e normale al fondo ed e quindi dato da:
eζ =∇Φb
|∇Φb|
Per definire i versori della base relativi alle direzioni Ξ e Hvengono utilizzate due diverse espressioni a seconda che la massasia ferma o in movimento.
- Nel caso in cui l’ammasso sia in moto il versore che definisce ladirezione Ξ viene preso parallelo alla direzione della velocita
57

al fondo:
eΞ =u
|u|
∣
∣
∣
∣
z=b(x,y)
.
Sulla base dell’ipotesi di plug-flow (hp. 6, pag. 12) si puolavorare con la velocita media, anziche con la velocita al fondo.Il versore eH sara ortogonale ai due precedenti:
eH = −eΞ ∧ eζ .
- Nel caso in cui l’ammasso nevoso sia fermo, come direzione Ξsi assume la direzione parallela al fondo, lungo la quale si pre-sume si sviluppi la resistenza offerta dal terreno al movimentodella neve. Si suppone che tale direzione sia quella definitadalla proiezione sul pendio della linea di massima pendenzadella superficie della massa nevosa. Questa puo essere ottenu-ta proiettando sul fondo la componente orizzontale del vettore∇f .
Il versore normale al fondo e sempre dato da (B.46) ed eH
sara normale ai precedenti.
Nella realta la neve si comporta come un materiale granulare,che puo avere delle tensioni interne iniziali, le quali, nella fasedi avvio, possono deviare il moto dalla direzione Ξ appenadefinita. Lo stato tensionale iniziale e pero difficile da defi-nire. Puo essere generato da diversi fattori, come movimentidi scivolamento e reptazione o precedenti movimenti valan-ghivi, conformazione del terreno e conseguenti meccanismi diconcentrazione degli sforzi, azione del vento, configurazionestratigrafica. La semplificazione fatta sembra quindi giustifi-cabile. Si conta inoltre sul fatto che tale ambiguita inizialenella determinazione di eΞ possa influenzare solo le primissi-me fasi del movimento, senza modificare significativamente ilcomportamento globale della valanga.
58

3.1.2 Le equazioni del moto nel riferimento tri-
dimensionale
Vengono ora sviluppate le equazioni che descrivono le condizioni alcontorno cinematiche al fondo e sulla superficie libera e le equazionidel moto, nel riferimento tridimensionale cartesiano ortogonale x,y, z. Nel paragrafo precedente §3.1.1, si e ricavato il tensore deglisforzi in corrispondenza del fondo. Attraverso opportune ipotesisi possono ricavare le espressioni che descrivono la variazione dellecomponenti di tale tensore all’interno dell’ammasso. Tali espressio-ni vengono sostituite nelle equazioni di conservazione della quantitadi moto.
Vettorialmente l’equazione di continuita e data da:
ρ,t + ∇ · (ρu) = ρ,t + ∇ρ · u + ρ∇ · u = 0 . (3.8)
L’ipotesi di incomprimibilita del mezzo granulare afferma che ladensita ρ non varia nello spazio e non varia nel tempo t. Ri-mane come funzione incognita solo la velocita u. L’equazione sisemplifica:
∇ · u = 0 . (3.9)
L’equazione di conservazione della quantita di moto, in formavettoriale, e data da:
ρdu
dt= ρ (u,t + u · ∇u) = f + ∇ · P , (3.10)
essendo f la forza esterna di volume, P il tensore degli sforzi.
Si vogliono sviluppare tali equazioni nel riferimento assoluto,cartesiano, ortogonale, con asse z verticale e assi x e y giacenti sulpiano orizzontale.
I vettori della base di tale riferimento sono dei versori, reci-procamente ortogonali. Cio implica che non vi sia distinzione trabase “roof” e base “cellar” e tra componenti “roof” e componen-ti “cellar”: si ricorrera alla notazione “cellar”. Inoltre le derivatecovarianti coincidono con le derivate parziali [24].
59

Scritte rispetto al riferimento globale, le equazioni differenzialidel fenomeno si presentano nella forma:
ux,x + uy,y + uz,z = 0 ,(3.11)
ux,t +ux ux,x + uy ux,y + uz ux,z =
=fx
ρ+
1
ρ(pxx,x + pyx,y + pzx,z) , (3.12)
uy,t +ux uy,x + uy uy,y + uz uy,z =
=fy
ρ+
1
ρ(pxy,x + pyy,y + pzy,z) , (3.13)
uz,t +ux uz,x + uy uz,y + uz uz,z =
=fz
ρ+
1
ρ(pxz,x + pyz,x + pzz,z) . (3.14)
La forza di volume esterna e rappresentata dalla forza di gravita:
f = (0, 0,−ρ g) ,
dove g l’accelerazione di gravita.
Se Φb (x, y, z) = z − b (x, y) = 0 e l’equazione implicita dellasuperficie del fondo nel riferimento scelto, la condizione cinematicaal fondo richiede che sia:
∂Φb
∂xux|z=b +
∂Φb
∂yuy|z=b +
∂Φb
∂zuz|z=b = 0 ⇒
⇒ −b,x ux|z=b − b,y uy|z=b + uz|z=b = 0 ,
(3.15)
cioe la componente normale al fondo del vettore velocita deve esserenulla.
Analogalmente, sia Φf (x, y, z, t) = z−f (x, y, t) = 0 l’equazioneimplicita della superficie libera, la condizione cinematica richiedeche ogni particella della superficie libera ne continui a far parte,
60

cioe:
dΦf
dt= 0 ⇒
⇒ ∂Φf
∂t+
∂Φf
∂xux|z=f +
∂Φf
∂yuy|z=f +
+∂Φf
∂zuz|z=f = 0 ⇒
⇒ f,t − f,x ux|z=f − f,y uy|z=f + uz|z=f = 0 ⇒⇒ H,t − f,x ux|z=f − f,y uy|z=f + uz|z=f = 0 ,
(3.16)
visto che f (x, y, z, t) = H (x, y, z, t) + b (x, y, z), e quindi f,t =H,t. Per poter integrare le equazioni del moto in direzione verticalee necessario trovare delle espressioni che descrivano l’andamentodelle componenti del tensore degli sforzi P lungo z. Il valore dellacomponente del tensore degli sforzi pζζ al fondo e dato da:
(
pζζ)
b= − ρ H cos zζ
1 + b2,x + b2
,y
(
g +1
1 + b2,x + b2
,y
·
·(
b,xx U2x0 + b,xy Ux0 Uy0 + b,yy U2
y0
)
)
,
(3.17)
dove:
Ux0 = Ux
(
1 + b2,y
)
− Uy b,x b,y + Uz b,x ,
Uy0 = −Ux b,x b,y + Uy
(
1 + b2,x
)
+ Uz b,y .(3.18)
Tale equazione viene ottenuta dall’equazione (B.36), sapendo chel’altezza verticale dell’ammasso granulare H e pari a:
H ∼= h
cos zζ= h
√
1 + b2,x + b2
,y , (3.19)
dove zζ e l’angolo formato dall’asse ζ con l’asse z (vedi Figura 3.3).L’equazione (3.19) non e esatta, poiche la superficie libera non
e parallela al fondo. L’approssimazione e pero lecita se si puo sup-
61

Figura 3.3: Altezza verticale e spessore normale della neve nel dominiotridimensionale
porre che lo spessore h del manto sia costante su aree di dimensio-ni confrontabili con la proiezione dell’altezza verticale H lungo ilpendio.
L’equazione (3.7) fornisce tutte le componenti del tensore deglisforzi al fondo nel riferimento di assi Ξ, H e ζ in funzione dellacomponente pζζ :
P∣
∣
∣
z=b= K pζζ |z=b =
ka/p 0 − tan δ
0 k2 0
− tan δ 0 1
pζζ |z=b ,
62

dove con K si e indicata la matrice dei coefficienti di spinta. Leespressioni per calcolare ka/p e k2 sono date in (3.4), (3.5) e (3.6).
In §3.1.1 a pag. 57 e seguenti, sono state ricavate le relazio-ni lineari che reggono la trasformazione delle componenti del ten-sore degli sforzi dal sistema di coordinate (Ξ, H, ζ) al sistema dicoordinate (x, y, z):
P|z=b = E P∣
∣
∣
z=bET
= EKET pζζ |z=b
= K pζζ|z=b ,
(3.20)
dove K e la matrice dei coefficienti di spinta nel riferimento assoluto.In §3.1.1 a pag. 53 e seguenti, e stato anche dimostrato che
la componente pζζ , nell’ipotesi di “acque basse” (hp. 5, pag. 10),risulta distribuita linearmente lungo la normale al fondo.
Ora si fa l’ipotesi che pζζ sia distribuita linearmente non lungola normale al fondo, ma lungo la verticale. Come si puo dedurredall’equazione (3.17) tale ipotesi e corretta fintantoche la curvatura,la pendenza del fondo, lo spessore del manto nevoso ed il campodi velocita possono essere ritenuti costanti su aree di dimensioniconfrontabili con la proiezione sul fondo dell’altezza verticale delmanto nel punto considerato. Naturalmente all’aumentare dellapendenza l’estensione di tali aree cresce e l’approssimazione divienesempre piu grossolana.
Va inoltre ricordato che la distribuzione idrostatica delle pres-sioni e stata ricavata nell’ipotesi di acque basse (hp. 5, pag. 10):vale cioe finche la variabilita delle grandezze che caratterizzano ilcampo di moto si concentra lungo la direzione normale al fondo,mentre e limitata nelle direzioni trasversali.
Si aggiunge inoltre l’ipotesi che non solo la componente pζζ , matutte le componenti del tensore degli sforzi sono distribuite linear-mente lungo la verticale. Si assume cioe che i fattori di proporzio-nalita che legano le componenti del tensore degli sforzi al fondo apζζ si mantengano costanti lungo z. Sull’intera altezza del mantonevoso lo stato di sforzo rimane tangente all’inviluppo di rottura,nelle medesime condizioni che si realizzano sul fondo.
63

Si puo concludere quindi che il tensore degli sforzi all’internodel materiale granulare vale:
P (x, y, z, t) = ρ A (x, y, t) K (x, y, t) (f (x, y, t) − z) , (3.21)
dove si e definito il coefficiente A come:
A (x, y, t) = − 1
1 + b2,x + b2
,y
(
g +1
1 + b2,x + b2
,y
·
·(
b,xx U2x0 + b,xy Ux0 Uy0 + b,yy U2
y0
)
)
,
(3.22)
dove Ux0 e Uy0 sono date da (3.18).
64
3.1.3 Le equazioni del moto mediate sulla ver-
ticale
Si definiscono le componenti del vettore velocita mediate sulla ver-ticale:
Ux =1
H
∫ f
b
ux dz , Uy =1
H
∫ f
b
uy dz ,
Uz =1
H
∫ f
b
uz dz .
(3.23)
L’equazione di continuita (3.11) viene integrata lungo z richia-mando le condizioni al contorno di tipo cinematico in superficie(3.16) e al fondo (3.15). Si ottiene:
H,t + (H Ux),x + (H Uy),y = 0 . (3.24)
L’operazione di media sulle equazioni di conservazione dellaquantita di moto nelle direzioni x e y viene eseguita nelle ipote-si di dipendenza lineare del tensore degli sforzi da z e di profilouniforme delle velocita lungo la verticale, ed imponendo le condi-zioni al contorno di tipo cinematico in superficie libera ed al fondo.In realta l’ipotesi di plug-flow (hp. 6, pag. 12) vale in direzionenormale al fondo. Se la pendenza non e elevata ed il campo di mo-to non presenta una forte variabilita spaziale, si puo assumere cheanche lungo la verticale il vettore velocita sia costante.
65

Si perviene cosı alle espressioni:
dUx
dt= Ux,t + Ux Ux,x + Uy Ux,y =
= ((kxx,x + kyx,y) A + kxx A,x + kyx A,y)H
2+
+ (kxx H,x + kyx H,y) A +
+ (kxx b,x + kyx b,y − kzx) A , (3.25)
dUy
dt= Uy,t + Ux Uy,x + Uy Uy,y =
= ((kxy,x + kyy,y) A + kxy A,x + kyy A,y)H
2+
+ (kxy H,x + kyy H,y) A +
+ (kxy b,x + kyy b,y − kzy) A , (3.26)
dove le derivate parziali rispetto alle variabili spaziali x e y dellafunzione f sono state scomposte in termini di H e di b.
Dalla condizione di parallelismo della velocita media al fondosi ricava l’espressione per il calcolo della componente verticale Uz
del vettore velocita:
Uz = b,x Ux + b,y Uy . (3.27)
In Appendice B.1.5 si riportano i calcoli particolareggiati.
66

3.2 Il modello numerico bidimensionale
3.2.1 Lo schema numerico lagrangiano
Lo schema numerico utilizzato per implementare il modello mate-matico bidimensionale segue le stesse linee sviluppate per il modellomonodimensionale.
In particolare si e utilizzato uno schema di discretizzazione ditipo lagrangiano. Il corpo della valanga viene suddiviso in celledi forma prismatica, a base triangolare e con asse verticale (Figu-ra 3.4).
Figura 3.4: I triangoli di base della mesh di calcolo del modello numericobidimensionale.
Per ogni cella i (con i = 1, 2, . . . , nt, dove nt e il numero dicelle) viene definito il volume ∀i, sulla base del valore iniziale del-l’altezza media del manto all’interno della cella stessa. Tale volume
67

si conserva, mentre i vertici della cella si muovono (Figura 3.4),modificando la forma e l’area Ai del triangolo di base. La posizionedel generico vertice j (con j = 1, 2, . . . , nv, dove nv e il numero divertici della mesh), viene aggiornata all’istante tn, avendo calcolato
la velocita dello stesso all’istante tn− 1
2 .Siano (xj, yj) le coordinate del vertice j, si ha che:
xnj = xn−1
j + Uxn− 1
2
j
(
tn − tn−1)
,
ynj = yn−1
j + Uyn− 1
2
j
(
tn − tn−1)
,
(3.28)
dove(
Uxn− 1
2
j , Uyn− 1
2
j
)
e il vettore velocita, mediato sulla verticale,
calcolato all’istante tn−1
2 come media dei valori ricavati all’istantetn e tn−1:
Uxn− 1
2
j =Ux
n−1j + Ux
nj
2,
Uyn− 1
2
j =Uy
n−1j + Uy
nj
2.
(3.29)
Nota la posizione dei vertici all’istante tn, e possibile calcolarel’area di base Ai della cella i, con la formula:
Ani =
1
2
( (
x(1)i y
(2)i − x
(2)i y
(1)i
)
+(
x(2)i y
(3)i − x
(3)i y
(2)i
)
+(
x(3)i y
(1)i − x
(1)i y
(3)i
))∣
∣
∣
t=tn,
(3.30)
dove(
x(j)i , y
(j)i
)
rappresentano le coordinate del j-esimo vertice del-
la cella i con j = 1, 2, 3. Poiche il volume dell’elemento di nevedeve conservarsi, si puo ricavare il valore dell’altezza verticale mediaHi del prisma triangolare, con l’espressione:
Hni =
∀i
Ani
. (3.31)
Note le componenti Ux e Uy del vettore velocita media all’i-stante tn, la componente verticale nel generico nodo j e data da
68

(Eq. (3.27)):
Uznj = b,xj Ux
nj + b,yj Uy
nj . (3.32)
Per il calcolo delle componenti orizzontali del vettore velocitamedia, si utilizza lo schema di Collatz, che e gia stato descritto nelcapitolo relativo al modello numerico monodimensionale in §2.2.Ponendosi nell’ottica lagrangiana si ha che:
Ux = Ux (x(t), t) = Ux(t) ,
Uy = Uy (x(t), t) = Uy(t) ,
per cui le equazioni del moto nella direzione x (3.25) e y (3.26)possono essere scritte nella forma di due equazioni ordinarie delprimo ordine:
dUx
dt= fx(t, Ux, Uy) ,
dUy
dt= fy(t, Ux, Uy) .
Questo sistema di equazioni puo essere risolto alle differenzefinite, utilizzando lo schema di Collatz:
Uxn+1j = Ux
nj + ∆t fx
(
tn+ 1
2 , Uxn+ 1
2
j , Uyn+ 1
2
j
)
,
Uyn+1j = Uy
nj + ∆t fy
(
tn+ 1
2 , Ux
n+ 1
2
j , Uy
n+ 1
2
j
)
, dove
Uxn+ 1
2
j = Uxnj +
∆t
2fx
(
tn, Uxnj , Uy
nj
)
,
Uyn+ 1
2
j = Uynj +
∆t
2fy
(
tn, Uxnj , Uy
nj
)
, essendo
∆t =(
tn+1 − tn)
.
(3.33)
fx e fy sono fornite dai secondi membri delle equazioni (3.25) e
69

(3.26):
fx = ((kxx,x + kyx,y) A + kxx A,x + kyx A,y)H
2+
+ (kxx H,x + kyx H,y) A +
+ (kxx b,x + kyx b,y − kzx) A ,
fy = ((kxy,x + kyy,y) A + kxy A,x + kyy A,y)H
2+
+ (kxy H,x + kyy H,y) A +
+ (kxy b,x + kyy b,y − kzy) A .
(3.35)
Per il calcolo dei vari termini delle funzioni fx e fy si rimandaa Appendice B.2.1.
70

3.2.2 Condizioni di avvio e di arresto
Le condizioni in cui si ha l’avvio o l’arresto del materiale vengonostudiate quando la massa e considerata ferma, cioe quando
|Uxy| < EPSI ,
dove, come viene precisato in Appendice B.2.1 a pag. 209, Uxy
e la componente orizzontale del vettore velocita, mentre EPSI euna costante positiva, posta pari a 1 · 10−3, attraverso la quale siidentifica la velocita nulla. L’uso del parametro EPSI si rendenecessario a causa della precisione finita della macchina che nonpermette alla velocita di assumere il valore nullo.
Quando il materiale e in condizioni stazionarie, il versore eΞ ,dato dall’equazione (B.49) definisce la direzione in cui eventualmen-te potrebbe avviarsi la massa, come visto in §3.1.1.
Sia f (Ux, Uy, t) il vettore che definisce la variazione di velocitaorizzontale nell’unita di tempo, di componenti (fx, fy), definite dalleequazioni (3.34) e (3.35). Se la sua proiezione nella direzione Ξ eminore di 0, il nodo che si sta analizzando e destinato a rimanerefermo.
Viceversa iniziera a muoversi quando la proiezione di f lungo Ξrisultera positiva.
Infatti se f · eΞ < 0, la forza resistente massima che si puosviluppare al fondo per attrito e maggiore della forza motrice. Intali condizioni, quindi, nello schema numerico, si pone f = (0, 0).
71

3.2.3 Le condizioni di stabilita
La filosofia per l’analisi della stabilita e la stessa seguita nel modellonumerico monodimensionale (§2.2.1).
Si vuole impedire che all’interno di un passo temporale la meshpossa degenerare, causa l’inversione di orientamento dei nodi deitriangoli di base. Durante un intervallo temporale ∆t, in nessunacella deve poter accadere che un vertice passi oltre il lato opposto.
Come si e fatto nel caso monodimensionale (§2.2.1), si aggiungepoi una condizione legata alla celerita di propagazione delle ondegravitazionali di piccola ampiezza. Si vuole che lo schema numericoriesca a seguire l’evoluzione fisica del fenomeno. Questo si traducenella condizione che nell’intervallo ∆t le informazioni trasferite dallecaratteristiche non raggiungano triangoli non adiacenti al vertice dicalcolo.
Un problema, che si e presentato nello schema numerico mo-nodimensionale (§A.3.2), e stato quello di far passare i nodi per lavelocita nulla, quando all’interno di un passo temporale si presentaun’inversione della direzione della velocita. Questo accorgimento enecessario onde evitare, durante le ultime fasi del moto della valan-ga, quelle continue oscillazioni di segno della velocita che ritardanol’arresto definitivo della massa, modificando la configurazione finaledel deposito. Anche nello schema bidimensionale si sono evidenziateinstabilita indotte da brusche inversioni di direzione della velocita.In tal caso pero non ha senso imporre il passaggio per la velocitanulla dato che le variazioni di velocita non avranno in generale lastessa direzione del vettore di velocita.
In Appendice B.2.2 viene descritto come sono state tradotte nelcaso bidimensionale le tre condizioni sul passo temporale ∆t.
Nonostante i vincoli imposti sull’intervallo temporale di calcolo∆t, lo schema numerico ha mostrato il permanere di condizioni diinstabilita. Si e reso necessario l’inserimento di un termine diffusivonelle equazioni del moto relative alle direzioni x e y. Si riporta unadescrizione particolareggiata di tale termine in Appendice B.2.3.
72
3.2.4 Il codice di calcolo
Il programma che implementa questo schema numerico e stato rea-lizzato in C + +.
Si e fatto uso della libreria P2MESH [30] [31] [32] [33]: unaraccolta di “C++ class templates” che facilita l’utilizzo di meshbidimensionali, non strutturate, a maglie triangolari e quadrilatere.
La mesh iniziale e stata definita con l’ausilio del programmatriangle [37], che genera mesh bidimensionali, a maglie triango-lari, a partire da un set di nodi predefiniti, utilizzando l’algoritmodi Delaunay. triangle consente inoltre di realizzare delle trian-golazioni di Delaunay vincolate, fissando dei segmenti che devonocomparire nella mesh finale. In questo modo e possibile generaremesh a partire da contorni concavi o mesh con buchi. Tramite l’al-goritmo di rifinitura di Ruppert triangle e in grado di generaremesh con dei vincoli sugli angoli e sulle aree dei triangoli.
73

3.3 Verifiche sperimentali del modello
bidimensionale
La verifica del modello numerico bidimensionale, e stata eseguitaconfrontando tra loro i dati ottenuti da prove sperimentali di slumpsu piano orizzontale ed inclinato con i risultati delle simulazioninumeriche del medesimo fenomeno.
3.3.1 Prove di laboratorio su piano orizzontale
Apparato sperimentale
L’apparato sperimentale (si vedano Figura 1 e Figura 2), constadi un piano d’appoggio in forex, fissato ad un telaio a penden-za regolabile; due coni di diverse caratteristiche geometriche; unapparato per il sollevamento dei coni; il materiale granulare, costi-tuito da zeoliti sintetiche; una struttura per la misura delle altezzedell’ammasso lungo sezioni longitudinali e trasversali al piano diprova.
La superficie sulla quale sono state eseguite le prove di slump supiano orizzontale e costituita da un piano in forex (PVC espanso),largo 150 cm e lungo 159 cm. Il piano in forex e montato su untelaio di 300 cm di lunghezza, che puo essere fatto ruotare attornoad una cerniera fissata ad un’estremita, per mezzo di un pistoneoleodinamico.
I lati corti del piano in forex sono chiusi da due sponde in legno.Sui lati lunghi sono montate due sponde trasparenti in perspex,alte 9.5 cm, alle quali sono state applicate delle scale millimetrateadesive.
L’acquisizione dei dati di altezza dell’ammasso viene eseguitacon un idrometro a punta, provvisto di nonio, che consente di ot-tenere misure precise al decimo di millimetro (si veda Figura 3.7).L’idrometro puo scorrere lungo un’asta millimetrata, disposta tra-sversalmente al piano e appoggiata, alle sue estremita, sulle spondein perspex. Spostando le estremita dell’asta lungo le sponde inperspex vengono individuate le varie sezioni di misura.
Per il contenimento del materiale, si sono utilizzate due diverse
74

Figura 3.5: Visione d’insieme del piano d’appoggio e dell’apparato disollevamento del cono.
forme tronco coniche, a base circolare. I due coni sono stati ottenutida due lamiere in acciaio dello spessore di 3 mm, opportunamentecalandrate e saldate. Entrambi i coni sono alti 20 cm e presenta-no un’apertura superiore di 10 cm di diametro, che ne consente ilriempimento con il materiale granulare. Nel cono piu piccolo la baseinferiore ha un diametro pari a 43.6 cm, a cui corrisponde un’incli-nazione della superficie laterale rispetto alla base di 50o. Il conopiu grande ha un diametro inferiore di 57.7 cm ed un’inclinazionedella superficie laterale rispetto alla base di 40o.
Il sollevamento rapido del cono in cui viene collocato il ma-teriale granulare e attuato tramite un pistone ad aria compressa.Questo e montato su di un supporto, svincolato dalla struttura chesostiene il piano d’appoggio, per evitare la trasmissione delle vi-brazioni prodotte dal sollevamento impulsivo del cono. L’altezza
75

Figura 3.6: Visione d’insieme dell’attrezzatura sperimentale dopol’esecuzione di una prova di slump.
dell’asta verticale di sostegno puo essere variata tra i 163 cm ed i258 cm. In testa all’ asta e incernierato un braccio inclinabile, checonsente di adattare l’apparato di sollevamento del cono alla pen-denza del piano di prova. In tale braccio e innestato un elemento aT scorrevole, che permette di variare la distanza dell’asse del conodalla sponda in legno piu vicina al supporto, tra 53 cm e 78 cm. Epossibile ottenere un’ulteriore regolazione in altezza dell’apparatodi sollevamento, facendo scorrere in testa all’elemento a T il comassu cui e montato il pistone ad aria compressa.
La pressione di alimentazione dell’aria compressa al pistone efissata tramite un regolatore di pressione. Agendo sulla leva dicomando di un partitore di flusso, e possibile ottenere l’abbassa-mento ed il sollevamento del cono (si veda Figura 3.8). Una valvoladi scarico rapida e stata applicata alla camera superiore del cilin-
76

Figura 3.7: La misura con idrometro del profilo della massa di zeolitidopo l’esecuzione della prova di slump.
dro del pistone ad aria compressa, per aumentare la velocita disollevamento del cono.
Il cono viene fissato al pistone ad aria compressa mediante untelaio, provvisto di quattro viti per la regolazione della giacituradel piano basale.
Materiali
Le prove di slump sono state eseguite con un materiale granulare,derivato da zeoliti sintetiche: delle resine anioniche, con particelledi forma pressocche sferica, granulometria compresa tra 0.1 mm e2 mm e diametro medio di 1 mm (si veda Figura 3.9). Il materialee lo stesso utilizzato da D’Accordi [35] nelle prove quasi–statichesvolte per la verifica del modello monodimensionale (si veda §2.3.1).Per l’angolo d’attrito interno statico φ si e pertanto utilizzato ilvalore di 28o stimato da D’Accordi.
La misura dell’angolo d’attrito al fondo δ tra le zeoliti e la base
77
Figura 3.8: Regolatore di pressione e partitore di flusso.
in forex e stata eseguita con la medesima scatola di taglio usatada D’Accordi [35] (si veda Figura 3.10). Questa e costituita dadue semi–scatole sovrapposte, di forma quadrata con lato del vanointerno pari a 24 cm, realizzate in perspex.
Per determinare l’angolo δ si utilizza solo la semi–scatola supe-riore, alta 5 cm. Essa viene appoggiata al piano di prova e riempitadi materiale granulare. Questo viene sottoposto ad uno sforzo nor-male, attraverso dei pesi innestati su di una piastra di carico. Allascatola viene quindi applicata una forza di taglio, mediante un si-stema di trasmissione, che comprende un cavo di collegamento, alquale sono applicati i pesi, ed una carrucola deviatrice del carico.
La prova viene eseguita incrementando la forza di taglio fino afar scorrere il provino sul fondo scabro.
Sono state fatte delle prove con 4 diversi carichi normali appli-cati.
Nel grafico in Figura 3.11, che presenta in ascissa i valori deglisforzi normali ed in ordinata quelli delle tensioni tangenziali, sonoriportati i dati sperimentali e la relativa retta di regressione lineare.
78
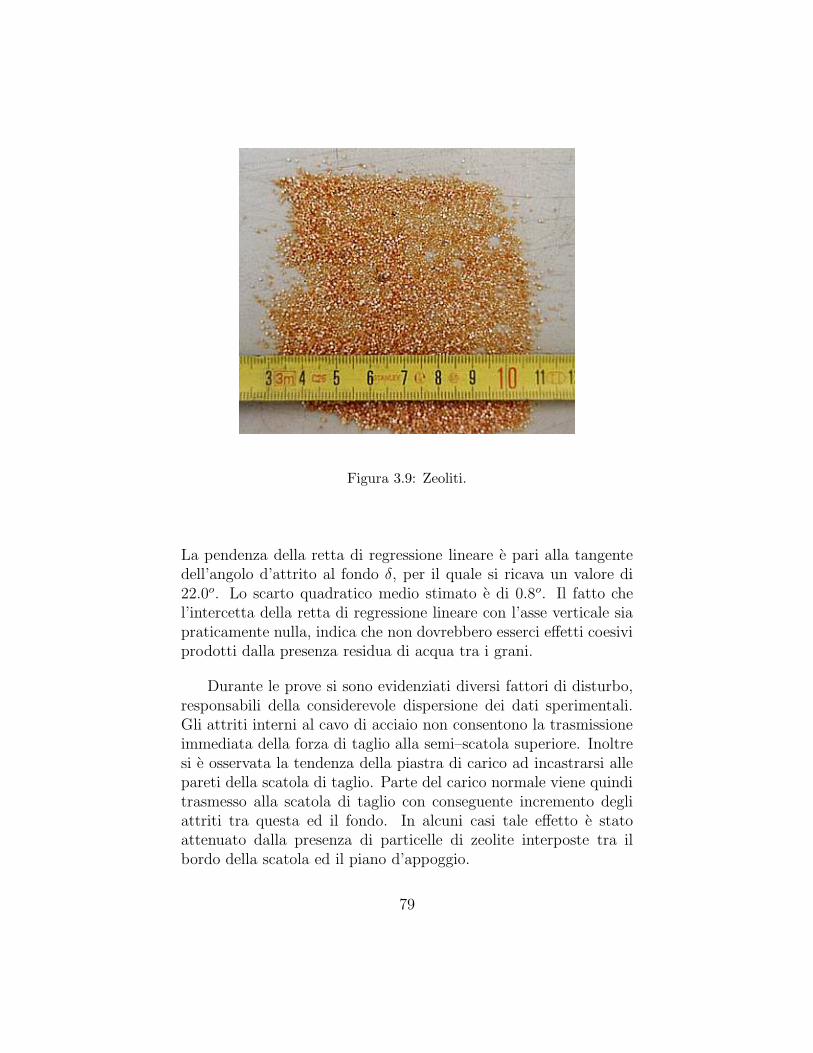
Figura 3.9: Zeoliti.
La pendenza della retta di regressione lineare e pari alla tangentedell’angolo d’attrito al fondo δ, per il quale si ricava un valore di22.0o. Lo scarto quadratico medio stimato e di 0.8o. Il fatto chel’intercetta della retta di regressione lineare con l’asse verticale siapraticamente nulla, indica che non dovrebbero esserci effetti coesiviprodotti dalla presenza residua di acqua tra i grani.
Durante le prove si sono evidenziati diversi fattori di disturbo,responsabili della considerevole dispersione dei dati sperimentali.Gli attriti interni al cavo di acciaio non consentono la trasmissioneimmediata della forza di taglio alla semi–scatola superiore. Inoltresi e osservata la tendenza della piastra di carico ad incastrarsi allepareti della scatola di taglio. Parte del carico normale viene quinditrasmesso alla scatola di taglio con conseguente incremento degliattriti tra questa ed il fondo. In alcuni casi tale effetto e statoattenuato dalla presenza di particelle di zeolite interposte tra ilbordo della scatola ed il piano d’appoggio.
79

Figura 3.10: La scatola di taglio utilizzata per la misura degli angolid’attrito. Nell’immagine sono presenti entrambe le semi-scatole.
0 1.25 2.5 3.75 50
0.5
1
1.5
2
Retta di regressione lineare
Dati sperimentali
0 1.25 2.5 3.75 50
0.5
1
1.5
2
PSfrag replacements
τ[k
Pa]
σ[kPa]
Figura 3.11: Risultati delle prove sperimentali per la misura dell’angolod’attrito al fondo δ. In ascissa σ, la tensione normale applicata, inordinata τ , la tensione tangenziale esercitata a rottura.
80

Modalita di esecuzione delle prove di slump.
Il cono utilizzato per la prova di slump viene montato sul telaioe quindi fissato al pistone. Agendo sulle viti di regolazione deltelaio si allinea la superficie di base del cono al piano d’appoggio.Si mette quindi in pressione il pistone, facendo aderire il bordoinferiore del cono al piano di prova. Dopo aver riempito il conodi zeoliti, agendo sulla leva di comando del partitore di flusso, siprovoca il sollevamento rapido del pistone.
Nelle prove eseguite, a causa della simmetria radiale dei depo-siti risultanti, ci si e limitati a rilevare i dati di altezza su 2 sezionidiametrali, una longitudinale e l’altra trasversale al piano di scivo-lamento. Sovrapponendo e mediando i profili radiali cosı ottenuti,si sono ricavati i grafici presentati in Figura 3.13 e Figura 3.12,nei quali sono riportati anche gli intervalli di confidenza stimati.I massimi scostamenti rispetto alla misura media sono inferiori ai2 mm e crescono allontanandosi dal centro dell’ammasso. Risul-ta piu consistente (3 cm) lo scarto quadratico medio del raggio deldeposito finale, a causa della difficolta di individuazione del bordodell’ammasso.
81

0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
Dati sperimentali
Stato iniziale
Scarti massimi
h/R
r/R
Figura 3.12: Risultati delle prove sperimentali di slump eseguite con ilcono avente superficie laterale inclinata di 50o rispetto al piano basale.Il raggio r e l’altezza h sono adimensionalizzati con il valore iniziale delraggio dell’ammasso R, pari a 28.85 cm.
82

