L EQUALIZZAZIONE DI CANALE - unipa.itmamola/Complementi di Com. Elettriche... · 2012. 6. 25. ·...
37
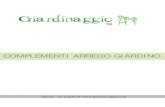
Campionatore 1 T Equalizzatore Decisore () nt () xt ˆ a x y Fig.1 – Schema del ricevitore. L’EQUALIZZAZIONE DI CANALE 1 – Generalità. In un sistema di trasmissione numerica, se è nota la risposta impulsiva o la risposta in frequenza del canale, è possibile annullare l’interferenza d’intersimbolo sagomando l’impulso di segnalazione corrispondente al segnale ricevuto in modo da soddisfare le condizioni ri- chieste dal criterio di Nyquist. Questo significa che nel ricevitore deve essere previsto un di- spositivo, detto equalizzatore, tale che da conformare il segnale in modo da ridurre, se non proprio annullare, l’interferenza di intersimbolo. Normalmente l’equalizzatore è un dispositi- vo numerico che opera sui campioni del segnale ricevuto e pertanto va inserito a valle del campionatore. Lo schema del ricevitore si presenta così come è schematizzato in Fig. 1. Sia (1.1) () ( ) () n n x t aqt nT nt ∞ =−∞ = − + ∑ l’inviluppo complesso di un segnale numerico PAM all’ingresso del ricevitore, dove: • { } n n a ∞ =−∞ ≡ a rappresenta la sequenza dei simboli emessi dalla sorgente supposti apparte- nenti ad un alfabeto composto da M elementi; • q( t) è l’impulso di segnalazione; • n( t) denota il rumore introdotto dal canale. Se si suppone un perfetto sincronismo fra il segnale trasmesso e quello ricevuto, all’uscita del campionatore si presenta il segnale: (1.2) ( ) [( )] ( ) ( ) ( ) n k n n n x kT aq k nT n kT a q nT n kT ∞ ∞ − =−∞ =−∞ = − + = + ∑ ∑ che, introducendo le sequenze { } ( ) n x nT ∞ =−∞ ≡ x , { } ( ) n q nT ∞ =−∞ ≡ q e { } ( ) n n nT ∞ =−∞ ≡ n , si può scrive- re nella forma: (1.3) = ∗ + x a q n In quel che segue si prendono in esame gli equalizzatori lineari che producono una se- quenza di variabili di decisione: (1.4) = ∗ y x h ottenuta come uscita di un filtro lineare di risposta impulsiva h quando al suo ingresso è presente la sequenza x . Le (1.2) e (1.4) permettono di definire lo schema equivalente del si- stema di trasmissione con equalizzatore lineare riportato in Fig. 2 dove il canale di trasmis-
Transcript of L EQUALIZZAZIONE DI CANALE - unipa.itmamola/Complementi di Com. Elettriche... · 2012. 6. 25. ·...

Campionatore
1T
Equalizzatore Decisore
( )n t
( )x t ax y
Fig.1 – Schema del ricevitore.
L’EQUALIZZAZIONE DI CANALE
1 – Generalità. In un sistema di trasmissione numerica, se è nota la risposta impulsiva o la risposta in
frequenza del canale, è possibile annullare l’interferenza d’intersimbolo sagomando l’impulso
di segnalazione corrispondente al segnale ricevuto in modo da soddisfare le condizioni ri-
chieste dal criterio di Nyquist. Questo significa che nel ricevitore deve essere previsto un di-
spositivo, detto equalizzatore, tale che da conformare il segnale in modo da ridurre, se non
proprio annullare, l’interferenza di intersimbolo. Normalmente l’equalizzatore è un dispositi-
vo numerico che opera sui campioni del segnale ricevuto e pertanto va inserito a valle del
campionatore. Lo schema del ricevitore si presenta così come è schematizzato in Fig. 1.
Sia
(1.1) ( ) ( ) ( )nn
x t a q t nT n t∞
=−∞
= − +∑
l’inviluppo complesso di un segnale numerico PAM all’ingresso del ricevitore, dove:
• { }n na ∞=−∞≡a rappresenta la sequenza dei simboli emessi dalla sorgente supposti apparte-
nenti ad un alfabeto composto da M elementi; • q(t) è l’impulso di segnalazione;
• n(t) denota il rumore introdotto dal canale.
Se si suppone un perfetto sincronismo fra il segnale trasmesso e quello ricevuto,
all’uscita del campionatore si presenta il segnale:
(1.2) ( ) [( ) ] ( ) ( ) ( )n k nn n
x kT a q k n T n kT a q nT n kT∞ ∞
−=−∞ =−∞
= − + = +∑ ∑
che, introducendo le sequenze { }( ) nx nT ∞=−∞≡x , { }( ) nq nT ∞
=−∞≡q e { }( ) nn nT ∞=−∞≡n , si può scrive-
re nella forma: (1.3) = ∗ +x a q n
In quel che segue si prendono in esame gli equalizzatori lineari che producono una se-
quenza di variabili di decisione: (1.4) = ∗y x h
ottenuta come uscita di un filtro lineare di risposta impulsiva h quando al suo ingresso è
presente la sequenza x . Le (1.2) e (1.4) permettono di definire lo schema equivalente del si-
stema di trasmissione con equalizzatore lineare riportato in Fig. 2 dove il canale di trasmis-

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 2 -
( )Q z Decisore
Canale di trasmissione Equalizzatore
( )H zaa
n
x y
Fig.2 – Schema equivalente tempo discreto del sistema di trasmissione numerico.
sione e l’equalizzatore sono rappresentati dalle funzioni di trasferimento. espresse nella va-riabile zeta, date da ( )Q z e ( )H z rispettivamente.
Le caratteristiche dell’equalizzatore sono determinate imponendo particolari condizioni
all’errore di predizione: (1.5) ˆk k ke y a= −
fra il segnale in entrata al decisore e la stima del dato. In quel che segue si suppone che la
decisione sia presa simbolo per simbolo e sia sempre corretta per modo che si può porre ˆk ka a= ; in tal caso la sequenza errore diventa:
(1.6) = −e y a
Dallo schema di Fig. 2 si deduce: (1.7) ( )= ∗ + ∗ −e a q n h a
che, potendosi scrivere = ∗a a δ , dove δ denota la sequenza impulsiva a tempo discreto, di-
venta: (1.8) ( )= ∗ ∗ − + ∗e a q h n hδ
La (1.8) può essere rappresentata come è mostrato in Fig.
3 dalla quale si desume che a produrre l’errore di decisione
intervengono due componenti: 1. l’interferenza di intersimbolo Ie ;
2. il rumore del canale di trasmissione Re .
La risposta impulsiva dell’equalizzatore, supposta nota la
forma dell’impulso di segnalazione all’uscita del canale di
trasmissione, può essere individuata prendendo in esame due distinte procedure:
a) imponendo l’annullamento dell’interferenza di intersimbolo, che corrisponde ad annullare la componente Ie dell’errore di decisione;
b) imponendo che il valore quadratico medio dell’errore di decisione sia minimo.
Gli equalizzatori conformati secondo la procedura a) sono denominati equalizzatori zero
forcing (equalizzatori ZF); quelli ottenuti con la procedura b) sono detti equalizzatori a mi-
nimo errore quadratico medio (equalizzatori MMSE Minimum Mean Square Error).
In quel che segue è necessario prendere in esame due diverse configurazioni del-
l’equalizzatore. Infatti esso può essere conformato come un filtro a risposta impulsiva infini-
ta (filtro IIR) o come un filtro a risposta impulsiva finita (filtro FIR).
∗ −q h δ+
+
Ie
Re
a
n
e
hFig.3 – Errore di decisione.

- 3 - L’ equalizzazione di canale
EQUALIZZATORI CONFORMATI SECONDO FILTRI IIR
2. - Equalizzatori zero forcing (ZF). Negli equalizzatori di tipo ZF si conforma l’equalizzatore in modo da annullare l’interferenza di intersimbolo. Ponendo uguale a zero la componente Ie dell’errore di decisio-
ne si ottiene: (2.1) o∗ =q h δ
dove oh denota la risposta impulsiva che caratterizza l’equalizzatore ottimo.
Prendendo la trasformata zeta di entrambi i membri della (2.1) si ottiene:
(2.2) 1( )( )oH z
Q z=
Per calcolare le prestazioni di un tale tipo di equalizzatore occorre valutare il valore qua-
dratico medio della sequenza errore. A tal proposito ricordando che il valore quadratico me-
dio di una sequenza aleatoria di ottiene integrando la sua densità spettrale, si ha:
(2.3) ( )jo eeW e d
πω
−πε = ω∫
Tenendo presente la (2.1), dalla (1.8) si deduce che la sequenza errore e si riduce a on h∗
per cui la densità spettrale ( )jeeW e ϕ , denotando con ( )j
nnW e ω la densità spettrale della se-
quenza di rumore, diviene:
(2.4) ( ) ( ) ( ) 2j j jee nn oW e W e H eω ω ω=
Supponendo che il circolo di raggio unitario del piano zeta sia contenuto nella regione di
convergenza della funzione ( )oH z , si ha ( ) ( )1j
o jH e
Q eω
ω= per cui si può scrivere:
(2.5) ( ) ( )( ) 2
jnnj
eej
W eW e
Q e
ωω
ω=
Risulta pertanto:
(2.6) ( )
( ) 2
jnn
jo
W e
Q ed
ω
ω
π
−πε = ω∫
Se le sequenze dei dati a e del rumore n si suppongono entrambe costituite da elementi incorrelati e caratterizzati da varianze pari a 2
aσ e 2nσ rispettivamente, la (2.6) scritta in ter-
mini del rapporto segnale rumore 2 2/a nγ = σ σ diviene:
(2.7) ( ) 2
2 1j
o aQ e
dω
π
−πε = σ ω
γ∫
Esempio E.1 Sia
0/( ) ( )t Tq t e u t−= la forma dell’impulso di segnalazione all’uscita del canale. È
0
00
kk
kkq
≥
<=
ρ⎧⎨⎩

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 4 -
1z− 1kx −kx
ky
ρ
Fig. E.1
con 0/ 1T Te−ρ = < . Si ha per z ≥ ρ :
0 0
( )1
1
k k
k
k
k
z zz
Qz z
z
∞−
=
∞
=
= ρ = =ρ
=ρ − ρ−
⎛ ⎞⎜ ⎟⎝ ⎠
∑ ∑
e quindi: 1( ) 1o
zH z z
z−− ρ
= = − ρ
che permette di dedurre lo schema dell’equalizzatore come indicato in Fig. E.1. È inoltre
( ) ( ) 11 jj
oH ee−− ωω = − ρ .
Se la sequenza di rumore si suppone stazionaria e composta da elementi a media nulla e varianza 2nσ è ( ) 2j
n nW e ω = σ , per cui l’errore di decisione vale:
22 2 2 2 21 (1 ) 2 cos 2 (1 )j
o n n nde dπ
−π
π − ω
−πσ σ ω σε = − ρ ω = + ρ − ρ ω = π + ρ⎡ ⎤⎣ ⎦∫∫
3. - Equalizzatori MMSE. Negli equalizzatori ZF il procedimento adottato per determinare i coefficienti del-
l’equalizzatore non tiene conto del rumore introdotto dal mezzo di trasmissione. Per questo
motivo, in particolari gravose condizioni, il comportamento di tali equalizzatori può non es-
sere accettabile. La risposta impulsiva h dell’equalizzatore MMSE, invece, si determina im-ponendo che il valore quadratico medio dell’errore fra il segnale in uscita y e la stima a del
dato trasmesso risulti minimo. Sempre nell’ipotesi di decisione corretta, gli elementi del filtro
ottimo sono calcolati come segue:
(3.1) { }2arg minoh
E= −h y a
Dalla teoria del filtro alla Wiener riportata nell’Appendice A si deduce che la risposta im-pulsiva ottima 0h dell’equalizzatore MMSE si ottiene dalla condizione:
(3.2) { }* 0n k nE x e− =
essendo n n ne y a= − l’errore di predizione. Nella stessa Appendice è mostrato che la caratteri-
stica del filtro ottimo, espressa nel dominio della variabile zeta, è:
(3.3) ( )
( )( )
xao
x
W zH z
W z=
Per valutare le densità spettrali che compaiono nella (3.3) occorre calcolare le corrispon-
denti funzioni di correlazione. Se si suppone che le sequenze a e n siano congiuntamente
incorrelate per cui si ha: (3.4) { }* 0 kn n kE a n ∀+ =
si ha, tenendo contro della (1.2):
(3.5)
{ } { }
{ }
{ } { }
* * * * * *
* * * *
* * *
( )
( )
xa n n k i n i n n k i n i n ki i
xx n n k i n i n j n k i n ki j
i j n i n k j n n ki j
R k E x a E q a n a q E a a
R k E x x E q a n q a n
q q E a a E n n
+ − + − +
+ − + − +
− + − +
⎧ ⎫⎡ ⎤⎪ ⎪= = + =⎨ ⎬⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭⎧ ⎫⎡ ⎤⎡ ⎤⎪ ⎪= = + + =⎢ ⎥⎨ ⎬⎢ ⎥
⎢ ⎥⎣ ⎦⎪ ⎪⎣ ⎦⎩ ⎭
= +
∑ ∑
∑ ∑
∑∑
che, denotando con { }*( )aa n n kR k E a a += e { }*( )nn n n kR k E n n += le autocorrelazione delle sequen-

