CERTIFICAZIONE DI SIMULATORI DI VOLO CIVILI E...
150
UNIVERSITÀ DEGLI STUDI DI NAPOLI “FEDERICO II” FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE (Classe delle lauree in Ingegneria Industriale n° 10) Dipartimento di Ingegneria Aerospaziale ELABORATO DI LAUREA CERTIFICAZIONE DI SIMULATORI DI VOLO CIVILI E MILITARI IN COLLABORAZIONE CON RELATORE CANDIDATO Ch.mo Prof. Agostino De Marco Calise Giuseppe Matr. 517/1261 CO-RELATORE Ch.mo Ing. Giuseppe Lupoli ANNO ACCADEMICO 2008-2009
Transcript of CERTIFICAZIONE DI SIMULATORI DI VOLO CIVILI E...
UNIVERSITÀ DEGLI STUDI DI NAPOLI “FEDERICO II” FACOLTÀ DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA AEROSPAZIALE (Classe delle lauree in Ingegneria Industriale n° 10)
Dipartimento di Ingegneria Aerospaziale
ELABORATO DI LAUREA
CERTIFICAZIONE DI SIMULATORI DI VOLO CIVILI E MILITARI
IN COLLABORAZIONE CON
RELATORE CANDIDATO
Ch.mo Prof. Agostino De Marco Calise Giuseppe Matr. 517/1261
CO-RELATORE Ch.mo Ing. Giuseppe Lupoli
ANNO ACCADEMICO 2008-2009

Alla mia famiglia A tutte le persone che hanno creduto in me
A chiunque ha un sogno e tutti i giorni lotta per realizzarlo
A chi, come me,non smette di sognare
«Hai mai fatto un sogno tanto realistico da sembrarti vero? E se da un sogno così non ti dovessi più svegliare?
Come potresti distinguere il mondo dei sogni da quello della realtà?» dal film “The Matrix” di Andy e Larry Wachowski

INDICE
CAPITOLO I : INTRODUZIONE AI SIMULATORI PER ADDESTRAMENTO DEL
PERSONALE NAVIGANTE DI VOLO 1
1.1 CENNI STORICI 1
1.2 L’ADDESTRAMENTO DEL PERSONALE NAVIGANTE DI VOLO 4
1.3 TIPOLOGIE DI SIMULATORI 9
1.4 CARATTERISTICHE HARDWARE DI UN SIMULATORE DI VOLO 11 1.4.1 Struttura di un FFS con Motion System 14 1.4.1.1 Visual System & Cockpit Section 18 1.4.1.2 Esempio di un FFS con MOTION System 22 1.4.2 Struttura di un FFS con Cockpit fisso 23 1.4.2.1 Cockpit Section 24 1.4.2.2 Visual System 26 1.4.2.3 Esempio di un FFS con COCKPIT fisso 30 1.4.3 Instructor Operator Station 31
1.5 CARATTERISTICHE SOFTWARE DI UN SIMULATORE DI VOLO 33 1.5.1 Il modello dinamico 34 1.5.2 Risoluzione delle equazioni del moto 38
CAPITOLO II : CERTIFICAZIONE DI UN SIMULATORE DI VOLO 43
2.1 RIFERIMENTI NORMATIVI 43
2.2 DISPOSITIVI DI SIMULAZIONE 43
2.3 DEFINIZIONI DI OPERATORE E DI UTILIZZATORE DI FSTD 48
2.4 REQUISITI DELL’ OPERATORE DI FSTD 49 2.4.1 Organizzazione dell’Operatore di FSTD 49 2.4.2 Sistema di Gestione della Qualità dell’Operatore di FSTD 52 2.4.3 Installazione e mantenimento in efficienza dell’FSTD 52 2.4.4 Aggiornamento dell’FSTD 53 2.4.5 Operatività dell’FSTD 54
I

II
2.5 DOCUMENTAZIONE TECNICA RICHIESTA PER LA QUALIFICAZIONE DI UN FSTD 54
2.5.1 Qualification Test Guide 55 2.5.2 Instructor Operation Manual 55 2.5.3 Manuale dell’Operatore 55 2.5.4 Quality Manual e Quality Assurance Programme 56
2.6 REQUISITI TECNICI MININI PER LA QUALIFICAZIONE DI UN FSTD 58
2.7 LE PROVE DI QUALIFICAZIONE 60 2.7.1 L’Objective e il Subjective Test 60 2.7.2 La prima Certificazione 64 2.7.3 Le linee-guida per la Qualificazione di un FSTD 70 2.7.4 Le tolleranze previste per il test di Qualificazione 73 2.7.5 Il Validation Test 75
2.8 QUALIFICAZIONE DELLE MODIFICHE EFFETTUATE SU UN FSTD 89
2.9 QUALIFICAZIONE DI UN SIMULATORE DI VOLO MILTARE 91 2.9.1 Esempi di test di qualifica di un simulatore di volo militare 92
CAPITOLO III : CASO STUDIO : IL SIMULATORE DI RICERCA DEL CENTRO DI
COMPETENZA TRASPORTI DELLA REGIONE CAMPANIA TEST S.C.A R.L. 94
3.1 DESCRIZIONE DEL SIMULATORE 94 3.1.1 Cockpit Section 96 3.1.2 Motion System 97 3.1.3 Control Loading 99 3.1.4 Software 101
3.2 ALCUNE CONSIDERAZIONI 103
CONCLUSIONI : IMPORTANZA DELLA QUALIFICAZIONE DI UN FSTD 108
APPENDICE A : CENNI DI FISIOLOGIA DEL VOLO 110
APPENDICE B : FLIGHT SIMULATOR STANDARDS 119
APPENDICE C : FSTD QUALIFICATI DALL’ENAC 134
Riferimenti e Bibliografia 140
INDICE DELLE FIGURE
Figura 1-1 – Link Trainer 1
Figura 1-2 – VMS di NASA Ames 3
Figura 1-3 – Piattaforma di Stewart a 6 gradi di libertà 17
Figura 1-4 – Interno del Cockpit di un FFS con Motion System 21
Figura 1-5 – Schema strutturale del VMS di NASA Ames 23
Figura 1-6 – Un FFS reale senza Motion System 26
Figura 1-7 – Schermo sferico (Visual System) per un simulatore
di volo di velivoli militari 30
Figura 1-8 – Schema strutturale di un tipico FFS statico 30
Figura 1-9 – Esempio di una tipica Stazione Istruttore 33
Figura 1-10 – Schema a blocchi dell’FDM 39
Figura 2-1 – FFS di livello B del Cessna Caravan prodotto da
FRASCA International Inc. 44
Figura 2-2 – Esempio di FNTP distribuito da CAE con pannelli
di controllo touch-screen 46
Figura 2-3 – Esempio di un tipico simulatore strumentale e procedurale 46
Figura 2-4 – Domanda di valutazione per la Qualificazione di un FSTD 57
Figura 2-5 – Modello di certificato di Qualificazione di un FSTD
da parte di ENAC 68
Figura 2-6 – Specifica di Qualificazione di un FSTD 69
Figura 3-1 – Disposizione dei sistemi nella zona di simulazione 95
Figura 3-2 – Comandi di volo 97
Figura 3-3 – Piattaforma di movimentazione 99
Figura 3-4 – Leva di carico della barra 100
Figura 3-5 – Configurazione hardware del simulatore 101
Figura Appendice A-1 – Visualizzazione dei moti di beccheggio(a),
rollio(b) e imbardata(c) 113
III

IV
INDICE DELLE TABELLE
Tabella 1-1 Simulazione visiva delle manovre militari
(requisiti tipici di un velivolo ad ala fissa) 27
Tabella 2-1 Requisiti minimi di Qualificazione di un simulatore di volo 59
Tabella 3-1 Caratteristiche della piattaforma di movimentazione 98
ACRONIMI E ABBREVIAZIONI
ATC Air Traffic Control
BITD Basic Instrument Training Device
COA Certificate of Authenticity
DSV Direzione Standard Volo
ENAC Ente Nazionale per l’Aviazione Civile
FAA Federal Aviation Administration
FDM Flight Dynamic Model
FFS Full Flight Simulator
FNPT Flight and Navigation Procedure Trainer
FOV Field Of View
FSTD Flight Simulation Training Devices
FTD Flight Training Device
FTO Flight Training Organization
GCA Ground Controlled Approach
HMD Helmet Mounted Display
IOS Instructor Operating Station
JAA Joint Aviation Authorities
MQTG Master Qualification Test Guide
MEL Minimum Equipment List
PDA Personal Digital Assistant
PIO Pilot Induced Oscillation
QTG Qualification Test Guide
R&D Research & Development
SOC Statement Of Compliance
STD Synthetic Training Device
TACAN UHF Tactical Air Navigation Aid
TRTO Type Rating Trainig Organization
VMS Vertical Motion Simulator
WAC Wide Angle Collimated
WIDE Wide-angle Infinity Display Equipment
V

INTRODUZIONE
La possibilità di poter riprodurre le condizioni reali, i comportamenti
caratteristi e di poter verificare le modifiche effettuate su un qualsiasi progetto,
hanno fatto sì che la Simulazione, nella sua accezione più generale, sia diventata
fondamentale per lo studio delle prestazioni dei velivoli e per l’addestramento del
personale navigante. Infatti, si può dire che nell’ambito della simulazione del volo,
«l’obiettivo principale di tale attività consiste nel fornire uno strumento semplice per
lo studio della risposta in manovra di velivoli appartenenti a categorie diverse,
l’analisi dei modi propri del velivolo e la comprensione dei meccanismi di valutazione
della qualità di volo e delle caratteristiche di manovrabilità dell’aeromobile»1.
Tuttavia, poiché ogni sistema ed, in particolare, ogni velivolo è unico, un ambiente di
simulazione non può essere universale, nel senso che, per ogni classe di velivoli e/o per
ogni tipo, configurazione e modello di velivolo, è necessario uno specifico sistema di
simulazione. È pur vero che possono esistere, però, alcuni casi in cui uno stesso
sistema di simulazione venga utilizzato per riprodurre la dinamica di più velivoli,
anche appartenenti a classi diverse, come è il caso dei software di simulazione
cosiddetti “commerciali”, quali Flight Simulator, FlightGear, X-plane, etc.; ma, se si
fa riferimento ai simulatori (di volo) “ingegneristici”, l’unicità di ogni velivolo
richiede un simulatore di volo che sia dedicato esclusivamente a quel particolare
modello e tipo di velivolo. Ciò presenta il vantaggio fondamentale di poter riprodurre
esattamente il comportamento dello stesso, preoccupandosi di riprodurne non solo la
dinamica, ma anche l’ambiente fisico nel quale il personale navigante ed, in
particolare, il pilota si troverà ad operare, con l’ambizione di essere una riproduzione
fedele del velivolo reale. Dunque, quando parliamo di simulazione di volo bisogna
pensare ad un complesso sistema di elementi che tenta di riprodurre le esperienze
vissute durante il volo e con il quale possono anche essere stabilite alcune specifiche
1 “Progetto e Sviluppo di Simulatori di Volo per Applicazioni Didattiche”, 3° Convegno Tecnico Scientifico del MIMOS, Torino 2003.
Introduzione VI

di progetto del velivolo stesso. Da ciò risulta evidente il ruolo fondamentale che i
simulatori di volo hanno nella formazione del personale navigante. Infatti, esso
consente di addestrare il personale navigante alle procedure normali e di emergenza,
in maniera più sicura rispetto all’utilizzo del velivolo reale; inoltre, le situazioni
riproducibili sono molteplici e variano dalla rottura di uno o più motori, al
malfunzionamento dei sistemi idraulici, di pressurizzazione e dei comandi di volo.
Però, affinché il simulatore di volo possa essere utilizzato per l’addestramento,
è necessario che riceva la Certificazione all’addestramento: l’Autorità nazionale per
l’aviazione civile ha il compito di verificare che il simulatore abbia le qualità
necessarie per essere conforme alle norme internazionali che regolano l’ambito della
simulazione del volo. In Italia, questo compito è affidato all’ ENAC (Ente Nazionale
per l’Aviazione Civile), il quale si preoccupa di verificare la corrispondenza del
simulatore alle norme JAR-STD 1A, JAR-STD 2A, JAR-STD 3A e JAR-STD 4A,
specifici per i simulatori di volo di velivoli ad ala fissa (i simulatori di volo per gli
elicotteri sono regolate dalle norme JAR-STD 1H, JAR-STD 2H e JAR-STD 3H).
Nel primo capitolo verranno illustrati gli aspetti fondamentali e caratterizzanti
dei simulatori utilizzati per l’addestramento del personale navigante, con particolare
attenzione alle caratteristiche hardware e software: in base ad esse, infatti, si può
fare una prima classificazione delle varie tipologie di Flight Simulation Training
Device (FSTD).
Nel secondo capitolo verranno affrontati gli aspetti principali della
Certificazione di un simulatore di volo. Dopo aver analizzato gli elementi
caratterizzanti di un sistema di simulazione e averne compreso la complessità, si
proverà ad affrontare il seguente problema: «Consideriamo di aver a disposizione
tutte le specifiche software e hardware necessarie a realizzare un simulatore di volo
per un particolare velivolo: quali sarebbero i passi necessari da compiere affinché
possa essere utilizzato per l’addestramento del personale navigante?».
Infine, nel terzo capitolo, verrà analizzato il dispositivo di simulazione
disponibile presso l’Università di Napoli. Il sistema è un laboratorio di simulazione
unico, nel senso che è un simulatore che utilizza un software di simulazione open
Introduzione VII

Introduzione VIII
source chiamato FlightGear, associato ad una piattaforma di Stewart a sei gradi di
libertà e ad un Control Loading.
In sostanza, nel corso della trattazione, si cercherà di presentare le
caratteristiche necessarie che un simulatore di volo deve possedere affinché possa
essere certificato ed utilizzato per l’addestramento del personale navigante di volo.
Capitolo 1 INTRODUZIONE AI SIMULATORI PER ADDESTRAMENTO DEL PERSONALE NAVIGANTE DI VOLO
1.1 CENNI STORICI
L’esigenza di creare un sistema per la simulazione del volo nacque essenzialmente
durante la Prima Guerra Mondiale, quando sembrò indispensabile addestrare il pilota a
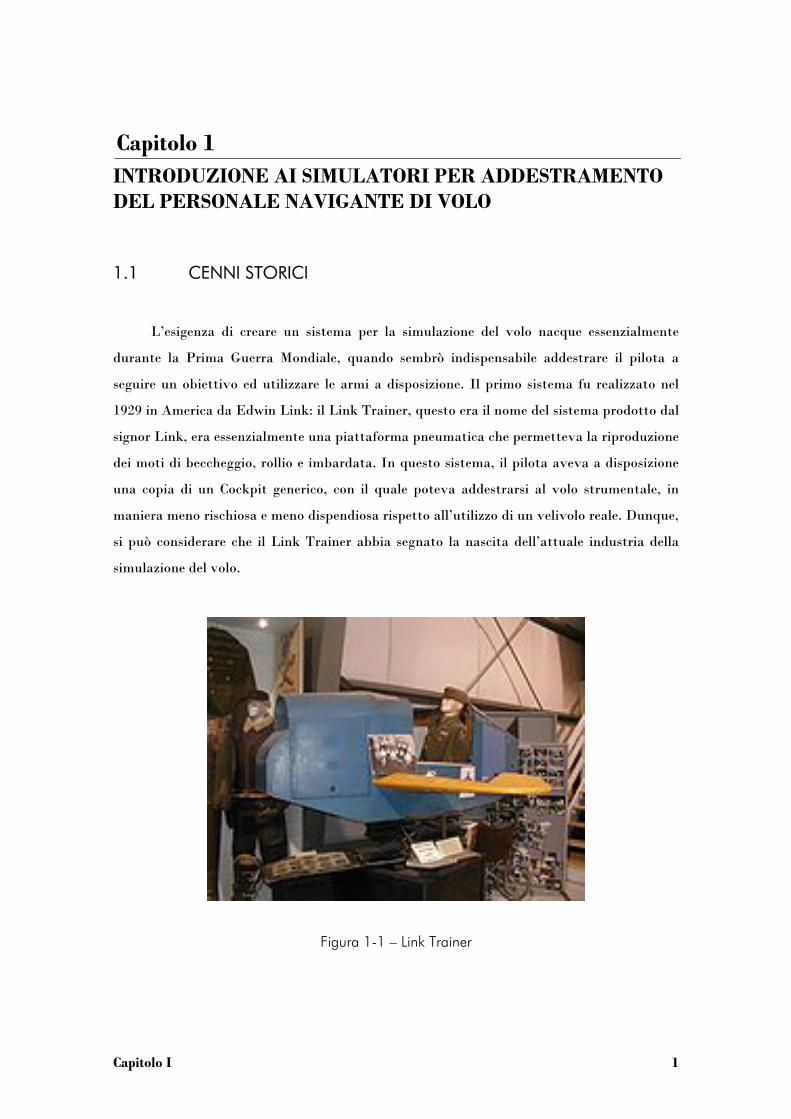
seguire un obiettivo ed utilizzare le armi a disposizione. Il primo sistema fu realizzato nel
1929 in America da Edwin Link: il Link Trainer, questo era il nome del sistema prodotto dal
signor Link, era essenzialmente una piattaforma pneumatica che permetteva la riproduzione
dei moti di beccheggio, rollio e imbardata. In questo sistema, il pilota aveva a disposizione
una copia di un Cockpit generico, con il quale poteva addestrarsi al volo strumentale, in
maniera meno rischiosa e meno dispendiosa rispetto all’utilizzo di un velivolo reale. Dunque,
si può considerare che il Link Trainer abbia segnato la nascita dell’attuale industria della
simulazione del volo.
Figura 1-1 – Link Trainer
Capitolo I 1
Il primo simulatore di volo per una compagnia aerea fu acquistato solo nel 1948.
Sebbene non avesse né un sistema di movimentazione, né un sistema di visualizzazione, il
Cockpit e la strumentazione erano riprodotti in maniera molto efficace, cosicché
l’addestramento del personale navigante fu notevolmente migliorato. I sistemi di
visualizzazione più antichi utilizzavano delle foto del terreno che venivano mostrate al pilota
in sequenza; tali foto erano effettuate da una telecamera che sorvolava uno scenario
artificiale fisso. La telecamera era sensibile alle manovre del pilota, consentendo di variare lo
scenario in risposta all’azione di controllo. Così, però, solo piccole porzioni di territorio
potevano essere simulate e, di solito, erano solo quelle zone attorno all’aeroporto; nelle
simulazioni militari, invece, veniva utilizzato un territorio generico sul quale veniva
piazzato qualche obiettivo.
Solo verso la fine degli anni ’50, i simulatori furono equipaggiati con un sistema di
movimentazione completo. Nel 1954, la futura L3 Communications sviluppò un simulatore
dinamico, che utilizzava un Cockpit fissato su una struttura di supporto metallica. Questa
era capace di 3 gradi di libertà, relativi all’angolo di beccheggio, all’angolo di rollio e
all’angolo di imbardata.
Nel 1964, tale sistema fu migliorato, aumentando le escursioni possibili di tali angoli
fino a 10°. Dal 1969, i sistemi di movimentazione furono sviluppati mediante l’utilizzo di
attuatori idraulici, capaci di controllare ciascuno degli assi di movimento: il simulatore, così,
poteva avere fino a sei gradi di libertà (beccheggio, rollio, imbardata, surge, heave, sway).
L’avvento dei calcolatori digitali, nella simulazione del volo, avvenne solo negli anni ’60.
A partire dal 1977, le compagnie aeree cominciarono ad adottare le moderne
configurazioni cab, dove i calcolatori erano alloggiati nella zona del Cockpit, piuttosto che in
una zona esterna alla cabina di pilotaggio; le strumentazioni, quando il sistema di
movimentazione non era in funzione, erano comandate da segnali elettrici che venivano
trasmessi con opportuni cablaggi.
In questo periodo, fu anche sviluppata una nuova tecnologia di visualizzazione. Nel
1972, venne realizzato un sistema dei visualizzazione che, mediante delle lenti convergenti,
uno specchio e un semi riflettente, consentiva al pilota di visualizzare le immagini del mondo
esterno dal finestrino del Cockpit. Ciò aumentò notevolmente il realismo della simulazione,
anche se ognuno dei monitor poteva offrire solamente un campo visivo di poco superiore ai
28°; tuttavia, lo scopo fondamentale del sistema era fornire una visione realistica e ciò
veniva realizzato efficacemente. Nel 1976, vennero introdotti i monitor con un più ampio
Capitolo I 2
angolo di visualizzazione, i cosiddetti Wide Angle Collimated (WAC) windows. Solo nel 1982,
furono introdotti i Wide-angle Infinity Display Equipment (WIDE) che usavano uno
specchio curvo di grandi dimensioni, il quale permetteva di aumentare la distanza focale e
garantire al pilota una visuale più ampia, da un lato all’altro del campo visivo.
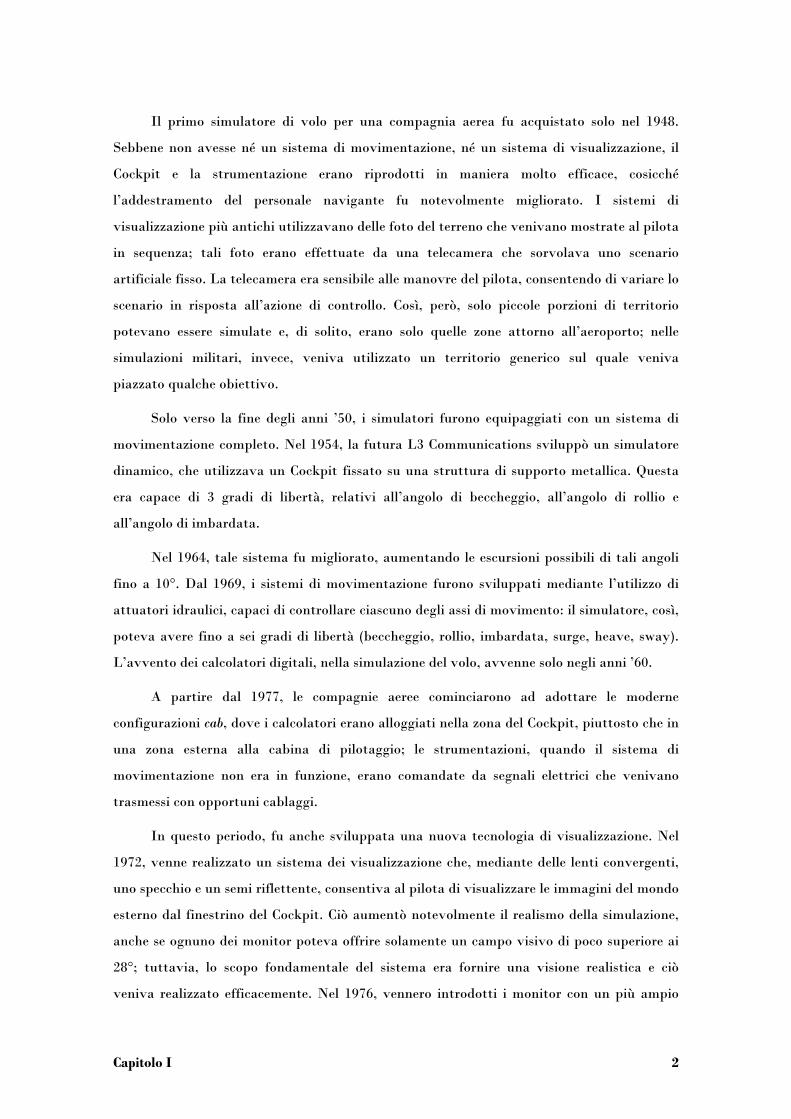
Oggi, i sistemi di visualizzazione WIDE sono quelli universalmente utilizzati per i
simulatori FFS di più alto livello. Inoltre, l’utilizzo di attuatori elettrici per i sistemi di
movimentazione, più economici rispetto al sistema ai pistoni idraulici, ha consentito una
diffusione su larga scala dei Full Flight Simulator (FFS), fin anche ad essere utilizzati per
piccoli velivoli da trasporto civile.
Figura 1-2 – VMS di NASA Ames
Capitolo I 3

1.2 L’ADDESTRAMENTO DEL PERSONALE NAVIGANTE DI VOLO
Il volare non è uno stato naturale per il corpo umano. Molti dei nostri sensi e
istinti, per così dire, naturali, possono essere ingannati durante una situazione
innaturale come il volo. Diverse sono le ragioni di questo stato confusionale: le
accelerazioni angolari, le accelerazioni lineari, le vibrazioni, alcune condizioni uniche
di luminosità e di percezione del moto, la dissonanza tra ciò che ci si aspetta di
percepire durante la manovra e ciò che realmente si percepisce, etc. . Queste ed altre
cause realizzano delle condizioni particolari per le quali il cervello e il corpo umano
sono portati a reagire in maniera anche discorde o comunque inaspettata; l’effetto
risultante è una interruzione della connessione tra pensiero ed azione, tra ciò che si
pensa di fare e ciò che effettivamente il corpo compie. Tale separazione può
esprimersi in diversi modi, a partire da una momentanea perdita di orientamento ad
un vero e proprio stato di confusione, il cosiddetto disorientamento spaziale, causa
principale di numerosi incidenti aerei.
La maggiore conoscenza, le nuove e più aggiornate strumentazioni di bordo e i
miglioramenti dei metodi di controllo dell’aereo, insieme con una migliore conoscenza
del fenomeno, hanno permesso di limitare gli effetti negativi del disorientamento
spaziale ed hanno anche fornito al pilota un modo per riconoscerla. Tuttavia, è
evidente che, per permettere al pilota di comprendere come fronteggiare una tale
situazione, sia indispensabile il ruolo dell’addestramento al simulatore, durante il
quale egli può sviluppare adeguatamente la cosiddetta Situation Awareness. Infatti,
egli deve imparare a riconoscere lo stato di cattiva percezione o di pericolo e ad
utilizzare gli aiuti derivanti dal volo strumentale, per compiere le opportune azioni
correttive. Perciò, la necessità di migliorare la Situation Awareness e di dover
addestrare il pilota ad utilizzare correttamente gli strumenti ha fatto sì che la
simulazione diventasse fondamentale per aumentare il livello di sicurezza globale del
volo.
Oggi, i simulatori di volo, sia civili che militari, hanno una notevole rilevanza
per quanto riguarda l’addestramento del personale navigante, tanto che vengono
Capitolo I 4
utilizzati sia nella fase di prima formazione del personale navigante, sia
nell’addestramento avanzato e sia nelle fasi di conversione del personale da un tipo di
velivolo ad un altro tipo. Sia che l’addestramento preveda il solo utilizzo del
simulatore o il suo utilizzo a supporto dell’addestramento in volo, il sistema di
simulazione, in entrambi i casi, deve poter garantire un elevato livello di
corrispondenza della simulazione al velivolo reale, allo scopo di non pregiudicare le
abilità di manovra del pilota durante il volo e non richiedere un elevato tempo di
adattamento del pilota al velivolo reale.
L’addestramento al simulatore presenta notevoli vantaggi. Innanzitutto, il
primo riguarda la riduzione dei costi di addestramento: infatti, anche se i sistemi di
simulazione presentano ancora dei costi iniziali elevati, le spese richieste durante le
fasi di addestramento risultano notevolmente minori rispetto a quelle che si
avrebbero con l’utilizzo del velivolo completo, a causa dei costi di gestione e
manutenzione relativi, consentendo così di ammortizzare la spesa per l’acquisto del
simulatore dopo un certo numero di esecuzioni della simulazione. Il secondo e, forse,
più evidente, riguarda la sicurezza delle operazioni svolte: spesso, infatti,
l’addestramento consiste nell’abituare il pilota a fronteggiare le operazioni inusuali di
funzionamento del velivolo, come possono essere quelle conseguenti ad un
malfunzionamento. Quando l’addestramento a queste situazioni veniva effettuato
sul velivolo reale, si notò, addirittura, che gli incidenti erano più frequenti in fase di
addestramento che durante le situazioni reali di pericolo; pertanto, evidentemente,
l’esecuzione di tali operazioni al simulatore ha garantito sia di non esporre il pilota e
l’istruttore a potenziali situazioni di pericolo, sia un ulteriore ottimizzazione dei costi
e sia una maggiore riproducibilità degli eventi.
Proprio il fatto di poter riprodurre le operazioni di volo con una frequenza
maggiore rappresenta uno degli argomenti fondamentali a favore dell’utilizzo dei
simulatori di volo per l’addestramento. Infatti, una discussione sempre attuale, e che
ci si pone sin dalla nascita dei simulatori, è quella che riguarda l’efficacia
dell’addestramento al simulatore. Riguardo all’efficacia, è necessario porre in luce
che proprio la simulazione del volo ha consentito un miglioramento della qualità
Capitolo I 5
dell’addestramento, nel senso sia dell’ottimizzazione dei tempi d’addestramento
(eliminazione dei tempi “morti” tra le manovre), che del comfort del volo: ciò è stato
possibile, da un lato, grazie al fatto di poter riprodurre più volte una stessa manovra,
cosa non sempre possibile durante l’addestramento in volo, e, dall’altro, grazie
all’elevato livello di fedeltà raggiunto dai simulatori. Inoltre, non bisogna
dimenticare che, proprio grazie alla simulazione del volo, è possibile addestrare il
pilota in un gran numero di situazioni avverse (scarsa visibilità, vento a traverso
sulla pista, volo in nube, …), per le quali l’addestramento in volo richiedeva che tali
situazioni si verificassero, e ciò poteva anche non accedere abbastanza
frequentemente, come richiesto dalle sessioni di addestramento.
Nella definizione delle caratteristiche che il simulatore deve possedere, per
essere efficace all’addestramento, giocano un ruolo fondamentale sia l’acquirente del
simulatore, sia il legislatore, sia il produttore. Il primo deve individuare le
caratteristiche richieste al dispositivo di simulazione in relazione allo specifico
programma di addestramento e, una volta definiti, scegliere il dispositivo più
adeguato agli scopi d’addestramento, descrivendo dettagliatamente le specifiche
richieste al dispositivo. Inoltre, egli ha anche il compito di indicare come sarà
utilizzato il simulatore e come sarà garantita la sua manutenzione. Una volta
definite le caratteristiche del dispositivo, il legislatore, ovvero l’Autorità nazionale
per l’Aviazione Civile, deve assicurare che il personale navigante venga addestrato
adeguatamente e che le loro competenze siano regolarmente controllate e certificate.
A tale scopo, egli definisce tutta una serie di criteri che il dispositivo, se deve essere
utilizzato per l’addestramento, è obbligato a corrispondere. Infine, il ruolo del
produttore entra in gioco nel creare la rappresentazione più realistica possibile del
comportamento del velivolo reale nell’ambiente simulato, nella maniera più
efficiente possibile sia per quanto riguarda i costi, sia per i compiti d’addestramento.
Tuttavia, i simulatori di volo rappresentano solo uno dei possibili dispositivi di
addestramento; ma, la loro notevole importanza sta nel fatto che consentono di
eliminare l’addestramento in volo, i relativi pericoli e costi, e di migliorare
efficacemente molte delle abilità del pilota.
Capitolo I 6

