INTRODUZIONE ALL‟ANALISI DEI...
89
Università degli Studi di Pavia Dipartimento di Informatica e Sistemistica INTRODUZIONE ALL‟ANALISI DEI SISTEMI Dipartimento di Informatica e Sistemistica Università di Pavia
Transcript of INTRODUZIONE ALL‟ANALISI DEI...

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
INTRODUZIONE ALL‟ANALISI
DEI SISTEMI
Dipartimento di Informatica e Sistemistica
Università di Pavia

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciIl concetto di sistema
Un sistema è un‟entità caratterizzata da alcune grandezze interne x(t),
supposte osservabili, la cui evoluzione è regolata da alcune grandezze
esterne u(t) mediante una equazione differenziale del tipo:
u(t)x(t)
x(t)
Modello Dinamico )(),()(
tutxfdt
tdx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modelli dinamici
Modelli matematici
in grado di descrivere il comportamento degli oggetti o dei
fenomeni considerati anche quando le variabili in gioco non sono
tutte costanti nel tempo
n
Ru
Rx
m
nvariabili di stato
variabili di ingresso
ordine del sistema
)(),()(
tutxfdt
tdx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
esempi

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Serbatoio a efflusso forzato
h
qi
qo
S
h = livello
S = area della sezione (costante)
qi = portata volumetrica d’ingresso (imposta)
qo = portata volumetrica d’uscita (imposta)
Equazione di bilancio di massa
)()(1)(
tqtqSdt
tdhoi

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
22
22
oambpamb vPgh
vP
Serbatoio a efflusso libero
h
qi
qo
S
Da cui
Equazione di Bernulli
Poiché si ottiene0pv
)(2)( tghtvo
)(2)( tghktqo
k = area sezione efflusso

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
)()(1)(
tqtqSdt
tdhoi
)(2)( tghktqo
Serbatoio a efflusso libero
h
qi
qo
S
h = livello
S = area della sezione (costante)
qi = portata volumetrica d’ingresso
k = area sezione efflusso
Dall‟equazione di Bernoulli
Equazione di bilancio di massa

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Serbatoio a efflusso libero
h
qi
qo
S
h = livello
S = area della sezione (costante)
qi = portata volumetrica d’ingresso
k = area sezione efflusso
Dall‟equazione di Bernoulli
Equazione di bilancio di massa
)(2)( tghktqo
)(2)(1)(
tghktqSdt
tdhi

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Circuito elettrico
Equazione del condensatore
Equazione della resistenza
RC
tv
RC
tvtv
gcc
)()()(
Riv
ivC
R
c
Legge di Kirchoff‟s alla maglia
cccg vvCRviRv
Cgv
cv
R Rv

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Economia nazionaleun modello keynesiano - I
Siano:
Y = prodotto nazionale lordo
C = consumi delle famiglie
I = investimenti delle imprese, della pubblica amministrazione,
al netto delle imposte, le esportazioni al netto delle
importazioni
Risulta
Y = C + I

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Economia nazionaleun modello keynesiano - II
I consumi delle famiglie aumentano all‟aumentare del prodotto
nazionale lordo
Aumentando gli investimenti aumentano
anche i consumi e cresce il prodotto nazionale
lordo. Se le famiglie consumano molto,
tenderanno a diminuire il consumo in futuro
con un coefficiente opportuno a.
a e b sono opportuni
coefficienti positivi. Fu la ricetta per uscire dalla
grande depressione dopo il
„29. Infatti, secondo le teorie
keynesiane,il livello di
occupazione è dettato dal
prodotto nazionale lordo
)()()()()(
tbItCabtbYtCadt
tdC

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modelli di crescita delle popolazioniModello di Malthus (1798) - crescita esponenziale
x = numero degli individui (concentrazione)
b = tasso di nascita
d = tasso di mortalità
Modello di Verhulst (1848) - “logistic growth” - crescita limitata
K = “capacità della popolazione” dovuta a limiti nella disponibilità
di alimento (substrato), a limiti di spazio, ad altri fattori che
impediscono la crescita
)()()(
tdxtbxdt
tdx
K
txtbx
dt
tdx )(1)(
)(
)0()( )( xetx tdb

