INTRODUZIONE.unina.stidue.net/Universita' di Trieste/Ingegneria... · rappresentazione. Parte...
43
1. INTRODUZIONE. Nelle discipline scientifiche è quanto mai usuale il ricorso alle rappresentazioni grafiche per una descrizione sintetica dei risultati numerici di calcoli o di sperimentazioni. Vi sono però casi in cui la rappresentazione grafica assume il ruolo di elemento di base per lo sviluppo di una procedura di calcolo o di analisi quantitativa, sia pure approssimata, di qualche proprietà relativa all'oggetto dello studio. In questi casi è lecito parlare di veri e propri "metodi grafici" di analisi o di progettazione: per certe applicazioni ingegneristiche essi sono un elemento essenziale non solo per la funzione informativa che è propria della rappresentazione grafica, ma appunto in quanto elemento di base per lo sviluppo dei calcoli di progetto; ciò è particolarmente vero, ad esempio, nelle applicazioni più tradizionali dell'ingegenria civile. Le capacità dei moderni elaboratori elettronici, a tutti i livelli di potenza ormai, se da un lato hanno reso possibile l'adozione di tecniche di lavoro più precise, basate sull'elaborazione di dati numerici esatti, anzichè su dati approssimati a causa dei limiti di quantificazione insiti nell'uso di loro rappresentazioni grafiche, dall'altro hanno reso estremamente semplice e quindi comoda la produzione di grafici, che possono essere ottenuti con caratteristiche di precisione superiori a quelle consentite da una qualsiasi manualità , per quanto sofisticata, e in quantità teoricamente illimitata. Poichè la sinteticità con cui grandi quantità di informazione vengono rappresentate dai grafici è caratteristica di enorme valore pratico, ben si comprende come in effetti lo strumento grafico abbia conseguito, grazie alle nuove tecnologie, un ulteriore valorizzazione ed attualizzazione. Beninteso, il grafico va concepito sempre come strumento di supporto, sia pure prezioso per quanto detto in precedenza, e in quanto tale esso è solo parte di una procedura più complessa. Esso si propone quindi molto spesso solo come punto di riferimento per uno studio più approfondito delle proprietà dell' oggetto di rappresentazione. Parte integrante del metodo grafico è quindi quell'insieme di informazioni che consentono, da un lato, di tracciare correttamente il grafico, e dall'altro, di ricavarne in modo matematicamente corretto e numericamente esatto le informazioni principali in esso contenute e che in forma numerica dovranno in definitiva essere convertite per gli impieghi pratici. Nel settore specifico delle applicazioni che interessano l'ingegneria elettrica l'impiego di strumenti grafici di studio, sia per l'analisi che per la sintesi, è da decenni ben affermato in discipline come la teoria dei campi, la teoria delle reti, la teoria dei sistemi dinamici e dei sistemi di controllo in particolare. Le pagine che seguono sono dedicate appunto ai metodi grafici propri di quest'ultima area. Esse hanno fondamentalmente uno scopo didattico, essendo rivolte sopratutto agli studenti dei corsi di laurea in Ingegneria Elettrotecnica e in Ingegneria Elettronica, ai quali vorrebbero fornire una, sia pure parziale, base di appoggio per il loro impegno di studio delle discipline summenzionate. Il presente volume tratta quasi esclusivamente dei metodi grafici con cui possono essere affrontati problemi di analisi e di sintesi concernenti i sistemi dinamici lineari e stazionari: la funzione di trasferimento è il modello matematico che è assunto a base della descrizione di tali sistemi e che costituisce altresì il 1
Transcript of INTRODUZIONE.unina.stidue.net/Universita' di Trieste/Ingegneria... · rappresentazione. Parte...

1. INTRODUZIONE. Nelle discipline scientifiche è quanto mai usuale il ricorso alle rappresentazioni grafiche per una descrizione sintetica dei risultati numerici di calcoli o di sperimentazioni. Vi sono però casi in cui la rappresentazione grafica assume il ruolo di elemento di base per lo sviluppo di una procedura di calcolo o di analisi quantitativa, sia pure approssimata, di qualche proprietà relativa all'oggetto dello studio. In questi casi è lecito parlare di veri e propri "metodi grafici" di analisi o di progettazione: per certe applicazioni ingegneristiche essi sono un elemento essenziale non solo per la funzione informativa che è propria della rappresentazione grafica, ma appunto in quanto elemento di base per lo sviluppo dei calcoli di progetto; ciò è particolarmente vero, ad esempio, nelle applicazioni più tradizionali dell'ingegenria civile. Le capacità dei moderni elaboratori elettronici, a tutti i livelli di potenza ormai, se da un lato hanno reso possibile l'adozione di tecniche di lavoro più precise, basate sull'elaborazione di dati numerici esatti, anzichè su dati approssimati a causa dei limiti di quantificazione insiti nell'uso di loro rappresentazioni grafiche, dall'altro hanno reso estremamente semplice e quindi comoda la produzione di grafici, che possono essere ottenuti con caratteristiche di precisione superiori a quelle consentite da una qualsiasi manualità , per quanto sofisticata, e in quantità teoricamente illimitata. Poichè la sinteticità con cui grandi quantità di informazione vengono rappresentate dai grafici è caratteristica di enorme valore pratico, ben si comprende come in effetti lo strumento grafico abbia conseguito, grazie alle nuove tecnologie, un ulteriore valorizzazione ed attualizzazione. Beninteso, il grafico va concepito sempre come strumento di supporto, sia pure prezioso per quanto detto in precedenza, e in quanto tale esso è solo parte di una procedura più complessa. Esso si propone quindi molto spesso solo come punto di riferimento per uno studio più approfondito delle proprietà dell' oggetto di rappresentazione. Parte integrante del metodo grafico è quindi quell'insieme di informazioni che consentono, da un lato, di tracciare correttamente il grafico, e dall'altro, di ricavarne in modo matematicamente corretto e numericamente esatto le informazioni principali in esso contenute e che in forma numerica dovranno in definitiva essere convertite per gli impieghi pratici. Nel settore specifico delle applicazioni che interessano l'ingegneria elettrica l'impiego di strumenti grafici di studio, sia per l'analisi che per la sintesi, è da decenni ben affermato in discipline come la teoria dei campi, la teoria delle reti, la teoria dei sistemi dinamici e dei sistemi di controllo in particolare. Le pagine che seguono sono dedicate appunto ai metodi grafici propri di quest'ultima area. Esse hanno fondamentalmente uno scopo didattico, essendo rivolte sopratutto agli studenti dei corsi di laurea in Ingegneria Elettrotecnica e in Ingegneria Elettronica, ai quali vorrebbero fornire una, sia pure parziale, base di appoggio per il loro impegno di studio delle discipline summenzionate. Il presente volume tratta quasi esclusivamente dei metodi grafici con cui possono essere affrontati problemi di analisi e di sintesi concernenti i sistemi dinamici lineari e stazionari: la funzione di trasferimento è il modello matematico che è assunto a base della descrizione di tali sistemi e che costituisce altresì il
1

2 fig.1
altre applicazioni
del metodo del luogo
delle radici
rappresentazioni delle
trasferenze
fisica realizzabilità
di una rete
regioni di stabilità di
un sistema discreto
Rappresentazioni
delle trasferenze
sull'asse immaginario
di
NYQUIST
di
BODE
esatti
asintotici
di
NICHOLS
sul piano complesso
luoghi a fase
costante
luoghi a modulo
costante
luoghi a parte reale
costante
Applicazioni delle
il metodo del luogo delle
radici
per sistemi a un
ingresso e una uscita
per sistemi
multivariabili
METODI GRAFICI
PER LO STUDIO DEI
SISTEMI DINAMICI
studio del comportamento
locale delle radici
di una equazione

3
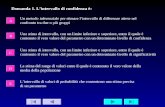
fondamento su cui vengono costruiti i metodi in oggetto . I metodi stessi si inquadrano pertanto in quella parte delle metodologie , che è usuale chiamare "tradizionali", che traggono spunto dall'impiego della trasformata di Laplace, operando quindi nel campo delle "frequenze complesse": e che si contrappongono a quelle metodologie, "moderne", che operano invece essenzialmente nel tempo. Gli argomenti vengono suddivisi ed affrontati secondo uno schema, che è riportato per maggiore chiarezza in forma grafica (appunto!) , in fig. 1; essa mostra che il discorso sui metodi grafici per lo studio dei sistemi dinamici si può distinguere fondamentalmente in due parti: la prima è quella dedicata alle rappresentazioni grafiche vere e proprie, la seconda ad alcune delle più importanti applicazioni. 1.1 Generalità sulle rappresentazioni grafiche delle funzioni di trasferimento. La funzione di trasferimento è una funzione razionale complessa di variabile complessa: in quanto tale deve essere specificata attraverso le funzioni (di s) che definiscono la sua parte reale e la sua parte immaginaria, ovvero il suo modulo e la sua fase: W(s) = R(s) + j I(s) = M(s) e j ϕ(s) (1.1) e ponendo s = σ + j ω (1.2) se ne deduce che, per una specificazione completa della funzione di trasferimento, occorre assegnare due funzioni reali di variabili reali R = R(σ,ω) oppure M = M(σ,ω) I = I(σ,ω) (1.3) ϕ = ϕ(σ,ω) (1.4) Quando di tali funzioni si voglia fornire una rappresentazione grafica ci si trova quindi di fronte alle possibilità , ma anche alle difficoltà , che sono proprie di questa categoria di funzioni. Un' interpretazione delle (1.3) o (1.4) in termini geometrici , porta a considerare le stesse come equazioni, in coordinate cartesiane (σ,ω,R) eccetera, di una superficie in uno spazio tridimensionale (R3). Per rappresentare tale superficie, per ciascuna funzione, si può ricorrere alla rappresentazione tramite linee di livello oppure ad una rappresentazione in prospettiva tramite linee coordinate. Le linee di livello, che vanno tracciate nel piano s, cioè nel piano cartesiano (σ,ω), verranno banalmente designate come "luoghi a parte reale costante" e rispettivamente "luoghi a parte immaginaria costante", se relative alla rappresentazione (1.3) , e come "luoghi a modulo costante" e rispettivamente "luoghi a fase costante", se relative alla rappresentazione (1.4). Per le funzioni razionali di variabile complessa, come si vedrà, sussiste una concreta possibilità di tracciare, o perlomeno di individuare con sufficiente precisione, l 'andamento delle curve di livello "a fase", "a modulo" e "a parte reale" costante. Per le utilizzazioni che verranno specificate più avanti esse si propongono come effettivo mezzo di studio delle proprietà del sistema lineare di cui la W(s) è funzione di trasferimento.

