LER cat it - content2.smcetech.comcontent2.smcetech.com/pdf/LER-A_IT.pdf · Serie LER Tipo a 90°...
32
Profilo ribassato Profilo ribassato Compatta Compatta H Taglia Coppia rotazionale [N·m] Base Coppia elevata Max. velocità [°/s] Base Coppia elevata Ripetibilità di posizionamento [°] Base Coppia elevata 10 30 50 0.2 0.8 6.6 0.3 1.2 10 420 280 ±0.05 (Estremità: ±0.01) ∗ 50.00° 200°/s Videata Terminale di programmazione Tipo base (mm) Modello LER10 LER30 LER50 H 42 53 68 Tipo ad alta precisione (mm) Modello LERH10 LERH30 LERH50 H 49 62 78 È possibile impostare velocità, accelerazione/decelerazione e posizione. Max. 64 punti Funzionamento ad alta velocità Max. velocità: 420°/sec (7.33 rad/sec) Max. accelerazione/decelerazione: 3,000°/sec 2 (52.36 rad/sec 2 ) Ripetibilità di posizionamento: ±0.05° Ripetibilità a fine corsa: ±0.01° (Controllo della spinta/con stopper esterno) Angolo di rotazione 320° (310°), 180°, 90° Il valore tra parentesi è l'angolo della serie LER10. Energy Saving Riduzione automatica della potenza del 40% dopo l'arresto della tavola. Facile impostazione Alloggia il cablaggio e le connessioni dei pezzi Stelo cavo Ingombri ridotti I b i id i Motore incorporato ∗ Valore quando è montato uno stopper esterno. T ∗ V È possibile impostare i dati con soli 2 parametri: posizione e velocità. ∗ Se si utilizza un terminale di programmazione. Con controllore dedicato Impostazione con parametri predefiniti Dati Asse 1 Passo No. 0 Pos. Velocità CAT.EUS100-94A-IT Serie LER Novità Novità RoHS
Transcript of LER cat it - content2.smcetech.comcontent2.smcetech.com/pdf/LER-A_IT.pdf · Serie LER Tipo a 90°...

Profilo
ribassato
Profilo
ribassato
Compatta Compatta
H
TagliaCoppia rotazionale [N·m]
Base Coppia elevata
Max. velocità [°/s]
Base Coppia elevata
Ripetibilità di posizionamento [°]
Base Coppia elevata
10
30
50
0.2
0.8
6.6
0.3
1.2
10
420 280±0.05
(Estremità: ±0.01)∗50.00° 200°/s
Videata Terminale di programmazione
Tipo base (mm)
Modello
LER10LER30LER50
H42
53
68
Tipo ad alta precisione (mm)
Modello
LERH10LERH30LERH50
H49
62
78
È possibile impostare velocità, accelerazione/decelerazione e posizione.Max. 64 punti
Funzionamento ad alta velocità Max. velocità: 420°/sec (7.33 rad/sec)
Max. accelerazione/decelerazione: 3,000°/sec2 (52.36 rad/sec2)
Ripetibilità di posizionamento: ±0.05°Ripetibilità a fine corsa: ±0.01°(Controllo della spinta/con stopper esterno)
Angolo di rotazione320° (310°), 180°, 90°Il valore tra parentesi è l'angolo della serie LER10.
Energy SavingRiduzione automatica della potenza del 40% dopo l'arresto della tavola.
Facile impostazione
Alloggia il cablaggio e le connessioni dei pezzi
Stelo cavo
Ingombri ridottiI b i id i
Motore incorporato
∗ Valore quando è montato uno stopper esterno.
T
∗ V
È possibile impostare i dati con soli 2 parametri: posizione e velocità.∗ Se si utilizza un terminale di programmazione.
Con controllore dedicatoImpostazione con parametri predefiniti
Dati Asse 1Passo No. 0Pos.Velocità
CAT.EUS100-94A-IT
Serie LER
NovitàNovità
RoHS

� Tolleranza tra il diametro interno e il diametro esterno della tavola: H8/h8� Foro di posizionamento� Stelo cavo Alloggia il cablaggio e le connessioni dei pezzi.
10 30 50Stelo cavo ø8 ø17 ø20
Posizionamento della direzione di rotazione
È disponibile il tipo base e il tipo ad alta precisione.
320° (310°), 180°, 90°Il valore tra parentesi è l'angolo della serie LER10.
È possibile ruotare la tavola quando l'alimentazione è disattivata mediante azionamento manuale.
Il rapporto di trasmissione è 30 volte maggiore grazie ad uno speciale in-granaggio a vite senza fine.Ruota a vite speciale con gioco ridotto.
Angolo di rotazione
Ingombri ridotti
Motore incorporato(Servo/24 VDC)
Vite diazionamento manuale
(entrambi i lati)(N·m)
LER10LER30LER50
0.3
1.2
10.0
0.2
0.8
6.6
È possibile selezionare il rapporto di decelerazione della cinghia.
Coppia elevata
Il movimento nella direzione di spinta radiale della tavola è ridotto.
Features 1

Serie LER
Tipo a 90° Tipo a 180°Vite di regolazione
Varianti di montaggio
Ripetibilità a fine corsa: ±0.01°
Trasferimento a rotazione dopo la presa mediante l'uso di una pinza
Trasferimento verticale: velocità costante per fluttuazione del carico
Facile montaggio del corpo principale
Con stopper esterno/angolo di rotazione: Tipo a 90°/180°
Esempi di applicazione
� Montaggio con fori passanti
� Montaggio con fori filettati
Campo di impostazione ±2°
Foro diposizionamento
Pinza elettrica
Serie LEH
Diametro di riferimento(risalto)
Foro diposizionamento
Diametro di riferimento(foro)

PLC� Unità rotante elettrica
� Controllore∗
Per CN4Per CN3
Per CN2
Per CN1
I componenti indicati con ∗ sono compresi a seconda del modello selezionato.
Cavo di collegamento∗(cavo robotico)Codice: LE-CP-�
� Cavo USB
PC
Cavo di �comunicazione �
� Unità diconversione
(Tipo A-miniB)
� Terminale di programmazione(con cavo da 3 m)Codice: LEC-T1-3EG�
� Connettore di alimentazione<Misura cavo applicabile>AWG20 (0.5 mm2)
� Kit di impostazione del controllore(Software di programmazione controllore cavo di comunicazione, unità di conversione e cavo USB).Codice: LEC-W1
Alimentazione elettricaper segnale I/O
24 VDC
Alimentazione del controllore
oppure
Opzioni
Per CN5
Configurazione
� Cavo I/O∗Codice: LEC-CN5-�
Pag. 21
Pag. 15Pag. 21
Pag. 23 Pag. 22
�
Features 3

