Progetto di un sistema di georeferenziazione e visualizzazione di flussi video
Prof. L. Surace 1
La georeferenziazione delle informazioni territoriali in Italia
Luciano Surace
1. – Premessa
La cartografia è stata una delle prime manifestazioni di civiltà. Essa si è evoluta da forme primitive di disegno fino a carte accuratissime e raffinate, dapprima in formato analogico e oggi in forma digitale. Le caratteristiche fondamentali delle carte, così come dei sistemi informativi geografici e territoriali, sono il contenuto, l’attualità e la precisione. Il contenuto dipende in larga misura dalla scala e l’attualità dalla data del rilevamento, mentre la precisione, o meglio l’accuratezza, ci dice quanto bene sono georeferenziati o georeferenziabili i particolari in un predefinito sistema di riferimento. La variegata gamma di possibili approcci al problema della acquisizione e della gestione delle informazioni territoriali sconsiglierebbe il tentativo di definire in forma esaustiva cosa debba intendersi con il termine georeferenziazione, uno dei tanti neologismi con cui l’era dell’informazione globale ci costringe a convivere. Una possibile definizione che privilegia l’approccio topografico e metrologico, oggettivamente prevalente, consiste nell’intendere come georeferenziazione delle informazioni territoriali quel complesso di attività che consentono di stabilire una serie di corrispondenze tra: • un’informazione territoriale, intesa come categoria informativa, inserita o da inserire in un
sistema informativo; • l’oggetto descritto dall’informazione; • l’epoca del rilevamento del fenomeno; • la stima della posizione spaziale che compete all’oggetto, definita da una sequenza di
coordinate di affidabilità nota, in un assegnato sistema di riferimento. Di quest’ultimo punto è necessario esaminare in dettaglio ed in profondità gli aspetti noti e meno noti, per consentire agli utenti di informazioni georeferenziate di muoversi senza ambiguità ed incertezza tra coordinate e sistemi di riferimento. Nel passato l’interesse verso i sistemi di riferimento in cui era inquadrata la cartografia e verso le coordinate presenti sulle carte era limitato agli scienziati ed ai costruttori di carte, mentre l’utente era interessato solo al posizionamento relativo in un ambito locale, spesso l’area contenuta nel singolo elemento cartografico. Un classico esempio di questo approccio sono le rappresentazioni policentriche del Catasto italiano e della Carta d’Italia alla scala 1:100000. D’altra parte l’attenzione all’utente nel fornire strumenti per una georeferenziazione “assoluta” era praticamente nulla: le coordinate avevano in effetti scarso interesse e, in epoca di cartografia grafica, erano solo un mezzo per giungere all’impianto della cartografia, non un’informazione di valore autonomo da sfruttare da parte dell’utilizzatore. Le carte tradizionali sono storicamente usate da una vasta gamma di utenti, dalle organizzazioni militari ai servizi di polizia, dalla protezione civile agli enti che gestiscono le risorse naturali e artificiali, da chi si occupa di sviluppo e di pianificazione fino ai cacciatori ed ai pescatori, dagli alpinisti ai naviganti ed agli escursionisti e da tante altre categorie di persone che richiedono continuamente accurate informazioni territoriali e geografiche. Oggi, con l’aumento vertiginoso delle informazioni che vengono raccolte e rese disponibili in svariate forme di banche dati, il ruolo prevedibile dei sistemi informativi geografici è imponente. Tutti coloro che si occupano di tali sistemi evidenziano sistematicamente la necessità di una base geometrica omogenea, estesa a tutto il territorio nazionale. L’omogeneità richiesta si riferisce ovviamente in primo luogo all’adozione di un unico sistema di
Prof. L. Surace 2
coordinate, cioè di un unico linguaggio comune nella localizzazione e nel posizionamento delle informazioni territoriali. Un efficace ed esplicito sistema di riferimento, unitamente alla scelta della rappresentazione cartografica associata e delle sue condizioni di applicazione, sono dunque strumenti indispensabili per un appropriato e corretto uso delle informazioni territoriali. Accade oggi che tanti utenti di carte non conoscitori di coordinate diventino utenti di coordinate non conoscitori dei sistemi di riferimento. D’altra parte i processi di globalizzazione nel trattamento delle informazioni esigono l’adozione di un unico sistema di riferimento e le metodologie di acquisizione delle informazioni di posizione lo consentono. Con la crescita delle applicazioni riferite ad osservazioni satellitari, il sistema di riferimento globale assume un’importanza sempre maggiore sia nel settore della navigazione terrestre, marittima ed aerea, che nel campo cartografico e geodetico. Soprattutto una sua corretta realizzazione consente di poter mettere in relazione dati riferiti a sistemi di riferimento locali riducendoli tutti ad un sistema comune: sostituendo tanti sistemi di riferimento locali con uno globale è possibile far uso in maniera estremamente semplificata sia di prodotti cartografici che geodetici. L’avvento della cartografia numerica e del posizionamento satellitare impongono dunque una revisione dei sistemi di riferimento in uso e la loro sostituzione con un sistema appropriato, completo e di immediata utilizzazione anche da parte di chi non abbia approfondite conoscenze geodetiche. Tra i problemi emergenti nel settore delle scienze geomatiche, uno di sicura rilevanza strategica è quello della standardizzazione del sistema di riferimento geodetico. Con la dirompente diffusione dei GIS ed alla luce del consolidamento delle tecniche di posizionamento GPS e della progressiva, costante integrazione tra fotogrammetria e telerilevamento da satellite, si pone quotidianamente il problema di correlare efficacemente informazioni geografiche, per definizione georeferenziate. Oggi la quasi totalità dei rilevamenti avviene con metodi satellitari nel sistema WGS84. La possibilità di una diretta utilizzazione dei dati di posizione forniti dal GPS rende tutti i prodotti di maggiore valore, perché immediatamente utilizzabili in ogni fase del rilevamento, sia statico che dinamico. Continuando ad operare nei sistemi di riferimento locali, le coordinate rilevate da un ricevitore GPS non possono infatti essere direttamente impiegate. Gli utenti di informazioni territoriali reclamano invece un sistema di coordinate immediatamente utilizzabile che consenta di correlare le informazioni e di facilitare le comunicazioni. E’ tempo di ridurre tutti i dati ad un sistema comune che superi anche le discontinuità dei lavori soprannazionali. Il GPS riduce drasticamente le difficoltà operative delle determinazioni di posizione e lascia più spazio al trattamento rigoroso delle misure, quale strumento per effettuare un obbiettivo controllo di qualità dei rilevamenti: oggi, elaborare secondo definite regole matematiche insiemi di misure esuberanti rispetto a quelle strettamente necessarie per risolvere geometricamente i problemi è un percorso non più eludibile. Se l’obbiettività dei controlli di qualità risulta fondamentale nel momento in cui i risultati vanno a far parte di banche dati pubbliche, un controllo di qualità obbiettivo è necessario in qualunque rilevamento, indipendentemente dalle specifiche di accuratezza prescritte. Purtroppo il trattamento rigoroso dei dati viene ancora spesso associato ai rilevamenti di alta precisione: nulla di più errato! In un rilievo di bassa precisione, ad es. 1 m, è importante assicurarsi che non esistano errori di 10 m, così come in un rilievo millimetrico non si vogliono errori di 1 cm. Sul solco di innovazione scavato dal GPS, altri sensori stanno trovando agevole diffusione,

Prof. L. Surace 3
quali sistemi inerziali e laser a scansione terrestri ed aerei, mentre l’avvento delle immagini satellitari ad alta risoluzione, la transizione dalla fotogrammetria analitica a quella digitale e la fotogrammetria “diretta” completano il panorama dei fattori di sviluppo che stanno condizionando processi e prodotti degli ultimi anni. In parecchi lustri di prove “sul campo”, sia nel settore operativo che in quello della formazione, si è riscontrata una significativa confusione, sia concettuale che formale, nell’uso appropriato delle “coordinate”. Tale “confusione interna” è in parte dovuta alla coesistenza ed alla stratificazione di molteplici sistemi di riferimento; si assiste però, con l’avvento dei GIS e con l’affacciarsi di nuove figure professionali di brillante estrazione informatica, ad una proliferazione di soluzioni software di tipo miracolistico, capaci di calcolare tutto da tutto, in una sorta di mercato delle coordinate. Ciò genera disorientamento e “confusione esterna”, che non giovano né sul piano culturale né su quello professionale. Fin tanto che il rilevamento riguarda ambiti di limitata estensione (dell’ordine delle migliaia di km2), la georeferenziazione continua ed omogenea delle informazioni non presenta formalmente alcun problema. Ben diversa è la situazione quando le applicazioni devono estendersi per coprire tutto il territorio nazionale o addirittura adeguarsi a potenziali utilizzazioni soprannazionali. E’ in questo caso necessaria e urgente una riflessione sui problemi della standardizzazione del sistema di riferimento, in una visione unitaria che prescinda dalle differenti sorgenti di dati e tenga conto della loro comune destinazione. Ai sistemi di riferimento compete oggi non solo il ruolo storico di inquadramento geometrico e geofisico, ma soprattutto quello di strumento fondamentale di correlazione delle informazioni geografiche. L’Italia è peraltro uno dei paesi più ricchi di sistemi di coordinate. Fattori contingenti hanno sicuramente determinato questo stato di cose, ma anche la mancanza di una visione globale ritenuta a suo tempo non essenziale. La mancanza di standard nelle convenzioni può portare ad errori ed equivoci ad alto rischio e la mancanza di omogeneità nei sistemi di riferimento in uso può indurre ad una visione catastrofica della situazione cartografica nazionale, ma la confusione non è una caratteristica solo italiana: le considerazioni delle forze armate USA dopo la prima guerra del Golfo hanno evidenziato che c’è stata una confusione totale su sistemi di riferimento, ellissoidi e reticolati. La lezione principale è stata che bisogna sapere ciò che si fa e che non si può pretendere che ogni utente sia un geodeta. L’ellissoide di Everest (1830) è un classico della confusione: definito originariamente in piedi da George Everest per i rilievi dell’India, successivamente trasformato in metri per mezzo di differenti fattori di conversione e quindi “pseudoclonato”, dà luogo a differenti coordinate per gli stessi punti in sistemi di riferimento che formalmente appaiono gli stessi (stesso ellissoide e stesso orientamento), salvo scoprire, approfondendo l’analisi di documentazione non sempre disponibile, che le dimensioni dell’ellissoide di riferimento, univocamente definite all’origine, sono diverse in funzione di chi ha operato il cambiamento di unità di misura. Altrettanta confusione è riscontrabile tra i sistemi cartografici. Per valutare la pericolosità di tale confusione è sufficiente comprendere che la potenzialità di un sistema informativo è basata soprattutto sulla possibilità di correlare informazioni di vario tipo secondo logiche flessibili e adattabili alle specifiche esigenze dell’utente. La particolarità dei sistemi informativi geografici consiste nel fatto che le informazioni, oltre ad avere una definizione quantitativa e/o qualitativa intrinseca, sono anche collocate spazialmente, cioè definite con affidabilità nota nella loro posizione spaziale rispetto ad un sistema di riferimento
Prof. L. Surace 4
assegnato. È allora intuitivo che uno dei più immediati e potenti strumenti di correlazione tra le informazioni è certamente costituito dalle coordinate che a ciascuna informazione vengono assegnate per definirne la posizione e attraverso cui si possono determinare relazioni di vicinanza, influenza, conflitto, appartenenza e così via. Tale potere di correlazione è pienamente sfruttabile se, prima dell’immissione delle informazioni, è stato correttamente definito il sistema di riferimento. Solo a tali condizioni la correlabilità spaziale tra dati qualitativi potrà diventare strumento efficace di ricerca ed interrogazione; e solo a tali condizioni si potrà sfruttare compiutamente l’ingente patrimonio di dati territoriali già acquisito e consegnato dall’opera dei rilevatori agli archivi cartacei (cartografici e alfanumerici). Infatti, comunque si articoli l’interazione tra utente e sistema informativo, essa non può non partire dalle domande elementari del dove (cioè in corrispondenza di quali coordinate si trovi un elemento informativo presente nel sistema o vada inserita una nuova informazione) e/o del cosa (cioè quali e quanti elementi informativi ricadono totalmente o parzialmente in una data area geografica definita da una sequenza di coordinate). Il problema base della georeferenziazione è dunque la determinazione di posizione e la valutazione della relativa affidabilità; è l’attività fondamentale del Topografo, propedeutica a tutti gli altri campi di applicazione. Risulta dunque necessario esaminare i problemi posti dall’esistenza, storicamente consolidata, di differenti sistemi di riferimento rispetto ai quali sono referenziati i dati territoriali, ma tra i quali è spesso difficile, e talvolta impossibile, istituire delle metodologie di trasformazione generalizzate. I parametri che descrivono compiutamente il sistema di riferimento e la rappresentazione cartografica adottata dovrebbero essere le informazioni minime di corredo quando lo strumento “coordinate” viene offerto all’utente, sia in forma analogica che digitale. Solo tali parametri consentono di definire univocamente a che cosa le coordinate sono associate nel mondo reale. 2. – Sistemi di riferimento: definizione, realizzazione e utilizzazione
La definizione e la realizzazione di sistemi di riferimento appropriati per il posizionamento sono da sempre considerati un problema fondamentale della geodesia. Infatti la determinazione di precisione di punti sulla superficie terrestre è uno dei principali obbiettivi di questa scienza e “i punti” costituiscono il servizio più tangibile fornito dalla geodesia alla collettività. Nella storia della scienza la geodesia è una delle discipline più antiche. Essa ha obbiettivi sia scientifici che operativi. Uno degli obbiettivi scientifici fondamentali è la determinazione delle dimensioni e della forma della Terra, insieme allo studio del campo gravitazionale terrestre e delle relative variazioni temporali. La geodesia operativa presiede invece alle misure ed ai calcoli necessari per la descrizione geometrica della superficie della Terra. Il suo scopo principale è dunque la determinazione di coordinate. In tale ambito, operativo, è bene non dimenticare che esiste un’esigenza di rendimento e quindi di economia; un certo livello necessario di precisione deve essere raggiunto, ma non superato, pena il rischio di compromettere la rapidità d’esecuzione e l’economia di realizzazione. La determinazione delle posizioni è stata tradizionalmente scissa in due componenti: verticale e orizzontale. Ciò ha implicato che nel contesto classico sono definiti due sistemi di riferimento geodetico. In effetti il campo di variabilità della componente verticale è di gran lunga più piccolo rispetto a quello della componente orizzontale: in un ipotetico modello della
Prof. L. Surace 5
Terra, costituito da un globo del diametro di 2 m (scala 1 : 6000000 circa), l’Everest è alto poco più di 1 mm, appena percepibile al tatto. La definizione di sistemi di riferimento unici per tutta la Terra, oggi indispensabile, è stata di scarso interesse e di difficile realizzazione prima dell’avvento dei sistemi di posizionamento satellitare, a causa del carattere essenzialmente locale delle tecniche classiche di rilievo geodetico e topografico. Per questo motivo ci troviamo oggi ad avere nel mondo molti sistemi geodetici locali definiti con l’intento di ottenere una buona approssimazione unicamente nelle aree di interesse, articolati in due superfici di riferimento diverse per ogni nazione: un geoide e un ellissoide locali. La Terra somiglia molto ad una sfera, ma in realtà non lo è; considerarla tale è un’approssimazione che può essere utile in certi casi, ma troppo grossolana per la maggior parte delle applicazioni. La superficie fisica della Terra è invece molto vicina a quella di un ellissoide di rotazione, cioè un ellissoide biassiale: forma e dimensioni sono assegnate attraverso due parametri e la posizione spaziale è definita attraverso sei parametri. La superficie ellissoidica è regolare e facilmente trattabile dal punto di vista matematico e proprio per questo è diffusamente usata come superficie di riferimento per le coordinate “planimetriche”. Invece l’ellissoide è molto meno sfruttabile come superficie di riferimento per le coordinate altimetriche in quanto priva di significato fisico; al suo posto è utilizzato il geoide, definito come superficie equipotenziale del campo della gravità molto bene approssimata dal livello medio del mare, anche se non coincidente con esso. Una superficie di riferimento deve avere due caratteristiche: – essere matematicamente trattabile; – essere fisicamente individuabile con facilità. La seconda caratteristica è facilmente riscontrabile nelle superfici equipotenziali del campo della gravità, almeno per quanto riguarda il loro orientamento locale, essendo in ogni punto ortogonali alla direzione del filo a piombo; il geoide, che è una di queste superfici, non possiede però la prima caratteristica, che è invece propria dell’ellissoide biassiale. Da ciò è discesa storicamente la dicotomia tra superficie ellissoidica, matematicamente trattabile con facilità, non individuabile fisicamente e quindi senza significato fisico, cui affidare il posizionamento planimetrico, e superficie geoidica, fisicamente riproducibile e fisicamente significativa, ma matematicamente intrattabile in forma chiusa, cui delegare il compito di riferimento fondamentale per le quote. Da questo dualismo di superfici di riferimento è poi discesa la separazione delle coordinate in planimetriche ed altimetriche, la separazione delle misure angolari in azimutali e zenitali, la separazione della rappresentazione cartografica in contenuto planimetrico e contenuto altimetrico. Una carta topografica è in realtà la rappresentazione bidimensionale di due distinte superfici a curvatura totale non nulla: l’ellissoide, su cui si proiettano i punti della superficie fisica oggetto del rilevamento planimetrico, ed il geoide, definito in modo discreto attraverso le quote dei punti oggetto del rilevamento altimetrico. Oggi con le determinazioni satellitari lo scenario è profondamente mutato: la crescente precisione di queste tecniche richiede in primo luogo un equivalente incremento di precisione nei sistemi di riferimento. In secondo luogo in geodesia satellitare i sistemi di coordinate sono per loro natura globali, geocentrici e tridimensionali, poiché il moto dei satelliti fa riferimento al centro di massa della Terra. Le misure terrestri sono invece per loro natura locali e sono normalmente riferite a sistemi locali.
Prof. L. Surace 6
Con i metodi di posizionamento satellitare si ottengono coordinate cartesiane in una terna geocentrica o coordinate geografiche e altezza riferite all'ellissoide geocentrico associato a quella terna. Una prima analisi potrebbe indurre ad ipotizzare, proprio alla luce di questi mutamenti, un facile superamento della dicotomia storica tra geoide ed ellissoide: purtroppo, l’unificazione dei sistemi di riferimento planimetrico ed altimetrico nel sistema satellitare è possibile solo quando non interessi la significatività fisica della terza dimensione. Esistono vasti campi di applicazione in cui tale condizione è verificata ed in tal caso l’ellissoide biassiale geocentrico garantisce, solo esso e solo ora con l’avvento delle metodologie satellitari, facile trattabilità matematica e facile individuabilità fisica, cioè facile e affidabile riproducibilità, attraverso la diretta e precisa determinazione di coordinate geocentriche (cartesiane o ellissoidiche). Sta in ciò il poderoso salto di qualità nel passaggio dagli ellissoidi locali ad un ellissoide geocentrico. Nella maggior parte delle applicazioni è però necessaria quella significatività fisica, che in questo contesto vuol dire capacità dell’informazione di posizione di denunciare al meglio possibile le differenze di potenziale della gravità. Tutte le opere antropiche sono soggette a delle forze, per le quali vengono progettate: una strada, un canale, una ferrovia, una casa... Ha senso chiedersi quanto valgano quelle forze e progettare le opere per le forze "verticali" (di gravità) e per quelle orizzontali. Ha senso sapere se occorra compiere lavoro per far fluire l’acqua da un punto A ad un punto B e poterlo chiedere alle quote di A e di B ... Ciò non è possibile con le coordinate ellissoidiche o cartesiane fornite dai metodi di posizionamento satellitare, perché i sensori di posizione, cioè i satelliti, per altro troppo lontani dalla superficie terrestre per risentire delle variazioni del campo della gravità nella misura che a noi interessa, forniscono all’utente finale solo un’informazione geometrica. Ecco dunque che, con diverse motivazioni, resta al momento immutata l’esigenza del geoide cui riferire la posizione altimetrica e dell’ellissoide, cui riferire quella planimetrica. Il localismo non è dunque eliminato, ma ridotto alla sola componente altimetrica, poiché attualmente non esiste alcun sistema di riferimento altimetrico definito per unificare e correlare i vari sistemi locali, mantenendone l’accuratezza. La novità, parziale, sta comunque nel fatto che fino a ieri, avendo fissato una coppia di sistemi di riferimento locali capaci di eliminare la deficienza di rango implicita nelle misure di grandezze relative, si passava dalla misura di grandezze geometriche (distanze, angoli, direzioni, dislivelli) sulla superficie fisica al calcolo della posizione relativa rispetto ad un punto di coordinate fissate in un sistema di riferimento scelto convenzionalmente, in funzione di esigenze locali e quindi variabili nello spazio e nel tempo. Oggi si ottengono direttamente coordinate rispetto ad un sistema fissato con una definizione pur sempre convenzionale, ma legata alla realtà fisica (origine del sistema coincidente con il centro di massa e asse Z orientato al polo medio), non variabile dall’utente e condivisa internazionalmente.