Meno accessibile si presenta invece la possibilità di rappresentazione prospettica, tramite superfici, delle varie componenti della funzione di trasferimento, e del resto non ne scaturisce nessuna applicazione pratica. Vi è però un forte interesse a considerare una particolare linea "coordinata" di tali superfici e precisamente la linea corrispondente al caso σ = 0 , ovvero alle curve che rappresentano la W(s) quando s assume valori immaginari puri jω . Ciò è giustificato, notoriamente, dal rilevante interesse , sia teorico che pratico, della "risposta di frequenza", cioè appunto della funzione complessa di variabile reale W(jω). Essa è infatti in grado di fornire informazioni complete sulla risposta di regime del sistema di trasferenza W(s) alle sollecitazioni di tipo sinusoidale di pulsazione ω. In particolare ponendo (per non indurre a ritenere che si tratti delle stesse funzioni sopra indicate con le stesse lettere, si sono diversificati, per quanto possibile, i caratteri) : W(jω) = R(ω) + j I (ω) = M(ω) e j φ(ω) (1.5) è noto che M(ω) rappresenta l' ampiezza della risposta di regime sinusoidale a un ingresso sinusoidale di ampiezza unitaria, mentre φ(ω) rappresenta lo sfasamento tra le stesse sinusoidi. Si ricordi, a questo riguardo, che un angolo positivo indica uno sfasamento "in anticipo" della uscita rispetto all'ingresso. Le utilizzazioni della risposta di frequenza sono importanti in un ampio numero di settori disciplinari, così da "generare" un immediato interesse per le sue rappresentazioni grafiche. A ciò si può provvedere in svariati modi, ma sostanzialmente divisibili in due categorie: a) si rappresenta in modo implicito (ad esempio nel piano complesso di coordinate cartesiane R ed I, ovvero di coordinate polari M e φ,ma non solo in questo riferimento), la dipendenza da ω attraverso la curva di equazioni parametriche R = R(ω) ; I = I (ω) ovvero M = M(ω) ; φ = φ(ω) (1.6) b) si rappresentano , separatamente , come funzione di ω , le curve che descrivono in modo esplicito la dipendenza da ω delle stesse grandezze. 1.2 Rappresentazione formale della funzione di trasferimento. Per una migliore comprensione della simbologia che verrà usata in seguito è utile ricordare le diverse forme in cui può rappresentarsi una funzione razionale. Per talune applicazioni è sufficiente il ricorso alla espressione che la presenta semplicemente nella forma di rapporto di due polinomi:
W(s) = bmsm+bm-1sm-1+.....+b1s+b0 ansn + an-1sn-1 +....+ a1s + a0
=
∑i=0
mbisi
∑i=0
naisi
(1.7)
4

Questa rappresentazione è unica se si impone an=1. Per molte utilizzazioni è invece conveniente porre in evidenza zeri e poli della funzione di trasferimento, cioè fare ricorso alla sua forma fattorizzata:
W(s) =K' (s-z1)(s-z2)....(s-zm)(s-p1)(s-p2)....(s-pn) = K'
∏i=1
m(s-zi)
∏i=1
n(s-pi)
(1.8 )
Alla formula (8), peraltro, si preferisce talvolta quella che pone in esplicita evidenza la situazione (eventuale) in cui alcuni zeri e/o poli cadono nell'origine. Più in generale, per prevedere questa circostanza, si dovrebbe scrivere
W(s) = K' sµ−ν
∏i=1
m-µ(s-zi)
∏i=1
n-ν(s-pi)
(1.9)
Talvolta ancora è preferibile evidenziare il termine di guadagno, K, della funzione di trasferimento corrispondente al valore che la funzione stessa, depurata di zeri o poli nulli, assume nell'origine. A questa esigenza si fa fronte con la forma seguente:
W(s) = K sµ−ν
∏i=1
m-µ(1+sτ'i)
∏i=1
n-ν(1+sτi)
(1.10)
Le quantità zi , pi, τ'i, τi peraltro possono avere valore complesso: è opportuno ricordare espressamente che , in tal caso, esse compaiono nella trasferenza sempre accoppiate al rispettivo valore complesso coniugato così da dare luogo, nella (7), sempre e soltanto a coefficienti reali. In tal caso si utilizzano , in luogo delle espressioni (9) e (10) le forme seguenti che fanno comparire anche i fattori quadratici corrispondenti appunto alle coppie di zeri o poli complessi coniugati:
W(s) = K' sµ−ν
∏i=1
m1(s-zi)∏
i=1
m2(s2+2ξ'ω'nis+ω'ni2)
∏i=1
n1(s-pi)∏
i=1
n2(s2+2ξωnis+ωni2)
con m1+m2+µ = m (1.11)
5

W(s) = K sµ−ν
∏i=1
m1(1+sτ'i)∏
i=1
m2
(1+2ξ'is
ω'ni +
s2
ω'ni2 )
∏i=1
n1(1+sτi)∏
i=1
n2
(1+2ξis
ωni +
s2
ωni2 )
con n1+n2+ν=n (1.12)
Le quantità τi sono reali e si chiamano costanti di tempo della funzione di trasferimento, le quantità ωni si chiamano pulsazioni naturali dei modi associati ai poli complessi , i coefficienti ξi sono detti coefficienti di smorzamento dei relativi modi.
6

2. Rappresentazioni grafiche della risposta di frequenza. 2.1 Il diagramma di Nyquist. Il diagramma polare della W(jw) prende il nome di "diagramma di Nyquist" dallo studioso di elettronica e comunicazioni che portò un grande contributo nella teoria della stabilità dei sistemi a ciclo chiuso sulla base della risposta a ciclo aperto ad ingressi sinusoidali [1]. Interpretando R e I nella (1.5) come coordinate cartesiane del piano complesso, che denomineremo in seguito anche "piano di Nyquist", le (1.6) rappresentano le equazioni parametriche , nel parametro ω , del diagramma di Nyquist della generica funzione di trasferimento. E' facile verificare che le ipotesi adottate in partenza sulla realtà dei coefficienti della funzione di trasferimento inducono queste proprietà sulle funzioni R(ω) ,I (ω), M(ω) e φ(ω); R(ω) e M(ω) sono funzioni pari di ω, I (ω) e φ(ω) sono funzioni dispari di ω. Questo fa sì che la funzione W(jω) mappi l'asse immaginario del piano s in una curva del piano di Nyquist che presenta simmetria assiale rispetto all'asse reale. Ciò esime in pratica dal considerare la parte del luogo corrispondenti a valori negativi di ω ed ha un riscontro pratico nel fatto che la risposta di frequenza è significativa, appunto, solo per valori di ω non negativi. Un'informazione completa sulla risposta di frequenza da parte del diagramma di Nyquist implica una parametrizzazione dei punti della curva con i valori di ω.Ciò comporta ovviamente problemi di ordine pratico e non viene realizzato che per alcuni particolari punti; solo in alcuni casi di funzioni di trasferimento particolarmente semplici è possibile, attraverso una opportuna "costruzione geometrica", risalire dal generico punto del diagramma al corrispondente valore di ω .Tale possibilità è stata messa in evidenza nelle figure 2-6 in cui sono riportati gli andamenti dei diagrammi di Nyquist di talune funzioni di trasferimento "elementari", con questo termine intendendo che una generica funzione di trasferimento può essere ottenuta moltiplicando fra loro una o più di esse . Particolarmente significative risultano però, a questo riguardo, anche le trasferenze elementari relative a fattori complessi quali quelli messi esplicitamente in evidenza nelle espressioni (1.11) e (1.12). Le figg. 7 e 8 mostrano i diagrammi di Nyquist per alcuni di questi fattori, in corrispondenza a diversi valori del fattore di smorzamento ζ. In relazione a questi diagrammi si può utilmente osservare che la curva relativa a una funzione di trasferimento ottenuta come reciproca di una data W(s) è legata al digramma di Nyquist di quest'ultima da una semplice trasformazione geometrica: il reciproco di un numero complesso è rappresentato, infatti, nel piano complesso, da un punto che si ottiene come prodotto di una trasformazione per raggi vettori reciproci (rispetto all'origine) e di una simmetria (rispetto all'asse reale). Quindi la curva di fig. 6, per esempio, si può ottenere come simmetrico del trasformato per raggi vettori reciproci (polarità rispetto al cerchio "unitario") della semiretta di fig. 5; lo stesso legame sussiste fra le curve di fig. 8 e le parabole (poichè tali sono come si può facilmente verificare) di fig. 7. Un problema che si pone abbastanza spesso nelle applicazioni pratiche è quello della taratura in ω del diagramma di Nyquist. La considerazione ora fatta sul legame
7

