
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI … · del campione corrente e degli M campioni passati...
30
INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO Strutture realizzative di una FdT Strutture realizzative di una FdT Prof. Carlo Rossi DEIS - Università di Bologna Tel: 051 2093020 email: [email protected]
Transcript of INGEGNERIA E TECNOLOGIE DEI SISTEMI DI … · del campione corrente e degli M campioni passati...

INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO
Strutture realizzative di una FdTStrutture realizzative di una FdT
Prof. Carlo RossiDEIS - Università di Bologna
Tel: 051 2093020email: [email protected]
Strutture FdT
Introduzione
• Un sistema tempo discreto LSI è completamente specificato dalla sua risposta all’impulso o equivalentemente dalla sua FdT (Z-trasformata della risposta all’impulso)
• Per realizzazione di una FdT intendiamo un algoritmo che applicato alla sequenza di ingresso produce la sequenza di uscita
• Esistono infinite realizzazioni, tutte idealmente equivalenti• Quando l’algoritmo viene implementato su un processore
digitale, esistono anche altri criteri da considerare– occupazione di memoria– tempo di esecuzione– sensibilità alla quantizzazione di coefficienti e variabili
• Da questo punto di vista, le differenti realizzazioni non sono più equivalenti
Strutture FdT
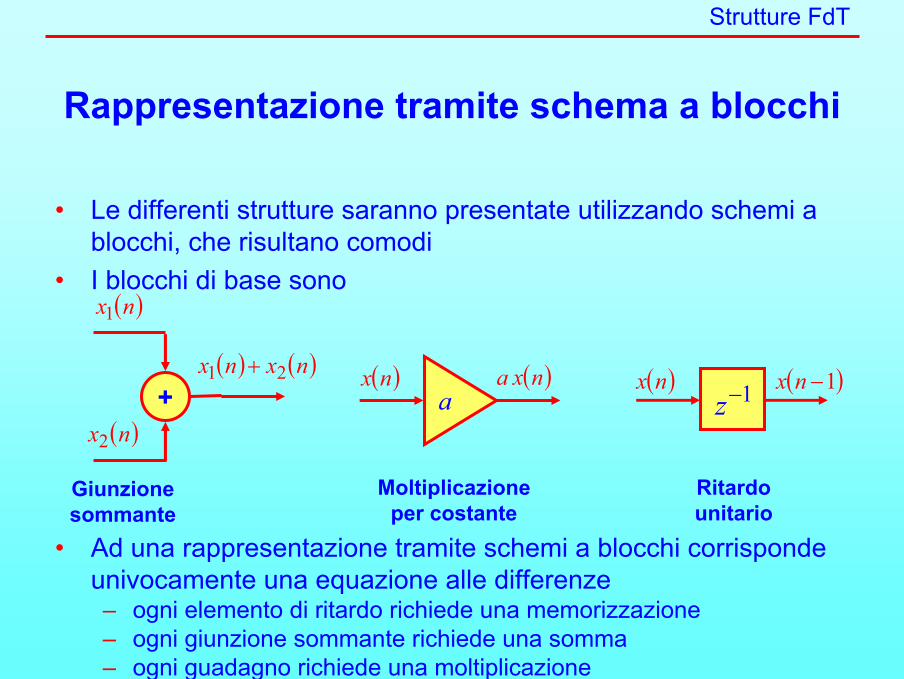
Rappresentazione tramite schema a blocchi
• Le differenti strutture saranno presentate utilizzando schemi a blocchi, che risultano comodi
• I blocchi di base sono
• Ad una rappresentazione tramite schemi a blocchi corrisponde univocamente una equazione alle differenze– ogni elemento di ritardo richiede una memorizzazione– ogni giunzione sommante richiede una somma– ogni guadagno richiede una moltiplicazione
