Editorial Board Raffaele Azzaro (CT) Sara Barsotti (PI...
50
Transcript of Editorial Board Raffaele Azzaro (CT) Sara Barsotti (PI...
Direttore
Enzo Boschi
Editorial Board
Raffaele Azzaro (CT)Sara Barsotti (PI)Viviana Castelli (MI)Anna Grazia Chiodetti (AC)Rosa Anna Corsaro (CT)Luigi Cucci (RM1)Mauro Di Vito (NA)Sergio Gurrieri (PA)Lucia Margheriti (CNT)Simona Masina (BO)Nicola Pagliuca (RM1)Leonardo Sagnotti (RM2)Salvatore Stramondo (CNT)Andrea Tertulliani - coordinatore (RM1)Gianluca Valensise (RM1)Gaetano Zonno (MI)
Segreteria di Redazione
Francesca Di Stefano - responsabileTel. +39 06 51860055Fax +39 06 36915617
Sabrina PaloneTel. +39 06 51860405Fax +39 06 51860585

LE PRIME STAZIONI GPS PERMANENTI INGV-CNT PER ILMONITORAGGIO DELLE DEFORMAZIONI CROSTALI
DELL’AREA ITALIANA
Marco Anzidei, Giuseppe Casula, Alessandro Galvani, Federica Riguzzi, Grazia Pietrantonio, Angelo Massucci, Sergio Del Mese
INGV-CNT
U.F. Geodesia e Telerivamento


Riassunto
In questi ultimi anni molti Enti oUniversità italiane e straniere impegnate in studigeofisici a carattere geodinamico e geodetico,hanno sentito la necessità di realizzare reti GPSin monitoraggio continuo capaci di raggiungerele migliori precisioni possibili ottenibili e alcontempo di poter disporre di dati inquadrati inun solo sistema di riferimento. Infatti i dati GPSacquisiti in continuo su reti realizzate con pro-cedure automatizzate di acquisizione, trasmis-sione e analisi dei dati, rappresentano un poten-te mezzo per studiare le deformazioni del suolodi origine tettonica e vulcanica, consentendoavanzamenti significativi nella ricerca geofisicae geodetica e per scopi di monitoraggio orienta-ti per applicazioni di Protezione Civile.
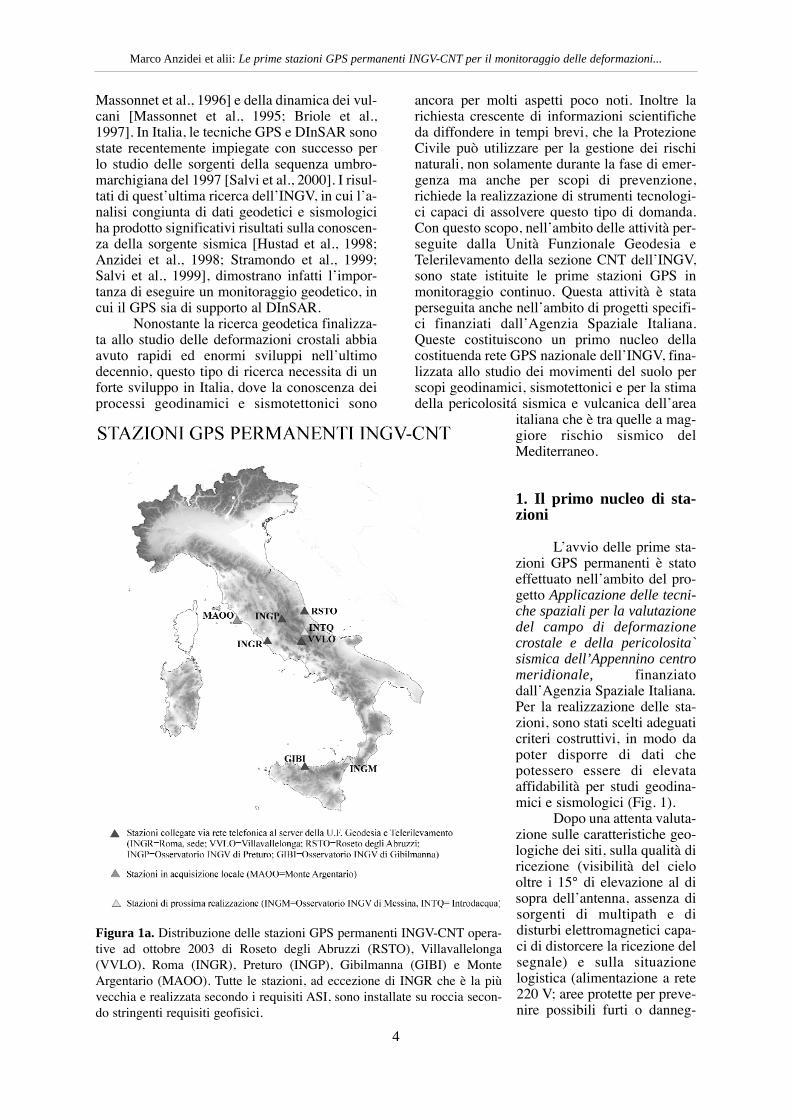
Con questi obiettivi sono state realizzatele stazioni GPS di Roma (INGR),Villavallelonga (VVLO), Roseto degli Abruzzi(RSTO), Gibilmanna (GBLM), Preturo (INGP)e Monte Argentario (MAOO), distribuite nellearee italiane di principale interesse geodinamicoe sismologico. Queste sono state collocate inparticolare dove andava colmato un gap sulladistribuzione di stazioni permanenti già esisten-ti afferenti alla rete GPS dell’Agenzia SpazialeItaliana. Le stazioni, realizzate secondo criteriche soddisfano la ricerca geofisica, sono costi-tuite da ricevitori GPS geodetici a doppia fre-quenza le cui antenne sono state collocate supilastrini in cemento armato prevalentementefondati su affioramenti rocciosi.
In questa pubblicazione viene descritto lostato attuale della rete, la struttura dei monu-menti geodetici, la strumentazione utilizzata, lemodalità di acquisizione e trasmissione dei dati,la loro analisi e archiviazione. Viene anchemostrato un confronto sulla qualità dei dati pro-dotti dalle stazioni INGV rispetto alle stazioni diMatera (MATE) e Cagliari (CAGL), afferentialla rete internazionale dell’InternationalGodynamic Service.
Introduzione
La tecnica godetica spaziale GlobalPositioning System (GPS) rappresenta unmezzo estremamente potente, versatile ed effi-cace per fornire informazioni relative alle defor-mazioni del suolo non solo per scopi puramentescientifici ma anche per la prevenzione di rischinaturali e di Protezione Civile. In particolare,rispetto alle altre tecniche di geodesia spazialedisponibili (VLBI, SLR, DORIS, SAR), la tec-nica GPS, proprio per la sua accuratezza, versa-
tilità di utilizzo, costi limitati, rapidità e maggiorsemplicità nell’acquisizione e trattazione deidati, si è largamente diffusa per scopi geofisici[Granci, 1999]. La motivazione principale cheporta alla necessità di avere a disposizioneinformazioni geodetiche di alta precisione perscopi geofisici, ottenute da reti di stazioni GPSpermanenti a densità sufficientemente elevata, èlo studio della evoluzione spaziale e temporaledelle deformazioni crostali, di aree soggette arischio sismico e vulcanico. Infatti, i dati prove-nienti dalle reti GPS possono essere utilizzabilicon successo per la modellazione della sorgentedeformativa, permettendo di ampliare le cono-scenze sui processi fisici che causano terremotied eruzioni. In ambito geodinamico, queste retipermettono di studiare la cinematica delle plac-che e al contempo forniscono dati utili per lostudio dei parametri atmosferici (ionosfera e tro-posfera) [Anzidei et al., 1997, Mirenna et al.,1997, Circolo and Spalla, 1997].
Esempi di applicazione di reti GPS per-manenti ad una densità spaziale sufficiente per ilmonitoraggio delle deformazioni della crostaterrestre ci provengono dal Giappone e dagliU.S.A. già dai primi anni ‘90 [Sheimada andBock, 1992; Miyazaki et al., 1995; Tsuji et al.,1995; Zhang, 1996; Zhang et al., 1997; Naito etal., 1998; Shen et al., 1998; Bock at al., 1997].Queste reti di monitoraggio geodetico (circa1000 stazioni solo in Giappone, ed altrettantequelle previste nell’ambito del progetto PlateBoundary Observatory, per la costa Pacificadegli Stati Uniti; http://sopac.ucsd.edu/pro-jects/pbo) stanno producendo importanti risulta-ti sulla conoscenza dei campi di deformazionesia a scala locale (aree vulcaniche e faglie atti-ve) che regionale (cinematica delle placche).Inoltre, il loro inquadramento nella rete globaledell’International GPS Service forGeodynamics (IGS), sta consentendo di studiaredirettamente la cinematica delle placche conti-nentali. L’utilizzo di reti GPS permanenti, con-testualmente a quelle non permanenti [Dong etal., 1998], oltre alle applicazioni geodinamiche,consentono di studiare le deformazioni legate alciclo sismico o eruttivo [Wdowinski et al.,1997]. L’obiettivo è quello di utilizzare i datigeodetici per identificare i segnali associati apossibili correlazioni spaziali e temporali deifenomeni vulcanici e sismici [Wald D.J. andHeaton T.H. , 1994; Pollitz et al.,1997]. Nel casodello studio delle deformazioni a scala locale, lacombinazione di dati GPS con osservazioni ditipo Interferometria Differenziale SAR [Bock Y.and Williams S., 1997] permette una definizionecompleta degli spostamenti superficiali associa-ti al ciclo sismico [Massonnet D. et al., 1993;
3
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Massonnet et al., 1996] e della dinamica dei vul-cani [Massonnet et al., 1995; Briole et al.,1997]. In Italia, le tecniche GPS e DInSAR sonostate recentemente impiegate con successo perlo studio delle sorgenti della sequenza umbro-marchigiana del 1997 [Salvi et al., 2000]. I risul-tati di quest’ultima ricerca dell’INGV, in cui l’a-nalisi congiunta di dati geodetici e sismologiciha prodotto significativi risultati sulla conoscen-za della sorgente sismica [Hustad et al., 1998;Anzidei et al., 1998; Stramondo et al., 1999;Salvi et al., 1999], dimostrano infatti l’impor-tanza di eseguire un monitoraggio geodetico, incui il GPS sia di supporto al DInSAR.
Nonostante la ricerca geodetica finalizza-ta allo studio delle deformazioni crostali abbiaavuto rapidi ed enormi sviluppi nell’ultimodecennio, questo tipo di ricerca necessita di unforte sviluppo in Italia, dove la conoscenza deiprocessi geodinamici e sismotettonici sono
ancora per molti aspetti poco noti. Inoltre larichiesta crescente di informazioni scientificheda diffondere in tempi brevi, che la ProtezioneCivile può utilizzare per la gestione dei rischinaturali, non solamente durante la fase di emer-genza ma anche per scopi di prevenzione,richiede la realizzazione di strumenti tecnologi-ci capaci di assolvere questo tipo di domanda.Con questo scopo, nell’ambito delle attività per-seguite dalla Unità Funzionale Geodesia eTelerilevamento della sezione CNT dell’INGV,sono state istituite le prime stazioni GPS inmonitoraggio continuo. Questa attività è stataperseguita anche nell’ambito di progetti specifi-ci finanziati dall’Agenzia Spaziale Italiana.Queste costituiscono un primo nucleo dellacostituenda rete GPS nazionale dell’INGV, fina-lizzata allo studio dei movimenti del suolo perscopi geodinamici, sismotettonici e per la stimadella pericolositá sismica e vulcanica dell’area
italiana che è tra quelle a mag-giore rischio sismico delMediterraneo.
1. Il primo nucleo di sta-zioni
L’avvio delle prime sta-zioni GPS permanenti è statoeffettuato nell’ambito del pro-getto Applicazione delle tecni-che spaziali per la valutazionedel campo di deformazionecrostale e della pericolosita`sismica dell’Appennino centromeridionale, finanziatodall’Agenzia Spaziale Italiana.Per la realizzazione delle sta-zioni, sono stati scelti adeguaticriteri costruttivi, in modo dapoter disporre di dati chepotessero essere di elevataaffidabilità per studi geodina-mici e sismologici (Fig. 1).
Dopo una attenta valuta-zione sulle caratteristiche geo-logiche dei siti, sulla qualità diricezione (visibilità del cielooltre i 15° di elevazione al disopra dell’antenna, assenza disorgenti di multipath e didisturbi elettromagnetici capa-ci di distorcere la ricezione delsegnale) e sulla situazionelogistica (alimentazione a rete220 V; aree protette per preve-nire possibili furti o danneg-
4
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 1a. Distribuzione delle stazioni GPS permanenti INGV-CNT opera-tive ad ottobre 2003 di Roseto degli Abruzzi (RSTO), Villavallelonga(VVLO), Roma (INGR), Preturo (INGP), Gibilmanna (GIBI) e MonteArgentario (MAOO). Tutte le stazioni, ad eccezione di INGR che è la piùvecchia e realizzata secondo i requisiti ASI, sono installate su roccia secon-do stringenti requisiti geofisici.
giamenti; protezione delle superfici esterne deicavi di collegamento antenna-ricevitore concanaline interrate; ricevitore, acquisitore e siste-ma di trasmissione conservati in ambiente benaerato riparato dall’acqua e dall’umidità), si èproceduto alla realizzazione delle stazionisecondo criteri adottati dalle reti internazionali[Anzidei ed Esposito, 2003].
2. I monumenti geodetici
Il tipo di materializzazione scelto per lamonumentazione di una rete geodetica rappre-senta una fase determinante nella sua costruzio-ne. I monumenti delle reti geodetiche dedicate ascopi geofisici devono essere duraturi nel tempoe caratterizzati da elevate stabilità meccaniche alungo termine, al fine di fornire dati significati-vi sull’andamento delle deformazioni del suolonel tempo.
Sulla base della esperienza maturatadall’INGV e da altri Enti italiani e stranieri perla realizzazione di alcune stazioni permanenti,sono stati adottati standard fondamentali per laloro realizzazione.
Le stazioni hanno richiesto una scelta dimateriali di elevata qualità per la realizzazione
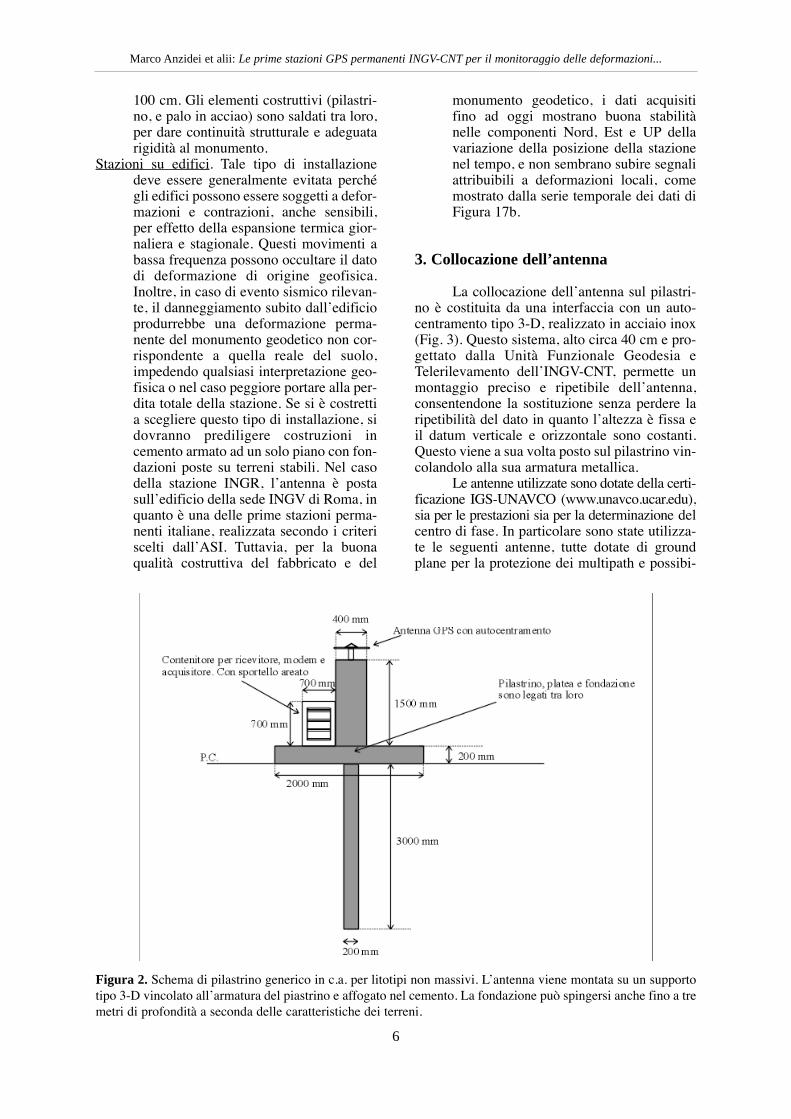
dei monumenti e la progettazione si è dovutaadattare ai singoli casi, definendo fondazioniadeguate al litotipo affiorante (Fig. 2):
Stazioni su litotipi non massivi. I monumentisono costituiti da pilastrini in cementoarmato di sezione circolare di 30 cm didiametro o di sezione quadrata 25x25 cm,con altezza compresa tra 100 e 200 cm. Inalcuni casi sono dotati di una piccola pla-tea a pianta quadrata di 150x150 cm. Lafondazione del pilastrino, dotato di arma-tura in ferro, si può spingere anche oltre i200 cm di profondità. I tre elementicostruttivi (pilastrino, platea e fondazio-ne) sono vincolati tra loro mediante l’ar-matura in ferro per dare continuità strut-turale e adeguata rigidezza al monumen-to.
Stazioni su litotipi massivi. Anche in questocaso i monumenti sono costituiti da pila-strini in cemento armato di sezione circo-lare di 30 cm di diametro o di sezionequadrata 25x25 cm, con altezza compresatra 100 e 200 cm. La fondazione del pila-strino, dotato di armatura in ferro, è costi-tuita da un palo in acciaio infisso in roc-cia anche fino ad oltre la profondità di
5
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
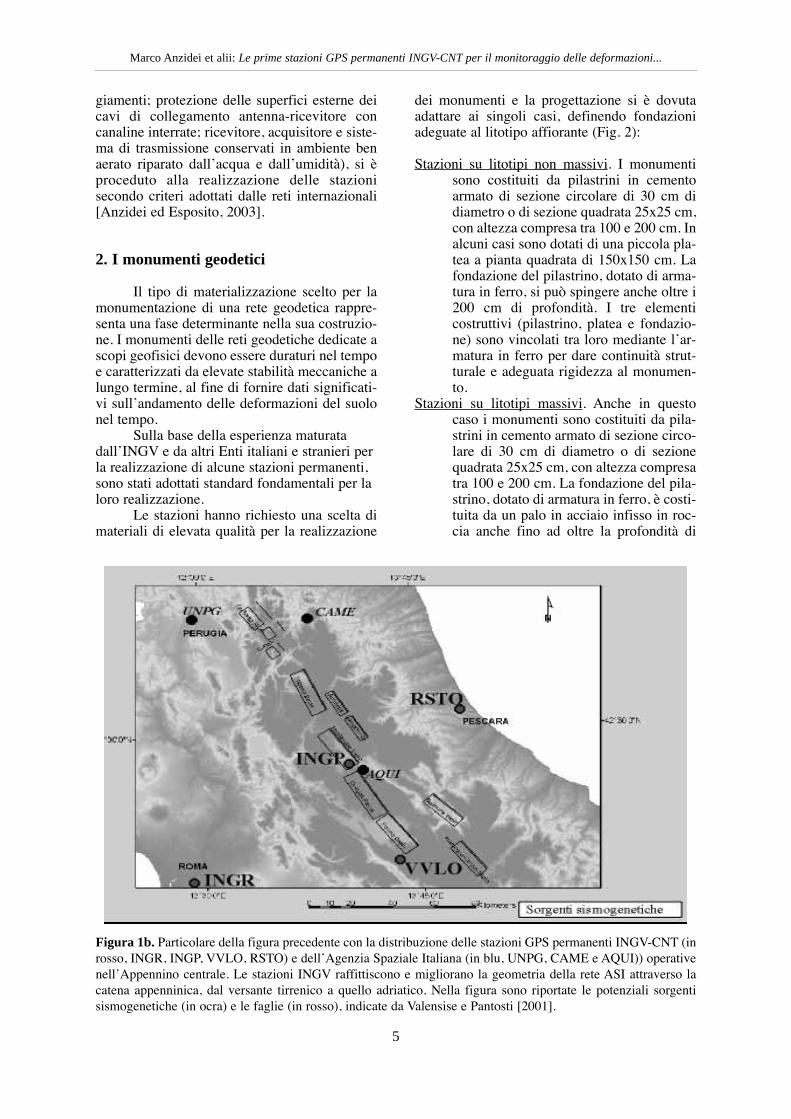
Figura 1b. Particolare della figura precedente con la distribuzione delle stazioni GPS permanenti INGV-CNT (inrosso, INGR, INGP, VVLO, RSTO) e dell’Agenzia Spaziale Italiana (in blu, UNPG, CAME e AQUI)) operativenell’Appennino centrale. Le stazioni INGV raffittiscono e migliorano la geometria della rete ASI attraverso lacatena appenninica, dal versante tirrenico a quello adriatico. Nella figura sono riportate le potenziali sorgentisismogenetiche (in ocra) e le faglie (in rosso), indicate da Valensise e Pantosti [2001].
100 cm. Gli elementi costruttivi (pilastri-no, e palo in acciao) sono saldati tra loro,per dare continuità strutturale e adeguatarigidità al monumento.
Stazioni su edifici. Tale tipo di installazionedeve essere generalmente evitata perchégli edifici possono essere soggetti a defor-mazioni e contrazioni, anche sensibili,per effetto della espansione termica gior-naliera e stagionale. Questi movimenti abassa frequenza possono occultare il datodi deformazione di origine geofisica.Inoltre, in caso di evento sismico rilevan-te, il danneggiamento subito dall’edificioprodurrebbe una deformazione perma-nente del monumento geodetico non cor-rispondente a quella reale del suolo,impedendo qualsiasi interpretazione geo-fisica o nel caso peggiore portare alla per-dita totale della stazione. Se si è costrettia scegliere questo tipo di installazione, sidovranno prediligere costruzioni incemento armato ad un solo piano con fon-dazioni poste su terreni stabili. Nel casodella stazione INGR, l’antenna è postasull’edificio della sede INGV di Roma, inquanto è una delle prime stazioni perma-nenti italiane, realizzata secondo i criteriscelti dall’ASI. Tuttavia, per la buonaqualità costruttiva del fabbricato e del
monumento geodetico, i dati acquisitifino ad oggi mostrano buona stabilitànelle componenti Nord, Est e UP dellavariazione della posizione della stazionenel tempo, e non sembrano subire segnaliattribuibili a deformazioni locali, comemostrato dalla serie temporale dei dati diFigura 17b.
