Controllo di stabilità di un modellino hovercraft - wpage.unina.itwpage.unina.it/framato/materiale...
44
1 UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II Facoltà di Ingegneria CORSO DI LAUREA IN INGEGNERIA DELL’AUTOMAZIONE Corso di Sistemi di Controllo Multivariabile Controllo di stabilità di un modellino hovercraft MATTEO DEL CASTELLO ROSARIO MELITO MATR. M58/29 MATR. M58/34 ANNO ACCADEMICO 2011/2012
Transcript of Controllo di stabilità di un modellino hovercraft - wpage.unina.itwpage.unina.it/framato/materiale...
1
UNIVERSITÀ DEGLI STUDI DI NAPOLI FEDERICO II
Facoltà di Ingegneria
CORSO DI LAUREA IN
INGEGNERIA DELL’AUTOMAZIONE
Corso di Sistemi di Controllo Multivariabile
Controllo di stabilità di un modellino hovercraft
MATTEO DEL CASTELLO ROSARIO MELITO
MATR. M58/29 MATR. M58/34
ANNO ACCADEMICO 2011/2012
2
INDICE
1. Introduzione pag.3
2. Hovercraft, principio di funzionamento pag.4
3. Elettronica di bordo e attuatori pag.7
4. Derivazione modello matematico pag.17
5. Progetto del controllore pag.25
6. Appendice A pag.37
7. Appendice B pag.43

3
1. Introduzione
Il lavoro presentato consiste nel progetto di un regolatore allo scopo di stabilizzare e
controllare in traiettoria un piccolo modello di hovercraft. Un hovercraft è un mezzo anfibio
che sostentato da un cuscino d’aria e quindi non a contatto diretto con il terreno sottostante è
in grado di spostarsi su superfici di vario genere tra cui acqua, fango, asfalto ecc.. L’idea
risale al sedicesimo secolo anche se, causa l’impossibilità di sviluppare potenze sufficienti al
sostentamento e alla propulsione e le scarse conoscenze di fluidodinamica possedute, le prime
realizzazioni pratiche risalgono alla metà del secolo scorso.
4
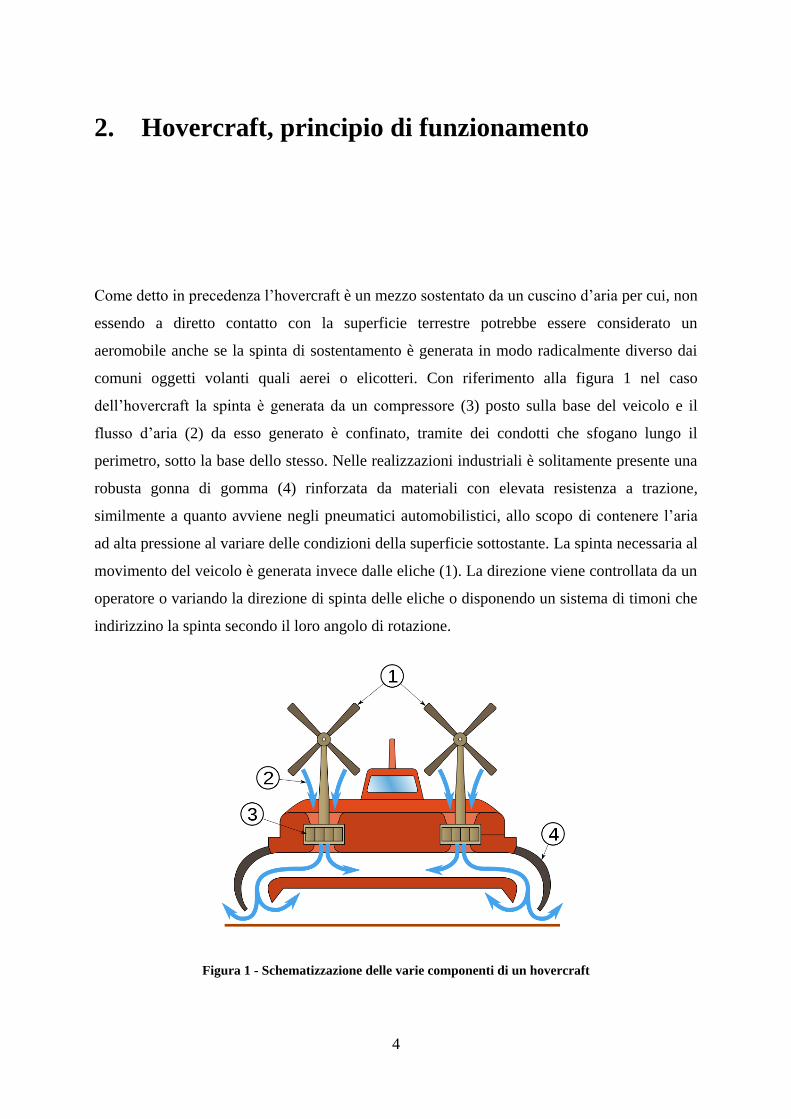
2. Hovercraft, principio di funzionamento
Come detto in precedenza l’hovercraft è un mezzo sostentato da un cuscino d’aria per cui, non
essendo a diretto contatto con la superficie terrestre potrebbe essere considerato un
aeromobile anche se la spinta di sostentamento è generata in modo radicalmente diverso dai
comuni oggetti volanti quali aerei o elicotteri. Con riferimento alla figura 1 nel caso
dell’hovercraft la spinta è generata da un compressore (3) posto sulla base del veicolo e il
flusso d’aria (2) da esso generato è confinato, tramite dei condotti che sfogano lungo il
perimetro, sotto la base dello stesso. Nelle realizzazioni industriali è solitamente presente una
robusta gonna di gomma (4) rinforzata da materiali con elevata resistenza a trazione,
similmente a quanto avviene negli pneumatici automobilistici, allo scopo di contenere l’aria
ad alta pressione al variare delle condizioni della superficie sottostante. La spinta necessaria al
movimento del veicolo è generata invece dalle eliche (1). La direzione viene controllata da un
operatore o variando la direzione di spinta delle eliche o disponendo un sistema di timoni che
indirizzino la spinta secondo il loro angolo di rotazione.
Figura 1 - Schematizzazione delle varie componenti di un hovercraft
5
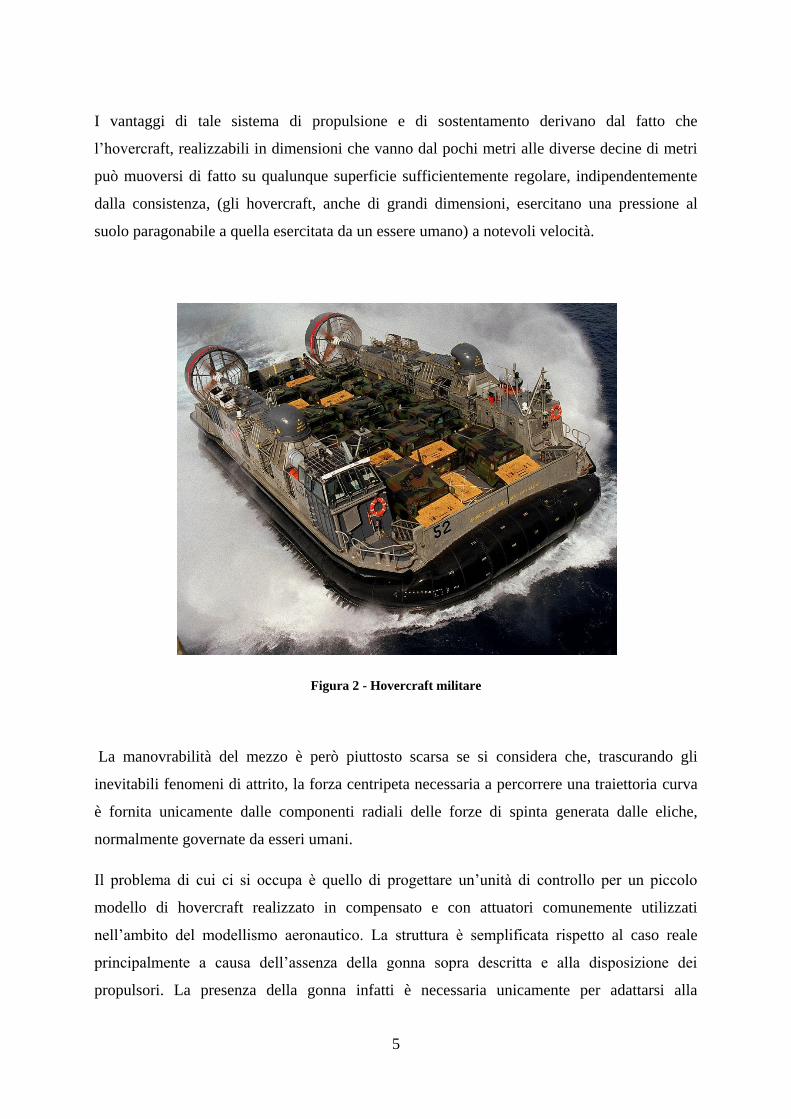
I vantaggi di tale sistema di propulsione e di sostentamento derivano dal fatto che
l’hovercraft, realizzabili in dimensioni che vanno dal pochi metri alle diverse decine di metri
può muoversi di fatto su qualunque superficie sufficientemente regolare, indipendentemente
dalla consistenza, (gli hovercraft, anche di grandi dimensioni, esercitano una pressione al
suolo paragonabile a quella esercitata da un essere umano) a notevoli velocità.
Figura 2 - Hovercraft militare
La manovrabilità del mezzo è però piuttosto scarsa se si considera che, trascurando gli
inevitabili fenomeni di attrito, la forza centripeta necessaria a percorrere una traiettoria curva
è fornita unicamente dalle componenti radiali delle forze di spinta generata dalle eliche,
normalmente governate da esseri umani.
Il problema di cui ci si occupa è quello di progettare un’unità di controllo per un piccolo
modello di hovercraft realizzato in compensato e con attuatori comunemente utilizzati
nell’ambito del modellismo aeronautico. La struttura è semplificata rispetto al caso reale
principalmente a causa dell’assenza della gonna sopra descritta e alla disposizione dei
propulsori. La presenza della gonna infatti è necessaria unicamente per adattarsi alla

