Introduzione alle geometrie non...
32
Introduzione alle geometrie non euclidee Prof. Daniele Ippolito Liceo Scientifico “Amedeo di Savoia” di Pistoia
Transcript of Introduzione alle geometrie non...
Introduzione alle geometrie non euclidee
Prof. Daniele Ippolito
Liceo Scientifico “Amedeo di Savoia” di Pistoia
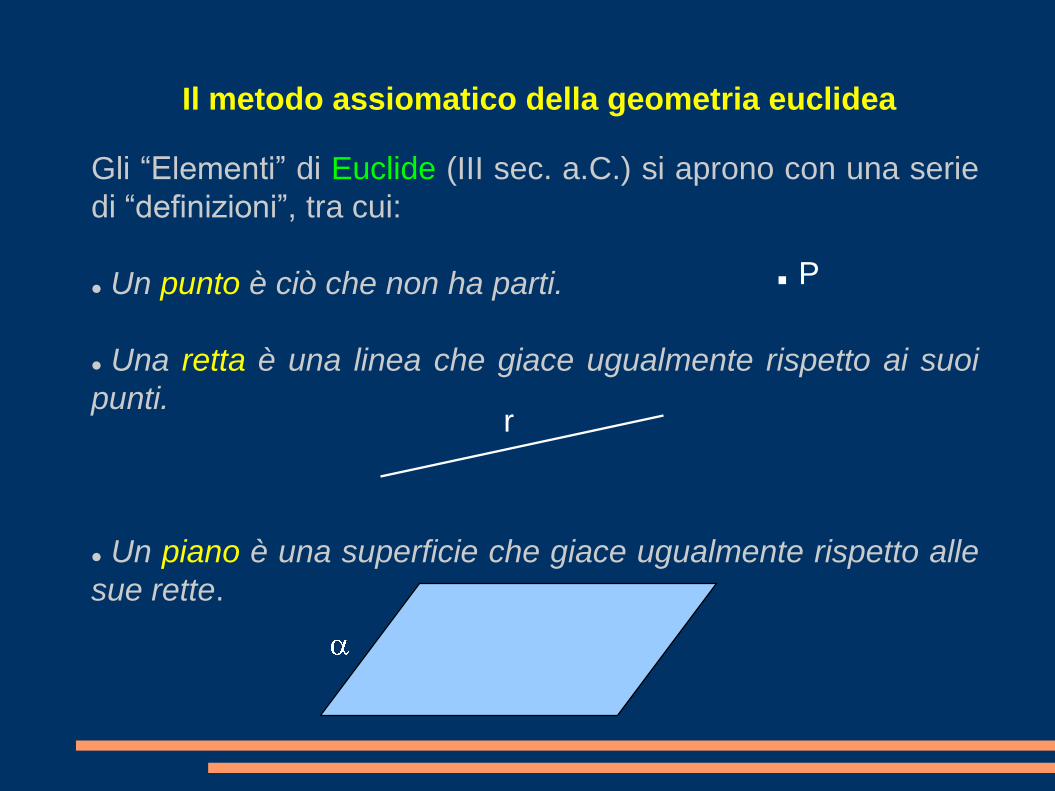
Gli “Elementi” di Euclide (III sec. a.C.) si aprono con una serie
di “definizioni”, tra cui:
Un punto è ciò che non ha parti.
Una retta è una linea che giace ugualmente rispetto ai suoi
punti.
Un piano è una superficie che giace ugualmente rispetto alle
sue rette.
. P
r
Il metodo assiomatico della geometria euclidea
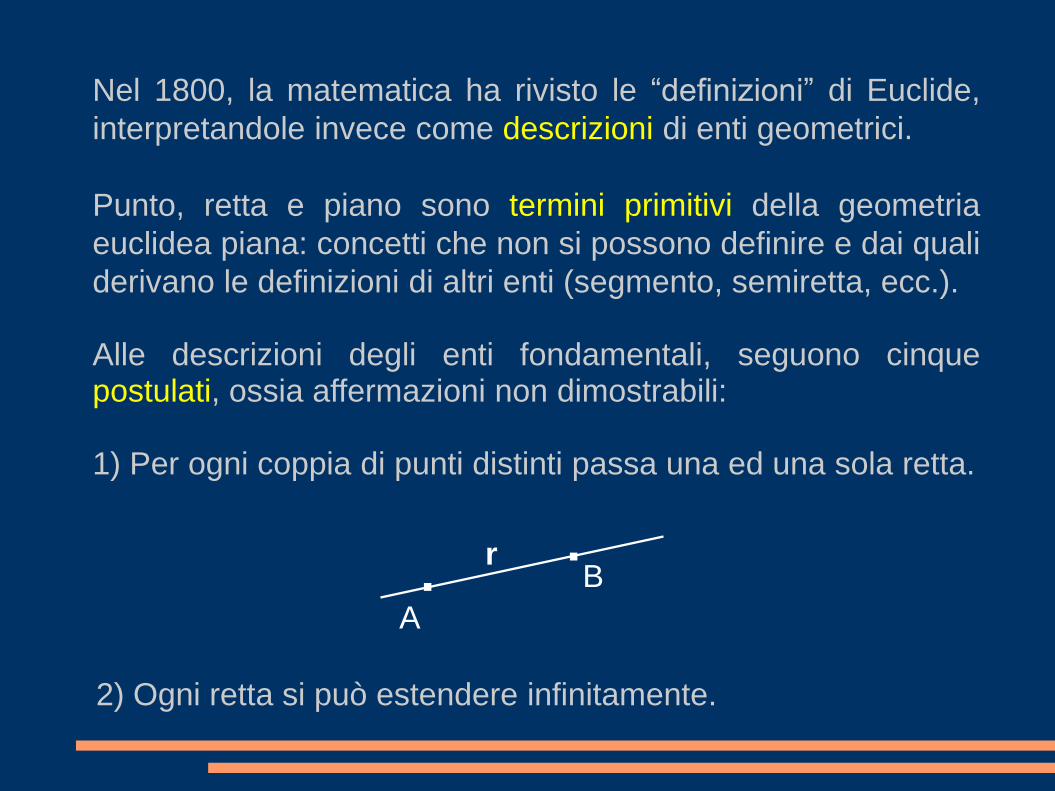
Nel 1800, la matematica ha rivisto le “definizioni” di Euclide,
interpretandole invece come descrizioni di enti geometrici.
Punto, retta e piano sono termini primitivi della geometria
euclidea piana: concetti che non si possono definire e dai quali
derivano le definizioni di altri enti (segmento, semiretta, ecc.).
Alle descrizioni degli enti fondamentali, seguono cinquepostulati, ossia affermazioni non dimostrabili:
1) Per ogni coppia di punti distinti passa una ed una sola retta.
.r .
A
B
2) Ogni retta si può estendere infinitamente.
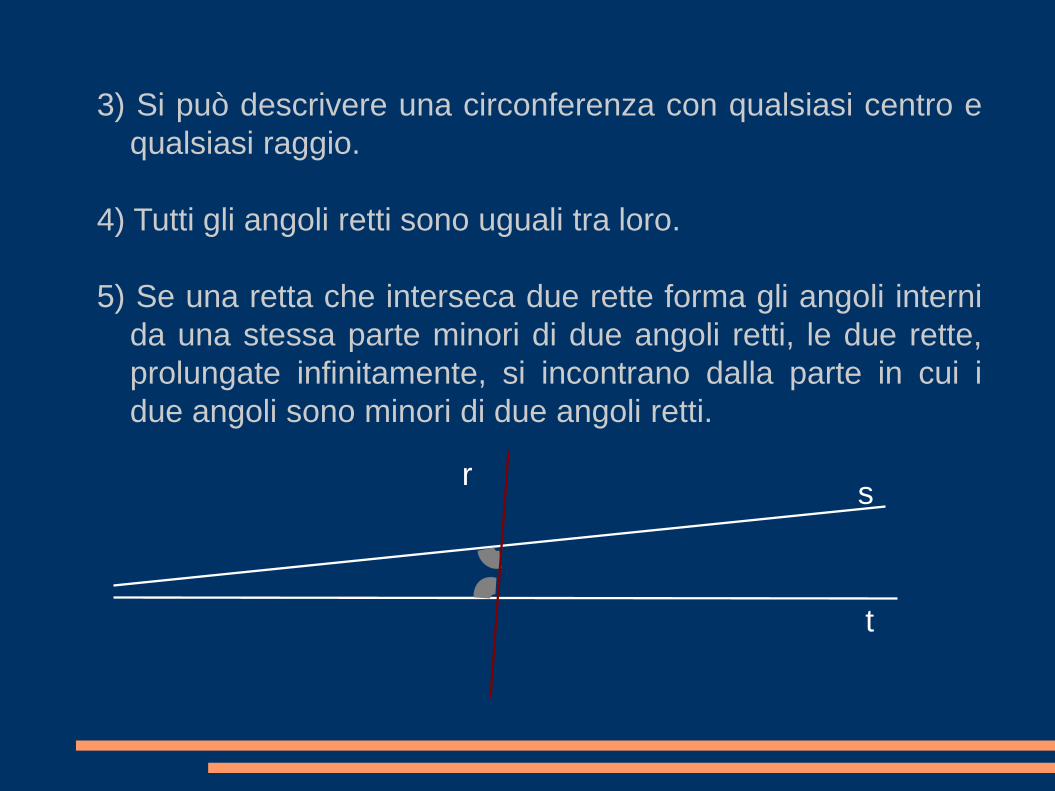
3) Si può descrivere una circonferenza con qualsiasi centro e
qualsiasi raggio.
4) Tutti gli angoli retti sono uguali tra loro.
5) Se una retta che interseca due rette forma gli angoli interni
da una stessa parte minori di due angoli retti, le due rette,
prolungate infinitamente, si incontrano dalla parte in cui i
due angoli sono minori di due angoli retti.
t
sr
Nel primo libro degli “Elementi”, che contiene 48 proposizioni,
Euclide ricorre al quinto postulato soltanto alla proposizione
29.
Dal quinto postulato dipendono tuttavia teoremi importanti
della geometria piana, come quello sulla somma degli angoli
interni di un triangolo e il teorema di Pitagora.