3. - Superfici di riferimento
Alle nuove coordinate, cartesiane o ellissoidiche, va dunque assegnato il ruolo di coordinate standard. La semplicità del sistema cartesiano e della sua metrica farebbero propendere per una scelta drastica di X, Y, Z ed un abbandono delle coordinate curvilinee superficiali, latitudine e longitudine. Ma la facile corrispondenza biunivoca fra i due sistemi rende innocua la scelta per l’uno o per l’altro. In fondo, con il definitivo avvento del GPS, il sistema di coordinate che si impone è uno dei
Prof. L. Surace 7
più antichi, quello cartesiano geocentrico, con l’origine nel centro di gravità della Terra. E’ un sistema assai familiare agli astronomi, che se ne servono correntemente da alcuni secoli a questa parte e che sta, ad esempio, alla base di tutta la teoria delle maree. Esso non era naturalmente ignoto ai Geodeti del passato, ma cadeva in difetto per l’inaccessibilità alle misure: il centro di massa della Terra era infatti una pura astrazione e si sottraeva all’osservazione. Ma dal 4 ottobre 1957 non è più così: i satelliti artificiali descrivono orbite che noi possiamo osservare con i nostri strumenti e che sono geometricamente collegate con il centro di gravità della Terra; il sistema cartesiano geocentrico WGS84 acquisisce quindi pieno diritto di cittadinanza nella prassi operativa ed assume il ruolo di primo attore del posizionamento. Le vedute più moderne ci hanno riportato così sulle strade più antiche. Antiche coordinate, soppiantate per alcuni secoli da quelle ellissoidiche, riacquistano nuovi diritti; triangoli e poligoni, formati dalle baseline misurate dal GPS, vere e proprie linee geodetiche nello spazio, figure piane analoghe a quelle che i nostri antenati osservavano col sestante, ricompaiono sotto altra forma, ma con immutata sostanza. E l’ellissoide, chiamato più di tre secoli fa al convito geodetico quale gradito e utile invitato, dopo aver gradualmente e parassitariamente acquistato la veste di ospite invadente, torna al suo ruolo domestico di superficie matematica approssimante da rappresentare sul piano cartografico, come entità associata al sistema di riferimento cartesiano geocentrico e non come primaria superficie di riferimento, cui ridurre forzosamente le osservazioni e su cui condurre i calcoli. La posizione geografica di un punto sulla Terra può dunque essere definita come la sua posizione relativa ad una superficie di riferimento utilizzata in sostituzione della reale forma della Terra. Le superfici di riferimento più spesso utilizzate sono la sfera, l’ellissoide biassiale ed il geoide (superficie equipotenziale del campo di gravità). Le prime due hanno una definizione puramente geometrica e sono alternative, la terza ha una definizione fisica ed è associata alle altre per la determinazione più utilizzata delle quote. La posizione è solitamente definita per mezzo di una coppia di coordinate curvilinee come la latitudine e la longitudine, cui è associata l’altezza sopra la superficie di riferimento. È consuetudine corretta e necessaria distinguere tra coordinate sferiche, ellissoidiche e geoidiche, a secondo che siano utilizzate rispettivamente la sfera, l’ellissoide o il geoide come superfici di riferimento. Le coordinate ellissoidiche sono anche dette geodetiche, mentre le geoidiche sono le coordinate astronomiche. In accordo con questa interpretazione il termine “coordinate geografiche” è un termine generale che include i tre tipi menzionati sopra. La superficie quadrica sulla quale tutte le curve di intersezione con piani sono ellissi, è chiamata ellissoide. Dal punto di vista geodetico si è soliti distinguere tra ellissoidi rotazionali o biassiali ed ellissoidi triassiali. L’ellissoide biassiale (fig. 1), detto anche sferoide, è generato dalla rotazione di un’ellisse attorno al suo asse minore ed è definito da due parametri, ad es. dalla lunghezza dell’asse minore e dell’asse maggiore, o dall’asse maggiore e da una quantità ausiliaria dipendente dai due semiassi. L’ellissoide triassiale è definito da tre parametri, ad es. dalla lunghezza dei tre assi mutuamente ortogonali. Il più utilizzato come superficie di riferimento è l’ellissoide di rotazione. La forma del geoide (figg. 2.a e 2.b) dipende dalla distribuzione irregolare delle masse all’interno della Terra e non può essere descritta da una equazione matematica chiusa come l’ellissoide; quindi, in senso convenzionale, essa è considerata una superficie fisica piuttosto che matematica. Le sue proprietà fondamentali, dalle quali dipendono tutte le altre, sono che il

Prof. L. Surace 8
potenziale del campo di forza della gravità è costante su di essa e che la linea di forza, cui è tangente in ogni punto la verticale, è perpendicolare ad essa ovunque. La tangente alla linea di forza coincide con la direzione della gravità e il geoide è una superficie liscia senza lacerazioni o discontinuità. Punti con la stessa latitudine o longitudine geoidiche (astronomiche) sono situati rispettivamente sullo stesso parallelo o meridiano geoidici (astronomici). Queste curve non sono né circonferenze né ellissi, come sulla sfera o sull’ellissoide, ma sono linee non piane né regolari (fig. 2c). Dunque, all’esigenza di standardizzazione, la risposta, tanto logica quanto ovvia, è la scelta di definire la posizione di un punto attraverso le sue coordinate cartesiane geocentriche X, Y e Z nel sistema geodetico WGS84 e di definirne la quota geoidica rispetto al modello di geoide nazionale disponibile. E’ allora il momento di cambiare ufficialmente il datum. 4 - Il sistema di riferimento planimetrico
Considerando, come si è già detto, che il problema della determinazione dei punti è stato tradizionalmente affrontato, dalla geodesia classica, scindendo nettamente la parte altimetrica da quella planimetrica, troviamo normalmente due superfici di riferimento definite in maniera diversa in ogni nazione: un geoide e un ellissoide locali. Prima dell’avvento dei sistemi di posizionamento satellitare non sarebbe stato possibile realizzare ed utilizzare sistemi geocentrici. I sistemi di coordinate geodetiche locali, con ellissoidi di riferimento scelti per approssimare la forma della Terra al meglio in una determinata regione (fig. 3), erano e sono ancora utilizzati in molti paesi. Esistono più di 150 di tali sistemi e talvolta le carte hanno più di un reticolato ed ogni reticolato si riferisce ad un differente sistema di riferimento o, come si denominerà nel seguito, ad un differente datum. Un datum “planimetrico” (horizontal datum in inglese) è il modello matematico della Terra che usiamo per calcolare le coordinate geografiche dei punti. Esso può essere definito rigorosamente come un complesso di prescrizioni ed un complesso di misure tali che le prescrizioni eliminano esattamente le deficienze di rango per la determinazione di tutti i punti legati dalle misure. In pratica esso è costituito da un set di otto parametri, due di forma dell’ellissoide e sei di posizione e di orientamento, e da una rete compensata di punti, estesa sull’area di interesse, che lo materializza. In uno stesso datum si possono usare differenti sistemi di coordinate: le trasformazioni tra questi ultimi sono sempre puramente matematiche e non richiedono l’introduzione di misure. La trasformazione tra due datum può essere invece calcolata solo quando vi siano sufficienti misure che legano punti nei due sistemi. Un ellissoide biassiale di riferimento associato ad un sistema locale costituisce il sistema di riferimento geodetico planimetrico (cioè bidimensionale). Un tale sistema di riferimento non è geocentrico, cioè il centro dell’ellissoide è spostato rispetto al centro di massa della Terra di quantità dell’ordine delle centinaia di metri. Anche l’asse di simmetria dell’ellissoide è disallineato rispetto all’asse di rotazione terrestre medio, ma gli scostamenti angolari sono comunque molto piccoli, dello stesso ordine di grandezza delle precisioni delle misure angolari più sofisticate. L’ellissoide locale deve essere posizionato e orientato rispetto alla Terra. Precedentemente all’avvento delle tecniche satellitari, quando non era possibile il posizionamento geocentrico, l’unico modo per posizionare ed orientare i sistemi di riferimento consisteva nel collegamento, al sistema astronomico locale, di un punto scelto allo scopo, normalmente
Prof. L. Surace 9
baricentrico rispetto alla zona di interesse. Il sistema astronomico locale è definito dalla verticale locale e dall’asse di rotazione terrestre. Sei parametri determinanti (i sei gradi di libertà di un corpo rigido nello spazio) devono essere scelti nel punto iniziale (chiamato anche punto di emanazione): latitudine e longitudine ellissoidica, altezza geoidica, due componenti della deviazione della verticale e l’azimut ellissoidico (o geodetico) di una direzione che ha origine in questo punto. Stabilite preliminarmente, in modo opportuno, forma e dimensioni dell’ellissoide di riferimento da adottarsi, l’idea di base è quella di vincolare le due superfici fondamentali, geoide ed ellissoide. Scelto il punto di emanazione di quota geoidica nota, si provvede a determinarne latitudine e longitudine astronomica (cioè assolute, da non confondersi con le analoghe ellissoidiche): senza entrare in dettaglio, questo significa individuare la posizione dello Zenit del punto (cioè “dell’orientamento” della verticale geoidica), nel sistema terrestre convenzionale (CTS Conventional Terrestrial System), di cui si dirà tra breve. È importante ricordare che, prima dell’avvento della geodesia satellitare, l’astronomia geodetica era l’unico metodo che consentiva di eseguire posizionamenti “assoluti”, giacché tutte le possibili misure fra punti sulla Terra realizzano soltanto determinazioni relative. Si impone quindi che le coordinate ellissoidiche del punto d’emanazione coincidano con quelle astronomiche. Questa condizione ha per effetto di vincolare un punto prefissato dell’ellissoide ad una direzione nello spazio (il che elimina due “gradi di libertà”) e di assicurare in quel punto la coincidenza della normale ellissoidica con la verticale geoidica (altri due gradi di libertà fissati dall’annullarsi delle due componenti della deviazione della verticale). Ciò implica il parallelismo dei piani tangenti alle due superfici, individuati dalla normale e dalla verticale. I due rimanenti “gradi di libertà” dell’ellissoide rispetto al geoide (scorrimento lungo la normale-verticale e rotazione intorno ad essa) vengono infine fissati attribuendo al punto di emanazione quota ellissoidica coincidente con quella geoidica nota (si realizza così la condizione di effettiva tangenza delle due superfici nel punto) e orientando l’asse di rotazione dell’ellissoide nella direzione del Nord astronomico (tale direzione viene in effetti preventivamente determinata insieme alla latitudine e alla longitudine astronomica). Al termine di queste operazioni, si dice che si è orientato l’ellissoide locale di riferimento sul punto di emanazione. Per definizione, un sistema di coordinate geocentrico è invece un sistema la cui origine coincide con il centro di massa della Terra e i cui assi sono fissati per convenzione. Il più comune sistema geocentrico usato in geodesia è il sistema terrestre convenzionale (CTS), orientato in modo che l’asse Z sia diretto verso l’Origine Internazionale Convenzionale (CIO), l’asse X sia complanare con il Meridiano Convenzionale di Greenwich e l’asse Y formi con gli altri due una terna cartesiana destrorsa. Al sistema è associato un ellissoide di dimensioni predefinite. Le posizioni nel sistema CTS sono talvolta date in coordinate cartesiane (X, Y, Z) e talvolta in coordinate ellissoidiche (ϕ, λ, h), cioè latitudine, longitudine e altezza ellissoidiche. L’altezza ellissoidica h, talvolta chiamata quota geodetica, è la distanza di un punto dall’ellissoide di riferimento, misurata lungo la normale all’ellissoide stesso. Il sistema di riferimento geodetico del 1980 (GRS 80), raccomandato per l’uso in geodesia dall’Associazione Internazionale di Geodesia (IAG) nel 1980, utilizza un ellissoide di riferimento dimensionato per approssimare al meglio la forma attuale della Terra. Esso ha
Prof. L. Surace 10
semiasse maggiore a = 6378137 m e schiacciamento approssimativamente eguale a 1/298.25. È attualmente utilizzato, quasi universalmente, nei lavori geodetici. 5. - I sistemi geodetico-cartografici di interesse nazionale
La situazione dei sistemi di riferimento di interesse nazionale merita un inquadramento schematico per non perdere di vista i problemi con cui è necessario confrontarsi, ma soprattutto quelli con cui è utile tale confronto. Pur rinunciando ad una dettagliata cronistoria dei vari sistemi di coordinate in uso in Italia, è tuttavia necessario ricordare alcune tappe di quel processo. È innanzi tutto opportuno rammentare che, per utilizzare compiutamente un sistema geodetico-cartografico, è necessario precisare quali siano: – il sistema geodetico di riferimento (geodetic datum); – le misure ed i calcoli di compensazione della rete di inquadramento che lo realizzano; – la rappresentazione cartografica adottata e le condizioni di applicazione. Un sistema di riferimento geodetico è realizzato attraverso l’istituzione di una rete compensata di punti che si estende sull’area di interesse. Come è noto a tutti, i rilevamenti effettuati e che si effettuano nel nostro paese, hanno una base comune: l’inquadramento geodetico proveniente dai lavori dell’I.G.M. In Italia la possibilità di istituire un sistema di riferimento unico fu presa in considerazione, per la prima volta, dopo l’unificazione del Regno, quando l’allora “Ufficio Tecnico del Corpo di Stato Maggiore” ebbe l’incarico del rifacimento totale della triangolazione nazionale tramite l’unificazione delle reti parziali preesistenti; ognuno degli Stati preunitari aveva infatti eseguito lavori geodetici sviluppandoli su propri sistemi di riferimento diversi l’uno dall’altro. Nei lavori, completati alla fine del secolo scorso per la rete fondamentale, venne adottato l’ellissoide di Bessel con tre orientamenti differenti su tre punti di coordinate astronomiche note: Genova (Osservatorio astronomico dell’Istituto Idrografico della Marina) per il nord, Roma (Osservatorio astronomico di M. Mario) per il centro e Castanea delle Furie (Messina) per il Sud. In pratica tre differenti sistemi di riferimento. L’orientamento venne ottenuto con altrettanti azimut astronomici, mentre il dimensionamento venne dato dalla misura di otto basi. Per procedere allo sviluppo topografico e cartografico in sistemi cartesiani, vennero adottate le formule di corrispondenza della proiezione policentrica naturale (o di Flamsteed modificata) riferita al centro degli elementi cartografici alla scala 1:100000; queste coordinate “cartografiche”, che si possono definire di transizione, non ebbero alcun seguito, al di là della fase di impianto, dopo l’utilizzazione ai fini del rilevamento, dapprima grafico (la “puntinatura” delle tavolette) e successivamente aerofotogrammetrico. Nei cataloghi dei punti trigonometrici di allora sono riportate infatti le sole coordinate geografiche. Ai primi del ’900, quando i lavori di campagna, che si erano protratti per quasi mezzo secolo, volgevano al termine, fu affrontato il problema di compensare l’intera rete su un’unica superficie di riferimento. Il lavoro, impresa memorabile per quei tempi, fu condotto in due fasi distinte: la prima parte si concluse nel 1908 con la stampa del volume “Compensazione della rete geodetica a Nord del parallelo di Roma”, la seconda terminò nel 1919 con un’analoga pubblicazione per la zona a Sud del parallelo di Roma. Il dimensionamento della rete, o meglio delle otto sottoreti in cui l’Italia era stata divisa (tre nel settentrione, quattro nel meridione più la Sardegna), avvenne tramite l’introduzione di otto basi misurate (fig. 4 - Rete geodetica fondamentale 1908-1919). Tali partizioni, rese necessarie dalle limitate potenzialità
Prof. L. Surace 11
di calcolo dell’epoca, vanificarono parzialmente gli intenti di unificazione che il progetto si era proposto.
SISTEMA DI RIFERIMENTO ITALIANO ANTE 1940
DEFINIZIONE
Ellissoide: BESSEL (1841) a = 6 377 397.155 f = 1/299.1528128
Orientamento: GENOVA IIM (definizione astronomica 1902) ϕ = 44° 25’ 08.235”
λ = 0° azimut su Monte del Telegrafo α = 117° 31’ 08.91”
REALIZZAZIONE
Rete fondamentale di primo ordine dimensionata su otto basi. RAPPRESENTAZIONE CARTOGRAFICA
Proiezione policentrica naturale (o di Flamsteed modificata) riferita al centro di ciascuno degli elementi cartografici 1:100 000
Il calcolo fu eseguito sull’ellissoide di Bessel (definizione 1841), orientato a Genova sul pilastrino dell’osservatorio dell’Istituto Idrografico della Marina, con azimut su Monte del Telegrafo. Nel contempo il Catasto iniziò i suoi lavori e per quanto riguarda l’inquadramento venne stabilita la derivazione dalle reti di 1°, 2° e 3° ordine I.G.M., mentre per la rappresentazione sul piano venne adottata la proiezione di Cassini-Soldner, avente caratteristiche di deformazione più idonee alla misura delle aree. La rappresentazione richiede, com’è noto, la scelta di un centro di sviluppo preferibilmente baricentrico rispetto alla zona da rilevare; l’estensione di questa, per evitare deformazioni incompatibili con la scala, venne contenuta in un campo di circa 100 km di raggio. Ma non sempre sono stati adottati sviluppi di questa estensione, quali ad esempio quello che interessa quasi tutta la Toscana (origine Siena), o la Calabria (origine Monte Bruto), ma sviluppi assai limitati, addirittura comprendenti un solo comune, per cui oltre a qualche decina di sistemi estesi, si hanno molte centinaia di piccoli sistemi locali. Anche per il sistema catastale è opportuno fornire alcune precisazioni, utili ai fini dello studio della trasformazione nel sistema nazionale. In realtà tale sistema, coincidente ufficialmente con quello adottato dall’I.G.M. nella prima compensazione definitiva della propria rete (1908-1919), non è stato utilizzato per l’intero territorio nazionale. I lavori catastali si sono infatti svolti in molti casi prima del completamento dei lavori di triangolazione dell’I.G.M.; essi hanno quindi spesso fatto riferimento a sistemi geodetici di definizione precedente (in particolare a definizioni adottate dallo stesso I.G.M. in epoche anteriori al calcolo finale: ellissoide di Bessel orientato a Castanea delle Furie per molte province a sud di Roma e orientato a M. Mario per alcune zone dell’Italia centrale) e talvolta provvisoria. Sempre a causa del “ritardo” delle operazioni I.G.M. rispetto alle esigenze catastali, sono stati frequentemente assunti, per i vertici di 1°, 2° e 3° ordine, valori provvisori delle coordinate forniti volta per volta dallo stesso I.G.M., spesso diversi (in certi casi sensibilmente) dai definitivi. La rete catastale non è quindi del tutto congruente con quella nazionale, ovvero angoli e lati della rete non sono esattamente gli stessi, anche prescindendo dal diverso sistema
Prof. L. Surace 12
geodetico di riferimento. Molti vertici di 4° ordine I.G.M. fanno parte della rete catastale come vertici di rete, sottorete o dettaglio. Le relative coordinate derivano però da misure eseguite autonomamente dal Catasto e sono quindi in genere diverse da quelle calcolate dall’I.G.M.; in certi casi è diversa anche la materializzazione.
SISTEMA(I) DI RIFERIMENTO CATASTALE
DEFINIZIONE
Ellissoide: BESSEL (1841) a = 6 377 397.155 f = 1/299.1528128
Orientamento: GENOVA IIM (definizione astronomica 1902) ϕ = 44° 25’ 08.235”
λ = 0° azimut su Monte del Telegrafo α = 117° 31’ 08.91”
REALIZZAZIONE
Rete di inquadramento costituita dalla triangolazione dell'IGM (limitatamente ai vertici di I, II e III ordine), raffittita con la triangolazione catastale di rete, sottorete e dettaglio.
RAPPRESENTAZIONE CARTOGRAFICA
Cassini-Soldner, con suddivisione del territorio nazionale in zone, riferita ciascuna ad una diversa origine ("centro di sviluppo"), coincidente in molti casi con un vertice IGM.
Il 30 novembre del 1940, a Torino, la Commissione Geodetica Italiana, accogliendo le raccomandazioni espresse dalla Associazione Internazionale di Geodesia nel convegno di Madrid del 1924, decise di cambiare sistema di riferimento. Come ellissoide fu scelto quello di Hayford (detto anche internazionale), ritenuto più vicino alla realtà fisica terrestre, e per l’orientamento fu realizzata un’apposita stazione astronomica sul vertice di 1° ordine di M. Mario. Per inquadrare la rete nel nuovo datum non fu effettuata una nuova compensazione, ma semplicemente un “trasporto” dei vertici della rete geodetica fondamentale (1° ordine), i quali mantennero nel nuovo sistema tutte le loro inesattezze e disomogeneità. In seguito sono state eseguite, con moderni metodi di calcolo, ricompensazioni parziali di alcuni blocchi, ma sempre con il dimensionamento e l’orientamento derivanti dal calcolo 1908-1919 e quindi senza miglioramenti significativi. Questo sistema, che costituisce ancora oggi il riferimento ufficiale nazionale, è denominato Roma 40, con richiamo alla data della determinazione astronomica (fig. 5 - Rete geodetica fondamentale – sistema Roma40). Nel dopoguerra venne inoltre adottata, anche su proposta del Prof. Boaga, la rappresentazione conforme di Gauss; e ciò non solo per la cartografia, ma anche, e prima, per lo sviluppo dei calcoli geodetici, che, semplificati, possono essere condotti sul piano conforme, con gli evidenti vantaggi dell’uso della trigonometria piana in luogo di quella sferica. Il sistema geodetico-cartografico nazionale (Roma 40 - Gauss-Boaga) è il sistema in cui sono calcolate le coordinate dei vertici della rete trigonometrica fondamentale italiana, a disposizione dell’utenza nei cataloghi I.G.M. La denominazione corrente di coordinate Gauss-Boaga si riferisce esclusivamente alle coordinate piane (o cartografiche).
SISTEMA DI RIFERIMENTO ROMA 1940
Prof. L. Surace 13
DEFINIZIONE
Ellissoide: INTERNAZIONALE a = 6 378 388
f = 1/297 Orientamento: ROMA M. MARIO (definizione astronomica 1940)
ϕ = 44° 25’ 08.235” λ = 0° (12° 27’ 08.4” est da Greenwich)
azimut su Monte Soratte α = 6° 35’ 00.88”
REALIZZAZIONE
Rete di Triangolazione fondamentale (calcolo di compensazione del 1908-1919) e reti di raffittimento
RAPPRESENTAZIONE CARTOGRAFICA
Conforme di Gauss; territorio nazionale praticamente compreso in due fusi, denominati rispettivamente OVEST ed EST, di 6° di ampiezza, con meridiani centrali a - 3° 27’ 8.400” e
2° 32’ 51.600” di longitudine da M.Mario fattore di contrazione m
0 = 0,9996
falsa origine per le coordinate Est: 1500 km (fuso OVEST)
2520 km (fuso EST) Nel sistema nazionale vengono inquadrati i lavori geodetici e topocartografici nazionali e regionali, oltre a numerosi rilievi locali e tecnici. A proposito della rete vanno fatte alcune precisazioni, utili soprattutto ai fini del confronto dei dati I.G.M. con quelli dei sistemi locali catastali: il calcolo del 1908-1919 è stato eseguito nel sistema geodetico di riferimento adottato all’epoca (ellissoide di Bessel orientato a Genova, definizione 1902), e solo nel 1940 è stato adottato l’ellissoide internazionale orientato a M. Mario, ricalcolando le coordinate di tutti i vertici nel nuovo riferimento; la longitudine è contata dal meridiano di Roma (M. Mario). In effetti per realizzazione del sistema nazionale, va inteso il risultato del trasferimento sull’ellissoide internazionale orientato a Roma M. Mario (definizione 1940) dei dati ottenuti con le compensazioni definite nel 1908 e nel 1919, calcolate sull’ellissoide di Bessel orientato a Genova. A seguito delle campagne di triangolazione susseguitesi nel tempo, numerosi blocchi della rete sono stati rideterminati in base a nuove misure ed a nuovi calcoli di compensazione, modificando le “distorsioni” locali nella rete; le coordinate attualmente in catalogo sono quindi, per effetto di queste “ricompensazioni”, diverse anche da quelle del 1940, e a volte è variata anche la materializzazione dei punti. Lo stesso Prof. Boaga, come Direttore Generale del Catasto, intravide, negli anni ’50, la possibilità di realizzare l’unificazione dei sistemi catastali con la trasformazione delle coordinate Cassini-Soldner in coordinate gaussiane. È un’operazione ancora incompiuta. Apparentemente il problema è quanto mai semplice: note le formule di corrispondenza delle due rappresentazioni, nonché le coordinate geografiche del centro di sviluppo, con pochi semplici passaggi attraverso le coordinate geografiche si perviene alla soluzione. Ma la semplicità è solo apparente, sia per la casistica varia che si può incontrare sia per la necessità generale di trasformare le coordinate geografiche che si ottengono dalle Cassini, relative all’ellissoide di Bessel, in coordinate sull’ellissoide internazionale. Poteva essere un grande
Prof. L. Surace 14
progetto degli anni ’70, supportato dall’avvento dei calcolatori elettronici, ma non si è fatto nulla di organico e definitivo. Anche se il Catasto italiano ha ufficialmente adottato il sistema nazionale “Roma40 - Gauss Boaga” da vari anni, in pratica solo in alcune zone si è passati effettivamente a tale sistema. Per una vasta parte del territorio nazionale la cartografia catastale ed i relativi atti di aggiornamento sono ancora riferiti al sistema catastale adottato in sede di formazione della cartografia (dal 1866 in poi), caratterizzato, come si è detto, dall’uso della rappresentazione cartografica “Cassini-Soldner” per zone limitate aventi ciascuna una diversa origine. La conseguenza più grave di questo mancato impegno è stata la non utilizzabilità, in molti casi, dei trigonometrici catastali nella formazione delle carte tecniche. Sarebbe stato possibile e conveniente ricavare almeno l’inquadramento geometrico della nuova carta dalla mappa del Nuovo Catasto Terreni. Ma quella possibilità e quella convenienza furono ignorati con conseguente dispendio di fatica e di denaro. Infatti fin dai primi progetti di carta tecnica a grande scala è stato previsto l’inquadramento nel sistema nazionale unificato e secondo la rappresentazione conforme di Gauss; da ciò l’immediata utilizzazione dei trigonometrici dell’I.G.M., già disponibili in questo sistema, a fronte della scarsa utilizzazione dei vertici catastali, con la conseguente ridotta compatibilità. Ai tre sistemi di inquadramento di interesse nazionale su esposti se ne aggiunge, negli anni ’50, un quarto. Infatti, per quanto riguarda l’Europa, fino alla II guerra mondiale ogni stato, analogamente all’Italia, si era costruito un proprio sistema di riferimento. Questi sistemi erano completamente scollegati, sia per la limitatezza delle tecniche di rilievo dell’epoca, sia per una spiccata autonomia manifestata dagli stati di allora. La I e la II guerra mondiale dimostrarono l’esigenza militare di un sistema cartografico uniforme e, alla fine della II guerra mondiale, il consenso generale andò verso la rappresentazione di Gauss, detta anche di Mercatore trasversa, che presuppone la suddivisione del globo in fusi delimitati da assegnati meridiani. Dopo la fine della II guerra mondiale, conseguentemente all’instaurarsi di un clima di cooperazione tendente ad unificare metodi e sistemi in ogni campo, fu sentita l’esigenza di uniformare le cartografie e quindi anche i sistemi di riferimento. In verità l’esigenza di unificazione nacque proprio durante la guerra e per motivi bellici legati all’operatività delle forze armate. Nel successivo dopoguerra la necessità si trasferì anche al campo civile. D’altra parte, la diffusione delle macchine calcolatrici elettroniche permetteva di affrontare calcoli di mole prima impensabile. È opportuno ricordare come l’istituzione di una rappresentazione presupponga l’esistenza di una rete geodetica omogenea quale fondamento delle coordinate geografiche ellissoidiche. Nell’ambito dell’Associazione Internazionale di Geodesia, molti Stati europei concordarono di procedere ad un calcolo di compensazione di insieme di una selezione delle rispettive reti geodetiche, onde riferire le coordinate dei punti ad un unico sistema. Fu scelta come superficie di riferimento l’ellissoide di Hayford ed il centro di emanazione fu stabilito a Potsdam (Torre di Helmert, di coordinate astronomiche ϕ = 52° 22’ 54.8” e λ = 13° 04’ 01.7”), ma l’orientamento dell’ellissoide non fu tale da annullare in quel punto la deviazione della verticale, bensì fu anche lì lasciata una deviazione residua (i valori delle componenti della deviazione della verticale in questo punto, secondo i calcoli del Bomford, sono: ξ = + 3.36” e η = + 1.70”), in modo da minimizzare le deviazioni della verticale negli altri punti di azimut e longitudine astronomici noti, specialmente nelle zone periferiche dell’Europa: fu, cioè, assunto quello che viene detto “orientamento medio europeo”. Fu anche stabilito di contare le longitudini dal meridiano di

Prof. L. Surace 15
Greenwich, ed il sistema di riferimento fu denominato “European Datum 1950”, in sigla ED50 (fig. 6 - Reti fondamentali partecipanti alla compensazione ED50). Il calcolo fu eseguito dell’Army Map Service con macchine calcolatrici I.B.M. a schede perforate, automatizzando le operazioni di moltiplicazione e di somma e l’organizzazione della stampa dei risultati in appositi elenchi! L’I.G.M., per ottemperare ad impegni di carattere internazionale, soprattutto militari, inserì nella propria cartografia i reticolati geografico e piano relativi rispettivamente al sistema geodetico ED50 ed alla rappresentazione UTM associata. In Italia per il reticolato gaussiano relativo al sistema ED50 venne adottata la denominazione UTM, per distinguerlo da quello relativo al sistema nazionale, che viene denominato di Gauss-Boaga, pur essendo identica la rappresentazione. La denominazione corretta è però UTM-ED50, oggi indispensabile per distinguerla dalla UTM-WGS84 ed evitare gravissime confusioni. L’I.G.M. adottò quindi il sistema ED50 per il taglio della nuova cartografia alla scala 1:50000 e il relativo reticolato UTM: dunque c’è omogeneità, in queste carte, tra le coordinate geografiche dei vertici e le coordinate cartografiche (UTM-ED50) desumibili dal reticolato. In seguito le norme della Commissione Geodetica Italiana prescrissero lo stesso “taglio” geografico per le carte tecniche regionali, in modo che queste fossero sottomultipli dei fogli 1:50000. Questa decisione, quanto mai infelice, aggiunse confusione a confusione. Infatti in queste carte tecniche, costruite ovviamente nel sistema nazionale, l’omogeneità fra coordinate cartografiche (Gauss-Boaga) del reticolato e coordinate geografiche ellissoidiche dei vertici non esiste. Il sistema geodetico-cartografico europeo (ED50-UTM) è il sistema usato per il “taglio” (delimitazione degli elementi cartografici secondo trasformate di archi di meridiani e paralleli) della maggior parte della cartografia attualmente in produzione a livello nazionale (I.G.M.) e regionale. Non è impiegato come sistema di inquadramento, anche se presso l’I.G.M. sono disponibili le coordinate in questo sistema dei vertici della rete trigonometrica fondamentale. Anche qui la denominazione corrente di “coordinate UTM” si riferisce esclusivamente alle coordinate cartografiche. Uno stesso punto ha nel sistema UTM-ED50 coordinate differenti (di decine o centinaia di metri, a parte le false origini) da quelle nel sistema “Gauss-Boaga”. Tale scostamento è dovuto principalmente al diverso datum geodetico, ma in parte anche ai differenti calcoli di compensazione che hanno dato origine ai valori delle coordinate. La rete fondamentale si presenta in sostanza “distorta” in maniera diversa nei due sistemi. Per quanto sopra, il passaggio dalle coordinate UTM-ED50 alle “Gauss-Boaga” o viceversa è eseguibile solo con formule di corrispondenza di tipo empirico, con parametri stimati ai minimi quadrati, valide in genere in zone di estensione limitata e solo per applicazioni cartografiche a media e piccola scala. Espressioni di tipo polinomiale per questa trasformazione sono state ricavate dal Prof. Piero Bencini e dallo scrivente, a solo scopo cartografico, rispettivamente per la cartografia a media e piccola scala.
