Embedded Systems: Communication - Intranet...
53
Politecnico di Milano © 2006 - Luca Pizzamiglio Embedded Systems: Communication Embedded Systems: comunicazione real-time Lecturer: Prof. William Fornaciari [email protected]
Transcript of Embedded Systems: Communication - Intranet...
Politecnico di Milano
© 2006 - Luca Pizzamiglio
Embedded Systems: Communication
Embedded Systems: comunicazione real-time
Lecturer:
Prof. William [email protected]
Communication © 2006 - Luca Pizzamiglio- 2 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 3 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 4 -
Introduzione
La comunicazione basata su bus soffre di un
problema nella garanzia dei vincoli real-time
La causa principale è dovuta all’arbitraggio
Se l’arbitraggio favorisce l’attore sbagliato, una
comunicazione può non avvenire nei tempi previsti e
si verifica un fallimento
Le prestazioni massime di un bus sono fisse
Se arrivano troppe richieste, il bus può risultare
inadeguato
Gestione con code di priorità
Le ritrasmissioni modificano i tempi di trasmissione
in modo impredicibile
Communication © 2006 - Luca Pizzamiglio- 5 -
Introduzione
In generale, vi sono due approcci alla gestione real-
time di un bus
Gestione ad eventi (CAN) – event driven
Gestione a tempo (TTP) – time driven
Oltre a queste due filosofie, se ne affianca una
mista che cerca di riunire i vantaggi dei due
approcci
Si sovrappone una gestione time driven con una parte
event driven
Communication © 2006 - Luca Pizzamiglio- 6 -
Introduzione
Il protocollo ethernet non ha nessuna garanzia real-
time
La politica di accesso al link, la CSMA/CD, non
garantisce caratteristiche di determinismo
Le contese sono risolte con ritardi generati su base
statistica
Non ci sono garanzie sui tempi di attesa
Si presenteranno due approcci che estendono
ethernet fornendo garanzie real-time
RTNET – protocollo TDMA
Rether – protocollo a token
Communication © 2006 - Luca Pizzamiglio- 7 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 8 -
Il bus CAN
Il protocollo CAN – Controller Area Network – è uno
standard ISO – ISO 11898 – per le comunicazioni
seriali
Nasce per il settore automotive, ma al giorno d’oggi
è usato anche in altri settori, tra cui quello
dell’automazione industriale
Lo standard, in riferimento alla pila ISO-OSI, copre
solo il livello fisico e e il livello dati.
Le altre funzionalità vengono demandate ad altri
protocolli di livello superiore (Higher Level Protocol)
Il livello fisico non è strettamente specificato, ma
sono suggerite alcune realizzazioni di riferimento
Communication © 2006 - Luca Pizzamiglio- 9 -
Il bus CAN – il livello fisico
Lo standard prevede due possibili livelli fisici
High speed CAN
Low speed CAN
Entrambi questi standard utilizzano una
trasmissione differenziale su una coppia di cavi
Esiste uno standard, legato all’automotive,
suggerito in SAE J2411, caratterizzato da un singolo
filo
Comunque è previsto un riferimento di massa comune
Communication © 2006 - Luca Pizzamiglio- 10 -
Il bus CAN – il livello fisico
La codifica prevista è la Non Zero Returning
Riduce la banda necessaria
Necessita di bit di stuffing
Per motivi di sincronizzazione, ogni 5 bit uguali viene inserito un bit opposto (il bit di stuffing) che dovrà essere riconosciuto ed eliminato dal ricevitore
Lo standard definisce i bit come recessivi e dominanti rispetto alle operazioni logiche AND e OR
A seconda del tipo di cablaggio il bit dominante sarà 0 o 1
Si rendono possibili entrambe le implementazioni
Tratteremo l’OR wiring, utilizzando 1 come bit dominante e 0 come bit recessivo
Communication © 2006 - Luca Pizzamiglio- 11 -
Il bus CAN – il livello fisico
High speed CAN
Trasmissione fino a 1 Mbit/s su distanza massima di 40m
Doppino intrecciato
Impedenza di 120 Ohm per annullare la rilfessione dei segnali
Low speed CAN
Trasmissione fino a 125 Kbit/s
Doppino intrecciato
I dispositivi collegati gestiscono in modo completo tutti i problemi che possono sorgere a livello fisico
Detto anche CAN Fault Tolerant
Single wire CAN
Trasmissione fino a 33Kbit/s su un solo filo
Necessario un riferimento a massa comune
Communication © 2006 - Luca Pizzamiglio- 12 -
Il bus CAN – il livello dati
Il punto chiave del bus CAN è la gestione delle comunicazioni orientata al contenuto
A questo livello le comunicazioni sono tutte in broadcast – non è previsto un indirizzamento diretto vero una particolare periferica