3. Collocazione dell’antenna
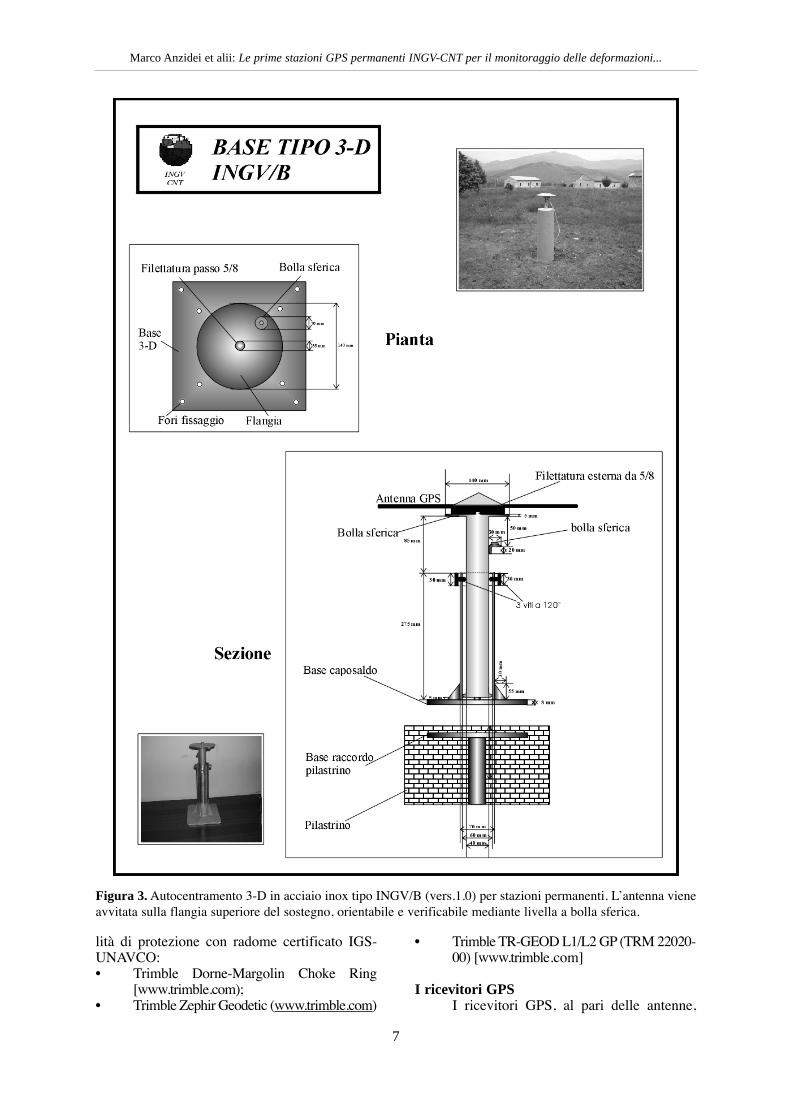
La collocazione dell’antenna sul pilastri-no è costituita da una interfaccia con un auto-centramento tipo 3-D, realizzato in acciaio inox(Fig. 3). Questo sistema, alto circa 40 cm e pro-gettato dalla Unità Funzionale Geodesia eTelerilevamento dell’INGV-CNT, permette unmontaggio preciso e ripetibile dell’antenna,consentendone la sostituzione senza perdere laripetibilità del dato in quanto l’altezza è fissa eil datum verticale e orizzontale sono costanti.Questo viene a sua volta posto sul pilastrino vin-colandolo alla sua armatura metallica.
Le antenne utilizzate sono dotate della certi-ficazione IGS-UNAVCO (www.unavco.ucar.edu),sia per le prestazioni sia per la determinazione delcentro di fase. In particolare sono state utilizza-te le seguenti antenne, tutte dotate di groundplane per la protezione dei multipath e possibi-
6
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 2. Schema di pilastrino generico in c.a. per litotipi non massivi. L’antenna viene montata su un supportotipo 3-D vincolato all’armatura del piastrino e affogato nel cemento. La fondazione può spingersi anche fino a tremetri di profondità a seconda delle caratteristiche dei terreni.
lità di protezione con radome certificato IGS-UNAVCO:• Trimble Dorne-Margolin Choke Ring
[www.trimble.com);• Trimble Zephir Geodetic (www.trimble.com)
• Trimble TR-GEOD L1/L2 GP (TRM 22020-00) [www.trimble.com]
I ricevitori GPSI ricevitori GPS, al pari delle antenne,
7
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 3. Autocentramento 3-D in acciaio inox tipo INGV/B (vers.1.0) per stazioni permanenti. L’antenna vieneavvitata sulla flangia superiore del sostegno, orientabile e verificabile mediante livella a bolla sferica.
sono anch’essi dotati della certificazione IGS-UNAVCO [www.unavco.ucar.edu] e sono costi-tuiti da ricevitori Trimble 4700, Trimble4000SSI e Trimble 5700 con le seguenti caratte-ristiche fondamentali:• doppia frequenza (senza opzione
Glonass);• codici e fasi su L1 e L2 e criptamento del
codice P e AS (SA=off);12 o 24 canali ;• capacità di acquisire fino a 12 satelliti;• passo di campionamento variabile;• protezione da mancanza di alimentazione,
scariche atmosferiche, disturbi e.m.;• porte per collegamento a sistemi di acqui-
sizione, trasmissione e controllo remoto;• possibilità di memoria espandibile (flash-
card) per collocazione tipo “stand alone”.
4. Alimentazione delle stazioni
Le stazioni sono alimentate a rete elettri-ca 220V e sono dotate di gruppo di continuitàcapace di assicurare l’alimentazione del sistemada alcuni minuti ad alcune ore in caso di man-canza provvisoria di corrente. Il sistema ècomunque capace di ristabilire automaticamentele procedure di acquisizione e di trasmissioneanche dopo un suo completo spegnimento. Ilconsumo del complesso ricevitore GPS, sistemadi acquisizione e comunicazione è di circa 80 W.A tutte le stazioni è presente energia elettrica a
220 V, mentre la comunicazione dati è fornita dauna linea telefonica commutata gestita dallaTelecom Italia.
5. Il sistema di acquisizione
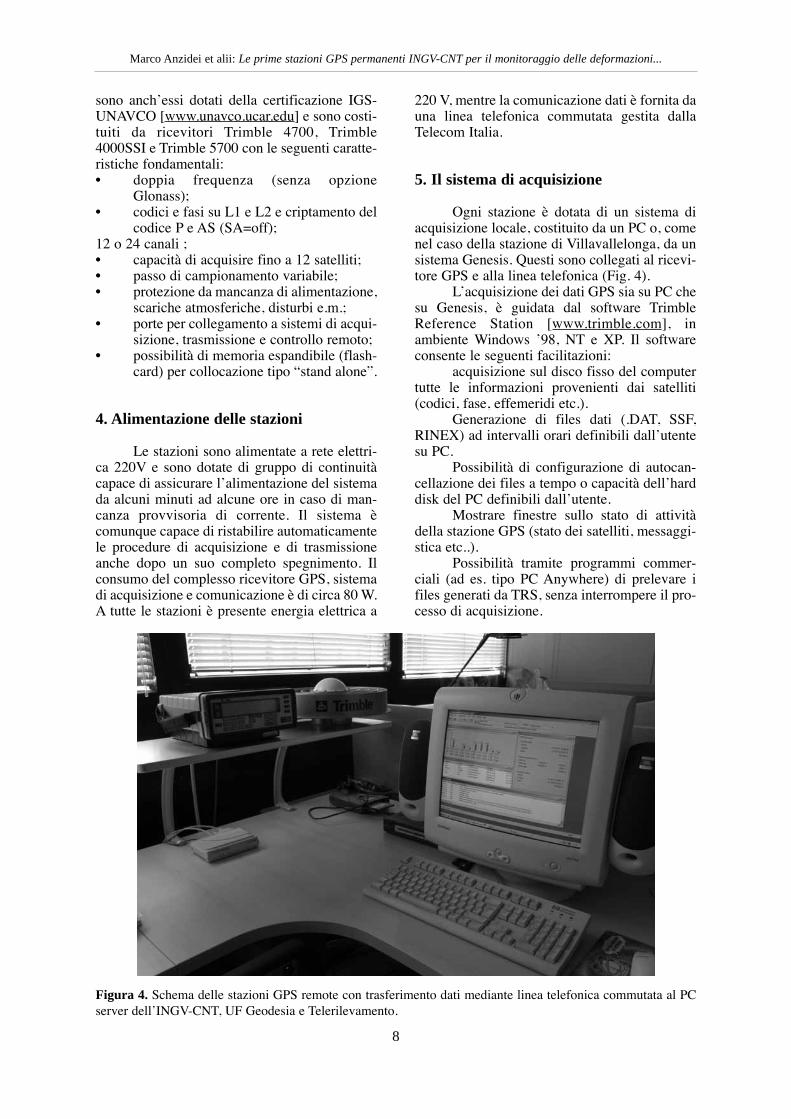
Ogni stazione è dotata di un sistema diacquisizione locale, costituito da un PC o, comenel caso della stazione di Villavallelonga, da unsistema Genesis. Questi sono collegati al ricevi-tore GPS e alla linea telefonica (Fig. 4).
L’acquisizione dei dati GPS sia su PC chesu Genesis, è guidata dal software TrimbleReference Station [www.trimble.com], inambiente Windows ’98, NT e XP. Il softwareconsente le seguenti facilitazioni:
acquisizione sul disco fisso del computertutte le informazioni provenienti dai satelliti(codici, fase, effemeridi etc.).
Generazione di files dati (.DAT, SSF,RINEX) ad intervalli orari definibili dall’utentesu PC.
Possibilità di configurazione di autocan-cellazione dei files a tempo o capacità dell’harddisk del PC definibili dall’utente.
Mostrare finestre sullo stato di attivitàdella stazione GPS (stato dei satelliti, messaggi-stica etc..).
Possibilità tramite programmi commer-ciali (ad es. tipo PC Anywhere) di prelevare ifiles generati da TRS, senza interrompere il pro-cesso di acquisizione.
8
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 4. Schema delle stazioni GPS remote con trasferimento dati mediante linea telefonica commutata al PCserver dell’INGV-CNT, UF Geodesia e Telerilevamento.
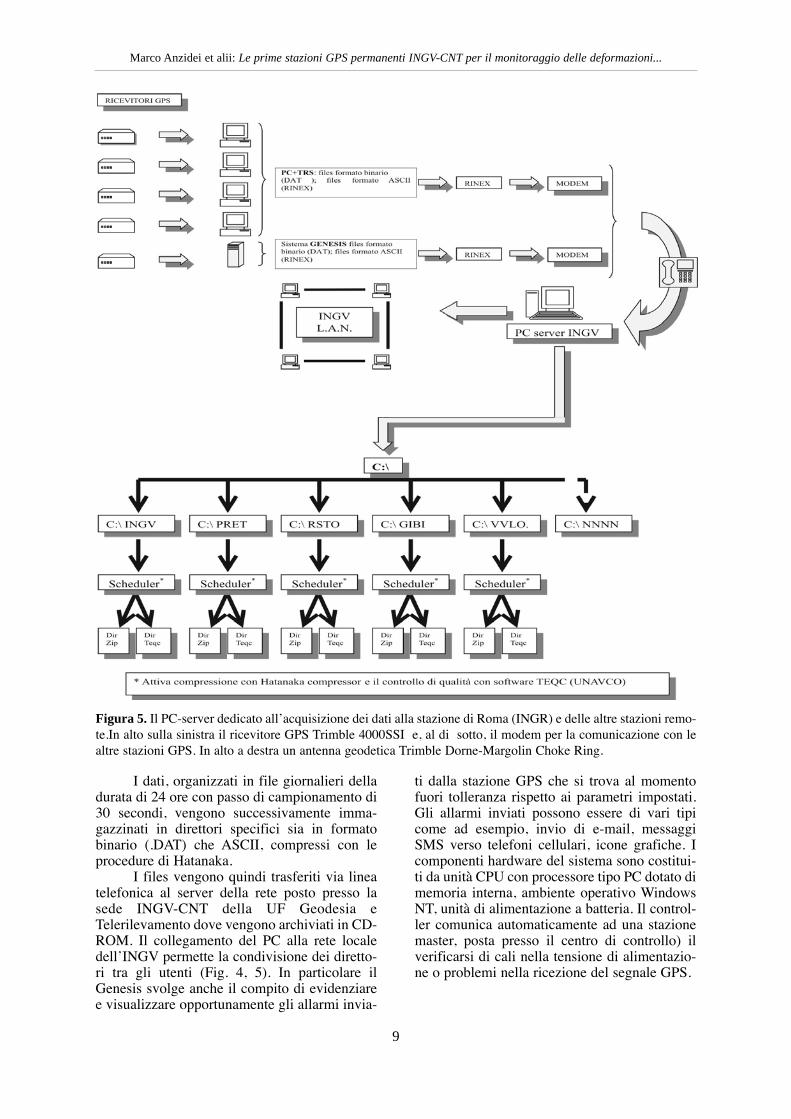
I dati, organizzati in file giornalieri delladurata di 24 ore con passo di campionamento di30 secondi, vengono successivamente imma-gazzinati in direttori specifici sia in formatobinario (.DAT) che ASCII, compressi con leprocedure di Hatanaka.
I files vengono quindi trasferiti via lineatelefonica al server della rete posto presso lasede INGV-CNT della UF Geodesia eTelerilevamento dove vengono archiviati in CD-ROM. Il collegamento del PC alla rete localedell’INGV permette la condivisione dei diretto-ri tra gli utenti (Fig. 4, 5). In particolare ilGenesis svolge anche il compito di evidenziaree visualizzare opportunamente gli allarmi invia-
ti dalla stazione GPS che si trova al momentofuori tolleranza rispetto ai parametri impostati.Gli allarmi inviati possono essere di vari tipicome ad esempio, invio di e-mail, messaggiSMS verso telefoni cellulari, icone grafiche. Icomponenti hardware del sistema sono costitui-ti da unità CPU con processore tipo PC dotato dimemoria interna, ambiente operativo WindowsNT, unità di alimentazione a batteria. Il control-ler comunica automaticamente ad una stazionemaster, posta presso il centro di controllo) ilverificarsi di cali nella tensione di alimentazio-ne o problemi nella ricezione del segnale GPS.
9
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 5. Il PC-server dedicato all’acquisizione dei dati alla stazione di Roma (INGR) e delle altre stazioni remo-te.In alto sulla sinistra il ricevitore GPS Trimble 4000SSI e, al di sotto, il modem per la comunicazione con lealtre stazioni GPS. In alto a destra un antenna geodetica Trimble Dorne-Margolin Choke Ring.
6. Trasmissione dati
Le moderne tecnologie consentono lagestione di strumentazione remota senza l’inter-vento umano in loco, sebbene la trasmissionedei dati rappresenti una delle maggiori difficol-tà per la gestione di una rete di monitoraggioGPS per le dimensioni dei files giornalieri chedevono essere trasferiti dalle stazioni ai centri diraccolta dati. Il sistema adottato (Fig. 4), è basa-to sulle tecnica di trasmissione con linea telefo-nica commutata. Questa rappresenta una solu-zione tra le più semplici ed economiche per lagestione della stazione. Tuttavia le limitazionisono dipendenti dalla possibilità di ottenere uncollegamento fisico tra la stazione e la borchiatelefonica più vicina. La velocità di trasmissio-ne dipende dall’area geografica e può variaresensibilmente. Si può stimare una durata di tra-smissione variabile da 2 a 6 minuti circa per sta-zione, per il trasferimento di un file giornalierocompresso delle dimensioni medie di 700 Kb. Irequisiti del modem telefonico utilizzateo per lelinee commutate sono:• Alimentazione 12 V per collegamento ad
una unità di back up • V.32, V.32 bis per protocollo di comuni-
cazione• V.42, MNP per compressione dati e corre-
zione errori• RTS/CTS per controllo di flusso hardwa-
re• Baud rate ad alta velocità (2.4, 19.2 Kb/s)• Compatibile con RS232
La trasmissione dei dati dalle stazioniremote e la loro ricezione presso il sistema diacquisizione locale è affidata a procedure auto-matizzate implementate nel sistema operativoWindows. Si sta anche esplorando la possibilitàdi poter utilizzare le tecnologie di trasmissionevia rete telefonica cellulare GPRS o UMTS, chepotrebbero fornire prestazioni simili a quelledelle linee telefoniche tipo ADSL, utilizzate perla trasmissione veloce di dati.
Tuttavia, la trasmissione via satellite puòcostituire una ottima alternativa a quelle senzacavo in quanto si è completamente svincolati daconnessioni fisiche a terra. Permette la realizza-zione di una stazione ovunque richiesto, senzadipendere dalla presenza di linee telefoniche diqualsiasi tipo.
La velocità di trasmissione è elevata econsente con sistemi tipo Cygnus-Lybra/Nanometrics di trasferire il file epoca perepoca, ricostruendo il file giornaliero in un ser-ver dedicato presso il centro raccolta dati.Inoltre, questo sistema permette di utilizzare un
solo sistema di trasmissione per inviare oltre aquelli GPS, anche altri dati provenienti da diffe-renti tipi di sensori (ad es. sismici).
7. Archiviazione dei dati
Una rete GPS permanente produce unalarga quantità di dati che necessita di una ade-guata archiviazione al fine di poter essere facil-mente accessibile e consultabile in ogni momen-to. Il sistema di acquisizione locale, posto pres-so la UF Geodesia e Telerilevamento dellasezione INGV di Roma, CNT, è costituito da unpiccolo server nel quale funzionano in cascatadei software automatizzati dedicati all’acquisi-zione, compressione e archiviazione, secondoparametri pre-impostati.
Lo scheduler di Windows‚ ha il compitodi organizzare temporalmente le chiamate allestazioni GPS e di inviare i files ricevuti nelledirectory preposte. Il server è collegato allaLocal Area Network (LAN) permettendo la con-divisione del data base geodetico tra gli utenti.Vengono quindi realizzati back up periodici deidati Rinex e Dat, su supporti optomagnetici tipoCD-Rom.
8. Descrizione delle stazioni attive
Le stazioni sono state realizzate a partiredal 1997 con la stazione di Roma (INGR). Nelmaggio del 2000 è stata realizzata la prima sta-zione remota a Villavalleonga. Questa è statautilizzata in via sperimentale per la messa apunto del sistema di acquisizione locale, tra-smissione dati e acquisizione dati al server postoall’INGV-CNT di Roma. Tra il maggio 2001 e ilsettembre 2003 sono state quindi realizzate lestazioni di Gibilmanna, Roseto degli Abruzzi,Preturo e Monte Argentario.
Dopo un primo periodo di valutazione idati sono acquisiti in via continuativa dal 16aprile 2003. La descrizione delle stazioni èanche disponibile presso il sito WEB dell’INGVall’indirizzo internet:http://www.ingv.it/%7eroma/profilo/fondazio-ne/sezioni/cn/UF-Geodesia/index2.html.
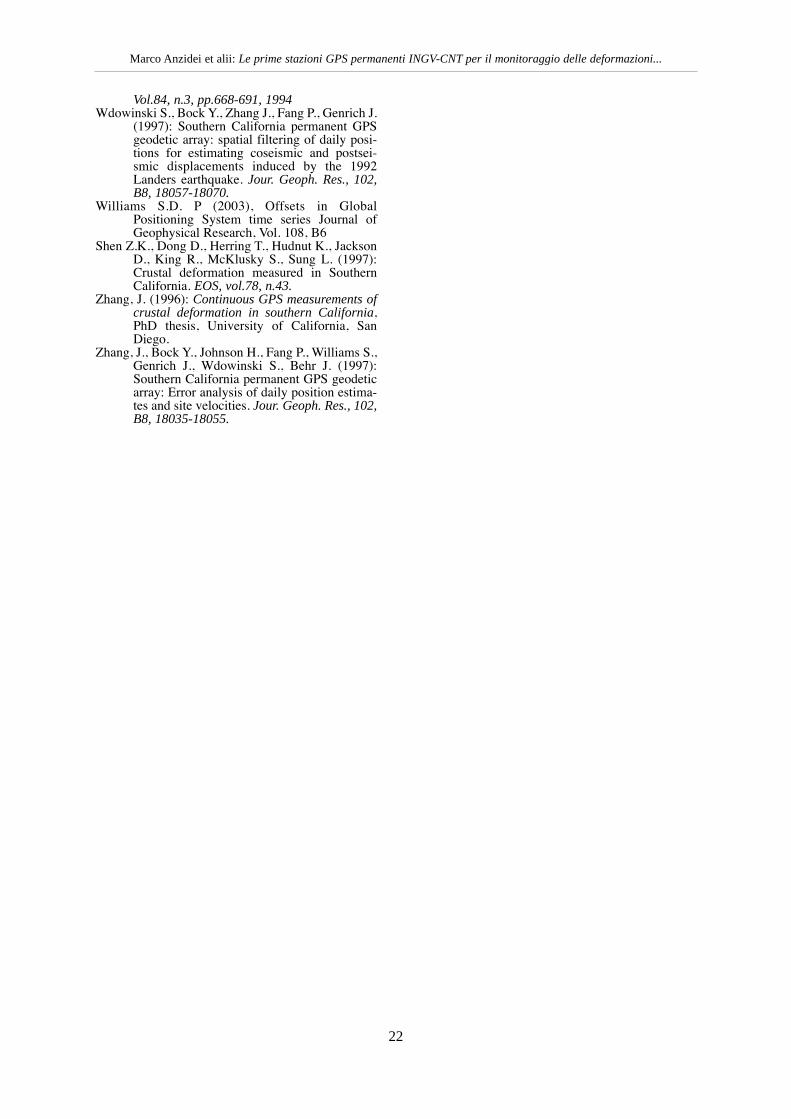
8.1 INGRLa stazione dell’Istituto Nazionale di
Geofisica e Vulcanologia (sigla INGR) è postoall’interno della struttura della sede INGV diRoma (Fig. 6). La stazione è permanente dal1999 ed afferisce alla rete GPS nazionaledell’Agenzia Spaziale Italiana a partire dal mesedi gennaio 2002. Il monumento geodetico è
10
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
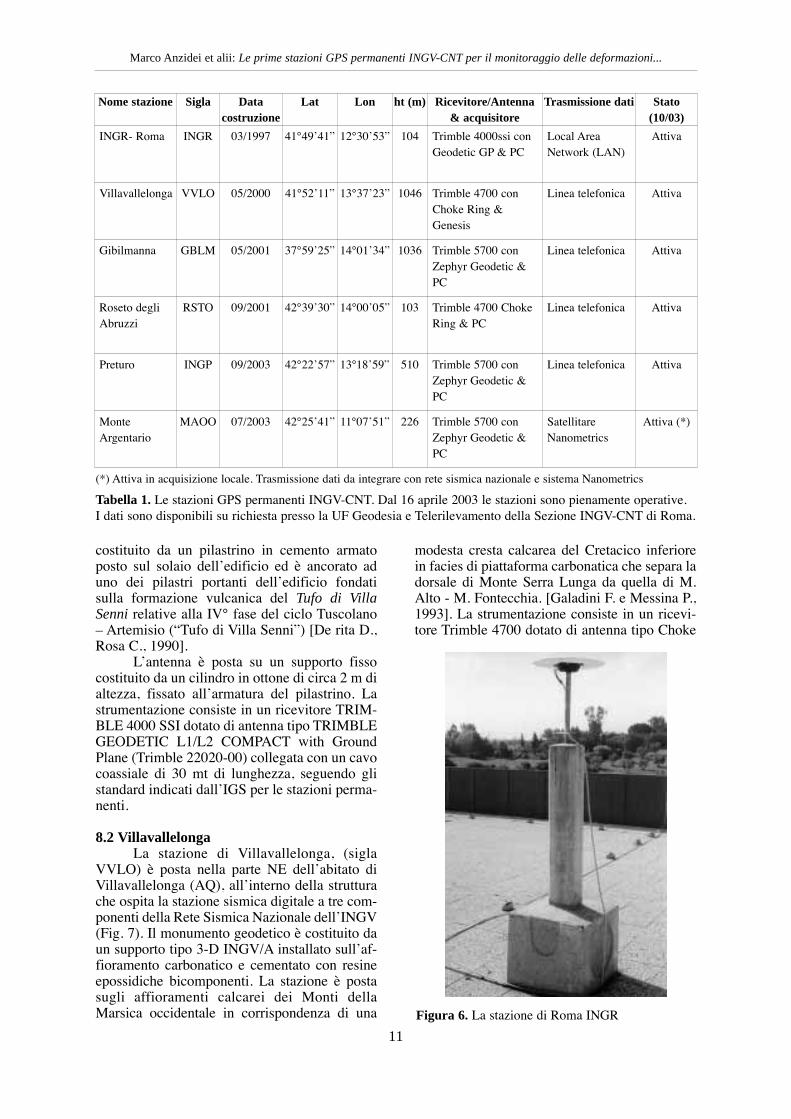
costituito da un pilastrino in cemento armatoposto sul solaio dell’edificio ed è ancorato aduno dei pilastri portanti dell’edificio fondatisulla formazione vulcanica del Tufo di VillaSenni relative alla IV° fase del ciclo Tuscolano– Artemisio (“Tufo di Villa Senni”) [De rita D.,Rosa C., 1990].
