
Metodi e Modelli per le Decisioni - homes.di.unimi.it · Metodi e Modelli per le Decisioni Corso di...
25
Metodi e Modelli per le Decisioni Corso di Laurea in Informatica e Corso di Laurea in Matematica Roberto Cordone DI - Universit` a degli Studi di Milano Lezioni: Gioved` ı 13.30 - 15.30 Venerd` ı 15.30 - 17.30 Ricevimento: su appuntamento Tel.: 02 503 16235 E-mail: [email protected] Web page: http://homes.di.unimi.it/ ~ cordone/courses/2015-mmd/2015-mmd.html Lezione 4: Programmazione Matematica Milano, A.A. 2015/16 1/1
Transcript of Metodi e Modelli per le Decisioni - homes.di.unimi.it · Metodi e Modelli per le Decisioni Corso di...

Metodi e Modelli per le DecisioniCorso di Laurea in Informatica e Corso di Laurea in Matematica
Roberto Cordone
DI - Universita degli Studi di Milano
Lezioni: Giovedı 13.30 - 15.30
Venerdı 15.30 - 17.30
Ricevimento: su appuntamento
Tel.: 02 503 16235
E-mail: [email protected]
Web page: http://homes.di.unimi.it/~cordone/courses/2015-mmd/2015-mmd.html
Lezione 4: Programmazione Matematica Milano, A.A. 2015/16
1 / 1
Ottimi locali e globali
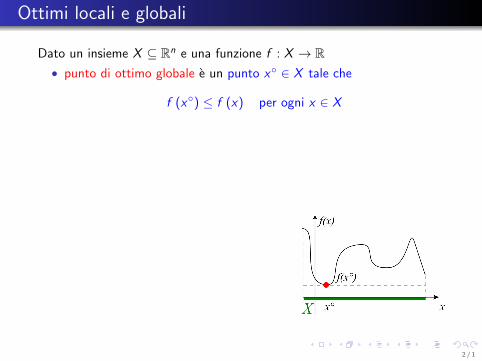
Dato un insieme X ⊆ Rn e una funzione f : X → R• punto di ottimo globale e un punto x◦ ∈ X tale che
f (x◦) ≤ f (x) per ogni x ∈ X
2 / 1
Ottimi locali e globali
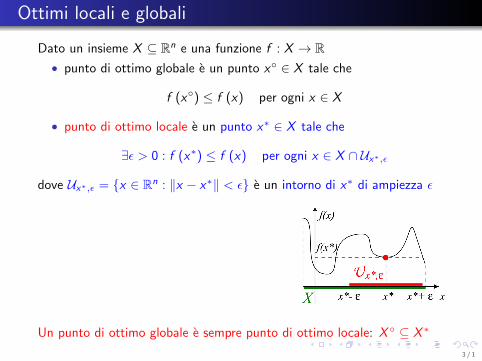
Dato un insieme X ⊆ Rn e una funzione f : X → R• punto di ottimo globale e un punto x◦ ∈ X tale che
f (x◦) ≤ f (x) per ogni x ∈ X
• punto di ottimo locale e un punto x∗ ∈ X tale che
∃ε > 0 : f (x∗) ≤ f (x) per ogni x ∈ X ∩ Ux∗,ε
dove Ux∗,ε = {x ∈ Rn : ‖x − x∗‖ < ε} e un intorno di x∗ di ampiezza ε
Un punto di ottimo globale e sempre punto di ottimo locale: X ◦ ⊆ X ∗
3 / 1

Dove vogliamo arrivare?