+
( )nx1
( )nx2
( ) ( )nxnx 21 +
a( )nx ( )nxa
1−z( )nx ( )1−nx
Giunzionesommante
Moltiplicazioneper costante
Ritardounitario
Strutture FdT
Sistemi FIR (Finite Impulse Response)
• Sono i sistemi LSI caratterizzati da una risposta all’impulso con un numero finito di campioni diversi da zero
• La sequenza di uscita è calcolata come combinazione lineare del campione corrente e degli M campioni passati dell’ingresso
( )
( ) ( ) ( ) ( ) ( )Mnxbnxbnxbbknxny
MnMnb
nh
MM
kk
n
−++−+=−=
≥≤≤
=
∑=
…1
00
100
Strutture FdT
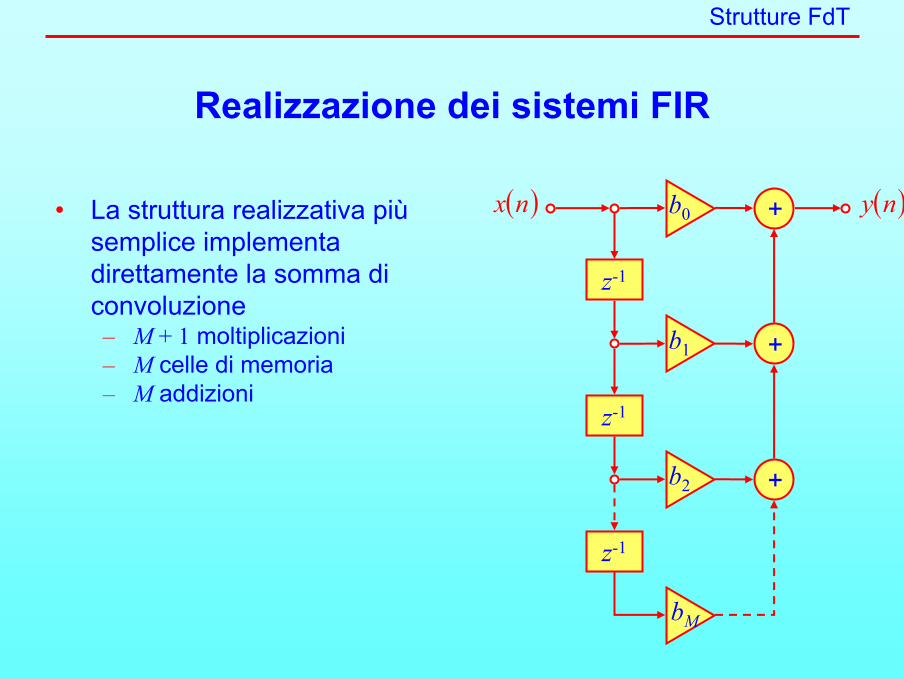
Realizzazione dei sistemi FIR
• La struttura realizzativa più semplice implementa direttamente la somma di convoluzione
– M + 1 moltiplicazioni– M celle di memoria– M addizioni
+b0
z-1
+b1
z-1
+b2
z-1
bM
( )nx ( )ny
Strutture FdT
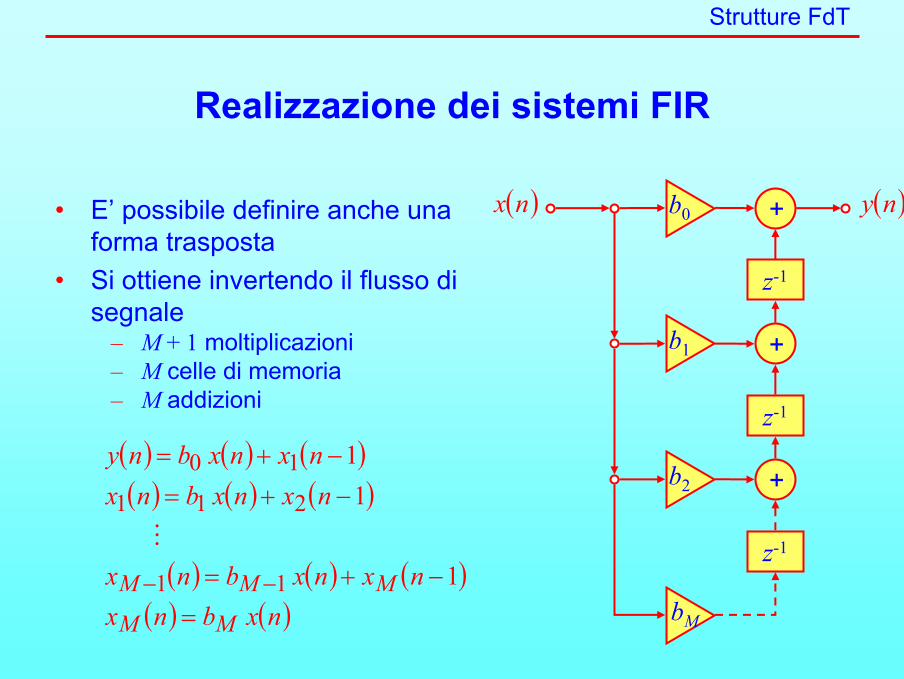
Realizzazione dei sistemi FIR
• E’ possibile definire anche una forma trasposta
• Si ottiene invertendo il flusso di segnale
– M + 1 moltiplicazioni– M celle di memoria– M addizioni
+b0
z-1
+b1
z-1
+b2
z-1
bM
( )nx ( )ny
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( )nxbnx
nxnxbnx
nxnxbnxnxnxbny
MM
MMM=
−+=
−+=−+=
−− 1
11
11
211
10
Strutture FdT
Realizzazione di FdT a fase lineare
• FdT con andamento di fase lineare sono caratterizzate da avere la risposta impulsiva simmetrica o antisimetrica
• Può essere sfruttato per ridurre il numero delle moltiplicazioninecessari
• Per una FdT con risposta impulsiva simmetrica si può ricavare
a cui è possibile associare lo schema a blocchi corrispondente• E’ anche possibile definire la forma trasposta associata
( ) ( ) ( ) ( ) ( )( ) ( )[ ] ( ) ( )[ ] …
…++−+−+−+=
++−+−+−+= −11