6
disomogeneità della superficie e aggiungerebbe, per l’elasticità del cuscino d’aria ulteriori
gradi di libertà al modello che non potrebbero essere trascurati. La scelta effettuata di una
struttura completamente rigida rende invece trascurabili le rotazioni lungo gli assi di rollio e
beccheggio nonché le traslazioni lungo l’asse verticale permettendo di pervenire ad un più
semplice modello matematico e di conseguenza ad un più semplice controllore. La
disposizione degli attuatori rende più agevole la generazione di forze e coppie necessarie al
controllo.

7
3. Elettronica di bordo e attuatori
Il sistema di controllo è basato sulla piattaforma open source Arduino mega 2560. Tale
dispositivo è a sua volta basato sul microcontrollore Atmel AVR ATmega 2560 a 8 bit che
dispone di numerose periferiche di input/output sia analogiche che digitali oltre ai preziosi
contatori e timer utili alla generazione di segnali modulati in ampiezza di impulsi,
temporizzazione e conteggio di eventi esterni.
Figura 3 - Scheda Arduino 2560
Il vantaggio derivante dall’impiego di Arduino deriva dall’immediata disponibilità di
un’unita di programmazione del microcontrollore e di un circuito stampato che rende
semplice l’accesso alle periferiche sopra elencate, senza considerare le difficoltà che
deriverebbero dalla saldatura dell’integrato non disponendo di adeguate attrezzature. Inoltre
l’ambiente di sviluppo mette anche a disposizione un’interfaccia di comunicazione seriale
utile al trasferimento di dati provenienti dalle periferiche di acquisizione del microcontrollore
al PC. Per quanto riguarda tutto il resto dell’elettronica necessaria all’acquisizione delle
8
grandezze di stato provenienti dai sensori e la distribuzione dei segnali di potenza agli
attuatori i circuiti stampati sono stati realizzati autonomamente. In particolare si sono resi
necessari due driver H-bridge per il comando dei motori a corrente continua che movimentano
le eliche direzionabili posti sui lati dell’hovercraft e una scheda per il comando dei
servomotori che provvedono alla rotazione dei propulsori. La complessità di tali circuiti è
piuttosto modesta per cui ci si limiterà a descriverne superficialmente le caratteristiche. Il
compressore per il sostentamento è collegato direttamente al sistema di alimentazione
dovendo funzionare a potenza costante. Esso non è altro che un motore CC sul cui asse è
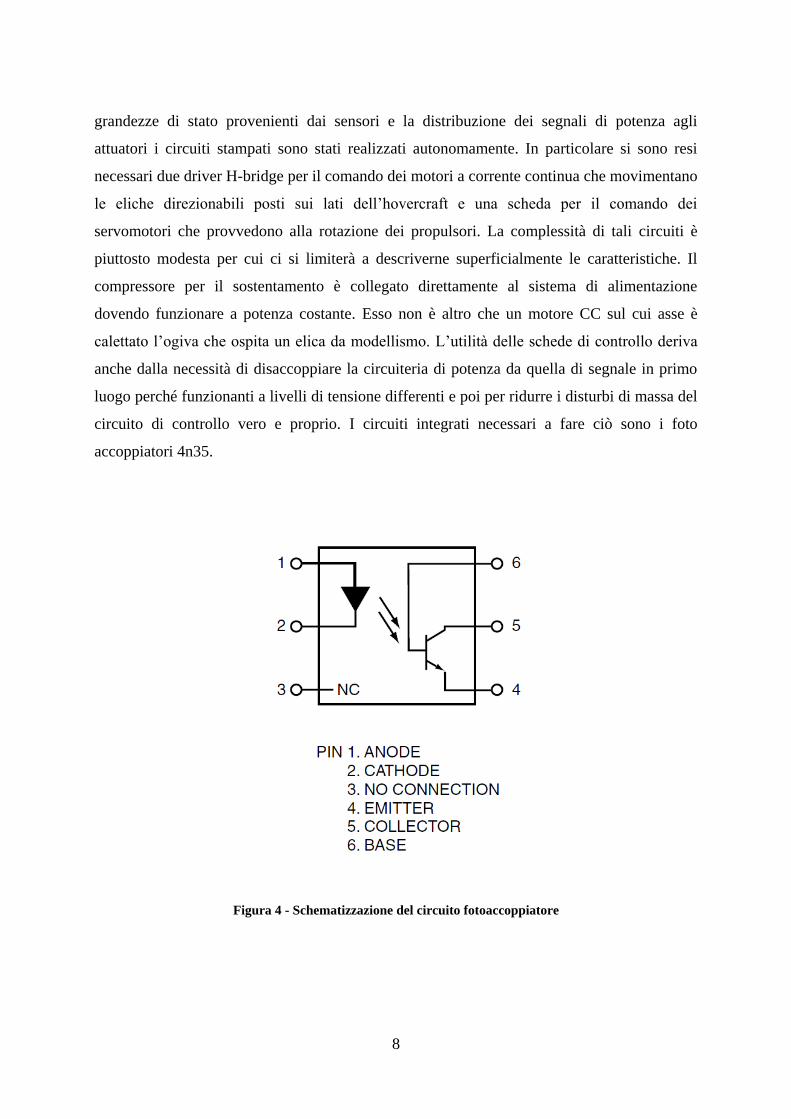
calettato l’ogiva che ospita un elica da modellismo. L’utilità delle schede di controllo deriva
anche dalla necessità di disaccoppiare la circuiteria di potenza da quella di segnale in primo
luogo perché funzionanti a livelli di tensione differenti e poi per ridurre i disturbi di massa del
circuito di controllo vero e proprio. I circuiti integrati necessari a fare ciò sono i foto
accoppiatori 4n35.
Figura 4 - Schematizzazione del circuito fotoaccoppiatore

9
Un altro circuito stampato è quello che alloggia direttamente sulla scheda Arduino ed ospita i
sensori inerziali e i circuiti di condizionamento necessari a quest’ultimi oltre a rendere
possibile l’interfacciamento con gli altri sensori necessari. In particolare per la misurazione
della velocità delle eliche necessarie a generare le forze trainanti e alla chiusura di un anello
di controllo in velocità dei motori elettrici ad esse collegate si sono resi necessari degli
encoder incrementali ricavati da un vecchio mouse. Per essere conteggiati, gli impulsi
provenienti dalle fotocellule sono preventivamente squadrati da un comparatore di tensione ad
isteresi che alloggia sulla scheda suddetta. Oltre alle misure inerziali è disponibile una misura
dello spostamento effettuata interfacciando Arduino con un vecchio mouse Ps2 a pallina.
Figura 5 - Dettaglio elica, servomotore ed encoder incrementale