Ogni messaggio ha una intestazione che contiene un identificatore di messaggio, che rappresenta la priorità del messaggio rispetto agli altri
Le priorità sono:
stabilite in fase di progetto
sono statiche, non dinamiche
devono essere univoche per ciascun tipo di messaggio
– Due diverse stazioni non devono poter trasmettere messaggi con lo stesso identificatore (priorità)
Communication © 2006 - Luca Pizzamiglio- 13 -
Il bus CAN – il livello dati
Vi sono due tipi di messaggio, oltre a diversi messaggi di
segnalazione
RF – Remote Frame
Frame senza campo dati che sollecita l’invio di un valore
DF – Data Frame
Frame di trasmessione dati
EF – Error Frame
Rileva un errore e provoca la ritrasmissione
OF – Overload Frame
Viene inviato da un nodo sovraccarico per ritardare la
trasmissione del pacchetto successivo
IS – Interframe Space
Precede ogni DF e RF e ha una funzione separatrice
Communication © 2006 - Luca Pizzamiglio- 14 -
Il bus CAN – il livello dati
I messaggi Data e Remote Frame sono composti da:Start Of Frame
un solo bit 1 con due scopi– distinguere i Data e Remote Frame dagli altri messaggi
– sincronizzare i ricevitori
Arbitration Fieldcontiene l’identificatore del messaggio
Remote Trasmission Requestdistingue tra RF e DF, con priorità al DF
Control Fieldspecifica la lunghezza del Data Field (4 bit) e 2 bit sono riservati per usi futuri
Data Field (solo DF)contiene i dati e può avere una dimensione tra 0 e 8 bytes
CRC Fieldsequenza di controllo d’errore (16 bit)
ACKcampo che può essere sovrascritto da qualsiasi nodo per segnalare un’errore di ricezione e chiedere la ritrasmissione del dato
End Of Frame7 bit uguali a zero per segnalare la fine della trasmissione
Communication © 2006 - Luca Pizzamiglio- 15 -
Il bus CAN – il livello dati
L’arbitraggio avviene direttamente sul bus a livello di identificatore di messaggio (Arbitration Field)
Ciascuna stazione trasmittente, mentre trasmette, monitora il bus
Qualora ci fosse un conflitto con un identificatore più alto (basso), l’OR (AND) wiring cambia il valore presente sul bus
Tutte le stazioni trasmittenti che perdono l’arbitraggio diventano ricevitori del messaggio
Questo meccanismo garantisce tempi di trasmissione certi ai messaggi con più alta priorità
La priorità deve essere scelta opportunamente dal progettista
Communication © 2006 - Luca Pizzamiglio- 16 -
Il bus CAN – la gestione degli errori
La gestione degli errori avviene al livello dati
La presenza di diversi tipi di protezione dagli errori insiti nel protocollo stesso, ha garantito una larga diffusione del protocollo CAN
Protezione sul messaggio
CRC
ACK
Frame check
Protezione a livello di bit
Monitoring
Bit stuffing
Autoesclusione delle stazioni riceventi
Se presentano una percentuale di errori elevata, per non compromettere l’intero bus con continue ritrasmissioni, le stazioni riceventi possono autoescludersi
Communication © 2006 - Luca Pizzamiglio- 17 -
Il bus CAN – la gestione degli errori
La protezione sul messaggio
CRC a 16 bit
Nel messaggio viene incluso un codice a correzione d’errore di 16 bit calcolato sui dati inviati
ACK
Il segnale di ack chiede la ritrasmissione del messaggio nel caso in cui il controllo CRC o l’identificazione delle componenti del messaggio falliscano
Protezione sui bit
Il monitoring dello stato del bus permette al trasmettitore attivo di identificare propri errori, nonchè errori globali
Il bit stuffing garantisce la sincronizzazione in caso di sequenze di bit identici superiori a 5 elementi
Communication © 2006 - Luca Pizzamiglio- 18 -
Il bus CAN – la gestione degli errori
Autoesclusione
Ogni stazione gestisce due contatori
Errori rilevati o segnalati da altri durante la trasmissione
Errori in ricezione
I contatori vengono incrementati da ciascun errore identificato con le metodologie precedenti assegnando anche una gravità
In base al valore assunto dai due contatori, la stazione si pone in uno dei seguenti stati
Error active: il numero di errori è accettabile e la stazione partecipa alla trasmissione
Error passive: la stazione commette un numero elevato di errori; la segnalazione di errore non genera automaticamente la ritrasmissione
Bus off: la stazione commette un numero di errori che comprometterebbe la rete. La stazione non partecipa alla rete, ma si mette in modalità di ascolto. Può riprendere le trasmissioni solo quando il bus è libero e non partecipa alle contese.
