Ispezione Ponti - sitecoinf.it · scansione” formate da circa 2000 punti tridimensionali. Tenendo...
5
Committente: Provincia di Napoli (Politecnica SpA) Obiettivo del progetto: Uno dei settori di maggiore potenzialità per l’utilizzo delle tecnologie di rilievo del Mobile Mapping System SCANNER è quella finalizzata all’ispezione e al disegno as-built delle opere d’arte e in particolare dei ponti. In questo documento viene descritta la metodologia applicata per alcuni ponti della Provincia di Napoli. Metodologia e strumentazioni: Road-SCANNER permette il rilievo laser scanner tridimensionale in movimento, pertanto il sistema è perfetto per il rilievo di infrastrutture stradali quali ponti, viadotti etc, poiché è possibile eseguire i lavori senza interrompere il flusso di traffico, condizione spesso necessaria per i rilievi eseguiti con metodologia tradizionale. Il rilievo è stato eseguito passando col veicolo su tutte le strade percorribili interessate dall’opera. Per i ponti che oltrepassano ostacoli non percorribili (ad es. fiumi o linee ferroviarie) il rilievo è stato eseguito unicamente nella parte superiore dell’opera. E’ in corso una campagna di rilievi integrativi con metodologia tradizionale, ovvero con scansioni statiche. La velocità di registrazione del laser scanner utilizzato (Faro Photon 120) è pari a 120mila punti al secondo, acquisiti con una velocità di rotazione dello specchio pari a 60Hz. Questo significa che le opere sono state rilevate con 60 “linee di scansione” formate da circa 2000 punti tridimensionali. Tenendo conto della velocità di rilievo, compresa fra i 5 e i 15 km/h, la distanza fra ogni linea di scansione è compresa fra i 2 e i 7 cm, con una densità di punti sull’opera praticamente paragonabile ad una scansione laser scanner statica (Fig.1). Il rilievo nella parte inferiore dell’opera è stato eseguito sulla corsia di emergenza in modo da non ostacolare minimamente il traffico e poter procedere in sicurezza a basse velocità. (Fig.2). Fig.1 Esempio della densità dei punti laser sulla struttura Georeferenziazione del Rilievo: Il Roadscanner dispone di una piattaforma inerziale e di un ricevitore GPS per registrare il proprio assetto e la propria posizione ad una frequenza di 100Hz.La conoscenza della posizione e dell’assetto del veicolo permette la georeferenziazione diretta della nuvola di punti. In tale maniera, pur effettuando diversi passaggi, le nuvole di punti risultano già topograficamente coerenti con l’opera.L’inquadramento della posizione è stato eseguito tramite elaborazione cinematica dei dati; per garantire un risultato ottimale si è avuto cura di mantenere sempre sotto ai 10km la distanza fra il veicolo e la stazione GPS master di riferimento. Inoltre ogni opera è stata rilevata all’interno della stessa missione cinematica, in modo da rendere minime le incongruenze di inquadramento. In Figura 3 è riportato l’andamento della distanza Base-Veicolo relativamente alla prima missione di rilievo della giornata del 27 /02/2012. Per alcune opere è stato possibile eseguire più di due passaggi nella parte inferiore, come nel caso dell’opera 2 (Asse Mediano) che presenta 4 corsie per nella parte inferiore . Ad ognuno dei differenti passaggi vengono assegnati i relativi Filmati eseguiti con 7 camere ad alta definizione e la relativa nuvola di punti. Fig 3 Distanza Veicolo Base GPS di riferimento, in ascissa è riportato il tempo e in ordinata la distanza in km Ispezione Ponti
Transcript of Ispezione Ponti - sitecoinf.it · scansione” formate da circa 2000 punti tridimensionali. Tenendo...

Committente: Provincia di Napoli (Politecnica SpA)
Obiettivo del progetto: Uno dei settori di maggiore potenzialità per
l’utilizzo delle tecnologie di rilievo del Mobile Mapping System
SCANNER è quella finalizzata all’ispezione e al disegno as-built delle
opere d’arte e in particolare dei ponti. In questo documento viene
descritta la metodologia applicata per alcuni ponti della Provincia di
Napoli.
