APPUNTI - liceocopernico.edu.it stato usato il hetto pacc pstricks. Roma, 19 gennaio 2011. ii....
188
Transcript of APPUNTI - liceocopernico.edu.it stato usato il hetto pacc pstricks. Roma, 19 gennaio 2011. ii....

APPUNTI DI FISICA 1Pietro Donatis
Versione 1
Questa dispensa è pubbli ata sotto una li enza he può essere visionata al sito http:// reative ommons.org/li enses/by-n -sa/2.5/it/.
iPremessa e notazioni.Questi Appunti di si a 1 sono rivolti agli studenti del terzo anno di un li eo s ienti o, ma pos-sono essere utilizzati, apportando i tagli he si riterranno opportuni, an he da studenti di altriindirizzi di studio.L'idea da ui sono nati non è quella di aan are il libro di testo in adozione, ma di sostituirlo.Questo prin ipalmente per motivi e onomi i, per hé gli allievi possano disporre di un testo serioe gratuito: s ari abile dalla rete e foto opiabile liberamente. Al momento man ano an ora glieser izi, quindi l'eman ipazione dall'adozione non è an ora ompleta. Abbiate pazienza.Si è voluto er are di metter i dentro molte ose, molte piú di quelle normalmente svolte in un orso tradizionale. Si è ritenuto infatti utile presentare al lettore un riferimento hiaro e quanto piúpossibile sempli e per argomenti solitamente onsiderati molto osti i. Al une parti, tralas iabilisenza ompromettere la omprensione del seguito, sono presentate ome intermezzi.La responsabilità di quanto s ritto, e di tutti gli eventuali errori, è es lusivamente di Pietro Do-natis; il quale, tuttavia, deve ringraziare Fabio Maria Antoniali e Carlo Càssola per le numerosedis ussioni, indispensabili a hiarirgli i molti punti deli ati.Questo lavoro è senz'altro da onsiderarsi in evoluzione; sarò grato a tutti oloro he vorrannoessere tanto gentili da segnalare errori o fornire ommenti utili al miglioramento di quanto s rittoin vista di auspi abili nuove versioni.Per separare la parte de imale di un numero si è usato il punto inve e della virgola.Le quantità vettoriali sono indi ate in grassetto mentre i orrispondenti moduli sono in aratterenormale; osi hé, ad esempio, v indi a un vettore e v il suo modulo.Il simbolo indi a la ne della dimostrazione di un teorema.Le ostanti si he itate nel testo sono riportate utilizzando, se non diversamente indi ato, i va-lori forniti dal Parti le Data Group (http://pdg.lbl.gov) e dal National Institute of Standard andTe hnology (http://www.nist.gov); questi valori sono riportati on il loro errore sperimentale sulleultime ifre indi ato fra parentesi tonde: per esempio, la ostante di gravitazione universale havalore G = 6.67428(67) · 10−11 m3 kg−1 s−2 e quindi le ultime due ifre, 28, sono in erte e l'errore ommesso nella loro determinazione è di 67; in maniera meno ompatta tale valore si s rivereb-be G = (6.67428± 0.00067) · 10−11m3 kg−1 s−2. Le ostanti senza errore, ome l'a elerazione digravità standard, sono valori esatti.Si è ritenuto di utilizzare lo strumento delle funzioni goniometri he, le prin ipali proprietà dellequali sono riassunte in appendi e B.Questa dispensa è stata s ritta usando il programma di omposizione tipogra a LATEX; per legure è stato usato il pa hetto pstri ks . Roma, 19 gennaio 2011

ii

Indi eI Me ani a del punto materiale 11 Introduzione. 21.1 Considerazioni metodologi he. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Grandezze si he fondamentali e derivate. . . . . . . . . . . . . . . . . . . . . . . . 31.2.1 Intervallo di tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.2 Lunghezza. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.3 Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Dimensioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 Cinemati a del punto materiale. 62.1 Il modello di punto materiale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 Sistema di riferimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 Moti rettilinei. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3.1 Moto rettilineo uniforme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.2 Moto vario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.3 Moto uniformemente a elerato . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.4 Moto di aduta libera. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Intermezzo. Moto uniformemente a elerato e numeri dispari . . . . . . . . . . . . . . . 162.4 Moti piani. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4.1 Algebra dei vettori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4.2 Des rizione dei moti piani. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.3 S omposizione di un moto piano. . . . . . . . . . . . . . . . . . . . . . . . . 232.4.4 Moto di un proiettile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.5 Moto ir olare uniforme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.5.1 Coordinate angolari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.5.2 Coordinate artesiane. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.6 Moto armoni o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.7 Coordinate polari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.8 Cinemati a dei moti relativi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.8.1 Moto relativo di due punti materiali. . . . . . . . . . . . . . . . . . . . . . . 342.8.2 Caso traslatorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.8.3 Caso rotatorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.8.4 Caso rototraslatorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.8.5 Trasformazioni di Galilei. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Intermezzo. A hille e la Tartaruga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39iii

iv INDICE3 Dinami a del punto materiale. 423.1 La massa inerziale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.2 La legge fondamentale della dinami a. . . . . . . . . . . . . . . . . . . . . . . . . . 443.3 Prin ipio di azione e reazione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.4 Sistemi di riferimento inerziali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453.5 I prin ipi di Newton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463.6 Forza peso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.6.1 Piano orizzontale lis io. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.6.2 Piano in linato lis io. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483.7 Forza di attrito radente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.7.1 Attrito radente stati o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.7.2 Attrito radente dinami o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.8 Fili e molle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.8.1 Filo ideale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.8.2 Molla ideale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.8.3 Il dinamometro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.9 Carru ole. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.9.1 Carru ola mobile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.10 Pendolo sempli e. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.11 Forza entripeta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.12 Dinami a dei moti relativi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.13 Prin ipio di relatività. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.14 Stati a del punto materiale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Intermezzo. Il pendolo di Fou ault. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604 Gravitazione. 634.1 Le osservazioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.2 I modelli anti hi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644.3 I modelli moderni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.4 Le leggi di Kepler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.5 La legge di gravitazione universale. . . . . . . . . . . . . . . . . . . . . . . . . . . . 664.6 Massa gravitazionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.7 L'a elerazione gravitazionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694.8 Satelliti. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.9 Campo gravitazionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Intermezzo. La misura della densità della Terra. . . . . . . . . . . . . . . . . . . . . . . 725 Leggi di onservazione. 745.1 Conservazione dell'energia me ani a. . . . . . . . . . . . . . . . . . . . . . . . . . 745.1.1 Lavoro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745.1.2 Potenza. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775.1.3 Teorema dell'energia ineti a. . . . . . . . . . . . . . . . . . . . . . . . . . . 785.1.4 Forze onservative. Energia potenziale. . . . . . . . . . . . . . . . . . . . . . 785.1.5 Casi parti olari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 815.1.6 La relazione tra forza ed energia potenziale. . . . . . . . . . . . . . . . . . . 825.1.7 Conservazione dell'energia me ani a. . . . . . . . . . . . . . . . . . . . . . 845.1.8 Energia totale nel aso della forza gravitazionale. . . . . . . . . . . . . . . . 845.2 Conservazione della quantità di moto. . . . . . . . . . . . . . . . . . . . . . . . . . 865.2.1 Impulso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
INDICE v5.2.2 Quantità di moto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.2.3 Conservazione della quantità di moto. . . . . . . . . . . . . . . . . . . . . . 875.3 Conservazione del momento angolare. . . . . . . . . . . . . . . . . . . . . . . . . . 885.3.1 Momento di un vettore. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 885.3.2 Momento angolare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.3.3 Conservazione del momento angolare. . . . . . . . . . . . . . . . . . . . . . 905.4 Forze entrali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90II Me ani a dei sistemi materiali. 936 Dinami a dei sistemi materiali. 946.1 Forze interne ed esterne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 946.2 Equazioni ardinali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.3 Centro di massa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 966.4 Energia ineti a di un sistema materiale. . . . . . . . . . . . . . . . . . . . . . . . . 98Intermezzo. Problema dei due orpi. Massa ridotta. . . . . . . . . . . . . . . . . . . . . 997 Urti. 1037.1 I diversi tipi di urto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1047.2 Urto elasti o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1047.2.1 Casi parti olari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1057.3 Urto anelasti o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1067.4 Nel sistema del entro di massa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1077.4.1 Urto elasti o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1077.4.2 Urto ompletamente anelasti o. . . . . . . . . . . . . . . . . . . . . . . . . . 1087.5 Urti obliqui. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1087.6 Esplosioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1108 Dinami a del orpo rigido. 1118.1 Moto traslatorio e moto rotatorio. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1118.2 Momento d'inerzia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1128.3 Teorema di Huygens-Steiner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1138.4 Dinami a rotazionale del orpo rigido. . . . . . . . . . . . . . . . . . . . . . . . . . 1148.4.1 Conservazione del momento angolare assiale. . . . . . . . . . . . . . . . . . 1168.4.2 Analogia fra moto rettilineo e moto rotatorio. . . . . . . . . . . . . . . . . . 1168.5 Appli azioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1178.5.1 Rotazione attorno ad un asse non prin ipale. . . . . . . . . . . . . . . . . . 1178.5.2 Moto di rotolamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188.5.3 Il pendolo di torsione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.5.4 Pendolo omposto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1228.5.5 Carru ola. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123Intermezzo. Il aso generale. Equazioni di Eulero . . . . . . . . . . . . . . . . . . . . . . 1249 Stati a del orpo rigido. 1299.1 Equilibrio della bilan ia a bra i. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1299.2 Equazioni ardinali della stati a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1359.3 Centro di forze parallele. Bari entro . . . . . . . . . . . . . . . . . . . . . . . . . . 1369.3.1 La s ala appoggiata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1389.4 Equilibrio di un orpo rigido vin olato. . . . . . . . . . . . . . . . . . . . . . . . . . 139
vi INDICE9.4.1 Corpo vin olato ad un asse. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399.4.2 Corpo rigido appoggiato su di un piano orizzontale. . . . . . . . . . . . . . 1409.5 La leva. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140III Me ani a dei liquidi. 14210 Stati a dei liquidi. 14310.1 Stati di aggregazione della materia. . . . . . . . . . . . . . . . . . . . . . . . . . . . 14310.2 Densità e pressione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14310.2.1 Pressione atmosferi a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14510.3 Liquido in equilibrio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14510.4 Legge di Stevin. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14710.4.1 Tor hio idrauli o. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14810.4.2 Barometro di Torri elli. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14810.5 Legge di Ar himede. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14910.5.1 Equilibrio dei galleggianti. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15110.5.2 Bilan ia idrostati a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15110.6 Tensione super iale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15210.6.1 Linee di ontatto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15310.6.2 Legge di Young-Lapla e. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15410.6.3 Capillarità. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155Intermezzo. Liquido in rotazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15611 Dinami a dei liquidi. 15811.1 Denizione del modello. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15811.2 Portata. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15911.3 Teorema di Bernoulli. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16011.3.1 Teorema di Torri elli. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16211.3.2 Eetto Venturi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16211.3.3 Eetto Magnus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16311.4 Vis osità. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16311.4.1 Attrito vis oso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164IV Appendi i. 167A Unità di misura e ostanti si he. 168A.1 Grandezze fondamentali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168A.2 Grandezze derivate. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169A.3 Pressi per multipli e sottomultipli. . . . . . . . . . . . . . . . . . . . . . . . . . . . 170A.4 Al une ostanti si he. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170B Funzioni goniometri he. 171C Coordinate polari. 174Bibliograa 176Indi e analiti o 177
Parte IMe ani a del punto materiale
1

Capitolo 1Introduzione.1.1 Considerazioni metodologi he.La si a, dal gre o φύσις, è la s ienza he studia i fenomeni naturali enun iando le leggi he lides rivono. Questa des rizione è fatta in termini di on etti teori i, opportunamente s elti, herappresentano il fenomeno si o all'interno di un erto s hema on ettuale. Un on etto teori outilizzato nella des rizione di un fenomeno si o viene detto grandezza si a, mentre lo s hema on ettuale di riferimento viene detto modello.Per hiarire osa sia una grandezza si a e quale sia il suo ruolo nella des rizione di un fenomeno onviene fare qual he esempio. Se si intende des rivere il moto di un treno lungo un binario o orredenire grandezze si he ome la posizione, il tempo, la velo ità; des rivendo il moto delle mole oledi un gas he si muovono all'interno di un re ipiente hiuso saranno utili altre grandezze si hequali il volume del re ipiente e la dimensione delle mole ole; volendo des rivere dell'a qua portataad ebollizione sarà ne essario introdurre fra le grandezze si he la temperatura; e via di seguito.È bene sottolineare il fatto he le grandezze si he sono oggetti teori i he non ostituis ono larealtà si a, ma la rappresentano, all'interno del modello, attraverso una pre isa orrispondenzafra oggetti reali e teori i.Un modello è ostituito da una serie di ipotesi sulle grandezze si he he sempli ano il fenomenoin questione: per esempio si può supporre he le ruote del treno siano perfettamente ir olari e he le mole ole di un gas siano pi ole sferette rigide; nonostante queste ipotesi non siano `vere'ma siano sempli azioni, esse onsentono di dare una rappresentazione del fenomeno in linguaggiomatemati o. La matemati a è quindi lo strumento fondamentale per hé, rappresentando le gran-dezze si he, onsente di metterle in relazione tramite equazioni o formule he vanno sottoposte alvaglio sperimentale. Ognuna di queste equazioni o formule è detta legge si a.La bontà di un modello è pertanto ostituita dall'a ordo fra la des rizione matemati a he nerisulta, ioè la legge si a, ed il dato sperimentale; tale a ordo non è mai perfetto visto he leipotesi fatte sempli ano sempre. Di uno stesso fenomeno si o si possono dare des rizioni piú omeno a urate a se onda del diverso modello s elto per la des rizione: solitamente i modelli piúa urati sono an he i piú omplessi quindi spesso si s eglie la sempli ità sa ri ando l'a uratezza.Un modello può an he essere preferito per hé des rive meglio erti aspetti di un fenomeno purtras urandone altri he, per lo studio in questione, non sono onsiderati rilevanti. Per esempiovolendo des rivere il galleggiamento di una nave in mezzo all'O eano Atlanti o si userà un modello he onsidera la super ie dell'a qua ome piatta, volendo inve e des rivere il fenomeno delle mareedell'O eano Atlanti o si userà un modello he onsidera la super ie dell'a qua ome una porzionedi sfera; questi due modelli onsentono di dare una buona des rizione dei fenomeni in questione2

1.2. GRANDEZZE FISICHE FONDAMENTALI E DERIVATE. 3nonostante il fatto he la super ie dell'O eano Atlanti o non sia né piatta né una porzione disfera.Ogni teoria si a ha i suoi limiti di validità entro i quali le ipotesi he stanno alla base del modello onsentono una buona des rizione del fenomeno. Per esempio un modello he des riva la adutadei gravi sotto l'azione della forza attrattiva della Terra tras urando l'eetto dell'attrito dell'aria èvalido per una pi ola pallina he ada per qual he metro. Inve e nel aso in ui il orpo he adesia esteso e la aduta sia di diverse de ine o entinaia di metri l'attrito ha un ruolo importante he non si può tras urare senza ritrovarsi on un modello teori o in forte disa ordo on il datosperimentale.Quanto detto dovrebbe aver onvinto il lettore he1. la si a non des rive la realtà in sé, ma ne dà una rappresentazione attraverso dei modelli heusano ipotesi he sempli ano il fenomeno in questione rendendone possibile una des rizione he utilizzi il linguaggio matemati o;2. le bontà di un modello può essere valutata solo in rapporto alla orrispondenza on il datosperimentale del fenomeno he si vuole des rivere;3. una teoria si a, quindi, basandosi su modelli, non è né giusta né sbagliata e an or meno vera,ma piuttosto des rive piú o meno a uratamente un fenomeno entro erti limiti di validità.Il metodo di formazione di una teoria si a per mezzo della ostruzione di modelli e della loroveri a sperimentale è noto on il nome di metodo s ienti o o metodo sperimentale la ui odi azione nella s ienza moderna è dovuta a Galilei1 ed è stata enormemente sviluppata neiquattro se oli su essivi.La si a viene tradizionalmente divisa in diverse bran he; le prin ipali sono la me ani a, hestudia il moto dei orpi, la termodinami a, he studia i fenomeni termi i, l'otti a, he studiale proprietà della lu e, l'elettromagnetismo, studia le proprietà elettri he e magneti he dellamateria. Queste bran he sono dette far parte della si a lassi a, on il qual termine si intendonodesignare tutte le teorie si he sviluppate no alla ne dell'Otto ento e he non fanno uso né dellateoria della relatività né della me ani a quantisti a.Il testo he state leggendo tratta la prima di queste bran he.1.2 Grandezze si he fondamentali e derivate.La omunità s ienti a ha adottato il Sistema internazionale di unità di misura (SI) he usa settegrandezze fondamentali ; esse sono l'intervallo di tempo t, la lunghezza l, la massa m, la tempera-tura T , l'intensità di orrente i, la quantità di sostanza n e l'intensità luminosa I. Tutte le altre sidi ono grandezze derivate. La s elta delle grandezze fondamentali è onvenzionale: sarebbe statopossibile eettuare una s elta diversa.Per lo studio della me ani a si utilizzano solo le prime tre grandezze fondamentali: tempo, lun-ghezza e massa. O orre tener presente he la denizione di una grandezza si a è sempre unadenizione operativa; questa s elta si oppone alla denizione essenzialista he inve e si propone di ogliere l'essenza dell'oggetto da denire.Esempi lassi i di denizioni essenzialiste sono le prime denizioni degli Elementi di Eu lide2(siveda [5); la prima, per esempio, suona: Un punto non ha parti.La denizione operativa, inve e, rinun ia a er are l'essenza ma denis e la grandezza spiegan-do ome essa viene misurata. La misura di una grandezza è una pro edura, he può far uso di1Galileo Galilei (1564-1642), s ienziato italiano.2Eu lide (III se . a.C.), grande matemati o e s ienziato di Alessandria (?).

4 1. INTRODUZIONE.una strumentazione piú o meno ompli ata, he la onfronta on una grandezza di riferimento,detta unità di misura, e on i suoi multipli e sottomultipli. Per una des rizione dei multipli esottomultipli standard di una unità di misura, si veda l'appendi e A.1.2.1 Intervallo di tempo.Un intervallo di tempo t viene denito operativamente utilizzando appositi strumenti detti orologi;la misura viene eettuata leggendo sull'orologio il numero t1 indi ato all'inizio e il numero t2indi ato alla ne dell'intervallo temporale he si vuole misurare; in questo modo l'intervallo ditempo è dato dat2 − t1 (1.1)Per hé la denizione operativa sia ompleta rimane da dire he osa si un orologio. Si trattadi uno strumento on una parte mobile he ompie il suo movimento in un intervallo di temponoto. La parte mobile può essere dell'a qua, della sabbia, un pendolo, delle lan ette, la rotazioneapparente del Sole attorno alla Terra o altro. Il punto è he il movimento dell'orologio deve essere ompiuto sempre nello stesso intervallo di tempo. Il problema è he il ontrollo sulla regolarità delmoto di un orologio può essere fatto solo per mezzo di un altro orologio. Da questo ir olo viziososi es e s egliendo arbitrariamente un orologio di riferimento standard il ui omportamento viene onvenzionalmente ritenuto regolare. Come orologio standard è stato s elto un orologio atomi o he utilizza il periodo di os illazione della radiazione elettromagneti a prodotta dalla transizionefra due livelli iperni dello stato fondamentale dell'atomo di esio133. Non è osí importantesapere qui osa siano due livelli iperni o osa sia una transizione fra di essi; quello he importa èsapere he si tratta di un pro esso he si ripete on una regolarità he viene ritenuta su iente adessere usato ome standard per la misurazione del tempo.Il Sistema internazionale utilizza ome unità di misura on ui onfrontare gli intervalli di tempoil se ondo, indi ato on il simbolo s. Per denire il se ondo si è er ato per lungo tempo di fareriferimento al moto del Sole denendolo ome 1/86400 del giorno solare medio; il giorno solare nonha però un valore stabile poi hé la rotazione della Terra attorno al proprio asse non è su ien-temente uniforme. Oggi si denis e se ondo ome la durata di 9192631770 periodi dell'orologioatomi o standard.Denita l'unità di misura, ogni altro intervallo di tempo viene misurato per onfronto on questaunità o on i suoi multipli quali il minuto, l'ora, il giorno e osí via; o i suoi sottomultipli quali ilde imo, il entesimo o il millesimo di se ondo.1.2.2 Lunghezza.Una lunghezza l (a volte an he detta distanza d) viene denita operativamente utilizzando appositiregoli graduati; volendo misurare, ad esempio, la lunghezza di un tavolo si pone un'estremità delregolo graduato in orrispondenza di una delle estremità del tavolo di ui si vuole onos ere lalunghezza; l'altra estremità del tavolo si viene a trovare in orrispondenza on una erta graduazionedel regolo ove si trova un numero; tale numero è la lunghezza del tavolo.Rimane da spiegare ome fare a graduare un regolo; per farlo o orre disporre di una lunghezzadi riferimento, e dei suoi multipli e sottomultipli, da riportare sul regolo usato per la misura. Talelunghezza di riferimento è l'unità di misura della lunghezza e viene dettametro, indi ata il simbolo
m. La denizione di metro è mutata nel orso degli anni; per esempio è stato denito ome laquarantamilionesima parte del meridiano terrestre passante per Parigi e ome la lunghezza di unasbarra ampione di platino-iridio, onservata nei pressi di Parigi. Oggi il metro è denito ome lospazio per orso dalla lu e nel vuoto in 1/299792458s.

1.3. DIMENSIONI. 51.2.3 MassaLa pro edura per la denizione operativa della massa m ri hiede al une onos enze he verrannodate solo nel seguito del testo, se ne rimanda quindi la des rizione al luogo opportuno. Qui i silimita a denire quale sia la massa di riferimento per la misura e quale ne sia l'unità. La massaunitaria di riferimento è stata per molti anni quella di un litro, ioè 1 dm3, di a qua distillata allatemperatura di 3.98 C; ora si utilizza quella di un ilindro di altezza e diametro pari a 0.039m diuna lega di platino-iridio depositato presso l'U io internazionale dei pesi e delle misure a Sèvres,vi ino a Parigi. Il valore attribuito a tale massa di riferimento è detto hilogrammo e indi ato on il simbolo kg.1.3 Dimensioni.Alle grandezze si he fondamentali vengono attribuite delle dimensioni indi ate on i simboli[t] , [l] , [m] . (1.2)Per la generi a grandezza derivata X le dimensioni sono date da un'equazione della forma[X ] = [t]α[l]β [m]γ ; (1.3)
α, β e γ sono numeri razionali e si di ono le dimensioni diX rispetto alle dimensioni delle grandezzefondamentali, osí, per esempio, una grandezza F per ui valga[F ] = [t]−2[l]1[m]1 (1.4)ha dimensioni −2 rispetto al tempo e +1 rispetto a lunghezza e massa; si di e an he he F ha ledimensioni di una lunghezza per una massa diviso un tempo al quadrato; la sua unità di misura è, onseguentemente, m kg s−2.Una grandezza si di e adimensionale se le sue dimensioni sono nulle, ioè se vale α = β = γ = 0;due grandezze avente le stesse dimensioni si di ono omogenee.Il termine dimensioni si riferis e al fatto he se l'unità di misura di una grandezza fondamentaleviene moltipli ata per un fattore k l'unità di misura della grandezza derivata X risulta moltipli ataper k elevato a una potenza uguale alla dimensione di X rispetto a quella grandezza fondamentale.Per esempio se la lunghezza viene misurata in entimetri anzi hé in metri e il tempo in minutiinve e he in se ondi, ioè se l'unità di misura della lunghezza viene divisa per 100 e quella deltempo moltipli ata per 60 la nuova unità di misura di F è
cm kg min−2 =1
100 · 602m kg s−2 . (1.5)Ogni legge si a è una relazione fra grandezze omogenee; quindi se la legge ha la formaA+B = C +D (1.6)tutti i termini A, B, C, D devono avere le stesse dimensioni. Questa ri hiesta di omogeneità èspesso un'utile euristi a per la determinazione di una legge si a.
Capitolo 2Cinemati a del punto materiale.2.1 Il modello di punto materiale.Si di e inemati a quella teoria si a he des rive il moto dei orpi. Si di e punto materialeun orpo le ui dimensioni non sono rilevanti per la des rizione del suo moto; questo non signi aperò he le dimensioni dell'oggetto siano eettivamente pi ole. Qual he esempio servirà a hiarirequesto punto molto importante. Si onsideri una vettura he per orre una strada rettilinea: perdes rivere il suo moto non ha al una importanza sapere quali siano le sue dimensioni, se si trattadi una moto i letta, una utilitaria, un fuoristrada o un furgone on rimor hio, ome non è rile-vante onos erne il olore, l'anno di fabbri azione o il nome della ditta he l'ha fabbri ata. Nellades rizione del moto della vettura si fa astrazione da tutte le aratteristi he he non on orronoa determinarne il moto: quello he rimane è un punto. L'aggettivo materiale serve a rimar are ilfatto he, fatta l'astrazione, rimane omunque qual osa di si o, di esistente, qual osa di per epi-bile per mezzo dei inque sensi; diversamente il punto geometri o è un ente astratto non reperibilein natura.Si onsideri ora una delle ruote della vettura in questione; per des rivere il moto rotatorio he essa ompie è ne essario tenere debito onto delle sue dimensioni; il moto rotatorio, quindi, non puòessere des ritto utilizzando il on etto di punto materiale. Il moto di una palla da tennis olpitada una ra hetta può essere des ritto onsiderandola un punto materiale no a he sia possibiledisinteressarsi della rotazione della palla; se il moto rotatorio diventa rilevante (per esempio per hési vogliono studiare erti strani rimbalzi he ha una palla rotante) la palla non può piú essere onsiderata solo un punto ( he, ome tale, non ruota). L'asse di un trampolino deformato dai saltidi un tuatore non può ertamente essere onsiderato un punto materiale ( he non si deforma).Come illustrato dagli esempi fatti, il modello di punto materiale è adeguato a des rivere il motodi orpi nei limiti in ui è possibile tras urare le variazioni di forma o di volume del orpo e il suomoto di rotazione.Ove il modello di punto materiale risulti insu iente o orrerà, ome si vedrà a suo tempo,utilizzare uno modello dierente.2.2 Sistema di riferimento.La des rizione del moto di un punto materiale P onsiste nello spe i are la sua posizione in ogniistante di tempo; per far iò l'osservatore O del moto di P utilizza un sistema di assi artesiani eun orologio; in questo modo la posizione di P è individuata dalle tre oordinate (xp, yp, zp) e gli6

2.3. MOTI RETTILINEI. 7istanti di tempo in ui ias una posizione dello spazio viene o upata da P è letta sull'orologio.L'insieme di osservatore, assi artesiani e orologio viene detto sistema di riferimento.La des rizione del moto è dunque ompleta se per ogni istante t è nota ias una delle oordinate he individuano la posizione di P , ioè se sono note le tre equazionixp = x(t) , yp = y(t) , zp = z(t) (2.1)L'insieme delle tre relazioni pre edenti è detta legge oraria del moto. Evidentemente la leggeoraria dipende dal sistema di riferimento s elto; onverrà pertanto orientare gli assi e s egliernel'origine in modo da ottenere la legge oraria piú sempli e.Si di e traiettoria l'insieme di tutte le posizioni o u-
bP
xp
yp
zp
x
y
z
O
Figura 2.1: Un sistema di riferimentopate dal punto materiale P ; essa è sempre una linea on-tinua. A se onda del tipo di linea è possibile dare unaprima lassi azione del moto. Il moto è detto rettili-neo se la sua traiettoria è una retta; in questo aso perla des rizione del moto è su iente una sola oordina-ta artesiana x denita lungo l'asse he si sovrapponealla traiettoria. Se la traiettoria non è rettilinea ma gia- e su un piano si parla di moto piano; in questo asosono ne essarie due oordinate artesiane x, y; un motopiano può essere ir olare, paraboli o, ellitti o o altroa se onda della forma della traiettoria. Inne il moto, ome nell'esempio della gura 2.1, può svolgersi nellospazio tridimensionale, in questo aso sono ne essarie letre oordinate artesiane x, y, z. Un'altra lassi azione è data dal tipo di moto on ui vieneper orsa la traiettoria; ome si vedrà nella prossima sezione.2.3 Moti rettilinei.Come detto sopra, il sistema di riferimento utilizzato per la des rizione di un moto rettilineo è ostituito da una sola retta orientata, dotata di un'origine ed una unità di misura (il metro) su ui è denita la oordinata1 x ome in gura 2.2. La posizione o upata all'istante t dal puntomateriale è individuata dalla sua as issa x.Se ad un erto istante t1 il punto materiale si trova nella posizione x1 = x(t1) e al su essivo istantet2 si trova nella posizione x2 = x(t2) si di e spostamento s la quantità
s = x2 − x1 ≡ ∆x . (2.2)Il simbolo ∆ he ompare nella pre edente equazione viene usato per indi are la variazione dellagrandezza he lo segue.Quindi ∆x rappresenta la variazione della posizione x ex1 x2 xOFigura 2.2: Il sistema di riferimentoper il moto uniforme.quindi lo spostamento. Similmente ∆t = t2−t1 indi a lavariazione di istante di tempo e quindi l'intervallo tem-porale inter orso fra i due istanti t1 e t2. Il simbolo ∆ on questo signi ato di variazione verrà utilizzato fre-quentemente in questo testo.1Si potrebbe denire una oordinata x an he nel aso di una traiettoria non rettilinea: si pensi al aso delmoto di una autovettura lungo un'autostrada on urve; in ogni istante l'as issa he va asso iata alla posizionedell'autovettura è il numero he si legge sul onta hilometri. La s elta di un'as issa ` urvilinea', tuttavia, presentadelle ompli azioni he non è il aso di arontare in questa sede.

8 2. CINEMATICA DEL PUNTO MATERIALE.Si osservi he lo spostamento è positivo se il moto si svolge nel verso positivo dell'asse di riferimento,negativo se si svolge nel verso opposto.Si denis e distanza per orsa il valore assoluto d dello spostamento, ioèd = |x2 − x1| = |∆x| : (2.3)la distanza per orsa è quindi sempre non negativa.2.3.1 Moto rettilineo uniforme.Il piú sempli e moto on ui un punto materiale può per orrere una erta traiettoria è il motouniforme; la sua prima denizione2 è dovuta a Galilei ed è la seguente.Si di e moto uniforme quello di un punto materiale he ompie spostamenti uguali inintervalli di tempo uguali, omunque questi siano s elti.Lo stesso Galilei a ompagna questa denizione on una admonitio sottolineando l'importanza dipoter s egliere gli intervalli di tempo in maniera arbitraria; diversamente potrebbe apitare hegli spostamenti siano uguali per una erta s elta degli intervalli di tempo e non lo siano per unas elta di intervalli minori. La denizione data aerma he l'insieme degli spostamenti e dei tempiimpiegati a per orrerli ostituis ono due lassi di grandezze direttamente proporzionali e, quindi, ilrapporto fra elementi orrispondenti delle due lassi deve essere ostante; in altre parole nel motouniforme il rapporto fra lo spostamento s e il tempo t impiegato a per orrerlo è ostante, nondipende dalla s elta dall'intervallo di tempo. Tale ostante è detta velo ità v del moto uniforme;vale quindi
v =s
t. (2.4)L'unità di misura della velo ità è il metro al se ondo e si indi a on il simbolo m s−1.Se la traiettoria per orsa dal punto materiale è una retta il moto si di e rettilineo uniforme.Alla lu e di quanto visto nella sezione pre edente, la velo ità di un moto rettilineo uniforme si puòs rivere nella forma
v =x2 − x1t2 − t1
=∆x
∆t. (2.5)Si osservi he il denominatore della (2.5) è una quantità positiva, quindi la velo ità ha lo stessosegno dello spostamento e quindi è positiva per moti he si svolgono nel verso positivo dell'asse diriferimento e negativa per moti he si svolgono in verso opposto.Per ri avare la legge oraria del moto rettilineo uniforme si onsideri un istante iniziale t0 e sia
x0 = x(t0) la posizione in questo istante iniziale, allora se è nota la velo ità del moto è possibiledeterminare la posizione in ogni istante t su essivo, vale infattiv =
x(t)− x0t− t0
←→ x(t) = x0 + v(t− t0) . (2.6)La s elta dell'istante iniziale t0 è evidentemente arbitraria; si può pensare di onsiderarlo omel'istante in ui l'osservatoreO omin ia a misurare il moto del punto materiale. Quando è possibile,è sempre onveniente onsiderare nullo tale istante iniziale e porre t0 = 0 s; questo orrisponde a far2Di seguito si riporta il testo originale latino tratto dall'inizio della `Giornata terza' dei Dis orsi e dimostrazionimatemati he (si veda [7, pag. 166): Aequalem, seu uniformem, motum intelligo eum uius partes quibus umquetemporibus aequalibus a mobili pera tae, sunt inter se aequales.

2.3. MOTI RETTILINEI. 9partire un ronometro all'istante iniziale. In questo aso la pre edente equazione (2.6) si sempli ae diventax(t) = x0 + vt , (2.7) he è la legge oraria del moto rettilineo uniforme.Non è possibile porre t0 = 0 s nel aso in ui i siano due punti materiali in moto tale he i loroistanti iniziali siano diversi, per esempio per hé uno dei due parte dopo l'altro; in tal aso per unodei due si può porre t0 = 0 s e usare la (2.7) per l'altro o orre usare la legge generale (2.6).È utile rappresentare la legge (2.7) su un piano artesiano ove si pongano gli istanti in as issa e leposizioni in ordinata; il gra o he si ottiene è detto gra o spazio-tempo; per il moto rettilineouniforme è rappresentato da una retta in ui l'intersezione on l'asse delle ordinate rappresenta leposizione iniziale x0, mentre la pendenza, o oe iente angolare, rappresenta la velo ità. In gura2.3(a) è rappresentato il gra o spazio-tempo di un punto materiale he si muove di moto uniforme on legge orariax(t) =
1
2(t+ 1) (2.8) ioè he all'istante t0 parte dalla posizione x0 = 0.5m e si muove on velo ità v = 0.5m s−1 noad arrivare, all'istante t = 3 s nella posizione x(t) = 2m.In gura sono stati an he rappresentati un intervallo di tempo ∆t e il orrispondente spostamento
∆t
∆x
x0
t
x
(a) Gra o spazio-tempo per il motouniforme. t1
x1
A
B
t
x
(b) Gra o spazio-tempo perdiversi moti uniformi.Figura 2.3: Al uni gra i spazio-tempo per il moto uniforme.∆x per mettere in evidenza he il loro rapporto, he per denizione è il oe iente angolare dellaretta, rappresenta la velo ità del moto uniforme e he tale rapporto è indipendente dalla s elta di∆t.È hiaro he il gra o spazio-tempo di un moto non uniforme, la ui velo ità non è ostante, nonpuò essere una retta. Conseguentemente, la legge oraria del moto rettilineo uniforme è un'equazionealgebri a di primo grado nelle variabili t e x e vi eversa ogni equazione algebri a di primo gradonelle variabili t e x è la legge oraria di qual he moto rettilineo uniforme.Si osservi inoltre he il gra o spazio-tempo non è la traiettoria del moto ma rappresenta la leggeoraria.La gura 2.3(b) rappresenta il gra o spazio-tempo di due punti materiali A e B he per orronol'asse delle as isse x on versi opposti e leggi orarie date dalle equazioni
xa(t) = 2− t , xb(t) = −1
2+
2
3t . (2.9)

10 2. CINEMATICA DEL PUNTO MATERIALE.A e B si in ontrano all'istante t1 nella posizione x1 = xa(t1) = xb(t1) dati dall'intersezione delledue rette he rappresentano il gra o spazio-tempo dei due moti e possono essere determinatirisolvendo il sistema
xa(t) = 2− txb(t) = −
1
2+
2
3t
−→
t1 = 1.5 sx1 = 0.5m.
(2.10)Tutte le equazioni s ritte sopra sono tutte oerenti dal punto di vista dimensionale; si onsideriper esempio la legge oraria del moto uniforme; onsiderato he la posizione ha le dimensioni di unalunghezza, ioè [x] = [l], e he la velo ità ha le dimensioni di una lunghezza diviso un tempo, ioè[v] = [l][t]−1, dal punto di vista dimensionale la (2.7) si s rive
[l] = [l] + [l][t]−1[t] ; (2.11)entrambi i membri dell'equazione quindi hanno le dimensioni di una lunghezza.2.3.2 Moto vario.Se la velo ità di un moto non è ostante, ioè se in intervalli di tempo uguali il punto materiale P ompie spostamenti diversi il moto di P si di e vario. In questo aso il rapporto fra lo spostamentoe il tempo impiegato si di e velo ità media vm:vm =
∆x
∆t; (2.12)il se ondo membro della pre edente equazione è formalmente uguale a quello della (2.5) ma siriferis e a una situazione si a diversa: lí il rapporto è indipendente dalla s elta dell'intervallodi tempo e ne risulta una velo ità ostante, qui il rapporto dipende dalla s elta dell'intervallodi tempo e la velo ità è diversa per diverse s elte di ∆t. Riferendosi al gra o spazio-tempo, lavelo ità media ha una sempli e interpretazione geometri a; è infatti legata alla pendenza del gra onell'intervallo di tempo onsiderato. Per vederlo si onsideri la gura 2.4 ove è rappresentato il
t1
x1
t2
x2
∆t
∆x
t
x
Figura 2.4: Velo ità media.gra o spazio-tempo di un moto on velo ità variabile;la velo ità media è il oe iente angolare della retta se- ante la urva nei punti di as issa t1 e t2.La nozione di velo ità media, ben hé sia su iente a dareun'idea del moto del punto materiale in un erto interval-lo di tempo non di e qual è la velo ità in un dato istante;in fondo esistono strumenti, detti ta himetri, he onsen-tono di determinare la velo ità di un'autovettura o di unamoto i letta in ogni istante. Deve quindi essere possibi-le denire la velo ità istantanea. Per farlo si osservi he la velo ità media misurata fra l'istante t1 e l'istantet2 si approssima tanto meglio alla velo ità all'istante t1quanto piú è pi olo l'intervallo di tempo ∆t = t2 − t1.Quindi la velo ità media diventa la velo ità istantanea quando l'intervallo di tempo diventa zero.Dal punto di vista matemati o questo è un problema; nella denizione di velo ità media, equazione(2.12), l'intervallo di tempo è al denominatore, e se il denominatore diventa zero, la frazione perdedi senso. Si noti però he in un intervallo di tempo nullo an he lo spostamento eettuato è nullo;quindi an he il numeratore della (2.12) è nullo. Si tratta osí di quello he in algebra viene talvolta

2.3. MOTI RETTILINEI. 11detta una forma indeterminata. Il punto qui è he la velo ità del punto materiale all'istante t1 nonè indeterminata, anzi è perfettamente denita, tanto he può essere misurata da un ta himetro.Quello he a ade è he il numeratore ed il denominatoret1
x1
t
x
Figura 2.5: Velo ità istantaneaall'istante t1.diventano nulli in modo tale he il loro rapporto abbiaun valore ben denito.Dal punto di vista geometri o si è visto he la velo i-tà media è il oe iente angolare della retta se ante;quando l'intervallo di tempo si annulla, ioè quando t2si avvi ina a t1, la retta se ante diventa la retta tangen-te, ome rappresentato in gura 2.5: la velo ità del motodi un punto materiale all'istante t è quindi il oe ienteangolare della retta tangente al gra o spazio-tempo delmoto nel punto di as issa t.La osa, he in eetti è un punto molto deli ato, risulteràpiú hiara onsiderando il seguente esempio. Si onsideriun punto materiale he per orra un moto vario on leggeoraria
x(t) = t2 − 3t+ 1 . (2.13)Si determini la velo ità media nell'intervallo ompreso fra l'istante t e l'istante t + ∆t; in taleintervallo di tempo, lo spostamento è dato da∆x = x(t +∆t)− x(t) = (t+∆t)2 − 3(t+∆t) + 1− (t2 − 3t+ 1) =
= t2 + 2t∆t+ (∆t)2 − 3t− 3∆t+ 1− t2 + 3t− 1 =
= ∆t(2t− 3 + ∆t)
(2.14)Quindi la velo ità media èvm =
∆x
∆t= 2t− 3 + ∆t ; (2.15) ome si vede vm dipende da ome si s eglie l'intervallo di tempo ∆t. Ma la velo ità media diventala velo ità istantanea quanto ∆t tende a zero3, ioè
vm−−−−−→∆t→0
v(t) = 2t− 3 . (2.16)In questo esempio si è visto ome il al olo del rapporto ∆x/∆t per ∆t → 0 è tutt'altro he pro-blemati o o indeterminato. L'equazione ottenuta permette di al olare senza problemi la velo itàistantanea ad ogni istante t. Il lettore studioso può veri are on il al olo he la tangente allaparabola di equazione x = t2−3t+1 nel suo punto di as issa t1 ha oe iente angolarem = 2t1−3.La funzione v = v(t) he fornis e in ogni istante il valore della velo ità istantanea di un moto varioè detta legge della velo ità del moto in questione.Per la determinazione della legge oraria di un moto vario onviene pro edere in maniera gra- a. Si onsideri ome sempli e esempio iniziale il aso di un moto uniforme e si disegni il gra ovelo ità-tempo; la velo ità del moto uniforme è ostante quindi il gra o risulta un segmento diretta parallelo all'asse dei tempi, ome nella gura 2.6(a); nell'intervallo ∆t = t−t0 lo spostamento∆x = x(t)−x0 = v∆t è uguale all'area ompresa fra il gra o velo ità-tempo e l'asse delle as isse.Il risultato qui trovato si estende in modo naturale al aso del moto vario. Per vederlo si suddivida3Si usa l'espressione tende a inve e he `è uguale a' e una fre ia inve e del simbolo = per rimar are il fatto hedal punto di vista matemati o si tratta di un pro edimento deli ato, detto limite, e studiato dall'analisi matemati a.In questa sede si rinun ia ad una des rizione pre isa del on etto di limite ma se ne onserva il simbolo.
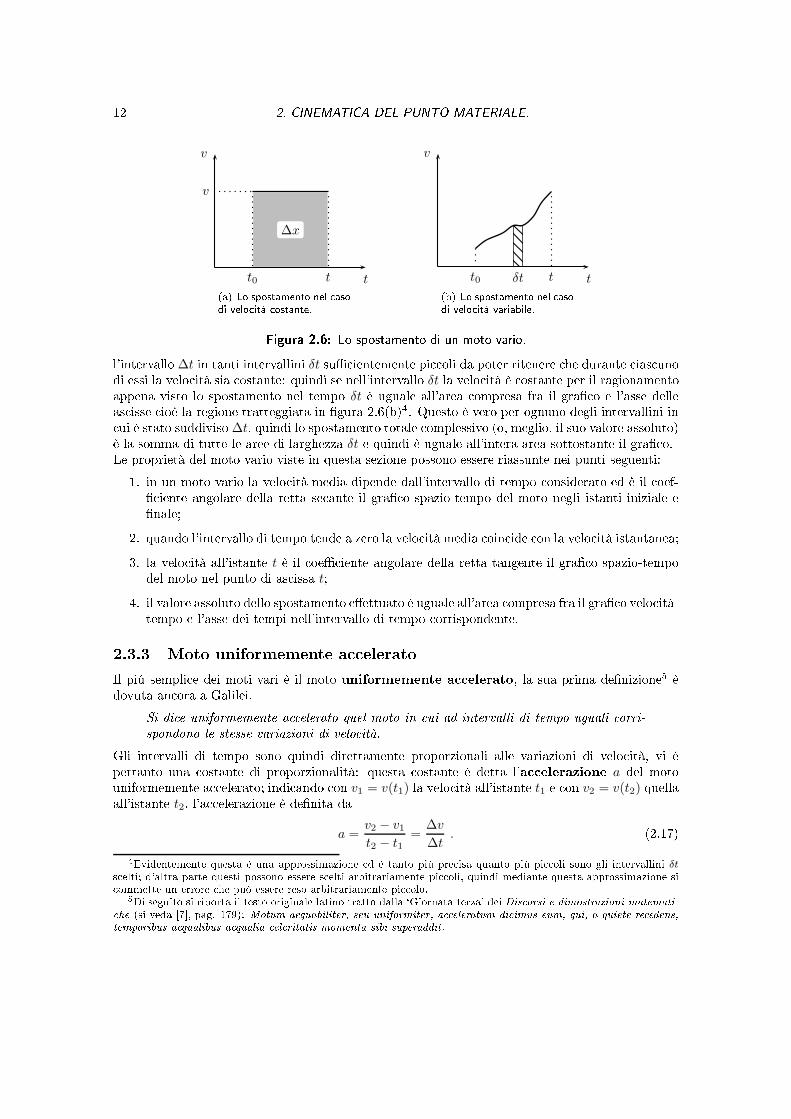
12 2. CINEMATICA DEL PUNTO MATERIALE.∆x
v
t
v
t0 t(a) Lo spostamento nel asodi velo ità ostante.v
tt0 tδt(b) Lo spostamento nel asodi velo ità variabile.Figura 2.6: Lo spostamento di un moto vario.l'intervallo ∆t in tanti intervallini δt su ientemente pi oli da poter ritenere he durante ias unodi essi la velo ità sia ostante: quindi se nell'intervallo δt la velo ità è ostante per il ragionamentoappena visto lo spostamento nel tempo δt è uguale all'area ompresa fra il gra o e l'asse delleas isse ioè la regione tratteggiata in gura 2.6(b)4. Questo è vero per ognuno degli intervallini in ui è stato suddiviso ∆t, quindi lo spostamento totale omplessivo (o, meglio, il suo valore assoluto)è la somma di tutte le aree di larghezza δt e quindi è uguale all'intera area sottostante il gra o.Le proprietà del moto vario viste in questa sezione possono essere riassunte nei punti seguenti:1. in un moto vario la velo ità media dipende dall'intervallo di tempo onsiderato ed è il oef- iente angolare della retta se ante il gra o spazio-tempo del moto negli istanti iniziale enale;2. quando l'intervallo di tempo tende a zero la velo ità media oin ide on la velo ità istantanea;3. la velo ità all'istante t è il oe iente angolare della retta tangente il gra o spazio-tempodel moto nel punto di as issa t;4. il valore assoluto dello spostamento eettuato è uguale all'area ompresa fra il gra o velo ità-tempo e l'asse dei tempi nell'intervallo di tempo orrispondente.2.3.3 Moto uniformemente a eleratoIl piú sempli e dei moti vari è il moto uniformemente a elerato, la sua prima denizione5 èdovuta an ora a Galilei.Si di e uniformemente a elerato quel moto in ui ad intervalli di tempo uguali orri-spondono le stesse variazioni di velo ità.Gli intervalli di tempo sono quindi direttamente proporzionali alle variazioni di velo ità, vi èpertanto una ostante di proporzionalità: questa ostante è detta l'a elerazione a del motouniformemente a elerato; indi ando on v1 = v(t1) la velo ità all'istante t1 e on v2 = v(t2) quellaall'istante t2, l'a elerazione è denita daa =
v2 − v1t2 − t1
=∆v
∆t. (2.17)4Evidentemente questa è una approssimazione ed è tanto piú pre isa quanto piú pi oli sono gli intervallini δts elti; d'altra parte questi possono essere s elti arbitrariamente pi oli, quindi mediante questa approssimazione si ommette un errore he può essere reso arbitrariamente pi olo.5Di seguito si riporta il testo originale latino tratto dalla `Giornata terza' dei Dis orsi e dimostrazioni matemati- he (si veda [7, pag. 179): Motum aequabiliter, seu uniformiter, a eleratum di imus eum, qui, a quiete re edens,temporibus aequalibus aequalia eleritatis momenta sibi superaddit.

2.3. MOTI RETTILINEI. 13L'unità di misura dell'a elerazione è il metro al se ondo quadrato e si s rive m s−2, le sue dimen-sioni sono [a] = [l][t]−2.Similmente a quanto visto per la velo ità, l'a elerazione è positiva se la velo ità aumenta nell'in-tervallo di tempo ∆t ed è negativa se la velo ità diminuis e; in questo aso si di e he vi è unade elerazione.Dalla (2.17) si può ottenere la legge della velo ità v(t) per il moto uniformemente a elerato. Ilpro edimento è formalmente identi o a quello he ha portato alle leggi orarie (2.6) e (2.7). Si onsideri un istante iniziale t0 e sia v0 = v(t0) la velo ità in questo istante iniziale. Allora la (2.17)fornis e la velo ità all'istante ta =
v(t) − v0t− t0
←→ v(t) = v0 + a(t− t0) . (2.18)Se è possibile s egliere nullo l'istante iniziale la pre edente equazione prende la sempli e formav(t) = v0 + at . (2.19)Il gra o velo ità-tempo per il moto uniformemente a -
∆x
v
t
v0
v(t)
tFigura 2.7: Lo spostamento del motouniformemente a elerato. elerato è quindi una retta la ui intersezione on l'assedelle ordinate rappresenta la velo ità iniziale mentre lapendenza rappresenta l'a elerazione. Alla lu e di quan-to visto nella sezione pre edente, lo spostamento del pun-to materiale in moto uniformemente a elerato fra l'i-stante iniziale t0 = 0 s e il generi o istante su essivo tè dato dall'area del trapezio rettangolo ombreggiato ingura 2.7; questo trapezio rettangolo ha le basi uguali av0 e v(t) è l'altezza uguale a t; quindi lo spostamento è
∆x =1
2[v0 + v(t)]t ; (2.20)osservando he vale ∆x = x(t)− x0, e usando la (2.19), si ottiene
x(t)− x0 =1
2(2v0 + at)t (2.21)e quindi
x(t) = x0 + v0t+1
2at2 (2.22) he è la legge oraria del moto uniformemente a elerato. Il lettore studioso provi a tra iareun gra o velo ità-tempo e a dedurne la orrispondente legge oraria nel aso in ui sia t0 6= 0 s.L'equazione (2.22) è di se ondo grado in t; quindi il suo gra o nel piano artesiano spazio-tempo èuna parabola. Vi eversa ogni equazione nelle variabili t e x di se ondo grado rispetto t e di primogrado rispetto a x è la legge oraria di qual he moto uniformemente a elerato e, se s ritta in formaespli ita ome la (2.22), il oe iente del termine di se ondo grado è la metà dell'a elerazione, il oe iente del termine di primo grado è la velo ità iniziale ed il termine noto la posizione iniziale.Si ri onsideri l'esempio visto sopra del moto di legge oraria (2.13); evidentemente si tratta di unmoto uniformemente a elerato on a elerazione a = 2m s−2, velo ità iniziale v0 = −3m s−1 eposizione iniziale x0 = 1m. Utilizzando la legge della velo ità (2.19) è possibile trovare la velo itàin ogni istante:
v(t) = −3 + 2t (2.23)

14 2. CINEMATICA DEL PUNTO MATERIALE.risultato in a ordo on quanto trovato sopra, equazione (2.16), usando la denizione di velo itàistantanea.È utile al olare la velo ità media di un moto uniformemente a elerato fra l'istante iniziale t0 eun dato istante nale t; qui si onsidera il aso in ui l'istante iniziale sia nullo in modo tale hevalga ∆t = t − t0 = t, las iando al lettore studioso il aso generale on t0 6= 0. Lo spostamentonell'intervallo di tempo onsiderato è ∆x = x(t)− x0; usando la (2.22), la velo ità media è quindivm =
∆x
∆t=x(t)− x0
t=v0t+
1
2at2
t= v0 +
1
2at . (2.24)Dalla (2.19) si ottiene la relazione at = v(t)− v0 he, sostituita nella pre edente, dà
vm = v0 +1
2
[
v(t)− v0]
=v(t) + v0
2. (2.25)Quindi per il moto uniformemente a elerato la velo ità media è la media aritmeti a delle velo itàiniziale e nale.Un'altra utile relazione è quella he lega lo spostamento alla variazione di velo ità; an he qui si onsidera il aso in ui l'istante iniziale sia nullo. Lo spostamento si può s rivere ome velo itàmedia per intervallo di tempo, quindi
∆x = vmt =v(t) + v0
2t ; (2.26)ri avando t dalla (2.19) e sostituendolo nella pre edente si trova
∆x =v(t) + v0
2· v(t)− v0
a(2.27)e quindi
∆x =v2(t)− v20
2a←→ v2(t) = v20 + 2a∆x . (2.28)2.3.4 Moto di aduta libera.Tra i moti uniformemente a elerati è parti olarmente importante il moto di aduta libera dei orpiverso il entro della Terra. È un fatto sperimentale he, nell'approssimazione in ui sia possibiletras urare l'attrito dell'aria, tutti i orpi adono on la stessa a elerazione; questa a elerazioneè detta a elerazione di gravità e viene indi ata on il simbolo g; il suo valore dipende dallaposizione sulla super ie terrestre: aumenta on la latitudine, ioè on la distanza dall'equatore ediminuis e all'aumentare dell'altezza sul livello del mare. Il valore standard è
g = 9.80665m s−2 , (2.29)ed è onvenzionalmente onsiderato esatto, ioè privo di errore; tradizionalmente viene approssi-mato in 9.81m s−2.Si onsideri quindi un punto materiale P he ade da un'altezza h dal suolo; ome sistema diriferimento si s elga un asse verti ale orientato verso il basso on l'origine nel punto di partenza diP , ome illustrato in gura 2.8(a). Il moto del punto materiale è des ritto dalla sua legge oraria edalla legge della velo ità:
y(t) = x0 + v0t+1
2gt2
v(t) = v0 + gt .(2.30)
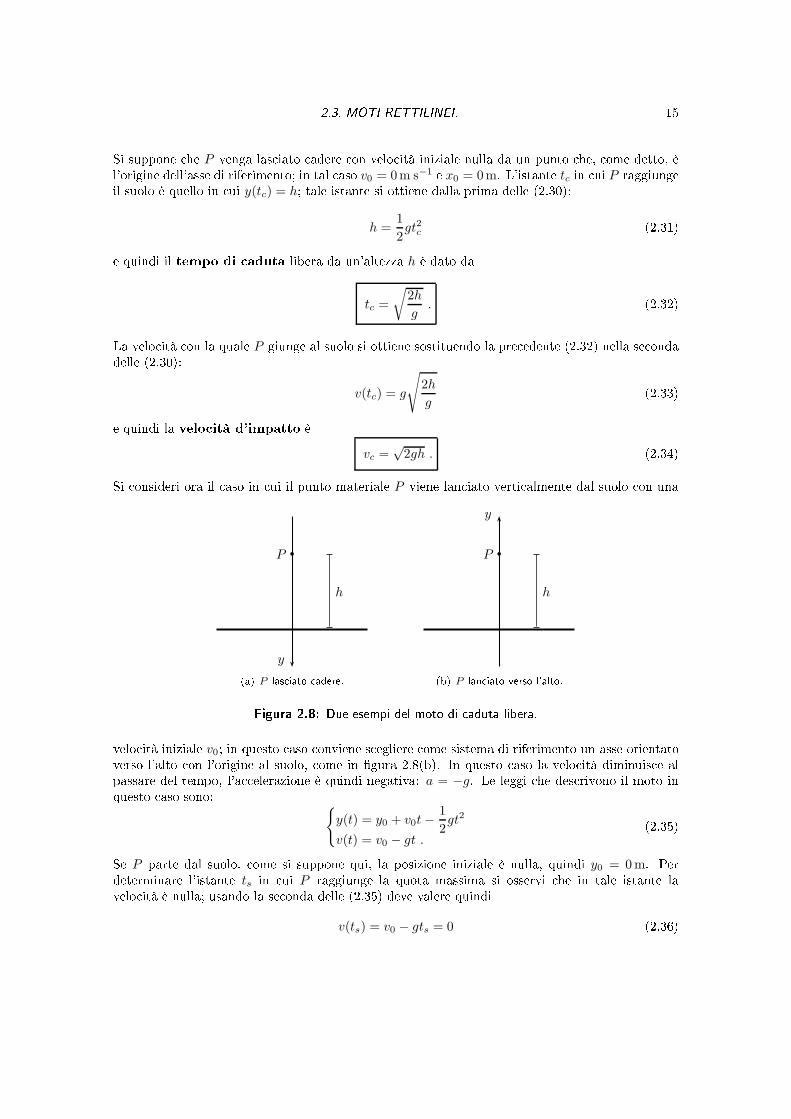
2.3. MOTI RETTILINEI. 15Si suppone he P venga las iato adere on velo ità iniziale nulla da un punto he, ome detto, èl'origine dell'asse di riferimento; in tal aso v0 = 0m s−1 e x0 = 0m. L'istante tc in ui P raggiungeil suolo è quello in ui y(tc) = h; tale istante si ottiene dalla prima delle (2.30):h =
1
2gt2c (2.31)e quindi il tempo di aduta libera da un'altezza h è dato da
tc =
√
2h
g. (2.32)La velo ità on la quale P giunge al suolo si ottiene sostituendo la pre edente (2.32) nella se ondadelle (2.30):
v(tc) = g
√
2h
g(2.33)e quindi la velo ità d'impatto è
vc =√2gh . (2.34)Si onsideri ora il aso in ui il punto materiale P viene lan iato verti almente dal suolo on una
h
bP
y(a) P las iato adere.bP
h
y
(b) P lan iato verso l'alto.Figura 2.8: Due esempi del moto di aduta libera.velo ità iniziale v0; in questo aso onviene s egliere ome sistema di riferimento un asse orientatoverso l'alto on l'origine al suolo, ome in gura 2.8(b). In questo aso la velo ità diminuis e alpassare del tempo, l'a elerazione è quindi negativa: a = −g. Le leggi he des rivono il moto inquesto aso sono:
y(t) = y0 + v0t−1
2gt2
v(t) = v0 − gt .(2.35)Se P parte dal suolo, ome si suppone qui, la posizione iniziale è nulla, quindi y0 = 0m. Perdeterminare l'istante ts in ui P raggiunge la quota massima si osservi he in tale istante lavelo ità è nulla; usando la se onda delle (2.35) deve valere quindi
v(ts) = v0 − gts = 0 (2.36)

16 2. CINEMATICA DEL PUNTO MATERIALE.e quindi il tempo di salita èts =
v0g
. (2.37)Sostituendo questa espressione nella prima delle (2.35), ri ordando he y0 = 0m, si trova l'altezzah raggiunta:
h = y(ts) = v0v0g− 1
2gv20g2
=v20g− v20
2g(2.38)e quindi
h =v202g
. (2.39)Una volta giunto all'altezza massima il punto materiale P ri ade; l'istante in ui giunge al suolo èdeterminato dalla prima delle (2.35) on la ondizione y = 0m; ri ordando he nel aso presentey0 è nullo, si imponev0t−
1
2gt2 = 0 ←→ t
(
v0 −1
2gt
)
= 0 ←→ t1 = 0 s ∨ t2 =2v0g
= 2ts . (2.40)Vi sono due soluzioni per hé due sono gli istanti in ui y = 0m, uno è l'istante iniziale, l'altro èl'istante nale he qui si vuole determinare; quindi l'istante di ri aduta è il doppio dell'istante disalita, quindi P impiega lo stesso tempo a salire e a ri adere. La velo ità di impatto nella ri adutaèv(t2) = v0 − gt2 = v0 − 2v0 = −v0 . (2.41)La velo ità di impatto nella ri aduta ha quindi lo stesso valore della velo ità iniziale; il segnonegativo è dovuto al fatto he nel moto di ri aduta P si muove nel verso opposto a quello dell'assedi riferimento s elto.Quindi un punto materiale lan iato verti almente verso l'alto impiega lo stesso tempo a salire ea ri adere e la velo ità on ui giunge al suolo è uguale alla velo ità iniziale on la quale è statolan iato verso l'alto.Se l'a elerazione non è ostante il rapporto ∆v/∆t è l'a elerazione media nell'intervallo ∆t. Inmaniera analoga a quanto fatto per la velo ità, è possibile denire una a elerazione istantanea: onsiderato un intervallo di tempo ompreso fra t e t + ∆t si denis e a elerazione istantaneaall'istante t il rapporto fra la variazione di velo ità e l'intervallo di tempo per ∆t he tende a zero.
∆v
∆t−−−−−→∆t→0
a(t) . (2.42)Intermezzo. Moto uniformemente a elerato e numeri dispari.Si onsideri un punto materiale he, partendo da fermo, si muova di moto uniformemente a elerato on a elerazione a; la legge oraria è dunque data da
x(t) = x0 +1
2at2 (2.43)

2.4. MOTI PIANI. 17 ioè le posizioni via via assunte dal punto materiale sono proporzionali ai quadrati dei tempi. Si onsiderino ora le posizioni o upate agli istanti multipli di un erto tempo T , ioè agli istantit0 = 0 , t1 = T , t2 = 2T , t3 = 3T , . . . , tn−1 = (n− 1)T , tn = nT ; (2.44)queste posizioni sono
x0 ≡ x(t0) = x0
x1 ≡ x(t1) = x0 +1
2aT 2
x2 ≡ x(t2) = x0 +4
2aT 2
x3 ≡ x(t3) = x0 +9
2aT 2...
xn−1 ≡ x(tn−1) = x0 +(n− 1)2
2aT 2
xn ≡ x(tn) = x0 +n2
2aT 2
(2.45)È quindi possibile al olare gli spostamenti eettuati dal punto materiale in ias uno degli intervallidi tempo su essivi di durata T ; essi sono
s1 ≡ x1 − x0 =1
2aT 2 = s1
s2 ≡ x2 − x1 =3
2aT 2 = 3s1
s3 ≡ x3 − x2 =5
2aT 2 = 5s1...
sn ≡ xn − xn−1 =n2 − (n− 1)2
2aT 2 =
(2n− 1)
2aT 2 = (2n− 1)s1 .
(2.46)Quindi gli spostamenti eettuati in intervalli di tempo su essivi di ugual durata sono proporzionalialla su essione dei numeri dispari. Questo fatto, osservato per primo da Galilei nel Corollarium Ial Theorema II della Giornata terza dei suoi Dis orsi (si veda [7, pagina 186), dis ende dal fatto he il quadrato del numero naturale n è la somma dei primi n dispari:
1 = 1 , 4 = 1 + 3 , 9 = 1 + 3 + 5 , . . . , n2 = 1 + · · ·+ 2n− 1 . (2.47)2.4 Moti piani.Si di ono piani quei moti la ui traiettoria gia e su un piano; ome già a ennato sopra, il sistemadi riferimento usato per per la des rizione dei moti piani è ostituito da due assi artesiani indi ati on x e y. Sulla retta il punto materiale si muove lungo una direzione obbligata; tale direzione puòessere per orsa in due versi. Sul piano la situazione è un po' piú ompli ata poi hé la direzionedel moto non è ostante ma varia da un istante all'altro. Per des rivere in modo adeguato questasituazione è ne essario una nuova lasse di grandezze si he dette vettoriali, le ui proprietà sonodes ritte nel paragrafo seguente.