– Il nodo resta in attesa di 11 o più bit recessivi consecutivi che costituiscono lo spazio minimo tra due frame consecutivi
Communication © 2006 - Luca Pizzamiglio- 19 -
Il bus CAN – TTCAN
TTCAN è un protocollo di alto livello che, basandosi
su un’infrastruttura CAN, gestisce la trasmissione
dei dati sia in modalità time-triggered sia in
modalità event-triggered
TTCAN è l’acronimo di time-triggered CAN
È definito nello standard OSI 11898-1
L’utilizzo di TTCAN permette di gestire i controlli in
catena chiusa mediante CAN e di migliorare le
prestazioni di CAN caratterizzando le esigenze
temporali di ciascun tipo di segnale
Segnali periodici
Segnali associati ad eventi
Communication © 2006 - Luca Pizzamiglio- 20 -
Il bus CAN – TTCAN
Ogni stazione possiede un livello software che gestisce la sincronizzazione mediante il riconoscimento di un reference frame
Tutte le stazioni sono sincronizzate e ogni stazione sa dopo quanto tempo dal reference frame deve iniziare a trasmettere
Il periodo di tempo che intercorre tra due reference frame è detto frame cycle e non è necessariamente costante
Si possono servire le diverse esigenze con periodi differenti
La somma dei diversi frame cycle fornisce il tempo di ciclo
Communication © 2006 - Luca Pizzamiglio- 21 -
Il bus CAN – TTCAN
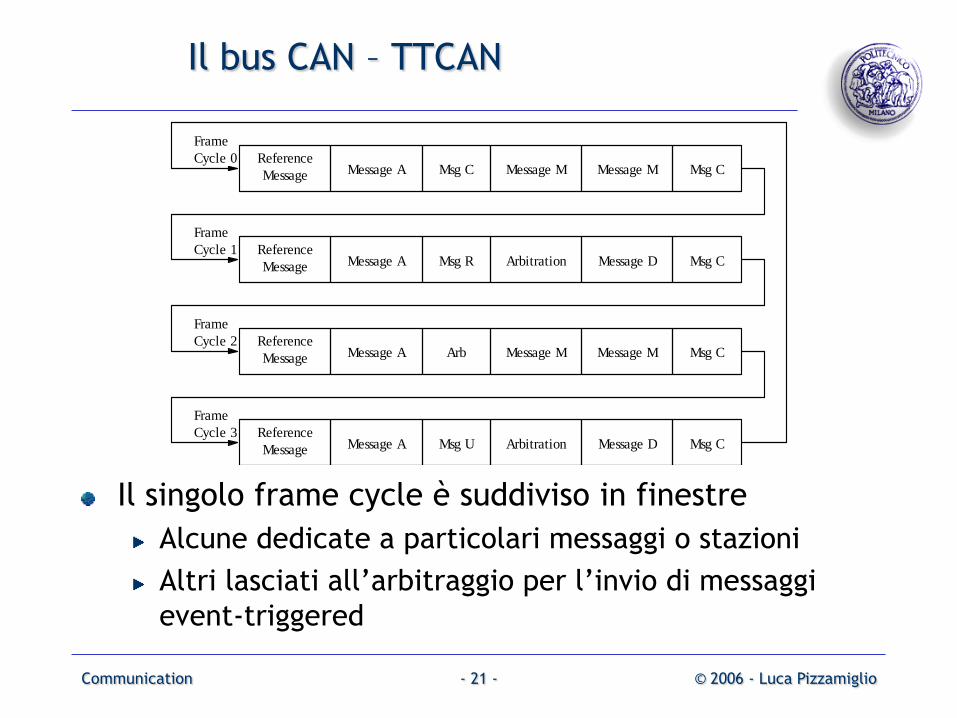
Il singolo frame cycle è suddiviso in finestre
Alcune dedicate a particolari messaggi o stazioni
Altri lasciati all’arbitraggio per l’invio di messaggi
event-triggered
Reference
Message
Reference
Message
Reference
Message
Reference
Message
Message A
Message A
Message A
Message A
Msg C
Arb
Msg U
Msg R
Message M
Message M
Arbitration
Arbitration
Msg CMessage M
Message M
Message D
Message D
Msg C
Msg C
Msg C
Frame
Cycle 0
Frame
Cycle 1
Frame
Cycle 2
Frame
Cycle 3
Communication © 2006 - Luca Pizzamiglio- 22 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 23 -
Il bus TTP
Il TTP (Time Triggered Protocol) è basato su TDMA
(Time Driven Multiple Access) statico al bus da
parte delle diverse stazioni
Questo approccio si contrappone al bus CAN
Il bus CAN gestisce l’accesso in modo event-triggered
attraverso la risoluzione delle contese
Lo scheduling statico delle trasmissioni garantisce
ad ogni stazione di poter comunicare, ed essere
quindi ascoltata, ad intervalli predefiniti
Non si corre il rischio di rinvii indefiniti
Lo scheduling statico può portare a un tempi di bus
inutilizzati e a un basso utilizzo della risorsa
