Droni e multirotori, la nuova frontiera delle applicazioni aeree
98
www.campuslacamilla.it www.virtualrobotix.com presentano : Droni e multirotori, la nuova frontiera delle applicazioni aeree #Droni @CampusLaCamilla [email protected] [email protected]
-
Upload
enrico-bazan -
Category
Self Improvement
-
view
2.255 -
download
3
description
Droni e Multirotori: - Cosa sono e come sono fatti - Principi di funzionamento - Configurazioni e componenti Usi ed applicazioni: - Normative italiane ed estere - Applicazioni presenti e future - Missioni autonome
Transcript of Droni e multirotori, la nuova frontiera delle applicazioni aeree

www.campuslacamilla.itwww.virtualrobotix.com
presentano :
Droni e multirotori, la nuova frontiera delle applicazioni aeree
#Droni @CampusLaCamilla
[email protected]@gmail.com

AgendaDroni e multirotori● Cosa sono e come sono fatti● Principi di funzionamento● Configurazioni e componenti
Pausa caffe’
Usi ed applicazioni● Normative italiane ed estere● Applicazioni presenti e future● Missioni autonome
Dimostrazione di volo
Dom
and
e e
risp
oste

Droni e multirotori
Cosa sono e come sono fatti?

Droni, UAV e APRIl temine inglese ‘Drone’ (fuco in Italiano) è usato comunemente per indicare i velivoli a comando remoto o autonomi. Ha origine in Inghilterra a seguito del primo velivolo a pilotaggio remoto chiamato Queen Bee.
UAV e’ l’acronimo di ‘Unmanned Aerial Vehicle’. E’ un veivolo senza pilota a bordo. Il volo e’ controllato autonomamente dal computer di bordo RPA: velivolo pilotato da da un pilota a terra (o su altro veicolo) mediante un telecomando.

Cos'è un multirotore
Un multirotore e’ una particolare tipologia di UAV che si differenzia dagli elicotteri standard per la presenza di 3 o più eliche a passo fisso.
E' un velivolo di semplice costruzione meccanica, ma di complessa gestione dinamica.
Non ha alcuna stabilità aerodinamica (come un ferro da stiro) e per volare necessita’ di una centralina dedicata per il controllo del volo e della stabilizzazione.

Cos'è un multirotore

Come funzionano?
Droni e multirotori

Principi di funzionamento
Il multirotore vola agendo esclusivamente sulla velocità di rotazione dei gruppi elica/motore, nessun’altra parte meccanica e’ in movimento.
Eccezione: il ‘tricottero’ richiede un servo per il movimento del motore di coda.
Nel multirotore esistono due tipi di eliche:destrorse (pusher) e sinistrorse (standard).

Eliche destrorse e sinistrorseVerde Rotanti (pusher) - Blu Controrotanti (standard)

Le forze in gioco
Ogni accoppiata motore-elica produce due componenti di forza utili a governare il multirotore:
SPINTA e MOMENTO TORCENTE (coppia)
Regolando queste due forze si può spostare il multi in qualsiasi direzione nello spazio

L’equilibrioPer mantenersi in equilibrio sull'asse Z (YAW o IMBARDATA) il momento torcente dei motori 1-3 deve essere uguale e contrario a quello sviluppato dai motori 2-4.
Per l’equilibrio degli assi X e Y la somma delle spinte sui motori 1-3 (ROLL o rollio) e 2-4 (PITCH o beccheggio) deve essere uguale.

Roll e Pitch
Per il movimento si mantiene un angolo di ROLL o PITCH diverso da 0. Nell' esempio, controllando la velocità dei motori 1-3 (aumentando 3 e diminuendo 1) il momento rimane costante ma cambia l'inclinazione facendo ruotare il quad sull’asse x.

