Dispense Di Progettazione Assistita
72
Progettazione Assistita di Strutture Meccaniche Dispense 2003 Stefano Miccoli 22 ottobre 2004
-
Upload
daniele-g-quattropani -
Category
Documents
-
view
236 -
download
8
description
Aided Designing
Transcript of Dispense Di Progettazione Assistita
-
Progettazione Assistita di Strutture Meccaniche
Dispense 2003
Stefano Miccoli
22 ottobre 2004
-
Documento composto il 22 ottobre 2004.Questo documento in fase di stesura e potr essere modificato; il numero di revisione deisingoli capitoli il seguente:
rev. in data statoCapitolo 1 1.6 17 novembre 2003 bozzaCapitolo 2 1.3 1 marzo 2002 bozzaCapitolo 3 1.3 16 dicembre 2002 formuleCapitolo 4 1.1 21 settembre 2001 incompletoCapitolo 5 1.3 5 giugno 2003 incompletoCapitolo 6 1.1 21 settembre 2001 incompletoAppendice A 1.4 9 luglio 2002 bozzaAppendice B 1.3 9 luglio 2002 bozzaAppendice C 1.4 5 giugno 2003 bozzaAppendice D 1.4 1 ottobre 2002 incompleto
La versione pi aggiornata di questo documento attualmente disponibile in
http://www.mecc.polimi.it/~miccoli/didattica/PASM/dispense2003.pdf
Materiale ad esclusivo uso degli studenti del corso di
Progettazione Assistita di Strutture Meccanichehttp://www.mecc.polimi.it/~miccoli/didattica/PASM/
tenuto presso il Politecnico di Milano, Facolt di Ingegneria, Campus Bovisa.
Copyright c 2000, 2003 by Stefano Miccoli. This material may be distributed only subject tothe terms and conditions set forth in the Open Publication License, v1.0 or later (the latestversion is presently available at http://www.opencontent.org/openpub/).Distribution of substantively modified versions of this document is prohibited without theexplicit permission of the copyright holder.Distribution of the work or derivative of the work in any standard (paper) book form isprohibited unless prior permission is obtained from the copyright holder.
-
Indice
1. Formulazione differenziale del Problema Elastico 11.1. Ipotesi di base della Meccanica del Continuo . . . . . . . . . . . . . . . . . 11.2. Descrizione geometrica del continuo . . . . . . . . . . . . . . . . . . . . . . 31.3. Statica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1. Forze esterne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.2. Forze interne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.3. Equazioni indefinite di equilibrio . . . . . . . . . . . . . . . . . . . 6
1.4. Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4.1. Spostamenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4.2. Deformazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5. Lavoro di deformazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.6. Componenti ingegneristiche di sforzo e deformazione . . . . . . . . . . . . 9
1.6.1. Equazioni di equilibrio e compatibilit . . . . . . . . . . . . . . . . 101.7. Legame costitutivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.7.1. Legame elastico generale, o iperelastico . . . . . . . . . . . . . . . . 121.7.2. Legame elastico-lineare . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8. Equazioni di Navier e relativo problema ai limiti . . . . . . . . . . . . . . 161.9. Problemi Piani . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.9.1. Problema piano di deformazione . . . . . . . . . . . . . . . . . . . 221.9.2. Problema piano di sforzo . . . . . . . . . . . . . . . . . . . . . . . . 251.9.3. Considerazioni finali . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.10. Cambiamento del sistema di riferimento . . . . . . . . . . . . . . . . . . . 271.10.1. Vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271.10.2. Tensore di sforzo e deformazione . . . . . . . . . . . . . . . . . . . 281.10.3. Matrice di rigidezza . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.11. Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2. Formulazione ai residui pesati del Problema Elastico 372.1. Principio dei Lavori Virtuali . . . . . . . . . . . . . . . . . . . . . . . . . . 372.2. Metodo dei residui pesati applicato alle equazioni di equilibrio . . . . . . . 38
v
-
Indice
2.3. Metodo dei residui pesati applicato al problema elastico . . . . . . . . . . 392.4. Alcuni approfondimenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.4.1. Prodotto interno di due funzioni . . . . . . . . . . . . . . . . . . . 402.4.2. Operatore aggiunto . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.4.3. Operatori auto-aggiunti . . . . . . . . . . . . . . . . . . . . . . . . 43
3. Formulazione variazionale del Problema Elastico 453.1. Energia potenziale totale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.1.1. Energia di deformazione elastica . . . . . . . . . . . . . . . . . . . 453.1.2. Potenziale dei carichi . . . . . . . . . . . . . . . . . . . . . . . . . . 453.1.3. Stazionariet dellenergia potenziale totale . . . . . . . . . . . . . . 45
3.2. La norma dellenergia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4. Teorie Strutturali 49
5. Il metodo di Ritz 51
6. Il metodo degli elementi finiti 53
Bibliografia 55
A. Notazione 57A.1. Matrici e tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
A.1.1. Matrici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57A.1.2. Vettori e tensori . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
A.2. Operatori differenziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
B. Richiami di Analisi Matematica 61B.1. Differenziale di una funzione di pi variabili . . . . . . . . . . . . . . . . . 61B.2. Integrazione per parti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
C. Richiami di Calcolo Numerico 63C.1. Integrazione Numerica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
D. Simboli principali 65
vi
-
Elenco delle figure
1.1. Densit media (x, x) in funzione del diametro d dellintorno x. . . . . 21.2. Microfotografia (100) di un acciaio austenitico. . . . . . . . . . . . . . . 31.3. Rotazione rigida infinitesima. . . . . . . . . . . . . . . . . . . . . . . . . 321.4. Regione del piano G,K in cui si ha definizione positiva di D. . . . . . . . 33
vii
-
Elenco delle tabelle
1.1. Volume rappresentativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2. Relazioni tra differenti Moduli Elastici . . . . . . . . . . . . . . . . . . . . 171.3. Relazioni tra moduli piani. . . . . . . . . . . . . . . . . . . . . . . . . . . 361.4. Relazioni tra moduli piani e moduli tridimensionali. . . . . . . . . . . . . 36
ix
-
Rien ne se fait tout dun coup, et cest une de mes grandesmaximes et des plus vrifies, que la nature ne fait jamais desauts: ce que jappelais la loi de la continuit lorsque jen parlaidans les premires Nouvelles de la Rpublique des lettres, etlusage de cette loi est trs considrable dans la physique: elleporte quon passe toujours du petit au grand, et, rebours, parla mdiocre dans les degrs comme dans le parties, [. . . ]
Gottfried Wilhelm Leibniz, Nouveauxessais sur lentendement humain, 1704.
1. Formulazione differenziale del Problema Elastico
1.1. Ipotesi di base della Meccanica del Continuo
La Meccanica del Continuo un modello matematico che studia gli sforzi, le defor-mazioni, il flusso, in oggetti solidi, liquidi, gassosi. Il sostantivo continuo si riferisceal formalismo adottato, che quello delle equazioni differenziali alle derivate parziali.Infatti si suppone che
a tutte le grandezze estensive proprie del modello siano associabili grandezzespecifiche o densit, funzioni del punto,
le grandezze intensive siano funzioni del punto, e che queste funzioni siano sufficientemente regolari perch abbia senso calcolarne lederivate parziali rispetto alle coordinate spaziali.
Queste tre ipotesi portano naturalmente ad introdurre lipotesiforse sarebbe meglio direil postulatodella continuit delle grandezze in questione e dunque anche del mezzosul quale sono definite. Ovviamente la continuit del mezzo non unipotesi fisicama semplicemente una assunzione di natura matematica, utile nella misura in cui le sueconseguenze sono verificate dalla sperimentazione.Per chiarire la natura formale delle grandezze della meccanica del continuo pu essere
utile analizzare il concetto di densit di massa per un solido che occupi la porzione dello spazio fisico R3. Se V il volume del solido e M la sua massa, si definisce la densitmedia come = M/V . Si consideri ora un certo punto x, che appartiene al solido assiemead un suo intorno x 3 x: indicando con Vx il volume e Mx la massa associati aquesto intorno, la densit media in x rispetto a x vale
(x, x) =MxVx
.
Lipotesi di continuit si esprime richiedendo che sia possibile eseguire un passaggio allimite per Vx 0. Cos facendo si introduce la densit di massa puntuale (x),Revisione 1.6 in data 17 novembre 2003 (bozza).
1
-
1. Formulazione differenziale del Problema Elastico
106 105 104 103 102 101 100
0
d
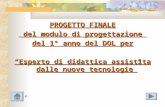
Figura 1.1: Densit media (x, x) in funzione del diametro d dellintorno x.
definita come(x) D= lim
Vx0MxVx
, x . (1.1)In generale si richiede che questo limite esista per ogni punto in , escluso al pi uninsieme di misura nulla.Senza approfondire le ipotesi di regolarit che devono essere poste, sia sulla funzio-
ne (x) sia sul dominio , perch una equazione come la (1.1) abbia senso, interessanteanalizzare il significato fisico di questa definizione. Immaginando di condurre un esperi-mento ideale su un solido dato, si fissa un punto x ed un intorno sferico di diametro d;si riporta quindi in figura 1.1 lipotetico andamento di (x, x) in funzione di d. Dallafigura si osserva che a livello macroscopico (d > 103), il solido appare omogeneo, convariazioni di regolari e continue, che sembrano ammettere un limite 0. Quando per dscende al di sotto di una dimensione caratteristica ( 103 in figura), il materiale appareeterogeneo e presenta brusche fluttuazioni di ; a scale ancora pi piccole gli andamentisi fanno pi irregolari, per perdere completamente di significato quando si consideranoscale di grandezza per le quali non vale pi la meccanica classica.Appare evidente dunque che alloperazione di limite in equazione (1.1) non pu essere
dato un significato sperimentale, ma solo un significato puramente formale. Tuttavialunica utilit della meccanica del continuo risiede nella sua capacit di descrivere il com-portamento fisico di corpi reali, e dunque necessario legare le grandezze matematiche,come la (x), a grandezze fisiche misurabili. Dalla figura 1.1 facile intuire quale lastrategia adottata: si assume semplicemente
(x) D= 0;
in altri termini si interpreta la densit puntuale (x) secondo un significato macroscopicoe non microscopico, assumendo per essa il valore medio su un volume caratteristico, o
2
-
1.2. Descrizione geometrica del continuo
Materiale eterogeneit diametro [m]eterogeneit
diametro [m]volume rappr.
metalli e leghe cristalli 106 104 0.5 103polimeri molecole 105 104 103legno fibre 104 103 102calcestruzzo inerti 102 101
Tabella 1.1: Volume rappresentativo, da [9].