Prof. L. Surace 16
SISTEMA DI RIFERIMENTO ED50
DEFINIZIONE
Ellissoide: INTERNAZIONALE (Hayford) a = 6 378 388
f = 1/297 Orientamento: medio europeo 1950 (European Datum 1950)
origine delle longitudini Greenwich
REALIZZAZIONE
Non ha una propria realizzazione, essendo nato per esclusivi scopi di omogeneizzazione cartografica per la cartografia a media e piccola scala, ma si basa su una rete di
inquadramento consistente in una selezione delle reti di I ordine europee; il calcolo di compensazione è stato eseguito nel 1950 dall’A.M.S. (Army Map Service), poi D.M.A.
(Defence Mapping Agency), oggi N.I.M.A. (National Imagery Mapping Agency). Le coordinate geografiche sono state ricalcolate in base a questa compensazione e al "Datum"
geodetico di cui sopra, con origine delle longitudini su Greenwich. La compensazione ED50 può essere usata per taluni scopi pratici, soprattutto di tipo cartografico, ma non per
quelli geodetici, né operativi né tantomeno scientifici
RAPPRESENTAZIONE CARTOGRAFICA:
di Mercatore Trasversa Universale (per gli americani "Universal Transverse Mercator") territorio nazionale praticamente compreso in due fusi di 6° di ampiezza, con meridiani centrali a 9° e 15° di longitudine est Greenwich (fusi 32 e 33 del sistema internazionale)
fattore di contrazione m0 = 0,9996 falsa origine per le coordinate Est: 500 km
6. - I sistemi di riferimento continentali e mondiali
I sistemi geodetici locali adottati in geodesia e cartografia prima dell’avvento dei sistemi satellitari sono basati, come abbiamo visto, su ellissoidi orientati in modo da approssimare bene localmente la superficie geoidica. In questo modo risultano ridotti e trascurabili, nelle applicazioni operative, gli scostamenti tra verticale e normale ellissoidica, e le misure angolari eseguite sul terreno possono essere riferite alle figure ellissoidiche senza apportarvi correzioni. L’esigenza di avere sistemi di riferimento sempre più estesi è andata crescendo nel corso degli ultimi decenni in concomitanza con l’aumentare delle possibilità e della velocità di scambi di vario tipo (economici, commerciali, culturali, scientifici, etc.) fra ogni parte del mondo. Già nei primi anni ’50 era apprezzata l’idea di istituire un sistema di riferimento unico per tutto il globo, a cui poter riferire i prodotti cartografici, geodetici e gravimetrici sia analogici che digitali, ed in ultima analisi tutte le informazioni per cui sia significativa la localizzazione spaziale; infatti sono intuitivi i molteplici vantaggi, derivanti dal poter utilizzare un unico sistema di coordinate per tutta la Terra. L’avvento della geodesia satellitare ha reso poi indispensabile l’adozione di riferimenti unici e geocentrici che fossero in accordo con il moto dei satelliti che, così come le traiettorie dei missili intercontinentali, sono riferite al centro di massa della Terra.
Prof. L. Surace 17
Alla fine degli anni ’50 gli Stati Uniti, principalmente per esigenze di carattere militare, hanno sviluppato sistemi di riferimento mondiali studiati in modo da ottenere una buona approssimazione media in ogni parte del globo. Negli ultimi decenni molti dati di posizione di elevata precisione si sono accumulati: sono state completate poligonali di estensione transcontinentale, determinate posizioni con metodi satellitari Doppler, deviazioni della verticale con metodi astrogeodetici e sono soprattutto disponibili oggi grandi quantità di misure gravimetriche su scala mondiale. Tutti questi fattori combinati hanno reso possibile definire e realizzare un nuovo sistema di riferimento di applicabilità mondiale e con origine coincidente con il centro di massa della Terra. Un sistema orientato a tale scopo, per essere anche strumento di correlazione tra i differenti sistemi geodetici locali, deve essere geocentrico e solidale con la Terra. Tale sistema è denominato ECEF, acronimo di Earth-Centered, Earth-Fixed: è geocentrico poiché il centro del sistema coincide con il centro di massa della Terra; solidale nel senso che il sistema è “fissato” alla Terra e quindi la segue nei suoi grandi moti (rotazione e rivoluzione) ma non per i moti di nutazione, precessione, etc. I primi sistemi ad avere queste caratteristiche, e quindi denominati mondiali, sono stati sviluppati dal Dipartimento della Difesa degli Stati Uniti. La definizione del Sistema Geodetico Mondiale (WGS) è passata dall’iniziale WGS60 ai seguenti WGS66, 72 e 84 e ai successivi raffinamenti di quest’ultimo, resi possibili da ulteriori dati di posizione precisi ed accurati, da nuove determinazioni di gravità, dalla disponibilità di grandi quantità di dati altimetrici acquisiti dai satelliti e di dati intersatellitari di tracciamento delle orbite. I cambiamenti dal ’60 al ’66, al ’72 e all’84 risultarono talmente significativi per la maggior parte delle applicazioni, da configurarsi come veri cambi di datum, evidenziati anche dal cambio di acronimo. Non altrettanto può dirsi per i successivi affinamenti del WGS84. WGS84 è l’acronimo di “World Geodetic System 1984” e definisce il sistema come geodetico, mondiale, riferito al 1984; esso costituisce un modello matematico della Terra da un punto di vista geometrico, geodetico e gravitazionale, costruito sulla base delle misure e delle conoscenze scientifiche e tecnologiche disponibili al 1984. Il sistema WGS84 è un sistema terrestre convenzionale (CTS), definizione con la quale sono indicati i sistemi geocentrici solidali con la Terra e riferiti ad elementi convenzionalmente fissati (Polo medio, Greenwich); esso è derivato dal WGS72 al quale sono state apportate varie modifiche, alcune delle quali erano necessarie per accordarlo con le più recenti definizioni dell’IERS (International Earth Rotation Service). L’origine delle coordinate coincide con il centro di massa della Terra; l’asse Z è diretto verso il polo Nord terrestre convenzionale (CTP Conventional Terrestrial Pole) definito dal BIH (Bureau International de l’Heure, oggi IERS) al 1984.0; l’asse delle X è l’intersezione del piano del meridiano zero definito dal BIH al 1984.0 (quello passante per Greenwich) con il piano equatoriale associato al CTP; l’asse delle Y completa una terna ortogonale destrorsa e giace sul piano equatoriale 90° gradi ad Est dell’asse X; la terna cartesiana è solidale con la Terra. L’origine e gli assi delle coordinate sono anche il centro e gli assi dell’ellissoide associato al sistema, con l’asse Z come asse di simmetria dell’ellissoide. Nel definire tale ellissoide, denominato ellissoide WGS84, la Difesa statunitense decise di uniformarsi all’impostazione della “Unione Internazionale di Geodesia e Geofisica” che aveva portato all’adozione del sistema di riferimento geodetico GRS80 e venne scelto quindi un ellissoide biassiale, geocentrico e equipotenziale. I parametri utilizzati per definire tale ellissoide sono il semiasse maggiore a, la costante gravitazionale GM, il coefficiente normalizzato zonale gravitazionale di secondo grado C20 e la velocità angolare della Terra ω;
Prof. L. Surace 18
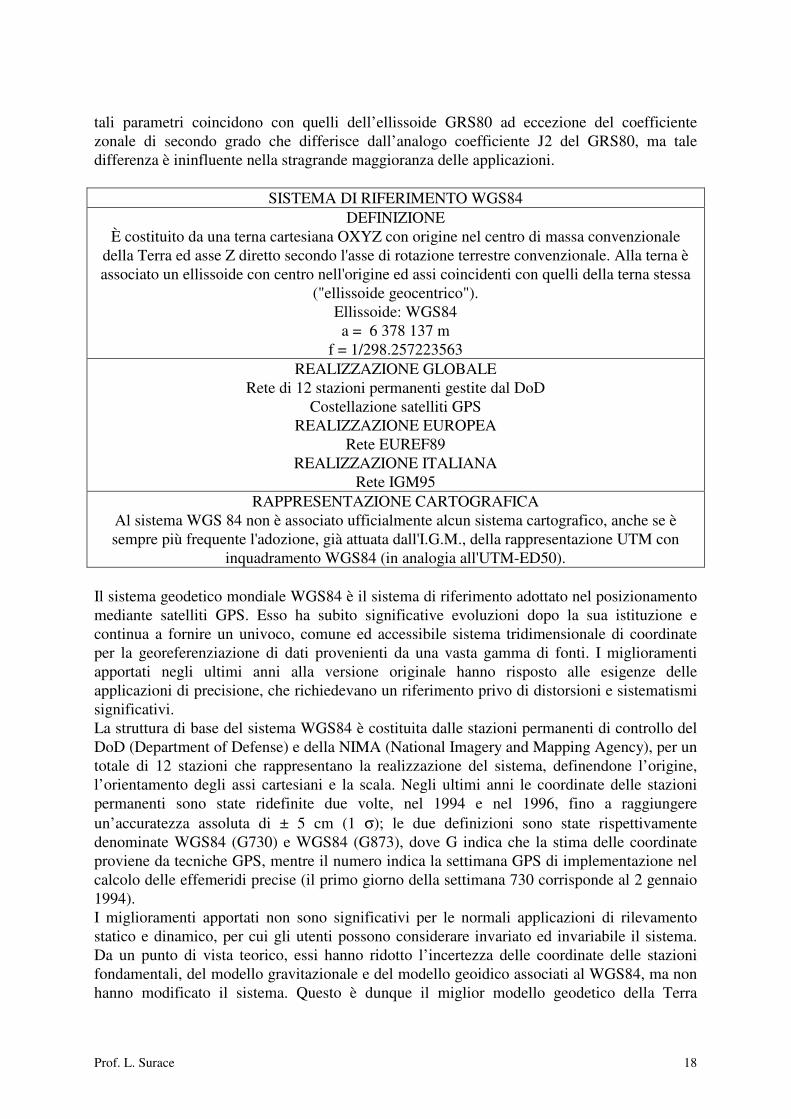
tali parametri coincidono con quelli dell’ellissoide GRS80 ad eccezione del coefficiente zonale di secondo grado che differisce dall’analogo coefficiente J2 del GRS80, ma tale differenza è ininfluente nella stragrande maggioranza delle applicazioni.
SISTEMA DI RIFERIMENTO WGS84 DEFINIZIONE
È costituito da una terna cartesiana OXYZ con origine nel centro di massa convenzionale della Terra ed asse Z diretto secondo l'asse di rotazione terrestre convenzionale. Alla terna è associato un ellissoide con centro nell'origine ed assi coincidenti con quelli della terna stessa
("ellissoide geocentrico"). Ellissoide: WGS84 a = 6 378 137 m
f = 1/298.257223563 REALIZZAZIONE GLOBALE
Rete di 12 stazioni permanenti gestite dal DoD Costellazione satelliti GPS
REALIZZAZIONE EUROPEA Rete EUREF89
REALIZZAZIONE ITALIANA Rete IGM95
RAPPRESENTAZIONE CARTOGRAFICA Al sistema WGS 84 non è associato ufficialmente alcun sistema cartografico, anche se è sempre più frequente l'adozione, già attuata dall'I.G.M., della rappresentazione UTM con
inquadramento WGS84 (in analogia all'UTM-ED50). Il sistema geodetico mondiale WGS84 è il sistema di riferimento adottato nel posizionamento mediante satelliti GPS. Esso ha subito significative evoluzioni dopo la sua istituzione e continua a fornire un univoco, comune ed accessibile sistema tridimensionale di coordinate per la georeferenziazione di dati provenienti da una vasta gamma di fonti. I miglioramenti apportati negli ultimi anni alla versione originale hanno risposto alle esigenze delle applicazioni di precisione, che richiedevano un riferimento privo di distorsioni e sistematismi significativi. La struttura di base del sistema WGS84 è costituita dalle stazioni permanenti di controllo del DoD (Department of Defense) e della NIMA (National Imagery and Mapping Agency), per un totale di 12 stazioni che rappresentano la realizzazione del sistema, definendone l’origine, l’orientamento degli assi cartesiani e la scala. Negli ultimi anni le coordinate delle stazioni permanenti sono state ridefinite due volte, nel 1994 e nel 1996, fino a raggiungere un’accuratezza assoluta di ± 5 cm (1 σ); le due definizioni sono state rispettivamente denominate WGS84 (G730) e WGS84 (G873), dove G indica che la stima delle coordinate proviene da tecniche GPS, mentre il numero indica la settimana GPS di implementazione nel calcolo delle effemeridi precise (il primo giorno della settimana 730 corrisponde al 2 gennaio 1994). I miglioramenti apportati non sono significativi per le normali applicazioni di rilevamento statico e dinamico, per cui gli utenti possono considerare invariato ed invariabile il sistema. Da un punto di vista teorico, essi hanno ridotto l’incertezza delle coordinate delle stazioni fondamentali, del modello gravitazionale e del modello geoidico associati al WGS84, ma non hanno modificato il sistema. Questo è dunque il miglior modello geodetico della Terra
Prof. L. Surace 19
elaborato sulla base dei dati, delle tecniche e della tecnologia disponibili al 1996, ma non ha assunto la denominazione WGS96 per i motivi che stiamo esponendo. Le variazioni di coordinate delle 12 stazioni permanenti tra le soluzioni G873 e G730 sono di ordine centimetrico e ciò rafforza la presunzione di invariabilità a lungo termine del sistema per tutte le applicazioni di nostro interesse. Nel 1988 il Servizio Internazionale per la Rotazione Terrestre (IERS) ha definito un nuovo sistema di riferimento convenzionale terrestre, denominato ITRS (IERS Terrestrial Reference System). La sua origine coincide con il centro di massa della Terra, l’asse Z del sistema contiene l’Origine Convenzionale Internazionale (CIO), l’asse X è diretto verso il meridiano zero (Greenwhich) e l’asse Y completa una terna cartesiana destrorsa. Lo IERS pubblica annualmente una realizzazione del sistema, denominata ITRF (IERS Terrestrial Reference Frame) con riferimento all’anno di validità (es. ITRF92). Ciascuna di queste realizzazioni (frames) del sistema consiste in un set di coordinate e di velocità di vertici delle reti mondiali VLBI (Very Long Baseline Interferometry), LLR (Lunar Laser Ranging), SLR (Satellite Laser Ranging) e GPS permanenti che contribuiscono all’IERS. La Sottocommissione EUREF dell’IAG (Associazione Internazionale di Geodesia) responsabile della realizzazione del sistema di riferimento europeo, ha definito il sistema di riferimento terrestre europeo (ETRS), ne ha curato la realizzazione (ETRF) nel 1989 e provvede ai suoi aggiornamenti annuali, comprensivi di integrazioni ed estensioni. Il sistema ETRF89 è una realizzazione del sistema WGS84, mentre il sistema IGM95 ne è la realizzazione italiana. La combinazione della rete IGM95 e del modello locale di ondulazioni geoidiche, che le è associato, rappresenta il più consistente passo verso la precisione, la completezza, l’interscambiabilità e la piena utilizzazione delle informazioni territoriali nazionali. Il passaggio al WGS84 si configura dunque come transizione da un sistema locale dotato di una propria realizzazione (Roma40) ad uno globale, realizzato omogeneamente su scala globale (stazioni permanenti DoD e NIMA), su scala europea (ETRF) e su scala nazionale (IGM95) con accuratezza nettamente superiore alla corrispondente del sistema Roma40 e con elevate garanzie di durata nel tempo. A dispetto dei Cartografi, la superficie terrestre non è assolutamente statica. Nel sistema ITRS il continente europeo mostra un movimento annuo di circa 3 cm in direzione Nord-Est, una quantità che potrebbe essere un disturbo per alcune applicazioni pratiche. Per evitare impraticabili variazioni annue nelle coordinate, l’EUREF ha adottato un sistema europeo, il cosiddetto ETRS89, che si muove insieme alla parte continentale stabile verso NE; ciò è stato fatto mantenendo fisse al valore 1989.0 le coordinate dei punti delle stazioni europee che contribuiscono all’IERS. In analogia all’IERS, la Sottocommissione EUREF pubblica ogni anno nuove e più precise realizzazioni dell’ETRS89, chiamate ETRF90, ETRF91, etc. Dall’89 ad oggi, attraverso campagne annuali internazionali, la rete ETRF89 è stata raffittita e progressivamente estesa verso Nord e verso Est, includendo oggi gran parte dei paesi dell’ex blocco orientale. In questi anni la maggior parte dei paesi europei hanno provveduto ad istituire nuove reti geodetiche che rappresentano le realizzazioni nazionali del sistema WGS84. Attualmente si va consolidando in ambito europeo l’adozione della realizzazione ETRF2000, significativamente migliore della soluzione ETRF89. A causa del movimento delle placche tettoniche e quindi anche delle stazioni solidali alla crosta terrestre, un certo set di coordinate di stazioni può essere associato solo ad una determinata epoca nel caso in cui si vogliano raggiungere precisioni assolute dell’ordine del
Prof. L. Surace 20
decimetro. Per le placche tettoniche contenenti delle stazioni DoD si è riscontrato uno spostamento orizzontale massimo di 7 cm in un anno; nel caso peggiore, ignorare tali variazioni comporterà errori che nell’arco di 10 anni supereranno il mezzo metro su scala mondiale. Ora che la rete di riferimento per il GPS ha raggiunto un livello di accuratezza decimetrico, si rende necessario mantenere questo livello di precisione e sicuramente occorrerà tenere conto del movimento delle placche tettoniche e degli effetti delle maree terrestri. Per quanto riguarda la realizzazione italiana del WGS84, cioè la rete IGM95 (fig. 7), è utile aggiungere alcune considerazioni. La rete è ora completata su tutto il territorio nazionale, è omogenea, ha distribuzione uniforme, è facilmente accessibile, ha coordinate WGS84 definitive, e definitivi parametri di passaggio al sistema nazionale. Essa è stata concepita per rivoluzionare in brevissimo volger di tempo le metodologie di intervento sulla rete geodetica, con il ricorso alle tecniche GPS. Risulta finalmente possibile ed opportuno che tutte le carte riportino un unico sistema di riferimento, ma purtroppo non è ancora così. Fare cartografia è un’operazione lenta e costosa e convertire le carte da un datum ad un altro non è semplice. Così le carte in circolazione sono tuttora riferite ai “vecchi” sistemi ed al più riportano le costanti di passaggio dal vecchio al nuovo sistema. È comunque necessario affrontare il problema del cambiamento di datum. Dai risultati conseguiti e dalle riflessioni indotte, oltre che dalla necessità di utilizzare il patrimonio di dati geodetici e cartografici preesistenti viene lo stimolo a riesaminare il sistema Roma40. Infatti non vi è dubbio che approfondire la conoscenza delle caratteristiche della “vecchia rete” è la strada più corretta per un'efficace integrazione tra questa e la nuova rete e per la individuazione delle possibili soluzioni al problema della trasformazione delle coordinate, o meglio al problema del cambiamento del sistema di riferimento. Non a caso si è detto “possibili soluzioni” e non “soluzione”, giacché il cambiamento di datum, problema geodetico e non semplicemente geometrico, presenta una gamma di possibili soluzioni, tutte comunque sperimentali; gamma di possibili soluzioni in funzione di varie possibili ipotesi “a priori” su cui basare lo sviluppo delle soluzioni stesse. Con i metodi di posizionamento satellitare si ottengono coordinate cartesiane in una terna geocentrica o coordinate geografiche riferite all’ellissoide geocentrico. Per trasformare tali coordinate nel sistema locale relativo alla zona in cui si sta operando è necessario ricorrere ad algoritmi con parametri determinati probabilisticamente, per poter adattare i risultati delle misure satellitari (in sé molto precisi) alle inevitabili deformazioni della rete che realizza il sistema locale. Un qualsiasi ellissoide orientato localmente si discosta in modo notevole da quello geocentrico adottato nel sistema WGS84, non solo per i diversi parametri ma soprattutto per la posizione del centro e l’orientamento degli assi (fig. 8- Sezione meridiana sul meridiano centrale del fuso). Di conseguenza, le coordinate geografiche di uno stesso punto nel datum locale ed in quello globale risultano sensibilmente diverse: gli scostamenti, tradotti in lunghezze, possono essere anche di parecchie centinaia di metri. La tabella mostra le differenze dimensionali tra l’ellissoide del sistema geodetico italiano, identico a quello dell’ED50 ed il corrispondente WGS84. Dunque l’ellissoide WGS84 è più piccolo sia nella dimensione equatoriale che in quella polare. La figura 8 mostra schematicamente come le variazioni di dimensione e di origine si riflettono sulla latitudine ellissoidica (o geodetica) e sulle coordinate piane (gaussiane) Nord di un punto
Prof. L. Surace 21
della superficie terrestre. Analoghe variazioni si verificano sulla longitudine ellissoidica e sulle coordinate Est. Per trasformare le coordinate geografiche e quelle cartografiche da un sistema ad un altro è necessario applicare ad ogni punto delle variazioni ∆ϕ e ∆λ, ∆E e ∆N, che, per l’origine che hanno, fondate sulle misure e quindi affette da errori, sono funzioni del punto: cioé gli spostamenti da applicare a ciascun punto variano con la posizione. Purtroppo non è dato di conoscere la legge di variazione, se non empiricamente ed in modo discreto, così come empiricamente e in modo discreto è conoscibile la metrica dei due sistemi. Per la cartografia a piccola scala si può calcolare una coppia di variazioni medie per ciascun elemento cartografico, da apportare senza introdurre errori significativi. Ad esempio per la cartografia alla scala 1:50000 le differenze tra i valori medi per elemento cartografico e i valori veri all’interno, non sono significative per la maggior parte delle applicazioni, poiché generalmente quelle carte consentono ad esempio la digitalizzazione di particolari con una precisione tra ±10 e ±15 m. E’ allora relativamente facile determinare le variazioni di coordinate cartografiche e geografiche per ciascuno dei 634 fogli (e per i sottomultipli 1:5000 e 1:10000) della carta d’Italia 1:50000. Naturalmente, si possono modificare le note marginali indicando sulle carte le correzioni necessarie per trasformare le coordinate dei prodotti grafici e di quelli digitali nell’appropriato sistema di riferimento. A regime è poi auspicabile che sulla carta sia stampato il solo reticolato piano UTM-WGS84 e sul bordo i contrassegni per la costruzione del reticolato geografico, lasciando eventualmente alle note marginali le informazioni sulle relazioni con i precedenti sistemi di riferimento geodetici (Roma40 e ED50) e cartografici (Gauss-Boaga e UTM-ED50). Quanto sopra vale per il recupero delle informazioni territoriali esistenti e riferite al sistema nazionale. Per le operazioni di inquadramento geodetico il problema è diverso e più complesso. La trasformazione fra due diversi datum locali in una stessa area (ad es. tra quello della rete nazionale e quello della rete catastale) viene spesso eseguita con metodi empirici o comunque con criteri semplificati, basati sul fatto che le due superfici di riferimento, seppur diverse, sono molto vicine tra di loro, e la principale differenza è quella di orientamento. L’ipotesi di cui sopra viene meno nel caso della trasformazione tra un sistema geocentrico globale come il WGS84 e un sistema geodetico locale: le due superfici ellissoidiche in questo caso sono notevolmente distanziate (di decine di metri) ed è necessario ricorrere ad algoritmi di trasformazione più generali. Il cambio di datum è prepotentemente salito alla ribalta con il GPS. La trasformazione tra due sistemi di riferimento può essere calcolata solo quando vi siano sufficienti misure che legano punti nei due sistemi. Fino a poco tempo fa era necessario che il rilievo GPS comprendesse alcuni punti noti nel "vecchio" sistema geodetico in cui il rilievo stesso andava inquadrato; era così possibile calcolare i parametri della trasformazione validi per la zona, secondo un modello consolidato di rototraslazione spaziale con variazione di scala. Per effetto delle distorsioni non eliminabili che caratterizzano le reti geodetiche (specie quelle meno recenti), la stima dei parametri risulta più o meno approssimata e comunque legata alla specifica configurazione dei punti in comune e alla loro accuratezza. La trasformazione di datum è quindi fonte di disomogeneità e di incertezze che si sovrappongono a quelle di misura. Un metodo di trasformazione fondato su chiari presupposti teorici è quello basato su una rototraslazione nello spazio. La rototraslazione semplice inserisce un rilievo GPS in una rete geodetica preesistente variandone l’orientamento complessivo (nello spazio) senza modificare le posizioni relative dei punti. La precisione intrinseca del rilievo GPS non viene quindi degradata dalla trasformazione.
