
Lezione 13: Sonar, e laser range scanner - Welcome to ... ex Uni/Sito...
12
Robotica - Robot Industriali e di Servizio 2012-2013 17 aprile 2013 Lezione 13 Sonar e laser range scanner 1 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati Robotica – Robot Industriali e di Servizio Lezione 13: Sonar, e laser range scanner 17 aprile 2013 Sensori a tempo di volo Misurano il tempo necessario a un determinato gruppo di onde per raggiungere un bersaglio e tornare indietro Onde usate: Acustiche Luminose Come: A impulsi (pacchetti) Modulate 17 aprile 2013 Lezione 13 Sonar e laser range scanner 2
-
Upload
truongliem -
Category
Documents
-
view
214 -
download
0
Transcript of Lezione 13: Sonar, e laser range scanner - Welcome to ... ex Uni/Sito...
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
1 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Robotica – Robot Industriali e di Servizio
Lezione 13: Sonar, e laser range scanner
17 aprile 2013
Sensori a tempo di volo
Misurano il tempo necessario a un determinato gruppo di onde per raggiungere un bersaglio e tornare indietro
Onde usate: Acustiche Luminose
Come: A impulsi (pacchetti) Modulate
17 aprile 2013 Lezione 13 Sonar e laser range scanner 2