0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
Dati sperimentali
Stato iniziale
Scarti massimi
h/R
r/R
Figura 3.13: Risultati delle prove sperimentali di slump eseguite con ilcono avente superficie laterale inclinata di 40o rispetto al piano basale.Il raggio r e l’altezza h sono adimensionalizzati con il valore iniziale delraggio dell’ammasso R, pari a 28.85 cm.
83

Confronto dei dati sperimentali con i risultati delle simu-lazioni numeriche eseguite con il modello bidimensionale
E possibile evidenziare alcuni aspetti del comportamento del mo-dello bidimensionale, confrontando i dati sperimentali con i risul-tati delle prove numeriche, eseguite con diversi valori dell’angolod’attrito al fondo δ e dell’angolo d’attrito interno φ.
Per le prove realizzate con il cono avente la superficie latera-le inclinata di 50o rispetto al piano basale, i valori dei parametriutilizzati nelle simulazioni numeriche sono riportati in Tabella 3.1.
Caso φ[o] δ[o] ∆t[s] Nt
1 28 22 0.0001 464
2 28 18 0.0001 464
3 24 22 0.0001 464
4 24 18 0.0001 464
Tabella 3.1: Valori dei parametri significativi utilizzati nelle diverse si-mulazioni numeriche delle prove di laboratorio, eseguite con il cono aven-te suparficie laterale inclinata di 50o rispetto al piano basale. φ e δ sonogli angoli d’attrito interno ed al fondo; ∆t e il passo temporale; Nt e ilnumero di triangoli in cui e suddivisa la griglia di calcolo.
La Figura 3.14 presenta una visione dall’alto del deposito fina-le, relativo alla terza prova di slump eseguita con il cono aventesuperficie laterale inclinata di 50o rispetto al piano di base. In Fi-gura 3.15 si riporta il risultato della simulazione numerica prodottacon i valori dei parametri relativi al caso 1 (φ = 28o e δ = 22o).
Valgono le stesse considerazioni fatte per il modello monodi-mensionale riguardo all’angolo d’attrito interno φ e all’angolo d’at-trito al fondo δ (si veda §2.3.1). In particolare l’effetto di φ non epiccolo quando ε = Hs/Ls e di ordine di grandezza unitario. Al cre-scere di φ cresce la capacita del materiale di autosorreggersi, comeemerge dal confronto tra Figura 3.16 e Figura 3.17.
Incrementando δ, invece, si riscontra un maggiore effetto di
84

spargimento del materiale sul piano, dovuto all’aumento del coeffi-ciente di spinta attiva.
I risultati numerici presentano un adattamento ottimale ai datisperimentali nel caso in cui φ sia posto pari a 28o e δ a 22o, cioecon i valori statici degli angoli di attrito.
85
Figura 3.14: Prova di slump con il cono avente superficie laterale incli-nata di 50o rispetto al piano di base. Visione dall’alto, con sovrappostauna griglia a maglie quadrate con lato di 10.9 cm (pari a meta raggioiniziale).
−2.5 0.0 2.5−2.5
0.0
2.5
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
−2.5×100 −1.0×100 5.0×10−1 2.0×100−2.5×100
−2.0×100
−1.5×100
−1.0×100
−5.0×10−1
1.3×10−16
5.0×10−1
1.0×100
1.5×100
2.0×100
2.5×100
PSfrag replacements
x/R
y/R
Figura 3.15: Risultato della simulazione numerica della prova di slumpcon il cono avente superficie laterale inclinata di 50o rispetto al piano dibase, per φ = 28o e δ = 22o. x e y sono adimensionalizzate con il valoredel raggio iniziale dell’ammasso, pari a 21.8 cm.
86

0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
Caso 1: δ = 22o
Caso 2: δ = 18o
Dati sperimentali
Stato iniziale
h/R
r/R
Figura 3.16: Risultati delle prove numeriche di slump eseguite con ilcono avente superficie laterale inclinata di 50o rispetto al piano basale,per φ pari a 28o. Il raggio r e l’altezza h sono adimensionalizzati con ilvalore iniziale del raggio dell’ammasso R, pari a 28.85 cm.
87

0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
h/R
r/R
Caso 3: δ = 22o
Caso 4: δ = 18o
Dati sperimentali
Stato iniziale
Figura 3.17: Risultati delle prove numeriche di slump eseguite con ilcono avente superficie laterale inclinata di 50o rispetto al piano basale,per φ pari a 24o. Il raggio r e l’altezza h sono adimensionalizzati con ilvalore iniziale del raggio dell’ammasso R, pari a 28.85 cm.
88

In Tabella 3.2 si trovano i valori dei parametri utilizzati nel-le diverse simulazioni numeriche per le prove eseguite con il conoavente la superficie laterale inclinata di 40o. In Figura 3.20 e Figu-ra 3.21 vengono evidenziati gli effetti dell’angolo d’attrito interno edell’angolo d’attrito al fondo sul comportamento del modello nume-rico. Valgono le stesse osservazioni presentate per il caso del conopiu piccolo.
Caso φ[o] δ[o] ∆t[s] Nt
1 28 22 0.0001 814
2 28 18 0.0001 814
3 24 22 0.0001 814
4 24 18 0.0001 814
Tabella 3.2: Valori dei parametri significativi utilizzati nelle diverse si-mulazioni numeriche delle prove di laboratorio, eseguite con il cono aven-te superficie laterale inclinata di 40o rispetto al piano basale. φ e δ sonogli angoli d’attrito interno ed al fondo; ∆t e il passo temporale; Nt e ilnumero di triangoli in cui e suddivisa la griglia di calcolo.
In Figura 3.18 e Figura 3.19 vengono messi a confronto il depo-sito sperimentale e quello numerico, ottenuto per φ = 24o e δ = 18o
(Caso 4).Per questa prova di slump i risultati numerici piu aderenti alla
situazione reale sono quelli relativi al caso 4, in cui φ e pari a 24o
mentre δ e pari a 18o. Tali valori sono di 4o inferiori rispetto aiparametri ricavati con le prove eseguite con la scatola di taglio ecorrisponderebbero pertanto, secondo Hungr e Morgenstern [10], aivalori dinamici.
89
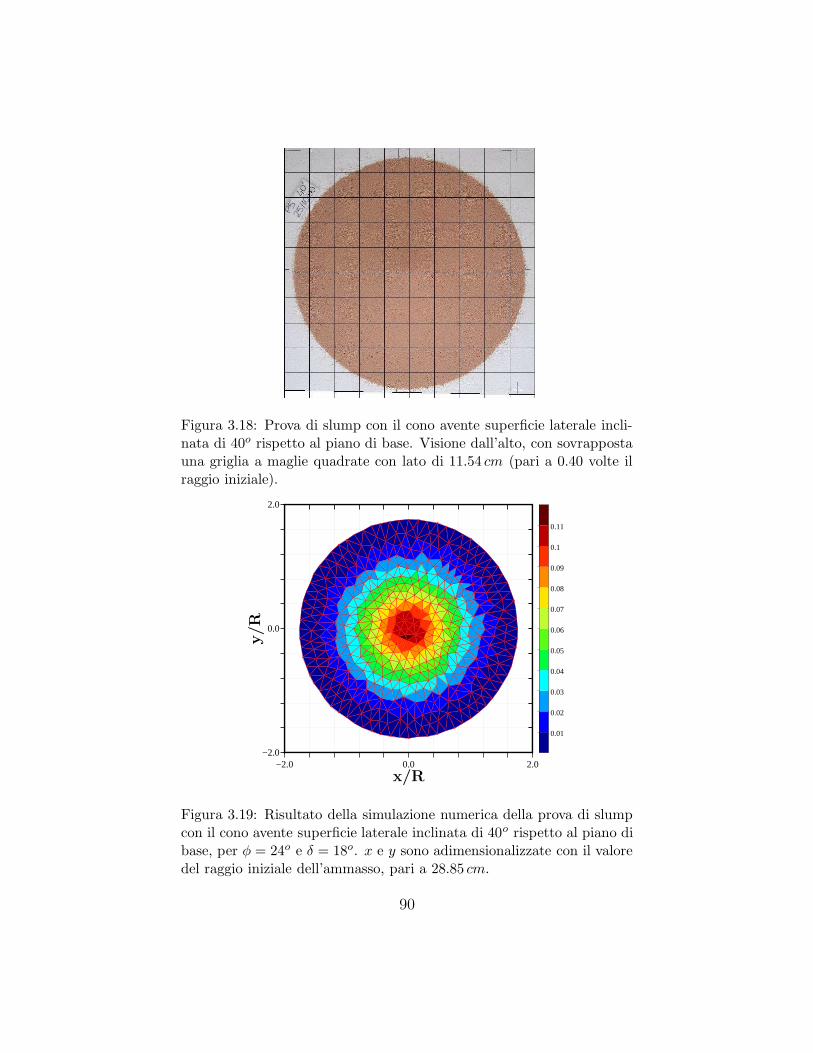
Figura 3.18: Prova di slump con il cono avente superficie laterale incli-nata di 40o rispetto al piano di base. Visione dall’alto, con sovrappostauna griglia a maglie quadrate con lato di 11.54 cm (pari a 0.40 volte ilraggio iniziale).
−2.0 0.0 2.0−2.0
0.0
2.0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
−2.0×100 −8.0×10−1 4.0×10−1 1.6×100−2.0×100
−1.6×100
−1.2×100
−8.0×10−1
−4.0×10−1
−4.8×10−17
4.0×10−1
8.0×10−1
1.2×100
1.6×100
2.0×100
PSfrag replacements
x/R
y/R
Figura 3.19: Risultato della simulazione numerica della prova di slumpcon il cono avente superficie laterale inclinata di 40o rispetto al piano dibase, per φ = 24o e δ = 18o. x e y sono adimensionalizzate con il valoredel raggio iniziale dell’ammasso, pari a 28.85 cm.
90
0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
h/R
r/R
Caso 1: δ = 22o
Caso 2: δ = 18o
Dati sperimentali
Stato iniziale
Figura 3.20: Risultati delle prove numeriche di slump eseguite con ilcono avente superficie laterale inclinata di 40o rispetto al piano basale,per φ pari a 28o. Il raggio r e l’altezza h sono adimensionalizzati con ilvalore iniziale del raggio dell’ammasso R, pari a 28.85 cm.
91

0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
PSfrag
replacem
ents
h/R
r/R
Caso 3: δ = 22o
Caso 4: δ = 18o
Dati sperimentali
Stato iniziale
Figura 3.21: Risultati delle prove numeriche di slump eseguite con ilcono avente superficie laterale inclinata di 40o rispetto al piano basale,per φ pari a 24o. Il raggio r e l’altezza h sono adimensionalizzati con ilvalore iniziale del raggio dell’ammasso R, pari a 28.85 cm.
92
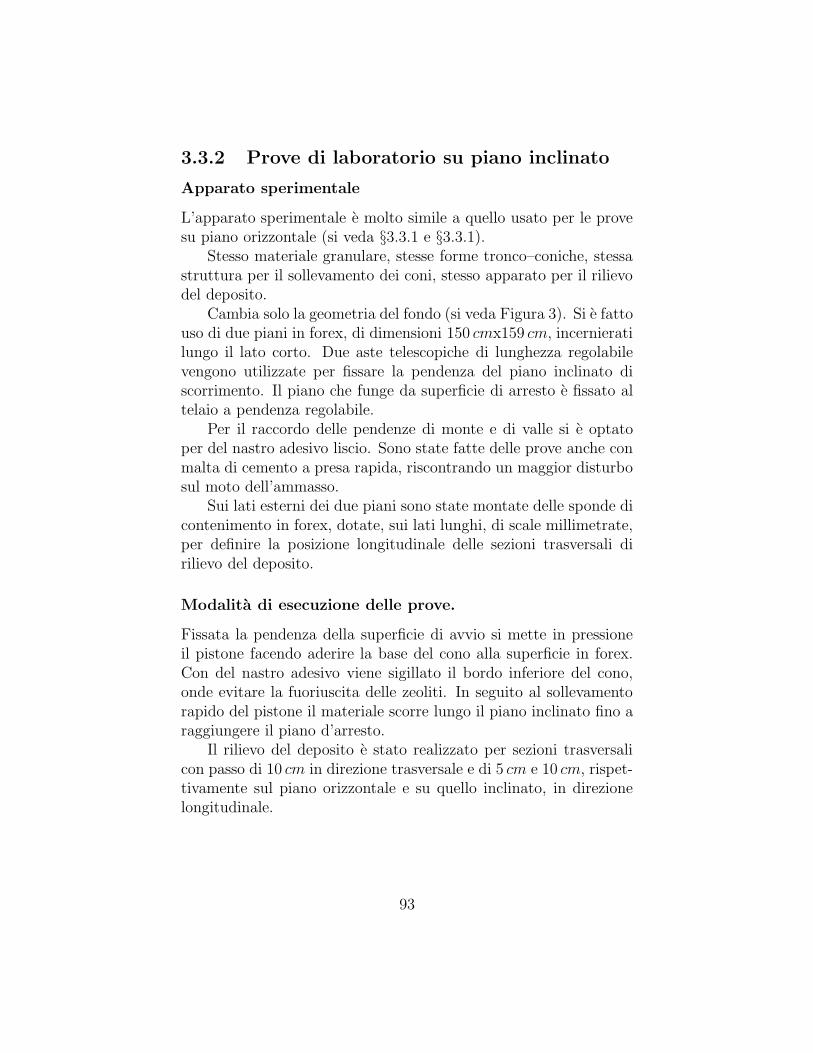
3.3.2 Prove di laboratorio su piano inclinato
Apparato sperimentale
L’apparato sperimentale e molto simile a quello usato per le provesu piano orizzontale (si veda §3.3.1 e §3.3.1).
Stesso materiale granulare, stesse forme tronco–coniche, stessastruttura per il sollevamento dei coni, stesso apparato per il rilievodel deposito.
Cambia solo la geometria del fondo (si veda Figura 3). Si e fattouso di due piani in forex, di dimensioni 150 cmx159 cm, incernieratilungo il lato corto. Due aste telescopiche di lunghezza regolabilevengono utilizzate per fissare la pendenza del piano inclinato discorrimento. Il piano che funge da superficie di arresto e fissato altelaio a pendenza regolabile.
Per il raccordo delle pendenze di monte e di valle si e optatoper del nastro adesivo liscio. Sono state fatte delle prove anche conmalta di cemento a presa rapida, riscontrando un maggior disturbosul moto dell’ammasso.
Sui lati esterni dei due piani sono state montate delle sponde dicontenimento in forex, dotate, sui lati lunghi, di scale millimetrate,per definire la posizione longitudinale delle sezioni trasversali dirilievo del deposito.
Modalita di esecuzione delle prove.
Fissata la pendenza della superficie di avvio si mette in pressioneil pistone facendo aderire la base del cono alla superficie in forex.Con del nastro adesivo viene sigillato il bordo inferiore del cono,onde evitare la fuoriuscita delle zeoliti. In seguito al sollevamentorapido del pistone il materiale scorre lungo il piano inclinato fino araggiungere il piano d’arresto.
Il rilievo del deposito e stato realizzato per sezioni trasversalicon passo di 10 cm in direzione trasversale e di 5 cm e 10 cm, rispet-tivamente sul piano orizzontale e su quello inclinato, in direzionelongitudinale.
93

Figura 3.22: Apparato sperimentale per le prove su piano inclinato.Prova 3.
I dati sperimentali.
In Tabella 3.3 sono descritti i dati geometrici caratteristici delle pro-ve realizzate su piano inclinato. Dalla Figura 3.24 alla Figura 3.32sono riportate le viste in pianta ed i profili.
Le prove sperimentali su piano inclinato sono state realizzatecon entrambi i coni e per pendenze di 22o e 27o. Sui pendii per-corsi da valanghe si trovano facilmente pendenze superiori, ma perquestioni di ingombro dell’apparato sperimentale non si e potutoportare l’inclinazione del piano di monte a valori piu elevati.
Si osserva poi che la pendenza minima coincide col valore del-l’angolo d’attrito al fondo in condizioni statiche δ = 22o. In talicondizioni la forza motrice e di poco superiore alla resistenza delfondo. La coda del deposito si prolunga sul piano inclinato conspessori molto piccoli (Si vedano Figura 3.30, Figura 3.31, Figu-ra 3.32). In queste condizioni e stato difficile definire la posizionedel bordo dell’ammasso. Inoltre a causa della bassa inerzia dellamassa in movimento, si sono manifestati sul fronte dell’ammasso in
94

Prova α[o] Xc[mm] Yc[mm] R[mm] β[o]
2 27 -781 701 288.5 40
3 27 -777 700 288.5 40
4 27 -856 715 218 50
5 27 -848 715 218 50
6 22 -882 715 218 50
7 22 -887 720 218 50
8 22 -896 710 218 50
Tabella 3.3: Valori dei parametri che definiscono la geometria del sistemanelle 7 prove valide, realizzate su piano inclinato. α e la pendenza delpiano, Xc e Yc rappresentano le coordinate orizzontali del centro dellabase del cono, R e il raggio del cono e β l’inclinazione delle falde rispettoal piano basale.
movimento degli effetti di fingering, evidenziati dalla forma lobatadel deposito finale. (Si veda Figura 4).
Come si puo evincere da Tabella 3.3 e dai grafici riportati, estato difficile riprodurre esattamente la posizione iniziale del cononelle diverse prove.
Nonostante questi effetti di disturbo le prove risultano ripetibili.I massimi errori sono nella valutazione della posizione del fronte edella coda per le prove 6, 7 e 8, cioe per le prove fatte con lapendenza pari all’angolo d’attrito al fondo, e non sono superiori ai5 cm.
95

Figura 3.23: Effetti di fingering evidenziati dall’aspetto lobato deldeposito. Prova 7.
96

−4 −3 −2 −1 0 1 2
−2
−1
0
1
2 Prova 2Prova 3
PSfrag
replacem
ents
x/R
y/R
Figura 3.24: Confronto tra i dati sperimentali per le prove 2 e 3, ca-ratterizzate dai parametri definiti in Tabella 3.3. Vista dall’alto. Lecoordinate orizzontali x ed y sono adimensionalizzate con il raggio R delcono pari a 288.5mm.
−4 −3 −2 −1 0 1 2
0
1
2
3
Prova 2Prova 3
PSfrag replacements
x/Ry/R
x/R
h/R
Figura 3.25: Confronto tra i dati sperimentali per le prove 2 e 3, carat-terizzate dai parametri definiti in Tabella 3.3. Sezione longitudinale dimezzeria. Le coordinate x ed h sono adimensionalizzate con il raggio Rdel cono pari a 288.5mm.
97
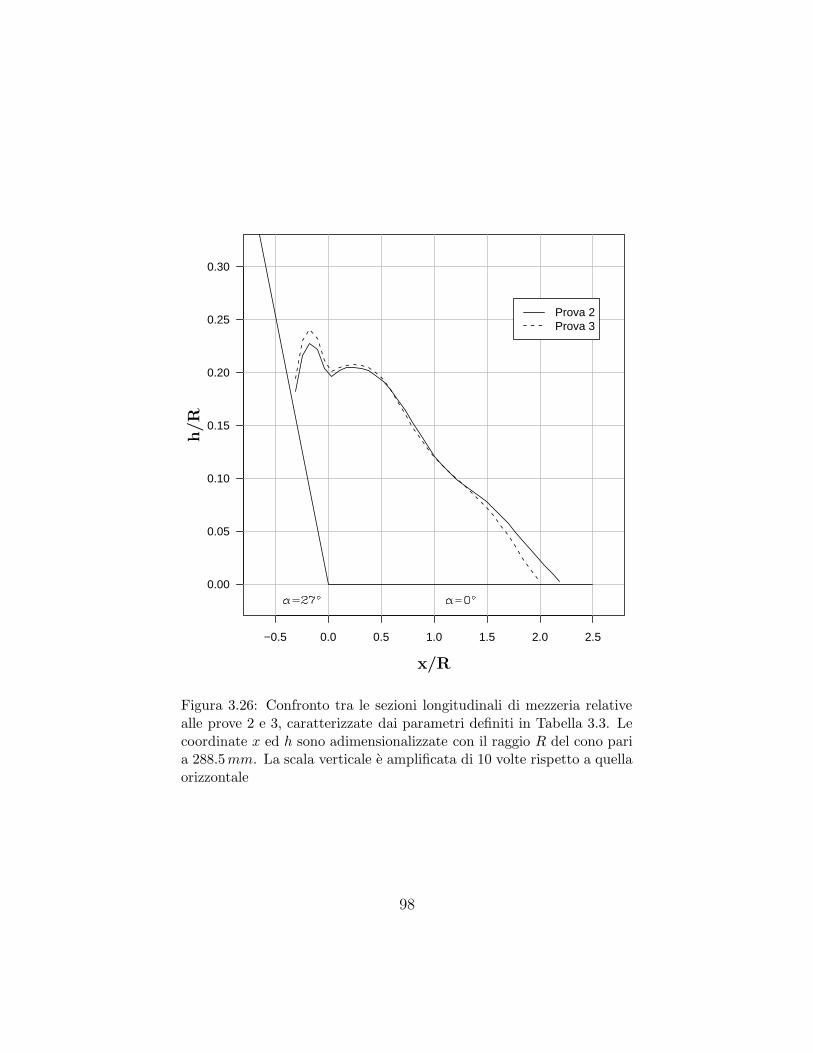
−0.5 0.0 0.5 1.0 1.5 2.0 2.5
0.00
0.05
0.10
0.15
0.20
0.25
0.30
Prova 2Prova 3
PSfrag replacements
h/R
x/R
Figura 3.26: Confronto tra le sezioni longitudinali di mezzeria relativealle prove 2 e 3, caratterizzate dai parametri definiti in Tabella 3.3. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 288.5mm. La scala verticale e amplificata di 10 volte rispetto a quellaorizzontale
98

−5 −4 −3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
Prova 4Prova 5
PSfrag replacements
x/R
y/R
Figura 3.27: Confronto tra i dati sperimentali per le prove 4 e 5, ca-ratterizzate dai parametri definiti in Tabella 3.3. Vista dall’alto. Lecoordinate orizzontali x ed y sono adimensionalizzate con il raggio R delcono pari a 218mm.
−5 −4 −3 −2 −1 0 1 2 3
0
1
2
3
Prova 4Prova 5
PSfrag replacements
x/Ry/R
x/R
h/R
Figura 3.28: Confronto tra i dati sperimentali per le prove 2 e 3, carat-terizzate dai parametri definiti in Tabella 3.3. Sezione longitudinale dimezzeria. Le coordinate x ed h sono adimensionalizzate con il raggio Rdel cono pari a 218mm.
99

−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
0.00
0.05
0.10
0.15
0.20
0.25
0.30
Prova 4Prova 5
PSfrag replacements
h/R
x/R
Figura 3.29: Confronto tra le sezioni longitudinali di mezzeria relativealle prove 4 e 5, caratterizzate dai parametri definiti in Tabella 3.3. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 218mm. La scala verticale e amplificata di 10 volte rispetto a quellaorizzontale
100
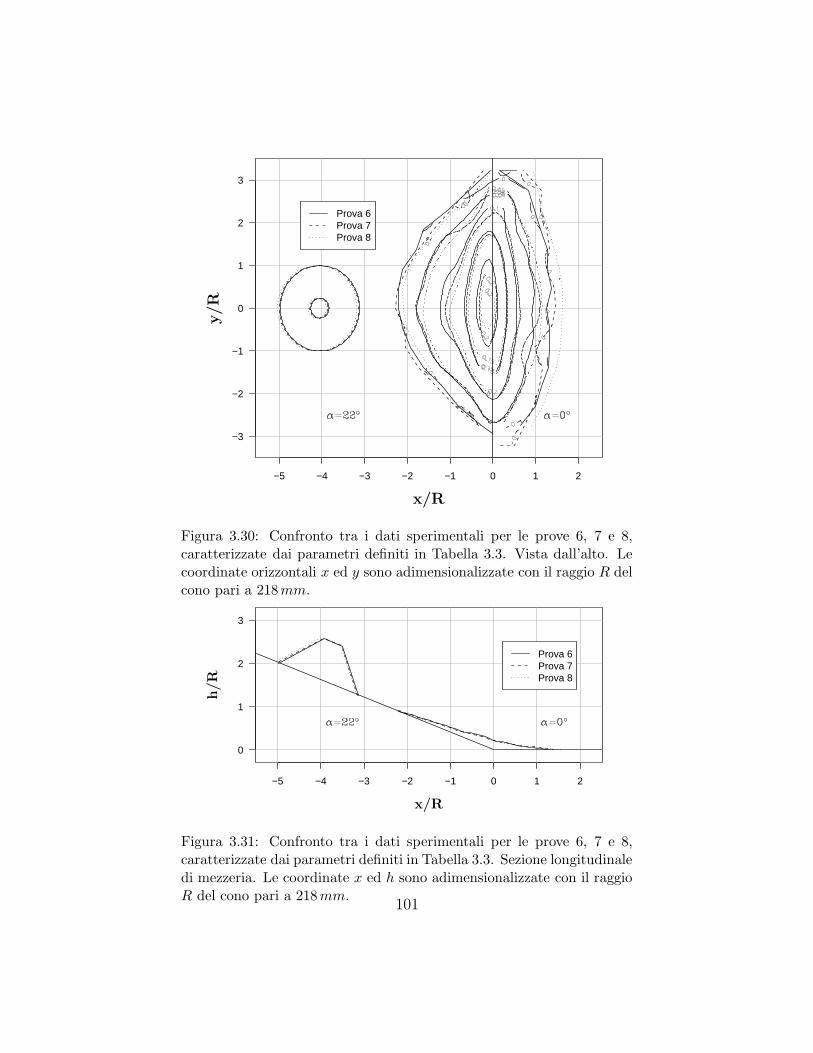
−5 −4 −3 −2 −1 0 1 2
−3
−2
−1
0
1
2
3
Prova 6Prova 7Prova 8
PSfrag replacements
x/R
y/R
Figura 3.30: Confronto tra i dati sperimentali per le prove 6, 7 e 8,caratterizzate dai parametri definiti in Tabella 3.3. Vista dall’alto. Lecoordinate orizzontali x ed y sono adimensionalizzate con il raggio R delcono pari a 218mm.
−5 −4 −3 −2 −1 0 1 2
0
1
2
3
Prova 6Prova 7Prova 8
PSfrag replacements
x/Ry/R
x/R
h/R
Figura 3.31: Confronto tra i dati sperimentali per le prove 6, 7 e 8,caratterizzate dai parametri definiti in Tabella 3.3. Sezione longitudinaledi mezzeria. Le coordinate x ed h sono adimensionalizzate con il raggioR del cono pari a 218mm.
101
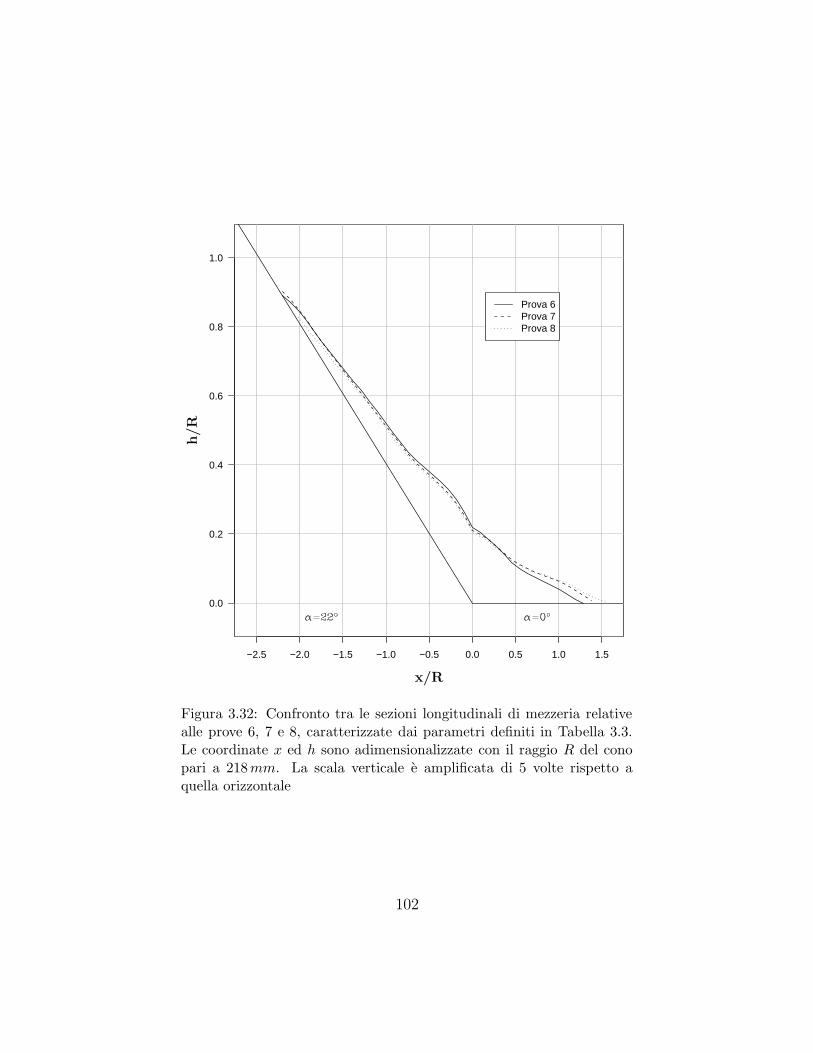
−2.5 −2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5
0.0
0.2
0.4
0.6
0.8
1.0
Prova 6Prova 7Prova 8
PSfrag replacements
h/R
x/R
Figura 3.32: Confronto tra le sezioni longitudinali di mezzeria relativealle prove 6, 7 e 8, caratterizzate dai parametri definiti in Tabella 3.3.Le coordinate x ed h sono adimensionalizzate con il raggio R del conopari a 218mm. La scala verticale e amplificata di 5 volte rispetto aquella orizzontale
102

Confronto con i risultati delle simulazioni numeriche.
Di seguito vengono riportati alcuni diagrammi di confronto tra i da-ti sperimentali delle prove 6, 4 e 2 ed alcune simulazioni numericheeseguite con il modello numerico bidimensionale.
La prova 6 e quella piu delicata visto che la pendenza e prossimaal valore dell’angolo d’attrito al fondo. In Tabella 3.4 si trovano ivalori dei parametri inseriti nel modello.
Caso φ[o] δ[o] ∆t[s] Nt
1 28 20.5 0.001 317
2 28 22 0.001 317
3 28 18 0.001 226
Tabella 3.4: Valori dei parametri significativi utilizzati nelle diverse si-mulazioni numeriche della prova numero 6, eseguita con il cono con faldeinclinate di 50o, con una pendenza del fondo di 22o. φ e δ sono gli angolid’attrito interno ed al fondo; ∆t e il passo temporale; Nt e il numero ditriangoli in cui e suddivisa la griglia di calcolo.
In Figura 3.33 e in Figura 3.34 si osserva come varia la formadel deposito finale al variare dell’angolo d’attrito al fondo δ, postoφ = 28o. E difficile dire quale e la simulazione che fornisce i risu-lati migliori. Per δ = 20.5o si ottiene una miglior rappresentazionedella forma della coda. La simulazione ottenuta ponendo δ = 22o
riproduce meglio il fronte. Il caso 3 rappresenta bene la configura-zione allungata che aveva la coda nel deposito finale subito dopol’esecuzione della prova. La forma del deposito si e poi assestatamolto lentamente portandosi verso la configurazione finale, che estata poi quella rilevata.
103

−5 −4 −3 −2 −1 0 1 2
−3
−2
−1
0
1
2
3
PSfrag
replacem
ents
x/R
y/R
Prova 6
Caso 2
Caso 3
Figura 3.33: Confronto tra i dati sperimentali e le soluzioni numeriche alvariare di δ, posto φ = 28o. Visione dall’alto. Le coordinate orizzontalix ed y sono adimensionalizzate con il raggio R del cono pari a 218mm.
104

−3 −2 −1 0 1 2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
PSfrag replacements
h/R
x/R
Prova 6
Caso 1
Caso 2
Caso 3
Figura 3.34: Confronto tra i dati sperimentali e le soluzioni numericheal variare di δ, posto φ = 28o. Sezione longitudinale di mezzeria. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 218mm. La scala verticale e amplificata di 5 volte rispetto a quellaorizzontale.
105

Con riferimento alla prova 4 si analizza l’effetto dell’angolo d’at-trito interno φ sul comportamento del modello numerico, postoδ = 20.5o.
Caso φ[o] δ[o] ∆t[s] Nt
1 28 20.5 0.0001 218
2 24 20.5 0.0001 218
Tabella 3.5: Valori dei parametri significativi utilizzati nelle diverse si-mulazioni numeriche della prova numero 4, eseguita con il cono con faldeinclinate di 50o, con una pendenza del fondo di 27o. φ e δ sono gli angolid’attrito interno ed al fondo; ∆t e il passo temporale; Nt e il numero ditriangoli in cui e suddivisa la griglia di calcolo.
Osservando Figura 3.35 e Figura 3.36 si nota come riducen-do l’angolo φ dal valore statico di 28o al valore dinamico di 24o ildeposito risulti piu avanzato, piu alto e piu largo. Le differenzecomunque sono minime e confrontabili con gli errori sperimenta-li. Viene data conferma cosı a quanto gia osservato nel modellobidimensionale e cioe che l’angolo d’attrito interno φ influisce mini-mamente sul comportamento del modello numerico, nei casi in cuii termini inerziali diventano dominanti nell’equazione del moto.
Le simulazioni numeriche descrivono con una buona accura-tezza la posizione del punto di massimo, del fronte e della coda.E invece maggiore l’errore commesso nella stima dell’allargamentodell’ammasso e quindi dell’altezza massima dello stesso. Vengo-no riprodotti con una certa fedelta i cambiamenti di concavita nelprofilo del deposito.
106