Il dibattito sul quinto postulato di Euclide
Numerosi sono stati i tentativi di dedurre il quinto postulato di
Euclide dai primi quattro o di sostituirlo con una versione più
semplice. Tra questi:
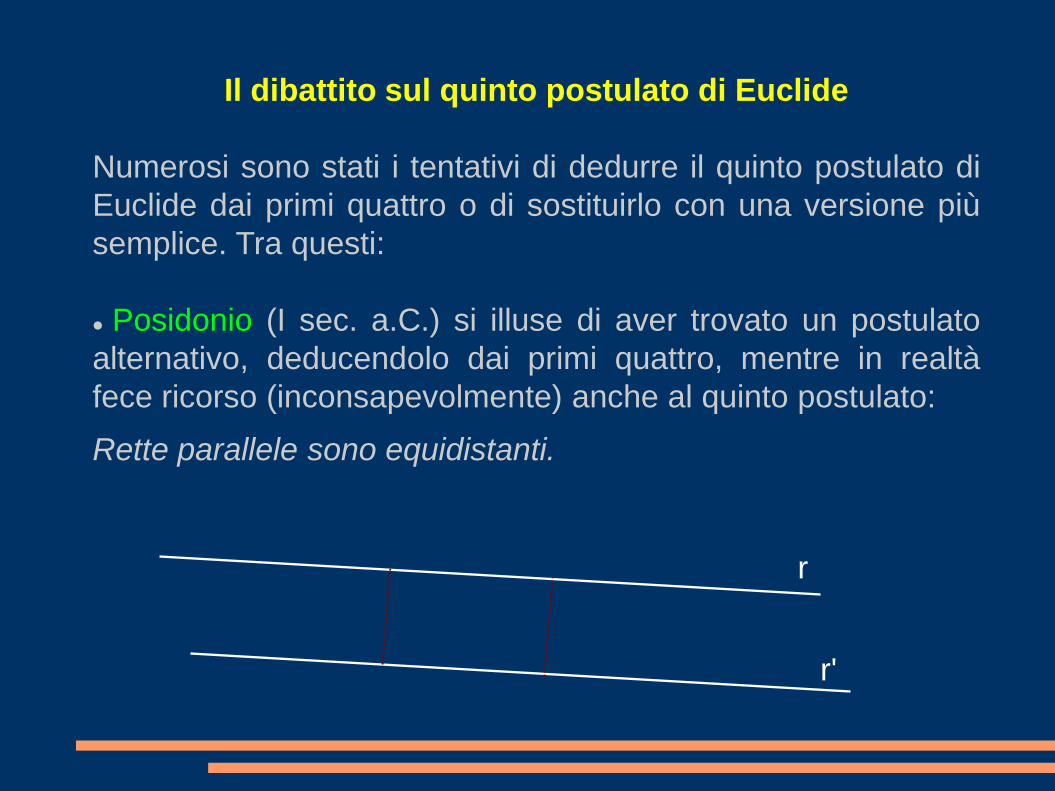
Posidonio (I sec. a.C.) si illuse di aver trovato un postulato
alternativo, deducendolo dai primi quattro, mentre in realtà
fece ricorso (inconsapevolmente) anche al quinto postulato:
Rette parallele sono equidistanti.
r'
r
Il dibattito sul quinto postulato di Euclide
Numerosi sono stati i tentativi di dedurre il quinto postulato di
Euclide dai primi quattro o di sostituirlo con una versione più
semplice. Tra questi:
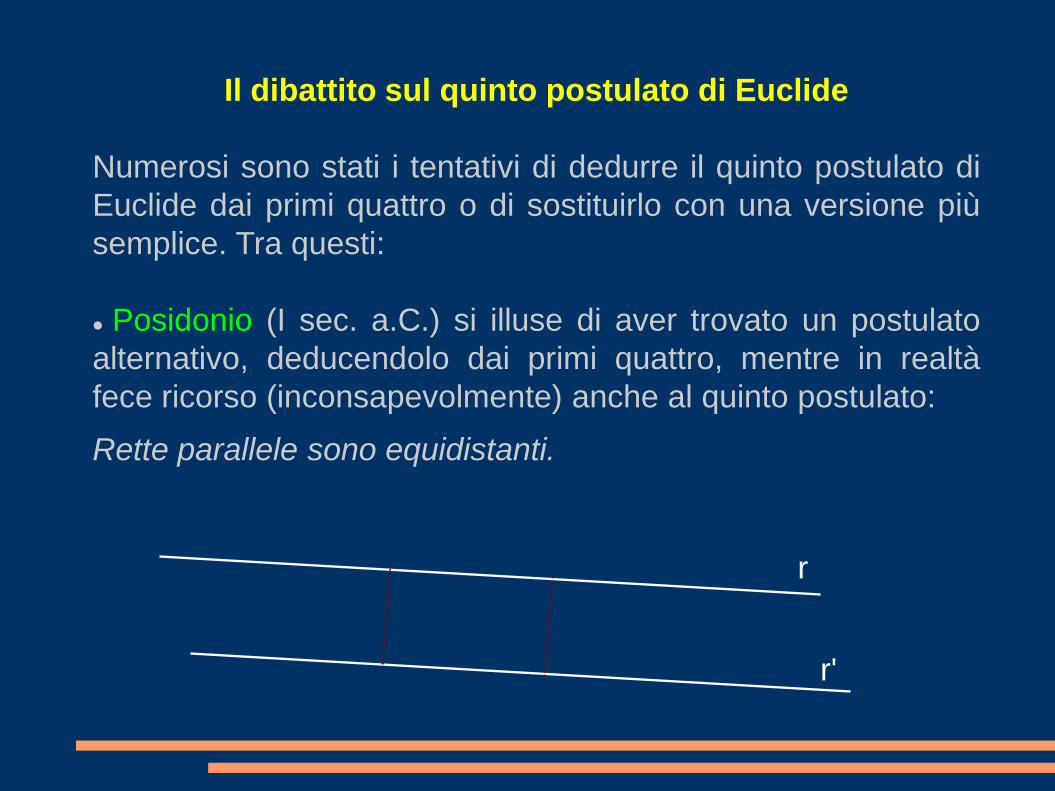
Posidonio (I sec. a.C.) si illuse di aver trovato un postulato
alternativo, deducendolo dai primi quattro, mentre in realtà
fece ricorso (inconsapevolmente) anche al quinto postulato:
Rette parallele sono equidistanti.
r'
r
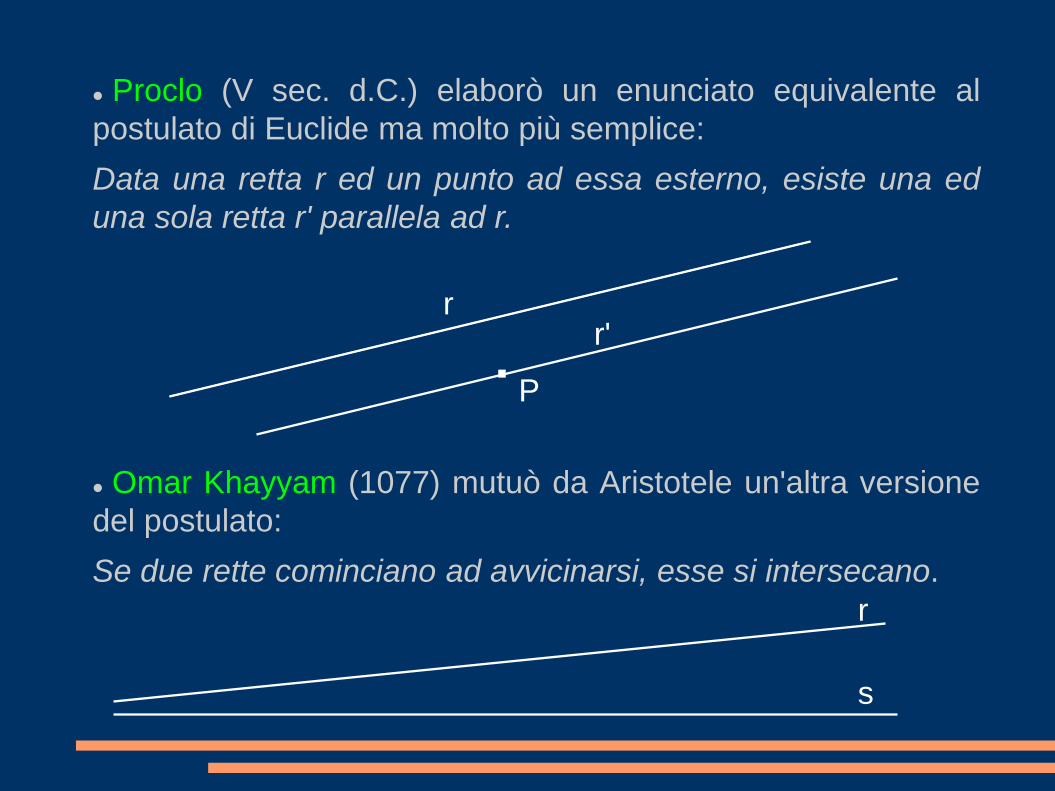
Proclo (V sec. d.C.) elaborò un enunciato equivalente al
postulato di Euclide ma molto più semplice:
Data una retta r ed un punto ad essa esterno, esiste una ed
una sola retta r' parallela ad r.
s
r
Omar Khayyam (1077) mutuò da Aristotele un'altra versione
del postulato:
Se due rette cominciano ad avvicinarsi, esse si intersecano.
