Bio Mecca Nica
149
biomeccanica Università degli Studi di Perugia Facoltà di Medicina e Chirurgia del sistema muscolo-scheletrico Prof. Andrea Biscarini
-
Upload
valerio-langella -
Category
Documents
-
view
23 -
download
0
description
biomeccanica
Transcript of Bio Mecca Nica

biomeccanica
Università degli Studi di Perugia
Facoltà di Medicina e Chirurgia
biomeccanicadel sistema muscolo-scheletrico
Prof. Andrea Biscarini

Capitolo 1:
INTRODUZIONE
1.1 - La biomeccanica: definizione e campo di indagine
1.2 - La biomeccanica del sistema muscolo scheletrico
Capitolo 2:
RICHIAMI DI MECCANICA DEI SISTEMI
2.1 - Braccio e momento di una forza
2.2 - Le leve: definizione, regola di equilibrio, classificazione
2.3 - Le leve: proprietà dinamiche
Capitolo 3:
FORZE ESTERNE
3.1 - Classi di forze esterne
3.2 - Momento delle forze esterne
3.3 - Misura delle forze esterne
Capitolo 4: Capitolo 4:
FORZA MUSCOLARE
Aspetti geometrici:
4.1 - Punto di applicazione, direzione, verso
4.2 - Braccio della forza muscolare
4.3 - Angolo di trazione
Intensità e regolazione della forza muscolare:
4.4 - Curva lunghezza-tensione
4.5 - Curva forza-velocità
4.6 - Livello di attivazione
4.7 - Parametri dell’architettura del muscolo
4.8 - Momento della forza muscolare
Valutazione della forza muscolare:
4.9 - Elettromiografia
4.10 - Modelli biomeccanici

Capitolo 5:
CARICHI ARTICOLARI
1.1 - La biomeccanica: definizione e campo di indagine
1.2 - La biomeccanica del sistema muscolo scheletrico
Capitolo 6
APLLICAZIONI
6.1 - Strength training equipment (leg extension modificato)
6.2 - Ergonomia
6.3 - Supporti per la riabilitazione del ginocchio in acqua
6.4 - Cardio equipment (cardio wave)
Capitolo 7
ASPETTI FUNZIONALI
7.1 - Ciclo allungamento-accorciamento
7.2 - Biomeccanica dei muscoli poliarticolari
7.3 - Co-contrazione

Capitolo 1:
INTRODUZIONE
1.1 - La biomeccanica: definizione e campo di indagine1.1 - La biomeccanica: definizione e campo di indagine
1.2 - Biomeccanica del sistema muscolo-scheletrico

Definizioni generali:
“Biomechanics is the science that study
structures and functions of biological systems
using the knowledge and methods of mechanics.”
(Hatze, 1971)
1.1 La biomeccanica: definizione e campo di indagine
Definizioni specifiche:
“Biomechanics is the science that examines
forces acting upon and within a biological structure
and the effects produced by such forces.”
(Hay, 1973)

Società:
European Society of Biomechanics
International Society of Biomechanics
International Society of
Biomechanics in Sports
American Society
of Biomechanics
Canadian Society
of Biomechanics

Journal of Biomechanics Clinical Biomechanics
Impact Factor 2.4 Impact Factor 1.5
Riviste:
Journal of
Applied BiomechanicsJournal of
Biomechanical Engineering
Impact Factor 0.5 Impact Factor 1.7

Campo di indagine:
Fundamental Topics - Biomechanics of the musculoskeletal, cardiovascular, and respiratory systems,
mechanics of hard and soft tissues, biofluid mechanics, mechanics of prostheses and implant-tissue
interfaces, mechanics of cells.
Cardiovascular and Respiratory Biomechanics - Mechanics of blood-flow, air-flow, mechanics of the soft
tissues, flow-tissue or flow-prosthesis interactions.
Cell Biomechanics - Biomechanic analyses of cells, membranes and sub-cellular structures; the relationship
of the mechanical environment to cell and tissue response.
Dental Biomechanics - Design and analysis of dental tissues and prostheses, mechanics of chewing.
Functional Tissue Engineering - The role of biomechanical factors in engineered tissue replacements andFunctional Tissue Engineering - The role of biomechanical factors in engineered tissue replacements and
regenerative medicine.
Injury Biomechanics - Mechanics of impact and trauma, dynamics of man-machine interaction.
Molecular Biomechanics - Mechanical analyses of biomolecules.
Orthopedic Biomechanics - Mechanics of fracture and fracture fixation, mechanics of implants and implant
fixation, mechanics of bones and joints, wear of natural and artificial joints.
Rehabilitation Biomechanics - Analyses of gait, mechanics of prosthetics and orthotics.
Sports Biomechanics - Mechanical analyses of sports performance.

Definizione:
“Biomechanics of the musculo-skeletal system is the science that examines
forces acting on the musculo-skeletal system
(external loads, muscular forces and joint load)
and the effects produced by such forces
(movements, deformations, biological change in tissues).”
1.2 Biomeccanica del sistema muscolo-scheletrico
Tre tipi di forze:
• Forze esterne
• Forze muscolari
• Carichi articolari

Capitolo 2:
RICHIAMI DI MECCANICA DEI SISTEMI
2.1 - Braccio e momento di una forza2.1 - Braccio e momento di una forza
2.2 - Le leve: definizione, regola di equilibrio, classificazione
2.3 - Le leve: proprietà dinamiche

asse di rotazione
corpo rigido
FbM a ±=
Definizione
Dato un corpo rigido vincolato a ruotare attorno ad un asse fisso,
e una forza agente sul corpo e appartenente a un piano perpendicolare a tale asse,
si definisce momento della forza rispetto all’asse
il prodotto del modulo della forza per il suo braccio.
Il braccio è la minima distanza fra l’asse e retta di applicazione della forza.
2.1 Braccio e momento di una forza
corpo rigido
Fr
[ ] [ ] [ ] [ ]222 −− === TMLLMLTFLM a
Dimensioni ed unità di misura
22 −= smkgNm

corpo rigido
Fr
Il braccio della forza (ed il momento)
aumenta all’aumentare della distanza
fra punto di applicazione della forza e
centro di rotazione
Il braccio della forza (ed il momento)C
C
corpo rigido
Fr
Il braccio della forza (ed il momento)
aumenta all’aumentare quanto più la
forza è perpendicolare alla retta fra il
punto di applicazione della forza e il
centro di rotazione
Il braccio della forza (e il momento) è nullo quando la retta di applicazione della forza passa per il centro di rotazione C
C

Definizione:
Corpo rigido vincolato ad asse fisso (fulcro) sollecitato da due forze (dette forza F e resistenza R) che producono
momenti assiali di segno opposto (rotazioni di verso opposto).
gmRr=F
rBraccio della
resistenza, bR
φr
2.2 Le leve: definizione, regola di equilibrio, classificazione
retta di applicazione
della resistenza
Rb
bFRbFbRbFbM
F
RRFRF
esta ===−= 00)(
Regola d’equilibrio:
RFbb RF 10
110 =⇒= (per equilibrare la resistenza basa una forza 10 volte più piccola).Se

