Costruzione e Sviluppo in ambiente STNucleo di un Quadricottero con Stabilizzazione dell’Assetto
80
Università degli Studi di Trieste Dipartimento di Ingegneria e Architettura Corso di Studi in Ingegneria dell’Informazione Costruzione e Sviluppo in ambiente STNucleo di un Quadricottero con Stabilizzazione dell’Assetto Tesi di Laurea Triennale Candidato: Simone Fini Relatore: Prof. Ing. Stefano Marsi Correlatore: Prof. Ing. Sergio Carrato Anno Accademico 2015-2016
-
Upload
simone-fini -
Category
Engineering
-
view
63 -
download
0
Transcript of Costruzione e Sviluppo in ambiente STNucleo di un Quadricottero con Stabilizzazione dell’Assetto

Università degli Studi di Trieste Dipartimento di Ingegneria e Architettura
Corso di Studi in Ingegneria dell’Informazione
Costruzione e Sviluppo in
ambiente STNucleo di un
Quadricottero con Stabilizzazione
dell’Assetto
Tesi di Laurea Triennale
Candidato:
Simone Fini
Relatore:
Prof. Ing. Stefano Marsi
Correlatore:
Prof. Ing. Sergio Carrato
Anno Accademico 2015-2016


Desidero ringraziare il mio relatore,
il Professor Stefano Marsi,
per la pazienza, la fiducia,
l’esempio di professionalità
e di amore verso la professione
che mi ha dato.
Desidero inoltre ringraziare il mio correlatore,
il Professor Sergio Carrato,
sempre disponibile e pronto a dare una mano
a chiunque ne abbia bisogno.

Indice
L’Hardware ............................................................................................................ 3
1.1 La Scheda Programmabile ..................................................................... 3
1.1.1 Caratteristiche Generali ............................................................. 3
1.1.2 L’Ambiente di Sviluppo “mbed” .................................................. 8
1.2 I Motori Brushless ................................................................................ 11
1.3 Gli E.S.C. .............................................................................................. 15
1.3.1 Introduzione al dispositivo ....................................................... 15
1.3.2 Programmazione degli E.S.C. in Dotazione ............................. 17
1.3.3 Codice Utilizzato per la Programmazione degli E.S.C. ........... 19
1.3.4 Determinazione delle Caratteristiche Fisiche dei Motori ....... 20
1.4 Il Ricevitore ad Infrarossi (IR) ............................................................. 24
1.4.1 Funzionamento della Trasmissione ......................................... 24
1.4.2 Il Protocollo NEC ...................................................................... 26
1.5 MPU6050 .............................................................................................. 29
1.5.1 Il Sensore ................................................................................... 29
1.5.2 La FIFO ..................................................................................... 31
1.5.3 Giroscopio ed Accelerometro ..................................................... 31
1.5.4 Digital Motion Processor........................................................... 33
1.5.5 Il Clocking ................................................................................. 34
I Filtri Software ................................................................................................... 35
2.1 Il DMP ed i Quaternioni ....................................................................... 37
2.2 Il Filtro Complementare ...................................................................... 39
2.2.1 Implementazione Software del Filtro Complementare ........... 40
2.3 Il Filtro di Kalman ............................................................................... 43
2.3.1 Trattazione Matematica del Filtro ........................................... 43
2.3.2 Implementazione Software del Filtro di Kalman: la Libreria
“kalman” ............................................................................................. 45
2.4 Confronto Sperimentale tra i Due Filtri .............................................. 49
2.4.1 Simulazione 0°-90°-0° ............................................................... 49
2.4.2 Simulazione con Piattaforma e Microcontrollore Arduino ...... 51
L’Applicazione Android “Drone” .......................................................................... 54
3.1 Caratteristiche Generali di un’App Android ....................................... 55
3.2 Android Manifest .................................................................................. 56
3.3 Implementazione della Grafica tramite Linguaggio XML .................. 58
3.3.1 Layout “Intro” ............................................................................ 59
3.3.2 Layout “Main” ........................................................................... 62
3.4 Implementazione del Codice Esecutivo Java ...................................... 65
3.4.1 Activity “Intro” .......................................................................... 66
3.4.2 Activity “MainActivity” ............................................................. 68
Sitografia e Bibliografia ....................................................................................... 71

1
Introduzione
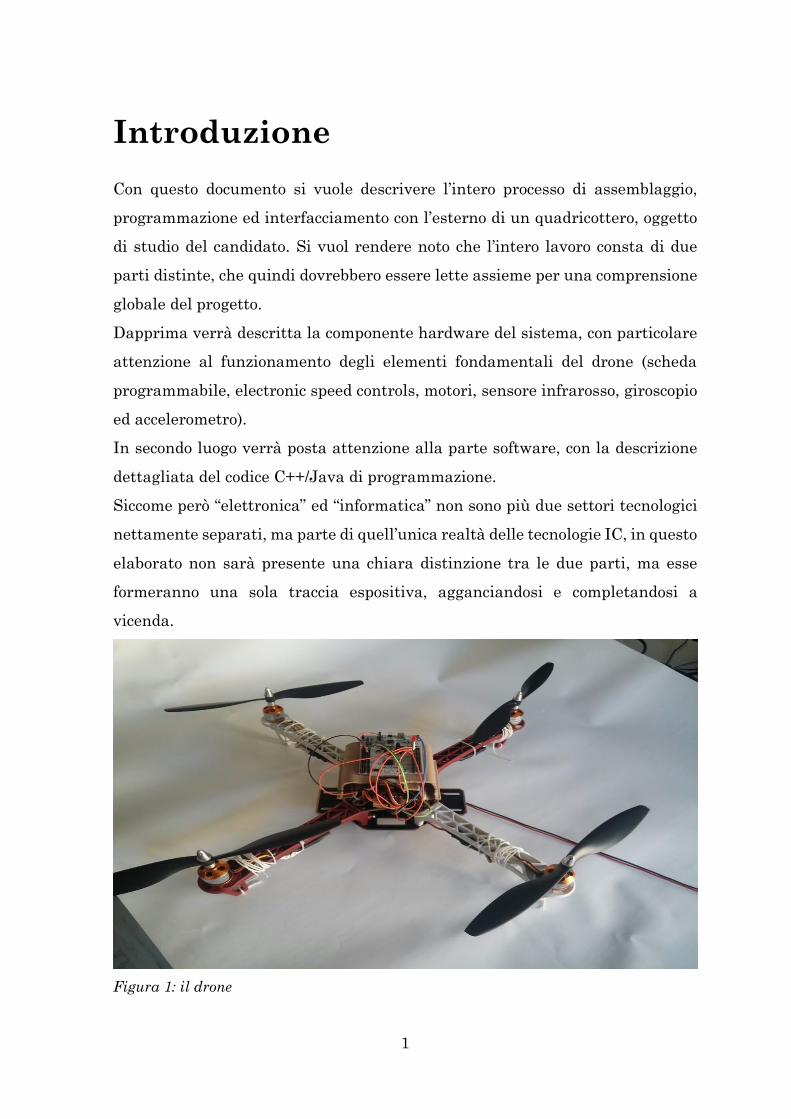
Con questo documento si vuole descrivere l’intero processo di assemblaggio,
programmazione ed interfacciamento con l’esterno di un quadricottero, oggetto
di studio del candidato. Si vuol rendere noto che l’intero lavoro consta di due
parti distinte, che quindi dovrebbero essere lette assieme per una comprensione
globale del progetto.
Dapprima verrà descritta la componente hardware del sistema, con particolare
attenzione al funzionamento degli elementi fondamentali del drone (scheda
programmabile, electronic speed controls, motori, sensore infrarosso, giroscopio
ed accelerometro).
In secondo luogo verrà posta attenzione alla parte software, con la descrizione
dettagliata del codice C++/Java di programmazione.
Siccome però “elettronica” ed “informatica” non sono più due settori tecnologici
nettamente separati, ma parte di quell’unica realtà delle tecnologie IC, in questo
elaborato non sarà presente una chiara distinzione tra le due parti, ma esse
formeranno una sola traccia espositiva, agganciandosi e completandosi a
vicenda.
Figura 1: il drone

2

3
Capitolo 1
L’Hardware
1.1 La Scheda Programmabile
Un microcontrollore è un sistema elettronico programmabile in grado di
acquisire e gestire opportunamente dati provenienti da sorgenti hardware
esterne.
È un sistema d’elaborazione completo, che può essere suddiviso in varie
componenti, ognuna delle quali ha un compito ben preciso per il funzionamento
dell’apparato nel suo complesso:
CPU o microprocessore, ovvero il “cervello” che gestisce tutti i processi
eseguiti;
ROM, memoria in cui viene salvato il programma creato;
RAM, memoria che viene utilizzata per la gestione delle variabili
temporanee;
Timer, circuito oscillatore che definisce il clock ed i vari intervalli
temporali;
Porte I/O, che permettono la comunicazione con altri dispositivi [1].
1.1.1 Caratteristiche Generali
Le schede STM32 appartengono alla famiglia dei microcontrollori di
STMicroelectronics, azienda franco-italiana con sede a Ginevra, leader nel
settore di produzione di componenti elettronici a semiconduttore. Sono
particolarmente indicate per applicazioni/progetti sia a scopo d’insegnamento,
sia in ambito industriale, data la enorme offerta in termini di prestazioni e
prezzi.
4
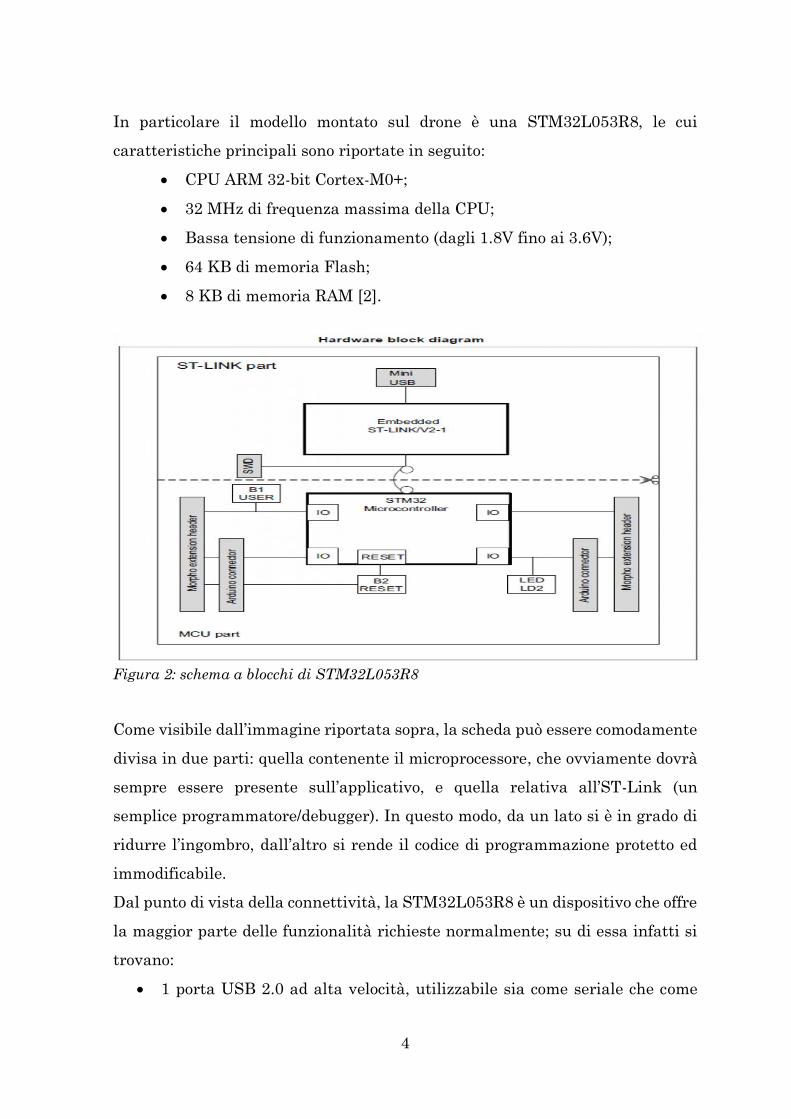
In particolare il modello montato sul drone è una STM32L053R8, le cui
caratteristiche principali sono riportate in seguito:
CPU ARM 32-bit Cortex-M0+;
32 MHz di frequenza massima della CPU;
Bassa tensione di funzionamento (dagli 1.8V fino ai 3.6V);
64 KB di memoria Flash;
8 KB di memoria RAM [2].
Figura 2: schema a blocchi di STM32L053R8
Come visibile dall’immagine riportata sopra, la scheda può essere comodamente
divisa in due parti: quella contenente il microprocessore, che ovviamente dovrà
sempre essere presente sull’applicativo, e quella relativa all’ST-Link (un
semplice programmatore/debugger). In questo modo, da un lato si è in grado di
ridurre l’ingombro, dall’altro si rende il codice di programmazione protetto ed
immodificabile.
Dal punto di vista della connettività, la STM32L053R8 è un dispositivo che offre
la maggior parte delle funzionalità richieste normalmente; su di essa infatti si
trovano:
1 porta USB 2.0 ad alta velocità, utilizzabile sia come seriale che come
5
entrata per l’alimentazione esterna;
1 LED tricolore (LD1) che fornisce informazioni sullo stato di
comunicazione dell’ST-Link:
o lampeggia lentamente di rosso prima che l’USB sia inizializzata,
rimane acceso il rosso dopo;
o lampeggia rosso e verde durante la comunicazione PC-scheda;
o rimane acceso il verde quando la comunicazione è avvenuta con
successo;
o rimane acceso l’arancione se la comunicazione fallisce;
1 LED (LD2) utilizzabile dall’utente;
1 LED (LD3) utilizzato per la verifica dello stato dell’alimentazione;
1 pulsante di reset ed 1 utilizzabile dall’utente (USER_BUTTON);
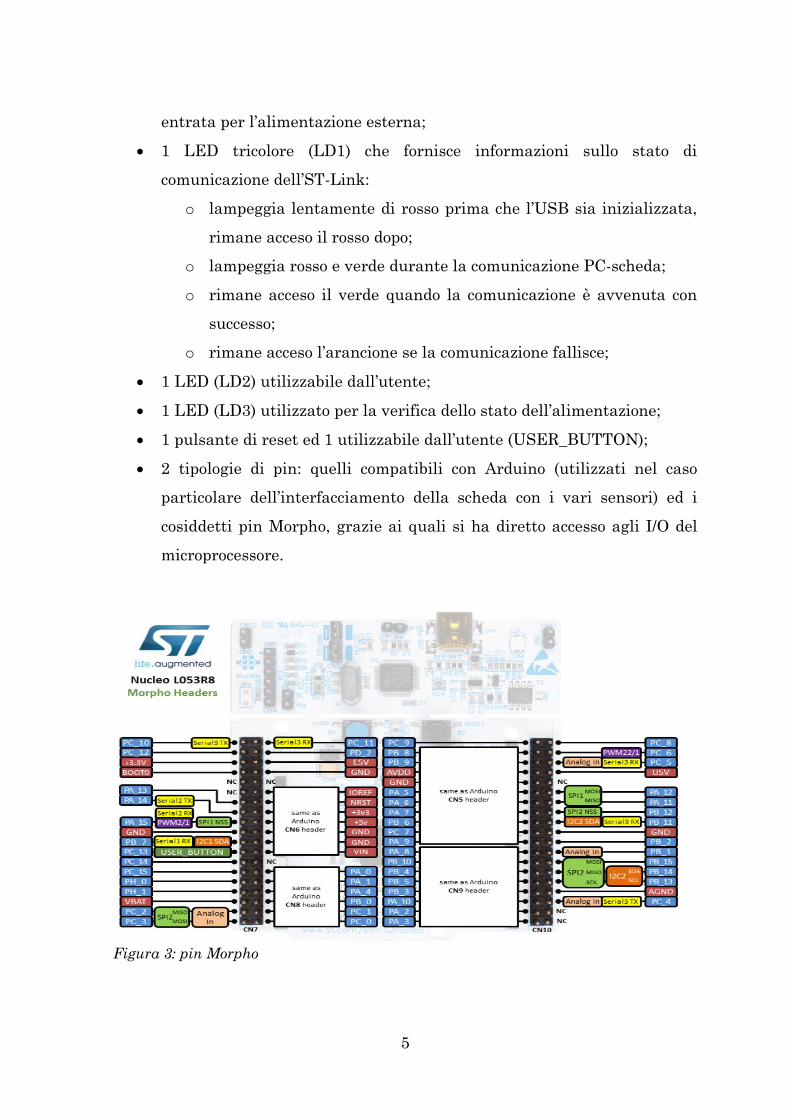
2 tipologie di pin: quelli compatibili con Arduino (utilizzati nel caso
particolare dell’interfacciamento della scheda con i vari sensori) ed i
cosiddetti pin Morpho, grazie ai quali si ha diretto accesso agli I/O del
microprocessore.
Figura 3: pin Morpho
6
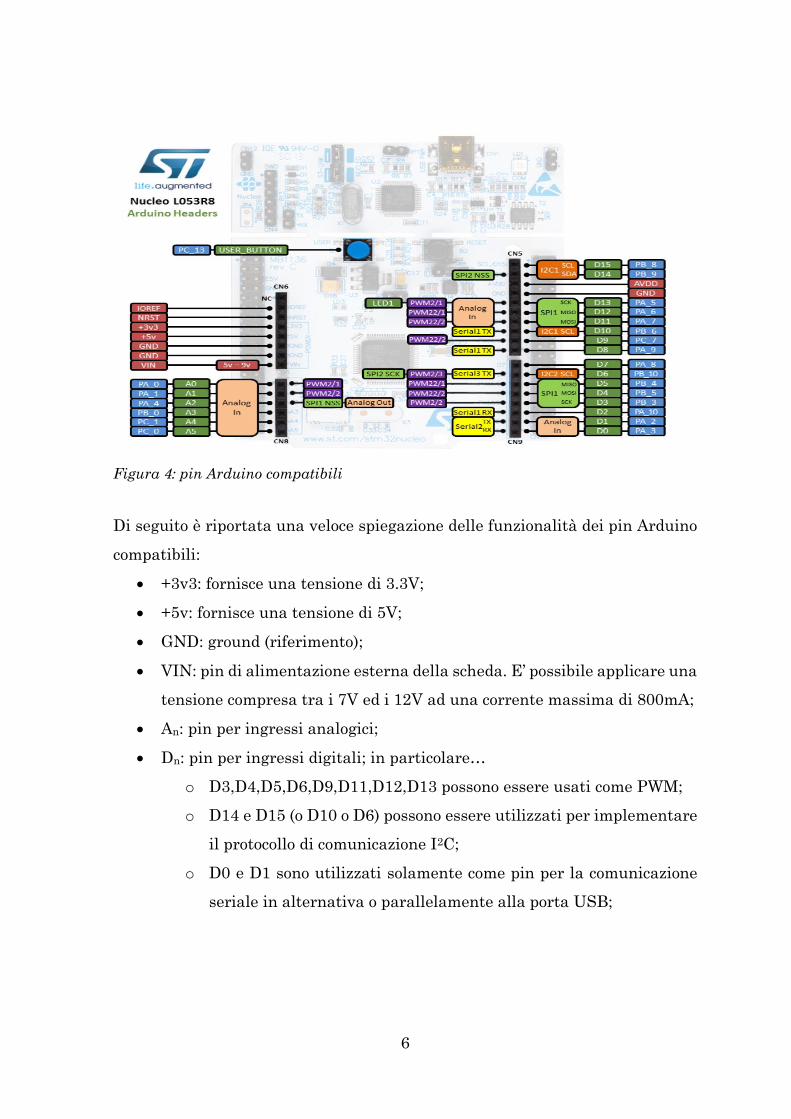
Figura 4: pin Arduino compatibili
Di seguito è riportata una veloce spiegazione delle funzionalità dei pin Arduino
compatibili:
+3v3: fornisce una tensione di 3.3V;
+5v: fornisce una tensione di 5V;
GND: ground (riferimento);
VIN: pin di alimentazione esterna della scheda. E’ possibile applicare una
tensione compresa tra i 7V ed i 12V ad una corrente massima di 800mA;
An: pin per ingressi analogici;
Dn: pin per ingressi digitali; in particolare…
o D3,D4,D5,D6,D9,D11,D12,D13 possono essere usati come PWM;
o D14 e D15 (o D10 o D6) possono essere utilizzati per implementare
il protocollo di comunicazione I2C;
o D0 e D1 sono utilizzati solamente come pin per la comunicazione
seriale in alternativa o parallelamente alla porta USB;