Prof. L. Surace 22
Nella pratica, come già si è accennato, occorre tener conto che ogni datum è in realtà realizzato dalla rete geodetica ad esso associata, e risente quindi degli errori di misura e dei conseguenti errori di orientamento e di scala che producono distorsioni e deformazioni della rete stessa. Il modello teorico della rototraslazione spaziale (trasformazione a sei parametri), che funzionerebbe perfettamente se le reti fossero prive di errori, deve essere modificato, introducendo parametri aggiuntivi (in generale un fattore di scala) che permettano di modellare in qualche modo le imperfezioni delle reti. La rototraslazione pura è applicabile solo quando la rete preesistente, in cui il rilievo GPS viene inserito, presenta distorsioni modeste, altrimenti l’approssimazione diventa inaccettabile; essa è invece da applicare, ad esempio, quando la finalità primaria della rete non sia cartografica ma ingegneristica (progettazioni e costruzioni di infrastrutture) o di monitoraggio di movimenti e necessita quindi di sfruttare a pieno la precisione del GPS. Per applicazioni cartografiche a piccola scala, ad es. per le carte utilizzate nella navigazione marittima ed aerea, in cui i requisiti di precisione sono bassi, si possono a volte trascurare le rotazioni tra i due sistemi, realizzando una traslazione semplice (trasformazione a 3 parametri). Poiché generalmente in un sistema locale sono disponibili solo le coordinate ellissoidiche ϕ e λ (latitudine e longitudine), la quota geoidica H ed eventualmente, talvolta con minor affidabilità e precisione, la quota ellissoidica h (data dalla somma di H con l’ondulazione geoidica N), è utile esprimere il modello di trasformazione in funzione del suddetto tipo di coordinate. A tale scopo si rivelano adatte le ben note formule di Molodenskij che consentono di scindere i contributi dei punti noti solo in planimetria da quelli noti solo in quota. Per ottenere una migliore approssimazione e tener conto delle distorsioni e delle deformazioni delle reti, il procedimento più frequentemente adottato consiste nell’introdurre un fattore di scala (settimo parametro) nella trasformazione. La rototraslazione con fattore di scala è detta anche trasformazione di similarità o conforme, in quanto mantiene invariati gli angoli delle figure nello spazio (giacenti su piani variamente inclinati) e quindi la forma delle figure che costituiscono il rilievo originario, variandone la scala complessiva e l’orientamento per adattarlo alla rete in cui viene inserito. L’introduzione di un fattore di scala si basa sull’ipotesi che tra le due reti sia ipotizzabile un modello di deformazione isotropa costante per tutta la zona. Se la situazione si discosta da questa ipotesi, il modello riduce la propria validità e le opzioni possibili sono solo due: – cambiamento di modello con l’introduzione di ulteriori parametri; – scomposizione della zona in porzioni dove il modello iniziale sia sufficientemente
giustificato. Aumentare il numero dei parametri della trasformazione per cercare di modellare meglio le distorsioni della rete è operazione che va eseguita con cautela e cercando di non perdere di vista il significato geometrico della trasformazione stessa. In sostanza, bisogna evitare una “sovrapparametrizzazione”, che porta solo apparentemente a buoni risultati. Aumentando il numero dei parametri da stimare (passando ad esempio da espressioni lineari a formule polinomiali) i residui sui punti noti utilizzati per la stima dei parametri divengono in genere minori; non è detto, però, che il modello si comporti altrettanto bene per altri punti non considerati nel calcolo dei parametri. È necessario subito osservare che almeno due fattori diversi concorrono a rendere in linea di principio poco significativi i parametri stimati: da una parte l’introduzione delle quote geoidiche H in luogo di quelle ellissoidiche, normalmente non disponibili nel sistema locale, che costituisce una violazione delle ipotesi del modello adottato; dall’altra una notevole correlazione risultante fra i sette parametri, se stimati, come sempre accade, per zone di
Prof. L. Surace 23
estensione limitata in rapporto alle dimensioni degli ellissoidi di riferimento dei due sistemi (problema geometricamente mal condizionato). D’altra parte l’eccessiva correlazione fra i parametri ha un’influenza negativa essenzialmente sulla significatività geometrica degli stessi e non sulla efficacia nel loro impiego che si limita al passaggio fra i due sistemi di riferimento all’interno delle piccole zone che li hanno generati. Nella maggior parte delle campagne di misura GPS eseguite in Italia, inserendo il rilievo ottenuto nelle reti nazionale e catastale, si sono ottenuti residui planimetrici massimi dell’ordine dei 15 - 20 cm, accettabili per operazioni di raffittimento a scopo cartografico o per lavori di aggiornamento catastale. Le esperienze sinora eseguite hanno comunque mostrato che, a causa delle distorsioni delle “vecchie” reti trigonometriche, la trasformazione di datum risulta sempre critica. Quei 15 - 20 centimetri sono un limite invalicabile... Lo sfruttamento delle metodologie GPS nel contesto dei riferimenti locali è possibile dunque solo eseguendo un passaggio tra sistemi che, anche se condotto nel modo migliore, peggiora la qualità delle determinazioni realizzate in WGS84. Per ottenere risultati accettabili nei termini sopra detti, è necessario suddividere il territorio in zone di estensione abbastanza limitata e determinare un set di parametri per ogni zona. Nei parametri, in sostanza, si “scaricano” prevalentemente le distorsioni locali della rete, ma il risultato della trasformazione (cioè le coordinate nel sistema locale che da essa si ottengono) è in genere buono e omogeneo con la rete. Calcolando la trasformazione per zone molto ampie la significatività dei parametri risulta migliore (nel senso che i parametri esprimono meglio gli effettivi scostamenti traslazionali e di orientamento tra i due sistemi geodetici) ma i residui ottenuti localmente vengono ad essere spesso di entità inaccettabile. Per affrontare il problema della trasformazione di datum, fu inserito, tra i principali scopi del progetto IGM95, l’obbiettivo di definire le relazioni tra il sistema geodetico nazionale Roma40, e quello proprio del rilievo GPS, cioè il WGS84, di cui la rete IGM95 è una realizzazione. Si ritenne inoltre opportuno valutare le relazioni intercorrenti tra i suddetti sistemi geodetici (e quelli cartografici associati) e l’UTM-ED50, il quale, pur non possedendo caratteristiche di precisione sufficienti per una corretta conduzione delle operazioni geodetiche e topografiche di inquadramento geometrico, ha avuto ed ha tuttora rilevante influenza. Dopo un’accurata analisi dei dati disponibili ed un approfondito esame comparativo delle differenti strategie operative perseguibili, è stata messa a punto dapprima una metodologia che ha portato alla definizione ottimizzata delle relazioni tra la rete classica e quella fondata sulle misure GPS. Il risultato consistette in un set di sette parametri locali per ogni punto della rete IGM95, da applicare alle nuove misure GPS condotte nell’ambito di circa 10 km dal vertice utilizzato; considerando la densità media della nuova rete (1 punto ogni 250 km2 con interdistanza media di 15 - 20 km), ciò significò la totale ed omogenea copertura del territorio nazionale. Successivamente, è stata predisposta e resa disponibile dall’IGM una nuova procedura di trasformazione (VERTO), basata sull’interpolazione di matrici di valori di passaggio tra i sistemi di interesse nazionale; essa è caratterizzata da una precisione dell’ordine di 20 cm, ma soprattutto consente il passaggio fra sistemi in modo univoco, senza soluzioni di continuità e senza ambiguità, presenti invece nella procedura a sette parametri per ogni vertice IGM95. Il pieno sfruttamento del patrimonio esistente è ora più semplice, poiché è possibile ottenere una sua conversione in WGS84 in maniera omogenea e univoca.
Prof. L. Surace 24
Per quanto riguarda le quote, il risultato è significativamente migliorato introducendo per le altezze ellissoidiche una loro stima ottenuta correggendo quelle geoidiche con i valori di separazione (N) di cui oggi siamo in possesso. Tale metodologia rende dunque finalmente possibile un pieno sfruttamento del GPS per l’integrazione delle nuove informazioni di posizione rispetto a quelle esistenti e apre definitivamente la strada all’affermazione delle tecniche satellitari non solo presso enti e aziende di rilievo geotopocartografico, ma anche a livello di singoli professionisti orientati ad applicazioni tematiche e di dettaglio.
7. - Il cambio di sistema di riferimento
La scelta di cambiare il sistema di riferimento ufficiale di una nazione è una decisione che comporta pesanti conseguenze; infatti, l’intero patrimonio cartografico potrebbe risultare di colpo superato, con l’avvio di un periodo di incertezza nel quale i due sistemi, vecchio e nuovo, devono convivere prima che il nuovo raggiunga una diffusione tale da costituire uno standard indiscusso. Tale periodo, nel quale si ingenerano complicazioni ed ambiguità, poteva nel passato essere anche molto lungo (come fu per noi in conseguenza della transizione dal sistema Bessel-Genova al sistema Roma40); in certi casi esso appare interminabile, se solo si pensi alla coesistenza incoerente, ma ancora attuale, delle coordinate catastali con quelle Gauss-Boaga. È quindi normale che prima di decidere un cambio di sistema di riferimento siano valutati con attenzione i reali benefici che si otterranno in relazione agli oneri che da tale decisione derivano ed in ogni caso è indispensabile che il nuovo sistema abbia, almeno come previsione, i requisiti per una lunga durata. Dunque, dopo aver motivato la scelta del sistema WGS84 come sistema geodetico ufficiale, occorre correttamente esaminare le possibili controindicazioni e valutarne la portata, insieme agli impatti culturali ed economici. E’ perciò opportuno porsi almeno alcune domande: quali prospettive di durata presenta il nuovo datum? Quali possibilità di recupero si prospettano per il patrimonio dei dati preesistenti? Quali sarebbero le risorse da destinare al recupero dei vecchi dati? Quali mutamenti significativi sono indotti dal cambio di datum sulla geometria delle informazioni georeferenziate? Per introdurre le risposte, può essere utile ripercorrere velocemente la storia degli altri cambi di datum che il nostro patrimonio di informazioni territoriali ha subito nel passato. Senza voler rifare la storia della nostra rete geodetica, accenneremo solo a quanto essa fosse inizialmente spezzettata ed disomogenea, soprattutto perché le varie reti che si susseguirono nel tempo furono orientate su stazioni astronomiche diverse, o anche sulla medesima stazione astronomica, ma con diversi valori. Inspiegabile e grave errore del passato fu la preoccupazione di ricercare dati di partenza molto accurati per l’orientamento, piuttosto che di averli unitari per tutta la rete nazionale: anche se riferiti ad una stazione con dei valori poco attendibili, essi si sarebbero potuti considerare come convenzionali. Si può dire che ogni qualvolta a Roma veniva fatta una nuova determinazione astronomica, ci si sentiva in dovere di cambiare l’orientamento della rete geodetica. Fra tanta confusione, l’unica cosa rimasta stabile era fortunatamente la superficie di riferimento dell’ellissoide di Bessel; fin dalle prime triangolazioni essa fu la base di tutti i nostri calcoli e di tutta la nostra cartografia, militare e catastale, e fu conservata fino allo scoppio della II guerra mondiale. Ma, come già visto, il 30 novembre del 1940 la Commissione Geodetica Italiana propose di cambiare sistema di riferimento e si paasò al
Prof. L. Surace 25
sistema che chiamiamo Roma40, con richiamo alla data della determinazione astronomica. A prescindere dal fatto che l’orientamento sulla verticale di Roma M. Mario non può essere considerato, in termini di accuratezza, significativamente migliore di quello di Genova, da un punto di vista puramente scientifico si deve ritenere che l’adozione della rete geodetica, qual era stata pubblicata nel 1908-1919, sarebbe stata da preferire, ma l’introduzione dell’orientamento di Roma si imponeva piuttosto per ragioni sentimentali che per motivi scientifici. Se ci si fosse limitati a trasformare i dati nel sistema che potremmo chiamare “Roma–Bessel”, si sarebbe comunque compiuta un’operazione utile e meritoria, ancorché lunga e faticosa; ma si volle invece introdurre, al posto dell’ellissoide di Bessel, quello di Hayford. Tale infatti fu l’ordine che la Divisione Geodetica dell’Istituto Geografico Militare ricevette nell’anno 1942, in piena guerra. La giustificazione del cambiamento dell’ellissoide è ricercabile, per quanto è dato di sapere allo scrivente attraverso lo studio delle fonti storiche disponibili, unicamente nel fatto che l’Unione Geodetica Internazionale aveva a suo tempo suggerito l’adozione di tale ellissoide, che sembrava adattarsi meglio di quello di Bessel alla superficie geoidica. Che le carte topografiche di una nazione siano realizzate con riferimento all’ellissoide di Hayford o a quello di Bessel, è questione di assai modesto interesse; né si può d’altra parte pretendere che ogni qualvolta i geodeti riescono a migliorare le costanti dell’ellissoide di riferimento, ogni stato sia obbligato a cambiare la cartografia. Tanto più dannosa appariva l’introduzione di tale nuova superficie di riferimento, in quanto gli stati confinanti con l’Italia, ad eccezione della Francia (ellissoide di Clarke), avevano adottato sin dagli albori l’ellissoide di Bessel; e l’unificazione delle triangolazioni con tali stati, operazione che in guerra è della massima importanza, incontrò nuove difficoltà che si potevano benissimo evitare. Ad ogni modo il passo fu fatto, e nel momento più inopportuno; ma ciò che naturalmente non si poté fare in tempi brevi, fu l’unificazione di tutta la rete geodetica italiana, articolata gerarchicamente in ordini: la confusione si accrebbe ulteriormente per la lunga convivenza dei due sistemi. Il cambio di datum da Bessel-Genova a Roma40 fu dunque un non ben motivato passaggio da un datum locale ad un altro, pur sempre locale, con un trasporto della rete realizzante senza alcuna modifica migliorativa e senza alcuna garanzia sulla durata del nuovo sistema, che anzi altri stati europei si guardarono bene dall’adottare. Per quanto riguarda l’Europa, fino alla seconda guerra mondiale ogni stato, analogamente all’Italia, si era costruito un proprio sistema di riferimento. Questi sistemi erano completamente scollegati, sia per la limitatezza delle tecniche di rilievo dell’epoca, sia per una spiccata autonomia manifestata dagli stati di allora. Dopo la fine di quella guerra, nell’ambito dell’Associazione Internazionale di Geodesia, molti Stati europei concordarono nel procedere ad un calcolo di compensazione di insieme e, come già detto, fu definito il sistema ED50. L’introduzione in Italia dell’ED50, sistema ancora locale anche se più esteso del Roma40, cui comunque non è mai subentrato nei rilevamenti nazionali, si presenta come un primo tentativo di internazionalizzazione, destinato però ad ingenerare non poche confusioni. La rete che lo realizza è meno accurata delle reti nazionali chiamate a sostenerlo e dunque ad esso possono essere e sono assegnati solo limitati fini cartografici.
7.1 - Il recupero dei dati esistenti
Il problema dell’integrazione fra le misure satellitari e i dati preesistenti, che costituiscono un immenso patrimonio informativo che non può e non deve essere trascurato, è certamente
Prof. L. Surace 26
cruciale e va esaminato sia dal punto di vista della fattibilità teorica che da quello concretamente operativo. Innanzi tutto è però necessario capire se, e in che termini, è oggi fattibile l’operazione di trasformazione tra il datum Roma40 e il WGS84. Definita la fattibilità teorica secondo le procedure standardizzate di cui si è già scritto, si può rispondere positivamente, ma solo parzialmente, al secondo quesito: il patrimonio delle informazioni preesistenti è teoricamente recuperabile. Resta da valutare se ciò sia anche fattibile dal punto di vista delle risorse necessarie, cioè dal punto di vista del rapporto costi-benefici. Prima però è opportuno chiarire perché, una volta definito in maniera univoca il passaggio tra WGS84 e Roma40 (e indirettamente anche con ED50), non si sfrutti questa procedura per portare nel vecchio sistema tutta la georeferenziazione operata in WGS84, salvaguardando così il patrimonio preesistente. E’ in effetti la procedura seguita ancora oggi e resa obbligatoria dall’ufficialità del sistema Roma40, ma esistono almeno due motivi per i quali essa non risulta ulteriormente proponibile, né sostenibile: in primo luogo la quantità di informazioni nel sistema Roma40 è un insieme finito, per quanto grande, e conseguentemente suscettibile di una valutazione quantitativa precisa; viceversa la quantità di informazioni georeferenziate in WGS84 è un insieme in costante, tumultuosa crescita, destinato a superare presto, ammesso che non lo abbia già fatto, l’insieme preesistente. In secondo luogo, trasportare un rilevamento GPS nel sistema Roma40 significa accettare un inutile degrado di accuratezza e l’introduzione di sistematismi e disomogeneità non giustificati. Nel passaggio dal sistema di riferimento globale a quello locale svanisce infatti la precisione intrinseca del posizionamento satellitare. Per quanto riguarda la valutazione delle risorse necessarie alla trasformazione, occorre suddividere le informazioni preesistenti in due grandi categorie: informazioni vettoriali (es. la cartografia numerica) e informazioni raster (es. la cartografia grafica digitalizzata per scansione). Per valutare le risorse strumentali e temporali necessarie al cambio di datum della cartografia vettoriale, ci si può riferire, a titolo di esempio, alle carte tecniche regionali numeriche, che rappresentano una parte non trascurabile del patrimonio cartografico-numerico presente oggi in Italia. Può essere opportuno assumere come campione una sezione cartografica 1:10000, il cui livello di dettaglio nella rappresentazione del territorio fa sì che i file vettoriali contengano un elevato numero di particolari cartografici, ma che al contempo è ammissibile utilizzare - ai soli fini di esemplificazione - come modello per una ipotetica cartografia a copertura nazionale. Come si evince analizzando file di cartografia numerica realmente esistente e rappresentativa della categoria, una sezione 1:10000 contiene mediamente alcune centinaia di migliaia di coordinate. La conversione di un tale quantitativo di dati, effettuabile con l’impiego di un normale PC, richiede pochi secondi di elaborazione. Considerando - in valutazione approssimativa, ma idonea ad una stima di massima - che per coprire l’intero territorio nazionale occorrerebbero circa 9000 file, si ha che la conversione di un’ipotetica cartografia numerica 1:10000 di tutta Italia richiederebbe solamente alcune ore di elaborazione! La trasformazione di coordinate applicata ad un formato raster presenta aspetti più problematici rispetto alla conversione del formato vettoriale. Normalmente, un’immagine raster georeferenziata consiste in una matrice rettangolare di punti (pixel), alla quale sono associate le opportune informazioni per il posizionamento di uno degli spigoli (o del centro di un pixel di spigolo) nel sistema di riferimento, l’orientamento di
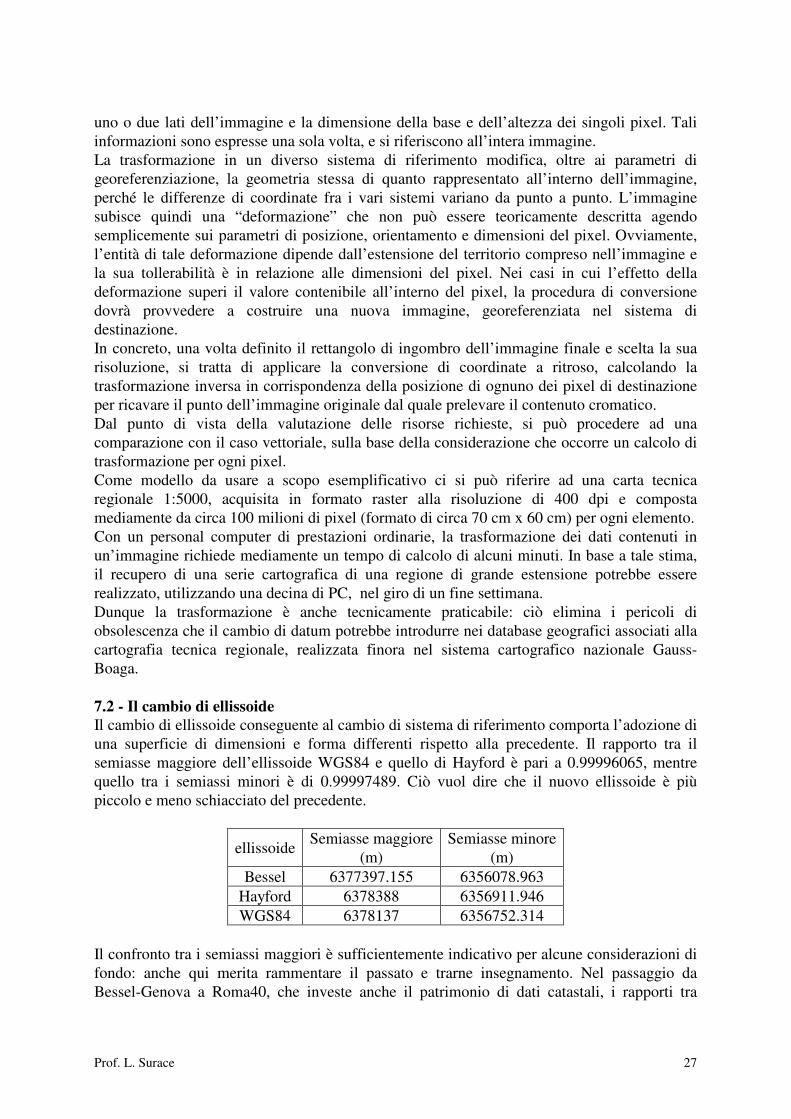
Prof. L. Surace 27
uno o due lati dell’immagine e la dimensione della base e dell’altezza dei singoli pixel. Tali informazioni sono espresse una sola volta, e si riferiscono all’intera immagine. La trasformazione in un diverso sistema di riferimento modifica, oltre ai parametri di georeferenziazione, la geometria stessa di quanto rappresentato all’interno dell’immagine, perché le differenze di coordinate fra i vari sistemi variano da punto a punto. L’immagine subisce quindi una “deformazione” che non può essere teoricamente descritta agendo semplicemente sui parametri di posizione, orientamento e dimensioni del pixel. Ovviamente, l’entità di tale deformazione dipende dall’estensione del territorio compreso nell’immagine e la sua tollerabilità è in relazione alle dimensioni del pixel. Nei casi in cui l’effetto della deformazione superi il valore contenibile all’interno del pixel, la procedura di conversione dovrà provvedere a costruire una nuova immagine, georeferenziata nel sistema di destinazione. In concreto, una volta definito il rettangolo di ingombro dell’immagine finale e scelta la sua risoluzione, si tratta di applicare la conversione di coordinate a ritroso, calcolando la trasformazione inversa in corrispondenza della posizione di ognuno dei pixel di destinazione per ricavare il punto dell’immagine originale dal quale prelevare il contenuto cromatico. Dal punto di vista della valutazione delle risorse richieste, si può procedere ad una comparazione con il caso vettoriale, sulla base della considerazione che occorre un calcolo di trasformazione per ogni pixel. Come modello da usare a scopo esemplificativo ci si può riferire ad una carta tecnica regionale 1:5000, acquisita in formato raster alla risoluzione di 400 dpi e composta mediamente da circa 100 milioni di pixel (formato di circa 70 cm x 60 cm) per ogni elemento. Con un personal computer di prestazioni ordinarie, la trasformazione dei dati contenuti in un’immagine richiede mediamente un tempo di calcolo di alcuni minuti. In base a tale stima, il recupero di una serie cartografica di una regione di grande estensione potrebbe essere realizzato, utilizzando una decina di PC, nel giro di un fine settimana. Dunque la trasformazione è anche tecnicamente praticabile: ciò elimina i pericoli di obsolescenza che il cambio di datum potrebbe introdurre nei database geografici associati alla cartografia tecnica regionale, realizzata finora nel sistema cartografico nazionale Gauss-Boaga.
