EDFOMAI - · Comunicazione:comunicazione inter-task sincrona a messaggi, code di messaggi, ......
75
EDFOMAI Daniele Bellavista, Luca Mella, Luca Ricci University of Bologna, Scuola di Ingegneria ed Architettura Laurea Magistrale in Ingegneria Informatica Corso di Sistemi e Tecnologie per l’Automazione LM Anno Accademico: 2012/2013 {daniele.bellavista,luca.mella,luca.ricci14}@studio.unibo.it 7/12/2012 (University of Bologna) 7/12/2012 1 / 74
-
Upload
vuongtuong -
Category
Documents
-
view
221 -
download
0
Transcript of EDFOMAI - · Comunicazione:comunicazione inter-task sincrona a messaggi, code di messaggi, ......

EDFOMAI
Daniele Bellavista, Luca Mella, Luca Ricci
University of Bologna, Scuola di Ingegneria ed ArchitetturaLaurea Magistrale in Ingegneria Informatica
Corso di Sistemi e Tecnologie per l’Automazione LMAnno Accademico: 2012/2013
{daniele.bellavista,luca.mella,luca.ricci14}@studio.unibo.it
7/12/2012
(University of Bologna) 7/12/2012 1 / 74

Outline I
1 ArchitetturaI-PipeRT-NucleusSkinRTDM SkinReal-Time Tasks
2 Esempi su Xenomai
3 EDFOMAIPercorso di lavoroDescrizioneInterfacciaUnder the Hood
DeviceHookEDF ServiceDeadline MissLogs
(University of Bologna) 7/12/2012 2 / 74

Outline II
4 Esempi di implementazione su EDFOMAI
5 Mapping SFC in Xenomai
6 References
(University of Bologna) 7/12/2012 3 / 74

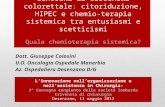
Architettura di Xenomai
(University of Bologna) 7/12/2012 4 / 74

Architettura: I-Pipe I
La pipeline di interrupt e una astrazione software per la gestione degliinterrupt trap implementata da Adeos (Adaptive DomainEnvironment for Operating Systems).
Adeos gestisce una pipeline di domini ai quali e possibile associaredegli interrupt handler, gestendo in questo modo l’ordine di temporaledi ricezione degli interrupt.
Adeos permette di stallare un interrupt in un certo dominioimpedendo l’attraversamento della pipeline.
(University of Bologna) 7/12/2012 5 / 74

Architettura: I-Pipe II
Xenomai utilizza una pipeline a 3 domini: Il primo dominio (primarydomain) e per RTOS Core, il terzo (secondary domain) per il kernelLinux.
Grazie a questa separazione, Xenomai riceve gli interrupt prima delkernel in modo da avere una priorita maggiore di esecuzione.
Il secondo dominio, chiamato Interrupt Shield serve per stallare glieventi diretti al kernel, evitando che Task RT subiscano preemptionnon volute.
(University of Bologna) 7/12/2012 6 / 74

Architettura: I-Pipe III
(University of Bologna) 7/12/2012 7 / 74

Architettura: RTOS Core (RT-Nucleus) I
RT-Nucleus e il nano-kernel di Xenomai che fornisce:
Supporto multithreading: priorita e priority inerithance, possibilita dilimitare il wait su una risorsa, round-robin schedulingper task con la medesima priorita.
Supporto sincronizzazione: fornisce un semplice oggetto xnsynch, chesupporta priortiy inversion, attese time-bounded eforcible deletion.
Gestione del timing e del clock: il Nucleus si interfaccia con il timerhardware e permette la gestione oneshot (hardwareriprogrammato ad ogni tick) o periodic (utile se sidispone di un Programmable Interrupt Timer).
Supporto per l’allocazione della memoria: gestione basilare di unoheap real-time.
(University of Bologna) 7/12/2012 8 / 74

Architettura: Native Skin I
Le Skin sono moduli linux che forniscono interfacce di piu alto livelloscritte in vari standard (nativo, POSIX, VxWorks, RTAI, . . . )
Le API definiscono 6 categorie di syscall utilizzabii in kernel space,user space o in entrambi:
Gestione Task: API che permettono la gestione dei task e della loroschedulazione.
Servizi Timing: API per accedere ai servizi di timing di basso livello.Inoltre forniscono gli Alarm, ovvero watchdog per usogenerale.
Servizi Sincronizzazione: semafori, mutex, condition variable e eventflag group.
Comunicazione: comunicazione inter-task sincrona a messaggi, codedi messaggi, memoria heap condivisa e messagge pipeper lo scambio di dati con processi Linux.
(University of Bologna) 7/12/2012 9 / 74

Architettura: Native Skin II
Gestione dispositivi I/O: le API forniscono semplici meccanismi pergestire interrupt e I/O. Una gestione piu avanzatarichiete l’utilizzo dell’interfaccia RTDM (Real-TimeDriver Model).
Registri: i registri sono componenti che permettono di indicizzarestrutture dati per poter essere riferite da qualunquespazio di esecuzione.
(University of Bologna) 7/12/2012 10 / 74

Architettura: Skin RTDM I
Real-Time Driver Model e un livello di astrazione che permette di unificarele interfacce per lo sviluppo di driver. In Xenomai e implementata comeuna skin.
(University of Bologna) 7/12/2012 11 / 74

Architettura: Skin RTDM II
Uniforma la creazione di device definendo dei device profile. Ognunodi essi ha come proprieta:
Caratteristica: device named (open()/close()) o protocol(socket()/close()).
Operazioni: insieme delle operazioni supportate (eg: read(), write(),ioctl(), send msg(),. . . ), specificando il contesto diinvocazione (rt o non rt) e il significato del valore diritorno.
Tipi di dato e costanti: definizione di tutte le strutture e datinecessari per il device (eg: le sock addr per le socket).
Permette di registare device con un unica interfaccia e assegnarli uncontesto: real-time o non real-time.
(University of Bologna) 7/12/2012 12 / 74

Xenomai Real Time Task I
I task realtime non sono associati ai processi Linux, ma sono gestitiindipendentemente e possono essere in esecuzione su due differentiexecution mode:
Primary mode (dominio Xenomai)
I task risiedono in user-space e sono schedulati da Xenomai, dunque si hauna protezione della memoria e una latency estremamente bassa, poiche loscheduler di Xenomai non e legato alle attivita del kernel Linux.
(University of Bologna) 7/12/2012 13 / 74