10
Figura 6 - Scheda controllo motori (H-Bridge)
Figura 7 - Dettaglio sensore di posizione (PS/2 Mouse)
11
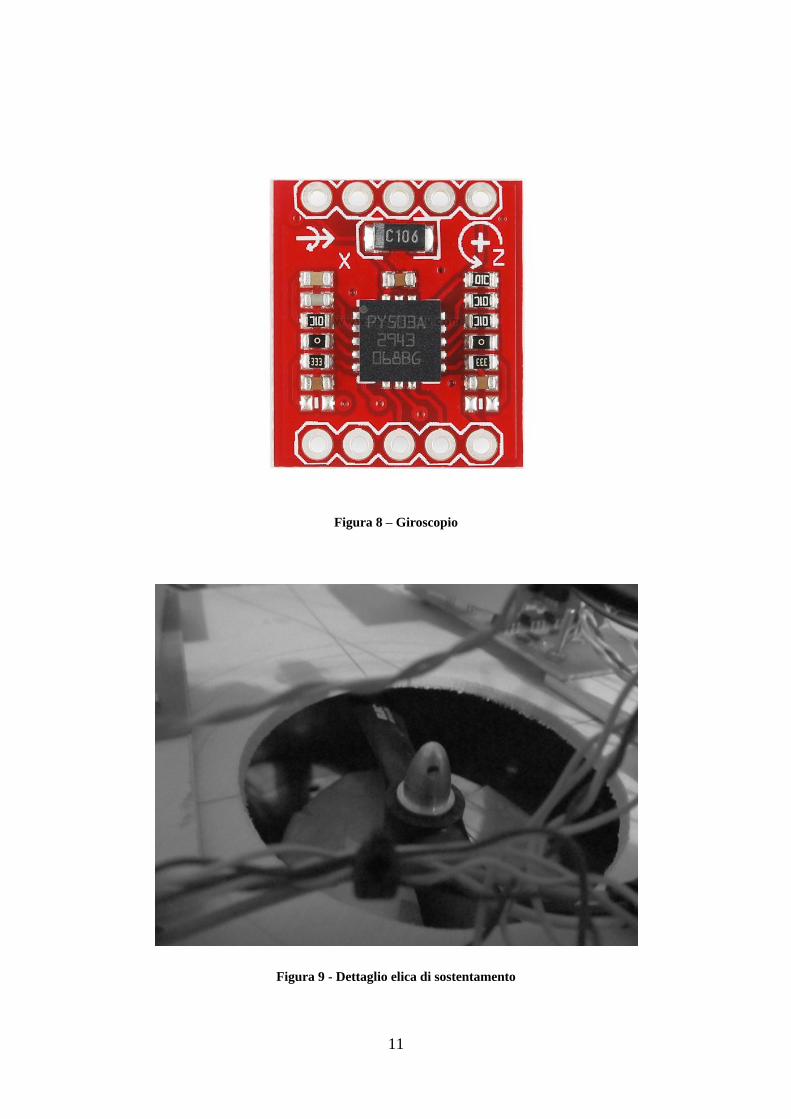
Figura 8 – Giroscopio
Figura 9 - Dettaglio elica di sostentamento

12
Figura 10 - Fondo per la generazione del cuscino d'aria
Figura 11 - Dettaglio scheda sensori e distribuzione segnali

13
Figura 12 - Sistema di alimentazione
Prima di procedere è il caso di fare alcune considerazioni sugli attuatori. Innanzitutto per
quanto riguarda i servomotori, comunemente adottati nell’ambito del aeromodellismo, della
robotica di consumo ecc. va detto che nonostante sia già implementato al loro interno un
sistema di controllo a controreazione che garantisce entro certi limiti la correttezza del
posizionamento non è possibile esprimere il legame tra riferimento e uscita tramite
un’equazione differenziale lineare in quanto il loro sistema di controllo è basato su relè. Dal
punto di vista del sistema di controllo complessivo inoltre i servomotori pongono un limite
sulla frequenza di campionamento utilizzabile. Ciò è dovuto al fatto che il riferimento deve
essere modulato con la tecnica PWM con una portante a 50Hz. Inoltre da considerazioni
basate sull’esperienza deriva che è il caso che il periodo di campionamento del sistema di
controllo sia in relazione armonica con la portante del segnale di riferimento.

14
Figura 13 - Segnale di riferimento servomotore
Ciononostante la modellazione del servomotore sarà comunque effettuata tramite funzione di
trasferimento considerata per semplicità del primo ordine.
Per quanto riguarda i motori elettrici che movimentano le eliche si è effettuato un processo di
identificazione basato sull’apposito pacchetto messo a disposizione da Matlab, system
identification tool, a partire dall’acquisizione di un segnale di riferimento casuale e dall’uscita
ad esso corrispondente. Di seguito sono riportati gli andamenti temporali di tali grandezze.
Figura 14 - Andamento del riferimento

15
Figura 15 - Andamento dell'uscita misurata
Figura 16 - Tool di identificazione
Procedendo come mostrato in Figura 16 si giunge all’identificazione della funzione di
trasferimento TD seguente:

16
Che rappresenta il legame differenziale esistente tra segnale di alimentazione e numero di giri
(scalati opportunamente) che caratterizza i propulsori dell’hovercraft. Il tempo di
campionamento coincide con quello del sistema di controllo. Nella figura successiva è
riportato il risultato di una simulazione effettuata sul sistema identificato confrontato con il
segnale proveniente dai sensori. Le differenze che si notano nel primo tratto del grafico sono
da attribuire anche alla modalità di simulazione che non tiene conto delle condizioni iniziali
diverse da zero.
Figura 17 - Simulazione sul sistema identificato
Sulla base del modello identificato è stato progettato un regolatore PI in grado di garantire il
corretto numero di giri delle eliche e modificarne la dinamica. Si omettono i dettagli del
progetto poiché le tecniche utilizzate non risultano interessanti per questo corso. Infine è il
caso di dire che così come i servomotori, all’interno delle simulazioni atte alla validazione del
controllore le dinamiche di tali attuatori sono state considerate del primo ordine e lineari.

17
4. Derivazione del modello matematico
Con riferimento alla figura deriviamo il sistema di equazioni che governano la dinamica
dell’hovercraft.
Figura 18 - Sistemi di coordinate fisso e solidale
Se consideriamo il sistema OXY di riferimento inerziale, indicando con Fu e Fv le componenti
della forza sugli assi del riferimento O’UV solidale all’hovercraft, e trascurando fenomeni
dovuti alle forze d’attrito, si ottiene il seguente sistema di equazioni:

18
Dove con m si è indicata la massa del sistema, con I si è indicato il momento di inerzia di
massa, con M il momento torcente agente sul sistema, mentre, come si può dedurre dalla
figura, indica l’angolo di rotazione del sistema di riferimento solidale rispetto al fisso.
Il modello matematico ricavato in precedenza, esprime i valori del sistema in un riferimento
inerziale, ma poiché le grandezze in gioco vengono misurate nel sistema solidale, sorge la
necessità di trovare un legame che permetta di riportare le informazioni da un sistema
all’altro.
L’equazione successiva rappresenta le componenti di velocità del sistema solidale rispetto a
quello fisso. Nel sistema di riferimento fisso leggo lo stesso vettore velocità ma con
componenti differenti. Il legame esistente tra le componenti di uno stesso vettore nei due
sistemi di riferimento è il seguente:
Derivando ambo i membri si ottiene:
Considerando la prima equazione, si ricava:

19
Indicando con R la matrice di rotazione tra i due sistemi di riferimento
Moltiplicando per l’inversa di R a primo e secondo membro si ottiene:
E quindi si giunge a:
Che unita alla 2 dà il sistema di equazioni espresso nel sistema di riferimento solidale.
Poniamo ora il sistema in forma di stato. Il vettore di stato è costituito dalla posizione e
velocità angolare, dalla posizione e dalla velocità lungo u e lungo v.
Indicando con x={x1,x2,x3,x4,x5,x6} il vettore di stato, dove le variabili di stato rappresentano:
x1 la posizione lungo u
x2 la posizione lungo v
x3 la posizione angolare
x4 la velocità lungo u
x5 la velocità lungo v