YawPer la rotazione sull’asse z si modificano le velocità delle due coppie in modo che la differenza di momento torcente faccia ruotare il quad. La somma delle forze però deve rimanere costante quindi si agisce aumentando la velocità di una coppia e diminuendo l'altra

L'orientamento del drone nello spazio La DCM (Direction Cosine Matrix)usa le rotazioni di matrice per calcolare la posizione dell'oggetto relativa ad un sistema di riferimento fisso (es. il multirotore in riferimento alla terra).
I multirotori usano, a seconda della modalita’ di volo configurata, due sistemi di riferimento fissi: Il corpo stesso e la terra.

I due sistemi di riferimento

Attitude: l’orientamento
Il risultato della DCM viene trasformato in "angoli di eulero".Gli angoli di Eulero sono utili per comprendere l' inclinazione del corpo rispetto ad un sistema fisso, utile nelle funzioni automatiche di navigazione.

Configurazioni
Droni e multirotori

Configurazione ‘Quad’AKA ‘X4’

Configurazione ‘Octa Quad’AKA ‘X8’

Configurazione ‘Hexa’

Configurazione ‘Octa’

Configurazioni ‘Octa V’ e ‘Y6’OCTA V: Y6:

Configurazioni ‘Tricopter’

Componenti
Droni e multirotori

Frame / Telaio
(3) supporto motore
(2) braccio
(1) corpo centrale(4) supporto batteria
(5) pattini di atterraggio

Frame / TelaioIl telaio di un multirotore è composto principalmente da 5 elementi:1) il corpo centrale : normalmente composto da due piastre parallele di materiale composito atte a ospitare tutta l’elettronica di volo, quella di comando e varie elettroniche accessorie (trasmettitori telemetria,trasmettitore video, osd, ecc ecc)2) i bracci porta motori : generalmente in alluminio o in materiali compositi vari (carbonio/fibra/o plastiche) 3) supporto motore : alloggiamento fisico di ancoraggio dei motori di volo.4) supporto batteria di volo principale.5) pattini di atterraggio : non sempre inclusi nei frame commerciali, sono di vario genere, e misure, a seconda della necessità.

Frame: esempi DIY

I frame Virtual Robotix
Lifter Pro8
X4 e X8 B.O.D.

e-Volo

La centralina di controllo
Per funzionare, un multirotore DEVE necessariamente disporre di una centralina di controllo con microcontrollore (MCU).
Molto popolari son gli Arduino a 8 bit (es. ArduPilotMega) oggi gradualmente sostituiti da piattaforme ARM a 32 bit.
La centralina si occupa di variare la velocità dei motori ad una frequenza molto elevata; operare un multirotore senza centralina è impossibile.

La centralina di controllo
Le centraline devono disporre di almeno 4 ingressi e 4 uscite per poter controllare un Quadricottero.
I 4 ingressi base sono Roll, Pitch, Throttle, Yaw (Rollio, Beccheggio, Gas, Imbardata).
Gli ulteriori ingressi servono per le modalità di volo e funzionalita’ opzionali.
Le uscite sono 1:1 con i motori/eliche e generano degli impulsi (PWM) che comandano i motori tramite gli ESC (Electronic Speed Controller).

Software di controlloIl software di controllo è il vero e proprio “cervello” del drone.Il SW ha il compito di:1. mantenere in equilibrio il drone usando i
sensori di bordo2. interpretare i comandi del pilota convertendoli
in segnali per i motori3. eseguire funzioni di volo autonomo4. verificare la funzionalità delle componenti di
bordo5. inviare alla stazione di controllo i dati di
telemetria

Software di controlloIn commercio esistono 2 tipologie di SW:● open source (software aperto)● closed source (software chiuso)
Le piattaforme open source contano decine di sviluppatori che convergono su un’unico progetto.Il codice viene reso pubblico e può essere utilizzato per creare nuovo codiceLe piattaforme closed sono sviluppate all’interno di società/enti che non rendono pubblico il codice e quindi non permette la customizzazione delle parti SW.