Xenomai Real Time Task II
Secondary mode (dominio Linux)
I task hanno accesso a tutte le syscall di Linux ma al prezzo di risentire delnon-determinismo introdotto dallo scheduler del kernel.
Il problema si risolve abilitando l’interrupt shield, bloccando in questomodo la preemption del task fintanto che e in stato di running:l’intero kernel linux eredita la sua priorita.
Questa soluzione soffre di priority inversion: tutti i thread in primaryche aspettano un interrupt rimangono bloccati.
Si risolve creando interrupt con RTDM che sono diretti per il dominioAdeos Xenomai.
(University of Bologna) 7/12/2012 14 / 74

Xenomai Real Time Task III
(University of Bologna) 7/12/2012 15 / 74

Esempi di implementazione su Xenomai I
Esempio di due task one-shot che utilizzano due semafori.
1 s t a t i c RT TASK t1 , t2 ; RT SEM semGlobal1 , semGloba l2 ;2 i n t g l o b a l = 0 ;3 i n t main ( i n t argc , c h a r ∗ a r g v [ ] ) {4 // I n i t t he p r o c e s s non−r t output b u f f e r5 r t p r i n t a u t o i n i t ( 1 ) ;6 // D i s a b l e l i n u x on−demand p a g i n g scheme7 m l o c k a l l (MCL CURRENT |MCL FUTURE) ;8 r t s e m c r e a t e (& semGlobal1 , ” semaphore1 ” , 1 , S FIFO ) ;9 r t s e m c r e a t e (& semGlobal2 , ” semaphore2 ” , 0 , S FIFO ) ;
10 r t t a s k c r e a t e (&t1 , ” taskOne ” , 0 , 1 0 , 0 ) ;11 r t t a s k c r e a t e (&t2 , ” taskTwo ” , 0 , 1 0 , 0 ) ;12 r t t a s k s t a r t (&t1 ,& taskOne , NULL) ;13 r t t a s k s t a r t (&t2 ,& taskTwo , NULL) ; }
(University of Bologna) 7/12/2012 16 / 74

Esempi di implementazione su Xenomai II
Tasck incrementatore:
1 v o i d taskOne ( v o i d ∗ ar g ) {2 i n t i ;3 f o r ( i =0; i<ITER ; i ++){4 r t s e m p (& semGlobal1 , 0 ) ;5 r t p r i n t f ( ” I ’m taskOne and g l o b a l = %d . . . \ n” ,6 ++g l o b a l ) ;7 r t s e m v (& semGloba l2 ) ;8 }9 }
(University of Bologna) 7/12/2012 17 / 74

Esempi di implementazione su Xenomai III
Task decrementatore:
1 v o i d taskTwo ( v o i d ∗ ar g ) {2 i n t i ;3 f o r ( i =0; i<ITER ; i ++){4 r t s e m p (& semGlobal2 , 0 ) ;5 r t p r i n t f ( ” I ’m taskTwo and g l o b a l = %d−−−\n” ,6 −−g l o b a l ) ;7 r t s e m v (& semGloba l1 ) ;8 }9 }
(University of Bologna) 7/12/2012 18 / 74

Esempi di implementazione su Xenomai IV
Esempio di tre task periodici.
1 RT TASK demo task ; RT SEM s ;2 i n t main ( i n t argc , c h a r ∗ a r g v [ ] ) {3 c h a r s t r [ 1 0 ] ; i n t p e r i o d s [ 3 ] ; i n t i ;4 r t p r i n t a u t o i n i t ( 1 ) ;5 m l o c k a l l (MCL CURRENT |MCL FUTURE) ;6 r t p r i n t f ( ” [ Main ] : s t a r t t a s k \n” ) ;7 f o r ( i =0; i <3; i ++){8 s p r i n t f ( s t r , ”Task−%d” , i ) ;9 p e r i o d s [ i ]= i +1;
10 r t t a s k c r e a t e (&demo task , s t r ,10 ,50+ i , 0 ) ;11 r t t a s k s t a r t (&demo task ,&demo,& p e r i o d s [ i ] ) ;12 }13 r t p r i n t f ( ” end program by CTRL−C\n” ) ; pause ( ) ;14 }
(University of Bologna) 7/12/2012 19 / 74

Esempi di implementazione su Xenomai V
1
2 v o i d demo ( v o i d ∗ ar g ) {3 RTIME p = 1 e9 ; RT TASK INFO c u r t a s k i n f o ;4 i n t r e t v a l = r t t a s k i n q u i r e ( r t t a s k s e l f ( ) ,5 &c u r t a s k i n f o ) ; // i n q u i r e c u r r e n t t a s k6 r e t v a l = ∗ ( i n t ∗) a rg ; p ∗= r e t v a l ;7 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, p∗ r e t v a l ) ;8 w h i l e ( 1 ) {9 r t t i m e r s p i n ( p /2) ; // Busy Wait
10 r t p r i n t f ( ”[% s ] %d s p e r i o d i c \n” ,11 c u r t a s k i n f o . name , r e t v a l ) ;12 r t t a s k w a i t p e r i o d (NULL) ;13 }14 }
(University of Bologna) 7/12/2012 20 / 74

EDFOMAI
Il Progetto
Lo scopo del progetto e quello di implementare un meccanismo chepermetta lo scheduling EDF su Xenomai.
Successivamente, l’implementazione e da testare sviluppando appositiesempi.
Abbiamo chiamato il progetto EDFOMAI
Sorgenti
https://github.com/dbellavista/edfomai/
(University of Bologna) 7/12/2012 21 / 74

EDFOMAI - Percorso di lavoro: Setup ambiente I
Problemi iniziali
Avendo bisogno dei sorgenti del kernel e di xenomai per poterimplementare driver, abbiamo provato ad installare l’ultima versionedi Xenomai su Debian 6.
Adeos non supporta il kernel stabile di Debian 6, quindi abbiamodovuto installare una versione successiva.
Dopo numerevoli tentativi abbiamo abbandonato l’idea: nonriuscivamo a far funzionare il sistema.
L’unica macchina che funzionasse era una virtual machine trovata sulweb con installato Debian 4 e Xenomai 2.4 (ora e stabile la 2.6).
La virtual machine non possedeva gli header e i sorgenti di xenomai edel kernel e non siamo riusciti ad installarli.
(University of Bologna) 7/12/2012 22 / 74