Vorremmo X ◦, ma cerchiamo condizioni necessarie per l’ottimalita locale
Ottimo globale ⇒ Ottimo locale ⇒ Condizioni di KKT
X ◦ ⊆ X ∗ ⊆ XKKT
Le condizioni di KKT individuano punti candidatia essere punti di ottimo locale, e quindi di ottimo globale
1 si risolve il sistema delle condizioni, costruendo XKKT
2 si valutano uno per uno i punti di XKKT
3 i migliori formano X ◦
Si spera che XKKT sia un insieme finito o descrivibile analiticamente
4 / 1
Serie di Taylor
Ogni funzione regolare si puo approssimare localmente con un polinomio
Sia f ∈ C k (Ux,ε) funzione di una sola variabile x ∈ R:
f (x) =k∑
i=0
f (i) (x) (x − x)i + Rk (x − x) per ogni x ∈ Ux,ε
con f (0) = f , f (i) =d i f
dx iper ogni i > 0, e lim
x→x
Rk (x − x)
‖x − x‖k= 0
Per k = 1 si ottiene l’approssimazione lineare
f (x) = f (x) + f ′ (x) (x − x) + R1 (|x − x |)
che per funzioni di piu variabili (x ∈ Rn) diventa
f (x) = f (x) + (∇f (x))T (x − x) + R1 (‖x − x‖)
5 / 1
Direzioni
Dato un punto x ∈ Rn, un vettore d ∈ Rn si dice “direzione” se e pensatocome termine da modulare e aggiungere a x per spostarsi in altri punti
Direzione ammissibile in x ∈ X e un vettore d ∈ Rn tale che
∃α > 0 : x + αd ∈ X ∀α ∈ [0; α)
Spostandosi da x di poco in direzione d , la soluzione resta ammissibile
Direzione migliorante in x ∈ X e un vettore d ∈ Rn tale che
∃α > 0 : f (x + αd) < f (x) ∀α ∈ (0; α)
Spostandosi da x di poco in direzione d , la soluzione migliora
6 / 1

Condizioni necessarie di ottimalita locale
Se x∗ e un punto di ottimo locale,nessuna direzione d e insieme ammissibile e migliorante in x∗
Se x∗ e un punto di ottimo locale, allora f (x) ≥ f (x∗) per ogni x ∈ Ux∗,ε ∩ X
Per assurdo, sia d e ammissibile e migliorante: esistono α1 e α2 tali che
• x∗ + αd ∈ X per ogni α ∈ [0; α1)
• f (x∗ + αd) < f (x∗) per ogni α ∈ (0; α2)
Ora poniamo α = 12
min(
ε‖d‖ , α1, α2
)> 0 e x = x∗ + αd
Dai tre termini dell’operatore di minimo deriva che:
• ‖x − x∗‖ ⇒ x ∈ Ux∗,ε• x ∈ X
• f (x) < f (x∗)
ma poiche x ∈ X ∩ Ux∗,ε deve essere anche f (x) ≥ f (x∗), che e un assurdo
7 / 1
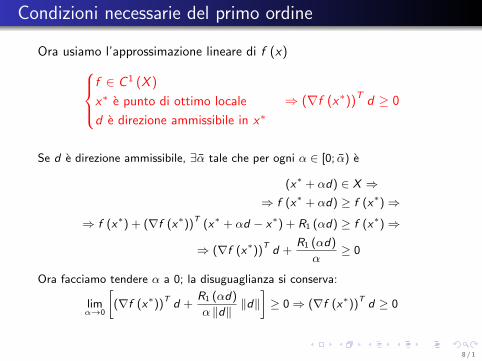
Condizioni necessarie del primo ordine
Ora usiamo l’approssimazione lineare di f (x)f ∈ C 1 (X )
x∗ e punto di ottimo locale