7
Infine qualche parola va spesa per le modalità di alimentazione; come già
riportato in precedenza, la scheda può essere alimentata sia tramite USB sia
tramite pin. Per impostare una delle due modalità e per fare in modo che la
board non subisca danni (a volte critici) dovuti ad eventuali sovratensionamenti,
si deve modificare leggermente l’architettura della circuiteria, mediante dei
jumpers. Questi sono dei semplici ponticelli metallici mobili, utilizzati per
cortocircuitare dei contatti in modo da attivare o disattivare funzioni diverse del
circuito [3].
L’alimentazione di default è quella via USB, ma se il PC non è in grado di
erogare una corrente di 300mA il microprocessore non potrà funzionare; allora
è possibile, con il jumper JP1 chiuso, richiedere allo stesso calcolatore una
corrente di 100mA.
Se in alternativa si vuole alimentare la scheda tramite pin VIN è necessario
spostare il jumper JP5 in posizione E5V, lasciando aperto JP1 e connettendo
l’USB solo dopo l’accensione del micro per poter eseguire la programmazione [4].
Fonte Ingresso Tensione Corrente
Massima
JP1 JP5 ST-LINK
PC con USB
che può erogare
300mA
USB 5V 300mA Aperto U5V Non
rimosso
PC con USB
che non può
erogare 300mA
USB 5V 100mA Chiuso U5V Non
rimosso
Carica batterie USB 5V Non
specificato
Chiuso U5V Non
rimosso
Alimentazione
esterna
VIN 7÷12V 800mA Aperto E5V Possibile
rimuoverlo
Alimentazione
esterna
E5V 5V 500mA Aperto E5V Possibile
rimuoverlo
Alimentazione
esterna
+3V3 3.3V Non
specificato
Indifferente Indifferente Rimosso
Tabella 1: configurazione dei jumpers in base alla sorgente di alimentazione
8
1.1.2 L’Ambiente di Sviluppo “mbed”
Mbed1 è una piattaforma online nata per semplificare la vita ai programmatori:
infatti questo ambiente di sviluppo permette di scrivere codice di
programmazione (per le schede programmabili che supportano questo servizio)
e salvarlo all’interno di un cloud dedicato, in modo tale da poter lavorare in
qualsiasi momento, su qualsiasi calcolatore ed in qualsiasi luogo, a patto
ovviamente di essere in possesso di una connessione Internet.
La forza di questo ambiente di sviluppo però è la libreria “mbed.h”, creata dagli
sviluppatori ufficiali e contenente le classi principali e, in linea di massima, più
utilizzate dai consumatori (qui di seguito non vengono riportate tutte le
categorie di oggetti con i relativi metodi, ma soltanto quelle utilizzate per la
programmazione del drone):
AnalogIn, per la gestione dei segnali analogici che arrivano ai pin della
scheda
o AnalogIn (PinName pin), il costruttore che ha come parametro
un pin;
o float read(), funzione per leggere una tensione in ingresso e lo
rappresentarla attraverso un valore di tipo float compreso tra 0.0
e 1.0.
AnalogOut, per i segnali analogici inviati dalla scheda
o AnalogOut (PinName pin), analogo al costruttore di AnalogIn;
o void write(float value), setta una tensione in uscita fornita
come parametro.
DigitalIn, per gestire i segnali digitali in ingresso
o DigitalIn (PinName pin), costruttore;
o int read(), funzione che legge una tensione in ingresso;
quest’ultima viene rappresentata da uno 0 o da un 1.
DigitalOut, per gestire i segnali digitali in uscita
1 https://www.mbed.com/en/

9
o DigitalOut (PinName pin), costruttore;
o void write(int value), funzione atta ad impostare l’uscita a 0 o
1.
InterruptIn, per la gestione di un interrupt, ovvero un evento che
consente l’interruzione di un processo qualora si verifichi un determinato
evento definito dall’utente
o InterruptIn (PinName pin), costruttore;
o void rise(Callback <void()> function), metodo che richiama
una funzione durante il fronte di salita di un determinato segnale
in ingresso, ad esempio quando un interruttore, inserito in un
circuito con resistenza di pull-down, viene chiuso e la tensione
conseguentemente si alza;
o void fall(Callback <void> function), simile al precedente, ma
che chiama la funzione durante il fronte di discesa, ad esempio
quando un interruttore, collegato con una resistenza di pull-down,
viene aperto e la tensione si abbassa.
PwmOut, per inviare da un pin digitale un segnale PWM
o PwmOut (PinName pin), costruttore;
o void period_us(int us), imposta il periodo in microsecondi
dell’onda mantenendo inalterata la larghezza dell’impulso. Sono
presenti anche le versioni atte a fornire il parametro
rispettivamente in secondi e millisecondi;
o void pulsewidth_us(int us), setta la larghezza dell’impulso in
microsecondi mantenendo inalterato il periodo. Come per il metodo
precedente esistono le versioni in secondi e millisecondi.
Serial, grazie alla quale si riesce a configurare la scheda programmabile
per la comunicazione seriale di tipo RS232 con altri dispositivi
o Serial (PinName tx, PinName rx, int baud), costruttore che
crea una porta seriale connessa ai pin specifici di trasmissione e
ricezione, con un determinato baud, ovvero il numero di dati che
viene trasmesso in un secondo.
10
Timer, che inizializza un semplice conteggio temporale
o void start(), fa partire il timer;
o void stop(), lo ferma;
o void reset(), resetta il conteggio;
o int read_us(), ritorna il periodo di tempo passato in
microsecondi.
I2C, libreria che permette di implementare l’omonimo protocollo. Questa
verrà presentata nella seconda parte della tesi, con un maggior grado di
dettaglio e precisione.

11
1.2 I Motori Brushless
Figura 5: motori usati per il drone con relative eliche
I motori utilizzati per sostenere il drone durante la fase di volo richiedono
particolari caratteristiche; devono infatti:
essere poco ingombranti, ma allo stesso tempo erogare molta potenza;
lavorare con un rendimento molto alto, per fare in modo di massimizzare
il periodo di utilizzo del sistema;
essere controllabili con un grado di precisione elevata sia in velocità che
in accelerazione.
Per soddisfare tali requisiti si può far ricorso ai motori sincroni di tipo brushless.
Una macchina sincrona, identificata la maggior parte delle volte attraverso
l’acronimo MS, è una macchina elettrica rotante, funzionante in corrente
alternata.
Il funzionamento della maggior parte di queste macchine si basa sul principio
del campo magnetico rotante: per ottenerlo, occorre soddisfare le seguenti due
condizioni:
tre avvolgimenti (bobine) fissi nello spazio uguali tra loro, con lo stesso
numero di spire N e disposti con gli assi a 120° l’uno dall’altro;

12
all’interno di questi tre avvolgimenti devono circolare tre correnti AC
isofrequenziali, con lo stesso valore massimo IM e sfasate tra loro di 120°.
{
𝑖𝑎 = 𝐼𝑀𝑐𝑜𝑠(𝜔𝑡)
𝑖𝑏 = 𝐼𝑀𝑐𝑜𝑠 (𝜔𝑡 +2𝜋
3)
𝑖𝑐 = 𝐼𝑀𝑐𝑜𝑠 (𝜔𝑡 +4𝜋
3)
Ogni avvolgimento percorso da corrente quindi sostiene una forza
elettromotrice, sinusoidale e con lo stesso valore massimo, diretta secondo l’asse
dell’avvolgimento stesso. Utilizzando quindi la regola del parallelogramma per
la somma di vettori, si determina che la forza elettromotrice risultante ha, in
ogni istante, lo stesso valore, pari ad 1.5 volte quello massimo della f.e.m. di una
singola fase, e ruota nello spazio con velocità angolare costante.
La legge di Hopkinson stabilisce che “una forza elettromotrice produce un flusso
di induzione magnetica Φ, che è proporzionale alla f.e.m. stessa”, ed è
esprimibile attraverso la seguente relazione:
Φ = |𝑓. 𝑒.𝑚. |
𝑟𝑖𝑙𝑢𝑡𝑡𝑎𝑛𝑧𝑎
Il campo magnetico B, infine, supponendolo omogeneo e perpendicolare alla
superficie, è definito come il rapporto tra il flusso di induzione magnetica e la
superficie stessa:
Φ = 𝐵 ∙ 𝑆 = 𝐵𝑆𝑐𝑜𝑠𝛼
Pertanto i tre avvolgimenti producono un campo magnetico rotante, equivalente
a quello prodotto da un magnete posto in rotazione da un sistema meccanico.
La MS è denominata sincrona poiché la sua velocità di rotazione è la stessa del
campo rotante al suo interno, ovvero
𝑣0 =120𝑓
𝑝
con p=numero delle polarità magnetiche della macchina, f=frequenza della
13
corrente AC [5] [6].
È costituita da due strutture magnetiche differenti:
una, il rotore, su cui sono presenti diversi poli magnetici di polarità
alterna;
l’altra, chiamata statore, alloggia un avvolgimento, percorso da correnti,
in cui vengono indotte le forze elettromotrici.
Nel caso dei motori brushless, i poli sono generati attraverso la disposizione di
magneti permanenti sul rotore (o internamente o esternamente ad esso); in
questo modo quindi, il rotore andrà ad interagire direttamente con il campo
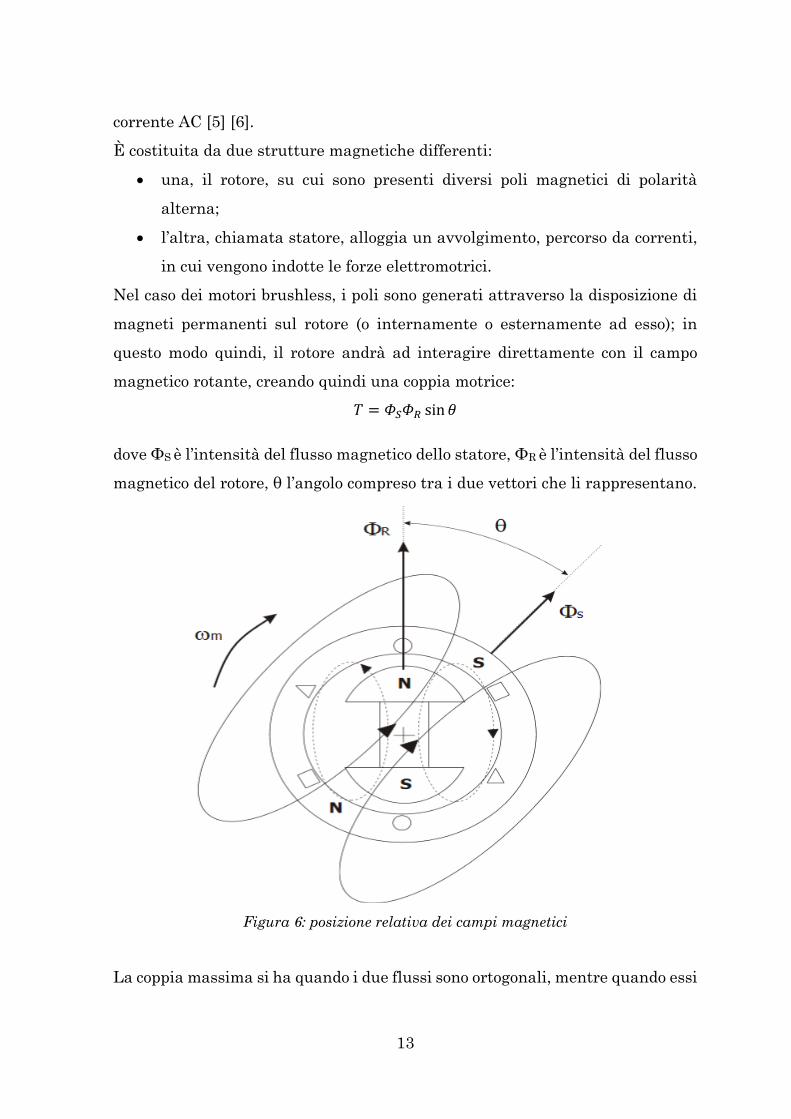
magnetico rotante, creando quindi una coppia motrice:
𝑇 = 𝛷𝑆𝛷𝑅 sin 𝜃
dove ΦS è l’intensità del flusso magnetico dello statore, ΦR è l’intensità del flusso
magnetico del rotore, θ l’angolo compreso tra i due vettori che li rappresentano.
Figura 6: posizione relativa dei campi magnetici
La coppia massima si ha quando i due flussi sono ortogonali, mentre quando essi

