Il sistema GPS - unipa.it · NAV igation System with Timing And Ranging Global Positioning System...
26
Il sistema GPS Il sistema GPS G. Lullo A. A. 2008-2009 CORSO DI ELETTRONICA DELLE TELECOMUNICAZIONI
Transcript of Il sistema GPS - unipa.it · NAV igation System with Timing And Ranging Global Positioning System...
Il sistema GPSIl sistema GPS
G. Lullo A. A. 2008-2009
CORSO DI ELETTRONICA DELLE TELECOMUNICAZIONI
NAVigation System with Timing And Ranging Global Positioning System
NAVSTAR-GPS
CaratteristicheCaratteristiche del del sistemasistema::
- Sistema basato sul “tempo di volo” di segnali radio a circa 1,5 GHz.
- Consente la determinazione della posizione (3-D) e del tempo.
- Copertura mondiale con utilizzo in terra, mare, cielo.
- Operatività in ogni condizione di tempo metereologico.
- Funziona sia con ricevitore fermo (trekking), sia in movimento ad alta
velocità (aerei militari).
- Abilitato agli usi militari (hi-res. < 1m) e civili (low res. ≈≈≈≈ 10–100m).
Il sistema GPSIl sistema GPS
Il sistema GPSIl sistema GPS
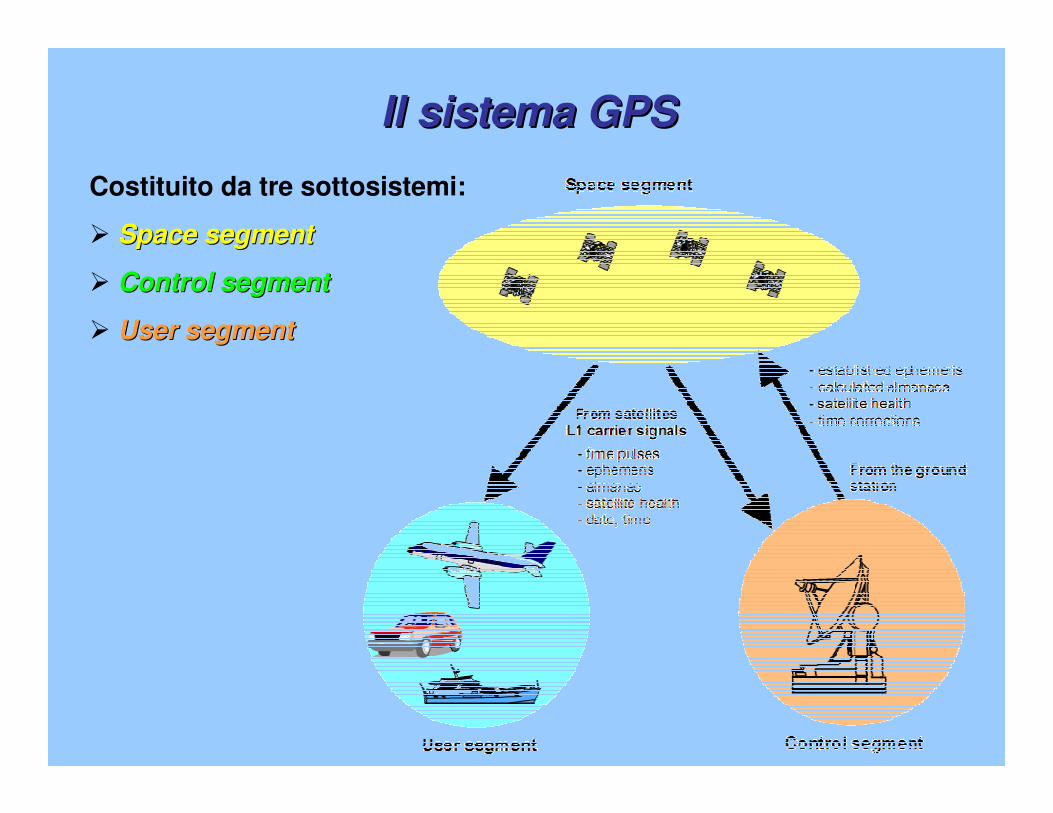
Costituito da tre sottosistemi:
� Space segmentSpace segment
� Control segmentControl segment
� User segmentUser segment

GPS GPS –– SpaceSpace segmentsegment
Costellazione di satelliti:
• 24 satelliti (Space Vehicles o SV).
• 6 piani orbitali (inclinazione 55°
rispetto l’equatore).
• 4 satelliti in ogni piano.
• Ridondanza: fino a 28 satelliti,
fino a 5 per piano.
• 20.200 km di altezza (periodo di
rivoluzione 12 ore).
• Velocità 13.600 km/h.
• Da ogni punto della Terra sono
sempre visibili almeno 4 satelliti.