7.2 - Il cambio di ellissoide
Il cambio di ellissoide conseguente al cambio di sistema di riferimento comporta l’adozione di una superficie di dimensioni e forma differenti rispetto alla precedente. Il rapporto tra il semiasse maggiore dell’ellissoide WGS84 e quello di Hayford è pari a 0.99996065, mentre quello tra i semiassi minori è di 0.99997489. Ciò vuol dire che il nuovo ellissoide è più piccolo e meno schiacciato del precedente.
ellissoide Semiasse maggiore
(m) Semiasse minore
(m) Bessel 6377397.155 6356078.963
Hayford 6378388 6356911.946 WGS84 6378137 6356752.314
Il confronto tra i semiassi maggiori è sufficientemente indicativo per alcune considerazioni di fondo: anche qui merita rammentare il passato e trarne insegnamento. Nel passaggio da Bessel-Genova a Roma40, che investe anche il patrimonio di dati catastali, i rapporti tra
Prof. L. Surace 28
semiassi maggiore e minore dell’ellissoide entrante (Hayford) e uscente (Bessel) erano rispettivamente di 1.00015537 e 1.00013105; come si vede, le variazioni incidono per poco più di una unità della quarta decimale, cioè un decimetro per chilometro, e risultano sempre superiori a quelle derivanti dal nuovo cambio di datum proposto (da Hayford a WGS84). Dunque la variazione di oggi comporterebbe un “trauma” minore di quello imposto senza conseguenze, nel secolo scorso, al nostro sistema geodetico-cartografico. Né d’altronde le variazioni dimensionali dell’ellissoide potevano comportare un’alterazione di scala, giacché questa è data piuttosto dalle misure che dalle dimensioni della superficie di riferimento. Analogo ragionamento può farsi per le grandezze superficiali, di rilevante interesse fiscale: con facili calcoli sulle aree di figure simili sulle differenti superfici ellissoidiche, si ricava che un ettaro, cioè 10000 m2, divenne circa 10003 m2 (+ 0.03%) nel passaggio da Bessel a Hayford e tornerebbe a 10002 m2 (+ 0.02%) nel passaggio a WGS84. Anche ammesso per assurdo che le superfici catastali fossero determinate con una precisione capace di risentire di variazioni dell’ordine di 0.01%, il nuovo sistema fornirebbe valori più vicini a quelli originari di quanto non avvenga con il transito da Cassini-Soldner (Bessel Genova) a Gauss-Boaga (Roma40). 8. - Il sistema di riferimento altimetrico
Il primo elemento necessario per la definizione della quota è la superficie di riferimento. Una volta stabilita questa, è individuata la direzione (ortogonale) lungo cui misurare le quote, mentre dalla realizzazione del sistema di riferimento discende la scala delle misure lungo quella direzione. In funzione di come si scelgono questi elementi, si possono definire differenti sistemi di quota. Usare un piano come superficie di riferimento è ovviamente insufficiente, salvo che per applicazioni di estensione particolarmente limitata. Scelte migliori, più vicine alla reale forma della Terra, sono la superficie di un ellissoide di rotazione o una superficie equipotenziale che si adagia approssimativamente su un’idealizzata superficie degli oceani, dando così significato al termine quota sul livello medio del mare. La prima delle scelte di cui sopra, è usata per definire le altezze ellissoidiche; la seconda per le quote ortometriche. Le due superfici di riferimento sono di natura completamente diversa. La prima risulta da una definizione geometrica e può essere matematicamente descritta in maniera semplice. Sfortunatamente, poiché una simile superficie non ha significato fisico, nessuna strumentazione poteva direttamente rilevarla prima dell’avvento del GPS. Per conservare il significato fisico della quota è necessario definirla rispetto ad una superficie fisicamente significativa: generalmente si considera a tale scopo una superficie equipotenziale approssimata globalmente dalla superficie media del mare. In prima approssimazione le superfici equipotenziali possono essere rappresentate da superfici teoriche di grandi masse d’acqua. Teoriche in questo caso significa che il movimento delle onde, le correnti oceaniche, le maree e altri fenomeni di cambiamento nel tempo non vengono presi in considerazione. L’importanza pratica di tali superfici è data dal fatto che una superficie di livello è intuitivamente interessante come riferimento per le quote, in quanto essa rappresenta uno stato di equilibrio per i fluidi. Così, differenze di potenziale, che generano il moto, sono messe in relazione alle differenze di quota. Purtroppo questa definizione implica gravi complicazioni matematiche e per mettere in relazione i sistemi di quota ellissoidico e geoidico occorre determinare la differenza fra le due superfici, cioè l’ondulazione geoidica N o separazione geoide-ellissoide (fig. 9).
Prof. L. Surace 29
L’adozione del geoide come superficie di riferimento per l’altimetria è una scelta obbligata; pur nella sua complessità essa offre prestazioni impareggiabili: è già materializzata con buona approssimazione dagli oceani in gran parte del pianeta ed essendo legata alla gravità rappresenta l’unico riferimento che permette di definire un concetto di quota significativo anche dal punto di vista fisico. Il geoide è definito come la superficie equipotenziale del campo di gravità usata come riferimento delle quote ortometriche, cioè il datum altimetrico. In prima approssimazione, a meno di qualche millimetro, la relazione tra altezze ellissoidiche h e quote ortometriche H è: h = H + N h è osservabile con il GPS, mentre H è determinabile con livellazioni opportunamente corrette in base ai dati gravimetrici; l’ondulazione geoidica N è la quantità che connette i due sistemi di altezze, ed è quindi essenziale quando si vogliano usare insieme diversi tipi di osservazioni. Questa formula è un’approssimazione, soprattutto perché considera solo la differenza fra le superfici e trascura le differenze di lunghezza delle normali e le differenze di scala tra i differenti tipi di osservazioni. Per quote terrestri e per fini operativi, l’errore generato da questa approssimazione può essere sicuramente trascurato. Per l’altimetria Topografi e Cartografi hanno cercato tradizionalmente di semplificare il problema della superficie di riferimento usando il livello medio del mare come definizione di quota zero, poiché la superficie del mare è disponibile un po’ dovunque. Il l.m.m. è determinato con osservazioni mareografiche su un punto fondamentale per un periodo sufficientemente lungo in modo da depurare gli effetti di marea. La definizione di un geoide locale è un’operazione relativamente semplice poiché, proprio per il modo in cui esso è definito, vi è un solo “grado di libertà” nella scelta: si definisce geoide locale, per una certa area di interesse, quella superficie equipotenziale del campo della gravità passante per un punto prestabilito dell’area stessa (normalmente un punto della linea di costa più vicina, posto all’altezza del livello medio del mare convenzionalmente definito per una data epoca). È a partire da quel punto, assunto come riferimento fondamentale di quota zero, che si provvede, con i metodi propri della livellazione geometrica, ad attribuire una quota geoidica a ciascuno dei punti (detti capisaldi) delle linee di una rete che si estende su tutto il territorio. Il sistema di riferimento altimetrico italiano è realizzato dalla rete di livellazione geometrica di alta precisione dell’I.G.M. (fig. 10). Rimane così definito, come conseguenza immediata della procedura di quotazione, anche il geoide locale, poiché la rete di capisaldi, altimetricamente determinati rispetto ad esso, contribuisce ad individuarlo, lungo i profili delle sue linee, rispetto alla topografia del terreno. Per l’Italia continentale il punto di quota convenzionale zero si trova a Genova, ed è stato determinato come media delle osservazioni che un mareografo ha registrato per 10 anni: dal 1937 al 1946 (data convenzionale di riferimento 1 gennaio 1942). Data l’impossibilità di mantenere l’alta precisione, necessaria per la rete di livellazione fondamentale, nel trasporto delle quote al di là di larghi tratti di mare, le isole maggiori hanno ciascuna un proprio mareografo di riferimento: rispettivamente Catania e Cagliari. In particolare la quota “zero” a Catania è frutto della media di un anno di registrazioni effettuate nel 1965, mentre per Cagliari si fa riferimento ad una serie di osservazioni dal 1 giugno 1955 al 31 agosto 1957 (data convenzionale di riferimento 1 luglio 1956). Molti altri mareografi operano lungo le

Prof. L. Surace 30
coste italiane; i loro dati non costituiscono riferimenti, ma se fossero collegati alla rete di livellazione, potrebbero permettere importanti indagini di carattere geofisico. È più corretto allora definire il l.m.m. come la superficie convenzionale di quota zero per una certa area (datum altimetrico locale) e ricordare che esso è solo una buona approssimazione del geoide, che è la vera superficie zero per la misura delle quote. Ma poiché non possiamo vedere la superficie del geoide, non possiamo direttamente misurare le quote al di sopra e al di sotto di quella superficie; ne possiamo indirettamente determinare la posizione attraverso misure puntuali di gravità ed una loro successiva modellizazione. Per scopi pratici accettiamo l’ipotesi che sulla costa geoide e l.m.m. siano essenzialmente coincidenti e comunque, muovendoci verso l’interno, misuriamo dislivelli rispetto alla quota zero sulla costa, che in effetti vuol dire rispetto al l.m.m. Per tutte le ipotesi che si fanno, per la varietà di strumenti, metodologie e convenzioni che si usano nelle misure altimetriche, non c’è nessuna garanzia di diretta confrontabilità tra dati altimetrici differenti, sebbene le carte dicano che le quote sono riferite al l.m.m. Insomma il l.m.m. è uno standard solo nominale; sfortunatamente per Cartografi e Topografi, esso non è una superficie semplice: le anomalie di morfologia e densità della crosta terrestre producono lievi variazioni del campo della gravità, risultanti in variazioni del geoide. Poiché anche la superficie del mare risente del campo della gravità, anche il l.m.m. ha lievi colline e piccole valli, come la terraferma, anche se molto più attenuate. A secondo di dove ci troviamo, il l.m.m. può essere più vicino o più lontano dal centro della Terra rispetto ad un altro punto: le quote non beneficiano di una definizione univoca del livello medio dei mari e tutt’oggi non esiste un sistema di riferimento altimetrico globale che consenta di unificare e legare tra loro le misure compiute in vari sistemi “verticali”. Ad aumentare l’incertezza, la rappresentazione dei fondali marini sulle carte nautiche non fa riferimento al livello medio del mare, ma al cosiddetto Livello di Riduzione degli Scandagli (LRS): è un’origine convenzionale, scelta in modo che solo raramente l’acqua possa scendere al di sotto di essa. Ogni nazione adotta un criterio per la sua determinazione: in Italia l’Istituto Idrografico della Marina adotta un L.R.S corrispondente, per le varie località, alla media delle basse maree sigiziali osservate. In ogni caso non ci si deve meravigliare se in navigazione lo scandaglio rileverà profondità maggiori di quelle riportate sulla carta nautica, assicurando così una condotta in sicurezza dei natanti. Anche le oscillazioni del livello marino si stimano dal L.R.S.: per altezza dell’Alta Marea in un dato giorno si intende dunque, se non diversamente specificato, l’altezza dell’acqua misurata da tale origine convenzionale. L’altezza del livello medio del mare sul L.R.S. viene indicata, secondo una connotazione internazionale, con Z0 (“Zeta Zero”). La conoscenza di tale parametro (Chart Datum), il cui valore è riportato nelle informazioni marginali di tutte le carte nautiche, consente una prima valutazione quantitativa del fenomeno della marea, essendo in sostanza la differenza tra il livello medio del mare e il corrispondente livello minimo ivi riscontrabile. Questo aspetto riguardante la cartografia nautica, pressoché sconosciuto ai topografi, ha generalmente modesta rilevanza nel Mediterraneo, dati i piccoli valori di Z0 riscontrabili (ordine di qualche decimetro). E’ fondamentale, però, non dimenticare che sulle coste oceaniche le escursioni del livello medio del mare possono raggiungere molti metri, con conseguenti valori di Z0 dello stesso ordine. Riferendosi alle misure GPS per la determinazione della quota è utile infine ricordare che in un generico punto la “quota” determinata direttamente dal GPS è l’altezza del ricevitore (centro di fase dell’antenna) rispetto all’ellissoide di riferimento. Come evidenziato in fig. 9,
Prof. L. Surace 31
per convertire questo dato (h) nell’altezza ortometrica convenzionale H (sul l.m.m.) occorre tener conto dell’ondulazione geoidica N. Una volta note le ondulazioni geoidiche con sufficiente precisione, il problema della trasformazione di quote ellissoidiche in quote geoidiche (o ortometriche) è essenzialmente risolto. L’approssimazione con cui sono note tali ondulazioni determina in pratica la precisione finale sulle quote geoidiche ottenute. Un rilievo GPS isolato fornisce le quote ellissoidiche rispetto a un ellissoide “pseudogeocentrico”, ovvero traslato di molti metri rispetto a quello geocentrico. Non è quindi corretto applicare a queste quote le ondulazioni geoidiche riferite all’ellissoide geocentrico. Le ondulazioni geoidiche su scala mondiale, rispetto all’ellissoide WGS84, variano da +75 m a –104 m. Negli Stati Uniti il geoide è sempre al di sotto dell’ellissoide, con variazioni da –5 a –53. In Italia il geoide è sempre sopra l’ellissoide con variazioni da +37 m a +54 m. Il modello di ondulazione geoidica Italgeo, sviluppato dal Politecnico di Milano in collaborazione con l’IGM, fornisce, con un opportuno programma di interpolazione (VERTO), le ondulazioni geoidiche che competono ai punti rilevati con GPS, con una precisione di ordine decimetrico su tutto il territorio nazionale. Questo modello di ondulazioni geoidiche consente al Topografo di avvicinarsi molto all’obbiettivo di usare quotidianamente il GPS per i propri rilievi tridimensionali, anche se ancora, per le applicazioni di alta precisione, restano insostituibili le tecniche classiche di livellazione geometrica; in futuro l’approssimazione dei modelli del geoide verrà migliorata, ma sarà sempre difficile tener conto di tutte le irregolarità locali del campo di gravità, cui invece si adatta sempre puntualmente con elevatissima precisione la livellazione geometrica che misura dislivelli fra coppie di superfici equipotenziali. Oggi, sulla base delle esperienze più recenti, si può tranquillamente affermare che l’uso corretto del modello Italgeo, attraverso un adattamento locale su punti di quota geoidica nota (capisaldi di livellazione geometrica) e di quota ellissoidica misurata con il GPS, elimina totalmente il ricorso a tecniche topografiche classiche (assai più laboriose e dispendiose) per le determinazioni altimetriche richieste nella produzione di cartografia anche a grande e grandissima scala. Generazioni di Topografi in tutto il mondo hanno contribuito con la livellazione geometrica all’arduo compito di tradurre il concetto di quota in una quantità misurabile. Ciò ha condotto alla creazione di numerosi riferimenti altimetrici nazionali prima e sovrannazionali poi, come la rete europea UELN (United European Levelling Net), compensata nel 1973 e comprendente i Paesi dell’Europa occidentale, ed il progetto della rete EVS (European Vertical System) che comprenderà anche molti Paesi dell’Europa orientale. Tutto ciò evidenzia chiaramente una tendenza verso il concepimento e la realizzazione, presumibilmente in pochi anni, di un sistema altimetrico continentale.
9. - La scelta della rappresentazione cartografica
Una volta definito il sistema geodetico di riferimento ed in esso i sistemi di coordinate geocentrico (X, Y, Z) e geografico (φ, λ e h - latitudine, longitudine e quota ellissoidica), unitamente al modello di ondulazioni geoidiche per la determinazione delle quote ortometriche, il problema della georeferenziazione delle informazioni territoriali sarebbe definitivamente risolto, con la disponibilità di un datum globale e continuo, omogeneo e preciso, come le realizzazioni del WGS84. La scelta di una rappresentazione cartografica resta comunque un’opzione valida per larga parte dell’utenza, poiché ad essa compete il ruolo di efficace interfaccia tra la realtà fisica quadri-dimensionale e le esigenze di analisi sinottica delle informazioni territoriali, in un
Prof. L. Surace 32
quadro di regole e convenzioni chiare, condivise e compatibili con i sistemi informatici disponibili. Una tale scelta può oggi essere affrontata senza gli schematismi rigidi del passato, ma nella consapevolezza che il passaggio da coordinate cartesiane geocentriche X, Y, Z (o geografiche associate φ e λ) a coordinate cartografiche (piane) è un passaggio puramente matematico, sempre reversibile e modificabile; tale caratteristica era verificata ovviamente anche nel passato, ma solo teoricamente, giacché in pratica, in epoca di cartografia cartacea, cambiare rappresentazione voleva dire sostanzialmente ricominciare daccapo un lungo e laborioso processo produttivo. Oggi le risorse informatiche, hardware e software, consentono di elaborare in tempo quasi reale enormi quantità di informazioni territoriali, modificandone a piacimento la rappresentazione cartografica. Le coordinate cartografiche non erano nel passato esplicitamente associate alla rappresentazione. Il reticolato geografico di paralleli e meridiani è stato per lungo tempo lo strumento convenzionale per definire la posizione di un punto su una carta. Però le unità di latitudine e longitudine hanno dimensioni differenti e ciò comporta complessità e tempo per il posizionamento e la misura. Essenziali per molti scopi, latitudine e longitudine sono misurate in gradi, primi e secondi. Queste unità di misura risultano più complesse se paragonate con i semplici numeri delle coordinate piane: incrementi uguali di longitudine diminuiscono in dimensione lineare quando ci si allontana dall’equatore, mentre incrementi uguali di latitudine sono quasi costanti lungo un meridiano. Il reticolato geografico fu ad un certo punto sostituito dal reticolato cartografico, cioè un reticolato cartesiano, con il quale chiunque, anche non di estrazione geodetica o cartografica, può velocemente definire la posizione di un punto in termini di coordinate piane, così come, dati due punti, determinare direzione e distanza, cioè effettuare elaborazioni che, se eseguite in coordinate geografiche, richiederebbero degli specialisti. Su una carta correttamente compilata, tale reticolato cartografico garantisce inoltre la precisione dimensionale. Anche se la carta è stata piegata e deformata, un posizionamento accurato può ancora essere fatto con riferimento alla linea più vicina del reticolato. I vantaggi del reticolato cartografico furono per primi intuiti dai militari. Ciò avvenne in particolare in Europa, dove vasti territori furono ripetutamente oggetto di guerre e di cambio di appartenenza. In Nord America, i militari raramente ebbero il tempo e la necessità di preparare carte poco più che dimostrative e il concetto del reticolato cartografico non fu compreso che nella seconda parte del XX secolo. L’esercito statunitense, scioccato dalle proprie lacune cartografiche durante l’ultimo conflitto, iniziò l’impresa di istituire un sistema cartografico mondiale dotato di reticolato piano. La NATO seguì il concetto americano e, dalla metà degli anni ’50, i paesi aderenti decisero di adottare la rappresentazione di Mercatore trasversa su scala mondiale. La rappresentazione di Gauss, come è più giusto chiamarla, fu presto adottata per usi civili da numerose nazioni che non avevano ancora sviluppato un proprio sistema cartografico e l’ONU ha giocato in questo un ruolo chiave: oggi in quasi tutto il mondo è stato adottato il reticolato UTM come base per le carte a media e grande scala. La cartografia tradizionale e quella numerica, i GIS basati su datum locali, presentano discontinuità comprensibili quasi esclusivamente dagli specialisti e quasi mai dagli utenti finali. L’informatica può consentire un epocale salto di qualità nel campo delle informazioni territoriali, rendendo flessibile e complementare il ruolo delle rappresentazioni bidimensionali che attualmente si scontrano, per le applicazioni GIS a copertura nazionale, con la discontinuità generata nella cartografia ufficiale dalla suddivisione della rappresentazione in fusi distinti, di non immediata correlabilità.