8

esistente fra curve relative a trasferenze reciproche può aiutare a risolvere tale
9

problema in alcuni casi semplici, come quelli rappresentati nelle figure citate. Le figg. 9 e 10 illustrano tale possibilità affiancando in un unico grafico i tracciati relativi alle funzioni reciproche. La possibilità di individuare facilmente il valore di ω corrispondente ad un qualunque punto del diagramma di 1/W*(s) consente infatti di associare immediatamente tale valore al punto del diagramma di W(s) che con quello è allineato. Sussiste peraltro un'altra possibilità che ha il pregio di valere per una larga classe di funzioni di trasferimento: di essa verrà detto nel successivo paragrafo.
2.2 L'equazione del diagramma di Nyquist e la sua taratura in ω.
10

Come già si è detto la disponibilità delle relazioni (1.6) fornisce una soluzione del problema della determinazione di una rappresentazione analitica formale del luogo: tali relazioni sono infatti a tutti gli effetti le equazioni parametriche del diagramma di Nyquist. La loro conoscenza permette di risolvere taluni problemi particolari relativi alle carratteristiche geometriche del diagramma, quali ad esempio la determinazione delle eventuali intersezioni con gli assi e dei rispettivi valori di ω, oppure dei punti in cui la parte reale, ovvero quella immaginaria risultano stazionari nonchè dei relativi valori di ω. Ciò comporta però in generale l'esecuzione di calcoli complessi e in particolare la souzione di equazioni algebriche di ordine pari ad n+m . Disponendo di idonei strumenti di calcolo questo non sarà difficile da realizzare. Risulta pertanto importante una procedura che consenta di ricavare, dalla forma (1.7) della W(s) , le espressioni delle funzioni R(ω) e I(ω). A tale scopo occorre razionalizzare la W(jω). Posto
W(s) = N(s)D(s) (2.1)
e quindi
W(jω) = N(jω)D(jω) (2.2)
si ha:
W(jω) = N(jω)D(-jω)D(jω)D(-jω) (2.3)
da cui; sostituendo a N e D i polinomi che compaiono nella forma (1.7) della W; e sviluppando ulteriormente si trova:
W(jω) =
∑r=0
m+njrωr ∑
h=h1
h2ahbr-h
∑r=0(2)
m+njrωr ∑
k=k1
k2akar-k
(2.4)
dove : h1 = max(r-m,0) e h2 = min (r,n) k1 = max(r-n,0) e k2 = min (r,n) = h2 Separando la parte reale (r pari) dalla parte immaginaria (r dispari) si perviene infine alle:
11

R(ω) =
∑r=0(2)
m+njrωr ∑
h=h1
h2(-1)hahbr-h
∑r=0(2)
2njrωr ∑
k=k1
k2(-1)kakar-k
; I (ω) =
∑r=1(2)
m+njr-1ωr ∑
h=h1
h2(-1)hahbr-h
∑r=0(2)
2njrωr ∑
k=k1
k2(-1)kakar-k
(2.5)
___________________ Esempio 2.1. Si consideri ad esempio il caso m=1 e n=2; siano cioè da ricavare le espressioni della parte reale e della parte immaginaria di
W(s) = b1s+b0
a2s2+a1s+a0
Le (2.5) danno:
R(ω) = b0a0+(a1b1-a2b0)ω2
a02+(2a0a2+a12)ω2+a22ω4 I (ω) = ω(a0b1-a1b0)-ω3a2b1
a02+(2a0a2+a12)ω2+a22ω4
___________________ La deduzione dalle (2.5) dell'equazione del luogo in altre forme, ad esempio sotto forma di equazione implicita in coordinate cartesiane, non sempre è agevole: essa passa in genere attraverso una eliminazione del parametro ω tra le equazioni parametriche. Per maggior chiarezza nel seguito indicheremo con X e Y la parte reale e rispettivamente immaginaria di W(jω): X= R(ω) ; Y = I (ω) (2.6) L'eliminazione di ω tra queste due equazioni porta, ovviamente, all'equazione nelle coordinate cartesiane X ed Y della curva. Un procedimento più semplice ma altrettanto idoneo a fornire l'equazione cartesiana, in forma implicita, del luogo di Nyquist è il seguente. Si ponga
W(jω) = X + j Y = Nx(ω) + jNy(ω)Dx(ω) + jDy(ω) ;
moltiplicando ambo i membri di questa per Dx(ω) + jDy(ω) , dall'eguaglianza delle parti reali e immaginarie si ottengono due relazioni: X Dx(ω) - Y Dy(ω) = Nx(ω) ; X Dy(ω) + Y Dx(ω) = Ny(ω) (2.7) Dall'eliminazione di ω fra queste due equazioni si ottiene l'equazione cercata. In linea teorica comunque si può affermare che il procedimento ora delineato porta ad una equazione di grado pari a 2.max(m,n) ; quindi i diagrammi polari di funzioni razionali di variabile complessa sono curve algebriche al più di tale ordine. Si noti ancora che la soluzione della (2.7) in X e Y fornisce una via alternativa, al procedimento di razionalizzazione di W(jω), e molto spesso più comoda per arrivare alle (2.6).
12

Esempio 2.2 . Si voglia determinare l'equazione cartesiana del diagramma polare relativo alla trasferenza
W(s) = s+2
s2+4s+3
Con il procedimento sopra indicato si deve scrivere
X + j Y = 2 + jω
3 - ω2 +4jω
e quindi X ω2 + 4Yω + 2-3X = 0 ; Y ω2 + (1-4X)ω - 3Y = 0 Dall'eliminazione di ω (ad esempio calcolando il risultante) si trova: 48(X2+Y2)2 - 56X(X2+Y2) + 19X2 + 4Y2 - 2X = 0 _______________________ Le (2.6) risolvono ovviamente il problema della determinazione per punti del tracciato del diagramma e si prestano ad analizzarne particolari caratteristiche geometriche. E' peraltro possibile procedere ad una determinazione in via più diretta , e quindi più comoda, di talune particolarità che consentono, eventualmente al calcolo limitato ad alcuni specifici punti, un tracciamento qualitativo molto spesso sufficiente ai fini di certe applicazioni . E' quanto ci riserviamo di mostrare più avanti. Molto spesso però si pone il problema inverso a quello sopra delineato: dato un punto del diagramma, attraverso le sue coordinate, si chiede di trovare il corrispondente valore di ω. Le (2.6) rispondono a questa esigenza in modo complicato dal fatto che esse non sono facilmente invertibili: lette come equazioni (facilmente riducibili ad equazioni algebriche) propongono naturalmente una procedura basata sulla loro soluzione che peraltro fornisce anche valori inaccettabili o non interessanti per ω, poichè la soluzione che interessa è quella che soddisfa, per una data coppia (X,Y) entrambe le equazioni. Per superare tali difficoltà si può seguire una via alternativa che, in taluni casi, offre la possibilità di una determinazione di ω tramite un procedimento di calcolo; questo può essere interpretato come la traduzione in termini numerici o analitici di una opportuna costruzione geometrica . La possibilità in oggetto nasce dal considerare il digramma polare come membro di una famiglia di curve di cui interessi individuare i punti corrispondenti allo stesso valore di ω. In altri termini si tratta di pensare alla famiglia dei diagrammi polari di una funzione di trasferimento che dipende da un parametro reale: W(s,α). Al variare di α si genera appunto un insieme di funzioni di trasferimento a ciascuna delle quali si può associare il suo diagramma polare. E' facilmente dimostrabile, nel caso in cui il parametro α compaia linearmente a numeratore e/o a denominatore della trasferenza W(s,α), che il luogo su cui sono situati i punti corrispondenti allo stesso valore di ω è, in generale, un cerchio: in taluni casi particolari questo può "degenerare" in una retta. Si pensi infatti alla funzione razionale a coefficienti complessi
W = N1 + αN2D1 + αD2
13

Al variare di α, W descrive nel piano complesso un cerchio: ciò si può intuire osservando che la funzione reciproca 1/W* è dello stesso tipo di W e quindi il relativo diagramma, trasformato per raggi vettori reciproci del diagramma originale, deve avere le stesse caratteristiche del diagramma originale. Ora questa proprietà di "invarianza" rispetto alla trasformazione per raggi vettori reciproci è appunto tipica del cerchio. Per ricavarne l'equazione si espliciti α dalla precedente:
W = N1 + αN2D1 + αD2
====> α = - WD1- N1WD2- N2
= reale!
Perciò, razionalizzando, si dovrà avere: (WD1- N1) (WD2- N2)*= reale
Cioè: WW*D1D2*-WD1N2*- W*N1D2* + N1N2*= reale
ma WW*= (X2+Y2) è reale, quindi:
WW*Im(D1D2*) - Im(WD1N2*) - Im(W*N1D2*) + Im(N1N2*) = 0 ovvero:
WW*Im(D1D2*) - Re(W)Im(D1N2*) - Re(W*)Im(N1D2*) - Im(W)Re(D1N2*) - -Im(W*)Re(N1D2*)+ Im(N1N2*) = 0
e infine, (X2+Y2) Im(D1D2*)-X Im(D1N2*+ N1D2*)-Y Re(D1N2*-N1D2*) + Im(N1N2*)=0 (2.8) da cui facilmente si desumono le caratteristiche geometriche cercate. Nel ruolo del parametro α si può assumere un qualunque parametro che compaia linearmente nell'espressione del numeratore e/ o del denominatore di W(s), ad esempio un coefficiente. Se il legame fra ω e un particolare carattere del cerchio, quale una coordinata del centro o della sua intersezione con un asse coordinato o simili, risulta semplice e facilmente invertibile è abbastanza immediato poter risalire al valore di ω. La cosa verrà illustrata con un esempio. ___________________ Esempio 2.3 : Si consideri la famiglia delle trasferenze di fig. 8 , con ωn = 2 , cioè la
W(s) = 1
s2 + 4ζs + 4
e si assuma ζ come parametro. Allora :
W(iω) = 1
4 - ω2 + j4ζω
per cui si ha N1 = 1 , N2 = 0 , D1 = 4 - ω2 , D2 = j 4ω e pertanto il luogo cercato è il cerchio di equazione
14