L’addestramento del personale navigante di volo e del pilota sono
indispensabili specialmente per la prevenzione di molti casi di incidente aereo.
Infatti, molti sono da attribuire ai cosiddetti human factors, cioè ad una generale
inadeguatezza delle decisioni e delle azioni eseguite dal personale navigante durante
una particolare situazione di volo, mentre solo alcuni di essi sono dovuti a cattive
condizioni meteorologiche o malfunzionamenti del velivolo. Pertanto, la prevenzione
degli incidenti aerei non può non passare per il miglioramento delle abilità cognitive
(cognitive skills) e delle abilità psico-motorie (perceptual-motor skills) del personale
navigante.
Le abilità classificate con il termine perceptual-motor skills comprendono, in
sostanza, tutti i mezzi che il pilota possiede per riconoscere la condizione di moto a
cui è sottoposto. Pertanto, esse possono essere assunte come coincidenti con gli
organi sensoriali del pilota, cioè con quelli che consentono ad un individuo di
percepire il suo stato di moto. In generale, tutti gli organi sensoriali possono essere
chiamati in causa per la percezione del moto; ma, senza dubbio, i principali sono
quello visivo, quello vestibolare e quello tattile/somatosensoriale. Le abilità psico-
motorie del pilota, dunque, dipendono dalle caratteristiche di ciascuno di questi
organi sensoriali e, dal momento che, il volare non rappresenta una naturale
condizione di moto dell’individuo, si può facilmente intuire come sia fondamentale
addestrare il pilota a riconoscere correttamente le sollecitazioni provenienti da
ciascuno degli organi sensoriali.
Con il termine cognitive skills, invece, vengono classificati tutti i processi
cognitivi che si riferiscono a funzioni mentali impegnative, come la memoria,
l’attenzione e il ragionamento simbolico, le quali, in alcune condizioni, possono
richiedere un elevato sforzo mentale del pilota. In realtà, per estensione, il termine
cognitive skills si può riferire a tutti quei compiti di pilotaggio che dipendono dalle
capacità cognitive del pilota, come la gestione del personale navigante, il planning, le
comunicazioni, il problem-solving e la decision-making. Queste abilità, a differenza di
quelle psico-motorie, in generale, non possono essere allenate contemporaneamente,
Capitolo I 7

e, per di più, il carico di lavoro richiesto per apprenderle ed utilizzarle dipende
fortemente dal livello di esperienza del pilota.
Da quanto detto è evidente che l’ambiente di simulazione deve essere capace di
fornire alti livelli di fedeltà non solo per la simulazione visiva o delle qualità di
manovra, ma anche nella valutazione e l’addestramento delle abilità cognitive del
pilota, in modo da abituarlo a tutti i carichi di lavoro che deve affrontare durante il
volo del velivolo.
Gli human factors sono dipendenti da entrambe le tipologie di abilità: da un
lato, quelle cognitive, cioè un buon judgment2, decision-making e Situation Awareness;
dall’altro, quelle psico-motorie, con l’abitudine ai carichi di lavoro richiesti e al
riconoscimento delle particolari sollecitazioni motorie del volo. Per quanto riguarda
le cognitive skills, il judgment e la decision-making possono essere condizionate
fortemente da altri fattori esterni, come la personalità del pilota, il modo di reagire
ad una situazione di pericolo, il suo stato emotivo, psicologico, morale e sociale. Tali
fattori condizionano il pilota nel senso che gli impediscono di prendere una good
decision, compromettendone il risultato.
Sebbene la Situation Awareness sia da includere nelle cosiddette cognitive skills,
essa risulta fortemente dipendente anche dalle perceptual-motor skills. Una buona
Situation Awareness si basa su una accurata Situation Assessment, ovvero su una
corretta valutazione degli eventi. Tale Situation Assessment non è altro che un
processo di riconoscimento e valutazione della situazione, attraverso il quale vengono
controllate e affrontate le condizioni avverse. Dunque, una tempestiva e accurata
Situation Assessment viene ottenuta grazie alle abilità di percezione e di osservazione
dei fenomeni e ad una piena comprensione della natura del problema, frutto di una
intensa attività della sfera cognitiva in termini di esperienza e conoscenza. Il
processo di riconoscimento (recognition) del problema parte dalla percezione degli
2 Il judgment rappresenta il processo cognitivo attraverso il quale viene presa una decisione. Tale decisione rappresenta una good decision quando viene presa in relazione al grado di consapevolezza, alla rapidità della comprensione della situazione e all’abilità di riconoscere il giusto corso degli eventi.
Capitolo I 8
stimoli sensoriali, i quali, se non riconosciuti in tempo e accuratamente, possono
compromettere la stessa Situation Assessment. Una volta riconosciuta l’esistenza di
un problema, il secondo passo è quello della valutazione: in questa fase, occorre
capire quale sia la natura del problema, allo scopo di operare le opportune operazioni
correttive. La Situation Awareness è il risultato di una buona Situation Assessment ed
è adeguata quando un pilota riesce a comprendere l’ambiente che lo circonda,
decidere come gestire i fattori esterni e, poi, scegliere le migliori azioni da compiere.
Da alcuni studi effettuati da NASA è risultato che una cattiva Situation Assessment
rappresenta una delle principali cause di incidenti aerei: essi dipendono
principalmente dalla inabilità del personale navigante di riconoscere e comprendere il
problema con cui hanno a che fare. Quindi, poter addestrare adeguatamente il pilota
per migliorare la sua Situation Awareness è importantissimo per prevenire queste
tipologie di incidente aereo e per limitare i fenomeni di disorientamento spaziale,
potenziando il legame tra sfera cognitiva e psico-motoria.
1.3 TIPOLOGIE DI SIMULATORI
In linea di massima, un simulatore di volo si compone di alcuni sistemi principali che
sono:
o Cockpit Section;
o Motion Platform;
o Visual System;
o Audio environment;
o Control Station.
Durante la simulazione, i suddetti sistemi assicurano che il pilota possa riprovare
alcune condizioni sperimentate durante il volo.
In particolare:
− la cabina di pilotaggio (Cockpit Section) riproduce gli equipaggiamenti, i
pannelli, gli strumenti ed i controlli, che devono essere capaci di simulare il
comportamento connesso all’interazione con il mondo esterno;
Capitolo I 9

− il sistema di movimentazione (Motion Platform) deve simulare le accelerazioni
lineari e angolari che il pilota subisce durante le manovre;
− il sistema di visualizzazione (Visual System) ha il compito di fornire sufficienti
dettagli insieme ad un ampio e profondo campo visivo, per addestrare il pilota
a compiere missioni che richiedono una rapida e accurata assimilazione delle
informazioni dal mondo esterno;
− l’ambiente audio (Audio environment) contribuisce a determinare una
esperienza completa del moto del velivolo, attraverso la riproduzione dei suoi
suoni caratteristici;
− la stazione di controllo (Control Station) permette all’istruttore di seguire
l’evoluzione del volo e di analizzare successivamente la missione.
Ognuno di questi sistemi richiede conoscenze e requisiti di progetto opportuni, che
non rientrano negli scopi della trattazione. Ciò che qui si vuole sottolineare è che, se
un sistema di simulazione deve essere usato per l’addestramento del personale
navigante, è necessaria una approvazione delle Autorità nazionali, come la Civil
Aviation Autorithy (UK), l’ENAC (IT), la Joint Aviation Authority (EU) o la
Federal Aviation Administration (USA). Tali Autorità hanno il compito di garantire
che l’addestramento al simulatore, svolto dal personale navigante, sia adeguato,
verificando la corrispondenza del simulatore agli standard internazionali di
Certificazione.
I simulatori di volo (Full Flight Simulator, FFS) possono essere classificati,
macroscopicamente, in due categorie distinte:
o quelli in cui il Cockpit è solidale ad una piattaforma mobile che riproduce le
accelerazioni iniziali delle manovre (FFS con Motion System, paragrafo
1.6.1);
o quelli in cui il Cockpit è fisso ed immerso in uno scenario virtuale che
collabora a riprodurre gli effetti del moto del velivolo, come vengono avvertiti
dal pilota (FFS con Cockpit fisso, paragrafo 1.6.2).
Sebbene il primo approccio sia utilizzato prettamente nell’ambito dei simulatori di
volo commerciali, mentre il secondo sia essenzialmente adoperato per quelli militari,
Capitolo I 10

entrambi devono avere l’obiettivo di realizzare una riproduzione quanto più fedele
possibile delle condizioni in cui il pilota si trova ad operare.
1.4 CARATTERISTICHE HARDWARE DI UN SIMULATORE DI VOLO
Molti considerano che, affinché la simulazione del volo possa essere realistica,
sia necessario stimolare il sistema sensoriale del pilota in maniera analoga a quanto
egli sperimenta sul velivolo; in realtà, se si analizzassero le informazioni utilizzate da
ciascun apparato sensoriale del pilota, si noterebbe che solo una piccola parte di tutte
le stimolazioni sensoriale, fornite da un moderno simulatore di volo, vengono
effettivamente utilizzate: infatti, solo alcuni elementi dello scenario visualizzato dal
pilota e solo una piccola parte di tutti i movimenti complessi di un velivolo sono
realmente necessari all’esecuzione dei compiti di missione e sono utilizzati con
frequenza dal pilota.
Inoltre, riprodurre il moto del velivolo completo non è un’operazione semplice,
dal momento che sarebbe necessario ricreare, al suolo, tutte le accelerazioni avvertite
dal pilota durante il volo. In generale, per riprodurre un’accelerazione, occorre un
movimento macroscopico del simulatore, la cui ampiezza dipende dall’entità
dell’accelerazione: maggiore è l’accelerazione, più grande è lo spostamento richiesto
al simulatore. Invece, le accelerazioni angolari possono essere realizzate anche solo
con una rotazione attorno a un dato punto dello spazio. Pertanto, riprodurre questo
tipo di accelerazioni è meno difficoltoso rispetto alle accelerazioni lineari, in quanto è
teoricamente possibile riprodurle senza la necessità di una traslazione del dispositivo.
In ogni caso, molti movimenti e sollecitazioni complesse, associate all’azioni di
controllo del pilota, richiedono che un simulatore di volo sia capace di produrre
contemporaneamente sia delle rotazioni che delle traslazioni.
I requisiti necessari per fornire tali sollecitazioni dipendono dalla scelta
progettuale; ogni scelta progettuale comporta dei compromessi e, ogni compromesso,
determina una limitazione degli effetti riproducibili. In generale, non è possibile
stabilire, a priori, quale sia la scelta progettuale corretta; invece, è molto importante
Capitolo I 11

comprendere quali sono le condizioni che la rendono tale. Nel caso del Motion System,
si può considerare che una buona scelta di progetto debba possedere almeno due
caratteristiche: la prima riguarda il fatto che non debbano essere presenti dei disturbi
di natura meccanica che possono compromettere le abilità di pilotaggio del velivolo;
il secondo riguarda, invece, il modo in cui viene mossa la piattaforma di
movimentazione, la quale non deve presentare moti spuri percettibili. La capacità di
compiere entrambi questi obiettivi, cioè di avere disturbi non riscontrabili e
movimenti artificiali impercettibili, dipende dal fatto che l’uomo riconosce le
sollecitazioni motorie solo in alcune condizioni, mentre le altre sollecitazioni, che non
corrispondono a tali condizioni, non ne influenzano la sua risposta. Pertanto, i
simulatori di volo possono essere di diverso tipo, a patto che riescano a realizzare tali
obiettivi.
I sistemi FFS dotati di sistema di movimentazione della cabina, detti in gergo
“dinamici”, si basano sulla assunzione che, affinché il pilota possa riprovare le
sensazioni vissute durante il volo, il velivolo simulato deve produrre le accelerazioni
avvertite dal pilota durante il volo: il pilota sfrutta proprio queste accelerazioni per
stabilizzare e manovrare il velivolo, nonché capire quando si verifica un guasto, una
vibrazione anomala o una turbolenza.
Un’altra classe di FFS, detti “statici”, sono quelli privi di sistema di
movimentazione. In essi, gli effetti delle accelerazioni si possono valutare
semplicemente attraverso la dinamica degli strumenti del Cockpit o dalle variazioni
delle immagini visualizzate relative al mondo esterno che viene simulato; ma, poiché
il pilota “sente” l’aereo anche e soprattutto con il movimento avvertito dai suoi
sensi, è necessario stimolarli adeguatamente affinché la simulazione sia
soddisfacente.
Una parte essenziale della simulazione del volo è legata alla generazione e alla
visualizzazione del mondo esterno al Cockpit. Nei sistemi di visualizzazione, la parte
competente all’elaborazione delle immagini è comandata da un calcolatore che
esegue una porzione di codice, competente alla produzione delle immagini, in
relazione alla posizione, all’assetto e allo stato di moto del velivolo. Più in generale,
Capitolo I 12

però, quando si parla di Visual System, non si intendono le caratteristiche del
software, ma si punta l’attenzione essenzialmente alle componenti hardware del
sistema.
A seconda che il simulatore di volo sia utilizzato per l’addestramento civile o
militare, il compito del sistema di visualizzazione è diverso: nel primo caso, le
manovre più frequenti da simulare sono l’atterraggio e il decollo, mentre, nel secondo
caso, esistono anche delle altre manovre che sono indispensabili per un velivolo
militare. Tuttavia, tutti i sistemi di visualizzazione debbono avere necessariamente:
− una fonte dati da cui recuperare le informazioni sul territorio e gli oggetti da
simulare;
− un metodo di manipolazione dei dati che consente una corretta elaborazione
di una visione prospettica;
− un complesso di dispositivi hardware per visualizzare la prospettiva
elaborata.
Infine, il sistema di visualizzazione deve anche essere in grado di degradare la
scena visualizzata, allo scopo di simulare le condizioni di scarsa visibilità o altre
condizioni atmosferiche avverse.
In ogni caso, le modalità con le quali si può realizzare un sistema di
visualizzazione sono essenzialmente tre:
o con un sistema di proiettori (Projection System);
o mediante un metodo diretto di visualizzazione (Direct View System);
o con una visione diretta/collimata (Direct View/Collimated System).
Oltre alla presenza di un Motion System e di un Visual System, allo scopo di ottenere
un livello elevato di fedeltà del simulatore, vanno introdotti altri elementi essenziali
per un Full Flight Simulator, come un ambiente audio, un sistema di controllo dei
carichi e un abitacolo caratteristico del tipo e del modello di velivolo da simulare.
Spesso la presenza o meno di un ambiente audio adeguato alla simulazione
viene sottovalutato in quanto la normativa non è particolarmente stringente a
riguardo. Tuttavia, la presenza di un simile elemento è fondamentale sia per
Capitolo I 13
l’addestramento di alcune manovre, come il decollo, l’approccio e l’atterraggio, sia
per il miglioramento del livello di realismo fornito al pilota. Infatti, avere un
adeguato feedback sonoro, in seguito a un malfunzionamento (rottura di un motore,
bird-stike, etc.) o a condizioni particolari di volo (onde d’urto, buffeting, etc. ),
contribuisce a generare nel pilota la sensazione di aver a che fare con le reali
condizioni operative che potrebbe incontrare durante il volo. Infine, c’è da
sottolineare che i benefici prodotti dall’adozione di un ambiente audio adeguato sono
notevolmente maggiori rispetto ai costi necessari alla sua realizzazione.
Il sistema di controllo dei carichi rappresenta un elemento importante per la
simulazione in quanto consente di addestrare il pilota agli sforzi di barra che dovrà
controllare e ad aumentare la sua sensibilità rispetto ai comandi di volo. Questi due
aspetti sono importanti in quanto, da un lato, aumentano la resistenza alla fatica e,
dall’altro, consentono di ottenere quel livello di familiarità necessaria al pilota
quando adopera il controllo, per garantire un adeguato livello di sicurezza durante il
volo.
Infine, per ricreare un ambiente che il pilota possa avvertire familiare, è
indispensabile che l’addestramento ad un particolare tipo e modello di velivolo, di
una particolare classe, avvenga all’interno di una cabina che riproduca esattamente
tutte le caratteristiche del velivolo che egli dovrà governare.
Nei paragrafi successivi, verranno analizzati alcuni dei suddetti sistemi in
maniera abbastanza dettagliata, in modo da fornire al lettore un’idea generale sulla
struttura di un FFS.
1.4.1 STRUTTURA DI UN FFS CON MOTION SYSTEM
Gli FFS dinamici prevedono sia una piattaforma mobile di movimentazione,
sia un sistema di visualizzazione e sia un sistema per il controllo dei carichi, i quali,
sincronizzati adeguatamente, consentono la simulazione del volo.
Il sistema di movimentazione è generalmente caratterizzato dalle sue escursioni
massime, dalle sue velocità e delle sue accelerazioni per ogni grado di libertà. Esso è
Capitolo I 14

essenzialmente una piattaforma a sei gradi di libertà (Stewart platform o Hexapod)
che, attraverso il moto coordinato e contemporaneo di 6 pistoni idraulici, permette la
riproduzione degli spostamenti lineari (heave, sway e surge) e delle rotazioni (pitch, roll
e yaw). La piattaforma ha anche la funzione di essere una base sulla quale ancorare la
cabina; l’insieme della cabina e dalla base, in cui sono alloggiati altri sistemi ausiliari,
è collegato ai sei pistoni che riproducono le accelerazioni del velivolo: in generale, essi
sono capaci di fornire escursioni di circa +/- 35°, per le rotazioni, e di un metro, per
gli spostamenti. Ai fini della simulazione, è importantissimo che la piattaforma
riproduca solo le accelerazioni che sono caratteristiche del velivolo: perciò, va fatta
un’attenta valutazione dell’entità delle accelerazioni spurie, che inevitabilmente
nascono dai fenomeni di risonanza con la struttura portante, i servomeccanismi e gli
altri componenti del simulatore, e progettare il sistema in modo da evitare condizioni
di risonanza, che comunque non possono essere del tutto eliminate.
Ad eccezione di alcune particolari condizioni di volo, è importante rilevare che
nessuna piattaforma di movimentazione, di qualsiasi dimensione, può muovere un
Cockpit in maniera esattamente uguale alla realtà fisica; ma, al massimo, può dare al
pilota una percezione accettabile delle accelerazioni inerziali dovute al moto. Da ciò,
l’obiettivo deve essere quello di realizzare un moto della piattaforma tale che, nella
posizione del pilota, si possano avvertire delle accelerazioni angolari e lineari, dovute
ai carichi inerziali, con una approssimazione accettabile.
Attraverso le accelerazioni iniziali del moto, il pilota può sperimentare una
particolare forza, dovuta ad una raffica, ad una turbolenza o ad una manovra, e
valutare la risposta del velivolo. Ai fini della simulazione, poiché il corpo umano è
più sensibile alle accelerazioni che non ai movimenti a velocità costante, ha maggiore
importanza l’accelerazione impressa alla cabina, piuttosto che un suo moto a velocità
costante. Inoltre, essendo le escursioni dei pistoni comunque limitate, è necessario
utilizzare una particolare tecnica, detta “acceleration onset cueing”, che consenta sia
di superare i limiti connessi alle escursioni massime dei pistoni, sia di ottenere un
soddisfacente livello di realismo: la piattaforma di movimentazione, dopo
l’accelerazione iniziale, viene arrestata lentamente e, a velocità costante, viene fatta
Capitolo I 15
ritornare nella sua posizione iniziale, pronta per una successiva accelerazione. Questo
processo è gestito automaticamente dal calcolatore del simulatore e prende il nome di
“washout phase”.
In alcune configurazioni, la piattaforma di Stewart può anche essere
accoppiata ad un sedile particolare, le cui cinture vengono tese e rilasciate
adeguatamente: in questo modo, mediante un’opportuna tensione, è possibile
riprodurre alcune altre forze agenti sul pilota; poi, quando la sua soglia di percezione
delle sollecitazioni non è più sensibile, queste vengono rilasciate. Da ciò è evidente
che la calibrazione di tutti questi sistemi non è, né può essere, un’operazione banale,
in quanto deve tener conto delle suddette soglie di percezione del corpo umano. Esse
dipendono sia da quali apparati sensoriali sono sollecitati durante la simulazione e sia
dalla frequenza propria di risposta dello specifico apparato.
Inoltre, la piattaforma di movimentazione è fondamentale anche per
l’addestramento del pilota al volo strumentale. Infatti, quando il pilota è costretto
ad operare in condizioni avverse o di scarsa visibilità, egli deve essere capace di
distinguere i movimenti del velivolo connessi al pilotaggio da quelli dovuti ad un
disturbo; così, con la possibilità di riprodurre, durante l’addestramento, le condizioni
operative più sfavorevoli possibili, egli può e deve imparare a distinguere le
sollecitazioni derivanti dal moto del velivolo completo da quelle dovute ad un
disturbo, per evitare di ritrovarsi in condizioni pericolose, e riconoscere la condizione
di disorientamento spaziale (cfr. Appendice A).
Il sistema di controllo dei carichi ha lo scopo di riprodurre, sui comandi del
pilota, le forze di reazione alle manovre. Per ottenere ciò, il sistema deve riprodurre
correttamente la variazione della forza avvertita dal pilota sui controlli, in tutte le
condizioni operative del velivolo. La causa prima di tali forze è legata ai carichi
aerodinamici sulle superfici di controllo.
La simulazione dei carichi sui comandi può avvenire mediante dei sistemi
passivi o attivi: i sistemi passivi utilizzano l’energia meccanica di un sistema massa-
molla-smorzatore o di un sistema frenante elettromagnetico, mentre i sistemi attivi
usano sistemi elettro-idraulici controllati da segnali analogici o digitali. Il vantaggio
Capitolo I 16

dei sistemi attivi, che, nella maggior parte dei casi, hanno rimpiazzato quelli passivi,
consiste nelle minori resistenze in gioco e nel fatto che gli elementi idraulici possono
essere comandati tramite un semplicissimo segnale elettrico che apre o chiude una
elettrovalvola. Inoltre, i sistemi attivi, a differenza di quelli passivi, sono capaci di
esplicare tali forze anche quando il pilota non esercita l’azione di controllo.
Per applicare la forza di reazione sul controllo del pilota è indispensabile
riconoscere la forza che il pilota esercita sul controllo ovvero rilevare la posizione del
comando stesso. Essa viene rilevata tramite una cellula di carico, che è
essenzialmente un potenziometro. Poi, una volta nota la posizione del comando,
vengono calcolate via software le forze di reazione da applicare sul controllo e, infine,
applicate sui controlli del pilota, il quale li avverte come un ritorno di forza per
effetto della manovra.
Figura 1-3 – Piattaforma di Stewart a 6 gradi di libertà
Capitolo I 17
1.4.1.1 Visual System & Cockpit Section
Nei FFS dinamici, il pilota è immerso in una copia fedele della cabina di
pilotaggio del velivolo che dovrà essere in grado di pilotare: perciò la struttura del
Cockpit e i suoi equipaggiamenti dipendono dal velivolo simulato. La cabina è fissata
alla piattaforma di Stewart e riceve da esse tutte le forze e le accelerazioni che
vengono sperimentate dal Cockpit fisico durante il volo. Alcune piattaforme, per la
loro particolare costruzione, che prevede un’interfaccia universale con la cabina,
permettono di poter utilizzare più di un Cockpit.
In generale, quando il simulatore è dedicato a velivoli di grandi dimensioni,
all’interno della cabina può essere presente anche l’istruttore insieme al pilota; ma,
per i velivoli più piccoli, come quelli acrobatici o da combattimento,
necessariamente, l’istruttore deve essere fuori da essa.
Per garantire che all’interno del Cockpit ci sia tutta la strumentazione
disponibile sul velivolo reale, vengono utilizzati degli strumenti che, a prima vista
sono esattamente uguali a quelli reali, ma il cui funzionamento è generalmente
controllato da un computer dedicato. Inoltre, per alcuni di essi, sono necessarie
elevate pressioni per funzionare, come quelle che si sviluppano durante il volo; altri
problemi, poi, sono legati alla connessione degli strumenti con i sensori e al
funzionamento stesso degli strumenti che misurano gli effetti giroscopici e
accelerometrici, i quali utilizzano il telaio dello strumento come riferimento fisso. In
tutti questi casi, gli strumenti possono essere sostituiti con degli altri, esattamente
identici, che sono controllati elettronicamente. Inoltre, se si volessero usare gli stessi
strumenti utilizzati per un velivolo reale, ciò sarebbe anche notevolmente più
costoso. Infatti, essendo soggetti a numerosi cicli operativi, che diminuiscono il
tempo medio tra due rotture, sarebbero necessarie delle manutenzioni molto
frequenti, con costi elevati.
Tutti questi problemi possono essere risolti modificando lo strumento. Ad
esempio, se consideriamo un virosbandometro, la “pallina” dello strumento viene
sostituita e i circuiti rivisti, introducendo una nuova interfaccia elettrica, con
Capitolo I 18
amplificatori, potenziometri e motori, in modo che sia possibile ottenere uno
strumento simulato esattamente corrispondente a quello reale. Questo accorgimento
consente di aumentare la vita operativa dello strumento, anche se, in alcuni casi, ne
complica l’installazione all’interno del Cockpit, poiché le dimensioni dello strumento
simulato, in generale, possono risultare maggiori di quello reale.
Per quanto riguarda il Visual System, normalmente, in un FFS dinamico di un
velivolo commerciale, il sistema hardware di visualizzazione è costituito da un Direct
View System. Tale sistema è quello più semplice da realizzare, poiché è
essenzialmente costituito da una serie di semplici monitor, alloggiati negli spazi
corrispondenti ai finestrini del Cockpit. In questa configurazione, il pilota riceve
l’immagine del mondo esterno come viene direttamente visualizzata su un
normalissimo schermo (del tipo CRT, LCD o al plasma). Ciascun monitor, poi, viene
gestito dal modulo software, che non solo produce l’immagine da visualizzare, ma
coordina anche le sequenza delle immagini da inviare ad ogni schermo.
Uno dei vantaggi del Direct View System è sicuramente il fatto che il pilota
possa avere la sensazione di trovarsi effettivamente all’interno del velivolo reale.
Inoltre, come è facile comprendere, il sistema è molto semplice, facilmente
installabile (non ci sono specchi da focalizzare o proiettori da puntare
opportunamente) e consente un elevato livello di luminosità e risoluzione delle
immagini, grazie all’utilizzo di schermi di dimensioni non troppo elevate. Tuttavia,
se si volesse realizzare un ampio Field Of View (FOV), analogo a quello che si utilizza
nei FFS senza Motion, sarebbe necessario un elevato numero di monitor affiancati,
con un notevole aumento dei costi di realizzazione.
Per quanto riguarda la qualità della visualizzazione, il principale svantaggio è
connesso all’errata percezione della profondità dell’immagine: infatti, quando
l’immagine viene osservata da una distanza all’incirca minore di un metro, si può
avere una cattiva percezione delle dimensioni dell’oggetto visualizzato. Alcuni studi
hanno mostrato che, a tale distanza, un oggetto sembra più piccolo del 15-30%
rispetto a quanto appare ad una distanza adeguata, pregiudicando così l’abilità del
pilota di riconoscere la distanza corretta da un oggetto, stimando le sue dimensioni.
Capitolo I 19

