Control y Guiado - UNLP
20
Control y Guiado Ingenier´ ıa Aeroespacial - Edici ´ on 2020
Transcript of Control y Guiado - UNLP

Control y GuiadoIngenierıa Aeroespacial - Edicion 2020


Indice general
1. Sistemas de Control Automatico 11.1. Dinamica y Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1. Dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2. Sistemas Realimentados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2. Sistemas de Control Automatico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.1. Control a Lazo Abierto y Lazo Cerrado . . . . . . . . . . . . . . . . . . . . . . . 61.2.2. Entradas y Salidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.3. Control ON/OFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.4. Control Proporcional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.5. Control PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.6. Automatizacion y Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3. Ingenierıa de Control Automatico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.1. Control Industrial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.3.2. Pilotos Automaticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.3.3. Vehıculos Espaciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.4. Sistemas Autonomos y Robotica . . . . . . . . . . . . . . . . . . . . . . . . . . 15


1

1Sistemas de Control Automatico
version 0.1 - pag.2

Dinamica y Control
1.1.1. Dinamica
Toda nuestra existencia se desarrolla en un contexto dinamico. Nuestro entornoevoluciona en mayor o menor medida con el transcurso del tiempo, aunque no todo esperceptible de forma cotidiana. Hay procesos que duran anos, siglos o milenios; mientrasque otros evolucionan en fracciones de segundo.
Podemos notar que a la larga todo proceso dinamico tiende a equilibrarse en ciertascondiciones que dependen de su propia naturaleza y de las interacciones del entorno,a las que llamaremos perturbaciones. Es oportuno aclarar que el equilibrio solo puededarse si las perturbaciones se mantienen constantes, o si se neutralizan entre sı.
Como ejemplo simple consideremos lo que ocurre al calentar agua en un recipiente.El proceso dinamico en este caso es de naturaleza termica, y se manifiesta a traves deun cambio en la temperatura del contenido.La perturbacion es el flujo de calor que entregamos al recipiente, y la perdida del mismopor conduccion con el aire circundante. La condicion de equilibrio se alcanza cuando elcalor perdido es igual al calor entregado por el calentador, lo que da como resultado quela temperatura se mantenga constante.
Si cambiamos el flujo de calor o la temperatura del ambiente se pierde el balance, y latemperatura evoluciona hasta alcanzar una nueva condicion de equilibrio; como se ilustraen la siguiente figura.
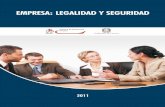
Como segundo ejemplo podemos considerar la evolucion de la concentracion de azucaren la sangre de un ser vivo. Esta se altera al ingerir alimentos (perturbaciones), y luegoevoluciona libremente hasta alcanzar una condicion de equilibrio, como se ilustra en lafigura 1.1.
version 0.1 - pag.3

Llamamos dinamica a las relaciones existentes en el proceso que definen:
las condiciones en las cuales este es capaz de equilibrarsela forma en la cual evoluciona cuando no se encuentra en equilibrio, a lo quecomunmente definimos como comportamientoel efecto que tienen las perturbaciones sobre esta evolucion.
En ingenierıa buscamos construir modelos conceptuales a partir de los principiosfuncionales del proceso en estudio, y con ello obtener modelos matematicos que nospermitan hacer analisis, diseno y simulacion.
1.1.2. Sistemas Realimentados
Los seres vivos interactuan permanentemente sobre su entorno, perturbando procesosdinamicos de forma apropiada para llevarlos a condiciones de equilibrio deseables.Esto es particularmente frecuente y deliberado en el caso de los humanos; ensituaciones que van desde la manipulacion de objetos hasta la conduccion de sistemascomplejos, ya sean estos de caracter tecnologico, social, economico, biologico, etc.
A modo de ejemplo podemos reflexionar respecto de los elementos presentes y la formaen que estos interactuan cuando:
un piloto conduce una aeronaveun equipo economico de gobierno (por ejemplo el Banco Central de un Paıs)interviene para ajustar variables macro economicasun medico diagnostica, trata y monitorea la salud de un paciente
Figura 1.1: Diagrama idealizado de la evolucion del azucar en sangre (rojo) y de la insulina (azul) en humanos a lo largo del dıacon tres comidas; incluyendo el efecto de comidas enriquecidas.
version 0.1 - pag.4