EDFOMAI - Percorso di lavoro: Setup ambiente II
Soluzione
Abbiamo scelto di installare una ubuntu-12.04.1, dove la patch adeos,xenomai ed alcuni utili script sono disponibili direttamente dairepository (Xenomai v2.5.6)
In seguito sono stati scaricati e patchati i sorgenti di linux 2.6.35.7.
Infine abbiamo compilato il kernel patchato e pacchettizzato siabinanari che headers in comodi e riutilizzabili .deb
(University of Bologna) 7/12/2012 23 / 74

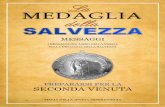
EDFOMAI - Implementazione di EDF su Xenomai I
EDF scheduling e Xenomai
Xenomai non ha il concetto di deadline associato ad un task:implementazione banale di EDF e dunque impossibile.
La strada seguita in[Santos et.all,2009] e stata quella di modificaredirettamente Nucleus per implementare direttamente API e strutturedati necessarie.
Visto il tempo e gli strumenti a disposizione e l’impossibilita dicompilare il nucleus abbiamo ritenuto necessario utilizzare unapproccio piu versatile:
EDFOMAI e un layer logico costruito sopra la skin nativa.I task RT utilizzano EDFOMAI per inizializzazione, configurazione edattesa.
(University of Bologna) 7/12/2012 24 / 74

EDFOMAI - Implementazione di EDF su Xenomai II
Figura: Modello del sistema con EDFOMAI(University of Bologna) 7/12/2012 25 / 74

EDFOMAI - Interfaccia I
(University of Bologna) 7/12/2012 26 / 74

EDFOMAI - Strutture dati I
Deadline
Il concetto di DeadLine e stato aggiunto creando una struttura dati chemantiene il riferimento ad un RT TASK con al suo interno campi utili peril ricalcolo della priorita. Inoltre e stato predisposto spazio sufficiente perospitare una struttura RT TASK INFO, che contiene utili informazionicome la priorita corrente.Insieme al concetto di DeadLine e previsto un meccanismo di MissDeadLine: l’utente specifica un handler che e richiamato in caso dimancata terminazione del task entro la deadline prefissata.
(University of Bologna) 7/12/2012 27 / 74

EDFOMAI - Strutture dati II
1 t y p e d e f s t r u c t r t d e a d l i n e t a s k {2 u n s i g n e d l o n g d e a d l i n e ;3 u n s i g n e d l o n g remain ;4 u n s i g n e d l o n g r e l a t i v e d e a d l i n e ;5 RT TASK ∗ t a s k ;6 RT TASK INFO t a s k i n f o ; } RT DEADLINE TASK ;
Tempi ed unita di misura
Da notare che a seconda che il timer di sistema sia programmato inoneshot o periodic mode, la deadline e espressa in nanosecondi o jiffies.. . . Quindi attenzione a come compilate Xenomai!
(University of Bologna) 7/12/2012 28 / 74

EDFOMAI - API Utente I
Avvio di un task specificando la deadline.
1 i n t e d f t a s k s t a r t (2 RT TASK ∗ task ,3 u n s i g n e d l o n g d e a d l i n e ,4 v o i d (∗ p r o c e d u r e ) ( v o i d ∗ ar g ) , v o i d ∗ ar g ) ;
(University of Bologna) 7/12/2012 29 / 74

EDFOMAI - API Utente II
(University of Bologna) 7/12/2012 30 / 74

EDFOMAI - API Utente III
Attesa fino al prossimo periodo
1 e d f t a s k w a i t p e r i o d ( u n s i g n e d l o n g ∗ o v e r r u n s )
(University of Bologna) 7/12/2012 31 / 74

EDFOMAI - API Utente IV
(University of Bologna) 7/12/2012 32 / 74

EDFOMAI - Under the Hood I
Kernel space. . .
Per fornire il supporto EDF ed agire sullo scheduling senza modificareNucleus, e stato necessario implementare un modulo/driver, capace dilavorare al livello del kernel Xenomai.
(University of Bologna) 7/12/2012 33 / 74

EDFOMAI - Under the Hood II
Il modulo kernel deve reagire agli eventi di schedulazione, quindi vieneregistrato un hook allo scheduler (rt task add hook).
Le strutture rt deadline task sono memorizzate all’interno di unaHASHMAP per consentire un tempo di accesso O(1).
Un task di servizio (EDF Service) viene creato per servire le richiestedi ricalcolo priorita.
Il calcolo della priorita ha complessita O(N).
La priorita viene ricalcolata ad ogni
creazione di taskswitch di contestoset/reset di deadlinecancellazione di task
La comunicazione con driver gestita attraverso delle write sul device:il modulo legge un EDFMessage ed aggiorna le strutture dati.
(University of Bologna) 7/12/2012 34 / 74

EDFOMAI - Under the Hood III
Le corse critiche per strutture dati fra il modulo ed il task sono gestiteda un rtdm mutex.
Gli RT TASK vengono recuperati grazie al registro(xnregistry bind,xnregistry fetch), attraverso API utilizzabili solo alivello Kernel
E’previsto il supporto alle notifiche di deadline-miss attraversoRT QUEUE accessibili anche in user-space.
(University of Bologna) 7/12/2012 35 / 74

EDFOMAI - Under the Hood: Problematiche I
La procedura registrata sull’hook deve accedere a strutture daticondivise per aggiornarne lo stato, ma non puo usare dei lock, poichee eseguito nel contesto di un interrupt (non preemptable).
Dunque e necessario usare un task di servizio (EDF Service), cheattenda appositi rtdm event e che si preoccupi dell’accesso allestrutture.
La presenza del task/servizio e inoltre motivata dalla noncompatibilita nella alterazione delle politiche di scheduling all’internodi un hook dello scheduler stesso (rt task set priority puo causarerescheduling).
Quindi, quando l’hook e richiamato l’event e segnalato e EDF Servicericalcola le priorita in base alle deadline.
(University of Bologna) 7/12/2012 36 / 74