Questa valutazione errata è particolarmente pericolosa durante le procedure di
approccio e di atterraggio, in quanto il pilota si ritrova con un’errata altitudine dal
suolo, a partire dalla cattiva valutazione della larghezza e della lunghezza della pista
o delle errate dimensioni di un oggetto al suolo.
L’evoluzione del Direct View System è il Direct View/Collimated System: esso
consente di migliorare la visualizzazione delle immagini anche a distanze minori di
quelle ottimali. I Direct View/Collimated System, o più semplicemente i Collimated
Display, eliminano i problemi connessi al Direct View System, in quanto focalizzano
l’immagine all’infinito. Tuttavia, l’accorgimento tecnico utilizzato nei Collimated
Display riduce il FOV effettivo, comportando la necessità di aumentare le dimensioni
degli schermi o il loro numero. Nonostante ciò, il sistema ha notevoli vantaggi: il
principale è quello di ottenere una immagine focalizzata all’infinto, che riduce o
elimina del tutto i problemi connessi all’errata valutazione della profondità delle
immagini visualizzate.
Al fine di evitare la visualizzazione di una immagine piatta e distorta, quale
quella vista frontalmente o lateralmente ad uno schermo, i Collimated Display sono
realizzati in modo che l’immagine vista dal pilota sia, in realtà, quella riflessa da uno
specchio sferico, dopo che essa sia stata emessa da un tradizionale schermo a tubo
catodico (CRT) e abbia attraversato un semiriflettente: proprio l’utilizzo del
semiriflettente e dello specchio sferico consentono la focalizzazione all’infinito
dell’immagine, riflettendo verso il pilota dei raggi luminosi (che costituiscono
l’immagine) tutti paralleli tra loro. Inoltre, i monitor, ovvero tutti gli specchi sferici,
vengono disposti in modo che siano convergenti in un punto, corrispondente al sedile
del pilota, cosicché egli possa ricevere un’immagine non distorta comunque muova la
testa.
Ciò nonostante, il sistema non è esente da qualche problema. Il più evidente è
quello connesso alle maggiori dimensioni del sistema di visualizzazione rispetto al
Direct View System. Ciò, se non altro per la necessaria presenza dello specchio sferico
e del semiriflettente, ma anche perché occorre destinare uno spazio sufficiente tra il
semiriflettente e il monitor, tale da garantire un’immagine correttamente focalizzata
Capitolo I 20

all’infinito. Inoltre, esiste anche un problema connesso alla qualità degli specchi e
delle lenti da utilizzare, in quanto, se la qualità non è elevata, ovvero presentano un
certo numero di difetti, possono produrre distorsioni impreviste e non volute
nell’immagine. Infine, un altro problema è legato all’attenuazione della luminosità
dell’immagine visualizzata, dal momento che essa deve attraversare almeno due
volte il semiriflettente.
Evidentemente, poi, quando deve essere utilizzato per i velivoli di grandi
dimensioni, idonei a trasportare due piloti, il Collimated Display deve essere replicato
anche per la postazione del co-pilota.
Figura 1-4 – Interno del Cockpit di un FFS con Motion System
Capitolo I 21

1.4.1.2 Esempio di un FFS con MOTION System
Un esempio di FFS dinamico è certamente il Vertical Motion Simulator (VMS) di
NASA Ames3. Si tratta di un simulatore FFS di grandi dimensioni, con una
piattaforma di movimentazione che consente spostamenti lineari dell’ordine dei
metri. Inoltre, la cabina è ancorata su un Hexapod convenzionale a sei gradi di
libertà (6DOF). La particolarità del VMS, oltre alle sue dimensioni, è costituita dal
fatto che la cabina è facilmente intercambiabile, consentendo al VMS di poter
simulare diverse tipologie di velivoli. La ragione per la quale il VMS fu realizzato con
un così importante impianto per la movimentazione è legato allo studio delle
oscillazioni longitudinali indotte sul pilota (PIO) al momento del ritorno in
atmosfera, durante le prime missioni con lo Shuttle, quando non erano disponibili
sufficienti informazioni a riguardo.
3 Video del VMS in azione su http://www.youtube.com/watch?v=oVWYgNIw-28&hl=it
Capitolo I 22

Cabin Piattaforma di sway (28 m)
Piattaforma di Stewart
a sei gradi di libertà
Cablaggi Stazione Istruttore Attuatori di heave (18 m)
Figura 1-5 – Schema strutturale del VMS di NASA Ames
1.4.2 STRUTTURA DI UN FFS CON COCKPIT FISSO
Un FFS con Cockpit fisso o, più semplicemente, statico, cioè senza Motion
System, è un sistema costituito da più moduli, ciascuno dei quali viene controllato
mediante una serie di computer, che lavorano contemporaneamente, ad uno o più
compiti. Tale approccio consente, in primo luogo, una più facile integrazione dei
futuri aggiornamenti e, in secondo luogo, una più adeguata corrispondenza del
sistema alle richieste del cliente.
Capitolo I 23

Un FFS statico comprende sostanzialmente i seguenti sistemi:
o Cockpit Section;
o Visual System;
oltre naturalmente ad Audio environment e Control Station.
I componenti principali standard di un FFS statico possono essere indicati in:
− un g-seat ed un seat shaker system;
− un anti-g suit;
− un sistema di visualizzazione ad ampio FOV;
− un sistema di controllo dei carichi.
In questo modo, in maniera analoga a quanto visto per l’FFS dinamico, è possibile
replicare il volo del velivolo e le caratteristiche di manovrabilità al suolo, con un
sorprendente livello di realismo, pur non avendo una piattaforma di Stewart, ma
semplicemente integrando le ultime tecnologie per la simulazione ad alta fedeltà
dell’avionica ed il realismo della visualizzazione.
1.4.2.1 Cockpit Section
Come in un FFS dinamico, anche nel FFS senza Motion il pilota si trova
all’interno di una copia esatta del Cockpit reale. Pertanto, la principale differenza del
Cockpit non è nell’impatto visivo, ma nel modo in cui interagisce con il pilota.
Si è già accennato al fatto che è essenziale per il pilota “sentire” le forze e le
accelerazioni, avvertite durante il volo, ai fini stessi del governo del velivolo: ebbene,
come può un simulatore senza Motion System produrre tali forze? La risposta è
immediata: semplicemente, utilizzando altri dispositivi, come il sedile, la tuta del
pilota e il Visual.
Un g-seat non è altro che un dispositivo attivo che produce alcune delle
accelerazioni avvertite dal pilota. Sostanzialmente, si tratta di un sedile
convenzionale all’interno del quale sono disposte delle sacche gonfiabili. Tali sacche
vengono gonfiate o sgonfiate, secondo una opportuna sequenza temporale, connessa
Capitolo I 24
ai movimenti del velivolo simulato. Il sistema agisce principalmente sulle capacità
sensoriali tattili del pilota, le quali vengono stimolate come durante le fasi del volo
reale, consentendo al pilota un comportamento identico a quello che avrebbe tenuto
sul velivolo reale.
Altri effetti, come le forze o le coppie prolungate nel tempo, tipiche dei velivoli
militari, possono essere riprodotte adeguatamente, a rigore, solo facendo uso di una
centrifuga; tuttavia, utilizzando una serie di servomeccanismi, che esercitano una
forza in un particolare punto del corpo del pilota, si può riprodurre un effetto simile.
Essi vengono fissati alle braccia e/o alla testa del pilota e influenzano la sua risposta,
durante le diverse fasi di volo.
Il sistema anti g-suit, solitamente, viene usato dai piloti per limitare gli effetti
legati al deflusso del sangue nelle zone periferiche del corpo umano, per effetto di una
manovra. Questo sistema viene usato, qualche volta, anche nei simulatori statici, ma
con uno scopo differente: infatti, esso è capace di produrre, nel pilota, alcune
sensazioni forti che egli può associare come conseguenza di una manovra. L’anti g-
suit consente al pilota di avvertire la fine di una accelerazione e/o una sua variazione.
Le forzanti ad alta frequenza, come quelle dovute a vibrazioni o turbolenze,
non debbono essere trascurate ai fini della simulazione: esse sono il primo mezzo con
il quale il pilota riscontra un malfunzionamento; contribuiscono a stancarlo
fisicamente; gli rendono più complicata la lettura degli strumenti. Dunque,
addestrare il pilota a riconoscere tali forzanti e ad utilizzare gli strumenti
adeguatamente, durante queste situazioni, è fondamentale. La riproduzione degli
effetti connessi alle vibrazioni viene affidata ad un servomeccanismo che è collegato
al sedile, nella forma di una pedana vibrante (seat shaker system), e al pannello degli
strumenti.
Capitolo I 25

Figura 1-6 – Un FFS reale senza Motion System
1.4.2.2 Visual System
Come già abbiamo avuto modo di dire, i simulatori di volo per addestramento
civile hanno il compito principale di rappresentare le fasi di decollo, crociera e
atterraggio del velivolo in diverse condizioni: queste diverse situazioni possono essere
realizzate anche senza la necessità di un sistema di visualizzazione ad ampio FOV e
ad altissima risoluzione. Invece, i sistemi di visualizzazione per simulatori di volo
militari devono essere capaci di riprodurre, oltre alle classiche manovre, quali
l’atterraggio e il decollo di un velivolo ad ala fissa, anche delle altre manovre,
caratteristiche per tali velivoli, alcune delle quali sono davvero esigenti, in termini di
FOV e risoluzione. Perciò, i simulatori di volo militari continuano ad essere
problematici in tal senso e le aziende fornitrici sono costrette a spendere molte delle
loro qualità di Ricerca e Sviluppo (R&D) proprio sui sistemi di visualizzazione.
A seconda delle manovre da visualizzare, è possibile stabilire le caratteristiche
minime che un sistema di visualizzazione deve possedere, caratteristiche classificabili
in relazione al tipo di scenario virtuale da far visualizzare al pilota.
Capitolo I 26
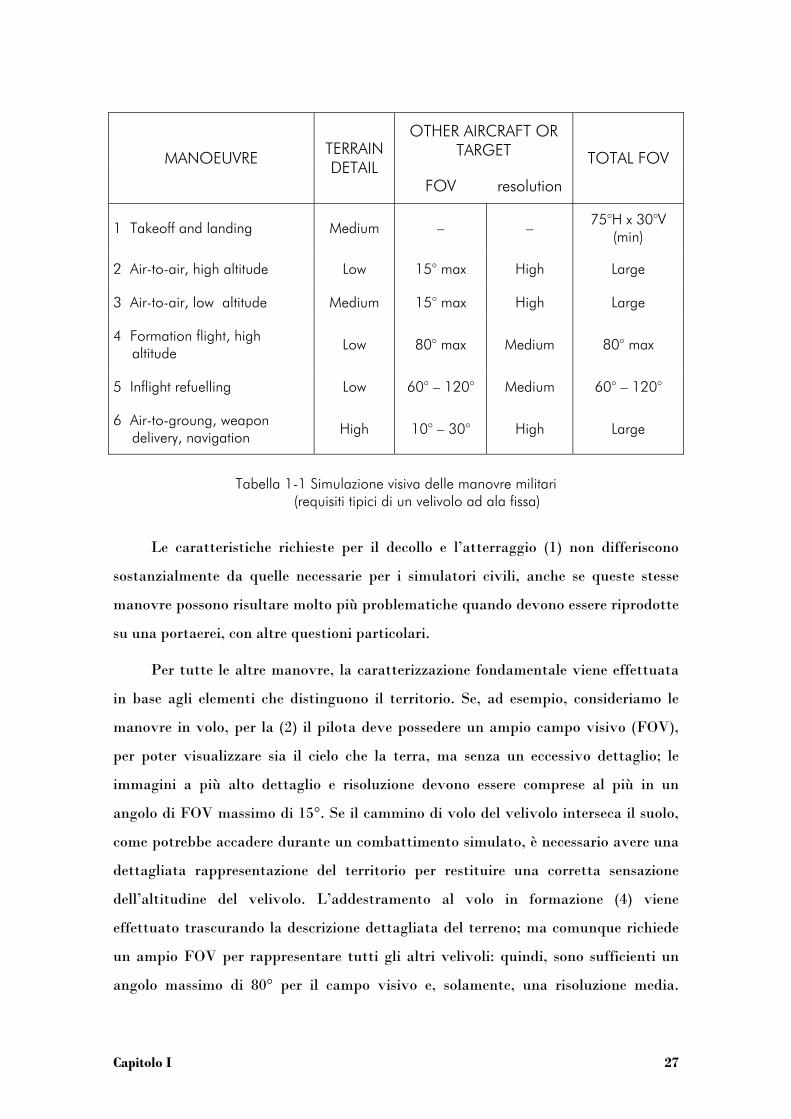
OTHER AIRCRAFT OR TARGET MANOEUVRE
TERRAIN DETAIL
FOV resolution
TOTAL FOV
1 Takeoff and landing Medium – – 75°H x 30°V (min)
2 Air-to-air, high altitude Low 15° max High Large
3 Air-to-air, low altitude Medium 15° max High Large
4 Formation flight, high altitude
Low 80° max Medium 80° max
5 Inflight refuelling Low 60° – 120° Medium 60° – 120°
6 Air-to-groung, weapon delivery, navigation
High 10° – 30° High Large
Tabella 1-1 Simulazione visiva delle manovre militari (requisiti tipici di un velivolo ad ala fissa)
Le caratteristiche richieste per il decollo e l’atterraggio (1) non differiscono
sostanzialmente da quelle necessarie per i simulatori civili, anche se queste stesse
manovre possono risultare molto più problematiche quando devono essere riprodotte
su una portaerei, con altre questioni particolari.
Per tutte le altre manovre, la caratterizzazione fondamentale viene effettuata
in base agli elementi che distinguono il territorio. Se, ad esempio, consideriamo le
manovre in volo, per la (2) il pilota deve possedere un ampio campo visivo (FOV),
per poter visualizzare sia il cielo che la terra, ma senza un eccessivo dettaglio; le
immagini a più alto dettaglio e risoluzione devono essere comprese al più in un
angolo di FOV massimo di 15°. Se il cammino di volo del velivolo interseca il suolo,
come potrebbe accadere durante un combattimento simulato, è necessario avere una
dettagliata rappresentazione del territorio per restituire una corretta sensazione
dell’altitudine del velivolo. L’addestramento al volo in formazione (4) viene
effettuato trascurando la descrizione dettagliata del terreno; ma comunque richiede
un ampio FOV per rappresentare tutti gli altri velivoli: quindi, sono sufficienti un
angolo massimo di 80° per il campo visivo e, solamente, una risoluzione media.
Capitolo I 27
Infine, nelle manovre che prevedono una dettagliata rappresentazione del terreno
(6), in realtà, solo la parte del FOV relativo all’obiettivo viene rappresentata ad alta
risoluzione, mentre tutta la restante parte viene rappresentata con un livello di
dettaglio più basso. Dunque, risulta evidente che il volo a bassa quora rappresenta la
condizione più difficoltosa da visualizzare.
Le condizioni necessarie per ottenere una simulazione visiva di buon livello,
possono essere realizzate con diverse scelte tecnologiche e progettuali. Quella più
efficace, per i FFS militari, è di utilizzare un sistema di proiettori (Projection System),
che può proiettare le immagini su uno schermo di grandi dimensioni, sia
frontalmente che posteriormente allo schermo.
Una prima possibilità è quella utilizzata nei simulatori noti come air combat
simulator: l’immagine di un velivolo viene proiettata all’interno di uno schermo
sferico (Visual Wall) che avvolge il Cockpit del pilota. Questo sistema, detto target
tracked, consente di piazzare l’obiettivo all’interno del FOV, tramite un primo
proiettore dedicato ad alta risoluzione, mentre un secondo proiettore, principale,
provvede a produrre l’immagine di sfondo, sulla quale deve essere piazzato
l’obiettivo, in relazione alla posizione relativa rispetto al pilota. Il proiettore
principale produce, dunque, le immagini di bassa risoluzione relative all’orizzonte, al
cielo e al terreno, che data l’elevata quota, non richiedono una elevata risoluzione.
Per consentire al target di essere dinamico, il proiettore dedicato è fornito di un
servomeccanismo che ne consente il movimento. Se, con questo sistema, si volesse la
riproduzione contemporanea di più obiettivi, sarebbe indispensabile utilizzare più
proiettori ad alta risoluzione, dedicati alla rappresentazione dei target.
L’utilizzo di uno schermo sferico è necessario affinché il pilota abbia la
sensazione di avere a che fare con una immagine reale: infatti, una immagine appare
reale quando viene osservata da un punto posto alla distanza corrispondente al
raggio della sfera dello specchio; ma, sembra virtuale, se ci troviamo in un punto
posto all’infinito dallo stesso. Pertanto, è ovvio che il Cockpit con il pilota debba
essere disposto proprio ad una distanza pari al raggio dello schermo sferico, in modo
Capitolo I 28

che la sensazione prodotta al pilota sia comparabile o, in qualche caso, superiore, a
quella ottenuta con i sistemi di visualizzazione civili.
Ad ogni modo, il sistema può simulare anche le operazioni a bassa quota, come
il dover colpire un obiettivo al suolo: per tali operazioni, il proiettore dedicato,
anziché proiettare il velivolo, si occupa di rappresentare sullo sfondo l’obiettivo e la
zona relativa ad esso, unica porzione di terreno nella quale è necessario ottenere una
elevata risoluzione.
Nei sistemi più moderni, sia le immagini di sfondo che quelle in primo piano,
vengono proiettate su uno schermo facendo uso di più proiettori (Fig. 1-7). La scelta
di proiettare l’immagine frontalmente o posteriormente allo schermo è fondamentale
per stabilire le caratteristiche necessarie dei proiettori: infatti, la retro-proiezione
comporta un’attenuazione della risoluzione e della luminosità delle immagini,
richiedendo proiettori più potenti; viceversa, la proiezione frontale richiede l’utilizzo
di lenti e specchi, che possono introdurre inattese distorsioni delle immagini. Nei
sistemi Dome, infatti, che proiettano le immagini su un’ampia superficie riflettente
curva, sono facilmente riscontrabili effetti di questo tipo.
Il Projection System possiede un vantaggio significativo rispetto agli altri
sistemi: la possibilità di realizzare FOV molto ampi (dell’ordine dei metri sia
verticalmente che orizzontalmente) con un’accettabile risoluzione. Tuttavia,
l’utilizzo di questo approccio è vincolato dai costi necessari a realizzare un FOV
ampio, che abbia un’elevata luminosità e risoluzione spaziale, comparabili con gli
altri sistemi di visualizzazione di dimensioni minori.
Altre soluzioni realizzative del Visual System, per gli FFS militari, possono prevedere
l’uso di:
o un Helmet Mounted Display (HMD), nel quale il target viene proiettato sulle
lenti del casco del pilota;
o una serie di schermi, simili a quelli adoperati nei sistemi civili, affiancati l’uno
all’altro, per realizzare un ambiente analogo a quello ottenibile con uno
specchio sferico.
Capitolo I 29

Figura 1-7 – Schermo sferico (Visual System) per un simulatore di volo di velivoli militari
1.4.2.3 Esempio di un FFS con COCKPIT fisso
Cockpit Visual Projectors Computers System
Visual Wall Instructor Station
Figura 1-8 – Schema strutturale di un tipico FFS statico
Capitolo I 30
1.4.3 INSTRUCTOR OPERATOR STATION
Tutti i sistemi interessati dalla simulazione vengono controllati mediante una
più o meno complessa Stazione Istruttore (Instructor Operating Station, IOS), dalla
quale un istruttore può gestire tutta una serie di aspetti della simulazione, come le
condizioni di volo e gli eventuali malfunzionamenti del velivolo. Utilizzando l’IOS,
l’istruttore può gestire:
− le rotture dei motori;
− i malfunzionamenti ai carrelli d’atterraggio e ai sistemi di navigazione;
− problemi all’impianto elettrico, idraulico e di alimentazione dei motori;
− condizioni atmosferiche avverse, in volo e sulla pista d’atterraggio;
e molti altri problemi ai quali il personale navigante deve essere pronto a far fronte
durante il volo.
Molti simulatori consentono all’istruttore di controllare la simulazione da una
console posta dietro al pilota o al posto del co-pilota, quando il co-pilota non deve
essere addestrato. Nei simulatori equipaggiati con il Personal Digital Assistant
(PDA), l’istruttore visualizza su un computer palmare i dati della simulazione e può
volare a fianco del pilota, nel posto del co-pilota, controllando da lì la simulazione,
senza interferire con il controllo del velivolo.
In base alle funzioni che l’istruttore deve controllare vengono definite le
specifiche della IOS. Ai fini dell’addestramento, un istruttore deve poter monitorare,
oltre alla corretta realizzazione di una manovra, anche i tempi di risposta del pilota
ad una sollecitazione. A tale scopo, il ruolo dell’istruttore è anche quello di conoscere:
− i risultati della simulazione, in termini di manovre effettuate;
− rilevare quale è stata la risposta del pilota al cambiamento delle condizioni di
volo;
− confrontare i dati relativi al pilota addestrato con i valori comuni agli altri
piloti;
− informare il pilota delle sue prestazioni.
Capitolo I 31
Sia che la postazione IOS sia on-board oppure off-board, l’istruttore deve poter anche
valutare i progressi del pilota nella gestione delle operazioni di volo. Ciò viene fatto
sia osservando una serie di dati relativi alla simulazione, che l’istruttore deve saper
analizzare, e sia osservando il comportamento del pilota all’interno del Cockpit. In
alcune particolari condizioni di volo, come quelle di volo tattico e/o strumentale, è
necessario che l’istruttore possa ascoltare anche le conversazioni che vengono
eseguite dal pilota con il controllo a terra.
La stazione IOS tradizionale è composta da:
1. uno o più monitor sui quali vengono visualizzati alcuni dati, opportunamente
selezionati, relativi alla simulazione;
2. alcuni pannelli di controllo “tradizionali”.
I parametri da visualizzare alla IOS vengono gestiti via software e ciò garantisce la
flessibilità utile a organizzare il flusso di dati da trattare e le funzioni da controllare.
I pannelli di controllo della IOS sono costituiti da una serie di pulsanti, interruttori e
potenziometri che permettono all’istruttore di variare le condizione operative
semplicemente variando il loro stato. Essi, in generale, possono contenere:
− una zona relativa alle azioni dirette (direct action keys), nella quale vengono
gestite le anomalie nel funzionamento del velivolo;
− una zona relativa ai controlli (systems control);
− una zona relativa alle variable keys, cioè una porzione di pannello nella quale è
possibile variare alcuni parametri mediante una azione diretta sul loro valore
numerico.
Capitolo I 32

Figura 1-9 – Esempio di una tipica Stazione Istruttore
1.5 CARATTERISTICHE SOFTWARE DI UN SIMULATORE DI VOLO
Una simulazione deve comprende tre elementi principali: un modello di
rappresentazione della realtà fisica; un dispositivo fisico che implementa il modello;
una applicazione che interfaccia il modello al dispositivo, secondo tecniche
particolari che soddisfano specifici requisiti.
Nella simulazione del volo, quando si parla di “modello”, ci si riferisce ad un
insieme di equazioni capaci di descrivere il comportamento reale del sistema velivolo;
cioè, quello che si intende con il termine “modello” è una rappresentazione
matematica del velivolo e dei suoi modi di risposta alle sollecitazioni, che
rappresentano le componenti essenziali su cui fondare il funzionamento del
simulatore.
Capitolo I 33
1.5.1 IL MODELLO DINAMICO
Il modello dinamico di un simulatore di volo è essenzialmente un modello
matematico, nel quale è possibile individuare una serie di moduli separati:
1. modello matematico completo della dinamica del velivolo;
2. modello matematico del sistema propulsivo;
3. modello matematico dell’ambiente esterno;
4. modello matematico dell’atmosfera e della turbolenza atmosferica.
Questo insieme di elementi costituisce il cosiddetto modello dinamico del velivolo
(Flight Dynamic Model, FDM); molti testi specifici, come Aircraft Control and
Simulation di Brian L. Stevens e Frank L. Lewis, individuano le fondamenta di tale
rappresentazione matematica nelle classiche equazioni della dinamica.
Il primo modulo contiene un sistema di equazioni complete della dinamica del
velivolo, considerato come un corpo rigido a sei gradi di libertà: l’approccio utilizzato
è quello classico della meccanica del volo per lo studio del moto del velivolo in
atmosfera. Questo sistema di equazioni è differenziale e non lineare e la sua
risoluzione richiede particolari metodi di integrazione numerica.
Il velivolo, oggetto della simulazione, viene caratterizzato fornendo i suoi dati
geometrico-inerziali e il suo database aerodinamico, frutto di attente prove in
galleria. Perciò, il modello matematico del velivolo deve contenere più sottomodelli, i
quali riproducono le caratteristiche di manovra, i sistemi di controllo manuali ed
automatici e altri elementi relativi ai sistemi di comunicazione o a caratteristiche
particolari del velivolo, come possono essere gli armamenti. Le manovre eseguite dal
velivolo e l’orientazione dello stesso rispetto alla Terra possono essere espressi
efficacemente sia mediante una formulazione che fa uso degli angoli di Eulero
(φ,θ,ψ), i cui limiti sono connessi alle singolarità delle funzioni trascendenti di tali
angoli (gimbal lock), sia mediante un più efficiente approccio che utilizza i
quaternioni. Il vantaggio connesso all’utilizzo dei quaternioni è duplice: consente sia
di ottenere una formulazione delle equazioni del moto e delle equazioni cinematiche
Capitolo I 34

ausiliarie prive di singolarità, sia un minore costo computazione, che rende più veloce
la risoluzione delle equazioni del moto.
Più in dettaglio, il modello del velivolo può essere pensato come costituito,
principalmente, dal suo modello aerodinamico. Il modello aerodinamico deve
riprodurre le caratteristiche predominanti delle forze e dei momenti aerodinamici
agenti sul velivolo: portanza e resistenza, contributi principali alle performance del
velivolo, e i momenti attorno ai tre assi velivolo, attraverso i quali il pilota esercita le
azioni di controllo. Le equazioni che regolano il modello aerodinamico vengono
composte considerando separatamente i contributi delle semplici espressioni per i
singoli componenti fisici del velivolo (le ali, la fusoliera, il piano di coda, ecc…);
successivamente, tali espressioni vengono sommate con un metodo denominato
build-up. Il risultato del processo di build-up viene, poi, corretto considerando alcuni
effetti secondari, come l’effetto suolo (ground effect): il suolo, infatti, modifica il flusso
adiacente al velivolo e produce delle azioni aerodinamiche differenti rispetto al volo
in aria libera. Il ground effect è da tenere in conto specialmente durante la manovra di
atterraggio, in quanto la variazione del flusso attorno al velivolo produce una
variazione del momento di beccheggio con un conseguente abbassamento del muso.
Inoltre, il modello aerodinamico può essere considerato statico o quasi-statico, dal
momento che si può ritenere trascurabile il tempo caratteristico nel quale il flusso
d’aria ritorna nelle condizioni statiche, dopo una manovra; perciò, la variabile tempo
non viene considerata, anche se, in linea di principio, esiste una dipendenza dal
tempo, almeno nelle fasi transitorie.
Oltre al modello aerodinamico, il modello del velivolo deve contenere anche
delle informazioni sulle posizioni e sulle azioni dei carrelli, i quali consentono il moto
al suolo del velivolo: essi, quasi sempre, vengono modellati come un semplice sistema
massa-molla-smorzatore, capace di includere anche gli effetti dell’interazione del
pneumatico con il suolo e dei freni.
Infine, nel modello del velivolo deve essere contenuto anche un sottomodello
relativo ai sistemi di controllo: i controlli (joystick, manette, pulsanti, ecc…) sono
l’anello di congiunzione tra il pilota e le superfici di governo, che, nella realtà fisica,
Capitolo I 35

vengono interfacciate al pilota da un insieme di attuatori, cablaggi e manovellismi.
Tale sottomodello deve essere capace di modellare tutta una serie di possibili rotture
meccaniche, come interruzione dei cablaggi, bloccaggio degli attuatori, ecc…, e ciò
viene solitamente effettuato mediante una serie di segnali opportuni, elaborati da un
computer dedicato, a seconda dei compiti che il pilota deve eseguire o delle richieste
dell’istruttore. Sebbene ciò semplifichi la difficoltà di dover modellare il
funzionamento incognito di un componente meccanico danneggiato, evidentemente,
implica una crescita del livello di complessità del modello matematico del velivolo, il
quale deve poter contenere quante più funzioni matematiche è possibile,
relativamente anche al comportamento dei sistemi di controllo.
Il modello propulsivo può rappresentare sia le caratteristiche di un velivolo
motoelica che di un turbogetto e, oltre a valutare la spinta fornita, provvede anche al
calcolo degli eventuali momenti di beccheggio, di rollio e d’imbardata, connessi al
funzionamento del propulsore. Innanzitutto, tale modello deve fornire il valore
corretto della spinta stazionaria corrispondente ad un certo livello di potenza
richiesta dal pilota, spinta che viene modellata in termini di spinta netta (cioè,
trascurando le resistenze connesse al moto del fluido negli organi motore e quelle
degli organi motore stessi). Inoltre, dato il notevole effetto dei gas combusti sul piano
di coda, deve essere considerata anche l’orientazione della spinta, in modo da
determinare le effettive forze disponibili sulle superfici di controllo e gli eventuali
contributi alle azioni aerodinamiche. In un modello più complesso, può essere
contenuta anche una valutazione dei tempi di risposta del sistema motore. Infatti,
quando il pilota richiede più potenza, variando la posizione della manetta, la spinta
fornita non varia istantaneamente; ma, esiste un tempo di risposta, durante il quale,
per aumentare la spinta, viene inviato più combustibile al motore e viene aumentata
la velocità di rotazione delle sue macchine rotanti. Tale tempo può influenzare
l’abilità di controllo del pilota, in quanto può avere una durata variabile da pochi
decimi di secondo a qualche secondo. Per questo motivo, un modello propulsivo
accuratamente sviluppato deve contenere anche la variabile tempo per la
valutazione della spinta.
Capitolo I 36
Dal momento che il velivolo esegue le manovre in un ambiente fisico, anche il
modello simulato deve interagire con un ambiente simulato, che riproduce le
caratteristiche dell’ambiente reale. L’ambiente simulato viene rappresentato
attraverso un modello matematico che contiene una descrizione sia dell’atmosfera in
quota che del territorio al suolo, nei quali il velivolo simulato decolla, esegue delle
operazioni (ad es. colpire degli obiettivi, etc.) o atterra.
L’ultimo modulo, relativo all’atmosfera e alla turbolenza atmosferica, consente
di rappresentare la maggior parte delle condizioni operative del velivolo in quota,
compresi gli effetti dovuto al volo in aria turbolenta o in presenza di una raffica.
Esso si fonda sulla legge di variazione della densità con la quota, come è stabilita dal
modello di atmosfera standard; le altre condizioni, come le variazioni di latitudine o
di longitudine, gli orari di volo e le temperature, vengono ricostruite su base
statistica, facendo riferimento ad una serie di dati acquisiti durante diverse sessioni
di rilevamento. Anche per riprodurre la turbolenza e la raffica è necessario un
modello, che viene costruito a partire dai dati accumulati durante le osservazioni dei
fenomeni reali.
Da quanto detto, risulta evidente che ciascuno dei moduli sia basato su una più
o meno complessa formulazione matematica, la quale consente di sintetizzare e,
qualche volta, semplificare le infinite complicazioni connesse al volo reale, non
dimenticando di voler ottenere una simulazione quanto più fedele è possibile. Essi,
pur essendo stati analizzati separatamente, debbono poter lavorare insieme: ad
esempio, le informazioni del modello dell’atmosfera, relative al volo ad una certa
quota, vengono accorpate con quelle della propulsione, che fornisce la spinta del
propulsore, e al modello dell’ambiente esterno, il quale rappresenta la presenza o
meno di altri velivolo, di case o campi di volo; infine, tutte queste informazioni
vengono convogliate nel modello del velivolo, che ci restituisce le forze e i momenti
agenti sul velivolo.
Capitolo I 37