0.5mm
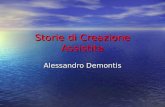
Figura 1.2: Microfotografia (100) di un acciaio austenitico.
rappresentativo: tutte le grandezze matematiche funzioni del punto della meccanicadel continuo acquistano significato solo come valori medi delle corrispondenti grandezzefisiche misurate su un volume rappresentativo del materiale.La dimensione del volume rappresentativo non ovviamente una costante universale
ma dipende dal materiale in esame e dalla sua micro-struttura. A titolo puramenteindicativo nella tabella 1.1 sono riportati i valori tipici del volume rappresentativo, propridi alcuni materiali di uso comune. In figura 1.2 riportata una microfotografia di unacciaio con lindicazione della dimensione caratteristica del volume rappresentativo. Perapprofondimenti si vedano [9, 3, 6].
1.2. Descrizione geometrica del continuo
Per quanto detto sopra opportuno identificare il solido in esame con linsieme deipunti materiali x che lo compongono; anche chiaro che perch sia possibile lapplicazionedel formalismo delle equazioni alle derivate parziali, sar necessario porre delle condizionidi regolarit sulla geometria. In questa sede questo tema non verr approfondito, e cilimiteremo a supporre che R3 sia un dominio aperto; la sua frontiera sialiscia e costituita da un numero finito di componenti non connesse.
3
-
1. Formulazione differenziale del Problema Elastico
1.3. Statica
1.3.1. Forze esterne
Le forze esterne che agiscono su un solido possono essere classificate in due categorieprincipali:
forze di volume la cui intensit F proporzionale al volume V del solido, come p. e. ilpeso,
forze di superficie che agiscono sulla superficie esterna del solido con intensit Fproporzionale allarea S, p. e. lazione di un fluido in un recipiente in pressione.
Queste sono chiaramente grandezze estensive, e dunque nella meccanica del continuooccorre definire le corrispondenti grandezze specifiche
f(x) D= limV0
FV
, x , (1.2)
per quanto riguarda le forze di volume, e
p(x) D= limS0
FS
, x , (1.3)per quanto riguarda le forze di superficie.La trattazione di forze concentrate, vale a dire di azioni puntuali esercitate su una
superficie o un volume piccolissimi, al limite nulli, possibile nella meccanica del conti-nuo, ma richiede particolare cautela. Infatti anche in questo caso si continuano a tenerevalide le definizioni (1.2) e (1.3); cos facendo si incorre per nella difficolt di definireuna funzione che nulla ovunque tranne che nel punto in cui applicata lazione concen-trata, dove la densit diventa infinita.1 La formalizzazione di questo concetto possibilericorrendo alla teoria delle distribuzioni, ma questa strada non verr perseguita in questasede.
1.3.2. Forze interne
Per la definizione delle forze interne si immagina di dividere il continuo in in dueparti, evidenziando una superficie di separazione . Attraverso questa superficie le dueporzioni di si scambiano delle azioni, uguali e contrarie per il principio di azione ereazione. Analogamente a quanto fatto in (1.3), si fissa un punto x si immagina dipoter determinare la risultante F x di queste azioni che competono ad una porzionedi superficie x, tale che x x . Se Sx larea di x si calcola la densit disuperficie di F x e si procede al limite per Sx 0:
p(x; )D= lim
Sx0F xSx
, x x .1I limiti che definiscono le grandezze specifiche del continuo sono normalmente del tipo 0/0: per ipotesiquesti limiti esistono finiti. Nel caso delle forze concentrate invece lintensit dellazione costante edunque nel punto di applicazione si ha un limite del tipo costante/0, che ovviamente non esiste in sensoproprio.
4
-
1.3. Statica
In questa espressione la superficie fissa, necessario perci stabilire, come variap(x; ) in funzione della particolare 3 x. logico assumere che p(x; ) sia unagrandezza locale, e dunque indipendente dalla forma in grande di ; se questultima sufficientemente regolare, p(x; ) pu dipendere solo dalla orientazione della normalen a in x. Per questo motivo si scriver semplicemente
pn(x)D= p(x; ) (1.4)
indicando con il pedice n la normale a nel punto considerato.
Tetraedro di Cauchy
La grandezza pn(x), x detta lo sforzo in x. Dalla definizione sembrerebbe unaquantit vettoriale dipendente dal punto e dallorientazione n: per descrivere lo stato disforzo in un punto sarebbe dunque necessaria una funzione (a valori vettoriali) di n, cioinfiniti vettori, visto che n pu variare con continuit. In realt la situazione molto pisemplice: infatti in base a semplici considerazioni di equilibrio (tetraedro di Cauchy) sipu dimostrare che pn su una giacitura n qualsiasi dipende linearmente dal valore pnjassunto per tre direzioni nj=1,2,3 linearmente indipendenti.In un sistema di riferimento cartesiano ortogonale conviene ovviamente assumere nj =
ej , dove ej il versore dellasse j-esimo. Dallequilibrio del tetraedro di Cauchy si ottiene
pn = pe1n1 + pe2n2 + pe3n3,
con ni, componente i-esima di n. Introducendo il tensore , definito come
D=((pe1 pe2 pe3
)), (1.5)
questo risultato pu essere espresso dal prodotto tensoriale
pn = n. (1.6)
Le componenti ij di ,
=
11 12 1321 22 2331 32 33
,
sono definite a partire dalle componenti di pej secondo lovvia relazione
pej =
pej 1pej 2pej 3
=1j2j3j
.In altri termini le componenti del tensore , in un sistema di riferimento cartesiano orto-gonale, sono le componenti, lette per colonne, degli sforzi agenti su elementi di superficiecon normale nella direzione degli assi.
5
-
1. Formulazione differenziale del Problema Elastico
1.3.3. Equazioni indefinite di equilibrio
Le equazioni di equilibrio indefinito si ottengono considerando una cella infinitesimacon facce perpendicolari alle direzioni coordinate. In un sistema di riferimento cartesianoortogonale si ottengono le seguenti due equazioni,
= T , (1.7)
x1
pe1(x)
x2pe2(x)
x3pe3(x) = f(x), (1.8)
entrambe valide a meno di infinitesimi di ordine superiore.La prima equazione esprime lequilibrio alla rotazione, ed ottenuta nellipotesi che
le forze di volume agenti su un elemento infinitesimo ammettono un momento risultantenullo (ipotesi di continuo apolare o di Cosserat); sotto questa ipotesi il tensore di sforzorisulta simmetrico.La seconda equazione invece esprime lequilibrio alla traslazione e lega le forze di
volume alle derivate degli sforzi agenti sulle facce delle celle. Osservando che le pej sonole colonne del tensore di sforzo il primo membro della (1.8) pu essere riscritto come
x1pe1(x) +
x2pe2(x) +
x3pe3(x) =
= pe1(x)
x1+ pe2(x)
x2+ pe3(x)
x3=((pe1(x) pe2(x) pe3(x)
))
x1x2x3
D=x
,
dove si sfruttata la notazione matriciale e la possibilit di porre loperatore differenzialealla destra delloperando, cfr. lappendice A.2.Con questa trasformazione le equazioni di equilibrio indefinito diventano semplicemen-
te
(x)
x= f(x). (1.9)
1.4. Cinematica
1.4.1. Spostamenti
Supponiamo che il continuo in esame subisca una trasformazione dalla configurazione diriferimento, nella quale occupa il dominio spaziale , ad una configurazione deformata,descritta dal dominio . Nella meccanica del continuo si suppone che esista una cor-rispondenza biunivoca tra i punti x e i punti x . Ci consente di definirelo spostamento u D= x x, il quale, in una descrizione Lagrangiana della cinematica considerato una funzione del punto in configurazione di riferimento:
u(x) D= x(x) x. (1.10)
6
-
1.4. Cinematica
A livello di componenti si ha ovviamente
u(x) =
u1(x)u2(x)u3(x)
=x1(x) x1
x2(x) x2x3(x) x3
.In pratica, mediante lapplicazione x 7 x, si considera x funzione di x.2La definizione di u(x) presenta le stesse difficolt concettuali di f(x). Infatti secondo
la meccanica del continuo si definisce lapplicazione x 7 x per tutti i punti x .In pratica dobbiamo legare ogni punto geometrico di al corpo materiale in esamee seguire lo spostamento che questo punto subisce, fino a x. intuitivo per che alivello microscopico impossibile legare un punto geometrico ad un corpo materiale,non fossaltro per le difficolt legate alla presenza di un moto di agitazione termica o alleindeterminazioni proprie della meccanica quantistica. Dunque anche per quanto riguardala cinematica il punto x associato non ad una porzione infinitesima di materiale, ma adun volume finito. Cos facendo u(x) non descrive lo spostamento puntuale di x, benslo spostamento medio di un volume caratteristico che contiene x.
1.4.2. Deformazioni
La deformazione di un intorno infinitesimo x+ dx di un punto x ottenuta consideran-do le differenza di spostamento tra i suoi punti. In pratica si tratta di determinare ildifferenziale del campo vettoriale u(x):
du = u(x+ dx) u(x).
Dallequazione (B.2) si ha
du = u(x)
x
T
D=F (x)
dx,
dove definita la nuova grandezza,
F (x) D= u(x)
x
T
, (1.11)
che a livello di componenti vale
F (x) =
x1
u1x2
u1x3
u1x1
u2x2
u2x3
u2x1
u3x2
u3x3
u3
. (1.12)
2In una descrizione Euleriana della cinematica invece, si considera lapplicazione inversa x 7 x, cheesiste perch la corrispondenza tra x e x biunivoca. Cos facendo si ha x(x) e lo spostamento risultafunzione di x.