Prof. L. Surace 33
Quella discontinuità può essere superata solo con la sua eliminazione attraverso un nuovo progetto cartografico completo e coerente: in quest’ottica va esaminata la transitabilità ad un unico sistema cartografico caratterizzato da un’opportuna formulazione delle condizioni di applicazione della rappresentazione. Le attuali potenzialità di calcolo e di gestione dei dati consentono la massima libertà di scelta, senza i condizionamenti imposti nel passato dalle metodologie classiche. È necessario però esaminare pregi e controindicazioni delle opzioni disponibili, stimandone contestualmente l’impatto futuro nei settori applicativi più moderni, particolarmente sensibili alla fruibilità dell’informazione ed al suo aggiornamento, oltre che alle tradizionali caratteristiche di precisione. Il problema della standardizzazione e della unificazione dei sistemi cartografici appare purtroppo sottovalutato e trascurato dagli ambienti scientifici e accademici ed invece superficialmente affrontato e «risolto» negli ambienti operativi pubblici (centrali e locali) e privati. Volendo scegliere una rappresentazione cartografica da associare al sistema geodetico di riferimento, è ovvio, per motivi storici e culturali, accordare la preferenza alla rappresentazione di Gauss: è quello che è stato fatto dall’IGM con la scelta della rappresentazione UTM da associare al sistema geodetico globale WGS84, che si impone per la superiore omogeneità, per l’accuratezza nettamente migliore rispetto al sistema nazionale e per le elevate garanzie di durata nel tempo. La rappresentazione UTM non può però fornire alcun contributo all’unificazione reclamata dai GIS, perché mantiene ovviamente le discontinuità della cartografia ufficiale, grafica e numerica. Le coordinate di punti appartenenti a fusi diversi non sono omogenee e non è possibile calcolare le mutue relazioni di posizione se non ricorrendo, direttamente o indirettamente, alle coordinate geografiche. La discontinuità può essere superata, come si è detto, solo con la sua eliminazione, attraverso un nuovo progetto: sempre la rappresentazione gaussiana, ma con una riformulazione delle condizioni di applicazione che prevedano un unico fuso per tutto il territorio nazionale ed una razionale scelta delle altre condizioni. Prima di esaminare il progetto cartografico del fuso unico, che chiameremo Fuso Italia, è opportuno fare un veloce excursus delle caratteristiche e dei parametri di progetto della rappresentazione, unitamente ad una panoramica storica delle sue applicazioni. 9.1 - La rappresentazione di Gauss
La costruzione di una carta è basata essenzialmente sulla definizione di due funzioni (equazioni della rappresentazione): (1) x = f(ϕ, λ) y = f(ϕ, λ) che permettono di calcolare per ogni punto di cui siano note le coordinate geografiche (latitudine φ e longitudine λ) in un assegnato sistema di riferimento, le coordinate piane ortogonali (coordinate cartografiche) x e y; sono sempre definibili anche le funzioni inverse che permettono di calcolare φ e λ, se sono note le x e y. L’espressione più generale di una rappresentazione conforme è una relazione del tipo: (2) x ± y = F(U ± iλ) con U = f(ϕ, λ) = latitudine crescente

Prof. L. Surace 34
Particolarizzando la funzione F, che può essere qualsiasi purché continua e invertibile, si ottengono tutte le possibili rappresentazioni conformi. Conformità significa semplicemente conservazione degli angoli, con la necessaria precisazione che un angolo tra due linee uscenti da un punto sull’ellissoide, ad es. due linee geodetiche, è definito come l’angolo, sul piano tangente all’ellissoide in quel punto, tra le tangenti alle curve stesse. Nelle rappresentazioni conformi rimangono inalterati gli angoli tra queste tangenti e quelle relative alle immagini delle linee sul piano della rappresentazione. È profondamente errato interpretare una rappresentazione conforme come una trasformazione proiettiva dell’ellissoide, semplicemente perché essa non è affatto una proiezione, ma il risultato dell’imposizione della condizione matematica di conformità alle equazioni della carta. Una possibile formulazione delle equazioni della rappresentazione di Gauss è la seguente: (3) Dove: Bφ è l’arco di meridiano dall’equatore alla latitudine φ, negativo per φ < 0; a e b sono i semiassi dell’ellissoide di riferimento; λ è la longitudine dal meridiano centrale del fuso. Dall’esame delle (3) si ricavano le seguenti considerazioni: a) né per φ = costante (equazione del parallelo), né per λ = costante (equazione del meridiano), ad eccezione di φ = 0 (equatore) e λ = 0 (meridiano centrale), si ottengono curve algebriche considerate dalla geometria analitica; i paralleli sono curve simili ad ellissi, i meridiani sono prossimi a sinusoidi (fig. 11);
( )
( ) ......3302705861720
cossin
49524
cossin
2
cossin
6222425
44223
2
ληηϕϕ
ληϕϕ
λϕϕ
ϕ
tttN
ttNN
Bx
−++−+
+++−++=
( )
( ) ......5814185120
cos
16
coscos
5222425
3223
ληηϕ
ληϕ
λϕ
tttN
tN
Ny
−++−+
++−+⋅=
( )( )
( )( )
)(sin1
1
;cos';tan
sin1
1);(
sin1
02322
0
2
222
2322
2
22
meridianodiarcode
deadB
et
e
eanormalegran
e
aN
∫∫−
−==
==
−
−=
−=
ϕϕ
ϕ ϕϕ
ϕϕρ
ϕηϕ
ϕρ
ϕ
Prof. L. Surace 35
b) la trasformata del meridiano assunto come origine delle longitudini (λ = 0) è una retta (y = 0); tutti gli altri meridiani sono rappresentati da linee curve che si incontrano al polo (per φ = π/2, y = 0) e risultano perpendicolari all’immagine dell’equatore (x = 0) in corrispondenza dell’intersezione con esso; c) la quantità (x - Bφ) è una serie di potenze crescenti pari di λ. Ciò comporta che punti di uguale latitudine (appartenenti al medesimo parallelo), simmetricamente disposti (+λP, – λP) rispetto al meridiano assunto come origine delle longitudini (meridiano centrale del fuso), hanno la stessa x, cioè i paralleli sono curve simmetriche rispetto all’asse x. Inoltre, per λ = 0 essi presentano un minimo nell’emisfero settentrionale ed un massimo in quello australe, cioè rivolgono la loro convessità verso l’equatore; d) la y è una serie di potenze crescenti dispari di λ e di cosφ. Ciò comporta che a valori opposti di λ (+λP, – λP) corrispondono segni opposti di y e che punti simmetrici rispetto all’equatore (+φP, – φP) hanno la stessa y (cos (–φ) = cos φ); i meridiani (λ = cost) sono simmetrici rispetto all’asse y con concavità verso l’asse x; e) fuori dal meridiano centrale, la x è in valore assoluto sempre maggiore del valore assoluto di Bφ e la y è in valore assoluto sempre maggiore del valore assoluto di λ · N · cosφ = λ · r, dove r è il raggio del parallelo di latitudine φ. Ciò comporta che le coordinate gaussiane hanno ovunque valori superiori alle lunghezze rettificate degli archi di meridiano e di parallelo che identificano il punto sull’ellissoide, maggiorati sempre di più, man mano che ci si allontana dall’equatore e dal meridiano centrale; dunque il modulo di deformazione lineare è sempre maggiore di 1, tranne che sul meridiano centrale, dove x = Bφ e y = 0, e cresce allontanandosi dal meridiano centrale; f) le immagini di meridiani e paralleli s’incontrano dovunque ad angolo retto. I meridiani in corrispondenza dell’equatore hanno tangente verticale e curvatura tanto maggiore quanto è maggiore λ; g) la rappresentazione è simmetrica sia rispetto all’asse x che all’asse y, quindi per studiarla basta studiarne un quadrante; h) per la simmetria dell’ellissoide lo studio di un fuso è riapplicabile a qualunque altro fuso di pari estensione in longitudine. Nel passaggio dalle grandezze geometriche lineari e angolari sull’ellissoide alle corrispondenti grandezze sul piano della rappresentazione conforme occorre introdurre quattro grandezze correttive: a) la convergenza del meridiano γ (angolo in un punto tra l’asse x del piano cartografico e la tangente all’immagine del meridiano in quel punto - fig. 11); b) la riduzione alla corda (angolo in un punto tra la tangente all’immagine di una linea geodetica e la corrispondente corda che unisce sul piano cartografico gli estremi della geodetica); c) il modulo di deformazione per elementi infinitesimi (nell’intorno di un punto) o fattore di scala puntuale mp; d) il modulo di deformazione per elementi finiti (per una linea geodetica di lunghezza finita, praticamente sempre approssimabile a quella della corda corrispondente), o fattore di scala lineare ml. I due fattori di scala sono i rapporti tra distanze cartesiane sul piano cartografico e corrispondenti distanze ellissoidiche (geodetiche). Piccole entità delle riduzioni alla corda e fattori di scala prossimi all’unità indicano la presenza di modeste deformazioni cartografiche, cioè piccole e talvolta trascurabili variazioni nel passaggio dall’ellissoide al piano.
Prof. L. Surace 36
Tali grandezze correttive, opportunamente applicate alle grandezze geometriche ellissoidiche, consentono di ridurre il problema dall’ellissoide al piano ed effettuare tutti i calcoli di posizione per mezzo della trigonometria piana: questa utilizzazione geodetica è il motivo dominante che ha reso praticamente universale l’adozione delle rappresentazioni conformi. Oggi occorre responsabilmente prendere atto che nessuna operazione geodetica di inquadramento e raffittimento viene condotta realizzando misure angolari o di distanze: dunque la conformità della rappresentazione non ha più applicazioni geodetiche … Per limitare le riduzioni, si limita l’area rappresentata in un singolo sistema cartografico e da ciò discende la necessità di più sistemi per rappresentare vaste porzioni del globo terrestre. Ogni punto assunto sul piano cartografico come origine delle coordinate cartesiane, che possiamo chiamare centro della rappresentazione, dà origine a un sistema cartografico, cosicché i sistemi per la carta di un determinato territorio sono tanti quanti sono i centri. Per esempio, l’UTM dà luogo a 60 sistemi cartografici. L’Italia ha due sistemi cartografici per le sue carte topografiche (fuso Ovest e fuso Est) ed un unico tipo di rappresentazione (Gauss-Boaga); naturalmente la corrispondenza biunivoca tra coordinate piane dei punti della carta e coordinate geografiche ellissoidiche sussiste solo nell’ambito di ciascun sistema. Occorre poi definire opportunamente le condizioni di applicazione della rappresentazione scelta, le quali vanno a modificare il valore delle riduzioni (le grandezze correttive precedentemente elencate) e, influenzando la precisione delle equazioni della carta, ne impongono un’analisi preventiva. Prima dell’avvento dei calcolatori, quando il calcolo delle riduzioni, così come quello delle coordinate cartografiche a partire da quelle ellissoidiche, presentava seri problemi, molte risorse furono dedicate allo studio delle equazioni di corrispondenza e delle riduzioni al piano conforme. Oggi le attuali potenze di calcolo consentono di ignorare totalmente il problema e di generalizzare le soluzioni, conferendo alla rappresentazione la massima flessibilità. Le condizioni di applicazione per la rappresentazione di Gauss sono le seguenti: a) scelta di un meridiano di longitudine λ0 approssimativamente centrale rispetto all’area di interesse (meridiano centrale, origine locale delle longitudini); b) imposizione della condizione che l’asse cartografico x (di equazione y = 0) rappresenti l’immagine del meridiano centrale secondo un rapporto di scala costante m0, cioè che per λ = 0° (meridiano centrale) sia x = m0 · Bφ
c) scelta della formulazione più adatta delle equazioni della rappresentazione in funzione dell’estensione in longitudine della zona da rappresentare e della precisione richiesta nel passaggio diretto e inverso tra ellissoide e piano cartografico; d) scelta degli eventuali valori di falsa origine E0 e N0, da applicare alle coordinate cartografiche y e x per ricavare le coordinate finali Est e Nord; le funzioni storicamente assegnate a tali valori sono sostanzialmente due, non necessariamente coesistenti: eliminazione dei valori negativi e riconoscibilità immediata del fuso di appartenenza. Quindi la rappresentazione di Gauss consente e richiede la scelta di cinque parametri: la longitudine del meridiano centrale, l’ampiezza del fuso, il fattore di scala sul meridiano centrale (detto meno bene fattore di contrazione) e le due false origini per le coordinate piane (Est e Nord). 9.2 - Le applicazioni della rappresentazione di Gauss
La diffusione della rappresentazione di Gauss (detta anche rappresentazione di Mercatore Trasversa o Transverse Mercator Projection per gli anglofoni) inizia nel 19° secolo. Come già detto, essa rientra tipicamente, per le sue caratteristiche, tra quelle suscettibili di applicazioni
Prof. L. Surace 37
geodetiche, quali il calcolo delle triangolazioni sul piano anziché sull’ellissoide. Anzi, se essa è stata applicata anche con finalità cartografiche, come in Italia a partire dal 1948, questo è stato in funzione del suo impiego geodetico, al fine di unificare i calcoli geodetici e le applicazioni cartografiche. Karl Friedrich Gauss istituì i fondamenti matematici e dedusse le equazioni di corrispondenza della rappresentazione, che perciò prende il suo nome, all’inizio del 1800. Gauss concepì dapprima una rappresentazione conforme dell’ellissoide sulla sfera e rappresentò quindi la sfera sul piano con la rappresentazione di Mercatore trasversa, ideata da Lambert. Tuttavia egli lasciò soltanto le formule risolutive, senza pubblicare alcuna memoria illustrativa. I concetti informatori che lo guidarono ci sono noti dalla sua corrispondenza con Schumacher, pubblicata nel 1860 e nel 1861. Nel 1866 la rappresentazione di Gauss fu ripresa in esame dal generale Oskar Schreiber, capo del Servizio Geodetico prussiano, che sviluppò le formule occorrenti, dando a queste anche forma logaritmica e derivando la rappresentazione che prese il nome di Gauss-Schreiber. Agli inizi del ’900 la rappresentazione di Gauss è stata studiata in profondità da L. Kruger, che ha sviluppato in dettaglio e con grande rigore tutte le formule occorrenti per le applicazioni in un fuso di 18° di ampiezza e cioè per punti distanti, alle latitudini medie, fino a 700 km circa dal meridiano centrale; principale merito di Kruger è quello di avere studiato il comportamento della trasformata della geodetica, consentendo così l’impiego della rappresentazione nei calcoli geodetici e conducendo alla rappresentazione Gauss-Kruger, comunemente usata in Europa. Le ricerche teoriche si sono susseguite da allora con maggiore intensità, anche in conseguenza del fatto che ormai la rappresentazione di Gauss si andava diffondendo per i suoi pregi e veniva adottata presso parecchie nazioni. A conferma dell’importanza delle applicazioni geodetiche della rappresentazione sta il fatto che, allorché nel 1821 Gauss si accinse a continuare nello Stato di Hannover la catena meridiana iniziata nel 1816 da H.C. Schumacher in Danimarca, estendendo poi la triangolazione a tutto lo Stato, egli pensò di avvalersi della rappresentazione conforme proprio per eseguire i calcoli in modo più semplice. È questa la prima volta nella storia della Geodesia che viene abbandonato l’ellissoide come sede dei calcoli, per sostituirlo con il piano; ed è interessante notare che dall’idea di Gauss ebbe inizio lo studio generale delle proiezioni conformi, che tanta importanza ha avuto in seguito non solo nella geodesia e nella cartografia. Nella prima metà del 20° secolo, la rappresentazione ebbe i maggiori impulsi nel mondo anglofono, dove fu adottata per vari sistemi cartografici. La prima nazione che si avvalse della rappresentazione di Gauss per la propria cartografia ufficiale è stata la Norvegia, che l’ha introdotta fin dal 1903; sono seguite nel 1919 la Bulgaria, nel 1920 la Svezia, nel 1923 la Germania, nel 1927 la Gran Bretagna, nei primi anni ’30 gli Stati Uniti, nel 1938 la Yugoslavia, nel 1941 l’Italia e successivamente numerose altre nazioni. Non per tutti i paesi la rappresentazione di Gauss portò alla ridefinizione dei sistemi cartografici; alcuni se ne servirono solo per le applicazioni geodetiche, cioè per il calcolo delle triangolazioni, e costruirono le carte in altre proiezioni; altri, invece, se ne servirono soltanto ai fini militari per il cosiddetto reticolato chilometrico, altri infine, e fra questi l’Italia e l’URSS, ne hanno fatto un sistema unico sia per le finalità geodetiche che per quelle cartografiche. Occorre però notare che le rappresentazioni adottate, se pure identiche dal lato teorico, differiscono tra di loro per l’ellissoide di riferimento, per l’ampiezza dei fusi entro i quali la rappresentazione è limitata, per i meridiani centrali e per il valore assegnato alla scala sul meridiano centrale, cioè al fattore m0 utile a ridurre i moduli di deformazione marginali.
Prof. L. Surace 38
Per quanto si riferisce all’ampiezza dei fusi, questa è in ogni caso compresa fra un minimo di 2° ed un massimo di 6°. Un fattore di riduzione di scala viene applicato per lo più quando l’ampiezza dei fusi è di 6°, ed è pari a 0.9996 (utile a dimezzare il modulo di deformazione massimo che, al margine del fuso di 6° ed alle latitudini medie, è pari a circa 1.0008); tale riduzione di scala non fu applicata dall’URSS che pure aveva adottato i fusi di 6°, mentre fu adottata in Jugoslavia, dove i fusi sono di 3° di ampiezza, con un valore di m0 pari a 0.9999. Per ciò che si riferisce invece ai meridiani centrali, regna ancora una certa confusione, in quanto alcune nazioni hanno tenuto come meridiano fondamentale quello tradizionale, che per lo più passa per l’osservatorio astronomico della rispettiva capitale; altre nazioni invece si sono riferite al meridiano di Greenwhich prendendo i meridiani centrali dei fusi a longitudini pari ad un multiplo intero di gradi da quello. In particolare tutte le nazioni che hanno adottato i fusi di 6° di ampiezza hanno seguito quest’ultimo sistema, assumendo i meridiani centrali in corrispondenza delle longitudini (3 + 6k)° da Greenwich, con k intero, cosicché i meridiani marginali hanno longitudini da Greenwich uguali a (6k)°. La seconda guerra mondiale dimostrò la ragionevolezza della proposta del sistema di fusi gaussiani: quando l’esercito tedesco si trovò impegnato in Russia col suo più importante fronte di guerra, riconobbe i pregi dei fusi gaussiani di 6°, tanto da decidere di applicare il sistema sotto forma di reticolati cartesiani conosciuti col nome di quadrettatura (gitter), su tutta la cartografia militare d’Europa. L’Italia, allora alleata della Germania, condivise la scelta e si assunse il compito di effettuare tutti i calcoli per i paesi mediterranei. La definitiva tappa della diffusione della rappresentazione è costituita da quella che fu immodestamente chiamata UTM (Universal Traverse Mercator, MTU per i francesi e di Mercatore Trasversa Universale per noi) dall’Army Map Service degli Stati Uniti. Sessanta fusi di 6°, numerati a partire dall’antimeridiano di Greenwich ed estesi da 84° N a 80° S di latitudine, coprirono virtualmente il globo terrestre con esclusione delle calotte polari. È questo il taglio dei fogli della carta internazionale 1:1000000, i cui fusi sono numerati progressivamente da 1 a 60, con il numero 1 riservato al fuso da 180° a 186° ad est da Greenwich, il numero 2 al fuso da 186° a 192° ad est da Greenwich e così via. Al meridiano centrale di ciascun fuso fu applicato il fattore di scala m0 di 0.9996, come nel sistema inglese; in tal modo le linee di isometria, che non sono meridiani, cadono, per la latitudine media italiana, a circa 180 km dal meridiano centrale e la discrepanza rispetto alla scala nominale non supera il valore di 40 centimetri al chilometro. Le coordinate Est furono poi maggiorate di 500 km (falsa origine) per evitare valori negativi (fig. 12a). La rappresentazione è usata per oltre l’80% delle aree coperte da cartografia a grande scala prodotta nel mondo e su tutti i pianeti cartografati dagli Stati Uniti. Dal punto di vista militare, il grande pregio della rappresentazione di Gauss rispetto alle altre risiedeva nel fatto che i fusi in cui si può suddividere il globo si ripetono identici a se stessi; tanto che con un’unica scorta di formule, di metodi e di tavole, era possibile operare su tutta la Terra. L’Army Map Service calcolò in conseguenza una serie di tavole, riferite a diversi ellissoidi (Bessel, Clarke 1866, Clarke 1880, Everest, Internazionale), tavole largamente usate dall’I.G.M., che da esse ne derivò altre di uso più rapido. Contemporaneamente l’A.M.S. trasformò nella rappresentazione di Gauss centinaia di migliaia di coordinate dell’America e di altre parti della Terra, in modo da poter sovrastampare sulla cartografia militare il reticolato cartesiano, che prende il nome di quadrettatura gaussiana. Per iniziativa del prof. Giovanni Boaga, Geodeta Capo dell’Istituto Geografico Militare, che studiò, sviluppò e adattò al calcolo logaritmico gli sviluppi in serie delle equazioni di corrispondenza, la rappresentazione di Gauss fu adottata in Italia nel 1941. Questa
Prof. L. Surace 39
introduzione fu inizialmente concepita solamente con finalità geodetiche, per facilitare il calcolo delle triangolazioni. Nessun riflesso avrebbe dovuto avere sulla cartografia, che sarebbe rimasta nella tradizionale proiezione di Samson Flamsteed modificata. Inizialmente si decise di adottare fusi di 3° di ampiezza onde limitare lo sviluppo delle formule e facilitare il calcolo. Furono così istituiti 5 fusi con meridiani centrali alle longitudini –6°, –3°, 0°, +3°, +6° da M. Mario. Poiché in ogni fuso la massima differenza di longitudine dal meridiano centrale era di 1° 30’, il modulo di deformazione raggiungeva al massimo il valore di circa 1.0002, per cui si conservò l’isometria sul meridiano centrale (m0 = 1). Per ricavare dalle coordinate piane (cartografiche) dei punti le mutue relazioni di posizione è ovviamente necessario che esse siano riferite allo stesso sistema di assi; tra le coordinate gaussiane di punti appartenenti a fusi diversi non vi è, infatti, alcuna relazione diretta. Si crearono allora, e si mantengono ancora oggi, delle zone di sovrapposizione, di ragionevole estensione, tra fusi adiacenti, ove le coordinate piane dei punti sono calcolate in entrambi i fusi, in modo da permettere i calcoli sia con punti situati ad ovest che con punti situati ad est della zona di sovrapposizione. Nel sistema con fusi di 3° erano quindi necessarie 4 zone di sovrapposizione. Per rendere possibile l’uso della rappresentazione di Gauss e facilitarne l’impiego, l’IGM elaborò, sotto la guida dello stesso prof. Boaga, una serie di testi tecnici ed una serie di tavole numeriche basata sia sull’ellissoide di Bessel che su quello di Hayford. Le formule di trasformazione prevedevano il calcolo misto meccanico-logaritmico e furono successivamente sostituite da quelle predisposte per il calcolo integralmente meccanico. L’esperienza della guerra mostrò però alcuni inconvenienti dei fusi di soli 3° di ampiezza, che implicavano quattro linee di discontinuità in corrispondenza dei meridiani di separazione; inoltre rese evidente l’enorme importanza militare del reticolato cartesiano (la “quadrettatura chilometrica”) per il tiro d’artiglieria. Si fece perciò strada nel dopoguerra la convinzione che fosse opportuno modificare il sistema inizialmente scelto, puntando ad un sistema che potesse essere impiegato non soltanto per i calcoli geodetici, ma anche per la costruzione della cartografia ufficiale, in sostituzione della proiezione di Samson Flamsteed modificata. Si sarebbe così evitata la fatica di passare ancora dalle coordinate piane alle geografiche e da queste a quelle di Samson Flamsteed e non si sarebbe dovuto adattare alla meglio sulla carta un reticolato cartesiano che nulla aveva in comune con la proiezione adottata. Così nel 1948 fu stabilito di adottare la rappresentazione di Gauss anche per la cartografia. In considerazione del fatto che l’Italia si estende per poco più di 12° in longitudine e tenendo conto di quanto era allo studio in altri stati, fu deciso allora di adottare due soli fusi di 6° di ampiezza (fig. 13), con meridiani centrali 9° e 15° a est di Greenwich (cui corrispondono le longitudini da M. Mario –3° 27’ 08.400” e +2° 32’ 51.600”) nel sistema geodetico Roma40 (ellissoide internazionale orientato a Roma M. Mario, definizione astronomica 1940) e di introdurre il fattore di riduzione (meglio detto fattore di scala sul meridiano centrale) m0 = 0.9996, onde contenere il modulo di deformazione che così assume il valore massimo di circa 1.0004. Per i due fusi, denominati fuso Ovest e fuso Est, furono adottati come falsa origine per le coordinate Est i valori 1500 km e 2520 km rispettivamente (fig. 12b), così che la prima cifra della coordinata E indicasse anche il fuso di appartenenza. La zona compresa tra le longitudini –0°30” e 0° da M. Mario (11° 57’ 08.400” e 12° 27’ 08.400” da Greenwich nel sistema Roma40) è stata stabilita come zona di sovrapposizione ed in essa le coordinate dei punti vengono determinate in entrambi i fusi. Il sistema geodetico-cartografico nazionale (Roma40 - Gauss-Boaga) è il sistema in cui sono calcolate le coordinate dei vertici della rete trigonometrica fondamentale italiana, a

Prof. L. Surace 40
disposizione dell’utenza nei cataloghi IGM. La denominazione corrente di coordinate Gauss-Boaga si riferisce esclusivamente alle coordinate piane (o cartografiche). La decisione del 1948, di capitale importanza nella storia della cartografia ufficiale italiana, fu adottata in comune accordo tra l’IGM, lo Stato Maggiore dell’Esercito e la Commissione Geodetica Italiana; fu quest’ultima che propose, in riconoscimento dei meriti acquisiti dal prof. Boaga, di designare la rappresentazione col nome di Gauss-Boaga. Le definizioni della cartografia ufficiale, talvolta trascurate dagli addetti ai lavori, divengono giustamente importanti quando i fruitori delle informazioni georeferenziate non siano specialisti di cartografia. Per chiarezza scientifica, tecnica e lessicale, è necessario ribadire che per la cartografia nazionale terrestre (IGM) e per quella tecnica regionale, la rappresentazione scelta è quella di Gauss, definita dalle (3). Il rilievo e la costruzione della carta sono stati eseguiti nel sistema nazionale Roma40 per tutte le carte realizzate prima dell’impiego del GPS per le reti di inquadramento e raffittimento e per i punti d’appoggio, in pratica prima della disponibilità della rete IGM95. Successivamente, i rilevamenti sono stati eseguiti nel datum WGS84 (realizzazione ETRF89). La squadratura geografica, e solo questa, è invece, riferita al sistema ED50. Il sistema geodetico-cartografico europeo (ED50-UTM) è dunque usato per il «taglio» (delimitazione degli elementi cartografici secondo trasformate di archi di meridiani e paralleli). Uno stesso punto ha in questo sistema coordinate differenti (di decine o centinaia di metri, a parte le false origini) da quelle nel sistema Gauss-Boaga. Tale scostamento è dovuto principalmente ai diversi datum e alle differenze tra le reti che li realizzano. La rete fondamentale si presenta in sostanza «distorta» in maniera diversa nei due sistemi. Dopo la realizzazione della rete IGM95, ai vertici di tale rete sono state associate le coordinate cartografiche UTM corrispondenti, denominate UTM-WGS84, o UTM-ETRF89. Dunque, il panorama delle possibili coppie di coordinate cartografiche che possono essere utilizzate per definire la posizione planimetrica di un punto in Italia è il seguente: 1)Nord e Est UTM-ED50 fuso 32 per punti compresi tra 6° e 12°30’ longitudine Est Greenwhich (definita nel sistema geodetico ED50); 2) Nord e Est UTM-ED50 fuso 33 per punti compresi tra 12° e 18°30’ longitudine Est Greenwhich (definita nel sistema geodetico ED50); 3) Nord e Est UTM- ED50 fuso 34 per punti oltre i 18° longitudine Est Greenwhich (definita nel sistema geodetico ED50) 4) Nord e Est UTM-WGS84 fuso 32, per punti compresi tra 5°40’ e 12°20’ longitudine Est Greenwhich (definita nel sistema WGS84 - realizzazione ETRF89); 5) Nord e Est UTM-WGS84 fuso 33 per punti compresi tra 11°40’ e 18°20’ longitudine Est Greenwhich (definita nel sistema WGS84 - realizzazione ETRF89); 6) Nord e Est UTM-WGS84 fuso 34 per punti compresi tra 17°40’ e 24°20’ longitudine Est Greenwhich (definita nel sistema WGS84 - realizzazione ETRF89); 7) Nord e Est Gauss-Boaga fuso Ovest per punti compresi tra 6° e 12°27’08,400” longitudine Est Greenwhich (definita nel sistema geodetico Roma40); 8) Nord e Est Gauss-Boaga fuso Est per punti compresi tra 11°57’08,400” e ~18°31’14.7” longitudine Est Greenwhich (definita nel sistema geodetico Roma40).