−5 −4 −3 −2 −1 0 1 2 3
−3
−2
−1
0
1
2
3
PSfrag
replacem
ents
x/R
y/R
Prova 4
Caso 1
Caso 2
Figura 3.35: Confronto tra i dati sperimentali e le soluzioni numeriche alvariare di φ, posto δ = 20.5o. Visione dall’alto. Le coordinate orizzontalix ed y sono adimensionalizzate con il raggio R del cono pari a 218mm.
107

−0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
0.00
0.05
0.10
0.15
0.20
0.25
0.30
PSfrag replacements
h/R
x/R
Prova 4
Caso 1
Caso 2
Figura 3.36: Confronto tra i dati sperimentali e le soluzioni numericheal variare di φ, posto δ = 20.5o. Sezione longitudinale di mezzeria. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 218mm. La scala verticale e amplificata di 10 volte rispetto a quellaorizzontale.
108
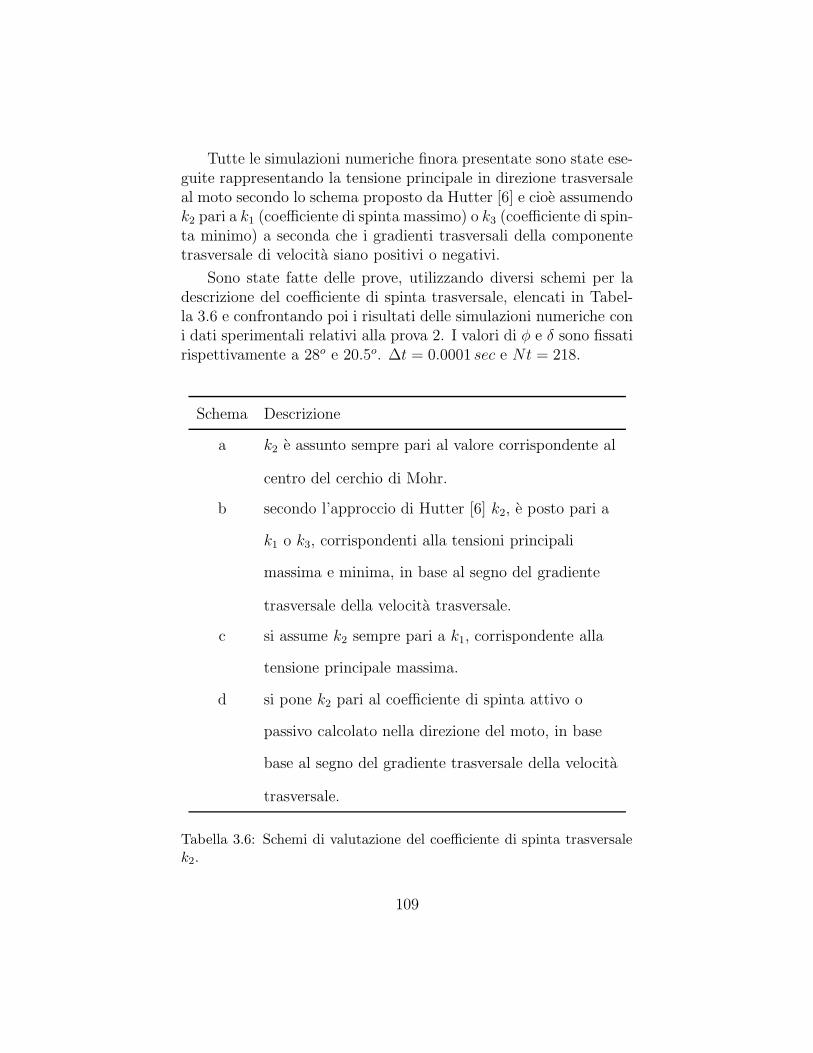
Tutte le simulazioni numeriche finora presentate sono state ese-guite rappresentando la tensione principale in direzione trasversaleal moto secondo lo schema proposto da Hutter [6] e cioe assumendok2 pari a k1 (coefficiente di spinta massimo) o k3 (coefficiente di spin-ta minimo) a seconda che i gradienti trasversali della componentetrasversale di velocita siano positivi o negativi.
Sono state fatte delle prove, utilizzando diversi schemi per ladescrizione del coefficiente di spinta trasversale, elencati in Tabel-la 3.6 e confrontando poi i risultati delle simulazioni numeriche coni dati sperimentali relativi alla prova 2. I valori di φ e δ sono fissatirispettivamente a 28o e 20.5o. ∆t = 0.0001 sec e Nt = 218.
Schema Descrizione
a k2 e assunto sempre pari al valore corrispondente al
centro del cerchio di Mohr.
b secondo l’approccio di Hutter [6] k2, e posto pari a
k1 o k3, corrispondenti alla tensioni principali
massima e minima, in base al segno del gradiente
trasversale della velocita trasversale.
c si assume k2 sempre pari a k1, corrispondente alla
tensione principale massima.
d si pone k2 pari al coefficiente di spinta attivo o
passivo calcolato nella direzione del moto, in base
base al segno del gradiente trasversale della velocita
trasversale.
Tabella 3.6: Schemi di valutazione del coefficiente di spinta trasversalek2.
109

Come si osserva in Figura 3.37 assumendo k2 sempre pari alvalore corrispondente al centro del cerchio di Mohr, la massa tendead espandersi maggiormente in direzione trasversale. Questo e do-vuto al fatto che in direzione trasversale si e sempre in condizionedi spinta attiva durante la fase di arresto, per cui secondo l’approc-cio di Hutter si avrebbe k2 pari al coefficiente di spinta minimo.Anche il profilo longitudinale dell’ammasso e meglio riprodotto conlo schema a piuttosto che con lo schema b (Figura 3.38).
In Figura 3.39 si osserva come lo schema c sia quello che megliodescrive lo spargimento trasversale della massa, utilizzando comevalore di k2 sempre quello corrispondente alla tensione principalemassima. Lo schema d che prevede di utilizzare i valori dei coef-ficienti di spinta attiva e passiva relativi alla direzione del motoin base al segno del gradiente trasversale della velocita trasversa-le, non da luogo a dei miglioramenti significativi nella stima dellageometria del deposito.
Non sono state trovate delle giustificazioni teoriche all’utilizzodi uno schema piuttosto di un altro. Si pone quindi un problemadi taratura. Indicazioni piu significative potrebbero venire dall’ap-plicazione del modello numerico a casi caratterizzati da bruschevariazioni di direzione.
110

−3 −2 −1 0 1 2
−2
−1
0
1
2
PSfrag
replacem
ents
x/R
y/R
Prova 2
Schema a
Schema b
Figura 3.37: Confronto tra le soluzioni numeriche ottenute con diversischemi di calcolo del coefficiente di spinta corrispondente alla direzionetrasversale al moto k2 (si veda Tabella 3.6). I parametri del modellonumerico sono quelli del caso 1. Visione dall’alto. Le coordinate x ed hsono adimensionalizzate con il raggio R del cono pari a 288.5mm.
111
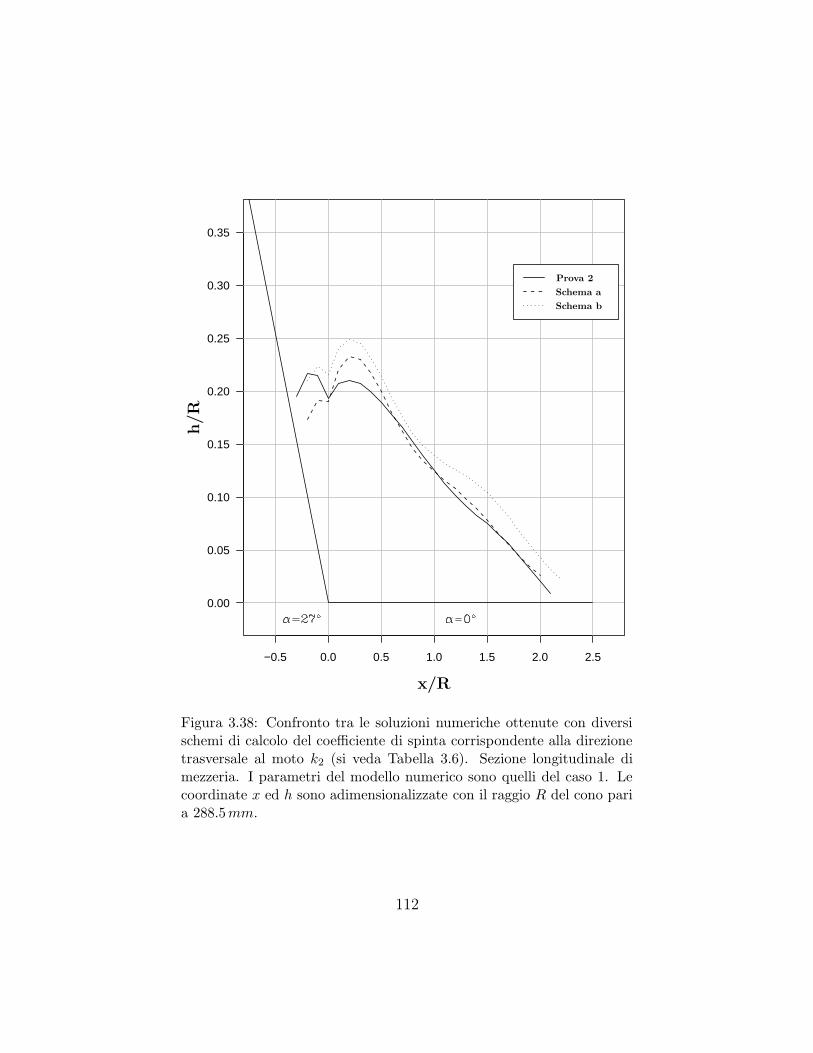
−0.5 0.0 0.5 1.0 1.5 2.0 2.5
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
PSfrag replacements
h/R
x/R
Prova 2
Schema b
Schema a
Figura 3.38: Confronto tra le soluzioni numeriche ottenute con diversischemi di calcolo del coefficiente di spinta corrispondente alla direzionetrasversale al moto k2 (si veda Tabella 3.6). Sezione longitudinale dimezzeria. I parametri del modello numerico sono quelli del caso 1. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 288.5mm.
112
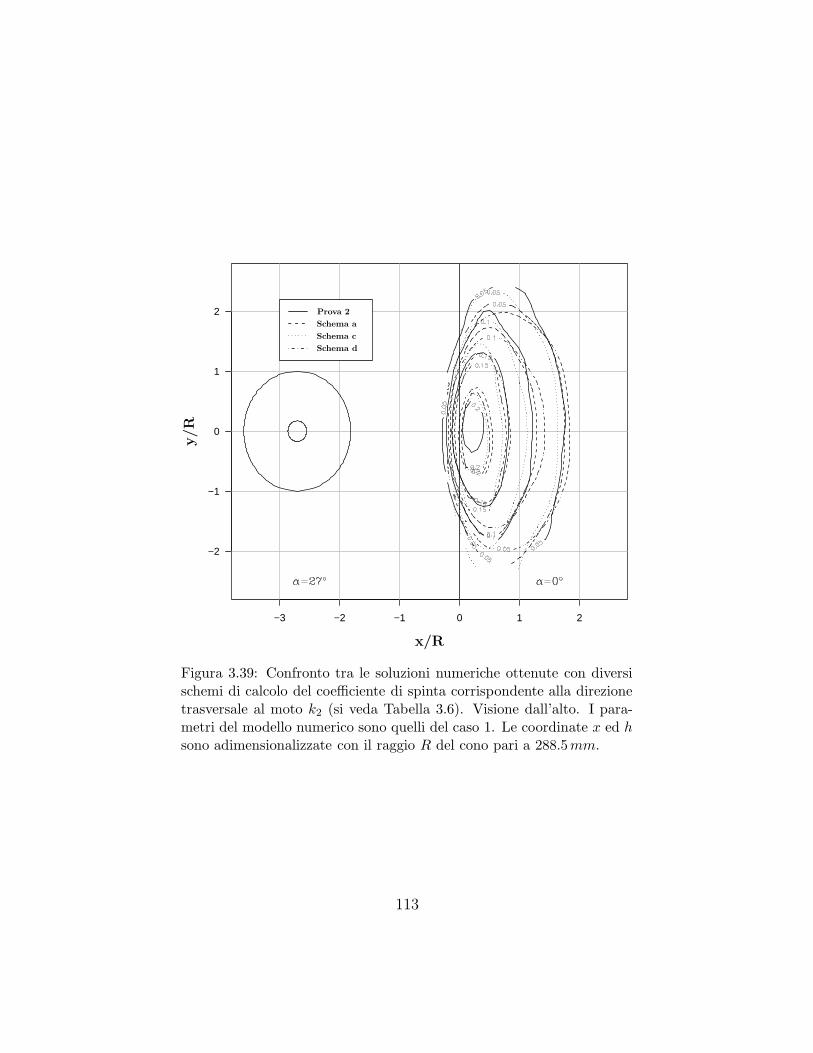
−3 −2 −1 0 1 2
−2
−1
0
1
2
PSfrag
replacem
ents
x/R
y/R
Prova 2
Schema a
Schema c
Schema d
Figura 3.39: Confronto tra le soluzioni numeriche ottenute con diversischemi di calcolo del coefficiente di spinta corrispondente alla direzionetrasversale al moto k2 (si veda Tabella 3.6). Visione dall’alto. I para-metri del modello numerico sono quelli del caso 1. Le coordinate x ed hsono adimensionalizzate con il raggio R del cono pari a 288.5mm.
113

−0.5 0.0 0.5 1.0 1.5 2.0 2.5
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
PSfrag replacements
h/R
x/R
Prova 2
Schema a
Schema c
Schema d
Figura 3.40: Confronto tra le soluzioni numeriche ottenute con diversischemi di calcolo del coefficiente di spinta corrispondente alla direzionetrasversale al moto k2 (si veda Tabella 3.6). Sezione longitudinale dimezzeria. I parametri del modello numerico sono quelli del caso 1. Lecoordinate x ed h sono adimensionalizzate con il raggio R del cono paria 288.5mm.
114

3.4 Applicazione del modello numerico
a casi che simulano situazioni reali.
Applicato a casi piu complessi, caratterizzati da una maggiore ar-ticolazione della topografia, il modello numerico ha dimostrato unascarsa flessibilita.
Si e cercato di simulare ad esempio il moto di una massa di nevedi 50 m di lunghezza e 5 m di spessore, in un canale, inclinato di 45o
sull’orizzontale, di forma trapezia, larga alla base 4 m e con spondeinclinate di 45o (si veda Figura 3.41). Utilizzando un angolo diattrito interno φ pari a 28o ed un angolo d’attrito al fondo δ di 23o
e facendo partire la massa da ferma, la simulazione si interrompedopo pochi istanti, a causa della forte deformazione subita dallamesh.
I gradienti di velocita che si instaurano tra il centro del canalee le sponde, a causa dell’attrito da queste esercitato, producono lostiramento delle celle (si veda Figura 3.42), che puo portare alladegenerazione della mesh. Si e osservato come, assegnando allamassa una velocita iniziale non nulla, l’effetto tenda ad attenuarsi.
Facendo terminare il canale di cui sopra su di un piano incli-nato di 10o sull’orizzontale, con un allargamento a 45o, come illu-strato in Figura 3.41, si e riprodotto il caso di sbocco su conoidedi una valanga. Le celle che si trovano ai bordi della massa nevosasperimentano, in corrispondenza dell’allargamento, delle curvaturenegative. Se la velocita e elevata si possono ottenere delle pres-sioni normali al fondo negative, cioe di trazione. Nella realta intali condizioni si produrrebbe un salto di fondo, che non puo esseredescritto dal modello, poiche deve essere rispettata la condizionedi aderenza della neve al suolo. Il risultato della simulazione delprocesso di sbocco, rappresentato in Figura 3.43 e Figura 3.44, estato ottenuto allargando le maglie della griglia su cui e definita lasuperficie del pendio.
Anche in applicazioni che riproducono l’arresto per effetto dibrusche riduzioni di pendenza si manifestano forti instabilita. Co-me esempio si puo considerare il caso della prova 2 considerato in§3.3.2 a pag. 109. In Figura 3.45(b) e Figura 3.46(b) viene rappre-sentata l’evoluzione della mesh che descrive l’ammasso. Si osserva
115
una forte contrazione delle celle nella direzione del moto, quandol’ammasso raggiunge il tratto orizzontale. Si produce uno “shock”,che tende a propagarsi verso monte. Lo schema numerico utilizzatoe scritto in forma non conservativa e non e in grado di riprodur-re brusche discontinuita delle funzioni incognite. Per attenuare leinstabilita e stato necessario ridefinire la geometria con un minordettaglio, in modo da avere valori di curvatura minori in corrispon-denza del cambio di pendenza. Inoltre si e dovuto ridurre il numerodi triangoli che definiscono la mesh. Evidentemente in questo modosi perde in accuratezza nella riproduzione del fenomeno.
116
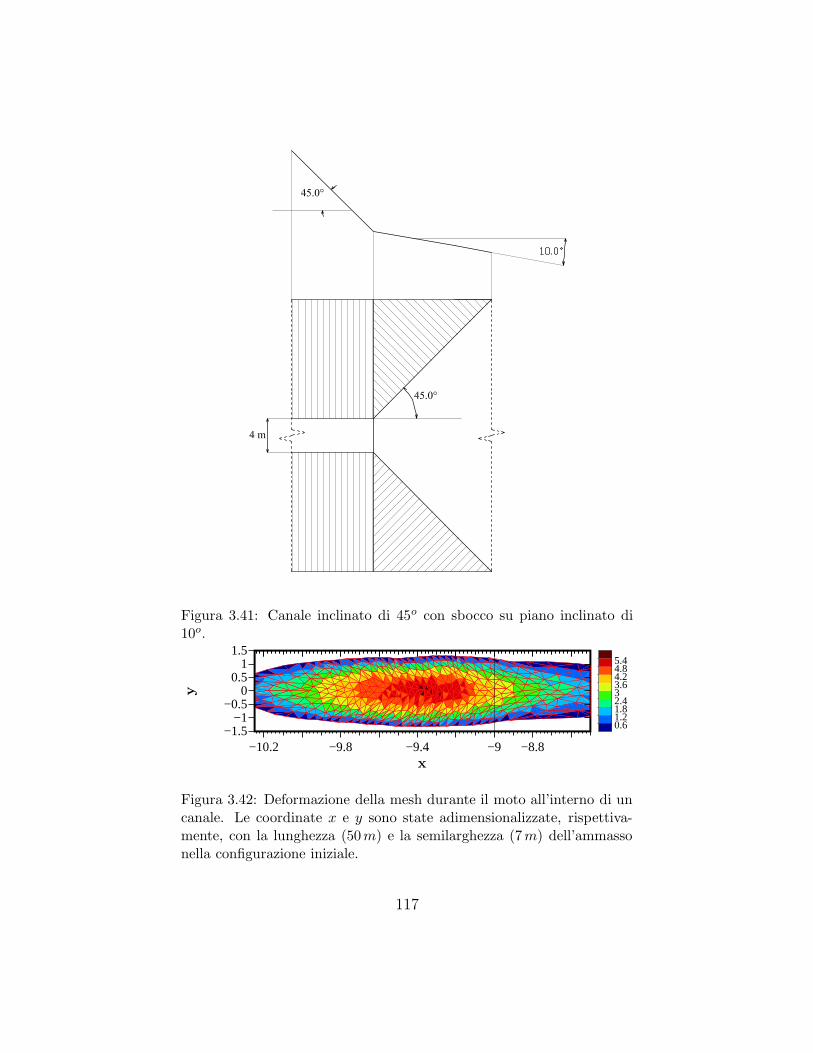
Figura 3.41: Canale inclinato di 45o con sbocco su piano inclinato di10o.
−10.2 −9.8 −9.4 −9 −8.8−1.5
−1−0.5
00.5
11.5
0.61.21.82.433.64.24.85.4
−10.2 −9.8 −9.4 −9 −8.8−1.5
−1−0.5
00.5
11.5
PSfrag replacements
x
y
Figura 3.42: Deformazione della mesh durante il moto all’interno di uncanale. Le coordinate x e y sono state adimensionalizzate, rispettiva-mente, con la lunghezza (50m) e la semilarghezza (7m) dell’ammassonella configurazione iniziale.
117

−12 −10 −8 −6 −5−6−4−2
0246
0.71.42.12.83.54.24.95.66.37
−12 −10 −8 −6 −5−6−4−2
0246
PSfrag replacements
x
y
(a) t = 0s
−12 −10 −8 −6 −5−6−4−2
0246
0.61.21.82.433.64.24.85.4
−12 −10 −8 −6 −5−6−4−2
0246
PSfrag replacements
x
y
(b) t = 5s
Figura 3.43: Simulazione dello sbocco di una valanga su un conoide. Ca-ratteristiche canale: forma trapezoidale con base di larghezza pari a 4m,sponde inclinate di 45o, pendenza del fondo di 45o. La superficie pianasu cui sbocca il canale e inclinata di 10o. Il cambio di pendenza avvienealla sezione x = −9. Nella simulazione numerica si e posto δ = 23o eφ = 28o. Le coordinate x e y sono state adimensionalizzate, rispettiva-mente, con la lunghezza (50m) e la semilarghezza (7m) dell’ammasso,nella configurazione iniziale.
118

−12 −10 −8 −6 −5−6−4−2
0246
0.30.60.91.21.51.82.12.42.733.3
−12 −10 −8 −6 −5−6−4−2
0246
PSfrag replacements
x
y
(a) t = 8s
−12 −10 −8 −6 −5−6−4−2
0246
0.10.20.30.40.50.60.70.80.91
−12 −10 −8 −6 −5−6−4−2
0246
PSfrag replacements
x
y
(b) t = 17s
Figura 3.44: Simulazione dello sbocco di una valanga su un conoide. Ca-ratteristiche canale: forma trapezoidale con base di larghezza pari a 4m,sponde inclinate di 45o, pendenza del fondo di 45o. La superficie pianasu cui sbocca il canale e inclinata di 10o. Il cambio di pendenza avvienealla sezione x = −9. Nella simulazione numerica si e posto δ = 23o eφ = 28o. Le coordinate x e y sono state adimensionalizzate, rispettiva-mente, con la lunghezza (50m) e la semilarghezza (7m) dell’ammasso,nella configurazione iniziale.
119

−1.5 −1 0 1 1.5−0.7
0
0.8
0.020.040.060.080.10.120.140.160.180.20.22
−1.5 −1 0 1 1.5−0.7
0
0.8
PSfrag replacements
x
y
(a) t = 0s
−1.5 −1 0 1 1.5−0.7
0
0.8
0.0030.0060.0090.0120.0150.0180.0210.0240.0270.030.033
−1.5 −1 0 1 1.5−0.7
0
0.8
PSfrag replacements
x
y
(b) t = 0.8s
Figura 3.45: Simulazione numerica della prova 2 con φ = 28o, δ =20.5o, ∆t = 0.0001 sec e con una mesh costituita da 218 triangoli. Lecoordinate non sono adimensionalizzate.
120
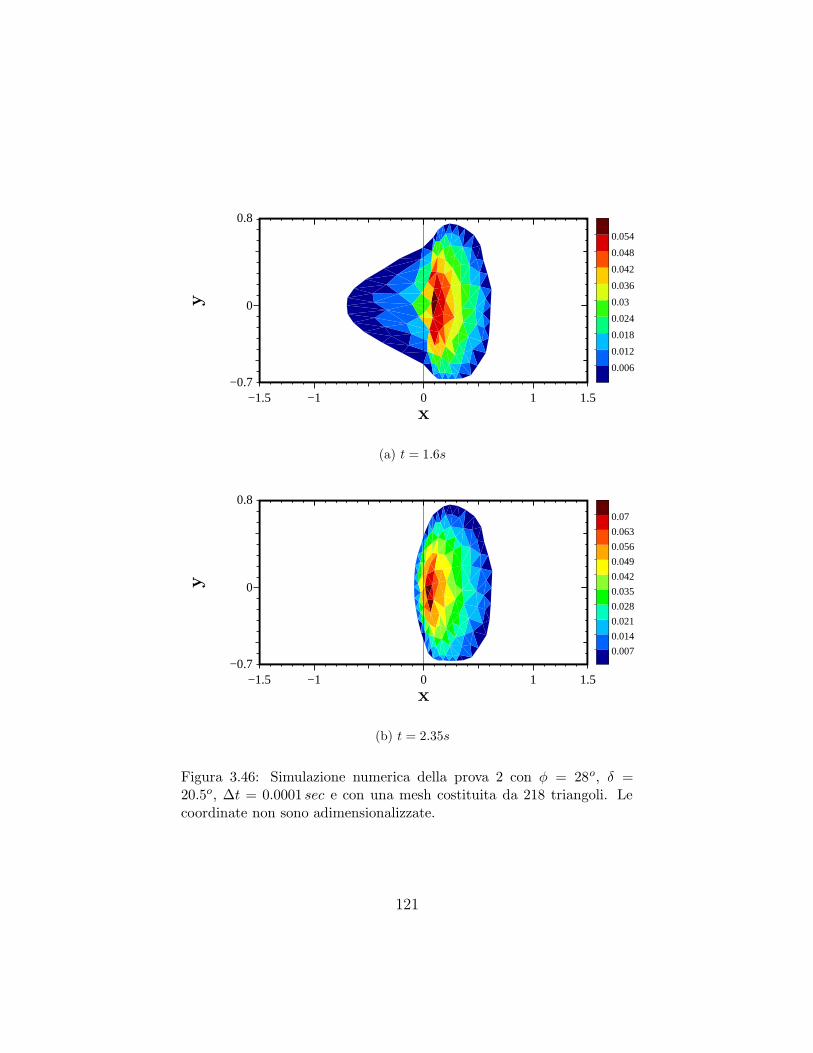
−1.5 −1 0 1 1.5−0.7
0
0.8
0.006
0.012
0.018
0.024
0.03
0.036
0.042
0.048
0.054
−1.5 −1 0 1 1.5−0.7
0
0.8
PSfrag replacements
x
y
(a) t = 1.6s
−1.5 −1 0 1 1.5−0.7
0
0.8
0.007
0.014
0.021
0.028
0.035
0.042
0.049
0.056
0.063
0.07
−1.5 −1 0 1 1.5−0.7
0
0.8
PSfrag replacements
x
y
(b) t = 2.35s
Figura 3.46: Simulazione numerica della prova 2 con φ = 28o, δ =20.5o, ∆t = 0.0001 sec e con una mesh costituita da 218 triangoli. Lecoordinate non sono adimensionalizzate.
121

122

Capitolo 4
Conclusioni.
In questo lavoro e stato illustrato un modello matematico e nume-rico bidimensionale, per lo studio delle valanghe di neve densa edasciutta.
Avendo rappresentato la neve come un mezzo continuo ed in-comprimibile, si e fatto ricorso alle equazioni del moto proprie dellafluidodinamica.
Nella definizione della reologia del materiale ci si e basati sullateoria di Hutter e Savage, in cui si descrive il comportamento arottura del materiale secondo il criterio di Coulomb e le interazionitra neve e suolo con una legge di tipo frizionale.
Richiamandosi all’ipotesi di “acque basse” e stata ricavata ladistribuzione delle pressioni in direzione normale al fondo.
Le equazioni del moto, scritte in un riferimento cartesiano orto-gonale, sono state mediate lungo la verticale, avendo ipotizzato che,lungo tale direzione, continui a valere la condizione di idrostaticitadelle pressioni e il profilo di velocita sia uniforme.
Il modello matematico e stato implementato con uno schemanumerico Lagrangiano, che discretizza la massa granulare per mezzodi una mesh a maglie triangolari.
Dall’analisi delle simulazioni numeriche di fenomeni riprodottisperimentalmente, si traggono le seguenti considerazioni:
1. le prove di laboratorio realizzate su piano orizzontale, in con-dizioni di simmetria piana e radiale, corroborano le scelte fatteper la rappresentazione della reologia dei materiali granulari;
123

2. si ottengono delle ulteriori conferme in tal senso anche da-l’applicazione del modello monodimensionale ai casi dinamiciriprodotti sperimentalmente da Hutter et al. [4] ;
3. i parametri che influenzano maggiormente i risultati numericiin condizioni dinamiche sono:
- la forma e i rapporti tra spessore, larghezza e lunghezzadell’ammasso, nelle condizioni iniziali. L’azione di taliparametri si esplica soprattutto nelle fasi di avvio e discorrimento, meno in quella di arresto;
- δ, che influisce sulla forma, sulle velocita di scorrimentoe sulla distanza di arresto;
- la risoluzione con cui e definito il pendio, in quanto daessa dipendono i valori di curvatura e quindi le pressioninormali e le azioni frenanti che si sviluppano al fondo.
Lo schema numerico ha evidenziato dei limiti:
1. il rispetto della condizione di contiguita tra le celle, che costi-tuiscono la griglia di calcolo, preclude al modello la possibi-lita di rappresentare processi in cui intervengono variazioni dimassa, quali erosioni, depositi o separazione della valanga inpiu corpi, in seguito all’interporsi di ostacoli lungo il percorso;
2. dovendo essere garantita la condizione di aderenza al suolo, ilmodello non e in grado di trattare i salti di fondo;
3. il modello presenta dei problemi di instabilita, dovuti alla de-generazione della mesh, specie in situazioni in cui forti velo-cita si combinano a geometrie del fondo rapidamente variabili;
4. trattando la neve come un mezzo incomprimibile, non vieneriprodotto l’iniziale processo di fluidizzazione, che comportaun incremento del volume dell’ammasso e un’alterazione delcomportamento reologico del materiale.
In base a tali considerazioni, si possono identificare diversepossibili direzioni di sviluppo del modello:
124
1. attraverso la realizzazione di prove di laboratorio, si puo te-stare la validita delle ipotesi reologiche introdotte nel model-lo bidimensionale; a questo proposito puo essere significativoapplicare il modello numerico nella riproduzione di prove diarresto, deviazione, allargamento e restringimento;
2. i problemi di degenerazione della mesh possono essere affron-tati percorrendo due diverse strade:
- l’utilizzo di algoritmi per la rigenerazione della mesh;
- il ricorso a schemi di integrazione di tipo “meshless”;
3. le distorsioni, introdotte dall’ipotesi di idrostaticita delle pres-sioni in direzione verticale, possono essere attenuate scrivendole equazioni del modello in un riferimento cartesiano ortogo-nale di coordinate x, y, e z, in cui il piano xy approssimi almeglio la superficie del pendio (nel modo di Hutter et al.[6]),specie nella zona di arresto;
4. l’utilizzo di metodi “meshless” dovrebbe poter estendere lecapacita del modello nella rappresentazione di fenomeni neiquali intervengono variazioni di massa.
125