14
sono paralleli è nulla e non avviene alcun tipo di rotazione; risulta quindi
evidente come il corretto funzionamento di un motore di questo tipo è
strettamente legato alla conoscenza esatta della posizione del flusso del rotore
[7].
Per questo motivo, esistono due diverse tipologie di motori brushless:
i sensored, ovvero dotati di tre speciali sensori ad effetto Hall, incorporati
nello statore, che generano un segnale nel momento in cui i poli magnetici
del rotore li oltrepassano. Questo segnale può essere alto (per un polo
positivo) o basso (per un polo negativo); ad ogni bobina del motore è
collegata una coppia di sensori, ed in base alla combinazione della
tensione prodotta da questi il controllore (il cui funzionamento viene
descritto nel capitolo successivo) determina la posizione esatta dei poli
magnetici del rotore e distribuisce le correnti statoriche in modo che il
flusso del campo magnetico rotante sia da subito in anticipo, rispetto a
quello del campo magnetico rotorico, di un angolo tale da permettere alla
coppia motrice di attivare la rotazione. In questo modo si prevengono i
ritardi di risposta del motore [8].
i sensorless (montati2 sul drone), motori privi dei sensori sopra citati, che
non interagiscono in alcun modo con i dispositivi di controllo. Per questo
motivo, il campo magnetico rotante potrebbe trovarsi inizialmente in
posizione tale da produrre una coppia motrice molto bassa, o addirittura
nulla, che non permette la rotazione istantanea del rotore.
2 http://www.rhydolabz.com/documents/26/BLDC_A2212_13T.pdf
15
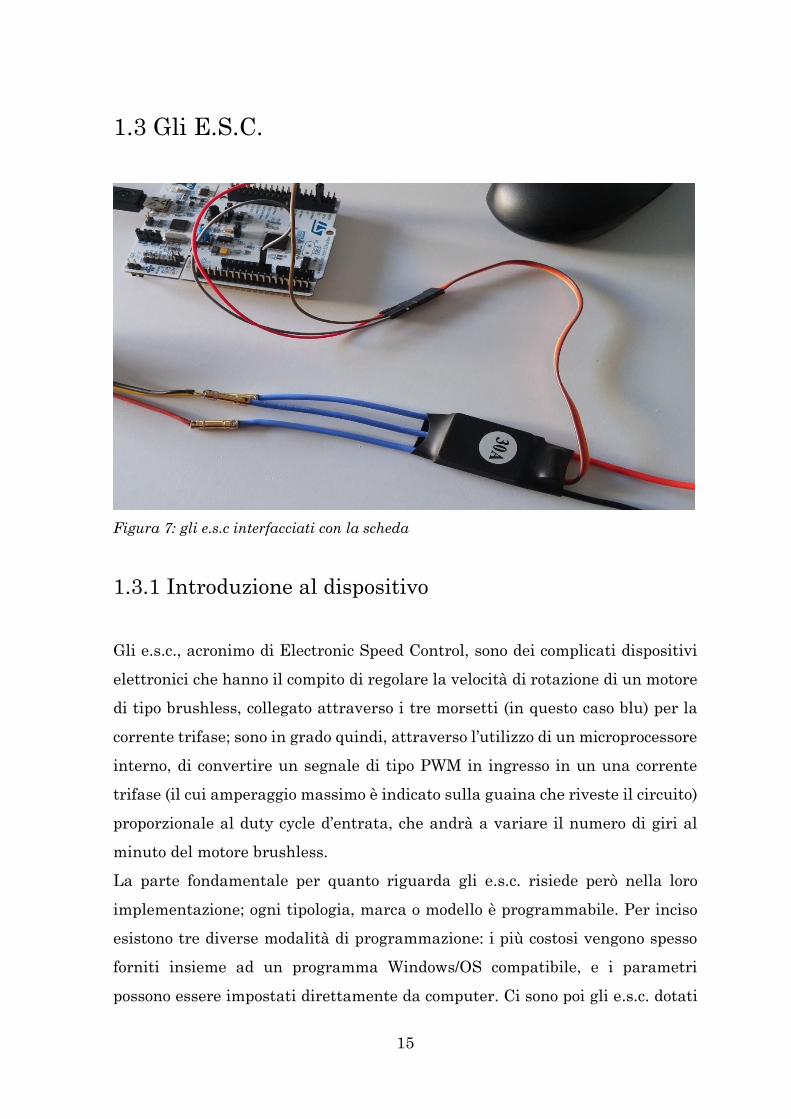
1.3 Gli E.S.C.
Figura 7: gli e.s.c interfacciati con la scheda
1.3.1 Introduzione al dispositivo
Gli e.s.c., acronimo di Electronic Speed Control, sono dei complicati dispositivi
elettronici che hanno il compito di regolare la velocità di rotazione di un motore
di tipo brushless, collegato attraverso i tre morsetti (in questo caso blu) per la
corrente trifase; sono in grado quindi, attraverso l’utilizzo di un microprocessore
interno, di convertire un segnale di tipo PWM in ingresso in un una corrente
trifase (il cui amperaggio massimo è indicato sulla guaina che riveste il circuito)
proporzionale al duty cycle d’entrata, che andrà a variare il numero di giri al
minuto del motore brushless.
La parte fondamentale per quanto riguarda gli e.s.c. risiede però nella loro
implementazione; ogni tipologia, marca o modello è programmabile. Per inciso
esistono tre diverse modalità di programmazione: i più costosi vengono spesso
forniti insieme ad un programma Windows/OS compatibile, e i parametri
possono essere impostati direttamente da computer. Ci sono poi gli e.s.c. dotati
16
di una particolare tastiera ed infine, i più semplici ma anche i più diffusi
(utilizzati anche per la costruzione del drone), che presentano una particolare
sequenza di programmazione che si interfaccia verso il mondo esterno
attraverso una serie di suoni emessi dai motori collegati.
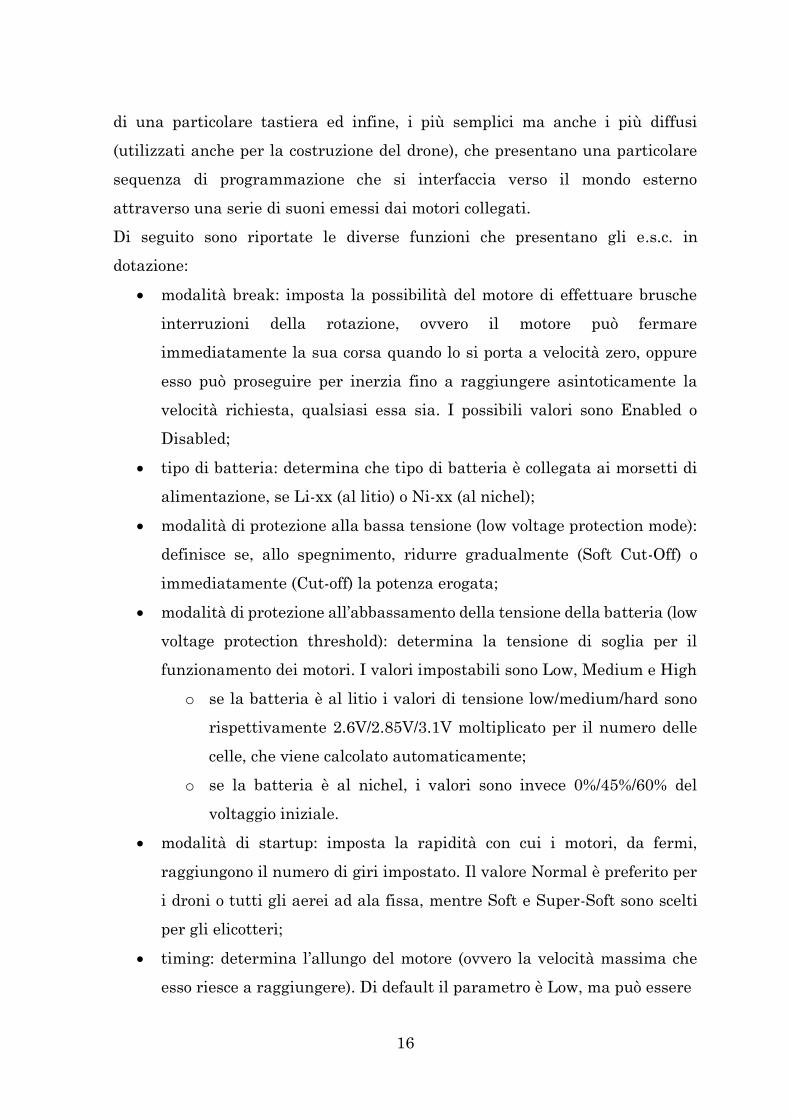
Di seguito sono riportate le diverse funzioni che presentano gli e.s.c. in
dotazione:
modalità break: imposta la possibilità del motore di effettuare brusche
interruzioni della rotazione, ovvero il motore può fermare
immediatamente la sua corsa quando lo si porta a velocità zero, oppure
esso può proseguire per inerzia fino a raggiungere asintoticamente la
velocità richiesta, qualsiasi essa sia. I possibili valori sono Enabled o
Disabled;
tipo di batteria: determina che tipo di batteria è collegata ai morsetti di
alimentazione, se Li-xx (al litio) o Ni-xx (al nichel);
modalità di protezione alla bassa tensione (low voltage protection mode):
definisce se, allo spegnimento, ridurre gradualmente (Soft Cut-Off) o
immediatamente (Cut-off) la potenza erogata;
modalità di protezione all’abbassamento della tensione della batteria (low
voltage protection threshold): determina la tensione di soglia per il
funzionamento dei motori. I valori impostabili sono Low, Medium e High
o se la batteria è al litio i valori di tensione low/medium/hard sono
rispettivamente 2.6V/2.85V/3.1V moltiplicato per il numero delle
celle, che viene calcolato automaticamente;
o se la batteria è al nichel, i valori sono invece 0%/45%/60% del
voltaggio iniziale.
modalità di startup: imposta la rapidità con cui i motori, da fermi,
raggiungono il numero di giri impostato. Il valore Normal è preferito per
i droni o tutti gli aerei ad ala fissa, mentre Soft e Super-Soft sono scelti
per gli elicotteri;
timing: determina l’allungo del motore (ovvero la velocità massima che
esso riesce a raggiungere). Di default il parametro è Low, ma può essere
17
impostato anche su Medium o High, a discapito però di un eccessivo
surriscaldamento del sistema [9].
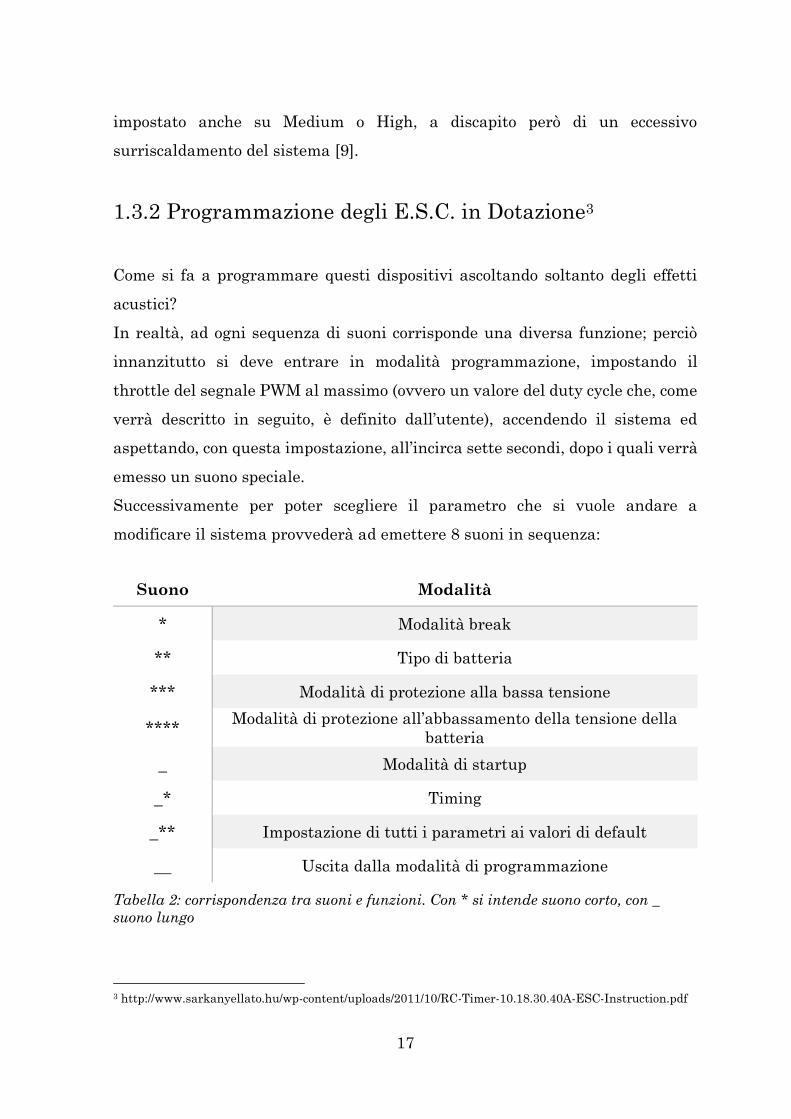
1.3.2 Programmazione degli E.S.C. in Dotazione3
Come si fa a programmare questi dispositivi ascoltando soltanto degli effetti
acustici?
In realtà, ad ogni sequenza di suoni corrisponde una diversa funzione; perciò
innanzitutto si deve entrare in modalità programmazione, impostando il
throttle del segnale PWM al massimo (ovvero un valore del duty cycle che, come
verrà descritto in seguito, è definito dall’utente), accendendo il sistema ed
aspettando, con questa impostazione, all’incirca sette secondi, dopo i quali verrà
emesso un suono speciale.
Successivamente per poter scegliere il parametro che si vuole andare a
modificare il sistema provvederà ad emettere 8 suoni in sequenza:
Suono Modalità
* Modalità break
** Tipo di batteria
*** Modalità di protezione alla bassa tensione
**** Modalità di protezione all’abbassamento della tensione della
batteria
_ Modalità di startup
_* Timing
_** Impostazione di tutti i parametri ai valori di default
__ Uscita dalla modalità di programmazione
Tabella 2: corrispondenza tra suoni e funzioni. Con * si intende suono corto, con _
suono lungo
3 http://www.sarkanyellato.hu/wp-content/uploads/2011/10/RC-Timer-10.18.30.40A-ESC-Instruction.pdf

18
In corrispondenza del suono che interessa si deve settare il throttle al minimo
entro tre secondi dallo stesso, in modo tale da accedere a tutte le varie possibilità
di valore per quella determinata funzione che, anche in questo caso, verranno
identificate attraverso dei suoni:
Modalità * ** ***
Brake Disabled Enabled
Tipo di batteria Li-xx Ni-xx
Modalità di protezione alla bassa tensione Soft Cut-
Off
Cut-Off
Modalità di protezione all’abbassamento
della tensione della batteria
Low Medium High
Modalità di startup Normal Soft Super-
Soft
Timing Low Medium High
Tabella 3: corrispondenza tra suoni e valori possibili per ogni modalità. Con * si
intende suono corto
Per scegliere un determinato valore, si setta il valore del throttle al massimo,
fino a che non viene emesso un tono speciale; in questo modo si ha una conferma
che il valore scelto è stato settato.
A questo punto, mantenendo il throttle così com’è si viene riportati nel menu
principale, e si possono andare a modificare altre modalità; se invece si porta il
throttle a valore minimo, si esce dalla modalità di programmazione e gli e.s.c.
saranno pronti a comandare i motori.
Prima di fare tutto ciò però, siccome il controllo della programmazione avviene
essenzialmente alternando il valore del throttle da massimo a minimo e
viceversa, si devono impostare questi due valori, o per meglio dire, fornire al
microprocessore il full scale range del segnale di comando. Per fare ciò si deve
impostare il throttle al valore che si vuole memorizzare come massimo,
accendere gli e.s.c. ed aspettare circa due secondi, dopo i quali verrà emesso un
doppio suono corto (**), che sarà la conferma dell’avvenuta registrazione. Fatto
ciò si andrà a abbassare il livello d’ingresso, in modo da salvare il valore minimo;
in questo caso però prima verranno emessi una serie di suoni corti (*) in base
19
alla tipologia di batteria che alimenta il sistema, poi un suono lungo (_) che
avverte l’utilizzatore che il range di valori è stato correttamente settato.
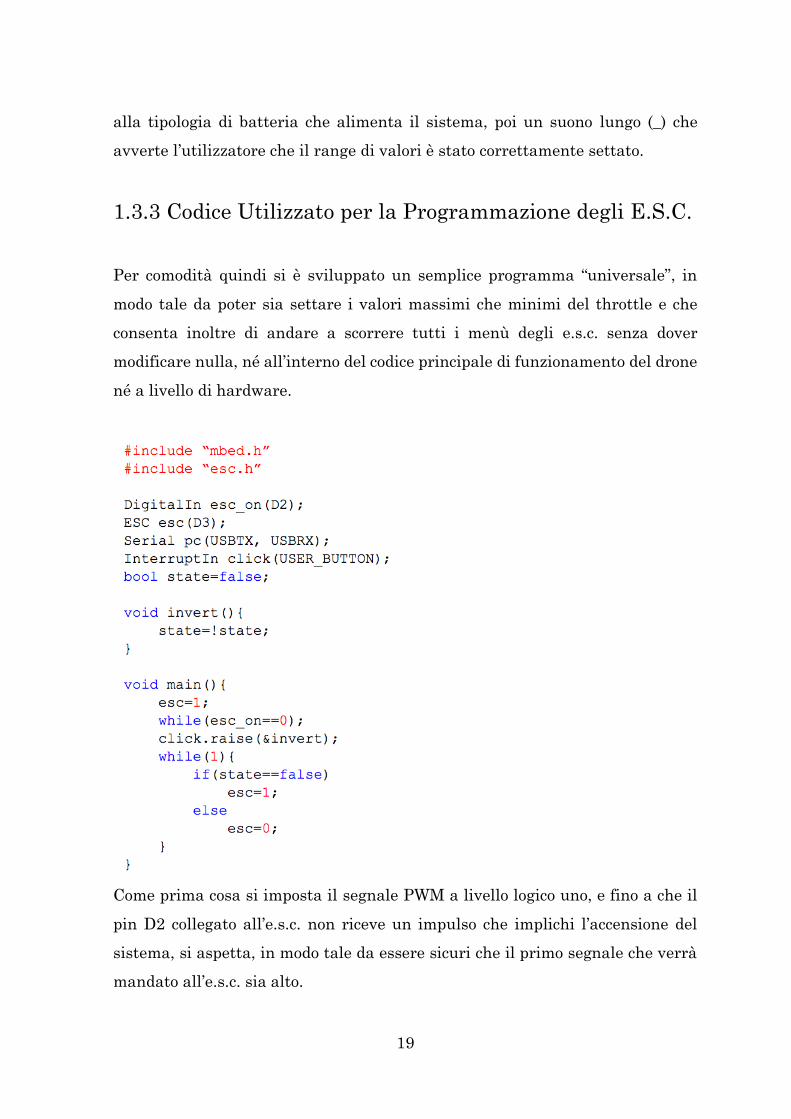
1.3.3 Codice Utilizzato per la Programmazione degli E.S.C.
Per comodità quindi si è sviluppato un semplice programma “universale”, in
modo tale da poter sia settare i valori massimi che minimi del throttle e che
consenta inoltre di andare a scorrere tutti i menù degli e.s.c. senza dover
modificare nulla, né all’interno del codice principale di funzionamento del drone
né a livello di hardware.
Come prima cosa si imposta il segnale PWM a livello logico uno, e fino a che il
pin D2 collegato all’e.s.c. non riceve un impulso che implichi l’accensione del
sistema, si aspetta, in modo tale da essere sicuri che il primo segnale che verrà
mandato all’e.s.c. sia alto.
20
A questo punto vi è la presenza di un interrupt, che fa in modo (agganciando il
segnale alla funzione invert) di cambiare il valore della variabile state ogni
qualvolta venga premuto lo user button della scheda. Infine si entra in un ciclo
infinito, in cui in base al valore booleano si imposta il PWM alto o basso.
In questo modo, premendo semplicemente un bottone si è in grado di alternare
i valori del throttle senza passare per stati intermedi, che potrebbero portare a
degli errori nelle impostazioni di configurazione degli e.s.c. senza accorgersene.
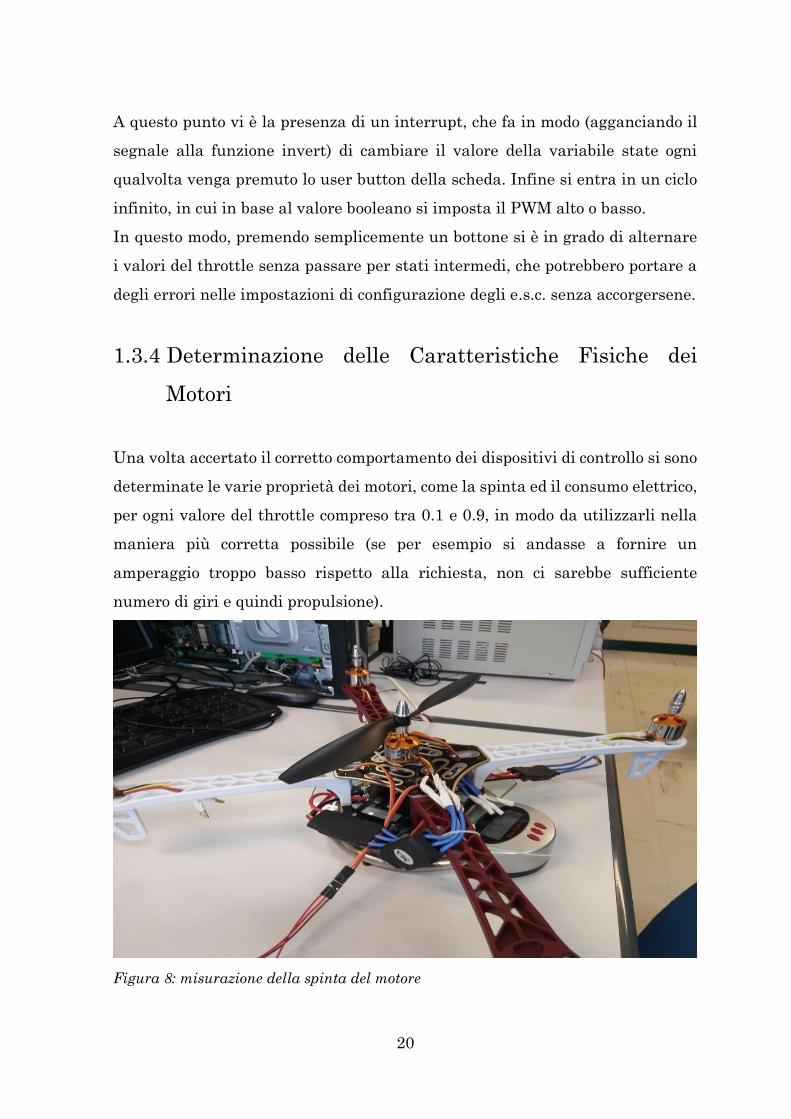
1.3.4 Determinazione delle Caratteristiche Fisiche dei
Motori
Una volta accertato il corretto comportamento dei dispositivi di controllo si sono
determinate le varie proprietà dei motori, come la spinta ed il consumo elettrico,
per ogni valore del throttle compreso tra 0.1 e 0.9, in modo da utilizzarli nella
maniera più corretta possibile (se per esempio si andasse a fornire un
amperaggio troppo basso rispetto alla richiesta, non ci sarebbe sufficiente
numero di giri e quindi propulsione).
Figura 8: misurazione della spinta del motore
21
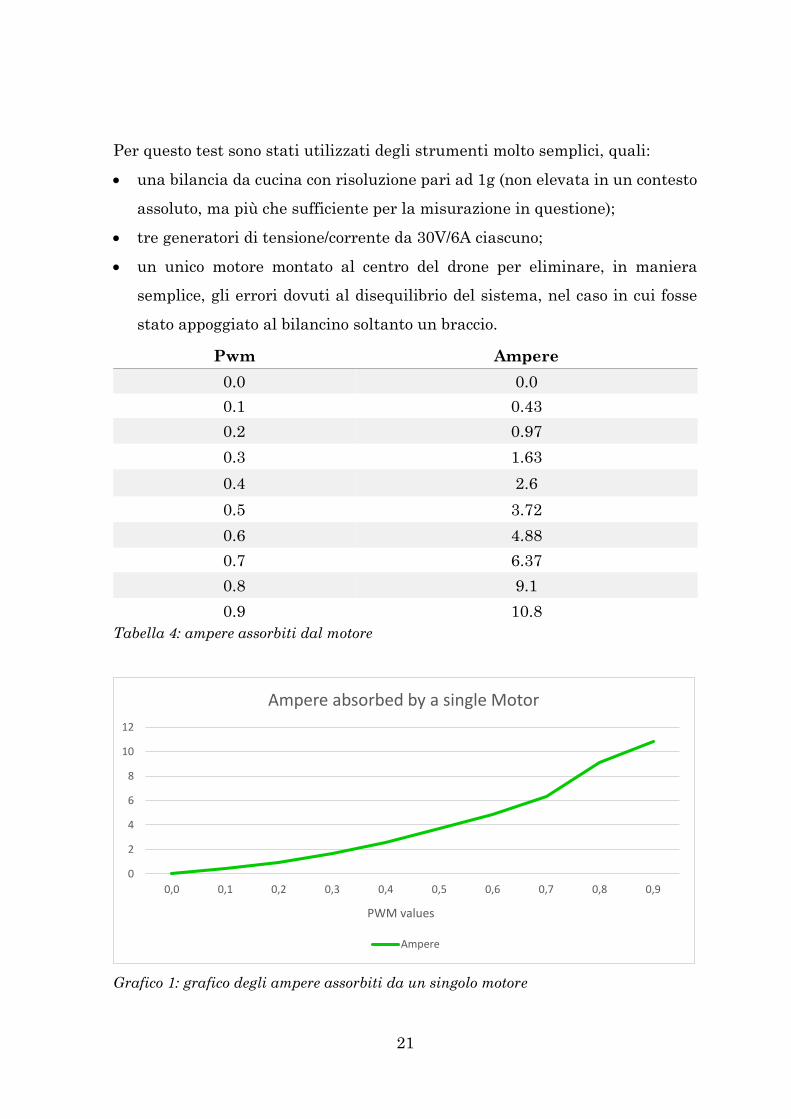
Per questo test sono stati utilizzati degli strumenti molto semplici, quali:
una bilancia da cucina con risoluzione pari ad 1g (non elevata in un contesto
assoluto, ma più che sufficiente per la misurazione in questione);
tre generatori di tensione/corrente da 30V/6A ciascuno;
un unico motore montato al centro del drone per eliminare, in maniera
semplice, gli errori dovuti al disequilibrio del sistema, nel caso in cui fosse
stato appoggiato al bilancino soltanto un braccio.
Pwm Ampere
0.0 0.0
0.1 0.43
0.2 0.97
0.3 1.63
0.4 2.6
0.5 3.72
0.6 4.88
0.7 6.37
0.8 9.1
0.9 10.8
Tabella 4: ampere assorbiti dal motore
Grafico 1: grafico degli ampere assorbiti da un singolo motore
0
2
4
6
8
10
12
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
PWM values
Ampere absorbed by a single Motor
Ampere
22
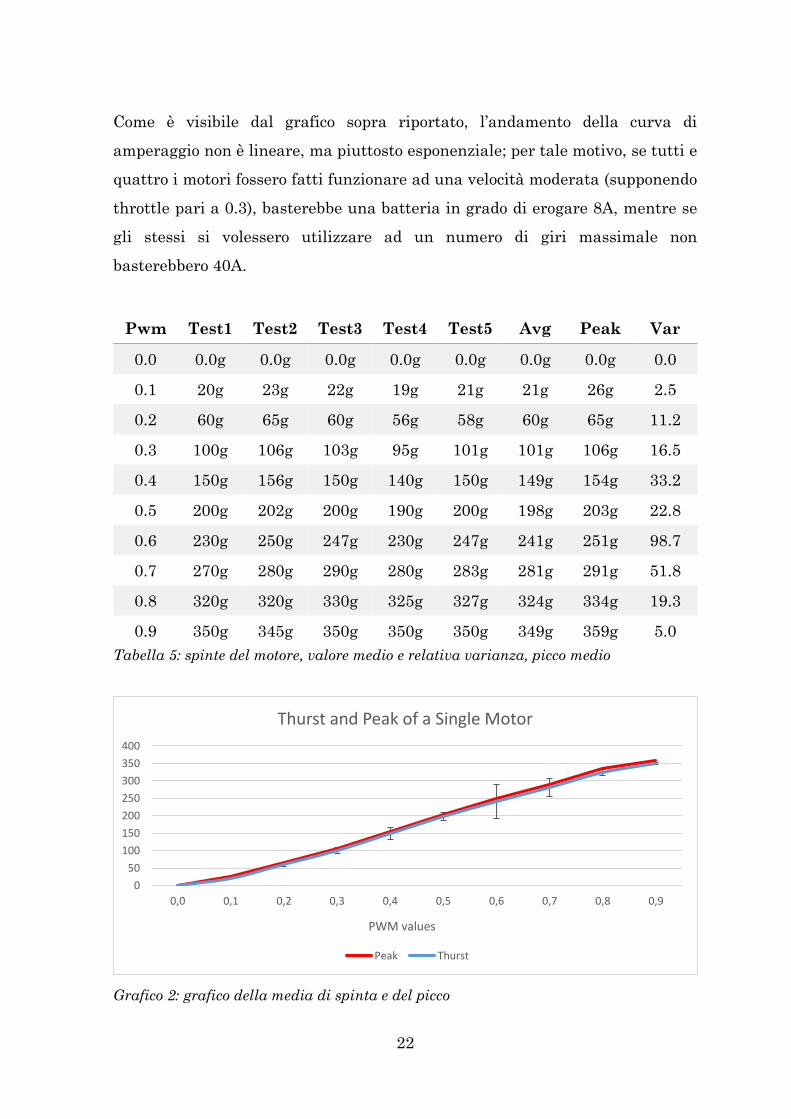
Come è visibile dal grafico sopra riportato, l’andamento della curva di
amperaggio non è lineare, ma piuttosto esponenziale; per tale motivo, se tutti e
quattro i motori fossero fatti funzionare ad una velocità moderata (supponendo
throttle pari a 0.3), basterebbe una batteria in grado di erogare 8A, mentre se
gli stessi si volessero utilizzare ad un numero di giri massimale non
basterebbero 40A.
Pwm Test1 Test2 Test3 Test4 Test5 Avg Peak Var
0.0 0.0g 0.0g 0.0g 0.0g 0.0g 0.0g 0.0g 0.0
0.1 20g 23g 22g 19g 21g 21g 26g 2.5
0.2 60g 65g 60g 56g 58g 60g 65g 11.2
0.3 100g 106g 103g 95g 101g 101g 106g 16.5
0.4 150g 156g 150g 140g 150g 149g 154g 33.2
0.5 200g 202g 200g 190g 200g 198g 203g 22.8
0.6 230g 250g 247g 230g 247g 241g 251g 98.7
0.7 270g 280g 290g 280g 283g 281g 291g 51.8
0.8 320g 320g 330g 325g 327g 324g 334g 19.3
0.9 350g 345g 350g 350g 350g 349g 359g 5.0
Tabella 5: spinte del motore, valore medio e relativa varianza, picco medio
Grafico 2: grafico della media di spinta e del picco
0
50
100
150
200
250
300
350
400
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
PWM values
Thurst and Peak of a Single Motor
Peak Thurst