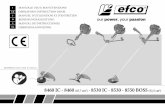
Figura 1.2: superficies de control aerodinamico en un avion
un equipo de trabajo social interviene de paliar problemas de una comunidad· · ·
Pero tambien observamos esta clase de interacciones cuando simplemente llevamosobjetos de un lugar a otro, o cuando hacemos “equilibrio” sosteniendo un baston con lapalma de la mano.
La intervencion se produce por medio del ajuste de ciertas perturbaciones que puedenser manipuladas de forma directa cuando sea necesario. Denominamos a estas accionesde control, para diferenciarlas respecto de aquellas perturbaciones que estan fuera denuestro alcance.
Por ejemplo, el medico ajusta la dosis de un medicamento, el piloto acciona loscomandos de la aeronave (figura 1.2), el Banco Central inyecta o retiene divisas en elmercado financiero, etc.
En general la intervencion no necesariamente finaliza al alcanzar la condicion deseada.Frecuentemente es necesario mantener un proceso de supervision continuo, para ajustarlas acciones de control al menos por dos razones:
porque debido a su comportamiento el proceso no tiende a mantenerse en lacondicion deseada por si mismo (porque dicha condicion es inestable)porque las perturbaciones fluctuan, alterando el equilibrio alcanzado
Para desarrollar estas actividades es necesario poder observar la evolucion del proceso,y para ello se requiere de ciertas capacidades sensoriales.El ente que intenta controlar el proceso (el controlador) lo observa permanentemente yreacciona ajustando las acciones de control en funcion de los apartamientos observadosrespecto de la condicion buscada.
Esta interaccion da lugar a un nuevo proceso dinamico. Este surge de la combinacionentre el proceso a controlar y el controlador, y tendra un comportamiento diferente al
version 0.1 - pag.5

Figura 1.3: Sistema realimentado
que tienen sus componentes de forma aislada. Se trata de un sistema realimentado,esquematizado en la figura 1.3, al que identificamos como sistema a lazo cerrado.De las capacidades sensoriales disponibles y de la capacidad de reaccion (es decir,de ajustar las acciones de control) del controlador dependera la aptitud del mismopara poder equilibrar el proceso en la condicion deseada, sostenerla ante cambiosen el contexto y lograr que el sistema a lazo cerrado tenga caracterısticas dinamicasaceptables.
En tareas que implican interactuar con el medio fısico los humanos aprendemos formasadecuadas de reaccion mediante el entrenamiento.Conducir un vehıculo, por ejemplo, es una tarea resuelta por el sistema lımbico denuestro cerebro, en contraste con los procesos de caracter intelectual que resolvemos enla corteza cerebral. Lo mismo ocurre en la practica deportiva o en la expresion corporal.Nuestras capacidades de control son reflejos que solo podemos adquirir mediante untiempo adecuado de practica.
Sistemas de Control Automatico
Un sistema de control automatico realiza las tareas del controlador sin intervencionhumana. Posee los elementos necesarios para observar el proceso (sensores),manipular las acciones de control (actuadores) y reaccionar adecuadamente accionandolos actuadores en funcion de la informacion obtenida mediante los sensores.
Un sistema de control automatico en general se configura mediante un procesomatematico para reaccionar adecuadamente al interactuar con un determinado procesodinamico, lo cual sustituye el entrenamiento; aunque existen algoritmos para “aprender”las reacciones correctas de forma experimental (controles adaptables).
1.2.1. Control a Lazo Abierto y Lazo Cerrado
Cuando hablamos de sistemas de control normalmente nos referimos a aquellos quefuncionan a lazo cerrado, como el representado en la figura 1.4.
version 0.1 - pag.6

