Matrici MarcoRobutti - Tutorati UNIPV · Definizione(Sottomatrice,minore,orlato) SiaA...
32
Capitolo 3 Matrici Marco Robutti Facoltà di ingegneria Università degli studi di Pavia Anno accademico 2017-2018 Tutorato di geometria e algebra lineare Marco Robutti Capitolo 3
Transcript of Matrici MarcoRobutti - Tutorati UNIPV · Definizione(Sottomatrice,minore,orlato) SiaA...
Capitolo 3Matrici
Marco Robutti
Facoltà di ingegneriaUniversità degli studi di Pavia
Anno accademico 2017-2018
Tutorato di geometria e algebra lineare
Marco Robutti Capitolo 3

Definizione (Matrice)Una matrice A ∈MR (k, n) è una tabella rettangolare dinumeri, detti entrate, di k righe e n colonne:
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
ak1 ak2 · · · akn
oppure, in forma più sintetica:
A = (aij) ; i = 1, . . . , k; j = 1, . . . , n
Marco Robutti Capitolo 3
Definizione (Somma di matrici)Date le matrici A, B ∈MR (k, n):
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
ak1 ak2 · · · akn
, B =
b11 b12 · · · b1n
b21. . . · · · b2n
...... . . . ...
bk1 bk2 · · · bkn
la matrice A + B è definita come:
A + B =
a11 + b11 a12 + b12 · · · a1n + b1n
a21 + b21. . . · · · a2n + b2n
...... . . . ...
ak1 + bk1 ak2 + bk2 · · · akn + bkn
Marco Robutti Capitolo 3
Definizione (Moltiplicazione matrice-scalare)Data le matrice A ∈MR (k, n) e lo scalare λ ∈ R:
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
ak1 ak2 · · · akn
, λ ∈ R
il prodotto λA è la matrice definita come:
λA ==
λa11 λa12 · · · λa1n
λa21. . . · · · λa2n
...... . . . ...
λak1 λak2 · · · λakn
Marco Robutti Capitolo 3

Definizione (Moltiplicazione matrice-vettore)Data le matrice A ∈MR (k, n) e il vettore X ∈ Rn, il prodottotra la matrice A e il vettore X è il vettore così definito:
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
ak1 ak2 · · · akn
, X =
x1...
xn
AX =(A1 | A2 | · · · | An
)·
x1...
xn
= x1A1 + x2A2 + · · ·+ xnAn
Marco Robutti Capitolo 3
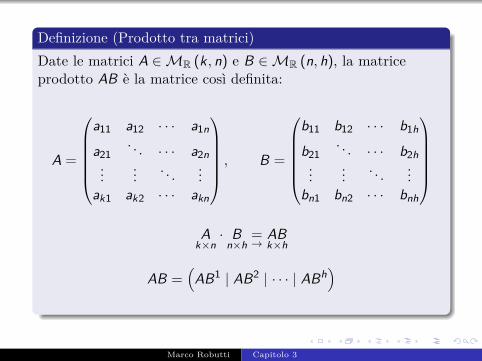
Definizione (Prodotto tra matrici)Date le matrici A ∈MR (k, n) e B ∈MR (n, h), la matriceprodotto AB è la matrice così definita:
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
ak1 ak2 · · · akn
, B =
b11 b12 · · · b1h
b21. . . · · · b2h
...... . . . ...
bn1 bn2 · · · bnh
A
k×n· B
n×h=→
ABk×h
AB =(AB1 | AB2 | · · · | ABh
)
Marco Robutti Capitolo 3

Definizione (Prodotto tra matrici)In forma meno analitica possiamo scrivere tale prodotto nellaseguente forma:
AB =
(a11b11 + · · · a1nbn1) · · · (a11b1h + · · ·+ a1nbnh)
(a21b11 + · · ·+ a2nbn1) · · · (a21b1h + · · ·+ a2nbnh)... . . . ...
(ak1b11 + · · ·+ aknbn1) · · · (ak1b1h + · · ·+ aknbnh)
NB: E’ possibile fare il prodotto AB sono se il numero dicolonne della matrice A coincide con il numero di righe dellamatrice B!
Marco Robutti Capitolo 3