Utilità:
E’possibile equilibrare/spostare un carico elevato con una forza minima
r bRbFr
Rr
bRbF

Leve di primo tipo
Fulcro in posizione intermedia fra forza e resistenza
Leve di secondo tipo
Resistenza in posizione intermedia fra forza e fulcro
Leve di terzo tipo
forza in posizione intermedia fra resistenza e fulcro
Leve vantaggiose
Braccio della forza è maggiore del braccio della resistenza
1° tipo
Fr
Fr
Rr
Classificazione:
Leve svantaggiose
Braccio della forza è miniore del braccio della resistenza
* * *
• Le leve di primo genere possono essere vantaggiose
o svantaggiose
• Le leve di secondo genere sono in genere vantaggiose
• Le leve ti terzo genere sono in genere svantaggiose
2° tipo
3° tipo
Fr
Rr
Rr
RFbb RF <⇒>
RFbb RF >⇒<

Fr
Leve di forza e leve di velocità
Le leve anatomiche sono in maggioranza svantaggiose. Ciò appare un controsenso. In realtà una leva svantaggiosa dal
punto dinamico(delle forze) è vantaggiosa dal punti di vista cinematico (degli spostamenti e delle velocità) e viceversa.
∆sF
RFRF
RFRF
LLsRsF
snsen
RFnbb
=⇒∆=∆⇒
∆=∆=⇒=
gmRr=
∆sR
Il lavoro compiuto dalla forza e la resistenza è lo stesso.
Una piccola forza può spostare una grande resistenza, ma
lo spostamento della resistenza è piccolo rispetto a quello
del punto di applicazione della forza.

Momento di inerzia:
Data un asse a, si definisce momento di inerzia di un sistema rispetto all’asse a, e si indica con il simbolo Ia ,
la somma dei prodotti delle masse dei punti del sistema per i quadrati delle rispettive distanze dall’asse.
2211
211 NNa dmdmdmI +++= L ( )
∫∆
→∆
≡
∆++∆+∆=
m
NNm
a
dmr
rmrmrmIi
2
2211
211
0lim L
Sistema continuoSistema particellare
2.3 Le leve: proprietà dinamiche
m2
m1
mi
mN
d1
d2
di
dN
∆midi

retta di applicazione
gmRr=F
rBraccio della
resistenza, bR
φr
Equazione del moto:
retta di applicazione
della resistenza
F
RRF
esta b
IRbFIRbFbIM
α+=α=−α=)(
diminuisceRbFb
costanteRbFb
aumentaRbFb
RF
RF
RF
ω⇒<α⇒<ω⇒=α⇒=ω⇒>α⇒>
0
0
0 ω =cost: movimento isocinetico
In particolare:
ω=0: equilibrio statico
α = accelerazione angolare
ω = velocità angolare

Capitolo 3:
Forze esterne agenti sul sistema
muscolo-scheletrico
3.1 - Classi di forze esterne
3.2 - Momento delle forze esterne
3.3 - Misura delle forze esterne

• Pesi liberi o vincolati
• Forze elastiche
• Resistenze di mezzi fluidi
• Razioni vincolari di appoggio (“ground reaction”)
Le forze esterne, sono note a priori (pesi liberi o vincolati, forze elastiche) o possono essere misurate
(resistenze di mezzi fluidi, reazioni vincolari). Possono quindi essere considerate note in modulo
direzione e verso.
3.1 Classi di forze esterne

Forza peso
Intensità: prodotto della massa del corpo per l’accelerazione di gravità;
Direzione e verso : verticale discendente.
g = 9.81 m/s2 alle nostre latitudini
g = 9.78 m/s2 all’equatore
g = 9.83 m/s2 ai poli
Esempio (pesi liberi):
Esercizi con manubri.
gmr
gmPrr
=
gmr
Implicazioni biomeccaniche:
Durante un esercizio con pesi liberi la resistenza
mantiene direzione ed intensità invariate.
gmr
gm

Esempio (pesi vincolati al moto di leve):
Esercizi al la leg extension.
Implicazioni biomeccaniche:
Durante un esercizio quasi-statico alla leg extension la resistenza
mantiene intensità R invariata ma cambia la sua direzione.
Rr
Rr
Rr

Rr
Esempio (pesi vincolati a cavi):
Esercizi ai cavi.
Rr
Implicazioni biomeccaniche:
Durante un esercizio ai cavi la resistenza mantiene intensità R
invariata (R=mg) ma cambia la sua direzione.
gmrR
r

Forza elastica di centro O
Forza sempre diretta verso un punto fisso O (detto centro
della forza elastica) in modulo proporzionale alla distanza
di P da O
rkrrkkOPFel ˆ−=−=−= rr
O
Pr
r̂
k = costante elastica
banda elastica a riposoEsempio (bande elastiche):
Forza esercitata da una molla compressa o
rrrOP ˆ== r
elFr
banda elastica allungata
OP
Forza esercitata da una molla compressa o
allungata, o da una banda elastica
allungata rispetto alla configurazione a
riposo (assenza di sollecitazione).
banda elastica allungata
OP
Implicazioni biomeccaniche:
Durante un esercizio con bande elastiche
varia sia la direzione che l’intensità della
resistenza.

vvAfF ˆ)(γρ−=r
Resistenze di mezzi fluidi
Quando un corpo si muove all’interno di un fluido esercita una forza sulle particelle del fluido. Le
particelle, per il terzo principio, esercitano sul corpo forze uguali e contrarie: la somma di queste forze
costruisce la resistenza offerta dal mezzo fluido al moto del corpo.
ρ = densità del fluido
γ = coefficiente di forma
A = superficie investita
smvvvf
smvvvf
/2002)(
/20)(2 ≤<=
≤≤= (regime viscoso)
(regime idraulico)
Avr
vr
fluido
Esempio:
I due corpi rappresentati
hanno lo stesso valore di
A ma differenti valori di γ.
Implicazioni biomeccaniche:
Durante un esercizio in acqua l’intensità della resistenza può essere
modulata variando la velocità dell’esercizio e la superficie esposta.