Software di controlloLe piattaforme closed più famose sono:● Mikrokopter (parzialmente closed)● DJI● ASCTEC
Le piattaforme Open più diffuse sono:● Ardupilot● Multiwii● Autoquad● Aeroquad● ACopter32

Software di controlloPRIMA:Processori 8bitSensori analogiciSW monothreadORA:Processori single core 32bit (ARM)Sensori digitaliSW multithread con Sistema OperativoPOI...:Processori multicore 32bit (es. iPhone, Galaxy S4)SW Linux embedded Più sensori su un’unico chip

Modalita’ di voloManuali e Semiautomatiche● ACRO● SPORT● STABILIZE● ALTITUDE HOLD
Funzioni Automatiche● SIMPLE e Super-SIMPLE● GPS Hold e Attitude ● GUIDED● AUTO
○ RTL○ TAKE-OFF & LAND○ CIRCLE

PID di stabilizzazione in AC32

I sensori di bordo
Esistono 5 tipi di sensori che sono alla base del volo autonomo di un multirotore:● Giroscopio (essenziale)● Accelerometro (opzionale)● Bussola (opzionale)● GPS (opzionale)● Barometro (opzionale)Grazie alla tecnologia MEMS quasi tutti i sensori possono essere inseriti in un unico chip.

Inertial Measurement UnitL’insieme dei sensori combinati su di una scheda compongono quella che viene chiamata IMU (Inertial Measurement Unit o Unità di Misura Inerziale).
Esempio VRBrain:● MPU6000 (6 assi di misurazione) combina
un accelerometro a 3 assi e un giroscopio a 3 assi
● HMC5883 bussola digitale su 3 assi● MS5611 barometro ad alta precisione

Inertial Measurement UnitI giroscopi misurano la velocità angolare su 3 assi. Unità di misura: gradi/s.Gli accelerometri misurano la forza di gravità su 3 assi. Unità di misura: m/s2 (9.8m/s2=1G).La bussola digitale misura il nord magnetico sui tre assi (°)Il barometro misura temperatura e pressione atmosferica che converte in altitudine s.l.m.

Inertial Measurement Unit
Con una board appoggiata al tavolo i sensori dovranno fornire (assi x,y,z):● Giroscopi : 0,0,0● Accel.: 0,0,1G
Con il muso verso l'alto i sensori forniranno come output:● Giroscopio: 0,0,0● Accel.: 1G,0,0

Inertial Measurement Unit
Gli accelerometri sono rumorosi, ma tendenzialmente resistenti agli sbalzi di calore
I Giroscopi sono molto precisi, ma sensibili alle vibrazioni e ai cambi repentini di temperatura
Le bussole sono molto sensibili ai campi magnetici e oggetti metallici in genere.
I barometri sono sensibili ai movimenti di aria e alla luce

31 satelliti attualmente in orbita
GPS: Global positioning system

Come funziona il GPSMisurando la distanza da almeno 3 satelliti (con posizione nota) e’ possibile ottenere un posizionamento 2D (delle due possibili soluzioni una viene scartata perche’ non compatibile con la superficie terrestre).
Con quattro satelliti si ottiene un posizionamento 3D, ogni satellite addizionale contribuisce a migliorare la precisione.

La calibrazione dei sensori
Tutti i chip escono dalla fabbrica con un offset leggermente differente.In ogni sistema di navigazione inerziale è fondamentale procedere con una corretta calibrazione per registrare lo zero.Il codice della VBRAIN procede alla calibrazione dei GYRO e degli ACC. in fase di startup.La calibrazione della bussola deve essere fatta almeno una volta.

La calibrazione dei sensoriDato che i giroscopi sono sensibili ai cambi di temperatura, prima di volare, soprattutto in inverno, si raccomanda di lasciare che i chip si adeguino alla temperatura esterna.
In alternativa si dovrebbe comprendere nel software un sistema per la calibrazione dinamica in base alla temperatura.
Pro: nessuna calibrazione ulterioreContro: lungo processo di messa punto e complessità di gestione.