EDFOMAI - Under the Hood: Driver I
Il device virtuale e un named device non realtime gestito a stream,descritto dal seguente profilo:
1 s t a t i c s t r u c t r t d m d e v i c e d e v i c e = {2 . s t r u c t v e r s i o n = RTDM DEVICE STRUCT VER ,3 . d e v i c e f l a g s = RTDM NAMED DEVICE,4 . c o n t e x t s i z e = s i z e o f ( c o n t e x t t ) ,5 . d e v i c e n a m e = DEVICE NAME ,6 . o p e n n r t = e d f r t d m o p e n n r t ,7 . ops = {8 . c l o s e n r t = e d f r t d m c l o s e n r t ,9 . r e a d n r t = e d f r t d m r e a d n r t ,
10 . w r i t e n r t = e d f r t d m w r i t e n r t ,11 } ,12 . d e v i c e c l a s s = RTDM CLASS EXPERIMENTAL ,13 . d e v i c e s u b c l a s s = SOME SUB CLASS ,14 . p r o f i l e v e r s i o n = 1 ,
(University of Bologna) 7/12/2012 37 / 74

EDFOMAI - Under the Hood: Driver II
15 . d r i v e r n a m e = ”EDFOMAI” ,16 . d r i v e r v e r s i o n = RTDM DRIVER VER ( 0 , 0 , 1) ,17 . p e r i p h e r a l n a m e = ”EDFOMAI−SCHED−SVC” ,18 . p r o v i d e r n a m e = ” Luca M e l l a ” ,19 . proc name = d e v i c e . dev ice name ,20 } ;
(University of Bologna) 7/12/2012 38 / 74

EDFOMAI - Under the Hood: Driver III
Una scrittura sul device di un EDFMessage comporta l’acquisizionedel lock sulla struttura dati dei task e l’esecuzione di una funzione sudi essi:
1 s t a t i c s s i z e t e d f r t d m w r i t e n r t (2 s t r u c t r t d m d e v c o n t e x t ∗ c o n t e x t ,3 r t d m u s e r i n f o t ∗ u s e r i n f o ,4 c o n s t v o i d ∗buf , s i z e t nbyte ) {5 . . .6 s w i t c h ( message−>command ) {7 c a s e CREATE TASK :8 m t x a c q u i r e ( ) ;9 r t d t a s k c r e a t e ( task , message−>d e a d l i n e ) ;
10 m t x r e l e a s e ( ) ;11 b r e a k ;12 . . . } . . . }
(University of Bologna) 7/12/2012 39 / 74

EDFOMAI - Under the Hood: Hook I
L’Hook e creato all’avvio del device driver ed attaccato agli eventi discheduling.
Quando lo scheduler effettua un cambio di contesto o un nuovo taske inserito, l’hook e richiamato.
Al suo interno, l’hook segnala l’evento, svegliando il task EDF Service.
1 v o i d e d f s t a r t s w i t c h h o o k ( v o i d ∗ c o o k i e ) {2 RT TASK ∗ t a s k ;3 t a s k=T DESC( c o o k i e ) ;4 r t d m e v e n t s i g n a l (& e d f e v e n t ) ;5 }
(University of Bologna) 7/12/2012 40 / 74

EDFOMAI - Under the Hood: EDF Service I
Alla creazione, EDF Service si mette in attesa dell’event creato dalmodulo.
L’event e segnalato dall’hook al verificarsi di eventi di scheduling.
Al risveglio, EDF Service esegue il calcolo dinamico della priorita.
NOTA: e importante che EDF Service abbia priorita maggiore dei taskdi cui ricalcola la priorita.
1 v o i d e d f s e r v i c e ( v o i d ∗ ar g ) {2 i n t r e t ;3 f o r ( ; ; ) { r t d m e v e n t w a i t (& e d f e v e n t ) ;4 r e t= m t x a c q u i r e ( ) ;5 i f ( r e t ) c o n t i n u e ;6 r t d t a s k r e c a l c u l a t e p r i o ( ) ;7 r e t= m t x r e l e a s e ( ) ;8 r t d m e v e n t c l e a r (& e d f e v e n t ) ;}}
(University of Bologna) 7/12/2012 41 / 74

EDFOMAI - Under the Hood: Deadline Miss Managment I
Supporto Attuale
Ogni volta che viene ricalcolata la priorita, viene controllato lo statodella deadline.
Se un task non ha rispettato la sua deadline il modulo Edfomai(deadline missed) invia tempestivamente la notifica nella RT QUEUE“EDF-DMISSED-Q”
Lato utente occorre prima “bindare” la coda di messaggi(rt queue bind) ed in seguito attendere la ricezione delle notifiche dideadline miss (rt queue read).
La priorita del task con deadline-miss rimane alta.
(University of Bologna) 7/12/2012 42 / 74

EDFOMAI - Under the Hood: Deadline Miss Managment II
Under Development. . .
Creazione di un watchdog per ogni task (RT ALARM) che se nonresettato notifica immediatamente la deadline-miss.
Il watchdog viene resettato prima che il task esegua una wait period,e riattivato al risveglio.
Questo approccio puo diminuire i tempi di reazione ad unadeadline-miss, nel caso precedente potrebbero esserci latenze nonpredicibili.
API di supporto per deadline-miss monitoring.
(University of Bologna) 7/12/2012 43 / 74

EDFOMAI - Under the Hood: Logs I
1 Edfomai : [ @d t c r e a t e ] c r e a t i n g d ta sk (T1) wi th d e a d l i n e 2000002 . . .3 Edfomai : [ @d t c r e a t e ] c r e a t i n g d ta sk (T2) wi th d e a d l i n e 3500004 . . .5 Edfomai : [ @d t c r e a t e ] c r e a t i n g d ta sk (T3) wi th d e a d l i n e 2500006 Edfomai : [ @ r e c a l c p r i o ] r e c a l c u l a t i n g p r i o r i t i e s o f 3 t a s k s7 Edfomai : [ @ r e c a l c p r i o ] t a s k (T1) oldP (50) newP(50) remain (103435) maxRem(300060) minRem
=(103435)8 Edfomai : [ @ r e c a l c p r i o ] t a s k (T2) oldP (0) newP (0) remain (300060) maxRem(300060) minRem
=(103435)9 Edfomai : [ @ r e c a l c p r i o ] t a s k (T3) oldP (25) newP(16) remain (241003) maxRem(300060) minRem
=(103435)10 . . .
Listing 1: Edfomai logs (dmesg), aggiustamento priorita
(University of Bologna) 7/12/2012 44 / 74