1.5.2 RISOLUZIONE DELLE EQUAZIONI DEL MOTO
Per comprendere, in linea di massima, come viene gestito il modello dinamico da un
software di simulazione, possiamo far riferimento al seguente schema a blocchi.
Capitolo I 38

Figu
ra 1
-10
– Sc
hem
a a
bloc
chi d
ell’F
DM
Capitolo I 39

La prima cosa da sottolineare è che un sistema di simulazione deve essere
capace di funzionare in real time. Un sistema può dirsi funzionante in real time
quando tutti i sottosistemi che lo compongono (ognuno dei quali ha un proprio
tempo di risposta), ad ogni iterazione di aggiornamento dello stato dell’intero
impianto, portano a termine i rispettivi task, secondo specifici vincoli temporali. In
altre parole, ogni sottosistema deve essere capace di riaggiornare il suo stato in un
tempo sufficientemente breve in modo che lo stato globale avanzi nel tempo con una
determinata frequenza. Tale frequenza deve essere quella che è capace di fornire la
percezione di realismo all’utente della simulazione. Pertanto, il software deve
provvedere alla risoluzione delle equazioni in modo da assicurare il real-time, cioè
valutando, ad ogni fissato Δt ovvero con una frequenza stabilita, come variano i
parametri della simulazione. A partire da un certo istante iniziale e fissato Δt, viene
valutato lo stato iniziale del velivolo all’istante t0, cioè la posizione del baricentro
rispetto alla Terra (XeG,YeG,ZeG), le componenti del vettore velocità V=(u,v,w), le
velocità angolari (p,q,r) e gli angoli di Eulero (ψ,θ,ϕ). Dalle componenti del vettore
velocità vengono determinati gli angoli di attacco (α), di derapata(β) e il modulo del
vettore velocità (V), utile al calcolo della pressione dinamica (q∞). Le informazioni
relative ad α e β, insieme con le velocità angolari adimensionalizzate, al numero di
Mach (M∞) e alle proprietà geometriche ed inerziali del velivolo, vengono immesse nel
modello aerodinamico, il quale, tenendo conto delle azioni di controllo effettuate dal
pilota (δT, δa, δe, δr), costruisce i coefficienti aerodinamici (CL, CD, CY,CL, CM, CN).
Essi, moltiplicati per la pressione dinamica, consentono di ottenere le forze ed i
momenti risultanti agenti sul velivolo.
Poiché i coefficienti aerodinamici sono valutati in un sistema d’assi mobile,
solidali al velivolo, mentre le equazioni differenziali della dinamica, da risolvere, sono
espresse nel sistema di riferimento inerziale, occorrerà trasformare le componenti
della forza e del momento risultanti, che rappresentano i termini noti dell’equazioni
della dinamica, dal sistema mobile al sistema inerziale.
Infatti, ogni contributo alle forze agenti sul velivolo viene espresso nel sistema
mobile più conveniente: i coefficienti aerodinamici in un sistema d’assi aerodinamici,
Capitolo I 40
cosicché occorrerà una matrice di trasformazione funzione degli angoli α e β, tra il
sistema d’assi aerodinamici e quello d’assi corpo; le forze propulsive vengono espresse
in un sistema d’assi corpo e, per effetto del calettamento dei propulsori, possono
presentare tutte e tre le componenti lungo gli assi coordinati; mentre, la forza peso è
convenientemente espressa nel sistema inerziale, mediante una sola componente non
nulla. Espresse le forze nel sistema d’assi, solidale al velivolo, con una matrice di
trasformazione Mb2e, ottenuta per una determinata sequenza degli angoli di Eulero
(solitamente viene utilizzata una sequenza 321 per gli angoli ψ, θ, ϕ), si possono
trasformare le forze nel sistema inerziale, prima di procedere alla soluzione delle
equazioni.
La struttura del software che implementa tale schema a blocchi dipende dalle
caratteristiche del sistema di calcolatori. Un software di simulazione è una estesa
porzione di codice da elaborare, cosicché, di solito, esso viene suddiviso in una serie di
porzioni di codice, procedure o funzioni, ciascuna delle quali lavora con un solo
ingresso ed una sola uscita. Queste funzioni, poiché debbono essere sincronizzate ed
avvenire in un tempo minore o uguale a quello reale (wall clock time), vengono
controllate da un software executive and rate sequenser, il quale sincronizza le
operazioni da eseguire e controlla la frequenza di esecuzione. La necessità di
assicurare che tutte le accelerazioni, le visualizzazioni e le interazioni avvengano in
tempo reale comporta che il software debba risolvere il problema del secondo ordine
come un problema dinamico. Così, il sistema di simulazione itera il processo di
soluzione delle equazioni ad una frequenza che viene stabilita dalle necessità della
simulazione e controllata dal software stesso. Poiché risolvere tutti i parametri con la
stessa frequenza richiederebbe delle potenze di calcolo troppo elevate e dal momento
che non tutti i parametri variano con la stessa frequenza, solitamente, per ciascun
modulo viene stabilita una frequenza di aggiornamento diversa, multiplo o sotto-
multiplo della frequenza principale. La frequenza principale viene condizionata dalla
scelta tecnologica circa i sistemi utilizzati nell’impianto di simulazione; quello che
possiede la frequenza minore di aggiornamento impone la massima frequenza
principale del sistema di simulazione. Inoltre, poiché l’interazione di più sistemi può
comportare la variazione della frequenza caratteristica di risposta di ciascuno di essi,
Capitolo I 41
Capitolo I 42
occorre verificare la frequenza principale del sistema nelle condizioni operative più
gravose, per controllare che sia assicurato il necessario livello di realismo richiesto.
Stabilendo la frequenza principale, si impone anche il Δt con il quale vengono risolte
le equazioni della dinamica del velivolo.
Infine, una volta risolte le equazioni del moto, il software interagisce
coerentemente con tutti gli altri sistemi del simulatore (Motion, Visual, Cockpit,
etc.), inviando loro i dati necessari a mettere in atto le azioni della simulazione.
Perciò, la fedeltà della simulazione è anche risultato del software di simulazione, che
deve essere curato attentamente.
Capitolo 2 CERTIFICAZIONE DI UN SIMULATORE DI VOLO
2.1 RIFERIMENTI NORMATIVI
Le norme applicabili alla Certificazione di un simulatore di volo di tipo
commerciale sono le JAR-STD. Queste norme permettono di adottare criteri
omogenei, uniformi e riconosciuti dalle Joint Aviation Authorities (JAA) per la
Qualificazione dei dispositivi di addestramento per il personale navigante.
Le istruzioni e le procedure per gli Operatori e gli Utilizzatori dei Flight Simulation
Training Devices (FSTD), cioè per i simulatori di volo di velivoli, sono contenute
nelle norme seguenti:
o JAR-STD 1A, Aeroplane Flight Simulators, concernente i simulatori di volo
per velivoli;
o JAR-STD 2A, Flight Training Devices, concernente i dispositivi di
addestramento al volo;
o JAR-STD 3A, Flight and Navigation Procedures Trainers, concernente i
dispositivi per l'addestramento alle procedure di volo e di navigazione;
o JAR-STD 4A, Basic Instrument Training Devices, concernente i dispositivi per
l'addestramento basico alle procedure di volo e di navigazione.
Le norme relative ai simulatori di elicotteri sono le JAR-STD 1H, JAR-STD 2H e
JAR-STD 3H.
2.2 DISPOSITIVI DI SIMULAZIONE
In base alle norme riferite al paragrafo precedente, i sistemi di simulazione per
l’addestramento al volo sono classificati in diverse categorie.
Capitolo II 43

I termini Synthetic Training Device (STD) e Flight Simulation Training Device
(FSTD) identificano tutti i dispositivi basati a terra e destinati all’addestramento al
volo del personale di condotta. I diversi tipi di simulatori sono descritti di seguito.
− FFS (Full Flight Simulator). Il simulatore di volo “completo”, rappresentante
un tipo di aeromobile certificato, è costituito dai seguenti assiemi principali:
o una riproduzione, in scala 1:1, della cabina di pilotaggio di un
aeromobile di uno specifico tipo o marca, modello o versione, inclusa la
dotazione di tutti gli equipaggiamenti e delle risorse informatiche
necessari per la riproduzione delle operazioni a terra e in volo;
o un sistema visivo, chiamato in gergo Visual, per la riproduzione
dell’ambiente esterno alla cabina di pilotaggio;
o un sistema di movimento, chiamato Motion, per la riproduzione delle
accelerazioni a cui è soggetta la cabina di pilotaggio.
Questo tipo di simulatore è conforme agli standard minimi richiesti per la
Qualificazione di un FFS (cfr. Tabella 2-1 a pag. 58).
Figura 2-1 – FFS di livello B del Cessna Caravan prodotto da FRASCA International Inc.
Capitolo II 44

− FTD (Flight Training Device). Questo tipo di simulatore è un simulatore di
volo statico, rappresentante un tipo di aeromobile certificato, e comprende:
o una riproduzione, in scala 1:1 ed in relazione ai sistemi installati, degli
strumenti, degli equipaggiamenti, dei pannelli e dei controlli di un
aeromobile, posizionati in un simulacro di cabina di pilotaggio chiusa
o aperta, inclusa l’implementazione delle risorse informatiche
necessarie per la riproduzione delle operazioni a terra e in volo.
Questo tipo non richiede l’installazione di un sistema di movimentazione o di
visualizzazione ed è conforme agli standard minimi richiesti per la
Qualificazione di uno specifico livello di un FTD.
− FNPT I (Flight and Navigation Procedure Trainer - Type I). Questo tipo di
simulatore è un simulatore di volo strumentale e procedurale, che rappresenta
l’ambiente di una cabina di pilotaggio. Esso non è dotato di sistema di
visualizzazione e rappresenta una classe di aeromobili.
− FNPT II/III [MCC] (Flight and Navigation Procedure Trainer - Type II, Type
III or Type II MCC/Type III MCC). Questo tipo di simulatore è anch’esso un
simulatore di volo strumentale e procedurale, rappresentante una classe di
aeromobili, ed è costituito dai seguenti assiemi principali:
o l’ambiente di una cabina di pilotaggio di un aeromobile (plurimotore per
tipo e per classe) e dei suoi equipaggiamenti;
o un sistema per la visualizzazione esterna alla cabina di pilotaggio.
Questo tipo di simulatore consente di rappresentare il velivolo durante le
condizioni operative e di far funzionare i sistemi così come avviene durante il
volo. La denominazione MCC indica la capacità di effettuare training di tipo
Multi Crew Co-operation.
Capitolo II 45

Figura 2-2 – Esempio di FNTP distribuito da CAE con pannelli di controllo touch-screen
− BITD (Basic Instrument Training Device). Questo tipo di simulatore è un
dispositivo al suolo per l’addestramento strumentale di base, che riproduce la
postazione del pilota per una specifica classe di aeroplani. Può comprendere:
o un pannello degli strumenti elettronico (screen based);
o comandi di volo gestiti con sistema meccanico (springloaded).
Esso è perciò una piattaforma per l’addestramento alle procedure di volo
strumentale.
Figura 2-3 – Esempio di un tipico simulatore strumentale e procedurale
Capitolo II 46
Un’altra classe di simulatori, molto importanti per lo studio delle qualità di
volo e la ricerca di nuove soluzioni tecniche, è quello che prende il nome di Research
Simulator o Engineering Simulator. La normativa sui simulatori di volo non prevede
alcuna specifica di progetto relativamente a questo tipo di simulatori, in quanto le
loro caratteristiche specifiche vengono determinate in relazione agli studi che
vengono eseguiti con questo dispositivo di simulazione. Poiché spesso sono utilizzati
per studiare gli effetti sulle qualità di manovra del velivolo, in seguito alla variazione
di uno o più componenti dello stesso, la simulazione deve essere guidata e coadiuvata
da un pilota che abbia una notevole esperienza in relazione al velivolo: in questo
modo, egli può guidare il lavoro degli ingegneri fornendo loro un adeguato feedback
circa gli effetti delle modifiche effettuate. In questo senso, avere un Research
Simulator che garantisca un elevato livello di fedeltà è importante per assicurare la
validità delle prove effettuate, in quanto, si può dire che, ad un elevato livello di
fedeltà corrisponda un’efficace comportamento e performance del pilota. Pertanto,
oltre che per la fase di progetto vero e proprio, come strumento di validazione dello
stesso, questi simulatori sono molto importanti anche nella fase di prima
Certificazione, sia del velivolo completo che del simulatore corrispondente, in quanto
possono fornire un insieme di dati preliminari alle prove in volo, molto utili nelle fasi
di Valutazione Iniziale.
La stessa normativa, oltre alle diverse categorie di simulatori, definisce, inoltre,
chi gestisce il simulatore, chi lo utilizza e alcune caratteristiche e documenti
fondamentali della Certificazione, come:
− Flight Simulation Training Device Operator: la persona, l’organizzazione o
l’impresa direttamente responsabile nei confronti dell’Autorità per la richiesta
ed il mantenimento della Qualificazione di uno specifico FSTD.
− Flight Simulation Training Device User è la persona, l’organizzazione o
l’impresa che richiede i crediti per l’addestramento, per il controllo e per gli
esami da effettuare tramite l’uso di un FSTD.
Capitolo II 47
− Flight Simulation Training Device Approval è il limite di utilizzazione fino a cui
un STD di uno specifico livello di Qualificazione può essere impiegato da una
persona, da una organizzazione o da una impresa, in conformità
all’autorizzazione rilasciata dall’Autorità. Tale limite tiene conto sia delle
differenze tra l’aeromobile e l’FSTD, sia delle capacità operative e di
addestramento dell’utilizzatore.
− Flight Simulation Training Device Qualification identifica il livello della
capacità tecnica di un FSTD come riportato nel documento di conformità.
− Qualification Test Guide (QTG) è il documento che dimostra che le qualità delle
prestazioni e del pilotaggio di un FSTD siano in tolleranza con quelle
dell’aeromobile (simulato) e che siano stati soddisfatti tutti i requisiti previsti
dalle norme JAR-STD. La QTG comprende i dati sia dell’aeroplano/elicottero
che dell’FSTD, utilizzati a supporto delle prove di accettazione.
2.3 DEFINIZIONI DI OPERATORE E DI UTILIZZATORE DI FSTD
Nel paragrafo precedente, è stato identificato l’Operatore di FSTD (FTSD
Operator). In base alla normativa applicabile agli FSTD, la definizione di “Operatore
di FSTD” si applica alle persone, alle organizzazioni o alle imprese che richiedono la
Qualificazione di un FSTD e sono responsabili del mantenimento della Qualificazione
ottenuta.
Ogni norma JAR-STD applicabile agli FSTD al paragrafo XA.001
“Applicability” (ove X sta per 1, 2, 3 o 4, a seconda della norma) ribadisce che «la
norma JAR-STD in esame si applica alle persone, alle organizzazioni o alle imprese
che richiedono l'ottenimento della Qualificazione per il Training Device».
Invece, la definizione di “Utilizzatore di FSTD” (FTSD User) si applica alle
persone, alle organizzazioni o alle imprese che adoperano un FSTD per addestrare e
controllare il personale navigante.
Capitolo II 48

2.4 REQUISITI DELL’ OPERATORE DI FSTD
L’Operatore di FSTD deve possedere una serie di requisiti sia per ottenere la
Qualificazione del Training Device sia per mantenerla. In particolare, l’Operatore di
FSTD deve:
1. organizzare la propria struttura, garantendo la presenza di alcune figure
chiave, che saranno definite nei paragrafi seguenti;
2. implementare un Sistema di Gestione della Qualità (Quality System),
nominando un Responsabile del Sistema Qualità (Quality Manager);
3. garantire la corretta e sicura installazione dell’FSTD;
4. garantire il mantenimento in efficienza dell’FSTD;
5. prevedere un sistema di aggiornamento dell’FSTD;
6. tenere traccia dell’utilizzazione dell’FSTD, delle eventuali anomalie ed
informare l’Ente riguardo le anomalie gravi che impediscano l’operatività
dell’FSTD per un periodo di tempo uguale o superiore a due giorni.
2.4.1 ORGANIZZAZIONE DELL’OPERATORE DI FSTD
La struttura di gestione di un FSTD deve prevedere le seguenti funzioni:
o A) Accountable Manager FSTD: è la persona, riconosciuta dall'Autorità
competente (ENAC, JAA,…), che ha la delega aziendale per assicurare che
tutte le attività necessarie al mantenimento in efficienza ed all’aggiornamento
del singolo FSTD possano essere finanziate e svolte, secondo gli standard
richiesti dalla stessa Autorità, e che possa essere applicato ogni altro requisito
definito dall'Operatore di FSTD.
o B) Responsabile Tecnico (FSTD Technical Manager): è la persona,
riconosciuta dall'Autorità, con caratteristiche professionali tali da garantire la
sorveglianza operativa, la continuità della Qualificazione – ivi compresa
l’esecuzione programmata dei Validation Test della QTG - e gli interventi di
manutenzione (che possono essere effettuati anche da tecnici esterni
Capitolo II 49

qualificati), allo scopo di mantenere in efficienza l’FSTD, in base a quanto
stabilito nei certificati di Qualificazione dell’Autorità competente.
o C) Quality Manager FSTD: è la persona, accettata dall'Autorità, responsabile
per la gestione del Quality System, del controllo delle attività e della richiesta
delle azioni correttive.
L’esistenza di dette caratteristiche professionali viene dimostrata all’Autorità
tramite l’attestazione, rilasciata dal costruttore dell’FSTD, dell’esecuzione di corsi
specifici finalizzati alla conoscenza, manutenzione e gestione dell’FSTD. L’FSTD
Technical Manager può essere affiancato da uno o più vicari, purché essi abbiano
conseguito i requisiti professionali sopra descritti, e i loro nominativi, completi di
qualifiche professionali e dispositivi afferenti, vengano riportati nel manuale
dell’Operatore FSTD per l’accettazione da parte dell’Autorità. Per l’accettazione da
parte di ENAC, il Quality Manager FSTD deve conoscere le norme JAR-STD ed
avere la capacità di gestire il Sistema di Gestione della Qualità (Quality System) dello
specifico FSTD. Cioè, il Quality Manager per FSTD deve possedere i seguenti
requisiti:
− titolo di studio di scuola media superiore;
− esperienza lavorativa di almeno due anni in campo aeronautico e di un anno
nel processo di controllo qualità;
− corso di Quality Manager o di Auditor presso un’organizzazione riconosciuta
per i corsi di controllo qualità;
− conoscenza delle JAR-STD.
Infine, nel caso in cui l’Operatore di FSTD sia anche in possesso di Certificate of
Authenticity (COA) o di certificato di approvazione, quale Flight Training
Organization (FTO) o Type Rating Trainig Organization (TRTO), le funzioni di
Accountable Manager e di Quality Manager possono essere svolte dalle stesse figure
dell’Operatore o della FTO/TRTO, ferma restando l'attuazione dello specifico Quality
Assurance Programme per il settore FSTD riportato nel Quality Manual
dell’Operatore STD.
Capitolo II 50

Per guadagnare un determinato livello di Certificazione, un simulatore di volo
viene giudicato mediante una serie di procedure eseguite da un team tecnico scelto
dall’Autorità. Il team tecnico consiste di almeno:
− un ispettore tecnico (Technical Flight Simulator Inspector) dell’Autorità
nazionale o di un’altra delle Autorità JAA, competente in tutti gli aspetti
della simulazione del volo, quali hardware, software e computer modelling,
oppure una persona, designata dall’Autorità, che abbia delle conoscenze
equivalenti;
e una delle seguenti figure:
o un ispettore di volo (Flight Inspector) o un ispettore accreditato da un’altra
Autorità JAA, che abbia sia le competenze necessarie alle procedure di
addestramento del personale navigante e sia quelle relative al tipo di velivolo
simulato;
o un ispettore di volo (Flight Inspector), qualificato per l’addestramento del
personale navigante, assistito da un istruttore (Type Rating Instructor) che
abbia esperienza con il tipo di velivolo simulato;
o eccezionalmente, una persona designata dall’Autorità e qualificata nelle
procedure di addestramento, che abbia esperienza riguardo al tipo di velivolo
simulato.
Quando viene assegnato un sostituto per uno degli ispettori dell’Autorità, questa
persona deve essere correttamente certificata dall’Autorità nazionale o da un’altra
Autorità JAA.
In aggiunta, potrebbero essere presenti le seguenti persone:
o un comandante qualificato per l’addestramento (Training Captain),
normalmente derivante da un Operatore di STD o dal cliente principale del
simulatore di volo e che conosce la classe di velivoli da simulatore;
o un sufficiente staff di supporto che assista lo svolgimento del test e le
operazioni dalla Stazione Istruttore.
Capitolo II 51
2.4.2 SISTEMA DI GESTIONE DELLA QUALITÀ DELL’OPERATORE DI FSTD
Per assicurare la continuità della Qualificazione del FSTD, l’Operatore deve
dimostrare la capacità di mantenere le prestazioni, le funzioni e le altre
caratteristiche del singolo FSTD, specificate nel Certificato di Qualificazione,
prevedendo un Sistema di Gestione della Qualità (Quality System) e nominando un
Responsabile del Sistema Qualità (Quality Manager). Il loro scopo è quello di
verificare la conformità dell’Operatore alla norme JAR-STD e il rispetto delle
performance e delle procedure di manutenzione necessarie, così come sono riportate
nel “Manuale dell’Operatore di FSTD”. Il Quality System deve prevedere sia un
Quality Assurance Programme, sia uno strumento di feedback all’Accountable
Manager, con il quale egli può valutare le eventuali discrepanze e non conformità
dell’Operatore ed eseguire le opportune procedure correttive.
2.4.3 INSTALLAZIONE E MANTENIMENTO IN EFFICIENZA DELL’FSTD
L’installazione di un FSTD deve essere effettuata in locali che permettano
operazioni sicure ed affidabili. Allo scopo di migliorare l’efficienza del FSTD, è
opportuno prevedere alcuni spazi, nei pressi del simulatore, nei quali gli utilizzatori
possano eseguire le operazioni di briefing e/o debriefing dell’attività.
Come condizioni di minimo, deve essere garantito che:
− il personale operativo e di manutenzione abbia un adeguata istruzione circa le
operazioni di sicurezza del Training Device;
− siano presenti sistemi di sicurezza adeguati a consentire un passaggio sicuro al
personale del Training Device, in caso di incendio;
− sia presente una adeguata protezione contro rischi elettrici, meccanici,
idraulici e pneumatici, che comprendano il Control Loading e il Motion
System;
− siano presenti, nel luogo dell’istallazione, un numero sufficiente di luci
d’emergenza, uscite e strutture di sicurezza, confini dell’area di pericolo;
Capitolo II 52

− sia presente un pulsante d’emergenza che consenta l’interruzione delle
operazioni del Control Loading, sia dalla posizione del pilota che da quella
dell’istruttore.
Le caratteristiche di sicurezza del Training Device, come le luci e i pulsanti
d’emergenza, poi, devono essere regolarmente testate dall’Operatore almeno una
volta l’anno, tenendo traccia degli avvenuti controlli.
2.4.4 AGGIORNAMENTO DELL’FSTD
L’Operatore di FSTD deve prevedere un sistema di aggiornamento del simulatore,
mantenendo attivo un canale di collegamento con il costruttore per quanto riguarda
l’eventuale introduzione di qualche modifica. Tali modifiche possono riguardare:
− A) l’aeromobile;
− B) l’FSTD, compresi l’implementazione, l’aggiornamento o la rimozione, del
Motion o del Visual.
Le modifiche riguardanti l’aeromobile e ritenute essenziali per l'addestramento e per
le qualità di manovrabilità, devono essere apportate all’FSTD, a prescindere se esse
siano obbligatorie o meno per le direttive di navigabilità dell'aeromobile.
Ove applicabile ed essenziale per gli addestramenti ed i controlli, gli Operatori
di FSTD devono aggiornare i dispositivi in uso, ad esempio, alla luce dei dati
provenienti dalle prove in volo. Allo scopo di determinare l’impatto sui criteri della
Qualificazione originale, devono essere valutate le modifiche all’hardware ed al
software che possono modificare le caratteristiche di manovrabilità, sia in volo che al
suolo, e le prestazioni (situazioni di questo tipo si possono avere con qualunque
modifica ai sistemi di movimentazione o di visualizzazione).
Se necessario, l’Operatore deve preparare degli variazioni alla Master
Qualification Test Guide (MQTG) per tutti i Validation Test alterati dalle modifiche
introdotte e sottoporli all’Autorità per l’accettazione e il relativo aggiornamento
della MQTG. L’ENAC deve essere avvisata in anticipo riguardo ad ogni
cambiamento, per valutare se i controlli condotti dall'Operatore possano essere
Capitolo II 53
soddisfacenti. A discrezione dell’Autorità, può essere necessaria una prova di
valutazione speciale del FSTD, prima di poterlo riutilizzare per scopi addestrativi e
di controllo.
2.4.5 OPERATIVITÀ DELL’FSTD
L’Utilizzatore di FSTD ha l’obbligo di trascrivere su un quaderno tecnico
(Technical Logbook) dell’FSTD, messo a disposizione dall’Operatore FSTD, l’attività
effettuata e le eventuali anomalie rilevate durante l’uso. Al termine della sessione
d’utilizzo, il FSTD Technical Manager, o il personale tecnico da esso autorizzato,
prenderà visione del quaderno tecnico e risponderà alle eventuali segnalazioni.
E’ ammessa l’informatizzazione del quaderno tecnico, purché sia dimostrabile
che l’integrità e la congruenza dei dati immessi dalle persone autorizzate - User e
Responsabile Tecnico del FSTD - vengano salvaguardate da possibili alterazioni.
Come per il quaderno tecnico cartaceo, le precedenti registrazioni (storico) devono
essere convenientemente archiviate (preferibilmente su un supporto ottico) per un
periodo non inferiore a due anni e, su richiesta, rese disponibili all’Autorità.
Infine, nel caso in cui non sia prevista una Minimum Equipment List (MEL)
per gli FSTD, le discrepanze rilevate devono essere risolte dall’Operatore FSTD nel
più breve tempo possibile.
2.5 DOCUMENTAZIONE TECNICA RICHIESTA PER LA QUALIFICAZIONE DI UN FSTD
Per ottenere la Qualificazione di un FSTD, l’Operatore di FSTD deve presentare ad
ENAC la seguente documentazione tecnica a supporto del Training Device:
− Qualification Test Guide (QTG);
− Instructor Operation Manual (Manuale Stazione Istruttore);
− Manuale dell’Operatore di FSTD;
− Quality Manual con relativo Quality Assurance Programme.
Capitolo II 54
Nel caso di prima valutazione, tutta la manualistica, ed in particolare la QTG,
comprensiva dei Validation Test, deve essere consegnata all’Autorità almeno tre mesi
prima della prevista data di valutazione.
2.5.1 QUALIFICATION TEST GUIDE
Questo documento comprende tutte le informazioni e le procedure da applicare
durante il Validation Test per ottenere la Qualificazione dell’FSTD; inoltre, al suo
interno sono contenute anche le informazioni necessarie a tenere sotto controllo la
configurazione del sistema (Configuration Control System).
2.5.2 INSTRUCTOR OPERATION MANUAL
Questo documento comprende tutte le informazioni e procedure che l’istruttore deve
seguire, dalla IOS, durante l’uso dell’FSTD.
2.5.3 MANUALE DELL’OPERATORE
Questo manuale comprende la descrizione dettagliata della struttura dell’Operatore
di FSTD, delle risorse operative e dei relativi processi di controllo o intervento.
Il manuale è articolato nelle seguenti parti:
1. lista di distribuzione;
2. lista dei capitoli;
3. lista pagine effettive;
4. elenco revisioni;
5. indice dei contenuti;
6. mission dell’Operatore FSTD;
7. organigramma;
8. compiti e responsabilità dell’Accountable Manager, del Quality Manager, del
Technical Manager e del personale tecnico;
Capitolo II 55
9. nominativi, curriculum e qualificazioni del Technical Manager e dei suoi
eventuali vicari;
10. planimetria, dispositivi di sicurezza;
11. briefing di sicurezza;
12. istruzioni di utilizzazione dei FSTD;
13. gestione del Technical Logbook;
14. procedure per l’aggiornamento del Technical Manager e dei suoi eventuali
vicari;
15. gestione dei controlli tecnici;
16. manutenzione ordinaria e straordinaria;
17. rapporti con i fornitori;
18. gestione della documentazione tecnica del FSTD;
19. gestione dei records di manutenzione;
20. procedure per l’interfacciamento con l’Autorità.
2.5.4 QUALITY MANUAL E QUALITY ASSURANCE PROGRAMME
All’interno del Quality Manual viene descritto il Quality System e le procedure di
rapporto all'Accountable Manager, il quale deve assicurare gli eventuali interventi
correttivi necessari. Il Quality Assurance Programme è un documento che contiene le
procedure capaci di verificare che le specifiche prestazioni, funzioni e caratteristiche
del simulatore, rispettino tutti gli standard, requisiti e procedure applicabili allo
specifico Training Device. Il Quality Assurance Programme contiene le seguenti parti:
− programmazione dei processi di monitoraggio;
− procedure di Audit;
− procedure di Report;
− procedure correttive e di esecuzione;
− sistema di catalogazione.
Capitolo II 56