23
Per quanto riguarda invece la spinta si sono fatte cinque differenti misurazioni
per ogni valore del PWM e ne è stata poi calcolata la media.
Si è notato che il comportamento del singolo motore in questo caso ha uno
sviluppo pressoché lineare, tranne che per un periodo di tempo poco significativo
e poco influente rispetto al funzionamento complessivo del sistema, ma
comunque apprezzabile, per cui è presente un valore di picco.

24
1.4 Il Ricevitore ad Infrarossi (IR)
1.4.1 Funzionamento della Trasmissione
La comunicazione infrarossa tra due dispositivi elettronici è una tra le più
semplici ed economiche alternative per l’utilizzo della trasmissione wireless di
dati digitali (binari). Bastano infatti soltanto due componenti:
un trasmettitore, ovvero un led che funziona come un normale diodo ad
emissione luminosa, tranne per il fatto che l’onda emanata è invisibile
all’occhio umano;
un ricevitore, ovvero un foto-sensore che invia l’informazione estrapolata
dalla sequenza luminosa al dispositivo a cui è collegato [10].
Ad ogni diversa funzionalità del dispositivo di comando (selezionabile
solitamente attraverso la pressione di un tasto, fisico o virtuale) è associato un
diverso segnale, il quale viene fatto passare attraverso un codificatore che lo
trasforma in una sequenza di impulsi elettrici. Questa è prima modulata, in
modo tale da aumentare il suo rapporto segnale-rumore, e successivamente
inviata al led, che emette quindi un segnale luminoso quando in ingresso è
presente una tensione alta, mentre invece rimane spento se il segnale è basso.
Più precisamente si parla di due diversi stati:
space, durante il quale non c’è emissione luminosa (nessun impulso);
mark, ovvero la condizione per la quale il led lampeggia con una
determinata frequenza compresa tra i 30kHz ed i 60kHz [11].
Ci possono essere tre diverse codifiche utilizzate da un trasmettitore:
la codifica “Manchester”, attraverso la quale vengono identificati i bit 1 o
0 in base alla posizione del mark all’interno di vari slot temporali;

25
Figura 9: codifica Manchester o Bifase
la codifica “Pulse Distance”, con la quale i valori dei bit vengono
differenziati in base al periodo temporale che intercorre tra due marks;
Figura 10: codifica Pulse Distance
la codifica “Pulse Length”, per la quale i valori dei bit vengono
differenziati in base alla differente durata dai marks.
Figura 11: codifica Pulse Length

26
A questo punto, il segnale luminoso viene catturato dal ricevitore, che lo traduce
in tensione, e viene demodulato, in modo tale da avere in uscita un segnale logico
da cui ricavare le informazioni trasmesse [12].
Ovviamente, per fare in modo che i due dispositivi “si capiscano” e che quindi la
trasmissione avvenga in maniera corretta, serve implementare un protocollo;
solitamente ogni azienda produttrice utilizza il proprio (Sony, Samsung,
Siemens, NEC, Panasonic, ecc...), ed ognuno si differenzia rispetto agli altri in
base alla frequenza di modulazione ed alla durata di ogni slot temporale che
identifica ogni singolo bit.
1.4.2 Il Protocollo NEC
La trasmissione dei dati, in realtà, non è limitata al solo comando selezionato;
infatti, ogni pacchetto è formato da:
una sequenza di “start”, che indica l’inizio della comunicazione;
l’indirizzo del dispositivo ricevente;
il comando da eseguire;
una sequenza di “stop”, grazie alla quale il ricevitore riconosce la fine del
messaggio.
Figura 12: specifiche della codifica Pulse Distance per il protocollo NEC
In particolare, il protocollo di comunicazione infrarossa NEC (utilizzato per il
comando del drone attraverso l’applicazione Android) si basa sulla tipologia di
27
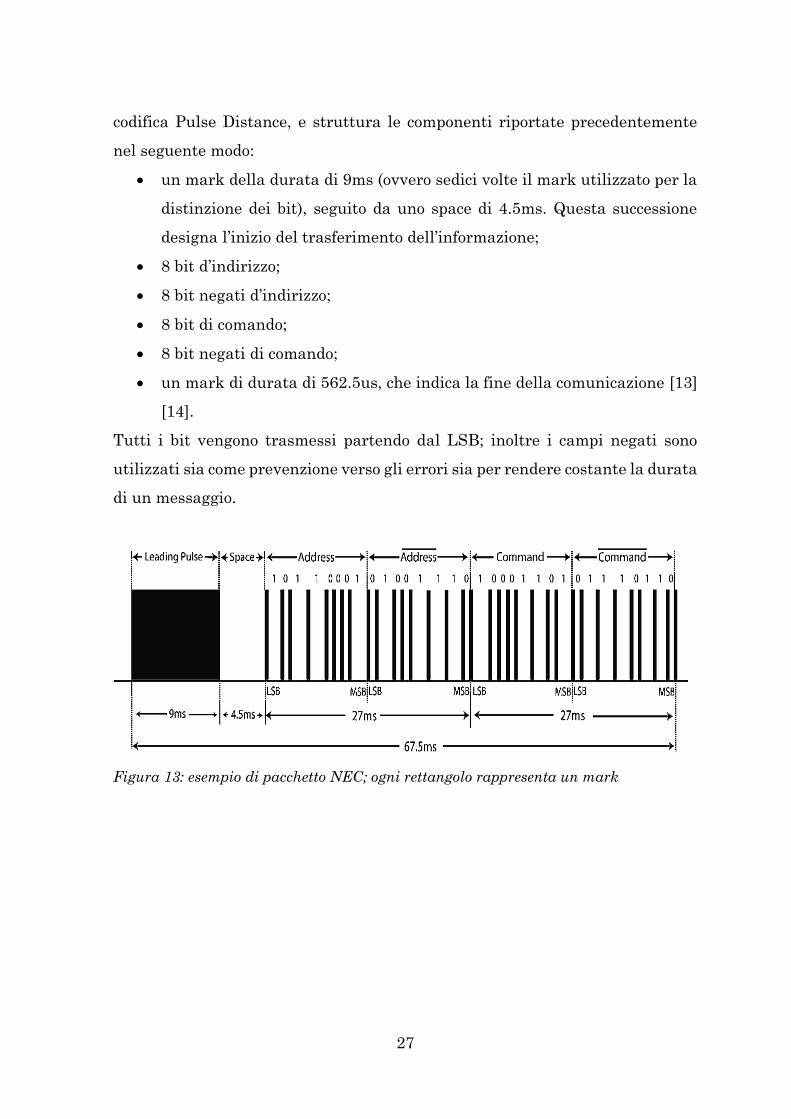
codifica Pulse Distance, e struttura le componenti riportate precedentemente
nel seguente modo:
un mark della durata di 9ms (ovvero sedici volte il mark utilizzato per la
distinzione dei bit), seguito da uno space di 4.5ms. Questa successione
designa l’inizio del trasferimento dell’informazione;
8 bit d’indirizzo;
8 bit negati d’indirizzo;
8 bit di comando;
8 bit negati di comando;
un mark di durata di 562.5us, che indica la fine della comunicazione [13]
[14].
Tutti i bit vengono trasmessi partendo dal LSB; inoltre i campi negati sono
utilizzati sia come prevenzione verso gli errori sia per rendere costante la durata
di un messaggio.
Figura 13: esempio di pacchetto NEC; ogni rettangolo rappresenta un mark
28
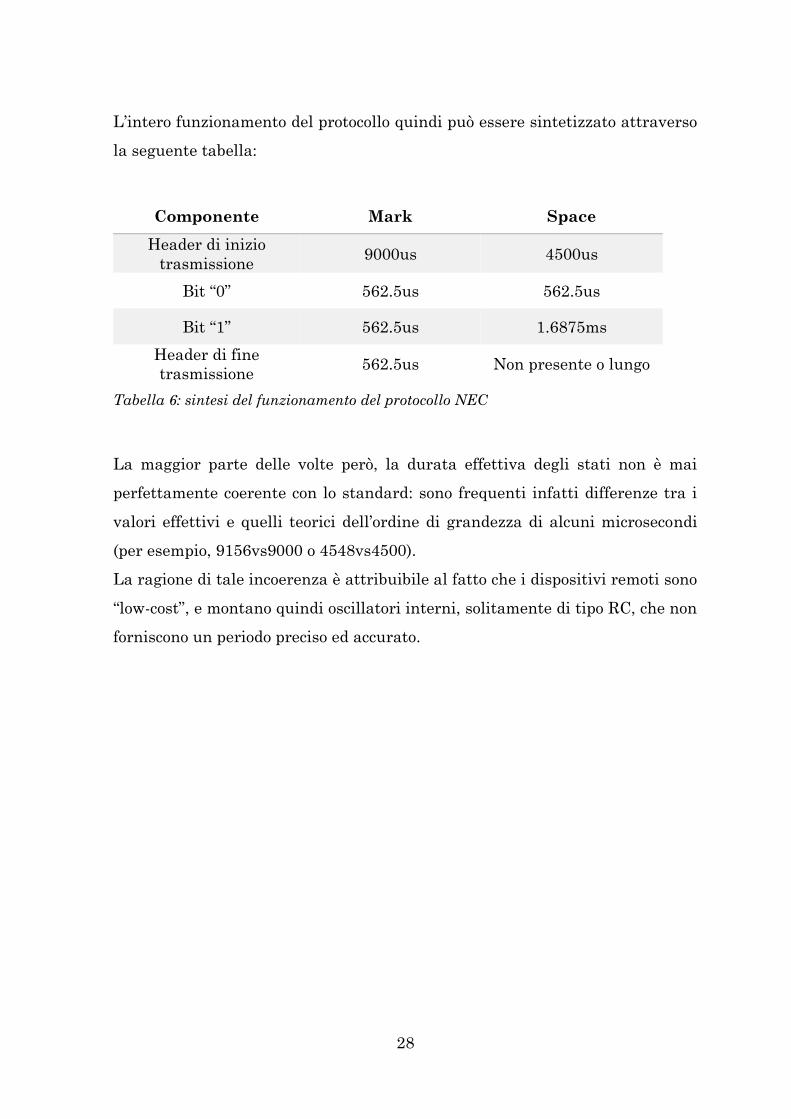
L’intero funzionamento del protocollo quindi può essere sintetizzato attraverso
la seguente tabella:
Componente Mark Space
Header di inizio
trasmissione 9000us 4500us
Bit “0” 562.5us 562.5us
Bit “1” 562.5us 1.6875ms
Header di fine
trasmissione 562.5us Non presente o lungo
Tabella 6: sintesi del funzionamento del protocollo NEC
La maggior parte delle volte però, la durata effettiva degli stati non è mai
perfettamente coerente con lo standard: sono frequenti infatti differenze tra i
valori effettivi e quelli teorici dell’ordine di grandezza di alcuni microsecondi
(per esempio, 9156vs9000 o 4548vs4500).
La ragione di tale incoerenza è attribuibile al fatto che i dispositivi remoti sono
“low-cost”, e montano quindi oscillatori interni, solitamente di tipo RC, che non
forniscono un periodo preciso ed accurato.