EDFOMAI - Under the Hood: Logs II
1 . . .2 Edfomai : [ @ r e s e t d e a d l i n e ] r e s e t t i n g d e a d l i n e o f t a s k T13 Edfomai : [ @ r e c a l c p r i o ] r e c a l c u l a t i n g p r i o r i t i e s o f 3 t a s k s4 Edfomai : [ @ r e c a l c p r i o ] t a s k (T1) oldP (50) newP (0) remain (1998352) maxRem(1998352) minRem
=(390050)5 Edfomai : [ @ r e c a l c p r i o ] t a s k (T2) oldP (0) newP(20) remain (1373517) maxRem(1998352) minRem
=(390050)6 Edfomai : [ @ r e c a l c p r i o ] t a s k (T3) oldP (25) newP(50) remain (390050) maxRem(1998352) minRem
=(390050)7 Edfomai : [ @wr i t e ] s e r v i n g r e q u e s t f o r t a s k (T3)8 Edfomai : [ @wr i t e ] t a s k r e s e t d e a d l i n e (T3)9 Edfomai : [ @ r e s e t d e a d l i n e ] r e s e t t i n g d e a d l i n e o f t a s k T3
10 Edfomai : [ @ r e c a l c p r i o ] r e c a l c u l a t i n g p r i o r i t i e s o f 3 t a s k s11 Edfomai : [ @ r e c a l c p r i o ] t a s k (T1) oldP (0 ) newP(32) remain (1470917) maxRem(2498349) minRem
=(846082)12 Edfomai : [ @ r e c a l c p r i o ] t a s k (T2) oldP (20) newP(50) remain (846082) maxRem(2498349) minRem
=(846082)13 Edfomai : [ @ r e c a l c p r i o ] t a s k (T3) oldP (50) newP (0) remain (2498349) maxRem(2498349) minRem
=(846082)14 . . .
Listing 2: Edfomai logs (dmesg), deadline reset
(University of Bologna) 7/12/2012 45 / 74

Esempi di implementazione su EDFOMAI I
Semplice esempio di implementazione di un task periodico su edfomai.
1 RT TASK demo task ;2 i n t main ( i n t argn , c h a r ∗∗ a r g v ) {3 c h a r s t r [ 1 0 ] ;4 u n s i g n e d l o n g p e r i o d s [ 3 ] [ 3 ] ;5 i n t i ; r t p r i n t a u t o i n i t ( 1 ) ;6 m l o c k a l l (MCL CURRENT |MCL FUTURE) ;7 e d f i n i t ( ) ;8 // [ p e r i o d , t imeUsed , d e a d l i n e ]9 p e r i o d s [ 0 ] [ 0 ] = 8 ; p e r i o d s [ 0 ] [ 1 ] = 2 ; p e r i o d s [ 0 ] [ 2 ] = 8 ;
10 p e r i o d s [ 1 ] [ 0 ] = 1 6 ; p e r i o d s [ 1 ] [ 1 ] = 3 ; p e r i o d s [ 1 ] [ 2 ] = 1 6 ;11 p e r i o d s [ 2 ] [ 0 ] = 1 2 ; p e r i o d s [ 2 ] [ 1 ] = 5 ; p e r i o d s [ 2 ] [ 2 ] = 1 2 ;12 r t p r i n t f ( ” [ Main ] : s t a r t t a s k \n” ) ;13 f o r ( i =0; i <3; i ++){14 s p r i n t f ( s t r , ”Task−%d” , i ) ;15 p e r i o d s [ i ]= i +1;16 r t t a s k c r e a t e (&demo task , s t r , 1 0 , 5 0 , 0 ) ;
(University of Bologna) 7/12/2012 46 / 74

Esempi di implementazione su EDFOMAI II
17 e d f t a s k s t a r t (&demo task , p e r i o d s [ 2 ] ,18 &demo , p e r i o d s [ i ] ) ;19 }20 r t p r i n t f ( ” end program by CTRL−C\n” ) ;21 pause ( ) ;22 }
(University of Bologna) 7/12/2012 47 / 74

Esempi di implementazione su EDFOMAI III
1 v o i d demo ( v o i d ∗ ar g ) {2 RT TASK INFO c u r t a s k i n f o ;3 u n s i g n e d l o n g ∗ params ; i n t i ;4 i n t r e t v a l=r t t a s k i n q u i r e ( r t t a s k s e l f ( ) ,& c u r t a s k i n f o ) ;5 i f ( r e t v a l <0){6 r t p r i n t f ( ” i n q u i r i n g e r r o r %d:% s \n” ,7 −r e t v a l , s t r e r r o r (− r e t v a l ) ) ;}8 params = ( i n t ∗) a rg ; RTIME p = 1 e8 ; // 0 . 1 s9 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, params [ 0 ] ∗ p ) ;
10 w h i l e ( 1 ) {11 r t p r i n t f ( ”[% s ] %d s p e r i o d i c \n” ,12 c u r t a s k i n f o . name , r e t v a l ) ;13 r t t i m e r s p i n ( param [ 1 ] ∗ p ) ;14 r t t a s k w a i t p e r i o d (NULL) ;15 }}
(University of Bologna) 7/12/2012 48 / 74