11
10
110MnxnxbMnxnxb
MnxbnxbMnxbnxbny MM
Strutture FdT
Realizzazione di sistemi IIR
• Nel seguito si parlerà di realizzazioni o forme canoniche. Definiscono delle regola standard per la realizzazione di FdT
• Si considereranno inizialmente le forme canoniche basate sull’equazione alle differenze corrispondente alla FdT
• Successivamente si introdurranno anche forme canoniche nello spazio di stato
• Si parlerà di sistemi SISO. Estensione a sistemi MISO, SIMO e MIMO sono possibili per alcune delle forme canoniche
Strutture FdT
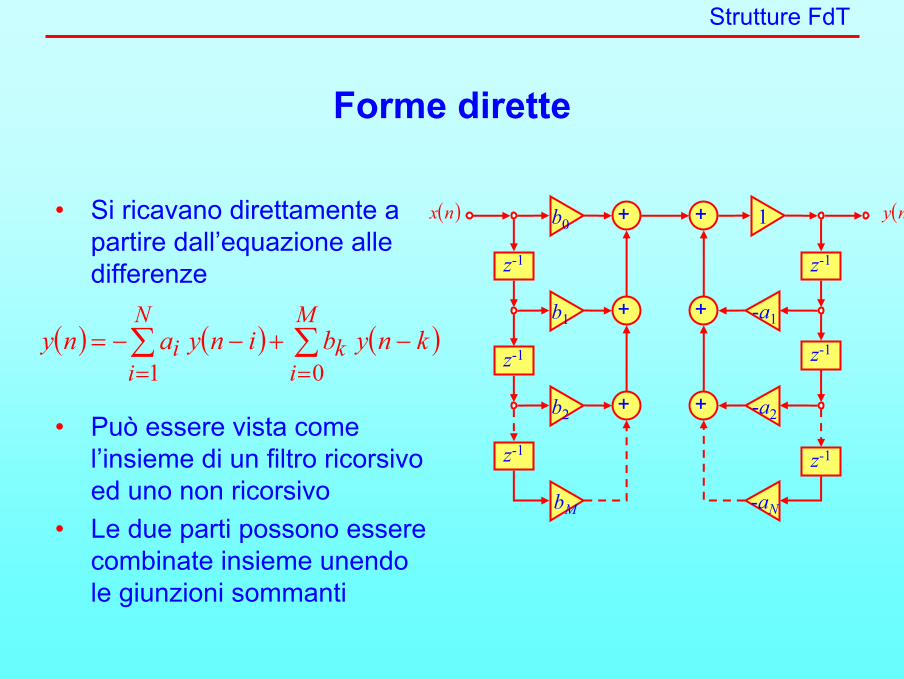
Forme dirette
• Si ricavano direttamente a partire dall’equazione alle differenze
• Può essere vista come l’insieme di un filtro ricorsivo ed uno non ricorsivo
• Le due parti possono essere combinate insieme unendo le giunzioni sommanti
( ) ( ) ( )∑∑==
−+−−=M
ik
N
ii knybinyany
01
-a1
+b0
z-1
+b1
z-1
+b2
z-1
bM
( )nx ( )ny1+
+
+ -a2
z-1
z-1
z-1
-aN
Strutture FdT
Forme dirette
-a1
+b0
z-1
+b1
z-1
+b2
z-1
bN
( )nx ( )ny1
-a2
z-1
z-1
z-1
-aN+
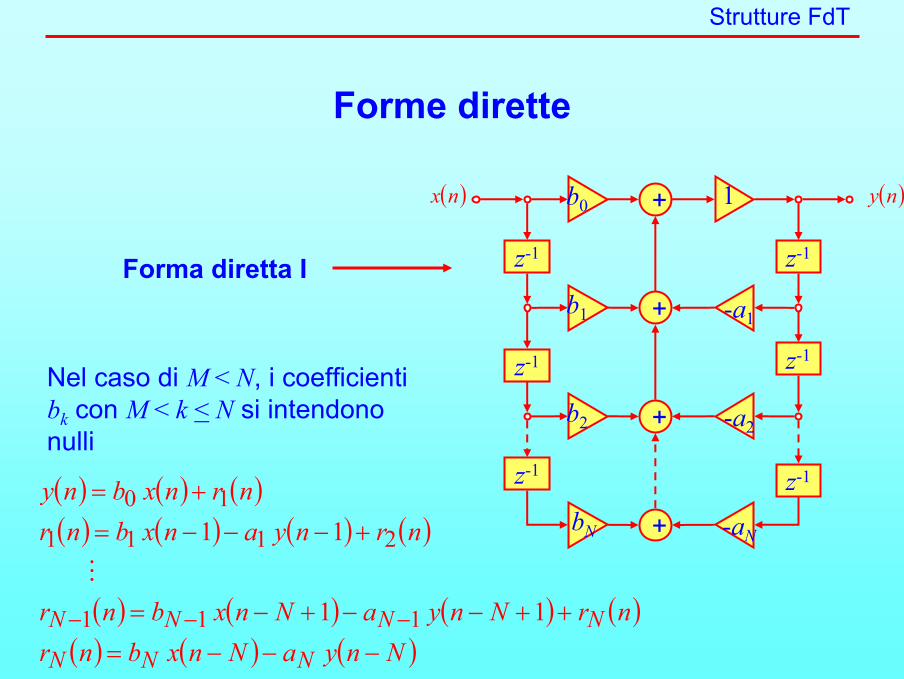
Nel caso di M < N, i coefficienti bk con M < k < N si intendono nulli
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( )NnyaNnxbnr
nrNnyaNnxbnr
nrnyanxbnrnrnxbny
NNN
NNNN−−−=
++−−+−=
+−−−=
+=
−−− 11
11
111
2111
10
Forma diretta I
Strutture FdT
Forme dirette
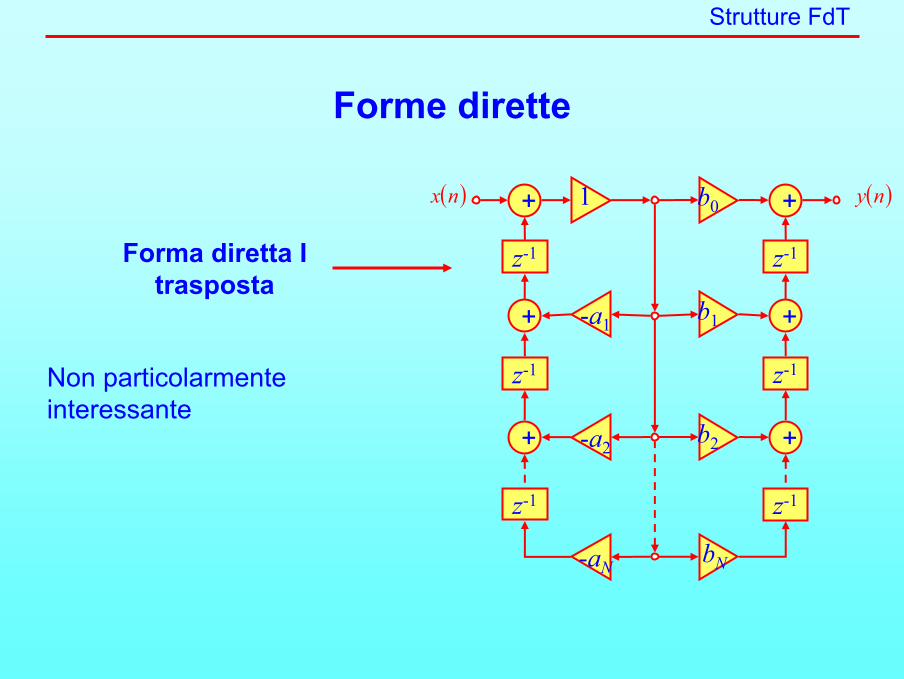
Non particolarmente interessante
Forma diretta Itrasposta
-a1
b0
z-1
b1
z-1
b2
z-1
bN
( )nx ( )ny1
-a2
z-1
z-1
z-1
-aN
+ +
+
+
+
+

Strutture FdT
Forme dirette
• Sempre a partire dallo schema elementare, le due sezioni ricorsiva e non possono essere scambiate tra di loro. In questo caso si ottengono due sezioni in cui gli elementi di ritardo hanno lo stesso ingresso e quindi possono unite. Si ottengono così delle forme canoniche con il numero minimo di celle di memoria