Communication © 2006 - Luca Pizzamiglio- 24 -
Il bus TTP
Il bus TTP è stato ottimizzato sia per una topologia a stella sia per una topologia ad anello
Ad ogni modifica della topologia deve seguire una riconfigurazione di tutte le stazioni
Nel caso di un nuovo nodo trasmittene, è necessario riconfigurare tutti i nodi al fine di riservare uno slot di trasmissione per il nuovo nodo
Viste le caratteristiche principali del bus TTP, si intuisce che questo protocollo è indicato per le applicazioni “mission critical”
In queste applicazioni non è fondamentale lo sfruttamento del bus, ma deve essere garantito il ritardo massimo da quando un nodo vuole trasmettere a quando il nodo può effettivamente comunicare
Communication © 2006 - Luca Pizzamiglio- 25 -
Il bus TTP – il livello fisico
Il bus TTP è stato implementato e testato su diversi tipi di
livello fisico (tra cui anche sul bus CAN)
Attualmente, è stato definito uno standard specifico per la
realizzazione di un bus TPP
Lo standard, purtroppo, non è disponibile pubblicamente, ma
se ne conoscono le caratteristiche principali
Tensione di funzionamento compresa tra -12 V e +20 V
Throughput: 25Mbit/s in modalità sincrona, 5Mbit/s in
modalità asincrona
Funzionalità di wake-up e sleep integrate nel livello fisico
Autodiagnosi e sezionamento della rete in caso di probelmi
elettrici a livello fisico
Disponibile anche con comunicazione su fibra ottica
Communication © 2006 - Luca Pizzamiglio- 26 -
Il bus TTP – il livello fisico
La sincronizzazione del clock non è gestita in modo
centralizzato
La sincronizzazione si basa sulla conoscenza a priori
delle durate della trasmissione
Ogni stazione può calcolare la deviazione tra il
proprio clock e quello del trasmettitore ed allinearsi
Sono state testate topologie sia a stella che a bus
Per aumentare la robustezza ai guasti, sono state
testate anche architetture a stella con più centri
stella, in modo tale da scongiurare il blocco del
sistema per un guasto al controller di centro stella
(Single Point of Failure)
Communication © 2006 - Luca Pizzamiglio- 27 -
Il bus TTP – arbitraggio
In un bus con gestione TDMA pura, non esistono casi
di contesa e l’arbitraggio avviene in modo
puramente statico e deterministico
L’arbitraggio è stabilito nella fase di progettazione
del sistema
Ad ogni nodo è assegnata una parte della banda
disponibile, suddividendo in time slot di durata
differente ciascun round TDMA.