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
2 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Sensori acustici (sonar) Nati per uso subacqueo Funzionano anche nell’aria Velocità del suono nell’aria: ~340 m/s = 340mm/ms Distanza di 1m: quasi 6 ms perché il suono deve andare e tornare
17 aprile 2013 Lezione 13 Sonar e laser range scanner 3
Un esempio “amatoriale”
17 aprile 2013 Lezione 13 Sonar e laser range scanner 4
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
3 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Un esempio industriale
17 aprile 2013 Lezione 13 Sonar e laser range scanner 5
Il sonar della Polaroid
17 aprile 2013 Lezione 13 Sonar e laser range scanner 6
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
4 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
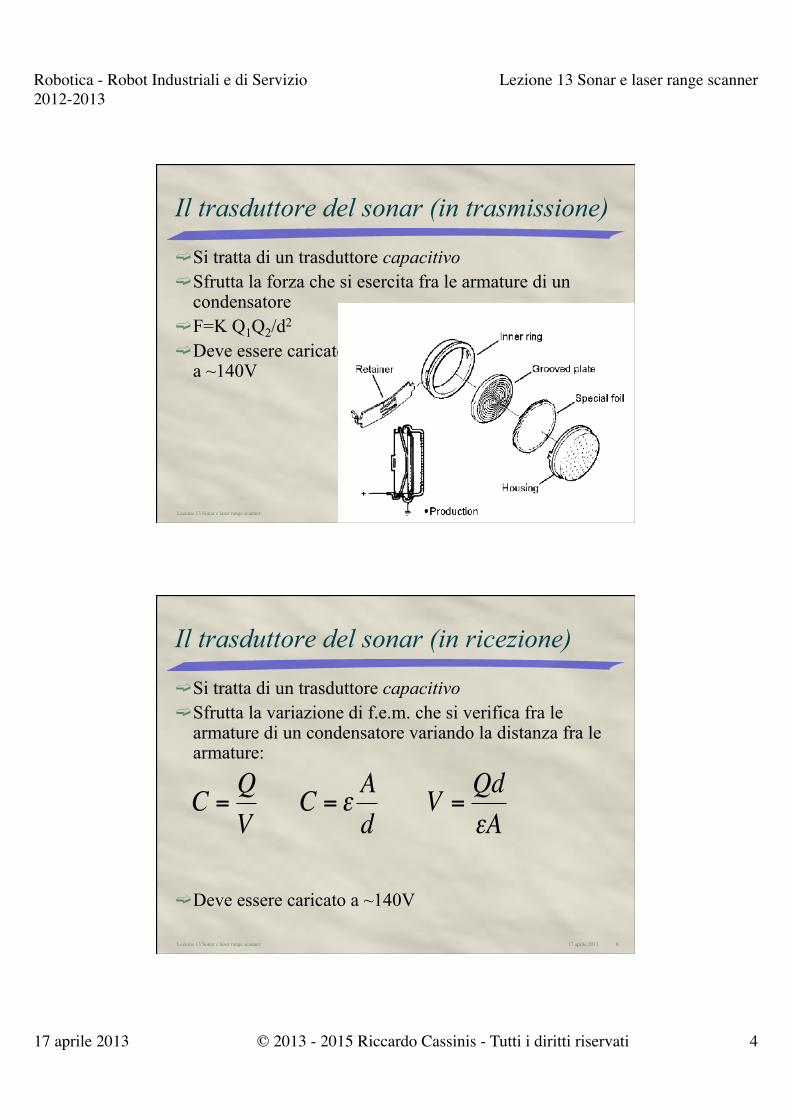
Il trasduttore del sonar (in trasmissione)
Si tratta di un trasduttore capacitivo Sfrutta la forza che si esercita fra le armature di un
condensatore F=K Q1Q2/d2 Deve essere caricato
a ~140V
17 aprile 2013 Lezione 13 Sonar e laser range scanner 7
Il trasduttore del sonar (in ricezione)
Si tratta di un trasduttore capacitivo Sfrutta la variazione di f.e.m. che si verifica fra le
