Esercizi di Matematica Discreta - Parte I · Esercizi di Matematica Discreta - Parte I 7 ottobre...
98
Esercizi di Matematica Discreta - Parte I 7 ottobre 2011 AVVISO: Sia i testi che gli svolgimenti proposti possono contenere errori e/o ripetizioni. Essi sono infatti opera di vari collage e, per ovvie questioni di tempo, non sono stati rivisti. Pertanto non intendono sostituire alcun libro di esercizi. Gli studenti sono quindi pregati di prestare particolare attenzione. Prego infine gli studenti di volermi cortesemente informare sia direttamente che per e-mail ([email protected]) di qualunque errore o sospetto di errore notato. esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 1
Transcript of Esercizi di Matematica Discreta - Parte I · Esercizi di Matematica Discreta - Parte I 7 ottobre...

Esercizi di Matematica Discreta - Parte I
7 ottobre 2011
AVVISO: Sia i testi che gli svolgimenti proposti possono contenere errori e/o ripetizioni.Essi sono infatti opera di vari collage e, per ovvie questioni di tempo, non sono statirivisti. Pertanto non intendono sostituire alcun libro di esercizi. Gli studenti sono quindipregati di prestare particolare attenzione. Prego infine gli studenti di volermi cortesementeinformare sia direttamente che per e-mail ([email protected]) di qualunque erroreo sospetto di errore notato.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 1
Indice
1 Insiemi e relazioni 3
2 Matrici e sistemi lineari 7
3 Geometria lineare del piano 28
4 Geometria lineare dello spazio 39
5 Spazi vettoriali 66
6 Applicazioni lineari 82
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 2

1 Insiemi e relazioni
1. Sia A = 0, 1, 2. Si dica se le affermazioni che seguono sono vere o false:
• 0 ⊆ A;
• 0 ∈ A;
• 0 ∈ A;
• ∅ ⊆ A;
• ∅ ∈ A;
• ∅ ⊆ A.
2. Siano A,B,C insiemi. Si provi che:
(a) se A ⊆ B e B ⊆ C, allora A ⊆ C;
(b) se A ⊆ B, allora (B − A) ∩ A = ∅ e (B − A) ∪B = B;
(c) se A ⊆ C, B ⊆ C, A ∩B = ∅, e A ∪B = C, allora A = C −B;
(d) se A ⊆ B, allora B − (B − A) = A;
(e) se A,B ⊆ C, allora C − (A ∪ B) = (C − A) ∩ (C − B) e C − (A ∩ B) =(C − A) ∪ (C −B).
3. Siano A e B due insiemi. Si provi che le seguenti affermazioni sono equivalenti:
(a) A ∩B = A;
(b) A ⊆ B;
(c) A ∪B = B.
4. Per ogni i ∈ Z sia Ai = x | x ∈ N, x ≥ i. Si provi che ∪i∈ZAi = N e ∩i∈ZAi = ∅.5. Per ogni i ∈ N sia Ai = x | x ∈ Q, x 6= i. Si provi che ∪i∈NAi = Q e ∩i∈NAi =Q− N.
6. Siano f(x) = 3x− 1 e g(x) = 5x+ 4 due applicazioni da R→ R:
(a) Provare che sia f che g sono biunivoche.
SVOLGIMENTO. Iniettivita: se x1 6= x2 allora f(x1) = 3x1 − 1 6= 3x2 − 1 =f(x2) e g(x1) = 5x1 + 4 6= 5x2 + 4 = g(x2).
Suriettivita: per ogni y ∈ R, si ha 3x − 1 = y per x = y+13
e 5x + 4 = y per
x = y−45.
(b) Verificare che f g 6= g f .SVOLGIMENTO. f g(x) = 3(5x+4)−1 = 15x+11, gf(x) = 5(3x−1)+4 =15x− 1. Poiche 15x+ 11 6= 15x− 1, si ha l’asserto.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 3

(c) Posto g(x) = 5x + λ, λ ∈ R, determinare gli eventuali valori di λ per cuif g = g f .SVOLGIMENTO. f g(x) = 3(5x+λ)−1 = 15x+3λ−1; gf(x) = 5(3x−1)+λ = 15x− 5+λ. Devo trovare i valori di λ per cui 15x+3λ− 1 = 15x− 5+ λ.Quindi λ = −2.
7. Siano f(x) = 4x+ 2 e g(x) = 6x− 1 due applicazioni da R→ R:
(a) Provare che sia f che g sono biunivoche.
SVOLGIMENTO. Iniettivita: se x1 6= x2 allora f(x1) = 4x1 + 2 6= 4x2 + 2 =f(x2) e g(x1) = 6x1 − 1 6= 6x2 − 1 = g(x2).
Suriettivita: per ogni y ∈ R, si ha 4x + 2 = y per x = y−24
e 6x − 1 = y per
x = y+16.
(b) Verificare che f g 6= g f .SVOLGIMENTO. f g(x) = 4(6x−1)+2 = 24x−2, gf(x) = 6(4x+2)−1 =24x+ 11. Poiche 24x− 2 6= 24x+ 11, si ha l’asserto.
(c) Posto g(x) = 6x + λ, λ ∈ R, determinare gli eventuali valori di λ per cuif g 6= g f .SVOLGIMENTO. f g(x) = 4(6x+λ)+2 = 24x+4λ+2; gf(x) = 6(4x+2)+λ = 24x+12+λ. Devo trovare i valori di λ per cui 24x+4λ+2 = 24x+12+λ.Quindi λ = 10
3.
8. Siano f(x) = 2x− 3 e g(x) = λx+ 3, λ ∈ R, due applicazioni da R → R.
(a) Provare che f(x) e biunivoca.
SVOLGIMENTO. Surietivita di f . Per ogni α ∈ R si ha
f(α + 3
2) = α.
Iniettivita di f . Per ogni x1, x2 ∈ R con x1 6= x2 si ha 2x1 − 3 6= 2x2 − 3.
(b) Determinare gli eventuali valori di λ ∈ R per cui g(x) non e biunivoca.
SVOLGIMENTO. Se λ 6= 0 si vede facilmente che g e biunivoca (procedere inmodo simile al caso precedente). Per λ = 0, g(x) = 3 e tale funzione non ebiunivoca.
(c) Determinare gli eventuali valori di λ ∈ R tali che f g = g f .
SVOLGIMENTO. Si ha
f g(x) = f(g(x)) = 2(λx+ 3)− 3 = 2λx+ 3,
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 4

g f(x) = g(f(x)) = λ(2x− 3) + 3 = 2λx− 3λ+ 3.
Imponendo l’uguaglianza (per ogni x) si ha
2λx+ 3 = 2λx− 3λ+ 3
da cui segue λ = 0.
9. Siano f e g le applicazioni da R in R definite rispettivamente dalle leggi f(x) =3x− 5 e g = λx+ 28, ove λ e un parametro reale. Risolvere i seguenti quesiti:
• esistono valori di λ per cui f g = g f ? In caso affermativo calcolare talivalori;
• l’applicazione f e invertibile? In caso di risposta affermativa calcolarne l’ap-plicazione inversa;
• l’applicazione g e invertibile per ogni valore di λ? In caso di risposta affermativacalcolarne l’applicazione inversa.
10. Siano f(x) = 2λx+ 7 e g(x) = 7x− 5, λ ∈ R, due applicazioni da R → R.
(a) Provare che g(x) e biunivoca.
(b) Determinare gli eventuali valori di λ ∈ R per cui f(x) non e biunivoca.
(c) Determinare gli eventuali valori di λ ∈ R tali che f g = g f .11. Siano a, b, α, β ∈ R con a < b e α < β.
• Provare che f(x) = (b− a)x+ a e la legge di una applicazione biiettiva di [0, 1]in [a, b].
• Determinare la legge di f−1.
• Scrivere la legge di una applicazione biettiva di [α, β] in [a, b].
12. Trovare una corrispondenza biunivoca fra un intervallo chiuso (cioe compresi gliestremi) e una retta.
13. Sia A un sottoinsieme inferiormente limitato di Z. Provare che A ha il minimo.
14. Sia S la seguente relazione su N× N: (n,m)S(n′,m′) se e solo se n+m′ = m+ n′.Provare che S e una relazione di equivalenza. Descrivere le classi di equivalenza.
15. Sia P la seguente relazione su Z×(Z−0): (n,m)P(n′,m′) se e solo se nm′ = mn′.Provare che P e una relazione di equivalenza. Descrivere le classi di equivalenza.
16. • Sia A = R × R e sia R1 la relazione su A cosı definita: (x1, y1)R1(x2, y2) se esolo se x2
1 + y21 = x22 + y22. Provare che R1 e una relazione di equivalenza su A.
SVOLGIMENTO. Riflessiva: (x1, y1)R1(x1, y1) ⇐⇒ x21 + y21 = x2
1 + y21.Simmetrica: (x1, y1)R1(x2, y2) =⇒ (x2, y2)R1(x1, y1). E vera in quanto x2
1 +
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 5

y21 = x22 + y22 =⇒ x2
2 + y22 = x21 + y21.
Transitiva: (x1, y1)R1(x2, y2) e (x2, y2)R1(x3, y3) =⇒ (x1, y1)R1(x3, y3). Anchequesta proprieta vale in quanto x2
1 + y21 = x22 + y22 e x2
2 + y22 = x23 + y23 =⇒
x21 + y21 = x2
3 + y23.
• Sia A = R × R e sia R2 la relazione su A cosı definita: (x1, y1)R2(x2, y2) se esolo se x2
1+y21 ≤ x22+y22. Provare cheR2 non verifica ne la proprieta simmetrica
ne quella antisimmetrica.
SVOLGIMENTO. Simmetrica: (x1, y1)R2(x2, y2) =⇒ (x2, y2)R2(x1, y1). Cioex21 + y21 ≤ x2
2 + y22 =⇒ x22 + y22 ≤ x2
1 + y21.Posto (x1, y1) = (1, 1) e (x2, y2) = (2, 2), si ha x2
1 + y21 = 2 ≤ 8 = x22 + y22 6=⇒
x22 + y22 = 8 ≤ 2 = x2
1 + y21. Quindi la proprieta simmetrica non e valida.Antisimmetrica: (x1, y1)R2(x2, y2) e (x2, y2)R2(x1, y1) =⇒ (x1, y1) = (x2, y2).Cioe x2
1 + y21 ≤ x22 + y22 e x2
2 + y22 ≤ x21 + y21 =⇒ (x1, y1) = (x2, y2).
Posto (x1, y1) = (1, 1) e (x2, y2) = (12,√
74), si ha x2
1 + y21 = 2 ≤ 2 = x22 + y22
e x22 + y22 = 2 ≤ 2 = x2
1 + y21 6=⇒ (x1, y1) = (x2, y2). Quindi la proprietaantisimmetrica non e valida.
• Siano R1 e R2 le due relazioni su A = R×R definite nei due punti precedenti.Si consideri l’insieme quoziente B = A/R1
e si definisca su esso la seguenterelazione: αR3β se e solo se comunque presi (x1, y1) ∈ α e (x2, y2) ∈ β, si ha(x1, y1)R2(x2, y2). Provare che R3 e una relazione d’ordine su B.
SVOLGIMENTO. Riflessiva: αR3α. Cioe comunque preso (x1, y1) ∈ α, si ha(x1, y1)R2(x1, y1), ovvero x2
1 + y21 ≤ x21 + y21. La proprieta riflessiva risulta ov-
viamente vera.Antisimmetrica: αR3β e βR3α =⇒ α = β. Cioe comunque presi (x1, y1) ∈ α e(x2, y2) ∈ β, si ha (x1, y1)R2(x2, y2), ovvero x
21+y21 ≤ x2
2+y22, e (x2, y2)R2(x1, y1),ovvero x2
2 + y22 ≤ x21 + y21. Quindi e x2
1 + y21 = x22 + y22. Ne segue che (x1, y1)
e (x2, y2) appartengono ad una stessa classe di equivalenza di B = A/R1. Es-
sendo (x1, y1) ∈ α e (x2, y2) ∈ β, ne segue α = β.Transitiva: αR3β e βR3γ =⇒ αR3γ. Cioe comunque presi (x1, y1) ∈ α,(x2, y2) ∈ β e (x3, y3) ∈ γ, si ha (x1, y1)R2(x2, y2), ovvero x2
1 + y21 ≤ x22 + y22,
(x2, y2)R2(x3, y3), ovvero x22 + y22 ≤ x2
3 + y23. Quindi e x21 + y21 ≤ x2
3 + y23, cioe(x1, y1)R2(x3, y3), la quale implica αR3γ.
17. • Sia R+ l’insieme dei numeri reali positivi. Posto A = R+ × R+, si definisca suA la seguente relazione: (x1, y1)R1(x2, y2) se e solo sey1x1
= y2x2. Provare che R1 e una relazione di equivalenza su A.
SVOLGIMENTO. Riflessiva: (x1, y1)R1(x1, y1) ⇐⇒ y1x1
= y1x1.
Simmetrica: (x1, y1)R1(x2, y2) =⇒ (x2, y2)R1(x1, y1). E vera in quanto y1x1
= y2x2
=⇒ y2x2
= y1x1.
Transitiva: (x1, y1)R1(x2, y2) e (x2, y2)R1(x3, y3) =⇒ (x1, y1)R1(x3, y3). Anchequesta proprieta vale in quanto y1
x1= y2
x2e y2
x2= y3
x3=⇒ y1
x1= y3
x3.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 6

• Sia A = R+ ×R+ e sia R2 la relazione su A cosı definita: (x1, y1)R2(x2, y2) see solo se y1
x1≤ y2
x2. Provare che R2 non verifica ne la proprieta simmetrica ne
quella antisimmetrica.
SVOLGIMENTO. Simmetrica: (x1, y1)R2(x2, y2) =⇒ (x2, y2)R2(x1, y1). Cioey1x1
≤ y2x2
=⇒ y2x2
≤ y1x1.
Posto (x1, y1) = (1, 1) e (x2, y2) = (1, 2), si ha y1x1
= 1 ≤ 2 = y2x2
6=⇒ y2x2
= 2 ≤1 = y1
x1. Quindi la proprieta simmetrica non e valida.
Antisimmetrica: (x1, y1)R2(x2, y2) e (x2, y2)R2(x1, y1) =⇒ (x1, y1) = (x2, y2).Cioe y1
x1≤ y2
x2e y2
x2≤ y1
x1=⇒ (x1, y1) = (x2, y2).
Posto (x1, y1) = (1, 1) e (x2, y2) = (2, 2), si ha y1x1
= 1 ≤ 1 = y2x2
e y2x2
= 1 ≤ 1 =y1x1
6=⇒ (x1, y1) = (x2, y2). Quindi la proprieta antisimmetrica non e valida.
• SianoR1 eR2 le due relazioni su A = R+×R+ definite nei due punti precedenti.Si consideri l’insieme quoziente B = A/R1
e si definisca su esso la seguenterelazione: αR3β se e solo se comunque presi (x1, y1) ∈ α e (x2, y2) ∈ β, si ha(x1, y1)R2(x2, y2). Provare che R3 e una relazione d’ordine su B.
SVOLGIMENTO. Riflessiva: αR3α. Cioe comunque preso (x1, y1) ∈ α, si ha(x1, y1)R2(x1, y1), ovvero
y1x1
≤ y1x1. La proprieta riflessiva risulta ovviamente
vera.Antisimmetrica: αR3β e βR3α =⇒ α = β. Cioe comunque presi (x1, y1) ∈ αe (x2, y2) ∈ β, si ha (x1, y1)R2(x2, y2), ovvero
y1x1
≤ y2x2, e (x2, y2)R2(x1, y1),
ovvero y2x2
≤ y1x1. Quindi e y1
x1= y2
x2. Ne segue che (x1, y1) e (x2, y2) apparten-
gono ad una stessa classe di equivalenza di B = A/R1. Essendo (x1, y1) ∈ α e
(x2, y2) ∈ β, ne segue α = β.Transitiva: αR3β e βR3γ =⇒ αR3γ. Cio comunque presi (x1, y1) ∈ α,(x2, y2) ∈ β e (x3, y3) ∈ γ, si ha (x1, y1)R2(x2, y2), ovvero
y1x1
≤ y2x2,
(x2, y2)R2(x3, y3), ovveroy2x2
≤ y3x3. Quindi e y1
x1≤ y3
x3, cioe (x1, y1)R2(x3, y3), la
quale implica αR3γ.
2 Matrici e sistemi lineari
1. Studiare il sistema lineare: 2x− 3y + 4z = 2x− 2y + z = 1
SVOLGIMENTO. Nella notazione seguita viene scritta la matrice completa, sepa-rando con una linea verticale la colonna dei termini noti, cosı a sinistra si evidenziala matrice incompleta. Si ricordi che per ridurre la matrice e sufficiente usare ripe-tutamente le seguenti regole: 1) Ri → λRi + µRj, con λ 6= 0 e i 6= j; 2) Ri ↔ Rj.Se una matrice e ridotta gli elementi scelti come speciali saranno sottolineati.
(2 −3 4 21 −2 1 1
)R2 → −2R2 +R1 −→
(2 −3 4 20 1 2 0
)R1 → R1 + 3R2
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 7

−→(
2 0 10 20 1 2 0
)R1 → 1
2R1 −→
(1 0 5 10 1 2 0
).
Si ottiene cosı il seguente sistema, equivalente a quello assegnato,
x = 1− 5zy = −2z
Quindi le soluzioni cercate sono (x, y, z) = (−5z + 1,−2z, z) ∀z ∈ R.2. Studiare il sistema lineare:
2x+ 3y = 4x− 2y = 2x+ y = 0x− 2y = 1
SVOLGIMENTO. Procediamo come nell’Esercizio 1.
2 3 41 −2 21 1 01 −2 1
R2 → −2R2 +R1
R3 → −2R3 +R1
R4 → −2R4 +R1
−→
2 3 40 7 00 1 40 7 2
R3 → −7R3 +R2
R4 → R4 −R2
−→
2 3 40 7 00 0 −280 0 2
R4 → 14R4 +R3 −→
2 3 40 7 00 0 −280 0 0
.
La matrice incompleta e la completa hanno un numero differente di elementi speciali.Quindi il sistema e impossibile. Si osservi che il sistema associato alla matrice ridottae
2x+ 3y = 47z = 00 = −280 = 0
Il quale e, ovviamente, impossibile.
3. Studiare il sistema lineare:
x− 2y + 3z = 17x− 2y + 7z = 52x− y + z = 2x+ y + z = 05x− y + 6z = 3
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 8

SVOLGIMENTO. Procediamo come nell’Esercizio 1.
1 −2 3 17 −2 7 52 −1 1 21 1 1 05 −1 6 3
R2 → R2 − 7R1
R3 → R3 − 2R1
R4 → R4 −R1
R5 → R5 − 5R1
−→
1 −2 3 10 12 −14 −20 3 −5 00 3 −2 −10 9 −9 −2
R3 → −4R3 +R2
R4 → −4R4 +R2
R5 → 4R5 − 3R2
−→
1 −2 3 10 12 −14 −20 0 6 −20 0 −6 20 0 6 −2
R4 → R4 +R3
R5 → R5 −R3
−→
1 −2 3 10 12 −14 −20 0 6 −20 0 0 00 0 0 0
R2 → 7R3 + 3R2
R1 → −R3 + 2R1
−→
2 −4 0 40 36 0 −200 0 6 −20 0 0 00 0 0 0
R1 → 9R1 +R2 −→
18 0 0 160 36 0 −200 0 6 −20 0 0 00 0 0 0
R1 → 118R1
R2 → 136R2
R3 → 16R3
−→
1 0 0 89
0 1 0 −59
0 0 1 −13
0 0 0 00 0 0 0
Si ottiene cosı il seguente sistema, equivalente a quello assegnato,
x = 89
y = −59
z = −13
Pertanto il sistema assegnato ha una ed una sola soluzione data da (89,−5
9,−1
3).
4. Studiare il sistema lineare omogeneo:
x+ y − z = 02x+ 3y = 0x+ 2y + z = 0
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 9