GPS GPS –– SpaceSpace segmentsegment
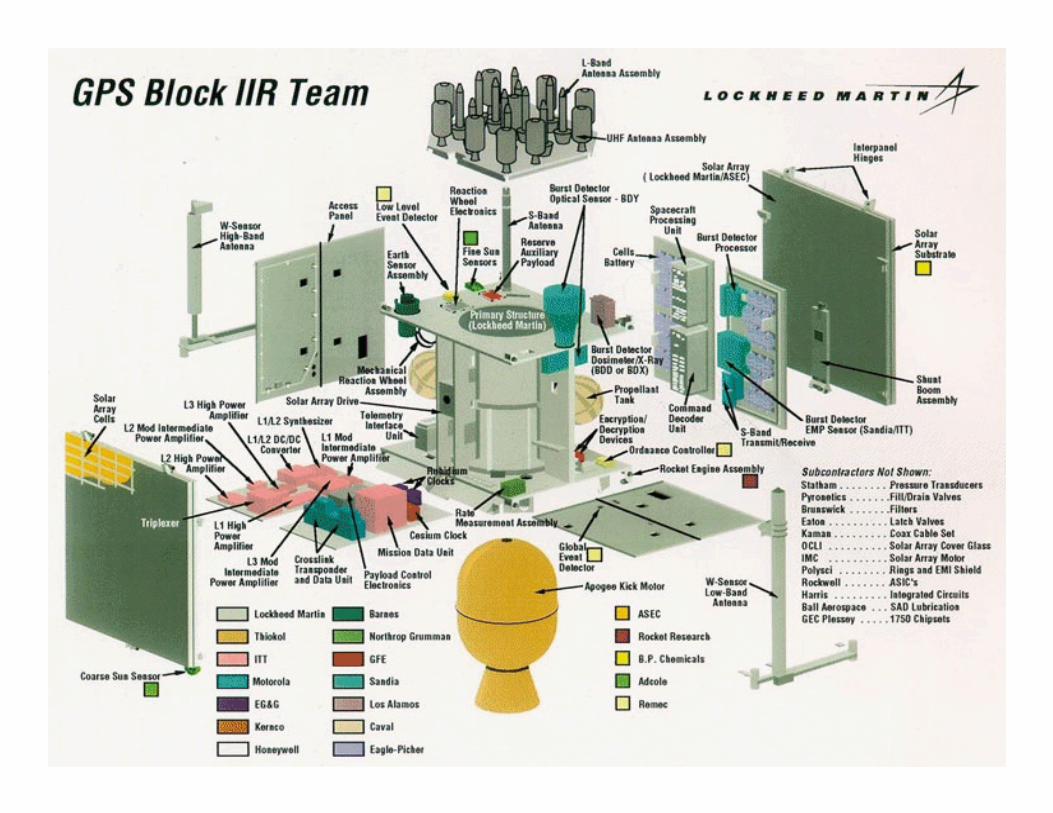
Caratterisiche dei satelliti:
• Fabbricati da Rockwell International,
di recente da Lockheed M&S.
• Peso in orbita: 1000kg.
• Dimensioni: 2 m (7 m pannelli incl.).
• Vita media: 7 – 10 anni.
• Fino a 4 orologi atomici al cesio o al
rubidio (errore: 1 sec./30k-1M anni).
• Trasmettono su due frequenze:
L1 (1575,42MHz) e L2 (1227,60MHz).
• Potenza trasmessa < 50W
GPS GPS –– ControlControl segmentsegment
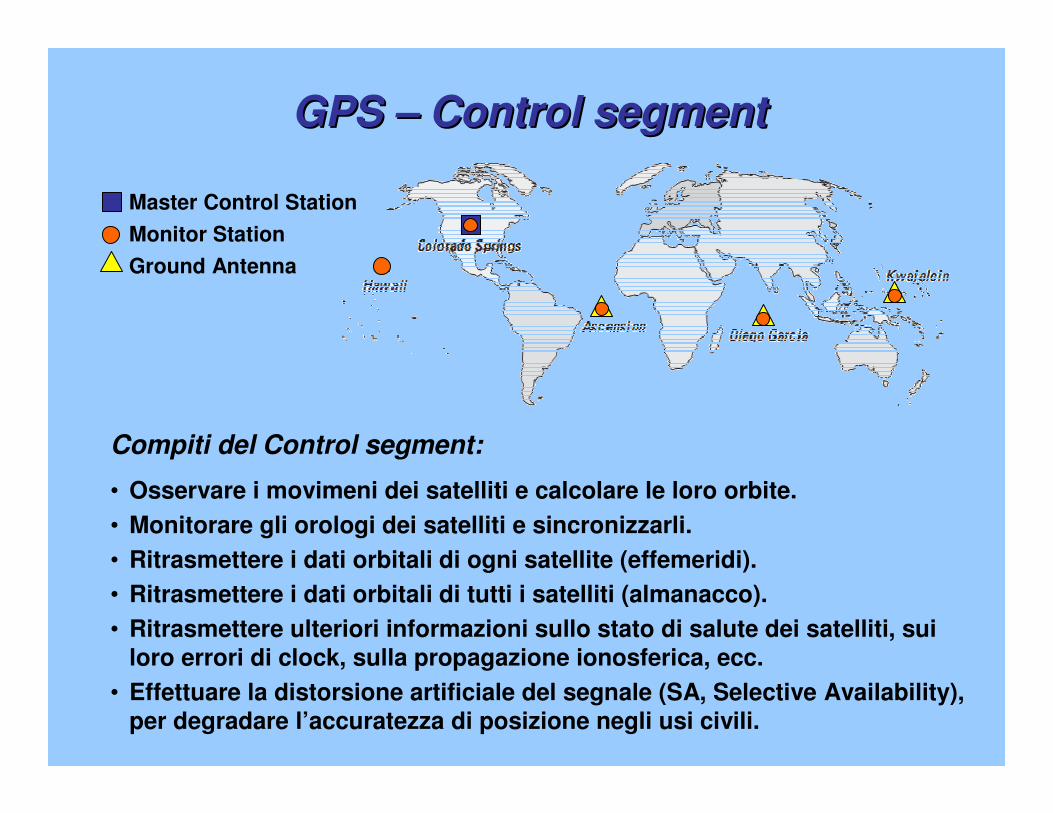
Master Control Station
Monitor Station
Ground Antenna
Compiti del Control segment:��������
• Osservare i movimeni dei satelliti e calcolare le loro orbite.
• Monitorare gli orologi dei satelliti e sincronizzarli.
• Ritrasmettere i dati orbitali di ogni satellite (effemeridi).
• Ritrasmettere i dati orbitali di tutti i satelliti (almanacco).
• Ritrasmettere ulteriori informazioni sullo stato di salute dei satelliti, sui loro errori di clock, sulla propagazione ionosferica, ecc.
