Easy Drill su pontone - tecnico
6
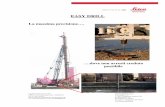
Leica Geosystems S.p.A. Via delle Bartoline 41 50041Calenzano (FI) Sistema di guida GPS per il controllo e l’infissione dei pali in acciaio e C.A.C. da pontone autosollevante. Il sistema di guida Leica, permette all’operatore il controllo della posa del palo in acciaio e C.A.C. , nell’esatta posizione stabilita dal progetto. L’operazione di posizionamento, avviene senza ricorrere a nessun tipo di riferimento esterno tradizionale, come picchetto o prisma di riferimento. L’operatore della macchina ha come riferimento di controllo un monitor, il quale, visualizza in modo semplice, la posizione planimetrica della macchina rispetto alle coordinate di progetto. L’operazione di posa, avviene spostando il battipalo (rappresentato graficamente da un mirino circolare) sul riferimento planimetrico del palo (rappresentato graficamente da un quadrato rosso). L’infissione dei pali avviene seguendo un Iter di lavoro, descritto qui di seguito: 1) Selezionare sull’ immagine planimetrica o digitarlo numericamente il palo che si desidera posizionare. 2) Portare l’antenna della battipalo in prossimità del punto prescelto osservando la planimetria di destra. 3) Eseguire la collimazione fine facendo collimare il quadratino rosso all’interno del cerchio di tolleranza. 4) Premere il pulsante “Inizio battitura” e premerlo di nuovo al termine del lavoro.
-
Upload
emilio-palchetti -
Category
Documents
-
view
215 -
download
2
description
2) Portare l’antenna della battipalo in prossimità del punto prescelto osservando la avviene senza ricorrere a nessun tipo di riferimento esterno tradizionale, come picchetto o 3) Eseguire la collimazione fine facendo collimare il quadratino rosso all’interno del desidera posizionare. quadrato rosso). L’operatore della macchina ha come riferimento di controllo un monitor, il quale, visualizza prisma di riferimento. planimetria di destra. cerchio di tolleranza. progetto.
Transcript of Easy Drill su pontone - tecnico
Leica Geosystems S.p.A. Via delle Bartoline 4150041Calenzano (FI)
Sistema di guida GPS per il controllo e l’infissione dei pali in acciaio e C.A.C. da pontone autosollevante.
Il sistema di guida Leica, permette all’operatore il controllo della posa del palo in acciaio e
C.A.C. , nell’esatta posizione stabilita dal progetto. L’operazione di posizionamento,
avviene senza ricorrere a nessun tipo di riferimento esterno tradizionale, come picchetto o
prisma di riferimento.
L’operatore della macchina ha come riferimento di controllo un monitor, il quale, visualizza
in modo semplice, la posizione planimetrica della macchina rispetto alle coordinate di
progetto.
L’operazione di posa, avviene spostando il battipalo (rappresentato graficamente da un
mirino circolare) sul riferimento planimetrico del palo (rappresentato graficamente da un
quadrato rosso).
L’infissione dei pali avviene seguendo un Iter di lavoro, descritto qui di seguito:
1) Selezionare sull’ immagine planimetrica o digitarlo numericamente il palo che si
desidera posizionare.
2) Portare l’antenna della battipalo in prossimità del punto prescelto osservando la
planimetria di destra.
3) Eseguire la collimazione fine facendo collimare il quadratino rosso all’interno del
cerchio di tolleranza.
4) Premere il pulsante “Inizio battitura” e premerlo di nuovo al termine del lavoro.