7
-
1. Formulazione differenziale del Problema Elastico
Si pu dimostrare che F (x) ha natura tensoriale; per questo motivo chiamato tensoregradiente di spostamento.Il tensore gradiente F (x) descrive completamente il campo di spostamenti in un in-
torno infinitesimo di x, tuttavia non interpretabile direttamente come una misura dideformazione: infatti esso identicamente nullo se, e solo se, lintorno di x subisce unatraslazione rigida. In altre parole F (x) contiene informazioni sia sulla deformazione, siasulla rotazione rigida, dellintorno in esame, cfr. lesercizio 1.1.Tra le molte definizioni alternative di misure di deformazione che possono essere ot-
tenute da F (x), si considera qui il tensore delle piccole deformazioni, valido nel casolimite di spostamenti u(x) infinitesimi. In questo caso si pu assumere che il tensoredelle rotazioni e il tensore delle deformazioni dipendano linearmente da F (x). na-turale allora scomporre il tensore F (x) in una parte simmetrica E(x) ed una parteantisimmetrica (x)
E(x) D=12(F (x) + F (x)T
),
(x) D=12(F (x) F (x)T ) ,
in modo che
F (x) = E(x) +(x), (1.13)
E(x) = E(x)T ,
(x) = (x)T .Per la loro definizione, anche E(x) e (x) sono tensori.3,4
Il tensore (x) detto tensore delle piccole rotazioni. Si pu dimostrare infatti che lesue componenti non nulle,
(x) =
0 3 23 0 12 1 0
=
=12
0
x2
u1 x1u2 x3u1 x1u3x1
u2 x2u1 0 x3u2 x2u3x1
u3 x3u1 x2u3 x3u2 0
,
coincidono con gli angoli di rotazione i intorno allasse xi al limite di un campo dispostamenti u(x) infinitesimo. Per i continui non polari, cio con tensore di sforzo (x)
3Le operazioni di somma, moltiplicazione per uno scalare e trasposizione mantengono la natura tensorialedegli enti su cui sono definite.4Esplicitando le espressioni di E(x) e (x) in funzione degli spostamenti si ottiene
E(x) =1
2
u(x) x
T
+
xu(x)T
, (x) = 12
u(x) x
T
xu(x)T
. (1.14)
8
-
1.5. Lavoro di deformazione
simmetrico, il tensore delle piccole rotazioni non gioca alcun ruolo particolare perch leequazioni di equilibrio alla rotazione sono soddisfatte a priori. Per questo motivo noncomparir pi nella trattazione seguente.Il tensore E(x) detto tensore delle piccole deformazioni. Lespressione esplicita delle
sue componenti la seguente:
E(x) =
11 12 1321 22 2331 32 33
=
=
x1
u112
(x2
u1 + x1u2)
12
(x3
u1 + x1u3)
12
(x1
u2 + x2u1)
x2
u212
(x3
u2 + x2u3)
12
(x1
u3 + x3u1)
12
(x2
u3 + x3u2)
x3
u3
. (1.15)
Come noto i termini diagonali ii esprimono lallungamento lineare di fibre dispostecome gli assi coordinati xi; i termini extradiagonali ij , i 6= j, sono invece legati agliscorrimenti angolari.
1.5. Lavoro di deformazione
Nella Meccanica del continuo, spostamenti u(x) e forze di volume f(x) sono grandezzeduali, nel senso che il prodotto interno f(x)Tu(x) rappresenta la densit di volumedel lavoro delle forze esterne. Anche sforzi e deformazioni sono grandezze duali, e illoro prodotto interno rappresenta la densit di volume del lavoro di deformazione. Peresprimere matematicamente questo concetto si esegue il prodotto interno tensoriale di e E,
tr(TE) =3
h,k=1
hkkh, (1.16)
cfr. (A.10). Il concetto di lavoro di deformazione verr approfondito nei capitoli 2 e 3.
1.6. Componenti ingegneristiche di sforzo e deformazione
Con la notazione fin qui adottata, sforzi e deformazioni vengono rappresentati da matrici3 3, rispettivamente e E. Si pu osservare che questa notazione sovrabbondante,perch un tensore 33 simmetrico ha solo 6 componenti indipendenti, e non 9. Pu essereconveniente dunque raccogliere in due vettori 6 1, e , le componenti indipendentidei tensori di sforzo e deformazione.Il modo in cui sei componenti indipendenti di e E sono riordinate nei corrispondenti
vettori ha ovviamente un certo grado di arbitrariet; la regola che verr seguita tuttavia quella di lasciare invariato il significato energetico del prodotto interno tra sforzi edeformazioni. In altre parole si richiede che
tr(TE) = T, (1.17)
9
-
1. Formulazione differenziale del Problema Elastico
per ogni coppia di tensorivettori corrispondenti, (,), (E, )Secondo la convenzione ingegneristica le componenti di e sono
D=
1
2
3
23
31
12
=
11
22
33
23
31
12
,
D=
1
2
3
23
31
12
=
11
22
33
223231212
. (1.18)
Esplicitando lequazione (1.17) e sfruttando la simmetria dei tensori e E,
1111 + 2222 + 3333 + 22323 + 23131 + 21212 =11 + 22 + 33 + 2323 + 3131 + 1212,
si verifica facilmente che, secondo le (1.18), questa equazione sempre soddisfatta.Si noti che, mentre gli sforzi di taglio sono eguali alle componenti extradiagonali del ten-
sore di sforzo, ij = ij , per le deformazioni angolari si ha ij = 2ij . Questa discrepanzanella definizione di ij e ij proprio una conseguenza naturale della condizione (1.17).
1.6.1. Equazioni di equilibrio e compatibilit
Laver raccolto in un vettore le componenti dei tensori di sforzo e deformazione obbli-ga anche a riscrivere le equazioni di equilibrio e congruenza. facile verificare che leequazioni (1.6) e (1.9) sono equivalenti, rispettivamente, alle due equazioni matriciali
n1 0 0 0 n3 n20 n2 0 n3 0 n10 0 n3 n2 n1 0
N[n]
1
2
3
23
31
12
= pn(x),
x1
0 0 0 x3x2
0 x2 0x3
0 x10 0 x3
x2
x1
0
N[ x
]
1
2
3
23
31
12
= f(x),
nelle quali si anche introdotto il simbolo N[ ], che opera su un vettore (od un opera-tore differenziale vettoriale) e lo trasforma in una matrice (o un operatore differenziale
10
-
1.7. Legame costitutivo
matriciale) di dimensioni 3 6:
N[a]D=
a1 0 0 0 a3 a20 a2 0 a3 0 a10 0 a3 a2 a1 0
. (1.19)Sfruttando questa notazione dunque le equazioni di equilibrio del tetraedro di Cauchy edi equilibrio indefinito diventano
N[n](x) = pn(x), (1.20)
N[ x
](x) = f(x). (1.21)
Per quanto riguarda il legame spostamenti deformazioni immediato verificarelequivalenza della (1.15) con la seguente equazione
(x) =
x1
0 0
0 x2 0
0 0 x30 x3
x2
x3
0 x1x2
x1
0
NT[ x
]
u1(x)u2(x)u3(x)
,
dove compare il trasposto delloperatore di equilibrio N[ x
].Il legame spostamentideformazioni si pu dunque scrivere nella forma
(x) = NT[ x
]u(x); (1.22)
Le conseguenze del fatto, apparentemente fortuito, per cui loperatore di congruen-za NT
[ x
] il trasposto delloperatore di equilibrio N[
x] saranno approfondite nel
capitolo 2.
1.7. Legame costitutivo
Fino a questo punto sforzi e deformazioni sono stati trattati come grandezze indipendenti,ancorch duali, cfr. (1.16) e (1.17). In realt, facendo riferimento allo stato fisico di unmateriale, alla deformazione si accompagna linsorgere di uno stato di sforzo, secondo unalegge detta legame costitutivo. In queste dispense verr trattato solo il legame elastico,trascurando il caso di relazione pi generali. Nel seguito, per alleggerire la notazione,si ometter di indicare la dipendenza di sforzi e deformazioni dal punto x: si intendeinsomma che la legge riferita ad una porzione di materiale con deformazione omogenea,o nel caso generale, ad un intorno infinitesimo di x.
11
-
1. Formulazione differenziale del Problema Elastico
1.7.1. Legame elastico generale, o iperelastico
Il legame elastico pi generale tra sforzi e deformazioni rappresentato da una leggeolonoma (E) per la quale possibile definire una funzione potenziale, detta densitdi energia di deformazione elastica. Questultima grandezza esprime il lavoro compiutodagli sforzi, funzione delle deformazioni, per le deformazioni stesse, a partire da uno statodi riferimento noto, usualmente assunto come E = 0:
(E) D=
0Etr((E)TdE), (1.23)
o in notazione ingegneristica,
() D=0
()T d. (1.24)
La () risulta un potenziale se lintegrale di linea
indipendente dal percorso diintegrazione 0 .5 Ovviamente data la definizione di (), si richiede che questa siauna grandezza strettamente positiva per 6= 0.Se noto il potenziale () immediato ricavare dalla definizione (1.24) la legge
costitutiva:
() = (). (1.25)
1.7.2. Legame elastico-lineare
Nel caso particolare di legge sforzideformazioni lineare, il legame costitutivo pu essereespresso in forma algebrica. In notazione ingegneristica si ha infatti
= D, (1.26)
dove D detta matrice di rigidezza del materiale. Questa equazione definisce il pigenerale legame lineare, perch questo risulti anche elastico necessario porre ulterioricondizioni.
Simmetria. Perch lintegrale (1.24) che definisce la densit di energia di deformazioneelastica sia indipendente dal percorso necessario che
()T d = D d
sia un differenziale esatto: come noto dai corsi di analisi matematica ci implicache la matrice D sia simmetrica:
D = DT .5Definita una parametrizzazione (t), 0 t 1, del percorso 0 , lintegrale di linea si ottiene come
0
()T d =
10
((t)
)T d (t)dt
dt.
12
-
1.7. Legame costitutivo
Si noti che nel caso del legame elastico lineare la densit di energia elastica diventasemplicemente
=12()T =
12TD. (1.27)
Definizione positiva. Perch lenergia di deformazione elastica (data dalla (1.27)) siauna grandezza positiva necessario che la matrice D sia definita positiva:
TD > 0, se 6= 0.
Legame inverso
Contrariamente al caso iperelastico, nel caso lineare agevole ricavare la relazione inversadi (1.26). Infatti si ha
= A, (1.28)
dove A, matrice di cedevolezza, linversa di D,
A = D1.