Figura 1.4: Lazo de control a lazo cerrado
En control automatico se suele designar como planta al proceso dinamico a controlar.La observacion se realiza a traves de sensores y las acciones de control se ejercenmediante actuadores.En problemas de economıa, sociologıa o epidemiologıa por ejemplo estos elementos noson dispositivos fısicos sino acciones humanas, pero cumplen el mismo rol.
Es posible concebir estrategias de control a lazo abierto, las cuales prescinden de laobservacion. Pero estas no tienen la capacidad necesaria para contrarrestar cambios enlas propiedades dinamicas de la planta o variaciones en las perturbaciones actuantessobre la misma, ya que no manejan informacion sobre la situacion real del proceso.Solo es posible plantear una estrategia de este tipo contando con un conocimientosignificativo de las propiedades dinamicas de la planta y de la condicion en la cual seencontrara en el momento de actuar sobre ella.
Por ejemplo, llenar un vaso con agua manteniendo los ojos cerrados es una estrategiade control a lazo abierto para ajustar el nivel de lıquido en el vaso.Al abrir los ojos y observar el nivel mientras agregamos agua convertimos la tarea enuna de control a lazo cerrado.
1.2.2. Entradas y Salidas
En control automatico llamamos entradas a las acciones de control y perturbaciones queactuan sobre la planta (el proceso dinamico a controlar), y salidas a las observaciones.
Cuando nos referimos a un control SISO, el acronimo SI (Single Input) hace referenciaal caso en el cual hay una unica entrada que podemos manipular (accion de control).Serıa el caso si por ejemplo en un control termico solo podemos actuar sobre una unicocalefactor.De forma analoga, el acronimo SO (Single Output) se refriere a disponer datos de unaunica variable escalar para monitorear el proceso. En el ejemplo del control termico esteserıa el caso si contamos con capacidad para medir temperatura en un unico punto.
version 0.1 - pag.7

Naturalmente MI y MO hace referencia a los casos en los cuales se cuenta con entradasy salidas multiples. Un ejemplo claro de sistema MIMO es el del control de vuelo de unhelicoptero, en donde las acciones de control son el paso cıclico, colectivo y rotor decola; mientras que las entradas seran diferentes angulos y velocidades.
1.2.3. Control ON/OFF
Los controles ON/OFF (o bang-bang) son aquellos sistemas de control SISO enlos cuales la accion de control puede tomar solo dos estados (encendido/apagado,abierto/cerrado, etc.). En estos casos la representacion matematica de la accion decontrol se realiza a traves de una variable booleana.Esto es muy comun a nivel domestico. Podemos citar como ejemplos los equipos deaire-acondicionado (excepto los denominados inverter ), los calentadores electricos parael agua o para planchar la ropa, el control de nivel del reservorio de agua potable, etc.Para el suministro de agua caliente se puede contar con un termotanque, que tambienconstituye un control ON/OFF; o con un calefon, el cual funciona como control a lazoabierto (no cuenta con sensor de temperatura).
La ventaja de este tipo de estrategia es su simplicidad, llegando inclusive a utilizarsemasivamente en vehıculos espaciales para el control termico de sus componentes.
El control ON/OFF no permite en general ajustar la condicion de equilibrio con altaprecision, excepto que la conmutacion pueda realizarse a alta frecuencia, como es elcaso de las fuentes electricas de tipo switching.Cuando esto no es posible resulta necesario establecer una banda de toleranciaalrededor del valor nominal deseado dentro de la cual no se realiza ninguna accion.La conmutacion ocurre unicamente al traspasar los lımites de esta banda.
1.2.4. Control Proporcional
Hablamos de control proporcional cuando las acciones de control pueden variar deforma continua. Las representamos matematicamente con numeros reales, mas alla decual sea su naturaleza fısica (la temperatura, la concentracion de glucosa en sangre, lacotizacion de una divisa extranjera, etc.).
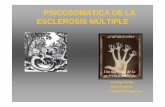
Un ejemplo domestico de control proporcional es el regulador de gas, el cual proporcionauna presion constante a la salida aunque la presion de entrada fluctue (siempre que semantenga por encima del valor deseado para la salida).En la figura 1.5b se muestra un esquema del dispositivo. Un diafragma actua comosensor. Una aguja obtura proporcionalmente el paso de gas, operando como actuador.El controlador serıan los resortes, que establecen una apertura proporcional del paso degas en funcion de la presion diferencia entre la presion a la salida y el valor deseadoestablecido por la compresion del resorte superior.
1.2.5. Control PID
En el ejemplo del regulador de gas la reaccion (variacion de la accion de control) alos apartamientos del proceso es proporcional al desvıo de la salida respecto del valor
version 0.1 - pag.8