126

Allegati: Derivazionimatematiche
127

128
Appendice A
Il modellomonodimensionale
A.1 Il modello monodimensionale nel
riferimento locale
Le ipotesi di partenza sono che l’ammasso nevoso sia un ammassogranulare secco (hp. 2, pag. 10), che possa essere trattato comeun continuo (hp. 3, pag. 10) e che la densita sia costante (hp. 4,pag. 10). L’equazione di conservazione della massa e della quantitadi moto, scritte in forma vettoriale, sono:
∇ · u = 0 , (A.1)
ρdu
dt= −∇ · P + ρ g , (A.2)
Indicando con ρ la densita, u il vettore velocita, t il tempo, P il ten-sore degli sforzi, g il vettore accelerazione di gravita. In superficielibera vi sono due condizioni al contorno:
la condizione cinematica:
∂Φf
∂t+ u · ∇Φf = 0 per η = h , (A.3)
129

dove Φf = 0 e l’equazione implicita della superficie libera;
la condizione di sforzo nullo:
P · nf = 0 per η = h , (A.4)
dove nf e la normale alla superficie libera.
Al fondo allo stesso modo vale la condizione cinematica:
u · nb = 0 per η = 0 , (A.5)
ove nb e la normale al fondo.Per quanto riguarda gli sforzi trasmessi dal fondo alla massa ne-vosa, si suppone possano essere descritti con una legge di tipoCoulombiano (hp. 7, pag. 12) con angolo d’attrito al fondo paria δ:
t = − ub
|ub||s| tan δ ,
dove
|s| = nb · P nb e
t = P · nb − |s| nb , per η = 0,
(A.6)
essendo t e s la componente tangenziale e normale al pendio dellosforzo che il fondo trasmette alla neve.
Le equazioni vengono sviluppate nel caso di moto piano rispettoal sistema di riferimento curvilineo di Figura A.1, in cui l’asse ξsegue il profilo del fondo, le linee coordinate η sono normali al fondo,le linee coordinate ξ sono ortogonali alle precedenti. Si indica conζ la pendenza del fondo, r = r(ξ) e il raggio di curvatura e χ lacurvatura, pensati positivi nel caso di pendii concavi verso l’alto. Sel’equazione esplicita della superficie del fondo rispetto al riferimentoassoluto ha la forma z = b(x), risulta che:
tan ζ = −b,x e (A.7)
χ =1
r=
b,xx
(1 + b2,x)
3/2. (A.8)
130
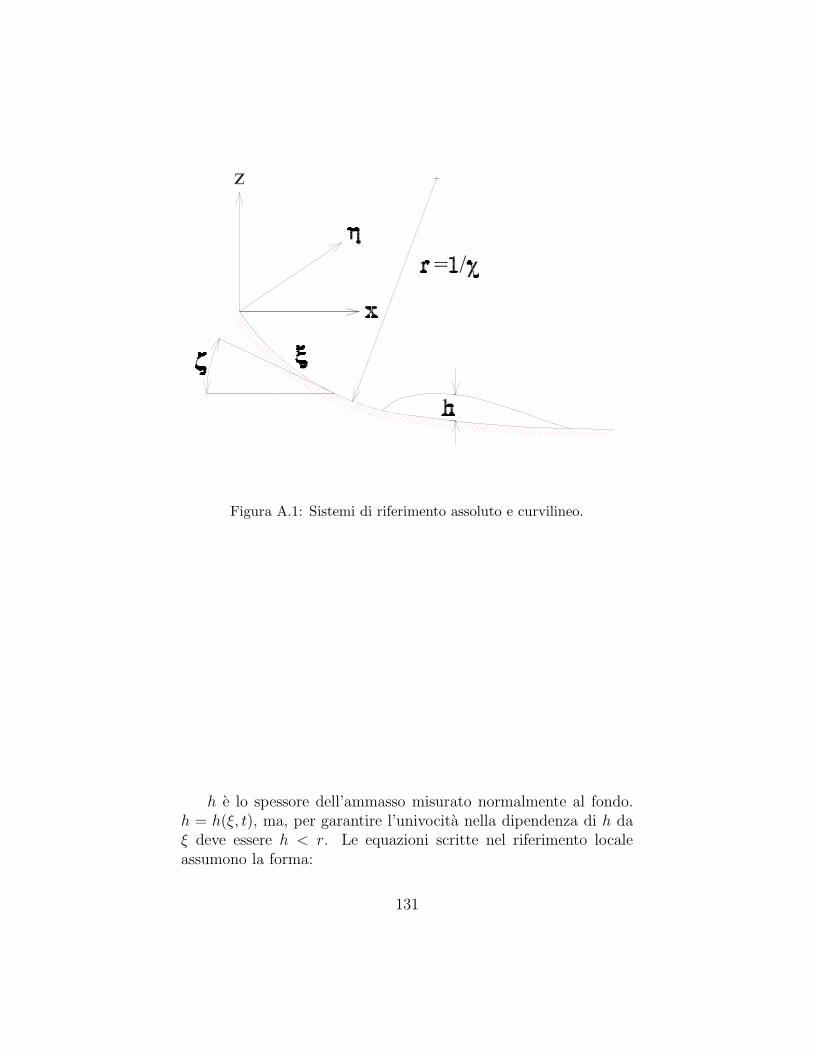
Figura A.1: Sistemi di riferimento assoluto e curvilineo.
h e lo spessore dell’ammasso misurato normalmente al fondo.h = h(ξ, t), ma, per garantire l’univocita nella dipendenza di h daξ deve essere h < r. Le equazioni scritte nel riferimento localeassumono la forma:
131

∂uξ
∂ξ+
∂
∂η((1 − χη) uη) = 0 , (A.9)
∂uξ
∂t+
uξ
1 − χη
∂uξ
∂ξ+ uη
∂uξ
∂η− χ
1 − χηuξ uη = g sin ζ +
−1
ρ
(
1
1 − χη
∂pξξ
∂ξ+
∂pξη
∂η− 2χ
1 − χηpξη
)
, (A.10)
∂uη
∂t+
uξ
1 − χη
∂uη
∂ξ+ uη
∂uη
∂η+
χ
1 − χηuξ
2 = −g cos ζ +
−1
ρ
(
1
1 − χη
∂pξη
∂ξ+
∂pηη
∂η+
χ
1 − χη(pξξ − pηη)
)
.(A.11)
Per descrivere lo stato di sforzo si fa ricorso al criterio di rotturadi Mohr-Coulomb per un materiale senza coesione (hp. 7, pag. 12).Al fondo vi sara scivolamento, con un angolo d’attrito pari a δ(hp. 6, pag. 12) e quindi
pξη = − uξ
|uξ|
∣
∣
∣
∣
η=0
tan δ .
Il cerchio di Mohr, che descrive lo stato di sforzo nel diagram-ma di Mohr, dovra poi essere tangente all’inviluppo di rotturaFigura A.2
τ = σ tanφ .
Si ricava quindi che pξξ = ka/p pηη dove ka e kp sono i coefficientidi spinta attiva e passiva e valgono
kp
ka
}
=2
cos2 φ
[
1 ±√
1 − cos2 φ
cos2 δ
]
− 1, per∂uξ
∂ξ< 0> 0
. (A.12)
132

Figura A.2: Diagramma di Mohr per il calcolo dello stato tensionale.
Il calcolo dei coefficienti di spinta lo si puo trovare con maggiordettaglio in Appendice B.1.3, visto che anche nel caso tridimensio-nale, si suppone che la rottura interessi uno specifico piano.
Per individuare i termini che possono essere trascurati, ven-gono introdotte tre lunghezze scala: la scala longitudinale Ls, lascala delle profondita Hs e una scala per il raggio di curvatura delfondo Rs. Si definiscono quindi le velocita scala Uξs e Uηs, il tem-po scala Ts e la pressione scala Ps. La definizione delle variabiliadimensionalizzate viene di conseguenza:
ξ =ξ
Lsη =
η
Hsχ = χ Rs uξ =
uξ
Uξsuη =
uη
Uηs
t =t
Tspξξ =
pξξ
Pspξη =
pξη
Pspηη =
pηη
Ps.
Si definiscono poi i rapporti
ε =Hs
Ls
e λ =Ls
Rs
.
133

A questo punto vengono proposte le seguenti ipotesi:
Uηs ≈ UξsHs
Ls= ε Uξs,
U2ξs
g Ls≈ 1 ⇒ Uξs ≈
√
g Ls ,
Ts ≈Ls
Uξs
, Ps ≈ ρ g Hs .
Per brevita le equazioni adimensionalizzate vengono riscritteomettendo il cappello per indicare le grandezze adimensionali:
∂uξ
∂ξ+
∂
∂η((1 − ελχη) uη) = 0 , (A.13)
∂
∂t((1 − ελχη) uξ) + uξ
∂uξ
∂ξ+ uη
∂
∂η((1 − ελχη) uξ) =
= (1 − ελχη) sin ζ − ε∂pξξ
∂ξ+
+ (1 − ελχη)∂pξη
∂η− 2 ελχ pξη , (A.14)
ε
(
∂uη
∂t+
1
1 − ελχηuξ
∂uη
∂ξ+ uη
∂uη
∂η
)
+λχ
1 − ελχηuξ
2 =
= − cos ζ − ε
1 − ελχη
∂pξη
∂ξ+
−∂pηη
∂η− ελχ
1 − ελχη(pξξ − pηη) . (A.15)
Al fondo la condizione cinematica in termini adimensionali as-sume la forma:
uη = 0 per η = 0 , (A.16)
mentre la condizione dinamica viene descritta dalle due relazio-ni:
134

pξη = −|uξ|uξ
tan δ pηη per η = 0 , (A.17)
pξξ = −ka/p pηη per η = 0 . (A.18)
In superficie libera la condizione cinematica e data da:
uη =∂h
∂t+
1
1 − ελχhuξ
∂h
∂ξper η = h . (A.19)
Dalla condizione di sforzo tangenziale, supponendo che le con-dizioni di rottura vengano raggiunte anche all’interno dell’interoammasso, si ottiene che:
pξξ = pξη = pηη = 0 per η = h . (A.20)
Dopo aver definito la velocita media sulla verticale:
Uξ =1
h
∫ h
0
uξ dη ; (A.21)
e possibile integrare lungo z l’equazione di continuita e le equa-zioni del moto. Se si suppone che ε sia piccolo (hp. 5, pag. 10) sipossono trascurare tutti i termini di ordine superiore ad ε nell’equa-zione di conservazione della quantita di moto, scritta nella direzionenormale al fondo:
λχ uξ2 = − cos ζ +
∂pηη
∂η. (A.23)
A questo punto, integrando tra η e h, si ottiene l’equazione chedescrive la distribuzione idrostatica delle pressioni.
pηη = −(
λχ Uξ2 + cos ζ
)
(h − η) . (A.25)
135

Dall’equazione di continuita si ricava:
(1 − ελχh)∂h
∂t+
∂Uξ h
∂ξ= 0 . (A.26)
L’equazione di conservazione della quantita di moto nella dire-zione ξ diventa:
(1 − ελχ h
2
)
∂Uξ
∂t+
(
1 +ελχ h
2
)
Uξ∂Uξ
∂ξ=
=
(
1 − ελχ h
2
)
sin ζ +
−ε h
2
∂
∂ξ
(
ka/p
(
cos ζ + λχUξ2))
+
−(
cos ζ + λχ Uξ2)
·
·[(
1 +ελχ h
2
)
sgn(Uξ) tan δ + εka/p∂h
∂ξ
]
.
(A.27)
Le precedenti due equazioni sono state ottenute utilizzando l’e-quazione (A.25) e supponendo che gli stati di sforzo abbiano unadistribuzione lineare lungo la normale al fondo. Sono stati peroconservati i termini in ε. Inoltre, sulla base dell’ipotesi di plug-flow(hp. 6, pag. 12), si e posto:
∫ h
0
η uξ dη ∼= Uξ h2
2,
∫ h
0
uξ2 dη ∼= h Uξ
2 .
(A.28)
Se si suppone che sia tan δ = O(
ε1
2
)
e λ = O(
ε1
2
)
, si possono
trascurare i termini di ordine ε nell’equazione di continuita ed itermini di ordine superiore ad ε nell’equazione di conservazione dellaquantita di moto ottenendo:
136

∂h
∂t+
∂Uξ h
∂ξ= 0 , (A.29)
∂Uξ
∂t+ Uξ
∂Uξ
∂ξ= sin ζ − ka/p ε cos ζ
∂h
∂ξ+
−(
cos ζ + λ χUξ2)
sgn(Uξ) tan δ . (A.31)
Resta da capire se le valutazioni riguardo all’ordine di grandez-za di tan δ e λ sono realistici. Se si considera un ammasso di neve dialtezza 10m, lunghezza 100m, risulta ε = 0.1. Con δ ∼= 17o sarebbetan2 δ ∼= 0.09 ∼= ε. Dovrebbe essere inoltre Rs
∼= 300m. Le appros-simazioni sono giustificabili solo per piccole curvature del fondo.In tale ottica non ha senso rappresentare il pendio con un eccessi-vo dettaglio, dato che il modello dovrebbe descrivere situazioni adelevata curvatura, in cui alcuni dei termini trascurati potrebberodiventare significativi.
137

A.2 Il modello monodimensionale nel
riferimento assoluto
Viene di seguito sviluppato il modello matematico monodimensio-nale in un riferimento cartesiano ortogonale. Si ricavano le equa-zioni del moto e le condizioni al contorno in un riferimento assolutopiano, con asse x orizzontale e asse z verticale. Si procede poi conla definizione della reologia del materiale. Infine le equazioni delmoto vengono mediate lungo la verticale.
A.2.1 Le equazioni del moto rispetto al riferi-mento assoluto
Le equazioni del moto vengono ricavate con riferimento ad un vo-lume di controllo di lati ∆x e ∆z. Dal bilancio di massa si ottiene(Figura A.3):
−ux A14 +
(
ux +∂ux
∂x∆x
)
A23 +
−uz A12 +
(
uz +∂uz
∂z∆z
)
A34 = 0 ,
dove Aij e l’area della superficie del volume di controllo, compresatra i nodi i e j:
A12 = A34 = 1 · ∆x;
e
A23 = A14 = 1 · ∆z .
Semplificando e dividendo per ∆x ∆z si ricava l’equazione di con-tinuita:
∂ux
∂x+
∂uz
∂z= 0 .
138

Figura A.3: Flussi di massa e di quantita di moto.
Il bilancio della quantita di moto viene scritto con riferimentoallo stesso volume di controllo. In forma vettoriale:
dQ
dt=∑
Fext ,
dove si e indicato con Q il vettore quantita di moto e con Fext lagenerica forza esterna. Per scrivere il contributo dato dai terminiinerziali, si fa riferimento allo schema in Figura A.3. Nella direzionex si ottiene:
ρdux
dt∀ = ρ
( ∂ux
∂t∀ − ux ux A14 − ux uz A12 +
+
(
ux +∂ux
∂x∆x
) (
ux +∂ux
∂x∆x
)
A23 +
+ux
(
uz +∂uz
∂z∆x
)
A34
)
,
139

dove si e indicato con
∀ = ∆x · ∆z · 1
il volume di controllo e con ρ la densita. Si semplifica e, supponendo∆x e ∆z infinitesimi, si trascurano i termini di ordine superiore.Richiamando l’equazione di continuita (2.2) ed infine raccogliendo(∆x ∆z) si ottiene:
ρ (∆x ∆z)dux
dt= ρ (∆x ∆z)
(
∂ux
∂t+ ux
∂ux
∂x+ uz
∂ux
∂z
)
.
In maniera del tutto identica si procede con i termini inerzialidell’equazione di bilancio della quantita di moto nella direzione z,ottenendo:
ρ (∆x ∆z)duz
dt= ρ (∆x ∆z)
(
∂uz
∂t+ ux
∂uz
∂x+ uz
∂uz
∂z
)
.
Le forze esterne sono rappresentate dalla forza peso:
ρ g ∀ = ρ (0 , −g) ∀ ,
dove g e il modulo del vettore accelerazione di gravita. Vi sonopoi le forze trasmesse dalla neve circostante attraverso le superficidel volume di controllo. Facendo riferimento alla Figura A.4, siottengono, rispettivamente nella direzione x e z, i contributi:
Fsx = −pxx A14 +
(
pxx +∂pxx
∂x∆x
)
A23 +
−pzx A12 +
(
pzx +∂pzx
∂z∆z
)
A34
Fsz = −pzz A12 +
(
pzz +∂pzz
∂z∆z
)
A34 +
−pxz A14 +
(
pxz +∂pxz
∂x∆x
)
A23 .
140

Figura A.4: Le forze di superficie.
Semplificando e raccogliendo (∆x ∆z) si ottiene:
Fsx = (∆x ∆z)
(
∂pxx
∂x+
∂pzx
∂z
)
,
F sz = (∆x ∆z)
(
∂pxz
∂x+
∂pzz
∂z
)
.
Sommando i diversi contributi e dividendo per (ρ ∆x ∆z), siricavano le equazioni di conservazione della quantita di moto:
∂ux
∂t+ ux
∂ux
∂x+ uz
∂ux
∂z=
1
ρ
(
∂pxx
∂x+
∂pzx
∂z
)
∂uz
∂t+ ux
∂uz
∂x+ uz
∂uz
∂z=
1
ρ
(
∂pxz
∂x+
∂pzz
∂z
)
− g .
Se si scrive l’equilibrio alla rotazione rispetto al baricentro si
141

osserva che la forza di gravita, le forze inerziali e le componentidelle forze superficiali normali alle facce del volume di controllonon danno luogo a momenti, dato che hanno braccio nullo. Siricava percio che:
−pxz A14∆x
2−(
pxz +∂pxz
∂x∆x
)
A23∆x
2+
+pzx A12∆z
2+
(
pzx +∂pzx
∂z∆z
)
A34∆z
2= 0 ,
da cui, trascurando i termini di ordine superiore, si ottiene che:
pxz = pzx.
142

A.2.2 Le condizioni al contorno di tipo cinema-
tico
Di seguito vengono ricavate le condizioni al contorno di tipo cine-matico e dinamico sulla superficie libera ed al fondo.
Le equazioni esplicite che definiscono la superficie libera ed ilfondo sono:
z = f(x, t) e z = b(x).
In forma implicita possono essere espresse come:
Φf (x, z, t) = z − f(x, t) e Φb(x, z) = z − b(x).
La condizione cinematica sulla superficie libera e data da:
dΦf
dt=
∂Φf
∂t+ ux
∂Φf
∂x+ uz
∂Φf
∂z= 0 ⇒
−∂f
∂t− ux
∂f
∂x+ uz = 0 per z = f .
Al fondo:
dΦb
dt=
∂Φb
∂t+ ux
∂Φb
∂x+ uz
∂Φb
∂z= 0 ⇒
−ux∂b
∂x+ uz = 0 per z = b .
143

A.2.3 Il tensore degli sforzi
L’espressione per il tensore degli sforzi al fondo, scritto nel rife-rimento locale di coordinate ξ , η, e stata ricavata in AppendiceA.1:
P =
(
pξξ pξη
pηξ pηη
)∣
∣
∣
∣
∣
z=b
=
(
ka/p −sgn((uξ)b) tan δ
−sgn((uξ)b) tan δ 1
)
(pηη)b .
(A.32)
dove il coefficiente di spinta ka/p vale (Eq. (A.12)):
kp
ka
}
=2
cos2 φ
[
1 ±√
1 − cos2 φ
cos2 δ
]
− 1, per∂uξ
∂ξ< 0> 0
.
sgn((uξ)b) e il segno della componente tangenziale al fondo del vet-tore velocita e (pηη)b rappresenta la componente normale al fon-do dello sforzo che si sviluppa lungo l’interfaccia tra la neve ed ilpendio.
Sempre in Appendice A.1 si e dimostrato che nell’ipotesi d’ac-que basse vale la distribuzione idrostatica delle pressioni:
pηη = −ρ(
χ (uξ)2b + g cos ζ
)
(h − η) ,
dove χ e ζ sono rispettivamente la curvatura e la pendenza delfondo e h e lo spessore della valanga, misurato normalmente allasuperficie del pendio. In particolare sul fondo pηη vale:
pηηb= −ρ
(
χ (uξ)2b + g cos ζ
)
h . (A.33)
Si possono ottenere le componenti del tensore degli sforzi alfondo nel riferimento assoluto, ricorrendo alla matrice di rotazioneR, che contiene nelle righe le componenti nel riferimento locale deiversori del riferimento assoluto:
ex = cos ζ eξ + sin ζ eη ey = − sin ζ eξ + cos ζ eη
per cui R =
(
cos ζ sin ζ− sin ζ cos ζ
)
.(A.34)
144

Il tensore degli sforzi nel riferimento assoluto risulta quindi paria:
P =(
pxx pxzpzx pzz
)
= RPRT =
=
(
B CC D
)
(
−ρ(
χ (uξ)2b + g cos ζ
)
h)
,
(A.35)
dove si puo ricavare (uξ)b in funzione della componente orizzontaledi velocita tramite l’espressione:
(uξ)b = (ux)b / cos ζ . (A.36)
I coefficienti B, C, e D sono definiti come:
B(x, t) = 1 − 1 − ka/p
2(1 + cos 2 ζ) +
−sgn(
(uξ)b
)
tan δ sin 2 ζ ,
C(x, t) =1 − ka/p
2sin 2 ζ +
−sgn(
(uξ)b
)
tan δ cos 2 ζ ,
D(x, t) = 1 − 1 − ka/p
2(1 − cos 2 ζ) +
+sgn(
(uξ)b
)
tan δ sin 2 ζ ,
A questo punto si suppone che la distribuzione delle pressionipηη sia lineare non lungo la normale al fondo, come in Eq. (2.11),ma lungo la verticale e si e posto
h(x, t) ∼= H(x, t) cos ζ(x) = (f(x, t) − b(x)) cos ζ(x) .
Ipotizzando infine che le componenti del tensore degli sforzi simantengano proporzionali a pηη sull’intero profilo dell’ammasso siricava che:
P(x, z, t) = ρ A′(x, t)
(
B(x, t) C(x, t)
C(x, t) D(x, t)
)
(f(x, t) − z) (A.37)
145

dove
A′(x, t) = −(
χ (uξ)2b + g cos ζ
)
cos ζ .
Le derivate rispetto a x sono date dalle seguenti espressioni:
1
ρ
∂pxx
∂x=
∂ (A′ B)
∂x(f − z) + A′ B
(
− tan ζ +∂H
∂x
)
,
1
ρ
∂pxz
∂x=
∂A′ C
∂x(f − z) + A′ C
(
− tan ζ +∂H
∂x
)
.
146

A.2.4 L’operazione di media sulla verticale
Si definiscono le componenti medie del vettore velocita sulla verti-cale:
Ux =1
H
∫ f
b
ux dz , (A.38)
Uz =1
H
∫ f
b
uz dz . (A.39)
Integrando lungo z tra b(x) ed f(x, t) l’equazione di continuita (2.2)si ottiene:
∫ f
b
(
∂ux
∂x+
∂uz
∂z
)
dz = 0 ⇒
∂
∂x
(∫ f
b
ux dz
)
− (ux)f
∂f
∂x+ (ux)b
∂b
∂x+ (uz)f − (uz)b = 0 ,
Se si invoca la condizione cinematica al fondo (2.8) e in superficielibera (2.6), che, essendo f(x, t) = H(x, t) + b(x), diventa:
−∂H
∂t− (ux)f
∂f
∂x+ (uz)f = 0 ,
si ricava:
∂H
∂t+
∂(Ux H)
∂x= 0 . (A.40)
Prima di eseguire l’operazione di media sui termini inerzialidell’equazione del moto nella direzione x, e opportuno scriverli informa conservativa, ricorrendo all’equazione di continuita (2.2):
dux
dt=
∂ux
∂t+ ux
∂ux
∂x+ uz
∂uz
∂z=
=∂ux
∂t+
∂(ux2)
∂x+
∂(ux uz)
∂z−(
∂ux
∂x+
∂uz
∂z
)
=
=∂ux
∂t+
∂(ux2)
∂x+
∂(ux uz)
∂z.
147

Mediando si ottiene:
∫ f
b
dux
dtdz =
∫ f
b
(
∂ux
∂t+
∂(ux2)
∂x+
∂(ux uz)
∂z
)
dz =
=∂
∂t
(∫ f
b
ux dz
)
− (ux)f
∂f
∂t+
+∂
∂x
(∫ f
b
ux2 dz
)
−(
ux2)
f
∂f
∂x+(
ux2)
b
∂b
∂x+
+ (ux uz)f − (ux uz)b =
=∂ (H Ux)
∂t+
∂ (αxx H Ux2)
∂x+
+ (ux)f
(
−∂f
∂t− (ux)f
∂f
∂x+ (uz)f
)
+
+ (ux)b
(
+ (ux)b
∂b
∂x− (uz)b
)
,
dove si e definito αxx tale per cui:
∫ f
b
ux2 dz = αxx H Ux
2. (A.41)
Ricorrendo alle condizioni cinematiche in superficie libera (2.6) edal fondo (2.8), si ottiene:
∫ f
b
dux
dtdz =
∂ (H Ux)
∂t+
∂ (αxx H Ux2)
∂x.
148

Vengono trattati ora i termini delle forze esterne :
1
ρ
(∫ f
b
∂pxx
∂xdz +
∫ f
b
∂pzx
∂xdz
)
=
=∂ (A′ B)
∂x
∫ f
b
(f − z) dz + A′ B
(
∂H
∂x− tan ζ
)∫ f
b
dz +
+(
(pzx)f − (pzx)b
)
=
=H2
2
∂ (A′ B)
∂x− A′ H
(
B
(
tan ζ − ∂H
∂x
)
+ C
)
.
Le equazioni di continuita e del moto in direzione x, mediatelungo la verticale, assumono quindi la seguente forma:
∂H
∂t+
∂ (Ux H)
∂x= 0 , (A.42)
∂ (H Ux)
∂t+
∂ (αxx H Ux2)
∂x=
= H
(
H
2
∂ (A′ B)
∂x− A′
(
B
(
tan ζ − ∂H
∂x
)
+ C
))
(A.43)
Si richiama a questo punto l’ipotesi di scivolamento (hp. 6,pag. 12), che dice che il profilo di velocita lungo la normale al fondosia uniforme. Questo implica che, per non violare la condizione alcontorno di tipo cinematico al fondo, la velocita media debba esseretangente al pendio. Da semplici considerazioni geometriche (si vedaFigura A.5), e possibile ricavare la componente lungo z del vettorevelocita, mediato sulla verticale:
Uz = −Ux tan ζ .
Nel caso in cui la pendenza non sia molto elevata ed il campo dimoto non subisca brusche variazioni nella direzione ξ, si puo ipotiz-zare che anche lungo la verticale il profilo di velocita sia costante.Il coefficiente αxx, definito da Eq. (A.41), risulta allora unitario.
149

Figura A.5: Le componenti del vettore velocita nelle direzioni x e z.
Applicando la proprieta distributiva dell’operatore di deriva-zione rispetto al prodotto, si scompongono le derivate dei terminiinerziali delle equazioni del moto. Si puo quindi semplificare grazieall’equazione di continuita mediata (2.20). Dopo aver diviso perH ambo i membri di ciascuna delle due equazioni di bilancio delleforze, si ottiene:
150

∂H
∂t+
∂ (Ux H)
∂x= 0 , (A.44)
∂Ux
∂t+ Ux
∂Ux
∂x=
H
2
∂ (A′ B)
∂x+
−A′
(
B
(
tan ζ − ∂H
∂x
)
+ C
)
, (A.45)
∂Uz
∂t+ Ux
∂Uz
∂x=
H
2
∂ (A′ C)
∂x+
−A′
(
C
(
tan ζ − ∂H
∂x
)
+ D
)
− g . (A.46)
Sulla base dell’ipotesi che il profilo verticale di velocita sia uni-forme, si assume che (uξ)b
∼= Uξ. Le espressioni per A′ (Eq. (2.13)),B (Eq. (2.14)), C (Eq. (2.15)) e D (Eq. (2.16)) vengono percioriscritte nella forma:
A′(x, t) = −(
χ Uξ2 + g cos ζ
)
cos ζ .
B(x, t) = 1 − 1 − ka/p
2(1 + cos 2 ζ) +
−sgn (Uξ) tan δ sin 2 ζ ,
C(x, t) =1 − ka/p
2sin 2 ζ − sgn (Uξ) tan δ cos 2 ζ , (A.47)
D(x, t) = 1 − 1 − ka/p
2(1 − cos 2 ζ) +
+sgn (Uξ) tan δ sin 2 ζ .
151

A.3 Il modello numerico monodimen-
sionale
A.3.1 Il calcolo della funzione integranda f
f e data dall’espressione (si veda Eq. (2.23)):
f =H
2
∂ (A′ B)
∂x− A′
(
B
(
tan ζ − ∂H
∂x
)
+ C
)
dove (Eq. (2.25)-Eq. (2.28)):
A′(x, t) = −(
χ Uξ2 + g cos ζ
)
cos ζ ;
B(x, t) = 1 − 1 − ka/p
2(1 + cos 2 ζ) +
−sgn (Uξ) tan δ sin 2 ζ ;
C(x, t) =1 − ka/p
2sin 2 ζ − sgn (Uξ) tan δ cos 2 ζ .
(A.48)
Per determinare la pendenza ζ e la curvatura χ, e necessariocalcolare le derivate del primo e del secondo ordine di z = b(x).Infatti:
tan ζ = − ∂b
∂xe (A.49)
χ =∂2b∂x2
(
1 + ∂b∂x
2)3/2
. (A.50)
Per il calcolo di tali derivate si e fatto ricorso ai polinomi inter-polanti di Neville [36]. Data una funzione y = y(x) nota in n puntidi supporto (xj, yj), con j = 1, 2, . . . n, l’i-esimo polinomiointerpolante di ordine k (con i compreso tra 1 e n−k) viene definito
152

dalla formula iterativa:
pi i+1 ... i+k(x) = pi i+1 ... i+k−1(x)(xk − x)
(xk − xi)+
+ pi+1 i+2 ... i+k(x)(x − xi)
(xk − xi).
(A.51)
Si osserva che:
pi i+1 ... i+k(x) = pi+1 i+2 ... i+k(x) per x = xk
pi i+1 ... i+k(x) = pi i+1 ... i+k−1(x) per x = xi .
I polinomi di ordine 0, dai quali si sviluppa questa formula iterativa,sono:
pi = yi per i = 1, 2, . . . , n. (A.52)
Questo schema numerico e finalizzato a restituire il valore delpolinomio interpolante per il generico valore di x, piuttosto chea fornire un’espressione finita per il polinomio interpolante stesso.Tuttavia consente di ottenere delle espressioni iterative, agevoli daimplementare in un codice di calcolo, anche per le derivate dei po-linomi interpolanti. In particolare le derivate prime possono esserecalcolate attraverso l’espressione iterativa:
dpi i+1 ... i+k(x)
dx=
dpi i+1 ... i+k−1(x)
dx
(xk − x)
(xk − xi)+
+dpi+1 i+2 ... i+k(x)
dx
(x − xi)
(xk − xi)+
+pi+1 i+2 ... i+k(x) − pi i+1 ... i+k−1(x)
(xk − xi),
(A.53)
dove per i polinomi di ordine 0 si ricava naturalmente che:
dpi
dx= 0 per i = 1, 2, . . . , n . (A.54)
La derivata seconda del polinomio interpolante e invece data
153
da:
d2
dx2(pi i+1 ... i+k(x)) =
d2pi i+1 ... i+k−1(x)
dx2
(xk − x)
(xk − xi)+
+d2pi+1 i+2 ... i+k(x)
dx2
(x − xi)
(xk − xi)+
+2
xk − xi
(
dpi+1 i+2 ... i+k(x)
dx+
−dpi i+1 ... i+k−1(x)
dx
)
,
(A.55)
dove per i polinomi di ordine 0 e 1 si ha:
d2pi
dx2= 0 per i = 1, 2, . . . , n e
d2pi i+1
dx2= 0 per i = 1, 2, . . . , n-1 .
(A.56)
Da semplici considerazioni geometriche (vedi Figura A.5):
Uξ = Ux/ cos ζ.
La derivata ∂H∂x
in Eq. (2.23), viene calcolata come derivataseconda del polinomio di secondo grado che interpola i volumi dellecelle della griglia.
Il coefficiente di spinta in corrispondenza dei nodi della griglia(
ka/p
)
iviene determinato attraverso la media pesata sui volumi dei
valori che esso assume nelle celle adiacenti. Poiche il coefficientedi spinta varia in maniera discreta, il fatto di operare una mediaintroduce un effetto diffusivo che, si e verificato, esercita un’azionestabilizzante sullo schema numerico. Nella cella i + 1
2, ka/p e dato
da:
(
ka/p
)
i+ 1
2
=
(
2
cos2 φ
(
1 ∓√
1 − cos2 φ
cos2 δ− 1
)
− 1
)∣
∣
∣
∣
∣
i+ 1
2
.
Se (Ux)i − (Ux)i+1 > EPSI, viene assunto il valore del coef-ficiente di spinta passiva;
154

se (Ux)i − (Ux)i+1 < EPSI, viene assunto il valore del coeffi-ciente di spinta attiva;
dove EPSI e una costante positiva, in genere assunta pari a1 · 10−3. L’utilizzo di tale costante e necessario per poter discrimi-nare le condizioni di arresto, visto che per problemi di precisionedella macchina, la velocita non arriva mai ad assumere esattamenteil valore 0. E stata fatta la scelta di utilizzare sempre il valore ka
quando∣
∣(Ux)i − (Ux)i+1
∣
∣ < EPSI, cioe quando la massa e consi-derata ferma, anche per valori negativi del gradiente di velocita.Questo equivale a supporre che, quando la massa della valanga eferma, si abbia al suo interno un rilassamento degli sforzi. Questaassunzione si e resa necessaria per eliminare delle instabilita, chesi manifestano nella fase di arresto, a causa del continuo alternarsidi segno della derivata, prodotto da variazioni di velocita minori diEPSI.
Il termine sgn (Uξ) dell’equazione (2.23) definisce la direzionein cui si sviluppa l’attrito sul fondo. Esso dipende dalle condizionidi moto del materiale granulare. Per una descrizione delle modalitasecondo cui e stato calcolato nel modello numerico si veda §A.3.2.
Per completare il calcolo di f e necessario valutare ∂A′ B∂x
:
∂A′ B
∂x=
∂A′
∂xB + A′
∂B
∂x,
dove, visto che:
∂ζ
∂x= − χ
cos ζ.
155

si ottiene:
∂A′
∂x= −χ
(
2 g sin ζ + χ Uξ2 tan ζ
)
− cos ζ∂ (χ Uξ
2)
∂x, (A.57)
∂B
∂x=(
−(
1 − ka/p
)
sin 2ζ + 2 sgn (Uξ) tan δ cos 2ζ)
·
· χ
cos ζ+
1 + cos 2ζ
2
∂ka/p
∂x+
− sin 2ζ∂ (sgn (Uξ) tan δ)
∂x=
=(
−(
1 − ka/p
)
sin 2ζ + 2 sgn (Uξ) tan δ cos 2ζ)
·
· χ
cos ζ− sin 2ζ sgn (Uξ)
∂ (tan δ)
∂x(A.58)
Le derivate∂ka/p
∂x,
∂(sgn(Uξ) )∂x
vengono poste pari a 0. Infatti ka/p
e sgn (Uξ) sono delle funzioni a gradino. Di conseguenza hannoderivata nulla ovunque, tranne nel punto in cui si situa il gradino.In tale punto la derivata tende all’infinito e quindi le equazioniperdono di significato.
A.3.2 Le condizioni di avvio e di arresto
Il valore assegnato alla funzione sgn (Uξ) dipende dallo stadio delmoto della massa nevosa. In particolare viene calcolata in manieradifferente nelle fasi di avvio, scorrimento e arresto del materialegranulare.
• Se |Ux| > EPSI, cioe se la massa e definita in movimento(si veda pag. 155), la forza d’attrito risultera diretta in versoopposto rispetto al moto. Cioe:
Ux > 0 ⇒ sgn (Uξ) = 1 ;
Ux < 0 ⇒ sgn (Uξ) = −1 .
• Se |Ux| < EPSI, cioe se la massa e definita in condizioni dinon movimento, si confrontano i valori della forza motrice Fm
156

e della forza resistente Fr, per unita di massa. Le espressionidi queste grandezze sono ricavate dall’equazione del moto,scritta nel riferimento locale (A.31) in termini dimensionali:
Fm = g
(
sin ζ − ka/p cos ζ∂h
∂ξ
)
; (A.59)
Fr = tan δ(
g cos ζ + χUξ2)
. (A.60)
- Se |Fm| > Fr allora la massa e ferma, ma si trova incondizione di mettersi in moto. In tal caso il segno saralegato alla direzione della forza motrice. In particolare:
Fm > 0 ⇒ sgn (Uξ) = 1 ;
Fm < 0 ⇒ sgn (Uξ) = −1 .
- Se |Fm| < Fr allora la forza motrice e minore della mas-sima resistenza che puo essere mobilitata in condizionistatiche per effetto dell’attrito. In tal caso la massa simantiene in condizioni di non movimento. La funzionef , definita in Eq. (2.32), viene posta pari a 0.
A.3.3 Condizioni di stabilita del modello
La condizione imposta affinche non si abbia la degenerazione dellacella i + 1
2puo essere espressa tramite l’espressione:
(∆t)i+ 1
2
=α ∆x
max (|Uxi| , |Uxi+1|). (A.61)
L’intervallo temporale di calcolo viene assunto pari al minimo valoretra il ∆t di base e tra i ∆t forniti per le singole celle dall’espressione(A.61).
Il valore di α massimo e 0.5. Per valori superiori gli estremidelle celle potrebbero invertirsi e si otterrebbero dei volumi negativi.Sulla base di prove numeriche si e ottenuto che il valore ottimale diα, che da luogo alle migliori condizioni di stabilita, e pari a 0.25.
E stato testato un diverso approccio, che prevede di considerarela velocita relativa dei due nodi che definiscono la cella. ∆t vienescelto in maniera tale che lo spostamento reciproco tra le due facce
157

della cella non sia superiore alla frazione α dell’ampiezza della cella.Per la cella i + 1
2si avrebbe cioe:
(∆t)i+ 1
2
=α ∆x
|Uxi+1 − Uxi|. (A.62)
Nelle simulazioni numeriche eseguite con questo tipo di con-trollo su ∆t, si osserva che la correzione dell’intervallo temporale dicalcolo viene eseguita meno di frequente e le celle presentano rapidevariazioni di dimensione. Come conseguenza di questo si sono ma-nifestati degli andamenti a fisarmonica nel profilo delle altezze delmanto nevoso, con conseguenti instabilita numeriche. Si e perciopreferito a questo metodo quello descritto in precedenza.
Il criterio tipo Courant per la cella i + 12
si traduce in un limitesull’intervallo temporale ∆t dato da:
(∆t)i+ 1
2
=α ∆x
max (|ci| , |ci+1|). (A.64)
dove ci e stato calcolato come:
ci =
√
−A′i Bi
Hi+ 1
2
+ Hi− 1
2
2. (A.65)
Il valore ottimale di α e, in questo caso, 0.5.Ad ogni passo temporale si e utilizzato come ∆t di calcolo il
minimo valore tra quello ottenuto con l’equazione (A.61) e quellocalcolato per ogni nodo con l’espressione (A.64).
Per impedire che, in corrispondenza del nodo i, all’interno di unintero intervallo temporale, vi sia l’inversione del moto, si imponeche se:
|Uxi| > EPSI e (Uxi + f(t, Uxi) ∆t) · Uxi < 0 ,
si ricorre ad un intervallo temporale corretto:
(∆t)corr = − Uxi
f(t, Uxi), (A.66)
158