Ovviamente anche A risulta simmetrica e definita positiva.
Legame isotropo
Il legame elastico lineare appena introdotto anisotropo, nel senso che lespressione dellamatrice di rigidezza dipende dal sistema di riferimento adottato. Per definire un legameelastico lineare isotropo dunque necessario trovare unespressione diD che sia invarianterispetto al cambiamento del sistema di riferimento.6
Notazione tensoriale Lanalisi del legame isotropo pu essere pi facilmente condottain notazione tensoriale invece che ingegneristica. Infatti dallalgebra noto che gli uni-ci tensori che possono essere formati con operazioni lineari e isotrope a partire da untensore simmetrico T , sono il tensore stesso e tr(T )I. Questa osservazione implica chenel caso lineare-isotropo lespressione pi generale del legame deformazionisforzi unacombinazione lineare di E e tr(E)I:
= 2GE + tr(E)I. (1.29)
I coefficienti della combinazione lineare 2G e sono detti costanti di Lam. Questi coef-ficienti sono evidentemente parametri del materiale, da determinarsi sperimentalmente.Le costanti di Lam sono tra loro indipendenti, possono assumere cio qualsiasi valore,purch la densit di energia di deformazione elastica sia positiva.
6Per la legge con cui varia D al variare del sistema di riferimento adottato, confronta infra alparagrafo 1.10.3, pagina 29.
13
-
1. Formulazione differenziale del Problema Elastico
In notazione tensoriale, la densit di energia di deformazione elastica per un legamelineare vale
=12tr((E)TE), (1.30)
cfr. (1.27). Per valutare il prodotto interno tr((E)TE) conveniente decomporre itensori e E nella loro parte isotropa e deviatorica:7
=13tr()I + S, (1.31)
E =13tr(E)I +D; (1.32)
dove sono stati introdotti due nuovi simboli, S per il deviatore di sforzo e D per ildeviatore di deformazione. facile verificare8 che
tr(TE) =13tr() p
tr(E) v
+tr(STD);
dove sono state introdotte due nuove quantit, la pressione idrostatica p e la deformazionevolumetrica v.9 La densit di energia di deformazione elastica vale dunque
=12pv +
12tr(STD). (1.33)
Occorre ora esprimere, mediante la (1.29), p e S in funzione di v e D:
p =13tr() =
13(2G tr(E) + 3 tr(E)) =
(23G+
)tr(E)
v
,
S = 13tr()I = 2GE + tr(E)I
(23G+
)tr(E)I =
= 2G(E 1
3tr(E)I
)
D
.
Questo risultato particolarmente interessante perch mostra che per un legame isotro-po si ha un disaccoppiamento tra la componente deviatorica e isotropa dei tensori dideformazione e sforzo. Introducendo il modulo di rigidezza volumetrica
KD=(23G+
), (1.34)
7Dato un tensore T , la sua componente isotropa 13tr(T )I, mentre T 1
3tr(T )I la sua componente
deviatorica.8Si ricordi che tr(A+B) = tr(A) + tr(B), tr(I) = 3 e tr(S) = tr(D) = 0.9Si noti che la definizione di p e v non coincide con linvariante primo di sforzo e deformazione: per quantoriguarda gli sforzi si introdotto un coefficiente 1
3in modo che p v rappresenti un lavoro. La situazione
simili a quanto fatto per ij e ij , dove stato necessario introdurre il coefficiente 2 nella definizionedegli scorrimenti angolari.
14
-
1.7. Legame costitutivo
le equazioni precedenti diventano semplicemente
p = Kv, (1.35)S = 2GD. (1.36)
Lenergia di deformazione elastica (1.33) si esprime perci come
=12Kv2 +G tr(DTD) 3
i,j=1 d2ij
. (1.37)
Nellequazione precedente, le costanti K e G moltiplicano termini quadratici e percila densit di energia di deformazione elastica E positiva se, e solo se,
K > 0, G > 0. (1.38)
Ritornando alle costanti di Lam queste condizioni diventano
G > 0, > 23G. (1.39)
Notazione ingegneristica Ritornando alla notazione ingegneristica, con facili passaggi,lequazione (1.29) diventa
=
+ 2G + 2G + 2G
G
G
G
D
. (1.40)
Per compattezza di notazione pu essere utile introdurre un modulo di elasticit vincolataM
D= +2G, che esprime il rapporto tra sforzo e deformazione in una barretta sottopostaa deformazione monoassiale.10
La matrice di cedevolezza A si ottiene semplicemente invertendo la matrice D:
=
+GG(3+2G) 2G(3+2G) 2G(3+2G)
2G(3+2G) +GG(3+2G) 2G(3+2G) 2G(3+2G) 2G(3+2G) +GG(3+2G)
1G
1G
1G
A=D1
. (1.41)
10Si noti che M non coincide con il modulo di Young E = +GG(3+2G)
, che invece esprime il rapportosforzodeformazione in una barretta sottoposta ad uno stato di sforzo monoassiale.
15
-
1. Formulazione differenziale del Problema Elastico
I termini di questa matrice sono usualmente espressi in funzione di due nuove costantielastiche, il modulo di Young E e il coefficiente di Poisson definiti come
1E
D=+G
G(3+ 2G)e D=
2(+G). (1.42)
Cos facendo si ottiene lusuale espressione della matrice di flessibilit
A =
1E E E E 1E E E E 1E
1G
1G
1G
. (1.43)
La condizione di definizione positiva della matrice di rigidezza pu essere impostarichiedendo che i suoi autovalori siano positivi. Cos facendo si ottengono le seguenticondizioni
G > 0, 2G > 0, 3+ 2G > 0, (1.44)
che si riducono aG > 0, > 2
3G, (1.45)
confermando quanto gi ricavato in notazione tensoriale.
Relazioni tra le varie costanti elastiche. Sono state introdotte nel corso della tratta-zione diverse costanti elastiche, G, , K, M , E, . Ovviamente per la condizione diisotropia, espressa dalle (1.29), solo due costanti possono essere considerate indipenden-ti, essendo le rimanenti esprimibili in funzione di esse. Alcune di queste relazioni sonoriportate in tabella 1.2.
1.8. Equazioni di Navier e relativo problema ai limiti
Nei paragrafi precedenti sono state introdotte equazioni di equilibrio, (1.20)(1.21), co-stitutive, (1.26), di congruenza (1.22), mentre risultano incogniti i campi u(x), (x) e(x), per x . La soluzione del problema elastico consiste nel determinare questicampi, date le forze di volume f(x) in ed eventuali forze p(x) sulla superficie .La strategia di soluzione di un approccio agli spostamenti di sostituire nelle equazioni
di equilibrio (1.21)
N[ x
](x) = f(x)
le deformazioni , per mezzo del legame costitutivo (1.26),
N[ x
]
(D(x)(x)
)= f(x),
16
-
1.8. Equazioni di Navier e relativo problema ai limiti
GK
M
E
>
0
G,K
GK
K
2 3G
K+
4 3G
9GK
3K+G
3K2G
2(3K
+G)
G>
0K
>0
G,
G+
2 3G
+2G
G(3+2G
)+G
2(+G)
G>
0>
2 3G
G,M
GM
4 3G
M2G
MG(3M4G
)MG
M2G
2(MG)
0 0 oppure
K < 43G,
G > 0,
{ > 23G oppure < 2G.
Anche in questo caso, la condizione per il problema piano meno restrittiva dellacorrispondente condizione per il problema tridimensionale.
I risultati ottenuti sono apparentemente paradossali, in quanto si visto che sono ammessimoduli elastici negativi, K < 0, E < 0, e valori di > 12 . Per dissipare il paradosso sipu immaginare di riscrivere la teoria del legame elastico-lineare isotropo dal punto di vista
33
-
1. Formulazione differenziale del Problema Elastico
di un ipotetico essere che vive su una variet bidimensionale, immersa in uno spazio euclideoa tre dimensioni. Per non complicare troppo la trattazione si suppone che anche su questosottospazio bidimensionale valga, almeno localmente, la metrica euclidea, in modo che siapossibile, come in (1.53), identificare le coordinate x definite sulla variet bidimensionalecon le prime due componenti delle coordinate x definite nello spazio globale. Se lapparatoneurosensoriale di questo essere fosse strutturato in modo da non poter vedere al di fuori delsuo spazio bidimensionale, non potrebbe essere conscio dellesistenza di una coordinata x3.17
Segue dunque lipotetica teoria della definizione postiva dellenergia di deformazione elasticanel caso piano.
Nel caso lineare-isotropo il legame deformazionisforzi una combinazione linearedi E e tr(E)I:
= 2GE + tr(E)I.
In notazione tensoriale, la densit di energia di deformazione elastica per un legamelineare vale
=12tr((E)T E).
conveniente decomporre i tensori e E nella loro componente isotropa edeviatorica:
=12tr()I + S,
E =12tr(E)I + D.
facile verificare che
tr(TE) =
12tr() p
tr(E) v
+tr(STD);
dove sono state introdotte due nuove quantit, la pressione idrostatica p e ladeformazione volumetrica v. La densit di energia di deformazione elastica valedunque
=12pv +
12tr(S
TD).
p e S in funzione di v e D valgono:
p =12tr() =
12
(2G tr(E) + 2 tr(E)
)=(G+
)
K
v,
S = 2GE + tr(E)I (G+
)tr(E)I = 2GD.
Lenergia di deformazione elastica vale
=12Kv2 + G tr(D
TD).
La condizione di definizione positiva del legame elastico dunque
K > 0, G > 0.17Questa finzione ovviamente ricalca Flatland di E. A. Abbot.
34
-
1.11. Esercizi
oppureG > 0, > G.
In termini di componenti ingegneristiche il legame costitutivo si esprime come
=
M 0 M 00 0 G
,con M = + 2G; la relazione inversa vale
=
1E
E
0
E
1E
00 0 1
G
,con
E =4G(+ G)+ 2G
=4GKK + G
, =
+ 2G=
K GK + G
.
Le relazioni tra i vari moduli sono riassunte nella tabella 1.3.