SVOLGIMENTO. Il sistema e omogeneo quindi ammette sempre almeno la soluzionebanale (0, 0, 0). Nel ridurre il sistema e sufficiente scrivere solo la matrice incompletain quanto la colonna dei termini noti e sempre formata da elementi uguali a 0.
1 1 −12 3 01 2 1
R3 → R3 +R1 −→
1 1 −12 3 02 3 0
R3 → R3 −R2 −→
1 1 −12 3 00 0 0
R1 → −2R1 +R2 −→
0 1 22 3 00 0 0
R1 → 1
2R1
R2 → 12R2
−→
0 12
11 3
20
0 0 0
. Si ottiene cosı il seguente sistema, equivalente a quello assegnato,
z = −1
2y
x = −32y
che ha le ∞1 soluzioni (x, y, z) = (−32y, y,−1
2y) ∀y ∈ R.
5. Risolvere i seguenti sistemi lineari:
(a)
2x− 5y − 3z = −1x+ 6y − 7z = −19
30
(b)
2x− y − z − 4t = 94x− 3z − t = 08x− 2y − 5z − 9t = 18
(c)
x+ y + z = 02x+ y − 3z = 0x− y = 04x+ 5y + 2z = 0
(d)
x+ 2y + z − 3t = 0x+ y − 2t = 0−6x+ 3y + 5z + t = 0
6. Studiare, al variare del parametro reale k, il seguente sistema lineare:
4x− 2y + 4z + 3t = 15x− 2y + 5z − 3t = k + 18x− 4y + (2k + 7)z + (4k + 4)t = 5
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 10

SVOLGIMENTO. Procediamo come nell’Esercizio 1.
4 −2 4 3 15 −2 5 −3 k + 18 −4 2k + 7 4k + 4 5
R2 → R2 −R1
R3 → R3 − 2R2
−→
4 −2 4 3 11 0 1 −6 k0 0 2k − 1 4k − 2 3
.
Se k = 12si ha 2k − 1 = 4k − 2 = 0, e il sistema e impossibile in quanto il numero
degli elementi speciali della matrice incompleta e diverso da quello della completa.Se k 6= 1
2, possiamo scrivere
4 −2 4 3 11 0 1 −6 k0 0 2k − 1 4k − 2 3
R2 → − 1
2k−1R3 +R2
R1 → − 42k−1
R3 +R1
−→
4 −2 0 −5 2k−132k−1
1 0 0 −8 2k2−k−32k−1
0 0 2k − 1 4k − 2 3
R1 → −4R2 +R1 −→
0 −2 0 27 −8k2+6k−12k−1
1 0 0 −8 2k2−k−32k−1
0 0 2k − 1 4k − 2 3
R1 → −1
2R1
R3 → 12k−1
R3−→
0 1 0 −272
−8k2+6k−1−4k+2
1 0 0 −8 2k2−k−32k−1
0 0 1 2 32k−1
quindi
x = 2k2−k−32k−1
+ 8t
y = −8k2+6k−1−4k+2
+ 272t
z = 32k−1
− 2t
.
Pertanto, per ogni k 6= 12, il sistema assegnato ha le ∞−1 soluzioni
(2k2 − k − 3
2k − 1+ 8t,
−8k2 + 6k − 1
−4k + 2+
27
2t,
3
2k − 1− 2t, t
)∀t ∈ R.
7. Studiare, al variare del parametro reale k, il sistema lineare:
x+ z = 12x+ ky + 2z = 2x+ (1 + k)y = 3
.
SVOLGIMENTO. Procediamo come nell’Esercizio 1.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 11

1 0 1 12 k 2 21 1 + k 0 3
R2 → R2 + (−2)R1 −→
1 0 1 10 k 0 01 1 + k 0 3
R2 ↔ R3 −→
1 0 1 11 1 + k 0 30 k 0 0
.
Caso k = 0. Si ha
1 0 1 11 1 0 30 0 0 0
R1 → R1 −R2 −→
0 −1 1 −21 1 0 30 0 0 0
da cui
z = y − 2x = −y + 3
. Pertanto il sistema assegnato ha le ∞1 soluzioni (3−y, y, y−2), al variare di y in R.
Caso k 6= 0. Abbiamo
1 0 1 11 1 + k 0 30 k 0 0
R2 → −kR2 + (1 + k)R3 −→
1 0 1 1−k 0 0 −3k0 k 0 0
R1 → kR1 +R2 −→
0 0 k −2k−k 0 0 −3k0 k 0 0
R1 → 1kR1
R2 → − 1kR2
R3 → 1kR3
−→
0 0 1 −21 0 0 30 1 0 0
da cui
z = −2x = 3y = 0
.
Quindi, se k 6= 0, il sistema assegnato ha una ed una sola soluzione data da(3, 0,−2).
8. Studiare, al variare del parametro reale k, i seguenti sistemi lineari:
(a)
kx− 5y − 3z = −1x+ 6y − (k − 1)z = −19
30
(b)
2x− y − z − kt = 94x− 3kz − t = 08kx− 2y − 5z − 9t = 18
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 12

(c)
x+ ky + z = 02x+ ky − 3z = 0x− y = 04x+ 5y + 2kz = 0
(d)
(k − 1)x+ 2y + z − 3t = 0x+ y − 2kt = 0−6kx+ 3y + 5z + t = 0
9. Dire se la matrice
A =
1 −1 21 3 12 1 −1
e invertibile e, in caso affermativo, trovare A−1.
SVOLGIMENTO. Svolgeremo l’esercizio in tre modi differenti.
PRIMO METODO. La matrice A e invertibile se e solo se esiste una ed una solamatrice
B =
x1 x2 x3
y1 y2 y3z1 z2 z3
tale che A ·B = I3. In tal caso avremo A−1 = B. Quindi
1 −1 21 3 12 1 −1
·
x1 x2 x3
y1 y2 y3z1 z2 z3
=
1 0 00 1 00 0 1
,
x1 − y1 + 2z1 x2 − y2 + 2z2 x3 − y3 + 2z3x1 + 3y1 + z1 x2 + 3y2 + z2 x3 + 3y3 + z32x1 + y1 − z1 2x2 + y2 − z2 2x3 + y3 − z3
=
1 0 00 1 00 0 1
,
da cui si hanno i tre sistemi
x1 − y1 + 2z1 = 1x1 + 3y1 + z1 = 02x1 + y1 − z1 = 0
,
x2 − y2 + 2z2 = 0x2 + 3y2 + z2 = 12x2 + y2 − z2 = 0
,
x3 − y3 + 2z3 = 0x3 + 3y3 + z3 = 02x3 + y3 − z3 = 1
. (1)
Ovviamente A e invertibile se e solo se tutti e tre i precedenti sistemi hanno una eduna sola soluzione. Risolviamo il primo sistema. In modo analogo si risolverannogli altri due
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 13

1 −1 2 11 3 1 02 1 −1 0
R2 → R2 −R1
R3 → R3 − 2R1
−→
1 −1 2 10 4 −1 −10 3 −5 −2
R3 → 4R3 − 3R2 −→
1 −1 2 10 4 −1 −10 0 −17 −5
R2 → 17R2 −R3
R1 → 17R1 + 2R3
−→
17 −17 0 70 68 0 −120 0 −17 −5
R1 → 4R1 +R2 −→
68 0 0 160 68 0 −120 0 −17 −5
R1 → 168R1
R2 → 168R2
R3 → 1−17
R3
−→
1 0 0 417
0 1 0 − 317
0 0 1 517
, quindi
x1 =4
17, y1 = − 3
17, z1 =
5
17
e la soluzione del primo sistema. Analogamente, le soluzioni degli altri due sistemisono
x2 = − 1
17, y2 =
5
17, z2 =
3
17, e
x3 =7
17, y3 = − 1
17, z3 = − 4
17.
Pertanto
A−1 = B =
417
− 117
717
− 317
517
− 117
517
317
− 417
.
SECONDO METODO. In effetti questo metodo non e altro che il precedente overisolviamo contemporaneamente i tre sistemi in (1):
1 −1 2 1 0 01 3 1 0 1 02 1 −1 0 0 1
R2 → R2 −R1
R3 → R3 − 2R1
−→
1 −1 2 1 0 00 4 −1 −1 1 00 3 −5 −2 0 1
R3 → 4R3 − 3R2 −→
1 −1 2 1 0 00 4 −1 −1 1 00 0 −17 −5 −3 4
R2 → 17R2 −R3
R1 → 17R1 + 2R3
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 14

−→
17 −17 0 7 −6 80 68 0 −12 20 −40 0 −17 −5 −3 4
R1 → 4R1 +R2 −→
68 0 0 16 −4 280 68 0 −12 20 −40 0 −17 −5 −3 4
R1 → 168R1
R2 → 168R2
R3 → 1−17
R3
−→
1 0 0 417
− 117
717
0 1 0 − 317
517
− 117
0 0 1 517
317
− 417
e quindi A−1 =
417
− 117
717
− 317
517
− 117
517
317
− 417
.
TERZO METODO. Ricordiamo il seguente teorema: Una matrice A di ordine n einvertibile se e solo se detA 6= 0. Posto inoltre A = (aij) e A−1 = (bij), si ha
bij =Aji
detA
essendo Aji il complemento algebrico dell’elemento aji di A.
Abbiamo detA = −17. Pertanto A e invertibile. Per determinare A−1 calcoliamo icomplementi algebrici:
A11 = (−1)2(−3− 1) = −4, A12 = (−1)3(−1− 2) = 3, A13 = (−1)4(1− 6) = −5,
A21 = (−1)3(1− 2) = 1, A22 = (−1)4(−1− 4) = −5, A23 = (−1)5(1 + 2) = −3,
A31 = (−1)4(−1− 6) = −7, A32 = (−1)5(1− 2) = 1, A33 = (−1)6(3 + 1) = 4.
Quindi
A−1 =
417
− 117
717
− 317
517
− 117
517
317
− 417
.
10. Siano date le seguenti matrici.
A =
1 −1 21 3 12 1 −1
; B =
2 −1 13 2 −11 1 −1
.
(a) Calcolare i determinanti di A e di B.
(b) Calcolare il determinante della matrice prodotto A·B e confrontarne il risultatocol prodotto del determinante di A col determinante di B.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 15

SVOLGIMENTO. Si ha
det
1 −1 21 3 12 1 −1
= det
1 −1 20 4 −10 3 −5
= 1(−1)2det
(4 −13 −5
)= −17.
det
2 −1 13 2 −11 1 −1
= det
2 −1 13 2 −13 0 0
= 3(−1)4det
( −1 12 −1
)= −3.
Pertanto detA · detB = 51. Calcoliamo ora il determinante di A ·B:
detA ·B = det
1 −1 21 3 12 1 −1
·
2 −1 13 2 −11 1 −1
= det
1 −1 012 6 −36 −1 2
=
det
1 0 012 18 −36 5 2
= 1(−1)2det
(18 −35 2
)= 51. Com’era prevedibile per il
teorema di Binet.
11. Siano date le seguenti matrici.
A =
3 −2 −1−5 3 −41 9 2
; B =
3 −4 51 2 36 −1 −2
.
(a) Calcolare i determinanti di A e di B.
(b) Calcolare il determinante della matrice prodotto A·B e confrontarne il risultatocol prodotto del determinante di A col determinante di B.
(c) Dire se A e B sono invertibili e, in caso affermativo, calcolare le matrici inverse.
12. Calcolare il determinante della matrice
A =
1 2 3 43 6 −1 03 2 1 5−1 −3 −5 −7
.
Dire inoltre se A e invertibile e, in caso affermativo, calcolare il determinante dellamatrice inversa.
13. Sia data la matrice
A =
1 k 3 43 6 −1 03 2 1 5−1 −3 −5 k
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 16

Determinare i valori del parametro reale k per cui il determinante di A risulti diversodallo zero.
14. Calcolare il determinante della matrice
3 5 −2 −3 −54 1 3 −3 26 10 1 2 21 −1 1 −2 1−3 6 2 7 6
.
15. Sia data la matrice
B =
3 5 −2 −3 −54 1 3 −3 26 k 1 2 21 −1 1 −2 1−3 6 2 7 6
.
Determinare gli eventuali valori del parametro reale k per cui A risulti invertibile.Per questi valori calcolare il determinante della matrice inversa.
16. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
kx− ky + 2z = 1−x+ y + kz = 2−kx+ z = 3
SVOLGIMENTO. Il sitema precedente puo essere studiato col teorema di Rouche-Capelli. Per trovare il rango delle matrici completa e incompleta useremo il metododi riduzione per righe. Nella notazione seguita viene scritta la matrice completa,separando con una linea verticale la colonna dei termini noti, cosı a sinistra sievidenzia la matrice incompleta. (Si ricordi che per ridurre la matrice e sufficienteusare ripetutamente la seguente regola Ri → λRi + µRj, essendo λ 6= 0 e i 6= j).
Conviene distinguere subito i casi: k = 0 e k 6= 0.
Caso k = 0.
0 0 2 1−1 1 0 20 0 1 3
R3 → −2R3 +R1 −→
0 0 2 1−1 1 0 20 0 0 −5
.
La matrice incompleta ha rango 2 mentre la completa ha rango 3. Pertanto ilsistema e impossibile.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 17

Caso k 6= 0.
k −k 2 1−1 1 k 2−k 0 1 3
R2 → R2 +
1kR1 −→
−→
k −k 2 1
0 0 k2+2k
2k+1k
−k 0 1 3
.
Si ottiene cosı, scambiando la seconda con la terza riga, una matrice ridotta.Quindi, per k 6= 0, sia la matrice completa che quella incompleta hanno rango3. Per il teorema di Cramer, il sistema ha una e una sola soluzione data da
x =
∣∣∣∣∣∣∣∣∣
1 −k 22k+1k
0 k2+2k
3 0 1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −k 2
0 0 k2+2k
−k 0 1
∣∣∣∣∣∣∣∣∣
, y =
∣∣∣∣∣∣∣∣∣
k 1 2
0 2k+1k
k2+2k
−k 3 1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −k 2
0 0 k2+2k
−k 0 1
∣∣∣∣∣∣∣∣∣
, z =
∣∣∣∣∣∣∣∣∣
k −k 10 0 2k+1
k
−k 0 3
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −k 2
0 0 k2+2k
−k 0 1
∣∣∣∣∣∣∣∣∣
.
17. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
2x+ ky − z = 1x+ y = 2x− y + kz = 3
SVOLGIMENTO. Nella soluzione del sistema assegnato applicheremo il teorema diRouche-Capelli. Per trovare il rango delle matrici completa e incompleta useremoil metodo di riduzione per righe. Nella notazione seguita viene scritta la matricecompleta, separando con una linea verticale la colonna dei termini noti, cosı a sinistrasi evidenzia la matrice incompleta. (Si ricordi che per ridurre la matrice e sufficienteusare ripetutamente la seguente regola Ri → λRi + µRj, essendo λ 6= 0 e i 6= j).
2 k −1 11 1 0 21 −1 k 3
R3 → R3 + kR1 −→
2 k −1 11 1 0 2
1 + 2k k2 − 1 0 3 + k
R3 → R3 − (1 + 2k)R2 −→
2 k −1 11 1 0 20 k2 − 2k − 2 0 1− 3k
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 18

Per k = 1 ± √3, si ha k2 − 2k − 2 = 0 e 1 − 3k 6= 0. Quindi, per questi valori
di k, il sistema e impossibile in quanto la matrice incompleta ha rango 2 mentre lacompleta ha rango 3.
Sia k 6= 1 ± √3. Per il teorema di Cramer, il sistema ha una e una sola soluzione
data da
x =
∣∣∣∣∣∣∣∣∣
1 k −12 1 0
1− 3k k2 − 2k − 2 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
2 k −11 1 00 k2 − 2k − 2 0
∣∣∣∣∣∣∣∣∣
, y =
∣∣∣∣∣∣∣∣∣
2 1 −11 2 00 1− 3k 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
2 k −11 1 00 k2 − 2k − 2 0
∣∣∣∣∣∣∣∣∣
,
z =
∣∣∣∣∣∣∣∣∣
2 k 11 1 20 k2 − 2k − 2 1− 3k
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
2 k −11 1 00 k2 − 2k − 2 0
∣∣∣∣∣∣∣∣∣
.
18. Studiare, al variare del parametro reale k, il seguente sistema lineare:
kx+ y + (k + 1)z + 1 = 02kx+ 4y + (2k + 5)z = 0kx+ y + (2k + 1)z + 2− k = 0kx+ 3y + 4z + k − 2 = 02kx+ 4y + (2k + 5)z = 0
.
SVOLGIMENTO. Risolviamo il sistema assegnato col teorema di Rouche-Capelli.Per trovare il rango delle matrici completa e incompleta useremo il metodo di riduzio-ne per righe. Nella notazione seguita viene scritta la matrice completa, separandocon una linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia lamatrice incompleta.
k 1 k + 1 −12k 4 2k + 5 0k 1 2k + 1 k − 2k 3 4 2− k2k 4 2k + 5 0
−→
k 1 k + 1 −10 2 3 20 0 k k − 10 0 0 00 0 0 0
.
Sia la matrice completa che quella incompleta sono ridotte. Per k = 0 il rangodella matrice incompleta e 2 mentre quello della completa e 3. Quindi il sistema e
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 19

impossibile. Per k 6= 0 il sistema ammette soluzioni. Esso equivale al seguente
kx+ y + (k + 1)z = −12y + 3z = 2kz = k − 1
che si risolve facilmente.
19. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
kx− y + 2kz = 2x− 2y + 3z = −1x+ (k − 3)z = 4
SVOLGIMENTO. Si puo studiare per mezzo del teorema di Rouche-Capelli. Pertrovare il rango delle matrici completa e incompleta useremo il metodo di riduzioneper righe. Nella notazione seguita viene scritta la matrice completa, separando conuna linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta. (Si ricordi che per ridurre la matrice e sufficiente usare ripetutamentela seguente regola Ri → λRi + µRj, essendo λ 6= 0 e i 6= j).
k −1 2k 21 −2 3 −11 0 k − 3 4
R2 → R2 + (−2)R1 −→
k −1 2k 21− 2k 0 3− 4k −5
1 0 k − 3 4
.
Quindi −1 e l’elemento speciale della prima riga. Ancora la matrice non e ridotta.Ovviamente conviene che anche l’elemento speciale della seconda riga appartengaalla matrice incompleta. Possiamo cosı scegliere fra 1 − 2k e 3 − 4k. Procediamoin modo che 1− 2k diventi un elemento speciale. Cio sara possibile per quei valoridi k per cui 1 − 2k 6= 0 (si ricordi che l’elemento speciale deve essere diverso dallozero). Si hanno cosı due casi k = 1
2e k 6= 1
2.
Caso k = 12. La matrice diventa
12
−1 1 20 0 1 −51 0 −5
24
che e ridotta (basta scambiare fra loro la seconda e terza riga).
Poiche sia la matrice completa che quella incompleta hanno rango 3, il sistemae possibile e, per il teorema di Cramer, ha una sola soluzione. Essa e
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 20

x =
∣∣∣∣∣∣∣∣∣
2 −1 1−5 0 14 0 −5
2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
12
−1 10 0 11 0 −5
2
∣∣∣∣∣∣∣∣∣
, y =
∣∣∣∣∣∣∣∣∣
12
2 10 −5 11 4 −5
2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
12
−1 10 0 11 0 −5
2
∣∣∣∣∣∣∣∣∣
, z =
∣∣∣∣∣∣∣∣∣
12
−1 20 0 −51 0 4
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
12
−1 10 0 11 0 −5
2
∣∣∣∣∣∣∣∣∣
.
Caso k 6= 12. Si ha
k −1 2k 21− 2k 0 3− 4k −5
1 0 k − 3 4
R3 → R3 + ( 1
2k−1)R2 −→
−→
k −1 2k 21− 2k 0 3− 4k −5
0 0 2k2−11k+62k−1
9−8k1−2k
, che e ridotta.
Per k = 11±√73
4, si ha 2k2−11k+6
2k−1= 0 e 9−8k
1−2k6= 0. Pertanto, per questi due valori
di k, il sistema risulta impossibile essendo il rango della matrice incompletauguale a due mentre quello della completa uguale a tre.
Per k 6= 11±√73
4(e k 6= 1
2), si ha 2k2−11k+6
2k−16= 0. Quindi sia la matrice completa
che quella incompleta hanno rango 3. Il sistema e possibile e, per il teoremadi Cramer, ha una sola soluzione. Essa e
x =
∣∣∣∣∣∣∣∣∣
2 −1 2k−5 0 3− 4k9−8k1−2k
0 2k2−11k+62k−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −1 2k1− 2k 0 3− 4k
0 0 2k2−11k+62k−1
∣∣∣∣∣∣∣∣∣
, y =
∣∣∣∣∣∣∣∣∣
k 2 2k1− 2k −5 3− 4k
0 9−8k1−2k
2k2−11k+62k−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −1 2k1− 2k 0 3− 4k
0 0 2k2−11k+62k−1
∣∣∣∣∣∣∣∣∣
,
z =
∣∣∣∣∣∣∣∣∣
k −1 21− 2k 0 −5
0 0 9−8k1−2k
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
k −1 2k1− 2k 0 3− 4k
0 0 2k2−11k+62k−1
∣∣∣∣∣∣∣∣∣
.
20. Studiare, al variare del parametro reale k, il seguente sistema lineare:
2x− y + 3z + 2t = k4x+ 7z + 5t = 2k + 16x− 3y + (3k + 3)z + (k + 4)t = 2 + 3k
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 21