- 5 - L’ equalizzazione di canale
ze a e n , assumono la forma:
(3.6)
*
*
( ) ( )
( ) ( ) ( )
xa i aai
xx i j aa nni j
R k q R k i
R k q q R k i j R k
= +
= + − +
∑
∑∑
Prendendo le trasformate zeta delle (3.6) si ottiene:
(3.7)
* * ( ) * * *
*
* ( )
*
( ) ( ) ( ) ( ) ( ) (1/ )
( ) ( ) ( )
( ) ( )
( )
k i k i ixa i aa i aa aa i aa
k i k i ik k
xx i j aa nnk i j k
i j k i j ki j aa nn
k i j k
iaa i
i
W z q R k i z q z R k i z W z q z W z Q z
W z q q R k i j z R k z
q z q z R k i j z R k z
W z q z
− − +
− −
− − + − −
⎛ ⎞= + = + = =⎜ ⎟
⎝ ⎠
= + − + =
⎛ ⎞= ⋅ + − + =⎜ ⎟⎜ ⎟
⎝ ⎠
=
∑∑ ∑ ∑ ∑
∑∑∑ ∑
∑ ∑ ∑ ∑
* *( ) ( ) ( ) (1/ ) ( )jj nn aa nn
jq z W z W z Q z Q z W z−⎛ ⎞
⋅ + = +⎜ ⎟⎜ ⎟⎝ ⎠∑ ∑
dove ( )Q z denota la trasformata zeta della sequenza q e dove si è fatto uso della relazione:
(3.8) *
* * **
1 (1/ )i
ii i
i iq z q Q z
z
−⎡ ⎤⎛ ⎞= =⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
∑ ∑ .
Sostituendo le (3.7) nella (3.3) si ha:
(3.9) * *
* *( ) (1/ )
( )( ) ( ) (1/ ) ( )
aao
aa nn
W z Q zH z
W z Q z Q z W z=
+
Tenendo conto dei risultati dell’Appendice A, si deduce infine:
(3.10) * *
* * * *( ) ( ) (1/ ) ( ) ( )
( ) ( ) 1( ) ( ) (1/ ) ( ) ( ) ( ) (1/ ) ( )
aa aa nnee aa
aa nn aa nn
W z Q z Q z W z W zW z W z
W z Q z Q z W z W z Q z Q z W z
⎡ ⎤= − =⎢ ⎥
+ +⎢ ⎥⎣ ⎦
essendo * *( ) (1/ )xx xxW z W z= .
Se il circolo unitario del piano zeta è contenuto nella regione di convergenza della tra-sformata ( )eeW z , ponendo nella (3.10) jz e ω= , si ottiene la trasformata di Fourier della se-
quenza errore ne :
(3.11) ( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( )( ) ( ) ( )
2
2 21j j j j
aa aa nnj jee aa
j j j j j jaa nn aa nn
W e Q e W e W eW e W e
W e Q e W e W e Q e W e
ω ω ω ωω ω
ω ω ω ω ω ω
⎡ ⎤⎢ ⎥
= − =⎢ ⎥⎢ ⎥+ +⎢ ⎥⎣ ⎦
Se le sequenze a e n sono entrambe costituite da elementi incorrelati, a media nulla e varianze date da 2
aσ e 2nσ rispettivamente, la (3.11) può essere espressa in termini del rap-
porto segnale rumore 2
2a
n
σγ =
σ come segue:
(3.12) ( )( )
2
21
j aee
jW e
Q e
ω
ω
σ=
γ +
La trasformata ( )jeeW e ω consente di calcolare il valore quadratico medio dell’errore di de-
cisione e si ha:
(3.13)
( )2
22 1
ao
j
d
Q e
π
ω−π
σ ωε =
πγ +
∫
Confrontando la precedente con la (2.7) si deduce che negli equalizzatori MMSE, a parità

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 6 -
1z−
1z−
1z−
1z−−γ 1−
1nx −
2nx −
1ny −
2ny −
nxny
γ− ρ
21+ γ +ρρ
Fig. E.2
di condizioni, il valore quadratico medio dell’errore di decisione è più basso del corrispon-
dente errore che si verifica negli equalizzatori ZF e ciò è dovuto alla circostanza che le carat-
teristiche dell’equalizzatore MMSE sono determinate tenendo in conto il rumore introdotto
dal canale di trasmissione.
Esempio E.2 Con riferimento all’Esempio E.1, dalla (3.4), tenendo conto delle (3.7), si ottiene:
* *
* *
( ) (1/ )( )
( ) ( ) (1/ ) ( )aa
oaa nn
W z Q zH z
W z Q z Q z W z=
+
che, se le sequenze a e n si suppongono costituite da elementi incorrelati e caratterizzati da varianze 2aσ e 2
nσ rispettivamente per cui è 2( )aa aW z = σ e 2( )nn nW z = σ , diventa 2 * *
2 * * 2
(1/ )( )
( ) (1/ )a
oa n
Q zH z
Q z Q z
σ=
σ + σ
Essendo d’altra parte ( )z
Q zz
=− ρ
e * * 1(1/ )
1Q z
z=
− ρ, si deduce l’espressione della funzione ( )oH z in
funzione del rapporto segnale rumore 2 2/a nγ = σ σ :
dalla quale si ottiene lo schema del-l’equalizzatore riportato in Fig. E.2. Il valore quadratico medio dell’errore di decisione vale:
2
2
(1 ) 2 cos2(1 ) 2 coso a d+ρ − ρ ωπ
−π +ρ +γ − ρ ωε = σ ω∫
Per risolvere l’integrale si ponga
2tant ω= . Si ha:
2
2
1cos
1
t
t
−ω =
+ e
2
2
1
dtd
tω =
+.
Si ottiene: 2
2
2
22
2
2 2 2
2 22 2 22 2
11 2
11
1 21
1 1 2 12 2
1 11 1 2 1
( )
( )
( )( ) ( )
( ) ( ) ( )o a a
t
tt
t
dt t t dt
t tt t
∞ ∞
−∞ −∞
−+ ρ − ρ
+
−+ ρ + γ − ρ
+
+ ρ + − ρ −ε = = =
+ ++ ρ + γ + − ρ −σ ⋅ σ ⋅
⎡ ⎤⎣ ⎦∫ ∫
( ) ( )2 2 2
222
2 2
1 2 1 22
11 2 1 2( ) ( )
at dt
tt
∞
−∞
− ρ + ρ + + ρ + ρ=
++σ ⋅
− ρ + ρ + γ + ρ + ρ + γ∫
che ponendo: 2 2
2 2
(1 ) (1 )
(1 ) (1 )A B
α = − ρ β = + ρ
= − ρ + = + ρ +γ γ
diventa:
( ) ( )2
22 2
21
o at
dtA Bt t
∞
−∞
α + βε = σ
+ +∫
Si osservi ora che si può scrivere: 2
2 2 2 21
1 1
1
t
A Bt t
B AB A B AA Bt t
α + β
+ +
α − β α − β= −
− −+ +( )( )
per cui è:
2 2 2 2
2 2 2 2
1 1 12 2 2 2
BA
o a a a adt dt dt dt
A Bt t t t
B A B AB A B A B A A B A
∞ ∞ ∞ ∞
−∞ −∞ −∞ −∞= =
+ + + +
α − β α − β α − β α − βε − −
− − − −σ σ σ σ∫ ∫ ∫ ∫( )
( )2( )
1o
zH z
z z
− ρ= γ
−ρ + + γ + ρ − ρ

- 7 - L’ equalizzazione di canale
+ −
( ) 1H z −
Decisore ax z
Fig. 4 – Equalizzatore a reazione
Ponendo BA
x t= nel primo integrale si ha:
22o aB A
B AB A AB
α − β α − β= −
−−ε
⎡ ⎤σ ⎢ ⎥
⎣ ⎦( )
Tenendo conto delle posizioni fatte, si ottiene infine:
2
2 2 2
21
1 4( )o a=ε
γσ −
+ ρ + γ − ρ
⎡ ⎤⎢ ⎥⎢ ⎥⎣ ⎦
4. - Equalizzatori a reazione. Un ulteriore tipo di equalizzatore è costituito dall’equalizzatore a reazione detto anche e-
qualizzatore DFE (Decision-Feedback Equalizator) in quanto si utilizzano le decisioni sui
simboli precedentemente trasmessi a quello attuale per attenuare l’interferenza di intersim-
bolo. Il segnale in arrivo al ricevitore può essere espresso nella forma: (4.1) k k k kx a i n= + +
in termini cioè del simbolo trasmesso ka , del rumore di canale kn e dell’interferenza di in-
tersimbolo:
(4.2) 1
1( )
k
k i k i i k i i k ii i i ki k
i q a q a q a∞ − ∞
− − −=−∞ =−∞ = +≠
= = +∑ ∑ ∑
Negli equalizzatori a reazione si effettua una stima dell’interferenza
(4.3) 1 0
ˆ ˆ ˆ ˆk i k i i k i k ki i
i h a h a a∞ ∞
− −= =
= = − ∗δ∑ ∑
ottenuta elaborando i dati stimati ˆka mediante un filtro causale ( 0kh = per 0k < ) e monico
( 0 1h = ) e tale stima è sottratta al segnale in arrivo per cui il segnale così ottenuto:
(4.4) ˆk k kz x i= −
può presentare una riduzione notevole dell’interferenza di intersimbolo.
È bene precisare che l’interferenza è completamente annullata se il canale di trasmissio-ne si suppone causale 0kq = per 0k < e monico ( 1oq = ) e si pone k kh q= . In caso contrario
la stima ki può solo annullare la componente dell’ISI dovuta ai simboli precedenti quello at-
tuale ma non può influenzare il valore della compo-
nente dovuta ai simboli successivi.
Supponendo le decisioni esatte ( ˆ =a z ) dalla Fig. 4 si
deduce la seguente equazione espressa nel dominio
della variabile zeta: (4.5) [ ]( ) ( ) ( ) ( ) 1A z X z A z H z= − −
da cui:
(4.6) ( )( )( )
X zA zH z
=
Si moltiplichi numeratore e denominatore della precedente per una funzione ( )U z . Si ha:
(4.7) ( ) ( ) ( )( ) ( )( ) ( ) ( )
X z U z U zA z X zH z U z V z
= =
dove si è posto ( )( ) ( ) ( )( )
V zU z C z V zH z
= = . La (4.7) dà luogo allo schema del ricevitore riportato in

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 8 -
+ −( )Q z ( )U z
( ) 1V z −
Decisorea
nx y z
w
a
Fig.6 – Equalizzatore a reazione.
( ) ( ) 1Q z C z −
( )V z+
+
( )C z
Ie
Re
a
n
e ′e
Fig.7 – Errore di decisione per equalizzatori a reazione.
+−
( )U z
( ) 1V z −
Decisoreax y z
Fig. 5 – Equalizzatore a reazione con filtri forward e feedback.
Fig. 5. Tale schema comporta la pre-
senza di due filtri: • il filtro forward ( )U z
• il filtro feedback ( )V z
che introducono due gradi di libertà
nella determinazione dei parametri
dell’equalizzatore DFE.
Lo schema completo del sistema di trasmissione con equalizzatore di tipo DFE è compo-sto come è indicato in Fig. 6. Se il filtro ( )V z si suppone causale (con risposta impulsiva v
tale che 0kv = per 0k < ) e monico ( 0 1v = ), la sequenza in ingresso al decisore è:
(4.8) = −z y w
con: (4.9) ˆ ( )= ∗ −w a v δ
Denotando con u la risposta impulsiva del filtro ( )U z , introducendo la (4.9) nella (4.8) e
tenendo conto che è ( )= ∗ + ∗y a q n u , si ottiene:
(4.10) ( ) ( )ˆ= ∗ + ∗ − ∗ −z a q n u a v δ
che, se la decisione si suppone esatta, si riduce alla: (4.11) ( )= ∗ ∗ − + ν ∗ +z a q u v u a
e quindi la sequenza errore: (4.12) ( )= − = ∗ ∗ − + ∗e z a a q u v n u
che, essendo = ∗u c v , assume la forma: (4.13) ( ) ( ) ( )= ∗ ∗ ∗ − + ∗ ∗ = ∗ ∗ − ∗ + ∗ ∗ = ∗ ∗ − + ∗ ∗⎡ ⎤ ⎡ ⎤⎣ ⎦ ⎣ ⎦e a q c v v n c v a q c a n c v a q c n c vδ δ
La (4.13) dà luogo allo schema di Fig. 7.
Dal confronto dello schema di Fig. 7 con
quello di Fig. 3, è evidente che nell’equaliz-
zatore a reazione si registra la presenta del filtro ( )V z che può essere utilmente
impiegato per ridurre il valore quadratico
medio dell’errore di decisione; così facendo le
prestazioni dell’equalizzatore a reazione sono quindi migliori di quelle degli equalizzatori
MMSE.
Riassumendo, per determinare le caratteristiche dell’equalizzatore a reazione si può pro-
cedere come segue: a) si determina la caratteristica ( )C z imponendo che e raggiunga la condizione di otti-