.r'
P
r
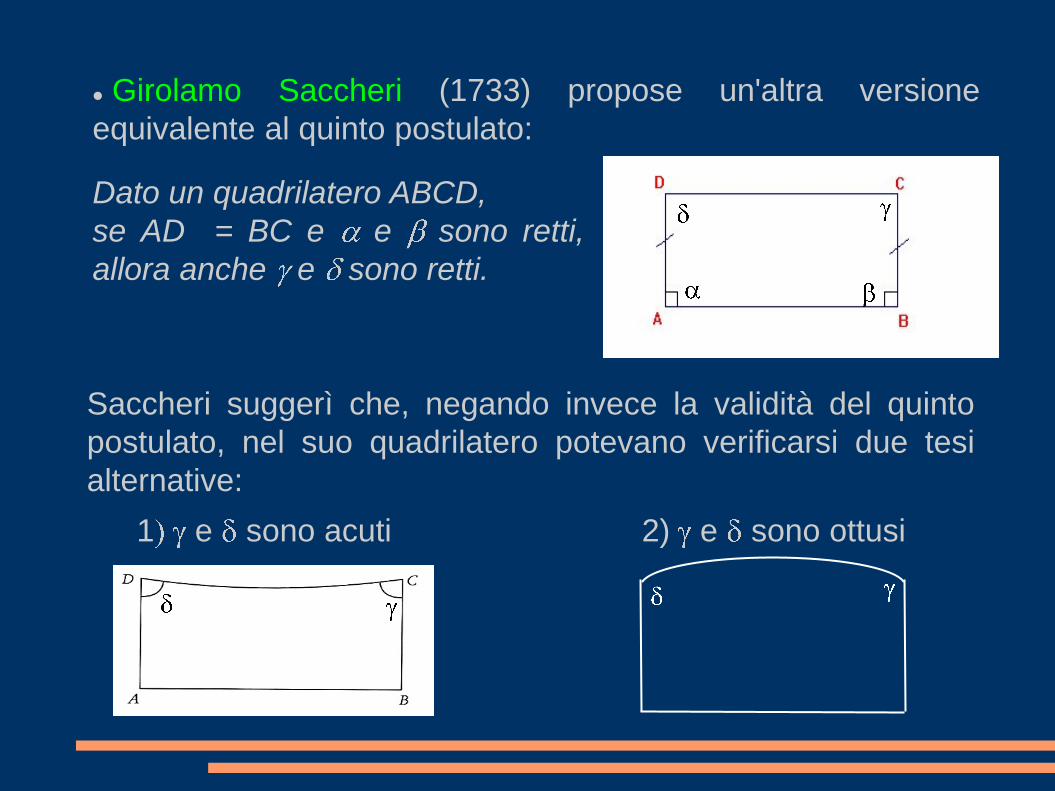
Girolamo Saccheri (1733) propose un'altra versione
equivalente al quinto postulato:
Dato un quadrilatero ABCD,
se AD = BC e e sono retti,
allora anche e sono retti.
Saccheri suggerì che, negando invece la validità del quinto
postulato, nel suo quadrilatero potevano verificarsi due tesi
alternative:
2) e sono ottusi1 e sono acuti
Johann Heinrich Lambert (1766), perseguendo la stessa
strada di Saccheri, giunse a verificare che, negando la validità
del postulato delle parallele:
In un triangolo la somma degli angoli interni è
variabile ed è minore di due angoli retti.
Saccheri e Lambert vengono considerati due precursori delle
geometrie non euclidee.
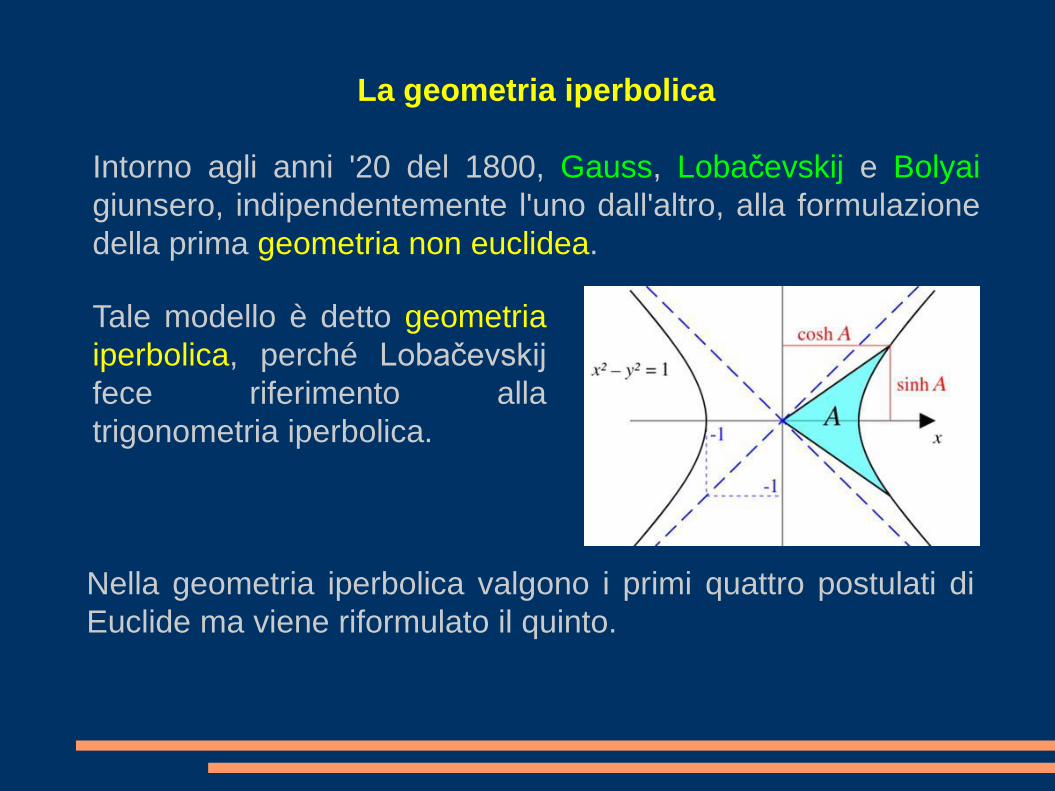
La geometria iperbolica
Intorno agli anni '20 del 1800, Gauss, Lobačevskij e Bolyai
giunsero, indipendentemente l'uno dall'altro, alla formulazione
della prima geometria non euclidea.
Tale modello è detto geometria
iperbolica, perché Lobačevskij
fece riferimento alla
trigonometria iperbolica.
Nella geometria iperbolica valgono i primi quattro postulati di
Euclide ma viene riformulato il quinto.
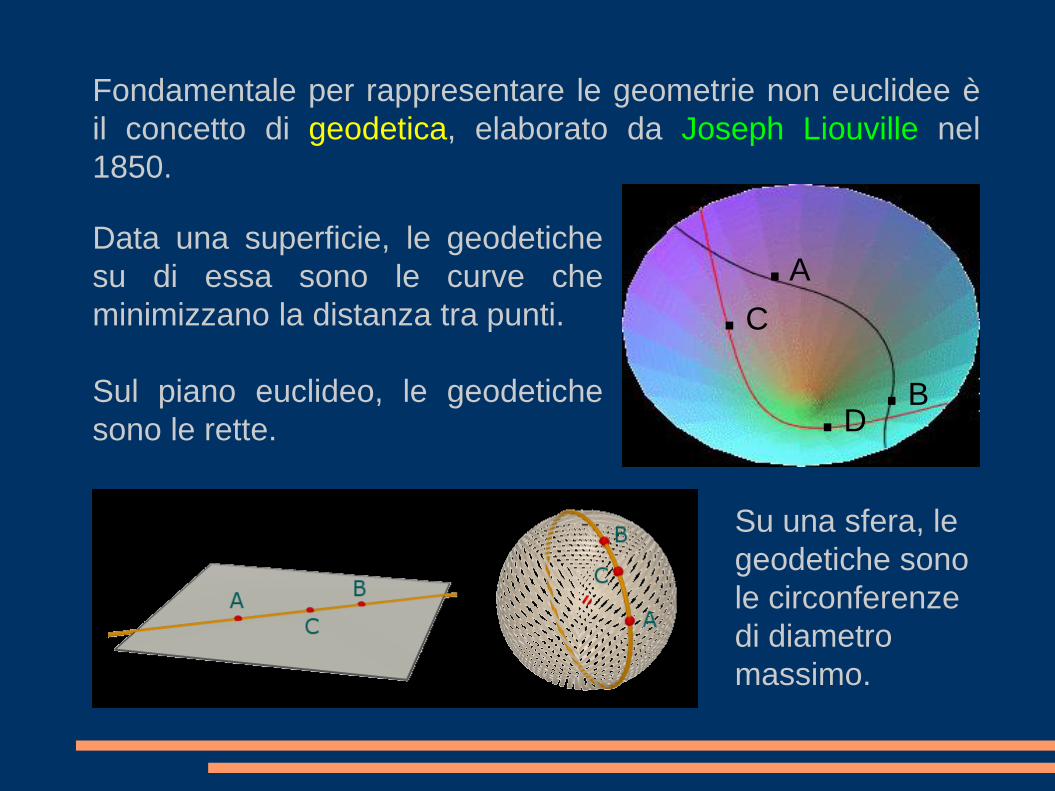
Fondamentale per rappresentare le geometrie non euclidee è
il concetto di geodetica, elaborato da Joseph Liouville nel
1850.
Data una superficie, le geodetiche
su di essa sono le curve che
minimizzano la distanza tra punti.
Sul piano euclideo, le geodetiche
sono le rette.
. A
. B
. C
. D
Su una sfera, le
geodetiche sono
le circonferenze
di diametro
massimo.