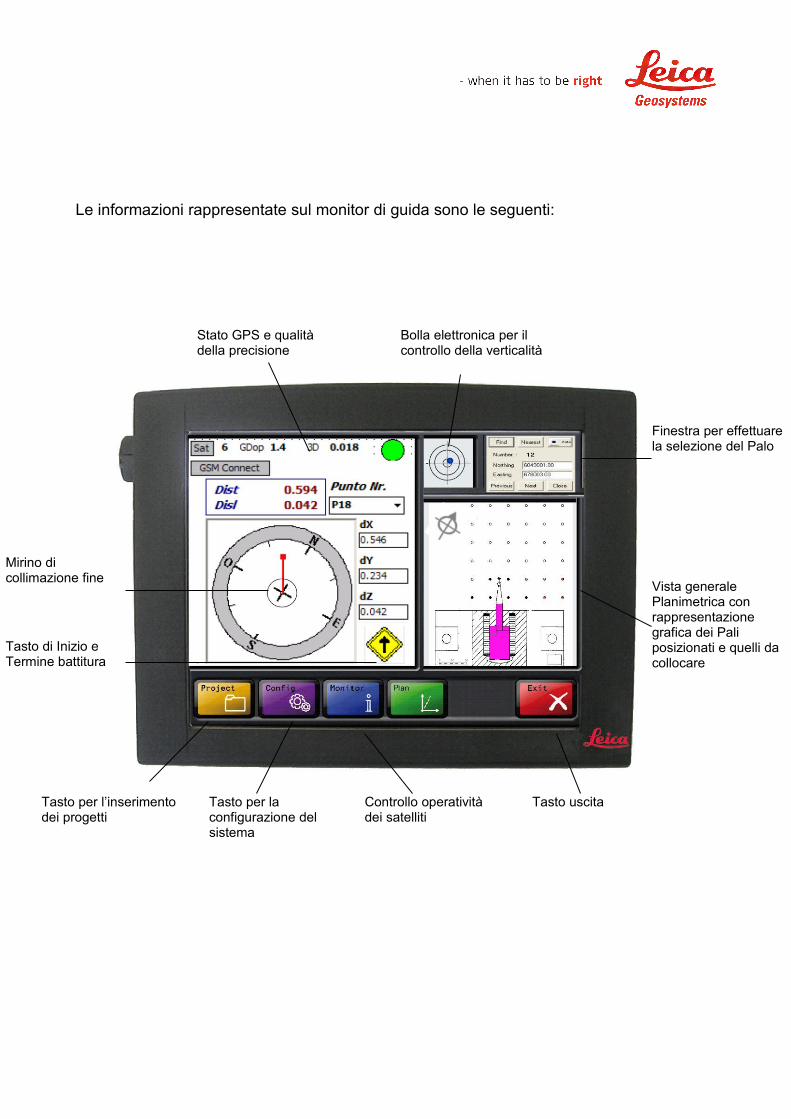
Le informazioni rappresentate sul monitor di guida sono le seguenti:
Mirino di collimazione fine
Stato GPS e qualità della precisione
Bolla elettronica per il controllo della verticalità
Finestra per effettuare la selezione del Palo
Vista generale Planimetrica con rappresentazione grafica dei Pali posizionati e quelli da collocare
Tasto di Inizio e Termine battitura
Tasto per l’inserimento dei progetti
Tasto per la configurazione del sistema
Controllo operatività dei satelliti
Tasto uscita
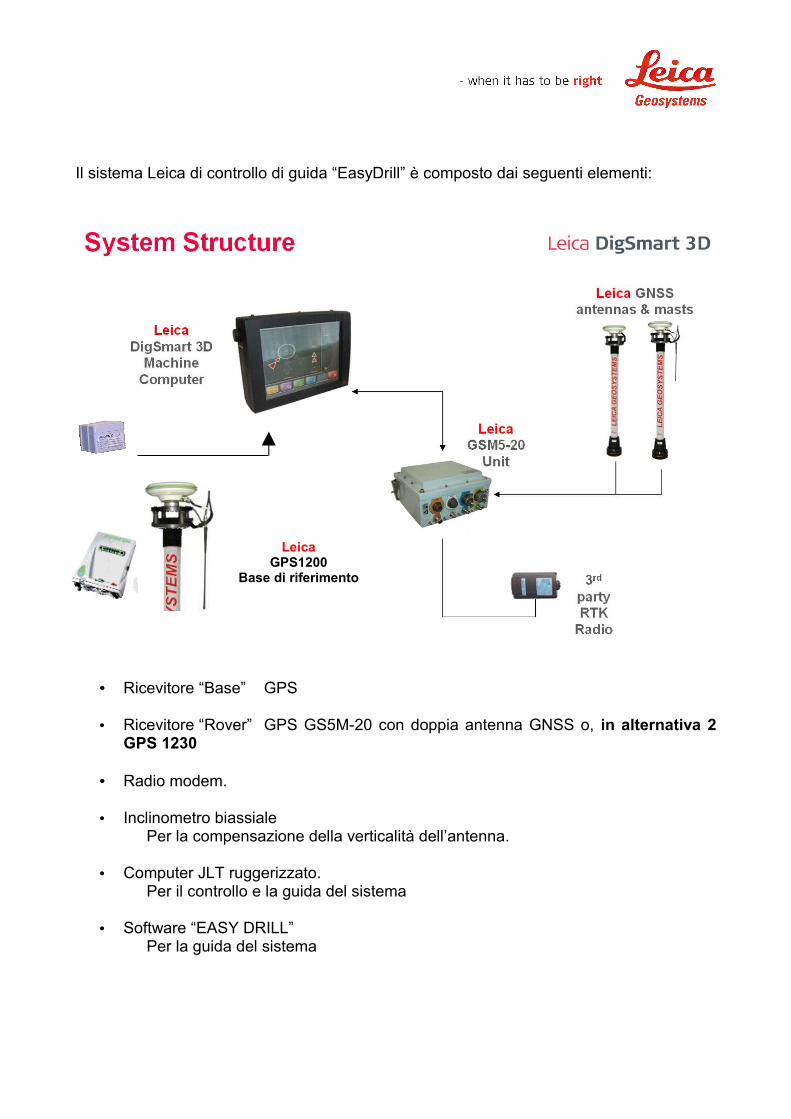
Il sistema Leica di controllo di guida “EasyDrill” è composto dai seguenti elementi:
• Ricevitore “Base” GPS
• Ricevitore “Rover” GPS GS5M-20 con doppia antenna GNSS o, in alternativa 2 GPS 1230
• Radio modem.