Figura 2-4 – Domanda di valutazione per la Qualificazione di un FSTD
Capitolo II 57
2.6 REQUISITI TECNICI MININI PER LA QUALIFICAZIONE DI UN FSTD
I requisiti tecnici minimi necessari per ottenere uno specifico livello di
Qualificazione variano a seconda delle caratteristiche del simulatore di volo. I livelli
di Qualificazione di un FSTD sono quattro e vengono indicati con le lettere A, B, C e
D, tra le quali l’ultima rappresenta quella relativa ai sistemi di simulazione più
complessi. Per ognuna di esse esiste una descrizione dettagliata delle tecnologie che il
simulatore deve possedere e il numero massimo di crediti che deve conseguire durante
le prove, le verifiche e l’addestramento. Tuttavia, solo questi due aspetti non sono
sufficienti a determinare direttamente la classificazione di un simulatore in uno
specifico livello. Per alcuni requisiti del simulatore o del sistema di visualizzazione
deve esistere un attestato di conformità (Statement Of Compliance, SOC), nel quale
vengono descritti i modi in cui è stato ottenuto un particolare requisito (ad esempio,
il modello matematico dei carrelli, i dati per i coefficienti di attrito, etc.).
Nella tabella seguente viene riportata una prima classificazione, che mette in
luce i requisiti minimi necessari per ottenere un certo livello di Qualificazione del
simulatore di volo.
All’interno della JAR-STD 1A, è presente anche un’altra classificazione, che
mette in luce gli standard di ogni livello, approfondendo le caratteristiche richieste a
ciascun sottosistema: tale classificazione è riportata nell’appendice B.
Capitolo II 58

Tabella 2-1 Requisiti minimi di Qualificazione di un simulatore di volo
Capitolo II 59

2.7 LE PROVE DI QUALIFICAZIONE
Le procedure di valutazione iniziale e periodica sono descritti nella JAR-STD
XA.030 “Simulator Validation Test” Nella prima fase vengono eseguite le prove
“oggettive”; nella seconda fase, quelle “funzionali e soggettive”. Per la Valutazione
Iniziale, il tempo richiesto (inteso come utilizzo esclusivo del FSTD) ammonta ad
almeno 8 ore, mentre, per le prove di Valutazione periodica, il tempo richiesto (inteso
come utilizzo esclusivo del FSTD) è di almeno 4 ore.
2.7.1 L’OBJECTIVE E IL SUBJECTIVE TEST
Il test “oggettivo” (Objective Test) è fondato sulla QTG. I test preliminari
devono cominciare da una valutazione iniziale dell’accettabilità dei Validation Test
contenuti nella QTG, che devono essere approvati dall’Autorità prima della data di
valutazione, per assicurare che il tempo speso durante la valutazione del simulatore
di volo non sia tempo perso. L’accettabilità dei test dipende dal loro contenuto, dalla
loro accuratezza e dalla data a cui si riferiscono i risultati delle prove.
Molto del tempo speso durante i test oggettivi dipende dalla velocità dei sistemi
manuali e automatici preparati per lo svolgimento di ciascun test e se siano stati
richiesti o meno degli equipaggiamenti speciali. L’Autorità non è obbligata a fornire
una copia del Validation Test che andrà ad eseguire, a meno che non siano richieste
delle speciali attrezzature. Una approfondita spiegazione di come debbono essere
eseguiti i Validation Test è contenuta nel “Aeroplane Flight Simulator Evaluation
Handbook”.
Il test “funzionale e soggettivo” (Subjective Test) è un insieme di procedure che,
insieme al test oggettivo, consente un confronto completo tra il simulatore e il
velivolo. Mentre i test funzionali verificano l’accettabilità dei sistemi simulati e della
loro integrazione, i test soggettivi verificano lo stato di salute del simulatore di volo
rispetto ai compiti di addestramento, di controllo e di verifica delle abilità del
personale addestrato.
Capitolo II 60
Per eseguire i test soggettivi, solitamente è richiesto un intero giorno
lavorativo, durante il quale il simulatore di volo non può essere utilizzato per nessun
altro scopo. I test soggettivi debbono garantire almeno due condizioni fondamentali:
− un’adeguata flessibilità, per consentire il raggiungimento degli obiettivi
desiderati o richiesti, e il mantenimento della percezione, da parte del
personale navigante, di operare nell’ambiente di un velivolo reale;
− la IOS non deve presentare elementi che siano causa di distrazione rispetto
all’osservazione delle attività del personale navigante, mentre deve fornire
adeguati strumenti per lo svolgimento dei compiti dell’istruttore.
Una parte dei test soggettivi richiede un fly-out4 ininterrotto, paragonabile alla
durata delle tipiche sessioni di addestramento, insieme con una valutazione del flight
freeze and repositioning5
Come per i test oggetti, anche le procedure funzionali e soggettive vengono
descritte dettagliatamente in altri volumi specifici, oltre che nelle JAR–STD:
l’“Aeroplane Flight Simulator Evaluation Handbook” e l’“ICAO Manual of Criteria for
the Qualification of Flight Simulators”.
Infine, per effettuare adeguatamente i test soggettivi e oggettivi e garantire
una buona gestione dei costi, per la Valutazione Iniziale debbono essere dedicati
all’incirca tre giorni consecutivi.
Durante le Valutazioni periodiche, l’Autorità visiona i risultati delle esecuzioni
riuscite della QTG, eseguite nell’intervallo tra i processi di valutazione programmati,
e sceglie un numero limitato di test da eseguire durante tali prove, inclusi quelli che
potrebbero essere fonte di preoccupazione per l’Operatore. Nel caso in cui siano
richieste delle attrezzature speciali per la valutazione, essa emette un’opportuna
notifica. Il tempo necessario ad eseguire il test oggettivo dipende dalle necessità
4 Il fly-out è un’azione che prevede l’esecuzione di tutte le manovre della fase di decollo, dallo stacco dalla pista fino al raggiungimento della quota di crociera. 5 Il flight freeze and repositioning è l’operazione mediante la quale un istruttore può interrompere l’addestramento, congelando la posizione del velivolo; i motivi per cui si esegue
Capitolo II 61

connesse a tali equipaggiamenti speciali e alle operazioni di test; ma, durante tutto
questo tempo, comunque il simulatore di volo non può essere usato né per i test
soggettivi, né per quelli funzionali. I test soggettivi, che vengono eseguiti in sede di
Valutazione Periodica, sono essenzialmente gli stessi che vengono eseguiti durante la
Valutazione Iniziale; il tempo richiesto per lo svolgimento dei test soggettivi e
all’incirca di quattro ore, durante le quali il simulatore non può essere utilizzato per
altri scopi. Nei simulatori di volo più recenti, per favorire il testing del simulatore,
sono previsti alcuni sistemi automatici di controllo che garantiscono l’esecuzione dei
test in circa quattro ore. Viceversa, per i simulatori di volo, per i quali non sono
previste operazioni automatiche, è necessario un periodo di tempo più lungo.
Dunque, in generale, per assicurare un adeguato svolgimento dei test soggettivi e
oggettivi, deve essere destinato un tempo totale di almeno 8 ore.
I test oggettivi, eseguiti in sede di Valutazione Iniziale, vengono inseriti nella
QTG, la quale, una volta accettata dall’ENAC, assume la denominazione di Master
Qualification Test Guide (MQTG) e costituisce il documento di riferimento per le
prove oggettive eseguite successivamente. Analogamente, il Configuration Control
System (riportante la configurazione hardware e software del dispositivo) viene
congelato una volta che l’FSTD è stato qualificato. Pertanto, come abbiamo già
accennato al par. 2.4.4 e vedremo più in dettaglio successivamente, ogni ulteriore
modifica dell’FSTD, ovvero del velivolo che viene simulato, dovrà ottenere una
preventiva approvazione dell’Autorità, prima di entrare in utilizzo.
I test oggettivi, sia quelli eseguiti durante la Valutazione Iniziale che quelli
eseguiti per le valutazioni periodiche, devono essere autenticati dall’Operatore FSTD
tramite l’apposizione, su ogni test, della firma del Technical Manager o di un suo
vicario accettato dall’ENAC. Prima dell’inizio delle prove di Qualificazione, ai
tecnici che rappresentano l’Autorità, deve essere indicato come siano stati eseguiti
tutti i controlli previsti dal Quality Assurance Program per lo specifico FSTD,
mediante l’emissione di un Audit. Un Audit è una comparazione sistematica ed
il freeze possono essere diversi, ma principalmente per eseguire nuovamente la stessa manovra oppure riposizionare il velivolo per un altro tipo di manovra.
Capitolo II 62

autonoma, che viene eseguita dall’Auditor o dall’Audit Team, tra il modo in cui
un’attività è stata condotta e il modo in cui le procedure pubblicate dall’Autorità
dicono che deve essere eseguita. Una copia dei rapporti di Audit dovrà essere fornita,
su richiesta, ai rappresentanti dell’Autorità.
In Italia, il certificato di Qualificazione FSTD viene emesso dalla Direzione
Standard Volo (DSV) dell’ENAC, a conclusione favorevole delle prove di
Qualificazione. Il certificato di Qualificazione FSTD è conforme alle JAR-STD e
contiene l'indicazione della specifica norma relativa e dei suoi contenuti. In seguito,
l’Autorità assegna un numero identificativo per ciascuna configurazione differente
realizzata su uno stesso FSTD. Nel caso di valutazioni ricorrenti e in assenza di
cambiamenti ai dati riportati sul certificato, gli estremi del rinnovo possono essere
riportati da uno dei componenti del team di valutazione sull’apposito spazio previsto
in calce alla specifica di Qualificazione. La DSV, per gli FFS e FTD di registrazione
Italiana, aggiorna il sistema informativo della JAA per i Training Device, riportante
i dati dei FFS e FTD qualificati dalle Autorità JAA e i relativi operatori.
Nell’appendice D è stata riportata la lista dei simulatori di volo approvati da ENAC,
fino al 12 maggio 2009, situati sia in Italia che all’estero.
Conformemente a quanto previsto dalla JAA, dopo le prove di Qualificazione,
l’Autorità nazionale trasmette all’Operatore FSTD il rapporto redatto dal team di
Valutazione dell’FSTD, denominato “FSTD Evaluation Report”: Esso contiene
anche le eventuali non conformità (findings) rilevate ed è suddiviso nelle sezioni
“Quality System”, “FSTD Operator”, “Objective” e “Subjective”. Nel caso in cui siano
state riscontrate delle non conformità, l’Operatore di FSTD dovrà dimostrare di
averle risolte entro i termini di scadenza riportati sul FSTD Evaluation Report. Al
fine di assicurare un'adeguata tracciabilità delle non conformità, la DSV cura
l’aggiornamento di un database, nel quale sono riportati i FSTD, i relativi operatori
e le non conformità rilevate nel corso delle prove di Valutazione.
Capitolo II 63

2.7.2 LA PRIMA CERTIFICAZIONE
Quando un produttore vuole provvedere alla messa in opera di un nuovo
simulatore, per un nuovo tipo di velivolo, sono necessarie delle particolari procedure.
Punto di partenza di tale processo deve esser la conoscenza di alcuni dati di
volo. Le prestazioni reali e le qualità di manovrabilità, dei sistemi e dell’avionica,
non sono noti prima dell’entrata in servizio del velivolo; pertanto, inizialmente,
bisogna far riferimento ai dati forniti dal produttore, in quanto è necessario
provvedere ad un addestramento preliminare del personale navigante e a che la
Certificazione avvenga qualche mese prima della piena attività del velivolo.
Nell’intervallo di tempo che serve per ottenere i dati definitivi, l’Autorità accetta
alcuni dati, ottenuti con un simulatore di ricerca e preliminarmente verificati,
riguardo all’aeroplano, ai sistemi di bordo e alla prima versione dell’avionica, allo
scopo di consentire gli eventi programmati di addestramento, Certificazione e messa
in opera.
In ogni caso, un Operatore, che vuole la Certificazione a partire dai dati forniti
allo stato iniziale, dovrebbe consultare l’Autorità appena venga a conoscenza di
accorgimenti speciali indispensabili, oppure appena sia chiaro che altri dati siano
necessari per la Qualificazione del simulatore di volo. Sia il produttore del simulatore
che il produttore del velivolo debbono anche essere informati ed essere coinvolti nella
pianificazione della raccolta dei dati e della Qualificazione del simulatore di volo. La
pianificazione delle operazioni deve prevedere incontri periodici per mantenere
informate le parti interessate circa lo stato del progetto.
Le precise procedure da seguire per guadagnare l’approvazione dell’Autorità,
per i dati preliminari di volo, variano da caso a caso e tra i diversi produttori di
velivoli. Infatti, ogni produttore prevede lo sviluppo di un nuovo aeroplano e la
programmazione delle prove secondo uno schema che sia adatto ai bisogni di un
particolare progetto. Perciò, un altro produttore, o anche lo stesso produttore,
potrebbe non prevedere gli stessi eventi o la stessa sequenza di eventi che adotta per
la stesura dei dati preliminari di un altro velivolo.
Capitolo II 64
Senza dubbio, è fondamentale che i dati preliminari forniti dal produttore siano
la migliore rappresentazione dell’aeroplano e che, ragionevolmente, i dati finali non
si allontanino molto da quelli preliminari.
A tale scopo, i dati previsti o le tecniche preliminari debbono essere valutate da:
− un rapporto ingegneristico del produttore, che spiega i metodi di previsione
usati e mostra i risultati positivi ottenuti con tali metodi su progetti simili (ad
esempio, su un precedente modello o comparando i risultati ottenuti,
dall’applicazione di tale metodo su un modello precedente, con quelli
definitivi per quel modello);
− i primi risultati del test di volo, che possono essere derivati dal test di
Certificazione del velivolo e devono essere usati per la prima prova di
Certificazione del simulatore.
Alcuni test sono particolarmente critici e devono essere eseguiti preliminarmente al
programma di Certificazione del velivolo, in quanto sono essenziali per garantire
l’addestramento del pilota e l’autorizzazione all’esecuzione di alcune manovre. Questi
test includono i casi in cui il pilota deve essere in grado di fronteggiare un’avaria del
velivolo.
L’uso dei dati preliminari è consentito per un massimo di sei mesi, all’interno
dei quali il produttore del velivolo deve fornire i dati di volo definitivi, prima
dell’entrata in servizio del velivolo. In alcuni casi, l’Autorità può consentire
all’Operatore di FSTD e al produttore del velivolo un’estensione del tempo limite,
comunque non superiore ad un anno. Nell’applicazione di una qualifica temporanea,
sia l’Operatore che l’Autorità debbono essere d’accordo nel prevedere un programma
di aggiornamento. Questo, di solito, stabilisce che i dati aggiornati definitivi vengano
installati nel simulatore in un periodo non superiore a sei mesi, a meno che non
esistano condizioni particolari o venga accettata una differente programmazione.
Le performance del simulatore e la Certificazione delle qualità di manovra
dovrebbero essere basate sui test di volo. I dati iniziali relativi ai sistemi del velivolo
devono essere aggiornati dopo il test e quelli definitivi usati per programmare il
simulatore e per la Certificazione.
Capitolo II 65
L’avionica del simulatore deve essere essenzialmente al passo con gli
aggiornamenti (hardware e software) dell’avionica del velivolo. Il tempo permesso
per l’aggiornamento di tali strumenti non è fisso, ma deve comunque essere il minimo
possibile. Esso può dipendere sia dall’entità degli aggiornamenti, che da come la
QTG, l’addestramento del pilota e la Certificazione sono influenzati da tali
aggiornamenti.
La Certificazione di idoneità, rilasciata dall’Autorità, ha una validità di 12
mesi, se non viene diversamente indicato; il processo di Valutazione Periodica deve
avvenire 60 giorni prima della scadenza della validità del precedente documento.
Infine, la nuova Certificazione diventa effettiva solo dopo che la precedente è
scaduta.
A seconda del caso, l’Autorità può garantire una estensione del periodo di
validità della Qualificazione fino ad un massimo di 36 mesi. Ma, al contrario,
l’Autorità ha la possibilità di rifiutare, revocare, sospendere o variare la
Qualificazione del FSTD se, per qualche motivo, non viene rispettato uno qualsiasi
dei requisiti minimi stabiliti dalle JAR-STD.
Per uno specifico Operatore di FSTD, di uno specifico simulatore di volo, l’Autorità
concede l’estensione della validità del certificato, a condizione che:
− sia stata eseguita una Valutazione Iniziale ed almeno una Valutazione
Periodica, su quello specifico simulatore di volo, dalla stessa Autorità;
− l’Operatore di FSTD abbia ottenuto un record soddisfacente per la
valutazione del simulatore, per un periodo superiore ad almeno tre anni;
− l’Operatore di FSTD abbia istituito e mantenuto operativo un Quality System
per almeno tre anni;
− l’Autorità abbia emesso ogni anno un Audit ufficiale riguardo al Quality
System dell’Operatore di FSTD;
− sia presente un responsabile dell’Operatore di FSTD, con discreta esperienza
riguardo al simulatore di volo e all’addestramento, riconosciuto dall’Autorità,
come può essere un comandante qualificato per l’addestramento, che controlli
Capitolo II 66

le regolari reiterazioni della QTG e conduca le funzioni principali e i Subjective
Test ogni 12 mesi;
− venga emesso un report dettagliato dei risultati delle reiterazioni dei test della
QTG, delle funzioni e delle Subjective Evaluation, firmato e sottoposto dal
responsabile, descritto al punto e), all’Autorità.
In ogni caso, l’Autorità ha sempre il diritto di effettuare una prova di valutazione del
simulatore, ogni volta che ritenga possa essere necessario.
Capitolo II 67

Figura 2-5 – Modello di certificato di Qualificazione di un FSTD da parte di ENAC
Capitolo II 68

Figura 2-6 – Specifica di Qualificazione di un FSTD
Capitolo II 69
2.7.3 LE LINEE-GUIDA PER LA QUALIFICAZIONE DI UN FSTD
Durante la Valutazione Iniziale o quelle periodiche, l’Autorità esegue i test
oggettivi e soggettivi, descritti nelle JAR–STD XA.030 e JAR–STD XA.035. In
seguito ad una prova di Valutazione, è possibile che vengano riscontrati una serie di
difetti, i quali, se sono gravi, posso comportare un immediato declassamento del
livello di Qualificazione. Per difetti gravi del simulatore si intendono quelli che
interessano l’addestramento, il controllo e la verifica delle abilità del personale
navigante addestrato.
Un simulatore ingegneristico può rappresentare una valida sorgente alternativa per i
dati preliminari necessari alla valutazione se possiede almeno:
− una tipica cabina della classe di velivoli simulata, con i comandi di volo
sufficienti ad effettuare il volo manuale;
− un sistema di visualizzazione, e, preferibilmente, anche un sistema di
movimentazione;
− un’avionica reale o simulata via software;
− un sistema di controllo della configurazione hardware e software;
− una rappresentazione dell’aeroplano di alta fedeltà, accertata dal produttore,
dall’Operatore e dall’Autorità.
Tale procedura alternativa consente alcune tipologie di modifiche, purché producano
“effetti ben comprensibili”, come:
− software (autopilota, computer del controllo di volo,…);
− revisioni geometriche semplici (in termini aerodinamici, come la lunghezza
della fusoliera,… );
− motori, limitatamente ai velivoli non propulsi ad elica;
− sistemi di controllo dei meccanismi, delle manovre e dei limiti di deflessione
delle superfici aerodinamiche;
− revisioni dei freni, pneumatici e dei dispositivi di manovra.
Il produttore che vuole adottare questa procedura alternativa, inoltre, non è
obbligato a fornire un sistema audio (Audio environment). Questo tipo di approccio
Capitolo II 70

mostra che gli effetti prodotti dalle modifiche agli elementi su indicati sono
incrementali, facilmente comprensibili e ben definiti, confermando la non necessità di
dati addizionali riguardo a prove in volo. Invece, nel caso in cui le previsioni non si
ritengano sufficientemente accurate, è necessario raccogliere una serie di dati di volo
che consentano di confermare tali previsioni.
Solitamente, la Valutazione iniziale ha un duplice obiettivo: in primo luogo,
assicurare che le caratteristiche di manovrabilità e le performance di un FSTD siano
comparabili con quelle del tipo di velivolo da simulare; successivamente, stabilire
alcuni valori di base per i test di Valutazione Periodica. Tali test sono tesi ad
assicurare che le prestazioni del FSTD siano contenute all’interno delle tolleranze
necessarie a mantenere la Certificazione. Una volta completata la Valutazione, la
QTG deve essere conservata dall’Operatore FSTD in un file per futuri riferimenti
durante i test di Valutazione Periodica. L’ispettore dell’Autorità civile deve
controllare l’esecuzione del test di Valutazione Iniziale e deve controllare i test di
Valutazione Periodica, durante le quali l’FSTD deve essere valutato nelle condizioni
critiche per l’addestramento del pilota e superare le prove a cui è sottoposto.
Perciò, debbono essere controllate:
1. le risposte aerodinamiche;
2. i controlli;
3. le performance di decollo, salita, crociera, discesa, approccio e atterraggio;
4. le funzioni della stazione istruttore;
5. il sistema di visualizzazione, se installato, per assicurare che le manovre siano
rappresentate correttamente.
È ovvio che la valutazione degli FSTD debba essere quanto più oggettiva è possibile.
Per quanto riguarda la Certificazione di un dato livello di FSTD, è possibile
fornire alcune semplici linee-guida, come quelle seguite dall’Autorità canadese
(Transport Canada Safety and Security Civil Aviation) durante i suoi processi di
Qualificazione. L’Autorità canadese è attenta a:
Capitolo II 71

− fornire una copia della QTG all’Operatore di FSTD almeno due settimane
prima della prova di Qualificazione programmata dall’Autorità, allo scopo di
rendere noto quali siano le qualità richieste;
− effettuare i Validation Test, che assicurano lo stato iniziale e i cambiamenti
rispetto ad esso, per comprendere il modo in cui il dispositivo riproduce le
caratteristiche di volo del velivolo (caratteristiche geometrico-inerziali,
velocità del flusso d’aria, potenza, configurazione dei flap, ecc…);
− controllare che l’Operatore, durante i Validation Test, fornisca l’assistenza di
due persone qualificate, una alla IOS e una che fa “volare” l’FSTD;
− controllare che l’Operatore di FSTD assicuri la disponibilità di una serie di
accessori utili a eseguire la prova di Qualificazione (ad es., un cronometro
digitale, etc.);
− controllare che l’Operatore garantisca l’operatività completa dell’FSTD al
momento della programmata prova di Valutazione;
− che una copia della QTG sia stata conservata insieme ai documenti dell’FSTD
per le valutazioni periodiche;
− consigliare l’effettuazione di una riunione preliminare al Validation Test, di
tutto il personale interessato durante la prova.
Affinché un FSTD mantenga la sua Qualificazione, esso deve essere rivalutato in
relazione alla MQTG. Ogni valutazione periodica dovrà consistere di una prova
soggettiva e funzionale, e almeno una porzione del Validation Test, presenti
all’interno della MQTG. Queste prove servono per confermare che le funzioni di
controllo e i parametri di volo siano compresi nei valori di tolleranza presenti nella
MQTG. Le tolleranze vengono stabilite dalla norma e possono variare leggermente
per ogni Autorità nazionale; i valori ottenuti durante la Valutazione Iniziale servono
come riferimento per le prove successive e per quelle speciali. Le valutazioni
periodiche devono essere pianificate ogni sei mesi con, approssimativamente, metà
del Validation Test, presente nella MQTG redatta ogni volta. Ciò consente di
compiere annualmente tutti i test presenti nella MQTG. Quando le verifiche annuali
sono state completate, deve essere redatto un documento nel quale vengono
Capitolo II 72

registrati i risultati; una volta redatto, l’Operatore deve inviare una lettera di
conformità all’Autorità.
2.7.4 LE TOLLERANZE PREVISTE PER IL TEST DI QUALIFICAZIONE
Le tolleranze che vengono descritte nella JAR-STD XA.030 vengono
considerate come una misura della qualità con la quale vengono raggiunti i dati di
volo di riferimento. Molte sono le ragioni per le quali un particolare test non può
essere conforme alle tolleranze prescritte, alcune delle quali possono essere:
o errori nella strumentazione di bordo o dovuti a disturbi atmosferici durante la
raccolta dei dati;
o variazioni troppo rapide delle grandezze o presenza di disturbi.
Durante l’applicazione delle tolleranze, può accadere che un test non soddisfi le
tolleranze prescritte, senza una ragione apparente: in queste condizioni, deve essere
applicato un buon criterio ingegneristico. La norma suggerisce che un buon criterio
possa essere quello di far riferimento ai dati di un non-flight-test, ottenuti mediante
un simulatore ingegneristico, che utilizza lo stesso modello usato durante
l’addestramento.
Tuttavia, l’utilizzo di tolleranze adatte per i risultati del test di volo può
risultare non adeguato per i dati del simulatore ingegneristico, in quanto deve essere
dimostrato un adeguato sviluppo e utilizzo dell’insieme di dati. Evidentemente, le
ragioni per le quali sono attesi dei risultati diversi tra il test in volo e il simulatore
ingegneristico sono legate a:
− Hardware (avionica e controlli di volo);
− passo di iterazione;
− ordine di esecuzione;
− architettura del processore;
Capitolo II 73

− digital drift6;
− metodo d’interpolazione;
− differenze con i dati di manovrabilità;
− test automatico di trim delle tolleranze.
Comunque, qualsiasi siano le differenze riscontrate, esse devono essere piccole e le
ragioni di ognuna di esse, oltre a quelle indicate precedentemente, devono essere
spiegate chiaramente.
Storicamente, i dati della simulazione ingegneristica erano usati solo per
dimostrare la conformità con alcune caratteristiche ulteriori. L’incremento
dell’utilizzo dei dati della simulazione ingegneristica è una questione importante, in
quanto:
o spesso i dati delle prove in volo non sono disponibili per motivi tecnici;
o si stanno sviluppando soluzioni tecniche alternative;
o i costi rappresentano sempre una questione importante.
Pertanto, sono indispensabili alcune linee-guida anche per l’applicazione delle
tolleranze ai dati provenienti dal simulatore ingegneristico.
Quando per ottenere dei dati di riferimento per la Qualificazione vengono
utilizzati i simulatori ingegneristici, o un'altra fonte per i dati del non-flight-test
(ottenuti seguendo i test oggettivi del Validation Test), la corrispondenza tra i dati di
riferimento e i risultati del simulatore di volo è quasi esatta.
In generale, è impossibile definire un preciso insieme di tolleranze per i dati del
non-flight-test, dal momento che la corrispondenza dei risultati dipende da diversi
fattori. In generale, a meno di una giustificazione ragionevole per un eccessiva
differenza tra i dati di riferimento e i risultati della simulazione del volo, si può
assumere ragionevole che un buon set di dati ingegneristici sia quello per il quale i
risultati siano compresi almeno all’interno del 20% delle tolleranze previste per il test
di volo. Affinché questa linea-guida sia applicabile, i dati forniti devono essere
6 Il digital drift è l’accumulo degli errori numerici nella rappresentazione dell’orientamento del velivolo.
Capitolo II 74

conformi a un ben documentato modello matematico e a una buona procedura di
test, la quale consenta una possibile replica esatta dei risultati relativi alla
simulazione ingegneristica.
2.7.5 IL VALIDATION TEST
In accordo a quanto è stato appena detto, di seguito viene mostrato un esempio
di Validation Test così come viene eseguito dall’Autorità Canadese per l’Aviazione
Civile, per la Certificazione di un FTD.
Capitolo II 75