Metodologia e strumentazioni: Road-SCANNER permette il rilievo
laser scanner tridimensionale in movimento, pertanto il sistema è
perfetto per il rilievo di infrastrutture stradali quali ponti, viadotti etc,
poiché è possibile eseguire i lavori senza interrompere il flusso di
traffico, condizione spesso necessaria per i rilievi eseguiti con
metodologia tradizionale. Il rilievo è stato eseguito passando col veicolo
su tutte le strade percorribili interessate dall’opera. Per i ponti che
oltrepassano ostacoli non percorribili (ad es. fiumi o linee ferroviarie) il
rilievo è stato eseguito unicamente nella parte superiore dell’opera. E’
in corso una campagna di rilievi integrativi con metodologia
tradizionale, ovvero con scansioni statiche. La velocità di registrazione
del laser scanner utilizzato (Faro Photon 120) è pari a 120mila punti al
secondo, acquisiti con una velocità di rotazione dello specchio pari a
60Hz. Questo significa che le opere sono state rilevate con 60 “linee di
scansione” formate da circa 2000 punti tridimensionali. Tenendo conto
della velocità di rilievo, compresa fra i 5 e i 15 km/h, la distanza fra ogni
linea di scansione è compresa fra i 2 e i 7 cm, con una densità di punti
sull’opera praticamente paragonabile ad una scansione laser scanner
statica (Fig.1). Il rilievo nella parte inferiore dell’opera è stato eseguito
sulla corsia di emergenza in modo da non ostacolare minimamente il
traffico e poter procedere in sicurezza a basse velocità. (Fig.2).
Fig.1 Esempio della densità dei punti laser sulla struttura
Georeferenziazione del Rilievo: Il Roadscanner dispone di una
piattaforma inerziale e di un ricevitore GPS per registrare il proprio
assetto e la propria posizione ad una frequenza di 100Hz.La
conoscenza della posizione e dell’assetto del veicolo permette la
georeferenziazione diretta della nuvola di punti. In tale maniera, pur
effettuando diversi passaggi, le nuvole di punti risultano già
topograficamente coerenti con l’opera.L’inquadramento della posizione
è stato eseguito tramite elaborazione cinematica dei dati; per garantire
un risultato ottimale si è avuto cura di mantenere sempre sotto ai 10km
la distanza fra il veicolo e la stazione GPS master di riferimento. Inoltre
ogni opera è stata rilevata all’interno della stessa missione cinematica,
in modo da rendere minime le incongruenze di inquadramento. In
Figura 3 è riportato l’andamento della distanza Base-Veicolo
relativamente alla prima missione di rilievo della giornata del 27
/02/2012.
Per alcune opere è stato possibile eseguire più di due passaggi nella parte inferiore, come nel caso dell’opera 2 (Asse Mediano)
che presenta 4 corsie per nella parte inferiore . Ad ognuno dei differenti passaggi vengono assegnati i relativi Filmati eseguiti con 7