18 2. CINEMATICA DEL PUNTO MATERIALE.2.4.1 Algebra dei vettori.Si di e vettore un segmento orientato; esso è denito una volta he siano assegnate le sue treproprietà:1. la lunghezza, detta an he modulo o intensità del vettore;2. la direzione;3. il verso.Si noti he due vettori paralleli hanno la stessa direzione; se hanno an he uguale verso e modulosono lo stesso vettore; ogni vettore quindi è rappresentato da tutti i segmenti orientati he hannoα
x
y
vy
vx
v
A
B
Figura 2.9: Un vettore e le sue ompo-nenti.
lo stesso modulo, la stessa direzione e lo stesso verso. Unagrandezza si a è detta vettoriale se per la sua des ri-zione oltre ad un valore numeri o in una unità di misuraè ne essario an he spe i are una direzione ed un verso.Una grandezza si a non vettoriale, ioè quella ui si as-so ia solamente un numero e non an he una direzione edun verso, è detta s alare.Un vettore può essere indi ato in moti modi; on unalettera he lo identi hi o espli itandone i punti estremi;il vettore in gura 2.9 ad esempio si può indi are on vo on AB. In ogni aso, per distinguerle dagli s alari, legrandezze vettoriali si denotano in arattere tipogra ograssetto. Il modulo, grandezza s alare, viene rappresen-tato in arattere normale o ponendo il vettore fra sbar-rette verti ali; osí il modulo di v si indi a on v o on‖v‖.È estremamente omodo rappresentare i vettori sul piano artesiano in termini delle loro proiezionisugli assi oordinati; tali proiezioni si di ono omponenti del vettore e si s rivev = (vx, vy) (2.48)in modo simile a ome si indi ano le oordinate artesiane di un punto. Le omponenti di unvettore sono positive o negative a se onda he la proiezione sia orientata ome l'asse su ui è stataproiettata o meno; per esempio in gura 2.9 vx è positiva mentre vy è negativa.Note le sue omponenti, è possibile determinare il modulo di un vettore on una sempli eappli azione del teorema di Pitagora6:
‖v‖ = v =√
v2x + v2y . (2.49)La direzione e il verso di v sono onvenzionalmente individuati dall'angolo α formato dal vettoree il semiasse maggiore delle as isse, ome illustrato in gura 2.9; vale dunque (per la denizione el'uso delle funzioni goniometri he si veda l'appendi e B).tgα =vyvx
(2.50)Vi eversa, noto il modulo v del vettore e la sua direzione α le omponenti sono date da
vx = v cosαvy = v senα . (2.51)6Pitagora (575495 a.C. ?), grande matemati o e losofo di Samo.

2.4. MOTI PIANI. 19Somma e dierenza di vettori. La somma di due vettori è denita nel modo seguente. Datiu e v, il vettore somma w = u + v è quello he ha ome omponenti la somma delle omponentidei vettori addendi, vale quindi
wx = ux + vxwy = uy + vy .
(2.52)vx ux
uy
vy
x
y
v
u
w
(a) Somma on il metododel parallelogramma. ux vx
uy
vy
x
y
v
u
w
(b) Somma on il metodopunta- oda. vxux
uy
vy
x
y
v
u
t
( ) Dierenza.Figura 2.10: Somma e dierenza di due vettori.Dal punto di vista gra o, due vettori si sommano on il metodo del parallelogramma o on ilmetodo punta- oda, ome illustrato nelle gure 2.10(a) e 2.10(b).La dierenza fra due vettori si denis e in modo simile: se t = u− v allora
tx = ux − vxty = uy − vy . (2.53)Si osservi he ostruendo il parallelogramma ome in gura 2.10(a), una delle diagonali è il vettoresomma, mentre l'altra diagonale è il vettore dierenza.La dierenza di due vettori uguali è il vettore nullo he si indi a on il simbolo 0, vale quindi
∀v v − v = 0 . (2.54)Il modulo del vettore somma non è uguale alla somma dei moduli dei vettori addendi, similmente,il modulo del vettore dierenza non è uguale alla dierenza dei moduli dei vettori sottraendi; perrendersene onto basta osservare le gure 2.10(b) e 2.10( ) e ri ordare la proprietà dei lati di untriangolo; fra i moduli della somma della dierenza vale la seguente relazione triangolare∣
∣‖v‖ − ‖u‖∣
∣ ≤ ‖v + u‖ ≤ ‖v‖+ ‖u‖ . (2.55)Prodotto per uno s alare. Dalla denizione di somma di due vettori si ottiene quella dimultiplo di un vettore; per esempio il vettore w = v + v = 2v è il vettore he ha omponentiwx = 2vx e wy = 2vy; questa proprietà si estende nella denizione del prodotto di un vettore peruno s alare:
w = kv ←→
wx = kvxwy = kvy ;
(2.56)Ne risulta he il vettore w ha modulo w = |k|v, ha la stessa direzione di v e verso uguale odopposto a quello di v e se onda he k sia positivo o negativo.

20 2. CINEMATICA DEL PUNTO MATERIALE.Il prodotto per uno s alare è distributivo rispetto alla somma e alla sottrazione di vettori, vale ioèk(v ± u) = kv ± ku . (2.57)I vettori unitari. Risulta assai omodo rappresentare i vettori bi- e tridimensionali in termini divettori unitari an he detti versori. Questi, ome di e il nome, sono vettori di lunghezza unitaria he hanno la direzione ed il verso dei tre assi artesiani del sistema di riferimento artesianopres elto.Vengono indi ati rispettivamente on i simboli (si veda la gura 2.11):
ı , , k (2.58)x
y
z
P
Oxpı
yp
zpk
xpı+ zpk
ı
k
Figura 2.11: Utilizzo dei versori nella rappresentazione di unvettore tridimensionale.
Con questa rappresentazione è possi-bile s rivere i vettori (bi-) tridimen-sionali ome somma di (due) tre vet-tori perpendi olari di lunghezza parialle omponenti e aventi le direzionie i versi degli assi oordinati.Per esempio, il vettore OP del asoillustrato in gura, si può s rivere nelmodo seguente:OP = xpı + yp+ zpk . (2.59)Analogamente si rappresentano tuttigli altri vettori, per esempiov = vxı+ vy + vkk . (2.60)Utilizzando i versori, la somma e ladifferenza di due vettori bidimensio-nali pertanto si s rivono nel modo seguente
w = v ± u = (vx ± ux)ı+ (vy ± uy) . (2.61)Prodotti fra vettori. Si denis ono due diversi prodotti fra vettori: il primo è detto prodottos alare ed ha ome risultato uno s alare; il se ondo è detto prodotto vettoriale ed ha omerisultato un vettore.Il prodotto s alare fra i due vettori v e u è denito dav · u = vu cosα (2.62)ove α è l'angolo onvesso formato dai due vettori. Poi hé u cosα = u‖ è la proiezione di u nelladirezione parallela a v, si può an he s rivere:v · u = ±vu‖ . (2.63)Il segno dipende dall'angolo α; positivo per α a uto e negativo per α ottuso: se ne veda un esempioin gura 2.12(b). Se i due vettori sono perpendi olari il loro prodotto è nullo; in eetti nell'algebradei vettori non vale la proprietà di annullamento del prodotto: se il prodotto è nullo i due fattoripossono essere entrambi diversi da zero; vale ioè
v · u = 0⇐⇒ v ⊥ u , se v 6= 0 ∧ u 6= 0 . (2.64)

2.4. MOTI PIANI. 21α
u‖
v
u
(a) Angolo a uto. α
u‖v
u
(b) Angolo ottuso.Figura 2.12: Prodotto s alare.Il prodotto s alare è ommutativo e distributivo rispetto alla somma e alla dierenza:v · u = u · v , v · (u ±w) = v · u± v ·w , (2.65) ommuta inoltre on il prodotto per uno s alare
v · (ku) = k(v · u) . (2.66)Si può dimostrare, e la dimostrazione viene las iata al lettore studioso, he in termini delle loro omponenti il prodotto s alare fra due vettori si s rive nel modo seguente:v · u = vxux + vyuy . (2.67)Come immediata onseguenza di iò si trova he il prodotto s alare di un vettore on sé stesso è ilquadrato del suo modulo:
v · v = v2x + v2y = ‖v‖2 . (2.68)Il prodotto vettoriale w di due vettori v e u si indi a on il simboloα
u⊥
v
uw
Figura 2.13: Prodotto vettorialew = v × u (2.69)ed è il vettore w di modulo
w = vu senα = vu⊥ , (2.70)ha direzione perpendi olare a quella del piano individuato daivettori fattori v e u e ome verso quello dal quale la rotazionedal primo fattore al se ondo è vista in senso antiorario, si vedala gura 2.13.An he per il prodotto vettoriale non vale la legge di annulla-mento del prodotto; due vettori paralleli, equiversi o antiversi,hanno prodotto vettoriale nullo, vale ioèv × u = 0⇐⇒ v ‖ u , se v 6= 0 ∧ u 6= 0 . (2.71)Il prodotto vettoriale non è ommutativo, ma vale
v × u = −u× v ; (2.72) ommuta però on il prodotto per uno s alare:v × (ku) = k(v × u) ; (2.73)

22 2. CINEMATICA DEL PUNTO MATERIALE.è inoltre distributivo sia rispetto alla somma he alla dierenza:v × (u±w) = v × u± v ×w . (2.74)Valgono inoltre le relazioni
v · (u ×w) =u · (w × v) = w · (v × u)
v × (u×w) = (v ·w)u− (v · u)w .(2.75)Il prodotto vettoriale in termini delle omponenti dei fattori si s rive nel modo seguente:
v × u = (vyuz − vzuy)ı+ (vzux − vxuz)+ (vxuy − vyux)k . (2.76)2.4.2 Des rizione dei moti piani.Si onsideri il punto materiale P in moto su un piano; il sistema di riferimento è ostituito da dueassi artesiani di oordinate x e y e origine O. La posizione di P in ogni istante è data dal vettoreOP . Se ad un erto istante t1 il punto materiale si trova nel punto P1(x1, y1) ed in un su essivoistante t2 si trova nel punto P2(x2, y2), lo spostamento è denito, ome nel aso rettilineo, dallavariazione della posizione e quindi dal vettore ∆OP , si veda la gura 2.14:
∆OP = OP2 −OP1 = P1P2 . (2.77)Lo spostamento non è la traiettoria; per evidenziare la dierenza in gura 2.14 è stata tra iata unaP1
P2
x1 x2
y1
y2
x
y
OFigura 2.14: Lo spostamento in un moto piano.traiettoria urva he unis e P1 e P2. Per i mo-ti piani quindi, diversamente dai moti rettili-nei, la distanza per orsa non è il valore assolutodello spostamento. Le omponenti del vettorespostamento sono date da∆OP = (∆x,∆y) = (x2−x1, y2−y1) . (2.78)Mentre P si sposta da P1 a P2, la sua proie-zione sull'asse delle x si sposta da x1 a x2 ela sua proiezione sull'asse y da y1 a y2; quin-di le omponenti del vettore spostamento sonogli spostamenti delle proiezioni di P sugli assi artesiani. La velo ità media è an ora denita ome il rapporto fra lo spostamento ed il tempo impiegato a per orrerlo, è quindi il vettore
vm =∆OP
∆t=
(
∆x
∆t,∆y
∆t
)
; (2.79)le omponenti della velo ità media sono quindi le velo ità medie on ui si spostano le proiezionidi P sugli assi artesiani. La velo ità media è data dal prodotto del vettore spostamento ∆OPper lo s alare positivo 1/∆t. Quindi vm ha la stessa direzione e lo stesso verso dello spostamento.La velo ità istantanea è an ora la velo ità media quando l'intervallo di tempo tende a zero ed è ilvettore he ha per omponenti le velo ità istantanee delle proiezioni di P sugli assi artesiani, ioèvm−−−−−→
∆t→0v(t) =
(
vx(t), vy(t))
. (2.80)

2.4. MOTI PIANI. 23x
y
OFigura 2.15: Velo ità istantanea in unmoto piano.Per quanto riguarda la direzione ed il verso della ve-lo ità istantanea, si noti he quando l'intervallo ditempo tende a zero il vettore spostamento, e quindiil vettore velo ità, diventa tangente alla traiettoria(un ragionamento simile è stato fatto prima dell'e-quazione (2.13) dis utendo il signi ato geometri odella velo ità istantanea di un moto vario sul gra- o spazio-tempo). La velo ità istantanea quindi è,in ogni istante, un vettore tangente alla traiettoria ome mostrato in gura 2.15, ove si è utilizzata latraiettoria della gura 2.14; si noti he la velo itàvaria di modulo da punto a punto, ma si mantienesempre tangente alla traiettoria.L'a elerazione si denis e an ora ome il rapportofra la variazione della velo ità e l'intervallo di tempo:
a =∆v
∆t=
(
∆vx∆t
,∆vy∆t
) (2.81)quindi, le omponenti dell'a elerazione sono uguali alle a elerazioni delle proiezioni di P sugliassi artesiani. Se l'a elerazione non è ostante l'equazione pre edente dà l'a elerazione mediaam; si denis e allora il vettore a elerazione istantanea:
am−−−−−→∆t→0
a(t) =(
ax(t), ay(t)) (2.82)ove ax(t) e ay(t) sono, an ora, le a elerazioni istantanee delle proiezioni di P sugli assi.2.4.3 S omposizione di un moto piano.Quanto visto nel paragrafo pre edente mostra ome durante il moto di P sul piano ove sia statodenito un sistema di riferimento di assi x e y, le proiezioni di P su questi assi ompiano moti i uispostamenti, velo ità ed a elerazioni sono le omponenti delle orrispondenti grandezze vettorialiper il moto di P .Questo suggeris e di des rivere il moto piano di P per mezzo dei moti delle sue proiezioni. La leggeoraria, la legge della velo ità e dell'a elerazione del moto di P sono quindi date dalle
x = x(t)y = y(t)
vx = vx(t)vy = vy(t)
ax = ax(t)ay = ay(t) .
(2.83)Il moto di P risulta quindi s omposto nei moti delle sue omponenti; l'operazione risulta vantaggiosaper hé le proiezioni di P si muovono sugli assi e quindi il loro moto è rettilineo. La des rizione diun piano viene quindi riportata alla piú sempli e des rizione di due moti rettilinei simultanei.2.4.4 Moto di un proiettile.Come aso esemplare della s omposizione di un moto piano si onsideri il moto di un punto ma-teriale P he venga lan iato dalla posizione iniziale individuata dal vettore OP0 = (x0, y0) onvelo ità iniziale v0 = (v0x, v0y); allora il moto di P viene s omposto in un moto orizzontale uni-forme on velo ità v0x e un moto verti ale uniformemente a elerato on a elerazione pari a g;

24 2. CINEMATICA DEL PUNTO MATERIALE.s egliendo ome sistema di riferimento due assi artesiani on l'asse delle ordinate diretto versol'alto le equazioni he des rivono il moto di P sono pertanto
x(t) = x0 + v0xt
y(t) = y0 + v0yt−1
2gt2
vx(t) = vx0vy(t) = v0y − gt
ax(t) = 0ay(t) = −g . (2.84)Ri avando t dalla omponente x della legge oraria
t =x− x0v0x
(2.85)e sostituendolo nella omponente y si trovay = y0 +
v0yv0x
(x − x0)−g
2v20x(x− x0)2 , (2.86) he è l'equazione artesiana della traiettoria. Si tratta di una parabola on la on avità volta versoil basso on verti e nel punto di oordinate (se ne las ia il al olo alla ura del lettore studioso):
V =
(
x0 +v0xv0yg
, y0 +v20y2g
)
. (2.87)Con l'armamentario teori o qui des ritto è possibile arontare lo studio dei diversi asi on ui puòpresentarsi il problema della lan io di un proiettile. Di seguito si esaminano due asi.Velo ità iniziale orizzontale. Si onsideri il aso di un punto materiale lan iato dal punto di oordinate (x0, y0) = (0, h) on velo ità orizzontale, ioè avente omponente y nulla, di modulo v0,v0
h
x
y
Figura 2.16: Proiettile on velo ità inizialeorizzontale. ome in gura 2.16. Le (2.84) per il aso presentediventano
x(t) = v0t
y(t) = h− 1
2gt2
vx(t) = v0vy(t) = −gt
ax(t) = 0ay(t) = −g
(2.88)Da queste equazioni è possibile determinare tuttele aratteristi he del moto. Il tempo di aduta sidetermina osservando he l'istante tc in ui il punto materiale raggiunge il suolo è quello per uivale y(tc) = 0, quindi dalla se onda del primo sistema si trovatc =
√
2h
g; (2.89)sostituendo questo valore nella prima equazione del primo sistema si trova il punto di impatto:
x(tc) = v0
√
h
2g; (2.90)

2.4. MOTI PIANI. 25Il valore ottenuto per il punto di impatto si sarebbe potuto ri avare an he dall'equazione dellatraiettoria (2.86).La velo ità di impatto è il modulo del vettore velo ità all'istante tc e quindi èv(tc) =
√
v2x(tc) + v2y(tc) =√
v20 + g2t2c =√
v0 + 2gh (2.91)Per v0 = 0m s−1 si ritrovano le soluzioni del moto di aduta libera, equazioni (2.32) e (2.34);naturalmente in quel aso il punto di impatto è l'origine.Lan io del proiettile dal suolo. Si onsideri ora il aso di un punto materiale lan iato dalsuolo on una velo ità he forma un angolo α on l'orizzontale, ome in gura 2.17. Le omponentidella velo ità iniziale sono pertanto
v0x = v0 cosαv0y = v0 senα , (2.92)e le (2.84) per questo aso diventano
x(t) = v0xt
y(t) = v0yt−1
2gt2
vx(t) = v0xvy(t) = v0y − gt
ax(t) = 0ay(t) = −g (2.93)
α
v0v0y
v0x x
y
Figura 2.17: Proiettile lan iato dal suolo.Per determinare l'istante tm in ui il pun-to materiale raggiunge l'altezza massima,si osservi he in tale istante la velo ità, es-sendo tangente alla traiettoria è orizzonta-le e quindi non ha omponente verti ale;deve pertanto valere
vy(tm) = v0y − gtm = 0 (2.94)da ui è immediato ri avaretm =
v0yg
. (2.95)L'altezza massima risultay(tm) = v0ytm −
1
2gt2m =
v20y2g
, (2.96)e si ha in orrispondenza dell'as issax(tm) =
v0xv0yg
. (2.97)L'istante tc in ui il punto materiale giunge al suolo è quello per ui vale y(ts) = 0 è quindiy(tc) = v0ytc −
1
2gt2c = 0 (2.98)equazione he, oltre a quella nulla (infatti all'istante t = 0 s il punto materiale si trova al suolo),ha la soluzione
tc =2v0yg
= 2tm . (2.99)

26 2. CINEMATICA DEL PUNTO MATERIALE.I tempi di salita e di dis esa di questo moto moto paraboli o sono uguali a quelli già trovato nel aso del moto di aduta libera, equazioni (2.37) e (2.40). Il punto di impatto è:x(tc) = v0xtc =
2v0xv0yg
. (2.100)Questo punto rappresenta la gittata del lan io.I valori ottenuti per l'altezza massima e la gittata si sarebbero potuti ri avare an he dall'equazionedella traiettoria (2.86). Si noti he l'as issa x(tc) del punto d'impatto è il doppio dell'as issa x(tm)di altezza massima, ome i si deve aspettare vista la simmetria della parabola.È interessante determinare per quale valore dell'angolo α, per un dato modulo v0 della velo itàiniziale, si ha la gittata massima. Per vederlo onviene determinare il massimo del quadrato dellagittata: questo è onsentito dal fatto he la gittata ha ertamente un valore positivo. Ri ordando he vale v20 = v20x + v20y, il quadrato della gittata x(tc) si può s rivere:x2(tc) =
4
g2v20xv
20y =
4
g2v20x(v
20 − v20x) = −
4
g2v40x +
4v20g2
v20x ; (2.101)questa è un'equazione quadrati a in v20x il ui gra o è una parabola volta verso il basso; il massimoquindi si ha in orrispondenza del verti e, ioè perv20x =
v202
(2.102)la gittata è quindi massima perv20x = v20y =
v202
←→ α = 45 . (2.103)Si sottolinea he quanto visto in questa sezione è valido solo nei limiti di validità del modello delpunto materiale e ove siano tras urabili tutti gli attriti.2.5 Moto ir olare uniforme.Un punto materiale he ompia un moto avente per traiettoria una ir onferenza he venga per orsa on velo ità di modulo ostante è detto moto ir olare uniforme. S egliendo ome origine del∆θ
b
b
O P1
P2
v1
v2
v1v2
∆v
Figura 2.18: La velo ità nel moto ir olare uniforme.sistema di riferimento il entro O del-la ir onferenza, la posizione del pun-to materiale è in ogni istante t indi-viduata dal vettore OP (t) di modulouguale al raggio r della ir onferenza.La velo ità è in ogni punto tangentealla traiettoria e quindi in ogni pun-to ambia direzione, pur onservandoil modulo ostante. Il vettore velo i-tà pertanto è ad ogni istante diversopoi hé due vettori aventi direzioni di-verse sono vettori diversi. Vi è quindiun vettore a elerazione media la uidirezione è uguale a quella del vettore ∆v, si veda la gura 2.18:
am =∆v
∆t. (2.104)

2.5. MOTO CIRCOLARE UNIFORME. 27Per la determinazione della a elerazione istantanea, si osservi he per ∆t → 0 l'angolo fra i duevettori v1 e v2 tende a zero e quindi ∆v diviene perpendi olare alla velo ità; in altre parole, nelmoto ir olare uniforme l'a elerazione è in ogni istante perpendi olare alla velo ità e, visto hela velo ità è tangente alla traiettoria, l'a elerazione è diretta verso il entro, per questo vienedetta a elerazione entripeta e indi ata on il simbolo ac. Il moto ir olare uniforme si ripetesempre uguale ad ogni giro; più pre isamente si di e he si tratta di un moto periodi o. È dettoperiodi o un moto per il quale esiste un intervallo di tempo detto periodo, ed indi ato on ilsimbolo T tale he valgaOP (t+ T ) = OP (t) ∀t (2.105)Il periodo del moto ir olare uniforme è l'intervallo di tempo impiegato da P a ompiere un giro ompleto della traiettoria; pertanto T deve essere uguale alla lunghezza della ir onferenza divisola velo ità, ri ordando he la lunghezza di una ir onferenza è uguale a π per il diametro, si trova
T =2πr
v. (2.106)Chiaramente il periodo si misura in se ondi.Una grandezza he si usa omunemente nella des rizione dei moti periodi i è la frequenza ν,denita ome il numero di volte in ui il moto periodi o si ripete diviso il tempo impiegato aper orrerlo. Quindi lo spostamento di un punto materiale he si muove per un tempo ∆t allavelo ità di modulo v è v∆t; dividendo tale spostamento totale per quello per orso in un periodo sitrova il numero di volte in ui il periodo viene per orso; tale numero è quindi
v∆t
2πr(2.107)per ottenere la frequenza o orre dividere questo numero per ∆t, quindi
ν =v
2πr=
1
T(2.108)la frequenza di un moto periodi o è quindi il re ipro o del periodo; l'unità di misura della frequenzaè detta hertz7, simbolo Hz, ed ha le dimensioni del re ipro o di un tempo.2.5.1 Coordinate angolari.Per des rivere il moto ir olare uniforme onviene introdurre delle oordinate angolari. Fissato unsemiasse delle as isse on origine nel entro O della ir onferenza, la posizione del punto materiale
P è denita dall'angolo θ formato dal semiasse di riferimento ed il vettore OP , si veda la gura2.19(a). L'angolo θ è denito ome il rapporto fra l'ar o sotteso ℓ ed il raggio r = ‖OP ‖ dellatraiettoria. Vale quindiθ =
ℓ
r(2.109)Con questa denizione, l'unità di misura di θ è il radiante e viene indi ato on il simbolo rad. Inquanto denito ome rapporto fra grandezze omogenee l'angolo è una grandezza adimensionale.Se il punto materiale si sposta dalla posizione P1 alla posizione P2, in modo simile a quanto fattoper lo spostamento lineare, si denis e, gura 2.19(b), spostamento angolare la quantità
∆θ = θ2 − θ1 =ℓ2r− ℓ1
r=
∆ℓ
r, (2.110)7Heinri h Rudolf Hertz (1857-1894), si o tedes o.

28 2. CINEMATICA DEL PUNTO MATERIALE.θ
ℓ
O
P
x(a) La oordinata θ.θ1
θ2 ℓ1
ℓ2
O
P1
P2
x(b) Lo spostamento angolare.Figura 2.19: Uso della oordinata angolare.ove ∆ℓ è la distanza per orsa lungo l'ar o di ir onferenza.Si denis e velo ità angolare la quantitàω =
∆θ
∆t; (2.111)usando la (2.110), si trova la relazione fra la velo ità angolare ω e quella lineare v:
ω =∆ℓ/r
∆t=
∆ℓ/∆t
r(2.112)quindi
ω =v
r. (2.113)Un moto ir olare uniforme è quindi aratterizzato dalla sua velo ità angolare; questa però misurasolo la rapidità ma non di e nulla del verso di rotazione. Per ovviare a iò si introdu e il vettore
ω
v
P
OFigura 2.20: Il vettore a elerazioneangolare.velo ità angolare ω: esso ha modulo dato dalla (2.113),direzione perpendi olare al piano del moto e verso dalquale si vede la rotazione svolgersi in senso antiorario.Ri ordando la denizione di prodotto vettoriale, si vede he risulta
v = ω ×OP . (2.114)È possibile mettere in relazione la velo ità angolare onil periodo; usando la (2.106) si trova infattiT =
2π
ω. (2.115)Per determinare la legge oraria del moto ir olare uniforme nella oordinata angolare θ si pro ede ome per il moto moto rettilineo uniforme. Sia t0 l'istante iniziale e t un qualsiasi istante su essivoallora, posto θ(t0) = θ0, l'equazione (2.111) si s rive
ω =θ(t)− θ0t− t0
⇐⇒ θ(t) = θ0 + ω(t− t0) ; (2.116)se è possibile porre t0 = 0 s la pre edente diventaθ(t) = θ0 + ωt . (2.117) he è la legge oraria del moto ir olare uniforme.

2.5. MOTO CIRCOLARE UNIFORME. 29∆θ
v1
v2
∆v
Figura 2.21: L'a elerazione entripeta.L'introduzione della oordinata angolare onsente, fra le altre ose,di ri avare in modo sempli e il modulo della a elerazione entripe-ta; si onsideri la dierenza di velo ità ∆v di gura 2.18, riportataingrandita in gura 2.21; le velo ità v1 e v2 sono perpendi olaririspettivamente ai vettori OP1 ed OP2, quindi quelle formano lostesso angolo he formano questi: ∆θ. Si onsideri ora il triango-lo isos ele formato da v1, v2 e ∆v e si divida la base ∆v in dueparti uguali mediante l'altezza (tratteggiata in gura); utilizzan-do la denizione di seno di un angolo, equazione (B.1), è possibiledeterminare metà della base e quindi
∆v
2= v sen ∆θ
2(2.118)ove v è il modulo della velo ità, ioè v = ‖v1‖ = ‖v2‖. Da questa relazione è possibile determinareil modulo di ∆v e quindi quello dell'a elerazione media:
∆v = 2v sen ∆θ
2⇐⇒ am =
∆v
∆t=
2v
∆tsen ∆θ
2(2.119)Per trovare l'a elerazione entripeta o orre porre ∆t → 0; si osservi però he se l'intervallo ditempo è pi olo è pi olo an he l'angolo ∆θ; vale quindi l'approssimazione (B.7) he, appli ata al aso presente, fornis e sen ∆θ
2≃ ∆θ
2(2.120)quindi, per ∆t→ 0, si trova
am−−−−−→∆t→0
ac =2v
∆t
∆θ
2= v
∆θ
∆t= vω (2.121)da ui, usando la (2.111), si trova
ac =v2
r. (2.122)Questa relazione, usando la (2.113) si può an he s rivere in termini della velo ità angolare:
ac = ω2r . (2.123)Se il moto ir olare non è uniforme si denis e l'a elerazione angolare α data daα =
∆ω
∆t. (2.124)Se α è ostante, il moto ir olare è uniformemente a elerato e, in perfetta analogia on il orrispondente moto rettilineo, la sua legge oraria angolare è data da
θ(t) = θ0 + ω0t+1
2αt2 , (2.125)ove θ0 e ω0 denotano la posizione e la velo ità angolari iniziali.Per determinare la relazione fra α e la orrispondente a elerazione lineare a si usa l'equazione(2.113):
α =∆ω
∆t=
1
r
∆v
∆t=a
r. (2.126)

30 2. CINEMATICA DEL PUNTO MATERIALE.2.5.2 Coordinate artesiane.Il moto ir olare uniforme, ome tutti i moti piani, può an he essere riferito a due assi ar-tesiani; tale des rizione ri hiede l'uso delle funzioni goniometri he des ritte nell'appendi e B.x
y
θ
b
O
P
xp
yp
Figura 2.22: Le oordinate artesiane.
Si onsideri un sistema di assi artesiani x e y onl'origine nel entro della ir onferenza. La posizionedel punto materiale P è allora individuata dalle om-ponenti del vettore OP = (xp, yp), le quali, si noti,sono an he le oordinate del punto P . Utilizzandole equazioni (B.3) si può s rivere
xp(t) = r cos θ(t)
yp(t) = r sen θ(t) .(2.127)Questa è l'equazione artesiana della legge oraria delmoto ir olare uniforme. Le due oordinate non so-no indipendenti, visto he P è vin olato a muoversisulla ir onferenza; detto in altro modo, le ompo-nenti del vettore OP devono essere tali da dare unvettore di modulo in ogni istante uguale al raggio;ri ordando (2.49), deve quindi valere:
x2p(t) + y2p(t) = r2 , (2.128) he è l'equazione della traiettoria ir olare. Si veda an he la prima delle (B.2).Utilizzando la (2.117), le (2.127) diventano
xp(t) = r cos[
ωt+ θ0]
yp(t) = r sen[ωt+ θ0]
.(2.129)Per determinare le omponenti del vettore velo ità è ne essario proiettarlo sugli assi artesiani.Osservando la gura 2.23(a), ove è indi ato on una fre etta l'angolo θ, si vede he
vx(t) = −v sen θ(t) = −ωr sen θ(t)vy(t) = v cos θ(t) = ωr cos θ(t) ,
(2.130)si noti he la omponente x della velo ità è negativa poi hé il verso è opposto a quello dell'assedelle as isse. Similmente per l'a elerazione, on riferimento alla gura 2.23(b), si trova
ax(t) = −a cos θ(t) = −ω2r cos θ(t) = −ω2x(t)
ay(t) = −a sen θ(t) = −ω2r sen θ(t) = −ω2y(t) ,(2.131)ove sono state utilizzate le (2.127). Le omponenti del vettore a elerazione sono quindi propor-zionali alle omponenti del vettore posizione, ma hanno segno opposto; questa relazione si puòs rivere in forma vettoriale:
a(t) = −ω2OP (t) . (2.132)

2.6. MOTO ARMONICO. 31x
y
θ
b
O
Pvx
vy
v
(a) La velo ità.x
y
θ
b
O
Pax
ay
ac
(b) L'a elerazione.Figura 2.23: Componenti artesiane.2.6 Moto armoni o.Si di e armoni o un moto unidimensionale (il ui studio viene inserito a questo punto dellatrattazione per il suo stretto rapporto on il moto ir olare uniforme) in ui il vettore posizioneOP ha in ogni istante modulo proporzionale al modulo del vettore a elerazione, stessa direzionema verso opposto. Fra posizione e a elerazione vale dunque la seguente relazione di proporzionalità
a(t) = −ω2OP (t) (2.133)ove ω è una ostante positiva detta pulsazione del moto armoni o. Per la pulsazione si è, omed'uso, utilizzato lo stesso simbolo he viene usato per la velo ità angolare del moto ir olareuniforme; questo è dovuto alla relazione he vi è fra i due moti he verrà dis ussa fra po he righe.La (2.133) è formalmente identi a alla pre edente equazione (2.132); si osservi però he quellades rive un moto rettilineo mentre questa des rive un moto piano. Tuttavia, se P si muove di moto ir olare ir olare uniforme, le sue proiezioni sugli assi artesiani sono moti rettilinei armoni i e lavelo ità angolare di quello è uguale alla pulsazione di questi. In altre parole, le leggi orarie dei motidi queste proiezioni non sono altro he le omponenti della legge oraria del moto ir olare uniformein forma artesiana ri avata sopra nelle equazioni (2.127) e (2.129); analogamente, la legge dellavelo ità è data dalle (2.130). Il moto armoni o quindi è un moto os illatorio attorno ad un punto entrale ed è periodi o on periodo uguale a quello del moto ir olare di ui è omponente.Quindi per un moto armoni o he si muova sull'asse delle x valgono:
x(t) = A cos[
ωt+ θ0]
v(t) = −Aω sen[ωt+ θ0]
a(t) = −Aω2 cos[
ωt+ θ0]
.
(2.134)La ostante A è detta ampiezza del moto armoni o e rappresenta la massima distanza di P nellasua os illazione attorno ad O; la ostante θ0, detta fase iniziale, stabilis e la posizione all'istante

32 2. CINEMATICA DEL PUNTO MATERIALE.iniziale t = 0 s.Il moto armoni o è periodi o e, ome per il moto ir olare uniforme, il suo periodo dipende dallapulsazione se ondo la seguente legge:T =
2π
ω. (2.135)La velo ità e l'a elerazione del moto armoni o variano in modo he il modulo dell'una sia nulloquando quello dell'altra è massimo e vi eversa. Per vederlo in modo sempli e ( ioè senza aron-tare le (2.134), he sono equazioni goniometri he) onviene riferirsi al moto ir olare uniforme e
x
b
b
b bb bb
O P1P2
−A Ava
ac
v
Figura 2.24: Il moto armoni o.
onsiderarne la proiezione sull'asse x. Si veda lagura 2.24 ove, per hiarezza, sono state disegnatela velo ità per la posizione P1 e l'a elerazione perla posizione P2. Si onsideri, per ssare le idee, unpunto materiale he all'istante t = 0 s si trova nelpunto di as issa A (il he, si noti, orrisponde aporre θ0 = 0), sia ioè x(0) = A. Risulta hia-ro he quando il punto materiale si trova in O, ilmodulo della velo ità è massima e l'a elerazioneè minima: questo a ade quando il punto mate-riale ha per orso 1/4 e 3/4 del suo moto periodi oe quindi per t = T/4 e per t = 3T/4. Vi eversa,quando il punto materiale si trova in ±A il modulodella velo ità è nullo, mentre quello dell'a elera-zione è massimo: questo a ade quando il puntomateriale ha per orso metà e l'intero periodo equindi per t = T/2 e t = T . Si osservi inoltre he i valori massimi si hanno quando viene proiettatol'intero vettore, ioè quando velo ità e a elerazione sono uguali a quelle del moto uniforme: talivalori massimi sono quindivM = v
(
T
4
)
= v
(
3
4T
)
= ωA , aM = v
(
T
2
)
= v(0) = ω2A . (2.136)2.7 Coordinate polari.Per ompletezza, in questa sezione si introdu ono le oordinate polari. Sono una oppia di oor-dinate he identi ano un punto sul piano alternative alle oordinate artesiane. Si denis onoθ
b P
ρ
x
y
OFigura 2.25: Le oordinate polari.ssando un'origine O e un semiasse x; la posizione di unpunto P è allora individuata dalla lunghezza ρ, modulo delvettore OP , e dall'angolo θ, orientato in senso antiorario,formato dal semiasse di riferimento e dal vettore OP . Ingura 2.25 sono stati rappresentati entrambi gli assi arte-siani per ragurare la relazione fra le oordinate polari e le oordinate artesiane aventi la stessa origine e lo stesso assedelle as isse:
xp = ρ cos θyp = ρ sen θ ,
ρ =√
x2p + y2p
θ = ar tg ypxp
.(2.137)Il sistema di riferimento polare è stato usato sopra per des rivere il moto ir olare uniforme permezzo delle grandezze angolari, in quel aso la oordinata ρ era ostante e uguale al raggio della

2.8. CINEMATICA DEI MOTI RELATIVI. 33 ir onferenza. In generale le oordinate polari sono usate quando la geometria del sistema si opresenta una simmetria per rotazioni. La determinazione delle omponenti dei vettori spostamento,velo ità ed a elerazione in oordinate polari è un eser izio istruttivo ma lungo; poi hé questoargomento può essere tralas iato dal lettore disinteressato senza pregiudi are la omprensione diquel he segue, se ne rinvia la trattazione all'appendi e C.2.8 Cinemati a dei moti relativi.La des rizione di un moto dipende dal sistema di riferimento pres elto. In questa sezione si ana-lizzano le relazioni fra le des rizioni dei moti rispetto a diversi sistemi di riferimento.Per rendere piú spedita e leggibile la su essiva esposizione, si è ritenuto di farla pre edere da dueparagra di prerequisiti matemati i, di ui viene an he fornita una breve dimostrazione. Il lettoresmaliziato potrà, eventualmente, saltarli e passare oltre.Rapidità di variazione nel tempo. In quel he segue si userà frequentemente la rapidità divariazione nel tempo di una grandezza; questo importante on etto è già stato in ontrato nelladenizione di velo ità e di a elerazione quindi non apparirà estraneo al lettore attento.Si onsideri una grandezza, s alare o vettoriale, A(t) dipendente dal tempo; sia ∆t un intervallo ditempo e sia ∆A la variazione di A(t) in tale intervallo di tempo, valga ioè∆A = A(t+∆t)−A(t) ; (2.138)allora si denis e rapidità di variazione di A(t) nell'intervallo ∆t il rapporto
∆A
∆t(2.139)Il rapporto osí denito dipende dalla s elta di ∆t; onviene pertanto denire, in modo similea ome si denis e la velo ità istantanea, la rapidità istantanea di variazione fa endo tenderel'intervallo ∆t a zero. Seguendo una notazione he risale a Newton, si denis e pertanto
∆A
∆t−−−−−→∆t→0
A(t) . (2.140)Come esempio dell'uso di questa notazione, si noti he si può s riverev(t) = ˙OP (t) , a(t) = v(t) , ω(t) = θ(t) , α(t) = ω(t) . (2.141)In quel he segue, in parti olare, è utile la determinazione della rapidità istantanea di variazioneper una grandezza he sia omposta dalla somma e dal prodotto di due grandezze.Siano quindi A(t), B(t), C(t) tre grandezze s alari o vettoriali tali he valga A(t) = B(t) + C(t),allora
∆A =[
B(t+∆t) + C(t+∆t)]
−[
B(t) + C(t)]
=
= B(t+∆t)−B(t) + C(t+∆t)− C(t) = ∆B +∆C ,(2.142)da ui, dividendo per ∆t, si ottiene
∆A
∆t=
∆B
∆t+
∆C
∆t(2.143)

34 2. CINEMATICA DEL PUNTO MATERIALE.e, per ∆t→ 0,A(t) = B(t) + C(t) . (2.144)Sia poi A(t) = B(t) · C(t), allora
∆A = B(t+∆t)C(t+∆t)−B(t)C(t) =
= B(t+∆t)C(t+∆t)−B(t+∆t)C(t) +B(t+∆t)C(t)−B(t)C(t) =
= B(t+∆t) [C(t+∆t)− C(t)] + [B(t+∆t)−B(t)]C(t) =
= B(t+∆t)∆C +∆BC(t) .
(2.145)Quindi∆A
∆t= B(t+∆t)
∆C
∆t+
∆B
∆tC(t) , (2.146)da ui, per ∆t→ 0, si ottiene
A(t) = B(t) C(t) + B(t)C(t) (2.147)Le relazioni ora trovate, valgono qualunque sia la natura, s alare o vettoriale, delle grandezze B(t)e C(t) e del tipo di prodotto (prodotto fra s alari, di un vettore per uno s alare, s alare o vettorialefra vettori). La notazione newtoniana qui introdotta verrà diusamente utilizzata in quel he segue.I versori rotanti. Parti olarmente importante per la dis ussione seguente è la determinazionedella rapidità di variazione nel tempo di un versore rotante. Per far iò si onsideri un puntoP
ρ
O
r
Figura 2.26: Il versore rotante ρ.
materiale P in moto ir olare uniforme on velo ità angola-re ostante intorno ad un entro O. Se r è il raggio dellatraiettoria, il vettore posizione può essere s ritto nella formaOP = rρ (2.148)ove ρ è il versore he punta dal entro al punto P ; nel tempo,evidentemente, ρ ruota attorno ad O. Si ri orda he il vettorevelo ità è dato in ogni istante dalla relazione (2.114) he sipuò ris rivere:
˙OP = ω ×OP (2.149)e quindi( ˙rρ) = ω × (rρ) −→ r ˙ρ = rω × ρ , (2.150)ove si è usato il fatto he r è ostante. Quindi
˙ρ = ω × ρ . (2.151)2.8.1 Moto relativo di due punti materiali.Si onsiderino due punti materiali P1 e P2 in moto rispetto al punto O on velo ità istantanee v1(t)e v2(t) e a elerazioni istantanee a1(t) e a2(t). Si onsideri il moto di P2 nel sistema di riferimentoin ui P1 è fermo. Il moto di P2 in tale sistema di riferimento è dettomoto relativo di P2 rispettoa P1. La posizione di P2 rispetto a P1 è dato dal vettorer ≡ P1P2 = OP2 −OP1 ; (2.152)

2.8. CINEMATICA DEI MOTI RELATIVI. 35r è detto posizione relativa di P2 rispetto a P1.La velo ità di P2 rispetto a P1 è detta velo ità relativa ed è data da v = r, e quindi
v = v2 − v1 . (2.153)Similmente l'a elerazione relativa di P2 rispetto a P1 è data da a = v e quindia = a2 − a1 . (2.154)2.8.2 Caso traslatorio.Piú in generale, si onsideri un sistema di riferimento S di origine O e assi artesiani x, y, z e unse ondo sistema di riferimento S′ in moto rispetto al primo di origine O′ e assi x′, y′, z′.
x
y
z
Oı
k
Pb
x′
y′
z′
O′ ı′
′
k′
Figura 2.27: I due sistemi S ed S′ ed il punto P .Siano inoltre ı, , k e ı′, ′, k′ i versori dei due sistemi. Si suppone inoltre he il moto di S′ rispettoa S sia puramente traslatorio; on questa aermazione si intende pre isamente dire he, ben hé ilmoto di O′ possa essere arbitrariamente a elerato rispetto a O, gli assi di S′ mantengono angoli ostanti rispetto agli assi di S. Per sempli ità di rappresentazione, si suppone ulteriormente hegli assi dei due sistemi siano paralleli (si veda la gura 2.27). Evidentemente questa supposizionenon altera la generalità dei risultati he si troveranno. In ogni istante t vale la relazione vettorialeOP (t) = OO′(t) +O′P (t) . (2.155)Considerando un intervallo di tempo ∆t, la pre edente equazione vale an he all'istante t+∆t, ioè:
OP (t+∆t) = OO′(t+∆t) +O′P (t+∆t) (2.156)Sottraendo membro a membro le due pre edenti si trova∆OP = ∆OO′ +∆O′P , (2.157)ove ∆OP = OP (t+∆t)−OP (t) è lo spostamento di P nel sistema S nell'intervallo di tempo ∆te, similmente, ∆OO′ e ∆O′P sono, rispettivamente lo spostamento di O′ rispetto nel sistema S elo spostamento di P nel sistema S′.

36 2. CINEMATICA DEL PUNTO MATERIALE.Ad illustrazione di quanto trovato, si onsideri il seguente esempio (si veda la gura 2.28). SiaO un osservatore sulla sponda di un ume e sia S il sistema di riferimento di origine in O. Siainoltre O′ un se ondo osservatore in navigazione su di una hiatta lungo il ume e sia S′ il suosistema di riferimento. I due osservatori onsiderano il moto della palla he un bambino in P1 stalan iando ad un altro bambino he si trova in Q1. Per O′ i due bambini sono fermi e si muove solo
P1
Q1
O′1
P2
Q2
O′2
O
b b
bFigura 2.28: Composizione di due movimenti simultanei.la palla, mentre per O i due bambini ompiono rispettivamente gli spostamenti P1P2 e Q1Q2. Lospostamento P1Q2 della palla rispetto a S è uguale allo spostamento P1P2 = Q1Q2 = O′1O
′2 della hiatta rispetto a S piú lo spostamento P1Q1 = P2Q2 della palla in S′. Non solo, ma si osservi he lo spostamento di P rispetto ad S sarebbe il medesimo se i due spostamenti P1P2 e P1Q1avvenissero su essivamente inve e he simultaneamente. Questo fatto, già notato da Galilei, èdetto prin ipio di indipendenza degli spostamenti simultanei e può essere enun iato nelmodo seguente.Se un punto materiale si muove simultaneamente di due moti diversi qualunque, lospostamento eettuato dal punto in un qualunque intervallo di tempo ∆t è uguale aquello he si avrebbe se il punto materiale eettuasse, in due intervalli di tempo ugualia ∆t ma fra loro su essivi, i due moti indipendentemente uno dall'altro.Questo prin ipio sta a fondamento della s omposizione di un moto in due moti indipendenti esimultanei: si pensi al moto paraboli o he è stato studiato s omponendolo in un moto rettilineouniforme orizzontale ed uno uniformemente a elerato verti ale.Usando l'equazione (2.144), dalla (2.155) si trova
˙OP (t) = ˙OO′(t) + ˙O′P (t) (2.158) he può essere ris rittavp(t) = vo′(t) + v′
p(t) , (2.159)detta legge di omposizione delle velo ità. Nella pre edente equazione sono stati usati isimboli:vp la velo ità di P nel sistema S;vo′ la velo ità di O′ nel sistema S;v′p la velo ità di P nel sistema S′.Si noti he si sta usando qui la onvenzione di indi are on v la velo ità nel sistema S, e quindirispetto a O, e on v′ la velo ità nel sistema S′, e quindi rispetto ad O′.Le velo ità quindi si ompongono ome gli spostamenti; on riferimento all'esempio della hiatta edella palla, la velo ità della palla per O è uguale alla velo ità della hiatta rispetto a O piú quelladella palla rispetto a O′.Sembra utile osservare he le pre edenti relazioni vettoriali (2.157) e (2.159) sono valide omponente

2.8. CINEMATICA DEI MOTI RELATIVI. 37per omponente:
∆xp = ∆xo′ +∆x′p
∆yp = ∆yo′ +∆y′p
∆zp = ∆zo′ +∆z′p
,
vpx(t) = vo′x(t) + v′px(t)
vpy(t) = vo′y(t) + v′py(t)
vpz(t) = vo′z(t) + v′pz(t)
(2.160)In modo perfettamente analogo si ottiene la relazione fra le a elerazioni nei due sistemi diriferimento. Dalla (2.159) si ottiene immediatamente, ri ordando la (2.144),vp(t) = vo′(t) + v′
p(t) ; (2.161) he può essere ris rittaap(t) = ao′(t) + a′
p(t) . (2.162) he è la legge di omposizione delle a elerazioni (nel aso traslatorio).2.8.3 Caso rotatorio.x
y
O ı
Pb
x′
y′
ı′′Figura 2.29: S′ rotante attorno a S.Nel aso rotatorio il al olo della rapidità di varia-zione dei vettori è ompli ato dal fatto he an he iversori del sistema S′ ruotano e quindi o orre tene-re onto della loro variazione. Si onsideri il aso in ui il sistema S′ abbia la stessa origine di S, ioè val-ga O = O′, ma sia un sistema rotante on velo itàangolare ostante. Per sempli ità di rappresentazio-ne, in gura 2.29 è rappresentato il aso parti olarein ui S′ ruota attorno al omune asse z; le equazioni he seguono non fanno aatto uso di tale ipotesi, o-stituis ono pertanto una trattazione ompletamentegenerale. Si onsiderino i termini l'equazione (2.155), s ritti usando i versori, ome esempli atonella (2.59):
OP = xpı+ yp+ zpk , OO′ = 0 , O′P = x′pı′ + y′p
′ + z′pk′ . (2.163)e se ne onsiderino le rapidità di variazione, ome nell'equazione (2.140). Il primo è sempli e:
˙OP = xpı+ yp+ zpk = vpx ı+ vpy + vpzk = vp ; (2.164)i versori ı, e k sono ssi, quindi vale ˙ı = ˙ = ˙ı = 0. Per il al olo della rapidità di variazione diO′P , è ne essario al olare la rapidità di variazione dei versori ı′, ′ e k′ he sono variabili; essesono date dalla (2.151):
˙O′P = x′pı′ + y′p
′ + z′pk′ + x′p
˙ı′ + y′p˙′ + z′p
˙k′ =
= v′pxı′ + v′py
′ + v′pzk′ + x′pω × ı′ + y′pω × ′ + z′pω × k′ =
= v′p + ω × (x′pı
′ + y′p′ + z′pk
′) =
= v′p + ω ×O′P .
(2.165)

38 2. CINEMATICA DEL PUNTO MATERIALE.La (2.158) pertanto divienevp(t) = v′
p(t) + ω ×O′P (t) . (2.166)Questa è la legge generale della relazione fra le velo ità di un punto materiale P in moto rispettoa un sistema di riferimento S ed un sistema S′ rotante rispetto a S.Nel aso parti olare in ui P sia fermo in S′, ioè valga v′p = 0 la pre edente equazione si ridu e alla(2.114) ome deve essere per un moto puramente rotatorio. Quindi l'equazione (2.166) ontieneun termine di traslazione di P in S′ più il termine di rotazione di S′ rispetto a SPoi hé nel aso in esame O = O′, nell'equazione (2.166) si sarebbe potuto sostituire O al posto di
O′. Si è preferito mantenere O′ per hé quando si onsidererà S′ in moto rototraslatorio rispettoa S, sarà ne essario integrare la (2.166) on la (2.159) e quindi risulterà onveniente aver distintoO′ da O.Passando alle a elerazioni si trova, pro edendo in modo analogo:
vp = vpx ı+ vpy + vpzk = apxı+ apy + apzk = ap
v′p = v′px ı
′ + v′py ′ + v′pzk
′ + v′px˙ı′ + v′py
˙′ + v′pz˙k′ =
= a′pxı′ + a′py
′ + a′pzk′ + v′pxω × ı′ + v′pxω × ′ + v′pzω × k′ =
= a′p + ω × (v′pxı
′ + v′py ′ + v′pzk
′) =
= a′p + ω × v′
p
˙ω ×O′P = ω × ˙O′P = ω × (v′p + ω ×O′P ) = ω × v′
p + ω × (ω ×O′P ) .
(2.167)Quindi
ap = a′p + 2ω × v′
p + ω × (ω ×O′P ) . (2.168)Resta inne da al olare il vettore ω × (ω ×O′P ); ri ordando la relazione (2.75), valeω × (ω ×O′P ) = (ω ·O′P )ω − ω2O′P , (2.169)ma ω e O′P sono vettori perpendi olari, quindi il loro prodotto s alare è nullo; rimane pertanto
ω × (ω ×O′P ) = −ω2O′P . (2.170)Mettendo nalmente tutto insieme, si trovaap(t) = a′
p(t) + 2ω × v′p(t)− ω2O′P (t) . (2.171)2.8.4 Caso rototraslatorio.Nel aso in ui il sistema S′ si muova di moto rototraslatorio rispetto al sistema S, o orre mettereinsieme i risultati trovati nei due paragra pre edenti. Per far iò, basta prendere le equazionidelle velo ità e degli spostamenti nel aso rotatorio, equazioni (2.166) e (2.171), e aggiungervi, lavelo ità vo′ e l'a elerazione ao′ ome visto nel aso traslatorio.Le formule generali sono quindi
vp(t) = vo′ + v′p(t) + ω ×O′P (t) , (2.172)
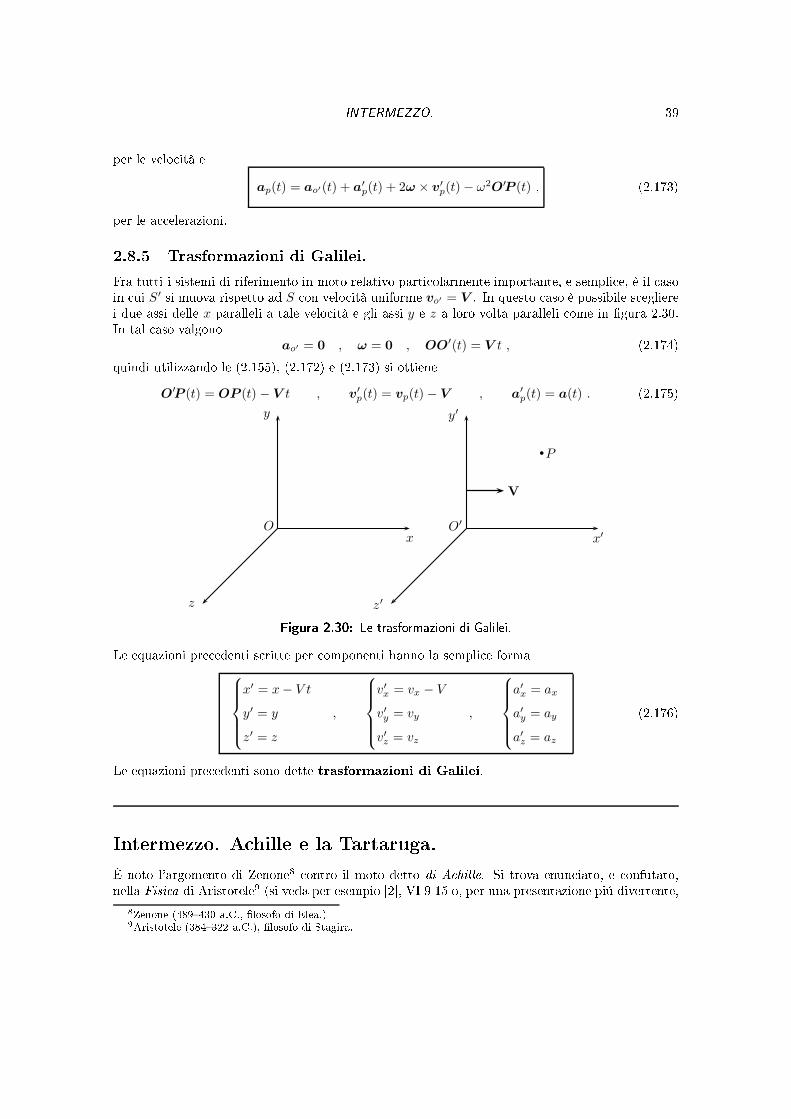
INTERMEZZO. 39per le velo ità eap(t) = ao′(t) + a′
p(t) + 2ω × v′p(t)− ω2O′P (t) , (2.173)per le a elerazioni.2.8.5 Trasformazioni di Galilei.Fra tutti i sistemi di riferimento in moto relativo parti olarmente importante, e sempli e, è il asoin ui S′ si muova rispetto ad S on velo ità uniforme vo′ = V . In questo aso è possibile s eglierei due assi delle x paralleli a tale velo ità e gli assi y e z a loro volta paralleli ome in gura 2.30.In tal aso valgono
ao′ = 0 , ω = 0 , OO′(t) = V t , (2.174)quindi utilizzando le (2.155), (2.172) e (2.173) si ottieneO′P (t) = OP (t) − V t , v′
p(t) = vp(t)− V , a′p(t) = a(t) . (2.175)
x
y
z
O
Pb
V
x′
y′
z′
O′
Figura 2.30: Le trasformazioni di Galilei.Le equazioni pre edenti s ritte per omponenti hanno la sempli e forma
x′ = x− V ty′ = y
z′ = z
,
v′x = vx − Vv′y = vy
v′z = vz
,
a′x = ax
a′y = ay
a′z = az
(2.176)Le equazioni pre edenti sono dette trasformazioni di Galilei.Intermezzo. A hille e la Tartaruga.È noto l'argomento di Zenone8 ontro il moto detto di A hille. Si trova enun iato, e onfutato,nella Fisi a di Aristotele9 (si veda per esempio [2, VI 9 15 o, per una presentazione piú divertente,8Zenone (489430 a.C., losofo di Elea.)9Aristotele (384322 a.C.), losofo di Stagira.