A.3.4 Il termine diffusivo nel modello numerico
monodimensionale
Il modello tende a manifestare delle instabilita, che si presenta-no nella forma di un andamento oscillante delle funzioni incognite.Questo si verifica soprattutto nella fase di arresto e specie in alcunesituazioni limite, come ad esempio in presenza di forti curvature.Tale comportamento a volte puo compromettere il corretto funzio-namento del programma. In particolare il materiale granulare pereffetto di tali oscillazioni non giunge mai ad un completo arresto. Estato percio inserito un termine diffusivo nell’equazione del moto.Esso tende ad attenuare le oscillazioni, ma rappresenta anche unerrore aggiunto, che riduce l’ordine dello schema di integrazione.
Si sono testate diverse forme per il termine diffusivo da aggiun-gere alla funzione f definita nella Eq. (2.32). L’espressione che haprodotto i migliori risultati e la seguente:
β1
∀
∫
∀
∇ · (c∇Ux) d∀ , (A.67)
dove il “volume” ∀ e rappresentato da un elemento di lunghezza(
xi+ 1
2− xi− 1
2
)
attorno al nodo xi; il gradiente di Ux e semplice-
mente ∂Ux
∂x; c e la celerita di propagazione delle perturbazioni gra-
vitazionali di piccola ampiezza, rispetto ad un osservatore solidalecon la massa in movimento; β e una costante, dimensionalmenteuna lunghezza.
L’integrale viene cosı sviluppato:
1
∀
∫
∀
∇ · (c∇Ux) d∀ =1
xi+ 1
2
− xi− 1
2
∫ xi+1
2
xi− 1
2
∂
∂x
(
c∂Ux
∂x
)
dx =
=2
xi+1 − xi−1
c∂Ux
∂x
∣
∣
∣
∣
xi+1
2
xi− 1
2
=
=2
xi+1 − xi−1
(
ci+ 1
2
Uxi+1 − Uxi
xi+1 − xi− ci− 1
2
Uxi − Uxi−1
xi − xi−1
)
.
Assumendo la lunghezza β pari a 0.5 (xi+1 − xi−1), il termine
159

diffusivo aggiunto risulta:
1
2
(
ci+ 1
2
Uxi+1 − Uxi
xi+1 − xi
− ci− 1
2
Uxi − Uxi−1
xi − xi−1
)
.
deve essere determinata l’espressione per la celerita c. Per ripor-tarsi nell’ambito di un approccio lagrangiano, si scrive il sistema,costituito dall’equazione di continuita (2.20) e dall’equazione delmoto nella direzione x (2.23), rispetto ad un osservatore solidalecon la massa in movimento. Vengono definite due nuove variabili:
x = x(x, t) = x −∫ t
0
Ux dt ,
t = t(t) = t ,
Se si assume che localmente Ux possa essere considerato costante,cioe che si possa porre ∂Ux
∂x∼= 0, si avra:
∂x
∂x= 1 ,
∂x
∂t= −Ux ,
∂t
∂x= 0 ,
∂t
∂t= 1 ,
Data una generica funzione g (x, t) = g (x(x, t), t(t)), le derivaterispetto alle variabili del riferimento fisso possono essere espresse infunzione delle derivate rispetto alle variabili del riferimento mobile:
∂g
∂x=
∂g
∂x
∂x
∂x+
∂g
∂t
∂t
∂x=
∂g
∂x,
∂g
∂t=
∂g
∂x
∂x
∂t+
∂g
∂t
∂t
∂t= −Ux
∂g
∂x+
∂g
∂t.
Sulla base di tali espressioni, si possono scrivere le equazioni delmoto rispetto al riferimento mobile:
∂H
∂t+ H
∂Ux
∂x= 0 , (A.68)
∂Ux
∂t− A′ B
∂H
∂x=
∂A′ B
∂x− A′ (B tan ζ + C) . (A.69)
160

Tale sistema puo essere riscritto in forma matriciale:
(
HU
)
,t
+
0 H
−A′ B 0
(
HU
)
,x
=
0
∂A′ B
∂x− A′ (B tan ζ + C)
,
(A.70)
Le celerita caratteristiche sono date dagli autovalori λ dellamatrice di tale sistema:
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
−λ H
−A′ B −λ
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
= λ2 + A′ B H = 0 ,
da cui si ricavano due valori di λ:
λ12 = c12 = ±√−A′ B H . (A.72)
E possibile verificare che A′ B H e negativo e che quindi le duecelerita caratteristiche sono reali distinte ed il problema e iperboli-co.
H e positivo. A′, la cui espressione e data da (2.25), e negativo.Infatti (χ Uξ
2 + g cos ζ) deve essere positivo, dato che rappresen-ta lo sforzo trasmesso normalmente al fondo: se fosse negativo siavrebbero delle tensioni di trazione, la neve perderebbe di aderenzae tale situazione non puo essere descritta da questo modello.
Richiede qualche parola in piu la dimostrazione che B e posi-tivo. L’espressione (2.26), che descrive B, puo essere sviluppatacome:
B = sin2 ζ + ka/p cos2 ζ − 2 sgn (Uξ) tan δ sin ζ cos ζ . (A.74)
161

Se sgn (Uξ) < 0, allora B e certamente positivo. Se invece sgn (Uξ) >0, si puo ulteriormente sviluppare l’espressione (A.74), dividendoper cos2 ζ. Si ricava che B e positivo quando tan ζ si trova negliintervalli esterni alle radici dell’equazione:
tan2 ζ − 2 tan δ tan ζ + ka/p = 0 date da
tan ζ = tan δ ±√
tan2 δ − ka/p .
Questo accade per ogni valore di ζ nell’insieme dei reali, in quantotali radici sono complesse coniugate. Infatti:
tan2 ζ − ka/p < 0 .
Essendo il coefficiente di spinta dato dall’espressione (A.12), biso-gna dimostrare che:
tan δ2 + 1 − 2
cos2 φ
(
1 ∓√
1 − cos2 φ
cos2 δ
)
=
=1
cos2 δ− 2
cos2 φ± 2
cos2 φ
√
1 − cos2φ
cos2 δ< 0
In condizioni di spinta passiva, la disuguaglianza deve valerecon il segno −. E sufficiente dimostrare che:
1
cos2 δ<
2
cos2 φ. (A.76)
Ma questo discende immediatamente dal fatto che l’angolo d’attri-to interno φ deve essere maggiore dell’angolo d’attrito al fondo δ,affinche il radicando sia positivo. Cio vuol dire che:
1
cos2 φ>
1
cos2 δ,
e quindi a maggior ragione dovra essere vera la disequazione (A.76).In condizioni di spinta attiva, la disuguaglianza da verificare
puo essere riscritta nella forma:√
1 − cos2 φ
cos2 δ< 1 − cos2 φ
2 cos2 δ.
162

Poiche il secondo membro e certamente positivo, essendocos2 φ < cos2 δ < 2 cos2 δ per quanto detto in precedenza, basteradimostrare che la disuguaglianza continua a valere quando i duemembri della disequazione sono elevati al quadrato. Cioe deveessere:
1 − cos2 φ
cos2 δ< 1 − cos2 φ
cos2 δ+
cos4 φ
4 cos4 δ,
ma questo e sicuramente vero essendo cos4 φ4 cos4 δ
> 0.Poiche nello schema di integrazione numerica A′ B e valutato
nei nodi della griglia di calcolo, mentre H in corrispondenza dellecelle, si e scomposta l’espressione che fornisce la celerita di pro-pagazione in due fattori. Il termine diffusivo, aggiunto al secondomembro dell’equazione del moto, scritta in direzione x, ha dunquela forma:
1
2
√
− (A′ B)i
(
√
Hi+ 1
2
Uxi+1 − Uxi
xi+1 − xi
−√
Hi− 1
2
Uxi − Uxi−1
xi − xi−1
)
.
163

164
Appendice B
Modello bidimensionale
B.1 Il modello bidimensionale nel rife-
rimento assoluto
B.1.1 Gli strumenti forniti dall’analisi tensoria-le
La simbologia utilizzata in quanto segue, relativamente all’analisitensoriale, e derivata dal testo “A Brief on Tensor Analysis” diJ.G.Simmonds [24]. Viene utilizzata la convenzione di Einstein,in base alla quale si applica la sommatoria ove gli indici vengonoripetuti. Le derivate parziali vengono descritte simbolicamente conl’uso della virgola.
Le componenti del tensore degli sforzi al fondo vengono calco-late lavorando in un sistema di riferimento curvilineo di coordinate(ξ, η, ζ), legato alla superficie del pendio. Si definisce un asse ζnormale al fondo e si suppone che le linee coordinate ξ ed η si svi-luppino lungo la superficie del pendio ortogonalmente all’asse y eall’asse x del riferimento assoluto (vedi Figura B.1). Tale sistemadi riferimento non e in generale ortonormale.
Siano
z = b (x, y) e (B.1)
φb (x, y, z) = z − b (x, y) = 0 (B.2)
165

Figura B.1: Sistemi di riferimento assoluto e curvilineo nel dominiotridimensionale.
le equazioni, esplicita ed implicita, del fondo nel riferimento asso-luto. Il versore che definisce la direzione dell’asse ζ e:
eζ =∇φb
|∇φb|=
(−b,x,−b,y, 1)√
1 + b2,x + b2
,y
. (B.3)
Il versore che definisce localmente la direzione delle linee coor-dinate ξ dovra essere di modulo unitario, normale al versore eζ eall’asse y, cioe al versore ey = (0, 1, 0):
eξ · eζ = 0
eξ · ey = 0
|eξ| = 1
⇒ eξ =(1, 0, b,x)√
1 + b2,x
. (B.4)
Analogalmente il versore eη dovra essere di modulo unitario,
166

normale al versore eζ e all’asse x, cioe al versore ex = (1, 0, 0):
eη · eζ = 0
eη · ex = 0
|eη| = 1
⇒ eη =(0, 1, b,y)√
1 + b2,y
. (B.5)
Sia x = x(
ξ, η, ζ)
una funzione vettoriale che descrive la po-
sizione di un generico punto nello spazio in termini di coordinatecurvilinee. I vettori della base “cellar” del riferimento curvilineovengono ricavati derivando la funzione x rispetto a ξ, η e ζ [24]. Si
puo localizzare il generico punto x = x(
ξ, η, z)
muovendosi prima
lungo l’asse ξ ( η = 0 ) fino al punto in cui ξ = ξ, quindi lungola linea coordinata η (ξ = ξ) fino ad η = η, infine sollevandosinormalmente al fondo di ζ (vedi Figura B.1, percorso 1):
x = x0 +
∫ ξ
0
eξ|ξ=τη=0
dτ +
∫ η
0
eη|ξ=ξη=µ
fη
(
ξ, µ)
dµ +
+ζ eζ |ξ=ξη=η
,
(B.6)
dove x0 definisce la posizione dell’origine del riferimento curvilineo,
mentre fη
(
ξ, µ)
dµ rappresenta lo spostamento lungo la linea coor-
dinata η (ξ = ξ) corrispondente ad un movimento di lunghezza dµlungo l’asse curvilineo η (vedi Figura B.2). Se ci si sposta di dµlungo l’asse η, si passa dalla linea coordinata ξ (η = µ) alla lineacoordinata ξ (η = µ + dµ). Le due linee si trovano su due pianiche sono ortogonali all’asse y. Cio vuol dire che la componente dispostamento nella direzione y dovra essere la stessa lungo le duelinee e quindi:
(
eη|ξ=ξη=µ
fη
(
ξ, µ)
dµ
)
· ey =
(
eη|ξ=0η=µ
dµ
)
· ey ⇒
⇒ fη
(
ξ, µ)
=
√
1 + b2,y
∣
∣
ξ=ξη=µ
√
1 + b2,y
∣
∣
ξ=0η=µ
.
167
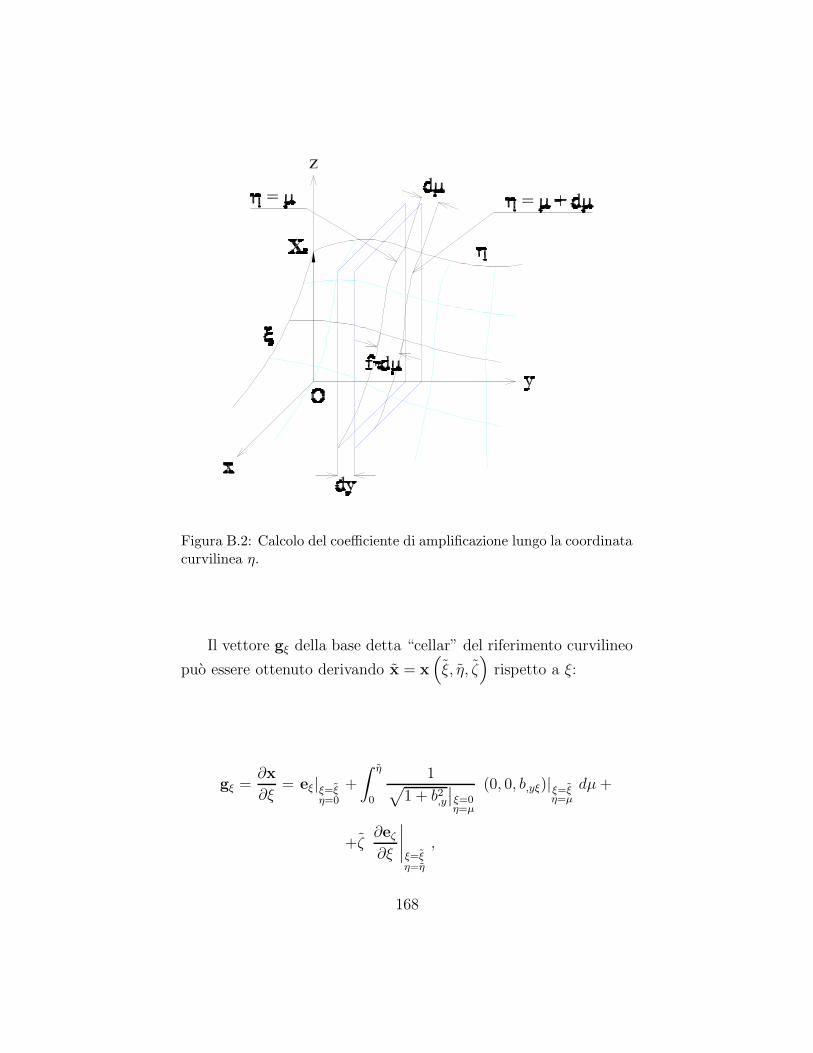
Figura B.2: Calcolo del coefficiente di amplificazione lungo la coordinatacurvilinea η.
Il vettore gξ della base detta “cellar” del riferimento curvilineo
puo essere ottenuto derivando x = x(
ξ, η, ζ)
rispetto a ξ:
gξ =∂x
∂ξ= eξ|ξ=ξ
η=0
+
∫ η
0
1√
1 + b2,y
∣
∣
ξ=0η=µ
(0, 0, b,yξ)|ξ=ξη=µ
dµ +
+ζ∂eζ
∂ξ
∣
∣
∣
∣
ξ=ξη=η
,
168

dove:
∂eζ
∂ξ=
1(
1 + b2,x + b2
,y
)3/2
b,x b,y b,yξ − b,xξ
(
1 + b2,y
)
b,x b,y b,xξ − b,yξ
(
1 + b2,x
)
− (b,x b,xξ + b,y b,yξ)
. (B.7)
Si ottiene infine che:
gξ =
1√
1 + b2,x
∣
∣
ξ=ξη=0
+
+b,y (b,x b,yξ − b,y b,xξ) − b,xξ
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,x (b,y b,xξ − b,x b,yξ) − b,yξ(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,x√
1 + b2,x
∣
∣
∣
∣
∣
ξ=ξη=0
− b,x b,xξ + b,y b,yξ(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ+
+
∫ η
0
1√
1 + b2,y
∣
∣
ξ=0η=µ
b,yξ|ξ=ξη=µ
dµ
. (B.8)
Il vettore della base “cellar” relativo alla direzione η e invece:
gη =∂x
∂η= eη|ξ=ξ
η=η
√
1 + b2,y
∣
∣
ξ=ξη=η
√
1 + b2,y
∣
∣
ξ=0η=η
+∂eζ
∂η
∣
∣
∣
∣
ξ=ξη=η
ζ .
La derivata del versore eζ fornisce:
∂eζ
∂η=
1(
1 + b2,x + b2
,y
)3/2
b,x b,y b,yξ − b,xξ
(
1 + b2,y
)
b,x b,y b,xη − b,yη
(
1 + b2,x
)
− (b,x b,xη + b,y b,yη)
. (B.9)
169

per cui:
gη =
b,y (b,x b,yη − b,y b,xη) − b,xη(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
1√
1 + b2,y
∣
∣
ξ=0η=η
+b,x (b,y b,xη − b,x b,yη) − b,yη
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,y|ξ=ξη=η
√
1 + b2,y
∣
∣
ξ=0η=η
− b,x b,xη + b,y b,yη(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
. (B.10)
Infine nella direzione ζ il vettore della base “cellar” e:
gζ =∂x
∂ζ= eζ =
1√
1 + b2,x + b2
,y
−b,x
−b,y
1
. (B.11)
Il vettore gξ ha pero la componente nella direzione ζ che pre-senta un termine integrale. Questo lo rende difficile da maneggiare.Una seconda terna di vettori di base puo essere ricavata definendo
il vettore posizione x = x(
ξ, η, ζ)
in un altro modo:
x = x0 +
∫ η
0
eη|ξ=0η=µ
dµ +
∫ ξ
0
eξ|ξ=τη=η
fξ (τ, η) dτ +
+ζ eζ |ξ=ξη=η
.
(B.12)
In questo caso, partendo dall’origine del sistema di riferimento cur-vilineo x0, ci si sposta prima lungo l’asse curvilineo η fino a raggiun-gere η, quindi lungo la linea coordinata ξ (η = η), fino al punto sulla
170

superficie di coordinate(
ξ, η, 0)
, da dove poi ci si muove normal-
mente al fondo di un tratto lungo ζ (si veda Figura B.1, percorso2). La funzione fξ (τ, η) e il fattore amplificativo che fornisce lospostamento lungo la linea coordinata ξ (η = η) corrispondente aduno spostamento unitario lungo l’asse ξ (η = 0) quando ξ = τ .Se ci si muove di dτ , dalla linea coordinata η (ξ = τ) alla lineaη (ξ = τ + dτ), poiche queste devono giacere su piani ortogonaliall’asse x, la componente di spostamento lungo x dovra essere lastessa (vedi Figura B.3). Cioe:
(
eξ|ξ=τη=η
fξ (τ, η) dτ
)
· ex =
(
eξ|ξ=τη=0
dτ
)
· ex ⇒
⇒ fξ (τ, η) =
√
1 + b2,x
∣
∣
ξ=τη=η
√
1 + b2,x
∣
∣
ξ=τη=0
.
I vettori della base “cellar” possono essere ottenuti, come inprecedenza, derivando rispetto a ξ, η e ζ il vettore posizione.
Il vettore della base “cellar” relativo alla direzione ξ e cosı datoda:
gξ =∂x
∂ξ= eξ|ξ=ξ
η=η
√
1 + b2,x
∣
∣
ξ=ξη=η
√
1 + b2,x
∣
∣
ξ=ξη=0
+∂eζ
∂ξ
∣
∣
∣
∣
ξ=ξη=η
ζ .
La derivata del versore eζ rispetto a ξ e gia stata ricavata in prece-
171
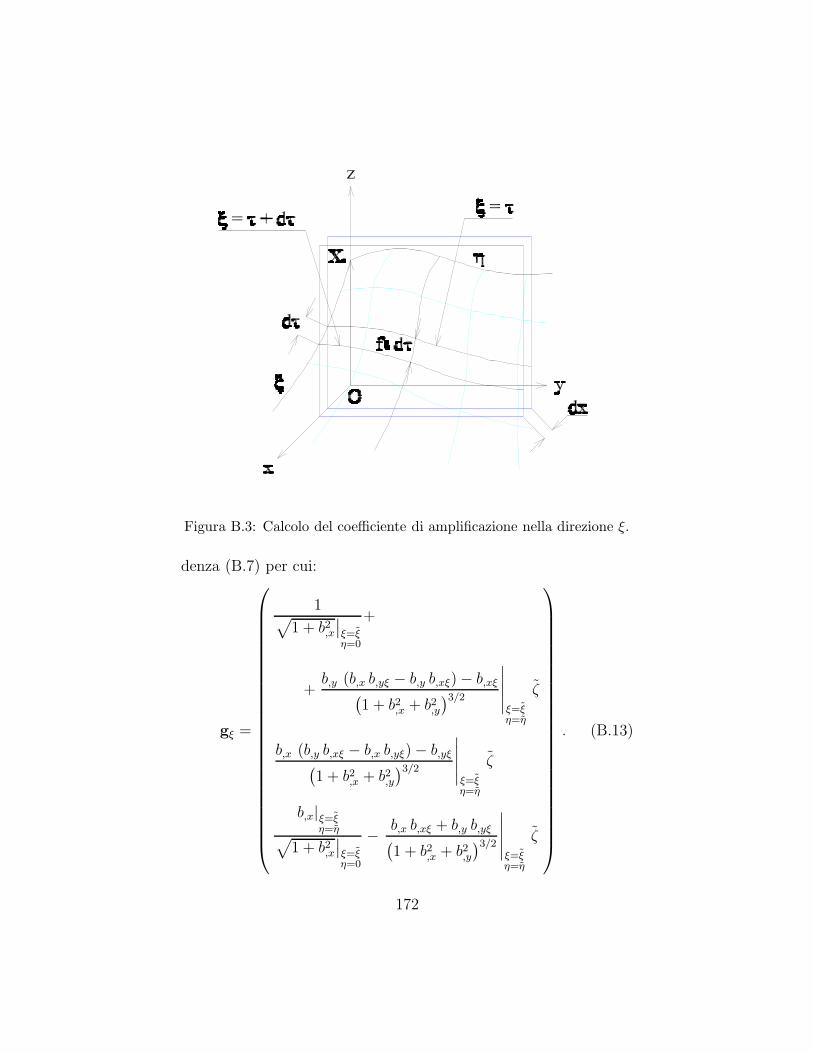
Figura B.3: Calcolo del coefficiente di amplificazione nella direzione ξ.
denza (B.7) per cui:
gξ =
1√
1 + b2,x
∣
∣
ξ=ξη=0
+
+b,y (b,x b,yξ − b,y b,xξ) − b,xξ
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,x (b,y b,xξ − b,x b,yξ) − b,yξ(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,x|ξ=ξη=η
√
1 + b2,x
∣
∣
ξ=ξη=0
− b,x b,xξ + b,y b,yξ(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
. (B.13)
172

Analogalmente per gη:
gη =∂x
∂η= eη|ξ=0
η=η+
∫ ξ
0
1√
1 + b2,x
∣
∣
ξ=τη=0
(0, 0, b,xη)|ξ=τη=η
dτ +
+ζ∂eζ
∂η
∣
∣
∣
∣
ξ=ξη=η
,
Utilizzando l’espressione (B.9) per descrivere la derivata di ez ri-spetto a η, si ricava:
gη =
b,y (b,x b,yη − b,y b,xη) − b,xη(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
1√
1 + b2,y
∣
∣
ξ=0η=η
+
+b,x (b,y b,xη − b,x b,yη) − b,yη
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ
b,y√
1 + b2,y
∣
∣
∣
∣
∣ξ=0η=η
− b,x b,xη + b,y b,yη(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ζ+
+
∫ ξ
0
b,xη|ξ=τη=η
√
1 + b2,x
∣
∣
ξ=τη=0
dτ
. (B.14)
Per gζ si ottiene di nuovo l’espressione (B.11). In questa secon-da terna di vettori, il termine integrale compare nell’ espressioneper gη. Le due equazioni (B.6) e (B.12) devono essere uguali, in
quanto forniscono la posizione del medesimo punto x = x(
ξ, η, ζ)
.
Quindi le derivate rispetto a ξ, η e ζ devono restituire gli stessivettori, cioe le due terne di vettori di base devono essere coinci-denti. In Appendice B.1.1 viene riportata la dimostrazione che lediverse espressioni per i vettori di base coincidono. Si possono per-
173
cio scegliere le espressioni che non contengono termini integrali. Inparticolare per gξ l’equazione (B.13), per gη (B.10), per gζ (B.11).
Facendo l’ipotesi di acque basse (hp. 5, pag. 10) non tutti itermini delle componenti della base “cellar” sono confrontabili. Enecessario fare un’analisi dimensionale per individuare i termini chepossono essere trascurati.
Indico con Lsξ ed Lsη le dimensioni caratteristiche dell’ammas-so nevoso nelle direzioni ξ ed η, con Lsx ed Lsy i corrispondentivalori lungo x e lungo y, con Hs lo spessore verticale massimo dellavalanga, con Bs il massimo dislivello sul quale si sviluppa la massadi neve. Definisco le grandezze adimensionalizzate:
x =x
Lsxy =
y
Lsyz =
z
Bsb =
b
Bs
ξ =ξ
Lsξ
η =η
Lsη
ζ =ζ
Hs
(B.15)
Per le pendenze tipiche del fenomeno in questione, si puo assu-mere che sia Bs ≈ Lsx ≈ Lsy. Dall’equazione (B.28) si ricava:
dξ
dx=√
1 + b2,x
∣
∣
∣
ξ=ξη=0
.
che adimensionalizzata fornisce:
dξ
dx
Lsξ
Lsx
=
√
1 +
(
Bs
Lsx
)2
ˆb,x2
∣
∣
∣
∣
∣
∣
ξ=ξη=0
⇒
⇒ Lsξ
Lsx=
dx
dξ
√
1 +
(
Bs
Lsx
)2
b2x
∣
∣
∣
∣
∣
∣
ξ=ξη=0
≈ 1 ,
essendo dx/dξ ≈ 1 e bx ≈ 1.Allo stesso modo, scrivendo l’equazione (B.29) in forma adi-
mensionale, si ricava che Lsη/Lsy ≈ 1. Quindi Lsx, Lsy, Lsξ, Lsη,Bs sono tutti dello stesso ordine di grandezza, che si assume pari aLs.
174
Si definisce il rapporto:
ε =Hs
Ls.
I vettori della base “cellar” scritti in forma adimensionale, as-sumono la forma:
gξ =
1√
1 + b2,x
∣
∣
ξ=ξη=0
+ε ζb,y (b,x b,yξ − b,y b,xξ) − b,xξ
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
ε ζb,x (b,y b,xξ − b,x b,yξ) − b,yξ
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
b,x|ξ=ξη=η
√
1 + b2,x
∣
∣
ξ=ξη=0
− ε ζb,x b,xξ + b,y b,yξ(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
, (B.16)
gη =
ε ζb,y (b,x b,yη − b,y b,xη) − b,xη
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
1√
1 + b2,y
∣
∣
ξ=0η=η
+
+ε ζb,x (b,y b,xη − b,x b,yη) − b,yη
(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
b,y|ξ=ξη=η
√
1 + b2,y
∣
∣
ξ=0η=η
− ε ζb,x b,xη + b,y b,yη(
1 + b2,x + b2
,y
)3/2
∣
∣
∣
∣
∣
ξ=ξη=η
, (B.17)
175

gζ =∂x
∂ζ= eζ =
1√
1 + b2,x + b2
,y
−b,x
−b,y
1
, (B.18)
dove per brevita si e tralasciato il cappello per indicare le grandezzeadimensionalizzate.
Oltre alla base “cellar” del sistema di riferimento, si puo definireuna base denominata “roof”, la quale e legata alla base “cellar”dalle seguenti relazioni:
gi · gj = δij . (B.19)
δij e il delta di Kronecker e vale:
δij =
{
1 i = j0 i 6= j
.
Vengono di seguito ricavate le componenti dei vettori della base“roof”, trascurando i termini di ordine ε.
Nella direzione ξ dovra essere per le (B.19):
gξ · gξ = 1 ,
gξ · gη = 0 ,
gξ · gζ = 0 ,
⇒
⇒ gξ =
√
1 + b2,x
∣
∣
ξ=ξη=0
1 + b2,x + b2
,y
∣
∣
ξ=ξη=η
(
1 + b2,y,−b,x b,y, b,x
)∣
∣
ξ=ξη=η
.
(B.20)
176

Il vettore “roof” relativo alla direzione η e dato da:
gη · gη = 1 ,
gη · gξ = 0 ,
gη · gζ = 0 ,
⇒
⇒ gη =
√
1 + b2,y
∣
∣
ξ=0η=η
1 + b2,x + b2
,y
∣
∣
ξ=ξη=η
(
−b,x b,y; 1 + b2,x ; b,y
)∣
∣
ξ=ξη=η
.
(B.21)
Infine e facile verificare che:
gζ = gζ = eζ =1
√
1 + b2,x + b2
,y
(−b,x;−b,y; 1)
∣
∣
∣
∣
∣
ξ=ξη=η
. (B.22)
Infatti gζ e normale al fondo e quindi anche ai due vettori della base“cellar” gξ e gη (gζ ·gξ = 0 e gζ ·gξ = 0). Inoltre gζ ·gζ = 1, essendogζ di modulo unitario. Sono quindi soddisfatte le condizioni (B.19),per la definizione dei vettori della base “roof”.
Un generico vettore v puo essere descritto attraverso una com-binazione lineare dei vettori della base “cellar” o della base “roof”del sistema di riferimento:
v = vi gi = vj gj , (B.23)
dove vi rappresenta l’i-esima componente “roof” e vj la j-esimacomponente “cellar” del vettore v.
La definizione delle componenti “roof” e “cellar” di un vettorediscende immediatamente dalla definizione dei vettori della base“cellar” e dei vettori della base “roof”:
vi = v · gi e vj = v · gj . (B.24)
Allo stesso modo un generico tensore puo essere descritto intermini di componenti “roof” o di componenti “cellar” o ancora dicomponenti miste con le seguenti definizioni:
T = tij gj gi = tij gj gi = ti·j gj gi = t·ji gj gi . (B.25)
177