Abbandonando la visione bidimensionale, ci si pu chiedere quali sono i valori delle costantielastiche misurate nella variet bidimensionale, nellipotesi che i provini siano realizzati dimateriale isotropo nel super-spazio tridimensionale. La risposta diversa a seconda che ilcomportamento meccanico nella variet bidimensionale sia assimilabile dal punto di vista di unosservatore nello spazio tridimensionale ad uno stato piano di sforzo o deformazione. I risultati,facilmente ottenibili, sono dati in tabella 1.4. Si noti che
G = G, sempre,
K = K, mai,
M = M, = in deformazione piana,
E = E, = in sforzo piano.
Fatte queste osservazioni facile capire che se si considerano materiali isotropi tridimensionaliquesti presenteranno un intervallo di valori di valori misurati per K meno ampio di quello teori-co.18 Al contrario se si ammettono materiali anisotropi nello spazio tridimensionale ma isotropinel piano (cio trasversalmente isotropi), tutti i valori ammissibili nello spazio bidimensionalepotranno essere raggiunti.
A livello di ulteriore esercizio si pu a questo punto provare a ricavare le limitazioni che lisotro-pia in uno spazio quadridimensionale impone sui valori misurati in uno sotto-spazio tridimen-sionale. ( questo il motivo per cui non si hanno materiali con < 0, pur essendo per la teoria1 < < 12?)
esercizio 1.3 o
18Dualmente, lintervallo di valori teroricamente ammissibile per K implica valori impossibili, nellipotesidi isotropia, per K.
35
-
1. Formulazione differenziale del Problema Elastico
G K M E > 0
G, K G K K G G+ K 4GKK+G
KGK+G
G > 0, K > 0
G, G G+ 2G+ 4G(+G)+2G
+2G
G > 0, > GE, E2(1+)
E2(1)
E12
E12 E E > 0, 1 < < 1
Tabella 1.3: Relazioni tra moduli piani.
stato piano di G K M E
G,K def. G K + 13G K 23G K + 43G4G(K+ 1
3G)
K+ 43G
K 23G
K+ 43G
sforzo G 3GKK+ 4
3G
2G(K 23G)
K+ 43G
4G(K+ 13G)
K+ 43G
3GKK+ 1
3G
K 23G
2(K+ 13G)
G, def. G G+ 2G+ 4G(+G)+2G
+2G
sforzo G G(3+2G)+2G2G+2G
4G(+G)+2G
G(3+2G)+G
2(+G)
E, def. E2(1+)E
2(1+)(12)E
(1+)(12)(1)E
(1+)(12)E
12
1sforzo E2(1+)
E2(1)
E12
E12 E
Tabella 1.4: Relazioni tra moduli piani e moduli tridimensionali.
36
-
2. Formulazione ai residui pesati del Problema Elastico
2.1. Principio dei Lavori Virtuali
Il principio dei lavori virtuali (plv) asserisce che se, e solo se, la seguente equazio-ne (2.1) vale per ogni campo di spostamenti u(x) e per ogni campo di deformazionicongruenti (x) = NT
[ x
]u(x),
(x)T(x) d =
f(x)Tu(x) d+
p(x)Tu(x) d, (2.1)
allora gli sforzi (x) sono equilibrati alle forze di volume f(x) e alle forze disuperficie p(x); in formule
[(1.21):] N[ x
](x) = f(x), x [(1.20):] N[n](x) = p(x), x .
Infatti, integrando per parti1 il primo membro di (2.1) si ottiene(x)T(x) d =
(x)T
NT
[ x
]u(x) d =
= (x)T
NT
[ x
]u(x) d+
(x)TNT[n]u(x) d =
=
[
N[
x](x)
]Tu(x) d+
[N[n](x)
]Tu(x) d; (2.2)
sostituendo questo risultato in (2.1), portando tutti i termini a primo membro eraccogliendo u(x) a fattor comune si ottiene
[
N[
x](x) f(x)
]Tu(x) d+
[N[n](x) p(x)
]Tu(x) d = 0. (2.3)
Revisione 1.3 in data 1 marzo 2002 (bozza).1Cfr. appendice B.2.
37
-
2. Formulazione ai residui pesati del Problema Elastico
Se le (x) sono sufficientemente regolari per poter eseguire lintegrazione per parti, allorala (2.1) implica la (2.3); analogamente se le u(x) sono sufficientemente regolari, allorala (2.3) implica la (2.1). Sotto ampie condizioni di regolarit dunque le (2.1) e (2.3) sonoequivalenti.Dalle equazioni di equilibrio (1.20)(1.21) discende immediatamente la (2.3) e dunque
la (2.1). Al contrario, la (2.1) implica la (2.3), la quale, tenuto conto dellarbitrariet diu(x), implica, in senso debole, le (1.20)(1.21).
2.2. Metodo dei residui pesati applicato alle equazioni di equilibrio
Il plv rappresenta una tipica applicazione del metodo dei residui pesati. Lequazione diequilibrio indefinito (1.21), portando a primo membro il termine noto, diventa
N[ x
](x) f(x) = 0;definito il residuo di questa equazione la grandezza
r(x) D= N[ x
](x) f(x), (2.4)lequazione di equilibrio indefinito (1.21) soddisfatta in senso forte quando
r(x) = 0, x . (2.5)Introducendo una famiglia W di funzioni peso w(x), si dice che lequazione di equilibrioindefinito (1.21) soddisfatta in senso debole quando
w(x)Tr(x) d = 0, w(x) W. (2.6)
Se le funzioni di W sono sufficientemente regolari, lintegrale a primo membro di (2.6)pu essere integrato per parti, ottenendo
w(x)Tr(x) d =
w(x)T
(
N[
x](x) f(x)
)d =
=w(x)T
N[
x](x) d
w(x)Tf(x) d
w(x)TN[n](x) d = 0. (2.7)
Il termine al contorno,w(x)
TN[n](x) d, pu essere eliminato scegliendo funzionipeso che si annullano su : infatti w(x)
= 0 implica
w(x)
TN[n](x) d = 0.Il risultato ottenuto mostra che, pur di prendere una famiglia di funzioni W sufficiente-
mente regolare e che soddisfa opportune condizioni al contorno, le equazioni di equilibrioin possono essere riscritte in una forma che non richiede la derivazione del campo disforzo (x).Dallequazione (2.7) si arriva al plv introducendo la grandezza w(x) = NT[
x]w(x)
(campo di deformazioni associato alle funzioni peso) e un nuovo residuo, associatoallequazione di equilibrio al contorno (1.20)
q(x) = N[n](x) p(x) (2.8)
38
-
2.3. Metodo dei residui pesati applicato al problema elastico
Scegliendo opportunamente la classe di funzioni peso W si ha che le equazioniw(x)Tr(x) d = 0,
w(x)Tq(x) d = 0,
w(x) W,
sono entrambe soddisfatte se e solo sew(x)Tr(x) d+
w(x)Tq(x) d = 0, w(x) W. (2.9)
Da questa equazione, integrando per parti e con semplici passaggi, si arriva aw(x)T(x) d =
w(x)Tf(x) d+
w(x)Tp(x) d, (2.10)
cio il plv, se identifichiamo w(x) con u(x).
2.3. Metodo dei residui pesati applicato al problema elastico
Il metodo dei residui pesati pu essere applicato anche per la soluzione del problemaelastico, governato dalle equazioni (1.49)(1.51):
[(1.49):] L[ x
, x
]u(x) = f(x), x ;[(1.50):] u(x)
u
= u(x), x u;[(1.51):]
(L[n,
x]u(x)
)p
= p(x), x p.
In questo caso si definisce il residuo delle equazioni di Navier (1.49) e delle condizioni alcontorno statiche (1.51),
r(x) D= L[ x
, x
]u(x) f(x), x (2.11)q(x) D= L[n,
x]u(x) p(x), x p. (2.12)
Come sopra si richiede che questi due residui siano nulli in senso debole,w(x)Tr(x) d+
p
w(x)Tq(x) d = 0. (2.13)
Invece, per quanto riguarda le condizioni al contorno cinematiche (1.50), si richiede chequeste siano soddisfatte in senso forte; inoltre la classe W delle funzioni peso viene sceltain modo da soddisfare in senso forte una condizione al contorno omogenea su u:
w(x)u
= 0, x u, w(x) W. (2.14)
39
-
2. Formulazione ai residui pesati del Problema Elastico
Analogamente a quanto visto nel paragrafo precedente si procede ad integrare per partiuna volta il termine
w(x)
T(L[
x, x
]u(x))d per ottenere
w(x)T
(L[ x
, x
]u(x))d =
w(x)T
(
N[
x]D
NT
[ x
]u(x)
)d =
=w(x)T
N[
x]DN
T[ x
]u(x) d
w(x)TN[n]DN
T[ x
]u(x) d =
=
(NT
[ x
]w(x)
)
w(x)T
DNT[ x
]u(x)
u(x)
dp
w(x)TL[n, x
]u(x) d; (2.15)
(si ricordi che w(x)u
= 0.) Sostituendo questo risultato nella (2.13), con facili passaggisi ottiene
w(x)Tu(x) d =
w(x)Tf(x) d+
p
w(x)T p(x) d, (2.16)
con
w(x) = NT[ x
]w(x),
u(x) = DNT[ x
]u(x).
Lequazione (2.16) rappresenta unaltra forma del plv.2
Come visto in precedenza, sotto sufficienti condizioni di regolarit per la classe W,lequazione (2.16) rappresenta una formulazione debole delle equazioni di Navier (1.49),e delle condizioni al contorno statiche (1.51). Il plv (2.16) dunque equivalente alproblema elastico, in quanto le condizioni al contorno cinematiche (1.50) sono soddisfattein senso forte.3
2.4. Alcuni approfondimenti
2.4.1. Prodotto interno di due funzioni
Trattando in generale del metodo dei residui pesati opportuno introdurre una notazionepi agile e compatta. Il prodotto interno di due funzioni su definito come
(w,u) D=w(x)Tu(x) d; (2.17)
similmente sulla frontiera si ha
w,u D=w(x)Tu(x) d. (2.18)
2La condizione al contorno omogenea su u esprime appunto il fatto che il campo di spostamento virtuale congruente ai vincoli.
3Si ricordi che similmente le funzioni peso in W soddisfano in senso forte una condizione al contornoomogenea su u.
