Fieldbus & Networks Ethernet si...
5
Fonte: Beckhoff Automation - PC Control 03/2006 Building blocks Il fieldbus Ethercat (Ethernet control automation technology) è basato su standard in grado di migliorare le pre- stazioni delle applicazioni in tempo reale, introducendo un buon livello di flessibilità topologica. Tale tecnologia incontra, inoltre, il favore degli opera- tori del settore, grazie anche al costo ridotto delle soluzioni. In particolare, Ethercat è basato sulla tecnologia Ethernet ed è stato svilup- pato originariamente da Beckhoff Automation; le sue funzionalità si rife- riscono alle specifiche IEC/PAS 62407 e includono: sincronizzazione ad alta efficienza degli apparati, opzioni di ridondanza delle trasmissioni e protocolli di sicurezza evoluti (SIL3). L’evoluzione tecnologi- ca di questo protocollo si svi- luppa inoltre attraverso Ethercat Technology Group, che ne supporta e ne pro- muove le soluzioni attraverso l’impegno di produttori (OEM), tecnici e utenti finali associati. L’organizzazione favorisce inoltre la dif- fusione di questo bus di campo attraverso i propri uffici, dis- locati in tutto il mondo, in grado di fornire strumenti e sug- gerimenti tecnici a chiunque li richieda. Una tecnologia allo stato dell’arte I fieldbus possono essere considerati dei sistemi integrati alla tecnologia d’automazione, mentre però le CPU conti- nuano la corsa verso livelli prestazionali sempre più elevati, i protocolli di rete di tipo convenzionale rischiano di rallen- tare l’evoluzione delle soluzioni. Un ulteriore aspetto da con- siderare durante la valutazione dei livelli di efficienza dei bus, è la stratificazione dei ‘layer’ che compongono l’architettura dei sistemi ciclici, ad esempio i controllori, le espansioni di tipo locale o i ‘firmware’ dei dispositivi periferici. I tempi di reazione, infatti, possono raggiungere valori cinque volte superiori a quelli dei cicli dei controllori, determinando ine- vitabili e drastiche riduzioni delle prestazioni. Ethernet è ormai lo stato dell’arte per molte applicazioni fieldbus, ma costituisce sicuramente una novità riscontrar- ne l’uso in ambiti fino a pochi anni fa di dominio assoluto dei sistemi bus convenzionali. Ne è un esempio eclatante il suo utilizzo a livello di I/O o in ambito di controllo, dove la rispo- sta in ‘real-time’ costituisce una delle peculiarità maggior- mente apprezzata. Ethercat aggiunge un capitolo alla storia di Ethernet, fornendo anche a livello I/O la disponibilità del- la tecnologia Internet. Ethernet come punto di partenza Esistono differenti aspetti che rendono Ethernet una tecno- logia in grado di rispondere anche alle esigenze del real- time. Per sfruttarne i vantaggi in tale contesto funzionale è sufficiente disabilitare la procedura Csma/CD a favore del ‘polling’ o utilizzare switch in grado di regolare adeguata- Fieldbus & Networks Fieldbus & Networks - Novembre 2007 70 Matteo Marino Le prestazioni di Ethercat costituiscono il ‘pezzo forte’ del protocollo, raggiungendo livelli che le tipiche reti industriali stentano a esprimere Ethernet si raffina Attività del PLC I O Ciclo di bus Attività del PLC I O Attività del PLC I O Attività del PLC I O Attività del PLC I O Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Tempi di reazione nel caso migliore Tempi di reazione nel caso peggiore Input (nel caso peggiore) Input (nel caso migliore) Tmdv: ritardo del processo master TI/O: di aggiornamento degli I/O locali (Firmware) Output Tmdv TI/O Tempi di risposta di un fieldbus di tipo convenzionale La tecnologia Ethercat viene promossa e supportata nel suo sviluppo da Ethercat Technology Group (ETG) Ethernet si raffina
Transcript of Fieldbus & Networks Ethernet si...