- 9 - L’ equalizzazione di canale
mo; b) una volta individuata la caratteristica ( )C z si determina il valore ottimo del filtro
( )V z imponendo che il valore quadratico medio della sequenza di errore ′e sia mini-
ma. c) si determini infine il valore del filtro forward essendo ( ) ( ) ( )U z C z V z= .
Occorre infine precisare che il filtro ( )C z può, a sua volta, essere individuato con le se-
guenti procedure:
a) imponendo che sia nulla l’interferenza di intersimbolo (equalizzatori DFE ZF): b) imponendo che sia minimo il valore quadratico medio della sequenza errore ke (e-
qualizzatori DFE MMSE).
4.1 - Equalizzatori DFE ZF.
Con riferimento alla Fig. 7, l’annullamento dell’interferenza di intersimbolo si ottiene se è:
(4.14) 1( )( )oC z
Q z=
per cui il valore ottimo del filtro ( )U z vale:
(4.15) ( )( )( )o
V zU zQ z
=
La sequenza e , essendo 0I =e , diventa:
(4.16) o= ∗e n c
alla quale corrisponde la densità spettrale che, espressa nel dominio della variabile zeta, va-
le:
(4.17) 2
* ** *( ) ( ) ( ) (1/ )
( ) (1/ )n
ee nn o oW z W z C z C zQ z Q z
σ= =
avendo supposto la sequenza di rumore stazionaria e costituita da elementi incorrelati e ca-ratterizzati dalla varianza 2
nσ .
4.2 - Equalizzatori DFE MMSE. Per determinare il valore ottimo del filtro ( )C z nel caso di equalizzatori DFE MMSE basta
osservare che la caratteristica ottima del filtro ( )C z è la stessa di quella ottenuta nel par. 3.
Si ha pertanto:
(4.18) * *
* *( ) (1/ )
( )( ) ( ) (1/ ) ( )
aao
aa nn
W z Q zC z
W z Q z Q z W z=
+
per cui il filtro ( )U z diventa:
(4.19) * *
* *( ) (1/ ) ( )
( )( ) ( ) (1/ ) ( )
aao
a nn
W z Q z V xU z
W z Q z Q z W z=
+
La densità spettrale della sequenza e , data dalla (3.10), è:
(4.20) * *( ) ( )
( )( ) ( ) (1/ ) ( )
aa nnee
aa nn
W z W zW z
W z Q z Q z W z=
+
che, se è 2( )aa aW z = σ e 2( )nn nW z = σ diventa:
(4.21) 2
2* *
2
( )( ) (1/ )
nee
n
a
W zQ z Q z
σ=
σ+
σ
Dal confronto della (4.17) con la (4.21) si deduce che, nel caso di equalizzatori DFE, la

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 10 -
densità spettrale della sequenza e può essere espressa nella forma:
(4.22) 2
( )( )n
eeW zF zσ
=
in cui
(4.23)
* *
2* *
2
per equalizzatori DFE ZF
per equalizzatori DFE MMSE
( ) (1/ )( )
( ) (1/ ) n
a
Q z Q zF z
Q z Q z
⎧⎪
= ⎨ σ+⎪
σ⎩
Dalle (4.23) è evidente che la funzione ( )jF e ω presenta la caratteristiche di una densità
spettrale di un’opportuna sequenza f ; questo comporta che la trasformata zeta ( )F z di det-
ta sequenza, può essere fattorizzata come segue (v. Appendice B. Fattorizzazione spettrale): (4.24) * *( ) ( ) (1/ )F z k M z M z= ⋅
dove
• k è una quantità reale e positiva; • ( )M z è una funzione causale, monica e stabile (questo comporta che i suoi zeri e poli
sono contenuti nel circolo unitario del piano z ); • * *(1/ )M z è una funzione anticausale, monica (questo comporta che i suoi zeri e poli
sono esterni al circolo unitario del piano z ). Con riferimento alla Fig. 7, la sequenza errore ke presenta una densità spettrale, definita
nel dominio della variabile z , data dalla:
(4.25) 2 * *
* ** *
( ) (1/ )( ) ( ) ( ) (1/ )( ) (1/ )
ne e ee
V z V zW z W z V z V zk M z M z
′ ′σ
= = ⋅
Poiché si è supposto che il filtro ( )V z è causale, monico, la funzione ( )( )( )
V zG zM z
= caratterizza
un filtro causale e monico e pertanto può essere espressa nella forma 2
( ) 1 kk
kG z g z
∞−
=
= + ∑ .
Il valore quadratico medio della sequenza errore ke′ vale:
(4.26) { } ( ) ( )( ) ( )
2 22 22 1 1 1
2 2 2
jj jn n
k ee j
V eE e W e d d G e d
k kM e
ωπ π πω ω
ω−π −π −π
σ σ′ = ω = ω = ωπ π π∫ ∫ ∫
che applicando il teorema di Parseval si può scrivere come segue:
(4.27) { }2
2 2
2
1 12
nk k
kE e g
∞
=
⎛ ⎞σ′ = +⎜ ⎟⎜ ⎟π γ ⎝ ⎠∑
dalla quale si evince che il valore minimo di { }2kE e′ si raggiunge quando è 0kg = (per 2k ≥ )
e cioè quando è ( ) 1G z = . Il valore ottimo del filtro ( )V z è quindi:
(4.28) ( ) ( )oV z M z=
Tenendo conto della (4.28) le (4.15) e (4.19) diventano
(4.29) * *
* *
per equalizzatori DFE ZF
per equalizzatori DFE MMSE
( )( )
( ) ( ) (1/ )
( ) ( ) (1/ ) ( )
( )aa
aa nn
o
M zQ z
W z M z Q z
W z Q z Q z W z
U z
−
−+
⎧⎪⎪= ⎨⎪⎪⎩
Se è ( ) 2jaa aW e ω = σ e ( ) 2j
nn nW e ω = σ le precedenti si riducono alle:

- 11 - L’ equalizzazione di canale
(4.30) * *
* *
2
2 2
per equalizzatori DFE ZF
per equalizzatori DFE MMSE
( )( )
( ) (1/ )
( ) (1/ )
( )oa
a n
M zQ z
M z Q z
Q z Q z
U z
−
−σ
σ + σ
⎧⎪⎪= ⎨⎪⎪⎩
In tali condizioni si ha:
(4.31) { }2
2 nkE e
kσ′ =
È da tener presente che se ( )Q z è causale ( 0nq ≡ per 0n < ), si ha:
0
00 0*
* * * *0
00 0
( )
(1/ )
n nnn
n n
n nnn
n n
qQ z q z q z
q
qQ z q z q z
q
∞ ∞− −
= =
∞ ∞
= =
= =
⎛ ⎞= = ⎜ ⎟
⎝ ⎠
∑ ∑
∑ ∑
per cui nel caso di equalizzatori DFE-ZF è
(4.32) *
20
0 00 0( ) n nn n
n n
q qF z q z z
q q
∞ ∞−
= =
⎛ ⎞= ⎜ ⎟
⎝ ⎠∑ ∑
Si ha:
(4.33) 20
0 00
( )( ) nn
n
q Q zM z z k qq q
∞−
=
= = =∑
Esempio E.3 Con riferimento all’esempio E.1 per determinare le caratteristiche di equalizzatori DFE di tipo FF o MMSE è necessario calcolare le funzioni ( )oV z e ( )oU z ; a tal fine occorre effettuare la scomposizione spettrale della funzione ( )F z , che osservando che è ( ) /( )zQ z z= − ρ diviene:
( )( )
( )( ) 2
2
per equalizzatori DFE ZF
per equalizzatori DFE MMSE
1( )
1a
n
zz z
F zz
z z
−
σ+ −
σ
− ρ − ρ=
− ρ − ρ
⎧⎪⎪⎨⎪⎪⎩
Equalizzatori DFE-ZF La funzione ( )F z presenta due poli di valore ρ e 1/ ρ e uno zero all’origine. Essendo 1ρ < , la fun-
zione ( )M z deve contenere il polo di valore ρ e lo zero all’origine; di conseguenza * *(1/ )M z deve con-tenere il polo di valore 1/ ρ . Poiché entrambe tali funzioni devono essere moniche, si ha:
1
* *1( )
1
1(1/ )
1z
M zz z
M zz−
= =− ρ − ρ
=− ρ
con 1k = . È allora ( ) ( )oz
V z M zz
= =− ρ
e ( ) 1oU z = . Il valore quadratico medio dell’errore di decisione
vale { }2 2k nE e′ = σ .
Equalizzatori DFE-MMSE In tal caso la funzione ( )F z diventa:
( )( ) ( )( )
2 2 2
2
( 1) ( )( )
1 1 ( )n
a
z z z N zF z
z z z z D zσ −ρ + ρ + γ + − ρ
= + = =− ρ − ρ γ − ρ − ρσ
essendo 2 2/a nγ = σ σ il rapporto segnale rumore. Detti ξ (con 1ξ < ) e 1/ ξ le radici del trinomio ( )N z a numeratore (1) si può scrivere:
(1) Se 1z e 2z denotano gli zeri del polinomio ( )N z dalla condizione 1 2 1z z = discende 1
1 2z z−=

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 12 -
( )( ) ( )( )1 1( ) ( )N z z z D z z z− −= − − ξ − ξ = −γρ − υ − ρρ
per cui risulta:
( )( )( )( )
1 1
11
1( )
z z z zF z
z zz z
− −
−−
− ξ − ξ − ξ − ξ=
γ − ρ − ργ − ρ − ρ=
Si ha allora 1
* *1
1( ) (1/ )
z zM z M z k
z z
−
−
− ξ − ξ= = =
− ρ γ− ρ
Il valore quadratico medio dell’errore di decisione vale:
{ }2 2 2k n aE e = γσ = σ
5 – La precodifica di Tomlinson – Harashima. Come osservato in precedenza, il segnale in arrivo al ricevitore può essere posto nella for-
ma: (5.1) k k k ky a i n= + +
dove ki rappresenta l’ammontare dell’interferenza di intersimbolo prodotta dal canale di tra-
smissione. Negli equalizzatori a reazione si effettua una stima di tale interferenza
1
ˆ ˆk i k ii
i v a∞
−=
= ∑ ottenuta sulla base dei dati ˆka rivelati. Tale stima, sottratta al segnale in usci-
ta dal filtro ( )U z costituisce il segnale ˆk k kz y i= − che interviene nel decisore. Se la decisione
si suppone senza errori e il segnale in uscita dal filtro di reazione riesce a compensare esat-tamente l’interferenza di intersimbolo, il segnale in ingresso al decisore vale k k kz a n= + ot-
tenendosi così una perfetta cancellazione dell’ISI. A rigor di termini, l’interferenza di inter-
simbolo 0k k i ii
i a q∞
−== ∑ è annullata dalla stima ki solo se il canale è causale e se si adotta
un’equalizzazione del tipo ZF per modo che sia k kq v= . In caso contrario la stima ki riesce
solo ad attenuare la componente dell’ISI dovuta ai simboli precedenti al dato attuale ma non
a quelli successivi.
È da osservare che, anche se si riuscisse ad eliminare completamente l’interferenza, se si
commette un errore nella decisione del simbolo trasmesso, la stima dell’ISI non è più corret-
ta e ciò potrebbe comportare un errore nella rivelazione del simbolo successivo. In altri ter-
mini, l’errore potrebbe propagarsi; la sequenza dei dati rivelati potrebbe contenere un burst
di simboli errati.
Per sopperire a tale inconveniente si può trasferire la sezione a reazione di un ricevitore
che impiega un equalizzatore DFE nel trasmettitore. Si tratta di disporre al trasmettitore un
dispositivo, detto predittore, che genera una predizione dell’ISI che è utilizzata per correggere
il simbolo attuale. È evidente che un tale metodo è applicabile solo se il trasmettitore cono-
sce esattamente la caratteristica del canale di trasmissione.
Facendo riferimento a segnalazioni PAM M -arie, lo schema del predittore (predittore di
Tomlinson - Harashima) si presenta come è indicato in Fig. 8.

- 13 - L’ equalizzazione di canale
ka
( ) 1V z −
+ −( )MΓ ⋅kb kb ( )Q z ( )U z Decisore
kakn
kz
Fig. 8 – Schema di un equalizzatore con predittore TH.
Tralasciando per il momento il blocco non lineare, la sequenza in uscita dal predittore è ( k kb b= ):
(5.2) [ ]( ) ( ) ( ) 1 ( )B z A z V z B z= − −
da cui
(5.3) ( )( )( )
A zB zV z
=
e quindi il segnale all’ingresso del decisore, in assenza di rumore di canale, vale:
(5.4) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( )
U zZ z B z Q z U z A z Q z A z Q z C zV z
= = =
Ad esempio, nel caso di equalizzatori ZF essendo 1( ) ( )C z Q z−= la precedente diviene:
(5.5) ( ) ( )Z z A z=
L’interferenza di intersimbolo presente nel segnale in arrivo è stata così eliminata.
Ritornando allo schema del predittore riportato in Fig. 8 è facile riconoscere che il simbo-lo kb del predittore può risultare di valore notevole a causa del termine
0 i k iib v −≠∑ .potrebbe
Ciò comportare un eccessivo incremento della potenza in uscita dal predittore. Per eliminare tale inconveniente si introduce nel predittore in blocco non lineare ( )MΓ ⋅ che produca la ri-
duzione mod 2M del simbolo presente al suo ingresso. In altri termini, detto a il valore del
simbolo presente all’ingresso del blocco in questione, l’uscita c dal dispositivo ( )MΓ ⋅ è tale
che risulta:
(5.6) 2a c M i= + ⋅ dove i ∈ e [ ),c M M∈ − .
Ad esempio con 4M = , al valore 19, 4a = corrisponde 3, 4c = e 2i = essendo manifesta-
mente 19,4 3, 4 2 4 2= + ⋅ ⋅ .
In tali condizioni la sequenza in uscita dal predittore può essere scritta come segue: (5.7) [ ]( ) ( ) 2 ( ) ( ) ( ) ( ) 1 2 ( )B z B z M I z A z B z V z M I z= − ⋅ = − − − ⋅
che da luogo alla:
(5.8) [ ]1( ) ( ) 2 ( )( )
B z A z M I zV z
= − ⋅
In assenza di rumore di canale il segnale in ingresso al decisore vale:
(5.9) [ ] ( )( ) ( ) ( ) ( ) ( ) 2 ( ) ( )( )
U zZ z B z Q z U z A z M I z Q zV z
= = − ⋅
che, nel caso di equalizzatori ZF diviene: (5.10) ( ) ( ) 2 ( )Z z A z M I z= − ⋅

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 14 -
e cioè (5.11) 2k k kz a M i= − ⋅
Il dato trasmesso ka può cos’ essere dedotto da ka operando prima decisione una riduzione
mod 2M del segnale in arrivo.