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modelli di crescita delle popolazioniModello 1- crescita esponenziale
Modello più semplice: soluzione esplicita ma non realistica
Modello 2 - crescita limitata
)()()(
tdxtbxdt
tdx
K
txtbx
dt
tdx )(1)(
)(
)0()( )( xetx tdb
Modello più complesso: soluzione più difficile da calcolare ma maggior precisione
Qual è il migliore? Dipende dalle necessità

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Logistic growth
Inserire figura
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t
x/K b=1

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del II ordine
esempi

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Carrello
x
F
Carrello collegato a una molla e un
pistone con coefficienti k ed h
rispettivamenteM
nterisultaFMa
Entrambi creano delle forze
d‟attrito al moto
La forza di attrito dovuta alla
molla è proporzionale alla
posizione, mentre quella dovuta al
pistone è proporzionale alla
velocità
)(txkFmolla
)(txhFpistone

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Carrello
x
F
Supponendo che ci sia una forza di
attrito proporzionale alla posizione
e una proporzionale alla velocità
risulta
M
)()()()( tFtxhtkxtxM
è modello il , , , Posto 21 Fuxxxx
)()( 21 txtx
)()()(1
)( 212 tuthxtkxM
tx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolo
l
M
u
braccioFC
FMa tot
Il momento del pendolo viene eguagliato alla coppia
totale (contributo della forza peso + coppie)
Il pendolo è soggetto a una coppia motrice u e
a una coppia d‟attrito proporzionale alla
velocità angolare che si oppone al moto.
)(
)()(
tkC
tsenlMgCtsenMgF
attrito
Fpeso

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolo
l
M
u
)()())(( tutktsenlMgCtot
totCMal
alsls
)()())(()( tutktsenlMgtMll
)()())(()(2 tutktsenlMgtMl

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolo
l
M
u
)()())(()(2 tutktglMsintMl
Posto il modello è 21 , xx
)(1
)())(()(
)()(
22212
21
tuMl
txMl
ktxsin
l
gtx
txtx
Supponendo che ci siano una coppia motrice u
e una coppia di attrito proporzionale alla
velocità angolare, risulta

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericadinamica delle colonie batteriche (alghe, lieviti, batteri,
protozoi) utilizzate per la produzione di enzimi
substrato
biomassa
d
d
x = concentrazione della biomassa
S = concentrazione del substrato
d = portata specifica alimentazione substrato
Reattore a volume costante

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericadinamica delle colonie batteriche (alghe, lieviti, batteri,
protozoi) utilizzate per la produzione di enzimi
substrato
biomassa
d
dReattore a volume costante
Nel substrato l‟alimento viene trasformato con una velocità
nel prodotto. Il tasso con cui viene trasformato dipende dalla
concentrazione x. In ingresso e in uscita abbiamo un quantitativo
proporzionale a d (ed eventualmente a una definita) .
1k
iS

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modello di Monod (1914)
(o di Michaelis-Menten)Il tasso di crescita R dipende dalla concentrazione S dell‟alimento
(substrato)
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1curva di Monod
S/Ks
R/m
o
SK
SSRR
S 0)(
Valore limite di R per
Cost. uguale a S per cui R=0.5
SK
0 S
0

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericamodello matematico
)()()(
)()(
)()()(
)()(
01
0
tSSdtxtSK
tSk
dt
tdS
tdxtxtSK
tS
dt
tdx
i
S
S
1k
Siconcentrazione dell’alimentazione del substrato
fattore di resa

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modello preda-predatoreLotka - Volterra
In un ecosistema si hanno due specie: prede e predatori.
Il tasso di crescita delle prede segue il modello di Verhulst
visto per la popolazione, inoltre vengono immesse prede
nell‟ecosistema secondo l‟andamento di una variabile u.
Il tasso di decrescita dei predatori è invece proporzionale
al numero di predatori presenti.
L‟interazione preda predatore è di tipo non lineare, con
coefficienti e .