SVOLGIMENTO. Si puo studiare per mezzo del teorema di Rouche-Capelli. Pertrovare il rango delle matrici completa e incompleta useremo il metodo di riduzioneper righe. Nella notazione seguita viene scritta la matrice completa, separando conuna linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
2 −1 3 2 k4 0 7 5 2k + 16 −3 3k + 3 k + 4 3k + 2
−→
−→
2 −1 3 2 k4 0 7 5 2k + 10 0 3k − 6 k − 2 2
.
Quindi sia la matrice completa che quella incompleta sono ridotte. Se k = 2 si ha3k − 6 = k − 2 = 0, e il sistema e impossibile in quanto la matrice incompleta harango 2 mentre la completa ha rango 3. Se k 6= 2 il sistema ammette soluzioni.Poiche∣∣∣∣∣∣
2 −1 34 0 70 0 3k − 6
∣∣∣∣∣∣= 12k − 24 6= 0,
si hanno ∞1 soluzioni che si ottengono facilmente risolvendo (o per sostituzione ousando il teorema di Cramer) il seguente sistema nelle incognite x, y e z:
2x− y + 3z = −2t+ k4x+ 7z = −5t+ 2k + 1(3k − 6)z = 2− (k − 2)t
.
21. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
x+ 2y − z = 02x+ kz = −1(k2 + 2)x+ 2y + (k − 1)z = k
TRACCIA DELLO SVOLGIMENTO. Le matrici completa e incompleta del sistemapossono scriversi nel seguente modo
1 2 −1 02 0 k −1
k2 + 2 2 k − 1 k
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 22

Questa matrice puo essere ridotta alla seguente
1 2 −1 02 0 k −1
k2 − 1 0 0 k + 1
.
La precedente matrice e ridotta se k 6= 0. Allora
• per k = 0, la matrice diventa
1 2 −1 02 0 0 −1−1 0 0 1
,
da cui si ottiene la matrice ridotta
1 2 −1 02 0 0 −10 0 0 1
.
In tal caso il sistema e impossibile;
• per k = −1, il sistema ha ∞1 soluzioni;
• per k = 1, il sistema e impossibile;
• per k 6= ±1, il sistema ha 1 e 1 sola soluzione.
Si omette di indicare le soluzioni essendo, tale calcolo, estremamente facile.
22. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
x+ 2y + kz = 0x+ y + 2kz = k2
x+ 3y + k2z = −k2
.
TRACCIA DELLO SVOLGIMENTO. Le matrici completa e incompleta del sistemapossono scriversi nel seguente modo
1 2 k 01 1 2k k2
1 3 k2 −k2
.
Questa matrice puo essere ridotta alla seguente
1 2 k 00 −1 k k2
0 0 k2 0
.
Allora
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 23

• per k = 0 il sistema ha ∞1 soluzioni,
• per k 6= 0, il sistema ha 1 ed 1 sola soluzione.
Si omette di indicare le soluzioni essendo, tale calcolo, estremamente facile.
23. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
2x+ y + kz = 0−x+ z = −1k2x+ y + (k + 1)z = k
.
TRACCIA DELLO SVOLGIMENTO. Le matrici completa e incompleta del sistemapossono scriversi nel seguente modo
2 1 k 0−1 0 1 −1k2 1 k + 1 k
.
Questa matrice puo essere ridotta alla seguente
2 1 k 0−1 0 1 −1
k2 − 1 0 0 k + 1
.
Allora
• per k = −1 il sistema ha ∞1 soluzioni,
• per k = 1 il sistema e impossibile,
• per k 6= 1,−1, il sistema ha 1 ed 1 sola soluzione.
Si omette di indicare le soluzioni essendo, tale calcolo, estremamente facile.
24. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
x+ 2y + kz = 0x+ y + (k + 1)z = kx+ 2y + (k2 + k − 1)z = k + 1
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 24

TRACCIA DELLO SVOLGIMENTO. Le matrici completa e incompleta del sistemapossono scriversi nel seguente modo
1 2 k 01 1 k + 1 k1 2 k2 + k − 1 k + 1
.
Questa matrice puo essere ridotta alla seguente
1 2 k 00 −1 1 k0 0 k2 − 1 k + 1
.
Allora
• per k = −1 il sistema ha ∞1 soluzioni,
• per k = 1 il sistema e impossibile,
• per k 6= 1,−1, il sistema ha 1 ed 1 sola soluzione.
Si omette di indicare le soluzioni essendo, tale calcolo, estremamente facile.
25. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
kx− y + 2z = 0kx+ y + z = 1(2k − 3)x− y + 2z = 24kx+ 6z = 2
SVOLGIMENTO. Si puo studiare per mezzo del teorema di Rouche-Capelli. Pertrovare il rango delle matrici completa e incompleta useremo il metodo di riduzioneper righe. Nella notazione seguita viene scritta la matrice completa, separando conuna linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
k −1 2 0k 1 1 1
2k − 3 −1 2 24k 0 6 2
−→
k −1 2 02k 0 3 1
k − 3 0 0 20 0 0 0
.
Quindi sia la matrice completa che quella incompleta sono ridotte. Se k = 3 si hak − 3 = 0, e il sistema e impossibile in quanto la matrice incompleta ha rango 2mentre la completa ha rango 3. Se k 6= 3 il sistema ammette soluzioni. Poiche
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 25

∣∣∣∣∣∣
k −1 22k 0 3
k − 3 0 0
∣∣∣∣∣∣= −3(k − 3) 6= 0,
si ha, per ogni k 6= 3, esattamente una soluzione che si ottiene facilmente risolvendo(o per sostituzione o usando il teorema di Cramer) il seguente sistema nelle incognitex, y e z:
kx− y + 2z = 02kx+ 3z = 1(k − 1)z = 2
.
26. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
3x+ ky + z = 13x+ (k − 1)y + (k + 2)z = 36x+ 2ky + (k + 1)z = 39x+ 3ky + 3z = 3
SVOLGIMENTO. Si puo studiare per mezzo del teorema di Rouche-Capelli. Pertrovare il rango delle matrici completa e incompleta useremo il metodo di riduzioneper righe. Nella notazione seguita viene scritta la matrice completa, separando conuna linea verticale la colonna dei termini noti, cosı a sinistra si evidenzia la matriceincompleta.
3 k 1 13 k − 1 k + 2 36 2k k + 1 39 3k 3 3
−→
3 k 1 10 −1 k + 1 20 0 k − 1 10 0 0 0
.
Quindi sia la matrice completa che quella incompleta sono ridotte. Se k = 1 si hak − 1 = 0, e il sistema e impossibile in quanto la matrice incompleta ha rango 2mentre la completa ha rango 3. Se k 6= 1 il sistema ammette soluzioni. Poiche∣∣∣∣∣∣
3 k 10 −1 k + 10 0 k − 1
∣∣∣∣∣∣= −3(k − 1) 6= 0,
si ha, per ogni k 6= 1, esattamente una soluzione che si ottiene facilmente risolvendo(o per sostituzione o usando il teorema di Cramer) il seguente sistema nelle incognitex, y e z:
3x+ ky + z = 1−y + (k + 1)z = 2(k − 1)z = 1
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 26
27. Studiare, al variare del parametro reale k, il seguente sistema lineare (non e ne-cessario calcolare esplicitamente le eventuali soluzioni, e sufficiente indicarle comerapporto di determinanti):
(a)
kx+ y + z = 1x+ ky + z = kx+ y + kz = k2
(b)
x+ y + 3z = 3x− y + t = 02x+ 3y − kt = 1
(c)
4x− ky − z = 1kx− y + 3z = 2−x+ y − 3z = −1
(d)
x− ky − 2kz = 32x− 3y + kz = 1
(e)
kx− y + 2z = 0kx+ y + z = 1(2k − 3)x− y + 2z = 24kx+ 6z = 2
(f)
x− y = 1ky + z = 02x− kz = −1x+ y + z = −1
(g)
(1− k)x+ y + z = 02x+ (2− k)y + 2z = 0x+ y + (1− k)z = 0
(h)
x− ky − z = 0kx− y − z = 0x− (1− k)y − 2z = 03x+ ky − z = 0
(i)
3x+ ky + z = 13x+ (k − 1)y + (k + 2)z = 36x+ 2ky + (k + 1)z = 39x+ 3ky + 3z = 3
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 27
(j)
2x− y + 3z + 2t = k4x+ 7z + 5t = 2k + 16x− 3y + (3k + 3)z + (k + 4)t = 2 + 3k
(k)
4x− 2y + 4z + 3t = 15x− 2y + 5z − 3t = k + 18x− 4y + (2k + 7)z + (4k + 4)t = 5
(l)
kx+ y + (k + 1)z + 1 = 02kx+ 4y + (2k + 5)z = 0kx+ y + (2k + 1)z + 2− k = 0kx+ 3y + 4z + k − 2 = 02kx+ 4y + (2k + 5)z = 0
28. Sia S un sistema lineare omogeneo di m equazioni in n incognite. Dire, motivandola risposta, se le seguenti affermazioni sono vere o false.
(a) Il sistema puo essere impossibile.
(b) Se il numero n delle incognite e maggiore del numero m delle equazioni, ilsistema ammette infinite soluzioni.
(c) Se n ≤ m e il rango della matrice incompleta coincide col numero m delleequazioni, il sistema ammette una ed una sola soluzione.
(d) Se n ≤ m e il rango della matrice incompleta e minore di m, il sistema ammetteinfinite soluzioni.
3 Geometria lineare del piano
1. Si dica se i tre punti P , Q e R sono allineati nei seguenti casi:
(a) P ≡ (0, 5), Q ≡ (2, 7), R ≡ (1, 4);
(b) P ≡ (1, 3), Q ≡ (0, 0), R ≡ (4, 12);
(c) P ≡ (−1,−2), Q ≡ (−2, 0), R ≡ (1, 4).
2. Si trovi la retta r per P ≡ (1, 7) parallela a s) 2x− 3y + 4 = 0.
3. Si trovi la retta r per P ≡ (1,−2) parallela a s) 2x− 3y − 8 = 0.
4. Si trovi la retta r per P ≡ (1, 7) ortogonale a s) 2x− 3y + 4 = 0.
5. Si trovi la retta r per P ≡ (1,−2) ortogonale a s) 2x− 3y − 8 = 0.
6. Si stabilisca per quali k ∈ R le rette r) kx+ y − 1 = 0 e s) 2x− ky − 8 = 0 sono
(a) parallele;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 28

(b) ortogonali.
7. Si trovino, se esistono, i punti della retta r) 4x − 3y = 2 che distano 4 dall’originedelle coordinate.
8. Si trovino, se esistono, i punti della retta r) 4x − 3y = 2 che distano 1 dal puntoP ≡ (5, 1).
9. Si trovi la distanza di P da r nei casi seguenti:
(a) P ≡ (1, 3), r) 2x− 3y + 4 = 0;
(b) P ≡ (1, 2), r) 2x− 3y + 4 = 0;
(c) P ≡ (−3, 1), r)
x = 2t+ 1y = −3t+ 4
.
10. Si trovino le rette per P ≡ (2, 3) che hanno distanza 2 da Q ≡ (−1,−1).
11. Si trovino le rette parallele ad r) 2x+ 3y = 1 che hanno distanza 2 da Q ≡ (−1, 4).
12. Si calcoli la distanza tra r) 2x− 3y + 4 = 0 e s) 4x− 6y + 14 = 0.
13. Si calcoli la distanza tra r) 2x− 3y + 4 = 0 e s) 3x− 6y + 14 = 0.
14. Si verifichi se P ≡ (2, 4), Q ≡ (−2, 3) e R ≡ (3, 1) sono vertici di un triangolo e, incaso affermativo, si calcoli l’area di tale triangolo.
15. Si trovi l’asse del segmento PQ, essendo P ≡ (2, 4), Q ≡ (−2, 3).
16. Nel piano siano date le rette:
r) x+ 3y + 3 = 0 e s)
x = t+ 3y = 3t+ 8
.
Determinare:
(a) Le coordinate del centro C del fascio individuato da r e s.
(b) Le coordinate del punto B simmetrico di C rispetto alla bisettrice del secondoe quarto quadrante.
(c) Le rette del fascio parallele agli assi cartesiani.
(d) La retta m del fascio parallela alla congiungente l’origine col punto A ≡ (1, 2).
(e) La retta n del fascio perpendicolare alla retta di equazione 3x− 4y + 3 = 0.
(f) La retta t simmetrica di m rispetto all’asse x.
(g) La retta p simmetrica di n rispetto all’asse y.
SVOLGIMENTO:
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 29

(a) Le coordinate del centro C del fascio individuato da r e s.
Il centro del fascio coincide col punto intersezione delle rette r e s. Si haC ≡ (0,−1).
(b) Le coordinate del punto B simmetrico di C rispetto alla bisettricedel secondo e quarto quadrante.
Si ha B ≡ (1, 0).
(c) Le rette del fascio parallele agli assi cartesiani.
Le rette richieste hanno equazioni x = 0 e y = −1.
(d) La retta m del fascio parallela alla congiungente l’origine col puntoA ≡ (1, 2).
La retta congiungente l’origine col punto A ha coefficiente angolare 2. Quindim ha equazione y + 1 = 2x.
(e) La retta n del fascio perpendicolare alla retta di equazione 3x−4y+3 = 0.
La retta n ha equazione y + 1 = −43x.
(f) La retta t simmetrica di m rispetto all’asse x.
La retta m passa per i due punti (0,−1) e (12, 0). Quindi la retta t passa per i
punti (0, 1) e (12, 0). La sua equazione e 2x+ y − 1 = 0.
(g) La retta p simmetrica di n rispetto all’asse y.
La retta n passa per i due punti (0,−1) e (34, 0). Quindi la retta p passa per i
punti (0,−1) e (−34, 0). La sua equazione e 4x− 3y − 3 = 0.
17. Nel piano e data la retta r di equazione y = x + 2. Determinare le equazioni delleeventuali rette uscenti dal punto P ≡ (1, 0) e formanti con l’asse delle ascisse e laretta r un triangolo di area 4.
18. Sia s) 3x− 4y = 0. Si determini la retta r ottenuta ruotando s di un angolo α = π4
attorno all’origine delle coordinate e in verso antiorario.
19. Sia s) 3x − 4y + 3 = 0. Si determini la retta r ottenuta ruotando s di un angoloα = π
4attorno all’origine delle coordinate e in verso antiorario.
20. Sia s) 3x − 4y + 3 = 0. Si determini la retta r ottenuta ruotando s di un angoloα = π
4attorno a P ≡ (2, 1) e in verso antiorario.
21. Nel piano siano dati i punti A ≡ (2, 1) e B ≡ (1, 5). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π12
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con la retta di equazione x = 1;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 30

(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 4x+ y − 9 = 0.
(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π12
ha laseguente legge
(xy
)−→
(cos π
12− sin π
12
sin π12
cos π12
) (x− 2y − 1
)+
(21
),
(xy
)−→
( √6+
√2
4−
√6−√
24√
6−√2
4
√6+
√2
4
) (x− 2y − 1
)+
(21
),
(xy
)−→
( √6+
√2
4(x− 2)−
√6−√
24
(y − 1) + 2√6−√
24
(x− 2) +√6+
√2
4(y − 1) + 1
).
Il punto B viene quindi ruotato nel punto
B′ ≡(
−5√6+3
√2+8
4, 3
√6+5
√2+4
4
).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
x− 2
−5√6 + 3
√2=
y − 1
3√6 + 5
√2.
(c) C ≡(1, 8
√6+3
√2
5√6−3
√2
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dalla retta x = 1 (altezza). Con facilicalcoli si ottiene
Area(ABC) =1
2
(5− 8
√6 + 3
√2
5√6− 3
√2
).
22. Nel piano siano dati i punti A ≡ (4, 0) e B ≡ (0, 6). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π4
nel verso antiorario;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 31

(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 3x+ 2y − 12 = 0.
(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π4ha la
seguente legge
(xy
)−→
(cos π
4− sin π
4
sin π4
cos π4
) (x− 4y
)+
(40
),
(xy
)−→
( √22
−√22√
22
√22
) (x− 4y
)+
(40
),
(xy
)−→
( √22x−
√22y + 4− 2
√2√
22x+
√22y − 2
√2
).
Il punto B viene quindi ruotato nel punto
B′ ≡ (4− 5
√2,√2).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
x+ 5y − 4 = 0.
(c) C ≡ (0, 4
5
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(6− 4
5
)· 4 · 1
2.
23. Nel piano siano dati i punti A ≡ (2, 0) e B ≡ (0, 5). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π6
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 32

(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 5x+ 2y − 10 = 0.
(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π6
ha la seguente legge
(xy
)−→
(cos π
6− sin π
6
sin π6
cos π6
) (x− 2y
)+
(20
),
(xy
)−→
( √32
−12
12
√32
) (x− 2y
)+
(20
),
(xy
)−→
( √32x− 1
2y + 2−√
312x+
√32y − 1
).
Il punto B viene quindi ruotato nel punto
B′ ≡(−1+2
√3
2, 5
√3−22
).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazionee
(5√3− 2)x+ (5 + 2
√3)y − 10
√3 + 4 = 0.
(c) C ≡(0, 10
√3−4
5+2√3
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto del-la lunchezza di BC (base) per la distanza di A dall’asse delle ordinate(altezza). Quindi
Area(ABC) =
(5− 10
√3− 4
5 + 2√3
)· 2 · 1
2.
24. Nel piano siano dati i punti A ≡ (3, 0) e B ≡ (0, 5). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π4
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 33

SVOLGIMENTO:
(a) L’equazione della retta r e 5x+ 3y − 15 = 0.
(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π4ha la
seguente legge
(xy
)−→
(cos π
4− sin π
4
sin π4
cos π4
) (x− 3y
)+
(30
),
(xy
)−→
( √22
−√22√
22
√22
) (x− 3y
)+
(30
),
(xy
)−→
( √22x−
√22y + 6−3
√2
2√22x+
√22y − 3
√2
2
).
Il punto B viene quindi ruotato nel punto
B′ ≡ (3− 4
√2,√2).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
x+ 4y − 3 = 0.
(c) C ≡ (0, 3
4
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(5− 3
4
)· 3 · 1
2.
25. Nel piano siano dati i punti A ≡ (3, 0) e B ≡ (0, 7). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π4
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
SVOLGIMENTO:
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 34

(a) L’equazione della retta r e 7x+ 3y − 21 = 0.
(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π4ha la
seguente legge
(xy
)−→
(cos π
4− sin π
4
sin π4
cos π4
) (x− 3y
)+
(30
),
(xy
)−→
( √22
−√22√
22
√22
) (x− 3y
)+
(30
),
(xy
)−→
( √22x−
√22y + 6−3
√2
2√22x+
√22y − 3
√2
2
).
Il punto B viene quindi ruotato nel punto
B′ ≡ (3− 5
√2, 2
√2).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
2x+ 5y − 6 = 0.
(c) C ≡ (0, 6
5
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(7− 6
5
)· 3 · 1
2.
26. Nel piano siano dati i punti A ≡ (1, 0) e B ≡ (0, 3). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π3
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 3x+ y − 3 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 35

(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π3ha la
seguente legge
(xy
)−→
(cos π
3− sin π
3
sin π3
cos π3
) (x− 1y
)+
(10
),
(xy
)−→
(12
−√32√
32
12
) (x− 1y
)+
(10
),
(xy
)−→
(12x−
√32y + 1
2√32x+ 1
2y −
√32
).
Il punto B viene quindi ruotato nel punto
B′ ≡(
1−3√3
2, 3−
√3
2
).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
(3−√3)(x− 1)− (3
√3 + 1)y = 0.
(c) C ≡(0,
√3−3
3√3+1
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(3−
√3− 3
3√3 + 1
)· 1 · 1
2.
27. Nel piano siano dati i punti A ≡ (4, 0) e B ≡ (0, 8). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π4
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 2x+ y − 8 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 36