Font
e: B
eckh
off A
utom
atio
n -
PC C
ontr
ol 0
3/20
06
Building blocks
Il fieldbus Ethercat (Ethernet controlautomation technology) è basato sustandard in grado di migliorare le pre-stazioni delle applicazioni in temporeale, introducendo un buon livello diflessibilità topologica. Tale tecnologiaincontra, inoltre, il favore degli opera-tori del settore, grazie anche al costoridotto delle soluzioni.In particolare, Ethercat è basato sullatecnologia Ethernet ed è stato svilup-pato originariamente da BeckhoffAutomation; le sue funzionalità si rife-riscono alle specifiche IEC/PAS 62407
e includono: sincronizzazione ad altaefficienza degli ap parati, opzioni di
ridondanza del le trasmissioni eprotocolli di si curezza evoluti(SIL3). L’e vo lu zio ne tecnologi-ca di questo protocollo si svi-luppa inoltre attraversoEthercat Technology Group,che ne supporta e ne pro-
muove le soluzioni attraversol’impegno di produttori (OEM),
tecnici e utenti finali associati.L’organizzazione favorisce inoltre la dif-
fusione di questo bus di campo attraverso i propri uffici, dis-locati in tutto il mondo, in grado di fornire strumenti e sug-gerimenti tecnici a chiunque li richieda.
Una tecnologia allo stato dell’arteI fieldbus possono essere considerati dei sistemi integratialla tecnologia d’automazione, mentre però le CPU conti-nuano la corsa verso livelli prestazionali sempre più elevati,i protocolli di rete di tipo convenzionale rischiano di rallen-tare l’evoluzione delle soluzioni. Un ulteriore aspetto da con-siderare durante la valutazione dei livelli di efficienza dei bus,è la stratificazione dei ‘layer’ che compongono l’ar chitetturadei sistemi ciclici, ad e sem pio i controllori, le espansioni diti po locale o i ‘firmware’ dei dispositivi periferici. I tempi direazione, infatti, possono raggiungere valori cinque voltesuperiori a quelli dei cicli dei controllori, determinando ine-
vitabili e drastiche riduzioni delle prestazioni. Ethernet è ormai lo stato dell’arte per molte applicazionifieldbus, ma costituisce sicuramente una novità riscontrar-ne l’uso in ambiti fino a pochi anni fa di dominio assoluto deisistemi bus convenzionali. Ne è un esempio eclatante il suoutilizzo a livello di I/O o in ambito di controllo, dove la rispo-sta in ‘real-time’ costituisce una delle peculiarità maggior-mente apprezzata. Ethercat aggiunge un capitolo alla storiadi Ethernet, fornendo anche a livello I/O la disponibilità del-la tecnologia Internet.
Ethernet come punto di partenzaEsistono differenti aspetti che rendono Ethernet una tecno-logia in grado di rispondere anche alle esigenze del real-time. Per sfruttarne i vantaggi in tale contesto funzionale èsufficiente disabilitare la procedura Csma/CD a favore del‘polling’ o utilizzare switch in grado di regolare adeguata-
F i e l d b u s & N e t w o r k s
Fieldbus & Networks - Novembre 200770
Matteo Marino
Le prestazionidi Ethercat
costituiscono il ‘pezzoforte’ del protocollo,raggiungendo livelliche le tipiche reti
industriali stentanoa esprimere
Ethernet si raffina
Attivitàdel PLCI O
Ciclo di bus
Attivitàdel PLCI O Attività
del PLCI O Attivitàdel PLCI O Attività
del PLCI O
Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus
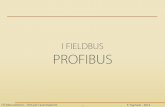
Tempi di reazione nel caso migliore
Tempi di reazione nel caso peggiore
Input(nel caso peggiore)
Input(nel caso migliore)
Tmdv: ritardo del processo masterTI/O: di aggiornamento degli I/O locali (Firmware)
Output
Tmdv
TI/O
Tempi di risposta di un fieldbus di tipo convenzionale