d e direzione ammissibile in x∗⇒ (∇f (x∗))T d ≥ 0
Se d e direzione ammissibile, ∃α tale che per ogni α ∈ [0; α) e
(x∗ + αd) ∈ X ⇒⇒ f (x∗ + αd) ≥ f (x∗)⇒
⇒ f (x∗) + (∇f (x∗))T
(x∗ + αd − x∗) + R1 (αd) ≥ f (x∗)⇒
⇒ (∇f (x∗))Td +
R1 (αd)
α≥ 0
Ora facciamo tendere α a 0; la disuguaglianza si conserva:
limα→0
[(∇f (x∗))
Td +
R1 (αd)
α ‖d‖ ‖d‖]≥ 0⇒ (∇f (x∗))
Td ≥ 0
8 / 1

Una via verso l’ottimo
Un approccio algoritmico per trovare punti candidati:
• scorriamo tutti i punti ammissibili
• scartiamo quelli che hanno direzioni ammissibili e miglioranti
Algorithm TrovaCandidati(f ,X )
C := X ;
For each x ∈ C do
{ Scarta i punti che si dimostrano non candidati }For each d ∈ Rn ammissibile in x do
If (∇f (x))T d < 0 then C := C \ {x}{ Restituisce il miglior punto candidato }Return arg min
x∈Cf (x)
Parrebbe peggio che scorrere esaustivamente i punti di X
9 / 1
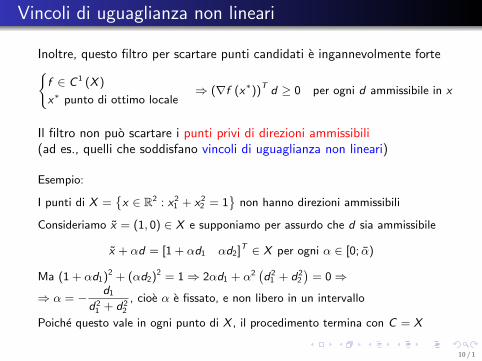
Vincoli di uguaglianza non lineari
Inoltre, questo filtro per scartare punti candidati e ingannevolmente forte{f ∈ C 1 (X )
x∗ punto di ottimo locale⇒ (∇f (x∗))
Td ≥ 0 per ogni d ammissibile in x
Il filtro non puo scartare i punti privi di direzioni ammissibili(ad es., quelli che soddisfano vincoli di uguaglianza non lineari)
Esempio:
I punti di X ={x ∈ R2 : x2
1 + x22 = 1
}non hanno direzioni ammissibili
Consideriamo x = (1, 0) ∈ X e supponiamo per assurdo che d sia ammissibile
x + αd = [1 + αd1 αd2]T ∈ X per ogni α ∈ [0; α)
Ma (1 + αd1)2 + (αd2)2 = 1⇒ 2αd1 + α2(d2
1 + d22
)= 0⇒
⇒ α = − d1
d21 + d2
2
, cioe α e fissato, e non libero in un intervallo
Poiche questo vale in ogni punto di X , il procedimento termina con C = X
10 / 1
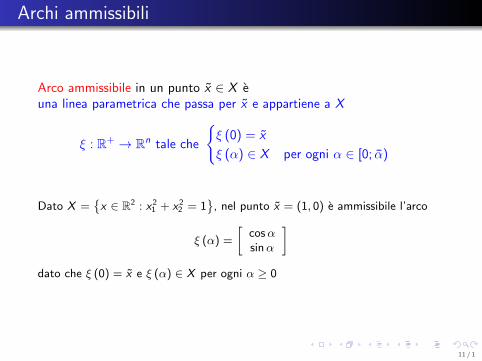
Archi ammissibili
Arco ammissibile in un punto x ∈ X euna linea parametrica che passa per x e appartiene a X
ξ : R+ → Rn tale che
{ξ (0) = x
ξ (α) ∈ X per ogni α ∈ [0; α)
Dato X ={x ∈ R2 : x2
1 + x22 = 1
}, nel punto x = (1, 0) e ammissibile l’arco
ξ (α) =
[cosαsinα
]dato che ξ (0) = x e ξ (α) ∈ X per ogni α ≥ 0
11 / 1
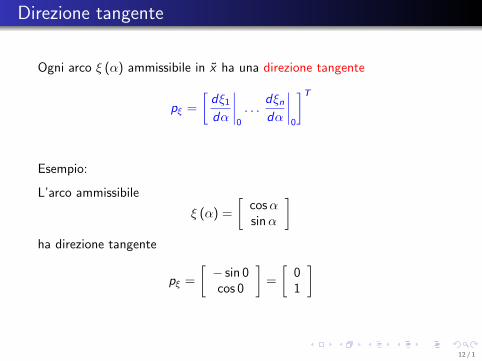
Direzione tangente
Ogni arco ξ (α) ammissibile in x ha una direzione tangente
pξ =
[dξ1
dα
∣∣∣∣0
. . .dξndα
∣∣∣∣0
]T
Esempio:
L’arco ammissibile
ξ (α) =
[cosαsinα
]ha direzione tangente
pξ =