-a1
+b0
z-1
+b1
z-1
+b2
z-1
bM
( )nx ( )ny1+
+
+ -a2
z-1
z-1
z-1
-aN
Strutture FdT
Forme dirette
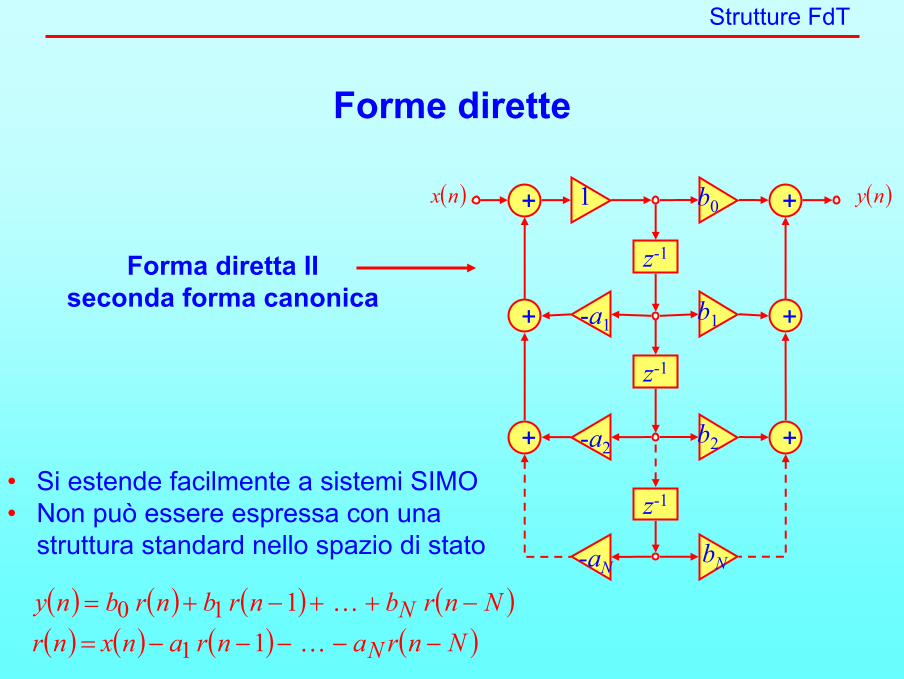
( ) ( ) ( ) ( )( ) ( ) ( ) ( )Nnranranxnr
Nnrbnrbnrbny
N
N−−−−−=
−++−+=……
11
1
10
Forma diretta IIseconda forma canonica -a1
b0
z-1
b1
z-1
b2
z-1
bN
( )nx ( )ny1
-a2
-aN
+ +
+
+
+
+• Si estende facilmente a sistemi SIMO• Non può essere espressa con una
struttura standard nello spazio di stato
Strutture FdT
Forme dirette
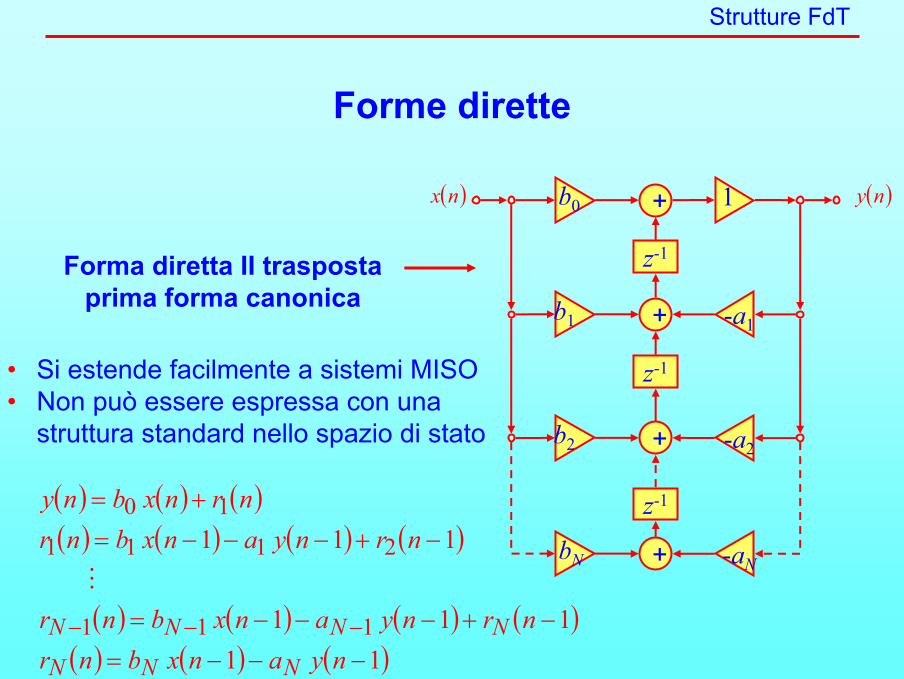
( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( )11
111
111
111
2111
10
−−−=−+−−−=
−+−−−=+=
−−−nyanxbnr
nrnyanxbnr
nrnyanxbnrnrnxbny
NNN
NNNN
Forma diretta II traspostaprima forma canonica
• Si estende facilmente a sistemi MISO• Non può essere espressa con una
struttura standard nello spazio di stato
-a1
1
z-1
b1
z-1
b2
z-1
bN
( )nx ( )nyb0
-a2
-aN
+
+
+
+
Strutture FdT
Forme dirette
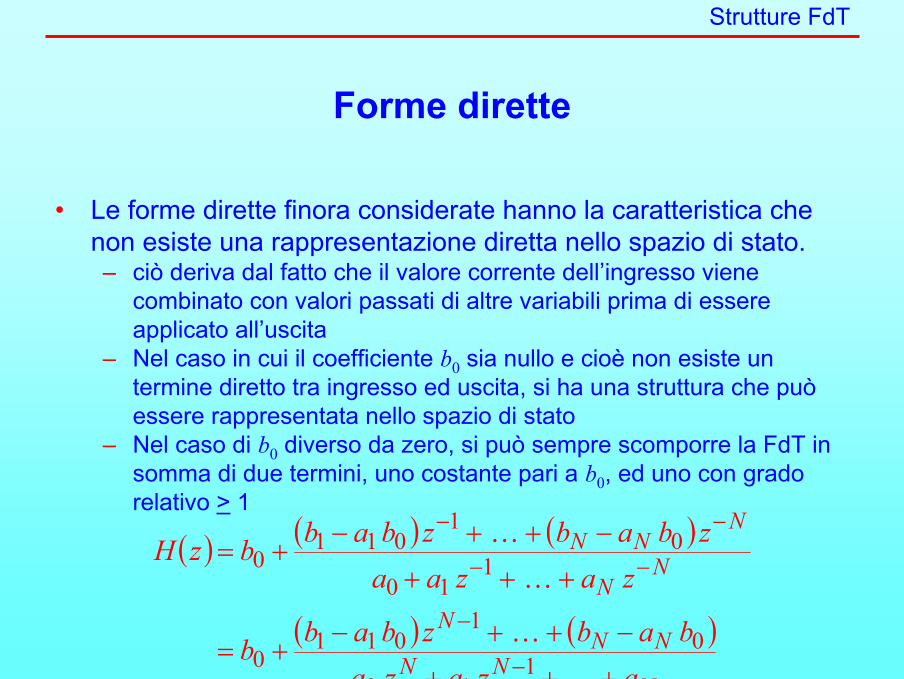
• Le forme dirette finora considerate hanno la caratteristica che non esiste una rappresentazione diretta nello spazio di stato. – ciò deriva dal fatto che il valore corrente dell’ingresso viene
combinato con valori passati di altre variabili prima di essere applicato all’uscita
– Nel caso in cui il coefficiente b0 sia nullo e cioè non esiste un termine diretto tra ingresso ed uscita, si ha una struttura che può essere rappresentata nello spazio di stato
– Nel caso di b0 diverso da zero, si può sempre scomporre la FdT in somma di due termini, uno costante pari a b0, ed uno con grado relativo > 1
( ) ( ) ( )
( ) ( )N
NNNN
N
NN
NNN
azazababzbabb
zazaazbabzbabbzH
+++
−++−+=