40 2. CINEMATICA DEL PUNTO MATERIALE.[10 pagine 47-49) e può essere riassunto ome segue.Si tratta di una gara fra A hille, il piú velo e degli umani, e una Tartaruga, il piú lento deglianimali: si stabilis e he la Tartaruga abbia un vantaggio; A hille dunque parte dal punto Amentre la Tartaruga dal punto B, si veda la gura 2.31. È hiaro he, prima di raggiungerela Tartaruga, A hille deve giungere nel punto B da ui la Tartaruga è partita; nel frattempo laTartaruga si è spostata in un nuovo punto C; ora, nuovamente, A hille prima di raggiungere laTartaruga deve giungere in C, mentre la Tartaruga si è spostata in un nuovo punto D, e osí via.È hiaro he il pro esso ri hiede un numero innito di passi su essivi e quindi un tempo innito.ℓ0 ℓ1 ℓ2
A B C D · · ·xFigura 2.31: A hille e la Tartaruga.Questo argomento appare logi amente orretto; eppure la omune esperienza in-segna he hi si muove piú velo ementeraggiunge sempre, e in un tempo nito, hi si muove piú lentamente. Vi è quindiun onitto insanabile fra iò he sugge-ris e l'intelletto e iò he omuni ano inostri sensi. In altre parole, sembra he la realtà non sia onos ibile mediante il ragionamento e lalogi a, ma solo osservabile mediante i sensi. Zenone, nel V se olo a. C., è stato il primo a metterequesto problema in tutta la lu e he merita.Evidentemente la s operta zenoniana impedis e ogni attività s ienti a intesa ome des rizione difenomeni noti e previsione di fenomeni an ora ignoti. Per non arrestare il progresso s ienti o è,quindi, ne essario inventare un metodo per ra ordare la apa ità logi a ed i sensi. Tale metodo èfornito dalla matemati a e dai modelli he essa ostruis e. Se Zenone voleva portare all'assurdo il on etto di moto, e on esso, quello di divenire, qui si propone una lettura diversa: la Natura è o-nos ibile dall'intelletto solo per mezzo della matemati a; l'intelletto las iato a sé stesso si inganna.E o per hé l'umanità ha dovuto inventare le teorie: per fornire all'intelletto lo strumento per la onos enza razionale del fenomeno; senza la matemati a l'intelletto non ha il ontrollo su iò he onos e e rimane sottoposto agli inganni zenoniani.In eetti la teoria sviluppata nella sezione 2.3.1 fornis e l'armamentario teori o ne essario a deter-minare a quale istante e in quale punto A hille raggiunge la Tartaruga; il lettore studioso eseguatale eser izio. Qui si vuole provare he è possibile ostruire uno strumento matemati o he on-senta di sommare tutti gli inniti intervalli di tempo in ui A hille ompie la sua innita rin orsae ottenere il medesimo risultato.Per farlo è ne essario ostruire la matemati a adatta. Sia x sia un qualunque quantità positiva maminore di 1, sia ioè 0 < x < 1. Si vuole al olare la somma innita
S = x+ x2 + x3 + x4 + · · · ; (2.177)ra ogliendo fra tutti gli addendi una x si ottiene:S = x(1 + x+ x2 + x3 + x4 + · · · ) = x(1 + S) ←→ S = x(1 + S) . (2.178)Risolvendo questa sempli e equazione di primo grado si determina S:
S =x
x− 1. (2.179)Questo sempli e al olo funziona per hé x < 1 e quindi ogni potenza è minore della pre edente;quello he si sta fa endo è sommare inniti termini sempre piú pi oli in modo tale he la lorosomma sia nita. Si osservi he la (2.179) non vale se x > 1 poi hé in tale aso ogni addendo èpiú grande e quindi la somma non può he essere innita, e quindi priva di senso; altrettanto po osensato risulta il aso on x = 1 in ui il denominatore della (2.179) si annulla.

INTERMEZZO. 41Questo metodo per sommare serie di inniti addendi sempre piú pi oli è pre isamente quello heserve per risolvere il problema di A hille. Sia infatti ℓ0 il vantaggio iniziale della Tartaruga suA hille, sia ioè la distanza he separa i punti A e B, siano inoltre va e vt le velo ità di A hillee della Tartaruga rispettivamente, on va > vt. Sia poi t1 l'istante in ui A hille giunge in B; è hiaro he valet1 =
ℓ0va
; (2.180)in questo tempo la Tartaruga è giunta in C per orrendo la distanzaℓ1 = vtt1 = vt
ℓ0va
. (2.181)Il tempo impiegato da A hille per giungere in C da B è quindit2 =
ℓ1va
=ℓ0va
vtva
; (2.182)durante il tempo t2 la Tartaruga è giunta in D per orrendo la distanzaℓ2 = vtt2 = vt
ℓ0va
vtva
, (2.183)il tempo impiegato da A hille per giungere in D da C è quindit3 =
ℓ2va
=ℓ0va
(
vtva
)2
, (2.184)e osí via. Il tempo totale t impiegato da A hille a raggiungere la Tartaruga è quindi dato dallasomma innitat = t1 + t2 + t3 + · · · =
=ℓ0va
+ℓ0va
vtva
+ℓ0va
(
vtva
)2
+ℓ0va
(
vtva
)3
+ · · · =
=ℓ0va
[
1 +vtva
+
(
vtva
)2
+
(
vtva
)3
+ · · ·]
.
(2.185)Questa espressione può essere ris ritta nella format =
ℓ0va
(1 + S) (2.186)ove S è un somma di potenze del tipo di (2.177) on x = vt/va; poi hé vt < va vale vt/va < 1, èquindi possibile utilizzare la (2.179) ottenendot =
ℓ0va
(
1 +vt/va
1− vt/va
)
=ℓ0va
(
1 +vt
va − vt
)
=ℓ0va
vava − vt
=ℓ0
va − vt(2.187) he è il risultato orretto in a ordo il dato sensoriale.Quindi l'intelletto ha inventato una strumento, le somme innite, he onsente di superare il pro-blema logi o posto da Zenone. Si noti he, se ondo questa interpretazione, il problema zenonianonon è risolto; in eetti qui non si sostiene he sia ne essario arontare la onos enza del mondofenomeni o usando la matemati a. Si potrebbe anzi sostenere, non senza qual he ragione, hel'idea stessa di una somma innita sia priva di senso, gurarsi determinarne il risultato; e he lamanipolazione disinvolta della somma S vista sopra è solo un tru o formale. Però, se si a etta lostrumento, on tutti i suoi limiti sia formali he sostanziali, e se lo si usa nel rispetto di tali limiti,esso produ e un risultato in a ordo on il dato sperimentale.

Capitolo 3Dinami a del punto materiale.Se la inemati a si o upa di des rivere il moto, la dinami a è lo studio del moto a partire dalle ause he lo determinano; suo s opo è quindi la determinazione della legge oraria onos endo le ause del moto. Con il termine ausa, in questo ontesto, i si riferis e ad una grandezza vettoriale he prende il nome di forza e he verrà introdotta in quel he segue.3.1 La massa inerziale.È giunto il momento di dare la denizione operativa di massa di un punto materiale. La denizionedi massa qui presentata è dovuta a Ma h1, si veda [11 pagina 236. Si onsiderino due puntimateriali P1 e P2 he ostituis ano un sistema isolato, ioè he interagis ano solo tra di loro senzainterferenze esterne. La natura dell'interazione non ha al una importanza; potrebbe trattarsi peresempio di due alamite he si attirano o si respingono o altro. Qui, per ssare le idee, si onsiderail aso di due punti materiali appoggiati su un tavolo (su ientemente lis io per hé ogni attritopossa essere tras urato) he si spingono l'un l'altro per mezzo di una molla inizialmente ompressa:allo s attare della molla P1 e P2 si mettono in movimento rispettivamente on a elerazioni a1 ea2. Eseguendo l'esperimento ora des ritto, si osservano i seguenti risultati1. i vettori a1 e a2 hanno la stessa direzione ma versi opposti;2. quali he siano le ondizioni sperimentali (per esempio indipendentemente dal tipo di mollao dal fatto he sia piú o meno ompressa), il rapporto fra i moduli delle due a elerazioni è ostante e dipende solamente dai punti materiali s elti per fare l'esperimento.Chiamando m12 tale ostante, si può quindi s rivere
a1a2
= m12 . (3.1)Qual he informazione in piú sulla ostante m12 si ottiene osservando he valea1a2
=
(
a2a1
)−1
, (3.2)da ui seguem12 =
1
m21. (3.3)1Ernst Waldfried Josef Wenzel Ma h (18381916), si o e losofo austria o.42

3.1. LA MASSA INERZIALE. 43Ripetendo l'esperimento on il punto materiale P1 ed un terzo punto materiale P3, quindi on P2e P3; si ottengono le relazionia1a3
= m13 ,a2a3
= m23 , (3.4)quindi, poi hé valea1a2
=a1a3· a3a2
=a1a3
:a2a3
, (3.5)si ottienem12 =
m13
m23. (3.6)Si osservi ora he le proprietà (3.3) e (3.6) sono veri ate se la ostante m12 è il rapporto di due ostanti positive attribuibili rispettivamente a P1 e P2; si pone quindi
m12 =m2
m1, (3.7)e quindi l'equazione (3.1) può essere s ritta:
a1a2
=m2
m1. (3.8)La ostante positiva m asso iata a ias un punto materiale, denita operativamente ome sopra,è detta massa inerziale del punto materiale in questione.Per determinare il valore numeri o da attribuire alla massa inerziale di ias un punto materiale losi onfronta, per mezzo della (3.8), on la massa unitaria di riferimento denita al paragrafo 1.2.3:se nell'esperimento des ritto sopra P1 è il orpo di massa unitaria, ioè se si pone m1 = 1kg, e P2è un qualunque altro punto materiale di ui si voglia determinare la massa m2, si trova:
m2 =a1a2m1 =
a1a2
. (3.9)In questo modo la misura della massa è ottenuta tramite la misura di due a elerazioni. Rimane osí denita la massa di qualunque punto materiale.Tenendo presente he, ome visto sopra, le due a elerazioni a1 e a2 hanno versi opposti, l'equazione(3.8) può essere ris ritta in nella seguente forma vettorialem1a1 = −m2a2 . (3.10)L'aggettivo inerziale serve a distinguere la massa di ui si tratta qui dalla massa gravitazionale hesi verrà trattata in un apitolo su essivo. Per sempli ità, dove non vi sia onfusione, d'ora in poila massa inerziale si hiamerà sempli emente massa.Il fatto di aver s elto la massa ome ostante positiva è ompletamente arbitrario. In eetti il on etto di massa è stato introdotto attraverso l'equazione (3.7) he di e he il rapporto dellemasse di due punti materiali è la ostante positiva m12 ( he è positiva in quanto rapporto deimoduli di due vettori, he sono due quantità positive), quindi le due masse devono avere lo stessosegno; si sarebbe quindi potuto s egliere il segno negativo. Il segno positivo per le masse è quindi onvenzionale.Si veri a sperimentalmente he se P1 e P2 vengono uniti insieme a ostituire un terzo puntomateriale P3, la massa risultante è la somma delle masse dei ostituenti, ioè valem3 = m1 +m2 ; (3.11)in questo senso si di e he la massa è una grandezza additiva.

44 3. DINAMICA DEL PUNTO MATERIALE.3.2 La legge fondamentale della dinami a.Se un punto materiale P di massa m in un erto istante possiede l'a elerazione a, si di e he suP in questione agis e la forza F denita dall'equazione
F = ma . (3.12)L'unità di misura della forza è detta newton, simbolo N; la forza di 1N è quella he agendo suun punto materiale avente la massa di 1 kg produ e l'a elerazione di 1m s−2. Le dimensioni dellaforza dunque sono[F ] = [t]−2[l]1[m]1 . (3.13)Poi hé la massa è positiva, la forza agente su di un punto materiale e l'a elerazione prodotta sonovettori aventi la stessa direzione e lo stesso verso.È un fatto sperimentale he se due forze F1 ed F2 agis ono simultaneamente su di un puntomateriale P di massa m l'a elerazione di P è la somma delle a elerazioni prodotte da ias unadelle due forze (si ri ordi an he il prin ipio di indipendenza degli spostamenti simultanei vistosopra, e l'equazione (2.162) he ne è una onseguenza)
a = a1 + a2 =F1
m+
F2
m. (3.14)Dalla (3.12), si ri ava
a =F
m(3.15)e quindi, per onfronto on la (3.14), si ottiene
F = F1 + F2 . (3.16)L'equazione pre edente si generalizza fa ilmente al aso di piú forze ed esprime il prin ipio disovrapposizione he può essere enun iato ome segue.Se su di un punto materiale agis ono simultaneamente piú forze, esso si muove omese su di esso agisse un'uni a forza data dalla somma vettoriale delle forze agenti.L'equazione (3.12), he è la denizione di forza, è lo strumento fondamentale per la determina-zione del moto nel aso generale. Infatti, una volta he siano note le forze agenti su di un puntomateriale di massa m, la sua a elerazione può essere fa ilmente determinata. Dalla onos enzadell'a elerazione è possibile risalire al tipo di moto ed alla legge oraria2.Vista la sua importanza, la (3.12) è nota on il nome di legge fondamentale della dinami a.3.3 Prin ipio di azione e reazione.Si onsiderino nuovamente i punti materiali P1 e P2 he interagis ono solo fra loro. La denizionedi forza data nella sezione pre edente permette di pre isare la natura della loro interazione; siindi hi on F12 la forza he agis e su P1 (dovuta a P2) e on F21 la forza he agis e su P2 (dovutaa P1); allora, per la (3.12), devono valereF12 = m1a1 , F21 = m2a2 . (3.17)2Questa aermazione è vera in tutte le situazioni si amente rilevanti; tuttavia la determinazione della legge delmoto nel aso generale ri hiede le te ni he dell'analisi matemati a. Qui si aronteranno solo i asi piú sempli i.

3.4. SISTEMI DI RIFERIMENTO INERZIALI. 45Ri ordando la (3.10), le forze on ui P1 e P2 interagis ono devono veri are la relazioneF12 = −F21 , (3.18) ioè sono uguali in modulo e direzione ma hanno versi opposti.Questa equazione esprime il ontenuto del prin ipio di azione e reazione3.Se due punti materiali interagis ono fra di loro, la forza on ui il primo agis e sulse ondo è uguale ed opposta a quella on ui il se ondo agis e sul primo.Nel aso in ui a interagire siano piú punti materiali il prin ipio si appli a a ias una delle oppieinteragenti. Per esempio, se vi sono tre punti materiali P1, P2 e P3 he interagis ono, valgono lerelazioni
F12 = −F21 , F13 = −F31 , F23 = −F32 (3.19)ove F12 è la forza on ui P2 agis e su P1, F21 quella on ui P1 agis e su P2 e via di seguito.3.4 Sistemi di riferimento inerziali.La legge fondamentale della dinami a, equazione (3.12), ha un importante limite di validità. Per apirlo, si onsideri la situazione seguente. Si supponga di stare viaggiando a bordo di un treno he si muova di moto rettilineo ed uniforme e he una pi ola pallina venga ollo ata, on velo itànulla, sul pavimento del vagone. Si supponga ora he improvvisamente il treno rallenti; i viaggiatorivedono la pallina mettersi in movimento nel verso del moto del treno. Si noti he sulla pallinanon ha agito al una forza, eppure essa, he era ferma, ha omin iato a muoversi on una velo itàdiversa da zero: la pallina ha quindi a elerato. A elerare senza essere sottoposti all'azione diuna forza è una hiara violazione della (3.12).Si onsideri ora la medesima situazione dal punto di vista di un viaggiatore he sia fermo sulmar iapiede della stazione: egli vede le ganas e dei freni he stringono le ruote del vagone ed iltreno rallentare; la pallina, inve e, non sottoposta a forze, la vede ontinuare il suo moto rettilineouniforme on una velo ità maggiore di quella del treno, he ha rallentato. Per l'osservatore sulmar iapiede, quindi, non vi è al un problema: il vagone, sottoposto alla forza frenante, rallenta,mentre la pallina, non sottoposta ad al una forza, ontinua il suo moto uniforme. Per lui, quindi,la (3.12) è perfettamente valida.I due osservatori, e quindi i sistemi di riferimento, non sono equivalenti dal punto di vista dinami o;diventano non equivalenti nel momento in ui quello sul treno è sottoposto ad a elerazione.Dall'esempio visto, si può on ludere he la legge fondamentale della dinami a vale solo rispettoai sistemi di riferimento non a elerati. Questi sono detti sistemi di riferimento inerziali.Per aratterizzare i sistemi di riferimento inerziali si fa uso del seguente prin ipio d'inerzia.Un punto materiale non sottoposto a forze ha velo ità v ostante.E quindi o è fermo ( aso di velo ità ostante nulla) o si muove di moto rettilineo uniforme. Inquesto modo si denis ono inerziali i sistemi di riferimento per i quali vale il prin ipio d'inerzia.I sistemi di riferimento per i quali non vale, ome per esempio i sistemi a elerati visti sopra, sidi ono sistemi di riferimento non inerziali.In quel he segue, salvo diverso avviso, si supporrà sempre di trovarsi in un sistema di riferimento3La terminologia azione e reazione è tradizionale ma può essere fuorviante. Qui la parola `azione' non ha ilsigni ato omune: non esiste l'opposto di un'azione ome quella di leggere un libro. Per azione e reazione siintendono delle forze.

46 3. DINAMICA DEL PUNTO MATERIALE.inerziale.Il prin ipio d'inerzia è stato formulato per primo da Galilei nellaGiornata Se onda del suo Dialogo.4A questo punto è ne essario hiedersi si esistano dei sistemi inerziali. Per rispondere a questadomanda è ne essario hiedersi se esistano orpi non a elerati; infatti i sistemi inerziali sonosistemi di riferimento non a elerati; quindi se si trovasse un orpo non a elerato si potrebbeutilizzarlo ome origine di un sistema di riferimento inerziale. Quindi la domanda se esistanosistemi di riferimento inerziali è equivalente alla domanda se esistano orpi non a elerati e ioè:esistono orpi non soggetti a forze. Sfortunatamente la risposta è no. Infatti sulla Terra ogni orposi muove del moto di rotazione della Terra attorno al proprio asse; tale moto è ir olare e quindia elerato. La Terra a sua volta è soggetta alla forza gravitazionale ( he verrà studiata in un apitolo su essivo) del Sole. Il Sole a sua volta sente la forza gravitazionale delle stelle piú vi inee osí via. Quindi non esistono sistemi di riferimento inerziali. A rigore, pertanto, la situazione in ui l'equazione (3.12) è valida non si presenta mai.Tuttavia, esistono molti sistemi di riferimento rispetto ai quali l'equazione (3.12) è valida onun'e ellente approssimazione. Per esempio la forza ui è sottoposto il Sole è estremamente pi olae quindi, per la maggioranza delle appli azioni, esso è un ottimo sistema inerziale. La Terra stessaè un buon sistema inerziale entro limiti di approssimazione a ettabili in molte situazioni. In ogni aso quando nel seguito si parlerà di sistema inerziale si intenderà sempre riferirsi ad un sistema diriferimento la ui approssimazione ad un sistema inerziale sia ben oltre le possibilità degli strumentidi misura.3.5 I prin ipi di Newton.La legge fondamentale della dinami a, il prin ipio di azione e reazione e il prin ipio d'inerzia ompaiono per la prima volta nella forma qui enun iata all'inizio, dopo al une denizioni, dellafondamentale opera di Newton5 Philosophiae Naturalis Prin ipia Mathemati a6. Newton hia-ma i tre prin ipi axiomata sive leges motus, ioè assiomi o leggi del moto. Questi gli enun iatinewtoniani.71. Ogni orpo persevera nel suo stato di quiete o di moto rettilineo ed uniforme, n hénon è ostretto a mutare quello stato da forze impresse.2. Il mutamento del moto è proporzionale alla forza motri e impressa e avviene se ondola linea retta lungo la quale tale forza è impressa.3. La reazione è sempre uguale e ontraria all'azione: o le azioni re ipro he di due orpi sono sempre uguali e dirette in direzioni ontrarie.Le tre leggi sono seguite da un orollario in ui si aerma he se due forze agis ono simultaneamentela loro risultante si ottiene on la regola del parallelogramma, ioè quello he qui è stato hiamatoprin ipio di sovrapposizione.4Si veda, per esempio, [6, pagg. 179-182.5Isaa Newton (1643-1727) s ienziato inglese.6Si veda [12.7Di seguito si riporta il testo latino originale delle leges e del su essivo orollarium.Lex I. Corpus omne perseverare in statu suo quies endi vel movendi uniformiter in dire tum, nisi quatenus a viribusimpressis ogitur statum illum mutare.Lex II. Mutationem motus proportionalem esse vi motri i impressae et eri se undum lineam re tam qua vis illaimprimitur.Lex III. A tioni ontrariam semper et aequalem esse rea tionem: sive orporum duorum a tiones in se mutuo semperesse aequales et in partes ontrarias dirigi.Corollarium I. Corpus viribus oniun tis diagonalem parallelogrammi eodem tempore des ribere, quo lateraseparatis.

3.6. FORZA PESO. 473.6 Forza peso.Si è visto pre edentemente he tutti i punti materiali adono verso il entro della Terra on lastessa a elerazione. A questa a elerazione orrisponde una forza ui si dà il nome di forza pesoo sempli emente peso. Il peso di un punto materiale è dunque la forza on ui esso è attratto dallaTerra. Indi ando on g l'a elerazione di gravità, il peso di un punto materiale di massa m è datodaFp = mg (3.20)ed è sempre diretto verso il entro della Terra.3.6.1 Piano orizzontale lis io.È già stato fatto lo studio del moto di aduta libera, ioè sotto l'azione del solo peso; qui si vuoleesaminare he a ade quando il punto materiale viene in ontatto on super i he ne limitano lalibertà di movimento. Come primo esempio si onsidera il punto P di massam vin olato a muoversisu di un piano orizzontale lis io, ioè tale he siano tras urabili le forze di attrito. Se P è postosul piano orizzontale on velo ità nulla, l'esperienza insegna he ontinuerà a starvi immobile. Peril prin ipio d'inerzia, quindi, su P agis e una forza totale nulla; pertanto il piano orizzontale devesviluppare una forza uguale ed opposta alla forza peso. Tale forza è detta reazione vin olare e,nel aso vin olo lis io, viene indi ata on il simbolo N . Il sostantivo reazione ri hiama il prin ipiodi azione e reazione: il piano agis e sul punto materiale on una forza uguale e ontraria a quella on ui il punto materiale agis e su di esso; l'aggettivo vin olare sottolinea il fatto he il pianoorizzontale ostituis e un vin olo he il punto materiale non può oltrepassare.
N
Fp
P
x
y
(a) Il aso del piano orizzontale. N
P(b) Il aso dellasuper ie urva.Figura 3.1: La reazione vin olare nel aso vin olo lis io.Vale quindi la relazioneFp +N = 0 . (3.21)Se, ome in gura 3.1(a), i si riferis e a un sistema di assi artesiani x e y, on l'asse delle ordinatevolto verso l'alto, la forza peso ha omponenti Fp = (0,−mg); la pre edente equazione può quindiessere s ritta nella forma seguente
Nx = 0Ny = mg .
(3.22)Quindi la reazione vin olare di una super ie lis ia è perpendi olare alla super ie. Questo risultatoè vero an he nel aso in ui la super ie he ostituis e il vin olo non sia piana ome mostrato ingura 3.1(b).

48 3. DINAMICA DEL PUNTO MATERIALE.3.6.2 Piano in linato lis io.Si onsideri ora il aso del punto materiale P vin olato a muoversi su di un piano in linato di un an-golo α rispetto all'orizzontale, privo di attrito, di lunghezza ℓ, base b e altezza h, ome in gura 3.2.α
N
Fp
F
P
h
b
ℓ
x
y
Figura 3.2: Il piano in linato.
Su P agis ono quindi due forze, la forza peso Fp,diretta verso il basso, e la reazione vin olare N ,perpendi olare al piano in linato. Le due forzenon hanno la stessa direzione e quindi non si fannoequilibrio; la risultante F è data daF = Fp +N . (3.23)Il piano in linato, ome nel aso orizzontale, eser itauna forza uguale e ontraria a quella on ui il puntomateriale preme su esso. Tale forza è la omponentedel peso perpendi olare al piano.Rispetto ad un sistema di riferimento he abbia o-me asse delle as isse una retta gia ente sul pianoe ome asse delle ordinate una perpendi olare alpiano, le forze agenti hanno omponenti
Fp = (Fpx, Fpy) , N = (0, N) . (3.24)Quindi, se la reazione vin olare è uguale e ontraria alla omponente della forza peso he premesul piano, deve valere N = −Fpy e quindi l'equazione (3.23) s ritta per omponenti diventa
Fx = Fpx
Fy = Fpy +N = 0 .(3.25)Per determinare le omponenti della forza peso si osservi he l'angolo formato da Fp e laperpendi olare al piano è uguale all'angolo α formato dal piano in linato e l'orizzontale; valequindi8
Fpx = Fp senα = mg senα = mgh
ℓ, Fpy = −Fp cosα = −mg cosα = −mgb
ℓ. (3.26)Appli ando la legge fondamentale della dinami a (3.12) e usando le pre edenti equazioni si ottiene
ax =Fx
m=h
ℓg
ay =Fy
m= 0 .
(3.27)Il punto materiale quindi si muove lungo il piano in linato di moto uniformemente a elerato ona elerazione ax direttamente proporzionale alla pendenza h/ℓ del piano in linato. La reazionevin olare del piano è data daN = mg
b
ℓ. (3.28)Se il punto materiale parte, on velo ità iniziale nulla, dalla sommità del piano in linato, il modulo
v della velo ità on ui arriva al fondo, dopo aver per orso lo spostamento ℓ, può essere al olatausando la (2.28):v =
√
2h
ℓgℓ =
√
2gh . (3.29)8Alle relazioni (3.26) si arriva an he senza l'utilizzo delle funzioni goniometri he osservando he il triangolorettangolo formato da Fp ed F e quello formato dal piano in linato sono simili.

3.7. FORZA DI ATTRITO RADENTE. 49La velo ità nale quindi non dipende dalla pendenza del piano in linato ma solo dalla sua altezza;tale velo ità è uguale alla velo ità on ui giunge al suolo un orpo in aduta libera da un'altezzah, equazione (2.34). Il tempo t di dis esa lungo il piano in linato è
t =v
ax=
√2gh
gh
ℓ
= ℓ
√
2
gh. (3.30)Si osservi he, ssata l'altezza h, l'a elerazione è inversamente proporzionale a ℓ, mentre il tempodi dis esa ne è direttamente proporzionale. Quindi, all'aumentare di ℓ, il punto materiale subis eun'a elerazione minore per un tempo maggiore, in modo tale he la velo ità nale (3.29) restiinvariata.Il piano in linato onsente di sollevare una massa di un'altezza h appli ando una forza minore delpeso della massa in questione; infatti per portare un punto materiale di massa m dalla base allasommità di un piano in linato basta appli are una forza di modulo almeno uguale alla F di gura3.2, e quindi tanto minore quanto è pi olo α. Per questo motivo il piano è spesso onsideratouna ma hina, ioè un dispositivo in grado di alleviare o omunque sempli are il lavoro umano.Poi hé si tratta di una ma hina elementare non ulteriormente s omponibile, viene dettama hinasempli e. Nel seguito si studieranno altre ma hine sempli i.3.7 Forza di attrito radente.Se la super ie non è lis ia o orre tenere onto della forza di attrito radente9. In questo aso lasuper ie è detta s abra. Questa situazione è quella on ui si ha sempre a he fare nelle situazionireali: per quanto una super ie possa essere levigata, l'attrito non è mai nullo; sapere ome tenerne onto è quindi importante se si vuole he la des rizione teori a del moto sia in buon a ordo onl'osservazione sperimentale.L'attrito radente fra due super i è dovuto alle forze intermole olari he si eser itano nei punti in ui le due super i sono in ontatto molto stretto.La forza di attrito si manifesta in due situazioni he vengono qui analizzate separatamente.3.7.1 Attrito radente stati o.Si onsideri un punto materiale P di massa m fermo su di una super ie orizzontale s abra e si
N
Fp
FPFs
R
Figura 3.3: L'attrito radentestati o.appli hi su di esso un forza orizzontale F . Se il modulo della forzaF è troppo pi olo il punto materiale P resta fermo per hé la su-per ie eser ita una forza di attrito Fs, detto stati o, he si opponeal moto di P . In questo aso, su P agis ono quattro forze: il pesoFp, la reazione vin olare perpendi olare N , la forza F e la forzadi attrito stati o Fs; poi hé P resta fermo deve valere
Fp +N + F + Fs = 0 (3.31)Ris rivendo questa relazione vettoriale per omponenti (in gura3.3, per sempli ità, non sono stati rappresentati gli assi artesiani),si trova
−mg +N = 0F − Fs = 0 .
(3.32)9L'aggettivo radente si riferis e a quel tipo parti olare di attrito he si manifesta fra due super i he s orronouna sull'altra. Nel seguito si vedranno altri tipi di attrito.

50 3. DINAMICA DEL PUNTO MATERIALE.L'attrito stati o è quindi in modulo uguale alla forza orizzontale appli ata.La reazione vin olare espli ata da una super ie s abra quindi ha, oltre he la omponente Nperpendi olare alla super ie, già presente nel aso di vin olo lis io, an he una omponente parallelaFs; la risultante viene indi ata on il simbolo R, si veda la gura 3.3, e vale:
R = N + Fs . (3.33)Aumentando il modulo di F il punto materiale nis e per mettersi in movimento; quindi l'attritoradente stati o ha un valore massimo FM
s il ui valore dipende dall'aderenza delle super i a ontatto: è tanto maggiore quanto piú esse aderis ono. FM
s è quindi proporzionale alla forza on ui P preme sulla super ie s abra; questa, d'altra parte, per il prin ipio di azione e reazione, èuguale a N ; vale quindiFM
s = µsN (3.34)ove µs è una ostante adimensionale, he dipende dalle aratteristi he delle due super i a ontatto,ed è detta oe iente di attrito stati o. Si noti he l'equazione pre edente non è una relazionevettoriale: i vettori N e FM
s , avendo direzioni diverse, non sono proporzionali; sono proporzionalisolo i loro moduli. Nel aso in ui la forza di attrito stati o sia massima an he la reazione vin olareè massima e viene indi ata on RM , gura 3.4(a).βs
N
FM
s
RM
(a) L'angolo βs. βs(b) Il ono di attritostati o.Figura 3.4: La reazione vin olare nel aso di super ie s abra.Il oe iente di attrito stati o ha un interessante signi ato geometri o; è infatti uguale allatangente dell'angolo βs formato da RM ed N :µs =
FM
s
N= tgβs . (3.35)Questo è l'angolo massimo entro il quale vi può essere una reazione vin olare stati a. La reazionevin olare R si trova quindi ne essariamente all'interno di un ono di apertura βs, detto ono diattrito stati o.3.7.2 Attrito radente dinami o.Se la forza F appli ata è maggiore del valore massimo FM
s he l'attrito stati o può espli are, ilpunto materiale si mette in movimento; è esperienza omune he per mantenerlo in movimento ène essario ontinuare ad appli are una forza altrimenti il orpo si ferma dopo po hi istanti. Vi èquindi una forza di attrito Fd, detto dinami o o talvolta ineti o, an he se P è in moto. La forzadi attrito dinami o è ostante e dipende an h'essa dall'aderenza fra le due super i, vale quindiuna relazione simile alla (3.34):Fd = µdN . (3.36)

3.8. FILI E MOLLE. 51La ostante adimensionale µd è detta oe iente di attrito dinami o e dipende dalle aratte-risti he delle super i a ontatto.Si veri a sperimentalmente he la forza he è ne essario appli are per mettere P in movimentoè maggiore di quella ne essaria a mantenerlo in movimento on velo ità ostante; questo signi a he FM
s > Fd e quindi, qualsiasi sia la oppia delle super i a ontatto, il oe iente di attritostati o è sempre maggiore di quello dinami o, ioè valeµs > µd . (3.37)3.8 Fili e molle.Su di un punto materiale possono venire appli ate delle forze per mezzo di dispositivi diversi; i piúsempli i sono i li e le molle des ritti in questa sezione.3.8.1 Filo ideale.Un lo è un orpo materiale ideale perfettamente essibile, inestensibile e di massa nulla avente unasezione tras urabile tale da poter essere onsiderato unidimensionale. Il lo, se opportunamentessato ad un orpo, onsente di eser itare una forza di trazione senza entrare direttamente in ontatto on il orpo. Si onsideri, ome in gura 3.5(a), un punto materiale P ui è atta ato unlo alla ui altra estremità A è appli ata una forza F1
P A F1bb(a) La trazione del lo. P A F1F2F ′1F ′
2b b(b) Le forze in gio o.Figura 3.5: Un lo ideale.Con riferimento alla gura 3.5(b), si onsiderino le forze in gio o: per il prin ipio di azione ereazione, il lo reagis e alla forza di F1 on la forza uguale ontraria F2. Il lo, inoltre, tira ilpunto P on una forza indi ata on F ′
1; il punto P reagis e an ora on una forza uguale e ontrariaF ′2. Valgono quindi
F1 = −F2 , F ′1 = −F ′
2 . (3.38)Si onsideri ora la forza totale F1 + F ′2 agente sul lo; per la legge fondamentale della dinami adeve valere
F1 + F ′2 = mfa (3.39)ove mf è la massa del lo e a la sua a elerazione. Ma il lo ideale he qui si sta usando ha massanulla quindi
F1 + F ′2 = 0 ←→ F1 = −F ′
2 (3.40)Usando le relazioni (3.38), si ottengono pertantoF1 = F ′
1 e F2 = −F ′1 (3.41)La prima di queste relazioni di e he il lo eser ita un'azione di trazione on una forza uguale aquella appli ata su di esso. La se onda di e he il lo eser ita forze di ugual modulo a entrambi isuoi estremi. Questa forza eser itata dal lo sui orpi ui esso si trova ollegato è detta tensionedel lo e viene solitamente indi ato on il simbolo τ . Si osservi he le forze qui onsiderate hannotutte lo stesso modulo, vale ioè
F1 = F ′1 = F2 = F ′
2 = τ . (3.42)

52 3. DINAMICA DEL PUNTO MATERIALE.3.8.2 Molla ideale.Unamolla ideale è un dispositivo di massa nulla he, se ompresso o allungato, eser ita una forzadi ri hiamo il ui modulo è proporzionale alla deformazione ma ha il verso opposto. Si onsideriOl0
xOP
Pl
xFigura 3.6: Una molla ideale.quindi una molla di massa tras urabile on un estremo ssatomentre l'altro, libero di muoversi, sia ollegato ad un puntomateriale di massa m; sia inoltre l0 la lunghezza della mol-la a riposo. Se la molla viene deformata no ad una nuovalunghezza l, essa sviluppa un forza di ri hiamo he tende ariportarla nella posizione di riposo.Si riferis a il moto ad un asse delle as isse disposto nella di-rezione della molla e on origine O nella posizione di riposo;quando il punto materiale si trova nella posizione P il vettorespostamento di OP ha modulo ∆x = |l − l0|. In gura 3.6 èrappresentato il aso in ui la molla è allungata rispetto allasua posizione di riposo; perfettamente analoga è la dis ussione del aso in qui la molla venga om-pressa. La forza di ri hiamo eser itata dalla molla è detta forza elasti a; è sempre diretta versoil punto O di riposo della molla, ed è data da
Fel = −kOP . (3.43)La ostante di proporzionalità k è detta ostante elasti a della molla e dipende dal tipo dalle aratteristi he della molla in questione; la sua unità di misura è Nm−1.Sotto l'azione della forza di ri hiamo della molla, il punto materiale P di massa m subis el'a elerazione a data da:a =
Fel
m= − k
mOP (3.44)Confrontando questa equazione on la (2.133), si vede he il moto di P è armoni o on pulsazione
ω =
√
k
m(3.45)e on entro nel punto di riposo della molla; la legge del moto è quindi data dalla (2.134).Le molle reali, oltre ad avere massa non nulla, eser itano una forza di ri hiamo data dalla (3.43)solo per deformazioni non troppo grandi; inoltre se allungate oltre una erta lunghezza limite sideformano permanentemente e perdono il omportamento elasti o.3.8.3 Il dinamometro.Lo strumento utilizzato per misurare l'intensità ( ioè il modulo) di una forza è detto dinamometro.La sua des rizione viene riportata qui, e non nel paragrafo in ui sono state introdotte le forze,per hé il suo funzionamento è basato su di una molla. Si onsideri una molla di ostante elasti anota k on un estremo ssato mentre sull'altro estremo sia appli ata una forza di intensità ignota
F ; la molla si allunga no a he la forza elasti a di ri hiamo Fel non eguaglia la forza appli ata.Poi hé, ome si è visto po o sopra, la forza di ri hiamo ha modulo proporzionale alla deformazione;si ottiene fa ilmenteF = Fel = k∆x . (3.46)La misura della deformazione ∆x, dunque, onsente la determinazione di F .

3.9. CARRUCOLE. 533.9 Carru ole.Oltre al piano in linato, un'altra ma hina sempli e molto importante è la arru ola ssa ideale.Si tratta di un dispositivo me ani o di massa nulla ostituito da una rotella apa e di ruotaresenza attrito attorno al proprio asse e dotata di una s analatura dentro ui passa il lo. Vieneutilizzata per deviare la retta di trazione del lo ome in gura 3.7(a) e non modi a la tensionedel lo.ττ (a) Una arru ola. τ
τ
m1gm2g
P1
P2(b) La ma hina di Atwood.Figura 3.7: Carru ole.La arru ola può essere impiegata per lo studio del moto uniformemente a elerato. Si onsideriinfatti una arru ola a ui siano appesi due punti materiali P1 e P2 aventi masse diverse m1 edm2, ome in gura 3.7(b). Rispetto ad un asse di riferimento y orientato verso il basso (nonrappresentato in gura), la legge fondamentale della dinami a per i due punti materiali si s rive
m1a1 = m1g − τm2a2 = m2 − τ .
(3.47)La tensione τ , per quanto detto sopra, è la stessa in ogni punto del lo. Poi hé il lo è inestensibile,i due punti materiali si muovono on a elerazione di ugual modulo ma verso opposto, supponendoquindi he P1 salga e P2 s enda si haa2 = −a1 = a . (3.48)La (3.47) diventa
−m1a = m1g − τm2a = m2 − τ .
(3.49) he risolta fornis e il valore dell'a elerazione e della tensione:
a =m2 −m1
m2 +m1g
τ =2m1m2
m1 +m2g .
(3.50)Come si vede, l'a elerazione ambia segno, e quindi P1 s ende e P2 sale, se m1 > m2. Il motodei due punti materiali è uniformemente a elerato e il modulo a dell'a elerazione ha, ome puòveri are on il al olo il lettore studioso, il seguente intervallo di validità:0 < a < g , (3.51)

54 3. DINAMICA DEL PUNTO MATERIALE.s egliendo adeguatamente le due masse, quindi, è possibile veri are sperimentalmente le proprietàdel moto uniformemente a elerato, per diversi valori di a. Il dispositivo qui des ritto è noto onil nome di ma hina di Atwood10.3.9.1 Carru ola mobile.Combinando insieme due arru ole nel modo des ritto in questo paragrafo si ottiene una ma hina omplessa parti olarmente vantaggiosa detta arru ola mobile. Consiste di una arru ola ssataττ
τ
τ
mg
FFigura 3.8: Una arru ola mobile.
al sotto mentre una se onda arru ola, di massa tras u-rabile, è tenuta sospesa dal lo he passa nella prima eva a ssarsi an h'esso al sotto, ome illustrato in gura3.8. Questa se onda arru ola è mobile e ad essa, trami-te un gan io ssato nel suo entro, si appende il ari oda sollevare. Le forze agenti sul ari o di massa m sonola forza peso e le due tensioni dei li. Ri ordando he illo presenta la stessa tensione in ogni suo punto, fa en-do riferimento ad un asse verti ale volto verso il bassol'equazione (3.12) per il ari o si s rivema = mg − 2τ (3.52)La forza minima ne essaria a sollevare il ari o è quella he lo solleva on una velo ità ostante ioè on a ele-razione nulla: iò a ade per
a = 0 ←→ τ =1
2mg . (3.53)Il lo, d'altra parte, è tenuto in tensione dalla forza F appli ata al apo libero; vale quindi
F = τ . (3.54)
Figura 3.9: Un paran o.
Pertanto la forza ne essaria a sollevare il ari o on velo ità ostante èF =
1
2mg (3.55)uguale a metà del peso del ari o. La arru ola mobile è un dispo-sitivo parti olarmente onveniente per sollevare grandi pesi; infattila forza da appli are all'estremità libera del lo è la metà della for-za peso del ari o. L'uni o svantaggio è he per sollevare il ari odi un'altezza h o orre tirare una lunghezza 2h di lo.Aumentando il numero di arru ole sse, ome in gura 3.9 ove visono due arru ole sse e una mobile, il vantaggio aumenta; nel aso ragurato la forza ne essaria a sollevare il ari o è un terzodel suo peso (e per sollevarlo di h o orre tirare 3h di lo). Unama hina di questo tipo è detta paran o.In gura 3.9, per hiarezza rappresentativa, le due arru ole ssesono di raggio diverso; nella prati a non solo esse hanno lo stessoraggio ma sono solitamente disposte sullo stesso asse di rotazione.10George Atwood (17451807), matemati o inglese.

3.10. PENDOLO SEMPLICE. 553.10 Pendolo sempli e.α
α
α
τ
F
Fp
PQ
ℓ
Ox
Figura 3.10: Il pendolo sempli e.
Si onsideri un punto materiale P di massam sospe-so tramite un lo ideale di lunghezza ℓ; una simile ongurazione si di e pendolo sempli e. Su Pagis ono due forze: il peso Fp e la tensione τ dello, ome in gura 3.10. Poi hé la tensione del loequilibra la omponente del peso parallela al lo, larisultante F delle forze agenti su P è la omponentedel peso perpendi olare al lo. Il modulo di F di-pende dall'angolo α formato dal lo on la verti ale.Nell'ipotesi he tale angolo sia pi olo, dell'ordinedi qual he grado, la traiettoria per orsa da P è onbuona approssimazione rettilinea, ioè l'ar o PQ èben approssimato dalla orda PQ. In gura 3.10,per hiarezza di rappresentazione, è stato disegnatoun angolo troppo grande per hé l'approssimazionesia ragionevole. L'approssimazione per pi oli an-goli è usualmente detta per pi ole os illazioni.In tale approssimazione, dunque, il punto materialeP os illa lungo il segmento PQ lungo il quale si on-sidera un asse delle as isse. La posizione del puntomateriale è quindi individuata dalla sua as issa x.Per determinare il modulo della forza risultante Fsi osservi he valgono le relazioni
F = Fp senα , senα =x
ℓ. (3.56)Vale quindi
F =Fp
ℓx . (3.57)Tenendo onto del fatto he i vettori F e OP hanno in ogni istante la stessa direzione, ma versoopposto, la pre edente relazione può essere s ritta nella forma vettoriale
F = −Fp
ℓOP ; (3.58)ora, tenuto onto della legge fondamentale della dinami a F = ma e he Fp = mg, dalla pre edenteequazione si ottiene
ma = −mgℓ
OP ←→ a = −gℓOP . (3.59)Ri ordando l'equazione (2.133), si ri onos e he il moto di P è un moto armoni o on pulsazionee periodo dati da
ω =
√
g
ℓ, T = 2π
√
ℓ
g. (3.60)Si noti he, nell'approssimazione di pi ole os illazioni, il periodo del pendolo sempli e non dipendené dalla massa del punto materiale os illante, né dall'ampiezza delle os illazioni. Questa proprietà,notata per la prima volta da Galilei (si veda [7 pagina 93), è detta iso ronismo delle pi oleos illazioni.

56 3. DINAMICA DEL PUNTO MATERIALE.3.11 Forza entripeta.Se un punto materiale P di massa m si muove di moto ir olare uniforme di entro O, ome vistonella sezione 2.5, la sua a elerazione è entripeta di moduloac =
v2
r= ω2r (3.61)ove r è il raggio della traiettoria ir olare, v il modulo della velo ità ed ω la velo ità angolare.Se ondo la legge fondamentale della dinami a, P è dunque sottoposto ad una forza diretta versoil entro di modulo F = mac detta forza entripeta Fc. In forma vettoriale si s rive
Fc = −mv2
r2OP = −mω2OP . (3.62)3.12 Dinami a dei moti relativi.A questo punto della trattazione è possibile riprendere il dis orso sui moti relativi omin iata nellasezione 2.8. Lí si è visto ome un sistema di riferimento S′ in moto rototraslatorio rispetto ad unsistema S misuri a elerazioni diverse. Il sistema S′ non è un sistema inerziale, quindi per esso nonvale la legge fondamentale della dinami a. Qui si vuole indagare quali modi he o orre apportarealla (3.12) in un sistema non inerziale.Si onsideri la (2.173) e la si moltipli hi per la massam del punto materiale P di ui si sta studiandoil moto; si trova
map = mao′ +ma′p + 2mω × v′
p −mω2OP . (3.63)Nel sistema inerziale S vale la se onda legge di Newton: F = map; nel sistema S′ non iner-ziale inve e il prodotto ma′p non è uguale alla forza bensí, ome si vede utilizzando l'equazionepre edente,ma′
p = F −mao′ − 2mω × v′p +mω2OP . (3.64)In S′ quindi, alla forza realmente agente F si aggiungono al uni termini dovuti alla a elerazione di
S′ rispetto a S. Questi termini sono per epiti nel sistema S′ ome forze he vanno ad aggiungersialla forza reale F , pur non essendo reali; per questo motivo si usa riferirsi ad essi on il nome diforze apparenti. Si esaminino uno alla volta.Il termine −mao′ ompare quando S′ si muove di moto traslatorio a elerato rispetto a S.Il termine −2mω × v′p ompare quando S′ si muove di moto rotatorio rispetto a S e P si muovein S′; questo termine è noto on il nome di forza di Coriolis11 .Il termine+mω2OP ompare quando S′ si muove di moto rotatorio rispetto a S indipendentementedal moto di P ; questo è noto on il il nome di forza entrifuga.Si onsiderino i seguenti esempi.a) L'as ensore a elerato.Sia S′ ssato solidale ad un as ensore he si muova di moto traslatorio on a elerazione ao′ rispettoad O; in tal aso ω = 0 vale allora
ma′p = F −mao′ . (3.65)11Gaspard-Gustave de Coriolis (17921843), matemati o, si o e ingegnere fran ese.

3.12. DINAMICA DEI MOTI RELATIVI. 57Se P è un punto materiale di massa m he viene las iato adere liberamente all'interno dell'as en-sore, evidentemente F = mg, quindia′p = g − ao′ . (3.66)L'a elerazione di aduta misurata all'interno dell'as ensore è minore di g se l'as ensore è a eleratoverso il basso e maggiore di g se l'as ensore è a elerato verso l'alto. Tale variazioni dell'a elera-zione di aduta sono per epite da hi si trovasse nell'as ensore ome variazioni di peso.Nel aso parti olare in ui l'as ensore sia in aduta libera, vale ao′ = g e quindiap = 0 . (3.67)Il punto P se las iato on velo ità nulla, avendo (in S′) a elerazione nulla, resta fermo. Si trattadel ben noto fenomeno dell'assenza di peso nei sistemi di riferimento in aduta libera, per esempionei satelliti orbitanti.
b bP
v′
pO
FcoFigura 3.11: La forza di Coriolis sullapiattaforma rotante.
b) La piattaforma rotante.Sia S′ solidale ad una piattaforma di entro O rotante onvelo ità angolare ostante ω e sia P un punto materiale ap-poggiato sulla piattaforma e non altrimenti vin olato; alloraao′ = 0, v′
p = 0 e F = 0. In questo aso è presente la solaforza entrifugama′
p = mω2OP ; (3.68)Il punto P si muove quindi on velo ità v′p verso il bordodella piattaforma, omin ia allora ad agire la forza di Corio-lis Fco la quale essendo perpendi olare alla velo ità indu etraiettorie approssimativamente ir olari (tale ir olarità sa-rebbe perfetta se non fosse presente simultaneamente an hela forza entrifuga).La forza entrifuga ha un importante ruolo nella variabilitàdell'a elerazione di gravità on la latitudine, ome si vedrà nel prossimo apitolo.La forza di Coriolis è responsabile dei moti ir olari dei uidi in moto sulla super ie terrestre.Esempi importanti sono il moto dei venti alisei nella zona tropi ale e la formazione di i loni. ) Pendolo oni o.Si tratta di un pendolo sempli e ostituito da un punto materiale P di massa m sospeso tramite
x
y
θ
bP
mg
Fc
τ
r
Figura 3.12: Il pendolo oni o.
un lo di lunghezza ℓ e posto in rotazione su una traiet-toria ir olare di raggio r in modo he il lo formi onla verti ale nel punto di sospensione l'angolo ostante θ.Vale quindir = ℓ sen θ . (3.69)Las iando al lettore studioso la soluzione del problemadinami o in un sistema inerziale, si aronta qui il me-desimo problema nel sistema rotante avente l'origine in
P , l'asse y verti ale e orientato verso l'alto e l'asse xorientato ome il vettore (rotante) OP . In tale sistemadi riferimento P è fermo quindi la risultante delle forzereali piú le forze apparenti è nulla, quindimg + τ +mgω2r = 0 . (3.70)

58 3. DINAMICA DEL PUNTO MATERIALE.S rivendo questa equazione per omponenti si trova
−τ sen θ +mω2r = 0
τ cos θ −mg = 0(3.71)Usando la (3.69) si trova, dalla prima
τ = mω2ℓ (3.72)e dalla se ondacos θ =
g
ω2ℓ(3.73) he è il legame fra la velo ità angolare di rotazione e l'ampiezza dell'angolo θ: all'aumentare di ω
cos θ diminuis e e quindi θ aumenta. Detto in altri termini, il periodo T di rotazione del pendolo oni o dipende dall'angolo θ e valeT = 2π
√
ℓ cos θ
g(3.74) he, per θ = 0, è in a ordo on la (3.60).3.13 Prin ipio di relatività.Se l'osservatore O′ si muove rispetto all'osservatore O di moto rettilineo ed uniforme vale la (2.162) on ao′ = 0, quindi i due osservatori misurano per il punto materiale P la stessa a elerazione;vale ioè, in ogni istante,
ap = a′p . (3.75)Quindi, se O è un osservatore inerziale per ui vale la legge fondamentale della dinami a, (3.12) loè an he O′, ioè
F = map ⇐⇒ F = ma′p . (3.76)Quindi an he O′ è un osservatore inerziale.Come onseguenza di quanto detto si osservi he se due sistemi sono in moto re ipro o rettilineo eduniforme signi a he essi sono o entrambi inerziali oppure hanno la stessa a elerazione rispetto adun sistema inerziale: in entrambi i asi, ome visto, misurano esattamente le stesse a elerazioni.Pertanto per essi la legge fondamentale della dinami a è la stessa. In parti olare, se i due sistemidi riferimento sono inerziali la legge vale nella sua forma (3.12), mentre se i due sistemi non sonoinerziali o orre introdurre delle forze apparenti.Questo fatto ha una grande generalità e non restringe la sua validità alla sola legge della dinami ama si estende a qualunque legge della si a. Esso è noto on il nome di prin ipio di relativitàe si enun ia ome segue.Le leggi he des rivono l'evoluzione di un qualunque sistema si o sono le stesse seriferite a due sistemi di riferimento he si muovano uno rispetto all'altro di motorettilineo ed uniforme.Il primo luogo ove il prin ipio di relatività appare enun iato12 è il famoso brano del gran navilio(si veda [6, pagg. 227-229)Il prin ipio di relatività ha delle immediate ri adute sperimentali. Infatti, ome sua onseguen-za, si può on ludere he qualunque esperimento dà lo stesso risultato se viene eseguito in due12Ben hé se ne possa trovare una tra ia già nell'Otti a di Eu lide, si vedano le proposizioni 50-57, [5 pagg.2102-2113.

3.14. STATICA DEL PUNTO MATERIALE. 59sistemi di riferimento in moto re ipro o rettilineo ed uniforme. Questo impli a he non vi è al unmodo di distinguere un sistema di riferimento dall'altro. Due sistemi di riferimento inerziali sonoquindi, oltre he si amente equivalenti, nel senso he in essi valgono le stesse leggi si he, an hesperimentalmente indistinguibili.3.14 Stati a del punto materiale.La stati a è quella parte della me ani a he studia le ondizioni per le quali un sistema si o è inequilibrio.Si di e he un punto materiale P è in equilibrio, quando la sua velo ità è nulla e rimane nullanonostante su di esso siano appli ate delle forze. Dal prin ipio d'inerzia è noto he la velo ità diun punto materiale rimane invariata se su di esso non agis ono forze o, meglio, se la somma delleforze agenti su di esso è il vettore nullo. In questo aso, se la velo ità iniziale di P è zero essa ontinua a rimanere zero, ioè il punto materiale rimane fermo.Quanto detto si può riassumere nella seguente denizione.Un punto materiale è in una posizione di equilibrio se e solo se si trova in tale posizione on velo ità nulla e la somma delle forze agenti su di esso è nulla.Quindi vi è equilibrio se e solo se valgono le seguenti ondizioni.v0 = 0 , Ftot = 0 . (3.77)Una posizione di equilibrio si può distinguere nelle tre situazioni seguenti.1. Equilibrio stabile. Si ha quando, spostando di su ientemente po o P dalla posizione diequilibrio, esso tende a ritornarvi.2. Equilibrio instabile. Si ha quando, spostando di quanto po o si voglia P dalla posizione diequilibrio, esso se ne allontana.3. Equilibrio indierente. Si ha quando spostando di su ientemente po o P dalla posizione diequilibrio, esso si trova in una nuova posizione di equilibrio.
(a) Equilibrio stabile. (b) Equilibrio instabile. ( ) Equilibrio indierente.Figura 3.13: I tre tipi di equilibrio.Un esempio del primo tipo si ha quando un punto materiale è posto nel punto in ui una super ielis ia forma un avvallamento, gura 3.13(a); uno del se ondo tipo si ha quando il punto materialeè posto sulla sommità di un dosso, gura 3.13(b); uno del terzo si ha quando il punto materiale èposto su di un piano in linato, gura 3.13( ).