[− sin 0cos 0
]=
[01
]
12 / 1
Relazione fra direzioni e archi ammissibili
Per ogni direzione d ammissibile in x si puo costruire un arco ammissibile
ξ (α) = x + αd
che e una semiretta
La tangente a tale arco e la direzione stessa: pξ = d
Le tangenti ad archi ammissibili generalizzano le direzioni ammissibili:
• alcuni archi ammissibili hanno come tangente una direzioneammissibile
• altri archi ammissibili hanno come tangente una direzione nonammissibile
Vedremo che si possono scartare punti da C anche con le tangenti
13 / 1
Condizioni necessarie del primo ordine
f ∈ C 1 (X )
x∗ punto di ottimo locale
ξ arco ammissibile in x∗⇒ (∇f (x∗))T pξ ≥ 0
Se ξ (α) e un arco ammissibile, ∃α tale che ξ (α) ∈ X per ogni α ∈ [0; α)
f (ξ (α)) ≥ f (x∗)⇒
⇒ f (ξ (0)) + αdf
dα
∣∣∣∣α=0
+ R1 (ξ (α)− ξ (0)) ≥ f (x∗)⇒
⇒ (∇f (x∗))Tpξ +
R1 (ξ (α)− ξ (0))
α≥ 0
Se facciamo tendere α a 0, la disuguaglianza si conserva:
limα→0
((∇f (x∗))
Tpξ +
R1 (ξ (α)− ξ (0))
‖ξ (α)− ξ (0)‖‖ξ (α)− ξ (0)‖
α
)≥ 0⇒ (∇f (x∗))
Tpξ ≥ 0
Ma come facciamo a scorrere le tangenti ad archi ammissibili?
14 / 1
Caratterizzazione degli archi ammissibili
Supponiamo di descrivere analiticamente la regione ammissibile
X ={x ∈ Rn : gj (x) ≤ 0, con gj ∈ C 1 (X ) , j = 1, . . . , s
}
Se ξ (α) e un arco ammissibile in x ∈ X , allora (∇gj (x))T pξ ≤ 0per ogni vincolo “attivo”, cioe tale che gj (x) = 0
Se ξ (α) e un arco ammissibile in x , esiste α > 0 tale che
gj (ξ (α)) ≤ 0 per ogni α ∈ [0; α) j = 1, . . . , s
ovvero
gj (ξ (α)) = gj (ξ (0)) +dgjdα
∣∣∣∣0
α + R1 (ξ (α)− ξ (0)) =
= gj (x) + α (∇gj (x))T pξ + R1 (ξ (α)− ξ (0)) ≤ 0
Per i vincoli non attivi in x , la disuguaglianza e ovvia perche gj (x) < 0
15 / 1
Caratterizzazione degli archi ammissibili
Invece per i vincoli attivi in x e gj (x) = 0, per cui
gj (ξ (α)) = α (∇gj (x))T pξ + R1 (ξ (α)− ξ (0)) ≤ 0
Dividendo ambo i membri per α e passando al limite, si ha la tesi:
limα→0
[∇gj (x)T pξ +
R1 (ξ (α)− ξ (0))
α
]= pT
ξ ∇gj (x) ≤ 0
Osservazione:
I vincoli di uguaglianza hi (x) = 0 sono sempre attivi e si possono vederecome coppie di disuguaglianze attive hi (x) ≤ 0 e −hi (x) ≤ 0, per cui{
(∇hi (x))T pξ ≤ 0
− (∇hi (x))T pξ ≤ 0⇒ (∇hi (x))T pξ = 0
Ci piacerebbe dire l’inverso: se un arco ha certe proprieta, allora e ammissibile