+++
−++−+=
−
−
−−
−−
……
……
110
01
0110
110
01
0110
Strutture FdT
Forme dirette
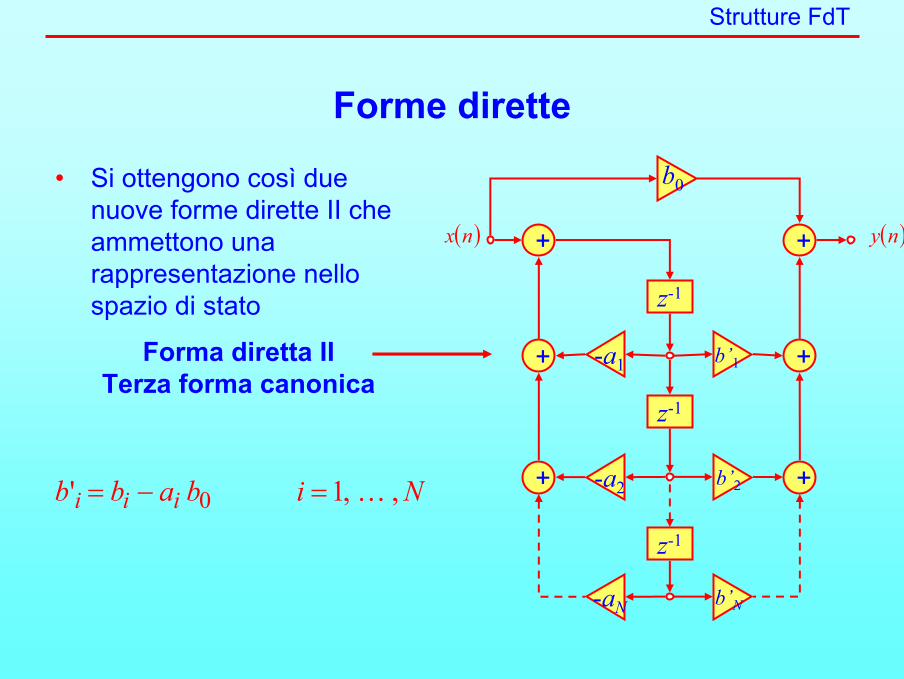
• Si ottengono così due nuove forme dirette II che ammettono una rappresentazione nello spazio di stato
-a1
b0
z-1
b’1
z-1
b’2
z-1
b’N
( )nx ( )ny
-a2
-aN
+ +
+
+
+
+
Forma diretta IITerza forma canonica
Nibabb iii ,,1' 0 …=−=

Strutture FdT
Forme dirette
Forma diretta II traspostaquarta forma canonica
-a1
z-1
b’1
z-1
b’2
z-1
b’N
( )nx ( )ny
b0
-a2
-aN
+
+
+
+
Nibabb iii ,,1' 0 …=−=
Strutture FdT
Forme dirette
• Tutte le forme dirette hanno la caratteristica di richiedere un numero di moltiplicazioni pari al massimo a 2N+1
• Scegliendo poi una forma canonica, si hanno N elementi di memoria
• Tra tutte le possibili rappresentazioni, sono quelle a costo minimo
• Dato che non forniscono gradi di libertà nella scelta dei coefficienti, non è comunque possibile ottimizzare il comportamento rispetto ad altri criteri, in particolare rispetto agli effetti indotti dalla rappresentazione con precisione finita deicoefficienti e della variabili in una implementazione digitale– sensitività della risposta rispetto ad imprecisione dei coefficienti– rumore di quantizzazione– comportamenti intabili e cicli limite
Strutture FdT
Strutture nello spazio di stato
• Offrono una flessibilità maggiore, ottenuta aumentando il costo della realizzazione
• Anche nel caso delle realizzazioni nello spazio di stato si ricercano delle forme canoniche
• L’espressione generale è data da
dove l’ingresso è indicato con u, lo stato con x e l’uscita con y. Nel caso MIMO sono tutti vettori di dimensioni appropriate, mentre nel caso SISO sia u che y sono scalari ed x è un vettore di dimensione N pari all’ordine della FdT.