Ground reaction
Forza esercitata dal piano di appoggio sulla zona di contatto fra piede e piano di appoggio. Per il terzo
principio della dinamica è uguale ed opposta alla forza esercitata dal piede sul piano

bR bR
gmr
3.2 Momento delle forze esterne
Estensione del ginocchio con cavigliera
MgbM RR =La resistenza mg resta costante,
il braccio della resistenza bR cresce,
quindi il momento della resistenza cresce
gmr gm
r

bR
bR
gmr
gmr
gmr
bR
Estensione del ginocchio con leg-extension
MgbM RR =La resistenza mg resta costante e pari al peso del pacco di piastre selezionate,
il braccio della resistenza bR resta costante,
quindi il momento della resistenza resta costante
gmr
gmr

bR
bR
r
bR
elFr
elFr
Estensione del ginocchio con elastici
MgbM RR =La resistenza elastica aumenta all’aumentare della lunghezza dell’elastico,
il braccio della resistenza bR diminuisce,
Momento della resistenza????
elFr elF

Pedane di forzaPedane di forza
3.3 Misura delle forze esterne

Pedane Pedane baropodometrichebaropodometriche


Capitolo 4:
FORZA MUSCOLARE
Aspetti geometrici:
4.1 - Punto di applicazione, direzione, verso
4.2 - Braccio della forza muscolare
4.3 - Angolo di trazione
Intensità e regolazione della forza muscolare:
4.4 - Curva lunghezza-tensione4.4 - Curva lunghezza-tensione
4.5 - Curva forza-velocità
4.6 - Livello di attivazione
4.7 - Parametri dell’architettura del muscolo
4.8 - Momento della forza muscolare
Valutazione della forza muscolare:
4.9 - Elettromiografia
4.10 - Modelli biomeccanici

Capitolo 4:
FORZA MUSCOLARE
Aspetti geometrici:
4.1 - Punto di applicazione, direzione, verso
4.2 - Braccio della forza muscolare
4.3 - Angolo di trazione
Intensità e regolazione della forza muscolare:
4.4 - Curva lunghezza-tensione4.4 - Curva lunghezza-tensione
4.5 - Curva forza-velocità
4.6 - Livello di attivazione
4.7 - Parametri dell’architettura del muscolo
4.8 - Momento della forza muscolare
Valutazione della forza muscolare:
4.9 - Elettromiografia
4.10 - Modelli biomeccanici

Parametri noti (studi anatomici):
• Punto di applicazione: inserzione (e origine)
• Direzione: tangente alla linea inserzione - origine nel punto di inserzione (e di origine)
• Verso: inserzione → origine (origine → inserzione)
• Braccio della forza rispetto all’asse di rotazione articolare
• Angolo di trazione rispetto all’asse meccanico del segmento anatomico su cui il muscolo si inserisce
4.1 Punto di applicazione, direzione e verso
Fr
Fr
− Fr

Definizione
Il braccio della forza muscolare
è la minima distanza fra la retta di applicazione della forza muscolare
ed il centro di rotazione articolare
Fr
4.2 Braccio della forza muscolare
Fr
Fr

Forza muscolareBraccio della forza
muscolare
aF
Fr
M = ± aF F
Determina l’accelerazione angolare a del
segmento anatomico in accordo alla seconda
equazione cardinale della dinamica dei sistemi:
Importanza
Il momento assiale M della forza muscolare è
definito come il prodotto del braccio della forza
muscolare per l’intensità della forza muscolare:
F
Iα = M
M = momento assiale della forza
I = momento di inerzia
α = accelerazione angolare

Variazione del braccio della forza muscolare
Il braccio della forza muscolare varia al variare dell’angolo articolare

Forza del quadricipite
femoraleBraccio
a
Fr
Esempio
Il braccio della forza del quadricipite femorale varia al variare dell’angolo di flessione del ginocchio.
aF

Esempio
Braccio dei muscoli flessori ed estensori del gomito.

Angolo di
trazione
Forza muscolare
Fr
4.3 angolo di trazione
Definizione
Angolo individuato della forza muscolare e l’asse meccanico longitudinale del segmento
anatomico su cui il muscolo si inserisce
ϕ

Variazione dell’angolo di trazione
L’angolo di trazione varia al variare dell’angolo articolare

Angolo di
trazione
Forza del
quadricipite
femorale
Fr
Esempio: quadricipite femorale
Angolo individuato dal tratto rettilineo di tendine rotuleo che si inserisce sulla tibia e
l’asse meccanico longitudinale della tibia
ϕ

ϕ
Importanza
Determina la componente rotatoria e componente stabilizzatrice della forza muscolare
Fr
ϕ

Fr F
r
Componente stabilizzatrice e de-stabilizzatrice
Nel caso del bicipite brachiale la componente stabilizzatrice, ad elevati angoli di flessione del gomito,
diviene de-stabilizzatrice (lussante)
Gomito: Angolo di flessione 70° Gomito: Angolo di flessione 135°

Funzione meccanica della rotula

Funzione meccanica dei condili mediali e dei malleoli

Capitolo 4:
FORZA MUSCOLARE
Aspetti geometrici:
4.1 - Punto di applicazione, direzione, verso
4.2 - Braccio della forza muscolare
4.3 - Angolo di trazione
Intensità e regolazione della forza muscolare:
4.4 - Curva lunghezza-tensione4.4 - Curva lunghezza-tensione
4.5 - Curva forza-velocità
4.6 - Livello di attivazione
4.7 - Parametri dell’architettura del muscolo
4.8 - Momento della forza muscolare
Valutazione della forza muscolare:
4.9 - Elettromiografia
4.10 - Modelli biomeccanici

1ce
fg
d
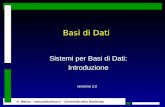
4.4 Curva lunghezza-tensione
Curva lunghezza tensione del sarcomero e sua interpretazione
La forza che il sarcomero è in grado di produrre dipende dalla sua lunghezza. Si possono individuare 4 regimi:
4.052.652.051.651.25
Lunghezza del sarcomero (µm)
0
bh
ai

4.05
2.65
2.45
2.05
µm1.21.2 1.6
0.2
a
b
c
d
0.025 0.025
2.05
1.65
e
f
g
h
1.25i

• Since sarcomeres are arranged in series, the force that a muscle fiber can generate is independent of the
number of sarcomeres, i.e. provided that sarcomere length is not-changing, the force produced by each
sarcomere will be equal. The force produced by the muscle fiber will be equal to the sarcomere force.
LFIBER = NSARC LSARC
• Because the maximum force which can be produced by a sarcomere depends on sarcomere length, themaximum force which can be produced by a muscle fiber will depend on its length. The relationshipbetween maximum force and muscle fiber length will depend on the number of sarcomeres that make upthe fiber.
Forza delle fibre muscolari
FFIBER = FSARC
FMAX depends on:LSARC = LFIBER / NSARC
the fiber.
• Sarcomeres may not be uniform and homogeneous. Sarcomere diameter, myofilament length and
myofilament density may vary along the length of the muscle fiber. This will result in different length-
tension relations for different sarcomeres.

Curva lunghezza tensione del muscolo
When a muscle fiber is stretched beyond a certain point, the structural proteins acting in parallel with
contractile proteins begin to be stretched. The force produced by these parallel elastic structures then
increases rapidly with muscle length. Consequently, the total sarcomere force (active + passive) is
generally a monotonically increasing function of length, despite the fact that myofilament overlap
decreases at long lengths.