Esempi di implementazione su EDFOMAI IV
Esempio di implementazione di un Mars Rover, composto da 4 taskperiodici sensor, processing, actuator e communicator con diversa priorita,periodo e deadline.La funzione main() inizializza e fa partire il sistema.
1 RTIME t ;2 RT TASK task , spawner ;3 RT SEM sens ingDone , p r o c e s s i n g D o n e , exLock ;4 s h o r t s t o p p e d = 0 ;5 i n t s h a r e d R e s o r u c e , s h a r e d = 0 ;6 u n s i g n e d l o n g param [ 4 ] [ 3 ] ;7
8 i n t main ( i n t argn , c h a r ∗∗ a r g v ) {9 i n i t e d f o m a i ( ) ;
10 r t p r i n t f ( ” i n i t i a l i z e d .\ n” ) ;11 r t p r i n t f ( ” s t a r t i n g up . . . \ n” ) ;12 s t a r t u p ( ) ;13 r t p r i n t f ( ” w a i t i n g C t r l+C\n” ) ;
(University of Bologna) 7/12/2012 49 / 74

Esempi di implementazione su EDFOMAI V
14 w a i t f o r c t r l c ( ) ;15 r t p r i n t f ( ” c l o s i n g . . . \ n” ) ;16 c l e a n u p ( ) ;17 r e t u r n 0 ;18 }
(University of Bologna) 7/12/2012 50 / 74

Esempi di implementazione su EDFOMAI VI
Questa funzione inizializza il sistema Xenomai ed EDFOMAI.
1 v o i d i n i t e d f o m a i ( ) {2 r t p r i n t a u t o i n i t ( 1 ) ;3 // Avo ids memory swapping f o r t h i s program4 m l o c k a l l (MCL CURRENT |MCL FUTURE) ;5 // I n i t i a l i z e e d f6 i f ( e d f i n i t ( ) ) e x i t ( 1 ) ;7 }
(University of Bologna) 7/12/2012 51 / 74

Esempi di implementazione su EDFOMAI VII
Questa funzione inizializza e fa partire i task.
1 v o i d s t a r t u p ( ) {2 // [ p e r i o d , busy , d e a d l i n e3 params [ 0 ] [ 0 ] = 1 1 ; params [ 0 ] [ 1 ] = 2 ; params [ 0 ] [ 2 ] = 3 ;4 params [ 1 ] [ 0 ] = 1 1 ; params [ 1 ] [ 1 ] = 3 ; params [ 1 ] [ 2 ] = 7 ;5 params [ 2 ] [ 0 ] = 1 1 ; params [ 2 ] [ 1 ] = 2 ; params [ 2 ] [ 2 ] = 1 0 ;6 params [ 3 ] [ 0 ] = 6 6 ; params [ 3 ] [ 1 ] = 6 ; params [ 3 ] [ 2 ] = 6 5 ;7 t = t i m e U n i t ;8 r t s e m c r e a t e (& sens ingDone ,9 ” sensorSem ” , 0 , S PRIO ) ;
10 r t s e m c r e a t e (& p r o c e s s i n g D o n e ,11 ” pr oces so rS em ” , 0 , S PRIO ) ;12 r t s e m c r e a t e (&exLock , ” s h a r e d R e s o u r c e ” , 1 , S PRIO ) ;13 r t t a s k c r e a t e (& task , ” s e n s o r ” , 0 , 90 , 0) ;14 e d f t a s k s t a r t (& task , params [ 0 ] [ 2 ] ∗ t , &sense ,15 params [ 0 ] ) ;16 r t t a s k c r e a t e (& task , ” p r o c e s s o r ” , 0 , 89 , 0) ;
(University of Bologna) 7/12/2012 52 / 74

Esempi di implementazione su EDFOMAI VIII
17 e d f t a s k s t a r t (& task , params [ 1 ] [ 2 ] ∗ t , &p r o c e s s ,18 params [ 1 ] ) ;19 r t t a s k c r e a t e (& task , ” a c t u a t o r ” , 0 , 88 , 0) ;20 e d f t a s k s t a r t (& task , params [ 2 ] [ 2 ] ∗ t , &act ,21 params [ 2 ] ) ;22 r t t a s k c r e a t e (& task , ” c o m u n i c a t o r ” , 0 , 87 , 0) ;23 e d f t a s k s t a r t (& task , params [ 3 ] [ 2 ] ∗ t , &comunicate ,
params [ 3 ] ) ;24 }
(University of Bologna) 7/12/2012 53 / 74

Esempi di implementazione su EDFOMAI IX
Funzione del task actuator.
1 v o i d a c t ( v o i d ∗ ar g ) {2 i n t i , r e s ;3 u n s i g n e d l o n g ∗ param = ( u n s i g n e d l o n g ∗) a r g s ;4 RT TASK INFO c u r t a s k i n f o ;5 r t t a s k i n q u i r e ( r t t a s k s e l f ( ) , &c u r t a s k i n f o ) ;6 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, param [ 0 ] ∗ t ) ;7 r t p r i n t f ( ”[% s ] s t a r t e d \n” , c u r t a s k i n f o . name ) ;8 w h i l e ( ! s t o p p e d ) {9 r t s e m p (& p r o c e s s i n g D o n e ) ;
10 r t s e m p (& exLock ) ;11 r e s=s h a r e d R e s o u r c e ;12 r t s e m v (& exLock ) ;13 f o r ( i =0 ; i < param [ 1 ] ; i ++){14 r t t i m e r s p i n ( t ) ;15 r t p r i n t ( ”[% s ] e x e c u t i n g \n” , c u r t a s k i n f o . name )
;
(University of Bologna) 7/12/2012 54 / 74

Esempi di implementazione su EDFOMAI X
16 }17 s h a r e d=r e s ;18 r t t a s k w a i t p e r i o d (NULL) ;19 }20 }
(University of Bologna) 7/12/2012 55 / 74

Esempi di implementazione su EDFOMAI XI
Funzione del task processing.
1 v o i d p r o c e s s ( v o i d ∗ ar g ) {2 i n t i , r e s ;3 u n s i g n e d l o n g ∗ param = ( u n s i g n e d l o n g ∗) a r g s ;4 RT TASK INFO c u r t a s k i n f o ;5 r t t a s k i n q u i r e ( r t t a s k s e l f ( ) ,& c u r t a s k i n f o ) ;6 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, param [ 0 ] ∗ t ) ;7 r t p r i n t f ( ”[% s ] s t a r t e d \n” , c u r t a s k i n f o . name ) ;8 w h i l e ( ! s t o p p e d ) {9 r t s e m p (& se ns in gD one ) ;
10 f o r ( i =0 ; i < param [ 1 ] ; i ++){11 r t t i m e r s p i n ( t ) ;12 r t p r i n t ( ”[% s ] e x e c u t i n g \n” , c u r t a s k i n f o . name )
;13 }14 r t s e m p (& exLock ) ;15 s h a r e d R e s o u r c e +=1;
(University of Bologna) 7/12/2012 56 / 74