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modello preda-predatoreLotka - Volterra
In un ecosistema a due specie, siano
x1(t) = numero di prede al tempo t
x2(t) = numero di predatori al tempo t
u(t) = immissione di prede al tempo t
e1 = tasso di crescita delle prede
e2 = tasso di decrescita dei predatori
k = capacità della popolazione delle prede
= coefficiente
= coefficiente
)()()()(
1)()( 211
111 tutxtxk
txtxtx
e
)()()()( 21222 txtxtxtx e

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamici e modelli matematici
• serbatoio a efflusso forzato
• serbatoio a efflusso libero
• circuito elettrico
• economia nazionale, modello keynesiano
• crescita delle popolazioni
• carrello
• pendolo
• cinetica batterica
• preda-predatore

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Utilità dei modelli dinamici
• Comprensione dei fenomeni
• Analisi
• Simulazione
• Progetto e ottimizzazione
• Diagnostica dei malfunzionamenti
• Progetto del controllore
• Addestramento operatore
• Prototipazione rapida
• ...

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciIl concetto di stato
Il vettore x(t) raccoglie quelle grandezze che, nel modello adottato,
descrivono completamente la situazione interna dell‟entità considerata.
u(t) x(t)
Una configurazione x(t0)=x0
può essere raggiunta a
seguito di diverse forme di
ingresso per i tempi t < t0 .
Lo stato memorizza in
qualche modo la
“storia” del sistema
)(),()(
tutxfdt
tdx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciclassificazione
Sistemi monovariabili, o multivariabili
SISO: una sola variabile di ingresso, una sola variabile di uscita
MIMO: più variabili di ingresso, più variabili di uscita
Sistemi propri e strettamente propri
la trasformazione di uscita (equazione algebrica).
Sia
Se l‟uscita dipende anche dall‟ingresso il sistema è detto proprio
Il sistema si dice strettamente proprio (puramente dinamico) se
)(),( tutxgy
)(txgy

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciclassificazione
Sistemi non dinamico
Sistemi invarianti e varianti nel tempo
Un sistema è detto variante nel tempo se f e/o g dipendono
esplicitamente dal tempo
Se sia f che g non dipendono esplicitamente da t il sistema è detto
tempo invariante o stazionario
)(tugy
ttutxgy
ttutxfdt
tdx
),(),(
),(),()(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Esempio sistema variante
x
FM
)()()()()( tFtxhtxtktxM
)()( tot
toektk
Si suppone che la costante elastica diminuisca esponenzialmente
nel tempo.

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciclassificazione
Sistemi liberi, o autonomi
L‟evoluzione dello stato dipende solo dalle condizioni iniziali,
altrimenti il sistema si dice forzato.
Sistemi lineari
)()(
txfdt
tdx
)()()(
tButAxdt
tdx
La dipendenza dallo stato e dall‟ingresso è lineare tramite le matrici
dei coefficienti mnnn RBRA ,, ,

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Classificazione dei sistemi
dinamici - esempi

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Serbatoio a efflusso forzato
Posto
x = h (livello)
u1 = qi (portata d’ingresso)
u2 = qo (portata d’uscita)
E’ un sistema lineare e forzato
tu
tu
SStxtx
2
1110)( UBXAX
)()(1
)( 21 tutuS
tx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Serbatoio a efflusso libero
Posto
x = h (livello)
u = qi (portata d’ingresso)
E’ un sistema non lineare e forzato
)(2)(1
)( tgxktuS
tx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Circuito elettrico
Posto
x = tensione sul condensatore
u = tensione del generatore
Sistema lineare e forzato
RC
tu
RC
txtx
)()()(
RCB
RCA
11