16 / 1
Punti regolari
Se un arco ξ e ammissibile, il vettore pξ soddisfa le condizioni appena viste,ma se un vettore p le soddisfa, non sempre e tangente a un arco ξ ammissibile
E un problema, perche non si puo usare p per filtrare i punti candidati
Punto regolare e un punto in cui i vincoli attivi hanno gradienti linearmenteindipendenti
Nei punti regolari, le condizioni diventano sufficienti (constraint qualification)
Se
{x e un punto regolare
(∇gj (x))T d ≤ 0 per ogni j : gj (x) = 0
allora esiste un arco ξ (α) ammissibile in x con direzione tangente pξ = d
Nota:
Un vincolo di uguaglianza produce due vincoli con gradienti opposti ±∇hi (x)
Questi sono ovviamente dipendenti, ma se ne considera uno solo, poiche esiste
sempre un arco ammissibile che “striscia” lungo il vincolo hi (x) = 0
17 / 1

Riscriviamo l’algoritmo
• Nei punti regolari, cerchiamo le direzioni p che soddisfano le condizioni suigradienti dei vincoli attivi e le usiamo per valutare punti candidati
• Nei punti non regolari, ogni direzione e inaffidabile (puo scartare punti diottimo locale), per cui consideriamo i punti non regolari come candidati
Algorithm TrovaCandidati(f , g1, . . . , gs)
C ′ := NonRegular(g);
C := X \ C ′;For each x ∈ C do
{ Scarta i punti che si dimostrano non candidati }For each p ∈ Rn : (∇gj (x))T p ≥ 0∀j : gj (x) = 0 do
If (∇f (x))T d < 0 then C := C \ {x}{ Restituisce il miglior punto candidato }Return arg min
x∈C∪C ′f (x)
18 / 1
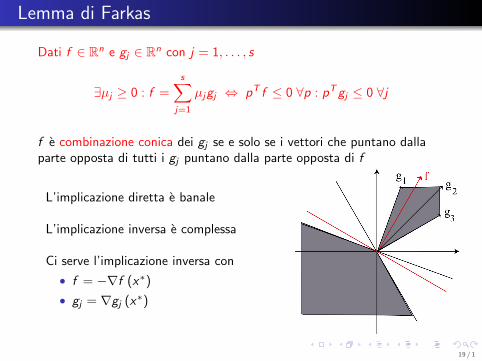
Lemma di Farkas
Dati f ∈ Rn e gj ∈ Rn con j = 1, . . . , s
∃µj ≥ 0 : f =s∑
j=1
µjgj ⇔ pT f ≤ 0 ∀p : pTgj ≤ 0 ∀j
f e combinazione conica dei gj se e solo se i vettori che puntano dallaparte opposta di tutti i gj puntano dalla parte opposta di f
L’implicazione diretta e banale
L’implicazione inversa e complessa
Ci serve l’implicazione inversa con
• f = −∇f (x∗)
• gj = ∇gj (x∗)
19 / 1
Applicazione agli ottimi locali
Nei punti di ottimo locale le direzioni ammissibili sono non miglioranti
pT∇f (x∗) ≥ 0 ∀p : pT∇gj (x∗) ≤ 0
Questo e il secondo membro del lemma di Farkas, dove si e posto
• f = −∇f (x∗)
• gj = ∇gj (x∗)
Quindi vale il primo membro del lemma di Farkas, secondo il qualese f ∈ C 1 (X ), se x∗ e punto di ottimo locale e se e regolare, allora