- 15 - L’ equalizzazione di canale
1z− 1z−Camp.x(t )
y k
1T
1kx −kx
∑
*0c *
1c*
1Nc −...
k Nx −( 1)k Nx − −
*Nc
Fig. 9 – Filtro numerico trasversale
EQUALIZZATORI CONFORMATI SECONDO FILTRI FIR 6 – Equalizzatori a spaziatura intera. Nella maggior parte dei casi gli equalizzatori sono conformati con filtri a risposta impulsi-
va finita (FIR) che sono presi in considerazione in questa sezione.
Il segnale in uscita da un equalizzatore costituito da un filtro FIR è dato dalla:
(6.1) *
0
N
k i k ii
y c x −=
= ∑
essendo { }*0
Nn n
c=
un insieme di 1N + coefficienti (in generale complessi) che costituiscono i
parametri dell’equalizzatore. L’elemento base dell’equalizzatore lineare è costituito da un fil-
tro numerico trasversale la cui struttura si presenta come è indicato in Fig. 9. La quantità
ky è inviata ad un decisore che prende una decisione simbolo per simbolo.
Il filtro numerico trasversale è composto da N celle di ritardo connesse in cascata; i cam-
pioni prelevati all’ingresso del filtro e all’uscita di ogni cella sono moltiplicati per i coefficien-
ti { }*0
Ni i
c=
e inviati al sommatore in uscita. La quantità N rappresenta la lunghezza
dell’equalizzatore.
È opportuno osservare che, di norma, l’impulso di segnalazione ( )q t tende a zero per
t → +∞ ; ciò significa che è possibile individuare un intero L tale che, per ( 1)t L T≥ + si abbia
q(t) ≅ 0 . Inoltre l’impulso di segnalazione è causale per cui risulta ( ) 0q t ≡ per 0t < . Da que-
ste considerazioni si deduce che la (1.2) contiene un numero finito di termini e cioè diventa:
(6.2) 0
( ) [( ) ] ( ) ( ) ( )k L L
n k nn k n
x kT a q k n T n kT a q nT n kT−
−= =
= − + = +∑ ∑
per cui il generico campione del segnale all’ingresso dell’equalizzatore è:
(6.3) 0
L
k k n n kn
x a q n−=
= +∑
Gli 1N + campioni di x(t) che intervengono nella determinazione della variabile di decisio-
ne si possono rappresentare mediante il vettore:
(6.4) 1
k
kk
k N
xx
x
−
−
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
x

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 16 -
il cui generico componente, sulla base della (6.3), si può porre nella seguente forma matri-
ciale:
(6.5) [ ] 100 1
k i
k ii Nk i L k i
k i L
aa
x q q q n
a
−
− −≤ ≤− −
− −
⎡ ⎤⎢ ⎥⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
Si ha dunque
[ ]
[ ]
[ ]
10 1
1
2 10 1
1
10 1
0 1
0 1
0 0 0 0 0 00 0
k
kL
k L
k k
k kk L
k L k N
k N
k NL
k L N
L
L
aa
q q q
a
a na n
q q q
a n
aa
q q q
a
q q qq q q
−
−
−
− −
− − −
−
− −
− −
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥= + =⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦
=
x
1 1
0 1
0 0 0 0
0 0 0 0
k k
k k
L k L N k N
a na n
q q q a n
− −
− − −
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⋅ +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
ovvero (6.6) k k k= ⋅ +x Q a n
essendo:
(6.7) 1;
kk
kk k L k
k Nk N L
an
na
na
−−
−− −
⎡ ⎤⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥= =⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦⎢ ⎥⎣ ⎦
a n
due vettori di dimensioni 1N L+ + e 1N + rispettivamente e Q una matrice di dimensioni ( ) ( )1 1N N L+ × + + definita dalla:
(6.8)
0 1
0 1
0 1
0 0 0 0 0 00 0 0 0 0 0
0 0 0 0
L
L
L
q q qq q q
q q q
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
Q
Si noti che tutte le righe della matrice Q contengono gli stessi elementi, ma sono sfalsati in
avanti di un posto quando dalla riga i -esima si passa alla riga successiva.
Se si denota con

- 17 - L’ equalizzazione di canale
(6.9)
0
1
N
cc
c
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
c
il vettore dei pesi di 1N + dimensioni, l’uscita dell’equalizzatore lineare, tenendo conto delle
(6.1) e (6.6), vale: (6.10) ( )H H H
k k k k k ky w= ⋅ = ⋅ ⋅ + = ⋅ ⋅ +c x c Q a n c Q a
dove l’apice H denota la trasposta coniugata (hermitiana) e si è posto: (6.11) H
k kw = c n
È bene mettere in evidenza che il filtro numerico trasversale altera il rumore introdotto dal canale. Così, ad esempio, se la sequenza { }kn si può ritenere stazionaria, incorrelata, a
media nulla e varianza σn2 , l’autocorrelazione della sequenza { }kw vale:
(6.12) { } { } { }* 2 2( ) H H H H H Hw l l k k l k k l k n nR k E w w E E+ + += = = ⋅ ⋅ = σ = σc n n c c n n c c Ic c c
essendo I la matrice unitaria di ordine 2 1N + .
7 – Equalizzatori a spaziatura frazionata. Il modello descritto nel precedente paragrafo si presta a rappresentare i cosiddetti equa-
lizzatori a spaziatura frazionata che usano un campionamento con una velocità r volte
maggiore di quella usata dagli equalizzatori a spaziatura intera. Normalmente r , che si
denota fattore di sovra-campionamento è un intero. Tale struttura migliora le prestazioni
dell’equalizzatore seppur ne aumenta la complessità. In un tale tipo di equalizzatore i valo-
ri campionati possono essere descritti da elementi del tipo mx kT Tr
⎛ ⎞+⎜ ⎟⎝ ⎠
con
{ }0 1 1, , ,m r∈ −… e k ∈ . È pertanto, per ogni k :
(7.1) ( ) ( ) ( ) { }0
0 1 1, , ,L
k nn
m rm m mx kT T a q nT T n kT Tr r r−
=
∈ −+ = + + +∑ …
Se si introducono i vettori
(7.2)
( )
( )
( )
( )
( )
( )
( )
( )
( )
1 1 1
1 1 1
; ;k k k
x kT q kT n kT
x kT T q kT T n kT Tr r r
r r rx kT T q kT T n kT Tr r r
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥= = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
− − −⎢ ⎥ ⎢ ⎥ ⎢ ⎥+ + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
x q n
la (7.1) si può porre nella forma:
(7.3) 0
L
k k n n kn
ka −=
∈= +∑x q n
Si supponga che l’equalizzatore utilizzi un blocco di 1N + simboli kx , ciascuno dei quali
composto da r campioni. Il vettore definito dall’insieme degli 1N + simboli kx vale:

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 18 -
(7.4)
0
1 110
0
0 1 1
0 1
0 1
L
k n nn
k kL
k kk n nn
k N k NL
k N n nn
k
L k
L
k L
L
k N L
a
a
a
aa
a
a
−=
− −− −=
− −
− −=
−
−
− −
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥= + =⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎣ ⎦
⎡ ⎤⎢ ⎥⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥= ⎢⎢ ⎥ ⎢⎢ ⎥ ⎢⎣ ⎦ ⎢⎢⎣ ⎦
∑
∑
∑
qx n
x nq
x nq
q q qq q q
q q q
0 0 0 00 0 0 0
0 0 0
1
k
k
k N
−
−
⎡ ⎤⎢ ⎥⎢ ⎥+⎥ ⎢ ⎥⎥ ⎢ ⎥⎥ ⎣ ⎦⎥
⎥
nn
n
in cui si è denotato con 0 un vettore di tutti zeri di r dimensioni. Con le notazioni:
(7.5)
0 1 1
1 0 1 1
0 1
; ; ;
k
k L k k
k L kk k k k
k L
k N L k N
k N L
aa
a
a
−
− −
−
− −
− −
⎡ ⎤⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥= = = =⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎢ ⎥⎢ ⎥⎣ ⎦
x q q q nx q q q n
x Q a n
x q q q n
0 0 0 00 0 0 0
0 0 0
la precedente diviene: (7.6) k k k k= ⋅ +x Q a n
Nella (7.6) i vettori kx e kn hanno Nr dimensioni, il vettore ka è di N L+ dimensioni e la
matrice kQ è del tipo ( )( )Nr N L× + . Un equalizzatore a lunghezza frazionata presenta una
lunghezza pari a Nr .
Le considerazioni svolte a proposito degli equalizzatori a spaziatura intera possono essere estesi anche a quelli a spaziatura frazionata purché si sostituiscano alle quantità kx , kQ e
kn le corrispondenti grandezze kx , kQ e kn .
8 - Equalizzatori del tipo zero forcing. Esplicitando la (6.10) si ha:
(8.1) ( )0
L NH
k k i kii
y a w+
−=
= +∑ c Q
dove ( )Hi
c Q rappresenta l’ i -esimo elemento del vettore riga Hc Q . Lo scopo dell’equalizzatore
consiste nel far sì che il campione ky all’uscita dell’equalizzatore riproduca il corrispondente
dato inviato dal trasmettitore. Se D T⋅ è il ritardo di propagazione, al simbolo ky corrisponde
il dato inviato k Da − . È bene ricordare che, nel caso di equalizzatori ZF, l’eliminazione
dell’interferenza di intersimbolo si ottiene senza tener conto della presenza del rumore. Ciò comporta che, se si ammette di mantenere finita la quantità ( )
1H
D+c Q , la sequenza dei pesi
{ } 0N
n nc = dovrà essere scelta in modo tale da realizzare le condizioni:
(8.2) ( )( )
1
( 1)
1
0
HD
H i Di
+
≠ +
=
=
c Q
c Q

- 19 - L’ equalizzazione di canale
13
tT
( )q t1
0 1 2 3 4 5 6
23
Fig. E.1
Le (8.2), indicando con Du il vettore
(8.3) 1posto
0
1
0
DD +←
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
u
di 1N L+ + dimensioni, possono essere riscritte sinteticamente nel seguente modo: (8.4) H H
D=c Q u
essendo manifestamente H T=u u . Prendendo il coniugato trasposto della precedente si ha: (8.5) H
D=Q c u
Il sistema (8.5) contiene, in generale, un numero di equazioni diverse dal numero delle in-
cognite per cui una soluzione unica può essere ottenuta solo se si determina quel valore del vettore c che rende minima la norma del vettore H
D−Q c u e cioè:
(8.6) 2
arg min Ho D
⎡ ⎤= −⎢ ⎥⎣ ⎦cc Q c u
In altri termini il vettore co si ottiene imponendo che in corrispondenza ad esso si annulli il
gradiente della funzione obiettivo:
(8.7)
( ) ( ) ( )( )2( )
1
HH H H H H HD D D D D
H H H H H HD D D D
H H H H HD D
J ≡ − = − − = − − =
= − − + =
= − − +
c Q c u Q c u Q c u c Q u Q c u
c QQ c c Qu u Q c u u
c QQ c c Qu u Q c
che costituisce una forma quadratica nelle quantità complesse ci = ′ c i + j ′ ′ c i . Come è noto (v.
Appendice C) il gradiente della funzione J(c) è: (8.8) { } ( )grad ( ) 2 H
DJ = −c QQ c Qu
e quindi: (8.9) 1( )H
o D−=c QQ Qu
È interessante osservare che poiché Q non è una matrice quadrata non esiste l’inversa Q−1 ; cosicché dalla (8.8) non si può dedurre 1( )H
o D−=c Q u .
Il valore minimo della funzione obiettivo vale: (8.10) min ( ) 1H H H H H
o o o o D D oJ J≡ = − − +c c QQ c c Qu u Q c
che, tenendo conto della (8.9), diventa:
(8.11) 1 1 1 1
min1
( ) ( )( ) ( ) ( ) 1
1 ( )
H H H H H H H H H H HD D D D D D
H H HD D
J − − − −
−
= − − + =
= −
u Q Q Q QQ QQ Qu u Q Q Q Qu u Q QQ Qu
u Q QQ Qu
che, ponendo 1( )H H −=M Q QQ Q diviene:
(8.12) 2min 1 1H
D D DDJ m= − = −u Mu
Poiché minJ dipende da D il valore ottimo del ritardo D si può determinare dall’indice
dell’elemento massimo della diagonale principale della matrice M .
Esempio E.1 Si determinino i valori dei pesi di un equalizzatore ZF con 2 celle di ritardo in un sistema di trasmissione numerica in banda base caratterizzato dall'impulso di segnalazione mostrato in Fig. E.1. Dall’esame della Fig. E.1 si deduce che è ( ) 0q t = per 6Tt ≥ per