(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π4ha la
seguente legge
(xy
)−→
(cos π
4− sin π
4
sin π4
cos π4
) (x− 4y
)+
(40
),
(xy
)−→
( √22
−√22√
22
√22
) (x− 4y
)+
(40
),
(xy
)−→
( √22x−
√22y + 4− 2
√2√
22x+
√22y − 2
√2
).
Il punto B viene quindi ruotato nel punto
B′ ≡ (−6√2 + 4, 2
√2).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
x+ 3y − 4 = 0.
(c) C ≡ (0, 4
3
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(8− 4
3
)· 4 · 1
2.
28. Nel piano siano dati i punti A ≡ (2, 0) e B ≡ (0, 4). Si determini:
(a) l’equazione della retta r passante per i punti A e B;
(b) l’equazione della retta s ottenuta ruotando r intorno ad A di un angolo α = π6
nel verso antiorario;
(c) le coordinate del punto C intersezione di s con l’asse delle ordinate;
(d) l’area del triangolo ABC.
SVOLGIMENTO:
(a) L’equazione della retta r e 2x+ y − 4 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 37

(b) La rotazione nel verso antiorario intorno al punto A di un angolo α = π6ha la
seguente legge
(xy
)−→
(cos π
6− sin π
6
sin π6
cos π6
) (x− 2y
)+
(20
),
(xy
)−→
( √32
−12
12
√32
) (x− 2y
)+
(20
),
(xy
)−→
( √32x− 1
2y + 2−√
312x+
√32y − 1
).
Il punto B viene quindi ruotato nel punto
B′ ≡ (−√3, 2
√3− 1
).
Poiche s coincide con la retta passante per i punti A e B′, la sua equazione e
(2√3− 1)x+ (
√3 + 2)y − 4
√3 + 2 = 0.
(c) C ≡(0, 4
√3−2√3+2
).
(d) L’area del triangolo ABC si ottiene dividendo per due il prodotto della lun-chezza di BC (base) per la distanza di A dall’asse delle ordinate (altezza).Quindi
Area(ABC) =
(4− 4
√3− 2√3 + 2
)· 2 · 1
2.
29. Sia s la retta di equazione 2x− 3y = 1. Scrivere l’equazione della retta s′ ottenutaapplicando ad s una riflessione nella retta r di equazione x+ y = 1.
SVOLGIMENTO. Sia α l’angolo che r forma col semiasse positivo delle ascisse.
Posto P0 ≡(
10
), abbiamo
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − 1y1 − 0
)+
(10
).
La retta r ha coefficiente angolare m = −1. Pertanto tanα = −1 e
cos 2α =1− tan2 α
1 + tan2 α= 0,
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 38

sin 2α =2 tanα
1 + tan2 α= −1.
Quindi (xy
)=
( −y1 + 1−x1 + 1
),
Sostituendo nell’equazione di s otteniamo
s′) 2(−y1 + 1)− 3(−x1 + 1) = 1.
30. Sia s la retta di equazione x − 2y = 1. Scrivere l’equazione della retta s′ ottenutaapplicando ad s una riflessione nella retta r di equazione 2x+ 3y = 1.
SVOLGIMENTO. Sia α l’angolo che la retta r forma col semiasse positivo delle
ascisse. Posto P0 ≡(
20
)∈ r, abbiamo
(xy
)=
(cos 2α sin 2αsin 2α − cos 2α
)(x1 − 2y1 − 0
)+
(20
).
La retta r ha coefficiente angolare m = −23. Pertanto tanα = −2
3e
cos 2α =1− tan2 α
1 + tan2 α=
5
13,
sin 2α =2 tanα
1 + tan2 α= −12
13.
Quindi (xy
)=
(513(x1 − 2)− 12
13y1 + 2
−1213(x1 − 2)− 5
13y1
),
s′)5
13(x1 − 2)− 12
13y1 − 2
(−12
13(x1 − 2)− 5
13
)= 3.
4 Geometria lineare dello spazio
1. Si trovi l’equazione del piano π passante per i tre punti:
(a) P ≡ (2, 0, 0), Q ≡ (0, 3, 0) e R ≡ (0, 0, 5);
(b) P ≡ (2, 3,−1), Q ≡ (9, 3, 0) e R ≡ (5, 0, 0).
2. Si trovi il piano passante per P e r nei seguenti casi:
(a) P ≡ (2, 3, 1), r)
2x− 3y + z = 1x+ 2y − z = 3
;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 39

(b) P ≡ (−2, 3, 1), r)
x = 3t− 1y = 2t+ 3z = −t+ 1
.
3. Determinare il piano passante per P ≡ (−1, 2, 4) ed ortogonale alla retta r neiseguenti casi:
(a) r)
2x+ y − z = 2−3x+ 2y + 3z = 0
;
(b) r)
x = −t+ 2y = 2tz = 3t− 4
;
(c) r)
2x+ y − z = −4−3x+ 2y + 3z = 19
.
4. Determinare la distanza fra il punto P e la retta r nei seguenti casi:
(a) P ≡ (2, 3, 1), r)
2x− 3y + z = 1x+ 2y − z = 3
;
(b) P ≡ (−2, 3, 1), r)
x = 3t− 1y = 2t+ 3z = −t+ 1
.
5. Determinare gli eventuali valori di k per cui il piano α) 2x− ky + 3z = 1
e la retta r)
x = 3t− 1y = 2t+ 3z = kt+ 1
sono paralleli.
6. Calcolare la retta per P ≡ (2,−1, 3) e ortogonale a r)
x+ 4y − 2z = 33x− y + 2z = 1
.
7. Date le rette
r)
x+ 3y + z = −1y + z = 0
e s)
x = −72t+ 1
2
y = −tz = t
,
provare che sono complanari e determinare un piano che le contiene.
8. Nello spazio sono assegnati il piano π di equazione x + 3y − 2z + 1 = 0, la retta
r)
x = 3 + ty = 1− tz = 1 + 2t
e il punto A ≡ (−1, 1, 0). Determinare:
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 40

(a) La retta per A e parallela ad r.
(b) La retta per A e perpendicolare a π.
(c) Il piano per A e parallelo a π.
(d) Il piano per A e perpendicolare a r.
(e) Il piano per A e contenente r.
(f) Il piano contenente r e ortogonale a π.
(g) La retta per A ortogonale e incidente con r.
(h) La proiezione ortogonale di r su π.
(i) Le distanze di A da π e da r.
SVOLGIMENTO:
(a) Il vettore (1,−1, 2) e parallelo alla retta r. Quindi la retta richiesta ha equazioni
x+ 1 = ty − 1 = −tz = 2t
.
(b) Il vettore (1, 3,−2) e ortogonale a π. Quindi la retta richiesta ha equazioni
x+ 1 = ty − 1 = 3tz = −2t
.
(c) Il vettore (1, 3,−2) e ortogonale a π. Quindi il piano richiesto ha equazionex+ 1 + 3(y − 1)− 2z = 0.
(d) Il vettore (1,−1, 2) e ortogonale al piano richiesto. Pertanto esso ha equazionex+ 1− (y − 1) + 2z = 0.
(e) Il fascio di piani per r e dato da λ(x+y−4)+µ(2x−z−5) = 0. Sostituendo alposto di x e y, rispettivamente l’ascissa e l’ordinata di A si ottiene 4λ+7µ = 0.Possiamo porre λ = 1 e µ = −4
7. IL piano richiesto ha quindi equazione
x− 7y − 4z + 8 = 0.
(f) Il piano generico del fascio per r e (λ+ 2µ)x+ λy− µz − 4λ− 5µ = 0. Quindiil vettore (λ + 2µ, λ,−µ) e ortogonale ad esso. Poiche (1, 3,−2) e ortogonaleal piano π, bisogna imporre la condizione che (λ + 2µ, λ,−µ) sia ortogonalea (1, 3,−2), cioe che si annulli il loro prodotto scalare. Si ottiene λ + µ = 0.Quindi l’equazione del piano richiesta e x− y − z − 1 = 0.
(g) La retta richiesta si ottiene come intersezione del piano per A e contenente r(punto e con il piano per A e perpendicolare a r (punto d). Quindi essa ha
equazioni
x− 7y − 4z + 8 = 0x− y + 2z + 2 = 0
.
(h) Questa retta si ottiene come intersezione del piano contenente r e ortogonale a π
(punto f) col piano π stesso. Quindi la retta richiesta e
x− y − z − 1 = 0x+ 3y − 2z + 1 = 0
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 41

(i) La distanza di A da π e |−1+3−0+1|√1+9+4
= 3√1+9+4
.
La distanza di A da r coincide con la distanza fra A e il punto T intersezionedi r col piano per A e ortogonale r (punto d). Si ha T ≡ (2, 2,−1). Quindi ladistanza di A da r e
√(−1− 2)2 + (1− 2)2 + 1 =
√11.
9. Siano dati il punto P ≡ (0, 1, 0) e le rette
r)
x− y + z = 0y − z = −1
, s)
x = t− 1y = tz = 1
e il piano α) 2x− y + 3z = 0. Trovare:
(a) la proiezione ortogonale di s su α;
(b) le eventuali rette per P ed incidenti r ed s;
(c) la retta passante per P e parallela ad s;
(d) la retta passante per P , parallela ad α ed incidente r;
(e) la retta passante per P , parallela ad α ed ortogonale ad s;
(f) la distanza di P da s;
(g) la distanza di P da α;
(h) il punto P ′ simmetrico di P rispetto ad α;
(i) il punto P ′ simmetrico di P rispetto ad s;
(j) la retta simmetrica di s rispetto ad α.
10. Siano dati il punto P ≡ (−1, 2, 1), la retta
r)
x = 3t− 1y = 2t+ 4z = −t− 1
e il piano α) x+ 2y − 3z = 1.
Trovare la retta s tale che: s e parallela ad α, s passa per P , s e incidente r.
11. Nello spazio sono assegnate le rette
r)
x = 3t− 1y = 2t+ 4z = −t− 1
e s)
x = 2ty = t+ 1z = t− 1
.
(a) Verificare se r ed s si intersecano o no.
(b) Nel caso r e s hanno intersezione vuota dire se sono parallele o sghembe.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 42

(c) Calcolare la distanza fra r ed s.
12. Nello spazio sono assegnati il punto A ≡ (2, 0, 1), la retta r di equazione z + 2y =2z + 3y − x = 0. Determinare:
(a) le equazioni del piano α passante per A ed ortogonale ad r;
(b) le coordinate del punto O′, simmetrico di O ≡ (0, 0, 0) rispetto al piano α.
13. Nello spazio sono assegnati il punto A ≡ (1, 2, 0) e la retta r di equazioni
x− 2z = 02x− 3y + z = 1
.
Determinare:
(a) l’equazione del piano π passante per A ed ortogonale alla retta r;
(b) le equazioni della retta s passante per A e parallela ad r;
(c) il punto simmetrico di O ≡ (0, 0, 0) rispetto a π.
14. Nello spazio sono assegnati il punto A ≡ (2, 3, 1), il piano π di equazione 2x− 3y +2z = 1 e la retta r di equazioni y = x+ z = 2− 2x. Determinare le equazioni dellaretta s passante per A, parallela a π ed incidente r.
15. Nello spazio sono date le rette:
r)
x+ y + z = 3−x+ 2y + 3z = 0
, s)
x+ 2y + z = 12x− y + 2z = 4
e il punto A ≡ (2,−1, 0).
Determinare:
(a) L’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia r che s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x+ y + z − 3) + µ(−x+ 2y + 3z) = 0.
Imponendo il passaggio per A si ha
λ = −2µ
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 43

da cui µ = 1 e λ = −2. Detto α il piano per A e r, la sua equazione e
−3x+ z + 6 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
3x+ y + 3z − 5 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni −3x+ z + 6 = 0
3x+ y + 3z − 5 = 0.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
−3x′ + z′ + 6t′ = 03x′ + y′ + 3z′ − 5t′ = 0t′ = 0
Esso e (13,−4
3, 1, 0). Quindi, essendo v = (1
3,−4
3, 1) parallelo ad r, il piano per
A ed ortogonale ad r ha equazione
1
3(x− 2)− 4
3(y + 1) + z = 0,
x− 4y + 3z = 6.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
x− 4y + 3z = 6x+ y + z = 3−x+ 2y + 3z = 0
Si ha quindi
B ≡(30
13,− 3
13,12
13
)e
d(A, r) = |AB| =√(
2− 30
13
)2
,
(−1 +
3
13
)2
,
(−12
13
)2
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 44

16. Nello spazio sono date le rette:
r)
x+ y + z = 3−x+ 2y + 3z = 0
, s)
x+ 2y + z = 12x− y + 2z = 4
e il punto A ≡ (1, 1, 1).
Determinare:
(a) L’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia r che s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
17. Nello spazio sono date le rette:
r)
x+ 2y + z = 1−x+ 3y + 2z = 3
, s)
x+ 2y + z = 13x− y + z = 2
e il punto A ≡ (1, 1,−2).
Determinare le eventuali rette passanti per A e incidenti sia r che s.
18. Nello spazio sono date le rette:
r)
x+ 2y + z = 1−x+ 3y + 2z = 3
, s)
x+ 2y + z = 13x− y + z = 2
e il punto A ≡ (0, 0, 0).
Determinare le eventuali rette passanti per A e incidenti sia r che s.
19. Nello spazio sono date le rette:
r)
x = 1 + 3ty = −1 + 2tz = 2 + t
, s)
x = 3ty = 4 + tz = 5 + t
e il punto A ≡ (5,−4, 0).
Determinare le eventuali rette passanti per A e incidenti sia r che s.
20. Nello spazio sono date le rette:
r)
x = 1 + 3ty = −1 + 2tz = 2 + t
, s)
x = 3ty = 4 + tz = 5 + t
e il punto A ≡ (1, 0, 0).
Determinare le eventuali rette passanti per A e incidenti sia r che s.
21. Determinare la distanza fra le rette r ed s nei seguenti casi:
(a) r)
x+ 3y + z = 1x− y + z = 0
e s)
x = 3t− 1y = 2tz = −t
;
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 45

(b) r)
3x+ 2z = 73y − z = −2
e s)
x = −2t− 1y = t+ 3z = 3t
;
(c) r)
x+ 2z = 33x+ 2y = 5
e s)
3y − 2z = 12x− y = 1
22. Nello spazio sono assegnati il punto A ≡ (1, 1, 1), la retta r di equazione x+2y−1 =2x+ 3y − z = 0. Determinare:
(a) le equazioni del piano α passante per A ed ortogonale ad r;
(b) le coordinate del punto Ω′, simmetrico di Ω ≡ (2, 0, 4) rispetto ad α.
23. Nello spazio sono date le rette:
r)
x− y + 2z = 1y + 3z = 2
, s)
−x− y + 2z = 22x+ 2y = 3
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x− y + 2z − 1) + µ(y + 3z − 2) = 0.
Imponendo il passaggio per A si ha
λ = −2µ
da cui µ = 1 e λ = −2. Detto α il piano per A e r, la sua equazione e
−2x+ 3y − z = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
3x+ 3y + 2z − 8 = 0
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 46

(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni −2x+ 3y − z = 0
3x+ 3y + 2z − 8 = 0.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
x′ − y′ + 2z′ − t′ = 0y′ + 3z′ − 2t′ = 0t′ = 0
Esso e (−5,−3, 1, 0). Quindi, essendo v = (−5,−3, 1) parallelo ad r, il pianoper A ed ortogonale ad r ha equazione
−5(x− 1)− 3(y − 1) + z − 1 = 0,
−5x− 3y + z + 7 = 0.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
−5x− 3y + z + 7 = 0x− y + 2z − 1 = 0y + 3z − 2 = 0
Si ha quindi
B ≡(1,
4
5,2
5
)e
d(A, r) = |AB| =√
(1− 1)2 +
(1− 4
5
)2
+
(1− 2
5
)2
.
24. Nello spazio sono date le rette:
r)
x− y + 2z = 42y + z = 2
, s)
2x+ 2y + z = 3x− y + 3z = 0
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 47

(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x− y + 2z − 4) + µ(2y + z − 2) = 0.
Imponendo il passaggio per A si ha
2λ = µ
da cui µ = 2 e λ = 1. Detto α il piano per A e r, la sua equazione e
x+ 3y + 4z − 8 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
4x+ 8y − 3z − 9 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni
x+ 3y + 4z − 8 = 04x+ 8y − 3z − 9 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
x′ − y′ + 2z′ − 4t′ = 02y′ + z′ − 2t′ = 0t′ = 0
Esso e (5, 1,−2, 0). Quindi, essendo v = (5, 1,−2) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
5(x− 1) + y − 1− 2(z − 1) = 0,
5x+ y − 2z − 4 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 48

(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
5x+ y − 2z − 4 = 0x− y + 2z − 4 = 02y + z − 2 = 0
Si ha quindi
B ≡(4
3,4
15,22
15
)e
d(A, r) = |AB| =√(
1− 4
3
)2
+
(1− 4
15
)2
+
(1− 22
15
)2
.
25. Nello spazio sono date le rette:
r)
2x− y − z = 1x+ 3y + 3z = 2
, s)
2x− y + z = 12z = 3
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(2x− y − z − 1) + µ(x+ 3y + 3z − 2) = 0.
Imponendo il passaggio per A si ha
λ = 5µ
da cui µ = 1 e λ = 5. Detto α il piano per A e r, la sua equazione e
11x− 2y − 2z − 7 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
2x− y + 3z − 4 = 0
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 49

(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni
11x− 2y − 2z − 7 = 02x− y + 3z − 4 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
2x′ − y′ − z′ − t′ = 0x′ + 3y′ + 3z′ − 2t′ = 0t′ = 0
Esso e (0,−1, 1, 0). Quindi, essendo v = (0,−1, 1) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
−(y − 1) + z − 1 = 0,
−y + z = 0.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
−y + z = 02x− y − z − 1 = 0x+ 3y + 3z − 2 = 0
Si ha quindi
B ≡(5
7,3
14,3
14
)e
d(A, r) = |AB| =√(
1− 5
7
)2
+
(1− 3
14
)2
+
(1− 3
14
)2
.
26. Nello spazio sono date le rette:
r)
2x+ y + 3z = 3−x+ z = 2
, s)
−x+ 2y + z = 13x+ 3y + 2z = −1
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 50

(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(2x+ y + 3z − 3) + µ(−x+ z − 2) = 0.
Imponendo il passaggio per A si ha
3λ = 2µ
da cui µ = 3 e λ = 2. Detto α il piano per A e r, la sua equazione e
x+ 2y + 9z − 12 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
12x− 15y − 7z + 10 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni
x+ 2y + 9z − 12 = 012x− 15y − 7z + 10 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
2x′ + y′ + 3z′ − 3t′ = 0−x′ + z′ − 2t′ = 0t′ = 0
Esso e (1,−5, 1, 0). Quindi, essendo v = (1,−5, 1) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
x− 1− 5(y − 1) + z − 1 = 0,
x− 5y + z + 3 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 51

(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
x− 5y + z + 3 = 02x+ y + 3z − 3 = 0−x+ z − 2 = 0
Si ha quindi
B ≡(−20
27,19
27,34
27
)e
d(A, r) = |AB| =√(
1 +20
27
)2
+
(1− 19
27
)2
+
(1− 34
27
)2
.
27. Nello spazio sono date le rette:
r)
2x− y − z = 1x+ 3y + 3z = 2
, s)
−x− y + 2z = 22x+ 2y = 3
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(2x− y − z − 1) + µ(x+ 3y + 3z − 2) = 0.
Imponendo il passaggio per A si ha
λ = 5µ
da cui µ = 2 e λ = 1. Detto α il piano per A e r, la sua equazione e
11x− 2y − 2z − 7 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
3x+ 3y + 2z − 8 = 0
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 52

(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni
11x− 2y − 2z − 7 = 03x+ 3y + 2z − 8 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
2x′ − y′ − z′ − t′ = 0x′ + 3y′ + 3z′ − 2t′ = 0t′ = 0
Esso e (0,−1, 1, 0). Quindi, essendo v = (0,−1, 1) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
−(y − 1) + z − 1 = 0,
−y + z = 0.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
−y + z = 02x− y − z − 1 = 0x+ 3y + 3z − 2 = 0
Si ha quindi
B ≡(5
7,3
14,3
14
)e
d(A, r) = |AB| =√(
1− 5
7
)2
+
(1− 3
14
)2
+
(1− 3
14
)2
.
28. Nello spazio sono date le rette:
r)
x− y + 2z = 42y + z = 2
, s)
−x+ 2y + z = 13x+ 3y + 2z = −1
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 53