• Effettuare la distorsione artificiale del segnale (SA, Selective Availability), per degradare l’accuratezza di posizione negli usi civili.

GPS GPS –– UserUser segmentsegment
Il costo del ricevitore è legato a:
• Tipo di antenna (patch, esterna, ecc.)
• Stabilità del clock
• Memoria disponibile
• Software (incluse mappe)
• Funzioni accessorie (WAAS, A-GPS,
ecc.)
Recreational$100 - $500
10 m accuracy
“Mapping grade”$3.000 - $25.000
accur. <1 m
Moduli O.E.M con antenne patch.$30 - $100, 10 m accuracy
Antenna elicoidale

GPS GPS –– Principio di funzionamentoPrincipio di funzionamento
• Si basa sulla misurazione del “tempo di volo” ∆∆∆∆t che il segnale RF
impiega a percorrere la distanza satellite-ricevitore.
• Se gli orologi del satellite e del ricevitore sono sincronizzati, si può
misurare questo tempo ∆∆∆∆t .
• ∆∆∆∆t > 67,3 ms (satellite allo zenith del ricevitore) + 3,33 µs/km.
• Nota la velocità della luce (c = 3 x 105 km/s), la distanza è: D = c ∗∗∗∗ ∆∆∆∆t

GPS GPS –– Principio di funzionamentoPrincipio di funzionamento
Se si conosce solo la distanza D da un satellite, il ricevitore può trovarsi in un punto qualsiasidella sfera di raggio D centrata sul satellite.
Se sono note le distanze D1 e D2 da due satelliti, il ricevitore può trovarsi in un puntoqualsiasi della circonferenza intersezione.
Se sono note le distanze D1, D2 e D3 da tresatelliti, il ricevitore può trovarsi in uno deidue punti ottenuti come intersezione.
Quindi bisogna conoscere le distanze del ricevitore da quattrosatelliti !

GPS GPS –– Principio di funzionamentoPrincipio di funzionamento
I quattro satelliti sono perfettamente sincronizzati (orologi atomici).
Il ricevitore GPS invece, per ragioni di costo, usa un semplice orologioal quarzo per cui conosce il tempo assoluto con un errore ∆∆∆∆t0 .
La distanza stimata dal satellite i-esimo (pseudorange) sarà allora:
PSRi = Di + c ∗∗∗∗ ∆∆∆∆t0
GPS GPS –– Principio di funzionamentoPrincipio di funzionamento
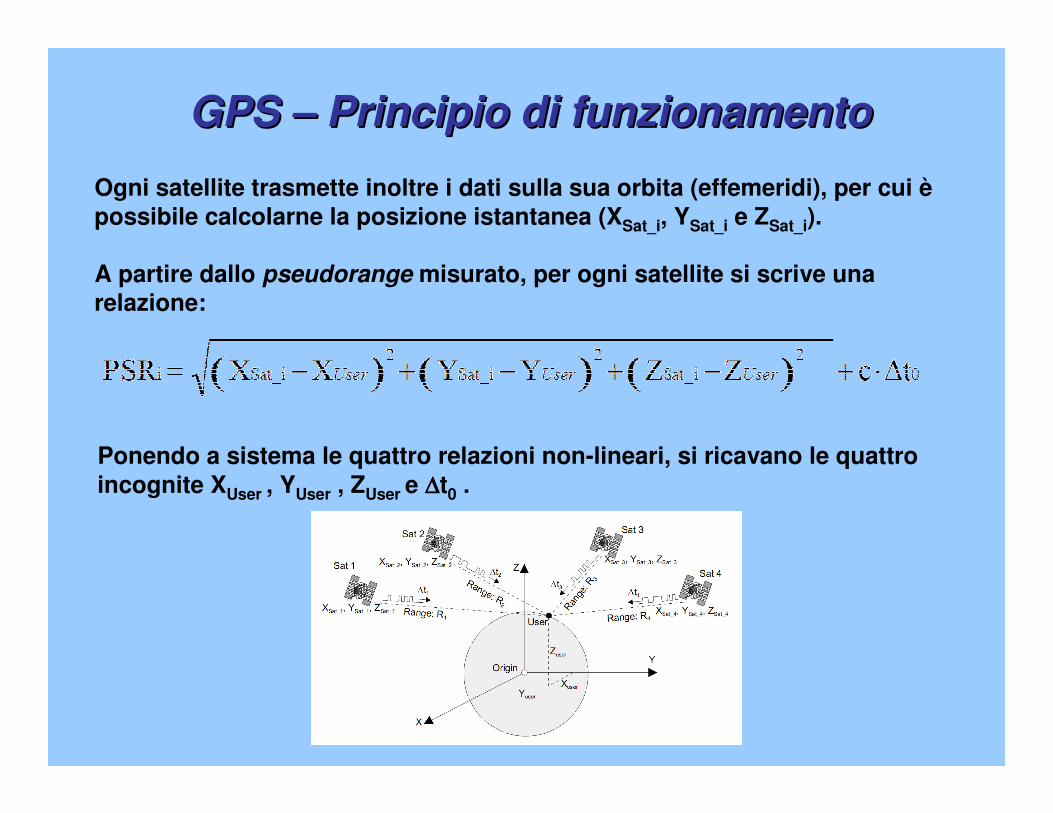
Ogni satellite trasmette inoltre i dati sulla sua orbita (effemeridi), per cui èpossibile calcolarne la posizione istantanea (XSat_i, YSat_i e ZSat_i).
A partire dallo pseudorange misurato, per ogni satellite si scrive unarelazione:
Ponendo a sistema le quattro relazioni non-lineari, si ricavano le quattroincognite XUser , YUser , ZUser e ∆∆∆∆t0 .

GPS GPS –– Segnali trasmessiSegnali trasmessi• Tutti i satelliti trasmettono su due sole frequenze:
L1 (1575,42MHz) ed L2 (1227,60MHz).