Taglia162532
standard50 a 30050 a 40050 a 500
Taglia162532
standard50 a 30050 a 40050 a 500
Tipo di motore
Servomotore (24 VDC)
Tipo di motore
Motore passo-passo(Servo/24 VDC)
Taglia162532
standard30 a 20030 a 30030 a 300
Taglia81625
standard50, 7550, 100
50, 100, 150
Taglia81625
standard50, 7550, 100
50, 100, 150
Taglia8
1625
standard50, 75
50, 10050, 100, 150
Taglia101620253240
4610142230
Taglia
103050
Angolo di rotazione (°)
310, 180, 90
320, 180, 90
0.20.86.6
0.31.210
Base Coppia elevata
Taglia10162025
46
1014
Taglia10203240
46812
Coppia rotazionale (N·m)Taglia
103050
Angolo dirotazione (°)
310, 180, 90
320, 180, 90
0.20.86.6
0.31.210
Base Coppia elevata
Coppia rotazionale (N·m)
Tipo baseSerie LEY
Tipo con stelo guidatoSerie LEYG
Taglia162532
standard100 a 400100 a 600100 a 800
Taglia162532
standard300 a 1000300 a 2000300 a 2000
Trasmissione a viteSerie LEFS
Tipo parallelo lato destroSerie LESH�R
Tipo Z (2 dita)Serie LEHZ
Tipo baseSerie LER
Tipo parallelo lato sinistroSerie LESH�L
Con protezione antipolvereSerie LEHZJ
Motore in lineaSerie LESH�Attacco
Tipo F (2 dita)Serie LEHF
Tipo S (3 dita)Serie LEHS
Tipo ad alta precisioneSerie LERH
Per motorepasso-passoSerie LECP6
Per servomotoreSerie LECA6
Trasmissione a cinghiaSerie LEFB
Tipo con motore in lineaSerie LEY�Attacco
Attuatori elettrici SMC
Novità Novità
Cilindro con stelo
Cilindro senza stelo
Slitta
Pinza
Unità rotante Controllore
Taglia10203240
16 (32)24 (48)32 (64)40 (80)
Apertura/Chiusura corsa
Apertura/Chiusura corsa
Apertura/Chiusura corsa
Apertura/Chiusura corsa
on stelo guidatooooooooooooooYG
Taglia standard
SH�L Serie Lre in lineaESH�AttaccoE
one
Series LEY
Electric Actuator/Rod Type
90.5 + Stroke
90.5 + Stroke
34.334.3
3434
Series Variations
Size∗ Screwlead
Pushing force [N] Max.speed[mm/s]
Stroke[mm]Step
motorServomotor
16
25
32
105
2.51263
1684
3874
141122238452189370707
3058
1113572
130
—
500250125500250125500250125
50 to 300
50 to 400
50 to 500
2
Easy settingEasy setting
Long stroke: Max. 500 mmMounting variations
Auto switch can be mounted.Speed control/Positioning: Max. 64 pointsPositioning and pushing control can be selected.
(LEY32)
∗ .
Data can be set with only 2 items:position and speed.
1. 0
Po
CAT.ES100-83A
CAT.ES100-83
LEFS16 LJ1H10
80
90
4040
4040
Series LEF
Electric ActuatorSlider Type
Belt driveSeries LEFB
Ball screw driveSeries LEFS
CompactHeight and Width: Reduced by
approx. 50%
Easy mounting of the body/Reduction of the installation timeEasy mounting of the body/Reduction of the installation time
∗ In comparison with SMC LJ1 series (Work load: 10 kg)
Easy settingEasy settingData can be set with only 2 items: position and speed.
Equipped with seal band as standardCovers the guide, ball screw and belt. Prevents grease from splash-ing and external foreign matter from entering.
NewNew
∗ The size corresponds to the bore of the air cylinder with an equivalent thrust. (For the operation using ball screws)
Series Size
16
25
32
16
25
32
10
20
45
1
5
14
Up to 400
Up to 600
Up to 800
Up to 1000
Up to 2000
Up to 2000
500
500
500
Up to 2000
Up to 2000
Up to 1500
±0.02
±0.1
Work load(kg)
Stroke(mm)
Speed(mm/s)
Positioningrepeatability
(mm)
Ball screw driveLEFS
Belt driveLEFB
Teaching box screen
Data Axis 1Step No. 0Posn 150.00 mmSpeed 200 mm/s
Possible to mount the main body without removing the external cover, etc.
CAT.ES100-87A
CAT.ES100-87
LEFS16 LJ1H10
80
90
4040
4040
Series LEF
Electric ActuatorSlider Type
Belt driveSeries LEFB
Ball screw driveSeries LEFS
CompactHeight and Width: Reduced by
approx. 50%
Easy mounting of the body/Reduction of the installation timeEasy mounting of the body/Reduction of the installation time
∗ In comparison with SMC LJ1 series (Work load: 10 kg)
Easy settingEasy settingData can be set with only 2 items: position and speed.
Equipped with seal band as standardCovers the guide, ball screw and belt. Prevents grease from splash-ing and external foreign matter from entering.
NewNew
∗ The size corresponds to the bore of the air cylinder with an equivalent thrust. (For the operation using ball screws)
Series Size
16
25
32
16
25
32
10
20
45
1
5
14
Up to 400
Up to 600
Up to 800
Up to 1000
Up to 2000
Up to 2000
500
500
500
Up to 2000
Up to 2000
Up to 1500
±0.02
±0.1
Work load(kg)
Stroke(mm)
Speed(mm/s)
Positioningrepeatability
(mm)
Ball screw driveLEFS
Belt driveLEFB
Teaching box screen
Data Axis 1Step No. 0Posn 150.00 mmSpeed 200 mm/s
Possible to mount the main body without removing the external cover, etc.
CAT.ES100-87A
CAT.ES100-87
Electric Slide Table
� Compact, Space-saving(61% reduction in volume compared to the SMC conventional products)
� Reduced cycle timeMax. acceleration and deceleration: 5,000 mm/s2/Max. speed: 400 mm/s
� Positioning repeatability: ±0.05 mm� Maximum pushing force: 180 N� Mounting in 2 directions is available.
36
58.5
Mounting bolt
Mounting bolt
Through-hole mounting
Body tapped mounting
124.5
Built-in motor
∗ LESH8 50 mm stroke
2Easy settingEasy settingData can be set with only 2 items:position and speed.
Series LES
∗ Teaching box screen
Data Axis 1Step No. 0Posn 50.00 mmSpeed 400 mm/s
CAT.ES100-78C
CAT.ES100-78
2
Electric Grippers
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Series LEH
Can hold round work pieces. Can hold round work pieces. 3-finger type is added!3-finger type is added!
Gripping force [N]
6 to 14
16 to 40
52 to 130
84 to 210
Compact
2 to 6
3 to 8
11 to 28
—
—
Basic
Stroke/both sides
[mm]
4
6
10
14
22
30
Body size
10
16
20
25
32
40
Series LEHZ
Z TypeZ Type
Easy settingEasy setting
Gripping force [N]
3 to 7
11 to 28
48 to 120
72 to 180
Stroke/both sides
[mm]
16 (32)
24 (48)
32 (64)
40 (80)
Body size
10
20
32
40
Series LEHF
( ): Long stroke
Data can be set with only 2 items: position and force.
� Compact body sizes and long stroke variationsCan achieve the gripping force equivalent to the widely used air grippers.
� Possible to set position, speed andforce. (64 points)
� Drop prevention function is provided.(Self-lock mechanism is provided for all series.)Gripping force of the work pieces is maintained when stopped or restarted.The work pieces can be removed by hand.
� Gripping check function is provided.Identify work pieces with different dimensions/detect mounting and removal of the work pieces.
� Energy-savingPower consumption reduced by self-lock mechanism
(2 fingers)
Gripping force [N]
Basic
2.2 to 5.5
9 to 22
36 to 90
52 to 130
Compact
1.4 to 3.5
7 to 17
—
—
Stroke/diameter
[mm]
4
6
8
12
Body size
10
20
32
40
Series LEHS
NEWNEW
S TypeS Type(3 fingers)
F TypeF Type(2 fingers)
∗ Teaching box screen
Data Axis 1Step No. 0Posn 12.00 mmForce 40%
CAT.ES100-77B
CAT.ES100-77
2
Electric Grippers
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Series LEH
Can hold round work pieces. Can hold round work pieces. 3-finger type is added!3-finger type is added!
Gripping force [N]
6 to 14
16 to 40
52 to 130
84 to 210
Compact
2 to 6
3 to 8
11 to 28
—
—
Basic
Stroke/both sides
[mm]
4
6
10
14
22
30
Body size
10
16
20
25
32
40
Series LEHZ
Z TypeZ Type
Easy settingEasy setting
Gripping force [N]
3 to 7
11 to 28
48 to 120
72 to 180
Stroke/both sides
[mm]
16 (32)
24 (48)
32 (64)
40 (80)
Body size
10
20
32
40
Series LEHF
( ): Long stroke
Data can be set with only 2 items: position and force.
� Compact body sizes and long stroke variationsCan achieve the gripping force equivalent to the widely used air grippers.
� Possible to set position, speed andforce. (64 points)
� Drop prevention function is provided.(Self-lock mechanism is provided for all series.)Gripping force of the work pieces is maintained when stopped or restarted.The work pieces can be removed by hand.
� Gripping check function is provided.Identify work pieces with different dimensions/detect mounting and removal of the work pieces.
� Energy-savingPower consumption reduced by self-lock mechanism
(2 fingers)
Gripping force [N]
Basic
2.2 to 5.5
9 to 22
36 to 90
52 to 130
Compact
1.4 to 3.5
7 to 17
—
—
Stroke/diameter
[mm]
4
6
8
12
Body size
10
20
32
40
Series LEHS
NEWNEW
S TypeS Type(3 fingers)
F TypeF Type(2 fingers)
∗ Teaching box screen
Data Axis 1Step No. 0Posn 12.00 mmForce 40%
CAT.ES100-77B
CAT.ES100-77
2
Electric Grippers
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Long stroke, can hold various types of work pieces.
Compact and light Various gripping forces
Series LEH
Can hold round work pieces. Can hold round work pieces. 3-finger type is added!3-finger type is added!
Gripping force [N]
6 to 14
16 to 40
52 to 130
84 to 210
Compact
2 to 6
3 to 8
11 to 28
—
—
Basic
Stroke/both sides
[mm]
4
6
10
14
22
30
Body size
10
16
20
25
32
40
Series LEHZ
Z TypeZ Type
Easy settingEasy setting
Gripping force [N]
3 to 7
11 to 28
48 to 120
72 to 180
Stroke/both sides
[mm]
16 (32)
24 (48)
32 (64)
40 (80)
Body size
10
20
32
40
Series LEHF
( ): Long stroke
Data can be set with only 2 items: position and force.
� Compact body sizes and long stroke variationsCan achieve the gripping force equivalent to the widely used air grippers.
� Possible to set position, speed andforce. (64 points)
� Drop prevention function is provided.(Self-lock mechanism is provided for all series.)Gripping force of the work pieces is maintained when stopped or restarted.The work pieces can be removed by hand.
� Gripping check function is provided.Identify work pieces with different dimensions/detect mounting and removal of the work pieces.
� Energy-savingPower consumption reduced by self-lock mechanism
(2 fingers)
Gripping force [N]
Basic
2.2 to 5.5
9 to 22
36 to 90
52 to 130
Compact
1.4 to 3.5
7 to 17
—
—
Stroke/diameter
[mm]
4
6
8
12
Body size
10
20
32
40
Series LEHS
NEWNEW
S TypeS Type(3 fingers)
F TypeF Type(2 fingers)
∗ Teaching box screen
Data Axis 1Step No. 0Posn 12.00 mmForce 40%
CAT.ES100-77B
CAT.ES100-77
Electric Slide Table/Symmetrical TypeSeries LESH�L
Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANURL http://www.smcworld.com©2010 SMC Corporation All Rights Reserved
09-E552D-DN Printing OS 12450KS
Information
Symmetrical type Standard
Cable
Table
TableCable
Standard
Installation exampleWhen two tables are installed side by side, they will not interfere with each other, allowing for space-saving. Symmetrical
type
Confirm that the combination of the controller and the actuator is compatible.
The actuator and controller are sold as a package. (Controller → Refer to the Series LES catalog (CAT.ES100-78).
<Be sure to check the following before use.>q Check that actuator label for model number. This matches the controller.w Check Parallel I/O configuration matches (NPN or PNP).
How to Order
LESH L881625
Size
SymbolKJ
LESH8L48
LESH16L510
LESH25L816
Lead screw type (mm)
NilS
BasicDustproof specification Note 3)
Body option
Actuator cable length
J 50 11R 6N
Note 3) A scraper is mounted onto the rod cover, and gaskets are mounted onto both the end covers.
Note 2) Not applicable to a stroke of 50 of body size 8 and 16.
Note 4) Produced upon receipt of order
Nil135
Without cable1.5 m3 m5 m
8ABC
8 m Note 4)
10 m Note 4)
15 m Note 4)
20 m Note 4)
Controller type Note 5)
Nil6N6P
Without controllerWith controller (NPN)With controller (PNP)
I/O cable length
Controller mounting
Nil135
Without cable1.5 m3 m5 m
NilD Note 6)
Screw mountingDIN rail mounting
Note 6) DIN rail is not included. Order it separately.
Note 5) Refer to CAT.ES100-78 for the detailed specifications of the controller itself.
∗ Refer to the operation manual for using the products. Please download it via our website. http://www.smcworld.com/
q w
Motor type
Symmetrical type
NilB
Without lockWith lock Note 2)
Motor option
NilR
Without cableRobotic cable (Flexible cable)
Actuator cable type
Note 1) CE-compliant productsq EMC compliance was tested by combining the electric actuator LES ser-
ies and the controller LEC series. The EMC depends on the configura-tion of the customer’s control panel and the relationship with other elec-trical equipment and wiring. Therefore conformity to the EMC directive cannot be certified for SMC components incorporated into the custom-er’s equipment under actual operating conditions. As a result it is neces-sary for the customer to verify conformity to the EMC directive for the machinery and equipment as a whole.
w For the servo motor (24 VDC) specification, EMC compliance was tested by installing a noise filter set (LEC-NFA). Refer to CAT.ES100-78 for the noise filter set. Refer to the LECA Operation Manual for installation.
Caution
LESH8LESH16LESH25
50
���
75
�100
��
150
�
Stroke
�: Without lock only �: With lock/Without lock
Stroke (mm)
Model
NilA
Step motor (Servo/24 VDC)Servo motor Note 1) (24 VDC)
Refer to the Series LES catalog (CAT.ES100-78) for more details about model selection.
� Symmetrical type newly added to electric slide table!The locations of the table and cable are opposite those of the standard product, expanding design applications.
1
09-E552
Information
2-finger type with dust cover is added to electric grippers!
� Prevents machining chips, dust, etc., from getting inside
� Prevents spattering of grease, etc.
Three types of cover material(Finger portion only)
Sealed-construction dust cover(Equivalent to IP50)
� Chloroprene rubber (black): Standard� Fluorine rubber (black): Option� Silicone rubber (white): Option
Data can be set with only 2 items: position and force.∗ When teaching box is used
Teaching box screen
With dedicated controllerSet with default parameters
Series LEHZJGripping force [N]
Basic
6 to 14
16 to 40
Compact
3 to 6
4 to 8
11 to 28
Stroke/both sides[mm]
4
6
10
14
Size
10162025
Cover designed with no protrusionsInward-folding design creates no protrusions when the cover is opened and closed, preventing interference with other devices’ operations.
Encoder dust coverSilicone rubber
RoHS
Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANURL http://www.smcworld.com©2010 SMC Corporation All Rights Reserved
09-E559D-DN Printing OT 12450KS
Electric Gripper 2-Finger Type/With Dust CoverSeries LEHZJ
� Drop prevention function is provided.(Self-lock mechanism is provided for all series.)Gripping force of the work pieces is maintained when stopped or restarted. The work pieces can be removed by hand.
� Energy-savingPower consumption reduced by self-lock mechanism
� Gripping check function is provided.Identify work pieces with different dimensions/detect mounting and removal of the work pieces.
� Possible to set position, speed andforce. (64 points)
Data Axis 1Step No. 0Posn 12.00 mmForce 40%
1
09-E559
Side holder mounting
Side holder
Body tapped mounting
Through-hole mountingHow to mount
Electric Slide Table/In-line Motor TypeSeries LESH�D
Information
In-line motor type newly added to electric slide table!
Width dimension shortened by up to 45%
�Reduced cycle timeMax. acceleration and deceleration: 5,000 mm/s2
Max. speed: 400 mm/s
�Positioning repeatability: ±0.05 mm�Maximum pushing force: 180 N�Speed control/Positioning: Max. 64 points
With dedicated controllerBasic operation setting installed
Data can be set with only 2 items: position and speed.∗ When a teaching box is used
Series Variations
Model
LESH8D
LESH16D
LESH25D
Screw lead(mm)
48510816
50, 75
50, 100
50, 100, 150
±0.05
Stroke (mm)Positioningrepeatability
(mm)
216496
0.50.25
2142
200400200400150400
Work load (kg)Max. speed
(mm/s)Step motor
Horizontal Vertical215
2.5——
0.50.25
21——
Servo motor
Horizontal Vertical
In-line motortype Motor parallel type
Teaching box screen
A Dimensions (mm)
Size In-line motor81625
324561
Motor parallel58.572.5106
AA
RoHS
Data Axis 1Step No. 0Posn 50.00 mmSpeed 400 mm/s
Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANURL http://www.smcworld.com©2010 SMC Corporation All Rights Reserved
09-E565D-DN Printing OW 12450KS
1
09-E565
Information
Application examples
Lifter Stopper
Series Variations
Model
LEYG16 �
LEYG25 �
LEYG32 �
Screwlead
10
5
2.5
12
6
3
16
8
4
38
74
141
122
238
452
189
370
707
30
58
111
35
72
130
—
1.5
3.5
7.5
7
15
29
9
20
41
1.5
3.5
7.5
2
5
11
—
500
250
125
500
250
125
500
250
125
30 to 200
30 to 300
30 to 300
Pushing force [N] Vertical work load [kg] Max.speed[mm/s]
Stroke[mm]Step
motorServomotor
Stepmotor
Servomotor
ML
ML
ML
Direct mounting: 3 directions
Topmounting
(Through-hole)Top
mounting(Through-hole)Bottom
mounting(Tap)
Bottommounting
(Tap)
Endmounting
(Tap)
A rod type with guide newly added!� Compatible with slide-bearing and ball-bushing bearing.� Compatible with moment load and stopper (slide bearing).� Speed control/Positioning: Max. 64 points� Positioning and pushing control can be selected.
Possible to hold the actuator when pushing the rod to a workpiece, etc.
∗ When this is used was a stopper, it must be mounted on the top or bottom.Applicable specifications: slide bearing, 30 stroke
Improved rigidityImproved rigidityLateral end load: 5 times more∗∗ Compared with size 25 and 100 stroke
LEYG�M (Slide bearing)LEYG�L (Ball bushing bearing)
LEYG�M (Slide bearing)
With dedicated controllerInitial parameters are already set.
Data can be set with only 2 items: position and speed.∗ When a teaching box is used
Teaching box screen
Vertical Horizontal
Rod Type/Series LEY
RoHS
Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANURL http://www.smcworld.com©2010 SMC Corporation All Rights Reserved
09-E554D-DN Printing OS 12450KS
Electric Actuator/Guide Rod TypeSeries LEYG
Data Axis 1Step No. 0Posn 50.00 mmSpeed 500 mm/s
1
09-E554
A7.
5∗
A7.
5∗
Electric Actuator/Rod TypeIn-line Motor TypeSeries LEY �D
InformationAkihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPANURL http://www.smcworld.com©2010 SMC Corporation All Rights Reserved
09-E563D-DN Printing OX 12450KS
In-line motor type newly added to rod type!
Height dimension shortened by up to 49%
� Speed control/Positioning: Max. 64 points� Either positioning or pushing control can
be selected.Possible to hold the actuator with the rod pushing to a workpiece, etc.
� Auto switch can be mounted.
With dedicated controllerBasic operation preinstalled
Data can be set with only 2 items: position and speed.∗ When a teaching box is used
Teaching box screen
A DimensionsSize In-line motor Motor parallel
162532
35.546.561
67.592118
Series Variations
Model Screw lead [mm]Pushing force [N]
Max. speed [mm/s] Stroke [mm]Step motor Servo motor
LEY16D
LEY25D
LEY32D
105
2.51263
1684
3874141122238452189370707
3058
1113572
130
—
500250125500250125500250125
50 to 300
50 to 400
50 to 500
∗ When “Motor option/With motor cover” is selected.
LEY16D LEY16
RoHS
(mm)
Data Axis 1Step No. 0Posn 50.00 mmSpeed 500 mm/s
1
09-E563