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Economia nazionale
Posto
x = C (consumi delle famiglie)
u = I (investimenti)
Sistema lineare e forzato
)()()()( tbutxabtx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Modelli di crescita della popolazione
Sistema lineare e libero Sistema non lineare e libero
K
txtRxtx
)(1)()(
)()()( txdbtx
)()( tRxtx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolo
Sistema non lineare e forzato
)(1
)())(()(
)()(
22212
21
tuMl
txMl
ktxsin
l
gtx
txtx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica batterica
Sistema non lineare e forzato
Posto
x1 = x (concentrazione biomassa)
x2 = S (concentrazione substrato)
u1 = d (portata specifica alimentazione substrato)
u2 = Si (concentrazione alimentazione substrato)
)()()()(
)()(
)()()(
)()(
221
2
2012
111
2
201
txtudtxtxK
txktx
txutxtxK
txtx
S
S

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Movimento dello stato
Dato l‟istante iniziale t0 , la funzione d‟ingresso u(t), t t0 , lo stato
iniziale x0, la soluzione x(t) del sistema di equazioni differenziali
è il movimento dello stato.
)(),()(
tutxfdt
tdx
000 ,()),(,,)( ttutxtttx .

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Traiettoria dello statoDefinisco traiettoria dello stato la proiezione del movimento sullo
spazio di stato.

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Movimento
libero
Movimento
forzato
t
t
tAttAdBuetxetx
0
0 )()()( )(
0
)(
Movimento dello stato sistemi lineari
Nei sistemi lineari il movimento è dato dalla formula di Lagrange
Nei sistemi lineari il movimento dello stato è determinato dalla
composizione (somma) del movimento libero (stato iniziale) con
quello forzato (ingresso lungo tutto l‟intervallo temporale).
Nel calcolo del movimento i due contributi possono essere
calcolati in maniera indipendente (sovrapposizione degli effetti)

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Principio di sovrapposizione
degli effetti
Si consideri ora il caso in cui l‟ingresso e lo stato iniziale siano
costituiti dalla stessa combinazione lineare degli ingressi e degli
stati iniziali precedenti
Allora
0
0
'')('',),('')(''')'(
')(',),(')(')'(
00
00
t
t
xtxtttButAxdt
tdx
xtxtttButAxdt
tdx
''''''
000)('')(')(''' ttt xxxtututu
0),('''''' tttxxx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamiciequilibrio
Dato un ingresso costante
si definiscono stati di equilibrio
quegli stati per cui
Gli stati di equilibrio sono quindi stati in cui il sistema, soggetto
all‟ingresso costante corrispondente, permane indefinitamente.
uxf ,0
xtx )(
utu )(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineariequilibrio
Per i sistemi lineari
posto
Per un generico ingresso , se A è invertibile lo stato di
equilibrio è
0u
uBAx 1
u
)()()(
tButAxdt
tdx
, l‟origine è un punto di equilibrio.

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Economia nazionaleequilibrio
Si noti che all‟equilibrio b/a = consumi/prodotto nazionale lordo
Inoltre all‟equilibrio risulta
k è il moltiplicatore di Keynes
IbCabYbCa )(0
ICY
kba
a
tiinvestimen
lordonazionaleprodotto

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Carrello
punti di equilibrio
uxhxkM
x
21
2
10
0
uxk
x
1
2 0 La forza elastica
equilibra
la forza esterna imposta

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
xdxSK
S
s
00
Cinetica battericapunti di equilibrio
)(0 01 SSdx
SK
Sk i
s
0x
iSS
Sk
SkSSdx s
i
10
)(
d
SdkS s
0

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericapunti di equilibrio
0x2.0S
1905.0x
1333.0S
2.0,35.0,4.0 1 is Skk
4.0,1.0 0 d

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolopunti di equilibrio
uMl
xMl
kxsin
l
g
x
2221
2
1)(0
0
0u
kx 1
Come formalizzare il concetto di
stabilità dell’equilibrio?
Equilibrio
“stabile”
Equilibrio
“instabile”