Definizione (Matrice trasposta)Data la matrice A ∈ MR (k, n), la sua trasposta è la matrice cosìdefinita:
• se A è un vettore riga, AT è semplicemente il vettore A messoper colonna;
• se A è un vettore colonna, AT è semplicemente il vettore Amesso per riga;
• in generale la matrice AT è la matrice le cui colonne sono lerighe di A trasposte:
AT =(
(A1)T | (A2)T | · · · | (Ak)T)
Marco Robutti Capitolo 3
Definizione (Matrice reale simmetrica)Data la matrice A ∈ MR (k, n), essa è detta essere una matricereale simmetrica se:
A = AT
Marco Robutti Capitolo 3

Algoritmo - Calcolo del determinante
Data la matrice quadrata A ∈MR (n), il determinante dellamatrice A può essere calcolato nei modi seguenti a seconda delvalore di n:
• n = 2:
A =(
a bc d
)=⇒ det (A) = ad − bc
• n = 3 =⇒ Regola di Sarrus :
A =
a b cd e fg h i
Marco Robutti Capitolo 3
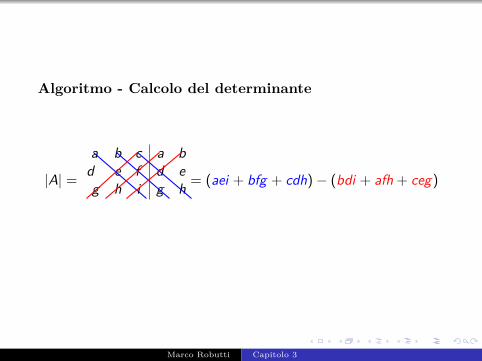
Algoritmo - Calcolo del determinante
|A| =
a b c a bd e f d eg h i g h = (aei + bfg + cdh)− (bdi + afh + ceg)
Marco Robutti Capitolo 3

Algoritmo - Calcolo del determinante
n ≥ 3 =⇒ Teorema di Laplace:per righe:
det (A) =n∑
i=1(−1)i+j aij det
(A[i,j]
)per colonne:
det (A) =n∑
j=1(−1)i+j aij det
(A[i,j]
)
Esempio (Sviluppo del determinante lungo la prima colonna)
|A| =
∣∣∣∣∣∣∣a b cd e fg h i
∣∣∣∣∣∣∣ = a∣∣∣∣∣e fh i
∣∣∣∣∣− d∣∣∣∣∣b ch i
∣∣∣∣∣+ g∣∣∣∣∣b ce f
∣∣∣∣∣Marco Robutti Capitolo 3

Calcolo del determinante
A ∈MR (n) è una matrice triangolare (superiore, inferioreo diagonale):
det (A) =n∏
i=1aij
Esempio (Determinante di una matrice triangolare)
|A| =
∣∣∣∣∣∣∣8 3 10 1 10 0 3
∣∣∣∣∣∣∣ = 8× 1× 3 = 24
Marco Robutti Capitolo 3

Osservazione (Una cosa utile...)Per determinare qual è il segno che bisogna dare a ciascuncoefficiente quando si calcola il determinante, cioè sapere perogni coefficiente qual è il risultato di (−1)i+j , si può usare laseguente tabella (qui nel caso di una matrice 4× 4):
"matrice dei segni" =
+ − + −− + − ++ − + −− + − +
Marco Robutti Capitolo 3