• Trasmissione in CDMA spread spectrum
(Code Division Multiple Access)
• Sono trasmessi due tipi di codice: C/A Code (Coarse/Acquisition code – usi civili)P-Code (Precision code – usi militari)
• I dati trasmessi sono relativi a:- ora esatta del satellite ed eventuali correzioni;- dati orbitali precisi del satellite (effemeridi);- dati orbitali approssimati di tutti i satelliti (almanacco);- stato di salute del satellite;- dati sulla propagazione ionosferica.
• Potenza trasmessa +43.4dBm (21.9W). Potenza ricevuta -130dBm, corrispondente a una densità spettrale di-190 dBm/Hz, al di sotto del rumore termico (–174 dBm/Hz @ 290 K).
GPS GPS –– Segnali trasmessiSegnali trasmessi
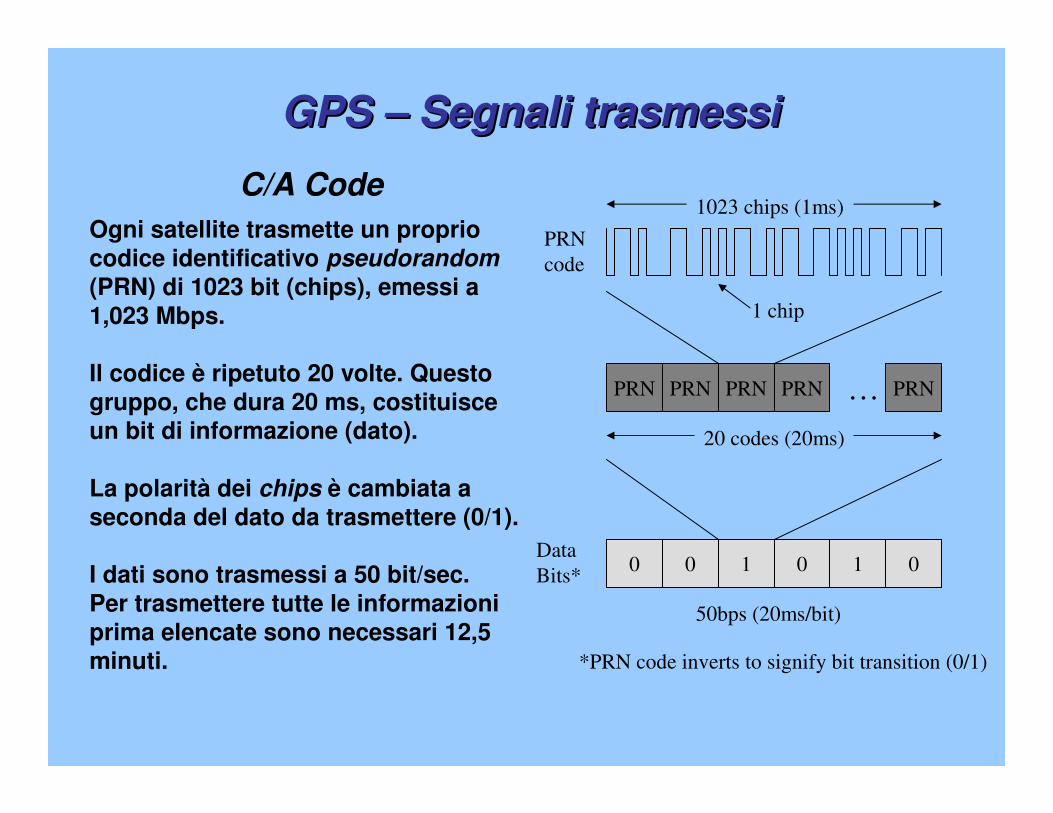
C/A Code
Ogni satellite trasmette un propriocodice identificativo pseudorandom
(PRN) di 1023 bit (chips), emessi a 1,023 Mbps.
Il codice è ripetuto 20 volte. Questogruppo, che dura 20 ms, costituisceun bit di informazione (dato).
La polarità dei chips è cambiata a seconda del dato da trasmettere (0/1).
I dati sono trasmessi a 50 bit/sec. Per trasmettere tutte le informazioniprima elencate sono necessari 12,5 minuti.