armature di un condensatore variando la distanza fra le armature:
Deve essere caricato a ~140V
17 aprile 2013 Lezione 13 Sonar e laser range scanner 8 €
C =QV
€
C = εAd
€
V =QdεA
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
5 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Uso del meccanismo
Emettere un “chirp” Frequenza: intorno a 50 KHz Intensità: molto forte Ascoltare Amplificare e filtrare Integrare e confrontare con una soglia
17 aprile 2013 Lezione 13 Sonar e laser range scanner 9
Sorgenti di errore
Temperatura v = 331 m/s + (0.6 m/s/C)*T La velocità del suono nell'aria secca, alla temperatura
di 0°C, è di 331,6 m/s, ma aumenta al crescere della temperatura; a 20 °C, ad esempio, raggiunge il valore di 344 m/s. Essa, infatti, risulta proporzionale alla radice quadrata del rapporto tra pressione e densità: poiché al crescere della temperatura la densità diminuisce, la velocità, che è inversamente proporzionale alla radice di quest’ultima grandezza, aumenta.
Pressione Umidità Percentuale di CO2
17 aprile 2013 Lezione 13 Sonar e laser range scanner 10
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
6 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Altri errori:
Le onde che incidono su una superficie vengono: Assorbite Diffuse Riflesse
Il rapporto tra le tre frazioni dipende da: Natura del materiale - frequenza del segnale Scabrosità del materiale Angolo di incidenza
17 aprile 2013 Lezione 13 Sonar e laser range scanner 11
Altri errori:
Eco non rilevata: Oggetto troppo piccolo Oggetto troppo assorbente Angolo di incidenza troppo piccolo
17 aprile 2013 Lezione 13 Sonar e laser range scanner 12
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
7 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
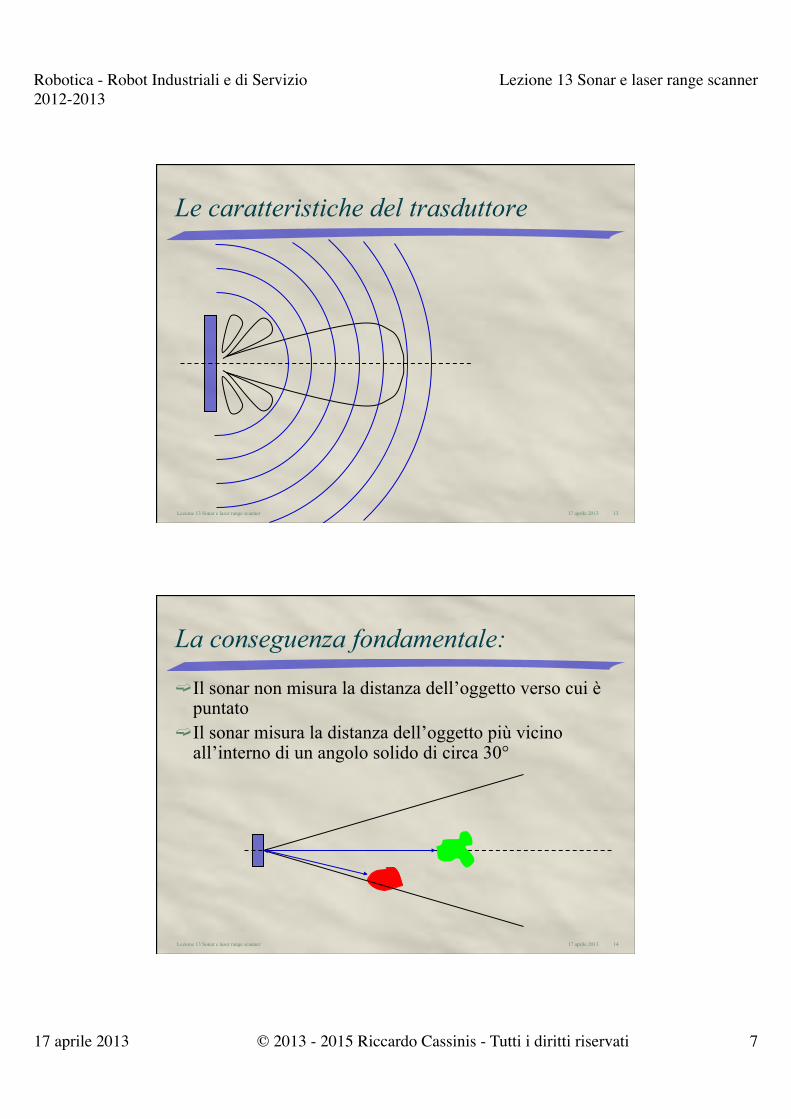
Le caratteristiche del trasduttore
17 aprile 2013 Lezione 13 Sonar e laser range scanner 13
La conseguenza fondamentale:
Il sonar non misura la distanza dell’oggetto verso cui è puntato
Il sonar misura la distanza dell’oggetto più vicino all’interno di un angolo solido di circa 30°
17 aprile 2013 Lezione 13 Sonar e laser range scanner 14
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
8 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
Risultati pratici:
17 aprile 2013 Lezione 13 Sonar e laser range scanner 15
Un’altra conseguenza della scarsa direzionalità