60 3. DINAMICA DEL PUNTO MATERIALE.Intermezzo. Il pendolo di Fou ault.In un sistema di riferimento inerziale il piano di os illazione di un pendolo sempli e resta invariato;in un sistema rotante iò non a ade. Si onsideri, per esempio, ome sistema di riferimento rotantela Terra. Un osservatore, solidale alla Terra rotante, he osservi le os illazioni di un pendolo postosu uno dei due poli terrestri vede il piano di os illazione ompiere un giro ompleto in ir a 24ore; eettuando lo stesso esperimento all'equatore non si osserva al una variazione del piano dios illazione. L'eetto quindi dipende dalla latitudine λ alla quale l'esperimento viene eseguito.λ
b P
z
x
ω
Figura 3.14: Il sistema di riferi-mento non inerziale.
Per esaminare piú in dettaglio osa a ade, onviene s egliereun sistema di riferimento non inerziale avente origine nel puntoP di latitudine λ ome in gura 3.14; si s elga quindi l'assez sulla verti ale di P e gli assi x e y tangenti alla super ieterrestre in P (in gura l'asse y è entrante nel foglio); sianoinoltre ı′, ′, k′ i versori dei tre assi. Sul pendolo di massa me lunghezza ℓ, quindi, oltre alla forza peso, agis e la forza diCoriolis:
Fc = −2mω × v , (3.78)ove ω è la velo ità angolare della rotazione terrestre, e v è lavelo ità del pendolo nel sistema rotante. Con riferimento allagura 3.14, e nell'approssimazione di pi ole os illazioni, ω sitrova nel piano xz, mentre v si trova nel piano xy, ioèω = ωxı
′ + ωzk′ , v = vxı
′ + vy ′ (3.79)e quindi, ri ordando la (2.76), le tre omponenti della forza diCoriolis diventano
Fcx = −2m(ωyvz − ωzvy) = +2mωzvy
Fcy = −2m(ωzvx − ωxvz) = −2mωzvx
Fcx = −2m(ωxvy − ωyvx) = −2mωxvy .
(3.80)Nell'ipotesi di pi ole os illazioni, il moto del pendolo avviene nel piano xy; le omponenti dell'e-quazione fondamentale della dinami a per il pendolo (3.59), on l'aggiunta della forza di Coriolis,rilevanti per lo studio del moto sono quindi:max = −mg
ℓx+ 2mωzvy
may = −mg
ℓy − 2mωzvx .
(3.81)PonendoΩ2 =
g
ℓ, (3.82)sempli ando la massa e introdu endo la notazione di Newton, si ottiene
x = −Ω2x+ 2ωz y
y = −Ω2y − 2ωzx(3.83)Questo è un sistema di equazioni dierenziali del se ondo ordine, la ui soluzione ri hiede le te ni hedell'analisi e quindi va al di là dei limiti di questi appunti. Ci si limita quindi a darne la soluzione

INTERMEZZO. 61più generale nel aso in ui la velo ità iniziale sia nulla:
x(t) = A
[
cos(ωzt− θ) cos√
Ω2 + ω2z t+
ωz√
Ω2 + ω2z
sen(ωzt− θ) sen√Ω2 + ω2z t
]
y(t) = A
[
− sen(ωzt− θ) cos√
Ω2 + ω2z t+
ωz√
Ω2 + ω2z
cos(ωzt− θ) sen√Ω2 + ω2z t
]
.
(3.84)Il parametro θ è stato introdotto per rappresentare in modo ompatto la posizione iniziale, valeinfattix(0) = A cos θ , y(0) = A sen θ . (3.85)Per analizzare questa soluzione onviene fare un'approssimazione. Si osservi he vale
ωz = ω senλ =2π
T0senλ (3.86)ove T0 = 86164 s è il tempo impiegato dalla Terra a ompiere una rotazione attorno al proprio asse: ir a 24 ore. Confrontando il valore di ωz ad una latitudine media di 45, on la pulsazione Ω diun pendolo di lunghezza ℓ = 1m, si trova
ωz
Ω=
2π
T0senλ√
g
ℓ
≃ 1.6 · 10−5 . (3.87)Quindi nella (3.84), i se ondi addendi di entrambi le equazioni sono tras urabili rispetto ai primi,e vale l'approssimazione√
Ω2 + ω2z ≃√Ω2 = Ω . (3.88)Quindi la (3.84) diviene
x(t) = A cos(ωzt− θ) cosΩty(t) = −A sen(ωzt− θ) cosΩt .
(3.89)Quindi dopo un periodo T = 2π/Ω il pendolo non torna nella posizione iniziale (3.85) ma si trovain
x(t) = A cos(
2πωz
Ω− θ)
y(t) = −A sen(2πωz
Ω− θ)
.(3.90)Quindi ad ogni os illazione il pendolo si trova in una posizione ruotata rispetto alla pre edente diun angolo
Φ = 2πωz
Ω; (3.91)per ompiere una ritornare alla posizione iniziale quindi il pendolo deve ompiere
2π
Φ=
Ω
ωz
(3.92)os illazioni. Ogni os illazione dura un tempo T , quindi il tempo in impiegato dal piano dios illazione del pendolo a ritornare alla posizione iniziale èTF
Ω
ωz
T =2π
ωz
=2π
ω senλ =T0senλ . (3.93)

62 3. DINAMICA DEL PUNTO MATERIALE.Alla latitudine di 45, per esempio, valeTF = 121854.3 s (3.94) ioè po o meno di 34 ore.Il fenomeno qui des ritto è stato usato da Fou ault13 per dare una dimostrazione diretta del motodi rotazione della Terra.
13Jean Bernard Léon Fou ault (18191868), si o fran ese.
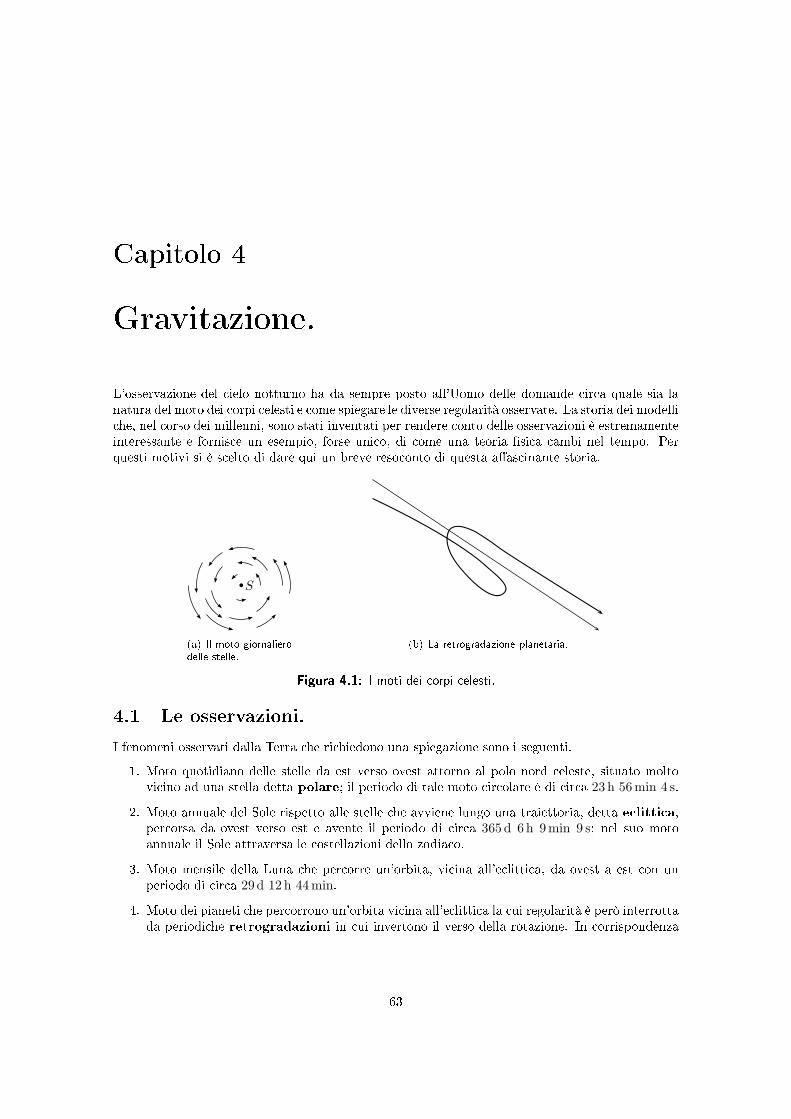
Capitolo 4Gravitazione.L'osservazione del ielo notturno ha da sempre posto all'Uomo delle domande ir a quale sia lanatura del moto dei orpi elesti e ome spiegare le diverse regolarità osservate. La storia dei modelli he, nel orso dei millenni, sono stati inventati per rendere onto delle osservazioni è estremamenteinteressante e fornis e un esempio, forse uni o, di ome una teoria si a ambi nel tempo. Perquesti motivi si è s elto di dare qui un breve reso onto di questa aas inante storia.S(a) Il moto giornalierodelle stelle. (b) La retrogradazione planetaria.Figura 4.1: I moti dei orpi elesti.4.1 Le osservazioni.I fenomeni osservati dalla Terra he ri hiedono una spiegazione sono i seguenti.1. Moto quotidiano delle stelle da est verso ovest attorno al polo nord eleste, situato moltovi ino ad una stella detta polare; il periodo di tale moto ir olare è di ir a 23 h 56min 4 s.2. Moto annuale del Sole rispetto alle stelle he avviene lungo una traiettoria, detta e litti a,per orsa da ovest verso est e avente il periodo di ir a 365 d 6 h 9min 9 s; nel suo motoannuale il Sole attraversa le ostellazioni dello zodia o.3. Moto mensile della Luna he per orre un'orbita, vi ina all'e litti a, da ovest a est on unperiodo di ir a 29d 12 h 44min.4. Moto dei pianeti he per orrono un'orbita vi ina all'e litti a la ui regolarità è però interrottada periodi he retrogradazioni in ui invertono il verso della rotazione. In orrispondenza63

64 4. GRAVITAZIONE.alle retrogradazioni i pianeti appaiono piú luminosi. Mer urio e Venere, diversamente daglialtri pianeti, non si allontanano mai molto dal Sole.In gura 4.1(a) è rappresentato il moto delle stelle attorno alla polare S nel orso di due ore equaranta minuti, orrispondenti a una rotazione di 40. In gura 4.1(b) è rappresentato il motoretrogrado di un pianeta attorno all'e litti a, rappresentata dalla linea tratteggiata.4.2 I modelli anti hi.I modelli anti hi, nella des rizione dei moti elesti, si basano tutti su una omposizione, piú o meno ompli ata, di moti ir olari uniformi1 (per una ri hiesta he Simpli io2 attribuis e a Platone3).Si elen ano qui di seguito i prin ipali.1. Era lide Ponti o4 spiegò il moto giornaliero delle stelle ipotizzando per primo il moto di rota-zione terrestre; ipotizzò inoltre he Mer urio e Venere ruotino intorno al Sole, diversamentedagli altri pianeti he ritenne ruotare attorno alla Terra. Questo modello, non spiega né leretrogradazioni né le variazioni di luminosità dei pianeti; ma è molto importante per hé è ilprimo he pensa ad un moto della Terra per spiegare l'apparente moto dei orpi elesti.2. Aristar o di Samo6 ostruí un modello in ui il Sole si trova al entro delle orbite di tutti ipianeti, ompresa la Terra. Cal olò le grandezza del Sole e della Luna e loro distanze dallaTerra. È molto importante per hé è stato il primo a ostruire un modello elio entri o.T
P
C
(a) L'epi i lo e il deferente.T
(b) Il moto risultante.Figura 4.2: Il modello di Apollonio.1Non si sa per hé proprio moti ir olari uniformi; si potrebbe però ri ondurre al fatto he il ompasso è uno deglistrumenti fondamentali della matemati a gre a, si veda [13, pagina 118.2Simpli io (∼490-560), losofo e matemati o bizantino.3Platone (428 a.C.348 a.C.), losofo ateniese.4Era lide Ponti o (385-322(?) a.C.), losofo e astronomo di Era lea.56Aristar o di Samo (∼310230 a.C.), astronomo di Samo.

4.3. I MODELLI MODERNI. 653. Apollonio di Perga7 ipotizzò un modello in base al quale ogni pianeta si muove di motouniforme lungo un'orbita ir olare detta epi i lo mentre il suo entro C si muove, a suavolta, di moto uniforme lungo un'orbita ir olare detta deferente avente il entro sullaTerra, si veda la gura 4.2. Questo modello è fondamentale per hé rende onto sia delleretrogradazioni planetarie he delle variazioni di luminosità.4. Tolomeo8 è l'ultimo grande astronomo dell'anti hità; introdusse una sempli azione al me-todo degli epi i li per mezzo dell'equante; il pianeta per orre un'orbita ir olare attornoalla Terra on velo ità variabile; il moto è però uniforme visto da un punto, detto appuntoequante, de entrato rispetto alla posizione della Terra. Il suo modello, he per des rivere ompletamente il moto dei orpi elesti usa 40 er hi, è detto Sistema tolemai o ed è giuntono a noi nell'opera Almagesto (termine he deriva da una parola araba he signi a `il piúgrande') di ui non sono disponibili traduzioni italiane, si veda [14.4.3 I modelli moderni.Per vedere qual osa di paragonabile alla grande tradizione astronomi a dell'anti hità o orre aspet-tare il XVI se olo e il lavoro di Coperni o9, he ostruis e un modello elio entri o. Usa an ora ilmodello a epi i li e deferenti, utilizzando in totale 34 er hi; abbandona, in polemi a on Tolomeo,l'equante. Diversamente dai modelli anti hi, nei quali le orbite ir olari sono sempli i oggetti geo-metri i, i orpi elesti nel modello operni ano si muovono su sfere materiali reali. Il suo modelloè presentato nel De revolutionibus orbium aelestium10 ed è diventato famoso (soprattutto graziea Galilei he lo ha sostenuto ontro il sistema tolemai o) on il nome di Sistema operni ano. Ilmodello tolemai o e operni ano sono si amente equivalenti. Questo signi a he se si er a difare una previsione, per esempio sul veri arsi di un'e lissi di Sole, utilizzando uno o l'altro modellosi ottengono risultati identi i. Per passare da un modello all'altro, infatti, basta fare un ambio dipunto di vista, ioè, nel linguaggio della si a, un ambio di sistema di riferimento, passando daun sistema entrato sul Sole a uno entrato sulla Terra.D'altra parte però oggi il modello operni ano è onsiderato migliore. Il motivo di iò è stori oe non s ienti o: il modello operni ano è stato sostenuto da oloro (prima di tutti Galilei) hesi misero in animo di liberare la ri er a s ienti a dal pantano in ui si trovava alla ne del XVIse olo. Il grande su esso s ienti o di questi s ienziati ha ausato il su esso del modello oper-ni ano.Oggi, quasi 400 anni dopo la morte di Galilei, è hiaro he il problema se la Terra si muova o stiaferma non è un problema ben posto. La quiete ed il moto di un orpo dipendono dal sistema diriferimento s elto.La prima vera novità moderna viene da Kepler11 il quale, avendo a disposizione una enorme massadati osservativi dovuti soprattutto al suo maestro Brahe12 (il quale per primo si rese onto he lesfere su ui Coperni o fa eva muovere i suoi pianeti non potevano esistere in quanto sarebbero stateattraversate dalle omete), sottopose il modello operni ano ad un rigoroso ontrollo osservativo.Giunse quindi ad enun iare le tre leggi he portano il suo nome e des rivono il moto dei pianeti on una sempli ità e pre isione mai raggiunte prima.7Apollonio di Perga (262-190 a.C.), matemati o e astronomo di Perga.8Claudio Tolomeo (∼100-175), astronomo e geografo di Alessandria.9Mikoªaj Kopernik (14731543), astronomo e sa erdote pola o.10Si veda [3, ove è presente ( on testo latino a fronte) il solo primo libro he ontiene l'esposizione e lagiusti azione delle ipotesi utilizzate da Coperni o, e [4, ove si trova la traduzione italiana dell'opera ompleta.11Friedri h Johannes Kepler (15711630), astronomo tedes o.12Ty ho Brahe (1546-1601), astronomo danese.

66 4. GRAVITAZIONE.4.4 Le leggi di Kepler.Tra il 1609 ed il 1618, Kepler s oprí le seguenti tre leggi13.1. Le orbite dei pianeti sono ellissi di ui il soli o upa uno dei fuo hi.2. Il vettore he unis e il Sole al pianeta spazza aree uguale in tempi uguali.3. I quadrati dei periodi di rivoluzione dei pianeti attorno al Sole sono proporzionali ai ubi deisemiassi maggiori delle rispettive orbite.S
Figura 4.3: La se onda legge di Kepler.La prima legge si ommenta da sola.La se onda di e he la velo ità on ui il pianeta per orre la sua orbita ellitti a non è ostantema diminuis e all'aumentare della distanza dal Sole. La situazione è illustrata in gura 4.3 ovei tre settori ellitti i ombreggiati hanno la stessa area. Evidentemente, quando il pianeta è piùvi ino, per spazzare, nel medesimo tempo, la stessa area di quando è lontano, deve per orrere unospazio maggiore e quindi muoversi on velo ità maggiore. Il punto dell'orbita in ui il pianeta èpiú vi ino al Sole, in ui la velo ità del pianeta è massima, è detto perielio, mentre quello in ui èpiú lontano, in ui la velo ità è minima, è detto afelio. Si usa enun iare la se onda legge di Kepleran he di endo he la velo ità areolare di ogni pianeta è ostante; per velo ità areolare s'intendeil rapporto fra l'area spazzata e il tempo impiegato.La terza legge di e esattamente ome variano i tempi di rivoluzione dei pianeti all'aumentare dellaloro distanza dal Sole; indi ando, ome d'uso, on a l'asse maggiore dell'ellisse e on T il periododi rivoluzione, la terza legge si può esprimere on la seguente equazioneT 2 = χa3 (4.1)La ostante di proporzionalità χ è la stessa per tutti i pianeti; verrà determinata nel prossimoparagrafo.4.5 La legge di gravitazione universale.Resta da apire per hé i pianeti si muovono in modo tale da rispettare le leggi di Kepler. Unmodello he fornis a questo tipo di risposta deve spe i are quale sia la forza di interazione frail Sole e i suoi pianeti. Fu Newton he, partendo proprio dalle leggi di Kepler, rius í a trovare larisposta orretta. Di seguito non si riper orre il pro edimento newtoniano ma una sua versionesempli ata. Si onsideri un pianeta di massa mp muoventesi attorno al Sole lungo un'orbita13Le prime due ompaiono nell'opera Astronomia nova del 1609 e la terza nell'opera Harmoni e mundi del 1619.

4.5. LA LEGGE DI GRAVITAZIONE UNIVERSALE. 67 ir olare14 di raggio r. Dalla se onda legge di Kepler segue he la velo ità del pianeta deve averemodulo v ostante; il pianeta quindi si muove di moto ir olare uniforme e la sua a elerazione è entripeta. Vi deve dunque essere una forza entripeta F on ui il Sole attira il pianeta; il modulodi questa forza èF = mp
v2
r. (4.2)Il periodo on ui viene per orsa l'orbita è
T =2πr
v, (4.3)ma, per la terza legge di Kepler, il quadrato di T è proporzionale al ubo di r, equazione (4.1):
4π2r2
v2= χr3 ←→ v2 =
4π2
χ
1
r; (4.4)pertanto la forza agente su P si può s rivere
F =4π2
χ
mp
r2. (4.5)Questa forza è quindi inversamente proporzionale al quadrato della distanza fra Sole e pianeta. La ostante di proporzionalità, a sua volta, è proporzionale alla massa mp del pianeta.Per il prin ipio di azione e reazione, se il Sole attira il pianeta on una forza di modulo F , an he ilpianeta deve attirare il Sole on una forza avente lo stesso modulo; non solo, ma se la forza agentesul pianeta è proporzionale alla massa del pianeta, la forza agente sul Sole deve essere proporzionalealla massa M⊙ del Sole; deve quindi esistere una ostante di proporzionalità, he si usa indi are on G, indipendente dalle masse in gio o, per ui valga
4π
χ= GM⊙ (4.6)Il modulo della forza di interazione fra Sole e pianeta è quindi
F = GM⊙mp
r2. (4.7)La ostante χ e la (4.1) si possono quindi s rivere nella forma
χ =4π2
GM⊙, T 2 =
4π2
GM⊙a3 . (4.8)Newton stesso generalizzò la forza osí determinata all'interazione gravitazionale fra qualunque oppia di masse; enun iò quindi la legge di gravitazione universale.Ogni oppia di punti materiali dell'universo si attira re ipro amente on una forzadirettamente proporzionale alle loro masse ed inversamente proporzionale al quadratodella loro distanza.Dette m1 ed m2 le due masse ed r la loro distanza, vale quindi
Fg = Gm1m2
r2. (4.9)14Questa non è una limitazione: la ir onferenza è una parti olare ellisse quindi la legge he qui si sta er andodeve valere an he in questo aso.

68 4. GRAVITAZIONE.P1
P2
F21Figura 4.4: La forza F21.La pre edente equazione può essere s ritta in forma vet-toriale; siano P1 e P2 i due punti materiali, allora la forza on ui P1 attira P2 è il vettore
F21 = Gm1m2
r2r21 , (4.10)ove r21 = P2P1/r è il versore he ha il verso da P2 a P1.La ostante di proporzionalità G è detta ostante digravitazione universale; se ondo le misure piú re entiil suo valore è
G = 6.67428(67) · 10−11Nm2 kg−2 . (4.11)La legge di gravitazione universale non vale per due orpi estesi non assimilabili a punti materiali; inun aso simile è ne essario suddividere ias un orpo in parti su ientemente pi ole da giusti arel'uso del modello di punto materiale ed appli are la legge a ias una delle parti osí ottenute.Tuttavia, lo stesso Newton dimostrò he se un orpo omogeneo ha simmetria sferi a ( ioè è unasfera o uno strato sferi o) la forza di attrazione su qualsiasi orpo esterno15 dipende solo dallamassa e non dal raggio della sfera; quindi, per il al olo dell'interazione gravitazionale ogni orpoa simmetria sferi a può essere onsiderato ome un punto materiale di uguale massa ollo ato nelsuo entro.Quindi per determinare la forza di attrazione di un orpo sferi o su di un punto materiale esterno,si usa la (4.9) misurando la distanza r dal entro della sfera.In parti olare, quanto detto è vero per i orpi elesti he, ome il Sole e i pianeti, possono essere, on ottima approssimazione, onsiderati una su essione di strati sferi i omogenei.4.6 Massa gravitazionale.O orre a questo punto fare attenzione ad un problema he ha grande importanza on ettuale.A suo tempo è stata denita massa quella proprietà di un punto materiale he denis e il suo omportamento sotto l'azione di una forza per mezzo della (3.12); in parti olare tanto maggiore èla massa tanto meno il punto materiale risente dell'azione della forza. Qui si ontinua a hiamaremassa la proprietà dei orpi he hanno di attrarre altri orpi ed esserne attratti; tale forza diattrazione aumenta on l'aumentare della massa.Sono diverse an he le denizioni operative delle due masse: la prima si denis e misurando a e-lerazioni, la se onda misurando forze gravitazionali e distanze. Per distinguerle, la prima, ome siè visto nella sezione 3.1, viene hiamata massa inerziale; la se onda viene usualmente hiamatamassa gravitazionale. Tuttavia l'esperienza mostra16, e se ne vedrà un esempio nella prossimasezione, he le masse inerziale e gravitazionale di un orpo sono numeri amente uguali. Pertanto,a meno di possibili fraintendimenti, nel seguito si ometterà l'aggettivo he le distingue hiaman-dole sempli emente massa. L'identi azione fra massa inerziale e massa gravitazione onsente, fral'altro, di adottare per entrambe la stessa unità di misura.Questa uguaglianza fra massa inerziale e massa gravitazionale di un orpo in si a lassi a appareun aso fortunato, ma in relatività generale assume un signi ato assai fondamentale; tuttavia nonè questo il luogo per entrare in ulteriori dettagli.15Il fatto he il orpo debba essere esterno è importante; la (4.9) non vale all'interno dei orpi. Si può dimostrare,per esempio, he all'interno della Terra la forza di attrazione verso il entro diminuis e proporzionalmente al raggio.16Le misure piú a urate oggi disponibili mostrano he la dierenza relativa fra i due tipi di massa è minore di10−13, si veda S hlamminger et al., Phys. Rev. Lett. 100, 2008.

4.7. L'ACCELERAZIONE GRAVITAZIONALE. 694.7 L'a elerazione gravitazionale.La legge di gravitazione universale può, in parti olare, essere usata per studiare l'attrazione fra laTerra e i orpi he si trovano attorno ad essa, misurando le distanze dal entro. Un punto materialeP di massa m he si trovi sulla super ie della Terra, quindi, risente di una forza di attrazione dimodulo
Fg = GM⊕m
R2⊕
, (4.12)ove,M⊕ è la massa della Terra e R⊕ il suo raggio. L'a elerazione gravitazionale di P quindi è unvettore diretto verso il entro della terra di moduloag =
Fg
m= G
M⊕
R2⊕
. (4.13)Si osservi he questa a elerazione non dipende dalla massa di P e he, pertanto, tutti i puntimateriali risentono della stessa a elerazione gravitazionale.Le attuali misure sui dati si i della Terra per la massa ed il raggio equatoriale medio sono:M⊕ = 5.9722(6) · 1024 kg , R⊕ = 6.378137(2) · 106m (4.14)utilizzando le quali si ottiene
ag = 9.7983m s−2 . (4.15)Questo valore, ome si vede, è molto vi ino all'a elerazione di gravità standard g, equazione(2.29). La dierenza è dovuta al fatto he la Terra non è una sfera perfetta: la distanza dal entroè maggiore all'equatore he ai poli, quindi il valore dell'a elerazione gravitazionale varia on lalatitudine; varia an he on l'altezza dal livello del mare e risente della forza entrifuga dovuta allarotazione terrestre. Il valore (2.29) è denito ome valore standard.La osa importante da osservare qui è he la massa m di P he ompare nella (4.12) è la massagravitazionale, mentre la massa m di P he ompare al denominatore della (4.13) è la massainerziale. Se non fossero uguali, infatti si dovrebbe distinguere una massa gravitazionale mg dauna massa inerziale mi, e l'a elerazione di gravità sarebbe s ritta nella forma seguentea = G
M⊕
R2⊕
mg
mi
(4.16)verrebbe quindi a dipendere dal rapporto fra i due tipi di massa e sarebbe diversa da orpo a orpo. Il fatto he l'a elerazione di gravità sia la stessa per tutti i orpi he risentono dell'at-trazione terrestre è quindi una importante veri a dell'uguaglianza fra la massa inerziale e quellagravitazionale.Con un pro edimento simile a quello he ha portato alla (4.13) è possibile determinare l'a elera-zione di gravità su qualsiasi orpo eleste di massa M e raggio R; valeag = G
M
R2. (4.17)Per il prin ipio di azione e reazione se la Terra attira il punto materiale P di massam, quest'ultimoattira la Terra on una forza di ugual modulo. L'a elerazione a quistata dalla Terra è dunque, si onfronti on (4.13):
a⊕ =Fg
M⊕= G
m
R⊕=
m
M⊕ag (4.18)L'a elerazione della Terra è quindi tanto piú pi ola dell'a elerazione di gravità di P quanto lamassa di questo è piú pi ola della massa di quella. Quindi, sostanzialmente, la Terra sta ferma e

70 4. GRAVITAZIONE.P si muove, in a ordo on la omune esperienza.Come detto sopra, l'a elerazione di gravità risente della forza entrifuga. La rotazione terrestreinfatti inuis e sulla forza totale agente su di un punto materiale misurata sulla super ie terrestre.
θ
P
C
mg
Fc
Fg
d
ω
Figura 4.5: Il ruolo della forza entrifuga.
La Terra, infatti, ruotando attorno all'asse terrestre,non è un sistema di riferimento inerziale. Nella deter-minazione della forza totale agente su P nel sistema diriferimento non inerziale solidale alla super ie terre-stre o orre quindi tenere onto delle forze apparenti ein parti olare della forza entrifuga.Dalla gura 4.5, ove il ruolo della forza entrifuga è, per hiarezza, fortemente a entuato, si vede he la forzaeettivamente agente su P non è la sola forza Fg di at-trazione gravitazionale verso il entro della Terra, ma viè una orrezione dovuta alla forza entrifuga. La forzarisultante è la forza peso mg eettivamente misuratasulla super ie terrestre. La forza entrifuga dipendedalla latitudine, il suo modulo vale infattiFc = mω2d = mω2R⊕ cos θ (4.19)ove d è la distanza di P dall'asse di rotazione terrestre e
θ è la latitudine. Per esempio l'a elerazione entrifugaagente su di un punto materiale he si trovi a 45 di latitudine ha moduloac = 2.2097 · 10−2m s−2 , (4.20)il ontributo dell'a elerazione entripeta alla (2.29) è quindi di po o piú dello 0.2%.4.8 Satelliti.Molti pianeti hanno dei satelliti, ioè altri orpi elesti di dimensioni minori he per orrono un'or-bita attorno al pianeta. Questi satelliti sono trattenuti dal pianeta mediante la forza gravitazionaleesattamente ome il Sole trattiene ias un pianeta. Il moto di un satellite attorno al proprio piane-ta è regolato dalle leggi di Kepler in modo analogo a quanto a ade per i pianeti orbitanti attornoal Sole; l'uni a osa a ambiare è la ostante di proporzionalità nella terza legge, he ora ontienela massa del pianeta, inve e della massa del Sole.Si vuole qui mostrare he, ome del resto previsto dalle leggi di Kepler, la velo ità on ui unsatellite per orre la sua orbita dipende dalla distanza dal pianeta. Per sempli ità si supponga heil satellite per orra un'orbita ir olare di raggio r on velo ità di modulo ostante v. La forzaagente sul satellite è entripeta; deve dunque valere
F = GMm
r2= m
v2
r(4.21)ove M è la massa del pianeta, m quella del satellite. Quindi la velo ità diminuis e all'aumentaredel raggio se ondo la formula
v =
√
GM
r. (4.22)Questa formula, oltre a valere per i satelliti naturali di un pianeta vale an he per i satelliti arti iali;in parti olare vale per i satelliti geostazionari. Questi sono satelliti he si trovano sempre nella

4.9. CAMPO GRAVITAZIONALE. 71stessa posizione rispetto alla super ie della Terra rotante attorno al proprio asse; si tratta ioè disatelliti he ruotano attorno alla Terra on una velo ità angolare uguale a quella terrestre o, heè lo stesso, he hanno periodo orbitale di un giorno, ioè T = 23h 56min 4 s = 86164 s. D'altraparte deve valere:T =
2πr
v=
√
4π2r3
GM⊕(4.23)e quindi
r =3
√
GM⊕
4π2T 2 = 42164172m . (4.24)L'orbita geostazionaria ha quindi un raggio di po o piú di 42000km.Si osservi la (4.23) non è altro he la terza legge di Kepler (4.8) appli ata alle orbite attorno allaTerra.4.9 Campo gravitazionale.La forza gravitazionale (4.9) onsente di spiegare on un'ottima approssimazione tutti i moti dei orpi del sistema solare. Ha avuto an he un ruolo predittivo: l'esistenza dei pianeti Nettuno e Plu-tone fu prevista analizzando, sulla base della (4.9), erte irregolarità dell'orbita di Urano. Tuttavia,nonostante i su essi sperimentali, la (4.9) presenta un problema di fondo. Diversamente da tuttequelle studiate in pre edenza, he sono forze di ontatto, la forza gravitazionale è un'interazionea distanza; non è quindi aatto hiaro quale sia il me anismo di tale interazione, non si apis e ioè in he modo due orpi, an he molto distanti fra loro, possano eser itare una forza re ipro a.Il problema era già stato sollevato da Newton, nello S olium generale alla ne dei Prin ipia.La si a moderna, soprattutto a partire dal lavoro di Faraday17 e Maxwell18, ha omin iato a de-s rivere l'azione a distanza in termini di ampo. L'idea è he la presenza di una massa modi hilo spazio ir ostante. Per farsi un'idea di quel he a ade, si pensi ad un orpo massi io posato
Figura 4.6: Modello ideale del ampo gravitazionale.su di una super ie elasti a; la super ie si in urva e una se onda massa presente sulla super ies ivola verso l'avvallamento. Se non si per episse la presenza della membrana si interpreterebbequel he a ade ome un'azione a distanza.Il ampo gravitazionale nel punto dello spazio P si denis e nel modo seguente. Si onsideri unpunto qualsiasi materiale di massa m he si trovi in P e sia Fg la forza gravitazionale agente sum, allora si di e ampo gravitazionale in P il vettore denito da
g =Fg
m. (4.25)Poi hé Fg è proporzionale a m, il ampo g non dipende dalla massa del punto materiale ollo atoin P ma solo dalle masse he agis ono su di esso e dalle loro distanze da P . Nel aso sempli e in17Mi hael Faraday (17911867), si o e himi o inglese.18James Clerk Maxwell (18311879), si o e matemati o s ozzese.

72 4. GRAVITAZIONE. ui ad agire sul punto materiale in P sia un uni o punto materiale (o un orpo a simmetria sferi a)di massa M posto a distanza r da P , il ampo gravitazionale è diretto verso M ed ha modulog = G
M
r2. (4.26)Si fa ia attenzione a non onfondere il modulo del ampo gravitazionale on l'a elerazione digravità, indi ata on il stesso simbolo.Il ampo gravitazionale ha le dimensioni di una forza fratto una massa e quindi la sua unità dimisura è N kg−1.Intermezzo. La pesatura della Terra.Nel 1798 Cavendish19 utilizzò la legge di gravitazione universale per misurare la densità della Terra, ioè il rapporto fra la massa ed il volume. L'apparato sperimentale he usò è molto sempli e, si
Od
A B
Figura 4.7: L'apparato sperimentale diCavendish.veda la gura 4.7 ove è presentata una vista dall'al-to. Si tratta di una bilan ia di torsione (su ui sidovrà tornare in un apitolo su essivo) ostituitada un sottile lo rigido O ui è appesa una leggeraasta di legno alle ui estremità si trovano due pi olesfere di piombo A e B uguali e di massa m. Se ilsistema è posto in rotazione attorno all'asse del loper mezzo di una forza esterna F , questo si tor e diun erto angolo α no a he la forza di ri hiamo dello, proporzionale ad α non eguaglia la forza F . Aquesto punto, una misura di α fornis e una misuradel modulo di F .Cavendish ollo ò alla stessa distanza dalle due sfe-re della bilan ia, due piú grosse sfere sse, sempredi piombo, uguali e di massa M , in modo he l'attrazione gravitazionale fra le sfere mettesse inrotazione la bilan ia di torsione. Misurando l'angolo di torsione fu quindi in grado di determinareil modulo della forza agente fra le sfere, il ui modulo vale
F = GMm
d2. (4.27)Cavendish fe e quindi il rapporto fra questa forza e la forza di attrazione terrestre delle sfere piúpi ole, ioè on la loro forza peso il ui modulo è
Fp = GM⊕m
R2⊕
. (4.28)Tale rapporto dàFp
F=M⊕d
2
MR2⊕
(4.29)La misura di F e del peso Fp, onsentí osí a Cavendish di determinare il rapporto fra la massa eil raggio della Terra; la misura di quest'ultimo era nota n dai tempi di Eratostene20. Da questi19Henry Cavendish (17311810), himi o e si o s ozzese.20Eratostene di Cirene (276194 a.C.), matemati o, astronomo, geografo e poeta di Cirene.

INTERMEZZO. 73dati Cavendish quindi poté al olare la densità ρ⊕ della Terra:ρ⊕ =
M⊕
4
3πR3
⊕
=3
4π
MFp
d2FR⊕. (4.30)Cavendish stesso si riferiva al proprio esperimento ome alla pesatura della Terra, poi hé dalladensità è immediato determinare la massa.
Capitolo 5Leggi di onservazione.La soluzione del problema dinami o utilizzando la sola legge fondamentale (3.12), ioè il passaredalla onos enza delle forze agenti su di un punto materiale alla legge oraria del moto e dellavelo ità, è spesso di ile. Un grande ausilio, sia te ni o he on ettuale, viene dalla onos enzadi erte grandezze si he he, in erte ondizioni, si mantengono ostanti durante il moto; si di eallora he la grandezza in questione si onserva. In questo apitolo si studiano queste grandezze ele ondizioni della loro onservazione.5.1 Conservazione dell'energia me ani a.5.1.1 Lavoro.1Si onsideri un punto materiale P di massa m in moto rettilineo sotto l'azione della forza ostanteF e sia s lo spostamento di P ; allora si denis e lavoro di F su P la quantità
L = F · s . (5.1)L'unità di misura del lavoro è detta joule2 ed ha le dimensioni di una forza per una lunghezza, ioè[L] = [F ] [l] = [t]−2 [l]2 [m] . (5.2)Per le note proprietà del prodotto s alare fra vettori, il lavoro è positivo, nullo o negativo a se onda he l'angolo formato dai vettori F e s sia a uto, retto od ottuso. Il lavoro positivo viene dettolavoro motore poi hé la forza favoris e il moto del punto materiale; vi eversa il lavoro negativoviene detto lavoro resistente poi hé la forza si oppone al moto di P .La denizione data di lavoro vale solo se lo spostamento di P è rettilineo e se durante lo sposta-mento la forza rimane ostante. Questa denizione può essere estesa al aso piú generale in uila traiettoria di P è una qualsiasi linea urva e la forza è variabile. In questo aso, la denizioneesatta del lavoro ri hiede il al olo integrale e quindi è fuori dai limiti di questi appunti; tuttaviasi ritiene assai istruttivo, senza al una pretesa di rigore matemati o, dare qual he enno di omesi possa al olare il lavoro nel aso generale.1Nella stesura della presente sezione sono debitore di Fabio Maria Antoniali per l'impostazione generale ed al unegure.2James Pres ott Joule (18181889), si o inglese. 74
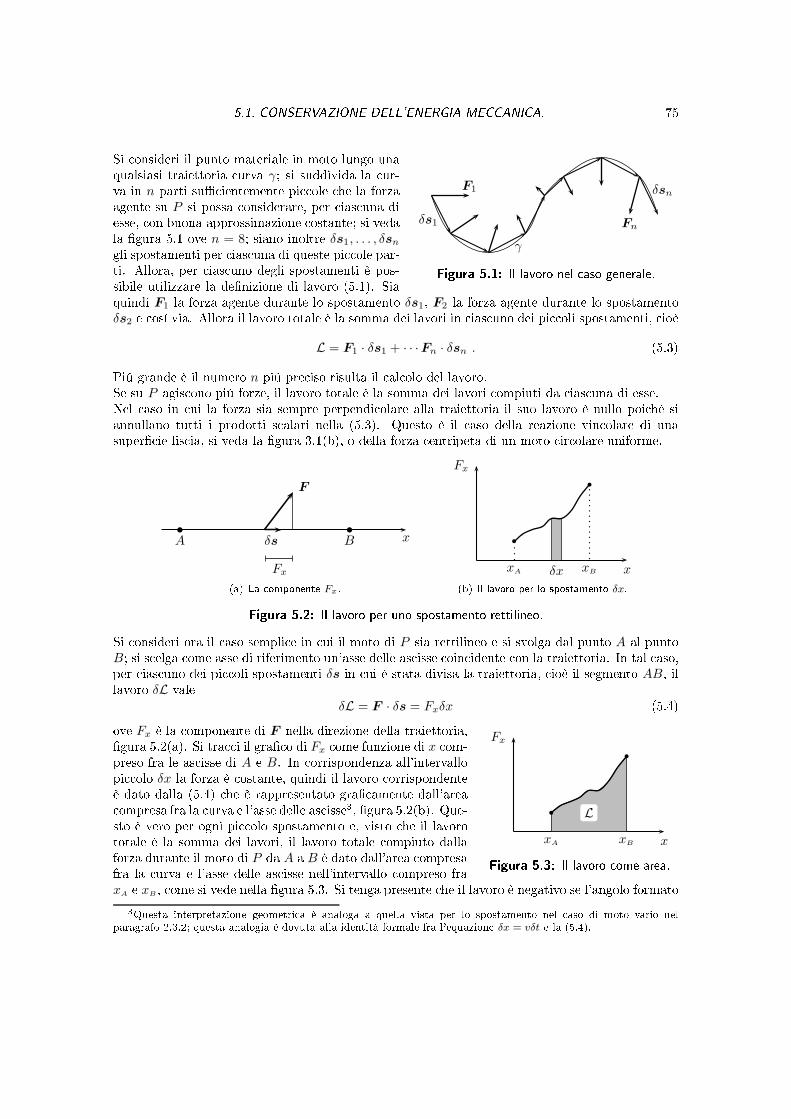
5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 75F1
Fnδs1
δsn
γFigura 5.1: Il lavoro nel aso generale.Si onsideri il punto materiale in moto lungo unaqualsiasi traiettoria urva γ; si suddivida la ur-va in n parti su ientemente pi ole he la forzaagente su P si possa onsiderare, per ias una diesse, on buona approssimazione ostante; si vedala gura 5.1 ove n = 8; siano inoltre δs1, . . . , δsngli spostamenti per ias una di queste pi ole par-ti. Allora, per ias uno degli spostamenti è pos-sibile utilizzare la denizione di lavoro (5.1). Siaquindi F1 la forza agente durante lo spostamento δs1, F2 la forza agente durante lo spostamentoδs2 e osí via. Allora il lavoro totale è la somma dei lavori in ias uno dei pi oli spostamenti, ioè
L = F1 · δs1 + · · ·Fn · δsn . (5.3)Piú grande è il numero n piú pre iso risulta il al olo del lavoro.Se su P agis ono piú forze, il lavoro totale è la somma dei lavori ompiuti da ias una di esse.Nel aso in ui la forza sia sempre perpendi olare alla traiettoria il suo lavoro è nullo poi hé siannullano tutti i prodotti s alari nella (5.3). Questo è il aso della reazione vin olare di unasuper ie lis ia, si veda la gura 3.1(b), o della forza entripeta di un moto ir olare uniforme.xA Bδs
F
Fx(a) La omponente Fx.Fx
xxA xBδx(b) Il lavoro per lo spostamento δx.Figura 5.2: Il lavoro per uno spostamento rettilineo.Si onsideri ora il aso sempli e in ui il moto di P sia rettilineo e si svolga dal punto A al puntoB; si s elga ome asse di riferimento un'asse delle as isse oin idente on la traiettoria. In tal aso,per ias uno dei pi oli spostamenti δs in ui è stata divisa la traiettoria, ioè il segmento AB, illavoro δL vale
δL = F · δs = Fxδx (5.4)L
Fx
xxA xBFigura 5.3: Il lavoro ome area.ove Fx è la omponente di F nella direzione della traiettoria,gura 5.2(a). Si tra i il gra o di Fx ome funzione di x om-preso fra le as isse di A e B. In orrispondenza all'intervallopi olo δx la forza è ostante, quindi il lavoro orrispondenteè dato dalla (5.4) he è rappresentato gra amente dall'area ompresa fra la urva e l'asse delle as isse3, gura 5.2(b). Que-sto è vero per ogni pi olo spostamento e, visto he il lavorototale è la somma dei lavori, il lavoro totale ompiuto dallaforza durante il moto di P da A a B è dato dall'area ompresafra la urva e l'asse delle as isse nell'intervallo ompreso fraxA e xB , ome si vede nella gura 5.3. Si tenga presente he il lavoro è negativo se l'angolo formato3Questa interpretazione geometri a è analoga a quella vista per lo spostamento nel aso di moto vario nelparagrafo 2.3.2; questa analogia è dovuta alla identità formale fra l'equazione δx = vδt e la (5.4).
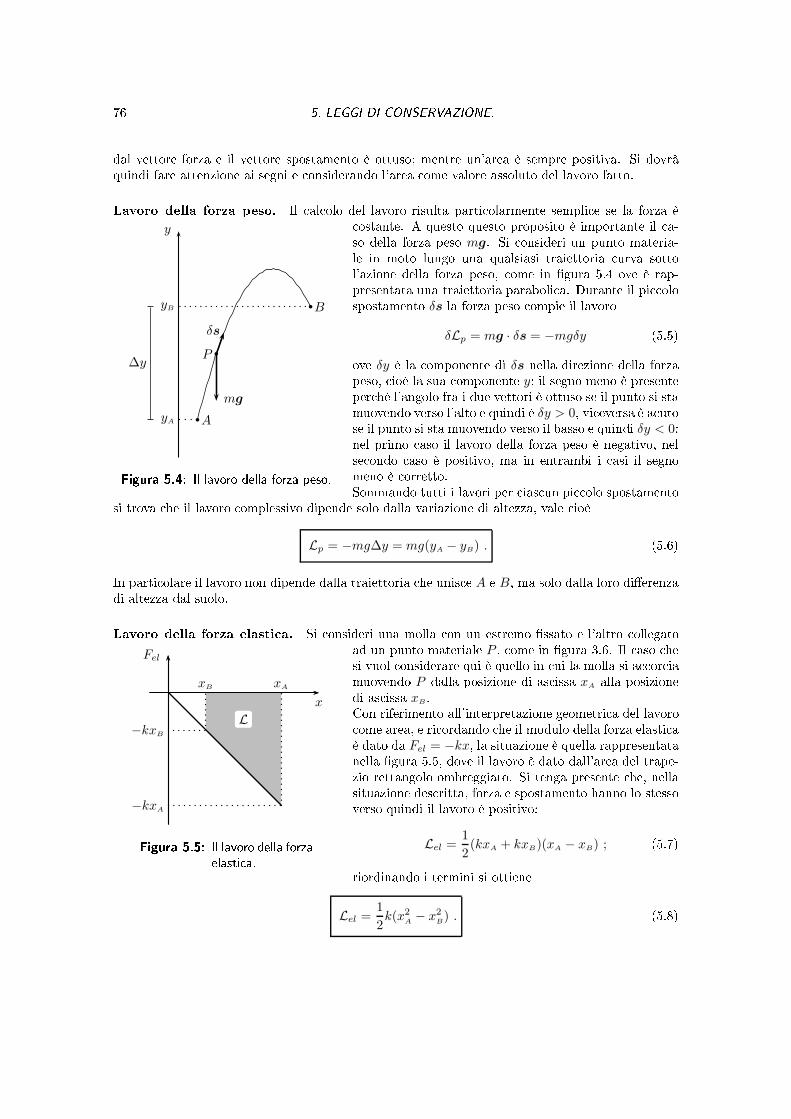
76 5. LEGGI DI CONSERVAZIONE.dal vettore forza e il vettore spostamento è ottuso; mentre un'area è sempre positiva. Si dovràquindi fare attenzione ai segni e onsiderando l'area ome valore assoluto del lavoro fatto.Lavoro della forza peso. Il al olo del lavoro risulta parti olarmente sempli e se la forza è
b
b
b
y
yA
yB
δs
mg
∆yP
A
B
Figura 5.4: Il lavoro della forza peso.
ostante. A questo questo proposito è importante il a-so della forza peso mg. Si onsideri un punto materia-le in moto lungo una qualsiasi traiettoria urva sottol'azione della forza peso, ome in gura 5.4 ove è rap-presentata una traiettoria paraboli a. Durante il pi olospostamento δs la forza peso ompie il lavoroδLp = mg · δs = −mgδy (5.5)ove δy è la omponente di δs nella direzione della forzapeso, ioè la sua omponente y; il segno meno è presenteper hé l'angolo fra i due vettori è ottuso se il punto si stamuovendo verso l'alto e quindi è δy > 0, vi eversa è a utose il punto si sta muovendo verso il basso e quindi δy < 0:nel primo aso il lavoro della forza peso è negativo, nelse ondo aso è positivo, ma in entrambi i asi il segnomeno è orretto.Sommando tutti i lavori per ias un pi olo spostamentosi trova he il lavoro omplessivo dipende solo dalla variazione di altezza, vale ioè
Lp = −mg∆y = mg(yA − yB) . (5.6)In parti olare il lavoro non dipende dalla traiettoria he unis e A e B, ma solo dalla loro dierenzadi altezza dal suolo.Lavoro della forza elasti a. Si onsideri una molla on un estremo ssato e l'altro ollegatoL
Fel
x
−kxB
−kxA
xAxB
Figura 5.5: Il lavoro della forzaelasti a.
ad un punto materiale P , ome in gura 3.6. Il aso hesi vuol onsiderare qui è quello in ui la molla si a or iamuovendo P dalla posizione di as issa xA alla posizionedi as issa xB.Con riferimento all'interpretazione geometri a del lavoro ome area, e ri ordando he il modulo della forza elasti aè dato da Fel = −kx, la situazione è quella rappresentatanella gura 5.5, dove il lavoro è dato dall'area del trape-zio rettangolo ombreggiato. Si tenga presente he, nellasituazione des ritta, forza e spostamento hanno lo stessoverso quindi il lavoro è positivo:Lel =
1
2(kxA + kxB)(xA − xB) ; (5.7)riordinando i termini si ottiene
Lel =1
2k(x2
A− x2
B) . (5.8)

5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 77L'equazione pre edente ha il segno orretto in tutti i asi pur hé si indi hi on A la posizioneiniziale e on B quella nale.Si osservi he il lavoro della forza elasti a non dipende dal per orso seguito dal punto materialesotto l'azione della molla: potrebbe, per esempio, aver fatto piú os illazioni. Il lavoro della forzaelasti a quindi, ome quello della forza peso, dipende solo dalle posizioni iniziale e nale e non dalper orso he le unis e.Lavoro della forza gravitazionale. Si onsideri una massa m2 he si muova nel ampo gravi-tazionale di una se onda massa m1 spostandosi da A a B. Il lavoro fatto dalla forza gravitazionaleFg
rrArBFigura 5.6: Il lavoro della forzagravitazionale.è positivo se rA > rB , mentre è negativo se rA < rB ; in ogni aso il suo valore assoluto è dato dall'area sottostante la urva,ombreggiata in gura 5.6. Sfortunatamente la determinazionedi questa area non è elementare, ma ri hiede la onos enza del al olo integrale; tuttavia, vista la sua grande importanza, sene dà qui l'espressione generale:
Lg = −Gm1m2
(
1
rA− 1
rB
)
. (5.9)Il segno è orretto sia he i due orpi si avvi inino ( om'è il aso rappresentato in gura) sia he si allontanino, pur hé Asia la posizione iniziale e B la posizione nale.An he il lavoro della forza gravitazionale, ome nei pre edenti esempi, dipende solo dalle posizioniiniziale e nale e non dalla traiettoria he le ongiunge.5.1.2 Potenza.Si di e potenza P sviluppata dalla forza ostante F he ompie il lavoro L nell'intervallo di tempo∆t, il lavoro svolto nell'unità di tempo, vale ioè
P =L∆t
. (5.10)Le dimensioni della potenza sono quelle di un'energia fratto un tempo, la sua unità di misura vienedetta watt4, simbolo W; sviluppa la potenza di un watt la forza he ompie il lavoro di un joulein un se ondo.Se F non è ostante, per denire la potenza in un dato istante t o orre onsiderare un intervallodi tempo da t a t + δt su ientemente pi olo da poter onsiderare F ostante. In tale pi olointervallo di tempo lo spostamento si δs; la potenza quindi si s riveP =
F · δsδt
. (5.11)Al tendere a zero di δt si trova la potenza all'istante t:P(t) = F (t) · v(t) , (5.12)ove v = δs/δt è la velo ità all'istante t.Il on etto di potenza è parti olarmente utile nel onfronto di due ma hine diverse he ompionolo stesso lavoro in tempi diversi; si pensi, per esempio ad una grande assa sollevata no al se ondopiano di un edi io a spalla o usando un monta ari hi.4James Watt (17361819), ingegnere s ozzese.

78 5. LEGGI DI CONSERVAZIONE.5.1.3 Teorema dell'energia ineti a.Se su un punto materiale P di massa m agis e la forza F , per la legge fondamentale della dinami aesso è a elerato e quindi la sua velo ità varia. Esiste una relazione fra il lavoro ompiuto dallaforza e la variazione della velo ità.Si supponga he la forza F sia ostante e sia diretta nella direzione dello spostamento; in questo aso il moto di P è uniformemente a elerato. Si supponga inoltre he all'istante iniziale t0 = 0 sla velo ità sia v0; all'istante t P avrà per orso lo spostamento ∆x dato dalla (2.28). Il lavoro dellaforza F orrispondente a tale spostamento è quindiL = F · s = F∆x = ma · v
2(t)− v202a
=1
2m[
v2(t)− v20]
. (5.13)La quantitàEc =
1
2mv2 . (5.14)è detta energia ineti a del un punto materiale P . È stato osí dimostrato he, nel aso diuna forza ostante diretta nella direzione del moto, il lavoro ompiuto è uguale alla variazionedell'energia ineti a. È possibile dimostrare, in modo non elementare poi hé è ne essario il al olodierenziale, he questo risultato ha una validità generale, valendo an he per una forza variabilee per qualunque spostamento di P . Questo risultato è detto teorema dell'energia ineti a odelle forze vive e può essere enun iato ome segue.Il lavoro fatto dalla risultante delle forze agenti su di un punto materiale di massa mè uguale alla variazione dell'energia ineti a del punto materiale.Vale quindi l'equazione
L = Ecf − Eci , (5.15)ove Eci e Ecf sono rispettivamente l'energia ineti a iniziale e nale. L'energia ineti a è unaquantità s alare; ha la stessa dimensione del lavoro e si misura, quindi, in joule.L'energia ineti a di un punto materiale dipende dal sistema di riferimento rispetto a ui vienemisurato il moto. Infatti la velo ità di un punto materiale è diversa in sistemi di riferimento diversi.Ciononostante, il teorema dell'energia ineti a è valido in ogni sistema di riferimento, inerziale omeno. In aso di sistema non inerziale o orre al olare il lavoro an he delle forze apparenti.Non si è ritenuto di dover dare una denizione generale di energia. In eetti, spesso si denis el'energia ome la apa ità di ompiere un lavoro. Tale denizione è tuttavia insoddisfa ente inquanto, a ausa della sua vaghezza, onsente di essere appli ata a molte ose diverse. Qui è statadata una denizione di due forme di energia: il lavoro di una forza e l'energia ineti a di un puntomateriale. Nel seguito si vedranno altre forme di energia ui si daranno nomi diversi. Denire ununi o on etto da riempire on un signi ato generi o non è molto utile. Piú utile sarà denireoperativamente le diverse forme di energia e vedere qual'è, se ve n'è una, la loro relazione.5.1.4 Forze onservative. Energia potenziale.Come visto sopra, il lavoro della forza peso, della forza elasti a e della forza gravitazionale, dipendedalle posizioni iniziale e nale del punto materiale ma non dalla traiettoria per orsa. Questaproprietà è aratteristi a di una lasse molto importante di forze, dette forze onservative. Valela seguente denizione.

5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 79Una forza è detta onservativa se, agendo su di un punto materiale in moto, il lavoro ompiuto dalla forza non dipende dalla traiettoria seguita né dalle aratteristi he delmoto on ui essa viene per orsa, ma solamente dalle posizioni iniziale e nale.Se una forza F è onservativa è possibile denire una funzione U della sola posizione tale he illavoro si possa esprimere in termini della variazione di tale funzione; piú pre isamente il lavoro ompiuto nello spostamento dalla posizione A alla posizione B si può s rivere nella forma seguenteLA→B = U(A)− U(B) . (5.16)Questa relazione denis e la funzione U he viene hiamata energia potenziale della forza on-servativa F .L'esistenza, nel aso di forze onservative, di una funzione U tale he valga la relazione (5.16) èdimostrabile, ome vedrà po o piú sotto. Quale sia poi l'equazione espli ita della funzione U perogni diversa forza onservativa è un problema la ui soluzione, nel aso generale, può an he essereestremamente ompli ata. Nel seguito si vedranno gli esempi piú sempli i.Si onsideri un punto materiale he, sotto l'azione della forza onservativa F , si muove dal punto Aal punto B lungo due traiettorie diverse 1 e 2, ome in gura 5.7(a). Poi hé la forza è onservativa,il lavoro da essa ompiuto nei due asi deve essere il medesimo deve quindi valere:
L1 = L2 . (5.17)b
b
1
2
A
B(a) Le due traiettorie 1 e 2. b
b
1
3A
B(b) La traiettoria hiusa.Figura 5.7: Il lavoro di una forza onservativa.Si potrebbe ripetere il ragionamento utilizzando qualunque altra traiettoria he onnetta i punti Ae B il lavoro ompiuto da F per spostare il punto materiale in questione da A a B quindi dipendesolamente dalle posizioni A e B.Questo stato di ose si può formalmente s rivere nel modo seguente:LA→B = U(A,B) , (5.18)dove U(A,B) è una funzione da determinare.Allo s opo di ottenere qual he ulteriore informazione sulla funzione U(A,B), si supponga he ilpunto materiale, una volta giunto in B lungo la traiettoria 1 ritorni in A lungo la traiettoria 3, ome in gura 5.7(b); in tal aso si di e he il punto materiale ha per orso una traiettoria hiusa.Valgono le relazioni:
L1 = U(A,B) , L3 = U(B,A) . (5.19)Il lavoro di una forza onservativa lungo una traiettoria hiusa è uguale qualunque sia la traiettoriaper orsa; in parti olare si può s egliere la traiettoria nulla, ioè il aso in ui il punto materialenon si muove. In questo aso, non essendo i al uno spostamento, il lavoro è nullo. Si può quindiaermare la seguente proprietà aratteristi a delle forze onservative.Se il punto materiale per orre una traiettoria hiusa una forza onservativa ompie sudi esso un lavoro nullo.

80 5. LEGGI DI CONSERVAZIONE.Quindi, relativamente al aso he si sta qui esaminando, valeL1+3 = L1 + L3 = 0 ←→ L1 = −L3 (5.20)e quindi
U(A,B) = −U(B,A) . (5.21)b
b
b
A
B
R
Figura 5.8: Il punto di riferimento R.Si supponga ora he il punto materiale, muovendosi daA a B passi per un erto punto R, ssato una vol-ta per tutte arbitrariamente, detto punto di riferimen-to. Allora, tenendo presente l'equazione (5.18), si puòs rivere:
U(A,B) = LA→B = LA→R + LR→B (5.22)e quindiU(A,B) = U(A,R) + U(R,B) . (5.23)Utilizzando la (5.21) appli ata alla traiettoria A→ R si trovaU(R,B) = −U(B,R) . (5.24)Questa, sostituita nella (5.23), dà inne la relazione
U(A,B) = U(A,R)− U(B,R) . (5.25)Poi hé lo stato di riferimento R è ssato una volta per tutte, si può omettere di indi arlo ognivolta nella funzione U e s rivere sempli ementeU(A,R) ≡ U(A) . (5.26)Quindi l'equazione (5.25) può essere ris ritta nella forma
U(A,B) = U(A)− U(B) . (5.27)Confrontando le equazioni (5.18) e (5.27) si ottieneLA→B = U(A) − U(B) , (5.28) he è quanto si doveva dimostrare.La funzione energia potenziale U , di ui è stata dimostrata l'esistenza quando siano presenti soloforze onservative, per quanto molto importante, è sempli emente una funzione matemati a in uisigni ato si o non è immediatamente esperibile. Ciò he ha signi ato si o ( ioè: iò he èmisurabile) è solamente il lavoro ompiuto dalla forza F . Tale lavoro è opposto alla variazione di
U . Quindi iò he ha signi ato si o non è la funzione U ma la sua variazione.Dall'equazione (5.27) è fa ile ri avare la relazioneU(A,R) = U(A)− U(R) . (5.29)Confrontando le (5.26) e (5.29), si ri ava immediatamente
U(R) = 0 . (5.30)

5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 81Quindi nello s egliere il punto di riferimento R di fatto viene s elto a quale posizione assegnareenergia potenziale nulla. E si ome tutto quanto dimostrato sopra è indipendente dalla s eltadi R, si può aermare he la s elta del punto in ui l'energia potenziale vale zero viene las iata ompletamente arbitraria. Questo fatto è onseguenza di quanto appena detto, ioè he l'uni aquantità avente signi ato si o è la variazione dell'energia potenziale: tale variazione non dipendedalla s elta dello zero.Un altro modo di vedere la medesima proprietà è aermare he l'energia potenziale è denita ameno di una ostante additiva arbitraria. Aggiungendo infatti ad U una qualsiasi ostante (positivao negativa), la sua variazione, he ome detto è l'uni a grandezza ad avere signi ato si o, restainvariata. In altre parole se al posto di U si onsidera la funzione U ′ = U + α, essendo α unaqualunque ostante, il lavoro ompiuto per andare dal punto A al punto B è dato daLA→B = U ′(A)− U ′(B) =
[
U(A) + α]
−[
U(B) + α]
= U(A)− U(B) . (5.31)L'utilizzo di U ′ o di U quindi porta allo stesso valore del lavoro ompiuto; le due energie potenzialisono quindi equivalenti. La s elta della ostante orrisponde alla s elta dello zero dell'energiapotenziale ed è dettata da riteri di onvenienza.5.1.5 Casi parti olari.Come già osservato, il lavoro della forza peso, della forza elasti a e della forza gravitazionaledipendono solo dalle posizioni iniziale e nale e non dalla traiettoria; queste tre sono quindi forze onservative. Le loro energie potenziali si possono fa ilmente dedurre dalle equazioni (5.6), (5.8) e(5.9). Per la forza peso si ha:Lp = mg(yA − yB) = Up(A) − Up(B) (5.32)quindi l'energia potenziale della forza peso è:
Up(y) = mgy . (5.33)Per la forza elasti a si haLel =
1
2k(x2
A− x2
B) = Uel(A) − Uel(B) (5.34)quindi l'energia potenziale della forza elasti a è
Uel(x) =1
2kx2 . (5.35)Per la forza gravitazionale si ha
Lg = −Gm1m2
(
1
rA− 1
rB
)
= Ug(A) − Ug(B) (5.36)quindi l'energia potenziale della forza gravitazionale èUg(r) = −G
m1m2
r. (5.37)

82 5. LEGGI DI CONSERVAZIONE.È molto istruttivo mostrare he la (5.33) si può ottenere ome approssimazione della (5.37). Si onsideri infatti un punto materiale di massam ad un'altezza y al di sopra della super ie terrestre;in tale aso la sua energia potenziale gravitazionale si può s rivere nella formaUg(y) = −G
M⊕m
R⊕ + y= −GM⊕m
R⊕
1
1 +y
R⊕
. (5.38)Se y ≪ R⊕ si può utilizzare l'approssimazione5 (1 + x)α ≃ 1 + αx valida per x ≪ 1; si ottienequindi1
1 +y
R⊕
=
(
1 +y
R⊕
)−1
≃ 1− y
R⊕, (5.39)e quindi
Ug(y) ≃ −GM⊕m
R⊕
(
1− y
R⊕
)
≃ GM⊕
R2⊕
my −GM⊕m
R⊕. (5.40)Ri ordando he GM⊕/R
2⊕ è l'a elerazione di gravità, equazione (4.13), e osservando he l'ultimotermine dell'equazione pre edente è ostante, si può s rivere:
Ug(y) ≃ gmy + cost. (5.41) he, a meno di una irrilevante ostante additiva, è uguale alla (5.33).5.1.6 La relazione tra forza ed energia potenziale.Si onsideri un punto materiale he, sotto l'azione della forza onservativa ostante F , si sposti,lungo una retta, dalla posizione A designata dall'as issa x alla posizione B designata dall'as issax+∆x. Il lavoro fatto dalla forza in questo sempli e aso è dato da
L = F ·AB = Fx∆x , (5.42)D'altra parte, poi hé la forza è onservativa, è possibile s rivere il lavoro in termini della variazionedell'energia potenziale:L = U(A)− U(B) = U(x) − U(x+∆x) = −
[
U(x+∆x) − U(x)]
= −∆U . (5.43)Ne segue he Fx∆x = −∆U e quindiFx = −∆U
∆x. (5.44)L'equazione (5.44) di e he la omponente x della forza è la rapidità on ui ambia l'energiapotenziale all'aumentare di x, e onsente di al olare la forza una volta he sia nota l'energiapotenziale ome funzione della posizione.Se la forza F non è ostante, l'equazione (5.44) fornis e la ( omponente x della) forza media he5 La dimostrazione per α intero è sempli e, basta infatti sviluppare la potenza n-esima del binomio e osservare he i termini ontenenti x2, x3, . . . sono tras urabili; si ottiene osí:
(1 + x)n ≃ 1 + nx .La dimostrazione per α non intero ri hiede le te ni he dell'analisi matemati a.