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 20 -
cui è 5L = . La matrice Q ha dimensioni 3 8× e vale: 3 31 1
3 3 3 33 31 1
3 3 3 33 31 1
3 3 3 3
0 1 0 0
0 0 1 0
0 0 0 1
⎡ ⎤⎢ ⎥
= ⎢ ⎥⎢ ⎥⎣ ⎦
Q
Poiché gli elementi della diagonale principale della matrice 1( )H H −=M Q QQ Q valgono
[ ]10 35 35 62 87 62 35 35
117
il valore ottimo del ritardo vale 3D = che corrisponde all’istante in cui la risposta ( )q t raggiunge il
massimo. È [ ]0 0 0 1 0 0 0 0 T
D =u e quindi il vettore il vettore oc , dato dalla (8.9), è:
1
3139
613
539
( ) To D
−= = −
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
c QQ Qu
Per valutare l’effetto dell’equalizzatore basta osservare che, in assenza di rumore, il segnale ricevu-to, dato dalla (6.3) con 0kn = , è:
3
1 2 3 4 5 60
1 2 2 13 3 3 30 0k k n n k k k k k k k
n
x a q a a a a a a a− − − − − − −
=
= = + + + +⋅ + + ⋅∑
e di conseguenza l’interferenza:
3 1 2 4 51 2 2 13 3 3 3k k k k k k ki x a a a a a− − − − −= − = + + +
L’interferenza è una grandezza aleatoria per cui per determinarne il peso è necessario calcolare il suo valore quadratico medio. Supponendo i dati { }1,1ka ∈ − equiprobabili ed incorrelati, si ha:
{ }2 101 4 4 1 1,11119 9 9 9 9kE i + + + = ==
In presenza dell’equalizzatore, il segnale in uscita è dato dalla (6.10), che in assenza di rumore, di-viene:
1 2 3 4 5 6 731 62 18 10 8 544
117 117 117 117 117 117 117H
k o k k k k k k k ky a a a a a a a− − − − − − −= ⋅ ⋅ = + + + + − +c Q a
Ad esso corrisponde l’intergerenza d’intersimbolo data dalla:
3 1 2 3 4 5 6 731 62 55 10 8 544
117 117 117 117 117 117 117k k k k k k k k k ki y a a a a a a a a− − − − − − − −′ = − = + + − + − +
il cui valore quadratico medio vale:
{ }2 961 1936 3844 3025 100 64 25 0, 72713689 13689 13689 13689 13689 1368913689kE i =′ + + + + + + =
È chiaramente { } { }2 2k kE i E i′ < .
9 - Equalizzatori di tipo MMSE. Negli equalizzatori di tipo ZF l’equazione risolutiva (8.9), che consente di determinare i va-
lori dei coefficienti del filtro numerico trasversale, è stata dedotta imponendo soltanto l’annullamento parziale dell’interferenza di intersimbolo; il segnale in uscita yk è pertanto
corrotto da un’interferenza residua dipendente dalla lunghezza finita dell’equalizzatore. Inol-
tre il procedimento adottato per la determinazione dei pesi non tiene conto del rumore intro-
dotto dal mezzo di trasmissione. Per questi motivi, in particolari gravose condizioni, il com-
portamento di tali equalizzatori può non essere accettabile. L’equalizzatore di tipo MMSE si basa sui campioni xn del segnale ricevuto e determina il
vettore dei pesi c imponendo che il valore quadratico medio dell’errore fra il segnale in uscita yk , dato dalla (6.10), e il corrispondente dato trasmesso k Da − risulti minimo. Ciò equivale a
dire che il dato k Da − è stimato attraverso la quantità yk e che il criterio di stima adottato è
quello di rendere minimo l’errore quadratico medio. (Stima MMSE Minimum Mean Square
Error). In altri termini, detto ek l’errore:

- 21 - L’ equalizzazione di canale
(9.1) k k k De y a −= −
i pesi c vengono determinati imponendo che la funzione obiettivo: (9.2) { }2( ) k k DJ E y a −= −c
risulti minima.
Tenendo conto della (6.10), la J(c) diventa:
(9.3)
( ) ( ){ }( ) ( ){ }
{ } { } { } { }
*
* *
( )HH H
k k D k k D
H Hk k D k k D
H H H Hk k k k D k D k k D k D
J E a a
E a a
E E a E a E a a
− −
− −
− − − −
= − − =
= − − =
= − − +
c c x c x
c x x c
c x x c c x x c
dalla quale si ottiene: (9.4) 2H H H
aJ = − − + σc c Rc c p p c( )
dove R rappresenta la matrice delle autocorrelazioni dei campioni xk
(9.5) { }Hk kE=R x x
di dimensioni ( 1) ( 1)N N+ × + e p è il vettore:
(9.6) { } ( ){ } { } { }k k D k k k D k k D k k DE a E a E a E a− − − −= = ⋅ + = +p x Q a n Q a n* * * *
di dimensioni 1N + . Si noti che essendo *ij jiR R= è H=R R e cioè R è una matrice hermitia-
na. Il valore ottimo co di c si calcola imponendo che in corrispondenza ad esso si annulli il
gradiente della funzione J(c) . Tenendo presente i risultati dell’Appendice C, si ha: (9.7) { } ( )2J = −c Rc pgrad ( )
co è ottenuta dalla soluzione dell’equazione:
(9.8) o =Rc p
nota come equazione di Wiener-Hopf.
Il valore minimo della funzione ( )J c vale:
(9.9) 2 2
2 2
H H H H H Ho o o o a o o o o o o a
H H Ha o o a o o
J = − − + σ = − − + σ =
= σ − = σ −
c Rc c p p c c Rc c Rc Rc c
c R c c Rcmin ( )
Sottraendo la (9.9) dalla (9.4) e tenendo conto delle (9.8), è facile riconoscere che si ha: (9.10) H
o oJ J= + − −c c c R c cmin( ) ( ) ( )
Supponendo ancora che la sequenza dati sia stazionaria e composta da elementi a media nulla, incorrelati e caratterizzati da un valore quadratico medio pari a σa
2 , si ottiene:
(9.11)
( ) ( ){ } ( ) ( ){ }( ) ( ){ }{ } { } { } { }
2 2
H H H Hk k k k k k k k
H H Hk k k k
H H H H H Hk k k k k k k k
Ha n
E E
E
E E E E
= ⋅ + ⋅ + = ⋅ + ⋅ + =
= ⋅ + ⋅ + =
= + + + =
= σ + σ
R Q a n Q a n Q a n a Q n
Q a n a Q n
Q a a Q Q a n n a Q n n
QQ I
dove, si è supposto che la sequenza del rumore sia composta da elementi a media nulla, in-correlati, a varianza 2
nσ ed indipendenti dagli elementi della sequenza dati.
Il vettore p vale:
(9.12) ( ){ } { } { }k k k D k k D k k DE a E a E a− − −= ⋅ + = ⋅ +p Q a n Q a n* * *

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 22 -
{ } 1N
k ku ′′
= Decisione
{ } 1N
k kv ′
=
+−
ki
k Da −kx kz ky
Fig. 10 – Equalizzatore a reazione
che essendo Hk D k Da − = a u* , assume la forma
(9.13) 2a D= σp Qu
Il vettore dei pesi ottimi vale allora:
(9.14) 12
12
H no D
a
−− ⎛ ⎞σ
= = +⎜ ⎟⎜ ⎟σ⎝ ⎠c R p QQ I Qu
Sostituendo la (9.14) nella (9.9) e tenendo conto della (9.13) si ottiene:
(9.15) ( ) ( ) ( )1 1 12 2 1 2 2 2min 1H H H H H H H H
a o o a a a a D DJ− − −− ⎡ ⎤= σ − = σ − = σ − = σ − σ⎢ ⎥⎣ ⎦
c Rc p R RR p p R p u Q R Qu
per cui, in base alla (9.11) si deduce:
(9.16) 12
2min 21 H H H n
a D Da
J−⎡ ⎤⎛ ⎞σ
⎢ ⎥= σ − +⎜ ⎟σ⎢ ⎥⎝ ⎠⎣ ⎦u Q Q Q I Qu
In modo analogo a quanto fatto a proposito dell’equalizzatore ZF, il ritardo D può essere calcolato determinando il minimo della minJ ; questo si ottiene scegliendo per D l’indice cui
corrisponde il massimo degli elementi diagonali della matrice 12
2H H n
a
−⎛ ⎞σ
= +⎜ ⎟σ⎝ ⎠M Q Q Q I Q .
Esempio E.2 Si determinino i valori dei pesi di un equalizzatore “MMSE” di lunghezza 2 in un sistema di tra-smissione numerica in banda base caratterizzato dall'impulso di segnalazione mostrato in Fig. E.1, sotto le ipotesi che: (1. la sequenza del rumore in ingresso { }kn sia costituita da elementi statisticamente indipendenti, a valor medio nullo e varianza unitaria; (2. la sequenza dei dati { }ka sia costituita da elementi binari, equiprobabili, appartenenti all’insieme { }1,1− ed indipendenti dagli elementi della sequenza { }kn . Calcolando la matrice M , il massimo elemento della sua diagonale principale è quello di posto 4 che corrisponde al simbolo 3ka − . Applicando la (9.14) si ha:
123
2592
123
o =
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
c
L’uscita dell’equalizzatore è
( ) ( )91 251 11 11 11 11 1 1 1
3 2 1 1 2 3 1 169 92 46 276 46 92 69 23 92 23
H Hk o k o k
k k k k k k k k k k
y
a a a a a a a n n n+ + + − − − + −
= ⋅ ⋅ + =
= ++ + + + + + ++
c Q a c n
Ad esso corrisponde l’intergerenza d’intersimbolo:
( ) ( )185 251 11 11 11 11 1 1 13 1 2 3 4 5 6 1 269 92 46 276 46 92 69 23 92 23k k k k k k k k k k k k ki y a a a a a a a a n n n− − − − − − − − −= − = + + − + + + + + +
il cui valore quadratico medio vale: { }2 0.67029kE i =
10. - Equalizzatori a reazione. Lo schema di un tale tipo di equalizzatore si presenta come è indicato in Fig. 10. Se la sti-ma ki si suppone lineare si ha:
(10.1) *
1
ˆ ˆN
k i k D ii
i v a′
− −=
= ∑
dove si sono denotati con { } 1N
i iv ′= i pesi
del filtro feedback ( ) 1V z − .
Se si suppone che non si commet-

- 23 - L’ equalizzazione di canale
tono errori nella decisione, per modo che si può porre ˆk ka a= , è dunque:
(10.2) 0 1
* *N N
k i k i i k D ii i
y u x v a′
− − −= =
= −∑ ∑
essendo { } 0N
i iu = i pesi del filtro forward ( )U z .
Introducendo i vettori
(10.3) [ ] [ ]
[ ] [ ]0 1 1 2
1 1 1 2
T TN N
T Tk k k k N k D k D k D k D N
u u u v v v
x x x a a a
′
′− − − − − − − − − −
= =
= =
u v
x a
la precedente assume la forma: (10.4) 1
H Hk k k Dy − −= −u x v a
Come nel caso dell’equalizzatore MMSE, i pesi dei filtri trasversali possono essere deter-
minati imponendo che in corrispondenza ai valori ottimi l’errore quadratico medio raggiunga
un minimo. A tale scopo definendo i vettori:
(10.5) 1
; kk D− −
⎡ ⎤⎡ ⎤= = ⎢ ⎥⎢ ⎥−⎣ ⎦ ⎣ ⎦
kxuc x
av
la (10.4) diviene (10.6) H
k ky = c x
e la funzione obiettivo in tal caso diventa: (10.7) { } { } { } { } { }2 H H H H
k k D k k k k D k D k k D k DJ E y a E E a E a E a a− − − − −= − = − − +c c x x c c x x c* *( )
Supponendo ancora che la sequenza dati sia stazionaria e composta da elementi a media nulla, incorrelati e caratterizzati da un valore quadratico medio pari a σa
2 , la precedente si
scrive, con ovvio significato dei simboli: (10.8) 2( ) H H H
aJ = − − + σc c Rc c p p c
Il valore ottimo dei pesi oc si ottiene annullando il gradiente della funzione J c( ) ; oc per-
tanto è dato dalla soluzione dell’equazione (10.9) o =Rc p
Tenendo presente le (9.11) e (10.5), si ha:
(10.10) { }2 2 2
1 2 21
Hk a n a DH H H
k k k k D H Hk D a D a
E E − −− −
⎡ ⎤⎧ ⎫ σ + σ σ⎡ ⎤⎪ ⎪⎡ ⎤= = = ⎢ ⎥⎨ ⎬⎢ ⎥ ⎣ ⎦ ′⎪ ⎪ σ σ⎢ ⎥⎣ ⎦⎩ ⎭ ⎣ ⎦
x QQ I QIR x x x a
a I Q I
essendo I e ′I le matrici unitarie di ordine 1N + e N ′ rispettivamente e DI una matrice i cui elementi sono { } { }0, 1 , 1,i N j Ni j D ′∈ + ∈− −δ . È inoltre:
(10.11) { } ( ) 2
1 1
** *
*k k k k D a D
k k D k Dk D k D k D
aE a E a E
a−
− −− − − − −
⎧ ⎫⎡ ⎤ ⎡ ⎤⎧ ⎫ +⎡ ⎤ σ⎪ ⎪ ⎪ ⎪= = = =⎢ ⎥⎨ ⎬ ⎨ ⎬ ⎢ ⎥⎢ ⎥⎪ ⎪ ⎢ ⎥⎣ ⎦⎩ ⎭ ⎣ ⎦⎪ ⎪⎣ ⎦⎩ ⎭
x Qa n Qup xa a 0
essendo Hk D k Da − = a u* .
Dalla (10.9), tenendo conto delle posizioni (10.5) si deduce:
(10.12) 2 2 2 2
2 2
Ha n a D o a D
H Hoa D a
⎡ ⎤ ⎡ ⎤σ + σ σ ⎡ ⎤ σ=⎢ ⎥ ⎢ ⎥⎢ ⎥−′σ σ⎢ ⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦
QQ I QI u QuvI Q I 0
dalla quale discendono i seguenti sistemi di equazioni:
(10.13) ( )2 2 2 2H
a n o a D o a D
H HD o o
σ + σ − σ = σ
=
QQ I u QI v Qu
I Q u v