La tecnologia Ethercat viene promossa e supportata nel suo sviluppo daEthercat Technology Group (ETG)
Ethernet si raffina
47 BBlocks1.qxd c:Layout 1 29-10-2007 11:23 Pagina 70

Font
e: B
eckh
off A
utom
atio
n -
PC C
ontr
ol 0
3/20
06
Building blocks
Il fieldbus Ethercat (Ethernet controlautomation technology) è basato sustandard in grado di migliorare le pre-stazioni delle applicazioni in temporeale, introducendo un buon livello diflessibilità topologica. Tale tecnologiaincontra, inoltre, il favore degli opera-tori del settore, grazie anche al costoridotto delle soluzioni.In particolare, Ethercat è basato sullatecnologia Ethernet ed è stato svilup-pato originariamente da BeckhoffAutomation; le sue funzionalità si rife-riscono alle specifiche IEC/PAS 62407
e includono: sincronizzazione ad altaefficienza degli ap parati, opzioni di
ridondanza del le trasmissioni eprotocolli di si curezza evoluti(SIL3). L’e vo lu zio ne tecnologi-ca di questo protocollo si svi-luppa inoltre attraversoEthercat Technology Group,che ne supporta e ne pro-
muove le soluzioni attraversol’impegno di produttori (OEM),
tecnici e utenti finali associati.L’organizzazione favorisce inoltre la dif-
fusione di questo bus di campo attraverso i propri uffici, dis-locati in tutto il mondo, in grado di fornire strumenti e sug-gerimenti tecnici a chiunque li richieda.
Una tecnologia allo stato dell’arteI fieldbus possono essere considerati dei sistemi integratialla tecnologia d’automazione, mentre però le CPU conti-nuano la corsa verso livelli prestazionali sempre più elevati,i protocolli di rete di tipo convenzionale rischiano di rallen-tare l’evoluzione delle soluzioni. Un ulteriore aspetto da con-siderare durante la valutazione dei livelli di efficienza dei bus,è la stratificazione dei ‘layer’ che compongono l’ar chitetturadei sistemi ciclici, ad e sem pio i controllori, le espansioni diti po locale o i ‘firmware’ dei dispositivi periferici. I tempi direazione, infatti, possono raggiungere valori cinque voltesuperiori a quelli dei cicli dei controllori, determinando ine-
vitabili e drastiche riduzioni delle prestazioni. Ethernet è ormai lo stato dell’arte per molte applicazionifieldbus, ma costituisce sicuramente una novità riscontrar-ne l’uso in ambiti fino a pochi anni fa di dominio assoluto deisistemi bus convenzionali. Ne è un esempio eclatante il suoutilizzo a livello di I/O o in ambito di controllo, dove la rispo-sta in ‘real-time’ costituisce una delle peculiarità maggior-mente apprezzata. Ethercat aggiunge un capitolo alla storiadi Ethernet, fornendo anche a livello I/O la disponibilità del-la tecnologia Internet.
Ethernet come punto di partenzaEsistono differenti aspetti che rendono Ethernet una tecno-logia in grado di rispondere anche alle esigenze del real-time. Per sfruttarne i vantaggi in tale contesto funzionale èsufficiente disabilitare la procedura Csma/CD a favore del‘polling’ o utilizzare switch in grado di regolare adeguata-
F i e l d b u s & N e t w o r k s
Fieldbus & Networks - Novembre 200770
Matteo Marino
Le prestazionidi Ethercat
costituiscono il ‘pezzoforte’ del protocollo,raggiungendo livelliche le tipiche reti
industriali stentanoa esprimere
Ethernet si raffina
Attivitàdel PLCI O
Ciclo di bus
Attivitàdel PLCI O Attività
del PLCI O Attivitàdel PLCI O Attività
del PLCI O
Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus Ciclo di bus
Tempi di reazione nel caso migliore
Tempi di reazione nel caso peggiore
Input(nel caso peggiore)
Input(nel caso migliore)
Tmdv: ritardo del processo masterTI/O: di aggiornamento degli I/O locali (Firmware)