In tali espressioni si e introdotta l’operazione prodotto direttotra vettori [24]. Dati due vettori u e v, Il prodotto diretto (uv)restituisce un tensore, detto diade, il quale, applicato ad un terzovettore w, fornisce:
(uv) w = u (v · w) .
Un vettore v puo essere poi definito in termini di componentifisiche:
v = v(i) gi
|gi|,
da cui deriva immediatamente la definizione delle componenti fisi-che:
v(i) = vi |gi| . (B.26)
Anche con i tensori e possibile lavorare in termini di componentifisiche:
T = t(ij)gj gi
|gj| |gi|,
dove si ha che:
t(ij) = tij |gi| |gj| .
Coincidenza delle due basi cellar definite nel riferimentolocale di coordinate (ξ, η, ζ)
Si vuole dimostrare che le espressioni ottenute per i vettori dellabase del riferimento curvilineo derivando le due equazioni (B.6) e(B.12) sono equivalenti.
Per quanto riguarda il vettore gξ, le componenti x ed y delledue espressioni (B.13) e (B.8) sono evidentemente identiche. Biso-gna spendere qualche parola in piu per la componente z. Si devedimostrare che:
178

b,x√
1 + b2,x
∣
∣
∣
∣
∣
ξ=ξη=0
+
∫ η
0
b,yξ|ξ=ξη=µ
√
1 + b2,y
∣
∣
ξ=0η=µ
dµ =
b,x|ξ=ξη=η
√
1 + b2,x
∣
∣
ξ=ξη=0
. (B.27)
Si osserva che, muovendosi lungo il piano coordinato ξ = ξ (cioevariando η e ζ), la x rimane costante. Cio vuol dire che x e funzionesolo di ξ. Un discorso analogo puo essere fatto per y che e funzione
solo di η. Quindi, data una generica funzione f = f(
ξ, η, ζ)
, essa
puo essere descritta in funzione delle coordinate assolute come f =f (x, y, z) = f (ξ (x) , η (y) , ζ (x, y, z)). Per cui posso esprimere lederivate di f rispetto alle coordinate assolute x e y, in termini dellederivate rispetto alle corrispondenti coordinate curvilinee ξ e η:
∂f
∂x=
∂f
∂ξ
dξ
dxe
∂f
∂y=
∂f
∂η
dη
dy,
Come si puo vedere in Figura B.4, se ci si sposta di dx lungol’asse delle x, il corrispondente spostamento lungo l’asse ξ sara:
dξ =dx
eξx|ξ=ξ
η=0
=√
1 + b2,x
∣
∣
∣
ξ=ξη=0
dx . (B.28)
Allo stesso modo si puo esprimere dη come:
dη =dy
eηy|ξ=0
η=η
=√
1 + b2,y
∣
∣
∣ξ=0η=η
dy . (B.29)
Quindi risulta che:
179

Figura B.4: Calcolo della derivata dξ/dx.
b,x|ξ=ξη=0
=(
b,ξ
√
1 + b2,x
)∣
∣
∣
ξ=ξη=0
,
b,x|ξ=ξη=η
= b,ξ|ξ=ξη=η
√
1 + b2,x
∣
∣
∣
ξ=ξη=0
e
b,yξ|ξ=ξη=µ
= b,ηξ|ξ=ξη=µ
√
1 + b2,y
∣
∣
∣
ξ=0η=µ
.
Ma allora, essendo b,ηξ = b,ξη, il primo membro dell’equazione(B.27) diventa:
b,ξ|ξ=ξη=0
+
∫ η
0
b,ξη|ξ=ξη=µ
dµ = b,ξ|ξ=ξη=0
+ b,ξ|ξ=ξη=η
− b,ξ|ξ=ξη=0
=
= b,ξ|ξ=ξη=η
,
180

che e proprio l’espressione che si ricava dal secondo membro. Si-milmente si dimostra che le definizioni (B.10) e (B.14) per il vettoregη sono identiche.
181

B.1.2 La distribuzione idrostatica delle pressio-
ni
In quanto segue si dimostra che l’equazione di conservazione dellaquantita di moto, scritta in direzione ζ, nell’ipotesi di acque bas-se (hp. 5, pag. 10), si traduce nella distribuzione idrostatica dellepressioni in direzione normale al fondo.
Le equazioni di conservazione della quantita di moto, scritte informa vettoriale, assumono la forma [24]:
ρdu
dt= ρ (u,t + u · ∇u) = f + ∇ · P . (B.30)
Il vettore f rappresenta le forze di volume esterne, P e il tensoredegli sforzi, u il vettore velocita, t il tempo, ρ la densita.
In forma indiciale, dopo aver diviso per la densita, le equazionisi presentano come:
ui,t gi + ul
(
gl · gj)
∇j ui gi =1
ρf igi +
1
ρgj∇jp
il (gl gi) ,
cioe nella direzione i:
ui,t + uj ∇j ui gi =
1
ρf i +
1
ρ∇jp
ij , (B.31)
essendo:
u = ui gi ,
f = f i gi ,
P = pil gl gi ,
∇ = gj∇j ,
dove gj e gj sono l’elemento j-esimo rispettivamente nella base“roof” e nella base “cellar” del riferimento curvilineo; ui, f i e pli
rappresentano le componenti “roof” dei vettori u, f e del tensoreP.
∇j prende il nome di derivata covariante e, applicata alle com-ponenti “roof” di un vettore u e di un tensore P viene definita
182

come:
∇jui = ui
,j + Γijk uk
∇kpji = pji
,k + Γjpk ppi + Γi
pk pjp .
Γkij sono i coefficienti di Christoffel, definiti come:
Γkij = gi,j · gk .
I coefficienti di Christoffel godono della seguente proprieta di sim-metria:
Γijk = Γjik , infatti:
Γijk = gi,j · gk = x,ij · gk =
= x,ji · gk = gj,i · gk =
= Γkji .
L’equazione di conservazione della quantita di moto nella dire-
183

zione ζ, sviluppata, si presenta come:
uζ,t + uξ
(
uζ,ξ + Γζ
ξξ uξ + Γζξη uη + Γζ
ξζ uζ)
+
+ uη(
uζ,η + Γζ
ηξ uξ + Γζηη uη + Γζ
ηζ uζ)
+
+ uζ(
uζ,ζ + Γζ
ζξ uξ + Γζζη uη + Γζ
ζζ uζ)
=
= − g1
√
1 + b2,x + b2
,y
+
+1
ρ
(
pζξ,ξ + Γζ
ξξ pξξ + Γζηξ pηξ + Γζ
ζξ pζξ+
+Γξξξ pζξ + Γξ
ηξ pζη + Γξζξ pζζ
)
+
+1
ρ
(
pζη,η + Γζ
ξη pξη + Γζηη pηη + Γζ
ζη pζη+
+Γηξη pζξ + Γη
ηη pζη + Γηζη pζζ
)
+
+1
ρ
(
pζζ,ζ + Γζ
ξζ pξζ + Γζηζ pηζ + Γζ
ζζ pζζ+
+Γζξζ pζξ + Γζ
ηζ pζη + Γζζζ pζζ
)
.
(B.32)
Attraverso l’analisi dimensionale si possono individuare i ter-mini di tale equazione che possono essere trascurati. Sono gia statedefinite a pag. 174 la scala dello spessore del manto Hs, la scalaLs della lunghezza e della larghezza della valanga ed il parametroε = Hs/Ls. Si possono poi definire i valori scala delle velocita Uξs,Uηs, Uζs rispettivamente nelle direzioni ξ, η e ζ. La scala dei tempiviene chiamata Ts e si fa l’ipotesi che sia:
Ts ≈Ls
Uξs
≈ Ls
Uηs
≈ Hs
Uζs
.
Ne segue che si puo far uso di un unico valore scala Us ≈ Uξs ≈ Uηs
per le componenti tangenziali del vettore velocita e che Uζs ≈ ε Us.Tali scale delle velocita si applicano pero alle componenti fisiche
del vettore u, mentre l’equazione del moto e scritta in termini di
184

componenti “roof”. Le equazioni (B.26) descrivono la relazione chesussiste tra componenti fisiche e componenti “roof”. Dalle equazio-ni (B.16) e (B.17), se si trascurano i termini di ordine ε invocandol’ipotesi di acque basse (hp. 5, pag. 10), si ricava che:
|gξ| =
√
1 + b2,x
∣
∣
ξ=ξη=η
√
1 + b2,x
∣
∣
ξ=ξη=0
e
|gη| =
√
1 + b2,y
∣
∣
ξ=ξη=η
√
1 + b2,y
∣
∣
ξ=0η=η
.
Essendo b,x ≈ b,y ≈ Bs/Ls ≈ 1 si ottiene che i moduli di gξ edi gη sono di ordine di grandezza unitario. gζ e un versore e quindiha modulo 1. Ne consegue che le componenti “roof” del vettorevelocita hanno lo stesso ordine di grandezza delle corrispondenticomponenti fisiche.
Con il medesimo ragionamento si giunge alle stesse conclusionianche per le componenti del tensore degli sforzi. Se Ps e il valorescala delle pressioni, le componenti “roof” del tensore degli sforzisaranno dello stesso ordine di grandezza.
Le coordinate del riferimento curvilineo adimensionalizzate so-no gia state definite in (B.15). Si possono poi definire il tempoadimensionalizzato:
t =t
Ts
e le componenti del vettore velocita adimensionalizzate:
uξ =uξ
Us
, uη =uη
Us
, uζ =uζ
Uζs
.
Per quanto riguarda i coefficienti di Christoffel si ha che:
Γjiξ = gi,ξ · gj ≈ 1
Ls,
Γjiη = gi,η · gj ≈ 1
Ls
.
185

Passando alle derivate delle basi “cellar” rispetto a ζ, si osserva chegζ non dipende da ζ, mentre gξ e gη dipendono da ζ attraverso itermini in ε (si vedano le equazioni (B.16) e (B.17)) e quindi:
Γjζζ = 0 , Γj
ξζ ≈1
Ls
, Γjηζ ≈
1
Ls
,
per cui i valori adimensionalizzati sono dati da:
Γjiξ = Γj
iξ Ls , Γjiη = Γj
iη Ls , Γjiζ = Γj
iζ Ls .
Viene analizzato, innanzitutto, il primo membro dell’equazio-ne del moto che comprende i termini inerziali. Omettendo perbrevita il cappello per indicare le grandezze adimensionalizzate eraccogliendo U 2
s /Ls si ottiene:
U2s
Ls
[
ε(
uζ,t + uξ uζ
,ξ + uη uζ,η + uζ uζ
,ζ+
+2 Γζξζ uξ uζ + 2 Γζ
ηζ uη uζ)
+
+Γζξξ (uξ)2 + 2 Γζ
ξη uξ uη + Γζηη (uη)2
]
∼=
∼= U2s
Ls
[
+Γζξξ (uξ)2 + 2 Γζ
ξη uξuη + Γζηη (uη)2
]
.
(B.33)
dove si sono trascurati i termini di ordine ε.Per ricavare i coefficienti di Christoffel calcolo le derivate dei
vettori della base “cellar”, trascurando i termini di ordine ε nelleespressioni (B.16) e (B.17).
gξ,ξ∼=
− b,x b,xx(
1 + b2,x
)2
∣
∣
∣
∣
∣
ξ=ξη=0
0b,xx|ξ=ξ
η=η
(
1 + b2,x
)∣
∣
ξ=ξη=0
− b,x|ξ=ξη=η
(b,xx b,x)|ξ=ξη=0
(
1 + b2,x
)2∣
∣
∣
ξ=ξη=0
,
186
dove si e usata la relazione (B.28) per scrivere la derivata rispettoa ξ in termini di derivata rispetto a x. Γζ
ξξ e quindi dato da:
Γζξξ = gξ,ξ · gζ =
b,xx√
1 + b2,x + b2
,y
∣
∣
∣
∣
∣
ξ=ξη=η
1(
1 + b2,x
)∣
∣
ξ=ξη=0
.
Ricorrendo all’equazione (B.29) per passare dalla derivata ri-spetto ad η alla derivata rispetto a y e trascurando i termini diordine ε, si ottiene gη,η:
gη,η∼=
0
− b,y b,yy(
1 + b2,y
)2
∣
∣
∣
∣
∣
ξ=0η=η
b,yy|ξ=ξη=η
(
1 + b2,y
)∣
∣
ξ=0η=η
− b,y|ξ=ξη=η
(b,yy b,y)|ξ=0η=η
(
1 + b2,y
)2∣
∣
∣ξ=0η=η
.
Γζηη risulta percio pari a:
Γζηη = gη,η · gζ ==
b,yy√
1 + b2,x + b2
,y
∣
∣
∣
∣
∣
ξ=ξη=η
1(
1 + b2,y
)∣
∣
ξ=0η=η
.
Manca infine il termine misto:
gη,ξ = gξ,η∼=
00
b,xy|ξ=ξη=η
√
1 + b2,y
∣
∣
ξ=0η=η
√
1 + b2,x
∣
∣
ξ=ξη=0
,
dal quale si ricava che:
Γζηξ = gη,ξ · gζ
=b,xy
√
1 + b2,x + b2
,y
∣
∣
∣
∣
∣
ξ=ξη=η
1√
1 + b2,y
∣
∣
ξ=0η=η
1√
1 + b2,x
∣
∣
ξ=ξη=0
.
187

Sostituendo in (B.33) ed esprimendo tutto in termini di compo-nenti fisiche del vettore velocita adimensionalizzate, si ottiene peri termini inerziali l’espressione:
U2s
Ls
1√
1 + b2,x + b2
,y
[
b,xx
1 + b2,x
(
u(ξ))2
+b,yy
1 + b2,y
(
u(η))2
+
+b,xy
√
1 + b2,x
√
1 + b2,y
u(ξ) u(η)
]
.
Passando ora a considerare il secondo membro dell’equazionedel moto (B.32), si suppone che sia:
Ps ≈ ρ g Hs ,
che cioe i termini di pressione siano confrontabili con la gravita. Siottiene allora, raccogliendo l’accelerazione di gravita g:
g
[
− 1√
1 + b2,x + b2
,y
+ pζζ,ζ +
+ε(
pζξ,ξ + Γζ
ξξ pξξ + Γζηξ pηξ + Γζ
ζξ pζξ+
+Γξξξ pζξ + Γξ
ηξ pζη + Γξζξ pζζ
)
+
+ε(
pζη,η + Γζ
ξη pξη + Γζηη pηη + Γζ
ζη pζη+
+Γηξη pζξ + Γη
ηη pζη + Γηζη pζζ
)
+
+ε(
Γζξζ pξζ + Γζ
ηζ pηζ + 0 pζζ + Γζξζ pζξ+
+Γζηζ pζη + 0 pζζ
)
]
∼=
∼= g
(
− 1√
1 + b2,x + b2
,y
+ pζζ,ζ
)
,
avendo trascurato i termini di ordine ε.
188

A questo punto si fa l’ipotesi che le forze inerziali abbiano lostesso peso della forza di gravita, che cioe sia U 2
s ≈ g Ls. L’equa-zione di conservazione della quantita di moto in direzione ζ, scrittain termini dimensionali, diventa:
pζζ,ζ =
ρ√
1 + b2,x + b2
,y
(
g +b,xx
1 + b2,x
(
u(ξ))2
+
+b,yy
1 + b2,y
(
u(η))2
+
+b,xy
√
1 + b2,x
√
1 + b2,y
u(ξ) u(η)
)
.
(B.34)
L’integrazione lungo ζ della precedente equazione fornisce un’e-spressione analitica chiusa, se si suppone che le componenti fisi-che della velocita siano costanti lungo la normale al fondo (hp. 6,pag. 12).
Si richiama, dapprima, la condizione dinamica in superficielibera:
P|ζ=h nh = 0 , (B.35)
dove nh e la normale alla superficie libera, data da:
nh =∇Φh
|∇Φh|,
essendo Φh (ξ, η, ζ, t) = ζ−h (ξ, η, t) = 0 l’equazione implicita dellasuperficie libera. Φh e uno scalare, per cui [24]:
∇Φh = gk ∇kΦh = gk Φh,k .
Si ottiene pertanto:
P∇Φh = pji Φh,k (gi gj) gk = pki Φh,k gi = 0 .
Nella generica direzione i questo si traduce in:
−pξi h,ξ − pηi h,η + pζi = 0 ,
189

che, in forma adimensionale, raccogliendo Ps e tralasciando i cap-pelli per rappresentare le grandezze adimensionali, diventa:
Ps
(
−ε(
pξi h,ξ + pηi h,η
)
+ pζi)
= 0 .
Se si trascurano i termini di ordine ε, si ottiene:
pζξ = pζη = pζζ = 0 .
In questo caso l’ipotesi di “acque basse” (hp. 5, pag. 10) si tra-duce nell’assunzione che la superficie libera sia pressocche parallelaal fondo, cioe circa normale a ζ.
A questo punto si puo integrare l’equazione (B.34) tra ζ = 0 eζ = h, imponendo che sia pζζ = 0 per ζ = h, come indicato dallacondizione dinamica in superficie, e supponendo che le componentifisiche di velocita siano costanti lungo ζ (hp. 6, pag. 12). Si ottieneche pζζ vale al fondo:
(
pζζ)
b= − ρ h
√
1 + b2,x + b2
,y
(
g +b,xx
1 + b2,x
(
U (ξ))2
+
+b,xy
√
1 + b2,x
√
1 + b2,y
U (ξ) U (η) +
+b,yy
1 + b2,y
(
U (η))2
)
,
dove U (ξ) e U (η) rappresentano i valori medi delle componenti fi-siche del vettore velocita lungo la normale (si veda Eq. (B.26) eEq. (B.24)):
U (ξ) = U ξ |gξ| =(
U · gξ)
|gξ| ,
U (η) = Uη |gη| = (U · gη) |gη| .
Utilizzando le definizioni (B.20), (B.21), (B.22) per i vettoridella base “roof” e (B.13), (B.10), (B.11) per la base “cellar”, si
190

ottiene:
U (ξ) =
√
1 + b2,x
√
1 + b2,x + b2
,y
(
Ux
(
1 + b2,y
)
− Uy b,x b,y + Uz b,x
)
,
U (η) =
√
1 + b2,y
√
1 + b2,x + b2
,y
(
−Ux b,x b,y + Uy
(
1 + b2,x
)
+ Uz b,y
)
.
Sostituendo in (3.1) si ottiene:
(
pζζ)
b= − ρ h
√
1 + b2,x + b2
,y
(
g +1
1 + b2,x + b2
,y
·
·(
b,xx U2x0 + b,xy Ux0 Uy0 + b,yy U2
y0
)
)
,
(B.36)
dove:
Ux0 = Ux
(
1 + b2,y
)
− Uy b,x b,y + Uz b,x ,
Uy0 = −Ux b,x b,y + Uy
(
1 + b2,x
)
+ Uz b,y .
Integrando tra ζ e h lungo la normale al fondo si ricava ladistribuzione idrostatica delle pressioni nel caso tridimensionale:
pζζ =(
pζζ)
b
(
1 − ζ
h
)
. (B.37)
Inoltre e opportuno osservare che:
pζζ = pζζ = p·ζζ = p·ζζ .
Questo deriva dal fatto che gζ = gζ (si veda Eq. (B.22)).
191
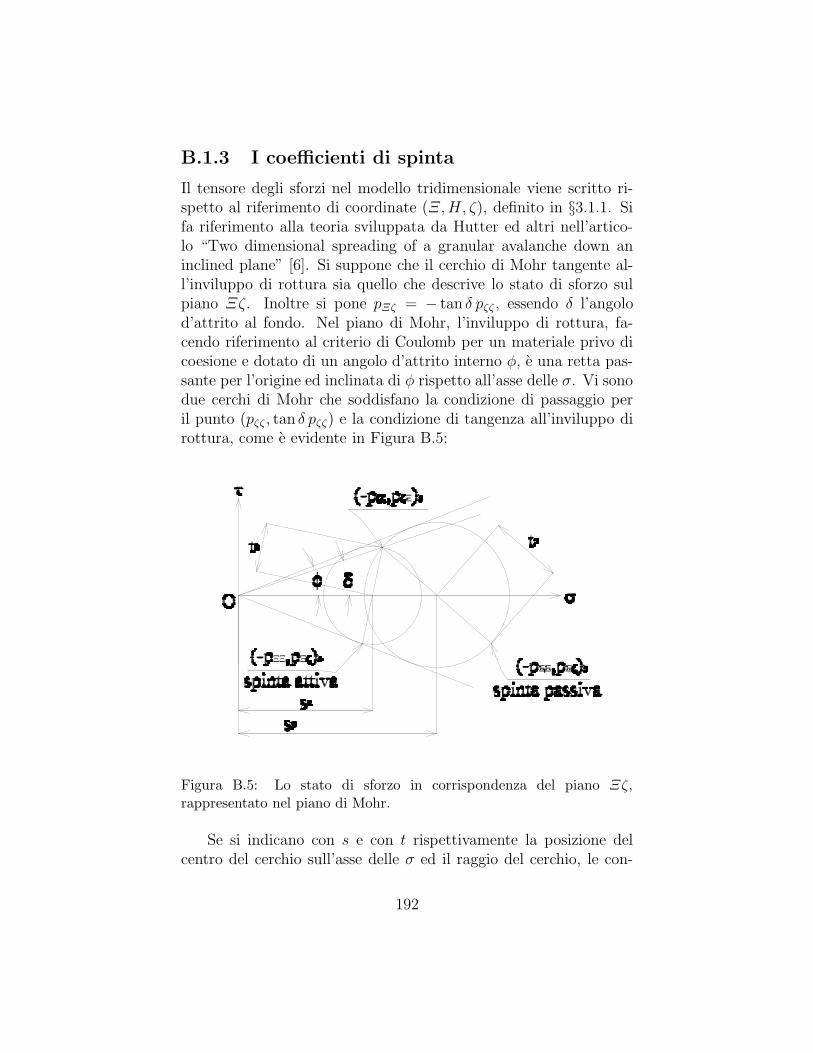
B.1.3 I coefficienti di spinta
Il tensore degli sforzi nel modello tridimensionale viene scritto ri-spetto al riferimento di coordinate (Ξ, H, ζ), definito in §3.1.1. Sifa riferimento alla teoria sviluppata da Hutter ed altri nell’artico-lo “Two dimensional spreading of a granular avalanche down aninclined plane” [6]. Si suppone che il cerchio di Mohr tangente al-l’inviluppo di rottura sia quello che descrive lo stato di sforzo sulpiano Ξζ. Inoltre si pone pΞζ = − tan δ pζζ , essendo δ l’angolod’attrito al fondo. Nel piano di Mohr, l’inviluppo di rottura, fa-cendo riferimento al criterio di Coulomb per un materiale privo dicoesione e dotato di un angolo d’attrito interno φ, e una retta pas-sante per l’origine ed inclinata di φ rispetto all’asse delle σ. Vi sonodue cerchi di Mohr che soddisfano la condizione di passaggio peril punto (pζζ , tan δ pζζ) e la condizione di tangenza all’inviluppo dirottura, come e evidente in Figura B.5:
Figura B.5: Lo stato di sforzo in corrispondenza del piano Ξζ,rappresentato nel piano di Mohr.
Se si indicano con s e con t rispettivamente la posizione delcentro del cerchio sull’asse delle σ ed il raggio del cerchio, le con-
192

dizioni di tangenza e di passaggio per (pζζ , tan δ pζζ) sono espressedalle equazioni:
t = s sin φ , (B.38)
(pζζ − s)2 + (pζζ tan δ)2 = t2 . (B.39)
Risolvendo il sistema dato dalle due equazioni, si ottengono duesoluzioni:
s =1
cos2 φ
(
1 ±√
1 − cos2 φ
cos2 δ
)
pζζ ,
t =sin φ
cos2 φ
(
1 ±√
1 − cos2 φ
cos2 δ
)
pζζ .
(B.41)
La soluzione con il segno + corrisponde alle condizioni di spintapassiva. Quella col segno − alle condizioni di spinta attiva. Il coef-ficiente con cui moltiplicare pζζ per ottenere pΞΞ e di conseguenzapari a:
ka/p =pΞΞ
pζζ
=2 s − pζζ
pζζ
=
=2
cos2 φ
(
1 ∓√
1 − cos2 φ
cos2 δ
)
− 1 .
(B.42)
Si possono inoltre ricavare i valori dei coefficienti di spintacorrispondenti agli sforzi principali massimo e minimo:
k1 =σ1
pζζ=
s + t
pζζ=
1 + sin φ
cos2 φ
(
1 ∓√
1 − cos2 φ
cos2 δ
)
, (B.43)
k3 =σ3
pζζ=
s − t
pζζ=
1 − sin φ
cos2 φ
(
1 ∓√
1 − cos2 φ
cos2 δ
)
. (B.44)
193

Anche in queste equazioni il segno − corrisponde alla situazionedi spinta attiva, che si suppone si realizzi quando ∂UΞ
∂Ξ> 0. Il segno
+ vale in condizioni di spinta passiva, per ∂UΞ
∂Ξ< 0.
194

B.1.4 La trasformazione del riferimento
Si osserva che i vettori della base del riferimento cartesiano locale(Ξ, H, ζ) sono reciprocamente ortogonali. Inoltre li si puo sceglieredi modulo unitario. Ne consegue che non c’e distinzione tra i vettoridella base “roof” e quelli della base “cellar” [24].
Siano pij le componenti del tensore degli sforzi nel riferimentolocale, definito dai versori ei (con i = 1, 2, 3); il tensore degli sforzipuo essere scritto come:
P = pij (ej ei) .
Le componenti rispetto al riferimento assoluto, definito dai ver-sori ei (con i = 1, 2, 3), possono essere calcolate come:
pkl = el ·(
P ek
)
= pij (el · ej) (ei · ek) =
= pij Eki Elj =(
E PET)
kl,
(B.45)
dove E e la matrice avente nelle colonne le componenti dei versoridella base locale rispetto al riferimento assoluto (Eki e la k-esimacomponente del vettore ei rispetto al riferimento assoluto).
Essendo Φb (x, y, z) = z−b (x, y) = 0 l’equazione implicita dellasuperficie del fondo nel riferimento assoluto, la direzione ζ risultadefinita dal versore:
eζ =∇Φb
|∇Φb|=
(−b,x,−b,y, 1)√
1 + b2,x + b2
,y
. (B.46)
Per la definizione del versore eΞ e del versore eH si distinguonodue casi:
- Se l’ammasso e in movimento il versore che definisce la dire-zione Ξ viene preso parallelo alla direzione della velocita alfondo:
eΞ =u
|u|
∣
∣
∣
∣
z=b(x,y)
.
195

Supponendo che il profilo di velocita sia uniforme sulla ver-ticale (hp. 6, pag. 12) si puo sostituire la velocita al fondocon la velocita media. Questa deve essere parallela alla su-perficie del pendio, onde evitare che sia violata la condizionecinematica al fondo. Si puo allora esprimere eΞ come:
eΞ =U
|U| =1
√
Ux2 + Uy
2 + Uz2
(Ux, Uy, Uz) . (B.47)
Il versore eH sara ortogonale ai due precedenti; in particolare:
eH = −eΞ ∧ eζ =
=(− (Uz b,y + Uy) , Uz b,x + Ux, Ux b,y − Uy b,x)
√
Ux2 + Uy
2 + Uz2√
1 + b2,x + b2
,y
.(B.48)
- Nel caso in cui la neve sia ferma si assume che la direzione Ξlungo la quale si sviluppa la resistenza per attrito del terre-no sia quella definita dalla proiezione sul pendio della linea dimassima pendenza della superficie della massa nevosa. Si pro-ietta sulla superficie del fondo la componente orizzontale v1
del vettore ∇f , ottenuta sottraendo a ∇f la sua componentelungo la verticale:
v1 = ∇f − (∇f · ez) ez = · · · = (−f,x;−f,y; 0) .
Togliendo a v1 la sua componente in direzione normale alpendio, se ne ricava la proiezione lungo il pendio v2:
v2 = v1 − (v1 · eζ) eζ = · · · =
=1
1 + b2,xx + b2
,yy
−f,x
(
1 + b2,y
)
+ f,y b,x b,y
−f,y
(
1 + b2,x
)
+ f,x b,x b,y
− (f,x b,x + f,y b,y)
.
A questo punto, dividendo per il modulo, si perviene alla
196

forma definitiva:
eΞ =v2
|v2|=
1
M
−f,x
(
1 + b2,y
)
+ f,y b,x b,y
−f,y
(
1 + b2,x
)
+ f,x b,x b,y
− (f,x b,x + f,y b,y)
, (B.49)
dove:
M =√
1 + b2,x + b2
,y
√
(f,x b,y − f,y b,x)2 + f 2
,x + f 2,y .
Il versore normale al fondo e sempre dato da (B.46). Invecenella direzione H si ottiene:
eH = −eΞ ∧ eζ
=(−f,y, f,x, f,x b,y − f,y b,x)
√
(f,x b,y − f,y b,x)2 + f 2
,x + f 2,y
. (B.50)
197

B.1.5 Le equazioni del moto mediate sulla ver-
ticale
Viene ora eseguita l’operazione di media lungo z dell’equazione dicontinuita (3.11) e delle equazioni di conservazione della quantitadi moto nella direzione x (3.12) e nella direzione y (3.11).
Si definiscono le componenti del vettore velocita mediate sullaverticale:
Ux =1
H
∫ f
b
ux dz , Uy =1
H
∫ f
b
uy dz ,
Uz =1
H
∫ f
b
uz dz .
(B.51)
Integrando lungo z l’equazione di continuita (3.11), si ottiene:
∫ f
b
(ux,x + uy,y + uz,z) dz = 0 ⇒
⇒(∫ f
b
ux dz
)
,x
− (ux)f f,x + (ux)b b,x
+
(∫ f
b
uy dz
)
,y
− (uy)f f,y + (uy)b b,y
+ (uz)f − (uz)b = 0 .
Richiamando le condizioni al contorno di tipo cinematico insuperficie libera (3.16) e al fondo (3.15), si giunge all’espressione:
H,t + (H Ux),x + (H Uy),y = 0 . (B.52)
Prima di integrare i termini inerziali dell’equazione di conser-vazione della quantita di moto nella direzione x (Eq. (3.12)), e
198

opportuno esprimerli in forma conservativa:
dux
dt= ux,t +ux ux,x + uy ux,y + uz ux,z =
= ux,t + (ux ux),x + (uy ux),y + (uz ux),z +
−ux (ux,x + uy,y + uz,z) =
= ux,t + (ux ux),x + (uy ux),y + (uz ux),z .
Applicando l’operatore di media:
∫ f
b
dux
dtdz =
∫ f
b
(
ux,t +(
ux2)
,x+ (ux uy),y +
+ (ux uz),z
)
dz =
=
(∫ f
b
ux dz
)
,t
− (ux)f f,t +
+
(∫ f
b
ux2 dz
)
,x
−(
ux2)
ff,x +
(
ux2)
bb,x +
+
(∫ f
b
ux uy dz
)
,y
− (ux uy)f f,y + (ux uy)b b,y
+ (ux uz)f − (ux uz)b =
= (H Ux),t +(
αxx H Ux2)
,x+ (αxy H Ux Uy),y +
+ (ux)f
(
−H,t − (ux)f f,x − (uy)f f,y + (uz)f
)
+
+ (ux)b
(
+ (ux)b b,x + (uy)b b,y − (uz)b
)
,
dove si sono definiti i coefficienti di Coriolis αxx e αyy tali per cui:
∫ f
b
ux2 dz = αxx H Ux
2 ,
∫ f
b
ux uy dz = αxy H Ux Uy .
199

Sulla base delle condizioni al contorno di tipo cinematico, alfondo (3.15) e in superficie (3.16), si puo semplificare:
∫ f
b
dux
dtdz = (H Ux),t +
(
αxx H Ux2)
,x+ (αxy H Ux Uy),y .
Passando ora al secondo membro dell’equazione del moto nel-la direzione x, e possibile descrivere la generica componente deltensore degli sforzi, sviluppando l’equazione (3.21):
pij (x, y, z, t) = ρ A (x, y, t) kij (x, y, t) (f (x, y, t) − z) .
Risultera percio che:
1
ρpxx,x = (kxx,x A + kxx A,x) (f − z) + kxx A f,x e
1
ρpyx,y = (kyx,y A + kyx A,y) (f − z) + kyx A f,y ,
per cui, integrando, risulta:
1
ρ
∫ f
b
pxx,x dz = (kxx,x A + kxx A,x)
∫ f
b
(f − z) dz +
+kxx Af,x
∫ f
b
dz =
= (kxx,x A + kxx A,x)H2
2+ kxx A f,x H ,
1
ρ
∫ f
b
pyx,y dz = (kyx,y A + kyx A,y)
∫ f
b
(f − z) dz +
+kyx Af,y
∫ f
b
dz =
= (kyx,y A + kyx A,y)H2
2+ kyx A f,y H ,
1
ρ
∫ f
b
pzx,z dz = (pzx)f − (pzx)b = −kzx A H .
200