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 24 -
Dalle precedenti si ottiene:
(10.14)
12
2
12
2
H H H no D D D
a
H H H H H no D D D D
a
−
−
⎛ ⎞σ= − +⎜ ⎟⎜ ⎟σ⎝ ⎠
⎛ ⎞σ= − +⎜ ⎟⎜ ⎟σ⎝ ⎠
u QQ QI I Q I Qu
v I Q QQ QI I Q I Qu
11. – Prestazioni degli equalizzatori. Le prestazioni di un equalizzatore sono pertanto individuate dal parametro (11.1) { }2
k k DE y a −η = −
Dalla (11.1) si ottiene facilmente:
(11.2) ( ) ( ){ }
{ } { } { } { }k k D k k D
k k k k D k D k k D k D
E y a y a
E y y E y a E a y E a a
− −
− − − −
η = − − =
= − − +
* *
* * * *
Tenendo conto della (6.10) e ricordando le ipotesi fatte a proposito della sequenza dati e del-
la sequenza del rumore, si ha:
(11.3)
{ } { } { } { } { }
{ } ( ){ } { } { }{ }
{ }
*
2 2 2 2
* * * * 2
* 2
* 2
H H H H H H H H H Hk k o k k o o k k o o k k o o k k o
H H H H H Ha o o n o o a o o n o o
H H H H Hk k D o k o k k D o k k D o k k D a o D
H Hk k D a D o
k D k D a
E y y E E E E
E y a E a E a E a
E y a
E a a
− − − −
−
− −
= + − + =
= σ + σ = σ + σ
= + = + = σ
= σ
= σ
c Q a a Q c c Q a n c c n a Q c c n n c
c QQ c c Ic c QQ c c c
c Qa c n c Q a c n c Qu
u Q c
Di conseguenza la (11.1) diviene:
(11.4) ( )2 2
2 22 2
1H H H H H Ha o o o D D o n o o
H Ha o D n o
η = σ − − + + σ =
= σ − + σ
c QQ c c Qu u Q c c c
c Q u c
che si può porre nella forma
(11.5) 2 22 2H
a o D n oη = σ − + σQ c u c
Il rapporto segnale/interferenza 2aσ
η si può scrivere in funzione dl rapporto segna-
le/rumore 2
2a
n
σ
σγ = e si ha:
(11.6) 2
2 2
11
a
Ho D o
σ=
η − +γ
Q c u c
È bene notare che ad eccezione degli equalizzatori ZF il vettore dei pesi ottimi dipende dal
rapporto segnale rumore.
Esempio E.3 Con riferimento agli equalizzatori di tipo ZF e MMSE di cui agli Esempi 1 e 2, si determini l’andamento della quantità η in funzione del rapporto segnale/rumore 2 2/a nγ = σ σ . Dalla (11.5) si ha:

- 25 - L’ equalizzazione di canale
ZF
MMSE
γ
2a
ησ
Fig. E.2
222 H o
a o Dη = σ − +γ
⎡ ⎤⎢ ⎥⎣ ⎦
cQ c u
Con i dati forniti negli Esempi 1 e 2 risulta: ( )
( )
2
2
2.35+3.51/
0.21+0.08/
Equalizzatore ZF
EqualizzatoreMMSE
a
a
η = σ γ
η = σ γ
Gli andamenti del rapporto 2/ aη σ in funzione di γ sono riportati in Fig. E.2 per i due diversi tipi di equalizzatore.
In quel che segue sono valutate le prestazioni degli equalizzatori di tipo ZF e MMSE sup-
ponendo che la lunghezza dell’equalizzatore sia abbastanza grande da poter considerare in-
finito il numero di celle di ritardo. Quanto detto comporta che la variabile di decisione è e-
spressa dalla:
(11.7) *k i k i
iy c x
∞
−=−∞
= ∑
5.1 – Equalizzatori ZF.
Introducendo nella (11.7) la (1.2), si ottiene:
(11.8) * * *k oi n k i n k i n oi k i n oi k i
i n n i iy c a q n a c q c n
∞ ∞ ∞ ∞ ∞
− − − − − −=−∞ =−∞ =−∞ =−∞ =−∞
⎡ ⎤ ⎡ ⎤= + = +⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦∑ ∑ ∑ ∑ ∑
L’imposizione dell’annullamento dell’interferenza di intersimbolo comporta il verificarsi
delle condizioni:
(11.9) *oi n i n
ic q
∞
−=−∞
= δ∑
Trasformando la precedente secondo Fourier (v. Appendice A. Filtri alla Wiener) si ottiene: (11.10) *( ) ( ) 1oC Q−ϕ ϕ =
dove con ( )oC ϕ e ( )Q ϕ si sono denotare le trasformate delle sequenze { }okc e { }kq rispettiva-
mente e si è tenuto conte che è { } 2 1l nfTn nn
e∞ − π=−∞
δ = δ =∑F .
Se sono soddisfatte le condizioni di annullamento dell’interferenza di intersimbolo, la quantità yk si riduce a *
k oi k iia c n∞
−=−∞+ ∑ e la differenza yk − ak si riduce solo alla quantità
*oi k ii
c n∞−=−∞∑ e cioè:
(11.11) *k k k oi k i
ie y a c n
∞
−=−∞
= − = ∑
Il valore quadratico medio di ky è allora:
(11.12) { } { }2 2* * 2k oi oj k i k j n oi
i j iE e c c E n n c
∞ ∞ ∞
− −=−∞ =−∞ =−∞
= = σ∑ ∑ ∑
avendo supposto la sequenza del rumore { }kn stazionaria, a media nulla, composta da ele-
menti statisticamente indipendenti e caratterizzati dalla varianza 2nσ . In virtù del Teorema di
Parseval la precedente diviene
(11.13) 1 12 21 12 2
22 22
1( )( )
n o nC d dQ− −
γ = σ ϕ ϕ = σ ϕ−ϕ∫ ∫
ovvero:

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 26 -
(11.14) 1212
22
1( )
n dQ−
γ = σ ϕϕ∫
5.2 – Equalizzatori MMSE.
Nel caso di equalizzatori MMSE, le condizioni (9.8), con N → ∞ , diventano:
(11.15) { } { } 0 1 2* * , , ,ioj k i k j k k ij
c E x x E a x∞
= ± ±− − −=−∞
=∑ …
che possono anche essere scritte nella forma:
(11.16) 0* *oj k j k k i
jE c x a x
∞
− −=−∞
⎧ ⎫⎛ ⎞⎪ ⎪⎜ ⎟− =⎨ ⎬⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭∑
la quale, espressa in funzione dell’errore k k ke y a= − , diventa:
(11.17) { } 0*k k iE e x − =
D’altra parte si può scrivere: (11.18) { } { } { }* * *( )k k k k k k kE e y a E e y E e aγ = − = −
e quindi, ricordando la (11.7) si ha
(11.19) { } { } 0* * *k k oi k k i
iE e y c E e x
∞
−=−∞
= =∑
La quantità γ allora diventa:
(11.20) { } { } { } { } { }2 2* * * * *( )k k k k k k k k a oi k k ii
E e a E y a a E a E a y c E a x∞
−=−∞
γ = − = − − = − = σ − ∑
Tenendo presente la scritta nella forma k k n n kx a q n∞−−∞
= +∑ e ricordando che la sequenza
di rumore è a media nulla ed indipendente dai dati ak , si ha:
(11.21) { } { } { } 2* * * * * * * *k k i k k i n n k i n k k i n k k i a i
n nE a x E a a q n q E a a E a n q
∞ ∞
− − − − − − − −=−∞ =−∞
⎧ ⎫⎛ ⎞⎪ ⎪= + = + = σ⎜ ⎟⎨ ⎬⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭∑ ∑
È quindi:
(11.22) 2 1 *a oi i
ic q
∞
−=−∞
⎛ ⎞γ = σ −⎜ ⎟⎜ ⎟
⎝ ⎠∑
Interpretando la sommatoria a secondo membro come la convoluzione, tra la sequenza dei pesi { }okc e quella { }kq dedotta dagli impulsi di segnalazione (v. Appendice A), calcolata
nel punto n = 0 , la (11.22) può essere più agevolmente calcolata operando nel dominio della
frequenza. Si ha:
(11.23) 1212
2 1 *( ) ( )a oC Q d−
⎛ ⎞γ = σ − ϕ −ϕ ϕ⎜ ⎟
⎝ ⎠∫
Per determinare la quantità γ si deve calcolare la grandezza 0 ( )C ω . A proposito si osservi
che, tenendo conto delle e (9.13), la (11.15) diviene
(11.24) 2 2 2*( )oj a n i j n n i j a i
j nc q q q
∞ ∞
− − − −=−∞ =−∞
⎛ ⎞σ + σ δ = σ⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∑
che introducendo la sequenza n nn
z q q −= ∑ * si può scrivere come:
(11.25) 2 2 2a oj i j n oj i j a i
j jc z c q
∞ ∞
− − −=−∞ =−∞
σ + σ δ = σ∑ ∑*
La trasformata secondo Fourier conduce alla:

- 27 - L’ equalizzazione di canale
(11.26) ( )2 2 2( ) ( ) ( )o a n aC Z Qϕ σ ϕ + σ = σ −ϕ
dove si è indicato con ( )Z ϕ la trasformata di Fourier della sequenza { }kz e si è tenuto pre-
sente che è { } 2 1l nfTn nn
e∞ − π=−∞
δ = δ =∑F . Potendosi scrivere n n n nn nz q q q q− − −= =∑ ∑* *
( ) la se-
quenza { }kz può essere interpretata come la convoluzione della sequenza { }kq con la se-
quenza { }kq− . Si ha 2Z Q Q Qϕ = ϕ ϕ = ϕ( ) ( ) * ( ) ( ) . È quindi:
(11.27) ( )22 2 2o a n aC Q Qϕ σ −ϕ + σ = σ −ϕ( ) ( ) ( )
da cui:
(11.28) 2
22 2a
oa n
QC
Q
σ −ϕϕ =
σ −ϕ + σ
( )( )
( )
Sostituendo il valore di ( )oC ϕ così ottenuto nella (11.23) si ha:
(11.29)
1 1 12 2 21 1 12 2 2
1 1 12 2 21 1 12 2 2
2 22 22 2 2 2
2 22 2 2 2
22 22 2
2 22 2 2 2
( ) ( )
( ) ( )
( )
( ) ( )
a aa a a a
a n a n
a na a
a n a n
Q Qd df d
Q Q
Qd d d
Q Q
− − −
− − −
σ −ϕ σ −ϕγ = σ − σ ϕ = σ − σ ϕ =
σ −ϕ + σ σ −ϕ + σ
⎛ ⎞σ −ϕ σ⎜ ⎟= σ ϕ − ϕ = σ ϕ⎜ ⎟σ −ϕ + σ σ −ϕ + σ⎝ ⎠
∫ ∫ ∫
∫ ∫ ∫
che equivale alla:
(11.30) 1
21 2
22
22( )
T
nT
a
nd
Q− σσ
ϕγ = σ
ϕ +∫
Esempio E.3 Si calcolino i valori del parametro γ per gli equalizzatori ZF e MMSE degli esempi E.1 e E.2. Dalla (2.1) discende:
{ } { } { } { } { }2 2 22 2 1k k k k k k kE y E a y E a E y E a yγ = − + = − +
Tenendo conto delle (1.1) e (1.5) è:
{ } { }2N N N N
k i j k i k j i j n n i j i ji N j N i N j N n
E y c c E x x c c q q− − + − −=− =− =− =−
= = + δ⎧ ⎫⎨ ⎬⎩ ⎭
∑ ∑ ∑ ∑ ∑
e
{ } { }N N
k k i k k i i ii N i N
E a y c E a x c q− −=− =−
= =∑ ∑
Si ha:
2 2 21 0 1 1 0 1 1 0 1 1 0 1
5 5 5 12 2 2 1
2 2 2 2c c c c c c c c c c c c− − − −γ = + + + + + − − − +
Numericamente si ha: 13 232 39ZF MMSEγ = γ =

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 28 -
( )H z−
+
d
eu v
Fig.1 – Predittore lineare.
APPENDICE A
FILTRI ALLA WIENER
1 – Generalità. Sia u una sequenza aleatoria, a valori in generale complessi, stazionaria, almeno in sen-
so lato che è usata per la predizione di un’altra sequenza d , supposta anch’essa staziona-
ria. Si dice che la predizione di d è eseguita sulla base delle osservazioni u . In quel che se-
gue si prendono in esame le predizioni lineari e cioè quelle predizioni della forma:
(A.1) = ∗v u h
che corrispondono all’uscita da un filtro a tempo discreto,
lineare e tempo invariante e caratterizzato da una risposta
impulsiva h (2) quando al suo ingresso è applicata la
sequenza u . Lo schema del predittore si presenta come è
indicato in Fig. 1 dove è anche indicato l’errore di predizione:
(A.2) = − ∗e d u h La scelta della risposta impulsiva del filtro ( )H z è operata scegliendo quella sequenza h
in corrispondenza della quale il valore quadratico medio della sequenza errore e raggiunge
un minimo. Tale criterio equivale a determinare la sequenza ottima che comporta un mini-
mo della funzione obiettivo definita dalla: (A.3) { } { }2 *( ) n n nJ E e E e e= =h
e cioè: (A.4) arg min ( )okh J=
hh
Il minimo corrisponde ad un punto di stazionarietà della funzione ( )J h e cioè al punto in
cui si annulla il gradiente: (A.5) ( ) 0k J∇ =h
che, posto n n nh a jb= + , è definito dalla:
(A.6) ( ) ( )( )kk k
J JJ ja b
∂ ∂∇ = +
∂ ∂h hh
Tenendo conto delle (A.2), dalla (A.3) si ha:
(A.7) { }
{ }
** * *
** * *
( )
( )
n nn n n k n n k n
k k k
n nn n n k n n k n
k k k
e eJ E e e E u e u ea a a
e eJ E e e E ju e ju eb b b
− −
− −
⎧ ⎫∂ ∂∂ ⎪ ⎪= + = − −⎨ ⎬∂ ∂ ∂⎪ ⎪⎩ ⎭
⎧ ⎫∂ ∂∂ ⎪ ⎪= + = − +⎨ ⎬∂ ∂ ∂⎪ ⎪⎩ ⎭
h
h
per cui è: (A.8) { }*2k n k nJ E u e−∇ = −
La condizione di stazionarietà è quindi data dalla:
(2) Si suppone che la risposta impulsiva del filtro sia di lunghezza infinita (filtro di tipo IIR). È ovvio che i filtri a ri-sposta impulsiva di lunghezza finita (filtri FIR) possono essere considerati casi particolari dei filtri IIR.