4ω(4-ω2) (X2+Y2) +X(-4ω) = 0
cioè X2+Y2 - X
4 - ω2 = 0
Si tratta evidentemente di un cerchio passante per l'origine e centrato sull'asse X nel punto di coordinata
Xc = 1
2(4 - ω2)
La situazione è illustrata nella figura. Questo risultato è utilizzabile ai fini della taratura in ω come segue. Fissato il punto generico sul diagramma di Nyquist, come in fig. 12 , si traccia l'asse di simmetria del segmento che ha per estremi il punto in oggetto e l'origine: detta Xc l'intercetta con l'asse X si ricava ω dalla:
ω = 4 - 1
2Xc
Sempre con riferimento alla funzione di trasferimento rappresentata in fig.12 si poteva però interpretare la stessa come membro della famiglia
W(s) = 1
s2 + 2s + α
con α=4 . Usando il procedimento sopra descritto con riferimento a questo nuovo parametro si trova che i punti a ω costante sono situati sul cerchio di equazione
X2+Y2 + Y2ω = 0
15

e quindi centrato sull'asse Y con coordinata pari a Yc = - 1/4ω. Immediata la conseguenza: ω = -1/4Yc.
fig.12 ___________________ Si osservi che la procedura basata sull'ottenimento dell'equazione (2.8) fornisce molte possibilità di ottenere una soluzione del problema della taratura in ω del diagramma , poichè molte sono le possibilità di "associazione" di un parametro fittizio alla funzione di trasferimento che si intende studiare. Ciò è stato illustrato appunto nel precedente esempio 2.3. Va altresì sottolineato che se esiste la possibilità di esplicitare ω dalla (2.8) si è anche risolto il problema dell'inversione delle relazioni (2.6) in forma chiusa. Nell'esempio citato questa possibilità era presente nell'equazione di entrambi i cerchi di fig.12. ____________________ Esempio 2.3 (continuazione): Assumendo ζ come parametro si era trovato il legame
X2+Y2 - X
4 - ω2 = 0
da cui facilmente
ω = 4 - X
X2 + Y2
Assumendo invece come parametro il termine noto del denominatore si era trovato il
cerchio X2+Y2 + Y2ω = 0
da cui immediatamente
ω = - Y
2( X2+Y2 )
Il fatto di trovare due espressioni diverse non deve sorprendere in quanto non vi è incompatibilità fra di esse: dal confronto delle stesse si evince infatti che
16

4 - X
X2 + Y2 = Y2
4(X2+Y2)2 ovvero 16(X
2+Y
2)
2- 4X(X
2+Y
2) - Y
2=0
che è appunto l'equazione cartesiana della curva! ___________________ Questa procedura risulta particolarmente utile per una categoria di funzioni di trasferimento di grande importanza per l'applicazione pratica che di essa si fa nella cosiddetta sintesi per tentativi: si tratta delle trasferenze delle "reti correttrici". La presenza di un parametro in tali trasferenze è desiderata in quanto si tratta di uno degli elementi alla cui scelta si affida il procedimento di sintesi. Esse sono sinteticamente presentate in fig. 13.
Non si deve peraltro pensare che il metodo proposto offra comunque una soluzione del problema della taratura in ω del diagramma. Tale possibilità è legata alla capacità di
17

individuare il parametro nel modo più adatto a far risultare semplice la dipendenza da ω dei coefficienti dell'equazione (2.8) del cerchio (linea di livello ω=costante!) e quindi consentire una semplice deduzione delle sue caratteristiche. Un'analisi preliminare accurata della (2.8) deve guidare in tale scelta. Ad esempio se si scegliesse come parametro un coefficiente del numeratore ciò automaticamente indurrebbe D2=0 (il denominatore non dipende dal parametro!). Di conseguenza , come si vede dalla (2.8), la linea di livello diventa una retta il che suggerisce facilità di costruzione geometrica e quindi, auspicabilmente, possibilità di più semplice soluzione del problema di taratura. In realtà affinchè il metodo abbia corrispondenza con una costruzione geometrica occorre che il cerchio che in generale costituisce la curva ω = costante abbia due caratteri invarianti (ad esempio che passi per un punto fisso e abbia il centro su un asse coordinato) o , nel caso che il luogo sia una retta, un carattere invariante con ω (ad esempio che appartenga ad un fascio). Ciò rende possibile individuare, in base alla condizione che detta curva contenga il punto (X,Y), univocamente il luogo stesso e quindi, attraverso di esso una corrispondenza tra la coppia (X,Y) e il valore di ω di taratura del luogo. Illustreremo la cosa con un ulteriore esempio. ___________________ Esempio 2.4. Sia da tarare in ω il diagramma di Nyquist della seguente funzione di trasferimento
W(s) = s + 2
s3 + 3s2 + 6s + 2
Se si sceglie D1(s) = s3 + 3s2 + 6s + 2 e quindi D2(s) = 0 e, inoltre, N1(s) = s e N2(s) = 2 (α=1) si troverebbe: Im(D1N2*) = 2(6ω−ω3) ; Re(D1N2*) = 2(2-3ω2) ; Im(N1N2*) = 2ω e quindi il luogo che congiunge i punti di eguale ω è la retta di equazione (6ω−ω3) X + (2-3ω2) Y - ω = 0 che, come si può verificare facilmente per esempio scegliendo tre valori diversi di ω, non appartiene ad un fascio, cioè non ha un proprio carattere invariante. Tale scelta non è quindi di aiuto nello stabilire la desiderata corrispondenza con ω. Volendo invece individuare come linea di livello un cerchio se ne possono fissare a priori alcuni proprietà come segue: - scegliendo N2(s) = 0 e quindi N1(s) = s + 2 si otterrà un cerchio passante per l'origine; - se si vuole ancora imporre come ulteriore carattere invariante che esso, ad esempio, abbia il centro sull'asse X, cioè Yc = 0, si osserva che questo accadrà se Re(N1D2*) = 0 per qualunque ω. Ciò significa anche che : arg(N1(jω)) - arg(D2(jω)) = ± 90° per qualunque ω. Ciò accadrà, per esempio, se D2(s) = sN1(s) . Ora dall'esame del denominatore si vede che ciò può essere realizzato scegliendo
18

D2(s) = s2 + 2s (α = 3!) e quindi D1(s) = s3 + 2 Sviluppando gli opportuni calcoli si trova: Im(D1D2*) = ω5 - 4ω ; Im(N1D2*) = - ω3- 4ω ; e appunto Re(N1D2*) = 0 Talchè il cerchio in questione ha equazione: (ω4- 4) (X2 + Y2) + (ω2+4) X = 0 da cui; risolvendo la biquadratica , si può ricavare ω2 in funzione di X e Y , oppure, ai fini di una visualizzazione della taratura per "via geometrica", la coordinata del centro:
Xc = - ω2 + 4
2 (ω4- 4)
Si osservi, per inciso, che da questa si può ricavare la seguente informazione: per ω = 2 il diagramma taglia l'asse immaginario! Il diagramma è riportato in fig. 14.
___________________ Ad agevolare la scelta dei polinomi Ni(s) e Di(s) (i=1,2) per conseguire risultati che possono riuscire utili in quanto determinano l'invarianza di qualche carattere del luogo che si utilizza per tarare il diagramma in ω , vale ricordare quanto segue: a) se D2(s) = 0 , cioè se non si fa dipendere il denominatore di W(s) dal parametro α,il luogo è una retta ; b) se il denominatore D(s) contiene solo potenze pari di s il luogo è una retta ; c) se il numeratore non contiene α il luogo è un cerchio passante per l'origine ; d) se N(s) contiene solo potenze pari di s il luogo è un cerchio passante per l'origine;
19

e) se si scelgono D1(s) e N2(s) come parti pari (dispari) rispettivamente del denominatore e del numeratore , e conseguentemente D2(s) e N1(s) come parti dispari (pari) del denominatore e numeratore rispettivamente, allora il luogo è un cerchio con centro sull'asse Y; f) se si scelgono N1(s) e D1(s) come parti dispari (pari) del numeratore e del denominatore rispettivamente , e conseguentemente N2(s) e D2(s) come rispettive parti pari (dispari), allora il luogo è un cerchio con il centro sull'asse X; g) assumendo N2(s) = 0 e D2(s) = kN1(s), con k costante reale, il luogo è un cerhio passante per l'origine centrato sull'asse Y; h) assumendo N2(s) = 0 e D2(s) = ksN1(s), con k costante reale, il luogo è un cerhio passante per l'origine centrato sull'asse X. 2.3 Il comportamento locale del diagramma di Nyquist. Nelle applicazioni pratiche più importanti del diagramma di Nyquist è sufficiente conoscerne in modo qualitativo l'andamento generale e soltanto per certi valori di ω è necessaria una conoscenza precisa del comportamento del grafico di W(jω). A questo scopo è bene precisare come si possano ricavare, economicamente in termini di calcolo, alcune caratteristiche legate al comportamento locale della curva. Questo paragrafo è quindi interamente dedicato all'esame della possibilità di stabilire caratteristiche "locali" del diagramma di Nyquist, cioè caratteristiche che interessano il tratto di curva corrispondente ad un certo intorno di ω. Per questo occorrerà esaminare lo sviluppo di W(s) nell'intorno del punto s=jω , con particolare riguardo ai valori immaginari puri di tale intorno. Nel caso in cui tale punto sia un polo della W(s) si dovrà ovviamente fare riferimento allo sviluppo in serie di Laurent. Anche per individuarne un andamento qualitativo è comunque necessario determinare tale comportamento innanzitutto per i valori estremi di ω: ω → 0 e ω → ∞ . a) Analisi del comportamento per ω → 0 . Nel caso in cui l'origine del piano s non sia un punto singolare per W(s) si avrà, W(s) = f0 + f1s + f2s
2 + f3s
3 + ....... (2.9)
I coefficienti dello sviluppo si possono ottenere ad esempio con l'algoritmo della "long division". Essi forniscono con immediatezza le seguenti informazioni: - il punto di "partenza" del diagramma di Nyquist (f0 = K = guadagno della funzione di trasferimento) - l'inclinazione della tangente: nel caso in cui f1 ≠ 0 questa è normalmente ±90°, con un segno che è quello di f1: infatti il termine f2s
2, che è responsabile della variazione
della parte reale per piccoli valori di ω, è un infinitesimo di ordine superiore a quello di f1s;
20