Esempi di implementazione su EDFOMAI XII
16 r t s e m v (& exLock ) ;17 r t s e m v (& p r o c e s s i n g D o n e ) ;18 r t t a s k w a i t p e r i o d (NULL) ;19 }20 }
(University of Bologna) 7/12/2012 57 / 74

Esempi di implementazione su EDFOMAI XIII
Funzione del task sensing.
1 v o i d s e n s e ( v o i d ∗ ar g ) {2 i n t i , r e s ;3 u n s i g n e d l o n g ∗ param = ( u n s i g n e d l o n g ∗) a r g s ;4 RT TASK INFO c u r t a s k i n f o ;5 r t t a s k i n q u i r e ( r t t a s k s e l f ( ) ,& c u r t a s k i n f o ) ;6 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, param [ 0 ] ∗ t ) ;7 r t p r i n t f ( ”[% s ] s t a r t e d \n” , c u r t a s k i n f o . name ) ;8 w h i l e ( ! s t o p p e d ) {9 f o r ( i =0 ; i < param [ 1 ] ; i ++){
10 r t t i m e r s p i n ( t ) ;11 r t p r i n t ( ”[% s ] e x e c u t i n g \n” , c u r t a s k i n f o . name )
;12 }13 r t s e m p (& exLock ) ;14 s h a r e d R e s o u r c e=s h a r e d ;15 r t s e m v (& exLock ) ;
(University of Bologna) 7/12/2012 58 / 74

Esempi di implementazione su EDFOMAI XIV
16 r t s e m v (& s ens in gD on e ) ;17 r t t a s k w a i t p e r i o d (NULL) ;18 }19 }
(University of Bologna) 7/12/2012 59 / 74

Esempi di implementazione su EDFOMAI XV
Funzione del task communicator.
1 v o i d comunicate ( v o i d ∗ ar g ) {2 i n t r e s ;3 u n s i g n e d l o n g ∗ param = ( u n s i g n e d l o n g ∗) a r g s ;4 r t t a s k s e t p e r i o d i c (NULL ,TM NOW, param [ 0 ] ∗ t ) ;5 w h i l e ( ! s t o p p e d ) {6 r t s e m p (& exLock ) ;7 r e s = s h a r e d R e s o u r c e ;8 r t s e m v (& exLock ) ;9 r t p r i n t f ( ” [ c o m u n i c a t o r ] s e n d i n g : %d” , r e s ) ;
10 r t t i m e r s p i n ( param [ 1 ] ∗ t ) ;11 r t p r i n t f ( ” [ c o m u n i c a t o r ] s e n t : %d” , r e s ) ;12 r t t a s k w a i t p e r i o d (NULL) ;13 }14 }
(University of Bologna) 7/12/2012 60 / 74

Esempi di implementazione su EDFOMAI XVI
DMESG log
1 [ 23636 . 091589 ] Edfomai : [ @d t r c a l c p ] t a s k ( p r o c e s s o r ) oldP (50) newP(42) remain (69995311)maxRem(390904685) minRem=(0)
2 [ 23636 . 091609 ] Edfomai : [ @d t r c a l c p ] t a s k ( a c t u a t o r ) oldP (49) newP(43) remain (61369634)maxRem(390904685) minRem=(0)
3 [ 23636 . 091618 ] Edfomai : [ @d t r c a l c p ] t a s k ( comun icato r ) oldP (50) newP(44) remain(390904685) maxRem(390904685) minRem=(0)
4 [ 23636 . 141612 ] Edfomai : [ @wr i t e ] s e r v i n g r e q u e s t f o r t a s k ( s e n s o r )5 [ 23636 . 141621 ] Edfomai : [ @wr i t e ] t a s k r e s e t d e a d l i n e ( s e n s o r )6 [ 23636 . 141626 ] Edfomai : [ @ d t r e s e t d l i n e ] r e s e t t i n g d e a d l i n e o f t a s k ( s e n s o r )7 [ 23636 . 141633 ] Edfomai : [ @d t r c a l c p ] r e c a l c u l a t i n g p r i o r i t i e s o f 4 t a s k s8 [ 23636 . 141641 ] Edfomai : [ @d t r c a l c p ] #t a s k s (4 ) #missed (0 )9 [ 23636 . 141645 ] Edfomai : [ @d t r c a l c p ] t a s k ( s e n s o r ) oldP (50) newP(48) remain (29993227)
maxRem(340714671) minRem=(11179620)10 [ 23636 . 141692 ] Edfomai : [ @d t r c a l c p ] t a s k ( p r o c e s s o r ) oldP (42) newP(49) remain (19805297)
maxRem(340714671) minRem=(11179620)11 [ 23636 . 141697 ] Edfomai : [ @d t r c a l c p ] t a s k ( a c t u a t o r ) oldP (43) newP(50) remain (11179620)
maxRem(340714671) minRem=(11179620)12 [ 23636 . 141702 ] Edfomai : [ @d t r c a l c p ] t a s k ( comun icato r ) oldP (44) newP(40) remain
(340714671) maxRem(340714671) minRem=(11179620)13 [ 23636 . 161884 ] Edfomai : [ @wr i t e ] s e r v i n g r e q u e s t f o r t a s k ( s e n s o r )14 [ 23636 . 161887 ] Edfomai : [ @wr i t e ] s t opp i ng watchdog o f t a s k ( s e n s o r )15 [ 23636 . 161889 ] Edfomai : [ @dt stopwdg ] s t opp i ng watchdog o f t a s k ( s e n s o r )16 [ 23636 . 161901 ] Edfomai : [ @wr i t e ] s e r v i n g r e q u e s t f o r t a s k ( a c t u a t o r )17 [ 23636 . 161904 ] Edfomai : [ @wr i t e ] s t opp i ng watchdog o f t a s k ( a c t u a t o r )18 [ 23636 . 161906 ] Edfomai : [ @dt stopwdg ] s t opp i ng watchdog o f t a s k ( a c t u a t o r )19 [ 23636 . 161925 ] Edfomai : [ @wr i t e ] s e r v i n g r e q u e s t f o r t a s k ( a c t u a t o r )20 [ 23636 . 161927 ] Edfomai : [ @wr i t e ] t a s k r e s e t d e a d l i n e ( a c t u a t o r )21 [ 23636 . 161929 ] Edfomai : [ @ d t r e s e t d l i n e ] r e s e t t i n g d e a d l i n e o f t a s k ( a c t u a t o r )
(University of Bologna) 7/12/2012 61 / 74