Capitolo II 76
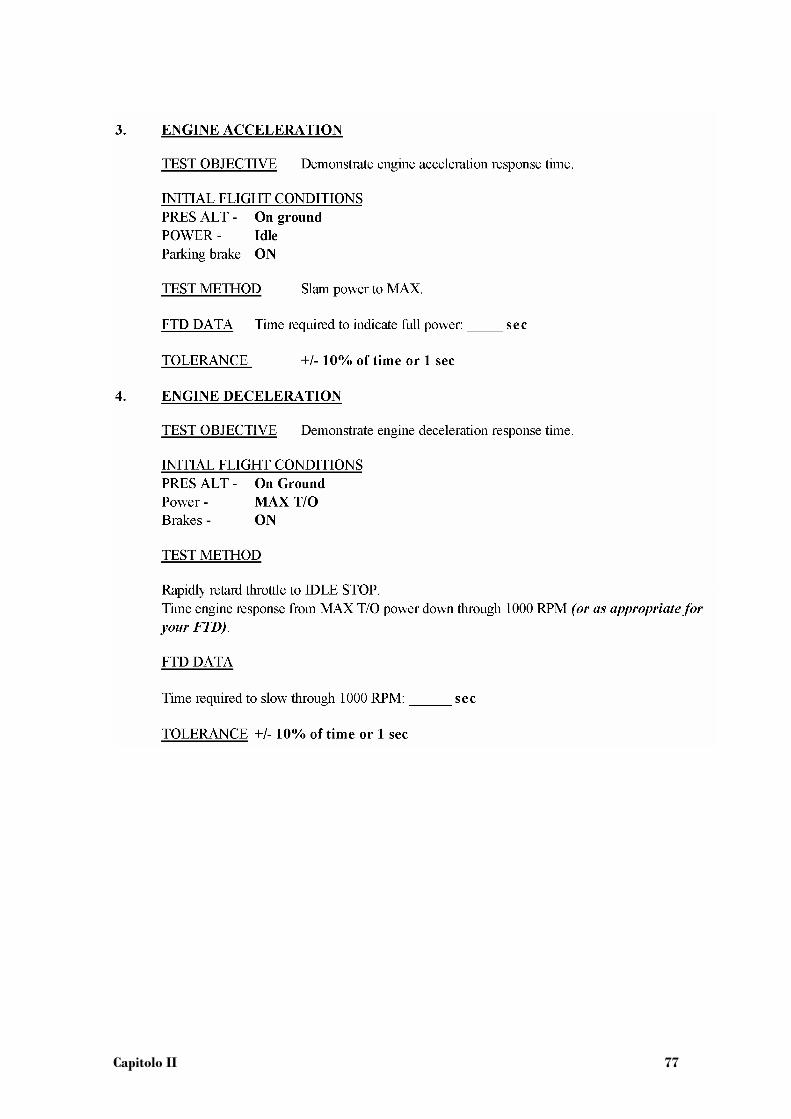
Capitolo II 77
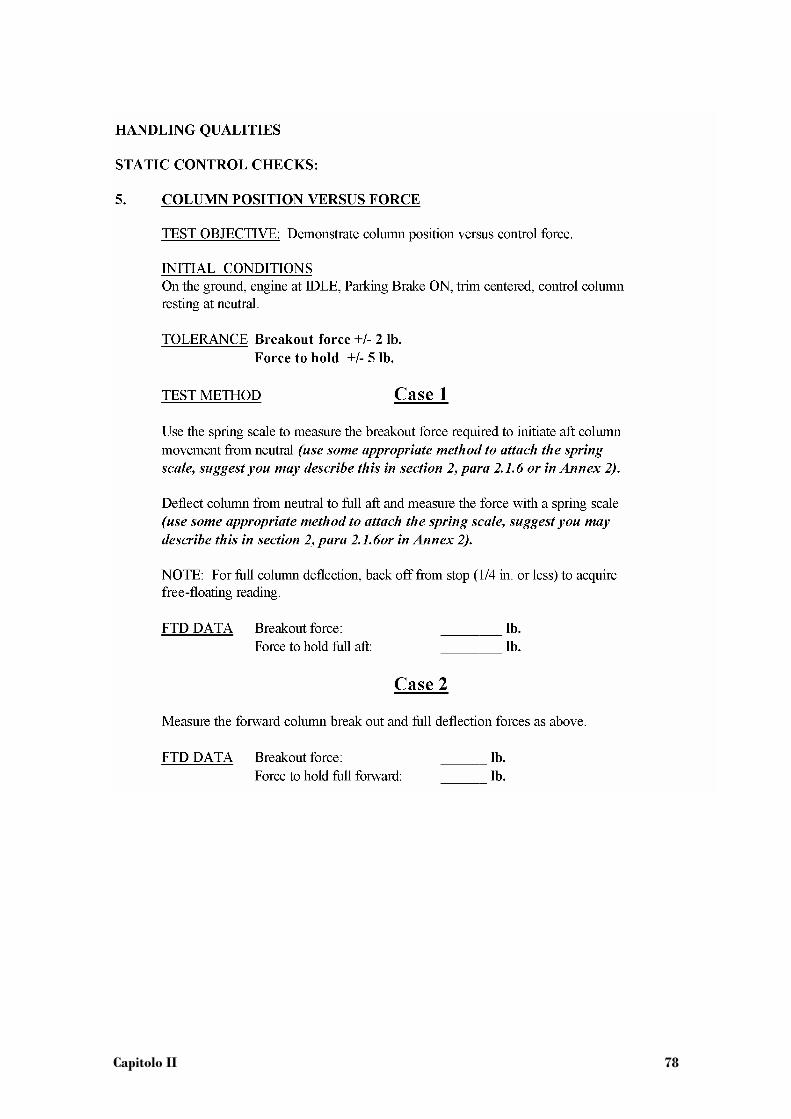
Capitolo II 78

Capitolo II 79

Capitolo II 80
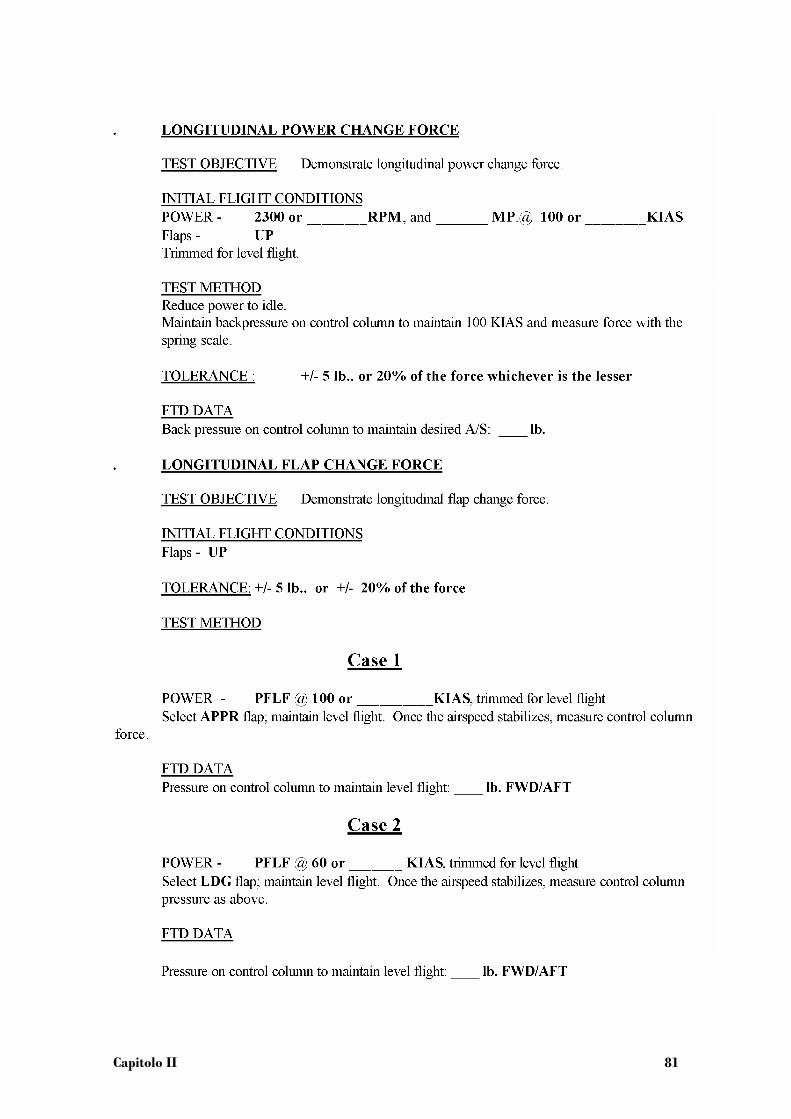
Capitolo II 81

Capitolo II 82

Capitolo II 83

Capitolo II 84

Capitolo II 85

Capitolo II 86

Capitolo II 87
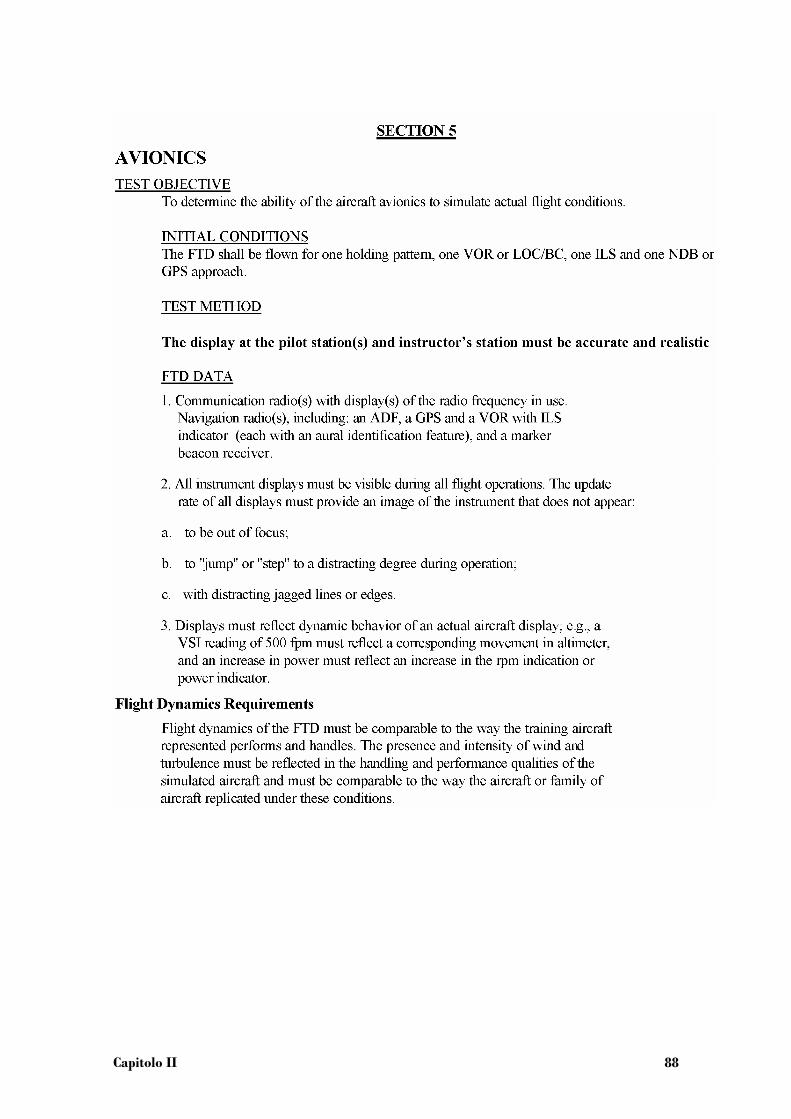
Capitolo II 88
2.8 QUALIFICAZIONE DELLE MODIFICHE EFFETTUATE SU UN FSTD
Il paragrafo JAR-STD XA.040 riporta le regole riguardanti il cambio di
dislocazione, l’introduzione di modifiche e/o di aggiornamenti e la disattivazione
temporanea di un FSTD. In ogni caso, se viene effettuata una modifica, l’Operatore
deve avvisare prontamente l’ENAC, prima di rimettere l’FSTD a disposizione degli
utilizzatori. Anche il Configuration Control System, consegnato all’Autorità in sede di
prima valutazione, dovrà essere opportunamente corretto per riportare le modifiche
apportate.
Tradizionalmente, come la configurazione del velivolo viene rivista, anche il
modello di simulazione deve essere modificato per rispecchiare i cambiamenti subiti
dal velivolo. Quando tali cambiamenti interessano l’aerodinamica, il motore, i
controlli di volo e i modelli di manovrabilità al suolo, il processo di revisione consiste
nella raccolta di dati addizionali relativi alle prove in volo e al successivo rilascio di
nuovi modelli e dati di valutazione.
Quando, per effetto dei cambiamenti della configurazione del velivolo, deve
essere modificata l’intera simulazione, un produttore qualificato di velivoli deve
scegliere, con il preventivo accordo dell’Autorità, come supportare i dati delle prove
in volo con un simulatore ingegneristico. In ogni caso, per la configurazione del
velivolo “entry-into-service”, deve essere sviluppato un insieme di dati, rispetto alle
prove in volo, che sia conforme agli standard attuali.
Per stabilire l’accettabilità della proposta presentata dal produttore, l’Autorità
conduce una revisione tecnica della programmazione stabilita e dei successivi dati per
la valutazione. Le procedure vengono completate con il rilascio di un resoconto di
approvazione, nel quale vengono identificate le sorgenti ritenute valide per i dati di
valutazione. Le procedure seguite per ottenere l’accettabilità dei dati del simulatore
ingegneristico variano da caso a caso e tra i produttori di velivoli e le tipologie di
modifica.
Capitolo II 89

A prescindere dalle soluzioni proposte, il simulatore ingegneristico deve rispettare i
seguenti criteri:
− il modello di simulazione originale deve aver eseguita una prova di volo
completa valida;
− i modelli rilasciati dal produttore di velivoli all’industria per l’uso nei
simulatori di volo d’addestramento devono essere essenzialmente identici a
quelli usati dallo stesso produttore nel suo simulatore ingegneristico;
Tali simulatori possono essere usati come parte integrante del progetto, dello
sviluppo e del processo di Certificazione del velivolo.
Quando un FSTD viene trasferito a un altro Operatore, aggiornato o spostato in una
nuova località, devono essere seguite alcune procedure:
− notificare all’ufficio competente dell’Autorità, prima del cambiamento;
− l’Operatore deve completare un Validation Test e un controllo delle funzioni,
prima del ritorno in servizio del FSTD.
I risultati di queste procedure, infine, vanno conservate e presentate all’Autorità in
fase di Valutazione Periodica.
L’Autorità può prevedere un visita di Valutazione programmata prima del
rilascio di una nuova Certificazione. Se, durante tali prove di Valutazione, viene
identificato qualche difetto o si evince che l’FSTD non è stato conservato al livello di
Qualificazione iniziale, l’Autorità può condurre una valutazione speciale per
verificarne lo stato. Se l’Autorità riscontra il non corretto mantenimento dei criteri
iniziali di valutazione, in conseguenza ad una valutazione speciale o a quelle
periodiche previste, l’FSTD può perdere la sua Certificazione. Inoltre, come abbiamo
già avuto modo di vedere in precedenza, l’Autorità deve avvisare l’Operatore quando
viene rilevato un difetto che mette in pericolo i requisiti dell’addestramento; in tal
caso, l’Operatore deve prendere dei provvedimenti per risolvere il difetto nella
maniera più efficiente, se non vuole incorrere nel ritiro della Qualificazione da parte
dell’Autorità.
Capitolo II 90

2.9 QUALIFICAZIONE DI UN SIMULATORE DI VOLO MILTARE
La Qualificazione di un simulatore di volo militare (generalmente definito Full
Mission Simulator) segue un iter procedurale diverso rispetto ad un simulatore di
volo civile.
In questo caso, la Qualificazione è definita col termine di “Ready For
Training”, in quanto il cliente finale (che rappresenta l’User, ossia la forza armata
che utilizzerà il simulatore per l’addestramento) richiede la piena rispondenza
dell’aereo e dei sistemi riprodotti/simulati all’aereo reale, inclusa, generalmente, la
piena compatibilità col software di gestione di missione, caricato a bordo dell’aereo
reale.
Per ottenere il “Ready For Training”, il simulatore viene sottoposto ad una
serie di test, in accordo alle specifiche ed alle normative in uso nella forza armata che
gestirà il simulatore.
La serie di test comprende i test cui sono sottoposti i diversi sistemi che
compongono il simulatore sia da un punto di vista software che hardware (es. test
specifici per il Cockpit System, test specifici per il Simulation Computer System,
ecc.).
Per il simulatore di volo militare, oltre ai test di carattere “aeronautico” cui
sono sottoposti i simulatori di volo civili (es. test per verificare la rispondenza del
simulatore alle varie fasi sia di decollo, che di volo, che di atterraggio), rivestono
grande importanza i test cui sono sottoposti i sistemi che consentono di replicare le
funzionalità tipiche di un aereo militare, ad es. i sistemi d’arma dell’aereo reale, la
simulazione del radar sia in fase di navigazione che in fase di attacco/difesa, la
simulazione del controllo del mission computer, ecc.
Inoltre viene attribuita notevole importanza anche ai test relativi ai sistemi di
supporto alla simulazione che possono far parte dell’architettura del simulatore e che
consentono, ad esempio, sia di costruire gli scenari di missione che il pilota deve
Capitolo II 91
affrontare sia di effettuare il debriefing delle missioni svolte al simulatore; sistemi
questi ultimi, che normalmente non sono presenti nei simulatori di volo civili.
Il “Ready For Training” è ovviamente ottenuto se il simulatore presenta la
piena corrispondenza agli specifici requisiti richiesti in fase di progettazione e di
sviluppo.
2.9.1 ESEMPI DI TEST DI QUALIFICA DI UN SIMULATORE DI VOLO MILITARE
Data la peculiarità dei simulatori di volo militari, di seguito è fornita una breve
lista esemplificativa dei possibili test cui sono sottoposti questi simulatori al fine di
ottenere la relativa qualifica (“Ready For Training”). I test sono raggruppati per
sistema.
1. Visual System a) Verifica del settore FOV richiesto. b) Controllo del livello di dettaglio richiesto per la riproduzione dello scenario
(high / low level). c) Controllo della fedeltà delle riproduzioni di target tracking.
2. Motion / Control Loading Systems a) Se il simulatore è di tipo dinamico, verifica della conformità della
piattaforma ai requisiti di manovra richiesti. b) Se il simulatore è di tipo statico, verifica delle risposte di sensibilità del
sistema Control Loading. c) Verifica della sensibilità della risposta per rudder/pedals e stick/throttle.
3. Sound System a) Verifica della corretta riproduzione dei suoni richiesti: Aircraft (es.
Refuelling, canopy), Engine, Environment, Crash. b) Verifica delle comunicazioni ATC. c) Verifica delle comunicazioni Istruttore-Pilota.
4. Cockpit a) Verifica della conformità della replica del Cockpit al Cockpit reale. b) Verifica della rispondenza degli strumenti/apparati riprodotti/simulati.
(1) Avionica (Comunicazione, navigazione, identificazione, CAS, GCAS, Autopilota ed FMS )
(2) Sistemi ( Electric, hydraulic, pneumatic, engine, anti icing, oxygen)
Capitolo II 92

Capitolo II 93
5. Modelli Weather a) Verifica della conformità dei parametri di “ceiling”, “wind”,
“temperature” e “pressure”. b) Verifica della conformità degli effetti “weather” come snow, rain, hail. c) Verifica della conformità degli effetti “turbulence”, “wind shear” ed
“icing”.
6. Modelli “Airfields” a) Verifica della conformità dei modelli di “airfield” e dei relativi
parametri (Radio, TACAN, navigation beacons, approach aids). b) Verifica della conformità dei modelli per il GCA Approach.
Capitolo 3 CASO STUDIO : IL SIMULATORE DI RICERCA DEL CENTRO DI COMPETENZA TRASPORTI DELLA REGIONE CAMPANIA TEST S.C.A R.L.7
3.1 DESCRIZIONE DEL SIMULATORE
In collaborazione con i suoi soci, TEST S.c.a r.l. gestisce otto laboratori, dotati
di attrezzature avanzate per la sperimentazione delle funzionalità di veicoli e di loro
componenti, di reti di infrastrutture e servizi. Attraverso tali laboratori, e con la
stretta collaborazione con il settore industriale, aerospaziale e ICT, TEST S.c. a r.l. si
prefigge l’obiettivo di incidere in modo cruciale su due processi:
− l’innovazione tecnologica e di processo nella produzione di veicoli terrestri,
aerei e marittimi
− l’innovazione nella gestione delle reti di infrastrutture e servizi di trasporto,
attraverso il trasferimento di nuove tecnologie informatiche e telematiche.
Il processo di collaborazione con il TEST S.c.a r.l. ha prodotto ottimi risultati sia nel
campo dei veicoli stradali (con ACI e ANAS S.p.a.) che in quello aeronautico (con
Alenia Aeronautica S.p.a., CIRA, Piaggio Aero Industries S.p.a., etc.).
Il simulatore di volo, utilizzato dall’Università di Napoli, è stato realizzato
dalla società francese OKTAL, per conto di CRdC T.E.S.T. S.c.a r.l., in
collaborazione con il DIAS (Dipartimento di Ingegneria Aerospaziale), ed è situato in
uno degli edifici del Consiglio Nazionale delle Ricerche (CNR), presso l’Istituto
Motori. Come si può vedere nella seguente figura, il simulatore è organizzato secondo
una precisa disposizione dei sistemi di simulazione, individuabili in tre zone:
− sala briefing/debriefing;
− stazione dell’istruttore/supervisore;
7 Maggiori informazioni su http://www.crdctest.it/on-line/Home/IlCentrodiCompetenza.html
Capitolo III 94

− stanza principale di simulazione
Figura 3-1 – Disposizione dei sistemi nella zona di simulazione
Dalla figura è possibile anche avere un’idea delle dimensioni del sistema di
simulazione. Il simulatore utilizza un sistema di visualizzazione composto da tre
ampi schermi, posti davanti alla cabina, sui quali viene proiettata l’immagine ad alta
risoluzione dell’ambiente esterno. La scelta di utilizzare un tale sistema di
visualizzazione è legata all’efficienza del simulatore, in questa configurazione, e al
fatto che riesce a riprodurre un immagine corrispondente a 190° di FOV orizzontale.
Capitolo III 95

Nella cabina, il pilota può avvertire le accelerazioni del volo grazie ad una
tradizionale piattaforma di movimentazione a sei gradi di libertà.
Questo particolare sistema di simulazione prevede la possibilità di essere
utilizzato anche come simulatore di guida, mediante l’utilizzo dell’abitacolo di un
automobile. Per garantire tale intercambiabilità, sia il Cockpit che il Motion sono
interfacciati con delle piastre di adattamento che garantiscono un collegamento
solido. In questo modo, la procedura di cambio Cockpit può essere realizzata in meno
di 30 min.
L’utilizzo effettivo del simulatore richiede la presenza di un addetto alla
stazione del supervisore, il quale deve assicurare la sicurezza del sistema durante
l’utilizzo. In queste fasi, le porte di accesso alla stanza del simulatore devono essere
chiuse per prevenire che qualcuno entri durante l’esecuzione della simulazione:
perciò, esse sono equipaggiate con dei contatti elettrici, collegati a dei segnali
luminosi (luce rossa/verde), posti all’esterno della stanza del simulatore. Il
supervisore ha un visuale diretta della zona di simulazione e può interrompere la
simulazione quando non ci sono più le condizioni di sicurezza necessarie. All’interno
dell’abitacolo, inoltre, è montata una telecamera per consentire all’istruttore di
osservare il pilota e ascoltare i suoni all’interno del Cockpit, dalla stazione stessa. La
zona del simulatore competente al Motion è protetta in modo da garantire che
nessuno oggetto o persona possa interferire con il simulatore.
3.1.1 COCKPIT SECTION
Il Cockpit riprodotto è quello di una generica cabina di un piccolo velivolo da
trasporto civile. La struttura del Cockpit prevede la presenza di due touch-screen, uno
utilizzato per visualizzare il pannello virtuale degli strumenti e l’altro per mostrare
alcuni parametri della simulazione, in termini di navigazione o di diagrammi dei
parametri di volo. Inoltre, è prevista anche l’installazione e l’utilizzo di un terzo
schermo.
I comandi di volo sono costituiti da:
Capitolo III 96
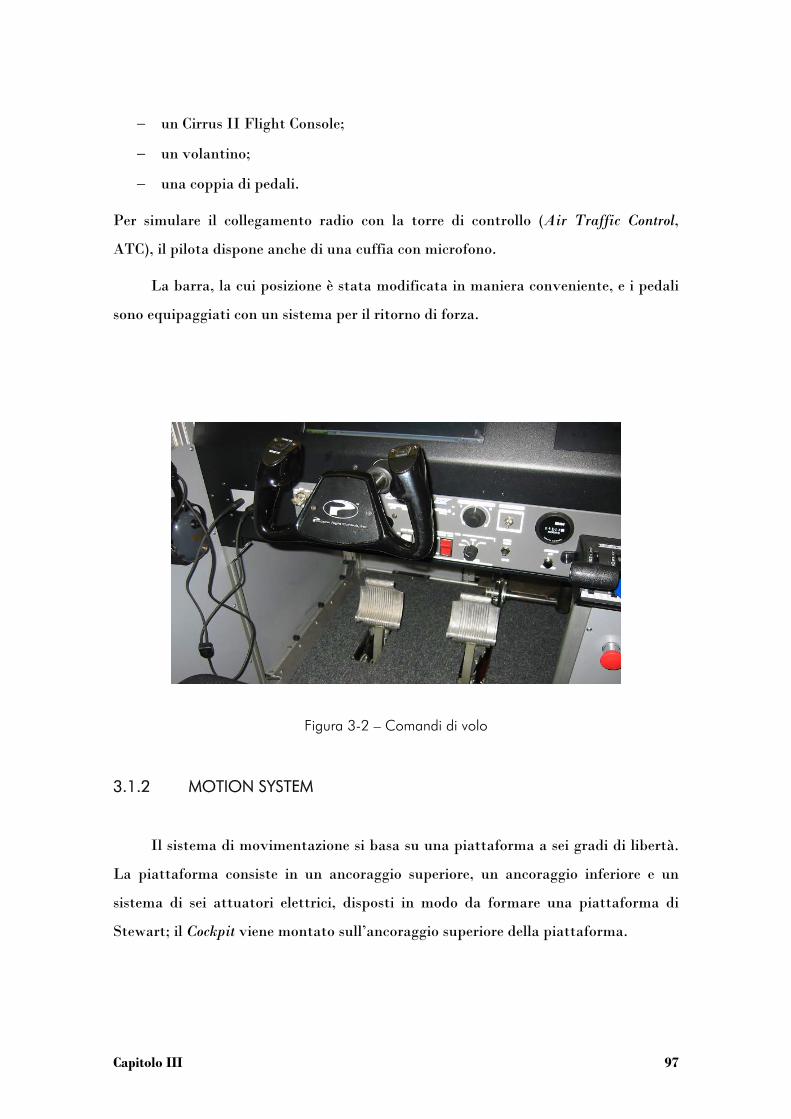
− un Cirrus II Flight Console;
− un volantino;
− una coppia di pedali.
Per simulare il collegamento radio con la torre di controllo (Air Traffic Control,
ATC), il pilota dispone anche di una cuffia con microfono.
La barra, la cui posizione è stata modificata in maniera conveniente, e i pedali
sono equipaggiati con un sistema per il ritorno di forza.
Figura 3-2 – Comandi di volo
3.1.2 MOTION SYSTEM
Il sistema di movimentazione si basa su una piattaforma a sei gradi di libertà.
La piattaforma consiste in un ancoraggio superiore, un ancoraggio inferiore e un
sistema di sei attuatori elettrici, disposti in modo da formare una piattaforma di
Stewart; il Cockpit viene montato sull’ancoraggio superiore della piattaforma.
Capitolo III 97