Esempio di impostazione dati di movimentazione Esempio di controllo del display
Impostazione facilitata
Data Axis 1Step No. 0Posn 123.45°Speed 100°/s
Monitor Axis 1Step No. 1Posn 12.34°Speed 10°/s
Impostazione movimento manuale e velocità costante
1° schermata 1° schermata
2° schermata 2° schermata
Possono essere impostati con “SET”dopo aver inserito i valori.
È possibile controllarelo stato di funzionamento.
Verificare che il controllore e l'unità rotante siano compatibili.
I parametri iniziali sono già impostati. L'Unità rotante e il controllore sono forniti in un set (è possibile ordinarli anche separatamente).
<Prima dell'uso, effettuare i seguenti controlli>q Controllare che il numero di modello riportato sull'etichetta del cilindro corrisponda a quello sull'etichetta del controllore.w Controllare che la logica dei segnali I/O sia la medesima (NPN o PNP).
Avvio test
Movimento a velocità costante
Movimento manuale
Impostazione punti di posizionamento
Facile impostazioneTempo di avvio ridotto� Il controllore è già impostato con i dati dell'Unità rotante.
Al momento della spedizione del controllore, i parametri iniziali sono già impostati.In modo semplice è possibile avviare il controllore in breve tempo.
q w
i f i i
w Co t o a e c e a og ca de seg a /O
q
Per i dettagli sul controllore, consultare pagina 15.
<Se si utilizza un PC>Software di controllore� È possibile impostare ed eseguire su
un'unica schermata i dati di movimentazione, il funzionamento di prova, il movimento manuale e il movimento a velocità costante.
Se si desidera usarla subito, selezionare ”Easy Mode”.
<Se si utilizza un terminale di programmazione>
Display Terminale di programmazione
� Semplice impostazione e funzionamento.
� Scegliere un'icona dalla prima schermata e selezionare una funzione.
� Impostare i dati di movimentazione e controllare il display nella seconda schermata.
� I dati possono essere impostati con la posizione e la velocità(le altre condizioni sono già impostate).
Attuatore
Controllore
Data Axis 1Step No. 1Posn 80.00°Speed 100°/s
Data Axis 1Step No. 0Posn 50.00°Speed 200°/s
Features 5

Elementi di impostazione TB : Terminale di programmazionePC : Software di programmazione controllore
∗1 Prima della spedizione dalla fabbrica, ciascun parametro viene impostato secondo la condizione raccomandata. Cambiare l'impostazione degli elementi che richiedono la regolazione.∗2 Terminale di programmazione: in Normal mode, è possibile impostare il terminale in inglese o in giapponese.∗3 Software di programmazione controllore: l'installazione prevede la versione in inglese o in giapponese.
FunzioneNormal modeEasy mode
DescrizioneTB, PC
∗2 ∗3 ∗2, ∗3
(Funzionamento continuo)
PCTBSelezione della “posizione assoluta” e della “posizione relativa”Impostabile in unità di 1°/s.Impostabile in unità di 0.01°.Impostabile in unità di 1°/s2.Operazione di posizionamento: impostazione su 0%.Operazione di posizionamento: impostazione su 0%.Impostabile su velocità di spinta.Forza di posizionamento: impostazione su 100%.Impostabile in unità di 0.01°.
+ limite laterale di posizione (unità: 0.01°)– limite laterale di posizione (unità: 0.01°)È possibile impostare la direzione di ritorno alla posizione di 0 asse.È possibile impostare la velocità di ritorno alla posizione di 0 asse.È possibile impostare l'accelerazione di ritorno alla posizione di 0 asse.È possibile testare il funzionamento continuo alla velocità impostata quando viene premuto l'interruttore.È possibile testare il funzionamento alla distanza e velocità impostate dalla posizione corrente.È possibile testare il ritorno alla posizione di 0 asse.
È possibile testare il funzionamento dei dati di movimentazione specificati.
È possibile testare lo stato ON/OFF del terminale di uscita.È possibile monitorare la posizione corrente, la velocità corrente, la forza corrente e il numero di dati di movimentazione specificati.È possibile monitorare lo stato ON/OFF corrente del terminale di ingresso e di uscita.È possibile controllare l'allarme attualmente attivo.È possibile controllare un allarme attivato in passato.È possibile salvare, inoltrare e cancellare tutti i parametri del controllore.Disponibile in giapponese e in inglese.
MOD movimentoVelocitàPosizioneAccelerazione/decelerazioneForza di spintaLivello di triggerVelocità di spintaForza di posizionamentoUscita area
In posizione
Corsa (+)Corsa (–)ORIG directionORIG speedORIG ACCJOGMOVEReturn to ORIG
Test drive
Compulsory outputDRV monIn/Out monActive ALMALM Log recordSave/LoadLanguage
Impostazionedati di
movimentazione
Impostazione parametri(Estratto)
Test
Display
ALM
FileAltro
Durante l'operazione di posizionamento: larghezza rispetto alla posizione target. Deve essere impostata su 0.5° o più.Durante il controllo e regolazione della forza di spinta: quanto si muove durante la spinta
Impostazione parametri standard
Schermata menù principale
Schermata di impostazione dati di movimentazione
Schermata del test
Schermata del monitoraggio
Selezionare "Normal mode" quando è richiesta l'impostazione standard.
<Se si utilizza un terminale di programmazione>
Videata Terminale di programmazione
� È possibile impostare nel dettaglio i punti di posizionamento.� È possibile monitorare i segnali e lo stato del terminale.
� È possibile impostare i parametri.� È possibile eseguire il movimento manuale e il movimento a velocità costante, il ritorno alla posizione di 0 asse e verificare il funzionamento corretto dei segnali I/O.
� L'impostazione punti di posizionamento, l'impostazione parametro, il display, l'autoapprendimento, ecc., sono indicati in finestre diverse.
Software di programmazione controllore<Se si utilizza un PC>
� È possibile salvare sul terminale di programmazione diversi punti di posizionamento e trasferirli sul controllore.
� Funzionamento di prova continuo fino a 5 punti di posizionamento.
� Dal menù principale è possibile selezionare ciascuna funzione (impostazione punti di posizionamento, test, display, ecc.).
Finestra di impostazione punti di posizionamento
Finestra di impostazione parametro
Finestra di monitoraggioFinestra di autoapprendimento
Menu Axis 1Step dataParameter Test
Data Axis 1Step No. 0 Operation type
Test Axis 1Step No. 1Position 123.45 mm Stop
Output monitor Axis 1BUSY[ ]SVRE[ ] SETON[ ]
Features 6

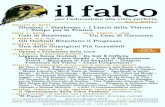
q Calcolo del momento d'inerzia
q Calcolo del tempo di reazione (tempo di rotazione)
Tempo di accelerazione angolare T1 = 420/1,000 = 0.42 secTempo di decelerazione angolare T3 = 420/1,000 = 0.42 secTempo di velocità costante
= 0.009 secTempo di reazione
= 1.049 (sec)
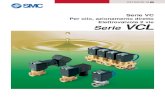
w Momento d'inerzia—Verifica dell'accelerazione/decelerazione angolare Selezionare il modello target sulla base del momento d'inerzia e dell'accelerazione e decelerazione angolari facendo riferimento al grafico sul momento d'inerzia—accelerazione/decelerazione angolare).
T1
ω· 1 ω· 2
θ
Vel
oci
tà:
ω [
°/se
c]
Tempo [s]
T2 T3 T4
θ : Angolo di rotazione [°] ω : Velocità angolare [°/sec]
ω· 1 : Accelerazione angolare [°/sec2] ω· 2 : Decelerazione angolare [°/sec2]
T1: Tempo di accelerazione [s] ... Tempo trascorso fino al raggiungimento della velocità impostataT2: Tempo velocità costante [s] ... Tempo durante il quale l'attuatore funziona ad una velocità costanteT3: Tempo di decelerazione [s] ... Tempo trascorso dall'arresto del funzionamento a velocità costanteT4: Tempo di assestamento [s] ... Tempo trascorso fino al completamento del posizionamento
Tempo di accelerazione angolare T1 = ω/ω· 1Tempo di decelerazione angolare T3 = ω/ω· 2Tempo di velocità costante T2 = {θ ω ωTempo di assestamento T4 = 0.2 (sec) Tempo di reazione
Posizione di montaggio: OrizzontaleTipo di carico: carico d'inerzia TaConfigurazione del carico: (Piastra rettangolare) Angolo di rotazione θ : 180°
Accelerazione angolare/decelerazione angolare ω· : 1,000°/sec2
Velocità angolare ω: 420°/secPeso del carico (m): 2.0 kgDistanza tra l'asse e ilbaricentro H: 40 mm
Condizioni d'esercizio.
Passo 1 Momento d'inerzia—Accelerazione/decelerazione angolare
Passo 2 Coppia necessaria
Passo 3 Carico ammissibile
Passo 4 Tempo di rotazione
w Verifica della coppia effettiva Verificare se è possibile controllare la velocità sulla base della coppia effettiva corrispondente alla velocità angolare facendo riferimento al grafico sulla coppia effettiva—velocità angolare.
q Tipo di carico
Coppia effettiva >– TsCoppia effettiva >– Coppia effettiva >–
Carico d'inerzia: TaΙ ω· π
= 0.21 N·m
q Verifica del carico ammissibile
Carico di spinta ammissibile >– Momento ammissibile >–
Ι 2 2 2
Formula
Formule
Formule
Formule
Ι 2 2 2
= 0.00802 kg·m2
LER30
0.000
0.005
0.010
0.015
0.020
0.025
0.030
100 1000 10000Accelerazione/decelerazione angolare: ω· (°/s2)
Mom
ento
d'in
erzi
a: Ι
(kg·
m2 )
LER�Coppia elevata
LER�30JBase
LER30
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 100 200 300 400 500Velocità angolare: ω (°/s)
Cop
pia
effe
ttiva
: T (
N·m
)LER�Coppia elevata
LER�30JBase
H
ab
Serie LER Selezione del modello 1
Procedura di Selezione
1

