LE COMPONENTI ELETTRONICHE PER LE PROTESI
33
LE COMPONENTI ELETTRONICHE PER LE PROTESI Autore: T.O. R. Pellegrini RESPONSABILE Reparto Protesi ITOP SpA Officine Ortopediche Via Prenestina Nuova, 163 Palestrina (RM)
Transcript of LE COMPONENTI ELETTRONICHE PER LE PROTESI

LE COMPONENTI ELETTRONICHE PER LE PROTESI
Autore: T.O. R. Pellegrini RESPONSABILE Reparto Protesi
ITOP SpA Officine OrtopedicheVia Prenestina Nuova, 163
Palestrina (RM)

LA BIONICA NELLE SOLUZIONI PROTESICHELA BIONICA NELLE SOLUZIONI PROTESICHE
Propriocezione Sistema Nervoso Centrale Movimento
RILEVARE ANALIZZARE AGIRE• Riduce lo sforzo (mentale e fisico )
• Riduce il pericolo di cadute migliorando la stabilità e l‘equilibrio
• Riduce l‘uso preponderante dell‘ arto sano stimolando il controllo volontario dell‘ arto protesico

• Tecnologia - Accelerometro
Un accelerometro è un dispositivo elettromeccanico che misura le forze di accelerazione lineari nelle tre direzioni dello spazio.
I sensori di accelerazione vengono usati per:
• sistemi di apertura airbag
• computer portatili• smartphone
INTRODUZIONEINTRODUZIONE

Il giroscopio è un componente elettromeccanico che misura le forze di accelerazione angolari attorno ad uno o più assi di rotazione.
INTRODUZIONEINTRODUZIONE
• Tecnologia - Giroscopi
I giroscopi vengono comunemente usati in:
• Locomotori segway;
• Sensori di pilotaggio automatico degli aerei
• Sistema di orientamento orbitale della stazione spaziale ISS (11 giroscopi per mantenere l'orbita rispetto al sole).

LA BIONICA NELLE SOLUZIONI LA BIONICA NELLE SOLUZIONI PROTESICHEPROTESICHE
RHEO KNEE
OTTOBOCKOSSUR
POWER KNEE
PROPRIO FOOT
GENIUM
C-LEG

GINOCCHIOGINOCCHIO IDRAULICO A CONTROLLO IDRAULICO A CONTROLLO
A CONTROLLO ELETTRONICO CA CONTROLLO ELETTRONICO C--LEGLEG
Grado di mobilità 3+4
SPECIFICHE TECNICHE• Ginocchio monocentrico
• Struttura testata fino a 125Kg
• Flessione del ginocchio consentita: 125 gradi
• Materiale della strutturacarbonio
• Peso: 1,143Kg
• Garanzia limitata 60 mesi
• Assistenza dopo 24 mesi
• Durata della batteria: 40 – 50 ore
• Tempo di ricarica 5 ore
• Grado mobilità: 3 e 4
• Frequenza di misurazione: ogni 0,02 secondi

GINOCCHIOGINOCCHIO IDRAULICO A CONTROLLO IDRAULICO A CONTROLLO ELETTRONICO CELETTRONICO C--LEGLEG
Tecnologia dei sensori
Accelerometro angolare in corrispondenza del centro articolare ed estensimetri all’interno del tubo di collegamento orientati lungo l’asse verticale e disposti in direzione antero-posteriore
Tali sensori consentono di calcolare il momento malleolare istante per istante e, a partire da questo, l’elettronica di comando è in grado di desumere in quale fase del ciclo del passo si trova l’utilizzatore

GINOCCHIOGINOCCHIO IDRAULICO A CONTROLLO IDRAULICO A CONTROLLO ELETTRONICO CELETTRONICO C--LEGLEG
Tecnologia dell’attuatore: pistone idraulico
• Pistone idraulico
• Elettrovalvole controllate da microprocessore
• Resistenza variabile in base alle condizioni di carico statiche e dinamiche
• Giusto equilibrio fra senso di sicurezza e dinamicità del passo

GINOCCHIOGINOCCHIO IDRAULICO A CONTROLLO IDRAULICO A CONTROLLO ELETTRONICO CELETTRONICO C--LEGLEG

GINOCCHIOGINOCCHIO MAGNETOMAGNETORHEORHEOLOGICO A LOGICO A CONTROLLO ELETTRONICO RHEOCONTROLLO ELETTRONICO RHEO--KNEEKNEE
SPECIFICHE TECNICHE• Ginocchio monocentrico
• Struttura testata fino a 125Kg
• Flessione del ginocchio consentita:
120 gradi
• Peso: 1,563Kg
• Garanzia limitata 60 mesi
• Assistenza dopo 24 mesi
• Durata della batteria: 40 – 50 ore
• Tempo di ricarica 5 ore
• Grado mobilità: K3 e K4
• Frequenza di misurazione: ogni 0,01 secondi
Grado di mobilità K3+K4