La media del secondo membro dell’equazione (3.12) fornisce:
1
ρ
(∫ f
b
pxx,x dz +
∫ f
b
pyx,y dz +
∫ f
b
pzx,z dz
)
=
= ((kxx,x + kyx,y) A + kxx A,x + kyx A,y)H2
2+
+ (kxx f,x + kyx f,y − kzx) A H .
La proiezione dell’equazione del moto in direzione x, mediatasulla verticale, assume la seguente forma:
(H Ux) ,t +(
αxx H Ux2)
,x+ (αxy H Ux Uy),y =
= ((kxx,x + kyx,y) A + kxx A,x + kyx A,y)H2
2+
+ (kxx f,x + kyx f,y − kzx) A H .
(B.53)
La procedura e del tutto identica per l’integrazione delle equa-zioni del moto nella direzione y (3.13). Dalla media dei terminiinerziali scritti in forma conservativa, si ricava che:
∫ f
b
duy
dtdz =
∫ f
b
(
uy,t + (uxuy),x +(
uy2)
,y+
+ (uz uy),z
)
dz =
= (H Uy),t + (αxy H Ux Uy),x +(
αyy H Uy2)
,y+
+ (uy)f
(
−H,t − (ux)f f,x − (uy)f f,y + (uz)f
)
+
+ (uy)b
(
+ (ux)b b,x + (uy)b b,y − (uz)b
)
=
= (H Uy),t + (αxy H Ux Uy),x +(
αyy H Uy2)
,y,
avendo fatto ricorso alle condizioni cinematiche al fondo (3.15) edin superficie libera (3.16) per semplificare. Si e inoltre introdotto ilcoefficiente di Coriolis, αyy, definito come:
∫ f
b
uy2 dz = αyy H Uy
2 .
201

L’integrazione dei termini delle forze esterne restituisce la se-guente espressione:
1
ρ
(∫ f
b
pxy,x dz +
∫ f
b
pyy,y dz +
∫ f
b
pzy,z dz
)
=
= ((kxy,x + kyy,y) A + kxy A,x + kyy A,y)H2
2+
+ (kxy f,x + kyy f,y − kzy) A H .
La equazione di conservazione della quantita di moto nella di-rezione y assume la seguente forma:
(H Uy) ,t + (αxy H Ux Uy),x +(
αyy H Uy2)
,y=
= ((kxy,x + kyy,y) A + kxy A,x + kyy A,y)H2
2+
+ (kxy f,x + kyy f,y − kzy) A H .
(B.54)
Le due equazioni di conservazione della quantita di moto, cosıricavate, sono ancora scritte in forma conservativa. Sviluppando lederivate dei termini inerziali, ricorrendo all’equazione di continuita(3.24) e, infine, dividendo per H, le si traduce in forma non conser-vativa. Sulla base dell’ipotesi di scivolamento (hp. 6, pag. 12), sisuppone che il profilo di velocita lungo la verticale sia costante. Diconseguenza per i coefficienti di Coriolis vale la seguente relazione:
αxx∼= αxy
∼= αyy∼= 1 .
Si perviene quindi alla forma definitiva del sistema risolutivo:
H,t + (H Ux),x + (H Uy),y = 0 , (B.55)
202

dUx
dt= Ux,t + Ux Ux,x + Uy Ux,y =
= ((kxx,x + kyx,y) A + kxx A,x + kyx A,y)H
2+
+ (kxx H,x + kyx H,y) A +
+ (kxx b,x + kyx b,y − kzx) A , (B.56)
dUy
dt= Uy,t + Ux Uy,x + Uy Uy,y =
= ((kxy,x + kyy,y) A + kxy A,x + kyy A,y)H
2+
+ (kxy H,x + kyy H,y) A +
+ (kxy b,x + kyy b,y − kzy) A , (B.57)
dove le derivate parziali rispetto alle variabili spaziali x e y dellafunzione f sono state scomposte in termini di H e di b:
f (x, y, t) = b (x, y) + H (x, y, t) per cui
f,x = b,x + H,x ,
f,y = b,y + H,y .
Affinche sia rispettata la condizione cinematica al fondo, il vet-tore velocita media dovra essere parallelo alla superficie del pen-dio. Da tale condizione si ricava un’espressione per il calcolo dellacomponente verticale Uz del vettore velocita:
Uz = b,x Ux + b,y Uy . (B.58)
203

B.2 Il modello numerico bidimensiona-
le
B.2.1 Il calcolo dei termini noti delle equazionidiscretizzate
Il coefficiente A
Il coefficiente A e definito dall’equazione (3.22):
A (x, y, t) = − 1
1 + b2,x + b2
,y
(
g +1
1 + b2,x + b2
,y
·
·(
b,xx U2x0 + b,xy Ux0 Uy0 + b,yy U2
y0
)
)
,
dove Ux0 e Uy0 sono date da (3.18):
Ux0 = Ux
(
1 + b2,y
)
− Uy b,x b,y + Uz b,x ,
Uy0 = −Ux b,x b,y + Uy
(
1 + b2,x
)
+ Uz b,y .
Ux, Uy e Uz e le derivate prime e seconde della funzione b nelledirezioni x e y vanno calcolate in corrispondenza del nodo di calcoloj.
La quota del fondo b e nota per punti su una griglia a maglierettangolari di lati, ∆x e ∆y. b in un punto generico (x, y) puoessere ottenuto attraverso un’interpolazione bilineare sugli otto nodipiu vicini della griglia (si veda Figura B.6). b,x, b,y, b,xx, b,xy, b,yy,vengono calcolati tramite le derivate di tale funzione interpolante.
La determinazione della funzione interpolante e delle sue deri-vate viene eseguita secondo la seguente procedura.
Sia (xi, yj), con xi = x0 + i ∆x e yj = y0 + j ∆y, il nodo dellagriglia a maglie rettangolari piu vicino al punto (x, y); i e j sonodati dalla parte intera rispettivamente di ((x − x0) /∆x + 0.5) e di((y − y0) /∆y + 0.5), essendo (x0, y0) il vertice in basso a sinistradella griglia su cui e nota b.
204
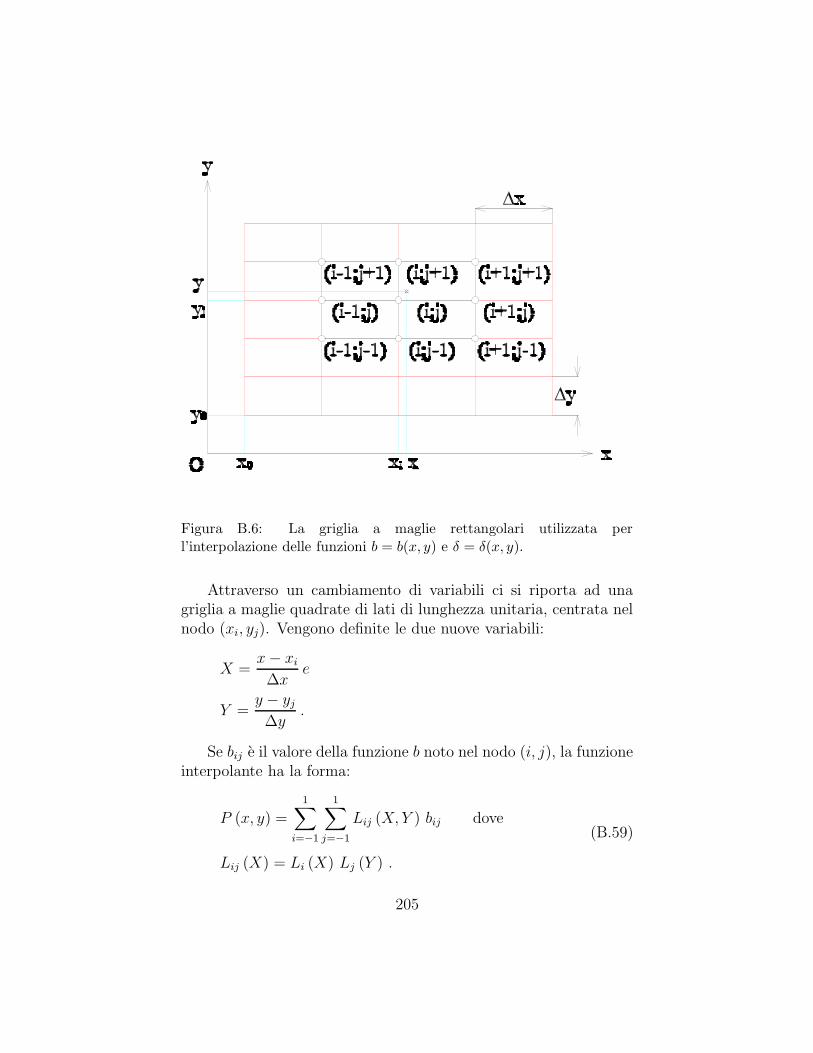
Figura B.6: La griglia a maglie rettangolari utilizzata perl’interpolazione delle funzioni b = b(x, y) e δ = δ(x, y).
Attraverso un cambiamento di variabili ci si riporta ad unagriglia a maglie quadrate di lati di lunghezza unitaria, centrata nelnodo (xi, yj). Vengono definite le due nuove variabili:
X =x − xi
∆xe
Y =y − yj
∆y.
Se bij e il valore della funzione b noto nel nodo (i, j), la funzioneinterpolante ha la forma:
P (x, y) =1∑
i=−1
1∑
j=−1
Lij (X, Y ) bij dove
Lij (X) = Li (X) Lj (Y ) .
(B.59)
205

Li (X) e Lj (Y ) sono delle funzioni base di secondo grado per lequali vale:
Li (Xk) = δik ,
Lj (Yk) = δjk ,
dove δij e il delta di Kronecker, pari a 0 se i 6= j e pari a 1 se i = j.In particolare:
L−1 (X) =X (X − 1)
2,
L0 (X) = (1 − X) (1 + X) ,
L1 (X) =X (X + 1)
2,
(B.60)
Le espressioni delle funzioni Lj (Y ) sono del tutto simili.
A questo punto si possono scrivere, con facilita, le derivateprime della funzione interpolante rispetto alle variabili X e Y :
∂P (X, Y )
∂X=
1∑
i=−1
1∑
j=−1
∂Li (X)
∂XLj (Y ) bij ,
∂P (X, Y )
∂Y=
1∑
i=−1
1∑
j=−1
Li (X)∂Lj (Y )
∂Ybij ,
(B.61)
dove le derivate delle funzioni di base sono date da:
∂L−1 (X)
∂X=
2 X − 1
2,
∂L0 (X)
∂X= −2 X ,
∂L1 (X)
∂X=
2 X + 1
2.
Si ottengono delle espressioni simili per le derivate delle funzionibase nella direzione Y .
206
Derivando una seconda volta le equazioni (B.61) rispetto a Xe a Y , si ottiene:
∂2P (X, Y )
∂X2=
1∑
i=−1
1∑
j=−1
∂2Li (X)
∂X2Lj (Y ) bij ,
∂2P (X, Y )
∂X∂Y=
1∑
i=−1
1∑
j=−1
∂Li (X)
∂X
∂Lj (Y )
∂Ybij ,
∂2P (X, Y )
∂Y 2=
1∑
i=−1
1∑
j=−1
Li (X)∂2Lj (Y )
∂Y 2bij ,
(B.62)
dove per le derivate seconde della funzione di base si fa uso delleespressioni:
∂2L−1 (X)
∂X2= 1 ,
∂2L0 (X)
∂X2= −2 ,
∂2L1 (X)
∂X2= 1 .
(B.63)
Non cambia nulla nelle derivate seconde delle funzioni base nelladirezione Y.
Va osservato pero che la trasformazione di variabili comprendeanche una variazione di scala. Questo comporta che per ottenerele derivate rispetto alle variabili originarie si dovra applicare alleespressioni appena descritte degli opportuni fattori:
∂
∂x=
1
∆x
∂
∂X,
∂
∂y=
1
∆y
∂
∂y,
∂2
∂x2=
1
(∆x)2
∂2
∂X2,
∂2
∂y2=
1
(∆y)2
∂2
∂Y 2,
∂2
∂x∂y=
1
∆x ∆y
∂2
∂X∂Y.
207

Nel caso in cui risulti A negativo il programma si arresta. In-fatti A e proporzionale allo sforzo pζζ che si sviluppa al fondo. Unvalore di A negativo corrisponde ad uno sforzo di trazione. In ta-li condizioni la neve perde aderenza al suolo e la situazione che siviene a presentare non puo essere interpretata tramite il modelloproposto.
Il problema si puo presentare quando si combinano elevate ve-locita a forti convessita del fondo, a causa dell’elevato valore che as-sume il termine centrifugo. La soluzione migliore e quella di rappre-sentare la geometria del pendio con un minore dettaglio, cercandosoprattutto di smorzare le brusche variazioni di pendenza.
Il tensore dei coefficienti di spinta
Nelle equazioni del moto, kij rappresentano le componenti rispet-to al riferimento assoluto del tensore dei coefficienti di spinta K.Dall’equazione (3.20) si ricava che:
ki,j = (K)ij =(
EKET)
ij. (B.64)
K e il tensore dei coefficienti di spinta scritto nel riferimento locale,di assi Ξ, H e ζ:
K =
ka/p 0 − tan δ
0 k2 0
− tan δ 0 1
,
Le componenti di tale tensore vengono calcolate, inizialmente,in corrispondenza dei triangoli di base.
δ e valutato nel baricentro dei triangoli le cui coordinate sonodate da:
xc =x1 + x2 + x3
3,
yc =y1 + y2 + y3
3,
essendo (xj; yj) le coordinate del j-esimo vertice del triangolo. δ enoto per punti su una griglia regolare a maglie rettangolari, come la
208

quota del fondo b. Per calcolarlo nel baricentro dei triangoli, che ingenerale non insiste sui nodi di tale griglia, si fa uso delle funzioniinterpolanti bilineari descritte in precedenza (si veda Eq. (B.59)).
Si osserva che sarebbe opportuno ricorrere ai due diversi valoridell’angolo d’attrito, quello statico e quello dinamico, minore dicirca 4o [10], a seconda che la massa sia ferma o in movimento.
Le espressioni per ka/p sono date da (3.4), quelle per k2 da(3.5) in condizioni di spinta attiva e da (3.6) in condizioni di spintapassiva. φ e assunto costante per l’intera massa di neve. La sceltatra le condizioni di spinta attiva e passiva viene fatta sulla base delvalore di ∂U
∂Ξ, avendo definito con U il modulo del vettore velocita
media.Noti i valori di U sui vertici del triangolo per il quale si sta
calcolando il tensore dei coefficienti di spinta, la derivata ∂U∂Ξ
vienecalcolata in corrispondenza del triangolo stesso come:
∂U
∂Ξ= ∇U · eΞ . (B.65)
Indicando con Uxy la componente orizzontale del vettore velo-cita, e con EPSI il valore di velocita che discrimina tra le condizionidi movimento e quelle di stazionarieta (si veda §2.2, pag. 155):
- se il nodo considerato e in movimento, cioe se:
|Uxy| =√
Ux2 + Uy
2 > EPSI ,
eΞ e dato dall’espressione (B.47);
- se invece il nodo e fermo, cioe se:
|Uxy| < EPSI ,
si ricorre alla formula (B.49).
eΞ e noto nei vertici. Il valore medio di eΞ nel triangolo dicalcolo viene ricavato sommando vettorialmente i vettori che defi-niscono la direzione Ξ nei vertici del triangolo e dividendo poi peril modulo del vettore somma.
209

Il gradiente ∇U viene calcolato eseguendo l’interpolazione li-neare dei valori di U sui vertici dei triangoli. Se (xi, yi) con i =1, 2, 3 sono le coordinate dei tre vertici del triangolo analizzatoe Ui i valori che la componente tangenziale di velocita possiedein tali punti, si puo definire un piano interpolante di equazioneU = a x + b y + c. Come approssimazione del gradiente di U puoessere assunta l’espressione:
∇U = (U,x; U,y) ∼= (a; b) ,
con a e b dati da:
a =U1 (y2 − y3) + U2 (y3 − y1) + U3 (y1 − y2)
det,
b =U1 (x2 − x3) + U2 (x3 − x1) + U3 (x1 − x2)
det,
(B.66)
dove:
det = x1 (y2 − y3) + x2 (y3 − y1) + x3 (y1 − y2) .
Se det e molto piccolo significa che i tre vertici del triangolo sonopraticamente allineati e cio vuol dire che la mesh si e fortementedeformata. I risultati restituiti dal programma sono affetti allora dagrossi errori, per cui si e introdotto un controllo su det, che arrestail programma quando il suo valore e troppo piccolo.
A questo punto per discriminare tra le condizioni di spinta atti-va e le condizioni di spinta passiva bisognerebbe verificare il segnodella derivata ∂U
∂Ξ, data dall’equazione (B.65).
Anche quando la massa e considerata ferma (|Uxy| < EPSI),possono persistere delle differenze tra i valori di velocita calcolatinei vertici, dell’ordine di grandezza di EPSI. Quindi si possonoottenere dei valori diversi da 0 per ∂U
∂Ξ.
In particolare se si indica con LΞs la dimensione caratteristicadella cella nella direzione Ξ, il modello restituisce per ∂U
∂Ξdei valori
che hanno un ordine di grandezza di EPSI/LΞs, mentre si dovrebbeottenere un valore nullo.
Questi errori nella determinazione di ∂U∂Ξ
rendono il modelloinstabile, poiche possono essere di segno diverso e quindi dar luogo
210

a improvvisi passaggi del coefficiente di spinta dal valore ka al valorekp o viceversa.
Si e risolto il problema imponendo le condizioni di spinta attivaquando ∂U
∂Ξ> −EPSI
LΞs, dove per LΞs si e assunto il minimo valore
tra le proiezioni dei lati del triangolo nella direzione Ξ media peril triangolo. Le condizioni di spinta passiva si realizzano invecequando ∂U
∂Ξ< −EPSI
LΞs.
Cosı facendo, quando tutti e tre i nodi della cella in questionesono fermi, il modello assegna quasi sempre le condizioni di spintaattiva, dato che, nello stato stazionario, risulta in genere
∣
∣
∂UΞ
∂Ξ
∣
∣ <−EPSI
LΞs. La cosa puo essere corretta nella fase di avvio, dato che
comunque la massa tende ad estendersi in tali condizioni. Invece,dopo che la massa si e arrestata, lo stato tensionale residuo e piudifficile da prevedere. L’approssimazione e quindi piu arbitraria, main ogni caso motivabile con l’impossibilita di descrivere l’effettivaconfigurazione dello stato di sforzo interno.
Rimane ora da decidere che valore assegnare a k2 tra quelli for-niti dalle equazioni (3.5) nelle condizioni di spinta attiva e dalleequazioni (3.6) nelle condizioni di spinta passiva. la tensione prin-cipale intermedia potrebbe assumere tutti i valori compresi tra latensione principale massima e la tensione principale minima. Il mo-dello di Hutter ed altri [6] assume k2 = k3, cioe considera pHH parialla tensione principale minima, quando ∂UH
∂H> −EPSI
LHs. Se invece
∂UH
∂H< −EPSI
LHssi fa ricorso alla tensione principale massima, cioe si
pone k2 = k1.La procedura per il calcolo di ∂UH
∂Hricalca quella vista per ∂U
∂Ξ.
Si determina UH nei vertici attraverso il prodotto scalare di U e eH .L’espressione che fornisce eH e data dall’equazione (B.48) o dall’e-quazione (B.50) a seconda che il nodo analizzato sia in movimentoo fermo.
Si calcola quindi il gradiente di UH in corrispondenza del trian-golo, passando per la determinazione della giacitura del piano in-terpolante i valori di UH nei vertici. Infine si pone
∂UH
∂H= ∇UH · eH ,
dove adesso eH non e quello relativo ai vertici, ma quello del trian-
211
golo, ottenuto come media delle direzioni H dei vertici che lo defi-niscono.
Per LHs si assume la piu piccola tra le proiezioni dei lati deltriangolo nella direzione H.
I coefficienti di spinta nei vertici vengono valutati facendo lamedia pesata dei valori che essi assumono nei triangoli adiacenti.Come peso si utilizza l’area dei triangoli. Si arriva cosı a determi-nare in corrispondenza dei vertici il tensore dei coefficienti di spintarelativo al riferimento locale K.
La trasformazione, che consente di passare al riferimento assolu-to, di assi x, y, z, e definita dal tensore E, il cui generico elemento eij
rappresenta la i-esima componente rispetto al riferimento assolutodel j-esimo versore che definisce il riferimento locale. E cioe con-tiene nelle colonne le componenti rispetto al riferimento assoluto,dei versori di base del riferimento locale eΞ , eH , eζ .
Le componenti di eΞ e eH sono date dalle equazioni (B.47) e(B.48) se il nodo e in moto e da (B.49) e (B.50) se il nodo e fermo.Invece eζ e dato in ogni situazione da (B.46).
Il passaggio dalle componenti del tensore dei coefficienti nelriferimento locale a quelle nel riferimento assoluto e descritto intermini indiciali dalle equazioni:
kij = eik kkl ejl ,
dove gli indici i, j e k assumono i valori Ξ, H e ζ (si veda Eq. (B.64)).
Il gradiente del coefficiente A
Il coefficiente A e noto nei vertici e si vuole calcolarne il gradientenei vertici stessi. Si valuta ∇A in corrispondenza dei triangoli,assumendolo pari al gradiente della funzione lineare che interpolai valori di A nei vertici. Fin qui si segue una procedura simile aquella vista per i gradienti di U e UH . A questo punto il valoredi ∇A nel generico vertice puo essere ottenuto come media, pesatasulle aree, dei valori che esso assume nei triangoli adiacenti.
Un altro schema di calcolo testato, prevedeva di assumere, trai valori dei gradienti di A dei triangoli adiacenti, quello di mini-mo modulo. L’errore che si commette in questo caso e maggiore.
212

Tuttavia puo avere un benefico effetto di tipo diffusivo, in quantosmorza gli elevati gradienti che possono instaurarsi quando la meshe molto fitta o quando tende fortemente a deformarsi.
Il gradiente dell’altezza verticale H
In questo caso si vuole ottenere nei vertici il gradiente di unafunzione nota in corrispondenza delle celle della mesh.
Si cerca la funzione lineare che approssima ai minimi quadratii valori delle altezze medie delle celle adiacenti, pensati assegnatiai baricentri dei triangoli di base. Si assume poi il gradiente di Hcoincidente con il gradiente di tale funzione approssimante.
La tecnica dei “minimi quadrati” viene applicata con l’utilizzodi pesi, rappresentati, per ogni cella adiacente il vertice di calcolo,dal rapporto tra l’area della cella stessa e la somma delle aree ditutte le celle contigue.
Sia H = aj x + bj y + cj l’equazione del piano con il quale sivuole appprossimare l’andamento dell’altezza verticale del mantoin prossimita del nodo j; la funzione errore che si vuole minimizzaree:
Errj = Errj (aj, bj, cj) =
=
ntj∑
i=1
(
aj x(j)ci + bj y
(j)ci + cj − H
(j)i
)2 A(j)i
Atot j,
dove(
x(j)ci , y
(j)ci
)
sono le coordinate del baricentro, A(j)i e l’area e
H(j)i e l’altezza media della neve dell’i-esimo triangolo contiguo al
vertice j; ntj e Atot j sono rispettivamente il numero e la sommadelle aree dei triangoli adiacenti al vertice j:
Atot j =
ntj∑
k=1
A(j)k .
Per minimizzare il valore della funzione errore Err, si imponel’annullamento delle derivate parziali della funzione Err rispetto aiparametri della funzione approssimante aj, bj e cj. Si ottengono treequazioni lineari in tali parametri incogniti.
213

Il parametro cj non serve per il calcolo del gradiente di H, datoche si assume:
(∇H)|j =
(
∂H
∂x,∂H
∂y
)∣
∣
∣
∣
j
∼= (aj, bj) .
Si possono combinare opportunamente le tre equazioni in modo daeliminare l’incognita cj, riportandosi cosı ad un sistema lineare didue equazioni in due incognite:
aj
(
XXj − X2cj
)
+ bj (XYj − Xcj Ycj) = Hx − H Xcj ,
aj (XYj − Xcj Ycj) + bj
(
Y Yj − Y 2cj
)
= Hy − H Ycj ,(B.67)
dove si e posto:
Xcj =
ntj∑
i=1
x(j)ci
A(j)i
Atot j, Ycj =
ntj∑
i=1
y(j)ci
A(j)i
Atot j,
XXj =
ntj∑
i=1
(
x(j)ci
)2 A(j)i
Atot j, Y Yj =
ntj∑
i=1
(
y(j)ci
)2 A(j)i
Atot j,
XYj =
ntj∑
i=1
x(j)ci y
(j)ci
A(j)i
Atot j, H =
ntj∑
i=1
H(j)i
A(j)i
Atot j,
Hx =
ntj∑
i=1
H(j)i x
(j)ci
A(j)i
Atot j, Hy =
ntj∑
i=1
H(j)i y
(j)ci
A(j)i
Atot j.
La soluzione del sistema e data da:
aj =1
det
( (
Y Yj − Y 2cj
) (
Hx − H Xcj
)
+
− (XYj − Xcj Ycj)(
Hy − H Ycj
) )
,
bj =1
det
( (
XXj − X2cj
) (
Hy − H Ycj
)
+
− (XYj − Xcj Ycj)(
Hx − H Xcj
) )
,
(B.68)
essendo:
det =(
XXj − X2cj
) (
Y Yj − Y 2cj
)
− (XYj − Xcj Ycj)2 ,
214

il determinante della matrice del sistema.Si osserva che se i triangoli adiacenti il vertice di calcolo sono
uno o due, il problema risulta indeterminato visto che vi sono in-finiti piani passanti per uno o due punti nello spazio. Se le celleattorno al vertice in cui e nota H sono tre, allora si ha un pianointerpolante tre punti. Solo se il numero di triangoli e maggiore ditre si ha effettivamente un problema di approssimazione.
Per i vertici di contorno sorge il problema di introdurre il vin-colo del passaggio dell’altezza della neve per 0 o lungo i lati dicontorno connessi al vertice studiato, o in corrispondenza di unaretta passante per il vertice stesso. Nel modello numerico vengonoproposte due soluzioni.
La prima consta nell’introdurre, per ogni vertice di contorno,una mesh ausiliaria, costituita dai triangoli simmetrici, rispetto alvertice stesso, dei triangoli ad esso adiacenti (si veda Figura B.7).
A ciascuno di tali triangoli simmetrici viene assegnato un vo-lume pari in modulo, ma di segno opposto, rispetto al volume deltriangolo corrispondente nella mesh originaria.
Dal punto di vista del calcolo, si tratta semplicemente di calco-lare le coordinate dei vertici simmetrici, collegare opportunamentetali vertici in modo da formare i triangoli simmetrici e infine ri-conoscere le relazione di simmetria dei triangoli cosı generati, inmaniera da assegnare i corretti valori di volume.
Indicando con (x0, y0) le coordinate del vertice di contorno e con(xp, yp) quelle di un generico vertice connesso, Il vertice simmetricoavra coordinate
(
x′
p, y′
p
)
date da:
x′
p = 2 x0 − xp ,
y′
p = 2 y0 − yp .
Nel caso in cui il vertice connesso sia un vertice d’angolo, cioeappartenga ad un solo triangolo, vi sara un solo triangolo simmetri-co. Per quanto detto in precedenza, il problema risulta, in questocaso, indeterminato, in quanto vi sono in tutto solo due triangoliin cui e nota H. In tale situazione si introducono due altri trian-goli ausiliari, ottenuti collegando ciascun vertice simmetrico con ilvertice di contorno che si trova di fronte ad esso (Figura B.8).
215
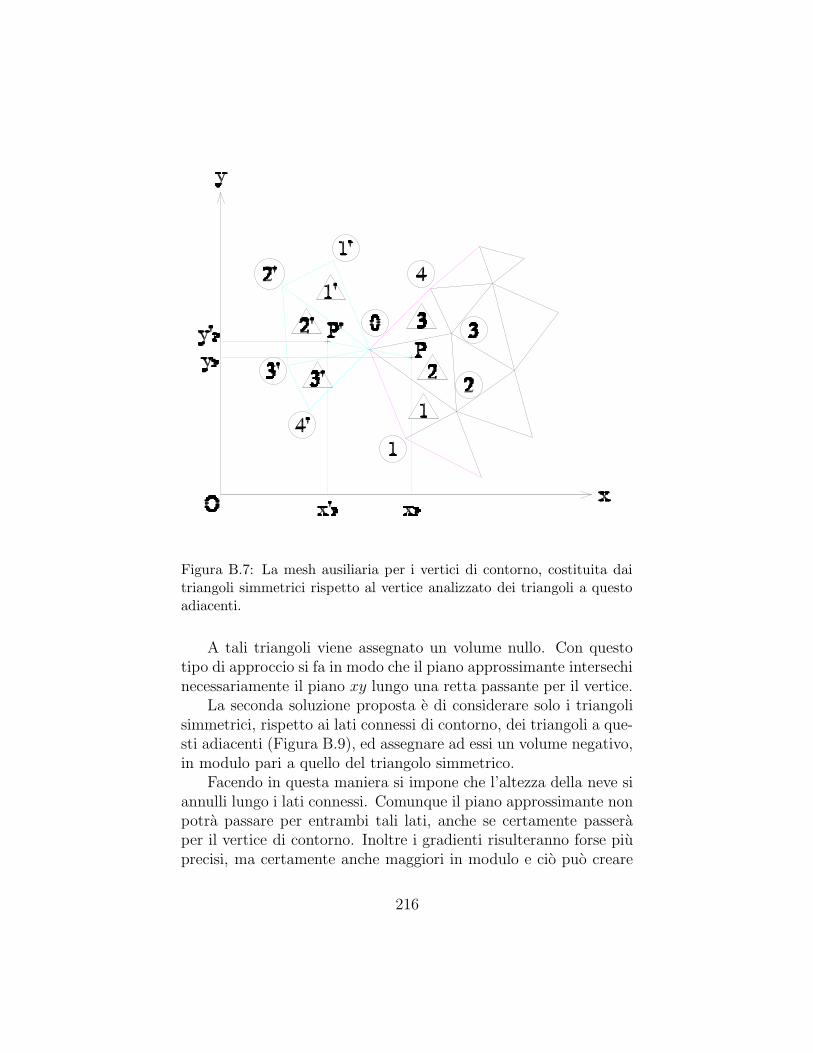
Figura B.7: La mesh ausiliaria per i vertici di contorno, costituita daitriangoli simmetrici rispetto al vertice analizzato dei triangoli a questoadiacenti.
A tali triangoli viene assegnato un volume nullo. Con questotipo di approccio si fa in modo che il piano approssimante intersechinecessariamente il piano xy lungo una retta passante per il vertice.
La seconda soluzione proposta e di considerare solo i triangolisimmetrici, rispetto ai lati connessi di contorno, dei triangoli a que-sti adiacenti (Figura B.9), ed assegnare ad essi un volume negativo,in modulo pari a quello del triangolo simmetrico.
Facendo in questa maniera si impone che l’altezza della neve siannulli lungo i lati connessi. Comunque il piano approssimante nonpotra passare per entrambi tali lati, anche se certamente passeraper il vertice di contorno. Inoltre i gradienti risulteranno forse piuprecisi, ma certamente anche maggiori in modulo e cio puo creare
216

Figura B.8: La mesh ausiliaria per i nodi di contorno appartenenti adun solo triangolo di base.
dei problemi di instabilita.
Siano (x0, y0) e (x1, y1) le coordinate dei punti che definisco-no il lato di contorno e (x2, y2) le coordinate del vertice internodel triangolo di contorno, il vertice del triangolo simmetrico avra
217