• Inclinometro biassiale Per la compensazione della verticalità dell’antenna.
• Computer JLT ruggerizzato.Per il controllo e la guida del sistema
• Software “EASY DRILL”Per la guida del sistema
LeicaGPS1200
Base di riferimento
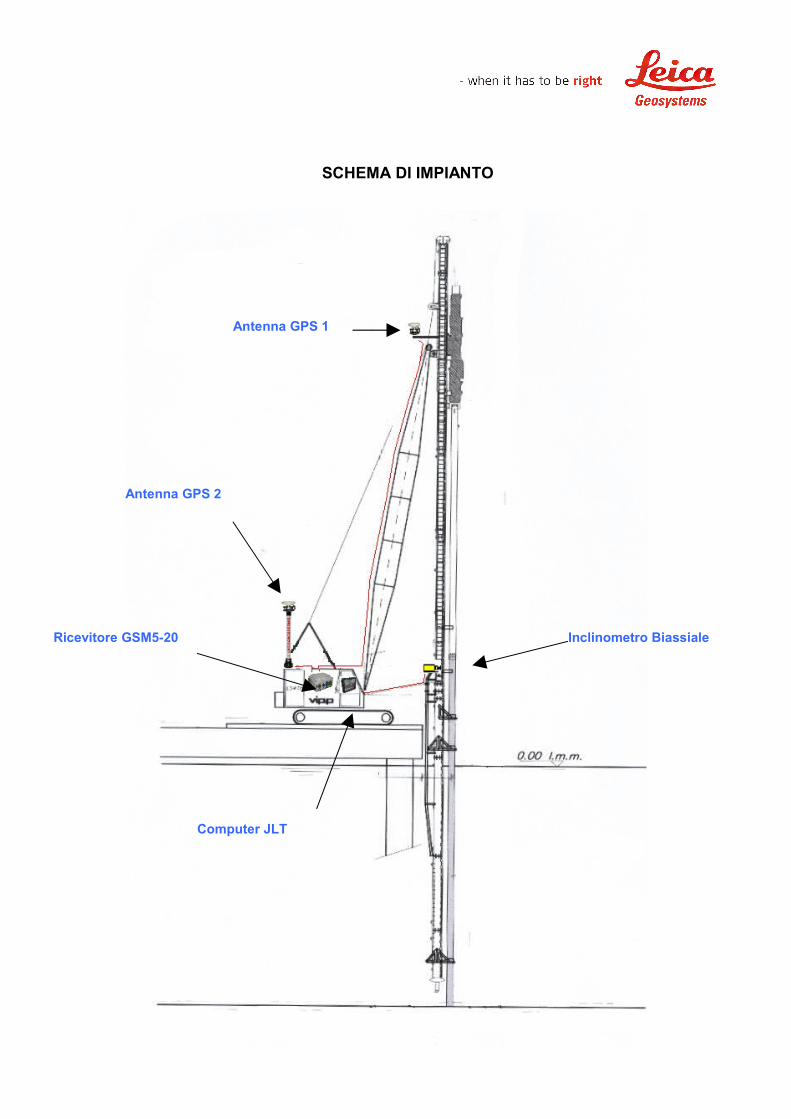
SCHEMA DI IMPIANTO
Antenna GPS 1
Antenna GPS 2
Ricevitore GSM5-20 Inclinometro Biassiale
Computer JLT
PROCEDURA DI LAVORO.
