DISTRETTO FORMATIVO ROBOTICA - Verona Convertitori Digitale/Analogico.
27
DISTRETTO FORMATIVO ROBOTICA - Verona Convertitori Digitale/Analogico
-
Upload
nerezza-lamberti -
Category
Documents
-
view
226 -
download
5
Transcript of DISTRETTO FORMATIVO ROBOTICA - Verona Convertitori Digitale/Analogico.

DISTRETTO FORMATIVO ROBOTICA - Verona
ConvertitoriDigitale/Analogico

DISTRETTO FORMATIVO ROBOTICA - Verona
1) DAC a resistori pesati.2) DAC a traliccio (scala R-2R).3) DAC integrati.4) Interfacciamento DAC μP.

DISTRETTO FORMATIVO ROBOTICA - Verona
1. DAC a resistori pesati

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 4
DISTRETTO FORMATIVO ROBOTICA - Verona
Architetture DAC a singolo stadio
• Esistono sostanzialmente 3 tipi di architetture a singolo stadio:a divisione di tensione, dove si
utilizza un traliccio di resistori di uguale valore, collegati in serie a modo di partitori di tensione.
a divisione di carica, in cui si utilizza un traliccio di capacitori.
a divisione di corrente, in cui i pesi dei bit sono delle correnti.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 5
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC a resistori pesati (1/3)
• Da un’unica tensione di riferimento costante (Vref) si prelevano n correnti pesate attraverso n interruttori.
• Su ciascun interruttore è posta una resistenza. Le resistenza hanno valori pesati secondo la potenza di 2 (R1=R0/2; R2 = R0/4; R3 = R0/8.
• Gli interruttori sono comandati dalle cifre binarie bi del numero da convertire in tensione.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 6
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC a resistori pesati (2/3)
• L’operazionale serve da sommatore (invertente) delle correnti pesate che passano attraverso gli interruttori e converte la corrente che attraversa Rf nella tensione d’uscita Vo.
• Il valore dei bit (0 o 1) determinerà l’entità della corrente che scorre su Rf, quindi il valore di Vo.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 7
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC a resistori pesati (3/3)
• La tensione analogica di uscità sarà (prescindendo dal segno “–”):
dove Q si ottiene da Vo ponendo b3b2b1b0=0001.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 8
DISTRETTO FORMATIVO ROBOTICA - Verona
Vantaggi e svantaggi
• Vantaggi della configurazione:Semplicità; Ridotto numero di resistori (n resistori per un
codice di n bit).• Svantaggio della configurazione:
L’ accuratezza del DAC dipende dalla stabilità di Vref, dai valori delle resistenze e dalla qualità degli interruttori.
Valori molto diversi di resistenza da integrare su singolo chip difficoltà di realizzare il preciso rapporto dei resistori (occorre una bassissima tolleranza del valore delle resistenze);
La corrente assorbita dal circuito dipende dalla configurazione dei bit di ingresso;

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 9
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC con rete a scala R-2R (1/5)
• La rete a scala consente di superare gli svantaggi presentati dal convertitore a resistori pesati.
• È un DAC che presenta una rete resistiva a scalare con due soli valori di resistenza, uno doppio dell’altro (da cui il nome R-2R), con la seguente struttura (n=4):

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 10
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC con rete a scala R-2R (2/5)
• Con l’ausilio del teorema di Thevenin si dimostra che:

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 11
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC con rete a scala R-2R (3/5)
• Il valore di Q si può ottenere dalla tensione Vo ponendo in ingresso il codice 0001, per cui:
Quindi si ha VFS= .
La VoMAX = VFS – Q si può ottenere anche sostituendo il codice 1111 nella formula di Vo.
reff VR3
R

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 12
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC con rete a scala R-2R (4/5)
• Vantaggi della configurazione: 1) Il diverso peso dei bit viene realizzato, anziché
mediante l’impiego di resistori pesati di difficile realizzazione integrata, mediante opportuni percorsi resistivi;
2) La corrente assorbita dal circuito non dipende dalla configurazione dei bit di ingresso (la resistenza vista da Vref è sempre R).
• Quindi: maggior numero di resistori (Svantaggio), ma di due valori soltanto (Vantaggio,
agevole realizzazione del componente integrato).

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 13
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC con rete a scala R-2R (5/5)
• Svantaggio della configurazione:La diversa posizione degli interruttori
nella rete produce una variazione del segnale di ingresso non uniforme per tutti i bit, a causa dei diversi tempi di propagazione dei bit attraverso la rete a scala.
Le prestazioni di questo convertitore possono essere migliorate utilizzando la configurazione R-2R a scala invertita.
approfondimento

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 14
DISTRETTO FORMATIVO ROBOTICA - Verona
I Glitch nei DAC a rete pesata (1/2)• Il funzionamento dei DAC
considerati finora richiede la commutazione di interruttoritra i valori Vref (1) e massa (0).
• Se, nel realizzare questa variazione, gli interruttori sono più veloci nel commutare verso lo stato off (1→0) di quanto non lo siano a commutare verso lo stato on (0→1), esisterà un breve intervallo di tempo (transitorio) durante il quale tutti i bit sono a zero e l’uscita del DAC risulta nulla (glitch).