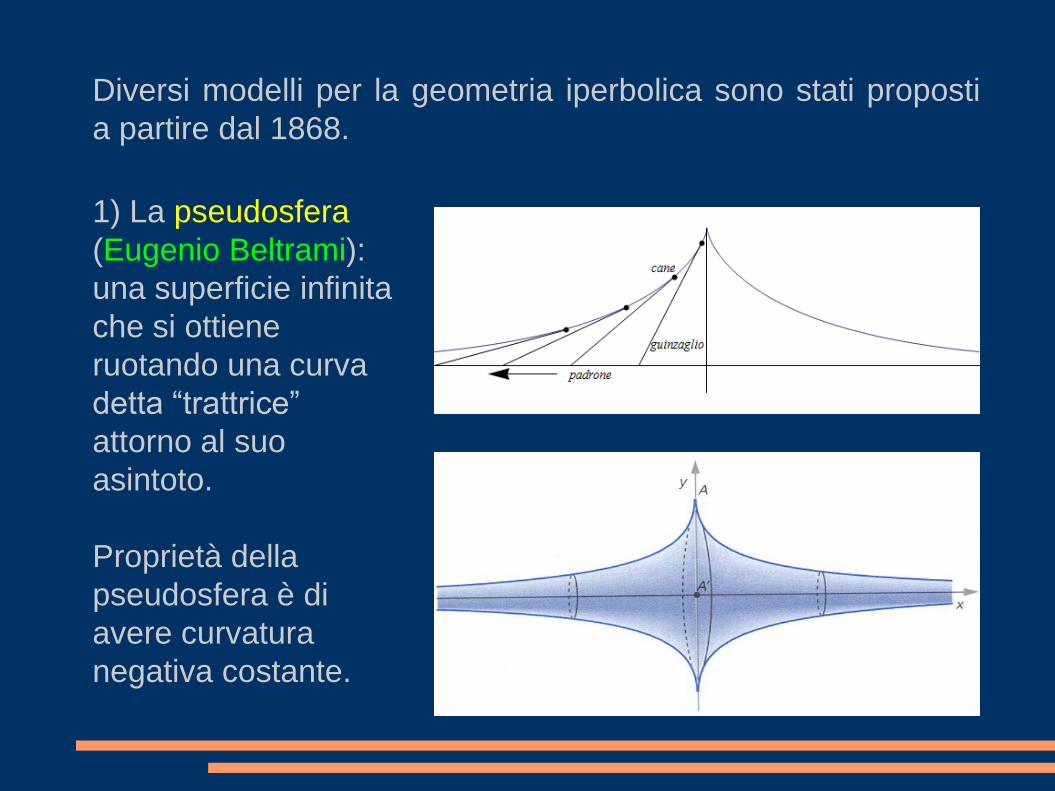
Diversi modelli per la geometria iperbolica sono stati proposti
a partire dal 1868.
1) La pseudosfera
(Eugenio Beltrami):
una superficie infinita
che si ottiene
ruotando una curva
detta “trattrice”
attorno al suo
asintoto.
Proprietà della
pseudosfera è di
avere curvatura
negativa costante.
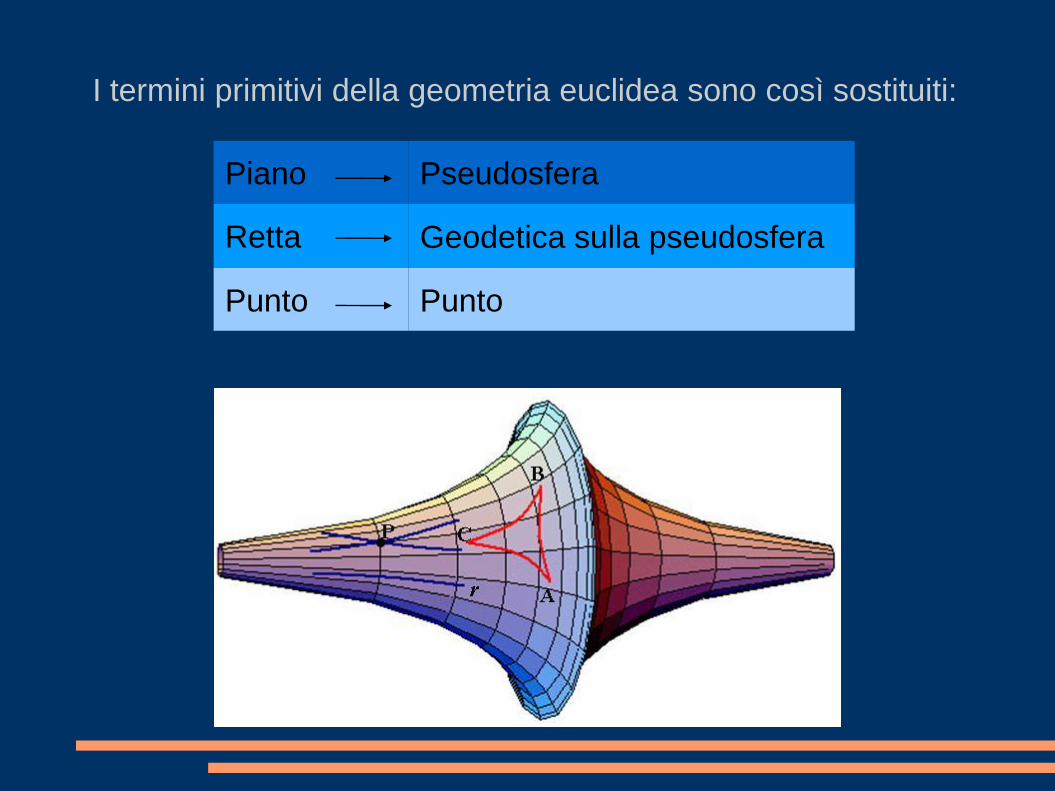
I termini primitivi della geometria euclidea sono così sostituiti:
Piano Pseudosfera
Retta Geodetica sulla pseudosfera
Punto Punto
2) Il disco di Klein:
Piano Cerchio (aperto)
Retta Corda (aperta)
Punto Punto
3) Il disco di Poincaré
Piano Cerchio (aperto)
Retta
Diametro (aperto) o
arco perpendicolare
al bordo
Punto Punto
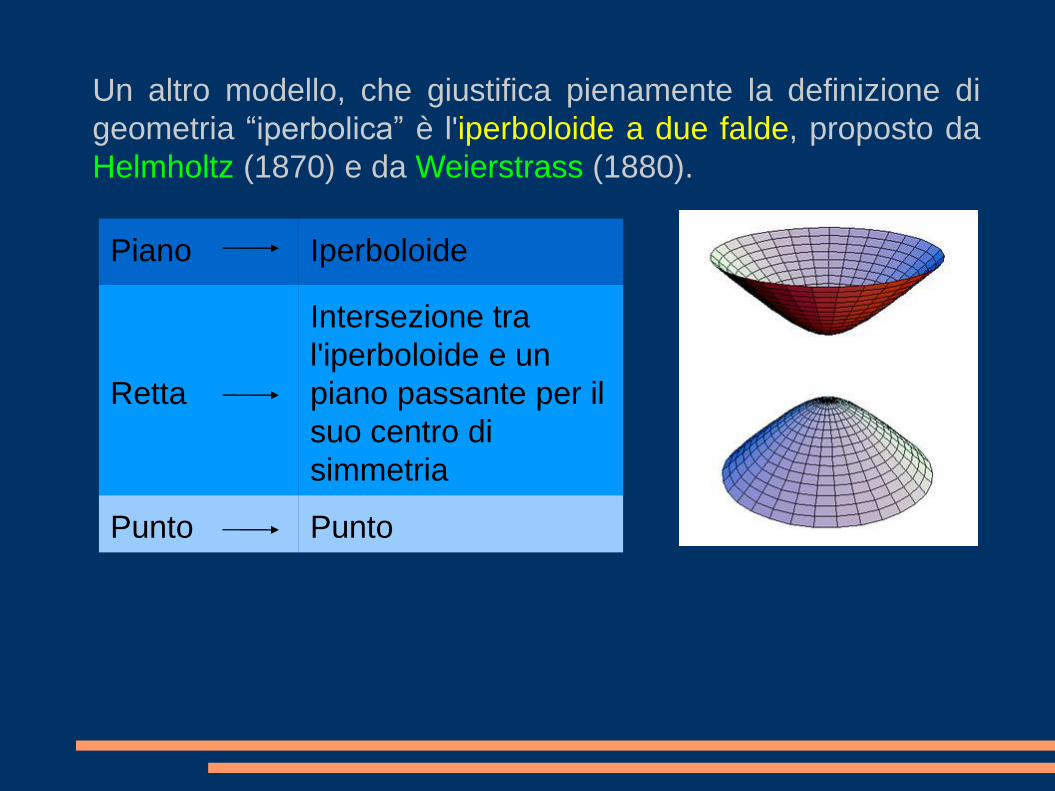
Un altro modello, che giustifica pienamente la definizione di
geometria “iperbolica” è l'iperboloide a due falde, proposto da
Helmholtz (1870) e da Weierstrass (1880).
Piano Iperboloide
Retta
Intersezione tra
l'iperboloide e un
piano passante per il
suo centro di
simmetria
Punto Punto
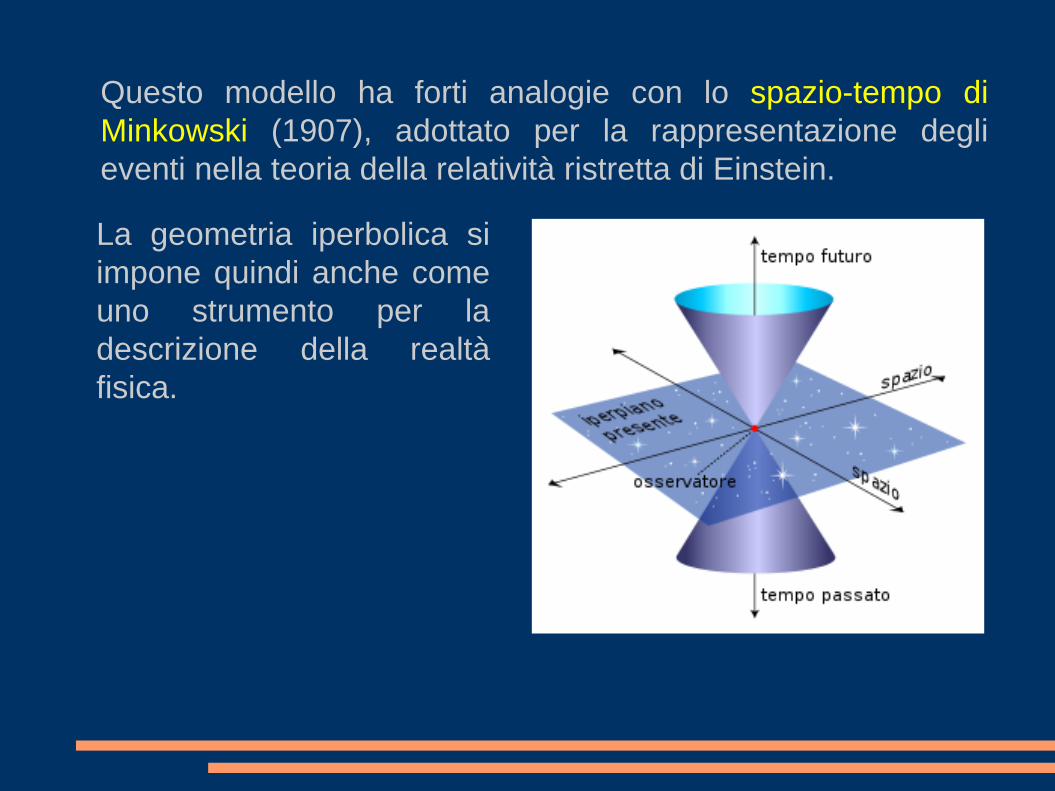
Questo modello ha forti analogie con lo spazio-tempo di
Minkowski (1907), adottato per la rappresentazione degli
eventi nella teoria della relatività ristretta di Einstein.