20
x6 la velocità angolare
considerando puramente algebrica la funzione di trasferimento degli attuatori si ottiene il
seguente modello matematico:
Come si vede il modello presenta dei termini di accoppiamento non lineare. Effettuando la
linearizzazione attorno al punto di equilibrio definito dal vettore nullo i termini suddetti
spariscono giungendo alla consueta forma ISU per modelli LTI.
Dove:
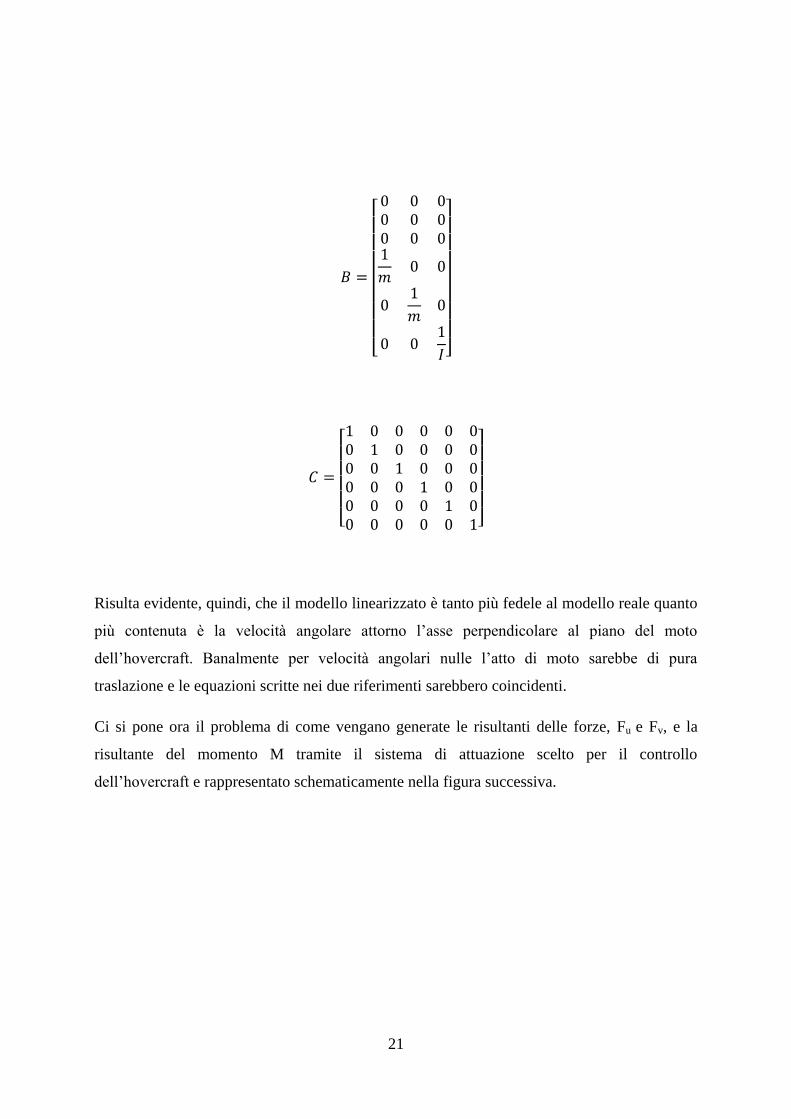
21
Risulta evidente, quindi, che il modello linearizzato è tanto più fedele al modello reale quanto
più contenuta è la velocità angolare attorno l’asse perpendicolare al piano del moto
dell’hovercraft. Banalmente per velocità angolari nulle l’atto di moto sarebbe di pura
traslazione e le equazioni scritte nei due riferimenti sarebbero coincidenti.
Ci si pone ora il problema di come vengano generate le risultanti delle forze, Fu e Fv, e la
risultante del momento M tramite il sistema di attuazione scelto per il controllo
dell’hovercraft e rappresentato schematicamente nella figura successiva.
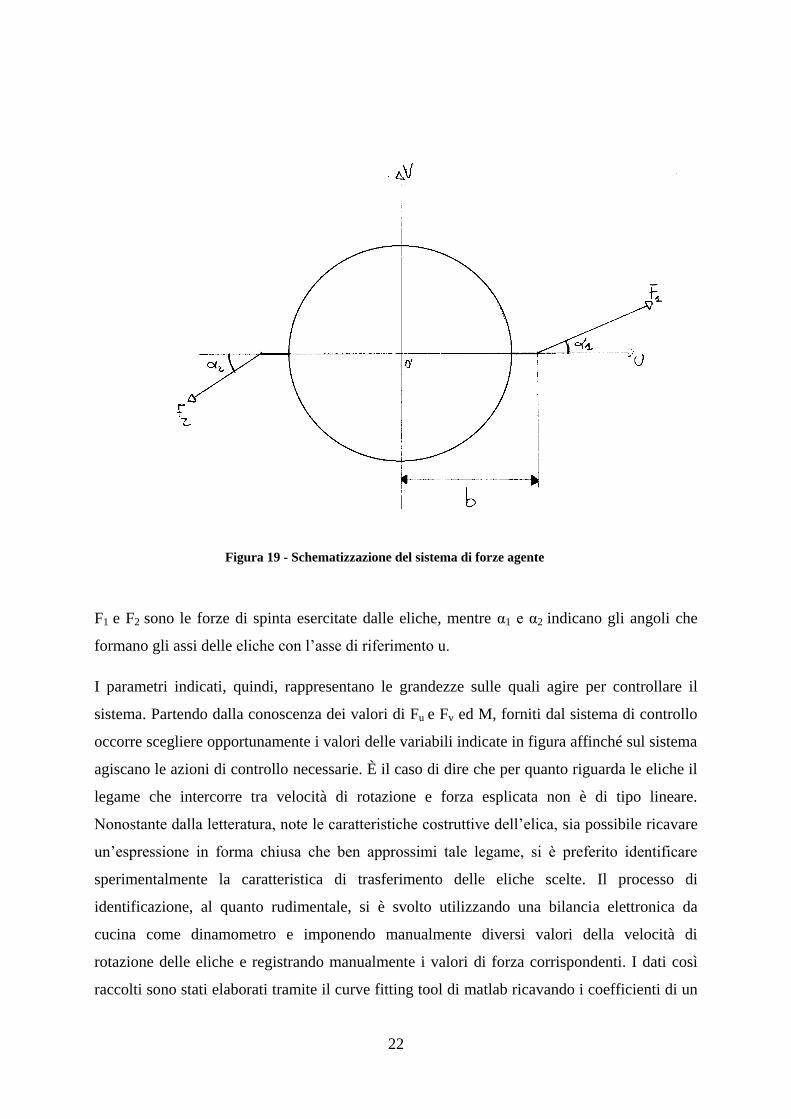
22
F1 e F2 sono le forze di spinta esercitate dalle eliche, mentre α1 e α2 indicano gli angoli che
formano gli assi delle eliche con l’asse di riferimento u.
I parametri indicati, quindi, rappresentano le grandezze sulle quali agire per controllare il
sistema. Partendo dalla conoscenza dei valori di Fu e Fv ed M, forniti dal sistema di controllo
occorre scegliere opportunamente i valori delle variabili indicate in figura affinché sul sistema
agiscano le azioni di controllo necessarie. È il caso di dire che per quanto riguarda le eliche il
legame che intercorre tra velocità di rotazione e forza esplicata non è di tipo lineare.
Nonostante dalla letteratura, note le caratteristiche costruttive dell’elica, sia possibile ricavare
un’espressione in forma chiusa che ben approssimi tale legame, si è preferito identificare
sperimentalmente la caratteristica di trasferimento delle eliche scelte. Il processo di
identificazione, al quanto rudimentale, si è svolto utilizzando una bilancia elettronica da
cucina come dinamometro e imponendo manualmente diversi valori della velocità di
rotazione delle eliche e registrando manualmente i valori di forza corrispondenti. I dati così
raccolti sono stati elaborati tramite il curve fitting tool di matlab ricavando i coefficienti di un
Figura 19 - Schematizzazione del sistema di forze agente
23
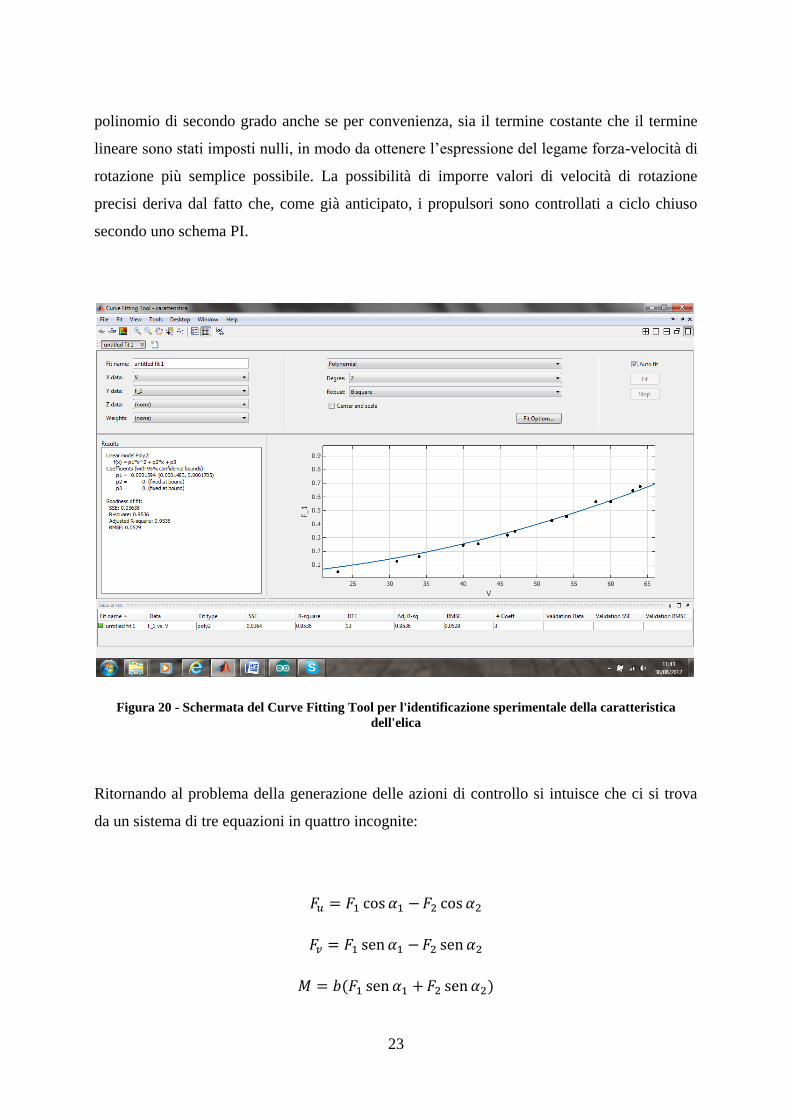
polinomio di secondo grado anche se per convenienza, sia il termine costante che il termine
lineare sono stati imposti nulli, in modo da ottenere l’espressione del legame forza-velocità di
rotazione più semplice possibile. La possibilità di imporre valori di velocità di rotazione
precisi deriva dal fatto che, come già anticipato, i propulsori sono controllati a ciclo chiuso
secondo uno schema PI.
Figura 20 - Schermata del Curve Fitting Tool per l'identificazione sperimentale della caratteristica
dell'elica
Ritornando al problema della generazione delle azioni di controllo si intuisce che ci si trova
da un sistema di tre equazioni in quattro incognite:

24
Volendo evitare rotazioni negative delle eliche e volendo mantenere gli angoli α1 e α2 in un
range limitato, una delle possibili soluzioni è quella di mantenere anche in condizioni di
equilibrio attive le eliche generando le F1 e F2 uguali ed opposte. Così facendo si perviene alla
seguente soluzione:
Nella trattazione si è solo accennato alla dinamica degli attuatori e di fatto nel modello
matematico la loro caratteristica è stata considerata puramente algebrica. In realtà sia le forze
di spinta che le loro direzioni sono governate da motori in corrente continua la cui dinamica
può essere considerata in prima approssimazione lineare e del primo ordine anche se, come si
vede dalle equazioni delle risultanti delle forze e dei momenti, la loro combinazione da luogo
ad una funzione non lineare delle variabili di stato. Tuttavia se si considera che le dinamiche
degli attuatori risultano più veloci della dinamica del sistema controllato allora si commette
un errore trascurabile nel ritenere algebrico il legame ingresso uscita. Nel modello simulink in
ogni caso si include il modello matematico degli attuatori per pervenire a simulazioni più
fedeli alla realtà.

25
5. Progetto del controllore
Come si vede dal modello matematico non lineare, le equazioni presentano dei termini di
accoppiamento non lineare che spariscono con la linearizzazione del sistema attorno
all’origine dello spazio di stato. Per questo motivo il problema che ci si presenta può in realtà
essere visto come tre problemi di controllo SISO, e di conseguenza affrontato con le tecniche
di progetto mono variabile note dai corsi di controlli automatici oppure risolto con tecniche
multi variabile quali LQR, allocazione dei poli, controllori di disaccoppiamento. Si vuole
sottolineare comunque che il disaccoppiamento delle equazioni è però solo frutto della
linearizzazione per cui il problema non è intrinsecamente disaccoppiato.
Per quanto detto precedentemente a proposito della dinamica, e quindi dal ritardo introdotto
all’interno del ciclo di reazione dagli attuatori non modellati nel sistema di equazioni ricavato,
per le sue caratteristiche di robustezza, il controllore che si è scelto di utilizzare è l’LQR. Il
control system toolbox di Matlab mette a disposizione numerose funzioni per la sintesi del
controllore, tra cui quelle per il progetto di LQR e LQR PI, quest’ultimo in grado di annullare
asintoticamente gli effetti dovuti a disturbi costanti agenti sul sistema.
Prima di affrontare il progetto del controllore è il caso di analizzare le proprietà strutturali del
sistema e cioè verificarne la controllabilità e l’osservabilità. Quest’operazione richiede in
realtà poche righe di codice Matlab e dato l’ingombro della matrice di controllabilità è
superfluo riportarne l’espressione numerica.
Nel progetto del controllore lo stato del sistema è considerato interamente misurabile. In
effetti i sensori presenti a bordo del modellino forniscono tutte le misure necessarie a meno
26
dei loro coefficienti i amplificazione. Supponendo quindi la matrice C proporzionale
all’identità, o comunque diagonale con elementi non nulli l’osservabilità è garantita. In realtà
nell’implementazione fisica del controllore alcune delle misure sono ottenute per integrazione
o per derivazione numerica poiché l’implementazione di un osservatore avrebbe aggiunto un
ulteriore carico computazionale i cui effetti avrebbero potuto degradare le prestazioni del
sistema a ciclo chiuso.
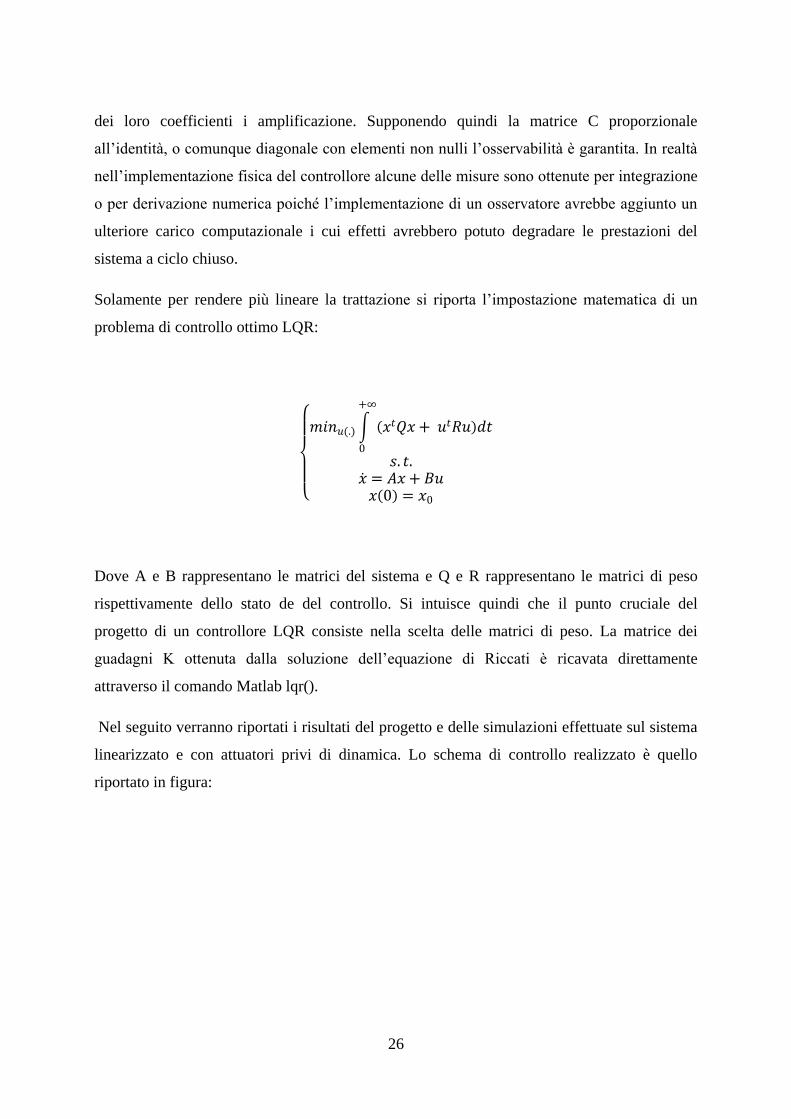
Solamente per rendere più lineare la trattazione si riporta l’impostazione matematica di un
problema di controllo ottimo LQR:
Dove A e B rappresentano le matrici del sistema e Q e R rappresentano le matrici di peso
rispettivamente dello stato de del controllo. Si intuisce quindi che il punto cruciale del
progetto di un controllore LQR consiste nella scelta delle matrici di peso. La matrice dei
guadagni K ottenuta dalla soluzione dell’equazione di Riccati è ricavata direttamente
attraverso il comando Matlab lqr().
Nel seguito verranno riportati i risultati del progetto e delle simulazioni effettuate sul sistema
linearizzato e con attuatori privi di dinamica. Lo schema di controllo realizzato è quello
riportato in figura:

27
Figura 21 - Schema di controllo Simulink
La scelta delle matrici di peso è la seguente:
Il significato fisico della scelta effettuata è da ricercare nel fatto che senza ulteriori
considerazioni lo scostamento dello stato del sistema dall’origine dello spazio di stato ha peso
identico per ogni sua componente. Stesso discorso si potrebbe ripetere per la matrice R che
esprime il costo dell’azione di controllo. Inoltre non esistono specifiche di progetto se non
quelle della stabilizzazione e della reiezione dei disturbi. Il motivo di tutto ciò è da ricercare
nel fatto che il modello sviluppato contiene numerose fonti di incertezza ed è costruito con
tecniche rudimentali. Il sistema di controllo possiede una potenza di calcolo piuttosto limitata.

28
Molti dei sensori utilizzati nascono per scopi differenti. La lista sarebbe ancora lunga e il
progetto certamente non esaurisce le possibilità di miglioramento. Di seguito sono riportati i
risultati del progetto del controllore e gli andamenti di velocità, posizione e azioni di
controllo a partire da uno stato iniziale non nullo del sistema controllato secondo lo schema
precedente.
Dalla struttura della matrice dei guadagni K si evince che il controllore agisce sul sistema
come se fosse costituito da tre sottosistemi completamente disaccoppiati. Un indubbio
vantaggio derivante è la semplicità di implementazione del controllore all’interno del
microcontrollore.
Figura 22 - Andamento posizione lineare ed angolare

29
Figura 23 - Andamento velocità lineare ed angolare
Figura 24 - Andamento delle azioni di controllo
Il progetto del controllore potrebbe essere considerato ultimato se non si avessero presenti gli
aspetti implementativi, come ad esempio la necessità di discretizzare il sistema di controllo o
la presenza inevitabile di saturazioni ed altri tipi di non linearità. In altre parole data, come già
anticipato, l’assenza di specifiche ben definite sulle prestazione non è facile giudicare
l’adeguatezza dei risultati.
Per validare il progetto inseriamo innanzitutto il controllore all’interno di un ciclo di controllo
che contenga il modello non lineare oltre al sistema di attuazione comprensivo di un suo
modello matematico così come mostrato di seguito.

30
Figura 25 - Schema di controllo completo di attuatori e modello non lineare
Di seguito sono riportati gli andamenti delle variabili di stato del sistema sottoposto ad un
disturbo sulle condizioni iniziali. A differenza del caso lineare la variabile che partiva dallo
stato di equilibrio subisce degli scostamenti a causa dei termini di accoppiamento di cui si è
precedentemente discusso. Per confronto sono riportate anche le simulazioni sul sistema
linearizzato.
Figura 26 - Andamento delle posizioni (non lineare)

31
Figura 27 - Andamento delle posizioni (lineare)
Figura 28 - Andamento delle velocità (non lineare)
32
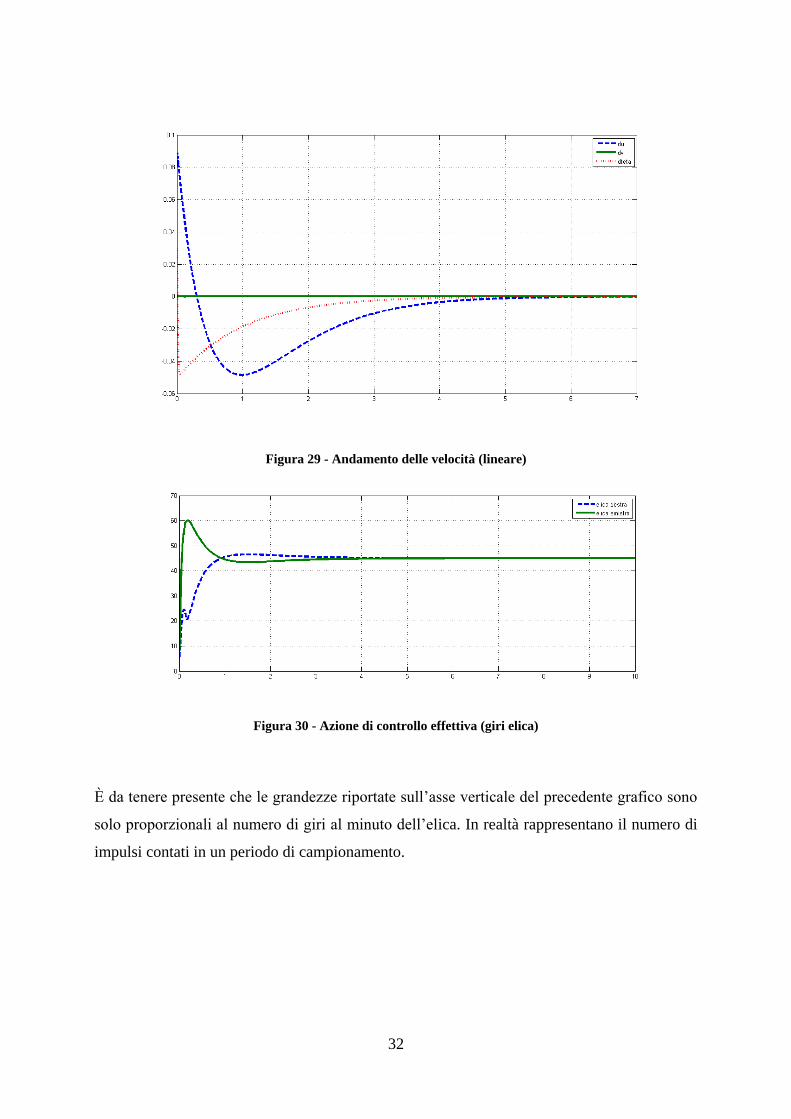
Figura 29 - Andamento delle velocità (lineare)
Figura 30 - Azione di controllo effettiva (giri elica)
È da tenere presente che le grandezze riportate sull’asse verticale del precedente grafico sono
solo proporzionali al numero di giri al minuto dell’elica. In realtà rappresentano il numero di
impulsi contati in un periodo di campionamento.
33
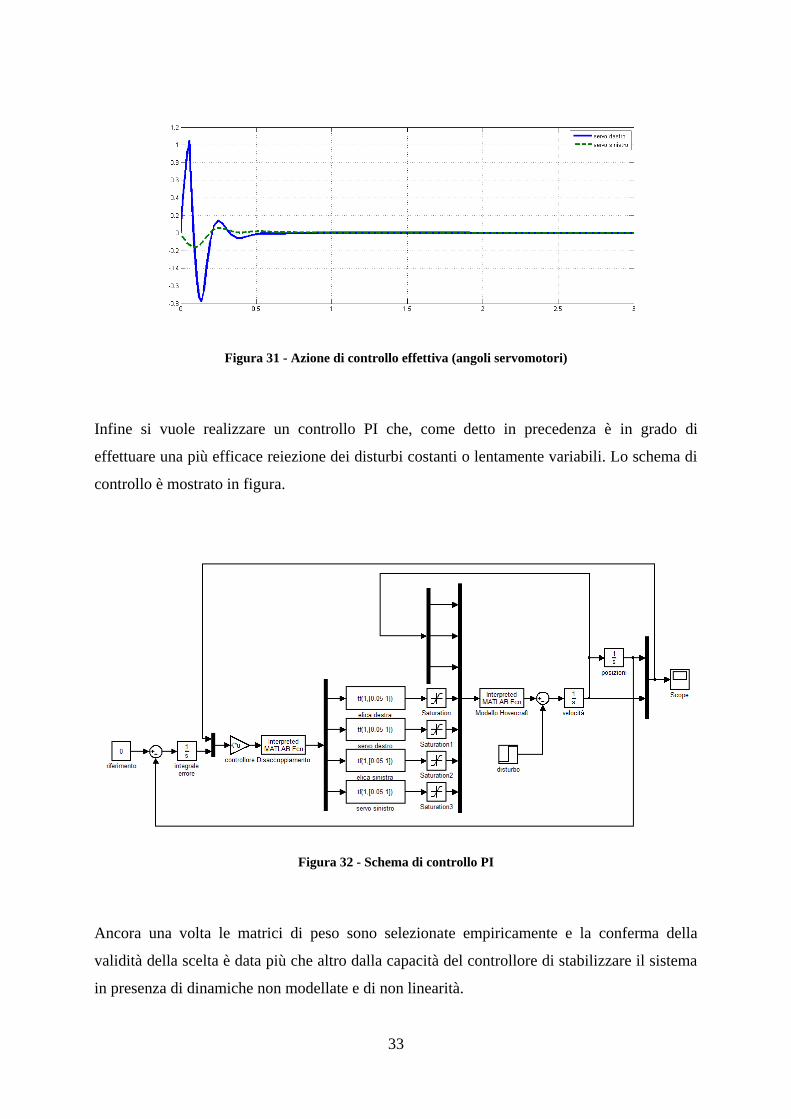
Figura 31 - Azione di controllo effettiva (angoli servomotori)
Infine si vuole realizzare un controllo PI che, come detto in precedenza è in grado di
effettuare una più efficace reiezione dei disturbi costanti o lentamente variabili. Lo schema di
controllo è mostrato in figura.
Figura 32 - Schema di controllo PI
Ancora una volta le matrici di peso sono selezionate empiricamente e la conferma della
validità della scelta è data più che altro dalla capacità del controllore di stabilizzare il sistema
in presenza di dinamiche non modellate e di non linearità.
34
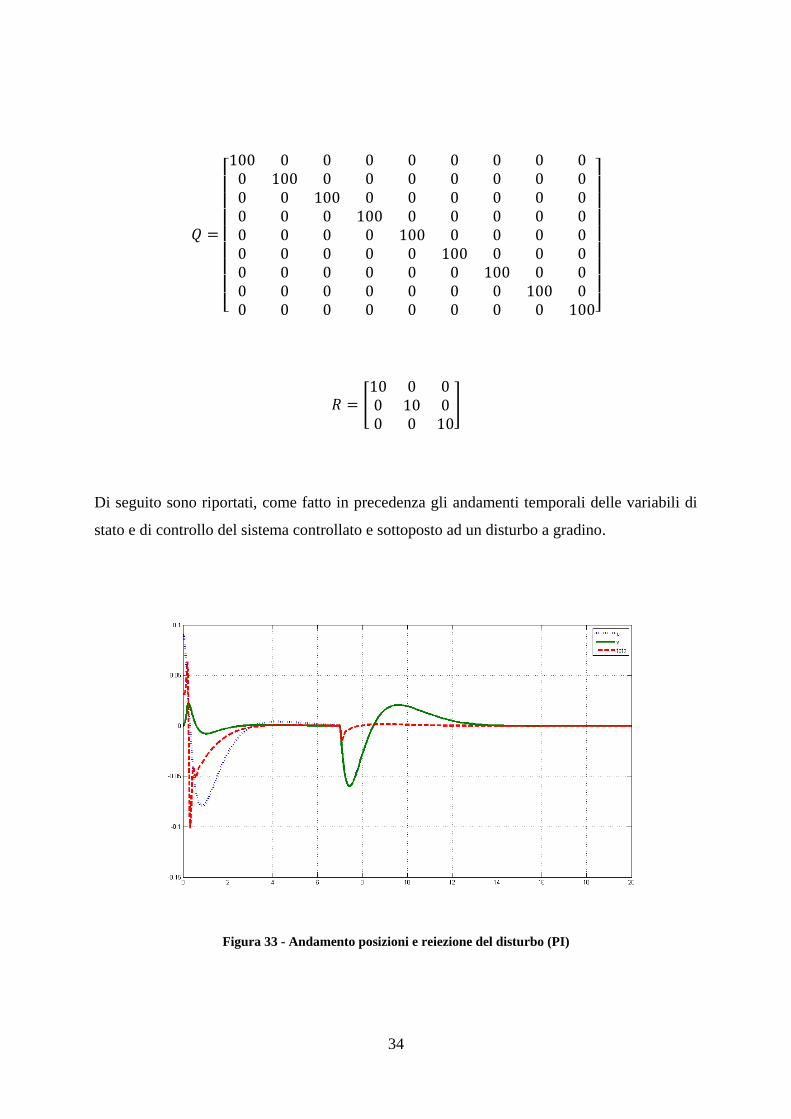
Di seguito sono riportati, come fatto in precedenza gli andamenti temporali delle variabili di
stato e di controllo del sistema controllato e sottoposto ad un disturbo a gradino.
Figura 33 - Andamento posizioni e reiezione del disturbo (PI)