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 15
DISTRETTO FORMATIVO ROBOTICA - Verona
I Glitch nei DAC a rete pesata (2/2)
• Si rendono così necessari appositi circuiti, detti deglitcher, per rimuovere gli impulsi spuri, o quantomeno per attenuarne gli effetti.
• Tali circuiti sono normalmente costituiti da dispositivi (S/H) che mantengono l’uscita del convertitore inalterata finché non è terminata l’operazione di commutazione degli switch.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 16
DISTRETTO FORMATIVO ROBOTICA - Verona
Parametri caratteristici dei DAC (1/3)
1. Risoluzione: rappresenta la minima variazione della grandezza di uscita Vo. Essendo, però, la variazione dell’uscita legata alla variazione minima dell’ingresso (Q, ossia 1LSB), quindi in definitiva al numero di bit n, si usa proprio il valore n, oppure Q/VFS = 1/2n, per indicare la risoluzione di un DAC.
Es: dire che un DAC con 8 bit di ingresso ha una risoluzione di 8 bit equivale a dire che ha una risoluzione dello 0,4 % [=(1/28)·100].

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 17
DISTRETTO FORMATIVO ROBOTICA - Verona
Parametri caratteristici dei DAC (2/3)
2. Accuracy: rappresenta la differenza tra il valore ideale e il valore reale di Vo per un dato codice di ingresso.
Es: per un DAC con ε = ± 0,1 % e VFS = 10 V, l’uscita effettiva si può discostare dal valore teorico presunto di 0,001·10 = 0,01 V = 10 mV.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 18
DISTRETTO FORMATIVO ROBOTICA - Verona
Parametri caratteristici dei DAC (3/3)
• Tempo di assestamento (settling time): è il tempo necessario affinché il segnale analogico di uscita, dopo una commutazione degli ingressi, si stabilizzi su un certo intorno del valore finale (a seconda dell’ errore tollerato).
• I DAC con uscita in corrente hanno settling time molto piccoli, cioè sono molto veloci.
• Il peggioramento del settling time è dovuto essenzialmente all’operazionale utilizzato per convertire la corrente in tensione.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 19
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC integrati (1/3)
• Tutti i DAC integrati hanno al loro interno i due blocchi della struttura corrispondenti a set di interruttori (elettronici) e rete resistiva.
• Alcuni di essi generano al loro interno la Vref a partire dalla Vcc;
• Altri presentano un piedino sul quale la Vref deve essere resa disponibile dall’esterno (generata da appositi riferimenti di tensione, che consentono una maggior stabilità della tensione di riferimento, nel tempo e con la temperatura).

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 20
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC integrati (2/3)
• La maggior parte dei DAC integrati ha una uscita in corrente; alcuni integrano anche il convertitore I/V fornendo l’uscita in tensione.
• Alcuni DAC accettano in ingresso il dato digitale (generalmente in binario puro) sotto forma parallela, altri sotto forma seriale per poter ridurre il numero di piedini del componente.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 21
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC integrati (3/3)
• Alcuni DAC dispongono di un buffer-latch di ingresso che consente l’interfacciamento diretto con la CPU.
• Questa, infatti, una volta indirizzato il DAC (visto come una periferica di uscita) e caricato il dato nel buffer-latch, può continuare ad eseguire il suo programma e limitarsi ad aggiornare il dato, se necessario.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 22
DISTRETTO FORMATIVO ROBOTICA - Verona
Interfacciamento DACμP (1/4)• Vi sono diverse modalità di interfacciamento tra μP e
DAC, a seconda del tipo di CPU e di DAC integrato che si usa.• I fogli tecnici allegati ai DAC (come del resto agli ADC)
presentano, oltre alle caratteristiche elettriche, diversi schemi applicativi di interfacciamento e misura, che evidenziano aspetti particolari relativi alle tensioni di riferimento e a speciali connessioni di uscita.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 23
DISTRETTO FORMATIVO ROBOTICA - Verona
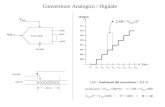
Interfacciamento DACμP (2/4)• 1° esempio: il convertitore digitale analogico della figura
precedente è il DAC0830 che presenta uscita in corrente.• L’operazionale U1 si comporta da convertitore corrente-
tensione e l’operazionale U2 è in configurazione invertente a guadagno unitario.
• In tal caso la tensione di uscita Vo che si ottiene è compresa tra 0 e 5V secondo la formula: Vo= (VFS/2n)N = (VREF/28)N = (5/256)N.

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 24
DISTRETTO FORMATIVO ROBOTICA - Verona
Interfacciamento DACμP (3/4)
• 2° esempio: schema di interfacciamento tra un DAC a 8 bit (dotato di segnali di controllo Chip Select e WRite) e un microprocessore a 8 bit (ad es. lo Z80).

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 25
DISTRETTO FORMATIVO ROBOTICA - Verona
Interfacciamento DACμP (4/4)
• Quando la CPU attiva il segnale , la Logica di controllo decodifica l’indirizzo del DAC (presente sul bus indirizzi della CPU) e, tramite il segnale , abilita il funzionamento del DAC. Il DAC, da parte sua, grazie al segnale di , riconosce automaticamente le operazioni di lettura e scrittura: quando entrambe sono a livello basso, i bit d’ingresso vengono
convertiti; quando almeno una delle due linee è a livello alto il convertitore
mantiene l’uscita precedente.
IORQ
CSWR

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 26
DISTRETTO FORMATIVO ROBOTICA - Verona
Approfondimenti

giugno 2008 Prof. Tozzi-ITIS Marconi-VR 27
DISTRETTO FORMATIVO ROBOTICA - Verona
DAC R-2R a scala invertita• Una soluzione molto spesso utilizzata per i
DAC fa uso di generatori di corrente a scalare (“current steering”), in cui ciascun generatore assorbe corrente o dalla massa o dalla linea di uscita a seconda del valore assunto dal bit di comando (0 o 1).
• Per ottenere un generatore di corrente si può utilizzare un BJT.
• I DAC con generatori di corrente a scalare sono molto diffusi, perché presentano prestazioni migliori riguardo alla velocità e alla precisione rispetto agli altri tipi di convertitori.
torna