Taratura degli Accelerometri
La taratura degli accelerometri è quella procedura che serve per registrare l'offset degli accelerometri sui tre assi.
Fondamentale per la navigazione ‘inerziale’.
Esempio da planner.

La calibrazione dei giroscopi
La calibrazione dei giroscopi deve essere effettuata con il sensore più fermo possibile.
Serve ad ottenere l'offset rispetto allo zero di fabbrica.
E' essenziale per avere un volo fluido e senza sobbalzi.

La calibrazione della bussola
La calibrazione della bussola è fondamentale per le funzioni di navigazione automatica.
Non è fondamentale per il volo stabilizzato manuale.

La calibrazione della bussola
Una perfetta calibrazione permette di eliminare le interferenze magnetiche generate dai motori e da apparecchiature elettriche.

Motori BrushlessI motori brushless (senza spazzole) sono motori sincroni alimentati da una sorgente a corrente alternata controllata elettronicamente.
Per la costruzione dei multirotori si utilizzano gli outrunners caratterizzati da magneti permanenti fissati sulla campana esterna che funge da rotore.
Gli outrunners hanno una elevata coppia a ridotto numero di giri, cosa che rende non necessario un riduttore di giricon i conseguenti benefici di leggerezza.

Electronic Speed ControllersGli ESC sono piccoli microcontrollori per il controllo dei motori brushless; fondamentali per una buona stabilità di volo.

Batterie LiPoLe batterie LiPo sono batterie ricaricabili composte da un elettrolita a base di sali di Litio incorporati in un polimero; cosa che le rende piu’ economiche, versatili e robuste.
La tensione di una cella LiPo varia da 2,7V (scarica) a 4,23V (carica) e mai deve superare i 4,235V.
E’ fondamentale utilizzare un caricabatterie specificatamente progettato e di buona qualita’ per evitare di superare i limiti di carica e rischiare la deflagrazione.
I pacchi batteria LiPo sono tipicamente costituiti da assemblaggi in serie (2/3/4/6S) e parallelo (2/3/4P) in base alle caratteristiche richieste dall’applicazione.

LiPo e sicurezza

La Radio RC
Per controllare un multirotore serve una radio di tipo RC preferibilmente digitale su frequenza 2.4GHz.
Le più comuni radio RC generano segnali PWM (un cavo per canale) mentre quelle di fascia medio alta solitamente generano segnali PPM-SUM (un cavo per n-canali).
Con alcuni sitemi si può usare un Joystick (Fly By Wire) o addirittura un PC/App quando disponibile la telemetria.

Il segnale PWM

Il segnale PPM

La Radio RCSono necessari almeno 4 canali per controllare il volo:1. Pitch2. Roll3. Throttle4. Yaw
Il quinto canale e’ solitamente utilizzato per la selezione delle modalita’ di volo.
I canali 6,7,8 sono utilizzati, sepresenti, per funzionalita’ opzionali.

TelemetriaSi tratta di un secondo canale di comunicazione, oltre alla radio R/C, con ‘la base’.Il canale di comunicazione si realizza tramite due moduti RTX collegati con una porta seriale della centrale di controllo e ad un PC, Tablet o smartphone a terra.
La portata della telemetriadipende dalla tecnologia utilizzatae puo’ anche arrivare a centinaia diKm se basata sulla rete cellulare.