camere ad alta definizione e la relativa nuvola di punti.
Fig 3 Distanza Veicolo Base GPS di riferimento, in
ascissa è riportato il tempo e in ordinata la distanza in km
Ispezione Ponti
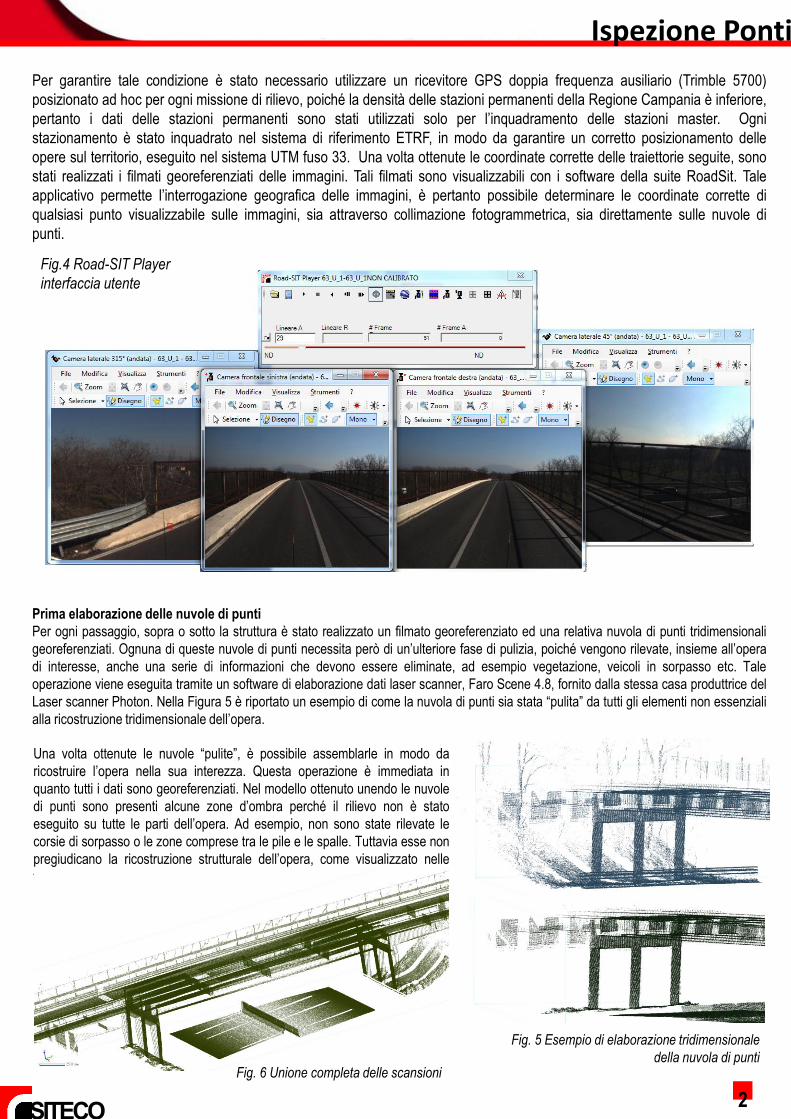
Per garantire tale condizione è stato necessario utilizzare un ricevitore GPS doppia frequenza ausiliario (Trimble 5700)
posizionato ad hoc per ogni missione di rilievo, poiché la densità delle stazioni permanenti della Regione Campania è inferiore,
pertanto i dati delle stazioni permanenti sono stati utilizzati solo per l’inquadramento delle stazioni master. Ogni
stazionamento è stato inquadrato nel sistema di riferimento ETRF, in modo da garantire un corretto posizionamento delle
opere sul territorio, eseguito nel sistema UTM fuso 33. Una volta ottenute le coordinate corrette delle traiettorie seguite, sono
stati realizzati i filmati georeferenziati delle immagini. Tali filmati sono visualizzabili con i software della suite RoadSit. Tale
applicativo permette l’interrogazione geografica delle immagini, è pertanto possibile determinare le coordinate corrette di
qualsiasi punto visualizzabile sulle immagini, sia attraverso collimazione fotogrammetrica, sia direttamente sulle nuvole di
punti.
2
Fig.4 Road-SIT Player
interfaccia utente
Fig. 5 Esempio di elaborazione tridimensionale
della nuvola di punti
Prima elaborazione delle nuvole di punti
Per ogni passaggio, sopra o sotto la struttura è stato realizzato un filmato georeferenziato ed una relativa nuvola di punti tridimensionali
georeferenziati. Ognuna di queste nuvole di punti necessita però di un’ulteriore fase di pulizia, poiché vengono rilevate, insieme all’opera
di interesse, anche una serie di informazioni che devono essere eliminate, ad esempio vegetazione, veicoli in sorpasso etc. Tale
operazione viene eseguita tramite un software di elaborazione dati laser scanner, Faro Scene 4.8, fornito dalla stessa casa produttrice del
Laser scanner Photon. Nella Figura 5 è riportato un esempio di come la nuvola di punti sia stata “pulita” da tutti gli elementi non essenziali
alla ricostruzione tridimensionale dell’opera.
Una volta ottenute le nuvole “pulite”, è possibile assemblarle in modo da
ricostruire l’opera nella sua interezza. Questa operazione è immediata in
quanto tutti i dati sono georeferenziati. Nel modello ottenuto unendo le nuvole
di punti sono presenti alcune zone d’ombra perché il rilievo non è stato
eseguito su tutte le parti dell’opera. Ad esempio, non sono state rilevate le
corsie di sorpasso o le zone comprese tra le pile e le spalle. Tuttavia esse non
pregiudicano la ricostruzione strutturale dell’opera, come visualizzato nelle
figure.