La geometria iperbolica si
impone quindi anche come
uno strumento per la
descrizione della realtà
fisica.
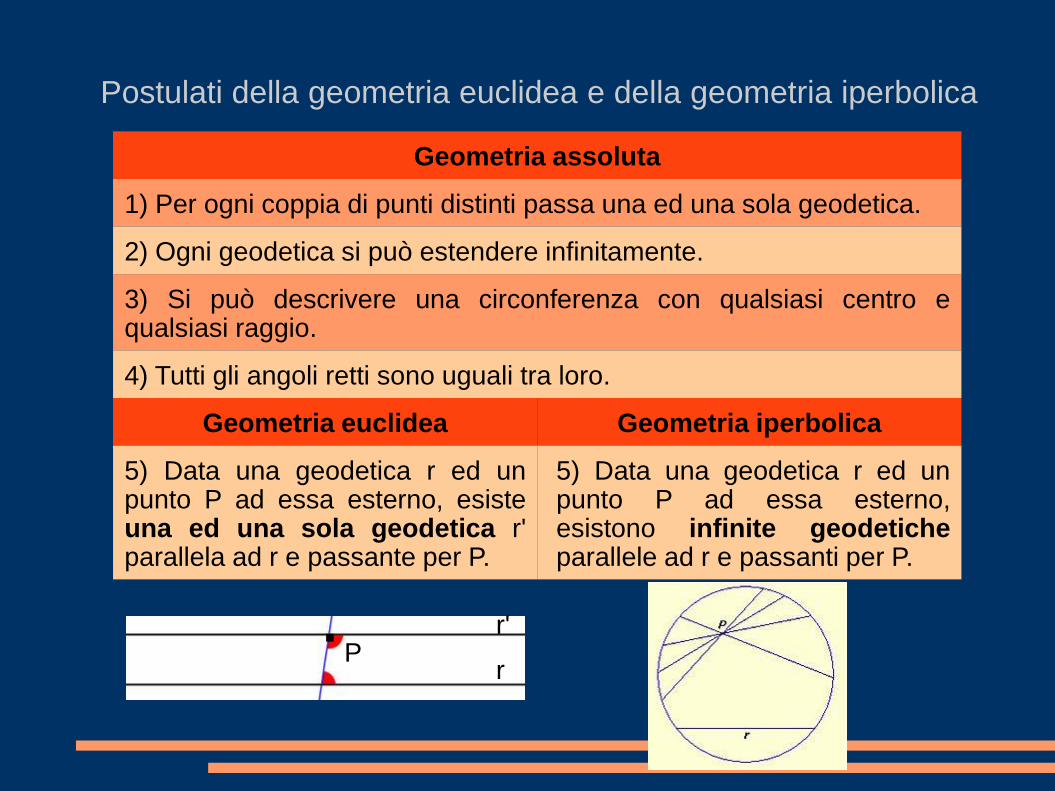
Geometria assoluta
1) Per ogni coppia di punti distinti passa una ed una sola geodetica.
2) Ogni geodetica si può estendere infinitamente.
3) Si può descrivere una circonferenza con qualsiasi centro equalsiasi raggio.
4) Tutti gli angoli retti sono uguali tra loro.
Geometria euclidea Geometria iperbolica
5) Data una geodetica r ed unpunto P ad essa esterno, esisteuna ed una sola geodetica r'parallela ad r e passante per P.
5) Data una geodetica r ed unpunto P ad essa esterno,esistono infinite geodeticheparallele ad r e passanti per P.
Postulati della geometria euclidea e della geometria iperbolica
.P
r
r'
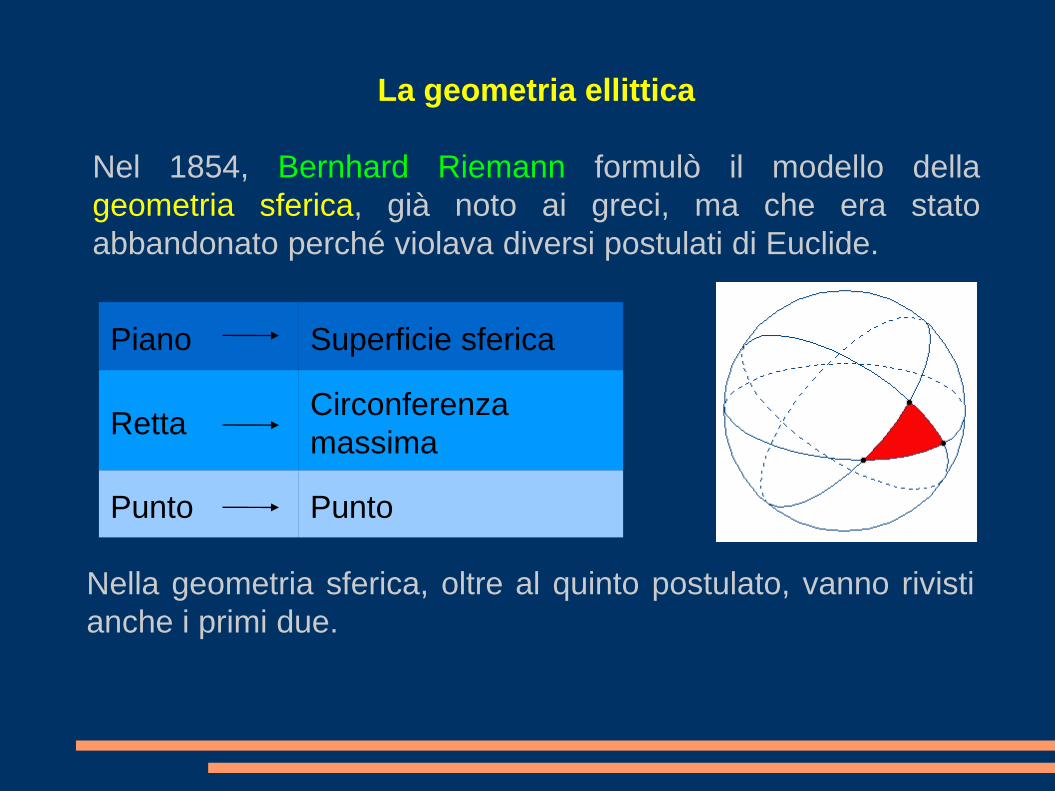
La geometria ellittica
Nel 1854, Bernhard Riemann formulò il modello della
geometria sferica, già noto ai greci, ma che era stato
abbandonato perché violava diversi postulati di Euclide.
Nella geometria sferica, oltre al quinto postulato, vanno rivisti
anche i primi due.
Piano Superficie sferica
Retta Circonferenza
massima
Punto Punto
Una variante al modello di Riemann è stata avanzata nel 1871
da Felix Klein, che ha identificato le coppie di punti agli
antipodi della sfera come un unico ente geometrico.
Il modello di Klein è equivalente al piano proiettivo, già noto ai
matematici, e pertanto viene rappresenta una geometria
proiettiva.
Il corpo comune alla geometria sferica e a quella proiettiva è
detto geometria ellittica.
Piano Superficie sferica
Retta Circonferenza
massima
PuntoCoppia di punti
antipodali
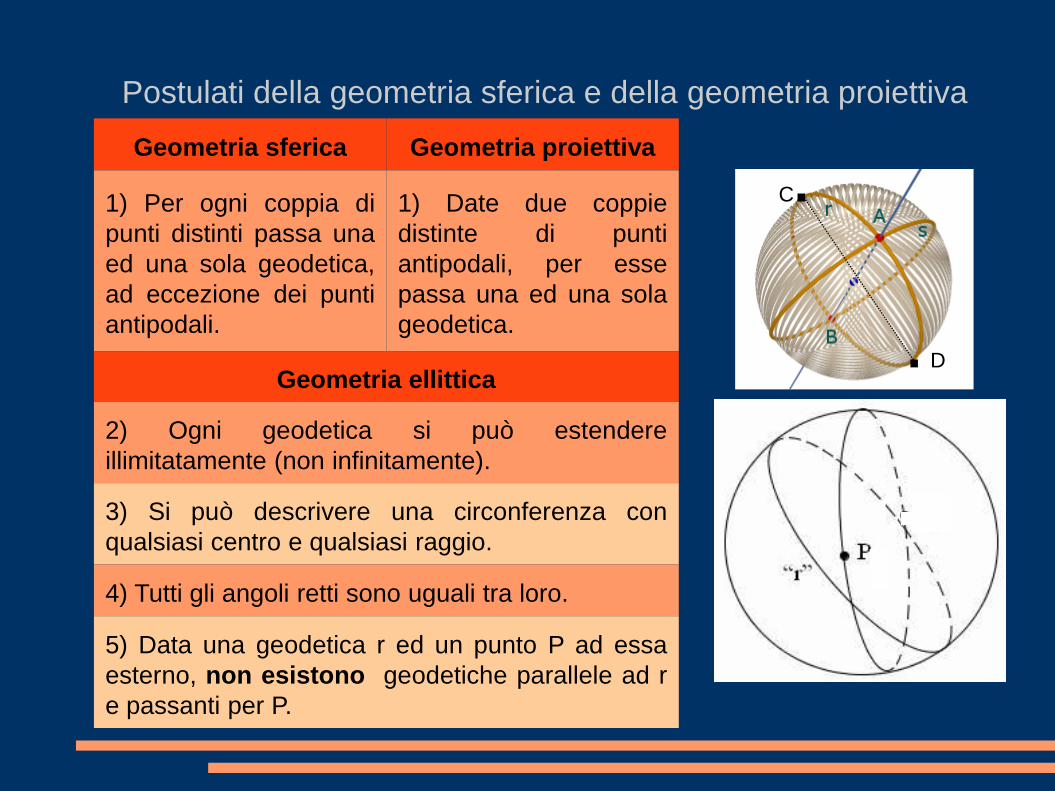
Geometria sferica Geometria proiettiva
1) Per ogni coppia di
punti distinti passa una
ed una sola geodetica,
ad eccezione dei punti
antipodali.