(a) regulador de gas para una garrafa (b) esquema de funcionamiento del regulador de gas
deseado. En muchos casos esto no resulta en un comportamiento aceptable del sistemaa lazo cerrado.Frecuentemente es necesario considerar la velocidad con la cual la salida se aparta ose acerca al valor deseado, incluyendo una accion proporcional a ese cambio. Esto sedenomina control derivativo, y tiene la propiedad de anticiparse a los cambios.Por otra, en muchos casos un sistema de control logra equilibrar la planta pero con uncierto error en relacion al valor deseado. Esto se compensa automaticamente con unaaccion integral.
La combinacion de las tres acciones: proporcional + integral + derivativa se conoce comocontrol PID, y es la estrategia mas comun en los sistemas de control a lazo cerrado.La intensidad de estas acciones se puede ajustar de forma empırica o semi-empırica.
En situaciones mas complejas se recurre a un estudio matematico del problema, siendonecesario en ocasiones disenar otras estrategias alternativas a la PID. Para esto laTeorıa de Control Automatico provee diferentes enfoques y herramientas, siendo estauna disciplina en permanente desarrollo.
Figura 1.6: Arquitectura de un sistema realimentado con un compensador PID
version 0.1 - pag.9

Figura 1.7: En esta imagen vemos arriba inverters de diferente potencia (a la izquierda) para control de motores electricos, uninterfaz de operador (a la derecha) y varios modelos de PLCs al centro y debajo
1.2.6. Automatizacion y Control
Existe en general una confusion entre lo que entendemos aquı como control automaticoy los automatismos.Es muy comun utilizar enclavamientos logicos para coordinar acciones de todo tipo.Se trata de manipular variables de tipo booleano cuando se cumplen ciertas condicioneslogicas.
En muchos casos de observan zonas grises para realizar esta discriminacion. Porejemplo, un control ON/OFF podrıa interpretarse como un enclavamiento logico.Al mismo tiempo en comun que los sistemas de control automatico incluyan enclava-mientos logicos para dar senales de alarma en situaciones anormales, e incluso llevar elproceso controlado a una condicion segura cuando las condiciones se tornan peligrosas.
Ingenierıa de Control Automatico
De lo dicho precedentemente puede deducirse que el control automatico tiene aplicacionen muchas disciplinas.Como ingenieros aeroespaciales estamos interesados principalmente en las aplicacio-nes industriales, transporte y sistemas espaciales.
1.3.1. Control Industrial
Actualmente la industria manufacturera hace un uso extensivo tanto de la automatizacion(omnipresente) y el control automatico, esto ultimo en los procesos de produccioncontinua como la petroquımica y la metal-mecanica.
Los enclavamientos logicos suelen implementarse en dispositivos de hardware denomi-nados PLCs (Programable Logic Controller, ver figura 1.7).
version 0.1 - pag.10

Se trata de computadoras sin interfaz humana disenados para digitalizar datos desensores discretos (ON/OFF con contactos secos, sensores inductivos y capacitivos,etc.) y analogicos (normalmente senales de 0-10V o 4-20mA generadas por diversostipos de sensores); y generar senales de salida de ambos tipos; aunque tambienpueden utilizarse redes de datos informaticas estandar (RS232, Ethernet, WiFi) o detipo industrial (FieldBus, Profibus, etc.).
La programacion de estos dispositivos se realiza con interfaces graficas desde unacomputadora conectada en red con el PLC, y para su uso pueden conectarse interfacesde operador en el piso de planta o con computadoras en una sala de control (sistemasSCADA: Supervisory Control and Data Aquisition) para visualizacion, registro de datos,realizar ajustes y enviar comandos al equipo (figura 1.8).
En control industrial la estrategia habitual es la PID, y existen dispositivos de hardwareespecıficos para ello; aunque tambien pueden programarse estas funciones en un PLC oen computadoras conectadas en red con estos dispositivos (para procesos de alto nivel).Solo en casos muy especıficos o para el control de procesos multi-variable se utilizanotras estrategias.
Los sistemas de control realimentados son imprescindibles para la operacion degeneradores electricos y turbinas eolicas, posicionamiento dinamico de plataformas off-shore, reactores nucleares, etc.
1.3.2. Pilotos Automaticos
En la actualidad existen pilotos automaticos para automoviles, embarcaciones, aerona-ves y vehıculos espaciales. Sus funciones van desde controlar una unica variable (porejemplo la velocidad en el control de crucero de un automovil) hasta la de realizar unamision completa de forma autonoma para descender en otro planeta.
Un piloto automatico es un sistema de control disenado para realizar tareas que realizaun piloto humano de forma desatendida.El primer auto-piloto en el campo aeronautico fue desarrollado por Lawrence BurstSperry, exhibido por primera vez en 1914 durante una competencia de innovacion en
Figura 1.8: Sistema SCADA en una sala de control
version 0.1 - pag.11