29
1.5 MPU6050
Si vuole introdurre l’argomento con una definizione: “un sistema di navigazione
inerziale è un ausilio alla navigazione di un mezzo, è composto da computer e
sensori con il fine di stimare la posizione, la velocità e l’orientamento della
vettura senza la necessità di riferimenti esterni” [15]. Il principale componente
di tale sistema è l’IMU (i.e. Inertial Measurement Unit), un dispositivo
elettronico in grado di misurare l’accelerazione inerziale e la velocità angolare
di una massa. A seconda dei casi, può anche essere capace di calcolare il campo
magnetico in cui il corpo è immerso e la sua altitudine.
I sensori IMU sono diventati ai giorni d’oggi uno dei congegni più impiegati in
ogni sorta di sistema elettronico: dagli smartphones, agli APR (Aeromobili a
Pilotaggio Remoto, o UAVs ) e ai robot autostabilizzanti.
Per effettuare tutte queste misure, un IMU è composto da più parti:
uno o più accelerometri;
uno o più giroscopi;
un magnetometro (o bussola);
un altimetro
Si veda ora più nel dettaglio il funzionamento di un accelerometro e di un
giroscopio, che sono i sensori che poi si andranno ad utilizzare nel corso del
progetto.
1.5.1 Il Sensore
Il dispositivo utilizzato in questa tesi è l’InvenSense MPU-6050 [16] che
contiene, riuniti in un singolo circuito integrato, un accelerometro e un
giroscopio, entrambi a tre assi. È infatti un sensore a sei assi, o con sei gradi di
libertà, che quindi fornisce sei valori come output. Impiega il protocollo I2C per
la comunicazione con l’esterno. Si tratta di un IMU economico ma piuttosto
affidabile e preciso, è tra i più diffusi

30
per progetti di questo tipo. In questa tesi viene utilizzato con il modulo GY-521,
così da avere l’MPU-6050 già pronto per l’interfacciamento con la scheda
programmabile. Inoltre nel modulo è presente un regolatore di tensione, che gli
permette di essere alimentato con una tensione compresa tra 3.3V e 5V. Oltre
ad accelerometro e giroscopio, l’MPU contiene anche un Digital Motion
Processor (DMP), di cui si parlerà in seguito, oltre ad una FIFO. È infine
presente un sensore di temperatura che può risultare utile per effettuare
opportune compensazioni dei dati di movimento. Tutte le informazioni qui
riportate sono state recuperate dal datasheet disponibile presso il sito della
InvenSense4.
Tramite I2C è possibile configurare molte impostazioni dell’MPU, scrivendo sui
suoi registri. Molti di questi però non sono ben documentati e quindi non è
assolutamente scontato capire il loro utilizzo. La mappa dei registri con le
relative descrizioni è disponibile presso il sito della InvenSense5. Va segnalato
tuttavia che l’utilizzo dei registri non è assolutamente banale, per questo è stata
costruita una libreria ad hoc che implementi le funzionalità più importanti, che
verrà esposta successivamente.
4 https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf 5 https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf
Figura 14: componenti dell'MPU6050
31
1.5.2 La FIFO
È possibile impostare l’MPU affinché scriva i dati dell’accelerometro e del
giroscopio nella FIFO, oppure eventualmente nei registri dedicati, perdendo
però la sicurezza di leggere tutti i dati generati dal sensore nel caso in cui la
lettura degli stessi avvenga ad una frequenza inferiore rispetto alla
memorizzazione. È tuttavia possibile impostare un interrupt (uscita INT) che
segnali la disponibilità di nuovi dati nei registri, in modo tale da andare a
leggerli prima che questi vengano sovrascritti.
La FIFO ha una dimensione di 1024 bytes ed è accessibile, ovviamente, tramite
interfaccia seriale. I registri di configurazione della FIFO determinano i dati che
vengono scritti al suo interno (giroscopio, accelerometro, temperatura, DMP).
Una comodità derivante dall’utilizzo della FIFO, oltre che, come già detto, la
certezza di non perdere dati, è il burst read. Questa funzione permette di leggere
tutti i dati della coda in un breve lasso di tempo, fino a svuotarla, per poi
aspettare che si torni a riempire. Così facendo è possibile lasciare il processore
della scheda logica in low-power mode mentre l’MPU riempie la FIFO.
1.5.3 Giroscopio ed Accelerometro
I campioni forniti da giroscopio ed accelerometro sono raw, grezzi, e per questo
vanno elaborati dopo essere stati prelevati (dai registri o dalla FIFO) per
ottenere le velocità angolari e le accelerazioni. Un ulteriore calcolo di fusione va
eseguito per arrivare agli angoli di Eulero (come verrà spiegato nell’introduzione
del capitolo riguardante i filtri).
Sull’MPU sono presenti sei convertitori AD da 16 bit, che permettono il
campionamento simultaneo dell’accelerometro e del giroscopio su ogni asse.
Avendo i campioni un peso di due byte l’uno, per sei assi si raggiunge un peso
totale di 12 bytes.
Il giroscopio ha una frequenza di campionamento configurabile da 4Hz a 8kHz
32
(standard 8kHz) e un filtro passa-basso programmabile da 5Hz a 256Hz.
L’accelerometro ha una frequenza di campionamento configurabile da 4Hz a
1kHz (standard 1kHz), con un filtro passa-basso da 5Hz a 260Hz. I filtri low
pass non sono stati trattati nella libreria utilizzata per il progetto.
L’interfaccia I2C è configurabile in fast-mode per lavorare a 400kHz oppure in
standard-mode a 100kHz. Considerando che ogni byte trasmesso richiede 9
clocks (8 bits più l’acknowledge), alla frequenza standard di 100kHz si
trasmettono i 12 bytes di campioni con una frequenza di circa 900Hz
(considerando che si prelevino sia i dati dell’accelerometro che quelli del
giroscopio, senza però la temperatura). Questo è un limite teorico che non viene
mai raggiunto, in quanto in ogni trasmissione I2C va considerato anche l’invio
dell’indirizzo dello slave con cui comunicare e del registro da cui leggere/scrivere
(ulteriori due bytes).
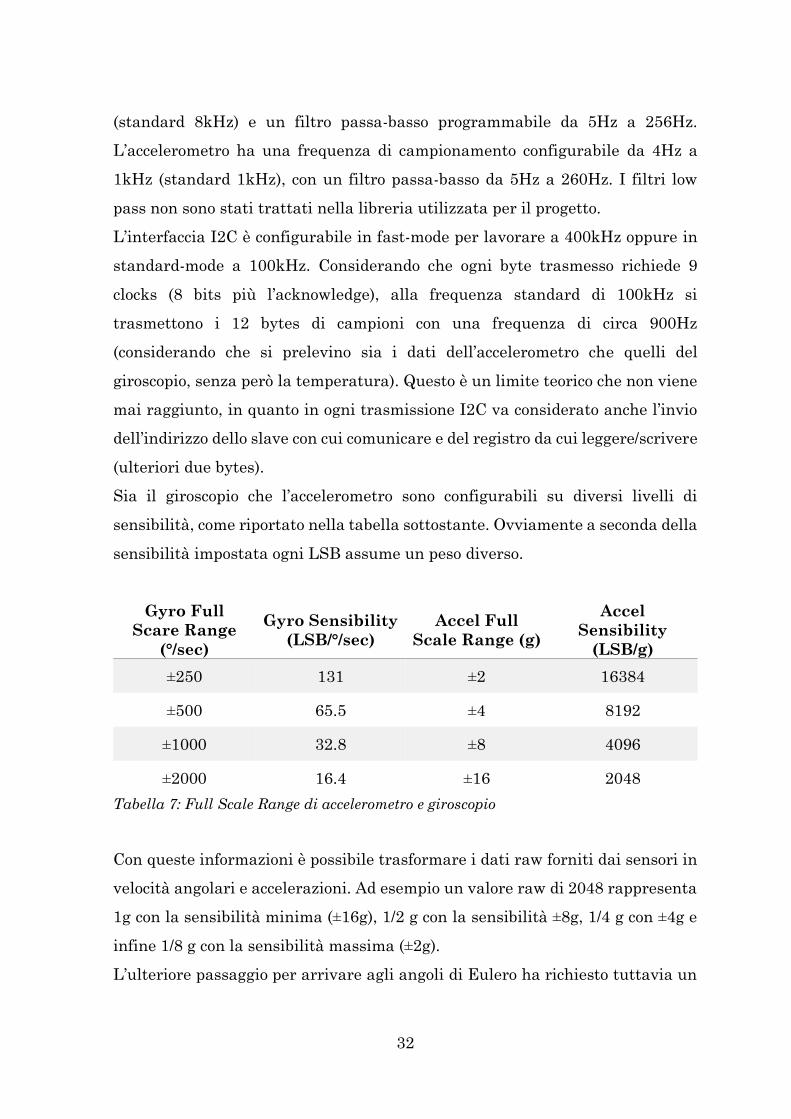
Sia il giroscopio che l’accelerometro sono configurabili su diversi livelli di
sensibilità, come riportato nella tabella sottostante. Ovviamente a seconda della
sensibilità impostata ogni LSB assume un peso diverso.
Gyro Full
Scare Range
(°/sec)
Gyro Sensibility
(LSB/°/sec)
Accel Full
Scale Range (g)
Accel
Sensibility
(LSB/g)
±250 131 ±2 16384
±500 65.5 ±4 8192
±1000 32.8 ±8 4096
±2000 16.4 ±16 2048
Tabella 7: Full Scale Range di accelerometro e giroscopio
Con queste informazioni è possibile trasformare i dati raw forniti dai sensori in
velocità angolari e accelerazioni. Ad esempio un valore raw di 2048 rappresenta
1g con la sensibilità minima (±16g), 1/2 g con la sensibilità ±8g, 1/4 g con ±4g e
infine 1/8 g con la sensibilità massima (±2g).
L’ulteriore passaggio per arrivare agli angoli di Eulero ha richiesto tuttavia un

33
ulteriore studio, che per la sua complessità ha richiesto un capitolo interamente
dedicato.
1.5.4 Digital Motion Processor
Il DMP (Digital Motion Processor), processore integrato nell’MPU, è in grado di
elaborare tramite avanzati algoritmi di fusione i dati grezzi a sei assi forniti dai
sensori. La sua implementazione è però tenuta segreta dalla InvenSense e,
sebbene per Arduino si trovino in abbondanza sul web librerie che lo trattino,
per ST-Nucleo la situazione è più complicata.
Nel corso del progetto si è provato a fare un porting della libreria più famosa
disponibile in ambiente Arduino: MPU6050 e I2Cdev di Jeff Rowberg,
disponibile su GitHub6. Purtroppo, sebbene funzioni piuttosto bene sotto gran
parte degli aspetti, non si può dire lo stesso per la parte di implementazione del
DMP. Sul web sono disponibili molti esempi di bug rilevati nella libreria quando
si utilizza il DMP, e non ci sono modi per capire come questo processore operi e
quindi correggerli. Per questo motivo, utilizzarlo per droni e altre applicazioni
di questo genere non è consigliato. In caso di freeze e crash inaspettati potrebbe
diventare veramente pericoloso.7
Nel corso del progetto si è cercato di utilizzare il DMP, configurato per dirottare
l’output nella FIFO. Si è avuto modo di notare l’incredibile precisione degli
algoritmi di fusione, gli angoli di Eulero ottenuti risultavano molto più precisi
di tutti i filtri fino ad allora utilizzati. Interessante notare che il DMP è in grado
di calcolare anche la rotazione sull’asse z (yaw o imbardata), cosa impossibile da
fare con i filtri.
Purtroppo dopo pochi test è subito emerso un problema: l’MPU dopo qualche
minuto andava in freeze, senza apparente motivo. Si è cercato di capire se
potesse essere un problema di overflow della FIFO, senza risultato. Si è cercato
6 https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050 7 https://github.com/jrowberg/i2cdevlib/issues/252
34
allora di calcolare e inserire manualmente gli offsets per il DMP, ritendendo
decisamente lunga l’attesa di 10 secondi ad ogni riavvio della scheda. Purtroppo
non è affatto chiaro come funzionino gli offsets del DMP (e sembrano non essere
gli stessi offsets presenti per il giroscopio e l’accelerometro): la documentazione
relativa è molto approssimativa se non inesistente. Potrebbe essere interessante
un approfondimento a riguardo, dirottando l’output del DMP sui registri
dedicati invece che sulla FIFO: si semplificherebbe così in maniera consistente
l’operazione di lettura dei dati (che altrimenti richiederebbe anche la gestione
dell’interrupt) e forse si risolverebbe il problema del freeze. In ogni caso,
premettendo che bisognerebbe verificare l’affidabilità dell’MPU con DMP attivo
(anche dopo aver risolto i problemi di freeze riscontrati), diversi utenti su
internet hanno segnalato una sostanziale indifferenza nel comportamento dei
loro velivoli con l’utilizzo del DMP o dei filtri [17]. Per questo motivo in questo
progetto si è scelto di abbandonare il processore integrato e proseguire
utilizzando i filtri.
1.5.5 Il Clocking
L’MPU 6050 permette di usare diverse sorgenti di clock, esterne o interne:
un oscillatore interno da 8MHz
uno degli oscillatori MEMS del giroscopio (asse x, y o z)
una sorgente esterna da 32,768kHz (onda quadra)
una sorgente esterna da 19,2MHz (onda quadra)
All’accensione il dispositivo usa l’oscillatore interno per operare, finché non
viene programmato diversamente. Selezionare il giroscopio come fonte di clock
fornisce maggiore stabilità e quindi è fortemente consigliato. Tuttavia in casi in
cui ad esempio il consumo di energia è il parametro principale, è possibile
disattivare i giroscopi e utilizzare l’oscillatore interno come riferimento.

35
Capitolo 2
I Filtri Software
L’MPU6050, come è stato descritto nel capitolo precedente, salva all’interno dei
propri registri dedicati sei dati (ciascuno della dimensione di due byte) per ogni
lettura:
i primi tre corrispondono alle componenti della velocità angolare del
sistema rispetto gli assi x, y, e z di un riferimento ortogonale il cui centro
coincide con il centro di massa della struttura;
gli ultimi tre corrispondono invece alle componenti rispetto agli stessi
assi del vettore accelerazione, che nel caso in cui il sistema sia fermo,
corrisponde all’accelerazione di gravità.
Ci sono però due problemi fondamentali, infatti:
se per la determinazione della posizione angolare dell’oggetto nello spazio
si utilizzassero soltanto i dati grezzi del giroscopio (definendo quindi
l’angolo come 𝜃 = ∫ 𝜔𝑑𝑡𝑡
0, ricordando che la velocità angolare è definita
come 𝜔 =𝑑𝜃
𝑑𝑡) ne risulterebbe tipicamente una misura accurata e non
suscettibile ad agenti esterni, ma che presenterebbe un effetto di deriva
a lungo termine dovuto all’errore che si accumula durante l’operazione di
integrazione;
se invece si usufruisse soltanto dei dati grezzi dell’accelerometro si
otterrebbe una misura angolare che in linea di principio non necessita di
integrazione, in quanto la direzione dell’accelerazione di gravità può
fornire direttamente gli angoli di Eulero del dispositivo, ma per contro la
misura dell’accelerazione risulta evidentemente sensibile a tutte le forze
di disturbo sul sistema. Per questo motivo, l’accelerometro fornirebbe
una buona lettura soltanto nel caso in cui il dispositivo si muovesse con
un moto rettilineo uniforme. Peraltro anche le eventuali vibrazioni dei
motori vengono ad aggravare ulteriormente il problema, introducendo un

36
significativo rumore [18].
Si tratta quindi di “fondere” opportunamente i campioni forniti da entrambi i
sensori, per ottenere una corretta rappresentazione degli Angoli di Eulero:
roll, corrispondente alla rotazione attorno all’asse x;
pitch, corrispondente alla rotazione attorno all’asse y;
yaw, corrispondente alla rotazione attorno all’asse z.

37
2.1 Il DMP ed i Quaternioni
Un metodo tipicamente usato per elaborare i dati sopra citati consiste nel
configurare opportunamente il DMP in modo tale da minimizzare gli errori,
propri del giroscopio e dell’accelerometro, per ottenere un calcolo preciso degli
angoli spaziali.
Uno dei dati che il DMP è in grado di fornire sono i cosiddetti quaternioni: questi
sono delle estensioni dei numeri complessi appartenenti allo spazio lineare 𝐻(𝑅)
a quattro dimensioni con base {1, i, j, k}. Ogni quaternione quindi è definito come
la combinazione lineare della suddetta base di forma 𝑞 = 𝑎 + 𝑖𝑏 + 𝑗𝑐 + 𝑘𝑑, dove
i, j, k sono le varie unità immaginarie.
Attraverso queste entità matematiche è possibile rappresentare orientamento e
rotazione di un oggetto nello spazio tridimensionale: infatti, dato un generico
quaternione unitario (ovvero la cui norma, definita come ‖𝑞‖ = √∑ 𝑞𝑖23𝑖=0 , vale
uno)
𝑞𝑢 = 𝑎𝑢 + 𝑖𝑏𝑢 + 𝑗𝑐𝑢 + 𝑘𝑑𝑢 = (𝑎𝑢, 𝒖) = cos 𝜃 + 𝒖 sin 𝜃,
esso rappresenta la rotazione di un angolo pari a 2θ attorno all’asse descritto
dal versore
𝒖 = (𝑏𝑢, 𝑐𝑢, 𝑑𝑢)𝑇.
Viceversa, data una rotazione di angolo θ attorno all’asse individuato dal versore
𝑢, il quaternione unitario che la descrive può essere ottenuto come 𝒒𝒖 =
(cos𝜃
2, 𝑏𝑢sin
𝜃
2, 𝑐𝑢sin
𝜃
2, 𝑑𝑢 sin
𝜃
2). In particolare, le rotazioni attorno ai tre assi di
un sistema di riferimento cartesiano corrispondono ai seguenti quaternioni
elementari [19]:
𝑅(𝑖, 𝛼) → 𝒒𝒙 = (cos𝛼
2, sin
𝛼
2, 0, 0)
𝑅(𝑗, 𝛽) → 𝒒𝒚 = (cos𝛽
2, 0, sin
𝛽
2, 0)
𝑅(𝑘, 𝛾) → 𝒒𝒛 = (cos𝛾
2, 0, 0, sin
𝛼
2)
L’utilizzo di queste entità quindi è particolarmente indicato per risolvere il
38
cosiddetto problema di “Gimbal Lock” o di “Blocco Cardanico”, ovvero la perdita
di un grado di libertà in un sistema tridimensionale descritto attraverso gli
angoli di Eulero quando avviene una rotazione dell’oggetto tale da far coincidere
due assi spaziali [20].
Si supponga per esempio che un aereo passi dall’avere un’inclinazione di 0°
rispetto all’asse y ad averne una di 90°; l’asse delle x e quello delle z quindi
vengono a coincidere, facendo sì che non si possa più discriminare quale sia
l’angolo di roll e quale quello di yaw.
Purtroppo però Invensense, azienda costruttrice del giroscopio montato sul
drone, non fornisce l’algoritmo da essi impiegato né per il computo dei
quaternioni né per il calcolo degli angoli spaziali, rendendo “open-source”
solamente una libreria per Arduino; per questo motivo è compito del
programmatore della scheda, in assenza della configurazione del DMP,
implementare i filtri software attraverso i quali i dati raw vengono elaborati,
per ottenere così valori degli angoli di roll e pitch il più possibile accurati e
precisi. Per quanto riguarda invece l’angolo di yaw è possibile determinarlo solo
attraverso l’elaborazione dei dati provenienti dal giroscopio, in quanto qualsiasi
variazione dell’angolo di imbardata risulterebbe del tutto ininfluente rispetto
alla variazione del vettore gravitazionale.