1023 chips (1ms)
PRN
code
PRN PRN PRN PRN PRN
0
20 codes (20ms)
…
01 10 0Data
Bits*
50bps (20ms/bit)
*PRN code inverts to signify bit transition (0/1)
1 chip
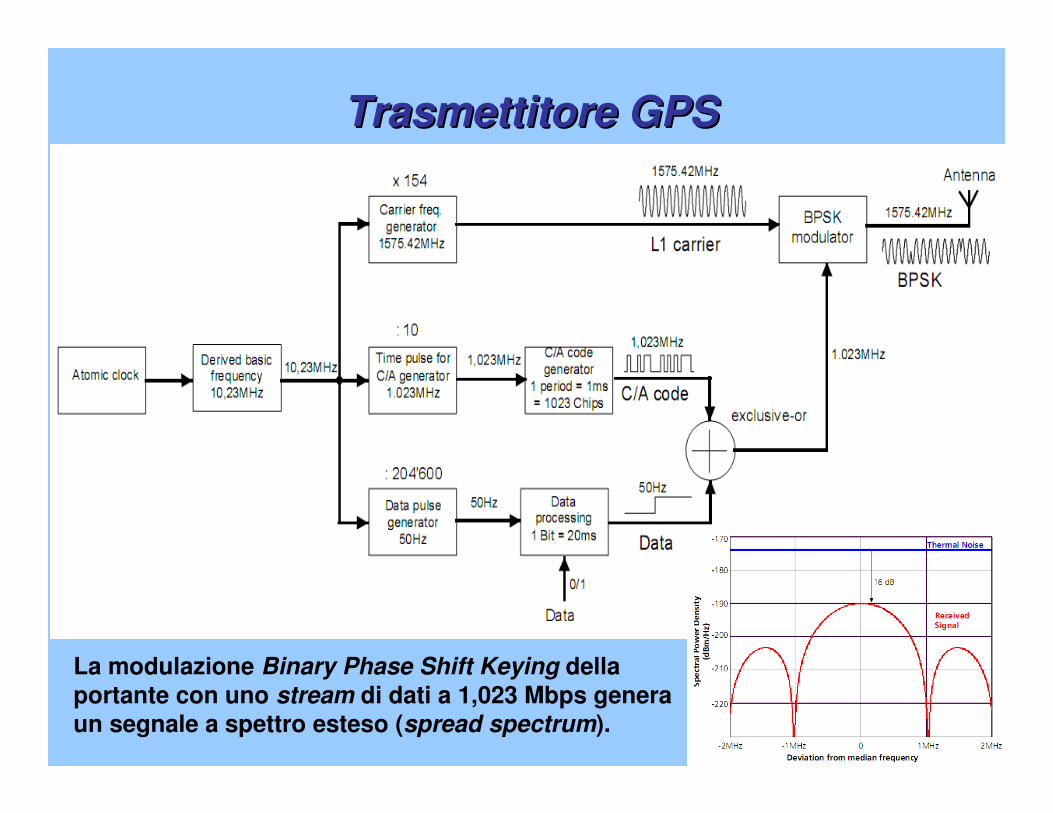
Trasmettitore GPSTrasmettitore GPS
La modulazione Binary Phase Shift Keying dellaportante con uno stream di dati a 1,023 Mbps genera un segnale a spettro esteso (spread spectrum).

GPS GPS –– Ricezione del segnaleRicezione del segnale
Al ricevitore GPS giungonocontemporaneamente i segnali dipiù satelliti, tutti alla stessafrequenza e con un livello inferiorealla soglia del rumore termico.
Per estrarre il segnale di un satellite si può cercare il codicepseudorandom ad esso associato.
Questa operazione vieneeffettuata con un processo dicross-correlazione, calcolando ilFattore di Correlazione.
GPS GPS –– Ricezione del segnaleRicezione del segnale
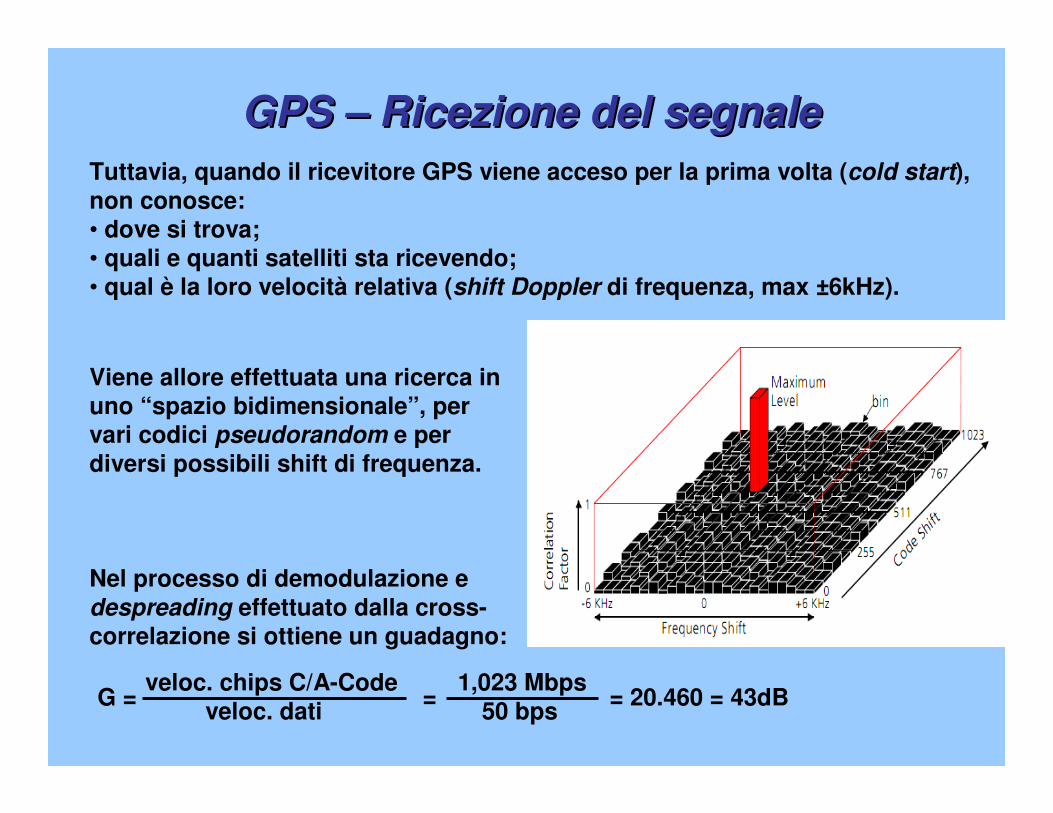
Tuttavia, quando il ricevitore GPS viene acceso per la prima volta (cold start), non conosce:• dove si trova;• quali e quanti satelliti sta ricevendo;• qual è la loro velocità relativa (shift Doppler di frequenza, max ±6kHz).
Viene allore effettuata una ricerca in uno “spazio bidimensionale”, per vari codici pseudorandom e per diversi possibili shift di frequenza.