Figura 1.9: Primer autopiloto Sperry (derecha) y su demostracion en Francia (izquierda), en el ano 1914
Francia (figura 1.9). Este era completamente mecanico y utilizaba giroscopos para medirla actitud (orientacion) del avion, los cuales se conectaban mediante cables y palancasa las superficies de control aerodinamico.
En la exhibicion Sperry, que no hablaba frances, volocon su mecanico Emil Cachin, que no hablaba ingles; yrealizo una primer pasada ante el publico levantandolos brazos para mostrar que los comando estabanlibres. En una segunda pasada Cachin abandono supuesto y camino por una de las alas mientras Sperrymantenıa los brazos en alto. En una tercer pasadaambos abandonaron el cockpit mientras el avion volabasolo en lınea recta.Naturalmente ganaron la competencia.
En 1945, motivados por los riesgos que se experimentaban en epoca invernal debido alas condiciones climaticas desfavorables de las islas britanicas combinadas con los altosniveles de contaminacion con carbon existentes en aquellos anos, se creo la unidad dedesarrollo BLEU (Blind Landing Experimental Unit) para trabajar sobre soluciones parael aterrizaje con baja visibilidad. Esto condujo en poco tiempo al desarrollo de un sistemade aterrizaje automatico, precursor de lo que hoy conocemos como autoland.
Estos desarrollos evolucionaron aplicandose en aeronavesmilitares como el English Electric Canberra y el Avro Vulcan;y posteriormente en aeronaves comerciales como HawkerSiddley Trident (imagen a la izquierda).
Actualmente los pilotos automaticos para aeronaves comer-ciales son capaces de realizar todas las maniobras de vue-lo de forma autonoma, incluyendo el despegue y aterrizaje;aunque se opera siempre bajo supervision humana.
version 0.1 - pag.12

Ademas dependen de la disponibilidad de radio ayudas para detectar los desvıosrespecto de la trayectoria deseada, aunque progresivamente van ganando terreno lossistemas de navegacion global satelital (GNSS) para obtener esta informacion.
Figura 1.10: Panel de interfaz del piloto automatico en un Boeing 737NG
Figura 1.11: Interfaz de comando para las funciones de un piloto automatico
En la aviacion existen ademas sistemas de control para mejorar el comportamiento deuna aeronave, categorizados como sistemas de aumento de estabilidad (SAS).Estos van desde casos simples como el amortiguador de guinada presentes en losreactores multimotor, hasta sistemas de control de vuelo completo para aeronavesintrınsecamente inestables. En particular, los aviones de combate de 4ta generaciony posteriores dependen fuertemente del SAS para poder volar.
Tambien se utilizan sistemas de control auxiliares, por ejemplo para regular la presion decabina. Los motores a reaccion modernos cuenta con el FADEC (Full Authority DigitalEngine Controller ), que monitorea y regula completamente la operacion del motor.Los motores alternativos por su parte incluyen una unidad electronica denominada ECU(Engine Control Unit), que incluye lazos de control para optimizar la combustion, queoperan ajustando la inyeccion de combustible y la entrada de gases al turbocompresor.En los helicopteros se incluye un controlador denominado governor, que mantieneconstante el regimen de giro de los rotores, de forma analoga al control de crucero deun automovil.
version 0.1 - pag.13

(a) Aterrizaje del Falcon 9 (SpaceX ) (b) Transbordador Buran acoplado al lanzador Energıa
(a) Actitud de un satelite en orbita terrestre (b) Satelites de la CONAE
1.3.3. Vehıculos Espaciales
Los sistemas espaciales no podrıan existir sin el desarrollo del control automatico, dadoque en su mayorıa se trata de vehıculos no tripulados. Y en el caso que lo sean, serequiere proveer asistencia a la tripulacion debido a la complejidad y requerimientos deprecision de las tareas a realizar.
Los vehıculos lanzadores cuentan con el equivalente al autopiloto de un avion, ademasde todos los lazos de control auxiliares para diferentes subsistemas.Actualmente los vehıculos espaciales reutilizables como el Falcon 9 de SpaceX (figura1.12a) operan de forma completamente autonoma desde su lanzamiento hasta elaterrizaje.
El primer sistema reutilizable con esta capacidad fue el transbordador sovietico Buran(figura 1.12b), que hizo su primer y unico vuelo el 15 de noviembre de 1988, antes delcolapso de la URSS.
En la mayor parte de los vehıculos orbitales existe un sistema esencial denominadoAOCS (Attitude and Orbit Control System). Una de las funciones principales es la depermitir ajustar la orientacion (actitud) de la nave (ver figura 1.13a), lo cual permiteapuntar el sistema de propulsion durante las maniobras de control orbital; y ajustar laorientacion de los instrumentos en el “modo ciencia” (estado del satelite cuando operasus instrumentos cientıficos).
version 0.1 - pag.14