Possibilità di scambiare un’eco altrui per il proprio (eco)
17 aprile 2013 Lezione 13 Sonar e laser range scanner 16
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
9 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
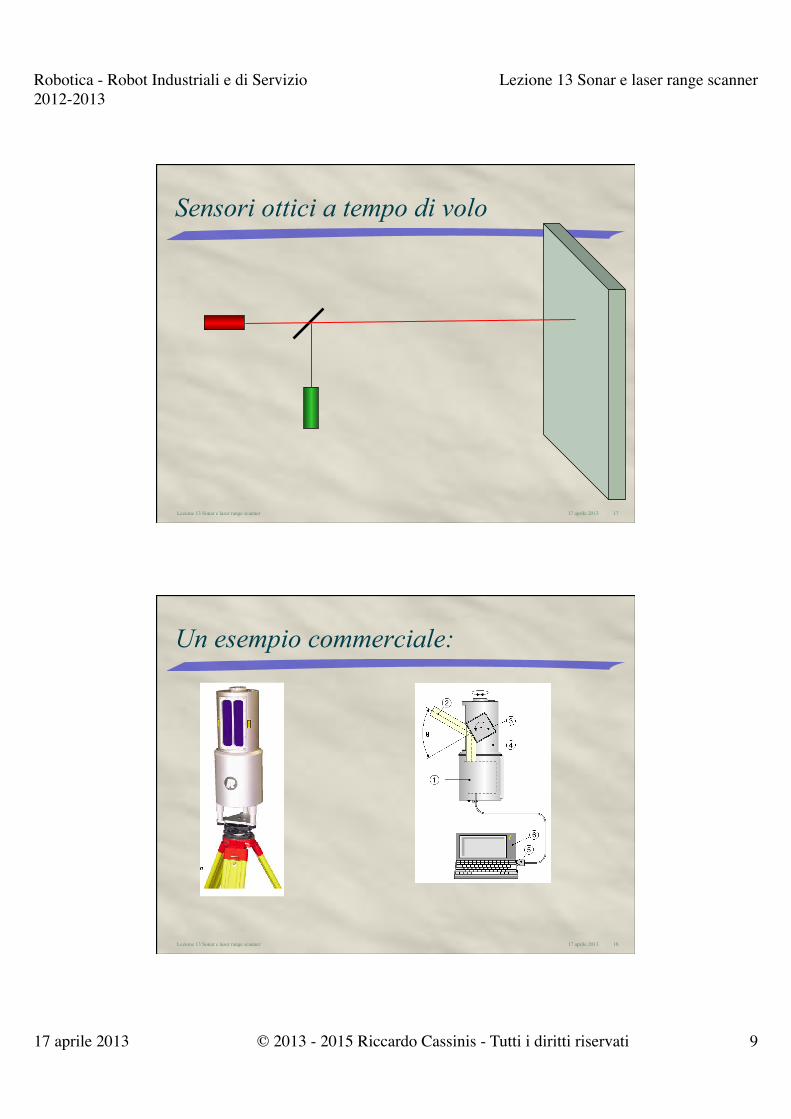
Sensori ottici a tempo di volo
17 aprile 2013 Lezione 13 Sonar e laser range scanner 17
Un esempio commerciale:
17 aprile 2013 Lezione 13 Sonar e laser range scanner 18
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
10 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
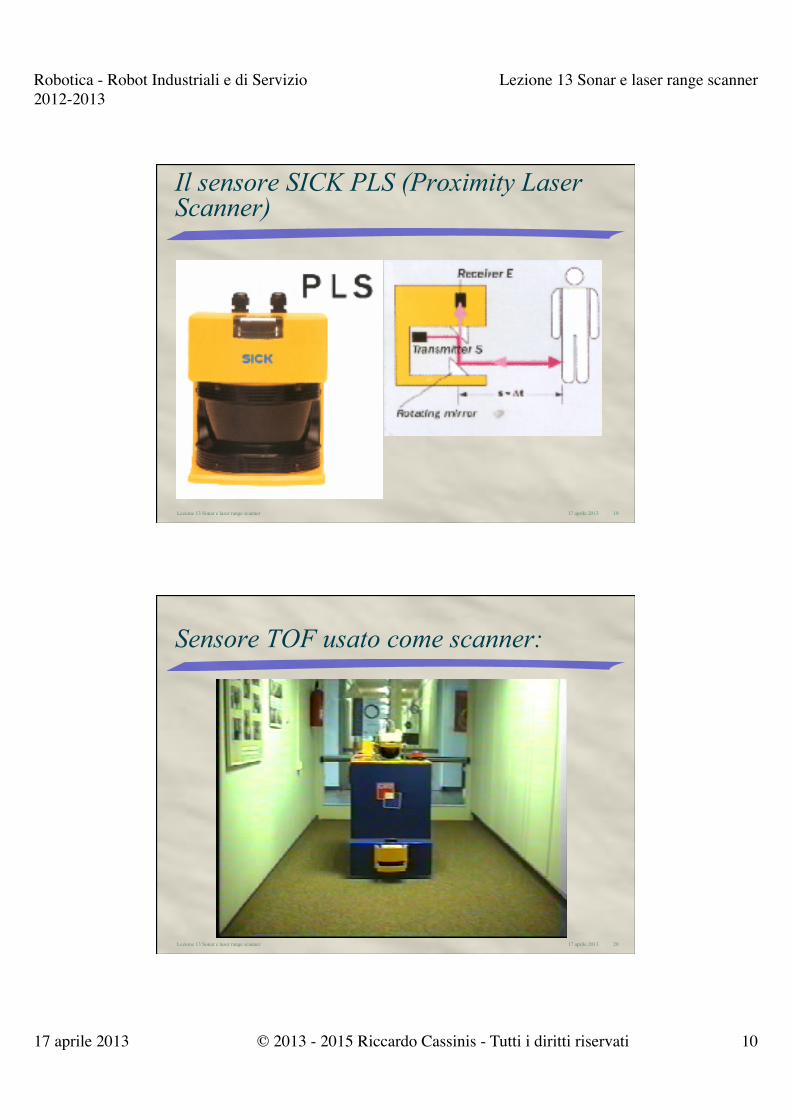
Il sensore SICK PLS (Proximity Laser Scanner)
17 aprile 2013 Lezione 13 Sonar e laser range scanner 19
Sensore TOF usato come scanner:
17 aprile 2013 Lezione 13 Sonar e laser range scanner 20
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
11 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
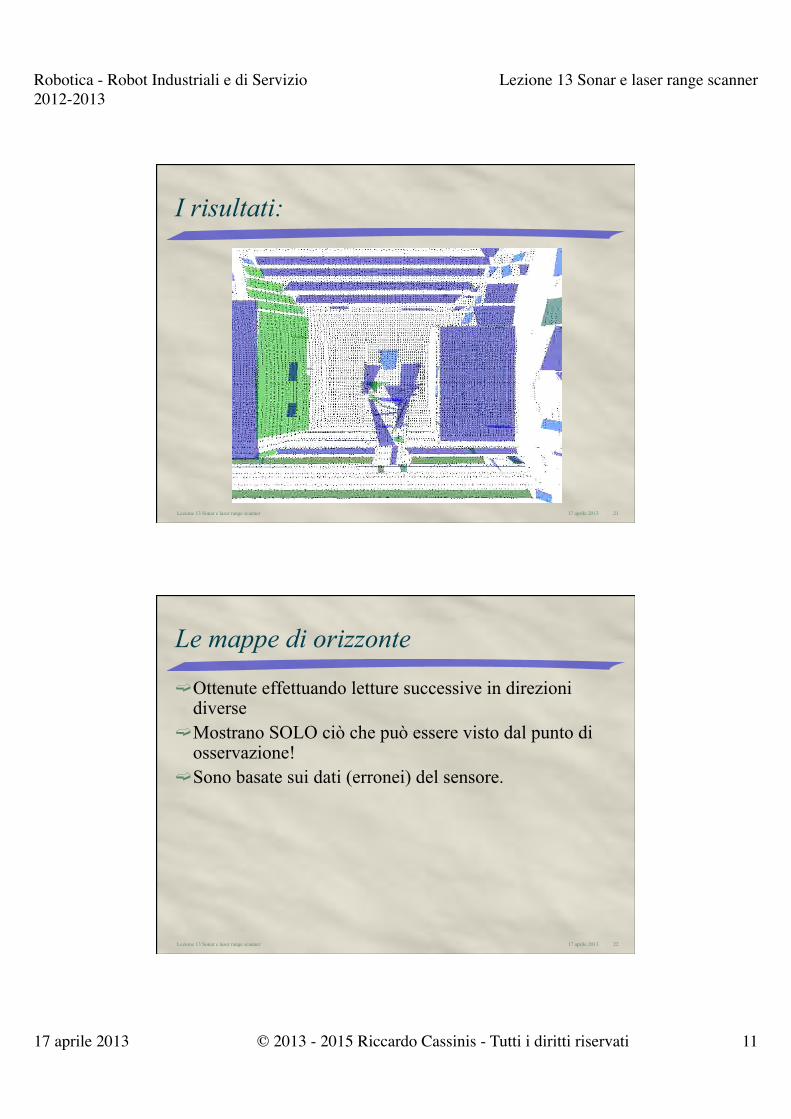
I risultati:
17 aprile 2013 Lezione 13 Sonar e laser range scanner 21
Le mappe di orizzonte
Ottenute effettuando letture successive in direzioni diverse
Mostrano SOLO ciò che può essere visto dal punto di osservazione!
Sono basate sui dati (erronei) del sensore.