Fig. 6 Unione completa delle scansioni
Ispezione Ponti
3
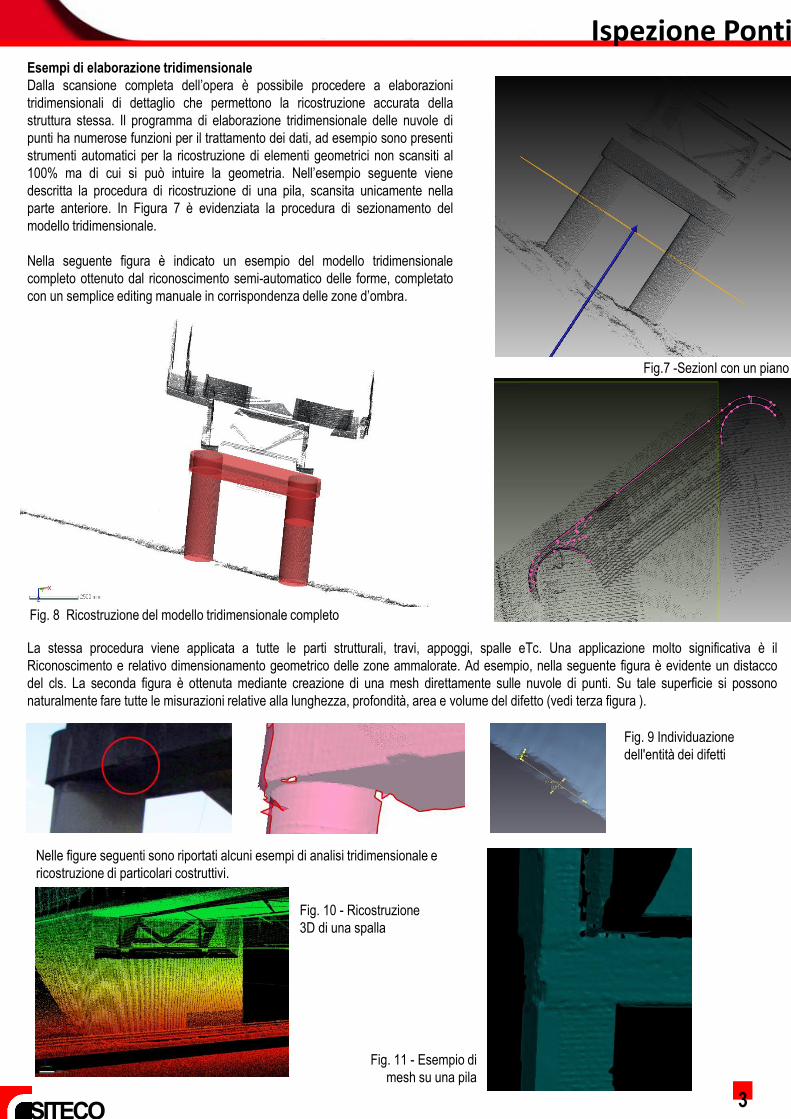
Esempi di elaborazione tridimensionale
Dalla scansione completa dell’opera è possibile procedere a elaborazioni
tridimensionali di dettaglio che permettono la ricostruzione accurata della
struttura stessa. Il programma di elaborazione tridimensionale delle nuvole di
punti ha numerose funzioni per il trattamento dei dati, ad esempio sono presenti
strumenti automatici per la ricostruzione di elementi geometrici non scansiti al
100% ma di cui si può intuire la geometria. Nell’esempio seguente viene
descritta la procedura di ricostruzione di una pila, scansita unicamente nella
parte anteriore. In Figura 7 è evidenziata la procedura di sezionamento del
modello tridimensionale.
Nella seguente figura è indicato un esempio del modello tridimensionale
completo ottenuto dal riconoscimento semi-automatico delle forme, completato
con un semplice editing manuale in corrispondenza delle zone d’ombra.