39
2.2 Il Filtro Complementare
L’idea alla base del filtro complementare consiste nel far passare il dato
proveniente dall’accelerometro attraverso un filtro passa basso, in modo da
mantenere la stabilità della misura a lungo termine ed eliminare le
accelerazioni istantanee (per estrapolare soltanto il vettore di gravità). Al
contempo il dato proveniente dal giroscopio viene filtrato attraverso un filtro
passa alto, per rimuovere l’effetto di deriva nel tempo. Le due uscite filtrate
vengono quindi sommate per creare una stima dell’angolo spaziale del sistema
che combina le parti più significative dei dati letti da entrambi i sensori [21].
Figura 15: schematizzazione del funzionamento di un filtro complementare
L’input dei due filtri però non può essere semplicemente la lettura grezza
proveniente dai registri dell’MPU, poiché il dato finale deve rappresentare un
angolo, si vuole che entrambi i sensori riportino tale dato; per questo motivo, da
una parte i dati del giroscopio, come visto in precedenza, vengono integrati nel
tempo, dall’altra i valori dell’accelerometro vengono elaborati attraverso
l’utilizzo della funzione:
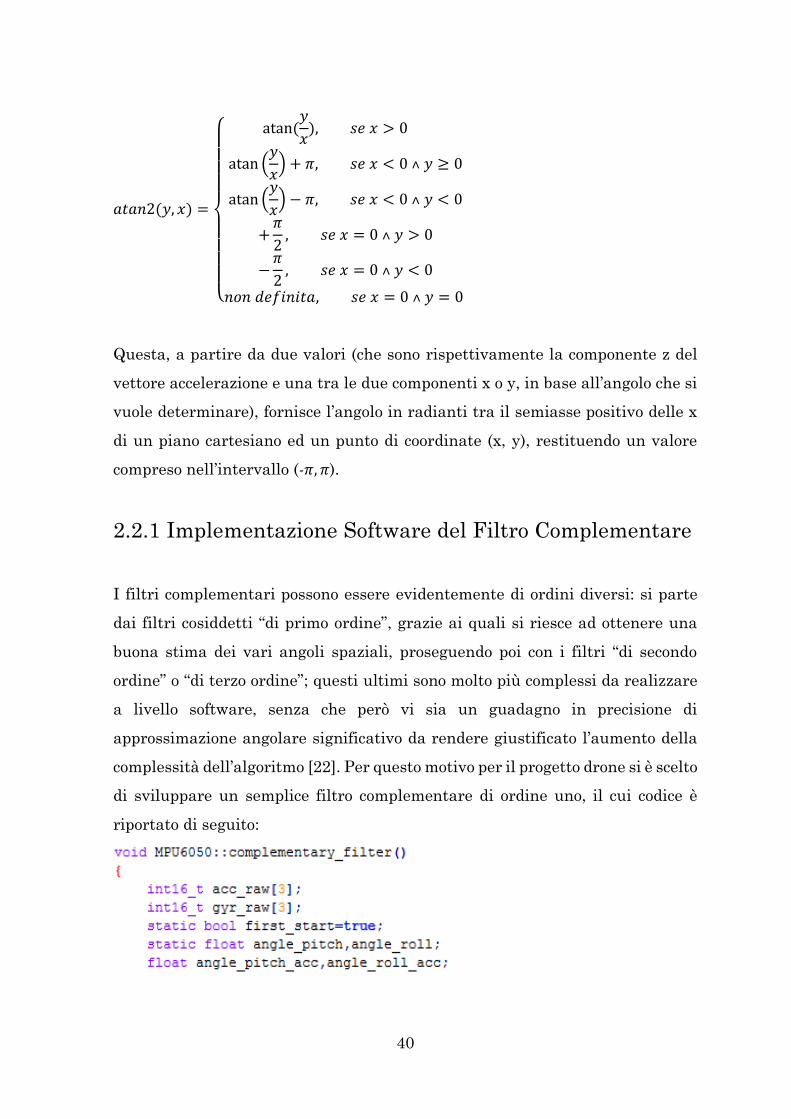
40
𝑎𝑡𝑎𝑛2(𝑦, 𝑥) =
{
atan (
𝑦
𝑥), 𝑠𝑒 𝑥 > 0
atan (𝑦
𝑥) + 𝜋, 𝑠𝑒 𝑥 < 0 ˄ 𝑦 ≥ 0
atan (𝑦
𝑥) − 𝜋, 𝑠𝑒 𝑥 < 0 ˄ 𝑦 < 0
+𝜋
2, 𝑠𝑒 𝑥 = 0 ˄ 𝑦 > 0
−𝜋
2, 𝑠𝑒 𝑥 = 0 ˄ 𝑦 < 0
𝑛𝑜𝑛 𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑎, 𝑠𝑒 𝑥 = 0 ˄ 𝑦 = 0
Questa, a partire da due valori (che sono rispettivamente la componente z del
vettore accelerazione e una tra le due componenti x o y, in base all’angolo che si
vuole determinare), fornisce l’angolo in radianti tra il semiasse positivo delle x
di un piano cartesiano ed un punto di coordinate (x, y), restituendo un valore
compreso nell’intervallo (-𝜋, 𝜋).
2.2.1 Implementazione Software del Filtro Complementare
I filtri complementari possono essere evidentemente di ordini diversi: si parte
dai filtri cosiddetti “di primo ordine”, grazie ai quali si riesce ad ottenere una
buona stima dei vari angoli spaziali, proseguendo poi con i filtri “di secondo
ordine” o “di terzo ordine”; questi ultimi sono molto più complessi da realizzare
a livello software, senza che però vi sia un guadagno in precisione di
approssimazione angolare significativo da rendere giustificato l’aumento della
complessità dell’algoritmo [22]. Per questo motivo per il progetto drone si è scelto
di sviluppare un semplice filtro complementare di ordine uno, il cui codice è
riportato di seguito:

41
Attraverso questa prima parte di codice vengono creati i due array che
serviranno per memorizzare temporaneamente i dati raw provenienti dalla
lettura dei due sensori; inoltre sono create le variabili corrispondenti agli angoli
da calcolare.
A questo punto viene richiamata la funzione getMotion6, grazie alla quale gli
array creati in precedenza vengono riempiti. Successivamente vengono integrati
i dati provenienti dal giroscopio: in questo caso, siccome tutte le azioni vengono
effettuate dal microprocessore a tempo discreto, questa operazione consiste nel
sommare agli angoli calcolati durante i cicli passati i dati raw dell’ultima
lettura, moltiplicati per il fattore 61.1e-6, corrispondente al periodo di tempo che
intercorre tra due rilevazioni successive. Questo valore viene determinato dal
reciproco del prodotto tra 131 (il valore del LSB rispetto al Full Scale Range
scelto, ovvero ±250 deg/s) e 250Hz (la frequenza del loop).
Per mezzo di questa porzione di codice viene calcolato dapprima il vettore
accelerazione totale, e successivamente, facendo riferimento alla geometria
spaziale e alla trigonometria, vengono determinati gli angoli di roll e pitch dai
dati dell’accelerometro. Il valore 57.296 è determinato dal rapporto tra 180 e 𝜋
e viene utilizzato per convertire il risultato della funzione asin da radianti a

42
gradi.
Infine, quando l’elaborazione viene effettuata per la prima volta dall’accensione
del sistema, gli angoli calcolati attraverso i dati del giroscopio vengono
eguagliati a quelli calcolati attraverso l’accelerometro, per avere una precisione
iniziale maggiore (supponendo che all’avvio del sensore la struttura sia ferma, e
che quindi non agiscano forze esterne di disturbo), e l’array globale contenente
gli angoli finali viene inizializzato a zero; successivamente invece viene
implementato il filtro, in cui il giroscopio ha peso 99.96% rispetto al calcolo
totale, mentre l’accelerometro lo 0.04%.
Per migliorare maggiormente la precisione di approssimazione e per avere
variazioni meno brusche, viene applicato un filtro anche nella fase di
aggiornamento dei valori dell’array globale.
43
2.3 Il Filtro di Kalman
Il filtro di Kalman è una procedura matematica ricorsiva che permette di
descrivere e prevedere l’evoluzione futura dello stato di un sistema dinamico
perturbato da fonti di rumore esterne, sulla base di misure linearmente
dipendenti dallo stato stesso.
Questo processo consiste nell’utilizzare la stima iniziale di una grandezza (che
nel caso del progetto corrisponde all’angolo calcolato attraverso i dati raw del
giroscopio), l’errore stimato iniziale ed i campioni misurati sperimentalmente
(ovvero gli angoli derivanti dai campioni del giroscopio) per calcolare un nuovo
valore stimato, che dipende sia dalla stima iniziale sia dalla grandezza misurata
[23], come viene spiegato in maniera più dettagliata successivamente.
Procedendo con l’iterazione e utilizzando volta per volta nuove misurazioni,
l’errore diventa sempre più piccolo e la stima dello stato attuale sempre più
vicina al valore reale.
2.3.1 Trattazione Matematica del Filtro
Si consideri un generico sistema lineare a tempo discreto del tipo
{𝒙𝒌 = 𝚽𝒌−𝟏𝒙𝒌−𝟏 + 𝚪𝒌−𝟏𝒖𝒌−𝟏 +𝒘𝒌−𝟏
𝒛𝒌 = 𝑯𝒌𝒙𝒌 + 𝒗𝒌 (a)
in cui:
𝒙𝒌 rappresenta la grandezza da stimare;
Φ è chiamata “matrice di transizione dello stato”, ed i suoi valori
rappresentano la relazione tra il k-esimo stato ed il (k-1)-esimo;
Γ è la matrice che lega l’input allo stato del sistema;
𝒖𝒌 è l’ingresso del sistema;
𝒘𝒌 rappresenta il rumore di processo;
𝒛𝒌 rappresenta la misurazione effettuata;
H è detta “matrice di sensitività di misurazione”, ed i suoi valori
44
rappresentano la sensitività dell’i-esima misurazione rispetto al j-esimo
stato;
𝒗𝒌 rappresenta il rumore di misurazione.
Le variabili aleatorie 𝒘𝒌 e 𝒗𝒌 sono assunte come indipendenti, con distribuzione
di probabilità Gaussiana 𝑝(𝑥) =1
𝜎√2𝜋𝑒−(𝑥−𝜇)2
2𝜎2 a valor medio nullo e varianza pari
rispettivamente a 𝑸𝒌 e 𝑹𝒌.
Si vuole far notare che tutti gli elementi sopracitati, nel caso di un sistema n-
dimensionale, sono grandezze vettoriali; se però lo studio del filtro di viene
semplificato ad un caso monodimensionale, tutti gli elementi diventano degli
scalari.
L’iterazione del filtro di Kalman consiste di due stadi:
il calcolo della stima a priori dello stato attuale;
l’aggiornamento e la correzione dei valori da utilizzare per il ciclo
successivo e quindi la stima a posteriori dello stato del sistema.
Come primo passaggio viene calcolata a priori la stima della grandezza in
esame:
�̂�𝒌− = 𝚽𝒌−𝟏𝒙𝒌−𝟏 + 𝚪𝒌−𝟏𝒖𝒌−𝟏 (b)
e, successivamente, il valore della matrice di covarianza (che fornisce
l’indicazione della tendenza di due variabili aleatorie a muoversi assieme [24])
dell’errore rispetto la stima appena determinata:
𝑷𝒌− = 𝑬[𝒆𝒌
−𝒆𝒌−𝑇] = 𝚽𝒌−𝟏𝑷𝒌−𝟏𝚽𝒌−𝟏
𝑇 + 𝑸𝒌, con 𝒆𝒌− = 𝒙𝒌 − �̂�𝒌
− (c)
Durante la seconda fase invece viene calcolata la stima dello stato a posteriori
(d) cercando di minimizzare l’effetto di disturbo introdotto dalla componente
rumore sulla misurazione; per fare ciò vengono utilizzati sia la stima a priori
calcolata precedentemente (b) sia la differenza (chiamata “innovation” o
“residuo”) tra la misura della grandezza attuale ed una previsione di essa [25],

45
utilizzando l’equazione della misurazione effettuata (a):
�̂�𝒌 = �̂�𝒌− +𝑲𝒌(𝒛𝒌 −𝑯𝒌𝒙𝒌) (d)
Lo stato calcolato varia quindi in base alla matrice 𝑲𝒌 ,chiamata “guadagno di
Kalman”, che, se determinata attraverso la formula seguente, minimizza la
covarianza a posteriori:
𝑲𝒌 = 𝑷𝒌−𝑯𝒌
𝑇(𝑯𝒌𝑷𝒌−𝑯𝒌
𝑇 + 𝑹𝒌)−𝟏 (e)
ed i cui elementi hanno valori compresi tra [0,1] che dipendono sia dall’errore
sulla stima sia da quello sulla misura. Utilizzando questo valore, la stima a
posteriori della matrice di covarianza diviene:
𝑷𝒌 = 𝑬[𝒆𝒌𝒆𝒌𝑇] = (𝐼 − 𝑲𝒌𝑯𝒌) 𝑷𝒌
−, con 𝒆𝒌 = 𝒙𝒌 − �̂�𝒌 (f)
In questo modo quindi, mano a mano che il programma viene eseguito in
maniera ricorsiva, lo stato (d) verrà stimato con un errore sempre minore, e
siccome la matrice di guadagno (e) verrà aggiornata ad ogni ciclo, permettendo
quindi di ridurre sempre più il valore della covarianza a posteriori (f),
approssimerà in maniera sempre più precisa lo stato reale [26].
2.3.2 Implementazione Software del Filtro di Kalman: la
Libreria “kalman”
Di seguito viene riportata l’intera libreria utilizzata per l’implementazione del
filtro di Kalman. Per ogni metodo viene proposta una descrizione che si collega
al sottocapitolo precedente 4.3.1, in modo da rendere più chiara l’applicazione
della teoria matematica alla pratica di calcolo.

46
Il primo metodo viene utilizzato per inizializzare tutte le componenti del filtro:
come prima cosa vengono poste a zero la deriva del giroscopio (x_bias), la stima
dell’angolo (x_rate) e l’angolo calcolato (x_angle). Successivamente vengono
settati i valori delle matrici di covarianza dell’errore di misurazione (R_angle) e
dell’errore di processo (Q_gyro e Q_angle). Infine vengono posti a zero tutti gli
elementi della matrice P della covarianza rispetto alla stima dello stato del
sistema.

47
Il metodo kalman_predict permette di realizzare la prima delle due fasi
ricorsive del filtro citate precedentemente: come prima cosa viene eliminata la
componente di deriva del giroscopio dalla misura effettuata dallo stesso
(dot_angle); quindi il dato “pulito” viene moltiplicato per il periodo di loop (dt),
realizzando, come visto durante il capitolo riguardante il filtro complementare,
l’operazione di integrazione a tempo discreto, attraverso la quale viene fornita
una stima a priori dell’angolo. Successivamente la matrice di covarianza viene
aggiornata, applicando il risultato finale della relazione (c) sopra indicata.
Il metodo kalman_update invece realizza la seconda fase ricorsiva del filtro,
fornendo la stima a posteriori dell’angolo. Innanzitutto viene determinato il
“residuo” (y) e successivamente, attraverso l’applicazione dell’equazione (e),
viene calcolata la matrice riga 𝑲𝒌 (i cui elementi in questo caso sono identificati
da K_0 e K_1): in questo caso viene fatto il rapporto tra la covarianza calcolata a
priori e la somma della stessa con la covarianza dell’errore di misurazione.
Infine viene aggiornata la matrice di covarianza, determinando quindi il suo

48
valore a posteriori (f), e viene fornita la stima a posteriori dell’angolo, come
descritto da (e).

49
2.4 Confronto Sperimentale tra i Due Filtri
Nei capitoli precedenti è stato illustrato, sia dal punto di vista teorico che da
quello pratico, il funzionamento dei filtri adottati per il progetto drone; non sono
stati presi in considerazione però i criteri attraverso i quali scegliere quale delle
due soluzioni adottare.
Per questo motivo sono state ideate ed eseguite due simulazioni sperimentali
per confrontare i comportamenti di entrambi i filtri:
una, meno rigorosa e precisa, effettuata soltanto mediante l’utilizzo del
movimento di una mano;
l’altra, realizzata attraverso una piattaforma basculante ed una scheda
Arduino.
2.4.1 Simulazione 0°-90°-0°
Il primo test realizzato è stato effettuato in maniera molto semplice, utilizzando
soltanto un supporto perpendicolare al banco da lavoro ed un timer:
per tre secondi il sensore è stato lasciato inerte in posizione orizzontale
(0°);
al terzo secondo è stata effettuata una transizione, della durata di un
secondo, verso la posizione verticale (90°);
al decimo secondo è stata effettuata la seconda ed ultima modifica
d’inclinazione, anch’essa della durata di un secondo, durante il quale
l’MPU6050 è stato riportato in posizione orizzontale (0°).
Ovviamente la perfetta simultaneità tra timer e movimento manuale non è
garantita; tuttavia grazie ai dati raccolti, riportati di seguito, viene fornita
un’idea generale di come i due filtri si comportano sia durante una fase
transitoria, corrispondente alla traslazione angolare del sensore, sia durante
una fase di regime.
Come è possibile notare dal grafico seguente, il filtro di Kalman approssima in

50
maniera quasi perfetta l’inclinazione reale del sensore; il filtro complementare
invece produce una misurazione meno accurata ed è soggetto a lunghi periodi di
assestamento prima dell’avvicinamento ad un valore di equilibrio; questo effetto
è conseguenza del maggior peso che è stato fornito ai dati provenienti dal
giroscopio.
Grafico 3: confronto tra filtro complementare e filtro di Kalman
-200
-150
-100
-50
0
50
100
0,0 1,2 2,4 3,6 4,8 6,0 7,1 8,3 9,5 10,7 11,9 13,1 14,3 15,5 16,7 17,9 19,0
First Kalman vs Complementary Filters Simulation
Acc_raw Gyro_raw Complementary Kalman Real value