• Nel seguito si farà riferimento di nuovo al caso SISO
( ) ( ) ( )( ) ( ) ( )nuDnxCny
nuBnxAnx+=
+=+1
Strutture FdT
FdT e forma di stato
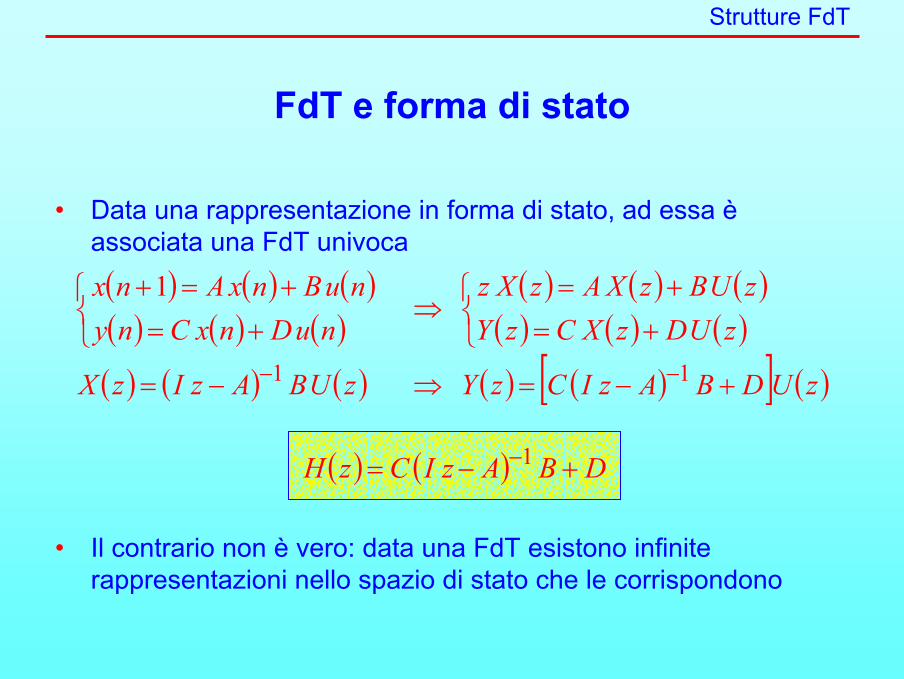
• Data una rappresentazione in forma di stato, ad essa è associata una FdT univoca
• Il contrario non è vero: data una FdT esistono infinite rappresentazioni nello spazio di stato che le corrispondono
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( ) ( )[ ] ( )zUDBAzICzYzUBAzIzX
zUDzXCzYzUBzXAzXz
nuDnxCnynuBnxAnx
+−=⇒−=
+=+=
⇒
+=+=+
−− 11
1
( ) ( ) DBAzICzH +−= −1
Strutture FdT
Trasformazioni di coordinate
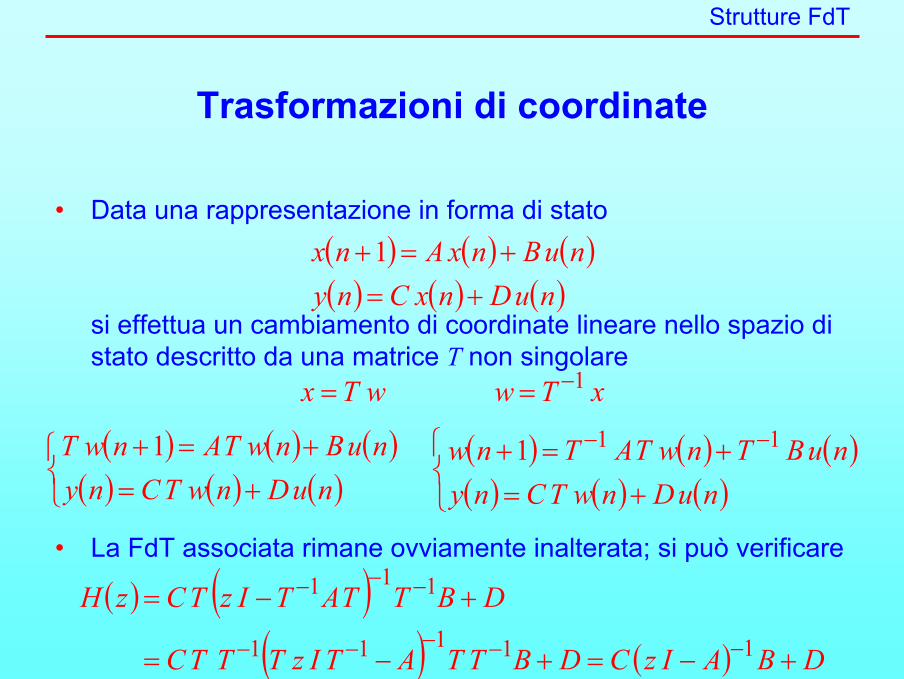
• Data una rappresentazione in forma di stato
si effettua un cambiamento di coordinate lineare nello spazio distato descritto da una matrice T non singolare
• La FdT associata rimane ovviamente inalterata; si può verificare
( ) ( ) ( )( ) ( ) ( )nuDnxCny
nuBnxAnx+=
+=+1
xTwwTx 1−==
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )
+=+=+
+=+=+ −−
nuDnwTCnynuBTnwTATnw
nuDnwTCnynuBnwTAnwT 1111
( ) ( )( ) ( ) DBAIzCDBTTATIzTTTC
DBTTATIzTCzH
+−=+−=
+−=
−−−−−
−−−
11111
111
Strutture FdT
Realizzazione
• Data una realizzazione in forma di stato, si può passare ad una equivalente (stessa FdT) tramite una trasformazione T
• Si può sfruttare tale grado di libertà per ottimizzare qualche altro criterio– numero minimo di parametri: corrisponderà alle forme canoniche
viste per la FdT– sensibilità rispetto ai parametri– . . .