Esempio: muscoli che attraversano il
gomito
Estimated operating ranges of the
elbow flexors over 100° of elbow
flexion and of the extensors over 90°
flexion. Estimated fascicle excursions
were normalized by optimal fascicle
length (l0M) and super-imposed on a
normalized force-length curve based
on the sarcomere lengths measured
from the five extended specimens.
The variation in force-generating
capacity during elbow flexion is
expressed as a proportion of peakexpressed as a proportion of peak
isometric force (F0M). Results shown
are averages of the 10 extremities in
this study. Both muscle moment arm
and optimal fascicle length determine
how much of the isometric force-
length curve each muscle uses.

4.5 Curva forza-velocità

• When a muscle fiber is activated to produce a steady force while being held isometric and is thenstretched at constant velocity, the resulting force is greater than the isometric force (Fig. 2.1).
Fase eccentrica (allungnamento)

• For low velocities of stretch the force increases with velocity, but as the velocity increases further the forcelevels off or drops slightly, reaching a maximum of between 1.2-1.8 times the isometric force (Fig 2.3).

The increase in force with muscle lengtheningvelocity is probably largely due to stretching ofattached cross-bridges (Fig. 1.6).
Cross-bridges, which are being stretched, willgenerate a greater average force during theirperiod of attachment than crossbridges which areisometric.
The higher the lengthening velocity, the greaterthe amount of stretch that will occur during theperiod of attachment and hence, the greater theaverage force during the period of cross-bridgeattachment.
Interpretation
When the lengthening velocity becomes too high,cross-bridges are stretched beyond the limits thatcan be supported by the binding force betweenactin and myosin, resulting in forcible detachment.This limits the maximum force during musclelengthening.

• When a muscle fiber is held isometric and is then released and allowed to shorten at a constantvelocity, the contractile force produced by the muscle fiber drops to a lower relatively constant value.The higher the shortening velocity the lower the force (Fig. 2.2).Conversely, by decreasing the load on amuscle fiber, its shortening velocity can be increased.
Fase concentrica (accorciamento)

• If contractile force is plotted against shortening velocity a hyperbolic relation is obtained where force isinversely proportional to velocity, decreasing continuously from its isometric value to zero at maximumshortening velocity (Fig. 2.3).

Interpretation
There are several possible reasons why muscle force drops as the velocity of shortening increases.
• First, there are fewer cross-bridges attached during shortening and their number decreases as thevelocity of shortening increases. It has been suggested that this is a consequence of an increase in therate of cross-bridge detachment during muscle shortening and a decrease in the rate of attachment.Both of these rates may be functions of velocity.
• Second, shortening likely reduces the tension in attached myosin cross-bridges (Fig. 1.6). Cross-bridges, which are shortening, will generate a smaller average force during their period of attachmentthan cross-bridges which are isometric. The higher the shortening velocity, the greater the amount ofshortening that will occur during the period of attachment and hence, the lower the average forceduring the period of crossbridge attachment.
• Third, some cross-bridges may be compressed as the result of shortening before they detach. Thesecross-bridges would generate negative force, thereby reducing the overall tension developed by thefiber. The higher the shortening velocity the more quickly cross-bridges would compress, resulting incross-bridges would generate negative force, thereby reducing the overall tension developed by thefiber. The higher the shortening velocity the more quickly cross-bridges would compress, resulting ina greater number of cross-bridges generating negative force before detachment.

Maximum velocity of muscle fiber shortening
• The maximum velocity of muscle fiber shortening occurs when there is no load on the muscle fiber.
• Conversely, when the muscle fiber is shortening at maximum velocity it does not generate anycontractile force.
The maximum shortening velocity of a muscle fiber depends
• on the number of sarcomeres that make up the muscle fiber
• their average length of sarcomeres that make up the muscle fiber

Velocity of muscle fiber shortening and fiber length
• The velocity of muscle fiber shortening (V) is the sum of the shortening velocities of the individualsarcomeres (vsarc). Each sarcomere has a maximum shortening velocity. Therefore, the maximumshortening velocity of the muscle fiber will be equal to the sum of the maximum shortening velocities ofthe sarcomeres. The greater the number of sarcomeres the higher the maximum velocity.
fiber shortening (s )
t
t + ∆t
Long fiber: number of sarcomeres nlong ; length llong = nlonglsarc
sarclongsarclonglong
long vnt
sn
t
sV =
∆=
∆= sarcshort
sarcshortshortshort vn
t
sn
t
sV =
∆=
∆=
short
long
short
long
short
long
l
l
n
n
V
V==
Short fiber: number of sarcomeres nshort ; length lshort = nshortlsarc
fiber shortening (slong)
fiber shortening (sshort)sarcomere shortening (ssarc)
t
t + ∆t

At sarcomere lengths that are long
enough to stretch the parallel elastic
structures of the muscle fiber,
passive tension acts as a driving
force on the contractile system and
increases the speed of shortening
above its maximum value at zero
load.
For very short sarcomere lengths,
the maximum shortening velocity
decreases in parallel with the
isometric tension (Fig. 2.4).
Velocity of muscle fiber shortening and sarcomere length
isometric tension (Fig. 2.4).

Motor unit: functional unit of neuro-muscular systems
• A muscle consists of thousands of muscle fibers organized into motor units. Each motor unit comprisesa group of muscle fibers, often several hundred, which are innervated by a single motoneuron. Themuscle fibers belonging to one motor unit may be distributed throughout a large region of the muscle,i.e., they need not be adjacent to one another.
• A motor unit is activated in an all-or-none fashion by a single action potential, which travels from themotoneuron along the axon to the muscle fibers. The neural action potential leads to an actionpotential in each muscle fiber innervated by that motoneuron.
4.6 Livello di attivazione

Twitch
• A single muscle action potential produces a brief contraction of the muscle fiber called a twitch. Theduration of the twitch depends on the muscle fiber type. The duration of both the contraction andrelaxation phases of the twitch are longer for slow-twitch (type I) than fasttwitch (type II) fibers (Fig.2.8).
• In skeletal muscle the range of contraction times (time to peak) is from 7.5 ms for fast (extraocularmuscle: IR- internal rectus); 40 ms for intermediate (G - gastrocnemius); to 90 ms for slow (S - soleus)muscle fibers. Most skeletal muscles have a mixture of different types of fibers: slow; fast oxidativeglycolytic (rare); or fast glycolytic. However, all fibers in a given motor unit are of the same type - thetype being determined to some extent, by the nature of the motoneurone. Small tonically activemotoneurones prompt development of slow fibre types; large, phasic motoneurones favour fastglycolytic fibres.