1) Date due coppie
distinte di punti
antipodali, per esse
passa una ed una sola
geodetica.
Geometria ellittica
2) Ogni geodetica si può estendere
illimitatamente (non infinitamente).
3) Si può descrivere una circonferenza con
qualsiasi centro e qualsiasi raggio.
4) Tutti gli angoli retti sono uguali tra loro.
5) Data una geodetica r ed un punto P ad essa
esterno, non esistono geodetiche parallele ad r
e passanti per P.
Postulati della geometria sferica e della geometria proiettiva
C.
. D
Curvatura di una superficie
Per comprendere il tipo di geometria descritto da una
superficie, introduciamo il concetto di curvatura, a cominciare
dalla curvatura di una curva.
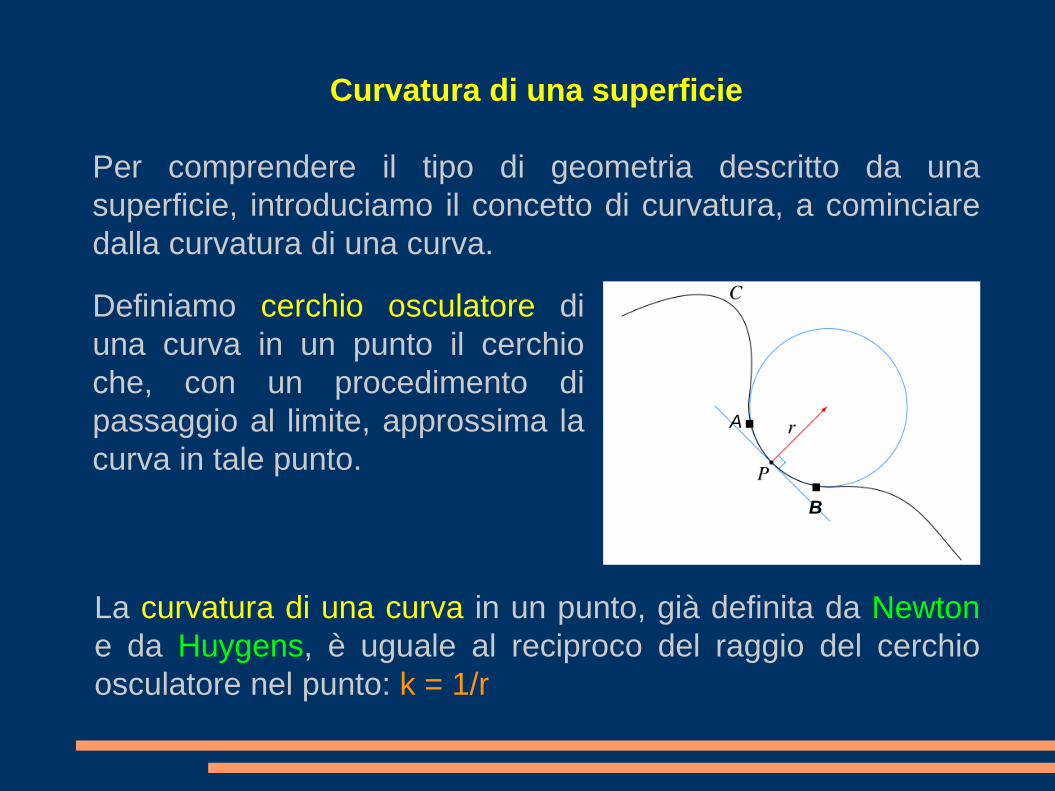
Definiamo cerchio osculatore di
una curva in un punto il cerchio
che, con un procedimento di
passaggio al limite, approssima la
curva in tale punto.
A.
.B
La curvatura di una curva in un punto, già definita da Newton
e da Huygens, è uguale al reciproco del raggio del cerchio
osculatore nel punto: k = 1/r
Nel piano, le uniche curve a k costante sono:
1) la retta (k = 0);
2) la circonferenza (k = 1/R)
Per definire la curvatura di una superficie S in un punto P, si
adotta il procedimento descritto da Eulero.
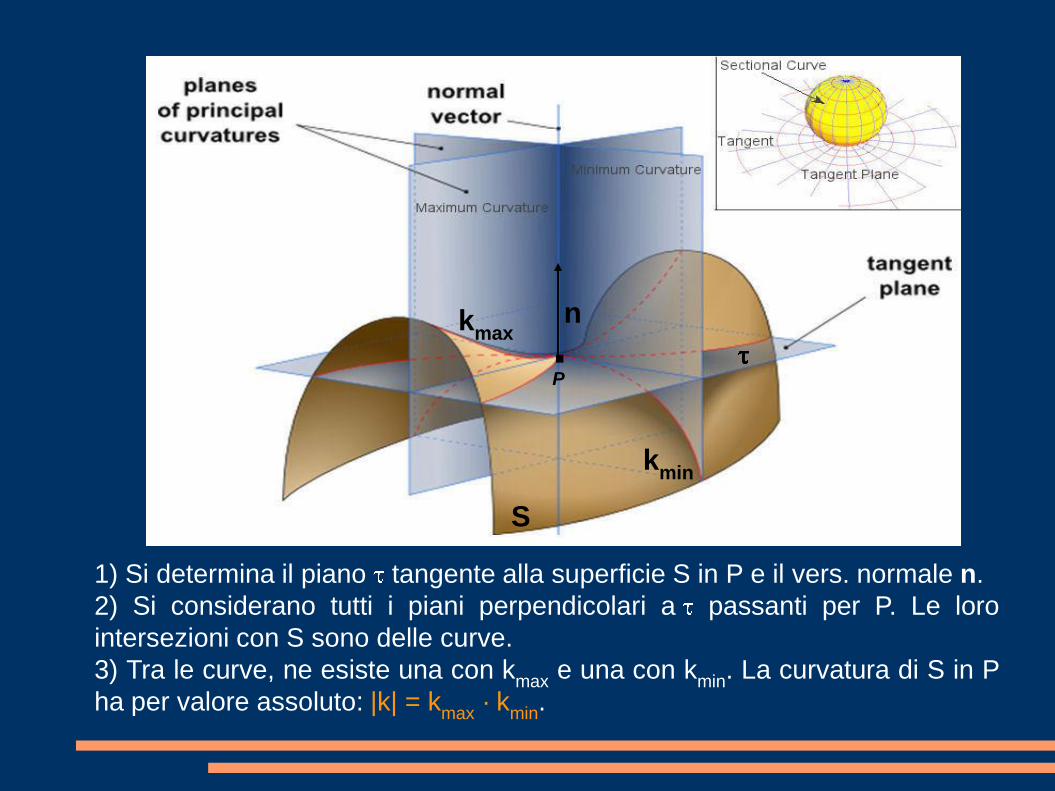
1) Si determina il piano tangente alla superficie S in P e il vers. normale n.
2) Si considerano tutti i piani perpendicolari a passanti per P. Le loro
intersezioni con S sono delle curve.
3) Tra le curve, ne esiste una con kmax
e una con kmin
. La curvatura di S in P
ha per valore assoluto: |k| = kmax
· kmin
.
.P
S
kmax
kmin
n
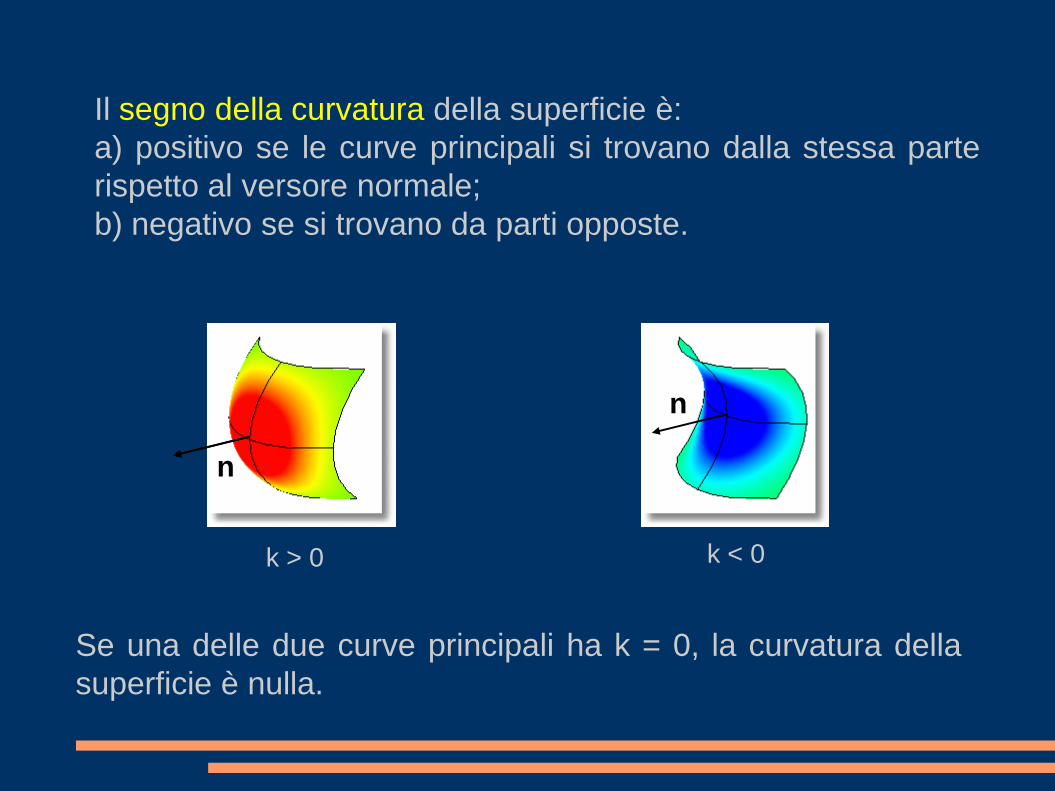
Il segno della curvatura della superficie è:
a) positivo se le curve principali si trovano dalla stessa parte
rispetto al versore normale;
b) negativo se si trovano da parti opposte.
n
n
k > 0 k < 0
Se una delle due curve principali ha k = 0, la curvatura della
superficie è nulla.