Ogni stazione può trasmettere solo nel time slot ad
essa assegnato
Ogni stazione ha quindi garanzie di banda e ritardi di
trasmissione certi
Communication © 2006 - Luca Pizzamiglio- 28 -
Il bus TTP – gestione degli errori
Un guasto ad una stazione corrisponde al suo time
slot inutilizzato
Il sistema di interfacciamento al bus fa sì che una
stazione guasta non posso scrivere nei time slot a lei
non assegnati, evitando di bloccare tutto il bus in
caso di singolo malfunzionamento (nodi fail silent)
La protezione sui dati trasmessi viene affidata ai
livelli di comunicazione superiori
La garanzia di continuità di funzionamento del bus è
dimostrata nell’ipotesi di guasto singolo
Un solo errore grave si verifica nello stesso istante nel
sistema
Communication © 2006 - Luca Pizzamiglio- 29 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 30 -
ByteFlight
ByteFlight è un bus seriale ad alta velocità sviluppato per applicazioni automotive da:
BMW
Motorola
ELMOS
Infineon
Siemens EC
Steinbeis
IXXAT
Attualmente è utilizzato da BMW nella produzione di serie delle vetture serie 7
È utilizzato ad Avidyne per la produzione di materiale avionico
Communication © 2006 - Luca Pizzamiglio- 31 -
ByteFlight – il livello fisico
Il bus, studiato per la fibra ottica con topologia a
stella, unisce le caratteristiche di un protocollo
event-driven e di uno time-driven, sfruttando i
vantaggi di ciascuna soluzione
Le prestazioni (10Mbit/s) e il campo applicativo per
cui è stato studiato, mostrano un collegamento
fisico particolarmente soggetto a disturbi di natura
elettromagnetica
Per questo motivo, il livello fisico si base su POF –
fibre ottiche plastiche in half-duplex e con topologia
a stella
Communication © 2006 - Luca Pizzamiglio- 32 -
ByteFlight – il livello fisico
Nonostante il notevole costo e la complessità nella
gestione dei segnali ottici, i vantaggi che se ne
derivano giustificano le scelte effettuate
L’isolamento elettrico dei vari componenti
L’immunità del sistema da blocchi dovuti a guasti
sorti in una stazione
A patto di ridurre le prestazioni, è possibile
utilizzare normali connessioni in rame con doppino
ritorto
Esistono anche controllori commerciali che fungono
da bridge tra più bus CAN e ByteFlight
Communication © 2006 - Luca Pizzamiglio- 33 -
ByteFlight – FTDMA
L’accesso al bus è definito FTDBA – Flexible Time Division Multiple Access
Tutti gli elementi che accedono al bus hanno una base temporale comune, generata dal segnale di SYNC che contraddistingue l’inizio di un ciclo
Ogni stazione può essere configurata come SYNC Master e gli altri si allineano al segnale ricevuto
Il tempo di ciclo è suddiviso in time slot
L’utilizzo dello slot è regolato dal protocollo e implementato in hardware
Durante ogni slot viene incrementato un contatore, che ogni stazione confronta con l’identificativo assegnato al messaggio che deve trasmettere
Se l’identificativo corrisponde, la stazione impegna il bus e trasmette
Se nessuna stazione ha un messaggio da trasmettere con quell’identificativo, dopo un breve periodo di tempo di attesa, il contatore viene incrementato e la procedura si ripete
Communication © 2006 - Luca Pizzamiglio- 34 -
ByteFlight – FTDMA
I messaggi con ID basso sono serviti in tempi brevi,
mentre quelli con vincoli meno stringenti sono
serviti solo quando il bus è libero
Si riesce a garantire un tempo di risposta
deterministico per i messaggi con priorità alta e un
utilizzo elevato del bus da parte degli altri messaggi