Figura B.9: La mesh ausiliaria per i vertici di contorno, costituitadai triangoli di contorno simmetrici rispetto ai lati del contorno checonvergono al nodo di calcolo.
coordinate:
x′
2 =1
(x1 − x0)2 + (y1 − y0)
2 ·
·(
2 (x1 − x0) (y1 − y0) (y − y0) +
+x (x1 − x0)2 + (2 x0 − x) (y1 − y0)
2 ) ,
y′
2 =1
(x1 − x0)2 + (y1 − y0)
2 ·
·(
2 (y1 − y0) (x1 − x0) (x − x0)
+y (y1 − y0)2 + (2 y0 − y) (x1 − x0)
2 ) .
(B.69)
218
Le derivate dei coefficienti di spinta
I termini nelle derivate dei coefficienti di spinta delle equazioni(3.34) e (3.35) sono stati trascurati. Le motivazioni sono le stes-se presentate parlando del modello numerico monodimensionale in§A.3.1 a pag.156.
219
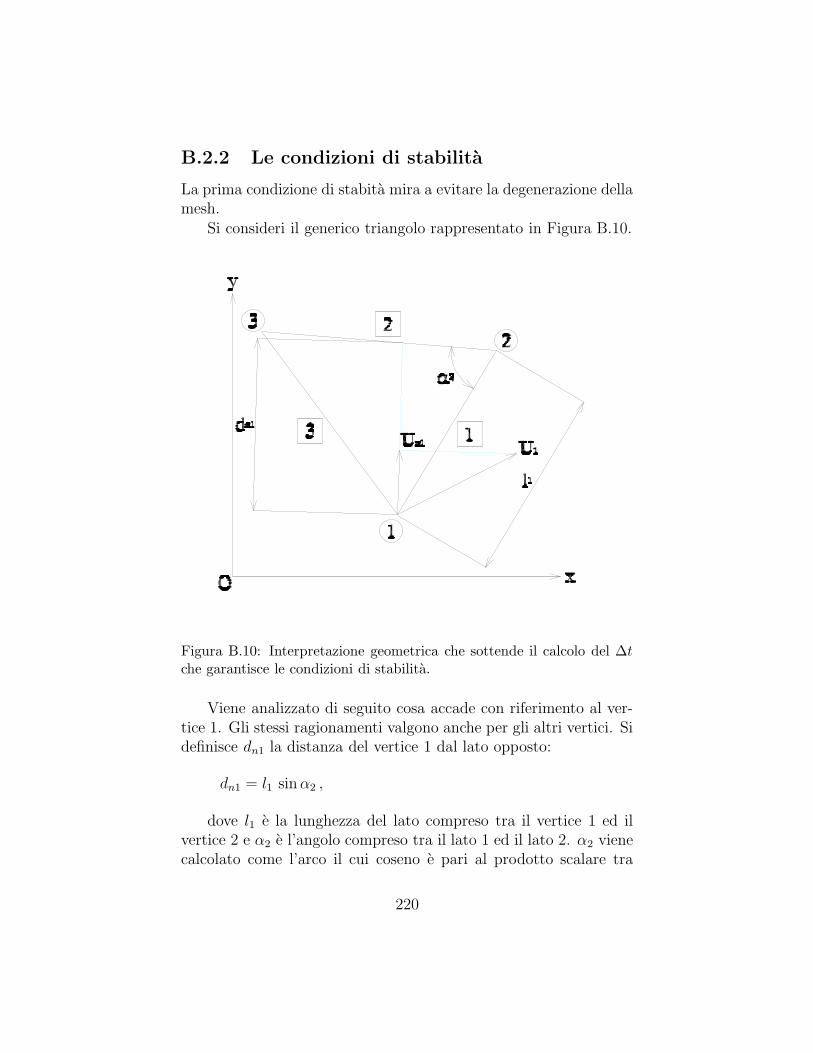
B.2.2 Le condizioni di stabilita
La prima condizione di stabita mira a evitare la degenerazione dellamesh.
Si consideri il generico triangolo rappresentato in Figura B.10.
Figura B.10: Interpretazione geometrica che sottende il calcolo del ∆tche garantisce le condizioni di stabilita.
Viene analizzato di seguito cosa accade con riferimento al ver-tice 1. Gli stessi ragionamenti valgono anche per gli altri vertici. Sidefinisce dn1 la distanza del vertice 1 dal lato opposto:
dn1 = l1 sin α2 ,
dove l1 e la lunghezza del lato compreso tra il vertice 1 ed ilvertice 2 e α2 e l’angolo compreso tra il lato 1 ed il lato 2. α2 vienecalcolato come l’arco il cui coseno e pari al prodotto scalare tra
220

il versore che definisce la direzione del lato 1 ed il versore direttocome il lato 2.
Nello schema di calcolo si fa in modo che, nell’intervallo ditempo ∆t, il nodo 1 non compia, nella direzione normale al latoopposto, uno spazio maggiore di una certa frazione βu della distanzadal lato stesso dn1, sia che il nodo si avvicini al lato opposto, sia chesi allontani. Se si indica con Un1 la componente del vettore velocitaorizzontale nella direzione normale al lato 2, deve essere:
∆t ≤ βu dn1
|Un1|.
Viene scelto il massimo ∆t, non superiore al valore inizialmenteimpostato, che soddisfa tale condizione per tutti i vertici di tutti itriangoli.
Si aggiunge poi una seconda condizione legata alla celerita dipropagazione delle onde gravitazionali di piccola ampiezza. Si im-pone che una qualsiasi perturbazione del campo di moto che simanifesta nel vertice 1 non possa compiere, nell’intervallo tempo-rale di calcolo, uno spazio maggiore di una certa frazione βc delladistanza dn1 del nodo dal lato opposto.
I valori di βu e di βc che danno i risultati migliori in termini distabilita sono rispettivamente 0.25 e 1. Si possono percio unire ledue condizioni attraverso l’espressione:
∆t ≤ 0.25 dn1
max (|Un1| , 0.25 |cmax|),
dove cmax e il valore massimo della celerita di propagazione chepuo realizzarsi nella direzione normale al lato 2 ed e pari a cmax =√
A H k1, essendo k1 il coefficiente di spinta corrispondente allatensione principale massima. Per la dimostrazione si rimanda aAppendice B.2.3.
Si impone un’ulteriore condizione sull’intervallo temporale dicalcolo onde impedire le fittizie inversioni del vettore velocita du-rante la fase di arresto. In tali condizioni di moto la variazionenell’unita di tempo del vettore velocita, data da f , non sara orien-tata esattamente in direzione opposta a Uxy. D’altro canto decise
221
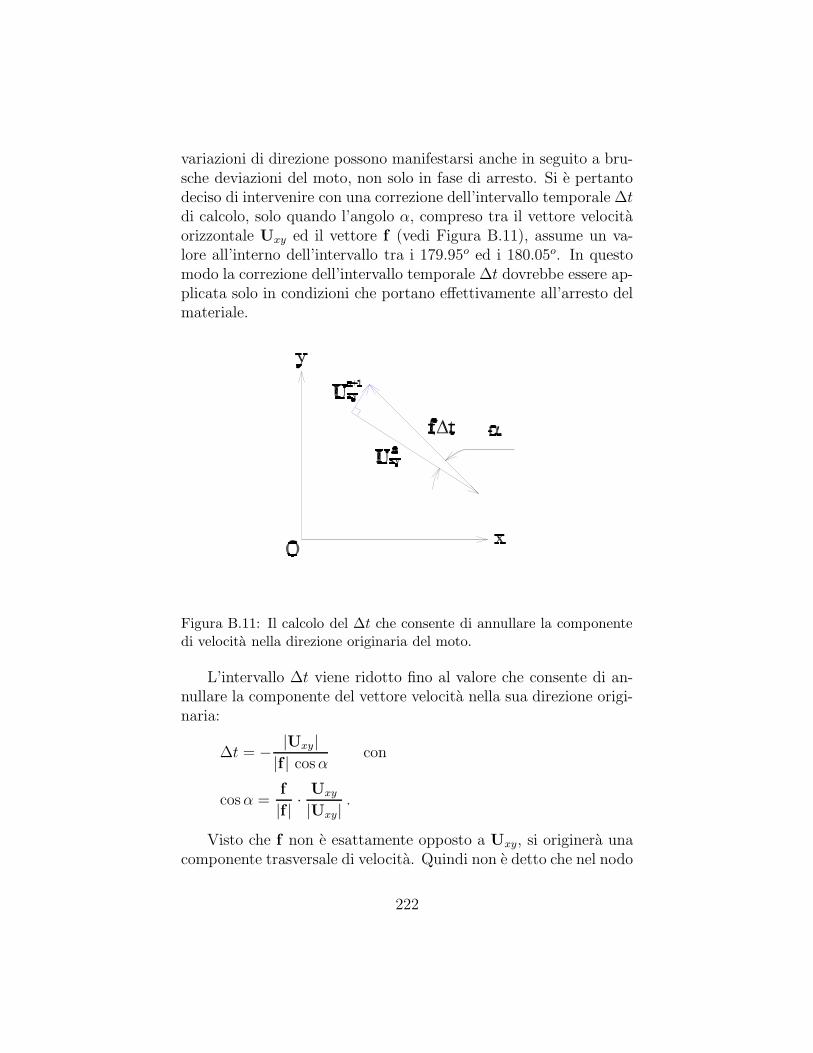
variazioni di direzione possono manifestarsi anche in seguito a bru-sche deviazioni del moto, non solo in fase di arresto. Si e pertantodeciso di intervenire con una correzione dell’intervallo temporale ∆tdi calcolo, solo quando l’angolo α, compreso tra il vettore velocitaorizzontale Uxy ed il vettore f (vedi Figura B.11), assume un va-lore all’interno dell’intervallo tra i 179.95o ed i 180.05o. In questomodo la correzione dell’intervallo temporale ∆t dovrebbe essere ap-plicata solo in condizioni che portano effettivamente all’arresto delmateriale.
Figura B.11: Il calcolo del ∆t che consente di annullare la componentedi velocita nella direzione originaria del moto.
L’intervallo ∆t viene ridotto fino al valore che consente di an-nullare la componente del vettore velocita nella sua direzione origi-naria:
∆t = − |Uxy||f | cos α
con
cos α =f
|f | ·Uxy
|Uxy|.
Visto che f non e esattamente opposto a Uxy, si originera unacomponente trasversale di velocita. Quindi non e detto che nel nodo
222

analizzato si arrivi ad avere |Uxy| < EPSI (si veda Figura B.11).Vengono pero smorzate quelle inversioni di direzione del vettorevelocita che disturbano la fase di arresto.
223

B.2.3 Il termine diffusivo
Si rimanda al paragrafo §A.3.4 per la presentazione dei motivi chehanno indotto all’introduzione di un termine diffusivo nell’equazio-ne del moto. A quanto detto si puo aggiungere solo che, mentrenel modello monodimensionale il termine diffusivo non e quasi mainecessario, nel modello bidimensionale in moltissimi casi non si puoevitare di introdurlo al fine di ottenere un modello stabile. Infattisenza termine diffusivo si arriva spesso ad un’eccessiva deformazio-ne della mesh, con triangoli caratterizzati da aree o angoli moltopiccoli.
Sono state fatte delle prove con diverse forme dei termini diffu-sivi aggiunti alle funzioni fx e fy, definite in Eq. (3.34) e Eq. (3.35).I risultati migliori sono stati ottenuti con le seguenti espressioni:
1
∀
∫
∀
β ∇ · (cx ∇Ux) d∀ ,
1
∀
∫
∀
β ∇ · (cy ∇Uy) d∀ ,
(B.70)
cx e cy sono i valori delle celerita di propagazione delle onde gra-vitazionali di piccola ampiezza, rispetto ad un osservatore solidalecon l’ammasso in movimento, nelle direzioni x e y. ∀ e il “covo-lume”, preso attorno al vertice di calcolo, rappresentato dall’areacompresa all’interno della poligonale chiusa, che passa per i bari-centri dei triangoli adiacenti al vertice e per i punti medi dei laticonnessi (si veda Figura B.12). β e una costante, dimensionalmenteuna lunghezza.
Di seguito viene proposta la modalita di calcolo del termine dif-fusivo aggiunto all’equazione scritta nella direzione x. Non cambianulla nella direzione y.
Applicando il teorema della divergenza si passa da un integralesul covolume ad un integrale sul perimetro della poligonale ∂∀ cheracchiude il covolume:
1
∀
∫
∀
β ∇ · (cx ∇Ux) d∀ =1
∀
∮
∂∀
β cx ∇Ux · n dA .
224

Figura B.12: Il “covolume” sul quale viene integrato il termine diffusivo.
Nel modello bidimensionale le “aree” di contorno del covolume sonorappresentate dai segmenti che uniscono i baricentri dei triangolicon i punti medi dei lati connessi al nodo su cui si sta eseguendol’analisi.
Se si indica con k il generico elemento di covolume evidenziatoin Figura B.12, l’integrale puo essere discretizzato con la seguentesommatoria:
1
∀
∮
∂∀
β cx ∇Ux · n dA ∼=
∼= 1
Acov
n∑
k=1
βk cxk ((∇Ux)k · nk) lk ,
(B.71)
225
dove:
n e il numero di elementi in cui viene diviso il covolume, parial doppio del numero di triangoli che condividono il vertice dicalcolo;
cxk e il valore della celerita di propagazione delle onde di gra-vita di piccola ampiezza, nella direzione x, per l’elemento dicovolume k; poiche cx, e calcolata in corrispondenza dei ver-tici, cxk viene ottenuto come media dei valori che assume neivertici del triangolo, all’interno del quale si colloca l’elementodi covolume k;
(∇Ux)k e il valore del gradiente della componente di velocitaUx, calcolato nel triangolo a cui appartiene l’elemento di co-volume k, secondo la procedura vista anche per ∇U in §3.2.1,parlando del tensore dei coefficienti di spinta;
lk e nk rappresentano la lunghezza e la normale uscente deltratto di poligonale di contorno del covolume appartenenteall’elemento k;
la costante βk viene assunta pari alla lunghezza del lato del-la mesh su cui insiste l’elemento di covolume k (vedi Figu-ra B.12);
Acov e l’area del covolume preso attorno al nodo di calcolo e ri-sulta pari ad 1/3 della somma delle aree dei triangoli adiacential nodo; infatti la frazione di covolume compresa all’internodi ciascun triangolo e un terzo dell’area del triangolo stesso.
Se il vertice si trova sul contorno, si dovranno aggiungere icontributi di flusso del vettore β cx ∇Ux attraverso i lati di contorno.In particolare, considerando l’elemento di covolume rappresentatoin Figura B.13, si aggiunge alla somma (B.71) il termine:
(βk)c (cxk)c
(
((∇Ux)k)c · (nk)c
)
(lk)c ,
dove:
226
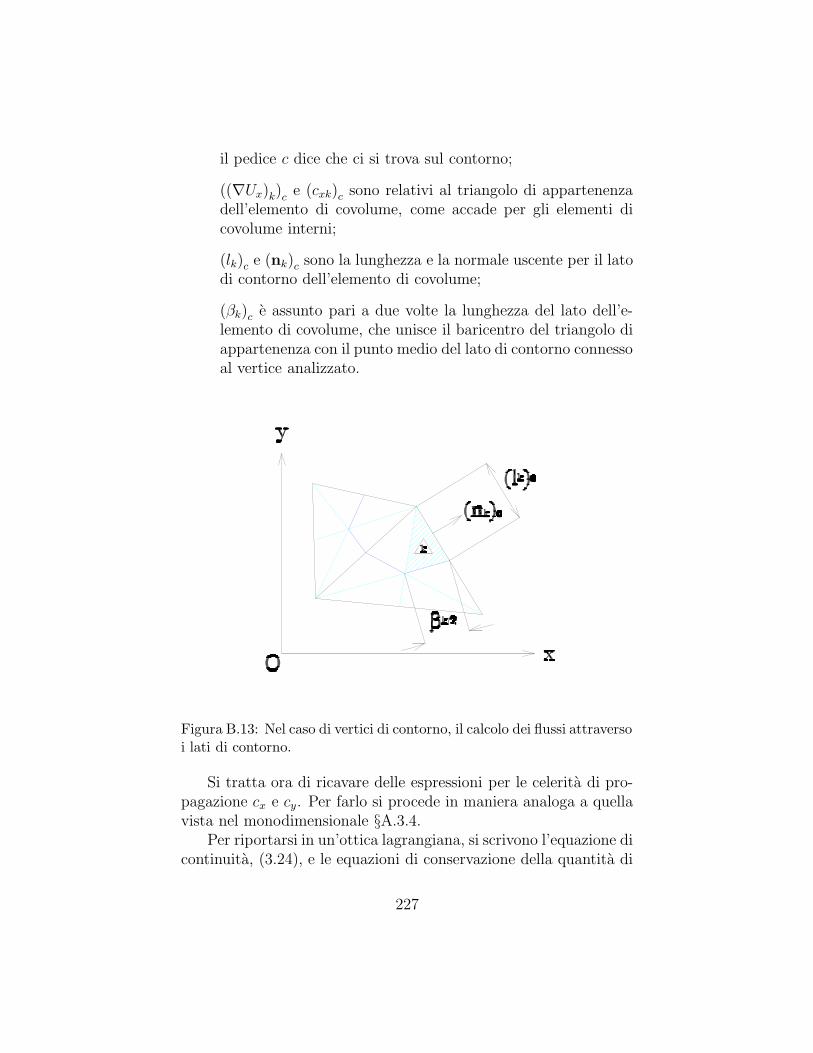
il pedice c dice che ci si trova sul contorno;
((∇Ux)k)c e (cxk)c sono relativi al triangolo di appartenenzadell’elemento di covolume, come accade per gli elementi dicovolume interni;
(lk)c e (nk)c sono la lunghezza e la normale uscente per il latodi contorno dell’elemento di covolume;
(βk)c e assunto pari a due volte la lunghezza del lato dell’e-lemento di covolume, che unisce il baricentro del triangolo diappartenenza con il punto medio del lato di contorno connessoal vertice analizzato.
Figura B.13: Nel caso di vertici di contorno, il calcolo dei flussi attraversoi lati di contorno.
Si tratta ora di ricavare delle espressioni per le celerita di pro-pagazione cx e cy. Per farlo si procede in maniera analoga a quellavista nel monodimensionale §A.3.4.
Per riportarsi in un’ottica lagrangiana, si scrivono l’equazione dicontinuita, (3.24), e le equazioni di conservazione della quantita di
227

moto nella direzione x e y, (3.25) e (3.26), rispetto ad un osservatoreche si muove con la velocita Uxy nel piano xy.
Vengono definite tre nuove variabili:
x = x(x, t) = x −∫ t
0
Ux dt ,
y = y(y, t) = y −∫ t
0
Uy dt ,
t = t(t) = t ,
per le quali vale:
∂x
∂x= 1 ,
∂x
∂y= 0 ,
∂x
∂t= −Ux ,
∂y
∂x= 0 ,
∂y
∂y= 1 ,
∂y
∂t= −Uy ,
∂t
∂x= 0 ,
∂t
∂y= 0 ,
∂t
∂t= 1 ,
purche si supponga che localmente Ux e Uy possano essere con-siderati costanti, cioe che si possano trascurare le derivate dellecomponenti orizzontali di velocita nelle direzioni x e y.
Per una generica funzione g = g (x, y, t) = g (x (x, t) , y (y, t) , t (t))le derivate parziali rispetto a x, y e t possono essere riscritte infunzione delle derivate parziali rispetto a x, y e t:
∂g
∂x=
∂g
∂x
∂x
∂x+
∂g
∂y
∂y
∂x+
∂g
∂t
∂t
∂x=
∂g
∂x,
∂g
∂y=
∂g
∂x
∂x
∂y+
∂g
∂y
∂y
∂y+
∂g
∂t
∂t
∂y=
∂g
∂y,
∂g
∂t=
∂g
∂x
∂x
∂t+
∂g
∂y
∂y
∂t+
∂g
∂t
∂t
∂t= −Ux
∂g
∂x− Uy
∂g
∂y+
∂g
∂t.
Se si sviluppano le derivate parziali delle equazioni del moto me-diate sulla verticale, utilizzando le precedenti espressioni, si ottiene
228

il seguente sistema:
∂H
∂t+ H
∂Ux
∂x+ H
∂Uy
∂y= 0 .
∂Ux
∂t− A kxx
∂H
∂x− A kyx
∂H
∂y=
=
((
∂kxx
∂x+
∂kyx
∂y
)
A + kxx∂A
∂x+ kyx
∂A
∂y
)
H
2+
+
(
kxx∂b
∂x+ kyx
∂b
∂y− kzx
)
A ,
∂Uy
∂t− A kxy
∂H
∂x− A kyy
∂H
∂y=
=
((
∂kxy
∂x+
∂kyy
∂y
)
A + kxy∂A
∂x+ kyy
∂A
∂y
)
H
2+
+
(
kxy∂b
∂x+ kyy
∂b
∂y− kzy
)
A ,
Avendo indicato con (T.N.)x e (T.N.)y i termini delle forzeesterne delle equazioni del moto nelle direzioni x e y, lo stessosistema, scritto in forma matriciale si presenta come segue:
HUx
Uy
,t
+
0 H 0−A kxx 0 0−A kxy 0 0
H
Ux
Uy
,x
+
+
0 0 H−A kyx 0 0
−A kyy 0 0
H
Ux
Uy
,y
=
0
(T.N.)x
(T.N.)y
,
(B.72)
Indicando con w in vettore delle funzioni incognite (H, Ux, Uy),
con F il vettore dei termini noti(
0; , (T.N.)x , (T.N.)y
)
e con Ax e
Ay le matrici dei coefficienti dei termini nelle derivate spaziali, siottiene:
229

w,t + Ax w,x + Ay w,y = F .
Non e possibile diagonalizzare entrambe le matrici contempora-neamente. Tuttavia ci si puo ridurre a lavorare con una sola matricese le derivate spaziali vengono calcolate in una specifica direzionenel piano xy.
Se ad esempio si considera la direzione che forma un angolo θcon l’asse delle x, si puo definire una coordinata µθ che si sviluppalungo tale retta. Allora sara x = x (µθ) e y = y (µθ), e quindile derivate parziali rispetto a x e ad y possono essere riscritte infunzione della derivata rispetto a µθ.
In particolare da Figura B.14 si evince che:
dµθ = cos θdx + sin θdy , per cui
∂
∂x=
∂µθ
∂x
∂
∂µθ= cos θ
∂
∂µθe
∂
∂y=
∂µθ
∂y
∂
∂µθ
= sin θ∂
∂µθ
.
Il sistema scritto nella direzione definita dall’angolo θ assumepercio l’aspetto:
w,t + (cos θ Ax + sin θ Ay) w,µθ= F .
La celerita di propagazione delle onde di gravita di piccola am-piezza e data dagli autovalori della matrice A = cos θ Ax+sin θ Ay,che sono dati dall’equazione:
det (A − λ I) = 0
det
−λ H cos θ H sin θ
−A (cos θ kxx + sin θkyx) −λ 0
−A (cos θ kxy + sin θkyy) 0 −λ
= 0 ⇒
⇒ −λ(
λ2 + A H(
cos2 θ kxx + 2 cos θ sin θ kxy+
+ sin2 θ kyy
))
= 0 .
230

Figura B.14: Calcolo di dµθ in funzione di dx e dy.
Risolvendo tale equazione di terzo grado si ricavano le espres-sioni dei tre autovalori:
λ1 = 0
λ2,3 = ±√−A H
√
cos2 θ kxx + 2 cos θ sin θ kxy + sin2 θ kyy .
L’autovalore nullo corrisponde al vettore velocita, che nel rife-rimento solidale con la massa in movimento e nulla; gli altri dueautovalori definiscono le celerita di propagazione delle perturbazio-ni gravitazionali di piccola ampiezza, relative al moto medio, nelladirezione definita da θ, verso monte e verso valle.
Le celerita di propagazione nelle direzioni x e y le si ottiene perθ = 0 e θ = π/2 e sono pari a:
cx =√
−A H kxx ,
cy =√
−A H kyy ,(B.73)
Le celerita di propagazione servono anche per l’analisi di stabi-lita (si veda §3.2.3). In particolare si vuole evitare che, nell’inter-
231

vallo di tempo ∆t, le informazioni relative a variazioni del campodi moto nel vertice di calcolo possano raggiungere triangoli nonimmediatamente adiacenti al vertice stesso.
Poiche ad ogni direzione corrisponde un diverso valore dellacelerita di propagazione, il controllo andrebbe eseguito per ognivalore di θ.
Si alleggerisce il calcolo eseguendo il controllo per ogni triangoloadiacente, solo nella direzione ortogonale al lato opposto al verticeanalizzato, e con una celerita pari a cmax =
√−A H k1, dove k1
e il valore del coefficiente di spinta relativa allo sforzo principalemassimo.
cmax e il massimo valore della celerita di propagazione che si puoottenere nel piano xy. Infatti cos2 θ kxx+2 cos θ sin θ kxy +sin2 θ kyy
rappresenta il coefficiente di spinta, corrispondente alla componen-te, nella direzione definita da θ, dello stato di sforzo che si sviluppasulla superficie normale alla stessa direzione. Tale componente saracertamente non superiore alla tensione principale massima.
Nel generico vertice, i valori di cx, cy e cmax sono stati calcolatiutilizzando i valori di A, kxx, kyy e kxy relativi al vertice stesso.H invece e stato ottenuto come media delle altezze dei triangolicontigui, pesata con le aree dei triangoli stessi.
232

Riferimenti bibliografici
1. Mroz, Z., Elastoplastic and Viscoplastic Consti-tutive Models for Granular Materials, Institute ofFundamental Technological Research, Warsaw, Polonia;
2. Mih, W.C., High Concentration Granular ShearFlow;
3. Hicher, P.Y., Experimental Behaviour of Granu-lar Materials, Laboratoire de Genie Civil de Nantes,Saint-Nazaire, Ecole Centrale de Nantes;
4. Hutter, K., Koch, T.,Pluss, C., Savage, S.B., The dy-namics of avalanches of granular materials from initiation torunout. Part II. Experiments, Acta Mechanica 109 (1995),127–165;
5. Savage, S.B., Hutter, K., Motion of granular material do-wn a rough incline, Journal of Fluid Mechanics 199 (1989),177–215;
6. Hutter, K., Siegel, M., Savage, S.B., Nohguchi, Y., Twodimensional spreading of a granular avalanche down an inclinedplane. Part I. Theory, Acta Mechanica 100 (1993), 37–68;
7. Vardoulakis, I., N.T.U.A. Strain localization in granular ma-terials, CISM, Lecture Notes Behaviour of Granular Materials,Chapter 7 (Cambou, B., eds.);
8. Kolymbas, D., Herle, I., Hypoplasticity: a Fra-mework to Model Granular Materials;
9. Micromechanical Approch in Granular Media;
10. Hungr, O., Morgenstern, N.R., Experiments on the flowbehaviour of granular materials at high velocity in an openchannel, Geotechnique 34, No. 3 (1984), 405–413;
11. Nohguchi, Y., Avalanche experiments with styrene foam par-ticles, Snow Engineering: Recent Advances (1997), 63–68,Proceedings of the Third International Conference of SnowEngineering/Senday/Japan/26–31 May 1996;
233
12. Qiu, J., Xu, J., Jiang, F., Abe, O., Sato, A., Nohgu-chi, Y., Nakamura, T., Study of avalanches in the Tian-shan Mountains, Xinjiang, China, Snow Engineering: RecentAdvances (1997), 85–90, Proceedings of the Third Internatio-nal Conference of Snow Engineering/Senday/Japan/26–31 May1996;
13. Nohguchi, Y., Kobayasi, T., Iwanamy, K., Nishimura,K., Sato, A., Granulation of snow, Snow Engineering: RecentAdvances (1997), 167–170, Proceedings of the Third Interna-tional Conference of Snow Engineering/Senday/Japan/26–31May 1996;
14. Decker, R., Lateral loads on structures due to snow avalancheimpacts, Snow Engineering: Recent Advances (1997), 229–234,Proceedings of the Third International Conference of SnowEngineering/Senday/Japan/26–31 May 1996;
15. McClung, D., Schaerer, P., Manuale delle valan-ghe: formazione, dinamica ed effetti, prevenzionee sicurezza, soccorso, Zanichelli, Bologna, 1996;
16. Barberi, M., Approccio statistico per l’analisi deldistacco delle valanghe, Tesi di Laurea in Ingegneria perl’Ambiente ed il Territorio, a.a.1994–95, Universita degli Studidi Trento;
17. Chen, W. F., Liu, X. L., Limit analysis in soilmechanics, Elsevier Science Publication, The Netherlands,1990;
18. Bardet, J. P., Introduction to computational gra-nular mechanics. A short course in granularmechanics, Udine, Italy, 1989;
19. Savage, S. B., Hutter, K., The dynamics of avalanches ofgranular materials from initiation to runout. Part I: analysis,Acta Mechanica 86 (1991), 201–223;
20. Zannoni, A., Il distacco artificiale delle valanghe.Dallo studio del problema alla definizione dei pianioperativi, Tesi di Laurea in Ingegneria per L’Ambiente ed ilTerritorio, a.a. 1993-94, Universita degli Studi di Trento;
234

21. Scotton, P., Studio dei fenomeni valanghivi della Valdei Spini (Comune di Pejo, Trento), Dipartimento di In-gegneria Civile ed Ambientale, Universita degli Studi di Trento,1999;
22. Shroder, J. F., Dendrogeomorphology: review and new tech-niques of tree-ring dating, Progress in Physical Geography 4(1980), 161–188;
23. Fletcher, C.A.J., Computational Techniques forFluid Dynamics (Volume II, Specific Techniques forDifferent Flow Categories), Springer Verlag, 1991;
24. Simmonds, J.G., A Brief on Tensor Analysis, SpringerVerlag, 1982;
25. Eisenhart, L.P., An introduction to differentialgeometry with the use of tensor calculus, PrinceUniversity Press, 1947;
26. Carrara, P.E., The determination of snow avalanches frequen-cy through tree-ring analysis and historical records at Ophir,Colorado, Geological Society of America Bullettin part I,No. 90, 773–780;
27. Butler, D.R., Malanson, G.P., Oelfke, J.G., Tree-ringanalysis and natural hazard cronologies: minimum sample sizesand index values, The Professional Geographer Vol. 39, No. 1(1978), 41–47;
28. Strunk, H., Dendrogeomorphology of debris flow, Dendrochro-nologia;
29. Bertolazzi, E., Manzini, G., Algorithm 817 P2MESH:generic object–oriented interface between 2-D unstructuredmeshes and FEM/FVM-based PDE solvers, ACM Trans.Math. Softw., http://doi.acm.org/10.1145/513001.513007Vol. 28, No. 1 (2002), 101–132;
30. Bertolazzi, E., Manzini, G., The Kernelof P2MESH, Tech. Rep. IAN-1166, IAN–CNR,http://www.unitn.it/~bertolaz/p2mesh/download.shtml,1999;
235

31. Bertolazzi, E., Manzini, G., P2MESH: Pro-gramming Finite Element and Finite Volu-me Methods, Tech. Rep. IAN-1165, IAN–CNR,http://www.unitn.it/~bertolaz/p2mesh/download.shtml,1999;
32. Bertolazzi, E., Manzini, G., P2MESH: Program-mer’s Manual, Tech. Rep. IAN-1164, IAN–CNR,http://www.unitn.it/~bertolaz/p2mesh/download.shtml,1999;
33. Bertolazzi, E., Manzini, G., P2MESH:a collection of generic classes forPDE solvers on unstructured 2-D grids,http://www.unitn.it/~bertolaz/p2mesh/download.shtml,2000;
34. Lancaster, P., Slakauskas, K., Surfaces Generated by mo-ving Least Squares Methods, Geotechnique Vol. 37, No. 155(1981), 141–158;
35. D’Accordi, M., Studio di un sito valanghivo: dati dicampo e modella zione numerica, Tesi di Laurea in Inge-gneria per l’Ambiente ed il Territorio, a.a.1998-99, Universitadegli Studi di Trento, 1999;
36. Stoer, S., Burlisch, R., Introduction to numericalanalysis, Springer Verlag, 1983;
37. Shewchuk, J. R., Triangle:Engineering a 2D Qua-lity Mesh Generator and Delaunay Triangulator,http://www.cs.cmu.edu/~quake/triangle.html, 1996;
38. Weiyan, T., Shallow Water Hydrodynamics, ElsevierScience Publisher, Amsterdam, 1992;
39. Casulli, V., Numerical Methods For Free SurfaceHydrodynamics;
40. Tubino, M., Appunti delle Lezioni di Idrodinamica,Universita degli Studi di Trento, Anno Accademico 1995-1996;
41. Scotton, P., Alcune sperimentazioni sulla dinamica di am-massi granulari lungo piani a forte pendenza, Interazioni del-
236

l’Acqua col Suolo e con le Strutture (1990), 223–234, Atti delXXII Convegno di Idraulica e Costruzioni Idrauliche;
42. Tai, Y.C., Dynamics of Granular Avalanchesand their Simulations with Shock–Capturing andFront–Tracking Numerical Schemes., Doctoral Dis-sertation, Darmstadt, University of Technology, Germany,2000;
237

Stefano De Toni si e laureato nel 2000 in “Ingegneria per l’Am-biente ed il Territorio” presso l’Universita di Trento, con una tesisulla dinamica delle valanghe di neve densa. Dal 2001 e titola-re di una borsa di dottorato in “Ingegneria Ambientale” presso ilDipartimento di Ingegneria Civile e Ambientale dell’Universita diTrento, dove svolge attivita didattica come esercitatore nell’ambitodel corso di Protezione Idraulica del Territorio. La sua attivita diricerca riguarda la modellazione matematica, numerica e fisica dimoti di ammassi granulari secchi e l’applicazione di tecniche nume-riche meshless di approssimazione e discretizzazione di equazionidifferenziali.
Paolo Scotton e Ricercatore di “Idraulica” presso l’Universita diTrento, dove svolge la sua attivita di ricerca presso il Dipartimen-to di Ingegneria Civile ed Ambientale e didattica per il Corso diLaurea in Ingegneria per l’Ambiente ed il Territorio, in qualita didocente di Protezione Idraulica del Territorio. Ha condotto ricer-che nel settore dell’idraulica dei torrenti, con riferimento ai metodidi stabilizzazione d’alveo e di sponda con metodi a basso impattoambientale, nel settore delle colate di detriti, con riferimento allaresistenza al moto e all’impatto dinamico su strutture e nel setto-re delle valanghe con riferimento alla parametrizzazione di campo,alla modellazione fisica, sperimentale e numerica.
Enrico Bertolazzi e Ricercatore di “Analisi Numerica” presso l’U-niversita di Trento, dove svolge la sua attivita di ricerca presso ilDipartimento di Ingegneria Meccanica e Strutturale e dove svolgela sua attivita didattica per il Corso di Laurea in Ingegneria, inqualita di docente di Calcolo Numerico. Ha condotto ricerche nelsettore dell’analisi numerica, con riferimento: metodi iterativi persistemi sparsi di grandi dimensioni; discretizzazione di equazionireattive; schemi a volumi finiti shock capturing per equazioni diEulero a regime ipersonico; schemi a Volumi Finiti/Elementi Fi-niti per problemi in idraulica; sviluppo di tecnologie per il calcoloscientifico: astrazione del concetto di mesh; analisi e studio delleproprieta di alcune classi di schemi a volumi finiti; metodi numericiper sistemi multi-body; dinamica della motocicletta e metodo dellamanovra ottima.
238