5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 83agis e sul punto materiale durante lo spostamento da A a B. Si onfronti l'equazione (5.44) onl'equazione (2.12) he denis e la velo ità media; in modo analogo a quanto fatto per denire lavelo ità istantanea a partire dalla velo ità media, è possibile determinare la ( omponente x della)forza nella posizione x fa endo tendere ∆x a zero. Vale dunque− ∆U
∆x−−−−−→∆x→0
Fx . (5.45)Gli esempi he seguono serviranno a hiarire la questione.Caso della forza peso. La forza peso è ostante, si può quindi utilizzare l'equazione (5.44).Si supponga he, sotto l'azione del proprio peso, un punto materiale di massa m si sposti versol'alto dalla posizione A di altezza y alla posizione B di altezza y + ∆y; la variazione dell'energiapotenziale, equazione (5.33), è quindi data da∆Up = Up(y +∆y)− Up(y) = mg(y +∆y)−mgy = mg∆y , (5.46)quindi la omponente nella direzione y della forza peso è
Fy = −∆Up∆y
= −mg , (5.47)il segno meno sta a indi are he la forza è diretta nel verso delle y de res enti, ioè verso il basso.Caso della forza elasti a. La forza elasti a non è ostante, è quindi ne essario utilizzare l'e-quazione (5.45). Si onsideri un orpo he, sotto l'azione di una molla di ostante elasti a k, sisposti dalla posizione A di as issa x alla posizione B di as issa x +∆x; la variazione dell'energiapotenziale, equazione (5.35), è quindi data da∆Uel = Uel(x+∆x) − Uel(x) =
1
2k(x+∆x)2 − 1
2kx2 =
1
2k(∆x)2 + kx∆x ; (5.48)quindi
−∆Uel∆x
= −1
2k∆x− kx−−−−−→
∆x→0−kx . (5.49)Quindi la omponente nella direzione x ( ioè delle x res enti) della forza elasti a è
Fel = −kx . (5.50)Caso della forza gravitazionale. La forza gravitazionale non è ostante, quindi è an ora ne- essario usare l'equazione (5.45). Si onsideri un orpo di massa m he, sotto l'azione di una forzagravitazionale dovuta alla presenza di un se ondo orpo di massa M , si muova dalla posizione A, he dista r da M , alla posizione B he dista r + ∆r da M ; la variazione dell'energia potenziale,equazione (5.37), è quindi∆Ug = Ug(r +∆r) − Ug(r) = −G
Mm
r +∆r+G
Mm
r= G
Mm∆r
r(r +∆r); (5.51)quindi
−∆Ug∆r
= −G Mm
r(r +∆r)−−−−−→∆r→0
−GMm
r2. (5.52)Quindi la omponente nella direzione delle r res enti della forza gravitazionale è
Fg = −GMm
r2, (5.53)ove il segno meno sta a indi are he la forza è diretta nel verso delle r de res enti, ioè è attrattiva.

84 5. LEGGI DI CONSERVAZIONE.5.1.7 Conservazione dell'energia me ani a.Il teorema dell'energia ineti a, equazione (5.15), vale in ogni situazione, mentre l'energia poten-ziale, denita dall'equazione (5.16), è denibile solamente nel aso in ui agis ano solamente forze onservative. Quindi, in quest'ultimo aso, le due relazioniLA→B = Ec(B)− Ec(A) LA→B = U(A) − U(B) (5.54)valgono entrambe. Pertanto, uguagliando i se ondi membri, si ottiene
Ec(B)− Ec(A) = U(A) − U(B) ←→ Ec(A) + U(A) = Ec(B) + U(B) . (5.55)Questa ultima equazione aerma he la grandezza ottenuta sommando energia ineti a ed energiapotenziale è uguale nella posizione iniziale A e nella posizione nale B. Poi hé le posizioni A eB sono ompletamente generi he, è hiaro he si sarebbe ottenuto lo stesso risultato s egliendoqualunque altra posizione. Pertanto la somma di energia ineti a e potenziale ha lo stesso valorein ogni posizione e quindi in ogni istante. Questa nuova grandezza è detta energia me ani a E :
E = Ec + U . (5.56)Vale quindi la seguente legge di onservazione dell'energia me ani a.Nel aso in ui su di un punto materiale agis ano solamente forze onservative, l'energiame ani a si onserva, ioè resta ostante durante il moto.Il prin ipio di onservazione ora enun iato giusti a il nome di forza onservativa. Non si ripeteràmai abbastanza, infatti, he l'energia me ani a si onserva solamente se tutte le forze in gio osono onservative.Un modo diverso di vedere il prin ipio della onservazione dell'energia me ani a è osservare he sela somma di energia ineti a ed energia potenziale è la stessa in ogni istante del moto, è hiaro heove una delle due diminuis a di una erta quantità l'altra deve ne essariamente aumentare dellastessa quantità. Questa proprietà è spesso hiamata trasformazione dell'energia da una formaad un'altra. Esistono altre forme in ui l'energia può essere trasformata; per esempio l'energiatermi a, studiata nell'ambito della termodinami a; l'energia himi a, he ha un ruolo importantenella formazione dei legami himi i; l'energia nu leare, he interessa la formazione e la disgregazionedei nu lei atomi i. Nel aso generale, qualunque sia il pro esso di trasformazione a ui un sistemasi o è sottoposto, l'energia totale, ioè la somma di tutte le energie in gio o (me ani a, termi a, himi a, e etera) rimane ostante. Il prin ipio di onservazione dell'energia è dunque un prin ipiofondamentale della si a a ui non si onos ono e ezioni. In questi appunti si onsiderano solopro essi me ani i, quindi l'uni a energia in gio o è l'energia me ani a.Se sono presenti forze non onservative l'energia me ani a non si onserva. La forza di attritoradente dinami o, per esempio, non è onservativa; si onsideri un punto materiale he s endelungo un piano in linato s abro; durante la dis esa l'energia potenziale diminuis e mentre l'energia ineti a aumenta. Poi hé l'energia me ani a non si onserva, non tutta l'energia potenziale sitrasforma in energia ineti a, per hé una parte viene dissipata dall'attrito; tale dissipazione simanifesta nel ris aldamento delle super i a ontatto.5.1.8 Energia totale nel aso della forza gravitazionale.Come esempio dell'uso del prin ipio di onservazione dell'energia me ani a si onsideri l'energiame ani a di un punto materiale P di massa m su ui agis e la forza gravitazionale di un orpo

5.1. CONSERVAZIONE DELL'ENERGIA MECCANICA. 85 eleste sferi o di massa M . Nel sistema di riferimento in ui il orpo eleste è fermo, l'energiame ani a del sistema è, in ogni istante, data dalla somma dell'energia ineti a di P e dell'energiapotenziale:E =
1
2mv2 −GMm
r. (5.57)Come si vede, l'energia me ani a è negativa o positiva a se onda he prevalga l'energia potenzialeo l'energia ineti a. Si esaminino i due asi uno alla volta.
E < 0. In questo aso prevale l'energia potenziale. Se P si allontana dal orpo eleste r aumenta,quindi l'energia potenziale (negativa) aumenta, onseguentemente l'energia ineti a, e quindi lavelo ità, diminuis ono in modo tale he E resti ostante. Esiste un valore di r per il quale lavelo ità è nulla e l'energia totale è interamente ostituita da energia potenziale; tale valore di rè la distanza massima di P dal orpo eleste. Raggiunta questa distanza massima, P si ferma e,risentendo della forza di attrazione gravitazionale del orpo eleste, ritorna verso di esso. P quindiè vin olato a muoversi attorno al orpo eleste: ne è un satellite; valgono le leggi di Kepler, P simuove lungo un'orbita ellitti a.E > 0. In questo aso prevale l'energia ineti a. Se P si allontana dal orpo eleste v non si annullamai per hé altrimenti E diverrebbe negativa; quindi quando la distanza di P dal orpo eleste èdiventata innitamente grande, e quindi l'energia potenziale è divenuta nulla, P possiede an orauna velo ità diversa da zero; quindi P è sfuggito all'attrazione del orpo eleste, non ne è unsatellite e per esso non valgono le leggi di Kepler; si può dimostrare he in questo aso P si muovelungo un'orbita iperboli a avente un fuo o sul orpo eleste.Si può anzi provare, in tutta generalità, an he se la dimostrazione fa uso del al olo dierenzialee quindi è fuori dalla portata di questi appunti, he la traiettoria di un punto materiale soggettoalla forza gravitazionale (4.9) è una oni a la ui e entri ità e è legata all'energia me ani a daun'equazione del tipo
e2 = 1 + κ E (5.58)ove κ è un'opportuna ostante; si hanno quindi le seguenti possibilità.L'energia me ani a è negativa; allora l'e entri ità è minore di uno e la traiettoria è un'ellisse ioèuna urva hiusa; il punto materiale quindi è un satellite he orbita attorno al orpo eleste.L'energia me ani a è positiva; allora l'e entri ità è maggiore di uno e la traiettoria è un'iperbole ioè una urva aperta; il punto materiale quindi sfugge all'attrazione del orpo eleste.L'energia me ani a è nulla; allora l'e entri ità è uguale a uno e la traiettoria è una parabola ioè an ora una urva aperta; il punto materiale ha l'energia minima he gli onsente di sfuggireall'attrazione del orpo eleste.È possibile al olare la velo ità minima vF he il punto materiale deve avere per sfuggire all'at-trazione di un orpo eleste. Tale velo ità è detta velo ità di fuga. Si onsideri quindi il puntomateriale P di massa m sulla super ie di un orpo eleste sferi o di massa M e raggio R; sisupponga he P si muova in verso opposto al entro del orpo eleste on una velo ità iniziale vF ;l'energia me ani a di P è:E =
1
2mv2
F−GMm
R. (5.59)Si è visto he la ondizione minima per hé P ries a a sfuggire all'attrazione del orpo eleste è hel'energia me ani a sia nulla, deve quindi valere
1
2mv2
F= G
Mm
R(5.60)

86 5. LEGGI DI CONSERVAZIONE.da ui si ottiene:vF =
√
2GM
R. (5.61)La velo ità di fuga dalla Terra è
vF =
√
2GM⊕
R⊕= 11186m s−1 . (5.62)Si di e bu o nero un orpo eleste il ui rapporto massa/raggio è osí elevato da far sí he lavelo ità di fuga risulti maggiore della velo ità della lu e.Nel aso parti olare in ui un satellite si muova di moto ir olare uniforme attorno ad un orpo eleste vale la (4.22); quindi l'energia me ani a diventa
E =1
2mGM
r−GMm
r= −GMm
2r=
1
2U = −Ec . (5.63)Quindi energia ineti a ed energia potenziale sono legate dalla relazione
2Ec = −U . (5.64)Quest'ultima equazione è un aso parti olare di una proprietà dei sistemi me ani i detta teoremadel viriale.5.2 Conservazione della quantità di moto.5.2.1 Impulso.Si onsideri una forza F ostante agente sul punto materiale P di massa m per un intervallo ditempo ∆t; si denis e allora impulso I di F la grandezza vettoriale ottenuta dal prodotto dellaforza per l'intervallo di tempo:I = F∆t . (5.65)Ha le dimensioni di una forza per un tempo; la sua unità di misura è quindi N s = kg m s−1.L'impulso è una grandezza utile nella des rizione di pro essi in ui intervengono forze molto intenseper tempi molto brevi; l'esempio tipi o è quello di un urto. Si pensi all'azione di un martello su un hiodo o ad una palla he rimbalza ontro una parete. Una forza di questo tipo è detta impulsiva;se ne vedranno degli esempi nel seguito.Se la forza non è ostante nel tempo, è ne essario ris rivere la (5.65) utilizzando la forza media Fmagente su P nell'intervallo di tempo ∆t:I = Fm∆t . (5.66)In generale il al olo della forza media ri hiede il al olo integrale; in molti dei asi importanti,tuttavia, può essere al olata usando l'equazione pre edente, ove l'impulso viene determinato uti-lizzando il teorema enun iato nella prossima sezione.Per la determinazione dell'impulso si può an he seguire il metodo gra o, ome già visto nel asodel lavoro di una forza variabile nello spazio.In questo aso l'impulso, il ui gra o è rappresentato in gura 5.9(a), relativo all'intervallo ditempo fra gli istanti t1 e t2 è l'area sottostante il gra o ompresa fra le as isse degli istanti dati.Per una forza impulsiva il gra o è ostituito da una urva ome in gura 5.9(b) ove si ha unagrande variazione della forza in un intervallo di tempo molto pi olo.

5.2. CONSERVAZIONE DELLA QUANTITÀ DI MOTO. 87I
F (t)
tt1 t2(a) L'impulso di una forza variabile.F (t)
t(b) Il aso della forza impulsiva.Figura 5.9: Il lavoro per uno spostamento rettilineo.5.2.2 Quantità di moto.Si onsideri un punto materiale P di massa m sottoposto all'azione della forza ostante F perun intervallo di tempo ∆t = t2 − t1; il moto di P risulta uniformemente a elerato. In tal aso,utilizzando la legge fondamentale della dinami a (3.12) e la denizione del vettore a elerazione(2.81), l'impulso di F si può s rivere nella forma seguenteI = F∆t = ma∆t = m∆v = m[v(t2)− v(t1)] . (5.67)La grandezza
p(t) = mv(t) , (5.68)è detta quantità di moto di P all'istante t. La quantità di moto è una grandezza vettoriale il uimodulo ha le dimensioni di una massa per una velo ità, quindi la sua unità di misura è kg m s−1.Confrontando le ultime due equazioni, si può s rivereI = p(t2)− p(t1) ≡ ∆p . (5.69)Questa equazione esprime il teorema dell'impulso, he può essere enun iato ome segue.L'impulso di una forza agente su di un punto materiale in un dato intervallo di tempo èuguale alla variazione della quantità di moto del punto materiale nello stesso intervallodi tempo.Il teorema dell'impulso, qui enun iato nel aso in ui la forza sia ostante, ha validità generalequalunque sia la forza agente.5.2.3 Conservazione della quantità di moto.Si onsiderino due punti materiali di masse m1 ed m2 interagenti fra loro mediante una forza ostante; indi ando on F1 la forza on ui il se ondo agis e sul primo e on F2 quella on ui ilprimo agis e sul se ondo, per il prin ipio di azione e reazione, deve valere
F1 + F2 = 0 (5.70)moltipli ando la pre edente equazione per l'intervallo di tempo ∆t durante il quale avviene l'inte-razione si ottiene la seguente relazione fra gli impulsi delle due forze:F1∆t+ F2∆t = 0 ←→ I1 + I2 = 0 . (5.71)

88 5. LEGGI DI CONSERVAZIONE.Se i due punti materiali ostituis ono un sistema isolato, ioè se non vi sono altri orpi interagenti on essi, per il teorema dell'impulso vale∆p1 +∆p2 = 0 . (5.72)Denendo quantità di moto totale del sistema si o ostituito dai due punti materiali la grandezza
P = p1 + p2, risulta∆P = ∆(p1 + p2) = ∆p1 +∆p2 = 0 . (5.73)La pre edente equazione esprime la seguente legge di onservazione della quantità di moto.In un sistema isolato di punti materiali la quantità di moto totale si onserva.A rigore, il prin ipio è stato dimostrato solo se vi sono due soli punti materiali he interagis ono on una forza ostante; tuttavia, se la forza non è ostante, basta dividere l'intervallo di tempo intanti intervallini su ientemente pi oli da far sí he la forza sia ostante in ias uno di essi; allorala quantità di moto si onserva in ias uno degli intervallini e quindi nell'intervallo totale. Inoltre,se vi sono piú di due punti materiali interagenti, o orre tenere onto di tutte le forze agenti su ias uno di essi; per esempio si vi sono tre punti materiali, si ha
I1 = (F21 + F31)∆t , I2 = (F12 + F32)∆t , I3 = (F13 + F23)∆t . (5.74)ove F21 è la forza on ui il se ondo punto materiale agis e sul primo, F31 è la forza on ui il terzopunto materiale agis e sul primo e osí via. Per il prin ipio di azione e reazione, le sei forze agentisono a due a due opposte, quindi valeI1 + I2 + I3 = 0 ←− ∆p1 +∆p2 +∆p3 = 0 ←→ ∆P = 0 . (5.75)Il prin ipio di onservazione della quantità di moto ha quindi validità generale.5.3 Conservazione del momento angolare.5.3.1 Momento di un vettore.In questa sezione si onsiderano vettori appli ati ; ioè sarà rilevante il punto in ui un erto vettoreè appli ato: due vettori aventi la stessa direzione, lo stesso verso, lo stesso modulo, ma diversopunto di appli azione saranno onsiderati vettori diversi.Dato il generi o vettoreAB ed il punto O, si di emomento diAB rispetto al poloO la grandezzaOA×AB
A
BO
Figura 5.10: Il momento delvettore AB.OP × AB essendo P un qualsiasi punto appartenente alla retta ui appartiene AB.L'indipendenza della denizione del momento dalla s elta del puntoP si giusti a osservando he, dati due punti qualsiasi P1 e P2allineati on AB, vale
OP2 ×AB = (OP1 + P1P2)×AB = OP1 ×AB (5.76)ove l'ultima uguaglianza segue dal fatto he P1P2 e AB sono al-lineati e quindi il loro prodotto vettoriale è nullo. Vista l'indipen-denza del momento dalla s elta del punto P , è spesso onvenientes eglierlo nel punto di appli azione del vettore.Il vettore momento è solitamente appli ato al polo O, ha direzioneperpendi olare al piano su ui si trovano AB ed O, ha per versoquello he vede la rotazione di OA su AB svolgersi in senso anti-orario e modulo uguale al modulo di AB per la distanza di O dalla retta ui appartiene AB. Ilmomento è nullo se O è allineato al vettore AB.

5.3. CONSERVAZIONE DEL MOMENTO ANGOLARE. 89b O
bQ1
b
Q2
bP1
bP2
F1 F2Figura 5.11: Il momento diuna oppia.Frequente è il aso in ui si debba al olare il momento di dueforze F1 ed F2 appli ate in due punti distinti P1 e P2 e aventilo stesso modulo, la stessa direzione ma verso opposto; sia bla distanza fra le rette di appli azione ome in gura 5.11. Ledue forze in questione sono dette ostituire una oppia diforze e b è detto bra io della oppia.La proprietà di una oppia di forze è he il momento totaledelle due forze non dipende dalla s elta del polo O. Per veder-lo, on riferimento alla gura 5.11, si onsiderino le proiezioniQ1 e Q2 di O rispettivamente sulle rette d'azione di F1 e F2;allora
Mo = OP1 × F1 +OP2 × F2 = (OQ1 +Q1P1)× F1 + (OQ2 +Q1P2)× F2 =
= OQ1 × F1 +OQ2 × F2 ;(5.77)ri ordando he F2 = −F1 si ottiene
Mo = OQ1 × F1 −OQ2 × F1 = (OQ1 −OQ2)× F1 = Q2Q2 × F1 . (5.78)Si vede dunque he Mo non dipende da O. Il suo modulo èMo = F1b (5.79)è ioè il prodotto fra il bra io della oppia e il modulo delle forze agenti.5.3.2 Momento angolare.Parti olarmente importante per lo studio he qui si intende fare è il momento del vettore quantità
p = mv del punto materiale P rispetto al polo O:Lo = OP × p = OP ×mv . (5.80)Questa grandezza è detta momento angolare; ha le dimensioni di una lunghezza per una massaper una velo ità e quindi la sua unità di misura è kg m2 s−1.La direzione di Lo è perpendi olare al piano he ontiene OP e v, il verso è dato dalla regola dellamano destra e il modulo è
Lo = mrv senα , (5.81)dove r è il modulo del vettore OP e α è l'angolo formato dai due vettori OP e v.LO
O
Pv
rFigura 5.12: Il vettore momentoangolare.Si onsideri ora il aso parti olare, ma molto importante, delmoto ir olare uniforme; si prenda ome polo il entro O dellatraiettoria, allora il vettore OP oin ide on il vettore r. Ilmomento angolare è perpendi olare al piano in ui si svolge ilmoto e il suo verso punta nella direzione dalla quale il moto èvisto svolgersi in senso antiorario (si veda la gura 5.12), inol-tre poi hé v e OP sono perpendi olari il modulo del momentoangolare può essere s ritto nella forma
Lo = mrv = mr2ω , (5.82)ove, nello s rivere l'ultima equazione, si è tenuta presente la (2.113). Ri ordando la relazione(2.114) l'equazione (5.80) divieneLo = OP ×m(ω ×OP ) = mr2ω . (5.83)ove si è usata la se onda delle (2.75).

90 5. LEGGI DI CONSERVAZIONE.5.3.3 Conservazione del momento angolare.È interessante determinare la rapidità istantanea di variazione nel tempo Lo del momento angolare;per farlo si usa l'equazione (2.147):Lo = ˙OP × p+OP × p (5.84)Il primo addendo, ri ordando la prima delle (2.141) e la denizione di p, si può ris rivere
v ×mv = 0 , (5.85)dal momento he i due vettori sono paralleli. Il se ondo addendo, ri ordando la se onda della(2.141), si può ris rivereOP ×mv = OP ×ma = OP × F (5.86)ove F è la forza totale agente su P . La quantità trovata è ilmomento della forza totale rispettoal polo O e si indi a:
Mo = OP × F . (5.87)Il momento di una forza ha le dimensioni di una lunghezza per una forza e quindi la sua unità dimisura è kg m2 s−2.È stato osí dimostrato il teorema del momento angolare, espresso dalla seguente equazione:Mo = Lo . (5.88)Si noti he i due momenti he ompaiono in questa equazione sono al olati rispetti allo stessopolo. La pre edente equazione è valida solo se il polo O è fermo; se la sua velo ità fosse diversa dazero o orrerebbe modi arla; in questi appunti si onsidera solo il aso in ui vo = 0.Nel aso parti olare in ui il momento della forza totale sia nullo, per hé è nulla la forza stessa oper hé è parallela al vettore OP , la rapidità istantanea di variazione del momento angolare è nulla, ioè il momento angolare rimane ostante. È questa la legge di onservazione del momentoangolare.Se il momento totale delle forze agenti su di un punto materiale è nullo, il momentoangolare del punto materiale si onserva.5.4 Forze entrali.Le forze entrali, he svolgono un ruolo fondamentale nello studio della dinami a del punto ma-teriale, sono un esempio parti olarmente feli e per mostrare l'utilità dei on etti visti in questo apitolo. Si di e entrale una forza he veri hi le seguenti ondizioni.1. Qualunque sia il punto P dello spazio in ui trova il punto materiale, la forza F agente su diesso è diretta se ondo la retta passante per P e per un punto sso O detto entro di forza.2. Il modulo della forza F dipende solamente dalla distanza di P dal entro, ioè dal modulo rdel vettore OP .Una forza entrale può essere attrattiva o repulsiva a se onda he sia diretta verso il entro o dal entro verso l'esterno, ioè a se onda he abbia lo stesso verso di PO o di OP rispettivamente.Le proprietà delle forze entrali sono le seguenti.

5.4. FORZE CENTRALI. 91A. Le forze entrali sono onservative ed è sempre possibile denire una funzione energia po-tenziale U(r) he dipenda solo dalla distanza dal entro.La dimostrazione di questo fatto nel aso piú generale ri hiede l'uso del al olo integrale edè quindi al di là dei limiti di questi appunti; tuttavia ne sono esempi la forza elasti a e laforza gravitazionale viste sopra.B. Il momento di una forza entrale, al olato rispetto al entro, è nullo.Questa proprietà è una sempli e onseguenza della denizione di momento di una forza(5.87) e del fatto he nel aso he la forza sia entrale F e OP hanno la stessa direzione equindi il loro prodotto vettoriale è nullo.C. Il momento angolare di un punto materiale sottoposto ad una forza entrale è ostante.Questa proprietà segue direttamente dalla pre edente per la legge di onservazione delmomento angolare.D. Un punto materiale sotto l'azione di una forza entrale si muove di moto piano.Infatti dall'equazione (5.80) segue he il vettore OP è perpendi olare al vettore Lo he,per la proprietà C, è ostante; in parti olare è ostante la sua direzione, quindi OP èperpendi olare ad una direzione ostante, quindi P si muove ne essariamente sul pianopassante per O e perpendi olare alla direzione di Lo.E. La velo ità areolare di un punto materiale in moto sotto l'azione di una forza entrale è ostante.∆θ
Q
O
P
H
Figura 5.13: Cal olo della ve-lo ità areolare.Si tratta pertanto di al olare l'area spazzata dal raggio vet-tore nell'intervallo di tempo ∆t in ui per orre un angolo∆θ.Se l'intervallo di tempo, ome qui si suppone, è abbastan-za pi olo, tale area può essere approssimata a quella deltriangolo OPQ (si veda la gura 5.13) he è
∆A =1
2OQ · PH , (5.89)osservando he vale PH = OP sen∆θ, si può ris rivere
∆A =1
2OQ · OP sen∆θ = 1
2‖OP ×OQ‖ = 1
2‖OP × (OP + PQ)‖ (5.90)ove si è usato il fatto he OQ = OP + PQ; osservando he OP ×OP = 0, si ottiene
∆A =1
2‖OP × PQ‖ , (5.91)ma PQ è il vettore spostamento, vale quindi, PQ = v∆t; osí:
∆A =1
2‖OP × v∆t‖ = 1
2‖OP × v‖∆t (5.92)e quindi, dividendo per ∆t, si ottiene la velo ità areolare:
∆A∆t
=1
2‖OP × v‖ = 1
2m‖OP ×mv‖ = ‖Lo‖
2m. (5.93)Pertanto dalla ostanza del momento angolare dis ende la ostanza della velo ità areolare.

92 5. LEGGI DI CONSERVAZIONE.Ri ordando he la forza gravitazionale è entrale, si vede he la se onda legge di Kepler non è altro he una onseguenza della onservazione del momento angolare del pianeta.
Parte IIMe ani a dei sistemi materiali.
93

Capitolo 6Dinami a dei sistemi materiali.In questo apitolo si aronta lo studio del moto di un sistema si o he possa essere rappresentatoteori amente mediante un insieme di N punti materiali. Tale insieme è detto sempli ementesistema materiale. In realtà i si è già avvi inati al problema quando è stata presentata la onservazione della quantità di moto di un sistema isolato di punti materiali. Qui si studia indettaglio quali sono le leggi he ne des rivono il moto.Si indi hi quindi on Pi l'i-esimo punto materiale (i = 1, . . . , N), on mi la sua massa, on vi lasua velo ità, on ai la sua a elerazione e on Fi la risultante delle forze agenti su di esso in undato istante.6.1 Forze interne ed esterne.Le forze agenti su Pi possono essere di due tipi: quelle eser itate da altri punti materiali del sistema,dette forze interne, e quelle dovute a punti materiali esterni al sistema, dette forze esterne.La risultante di tutte le forze interne agenti sul sistema materiale è nulla. Infatti se il punto i-esimoeser ita una forza Fji sul punto j-esimo è hiaro he, per il prin ipio di azione e reazione, il puntoj-esimo eser ita sul punto i-esimo una forza Fij uguale e ontraria, vale ioè
Fij = −Fji , (6.1)pertanto la loro somma è zero. Le forze interne Fij e Fji hanno an he momento totale nulloPi
Pj
Fij
Fji
O
Figura 6.1: Il momento delle forze interne.rispetto ad un qualunque polo O; on riferimentoalla gura 6.1, tale momento è
M ijo = OPi × Fij +OPj × Fji ; (6.2)da ui, usando la (6.1),
M ijo = OPi × Fij −OPj × Fij =
= (OPi −OPj)× Fij =
= PjPi × Fij = 0 ;
(6.3)l'ultima uguaglianza è dovuta al fatto he i vettori PjPi e Fij sono paralleli.Quanto detto è vero per qualunque oppia di punti materiali del sistema e per qualsiasi s eltadel polo. Le forze interne sono quindi raggruppabili in oppie aventi sia risultante he momentorisultante nullo. Per qualunque sistema materiale vale pertanto la seguente proprietà.94

6.2. EQUAZIONI CARDINALI. 95La risultante ed il momento risultante rispetto ad un qualsiasi polo O di tutte le forzeinterne di un sistema di punti materiali sono nulli.6.2 Equazioni ardinali.L'equazione del moto dell'i-esimo punto materiale Pi èFi = F I
i + F E
i = miai , (6.4)dove F I
i è la risultante delle forze interne e F E
i la risultante delle forze esterne agenti su Pi.Sommando i ontributi di tutti gli N punti materiali del sistema e usando il fatto he la risultantedelle forze interne è zero, si trova1F E =
N∑
i=1
F E
i =
N∑
i=1
miai . (6.5)D'altra parte, per ogni punto materiale valeFi = miai = mivi = pi . (6.6)Si può allora s rivere
F E =
N∑
i=1
pi . (6.7)Denendo la quantità di moto totale del sistemaP =
N∑
i=1
pi (6.8)e usando la (2.144), si trovaP =
N∑
i=1
pi ; (6.9)quindi, in denitiva, valeF E = P . (6.10)Questa equazione, he mette in relazione la risultante delle forze esterne agenti su un sistemamateriale on la rapidità di variazione nel tempo della quantità di moto totale del sistema, è dettaprima equazione ardinale ed è l'estensione della legge fondamentale (3.12) alla dinami a deisistemi.Dalla (6.10) segue in parti olare he se il sistema materiale è isolato, ioè se la risultante delle forze1Si usa qui la omoda notazione di sommatoria, he rappresenta la somma di tutti gli oggetti denotati da un erto indi e he varia in un dato intervallo; dati per esempio gli oggetti ai, on i = 1, . . . , N , vale:
N∑
i=1
ai = a1 + · · ·+ aN .La notazione si appli a an he agli indi i ripetuti quindi: N∑
i=1
aibi = a1b1 + · · · aNbN .

96 6. DINAMICA DEI SISTEMI MATERIALI.esterne è nulla, la quantità di moto totale del sistema materiale è ostante nel tempo. Questo èvero per ogni omponente; ioè se, per esempio, è nulla la omponente x della risultante delle forzeesterne, valeFx = Px = 0 −→ Px = cost. (6.11)Quindi se è nulla la risultante delle forze esterne lungo una sola direzione, si onserva solo la om-ponente della quantità di moto se ondo quella direzione.Appli ando l'equazione (5.88) a ias uno dei punti materiali he ostituis ono il sistema materialein questione si trova, rispetto al generi o polo OOPi × Fi = OPi × (F I
i + F E
i ) = Loi . (6.12)Ri ordando he il momento totale delle forze interne è nullo e sommando su tutti punti materialisi ottieneME
o =
N∑
i=1
OPi × F E
i =
N∑
i=1
Loi ; (6.13)denendo ora momento angolare totale del sistema materiale la quantitàLo =
N∑
i=1
Loi , (6.14)si ottieneME
o = Lo . (6.15)Questa equazione, he mette in relazione il momento delle forze esterne agenti su un sistemamateriale on la variazione nel tempo del momento angolare totale del sistema, è detta se ondaequazione ardinale ed è la generalizzazione ai sistemi del teorema del momento angolare vistoper il punto materiale.Similmente a quanto visto per la prima equazione ardinale, se il momento totale delle forze esterneagenti sul sistema è nullo il momento angolare totale si onserva e se è nullo il momento totaledelle forze esterne lungo una direzione, si onserva la omponente del momento angolare se ondoquella direzione .Conseguenza di quanto visto è la seguente aermazione.La quantità di moto totale ed il momento angolare totale di un sistema materiale isolatosono grandezze onservate.6.3 Centro di massa.Utilizzando la prima delle (2.141), la quantità di moto totale di un sistema materiale si può s riverenella forma:P =
N∑
i=1
mivi =N∑
i=1
mi˙OP . (6.16)Si denis e entro di massa del sistema il punto G la ui posizione è individuata dal vettore:
OG =1
m
N∑
i=1
miOPi , (6.17)

6.3. CENTRO DI MASSA. 97ovem =
N∑
i=1
mi (6.18)è la massa totale del sistema materiale. Confrontando (6.16) e (6.17) si ottieneP =
N∑
i=1
mi˙OPi = m ˙OG = mvG . (6.19)La quantità di moto totale del sistema materiale è quindi uguale alla quantità di moto di un singolopunto materiale avente la massa dell'intero sistema e la velo ità del entro di massa.La pre edente equazione onsente di ri avare, in ogni istante, la velo ità del entro di massa intermini delle velo ità dei punti materiali he ompongono il sistema; vale infatti
vG =1
m
N∑
i=1
mi˙OP i (6.20)quindi
vG =1
m
N∑
i=1
mivi . (6.21)Dalla prima equazione ardinale (6.10) si trova inoltreF E = P = mvG = maG , (6.22)esprimente il seguente teorema del entro di massa.Il entro di massa di un sistema materiale si muove ome un punto materiale di massauguale alla massa dell'intero sistema e sottoposto ad una forza uguale alla risultantedelle forze esterne agenti sul sistema.Il teorema ora trovato non è altro he la prima equazione ardinale s ritta in termini del moto del entro di massa; si tratta però di un risultato di estrema importanza. In eetti, pur perdendo ogniinformazione sul moto delle sue singole parti, esso permette di ri ondurre la dinami a dell'interosistema a quella del solo entro di massa; in altre parole, nota he sia la risultante F E delle forzeesterne, omunque si muovano i punti materiali he ostituis ono il sistema, il entro di massa simuove ome se la forza risultante agisse solo su di esso. Si tenga presente he il entro di massanon è un punto materiale; anzi può apitare he in G non vi sia al un punto del sistema.Il teorema del entro di massa ha due importanti onseguenze.1. Se il sistema materiale è isolato il suo entro di massa si muove di moto rettilineo uniforme.In parti olare se il entro di massa di un sistema isolato è fermo in un dato istante essorimane fermo durante tutta l'evoluzione dinami a del sistema. Come esempio, si onsideriun ordigno esplosivo fermo, al momento dell'esplosione (dovuta a me anismi interni e nona forze esterne) i vari pezzi in ui si disgrega l'ordigno si disperdono in tutte le direzioni, mail loro entro di massa rimane fermo; si veda su questo punto an he la sezione 7.6.2. Il momento totale della risultante di tutte le forze peso agenti sui punti del sistema materiale al olato rispetto a G è nullo.Infatti rispetto al generi o polo O si trova
MO =
N∑
i=1
OPi ×mig =
(
N∑
i=1
miOPi
)
× g = mOG × g = OG×mg ; (6.23)

98 6. DINAMICA DEI SISTEMI MATERIALI.quindi se O oin ide on G valeMG = GG×mg = 0 . (6.24)Da questo risultato segue he la retta di appli azione della risultante delle forze peso delsistema materiale passa per G. Osservando he questo risultato è indipendente dall'orienta-zione del sistema, ne segue he la risultante delle forze peso è appli ata in G. Per questo il entro di massa viene an he detto entro di gravità.6.4 Energia ineti a di un sistema materiale.L'energia ineti a totale di un sistema materiale è la somma delle energie ineti he di ias un puntomateriale omponente il sistemaEc =
N∑
i=1
1
2miv
2i , (6.25)dove qui la velo ità dei punti materiali è misurata rispetto ad un generi o punto O. Introdu endoun se ondo sistema di riferimento entrato nel entro di massa G del sistema e ri ordando la leggedi omposizione delle velo ità (2.159), per le velo ità dei punti vale la relazione
vi = vG + ui , (6.26)dove vG è la velo ità di G rispetto a O e ui è la velo ità dell'i-esimo punto materiale rispetto a G.Si osservi ora hev2i = vi · vi = (vG + ui) · (vG + ui) = v2
G+ u2i + 2vG · ui ; (6.27)sostituendo questo risultato nell'equazione (6.25) si ottiene
Ec =N∑
i=1
1
2miv
2G+
N∑
i=1
1
2miu
2i +
N∑
i=1
mivG · ui =1
2mv2
G+
N∑
i=1
1
2miu
2i + vG ·
(
N∑
i=1
miui
)
. (6.28)Si onsideri ora la quantità fra parentesi nell'ultimo addendo: essa è la quantità di moto totaledel sistema materiale al olata nel sistema di riferimento del entro di massa; ma ri ordandol'equazione (6.19), la quantità di moto totale del sistema è pari alla massa totale per la velo itàdel entro di massa; poi hé la velo ità del entro di massa nel sistema del entro di massa è nullaè hiaro he la quantità fra parentesi è nulla. Ciò può an he essere dimostrato analiti amente:N∑
i=1
miui =
N∑
i=1
mi(vi − vG) =
N∑
i=1
mivi −mvG = mvG −mvG = 0 , (6.29)ove è stata usta la (6.21). In on lusione, resta dimostrata la seguente importante equazioneEc =
1
2mv2
G+
N∑
i=1
1
2miu
2i , (6.30)esprimente il seguente teorema di König.22Johann Samuel König (17121757), matemati o tedes o.

INTERMEZZO. 99L'energia ineti a totale di un sistema materiale al olata rispetto ad un erto sistemadi riferimento è in ogni istante uguale alla somma dell'energia ineti a di un punto ma-teriale avente massa uguale alla massa totale del sistema e velo ità uguale alla velo itàdel entro di massa e dell'energia ineti a del sistema materiale al olata nel sistemadel entro di massa.Il teorema dell'energia ineti a si estende, al aso dei sistemi materiali, in modo ovvio: la variazionedi energia ineti a totale di un sistema materiale è uguale al lavoro ompiuto dalle forze interne edesterne sul sistema. Il lavoro delle forze esterne è uguale alla variazione del primo addendo dell'e-quazione (6.30), mentre il lavoro delle forze interne è uguale alla variazione del se ondo addendo.Dis orso simile vale per la onservazione dell'energia me ani a: se tutte le forze agenti sul sistemamateriale, interne ed esterne, sono onservative, l'energia totale del sistema, ioè la somma dell'e-nergia ineti a, data dalla (6.30), e di tutte le energie potenziali di tutte le forze agenti, interne edesterne, è una ostante.Intermezzo. Problema dei due orpi. Massa ridotta.Come prima importante appli azione del on etto di entro di massa, in questo paragrafo si studiail problema dei due orpi. Con tale nome si indi a il problema dinami o di due punti materiali P1e P2 he interagis ono solamente fra di loro e quindi ostituis ono un sistema isolato. Ciò signi a he le due forze agenti sui due punti sono uguali in modulo e in direzione e ontrarie in verso, vale ioè
F1 = −F2 . (6.31)Non è ne essario fare al una ipotesi sulla natura della forza di interazione dei due punti materiali,rimanendo quindi inteso he tutto iò he segue è vero qualunque sia tale forza. La posizione e lavelo ità del entro di massa G del sistema sono date dalle equazioni (6.17) e (6.21):mOG = m1OP1 +m2OP2 , mvG = m1v1 +m2v2 . (6.32)La soluzione del problema dinami o dei due orpi è parti olarmente sempli e se si s eglie il sistemadi riferimento del entro di massa G, ioè s egliendo il punto O oin idente on G; in tal aso laprima delle (6.32) diventa
m1GP1 +m2GP2 = 0 . (6.33)Indi ando on r, il vettore distanza fra i due punti materiali, valer = P2P1 = GP1 −GP2 ; (6.34)Dalla (6.33) si ri ava
GP2 = −m1
m2GP1 (6.35) he, sostituita nella (6.34), dà
r = GP1 +m1
m2GP1 =
m1 +m2
m2GP1 (6.36)

100 6. DINAMICA DEI SISTEMI MATERIALI.da ui
GP1 =m2
m1 +m2r
GP2 = − m1
m1 +m2r .
(6.37)Si osservi inoltre he, denendo la quantità v = r, si ottienev = GP 1 − ˙GP2 = u1 − u2 , (6.38)ove u1 e u2 sono le velo ità di P1 e P2 rispetto a G ed, evidentemente, v è la loro velo ità relativa,si veda l'equazione (2.153).Per trovare la relazione fra le velo ità rispetto al entro di massa u1 ed u2 e le velo ità v1 e v2 siusa la (6.26) insieme alla se onda delle (6.32); on po hi al oli, he vengono las iati alla ura dellettore studioso, si ottiene
u1 =m2
m1 +m2(v1 − v2) , u2 = − m1
m1 +m2(v1 − v2) . (6.39)Con queste denizioni, le leggi del moto dei due punti materiali
a1 =F1
m1, a2 =
F1
m2(6.40)sottratte membro a membro diventano
a1 − a2 =F1
m1− F2
m2=
(
1
m1+
1
m2
)
F1 , (6.41)ove si è usata la (6.31).Posto a = a1 − a2, he è l'a elerazione relativa dei due punti materiali, e denendo mR tale hesia1
mR
=1
m1+
1
m2←→ mR =
m1m2
m1 +m2, (6.42)l'equazione (6.41) diventa
F1 = mRa , (6.43)quindi il problema di due orpi, studiato rispetto al entro di massa, è equivalente al problemadi un uni o punto materiale di massa mR sotto l'azione della forza F1. La massa mR è dettamassa ridotta. Una volta risolta l'equazione (6.43), e determinata la legge oraria del moto r(t),è possibile determinare il moto dei due punti materiali P1 e P2 rispetto a G, e pertanto GP1(t)e GP2(t) usando le (6.37). Ri avato il moto nel sistema del entro di massa è possibile ri avarlorispetto ad un qualunque punto O osservando he vale OP = OG+GP , quindi tramite le (6.37)si ottiene
OP1 = OG +m2
m1 +m2r
OP2 = OG − m1
m1 +m2r .
(6.44)L'energia ineti a del sistema al olata nel sistema di riferimento del entro di massa, usando ilteorema di König e osservando he vG = 0, diventaEc =
1
2m1u
21 +
1
2m2u
22 . (6.45)

INTERMEZZO. 101Usando la (6.39) e osservando he v1 − v2 = u1 − u2 = v, si trovaEc =
1
2m1
m22
(m1 +m2)2v2 +
1
2m2
m21
(m1 +m2)2v2 =
1
2
m1m2
m1 +m2v2 ; (6.46)quindi
Ec =1
2mRv
2 . (6.47)Analogamente il momento angolare nel sistema di riferimento del entro di massa, ioè s egliendo ome polo G, diventaLG = GP1 ×m1v1 +GP2 ×m2v2 . (6.48)Utilizzando la (6.35), la pre edente si s rive:
LG = GP1 ×m1v1 −GP1 ×m1v2 = GP1 ×m1(v1 − v2) = GP1 ×m1v ; (6.49)da ui, nalmente, usando la prima delle (6.37):LG =
m1m2
m1 +m2r × v = r ×mRv . (6.50)Come si vede, dunque, tutte le grandezze dinami he del sistema di due orpi possono essere s rittenel sistema di riferimento del entro di massa ome riferite ad un solo orpo avente per massa lamassa ridotta avente la posizione e la velo ità relative fra i due orpi.Nel aso in ui i due punti materiali abbiano la stessa massa, ioè sia m1 = m2, la massa ridottaè la metà di ias una massa.Nel aso uno dei due punti materiali sia molto piú massivo dell'altro, il entro di massa del sistema oin ide prati amente on la massa maggiore he quindi può essere onsiderata ferma; in questo aso la massa ridotta oin ide prati amente on la massa minore; infatti se m1 ≪ m2 e quindi
m1/m2 ≪ 1, valemR = m1
1
1 +m1
m2
≃ m1
(
1− m1
m2
)
≃ m1 . (6.51)ove è stata usata l'approssimazione di ui alla nota 5 del apitolo 5.Quest'ultimo aso è parti olarmente rilevante nel aso in ui si studi il sistema orpo elestesatellite, usando il modello di punti materiali interagenti solo fra loro; in questo aso infatti èun ottima approssimazione onsiderare il orpo eleste fermo nel entro di massa del sistema edil satellite in moto sotto l'azione di una forza diretta verso il entro. In eetti in tutti i al olipre edentemente eettuati utilizzando l'interazione fra un orpo eleste ed un suo satellite si èsempre ta itamente fatta l'approssimazione di onsiderare il orpo eleste fermo. Un al olo esattori hiede l'utilizzo, al posto della massa del satellite quello della massa ridotta del sistema.È interessante vedere ome si risolve il problema del moto di un pianeta intorno al Sole usando ilmetodo della massa ridotta. Conviene inoltre utilizzare le oordinate polari, per le quali si rimandaall'appendi e C.La massa ridotta fra il Sole e il pianeta è quindimR =
M⊙m
M⊙ +m(6.52)L'energia me ani a del sistema diviene
E =1
2mRv
2 − GM⊙m
r(6.53)

102 6. DINAMICA DEI SISTEMI MATERIALI. he in oordinate polari diventaE =
1
2mR(r
2 + ω2r2)− GM⊙m
r(6.54)In oordinate polari il momento angolare (6.50) diventa
LG = r ×mR(rρ+ rωζ) = r ×mRrωζ = mRr2ω (6.55)ove, nell'ultimo passaggio si è usato il fatto he ω è un vettore perpendi olare al piano individuatoda ρ e ζ. Quindi, in parti olare,
L2G= m2
Rr4ω2 ←→ mRω
2r2 =L2
G
mRr2. (6.56)Con questa sostituzione l'energia me ani a quindi diventa
E =1
2mRr
2 +L2
G
mRr2− GM⊙m
r(6.57)Ri ordando he per la forza gravitazionale, he è una forza entrale, si ha onservazione sia del-l'energia me ani a he del momento angolare, nell'equazione pre edente l'uni a grandezza non ostante è r e la sua rapidità di variazione r. Una tale equazione, detta equazione dierenziale,può essere risolta on te ni he he ri hiedono il al olo integrale e quindi sono al di fuori dellaportata di questi appunti. Pare omunque interessante dare il risultato nale he rappresental'equazione, in oordinate polari, della traiettoria nel sistema del entro di massa:
r =ℓ
1− e cos θ . (6.58)Questa è l'equazione in oordinate polari di una oni a di e entri ità e; la relazione di e on iparametri si i del problema è:e2 = 1 +
2L2G
G2M2⊙m
2m2R
E (6.59)e ℓ è un parametro dato daℓ =
L2G
GM⊙mmR
. (6.60)Si osservi he l'equazione dell'e entri ità ha esattamente la forma (5.58), quindi le onsiderazionisvolte nel paragrafo 5.1.8 ri evono qui una onferma.

Capitolo 7Urti.Due punti materiali he si urtano possono essere onsiderati, on ottima approssimazione, unsistema isolato.La giusti azione di questa aermazione sta nel fatto he durante l'urto le forze in gio o sonoimpulsive e quindi sono molto piú grandi delle altre forze eventualmente presenti, ome per esempiola forza peso.Per rendersi onto di iò si veda il seguente sempli e esempio. Si onsideri una pallina di gomma dimassa m, abbastanza pi ola per ui sia legittimo appli are ad essa il modello di punto materiale;si supponga he ada al suolo da un'altezza h; si vuole fare una stima della forza media he agis esulla pallina durante l'urto on il suolo.La pallina to a il suolo on velo ità v =√2gh; a questo punto omin ia a deformarsi, a s hia iarsi,no a fermarsi. Si supponga inoltre he durante la deformazione sulla pallina agis a una forza ostante e quindi he essa si muova di moto uniformemente de elerato s endendo di un'ulterioredistanza d no a fermarsi in un tempo τ . La velo ità media vm di un moto uniformementea elerato, si veda l'equazione (2.25), è la media delle velo ità iniziale e nale, quindi nel asopresente si ha:
vm =v + 0
2=
√
gh
2; (7.1)il tempo impiegato dalla pallina a fermarsi, dopo aver per orso lo spazio d, è quindi
τ =d
vm= d
√
2
gh. (7.2)Se F è la forza ostante agente sulla pallina, per il teorema dell'impulso vale
F τ = −mv ; (7.3)il modulo di questa forza è quindiF =
mv
τ=h
dmg (7.4)La forza impulsiva he agis e sulla pallina durante l'urto sta al peso della stessa ome l'altezza da ui ade sta alla deformazione subita durante l'urto.Per fare una stima di quanto sia il rapporto in questione, pare ragionevole supporre he peruna aduta di qual he metro, la deformazione sia di po hi millimetri; posto quindi h = 1.5me d = 0.5 cm, si ottiene
F = 300mg . (7.5)103

104 7. URTI.Quindi l'approssimazione he tras ura la forza peso in onfronto alla forza impulsiva dell'urto èbuona.7.1 I diversi tipi di urto.Si onsiderino due orpi ai quali sia appli abile il modello di punto materiale, siano m1 ed m2 leloro masse. Si supponga he i due punti materiali vengano in ontatto ad un erto istante e sianorispettivamente v1 e v2 le loro velo ità prima dell'urto e V1 e V2 le loro velo ità dopo l'urto.Poi hé si sta supponendo he il sistema ostituito dai due punti materiali sia isolato, non vi sonoforze esterne; la variazione di energia ineti a a ausa dell'urto è quindi dovuta solo al lavoro delleforze interne impulsive he i due punti materiali si s ambiano durante l'urto. Indi ando on LItale lavoro (negativo) valeEcf − Eci = LI . (7.6)Nel aso parti olare (e ideale) in ui il lavoro delle forze interne sia nullo, l'energia ineti a totale simantiene ostante; un tale urto è detto elasti o. Vi eversa se il lavoro delle forze interne è diversoda zero, l'energia ineti a totale dopo l'urto è minore di quella prima dell'urto; un tale urto è dettoanelasti o.Si onsiderino due orpi ai quali non sia possibile appli are il modello di punto materiale.
b
v1
v2
r1r2Figura 7.1: Il parametro d'urto.
Si pensi per esempio a due sfere di masse m1 ed m2 eraggi r1 ed r2; è sempre possibile s egliere un sistemadi riferimento in ui le velo ità v1 e v2 delle due sfereprima dell'urto siano parallele, osa he qui si suppone.La distanza b fra le rette di appli azione delle velo ità,si veda la gura 7.1, è detta parametro d'urto. Seb = 0 l'urto è detto entrale: le due sfere si muovonomantenendo i loro entri sulla stessa retta e dopo l'urtosi muovono an ora sulla stessa retta. Se 0 < b < r1 + r2 l'urto è detto obliquo: dopo l'urto le duesfere si muovono su traiettorie rettilinee diverse. Se, inne, b ≥ r1 + r2 le sfere non si urtano.7.2 Urto elasti o.Si onsiderino due punti materiali P1 e P2 aventi massem1 edm2 e velo ità iniziali v1 e v2, he urti-no in modo elasti o. Il sistema è isolato quindi si onserva la quantità di moto totale ed il momento
x
v1 v2
P1 P2Figura 7.2: L'asse di riferimento. angolare totale. Inoltre l'ipotesi di elasti ità garantis e an hela onservazione dell'energia ineti a. S elto ome asse x diriferimento la retta su ui si svolge il moto dei due punti, ome nell'esempio illustrato in gura 7.2, fra le omponentidei vettori velo ità devono pertanto valere le relazioni:
m1v1 +m2v2 = m1V1 +m2V2
1
2m1v
21 +
1
2m2v
22 =
1
2m1V
21 +
1
2m2V
22 .
(7.7)Poi hé il moto è unidimensionale nell'equazione pre edente, senza limitazioni di generalità, sonostate usate le omponenti dei vettori velo ità nella direzione del moto. Riordinando i termini, il

7.2. URTO ELASTICO. 105pre edente sistema può essere ris ritto nella forma
m1(v1 − V1) = m2(V2 − v2)m1(v
21 − V 2
1 ) = m2(V22 − v22) .
(7.8)Dividendo membro a membro la se onda equazione per la prima si trovav1 + V1 = V2 + v2 ←→ v1 − v2 = V2 − V1 . (7.9)L'ultima equazione esprime la seguente importante proprietà degli urti elasti i.Se due punti materiali urtano in modo elasti o, le velo ità relative prima e dopo l'urtosono uguali ed opposte.Il sistema di se ondo grado (7.8) può quindi essere sostituito dal piú sempli e sistema di primogrado:
m1(v1 − V1) = m2(V2 − v2)v1 + V1 = V2 + v2 .
(7.10)La soluzione di questo sempli e sistema di due equazioni in due in ognite è las iato alla ura dellettore studioso. Qui se ne dà solo la soluzione:
V1 =(m1 −m2)v1 + 2m2v2
m1 +m2
V2 =(m2 −m1)v2 + 2m1v1
m1 +m2.
(7.11)Passando dal sistema di se ondo grado a quello di primo grado è stata persa una soluzione; sitratta tuttavia della soluzione banale V1 = v1 , V2 = v2, ioè della soluzione in ui ias uno deidue punti materiali onserva la propria velo ità: è il aso in ui non è avvenuto al un urto e in ui,ovviamente, si onservano sia la quantità di moto he l'energia ineti a.Si noti he nelle (7.11) le omponenti delle velo ità possono avere segni positivo o negativo ase onda della direzione del moto.La dis ussione fatta in questa sezione sull'urto elasti o di due punti materiali è valida an he nel aso he due sfere si s ontrino on un urto entrale elasti o. Il aso di urto elasti o non entraleverrà analizzato piú sotto.7.2.1 Casi parti olari.1. Le due masse sono uguali: m1 = m2. In questo aso le (7.11) diventano
V1 = v2
V2 = v1 ;(7.12)i due punti materiali quindi si s ambiano le velo ità.