51
2.4.2 Simulazione con Piattaforma e Microcontrollore
Arduino
Figura 16: esecuzione della simulazione
Il secondo test effettuato è quello di maggior rilievo dal punto di vista
sperimentale, poiché simula con un ottimo grado di approssimazione la fase
reale di volo del drone, tranne per il fatto che in questo caso la struttura possiede
un unico grado di libertà di movimento.
Per la simulazione sono stati utilizzati:
una piattaforma montata su di un blocco cardanico;
un servomotore;
una scheda Arduino.
Attraverso un semplice codice è stato programmato il microprocessore in modo
da controllare il servo. Quest’ultimo, grazie al movimento rotatorio di 180° del
perno, permette l’oscillazione della piattaforma, che per motivi di costruzione
raggiunge l’inclinazione massima di circa 6° (sia positivamente che
negativamente rispetto al piano orizzontale).
I dati, riportati nella tabella sottostante, sono stati presi in considerazione
durante un periodo di dieci oscillazioni complete della struttura, in modo da
ottenere una lettura sul lungo periodo, e non su di un’unica perturbazione.
52
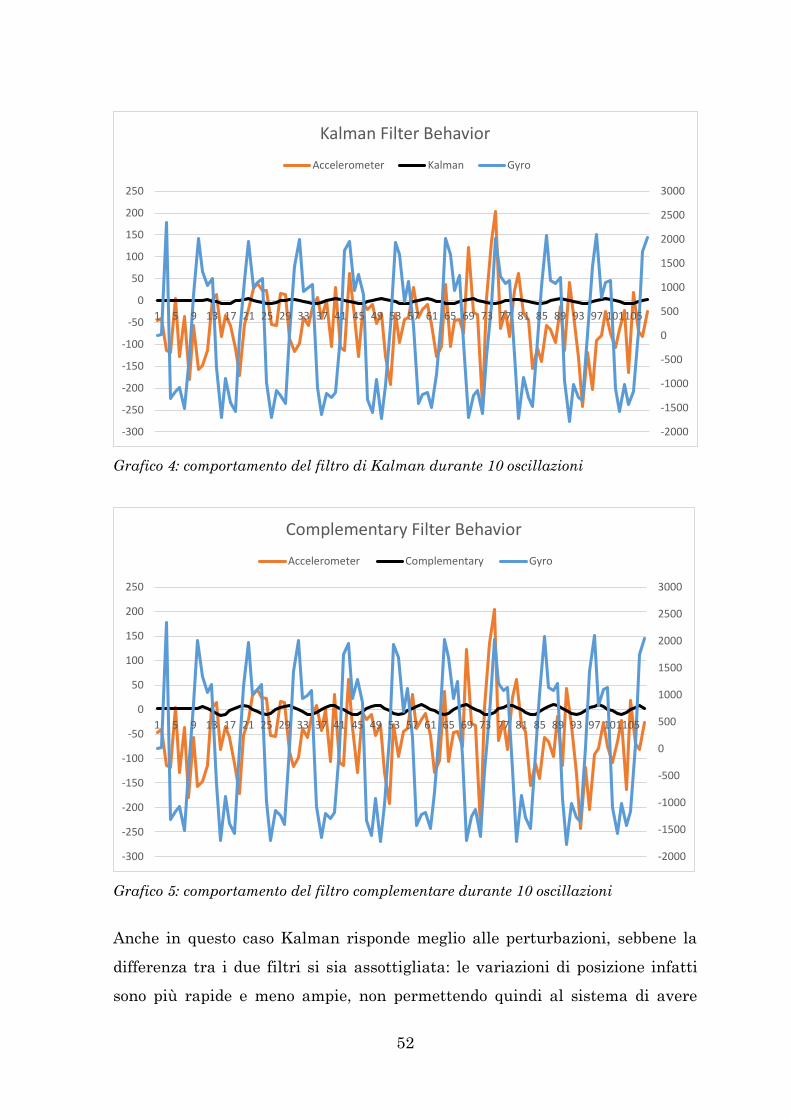
Grafico 4: comportamento del filtro di Kalman durante 10 oscillazioni
Grafico 5: comportamento del filtro complementare durante 10 oscillazioni
Anche in questo caso Kalman risponde meglio alle perturbazioni, sebbene la
differenza tra i due filtri si sia assottigliata: le variazioni di posizione infatti
sono più rapide e meno ampie, non permettendo quindi al sistema di avere
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
3000
-300
-250
-200
-150
-100
-50
0
50
100
150
200
250
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101105
Kalman Filter Behavior
Accelerometer Kalman Gyro
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
3000
-300
-250
-200
-150
-100
-50
0
50
100
150
200
250
1 5 9 13 17 21 25 29 33 37 41 45 49 53 57 61 65 69 73 77 81 85 89 93 97 101105
Complementary Filter Behavior
Accelerometer Complementary Gyro
53
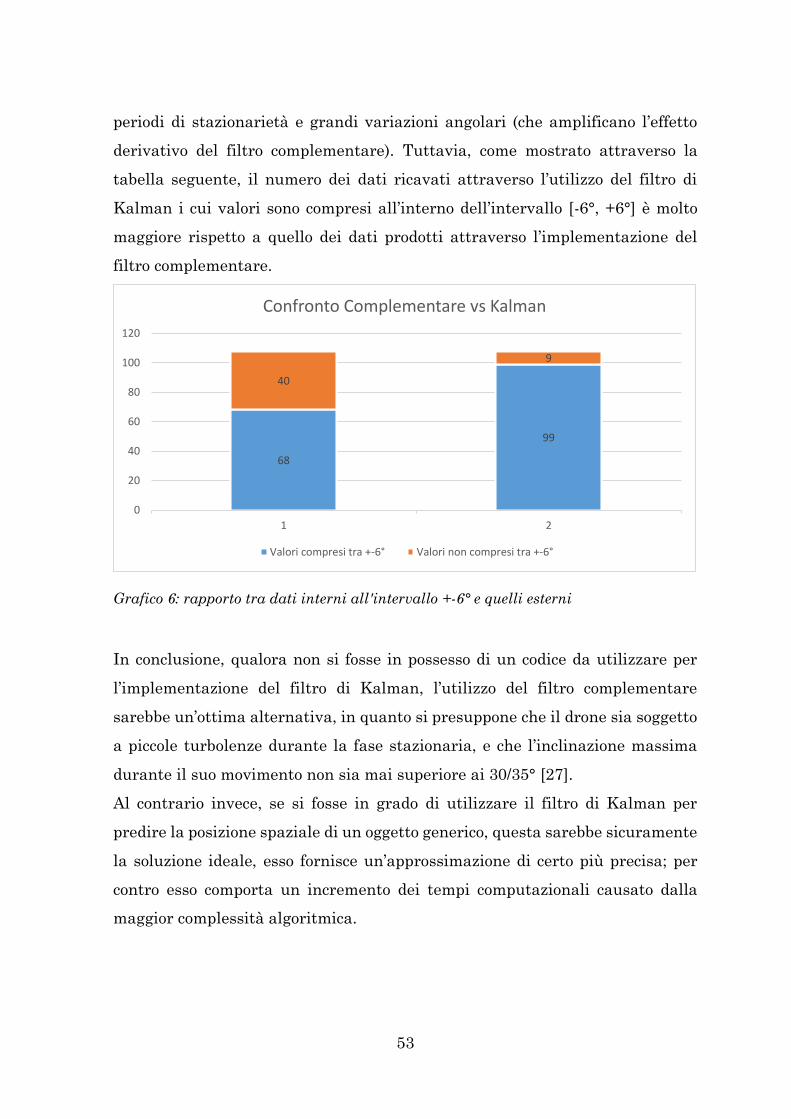
periodi di stazionarietà e grandi variazioni angolari (che amplificano l’effetto
derivativo del filtro complementare). Tuttavia, come mostrato attraverso la
tabella seguente, il numero dei dati ricavati attraverso l’utilizzo del filtro di
Kalman i cui valori sono compresi all’interno dell’intervallo [-6°, +6°] è molto
maggiore rispetto a quello dei dati prodotti attraverso l’implementazione del
filtro complementare.
Grafico 6: rapporto tra dati interni all'intervallo +-6° e quelli esterni
In conclusione, qualora non si fosse in possesso di un codice da utilizzare per
l’implementazione del filtro di Kalman, l’utilizzo del filtro complementare
sarebbe un’ottima alternativa, in quanto si presuppone che il drone sia soggetto
a piccole turbolenze durante la fase stazionaria, e che l’inclinazione massima
durante il suo movimento non sia mai superiore ai 30/35° [27].
Al contrario invece, se si fosse in grado di utilizzare il filtro di Kalman per
predire la posizione spaziale di un oggetto generico, questa sarebbe sicuramente
la soluzione ideale, esso fornisce un’approssimazione di certo più precisa; per
contro esso comporta un incremento dei tempi computazionali causato dalla
maggior complessità algoritmica.
68
99
40
9
0
20
40
60
80
100
120
1 2
Confronto Complementare vs Kalman
Valori compresi tra +-6° Valori non compresi tra +-6°

54
Capitolo 3
L’Applicazione Android “Drone”
Come descritto nel capitolo d’introduzione alle componenti hardware, il drone è
stato dotato di un ricevitore infrarossi per riuscire a controllarne il
comportamento a distanza. Per inciso, l’utilizzo di trasmissione infrarossa è
stato preferito ad altre tipologie di comunicazione elettronica wireless (quali per
esempio Wi-Fi, Bluetooth o ZigBee) per il semplice motivo che essa soddisfa in
maniera ottima i requisiti minimi richiesti:
controllo remoto da distanza inferiore ai 2/3m;
bassa probabilità d’errore dovuto ad interferenze nella comunicazione.
Si è pensato quindi di sviluppare un’applicazione [28] destinata all’installazione
su dispositivi mobili montanti sistema operativo Android e dotati di un
emettitore di luce infrarossa, per rendere più “smart” ed in un futuro espandibile
il controllo del sistema.
In alternativa è possibile comunque utilizzare un dispositivo “classico”, come un
telecomando, in quanto i pacchetti di dati inviati al ricevitore corrispondono a
sequenze standard del protocollo NEC (in particolare, a quelle di FF, Pause e
Play di un videoregistratore8).
8 http://irdb.tk/find/

55
3.1 Caratteristiche Generali di un’App Android
Una generica applicazione Android è il risultato della combinazione di una serie
di file contenenti sia il linguaggio di programmazione (Java e XML) sia tutte le
risorse utilizzate. In particolare:
AndroidManifest.xml, ovvero il file attraverso il quale vengono fornite
al sistema operativo le informazioni necessarie per l’avvio del processo,
come il nome, l’icona, le componenti dell’applicazione ed i permessi
necessari;
NameActivity.java, all’interno del quale si ritrova il codice d’esecuzione
in linguaggio Java;
Layout.xml, ossia il file attraverso il quale viene implementata la grafica
dell’applicazione;
Colors.xml, Strings.xml, Style.xml, contenenti rispettivamente i
colori, le stringhe e gli stili utilizzati durante l’esecuzione dell’app;
Drawable, MipMap, ovvero due cartelle all’interno delle quali vengono
salvate le immagini impiegate rispettivamente come sfondi e come logo
[29].
Il concetto fondamentale che però è alla base di ogni applicativo Android è
l’activity, ovvero una finestra contenente l’interfaccia utente dell’applicazione,
attraverso la quale viene permessa l’iterazione uomo-macchina. Ogni app può
avere zero o più activity, ma solitamente ne è presente almeno una; in
particolare, nel caso in esame, le activities sono due: “Intro” e “MainActivity”
(i cui funzionamenti vengono riportati in seguito).
Ad ognuna di queste è stata assegnata una specifica azione da eseguire, quindi
per il corretto funzionamento dell’intera applicazione è necessario che riescano
a comunicare tra loro: tale operazione è resa possibile grazie all’uso dell’Intent,
ovvero “una descrizione astratta di un’operazione che deve essere eseguita
dall’applicazione” [30].
56
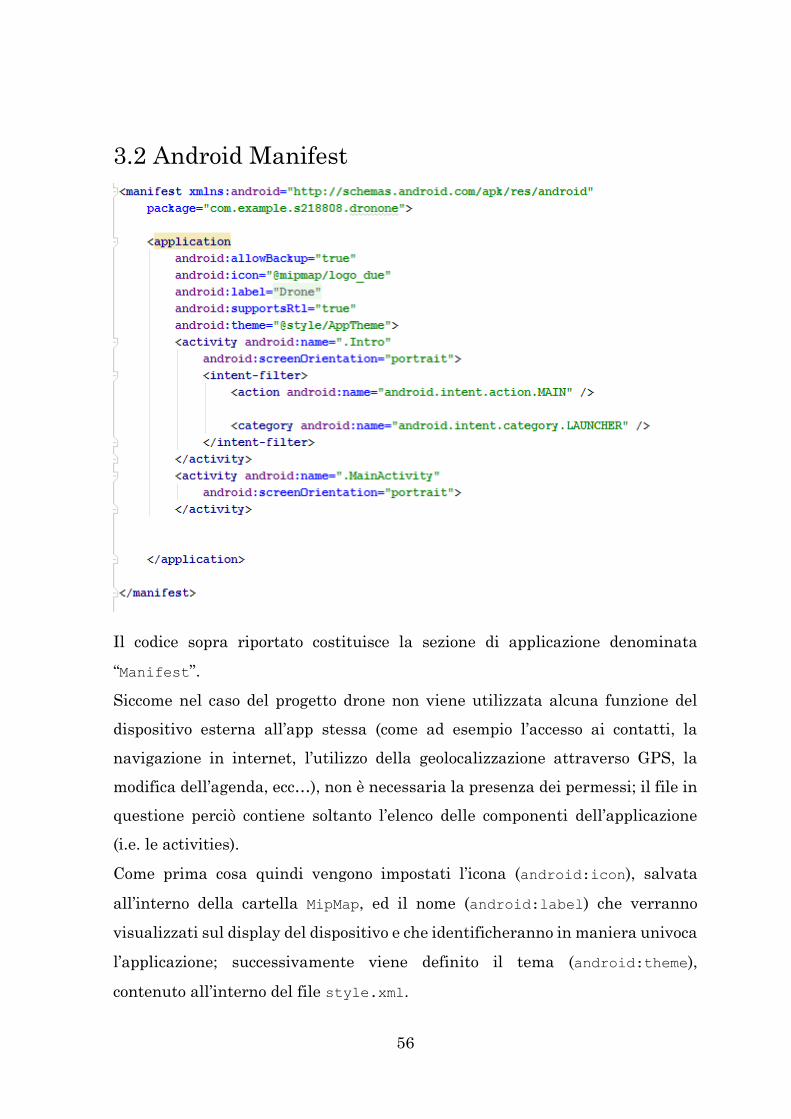
3.2 Android Manifest
Il codice sopra riportato costituisce la sezione di applicazione denominata
“Manifest”.
Siccome nel caso del progetto drone non viene utilizzata alcuna funzione del
dispositivo esterna all’app stessa (come ad esempio l’accesso ai contatti, la
navigazione in internet, l’utilizzo della geolocalizzazione attraverso GPS, la
modifica dell’agenda, ecc…), non è necessaria la presenza dei permessi; il file in
questione perciò contiene soltanto l’elenco delle componenti dell’applicazione
(i.e. le activities).
Come prima cosa quindi vengono impostati l’icona (android:icon), salvata
all’interno della cartella MipMap, ed il nome (android:label) che verranno
visualizzati sul display del dispositivo e che identificheranno in maniera univoca
l’applicazione; successivamente viene definito il tema (android:theme),
contenuto all’interno del file style.xml.

57
Infine vengono dichiarate tutte le activities che partecipano all’esecuzione
dell’applicazione; in particolare, attraverso il comando <intent-filter> viene
scelta quale tra tutte dev’essere visualizzata all’avvio.
58
3.3 Implementazione della Grafica tramite
Linguaggio XML
Ogni activity ha bisogno di una propria struttura grafica, che prende il nome di
Layout: nel caso particolare di Android, viene creata utilizzando un particolare
metalinguaggio di programmazione denominato XML (eXtensible Markup
Language). Questo è un linguaggio dichiarativo, che non richiede cioè la
scrittura di un codice, ma che si basa su delle semplici strutture chiamate tags.
Esistono svariate tipologie di layout; tuttavia la maggior parte delle applicazioni
ne utilizzano soltanto due:
LinearLayout, che consiste in una disposizione ordinata e sequenziale
degli elementi grafici (può essere sia orizzontale sia verticale);
RelativeLayout, ovvero una disposizione delle componenti totalmente
impostabile dal programmatore, senza quindi una struttura di base
ordinata.
Questi layouts vengono suddivisi in diverse aree, ognuna delle quali occupa una
precisa posizione dello schermo, attraverso le quali viene rappresentato un
effetto grafico e gestito un evento riguardante l’interazione tra utente e
dispositivo mobile [31]: le View, tutte derivanti dalla superclasse
android.view.View.
Di seguito vengono riportate le strutture utilizzate per il progetto drone:
TextView, ovvero una porzione di schermo all’interno della quale possono
essere inserite varie stringhe di testo;
ImageView, simile alla TextView, contenente però un’immagine;
Button, ovvero un bottone virtuale attraverso il quale l’utente può
interagire con il funzionamento dell’applicazione.
Ognuna di queste View ha molti parametri di personalizzazione, denominati
“attributi”; il più importante tra tutti è sicuramente l’attributo id, attraverso
cui viene identificata ogni View in modo univoco: soltanto grazie ad esso infatti
è possibile fare riferimento ad una struttura grafica (con il comando
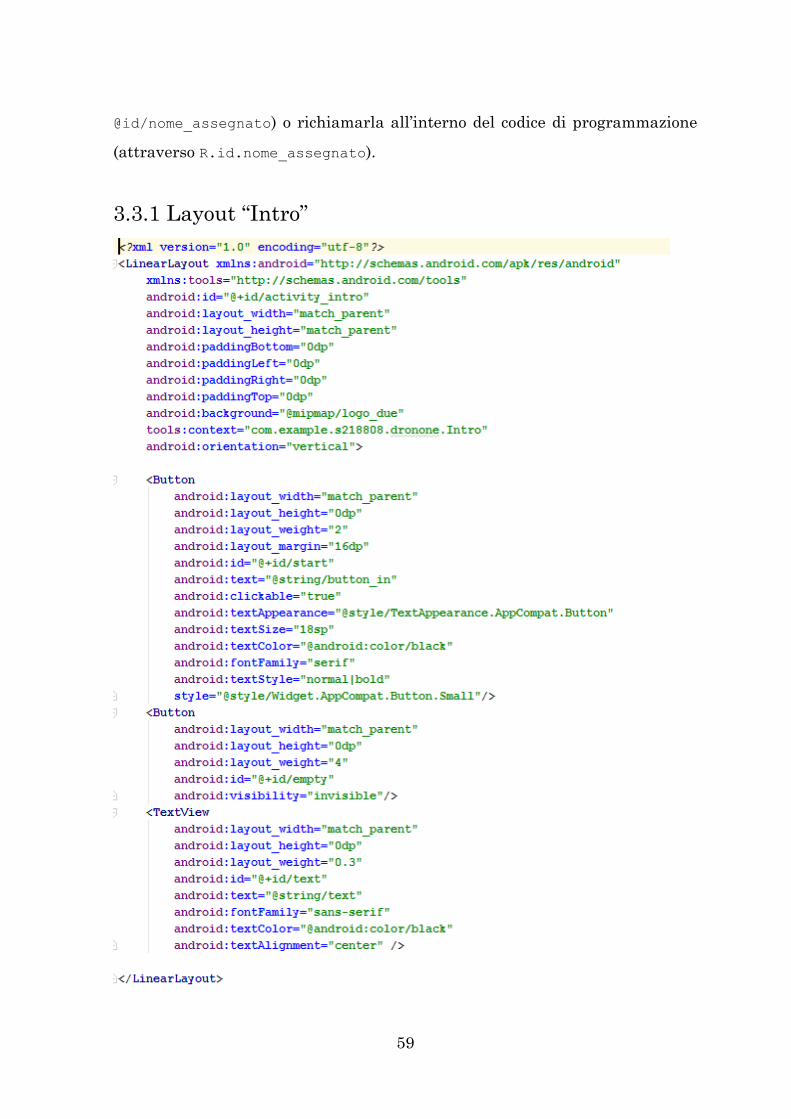
59
@id/nome_assegnato) o richiamarla all’interno del codice di programmazione
(attraverso R.id.nome_assegnato).
3.3.1 Layout “Intro”
60
Attraverso i tags sopra riportati viene implementato l’aspetto grafico
dell’activity “Intro”.
Come prima cosa viene impostato un layout lineare con orientamento verticale
a pieno schermo (si noti inoltre che all’interno del file “manifest”, utilizzando il
comando android:screenOrientation, è stata bloccata la rotazione
orizzontale).
Successivamente vengono create tre View, le cui descrizioni vengono riportate di
seguito:
la prima struttura è un bottone, la cui larghezza
(android:layout_width) è uguale alla struttura parente, ovvero il
layout lineare, ma i cui margini (android:layout_margin) sono di 16dp
per ogni lato. Per inciso, l’unità di misura della dimensione in Android è
il dp, ovvero il density pixel; questo per fare in modo che la
rappresentazione grafica di una struttura in diversi display con diverse
densità di pixel sia la medesima. Il bottone viene inoltre reso cliccabile
(andorid:clickable) e viene impostata la raffigurazione della stringa
denominata “button_in” e salvata all’interno del file string.xml.
la seconda struttura è un altro bottone invisibile (android:visibility)
e non cliccabile, molto più grande del precedente; la sua funzione è
soltanto quella di fornire una divisione in proporzione fissa dello
schermo;
l’ultima struttura è invece una TextView, contenente una semplice
stringa di “firma” dell’applicazione.
Il risultato grafico del sopracitato layout “Intro” è il seguente (l’immagine sotto
riportata rappresenta il vero display di uno smartphone LG G39):
9 http://www.lg.com/it/telefoni-cellulari/lg-G3-D855