Ι = m1· + m2·3a1
2
3a2
2
Ι = m· 12a2
Ι = m· 12a2
Ι = m1· 124a1
2 + b2
124a2
2 + b2
Ι = m· 12a2 + b2
Ι = m· 2r2
Ι = m· 52r2
Ι = m· 4r2
Ι = m1·
(Es.) Vedere il punto 7 quando la forma di
K = m2·
+ m2·a22 + K3
a12
52r2
1. Trovare il momento d'inerzia ΙB per la rotazione dell'asse (B).2. Quindi sostituire il momento d' inerzia ΙB attorno all'asse (A) con ΙA,
baΙA = ( )2·ΙB
1. BarrettaPosizione dell'asse di rotazione: Perpendicolare a una barrettapassando da un'estremità
2. BarrettaPosizione dell'asse di rotazione:Passa attraverso il centro di gravità di una piastra.
3. Piastrina rettangolare (cuboide)
Posizione dell'asse di rotazione: Passa attraverso il centro di gravità di una piastra.
4. Piastrina rettangolare (cuboide)
Posizione dell'asse di rotazione: Perpendicolare alla piastra passando da un'estremità. (Lo stesso vale per i cuboidi più spessi).
5. Piastrina rettangolare (cuboide)
Posizione dell'asse di rotazione: Passa attraverso il centro di gravità della piastra e perpendicolare alla piastra. (Lo stesso vale per i cuboidi più spessi).
7. Sfera Posizione dell'asse di rotazione: Diametro
6. Forma cilindrica (compreso un disco sottile)
Posizione dell'asse di rotazione: Asse centrale
8. Disco sottile (montaggio verticale)
Posizione dell'asse di rotazione: Diametro
9. Quando è montato un carico sull'estremità della leva 10. Cambio ad ingranaggi
Ι: Momento d'inerzia (kg·m2) m: Peso del carico (kg)Formule del momento d'inerzia (Calcolo del momento d'inerzia Ι)
FL
ω
ωL
mgμ
L
mg
Tipo di caricoCarico di resistenza: Tf Carico d'inerzia: TaCarico statico: Ts
Gravità applicata. Forza d'attrito applicata. Il centro di rotazione e il centro di di gravità del carico sono concentrici.
L'asse di rotazione è verticale (su e giù).
Tipo di carico
È necessaria solo la forza di pressione. (ad es. per la presa)
Coppia necessaria: T = Ts
Forza d'attrito o gravità applicata alla direzione di rotazione.
Coppia necessaria: T = Tf x 1.5 Nota 1)
Ruotare il carico per inerzia.
Coppia necessaria: T = Ta x 1.5 Nota 1)
Nota 1) Per regolare la velocità, è necessario un margine per Tf e Ta.
La gravità è applicata alladirezione di rotazione. Tf = m·g·L
La forza d'attrito è applicata alladirezione di rotazione. Tf = μ·m·g·L
Ts = F·L
Ts : Carico statico (N·m)F : Forza di presa (N)L : Distanza dal centro di rotazione alla posizione di presa (m)
Tf : Carico di resistenza (N·m)m : Peso del carico (kg)g : Accelerazione gravitazionale 9.8 (m/s2)L : Distanza dal centro di rotazione al punto di applicazione della gravità o della forza d'attrito (m)μ : Coefficiente d'attrito
Ta = Ι·ω· ·2 π/360(Ta = Ι·ω· ·0.0175)
Ta : Carico d'inerzia (N·m)Ι : Momento d'inerzia (kg·m2)
ω· : Accelerazione/decelerazione angolare (°/sec2)ω : Velocità angolare (°/sec)
Nessun carico di resistenza: Nessuna forza d'attrito o gravità applicata alla direzione di rotazione.Es. 1) L'asse di rotazione è verticale (su e giù).Es. 2) L'asse di rotazione (laterale), il centro di rotazione e il centro di gravità del carico sono concentrici. ∗ La coppia necessaria è solo il carico d'inerzia. T = Ta x 1.5
Carico di resistenza: Forza d'attrito o gravità applicata alla direzione di rotazione.Es. 1) L'asse di rotazione (laterale), il centro di rotazione e il centro di gravità del carico non sono concentrici.Es. 2) Il carico si muove scorrendo sul pavimento. ∗ Il totale del carico di resistenza e d'inerzia è la coppia necessaria. T = (Tf + Ta) x 1.5
a2
m2
m1
a1
r
ab
rr
r
a1
a2
b
a1
a2a
a
(B)(A)
Numero di denti = a
Numero didenti = b
+ m2·
Selezione del modello Serie LER
2

LER10 LER10
LER30 LER30
LER50 LER50
0.0000
0.0005
0.0010
0.0015
0.0020
0.0025
0.0030
0.0035
0.0040
0.0045
100 1000 10000
Accelerazione/decelerazione angolare: ω· (°/s2)
Mom
ento
d'in
erzi
a: Ι
(kg·
m2 )
LER�10KCoppia elevata
LER�10JBase
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0 100 200 300 400 500
Velocità angolare: ω (°/s)C
oppi
a ef
fetti
va: T
(N
·m)
LER�10KCoppia elevata
LER�10JBase
0.000
0.005
0.010
0.015
0.020
0.025
0.030
100 1000 10000
Accelerazione/decelerazione angolare: ω· (°/s2)
Mom
ento
d'in
erzi
a: Ι
(kg·
m2 )
LER�30KCoppia elevata
LER�30JBase
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 100 200 300 400 500
Velocità angolare: ω (°/s)
Cop
pia
effe
ttiva
: T (
N·m
) LER�30KCoppia elevata
LER�30JBase
0.00
0.02
0.04
0.06
0.08
0.10
0.12
100 1000 10000
Accelerazione/decelerazione angolare: ω· (°/s2)
Mom
ento
d'in
erzi
a: Ι
(kg·
m2 ) LER�50K
Coppia elevata
LER�50JBase
0
2
4
6
8
10
12
0 100 200 300 400 500
Velocità angolare: ω (°/s)
Cop
pia
effe
ttiva
: T (
N·m
) LER�50KCoppia elevata
LER�50JBase
Momento d'inerzia—Accelerazione/decelerazione angolare Coppia ammissibile—Velocità angolare
Serie LER Selezione del modello 2
3

0 5 10 15 20 25 30
10203040
400
0 10 20 30 40 50 60 70
50130150
200
250
300
0 20 40 60 80 100
50
120
120
150
200
350
Spo
stam
ento
(μm
)
Carico (N)
Spo
stam
ento
(μm
)
Carico (N)
Spo
stam
ento
(μm
)
Carico (N)
LER�10
LER�30
LER�50
LER10 (Base)
LERH10 (Alta precisione)
LERH50 (Alta precisione)
LER50 (B
ase)
LERH30 (Alta precisione)
LER30 (Base
)
Spostamento dell'unità di traslazione (valore di riferimento)
Tolleranza d'inclinazione: Spostamento alla rotazione di 180° (Guida)
Spos
tam
ento
CaricoA
LER (Base) LERH (Alta precisione)(mm)
TagliaTipo base
78196314
86233378
74197296
78363398
107398517
T Tipo base Tprecisione Tipo base
(a)
(a) (b)
(b)
T Tipo base T
103050
Momento ammissibile (N·m)
100
Carico ammissibile
Selezione del modello Serie LER
4

LER 10 11RK 6N
8ABC
—135
∗ Realizzato su richiesta
Lunghezza cavo cilindro
Codici di ordinazione
LER10, 30, 50Serie LERUnità rotante elettrica
Taglia
—D
Montaggio controllore
—135
Lunghezza cavo I/O
—6N6P
Tipo di controllore
—R
Tipo di cavo cilindro
Verificare che il controllore e il cilindro siano compatibili.
Il cilindro e il controllore sono forniti insieme (set). (Controllore → Pagina 15)
<Prima dell'uso, effettuare i seguenti controlli>q Controllare che il numero di modello riportato sull'etichetta del cilindro corrisponda a quello sull'etichetta del controllore.w Controllare che la logica dei segnali I/O sia la medesima (NPN o PNP).
∗ Consultare il manuale di funzionamento per usare questo prodotto. Scaricarlo dal nostro sito web http://www.smcworld.com
q w
RoHS
103050
—H
Tipo baseTipo ad alta precisione
Precisione unità
Max. coppia di rotazione (N·m)
KJ
LER10TipoCoppia elevata
Base
LER30 LER50Simbolo
Angolo di rotazione (°)
—23
LER10 LER30 LER50Simbolo
—
Base (ingresso su lato destro)
Ingresso cavo motore
L
Ingresso su lato sinistro
Senza cavo1.5 m3 m5 m
8 m∗
10 m∗
15 m∗
20 m∗
Montaggio con vitiMontaggio su guida DIN
Senza cavo1.5 m3 m5 m
Senza controlloreCon controllore (NPN)Con controllore (PNP)
Senza cavoCavo robotico (cavo flessibile)
0.30.2
1.20.8
106.6
310Stopper esterno: 180Stopper esterno: 90
320
5

Nota 1) La precisione della forza di spinta è LER10: ±30% (F.S.), LER30: ±25% (F.S.), LER50: ±20% (F.S.).
Nota 2) L'accelerazione angolare, la decelerazione angolare e la velocità angolare potrebbero oscillare a causa delle variazioni del momento d'inerzia.Consultare a pagina 3 il grafico “Momento d'inerzia—Accelerazione/decelerazione angolare, coppia effettiva—velocità angolare” per la verifica.
Nota 3) Resistenza agli urti: non si sono verificati malfunzionamenti durante il test d'urto sia in direzione assiale che in direzione perpendicolare alla vite di trasmissione. (Il test è stato eseguito con l'unità rotante in stato iniziale).Resistenza alle vibrazioni : sottoposta ad un collaudo tra 45 e 2000 Hz non presenta malfunzionamenti. Il test è stato eseguito sia in direzione assiale che in direzione perpendicolare alla vite di trasmissione. (Il test è stato eseguito con l'unità rotante in stato iniziale).
Nota 4) L'assorbimento (compreso il controllore) si riferisce solo a quando l'unità rotante è in funzione.
Nota 5) L'assorbimento in standby in funzionamento (compreso il controllore) si riferisce solo a quando l'unità rotante si arresta nella posizione impostata durante il funzionamento.
Nota 6) L'assorbimento max. momentaneo (compreso il controllore) si riferisce solo a quando l'unità rotante è in funzione. Questo valore può essere usato per selezionare l'alimentazione elettrica.
Campo di rotazione dell'unità rotante
320
3,000
±0.5
±0.05
150/30
Speciale ingranaggio a vite senza fine + trasmissione a cinghia
0.49
0.52
0.55
0.61
0.57
0.63
�20
11
7
14
1.1
1.2
180
90
±0.01
±2
1.2
1.4
1.2
1.4
�28
22
12
42
Motore passo-passo (Servo/24 VDC)
Fase A/B incrementale (800 impulsi/giro)
24 DC ±10%
0.15/montaggio con viti, 0.17/montaggio su guida DIN
2.2
2.4
2.5
2.7
2.6
2.8
�42
34
13
57
60
5 a 40
da 35 a 85
310
Motore passo-passo (Servo/24 VDC)Modello LER�10K LER�30K LER�50KLER�10J LER�30J LER�50J
Angolo di rotazione [°]
Max. coppia di rotazione [N·m]
Max. coppia di spinta [N·m] Nota 1)
Max. momento di inerzia [kg·m2] Nota 2)
Velocità angolare [°/sec] Nota 2)
Velocità di spinta [°/sec]
Max. accelerazione/decelerazione angolare [°/sec2] Nota 2)
Gioco [°]
Ripetibilità di posizionamento [°]
Resistenza a urti/vibrazioni [m/s2] Nota 3)
Funzionamento
Max. frequenza d'esercizio [c.p.m]
Campo temp. d'esercizio [°C]
Campo umidità d'esercizio [%]
Taglia motore
Tipo di motore
Encoder
Alimentazione elettrica [V]
Assorbimento [W] Nota 4)
Peso del controllore [kg]
Base
Base-2/braccio esterno (1 pz.) -3/braccio esterno (1 pz.)
Base
-2/braccio (1 pz.)
-3/braccio (2 pz.)
Ripetibilità a fine corsa [°]/con stopper esterno
Campo di impostazione stopper esterno [°]
Peso [kg]
Peso[kg]
Angolo di rotazione[°]
0.3
0.15
0.0040
20 a 280
20
0.2
0.1
0.0018
30 a 420
30
1.2
0.6
0.027
20 a 280
20
0.8
0.4
0.012
30 a 420
30
10
5
0.10
20 a 280
20
6.6
3.3
0.04
30 a 420
30
Sp
ecif
ich
e at
tuat
ore
T
ipo
bas
eT
ipo
co
n s
top
per
est
ern
oS
pec
ific
he
elet
tric
he
Alta precisione
Alta precisione
Alta precisione
Assorbimento in standbydurante il funzionamento [W] Nota 5)
Assorbimento max. momentaneo (W) Nota 6)
Nota 1) Limiti entro cui l'unità di traslazione può muoversi quando ritorna nella posizione di asse 0. Assicurarsi che il pezzo montato sull'unità non interferisca con i pezzi e le strutture circostanti. Nota 2) Posizione dopo il ritorno alla posizione di asse 0. Nota 3) Il numero tra parentesi indica quando è cambiata la direzione di ritorno alla posizione di asse 0.
Segno posizione iniziale Fine corsa
(Posizione iniziale) Nota 3)
Foro di posiziona-mento
5°(5
°)
Segno posizione iniziale
LER30, 50/320°LER10/310°
Campo d'esercizio unità di traslazione Nota 1)
Nota 2)Posizione iniziale
(Fine corsa)
Stopper esterno: 180° Stopper esterno: 90°
Campo di regolazione vite
Campo di regolazione vite
Campo di regolazione vite
Campo di regolazione vite
180°
90° 90°
±2° ±2° ±2° ±2°
∗ Le figure mostrano la posizione di asse 0 di ciascun cilindro.
Specifiche
Unità rotante elettrica Serie LER
6