- 29 - L’ equalizzazione di canale
(A.9) { }* 0n k nE u e− =
La sequenza errore è ortogonale alla sequenza delle osservazioni (Principio di ortogonali-
tà). Sia e la sequenza errore corrispondente ad una generica risposta impulsiva h e oe
l’errore ottenuto in corrispondenza alla sequenza ottima che soddisfa la condizione (A.9). Si
può scrivere:
(A.10)
{ } { }{ } { } ( ){ }{ } { }
{ } { } ( )
2 2
*2 2
2 2 * * * * * *
2 2 * * *
( )
2Re
2Re
2Re
n n on on
n on on n on on
n on on n k n k n ok n k onk k
n on on ok k n k onk
E e E e e e
E e e E e E e e e
E e e E e E d h u d h u e
E e e E e E h h u e
∞ ∞
− −=−∞ =−∞
∞
−=−∞
= − + =
⎡ ⎤= − + − − =⎢ ⎥⎣ ⎦⎡ ⎤⎧ ⎫⎛ ⎞⎪ ⎪= − + − − − + =⎢ ⎥⎜ ⎟⎨ ⎬⎜ ⎟⎢ ⎥⎪ ⎪⎝ ⎠⎩ ⎭⎣ ⎦
⎧⎛ ⎞⎪= − + − −⎜ ⎟⎨⎜ ⎟⎪⎝ ⎠⎩
∑ ∑
∑⎡ ⎤⎫⎪⎢ ⎥⎬⎢ ⎥⎪⎭⎣ ⎦
che, in virtù della (A.9), diventa: (A.11) { } { } { } { }2 2 2 2
n n on on onE e E e e E e E e= − + ≥
che dimostra che la condizione (A.9) conduce al minimo della funzione obiettivo. Esplicitando la (A.9) si perviene alle equazioni che definiscono la sequenza ottima oh :
(A.12) { } { }* * * 0 kn k n oi n i n k n ok n k n ii i
E u d h u E u d h E u x∞ ∞
∈− − − − −=−∞ =−∞
⎧ ⎫⎛ ⎞⎪ ⎪− = − =⎜ ⎟⎨ ⎬⎜ ⎟⎪ ⎪⎝ ⎠⎩ ⎭∑ ∑
Introducendo la funzione di correlazione fra due sequenze stazionarie a valori complessi: (A.13) { }*( )ab n n kR k E a b +=
le (A.12) assumono la forma:
(A.14) ( ) ( ) kok uu udk
h R k i R k∞
∈
=−∞
− =∑
che costituiscono le equazioni di Wiener-Hopf.
Per dedurre i valori dei pesi del filtro ottimo è opportuno prendere le trasformate zeta del-
la precedente. Si ha: (A.15) ( ) ( ) ( )uu o udW z H z W z⋅ =
dove ( )udW z e ( )uuW z denotano le densità spettrali (auto e mutua) definite nel dominio della
variabile zeta e
(A.16) ( ) no on
nH z h z
∞−
=−∞
= ∑
la trasformata zeta della sequenza ottima oh . Dalla (A.15) si deduce:
(A.17) ( )
( )( )
udo
uu
W zH z
W z=
La funzione di autocorrelazione della sequenza errore vale:

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 30 -
(A.18)
{ }
{ } { } { } { }
**
* * * * * *
*
( )
( ) ( ) ( )
ee n n k n i n i n k j n k ji j
n n k i n i n k j n n k j i j n i n k ji j i j
dd i ud j udi j
R k E e e E d h u d h u
E d d h E u d h E d u h h E u u
R k h R k i h R k j
∞ ∞
+ − + + −=−∞ =−∞
∞ ∞ ∞ ∞
+ − + + − − + −=−∞ =−∞ =−∞ =−∞
∞ ∞
=−∞ =−∞
⎧ ⎫⎛ ⎞⎛ ⎞⎪ ⎪⎜ ⎟= = − − =⎜ ⎟⎨ ⎬⎜ ⎟ ⎜ ⎟⎪⎝ ⎠ ⎪⎝ ⎠⎩ ⎭
= − − + =
= − + − −
∑ ∑
∑ ∑ ∑ ∑
∑ ∑ * ( )i j uui j
h h R k i j∞ ∞
=−∞ =−∞
+ + −∑ ∑
che trasformata nel dominio della variabile zeta, conduce alla:
(A.19) * *( ) ( ) ( ) ( ) ( )i j i jee dd ud i du j uu i j
i j i jW z W z W z h z W z h z W z h z h z
∞ ∞ ∞ ∞− −
=−∞ =−∞ =−∞ =−∞
= − − +∑ ∑ ∑ ∑
essendo:
(A.20)
* * ( ) *
( )
* *
) ( ) ( ) ( )
) ( ) ( ) ( )
) ( ) ( )
k i k i ii ud i ud ud i
k i k i i
k j k j jj du j du du j
k j k j j
k i ji j uu i j uu
k i j i j
a h R k i z h z R k i z W z h z
b h R k j z h z R k j z W z h z
c h h R k i j z h z h z R k i j z
− − +
− − − − −
− −
⎡ ⎤+ = + =⎢ ⎥
⎣ ⎦⎡ ⎤
− = − =⎢ ⎥⎢ ⎥⎣ ⎦
⎡ ⎤ ⎡ ⎤+ − = ⋅ + −⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
∑∑ ∑ ∑ ∑
∑∑ ∑ ∑ ∑
∑ ∑∑ ∑ ∑ ( )
*( )
k i j
k
i juu i j
i jW z h z h z
− + −
−
=
= ⋅
∑
∑ ∑
D’altra parte, come è facile rendesi conto, si ha:
(A.21) * * *
( )
(1/ )
ii
i
ii
i
h z H z
h z H z
∞−
=−∞∞
=−∞
=
=
∑
∑
ed inoltre, dalla condizione
(A.22) { } { }( ){ } { }( )
** * *
** * *
( ) ( )
( ) ( )
du n n k n k n ud
uu n n k n k n uu
R k E d x E x d R k
R k E x x E x x R k
+ +
+ +
= = = −
= = = −
discende:
(A.23)
** * * *
*
** * * *
*
1( ) ( ) ( ) ( ) ( ) (1/ )
1( ) ( ) ( ) ( ) ( ) (1/ )
kk k k
du du ud ud ud udk k k k
kk k k
uu uu uu uu uu uuk k k k
W z R k z R k z R k z R k W zz
W z R k z R k z R k z R k W zz
−∞ ∞ ∞ ∞− −
=−∞ =−∞ =−∞ =−∞
−∞ ∞ ∞ ∞− −
=−∞ =−∞ =−∞ =−∞
⎛ ⎞⎛ ⎞= = − = = =⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞⎛ ⎞= = − = = =⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
∑ ∑ ∑ ∑
∑ ∑ ∑ ∑
per cui la (A.19) può essere riscritta come segue: (A.24) * * * * * * *( ) ( ) (1/ ) ( ) (1/ ) ( ) ( ) (1/ )ee dd ud uuW z W z H z W z H z W z H z H z= − − +
La funzione ( )eeW z , calcolata in corrispondenza al valore ottimo ( )oH z dato dalla (A.17),
tenendo conto delle (A.23), diviene:
(A.25) * *( ) (1/ )
( ) ( )( )
ud udee dd
uu
W z W zW z W z
W z= −
Se il circolo unitario del piano zeta è contenuto nella regione di convergenza della trasforma-ta ( )eeW z , ponendo nella (A.25) jz e ω= si deduce l’espressione della trasforma discreta di
Fourier della sequenza errore e :

- 31 - L’ equalizzazione di canale
(A.26) ( ) ( ) ( )( )
2jduj j
ee dd juu
W eW e W e
W e
ωω ω
ω= −
Il valore quadratico medio della sequenza errore è allora dato dalla:
(A.27) ( ) ( ) ( )( )
2
2 1 12 2
jduj j
e ee dd juu
W eW e d W e d
W e
ωπ πω ω
ω−π −π
⎡ ⎤⎢ ⎥
σ = ω = − ω⎢ ⎥π π ⎢ ⎥⎣ ⎦
∫ ∫

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 32 -
APPENDICE B
FATTORIZZAZIONE SPETTRALE Sia y una sequenza aleatoria stazionaria (almeno in senso lato) e caratterizzata da una
funzione di autocorrelazione { }*( )yy n n kk E y y +γ = . Si supponga che tale sequenza sia ottenuta
come uscita da un sistema LTI sollecitato da una sequenza x bianca a valor medio nullo e
varianza 2σ e pertanto caratterizzata da una funzione di autocorrelazione data dalla 2( )xx kkγ = σ δ . Se h denota la risposta impulsiva del filtro LTI è = ∗y x h .
Se la sequenza x è applicata all’ingresso di un sistema LTI di risposta impulsiva h , la sequenza in uscita y si ottiene dalla convoluzione = ∗y x h e cioè:
(B.1) n m n mm
y h x∞
−=−∞
= ∑
La funzione di autocorrelazione della sequenza in uscita vale:
(B.2) { } { }* * * *
2 * 2 *
( ) ( )yy n n k i j n i n k j i j xxi j i j
i j k i j i k ii j i
k E y y h h E x x h h k i j
h h h h
∞ ∞ ∞ ∞
+ − + −=−∞ =−∞ =−∞ =−∞
∞ ∞ ∞
+ − +=−∞ =−∞ =−∞
γ = = = γ + − =
= σ δ = σ
∑ ∑ ∑ ∑
∑ ∑ ∑
La trasformata zeta della sequenza yyγ vale:
(B.3)
2 * *0
*2 * ( ) 2
*
( ) ( )
1
k k kyy yy i k i i k i
k k i i k
mi k i n
i k i i ni k m n
z k z h h z N h h z
h z h z h h zz
∞ ∞ ∞ ∞ ∞− − −
+ +=−∞ =−∞ =−∞ =−∞ =−∞
−∞ ∞ ∞ ∞− + −
+=−∞ =−∞ =−∞ =−∞
⎡ ⎤ ⎡ ⎤Γ = γ = σ = =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
⎡ ⎤⎡ ⎤ ⎡ ⎤⎛ ⎞= σ = σ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦
∑ ∑ ∑ ∑ ∑
∑ ∑ ∑ ∑
Se
(B.4) ( ) nn
nH z h z
∞−
=−∞
= ∑
denota la funzione di trasferimento del sistema LTI espressa nel dominio della variabile zeta,
la (B.3) diventa: (B.5) 2 * *( ) ( ) (1/ )yy z H z H zΓ = σ
Dalla (B.5) si deduce che una sequenza aleatoria y stazionaria in senso lato può essere
rappresentata come sequenza in uscita da un filtro LTI sollecitato da una sequenza bianca.
La (B.5) però non è invertibile. In altri termini, assegnata una funzione densità spettrale ( )yy zΓ non è possibile determinare in modo univoco una funzione ( )H z tale da soddisfare la
(B.5). Per rendersi conto facilmente di ciò basta osservare, ad esempio, che: a) se si sostituisce ( )H z con ( )H z− , ( )yy zΓ non cambia (ambiguità di segno);
b) se si sostituisce ( )H z con ( )pz H z− ( p ∈ ), ( )yy zΓ non cambia (ambiguità di ritardo);
Lo stesso problema si presenta se si vuole sbiancare una sequenza x aleatoria staziona-
ria in senso lato vale a dire se si vuole determinare un filtro LTI tale che la sequenza che si
ottiene in uscita quando al suo ingresso è applicata la sequenza x sia una sequenza bianca.