Frequency of activation (firing rate)
• Motor unit force is a function of the frequency of activation (firing rate) of the innervating motoneuron.Firing rate is defined as number of action potentials per second.
• The force produced by each muscle fiber, innervated by the motoneuron, increases with firing ratebecause of the accumulation of intracellular calcium (Ca+2). Each action potential depolarizes the musclemembrane, which results in more Ca+2 being released from the terminal cisternae, diffusing through theintracellular space and activating more actin-binding sites.
time
T
1 second
Action potential
T: period νννν: Frequency of activation. Numbers of action potential
per second

Mechanical summation (temporal summation)
• The intracellular calcium concentration produced by a single action potential, increases and decreases morerapidly than the isometric twitch force. Therefore, the amount of force added by a second action potentialoccurring immediately after the first will depend on the time interval between them, i.e., on the amount ofintracellular calcium at the time of occurrence. The additional force contribution by a second action potentialdrops steeply as a function of the interval between two successive action potentials.
Slowunits
Fastunits
Twitch sequences of fast and slow motor units. Numbers to the right of each trace indicate the time interval in ms, betweensuccessive action potentials.

Tetanus
• If a motor unit is activated at a steady frequency, the force will initially rise and then oscillate about a newmean value at the frequency of activation, producing what is called an unfused tetanus. Both the meanforce and the initial rate of force development will increase as firing rate increases. The higher the firingrate the smaller the oscillation with respect to the mean force. At high firing rates, there is no noticeableoscillation in force. This smooth steady force is called tetanus. Because type I motor units have longertwitch contraction times than type II units they reach tetanus at lower frequencies.
Fastunits
Slowunits
Unfused and fused tetanus of fast and slow motor units. Numbers to the right of each trace indicate the time interval in ms,between successive action potentials. At low stimulation rates (long intervals between action potentials) tetanus is unfused

Characteristic frequencies
• Humans can voluntarily activate motor units briefly at instantaneous firing rates of about 100 Hz duringbrief forceful contractions.
• The maximum firing rates that they can sustain during steady contractions are considerably lower andgenerally do not exceed 30 Hz. However, these rates are sufficiently high that several action potentialscan occur before the twitch force from the first action potential has dropped to zero. Whereas themuscle action potential has a duration of less than 10 ms, the twitch duration for skeletal muscle fibersis of the order of 100-200 ms. Action potentials which arrive before the twitch force has dropped to itspre-activation level produce additional force by causing more Ca+2 to be released.
ν = 30 Hz
T = 1/ 30 s = 0.033 s = 33 ms
ν = 100 Hz
T = 1/ 100 s = 0.01 s = 10 ms

Motor unit time-tension curve
Single stimulus
Twitch
Double stimulus
Summation
Slow train
Un-fused tetanus
Fast train
Fused tetanus

Motor unit recruitment: size principle
• When a muscle is activated voluntarily under isometric conditions, motor units tend to becomeactive in a fixed order.
• The recruitment order is correlated with the amount of force that a motor unit can produce.
• Motor unit force is related to the number of muscle fibers and the size of the muscle fibers that itcomprises.
• The motor unit that produces the smallest force is recruited first. It remains active and the nextmotor unit is recruited as the total muscle force increases. The motor units that produce the largestforces are the last to be recruited. As total muscle force increases, each newly recruited unitcontributes an increment in force, which is a similar percentage of the total muscle force. In this wayforce can be increased smoothly.

Muscular force regulation:
• frequency of activation
• recruitment strategy of
different motor units

La forza muscolare dipende anche dai parametri dell’architettura del muscolo:
• Sezione fisiologica del muscolo
• Angolo di pennazione
• Lunghezza delle fibre muscolari (numero di sarcomeri in serie)
• Lunghezza del tendine
• Braccio della forza muscolare
4.7 Parametri dell’architettura del muscolo

Pennation angle
• The arrangement of the muscle fibres has an important role to play. The muscle fibre direction is not always
in the same direction as the line of pull of the muscle.
• When the line of action of the muscle does not match the line of action of the fibres then the muscle is
known as pennate.
• There are a number of sub-classifications but the important property of these pennate muscles is the angle
of pennation: the angle between the two lines of action.
Fig.1. The internal architecture of skeletal muscles: (A) non-pennate; (B, E, F) unipennate; (C) bipennate.

Physiological cross-section
• The maximum force a muscle can generate depends on its physiological cross-section area (PCA): area of the
fibers perpendicular to fiber direction.
• In a non-pennate muscle this is simply the area of a slice taken in the middle of a muscle perpendicular to the
line of pull (fig.1A).
• In a pennate muscle this would miss some of the muscle fibers (fig.2). In this case the cross-sectional area would
need to be taken perpendicular (at right angles) to the average fiber direction so as to include all the fibers in the
muscle (fig.1B,1C).
Fig.2Fig.1: PCA for fusiform (A), unipinnate (B) and bipinnate (C) muscles.

• Relation between Physiological cross-section and pennation angle:
PCSA increases with increasing the pennation angle

Fiber length
• Long fibers have more sarcomeres in series
• Long fibers are capable of shortening over a greater distance
• Long fibers have greater maximum velocity of shortening
if 30000 sarcomeres shorten 1 mm if 20000 sarcomeres shorten 1 mm
total fiber shortens 3 cm total fiber shortens 2 cm

• Relation between fiber length and pennation angle:
Fiber length decreases with increasing the pennation angle
Fig.1 Schematic representation of muscle with different architecture:
muscles with short fibers and a large PCA (A);
muscles with long fibers and a small PCA (B);

Length-tension and force-velocity curves for muscles with different architectural properties:
• Long fibers
• Short fibers
• Large PCSA
• Small PCSA

Short fibers, Large PCA
Short fibers, Large
Mus
cle
For
ce
Length-tension and force-velocity curves for muscles with different architectural properties:
• Long fibers and Small PCSA
• Short fibers and Large PCSA
Muscle Shorthening
Long fibers, Small PCA
Mus
cle
For
ce
Short fibers, Large PCA
Long fibers, Small PCA
Muscle VelocityM
uscl
e F
orce

Example: Muscles that cross the elbow
Biceps brachii
(BIC, long and short heads),
brachialis
(BRA)
brachioradialis
(BRD)
extensor carpi radialis longus
(ECRL)
pronator terespronator teres
(PT)
and triceps brachii
(TRI, long and lateral heads)
W.M. Murray et al.
Journal of Biomechanics
33 (2000) 943-952

Tendon slack length
Diagram illustrating the relationships between
optimal muscle-fiber length (LOM) tendon slack
length (LST) and the minimum and maximum
physiological lengths of a muscle (LminM) and
(LmaxM) and a musculotendon actuator, (Lmin
MT)
and (LmaxMT) respectively. For the purpose of
illustration, pennation angle is assumed to be
zero.
• When tendon slack length is large, muscle-
fiber length is small; thus, muscle excursion
will be small.
• When tendon slack length is small, muscle-
fiber length is large, and muscle excursion
will be large

B. A. Garner and M. G. Pandy. Annals of Biomedical Engineering, Vol. 31, pp. 207–220, 2003

B. A. Garner and M. G. Pandy. Annals of Biomedical Engineering, Vol. 31, pp. 207–220, 2003

B. A. Garner and M. G. Pandy. Annals of Biomedical Engineering, Vol. 31, pp. 207–220, 2003

Muscle
force
Muscle force
moment arm
Fr
Braccio della forza muscolare
minima distanza fra la retta di applicazione della forza muscolare
ed il centro di rotazione articolare
aF
Joint center of
rotation