(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x− y + 2z − 4) + µ(2y + z − 2) = 0.
Imponendo il passaggio per A si ha
2λ = µ
da cui µ = 2 e λ = 1. Detto α il piano per A e r, la sua equazione e
x+ 3y + 4z − 8 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
12x− 15y − 7z + 10 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni
x+ 3y + 4z − 8 = 012x− 15y − 7z + 10 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
x′ − y′ + 2z′ − 4t′ = 02y′ + z′ − 2t′ = 0t′ = 0
Esso e (5, 1,−2, 0). Quindi, essendo v = (5, 1,−2) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
5(x− 1) + y − 1− 2(z − 1) = 0,
5x+ y − 2z − 4 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 54

(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
5x+ y − 2z − 4 = 0x− y + 2z − 4 = 02y + z − 2 = 0
Si ha quindi
B ≡(4
3,4
15,22
15
)e
d(A, r) = |AB| =√(
1− 4
3
)2
+
(1− 4
15
)2
+
(1− 22
15
)2
.
29. Nello spazio sono date le rette:
r)
2x+ y + 3z = 3−x+ z = 2
, s)
2x− y + z = 12z = 3
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(2x+ y + 3z − 3) + µ(−x+ z − 2) = 0.
Imponendo il passaggio per A si ha
3λ = 2µ
da cui µ = 1 e λ = 23. Detto α il piano per A e r, la sua equazione e
x+ 2y + 9z − 12 = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
2x− y + 3z − 4 = 0
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 55

(b) Se una retta passa per A ed e incidente sia con r che con s e pure complanare conentrambe. Quindi deve giacere sia nel piano α che nel piano β. Nel nostro caso,esiste una e una sola retta soddisfacente queste condizioni. Essa ha equazioni
x+ 2y + 9z − 12 = 02x− y + 3z − 4 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
2x′ + y′ + 3z′ − 3t′ = 0−x′ + z′ − 2t′ = 0t′ = 0
Esso e (1,−5, 1, 0). Quindi, essendo v = (1,−5, 1) parallelo ad r, il piano perA ed ortogonale ad r ha equazione
x− 1− 5(y − 1) + z − 1 = 0,
x− 5y + z + 3 = 0.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
x− 5y + z + 3 = 02x+ y + 3z − 3 = 0x− z + 2 = 0
Si ha quindi
B ≡(−20
27,19
27,34
27
)e
d(A, r) = |AB| =√(
1 +20
27
)2
+
(1− 19
27
)2
+
(1− 34
27
)2
.
30. Nello spazio sono date le rette:
r)
x− y + 2z = 1y + 3z = 2
, s)
2x+ 2y + z = 3x− y + 3z = 0
e il punto A ≡ (1, 1, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 56

(b) Le eventuali rette passanti per A e incidenti sia la retta r che la retta s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x− y + 2z − 1) + µ(y + 3z − 2) = 0.
Imponendo il passaggio per A si ha
λ = −2µ
da cui µ = 1 e λ = −2. Detto α il piano per A e r, la sua equazione e
−2x+ 3y − z = 0.
Analogamente si ottiene che il piano β per A e per s ha equazione
−4x− 8y + 3z + 9 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s, e pure complanarecon entrambe. Quindi deve giacere sia nel piano α che nel piano β. Nelnostro caso, esiste una e una sola retta soddisfacente queste condizioni. Essaha equazioni −2x+ 3y − z = 0
−4x− 8y + 3z + 9 = 0.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
x′ − y′ + 2z′ − t′ = 0y′ + 3z′ − 2t′ = 0t′ = 0
Esso e (−5,−3, 1, 0). Quindi, essendo v = (−5,−3, 1) parallelo ad r, il pianoper A ed ortogonale ad r ha equazione
−5(x− 1)− 3(y − 1) + z − 1 = 0,
−5x− 3y + z + 7 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 57

(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
−5x− 3y + z + 7 = 0x− y + 2z − 1 = 0y + 3z − 2 = 0
Si ha quindi
B ≡(1,
4
5,2
5
)e
d(A, r) = |AB| =√(
1− 4
5
)2
+
(1− 2
5
)2
.
31. Nello spazio sono assegnati il punto A ≡ (2, 3, 1), il piano π di equazione 2x− 3y +2z = 1 e la retta r di equazioni y = x+ z = 2− 2x. Determinare le equazioni dellaretta s passante per A, parallela a π ed incidente r.
SVOLGIMENTO. Il vettore v = (2,−3, 2) e ortogonale al piano π. L’equazione delpiano α passante per A e parallelo a π e quindi 2(x− 2)− 3(y − 3) + 2(z − 1) = 0.L’equazione del fascio di piani per r e
λ(x− y + z) + µ(2− 2x− y) = 0.
Si determini l’equazione del piano β del fascio passante per il punto A:
λ(2− 3 + 1) + µ(2− 4− 3) = 0
da cui si ha µ = 0, quindi l’equazione di β e x − y + z = 0 (si noti che ad essasi poteva pervenire semplicemente osservando che le coordinate di A verificano unadelle due equazioni di r). La retta s ha quindi equazioni
2(x− 2)− 3(y − 3) + 2(z − 1) = 0x− y + z = 0
.
32. Nello spazio sono assegnati il punto A ≡ (4, 1, 2), il piano π di equazione 6x+ 2y +3z = 2 e la retta r di equazioni 2x− 4 = 3y+3 = 6z− 12. Determinare le equazionidella retta s passante per A, parallela a π ed incidente r.
TRACCIA DELLO SVOLGIMENTO. Il vettore v = (6, 2, 3) e ortogonale al pianoπ. L’equazione del piano α passante per A e parallelo a π e quindi 6(x− 4) + 2(y−1) + 3(z − 2) = 0. L’equazione del fascio di piani per r e
λ(2x− 6z + 8) + µ(3y − 6z + 15) = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 58

Si determini l’equazione del piano β del fascio passante per il punto A:
λ(8− 12 + 8) + µ(3− 12 + 15) = 0
da cui si ha λ = 3 e µ = −2, quindi l’equazione di β e x− y− z− 1 = 0. La retta sha quindi equazioni
6(x− 4) + 2(y − 1) + 3(z − 2) = 0x− y − z − 1 = 0
.
33. Nello spazio sono assegnati il punto P0 ≡ (−2, 1, 3) e la retta r di equazioni
3x+ 2y − 2z = 2x− y + z = 1
.
Determinare:
(a) l’equazione del piano α passante per P0 ed ortogonale alla retta r;
(b) le equazioni della retta s passante per P0 e parallela ad r;
(c) il punto simmetrico di D ≡ (2, 4, 3) rispetto a α.
TRACCIA DELLO SVOLGIMENTO.
(a) Risolvendo il sistema
t′ = 03x′ + 2y′ − 2z′ − 2t′ = 0x′ − y′ + z′ − t′ = 0
,
si ottiene che il punto improprio della retta r e (0, 1, 1, 0). Quindi il vettorev = (0, 1, 1) e parallelo a r. Il piano α cercato e il luogo geometrico dei puntiP ≡ (x, y, z) dello spazio tali che v · (P − P0) = 0. Cioe (0, 1, 1) · (x + 2, y −1, z − 3) = 0, cosı l’equazione di α e data da y + z − 4 = 0.
(b) Le equazioni di s in forma parametrica sono
x = −2 + 0 · ty = 1 + 1 · tz = 3 + 1 · t
.
oppure, ricordando che v = (0, 1, 1) e parallelo a r, possiamo scrivere diretta-mente le equazioni di s in forma cartesiana:
x = −2y−11
= z−31
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 59

(c) Calcoliamo le equazioni della retta ρ passante per D e perpendicolare ad α.A tale scopo si ricordi che il vettore v = (0, 1, 1) e ortogonale ad α e quindiparallelo a ρ. Pertanto le equazioni di ρ in forma cartesiana sono
x = 2y−41
= z−31
.
Calcoliamo le coordinate del punto M , intersezione della retta ρ col piano α,risolvendo il sistema
x = 2y − z = 1y + z = 4
.
Si ottiene M ≡ (2, 52, 32). Indicato con D′ ≡ (x, y, z) il punto simmetrico di D
rispetto ad α, si vede subito che M e il punto medio del segmento di estremiD e D′. Pertanto, ricordando la formula delle coordinate del punto medio diun segmento, abbiamo M ≡ (x+2
2, y+4
2, z+3
2). Dall’uguaglianza
(2,5
2,3
2) = (
x+ 2
2,y + 4
2,z + 3
2),
si ricavano le coordinate (x, y, z) del punto D′.
34. Nello spazio sono date le rette:
r)
x+ y + z = 3−x+ 2y + 3z = 0
, s)
x+ 2y + z = 12x− y + 2z = 4
e il punto A ≡ (2,−1, 0).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) La retta passante per A e incidente entrambe le rette r e s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) Il fascio di piani per r e dato da
λ(x+ y + z − 3) + µ(−x+ 2y + 3z) = 0.
Imponendo il passaggio per A si ha
λ = −2µ
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 60

da cui µ = 1 e λ = −2. Il piano per A e r ha cosı equazione
−3x+ z + 6 = 0.
Analogamente si ottiene che il piano per A e per s ha equazione
3x+ y + 3z − 5 = 0
(b) Se una retta passa per A ed e incidente sia con r che con s e pure complanare conentrambe. Quindi deve giacere sia nel piano α che nel piano β. Nel nostro caso,esiste una e una sola retta soddisfacente queste condizioni. Essa ha equazione
−3x+ z + 6 = 03x+ y + 3z − 5 = 0
.
(c) Il punto improprio della retta r si ottiene risolvendo il sistema
−3x′ + z′ + 6t′ = 03x′ + y′ + 3z′ − 5t′ = 0t′ = 0
.
Esso e (13,−4
3, 1, 0). Quindi, essendo v = (1
3,−4
3, 1) parallelo ad r, il piano per
A ed ortogonale ad r ha equazione
1
3(x− 2)− 4
3(y + 1) + z = 0,
x− 4y + 3z = 6.
(d) Il punto B intersezione della retta r col piano passante per A ed ortogonale adessa si ottiene risolvendo il sistema
x− 4y + 3z = 6x+ y + z = 3−x+ 2y + 3z = 0
Si ha quindi
B ≡(30
13,− 3
13,12
13
)e
d(A, r) = |AB| =√(
2− 30
13
)2
+
(−1 +
3
13
)2
+
(−12
13
)2
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 61

35. Nello spazio sono date le rette:
r)
x = ty = −1z = 2t
, s)
2x− y + z = 0x− z + 1 = 0
e il punto A ≡ (0, 0, 1).
Determinare:
(a) l’equazione del piano passante per A e per la retta r e quella del piano passanteper A e per s.
(b) Le eventuali rette passanti per A e incidenti entrambe le rette r e s.
(c) Il piano passante per A e perpendicolare ad r.
(d) La distanza di A da r.
SVOLGIMENTO:
(a) L’equazione cartesiana di r e
y = −1−2x+ z = 0
.
Il fascio di piani per r e dato da
λ(y + 1) + µ(z − 2x) = 0
con λ, µ ∈ R, non entrambi nulli. Imponendo il passaggio per il punto A siottiene
λ+ µ = 0,
quindi possiamo porre λ = 1 e µ = −1. Pertanto il piano α per il punto A e laretta r e 2x+ y − z + 1 = 0.
Il punto A appartiene ad uno dei due piani che definiscono s. Quindi il pianoβ per A e s e x− z + 1 = 0.
(b) Se una retta passa per A ed e incidente sia con r che con s e pure complanare conentrambe. Quindi deve giacere sia nel piano α che nel piano β. Nel nostro caso,esiste una e una sola retta soddisfacente queste condizioni. Essa ha equazione
2x+ y − z + 1 = 0x− z + 1 = 0
.
Si verifica facilmente che questa retta interseca sia r che s.
(c) Il punto improprio di r e (1, 0, 2, 0). Quindi il piano richiesto ha equazionex+ 2(z − 1) = 0 (si ricordi che il vettore (1, 0, 2) e parallelo ad r).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 62

(d) Il punto B intersezione di π con r si ottiene risolvendo il sistema
x+ 2z − 2 = 0y + 1 = 0−2x+ z = 0
.
Si ha B ≡ (25,−1, 4
5) e
d(A, r) = d(A,B) =
√(2
5
)2
+ 12 +
(4
5− 1
)2
.
36. Nello spazio sono assegnati il punto A ≡ (1, 2, 0) e la retta r di equazioni
x− 2z = 02x− 3y + z = 1
.
Determinare:
(a) l’equazione del piano π passante per A ed ortogonale alla retta r;
(b) le equazioni della retta s passante per A e parallela ad r;
(c) il punto simmetrico di O ≡ (0, 0, 0) rispetto a π.
SVOLGIMENTO:
(a) Risolvendo il sistema
t′ = 0x′ − 2z′ = 02x′ − 3y′ + z′ − t′ = 0
,
si ottiene che il punto improprio della retta r e (2, 53, 1, 0). Quindi il vettore
v = (2, 53, 1) e parallelo a r. Il piano π cercato e il luogo geometrico dei punti
P ≡ (x, y, z) dello spazio tali che v ·(P−A) = 0. Cioe (2, 53, 1)·(x−1, y−2, z) =
0, cosı l’equazione di π e data da 6x+ 5y + 3z − 16 = 0.
(b) L’equazione di s in forma parametrica e
x = 1 + 2 · ty = 2 + 5
3· t
z = 0 + 1 · t.
oppure, ricordando che v = (2, 53, 1) e parallelo a r, possiamo scrivere diretta-
mente l’equazione di r in forma cartesiana:
x− 1
2=
y − 253
=z
1.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 63

(c) Calcoliamo l’equazione della retta ρ passante per O e perpendicolare a π. Atale scopo si ricordi che il vettore v = (2, 5
3, 1) e ortogonale a π e quindi parallelo
a ρ. Pertanto l’equazione in forma cartesiana di ρ e
x
2=
y53
=z
1,
oppure x− 2z = 03y − 5z = 0
.
Calcoliamo le coordinate del punto M intersezione della retta ρ col piano π,risolvendo il sistema
x− 2z = 03y − 5z = 06x+ 5y + 3z − 16 = 0
.
Si ottiene M ≡ (4835, 87, 2435). Indicato con O′ ≡ (x, y, z) il punto simmetrico di O
rispetto a π, si vede subito che M e il punto medio del segmento di estremi Oe O′. Pertanto, ricordando la formula delle coordinate del punto medio di unsegmento, abbiamo M ≡ (x+0
2, y+0
2, z+0
2). Dall’uguaglianza
(x
2,y
2,z
2) = (
48
35,8
7,24
35),
si ricavano le coordinate (x, y, z) del punto O′.
37. Nello spazio sono assegnati il piano π) x+ 2y − z = 0, la retta r)
x− y = 0z = 2
e
il punto A ≡ (1, 1, 0). Determinare:
(a) La retta s passante per A, ortogonale a π.
(b) La retta t passante per A, parallela a π e complanare con r.
SVOLGIMENTO. Equazione della retta s
x− 1 = ty − 1 = 2tz = −t
.
L’equazione del piano per A e parallelo a π e x + 2y − z − 3 = 0. Il fascio di pianiper r e dato da λ(x − y) + µ(z − 2) = 0. Cerco il piano del fascio passante per A:λ(1− 1) + µ(−2) = 0. Pertanto esso ha equazione x− y = 0. La retta t e
x+ 2y − z − 3 = 0x− y = 0
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 64

38. Nello spazio sono assegnate le rette
r)
x− y = 0z = 0
e s)
x = ty = −1z = 2t
.
Determinare la minima distanza fra r e s.
SVOLGIMENTO 1. La retta r ha la seguente forma parametrica
r)
x = ty = tz = 0
.
I vettori u = (1, 1, 0) e v = (1, 0, 2) sono paralleli rispettivamente ad r e ad s.Poiche u e v non sono proporzionali, le rette r ed s non sono parallele. Quindi o siintersecano in un punto oppure sono sghembe. L’eventuale punto intersezione di rcon s corrisponde ad un unica soluzione del seguente sistema (si noti che e necessariodistinguere il parametro di s da quello di r)
t = t′
t = −12t′ = 0
Il precedente sistema e impossibile. Quindi le rette sono sghembe. Allora esisteun’unica retta p ortogonale sia ad r che ad s, che interseca entrambe. Se P0 e Q0
sono i punti di intersezione di p con r ed s rispettivamente, la distanza d(P0, Q0) sichiama distanza tra r ed s.
La retta p si trova come segue: si considerano il punto generico P ≡ (t, t, 0) di r e ilpunto generico Q ≡ (t′,−1, 2t′) di s e si impone al vettore Q−P di essere ortogonalesia ad u che a v. Cioe si risolve il sistema lineare nelle incognite t e t′:
(Q− P ) · u = 0(Q− P ) · v = 0
=⇒ −9t′ − 1 = 0
5t′ − t = 0
Questo sistema ha l’unica soluzione (t, t′) = (−59,−1
9). I punti P0 ≡ (−5
9,−5
9, 0) e
Q0 ≡ (−19,−1,−2
9) individuano la retta p, e quindi d(r, s) = d(P0, Q0) =
23.
SVOLGIMENTO 2. Le rette r ed s sono sghembe (vedi Svolgimento 1). La distanzafra r ed s puo anche essere definita come la distanza fra un punto di s e il pianoα contenente r e parallelo ad s. Il fascio di piani per r e λ(x − y) + µz = 0.Essendo v = (1, 0, 2) il vettore parallelo ad s e w = (λ,−λ, µ) il vettore ortogonaleal piano generico del fascio, poniamo v · w = 0. Ne segue λ + 2µ = 0 e il piano αha equazione −2x + 2y + z = 0. Il punto R0 ≡ (0,−1, 0) appartiene ad s. Quindid(r, s) = d(R0, α) =
23.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 65

5 Spazi vettoriali
1. Siano v1, v2 e v3 tre vettori di uno spazio vettoriale V su un campo K. Dire,motivando la risposta, se le seguenti affermazioni sono vere o false.
(a) Se v1, v2 e v3 sono linearmente indipendenti, allora essi risultano a due a duelinearmente indipendenti.
(b) Se per ogni i, j ∈ 1, 2, 3, i 6= j, vi e vj sono linearmente indipendenti, alloratutti e tre i vettori sono linearmente indipendenti.
(c) Se v1, v2 e v3 sono linearmente indipendenti, allora, per ogni λ, µ ∈ K, µ 6= 0,i vettori v1, λv1 + µv2 e v3 risultano linearmente indipendenti.
2. Siano dati in R4 i vettori v1 = (1, 0, 2, 0), v2 = (0, 1, 1, 0) e v3 = (2,−1, 3, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
SVOLGIMENTO. Sia (x, y, z, t) ∈ Span(v1,v2,v3). Allora esistono λ1, λ2, λ3 ∈ Rtali che
λ1v1 + λ2v2 + λ3v3 = (x, y, z, t)
o, equivalentemente,
(λ1 + 2λ3, λ2 − λ3, 2λ1 + λ2 + 3λ3, 0) = (x, y, z, t).
In altre parole il sottospazio Span(v1,v2,v3) coincide con l’insieme dei vettori(x, y, z, t) ∈ R4 per cui il sistema, nelle variabili λ1, λ2 e λ3 (si noti che x, y, ze t sono i termini noti),
λ1 + 2λ3 = xλ2 − λ3 = y2λ1 + λ2 + 3λ3 = z0 = t
ammette soluzioni. Quindi
1 0 2 x0 1 −1 y2 1 3 z0 0 0 t
R3 → R3 − 2R1 −→
1 0 2 x0 1 −1 y0 1 −1 z − 2x0 0 0 t
R3 → R3 −R2 −→
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 66