GINOCCHIOGINOCCHIO MAGNETOMAGNETORHEORHEOLOGICO A LOGICO A CONTROLLO ELETTRONICO RHEOCONTROLLO ELETTRONICO RHEO--KNEEKNEE
ACCELEROMETRO E GIROSCOPIO: Rilevano la posizione spaziale e le accelerazioni cui è sottoposto il ginocchio istante per istante.
CELLE DI CARICO: Misurano l’entità delle forze puntuali di reazione piede-terreno.
MICROPROCESSORE: Integra le informazioni provenienti dall’accelerometro, dal giroscopio e dalle celle di carico per individuare la fase del passo in cui si trova l’utilizzatore ed elabora la risposta ottimale per l’esecuzione della sequenza motoria successiva.
Tecnologia dei sensori

GINOCCHIOGINOCCHIO MAGNETOMAGNETORHEORHEOLOGICO A LOGICO A CONTROLLO ELETTRONICO RHEOCONTROLLO ELETTRONICO RHEO--KNEEKNEE
Tecnologia dell’attuatore: lamine rotanti con interposto fluido magneto-reologico
La resistenza opposta dal fluido magneto-reologico varia, alla velocità della luce, a seconda della fase del passo nella quale l’utente si trova ed è in grado di adattarsi alle sue caratteristiche della deambulazione.

GINOCCHIOGINOCCHIO MAGNETOMAGNETORHEORHEOLOGICO A LOGICO A CONTROLLO ELETTRONICO RHEOCONTROLLO ELETTRONICO RHEO--KNEEKNEE

C-LEG OTTO BOCK RHEO-KNEE OSSUR
GINOCCHIO A CONTROLLO ELETRONICOC-LEG & RHEO-KNEE
• Possibilita’ di deambulazione a diverse velocita’
• Buon controllo volontario• Capacita’ cognitive• Motivazione di usufruire delle
varie potenzialita’ funzionali del ginocchio
• Limite di peso 125 kg.• Non in prima protesizzazione• Anche per amputati bilaterali• Per tutti i livelli di
amputazione transfemorale da moderati ad attivi.
PROFILO UTENTEPROFILO UTENTE

ARTICOLAZIONE DI CAVIGLIA ARTICOLAZIONE DI CAVIGLIA ELETTRONICA PROPRIOELETTRONICA PROPRIO--FOOTFOOT
Caratteristiche tecniche:
• Limite di peso del paziente: MAX 116 kg-MIN 45 Kg;
• Struttura in alluminio;
• Peso del dispositivo 995 g;
• Ingombro lungo l’asse: 180 mm;
• Peso della batteria: 240 g;
• Batteria agli ioni di litio con autonomia fino a 32 ore di uso continuativo;
• Tempo di ricarica: 3-4 ore;
• Livello attività: k2 - k3 (non adatto per la corsa)• Dorsiflessione in preparazione all'appoggio, nelle
salite e durante la discesa delle scale;• Possibile regolare il tacco elettronicamente da 0 a 5
cm;Grado di mobilità K2+K3

• Riconosce l‘ambiente
• Rileva gradi della salita/discesa, scale
• Rileva contatto iniziale, fase statica, stacco dell‘avampiede
SENSORI ED ATTUATORISENSORI ED ATTUATORI
• Riproduce il ciclo del passo
• Consente la flessione dorsale e plantare
•Elabora le informazioni con una frequenza di 1600 Hz (cicli/s)
1. Accelerometro:
2. Motore elettrico a vite senza fine:
3. Microprocessore:

PROPRIO FOOT
• Possibile regolare il tacco elettronicamente da 0 a 5 cm;
• La caviglia si adatta alla salita e alla discesa;
• Dorsiflessione in preparazione all’appoggio, in salita e discesa delle scale;
• Flessione plantare in relax da seduto;
• Dorsiflessione che facilita l’alzata dalla sedia;
• Massima flessione plantare durante la distensione supina.
FUNZIONI:
CAVIGLIA A CONTROLLO ELETTRONICOCAVIGLIA A CONTROLLO ELETTRONICO

ARTICOLAZIONE DI CAVIGLIA ARTICOLAZIONE DI CAVIGLIA ELETTRONICA PROPRIOELETTRONICA PROPRIO--FOOTFOOT

Grado di mobilità: 3+4
RHEO KNEE PROPRIO FOOT
SYMBIONIC LEG

FUNZIONI RHEO KNEE• Flessione uniforme e senza sforzo da
parte dell’utente
• Risposta proporzionale al carico
• Adattamento continuo
FUNZIONI PROPRIO FOOT• Riduzione della durata della fase di swing
• GRF controllata ad ogni passo
• Regolazione dell’altezza del tacco
SYMBIONICSYMBIONIC LEGLEG