Creazione datiPer fornire all’operatore i dati guida della macchina , occorre, svolgere una fase preparatoria di trattamento dei dati di progetto.Le coordinate planimetriche della posizione dei pali possono essere esportate da un file DWG nel sistema di guida Leica in formato DXF o TXT.Nel file sono descritte le coordinate plano-altimetriche del centro dell’asse palo in un sistema di coordinate prestabilito dall’utente, in genere si utilizza un sistema del tipo locale.
Esempio:
n. X Y Z1 1230,43 343,00 102 1330,50 342,00 053 1432,30 349,00 02
Trasferimento datiIl Files di guida vengono caricati nel computer di controllo tramite una scheda di memoria del tipo Compact Flash Card.
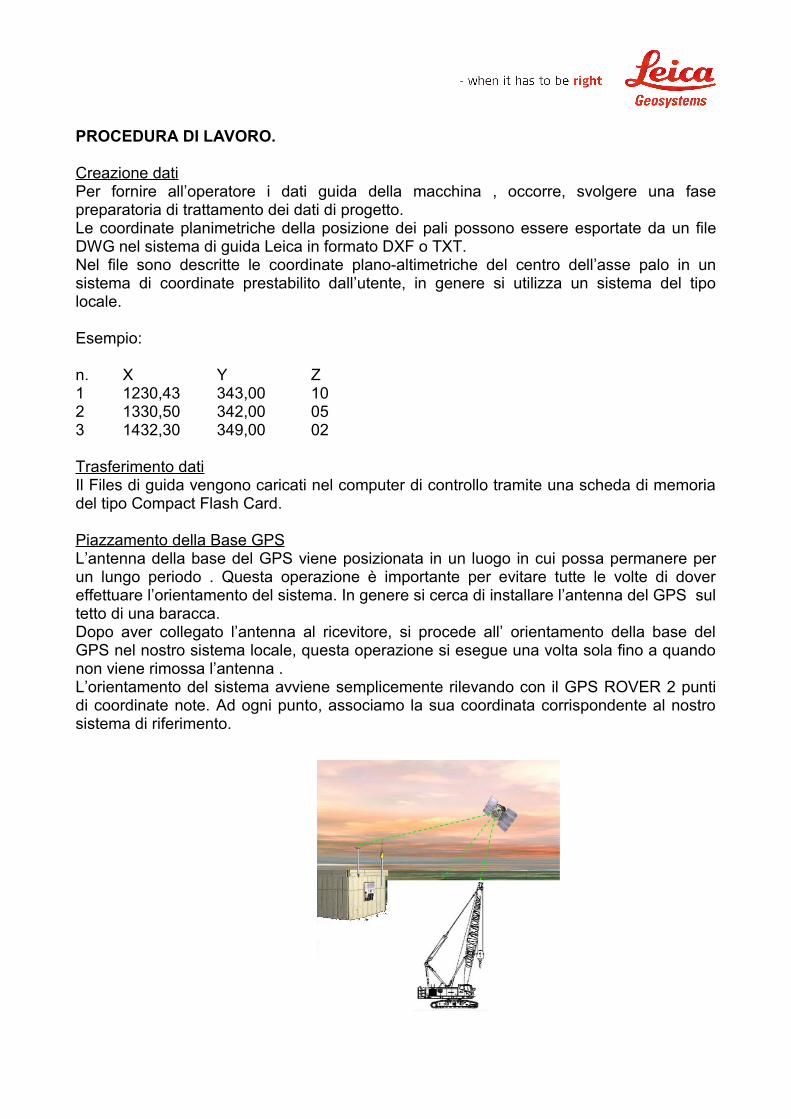
Piazzamento della Base GPSL’antenna della base del GPS viene posizionata in un luogo in cui possa permanere per un lungo periodo . Questa operazione è importante per evitare tutte le volte di dover effettuare l’orientamento del sistema. In genere si cerca di installare l’antenna del GPS sul tetto di una baracca.Dopo aver collegato l’antenna al ricevitore, si procede all’ orientamento della base del GPS nel nostro sistema locale, questa operazione si esegue una volta sola fino a quando non viene rimossa l’antenna . L’orientamento del sistema avviene semplicemente rilevando con il GPS ROVER 2 punti di coordinate note. Ad ogni punto, associamo la sua coordinata corrispondente al nostro sistema di riferimento.
Guida della Macchina Operatrice.