-come è rivolta la concavità della curva in corrispondenza del suo punto iniziale; ciò è chiaramente determinatao dal segno di f2,essendo ℜe[W(jω)]=f0-f2w2+f4w4+... Evidentemente per f2>0 la concavità è rivolta verso sinistra, mentre per f2<0 la concavità è rivolta verso destra: ciò è illustrato in fig.15.
fig.15
Nel caso in cui la W(s) abbia in s=0 un polo semplice lo sviluppo di Laurent risulta essere del tipo:
W(s) = f-1s + f0 + f1s + f2s2 + f3s3 + ....... (2.10)
la quale mostra chiaramente come il diagramma parta dal punto improprio ± j ∞ del piano di Nyquist, con segno che è opposto a quello di f-1. La curva ammette un asintoto parallelo all'asse Y con ascissa coincidente con f0. Infatti in questo caso si ha:
W(jω) = -j f-1ω + f0 + j f1ω - f2ω2 -j f3ω3 + .....
e anche qui il segno di f2 indica se la parte reale cresce o decsresce, nell'intorno di ω = 0, quindi se la curva è situata originariamente a destra, o rispettivamente a sinistra, dell'asintoto. Nel caso in cui la W(s) abbia in s=0 un polo multiplo la curva normalmente non ammette asintoti, essendo entrambe le parti reale ed immaginaria illimitate per ω→ 0, e l'esame dello sviluppo di Laurent serve essenzialmente ad individuare in quale quadrante è situato il suo tratto iniziale. Vi sono però situazioni particolari che possono determinarsi in corrispondenza dell'annullamento dei termini dello sviluppo successivi al primo. Gli esempi che seguono sono scelti con l'intento di costituire una casistica elementare dei casi più interessanti. _________________________ Esempio 2.4 (continua). La fig. 14 illustra una caso in cui f0 ≠ 0 ; infatti risulta
W(s) = s + 2
s3 + 3s2 + 6s + 2 = 1 - 2.5 s + 6 s2 - 14.75 s3 + ....
Evidentemente : Re[W(jω)] = 1 - 6 ω2 + ....; Im[W(jω)] = -2.5 j ω + 14.75 j ω3+ ..... sicchè il diagramma parte dal punto reale di ascissa 1 con tangente verticale e diretta verso il basso, in quanto la parte immaginaria è negativa con valore assoluto crescente, e con concavità a sinistra.
21

Esempio 2.5 La fig.16 illustra il caso di una funzione di trasferimento per la quale risulta f1=0: infatti si ha W(s) = 2 - s2 - 0.5s3 + ..... e, come si vede dalla figura, ciò implica "angolo di uscita" nullo nel punto iniziale. Il segno di f3 permette invece di stabilire che la curva "esce" dal punto (2,0) al di sopra dell'asse Esempio 2.6 Si consideri la funzione di trasferimento riportata in fig. 17. Qui è stata considerata una situazione con polo nell'origine; poichè tale singolarità è semplice il diagramma ammette un asintoto verticale la cui ascissa , come detto, è data da f0. Nel caso specifico si trova:
W(s) = 12s -
14 s +
14 s2 -
18 s3 + ........
Quindi f0 = 0 , il che indica che lo stesso asse Y è asintoto per la curva; questa è situata, per piccoli valori di ω , a sinistra dell'asintoto perchè f2 >0. _________________ b) Analisi del comportamento per ω →∞ . Il comportamento per ω → ∞ deve essere analizzato attraverso lo sviluppo asintotico della funzione di trasferimento. Se questa è una funzione razionale strettamente propria (m<n) il diagramma converge ovviamente nell'origine del pinao di Nyquist. L'inclinazione della tangente nell'origine dipende dalla differenza (n-m): infatti ponendo
W(s) = wn-msn-m +
wn-m+1sn-m+1 +
wn-m+2sn-m+2 + ........... (2.11)
si vede facilmente, sostituendo s con jω, che l'ordine di infinitesimo della parte reale prevale su quello della parte immaginaria o viceversa a seconda che n-m sia dispari o, rispettivamente , pari. Cioè il "tratto finale" del diagramma di Nyquist arriva con tangente orizzontale se n-m è pari, con tangente verticale se n-m è dispari. Per stabilire da quale quadrante questo tratto si approssima all'origine occorre analizzare i segni dei primi coefficienti wk dello sviluppo asintotico (parametri di Markov).
22

Una semplice analisi della (2.11) particolarizzata con s=jω permette di pervenire facilmente alle conclusioni . Nel caso in cui m=n il diagramma di Nyquist confluisce in un punto dell'asse reale diverso dall'origine e definito dal valore di w0=K'. Vi arriva con tangente verticale se w1≠0, con tangente orizzontale se w1=0 e w2≠0 , e così via. Riprendiamo in esame le trasferenze degli esempi 2.4,2.5 e 2.6. _________________ Esempio 2.4 (continua) . Per s → ∞ si ha :
W(s) = s + 2
s3+3s2+6s+2 =
1s2 -
1s3 -
3s4 + 13
s5 + .......
e il diagramma si avvicina all'origine tangente al semiasse reale negativo (w2>0) con parte immaginaria negativa (w3<0) (fig. 14). Esempio 2.5 (continua) .
23

Per s → ∞ si ha :
W(s) = 2s + 4
s3+ s2+ s+2 =
2s2 +
2s3 -
4s4 - 2
s5 + .......
e il diagramma si avvicina all'origine tangente al semiasse reale negativo (w2>0) con parte immaginaria positivo (w3>0) (fig. 16). Esempio 2.6 (continua) . Per s → ∞ si ha :
W(s) = s + 1
s3+2s2+2s =
1s2 -
1s3 + 2
s5 - 4s6 .......
e il diagramma si avvicina all'origine tangente al semiasse reale negativo (w2>0) con parte immaginaria negativa (w3<0) (fig. 17). _________________ Illustriamo qualche altro caso con ulteriori esempi. _________________ Esempio 2.7 Si consideri la famiglia di funzioni di trasferimento
W(s,α) = s2 + αs + 1
s3 + 3s2 + 3s
per la quale si ha per s → 0 :
W(s,;α) = 13s +
α-13 +
5-3α9 s +
2α-49 s2 + .........
e per s → ∞ :
W(s,α) = 1s +
α-3s2 +
7-3αs3 +
6α-12s4 + ...........
La fig.18 riporta le curve per tre diversi valori di α per illustrare la varietà degli andamenti possibili per il diagramma di Nyquist ottenibile cambiando anche un solo coefficiente della trasferenza. Esempio 2.8
Si consideri la trasferenza : W(s) = s2 + s + 1s2 + s + 4
e in particolare il suo
comportamento
per s → ∞ : si trova: W(s) = 1 - 3s2 +
3s3 +
9s4 + ....... Come mostra
chiaramente la fig.19, il diagramma di Nyquist tende al punto 1 + j0 tangente all'asse reale (come conseguenza del fatto che w1 = 0) , da valori reali maggiori di 1 (w2<0) e con parte immaginaria positiva (w3>0).
24

c) Analisi del comportamento per ω finito. L'esame del comportamento locale della curva in corrispondenza di un generico valore di ω può avvenire per svariate ragioni quali: la determinazione dell'inclinazione della tangente e / o della curvatura in un punto (ai fini di una conoscenza più precisa del luogo), l'individuazione degli eventuali asintoti dei rami della curva che vanno all'infinito in corrispondenza a valori immaginari puri di s, lo
25

studio di eventuali punti doppi del luogo. Tale esame si può attuare sul piano numerico attraverso uno sviluppo in serie (di Taylor o di Laurent, a seconda dei casi): allo scopo può essere utile ricordare che tale sviluppo si può ricavare applicando l'algoritmo della "long division" [2] alla W(jω + δ) pensata come funzione razionale di δ , e questa, a sua volta, si può ottenere con l'algoritmo di Ruffini-Horner ripetuto applicato separatamente ai polinomi a numeratore e denominatore. Per il polinomio p(s) = ansn + an-1sn-1 + ..... + a1s + a0 nel caso specifico in cui si debba eseguire la "traslazione" in jω, tale algoritmo si può descrivere come segue: 1) per i da 0 a n-1 2) per k da n-1 a i 3) ak = ak + jω ak+1 4) decrementa k 5) incrementa i Esso fornisce in ak il coefficiente di δk nel polinomio p(jω + δ) : ne vedremo l'applicazione negli esempi che seguiranno. Supposto che il valore di jω prescelto non corrisponda ad un polo della trasferenza W(s) , dallo sviluppo della funzione razionale W (δ) in potenze di δ si otterrà: W (δ) = c0 + δc1 +δ2c2 + δ3c3 + δ4c4 + ....... (2.12) dove notoriamente : c0 = W ^ (0) = W(jω);
c1 =(dW (δ)dδ ) δ=0 = (dW(s)
ds ) s=jω ;
c2 = 12(
d2W (δ)dδ2 ) δ=0 =
12(
d2W(s)ds2 ) s=jω ;
...............................................
ck = 1k!(
dkW (δ)dδκ ) δ=0 =
1k!(
dkW(s)dsk ) s=jω
Ora se si assume δ=jε, si vede che l'argomento di c1 definisce, a meno di 90°, l'inclinazione della tangente al diagramma di Nyquist: infatti , in prima approssimazione W[j(ω+ε)] ≅ W(jω) + jε c1 e quindi , per ε>0 e c1 ≠ 0, si ha: arg{W[j(ω+ε)] - W(jω)} ≅ arg c1 + 90° . (2.13) Sempre se s=jω è un punto regolare per la W(s), si può provare che il raggio di curvatura del diagramma di Nyquist nel generico punto è dato dalla seguente formula:
(ρ)s=jω = | c1 |3
2|Re(c1c2*)| (2.14)
26