17 aprile 2013 Lezione 13 Sonar e laser range scanner 22
Robotica - Robot Industriali e di Servizio 2012-2013
17 aprile 2013
Lezione 13 Sonar e laser range scanner
12 © 2013 - 2015 Riccardo Cassinis - Tutti i diritti riservati
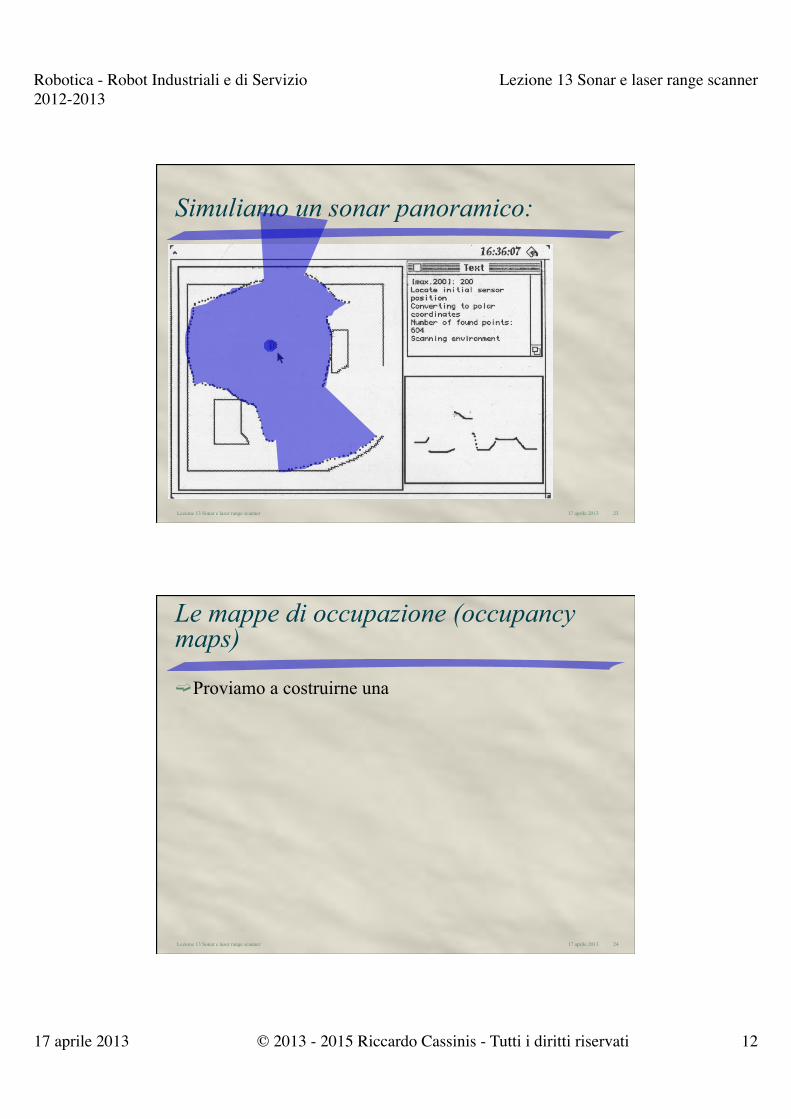
Simuliamo un sonar panoramico:
17 aprile 2013 Lezione 13 Sonar e laser range scanner 23
Le mappe di occupazione (occupancy maps)
Proviamo a costruirne una
17 aprile 2013 Lezione 13 Sonar e laser range scanner 24











![LO SCANNER 3D METROLOGICO REALMENTE PORTATILE · PRESENTAZIONE DELLO SCANNER HANDYSCAN 3D. La più facile esperienza di scansione 3D, FRQ PLVXUD]LRQL YHORFL H DIÀGDELOL ... SCANNER](https://static.fdocumenti.com/doc/165x107/5c69cdcb09d3f2310b8ba79a/lo-scanner-3d-metrologico-realmente-portatile-presentazione-dello-scanner-handyscan.jpg)