40
-
2.4. Alcuni approfondimenti
Dato che nel problema elastico la frontiera partizionata in u e p comodo definireanche
w,uu D=u
w(x)Tu(x) d, (2.19)
w,up D=p
w(x)Tu(x) d, (2.20)
in modo chew,u = w,uu + w,up. (2.21)
facile verificare che il prodotto interno simmetrico
(w,u) = (u,w), (2.22)
e lineare in entrambi gli argomenti
(w, u+ v) = (w,u) + (w,v), (2.23)(w + v,u) = (w,u) + (v,u). (2.24)
Analoghe propriet valgono ovviamente anche per w,u.Con la notazione, appena introdotta, di prodotto interno, il plv (2.1) pu essere
riscritto come(, ) = (f ,u) + p,u; (2.25)
mentre il plv in forma (2.16) diventa
(, ) = (f ,u) + p,up.La differenza tra le due forme del plv risiede nel fatto che la prima forma contienenellintegrale su valori di sforzo al contorno che nella formulazione del problema elasticopossono essere assegnati (p(x), per x p) oppure incogniti (le reazioni vincolari p(x)per x u). Nella forma (2.16) si richiede che u(x) = 0 per x u, in modo chenellintegrale al contorno compaia solo il valore assegnato p(x).
2.4.2. Operatore aggiunto
Dato un operatore L, si definisce loperatore aggiunto L come
(w,Lu) = (Lw,u); (2.26)
lequazione precedente vale nellipotesi che w= 0. Quando ci non accade possono
comparire anche termini al contorno.In generale per trovare loperatore aggiunto di un operatore differenziale lineare oc-
corre integrare per parti. Si consideri per esempio loperatore di congruenza NT[ x
]:
lequazione (2.2), nella notazione appena introdotta pu essere riscritta come
(,NT[ x
]u) = (N[
x],u) + N[n],u. (2.27)
41
-
2. Formulazione ai residui pesati del Problema Elastico
Questa equazione mostra che loperatore di equilibrio N[ x
] laggiunto delloperatoredi congruenza NT
[ x
].4 Il termine al contorno N[n],u scompare solo se u
= 0.
Dalla (2.27) immediato, ripercorrendo la via sopra esposta, ricavare la (2.25), ovveroil plv.5
La nozione di operatore aggiunto permette di fare un ulteriore commento sul plv:la dimostrazione di questo principio si basa sul fatto, apparentemente fortuito, che glioperatori di congruenza e di equilibrio sono luno laggiunto dellaltro. In realt unanalisipi attenta della struttura formale di unampia classe di teorie fisiche, che comprendeanche la meccanica del continuo, mostra che questo fatto in realt un tratto comune,che caratterizza una classe di modelli matematici che potremmo definire a formulazionevariazionale.6 Nel capitolo 3, infatti, si sfrutter il plv per ottenere una formulazionevariazionale del problema elastico, che cruciale sia per dimostrare che il problemaelastico ben posto, sia per introdurre la sua soluzione in forma numerica.Per questo motivo pratica comune presentare la meccanica del continuo secondo
uno schema logico differente da quello seguito nel capitolo 1, in modo da garantire cheloperatore di equilibrio e di congruenza siano luno laggiunto dellaltro. In sostanzasi introducono le grandezze cinematiche e le equazioni di congruenza del paragrafo 1.4e si definiscono le grandezze statiche come i coefficienti generalizzati che nel plv (2.1)moltiplicano le grandezze cinematiche. Dunque gli sforzi sono i coefficienti generalizzatiche moltiplicano le deformazioni nellespressione del lavoro interno, le forze di volume edi superficie sono legate agli spostamenti nellespressione del lavoro esterno, sul dominioe sul contorno, rispettivamente. Dallespressione del plv, che viene quindi postulata, siottengono, mediante integrazione per parti le equazioni di equilibrio, che dunque sono perdefinizione le aggiunte delle equazioni di congruenza. In formule, sostituendo la (2.27)nella (2.25) si ottiene
(N[ x
],u) + N[n],u = (f ,u) + p,u
la quale, portando tutti i termini a primo membro e raccogliendo u a fattor comunediventa
(N[ x
] f ,u) + N[n] p,u = 0.4 interessante notare che con la notazione matriciale qui adottata, laggiunto di un operatore differenzialelineare del primo ordine semplicemente il suo trasposto cambiato di segno.5Lequazione (2.9) pu essere riscritta come (w, r) + w, q = 0, cio
(w,N[ x
]) (w,f) + w,N[n] w,p = 0,in forma estesa. Sostituendo il primo termine di questa equazione con il risultato dellintegrazioneper parti (2.27) si ha
(NT[ x
]w,) w,N[n] (w,f) + w,N[n] w,p = 0,
che con ovvie semplificazioni e manipolazioni diventa
(NT[ x
]w,) = (w,f) + w,p. (2.28)
6Per approfondimenti si consiglia di consultare [13].
42
-
2.4. Alcuni approfondimenti
Da questa equazione immediato dedurre le equazioni di equilibrio (1.21) e (1.20).
2.4.3. Operatori auto-aggiunti
Nel caso particolare in cui L L, si parla di un operatore auto-aggiunto. interessante analizzare da questo punto di vista loperatore di Navier, L[
x, x
] =N[
x]DN[
x]. Nello spirito del metodo dei residui pesati si consideri lintegrale di
dominio (w,L[ x
, x
]u) e si proceda a due integrazioni per parti:
(w,L[ x
, x
]u) =
= (w,N[ x
]DNT[ x
]u) = (NT
[ x
]w,DNT
[ x
]u) w,N[n]DNT[
x]u =
= (DNT[ x
]w,NT
[ x
]u) w,N[n]DNT[
x]u =
= (N[ x
]DNT[ x
]w,u) + N[n]DNT[
x]w,u w,N[n]DNT[
x]u =
= (L[ x
, x
]w,u) + L[n, x
]w,u w,L[n, x
]u. (2.29)
Questo risultato, assumendo w(x)
= u(x)
= 0, mostra che loperatore di Na-vier auto-aggiunto, in quanto (w,L[
x, x
]u) = (L[ x
, x
]w,u). Le importanticonseguenze di questa propriet saranno analizzate nel capitolo 3.Il risultato dellequazione precedente pu essere convenientemente riscritto nella forma
(w,L[ x
, x
]u) + w,L[n, x
]u = (L[ x
, x
]w,u) + L[n, x
]w,u, (2.30)nota anche come teorema di Betti.
43
-
3. Formulazione variazionale del Problema Elastico
3.1. Energia potenziale totale
La soluzione di un problema elastico-lineare pu essere convenientemente caratterizza-ta anche come quel particolare campo di spostamenti u(x) che rende stazionario unfunzionale P
(u(x)
), appositamente definito. Questo funzionale prende il nome di ener-
gia potenziale totale e questo capitolo dedicato allo studio delle sue condizioni distazionariet.
3.1.1. Energia di deformazione elastica
Lenergia potenziale totale un funzionale del campo di spostamento composto da duetermini, il primo dei quali rappresenta lenergia di deformazione elastica.Per definizione lenergia di deformazione elastica altro non che lintegrale sul
dominio della densit di energia di deformazione elastica, gi definita in (1.24):
E((x)
) D= ((x)
)d. (3.1)
Come tale essa risulta un funzionale del campo di deformazioni (x).
3.1.2. Potenziale dei carichi
f(x)Tu(x) d
p
p(x)Tu(x) d
3.1.3. Stazionariet dellenergia potenziale totale
P(u(x)
) D= E(NT[ x
]u(x)
(x)
) f(x)Tu(x) d
p
p(x)Tu(x) d
u(x)u
= u(x), x u(3.2)
Revisione 1.3 in data 16 dicembre 2002 (formule).
45
-
3. Formulazione variazionale del Problema Elastico
P(u) =
(
()
)T d
fT u d
p
pT u d
=T d
fT u d
p
pT u d (3.3)
uu
= u = uu
= 0 (3.4)
P(u) = 0 =T d =
fT u d+
p
pT u d (3.5)
= D =
() =12TD
E((x)
)=
12
(x)TD(x)(x) d
P(u(x)
)=
12
u(x)T
N[
x]D
NT
[ x
]u(x) d
f(x)Tu(x) d+
p
p(x)Tu(x) d
(3.6)
3.2. La norma dellenergia
a(w,u) D= (NT[ x
]w,DNT
[ x
]u) (3.7)
a(w,u) = a(u,w) (3.8)a(w, u+ v) = a(w,u) + a(w,v) (3.9)
12a(u,u) = E(u) 0 (3.10)
P(u) =12a(u,u) (u,f) u, pp (3.11)
P(u+ u) =
=12a(u, u) 2P(u)
+ a(u,u) (u,f) u, pp P(u)
+12a(u,u) (u,f) u, pp
P(u)
(3.12)
46
-
3.2. La norma dellenergia
u(x)u u(x) = 0
Pu = 0
} a(u,u) = (u,f) + u, pp (3.13)
[(2.2):] r(x) D= N[ x
]DNT[ x
]u(x) f(x)
(w, r) = a(w,u) w,N[n]DNT[ x
]u (w,f) (3.14)
(w, r) = 0w(x)
u
= 0
w,N[n]DNT[ x
]up w, pp = 0
a(w,u) = (w,f) + w, pp (3.15)
u(x)u
= u(x)
u(x) = w(x)(3.16)
Pu = 0 {
(w, r) = 0
w,N[n]DNT[ x
]u pp = 0 (3.17)
47
-
Bibliografia
[1] Enrico Bazzaro, Carlo Gorla, e Stefano Miccoli. Lezioni di Tecnica delle CostruzioniMeccaniche, Parte Prima: Fondamenti. Edizioni Spiegel, Milano, 1997. ISBN 88-7660-087-X. Esaurito, nuova edizione ampliata [2].
[2] Enrico Bazzaro, Carlo Gorla, e Stefano Miccoli. Lezioni di Tecnica delle CostruzioniMeccaniche, Parte Generale. Edizioni Schnenfeld & Ziegler, Milano, 2004. ISBN88-88412-24-7.
[3] Giulio Belloni e Giuseppe Bernasconi. Sforzi Deformazioni e loro legami. EdizioniSpiegel, Milano, 1984.
[4] Carlo Cercignani. Vettori Matrici Geometria. Zanichelli, Bologna, 1976.
[5] Robert D. Cook. Finite Element Modeling for Stress Analysis. John Wiley & Sons,Inc., 1995. ISBN 0-471-10774-3.