Output
Tmdv
TI/O
Tempi di risposta di un fieldbus di tipo convenzionale
La tecnologia Ethercat viene promossa e supportata nel suo sviluppo daEthercat Technology Group (ETG)
Ethernet si raffina
47 BBlocks1.qxd c:Layout 1 29-10-2007 11:23 Pagina 70

Building blocks
mente la distribuzione dei pacchetti. Tali ‘escamotage’ risol-vono la questione del trasporto tra i no di Ethernet, trascu-rando l’aspetto del tempo richiesto per leggere i dati in in -gresso o della reindirizzazione dei pacchetti verso gli ‘out-put’ o i controllori. Quest’ultimo aspetto di pende esclusiva-mente dalle modalità implementative. In caso di ‘frame’ cor-ti, da 84 B, inviati individualmente verso i dispositivi, la per-centuale di disponibilità non sarebbe ac cettabile per le esi-genze di un’applicazione real-time, at te standosi solo al 4,8per cento, degradando a valori non su pe riori al 2 per centoin caso di tempi di risposta di 10 µs. At traverso Ethercat gli‘slave’ acquisiscono o indirizzano i da ti a loro dedicati, men-tre i frame, ritardati solo di pochi nanosecondi, passanoattraverso i nodi. In conseguenza della inclusione dei dati deidispositivi sia in entrata, sia in uscita all’interno dei frame, iltasso di disponibilità sale oltre il 90 per cento. Le funziona-lità ‘full duplex’ dei sistemi 100Base TX possono così esse-re completamente sfruttate alla velocità di 100 Mb/s. Il pro-tocollo Ethernet rimane in tal modo integro (Ieee 802.3) perogni dispositivo, senza la necessità di introdurre alcun bussuppletivo e de terminando la conversione del livello fisiconello standard Lvds (Low voltage differential signaling).
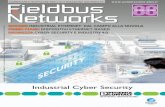
Il protocollo EthercatIl protocollo Ethercat è trasportato mediante i frame di tipoEthernet, che consistono in telegrammi dedicati a specifichearee di me moria, i quali possono rag giungere dimensioni fi -no a 4 GB. La sequenza di dati è indipendente dall’ordinefisico dei terminali Ether net disposti sulla rete, cosicché le
trasmissioni (‘broadcast’ e ‘mul ti cast’) e le co municazionitra slave possono avvenire in modo idoneo. È possibile, inol-tre, sfruttare l’indirizzamento diretto tra dispositivi nei casinei quali sia richiesto il massimo delle prestazioni, mentre icomponenti Ethercat esercitano la funzione di controllorinella specifica sezione della rete.L’impiego di Ethercat non è limitato solo ad applicazioni susingole ‘subnet’; grazie infatti alle funzionalità UDP (User Da -ta Protocol), che raccolgono il protocollo Ethercat in pacchet -ti UDP/IP, è abilitato il controllo di tipo Ethernet estendendo-ne il raggio d’azione. Attraverso tale funzionamento, inoltre,è possibile esercitare trasmissioni tra subnet differenti, percui le funzionalità dipendono esclusivamente dalle caratte-ristiche real-time dei controllori e dall’implementazione spe-cifica dei protocolli Ethernet.Oltre alle trasmissioni di tipo ‘master-slave’, Ethercat è ade-guato a comunicazioni ‘master-master’, agevolate da servi-zi come la parametrizzazione, la diagnosi, la programma-zione, il controllo remoto e le interfacce comuni.Le comunicazioni tra slave possono essere intraprese inEthercat attraverso due specifici meccanismi: il primo con-templa la trasmissione all’interno dello stesso ciclo, miglio-randone la velocità ma in modo dipendente dalla topologia;il secondo invece si affida al controllo attraverso i master, ri -chiedendo l’intervento di due cicli trasmissivi. Questo se -condo approccio è particolarmente robusto e offre elevateprestazioni, grazie alle caratteristiche del protocollo.