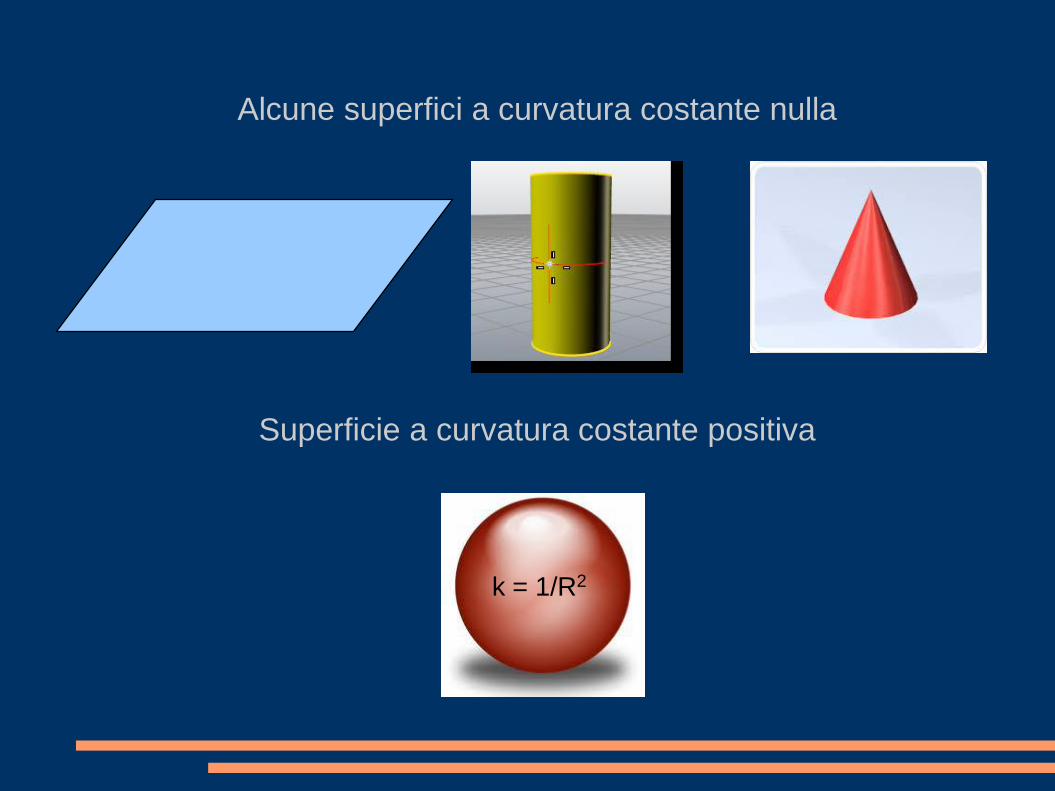
Alcune superfici a curvatura costante nulla
Superficie a curvatura costante positiva
k = 1/R2
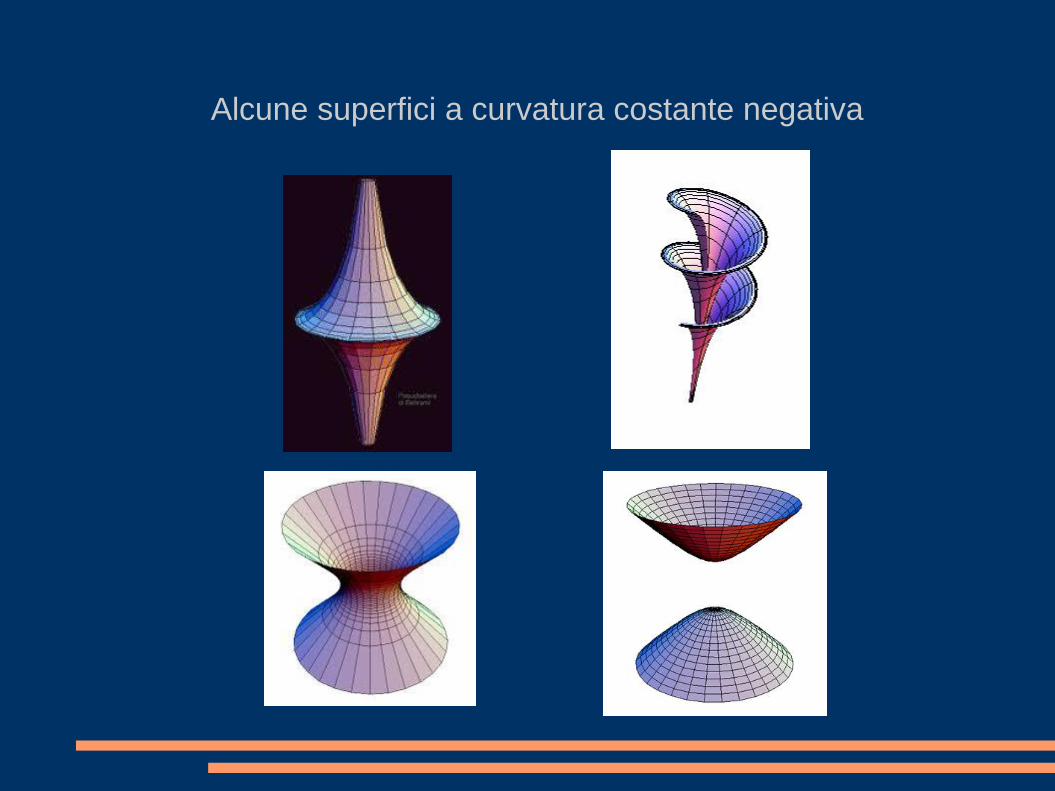
Alcune superfici a curvatura costante negativa
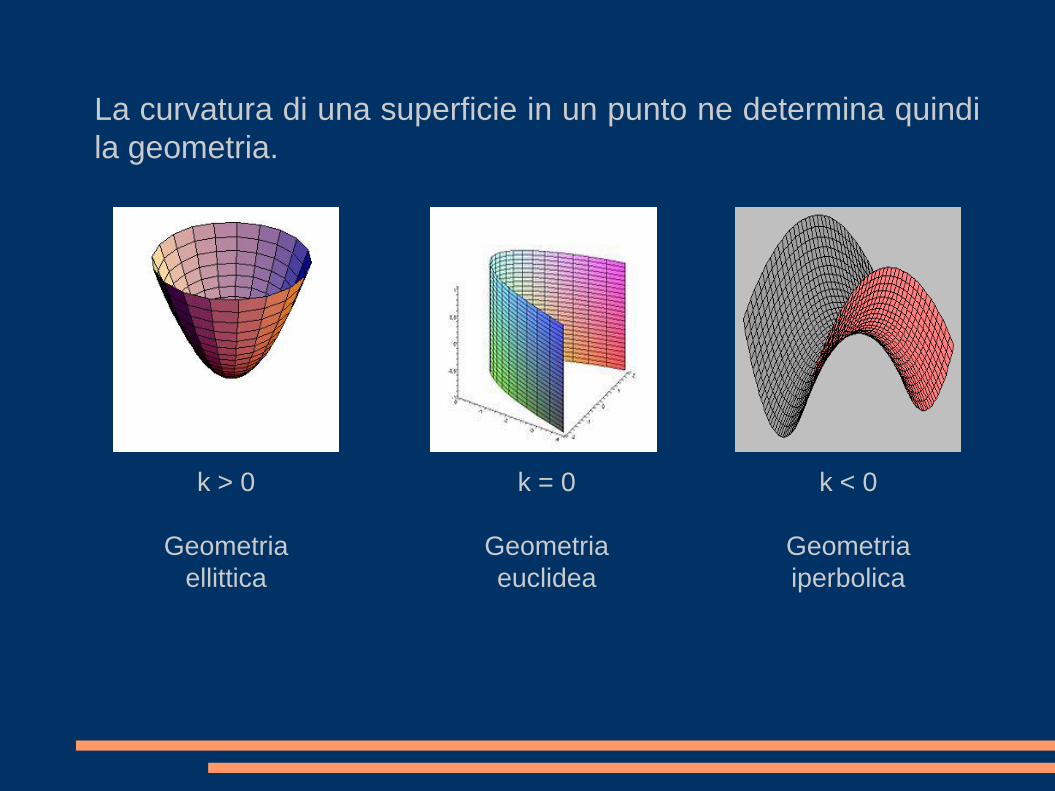
La curvatura di una superficie in un punto ne determina quindi
la geometria.
k > 0
Geometria
ellittica
k = 0
Geometria
euclidea
k < 0
Geometria
iperbolica
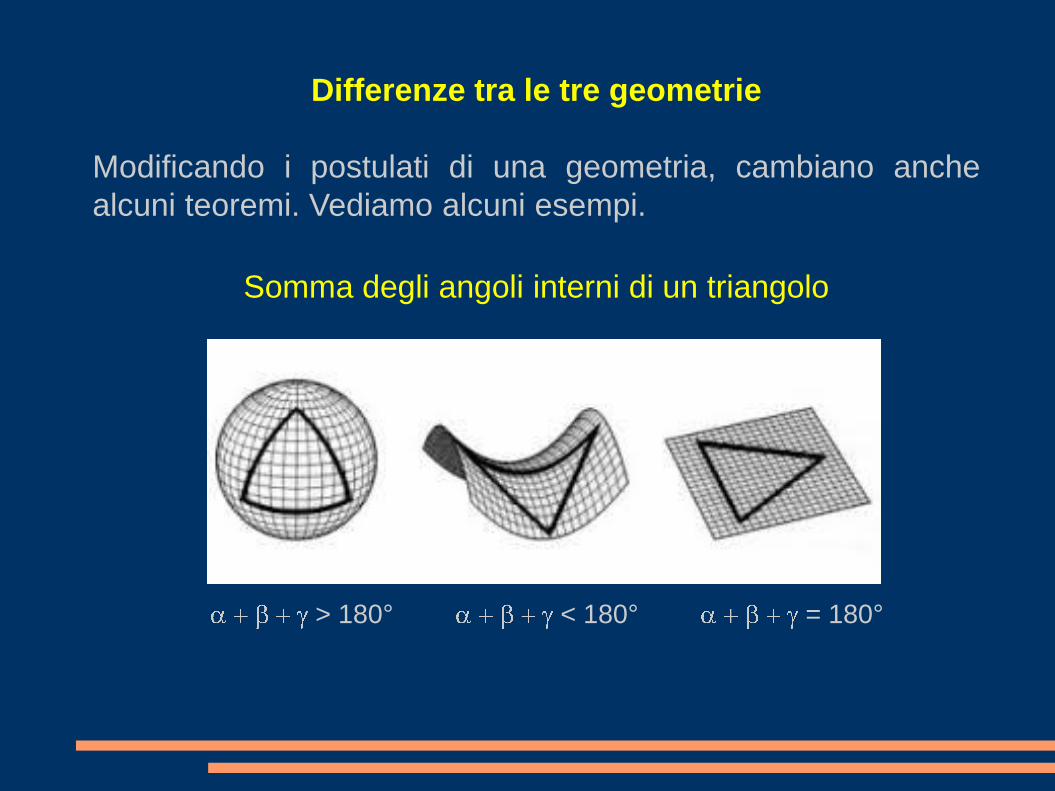
Differenze tra le tre geometrie
Modificando i postulati di una geometria, cambiano anche
alcuni teoremi. Vediamo alcuni esempi.