• In realtà non affronteremo tali problemi, ma si presenteranno alcune forme canoniche nello spazio di stato e se ne presenteranno le caratteristiche
Strutture FdT
Strutture canoniche in forma compagna
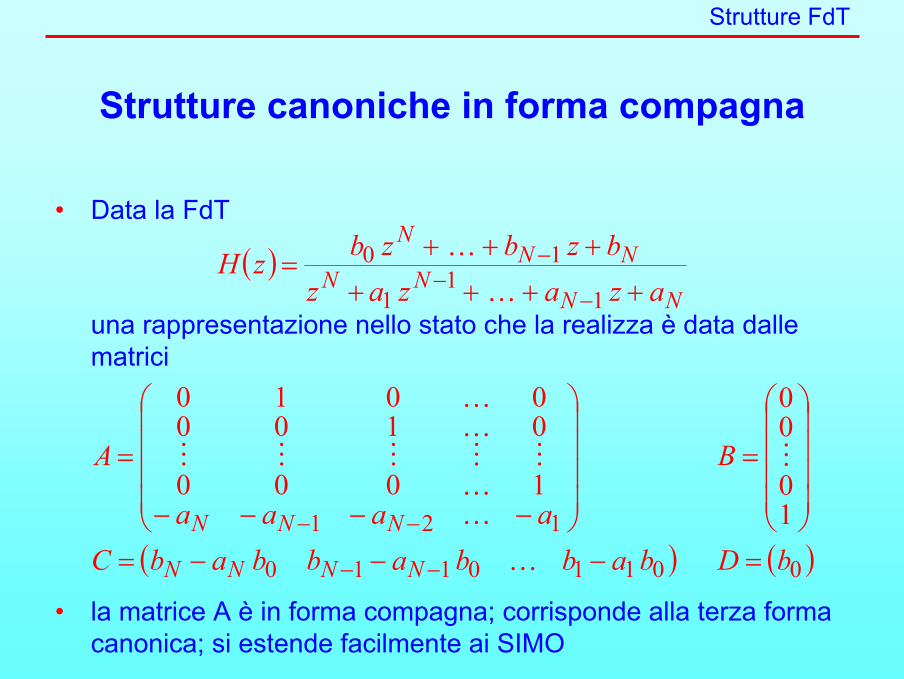
• Data la FdT
una rappresentazione nello stato che la realizza è data dalle matrici
• la matrice A è in forma compagna; corrisponde alla terza forma canonica; si estende facilmente ai SIMO
( )NN
NNNN
N
azazazbzbzbzH++++
+++=
−−
−
11
1
10…
…
( ) ( )00110110
121 10
00
1000
01000010
bDbabbabbabC
B
aaaa
A
NNNN
NNN=−−−=
=
−−−−
=
−−
−−
………
……
Strutture FdT
Strutture canoniche in forma compagna
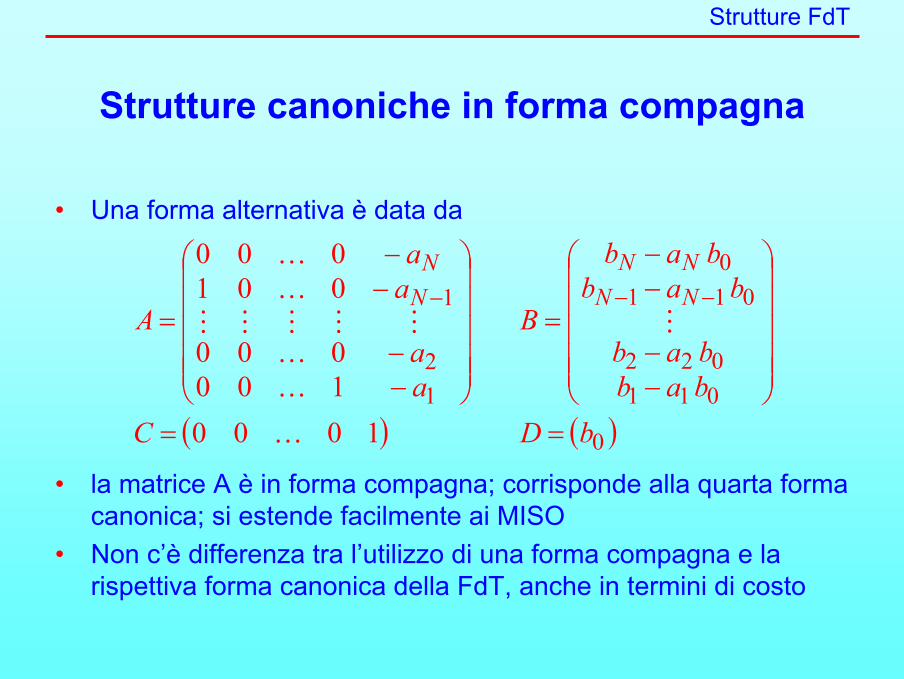
• Una forma alternativa è data da
• la matrice A è in forma compagna; corrisponde alla quarta forma canonica; si estende facilmente ai MISO
• Non c’è differenza tra l’utilizzo di una forma compagna e la rispettiva forma canonica della FdT, anche in termini di costo
( ) ( )0
011022
0110
12
1
1000100000
001000
bDCbabbab
babbab
B
aa
aa
ANNNN
NN
==
−−
−−
=
−−
−−
=−−−
………
……
Strutture FdT
Forma modale reale
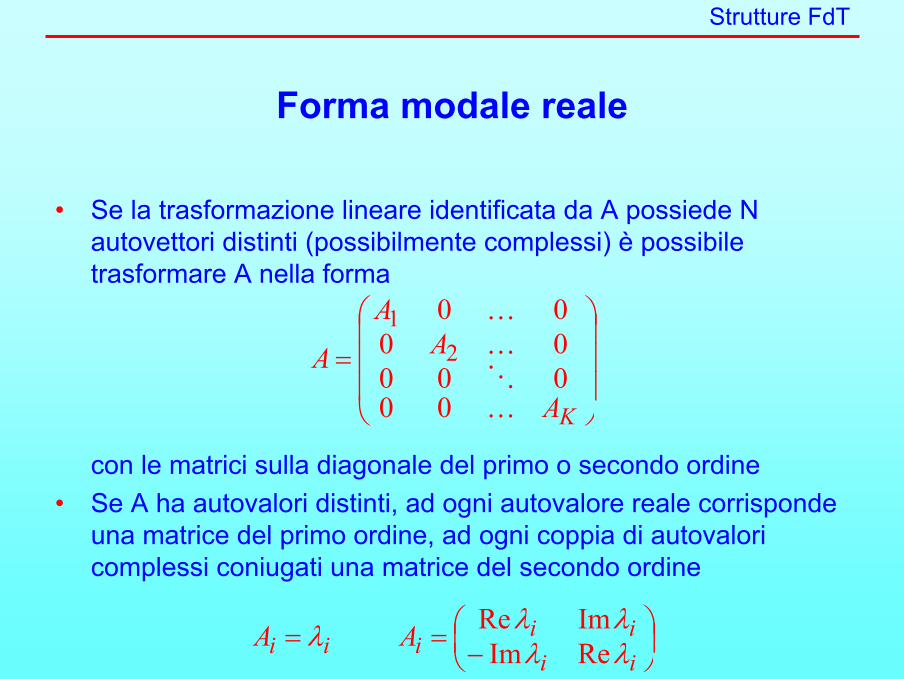
• Se la trasformazione lineare identificata da A possiede N autovettori distinti (possibilmente complessi) è possibile trasformare A nella forma
con le matrici sulla diagonale del primo o secondo ordine• Se A ha autovalori distinti, ad ogni autovalore reale corrisponde
una matrice del primo ordine, ad ogni coppia di autovalori complessi coniugati una matrice del secondo ordine
=
KA