quando è libero
In altre parole, il tentativo di ByteFlight è quello di
fornire il determismo dei protocolli time-driven con
lo sfruttamento del bus dei protocolli event-driven.
Communication © 2006 - Luca Pizzamiglio- 35 -
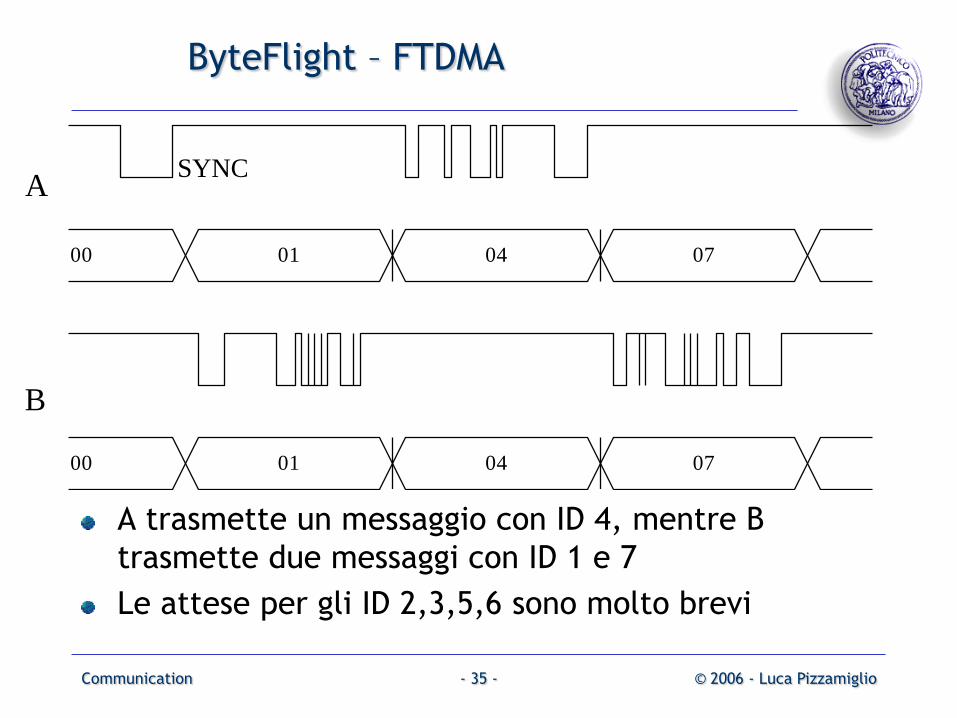
ByteFlight – FTDMA
A trasmette un messaggio con ID 4, mentre B
trasmette due messaggi con ID 1 e 7
Le attese per gli ID 2,3,5,6 sono molto brevi
01
01 07
070400
00 04
A
B
SYNC
Communication © 2006 - Luca Pizzamiglio- 36 -
ByteFlight – formato dei messaggi
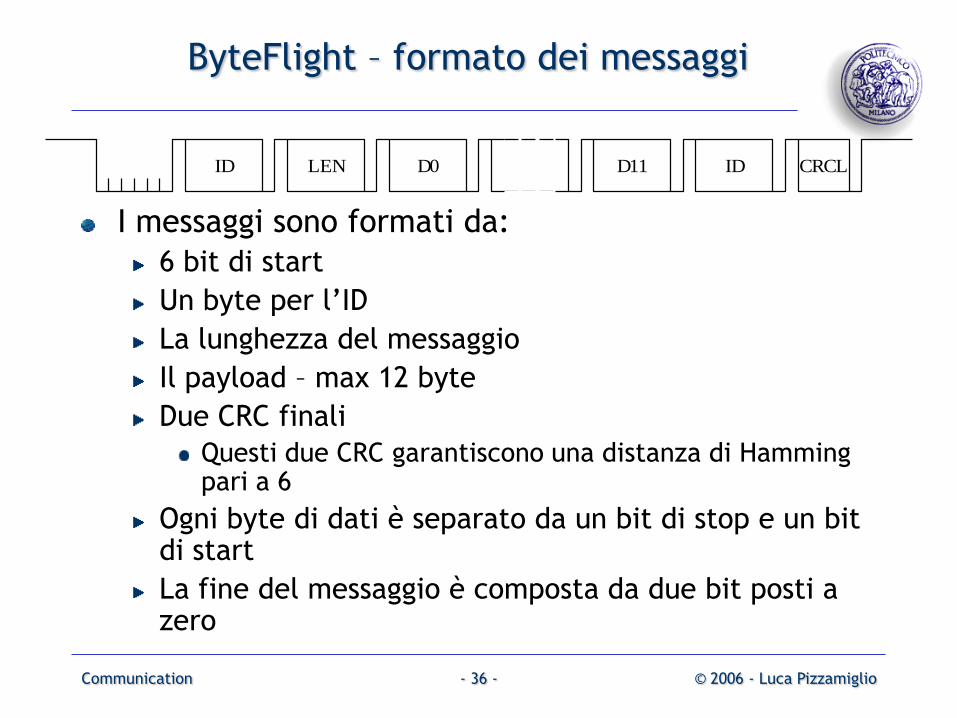
I messaggi sono formati da:
6 bit di start
Un byte per l’ID
La lunghezza del messaggio
Il payload – max 12 byte
Due CRC finali
Questi due CRC garantiscono una distanza di Hamming pari a 6
Ogni byte di dati è separato da un bit di stop e un bit di start
La fine del messaggio è composta da due bit posti a zero
ID IDLEN D0 D11 CRCL
Communication © 2006 - Luca Pizzamiglio- 37 -
ByteFlight – gestione degli errori
Poichè non si possono effettuare ritrasmissioni immediate, la gestione degli errori viene effettuata a livello di messaggio e di sistema
A livello di messaggio ne viene controllata l’integrità e la rispondenza alle specifiche
Se è il caso, viene generato un messaggio d’errore e la ritrasmissione avviene dopo il minimo intervallo di idle
Se si è persa la sincronizzazione tra i vari elementi, non avviene alcuna ritrasmissione fino a quando il sistema non si è risincronizzato nuovamente
Il centro stella partecipa attivamente effettuando controlli di sistema, escludendo stazioni che violano il time slot di trasmissione e controllando le prestazioni del canale ottico
Ogni transceiver si autoesclude in caso di violazione dei vincoli fisici
Communication © 2006 - Luca Pizzamiglio- 38 -
Sommario
La comunicazione RT
Introduzione
Il bus CAN
Il livello fisico
Il livello dati
Gestione degli errori
Il bus TTP
Il bus ByteFlight
Estensioni RT per ethernet
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 39 -
Estensioni RT su ethernet
Ethernet è un protocollo non real-time
Il suo meccanismo di arbitraggio per la risoluzione delle
contese non fornisce garanzie di determinismo
La risoluzione delle contese avviene ripetendo la
trasmissione dopo un tempo di attesa casuale
Statisticamente, le due stazioni che si contendono il bus
aspettano due tempi diversi
Scaduto il tempo di attesa e si riprova a trasmettere
Non si può escludere, almeno dal punto di vista teorico,
che le stazioni possano soffrire di rinvii indefiniti
Si analizzeranno due estensioni per ethernet che forniscono
alcune garanzie real-time
RTNET
Rether
Communication © 2006 - Luca Pizzamiglio- 40 -
RTNET
RTNET è un protocollo OpenSource, con
caratteristiche real-time basato su RTAI,
un’estensione RT di Linux
RTNET sfrutta hardware ethernet classico, non
richiede interfacce particolari
Realizza UDP/IP, ICMP e ARP in modo deterministico
Fornisce un socket BSD standard per l’utilizzo con il
kernel RTAI e processi utente real-time
La gestione delle contese avviene attraverso RTmac,
un protocollo a livello mac che gestisce l’accesso
alla risorsa
Communication © 2006 - Luca Pizzamiglio- 41 -
RTNET
RTNET gestisce il traffico non real-time (TCP/IP)
sulla stessa interfaccia di rete sulla quale passa il
traffico real-time
Permette di realizzare su un unico cavo entrambe le
tipologie di traffico senza però impattare le
prestazioni real-time
Ovviamente, l’impatto è limitato alle prestazioni non
real-time