Nel processo di demodulazione e despreading effettuato dalla cross-correlazione si ottiene un guadagno:
G = = = 20.460 = 43dBveloc. chips C/A-Code 1,023 Mbps
veloc. dati 50 bps

Ricevitore GPSRicevitore GPS
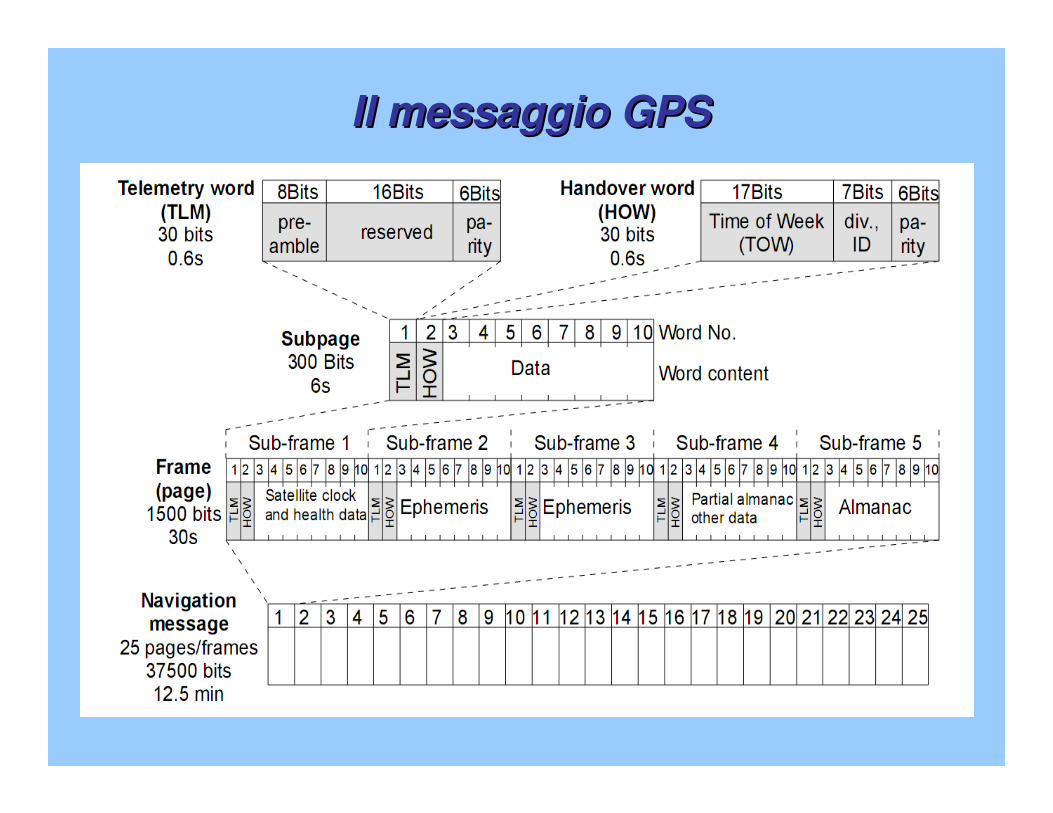
Il messaggio GPSIl messaggio GPS
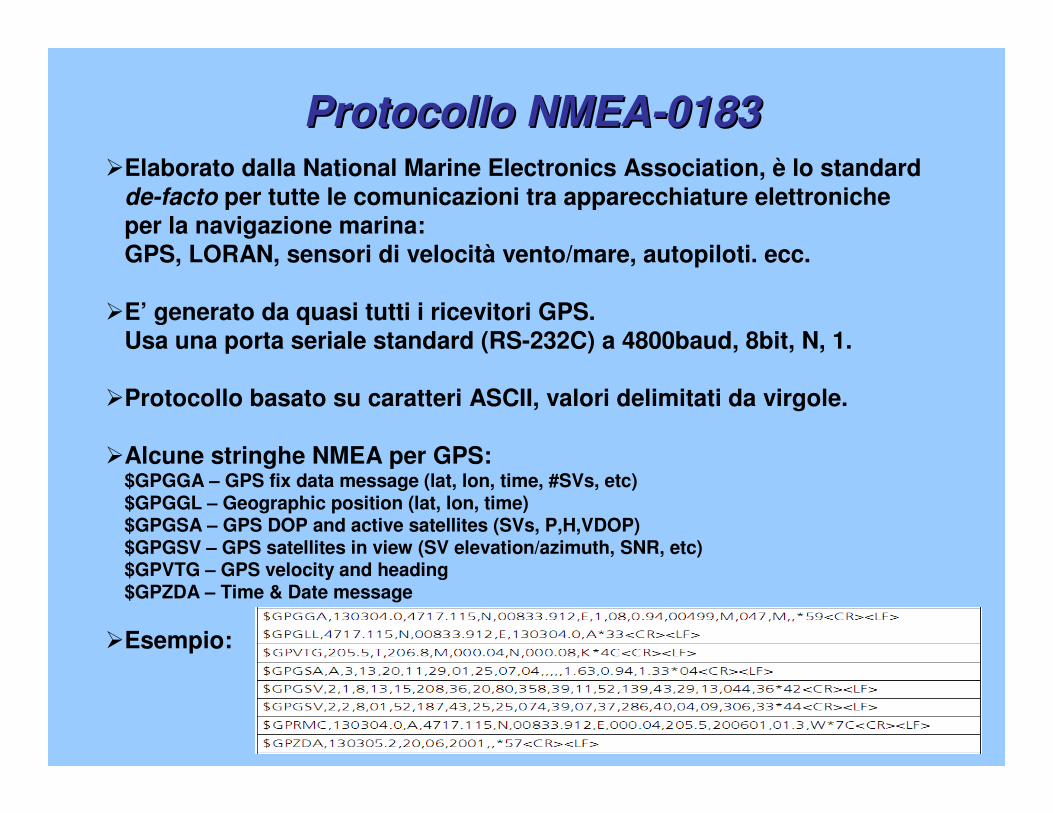
Protocollo NMEAProtocollo NMEA--01830183�Elaborato dalla National Marine Electronics Association, è lo standard
de-facto per tutte le comunicazioni tra apparecchiature elettronicheper la navigazione marina: GPS, LORAN, sensori di velocità vento/mare, autopiloti. ecc.