Componenti
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Descrizione
Lega di alluminio
Lega di alluminio
Lega di alluminio
Acciaio inox
Acciaio inox
Lega di alluminio
Lega di alluminio
Acciaio inox
Lega di alluminio
Lega di alluminio
Acciaio al carbonio
Lega di alluminio
Lega di alluminio
NBR
Acciaio al carbonio
—
—
—
—
—
—
Anodizzato
Anodizzato
AnodizzatoTrattato termicamente,
trattamento specialeTrattato termicamente,
trattamento speciale
Anodizzato
Corpo
Piastra laterale A
Piastra laterale B
Vite senza fine
Ruota a vite
Protezione guida
Unità di traslazione
Snodo
Supporto cuscinetto
Ferma cuscinetto
Vite di posizione iniziale
Puleggia A
Puleggia B
Grommet
Piastra motore
Base
Guida a ricircolo di sfere con scanalatura fonda
Guida a ricircolo di sfere con scanalatura fonda
Guida a ricircolo di sfere con scanalatura fonda
Cinghia
Motore passo-passo (Servo/24 VDC)
N. Materiale Nota
Guida a ricircolo di sferecon scanalatura fonda
Componenti
22
23
24
25
Descrizione
Lega di alluminio
Acciaio al carbonio
Lega di alluminio
Acciaio al carbonio
Anodizzato
Trattato termicamente, nichelato per elettrolisi
Anodizzato
Trattato termicamente, cromato
Unità di traslazione
Staffa
Sostegno
Vite di regolazione
N. Materiale Nota
Tipo con stopper esterno
Tipo ad alta precisioneTipo base!6
!6u!7y !1
e
!0!9otr
!8
!3
i
w
q
@0!2 !5 @1 !4
@5@4@3 @2
Altaprecisione
Guida a ricircolodi sfere speciale
Costruzione
Serie LER
7

20
83 2.12.1ø15H8 ( )
Lung
hezz
a ef
fettiv
a di
prec
ision
e =
7
Lung
hezz
a effe
ttiva d
i prec
ision
e = 2
2 x
ø5
ø8 (passante)ø18H8 ( )
ø42h8 ( )
ø43h8 ( )
+0.0270
0–0.039
0–0.039
+0.0270
20
2 x
ø5
83ø15H8 ( )2.12.1
Lung
hezz
a ef
fetti
va d
i pre
cisio
ne =
7
Lung
hezz
a effe
ttiva d
i prec
ision
e = 2
ø8 (passante)ø18H8 ( )
ø42h8 ( )ø43h8 ( )0
–0.0390
–0.039
+0.0270
+0.0270
Segno posizione iniziale
Vite di azionamento manuale(Su entrambi i lati)
16
76
65.8
0.2
0.2
6
H2
32H
12 x M6 x 1.0 x 12
142
3H8
(
)
prof
ondi
tà 4
20
+0.
014
0
≈ 300 (Ingresso cavo motore: tipo base)≈ 240 (Ingresso cavo motore: ingresso su lato sinistro)
20
2 x M6 x 1.0 x 12 142
≈ 300 (Ingresso cavo motore: tipo base)+
0.01
40
≈ 240 (Ingresso cavo motore: ingresso su lato sinistro)3H
8 (
) pr
ofon
dità
4
52
2 x ø5.5 (passante)
Nota) Non applicabile al tipo a 180° (LER�10-2) 2015.6
33.5
514
14
6 x M4 x 0.7 x 6
492
152 5
32
ø88.5 (Campo d'esercizio del braccio)
30°
+0.014
0
3H8 ( ) profondità 4
≈ 93 (
alla m
ax. lu
nghe
zza vit
e di re
golaz
ione)
2 x M5 x 0.8 (Vite di regolazione)
2 x ø9 profondità controforo Profondità 5,5
DimensioniModello
LER10LERH10
H110
17
H2 3.5
10.5
DimensioniModello
LER10LERH10
H110
17
H2 3.5
10.5
H3 9
16
Dimensioni
LER�10� (Angolo di rotazione: 310°)
LER�10-2 (Angolo di rotazione: 180°)LER�10-3 (Angolo di rotazione: 90°)
Serie LER
52
2 x ø9 profondità controforo Profondità 5,5
2 x ø5.5 (passante)
2
27
51 4
5°
32
6 x M4 x 0.7 x 6
152
3H8 (
)
profo
ndità
3.8 3H8 ( ) profondità 4
30°
+0.014
0
+0.01
4
0
Vite di azionamento manuale(Su entrambi i lati)
76
65.8
16
H3
4.8
0.2
0.2
8.5
0.5
6
H2
32H
1
8

66
1072.4 2.4
ø22H8 ( )
ø17 (passante)ø32H8 ( )
ø63h8 ( )
ø64h8 ( )
2 x ø11 profondità controforo Profondità 6.5
75
2 x ø6.8 (passante)
2 x
ø5
2020
48
392
4H8 (
) profo
ndità 4
.8
232
6 x M5 x 0.8 x 8
30°4H8 ( ) profondità 5
Lung
hezza
effet
tiva di
precis
ione =
2
Lung
hezz
a ef
fetti
va d
i pre
cisio
ne =
8
127
2 x M8 x 1.25 x 16 252
Nota) Non applicabile al tipo a 180° (LER�30-2)
75
20
2 x M8 x 1.25 x 16
20
252
4H8
(
)
prof
ondi
tà 5
107 2.42.4
Lung
hezz
a ef
fetti
va d
i pre
cisio
ne =
8
Lung
hezz
a effe
ttiva d
i prec
isione
= 2
6 x M5 x 0.8 x 8
≈ 126
(alla
max
. lung
hezz
a vite
di re
golaz
ione)
6646
19.5
5.2
2 x ø6.8 (passante)
2 x ø11 profondità controforo Profondità 6.5
ø64h8 ( )
ø63h8 ( )ø32H8 ( )
ø17 (passante)
2 x
ø5
ø22H8 ( )
45°
4H8
(
)
prof
ondi
tà 5
232
5.52 x M6 x 1.0 (Vite di regolazione)
14.5
48
30°
+0.01
8
0
+0.018
0
+0.0390
0–0.046
0–0.046
+0.0330
+0.0
180
+0.0
180
0–0.046
+0.0390
0–0.046
+0.0330
+0.018
0
Segno posizione iniziale
Vite di azionamento manuale(Su entrambi i lati)
20
88.2
102
40
0.2
0.2
8
H2
H1
88.2
102
20
H3
6
Vite di azionamento manuale(Su entrambi i lati)
40H
1H
28
0.2
0.2
11.5
0.5
≈ 250 (Ingresso cavo motore: tipo base)≈ 250 (Ingresso cavo motore: ingresso su lato sinistro)
≈ 250 (Ingresso cavo motore: tipo base)≈ 250 (Ingresso cavo motore: ingresso su lato sinistro)
4H8 ( ) profondità 5ø123.2 (Campo d'esercizio del braccio)
DimensioniModello
LER30LERH30
H113
22
H2 4.5
13.5
LER�30� (Angolo di rotazione: 320°)
LER�30-2 (Angolo di rotazione: 180°)LER�30-3 (Angolo di rotazione: 90°)
DimensioniModello
LER30LERH30
H113
22
H2 4.5
13.5
H312.5
21.5
Dimensioni
Serie LER
9

85 4
5°
2020
90
ø76h8 ( )ø74h8 ( )
ø35H8 ( )
2 x ø8.5 (passante)
ø14`profondità del controforoProfondità 8,5
2 x
ø555
26.52
45
2
30
152
5685
6.8
22
≈ 158
(alla
max
. lung
hezz
a vite
di re
golaz
ione)
ø20 (passante)
127
Lung
hezz
a ef
fetti
va d
i pre
cisio
ne =
11
Lung
hezza
effet
tiva di
prec
isione
= 2
2 x
ø5
20
127
Nota) Non applicabile al tipo a 180° (LER�50-2)
2 x M6 x 1,25 (Vite di regolazione)19
26.52
66 x M6 x 1.0 x 10
2 x M10 x 1.5 x 20
5H8
(
) p
rofo
ndità
5,5
ø26H8 ( )
5H8 (
) profo
ndità 5,
3 5H8 ( ) profondità 5,5
3 3
90
2 x ø8.5 (passante)
ø26H8 ( )
2 30
5H8
(
) p
rofo
ndità
5,5
20
2 x M10 x 1.5 x 20
ø76h8 ( )ø74h8 ( )
ø35H8 ( )ø20 (passante)
Lung
hezz
a ef
fetti
va d
i pre
cisio
ne =
11
Lung
hezz
a effe
ttiva d
i prec
isione
= 2
3 3
ø146 (Campo d'esercizio del braccio)
2
55
30°
30°
+0.01
8
0
+0.0180
0–0.046
0–0.046
+0.0390
+0.0330
+0.0
180
+0.0
180
0–0.046
0–0.046
+0.0390
+0.0330
+0.018
0
6 x M6 x 1.0 x 10
133
114.2
26
Vite di azionamento manuale(Su entrambi i lati)
Segno posizione iniziale
52
0.2
H1
H2
0.2
10
Vite di azionamento manuale(Su entrambi i lati)
7.5
H3
26
133
114.2
52H
1H
2
100.5
14.5
0.2
0.2
≈ 240 (Ingresso cavo motore: tipo base)≈ 230 (Ingresso cavo motore: ingresso su lato sinistro)
≈ 240 (Ingresso cavo motore: tipo base)≈ 230 (Ingresso cavo motore: ingresso su lato sinistro)
5H8 ( ) profondità 5,5
2 x ø14 profondità controforoProfondità 8,5
DimensioniModello
LER50LERH50
H116
26
H2 5.5
15.5
DimensioniModello
LER50LERH50
H116
26
H2 5.5
15.5
H315.5
25.5
LER�50� (Angolo di rotazione: 320°)
LER�50-2 (Angolo di rotazione: 180°)LER�50-3 (Angolo di rotazione: 90°)
Dimensioni
Serie LER
10

Montaggio del pezzo sull'unità rotante elettricaIl carico va montato alla coppia indicata nella tabella seguente avvitando il bullone nella filettatura femmina di montaggio.
Progettazione e selezione Montaggio
Attenzione Attenzione1. Se le condizioni operative implicano fluttuazioni del
carico, movimenti ascendenti/discendenti o cambi della resistenza all'attrito, assicurarsi che le misure di sicurezza siano in posizione onde evitare lesioni all'operatore o danni al sistema.L'assenza di queste misure potrebbe accelerare la velocità di funzionamento mettendo in pericolo il personale, i macchinari e gli altri impianti.
2. Un guasto dell'alimentazione elettrica potrebbe portare al calo della forza di spinta. Assicurarsi che le misure di sicurezza siano in posizione onde evitare lesioni all'operatore e danni al sistema.Quando il prodotto è usato per le operazioni di presa, la forza di presa potrebbe diminuire a causa di un guasto elettrico, creando potenzialmente una situazione pericolosa in cui il pezzo viene rilasciato.
3. Per il montaggio dell'unità rotante elettrica, usare viti dalla lunghezza adeguata e serrarle alla coppia adeguata rispettando i limiti di coppia indicati.Il serraggio delle viti ad una coppia più alta di quella raccomandata potrebbe causare un malfunzionamento, mentre il serraggio a una coppia più bassa può causare lo spostamento della posizione di montaggio o, in condizioni estreme, l'attuatore potrebbe staccarsi dalla sua posizione di montaggio.
4. La superficie di montaggio è dotata di fori e scanalature per il posizionamento. Se necessario, usarli per il posizionamento preciso dell'unità rotante elettrica.
5. Se è necessario azionare l'unità rotante elettrica quando non è eccitata, usare le viti di azionamento manuale.Quando il prodotto è azionato mediante le viti di azionamento manuale, controllare la loro posizione sul prodotto e lasciare lo spazio necessario. Non applicare una coppia eccessiva sulle viti di azionamento manuale che potrebbe portare al danneggiamento e al malfunzionamento del prodotto.
Montaggio
Attenzione1. Non far cadere o colpire l'unità rotante elettrica onde
evitare di graffiare o ammaccare le superfici di montaggio. Anche una deformazione minima può portare ad una minore precisione e ad un difetto di funzionamento.
2. Serrare le viti di montaggio del carico alla coppia prescritta.Il serraggio a una coppia più alta di quella specificata potrebbe causare un malfunzionamento e il serraggio insufficiente potrebbe causare lo spostamento.
Precauzione1. Se la velocità d'esercizio è impostata su un valore
troppo elevato e il momento d'inerzia è troppo grande, il prodotto potrebbe danneggiarsi. Impostare le condizioni d'esercizio appropriate del prodotto in accordo con la procedura di selezione del modello.
2. Se è necessaria una ripetibilità più precisa dell'angolo di rotazione, usare il prodotto con uno stopper esterno, con ripetibilità di ±0.01° (180° e 90° con regolazione di ±2°) o arrestando direttamente il pezzo usando un oggetto esterno mediante l'operazione di spinta.Durante la regolazione dell'angolo, l'angolo di rotazione impostato inizialmente potrebbe cambiare.
3. In caso di utilizzo dell'unità rotante elettrica con uno stopper esterno, o mediante l'arresto diretto esterno del carico, assicurarsi di utilizzare l'operazione di spinta.Assicurarsi inoltre che il pezzo non subisca urti esterni durante l'operazione di posizionamento o nel campo dell'operazione di posizionamento.
Modello
LER�10LER�30LER�50
Vite
M4 x 0.7
M5 x 0.8
M6 x 1
Max coppia diserraggio (N·m)
1.4
3.0
5.0
Modello
LER�10LER�30LER�50
Vite
M5 x 0.8
M6 x 1
M8 x 1,25
Max coppia diserraggio (N·m)
3.0
5.0
12.0
Modello
LER�10LER�30LER�50
Vite
M6 x 1
M8 x 1,25
M10 x 1.5
Max coppia diserraggio (N·m)
5.0
12.0
25.0
Max profondità diprofondità L [mm]
12
16
20
Montaggio corpo parte inferiore Montaggio corpo parte superiore
Montaggio corpo parte inferiore
Montaggio con fori passanti
Montaggio con fori filettati
Serie LERUnità rotante elettrica/Precauzioni specifiche del prodotto 1Leggere attentamente prima dell'uso. Consultare la retrocopertina per le Istruzioni di sicurezza e il Manuale di funzionamento per le Precauzioni degli attuatori elettrici.Scaricarlo dal nostro sito web http://www.smcworld.com
11