E' opportuno osservare come la (2.12) suggerisca che i punti per cui c1 = 0 , punti doppi del diagramma , sono sempre delle cuspidi : infatti in questo caso si può scrivere W[j(ω+ε)] ≅ W(jω) - ε2c2 e quindi a una variazione di ε , indipendentemente dal segno, corrisponde una stazionarietà sia del modulo che dell'argomento di W(s) . Occorre allora che la curva, in corrispondenza ai valori di ω per cui si annulla c1, cioè la derivata di W(s), si presenti tangente ad un cerchio centrato nell'origine (stazionarietà del modulo) e tangente ad una retta uscente dall'origine (stazionarietà della fase): è facile convincersi che questo può accadere appunto soltanto se la curva ha per tali valori di ω una cuspide. I punti in cui si annulla la derivata prima della W(s) sono detti punti critici della trasferenza: essi giuocano un ruolo importante nelle rappresentazioni grafiche della W(s) che verrà meglio illustrato più avanti. Nel caso in cui il valore di jω prescelto coincida con un polo di W(s) il diagramma di Nyquist avrà corrispondentemente un punto all'infinito: se il polo jω è semplice il diagramma tende all'infinito lungo un asintoto che si può sempre determinare dallo sviluppo in serie. Ponendo in questo ultimo caso
W (δ) = c-1δ + c0 + δc1 +δ2c2 + δ3c3 + δ4c4 + ....... (2.15)
si vede che, per δ → 0 , l'argomento di W (δ) è fondamentalmente determinato dal valore dell'argomento di c-1; infatti per δ = jε , si può scrivere: arg W(jω) = arg (c-1) - sign(ε) .90° Per individuare completamente l'asintoto ci si rifarà all'espressione approssimata
W (δ) ≅ X +jY = c-1δ + c0
Ponendo c-1 = c-1x + j c-1y e c0 = c0x + j c0y dal confronto fra parti reali ed immaginarie si trae:
X = c0x + c-1y
ε Y = c0y -
c-1x,ε
ed eliminando ε fra le due, ad esempio ricavandolo dalla prima equazione
ε = c-1y
X - c0x
e sostituendolo nella seconda, si ricava l'equazione cartesiana dell'asintoto:
Y = - c-1x c-1y
X + c-1yc0y + c-1xc0x
c-1y (2.16)
Si ricorda ancora che c-1 rappresenta il residuo di W(s) nel suo polo immaginario jω e ciò aiuta a calcolarlo. Illustreremo alcuni casi con ulteriori esempi. Esempio 2.9 Si consideri la trasferenza
W(s) = 5s2 + 5
s3 + 2s2 + 2s
27

Si vede che per s = j1 la W(s) si annulla: il corrispondente diagramma passa dunque per l'origine: si chiede di valutare inclinazione e curvatura del diagramma in tale punto.
Quindi si ha:
W (δ) = W(j1+δ) = 5δ2 + 10jδ
δ3 + (2+3j)δ2 + (4j-1)δ + (j-2)
Applicando ora l'algoritmo della long-division si trova: W (δ) = (2-4j) δ + (1.2+6.6j)δ2 - (3.88+3.84j)δ3 + ........ Poichè δ = jε , in prima approssimazione si può ricavare
arg[W(j1+δ)] = arg (2-4j) + 90° = atn(-2) + 90° = atn
1
2
che è l'angolo di inclinazione della tangente desiderato. Per la curvatura la (2.14) fornisce
ρ = (1.22 + 6.62)1.5
2(1.2x3.88+6.6x3.84) = 451.5
60 = 5.03 Esempio 2.10 Si consideri la trasferenza
W(s) = 4s + 4
s3 - s2 + 4s - 4 =
4(s + 1)(s2 + 4)(s -1)
c
che presenta una coppia di poli sull'asse immaginario, e precisamente per s = ± 2j .Il corrispondente diagramma di Nyquist presenta quindi un asintoto per ω = 2: l'andamento è visibile nella fig. 21. Operiamo la sostituzione s=2j+δ :per il numeratore i trova subito l'espressione
28

1 -1 4 -4s 4δ + (4+8j) ; per il denominatore 2j 2j -4-2j 4 usiamo l'algoritmo di Ruffini-Horner 1 2j-1 -2j 0 ripetuto; lo schema riportato accanto 2j 2j -2j-8 fornisce per il denominatore, come si vede, il seguente polinomio: 1 4j-1 -4j-8 2j 2j δ3 + (6j-1)δ2 - (4j+8)δ 1 6j-1
Con l'algoritmo della "long division" ora si trova:
4+8j -8-4j -20+32j -8-4j -172-72j e quindi c-1 = - 4+8j8+4j = -0.8 - 0.6j
4 -1+6j 4+8j -1+6j ..... c0 = 20-32j(8+4j)2
= -0.17 + 0.44j
1 1 c1 = -172-72j(8+4j)3
= 0.142 -0.2185j
perciò lo sviluppo nell'intorno del punto s=2j risulta:
W (δ) = - (0.8 + 0.6j)
δ - 0.17 + 0.44j + (0.142 -0.2185j)δ + ........
La (2.16) fornisce quindi la seguente espressione per l'equazione cartesiana dell'asintoto:
Y = - 43 X -
23
La fig. 21 conferma la correttezza di questo risultato. Esempio 2.11
29

Si consideri la trasferenza: W(s) = s2 - 4s - 5
s3 + s2 + 4s - 1
Il diagramma di Nyquist esibisce il curioso andamento mostrato in fig.22 : la curva presenta una cuspide in corrispondenza ad un valore di ω per cui W(jω) è immaginaria pura. Questo permette di trovare il valore di ω corrispondente tramite la (-5 - ω2) (-1 - ω2) - 4 ω2 (4 - ω2) = 5ω4- 10ω2 + 5 = 5(ω2-1)2 = 0 che esprime l'annullarsi della parte reale del numeratore nell'espressione razionalizzata di W(jω).
Dunque si vuole studiare il comportamento del diagramma di Nyquist nell'intorno del valore: ω = = 1 . Con i soliti passaggi attraverso l'algoritmo di Ruffini-Horner e l'algoritmo della "long division", il cui dettaglio è qui di seguito riportato, si ricava lo sviluppo in serie nel punto s = j1. 1 -4 -5 1 1 4 -1 j j -1-4j j j -1+j -1+3j 1 j-4 -6-4j 1 1+j 3+j -2+3j j j j j -2+j 1 2j-4 1 1+2j 1+2j j j 1 1+3j Per ridurre la complicazione dell'aritmetica complessa successiva conviene manipolare la funzione razionale W(δ) imponendole di avere eguale ad 1 il termine di grado 0 in δ al denominatore :
W (δ) = δ2 + (2j-4)δ - (6+4j)
δ3 + (1+3j)δ2 + (1+2j)δ+ (-2+3j) =
- 2+3j13 δ2 +
14+8j13 δ + 2j
- 2+3j13 δ3 +
7-9j13 δ2 +
4-7j13 +1
30

Lo schema della l.d. dà:
2j 1 0 1 - 20+j17
13 1 -121+j20
169
14+j813
4-j713
260+j221169
4-j713
-78+j52169
4-j713
- 2+j313
7-j913
78-j52169
7-j913
7-j913
- 2+j313 -
2+j313 -
2+j313
e quindi:
W (δ) = 2j - 20 + j17
13 δ2 + [-
11
13 2
+ j 20132 ] δ3 +....... =
= 2j - (1.538 + j1.308)δ2 + (-.716 + j .118) δ3 +....... ___________________
31

2.4 I diagrammi di Bode. I diagrammi di Bode, che prendono il nome da un insigne studioso di reti elettriche e circuiti elettronici [3] , rappresentano graficamente la dipendenza da ω di modulo e fase della risposta di frequenza. Essi sono quindi, salvo opportune precisazioni, i diagrammi cartesiani delle funzioni M(ω) e Φ(ω) che compaiono in (1.6). L'esigenza di disporre di questi grafici nasce spontaneamente nel momento in cui si vogliano rappresentare sinteticamente le prestazioni di quei sistemi elettrici destinati a manipolare segnali sinusoidali di frequenza variabile o segnali periodici con predefinito contenuto di armoniche. E' questo il caso, ad esempio, degli amplificatori e dei filtri, per i quali la rappresentazione in oggetto fornisce la maniera più sintetica ed efficace di descrivere proprietà quali la banda passante, l'amplificazione e/o l'atttenuazione massima, lo sfasamento massimo, eccetera. Il loro utilizzo si è esteso naturalmente a tutti quei sistemi per i quali queste proprietà rivestono particolare interesse, e quindi anche ai sistemi di controllo. Per le applicazioni pratiche, considerato che la gamma di frequenza in cui si desidera descrivere il comportamento è molto ampia (teoricamente illimitata) e che anche il campo di variazione dell'amplificazione e/o attenuazione del sistema è estremamente variabile, si preferisce usare la scala logaritmica per l'asse delle frequenze (o meglio delle pulsazioni ) e per l'asse dei moduli. La scelta può cadere sui logaritmi neperiani o sui logaritmi in base dieci. Più comunemente si addotta questa seconda soluzione.Come conseguenza di questa convenzione intervalli di lunghezza eguale dell'asse ω corrispondono in effetti ad intervalli di ω i cui valori estremi stanno in rapporto fisso: in particolare si chiama "decade" l'intervallo corrispondente ad un rapporto 10:1 delle pulsazioni, "ottava" l'intervallo corrispondente ad un rapporto 2:1. Per quanto riguarda il modulo della trasferenza, è abituale riportare in ordinate la quantità 20 log10 M(ω), ed il numero così ottenuto si dice esprimere il valore del modulo in "decibel". Una giustificazione più importante per l'introduzione del logaritmo del modulo è costituita dal fatto che l'operazione di moltiplicazione di due trasferenze, a rappresentare ad esempio la cascata di due blocchi, W(s) = W1(s) W2(s) (2.17) ha un riscontro sui moduli e sulle fasi che viene espreso espresso dalle relazioni M(s) = M1(s) M2(s) ϕ(s) = ϕ1(s) + ϕ2(s) (2.18) e quindi 20 log10M(s) = 20 log10M1(s) + 20 log10M2(s) cioè Mdb(s) = M1db(s) + M2db(s) (2.19) e quindi anche Mdb(ω) = M1db(ω) + M2db(ω) (2.20) Di conseguenza l'operazione di moltiplicazione di due trasferenze, che com'è noto fornisce la trasferenza corrispondente al sistema che si ottiene per connessione in cacata di due sottosistemi, ha, in termini di rappresentazioni con i diagrammi di Bode, un riscontro molto semplice in quanto i diagrammi di Bode (del modulo e della fase) di W(s) si ottengono per semplice "somma" dei diagrammi di Bode relativi a W1(s) e W2(s) nel momento in cui si adottino per essi le convenzioni sopra ricordate. In modo analogo si
32