L’assenza di cinghie o scatole di riduzione nel sistema di guida consente di
ottenere un moto morbido e lineare. Gli attuatori sono lubrificati ad olio e non
richiedono una manutenzione frequente.
Il massimo carico ammissibile per la piattaforma è di 1000 kg.; i Cockpit, comprese
due persone, raggiungono un peso di circa 500 kg., il quale garantisce una buona
prestazione del Motion.
INTERVALLI DI ESCURSIONE
[mm & deg]
VELOCITÀ MASSIMA
[mm/s & deg/s]
ACCELERAZIONE MASSIMA
[g’s & deg/s2]
Surge - 491 ÷ + 432 718 ± 1.39
Sway - 425 ÷ + 425 712 ± 1.2
Heave - 247 ÷ + 248 484 ± 0.59
Roll - 25 ÷ + 25 50 575
Pitch - 24 ÷ + 25 48 595
Yaw - 43 ÷ + 43 82 1100
Tabella 3-1 Caratteristiche della piattaforma di movimentazione
Capitolo III 98

Figura 3-3 – Piattaforma di movimentazione
3.1.3 CONTROL LOADING
Il simulatore prevede un modulo detto Control Loading o Force-Feedback
dedicato alla riproduzione degli sforzi di pilotaggio sulla barra e sui pedali, in
maniera conforme alle condizioni di volo. Lo scopo di questo sistema è di modellare le
condizioni di carico sulla barra e sui pedali di un velivolo dell’aviazione generale che
abbia le superfici aerodinamiche “reversibili”.
L’entità delle forze da applicare sui comandi di volo del pilota dipende dalla
posizione delle superfici aerodinamiche. Tale posizione è nota dalla risoluzione delle
equazioni dinamiche del velivolo, quando si conosce lo stato dello stesso ad ogni
intervallo di tempo. Questa risoluzione viene eseguita da una porzione di codice,
chiamata ForceGear, che migliora le funzionalità di FlightGear. Essa risolve le
equazioni del moto, tra due istanti successivi, e valuta la forza agente su ogni
superficie aerodinamica. Lo scopo di questo processo è quello di sintetizzare il
Capitolo III 99
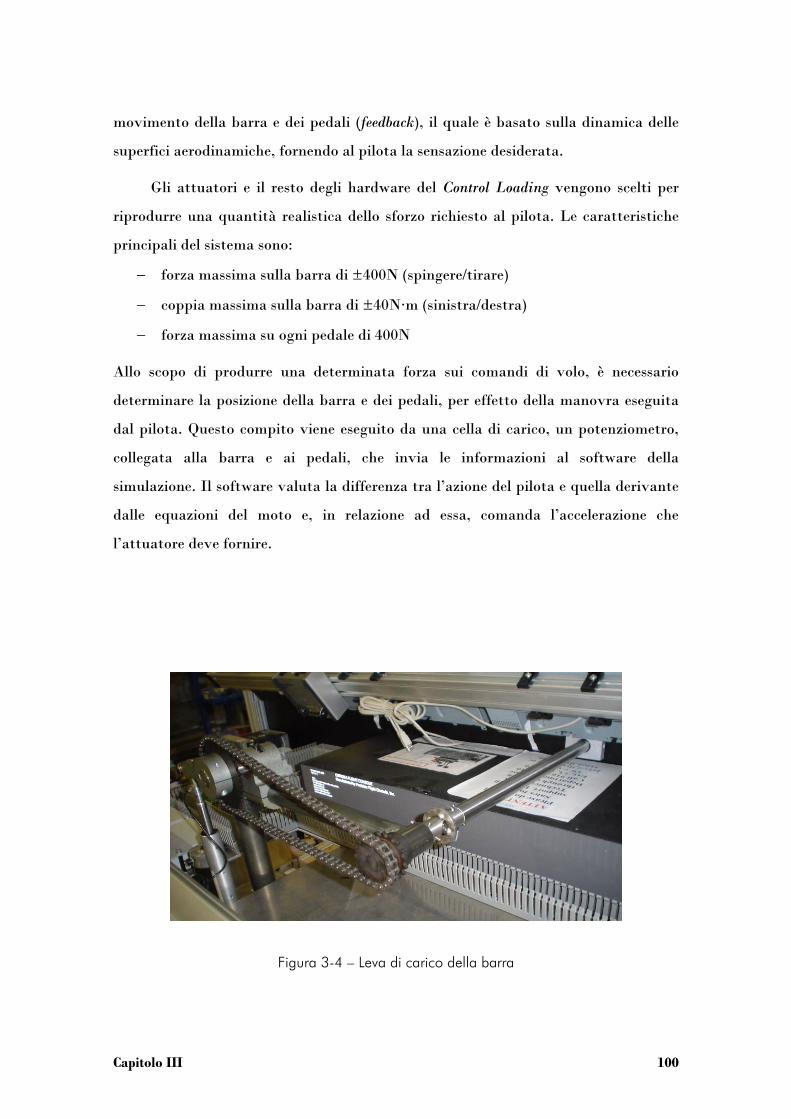
movimento della barra e dei pedali (feedback), il quale è basato sulla dinamica delle
superfici aerodinamiche, fornendo al pilota la sensazione desiderata.
Gli attuatori e il resto degli hardware del Control Loading vengono scelti per
riprodurre una quantità realistica dello sforzo richiesto al pilota. Le caratteristiche
principali del sistema sono:
− forza massima sulla barra di ±400N (spingere/tirare)
− coppia massima sulla barra di ±40N·m (sinistra/destra)
− forza massima su ogni pedale di 400N
Allo scopo di produrre una determinata forza sui comandi di volo, è necessario
determinare la posizione della barra e dei pedali, per effetto della manovra eseguita
dal pilota. Questo compito viene eseguito da una cella di carico, un potenziometro,
collegata alla barra e ai pedali, che invia le informazioni al software della
simulazione. Il software valuta la differenza tra l’azione del pilota e quella derivante
dalle equazioni del moto e, in relazione ad essa, comanda l’accelerazione che
l’attuatore deve fornire.
Figura 3-4 – Leva di carico della barra
Capitolo III 100
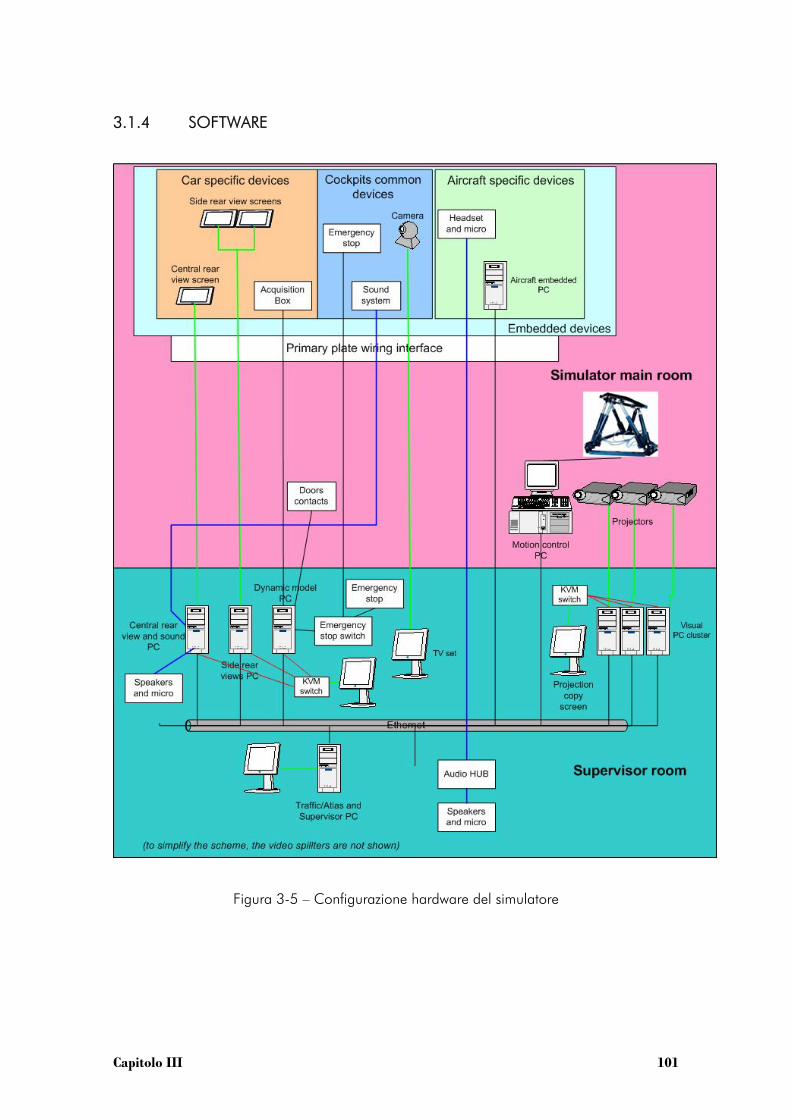
3.1.4 SOFTWARE
Figura 3-5 – Configurazione hardware del simulatore
Capitolo III 101

Nella figura precedente viene mostrata una rappresentazione della struttura del
computer della simulazione. Lo schema riporta l’andamento dei segnali dalla sala
dell’istruttore al resto dell’hardware del simulatore.
Il software scelto, a cui è demandato lo scopo di guidare i vari componenti del
sistema, si basa su un software di simulazione open-source chiamato FlightGear. Le
prestazioni offerte da tale software sono comparabili ai più popolari software di
simulazione commerciali.
La struttura del software utilizzato può essere scomposta in alcuni moduli:
− un modello dinamico del velivolo, individuato in JSBSim;
− un PLIB, un API portabile che contiene le funzioni base riguardanti
l’ambiente grafico e sonoro;
− SimGear, un modulo che consente il controllo della simulazione e della
costruzione dello scenario;
− TerraGear, un set di strumenti dedicati alla generazione del territorio, che
importa i dati GIS, DTM, etc.
La generazione dell’immagine in FlightGear consente di visualizzare sia elementi 3D
che 2D. Le funzioni principali del software di generazione dell’immagine 3D sono
quelle di rappresentare:
− la luna, le stelle e il sole;
− un Head-Up Display (HUD);
− un pannello degli strumenti interattivo;
− le nuvole e il vento.
La simulazione dei movimenti del velivolo, del pannello degli strumenti, dei controlli
di volo, e dello scenario esterno alla cabina, viene controllata da una serie di diverse
procedure di FlightGear, ognuna delle quali è in comunicazione con l’altra mediante
opportuni protocolli di rete. Inoltre, alla simulazione contribuiscono altri due
elementi software che controllano:
Capitolo III 102

− la piattaforma di movimentazione, in maniera congruente al modulo che
genera la visuale esterna, in modo da fornire una corretta sensazione delle
accelerazioni;
− un sistema di riproduzione dei carichi sui controlli del pilota che aggiunge una
aliquota ulteriore di realismo alle operazioni del pilota.
3.2 ALCUNE CONSIDERAZIONI
Il simulatore analizzato, senza dubbio, rappresenta una valida soluzione
iniziale per la realizzazione di un simulatore di volo per addestramento. Tuttavia, ciò
che risulta evidente, e che condiziona il livello di Certificazione ottenibile, è la
mancanza di un Cockpit reale, cioè l’assenza di un pannello degli strumenti e di
controlli caratteristici del tipo di velivolo da simulare. Questo fatto, dovuto alla
scelta di utilizzare il simulatore per i piccoli velivoli da trasporto civile e non per un
determinato velivolo, appartenente a tale classe, certamente non consente di
trasformare il simulatore in FFS, ma, al più, permetterebbe la possibilità di
adeguarlo agli standard richiesti per un FNTP o un BITD. Tuttavia, per rendere più
interessante il caso studio, si è ipotizzato di poter adeguare il simulatore agli
standard validi per gli FTD di livello 1, consapevoli comunque della necessità di
installare un Cockpit in scala 1:1 di uno specifico tipo e modello di velivolo.
Infatti, per gli FTD di livello 1, come stabilito nella JAR-STD 2A, è sufficiente che il
sistema di simulazione:
o sia specifico del tipo di velivolo e abbia almeno un sistema rappresentato
completamente;
o abbia una cabina di pilotaggio chiusa o aperta.
La scelta del sistema da simulare dipende dall’Operatore che vuole essere certificato.
Inoltre, la norma precisa che i campi di utilizzo di un simile sistema sono quelli del
controllo selettivo dei sistemi che non influenzano le abilità del pilota di manovrare il
velivolo.
Capitolo III 103

Dunque, per un FTD di livello 1, devono essere presenti i seguenti componenti:
− un pannello di dimensioni reali che possiede controlli e pulsanti analoghi a
quelli del velivolo che viene simulato (può essere utilizzato anche un pannello
virtuale sul quale sono incorporati pulsanti, potenziometri e interruttori, che
riproducono gli strumenti del velivolo);
− un sistema di illuminazione, per i pannelli e gli strumenti, sufficiente
all’esecuzione delle operazioni;
− interruttori automatici che funzionino accuratamente nelle classiche
condizioni operative e di malfunzionamento, durante le quali si richiede
l’intervento del personale navigante;
− un sistema analogico o digitale sufficiente a condurre un esecuzione completa
del dispositivo, includendo i test opportuni e la relativa valutazione (SOC);
− tutte gli indicatori degli strumenti rilevanti durante la simulazione e che
rispondono automaticamente agli ingressi di controllo;
− i dati di navigazione con le corrispondenti approach facilities, in modo da
poter utilizzare tutti gli aiuti della navigazione senza restrizioni (questo
componente è applicato al FTD di livello 1 solo se sono presenti gli
equipaggiamenti per la navigazione);
− alcune postazioni, oltre a quelle per il personale navigante, dedicate
all’istruttore e all’ispettore dell’Autorità, che consentano loro di osservare
adeguatamente le operazioni del personale navigante;
− un sistema che consenta di riprodurre condizioni normali, anormali e di
emergenza, in maniera appropriata, e che, una volta attivato, non richieda il
controllo dell’istruttore, ma possa essere gestito con operazioni opportune dai
sistemi di gestione del personale navigante;
− alcuni dispositivi della Stazione Istruttore che consentano all’Operatore di
FSTD di controllare tutte le variabili richieste dal sistema e di inserire
condizioni anormali e di emergenza, nei sistemi del velivolo;
− un’aerodinamica e un modello sufficienti a permettere operazioni e indicazioni
dei sistemi accurate;
Capitolo III 104
− aggiornamenti tempestivi dell’hardware e del software dell’FTD che siano
consistenti con le modifiche del velivolo (SOC);
− una QTG, stilata dall’Operatore del Training Device, nella forma e nei modi
previsti dall’Autorità competente;
− un sistema Visual (se installato).8
Per quanto riguarda le prove da superare per ottenere la Qualificazione del FTD al
livello 1, occorre sottolineare che esse, comunque, dipendono dalle caratteristiche del
velivolo simulato.
Considerando un piccolo velivolo da trasporto civile mono-motore, le principali prove
da eseguire riguardano:
− Preparation for flight (Preflight): una funzione che controlla tutti gli
interruttori, gli indicatori, i sistemi e gli equipaggiamenti, sia alla Stazione
Istruttore che all’abitacolo, determinando se il funzionamento è corretto e
corrispondente a quello del velivolo;
− Pre-Takeoff: prevede l’accensione dei motori in diverse condizioni, (1)
normali, (2) con procedure alternative, (3) con condizioni anormali di
spegnimento e accensione (hot start9, hung start10, etc.);
− Takeoff: in condizioni normali, valutando (1) le relazioni tra i parametri del
velivolo e del motore, (2) le caratteristiche di accelerazione e (3) sterzatura a
mezzo di ruotino e timone;
− Climb: comprende la verifica delle condizioni normali di salita del velivolo;
8 Se il sistema di visualizzazione è usato nelle manovre di addestramento come riferimento visivo (per la rotta o altre airfield competence), allora, il sistema Visual deve almeno essere corrispondente ai requisiti per il livello A di FFS, presentati alla Tabella 2-1. Inoltre, se vengono aggiunti altri sistemi di visualizzazione dall’Operatore FSTD, deve essere assicurato che questi non modifichino la Qualificazione del FSTD. 9 L’hot start è un fenomeno che si verifica quando, durante le fasi di accensione di un motore, per effetto dell’elevata temperatura in camera di combustione, si verifica un danno strutturale del motore dovuto al superamento della temperatura limite stabilita dal costruttore. 10 Il fenomeno di hung start si manifesta quando, durante le fasi di accensione di una turbina, non si riesce a raggiungere il valore di RPM necessario alla fase di idle del motore e si ha il conseguente spegnimento.
Capitolo III 105
− Cruise: valuta le performance del velivolo simulato in termini di velocità e
potenza;
− Manoeuvres: è la prova più complessa in quanto comprende la valutazione di
(1) prove di stallo e i warning relativi (in fase di decollo, crociera, approccio e
atterraggio), (2) controllo del flight envelope protection11 (limite di bank,
overspeed, etc.), (3) virata con e senza aerofreni, (4) spegnimento e accensione
del motore in volo , (5) manovre con il motore non operativo, (6)
malfunzionamenti ai controlli di volo, modi di ri-configurazione e revisioni
manuali;
− Descent: (1) in condizioni normali, (2) a massima velocità di discesa (con e
senza aerofreni, etc.), (3) con malfunzionamenti ai controlli di volo, modi di
ri-configurazione e revisioni manuali;
− Instrument Approaches: dipende dalle strumentazioni installate sul velivolo
simulato e può essere suddiviso in (1) approccio di precisione (approccio
manuale con o senza flight director12, approccio con o senza malfunzionamenti
al motore, approccio con minima potenza elettrica, etc.) e (2) approccio non di
precisione (con VOR, VOR/DME, VOR/TAC);
− Missed Approach: nelle condizioni di (1) funzionamento del motore o di (2)
malfunzionamenti ai controlli di volo, etc.
È bene sottolineare che le prove precedentemente indicate non hanno l’ambizione di
includere tutte le prove che sono da effettuare sul simulatore per ottenere la
Certificazione all’FTD di livello 1; ma, vogliono semplicemente dare un’idea di come
il simulatore debba essere testato. Esistono, infatti, alcune altre prove che non sono
state inserite nel precedente elenco solo per non appesantire ulteriormente la
trattazione, ma che, comunque, sono parte integrante del processo di Qualificazione
dell’FTD.
11 Si tratta di un sistema di controllo del velivolo che tutela il pilota dall’impartire al velivolo delle manovre che potrebbero comportare il superamento dei suoi limiti strutturali e aerodinamici 12 Strumentazione di volo, in generale, analoga al variometro, ma che fornisce informazioni anche riguardo al beccheggio, al rollio e ai relativi parametri correlati.
Capitolo III 106

Capitolo III 107
Per un maggior dettaglio, sia delle prove che delle tolleranze da applicare
all’FTD di livello 1, si rimanda alla tabella dei Validation Test, presente nella JAR-
STD 2A.

Conclusioni IMPORTANZA DELLA QUALIFICAZIONE DI UN FSTD
Un simulatore di volo è un’apparecchiatura complessa alla cui efficienza
contribuiscono una serie di elementi diversi. Le soluzioni realizzative e gli scopi di un
simulatore di volo sono molteplici e dipendono dalla scelta progettuale. In ogni caso,
tutti i componenti del simulatore devono garantire un elevato livello di realismo. Il
processo tecnologico, poi, ha garantito un miglioramento delle capacità di
simulazione ad un costo, in generale, sempre minore.
Nella simulazione del volo esiste una componente umana da non sottovalutare,
ma che, anzi, è fondamentale alla progettazione. Infatti, la progettazione del
simulatore di volo, le sue caratteristiche e l’efficienza dello stesso, dipendono da tale
componente umana: punto di partenza di ogni progettazione sono le capacità umane
di riconoscere una sollecitazione e di mettere in atto le adeguate azioni di controllo.
Pertanto, l’addestramento rappresenta una fase fondamentale della vita del
pilota. Egli non solo deve imparare a pilotare il velivolo ed utilizzare le
strumentazioni di bordo; ma, deve anche migliorare le sue capacità di Situation
Awareness e imparare a prevenire i fenomeni di disorientamento spaziale,
particolarmente pericolosi durante alcune fasi di volo. Tali abilità possono essere
conseguite, in maniera meno costosa e, spesso, più efficiente, mediante l’utilizzo di un
simulatore di volo.
I simulatori di volo possono essere utilizzati anche per sperimentare l’impatto
delle modifiche eseguite dal produttore sul velivolo (simulatore ingegneristico), oltre
che per allenare il pilota ad utilizzare il nuovo velivolo o le nuove caratteristiche
implementate dall’aggiornamento. Per quanto riguarda i simulatori da
addestramento, essi sono classificabili in diverse categorie (FFS, FTD, FNTP,
BITD) ed ognuna di esse richiede delle opportune caratteristiche.
Prima di approvare un programma di addestramento con un tipo di simulatore,
l’Operatore dell’FSTD deve garantirsi la Certificazione all’addestramento da parte
Conclusioni 108
Conclusioni 109
dell’Autorità nazionale. L’Autorità stabilisce i requisiti che il simulatore deve
possedere per un certo livello di Certificazione e garantisce che tali requisiti vengano
mantenuti in efficienza.
Sostanzialmente, all’Autorità interessa che il simulatore abbia un insieme di
sistemi capaci di riprodurre le caratteristiche del velivolo reale, caratteristiche che
consentono un determinato livello di Certificazione, e che l’Operatore di FSTD
dimostri la capacità di mantenere le prestazioni, le funzioni e le altre caratteristiche
del simulatore, all’interno dei limiti di tolleranza stabiliti per quel livello di
Qualificazione dell’FSTD.

Appendice A CENNI DI FISIOLOGIA DEL VOLO
Un velivolo è capace di compiere una serie di movimenti nello spazio
tridimensionale che lo circonda e, ad ognuno di essi, corrisponde una opportuna
accelerazione ovvero una particolare forza sul corpo del pilota. Queste forze
conseguenti al moto del velivolo completo vengono avvertite dal pilota mediante il
contributo di tutta una serie di apparati fisiologici. Capire come funzionano tali
apparati fisiologici è fondamentale per la progettazione, in quanto occorre modellare
il sistema di simulazione in modo che queste informazioni possano essere utilizzate
correttamente.
In generale, l’orientazione spaziale dell’individuo è il frutto dell’interazione
delle sue capacità psico-sensoriali. Infatti, il termine “orientamento” indica la
capacità dell’individuo di stabilire la propria posizione rispetto alla superficie
terrestre, ovvero rispetto all’ambiente circostante; quando, però, per qualche motivo,
esiste una discrepanza tra ciò che i sensi percepiscono e trasmettono al cervello e ciò
che, invece, il cervello si aspetta di ricevere, si verifica il cosiddetto disorientamento
spaziale. In altri termini, finchè i sensi e le strumentazioni di bordo forniscono delle
informazioni che sono corrispondenti tra loro, il pilota sperimenta uno stato di
armonia cognitiva e sensoriale, che generalmente identifichiamo come “orientamento
spaziale”; ma, in alcune situazioni, possono subentrare effetti reali o illusori che
mettono in conflittualità le percezioni sensoriali e quelle cognitive: in questo caso, il
pilota può uscirne “disorientato”.
Gli organi sensoriali psico-motori sono sensibili:
− alle accelerazioni lineari e angolari;
− ai cambi di direzione e di velocità;
− alle accelerazioni centripete;
− ai cambi di scenario e di sonoro.
Appendice A 110
Tuttavia, quando è necessario comprendere e stabilire l’orientamento rispetto ad un
sistema di riferimento in cui l’individuo si trova, cioè rispetto al mondo esterno
stesso, è importante considerare sia le accelerazioni, sia la direzione del moto e sia ciò
che il cervello percepisce di queste sollecitazioni. Inoltre, nel riconoscimento
dell’orientamento, il pilota viene aiutato dalla strumentazione di bordo, che gli
fornisce ulteriori informazioni sulla sua posizione nello spazio. Questo supporto è
fondamentale, in quanto, a differenza di chi conduce veicoli sulla superficie terrestre,
per il quale può essere sufficiente sapere in quale direzione si sta muovendo, il pilota
deve anche essere in grado di riconoscere a quale quota e con quale assetto sta
volando. Il pilota, inoltre, sfrutta anche alcuni punti di riferimento della cabina di
pilotaggio, che rapportati con l’ambiente esterno, gli consentono di stabilire la
propria posizione, nonché la pressione esercitata dal proprio corpo sul sedile o sulle
pareti laterali dell’abitacolo per rendersi conto dell’assetto: non a caso, i piloti
“anziani” dicevano che gli aerei si pilotavano con “il fondo dei pantaloni”. E’ quindi
chiaro che egli deve potere contare su tutti i meccanismi psico-motori e cogniti, i
quali risultano basilari per determinare l’orientamento ed essere pronto a
comprendere quando da essi pervengano informazioni fallaci: è proprio nel processo
di discernimento delle cattive percezioni che gioca un ruolo fondamentale
l’addestramento del pilota.
Infatti, poiché «noi non siamo stati disegnati per volare», durante il volo, i
sensi possono risultare notevolmente compromessi: il normale procedere in avanti,
indietro, sopra o sotto, di un essere umano, diventa un’operazione molto più
complicata a causa delle sollecitazioni di rollio, beccheggio e imbardata e delle
relative accelerazioni angolari. Perfino l’accelerazione di gravità, sebbene sia una
sollecitazione a cui l’uomo è abituato, può condurre ad un errato orientamento:
infatti, essa può produrre sensazioni contrastanti se viene combinata con una
posizione innaturale del corpo (ad es., nel volo rovescio,…) o con altre accelerazioni
(ad es., virata a raggio costante e prolungata nel tempo,…).
I meccanismi fisiologici basilari alla comprensione dell’ambiente circostante e
al rilevamento dell’orientamento rispetto ad esso possono essere individuati in quelli
Appendice A 111