35
Figura 34 - Andamento delle velocità (PI)
Figura 35 - Azione di controllo (giri elica PI)
36
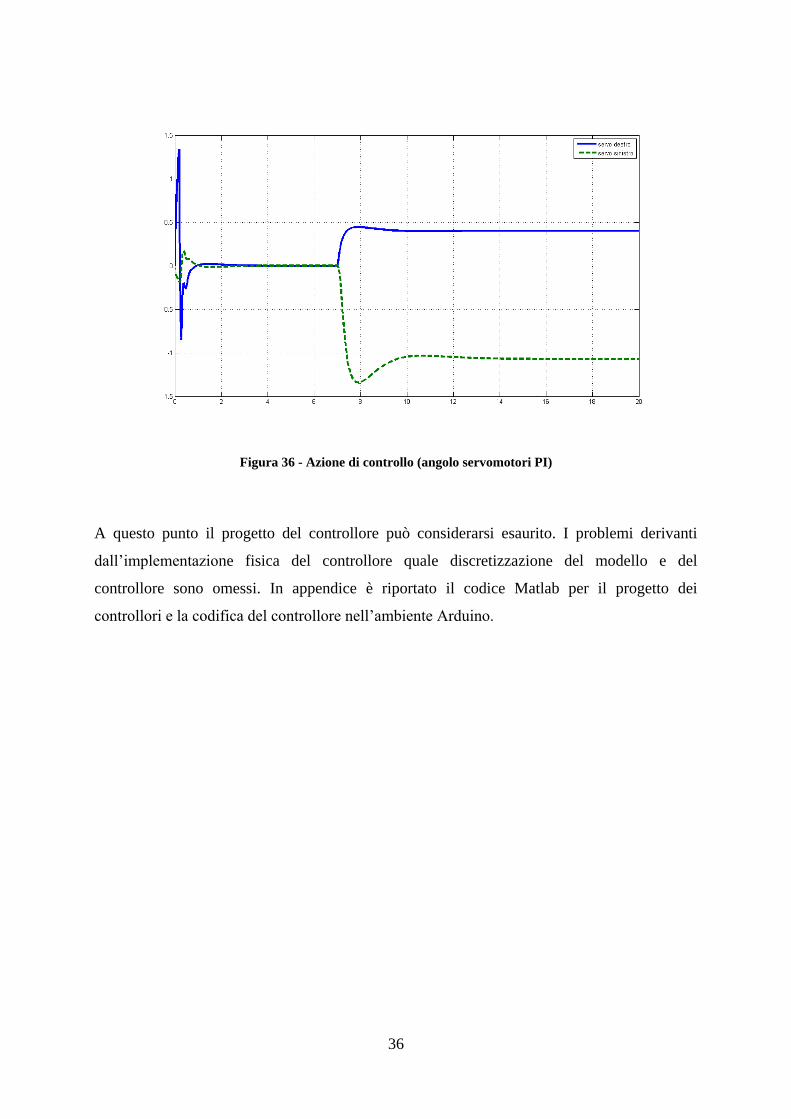
Figura 36 - Azione di controllo (angolo servomotori PI)
A questo punto il progetto del controllore può considerarsi esaurito. I problemi derivanti
dall’implementazione fisica del controllore quale discretizzazione del modello e del
controllore sono omessi. In appendice è riportato il codice Matlab per il progetto dei
controllori e la codifica del controllore nell’ambiente Arduino.
37
Appendice A
#include <avr/io.h>
#include <avr/interrupt.h>
#include <math.h>
#include <ps2.h>
PS2 mouse(31,33);
//peso dell'apparato 1425g
//momento di inerzia circa 0.03
void aziona_motore_s(unsigned int duty, boolean dir);
void aziona_motore_d(unsigned int duty, boolean dir);
int regola_motore_d(int r);
int regola_motore_s(int r);
unsigned int leggi_contatore(void);
void scrivi_contatore(unsigned int i);
void corpo(void);
int r_s, r_d, alfa_s, alfa_d;
float omega;
float teta;
int x,y;
void mouse_init()
{
mouse.write(0xff); // reset
mouse.read(); // ack byte
mouse.read(); // blank
mouse.read(); // blank
mouse.write(0xf0); // remote mode
mouse.read(); // ack
delayMicroseconds(100);
}
void setup()
{
Serial.begin(115200);
analogReference(INTERNAL2V56);
mouse_init();
//uscite pwm servomotori
pinMode(2,OUTPUT);
38
pinMode(3,OUTPUT);
//uscita pwm elica sostentamento
pinMode(9,OUTPUT);
//uscite pwm ventola direzionale sinistra
pinMode(11,OUTPUT);
pinMode(12,OUTPUT);
//uscite controllo direzione ventola destra
pinMode(14,OUTPUT);
pinMode(15,OUTPUT);
//uscite pwm ventola direzionale destra
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
//uscite controllo direzione ventola sinistra
pinMode(16,OUTPUT);
pinMode(17,OUTPUT);
//clock contatore 5
pinMode(47,INPUT);
pinMode(20,INPUT);
pinMode(21,INPUT);
//tutti i mosfet lato basso degli H-Bridge sono interdetti
digitalWrite(14,HIGH);
digitalWrite(15,HIGH);
digitalWrite(16,HIGH);
digitalWrite(17,HIGH);
digitalWrite(9,HIGH);
//configurazione modulo pwm servomotori
//frequenza portante 50Hz
TCCR3A = 0b11111110;
TCCR3B = 0b00011010;
ICR3 = 40000;
TIMSK3 = 0b00000001;
OCR3A=3000;
OCR3B=3000;
OCR3C=3000;
//configurazione modulo pwm elica direzionale sinistra
//frequenza portante 244Hz
TCCR1A = 0b10101010;
TCCR1B = 0b00011001;
ICR1 = 65535;
//configurazione modulo pwm elica direzionale destra
//frequenza portante 244Hz
TCCR4A = 0b10101010;
TCCR4B = 0b00011001;
ICR4 = 65535;