Teorema (Teorema di Binet)Il determinante del prodotto di due matrici A, B ∈ MR (n) èdato dal prodotto dei determinanti:
det (AB) = det (A) det (B)
Marco Robutti Capitolo 3
Definizione (Matrice invertibile)Data le matrice A ∈MR (n), essa è invertibile se esite lamatrice A−1 tale che:
AA−1 = In,
ovvero se:
det (A) 6= 0
Esistono due metodi principali per determinare l’inversa di unamatrice invertibile.
Marco Robutti Capitolo 3
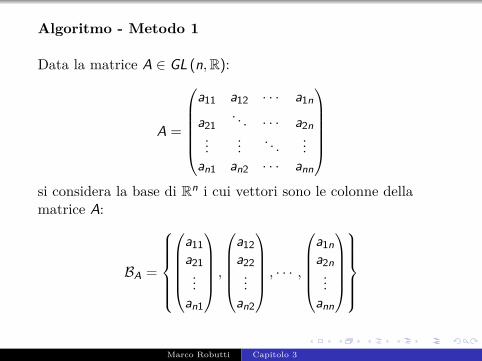
Algoritmo - Metodo 1
Data la matrice A ∈ GL (n,R):
A =
a11 a12 · · · a1n
a21. . . · · · a2n
...... . . . ...
an1 an2 · · · ann
si considera la base di Rn i cui vettori sono le colonne dellamatrice A:
BA =
a11a21...
an1
,
a12a22...
an2
, · · · ,
a1na2n...
ann
Marco Robutti Capitolo 3
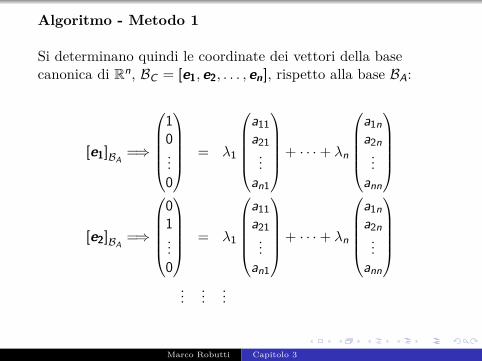
Algoritmo - Metodo 1
Si determinano quindi le coordinate dei vettori della basecanonica di Rn, BC = [e1, e2, . . . , en], rispetto alla base BA:
[e1]BA=⇒
10...0
= λ1
a11a21...
an1
+ · · ·+ λn
a1na2n...
ann
[e2]BA=⇒
01...0
= λ1
a11a21...
an1
+ · · ·+ λn
a1na2n...
ann
...
......
Marco Robutti Capitolo 3
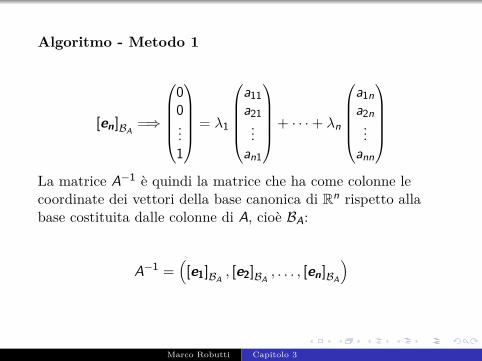
Algoritmo - Metodo 1
[en]BA=⇒
00...1
= λ1
a11a21...
an1
+ · · ·+ λn
a1na2n...
ann
La matrice A−1 è quindi la matrice che ha come colonne lecoordinate dei vettori della base canonica di Rn rispetto allabase costituita dalle colonne di A, cioè BA:
A−1 =(
[e1]BA, [e2]BA
, . . . , [en]BA
)
Marco Robutti Capitolo 3
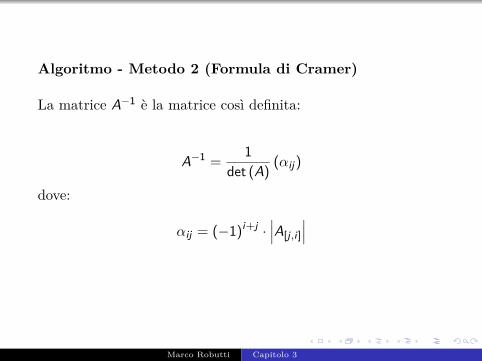
Algoritmo - Metodo 2 (Formula di Cramer)
La matrice A−1 è la matrice così definita:
A−1 = 1det (A) (αij)
dove:
αij = (−1)i+j ·∣∣∣A[j,i]
∣∣∣
Marco Robutti Capitolo 3