61
Figura 7: grafica del layout "Intro"

62
3.3.2 Layout “Main”

63
Il metalinguaggio XML sopra riportato implementa il design della seconda ed
ultima activity “MainActivity”.
Il layout scelto è lineare orientato verticalmente rispetto al display del
dispositivo, in questo caso però contiene una View in più rispetto al precedente:
i primi tre elementi grafici sono dei bottoni uguali per dimensioni, forma
e stile, tutti cliccabili e visibili, contenenti però tre diverse stringhe di
testo (rispettivamente button1, button2 e button3). Come verrà
descritto nel capitolo successivo, ad ognuno di questi bottoni è assegnata
una diversa sequenza di dati da inviare al ricevitore infrarosso del drone;
l’ultimo elemento è invece una TextView, di dimensione inferiore rispetto
ai bottoni precedenti, che contiene (android:src) un’immagine
denominata logo salvata all’interno della cartella Drawable; le dimensioni
della figura, ovvero il logo dell’Università degli Studi di Trieste, vengono
64
adattate alla grandezza della View che la contiene (android:scaleType).
Figura 8: grafica del layout “Main”

65
3.4 Implementazione del Codice Esecutivo Java
L’ultimo passo per la creazione di un’applicazione Android funzionante consiste
nella compilazione del codice Java, attraverso il quale vengono definite le azioni
che devono essere eseguite in corrispondenza di un determinato evento, ovvero
la pressione di un bottone. Nel caso del progetto drone l’unica attività
implementata è l’invio di un pacchetto dati, tramite comunicazione infrarossa,
al ricevitore.
Si noti però che, a differenza di tutte le altre case di dispositivi mobile quali ad
esempio Samsung, HTC, Huawei e Sony, l’azienda koreana LG (costruttrice del
G3 utilizzato) non si è basata sulla classe ConsumerIrManager10, sviluppata da
Google, ma ha preferito implementare una propria libreria, denominata “LG
QRemote11”. Per lo sviluppo del codice quindi sono state utilizzate le linee guida
fornite direttamente dalla casa madre del dispositivo mobile, importando di
volta in volta i vari elementi dei packages necessari.
10 https://developer.android.com/reference/android/hardware/ConsumerIrManager.html 11 http://mobile.developer.lge.com/develop/sdks/lg-qremote-sdk/

66
3.4.1 Activity “Intro”
Per fare in modo che gli oggetti utilizzati all’interno del codice Java vengano
riconosciuti dall’ambiente di sviluppo, vengono importate le varie classi dai
rispettivi packages; in particolare, le classi Intent, AppCompatActivity,
Bundle, Log, View, Button appartengono alle librerie standard Android, mentre
invece IRBlaster ed IRBlasterCallback sono entrambe classi create
appositamente da LG, come descritto precedentemente.
Come prima cosa quindi viene definita la classe base “Intro”, derivante da
AppCompatActivity, e vengono ereditati di fatto tutti gli attributi di
quest’ultima attraverso il costrutto super.onCreate (quindi tutte le variabili e

67
i metodi propri di un’activity Android) [32]. Viene definito quindi un metodo
onCreate, utilizzato per inizializzare l’activity e richiedente come parametro un
oggetto di tipo Bundle, che contiene lo stato dell’attività in esecuzione;
all’interno del suddetto metodo perciò viene inserito tutto il codice riguardante
l’activity stessa.
Successivamente vengono creati due oggetti:
cellBlaster, grazie al quale vengono gestiti tutti gli eventi IR;
cell, che si occupa di controllare il LED IR fisico del dispositivo [33].
A questo punto, viene invocato il metodo setContentView, attraverso il quale
viene rappresentata l’interfaccia grafica, che deve essere passata come
parametro; in questo caso si fa riferimento al layout “Intro” attraverso l’utilizzo
di R.layout.activity_intro: ciò vuol dire che il file XML è memorizzato
all’interno della sottocartella layout di Res.
Infine viene fatto riferimento al bottone denominato start, attraverso l’utilizzo
del metodo fondamentale findViewById, facendo in modo che alla pressione
(ovviamente virtuale) dello stesso venga inviato il pacchetto di dati x986730CF
(il cui contenuto verrà spiegato successivamente) con una frequenza portante di
38kHz (sendIRPattern); questo per fare in modo che venga avviato il metodo
catch del setup del drone per il controllo del corretto funzionamento dei singoli
motori. Una volta che il pacchetto d’informazioni viene inviato, viene creato un
oggetto di tipo Intent, attraverso il quale è possibile passare dall’activity
corrente “Intro” a “MainActivity”.
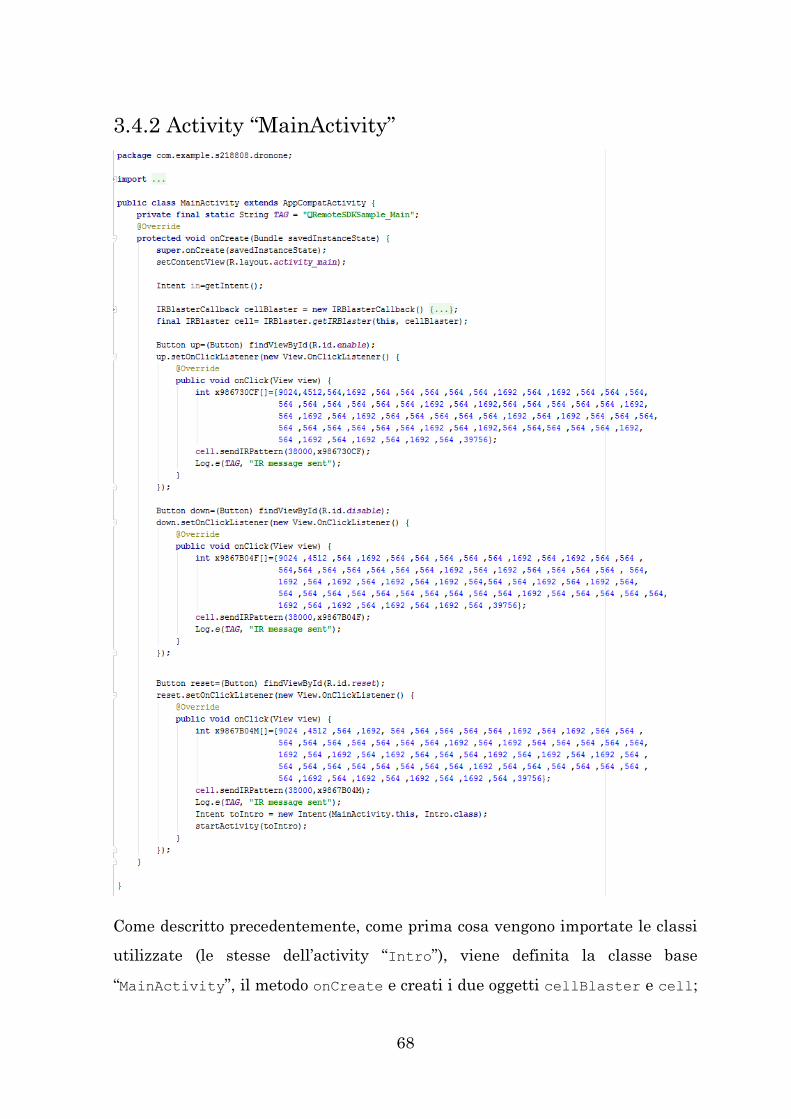
68
3.4.2 Activity “MainActivity”
Come descritto precedentemente, come prima cosa vengono importate le classi
utilizzate (le stesse dell’activity “Intro”), viene definita la classe base
“MainActivity”, il metodo onCreate e creati i due oggetti cellBlaster e cell;

69
la parte fondamentale di questo codice tuttavia risiede all’interno dei tre metodi
onClick.
Ogni qualvolta infatti venga premuto uno dei tre bottoni presenti
nell’interfaccia, viene azionato il LED IR, che invia, con una frequenza di
modulazione pari a 38kHz, un pacchetto diverso in base all’elemento grafico su
cui è stata fatta pressione. Si noti che le cifre all’interno dell’array corrispondono
agli intervalli di durata rispettivamente dei marks e degli spaces, ed i loro valori
sono conformi al protocollo standard NEC descritto nel capitolo dedicato
all’hardware di sistema. Per fare più chiarezza tuttavia, vengono riportate delle
tabelle di “conversione”, grazie alle quali è possibile comprendere meglio il
contenuto della trasmissione:
1°Sequenza 2°Sequenza 3°Sequenza 4°Sequenza 5°Sequenza 6°Sequenza
Corrispondenza Header inizio
trasmissione Indirizzo
Indirizzo
negato Comando
Comando
negato
Header fine
trasmissione
Binario - 1001000 01100111 00110000 11001111 -
Decimale - 25 230 12 243 -
Tabella 8: conversione pacchetto corrispondente al bottone "up"
Alla pressione del bottone up quindi viene inviato al ricevitore IR, il cui indirizzo
è 25 [34], il comando 12 (analogo ad “FF” di un videoregistratore), che è stato
fatto corrispondere all’aumento del throttle del segnale PWM in uscita dal pin
del microcontrollore di un fattore pari a 50e-2.
1°Sequenza 2°Sequenza 3°Sequenza 4°Sequenza 5°Sequenza 6°Sequenza
Corrispondenza Header inizio
trasmissione Indirizzo
Indirizzo
negato Comando
Comando
negato
Header fine
trasmissione
Binario - 1001000 01100111 01110000 10001111 -
Decimale - 25 230 14 241 -
Tabella 9: conversione pacchetto carrispondente al bottone "down"
Alla pressione invece del bottone down viene inviato il comando 14, associato
alla funzione “Pause”, corrispondente al decremento del throttle del PWM di un
fattore pari a -50e-2.

70
1°Sequenza 2°Sequenza 3°Sequenza 4°Sequenza 5°Sequenza 6°Sequenza
Corrispondenza Header inizio
trasmissione Indirizzo
Indirizzo
negato Comando
Comando
negato
Header fine
trasmissione
Binario - 1001000 01100111 10100000 01011111 -
Decimale - 25 230 5 250 -
Tabella 8: conversione pacchetto corrispondente al bottone "reset"
Infine, premendo il bottone reset viene inviato il comando 5 (funzione “Play”),
utilizzato come sistema di sicurezza, attraverso il quale viene fermata la corsa
dei motori, indipendentemente dalla loro velocità di rotazione, ed il drone viene
resettato. Successivamente viene creato un oggetto di tipo Intent, che permette
di ritornare all’activity “Intro”, per poter far ripartire il drone senza dover
riavviare l’applicazione.
Sitografia e Bibliografia
[1] D. Beninato, «Introduzione ai microcontrollori PIC,» [Online]. Available:
http://www.dei.unipd.it/~ieeesb/PIC/PresentazionePIC_01.pdf.
[2] «STM32 Nucleo-64 development board with STM32L053R8 MCU,
supports Arduino and ST morpho connectivity,» [Online]. Available:
http://www.st.com/content/st_com/en/products/evaluation-tools/product-
evaluation-tools/mcu-eval-tools/stm32-mcu-eval-tools/stm32-mcu-
nucleo/nucleo-l053r8.html.
[3] «Jumper,» [Online]. Available:
https://www.techopedia.com/definition/5299/jumper.
[4] L. Tanganelli, «Alla scoperta delle schede di sviluppo STM32 Nucleo,»
[Online]. Available: http://www.settorezero.com/wordpress/alla-scoperta-
delle-schede-di-sviluppo-stm32-nucleo/.
[5] L. Frosini, «Ripasso sul campo magnetico rotante,» [Online]. Available:
http://www-3.unipv.it/dmae/materiale_didattico/Costruzioni_13.pdf.
[6] A. d. Gerlando, «Macchina sincrona,» [Online]. Available:
http://docenti.etec.polimi.it/IND32/Didattica/ME_professionalizzante/mat
eriale_didattico/dispense/5_MS.pdf.
[7] L. Frosini, «Il motore brushless (1° parte): principi di funzionamento,»
[Online]. Available: http://www-
3.unipv.it/dmae/materiale_didattico/Costruzioni_22.pdf.
[8] S. Keeping, «Introduzione al controllo dei motori c.c. brushless,» [Online].
Available: https://www.digikey.it/it/articles/techzone/2013/mar/an-
introduction-to-brushless-dc-motor-control.
[9] RC Timer, «Manual of RC Timer ESC 30A Brushless Motor Speed
Controller,» [Online]. Available: http://www.sarkanyellato.hu/wp-
content/uploads/2011/10/RC-Timer-10.18.30.40A-ESC-Instruction.pdf.
[10] FutureElectronics, «What is an Infrared Receiver?,» [Online]. Available:
http://www.futureelectronics.com/en/optoelectronics/infrared-
receivers.aspx.
[11] SBProject, «IR Remote Control Theory,» [Online]. Available:
http://www.sbprojects.com/knowledge/ir/index.php.
[12] D. Tan, «Infrared Remote Control Protocols: Part 1,» [Online]. Available:
http://irq5.io/2012/07/27/infrared-remote-control-protocols-part-1/.
[13] G. Singh, «NEC Protocol IR (Infrared) Remote Control With a
Microcontroller,» [Online]. Available:
http://www.circuitvalley.com/2013/09/nec-protocol-ir-infrared-remote-
control.html.
[14] Vishay Semiconductors, «Data Formats for IR Remote Control,» [Online].
Available: http://www.vishay.com/docs/80071/dataform.pdf.

[15] Tampere University of Technology, «Basic Principles of Inertial
Navigation,» [Online]. Available:
http://aerostudents.com/files/avionics/InertialNavigationSystems.pdf.
[16] InvenSense, «MPU-6050 Six-Axis (Gyro + Accelerometer) MEMS
MotionTracking™ Devices,» [Online]. Available:
https://www.invensense.com/products/motion-tracking/6-axis/mpu-6050.
[17] GeekMomProjects, «MPU-6050 Redux: DMP Data Fusion vs.
Complementary Filter,» [Online]. Available:
http://www.geekmomprojects.com/mpu-6050-redux-dmp-data-fusion-vs-
complementary-filter/.
[18] G. Wetzstein, «Quaternions & IMU Sensor Fusion with Complementary
Filtering,» [Online]. Available:
https://stanford.edu/class/ee267/lectures/lecture10.pdf.
[19] B. Bona, «Quaternioni,» [Online]. Available:
http://www.ladispe.polito.it/corsi/meccatronica/01GTG/2008-
09/Slides/Quaternioni.pdf.
[20] GeekMomProjects, «MPU-6050: DMP Data from i2cdevlib,» [Online].
Available: http://www.geekmomprojects.com/mpu-6050-dmp-data-from-
i2cdevlib/.
[21] Instructables, «IMU Part 2: Complementary Filter,» [Online]. Available:
http://www.instructables.com/id/PCB-Quadrotor-Brushless/step15/IMU-
Part-2-Complementary-Filter/.
[22] Robottini, «Kalman filter vs Complementary filter,» [Online]. Available:
http://robottini.altervista.org/kalman-filter-vs-complementary-
filter?doing_wp_cron=1381307547.0642869472503662109375.
[23] M. Agozzino, «Tracciamento di particelle con Filtro di Kalman,» [Online].
Available:
http://amslaurea.unibo.it/12064/1/Tracciamento%20di%20particelle%20c
on%20filtro%20di%20Kalman.pdf.
[24] «Alcuni concetti di statistica: medie, varianze, covarianze e regressioni.,»
[Online]. Available: http://www.apogeonline.com/2002/libri/88-7303-864-
6/ebook/pdf/864_appendice1.pdf.
[25] P. Medici, «Filtro di Kalman,» [Online]. Available:
http://www.ce.unipr.it/people/medici/geometry/node52.html.
[26] A. P. A. Mohinder S. Grewal, Kalman Filtering-Theory and Practice
Using MATLAB, A John Wiley & Sons, Inc., Publication, 2008.
[27] DroneBase, «Droni per fotogrammetria e rilievo,» [Online]. Available:
http://www.dronebase.it/prodotto/drone-per-fotogrammetria-x-cam-700/.
[28] W.-M. Lee, Android 4 Application Development, John Wiley & Sons, Inc.,
2012.
[29] Google, «Android Developers,» [Online]. Available:
https://developer.android.com/index.html.
[30] Google, «Intent,» [Online]. Available:

https://developer.android.com/reference/android/content/Intent.html.
[31] G. Maggi, «View: le basi dell’interfaccia grafica,» [Online]. Available:
http://www.html.it/pag/48742/view/.
[32] M. Petrioli, «Analizziamo il nostro progetto (1a parte),» [Online].
Available: http://www.mrwebmaster.it/android/analizziamo-nostro-
progetto-1a-parte_10602.html.
[33] LG Electronics, «LG QRemote SDK,» [Online]. Available:
http://mobile.developer.lge.com/develop/sdks/lg-qremote-sdk/.
[34] irdb, «Known IR protocols for NEC devices,» [Online]. Available:
http://irdb.tk/db/.