Grado di mobilità 3+4
SYMBIONIC LEG
- Interazione funzionale ginocchio-caviglia
-Vantaggi combinati di ginocchio e caviglia
elettronica
-Possibilità di deambulare con un passo
variabile in lunghezza
-Deambulazione più naturale e senza
compensi posturali
- Alimentazione condivisa
FUNZIONI SYMBIONIC LEG

SYMBIONIC LEG

GINOCCHIOGINOCCHIO ATTIVO A CONTROLLO ATTIVO A CONTROLLO ELETTRONICO GENIUMELETTRONICO GENIUM
• Deambulazione migliorata con flessione nella fase statica;• Controllo migliorato della fase dinamica con regolazione
dell'angolo di flessione nominale in gradi;• Adattamento a diverse velocità di deambulazione su un'area
molto estesa;• Adattamento a parametri variabili (ad es. peso della scarpa);• Tubo modulare dotato di sensori;• Calcolo delle informazioni in tempo reale per l'innesco della
fase dinamica;• Campo di applicazione più ampio (ADL: Activities of Day Life);• Maggior comfort per il paziente;• Minore complessità di regolazione per il tecnico; • Gruppo di potenziali utenti più ampio.
Grado di mobilità 3+4

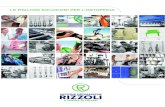
SENSORISENSORI
Momento del malleolo /sensore carico assiale
Giroscopio
Accelerometro a 2 assi
Sensore momento del ginocchio
Accumulatore

SENSORISENSORI
I sensori del GENIUM sono in grado di misurare:
• Angolo di flessione del ginocchio;
• Velocità di flessione del ginocchio;
• Momento del malleolo;
• Carico assiale;
• Momento del ginocchio;
• Inclinazione della gamba;
•Accelerazione lineare (2 direzioni);

GINOCCHIOGINOCCHIO ATTIVO A CONTROLLO ATTIVO A CONTROLLO ELETTRONICO GENIUMELETTRONICO GENIUM

GINOCCHIOGINOCCHIO ATTIVO A CONTROLLO ATTIVO A CONTROLLO ELETTRONICO POWERELETTRONICO POWER--KNEEKNEE
POWER KNEE è la prima articolazione protesica motorizzata di ginocchio, capace di imitare la contrazione muscolare concentrica, tipica della muscolatura che afferisce al ginocchio.
POWER KNEE è il primo ginocchio protesico in grado di:
• Supportare l’utente nell’azione di alzarsi da una posizione seduta;• Consentire il recupero della dinamica del passo;• Consentire la salita di rampe a passo alternato;• Consentire la salita di scale a passo alternato;• Obiettivo: diminuire l’impatto della protesizzazione riducendo il carico;• Diminuire il rischio di sviluppo di patologie concomitanti;• Ridurre il rischio di inciampo. Grado di mobilità K3+K4

Sensori:
Microprocessore:
Motore in correntecontinua:
Rilevano l’attività dell’utente
Il sistema di intelligenza artificiale, sulla base dei segnali acquisiti, elabora la risposta più opportuna da mettere in atto
Eseguono l’azione calcolata dal microprocessore
BIONICA DEL POWER KNEEBIONICA DEL POWER KNEE
PERCEZIONE
ELABORAZIONE
AZIONE

• Giroscopi
• Accelerometri
• Misuratori di coppia
• Sensori di contatto con il suolo
• Sensori di temperatura
PERCEZIONE
ELABORAZIONE
SENSORISENSORI
AZIONE

• Microprocessore integrato
• Elabora le informazioni provenienti dai sensori
• Applica nell’elaborazione un algoritmo di intelligenza artificiale
• E’ in grado di “capire” qual èl’azione che l’utente sta compiendo e calcolare la risposta più opportuna per l’esecuzione dell’azione successiva
• Invia le istruzioni al motore
MICROPROCESSORE DI CONTROLLOMICROPROCESSORE DI CONTROLLO
PERCEZIONE
ELABORAZIONE
AZIONE

• Motore in corrente continua• Rapporti con frizione
armonica a variatore automatico
• Coppia massima pari a 96 NM
• Le azioni eseguite sono coerenti con le istruzioni elaborate dal microprocessore
ATTUATORIATTUATORI
PERCEZIONE
ELABORAZIONE
AZIONE

GINOCCHIOGINOCCHIO ATTIVO A CONTROLLO ATTIVO A CONTROLLO ELETTRONICO POWERELETTRONICO POWER--KNEEKNEE

ROBERTO PELLEGRINI
ITOP SpA Officine ITOP SpA Officine OrtopedicheOrtopedichePalestrinaPalestrina, Roma, Roma
http://www.itop.it