Topologia e sincronizzazioneDal punto di vista topologico la tecnologia Ethercat non pre-senta particolari limitazioni, adeguandosi alla maggior partedelle configurazioni e de gli schemi d’impianto. In oltre, laflessibilità può essere in crementata scegliendo mezzi tra-smissivi differenti, come reti miste in fi bra e rame corredati
da adeguati switch econ vertitori. Ledimensioni Ether net del-le reti sono pressoché illi-mitate; i rami tradifferenti di spositivi pos-sono raggiungere 100 mdi estensione (100 B-TX)con un numero massimodi elementi pari a65.535.L’argomento sincroniz-zazione è di elevata rile-vanza, in modo particola-re nel caso in cui siimpieghino macchinarimulti-as se. In tali appli-cazioni il controllo accu-rato dei movimenti
Ethernet HDR HDR1 Data1 HDR2 Data2 HDRn Datan CRC
EthernetTelegram 1...n
EthernetTelegram 2
EthernetTelegram n
Lo
gic
al P
roce
ss im
age
up
to
4 G
B
2∞
0
˜
I dati di processo sono inseriti nei telegrammi
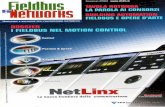
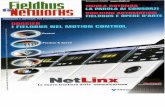
Confronto dell’utilizzo della larghezza della banda
Dati di processo Tempi di aggiornamento256 I/O digitali distribuiti 11 µs = 0,01 ms1.000 I/O digitali distribuiti 30 µs200 I/O (16 bit) analogici 50µs <—> 20 kHz100 servo-assi con 8 byte di input e output ciascuno 100 µs1 fieldbus master-gateway con 1.486 byte in input e altrettanti in output 150 µs
SCHEMA DELLE PRESTAZIONI DI ETHERCAT
Polling/Timeslicing
BroadcastMaster Slave
Ethercat
100
90
80
70
60
50
40
30
20
10
0
80-97%
20-30%
2-5%
Fieldbus & Networks - Novembre 200772
47 BBlocks1.qxd c:Layout 1 29-10-2007 11:23 Pagina 72

Building blocks
coordinati co stituisce uno degli aspetti in grado di influiresulle prestazioni complessive del sistema. Per ottenere, in -fatti, una perfetta sincronia è necessario agire sull’allinea-mento dei tempi di ‘clock’, così come descritto sullo stan-dard Ieee 1588. Contrariamente a quanto avviene nelle co municazioni field-bus completamente sincrone, un allineamento distribuito deiclock determina una buona tolleranza nei confronti dei ritar-di. Lo scambio dei dati in Ethercat è completamente affida-to all’infrastruttura hardware che, av valendosi di strutturelogiche di comunicazione con configurazione in anello, è ingrado di propagare in modo controllato e bilanciato i ritardinei confronti dei clock dei singoli slave e viceversa, median-te il ‘master clock’. In tal modo, si possono ottenere valori di‘jitter’ di molto inferiori al microsecondo. Oltre a offrire deibenefici dal punto di vista della sincronia, l’elevata risolu-zione nella gestione distribuita dei clock porta vantaggianche nell’acquisizione dei dati. Un esempio tipico è riscon-trabile nei controllori di moto, durante la stima delle veloci-tà che avviene attraverso la valutazione sequenziale delleposizioni reciproche degli elementi in movimento. Con Ethercat si può utilizzare il ‘timing’ come estensione lo -
gica dell’informazione, collegandone il valore misurato gra -zie anche all’ampia larghezza di banda disponibile. Così,l’accuratezza delle misurazioni non dipende dai tempi di jit-ter dei sistemi di comunicazione.