Example
Biceps brachii
Fr
Fr

small muscle moment arm large muscle moment arm
Effect of muscle moment arm on muscle shortening
With increasing muscle moment arm the muscle shortens further for a given range of motion
(say from 20° to 120°) of joint angles and utilizes a greater portion of the force-length curve
muscle shortening
muscleshortening
ROM ROM

Effect of muscle moment arm on joint angular velocity and range of motion
With increasing muscle moment arm joint angular velocity increases
small muscle moment armlarge muscle moment arm
shortening
lengthen muscle
contracted muscle
large ROM
small ROM

Example:
Muscles that cross the elbow
Estimated operating ranges of the
elbow flexors over 100° of elbow
flexion and of the extensors over 90°
flexion. Estimated fascicle excursions
were normalized by optimal fascicle
length (l0M) and super-imposed on a
normalized force-length curve based
on the sarcomere lengths measured
from the five extended specimens.
The variation in force-generating
capacity during elbow flexion is
expressed as a proportion of peakexpressed as a proportion of peak
isometric force (F0M). Results shown
are averages of the 10 extremities in
this study. Both muscle moment arm
and optimal fascicle length determine
how much of the isometric force-
length curve each muscle uses.

Example: upper limb
B. A. Garner and M. G. Pandy. Annals of Biomedical Engineering, Vol. 31, pp. 207–220, 2003

Forza muscolareBraccio della forza
muscolare
Fr
M = ±aF F
Momento assiale M della forza muscolare
prodotto del braccio della forza muscolare
per l’intensità della forza muscolare:
4.8 Momento della forza muscolare
aF
Centro di rotazione
articolare

Regola di equilibrio:
In esercizi con sovraccarico, in condizioni di equilibrio articolare, il momento della forza muscolare è uguale
in modulo al momento della forza esterna.
Rb
bFRbFbRbFbM
F
RRFRF
esta ===−= 00)(
r
Sistema meccanico = avambraccio + manubrio
Fr
Forza muscolare
Fr
Rr
Carico esterno = peso
dell’avambraccio e del manubrio
applicato nel cenrto di massa del
sistema avambraccio + manubrio
Rr
bF bR

Equazione del moto:
Determina l’accelerazione angolare a
del segmento anatomico in accordo
alla seconda equazione cardinale della
dinamica dei sistemi:
Fr
bF bR
α=−α= IRbFbIM RFest
a)(
IRb α+
α = accelerazione angolare
Ι = Momento di inerzia
Rr
diminuisceRbFb
costanteRbFb
aumentaRbFb
RF
RF
RF
ω⇒<α⇒<ω⇒=α⇒=ω⇒>α⇒>
0
0
0 ω =cost: movimento isocinetico
In particolare:
ω=0: equilibrio statico
(ω = velocità angolare)
F
R
b
IRbF
α+=
La forza muscolare dipende anche dall’accelerazione articolare

Architecture parameters, joint angular velocity and moment generating capacity
• PCA (number of fibers in parallel)
• Fiber length (number of sarcomeres in series)
• Pennation angle (arrangement of the fibers)
• Moment arm
• Tendon length
can be thought of as being designed for:
• Moment generating capacity
- short fibres, large pennation angle, large PCA- large moment arm
• Joint angular velocity
- long fibres, small pennation angle, small PCA
- small moment arm
• Compromise between two capacities
- short fibres, large pennation angle, large PCA (more fibres in parallel)
- small moment arm
or
- long fibres, small pennation angle, small PCA (more fibres in series)
- large moment arm

W.M. Murray et al. / Journal of Biomechanics 33 (2000) 943-952
Example of collection of architectural parameters

Capitolo 4:
FORZA MUSCOLARE
Aspetti geometrici:
4.1 - Punto di applicazione, direzione, verso
4.2 - Braccio della forza muscolare
4.3 - Angolo di trazione
Intensità e regolazione della forza muscolare:
4.4 - Curva lunghezza-tensione4.4 - Curva lunghezza-tensione
4.5 - Curva forza-velocità
4.6 - Livello di attivazione
4.7 - Parametri dell’architettura del muscolo
4.8 - Momento della forza muscolare
Valutazione della forza muscolare:
4.9 - Elettromiografia
4.10 - Modelli biomeccanici

Elettromiografia di superficieElettromiografia di superficie
4.9 Elettromiografia
Elettrodi
Unità
centrale
SoftwareScatola
interconnessione

Risultati dell’indagine elettromiografica
Valori sincronizzati nel tempo dell’attività elettrica dei principali muscoli agonisti, sinergici,
stabilizzatori, antagonisti.

Estensione del ginocchio: muscoli agonisti
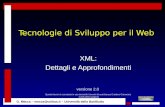
4.10 Modelli biomeccanici
vastus medialis (VasMed), vastus intermedius (VasInt), vastus lateralis (VasLat), rectus femoris (RF).
RF Vas

Estensione del ginocchio: muscoli antagonisti, …
vastus medialis (VasMed), vastus intermedius (VasInt), vastus lateralis (VasLat), rectus femoris (RF), biceps femoris
long head (BFLH), biceps femoris short head (BFSH), semimembranosus (MEM), semitendinosus (TEN), medial
gastrocnemius (GasMed), lateral gastrocnemius (GasLat), and tensor fascia latae (TFL). Also included in the model
but not shown are sartorius (SAR) and gracilis (GRA).
GasBFLHBFSH TENMEMTLF & SAR
GRA

Modello biomeccanico
The muscles of the leg is modeled by thirteen actuators (34):
vastus medialis (VasMed), vastus intermedius (VasInt), vastus
lateralis (VasLat), rectus femoris (RF), biceps femoris long head
(BFLH), biceps femoris short head (BFSH), semimembranosus
(MEM), semitendinosus (TEN), medial gastrocnemius
(GasMed), lateral gastrocnemius (GasLat), and tensor fascia
latae (TFL). Also included in the model but not shown are
sartorius (SAR) and gracilis (GRA).

Capitolo 5:
CARICHI ARTICOLARI
5.1 - Carico articolare: forze di contatto e tensione dei legamenti5.1 - Carico articolare: forze di contatto e tensione dei legamenti
5.2 - Determinazione del carico articolare

Il carico articolare è la risultante delle
• Forze di contatto di compressione che si esplicano frasegmenti anatomici adiacenti attraverso le superficiarticolari di contatto. Si oppongono alle sollecitazionidi compressione
• Forze attivate dalla tensione dei legamenti. Sioppongono alle sollecitazioni di trazione e discorrimento.
5.1 Carico articolare: forze di contatto e tensione dei legamenti

Esempio:
Forze di contatto
tibiofemorali
Superficie di contatto
tibiofemorale
Forze di contatto (di
compressione)
tibiofemorali

The ligaments of the tibiofemoral joint can be modeled by 14
elastic bundles: anterior (aACL) and posterior (pACL) bundles of
the anterior cruciate ligament; the anterior (aPCL) and posterior
(pPCL) bundles of the posterior cruciate ligament; the anterior
(aMCL), central (cMCL), and posterior (pMCL) bundles of the
superficial medial collateral ligament; the anterior (aCM) and
posterior (pCM) bundles of the deep medial collateral ligament;
the lateral collateral ligament (LCL); the popliteofibular ligament
(PFL); the anterolateral structures (ALS); and the medial (Mcap)
and lateral (Lcap) posteriorcapsule.
Esempio
Legamenti che contribuiscono al carico articolare
dell’articolazione tibiofemorale
and lateral (Lcap) posteriorcapsule.
* Kevin B. Shelburne, Michael R. Torry, Marcus G. PandyMed. Sci. Sports Exerc., Vol. 37, No. 11, pp. 1948–1956, 2005.