−→
1 0 2 x0 1 −1 y0 0 0 z − 2x− y0 0 0 t
.
Pertanto Span(v1,v2,v3) ha dimensione 2, una sua base e (v1,v2) e le sue equazionisono
z − 2x− y = 0t = 0
.
3. Siano dati in R4 i vettori v1 = (0, 1,−1, 0), v2 = (1, 0, 1, 0) e v3 = (2,−1, 3, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
SVOLGIMENTO. Procedendo come nell’Esercizio 2 si ha
0 1 2 x1 0 −1 y−1 1 3 z0 0 0 t
R3 → R3 −R1 −→
0 1 2 x1 0 −1 y−1 0 1 z − x0 0 0 t
R3 → R3 +R2 −→
−→
0 1 2 x1 0 −1 y0 0 0 z − x+ y0 0 0 t
.
Pertanto Span(v1,v2,v3) ha dimensione 2, una sua base e (v1,v2) e le sue equazionisono
z − x+ y = 0t = 0
.
4. Determinare una base del sottospazio di R3 definito dalle equazioni: 2x−y+3z = 0,x+ y = 0.
SVOLGIMENTO. Il sottospazio W di R3 definito dalle equazioni assegnate e datodall’insieme delle soluzioni del sistema
2x− y + 3z = 0x+ y = 0
il quale ha le ∞1 soluzioni (x,−x, x) ∀x ∈ R. Quindi W = (x,−x,−x) =x(1,−1,−1) | x ∈ R, cioe W = Span(1,−1,−1) . Una sua base e data da(1,−1,−1).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 67

5. Determinare una base del sottospazio di R3 definito dall’equazione: 2x−y+3z = 0.
SVOLGIMENTO. Il sottospazio W di R3 definito dall’equazione assegnata e datodall’insieme delle sue soluzioni. Esso e dato dalle ∞2 terne ordinate (x, 2x + 3z, z)∀x, z ∈ R. Quindi W = (x, 2x+ 3z, z) | x, z ∈ R. Si ha inoltre
(x, 2x+ 3z, z) = (x, 2x, 0) + (0, 3z, z) = x(1, 2, 0) + z(0, 3, 1).
Cosı W = Span(1, 2, 0), (0, 3, 1). I vettori (1, 2, 0), (0, 3, 1), essendo indipendenti,formano una base di W .
6. Determinare una base del sottospazio di R4 definito dalle equazioni: 2x−y+3z = 0,x+ y = 0.
SVOLGIMENTO. Il sottospazio W di R4 definito dalle equazioni assegnate e datodall’insieme delle soluzioni, nelle variabili x, y, z e t, del sistema
2x− y + 3z = 0x+ y = 0
il quale ha le ∞2 soluzioni (x,−x,−x, t) ∀x, t ∈ R. Quindi W = (x,−x,−x, t) |x, t ∈ R. Si ha inoltre
(x,−x,−x, t) = (x,−x,−x, 0) + (0, 0, 0, t) = x(1,−1,−1, 0) + t(0, 0, 0, 1).
Cosı W = Span(1,−1,−1, 0), (0, 0, 0, 1). I vettori (1,−1,−1, 0), (0, 0, 0, 1), essen-do indipendenti, formano una base di W .
7. Determinare una base del sottospazio di R4 definito dall’equazione: 2x−y+3z = 0.
SVOLGIMENTO. Il sottospazio W di R4 definito dall’equazione assegnata e datodall’insieme delle sue soluzioni. Esso e dato dalle ∞3 quaterne ordinate (x, 2x +3z, z, t) ∀x, z, t ∈ R. Quindi W = (x, 2x + 3z, z, t) | x, z, t ∈ R. Si ha inoltre(x, 2x+3z, z, t) = (x, 2x, 0, 0)+(0, 3z, z, 0)+(0, 0, 0, t) = x(1, 2, 0, 0)+ z(0, 3, 1, 0)+t(0, 0, 0, 1). Cosı W = Span(1, 2, 0, 0), (0, 3, 1, 0), (0, 0, 0, 1). I vettori (1, 2, 0, 0),(0, 3, 1, 0), (0, 0, 0, 1), essendo indipendenti, formano una base di W .
8. Siano dati in R4 i vettori v1 = (1, 0, 1, 1), v2 = (0, 0, 1, 0) e v3 = (2, 0, 1, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
SVOLGIMENTO. Procedendo come nell’Esercizio 2 si ha
1 0 2 x0 0 0 y1 1 1 z1 0 0 t
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 68

R3 → R3 −R1 −→
1 0 2 x0 0 0 y0 1 −1 z − x1 0 0 t
R4 → R4 −R1 −→
−→
1 0 2 x0 0 0 y0 1 −1 z − x0 0 −2 t− x
.
Pertanto Span(v1,v2,v3) ha dimensione 3, una sua base e (v1,v2,v3) e la suaequazione e y = 0.
9. Siano dati in R4 i vettori v1 = (1,−1, 1, 3), v2 = (2,−2, 2, 6) e v3 = (5,−5, 5, 15).Determinare una base e le equazioni di Span(v1,v2,v3).
SVOLGIMENTO. Procedendo come nell’Esercizio 2 si ha
1 2 5 x−1 −2 −5 y1 2 5 z3 6 15 t
R2 → R2 +R1
R3 → R3 −R1
R4 → R4 − 3R1
−→
1 2 5 x0 0 0 y + x0 0 0 z − x0 0 0 t− 3x
.
Pertanto Span(v1,v2,v3) ha dimensione 1, una sua base e v1 e le sue equazioni sono
x+ y = 0z − x = 0t− 3x = 0
.
10. Determinare una base e le equazioni dei seguenti sottospazi di R5:
(a) Span(0, 1, 2, 3, 0), (−1,−1,−2,−3, 0), (1, 1, 1, 1, 4);(b) Span(0, 1, 1, 1, 1), (2, 1, 2, 1, 2), (1, 0, 0, 0, 3), (1, 3, 3, 3, 3);(c) Span(1, 1, 1, 1, 1), (−1,−1,−2,−3, 0).
11. Determinare una base del sottospazio di R4 definito dalle equazioni: 2x+3y+z+t =0, x− y + t = 0, 3x+ 2y + z + 2t = 0.
SVOLGIMENTO. Il sottospazio W di R4 definito dalle equazioni assegnate e datodall’insieme delle soluzioni del sistema omogeneo
2x+ 3y + z + t = 0x− y + t = 03x+ 2y + z + 2t = 0
(2)
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 69

Abbiamo
2 3 1 11 −1 0 13 2 1 2
R2 → −2R2 +R1
R3 → −2R3 + 3R1
−→
2 3 1 10 5 1 −10 5 1 −1
−→
2 3 1 10 5 1 −10 0 0 0
Quindi (2) equivale a
2x+ 3y + z + t = 05y + z − t = 0
il quale ha le ∞2 soluzioni (y − t, y, t− 5y, t) ∀y, t ∈ R. Quindi W = (y − t, y, t−5y, t) | y, t ∈ R. Si ha inoltre (y − t, y, t − 5y, t) = (y, y,−5y, 0) + (−t, 0, t, t) =y(1, 1,−5, 0) + t(−1, 0, 1, 1). Cosı W = Span(1, 1,−5, 0), (−1, 0, 1, 1). I vettori(1, 1,−5, 0), (−1, 0, 1, 1), essendo indipendenti, formano una base di W .
12. Determinare una base del sottospazio di R4 definito dalle equazioni:
(a) 2x− y + t = 0, x+ z − t = 0;
(b) x− y + t = 0, 2x− y + 4t = 0;
(c) x− 2y + 3z − t = 0;
(d) x+ y − t = 0;
(e) x+ y = 0;
(f) x = 0.
13. Siano dati in R4 i vettori v1 = (1,−1, 1, 3), v2 = (2,−2, 0, 1) e v3 = (4,−4, 2, 7).Determinare una base e le equazioni di Span(v1,v2,v3).
Procedendo come nell’Esercizio 2 si ha
1 2 4 x−1 −2 −4 y1 0 2 z3 1 7 t
R2 → R2 +R1
R4 → 2R4 −R1
−→
−→
1 2 4 x0 0 0 x+ y1 0 2 z5 0 10 2t− x
R4 → R4 − 5R3 −→
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 70

−→
1 2 4 x0 0 0 x+ y1 0 2 z0 0 0 2t− x− 5z
.
Pertanto Span(v1,v2,v3) ha dimensione 2, una sua base e (v1,v2) e le sue equazionisono
x+ y = 02t− x− 5z = 0
.
14. Siano dati in R4 i vettori v1 = (2, 1,−1, 3), v2 = (0, 1,−1, 1) e v3 = (4, 2,−2, 6).Determinare una base e le equazioni di Span(v1,v2,v3).
SVOLGIMENTO. Procedendo come nell’Esercizio 2 si ha
2 0 4 x1 1 2 y−1 −1 −2 z3 1 6 t
R2 → R2 +R1
R3 → 2R3 +R1
R4 → 4R4 + 3R3
−→
2 0 4 x0 −2 0 x− 2y0 0 0 2z + 2y0 0 0 t+ 3z − x+ 2y
.
Pertanto Span(v1,v2,v3) ha dimensione 2, una sua base e (v1,v2) e le sue equazionisi ottengono annullando l’ultima riga,
2z + 2y = 0t+ 3z − x+ 2y = 0
.
15. Siano dati in R3 i vettori v1 = (−1, 2, 3), v2 = (0,−1, 2), v3 = (1, 1, 1) e v4 =(−1, 2, 4).
(a) Determinare una base di Span(v1,v2,v3,v4), Span(v1,v4) e Span(v2).
(b) Determinare le equazioni di Span(v1,v4).
16. Siano dati in R5 i vettori v1 = (1,−1, 2, 3, 1), v2 = (−1, 0, 1, 2, 2), v3 = (1, 1, 1, 1, 1),v4 = (2,−2, 4, 6, 2) e v5 = (2, 1,−1, 0, 3). Determinare una base e le eventualiequazioni di Span(v1,v2,v3,v4,v5).
17. Siano dati in R4 i vettori v1 = (4, 4, 4, 4), v2 = (3, 3, 3, 0), v3 = (2, 2, 0, 0), v4 =(1, 0, 0, 0) e v5 = (1, 2, 3, 4). Determinare una base e le eventuali equazioni diSpan(v1,v2,v3,v4,v5).
18. Siano dati in R4 i vettori v1 = (1, 0, 1, 0), v2 = (0, 0, 1, 0) e v3 = (2, 0, 1, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
19. Determinare le componenti dei vettori (1, 2, 2), (1, 2, 4) ∈ R3 rispetto la base A =[v1 = (2, 2, 2),v2 = (−1, 0, 3),v3 = (2, 1, 2)].
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 71
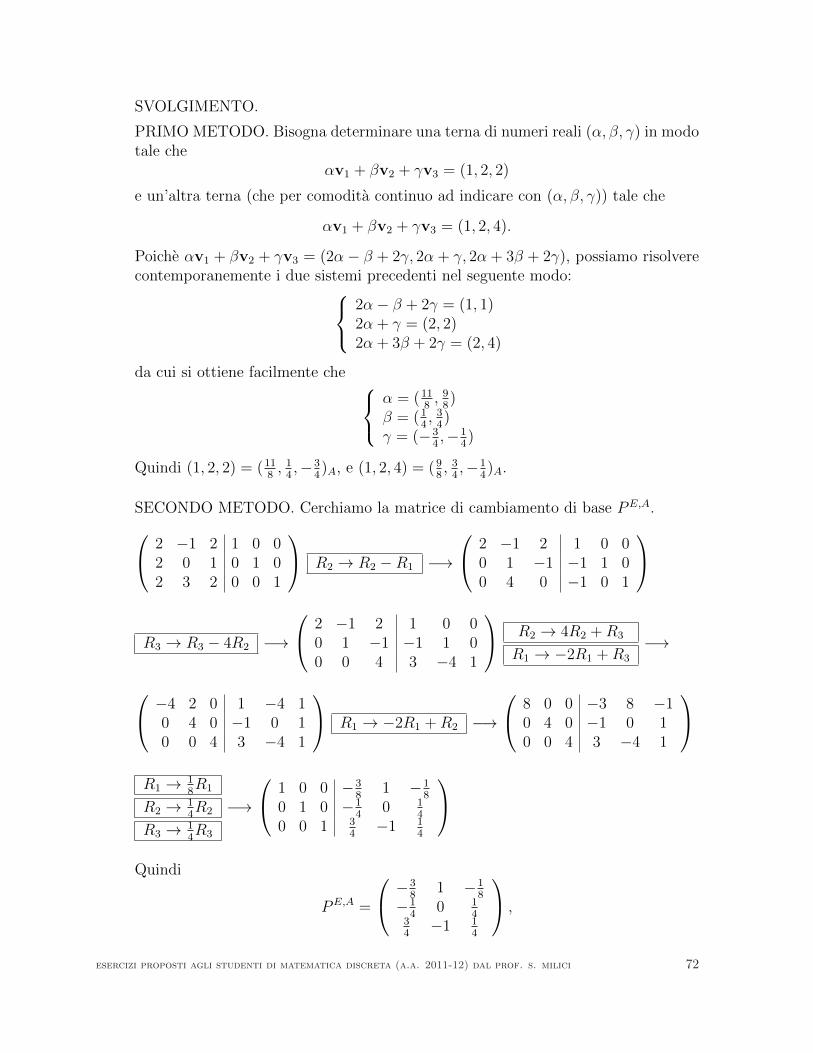
SVOLGIMENTO.
PRIMO METODO. Bisogna determinare una terna di numeri reali (α, β, γ) in modotale che
αv1 + βv2 + γv3 = (1, 2, 2)
e un’altra terna (che per comodita continuo ad indicare con (α, β, γ)) tale che
αv1 + βv2 + γv3 = (1, 2, 4).
Poiche αv1 + βv2 + γv3 = (2α− β + 2γ, 2α + γ, 2α + 3β + 2γ), possiamo risolverecontemporanemente i due sistemi precedenti nel seguente modo:
2α− β + 2γ = (1, 1)2α + γ = (2, 2)2α + 3β + 2γ = (2, 4)
da cui si ottiene facilmente che
α = (118, 98)
β = (14, 34)
γ = (−34,−1
4)
Quindi (1, 2, 2) = (118, 14,−3
4)A, e (1, 2, 4) = (9
8, 34,−1
4)A.
SECONDO METODO. Cerchiamo la matrice di cambiamento di base PE,A.
2 −1 2 1 0 02 0 1 0 1 02 3 2 0 0 1
R2 → R2 −R1 −→
2 −1 2 1 0 00 1 −1 −1 1 00 4 0 −1 0 1
R3 → R3 − 4R2 −→
2 −1 2 1 0 00 1 −1 −1 1 00 0 4 3 −4 1
R2 → 4R2 +R3
R1 → −2R1 +R3
−→
−4 2 0 1 −4 10 4 0 −1 0 10 0 4 3 −4 1
R1 → −2R1 +R2 −→
8 0 0 −3 8 −10 4 0 −1 0 10 0 4 3 −4 1
R1 → 18R1
R2 → 14R2
R3 → 14R3
−→
1 0 0 −38
1 −18
0 1 0 −14
0 14
0 0 1 34
−1 14
Quindi
PE,A =
−38
1 −18
−14
0 14
34
−1 14
,
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 72

PE,A
122
E
=
11814
−34
A
, PE,A
124
E
=
9834
−14
A
.
20. In R3 sono dati i vettori v1 = (1, 0, 1), v2 = (0, 1, 1), v3 = (1,−1, 2) e u = (3, 1, 2).Dire se B = [v1,v2,v3] e una base di R3 e, in tal caso, determinare le componentidi u rispetto la base B.
SVOLGIMENTO.PRIMO METODO. Poiche
∣∣∣∣∣∣
1 0 10 1 −11 1 2
∣∣∣∣∣∣= 2 6= 0,
B e una base. Sia u = (α, β, γ)B. Si ha (3, 1, 2) = u = αv1 + βv2 + γv3 =(α+ γ, β − γ, α + β + 2γ). Risolvendo il sistema
α + γ = 3β − γ = 1α + β + 2γ = 2
si ottiene α = 4, β = 0 e γ = −1. Quindi u = (4, 0,−1)B.
SECONDO METODO. Cerchiamo la matrice di cambiamento di base PE,B.
1 0 1 1 0 00 1 −1 0 1 01 1 2 0 0 1
R3 → R3 −R1 −→
1 0 1 1 0 00 1 −1 0 1 00 1 1 −1 0 1
R3 → R3 −R2 −→
1 0 1 1 0 00 1 −1 0 1 00 0 2 −1 −1 1
R2 → 2R2 +R3
R1 → −2R1 +R3
−→
−2 0 0 −3 −1 10 2 0 −1 1 10 0 2 −1 −1 1
R1 → −12R1
R2 → 12R2
R3 → 12R3
−→
1 0 0 32
12
−12
0 1 0 −12
12
12
0 0 1 −12
−12
12
Quindi
PE,B =
32
12
−12
−12
12
12
−12
−12
12
, e PE,B
312
E
=
40−1
B
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 73

21. Determinare le componenti dei vettori (2,−1, 1), (3, 2, 4) ∈ R3 rispetto la base A =[v1 = (1, 1, 2),v2 = (−1, 0, 3),v3 = (2, 3, 1)].
SVOLGIMENTO.PRIMO METODO. Bisogna determinare una terna di numeri reali (α, β, γ) in modotale che
αv1 + βv2 + γv3 = (2,−1, 1)
e un’altra terna (che per comodita continuo ad indicare con (α, β, γ)) tale che
αv1 + βv2 + γv3 = (3, 2, 4).
Poiche αv1 + βv2 + γv3 = (α − β + 2γ, α + 3γ, 2α + 3β + γ), possiamo risolverecontemporanemente i due sistemi precedenti nel seguente modo:
α− β + 2γ = (2, 3)α+ 3γ = (−1, 2)2α+ 3β + γ = (1, 4)
da cui si ottiene facilmente che
α = (72, 25
8)
β = (−32,−5
8)
γ = (−32,−3
8)
Quindi (2,−1, 1) = (72,−3
2,−3
2)A, e (3, 2, 4) = (25
8,−5
8,−3
8)A.
SECONDO METODO. Cerchiamo la matrice di cambiamento di base PE,A.
1 −1 2 1 0 01 0 3 0 1 02 3 1 0 0 1
R2 → −R2 +R1
R3 → −2R1 +R3
−→
1 −1 2 1 0 00 −1 −1 1 −1 00 5 −3 −2 0 1
R3 → R3 + 5R2 −→
1 −1 2 1 0 00 −1 −1 1 −1 00 0 −8 3 −5 1
R2 → −8R2 +R3
R1 → 4R1 +R3
−→
4 −4 0 7 −5 10 8 0 −5 3 10 0 −8 3 −5 1
R1 → 2R1 +R2 −→
8 0 0 −9 −7 30 8 0 −5 3 10 0 −8 3 −5 1
R1 → 18R1
R2 → 18R2
R3 → −18R3
−→
1 0 0 98
−78
38
0 1 0 −58
38
18
0 0 1 −38
58
−18
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 74

Quindi
PE,A =
98
−78
38
−58
38
18
−38
58
−18
,
PE,A
2−11
E
=
72
−32
−32
A
, PE,A
324
E
=
258
−58
−38
A
.
22. Determinare le componenti dei vettori (2,−1, 1), (3, 2, 4) ∈ R3 rispetto la base A =[v1 = (1, 1, 2),v2 = (−1, 0, 3),v3 = (2, 3, 1)].
23. Determinare le componenti dei vettori (1, 2, 2), (1, 2, 4) ∈ R3 rispetto la base A =[v1 = (2, 2, 2),v2 = (−1, 0, 3),v3 = (2, 1, 2)].
24. Siano dati in R2 i vettori v1 = (1,−2), v2 = (1, 0), u1 = (0, 1), u2 = (−1, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (4, 1)A.
SVOLGIMENTO(a) Sia A che B sono due basi in quanto
∣∣∣∣1 1−2 0
∣∣∣∣ = 2 6= 0 e
∣∣∣∣0 −11 1
∣∣∣∣ = 1 6= 0.
(b) Per determinare la matrice di cambiamento di base PA,B. usiamo due metodidifferenti.
PRIMO METODO. Le componenti di v1 e v2 nella base B si trovano nel seguentemodo:
(1,−2) = v1 = α11u1 + α12u2 = α11(0, 1) + α12(−1, 1) = (−α12, α11 + α12)B.
Risolvendo il sistema −α12 = 1α11 + α12 = −2
,
si ottieneα11 = −1, α12 = −1.
Analogamente
(1, 0) = v2 = α21u1 + α22u2 = α21(0, 1) + α22(−1, 1) = (−α22, α21 + α22)B.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 75