Osservazione (Inversa di una matrice 2× 2)Se A ∈ GL (2,R), allora la formula di Cramer dà il seguenterisultato:
A−1 = 1ad − bc
(d −b−c a
)
Marco Robutti Capitolo 3
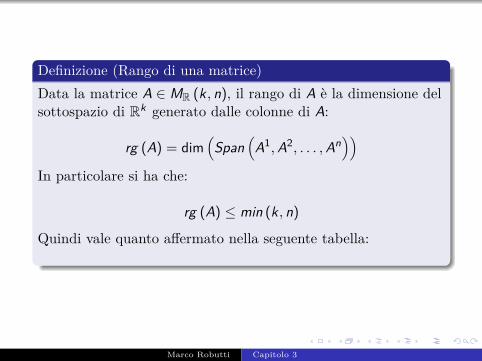
Definizione (Rango di una matrice)Data la matrice A ∈ MR (k, n), il rango di A è la dimensione delsottospazio di Rk generato dalle colonne di A:
rg (A) = dim(Span
(A1,A2, . . . ,An
))In particolare si ha che:
rg (A) ≤ min (k, n)
Quindi vale quanto affermato nella seguente tabella:
Marco Robutti Capitolo 3
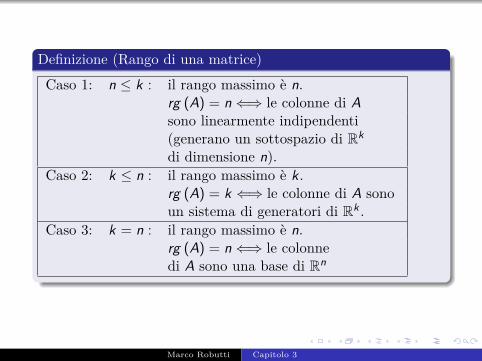
Definizione (Rango di una matrice)Caso 1: n ≤ k : il rango massimo è n.
rg (A) = n⇐⇒ le colonne di Asono linearmente indipendenti(generano un sottospazio di Rk
di dimensione n).Caso 2: k ≤ n : il rango massimo è k.
rg (A) = k ⇐⇒ le colonne di A sonoun sistema di generatori di Rk .
Caso 3: k = n : il rango massimo è n.rg (A) = n⇐⇒ le colonnedi A sono una base di Rn
Marco Robutti Capitolo 3
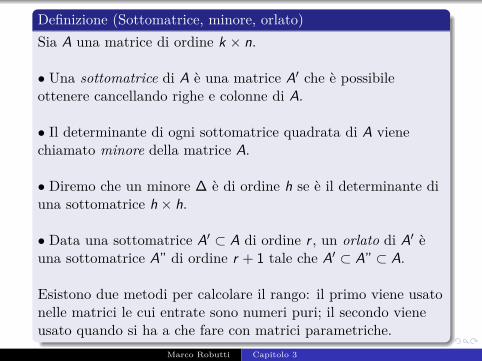
Definizione (Sottomatrice, minore, orlato)Sia A una matrice di ordine k × n.
• Una sottomatrice di A è una matrice A′ che è possibileottenere cancellando righe e colonne di A.
• Il determinante di ogni sottomatrice quadrata di A vienechiamato minore della matrice A.
• Diremo che un minore ∆ è di ordine h se è il determinante diuna sottomatrice h × h.
• Data una sottomatrice A′ ⊂ A di ordine r , un orlato di A′ èuna sottomatrice A” di ordine r + 1 tale che A′ ⊂ A” ⊂ A.
Esistono due metodi per calcolare il rango: il primo viene usatonelle matrici le cui entrate sono numeri puri; il secondo vieneusato quando si ha a che fare con matrici parametriche.
Marco Robutti Capitolo 3