Parametri noti:
• Punto di applicazione:
Superfici articolari di contatto
Punti di inserzione dei legamenti
• Verso
Dalla superficie articolare verso il segmento anatomico adiacente
Dall’inserzione del legamento verso l’origine
5.2 Determinazione del carico articolare
Incognite:
• Intensità
• Direzione
• Misure in vivo mediante strain gauge impiantati
nell’articolazione
• Modelli biomeccanici

Problema della dinamica diretta
“Note le forze attive (carichi esterni e forze muscolari),
ricavare il moto e le reazioni vincolari”
Noti:
• Carichi esterni
• Parametri anatomici: bracci a angoli di trazione delle forze
• Intensità delle forze muscolari (misure elettromiografiche, modelli meccanici del muscolo)• Intensità delle forze muscolari (misure elettromiografiche, modelli meccanici del muscolo)
Ricavare:
• Cinematica: traiettorie, velocità ed accelerazioni angolari
• Intensità, direzione dei carichi articolari

Problema della dinamica inversa
“Noto il moto del sistema ed alcune forze attive (carichi esterni),
ricavare le altre forze attive (forze muscolari) e le reazioni vincolari”
Noti:
• Carichi esterni
• Parametri anatomici: bracci a angoli di trazione delle forze muscolari
• Cinematica: traiettorie, velocità ed accelerazioni angolari• Cinematica: traiettorie, velocità ed accelerazioni angolari
Ricavare:
• Intensità delle forze muscolari
• Intensità, direzione dei carichi articolari

L’analisi cinematica nel problema della dinamica inversaL’analisi cinematica nel problema della dinamica inversa

Risultati dell’analisi cinematica
Velocità angolari e accelerazioni angolari articolari in funzione dell’angolo articolare

Capitolo 6:
APPLICAZIONI
6.1 - Strength training equipment (leg-extension modificato)6.1 - Strength training equipment (leg-extension modificato)
6.2 - Ergonomia
6.3 - Supporti per la riabilitazione del ginocchio in acqua
6.4 - Cardio equipment (cardio wave)

6.1 Strength training equipment

Ottimizzazione della forza muscolare
Most selectorized equipments provide a fine
control and optimization of the muscular force,
through the entire range of motion (ROM), by
including a cam in their mechanics, and
selecting properly:
• the shape and the dimension of the cam,
• the spatial configuration of the cam around itsaxis of rotation in a given reference workingposition,
• the radius of the first re-directional pulley(connected by the cable to the cam), the(connected by the cable to the cam), theposition of this pulley with respect to the cam.
selected weight stack

first re-directional pulley
cable
Rr
hip
cam
selected weight stack
knee
resistance pad
resistance rod
shankθ

Progettazione del profilo della cam
Typically, the system is configured to reproduce the user’s strength curve, such that the greatest (least)
amount of resistance torque is felt at the user’s strongest (weakest) point in the ROM.
This kind of calibration may be obtained by replacing the weight stack with an isokinetic dynamometer and
modifying the geometrical parameters of the cam/pulley system until a constant torque is provided by the
dynamometer within the entire ROM during maximal effort trials.

first re-directional pulley
cable
Rr
hip
camknee
resistance pad
resistance rod
shankθ
Iso
kin
etic
d
ynam
om
eter

first re-directional pulley
cable
Rr
hip
camknee
resistance pad
resistance rod
shankθ
Iso
kin
etic
d
ynam
om
eter


Progetto di ricerca
Calcolo delle componenti di (compressione, trazione e taglio) delle sollecitazioni articolari mediante modelli
biomeccanici.
Ottimizzazione dei carichi articolari
Unfortunately,
a general procedure
for the optimization
(minimization)
of the joint load
is lacking.
biomeccanici.
Minimizzazione delle componenti delle sollecitazioni articolari.
Progetto meccanico per la realizzazione di attrezzature per il potenziamento o la riabilitazione che
minimizzano la sollecitazione articolare complessiva o la sollecitazione su specifiche strutture articolari.

Leg extension equipment

γ
PTFr
φr Sistema = gamba + piede
Fr
Forza muscolare
φr
Carico articolare
Carico esternoRr
Schema meccanico
Rr
θ
x
γ angolo di trazione
θ angolo articolare

RFa RbFbI −=θ&&
( )RaF
F RbIb
F +θ= &&1
Fr
Braccio della forza muscolare (bPT)
Determinazione della forza muscolare
La forza muscolare può essere determinata mediante la seconda equazione cardinale
Rr
Braccio del carico esterno (bR) RF RbFb = R
b
bF
F
R=
Esercizi quasi-statici o isocinetici
RFbb FR >>→>>

FTG FRam φ++=rrrr
GFTTF amFRrrrrr
−+=φ−=φ
FRrrrr
+=φ−=φ
Fr
TFφr
φ
Aφ
Esercizi quasi-statici o isocinetici
Determinazione del carico articolare
Nota la forza muscolare, il carico articolare può essere determinato mediante prima equazione cardinale
FRFTTF
rrrr
+=φ−=φ
Rr
φT = componente di taglio
del carico articolare
φA = componente assiale
del carico articolare
Tφ
Rr
Fr
TFφr

Componente di taglio della sollecitazione sull’ articolazione tibiofemorale
PCL stress ACL stress
aR Rr
aR
ε+θ++θ
θ+θ
θ++
ε+θ+ε+θ++θ
θ+θ
θ++
ε+γ−
ε+θ+θ=φ
)sin(1
)sin()sin()sin(
)sin(
22
2
22
2
MM
SSMM
S
SS
GGMWCWCWCMR
GGSGGMWCWCWCMSPT
G
GSGSt
glmgmad
ydma
d
dymaI
a
glmglmgmad
ydma
d
dymaII
a
gmlm
&&&
&&&
&&
Rr
Rr

PCL stress
ACL stress
90° flex full ext. 90° flex full ext.