Il progetto ha natura accademica, anche se è
maturato e, oggi, si può considerare piuttosto
stabile
Communication © 2006 - Luca Pizzamiglio- 42 -
RTNET - RTmac
RTmac realizza un sistema che fornisce garanzie
temporali di risposta su una struttura fisica già
esistente e che non fornisce nessun tipo di
determinismo temporale
La tecnica utilizzata da RTNET è quella di costruire
un sistema TDMA sopra il CSMA/CD esistente
In altre parole, si istruiscono le diverse perficerche
imponendo un tempo preciso di trasmissione, in modo
da evitare che accadano contese e il CSMA/CD
introduca l’indeterminismo temporale
Communication © 2006 - Luca Pizzamiglio- 43 -
RTNET - RTmac
Il protocollo RTmac consta di tre fasi:
Distribuzione da parte di un master di un invito a tutti i client contenente la configurazione di RTmac
Scambio degli indirizzi fisici (i MAC address) e delle configurazioni arbitrarie di ciascun client
Sincronizzazione finale dopo le fasi di inizializzazione
Tutte le periferiche interfacciate sulla rete devono essere compatibili con RTNET
A priori deve essere stabilito, assegnato e implementato il ruolo di master
La rete deve essere quindi dedicata, non è possibile miscelare diverse reti
La rete è quindi dedicata a messaggi RT
La trasmissione di messaggi non real-time avviene incapsulandoli in messaggi RT
L’header MAC è molto semplice e contiene solo le informazioni essenziali
Tipo di pacchetto
Il pacchetto realizza un tunnelling di messaggi non RT
Communication © 2006 - Luca Pizzamiglio- 44 -
RTNET – TDMA v2.1
Il protocollo TDMA usato prevede la sincronizzazione iniziale dei vari membri della rete mediante un pacchetto speciale Start Of Frame - SOF
Dopo il SOF, tutti i partecipanti calcolano il tempo che deve intercorrere prima del proprio time slot
La divisione in time slot, le loro durate e il loro assegnamento viene stabilito durante la fase di inizializzaione e resta immutata fino ad una nuova inizializzazione dell’intera rete
Se è previsto il tunnelling di dati non RT, si riservano un certo numero di time slot
Il numero di questi time slot viene stabilito in modo da rispettare tutte le richieste temporali dei nodi RT
Communication © 2006 - Luca Pizzamiglio- 45 -
RTNET – RTcfg
RTcfg è il protocollo che realizza la configurazione
di RTNET nella fase di inizializzazione della rete
Gli ultimi sviluppi, hanno introdotto in RTNet la
capacità di hot-plugging e quindi la configurabilità
dinamica dell’intera rete
In caso di guasto di un nodo, non è necessario far
ripartire il sistema
I messaggi di configurazione di RTcfg sono inviati da
un gestore centralizzato che rileva, gestisce e
segnala ogni situazione particolare, comprese le fasi
iniziali
Communication © 2006 - Luca Pizzamiglio- 46 -
Rether
Rether – Realtime ETHERnet – si propone di gestire il
problema delle collisioni mediante un meccanismo
di token, che viene passato tra le varie stazioni
della rete
In questo modo, Rether può garantire una certa
banda a ciascuna stazione
Il protocollo si propone di essere assolutamente
trasparente verso il software di alto livello
Il protocollo è integrato nei driver di accesso allo
hardware ethernet standard
Garantisce la compatibilità con i protocolli UDP, TCP
e RTP
Communication © 2006 - Luca Pizzamiglio- 47 -
Rether
Vengono fornite una serie di primitive (API) che permette l’utilizzo da parte degli applicativi utente delle caratteristiche real-time
Le applicazioni non real-time sfrutteranno la parte di banda non occupata dalle applicazioni real-time