visivi, vestibolari, auditivi e somatosensoriali. Molti esperti hanno ragione di credere
che la vista sia il più importante di questi apparati in quanto consente di mantenere
una orientazione fissa durante tutte le condizioni di volo, anche in quelle in cui sono
presenti molte altre sollecitazioni particolari. Tuttavia, anche gli altri apparati (non
visivi) sono strumenti importanti attraverso i quali il pilota avverte le accelerazioni e
le forze a cui è sottoposto sia lui, sia il velivolo, sia il carico pagante. In alcune
circostante, a complemento degli organi visivi, tattili e vestibolari, intervengono
anche sensazioni meno importanti, come quelle olfattive e uditive, che giocano
comunque un ruolo importante nelle condizioni reali di volo.
In ogni caso, l’apparato visivo e quello vestibolare sono intimamente connessi e
proprio questo fatto fa sì che la loro interazione possa essere una delle cause delle più
comuni illusioni sensoriali. Anche l’apparato tattile/somatosensoriale interagisce con
i precedenti sistemi, vestibolare e visivo, sebbene esso sia capace di rilevare solo le
variazioni di pressione sui muscoli, le ossa, gli organi interni e il viso del pilota.
Comunque, ciò che è essenziale rilevare è che una condizione innaturale di moto,
come il volo, non può non avere effetto su tutti gli organi sensoriali; essi, quelli psico-
motori e quelli cognitivi, tutti insieme, cooperano a generare uno stato di confusione
nel pilota (pilot’s vertigo) che può anche produrre effetti catastrofici.
Abbiamo già accennato che l’uomo, per riconoscere un oggetto e orientarsi
nello spazio, sfrutta sia l’organo visivo che quello vestibolare. Più in dettaglio, il
modo in cui riconosce gli oggetti è detto visione focale: essa consente di rispondere
alla domanda «che cosa sto guardando?» e di rilevare tutto ciò che si trova
all’interno di 30° di campo visivo, per ogni occhio, aiutando l’individuo ad orientarsi
rispetto ad un oggetto. La visione periferica dell’ambiente aiuta, invece,
l’orientamento rispetto a ciò che è intorno all’uomo ed è chiamata a rispondere alla
domanda «dove sono?». Alcuni test hanno mostrato che queste due forme di
orientazione risultano essere abbastanza indipendenti. Ma, l’uomo è capace di
mantenere una orientazione visiva fissa, solo perché gli occhi hanno anche la
possibilità di poter effettuare dei movimenti propri, utili specialmente durante
condizioni innaturali di moto come il volo; anzi, proprio per questi movimenti,
Appendice A 112
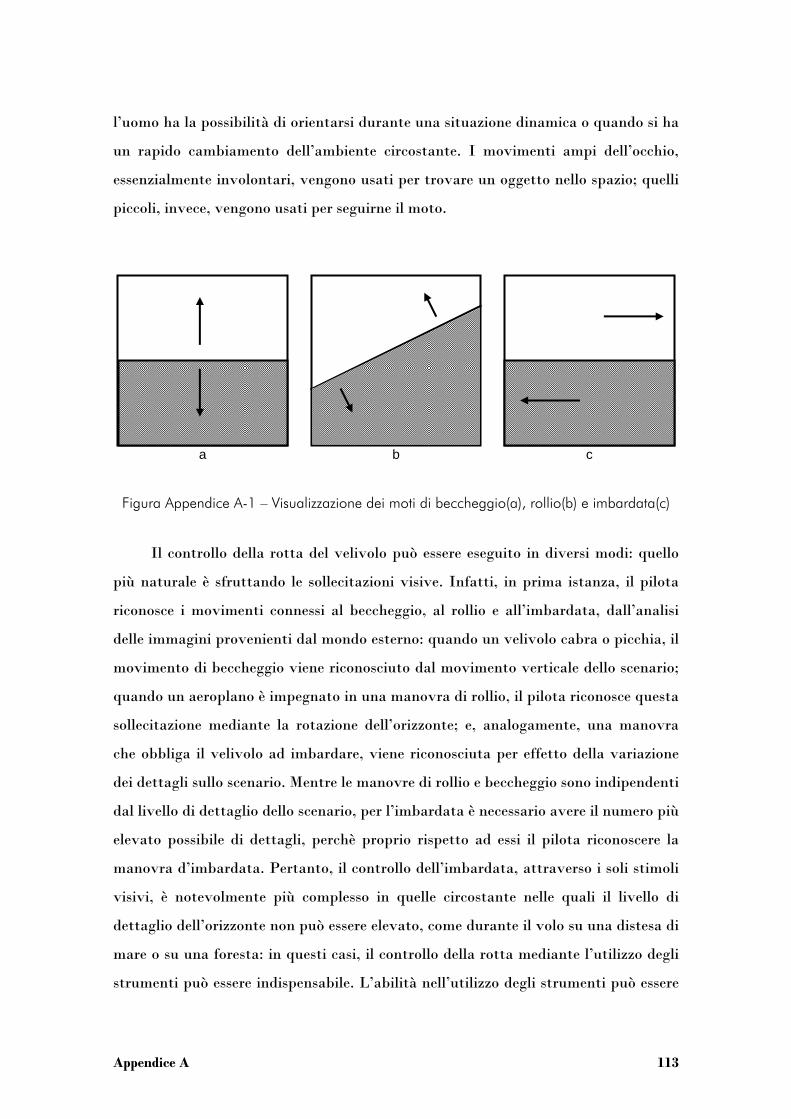
l’uomo ha la possibilità di orientarsi durante una situazione dinamica o quando si ha
un rapido cambiamento dell’ambiente circostante. I movimenti ampi dell’occhio,
essenzialmente involontari, vengono usati per trovare un oggetto nello spazio; quelli
piccoli, invece, vengono usati per seguirne il moto.
a
b
c
Figura Appendice A-1 – Visualizzazione dei moti di beccheggio(a), rollio(b) e imbardata(c)
Il controllo della rotta del velivolo può essere eseguito in diversi modi: quello
più naturale è sfruttando le sollecitazioni visive. Infatti, in prima istanza, il pilota
riconosce i movimenti connessi al beccheggio, al rollio e all’imbardata, dall’analisi
delle immagini provenienti dal mondo esterno: quando un velivolo cabra o picchia, il
movimento di beccheggio viene riconosciuto dal movimento verticale dello scenario;
quando un aeroplano è impegnato in una manovra di rollio, il pilota riconosce questa
sollecitazione mediante la rotazione dell’orizzonte; e, analogamente, una manovra
che obbliga il velivolo ad imbardare, viene riconosciuta per effetto della variazione
dei dettagli sullo scenario. Mentre le manovre di rollio e beccheggio sono indipendenti
dal livello di dettaglio dello scenario, per l’imbardata è necessario avere il numero più
elevato possibile di dettagli, perchè proprio rispetto ad essi il pilota riconoscere la
manovra d’imbardata. Pertanto, il controllo dell’imbardata, attraverso i soli stimoli
visivi, è notevolmente più complesso in quelle circostante nelle quali il livello di
dettaglio dell’orizzonte non può essere elevato, come durante il volo su una distesa di
mare o su una foresta: in questi casi, il controllo della rotta mediante l’utilizzo degli
strumenti può essere indispensabile. L’abilità nell’utilizzo degli strumenti può essere
Appendice A 113
adeguatamente addestrata solo mediante l’utilizzo di un simulatore. Inoltre, da
quanto si è visto in precedenza, è facilmente comprensibile il ruolo fondamentale che
la rappresentazione dello scenario riveste per i simulatori di volo.
La percezione del dettaglio degli oggetti visualizzati è fondamentale durante le
operazioni di volo a bassa quota: a poche migliaia di piedi dal suolo, i riferimenti al
suolo sono notevolmente importanti nel giudicare l’altitudine e la velocità
ascensionale, nonché l’assetto con il quale il velivolo si avvicina al suolo. A questo
scopo contribuiscono due elementi: gli oggetti da visualizzare e i dettagli in
prossimità dell’oggetto. L’oggetto visualizzato funge come mezzo di riferimento con
il quale il pilota gestisce l’orientamento del velivolo, allo scopo di seguire una precisa
rotta. I dettagli attorno all’oggetto, e dell’oggetto stesso, sono fondamentali nel
consentire al pilota un controllo efficace e valido della profondità e della distanza
dall’oggetto, nonché delle loro variazioni, in modo da gestire correttamente la
velocità e la quota, durante le operazioni a bassa quota. Quando ci si avvicina al
suolo, l’effetto più evidente è nella variazione delle dimensioni di un oggetto: la
relazione che esiste tra le dimensioni dell’oggetto e la quota rappresenta il primo
modo che il pilota ha per giudicare la quota, la distanza da un altro velivolo o da un
altro oggetto. Da quanto appena detto, è evidente che l’organo visivo debba essere
sollecitato opportunamente e si comprende facilmente l’impatto che il sistema di
visualizzazione ha sull’utilità e sull’efficacia di un simulatore di volo.
L’organo visivo e quello vestibolare sono convergenti nel senso che il processo
di connessione tra i due e il cervello consente di determinare l’orientamento
dell’individuo nello spazio tri-dimensionale.
Il sistema vestibolare è responsabile delle capacità di mantenimento del
bilanciamento e dell’equilibrio. Esso consente di riconoscere la posizione del corpo
per effetto del moto di un fluido, la perilinfa13, all’interno dell’orecchio interno.
13 La perilinfa è un liquido di origine linfatica che defluisce attraverso il canale cocleare dell’orecchio.
Appendice A 114
L’organo vestibolare può essere scomposto in tre principali parti, la coclea, il
vestibolo e i canali semicircolari, ciascuno dei quali ha una particolare funzione: la
coclea si occupa di percepire i suoni; il vestibolo è demandato al rilevamento delle
accelerazioni di gravità e lineari, e produce informazioni sugli spostamenti laterali e
l’inclinazione della testa; i canali semicircolari avvertono le variazioni delle
accelerazioni angolari di rollio, beccheggio e imbardata, attraverso gli spostamenti
della perilinfa. Il moto del fluido stimola le estremità di una piccola cella d’aria
contenuta nell’orecchio interno, che invia così le informazioni sensoriali al cervello.
Queste, poi, vengono messe insieme a quelle visive e cognitive del pilota per dargli
una idea della sua posizione nelle tre dimensioni dello spazio. Infatti, l’orientamento
spaziale viene ricostruito anche in relazione alle informazioni pregresse del pilota
acquisite dal pilota durante le fasi di addestramento, in quanto il riconoscimento di
un dato orientamento viene effettuato confrontando le sensazioni attualmente
percepite con le precedenti esperienze vissute dal pilota.
Le cause di disorientamento spaziale possono essere molteplici e connesse,
fondamentalmente, ai tre sensi principali: l’illusione vestibolare, quella visiva e
quella tattile/somatosensoriale.
L’illusione vestibolare si può manifestare con la falsa sensazione di ruotare
attorno ad uno o più assi del velivolo, anche quando il velivolo non è soggetto a
questo tipo di rotazioni, oppure con la falsa sensazione di un cambio nell’assetto,
conseguente ad una accelerazione o decelerazione lineare. Questa illusione dipende
dal fatto che la perilinfa possiede una propria inerzia, la quale rende il sistema lento a
rispondere alle accelerazioni e ad avvertire la loro fine. Ad esempio, in caso di
accelerazioni testa-piedi o piedi-testa, il pilota può percepire oggetti, che in realtà
sono fermi, come se fossero in movimento verso l’alto o il basso, credendo così di
essere in cabrata o in picchiata. Problemi analoghi si verificano in presenza di
accelerazioni tangenziali, che creano l’illusione di spostamenti laterali (il pilota è
indotto a deviare dalla rotta per seguire riferimenti che sembrano in movimento), o
in presenza di accelerazioni prolungate nel senso petto-schiena, le quali producono
l’illusione della cabrata (durante le accelerazioni) o della picchiata (durante le
Appendice A 115

decelerazioni), con conseguenti azioni del pilota. Infine, un’altra illusione vestibolare
è connessa al fenomeno di Coriolis, dovuto all’azione dell’omonima forza deviante, il
cui effetto è ben noto in meteorologia: i fluidi contenuti nei canali semicircolari
devono subire tale forza, comportando un’erronea percezione dell’orientamento
spaziale quando la testa si muove durante una virata.
In tutte queste circostanze, l’utilizzo di strumenti come l’altimetro, il
variometro e il virosbandometro, è fondamentale per consentire di superare la fase di
“disorientamento vestibolare”.
L’illusione visiva è più complessa e può manifestarsi in diverse forme:
− autokinesis: l’effetto che si ottiene quando il pilota fissa a lungo un oggetto
(un riferimento al suolo o, durante il volo notturno, una stella) e per il quale
può percepirlo in movimento per alcuni secondi, deviando dalla rotta per
seguirlo, o di dimensioni maggiori, credendosi più vicino;14
− black hole: quando si ha la perdita della visione periferica e viene usata solo
quella focale, come, ad esempio, durante gli atterraggi nelle situazioni di
scarsa visibilità, tempeste di neve o di sabbia;
− whiteout approaches: consiste, come il buco nero, in una perdita della visione
periferica, dovuto però alla perdita della vista dell’orizzonte;15
− size consistence:, è una valutazione non corretta dell’altezza al suolo,
particolarmente pericolosa durante l’atterraggio, in quanto il pilota, abituato
ad operare su piste strette (larghe), atterrando su una pista più larga (stretta),
riconosce un quota più bassa (alta), che risulta inesatta;
− shape consistence: quando la pista non appare piatta, ma sembra incurvarsi
verso l’alto o verso il basso, provocando una errata valutazione dell’altezza
dalla pista;
14 Particolare attenzione va prestata durante l’atterraggio, quando il guardare per troppo tempo la pista, può farla percepire come più larga di quanto non sia veramente. 15 Non riconoscendo l’orizzonte, il pilota, istintivamente, tende ad allineare l’aereo rispetto all’orizzonte illusorio.
Appendice A 116

− false horizon: quando, durante il volo notturno, il pilota ha una errata
percezione della quota dal suolo, poiché le luci delle città non sono
distinguibili da quelle delle stelle fisse e l’orizzonte appare più basso di quanto
non lo sia;
− height perception illusion: quando, durante il volo su un territorio con pochi o
privo di riferimenti, come quello su una foresta o su una distesa di mare, il
pilota avverte un’altezza maggiore di quella effettiva;
− flicker vertigo: è il senso di vertigine causato dal rapidissimo lampeggiare di
una luce negli occhi del pilota, causata dalla luce solare che attraversa il disco
dell’elica con il motore a bassi regimi, come durante l’atterraggio.
Anche durante il volo strumentale, l’assenza di sensazioni visive può creare
discordanza con le informazioni derivanti dagli strumenti; il pilota può percepire
fisicamente di trovarsi in assetti diversi da quelli reali e, persino, in volo rovescio.16
L’illusione somatosensoriale è connessa alla sensazione per la quale il pilota
vuole impostare una manovra, per correggere la sua condizione di moto, ma avverte
come se la sua mano si muovesse in una direzione opposta: questa sensazione è il
risultato di una dissonanza cognitiva tra il pensiero e il riflesso del pilota, allenato
durante l’addestramento.
La prevenzione dei fenomeni di disorientamento ha un solo nome:
addestramento. Al di là della necessità di conseguire un’abilitazione, è necessario che
il pilota: abbia imparato a volare in condizioni di tempo e di visibilità diverse, anche
su zone sconosciute; sappia utilizzare la carta geografica, per essere pronto a rilevare
la propria posizione in caso di necessità; sia in grado di pilotare l’aereo anche in
assetti inusuali, per riconoscerne le accelerazioni; faccia ricorso solo agli strumenti,
quando la percezione dell’assetto non sia più che certa.
16 Il caso tipico è quello del pilota che, uscendo da una lunga virata percorsa senza riferimenti visivi, non riesce più a percepire il grado di inclinazione dell’aereo e tende a correggere l’assetto nel senso della virata appena terminata, usando gli alettoni, perché l’assetto orizzontale non gli sembra più normale.
Appendice A 117

Appendice A 118
Dunque, in caso di disorientamento spaziale, bisogna costringersi ad ignorare le
percezioni sensoriali, il senso di nausea, di vertigine e spesso di panico che può
assalirci. In queste circostanze, gli istruttori di volo indicano che la prima manovra è
quella di livellare le ali con l’uso dell’orizzonte artificiale e di assicurarsi di avere una
velocità appropriata; solo allora e con cautela, guardare fuori alla ricerca di un punto
di riferimento, alla cui individuazione i sintomi di disorientamento svaniranno
pressoché istantaneamente.

Appendice B FLIGHT SIMULATOR STANDARDS
Questa appendice consente di mettere in luce le caratteristiche che ogni sottosistema
di un simulatore deve possedere per ottenere un dato livello di Certificazione.
Appendice B 119

Appendice B 120

Appendice B 121

Appendice B 122
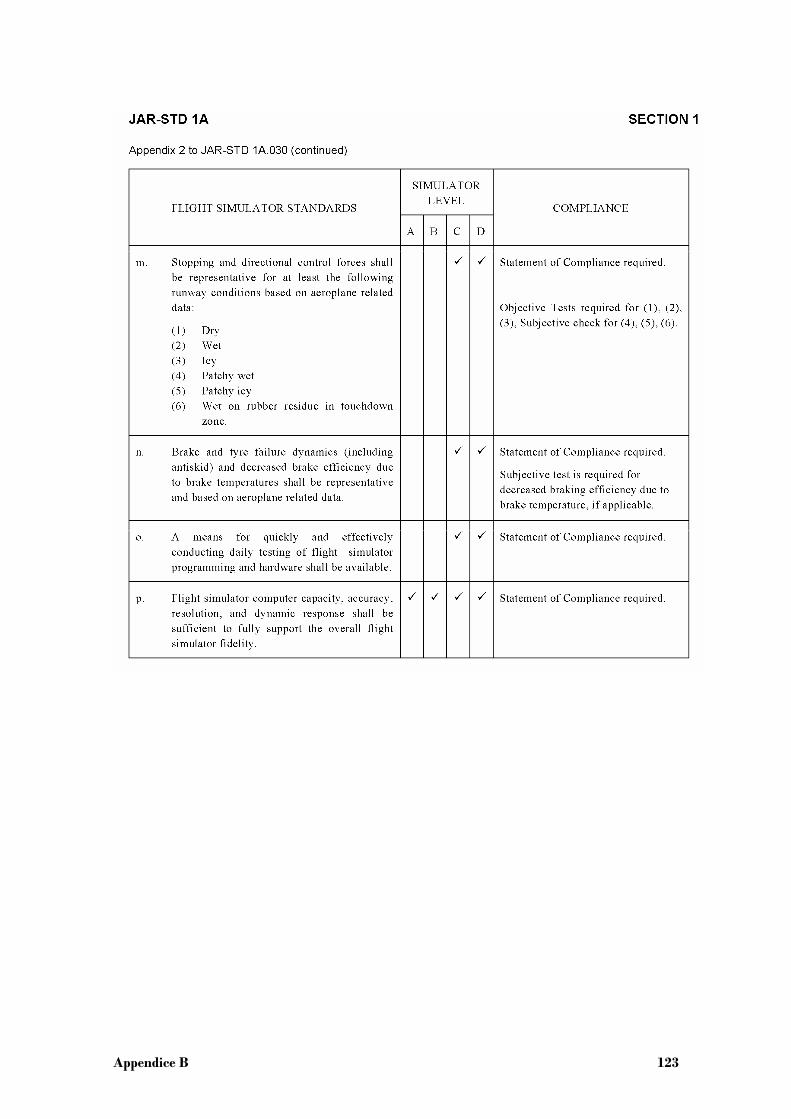
Appendice B 123
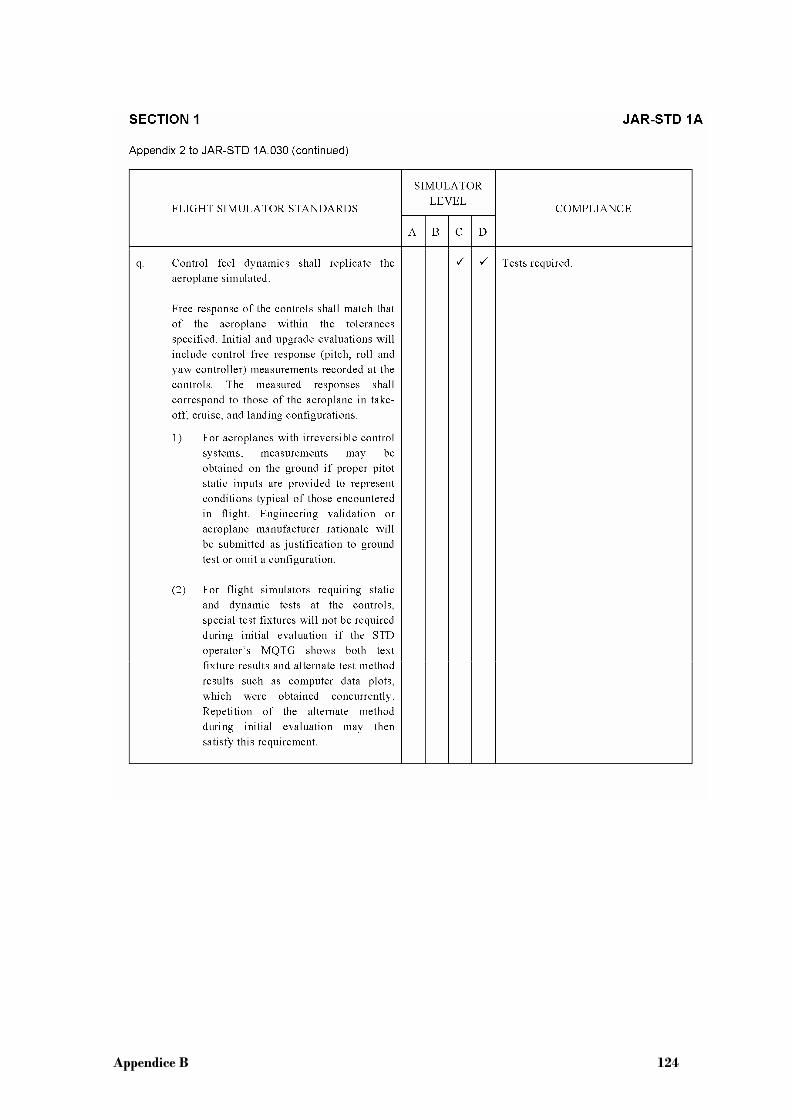
Appendice B 124

Appendice B 125

Appendice B 126

Appendice B 127
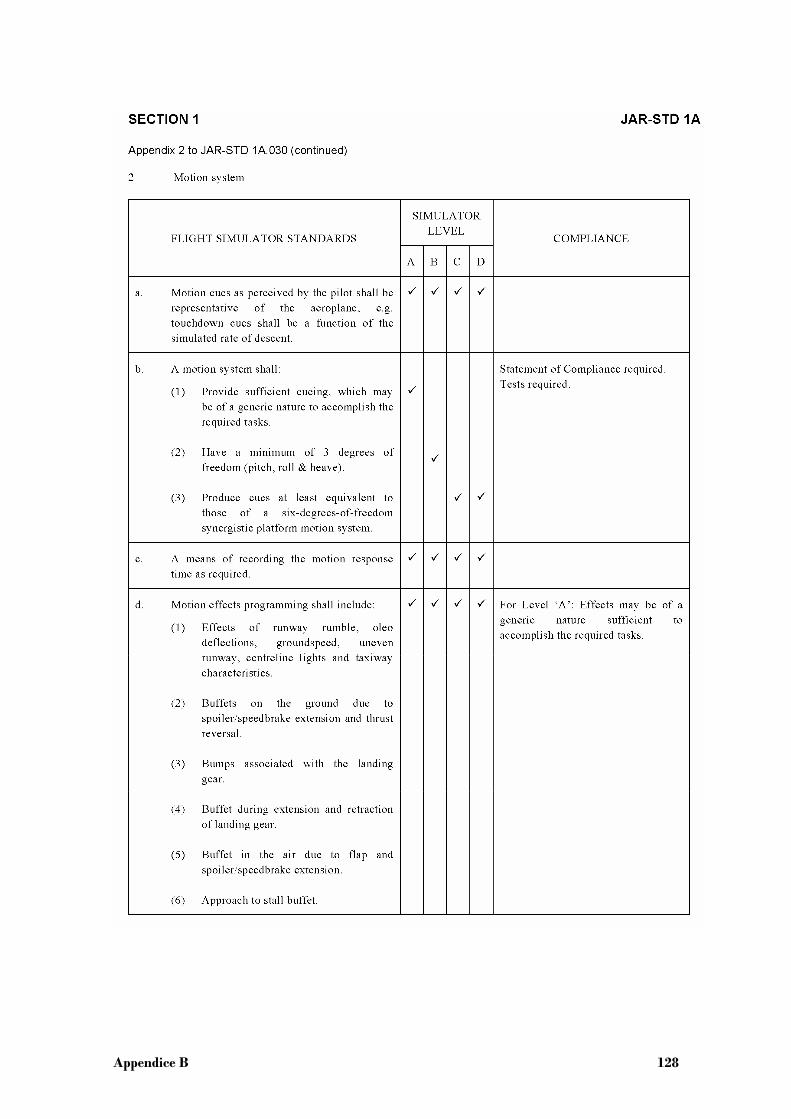
Appendice B 128

Appendice B 129

Appendice B 130

Appendice B 131

Appendice B 132

Appendice B 133

Appendice C FSTD QUALIFICATI DALL’ENAC
Questa appendice fornisce la lista dei simulatori di volo (FSTD) qualificati
dall’ENAC, sia in Italia che all’estero, fino al 12 maggio 2009.
Appendice C 134

Appendice C 135
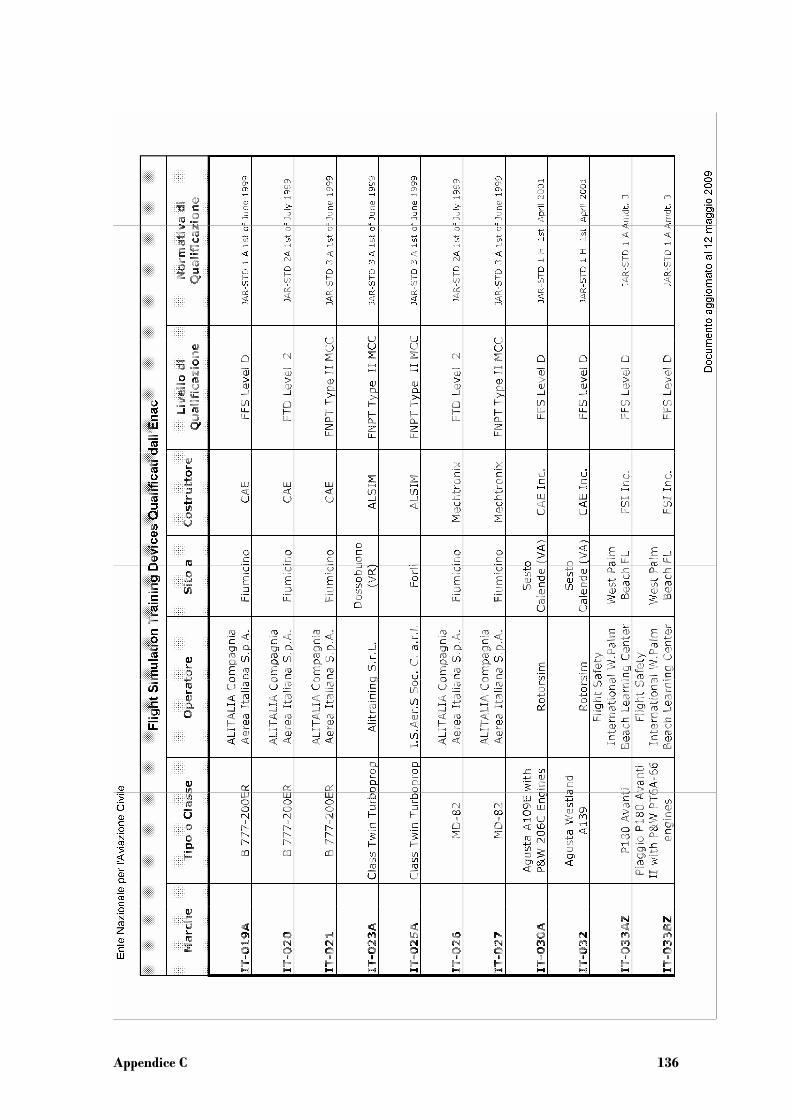
Appendice C 136
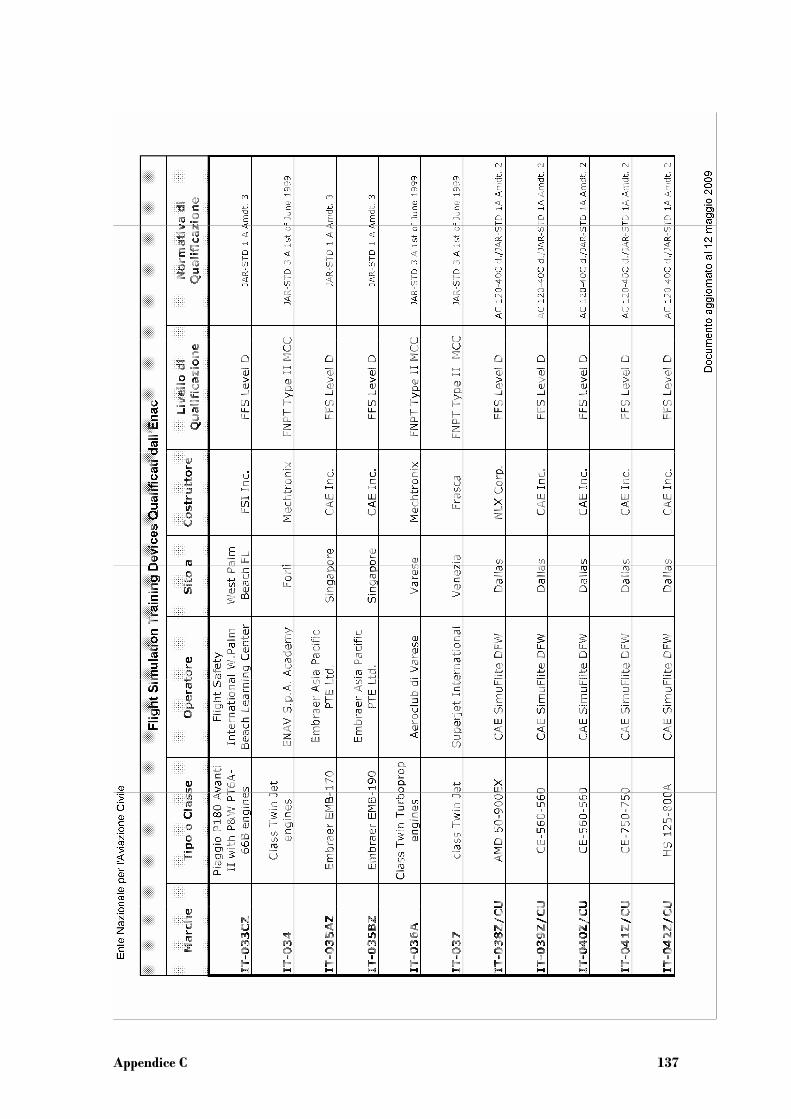
Appendice C 137

Appendice C 138

Appendice C 139

Riferimenti e Bibliografia
Rolfe, J.M. and Staples, K.J. (1986). Flight simulation. Cambridge University Press.
Alfred T. Lee (2006). Flight Simulation. Virtual Environments in Aviation. Ashgate.
Shari Stamford Krause, Ph. D. (2003). Aircraft Safety. Accident Investigations,
Analyses & Applications. Spatial Disorientation, 3-140. McGraw-Hill
Companies.
Brian L. Stevens e Frank L. Lewis. Aircraft Control and Simulation
Rizzi Giorgio. Fondamenti di Medicina Aeronautica, 59-62.
Circolare ENAC OPV-17A 20. Dispositivi per addestramento e controllo del personale
navigante – Procedure per la Qualificazione e l’utilizzazione del 20/01/2006.
Regolamento ENAC Regolamento per i dispositivi di addestramento al volo del
personale navigante di condotta (FSTD). Edizione n° 3 del 04/03/2009.
Joint Aviation Authorities. JAR-STD 1A Amendment 3 del 01/07/2003
Joint Aviation Authorities. JAR-STD 2A Issue 1.7.99
Joint Aviation Authorities. JAR-STD 3A Issue 01.06.99
Joint Aviation Authorities. JAR-STD 4A del 01/05/2002
http://en.wikipedia.org/wiki/Flight_simulator
Riferimenti e Bibliografia 140