ε+θ++θ
θ+θ
θ++
ε+θ+ε+θ++θ
θ+θ
θ++
ε+γ−
ε+θ+θ=φ
)sin(1
)sin()sin()sin(
)sin(
22
2
22
2
MM
SSMM
S
SS
GGMWCWCWCMR
GGSGGMWCWCWCMSPT
G
GSGSt
glmgmad
ydma
d
dymaI
a
glmglmgmad
ydma
d
dymaII
a
gmlm
&&&
&&&
&&
Minimizzazione della componente di taglio della sollecitazione sull’ articolazione tibiofemorale
)sin()sin()sin()sin(
)sin()(
22
2
22
2
SSSSMM
S
MM
GSGSGGSGGMWCWCWCMSPT
G
GGMWCWCWCM
OPTR
gmlmglmglmgmad
ydma
d
dymaII
a
glmgmad
ydma
d
dymaI
a
ε+θ−θ−
ε+θ+ε+θ++θ
θ+θ
θ++
ε+γ
ε+θ++θθ
+θ
θ+
=&&&&&
&&&
Calcolo del valore di aR per cui φt = 0
Rr
aR



ε+θ+ε+θ++θ
θ+θ
θ++= )sin()sin(
1 22
2
SSM GGSGMGMWCWCWCMSPT
PT glmglmgmad
ydma
d
dymaII
aF &&&
Tensione del tendine rotuleo, ovvero, forza complessiva del quadricipite femorale
E’ indipendente da aR
E’possibile minimizzare il carico articolare
(spostamento del punto di applicazione della resistenza)
senza interferire con l’ottimizzazione della forza muscolare (progettazione del profilo della cam)
Rr
aR



ε+θ+ε+θ++θ
θ+θ
θ++
ε+γ−
ε+θ+θ=φ
)sin()sin()cos(
)cos(
22
2
2
SSMM
S
SS
GGSGGMWCWCWCMSPT
G
GSGSn
glmglmgmad
ydma
d
dymaII
a
gmlm
&&&
&
Componente assiale della sollecitazione sull’ articolazione tibiofemorale
E’ indipendente da aR
ed approssimativamente coincide
con la tensione del tendine rotuleo
Rr
aR



Compressione assiale esterna

Pad mobile e compressione assiale esterna

6.2 Ergonomia

Lx
hipknee
ϕPTFr
ϕ: traction angle
6.3 Supporti per la riabilitazione del ginocchio in acqua
θ x
z Lz
z: flexion-extension axis
θ : joint angle
x: longitudinalshank axis

Conclusions
… In conclusion, this work highlights that aquatic exercises can be safely and usefully utilized in the
rehabilitation program following ACL surgery. However, the shape, the dimensions, the density, the surface
roughness and the location of the resistive device must be carefully selected, according to the indications
established in the present study.

6.4 Cardiovascular equipments
Cardio wave presentation

Conclusioni
I modelli biomeccanici consentono
• di valutare in modo non invasivo i carichi articolari durante esercizi statici o dinamici
in presenza di carichi esterni
• di progettare nuove attrezzature per il potenziamento muscolare o la riabilitazione
che simultaneamente ottimizzano la forza muscolare e minimizzano i carichi articolari

Capitolo 7:
ASPETTI FUNZIONALI
7.1 - Ciclo allungamento-accorciamento7.1 - Ciclo allungamento-accorciamento
7.2 - Muscoli poliarticolari
7.3 - Co-contrazione

Definition:
A common pattern (scheme) of muscle activation in which an activated muscle first lengthens (is stretched) before it shortens.
Importance:
It occurs in most movements that we perform, for example:
− in the knee extension and ankle plantarflexor muscle after footstrike in runing
− in the knee extensor muscles during kicking
− In the trunk and arm muscles during throwing
− In the hip, knee, and ankle extensor muscles during the countermovement jump and long-jump takeoff.
Advantages:
1. It can enhance the positive work done by muscle during the shortening contraction.
2. It can lower the metabolic cost of performing a prescribed amount of positive work.
7.1 Stretch-shorten cycle
2. It can lower the metabolic cost of performing a prescribed amount of positive work.
Mechanisms underlying the enhancement of performance with the stretch-shorten cycle:
− Time to develop force (1): increased time that the muscle has to become fully activated when there is an initial
lengthening contraction, and consequet increase in the muscle force at the beginning of the shortening contraction.
− Elastic energy (1,2): storage of elastic energy in tendon (and muscle connective tissue) during the lengthening contraction,
and subsequent use of this energy in the shortening contraction. This capability is greatest in muscles with long tendons.
− Force potentation (1): force from individual cross-bridges is enhanced as a consequence of the preceding stretch.
− Reflexes (1): the stretch reflex may be evoked by the forced lengthening of the muscle at the beginning of the stretch-
shorten cycle.
Open questions:
− Incomplete description of muscle function during the task: the change in whole-muscle (muscle fibers and tendon) length
do not necessary coincide with or parallel the change in length experienced by the muscle fibers.
− In slow eccentric contractions and in muscle with long tendons, the increase in the whole-muscle length may be
accomplished by a fiber shortening (and a greater tendon lengthening).

Definition:
A muscle whose attachment sites span two joints.
Importance:
There are a significant number two joints muscles (biceps brachii, rectus femoris, gastrocnemius)
Advantages:
• Two-joint muscle couple the motion at the two joints that they cross.
Thus, two-joint muscle may refine the coordination.
• The shortening velocity of two-joint muscle may be less than that of its one-joint synergists.
Thus, the two-joint muscle are higher on the force-velocity relation compared with the one-joint muscle and hence are capable
of exerting a force that is a greater proportion of the isometric maximum within the joint ROM.
• Two-joint muscle can redistribute muscle torque, joint power, and mechanical energy throughout a limb
7.2 Two-joint muscles
Activation of one-joint muscles 1 and 3 produce extensor torque at knee and hip
Co-activation of two-joint muscle 5 results in a reduction in the net torque at the
hip but an increase in the net torque at the knee.
Thus, two-joint muscle 5 is described as redistributing some of the extensor torque
and power from the hip to the knee.

Definition:
Concurrent activation of the muscles around a joint, usually involving the agonist and antagonist muscles.
Importance:
It is frequently used in many different activities.
Advantages:
• Increases the stiffness and hence the stability of a joint .
− lift heavy loads
− lift loads about which the lifters are uncertain
− learn novel tasks
• Transfer of power from one joint to another
7.3 Co-activation
• Transfer of power from one joint to another
− coactivation at the hip joint can result in an increase of the torque at the knee joint: coactivation of a
single-joint hip extensor (e.g., gluteus maximus) and a two-joint hip flexor (e.g., rectus femoris) has the
net effect of increasing the extensor torque at the knee joint.
• Perform a movement requiring a high degree of accuracy
− fine movements of the finger require complex patterns of co-activation.
• Economize movements that involve changes in direction (e.g., extension to flexion).
− It is more economical to modulate the level of tonic activity in an agonist-antagonist set of muscle than
to alternately turn then on and off.
− Activation of the stretch-shorten cycle.
• Protect the joint at extreme joint angles
Disvantages:
Reduction of the net muscle torque.