Manutenzione
Pericolo1. Il cuscinetto ad alta precisione è assemblato
premendolo in posizione. Non è possibile smontarlo.
Uso
Precauzione1. In caso di utilizzo di una guida esterna, collegare le
parti mobili del prodotto e il carico in modo tale che non esistano interferenze in nessun punto della corsa.Utilizzare un connettore a movimento libero (come un giunto di accoppiamento).
2. Segnale in uscita INP1) Operazione di posizionamento
Quando il prodotto rientra nel campo impostato tramite i dati di movimentazione [In posizione], si accenderà il segnale in uscita INP.Valore iniziale: impostato su [0.50] o più.
2) Operazione di spintaQuando la forza effettiva supera [il valore [Livello di trigger] (compresa la spinta durante l'operazione), si accenderà il segnale in uscita INP.Il [Livello di trigger] deve essere impostato tra il 40% e la [Forza di spinta].a) Per assicurarsi di ottenere la presa e l'arresto esterno mediante
la [Forza di spinta], si raccomanda che la [Forza di spinta] e il [Livello di trigger] siano impostati sullo stesso valore.
b) Quando il [Livello di trigger] e la [Forza di spinta] sono impostate su un valore al di sotto del limite inferiore del campo prescritto, è possibile che il segnale in uscita INP sia acceso dalla posizione di avvio dell'operazione di spinta.
3. Quando il pezzo viene arrestato dall'attuatore rotante elettrico con uno stopper esterno o direttamente da un oggetto esterno, utilizzare l' “operazione di spinta”. Non arrestare l'unità di traslazione con uno stopper esterno o un oggetto esterno durante l'uso all'interno del campo della “modalità operazione di posizionamento”. Se il prodotto è utilizzato nella modalità operazione di posizionamento, si potrebbe verificare un grippaggio o altri problemi quando il prodotto/pezzo entra a contatto con lo stopper esterno o l'oggetto esterno.
4. Quando l'unità di traslazione è arrestata mediante la modalità operazione di spinta (arresto/presa), impostare il prodotto su una posizione di almeno 1° dal pezzo. (Questa posizione corrisponde alla posizione di inizio spinta).Se la posizione di inizio dell'operazione di spinta (arresto o presa) è impostata sulla stessa posizione di un arresto esterno, si potrebbero verificare i seguenti allarmi e il funzionamento potrebbe diventare instabile.
a. Si genera l'allarme ”Pos. fallita"Non è possibile raggiungere la posizione di inizio dell'operazione di spinta entro il tempo target.
b. Si genera l'allarme ”ALM di spinta".Il prodotto viene respinto dalla posizione di inizio spinta dopo aver cominciato a spingere.
c. Si genera l'allarme “Deviazione eccessiva”.Si verifica uno spostamento oltre il valore indicato in corrispondenza della posizione di avvio dell'operazione di spinta.
5. Non si verifica nessun gioco quando il prodotto è arrestato esternamente dall'operazione di spinta.Per il ritorno alla posizione di asse 0, la posizione di asse 0 è impostata mediante l'operazione di spinta.
6. Per il tipo con stopper esterno, è fornita, di serie, una vite di regolazione dell'angolo.Il campo di regolazione dell'angolo di rotazione è pari a ±2° dall'estremità di rotazione dell'angolo. Se si supera il campo di regolazione dell'angolo, l'angolo di rotazione potrebbe cambiare a causa della forza insufficiente dello stopper esterno.Una rivoluzione della vite di regolazione corrisponde approssimativamente a 1° di giro.
Serie LER
Precauzioni specifiche del prodotto 2Leggere attentamente prima dell'uso. Consultare la retrocopertina per le Istruzioni di sicurezza e il Manuale di funzionamento per le Precauzioni degli attuatori elettrici.Scaricarlo dal nostro sito web http://www.smcworld.com
12

13

PLC
� Controllore� Unità rotante
� Cavo I/O
Per CN5
Per CN4Per CN3
Per CN2
Per CN1
Cavo di collegamento �
Cavo USB �
PC
� Cavo dicomunicazione
� Unità diconversione
(Tipo A-miniB)
� Terminale di programmazione(con cavo da 3 m)
� Connettore di alimentazione
� Kit controllore(Software controllore, cavo di comunicazione,unità di conversione e cavo USB compresi).
Alimentazione elettrica per segnale I/O 24 VDC
Alimentazione del controllore 24 VDC oppure
Opzioni
(Predisporre i cavi di alimentazione le alimentazioni elettriche di ingresso 24 VDC [alimentazioni elettriche eccetto il tipo a prevenzione corrente di punta] per il controllore).
Dispositivo per l'inserimento dei dati di impostazione del controllore
Software per l'inserimento dei dati di impostazione del controllore
Predisporre il PLC e l'alimentazione 24 VDC per il segnale I/O.
Serie LECP6
ControlloreMotore passo-passo(Servo/24 VDC)
� Unità rotante
14

Verificare che il controllore e il cilindro siano compatibili.
Il controllore è fornito come unità singola (ricambio).
<Prima dell'uso, effettuare i seguenti controlli>q Controllare che il numero di modello riportato sull'etichetta del cilindro corrisponda a quello sull'etichetta del controllore.w Controllare che la logica dei segnali I/O sia la medesima (NPN o PNP).
q w
Codici di ordinazione
Specifiche
Specifiche base
LE C P 6 N
Serie LECP6Controllore motore passo-passo (Servo/24 VDC)
P Motore passo-passo(Servo/24 VDC)
6 64 punti
Punti di posizionamento
NP
NPNPNP
Tipo di I/O parallelo
Lunghezza cavo I/O
Opzioni
Codice attuatore
Motore compatibile
Controllore
Prodotti elettrici
(Eccetto le specifiche del cavo e le opzioni dell'attuatore)Esempio: Inserire “LER10K-2” per LER10K-2L-R16N1.
Elemento SpecificheMotore compatibile
Alimentazione elettrica Nota 1)
Ingresso paralleloUscita parallela
Encoder compatibile
Comunicazione serialeMemoriaLEDMeccanismo frenoLunghezza cavo (m)Sistema di raffreddamentoCampo temperatura d'esercizio (°C)Campo umidità d'esercizio (%)Campo temperatura di stoccaggio (°C)Campo umidità di stoccaggio (%)
Peso (g)
Controllore motore passo-passo (servo/24 VDC)
11 ingressi (Fotoaccoppiato)13 uscite (Fotoaccoppiato)
RS485 (conforme con protocollo Modbus)EEPROM
LED (verde/rosso) uno di ciascunoNormalmente chiuso (n.c.) Nota 3)
Cavo I/O: 5 max. Cavo attuatore: 20 o menoRaffreddamento naturale ad aria
0 a 4035 a 85 -10 a 6035 a 85
Nota) Guida DIN non compresa. Ordinarla a parte.
Tensione di alimentazione: 24 VDC ±10% Assorbimento: 3 A (picco 5 A) Nota 2)
[Compresa potenza azionamento motore, potenza controllo, arresto, rilascio bloccaggio]
Tra sede (aletta di radiazione) e terminale SG 50 (500 VDC)50 (500 VDC)
Fase A/B, ingresso ricevitore lineaRisoluzione 800 p/r
150 (montaggio vite)170 (montaggio su guida DIN)
∗ Se si è selezionato il modello con controllore (-P6��) al momento di ordinare la serie LE, non c'è bisogno di ordinare questo controllore.
Nota 1) Non utilizzare un controllore con funzione di prevenzione “inrush current” per alimentare il controllore.Nota 2) L'assorbimento varia a seconda del modello di unità rotante. Per maggiori informazioni, consultare le specifiche dell'attuatore.Nota 3) Applicabile al meccanismo freno non magnetizzante.
RoHS
—135
Senza cavo1.5 m3 m5 m
—Attacco Nota)
Montaggio con vitiMontaggio su guida DIN
Resistenza di isolamento (MΩ)
15

a) Montaggio con viti (LECP6��-�)(Installazione con due viti M4)
b) Montaggio su guida DIN (LECP6��D-�)(Installazione con guida DIN)
Filo di terra
Guida DIN
La guida DIN è bloccata.
Direzione di montaggio
Direzione di montaggio
Filo di terra Filo diterra
Agganciare il controllore sulla guida DIN e premere la leva della sezione A nella direzione della freccia per bloccarlo.
Guida DIN
Adattatore di montaggio guida DIN
AXT100-DR-�∗ Per �, inserire un numero dalla linea “No.” nella tabella sotto.
Per le dimensioni di montaggio, andare a pagina 17.
40
510.5
39
498
38
485.5
37
473
36
460.5
35
448
34
435.5
33
423
32
410.5
31
398
30
385.5
29
373
28
360.5
27
348
26
335.5
25
323
24
310.5
23
298
22
285.5
21
273
N.
Dimensione L
20
260.5
19
248
18
235.5
17
223
16
210.5
15
198
14
185.5
13
173
12
160.5
11
148
10
135.5
9
123
8
110.5
7
98
6
85.5
5
73
4
60.5
3
48
2
35.5
1
23
N.
Dimensione L
Dimensioni L
L7.5
(25)
(35)
AAdattatore di montaggio guida DIN
LEC-D0 (con 2 viti di montaggio)
Da usarsi quando l'adattatore di montaggio della guida DIN viene montato successivamente sul controllore a montaggio con viti.
Montaggio
Controllore motore passo-passo (Servo/24 VDC) Serie LECP6
16

31
15.5
150
132
35
141
166
(81.7)
31
355.25 5.25
132
81.7
5.5
35
150
167.
3 (D
uran
te b
locc
aggi
o gu
ida
DIN
)
173.
2 (D
uran
te r
imoz
ione
gui
da D
IN)
1
66
(81.7)
(91.7)
11.5Vedere pagina 16 per la dimensione L e il
codice della guida DIN.
4.6per corpoinferiore
ø4.5per corpoinferiore
LED alimentazione elettrica (verde)(ON: alimentazione accesa).
Connettore I/O parallelo CN5
Connettore I/O seriale CN4
Connettore encoder CN3
Connettore di alimentazione elettrica motore CN2
Connettore di alimentazione elettrica CN1
LED alimentazione elettrica (rosso)(ON: allarme acceso).
a) Montaggio con viti (LECP6��-�)
b) Montaggio su guida DIN (LECP6��D-�)
Dimensioni
Serie LECP6
17