Parlando di prestazioniLe prestazioni di Ethercat sono apprezzabili grazie sia all’in-tegrazione hardware all’interno degli slave, sia all’accessodiretto alla memoria del controllore del fieldbus da parte dei‘master’. I processi del protocollo hanno origine a livellohardware, così da non essere soggetti né ai ‘runtime’ degli‘stack’, né alle prestazioni tipiche delle CPU, né all’imple-mentazione del software. Ne è un esempio l’impiego in retidotate di un migliaio di I/O, il cui aggiornamento può esse-re esercitato in soli 30 µs includendo i tipici tempi di ciclo.Inoltre, con un singolo frame di tipo Ethernet si possono tra-sferire fino a 1.486 B, pari a circa 12 mila dati di I/O in untempo di circa 300 µs. Ethercat esprime prestazioni eleva-te anche nei casi di utilizzo del fieldbus per il controllo delleposizioni di assi in movimento. Infatti, 100 µs è il lasso tem-porale necessario perché il fieldbus comunichi con 100 ser-voassi, fornendo loro le informazioni sui valori di comando,sui dati di controllo e rilevandone lo stato e la reciproca posi-zione. Il processo di clock distribuito rende robuste e stabi-li le applicazioni di controllo del moto, fino a raggiungereintervalli di asincronia tra gli assi di solo 1 ms. Oltre a ciò,Ethercat possiede una larghezza di banda sufficientementeampia da favorire scambi di informazioni asincrone di tipoTCP/IP, per scaricare parametri o per fornire dati di diagno-stica distribuita. Le prestazioni del protocollo costituisconoproprio il ‘pezzo forte’ di tale fieldbus, raggiungendo livelliche le tipiche reti industriali difficilmente riescono a espri-mere. Così, il bus non costituisce più la ‘Cenerentola’ delcontrollo sul campo, grazie anche alla sua scalabilità e allavelocità estensibile fino a 1 Gb/s.
Sicuri con EthercatAttraverso il protocollo SoE (Safety over Ethercat), questoprotocollo genera trasmissioni con un livello di sicurezzaadeguato a molte applicazioni. La valutazione eseguita dal-l’agenzia tedesca TÜV (German Technical InspectionAgency) ha certificato formalmente la disponibilità del pro-tocollo di sicurezza del bus per impieghi fino al livello SIL3,in accordo con la normativa IEC 61508. Ethercat è utilizza-to come sistema a singolo canale per trasferire tutte le infor-mazioni comprese quelle relative alla sicurezza, mentre ilmezzo di trasporto non costituisce una variabile rispetto alletrasmissioni. Il frame di sicurezza contiene i dati di tale pro-cesso, mentre le informazioni di ‘back-up’ sono contenutenei dati di processo. Tali informazioni sono analizzate suc-cessivamente in modalità sicura nel dispositivo bus a livelloapplicativo. ■
Fieldbus & Networks - Novembre 200774
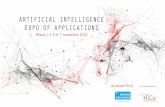
MTU: max 1514 Byte
48 Bit 48 Bit 16 Bit 16 Bit 32 Bit
Destinazione Sorgente EtherType Header
Ethernet H. IP Header UDP H. Header
CRC
CRC
160 Bit 64 Bit
11 Bit 1 Bit 4 Bit
Lunghezza Res. Type0 11 12 15
1 .. n comandiEthercat
Embedded nelloStandard Ethernet Framew. EtherType 88A4h
o via UDP/IP con UDP Port 88A4h
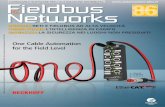
I frame Ethercat secondo lo standard Ieee 803.3
Safety input Safety input
Safety output
Safety logic
Safety drive
S
S
S
S
StandardPLC
Il sistema Safety over Ethercat
47 BBlocks1.qxd c:Layout 1 29-10-2007 11:23 Pagina 74

Building blocks
coordinati co stituisce uno degli aspetti in grado di influiresulle prestazioni complessive del sistema. Per ottenere, in -fatti, una perfetta sincronia è necessario agire sull’allinea-mento dei tempi di ‘clock’, così come descritto sullo stan-dard Ieee 1588. Contrariamente a quanto avviene nelle co municazioni field-bus completamente sincrone, un allineamento distribuito deiclock determina una buona tolleranza nei confronti dei ritar-di. Lo scambio dei dati in Ethercat è completamente affida-to all’infrastruttura hardware che, av valendosi di strutturelogiche di comunicazione con configurazione in anello, è ingrado di propagare in modo controllato e bilanciato i ritardinei confronti dei clock dei singoli slave e viceversa, median-te il ‘master clock’. In tal modo, si possono ottenere valori di‘jitter’ di molto inferiori al microsecondo. Oltre a offrire deibenefici dal punto di vista della sincronia, l’elevata risolu-zione nella gestione distribuita dei clock porta vantaggianche nell’acquisizione dei dati. Un esempio tipico è riscon-trabile nei controllori di moto, durante la stima delle veloci-tà che avviene attraverso la valutazione sequenziale delleposizioni reciproche degli elementi in movimento. Con Ethercat si può utilizzare il ‘timing’ come estensione lo -
gica dell’informazione, collegandone il valore misurato gra -zie anche all’ampia larghezza di banda disponibile. Così,l’accuratezza delle misurazioni non dipende dai tempi di jit-ter dei sistemi di comunicazione.