106 7. URTI.2. Uno dei due punti materiali è inizialmente fermo: v2 = 0. In questo aso le (7.11)diventano
V1 =m1 −m2
m1 +m2v1
V2 =2m1
m1 +m2v1 .
(7.13)Si hanno i seguenti sotto asi.(a) m1 = m2: le velo ità si s ambiano, quindi il primo punto materiale si ferma e il se ondo omin ia a muoversi on velo ità V2 = v1.(b) m1 > m2: le velo ità nali hanno lo stesso segno, quindi dopo l'urto i due punti simuovono nello stesso verso on ui si muoveva inizialmente il primo punto, he vienerallentato.( ) m1 < m2: V1 diviene negativa, quindi il primo punto materiale, urtando il se ondorimbalza indietro.(d) m2 ≫ m1: se la massa del punto in moto è tras urabile rispetto a quello fermo, sitrova V1 = −v1 e V2 = 0, quindi il punto inizialmente fermo ontinua a rimanere fermo,mentre il punto in moto rimbalza indietro on una velo ità in modulo uguale a quella he aveva prima dell'urto.7.3 Urto anelasti o.Se l'urto non è elasti o l'energia ineti a non si onserva per hé le forze impulsive durante l'urtone hanno dissipato una parte.La quantità di moto ontinua ad essere onservata; questa però dà una sola ondizione e nonè su iente per determinare le velo ità dei due punti materiali dopo l'urto. Per andare oltre ène essario avere qual he informazione sull'energia dissipata LI ; se essa è nota è possibile usare la(7.6) e risolvere il sistema
m1v1 +m2v2 = m1V1 +m2V2
1
2m1V
21 +
1
2m2V
22 −
1
2m1v
21 −
1
2m2v
22 = LI .
(7.14)Il problema dell'urto elasti o è risolvibile nel aso in ui l'energia perduta sia la massima possibile.In questo aso si di e he l'urto è ompletamente anelasti o. Per apire osa a ade onvienes egliere ome sistema di riferimento quello del entro di massa. L'energia perduta è massimaquando l'energia ineti a dopo l'urto è la minima possibile; questa è data dal teorema di König(6.30). Il primo addendo della (6.30) dipende dalla velo ità del entro di massa; questa è deter-minata dalle velo ità dei punti materiali prima dell'urto e, per la onservazione della quantità dimoto, non viene modi ata dalle forze impulsive. L'energia ineti a è quindi minima quando èminimo il se ondo addendo, he nel aso presente di due punti materiali, diventa:1
2m1u
21 +
1
2m2u
22 (7.15) he, si ri orda, è la somma delle energie ineti he dei due punti materiali nel sistema del entro dimassa. Poi hé si tratta della somma di due quantità positive, il valore minimo si ha quando esse

7.4. NEL SISTEMA DEL CENTRO DI MASSA. 107sono entrambe nulle. Ciò a ade quando valeu1 = u2 = 0 (7.16) ioè quando i due punti materiali dopo l'urto sono entrambi fermi nel sistema del entro di massa, ioè quando restano uniti. È stata osí dimostrata la seguente proprietà.Un urto fra due punti materiali è ompletamente anelasti o, ioè è massima l'energiaperduta nell'urto, quando dopo l'urto i due punti materiali restano uniti.Nel aso di un urto ompletamente anelasti o, pertanto, le equazioni he onsentono di risolvere ilproblema sono
m1v1 +m2v2 = m1V1 +m2V2
V1 = V2(7.17)la ui soluzione è
V1 = V2 =m1v1 +m2v2m1 +m2
. (7.18)Si osservi he, ome dev'essere, la quantità al se ondo membro è la velo ità del entro di massadel sistema materiale.7.4 Nel sistema del entro di massa.L'analisi ora fatta per la determinazione delle velo ità dopo l'urto è parti olarmente sempli e seeseguita nel sistema di riferimento del entro di massa. La sempli azione è dovuta al fatto he intale sistema di riferimento il entro di massa è fermo e quindi la quantità di moto totale è nulla.Indi ando on ui ed Ui le velo ità rispetto a G dei punti materiali prima e dopo dopo l'urto, valequindi:m1u1 +m2u2 = m1U1 +m2U2 = 0 (7.19)7.4.1 Urto elasti o.In questo aso si mantiene ostante an he l'energia ineti a; quindi vale
1
2m1u
21 +
1
2m2u
22 =
1
2m1U
21 +
1
2m2U
22 . (7.20)Questa ultima relazione può essere utilmente ris ritta nella forma
(m1u1)2
m1+
(m2u2)2
m2=
(m1U1)2
m1+
(m2U2)2
m2; (7.21)ma, per la (7.19), valgono m1u1 = −m2u2 e m1U1 = −m2U2; sostituendo nella pre edente m2u2e m2U2 e on un opportuna sistemazione dei termini, si ottiene
(
1
m1+
1
m2
)
(m1u1)2 =
(
1
m1+
1
m2
)
(m1U1)2 (7.22)da ui:
u21 = U21 (7.23)

108 7. URTI. he, onfrontata on la (7.19), dà an heu22 = U2
2 . (7.24)S artando la soluzione on U1 = u1 e U2 = u2, he, ome già visto sopra, orrisponde al aso in ui non vi è urto, si ottiene nalmente
U1 = −u1U2 = −u2
(7.25)Quindi nel sistema del entro di massa quando due punti materiali hanno un urto elasti o rimbal-zano indietro mantenendo la stessa velo ità.Per ottenere le velo ità nel sistema di riferimento fermo (an he detto sistema del laboratorio) bastari ordare he esse sono legate a quelle nel sistema di riferimento del entro di massa dalla relazione(6.26) he, nel aso presente, diventaV1 = vG + U1 = vG − u1 , V2 = vG + U2 = vG − u2 (7.26)ma, sempre per la (6.26), vale ui = vi − vG, quindi:
V1 = 2vG − v1 , V2 = 2vG − v2 (7.27) he, ome il lettore studioso può fa ilmente veri are usando la relazione mvG = m1v1 +m2v2, èequivalente alla (7.11).Inne si osservi he dall'equazione pre edente si vede he la velo ità del entro di massa è la mediadelle velo ità prima e dopo l'urto di ias un punto materiale. Vale ioèvG =
v1 + V12
=v2 + V2
2. (7.28)Questo risultato vale an he nel sistema del entro di massa, ove vG = 0 e ui + Ui = 0.7.4.2 Urto ompletamente anelasti o.In questo aso i due punti materiali rimangono uniti dopo l'urto; e poi hé il entro di massa havelo ità nulla rimangono fermi. Vale ioè
U1 = U2 = 0 . (7.29)Passando al sistema del laboratorio, si ottieneVi = vG + Ui = vG =
m1v1 +m2v2m1 +m2
, (7.30)in a ordo on la (7.18).Da questi esempi, risulta hiaro he la trattazione del problema dell'urto è molto sempli ata searontata nel sistema di riferimento del entro di massa.7.5 Urti obliqui.Si onsiderino due sfere di massa m1 ed m2 he si urtino in modo obliquo; si supponga inoltre dis egliere ome sistema di riferimento del laboratorio quello in ui una delle due sfere è ferma, omein gura 7.3, ove sono rappresentate due ongurazioni una prima e una dopo l'urto obliquo. Si onsidera qui il solo aso di urto elasti o.

7.5. URTI OBLIQUI. 109Sistema di riferimento del laboratorio. Poi hé l'urto è supposto elasti o, si onservano siala quantità di moto he l'energia ineti a totali del sistema:
m1v1 = m1V1 +m2V2
1
2m1v
21 =
1
2m1V
21 +
1
2m2V
22 .
(7.31)x
θ
ϕ
v1
V1
V2Figura 7.3: Un urto obliquo.
Queste sono tre equazioni s alari, visto he la prima ontie-ne una equazione per ogni omponente, nelle quattro in ogniteV1x, V1y, V2x, V2y; il problema quindi non è risolubile. È ne essariala onos enza almeno di qual he altro dato. Poi hé sperimental-mente è fa ile misurare gli angoli, onviene ris rivere le pre edentiintrodu endo gli angoli di deviazione delle due sfere dopo l'urto;vale infatti
V1x = V1 cos θV1y = V1 sen θ ,
V2x = V2 cosϕV2y = V2 senϕ (7.32)e quindi
m1v1 = m1V1 cos θ +m2V2 cosϕ
0 = m1V1 sen θ −m2V2 senϕ1
2m1v
21 =
1
2m1V
21 +
1
2m1V
22 .
(7.33)Se le due masse sono uguali la (7.31) diviene
v1 = V1 + V2
v21 = V 21 + V 2
2 ;(7.34)elevando al quadrato i due membri della prima si trova
v21 = (V1 + V2)2 = V 2
1 + 2V1 · V2 + V 22 (7.35) he, onfrontata on la se onda, dà:
V1 · V2 = 0 (7.36)quindi, se le masse delle due sfere sono uguali, le velo ità dopo l'urto elasti o sono perpendi olari.Sistema di riferimento del entro di massa. La quantità di moto totale del sistema è nulla;quindi
m1u1 +m2u2 = m1U1 +m2U2 = 0
1
2m1u
21 +
1
2m2u
22 =
1
2m1U
21 +
1
2m1U
22
(7.37)Ripetendo an ora il pro edimento già visto nel aso dell'urto elasti o entrale, si ottiene analoga-mente:U21 = u21 , U2
2 = u22 (7.38)dopo l'urto quindi la velo ità di ias una sfera ha lo stesso modulo della velo ità he aveva primadell'urto.Il moto delle due sfere dopo l'urto si svolge an ora su una retta, qui denotata ome asse X , he
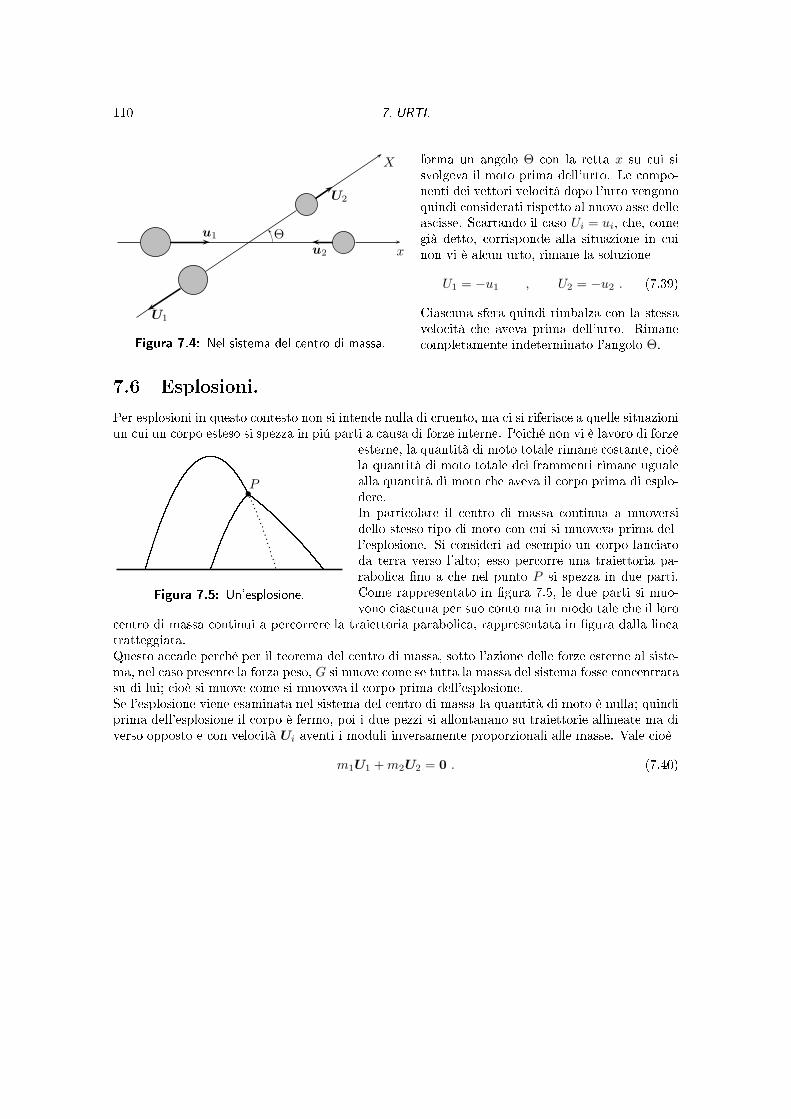
110 7. URTI.x
X
Θu1
u2
U1
U2
Figura 7.4: Nel sistema del entro di massa.forma un angolo Θ on la retta x su ui sisvolgeva il moto prima dell'urto. Le ompo-nenti dei vettori velo ità dopo l'urto vengonoquindi onsiderati rispetto al nuovo asse delleas isse. S artando il aso Ui = ui, he, omegià detto, orrisponde alla situazione in uinon vi è al un urto, rimane la soluzione
U1 = −u1 , U2 = −u2 . (7.39)Cias una sfera quindi rimbalza on la stessavelo ità he aveva prima dell'urto. Rimane ompletamente indeterminato l'angolo Θ.7.6 Esplosioni.Per esplosioni in questo ontesto non si intende nulla di ruento, ma i si riferis e a quelle situazioniun ui un orpo esteso si spezza in piú parti a ausa di forze interne. Poi hé non vi è lavoro di forzeP
Figura 7.5: Un'esplosione.esterne, la quantità di moto totale rimane ostante, ioèla quantità di moto totale dei frammenti rimane ugualealla quantità di moto he aveva il orpo prima di esplo-dere.In parti olare il entro di massa ontinua a muoversidello stesso tipo di moto on ui si muoveva prima del-l'esplosione. Si onsideri ad esempio un orpo lan iatoda terra verso l'alto; esso per orre una traiettoria pa-raboli a no a he nel punto P si spezza in due parti.Come rappresentato in gura 7.5, le due parti si muo-vono ias una per suo onto ma in modo tale he il loro entro di massa ontinui a per orrere la traiettoria paraboli a, rappresentata in gura dalla lineatratteggiata.Questo a ade per hé per il teorema del entro di massa, sotto l'azione delle forze esterne al siste-ma, nel aso presente la forza peso, G si muove ome se tutta la massa del sistema fosse on entratasu di lui; ioè si muove ome si muoveva il orpo prima dell'esplosione.Se l'esplosione viene esaminata nel sistema del entro di massa la quantità di moto è nulla; quindiprima dell'esplosione il orpo è fermo, poi i due pezzi si allontanano su traiettorie allineate ma diverso opposto e on velo ità Ui aventi i moduli inversamente proporzionali alle masse. Vale ioè
m1U1 +m2U2 = 0 . (7.40)

Capitolo 8Dinami a del orpo rigido.Si denis e orpo rigido un sistema materiale in ui le distanze re ipro he fra i punti materialisono ostanti; data ioè una qualunque oppia di punti materiali Pi e Pj , la distanza ‖PiPj‖ rimanela stessa a dispetto del fatto he i due punti si muovano nel tempo.8.1 Moto traslatorio e moto rotatorio.Si onsideri il moto di un orpo rigido rispetto al sistema di riferimento del suo entro di massaG: durante tale moto tutti i punti materiali del sistema si mantengono, in ogni istante, a distanza ostante da G, si muovono ioè des rivendo ar hi di ir onferenza on entro su di un asse dirotazione passante per G; in altre parole il moto di un orpo rigido nel sistema di riferimento delsuo entro di massa è in ogni istante un moto rotatorio attorno ad un asse passante per G. Ungeneri o spostamento del orpo rigido può essere pertanto s omposto in una traslazione del suo entro di massa piú una rotazione attorno al entro di massa. Quest'ultima aermazione è un asoparti olare del piú generale teorema di Chasles1 he qui si enun ia senza dimostrazione.È sempre possibile s egliere un sistema di riferimento rispetto al quale un generi ospostamento di un orpo rigido si può s omporre in una rotazione attorno ad un assee una traslazione lungo quell'asse.Il moto di traslazione del entro di massa è regolato dalla prima equazione ardinale
F E = maG , (8.1)dove F E è la risultante delle forze esterne, m è la massa totale del orpo rigido e aG è l'a elerazionedel entro di massa. Il moto di rotazione attorno al entro di massa è inve e regolato dalla se ondaequazione ardinaleME
G= LG . (8.2)Lo studio dell'equazione (8.1) non è altro he lo studio del moto del punto materiale G di massa
m sottoposto all'azione della forza F E ; un tale problema è già stato arontato nello studio delladinami a del punto materiale e non i si torna sopra in questa sede. Qui si rivolge l'attenzioneessenzialmente al problema del moto rotatorio del orpo rigido nel sistema del suo entro di massa, ioè allo studio dell'equazione (8.2).1Mi hel Floréal Chasles (17931880), matemati o fran ese.111

112 8. DINAMICA DEL CORPO RIGIDO.8.2 Momento d'inerzia.Si onsideri un orpo rigido ostituito da N punti materiali in rotazione attorno ad un asse ssato;in tal aso ogni punto materiale del orpo rigido si muove lungo una ir onferenza on il entro inun punto dell'asse di rotazione. In ogni istante ogni punto materiale del orpo rigido si muove onla stessa velo ità angolare ω e, se l'i-esimo punto si trova ad una distanza ri dall'asse di rotazione,il modulo della sua velo ità è data dall'equazionevi = ωri . (8.3)La situazione è ben illustrata dalla gura 8.1 in ui è rappresentato un dis o rotante visto dall'alto
Pi
Pj
OFigura 8.1: Il dis orotante.(dalla direzione verso ui punta il vettore velo ità angolare ω): i puntiPi e Pj , he hanno diverse distanze dal entro di rotazione, nello stessointervallo di tempo si muovono on la stessa velo ità angolare per orrendoar hi di ir onferenza di lunghezza diversa e quindi a velo ità diversa.L'energia ineti a del orpo rigido si può pertanto s rivere nella forma
Ec =N∑
i=1
1
2miv
2i =
N∑
i=1
1
2miω
2r2i =1
2
(
N∑
i=1
mir2i
)
ω2 . (8.4)La quantità fra parentesiI =
N∑
i=1
mir2i , (8.5)è detta momento d'inerzia del orpo rigido rispetto all'asse di rotazione onsiderato; ha le di-mensioni di una massa per una distanza al quadrato e quindi la sua unità di misura è kg m2.Per un orpo rigido le distanze dei punti materiali dall'asse di rotazione sono ostanti, omeovviamente sono ostanti le loro masse, quindi il momento d'inerzia I è ostante. Questa ostante
O
QiPi
z
Figura 8.2: Il vettore ω perun orpo rigido.
è naturalmente diversa da orpo a orpo ma, in linea di prin ipio2,è al olabile. Una volta he I sia noto, l'energia ineti a del orporigido assume, in ogni istante, la sempli e formaEC =
1
2Iω2 . (8.6)An he il momento angolare del orpo rigido al olato rispetto adun polo O appartenente all'asse di rotazione ammette una sempli eespressione in termini del momento d'inerzia. Per essere piú pre i-si, tale relazione è sempli e se si onsidera la sola omponente delmomento angolare nella direzione dell'asse di rotazione; s egliendol'asse artesiano z sovrapposto all'asse di rotazione, si tratta dun-que di al olare Loz.Sia Qi la proiezione di Pi sull'asse di rotazione, in modo tale ioè he valga ‖QiPi‖ = ri (si veda la gura 8.2); allora, poi hé
OPi = OQi +QiPi, si può s rivereLo =
N∑
i=1
OPi ×mivi =
N∑
i=1
(OQi +QiPi)×mivi . (8.7)2Di fatto il al olo, an he per i orpi piú sempli i, è eseguibile solamente utilizzando le te ni he dell'analisimatemati a e segnatamente il al olo integrale.

8.3. TEOREMA DI HUYGENS-STEINER 113Tutti i vettori OQi sono paralleli alla direzione dell'asse di rotazione, quindi i vettori OQi ×mivisono perpendi olari all'asse di rotazione e quindi hanno omponente z nulla; inve e i vettori QiPie mivi sono tutti perpendi olari all'asse di rotazione e quindi il vettore QiPi ×mivi = rimivik èparallelo all'asse di rotazione (si ri ordi he k è il versore dell'asse z). Pertanto la omponente zdi Lo èLoz =
N∑
i=1
rimivi =
N∑
i=1
rimiωri = ω
N∑
i=1
mir2i ; (8.8)ove si è usata la (8.3). Quindi
Loz = Iω . (8.9)In generale il momento angolare di un orpo rigido non è parallelo all'asse di rotazione poi hé viè il ontributo dei termini OQi ×mivi. Tuttavia è possibile dimostrare he per ogni orpo rigidoesistono tre direzioni fra loro perpendi olari tali he se esse sono assi di rotazione allora il momentoangolare Lo è parallelo all'asse.Queste direzioni si di ono assi prin ipali d'inerzia. Se un orpo rigido ha degli assi di simmetriaquesti sono sempre assi prin ipali d'inerzia. I momenti d'inerzia al olati rispetto ad essi si di onomomenti prin ipali d'inerzia.Se un orpo rigido ruota attorno ad un asse prin ipale d'inerzia Lo e ω sono paralleli e quindi valeLo = Iω (8.10)ove il momento d'inerzia I va al olato rispetto all'asse prin ipale in questione.In gura 8.3 sono riportati i momenti d'inerzia di al uni orpi rigidi di massa m, rispetto agli assiprin ipali d'inerzia indi ati.
r(a) Cilindro pieno:I =
1
2mr2.
r ℓ(b) Cilindro pieno:I = m
(
r2
4+
ℓ2
12
)
.
r
( ) Sfera:I =
2
5mr2. a b
c(d) Parallelepipedo:I =
1
12m(a2 + b2).Figura 8.3: Al uni momenti d'inerzia.8.3 Teorema di Huygens-SteinerEsiste una sempli e relazione fra il momento d'inerzia di un orpo rigido al olato rispetto adun asse passante per il bari entro e il momento d'inerzia rispetto ad un se ondo asse parallelo alprimo. Per vederlo si onsideri, ome in gura 8.4, una terna di assi artesiani x, y, z s elti inmodo tale he l'asse z passi per il entro di massa G del orpo rigido; sia inoltre r un se ondo asseparallelo all'asse z e distante d da esso. Si onsideri quindi il generi o punto materiale del sistemarigido Pi(xi, yi, zi) e siano P ′
i (0, 0, zi) e P ′′i (a, b, zi) le sue proiezioni sull'asse z e sull'asse r; allorail momento d'inerzia del orpo rigido rispetto a r è

114 8. DINAMICA DEL CORPO RIGIDO.Pi
P ′i
P ′′i
G
a
b
d
r
z
y
xFigura 8.4: Il teorema di Huygens-Steiner
Ir =
N∑
i=1
mi(PiP′′i )
2 =
=
N∑
i=1
mi
[
(xi − a)2 + (yi − b)2]
=
=N∑
i=1
mi(x2i − 2axi + a2 + y2i − 2byi + b2) he può essere ris ritta nella forma
Ir =
N∑
i=1
mi(x2i + y2i ) + (a2 + b2)
N∑
i=1
mi+
− 2a
N∑
i=1
mixi − 2b
N∑
i=1
miyi .
(8.11)la prima sommatoria è il momento d'inerzia IG rispetto all'asse z passante per G; la se onda sommaè uguale a md2 ove m è la massa totale del orpo rigido; la terza e la quarta sommatoria sono nulleper hé valgono:N∑
i=1
mixi = mxG ,
N∑
i=1
miyi = myG (8.12)ma G è sull'asse z e quindi le sue oordinate xG e yG sono nulle. Quindi, in denitiva, si è trovatoIr = IG +md2 . (8.13)L'equazione pre edente è nota on il nome di teorema di Huygens-Steiner3 ed è an he noto onil nome di teorema degli assi paralleli. In parti olare, onseguenza immediata del teorema è hedato un fas io di assi paralleli il momento d'inerzia di un orpo rigido è minimo rispetto all'assepassante per il entro di massa.8.4 Dinami a rotazionale del orpo rigido.Se un orpo rigido ruota attorno ad un asse, vale la se onda equazione ardinale
ME
o = LE
o (8.14)ove O è un punto dell'asse di rotazione. S egliendo il sistema di riferimento in modo he l'asse dirotazione oin ida on l'asse z, utilizzando la (8.9), si ottiene (per sempli ità di notazione, qui enel seguito si omette l'api e he denota le forze esterne):Mz = Lz = Izω = Izα (8.15)ove si è usata l'ultima delle (2.141) e il momento d'inerzia Iz è al olato rispetto all'asse di rotazione;si può omettere di indi are il polo O poi hé il momento assiale ha lo stesso valore rispetto a tutti ipunti dell'asse di rotazione. Mz, omponente del momento della risultante delle forze esterne lungo3Christiaan Huygens (16291695) matemati o e si o olandese. Jakob Steiner (17961863) matemati o svizzero.

8.4. DINAMICA ROTAZIONALE DEL CORPO RIGIDO. 115l'asse di rotazione, è detto momento assiale.Se il momento assiale è ostante, il orpo rigido ruota attorno all'asse z on a elerazione angolare ostante e quindi il moto risultante è rotatorio uniformemente a elerato; valgono dunque le leggi:θ(t) = θ0 + ω0t+
1
2αt2 , ω(t) = ω0 + αt . (8.16)
z
O
Qi
∆θ
Qi
Pi(t1)
Pi(t2)
Figura 8.5: Lo spostamento di Pi.
In questo aso, il generi o punto materialePi di massami del orpo rigido per orre unatraiettoria ir olare di raggio ri attorno al-l'asse di rotazione; nell'intervallo di tempo∆t = t2 − t1, Pi si sposta di
∆OPi = vi∆t = ω ×QiPi∆t , (8.17)ove è stata usata la (2.114). In gura 8.5, èrappresentato lo spostamento del punti ma-teriale Pi a ui, per hiarezza, è stata ag-giunta una vista `dall'alto'.Se su Pi agis e la forza risultante Fi il lavoro ompiuto da tale forza è quindiLi = Fi · ω ×QiPi∆t ; (8.18)quindi il lavoro omplessivo fatto sul orpo rigido è
L =
N∑
i=1
Fi · ω ×QiPi∆t . (8.19)Poi hé i vettori QiO e ω sono paralleli, valeω ×QiPi = ω × (QiO +OPi) = ω ×OPi (8.20)pertantoL =
N∑
i=1
Fi · ω ×OPi∆t = ω ·N∑
i=1
OPi × Fi∆t (8.21)ove è stata usata la prima delle (2.75); quindi, inne,L = ω ·
N∑
i=1
Moi∆t = Mo · ω∆t . (8.22)Poi hé ω ha la stessa direzione e lo stesso verso dell'asse z di rotazione e ri ordando he ω∆t = ∆θ,la pre edente si s riveL =Mzω∆t =Mz∆θ . (8.23)Il lavoro delle forze (esterne) agenti sul orpo rigido rotante attorno ad un asse è quindi il prodottodel momento assiale per lo spostamento angolare.Dalla pre edente equazione (8.23) si ottiene fa ilmente un'espressione per la potenza sviluppatadalle forze esterne:P =
L∆t
=Mz
∆θ
∆t=Mzω . (8.24)

116 8. DINAMICA DEL CORPO RIGIDO.La (8.23) è orretta per qualsiasi spostamento solo se Mz è ostante e quindi il moto rotatorio èuniformemente a elerato; diversamente o orre fare delle onsiderazioni simili a quelle fatte nelparagrafo 5.1.1 nel aso del lavoro di forza non ostante, e rappresentare il lavoro ome area al disotto della urva he rappresenta la funzione Mz(θ).Per il teorema dell'energia ineti a, il lavoro (8.23) deve essere uguale alla variazione dell'energia ineti a di rotazione (8.6); infatti, eliminando il tempo dalle (8.16), similmente a quanto fatto perottenere la (2.28), si ottiene∆θ = θ(t) − θ0 = ω0t+
1
2αt2 =
ω2(t)− ω20
2α(8.25)e quindi
Mz∆θ = Izα∆θ = Izαω2(t)− ω2
0
2α=
1
2Iz[
ω2(t)− ω2]
, (8.26)ove è stata usata la (8.15). La pre edente è stata dimostrata per momento assiale ostante, ma lasua validità è generale e rappresenta il teorema dell'energia ineti a nel aso rotatorio:Mz∆θ =
1
2Izω
2(t)− 1
2Izω
20 . (8.27)Se le forze esterne agenti sul orpo rigido sono onservative è possibile denire un'energia potenziale
U tale he, ome nel aso del punto materiale, il lavoro sia opposto alla variazione di U . In tal asosi ha la onservazione dell'energia me ani a denita an ora ome somma di energia ineti ae potenziale.8.4.1 Conservazione del momento angolare assiale.Se il momento assiale è nullo, dalla (8.15) si ri avaLz = 0 (8.28)quindi la omponente del momento angolare nella direzione dell'asse di rotazione rimane ostantedurante il moto.In parti olare iò si veri a quando l'asse di rotazione è verti ale e l'uni a forza ad agire sul orporigido è la forza peso; infatti in tale aso la risultante delle forze agenti e l'asse di rotazione sonoparalleli e quindi il momento assiale è nullo. In queste ondizioni il orpo rigido si muove di motorotatorio on velo ità angolare ostante.Interessante è an he il aso in ui il orpo non sia rigido ma deformabile; la (8.28), he è onseguenzadella se onda equazione ardinale, è an ora vera, ma in questo aso il momento d'inerzia può nonrimanere ostante. È quanto si veri a quando un pattinatore, he si pone in rotazione on lebra ia aperte, aumenta la propria velo ità angolare ripiegando le bra ia lungo il orpo: osífa endo, infatti, diminuis e la distanza fra le bra ia e l'asse di rotazione, diminuendo il momentod'inerzia rispetto alla verti ale. Poi héLz = Izω (8.29)rimane ostante, la diminuzione di Iz porta ad un aumento di ω.8.4.2 Analogia fra moto rettilineo e moto rotatorio.Il lettore attento si sarà a orto he le equazioni he des rivono la dinami a rotazionale di un orpo rigido sono formalmente analoghe alle orrispondenti equazioni he des rivono la dinami atraslatoria di un punto materiale. In eetti si ottengono le quelle da queste, formalmente operandole sostituzioni suggerite nella tabella 8.1.

8.5. APPLICAZIONI. 117Moto rettilineo Moto rotatorio attorno a un assespostamento lineare s spostamento angolare θvelo ità lineare v = s velo ità angolare ω = θa elerazione lineare a a elerazione angolare α = ωmassa m momento d'inerzia Iforza F = ma = p momento della forza Mz = Iα = Lzquantità di moto p = mv momento angolare Lz = Izωlavoro L = Fs lavoro L =Mzθpotenza P = Fv potenza P =Mzωenergia ineti a Ec =1
2mv2 energia ineti a Ec =
1
2Iω2Tabella 8.1: Le orrispondenze fra grandezze lineari e angolari.8.5 Appli azioni.Si vedono qui di seguito al uni asi importanti in ui la teoria sviluppata in questo apitolo trovaun'appli azione.8.5.1 Rotazione attorno ad un asse non prin ipale.Si onsideri ora il aso di due punti materiali P1 e P2 di uguale massa m ssati agli estremi di
θψ
ω
x
z
O
P1
P2
Lo
Figura 8.6: L'asta rotante.
un'asta di lunghezza l e massa tras urabile, vin olata a ruotareattorno ad un asse passante per il suo entro O e tale he for-mi on l'asta un angolo ostante θ ome in gura 8.6. Fissatil'asse x lungo l'asta orientato da P2 a P1, l'asse z perpendi o-lare all'asta per il suo entro O e l'asse y (non rappresentatoin gura) perpendi olare al foglio in O e di verso entrante, sivuole determinare il momento angolare del sistema. ValeLo = OP1 ×mv1 +OP2 ×mv2 (8.30)Osservando he v1 e v2 hanno lo stesso modulo v ma la primaè entrante nel foglio mentre la se onda è us ente, si trova he idue prodotti vettoriali della pre edente equazione danno omerisultati vettori avente lo stesso modulo, la stessa direzione elo stesso verso, vale ioèL0 =
l
2mvk′ +
l
2mvk′ = lmvk′ (8.31)ove k′ è il versore (rotante) dell'asse z. Il momento angolare
Lo, quindi non è parallelo all'asse di rotazione; questo nondeve stupire poi hé l'asse di rotazione, non essendo asse disimmetria del orpo rigido, non è asse prin ipale d'inerzia.

118 8. DINAMICA DEL CORPO RIGIDO.D'altra parte P1 e P2 si muovono di moto ir olare uniforme su traiettorie aventi lo stesso raggior e la stessa velo ità angolare ω, vale quindi la relazione
v = ωr = ωl
2sen θ (8.32)quindi
Lo =1
2l2mω sen θ k′ (8.33)Il momento d'inerzia del sistema rispetto all'asse z vale
Iz = 2m
(
l
2
)2
=1
2ml2 (8.34)Poi hé Lo ha la stessa direzione e lo stesso verso dell'asse z, vale
Lz =1
2l2mω sen θ = Izω sen θ = Izωz . (8.35)Il momento angolare quindi si mantiene in ogni istante perpendi olare all'asta, quindi ruota attorno
ω
LoFigura 8.7: Pre essione di Lo.all'asse rotazione; questo moto di Lo si di e pre essione del mo-mento angolare, gura 8.7. Per la se onda equazione ardinale,se il momento angolare varia vi deve essere un momento delle for-ze esterne. Questo è fornito dalle forze vin olari he mantengono ostante l'angolo θ; vale dunque
Mo = Lo =1
2l2mω sen θ ˙
k′ =1
2l2mω sen θω × k′ (8.36)e quindi
Mo =1
2l2mω sen θ senψ ′ (8.37)ove ψ è l'angolo fra ω e Lo, ed è il omplementare di θ; quindi
Mo = ωLz senψ ′ = ω ×Lo . (8.38)8.5.2 Moto di rotolamento.Si onsideri un dis o omogeneo di massa m e raggio r he rotola su di un piano orizzontale, senzab
b
GF
PFaFigura 8.8: Il dis o rotolante.stris iare, tirato da una forza F agente sul entro di mas-sa (si veda gura la 8.8). Il moto può essere s ompostonel moto di traslazione del entro di massa piú quello dirotazione attorno al entro di massa. La ondizione per ui il rotolamento avviene senza stris iare presuppone heil punto P di ontatto fra il dis o e il suolo sia fermo. Cisi può onvin ere di questo fatto nel modo seguente.La velo ità di un punto del dis o può essere pensata omesomma della velo ità del entro di massa piú la velo itàrispetto al entro di massa, equazione (6.26); nel aso diP si ha quindi
vP = vG + uP . (8.39)

8.5. APPLICAZIONI. 119D'altra parte nel sistema di riferimento del entro di massa il moto di P è rotatorio on velo itàangolare ω, per ui vale la (2.114) e quindiuP = ω ×GP (8.40)e quindi
vP = vG + ω ×GP . (8.41)La direzione di ω è perpendi olare al foglio e il suo verso è entrante, pertanto è perpendi olare aGP quindi il loro prodotto vettoriale è un vettore he ha ome modulo ωr e ome direzione e versoquello opposto di vG; quindi il modulo di vP è in ogni istante
vP = vG − ωr . (8.42)Se il dis o rotola senza stris iare, nel tempo t impiegato dal dis o a ompiere un giro ompleto, il entro di massa G si sposta di una distanza pari alla ir onferenza. Il tempo impiegato a fare ungiro on velo ità angolare ω è t = 2π/ω, mentre il tempo ne essario a per orrere la distanza 2πr avelo ità vG è t = 2πr/vG; uguagliando questi due tempi si ri ava:2π
ω=
2πr
vG
←→ vG = ωr ; (8.43)e quindivP = 0 (8.44) he è quanto si doveva mostrare.Si usino ora le equazioni (8.1) e (8.15) per determinare il moto del dis o. Le forze esterne agentisono la forza F , la forza d'attrito Fa, il peso e la reazione vin olare perpendi olare al piano; leultime due sono uguali ed opposte (si veda, tuttavia, la dis ussione sull'attrito volvente alla nedel paragrafo) e quindi non ontribuis ono alla risultante delle forze esterne (per questo non sonostate rappresentate in gura 8.8). S egliendo G ome polo per il al olo del momento totale delleforze esterne e ome asse z l'asse di rotazione nel sistema di riferimento del entro di massa, siottiene
F + Fa = maG , Mz = Izα . (8.45)F ed Fa hanno versi opposti e il momento di F rispetto a G è nullo quindi le equazioni pre edentisi possono s rivere
F − Fa = maG , Far =1
2mr2α (8.46)ove si è usato il momento d'inerzia di un dis o di massa m e raggio r riportato nella gura 8.3.Dalla (8.43) si ottiene
vG = ωr −→ aG = αr (8.47)e quindi la se onda delle (8.46) divieneFa =
1
2mrα =
1
2maG (8.48)sostituendo questa equazione nella prima delle (8.46) si trova
F =3
2maG . (8.49)Questa equazione onsente, nota la forza agente, di determinare l'a elerazione on ui si muoveil entro di massa. Si osservi he la ostante di proporzionalità fra forza e a elerazione non è la

120 8. DINAMICA DEL CORPO RIGIDO.massa, ma i tre mezzi di questa. La osa non è sorprendente poi hé la legge fondamentale delladinami a (3.12) è valida solo no a he è valido il modello di punto materiale, e non è questo il aso. Si noti an he he la forza di attrito è 1/3 della forza esterna.Se all'istante iniziale t0 = 0 s il dis o è fermo, al su essivo istante t il entro di massa si è spostatodis(t) =
1
2aGt
2 =1
3
F
mt2 ; (8.50)in tale istante la sua velo ità è
vG(t) = aGt =2
3
F
mt . (8.51)La forza d'attrito agis e sul punto P he, ome visto sopra, è fermo; il suo lavoro è quindi nullo. Illavoro totale delle forze agenti nell'intervallo di tempo da 0 a t è quindi quello di F , he, nel asopresente, si s rive:
L(t) = Fs(t) =1
3
F 2
mt2 =
3
4mv2
G(t) . (8.52)D'altra parte l'energia ineti a all'istante t è data dal teorema di König (6.30); ri ordando la (8.43)e utilizzando l'espressione per il momento d'inerzia di un dis o ( he è un ilindro) riportata ingura 8.3, si trova:
Ec(t) =1
2mv2
G(t) +
1
2IGω
2(t) =1
2mv2
G(t) +
1
2· 12mr2ω2(t) =
3
4mv2
G(t) , (8.53)in a ordo on il teorema dell'energia ineti a.Poi hé il punto P è fermo, il moto del dis o rotolante può, in ogni istante, essere onsiderato ome un moto rotatorio attorno a P . Cosí fa endo, l'energia ineti a può essere al olata piúsempli emente per hé non vi è energia ineti a di traslazione; è solamente ne essario al olare ilmomento d'inerzia rispetto a P , ma questo è dato dal teorema di Huygens-Steiner (8.13):
Ip = IG +mr2 =1
2mr2 +mr2 =
3
2mr2 . (8.54)L'energia ineti a all'istante t è quindi data dalla (8.6):
Ec(t) =1
2Ipω
2(t) =3
4mr2ω2(t) =
3
4mv2
G(t) , (8.55)in a ordo on quanto già trovato.Attrito volvente. Quando un orpo rotola su di un piano, la super ie di ontatto non è maipuntiforme: vi è sempre la deformazione di una area pi ola ma non nulla della super ie di ontatto; questa deformazione produ e, per il prin ipio di azione e reazione, una forza sul orporotolante he produ e un momento frenante.Per vedere ome iò a ada si onsideri un ilindro he rotoli su di piano orizzontale, ome in gura8.9. Quando il ilindro è fermo vi è una deformazione della super ie di appoggio simmetri arispetto alla verti ale passante per il bari entro del ilindro (gura 8.9(b)); questa deformazioneprodu e una reazione vin olare uguale ed opposta alla forza peso e passante per il bari entro. Inquesto aso la somma di peso e reazione vin olare è nulla.Quando il ilindro è in moto la deformazione della super ie di appoggio non è simmetri a ma èmaggiore nella direzione del moto (gura 8.9( )). In questo aso peso e reazione vin olare sonoan ora uguali ed opposte e quindi hanno risultante nulla, ma poi hé le loro rette di appli azionenon oin idono vi è un momento risultante Mv he si oppone al rotolamento. I vettori mg ed N ,

8.5. APPLICAZIONI. 121G
mg
N
(a) Il momento frenante. (b) Cilindro fermo. ( ) Cilindro rotolante.Figura 8.9: Attrito volvente.quindi, ostituis ono una oppia di forze il ui bra io è detto oe iente di attrito volventee dipende dalle super i a ontatto; il modulo di Mv è quindi dato daMv = µvN (8.56)Volendo interpretare questo momento ome eetto di una forza frenante Fv sviluppata dal vin olonel punto di ontatto, questa deve avere, rispetto al bari entro lo stesso momento Mv; quindi devevalere
Fvr =Mv −→ Fv = µv
N
r. (8.57)Risulta quindi he la forza d'attrito volvente è inversamente proporzionale al raggio di urvaturadel orpo nel punto di ontatto.Se il piano è obliquo la (8.56) ontinua a valere, solo he in tal aso N forma una oppia on la omponente del peso perpendi olare al piano in linato.8.5.3 Il pendolo di torsione.Si tratta di un dispositivo il ui funzionamento è simile a quello della bilan ia di torsione giàin ontrata alla ne del apitolo 4; si vuole qui utilizzare la teoria sviluppata in questo apitolo perdeterminarne il moto. Si onsideri quindi un dis o appeso sulla verti ale del suo entro di massa adun lo rigido di sezione tras urabile, ome in gura 8.10. Se il dis o viene ruotato attorno all'asse
θFigura 8.10: Il pendolodi torsione.del lo di un angolo θ rispetto alla posizione di equilibrio, il lo generauna forza di ri hiamo il ui momento assiale è proporzionale a θ. Postol'asse z nella direzione del lo, vale quindi
Mz = −c θ (8.58)ove c è una ostante he dipende dalle aratteristi he di rigidità dello. Detto Iz il momento d'inerzia del dis o rispetto all'asse del lo,utilizzando la (8.15) si ottiene:Izα = −c θ −→ α = − c
Iθ . (8.59)Questa equazione è analoga alla legge del moto armoni o (2.133): l'a - elerazione (angolare) è proporzionale all'opposto dello spostamento (angolare); quindi il dis o ompie delle rotazioni os illando on pulsazione ω data da
ω2 =c
I; (8.60)

122 8. DINAMICA DEL CORPO RIGIDO.il periodo di queste os illazioni è:T = 2π
√
I
c. (8.61)8.5.4 Pendolo omposto.Un problema dinami o la ui soluzione è assai simile a quella ora vista per il pendolo di torsione
θG
Od
PFigura 8.11: Il pendolo omposto.è quello del pendolo omposto. Si tratta si un orpo rigido libero diruotare attorno ad un asse orizzontale passante per un punto sso di-verso dal entro di massa. Se il orpo viene spostato dalla sua posizionedi equilibrio, sotto l'azione della forza peso, ompie delle os illazioni at-torno a questa.Si onsideri, per esempio, una sbarra libera di ruotare attorno al puntoO distante d da G. Indi ando on z l'asse di rotazione nel verso us entedal foglio, deve valere:
Mz = Izα (8.62)ove Iz è il momento d'inerzia rispetto all'asse di rotazione. Sulla sbarraagis ono la forza peso P , appli ata in G, e la forza vin olare, appli atain O. Rispetto al polo O il momento risultante delle forze esterne è ilmomento della forza peso Mo = OG × P . Questo vettore ha la stessa direzione dell'asse z, maverso opposto, quindiMz = −mgd sen θ ; (8.63)Se l'angolo θ è pi olo (in gura, per hiarezza di rappresentazione, è stato disegnato il aso di θtroppo grande per hé valga l'approssimazione qui utilizzata), è possibile usare l'approssimazione,si veda l'equazione (B.7): sen θ ≃ θ (8.64)e quindi si ri ava
Izα = −mgdθ −→ α = −mgdIz
θ . (8.65)Questa equazione, ome la (8.59), è l'equazione di un'os illazione armoni a di pulsazione ω datadaω2 =
mgd
Iz(8.66)e quindi avente periodo
T = 2π
√
Izmgd
. (8.67)Confrontando questa equazione on la (3.60), si vede he il pendolo omposto si omporta omeun pendolo sempli e avente lunghezzaℓ =
Izmd
, (8.68)detta lunghezza ridotta. D'altra parte per il teorema di Huygens-Steiner, valeIz = IG +md2 (8.69)e quindi la lunghezza ridotta divieneℓ = d+
IGmd
. (8.70)

8.5. APPLICAZIONI. 123La lunghezza ridotta ha la seguente proprietà. Se si er a in punto di sospensione a una diversadistanza d′ da G he dia la stessa lunghezza ridotta del pendolo omposto, deve valere:d′ +
IGmd′
= d+IGmd
, (8.71)da ui, on po hi al oli las iati alla ura del lettore studioso, si trovamdd′(d− d′) = IG(d− d′) . (8.72)Dalla ri hiesta he le distanze siano diverse, e ioè he valga d′ 6= d, segue:
d′ =IGmd
(8.73)e quindi, onfrontando on (8.70),d+ d′ = ℓ . (8.74)8.5.5 Carru ola.Si onsideri una arru ola, assimilabile ad un dis o di raggio r e massa m, libera di ruotare senzaattrito attorno ad un asse passante per il entro O; tramite un lo alla arru ola sono appesidue punti materiali di masse m1 ed m2, on m2 > m1 ome in gura 8.12. Si vuole determinareil moto delle due masse. La tensione del lo agis e sulla arru ola e sui due punti materiali;per la prima, he ompie un moto rotatorio attorno al suo asse, vale l'equazione (8.15), per ise ondi, he ompiono un moto traslatorio, vale la (3.12); quindi s egliendo l'asse z us ente dalfoglio e oin idente on l'asse di rotazione e osservando he le due masse si muovono on la stessa
τ2
τ1
O
m2
m1
r
Figura 8.12: La arru ola.
a elerazione:
m1a = τ1 −m1gm2a = m2g − τ2τ2r − τ1r = Izα
(8.75)ove Iz è il momento d'inerzia della arru ola rispetto al suoasse di rotazione. Consultando la gura (8.3), si trovaIz =
1
2mr2 (8.76)e quindi, usando an he la (2.126), si trova
τ1 = m1(g + a)τ2 = m2(g − a)τ2r − τ1r =
1
2mr2α =
1
2mra
(8.77)L'a elerazione a è l'a elerazione on ui si muove un punto della ir onferenza esterna della arru ola e quindi l'a elerazione on ui si muove il lo, ad essa solidale, e quindi l'a elerazionedei punti materiali appesi al lo. Risolvendo questo sistema nelle tre in ognite τ1, τ2 e a, si trova
τ1 =4m2 +m
m+ 2m1 + 2m2m1g
τ2 =4m1 +m
m+ 2m1 + 2m2m2g
a =2(m2 −m1)
m+ 2m1 + 2m2g .
(8.78)

124 8. DINAMICA DEL CORPO RIGIDO.il moto dei due punti materiali è quindi uniformemente a elerato.Se i due punti materiali partono da fermi, dopo aver per orso la distanza h la loro velo ità è datadalla (2.28):v =√2ah =
√
4(m2 −m1)
m+ 2m1 + 2m2gh . (8.79)Questa velo ità può an he essere determinata utilizzando il prin ipio di onservazione dell'energia;infatti se il punto materiale di massa m1 sale e il punto materiale di massa m2 s ende di un'altezza
h vi è una variazione di energia potenziale ui deve orrispondere un'eguale variazione di energia ineti a delle masse e della arru ola. Nella posizione nale i due punti materiali hanno la stessavelo ità (stesso modulo, ma versi opposti) v e la arru ola ha una velo ità angolare ω legata a vdalla (2.113); quindi:m2gh−m1gh =
1
2(m1 +m2)v
2 +1
2Izω
2 =1
2(m1 +m2)v
2 +1
4mr2ω2 (8.80) he si può ris rivere
(m2 −m1)gh =1
2(m1 +m2)v
2 +1
4mv2 (8.81)da ui
v =
√
4(m2 −m1)
m+ 2m1 + 2m2gh , (8.82) ome già trovato sopra.
Intermezzo. Il aso generale. Equazioni di Eulero.4Nel aso piú generale il moto rotatorio di un orpo rigido avviene attorno ad un punto sso, hepuò an he non appartenere al orpo rigido. Sia O tale punto; la posizione di ogni altro punto Pidel orpo rigido è individuata dal vettore ri ≡ OPi; ogni punto si muove on la stessa velo itàangolare ω attorno ad O on velo ità vi data davi = ω × ri . (8.83)Il momento angolare rispetto ad O vale quindi
Lo =
N∑
i=1
mi(ri × vi) =
N∑
i=1
mi(ri × ω × ri) =
N∑
i=1
mi
[
ωr2i − ri(ri · ω)]
, (8.84)4Il ontenuto del presente intermezzo è formalmente piuttosto omplesso, ben hé assai interessante, ed è inevi-tabilmente limitato a qual he enno del problema. Per approfondire ulteriormente l'argomento si onsiglia [9, doveil lettore studioso troverà pane i suoi denti.

INTERMEZZO. 125ove è stata usata la se onda delle (2.75). Espli itando le omponenti si trovaLox =
N∑
i=1
mi
[
r2i ωx − xi(xiωx + yiωy + ziωz)]
Loy =
N∑
i=1
mi
[
r2i ωy − yi(xiωx + yiωy + ziωz)]
Loz =
N∑
i=1
mi
[
r2i ωz − zi(xiωx + yiωy + ziωz)]
(8.85)Quindi, denendo i oe ienti d'inerzia:
Ixx =
N∑
i=1
mi(r2i − x2i ) , Iyy =
N∑
i=1
mi(r2i − y2i ) , Izz =
N∑
i=1
mi(r2i − z2i )
Ixy = −N∑
i=1
mixiyi , Ixz = −N∑
i=1
mixizi , Iyz = −N∑
i=1
miyizi ,
(8.86)le omponenti del momento angolare si possono s rivere nella formaLox = Ixxωx + Ixyωy + Ixzωz
Loy = Iyxωx + Iyyωy + Iyzωz
Lox = Izxωx + Izyωy + Izzωz
(8.87)Similmente, l'energia ineti a del orpo rigido si può s rivereEc =
1
2
N∑
i=1
miv2i =
1
2
N∑
i=1
mivi · (ω × ri) =1
2ω ·
N∑
i=1
miri × vi =1
2ω ·L (8.88)ove è stata usata la prima delle (2.75); quindi
Ec =1
2Ixxω
2x +
1
2Ixyωxωy +
1
2Ixzωxωz+
+1
2Iyxωyωx +
1
2Iyyω
2y +
1
2Iyzωyωz+
+1
2Izxωzωx +
1
2Izyωzωy +
1
2Izzω
2z .
(8.89)Si può provare (la dimostrazione ri hiede qual he nozione di algebra lineare e quindi è al di là deilimiti di questi appunti) he, se ome assi di riferimento si s elgono gli assi prin ipali d'inerzia del orpo rigido, i oe ienti d'inerzia misti Ixy, Ixz e Iyz si annullano e quindi il momento angolaree l'energia ineti a hanno la sempli e espressione:L1 = I1ω1 , L2 = I2ω2 , L3 = I3ω3
Ec =1
2I1ω
21+
1
2I2ω
22 +
1
2I3ω
23 ,
(8.90)ove le omponenti rispetto ai tre assi prin ipali sono state indi ate on 1, 2 e 3.È assai onveniente s rivere an he la se onda equazione ardinale nel sistema di riferimento, solidale

126 8. DINAMICA DEL CORPO RIGIDO.al orpo rigido, degli assi prin ipali d'inerzia 1, 2 e 3. Questo sistema di riferimento, he vieneindi ato C, è evidentemente un sistema non inerziale; oerentemente on la notazione introdottaal paragrafo 2.8.2 si indi ano on ı′, ′ e k′ i tre versori degli assi di C.Dato il generi o vettore A, la sua rapidità di variazione in C si può s rivere(A)c = A1ı
′ + A2′ + A3k
′ . (8.91)Questa è legata alla rapidità di variazione nel sistema di riferimento sso S, di origine O, dallerelazioni di Poisson5. Per determinarle si parte dal vettore A he nel sistema di riferimento S sis riveA = Axı+Ay +Azk (8.92)Cal olando la rapidità di variazione si trova
A = Axı+ Ay + Azk = (A)s (8.93)Similmente, nel sistema di riferimento C il vettore A si s riveA = A1 ı
′ +A2′ +A3k
′ . (8.94)Per al olarne la rapidità di variazione o orre tenere presente he an he i versori degli assi variano,il al olo va quindi eseguito in modo simile a quanto già fatto per giungere all'equazione (2.165).Si trova osí:A = A1ı
′ + A2′ + A3k
′ + ω ×A = (A)c + ω ×A . (8.95)Confrontando le (8.93) e (8.95) si ottengono le relazioni di Poisson:(A)s = (A)c + ω ×A . (8.96)Appli ando le relazioni di Poisson al momento angolareLo, ri ordando he per la se onda equazione ardinale vale (Lo)s = Mo, si ottieneMo = (Lo)c + ω ×Lo . (8.97)Si noti he la (8.38) è un aso parti olare della pre edente on Lo ostante in C. Ri ordando he in
C le omponenti del momento d'inerzia sono date dalla prima delle (8.90), la pre edente equazionesi può s rivere ome segue:M1 = L1 + ω2L3 − ω3L2 = I1ω1 + ω2I3ω3 − ω3I2ω2
M2 = L2 + ω3L1 − ω1L3 = I2ω2 + ω3I1ω1 − ω1I3ω3
M3 = L3 + ω1L2 − ω2L1 = I3ω3 + ω1I2ω2 − ω2I1ω1
(8.98)da ui si ottengono le equazioni di Eulero6M1 = I1ω1 − (I2 − I3)ω2ω3
M2 = I2ω2 − (I3 − I1)ω3ω1
M3 = I3ω3 − (I1 − I2)ω1ω2 .
(8.99)5Siméon-Denis Poisson (17811840), matemati o fran ese.6Leonhard Euler (17071783), matemati o e si o svizzero.

INTERMEZZO. 127Queste equazioni hanno in generale una soluzione ompli ata. Se il momento delle forze esterne ènullo le equazioni di Eulero diventanoI1ω1 = (I2 − I3)ω2ω3
I2ω2 = (I3 − I1)ω3ω1
I3ω3 = (I1 − I2)ω1ω2 ;
(8.100)se la rotazione è uniforme, ioè se ω1 = ω2 = ω3 = 0, allora almeno due delle omponenti di ωsono nulle e quindi la velo ità angolare ha la direzione di uno degli assi prin ipali d'inerzia, ioè vipuò essere moto rotatorio uniforme solo attorno ad un asse prin ipale d'inerzia.Sempre supponendo M = 0, si onsideri il aso sempli e in ui il orpo rigido abbia un'asse disimmetria; questo oin ide on un asse prin ipale d'inerzia, per esempio il 3. Per la simmetriaassiale, i due momenti d'inerzia perpendi olari all'asse di simmetria sono uguali, quindiI1 = I2 (8.101)allora le equazioni di Eulero diventano
I1ω1 = (I1 − I3)ω2ω3
I1ω2 = (I3 − I1)ω3ω1
I3ω3 = 0
(8.102)dall'ultima delle tre equazioni si dedu e he ω3 rimane ostante; dalle prime due, quindi si ri avaω1 = −Ωω2 , ω2 = Ωω1 (8.103) on
Ω =I3 − I1I1
ω3 . (8.104)Poi hé Ω è ostante, al olando la rapidità di variazione di ω1 si ottieneω1 = −Ωω2 = −Ω2ω1 . (8.105)Questa equazione è analoga a quella del moto armoni o on pulsazione Ω di ui si onos e lasoluzione; usando la prima delle (2.134):ω1(t) = A cosΩt , (8.106)ove, per sempli ità, la fase iniziale è stata posta a zero. Usando ora la se onda delle (2.134) siottieneω1(t) = −AΩ senΩt (8.107)e quindi, dalla prima delle (8.103), si ottiene
ω2(t) = −1
Ωω1 = A senΩt . (8.108)in denitiva, pertanto, si ha
ω1(t) = A cosΩt
ω2(t) = A senΩt . (8.109)Confrontando queste equazioni on le (2.129), si vede he rappresentano il moto ir olare uniforme

128 8. DINAMICA DEL CORPO RIGIDO.ω3k
ω
ω1ı+ ω2
Ω
Figura 8.13: La pre essione di ω.
di un vettore di omponenti ω1 ed ω2. In altre parole, mentreω3 è ostante, ω1 ed ω2 variano in modo he il vettore ω1ı+ω2ruoti on velo ità angolare Ω, ome rappresentato in gura8.13. Il vettore velo ità angolare ω del orpo rigido, quindi,ruota attorno all'asse di rotazione on velo ità angolare datadalla (8.104). Quindi ω ha un moto di pre essione attornoall'asse di simmetria.Un buon esempio per appli are quanto visto qui è il moto dirotazione terrestre attorno all'asse passante per i poli he èasse di simmetria; la Terra non è una sfera perfetta, ma è unpo' s hia iata ai poli. I momenti d'inerzia valgono7I3 = 8.034 · 1037 kg m2 , I1 = 8.008 · 1037 kg m2 (8.110)e quindi
Ω ≃ ω3
308(8.111)quindi, poi hé la rotazione della Terra avviene in un giorno,la pre essione dell'asse terrestre avviene in ir a 308 giorni, ioè ir a 10 mesi. Questa pre essioneha un'ampiezza di po hi metri e non va onfusa on la pre essione di origine astronomi a; que-sta, già onos iuta nell'anti hità e solitamente attribuita ad Ippar o8 è ben piú rilevante, aventeun'ampiezza di ir a 47; è dovuta all'interazione della Terra on il Sole e la Luna e ha un periododi ir a 26000 anni; è nota on il nome di pre essione degli equinozi.
7Si veda, per esempio, Kurt Lambe k The Earth's Variable Rotation, Cambridge University Press, 1980, p. 27, itato da http://s ien eworld.wolfram. om/physi s/MomentofInertiaEarth.html.8Ippar o di Ni ea (190120 a.C.), astronomo, matemati o e geografo di Ni ea.