Fig.7 -SezionI con un piano
Fig. 8 Ricostruzione del modello tridimensionale completo
La stessa procedura viene applicata a tutte le parti strutturali, travi, appoggi, spalle eTc. Una applicazione molto significativa è il
Riconoscimento e relativo dimensionamento geometrico delle zone ammalorate. Ad esempio, nella seguente figura è evidente un distacco
del cls. La seconda figura è ottenuta mediante creazione di una mesh direttamente sulle nuvole di punti. Su tale superficie si possono
naturalmente fare tutte le misurazioni relative alla lunghezza, profondità, area e volume del difetto (vedi terza figura ).
Fig. 9 Individuazione
dell'entità dei difetti
Nelle figure seguenti sono riportati alcuni esempi di analisi tridimensionale e
ricostruzione di particolari costruttivi.
Fig. 10 - Ricostruzione
3D di una spalla
Fig. 11 - Esempio di
mesh su una pila
Ispezione Ponti

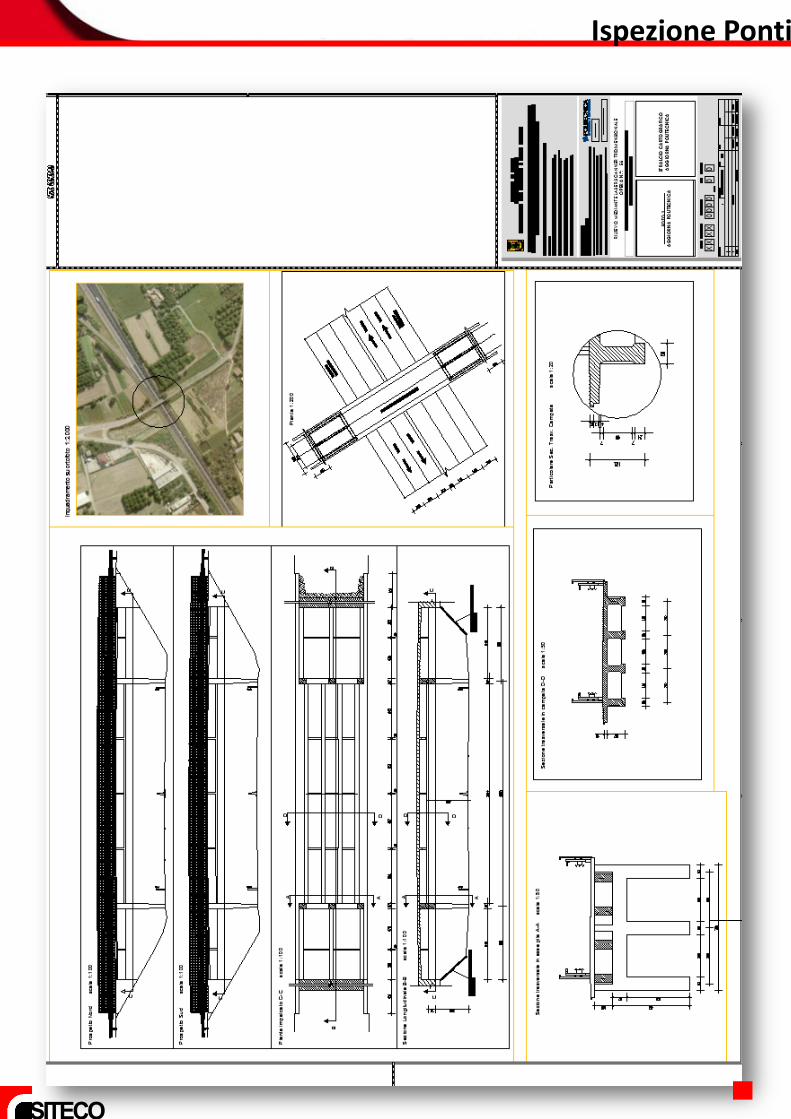
Disegno definitivo dell’opera
Al termine delle operazioni di elaborazione delle nuvole di punti è possibile realizzare i disegni tecnici dell’opera, con tutti gli elementi
quali prospetti, sezioni, ecc. Essi sono ricavati direttamente dai modelli tridimensionali ricostruiti.
Nelle figure seguenti sono riportati alcuni esempi di elaborati grafici più significativi:
Fig. 12 Esempio di sezione
in campata
Fig. 13 Esempio di sezione su pila
Fig. 14 Esempio di una pianta di impalcato
Fig. 15 Esempio di un prospetto
4
Ispezione Ponti
Ispezione Ponti