L’antenna è posta su un supporto fissocostituito da un cilindro in ottone di circa 2 m dialtezza, fissato all’armatura del pilastrino. Lastrumentazione consiste in un ricevitore TRIM-BLE 4000 SSI dotato di antenna tipo TRIMBLEGEODETIC L1/L2 COMPACT with GroundPlane (Trimble 22020-00) collegata con un cavocoassiale di 30 mt di lunghezza, seguendo glistandard indicati dall’IGS per le stazioni perma-nenti.
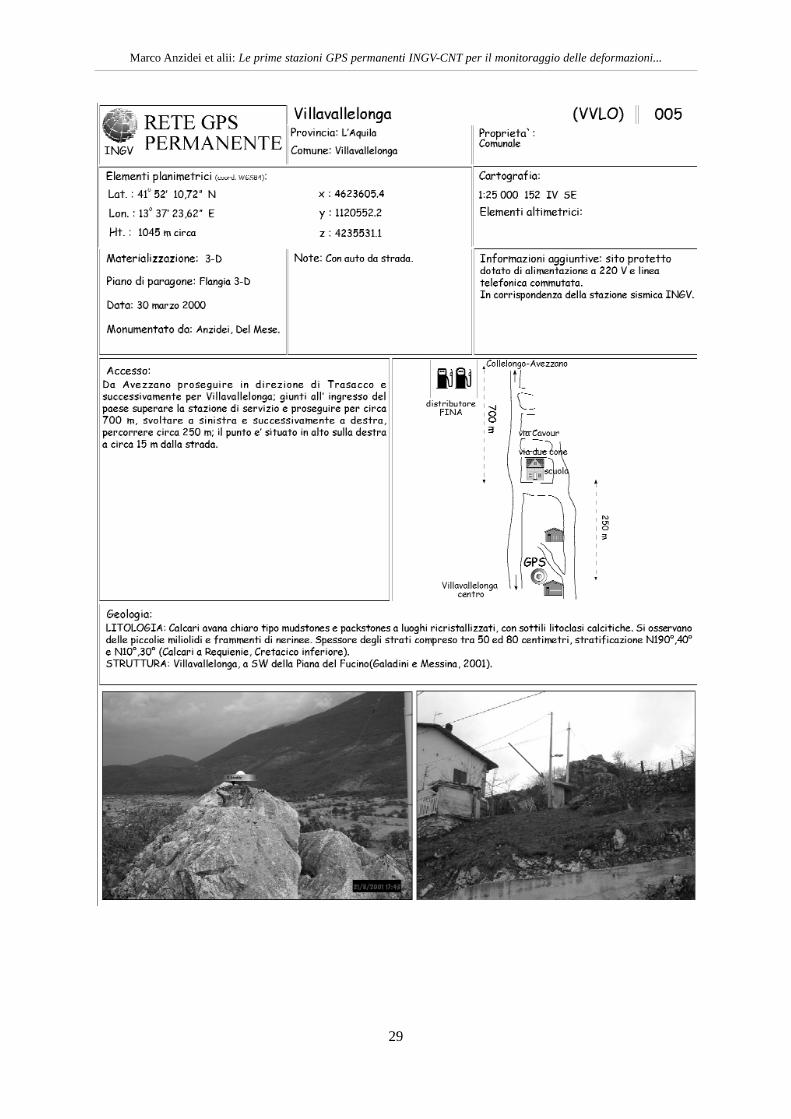
8.2 VillavallelongaLa stazione di Villavallelonga, (sigla
VVLO) è posta nella parte NE dell’abitato diVillavallelonga (AQ), all’interno della strutturache ospita la stazione sismica digitale a tre com-ponenti della Rete Sismica Nazionale dell’INGV(Fig. 7). Il monumento geodetico è costituito daun supporto tipo 3-D INGV/A installato sull’af-fioramento carbonatico e cementato con resineepossidiche bicomponenti. La stazione è postasugli affioramenti calcarei dei Monti dellaMarsica occidentale in corrispondenza di una
modesta cresta calcarea del Cretacico inferiorein facies di piattaforma carbonatica che separa ladorsale di Monte Serra Lunga da quella di M.Alto - M. Fontecchia. [Galadini F. e Messina P.,1993]. La strumentazione consiste in un ricevi-tore Trimble 4700 dotato di antenna tipo Choke
11
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
(*) Attiva in acquisizione locale. Trasmissione dati da integrare con rete sismica nazionale e sistema Nanometrics
Nome stazione Sigla Datacostruzione
Lat Lon ht (m) Ricevitore/Antenna& acquisitore
Trasmissione dati Stato(10/03)
INGR- Roma INGR 03/1997 41°49’41” 12°30’53” 104 Trimble 4000ssi conGeodetic GP & PC
Local AreaNetwork (LAN)
Attiva
Villavallelonga VVLO 05/2000 41°52’11” 13°37’23” 1046 Trimble 4700 conChoke Ring &Genesis
Linea telefonica Attiva
Gibilmanna GBLM 05/2001 37°59’25” 14°01’34” 1036 Trimble 5700 conZephyr Geodetic &PC
Linea telefonica Attiva
Roseto degliAbruzzi
RSTO 09/2001 42°39’30” 14°00’05” 103 Trimble 4700 ChokeRing & PC
Linea telefonica Attiva
Preturo INGP 09/2003 42°22’57” 13°18’59” 510 Trimble 5700 conZephyr Geodetic &PC
Linea telefonica Attiva
MonteArgentario
MAOO 07/2003 42°25’41” 11°07’51” 226 Trimble 5700 conZephyr Geodetic &PC
SatellitareNanometrics
Attiva (*)
Tabella 1. Le stazioni GPS permanenti INGV-CNT. Dal 16 aprile 2003 le stazioni sono pienamente operative. I dati sono disponibili su richiesta presso la UF Geodesia e Telerilevamento della Sezione INGV-CNT di Roma.
Figura 6. La stazione di Roma INGR
Ring collegata tramite un cavo coassiale da 10mt. L’alimentazione è a rete 220 V, servita da ungruppo di continuità. I dati vengono acquisiti inlocale da un acquisitore tipo Genesis e poi tra-sferiti mediante linea telefonica commutata allasede INGV di Roma.
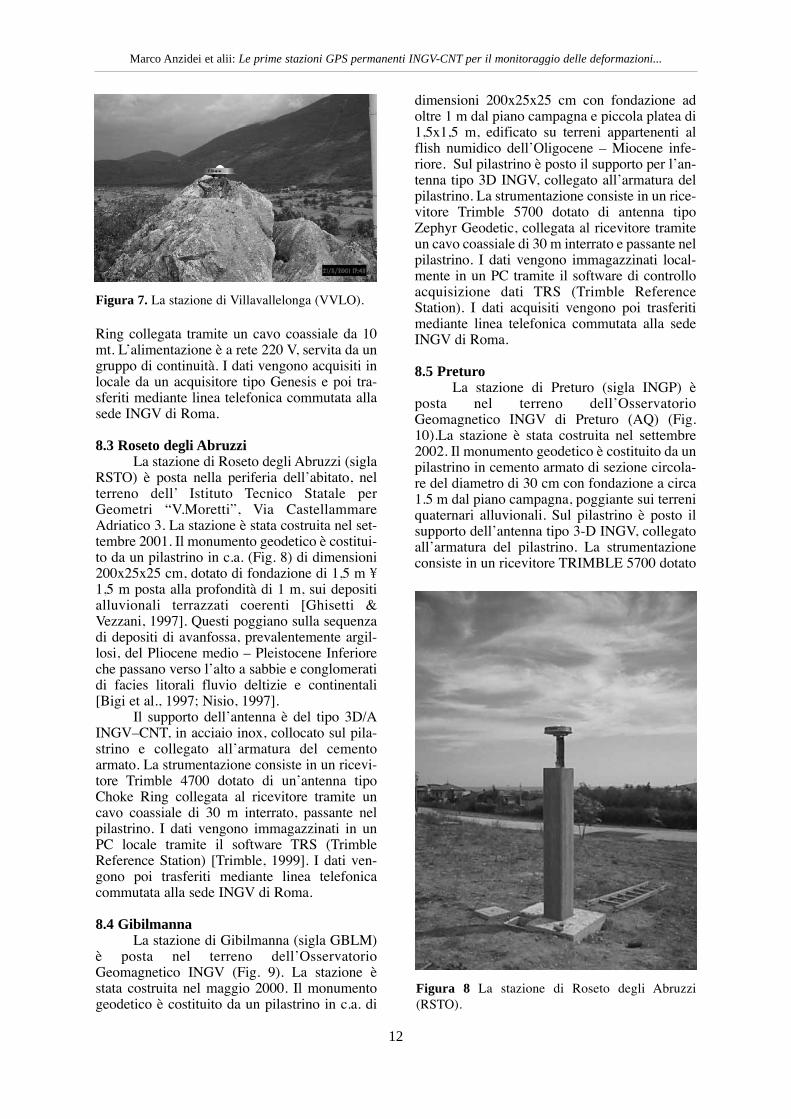
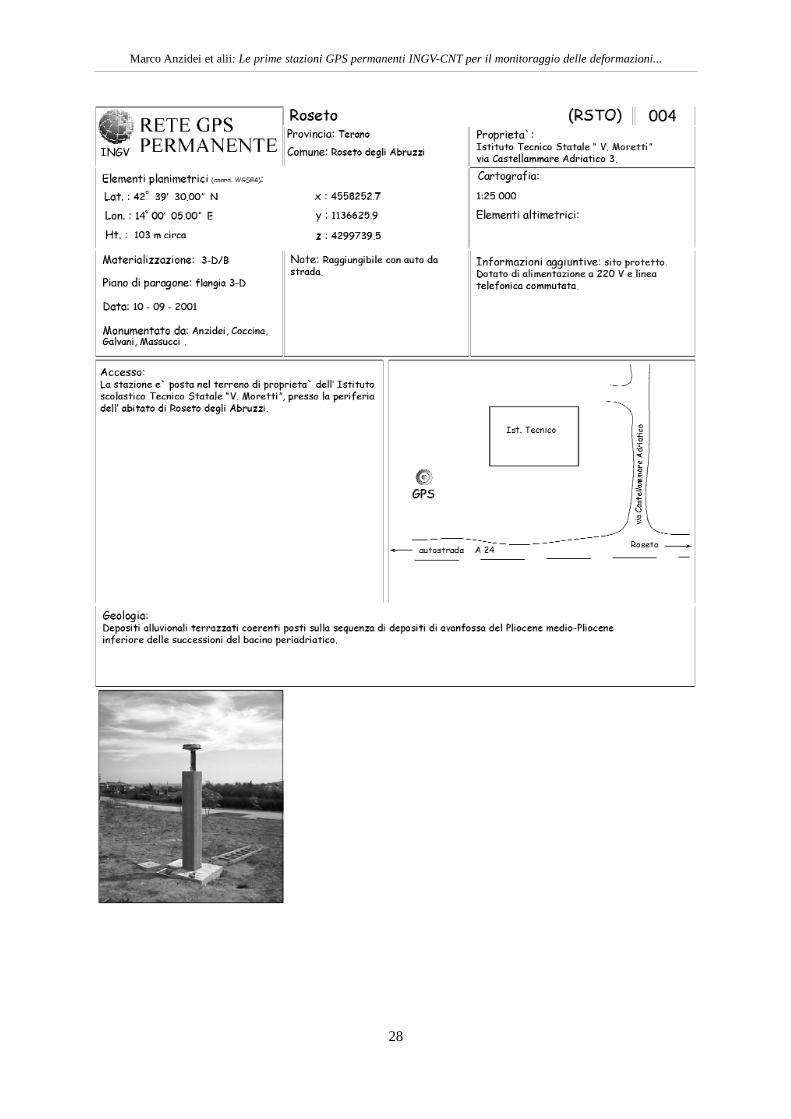
8.3 Roseto degli AbruzziLa stazione di Roseto degli Abruzzi (sigla
RSTO) è posta nella periferia dell’abitato, nelterreno dell’ Istituto Tecnico Statale perGeometri “V.Moretti”, Via CastellammareAdriatico 3. La stazione è stata costruita nel set-tembre 2001. Il monumento geodetico è costitui-to da un pilastrino in c.a. (Fig. 8) di dimensioni200x25x25 cm, dotato di fondazione di 1,5 m ¥1,5 m posta alla profondità di 1 m, sui depositialluvionali terrazzati coerenti [Ghisetti &Vezzani, 1997]. Questi poggiano sulla sequenzadi depositi di avanfossa, prevalentemente argil-losi, del Pliocene medio – Pleistocene Inferioreche passano verso l’alto a sabbie e conglomeratidi facies litorali fluvio deltizie e continentali[Bigi et al., 1997; Nisio, 1997].
Il supporto dell’antenna è del tipo 3D/AINGV–CNT, in acciaio inox, collocato sul pila-strino e collegato all’armatura del cementoarmato. La strumentazione consiste in un ricevi-tore Trimble 4700 dotato di un’antenna tipoChoke Ring collegata al ricevitore tramite uncavo coassiale di 30 m interrato, passante nelpilastrino. I dati vengono immagazzinati in unPC locale tramite il software TRS (TrimbleReference Station) [Trimble, 1999]. I dati ven-gono poi trasferiti mediante linea telefonicacommutata alla sede INGV di Roma.
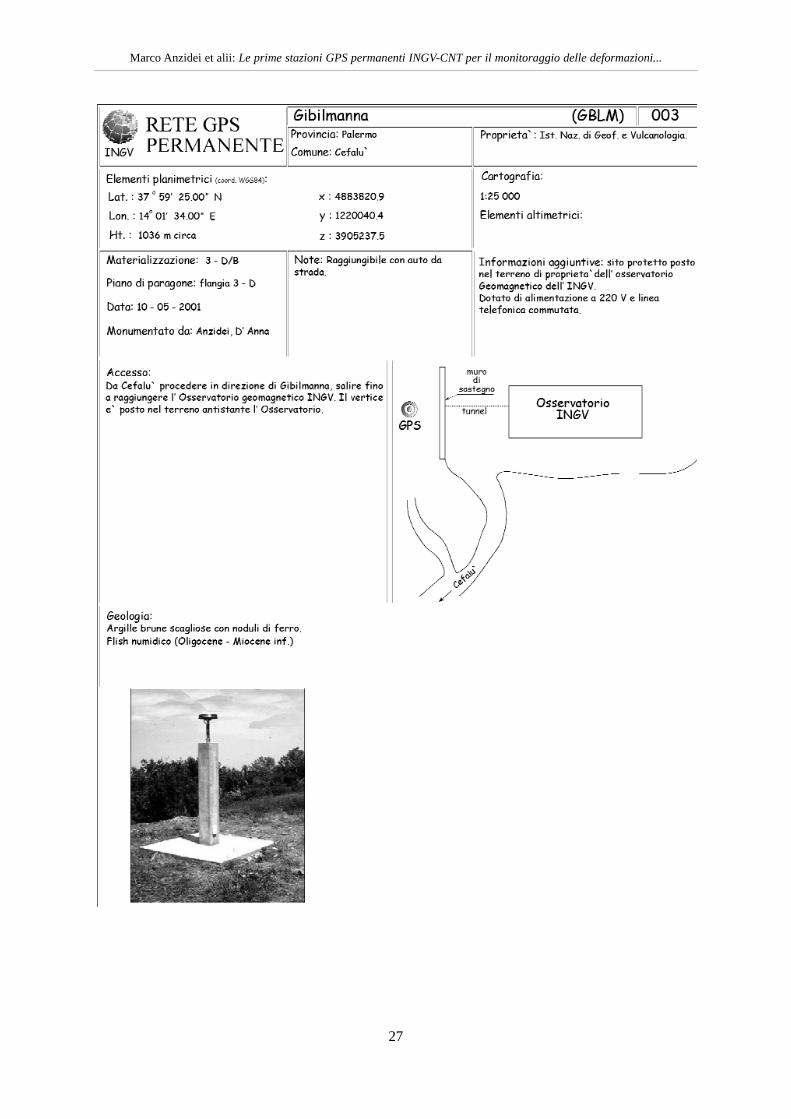
8.4 GibilmannaLa stazione di Gibilmanna (sigla GBLM)
è posta nel terreno dell’OsservatorioGeomagnetico INGV (Fig. 9). La stazione èstata costruita nel maggio 2000. Il monumentogeodetico è costituito da un pilastrino in c.a. di
dimensioni 200x25x25 cm con fondazione adoltre 1 m dal piano campagna e piccola platea di1,5x1,5 m, edificato su terreni appartenenti alflish numidico dell’Oligocene – Miocene infe-riore. Sul pilastrino è posto il supporto per l’an-tenna tipo 3D INGV, collegato all’armatura delpilastrino. La strumentazione consiste in un rice-vitore Trimble 5700 dotato di antenna tipoZephyr Geodetic, collegata al ricevitore tramiteun cavo coassiale di 30 m interrato e passante nelpilastrino. I dati vengono immagazzinati local-mente in un PC tramite il software di controlloacquisizione dati TRS (Trimble ReferenceStation). I dati acquisiti vengono poi trasferitimediante linea telefonica commutata alla sedeINGV di Roma.
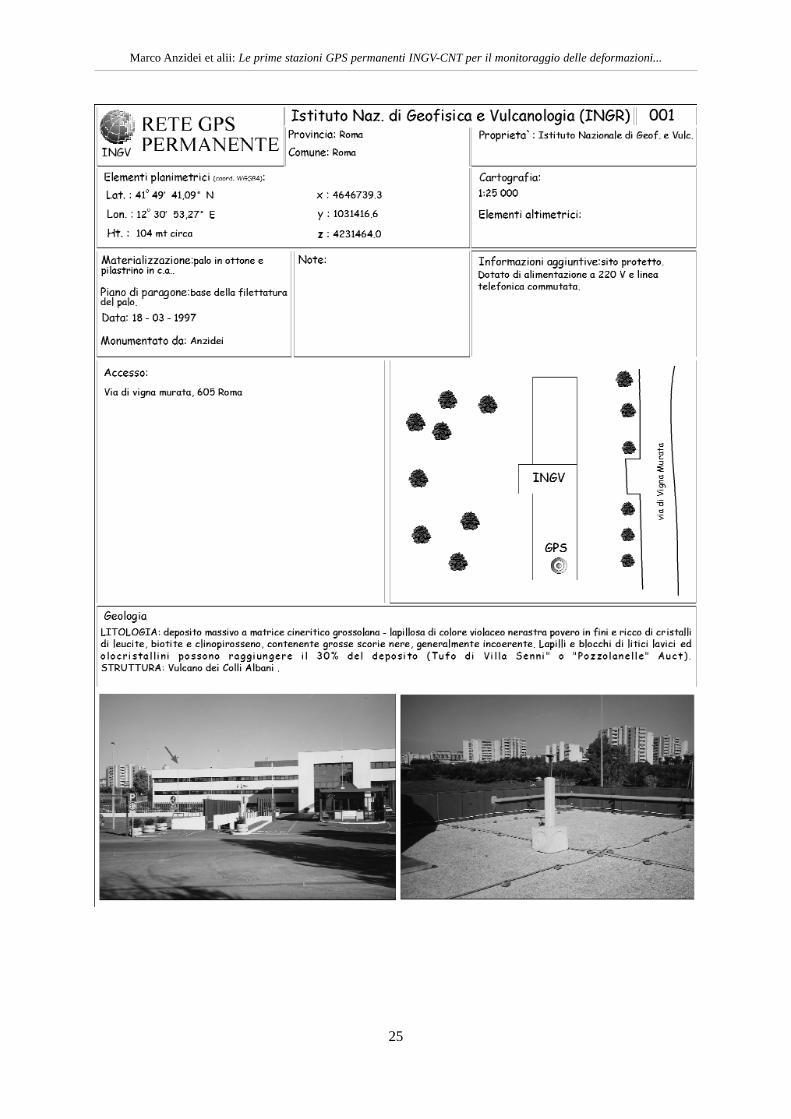
8.5 PreturoLa stazione di Preturo (sigla INGP) è
posta nel terreno dell’OsservatorioGeomagnetico INGV di Preturo (AQ) (Fig.10).La stazione è stata costruita nel settembre2002. Il monumento geodetico è costituito da unpilastrino in cemento armato di sezione circola-re del diametro di 30 cm con fondazione a circa1.5 m dal piano campagna, poggiante sui terreniquaternari alluvionali. Sul pilastrino è posto ilsupporto dell’antenna tipo 3-D INGV, collegatoall’armatura del pilastrino. La strumentazioneconsiste in un ricevitore TRIMBLE 5700 dotato
12
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 7. La stazione di Villavallelonga (VVLO).
Figura 8 La stazione di Roseto degli Abruzzi(RSTO).
di antenna tipo Zephyr Geodetic, collegata alricevitore tramite un cavo coassiale di 30 minterrato e passante esternamente al pilastrino. Idati vengono immagazzinati localmente in unPC tramite il software di controllo acquisizionedati TRS (Trimble Reference Station). I datiacquisiti vengono poi trasferiti mediante lineatelefonica commutata alla sede INGV di Roma.