Risolvendo il sistema −α22 = 1α21 + α22 = 0
,
si ottieneα21 = 1, α22 = −1.
Pertanto v1 = (−1,−1)B, v2 = (1,−1)B e
PA,B =
( −1 1−1 −1
).
Adesso cerchiamo la matrice di cambiamento di base PB,A. Ovviamente PB,A puoessere ottenuta come inversa di PA,B. Noi procediamo, invece, in modo analogo alprecedente. Le componenti di u1 e u2 nella base A si ottengono nel seguente modo:
(0, 1) = u1 = β11v1 + β12v2 = β11(1,−2) + β12(1, 0) = (β11 + β12,−2β11)A.
Risolvendo il sistema β11 + β12 = 0−2β11 = 1
,
si ottiene
β11 =−1
2, β12 =
1
2.
Analogamente
(−1, 1) = u2 = β21v1 + β22v2 = β21(1,−2) + β22(1, 0) = (β21 + β22,−2β21)A.
Risolvendo il sistema β21 + β22 = −1−2β21 = 1
,
si ottiene
β21 =−1
2, β22 =
−1
2.
Pertanto u1 = (−12, 12)A, u2 = (−1
2, −1
2)A e
PB,A =
( −12
−12
12
−12
).
SECONDO METODO. Per determinare PA,B procediamo nel seguente modo:
(0 −1 1 11 1 −2 0
)R1 → R1 +R2 −→
(1 0 −1 11 1 −2 0
)
R2 → R2 −R1 −→(
1 0 −1 10 1 −1 1
). Quindi PA,B =
( −1 1−1 1
).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 76

Determiniamo ora PB,A.
(1 1 0 −1−2 0 1 1
)R2 → 2R1 +R2 −→
(1 1 0 −10 2 1 −1
)
R1 → R1 − 12R2 −→
(1 0 −1
2−1
2
0 2 1 −1
)R2 → 1
2R2 −→
(1 0 −1
2−1
2
0 1 12
−12
). Quindi PB,A =
( −12
−12
12
−12
).
(c) Indicato con (y1, y2)B il vettore (4, 1)A nella base B, si ha
(y1y2
)
B
= PA,B
(41
)
A
=
( −1 1−1 −1
)(41
)
A
=
( −3−5
)
B
.
25. Siano dati in R2 i vettori v1 = (2, 4), v2 = (3, 0), u1 = (1, 2), u2 = (2, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2)A.
SVOLGIMENTO(a) Sia A che B sono due basi in quanto
∣∣∣∣2 34 0
∣∣∣∣ = −12 6= 0 e
∣∣∣∣1 22 1
∣∣∣∣ = −3 6= 0.
(b) Cerco la matrice di cambiamento di base PA,B mediante due differenti metodi.
PRIMO METODO. Le componenti di v1 e v2 nella base B si trovano nel seguentemodo:
(2, 4) = v1 = α11u1 + α12u2 = α11(1, 2) + α12(2, 1) = (α11 + 2α12, 2α11 + α12)B.
Risolvendo il sistema α11 + 2α12 = 22α11 + α12 = 4
,
si ottieneα11 = 2, α12 = 0.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 77

Analogamente
(3, 0) = v2 = α21u1 + α22u2 = α21(1, 2) + α22(2, 1) = (α21 + 2α22, 2α21 + α22)B.
Risolvendo il sistema α21 + 2α22 = 32α21 + α22 = 0
,
si ottieneα21 = −1, α22 = 2.
Pertanto v1 = (2, 0)B, v2 = (−1, 2)B e
PA,B =
(2 −10 2
).
Cerchiamo ora PB,A. Ovviamente PB,A puo essere ottenuta come l’inversa di PA,B.Noi procediamo, invece, in modo analogo al precedente. Le componenti di u1 e u2
nella base A si ottengono come segue:
(1, 2) = u1 = β11v1 + β12v2 = β11(2, 4) + β12(3, 0) = (2β11 + 3β12, 4β11)A.
Risolvendo il sistema 2β11 + 3β12 = 14β11 = 2
,
si ottiene
β11 =1
2, β12 = 0.
Analogamente
(2, 1) = u2 = β21v1 + β22v2 = β21(2, 4) + β22(3, 0) = (2β21 + 3β22, 4β21)A.
Risolvendo il sistema 2β21 + 3β22 = 24β21 = 1
,
si ottiene
β21 =1
4, β22 =
1
2.
Pertanto u1 = (12, 0)A, u2 = (1
4, 12)A e
PB,A =
(12
14
0 12
).
SECONDO METODO. Per determinare PA,B procediamo nel seguente modo:
(1 2 2 32 1 4 0
)R2 → R2 − 2R1 −→
(1 2 2 30 −3 0 −6
)
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 78

R1 → 2R2 + 3R1 −→(
3 0 6 −30 −3 0 −6
)R1 → 1
3R1
R2 → −13R2
−→
(1 0 2 −10 1 0 2
). Quindi PA,B =
(2 −10 2
).
Determiniamo ora PB,A.
(2 3 1 24 0 2 1
)R2 → −2R1 +R2 −→
(2 3 1 20 −6 0 −3
)
R1 → 2R1 +R2 −→(
4 0 2 10 −6 0 −3
)R1 → 1
4R1
R2 → −16R2
−→
(1 0 1
214
0 1 0 12
). Quindi PB,A =
(12
14
0 12
).
(c) Indicato con (y1, y2)B il vettore (3, 2)A nella base B, si ha
(y1y2
)
B
= PA,B
(32
)
A
=
(2 −10 2
)(32
)
A
=
(44
)
B
.
26. Siano dati in R2 i vettori v1 = (1, 1), v2 = (0,−1), u1 = (0, 1), u2 = (2, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (4, 1)A.
27. Siano dati in R2 i vettori v1 = (−1, 3), v2 = (0, 6), u1 = (4,−1), u2 = (1, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le componenti di u1 e u2 rispetto la base A.
(c) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A e provare che sono una l’inversa dell’altra.
28. Siano dati in R3 i vettori v1 = (1,−2, 1), v2 = (−1, 1, 0), v3 = (2, 0, 0), u1 =(0, 1,−2), u2 = (1, 2,−2), u3 = (1, 0, 1).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 79

(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
29. Siano dati in R3 i vettori v1 = (−1, 3, 5), v2 = (2, 6, 1), v3 = (4,−1, 3), u1 = (1, 1, 1),u2 = (2, 1, 1), u3 = (3, 2, 1).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le componenti di u1, u2 e u3 rispetto la base A.
(c) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
30. Siano dati in R3 i vettori v1 = (1, 2, 0), v2 = (0, 3, 0), v3 = (2, 0, 3), u1 = (1, 0, 1),u2 = (1, 2, 2), u3 = (1, 0, 0).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
31. Si consideri in R3 la base A = (v1,v2,v3), essendo v1 = (2, 3, 5), v2 = (2, 1, 0),v3 = (0, 1, 0). Determinare le componenti di w = (4, 2, 1)A rispetto la base B =(u1,u2,u3), essendo u1 = (1, 1, 1), u2 = (2, 1, 1), u3 = (3, 2, 1).
32. Siano dati in R3 i vettori v1 = (0, 1, 0), v2 = (2, 0, 1), v3 = (1,−1, 0), u1 = (2,−2, 0),u2 = (0, 2, 0), u3 = (−2, 0,−1).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
TRACCIA DELLO SVOLGIMENTO.(a) Sia A che B sono due basi in quanto
∣∣∣∣∣∣
0 2 11 0 −10 1 0
∣∣∣∣∣∣6= 0 e
∣∣∣∣∣∣
2 0 −2−2 2 00 0 −1
∣∣∣∣∣∣6= 0.
(b)
2 0 −2 0 2 1−2 2 0 1 0 20 0 1 0 1 0
R2 → R2 +R1 −→
2 0 −2 0 2 10 2 −2 1 2 00 0 1 0 1 0
R2 → R2 + 2R3
R1 → R1 + 2R3
−→
2 0 0 0 4 10 2 0 1 4 00 0 1 0 1 0
R1 → 1
2R1
R2 → 12R2
−→
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 80

1 0 0 0 2 12
0 1 0 12
2 00 0 1 0 1 0
. Quindi PA,B =
0 2 12
12
2 00 1 0
.
In modo simile si determina PB,A.
(c) Indicato con (y1, y2, y3)B il vettore (3, 2, 3)A nella base B, si ha
y1y2y3
B
=
0 2 12
12
2 00 1 0
323
A
.
33. Siano dati in R3 i vettori v1 = (1,−1, 0), v2 = (0, 1, 0), v3 = (2, 0, 1), u1 = (0, 1, 0),u2 = (1, 2, 1), u3 = (0, 0, 1).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
34. Siano dati in R3 i vettori v1 = (1, 2, 0), v2 = (0, 3, 0), v3 = (2, 0, 3), u1 = (1, 0, 1),u2 = (1, 2, 2), u3 = (1, 0, 0).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
35. Siano dati in R3 i vettori v1 = (1,−2, 1), v2 = (−1, 1, 0), v3 = (2, 0, 0), u1 =(0, 1,−2), u2 = (1, 2,−2), u3 = (1, 0, 1).
(a) Provare che A = (v1,v2,v3) e B = (u1,u2,u3) formano due basi di R3.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (3, 2, 3)A.
36. Siano dati in R4 i vettori v1 = (0, 1,−1, 0), v2 = (1,−2, 4, 0) e v3 = (1, 0, 2, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
37. Siano dati in R2 i vettori v1 = (0, 3), v2 = (1,−1), u1 = (2, 1), u2 = (0, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 81

(c) Calcolare le componenti, nella base B, del vettore w = (4, 1)A.
38. Siano dati in R4 i vettori v1 = (1, 0, 2, 0), v2 = (0, 1, 1, 0) e v3 = (2,−1, 3, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
39. Siano dati in R2 i vettori v1 = (1,−2), v2 = (1, 0), u1 = (0, 1), u2 = (−1, 1).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (4, 1)A.
40. Siano dati in R4 i vettori v1 = (0, 1,−1, 0), v2 = (1, 0, 1, 0) e v3 = (2,−1, 3, 0).Determinare una base e le equazioni di Span(v1,v2,v3).
41. Siano dati in R2 i vettori v1 = (0, 2), v2 = (−1, 1), u1 = (1, 0), u2 = (−1, 2).
(a) Provare che A = (v1,v2) e B = (u1,u2) formano due basi di R2.
(b) Determinare le matrici di cambiamento di base dalla base A alla base B e dallabase B alla base A.
(c) Calcolare le componenti, nella base B, del vettore w = (4, 1)A.
6 Applicazioni lineari
1. Sia
M =
h h 1−1 0 12 h 1
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R3 → R3.Al variare del parametro reale h, determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si verifica facilmente che il determinante di M e h(2−h). Quindise h 6= 0, 2, f e un automorfismo (Kerf = (0, 0, 0)).Per h = 0 si ha
M =
0 0 1−1 0 12 0 1
−→
0 0 1−1 0 00 0 0
Quindi Kerf = (0, y, 0) | y ∈ R e una sua base e data dal vettore (0, 1, 0).Sempre per h = 0 gli elementi speciali della matrice ridotta si trovano nella primae terza colonna quindi una base di Imf e [(0,−1, 2), (1, 1, 1)].
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 82

Per h = 2 si ha
M =
2 2 1−1 0 12 2 1
−→
2 2 1−1 0 10 0 0
Quindi Kerf = (z,−32z, z) | z ∈ R e una sua base e data dal vettore (1,−3
2, 1).
Sempre per h = 2 gli elementi speciali della matrice ridotta si trovano, per esempio,nella prima e terza colonna quindi una base di Imf e [(2,−1, 2), (2, 0, 2)].
2. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (3x− ky + 2z, 6x+ (1− 2k)y + (4 + k)z,−3x+ ky + (k2 − k − 2)z). Alvariare del parametro reale k, determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha, denotando con E la base canonica,
ME,Ef =
3 −k 26 1− 2k 4 + k−3 k k2 − k − 2
.
Pertanto ME,Ef R2 → R2 − 2R1 −→
3 −k 20 1 k−3 k k2 − k − 2
−→
R3 → R3 +R1 −→
3 −k 20 1 k0 0 k2 − k
.
Per k = 0, 1, si ha k2 − k = 0 e ME,Ef ha rango 2. Quindi dimKerf = 3 − 2 = 1 e
dimImf = 2. Per k 6= 0, 1, ME,Ef ha rango 3.
Caso k = 0. Per trovare una base di Kerf e sufficiente risolvere il sistema
3x+ 2z = 0y = 0
.
Pertanto Kerf = (−23z, 0, z) | z ∈ R e una sua base e data dal vettore
(−23, 0, 1). Una base di Imf e data dai due vettori le cui componenti sono
le colonne di ME,Ef che corrispondono alle due colonne della matrice ridotta
contenenti i due elementi speciali. Essi sono (3, 6,−3) e (0, 1, 0).
Caso k = 1. Per trovare una base di Kerf e sufficiente risolvere il sistema
3x− y + 2z = 0y + z = 0
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 83

Pertanto Kerf = (−z,−z, z) | z ∈ R e una sua base e data dal vettore(−1,−1, 1). Una base di Imf e data dai due vettori le cui componenti sonole colonne di ME,E
f che corrispondono alle due colonne della matrice ridottacontenenti i due elementi speciali. Essi sono (3, 6,−3) e (−1,−1, 1).
Caso k 6= 0,1. Si ha k2 − k 6= 0 e ME,Ef ha rango 3. Quindi dimKerf = 3− 3 = 0,
cioe Kerf = 0, e dimImf = 3, quindi Imf = R3 e una sua base puo esserela stessa base canonica E.
3. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (2x + ky − z, x + y, x − y + kz). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
4. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (kx− ky+2z,−x+ y+ kz,−kx+ z). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
5. Studiare, al variare del parametro reale k, l’applicazione linearef : R4 → R3 definita, rispetto le basi canoniche, dalle equazioni f(x, y, z, t) =(x+ 2y − t, x+ 3y + (k − 1)z + (k + 1)t, x+ 2y + kz + t).
SVOLGIMENTO. La matrice associata ad f e
M =
1 2 0 −11 3 k − 1 k + 11 2 k 1
.
Riducendo M per righe si ottiene
M −→
1 2 0 −10 1 k − 1 k + 20 0 k 2
.
Avendo M rango 3, si ha dimKer(f) = 1 e dim Im(f) = 3.
Una base di Ker(f) si ottiene risolvendo (rispetto alle incognite x, y, t) il sistema
x+ 2y − t = 0y + (k + 2)t = (1− k)z2t = −kz
Quindi (−2k2−k−42
, k2+22
, 1,−k2) e una base di Ker(f).
Una base di Im(f) e data dai vettori corrispondenti a un minore di ordine 3 di Mche ha determinante diverso dallo zero. Per esempio dai vettori le cui componentisono tate dalla prima, seconda e quarta colonna di M .
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 84

6. Sia
M =
h 2h 3−2 1 0h 2 3
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R3 → R3.Al variare del parametro reale h, determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha
M −→
h 2h 3−2 1 00 2− 2h 0
Per h = 1, M ha rango 2 e Kerf = (x, 2x,−53x) | x ∈ R e una sua base e data
dal vettore (1, 2,−53). Sempre per h = 1, gli elementi speciali della matrice ridotta
si trovano, per esempio, nella seconda e terza colonna. Quindi una base di Imf e[(2, 1, 2), (3, 0, 3)].
Per h 6= 1, M ha rango 3. Pertanto f e un automorfismo (il nucleo di f contienesolo il vettore nullo).
7. Sia f : R3 → R2 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x + 2y − z, x− y). Verificare che A = [v1 = (2, 1,−1),v2 =(0, 0, 1),v3 = (1, 0, 1)] e una base di R3 e B = [w1 = (2, 1),w2 = (−1, 1)] e una basedi R2. Determinare MA,B
f .
SVOLGIMENTO. A e B sono due basi in quanto le matrici
2 0 11 0 0−1 1 1
e
(2 −11 1
)hanno rispettivamente rango 3 e 2. Si ha f(v1) = (5, 1), f(v2) = (−1, 0)
e f(v3) = (0, 1). Adesso bisogna trovare le componenti dei vettori (5, 1), (−1, 0) e(0, 1) rispetto la base B. Da
αw1 + βw2 = (5, 1)
segue α = 2 e β = −1 e quindi il vettore (5, 1) espresso nella base B e 2w1 − w2.Analogamente si procede con gli altri due vettori e si ottiene
f(v1) = 2w1 −w2
f(v2) = −13w1 +
13w2
f(v3) =13w1 +
23w2
e MA,Bf =
(2 −1
313
−1 13
23
).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 85

8. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (3x− y + 2z, 6x+ y + 4z,−3x+ y + z). Determinare Kerf , Imf e unaloro base.
9. Sia f : R3 → R2 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x− 2y+ 3z, 6x− y− z). Determinare Kerf , Imf e una lorobase.
10. Sia f : R3 → R4 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x−2y+3z, 6x−y− z, x− z, y− z). Determinare Kerf , Imfe una loro base.
11. Sia f : R3 → R4 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x+y+2z,−x+3z, 2x+2y+4z, y+5z). Determinare Kerf ,Imf e una loro base.
12. Sia f : R3 → R4 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (2x+ y+3z, 2x+5z, 6x+3y+9z, 4x+ y+8z). DeterminareKerf , Imf e una loro base.
13. Sia
M =
1 0 1 h2 h 3 2−1 2h 0 2
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R4 → R3.Al variare del parametro reale h, determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha
M −→
1 0 1 h0 h 1 2− 2h0 2h 1 2 + h
−→
1 0 1 h0 h 1 2− 2h0 h 0 3h
Per h = 0, M ha rango 2 quindi dim Imf = 2 e dim Kerf = 4 − 2 = 2. Si vedefacilmente che le equazioni di Kerf sono
x+ z = 0z + 2t = 0
.
Si ha cosı Kerf = (−z, y, z,−12z) | y, z ∈ R, e una sua base e data da
[(0, 1, 0, 0), (−1, 0, 1,−12)]. Sempre per h = 0, gli elementi speciali della matrice
ridotta si trovano nella prima e terza colonna. Ne segue che una base di Imf e[(1, 2,−1), (1, 3, 0)]. Per trovare l’equazione di Imf si consideri (x, y, z) ∈ Imf e siriduca per righe la matrice
1 1 x2 3 y−1 0 z
−→
1 1 x−1 0 y − 3x0 0 z − y + 3x
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 86

Essendo (x, y, z) combinazione lineare dei vettori (1, 2,−1), (1, 3, 0) (formanti unabase di Imf), l’equazione di Imf e z − y + 3x = 0.
Per h 6= 0, M ha rango 3 quindi dim Imf = 3, cioe f e suriettiva (Imf = R3), edim Kerf = 4− 3 = 1. Si vede facilmente che le equazioni di Kerf sono
y + 3t = 0z − (5h− 2)t = 0x− (2− 6h)t = 0
.
Si ha cosı Kerf = ((2− 6h)t,−3t, (5h− 2)t, t) | t ∈ R, e una sua base e data da[(2− 6h,−3, 5h− 2, 1)].
14. Studiare, al variare di k ∈ R, l’applicazione lineare f : R4 → R3, definita, rispettole basi canoniche mediante la seguente matrice
1 0 1 −13 k 1 + k k − 12 k −1 k
.
SVOLGIMENTO. Denotando con E la base canonica, la matrice ME,Ef puo essere
ridotta alla seguente
1 0 1 −10 k k − 2 k + 20 0 −1− k 0
.
Si noti che la matrice precedente e ridotta per ogni valore di k. Infatti, se k = 0come elemento speciale della seconda riga si puo prendere 2, mentre, se k 6= 0, comeelemento speciale possiamo prendere k.
Allora ME,Ef ha rango 2 per k = −1 e rango 3 per k 6= −1. Determiniamo adesso
una base di Imf e Kerf .
Caso k = 0. Si ha dim Kerf = 1, dim Imf = 3. Per trovare una base di Kerf esufficiente risolvere il sistema
x+ z − t = 0−2z + 2t = 0−z = 0
.
Pertanto una base diKerf e data dal vettore (0, 1, 0, 0). Una base di Imf e datadai tre vettori le cui componenti sono le colonne di ME,E
f che corrispondonoalle tre colonne della matrice ridotta contenenti i tre elementi speciali. Essisono (1, 3, 2), (1, 1,−1) e (−1,−1, 0).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 87