TelemetriaTramite la telemetria e’ possibile monitorare da terra i tutti parametri di volo, frai quali:- posizione- orientamento, rotta, velocita’- tensione/corrente erogata dalla batteria, etc.
E’ inoltre possibile impartire, tramite la stazione base, comandi quali:- modifica parametri di volo- inserimento/modifica waypoint per volo autonomo- land/RTL (Return To Launch)- navigazione tramite joystick / game-pad

Ground Control StationTramite la stazione base di terra e’ solitamente possibile:- installare/aggiornare il SW di controllo- configurare i parametri di volo- pianificare le missioni autonome- monitorare in tempo reale i parametri di volo se disponibile la telemetria

Ground Control Station

Ground Control StationVisualizzazione in tempo reale dei parametri di volo.

Ground Control StationCreazione e gestione di missioni con waypoint.

Ground Control StationGestione dei parametri di volo e di stabilizzazione.

Pausa caffe’

NormativeIl panorama normativo inerente la materia è eterogeneo ed è composto dalla normativa internazionale, da quella comunitaria e da quella nazionale.
Il rapporto tra queste fonti è di tipo gerarchico quindi quanto disposto da una fonte normativa inferiore soccombe in presenza di disposizioni normative di una fonte superiore.

NormativeGerarchia internazionale:
ICAO
EASA
ENAC
ICAO: International Civil Aviation OrganizationEASA: European Aviation Safety AgencyENAC: Ente Nazionale Aviazione Civile

Normativa italianaENACEnte Nazionale per l’ Aviazione Civile
I Mezzi Aerei a Pilotaggio Remoto utilizzati esclusivamente per impiego ricreazionale e sportivo, si definiscono Aeromodelli mentre i mezzi impiegati o destinati all’impiego in operazioni specializzate sono definiti Sistemi Aeromobili a Pilotaggio Remoto (SAPR)

Normativa italianaImpiego di aeromodelli per uso professionaleGli aeromodelli (e quindi anche i multirotori) non possono essere utilizzati per effettuare lavori (ad ora).Solo alcune organizzazioni (protezione civile, esercito, vigili del fuoco) possono impiegare droni per usi specifici senza necessità di certificazione, ma solo con un autorizzazione del prefetto.

Normativa italianaBozza ENACUscita in Dicembre 2012 per sopperire alla mancanza di regolamentazione riguardo l’uso di SAPR per applicazioni professionali.Fino ad ora valgono le regole ICAO (International Civil Aviation Organization) che vietano l’uso a meno di essere regolarmente certificati.
Gli APR sono distinti in MTOW <=20 Kg e > 20 Kg fino a 150 Kg. Si parla di SAPR Sistemi Aeromobili Pilotaggio Remoto. La norma non parla di UAV (Unmanned Aerial Vehicle) in quanto sistemi con funzioni di volo autonome.

Normativa italianaBozza ENACIl SAPR NON è dotato di equipaggiamento che CONSENTE il volo autonomo ma di strumentazione che consente al pilota il comando e controllo del vettore. DEVE ESSERE GARANTITA LA PRESENZA DELL' UOMO NEL CIRCUITO DI COMANDO E CONTROLLO.Per i vettori <20 kg non è previsto di norma il rilascio di un certificato di aeronavigabilità.

Normativa italianaBozza ENACPer i vettori <20 kg non è previsto di norma il rilascio di un certificato di aeronavigabilità.Entra in vigore il concetto di volume aereo V70 con 70 metri di quota e 500 di raggio in condizioni VLOS con distanza di sicurezza di aree congestionate di minimo 150 metri e a distanza NON inferiore a 50 metri da persone e cose che non siano in controllo dell’ operatore.Valgono inoltre le regole di:● give way aircraft in caso di altri vettori simili nello spazio aereo
oggetto di traffico● modalità VFR / VMC (visual flight rules e visual meteo conditions)● condizioni di luce diurna● fuori da ATZ (Aerodrome Traffic Zone) e a distanza > 8 km da
aeroporti sentieri avvicinamento decollo● spazi segregati

Normativa estera (USA)
Dall’ Agosto 2013 la FAA (ENAC statunitense) rilascia delle licenze ad-hoc per l’uso di droni per uso commerciale.E’ comunque necessario avere un certificato e uno “sponsor” che garantisca l’operatività del mezzo.