�E’ generato da quasi tutti i ricevitori GPS. Usa una porta seriale standard (RS-232C) a 4800baud, 8bit, N, 1.
�Protocollo basato su caratteri ASCII, valori delimitati da virgole.
�Alcune stringhe NMEA per GPS:$GPGGA – GPS fix data message (lat, lon, time, #SVs, etc)$GPGGL – Geographic position (lat, lon, time)$GPGSA – GPS DOP and active satellites (SVs, P,H,VDOP)$GPGSV – GPS satellites in view (SV elevation/azimuth, SNR, etc)$GPVTG – GPS velocity and heading$GPZDA – Time & Date message
�Esempio:
Cause di erroreCause di errore
� Errori nei clock dei satelliti ed in quello del ricevitore.I primi vengono corretti dall’Ente di controllo.I secondi sono minimizzati dal ricevitore quando si “aggancia” correttamenteai segnali.
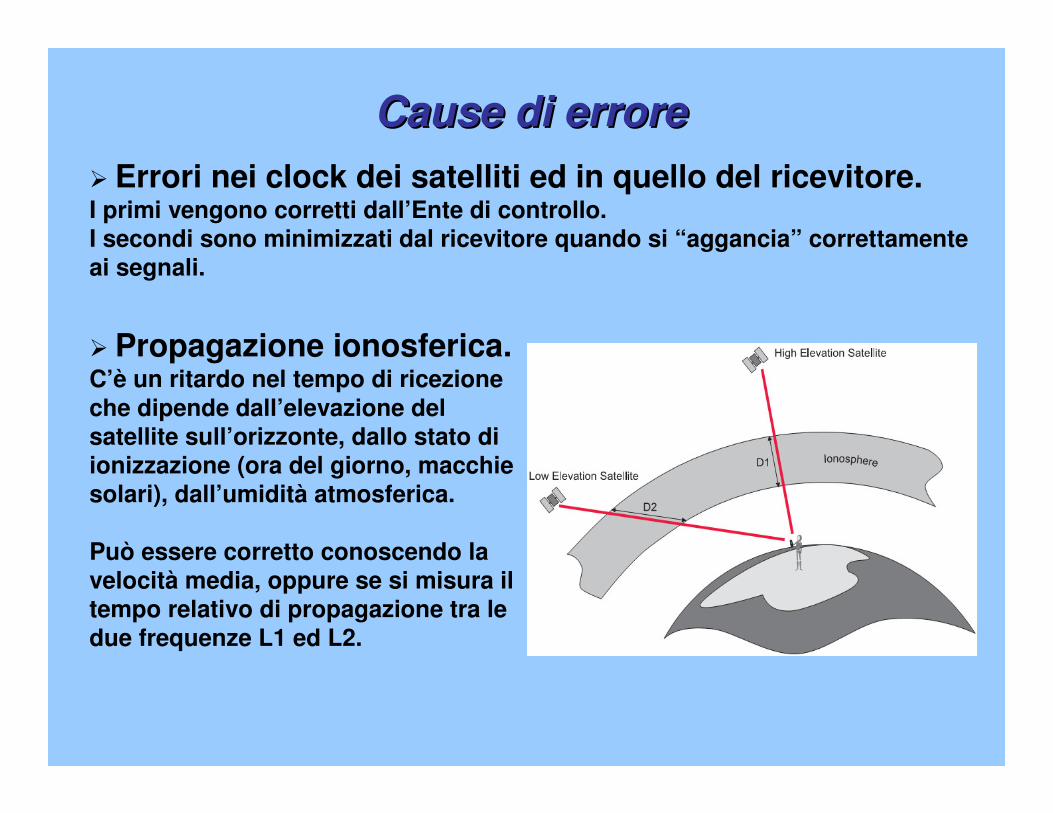
� Propagazione ionosferica.C’è un ritardo nel tempo di ricezioneche dipende dall’elevazione del satellite sull’orizzonte, dallo stato diionizzazione (ora del giorno, macchiesolari), dall’umidità atmosferica.
Può essere corretto conoscendo la velocità media, oppure se si misura iltempo relativo di propagazione tra le due frequenze L1 ed L2.

Cause di erroreCause di errore
� Propagazione multipath.Il ricevitore riceve echi multipli da vari“riflettori”. Ciò degrada la qualità del segnalee può far calcolare un errato tempo di volo.Nelle città è pure presente il fenomeno del canyoning (“gole” tra i palazzi).
� Selective Availability.Eliminata a maggio 2000, ripristinabile all’occorrenzaanche su aree limitate.
Si può combattere con antenne Choke-Ring.

Cause di erroreCause di errore
� Geometric Dilution of Precision (GDOP).E’ maggiore quando i satelliti che si ricevono sono vicini tra di loro.L’area di incertezza nel posizionamento si allarga.
Si riduce ricevendoed elaborando i dati, se possibile, di piùsatelliti (anche 8 o 12!)

DifferentialDifferential GPSGPS
Una stazione fissa riceve i segnali e calcola l’errore di posizione.La stazione fissa invia gli errori misurati ai ricevitori GPS nell’area.I ricevitori correggono i dati calcolati con gli errori ricevuti .