vede che i diagrammi di Bode di una trasferenza ottenuta come rapporto di due trasferenze si ottengono per "differenza" dei relativi diagrammi delle trasferenze originali. Queste considerazioni inducono peraltro a considerare con molto interesse la disponibilità dell'espressione fattorizzata, del tipo indicato in (1.11) o (1.12), per la generica funzione di trasferimento: infatti è possibile pensare di ottenere i diagrammi di Bode, del modulo e della fase, per somma o differenza dei diagrammi di Bode relativi ai fattori che compaiono a numeratore e denominatore della trasferenza. Poiché tali fattori sono essenzialmente di quattro tipi: - costanti - corrispondenti a zeri o poli che cadono nell'origine - corrispondenti a zeri o poli reali - corrispondenti a una coppia di zeri o poli complessi coniugati rivestono grande interesse pratico i diagrammi di Bode relativi a questi fattori, che si possono ovviamente considerare essi stessi come particolari ed elementari funzioni di trasferimento. Il caso della funzione di trasferimento costante è banale e non merita particolare attenzione. Esso è considerato comunque in fig. 23. Il caso dello zero di molteplicità µ nell'origine del piano s (che include in sé anche il caso del polo nell'origine, poiché basta assumere µ negativo) si lascia trattare anche molto facilmente. Infatti per W(s) = sµ si ha Mdb(ω) = µω e φ(ω) = µ.90° per cui la situazione è quella rappresentata in fig. 24.
fig.23 fig.24 Consideriamo quindi il caso di una funzione di trasferimento con un singolo polo, e più precisamente la trasferenza (a guadagno unitario)
W(s) = 1
1+sτ
33

Si tenga presente che per la trasferenza reciproca, cioè per il caso di un singolo zero reale, le curve del modulo (in dB) e della fase risultano le stesse cambiate di segno (cioè ribaltate rispetto all'asse ω). Un semplice sviluppo analitico porta a trovare Mdb(ω) = -10 log(1 + ω2τ2) e φ(ω) = − atn (ωτ) (2.21) e i corrispondenti andamenti delle curve sono quelli riportati in fig.25.
.001 .01 .1 1 10 100 1000-30
-20
-10
0
10M(db)
ω
.001 .01 .1 1 10 100 1000-100
-80
-60
-40
-20
0
ω
φ
fig.25 Come si vede la curva del modulo presenta spiccatamente due asintoti in corrispondenza dei valori bassi e alti di ω. Il primo è costituito dalla retta M = 0 dB, il secondo da una retta a inclinazione negativa. Ciò si giustifica facilmente sulla base delle seguenti considerazioni:
- per ωτ << 1 (cioè per ω << 1τ ) si ha Mdb(ω) • -10 log(1) = 0
- per ωτ >>1 (cioè per ω >> 1τ ) si ha Mdb(ω) • -10 log(ω2τ2) = -20log(ωτ)=
=-20log(ω)-20log(τ)
34

Questo risultato in particolare mostra come il secondo asintoto sia inclinato con una pendenza che decrementa le ordinate di 20 decibel per ogni decade (cioè con una pendenza di -20dB/dec); inoltre il secondo asintoto interseca il primo nel punto di ascissa 1/τ, che, si noti, corrisponde al valore assoluto del polo. Di rilievo il fatto che la spezzata costituita dai due asintoti (tratteggiati in fig. 25) segue abbastanza "dappresso" la curva del modulo: questa osservazione è di notevole importanza sul piano pratico perchè consente, come si vedrà più avanti, in taluni casi di costruire in modo molto semplice un diagramma del modulo (detto appunto "asintotico") che può approssimare abbastanza bene l'andamento del diagramma reale. Se indichiamo con M~ db(ω) la funzione il cui grafico è costituito dall'andamento asintotico si vede facilmente che lo scostamento è dato da: per ω ≤ 1/t : Mdb(ω) - M~ db(ω) = -10 log(1 + ω2τ2) per ω ≥ 1/t : Mdb(ω) - M~ db(ω) = -10 log(1 + ω2τ2)+10 log(ω2τ2) = = -10 log(1+1/ω2τ2) Un confronto di queste due espressioni mostra che lo scostamento assume valori eguali in corrispondenza di due pulsazioni ω' e ω" tali che ω'ω"=1/τ2, cioè tali da essere equidistanti, su scala logaritmica, dal punto di ascissa 1/τ. Lo scostamento massimo del diagramma asintotico del modulo dal diagramma effettivo in fig. 25 si ha quindi proprio in corrispondenza della pulsazione ω = 1/τ e la (2.21) dà immediatamente il valore -10 log(2) = -3.0103 dB per tale massimo: un'ottava sopra (o sotto) 1/τ lo scostamento si riduce a -0.97 dB mentre una decade sopra o sotto 1/τ lo scostamento si porta addirittura a 0.043dB. Anche il diagramma della fase mostra due asintoti ai due estremi di ω, uno a 0° e l'altro a -90°, ma la figura mette bene in evidenza come la spezzata costituita da tali asintoti e dal tratto di "raccordo" verticale approssimi male l'andamento effettivo. Per funzioni di trasferimento dotate di poli e zeri reali e sufficientemente "distanti" fra loro il diagramma ottenuto come somma dei diagrammi asintotici dei moduli rappresenta dunque una discreta approssimazione dell'andamento esatto. Si tratta evidentemente di una spezzata con tratti inclinati di multipli interi di ± 20 dB/dec sulla cui determinazione torneremo più avanti. Questa possibilità induce ad analizzare se analoghe circostanze si verificano anche in corrispondenza di fattori rappresentativi di una coppia di zeri o poli complessi coniugati. Si consideri dunque la trasferenza
W(s) =1 + 2ξs
ωn + s2
ωn2
I diagrammi del modulo e della fase dipendono ovviamente dal parametro ξ: la fig.26 mette in evidenza l'influenza che tale parametro ha sull'andamento delle due grandezze. In particolare se ξ = 0 ci si trova di fronte al caso di una coppia di zeri immaginari puri: in corrispondenza della pulsazione ωn il modulo in assoluto si annulla, per cui il corrispondente valore in decibel tende a -∞. Il caso ξ = 1 rappresenta invece la situazione corrispondente a due zeri reali coincidenti: i relativi diagrammi del modulo e della fase sono quindi quelli del singolo zero reale in ωn con le ordinate moltiplicate per due. Il diagramma del modulo presenta comunque ancora due asintoti, per qualunque valore di ξ: dalle formule
35

Mdb
10-1 100 101-20
0
20
40
0.10.20.50.7
1.0
ω/ωn φ
10-1 100 1010
50
100
150
0.10.2
0.50.71.0
ω/ωn fig.26
Mdb(ω) = 20 log (1 - ω2
ωn2)2 + 4ξ2 ω2
ωn2 (2.22a)
φ(ω) = atn 2ξ
ωωn
1 - ω2
ωn2
(2.22b)
36

si vede ancora come i due asintoti per il diagramma del modulo siano rappresentati - per ω c 0 dalla retta: M~ db(ω) = 0 - per ω c∞ dalla retta: M~ db(ω) = 20 log(ω2/ωn2) = 40log(ω/ωn) = = 40log(ω)-40log(ωn) Si tratta dunque, nel secondo caso, di una retta a pendenza di 40 dB/dec "uscente" dal punto di ascissa ωn. La fig. 27 mostra gli scostamenti del diagramma esatto del modulo dal diagramma asintotico come funzione di ω e di ξ. E' utile osservare che per ξ = 0.5 lo scostamento si annulla per ω = ωn. Mdb-M~ db
10-1 100 101-10
0
10
20
0.1
0.2
0.5
0.71.0
ω/ωn fig.27
Mentre l'approssimazione costituita dal diagramma asintotico del modulo risulta accettabile per valori non troppo bassi di ξ (ma comunque di valore anche più che doppio rispetto al caso del singolo zero o polo reale) l'approssimazione del diagramma della fase risulta, nel caso della coppia di zeri o poli complessi, tanto migliore quanto più è basso il valore di ξ. 2.5 I diagrammi di Bode asintotici per il modulo. Per talune applicazioni pratiche risulta sufficiente l'approssimazione del diagramma del modulo ottenuta sostituendo al diagramma reale quello ottenuto per somma dei diagrammi asintotici dei singoli fattori. Questo, costituito da una spezzata estesa indefinitamente agli estremi, si può ottenere, sempreché si disponga appunto della forma fattorizzata (1.11) o (1.12) della generica W(s), e anziché una vera e propria operazione di somma dei diagrammi corrispondenti ai singoli fattori
37