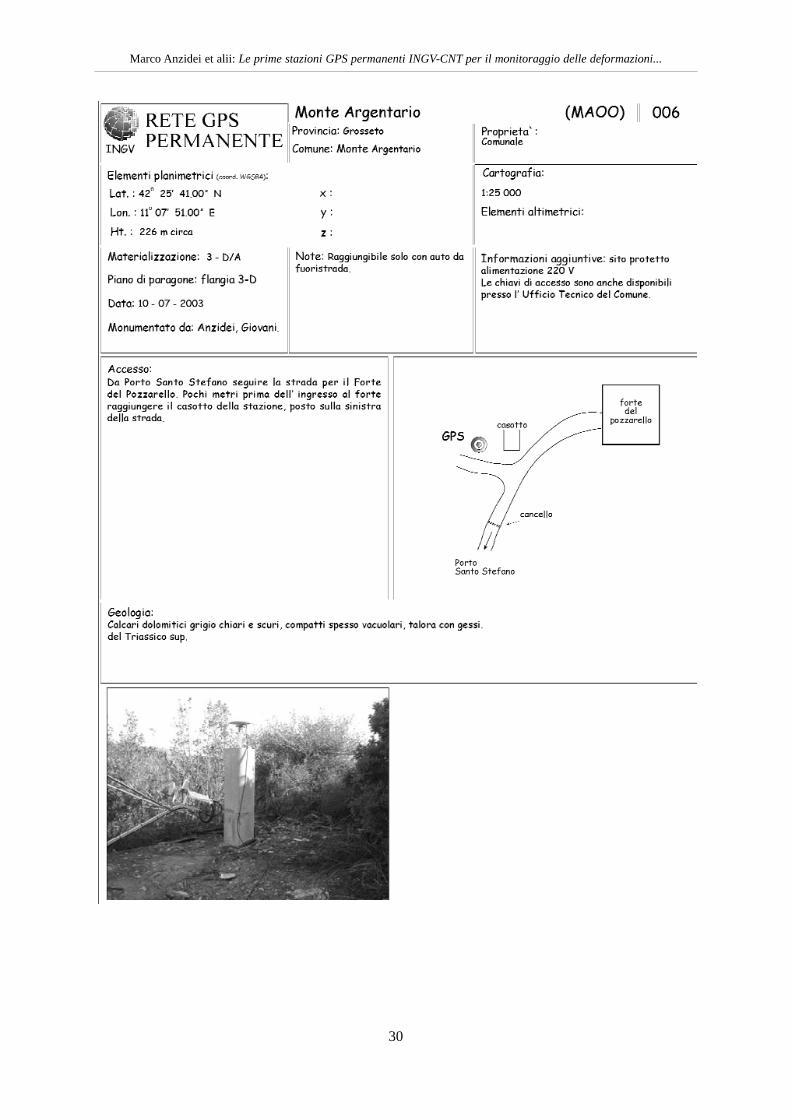
8.6 Monte ArgentarioLa stazione di Monte Argentario (sigla
MAOO) è posta su terreni demaniali delComune di Porto Santo Stefano (Fig. 11). Lastazione è stata costruita nel luglio 2003. Ilmonumento geodetico è costituito da un pilastri-no in cemento armato di dimensioni 100x30 cmcon fondazione di oltre 1 m dal piano campagna,poggiante sui terreni calcarei. Sul pilastrino èposto il supporto dell’antenna tipo 3-D INGV,collegato all’armatura del pilastrino. La stru-mentazione consiste in un ricevitore Trimble5700 dotato di antenna tipo Zephyr Geodetic,collegata al ricevitore tramite un cavo coassialedi 30 m interrato e passante nel pilastrino. I dativengono immagazzinati al momento solo local-mente mediante PC dotato di software di con-trollo acquisizione dati TRS (Trimble ReferenceStation). La stazione, che si integra con quella
della nuova rete sismica nazionale centralizzata,è dotata di sistema di trasferimento dati satelli-tare mediante il sistema Nanometrics. I datiacquisiti verranno trasferiti mediante questosistema alla sede INGV di Roma.
9. Controllo di qualità dei dati
Ogni stazione ha acquisito giornalmenteper 24 ore con un intervallo di acquisizione di30 sec. Il dato RAW, in formato binario, è statoautomaticamente trasformato in formatoRINEX (ASCII). I files giornalieri in formatoRINEX, per ogni stazione, sono stati sottoposti adun Quality Check tramite software TEQC sviluppa-to dall’UNAVCO (UniversityNAVstarConsortium)[www.unavco.ucar.edu/data_support/software/qc/qc.htm]. Il software, che utilizza una combina-zione lineare delle frequenze portanti del segnaleGPS, controlla il numero di osservazioni acquisite,il numero di cycle slips, il valore di RMS associatoal multipath calcolato con i codici C/Ae P sulla por-tante L1 (P1 multipath) e con il codice P sulla por-tante L2 (P2 multipath). Vengono anche date indi-cazioni sul ritardo troposferico, sul clock slip, sullaelevazione e azimuth dei satelliti utilizzati. I dativengono raccolti in un file “summary”. Si deve tut-tavia tenere presente che qualsiasi fonte dirumore sconosciuta può venire interpretatacome multipath, sia di origine interna (strumen-tale) come as es. il rumore generato dall’elettro-nica del ricevitore che di origine esterna comead es. da interferenze elettromagnetiche prodot-te da antenne trasmittenti che operano a fre-quenze vicine a quelle GPS [Betti et al., 1997].I database utilizzati ed elencati in tabella sono diestensione variabile in funzione del periodo diattivazione delle stazioni. (Tab.2). Per la solastazione di MAOO, poiché è attiva da pocotempo, non viene presentata l’analisi completadella qualità del dato per l’esiguità del data basedisponibile.
13
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 9. La stazione di Gibilmanna (GIBI).
Figura 10. La stazione di Preturo (INGP). Figura 11. La stazione di Monte Argentario(MAOO).
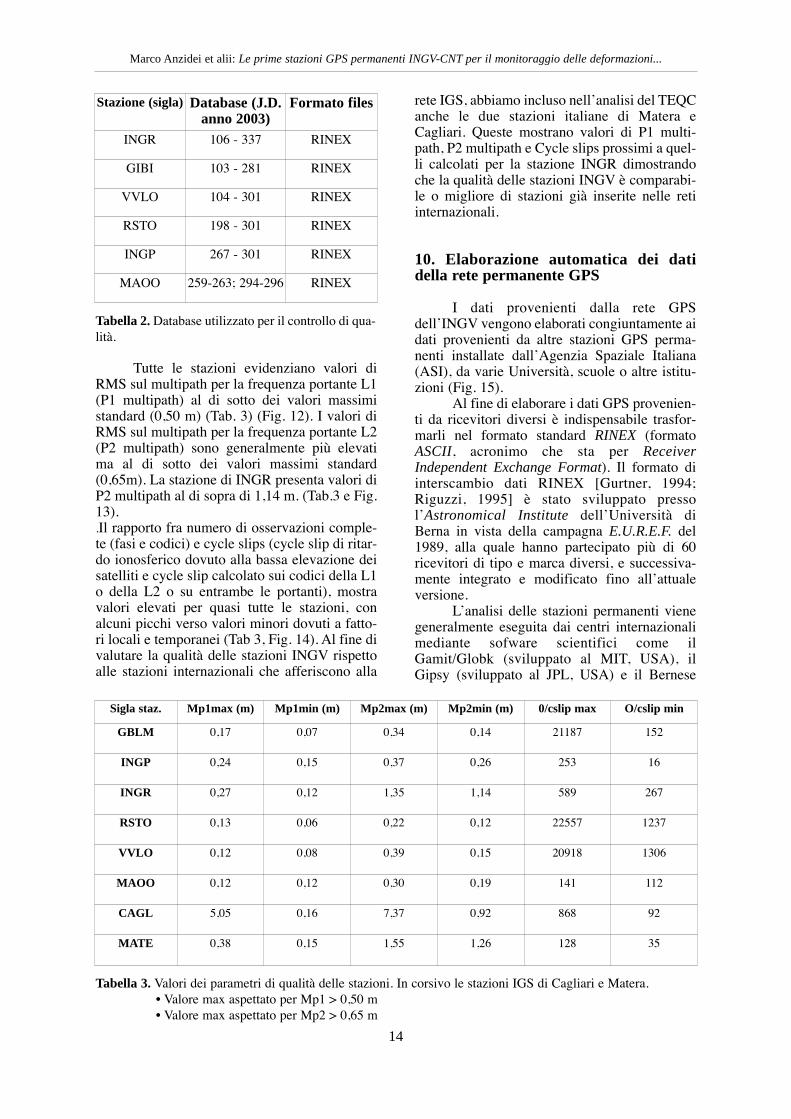
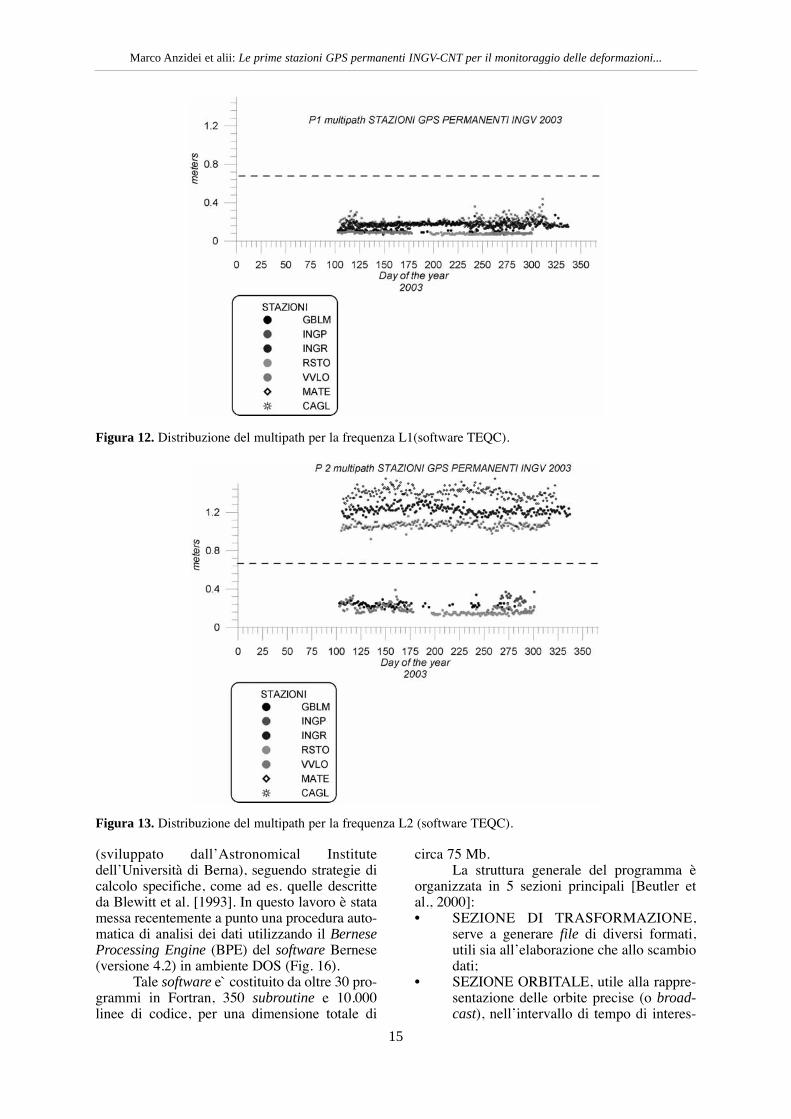
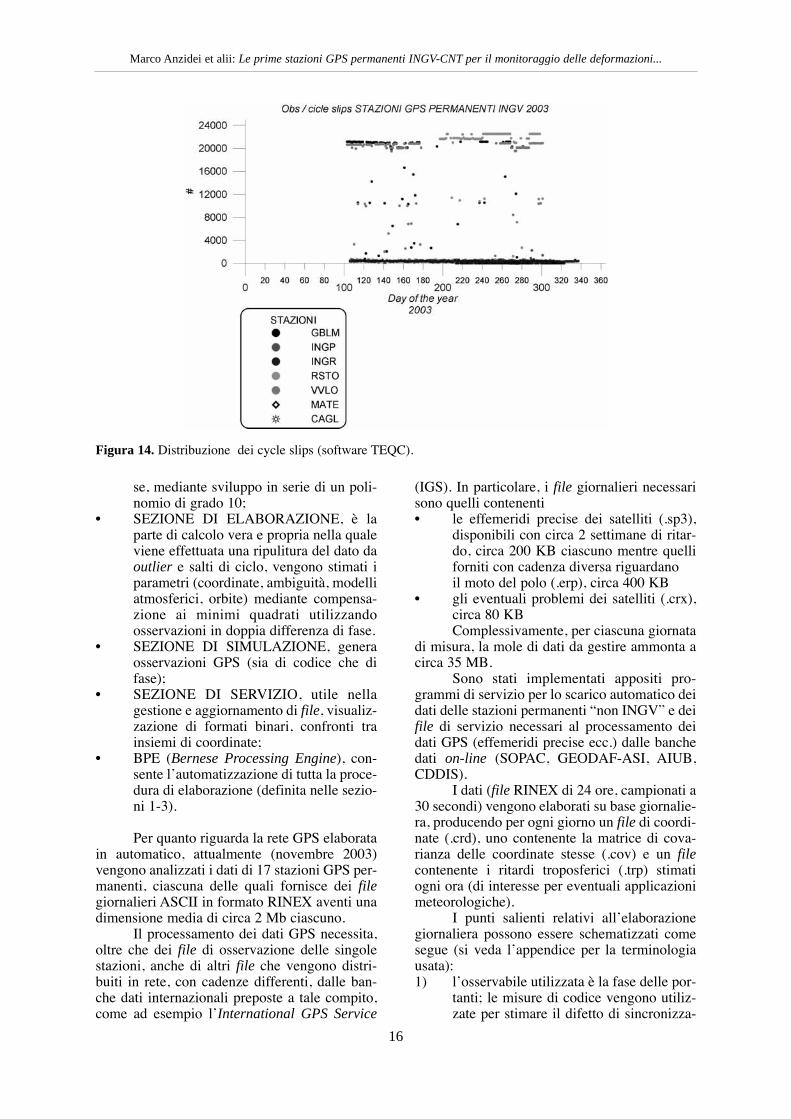
Tutte le stazioni evidenziano valori diRMS sul multipath per la frequenza portante L1(P1 multipath) al di sotto dei valori massimistandard (0,50 m) (Tab. 3) (Fig. 12). I valori diRMS sul multipath per la frequenza portante L2(P2 multipath) sono generalmente più elevatima al di sotto dei valori massimi standard(0,65m). La stazione di INGR presenta valori diP2 multipath al di sopra di 1,14 m. (Tab.3 e Fig.13)..Il rapporto fra numero di osservazioni comple-te (fasi e codici) e cycle slips (cycle slip di ritar-do ionosferico dovuto alla bassa elevazione deisatelliti e cycle slip calcolato sui codici della L1o della L2 o su entrambe le portanti), mostravalori elevati per quasi tutte le stazioni, conalcuni picchi verso valori minori dovuti a fatto-ri locali e temporanei (Tab 3, Fig. 14). Al fine divalutare la qualità delle stazioni INGV rispettoalle stazioni internazionali che afferiscono alla
rete IGS, abbiamo incluso nell’analisi del TEQCanche le due stazioni italiane di Matera eCagliari. Queste mostrano valori di P1 multi-path, P2 multipath e Cycle slips prossimi a quel-li calcolati per la stazione INGR dimostrandoche la qualità delle stazioni INGV è comparabi-le o migliore di stazioni già inserite nelle retiinternazionali.
10. Elaborazione automatica dei datidella rete permanente GPS
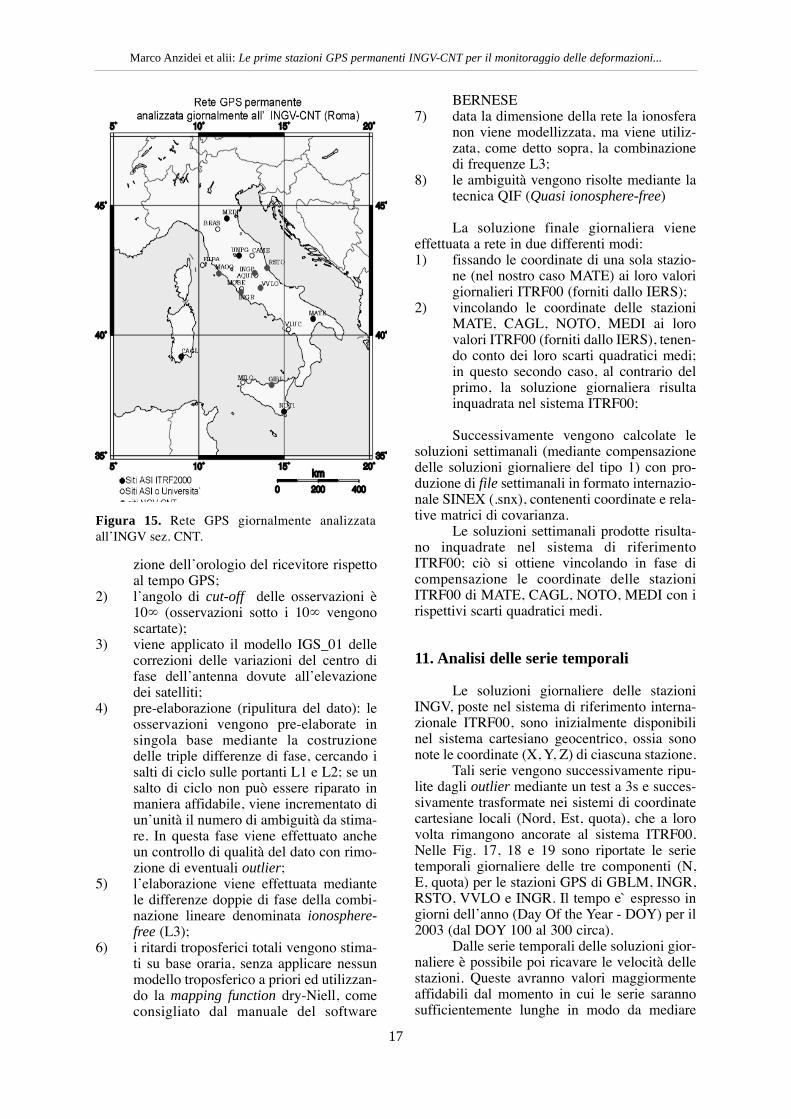
I dati provenienti dalla rete GPSdell’INGV vengono elaborati congiuntamente aidati provenienti da altre stazioni GPS perma-nenti installate dall’Agenzia Spaziale Italiana(ASI), da varie Università, scuole o altre istitu-zioni (Fig. 15).
Al fine di elaborare i dati GPS provenien-ti da ricevitori diversi è indispensabile trasfor-marli nel formato standard RINEX (formatoASCII, acronimo che sta per ReceiverIndependent Exchange Format). Il formato diinterscambio dati RINEX [Gurtner, 1994;Riguzzi, 1995] è stato sviluppato pressol’Astronomical Institute dell’Università diBerna in vista della campagna E.U.R.E.F. del1989, alla quale hanno partecipato più di 60ricevitori di tipo e marca diversi, e successiva-mente integrato e modificato fino all’attualeversione.
L’analisi delle stazioni permanenti vienegeneralmente eseguita dai centri internazionalimediante sofware scientifici come ilGamit/Globk (sviluppato al MIT, USA), ilGipsy (sviluppato al JPL, USA) e il Bernese
14
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Tabella 2. Database utilizzato per il controllo di qua-lità.
Stazione (sigla) Database (J.D.anno 2003)
Formato files
INGR 106 - 337 RINEX
GIBI 103 - 281 RINEX
VVLO 104 - 301 RINEX
RSTO 198 - 301 RINEX
INGP 267 - 301 RINEX
MAOO 259-263; 294-296 RINEX
Tabella 3. Valori dei parametri di qualità delle stazioni. In corsivo le stazioni IGS di Cagliari e Matera.• Valore max aspettato per Mp1 > 0,50 m• Valore max aspettato per Mp2 > 0,65 m
Sigla staz. Mp1max (m) Mp1min (m) Mp2max (m) Mp2min (m) 0/cslip max O/cslip min
GBLM 0,17 0,07 0,34 0,14 21187 152
INGP 0,24 0,15 0,37 0,26 253 16
INGR 0,27 0,12 1,35 1,14 589 267
RSTO 0,13 0,06 0,22 0,12 22557 1237
VVLO 0,12 0,08 0,39 0,15 20918 1306
MAOO 0,12 0,12 0,30 0,19 141 112
CAGL 5,05 0,16 7,37 0,92 868 92
MATE 0,38 0,15 1,55 1,26 128 35
(sviluppato dall’Astronomical Institutedell’Università di Berna), seguendo strategie dicalcolo specifiche, come ad es. quelle descritteda Blewitt et al. [1993]. In questo lavoro è statamessa recentemente a punto una procedura auto-matica di analisi dei dati utilizzando il BerneseProcessing Engine (BPE) del software Bernese(versione 4.2) in ambiente DOS (Fig. 16).
Tale software e` costituito da oltre 30 pro-grammi in Fortran, 350 subroutine e 10.000linee di codice, per una dimensione totale di
circa 75 Mb.La struttura generale del programma è
organizzata in 5 sezioni principali [Beutler etal., 2000]:• SEZIONE DI TRASFORMAZIONE,
serve a generare file di diversi formati,utili sia all’elaborazione che allo scambiodati;
• SEZIONE ORBITALE, utile alla rappre-sentazione delle orbite precise (o broad-cast), nell’intervallo di tempo di interes-
15
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 12. Distribuzione del multipath per la frequenza L1(software TEQC).
Figura 13. Distribuzione del multipath per la frequenza L2 (software TEQC).
se, mediante sviluppo in serie di un poli-nomio di grado 10;
• SEZIONE DI ELABORAZIONE, è laparte di calcolo vera e propria nella qualeviene effettuata una ripulitura del dato daoutlier e salti di ciclo, vengono stimati iparametri (coordinate, ambiguità, modelliatmosferici, orbite) mediante compensa-zione ai minimi quadrati utilizzandoosservazioni in doppia differenza di fase.
• SEZIONE DI SIMULAZIONE, generaosservazioni GPS (sia di codice che difase);
• SEZIONE DI SERVIZIO, utile nellagestione e aggiornamento di file, visualiz-zazione di formati binari, confronti trainsiemi di coordinate;
• BPE (Bernese Processing Engine), con-sente l’automatizzazione di tutta la proce-dura di elaborazione (definita nelle sezio-ni 1-3).
Per quanto riguarda la rete GPS elaboratain automatico, attualmente (novembre 2003)vengono analizzati i dati di 17 stazioni GPS per-manenti, ciascuna delle quali fornisce dei filegiornalieri ASCII in formato RINEX aventi unadimensione media di circa 2 Mb ciascuno.
Il processamento dei dati GPS necessita,oltre che dei file di osservazione delle singolestazioni, anche di altri file che vengono distri-buiti in rete, con cadenze differenti, dalle ban-che dati internazionali preposte a tale compito,come ad esempio l’International GPS Service
(IGS). In particolare, i file giornalieri necessarisono quelli contenenti • le effemeridi precise dei satelliti (.sp3),
disponibili con circa 2 settimane di ritar-do, circa 200 KB ciascuno mentre quelliforniti con cadenza diversa riguardano il moto del polo (.erp), circa 400 KB
• gli eventuali problemi dei satelliti (.crx),circa 80 KBComplessivamente, per ciascuna giornata
di misura, la mole di dati da gestire ammonta acirca 35 MB.
Sono stati implementati appositi pro-grammi di servizio per lo scarico automatico deidati delle stazioni permanenti “non INGV” e deifile di servizio necessari al processamento deidati GPS (effemeridi precise ecc.) dalle banchedati on-line (SOPAC, GEODAF-ASI, AIUB,CDDIS).
I dati (file RINEX di 24 ore, campionati a30 secondi) vengono elaborati su base giornalie-ra, producendo per ogni giorno un file di coordi-nate (.crd), uno contenente la matrice di cova-rianza delle coordinate stesse (.cov) e un filecontenente i ritardi troposferici (.trp) stimatiogni ora (di interesse per eventuali applicazionimeteorologiche).