Esempi di implementazione su EDFOMAI XVII
22 [ 23636 . 161931 ] Edfomai : [ @d t r c a l c p ] r e c a l c u l a t i n g p r i o r i t i e s o f 4 t a s k s23 [ 23636 . 161933 ] Edfomai : [ @d t r c a l c p ] #t a s k s (4 ) #missed (1 )24 [ 23636 . 161935 ] Edfomai : [ @d t r c a l c p ] t a s k ( s e n s o r ) oldP (50) newP(49) remain (9814105)
maxRem(320535549) minRem=(0)25 [ 23636 . 161959 ] Edfomai : [ @d t r c a l c p ] t a s k ( p r o c e s s o r ) has mis sed h i s d e a d l i n e
(University of Bologna) 7/12/2012 62 / 74

Proposta di mapping SFC in Xenomai I
Proposal
Parte finale del progetto, non implementato.
Il framework deve offire metodi e strutture dati per implementare undiagramma SFC su Xenomai.
Idee principali:
Il framework offre un ciclo di scansione: lettura degli input,aggiornamento dello stato, scrittura degli output.
Ogni azione e un task a cui e associato un Qualificatore.
La struttura che unisce due stati e detta Struttura di Collegamento.
(University of Bologna) 7/12/2012 63 / 74

Proposta di mapping SFC in Xenomai II
Ciclo di campionamento
Dopo aver inizializzato i data structure il framework inizia il main loop:
1 Lettura dei sensori e memorizzazione in memoria condivisa
2 Attivazione degli step sulla base del modello SFC
3 Attesa del tempo di scansione
4 Attivazione degli attuatori
(University of Bologna) 7/12/2012 64 / 74

Proposta di mapping SFC in Xenomai III
(University of Bologna) 7/12/2012 65 / 74

Proposta di mapping SFC in Xenomai IV
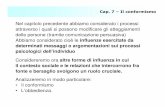
Modello di uno step
Uno step e composto da una struttura di collegamento, che lo collega allostep sucessivo, e un set di azioni, che sono composte a loro volta da unqualificatore e dalla procedura che esegue.
(University of Bologna) 7/12/2012 66 / 74

Proposta di mapping SFC in Xenomai V
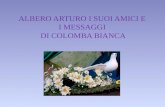
Strutture di collegamento
Sono strutture che collegano gli step predecessori con i successori.
Condizione: abilita lo step successore solo se il predecessore e attivo e lacondizione e soddisfatta
SceltaAlternativa: abilita uno step successore solo se il predecessore eattivo e la condizione relativa al successore e soddisfatta
Parallelismo: abilita gli step successori se il predecessore e attivo e lacondizione e soddisfatta
Convergenza: abilita lo step successore solo se uno dei predecessori eattivo e la relativa condizione e soddisfatta
Sincronizzazione: abilita lo step successore solo se tutti i predecessori sonoattivi e la condizione e soddisfatta
(University of Bologna) 7/12/2012 67 / 74

Proposta di mapping SFC in Xenomai VI
(University of Bologna) 7/12/2012 68 / 74

Proposta di mapping SFC in Xenomai VII
(University of Bologna) 7/12/2012 69 / 74

Proposta di mapping SFC in Xenomai VIII
(University of Bologna) 7/12/2012 70 / 74

Proposta di mapping SFC in Xenomai IX
Azioni
Le azioni sono mappate in task xenomai e sono abilitate all’attivazionedello step che le contiene.In base al qualificatore il framework prevede una differente mappaturadella procedura eseguita dall’azione.
(University of Bologna) 7/12/2012 71 / 74

Proposta di mapping SFC in Xenomai X
Qualificatori di azioni
Non Stored: task periodico che termina con la disattivazione dello step.
Pulsed: task one-shot eseguito all’abilitarsi di uno step.
Set: task periodico.
Reset: termina il task periodico a cui e riferito.
Time Limited: al task e affiancato un altro che aspetta per il tempodesignato prima di terminarlo.
Time Delayed: task che inizia con una wait real-time, interrotto se lo statosi disattiva.
Stored Delayed: task Set che inizia con una wait real-time.
Delayed Stored: task Set che inizia con una wait real-time, interrotto se lostato si disattiva.
Stored Time-Limited: task Set a cui e affiancato un altro che aspetta peril tempo designato prima di terminarlo.
(University of Bologna) 7/12/2012 72 / 74

References I
Adaptive Domain Enviroment for Operaring SystemsKarim Yaghmour
Xenomai APIsXenomai.org, http://www.xenomai.org/documentation/xenomai-2.5/html/api/index.html
Native API TourXenomai.org, http://www.xenomai.org/documentation/branches/v2.4.x/pdf/Native-API-Tour-rev-C.pdf
Life with AdeosXenomai.org, http://www.xenomai.org/documentation/xenomai-2.3/pdf/Life-with-Adeos-rev-B.pdf
(University of Bologna) 7/12/2012 73 / 74

References II
Xenomai - Implementing a RTOS emulation framework onGNU/LinuxPhilippe Gerum, 2004
The Real-Time Driver Model and First ApplicationsJ. Kiszka, University of Hannover
Hard Real Time Linux using Xenomai on Intel R© Multi-CoreProcessorsAmarpreet Singh Ugal, Intel Corporation, 2009
Implementacao da polıtica EDF no XenomaiJose Augusto Santos , George Lima, Universidade Federal da Bahia(UFBA), 2009
Xenamai Lab CourseRobot LAB, http://www.cs.ru.nl/lab/xenomai
(University of Bologna) 7/12/2012 74 / 74

Domande
?
(University of Bologna) 7/12/2012 75 / 74