elementari, attraverso un procedimento costruttivo piuttosto semplice basato sulle seguenti regole. a) Si individuano le pulsazioni corrispondenti ai moduli degli zeri e dei poli, eventualmente complessi: le diremo "pulsazioni caratteristiche" e in corrispondenza ad esse si presenteranno i vertici della spezzata. b) Se la W(s) presenta nell'origine uno zero (polo) di molteplicità µ (ν) il diagramma asintotico del modulo presenta come primo lato (a sinistra) una semiretta inclinata di 20µ (-20ν) db/dec. Per individuare esattamente la posizione di tale semiretta si rifletta al fatto che essa deve intersecare la verticale per ω = 1 rad/sec in corrispondenza al valore 20logK; infatti a basse frequenze l'unico contributo significativo al modulo viene dato, come si vede dalla forma (1.11) della W(s), dal termine Ksµ (Ks−ν), e quindi a bassa frequenza M~ db(ω) = 20 log K + 20µ log ω (M~ db(ω) = 20 log K - 20ν log ω) da cui l'asserto precedente. Se non vi è polo o zero nell'origine, il primo lato è una semiretta orizzontale a quota 20 log K. c)) Si prolunga il primo lato fino ad incontrare la verticale per la prima "pulsazione caratteristica": se si tratta di una pulsazione che corrisponde a - uno zero semplice si traccia il prossimo lato della spezzata aumentando la pendenza, rispetto al lato precedente, di 20 dB/dec; - un polo semplice si traccia il prossimo lato della spezzata diminuendo la pendenza, rispetto al lato precedente, di 20 dB/dec; - uno zero doppio o una coppia di zeri complessi si traccia il prossimo lato della spezzata aumentando la pendenza, rispetto al lato precedente, di 40 dB/dec; - un polo doppio o una coppia di poli complessi si traccia il prossimo lato della spezzata diminuendo la pendenza, rispetto al lato precedente, di 40 dB/dec; e così via- per zeri o poli di molteplicità maggiore di due si dovrà tenerne conto nel determinare l'incremento o il decremento della pendenza del lato che nasce in corrispondenza ad essi; d) allo stesso modo si procede per tutti i lati successivi al primo introducendo un nuovo lato in corrispondenza di ogni pulsazione caratteristica. Può accadere che uno zero abbia ad esempio modulo eguale a quello di una coppia di poli complessi: in corrispondenza della relativa pulsazione caratteristica si dovrà introdurre un lato con pendenza decrementata di 20 dB/dec in quanto il contributo positivo di 20 db/dec dovuto allo zero è più che compensato dal contributo negativo di -40 dB/dec dovuto alla coppia di poli complessi. In modo analogo si potrebbe procedere alla costruzione di un diagramma asintotico per la fase: la regola sarebbe in questo caso sostituita dalla seguente: a') il primo tratto è l'orizzontale per µ90° (-ν90°); b) si sale di 90° (180°) in corrispondenza ad uno zero reale (complesso o doppio) , si scende di 90° (180°) in corrispondenza ad un polo reale (complesso o doppio), eccetera. In fig. 28 è rappresentato il diagramma del modulo, effettivo e asintotico (la spezzata tratteggiata), e il diagramma di Bode della fase relativi alla funzione di trasferimento
38

W(s) = 20(s+0.1)
(s+1)(s2+4s+100)
modulo
fase
fig.28
39
Nel tracciamento dei diagrammi asintotici del modulo si deve affrontare spesso un problema di ordine pratico e precisamente si tratta di individuare le "coordinate" di un punto notevole della spezzata che costituisce il diagramma asintotico stesso.Allo scopo occorre ricordare che in ascisse sono riportate le quantità x=log ω e in ordinate le quantità y = 20log M. Poichè i lati di spezzata sono segmenti di retta inclinati di

multipli interi della pendenza base di 20 decibel per decade (db/dec) si ha a che fare con rette di equazione: y = ± 20µ. x + q (dove µ è un intero). In generale l'intercetta q può essere determinata in base alle informazioni che hanno portato alla costruzione del diagramma : ma più spesso l'equazione va utilizzata facendo riferimento alle coordinate, precedentemente calcolate e quindi note, di un altro punto della retta. Se sono x0 e y0 le coordinate di un simile punto si può notoriamente scrivere: y = y0 + 20µ.(x-x0). Volendo far riferimento ai valori del modulo e della pulsazione più direttamente si ha, per il punto generico di tale retta, il seguente vincolo:
M~ db = M~ 0 db + 20 µ log
ω
ω0
______________________ Esempio 2.12. Se si volessero ad esempio individuare le pulsazioni ω1 e ω2 in corrispondenza alle quali il diagramma asintotico del modulo di fig. 28 assume il valore di -20 db occorre procedere come segue. Si parte dall'informazione relativa alla ordinata del primo lato della spezzata che costituisce il diagramma; esso corrisponde al valore espresso in db del guadagno della funzione di trasferimento
W(s) = 20(s+0.1)
(s+1)(s2+4s+100)
ed è pari a 20log(2/100)= 20(0.30103-2)=-33.98 db. Poichè il prossimo lato della spezzata ha una pendenza corrispondente a µ = 1 ed ha inizio dal punto corrispondente a ω0 = 0.1 dovrà essere:
-20 + 33.98 = 20 log
ω1
ω0
cioè : ω1 = ω0 100.699= 0.5 rad/sec Il terzo lato della spezzata ha inclinazione di -40db/dec (µ=-2) e origina; in corrispondenza di ω0 = 10 da un quota di 20 db superiore a quella del tratto iniziale e cioè da -13.98 db. Si avrà pertanto:
-20 + 13.98 = -40 log
ω2
ω0
e quindi ω2 = ω0 100.15051 = 14.14213 rad/sec Quest'ultimo valore si poteva dedurre cercando prima direttamente "l'equazione dell'asintoto" della parte finale del diagramma del modulo. A questo scopo si può fare riferimento allo sviluppo asintotico della funzione di trasferimento:
W(s) = 20s2 + ......
da cui M∞ db = 20 log 20 - 40 log (ω) = 26.0206 - 40 log (ω) e quindi -20 - 26.0206 = - 40 log (ω2)
40

e infine ω2 = 101.15051 = 14.14213 rad/sec ______________________
Questo procedimento suggerisce un modo alternativo e più diretto di risolvere problemi numerici relativi al diagramma asintotico del modulo e/o della fase. Infatti va ricordato
che ad ogni lato di spezzata corrisponde un' "equazione" del tipo M~ =|W~ (s) | con W~
(s)
= ab
sµ
sν ; ora a e b , µ e ν vengono determinati in base all'approssimazione adottata. Va
ricordato in proposito che questa consiste essenzialmente nella sostituzione del generico fattore (s+q) con l'espressione (s) se il tratto di spezzata in esame si riferisce ad un valore di ω > q, rispettivamente con (q) se esso si riferisce ad un valore di ω < q. Allo stesso modo si ragiona per fattori del tipo (s2+qs+r2) che vanno sostituiti con (s2) ovvero con (r2) a seconda che sia ω > r o ω < r, rispettivamente. Restano ovviamente intatti nell'approssimazione fattori, costanti, come il guadagno K', o le potenze di s.
______________________
Esempio 2.12 (continuazione) Con riferimento alla funzione di trasferimento
W(s) = 20(s+0.1)
(s+1)(s2+4s+100)
si può dire che : per ω < 0.1 W~
(s) = 20.(0.1)(1).(100) =
2100
per 0.1 < ω < 1 W~
(s) = 20.(s)
(1).(100) = 2s10
per 1 < ω < 10 W~
(s) = 20.(s)
(s).(100) = 2
10
per 10 < ω W~
(s) = 20.(s)
(s).(s2) =
20s2
2.6 I diagrammi di Nichols. I diagrammi di Nichols sintetizzano l'informazione sul modulo e sulla fase in un'unica curva: al pari dei diagrammi di Nyquist essi vanno quindi tarati in ω per avere un'informazione completa sulla risposta di frequenza. Introdotti da N.B.Nichols [4], uno studioso di controlli automatici del M.I.T., essi riportano in ordinate il modulo in decibel (Mdb) in funzione della fase (ϕ) in ascisse. Si ottengono quindi "combinando" le informazioni desumibili direttamente dai diagrammi di Bode. Il motivo principale di interesse per questo tipo di rappresentazione è basato sulla proprietà definita dalle formule (2.18)-(2.20): il diagramma di Nichols di una funzione di trasferimento W(s) ottenibile come prodotto di due trasferenze : W(s) = W1(s) W2(s) si ottiene per "somma vettoriale" dei diagrammi di Nichols corrispondenti ai due fattori; in altri termini , come è schematicamente indicato in fig. 29, il punto del diagramma di Nichols di W(s) corrispondente ad un certo valore di ω si ottiene sommando i vettori che sul piano, detto appunto di Nichols, corrispondono ai due valori di W1(s) e W2(s) per quello stesso
41

valore di ω.
fig.29
Un carattere conseguente della rappresentazione delle trasferenze sul piano di Nichols, che risulta particolarmente importante nel campo dei controlli automatici, è costituito dal fatto che una variazione del guadagno della trasferenza provoca una semplice traslazione verticale dell'intero diagramma. Il diagramma di Nichols per la trasferenza W(s) = 1/(1+sτ) è riportato in fig.30 : essa mostra un andamento tipico, con asintoto verticale di ascissa ϕ = -90°.
fig.30
In fig. 31 è riportato invece il diagramma di Nichols corrispondente alla trasferenza i cui diagrammi di Bode sono quelli di fig. 28.
42

fig.31
43