I punti salienti relativi all’elaborazionegiornaliera possono essere schematizzati comesegue (si veda l’appendice per la terminologiausata):1) l’osservabile utilizzata è la fase delle por-
tanti; le misure di codice vengono utiliz-zate per stimare il difetto di sincronizza-
16
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 14. Distribuzione dei cycle slips (software TEQC).
zione dell’orologio del ricevitore rispettoal tempo GPS;
2) l’angolo di cut-off delle osservazioni è10∞ (osservazioni sotto i 10∞ vengonoscartate);
3) viene applicato il modello IGS_01 dellecorrezioni delle variazioni del centro difase dell’antenna dovute all’elevazionedei satelliti;
4) pre-elaborazione (ripulitura del dato): leosservazioni vengono pre-elaborate insingola base mediante la costruzionedelle triple differenze di fase, cercando isalti di ciclo sulle portanti L1 e L2; se unsalto di ciclo non può essere riparato inmaniera affidabile, viene incrementato diun’unità il numero di ambiguità da stima-re. In questa fase viene effettuato ancheun controllo di qualità del dato con rimo-zione di eventuali outlier;
5) l’elaborazione viene effettuata mediantele differenze doppie di fase della combi-nazione lineare denominata ionosphere-free (L3);
6) i ritardi troposferici totali vengono stima-ti su base oraria, senza applicare nessunmodello troposferico a priori ed utilizzan-do la mapping function dry-Niell, comeconsigliato dal manuale del software
BERNESE7) data la dimensione della rete la ionosfera
non viene modellizzata, ma viene utiliz-zata, come detto sopra, la combinazionedi frequenze L3;
8) le ambiguità vengono risolte mediante latecnica QIF (Quasi ionosphere-free)
La soluzione finale giornaliera vieneeffettuata a rete in due differenti modi:1) fissando le coordinate di una sola stazio-
ne (nel nostro caso MATE) ai loro valorigiornalieri ITRF00 (forniti dallo IERS);
2) vincolando le coordinate delle stazioniMATE, CAGL, NOTO, MEDI ai lorovalori ITRF00 (forniti dallo IERS), tenen-do conto dei loro scarti quadratici medi;in questo secondo caso, al contrario delprimo, la soluzione giornaliera risultainquadrata nel sistema ITRF00;
Successivamente vengono calcolate lesoluzioni settimanali (mediante compensazionedelle soluzioni giornaliere del tipo 1) con pro-duzione di file settimanali in formato internazio-nale SINEX (.snx), contenenti coordinate e rela-tive matrici di covarianza.
Le soluzioni settimanali prodotte risulta-no inquadrate nel sistema di riferimentoITRF00; ciò si ottiene vincolando in fase dicompensazione le coordinate delle stazioniITRF00 di MATE, CAGL, NOTO, MEDI con irispettivi scarti quadratici medi.
11. Analisi delle serie temporali
Le soluzioni giornaliere delle stazioniINGV, poste nel sistema di riferimento interna-zionale ITRF00, sono inizialmente disponibilinel sistema cartesiano geocentrico, ossia sononote le coordinate (X, Y, Z) di ciascuna stazione.
Tali serie vengono successivamente ripu-lite dagli outlier mediante un test a 3s e succes-sivamente trasformate nei sistemi di coordinatecartesiane locali (Nord, Est, quota), che a lorovolta rimangono ancorate al sistema ITRF00.Nelle Fig. 17, 18 e 19 sono riportate le serietemporali giornaliere delle tre componenti (N,E, quota) per le stazioni GPS di GBLM, INGR,RSTO, VVLO e INGR. Il tempo e` espresso ingiorni dell’anno (Day Of the Year - DOY) per il2003 (dal DOY 100 al 300 circa).
Dalle serie temporali delle soluzioni gior-naliere è possibile poi ricavare le velocità dellestazioni. Queste avranno valori maggiormenteaffidabili dal momento in cui le serie sarannosufficientemente lunghe in modo da mediare
17
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 15. Rete GPS giornalmente analizzataall’INGV sez. CNT.
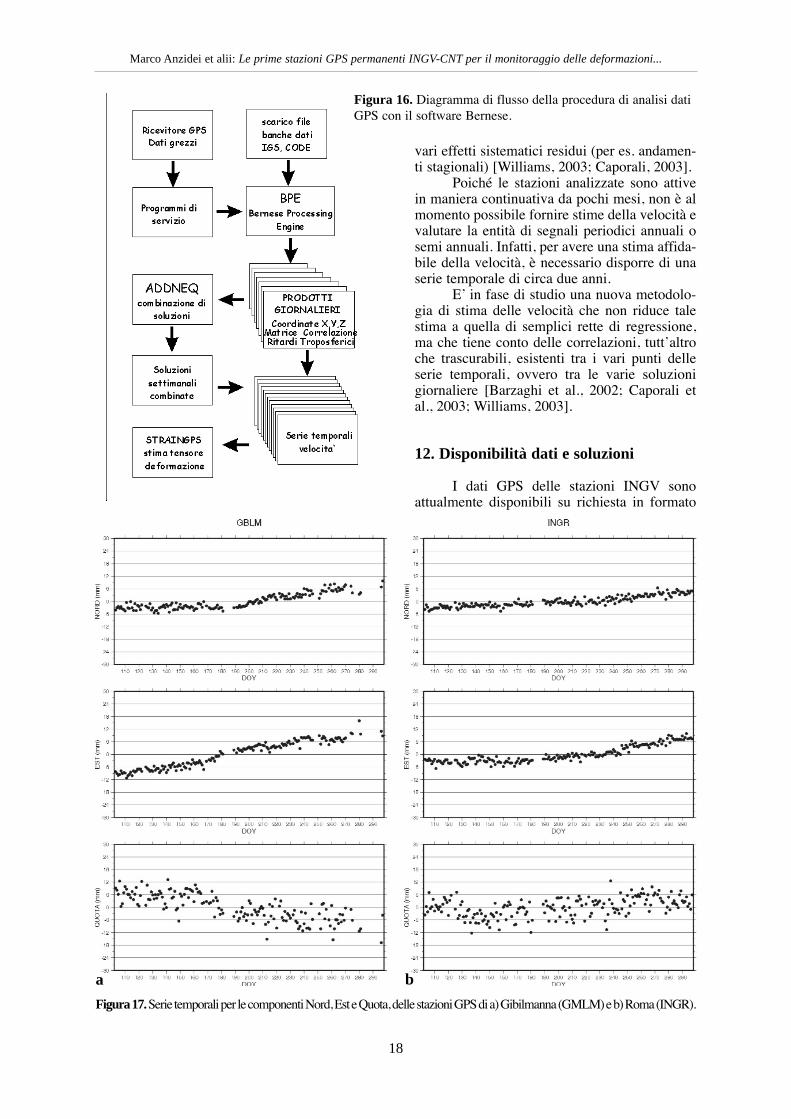
vari effetti sistematici residui (per es. andamen-ti stagionali) [Williams, 2003; Caporali, 2003].
Poiché le stazioni analizzate sono attivein maniera continuativa da pochi mesi, non è almomento possibile fornire stime della velocità evalutare la entità di segnali periodici annuali osemi annuali. Infatti, per avere una stima affida-bile della velocità, è necessario disporre di unaserie temporale di circa due anni.
E’ in fase di studio una nuova metodolo-gia di stima delle velocità che non riduce talestima a quella di semplici rette di regressione,ma che tiene conto delle correlazioni, tutt’altroche trascurabili, esistenti tra i vari punti delleserie temporali, ovvero tra le varie soluzionigiornaliere [Barzaghi et al., 2002; Caporali etal., 2003; Williams, 2003].
12. Disponibilità dati e soluzioni
I dati GPS delle stazioni INGV sonoattualmente disponibili su richiesta in formato
18
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 17.Serie temporali per le componenti Nord, Est e Quota, delle stazioni GPS di a) Gibilmanna (GMLM) e b) Roma (INGR).
a b
Figura 16. Diagramma di flusso della procedura di analisi datiGPS con il software Bernese.
RINEX o RINEX compresso per le stazioni diVVLO, RSTO, GBLM e INGP a partire dalgiorno 102 del 2003. I dati di INGR sono diret-tamente disponibili sul sito WEB dell’ASIhttp://geodaf.asi.mt.it, in quanto vengono elabo-rati congiuntamente a quelli di tutte le stazioniGPS permanenti italiane anche dal Centro diGeodesia Spaziale di Matera.
Le soluzioni settimanali sono attualmentedisponibili in formato SINEX solo per utentiINGV sulla macchina VAX ING750, accountRETEGPS, accessibile tramite SET DEF .
Le serie temporali e alcuni documentiriguardanti la rete sono disponibili sul sito WEBdell’U.F. Geodesia e Telerilevamentohttp://www.ingv.it/labtel2/ufpage.htm, nell’areaGeodesia - Reti Geodetiche GPS.
E’ stato recentemente richiesto di amplia-re il sistema di gestione della banca dati GPSimplementando un calcolatore completamentededicato a WEB server di gestione della granmole di dati e soluzioni che si producono.
Conclusioni
Sebbene le stazioni GPS non permanentiesistenti a scala regionale e locale stiano fornen-do informazioni cruciali per la comprensionedei processi geofisici in atto nel Mediterraneocentrale e nell’Appennino [Anzidei et al., 2001;Serpelloni et al., 2001, D’Agostino et al., 2001,Oldow et al., 2001; Hollenstein et al., 2003], lanecessità di disporre di stazioni in monitoraggiocontinuo permette di migliorare la risoluzionetemporale e spaziale sulle disomogeneitá dicomportamento strutturale alla scala italiana epiù in generale del Mediterraneo centrale. Lestazioni permanenti consentono di ottenere pre-cisioni superiori in coordinate e velocità rispet-to alle stazioni non permanenti, permettendo difornire nell’arco temporale di circa tre anni didati, prime stime di velocità utili per la osserva-zione e modellazione dei processi di deforma-zione crostale.
I prodotti che derivano dalla realizzazio-ne della rete permanente si possono così riassu-mere:• Produzione di soluzioni giornaliere e set-
19
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
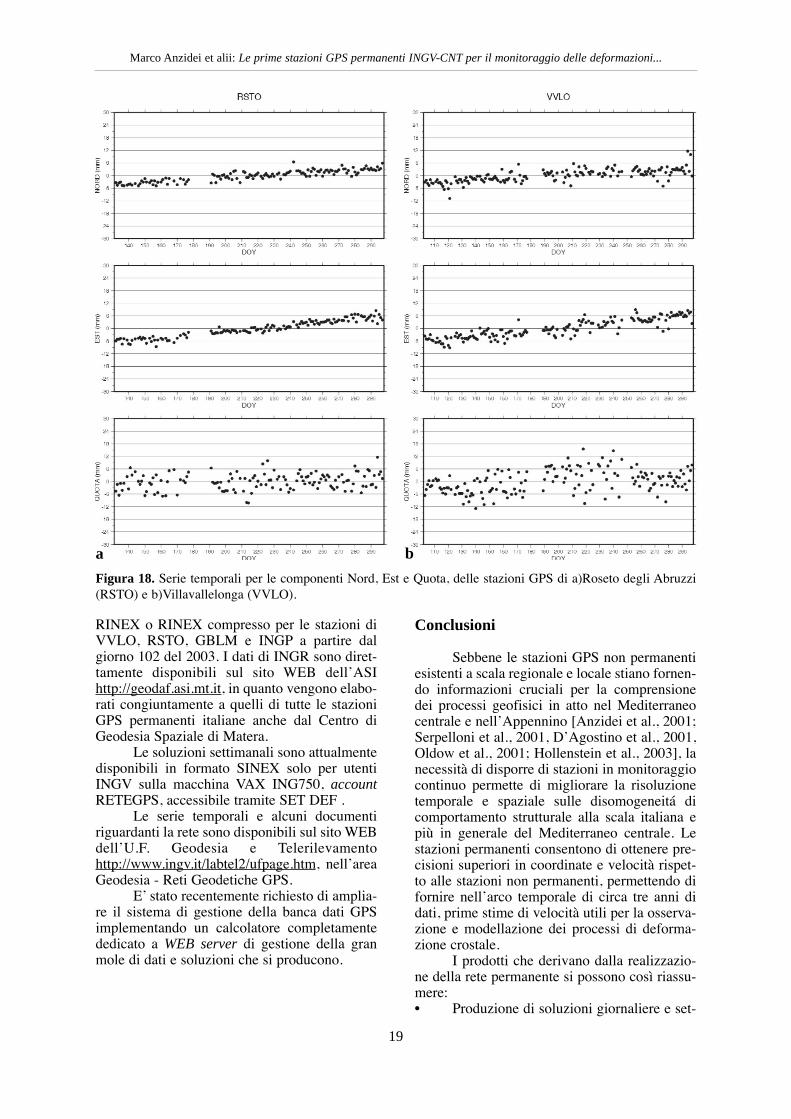
Figura 18. Serie temporali per le componenti Nord, Est e Quota, delle stazioni GPS di a)Roseto degli Abruzzi(RSTO) e b)Villavallelonga (VVLO).
a b
timanali di coordinate delle stazioni dellarete in formato h-files o Sinex;
• Produzione di soluzioni di velocità e dideformazione ottenute dall’analisi dellereti GPS in formato sinex;
• Archivio dati GPS• costruzione di una struttura WEB per la
diffusione e divulgazione dei prodotti erisultati delle reti GPS.
I risultati provenienti da queste reti, intermini di parametri delle deformazioni crostali(velocità orizzontali e verticali, tassi di defor-mazione) ci consentiranno di approfondiresignificativamente le nostre conoscenze sullatettonica e la geodinamica del Mediterraneocentrale e della penisola Italiana. In particolare,questi risultati potranno essere utlizzati per iseguenti scopi: 1) nello sviluppo di modellinumerici utilizzandoli come vincolo sperimen-tale 2) per ottenere informazioni sul rapporto tradeformazione sismica e deformazione asismicadi aree o particolari segmenti di faglie attive; 3)per vincolare modelli di sorgente sismica(deformazioni cosismiche); 4) per individuare
segnali transienti nel campo di deformazionelegati all’interazione tra strutture sismogeniche,nell’ambito dello studio del ciclo sismico; 5)integrazione con dati SAR per lo studio delledeformazioni cosismiche ed in prospettiva difuturi sviluppi dell’inteferometria radar, per lostudio delle deformazioni inter-sismiche e post-sismiche, anche mediante la tecnica deiPermanent Scatterers; 6) studi relativi ai sistemidi riferimento (ITRF, EUREF) e del geoide.
E’ indubbio che tutti queste applicazioniavranno una ricaduta significativa sulla stimadel rischio sismico, attraverso l’utilizzo diapprocci multidisciplinari di stima della perico-losità, così come dimostrato in altre aree dellaTerra.
Bibliografia
Anzidei M., Baldi P., Galvani A., Hunstad I., Pesci A.(1998): Coseismic displacements of the 26thSeptember 1997 Umbria-Marche earthquake(Italy) detected by GPS. Annali di Geofisicavol.42, n.4, 597-607.
Anzidei M., Baldi P., Casula G., Galvani A.,Mantovani E., Pesci A., Riguzzi F., SerpelloniE. (2001): Insights on present-day crustalmotion in the central Mediterranean area fromGPS surveys. Geophysical J. Int., 146, 98-110
Anzidei M. ed A. Esposito (2003): Linee guida per laidentificazione di siti idonei alla realizzazionedi stazioni GPS permanenti e non permanenti.Rapporti Tecnici dell’Istituto Nazionale diGeofisica e Vulcanologia, n.18.
Anzidei M., Bianchi C., Ciraolo L., Pezzopane M.,Scotto C. (1997): Gravity waves propagationin Thermosphere observed from electron den-sity profile and Total Electron Content mea-surement. Annali di Geofisica, vol.XL, n.6
Barzaghi R., Borghi A., Crespi M., Pietrantonio G.,Riguzzi F. (2002): GPS permanent networksolution: the impact of temporal correlations,V “Hotine-Marussi Symposium onMathematical Geodesy”, Matera.
Betti B., L. Biagi, M. Crespi and F. Riguzzi (1999).GPS sensitivity analysis applied to non per-manant GPS control networks. Journal ofGeodesy, 73, 158-167.
Beutler, G., Brockmann, E., Dach, R., Fridez, P.,Gurtner, W., Hugentobler, U., Johnson, J.,Mervant, L., Rothacher, M., Schaer, S.,Springer, T., Weber, R. (2000). BerneseSoftware 4.2. Astronomical Institute,University of Berne.
Blewitt, G., Bock, Y. & Gendt, G. (1993): Regionalclusters and distributed processing, Proc. 105Analysis Center Workshop, J. Kouba, ed., Int.Assoc. of Geodesy, Ottawa, Canada, 61-92.
Bock Y., Agnew D.C., Fang P., Genrich J.F., HagerB.H., Herring T.A., Hudnut W., King R.W.,Larsen S., Minster J.B., Stark K., WdowinskiS. and Wyatt F. (1993): Detection of crustaldeformation from the Landers earthquakesequenze using continuous geodetic measure-ments. Nature, vol.361, 28.
20
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
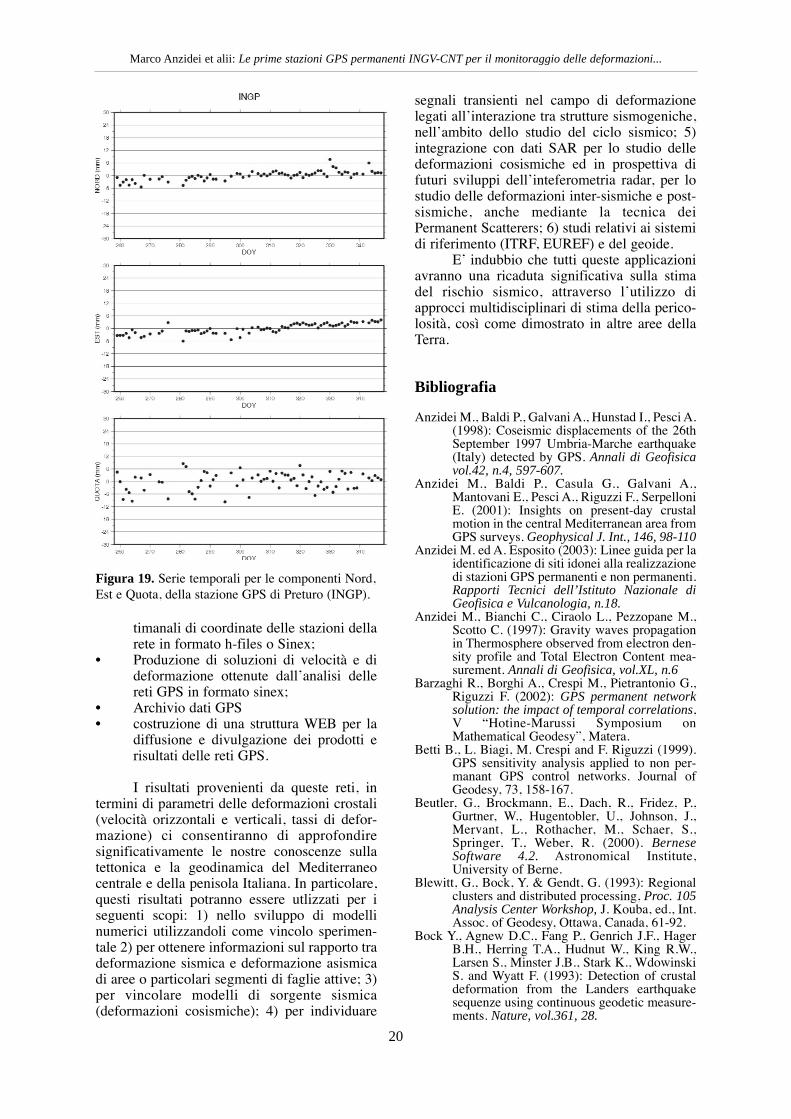
Figura 19. Serie temporali per le componenti Nord,Est e Quota, della stazione GPS di Preturo (INGP).
Bock Y., Wdowinski S., Fang P., Zhang J., WilliamsS., Johnson H., Behr J., Genrich J., Dean J.,Van Donselaar M., Agnew D.C., Wyatt F.,Stark K., Oral B., Hudnut K., King R.,Herring T., Dinardo S., Young W., Jackson D.,Gurtner W. (1997): Southern CaliforniaPermanent GPS geodetic array: Continuousmeasurements of regional crustal deformationbetween the 1992 Landers and 1994Northridge earthquakes. Jour. Geop. Res.,102, B8, 18013-18033.
Bock Y. Williams S. (1997): Integrated satellite inter-ferometry in Southern California. EOS,vol.78, n.29, 22.
Betti B., Cina A., Tombolini L. (1997): The TurinPolithecnic Permanent GPS station.Procedings of the workshop on the ItalianGPS permanent network. F. Vespe andM.Fermi Editors. Telespazio. 123-132.
Briole P., Massonnet D., Delacourt C. (1997): Posteruptive deformation associated with the1986-87 and 1989 lava flows of Etna detectedby radar interferometry. GeophysicalResearch Letters, vol.24, n.1
Caporali A. (2003): Average strain rate in the Italiancrust inferred from a permanent GPS network– I. Statistical analysis of the time series ofpermanent GPS stations. Geophysics JournalInternational, 155, 241-253.
Ciraolo L. and Spalla P. (1997): Comparison of TECevaluation from NNSS and GPS. Radio Sci.,32 (3), 1071-1080.
Dong, D., Herring, T. A. & King, R.W. (1998):Estimating regional deformation from a com-bination of space and terrestrial geodetic data,Journal of Geodesy, 72, 200-214.
Granci M. (1999): Misure GPS per il controllo delledeformazioni nell’area dei Colli Albani(Roma). Università degli Studi La Sapienza,D.I.T.S., Tesi di laurea anno accademico1998-1999.
Gurtner, W. (1994): RINEX: The ReceiverIndependent Exchange Format Version2.Astronomical Institute, University of Berne.
Oldow J.S., L. Ferranti, D.S. Lewis, J.K. Campbell,B. D’Argenio, R. Catalano, G. Pappone, L.Carmignani, P. Conti, C.L.V. Aiken (2002):Active fragmentation of Adria, the northAfrican promontori, central Mediterraneanorogen, Geology, 30, 9, 779-782.
Hollenstein C., Kahle H.G., Geiger A., Jenny S.,Goes S. and Giardini D. (2003): New GPSconstraints on the Africa-Eurasia plate boun-dary zone in southern Italy. Geoph. Res. Lett.,30, 18, 1935
Hunstad I., Anzidei M., Baldi P. Cocco M., GalvaniA., Pesci A. (1998): Modelling Coseismicdisplacements during the 1997 Umbria-Marche earthquake (Central Italy). Geoph.Jou. Int., 139, 283-295
IGS, http://igscb.jpl.nasa.govMassonnet D., Rossi M., Carmona C., Adragna F.,
Peltzer G., Feigl K., Rabaute T. (1993): Thedisplacement field of the Landers earthquakemapped by radar interferometry. Nature,vol.364, 8.
Massonnet D., Briole P., Arnaud A. (1995): Deflationof Mount Etna monitored by spaceborne radarinterferometry. Nature,vol.375.
Massonnet D., Thatcher W. and Vadon H. (1996):Detection of postseismic fault-zone collapsefollowing the Landers earthquake. Nature,vol.382.
Mirenna G., Riguzzi F., Zuccheretti E.(1997):Measurements og ionospheric TEC inthe direction of GPS satellites and comparisonwith three ionospeheric models. Annali diGeofisica, XL, 6, 1527-1533.
Miyazaki S., Tsuji H., Hatanaka Y. (1995): RegionalCrustal deformation of Japan observed byGSI’s Nationwide GPS array (GAPES). AGUFall Meeting
Naito I., Hatanaka Y., Mannoji N., Ichikawa R.,Shimada S., Yabuky T., Tsuji H., Tanaka T.(1998): Global Positioning System Project toimprove Japanese weather, earthquake pre-dictions. EOS, vol.79, n.26
Pollitz, F. (1997): Gravitational viscoelastic postsei-smic relaxation on a layered spherical Earth,J. Geophys. Res., 102, 17,921-17,941.
Riguzzi F. (1995): La trasformazione delle osserva-zioni GPS nel formato internazionale discambio RINEX: Bollettino di Geodesia eScienze Affini, 1.