∃µj ≥ 0 : ∇f (x∗) +∑
j :gj (x∗)=0
µj∇gj (x∗) = 0
L’antigradiente −∇f (x∗) cade nel cono dei gradienti dei vincoli attivi
20 / 1
Interpretazione geometrica
• L’antigradiente −∇f (x) e la direzione in cui f migliora (cala) piurapidamente
• I gradienti dei vincoli attivi ∇gj (x∗) sono le direzioni in cui essivengono violati (crescono) piu rapidamente
• Variando i moltiplicatori µj ≥ 0,∑
j :gj (x∗)=0
µj∇gj (x∗) disegna un cono
• Avere l’antigradiente dell’obiettivo nel cono dei gradienti dei vincoliattivi indica che l’obiettivo migliora solo violando almeno un vincolo
Quindi non ci sono direzioni ammissibili e miglioranti
21 / 1
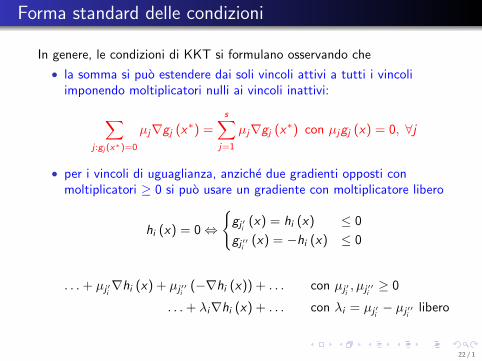
Forma standard delle condizioni
In genere, le condizioni di KKT si formulano osservando che
• la somma si puo estendere dai soli vincoli attivi a tutti i vincoliimponendo moltiplicatori nulli ai vincoli inattivi:
∑j :gj (x∗)=0
µj∇gj (x∗) =s∑
j=1
µj∇gj (x∗) con µjgj (x) = 0, ∀j
• per i vincoli di uguaglianza, anziche due gradienti opposti conmoltiplicatori ≥ 0 si puo usare un gradiente con moltiplicatore libero
hi (x) = 0⇔
{gj′i (x) = hi (x) ≤ 0
gj′′i (x) = −hi (x) ≤ 0
. . .+ µj′i∇hi (x) + µj′′i
(−∇hi (x)) + . . . con µj′i, µj′′i
≥ 0
. . .+ λi∇hi (x) + . . . con λi = µj′i− µj′′i
libero
22 / 1
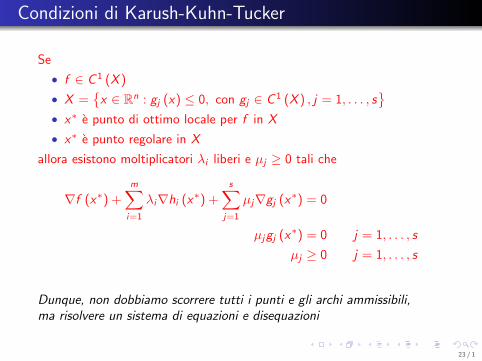
Condizioni di Karush-Kuhn-Tucker
Se
• f ∈ C 1 (X )
• X ={x ∈ Rn : gj (x) ≤ 0, con gj ∈ C 1 (X ) , j = 1, . . . , s
}• x∗ e punto di ottimo locale per f in X
• x∗ e punto regolare in X
allora esistono moltiplicatori λi liberi e µj ≥ 0 tali che
∇f (x∗) +m∑i=1
λi∇hi (x∗) +s∑
j=1
µj∇gj (x∗) = 0
µjgj (x∗) = 0 j = 1, . . . , s
µj ≥ 0 j = 1, . . . , s
Dunque, non dobbiamo scorrere tutti i punti e gli archi ammissibili,ma risolvere un sistema di equazioni e disequazioni
23 / 1

Casi particolari interessanti
• Problemi non vincolati: ∇f (x∗) = 0
I punti candidati sono punti di minimo, di massimo, di flesso. . .
• Problemi discreti: X ⊆ Zn
I vincoli hi (x) = sin (πxi ) = 0 vanno imposti esplicitamente, maquesto significa che ogni punto ammissibile e candidato
Del resto e ovvio: i punti isolati sono punti di ottimo locale
24 / 1

25 / 1


