[6] Leone Corradi dellAcqua. Meccanica delle strutture, vol. 2: le teorie strutturali e ilmetodo degli elementi finiti. McGraw-Hill Libri Italia srl, Milano, 1993.
[7] P. J. Davies e P. Rabinowitz. Methods of Numerical Integration. Academic Press,1975.
[8] Lee W. Johnson e R. Dean Riess. Numerical Analysis. Addison-Weseley PublishingCompany, 1982. ISBN 0-201-10392-3.
[9] Jean Lemaitre e Jean-Louis Chaboche. Mcanique des matriaux solides. Dunod, 2ed., 1988. ISBN 2-04-018618-2.
[10] Alfio Quarteroni. Modellistica numerica per problemi differenziali. Springer-VerlagItalia, Milano, 2000. ISBN 88-470-0108-0.
[11] Alfio Quarteroni, Riccardo Sacco, e Fausto Saleri. Matematica Numerica. Springer-Verlag Italia, Milano, 2000. ISBN 88-470-0077-7.
55
-
Bibliografia
[12] Gilbert Strang e George J. Fix. An Analysis of the Finite Element Method.Wellesley-Cambridge Press, Wellesley MA, 1988. ISBN 0-9614088-8-X. URLhttp://www-math.mit.edu/~gs/well_camb_press/wcp.html. Reprint. Originallypublished: Prentice-Hall, 1973.
[13] E. Tonti. La Struttura Formale delle Teorie Fisiche. Cooperativa LibrariaUniversitaria del Politecnico, Milano, 1976.
56
-
. . . what is real in mathematics is the notation, not an imagineddenotation.
Edward Nelson, Confessions of anApostate Mathematician, 1995
A. Notazione
A.1. Matrici e tensori
A.1.1. Matrici
Matrici in Rnm sono indicate da lettere in carattere grassetto maiuscolo, per esempio A;quando necessario specificare le dimensioni, queste sono scritte sotto il simbolo inquestione: A
nm . Le componenti di A sono aij con i = 1 . . . n, j = 1 . . .m, in modo chesi abbia
A =
a11 a1m...
. . ....
an1 anm
. (A.1)La matrice trasposta di A indicata come AT mentre C
nm = Anp Bpm indica il prodotto
matriciale.La matrice inversa di una matrice quadrata indicata come 1, in modo che
AA1 = A1A = I. (A.2)
Linversa trasposta invece indicata come
AT =(A1
)T = (AT )1 . (A.3)Il determinante di una matrice quadrata A
nn indicato come det(A). La traccia diA
tr(A) D=ni=1
aii. (A.4)
Matrici n 1 sono dette vettori-colonna e per essi si usa una lettera in caratteregrassetto minuscolo, per esempio x; le componenti del vettore-colonna x sono xi, con
Revisione 1.4 in data 9 luglio 2002 (bozza).
57
-
A. Notazione
i = 1 . . . n:
x =
x1...xn
. (A.5)Vettori-riga, ovvero una matrici 1 m, vengono considerati come vettori-colonnatrasposti.
A.1.2. Vettori e tensori
Vettori definiti nello spazio fisico sono indicati da lettere minuscole in grassetto corsivo,p. e. x, f , p; i tensori sono indicati da lettere maiuscole in grassetto corsivo, p. e. F , E,, S.Nel corso del testo si adotta regolarmente un sistema di riferimento cartesiano ortogo-
nale, i versori del quale sono ei, i = 1 . . . 3. Dato un vettore v le sue componenti rispettoa questa base sono indicate come vi, i = 1 . . . 3, in modo che v =
3i=1 eivi. Similmente
per un tensore T si indicano con tij , i, j = 1 . . . 3 le sue componenti rispetto al sistemadi riferimento cartesiano ortogonale adottato. pratica comune identificare vettori e tensori con vettori-colonna 3 1 e matrici
3 3 che raccolgono le loro componenti rispetto ad un sistema di riferimento cartesianoortogonale fissato. Da un punto di vista formale questa operazione corretta perchistituisce un isomorfismo tra lo spazio dei vettori (tensori) e lo spazio dei vettori colonna3 1 (matrici 3 3). Si ricordi per che mentre vettori e tensori sono invarianti rispettoalla scelta del sistema di riferimento, lo stesso non si pu dire delle loro componenti. dunque necessario specificare le regole secondo cui le componenti variano al variare delsistema di riferimento, cfr. il paragrafo 1.10.Ci specificato, in questo testo vettori e tensori sono identificati con vettori-colonna e
matrici. Per chiarezza di notazione, tuttavia, quando si vuole definire un vettore v e untensore T a partire dalle sue componenti si usano parentesi differenti da quelle usate pervettori-colonna e matrici:
v =
v1v2v3
, T =t11 t12 t13t21 t22 t23t31 t32 t33
. (A.6)
Le espressioni dei versori degli assi coordinati risultano ovviamente
e1 =
100
, e2 =010
, e3 =001
, (A.7)mentre il tensore identico definito come
ID=
1 0 00 1 00 0 1
. (A.8)
58
-
A.2. Operatori differenziali
Le operazione tra vettori e tensori sono dunque da interpretare, aritmeticamente, comeoperazioni tra matrici. In particolare si scrive
fTu, tr(TE),
per indicare il prodotto interno tra i vettori f e u e, rispettivamente, tra i tensori e E.A livello di componenti si ha dunque
fTu =3i=1
fiui, (A.9)
tr(TE) =3
h,k=1
hkkh. (A.10)
Riferimenti bibliografici
Su vettori, tensori, matrici, pu essere consultato qualsiasi testo di algebra; tra molti siconsiglia [4].
A.2. Operatori differenziali
Per i principali operatori differenziali (gradiente, divergenza, etc.) si adotta una notazionematriciale: si definiscono cio matrici le cui componenti sono i simboli di derivazioneparziale, e si applicano formalmente le regole dellalgebra matriciale. Per esempio ilgradiente di uno scalare a(x) pu essere espresso come
x1x2x3
a =
x1
ax2
ax3
a
;similmente la divergenza di un vettore f(x) pu essere espressa come
((x1
x2
x3
))f1f2f3
= x1
f1 +
x2f2 +
x3f3.
Pi brevemente, introdotto loperatore
x
D=
x1x2x3
, (A.11)si pu anche scrivere xa(x) e
x
Tf(x).
59
-
A. Notazione
Di frequente si presenta la necessit di definire matrici di derivate parziali. Per esempio,dato u(x), interessa definire
x1
u1x2
u1x3
u1x1
u2x2
u2x3
u2x1
u3x2
u3x3
u3
.
Con la notazione adottata si ha
x1
u1x2
u1x3
u1x1
u2x2
u2x3
u2x1
u3x2
u3x3
u3
= [
xu(x)T
]T.
Applicando la regola di trasposizione del prodotto,[xu(x)
T]T
=[u(x) x
T], si pu
per anche scrivere
x1
u1x2
u1x3
u1x1
u2x2
u2x3
u2x1
u3x2
u3x3
u3
= [u(x)
x
T],
adottando la convenzione che loperatore differenziale si applica verso sinistra nellespres-sione in parentesi quadre, e non verso destra, come al solito. Questa seconda notazione sicuramente pi espressiva;1 tuttavia per evitare ambiguit e non introdurre troppi livellidi parentesi si adotta una freccia, che punta verso il termine su cui opera loperatoredifferenziale. Si ha dunque
a
d
dxb = a db
dx,
a
d
dxb =
da
dx b,
xu(x)T
T = u(x) x
T
,
etc.Questa notazione, a prima vista un po astrusa, pu essere spiegata osservando che
volendo adottare lalgebra delle matrici con espressioni contenenti simboli di derivazione necessario che sia rispettata la commutativit del prodotto, e dunque si costretti a
scrivere siaddxa che a
ddx . Daltro canto la freccia necessaria perch, pur potendo imporre
formalmente la commutativit, per le derivate non pu ovviamente valere lassociativit.1Si comprende infatti a colpo docchio che le righe della matrice sono date dalle componenti di u, mentrele colonne sono date dalle derivate parziali i-esime. Un altro motivo per adottare questa notazione laconseguente semplificazione dellespressione dellintegrazione per parti, cfr. paragrafo B.2.
60
-
Carlo Gentina e Francesco Guerrini,Topolino n. 2396, 2001B. Richiami di Analisi Matematica
B.1. Differenziale di una funzione di pi variabili
Il differenziale di una funzione scalare di n variabili f(xi), i = 1 . . . n, definito come
df =nj=1
xjf(xi) dxj ,
oppure anche
df =nj=1
f(xi)
xjdxj ,
applicando da destra loperatore di derivazione parziale. Nel caso n = 3, introdotto
il vettore x e loperatore differenziale x , risulta3
j=1
xj
dxj =x
Tdx, e dunque
lequazione precedente pu essere riscritta come
df = f(x)
x
T
dx. (B.1)
Questa notazione particolarmente compatta quando si calcola il differenziale di uncampo vettoriale f(x); si ha infatti
df = f(x)
x
T
dx, (B.2)
dove f(x)x
T una matrice 3 3 che raccoglie le derivate parziali delle componentidi f(x).
Revisione 1.3 in data 9 luglio 2002 (bozza).
61
-
B. Richiami di Analisi Matematica
B.2. Integrazione per parti
La classica formula di integrazione per parti, nota da ogni corso di Analisi Matematica, baFdG
dxdx =
ba
dF
dxGdx+ [FG]ba ,
pu essere riscritta come
baF
d
dxGdx =
baF
d
dxGdx+ [FG]ba , (B.3)
adottando la convezione di indicare con una freccia la direzione in cui si applicaloperatore differenziale.