1.3.4. Sistemas Autonomos y Robotica
La robotica incluye varias areas de aplicacion. La primera en desarrollarse fue larobotica industrial, convirtiendose en una herramienta indispensable para la produccionautomotriz, electronica y muchas mas.Los principales desafıos se presentan en los campos de la mecanica y la instrumenta-cion, utilizandose el control automatico fundamentalmente para el movimiento.
Actualmente se combinan manipuladores roboticos, sistemas de reconocimiento deimagenes y otras tecnologıas de sensado para optimizar los procesos de fabricaciony los sistemas de operacion remota. Estos no son sistemas completamente autonomos,ya que para la toma de decisiones sobre situaciones no programadas en su mayorıadependen de la intervencion humana.
En las ultimas decadas se experimento un fuerte crecimiento en el campo de larobotica movil. Se trata de un area en fuerte desarrollo a la par de los avancesen inteligencia artificial e ingenierıa de control. Abarca desde vehıculos autonomosaereos (VANTs/UAVs), terrestres y submarinos (AUVs), hasta robots “bio-inspirados” yhumanoides.
Los vehıculos terrestres autonomos se disenan para desplazarse en un medioespecıfico; ya sea que se trate de terrenos abiertos, zonas rocosas, conductos, etc.Puede tratarse de vehıculos comunes, articulados, caminadores, etc.El control automatico en estos casos es relativamente sencillo, siendo mas importanteslos aspectos asociados a la navegacion y la coordinacion de multiples funciones dedeteccion y decision.
Vehıculos de esta clase (denominados rovers) se han desempenado satisfactoriamenteen la exploracion de la Luna y Marte; pero tambien existen en el mercado modeloscomerciales para tareas domesticas y usos industriales especıficos.
En esta lınea mencionemos que en el campo automotriz los pilotos automaticos paraautomoviles tienden hacia la robotizacion, permitiendo en la actualidad la conduccioncompletamente autonoma bajo ciertas condiciones (BWM, Tesla, etc.).
(a) Manipulador robotico (b) Vehıculo Aereo No Tripulado Ikhana, operado por la NASA
version 0.1 - pag.15

(a) Vehıculo submarino autonomo (b) Mars Exploration Rovers (MER), que operaron enMarte entre 2004 y 2019
(a) Robot bio-inspirado Spot Mini, de la firma americana Boston Dynamics (b) Robot humanoide Asimo, de la japonesaHonda
En aeronautica la tecnologıa de los UAVs se encuentra muy desarrollada a nivel militar,pero existen muchas otras aplicaciones como la inspeccion aerea y la agricultura; y esposible que en un futuro cercano se experimente un desarrollo importante de la mobilidadurbana utilizando aeronaves de despegue y aterrizaje vertical (VTOL : Vertical TakeOffand Landing) robotizadas.En estos casos control automatico cubre la mismas funciones que las del auto-pilotoen las aeronaves tripuladas; aunque se trabaja activamente en paralelo al desarrollo denuevas configuraciones y mecanicas de vuelo.En cuanto a vehıculos submarinos, en la actualidad existen muchos modelos comercia-les operados de forma remota para realizar operaciones submarinas y modelos autono-mos de investigacion.
Finalmente mencionemos el desarrollo de robots bio-inspirados. Los robots humanoideshan tenido un fuerte desarrollo en Japon, fundamentalmente como lıneas de investiga-cion tecnologica. Aunque se han sumado otras empresas, por el momento solo se co-mercializan robots humanoides con fines ludicos y publicitarios; pero lamentablementetambien hay desarrollos militares en este sector.
version 0.1 - pag.16