39
//configurazione contatore timer 5 associato al motore
destro
TCCR5A = 0b00000000;
TCCR5B = 0b00000111;
scrivi_contatore(0);
//configurazione contatore timer 0 associato al motore
sinistro
TCCR0A = 0b00000000;
TCCR0B = 0b00000110;
TCNT0 = 0;
}
void loop()
{
}
void corpo()
{
char mstat;
char mx;
char my;
float u_z, u_x, u_y;
float G;
unsigned int tempo;
static float m, F_x, F_y;
static float x, y;
float v_x, v_y;
static int x_1;
static float I_x=0, I_y=0;
static float I_teta;
int acc_x, acc_y;
mouse.write(0xeb); // give me data!
mouse.read(); // ignore ack
mstat = mouse.read();
mx = -mouse.read();
my = -mouse.read();
v_x = 25*float(mx)-2.2045*omega;
v_y = 25*float(my);
x+=0.04*v_x;
y+=my;
x_1+=mx;
I_x=-0.04*x+I_x;
I_y=-0.04*y+I_y;
I_teta=-0.04*teta+I_teta;
u_x=-double(0.00043*v_x+0.00061*x-0.0004*I_x);
u_y=-double(0.00043*v_y+0.00061*y-0.0004*I_y);
u_z=float(0.0002526*omega+0.0003074*teta-0.0028*I_teta);
40
disaccoppia(u_x,u_y,u_z);
tempo=TCNT3;
Serial.print("alfa_s ");
Serial.print(alfa_s);
Serial.print("\talfa_d ");
Serial.print(alfa_d);
Serial.print("\tX ");
Serial.print(x);
Serial.print("\tY ");
Serial.print(y);
Serial.print("\tteta ");
Serial.print(teta);
Serial.print("\tr_s ");
Serial.print(r_s);
Serial.print("\tr_d ");
Serial.print(r_d);
Serial.println();
}
ISR(TIMER3_OVF_vect)
{
static int cont=0;
cont++;
omega=float(analogRead(A4)-491);
teta+=float(omega*0.02);
if(cont==2){
cont=0;
corpo();
}
}
int regola_motore_d(int r)
{
int r_k;
boolean dir;
static int cont_0;
static int u_k=0,r_old=0;
cont_0=TCNT0;
TCNT0=0;
if(r>85) r=85;
if(r<5) r=5;
r_k=(r-cont_0);
u_k=616*r_k-520*r_old+u_k;
if(u_k>35000) u_k=35000;
if(u_k<-35000) u_k=-35000;
if(u_k>0)dir=false;
else dir=true;
aziona_motore_d(u_k,dir);

41
r_old=r_k;
return cont_0;
}
int regola_motore_s(int r)
{
int r_k;
boolean dir;
static int cont_5;
static int u_k=0,r_old=0;
cont_5=TCNT5;
TCNT5=0;
if(r>85) r=85;
if(r<5) r=5;
r_k=(r-cont_5);
u_k=616*r_k-520*r_old+u_k;
if(u_k>35000) u_k=35000;
if(u_k<-35000) u_k=-35000;
if(u_k>0)dir=false;
else dir=true;
aziona_motore_s(u_k,dir);
r_old=r_k;
return cont_5;
}
void aziona_motore_d(unsigned int duty, boolean dir)
{
static int stab=0;
//motore sinistro
if(dir==true)
{
stab++;
if(duty>10000)
duty=10000;
digitalWrite(16,LOW);
digitalWrite(17,HIGH);
OCR1A=0;
if(stab>20)
OCR1B=0;
else OCR1B=duty;
}
else
{
stab--;
if(stab<0) stab=0;
if(duty>35000)
duty=35000;
digitalWrite(16,HIGH);
digitalWrite(17,LOW);
OCR1A=duty;
42
OCR1B=0;
}
}
void aziona_motore_s(unsigned int duty, boolean dir)
{
static int stab;
//motore destro
if(dir==true)
{
stab++;
if(duty>10000)
duty=10000;
digitalWrite(14,LOW);
digitalWrite(15,HIGH);
OCR4A=0;
if(stab>20)
OCR4B=0;
else OCR4B=duty;
}
else
{
stab--;
if(stab<0) stab=0;
if(duty>35000)
duty=35000;
digitalWrite(14,HIGH);
digitalWrite(15,LOW);
OCR4A=duty;
OCR4B=0;
}
}
unsigned int leggi_contatore( void )
{
//la lettura del contatore avviene in due cicli macchina,
disattivando gli interrupt atomizzo l'operazione
unsigned int i;
noInterrupts();
i = TCNT5;
interrupts();
return i;
}
void scrivi_contatore(unsigned int i)
{
unsigned char sreg;
noInterrupts();
TCNT5 = i;
SREG = sreg;
interrupts();
43
}
void disaccoppia(float r_x, float r_y, float m)
{
//static float c=0.323;
static float c=0.4822;
r_d=int(sqrt(6273.525721*sqrt(square(c+r_x)+square(r_y+m))));
r_s=int(sqrt(6273.525721*sqrt(square(c-r_x)+square(m-
r_y))));
alfa_d=int(1120*atan2(r_y+m,c+r_x));
alfa_s=int(1120*atan2(m-r_y,c-r_x));
if(alfa_d>1000) alfa_d=1000;
if(alfa_d<-1000) alfa_d=-1000;
if(alfa_s>1000) alfa_s=1000;
if(alfa_s<-1000) alfa_s=-1000;
if(r_d>85) r_d=85;
if(r_d<0) r_d=0;
if(r_s>85) r_s=85;
if(r_s<0) r_s=0;
regola_motore_s(r_s);
regola_motore_d(r_d);
OCR3C=3000+alfa_s;
OCR3B=3000+alfa_d;
}
Appendice B
m=1.5; I=0.03; b=0.3;
A=[0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];
B=[0 0 0
44
0 0 0 0 0 0 1/m 0 0 0 1/m 0 0 0 1/I];
C=eye(6);
D=zeros(6,3);
hovercraft=ss(A,B,C,D);
Q=diag([100 100 100 100 100 100]); R=diag([10 10 10]);
[K,S,e]=lqr(hovercraft,Q,R,[]);
C_1=[eye(3),zeros(3,3)]; D_1=zeros(3,3); hovercraft_int=ss(A,B,C_1,D_1);
Q_i=diag([100 100 100 100 100 100 100 100 100]); R_i=diag([10 10 10]);
[K_i,S_i,e_i]=lqi(hovercraft_int,Q_i,R_i,[]);