Il protocollo ha la possibilità di cambiare la propria modalità di funzionamento da token a CSMA/CD quando non sono presenti comunicazione RT
Ovviamente, tutte le stazioni presenti nella rete devono avere dei driver che supportano Rether
La rete viene idealmente suddivisa in nodi RT (real-time) e nodi NRT (non real-time)
I nodi non corrispondono necessariamente a nodi fisiciamente separati
I nodi RT possono mandare un messaggio in broadcast che richiede il passaggio alla modalità di funzionamento a token, ovvero real-time
Communication © 2006 - Luca Pizzamiglio- 48 -
Rether – modalità RT
I nodi real-time sono numerati in sequenza
Il primo nodo della sequenza genera il token di
trasmissione RT
Il protocollo stabilisce due tempi:
Tempo di token: tempo durante il quale un nodo può
trattenere il token
Tempo totale tra la creazione e la distruzione del
token
Questi tempi sono generati per garantire
La banda richiesta da ciascuna stazione
I tempi di risposta richiesti
Communication © 2006 - Luca Pizzamiglio- 49 -
Rether – modalità RT
Il nodo RT che detiene il token
Se deve trasmettere, effettua la trasmissione per una durata massima pari al tempo di token, passando poi il token al nodo RT successivo nella sequenza di numerazione
Se non deve trasmettere, il nodo RT passa subito il token al nodo RT successivo nella sequenza di numerazione
Il passaggio dei token avviene in questo modo fino al raggiungimento dell’ultimo nodo RT
L’ultimo nodo RT inoltre il token al primo nodo NRT
Il token è contrassegnato da un suo tempo di validità, entro il quale le trasmissioni NRT devono essere terminate
Communication © 2006 - Luca Pizzamiglio- 50 -
Rether – modalità RT
Il token viene fatto girare tra le varie stazioni NRT
fino allo scadere del suo tempo di validità o al
raggiungimento dell’ultimo nodo NRT
Se una stazione NRT non riesce a concludere la
trasmissione entro il tempo di validità del token,
sarà la prima a ricevere il token nel round
successivo
Le sezioni del protocollo più complesse riguardano
Inizializzazione dei tempi
Variazione dei tempi
Communication © 2006 - Luca Pizzamiglio- 51 -
Rether – inizializzazione
Quando un nodo RT ha terminato la propria
trasmissione, invia in broadcast un messaggio di fine
RT
Quando tutti i nodi RT hanno terminato la
trasmissione, la rete torna in modalità CSMA/CD
Il meccanismo si basa sul fatto che tutti i nodi
dispongono di una lista dei nodi RT, che mantengono
aggiornata ad ogni ricezione dei messaggi di
broadcast di fine RT
Communication © 2006 - Luca Pizzamiglio- 52 -
Rether – inizializzazione
Quando la rete si trova in modalità standard, il
messaggio di switch-to-RT viene gestito in CSMA/CD
I token inizia a girare e quando i nodi RT lo
ricevono, stabiliscono quanta banda riservarsi
comunicandola in broadcast
Se un nodo NRT necessita di trasmissione RT, lo può
annunciare in broadcast quando riceve il token
Ogni nodo, nel riservarsi la banda, esegue dei test di
ammissibilità
Se la banda non è sufficiente, la richiesta di
trasmissione RT fallisce
Communication © 2006 - Luca Pizzamiglio- 53 -
Bibliografia
M. Inzaghi, “Protocolli e reti Real-Time”, dispensa
per il corso di Sistemi Embedded, AA 2004/2005
http://www.kvaser.de
http://www.can-cia.org
http://www.ee.ualberta.ca/archive/vmefaq.html
http://www.byteflight.com
http://www.tttech.com
http://www.ttpforum.org
http://www.rts.uni.hannover.de/rtnet
http://www.ecsl.cs.sunysb.edu/tr.TR6.ps.Z
http://canfestival.sourceforge.net