AA
A
…
……
000000000
21
−==
iiii
iii AA λλλλλ ReIm
ImRe
Strutture FdT
Forma modale reale
• Le corrispondenti matrici B e C non hanno una forma particolare, e presentano tutti elementi diversi da zero
• La forma reale modale corrisponde alla rappresentazione in parallelo della FdT
• E’ estendibile la caso di sistemi MIMO• Nel caso di autovalori multipli, la forma reale modale di A può
ancora esistere se esistono N autovettori linearmente indipendenti
Strutture FdT
Dalla forma compagna alla reale
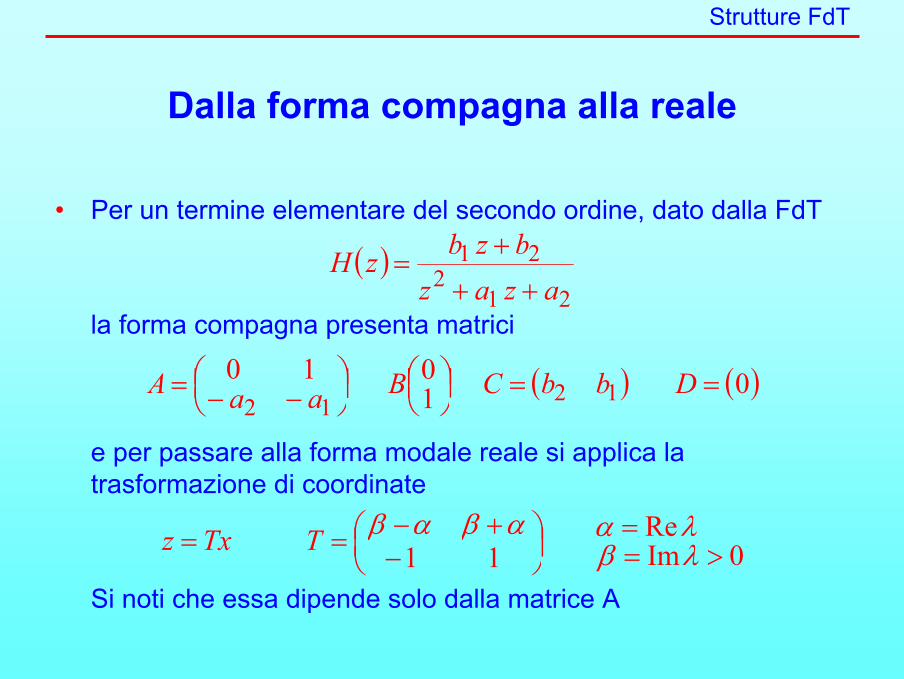
• Per un termine elementare del secondo ordine, dato dalla FdT
la forma compagna presenta matrici
e per passare alla forma modale reale si applica la trasformazione di coordinate
Si noti che essa dipende solo dalla matrice A
( )21
221
azazbzbzH++
+=
( ) ( )01010
1212==
−−= DbbCBaaA
0ImRe
11 >==
−+−== λβ
λααβαβTTxz
Strutture FdT
Dalla forma compagna alla reale
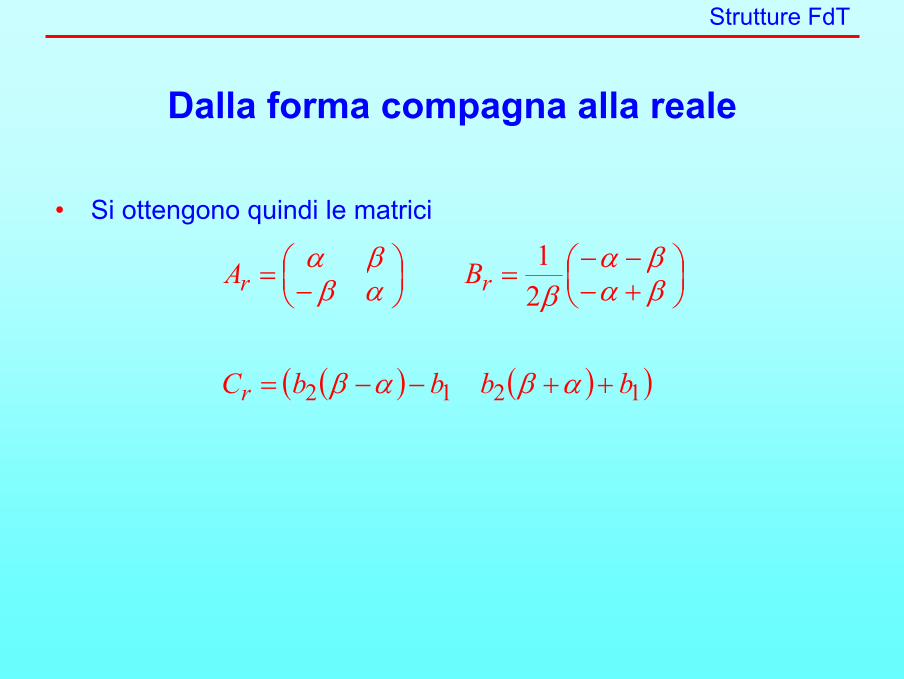
• Si ottengono quindi le matrici
( ) ( )( )1212
21
bbbbC
BA
r
rr
++−−=
+−−−=
−=
αβαβ
βαβα
βαββα

Strutture FdT
Forma di Schur
• Ogni matrice A è trasformabile nella forma di Schur
in cui le sottomatrici sulla diagonale sono le stesse della forma modale. E’ una forma applicabile al caso generico MIMO
=
KAXXAXXA
A
…
……
0000
0 21

INGEGNERIA E TECNOLOGIE DEI SISTEMI DI CONTROLLO
Strutture realizzative di una FdT Strutture realizzative di una FdT -- FineFine
Prof. Carlo RossiDEIS - Università di Bologna
Tel: 051 2093020email: [email protected]


