Salvi S., Stramondo S., Cocco M., Tesauro M.,Hunstad I., Anzidei M., Briole P., Baldi P.,Sansosti E., Fornaro G., Lanari R., DoumazF., Pesci A. and A. Galvani (2000): ModelingCoseismic Displacements resulting from SARinterferometry and GPS measurements duringthe 1997 Umbria-Marche seismic sequence.Journal of Seismology, 4.
Serpelloni E., Anzidei M., Baldi P., Casula G.,Galvani A., Pesci A., Riguzzi F. (2001):Geodetic measurement of crustal deforma-tions in Southern-Central Apennines (Italy)from repeated GPS surveys. Annali diGeofisica, 44, 3, 627-648.
Sheimada S., Bock Y. (1992): Crustal deformationMeasurements in Central Japan determinedby a Global Positioning System Fixed-Pointnetwork. Journal Geophysical Research,vol.97, n.b6.
Stramondo, S., Tesauro, M., Briole, P., Sansosti, E.,Salvi, S., Lanari, R., Anzidei, M., Baldi, P.,Fornaro, G., Avallone, A., Buongiorno, M.F.,Franceschetti, G., Boschi, E. (1999): TheSeptember 26, 1997 Colfiorito, Italy, earth-quakes: modeled coseismic surface displace-ment from SAR interferometry and GPS,Geophys. Res. Lett., 26, 7, pp. 883-886.
Tsuji H., Hatanaka Y., Sagiya T., Hashimoto M.(1995): Coseismic crustal deformation fromthe 1994 Hokkaido-Toho-Oki earthquakemonitored by a nationwide continuous GPSarray in Japan. Geophysical Research Letters,vol.22, n.13.
Valensise e Pantosti (Editors) (2001): Database ofPotential Sources for Earthquakes LargerThan M. 5.5 in Italy. Annali di Geofisica,suppl. vol. 4484, 180 pp
Williams S.P.D. (2003): Offsets in GlobalPositioning System time series. Journal ofGeophysical Research, 108, B6, 2310www.unavco.ucar.edu www.trimble.com
Wald D.J. and Heaton T.H. (1994): Spatial and tem-poral distribution of slip for the 1992 Landers,California, earthquake. Bull. Soc. Seism. Am.
21
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Vol.84, n.3, pp.668-691, 1994Wdowinski S., Bock Y., Zhang J., Fang P., Genrich J.
(1997): Southern California permanent GPSgeodetic array: spatial filtering of daily posi-tions for estimating coseismic and postsei-smic displacements induced by the 1992Landers earthquake. Jour. Geoph. Res., 102,B8, 18057-18070.
Williams S.D. P (2003), Offsets in GlobalPositioning System time series Journal ofGeophysical Research, Vol. 108, B6
Shen Z.K., Dong D., Herring T., Hudnut K., JacksonD., King R., McKlusky S., Sung L. (1997):Crustal deformation measured in SouthernCalifornia. EOS, vol.78, n.43.
Zhang, J. (1996): Continuous GPS measurements ofcrustal deformation in southern California,PhD thesis, University of California, SanDiego.
Zhang, J., Bock Y., Johnson H., Fang P., Williams S.,Genrich J., Wdowinski S., Behr J. (1997):Southern California permanent GPS geodeticarray: Error analysis of daily position estima-tes and site velocities. Jour. Geoph. Res., 102,B8, 18035-18055.
22
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...

Appendice/1Monografie delle stazioni GPS

25
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
26
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
27
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
28
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
29
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
30
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...

Appendice/2Breve introduzione al GPS

Il sistema di posizionamento digitale GPS
Il NAVSTAR/GPS (NAVigation SatelliteTime And Ranging / Global PositioningSystem) è un sistema di posizionamento globalebasato sull’emissione, da parte di una costella-zione di satelliti artificiali, di segnali complessiche permettono di ricavare informazioni relativeal tempo ed alle distanze tra satelliti e ricevito-re. Attraverso la ricezione e l’interpretazione ditali segnali, mediante apposita strumentazione, èpossibile realizzare un posizionamento tridi-mensionale (anche in tempo reale) in un sistemadi riferimento cartesiano geocentrico.
Nato da un progetto statunitense per scopimilitari, il GPS è stato concesso, per le suevastissime potenzialità applicative, agli usi civi-li nella prima metà degli anni ’80 e si è rapida-mente diffuso in vari campi di applicazione: ter-restre (rilievi a varie scale, monitoraggio dideformazioni, posizionamento in tempo reale diveicoli), marino (rilievi batimetrici, studi ocea-nografici sulla direzione delle correnti, posizio-namento di imbarcazioni in tempo reale, ecc.),aereo e spaziale (rilievi fotogrammetrici senzapunti di appoggio, posizionamento in temporeale di velivoli e di altri satelliti artificiali, ecc).
Nell’ambito di un rilievo geodetico, ivantaggi offerti da un tale sistema di misurasono:• la semplicità di esecuzione delle misure;• la precisione dei risultati che un lavoro
ben eseguito può fornire e la rapidità delrilievo: al giorno d’oggi si riescono a rag-giungere ed in alcune applicazioni a supe-rare le precisioni ottenibili con le miglio-ri strumentazioni terrestri, impiegandominor tempo sia per le sessioni di misurache per l’elaborazione dati;
• la non necessaria intervisibilità tra i puntie l’inesistenza di limiti massimi di distan-za;
• l’unicità del sistema di riferimento per laplanimetria e per l’altimetria.
• la possibilità di lavorare di notte o in pre-senza di condizioni meteorologiche sfa-vorevoli (pioggia o foschia), che rende-rebbero molto difficile o impossibile ilricorso a metodologie classiche.
Gli svantaggi: • la necessità della visibilità dei satelliti che
limita i rilievi solo all’aperto e la sensibi-lità a disturbi elettromagnetici;
• la disuniforme precisione in planimetria(maggiore), ed in quota (minore);
• la necessità di occupare i vertici da rile-vare, che esclude la possibilità di utilizzo
per alcune tipologie di vertici (verticimaterializzati da assi di campanili, spigo-li di muri, ecc.);
• la diversità tra il sistema di riferimentoGPS e quello geodetico nazionale.
Nonostante tali svantaggi, in molte appli-cazioni in ambito geodetico il GPS è ormai ingrado di sostituire completamente (o quantomeno di integrare notevolmente) le tecniche dirilievo tradizionale.
Esso risulta particolarmente indicato peril rilievo periodico di reti geodetiche finalizzateal controllo delle deformazioni in ambito locale,regionale ed anche continentale.
Le componenti del sistema
Il sistema GPS può considerarsi suddivi-so in tre segmenti:• il segmento spaziale;• il segmento di controllo;• il segmento di utilizzo.
Il segmento spaziale è costituito da unacostellazione di 24 satelliti (fig. 1), più due discorta, disposti su 6 piani orbitali distanziati di60° in ascensione retta ed inclinati di 55° rispet-to all’equatore celeste (fig. 2). Il raggio dell’or-bita è pari a circa 26.000 Km, con un periodo dirivoluzione di 12 ore siderali.
La particolare geometria della costella-zione garantisce che da ogni punto della terrasiano sempre visibili almeno 4 satelliti.
Le principali funzioni del segmento spa-
33
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 1. Esempio di satellite GPS.
ziale sono quelle di trasmettere varie informa-zioni agli utilizzatori attraverso l’invio di diver-si tipi di segnali, di ricevere e memorizzare leinformazioni provenienti dal segmento di con-trollo e permettere a quest’ultimo di eseguire leopportune correzioni d’orbita attraverso razzi dimanovra; infine la capacità di mantenere unsegnale di tempo molto accurato utilizzandoquattro oscillatori atomici (due al cesio e due alrubidio) collocati a bordo di ciascun satellite.
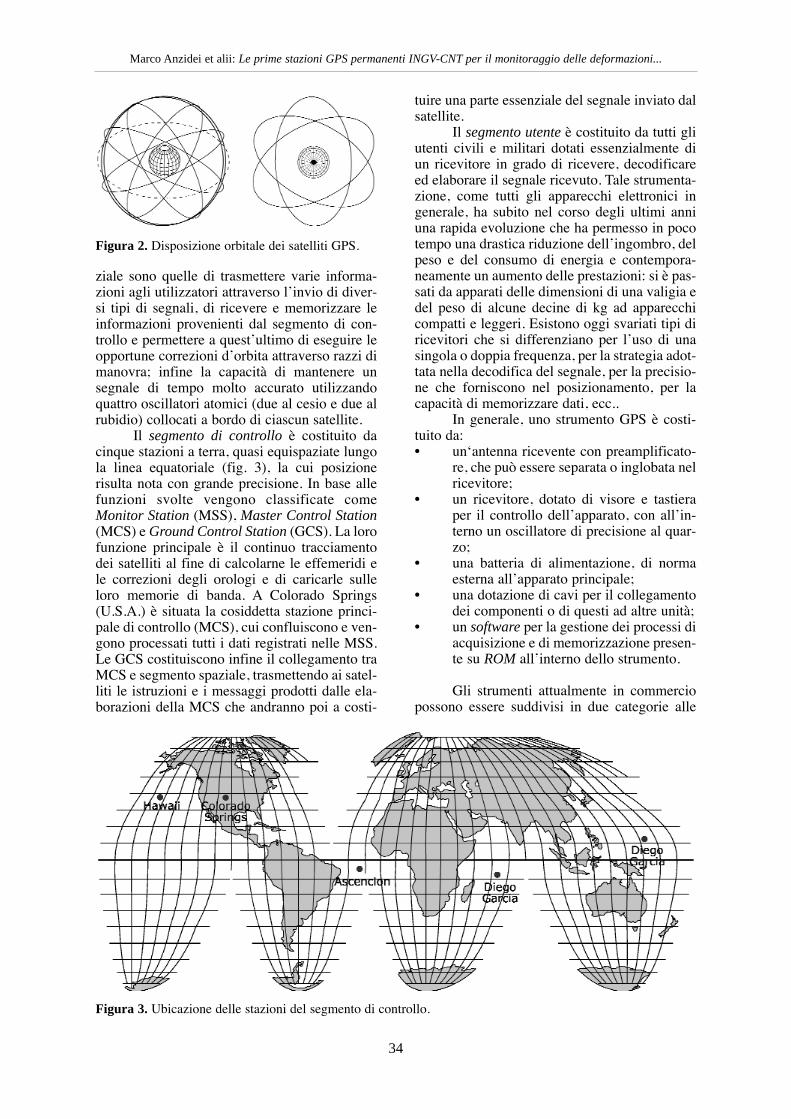
Il segmento di controllo è costituito dacinque stazioni a terra, quasi equispaziate lungola linea equatoriale (fig. 3), la cui posizionerisulta nota con grande precisione. In base allefunzioni svolte vengono classificate comeMonitor Station (MSS), Master Control Station(MCS) e Ground Control Station (GCS). La lorofunzione principale è il continuo tracciamentodei satelliti al fine di calcolarne le effemeridi ele correzioni degli orologi e di caricarle sulleloro memorie di banda. A Colorado Springs(U.S.A.) è situata la cosiddetta stazione princi-pale di controllo (MCS), cui confluiscono e ven-gono processati tutti i dati registrati nelle MSS.Le GCS costituiscono infine il collegamento traMCS e segmento spaziale, trasmettendo ai satel-liti le istruzioni e i messaggi prodotti dalle ela-borazioni della MCS che andranno poi a costi-
tuire una parte essenziale del segnale inviato dalsatellite.
Il segmento utente è costituito da tutti gliutenti civili e militari dotati essenzialmente diun ricevitore in grado di ricevere, decodificareed elaborare il segnale ricevuto. Tale strumenta-zione, come tutti gli apparecchi elettronici ingenerale, ha subito nel corso degli ultimi anniuna rapida evoluzione che ha permesso in pocotempo una drastica riduzione dell’ingombro, delpeso e del consumo di energia e contempora-neamente un aumento delle prestazioni: si è pas-sati da apparati delle dimensioni di una valigia edel peso di alcune decine di kg ad apparecchicompatti e leggeri. Esistono oggi svariati tipi diricevitori che si differenziano per l’uso di unasingola o doppia frequenza, per la strategia adot-tata nella decodifica del segnale, per la precisio-ne che forniscono nel posizionamento, per lacapacità di memorizzare dati, ecc..
In generale, uno strumento GPS è costi-tuito da:• un‘antenna ricevente con preamplificato-
re, che può essere separata o inglobata nelricevitore;
• un ricevitore, dotato di visore e tastieraper il controllo dell’apparato, con all’in-terno un oscillatore di precisione al quar-zo;
• una batteria di alimentazione, di normaesterna all’apparato principale;
• una dotazione di cavi per il collegamentodei componenti o di questi ad altre unità;
• un software per la gestione dei processi diacquisizione e di memorizzazione presen-te su ROM all’interno dello strumento.
Gli strumenti attualmente in commerciopossono essere suddivisi in due categorie alle
34
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 2. Disposizione orbitale dei satelliti GPS.
Figura 3. Ubicazione delle stazioni del segmento di controllo.
quali corrispondono due diverse metodologieoperative:• strumenti in grado di determinare esclusi-
vamente la posizione assoluta del punto(metodo del point positioning) attraversomisure di pseudorange;
• apparati che oltre allo pseudorange sonoin grado di eseguire misure di fase sulleonde portanti del segnale, consentendo unposizionamento relativo tra più strumentiche hanno acquisito contemporaneamen-te (metodo del differential positioning).
Delle differenze tra i due tipi di misuresopra accennati si tratterà più ampiamente nellepagine successive.
Il segnale GPS
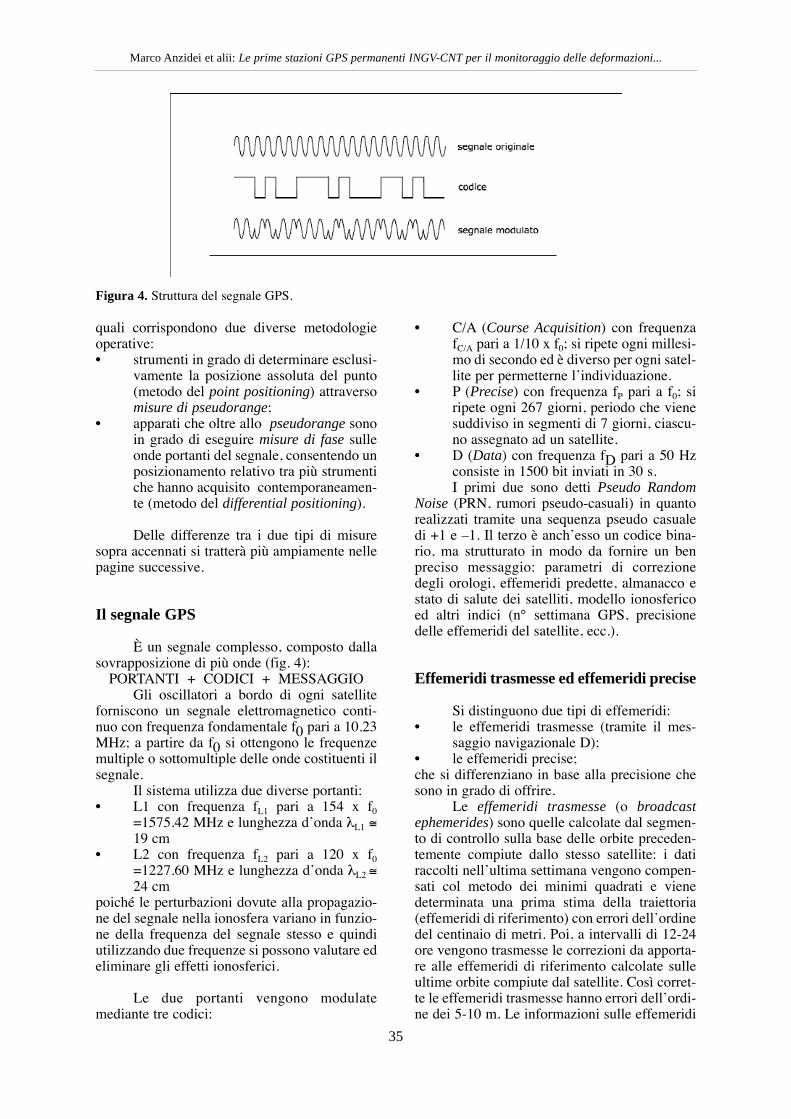
È un segnale complesso, composto dallasovrapposizione di più onde (fig. 4):
PORTANTI + CODICI + MESSAGGIOGli oscillatori a bordo di ogni satellite
forniscono un segnale elettromagnetico conti-nuo con frequenza fondamentale f0 pari a 10.23MHz; a partire da f0 si ottengono le frequenzemultiple o sottomultiple delle onde costituenti ilsegnale.
Il sistema utilizza due diverse portanti: • L1 con frequenza fL1 pari a 154 x f0
=1575.42 MHz e lunghezza d’onda λL1 ≅19 cm
• L2 con frequenza fL2 pari a 120 x f0=1227.60 MHz e lunghezza d’onda λL2 ≅24 cm
poiché le perturbazioni dovute alla propagazio-ne del segnale nella ionosfera variano in funzio-ne della frequenza del segnale stesso e quindiutilizzando due frequenze si possono valutare edeliminare gli effetti ionosferici.
Le due portanti vengono modulatemediante tre codici:
• C/A (Course Acquisition) con frequenzafC/A pari a 1/10 x f0; si ripete ogni millesi-mo di secondo ed è diverso per ogni satel-lite per permetterne l’individuazione.
• P (Precise) con frequenza fP pari a f0; siripete ogni 267 giorni, periodo che vienesuddiviso in segmenti di 7 giorni, ciascu-no assegnato ad un satellite.
• D (Data) con frequenza fD pari a 50 Hzconsiste in 1500 bit inviati in 30 s. I primi due sono detti Pseudo Random
Noise (PRN, rumori pseudo-casuali) in quantorealizzati tramite una sequenza pseudo casualedi +1 e –1. Il terzo è anch’esso un codice bina-rio, ma strutturato in modo da fornire un benpreciso messaggio: parametri di correzionedegli orologi, effemeridi predette, almanacco estato di salute dei satelliti, modello ionosfericoed altri indici (n° settimana GPS, precisionedelle effemeridi del satellite, ecc.).
Effemeridi trasmesse ed effemeridi precise
Si distinguono due tipi di effemeridi:• le effemeridi trasmesse (tramite il mes-
saggio navigazionale D);• le effemeridi precise;che si differenziano in base alla precisione chesono in grado di offrire.
Le effemeridi trasmesse (o broadcastephemerides) sono quelle calcolate dal segmen-to di controllo sulla base delle orbite preceden-temente compiute dallo stesso satellite: i datiraccolti nell’ultima settimana vengono compen-sati col metodo dei minimi quadrati e vienedeterminata una prima stima della traiettoria(effemeridi di riferimento) con errori dell’ordinedel centinaio di metri. Poi, a intervalli di 12-24ore vengono trasmesse le correzioni da apporta-re alle effemeridi di riferimento calcolate sulleultime orbite compiute dal satellite. Così corret-te le effemeridi trasmesse hanno errori dell’ordi-ne dei 5-10 m. Le informazioni sulle effemeridi
35
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 4. Struttura del segnale GPS.
trasmesse vengono memorizzate dal ricevitoreper poter poi essere utilizzate in sede di elabora-zione e consentendo inoltre il posizionamento intempo reale.
Vengono inoltre messe a disposizione lecosiddette effemeridi precise (o calcolate), chesi basano sul tracciamento dei satelliti da partedella rete di stazioni permanenti dell’IGS -International GPS Service. Tali effemeridihanno una precisione molto superiore rispettoalle precedenti (circa 20 cm), in quanto non sitratta di orbite predette ma di orbite ricalcolate.Le effemeridi precise sono disponibili general-mente due settimane dopo la raccolta dei dati equindi non possono essere utilizzate per il posi-zionamento in tempo reale.
Misure con il sistema GPS
Il segnale inviato dai satelliti viene capta-to dal ricevitore il quale ne effettua una replicaal suo interno. L’operazione impegna il ricevito-re per qualche istante dopo l’accensione e con-siste nel riprodurre col proprio oscillatore unsegnale simile a quello ricevuto, che si differen-zia da quest’ultimo per uno sfasamento lungol’asse dei tempi. Per questa operazione, ad ognisatellite collegato viene riservato un differentecanale all’interno del ricevitore.
A questo punto possono essere eseguitedue differenti misure sul segnale GPS:• misure di pseudorange (effettuate sui
codici PRN modulanti la portante);• misure di fase (effettuate sulle portanti
demodulate).Entrambe hanno lo stesso contenuto geo-
metrico (distanza ricevitore-satellite), ma preci-sioni diverse. Inoltre soltanto le prime fornisco-no senza particolari elaborazioni risultati intempo reale, con la possibilità di utilizzo a livel-lo navigazionale.
La distanza così determinata è da inten-dersi tra i due estremi individuati fisicamentedal centro di fase dell’antenna del ricevitore edal centro di fase dell’antenna del satellite.
Misure di pseudorange
Assumendo come nota in ogni istante laposizione dei satelliti nello spazio, rispetto ad unprefissato sistema di riferimento cartesiano(detto WGS84 e discusso nel seguito), un qual-siasi punto nello stesso sistema di riferimentoavrà coordinate esprimibili mediante un sistemadi tre equazioni del tipo:
(1)
avendo posto:
= distanza geometrica tra satellite i e ricevito-re j;
= coordinate dell’i-esimo satellite (coni = 1, 2, 3);
= coordinate del ricevitore j (incogni-te);
Affinchè sia possibile determinare laposizione di quel punto in quello istante è quin-di necessario misurare la distanza tra il punto inquestione ed almeno tre satelliti.
Questa misura è effettuata sui codicimodulanti le portanti, i quali permettono dideterminare il tempo necessario al segnale pergiungere dal satellite alla stazione di ricezione.
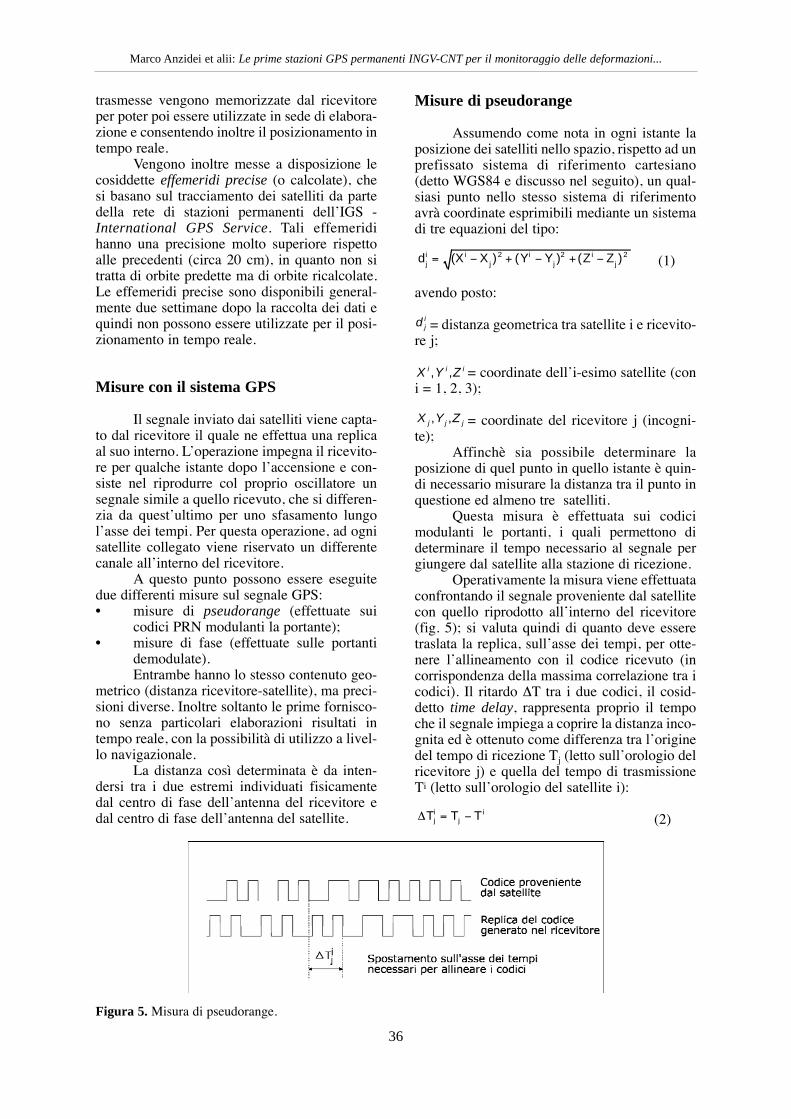
Operativamente la misura viene effettuataconfrontando il segnale proveniente dal satellitecon quello riprodotto all’interno del ricevitore(fig. 5); si valuta quindi di quanto deve esseretraslata la replica, sull’asse dei tempi, per otte-nere l’allineamento con il codice ricevuto (incorrispondenza della massima correlazione tra icodici). Il ritardo ∆T tra i due codici, il cosid-detto time delay, rappresenta proprio il tempoche il segnale impiega a coprire la distanza inco-gnita ed è ottenuto come differenza tra l’originedel tempo di ricezione Tj (letto sull’orologio delricevitore j) e quella del tempo di trasmissioneTi (letto sull’orologio del satellite i):
(2)
36
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 5. Misura di pseudorange.