Prof. L. Surace 41
In sintesi dobbiamo confrontarci con due triplette di sistemi cartografici generati dall’applicazione della rappresentazione di Mercatore Trasversa Universale ai sistemi geodetici ED50 e WGS84 ed una coppia di sistemi cartografici generati dall’applicazione della stessa rappresentazione al datum Roma40 (vds. fig. 12a e 12b, dove i bordi in colore più scuro indicano le zone di sovrapposizione). 9.3 - Limiti di applicabilità e deformazioni
Esistono varie formulazioni delle equazioni di corrispondenza, ma in generale, quale che sia quella prescelta, è indispensabile tenere presente che tutte hanno un limite di applicabilità che ne fa diminuire la precisione all’allontanarsi dal meridiano centrale, cioè al crescere della differenza di longitudine da esso. La scelta dei fusi di 6° di ampiezza è diretta conseguenza dell’applicabilità delle tavole elaborate nel dopoguerra dall’Army Map Service, così come quella italiana di fusi di 3°, nella prima fase di adozione della rappresentazione di Gauss, era legata alla semplificazione delle equazioni elaborata dal prof. Boaga. Per fusi di ampiezza maggiore di 6° le formulazioni ordinarie presentano criticità crescente al crescere del semifuso e devono essere sostituite da altre, tra cui per l’Italia risultano particolarmente utili le equazioni ricavate dal prof. Ballarin e quelle del prof. Bonifacino. È opportuno riflettere sulle ragioni per le quali l’ampiezza dei fusi in cui si applica la rappresentazione di Gauss è limitata a 6°, quantunque questa limitazione conduca a dannose discontinuità fra i sistemi gaussiani contigui. Già si è visto che il modulo di deformazione varia proporzionalmente al quadrato della distanza dal meridiano centrale, mentre la curvatura delle trasformate delle geodetiche (e quindi le riduzioni alla corda) cresce proporzionalmente a tale distanza. Queste sono due ragioni che consigliavano di limitare in longitudine l’estensione della rappresentazione; una terza ragione stava nella necessità di arrestare gli sviluppi in serie delle equazioni di corrispondenza ad un ragionevole numero di termini per non rendere i calcoli eccessivamente lunghi e laboriosi, limitando l’ampiezza dei fusi in modo tale che i termini trascurati, potenze crescenti di λ, non portassero contributi apprezzabili. Particolarmente importante era poi il fatto che le riduzioni alla corda per geodetiche marginali di lunghezza non eccessiva fossero trascurabili nelle ordinarie operazioni topografiche di media precisione, per non costringere coloro che della geodesia non fanno una professione a pesanti calcoli di riduzione. Tutte queste condizioni erano ben rispettate sui fusi di 6° adottati dall’Italia. 9.4 - Le deformazioni lineari
Lo studio delle deformazioni lineari è fondamentale per un nuovo progetto cartografico. Il primo a proporre l’analisi delle deformazioni cartografiche in termini rigorosi fu un grande matematico francese del 19° secolo, Tissot. Egli introdusse il concetto di «ellisse indicatrice», cioè un’ellisse che «in ciascun punto della rappresentazione stabilisce una specie di indicatrice del sistema di rappresentazione». Essa divenne nota come Indicatrice di Tissot o ellisse di distorsione. Il concetto di indicatrice può essere sintetizzato come segue: ogni piccolo (teoricamente infinitesimo) cerchio sull’ellissoide si proietta sul piano della carta come un’ellisse centrata sul punto corrispondente. In una rappresentazione conforme, in cui non vi è variazione locale della forma, tutti i cerchietti obiettivi restano cerchi (interpretabili come ellissi di uguali semiassi) sul piano cartografico, ma il loro raggio varia proporzionalmente alla scala in quel punto. In una rappresentazione equivalente tutti i cerchietti obbiettivi diventano ellissi di area uguale a quella del cerchietto di partenza e la forma dell’ellisse indica la variazione locale di forma,

Prof. L. Surace 42
mentre i suoi raggi vettori sono proporzionali alla scala della carta in quel punto e in quella direzione. Nella rappresentazione di Gauss il modulo di deformazione lineare mp, già definito in precedenza come rapporto tra un elemento lineare infinitesimo sulla carta e il corrispondente elemento lineare infinitesimo sull’ellissoide, è variabile da punto a punto, ma nel punto è indipendente dalla direzione: (4) dove e’2 = (a2 – b2)/b2. Dall’esame dell’espressione di mp, si nota subito che il modulo è uguale a 1 per λ = 0°, indipendentemente dalla latitudine φ, ossia sull’asse x (immagine del meridiano centrale) le lunghezze sono conservate (isometria del meridiano centrale); allontanandosi da questo meridiano, il modulo genera distanze cartografiche che differiscono dalle corrispondenti distanze ellissoidiche (o geodetiche). Per una data linea geodetica di lunghezza finita, la distanza cartografica tra gli estremi (lunghezza della corda, cioè del segmento congiungente gli estremi), che fino a 50 km può essere considerata uguale alla lunghezza della trasformata della geodetica, si ottiene moltiplicando la distanza geodetica per il modulo di deformazione lineare per elementi finiti ml, ricavato in funzione dei valori di mp negli estremi a e b e nel punto medio m:
(5)
bma
l
mmm
m141
6
++
=
Fuori dal meridiano centrale il modulo è sempre maggiore di 1, il che vuol dire che tutte le distanze cartografiche sono più lunghe dei corrispondenti archi di geodetica; esso cresce con legge pressoché parabolica in funzione di λ, analogamente a quanto accade nelle rappresentazioni di Mercatore e di Lambert allontanandosi dai paralleli di isometria (detti «standard»), fino ad assumere presto valori notevoli. Se, quindi, si vuole che la deformazione sia contenuta entro certi limiti, occorre contenere in longitudine la zona rappresentata. Nell’ambito di un fuso la deformazione lineare raggiunge il valore massimo sui meridiani marginali; per fusi di 6° e alla latitudine media italiana (fig. 14), il modulo di deformazione lineare raggiunge il valore di 1.0008, il che significa che una distanza ellissoidica di 10 km viene dilatata di circa 8 m. Tale deformazione non poteva essere assorbita dal graficismo (teoricamente pari a 0.2 ÷ 0.3 mm alla scala della carta) nella cartografia 1 : 25000. La massima variazione di lunghezza può essere però ridotta moltiplicando tutte le coordinate cartografiche per un fattore costante, m0, scelto in funzione dell’ampiezza del fuso e dell’ampiezza e della posizione della zona interessata. Ciò equivale a moltiplicare per m0 le espressioni (4) e (5). Sul meridiano centrale, dove la scala resta costante, si passa così dall’isometria all’ipometria. Una tale soluzione è stata adottata nelle rappresentazioni Gauss-Boaga, UTM-ED50 e UTM-WGS84 (m0 = 0.9996). Solo nella scelta ipometrica è corretto definire m0 fattore di contrazione. Il fattore di contrazione m0 ha dunque in questo caso il compito di ridurre la massima dilatazione provocata dalla rappresentazione. Il modulo di deformazione caratteristico della
( ) ( )ϕϕλ
ϕϕλ 24
4222
2
tan45cos24
cos'1cos2
1 −+++= em p
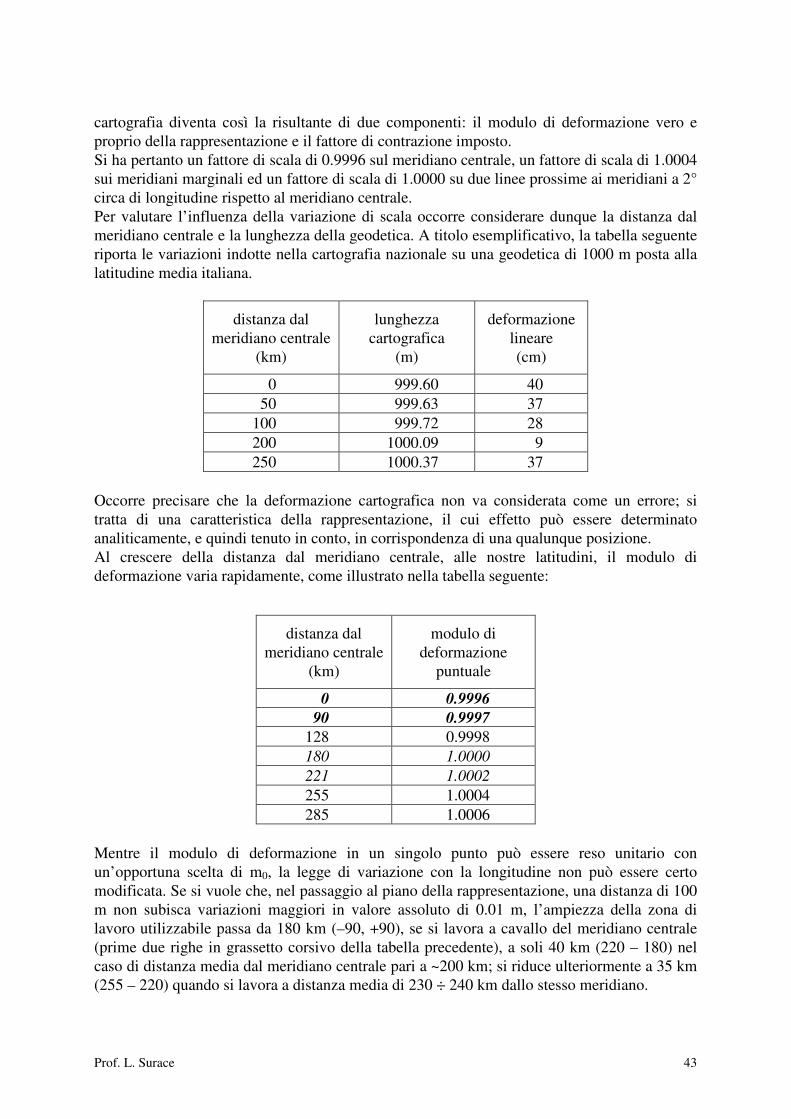
Prof. L. Surace 43
cartografia diventa così la risultante di due componenti: il modulo di deformazione vero e proprio della rappresentazione e il fattore di contrazione imposto. Si ha pertanto un fattore di scala di 0.9996 sul meridiano centrale, un fattore di scala di 1.0004 sui meridiani marginali ed un fattore di scala di 1.0000 su due linee prossime ai meridiani a 2° circa di longitudine rispetto al meridiano centrale. Per valutare l’influenza della variazione di scala occorre considerare dunque la distanza dal meridiano centrale e la lunghezza della geodetica. A titolo esemplificativo, la tabella seguente riporta le variazioni indotte nella cartografia nazionale su una geodetica di 1000 m posta alla latitudine media italiana.
distanza dal meridiano centrale
(km)
lunghezza cartografica
(m)
deformazione lineare (cm)
0 999.60 40 50 999.63 37
100 999.72 28 200 1000.09 9 250 1000.37 37
Occorre precisare che la deformazione cartografica non va considerata come un errore; si tratta di una caratteristica della rappresentazione, il cui effetto può essere determinato analiticamente, e quindi tenuto in conto, in corrispondenza di una qualunque posizione. Al crescere della distanza dal meridiano centrale, alle nostre latitudini, il modulo di deformazione varia rapidamente, come illustrato nella tabella seguente:
Mentre il modulo di deformazione in un singolo punto può essere reso unitario con un’opportuna scelta di m0, la legge di variazione con la longitudine non può essere certo modificata. Se si vuole che, nel passaggio al piano della rappresentazione, una distanza di 100 m non subisca variazioni maggiori in valore assoluto di 0.01 m, l’ampiezza della zona di lavoro utilizzabile passa da 180 km (–90, +90), se si lavora a cavallo del meridiano centrale (prime due righe in grassetto corsivo della tabella precedente), a soli 40 km (220 – 180) nel caso di distanza media dal meridiano centrale pari a ~200 km; si riduce ulteriormente a 35 km (255 – 220) quando si lavora a distanza media di 230 ÷ 240 km dallo stesso meridiano.
distanza dal meridiano centrale
(km)
modulo di deformazione
puntuale
0 0.9996
90 0.9997
128 0.9998 180 1.0000
221 1.0002
255 1.0004 285 1.0006
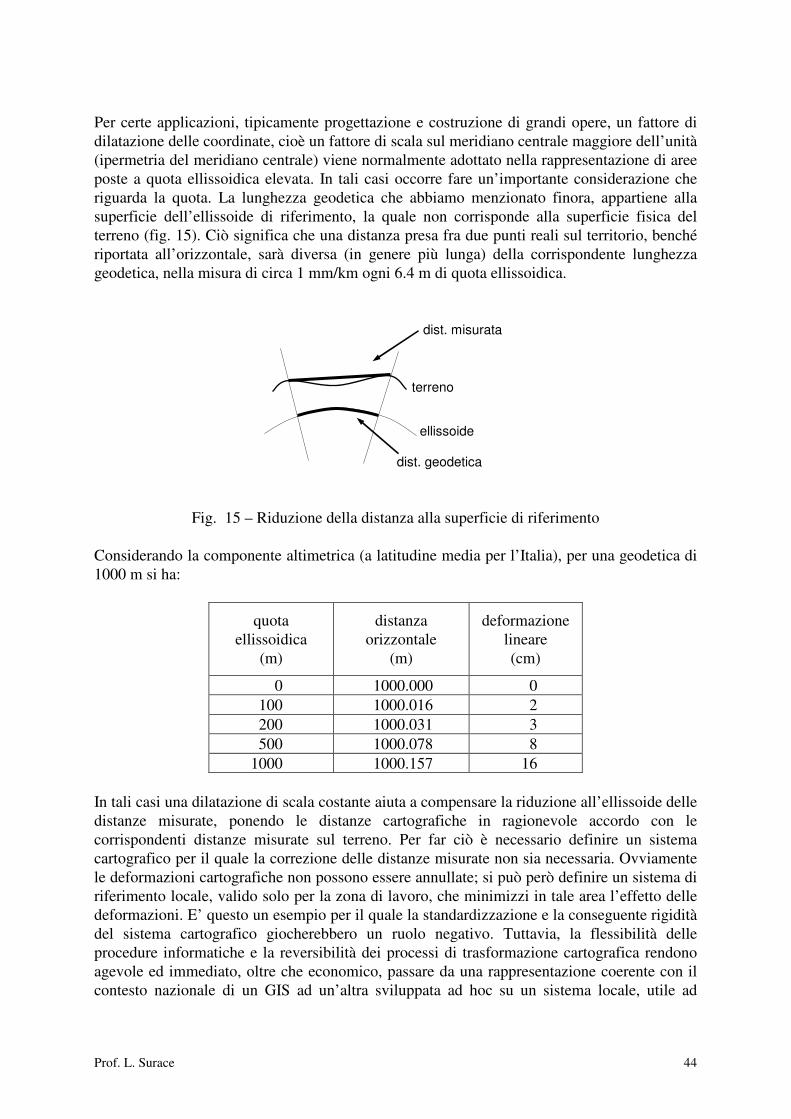
Prof. L. Surace 44
Per certe applicazioni, tipicamente progettazione e costruzione di grandi opere, un fattore di dilatazione delle coordinate, cioè un fattore di scala sul meridiano centrale maggiore dell’unità (ipermetria del meridiano centrale) viene normalmente adottato nella rappresentazione di aree poste a quota ellissoidica elevata. In tali casi occorre fare un’importante considerazione che riguarda la quota. La lunghezza geodetica che abbiamo menzionato finora, appartiene alla superficie dell’ellissoide di riferimento, la quale non corrisponde alla superficie fisica del terreno (fig. 15). Ciò significa che una distanza presa fra due punti reali sul territorio, benché riportata all’orizzontale, sarà diversa (in genere più lunga) della corrispondente lunghezza geodetica, nella misura di circa 1 mm/km ogni 6.4 m di quota ellissoidica.
Fig. 15 – Riduzione della distanza alla superficie di riferimento Considerando la componente altimetrica (a latitudine media per l’Italia), per una geodetica di 1000 m si ha:
quota ellissoidica
(m)
distanza orizzontale
(m)
deformazione lineare (cm)
0 1000.000 0 100 1000.016 2 200 1000.031 3 500 1000.078 8
1000 1000.157 16 In tali casi una dilatazione di scala costante aiuta a compensare la riduzione all’ellissoide delle distanze misurate, ponendo le distanze cartografiche in ragionevole accordo con le corrispondenti distanze misurate sul terreno. Per far ciò è necessario definire un sistema cartografico per il quale la correzione delle distanze misurate non sia necessaria. Ovviamente le deformazioni cartografiche non possono essere annullate; si può però definire un sistema di riferimento locale, valido solo per la zona di lavoro, che minimizzi in tale area l’effetto delle deformazioni. E’ questo un esempio per il quale la standardizzazione e la conseguente rigidità del sistema cartografico giocherebbero un ruolo negativo. Tuttavia, la flessibilità delle procedure informatiche e la reversibilità dei processi di trasformazione cartografica rendono agevole ed immediato, oltre che economico, passare da una rappresentazione coerente con il contesto nazionale di un GIS ad un’altra sviluppata ad hoc su un sistema locale, utile ad
dist. misurata
dist. geodetica
terreno
ellissoide
Prof. L. Surace 45
esempio per la progettazione e il tracciamento di un’opera, per poi tornare al sistema cartografico generale, aggiornato per le variazioni. 10. – L’estensione dei fusi
Il superamento della discontinuità generata dal frazionamento in fusi distinti è possibile, come già detto, solo progettando un unico fuso di rappresentazione per tutto il territorio nazionale. Volendo procedere in questa direzione è però indispensabile valutare correttamente e approfonditamente le specifiche condizioni di applicazione della rappresentazione di Gauss. La discontinuità non può essere eliminata con una semplice estensione di un fuso sull’altro (ad esempio il fuso UTM32 sul 33) fino a coprirlo totalmente, conservando le condizioni di applicazioni del fuso sopravvissuto. Con tale soluzione, infatti, quello che Gauss, con ovvio significato, denominava meridiano centrale, cui riferire le longitudini del territorio da rappresentare, diverrebbe meridiano eccentrico (in ogni senso!), poiché il territorio interessato si estenderebbe per 3° ad ovest e per ben 9° ad Est di esso. I due cardini fondamentali dello studio di Gauss, simmetria della rappresentazione e minimizzazione dell’estensione in longitudine, verrebbero totalmente ignorati e l’eccentricità del meridiano origine provocherebbe almeno due effetti negativi: a) l’aumento progressivo delle deformazioni cartografiche, con legge pressoché parabolica al crescere della longitudine dal meridiano origine, porta a valori inaccettabili di mp (fig. 16); al margine est del fuso esteso il fattore di scala raggiunge il valore di 1.00769, il che vuol dire che in Puglia una lunghezza sul terreno di 3 km subisce una dilatazione cartografica di circa 23 m, rendendo impossibile qualsiasi tentativo di sovrapposizione, anche grossolana, con la cartografia esistente, grafica e numerica. Ma già a 7° dal meridiano «centrale» i 3 km sul terreno aumentano di 12 m, con conseguenze inaccettabili; b) le formule adoperate per la normale applicazione della rappresentazione di Gauss non possono più garantire le precisioni conseguibili con i fusi di 6°; soprattutto si ha una forte disomogeneità di precisione tra la parte di territorio (6°) rappresentata nel fuso di appartenenza, cioè rimasta inalterata, e la parte restante (~6°), inglobata e deformata. Inoltre le coordinate assegnate nel fuso esteso non risultano distinguibili con immediatezza da quelle dei fusi ufficiali, ingenerando così rischi di ulteriori confusioni. Per evitare simili improponibili operazioni, sarebbe comunque sufficiente una semplice e veloce ricerca delle soluzioni che altre nazioni, affrontando il problema, hanno da tempo individuato: un’immediata indicazione viene dalla vicina Francia, dove l’Institut Geographique National fin dal 1986 ha introdotto un sistema cartografico unificato per le esigenze delle applicazioni informatiche a copertura nazionale, denominato «Lambert II étendu». Giova infine ricordare che il sogno di ogni cartografo è sempre stato quello di rappresentare la realtà tridimensionale con assoluta fedeltà geometrica su un supporto bidimensionale (il piano cartografico). È purtroppo un sogno irrealizzabile. Chi non ha consuetudine con le basi matematiche della scienza cartografica può incorrere nell’equivoco di considerare errori le deformazioni necessariamente indotte nella rappresentazione sul piano (caratterizzato da curvatura totale nulla) della superficie ellissoidica (avente curvatura totale ovunque diversa da zero e variabile con continuità in funzione della latitudine). Sono variazioni non eliminabili ma totalmente dominate e controllate dalla conoscenza della legge di corrispondenza biunivoca istituita da ogni rappresentazione. Al sogno, non realizzabile, di assenza di deformazioni, il cartografo ha sostituito l’obbiettivo di minimizzare quel fenomeno. Un obbiettivo di minimizzazione in prima istanza motivato dall’esigenza di analogia complessiva

Prof. L. Surace 46
tra oggetto e rappresentazione, ma principalmente dal fatto che, una volta cartografato, un oggetto portava con sé in dote coordinate cartografiche deformate di quantità conoscibili dagli specialisti e quasi mai dall’utente. Rendere le deformazioni piccole nella cartografia analogica ha consentito, in alcuni casi di poterle addirittura considerare trascurabili, perché assorbite dal leggendario «errore di graficismo», parafulmine di ogni carta di carta. Rammentiamo che la pur rigidissima stima di 0.2 mm per quell’errore, consentiva, nelle vecchie tavolette 1:25000 (per le quali assumeva il valore di 5 m sul terreno), di considerare le distanze cartografiche misurabili (pari al massimo alla diagonale dell’elemento cartografico, che approsimativamente vale 14 km) come significativamente uguali alle corrispondenti distanze geodetiche. Il modulo di deformazione lineare era, nella peggiore delle situazioni (ai margini del fuso o sul meridiano centrale), responsabile di variazioni non superiori a 40 cm/km; quindi la differenza massima tra lunghezza della linea geodetica e distanza gaussiana raggiungeva lo «stesso»valore del graficismo (circa 5 m) e diventava dunque trascurabile. Da ciò discese la scelta delle dimensioni dell’elemento cartografico «tavoletta». Non altrettanto può dirsi per la cartografia tecnica a grande scala, né per l’attuale produzione 1:25000, in cui è prevista l’indicazione del modulo di deformazione lineare medio all’interno dell’elemento, proprio per il corretto calcolo della distanza «sul terreno», o meglio sull’ellissoide. Oggi, con la cartografia numerica, lo scenario risulta completamente mutato e risulta indispensabile spiegarlo. Potrebbe infatti taluno essere indotto a pensare che, se si volesse progettare un nuovo sistema cartografico, l’esigenza di minimizzare le deformazioni consiglierebbe di ridurre l’ampiezza dei fusi; la lettura di quanto fin qui esposto dovrebbe escludere tale eventualità: ridurre l’ampiezza dei fusi per ridurre le deformazioni, pensando che esse siano errori sarebbe di certo una vera sciocchezza, se si considera che nella cartografia numerica sparisce il concetto di graficismo, le distanze non si misurano ma si calcolano grazie alla «dote» di coordinate geografiche e cartografiche, che ciascun oggetto possiede; al calcolo possiamo poi chiedere in tempo reale tutto ciò che ci serve, dalla distanza cartografica al cambio di datum e di rappresentazione, dalle distanze geodetiche agli azimut ellissoidici e piani, purché il calcolo stesso segua una strategia scientificamente corretta. 11. – Conclusione
Il rilevamento è lo sforzo incessante di misurare il mondo e di modellarlo senza mai arrivare a compimento. Poiché il mondo è costantemente perturbato, le nostre misure devono poterne seguire i movimenti. Nuovi sistemi di riferimento si renderanno necessari da qui a 10 - 20 anni. Il che ci sposta nel futuro verso sistemi di riferimento dinamici, in cui le coordinate dei punti “fissi” cambiano per i movimenti della crosta, per l’aumento di precisione delle misure, per il miglioramento delle reti di riferimento ecc... Il palcoscenico su cui si affacciano le innovative tecniche di acquisizione e trattamento dei dati è dominato dalla rivoluzione concettuale e operativa delle procedure di rilevamento satellitare. Da una parte le tecniche GPS hanno semplificato e migliorato il posizionamento diretto, allargato radicalmente l’utenza dei dati di posizione, incrementato il numero dei potenziali posizionatori ed aperto nuovi scenari. D’altra parte le nuove piattaforme satellitari permettono rilevamenti sempre più accurati e promettono un monitoraggio quasi continuo dei mutamenti territoriali. Nel campo cartografico o, ancor più in generale, nelle operazioni di georeferenziazione, un cambiamento di sistema di riferimento ha implicazioni pratiche non trascurabili e di difficile soluzione, in quanto cambiare sistema vuol dire variare una enorme mole di dati esistenti.