Esempio di cablaggio 2
Schema del cablaggioLECP6N��-� (NPN) LECP6P��-� (PNP)
Esempio di cablaggio 1
Terminale connettore di alimentazione elettrica CN1Connettore di alimentazione
0VM
24V
C24
VE
MG
BK
RLS
Le alimentazioni devono essere separate tra la potenza del controllore e la potenza del segnale I/O ed entrambe non devono essere del tipo con funzione di prevenzione "inrush current".Se le alimentazioni elettriche sono del tipo con funzione di prevenzione "inrush current", durante l'accelerazione dell'attuatore potrebbe verificarsi una caduta di tensione.
Precauzione
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
COM+
IN0
IN1
IN2
IN3
IN4
IN5
SETUP
HOLD
DRIVE
RESET
SVON
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
BUSY
AREA
SETON
INP
SVRE
∗ESTOP
∗ALARM
CN524 VDC
per segnale I/O
Carico
CN5A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
24 VDCper segnale I/O
Carico
Connettore di alimentazione elettrica: CN1 ∗ Connettore di alimentazione (Phoenix Contact FK-MC0.5/5-ST-2.5)
Nome terminale Funzione Descrizione della funzione
0V
M24VC24VEMG
BK RLS
Alimentazione comune (–)
Alimentazione elettrica motore (+)Alimentazione elettrica controllo (+)
Arresto (+)Rilascio freno (+)
Questa è l'alimentazione elettrica del motore (+) fornita al controllore.Questa è l'alimentazione elettrica del controllo (+) fornita al controllore.Questo è l'ingresso (+) che rilascia l'arresto.Questo è l'ingresso (+) che rilascia il freno.
Il terminale M24V/terminale C24V/terminale EMG/terminale BK RLS sono comuni (–).
Connettore I/O parallelo: CN5 ∗ Quando si collega un PLC al connettore I/O parallelo CN5, usare il cavo I/O (LEC-CN5-�).∗ Cambiare il cablaggio a seconda del tipo di I/O parallelo (NPN o PNP). Eseguire il cablaggio rispettando
quanto riportato nel seguente schema.
COM+
IN0
IN1
IN2
IN3
IN4
IN5
SETUP
HOLD
DRIVE
RESET
SVON
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
BUSY
AREA
SETON
INP
SVRE
∗ESTOP
∗ALARM
Segnale in ingressoNome ContenutoCOM+COM–
IN0 a IN5
SETUPHOLDDRIVERESETSVON
Collega l'alimentazione 24 V per il segnale in ingresso/uscitaCollega l'alimentazione 0 V per il segnale in ingresso/uscita
Istruzione per ritornare alla posizione originaleIl funzionamento è temporaneamente sospeso
Istruzione di azionamentoReset allarme e interruzione del funzionamento
Istruzione di accensione servo
No. di bit specificati dei dati di movimentazione(L'input viene ordinato in combinazione di IN0 a 5).
Segnale in ingressoNome Contenuto
OUT0 a OUT5BUSYAREA
SETON
INP
SVRE∗ESTOP Nota)
∗ALARM Nota)
Emette il numero di dati di movimentazione durante il funzionamentoSi attiva quando l'attuatore si muove
Si attiva all'interno del campo di impostazione uscita area dati di movimentazioneSi attiva durante il ritorno alla posizione originale
Si attiva quando il servo è accesoNessuna uscita quando è ordinato l'arresto EMGNessuna uscita quando è generato un allarme
Si attiva quando viene raggiunta la posizione o la forza target(Si accende al termine del posizionamento o della spinta).
Nota) Questi segnali vengono emessi quando l'alimentazione elettrica del controllore è attiva. (N.C.)
Controllore motore passo-passo (Servo/24 VDC) Serie LECP6
18

1. Impostazione per il posizionamento 2. Impostazione punti di posizionamento per la spintaDurante questa impostazione, l'unità rotante si muove in avanti e si arresta nella posizione target. Il seguente schema mostra i parametri operativi e l'operazione. Sotto sono indicati i parametri operativi e i valori impostati per questa opera-zione.
L'Unità rotante si sposta verso la posizione di inizio spinta e quando la raggiunge, comincia a spingere con meno forza rispetto alla forza impostata. Il seguente schema mostra i parametri operativi e l'operazione. Sotto sono indicati i parametri operativi e i valori impostati per questa operazione.
Impostazione punti di posizionamento
Punti di posizionamento
: Da impostare.: Da regolare, se necessario.: Impostazione non richiesta.
ElementoNecessità Descrizione
MOD movimento
In posizione
Area 1, Area 2
Forza di posizionamento
Livello di trigger
Velocità di spinta
Forza di spinta
Decelerazione
Accelerazione
Velocità
Posizione
Quando è richiesta la posizione assoluta, impostare Absolute. Quando è richiesta la posizione relativa, impostare Relative.
Impostare 0.(Se sono impostati i valori da 1 a 100, il funzionamento passerà al controllo e regolazione della forza di spinta).
Coppia max. durante l'operazione di posizionamento (non è richiesta una modifica specifica).
Velocità di trasferimento nella posizione target
Impostazione non richiesta.
Condizione che accende il segnale in uscita AREA.
Impostazione non richiesta.
Posizione target
Parametro che definisce la rapidità con cui l'attuatore raggiunge la velocità impostata. Quanto più elevato è il valore impostato tanto più rapidamente raggiunge la velocità impostata.
Parametro che definisce la rapidità con cui l'attuatore raggiunge l'arresto completo. Quanto più elevato è il valore impostato, tanto più velocemente si ferma.
Condizione che accende il segnale in uscita INP. Quando l'attuatore entra nel campo di [in posizione], si accende il segnale in uscita INP. (Non è necessario cambiarlo rispetto al valore iniziale). Se è necessario emettere il segnale di arrivo prima del termine dell'operazione, accrescere il valore.
Punti di posizionamento (spinta): Da impostare.: Da regolare, se necessario.
Elemento Descrizione
MOD movimento
In posizione
Area 1, Area 2
Forza di posizionamento
Velocità di spinta
Livello di trigger
Forza di spinta
Decelerazione
Accelerazione
Velocità
Posizione
Quando è richiesta la posizione assoluta, impostare Absolute. Quando è richiesta la posizione relativa, impostare Relative.
Coppia max. durante l'operazione di posizion-amento (non è richiesta una modifica specifica).
Velocità di trasferimento nella posizione di inizio spinta
Condizione che accende il segnale in uscita AREA.
Posizione di inizio spinta
Parametro che definisce la rapidità con cui l'attuatore raggiunge la velocità impostata. Quanto più elevato è il valore impostato tanto più rapidamente raggiunge la velocità impostata.
Parametro che definisce la rapidità con cui l'attuatore raggiunge l'arresto completo. Quanto più elevato è il valore impostato, tanto più velocemente si ferma.
Condizione che accende il segnale in uscita INP. Il segnale in uscita INP si accende quando la forza generata supera il valore. Il livello di soglia deve essere inferiore alla forza di spinta.
È definito il rapporto della forza di spinta.Il campo di impostazione varia a seconda del tipo di attuatore elettrico. Consultare il manuale di funzionamento per l'attuatore elettrico.
Velocità di spintaQuando la velocità è elevata, l'attuatore elettrico e i pezzi di lavorazione possono danneggiarsi a causa dell'impatto contro il finecorsa. Questo valore di impostazione deve essere inferiore. Consultare il manuale di funzionamento dell'attuatore elettrico.
Distanza di trasferimento durante la spinta. Se la distanza percorsa supera il valore impostato, si arresta anche se non è in fase di spinta. Nel caso in cui su superi la distanza di trasferimento, il segnale in uscita INP non si accenderà.
Necessità
Velocità
Velocità
Velocità di spinta
Forza di spinta
Forza
Livello di trigger
Uscita INP OFF
In posizionePosizione
Accelerazione Decelerazione
ONON
Velocità
Velocità
Uscita INP OFF
In posizione
Accelerazione Decelerazione
ONON
Posizione
Serie LECP6
19

Alimentazione elettrica
SVON
SETUP
BUSY
SVRE
SETON
INP
∗ALARM
∗ESTOP
Ingresso
Uscita
Velocità
Ritorno alla posizione di 0 asse
24 V 0 V
ONOFF
0 mm/s
ONOFF
IN
DRIVE
OUT
BUSY
INP
Ingresso
Uscita
VelocitàOperazione di posizionamento
ONOFF
0 mm/s
ONOFF
Se l'attuatore si trova all'interno del campo “in posizione” del parametro base, il segnale INP si accenderà. In caso contrario, rimarrà spento.
∗ “∗ALARM” e ”∗ESTOP” vengono espressi come circuito a logica negativa.∗ Quando sul grafico dei tempi ”power supply" è "ON", vuol dire che l'alimentazione elettrica è accesa. ∗ Quando “stop” sul grafico dei tempi è “OFF”, è premuto il pulsante di arresto. (Arrestato)
∗ Quando l'attuatore si trova nel campo di posizionamento dell'operazione di spinta, non si arresta nemmeno se è immesso il segnale HOLD. ∗ “∗ALARM” è espresso come circuito a logica negativa.
∗ ”OUT" viene emesso quando ”DRIVE" passa da ON a OFF.(Quando si applica l'alimentazione elettrica, ”DRIVE" o ”RESET" si accende oppure “∗ESTOP" si spegne, tutte le emissioni ”OUT" si spengono).
Scansione n. dati di movimentazione
Emissione n. punti di posizionamento
Se l'attuatore si trova all'interno del campo “in posizione” dei dati di movimentazione, il segnale INP si accenderà. In caso contrario, rimarrà spento.
HOLD
BUSY
Ingresso
Uscita
Velocità
ONOFF
0 mm/s
ONOFF
Se la forza di spinta in corso supera il valore ”livello di trigger" dei dati di movimentazione, si accenderà il segnale INP.
IN
DRIVE
OUT
BUSY
INP
Ingresso
Uscita
VelocitàOperazione di spinta
ONOFF
0 mm/s
ONOFF
Scansione n. dati di movimentazione
Emissione n. punti di posizionamento
RESET
OUT
∗ALARM
Ingresso
Uscita
ONOFF
ONOFF
ONOFF
Punto di partenza rallentamento
HOLD durante il funzionamento
Reset allarme
Emissione allarme
È possibile identificare il gruppo dell'allarme attraverso la combinazione dei segnali OUT quando si genera l'allarme.
Ritorno alla posizione di 0 asse
Operazione di posizionamento
HOLD Reset
Operazione di spinta
Funzionamento segnali 1
Controllore motore passo-passo (Servo/24 VDC) Serie LECP6
20

(17.
7)(1
7.7)
(30.7) (14.7)
(14.7)
L (11)
(30.7) L (11)
(14.2)(13.5)
(10)
(10)
(14)
(18)
(14.2)(13.5)
(14)
(18)
(22.
4)
(14.4) L
A1 B1
A6 B6
A1 B1
A6 B6
1 2
5 61 2
5 6
1 2
5 6
1 2
15 16
B1 A1
B13 A13
A1
……
B13
A13B1
ø8.9
ø8
Connettore C
Connettore C
Connettore A
Connettore A
Connettore D
Connettore D
ø5.5
ø6.3
Lato controllore Lato PLC
Lato controllore
Lato controllore
Lato attuatore(Numero pin)
(Numero pin)
(Numero pin)(Numero pin)
Lato attuatore
[Cavo di collegamento]
LE CP 1
Lunghezza cavo (L)1358ABC
1.5 m3 m5 m8 m∗
10 m∗
15 m∗
20 m∗
[Cavo I/O]
LEC CN5 1
Lunghezza cavo (L)135
A1Marrone chiaroMarrone chiaro
GialloGiallo
Verde chiaroVerde chiaro
GrigioGrigioBiancoBianco
Marrone chiaroMarrone chiaro
Giallo
NeroRossoNero
RossoNero
RossoNero
RossoNero
RossoNero
RossoNero
Colore punto
Colore Simbolo
IsolamentoColore
ConnettoreN. pin
A2A3A4A5A6A7A8A9A10A11A12A13
—
GialloVerde chiaroVerde chiaro
GrigioGrigioBiancoBianco
Marrone chiaroMarrone chiaro
GialloGiallo
Verde chiaroVerde chiaro
RossoNero
RossoNero
RossoNero
RossoNero
RossoNero
RossoNero
RossoSchermo
Colore punto
Colore Simbolo
IsolamentoColore
ConnettoreN. pin
B1B2B3B4B5B6B7B8B9B10B11B12B13
B
N. terminale connettore AB-1A-1B-2A-2B-3COM-A/COM
BBAA
A-3COM-B/—
B-4A-4B-5A-5B-6A-6
VccGND
A
B
Circuito Colore cavoMarrone
rossoarancione
GialloVerde
Blu
MarroneNerorossoNero
arancioneNero
—
N. terminale connettore C
Colore cavo N. terminale connettore D
216534
12137698
Schermo
3
A
LE-CP- /Lunghezza cavo: 1.5 m, 3 m, 5 m135
LE-CP- /Lunghezza cavo: 8 m, 10 m, 15 m, 20 m(∗Realizzato su richiesta)
8A
BC
∗ Misura conduttore: AWG28
∗ Realizzato
Opzioni
1.5 m3 m5 m
Serie LECP6
21

PCe Unità di conversione
q Software di impostazione del controllore)
w Cavo di comunicazione r Cavo USB
(Tipo A-miniB)
Codici di ordinazione
Contenuto
q Software controllore (CD-ROM)
w Cavo di comunicazione(Cavo tra il controllore e l'unità di conversione)
e Unità di conversione
r Cavo USB(Cavo tra il PC e l'unità di conversione)
Requisiti hardware
Macchina compatibile PC/AT installata con Windows XP e dotata di porte USB1.1 o USB2.0.
Esempio di schermata
Esempio di schermata "Easy mode" Esempio di schermata "Normal mode"
LEC W1Kit di impostazione del controllore
(Disponibile in giapponese e in inglese).
∗ Windows® e Windows XP® sono marchi registrati di Microsoft Corporation.
Facilità di utilizzo e semplicità delle impostazioni con "Easy mode"� Consente di impostare e visualizzare i punti
di posizionamento dell'unità rotante quali la posizione, la velocità, la forza, ecc.
� È possibile eseguire sulla stessa pagina l'impostazione dei punti di posizionamento e il test della trasmissione.
� Può essere usato per il movimento manuale e il movimento a velocità costante.
Impostazione standard� È possibile impostare nel dettaglio i punti di posizionamento.� È possibile monitorare i segnali e lo stato del terminale.� È possibile impostare i parametri.� È possibile eseguire il movimento manuale e il movimento a velocità
costante, il ritorno alla posizione di 0 asse e verificare il funzionamento corretto dei segnali I/O.
Serie LECKit controllore/LEC-W1
22