Somma degli angoli interni di un triangolo
> 180° < 180° = 180°
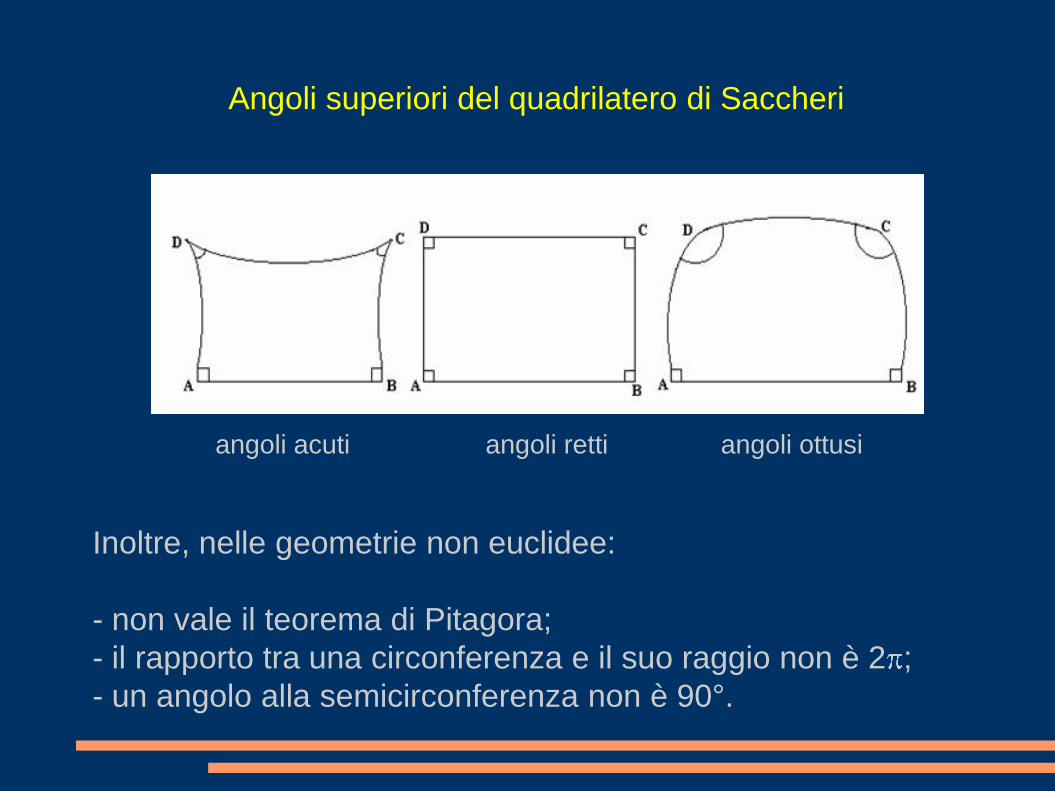
Angoli superiori del quadrilatero di Saccheri
angoli acuti angoli retti angoli ottusi
Inoltre, nelle geometrie non euclidee:
- non vale il teorema di Pitagora;
- il rapporto tra una circonferenza e il suo raggio non è 2 ;
- un angolo alla semicirconferenza non è 90°.
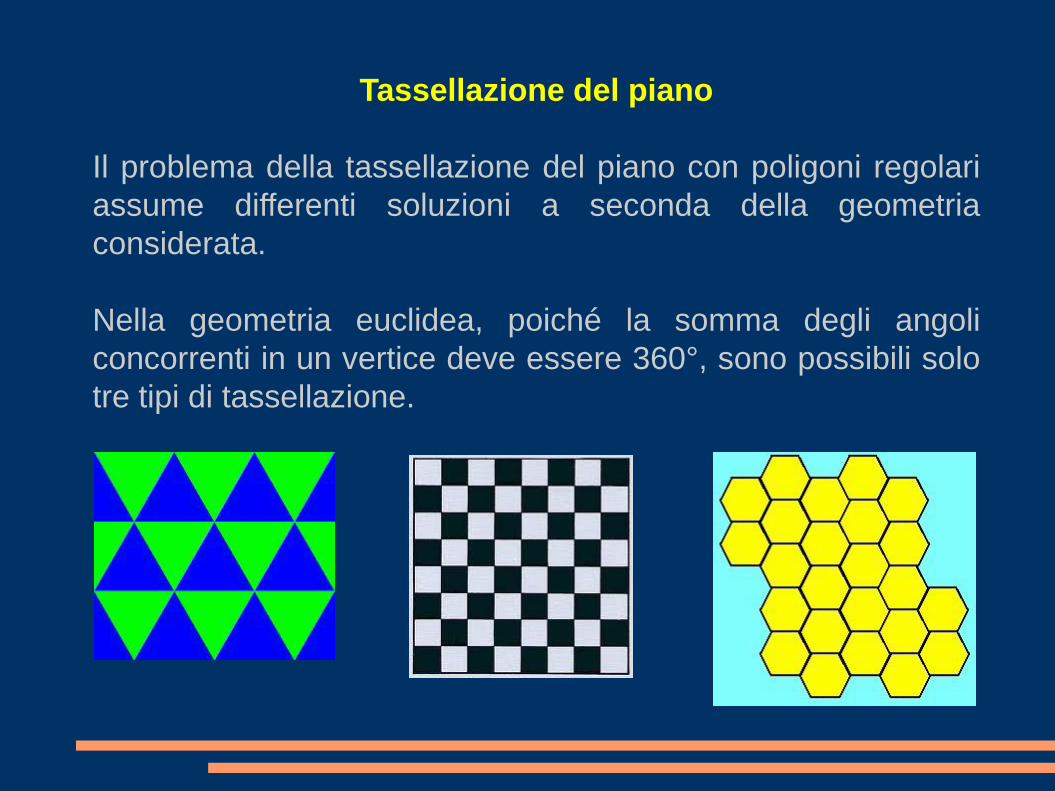
Tassellazione del piano
Il problema della tassellazione del piano con poligoni regolari
assume differenti soluzioni a seconda della geometria
considerata.
Nella geometria euclidea, poiché la somma degli angoli
concorrenti in un vertice deve essere 360°, sono possibili solo
tre tipi di tassellazione.
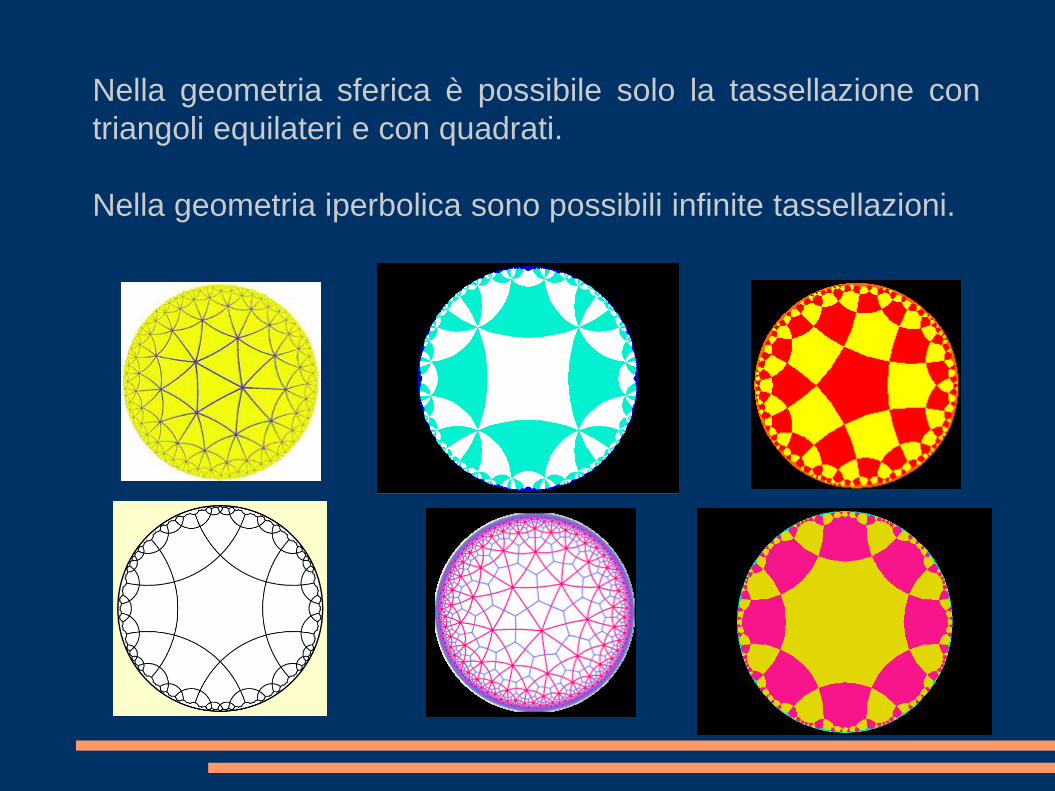
Nella geometria sferica è possibile solo la tassellazione con
triangoli equilateri e con quadrati.
Nella geometria iperbolica sono possibili infinite tassellazioni.