Normativa estera (UK)In UK, per droni di peso inferiore ai 20Kg non è necessaria nessuna registrazione o licenza a patto di operare lontano da aree congestionate e lontano dalle persone e non per scopi commerciali.Nel qual caso si deve disporre di un’ autorizzazione ad hoc e il pilota deve possedere un certificato che dimostri le conoscenze delle regole dell’aria e del traffico aereo e la capacità di pilotare il proprio mezzo.

Normativa estera (UK)L’ UAV deve poter disporre di log di volo.L’operatore deve mantenere una libretta di volo per dimostrare di non aver perso le capacità di pilotare il mezzo.La certificazione viene fatta sul mezzo specifico che deve avere il certificato di conformità del costruttore o se il mezzo è FDT deve essere valutata dalla commissione che rilascia la certificazione.BNUC-S e RPQ-s sono le due certificazioni possibili

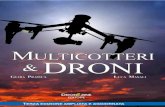
Principali applicazioni● Divertimento● Riprese e fotografia aerea● Fotogrammetria● Ricerca e salvataggio● Ispezioni ed esplorazione in aree pericolose o
inaccessibili● Rilevazioni ambientale● Rilevazioni geologiche● Agricoltura ● Spettacolo ed intrattenimento

Possibili applicazioni future
● Broadcasting televisivo in HD● Personal-drone● Riprese autonome in terza persona ● ...

Agricoltura(A) il quadrirotore sorvola autonomamente il campo coltivato ad una quota di 30m.
(B) le immagini multispettrali ottenute vengono elaborate per rilevare le erbe infestanti.

Hardware VRBrain
La piattaforma hardware VRBrain di VirtualRobotix basata su processore ARM:
● 168Mhz ARM CortexM4F microcontroller with DSP and floating-point hardware acceleration.
● 1024KiB of flash memory, 192KiB of RAM.
● MEMS accelerometer and gyro, magnetometer and barometric pressure sensor.
● 8 RC Input standard PPM , PPMSUM , SBUS - 8 RC Output at 490 hz
● 1 integrated high speed data flash for logging data
● 1 Can bus 2 i2c Bus
● 3 Serial port available for GPS / serial option / serial telemetry.
● 3 digital switch (ULN2003).
● Jtag support for onboard realtime debugger.
● 1 Buzzer output.
● 1 Input for control lipo voltage
● Italian design

Software VRBrainLa piattaforma VRBrain supporta pienamente una versione dedicata e frequentemente aggiornata del software APMCopter.Sono in corso sviluppi per il supporto di firmware TauLabs
Sviluppi open-source e supporto totalmente in Italia
Community Internazionale

Missioni autonome
Tramite il mission planner e’ possibile programmare (e modificare anche in volo) missioni automatiche con un numero virtualmente illimitato di waypoint.
Dimostrazione pratica su Mission Planner per dimostrazione di volo.

Domande e risposte
?

Costruisci il tuo quadcopter
E’ in fase di preparazione un corso di due giorni per imparare a:● auto costruire● configurare ● rendere operativo un multirotore.
Kit completo Quad - Radio -Batteria e caricabatteria.Prezzo da definire.

Scuola di volo
VirtualRobotix è disponibile a formare piloti UAV per scopi ludici e per le attività lavorative che si potranno effettuare dopo l’uscita della normativa ENAC.
VR Dispone di un campo volo in zona BG e nei pressi di Milano.
Per ogni info potete lasciare il vostro indirizzo e-mail.

Gruppo di discussionehttps://groups.google.com/forum/#!forum/droni-e-multirotori
Forum Virtualrobotix:http://www.virtualrobotix.com/forum
Forum sviluppo VR-Brain:http://www.baronerosso.it/forum/modelli-multirotori/274499-vrbrain-virtualrobotix.html
Restiamo in contatto