Capitolo 9Stati a del orpo rigido.In questo apitolo si studiano le ondizioni per l'equilibrio di un orpo rigido. Diversamente daquanto fatto nei apitoli pre edenti si vuole dare alla presente trattazione un'impostazione assioma-ti o deduttiva, si dedurranno in teoremi della stati a a partire da erti postulati opportunamentes elti. Nel far iò si segue la tradizione omin iata da Ar himede1 nella sua opera Sull'equilibriodei piani in [1 e proseguita da Galilei all'inizio della Se onda Giornata dei suoi Dis orsi in [7 edesposta in forma moderna nel primo apitolo di [11. Come si vedrà, da questo appro io deduttivous irà la nozione di momento di una forza, già in ontrato nei apitoli pre edenti, in modo moltonaturale.9.1 Equilibrio della bilan ia a bra i.Come primo sempli e esempio di orpo rigido si onsidera qui una bilan ia a bra i, he è un'astarigida e omogenea sospesa nel suo punto medio O alla quale possono essere appesi, in qualsiasiposizione, dei orpi. Si omin ia on una denizione.Denizione 1 Si di e di equilibrio una ongurazione in ui l'asta della bilan ia si trovi inposizione orizzontale.OFigura 9.1: La bilan ia s ari a.Si danno quindi i seguenti postulati.Postulato 1 La bilan ia s ari a è in equilibrio.Postulato 2 Se, a partire da una situazione di equilibrio, vengono appese due masse uguali suidue bra i a distanze uguali dal punto di sospensione dell'asta della bilan ia il sistema rimane inequilibrio.Postulato 3 A partire da una situazione di equilibrio, è possibile sostituire due masse ugualisospese in punti diversi P1 e P2 on le stesse due masse sospese entrambe nel punto medio di P1P2senza modi are la situazione di equilibrio.Dai postulati 1 e 2 segue immediatamente il seguente teorema.Teorema 1 Due masse uguali sospese sui due bra i a distanze uguali dal punto di sospensionedell'asta della bilan ia ostituis ono una ongurazione di equilibrio.1Ar himede (287212 a.C.), grande s ienziato di Sira usa.129

130 9. STATICA DEL CORPO RIGIDO.Inoltre dal postulato 3 e dal teorema pre edente si ottiene il seguenteTeorema 2 A partire da una ongurazione di equilibrio, è possibile appendere un numero qua-lunque di masse al punto di sospensione senza modi are al ondizione di equilibrio.Dimostrazione. Infatti da una qualunque ongurazione di equilibrio, per il postulato 2, èpossibile aggiungere una qualunque oppia di masse uguali equidistanti dal punto di sospensione equindi, per il postulato 3, spostarle nel punto di sospensione.
O
A B
O
A
BFigura 9.2: Illustrazione del teorema 2.A questo punto si pone il problema di risolvere il problema dell'equilibrio della bilan ia nel a-so generale in ui ai suoi bra i venga appeso un numero qualsiasi di masse. Si presentano, insu essione, al uni asi.Teorema 3 Una massa posta su un bra io della bilan ia ne equilibra due uguali alla prima postein uno stesso punto dell'altro bra io se la distanza dal punto di sospensione ui si trova quella èdoppia della distanza dal punto di sospensione ui si trovano queste.O
A B
O
A BC
O
A B
CFigura 9.3: Dimostrazione del teorema 3.Dimostrazione. Con riferimento alla gura 9.3, si parta dalla ongurazione di equilibrio (teo-rema 1) on due masse uguali A e B appese in punti equidistanti da O; si aggiunga (teorema 2)in O una massa C uguale alle pre edenti, quindi (postulato 3) si spostino la massa C e la B nelpunto medio dei loro punti di sospensione. La situazione è an ora di equilibrio e, per ostruzione,la distanza da O della massa A è il doppio della distanza da O delle due masse uguali B e C. Teorema 4 Una massa posta su un bra io della bilan ia ne equilibra tre uguali alla prima postein uno stesso punto dell'altro bra io se la distanza dal punto di sospensione ui si trova quella ètripla della distanza dal punto di sospensione ui si trovano queste.Dimostrazione. Con riferimento alla gura 9.4, si parta dalla ongurazione di equilibrio (teo-rema 1) on due masse uguali A e B appese in punti equidistanti da O; si aggiungano (teorema
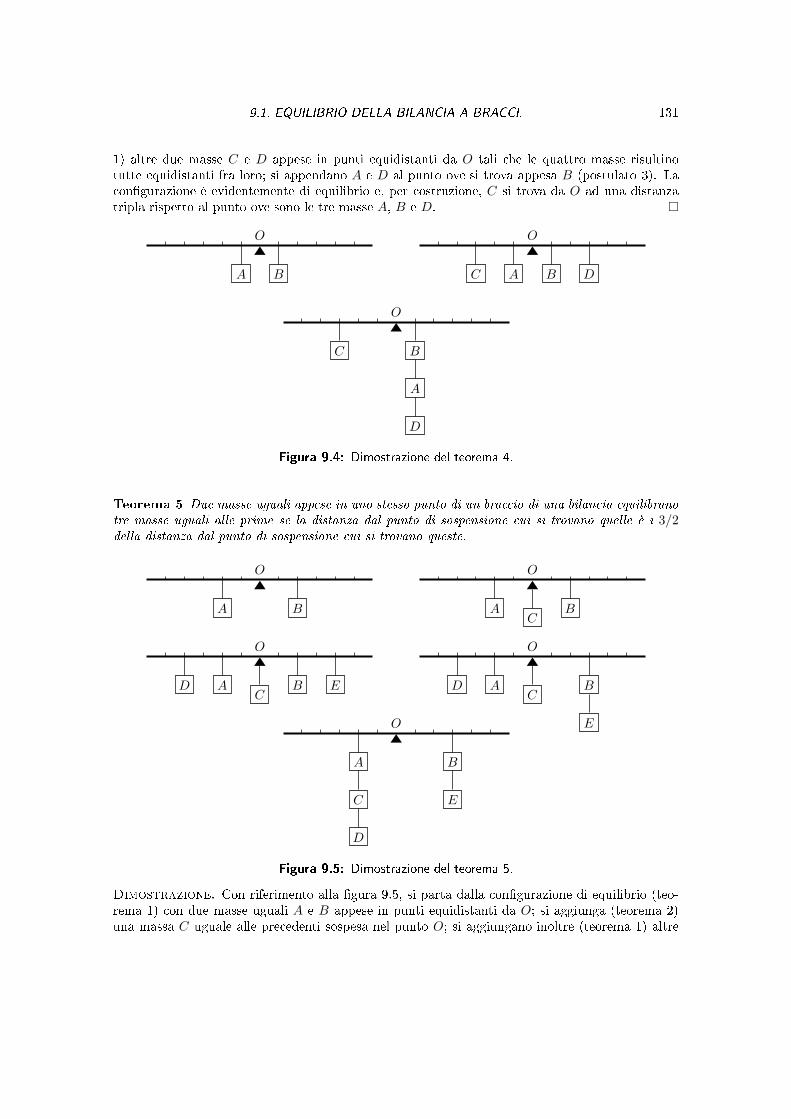
9.1. EQUILIBRIO DELLA BILANCIA A BRACCI. 1311) altre due masse C e D appese in punti equidistanti da O tali he le quattro masse risultinotutte equidistanti fra loro; si appendano A e D al punto ove si trova appesa B (postulato 3). La ongurazione è evidentemente di equilibrio e, per ostruzione, C si trova da O ad una distanzatripla rispetto al punto ove sono le tre masse A, B e D.
O
A B
O
A BC D
O
A
BC
DFigura 9.4: Dimostrazione del teorema 4.Teorema 5 Due masse uguali appese in uno stesso punto di un bra io di una bilan ia equilibranotre masse uguali alle prime se la distanza dal punto di sospensione ui si trovano quelle è i 3/2della distanza dal punto di sospensione ui si trovano queste.O
A B
O
A BC
O
A BC
D E
O
A BC
D
EO
A B
C
D
EFigura 9.5: Dimostrazione del teorema 5.Dimostrazione. Con riferimento alla gura 9.5, si parta dalla ongurazione di equilibrio (teo-rema 1) on due masse uguali A e B appese in punti equidistanti da O; si aggiunga (teorema 2)una massa C uguale alle pre edenti sospesa nel punto O; si aggiungano inoltre (teorema 1) altre
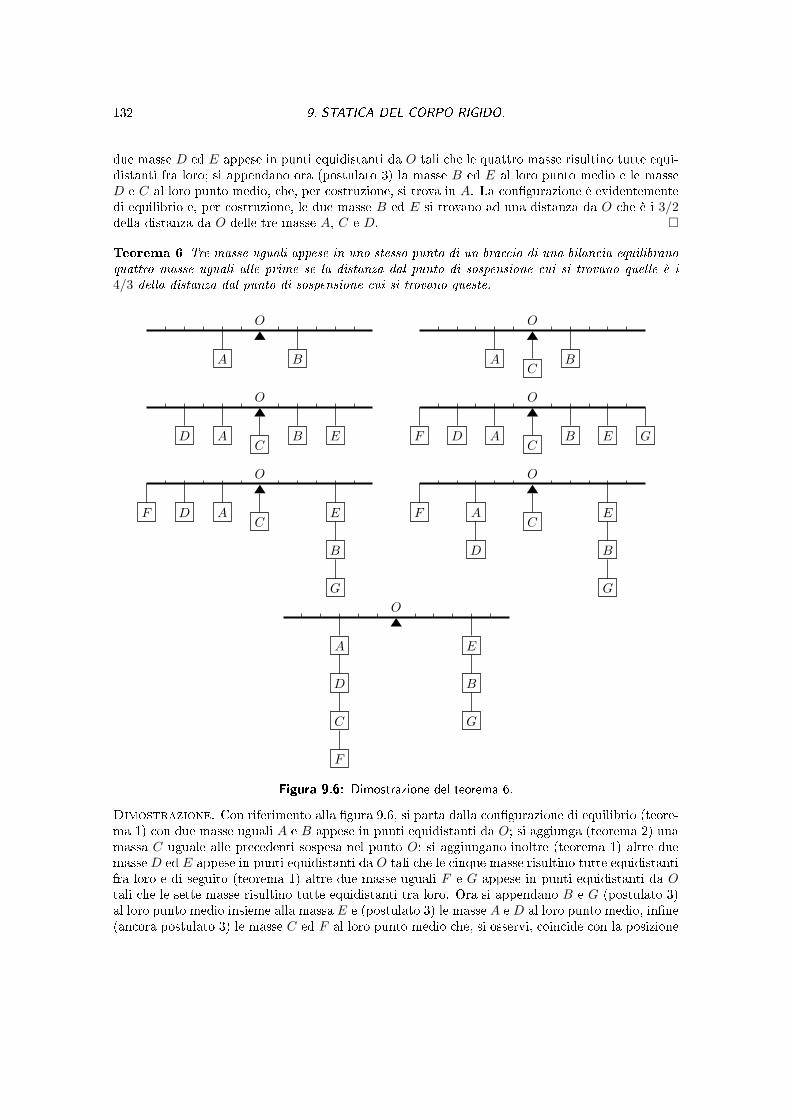
132 9. STATICA DEL CORPO RIGIDO.due masse D ed E appese in punti equidistanti da O tali he le quattro masse risultino tutte equi-distanti fra loro; si appendano ora (postulato 3) la masse B ed E al loro punto medio e le masseD e C al loro punto medio, he, per ostruzione, si trova in A. La ongurazione è evidentementedi equilibrio e, per ostruzione, le due masse B ed E si trovano ad una distanza da O he è i 3/2della distanza da O delle tre masse A, C e D. Teorema 6 Tre masse uguali appese in uno stesso punto di un bra io di una bilan ia equilibranoquattro masse uguali alle prime se la distanza dal punto di sospensione ui si trovano quelle è i4/3 della distanza dal punto di sospensione ui si trovano queste.
O
A B
O
A BC
O
A BC
D E
O
A BC
D EF G
O
A
B
CD EF
G
O
A
B
C
D
EF
G
O
A
B
C
D
E
F
GFigura 9.6: Dimostrazione del teorema 6.Dimostrazione. Con riferimento alla gura 9.6, si parta dalla ongurazione di equilibrio (teore-ma 1) on due masse uguali A e B appese in punti equidistanti da O; si aggiunga (teorema 2) unamassa C uguale alle pre edenti sospesa nel punto O; si aggiungano inoltre (teorema 1) altre duemasse D ed E appese in punti equidistanti da O tali he le inque masse risultino tutte equidistantifra loro e di seguito (teorema 1) altre due masse uguali F e G appese in punti equidistanti da Otali he le sette masse risultino tutte equidistanti tra loro. Ora si appendano B e G (postulato 3)al loro punto medio insieme alla massa E e (postulato 3) le masse A e D al loro punto medio, inne(an ora postulato 3) le masse C ed F al loro punto medio he, si osservi, oin ide on la posizione

9.1. EQUILIBRIO DELLA BILANCIA A BRACCI. 133in ui sono già appese A e D. La ongurazione è evidentemente di equilibrio e, per ostruzione,le due masse E, B e G si trovano ad una distanza da O he è i 4/5 della distanza da O delle tremasse A, D, C ed F . Evidentemente teoremi di questo tipo se ne possono ostruire inniti, ma i po hi esempi fattipossono essere riassunti e generalizzati nel seguente.Teorema 7 (Condizione di equilibrio di una bilan ia a bra i) Una bilan ia si trova in e-quilibrio se le masse appese ai suoi bra i sono inversamente proporzionali alle distanze dal puntodi sospensione.Come onseguenza di quanto visto n qui si ottiene la legge he dà la risultante di due vettoriparalleli.Infatti in ondizioni di equilibrio la risultante delle forze agenti sulla bilan ia deve essere nulla: se osí non fosse, infatti, ioè se vi fosse una forza risultante diversa da zero agente sulla bilan ia,essa si metterebbe in moto seguendo le leggi della dinami a e non sarebbe quindi in equilibrio.Ora, quando la bilan ia è s ari a essa è in equilibrio; questo signi a he la forza peso agente sudi essa è equilibrata esattamente dalla reazione vin olare, diretta verso l'alto, agente sul punto disospensione.Se ai bra i della bilan ia vengono appese delle masse in modo tale he la ongurazione sia an oradi equilibrio (quindi in a ordo on il teorema 7 visto sopra), usando il medesimo ragionamento sipuò on ludere he la risultante delle singole forze peso agenti su tali masse è an ora equilibratadalla reazione vin olare, ioè he la risultante delle forze peso agenti e la reazione vin olare sonodue vettori di intensità uguale, direzione uguale e verso opposto. Poi hé la reazione vin olare èappli ata nel punto di sospensione, an he la risultante delle forze peso, he ha ome intensità lasomma delle due intensità deve ne essariamente essere appli ata nel punto di sospensione.Quindi il presente ragionamento ha portato alla determinazione del punto di appli azione dellarisultante delle due forze peso parallele ed equiverse. Questo risultato è generalizzabile a qualunque oppia di forze parallele e può essere enun iato nella forma seguente.La risultante di due vettori paralleli ed equiversi è un vettore he ha ome modulo lasomma dei moduli, la stessa direzione e lo stesso verso dei vettori addendi e la sua rettadi appli azione è tale he le distanze dai punti di appli azione delle vettori addendi sonoinversamente proporzionali alle loro intensità.Di questo fatto è possibile an he dare una dimostrazione geometri a se ondo le linee seguenti.C
v1
v2
a b
v1 + a
v2 + b
O
A
BH
K
P1 P2L
Figura 9.7: La somma di due vettori paralleli.
Si onsiderino due vettori v1 e v2 paral-leli ed equiversi, appli ati rispettivamen-te in P1 e P2; per determinarne la sommav1+v2, evidentemente, non è possibile uti-lizzare l'usuale metodo del parallelogram-ma. Si ri orre quindi al seguente espedien-te. Si onsiderino due vettori a e b ugualied opposti, ioè tale he valga a+ b = 0 esi appli hino in P1 ed in P2, lungo la retta ongiungente i due punti, ome in gura9.7. In tal modo, la risultante v dei duevettori v1 e v2 si può s rivere nella formav = v1 + v2 = v1 + v2 + a+ b =
= (v1 + a) + (v1 + b) .(9.1)
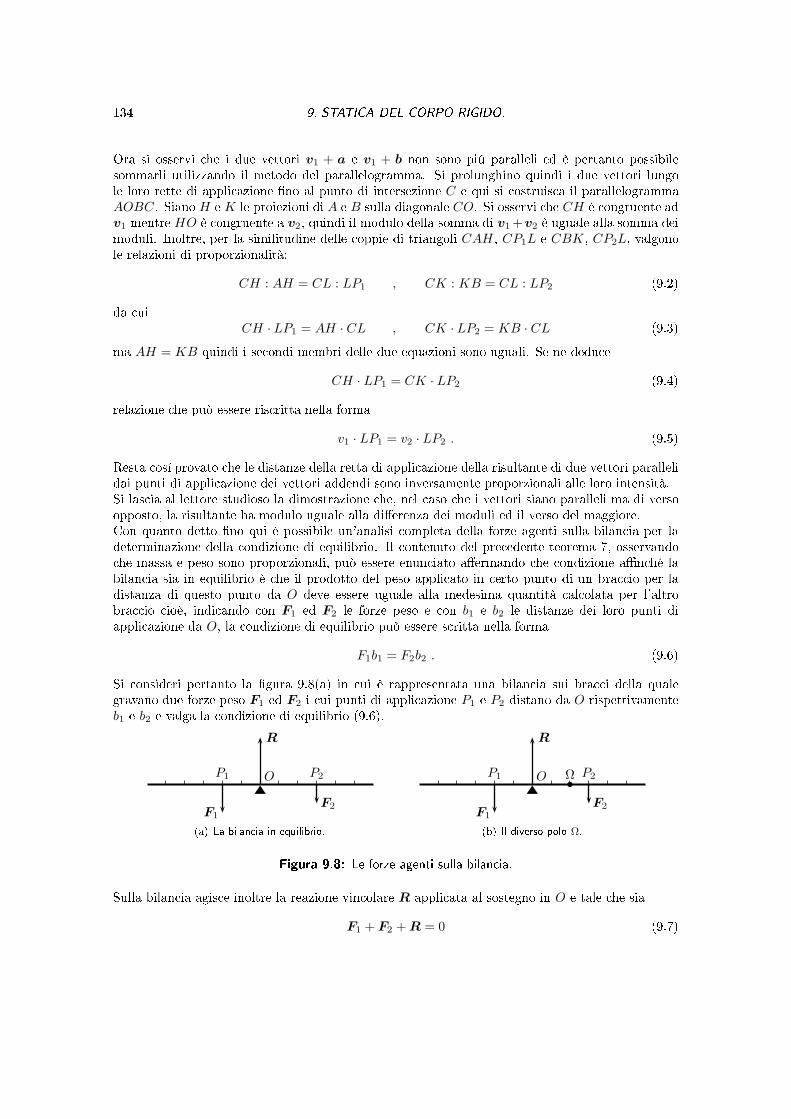
134 9. STATICA DEL CORPO RIGIDO.Ora si osservi he i due vettori v1 + a e v1 + b non sono piú paralleli ed è pertanto possibilesommarli utilizzando il metodo del parallelogramma. Si prolunghino quindi i due vettori lungole loro rette di appli azione no al punto di intersezione C e qui si ostruis a il parallelogrammaAOBC. Siano H e K le proiezioni di A e B sulla diagonale CO. Si osservi he CH è ongruente adv1 mentre HO è ongruente a v2, quindi il modulo della somma di v1+v2 è uguale alla somma deimoduli. Inoltre, per la similitudine delle oppie di triangoli CAH , CP1L e CBK, CP2L, valgonole relazioni di proporzionalità:
CH : AH = CL : LP1 , CK : KB = CL : LP2 (9.2)da uiCH · LP1 = AH · CL , CK · LP2 = KB · CL (9.3)ma AH = KB quindi i se ondi membri delle due equazioni sono uguali. Se ne dedu e
CH · LP1 = CK · LP2 (9.4)relazione he può essere ris ritta nella formav1 · LP1 = v2 · LP2 . (9.5)Resta osí provato he le distanze della retta di appli azione della risultante di due vettori parallelidai punti di appli azione dei vettori addendi sono inversamente proporzionali alle loro intensità.Si las ia al lettore studioso la dimostrazione he, nel aso he i vettori siano paralleli ma di versoopposto, la risultante ha modulo uguale alla dierenza dei moduli ed il verso del maggiore.Con quanto detto no qui è possibile un'analisi ompleta della forze agenti sulla bilan ia per ladeterminazione della ondizione di equilibrio. Il ontenuto del pre edente teorema 7, osservando he massa e peso sono proporzionali, può essere enun iato aermando he ondizione an hé labilan ia sia in equilibrio è he il prodotto del peso appli ato in erto punto di un bra io per ladistanza di questo punto da O deve essere uguale alla medesima quantità al olata per l'altrobra io ioè, indi ando on F1 ed F2 le forze peso e on b1 e b2 le distanze dei loro punti diappli azione da O, la ondizione di equilibrio può essere s ritta nella forma
F1b1 = F2b2 . (9.6)Si onsideri pertanto la gura 9.8(a) in ui è rappresentata una bilan ia sui bra i della qualegravano due forze peso F1 ed F2 i ui punti di appli azione P1 e P2 distano da O rispettivamenteb1 e b2 e valga la ondizione di equilibrio (9.6).
OP1 P2
F2F1
R
(a) La bilan ia in equilibrio. OP1 P2Ω
F2F1
R
(b) Il diverso polo Ω.Figura 9.8: Le forze agenti sulla bilan ia.Sulla bilan ia agis e inoltre la reazione vin olare R appli ata al sostegno in O e tale he siaF1 + F2 +R = 0 (9.7)

9.2. EQUAZIONI CARDINALI DELLA STATICA. 135Cal olando i momenti delle tre forze rispetto al polo O si trova he il momento M(R)O di R è nullopoi hé il punto di appli azione oin ide on O. I momenti di F1 ed F1 sono i vettori
M (1)o = OP1 × F1 , M (2)
o = OP2 × F2 . (9.8)Questi vettori hanno entrambi direzione perpendi olare al foglio, ma il primo ha verso us entementre il se ondo ha verso entrante. I loro moduli sono dati daM (1)
o = F1b1 , M (2)o = F2b2 . (9.9) he, per la ondizione di equilibrio (9.6), sono uguali. Quindi il momento totale
Mo = M (1)o +M (2)
o +M (R)o = M (1)
o +M (2)o (9.10)è nullo visto he i vettori addendi sono uguali ed opposti. Condizione di equilibrio della bilan iaquindi, oltre all'annullarsi delle forze agenti, equazione (9.7), è l'annullarsi del momento totale delleforze agenti.Per il al olo dei momenti il polo può essere s elto ovunque. Si onsideri, ad esempio, il punto Ωdiverso da O, ome in gura 9.8(b). Il al olo dei momenti dà
M(1)Ω = ΩP1 ∧ F1 = (ΩO +OP1) ∧ F1 = ΩO ∧ F1 +M (1)
o
M(2)Ω = ΩP1 ∧ F2 = (ΩO +OP2) ∧ F2 = ΩO ∧ F2 +M (2)
o ;
(9.11)a questi o orre ora aggiungere il momento della reazione vin olare, non piú zero:M
(R)Ω = ΩO ∧R . (9.12)Il momento totale è quindi
MΩ = M(1)Ω +M
(2)Ω +M
(R)Ω = ΩO ∧ F1 +M (1)
o +ΩO ∧ F2 +M (2)o +ΩO ∧R =
= ΩO ∧ (F1 + F2 +R) +M (1)o +M (2)
o = M (1)o +M (2)
o = Mo ,
(9.13)ove si è usata l'equazione (9.7). Il al olo del momento totale delle forze, quindi, non dipende dalpolo pres elto.9.2 Equazioni ardinali della stati a.I risultati qui ottenuti per la bilan ia a bra i possono essere generalizzati per qualunque orpoesteso.Condizione ne essaria all'equilibrio di un orpo rigidoUn orpo rigido si trova in equilibrio se sono nulli la risultante delle forze esterne agentisu di esso e il momento totale delle forze esterne rispetto a un polo O omunque s elto.Se sul orpo agis ono le N forze F1, . . . ,FN appli ate nei punti P1, . . . , PN , la ondizione oraenun iata è espressa dalle equazioniF =
N∑
i=1
Fi = 0 , Mo =
N∑
i=1
M (i)o =
N∑
i=1
OPi ∧ Fi = 0 . (9.14)dette equazioni ardinali della stati a del orpo rigido.

136 9. STATICA DEL CORPO RIGIDO.È il aso di pre isare he la prima delle due equazioni (9.14) è ondizione ne essaria all'equilibriorispetto alle traslazioni, mentre la se onda è ondizione ne essaria all'equilibrio rispetto alle rota-zioni del orpo rigido.La ondizione per l'equilibrio è solo ne essaria poi hé l'annullarsi di F ed Mo, garantis e he lavelo ità vG del entro di massa e la velo ità angolare ω del orpo rigido siano ostanti. Quindiper hé la ondizione data sia an he su iente all'equilibrio o orre he il orpo rigido sia in quiete.9.3 Centro di forze parallele. Bari entroUn insieme di N forze parallele ed F1 . . .FN appli ate nei punti P1 . . . PN hanno risultante appli atain un punto C detto entro delle forze parallele. Per vederlo, si onsiderino N forze tutteparallele al versore w, ioè tali he l'i-esima forza, di omponente Fi nella direzione di w, si possas rivere Fi = Fiw; allora il vettore risultante èF =
N∑
i=1
Fi =
N∑
i=1
Fiw =(
N∑
i=1
Fi
)
w = F w (9.15)la risultante, quindi, è an h'esso parallelo a w e ha ome omponente la somma delle omponenti.Il momento delle forze rispetto ad un qualunque polo O èMo =
N∑
i=1
OPi × Fi =
N∑
i=1
FiOPi × w (9.16)Si denis e allora entro di forza il punto C dato daOC =
1
F
N∑
i=1
FiOPi . (9.17)Con questa denizione il momento delle forze diventaMo = FOC × w = OC × F w = OC × F (9.18)Le N forze quindi agis ono ome un'uni a forza F appli ata in CUn aso molto importante in ui si appli a quanto visto qui è quello della forza peso. Un orporigido può essere pensato ome un insieme di punti materiali ias uno sottoposto ad una forza peso.L'insieme delle forze peso agenti su di un orpo rigido è proprio un aso di forze parallele. Il entrodelle forze peso di un orpo rigido, ioè il punto di appli azione della forza peso del orpo è dettobari entro del orpo del orpo. Per determinarlo, indi ato on il versore dell'asse verti ale, siha
P =
N∑
i=1
(−mig) = −mg (9.19)ove m è la massa del orpo rigido; pertanto nel aso presente Fi = −mig e quindiOC =
1
−mg
N∑
i=1
(−mig)OPi =1
m
N∑
i=1
miOPi . (9.20)Il bari entro quindi oin ide on il entro di massa, equazione (6.17).Per studiare l'equilibrio di un orpo rigido si onsidera pertanto la forza peso appli ata al entro

9.3. CENTRO DI FORZE PARALLELE. BARICENTRO 137di massa.Determinare il bari entro di un orpo rigido qualsiasi in generale ri hiede il al olo integrale edè quindi fuori dalla portata di questi appunti. Tuttavia in al uni asi al olare il bari entro èpossibile on te ni he elementari. Di seguito si analizzano al uni asi.1. Se il orpo rigido ha un asse di simmetria il bari entro si trova su tale asse.2. Se il orpo rigido ha piú assi di simmetria, il bari entro è il punto di intersezione di tali assi.3. Se il orpo rigido è omposto da piú orpi rigidi atta ati insieme, il bari entro del orpo è ilGa
GbG
A
B
Figura 9.9: Il bari entro di un orpo omposto.bari entro dei bari entri dei orpi omponenti. La osadiviene piú hiara mediante il seguente esempio. Si on-sideri un orpo rigido ostituito da due orpi A e B dimasse ma ed mb allora vale
OG =maOGa +mbOGb
m(9.21)ove m = ma +mb; infatti valgono
OGa =1
ma
∑
AmiOPi , OGb =
1
mb
∑
BmiOPi(9.22)ove on∑A si intende la somma limitata ai soli punti del orpo A e similmente per ∑B. Quindi
maOGa +mbOGb
ma +mb
=1
ma +mb
(
∑
AmiOPi +
∑
BmiOPi
)
=
=1
ma +mb
∑
A+B
miOPi = OG(9.23)La situazione è illustrata dalla gura 9.9, ove sono rappresentati due ubi he hanno gli spigoliaventi rapporto 3/2. Similmente, se il orpo rigido presenta un foro, il bari entro si ottiene per
G1
G2
G
Figura 9.10: Un orpo rigido on un bu o.sottrazione nel modo seguente. Si onsideri un orpo rigido di massa m he, ome in gura 9.10,presenti un bu o; sia m1 la massa he avrebbe il orpo senza bu o e sia G1 il suo bari entro; siapoi m2 la `massa del bu o' ioè la massa di un orpo he riempie esattamente il bu o e sia G2 ilsuo bari entro. Allora il bari entro G del orpo è dato daOG =
m1OG1 −m2OG2
m(9.24)ove m = m1 −m2; infatti, utilizzando la (9.21), si ottiene
OG1 =mOG+mbOG2
m1(9.25)

138 9. STATICA DEL CORPO RIGIDO.da ui segue immediatamente la (9.24).4. Per la determinare il bari entro delle gure piane può essere utile il teorema di Pappo-Guldino2 he qui si enun ia senza dimostrazione.Il volume del solido ottenuto fa endo ruotare una gura piana F di 360 attorno ad unasse è uguale al prodotto dell'area A di F per la lunghezza della ir onferenza per orsadal bari entro di F .Vale quindiV = 2πdA (9.26)ove d è la distanza del bari entro dall'asse di rotazione. La onos enza del volume generato edell'area della gura, onsente quindi di determinare la posizione del bari entro.9.3.1 La s ala appoggiata.Come aso esemplare di equilibrio di un orpo rigido si aronta qui il problema di determinare le ondizioni di equilibrio di una s ala di lunghezza l appoggiata ad un pavimento s abro e ad unaparete lis ia, ome in gura 9.11. Sulla s ala agis ono quindi tre forze: la forza peso P = mgappli ata al bari entro G, la reazione vin olare N1 perpendi olare alla parete lis ia, la reazionevin olare R obliqua al pavimento he si può s omporre nella omponente perpendi olare N2 enella omponente parallela, ioè l'attrito stati o Fa. Per l'equilibrio deve dunque valere
P +N1 +R = 0 , (9.27) ui si deve aggiungere un'analoga equazione per i momenti; s egliendo ome polo il punto O in ui
x
y
θP
N1
N2
Fa
R
G
OFigura 9.11: La s ala appoggiata.
la s ala appoggia sul pavimento ( he è la s elta piú onvenientepoi hé rispetto ad esso due delle forze agenti hanno momentonullo), si haMP
o +MN1
o = 0 (9.28)S elti opportunamente gli assi di riferimento (si veda la gura9.11 ove non è rappresentato l'asse z us ente dal foglio), onsi-derando le omponenti x e y della (9.27) e z della pre edente,si trovano le seguenti tre equazioni
N1 − Fa = 0N2 −mg = 0
mgl
2cos θ −N1l cos θ = 0
(9.29) he, risolte, fornis ono il valore delle reazioni vin olarine essari all'equilibrio:
N1 = Fa =1
2mg otg θ
N2 = mg(9.30)Ri ordando he Fa ≤ µsN2, vi è equilibrio se il oe iente di attrito stati o è su ientementegrande, ioè se:
Fa =1
2mg otg θ ≤ µsN2 = µsmg (9.31)da ui si trova la ondizione per l'equilibrio:µs ≥
1
2 otg θ . (9.32)2Pappo (IV se .), matemati o di Alessandria. Paul Guldin (15771643), matemati o svizzero.

9.4. EQUILIBRIO DI UN CORPO RIGIDO VINCOLATO. 1399.4 Equilibrio di un orpo rigido vin olato.Se un orpo rigido ha un vin olo, lo studio del suo equilibrio deve tenere onto della reazionevin olare; si esaminano qui di seguito due situazioni.9.4.1 Corpo vin olato ad un asse.Si onsideri dunque un orpo rigido vin olato a ruotare liberamente attorno ad un asse sso. Sub
b
C
G
P
R
y
Figura 9.12: Un orpo rigido vin- olato ad un asse.
di esso agis ono due forze: il peso P appli ato al bari entro G ela reazione vin olareR appli ata al punto C entro di rotazioneattorno all'asse sso, ome illustrato in gura 9.12 ove l'assedi rotazione, non rappresentato, è perpendi olare al foglio inC. Per le equazioni ardinali della stati a (9.14) il orpo èin equilibrio se sono nulli la risultante delle forze agenti e ilmomento totale rispetto a qualunque polo, ioè se valgono
P +R = 0 , MP +MR = 0 . (9.33)Dalla prima di queste equazioni si dedu e he le due forze agentisono uguali in modulo e direzione ma opposte in verso, osti-tuis ono pertanto una oppia di forze il ui momento totale,dato dalla (5.79), è nullo se è nullo il bra io della oppia, ioèse le due forze hanno la stessa retta di appli azione. Questoa ade quando il bari entro si trova sulla verti ale del punto disospensione.Vi sono pertanto tre possibilità a ui orrispondono tre tipidiversi di equilibrio del orpo rigido illustrate in gura 9.13.b
b
C
G(a) Stabile. b
b
C
G
(b) Instabile. b
G = C( ) Indierente.Figura 9.13: I diversi tipi di equilibrio di un orpo rigido vin olato ad un asse.1. Se il bari entro si trova al di sotto del punto di sospensione, ruotando di po o il orpo la oppia di forze formate da P eR ha un momento he tende a riportare il orpo nella posizionedi equilibrio; si ha quindi equilibrio stabile.2. Se il bari entro si trova al di sopra del punto di sospensione, ruotando di po o il orpo la oppia di forze formate da P e R ha un momento he tende ad allontanare il orpo dallaposizione di equilibrio; si ha quindi equilibrio instabile.3. Se il bari entro oin ide on il punto di sospensione, ruotando di po o il orpo la oppia diforze formate da P e R ha an ora momento nullo; il orpo quindi si trova an ora in unaposizione di equilibrio; si ha quindi equilibrio indierente.
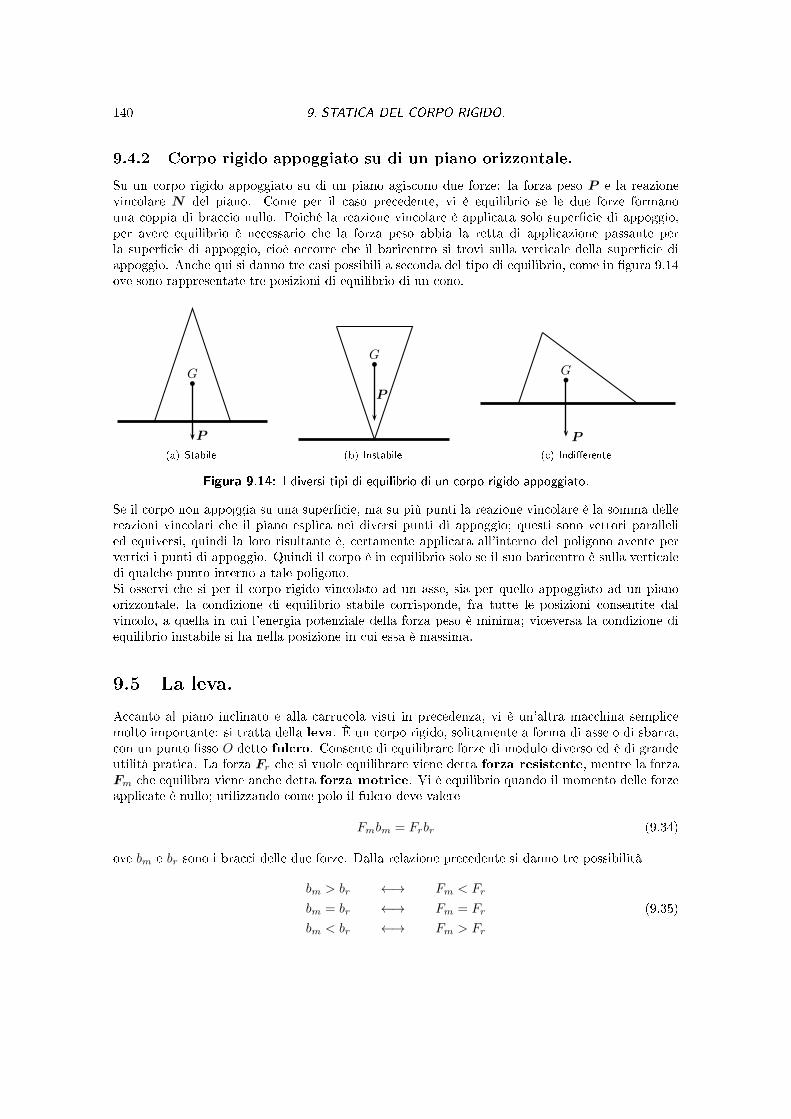
140 9. STATICA DEL CORPO RIGIDO.9.4.2 Corpo rigido appoggiato su di un piano orizzontale.Su un orpo rigido appoggiato su di un piano agis ono due forze: la forza peso P e la reazionevin olare N del piano. Come per il aso pre edente, vi è equilibrio se le due forze formanouna oppia di bra io nullo. Poi hé la reazione vin olare è appli ata solo super ie di appoggio,per avere equilibrio è ne essario he la forza peso abbia la retta di appli azione passante perla super ie di appoggio, ioè o orre he il bari entro si trovi sulla verti ale della super ie diappoggio. An he qui si danno tre asi possibili a se onda del tipo di equilibrio, ome in gura 9.14ove sono rappresentate tre posizioni di equilibrio di un ono.bG
P(a) Stabile.bG
P(b) Instabile. bG
P( ) Indierente.Figura 9.14: I diversi tipi di equilibrio di un orpo rigido appoggiato.Se il orpo non appoggia su una super ie, ma su più punti la reazione vin olare è la somma dellereazioni vin olari he il piano espli a nei diversi punti di appoggio; questi sono vettori parallelied equiversi, quindi la loro risultante è, ertamente appli ata all'interno del poligono avente perverti i i punti di appoggio. Quindi il orpo è in equilibrio solo se il suo bari entro è sulla verti aledi qual he punto interno a tale poligono.Si osservi he si per il orpo rigido vin olato ad un asse, sia per quello appoggiato ad un pianoorizzontale, la ondizione di equilibrio stabile orrisponde, fra tutte le posizioni onsentite dalvin olo, a quella in ui l'energia potenziale della forza peso è minima; vi eversa la ondizione diequilibrio instabile si ha nella posizione in ui essa è massima.9.5 La leva.A anto al piano in linato e alla arru ola visti in pre edenza, vi è un'altra ma hina sempli emolto importante: si tratta della leva. È un orpo rigido, solitamente a forma di asse o di sbarra, on un punto sso O detto ful ro. Consente di equilibrare forze di modulo diverso ed è di grandeutilità prati a. La forza Fr he si vuole equilibrare viene detta forza resistente, mentre la forzaFm he equilibra viene an he detta forza motri e. Vi è equilibrio quando il momento delle forzeappli ate è nullo; utilizzando ome polo il ful ro deve valere
Fmbm = Frbr (9.34)ove bm e br sono i bra i delle due forze. Dalla relazione pre edente si danno tre possibilitàbm > br ←→ Fm < Fr
bm = br ←→ Fm = Fr
bm < br ←→ Fm > Fr
(9.35)
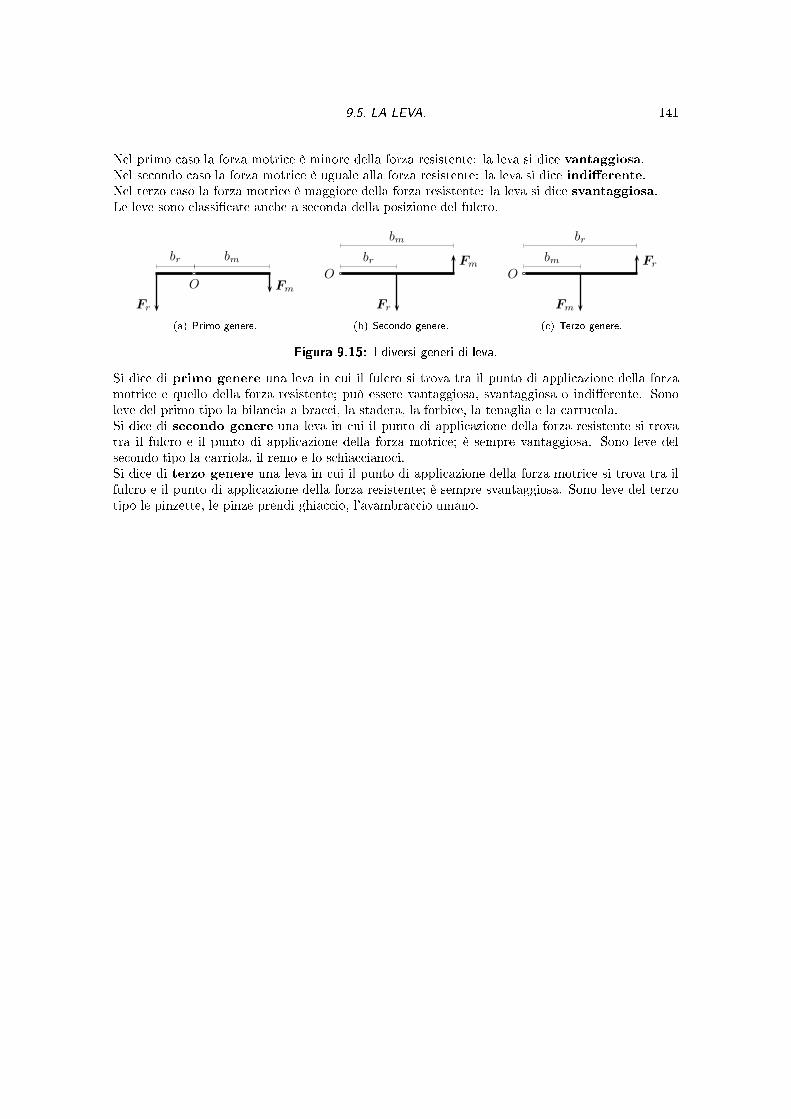
9.5. LA LEVA. 141Nel primo aso la forza motri e è minore della forza resistente: la leva si di e vantaggiosa.Nel se ondo aso la forza motri e è uguale alla forza resistente: la leva si di e indierente.Nel terzo aso la forza motri e è maggiore della forza resistente: la leva si di e svantaggiosa.Le leve sono lassi ate an he a se onda della posizione del ful ro.O Fm
Fr
br bm(a) Primo genere. OFm
Fr
br
bm
(b) Se ondo genere. OFr
Fm
bm
br
( ) Terzo genere.Figura 9.15: I diversi generi di leva.Si di e di primo genere una leva in ui il ful ro si trova tra il punto di appli azione della forzamotri e e quello della forza resistente; può essere vantaggiosa, svantaggiosa o indierente. Sonoleve del primo tipo la bilan ia a bra i, la stadera, la forbi e, la tenaglia e la arru ola.Si di e di se ondo genere una leva in ui il punto di appli azione della forza resistente si trovatra il ful ro e il punto di appli azione della forza motri e; è sempre vantaggiosa. Sono leve delse ondo tipo la arriola, il remo e lo s hia iano i.Si di e di terzo genere una leva in ui il punto di appli azione della forza motri e si trova tra ilful ro e il punto di appli azione della forza resistente; è sempre svantaggiosa. Sono leve del terzotipo le pinzette, le pinze prendi ghia io, l'avambra io umano.
Parte IIIMe ani a dei liquidi.
142
Capitolo 10Stati a dei liquidi.10.1 Stati di aggregazione della materia.La materia può presentarsi in tre diversi stati di aggregazione: solido, liquido e aeriforme. Che una erta sostanza si presenti in uno di questi tre stati dipende dalla relazione fra l'energia potenzialedella forza di attrazione intermole olare e l'energia ineti a delle sue mole ole.In una sostanza allo stato solido l'energia ineti a mole olare è pi ola rispetto all'energia poten-ziale; le mole ole quindi sono fortemente legate fra loro, sono disposte in maniera ordinata se ondoun s hema regolare detto reti olo ristallino; alle mole ole rimane solo la libertà di vibrare at-torno alla loro posizione reti olare. Come onseguenza un orpo solido ha una forma denita, èrigido ed in omprimibile.In una sostanza allo stato aeriforme l'energia ineti a è grande rispetto all'energia potenziale; lemole ole quindi sono libere di muoversi indipendentemente le une dalle altre on un moto forte-mente disordinato. Come onseguenza un aeriforme non ha una forma denita e tende ad o uparetutto il volume he ha a disposizione (va quindi onservato in re ipienti hiusi) ed è fortemente ompressibile.Una sostanza allo stato liquido ha un omportamento intermedio fra i due pre edenti; l'ener-gia ineti a e l'energia potenziale hanno valori paragonabili; il moto delle mole ole non è tale darenderle libere, ma è su iente a rompere l'ordine del reti olo ristallino; tuttavia le forze intermo-le olari sono an ora su ienti a far sí he la distanza media fra le mole ole sia simile a quella dellasostanza nello stato solido. Come onseguenza un liquido non ha una forma denita ma tende adassumere la forma del re ipiente he lo ontiene ed è molto po o omprimibile; sue aratteristi hesono la tensione super iale e la vis osità .In quel he segue si aronta lo studio della me ani a delle sostanze nello stato liquido.10.2 Densità e pressione.La forza di interazione mole olare è piuttosto omplessa da trattare poi hé è attrattiva quando lemole ole si trovano ad una distanza superiore a qual he ångstrom1. Al di sotto di tale distanza laforza diventa fortemente repulsiva. Inoltre, an he rius endo a risolvere il problema dinami o peruna forza simile, non si tratta dell'interazione fra due mole ole, ma dell'interazione re ipro a diun numero enorme di mole ole. Per avere un'idea di questo numero si onsideri he in un litro1L'ångstrom, (simbolo Å) è una unità di misura di lunghezza molto usata in si a atomi a; vale la relazione1Å = 10−10 m. Anders Jonas Ångström (18141874), si o svedese.143

144 10. STATICA DEI LIQUIDI.d'a qua vi sono ir a 1025 mole ole. Non è quindi possibile arontare il problema utilizzando ilmodello di punto materiale e la teoria della me ani a newtoniana utilizzata n qui e des rivere ilmoto delle mole ole del liquido in termini di forze, a elerazioni e velo ità. È pertanto ne essariotrovare un diverso appro io al problema.Per far iò è ne essario utilizzare un modello diverso he utilizzi nuove grandezze si he dettegrandezze ma ros opi he he, rinun iando a des rivere il moto di ogni singola mole ola diliquido, rendano onto del omportamento del liquido nel suo omplesso.Si denis e densità ρ di un orpo il rapporto fra la sua massa m e il suo volume V ; vale ioèρ =
m
V. (10.1)La densità ha le dimensioni di una massa fratto un volume e la sua unità di misura è il kg m−3.Un orpo si di e omogeneo se qualunque porzione di esso ha la stessa densità; se il orpo non èomogeneo la densità può variare da punto a punto; in questo aso per denire la densità nel punto
P si onsidera una pi ola porzione del orpo he ra hiuda P e si al ola il rapporto fra massa evolume al tendere a zero del volume della porzione.Come detto sopra, le sostanze allo stato liquido sono molto po o omprimibili. In questi appunti sisuppone he i liquidi siano perfettamente in omprimibili e he, quindi, la loro densità sia ostante(si veda oltre la denizione di liquido perfetto alla sezione 11.1).A anto al on etto di densità, è a volte utile introdurre quello di peso spe i o. Ps. Esso èdenito ome il rapporto fra il modulo della forza peso mg e il volume V di un orpo. Vale dunquePs =
mg
V= ρg . (10.2)Ha le dimensioni di una forza diviso un volume e la sua unità di misura è kg m−2 s−2.Il peso spe i o è un on etto da usare on una erta autela visto he l'a elerazione di gravità gnon è ostante sulla super ie terrestre.Si denis e pressione p eser itata da una forza F su una super ie il rapporto fra il modulo F⊥della omponente della forza perpendi olare alla super ie e l'area S della super ie in questione;vale ioè
p =F⊥
S. (10.3)La pressione ha le dimensioni di una forza fratto una super ie, la sua unità di misura è dettapas al2 (simbolo Pa); eser ita la pressione di un pas al la forza di un newton he prema su unasuper ie di un metro quadrato, vale quindi
1Pa = 1N m−2 = 1kg m−1 s−2 . (10.4)Le denizioni di densità e pressione date qui sopra valgono qualsiasi sia lo stato di aggregazionedella materia del orpo in questione. Se, in parti olare, il orpo è liquido è importante denire lapressione all'interno del liquido. Si onsideri dunque un punto P interno al liquido e si onsideriuna pi ola super ie S di entro P disposta orizzontalmente, allora la pressione p è il rapporto frala forza he il liquido soprastante eser ita sulla super ie e l'area della super ie stessa. Il valoredella pressione, in generale, può essere diverso da punto a punto quindi si denis e la pressione nelpunto P ome il valore ui tende il rapporto F/S al tendere a zero della super ie.2Blaise Pas al (1623-1662), matemati o, si o e losofo fran ese.
10.3. LIQUIDO IN EQUILIBRIO. 14510.2.1 Pressione atmosferi a.L'atmosfera è l'involu ro di gas he avvolge la Terra no ad un'altezza di qual he migliaio di hi-lometri. La sua omposizione e la sua densità variano molto on la quota ma i suoi omponentiprin ipali sono l'azoto e l'ossigeno. Sulla super ie della Terra si può misurare la pressione eser i-tata da questo `mare' di gas sovrastante, he viene detta pressione atmosferi a. Rimandando auna sezione su essiva la des rizione dello strumento di misura della pressione atmosferi a, qui siosserva he essa varia sia on la latitudine he on l'altitudine e, in un dato punto sulla super ieè omunque soggetta alle variazioni di temperatura e umidità. Si denis e pressione normale p0quella misurata al livello del mare alla latitudine di 45 e alla temperatura di 15 C. Per la misuradella pressione atmosferi a, oltre al pas al, si usano altre unità di misura: l'atmosfera (simboloatm), il bar (simbolo bar) on il suo sotto multiplo millibar (mbar). Valgono le relazioni
p0 = 1atm = 1.01325 · 105Pa = 1.01325bar = 1013.25mbar . (10.5)In questi appunti si suppone sempre la pressione atmosferi a abbia il valore normale p0.10.3 Liquido in equilibrio.Un liquido si di e in equilibrio se è fermo o, meglio, se non vi è trasporto di materia da un puntoad un altro. In realtà, ome visto sopra, le mole ole di un liquido si muovono; ma dal nuovo puntodi vista ma ros opi o iò non ha al una importanza, iò he onta è he in media le mole ole delliquido siano ferme.Piú pre isamente si può aermare he un liquido è in equilibrio se dato un qualunque volume Vad esso interno ed un qualunque intervallo di tempo ∆t, il numero di mole ole di liquido he sitrovano all'interno di V rimane ostante nell'intervallo ∆t. Quindi non è ne essario ri hiedere hele mole ole del liquido siano immobili, ma solamente he il numero di mole ole he nel tempo ∆tes ono da V sia uguale a quello delle mole ole he vi entrano.La pressione in un liquido in equilibrio ha le seguenti proprietà.1. La forza eser itata dalla pressione del liquido su ias una delle pareti del re ipiente he lo ontiene è sempre perpendi olare alla parete in questione.Un sempli e esperimento he può mettere in lu e questa proprietà è il seguente. Si prenda unpallon ino di gomma e lo riempia d'a qua si prati hino dei pi oli fori nella gomma, si vedrà illiquido fuorius ire on direzione perpendi olare alla super ie da ogni foro, qualsiasi sia la suaposizione.2. In ogni punto di un liquido in equilibrio la pressione p è indipendente dall'orientazione dellasuper ie rispetto alla quale la pressione viene al olata.Per veri arlo si onsideri, ome rappresentato in gura 10.1, un prisma retto a base triangolareattorno al generi o punto P (non rappresentato in gura) di un liquido in equilibrio. Si s elga unsistema di riferimento artesiano tridimensionale in ui i piani xy, yz e zx si trovino sulle fa eortogonali del prisma; si supponga inoltre per sempli ità (ma l'ipotesi non diminuis e la generalitàdell'argomento) he la fa ia obliqua sia quadrata di lato l; sia inne θ l'angolo formato dalla fa iaobliqua on il piano zx.Poi hé il prisma è supposto in equilibrio la somma delle forze agenti su di esso deve essere nulla;queste sono la forza peso e le forze di pressione. Si omin ia ol onsiderare la omponente x diqueste forze. Vi è la forza di pressione, in gura denotata on F1, he preme sulla fa ia yz la uiarea è l2 sen θ; quindi, indi ando on px la pressione nella direzione x, il modulo di F1 èF1x = pxl
2 sen θ (10.6)

146 10. STATICA DEI LIQUIDI.L'altra forza he ha una omponente x è la forza di pressione F he preme sulla super ie obliqua;θ l
l
F2
F1
F
x
y
z Figura 10.1: Il prisma in equilibrio.
detta p la pressione nella direzione perpendi- olare alla fa ia obliqua, il modulo di F èF = pl2, quindi la sua omponente x è
Fx = −pl2 sen θ (10.7)La ondizione di equilibrio per la omponentex quindi diventa
pxl2 sen θ − pl2 sen θ = 0 (10.8)Per quanto riguarda la omponente y, vi è laforza di pressione F2 he preme sulla fa ia zx he ha area l2 cos θ; quindi, indi ando on pyla pressione nella direzione y il modulo di F2è
F2y = pyl2 cos θ . (10.9)Vi è poi la omponente y della forza F :
Fy = −pl2 cos θ ; (10.10)inne vi è la forza peso mg; poi hé il volume del prisma è V = 12 l
3 sen θ cos θ, indi ando on ρ ladensità del liquido, la omponente y della forza peso si può s rivere−mg = −ρV g = −1
2ρl3g sen θ cos θ . (10.11)La ondizione di equilibrio per la omponente y quindi diventa
pyl2 cos θ − pl2 cos θ − 1
2ρl3g sen θ cos θ = 0 (10.12)Mettendo insieme, on le opportune sempli azioni, le due ondizioni di equilibrio (10.8) ed (10.12)si trova:
p = px
p = py −1
2ρlg sen θ cos θ (10.13)Se si vuole la pressione nel punto P o orre, ome detto sopra, far tendere a zero la super ie, osa he qui orrisponde a far tendere a zero l. Per le pressioni in P si trova quindi la relazione
p = px = py ; (10.14)poi hé questa relazione non dipende dall'angolo di in linazione della fa ia obliqua, la pressionep he preme su una super ie di un liquido in equilibrio è indipendente dall'orientazione dellasuper ie stessa, ome si doveva dimostrare. Per quanto riguarda la pressione nella direzione z,basta ripetere la dimostrazione ora vista on una diversa orientazione del prisma.An he per questa proprietà è possibile fare un sempli e esperimento. Si onsideri un pallon ino digomma stavolta gonato d'aria e lo si immerga ompletamente in a qua. Se la pressione all'internodell'a qua fosse diversa in direzioni diverse, il pallon ino ne risulterebbe deformato, inve e, purrimpi iolito a ausa della maggiore pressione in a qua rispetto a quella esterna, mantiene lapropria forma.

10.4. LEGGE DI STEVIN. 14710.4 Legge di Stevin.All'interno di un re ipiente ove si trovi un liquido in equilibrio si onsiderino due super i ugualiparallele di area S e distanti h. Poi hé il liquido fra le due super i è in equilibrio la risultante delleforze totali agenti su di esso deve essere nulla. Si omin ia a onsiderare la omponente verti aleh
F1
F2Figura 10.2: La legge diStevin.della risultante. Sia p1 la pressione he preme, verso il basso, sullasuper ie superiore e p2 quella he preme, verso l'alto, sulla super ieinferiore. Sulla porzione del liquido in questione agis ono le seguentiforze verti ali: la forza di modulo F1 = p1S, dovuta alla pressionep1, diretta verso il basso, la forza di modulo F2 = p2S, dovuta allapressione p2, diretta verso l'alto e la forza peso, diretta verso il basso,di modulo
P = mg = ρV g (10.15)ove ρ è la densità del liquido e V è il volume della porzione di liquido ompresa fra le due super i e quindi vale V = Sh. La ondizione diequilibrio quindi ri hiede he la dierenza delle due forze di pressioneequilibri la forza peso, ioè he valgaF2 − F1 = P ←→ p2S − p1S = ρShg (10.16)risistemando questa equazione si ottiene
p2 − p1 = ρgh . (10.17) he è nota on il nome di legge di Stevin3. La pressione in un liquido, quindi aumenta on laprofondità; onsiderando he la super ie libera di un liquido, essendo in equilibrio on l'atmosfera,ha pressione p0, la pressione all'interno di un liquido è sempre maggiore della pressione atmosferi a.La legge di Stevin ha al une importanti onseguenze.La prima è un immediato orollario della (10.17): la pressione ha lo stesso valore in due punti hesi trovino alla stessa profondità.Un'altra onseguenza della legge di Stevin è la legge di Pas al.Una variazione di pressione in un punto di un liquido si trasmette integralmente intutti gli altri punti del liquido stesso.Per vederlo si onsiderino due punti P1 e P2 del liquido, le qui pressioni p1 e p2 siano legate dalla(10.17), se la pressione p1 in P1 aumenta no al valore p′1 = p1 +∆p, in P2 la pressione divienep′2 = p′1 + ρgh = p1 +∆p+ ρgh = p2 +∆p (10.18)quindi gli aumenti di pressione sono uguali.Una terza onseguenza della legge di Stevin è il prin ipio dei vasi omuni anti.Se due o piú vasi in ui si trovi lo stesso liquido sono in omuni azione, le super ilibere dei liquidi in ias uno di essi si trovano alla stessa altezza.Infatti, poi hé le super i libere hanno tutte la stessa pressione p0 per la legge di Stevin il lorodislivello h deve essere nullo.3Simon Stevin (15481620), si o e matemati o ammingo.