Prof. L. Surace 47
Nel caso attuale di introduzione del sistema WGS84 e delle sue realizzazioni, la soluzione più semplice consisterebbe nel lasciare tutti i “vecchi” prodotti nel sistema geodetico-cartografico nativo e convertire in esso tutti i “nuovi” dati di georeferenziazione. E’ una soluzione praticabile, ma non soddisfacente, perché costringe l’utente a rinunciare ad una delle più importanti qualità del GPS, cioè la sua precisione. Nel passaggio dal sistema di riferimento globale a quello locale svanisce almeno per un ordine di grandezza la precisione intrinseca del posizionamento satellitare. L’alternativa è la conversione preventiva di tutti i “vecchi” prodotti nel sistema WGS84. Sebbene si sia portati intuitivamente a pensare che tale alternativa rappresenti la migliore soluzione, è utile esaminarne vantaggi e svantaggi. In primo luogo, essendo il WGS84 il più realistico modello disponibile della “figura” della Terra, la possibilità di un diretto posizionamento delle informazioni tramite GPS rende tutti i prodotti di maggiore valore perché direttamente utilizzabili in tutte le fasi del rilevamento sia statico che dinamico. Una tale impostazione consente la continuità della georeferenziazione, negata in presenza di differenti sistemi locali, ad esempio nei lavori aventi carattere sovrannazionale; minimizza gli errori dell’utente finale che si trova a lavorare con un unico, comune, sistema di riferimento e non è costretto a trasformare i suoi dati rilevati nel sistema o nei sistemi locali. Il maggiore problema è sicuramente il costo della conversione, che sarebbe distribuito tra gli utenti nel primo caso e accentrato presso i produttori nel secondo caso. Il primo non sarebbe certo minore, ma solo meno palese ed oltretutto carico di rischi di disomogeneità e di discontinuità spaziale e temporale. Siamo in presenza di un aspetto positivo della globalizzazione, sostanzialmente differente dal caso dell’introduzione del sistema ED50: infatti, mentre allora l’adozione di un sistema soprannazionale pagò lo scotto di una sorta di “generalizzazione” e quindi di un degrado della geometria relativa, oggi la globalizzazione del sistema agisce in direzione opposta grazie al ribaltamento dei rapporti di affidabilità tra sistema locale e sistema globale. Il sistema europeo ED50 era più esteso ma meno preciso dei sistemi nazionali, in quanto derivante da uno sfoltimento delle misure classiche che li realizzavano; il sistema globale WGS84 è più esteso e più preciso dei sistemi nazionali perché derivante da nuove e differenti misure e nuove metodologie di calcolo. Il passaggio al WGS84 si configura dunque come transizione da un sistema locale ad uno globale, omogeneo, con accuratezza nettamente superiore al sistema precedente e con elevate garanzie di durata nel tempo. Ritornando alla cartografia esistente, per rendere possibile ed agevole riportare coordinate GPS su di essa, la soluzione risiede in un nuovo reticolato cartografico UTM-WGS84. Senza un tale reticolato, le coordinate rilevate da un ricevitore GPS non possono essere direttamente utilizzate. Le coordinate sono in fondo un indirizzo spaziale; i ricevitori GPS più semplici costano qualche centinaio di euro e raggiungono un’accuratezza di qualche metro, quasi entro la tolleranza di una carta topografica 1:5000. Per i cacciatori o gli escursionisti, sacchi a pelo di buona qualità, tende e zaini costano ciascuno più dell’accesso al moderno sistema di navigazione da svariati miliardi di dollari! Tuttavia, l’assenza di un sistema standard di coordinate piane limita notevolmente l’uso delle informazioni di posizione fornite da questi ricevitori. Le unità GPS a basso costo incrementeranno l’uso di carte di tutti i tipi, analogiche e digitali, mentre le carte direttamente utilizzabili in UTM-WGS84 incrementeranno l’uso del GPS. È quindi importante stimolare i produttori di cartografia ad adottare il sistema UTM-WGS84 come uno standard. Non tanto tempo fa, un biglietto da visita con un indirizzo Internet era una novità, oggi è una pratica d’affari consueta. Nell’era dell’informazione le coordinate UTM-WGS84 dovrebbero diventare un indirizzo geospaziale comunemente accettato a completamento degli indirizzi convenzionali.
Prof. L. Surace 48
La costruzione dei GIS e lo sfruttamento delle varie sorgenti di dati pongono però non solo problemi di innovazione dei processi e dei prodotti, ma anche non meno importanti problemi di formazione e aggiornamento degli operatori, sia sul versante della produzione che su quello della committenza e dell’utenza. Troppo spesso, infatti, accade che l’integrazione e il dialogo tra gli attori fondamentali del processo, committente, produttore e utente, sia insufficiente o inefficace. Il risultato di tale situazione diviene ancor più grave alla luce dei nuovi ruoli che oggi i prodotti disponibili assegnano e consentono: le tecniche di acquisizione e gestione delle informazioni territoriali hanno di fatto trasformato il “consumatore” di informazioni territoriali dapprima in “utente” e, oggi, in “co-produttore”, allargando enormemente il bacino dei destinatari attivi, cioè capaci di dare valore aggiunto alle informazioni ricevute. La differenza sostanziale di scenario tra ieri (e in parte ancora oggi) e domani (e in parte già oggi) consiste nel fatto che a fronte di innumerevoli tecnologie di acquisizione si sta gradualmente passando da altrettante, specializzate e poco integrate, metodologie di fruizione ad un’unica strategia di fruizione attraverso il collettore intelligente dei sistemi informativi geografici. Alla luce di questa rivoluzione gli obbiettivi di un sistema di riferimento nazionale devono allargarsi per includere, oltre ai tradizionali impieghi geodetici e cartografici, la georeferenziazione spaziale nelle varie applicazioni GIS, per le quali il GPS rende possibili nuove soluzioni. L’esigenza che le informazioni territoriali siano dotate di coordinate universalmente accettate e immediatamente utilizzabili e che i sistemi informativi geografici si basino su un sistema di coordinate standard non può essere ulteriormente disattesa. Per quanto riguarda il sistema geodetico di riferimento la scelta non può che ricadere sul WGS84, definendo la posizione di un punto attraverso le sue coordinate cartesiane geocentriche X, Y e Z e la quota geoidica rispetto al modello di geoide nazionale disponibile. L’accuratezza e l’affidabilità dei rilievi GPS correttamente condotti nel sistema WGS84 ne garantiscono l’efficacia nella georeferenziazione per qualunque applicazione GIS e nei controlli di qualità dei risultati. L’esigenza che le informazioni territoriali siano dotate di coordinate immediatamente utilizzabili e che i sistemi informativi geografici si basino su un sistema di coordinate standard comporta infine una riflessione sui problemi della scelta della rappresentazione cartografica. La natura interdisciplinare delle applicazioni GIS e la varietà di oggetti da georiferire spazialmente, producono nuovi utenti, nuovi usi e nuovi prodotti. Per questo è auspicabile che, in un’ottica strategica che guardi almeno ai prossimi decenni e miri a costruire un prodotto fruibile anche in presenza di future esigenze, si ufficializzi un nuovo sistema geodetico globale, il WGS84, che, al di là di un breve, limitato periodo transitorio di coesistenza con i vecchi sistemi, li sostituisca totalmente come unico e moderno sistema di riferimento. Contestualmente a tale mutamento geodetico, la flessibilità e la potenza dei sistemi informatici consente, grazie alla totale reversibilità dei processi di trasformazione cartografica, il superamento delle discontinuità generate dai fusi della rappresentazione e dei limiti alla costruzione di sistemi informativi a copertura nazionale.
Prof. L. Surace 49
Bibliografia
Antongiovanni R. (1965), Istruzioni sull’uso delle scale graduate per il rilevamento delle coordinate geografiche di punti designati sulle carte topografiche al 100000 e al 25000 dell’IGM. Bollettino di Geodesia e Scienze Affini, vol. XXIV, no. 1, pp. 137-149. Ballarin S. (1948), Coordinate gaussiane di punti lontani dal meridiano fondamentale. Bollettino di Geodesia e Scienze Affini, vol. VII, no. 6, pp. 127-147. Ballarin S. (1949), Sul passaggio dalle coordinate piane gaussiane alle coordinate geografiche per punti distanti dal meridiano fondamentale. Bollettino di Geodesia e Scienze Affini, vol. VIII, no. 4, pp. 171-185. Ballarin S. (1953), Relazioni che intercorrono fra le corrispondenze relative all’ellissoide e alla sfera nella rappresentanzazione conforme di Gauss e loro impiego nella determinazione delle coordinate e della convergenza dei meridiani per fusi di notevole ampiezza. Bollettino di Geodesia e Scienze Affini, vol. XII, no. 4, pp. 461-489. Bencini P. (1951), Sul calcolo della distanza e dell’azimut geodetici per la preparazione del tiro. Bollettino di Geodesia e Scienze Affini, vol. X, no. 1, pp. 35-38. Bencini P. (1953), Risoluzione di problemi geodetici e topografici con le macchine calcolatrici superautomatiche. Bollettino di Geodesia e Scienze Affini, vol. XII, no. 1, pp. 143-166. Bencini P. (1962), Le macchine calcolatrici elettroniche. Loro applicazioni a calcoli geodetici e topografici (I parte). Bollettino di Geodesia e Scienze Affini, vol. XXI, no. 2, pp. 223-241. Bencini P. (1963), Le macchine calcolatrici elettroniche. Loro applicazioni a calcoli geodetici e topografici (II parte). Bollettino di Geodesia e Scienze Affini, vol. XXII, no. 3, 381-408. Bencini P. (1964), Le macchine calcolatrici elettroniche. Loro applicazioni a calcoli geodetici e topografici (III parte). Bollettino di Geodesia e Scienze Affini, vol. XXIII, no. 1, pp. 49-61. Bencini P. (1967), Le macchine calcolatrici elettroniche. Loro applicazioni a calcoli geodetici e topografici (continuazione e fine). Bollettino di Geodesia e Scienze Affini, vol. XXVI, no. 4, pp. 465-505. Bencini P. (1978), Appunti di Cartografia. Firenze, ed. IGM. Birardi G. (1962), Sulla precisione delle carte topografiche. Bollettino di Geodesia e Scienze Affini, vol. XXI, no. 3, pp. 449-475. Birardi G. (1972), “Il sistema di riferimento geodetico 1967”, Bollettino di Geodesia e Scienze
Affini, n. 2 – 1972, Firenze, IGM
Prof. L. Surace 50
Boaga G. (1943), Sviluppi in serie delle formule della rappresentazione conforme dell’ellissoide terrestre sul piano. Bollettino di Geodesia e Scienze Affini, vol. III, no. 6, pp. 154-159. Boaga G. (1943), Scostamento di un breve arco di trasformata piana di un arco di geodetica ellissoidica, per mezzo della rappresentazione conforme, dal segmento lineare che ne congiunge gli estremi. Bollettino di Geodesia e Scienze Affini, vol. III, no. 8, pp. 208-215. Boaga G. (1943), Sulla rappresentazione conforme di Gauss. Collezione Testi Tecnici IGM, II edizione, Firenze. Boaga G. (1944), Sulla risoluzione dei triangoli geodetici ellissoidici attraverso la loro rappresentazione piana conforme. Bollettino di Geodesia e Scienze Affini, vol. IV, no. 2, pp. 34-43. Bonifacino B. (1953), Formule di corrispondenza della rappresentazione conforme di Gauss-Boaga per fusi di grande ampiezza. Rivista del Catasto e dei Servizi Tecnici Erariali, nuova serie, anno VIII, n. 1. Bonifacino B. (1954), La convergenza dei meridiani ed i moduli di deformazione per punti distanti dal meridiano centrale nella rappresentazione conforme di Gauss-Boaga. Rivista del Catasto e dei Servizi Tecnici Erariali, nuova serie, anno IX, n. 2. Bonifacino B. (1960), Formule fondamentali della rappresentazione gaussiana della sfera sul piano. Bollettino di Geodesia e Scienze Affini, vol. XIX, no. 5, pp. 799-805. Bonifacino B. (1962), Sulla convergenza dei meridiani per qualunque tipo di rappresentazione conforme di una superficie di rotazione sul piano a notevole distanza dal meridiano fondamentale. Bollettino di Geodesia e Scienze Affini, vol. XXI, no. 3, pp. 413-421. Bonifacino B. (1963), Sulla convergenza dei meridiani nella rappresentazione conforme gaussiana per fusi di ampiezza. Bollettino di Geodesia e Scienze Affini, vol. XXII, no. 1, pp. 73-78. Bonifacino B. (1964), Sul problema inverso del trasporto delle coordinate geografiche per archi ellissoidici di considerevole lunghezza attraverso la rappresentazione conforme di Gauss. Bollettino di Geodesia e Scienze Affini, vol. XXIII, no. 2, pp. 143-152. Bonifacino B. (1965), Sul parametro isometrico della cartografia conforme. Bollettino di Geodesia e Scienze Affini, vol. XXIV, no. 1, pp. 89-94. Bonifacino B. (1966), Sull’ impiego della rappresentazione di Gauss per il calcolo sul piano di reti ellissoidiche di notevoli dimensioni. Bollettino di Geodesia e Scienze Affini, vol. XXV, no. 1, pp. 57-73. Bonifacino B. (1967), Nuova forma delle formule di corrispondenza di una rappresentazione conforme. Bollettino di Geodesia e Scienze Affini, vol. XXVI, no. 3, pp. 345-351.
Prof. L. Surace 51
Bonifacino B. (1971), Sulla convergenza dei meridiani nella rappresentazioni conformi. Bollettino di Geodesia e Scienze Affini, vol. XXX, no. 2, pp. 97-103. Burchietti G., Cima V., Maseroli R., Surace L. (2003), Geocoding of geological information for GIS implementation: the problem of global and local datums and its solution. Proceedings of the 4th European Congress on Regional Geoscientific Cartography and Information Systems, Bologna, 17-20 June. Caputo M. (1958), Sugli errori che si hanno troncando la serie del modulo e della corrispondenza nella rappresentazione di un ellissoide di rotazione sul piano secondo Gauss. Bollettino di Geodesia e Scienze Affini, vol. XVIII, no. 3, pp. 301-313. Cima V., Maseroli R., Surace L. (2003), Il processo di georeferenziazione dal telerilevamento ai GIS. Relazione invitata alla 7a Conferenza Nazionale ASITA, Verona, 27-30 ottobre, Atti. Department of the army (1967), TM 5-241-1, Grids and grid references, USA war office. Donatelli D., Maseroli R., Pierozzi M. (2002), “Le trasformazioni tra i sistemi di riferimento utilizzati in Italia”, Bollettino di Geodesia e Scienze Affini, n. 4 – 2002, Firenze, IGM Fici R., Surace L. (2002), Dialogo di un venditore di coordinate e di un passeggere. Bollettino SIFET, n. 1. Fondelli M. (2000), “Esperienze e riflessioni in margine al progetto di un nuovo Sistema cartografico di riferimento nazionale”, Bollettino Ingegneri – n. 5 – 2000, Firenze Fondelli M. (2000), Post scriptum in appendice alla nota “Esperienze e riflessioni in margine al progetto di un nuovo Sistema cartografico di riferimento nazionale”, Bollettino Ingegneri – n. 12 – 2000, Firenze Fondelli M. (2003), “Luci e ombre della georeferenziazione dei dati spaziali nel sistema WGS84”, Cartographica, n. 3 – 2003, Roma, ed. MondoGIS Inghilleri G. (1974), Topografia Generale. Torino, ed. UTET. Institut Geographique National (1986), Note complementare sur les projections Lambert utilisées pour la carte de France type 1922. Paris. Istituto Geografico Militare (1948), L’adozione di un reticolato chilometrico nella futura cartografia italiana. Bollettino di Geodesia e Scienze Affini, vol. VII, no. 5, pp. 123-125. Lenzi E. (1963), Sul passaggio delle coordinate piane di un punto da un fuso a quello adiacente, nella rappresentazione conforme di Gauss. Bollettino di Geodesia e Scienze Affini, vol. XXII, no. 2, pp. 243-245. Marussi A. (1950), La teoria della proiezione di Gauss con premesse di geometria differenziale. IGM, Firenze.
Prof. L. Surace 52
Maseroli R. (1995), “Il sistema di riferimento WGS84”, Bollettino di Geodesia e Scienze
Affini, n. 2 – 1995, Firenze, IGM NIMA - National Imagery and Mapping Agency (2000), “Department of Defense World Geodetic System 1984”, Technical Report 8350.2, third ed. Pericoli A. (1957), Reticolati cartografici e precisione planimetrica delle carte. Bollettino di Geodesia e Scienze Affini, vol. XVI, no. 1, pp. 91-100. Pericoli A. (1971), I reticolati di riferimento nella cartografia italiana. Bollettino di Geodesia e Scienze Affini, vol. XXX, no. 3, pp. 251-262. (vds. M. Pierozzi in Bollettino di Geodesia e S.A. n° 1, 1989, pp. 4555). Raccolta de «Il Bollettino Risponde» dal 1950 al 1995 (1997), Istituto Geogra-fico Militare, Firenze. Servizio Sismico Nazionale (2002), Norme Tecniche per l’acquisizione digitale di tutti i fogli della Carta Geologica d’Italia alla scala 1:100000. Roma. Stoppini A., Surace L. (1991), Formule approssimate per la trasformazione diretta e inversa tra sistema UTM (ED50) e sistema nazionale (Gauss-Boaga). Bollettino di Geodesia e Scienze Affini, vol. L, no. 3, pp. 187-197. Surace L. (1997), “La nuova rete geodetica nazionale IGM95: risultati e prospettive di utilizzazione”, Bollettino di Geodesia e Scienze Affini, n. 3 – 1997, Firenze, IGM Surace L. (1998), La georeferenziazione delle informazioni territoriali. Bollettino di Geodesia e Scienze Affini, vol. LVII, no. 2, pp. 181-234. Surace L. (2004), Perché WGS84. Cartographica, ed. MondoGis srl, no. 6, febbraio. Trombetti C., Bencini P. (1953), Costruzione ed uso delle tavole ausiliarie per i calcoli sul piano della proiezione di Gauss-Boaga. Bollettino di Geodesia e Scienze Affini, vol. XII, no. 3, pp. 445-460. Trombetti C. (1943), Sul passaggio dalle coordinate piane gaussiane alle coordinate geografiche. Bollettino di Geodesia e Scienze Affini, vol. III, no. 6, pp. 168-179. Trombetti C. (1943), Sulla convergenza dei meridiani nella rappresentazione conforme di Gauss in funzione delle coordinate piane. Bollettino di Geodesia e Scienze Affini, vol. III, no. 7, pp. 188-194. Trombetti C. (1943), Sulla trasformazione delle coordinate piane gaussiane per cambiamento di fuso. Bollettino di Geodesia e Scienze Affini, vol. III, no. 8, pp. 228-240.
Prof. L. Surace 53
Trombetti C. (1950), (1) Il modulo di deformazione lineare. (2) Riduzione del modulo e delle coordinate. (3) La scala di una carta. (4) Approssimazione grafica. Bollettino di Geodesia e Scienze Affini, vol. IX, no. 3, pp. 331-336. Trombetti C. (1950), (1) La proiezione conforme di Gauss-Boaga. (2) I fusi della cartografia ufficiale italiana. Bollettino di Geodesia e Scienze Affini, vol. IX, no. 3, pp. 337-342. Trombetti C. (1950), Le coordinate N ed E. Bollettino di Geodesia e Scienze Affini, vol. IX, no. 3, pp. 343-346. Trombetti C. (1950), Il reticolato chilometrico. Bollettino di Geodesia e Scienze Affini, vol. IX, no. 3, pp. 347-352. ^^^^^^^^^^^^^^^^^
Luciano Surace è professore Ordinario di Geodesia e Astronomia geodetica all’Istituto Idrografico della Marina di Genova e docente di Geodesia e di Cartografia al Master Universitario di II livello in Geomatica Marina di Genova. Autore di oltre cento pubblicazioni scientifiche specialistiche, è’ stato Direttore Geodetico dell’Istituto Geografico Militare di Firenze, Delegato italiano al Consiglio direttivo OEEPE (Organizzazione europea di studi fotogrammetrici sperimentali), Presidente della Società Italiana di Fotogrammetria e Topografia, professore a contratto di Topografia alla Facoltà di Ingegneria di Perugia e di Cartografia numerica alla Facoltà di Ingegneria di Firenze. Dal 2004 è membro permanente dell’International Advisory Board for Standard of Competence for Hydrographic Surveyors and Nautical Cartographers, istituito da FIG (International Federation of Surveyors), IHO (International Hydrographic Organization) e ICA (International Cartographic Association).