Codici di ordinazione
Specifiche
LEC T1 3 J GInterruttore di abilitazione
SAssenteDotato di interruttore di abilitazione
—Terminale di programmazione
Lunghezza cavo3 3 m
Pulsante di emergenzaG Pulsante di emergenza
LinguaKitE
GiapponeseInglese
Elemento
Vacuostato
Lunghezza cavo (m)
Grado di protezione
Campo temperatura d'esercizio (°C)
Campo umidità d'esercizio (%)
Peso (g)
Pulsante di emergenza, interruttore di abilitazione (opzione)
3
IP64 (eccetto connettore)
5 a 50 (senza condensazione)
35 a 85
350 (eccetto cavo)
DescrizioneFunzioni standardVisualizzazione in caratteri inglesi/cinesi.
Opzioni
∗ Interruttore interbloccato per funzione prova e movimento manuale
Interruttore di abilitazione(Su richiesta)
Pulsante di emergenza
Easy mode
Note) Conformità CELa conformità EMC del terminale di programmazione è stata provata con il controllore con motore passo-passo (servo/24 VDC) della serie LECP6 e l'attuatore applicabile.
RoHS
Serie LECTerminale di programmazione/LEC-T1
Funzione
Dati di movimentazione
Jog (manuale)
Test
Display
Allarme
Impostazione TB
Descrizione
isualizzazione asse e n. dati di movimentazione
da posizione, velocità, forza.
movimentazione e selezione dell'elemento per funzione di monitoraggio
MenùDatiDisplayJog (manuale)TestAllarmeImpostazione TB
Jog (manuale)
Movimento manuale
Test
AllarmeVisualizzazione allarme attivo
Impostazione TB
Semplice/normaleElemento impostato
DatiN. dati di movimentazioneImpostazione di due elementi selezionati sotto(Posizione, velocità, forza, accelerazione, decelerazione)
DisplayVisualizzazione n. passoVisualizzazione di due elementi selezionati sotto(Posizione, velocità, forza)
Schema operazioni menù
23

185
1024
25 22.5
34.5w
q
r
t
y e
iu
Funzione
Dati di movimentazione
Parametro
Test
Display
Allarme
File
Impostazione TB
Ricollegamento
Descrizione
a velocità costante
(specificare una massimo di 5 dati di movimentazione e azionare).
(Reset allarme)
e i parametri del controllore in uso per la comunicazione (è
insieme di dati di movimentazione e parametri definiti in un file unico).
di programmazione sul controllore in uso per la comunicazione.
MenùDati di movimentazioneParametro
TestAllarmeFileImpostazione TBRicollegamento
Dati di movimentazioneN. dati di movimentazione
PosizioneAccelerazioneDecelerazioneForza di spinta
Forza di posizionamento
In posizione
ParametroBase
Display DRV
N. di passoN. ultimo passo
Active ALM
Reset allarme
Visualizzazione registro ALM
DisplayAzionamento
Terminale di uscita Terminale di ingresso
Test
Test drive
Allarme
Impostazione TB
Retroilluminazione
Bip
Password
Ricollegamento
Impostazione base
Impostazione ORIG
Segnale in uscita
Segnale in ingresso
Terminale di uscita
Terminale di ingresso
File
Schema operazioni menù
Dimensioni
N.
1
2
3
4
5
6
7
8
Display
Anello
Pulsante di emergenza
Protezione pulsante di emergenza
Interruttore di abilitazione(Su richiesta)
Interruttore a chiave
Cavo
Connettore
Display a cristalli liquidi (con retroilluminazione)
Interruttore per ogni ingresso
Blocca e arresta il funzionamento quando questo interruttore viene premuto.
FunzioneDescrizione
Previene la messa in funzione indesiderata (funzionamento inatteso) della funzione di prova movimento manuale. Non sono coperte altre funzioni quali la modifica dati.
Terminale di programmazione Serie LEC
Normal mode
24

Lithuania +370 5 2308118 www.smclt.lt [email protected] +31 (0)205318888 www.smcpneumatics.nl [email protected] +47 67129020 www.smc-norge.no [email protected] +48 (0)222119616 www.smc.pl [email protected] +351 226166570 www.smc.eu [email protected] +40 213205111 www.smcromania.ro [email protected] +7 8127185445 www.smc-pneumatik.ru [email protected] +421 (0)413213212 www.smc.sk [email protected] +386 (0)73885412 www.smc.si [email protected] +34 945184100 www.smc.eu [email protected] +46 (0)86031200 www.smc.nu [email protected] +41 (0)523963131 www.smc.ch [email protected] +90 212 489 0 440 www.smcpnomatik.com.tr [email protected] UK +44 (0)845 121 5122 www.smcpneumatics.co.uk [email protected]
Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.SMC CORPORATION Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: 03-5207-8249 FAX: 03-5298-5362
1st printing PS printing PS 00 Printed in Spain
Austria +43 (0)2262622800 www.smc.at [email protected] +32 (0)33551464 www.smcpneumatics.be [email protected] +359 (0)2807670 www.smc.bg [email protected] Croatia +385 (0)13707288 www.smc.hr [email protected] Republic +420 541424611 www.smc.cz [email protected] Denmark +45 70252900 www.smcdk.com [email protected] Estonia +372 6510370 www.smcpneumatics.ee [email protected] +358 207513513 www.smc.fi [email protected] +33 (0)164761000 www.smc-france.fr [email protected] +49 (0)61034020 www.smc-pneumatik.de [email protected] +30 210 2717265 www.smchellas.gr [email protected] +36 23511390 www.smc.hu [email protected] +353 (0)14039000 www.smcpneumatics.ie [email protected] +39 0292711 www.smcitalia.it [email protected] +371 67817700 www.smclv.lv [email protected]
SMC Corporation (Europe)
Istruzioni di sicurezza Assicurarsi di leggere le "Precauzioni per l'uso dei prodotti di SMC" (M-E03-3) prima dell'uso.
1. La compatibilità del prodotto è responsabilità del progettista dell'impianto o di chi ne definisce le specifiche tecniche.Dato che il presente prodotto viene usato in diverse condizioni operative, la sua compatibilità con un determinato impianto deve essere decisa dalla persona che progetta l'impianto o ne decide le caratteristiche tecniche in base ai risultati delle analisi e prove necessarie. La responsabilità relativa alle prestazioni e alla sicurezza dell'impianto è del progettista che ha stabilito la compatibilità con il prodotto. La persona addetta dovrà controllare costantemente tutte le specifiche del prodotto, facendo riferimento ai dati del catalogo più aggiornato con l'obiettivo di prevedere qualsiasi possibile guasto dell'impianto al momento della configurazione dello stesso.
2. Solo personale qualificato deve azionare i macchinari e gli impianti.Il presente prodotto può essere pericoloso se utilizzato in modo scorretto. Il montaggio, il funzionamento e la manutenzione delle macchine o dell'impianto che comprendono il nostro prodotto devono essere effettuati da un operatore esperto e specificamente istruito.
3. Non effettuare la manutenzione o cercare di rimuovere il prodotto e le macchine/impianti se non dopo aver verificato le condizioni di sicurezza.1. L'ispezione e la manutenzione della macchina/impianto possono essere effettuate
solo ad avvenuta conferma dell'attivazione delle posizioni di blocco di sicurezza specificamente previste.
2. Al momento di rimuovere il prodotto, confermare che le misure di sicurezza di cui sopra siano implementate e che l'alimentazione proveniente da qualsiasi sorgente sia interrotta. Leggere attentamente e comprendere le precauzioni specifiche del prodotto di tutti i prodotti relativi.
3. Prima di riavviare la macchina/impianto, prendere le dovute precauzioni per evitare funzionamenti imprevisti o malfunzionamenti.
4. Contattare prima SMC e tenere particolarmente in considerazione le misure di sicurezza se il prodotto viene usato in una delle seguenti condizioni. 1. Condizioni o ambienti che non rientrano nelle specifiche date, l'uso all'aperto o in
luoghi esposti alla luce diretta del sole.2. Impiego nei seguenti settori: nucleare, ferroviario, aviazione, spaziale, dei
trasporti marittimi, degli autotrasporti, militare, dei trattamenti medici, alimentare, della combustione e delle attività ricreative. Oppure impianti a contatto con alimenti, circuiti di blocco di emergenza, applicazioni su presse, sistemi di sicurezza o altre applicazioni inadatte alle specifiche standard descritte nel catalogo del prodotto.
3. Applicazioni che potrebbero avere effetti negativi su persone, cose o animali, e che richiedano pertanto analisi speciali sulla sicurezza.
4. Utilizzo in un circuito di sincronizzazione che richiede un doppio sistema di sincronizzazione per evitare possibili guasti mediante una funzione di protezione meccanica e controlli periodici per confermare il funzionamento corretto.
Attenzione
Limitazione di garanzia ed esonero di responsabilità/Requisiti di conformità Il prodotto usato è soggetto alla seguente "Limitazione di garanzia ed esonero di responsabilità" e "Requisiti di conformità".
1. Questo prodotto è stato progettato per l'uso nell'industria manifatturiera.Il prodotto qui descritto è previsto basicamente per l'uso pacifico nell'industria manifatturiera. Se è previsto l'utilizzo del prodotto in altri tipi di industrie, consultare prima SMC per informarsi sulle specifiche tecniche o all'occorrenza stipulare un contratto. Per qualsiasi dubbio, contattare la filiale di vendita più vicina.
Precauzione
Limitazione di garanzia ed esonero di responsabilità1. Il periodo di garanzia del prodotto è di 1 anno in servizio o 1 anno e mezzo dalla
consegna del prodotto.∗2)
Inoltre, il prodotto dispone di una determinata durabilità, distanza di funzionamento o parti di ricambio. Consultare la filiale di vendita più vicina.
2. Per qualsiasi guasto o danno subito durante il periodo di garanzia di nostra responsabilità, sarà effettuata la sostituzione del prodotto o dei pezzi necessari. Questa limitazione di garanzia si applica solo al nostro prodotto in modo indipen-dente e non ad altri danni che si sono verificati a conseguenza del guasto del prodotto.
3. Prima di utilizzare i prodotti di SMC, leggere e comprendere i termini della garanzia e gli esoneri di responsabilità indicati nel catalogo del prodotto specifico.
∗2) Le ventose per vuoto sono escluse da questa garanzia di 1 anno.Una ventosa per vuoto è un pezzo consumabile pertanto è soggetto a garanzia per un anno a partire dalla consegna. Inoltre, anche durante il periodo di garanzia, l'usura del prodotto dovuta all'uso della ventosa per vuoto o il guasto dovuto al deterioramento del materiale in plastica non sono coperti dalla garanzia limitata.
Requisiti di conformità1. È assolutamente vietato l'uso dei prodotti di SMC negli impianti di produzione per
la fabbricazione di armi di distruzione di massa o altro tipo di armi.
2. Le esportazioni dei prodotti o della tecnologia di SMC da un paese a un altro sono regolate dalle relative leggi e norme sulla sicurezza dei paesi impegnati nella transazione. Prima di spedire un prodotto di SMC in un altro paese, assicurarsi di conoscere e osservare tutte le norme locali che regolano l'esportazione in questione.
Le istruzioni di sicurezza servono per prevenire situazioni pericolose e/o danni alle apparecchiature. Il grado di pericolosità è indicato dalle diciture di"Precauzione", "Attenzione" o"Pericolo.“ Rappresentano avvisi importanti relativi alla sicurezza e devono essere seguiti assieme agli standard internazionali (ISO/IEC)∗1)e altri regolamenti sulla sicurezza.
∗1) ISO 4414: Pneumatica – Regole generali relative ai sistemi pneumatici. ISO 4413: Idraulica – Regole generali relative ai sistemi. IEC 60204-1: Sicurezza dei macchinari – Apparecchiature elettriche delle macchine. (Parte 1: norme generali) ISO 10218-1: Sicurezza dei robot industriali di manipolazione. ecc.
Precauzione indica un pericolo con un livello basso di rischio che, se non viene evitato, potrebbe provocare lesioni lievi o medie.
Attenzione indica un pericolo con un livello medio di rischio che, se non viene evitato, potrebbe provocare lesioni gravi o la morte.
Precauzione:
Attenzione:
Pericolo :Pericolo indica un pericolo con un livello alto di rischio che, se non viene evitato, provocherà lesioni gravi o la morte.
Istruzioni di sicurezza