Parlando di prestazioniLe prestazioni di Ethercat sono apprezzabili grazie sia all’in-tegrazione hardware all’interno degli slave, sia all’accessodiretto alla memoria del controllore del fieldbus da parte dei‘master’. I processi del protocollo hanno origine a livellohardware, così da non essere soggetti né ai ‘runtime’ degli‘stack’, né alle prestazioni tipiche delle CPU, né all’imple-mentazione del software. Ne è un esempio l’impiego in retidotate di un migliaio di I/O, il cui aggiornamento può esse-re esercitato in soli 30 µs includendo i tipici tempi di ciclo.Inoltre, con un singolo frame di tipo Ethernet si possono tra-sferire fino a 1.486 B, pari a circa 12 mila dati di I/O in untempo di circa 300 µs. Ethercat esprime prestazioni eleva-te anche nei casi di utilizzo del fieldbus per il controllo delleposizioni di assi in movimento. Infatti, 100 µs è il lasso tem-porale necessario perché il fieldbus comunichi con 100 ser-voassi, fornendo loro le informazioni sui valori di comando,sui dati di controllo e rilevandone lo stato e la reciproca posi-zione. Il processo di clock distribuito rende robuste e stabi-li le applicazioni di controllo del moto, fino a raggiungereintervalli di asincronia tra gli assi di solo 1 ms. Oltre a ciò,Ethercat possiede una larghezza di banda sufficientementeampia da favorire scambi di informazioni asincrone di tipoTCP/IP, per scaricare parametri o per fornire dati di diagno-stica distribuita. Le prestazioni del protocollo costituisconoproprio il ‘pezzo forte’ di tale fieldbus, raggiungendo livelliche le tipiche reti industriali difficilmente riescono a espri-mere. Così, il bus non costituisce più la ‘Cenerentola’ delcontrollo sul campo, grazie anche alla sua scalabilità e allavelocità estensibile fino a 1 Gb/s.
Sicuri con EthercatAttraverso il protocollo SoE (Safety over Ethercat), questoprotocollo genera trasmissioni con un livello di sicurezzaadeguato a molte applicazioni. La valutazione eseguita dal-l’agenzia tedesca TÜV (German Technical InspectionAgency) ha certificato formalmente la disponibilità del pro-tocollo di sicurezza del bus per impieghi fino al livello SIL3,in accordo con la normativa IEC 61508. Ethercat è utilizza-to come sistema a singolo canale per trasferire tutte le infor-mazioni comprese quelle relative alla sicurezza, mentre ilmezzo di trasporto non costituisce una variabile rispetto alletrasmissioni. Il frame di sicurezza contiene i dati di tale pro-cesso, mentre le informazioni di ‘back-up’ sono contenutenei dati di processo. Tali informazioni sono analizzate suc-cessivamente in modalità sicura nel dispositivo bus a livelloapplicativo. ■
Fieldbus & Networks - Novembre 200774
MTU: max 1514 Byte
48 Bit 48 Bit 16 Bit 16 Bit 32 Bit
Destinazione Sorgente EtherType Header
Ethernet H. IP Header UDP H. Header
CRC
CRC
160 Bit 64 Bit
11 Bit 1 Bit 4 Bit
Lunghezza Res. Type0 11 12 15
1 .. n comandiEthercat
Embedded nelloStandard Ethernet Framew. EtherType 88A4h
o via UDP/IP con UDP Port 88A4h
I frame Ethercat secondo lo standard Ieee 803.3
Safety input Safety input
Safety output
Safety logic
Safety drive
S
S
S
S
StandardPLC
Il sistema Safety over Ethercat
47 BBlocks1.qxd c:Layout 1 29-10-2007 11:23 Pagina 74