Il GPS Rover posizionato sopra la macchina operatrice, riceverà via radio dalla base, le informazioni della correzione differenziale. Quest’ultima indispensabile per poter utilizzare il sistema GPS in tempo reale ad un precisione centimetrica.
L’operatore osserverà nel display in cabina, le informazioni utili per eseguire il controllo della macchina per la posa del palo. Occorrerà semplicemente far collimare il punto rosso (Posizione della macchina) con il centro del mirino (Posizione di progetto del palo).
Completata la fase di allineamento, l’operatore confermerà l’inizio e la fine della battitura del palo tramite un apposito pulsante rappresentato sullo schermo di guida.
Durante l’operazione di guida il sistema ”Easy Drill” registra all’interno di un LOG-FILE le seguenti informazioni:
• Nome dell’operatore.
• Data.
• Ora di inizio e fine lavoro.
• Posizione planimetrica delle coordinate di ogni palo con delta rispetto a quelle progetto.
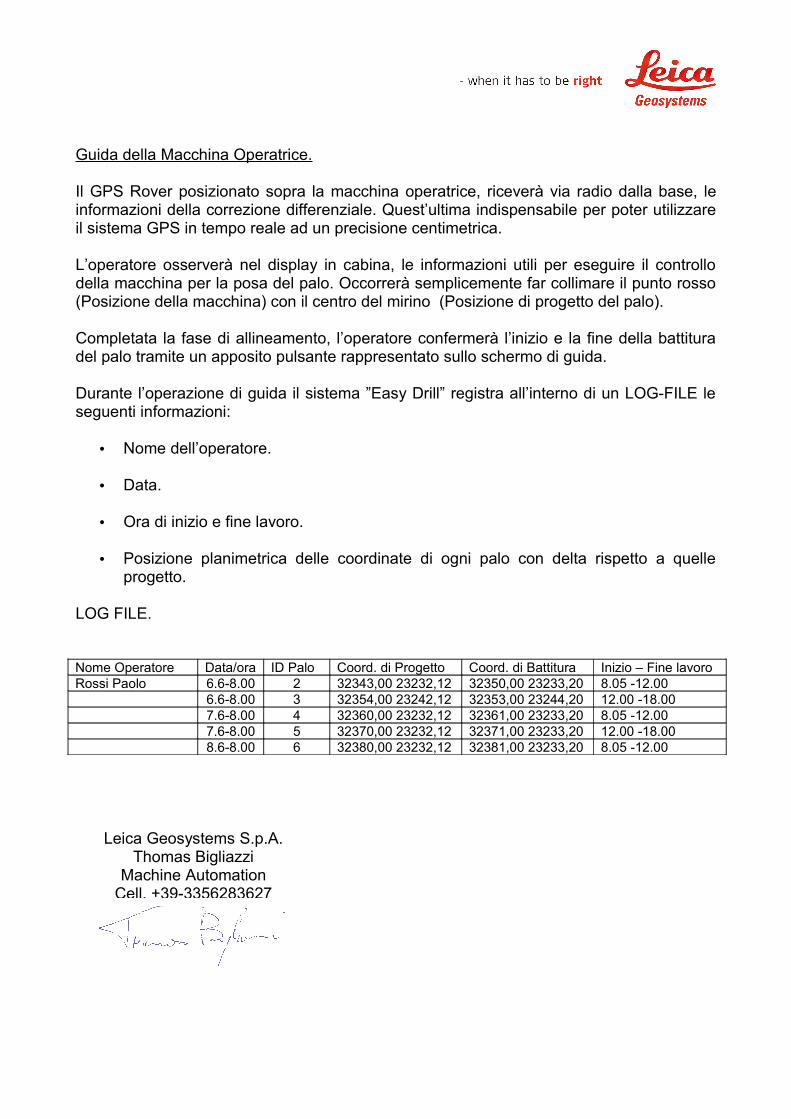
LOG FILE.
Nome Operatore Data/ora ID Palo Coord. di Progetto Coord. di Battitura Inizio – Fine lavoroRossi Paolo 6.6-8.00 2 32343,00 23232,12 32350,00 23233,20 8.05 -12.00
6.6-8.00 3 32354,00 23242,12 32353,00 23244,20 12.00 -18.007.6-8.00 4 32360,00 23232,12 32361,00 23233,20 8.05 -12.007.6-8.00 5 32370,00 23232,12 32371,00 23233,20 12.00 -18.008.6-8.00 6 32380,00 23232,12 32381,00 23233,20 8.05 -12.00
Leica Geosystems S.p.A.Thomas Bigliazzi
Machine AutomationCell. +39-3356283627