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamicistabilità dell’equilibrio - I
Uno stato di equilibrio x è asintoticamente stabile se tutti i
movimenti perturbati generati da stati iniziali x0 sufficientemente
prossimi a x rimangono in vicinanza di x e tendono
asintoticamente a x.
Quindi, e0, 0 tale che, per tutti gli stati iniziali x0 che
soddisfano la relazione
risulta
e
xx0
0,)( txtx e
0)(lim
xtxt

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi dinamicistabilità dell’equilibrio - II
Uno stato di equilibrio x è (semplicemente) stabile se tutti i
movimenti perturbati generati da stati iniziali x0 sufficientemente
prossimi a x rimangono in vicinanza di x.
Uno stato di equilibrio x è instabile se non è stabile

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Asintotica stabilità
x
e
x0
definisce la
regione di attrazione
Se è l‟intero spazio, il
punto di equilibrio è
globalmente asintoticamente
stabile
può anche essere
molto piccolo

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Stabilità dell‟equilibrio
Punti di equilibrio A e C
Equilibrio
Stabile
Punto di equilibrio B
Comunque perturbi il
sistema mi allontano
dall‟equilibrio
Equilibrio Instabile
x
dx
crescentetxdt
dxxx )(00
edecrescenttxdt
dxxx )(00

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolostabilità dell’equilibrio

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
equilibrio instabileequilibrio as. stabile
M=g=l=1
piano di fase
u(t)=0

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericastabilità dell’equilibrio

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
piano di fase
equilibrio instabile
equilibrio as. stabile
4.0,1.0,2.0,35.0,4.0 01 dSkk is

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Stabilità dell‟equilibrio
sistemi lineariMovimento di equilibrio
Movimento perturbato
La stabilità asintotica dipende dalla matrice A ed è una
proprietà del sistema
t
t
tAAt duBexex
0
)(
t
tAAt duBexetx0
)(
0)(
xxextx At 0)(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del I ordinestabilità
t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
x/x
(0)
a>0
a=0
a<0
La matrice A = a coincide con il suo autovalore
a > 0 sistema instabile
a = 0 sistema stabile
a < 0 sistema asintoticamente stabile
)()(
txadt
tdx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Economia nazionaleun modello keynesiano
La stabilità asintotica si ha per b < a
cioè se all’equilibrio i consumi sono
inferiori al prodotto nazionale lordo
)()()()()()(
tIbtCabtYbtCadt
tdC
)()()( tItCtY

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del II ordinestabilità
Come valutare il movimento dello stato e la stabilità quando il
sistema non è di primo ordine?
xxextx At 0)(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del II ordinestabilità
Ipotesi
La matrice A ha autovalori reali o complessi coniugati ma distinti
Le n soluzioni i dell’equazione caratteristica si dicono autovalori
di A.
0det AI

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del II ordinestabilità
Agli autovalori a1 e a2 corrispondono gli autovettori v1 e v2
21
1
2
111 ,0
0vvT
a
aTAT
tx
a
atxTAT
dt
txdtxA
dt
tdx ~
0
0~~
2
11
N.B. La corrispondenza tra x ed è biunivoca.x~
posto risulta:)(~)( 1 txTtx
2,1, ivavA iii

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del II ordinestabilità
00
00~
0
0~1
1
1
1
111 Txe
eTx
e
eTtxTtx
ta
ta
ta
ta
Il movimento libero dello stato è combinazione lineare di termini
esponenziali detti modi.
)0(~)(~)(~)(~
)0(~)(~)(~)(~
22222
11111
2
1
xetxtxadt
txd
xetxtxadt
txd
ta
ta

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi lineari del II ordinestabilità
Condizione necessaria e sufficiente perché il sistema sia asintoticamente
stabile è che Re(a1)<0 e Re(a2) <0