2j
i2j
i2j
iij
)ZZ()YY()XX(d −+−+−=
ijd
iii ZYX ,,
jjj ZYX ,,
ij
ij TTT −=∆

Indicando con ∆Tij l’intervallo temporale
necessario al segnale per giungere dal satellite ial ricevitore j e moltiplicandolo per la velocitàdi propagazione del segnale c (velocità dellaluce nel vuoto), si ottiene una lunghezza cherappresenta lo pseudorange (o pseudo distanza):
(3)
Si parla di pseudorange in quanto la gran-dezza così determinata è una distanza affettadall’errore di sincronismo tra l’orologio delricevitore e quello del satellite (oltre che da altrierrori di minore entità verranno introdotti inseguito). Infatti l’espressione (3) non può essereconsiderata corretta poiché richiederebbe chetutti gli orologi (satelliti e ricevitore) fosserocostantemente sincronizzati. Al contrario, men-tre gli orologi dei satelliti si possono ritenereadeguatamente sincronizzati tra loro, ciò non èvalido per il ricevitore (fig. 6).
Viene quindi introdotta nel problemaun’ulteriore incognita rappresentata dal difettodi sincronizzazione (offset) tra i tempi dei duegruppi di orologi:
(4)
in cui:
= difetto di sincronizzazone tra satelli-te i e ricevitore j, incognito.
L’incognita aggiuntiva richiede perciòl’osservazione di un quarto satellite. Il sistemadi equazioni (1), riscritto assumendo come gran-dezza osservabile la pseudodistanza, diventaquindi:
(5)
essendo:
= pseudorange tra satellite i e ricevitore j,misurato;c = velocità di propagazione del segnale, nota;dti = offset di tempo del satellite i, noto dal mes-saggio navigazionale D;dtj = offset di tempo del ricevitore j, incognito;
= coordinate dell’i-esimo satellite, notedal messaggio navigazionale D;
= coordinate del ricevitore j, incognite;
Ogni satellite osservato fornisce unaequazione del tipo (5) e quindi è possibile deter-minare la posizione del ricevitore risolvendo unsistema di almeno 4 equazioni che contengonole sole incognite di posizione e del difetto di sin-cronizzazione. Tale operazione viene eseguitadal software del ricevitore in tempo reale, for-nendo ad ogni epoca di misura la posizione delricevitore.
Gli stessi dati possono essere registrati edelaborati in un secondo tempo così da modelliz-zare analiticamente alcune cause di errore erimuoverle parzialmente. Nel caso in cui sianoosservati più di quattro satelliti è possibile (siain tempo reale che successivamente) stimare lasoluzione secondo il principio dei minimi qua-drati, aumentando l’affidabilità del posiziona-mento.
Le precisioni massime conseguibili nellamisura dello pseudorange dipendono dal codicesul quale viene effettuata la misura; una regolapratica esprime la precisione come percentuale
37
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
c)dtdt()tt()TT(T
jii
ji
ji
jij
+ρ
=−+−=−=∆
)dtdt(c
)dtdt( ij
jii
j−+
ρ=−+
Figura 6. Difetti di sincronismo del ricevitore e dei satelliti rispetto al tempo generale GPS.
)dtdt( ij −
)ZZ()YY()XX(p 2j
i2j
i2j
iij +−+−+−=
)dtdt(c ij ++
pij
iii ZYX ,,
jjj ZYX ,,
ij
ij Tcp ∆=
della lunghezza d’onda del segnale (0.2 ÷ 1%):• nel caso del codice C/A (λ ≅ 300 m) l’in-
certezza è dell’ordine dei 0.5 – 3 m• nel caso del codice P (λ ≅ 30 m) l’incer-
tezza è di circa 0.1 – 0.3 m.Vedremo però nel seguito che la presenza
di altre cause d’errore impedisce generalmentedi raggiungere tali precisioni.
Misure di faseLe misure di fase si effettuano sull’onda
portante demodulata dai codici; l’osservazione ècostituita dalla differenza tra la fase dell’ondaportante ricevuta e la fase di un’onda di riferi-mento generata all’interno del ricevitore, all’i-stante della ricezione.
Il principio operativo risulta essenzial-mente analogo a quello utilizzato per i codici: inentrambi i casi si giunge infatti alla determina-zione della distanza considerando lo sfasamentotra due onde ma, mentre per lo pseudorange lagrandezza misurata è una differenza di tempo, inquesto caso si tratta proprio di una differenza difase.
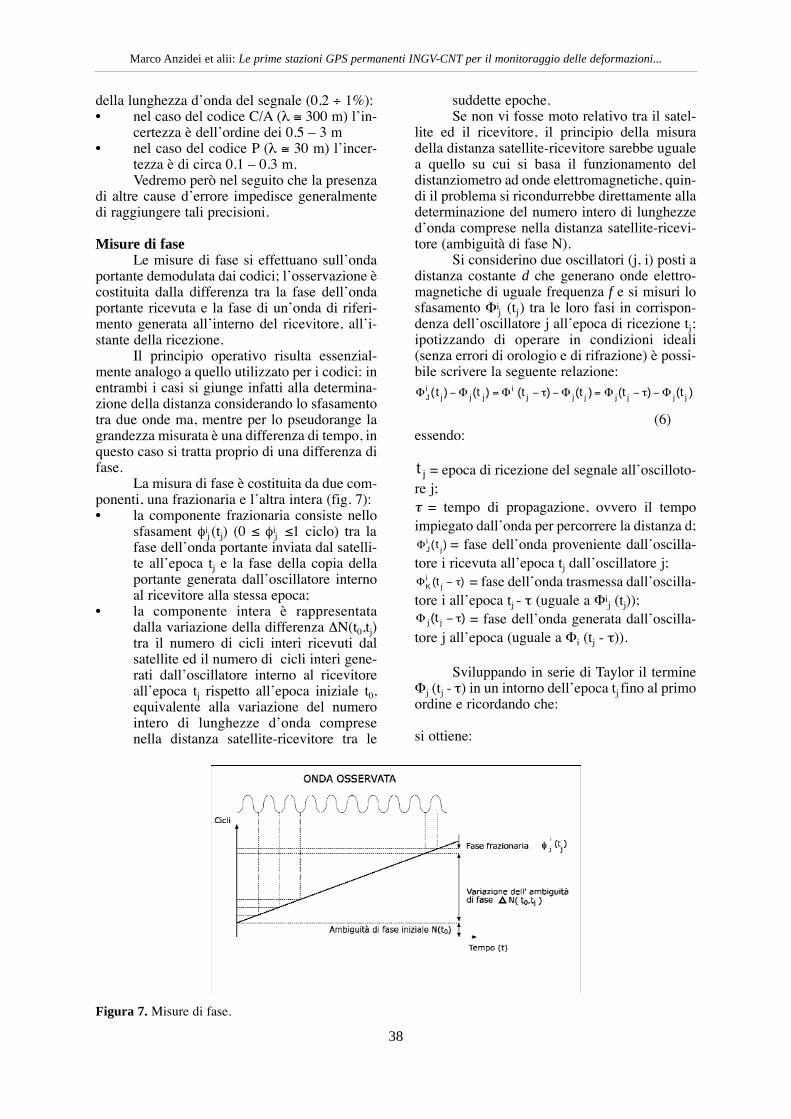
La misura di fase è costituita da due com-ponenti, una frazionaria e l’altra intera (fig. 7):• la componente frazionaria consiste nello
sfasament φij (tj) (0 ≤ φi
j ≤1 ciclo) tra lafase dell’onda portante inviata dal satelli-te all’epoca tj e la fase della copia dellaportante generata dall’oscillatore internoal ricevitore alla stessa epoca;
• la componente intera è rappresentatadalla variazione della differenza ∆N(t0,tj)tra il numero di cicli interi ricevuti dalsatellite ed il numero di cicli interi gene-rati dall’oscillatore interno al ricevitoreall’epoca tj rispetto all’epoca iniziale t0,equivalente alla variazione del numerointero di lunghezze d’onda compresenella distanza satellite-ricevitore tra le
suddette epoche.Se non vi fosse moto relativo tra il satel-
lite ed il ricevitore, il principio della misuradella distanza satellite-ricevitore sarebbe ugualea quello su cui si basa il funzionamento deldistanziometro ad onde elettromagnetiche, quin-di il problema si ricondurrebbe direttamente alladeterminazione del numero intero di lunghezzed’onda comprese nella distanza satellite-ricevi-tore (ambiguità di fase N).
Si considerino due oscillatori (j, i) posti adistanza costante d che generano onde elettro-magnetiche di uguale frequenza f e si misuri losfasamento Φi
j (tj ) tra le loro fasi in corrispon-denza dell’oscillatore j all’epoca di ricezione tj ;ipotizzando di operare in condizioni ideali(senza errori di orologio e di rifrazione) è possi-bile scrivere la seguente relazione:
(6)essendo:
= epoca di ricezione del segnale all’oscilloto-re j;
= tempo di propagazione, ovvero il tempoimpiegato dall’onda per percorrere la distanza d;
= fase dell’onda proveniente dall’oscilla-tore i ricevuta all’epoca tj dall’oscillatore j;
= fase dell’onda trasmessa dall’oscilla-tore i all’epoca tj - τ (uguale a Φi
j (tj));= fase dell’onda generata dall’oscilla-
tore j all’epoca (uguale a Φi (tj - τ)).
Sviluppando in serie di Taylor il termineΦj (tj - τ) in un intorno dell’epoca tj fino al primoordine e ricordando che:
si ottiene:
38
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 7. Misure di fase.
)t()t()t()t()t()t( jjjjjjji
jjjiJ Φ−τ−Φ=Φ−τ−Φ=Φ−Φ
jt
τ
)t( jiJΦ
)t( jiK τ−Φ
)t( jj τ−Φ

(7)in cui:λ = lunghezza d’ondad = distanza tra gli oscillatoriN = numero intero di lunghezze d’onda nelladistanza dϕi
j= parte frazionaria dello sfasamento
Va notato che nella (7) l’ambiguità di fasee lo sfasamento rimangono costanti nel tempo,poiché costante è la distanza d tra gli oscillatori.
Il moto relativo tra satellite e ricevitore fainvece variare nel tempo queste due quantità equindi è necessario misurarle continuamenteentrambe. In pratica è però impossibile misura-re l’ambiguità di fase N(tj) ad ogni epoca, men-tre si può misurare la sua variazione nel tempo∆N(t0,tj) ; rimane allora incognita solo l’ambi-guità di fase all’epoca iniziale (ambiguità inizia-le di fase N(t0)) poiché sussiste la relazione:
Conseguentemente, sempre ipotizzandoche non vi siano errori di nessun tipo, l’equazio-ne di osservazione relativa alla misura di faserisulta:
(8)
Sulla base di quanto detto sopra è possi-bile considerare le misure di fase sotto due puntidi vista differenti ma equivalenti:• come misure di distanze (variabili) affette
da una ambiguità di fase incognita varia-bile nel tempo:
; (9)
• come misure di differenze di distanzeaffette da una ambiguità di fase inizialeincognita:
; (10)
Nel seguito si sceglie la forma (10) perseparare le quantità misurate ∆N(t0,tj)e ϕi
j(tj) dai parametri Φij(tj), Φj(tj), N(t0) e si
pone:
,
cosicché l’equazione di osservazione (8) diventa:
. (11)
Per esplicitare le incognite geometrichenella (11) si procede in modo analogo a quantofatto per ricavare la (7) in cui compare la distan-za d; si deve però tenere presente che in questocaso il tempo di propagazione è variabile neltempo e quindi si ottiene:
(12)
I termini Φj(tj) e Φi(tj) sarebbero uguali sesi operasse in condizioni ideali, poiché per ipo-tesi, in tal caso, gli oscillatori del satellite e delricevitore dovrebbero essere identici. Come giàdetto però, esiste sempre un difetto di sincroniz-zazione (variabile nel tempo), esprimibile comedifferenza dei rispettivi difetti di sincronizzazio-ne al medesimo istante dti(tj), dtj(tj), rispetto altempo GPS. Bisogna quindi introdurre nella(12) il termine relativo agli errori di orologio intermini di fase.
Essendo:
con:
Φ(tj) = fase dell’oscillatore idealedΦi
k(tj) = fdti (difetto di sincronizzazione delsatellite all’epoca di ricezione)dΦj(tj) = fdtj (difetto di sincronizzazione delricevitore all’epoca di ricezione)Differenziando le due espressioni si ottiene:
e quindi la (12) diventa:
(13)
Nell’equazione di osservazione alla misu-ra di fase compaiono in definitiva la seguentiincognite:• 3 coordinate incognite del punto di sta-
zione (Xj, Yj, Zj);• l’incognita dovuta al difetto di sincroniz-
zazione degli orologi (dtj-dti);• l’incognita di ambiguità iniziale N(T0)
(numero intero).Si vedrà in seguito che in realtà nell’e-
)t(d)t()t( jjjjj Φ+Φ=Φ
39
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
ijjjjjjj
iJ N)t()t(N
df)t()t( ϕ−−=ϕ−−=
λ−=τ−=Φ−Φ
)t,t(N)t(N)t(N j00j ∆+=
)t()t,t(N)t(N)t()t( jijj00jjj
iJ ϕ−∆−−=Φ−Φ
)t()t(N)t()t( jijjjjj
iJ ϕ−−=Φ−Φ
)]t()t,t(N[)t(N)t()t( jijj00jjj
iJ ϕ+∆−−=Φ−Φ
)t,t(N)t()t( j0jijj
ij ∆+ϕ=Φ
=−Φ−Φ=Φ )t(N)t()t()t( 0jiJjjj
ij
=−τ−Φ−Φ= )t(N))t(t()t( 0jji
jj
=−τ+Φ−Φ= )t(N)t(f)t()t( 0jji
jj
)t(Nc
)t(f)t()t( 0
jij
ji
jj −ρ
+Φ−Φ=
)t(d)t()t( ji
jji Φ+Φ=Φ
)dtdt(f)t()t( ijj
ijj −=Φ−Φ
)t(Nc
)t(f)dtdt(f)t( 0
jiji
jjij −
ρ+−=Φ
)t(N)t()t()t( 0jiJjjj
ij −Φ−Φ=Φ
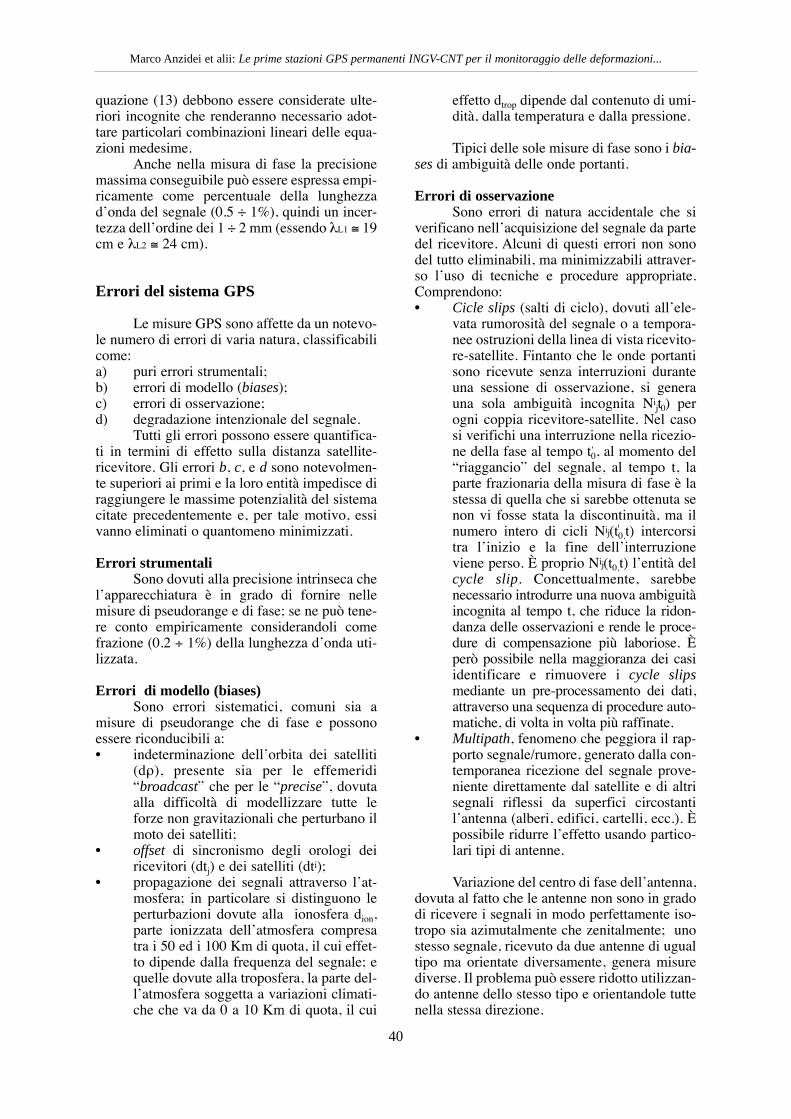
quazione (13) debbono essere considerate ulte-riori incognite che renderanno necessario adot-tare particolari combinazioni lineari delle equa-zioni medesime.
Anche nella misura di fase la precisionemassima conseguibile può essere espressa empi-ricamente come percentuale della lunghezzad’onda del segnale (0.5 ÷ 1%), quindi un incer-tezza dell’ordine dei 1 ÷ 2 mm (essendo λL1 ≅ 19cm e λL2 ≅ 24 cm).
Errori del sistema GPS
Le misure GPS sono affette da un notevo-le numero di errori di varia natura, classificabilicome:a) puri errori strumentali;b) errori di modello (biases);c) errori di osservazione;d) degradazione intenzionale del segnale.
Tutti gli errori possono essere quantifica-ti in termini di effetto sulla distanza satellite-ricevitore. Gli errori b, c, e d sono notevolmen-te superiori ai primi e la loro entità impedisce diraggiungere le massime potenzialità del sistemacitate precedentemente e, per tale motivo, essivanno eliminati o quantomeno minimizzati.
Errori strumentaliSono dovuti alla precisione intrinseca che
l’apparecchiatura è in grado di fornire nellemisure di pseudorange e di fase; se ne può tene-re conto empiricamente considerandoli comefrazione (0.2 ÷ 1%) della lunghezza d’onda uti-lizzata.
Errori di modello (biases)Sono errori sistematici, comuni sia a
misure di pseudorange che di fase e possonoessere riconducibili a:• indeterminazione dell’orbita dei satelliti
(dρ), presente sia per le effemeridi“broadcast” che per le “precise”, dovutaalla difficoltà di modellizzare tutte leforze non gravitazionali che perturbano ilmoto dei satelliti;
• offset di sincronismo degli orologi deiricevitori (dtj) e dei satelliti (dti);
• propagazione dei segnali attraverso l’at-mosfera; in particolare si distinguono leperturbazioni dovute alla ionosfera dion,parte ionizzata dell’atmosfera compresatra i 50 ed i 100 Km di quota, il cui effet-to dipende dalla frequenza del segnale; equelle dovute alla troposfera, la parte del-l’atmosfera soggetta a variazioni climati-che che va da 0 a 10 Km di quota, il cui
effetto dtrop dipende dal contenuto di umi-dità, dalla temperatura e dalla pressione.
Tipici delle sole misure di fase sono i bia-ses di ambiguità delle onde portanti.
Errori di osservazione Sono errori di natura accidentale che si
verificano nell’acquisizione del segnale da partedel ricevitore. Alcuni di questi errori non sonodel tutto eliminabili, ma minimizzabili attraver-so l’uso di tecniche e procedure appropriate.Comprendono:• Cicle slips (salti di ciclo), dovuti all’ele-
vata rumorosità del segnale o a tempora-nee ostruzioni della linea di vista ricevito-re-satellite. Fintanto che le onde portantisono ricevute senza interruzioni duranteuna sessione di osservazione, si generauna sola ambiguità incognita Ni
jt0) perogni coppia ricevitore-satellite. Nel casosi verifichi una interruzione nella ricezio-ne della fase al tempo t0, al momento del“riaggancio” del segnale, al tempo t, laparte frazionaria della misura di fase è lastessa di quella che si sarebbe ottenuta senon vi fosse stata la discontinuità, ma ilnumero intero di cicli Nij(t0,t) intercorsitra l’inizio e la fine dell’interruzioneviene perso. È proprio Nij(t0,t) l’entità delcycle slip. Concettualmente, sarebbenecessario introdurre una nuova ambiguitàincognita al tempo t, che riduce la ridon-danza delle osservazioni e rende le proce-dure di compensazione più laboriose. Èperò possibile nella maggioranza dei casiidentificare e rimuovere i cycle slipsmediante un pre-processamento dei dati,attraverso una sequenza di procedure auto-matiche, di volta in volta più raffinate.
• Multipath, fenomeno che peggiora il rap-porto segnale/rumore, generato dalla con-temporanea ricezione del segnale prove-niente direttamente dal satellite e di altrisegnali riflessi da superfici circostantil’antenna (alberi, edifici, cartelli, ecc.). Èpossibile ridurre l’effetto usando partico-lari tipi di antenne.
Variazione del centro di fase dell’antenna,dovuta al fatto che le antenne non sono in gradodi ricevere i segnali in modo perfettamente iso-tropo sia azimutalmente che zenitalmente; unostesso segnale, ricevuto da due antenne di ugualtipo ma orientate diversamente, genera misurediverse. Il problema può essere ridotto utilizzan-do antenne dello stesso tipo e orientandole tuttenella stessa direzione.
40
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...

Criptazione e degradazione intenzionale delsegnale
Il Dipartimento della Difesa degli U.S.A.,che gestisce il funzionamento del GPS, si riservala possibilità dell’uso esclusivo o della degrada-zione in qualunque momento del segnale GPS.
Ciò può essere realizzato in due diversimodi:• mediante il cosiddetto Anti-Spoofing
(AS), che consiste nella sovrapposizionedi un ulteriore codice pseudo-casualeincognito al codice P, che prende così ilnome di codice Y. Con tale espediente sirende impossibile il posizionamento diprecisione agli utilizzatori non militari.