Algoritmo - Metodo 1 (Regola degli orlati diKronecker)
Sia A una matrice di ordine k × n. Sia A′ una sottomatrice di Adi ordine r con determinante non nullo. Se tutti gli orlati di A′hanno determinante nullo allora rg (A) = r .Utilizzando tale criterio possiamo calcolare il rango di unamatrice A nel seguente modo:
1) Si fissa una sottomatrice A(1) di ordine 1 (ovvero un’entrata)non nulla.
2) Si considerano tutti gli orlati di tale sottomatrice. Se icorrispondenti minori sono tutti nulli si deduce che il rango di Aè 1. Altrimenti si fissa un’orlato A(2) (quindi di dimensione2× 2) con determinante diverso da 0.
Marco Robutti Capitolo 3
Algoritmo - Metodo 1 (Regola degli orlati diKronecker)
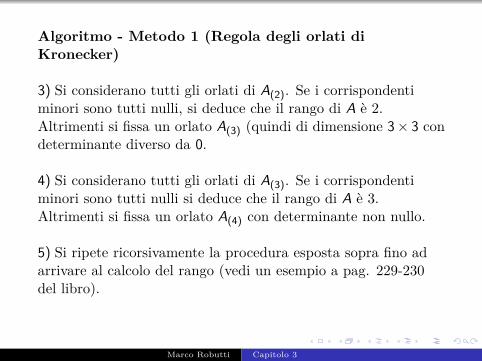
3) Si considerano tutti gli orlati di A(2). Se i corrispondentiminori sono tutti nulli, si deduce che il rango di A è 2.Altrimenti si fissa un orlato A(3) (quindi di dimensione 3× 3 condeterminante diverso da 0.
4) Si considerano tutti gli orlati di A(3). Se i corrispondentiminori sono tutti nulli si deduce che il rango di A è 3.Altrimenti si fissa un orlato A(4) con determinante non nullo.
5) Si ripete ricorsivamente la procedura esposta sopra fino adarrivare al calcolo del rango (vedi un esempio a pag. 229-230del libro).
Marco Robutti Capitolo 3
Algoritmo - Metodo 2 (per matrici parametriche)
1) Si prende la sottomatrice più grande possibile e se ne calcolail minore in funzione dei parametri contenuti nella matrice;
2) Si pone il minore calcolato uguale a 0 e si determina quindiper quali valori di h tale minore è nullo: per tutti i valori di hdiversi da quelli trovati, si può affermare che il rango dellamatrice è massimo e pari al numero di righe e colonne dellasottomatrice a cui il minore appartiene;
3) Per i valori di h che rendono nullo il minore precedentementecalcolato, si procede sostituendo tali valori all’interno dellamatrice, verificando quindi con il Metodo di Kronecker qual è ilrango della matrice per ciascun valore di h sostituito nellamatrice (vedi un esempio a pag. 231 del libro).
Marco Robutti Capitolo 3

Osservazione (Numero di minori estraibili da una matrice)Il numero di minori di ordine p estraibili da una matrice diordine k × n è:
n° minori =(
kp
)(np
)=( k!
p! (k − p)!
)( n!p! (n − p)!
)
Marco Robutti Capitolo 3
Osservazione (Numero degli orlati di una matrice)Sia A ∈ MR (k, n). Data una sottomatrice A′ ⊂ A di ordineh < k, n, si possono costruire un numero di orlati pari a:
n° orlati di A′ = (k − h) (n − h)
Marco Robutti Capitolo 3
Problema (Effettuare un cambiamento di base)Dato uno spazio vettoriale V di dimensione n, consideriamo duebasi distinte in V : B = {u1, . . . ,un}, D = {w1, . . . ,wn}.Dato un vettore v ∈ V , vogliamo calcolare le sue coordinaterispetto alle due basi: [v ]B e [v ]D.Supponendo di conoscere le coordinate dei vettori della base Drispetto alla base B , ∃ un modo per effettuare il cambio dicoordinate nei due sensi:
Marco Robutti Capitolo 3
Algoritmo - Da coordinate in D a coordinate in B
Supponiamo di conoscere le coordinate del vettore v rispettoalla base D, cioè [v ]D = (µ1, . . . , µn). allora si ha che:
[v ]B =
x1x2...
xn
= µ1 [w1]B + µ2 [w2]B + · · ·+ µn [wn]B
Tale relazione può essere riscritta come:
[v ]B = A · [v ]D = ([w1]B | · · · | [wn]B) ·
µ1µ2...µn
, (1)
dove la matrice A = MB,D è detta matrice di cambiamento dibase da D a B.
Marco Robutti Capitolo 3
Algoritmo - Da coordinate in B a coordinate in D
Dall’equazione (1) della slide precedente possiamo facilmentericavare che le coordinate del vettore v rispetto alla base Dsono date da:
[v ]D = A−1 · [v ]B ,
dove la matrice A−1 è detta matrice di cambiamento di base daB a D.OsservazioneNel caso in cui invece di conoscere le coordinate dei vettori dellabase D rispetto alla base B accadesse l’opposto, ovvero nel casoin cui conoscessimo le coordinate dei vettori della base Brispetto alla base D, il discorso non cambia: basta solamenterileggere quanto precedentemente scritto invertendo B con D.
Marco Robutti Capitolo 3






![LA - Unife...Premio SIAA "Ruggero Ricci" Ereditare e immaginare la città [Sala Estense, Teatro] [Sala Estense, Teatro] I n v e c c h i a r e n e l l a c i tt à . U n a s f ida co](https://static.fdocumenti.com/doc/165x107/60cc42063660df2b3c03cdca/la-premio-siaa-ruggero-ricci-ereditare-e-immaginare-la-citt.jpg)