- 33 - L’ equalizzazione di canale
Anche in questo caso il filtro sbiancante ( )wH z non è univocamente determinato.
Per superare tale difficoltà basta impone la condizione che il filtro ( )H z sia causale, stabi-
le e monico (il coefficiente del termine 0z nello sviluppo di ( )H z sia unitario), condizione
che, com’è noto, garantisce la fisica realizzabilità del sistema LTI.
È opportuno tener presente che se il circolo unitario del piano zeta è contenuto nella re-
gione di convergenza della trasformata zeta della funzione di autocorrelazione dalla (B.5) si
deduce:
(B.6) ( ) ( ) ( ) ( ) 22 * 2j j j jyy e H e H e H eω ω ω ωΓ = σ = σ
Una condizione necessaria e sufficiente perché una funzione ( )A ω reale e non negativa a
quadrato integrabile in [ ),−π π corrisponda al quadrato del modulo della risposta in frequen-
za di un sistema LTI causale è che sia soddisfatta la condizione:
(B.7) log ( )A dπ
−πω ω < ∞∫
nota come condizione di Paley- Wiener.
Da quanto detto ci si rende facilmente conto che la condizione di causalità imposta al fil-
ro LTI comporta per la (B.6) che si verifichi la condizione:
(B.8) ( )log jyy e d
π ω
−π+Γ ω < ∞∫
La (B.8) assicura che la funzione ( )log jyy e ωΓ , periodica di periodo 2π , in quanto assolu-
tamente integrabile nel periodo, ammette uno sviluppo in serie di Fourier. Pertanto si può
scrivere:
(B.9) ( )log j jnyy n
ne e
∞ω − ω
=−∞
Γ = λ∑
Si scomponga la serie (B.9) come segue. (B.10) ( ) 0
1 1log j jn jn
yy n nn n
e e eω − ω − ω
≤− ≥
Γ = λ + λ + λ∑ ∑
dalla quale si deduce che la convergenza della serie (B.9) comporta la convergenza delle fun-
zioni (B.11) ( ) ( )
1 1
j jn j jnn n
n nX e e X e eω − ω ω − ω
+ −≥ ≤−
= λ = λ∑ ∑
Si consideri adesso la funzione (B.12)
1( ) n
nn
X z z−+
≥
= λ∑
Poiché ( )jX e ω+ esiste, essa è convergente sul circolo unitario del piano zeta e cioè converge
per jz e ω= . Di conseguenza è convergente per tutti i valori di z tali che 1z ≥ . Si conclude
quindi che ( )X z+ è una funzione convergente nella regione del piano z esterna al circolo u-
nitario; essa pertanto corrisponde ad un sistema strettamente causale ( 0nλ ≡ per 0n ≤ ) e
stabile.
Con analogo ragionamento si può verificare che la funzione: (B.13)
1( ) n
nn
X z z−−
≤−
= λ∑
è convergente nella regione del piano zeta interna al circolo unitario; essa pertanto corri-sponde ad un sistema strettamente anticausale ( 0nλ ≡ per 0n ≥ ) e stabile.

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 34 -
Ponendo allora: (B.14) 0 ( ) ( )( ) X z X z
yy z e e e+ −λΓ = ⋅ ⋅
è immediato rendersi conto che le funzioni (B.15) ( ) ( )( ) ( )X z X zH z e H z e+ −
+ −= =
sono convergenti all’esterno e all’interno del circolo unitario del piano zeta rispettivamente e
quindi corrispondono a funzioni di trasferimento di sistemi stabili causali e anticausali ri-spettivamente. Se le funzioni ( )H z+ e ( )H z− si normalizzano in modo che il coefficiente di
ordine 0 delle sviluppo in serie di potenze di 1z− sia unitario, si ha: (B.16) ( ) ( ) ( )yy z H z H z+ −Γ = γ ⋅
Poiché, essendo ( )log jyy e ωΓ una funzione reale e pari (3) risulta *
n n n−λ = λ = λ per cui è
(B.17)
( )
1*
1 1
** *1
*1
( ) exp exp exp
exp (1/ )
n n nn n n
n n n
n
nzn
H z z z z
H z
− ∞ ∞−
− −=−∞ = =
∞ −
+=
⎡ ⎤ ⎡ ⎤ ⎡ ⎤= λ = λ = λ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎡ ⎤⎛ ⎞⎢ ⎥= λ =⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
∑ ∑ ∑
∑
cosicché la (B.16) assume la forma: (B.18) * *( ) ( ) (1/ )yy z H z H zΓ = γ ⋅
dove a) ( )H z è una funzione di trasferimento di un sistema LTI stabile e causale;
b) * *(1/ )H z è una funzione di trasferimento di un sistema LTI stabile e anticausale.
Tenendo conto dei risultati sopra ottenuti si conclude che la trasformata zeta della se-
quenza delle correlazioni di un segnale, se la corrispondente densità spettrale soddisfa le
condizioni di Paley-Wiener, può essere fattorizzata in termini di due funzioni della variabile
zeta contenente tutte le potenze di z ad esponente positivo e ad esponente negativo rispetti-
vamente. Tali funzioni sono inoltre entrambe moniche (cioè con il coefficiente della potenza
di 0z unitario). Di particolare interesse è il caso in cui la densità spettrale ( )yy zΓ è una funzione razionale
della variabile z , per cui è espressa dal rapporto:
(B.19) ( )
( )( )
yyyy
yy
N zz
D zΓ =
di due polinomi ( )yyN z e ( )yyD z .
Dalla condizione *n n−λ = λ discende:
(B.20) *
* * *1*( ) (1/ )
nn n n
yy n n n n yyzn n n n
z z z z z∞ ∞ ∞ ∞ −⎛ ⎞− ⎜ ⎟− ⎜ ⎟
⎝ ⎠=−∞ =−∞ =−∞ =−∞
⎛ ⎞Γ = λ = λ = λ = λ = Γ⎜ ⎟⎜ ⎟
⎝ ⎠∑ ∑ ∑ ∑
che comporta che se z = ρ è un polo o uno zero di ( )yy zΓ , allora anche *1/z = ρ è un polo o
uno zero di ( )yy zΓ . Poiché se 1ρ < , è *1/ 1ρ > e viceversa se 1ρ > , è *1/ 1ρ < , i poli e gli zeri
di ( )yy zΓ si distribuiscono equamente sia all’interno che all’esterno del circolo unitario del
piano zeta. Poiché la ( )yy zΓ è convergente sul circolo unitario, non sono presenti poli del ti-
po je ωρ = . Tuttavia sul circolo unitario possono essere allocati degli zeri. Se sono presenti
(3) Si noti che la densità spettrale è una funzione reale non negativa e pari di ω .

- 35 - L’ equalizzazione di canale
devono presentare una molteplicità pari. Infatti se 0
0je ωρ = è uno zero di molteplicità m appartenente al circolo unitario del piano
z , la funzione ( )yy zΓ , essendo una funzione reale e non negativa, non deve diventare negati-
va quando, muovendosi sul circolo unitario, attraversa il punto 0je ω . D’altra parte può scri-
versi:
(B.21) ( )0( ) ( )mj
yy yyz z e zωΓ = − Γ
in cui è ( )0 0jyy e ωΓ ≠ . Si costruisca il rapporto
( )( )
0
0
( )
(
jyy
jyy
e
e
ω +ε
ω −ε
Γ
Γ. Si ha:
(B.22)
( )( )
( )( )
( )( )
( )( ) ( )
0 0 00 0
0 00 0 0
0
0
( ) ( ) ( )( )
( )( ( (
( )/ 2 / 2 / 2
/ 2 / 2 / 2 (
11
( )( )
j j jm mj j jyy yy yy
j j jj j jyy yy yy
jmj j j myy yjmj j j j
yy
e e ee e eee ee e e
ee e e ee e e e
ω +ε ω +ε ω +εω +ε ω ε
ω −ε ω − εω −ε ω −ε ω −ε
ω +εε ε − εε
− ε − ε ε ω −ε
Γ Γ Γ⎛ ⎞ ⎛ ⎞− −= = =⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ −−Γ Γ Γ⎝ ⎠⎝ ⎠
Γ Γ⎛ ⎞−= = −⎜ ⎟⎜ ⎟− Γ⎝ ⎠
( )( )
( )( )
0
0
0
0
( )
(
( )
(( 1)
jy
jyy
jyym jm
jyy
e
e
ee
e
ω +ε
ω −ε
ω +εε
ω −ε
=Γ
Γ= −
Γ
Se il segno di tale rapporto è positivo allora ( )jyy e ωΓ non cambia segno se attraversa il pun-
to 00
je ωρ = ; viceversa, se il rapporto è negativo nell’attraversamento del punto 00
je ωρ = la
funzione ( )jyy e ωΓ subisce una variazione di segno. Il limite del rapporto (B.22) per ε → 0 , è:
(B.23) ( )( )
0
0
( )
(0lim ( 1)
jyy m
jyy
e
e
ω +ε
ω −εε→
Γ= −
Γ
Si ha un cambiamento di segno se m è dispari per cui tali valori della molteplicità dello zero
sono esclusi.
Sulla base di quanto esposto si può concludere nella fattorizzazione spettrale il termine ( )H z deve contenere tutti i poli e gli zeri esterni al circolo unitario nonché metà degli even-
tuali zeri che si trovano sul circolo unitario; in modo analogo * *(1/ )H z deve contenere tutti i
poli e gli zeri interni al circolo unitario nonché l’altra metà degli eventuali zeri disposti sul
circolo unitario.
Esempio Si determini la fattorizzazione spettrale della densità spettrale corrispondente alla funzione di auto-correlazione data dalla: ( ) kk a−γ = con a parametro reale ( 1a > ). Si ha:
0
0( ) 1k k kk k k
k k kz a z a z a z
∞ ∞− − −− − −
=−∞ =−∞ =
Γ = = + −∑ ∑ ∑
La densità spettrale è convergente nell’anello del piano z definito da 1a z a− ≤ ≤ . In questa regione si
ha:
1 11 1( ) 1
1 ( ) 1z
az a z− −Γ = + − =
− −
e cioè

G. Mamola: Lezioni di Complementi di Comunicazioni Elettriche - 36 -
T
1/a
nx ny
Fig. B.1
2( ) ( 1)( )(1 )
zz a
z a azΓ = −
− −
La funzione ( )zΓ presenta uno zero 0 0z = e due poli a 0p a= e 1 1/p a= . Scrivendo la ( )zΓ nella
forma:
2
2
1( )
1
a a azz
a z aza
−Γ =
− −⋅ ⋅
Poiché ponendo ( ) a
z aH z
−= è
** *
*(1/ )
1/ 11/
a a azH z
a z aza z= = =
− −−
⎛ ⎞⎜ ⎟⎝ ⎠
ed inoltre, operando la divisione
lunga si deduce
1 2
1 11 2 21
a z za z a aaz
az az a z
= + + +−
= + + +−
si conclude che i parametri della fattorizzazione spettrale della ( )zΓ
sono: 21
( ) 1a
H z aa z a
= γ = −−
Il filtro presenta la struttura riportata in Fig. B1.

- 37 - L’ equalizzazione di canale
APPENDICE C
GRADIENTE DI UNA FUNZIONE SCALARE
Il gradiente di una funzione scalare f (x ) di un vettore x ad n dimensioni e a valori com-
plessi è un vettore di n dimensioni le cui componenti sono definite dalle:
(C.1) [ ] ii i
f ff jx x
∂ ∂= +
′ ′′∂ ∂xgrad ( )
dove ′ x i e ′ ′ x i denotano la parte reale ed il coefficiente della parte immaginaria del complesso
xi rispettivamente.
Due casi sono particolarmente interessanti:
1 - Se v denota un vettore complesso ad n dimensioni, sia (C.2) ( ) H Hf = +x v x x v
È:
(C.3) 1 1 1 1
* * *( ) ( ) ( )n n n n
i i i i i i i i ii i i i
f v x x v v x jx x jx v= = = =
′ ′′ ′ ′′= + = + + −∑ ∑ ∑ ∑x
per cui
(C.4) [ ] 2* *grad ( ) ( ) ( )i i i i iii i
f ff j v v v v vx x
∂ ∂= + = + − − =
′ ′′∂ ∂x
e cioè (C.5) [ ] 2grad ( )f =x v
2 - Se A denota una matrice hermitiana di dimensioni (n × n) sia: (C.6) ( ) Hf =x x Ax
È
(C.7) 1 1 1 1
*( ) ( )( )n n n n
rs r s rs r r s sr s r s
f a x x a x jx x jx= = = =
′ ′′ ′ ′′= = − +∑∑ ∑∑x
per cui
(C.8)
[ ]
1 1 1 1
1 1 1
rr rn n n n
rs s s sr s s rs s s sr s ss s s s
n n n
rs s s sr s s rs s s sr ss s s
f ff jx x
a x jx a x jx j j a x jx j a x jx
a x jx a x jx a x jx a x j
= = = =
= = =
∂ ∂= + =
′ ′′∂ ∂
⎡ ⎤ ⎡ ⎤′ ′′ ′ ′′ ′ ′′ ′ ′′= + + − + − + + − =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦⎡ ⎤
′ ′′ ′ ′′ ′ ′′ ′ ′= + + − + + − −⎢ ⎥⎣ ⎦
∑ ∑ ∑ ∑
∑ ∑ ∑
xgrad ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) (1
1 12 2
n
ss
n n
rs s rs ss s
x
a x jx a x
=
= =
⎡ ⎤′ =⎢ ⎥
⎣ ⎦
′ ′′= + =
∑
∑ ∑
)
( )
e pertanto (C.9) [ ] 2f =x Axgrad ( )