• mediante la modalità SelectiveAvailability (SA), che consiste in unadegradazione delle informazioni contenu-te nel messaggio navigazionale D (dete-rioramento delle effemeridi trasmesse edei parametri per la correzione degli oro-logi dei satelliti).
Errori ed equazioni di osservazioneLe equazioni di osservazione (5) e (13)
rappresentano i modelli puramente geometricidelle misure di pseudo-range e di fase. Dalleconsiderazioni fatte nel presente paragrafo sirende necessario completare tali espressioni,introducendo i termini relativi agli errori siste-matici (biases).
Le equazioni possono essere così riscritte:
(pseudorange) (14)
(fase) (15)
dove:
dti = errore di sincronizzazione del satellite i;dtj = errore di sincronizzazione del ricevitore j;dρ = errore dovuto all’incertezza dell’orbita deisatelliti;dion = errore dovuto all’attraversamento dellaionosfera;dtrop = errore dovuto all’attraversamento dellatroposfera;de = errore dovuto al rumore del segnale, almultipath ed alla variazione del centro di fasedell’antenna.
Cenno alle tecniche di elaborazione
Gli errori accidentali hanno una entitànotevolmente inferiore rispetto a quelli sistema-tici, e vengono contenuti sia mediante una ido-nea architettura hardware che con un’opportunascelta dei punti di stazione.
Gli errori sistematici possono essererimossi adottando particolari procedimenti ope-rativi e combinazioni delle osservazioni, inmodo da eliminare alcune delle incognite egiungere alla soluzione del problema, rendendo-lo comunque sempre iperdeterminato peraumentare la precisione e l’affidabilità dellestime. I metodi operativi impiegati (per scopigeodetici di alta precisione)si riducono insostanza al calcolo di posizioni relative fra duericevitori (basi GPS), in cui le osservazioni ven-gono processate con i cosiddetti metodi differen-ziali: eseguendo opportune differenze tra leosservazioni di fase, si riesce a ridurre o elimi-nare gli errori sistematici comuni alle osserva-zioni coinvolte.
In particolare vengono impiegate:• le differenze singole tra ricevitori,• le differenze singole tra satelliti,• le differenze doppie,• le differenze triple.
La differenza singola tra ricevitori (fig. 8)è la differenza delle misure di fase acquisite daricevitori che osservano lo stesso satellite, nellostesso istante; questa osservabile elimina sostan-zialmente i biases dei satelliti (errori degli oro-logi e di orbita), inoltre per basi corte (inferioria 10 – 15 Km), si ha in genere una forte ridu-zione dei ritardi atmosferici, poiché il segnaleattraversa praticamente la stessa porzione diatmosfera.
Se in maniera analoga si differenziano leosservazioni di un solo ricevitore su due satelli-ti si ottiene la singola differenza tra satelliti (fig.9), che elimina gli errori di orologio relativi alricevitore. La doppia differenza (fig. 10) è la dif-ferenza tra le misure ottenute da due ricevitoriche osservano due differenti satelliti simultanea-mente. In questo caso si eliminano gli errorisistematici dovuti ai ricevitori ed ai satelliti e sela base è inferiore ai 10 – 15 Km vengono ridot-ti notevolmente anche gli errori di propagazioneatmosferica. Le differenze doppie, inoltre, con-sentono la determinazione delle ambiguità ini-ziali di fase come numeri interi, ma hanno, perla legge di propagazione della covarianza, unrumore 2 volte superiore a quello della misura difase originaria. Si deve poi sottolineare che, adifferenza delle misure originarie e delle singo-le differenze, le differenze doppie sono general-
41
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
dd)dtdt(cdp ij
ij
ij +ρ+−+=
c)dtdt(f
c
)t(f)t( i
jj
ij
jij +−+
ρ=Φ
)t(N)deddd(c
f) 0tropion −+++ρ+
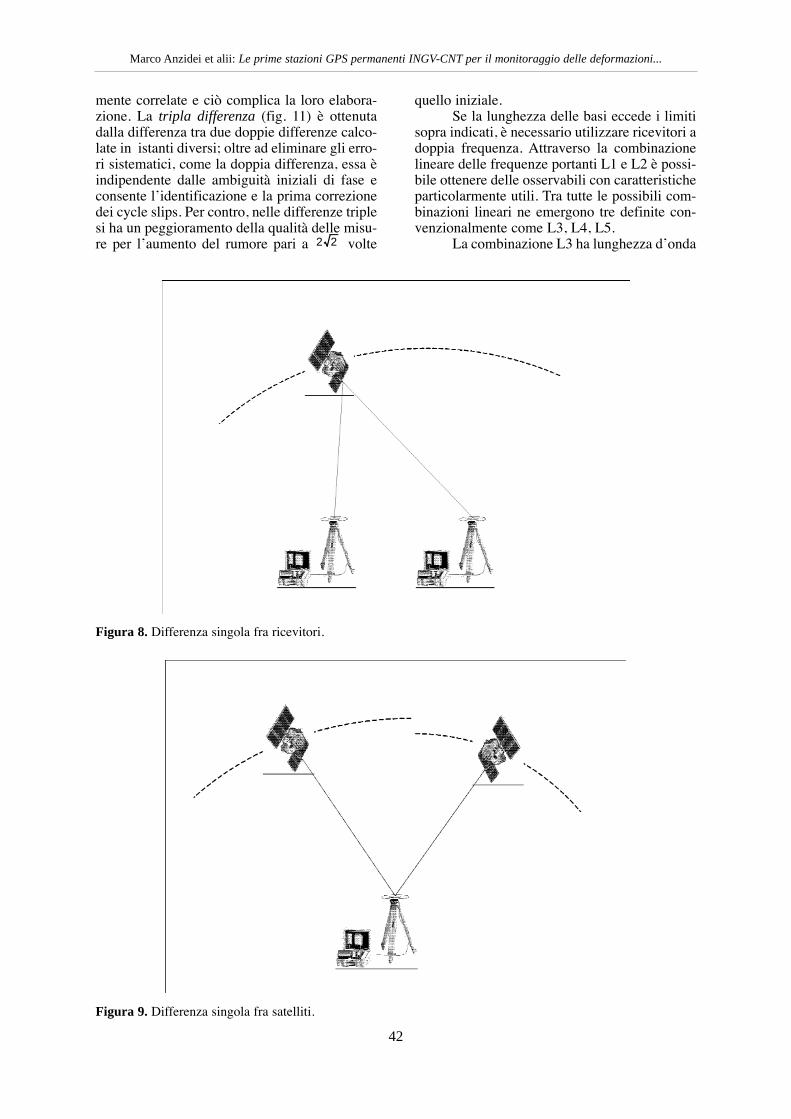
mente correlate e ciò complica la loro elabora-zione. La tripla differenza (fig. 11) è ottenutadalla differenza tra due doppie differenze calco-late in istanti diversi; oltre ad eliminare gli erro-ri sistematici, come la doppia differenza, essa èindipendente dalle ambiguità iniziali di fase econsente l’identificazione e la prima correzionedei cycle slips. Per contro, nelle differenze triplesi ha un peggioramento della qualità delle misu-re per l’aumento del rumore pari a volte
quello iniziale.Se la lunghezza delle basi eccede i limiti
sopra indicati, è necessario utilizzare ricevitori adoppia frequenza. Attraverso la combinazionelineare delle frequenze portanti L1 e L2 è possi-bile ottenere delle osservabili con caratteristicheparticolarmente utili. Tra tutte le possibili com-binazioni lineari ne emergono tre definite con-venzionalmente come L3, L4, L5.
La combinazione L3 ha lunghezza d’onda22
42
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 8. Differenza singola fra ricevitori.
Figura 9. Differenza singola fra satelliti.
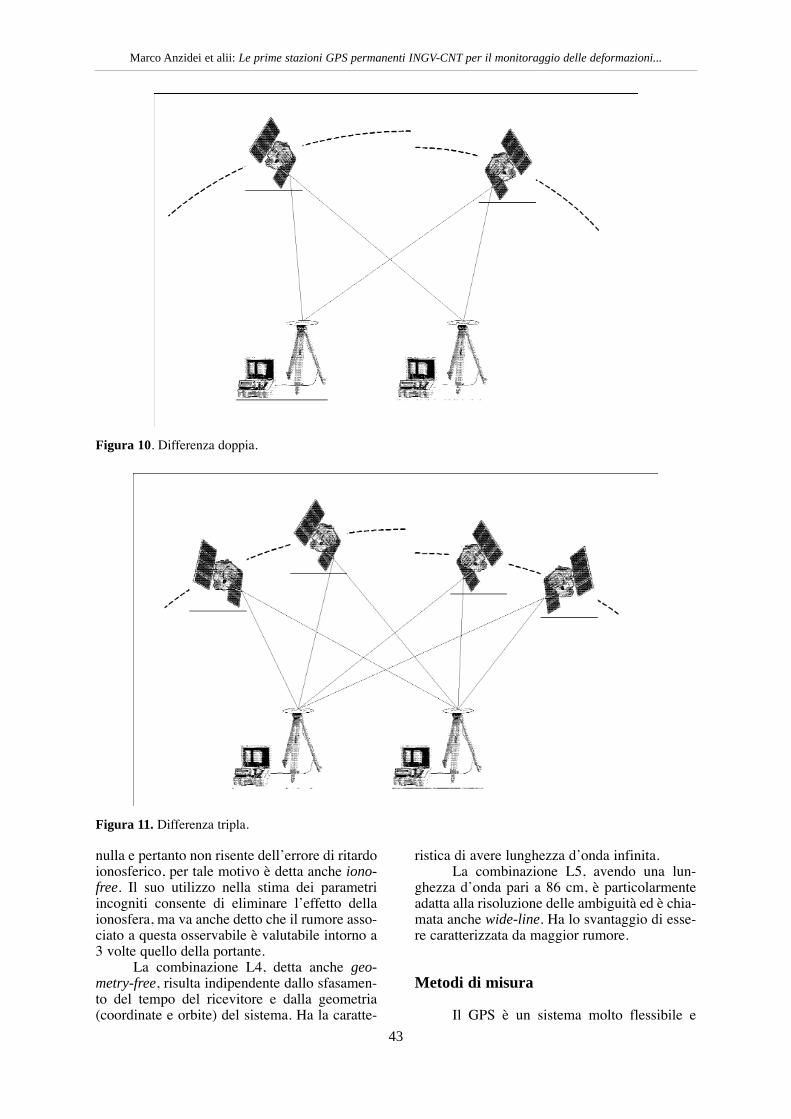
nulla e pertanto non risente dell’errore di ritardoionosferico, per tale motivo è detta anche iono-free. Il suo utilizzo nella stima dei parametriincogniti consente di eliminare l’effetto dellaionosfera, ma va anche detto che il rumore asso-ciato a questa osservabile è valutabile intorno a3 volte quello della portante.
La combinazione L4, detta anche geo-metry-free, risulta indipendente dallo sfasamen-to del tempo del ricevitore e dalla geometria(coordinate e orbite) del sistema. Ha la caratte-
ristica di avere lunghezza d’onda infinita.La combinazione L5, avendo una lun-
ghezza d’onda pari a 86 cm, è particolarmenteadatta alla risoluzione delle ambiguità ed è chia-mata anche wide-line. Ha lo svantaggio di esse-re caratterizzata da maggior rumore.
Metodi di misura
Il GPS è un sistema molto flessibile e
43
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 10. Differenza doppia.
Figura 11. Differenza tripla.
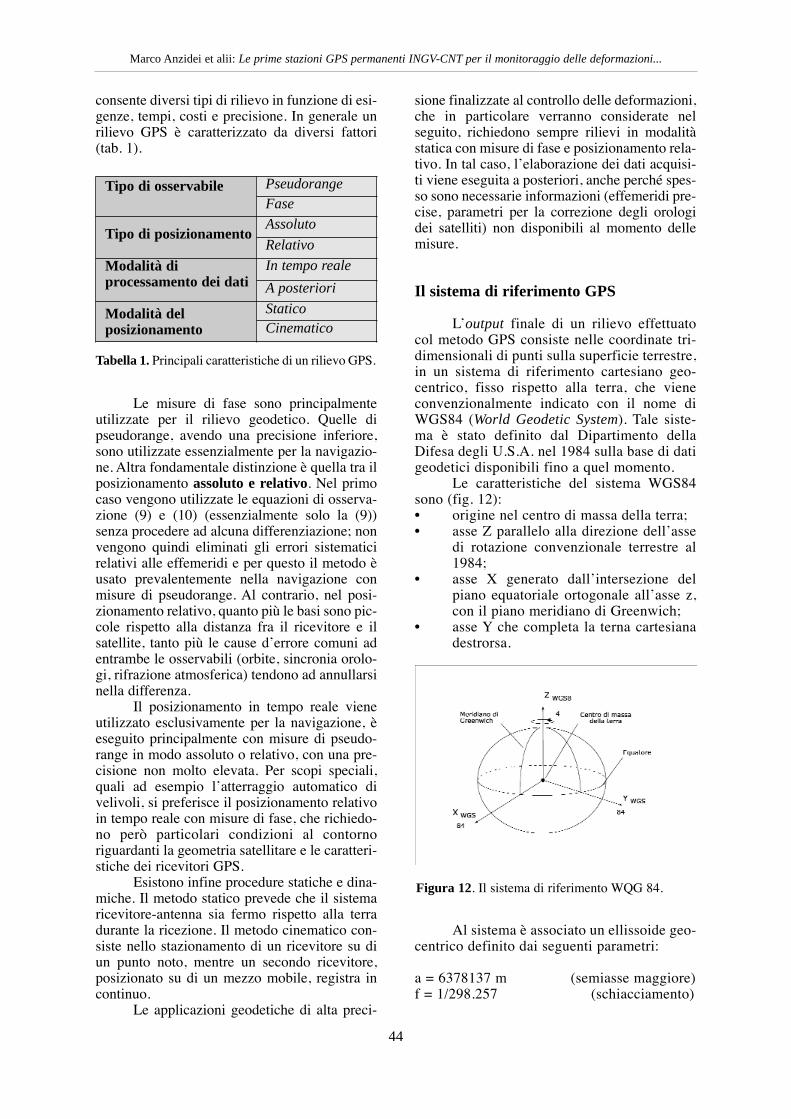
consente diversi tipi di rilievo in funzione di esi-genze, tempi, costi e precisione. In generale unrilievo GPS è caratterizzato da diversi fattori(tab. 1).
Le misure di fase sono principalmenteutilizzate per il rilievo geodetico. Quelle dipseudorange, avendo una precisione inferiore,sono utilizzate essenzialmente per la navigazio-ne. Altra fondamentale distinzione è quella tra ilposizionamento assoluto e relativo. Nel primocaso vengono utilizzate le equazioni di osserva-zione (9) e (10) (essenzialmente solo la (9))senza procedere ad alcuna differenziazione; nonvengono quindi eliminati gli errori sistematicirelativi alle effemeridi e per questo il metodo èusato prevalentemente nella navigazione conmisure di pseudorange. Al contrario, nel posi-zionamento relativo, quanto più le basi sono pic-cole rispetto alla distanza fra il ricevitore e ilsatellite, tanto più le cause d’errore comuni adentrambe le osservabili (orbite, sincronia orolo-gi, rifrazione atmosferica) tendono ad annullarsinella differenza.
Il posizionamento in tempo reale vieneutilizzato esclusivamente per la navigazione, èeseguito principalmente con misure di pseudo-range in modo assoluto o relativo, con una pre-cisione non molto elevata. Per scopi speciali,quali ad esempio l’atterraggio automatico divelivoli, si preferisce il posizionamento relativoin tempo reale con misure di fase, che richiedo-no però particolari condizioni al contornoriguardanti la geometria satellitare e le caratteri-stiche dei ricevitori GPS.
Esistono infine procedure statiche e dina-miche. Il metodo statico prevede che il sistemaricevitore-antenna sia fermo rispetto alla terradurante la ricezione. Il metodo cinematico con-siste nello stazionamento di un ricevitore su diun punto noto, mentre un secondo ricevitore,posizionato su di un mezzo mobile, registra incontinuo.
Le applicazioni geodetiche di alta preci-
sione finalizzate al controllo delle deformazioni,che in particolare verranno considerate nelseguito, richiedono sempre rilievi in modalitàstatica con misure di fase e posizionamento rela-tivo. In tal caso, l’elaborazione dei dati acquisi-ti viene eseguita a posteriori, anche perché spes-so sono necessarie informazioni (effemeridi pre-cise, parametri per la correzione degli orologidei satelliti) non disponibili al momento dellemisure.
Il sistema di riferimento GPS
L’output finale di un rilievo effettuatocol metodo GPS consiste nelle coordinate tri-dimensionali di punti sulla superficie terrestre,in un sistema di riferimento cartesiano geo-centrico, fisso rispetto alla terra, che vieneconvenzionalmente indicato con il nome diWGS84 (World Geodetic System). Tale siste-ma è stato definito dal Dipartimento dellaDifesa degli U.S.A. nel 1984 sulla base di datigeodetici disponibili fino a quel momento.
Le caratteristiche del sistema WGS84sono (fig. 12):• origine nel centro di massa della terra;• asse Z parallelo alla direzione dell’asse
di rotazione convenzionale terrestre al1984;
• asse X generato dall’intersezione delpiano equatoriale ortogonale all’asse z,con il piano meridiano di Greenwich;
• asse Y che completa la terna cartesianadestrorsa.
Al sistema è associato un ellissoide geo-centrico definito dai seguenti parametri:
a = 6378137 m (semiasse maggiore)f = 1/298.257 (schiacciamento)
44
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 12. Il sistema di riferimento WQG 84.
Tabella 1. Principali caratteristiche di un rilievo GPS.
Tipo di osservabile PseudorangeFase
Tipo di posizionamentoAssoluto
Relativo
Modalità di processamento dei dati
In tempo reale
A posteriori
Modalità del posizionamento
StaticoCinematico
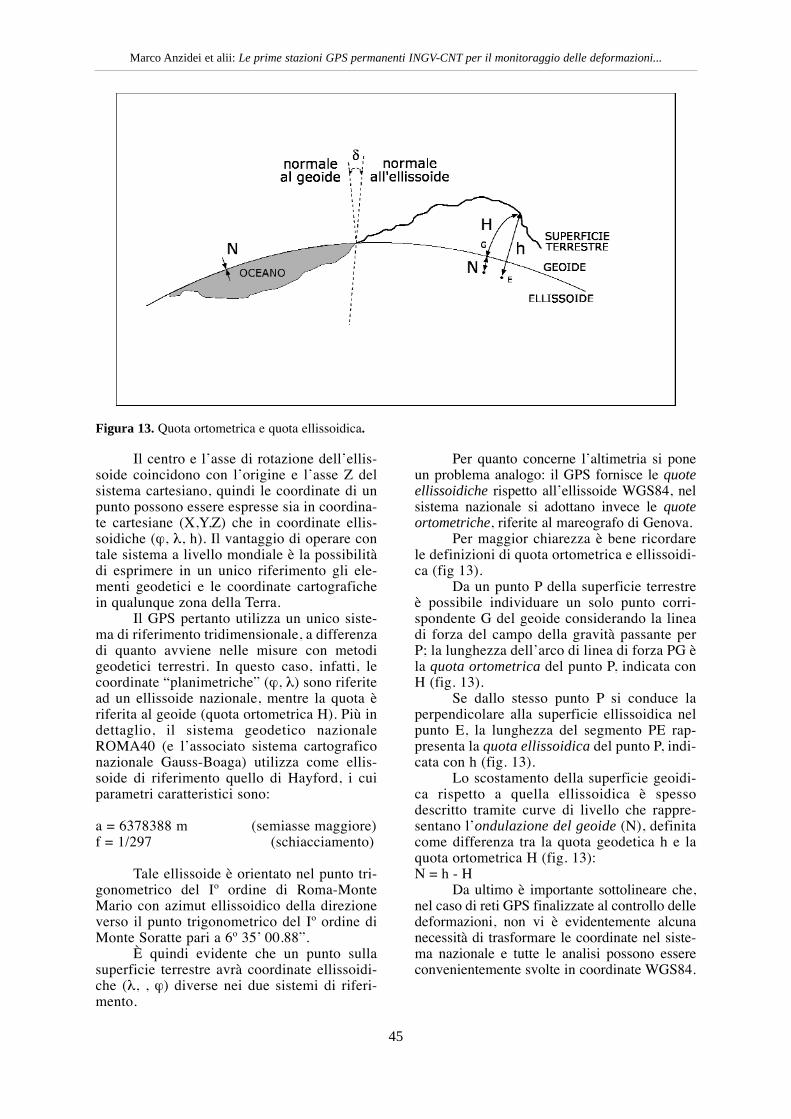
Il centro e l’asse di rotazione dell’ellis-soide coincidono con l’origine e l’asse Z delsistema cartesiano, quindi le coordinate di unpunto possono essere espresse sia in coordina-te cartesiane (X,Y,Z) che in coordinate ellis-soidiche (ϕ, λ, h). Il vantaggio di operare contale sistema a livello mondiale è la possibilitàdi esprimere in un unico riferimento gli ele-menti geodetici e le coordinate cartografichein qualunque zona della Terra.
Il GPS pertanto utilizza un unico siste-ma di riferimento tridimensionale, a differenzadi quanto avviene nelle misure con metodigeodetici terrestri. In questo caso, infatti, lecoordinate “planimetriche” (ϕ, λ) sono riferitead un ellissoide nazionale, mentre la quota èriferita al geoide (quota ortometrica H). Più indettaglio, il sistema geodetico nazionaleROMA40 (e l’associato sistema cartograficonazionale Gauss-Boaga) utilizza come ellis-soide di riferimento quello di Hayford, i cuiparametri caratteristici sono:
a = 6378388 m (semiasse maggiore)f = 1/297 (schiacciamento)
Tale ellissoide è orientato nel punto tri-gonometrico del Iº ordine di Roma-MonteMario con azimut ellissoidico della direzioneverso il punto trigonometrico del Iº ordine diMonte Soratte pari a 6º 35’ 00.88”.
È quindi evidente che un punto sullasuperficie terrestre avrà coordinate ellissoidi-che (λ, , ϕ) diverse nei due sistemi di riferi-mento.
Per quanto concerne l’altimetria si poneun problema analogo: il GPS fornisce le quoteellissoidiche rispetto all’ellissoide WGS84, nelsistema nazionale si adottano invece le quoteortometriche, riferite al mareografo di Genova.
Per maggior chiarezza è bene ricordarele definizioni di quota ortometrica e ellissoidi-ca (fig 13).
Da un punto P della superficie terrestreè possibile individuare un solo punto corri-spondente G del geoide considerando la lineadi forza del campo della gravità passante perP; la lunghezza dell’arco di linea di forza PG èla quota ortometrica del punto P, indicata conH (fig. 13).
Se dallo stesso punto P si conduce laperpendicolare alla superficie ellissoidica nelpunto E, la lunghezza del segmento PE rap-presenta la quota ellissoidica del punto P, indi-cata con h (fig. 13).
Lo scostamento della superficie geoidi-ca rispetto a quella ellissoidica è spessodescritto tramite curve di livello che rappre-sentano l’ondulazione del geoide (N), definitacome differenza tra la quota geodetica h e laquota ortometrica H (fig. 13):N = h - H
Da ultimo è importante sottolineare che,nel caso di reti GPS finalizzate al controllo delledeformazioni, non vi è evidentemente alcunanecessità di trasformare le coordinate nel siste-ma nazionale e tutte le analisi possono essereconvenientemente svolte in coordinate WGS84.
45
Marco Anzidei et alii: Le prime stazioni GPS permanenti INGV-CNT per il monitoraggio delle deformazioni...
Figura 13. Quota ortometrica e quota ellissoidica.