Lestensione di questa formula al caso dellintegrale di volume F
x1
Gd imme-diata se si osserva che d = dx1 dx2dx3: sotto generali condizioni di regolarit per sufficiente scomporre lintegrale triplo in un integrale esterno in dx2dx3 e un integraleinterno in dx1, al quale si applica la formula di integrazioni per parti monodimensiona-le; per trattare il fattore finito occorre inoltre notare che dx2dx3 = d|n1|, dove n1 lacomponente della normale uscente a in direzione dellasse x1, rispetto al quale si eseguelintegrazione per parti. Si giunge cos al risultato, noto dai corsi di Analisi Matematica:
F
x1Gd =
F
x1Gd+
Fn1Gd;
pi in generale si ha
F
xiGd =
F
xiGd+
FniGd, (B.4)
dove con ni(x) si indica la componente i-esima della normale uscente ad .Questo risultato, valido nel caso scalare, immediatamente estendibile al caso di un
operatore differenziale matriciale (lineare). Svolgendo lespressione matriciale si ottie-ne, componente per componente, una sommatoria di termini scalari ai quali si applicala (B.4); riformando lespressione matriciale si ottiene lespressione richiesta. affattointuitivo che lespressione ottenuta sar formalmente identica alla (B.4). Infatti, se F(x)e G(x) sono campi matriciali e D
xun operatore differenziale matriciale, seguendo il
ragionamento sopra esposto si ottieneFD
xG d =
FD
xG d+
FDnG d, (B.5)
dove Dn un campo matriciale, ottenuto formalmente sostituendo, elemento perelemento, ni(x) a xi .
62
-
Der Rechenschieber, das sind zwei unerhrt scharfsinnigverflochtene Systeme von Zahlen und Strichen; derRechenschieber, das sind zwei wei lackierte, ineinandergleitende Stbchen von flach trapezfrmigen Querschnitt, mitdessen Hilfe man die verwickeltsten Aufgaben im Nu lsen kann,ohne einen Gedanken nutzlos zu verlieren; der Rechenschieber,das ist ein Symbol, das man in der Brusttasche trgt und alseinen harten weien Strich ber dem Herzen fhlt.
Robert Musil, Der Mann ohneEigenschaften, 1930
C. Richiami di Calcolo Numerico
C.1. Integrazione Numerica
Lintegrale definito di una funzione f il funzionale
I(f) D= baf(x) dx; (C.1)
si tratta di un funzionale lineare in quanto
I(f + g) = I(f) + I(g), , R. (C.2)Una formula di quadratura numerica ad n punti un funzionale Qn(f) che
approssima I(f) come
I(f) Qn(f) =nj=1
Ajf(xj), a xj b, (C.3)
dove i coefficienti Aj sono detti pesi, le coordinate xj punti. Una formula di quadraturabasata su interpolazione polinomiale definita come
Qn(f)D= I(pn1), (C.4)
dove pn1(x) un polinomio di ordine n 1 che interpola f(x) negli n punti xj .Unespressione esplicita del polinomio interpolante pn1(x) pu essere ottenuta come
combinazione lineare dei polinomi di Lagrange
lj(x)D=
x x1xj x1
x x2xj x2
x xj1xj xj1
x xj+1xj xj+1
x xn1xj xn1
x xnxj xn =
ni=1i6=j
x xixj xi .
(C.5)Dalla propriet
lj(xi) = ij (C.6)
Revisione 1.4 in data 5 giugno 2003 (bozza).
63
-
C. Richiami di Calcolo Numerico
si ottiene immediatamente
pn1(x) =nj=1
f(xj)lj(x). (C.7)
Sfruttando la linearit dellintegrale definito immediato ottenere
Qn(f) = I(pn1) = I(nj=1
f(xj)lj) =nj=1
f(xj) I(lj)Aj
=nj=1
Ajf(xj), (C.8)
che fornisce lespressione esplicita Aj = I(lj).Per qualsiasi scelta dei punti xj , una formula di quadratura di questo tipo fornisce
un risultato esatto se f un polinomio di ordine non superiore a n 1, in quantof(x) pn1(x) e dunque Qn(f) I(f). Si pu osservare che per opportune scelte deipunti di integrazione si possono ottenere formule di integrazione esatte anche per polinomidi ordine superiore a n 1: si parla di integrazione di Gauss o gaussiana quando pesi epunti di integrazione vengono scelti in modo di fornire una formula esatta per polinomifino allordine 2n 1.Pesi e punti di integrazione sono forniti in forma tabellare e riferiti ad un intervallo di
integrazione fissato, di solito [1, 1]. Il caso generale trattato ricorrendo alla formulax = g(t), (C.9) b
af(x) dx =
g1(b)g1(a)
f(g(t))dg
dtdt, (C.10)
la quale, per g(t) = a+b2 +ba2 t, consente di esprime lintegrale su [a, b] come b
af(x) dx =
b a2
11
f
(a+ b2
+b a2
t
)dt. (C.11)
Da questa formula, definiti Aj e xj pesi e punti di integrazione sullintervallo [1, 1], si
ottengono i pesi e punti di integrazione su [a, b]:
Aj =b a2
Aj xj =a+ b2
+b a2
xj . (C.12)
Riferimenti bibliografici
Sulle formule di integrazione numerica pu essere consultato qualsiasi testo di CalcoloNumerico, per approfondimenti si consigliano [7, 8].
File Matlab
Unimplementazione in Matlab di una formula di integrazione gaussiana pu essere tro-vata nei file grule.m e gint.m, reperibili nella pagina http://www.mecc.polimi.it/~miccoli/PASM/m-files/.
64
-
Conoscere quindi i valori delle lettere dellalfabeto conoscerelessenza divina delluniverso fenomenico; e la struttura stessadelluniverso fenomenico ha riscontro puntuale nelle letteredellalfabeto, dalle e grazie alle quali si forma, dopotutto, ognipensiero, e quindi ogni consapevolezza umana.
Gabriele Mandel, Lalfabeto ebraico, 2000.
D. Simboli principali
Di seguito si definiscono i principali simboli adottati nel testo, elencati in ordine alfabetico(con le lettere latine che precedono le lettere greche.) Se definite si riportano anche ledimensioni fisiche dei simboli, utilizzando le seguenti grandezze generiche.1
1 adimensionaleL lunghezzaM massaT tempoF forza (MLT2)[ ] dimensioni della grandezza generica
Simbolo definizione dim. descrizioneD [(1.26)] FL2 matrice di rigidezzadet( ) [ ]n determinate della matrice , di ordine nei [(A.7)] 1 versore dellasse coordinato i-esimof [(1.2)] FL3 forze di volumeI [(A.8)] 1 tensore identicoN[ ] [(1.19)] [ ] operatore matriciale di riordinamento delle
componenti di N[
x] [(1.21)] L
1 operatore di equilibrioNT
[ x
][(1.22)] L1 operatore di congruenza
p [(1.3)] FL2 forze di superficie, sforzopn [(1.4)] FL2 sforzi interni, sforzi al contorno T [ ] trasposto di T [(A.3)] [ ]1 inversa trasposta di
continua a pagina seguente . . .
Revisione 1.4 in data 1 ottobre 2002 (incompleto).1Luso pi sotto del simbolo F va inteso come una abbreviazione del pi lungo MLT2, e non comelindicazione di utilizzare il sistema tecnico al posto di quello internazionale.
65
-
D. Simboli principali
. . . continua da pagina precedente
Simbolo definizione dim. descrizionetr( ) [(A.4)] [ ] traccia della matrice u [(1.10)] L vettore spostamentox L vettore posizione [(1.24)] FL2 densit di energia di deformazione elastica D= frontiera (o contorno) di
ijD=
{0 se i 6= j1 se i = j
1 delta di Kronecker
E [(1.15)] 1 tensore di deformazione [(1.18)] 1 componenti ingegneristiche del tensore di
deformazione [(1.5)] FL2 tensore di sforzo [(1.18)] FL2 componenti ingegneristiche del tensore di
sforzo dominio elastico [(2.26)] [ ] operatore aggiunto di (, ?) [(2.17)] [][?]L3 prodotto interno su di (x) e ?(x), ? [(2.18)] [][?]L2 prodotto interno su di (x) e ?(x), ?u [(2.19)] [][?]L2 prodotto interno su u di (x) e ?(x), ?p [(2.20)] [][?]L2 prodotto interno su p di (x) e ?(x)
66
-
Parole inesatte, refusi, parole aggiunte da mani distratte,perdute, raccattate, parole impossibili, parole caute,da dizionarioci mettono sullavviso: vi sono righe in cui leparole che vanno lette non sono state scritte. Anche il silenzio parola.
Giorgio Manganelli, Pinocchio: un libroparallelo, 1977
-
colophonQuesto testo composto in LATEX2 e pdfTEX con i caratteri della famiglia Computer Modern.
1 Formulazione differenziale del Problema Elastico1.1 Ipotesi di base della Meccanica del Continuo1.2 Descrizione geometrica del continuo1.3 Statica1.3.1 Forze esterne1.3.2 Forze interne1.3.3 Equazioni indefinite di equilibrio
1.4 Cinematica1.4.1 Spostamenti1.4.2 Deformazioni
1.5 Lavoro di deformazione1.6 Componenti ingegneristiche di sforzo e deformazione1.6.1 Equazioni di equilibrio e compatibilit
1.7 Legame costitutivo1.7.1 Legame elastico generale, o iperelastico1.7.2 Legame elastico-lineare
1.8 Equazioni di Navier e relativo problema ai limiti1.9 Problemi Piani1.9.1 Problema piano di deformazione1.9.2 Problema piano di sforzo1.9.3 Considerazioni finali
1.10 Cambiamento del sistema di riferimento1.10.1 Vettori1.10.2 Tensore di sforzo e deformazione1.10.3 Matrice di rigidezza
1.11 Esercizi
2 Formulazione ai residui pesati del Problema Elastico2.1 Principio dei Lavori Virtuali2.2 Metodo dei residui pesati applicato alle equazioni di equilibrio2.3 Metodo dei residui pesati applicato al problema elastico2.4 Alcuni approfondimenti2.4.1 Prodotto interno di due funzioni2.4.2 Operatore aggiunto2.4.3 Operatori auto-aggiunti
3 Formulazione variazionale del Problema Elastico3.1 Energia potenziale totale3.1.1 Energia di deformazione elastica3.1.2 Potenziale dei carichi3.1.3 Stazionariet dell'energia potenziale totale
3.2 La norma dell'energia
BibliografiaA NotazioneA.1 Matrici e tensoriA.1.1 MatriciA.1.2 Vettori e tensori
A.2 Operatori differenziali
B Richiami di Analisi MatematicaB.1 Differenziale di una funzione di pi variabiliB.2 Integrazione per parti
C Richiami di Calcolo NumericoC.1 Integrazione Numerica
D Simboli principali