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi linearistabilità
I risultati precedenti possono essere estesi anche al caso di sistemi del
secondo ordine con autovalori coincidenti o a sistemi di ordine più
elevato
Condizione necessaria e sufficiente affinché un sistema lineare sia
asintoticamente stabile è che tutti i suoi autovalori abbiano parte reale
minore di zero
Condizione sufficiente affinché un sistema lineare sia instabile è che
almeno un autovalore abbia parte reale maggiore di zero
Se tutti gli autovalori hanno parte reale minore o uguale a zero, il
sistema può essere stabile o instabile, ma non asintoticamente stabile

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Carrellostabilità
)(10
)(
)(10
)(
)(
2
1
2
1tu
Mtx
tx
M
h
M
ktx
tx
2
4
2
2,1M
k
M
h
M
h
a
Re(a1,2)<0 per h,k>0 asintotica stabilità

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi non linearilinearizzazione - I
Dato il sistema
e l‟equilibrio
si ponga
uxf ,0
)(),()(
tutxfdt
tdx
ututu
xtxtx
)()(
)()(
ux,

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi non linearilinearizzazione - II
Sviluppando il sistema in serie di Taylor attorno a
e arrestando lo sviluppo al I termine si ottiene
cioè, posto
ux,
),( uxf
uxux du
uxfB
dx
uxfA
,,
),(,
),(
)()(
))(),(( txxdt
d
dt
tdxtutxf
)(),(
,
txdx
uxf
ux
)(),(
,
tudu
uxf
ux

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi non linearilinearizzazione - II
con
che è chiamato sistema linearizzato
)(),(
)(),(
),())((
,,
tudu
uxftx
dx
uxfuxf
dt
txxd
uxux
uxux du
uxfB
dx
uxfA
,,
),(,
),(
)()()(
tuBtxAdt
txd

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi non linearistabilità dell’equilibrio
Lo stato di equilibrio è asintoticamente stabile se tutti gli
autovalori del sistema linearizzato corrispondente hanno parte reale
minore di zero
Lo stato di equilibrio è instabile se almeno uno degli
autovalori del sistema linearizzato corrispondente ha parte reale
maggiore di zero
Si osservi che per la stabilità asintotica si ha in questo caso solo una
condizione sufficiente, per cui nel caso di autovalori con parte reale
minore o uguale a zero non si può concludere nulla. Sono necessarie
altre tecniche di analisi
ux,
ux,

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Pendolosistema linearizzato
)(10
)(
)(
)cos(
10
)(
)(
22
1
212
1tu
Mltx
tx
Ml
kx
l
gtx
tx
0 ,0 21 xx 0 , 21 xx equilibri
2
4
2
22
2,1l
g
Ml
k
Ml
k
a
2
4
2
22
2,1l
g
Ml
k
Ml
k
a
Re(a1,2)<0 eq. as. stab. Re(a1)<0, Re(a2)>0 eq. instab.
kx 1
0k 1k

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Cinetica battericasistema linearizzato
equilibrio instabile equilibrio asintoticamente stabile
equilibri
022.00563.02,1 ja
)(0
)(
)(
)(
)(
2
0101
2
00
tSdtS
tx
dSk
xkk
Sk
Sk
Sk
xkd
Sk
S
dt
tSddt
txd
i
S
S
S
S
S
S
iSS
x
0
d
dkS
Sk
SkSSdx
s
Si
0
10
033.0,1.0 21 aa

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
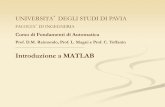
piano di fasex ' = ((mu y)/(ks + y)) x - d x
y ' = - ((k1 mu y)/(ks + y)) x + d (0.2 - y)
d = 0.1
k1 = 0.35
mu = 0.4
ks = 0.4
0 0.05 0.1 0.15 0.2 0.25 0.3
0
0.05
0.1
0.15
0.2
0.25
0.3
x
y
equilibrio instabile
equilibrio as. stabile

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Il problema del controllo
Dato il sistema
il problema del controllo consiste nell‟agire sulla variabile di ingresso
(o di controllo) u in modo da far assumere alle variabili di stato, o
a loro combinazioni (dette variabili di uscita) un dato andamento
nel tempo o un dato valore costante
)(),()(
tutxfdt
tdx