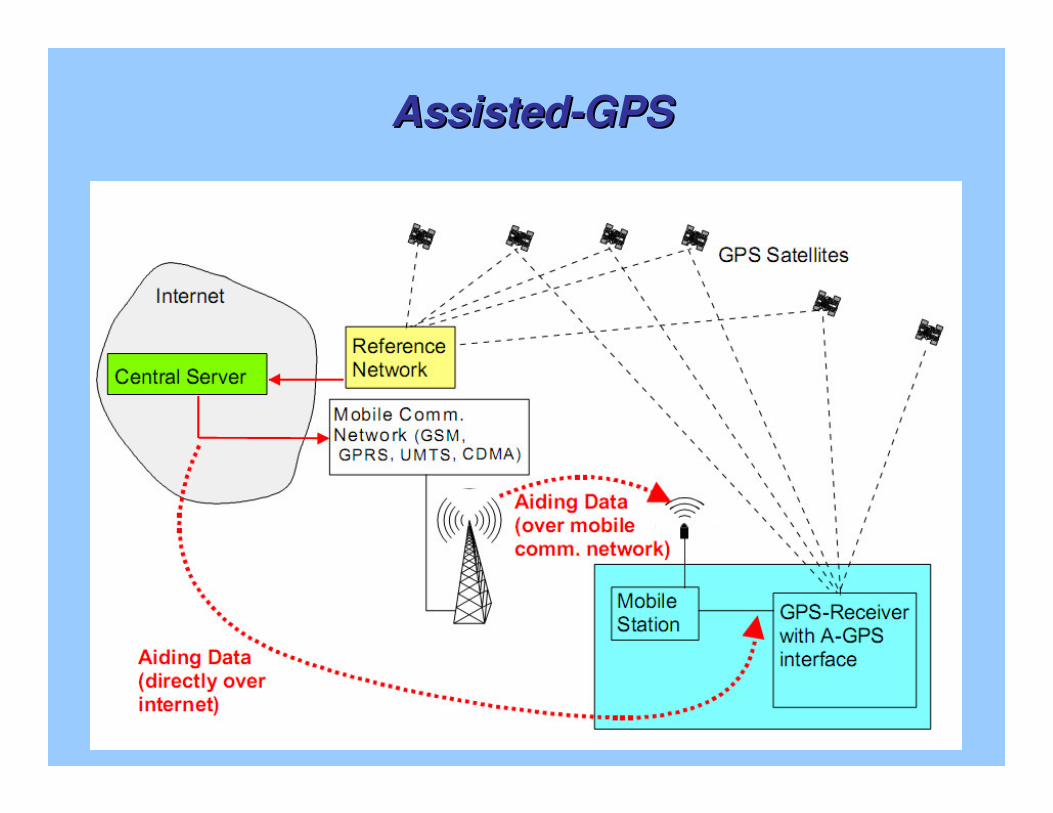
AssistedAssisted--GPSGPS
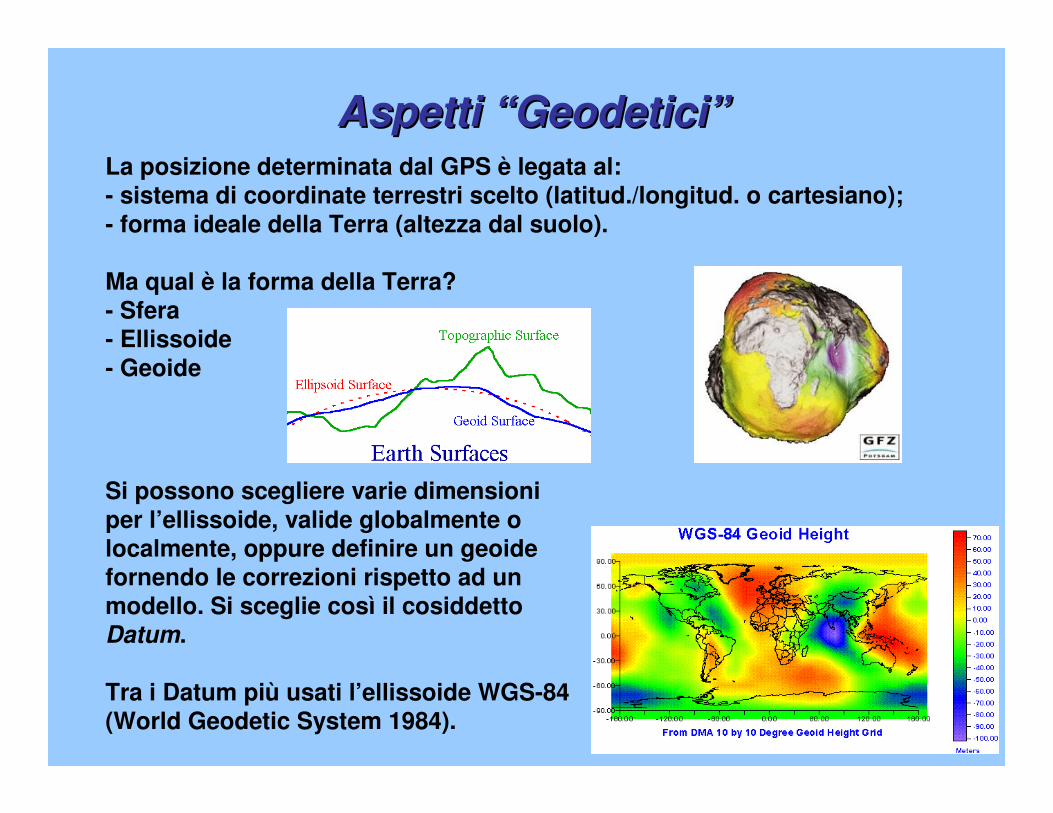
La posizione determinata dal GPS è legata al:- sistema di coordinate terrestri scelto (latitud./longitud. o cartesiano);- forma ideale della Terra (altezza dal suolo).
Ma qual è la forma della Terra?- Sfera- Ellissoide- Geoide
Aspetti Aspetti ““GeodeticiGeodetici””
Si possono scegliere varie dimensioniper l’ellissoide, valide globalmente o localmente, oppure definire un geoidefornendo le correzioni rispetto ad un modello. Si sceglie così il cosiddettoDatum.
Tra i Datum più usati l’ellissoide WGS-84 (World Geodetic System 1984).