Caso k 6= 0,−1. Si ha dim Kerf = 1, dim Imf = 3. Per trovare una base di Kerfe sufficiente risolvere il sistema
x+ z − t = 0ky + (k − 2)z + (k + 2)t = 0−(1 + k)z = 0
.
Pertanto una base di Kerf e data dal vettore (1,−k+2k, 0, 1). Una base di
Imf e data dai tre vettori le cui componenti sono le colonne di ME,Ef che
corrispondono alle tre colonne della matrice ridotta contenenti gli elementispeciali. Essi sono (1, 3, 2), (0, k, k) e (1, 1 + k,−1).
Caso k = −1. Si ha dim Kerf = 2, dim Imf = 2. Per trovare una base di Kerf esufficiente risolvere il sistema
x+ z − t = 0−y − 3z + t = 0
.
Pertanto Kerf = (−z + t,−3z + t, z, t) | t, z ∈ R. Una base di Kerfe (−1,−3, 1, 0), (1, 1, 0, 1). Una base di Imf e data dai due vettori le cuicomponenti sono le colonne di ME,E
f che corrispondono alle due colonne dellamatrice ridotta contenenti gli elementi speciali. Essi sono, per esempio, (1, 3, 2)e (0,−1,−1).
15. SianoA = [v1 = (1, 2, 3),v2 = (0, 1, 2),v3 = (1, 0, 1)] eB = [u1 = (1,−1, 1,−1),u2 =(0, 1, 2, 2),u3 = (0, 0, 1, 2),u4 = (0, 0, 0, 1)] basi di R3 e R4, rispettivamente. Siaf : R3 → R4 l’applicazione lineare definita mediante le immagini dei vettori dellabase A, dalle assegnazioni
f(v1) = (2, 2, 0, 1)Bf(v2) = (1, 2, 5, 3)Bf(v3) = (2, 2, 4, 0)B
Determinare la dimensione, le equazioni ed una base di Kerf e Imf .
SVOLGIMENTO.
MA,Bf =
2 1 22 2 20 5 41 3 0
.
Pertanto
2 1 2 x2 2 2 y0 5 4 z1 3 0 t
R2 → −R2 +R1
R4 → −2R4 +R1
−→
2 1 2 x0 −1 0 x− y0 5 4 z0 −5 2 x− 2t
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 88

R3 → 5R2 +R3
R4 → −5R2 +R4
−→
2 1 2 x0 −1 0 x− y0 0 4 5(x− y) + z0 0 2 −4x+ 5y − 2t
R4 → −2R4 +R3 −→
2 1 2 x0 −1 0 x− y0 0 4 5(x− y) + z0 0 0 13x− 15y + 4t+ z
. Pertanto Imf ha dimensione 3 ed equazione
13x− 15y + 4t+ z = 0. Una base di Imf e data dai vettori (2, 2, 0, 1)B, (1, 2, 5, 3)Be (2, 2, 4, 0)B. Il nucleo Kerf ha dimensione 0. Quindi Kerf = (0, 0, 0)A.
16. Sia f : R3 → R3 l’endomorfismo definito mediante le immagini dei vettori della baseA = [v1 = (1, 2, 3),v2 = (0, 1, 2),v3 = (1, 0, 1)], dalle assegnazioni
f(v1) = (2, 4, 6)Ef(v2) = (1, 2, 5)Ef(v3) = (2, 2, 4)E
Determinare la dimensione, le equazioni ed una base di Kerf e Imf .
17. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (x + 2y + (1 + k)z, ky, x + 2kz). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha, denotando con E la base canonica,
ME,Ef =
1 2 1 + k0 k 01 0 2k
.
Pertanto
ME,Ef R3 → R3 −R1 −→
1 2 1 + k0 k 00 −2 k − 1
.
Per k = 0, la matrice ha rango 2 e diventa
1 2 10 0 00 −2 −1
.
Quindi dimKerf = 3 − 2 = 1 e dim Imf = 2. Per trovare una base di Kerf esufficiente risolvere il sistema
x+ 2y + z = 0−2y − z = 0
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 89

Pertanto Kerf = (0, y,−2y) | y ∈ R e una sua base e data dal vettore (0, 1,−2).Una base di Imf e data dai due vettori le cui componenti sono le colonne di ME,E
f
che corrispondono alle due colonne della matrice ridotta contenenti i due elementispeciali. Essi sono, per esempio, (1, 0, 1) e (2, 0, 0).
Per k = 1, si ha
1 2 20 1 00 −2 0
R3 → R3 + 2R2 −→
1 2 20 1 00 0 0
.
Quindi dimKerf = 3 − 2 = 1 e dim Imf = 2. Per trovare una base di Kerf esufficiente risolvere il sistema
x+ 2y + 2z = 0y = 0
.
Pertanto Kerf = (−2z, 0, z) | y ∈ R e una sua base e data dal vettore (−2, 0, 1).Una base di Imf e data dai due vettori le cui componenti sono le colonne di ME,E
f
che corrispondono alle due colonne della matrice ridotta contenenti i due elementispeciali. Essi sono, per esempio, (1, 0, 1) e (2, 1, 0).
Per k 6= 0, 1, ME,Ef ha rango 3. Quindi dimKerf = 3− 3 = 0, cioe Kerf = 0, e
dim Imf = 3, quindi Imf = R3 e una sua base puo essere la stessa base canonicaE.
18. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (x + z, 2x + ky + 2z, x + (1 + k)y). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha, denotando con E la base canonica,
ME,Ef =
1 0 12 k 21 1 + k 0
.
Pertanto
ME,Ef R2 → R2 − 2R1 −→
1 0 10 k 01 1 + k 0
.
Per k = 0, la matrice ha rango 2 e diventa
1 0 10 0 01 1 0
.
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 90

Quindi dimKerf = 3 − 2 = 1 e dim Imf = 2. Per trovare una base di Kerf esufficiente risolvere il sistema
x+ z = 0x+ y = 0
.
PertantoKerf = (x,−x,−x) | x ∈ R e una sua base e data dal vettore (1,−1,−1).Una base di Imf e data dai due vettori le cui componenti sono le colonne di ME,E
f
che corrispondono alle due colonne della matrice ridotta contenenti i due elementispeciali. Essi sono, per esempio, (1, 2, 1) e (1, 2, 0).
Per k 6= 0, ME,Ef ha rango 3. Quindi dimKerf = 3 − 3 = 0, cioe Kerf = 0, e
dim Imf = 3, quindi Imf = R3 e una sua base puo essere la stessa base canonicaE.
19. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (kx− ky+2z,−x+ y+ kz,−kx+ z). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
SVOLGIMENTO. Si ha, denotando con E la base canonica,
ME,Ef =
k −k 2−1 1 k−k 0 1
.
Conviene distinguere subito i casi k = 0 e k 6= 0.
Sia k = 0.
ME,Ef =
0 0 2−1 1 00 0 1
R3 → R3 − 1
2R1 −→
0 0 2−1 1 00 0 0
.
Per k = 0, la matrice ha rango 2. Quindi dimKerf = 3 − 2 = 1 e dim Imf = 2.Per trovare una base di Kerf e sufficiente risolvere il sistema
2z = 0−x+ y = 0
.
Pertanto Kerf = (x, x, 0) | z ∈ R e una sua base e data dal vettore (1, 1, 0).Una base di Imf e data dai due vettori le cui componenti sono le colonne di ME,E
f
che corrispondono alle due colonne della matrice ridotta contenenti i due elementispeciali. Essi sono, per esempio, (0,−1, 0) e (2, 0, 1).
Per k 6= 0, si ha
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 91

ME,Ef R2 → R2 +
1kR1 −→
k −k 2
0 0 k2+2k
−k 0 1
.
ME,Ef ha rango 3. Quindi dimKerf = 3− 3 = 0, cioe Kerf = 0, e dimImf = 3,
quindi Imf = R3 e una sua base puo essere la stessa base canonica E.
20. Sia f : R3 → R4 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (kx− 2y + 3z, 6x− (1 + k)y− z, x− z, y− kz). Determinare,al variare del parametro reale k, Kerf , Imf e una loro base.
21. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (3x − y + 2kz, kx + y + 4z, (k − 3)x + y + z). Determinare, al variaredel parametro reale k, Kerf , Imf e una loro base.
22. Sia
h 2h 3−2 1 0h 2 3
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R3 → R3.Determinare, al variare del parametro reale h, Kerf e Imf e una loro base.
23. Sia
h h 1−1 0 12 h 1
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R3 → R3.Determinare, al variare del parametro reale h, Kerf e Imf e una loro base.
24. Sia
M =
1 0 1 h2 h 3 2−1 2h 0 2
la matrice associata, rispetto le basi canoniche, all’applicazione lineare f : R4 → R3.Al variare del parametro reale h, determinare Kerf , Imf e una loro base.
25. Studiare, al variare di h ∈ R, l’applicazione lineare f : R4 → R4 definita rispetto lebasi canoniche mediante la seguente matrice:
−2 1 1 h−1 0 2 33 0 0 h1 1 1 1
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 92

26. Studiare, al variare di h ∈ R, l’applicazione lineare f : R4 → R4 definita rispetto lebasi canoniche mediante la seguente matrice:
−2 1 1 h−1 h 1 13 0 1 11 1 1 1
27. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (3x− ky + 2z, 6x+ (1− 2k)y + (4 + k)z,−3x+ ky + (k2 − k − 2)z). Alvariare del parametro reale k, determinare Ker f , Imf e una loro base.
28. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (x + 2y + (1 + k)z, ky, x + 2kz). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
29. Sia f : R3 → R3 l’endomorfismo definito, rispetto le basi canoniche, dalle equazionif(x, y, z) = (x + z, 2x + ky + 2z, x + (1 + k)y). Al variare del parametro reale k,determinare Kerf , Imf e una loro base.
30. Sia f : R3 → R2 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x + 2y − z, x − y). Verificare che A = [v1 = (1, 2, 2),v2 =(−1, 0, 0),v3 = (1, 1, 0)] e una base di R3 e B = [w1 = (1, 3),w2 = (2, 2)] e una basedi R2. Determinare MA,B
f .
SVOLGIMENTO. A e B sono due basi in quanto le matrici
1 −1 12 0 12 0 0
e
(1 23 2
)hanno rispettivamente rango 3 e 2. Per determinare MA,B
f usiamo due
metodi differenti.
PRIMO METODO. Si ha f(v1) = (3,−1), f(v2) = (−1,−1) e f(v3) = (3, 0).Adesso bisogna trovare le componenti dei vettori (3,−1), (−1,−1) e (3, 0) rispettola base B. Procedendo in modo simile all’Esercizio 19, si ha
α + 2β = (3,−1, 3)3α + 2β = (−1,−1, 0)
e quindi α = (−2, 0,−32) e β = (5
2,−1
2, 94). Da cui segue
f(v1) = −2w1 +52w2
f(v2) = −12w2
f(v3) = −32w1 +
94w2
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 93

e MA,Bf =
( −2 0 −32
52
−12
94
).
SECONDO METODO. ME3,E2
f =
(1 2 −11 −1 0
). Si ha
MA,Bf = PE2,BME3,E2
f PA,E3 .
La matrice di cambiamento di base (dalla base A alla base E3) e immediata
PA,E3 =
1 −1 12 0 12 0 0
.
Cerchiamo la matrice di cambiamento di base (dalla base E2 alla base B)
(1 2 1 03 2 0 1
)−→
(1 2 1 00 −4 −3 1
)−→
(2 0 −1 10 −4 −3 1
), quindi
PE2,B =
( −12
12
34
−14
),
MA,Bf = PE2,BME3,E2
f PA,E3 =
( −12
12
34
−14
)(1 2 −11 −1 0
)
1 −1 12 0 12 0 0
=
( −2 0 −32
52
−12
94
).
31. Sia f : R3 → R2 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x + 2y − z, x− y). Verificare che A = [v1 = (2, 1,−1),v2 =(0, 0, 1),v3 = (1, 0, 1)] e una base di R3 e B = [w1 = (2, 1),w2 = (−1, 1)] e una basedi R2. Determinare MA,B
f .
32. Sia f : R3 → R2 l’applicazione lineare definita, rispetto le basi canoniche, dalleequazioni f(x, y, z) = (x + 2y − z, x − y). Verificare che A = [v1 = (1, 2, 2),v2 =(−1, 0, 0),v3 = (1, 1, 0)] e una base di R3 e B = [w1 = (1, 3),w2 = (2, 2)] e una basedi R2. Determinare MA,B
f .
33. Sia A = [v1 = (1, 2, 2),v2 = (−1, 0, 0),v3 = (1, 1, 0)] una base in R3, e B = [w1 =(1, 3),w2 = (2, 2)] una base in R2. Sia f : R3 → R2 l’applicazione lineare definitadall’equazione:
f ((x, y, z)A) = (x+ 2y − z, x− y)B
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 94

rispetto le basi A e B. Determinare ME3,E2
f .
SVOLGIMENTO.PRIMO METODO. Bisogna determinare f(e1), f(e2), f(e3) nella base E2. Abbia-mo due possibilita:
(a) Determiniamo e1, e2 e e3 nella base A:
e1 = (1, 0, 0) = α1v1 + β1v2 + γ1v3 = α1(1, 2, 2) + β1(−1, 0, 0) + γ1(1, 1, 0) == (α1 − β1 + γ1, 2α1 + γ1, 2α1),
e2 = (0, 1, 0) = α2v1 + β2v2 + γ2v3 = (α2 − β2 + γ2, 2α2 + γ2, 2α2),
e3 = (0, 0, 1) = α3v1 + β3v2 + γ3v3 = (α3 − β3 + γ3, 2α3 + γ3, 2α3).
αi − βi + γi = (1, 0, 0)2αi + γi = (0, 1, 0)2αi = (0, 0, 1)
,
αi =
(0, 0,
1
2
), βi =
(−1, 1,−1
2
), γi = (0, 1,−1),
α1 = 0, α2 = 0, α3 =1
2, β1 = −1, β2 = 1, β3 = −1
2, γ1 = 0, γ2 = 1, γ3 = −1.
Abbiamo quindi
e1 = (0,−1, 0)A, e2 = (0, 1, 1)A, e3 =
(1
2,−1
2,−1
)
A
.
Essendo f ((x, y, z)A) = (x+ 2y − z, x− y)B, abbiamo
f(e1) = f ((0,−1, 0)A) = (−2, 1)B,
f(e2) = f ((0, 1, 1)A) = (1,−1)B,
f(e3) = f((
12,−1
2,−1
)A
)=
(12, 1)B.
Ora, determiniamo (−2, 1)B, (1,−1)B e(12, 1)Bin base E2:
(−2, 1)B = −2w1 +w2 = −2(1, 3) + (2, 2) = (0,−4) = (0,−4)E2 ,
(1,−1)B = w1 −w2 = (1, 3)− (2, 2) = (−1, 1) = (−1, 1)E2 .
(12, 1)B= 1
2w1 +w2 =
12(1, 3) + (2, 2) =
(52, 72
)=
(52, 72
)E2.
In conclusione
ME3,E2
f =
(0 −1 5
2
−4 1 72
).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 95

(b) Invece di determinare e1, e2, e3 in base A come fatto prima, possiamo deter-minare direttamente f(e1), f(e2) ed f(e3) nel seguente modo:
f(1, 2, 2) = f(v1) = f ((1, 0, 0)A) = (1, 1)B,
f(−1, 0, 0) = f(v2) = f ((0, 1, 0)A) = (2,−1)B,
f(1, 1, 0) = f(v3) = f ((0, 0, 1)A) = (−1, 0)B,
Dalle precedenti relazioni, essendo
f(v1) = f(e1 + 2e2 + 2e3) = f(e1) + 2f(e2) + 2f(e3),
f(v2) = f(−e1) = −f(e1),
f(v3) = f(e1 + e2) = f(e1) + f(e2),
abbiamo
f(e1) + 2f(e2) + 2f(e3) = (1, 1)B−f(e1) = (2,−1)Bf(e1) + f(e2) = (−1, 0)B
,
che ha soluzioni
f(e1) = (−2, 1)B, f(e2) = (1,−1)B, f(e3) =
(1
2, 1
)
B
.
Per determinare (−2, 1)B, (1,−1)B e(12, 1)Bin base E2 si proceda come in (a).
SECONDO METODO. Si ha
ME3,E2
f = PB,E2MA,Bf PE3,A.
La matrice di cambiamento di base (dalla base B alla base E2) e immediata
PB,E2 =
(1 23 2
).
Cerchiamo la matrice di cambiamento di base (dalla base E3 alla base A):
1 −1 1 1 0 02 0 1 0 1 02 0 0 0 0 1
−→
1 −1 1 1 0 00 2 −1 −2 1 00 2 −2 −2 0 1
−→
1 −1 1 1 0 00 2 −1 −2 1 00 0 1 0 1 −1
, quindi PE3,A =
0 0 12
−1 1 −12
0 1 −1
,
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 96

ME3,E2
f = PB,E2MA,Bf PE3,A =
(1 23 2
)(1 2 −11 −1 0
)
0 0 12
−1 1 −12
0 1 −1
=
(0 −1 5
2
−4 1 72
).
34. Siano A = [v1 = (1, 2, 2),v2 = (−1, 0, 0),v3 = (1, 1, 0)], C = [u1 = (−1, 1, 1),u2 =(0, 2, 0),u3 = (0, 0, 1)],B = [w1 = (1, 3),w2 = (2, 2)],D = [z1 = (1, 2), z2 = (0, 1)].
(a) Verificare che A e C sono due basi in R3 e che B e D sono due basi in R2.
(b) Assegnata l’applicazione f avente equazione
f ((x, y, z)A) = (x+ 2y − z, x− y)B,
determinare MC,Df .
SVOLGIMENTO. Il quesito 1 si verifica facilmente. Risolviamo il quesito 2. Deter-miniamo u1, u2 e u3 nella base A:
u1 = (−1, 1, 1) = α1v1 + β1v2 + γ1v3 = α1(1, 2, 2) + β1(−1, 0, 0) + γ1(1, 1, 0) =(α1 − β1 + γ1, 2α1 + γ1, 2α1),
u2 = (0, 2, 0) = α2v1 + β2v2 + γ2v3 = (α2 − β2 + γ2, 2α2 + γ2, 2α2),
u3 = (0, 0, 1) = α3v1 + β3v2 + γ3v3 = (α3 − β3 + γ3, 2α3 + γ3, 2α3),
αi − βi + γi = (−1, 0, 0)2αi + γi = (1, 2, 0)2αi = (1, 0, 1)
,
αi =
(1
2, 0,
1
2
), βi =
(3
2, 2,−1
2
), γi = (0, 2,−1)
α1 =1
2, α2 = 0, α3 =
1
2, β1 =
3
2, β2 = 2, β3 = −1
2, γ1 = 0, γ2 = 2, γ3 = −1.
Abbiamo quindi
u1 =
(1
2,3
2, 0
)
A
, u2 = (0, 2, 2)A, u3 =
(1
2,−1
2,−1
)
A
.
Essendo f ((x, y, z)A) = (x+ 2y − z, x− y)B, abbiamo
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 97

f(u1) = f((
12, 32, 0)A
)=
(72,−1
)B,
f(u2) = f ((0, 2, 2)A) = (2,−2)B,
f(u3) = f((
12,−1
2,−1
)A
)=
(12, 1)B.
Ora, determiniamo(72,−1
)B, (2,−2)B e
(12, 1)Bin base D:
(72,−1
)B= 7
2(1, 3)− (2, 2) =
(32, 17
2
)= α1z1 + β1z2 = α1(1, 2) + β1(0, 1) =
= (α1, 2α1 + β1),
(2,−2)B = 2(1, 3)− 2(2, 2) = (−2, 2) = (α2, 2α2 + β2),
(12, 1)B= 1
2(1, 3) + (2, 2) =
(52, 72
)= (α3, 2α3 + β3)
αi =
(32,−2, 5
2
)2αi + βi =
(172, 2, 7
2
) ,
αi =
(3
2,−2,
5
2
), βi =
(11
2, 6,−3
2
).
Abbiamo quindi
f(u1) =(72,−1
)B=
(32, 11
2
)D, f(u2) = (2,−2)B = (−2, 6)D,
f(u3) =(12, 1)B=
(52,−3
2
)D. Pertanto
MC,Df =
(32
−2 52
112
6 −32
).
esercizi proposti agli studenti di matematica discreta (a.a. 2011-12) dal prof. s. milici 98