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello aperto - I
supponendo a<0 (sistema asintoticamente stabile), per far assumere
a x un dato valore (almeno a transitorio esaurito) si può porre x
che corrisponde al valore di regime di u(t) compatibile con
l‟equilibrio richiesto
Dato il sistema
xabutu 1)(
)()()(
tubtxadt
tdx
Regolatorex
xabu 1
Sistemau x)()(
)(tubtxa
dt
tdx
Legge di controllo

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
t
taat dxaexetx0
)( )()0()(
Sistemi del I ordine
controllo in anello aperto - II
Sostituendo l‟equazione del regolatore in quella del sistema si ottiene
e, poiché
xatxaxabbtxadt
tdx )()(
)( 1
xexxetx atat )0()(
tpereat 0
tperxtx )(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello aperto - III nel caso di sistemi non asintoticamente stabili (a0) la legge
di controllo precedente non può essere utilizzata
se il sistema vero è (errore di modello)
e si utilizza la legge di controllo
si ottiene
Errore a transitorio esaurito
atubtxdt
tdx ,0,)()(
)(
xabutu 1)(
tperxa
tx
)(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - IDato il sistema
si consideri il seguente schema di controllo in anello chiuso
SistemaRegolatore proporzionalex u x
in cui la legge di controllo è
0,)()()(
atubtxadt
tdx
)()()(
tubtxadt
tdx)()( tektu p
)()()( txkxktektu ppp
xxe

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - II
Utilizzando l‟equazione del regolatore in quella del sistema si ottiene
E‟ sempre possibile scegliere kp in modo da rendere asintoticamente
stabile il sistema in anello chiuso ( )
Il movimento dello stato del sistema retroazionato è
0 pbka
xbktxbkadt
tdxpp )(
)(
t
p
tbkatbkadbkexetx pp
0
))(()()0()(

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - III
Per l‟asintotica stabilità del sistema retroazionato
cioè (con il segno opportuno per
avere l‟asintotica stabilità)
Tuttavia, per
fisicamente poco realistico
xbkbka
ex
bka
bkxetx p
p
tbka
p
ptbkap
p
)()(
)0()(
tperx
bka
bktx
p
p)(
pkperxtx )(
pk
)0()0( xxku p

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - IV
Sistema
Regolatore proporzionale
x u x
Regolatore integrale
Si consideri il regolatore più complesso
Equazioni del regolatore
)()()(
tubtxadt
tdx
)(tek p
t
i dek0
)(
)()()(
)()(
tvktektu
tedt
tdv
ip
xxe

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - V
Sistema in anello chiuso
condizione di stabilità asintotica: autovalori della matrice A con parte
reale minore di zero
xbk
tv
txbkbka
dt
tdvdt
tdx
pip
1)(
)(
01)(
)(
0
0
i
p
bk
abk

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Sistemi del I ordine
controllo in anello chiuso - VI
Movimento dello stato
e, per la asintotica stabilità
errore a transitorio esaurito nullo
il controllo si assesta automaticamente sul valore richiesto
xbk
eAxbk
Av
xe
tv
tx pAtpAt
11)0(
)0(
)(
)(11
xbk
ax
xbk
Atv
tx
i
p
1)(
)(1
per t

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Controllo in anello chiuso
prestazioni
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
t
x
a=1 (sistema instabile), b=1
1x
)(8
)(4
)(2
verdekk
rossokk
blukk
ip
ip
ip

Università degli Studi
di Pavia
Dipartimento di
Informatica e Sistemistica
Il problema del controlloconclusioni
se il sistema in anello aperto è asintoticamente stabile e
perfettamente noto, il controllo in anello aperto consente di
ottenere le prestazioni desiderate
in controllo in anello chiuso consente di stabilizzare sistemi
instabili, di ottenere stabilità, errore a transitorio esaurito nullo, e
le prestazioni dinamiche desiderate
esiste una teoria generale che consenta di trattare in modo
sistematico sistemi di ordine superiore al primo