148 10. STATICA DEI LIQUIDI.h1
h21
2Figura 10.3: Vasi omuni anti.Le ose sono diverse se due vasi sono riempiti on liquidi didensità diversa. Si onsiderino due vasi omuni anti riempitiuno on un liquido di densità ρ1 e l'altro on un liquido didensità ρ2 > ρ1 e si supponga he i liquidi restino separatisenza mes olarsi (per esempio a qua e olio). Poi hé i due li-quidi sono in equilibrio, la pressione nei punti della super iedi separazione è uguale per entrambi, sia essa p. Inoltre lesuper i libere dei due liquidi sono in equilibrio on l'atmo-sfera, quindi le loro pressioni sono entrambe uguali a p0. I dueliquidi sono sottoposti alla stessa dierenza di pressione e la legge di Stevin (10.17) appli ata adessi, diventa
p0 − p = ρ1gh1 , p0 − p = ρ2gh2 (10.19)da ui, per onfronto, si ottieneρ1h1 = ρ2h2 (10.20)Quindi, le altezze dei due liquidi sopra la super ie di separazione sono inversamente proporzionalialle rispettive densità. Evidentemente, nel aso parti olare in ui le densità siano uguali si ritrovail prin ipio dei vasi omuni anti, ioè h1 = h2.10.4.1 Tor hio idrauli o.La legge di Stevin viene appli ata in un dispositivo, detto tor hio idrauli o, on il quale utilizzando
S1 S2
F1
F2
Figura 10.4: Il tor hioidrauli o.una pi ola forza è possibile equilibrare forze molto grandi. Come rap-presentato in gura 10.4, è ostituito da due ilindri di diametro diverso he ostituis ono un sistema di vasi omuni anti riempiti dallo stessoliquido e hiusi mediante due pistoni mobili ma a perfetta tenuta.Sia quindi S1 l'area del pistone del ilindro piú pi olo ed S2 quelladel piú grande. Nella posizione di lavoro in ui i due pistoni si trovanoalla stessa altezza la pressione del liquido a ontatto on i due pisto-ni è uguale; quindi, se il sistema è in equilibrio, le forze F1 ed F2 hespingono sui due pistoni eser itano la stessa pressione, vale ioè
F1
S1=F2
S2; (10.21)le due forze sono quindi direttamente proporzionali alle super i sullequali premono. Pertanto, s egliendo due ilindri on sezioni molto di-verse, è possibile equilibrare, on forze modeste, forze an he diverse de ine di volte piú intense;viene utilizzato ome sollevatore o martinetto.10.4.2 Barometro di Torri elli.Sulla legge di Stevin si basa an he il funzionamento del primo barometro ostruito per la misura-zione della pressione atmosferi a da Torri elli.4 Il dispositivo, illustrato in gura 10.5, è ostituitoda sottile un tubo di vetro della lunghezza di ir a un metro he viene riempito ompletamente dimer urio (la ui densità è ρHg = 13579kg m−3), tappato a uratamente in modo da non far en-trare aria, e quindi immerso in un re ipiente ontenente an h'esso mer urio. Rimuovendo il tapposi vede il mer urio s endere no ad un'altezza h = 760mm sulla super ie libera del mer urio nel4Evangelista Torri elli (16071647), matemati o e si o italiano.
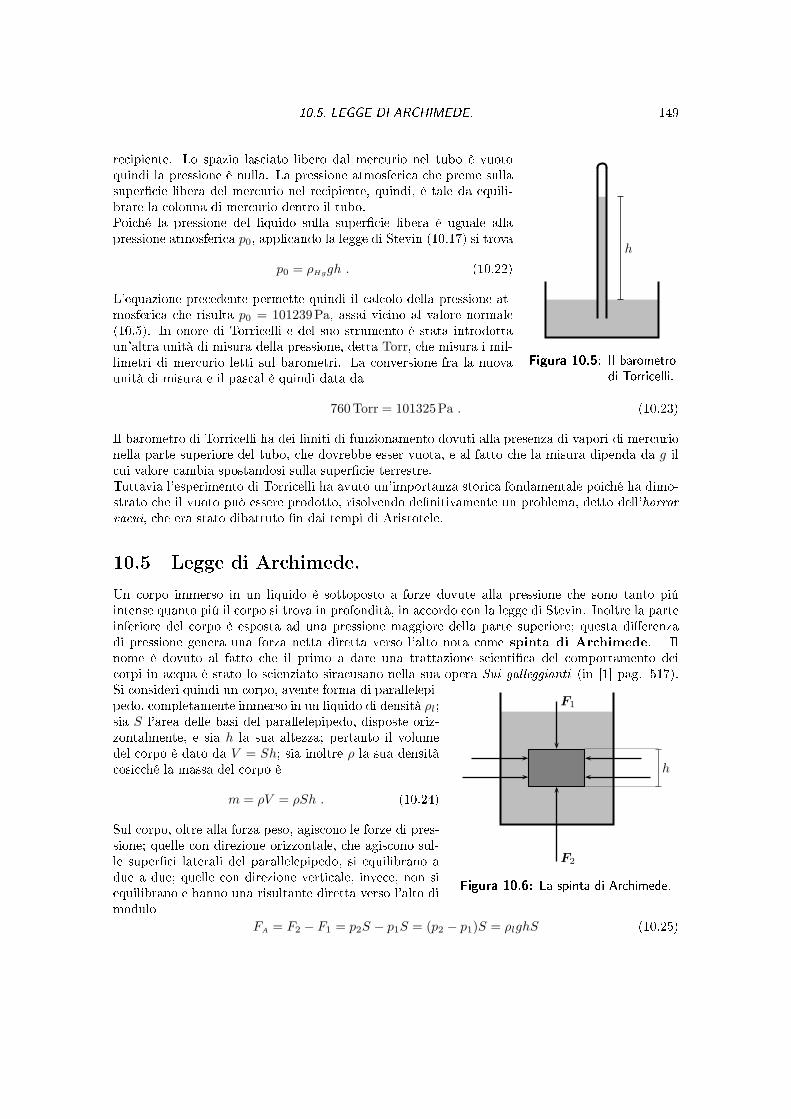
10.5. LEGGE DI ARCHIMEDE. 149h
Figura 10.5: Il barometrodi Torri elli.
re ipiente. Lo spazio las iato libero dal mer urio nel tubo è vuotoquindi la pressione è nulla. La pressione atmosferi a he preme sullasuper ie libera del mer urio nel re ipiente, quindi, è tale da equili-brare la olonna di mer urio dentro il tubo.Poi hé la pressione del liquido sulla super ie libera è uguale allapressione atmosferi a p0, appli ando la legge di Stevin (10.17) si trovap0 = ρHggh . (10.22)L'equazione pre edente permette quindi il al olo della pressione at-mosferi a he risulta p0 = 101239Pa, assai vi ino al valore normale(10.5). In onore di Torri elli e del suo strumento è stata introdottaun'altra unità di misura della pressione, detta Torr, he misura i mil-limetri di mer urio letti sul barometri. La onversione fra la nuovaunità di misura e il pas al è quindi data da
760Torr = 101325Pa . (10.23)Il barometro di Torri elli ha dei limiti di funzionamento dovuti alla presenza di vapori di mer urionella parte superiore del tubo, he dovrebbe esser vuota, e al fatto he la misura dipenda da g il ui valore ambia spostandosi sulla super ie terrestre.Tuttavia l'esperimento di Torri elli ha avuto un'importanza stori a fondamentale poi hé ha dimo-strato he il vuoto può essere prodotto, risolvendo denitivamente un problema, detto dell'horrorva ui, he era stato dibattuto n dai tempi di Aristotele.10.5 Legge di Ar himede.Un orpo immerso in un liquido è sottoposto a forze dovute alla pressione he sono tanto piúintense quanto piú il orpo si trova in profondità, in a ordo on la legge di Stevin. Inoltre la parteinferiore del orpo è esposta ad una pressione maggiore della parte superiore; questa dierenzadi pressione genera una forza netta diretta verso l'alto nota ome spinta di Ar himede. Ilnome è dovuto al fatto he il primo a dare una trattazione s ienti a del omportamento dei orpi in a qua è stato lo s ienziato sira usano nella sua opera Sui galleggianti (in [1 pag. 517).F1
F2
h
Figura 10.6: La spinta di Ar himede.Si onsideri quindi un orpo, avente forma di parallelepi-pedo, ompletamente immerso in un liquido di densità ρl;sia S l'area delle basi del parallelepipedo, disposte oriz-zontalmente, e sia h la sua altezza; pertanto il volumedel orpo è dato da V = Sh; sia inoltre ρ la sua densità osi hé la massa del orpo è
m = ρV = ρSh . (10.24)Sul orpo, oltre alla forza peso, agis ono le forze di pres-sione; quelle on direzione orizzontale, he agis ono sul-le super i laterali del parallelepipedo, si equilibrano adue a due; quelle on direzione verti ale, inve e, non siequilibrano e hanno una risultante diretta verso l'alto dimoduloFA = F2 − F1 = p2S − p1S = (p2 − p1)S = ρlghS (10.25)

150 10. STATICA DEI LIQUIDI.ove p1 e p2 sono le pressioni agenti sulle due basi del parallelepipedo ed è stata usata la (10.17).QuindiFA = ρlgV . (10.26)La forza FA è detta spinta di Ar himede. Per stabilire si in orpo galleggia FA va onfrontata onla forza peso P = mg = ρV g. Quindi, poi hé valgono
FA > P ←→ ρl > ρ
FA < P ←→ ρl < ρ ,(10.27)il parallelepipedo galleggia se la sua densità è minore di quella del liquido in ui è immerso,vi eversa aonda se la sua densità è maggiore di quella del liquido. Se le due densità sono ugualiil parallelepipedo rimane in equilibrio. Si noti he la spinta di Ar himede non dipende dalla pro-fondità a ui si trova il parallelepipedo.La spinta di Ar himede può essere espressa in un modo sempli e osservando he ρlV è la massadi una quantità di liquido avente il volume del parallelepipedo; si è soliti riferirsi a questo ome illiquido spostato dalla presenza del orpo. Quindi FA = ρlV g è il peso del liquido spostato.Quanto visto nel aso sempli e del parallelepipedo, può essere generalizzato a orpi di qualsiasiforma; si può quindi enun iare la seguente legge di Ar himede.Qualsiasi orpo immerso in un liquido ri eve una spinta verso l'alto di modulo ugualeal peso del liquido spostato.Questa legge è vera an he se il orpo galleggia essendo parzialmente immerso. Per vederlo si onsideri un orpo, per sempli ità an ora a forma di parallelepipedo, di densità minore del liquido
hi
Figura 10.7: Galleggiamento.in ui si trova immerso; la forza di Ar himede è maggiore della for-za peso, quindi il orpo si muove verso l'alto no a raggiungere unaposizione di equilibrio in ui una parte del orpo è emersa e unaparte è immersa, ome illustrato in gura 10.7. Sia quindi hi l'al-tezza della parte immersa, osi hé il volume immerso è Vi = Shi.Sulla super ie superiore, in equilibrio on l'atmosfera, preme ver-so il basso la pressione p0, sulla super ie inferiore preme versol'alto la pressione, data dalla legge di Stevin:
p = p0 + ρlghi (10.28)Quindi, il modulo della spinta di Ar himede èFA = pS − p0S = ρlghiS = ρlgVi (10.29) he è an ora il peso del liquido spostato, in a ordo on la legge di Ar himede. Poi hé il orpo èin equilibrio questa forza deve avere lo stesso modulo della forza peso P = mg = ρV g; quindi vale
FA = P ←→ ρlgVi = ρV g ←→ ViV
=ρ
ρl(10.30)Quindi quando un orpo galleggia il rapporto il volume immerso e il volume totale è uguale alrapporto fra la densità del orpo e la densità del liquido.

10.5. LEGGE DI ARCHIMEDE. 15110.5.1 Equilibrio dei galleggianti.G
C
P
FA
Figura 10.8: Equilibrio di ungalleggiante.Il punto di appli azione della forza peso è il bari entro Gdel orpo, mentre il punto di appli azione della forza di Ar- himede è il bari entro C della parte immersa; in generale,per un orpo galleggiante, questi due punti non oin idono, ome illustrato nella gura 10.8. Nel aso generale quindi,forza peso e spinta di Ar himede ostituis ono una oppiadi forze he tende a far ruotare il orpo immerso.Si ha equilibrio del galleggiante quando G e C si trovanosulla stessa verti ale; tale equilibrio è stabile o instabile ase onda he il bari entro dell'intero orpo si trovi piú inbasso o piú in alto del bari entro della parte immersa.L'analisi è ompli ata dal fatto he mentre G rimane sso,la posizione di C varia al variare della parte immersa sottol'azione del momento rotante. Si tratta un problema per progettisti di natanti he qui si puòtralas iare.10.5.2 Bilan ia idrostati a.La bilan ia idrostati a è un dispositivo utilizzato per misurare la densità dei orpi solidi non solubili.La prima des rizione del suo funzionamento si deve a Galilei he, nell'opera giovanile La bilan etta(si veda [8, pagina 49), ne fa uso per ri ostruire ongetturalmente il pro edimento he avrebbeseguito Ar himede per risolvere il famoso problema della orona di Gerone.
O
1
O
2
Figura 10.9: La due pesate on la bilan ia idrostati a.Si tratta di una bilan ia a bra i sui quali siano appesi, ad uguale distanza dal punto di sospensione,due piatti uguali. Per la misura della densità ρ di un orpo di massa in ognita m è ne essario faredue pesate. Nella prima, il orpo viene posto su uno dei piatti ed equilibrato on un orpo di massanota m1. Vale quindimg = m1g ←→ m = m1 . (10.31)Nella se onda il orpo viene appeso al piatto ed immerso in a qua, he è un liquido di densità nota
ρa ed equilibrato on un orpo di massa nota m2. Vale quindim2g = mg −mag ←→ m2 = m−ma , (10.32)ove ma è la massa dell'a qua spostata. Dal onfronto di queste due equazioni si trova
ma = m1 −m2 . (10.33)
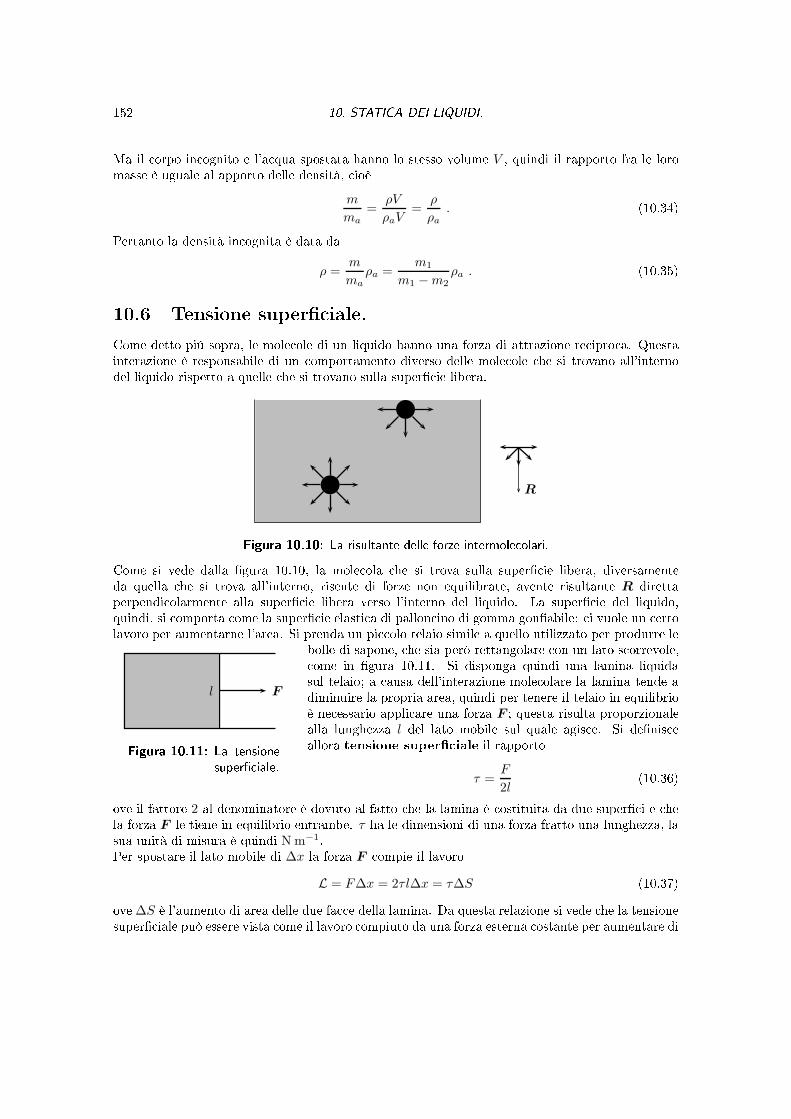
152 10. STATICA DEI LIQUIDI.Ma il orpo in ognito e l'a qua spostata hanno lo stesso volume V , quindi il rapporto fra le loromasse è uguale al apporto delle densità, ioèm
ma
=ρV
ρaV=
ρ
ρa. (10.34)Pertanto la densità in ognita è data da
ρ =m
ma
ρa =m1
m1 −m2ρa . (10.35)10.6 Tensione super iale.Come detto piú sopra, le mole ole di un liquido hanno una forza di attrazione re ipro a. Questainterazione è responsabile di un omportamento diverso delle mole ole he si trovano all'internodel liquido rispetto a quelle he si trovano sulla super ie libera.
RFigura 10.10: La risultante delle forze intermole olari.Come si vede dalla gura 10.10, la mole ola he si trova sulla super ie libera, diversamenteda quella he si trova all'interno, risente di forze non equilibrate, avente risultante R direttaperpendi olarmente alla super ie libera verso l'interno del liquido. La super ie del liquido,quindi, si omporta ome la super ie elasti a di pallon ino di gomma gonabile: i vuole un ertolavoro per aumentarne l'area. Si prenda un pi olo telaio simile a quello utilizzato per produrre leFlFigura 10.11: La tensionesuper iale.
bolle di sapone, he sia però rettangolare on un lato s orrevole, ome in gura 10.11. Si disponga quindi una lamina liquidasul telaio; a ausa dell'interazione mole olare la lamina tende adiminuire la propria area, quindi per tenere il telaio in equilibrioè ne essario appli are una forza F ; questa risulta proporzionalealla lunghezza l del lato mobile sul quale agis e. Si denis eallora tensione super iale il rapportoτ =
F
2l(10.36)ove il fattore 2 al denominatore è dovuto al fatto he la lamina è ostituita da due super i e hela forza F le tiene in equilibrio entrambe. τ ha le dimensioni di una forza fratto una lunghezza, lasua unità di misura è quindi Nm−1.Per spostare il lato mobile di ∆x la forza F ompie il lavoro
L = F∆x = 2τl∆x = τ∆S (10.37)ove ∆S è l'aumento di area delle due fa e della lamina. Da questa relazione si vede he la tensionesuper iale può essere vista ome il lavoro ompiuto da una forza esterna ostante per aumentare di
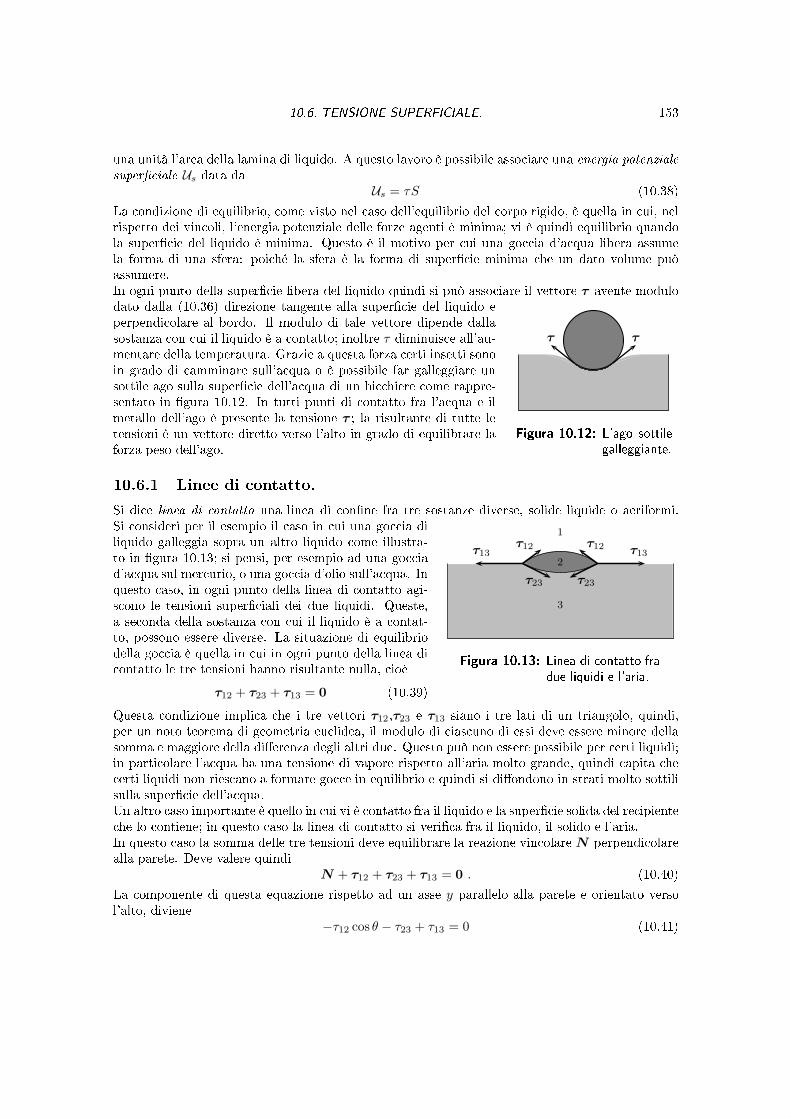
10.6. TENSIONE SUPERFICIALE. 153una unità l'area della lamina di liquido. A questo lavoro è possibile asso iare una energia potenzialesuper iale Us data daUs = τS (10.38)La ondizione di equilibrio, ome visto nel aso dell'equilibrio del orpo rigido, è quella in ui, nelrispetto dei vin oli, l'energia potenziale delle forze agenti è minima; vi è quindi equilibrio quandola super ie del liquido è minima. Questo è il motivo per ui una go ia d'a qua libera assumela forma di una sfera: poi hé la sfera è la forma di super ie minima he un dato volume puòassumere.In ogni punto della super ie libera del liquido quindi si può asso iare il vettore τ avente modulo
τ τ
Figura 10.12: L'ago sottilegalleggiante.dato dalla (10.36) direzione tangente alla super ie del liquido eperpendi olare al bordo. Il modulo di tale vettore dipende dallasostanza on ui il liquido è a ontatto; inoltre τ diminuis e all'au-mentare della temperatura. Grazie a questa forza erti insetti sonoin grado di amminare sull'a qua o è possibile far galleggiare unsottile ago sulla super ie dell'a qua di un bi hiere ome rappre-sentato in gura 10.12. In tutti punti di ontatto fra l'a qua e ilmetallo dell'ago è presente la tensione τ ; la risultante di tutte letensioni è un vettore diretto verso l'alto in grado di equilibrare laforza peso dell'ago.10.6.1 Linee di ontatto.Si di e linea di ontatto una linea di onne fra tre sostanze diverse, solide liquide o aeriformi.
1
2
3
τ12 τ12
τ23 τ23
τ13 τ13
Figura 10.13: Linea di ontatto fradue liquidi e l'aria.Si onsideri per il esempio il aso in ui una go ia diliquido galleggia sopra un altro liquido ome illustra-to in gura 10.13; si pensi, per esempio ad una go iad'a qua sul mer urio, o una go ia d'olio sull'a qua. Inquesto aso, in ogni punto della linea di ontatto agi-s ono le tensioni super iali dei due liquidi. Queste,a se onda della sostanza on ui il liquido è a ontat-to, possono essere diverse. La situazione di equilibriodella go ia è quella in ui in ogni punto della linea di ontatto le tre tensioni hanno risultante nulla, ioè
τ12 + τ23 + τ13 = 0 (10.39)Questa ondizione impli a he i tre vettori τ12,τ23 e τ13 siano i tre lati di un triangolo, quindi,per un noto teorema di geometria eu lidea, il modulo di ias uno di essi deve essere minore dellasomma e maggiore della dierenza degli altri due. Questo può non essere possibile per erti liquidi;in parti olare l'a qua ha una tensione di vapore rispetto all'aria molto grande, quindi apita he erti liquidi non ries ano a formare go e in equilibrio e quindi si diondono in strati molto sottilisulla super ie dell'a qua.Un altro aso importante è quello in ui vi è ontatto fra il liquido e la super ie solida del re ipiente he lo ontiene; in questo aso la linea di ontatto si veri a fra il liquido, il solido e l'aria.In questo aso la somma delle tre tensioni deve equilibrare la reazione vin olare N perpendi olarealla parete. Deve valere quindiN + τ12 + τ23 + τ13 = 0 . (10.40)La omponente di questa equazione rispetto ad un asse y parallelo alla parete e orientato versol'alto, diviene−τ12 cos θ − τ23 + τ13 = 0 (10.41)
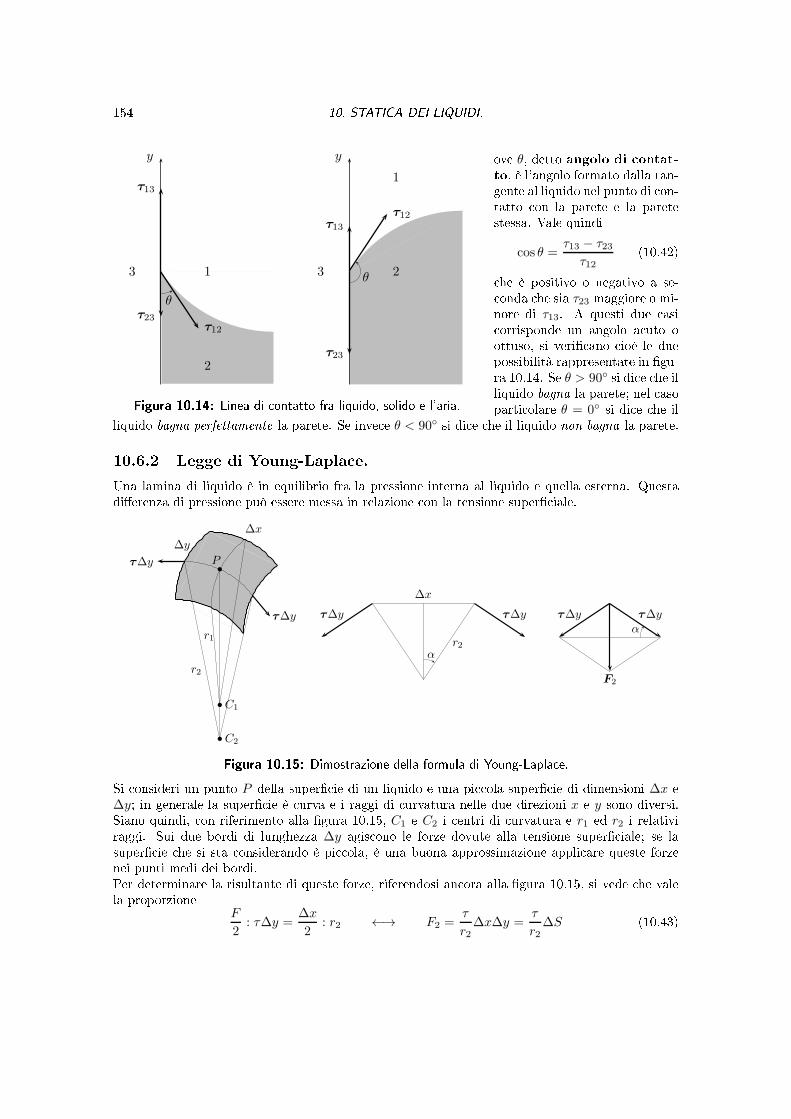
154 10. STATICA DEI LIQUIDI.θ
y
τ23
τ13
τ12
1
2
3 θ
y
τ13
τ23
τ12
1
23
Figura 10.14: Linea di ontatto fra liquido, solido e l'aria.
ove θ, detto angolo di ontat-to, è l'angolo formato dalla tan-gente al liquido nel punto di on-tatto on la parete e la paretestessa. Vale quindicos θ =
τ13 − τ23τ12
(10.42) he è positivo o negativo a se- onda he sia τ23 maggiore o mi-nore di τ13. A questi due asi orrisponde un angolo a uto oottuso, si veri ano ioè le duepossibilità rappresentate in gu-ra 10.14. Se θ > 90 si di e he illiquido bagna la parete; nel asoparti olare θ = 0 si di e he illiquido bagna perfettamente la parete. Se inve e θ < 90 si di e he il liquido non bagna la parete.10.6.2 Legge di Young-Lapla e.Una lamina di liquido è in equilibrio fra la pressione interna al liquido e quella esterna. Questadierenza di pressione può essere messa in relazione on la tensione super iale.b
b
b
C1
C2
r1
r2
P
∆x
∆y
τ∆y
τ∆y
αr2
∆x
τ∆y τ∆yα
τ∆y τ∆y
F2
Figura 10.15: Dimostrazione della formula di Young-Lapla e.Si onsideri un punto P della super ie di un liquido e una pi ola super ie di dimensioni ∆x e∆y; in generale la super ie è urva e i raggi di urvatura nelle due direzioni x e y sono diversi.Siano quindi, on riferimento alla gura 10.15, C1 e C2 i entri di urvatura e r1 ed r2 i relativiraggi. Sui due bordi di lunghezza ∆y agis ono le forze dovute alla tensione super iale; se lasuper ie he si sta onsiderando è pi ola, è una buona approssimazione appli are queste forzenei punti medi dei bordi.Per determinare la risultante di queste forze, riferendosi an ora alla gura 10.15, si vede he valela proporzione
F
2: τ∆y =
∆x
2: r2 ←→ F2 =
τ
r2∆x∆y =
τ
r2∆S (10.43)

10.6. TENSIONE SUPERFICIALE. 155ove ∆S = ∆x∆y è, nell'approssimazione di pi ola super ie, l'area della super ie in questione.Pro edendo nello stesso modo per le forze di tensione agenti sui due bordi di lunghezza ∆x si trovaF1 =
τ
r1∆y∆x =
τ
r2∆S (10.44)La risultante di queste due forze parallele ed equiverse pertanto ha modulo
F = F1 + F2 =
(
1
r1+
1
r2
)
τ∆S . (10.45)Questa forza, diretta nel verso della parte on ava della super ie, è la risultante delle forze dovutealla tensione super iale e deve equilibrare le forze di pressione presenti ai due lati della super ie.Sia dunque p2 il valore della pressione dal lato on avo della super ie e p1 il valore della pressionedal lato onvesso; vale p2 > p1 quindi(p2 − p1)∆S =
(
1
r1+
1
r2
)
τ∆S (10.46)quindip2 − p1 =
(
1
r1+
1
r2
)
τ (10.47) he è nota ome legge di Young-Lapla e5. La (10.47) può essere utilizzata, per esempio permettere in relazione la pressione interna di una bolla di sapone on la tensione super iale dell'a quasaponata he ostituis e la bolla stessa.10.6.3 Capillarità.Se si immerge in un re ipiente ontenente un liquido un tubo di vetro di diametro molto pi olo,dell'ordine di qual he frazione di millimetro, detto apillare, a ausa della tensione super iale illivello del liquido all'interno del apillare è diversa da quella del re ipiente, in violazione del prin ipiodei vasi omuni anti. Tale livello è maggiore o minore a se onda he il liquido bagni o non bagnila super ie del apillare ome illustrato in gura 10.16 ove, per hiarezza di rappresentazione, ildiametro del apillare è sproporzionatamente ingrandito.Si onsideri quindi, ome in gura 10.16(a), un tubo apillare di vetro di raggio a immerso in unre ipiente ontenente un liquido he bagna il vetro (per esempio l'a qua). L'angolo di ontatto frail liquido e la super ie verti ale del vetro è a uto, vi è quindi una tensione super iale direttaverso il basso, quindi, in a ordo on la legge di Young-Lapla e (10.47), la pressione del liquido èminore della pressione esterna; pertanto il liquido sale lungo il apillare no ad un'altezza h tale he la pressione idrostati a equilibri tale dierenza.Visto he il apillare è molto sottile, è una buona approssimazione supporre he la super ie on avadel liquido, dettamenis o on avo, sia una porzione di sfera di raggio r. Dall'analisi della gura10.16(a), si vede he valer =
a
cos θ. (10.48)Utilizzando la (10.47), osservando he nel aso presente vale r1 = r2 = r, si ottiene
∆p =2τ
r=
2τ cos θ
a. (10.49)5Thomas Young (17731829), si o ed egittologo inglese. Pierre-Simon Lapla e (17491827), s ienziato fran ese.
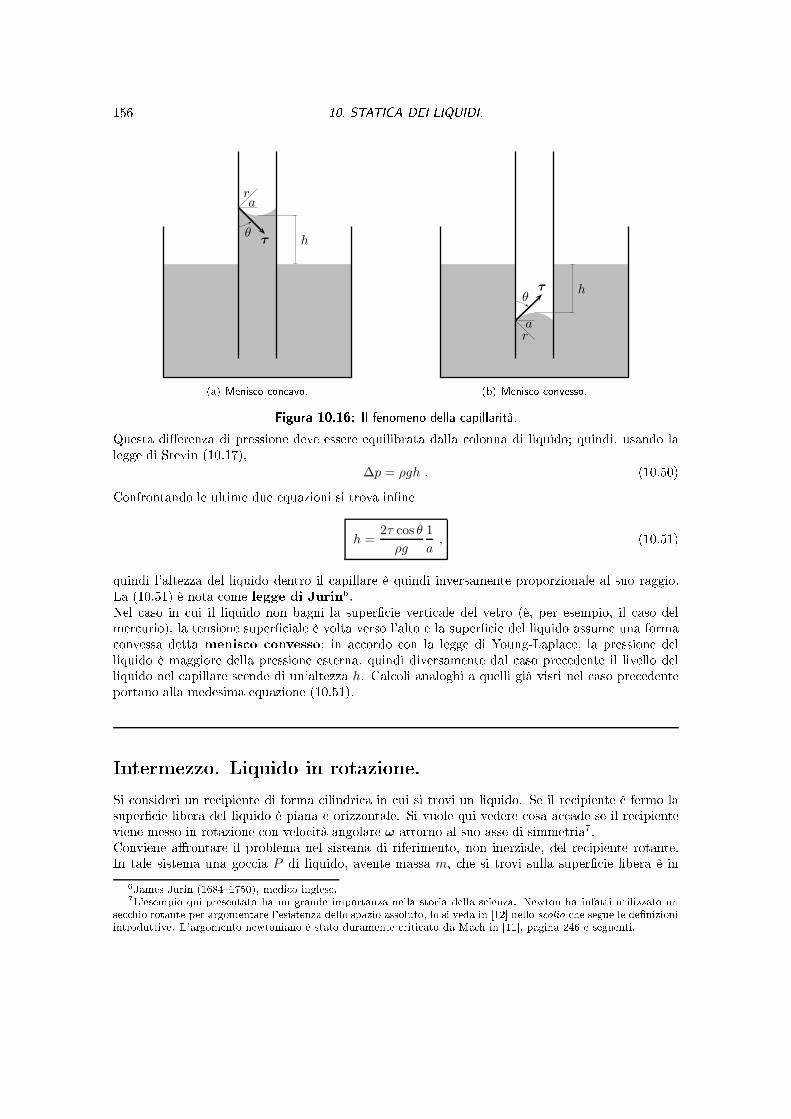
156 10. STATICA DEI LIQUIDI.θ
ra
hτ
(a) Menis o on avo.θ
ra
hτ
(b) Menis o onvesso.Figura 10.16: Il fenomeno della apillarità.Questa dierenza di pressione deve essere equilibrata dalla olonna di liquido; quindi, usando lalegge di Stevin (10.17),∆p = ρgh . (10.50)Confrontando le ultime due equazioni si trova inne
h =2τ cos θ
ρg
1
a, (10.51)quindi l'altezza del liquido dentro il apillare è quindi inversamente proporzionale al suo raggio.La (10.51) è nota ome legge di Jurin6.Nel aso in ui il liquido non bagni la super ie verti ale del vetro (è, per esempio, il aso delmer urio), la tensione super iale è volta verso l'alto e la super ie del liquido assume una forma onvessa detta menis o onvesso; in a ordo on la legge di Young-Lapla e, la pressione delliquido è maggiore della pressione esterna, quindi diversamente dal aso pre edente il livello delliquido nel apillare s ende di un'altezza h. Cal oli analoghi a quelli già visti nel aso pre edenteportano alla medesima equazione (10.51).Intermezzo. Liquido in rotazione.Si onsideri un re ipiente di forma ilindri a in ui si trovi un liquido. Se il re ipiente è fermo lasuper ie libera del liquido è piana e orizzontale. Si vuole qui vedere osa a ade se il re ipienteviene messo in rotazione on velo ità angolare ω attorno al suo asse di simmetria7.Conviene arontare il problema nel sistema di riferimento, non inerziale, del re ipiente rotante.In tale sistema una go ia P di liquido, avente massa m, he si trovi sulla super ie libera è in6James Jurin (16841750), medi o inglese.7L'esempio qui presentato ha un grande importanza nella storia della s ienza. Newton ha infatti utilizzato unse hio rotante per argomentare l'esistenza dello spazio assoluto, lo si veda in [12 nello s olio he segue le denizioniintroduttive. L'argomento newtoniano è stato duramente riti ato da Ma h in [11, pagina 246 e seguenti.

INTERMEZZO. 157equilibrio sotto l'azione delle forze di pressione, della forza peso di modulo P = mg, della forza entrifuga di modulo Fc = mω2x, ove x è la distanza di P dall'asse di rotazione.y
Px
mg
Fc
Figura 10.17: Il liquido rotante.
Poi hé le forze di pressione sono perpendi olari alla super ie li-bera del liquido tale deve essere an he la risultante R di peso eforza entrifuga. Per uno spostamento di P lungo la super ielibera, pertanto, il lavoro di R è nullo; quindi la somma delleenergie potenziali relative a P ed Fc deve avere lo stesso valorein ogni punto della super ie libera del liquido. L'energia po-tenziale della forza peso è nota ed è data dalla (5.33) e quindivale Up = mgy; per quanto riguarda la forza entripeta si osservi he, a parte il segno, è formalmente uguale alla forza elasti a;quindi la sua energia potenziale ha la stessa espressione formaledi quella elasti a, ioè valeUc = −
1
2mω2x2 . (10.52)La ondizione di equilibrio quindi èU = Up + Uc = mgy − 1
2mω2x2 = c (10.53)ove c è una ostante arbitraria. La pre edente equazione si può ris rivere
y =ω2
2gx2 +
c
mg(10.54) he è l'equazione di una parabola.Tornando al sistema di riferimento inerziale, la parabola ora determinata gira attorno al suo assedi simmetria generando una super ie detta paraboloide di rotazione. Quindi, in ondizioni diequilibrio, la super ie libera di un liquido rotante è un paraboloide di rotazione.
Capitolo 11Dinami a dei liquidi.11.1 Denizione del modello.Una des rizione ompletamente generale del moto di un liquido è assai omplessa e va ben oltrei limiti di questi appunti. Qui i si limita pertanto a studiare una lasse molto importante diliquidi. Si di e perfetto, o ideale, un liquido he sia perfettamente in omprimibile e heabbia vis osità nulla.Perfettamente in omprimibile signi a he una massa di liquido onserva il proprio volume qualsiasisia la pressione ui è sottoposto; un liquido perfettamente in omprimibile pertanto ha densità ostante.La vis osità è la presenza di attriti fra le diverse parti del liquido e fra il liquido e le pareti delre ipiente he lo ontiene. Per un liquido a vis osità nulla, quindi, non vi sono perdite di energiaper attrito.Un liquido non vis oso ha al une aratteristi he già viste per il liquido in equilibrio.Le forze di pressione agenti su una super ie hanno sempre direzione perpendi olare ad essa.La pressione in un punto è la stessa in tutte le direzioni. La dimostrazione è analoga a quantovisto nel aso stati o alla sezione 10.3; poi hé il liquido non è in equilibrio o orre in generale onsiderare una forza aggiuntiva uguale a ma, he essendo ome la forza peso proporzionale allamassa del liquido nel prisma, diventa tras urabile nel limite in ui l tende a zero.Oltre a queste ipotesi sulla natura del liquido è ne essario fare an he le seguenti ipotesi sul tipo dimoto ompiuto. Si suppone quindi he il moto del liquido sia stazionario e irrotazionale.Il moto di un liquido si di e stazionario quando in ogni punto dello spazio interessato dal motodel liquido la velo ità è ostante; ioè, detto in altri termini ogni mole ola di liquido he passaper un ssato punto dello spazio ha lo stesso vettore velo ità. Nella situazione di moto stazionariopertanto è onveniente asso iare non una velo ità ad ogni mole ola di liquido, ma ad ogni puntodello spazio. Questo modo di pro edere, assai omodo ome si vedrà, è detto punto di vistaeuleriano.Si di e irrotazionale il moto di un liquido in ui non ompaiono vorti i, ioè un moto in ui ogniporzione di liquido si muove di moto traslatorio senza ompiere rotazioni.Si denis e linea di usso, o di orrente, ogni linea he sia in ogni punto tangente a un vettorevelo ità. Se il liquido è in moto stazionario la velo ità è in ogni punto ostante nel tempo; quindila linea di usso rimane invariata nel tempo. Inoltre, sempre nel aso stazionario, due linee diusso non si interse ano mai per hé se lo fa essero vorrebbe dire he nel punto di intersezione lemole ole di liquido avrebbero due velo ità diverse, ognuna tangente a una diversa linea di usso.Si denis e tubo di usso l'insieme di tutte le linee di usso he passano per una qualunque urva158

11.2. PORTATA. 159 hiusa, ome rappresentato in gura 11.1. Se il moto del liquido è stazionario la porzione di liquido he si trova un dato istante all'interno di un dato tubo di usso vi rimane durante tutto il motoFigura 11.1: Tubo di usso.
ome se si trattasse di un tubo materiale. Per us irne infatti unamole ola di liquido dovrebbe attraversare le linee di usso he o-stituis ono la super ie laterale del tubo e quindi si avrebbe inter-sezione di linee di usso diverse osa, ome visto sopra, impossibile.Lo stesso argomento porta a ri onos ere he del liquido inizialmen-te esterno ad un tubo di usso non vi può penetrare.Pertanto, nel aso del moto stazionario, he qui si suppone, la di-nami a del liquido viene studiata analizzando ias uno dei tubi diusso he ompongono il liquido in movimento.11.2 Portata.Si onsideri un tubo di usso e una sua qualsiasi sezione di area S e sia ∆V il volume di liquido heattraversa la sezione nel tempo ∆t; allora si denis e portata media del tubo di usso attraversola sezione dataQ =
∆V
∆t. (11.1)Se il liquido è in moto stazionario la portata è ostante; altrimenti, per determinare la portataistantanea, o orre far tendere ∆t a zero e quindi Q = V . Qui si suppone, ome già detto, he ilmoto sia stazionario.La portata ha le dimensioni di un volume fratto un tempo la sua unità di misura è quindi m3 s−1.Per al olare la portata si onsideri un intervallo di tempo ∆t su ientemente pi olo he la
θ
v∆t
v
n
θh
S
v∆tFigura 11.2: Cal olo della portata.porzione di tubo di usso per orsa dal liquido possa essere on buona approssimazione onsiderata ilindri a (an he se,in generale, non si tratta di un ilindro retto), ioè he lelinee di usso per orse dal liquido siano, in tale intervallo,rettilinee. Si suppone inoltre he il tubo di usso sia ab-bastanza sottile e l'intervallo di tempo osí pi olo he lavelo ità del liquido all'interno di tale ilindro possa essere onsiderata ostante. Nel aso generale inoltre, ome rap-presentato in gura 11.2, la sezione non è perpendi olarealle linee di usso e quindi alla velo ità; sia quindi θ l'an-golo formato dalla velo ità v e dal versore n perpendi olarealla sezione. In queste ondizioni, il liquido he attraversala super ie S è quello ontenuto nel ilindro obliquo aventedi base S e generatri e v∆t. Il volume del ilindro obliquosi trova moltipli ando l'area di base per l'altezza h e quest'ultima, ome si vede dalla gura, è datada h = v∆t cos θ; quindi il volume ∆V di liquido he attraversa la sezione nell'intervallo di tempo∆t è
∆V = Sh = Sv∆t cos θ = Sv · n∆t (11.2)e quindi la portata:Q = Sv · n . (11.3)Pertanto la portata è il prodotto dell'area della sezione per la omponente della velo ità perpen-di olare alla sezione.
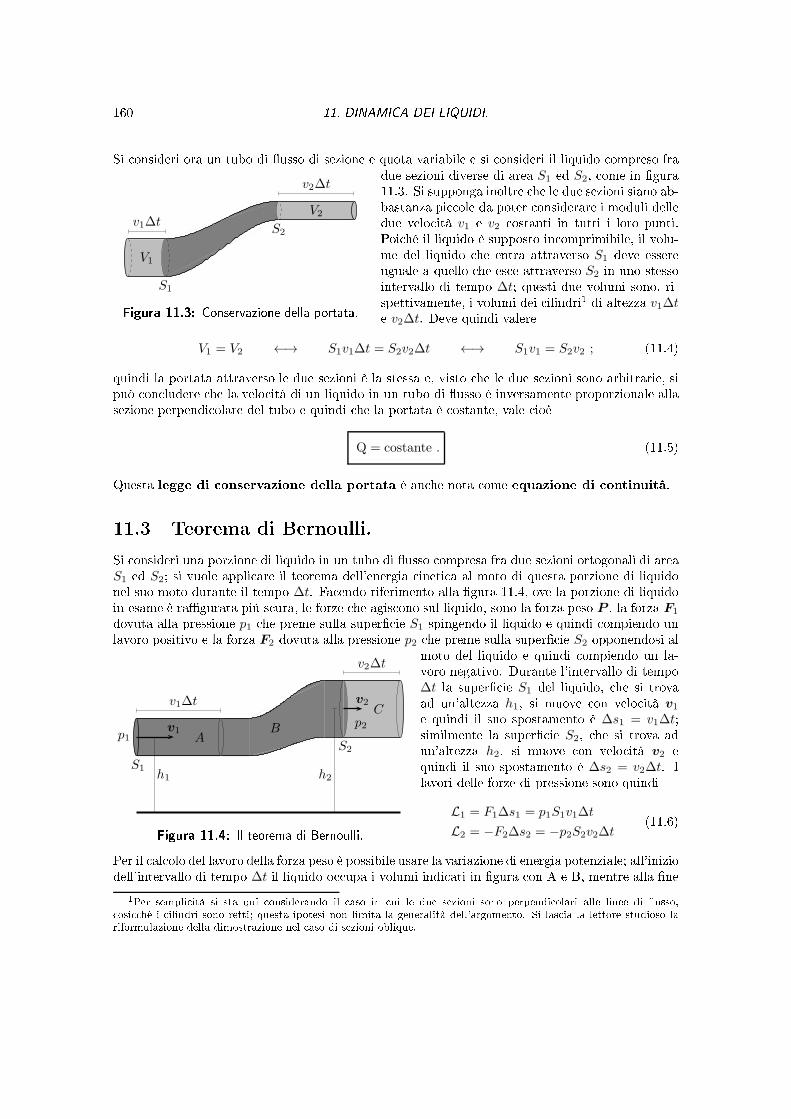
160 11. DINAMICA DEI LIQUIDI.Si onsideri ora un tubo di usso di sezione e quota variabile e si onsideri il liquido ompreso frav1∆t
v2∆t
S1
S2
V1
V2
Figura 11.3: Conservazione della portata.due sezioni diverse di area S1 ed S2, ome in gura11.3. Si supponga inoltre he le due sezioni siano ab-bastanza pi ole da poter onsiderare i moduli delledue velo ità v1 e v2 ostanti in tutti i loro punti.Poi hé il liquido è supposto in omprimibile, il volu-me del liquido he entra attraverso S1 deve essereuguale a quello he es e attraverso S2 in uno stessointervallo di tempo ∆t; questi due volumi sono, ri-spettivamente, i volumi dei ilindri1 di altezza v1∆te v2∆t. Deve quindi valere
V1 = V2 ←→ S1v1∆t = S2v2∆t ←→ S1v1 = S2v2 ; (11.4)quindi la portata attraverso le due sezioni è la stessa e, visto he le due sezioni sono arbitrarie, sipuò on ludere he la velo ità di un liquido in un tubo di usso è inversamente proporzionale allasezione perpendi olare del tubo e quindi he la portata è ostante, vale ioèQ = costante . (11.5)Questa legge di onservazione della portata è an he nota ome equazione di ontinuità.11.3 Teorema di Bernoulli.Si onsideri una porzione di liquido in un tubo di usso ompresa fra due sezioni ortogonali di area
S1 ed S2; si vuole appli are il teorema dell'energia ineti a al moto di questa porzione di liquidonel suo moto durante il tempo ∆t. Fa endo riferimento alla gura 11.4, ove la porzione di liquidoin esame è ragurata piú s ura, le forze he agis ono sul liquido, sono la forza peso P , la forza F1dovuta alla pressione p1 he preme sulla super ie S1 spingendo il liquido e quindi ompiendo unlavoro positivo e la forza F2 dovuta alla pressione p2 he preme sulla super ie S2 opponendosi alv1∆t
v2∆t
S1
S2
p1p2v1
v2
h1 h2
AB
C
Figura 11.4: Il teorema di Bernoulli.moto del liquido e quindi ompiendo un la-voro negativo. Durante l'intervallo di tempo∆t la super ie S1 del liquido, he si trovaad un'altezza h1, si muove on velo ità v1e quindi il suo spostamento è ∆s1 = v1∆t;similmente la super ie S2, he si trova adun'altezza h2, si muove on velo ità v2 equindi il suo spostamento è ∆s2 = v2∆t. Ilavori delle forze di pressione sono quindi
L1 = F1∆s1 = p1S1v1∆t
L2 = −F2∆s2 = −p2S2v2∆t(11.6)Per il al olo del lavoro della forza peso è possibile usare la variazione di energia potenziale; all'iniziodell'intervallo di tempo ∆t il liquido o upa i volumi indi ati in gura on A e B, mentre alla ne1Per sempli ità si sta qui onsiderando il aso in ui le due sezioni sono perpendi olari alle linee di usso, osi hé i ilindri sono retti; questa ipotesi non limita la generalità dell'argomento. Si las ia la lettore studioso lariformulazione della dimostrazione nel aso di sezioni oblique.
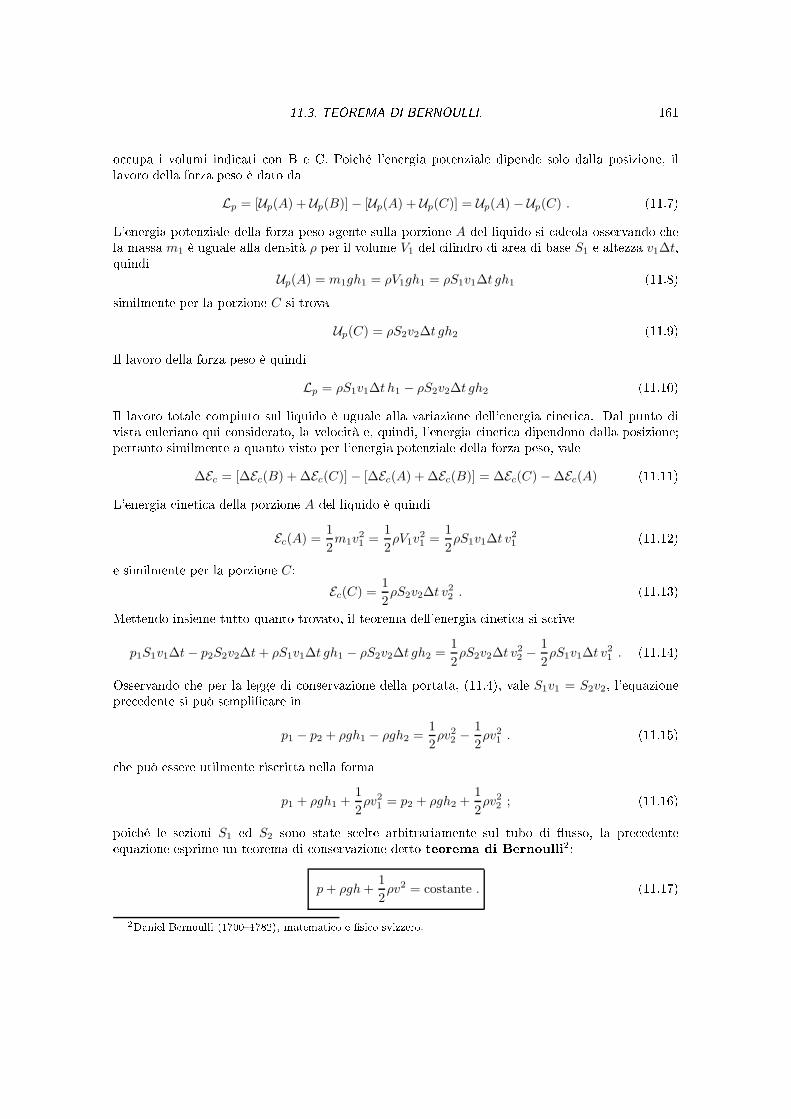
11.3. TEOREMA DI BERNOULLI. 161o upa i volumi indi ati on B e C. Poi hé l'energia potenziale dipende solo dalla posizione, illavoro della forza peso è dato daLp = [Up(A) + Up(B)]− [Up(A) + Up(C)] = Up(A)− Up(C) . (11.7)L'energia potenziale della forza peso agente sulla porzione A del liquido si al ola osservando hela massa m1 è uguale alla densità ρ per il volume V1 del ilindro di area di base S1 e altezza v1∆t,quindi
Up(A) = m1gh1 = ρV1gh1 = ρS1v1∆t gh1 (11.8)similmente per la porzione C si trovaUp(C) = ρS2v2∆t gh2 (11.9)Il lavoro della forza peso è quindi
Lp = ρS1v1∆t h1 − ρS2v2∆t gh2 (11.10)Il lavoro totale ompiuto sul liquido è uguale alla variazione dell'energia ineti a. Dal punto divista euleriano qui onsiderato, la velo ità e, quindi, l'energia ineti a dipendono dalla posizione;pertanto similmente a quanto visto per l'energia potenziale della forza peso, vale∆Ec = [∆Ec(B) + ∆Ec(C)]− [∆Ec(A) + ∆Ec(B)] = ∆Ec(C) −∆Ec(A) (11.11)L'energia ineti a della porzione A del liquido è quindi
Ec(A) =1
2m1v
21 =
1
2ρV1v
21 =
1
2ρS1v1∆t v
21 (11.12)e similmente per la porzione C:
Ec(C) =1
2ρS2v2∆t v
22 . (11.13)Mettendo insieme tutto quanto trovato, il teorema dell'energia ineti a si s rive
p1S1v1∆t− p2S2v2∆t+ ρS1v1∆t gh1 − ρS2v2∆t gh2 =1
2ρS2v2∆t v
22 −
1
2ρS1v1∆t v
21 . (11.14)Osservando he per la legge di onservazione della portata, (11.4), vale S1v1 = S2v2, l'equazionepre edente si può sempli are in
p1 − p2 + ρgh1 − ρgh2 =1
2ρv22 −
1
2ρv21 . (11.15) he può essere utilmente ris ritta nella forma
p1 + ρgh1 +1
2ρv21 = p2 + ρgh2 +
1
2ρv22 ; (11.16)poi hé le sezioni S1 ed S2 sono state s elte arbitrariamente sul tubo di usso, la pre edenteequazione esprime un teorema di onservazione detto teorema di Bernoulli2:
p+ ρgh+1
2ρv2 = costante . (11.17)2Daniel Bernoulli (17001782), matemati o e si o svizzero.

162 11. DINAMICA DEI LIQUIDI.Il teorema di Bernoulli non è altro he il teorema di onservazione dell'energia in ui si tenga ontoan he del lavoro delle forze di pressione.Dividendo i due membri dell'equazione (11.17) per la quantità ostante ρg, si ottiene una relazionefra tre grandezze aventi le dimensioni di una lunghezza:p
ρg+ y +
v2
2g= costante . (11.18)La prima, detta altezza piezometri a, è l'altezza he deve avere una olonna di liquido di densità
ρ per eser itare la pressione p; la se onda è l'altezza geometri a; la terza, detta altezza ineti a, èl'altezza massima raggiunta da un orpo lan iato verso l'alto on velo ità iniziale v. Per il teoremadi Bernoulli, quindi, in ogni punto di un qualsiasi tubo di usso di un liquido perfetto in motostazionario e irrotazionale la somma delle altezze piezometri a, geometri a e ineti a è ostante.11.3.1 Teorema di Torri elli.Si onsideri un liquido ontenuto in un re ipiente ove sia prati ato un pi olo foro. Si vuole al olarela velo ità di fuorius ita del liquido dal foro. Si supponga he il foro abbia una sezione S2 molto1
2
hFigura 11.5: Il teorema diTorri elli.più pi ola della super ie libera S1 del liquido; in tal modo il livello delliquido si abbassa osí lentamente da potersi tras urare la velo ità didis esa. Si onsiderino quindi un tubo di usso he olleghi un qualsiasipunto 1 sulla super ie libera e un punto 2 sulla super ie del gettoappena al di fuori del foro. In questi due punti il liquido è in equilibrio on la pressione atmosferi a, si trovano quindi alla stessa pressione p0.Quindi, nel aso presente, il teorema di Bernoulli (11.16) si s rive
p0 + ρgh1 = p0 + ρgh2 +1
2ρv2 (11.19)e quindi, indi ando on h = h1 − h2 la dierenza di altezza fra lasuper ie libera ed il foro, si trova
v =√2gh . (11.20)Si ri onos e he la velo ità trovata è quella raggiunta da un orpo in aduta libera per un'altezza
h. L'equazione ora trovata è nota ome teorema di Torri elli.11.3.2 Eetto Venturi.Si onsideri liquido he s orre in un ondotto orizzontale on una strozzatura e siano S1 l'area del-v1 v2
h
S1 S2Figura 11.6: Eetto Venturi.la sezione normale ed S2 quella della strozzatura, ome ingura 11.6. Appli ando il teorema di Bernoulli a qualun-que tubo di usso interno al ondotto, ri onos endo he,essendo il ondotto orizzontale, vale h1 = h2, si trova
p1 +1
2ρv21 = p2 +
1
2ρv22 . (11.21)Per la onservazione della portata si ha
v2 =S1
S2v1 (11.22)

11.4. VISCOSITÀ. 163 he sostituita nella pre edente, permette di trovare la pressione p2 nella strozzaturap2 = p1 −
1
2ρ(v22 − v21) = p1 −
1
2ρ
(
v22 −S22
S21
v22
) (11.23)e quindip1 −
1
2ρS21 − S2
2
S21
v22 . (11.24)Quindi la pressione del liquido nella strozzatura è tanto minore della pressione nel resto del tuboquanto maggiore è la dierenza fra le arre delle due sezioni. Questo fenomeno è detto eettoVenturi3.11.3.3 Eetto Magnus.Un orpo sferi o he ompie in moto rototraslatorio in un liquido risente di una forza he ne devia laA
B
−v
−v
FFigura 11.7: Eetto Magnus.
traiettoria. L'analisi ompleta del problema è piuttosto omplessae al di là dei limiti di questi appunti. Tuttavia vale la pena difar un'analisi qualitativa delle forze in gio o per apire quello hea ade. Si onsideri quindi una sfera in moto in un liquido in modotale he il suo entro di massa si muova on velo ità ostante v ela sfera ruoti attorno ad un asse passante per il entro di massa eperpendi olare a v on velo ità angolare ω. Conviene analizzareil problema nel sistema di riferimento del entro di massa. Conriferimento alla gura 11.7 ove la sfera è in moto verso sinistra,nel sistema del entro di massa essa risulta ruotare immersa inuna orrente he s orre verso destra on velo ità −v, i punti sullasuper ie del orpo, tuttavia si muovono rispetto al liquido: nelpunto A la velo ità dei punti della sfera ha verso opposto di quelladel liquido: tali velo ità quindi, si sottraggono; vi eversa, in B ipunti sulla sfera hanno velo ità he si somma on quella del liquido.Quindi la sfera si trova immersa in un liquido la ui velo ità è maggiore in B he in A. Poi hé, omevisto sopra, vi è una depressione nei punti del liquido di maggiore velo ità, questo eser ita sullasfera una pressione maggiore in A he in B; la sfera quindi è sottoposta ad una forza perpendi olarealla direzione del moto diretta nel verso da A a B. Essendo questa forza sempre perpendi olarealla velo ità del entro di massa della sfera, questo si muove lungo un ar o di ir onferenza.Questo fenomeno è noto on il nome di eetto Magnus4.11.4 Vis osità.Quando un liquido reale si muove si manifestano delle forze d'attrito fra il liquido e le super i delre ipiente he lo ontiene; vi sono an he forze di attrito fra diverse parti del liquido he s orrono leune sulle altre. Queste forze sono dovute alla oesione fra le mole ole del liquido e danno origine aquella aratteristi a ma ros opi a nota ome vis osità. Un liquido vis oso non rispetta il teoremadi Bernoulli poi hé le forze d'attrito ompiono un lavoro di ui o orre tenere onto. Inoltre se lavelo ità del liquido supera un erto valore limite il moto del liquido diventa turbolento e la suades rizione assai ompli ata. In quel he segue si suppone he le velo ità in gio o siano sempre3Giovanni Battista Venturi (1746-1822), si o italiano.4Heinri h Gustav Magnus (18021870), si o tedes o.

164 11. DINAMICA DEI LIQUIDI.largamente inferiori a tale valore limite.Per denire la vis osità di un liquido si onsideri uno strato di liquido ompreso fra due lamineorizzontali he siano in moto una rispetto all'altra. Se il liquido fosse perfetto rimarrebbe immobile,la lamine in moto non eser iterebbe infatti al una forza sul liquido; se il liquido è vis oso, inve e,vi sono delle forze di adesione fra la super ie superiore dello strato e la lamina in moto e an hefra i versi strati del liquido. Il moto della lamina, pertanto, si trasmette ai diversi strati del liquidono alla super ie inferiore, he, essendo a ontatto on la lamina ferma, rimane an h'essa ferma,la velo ità quindi diminuis e on la profondità.La forza d'attrito Fa fra strato e strato è stata determinata sperimentalmente da Newton; il suomodulo valeFa = ηS
∆v
∆y(11.25)ove S è la super ie dello strato, ∆v è la variazione di velo ità orrispondente ad una variazione
∆y di profondità, e η è il oe iente di vis osità ed è aratteristi o del tipo di liquido. Le suedimensioni sono di una forza per un tempo fratto una super ie, quindi la sua unità di misuraè kg m−1 s−1. Il oe iente di vis osità può essere misurato mediante il seguente esperimento.Fa
F
vh Figura 11.8: La misura di η.Si onsideri re ipiente in ui si trovi un liquido diprofondità h su ui galleggi una lastra avente areaS e omunque di dimensioni grandi rispetto ad h;si imprima alla lastra una forza di modulo res enteno a he la velo ità non raggiunge il valore ostantev; a questo punto il modulo F della forza impressaè uguale al modulo della forza di attrito Fa. Lapre edente equazione quindi diventa
F = ηSv
h(11.26)e quindi dalla misura di F , v, S e h è possibile determinare η.11.4.1 Attrito vis oso.È un dato sperimentale he un orpo in moto in un liquido subis e una forza frenante detta forzadi attrito vis oso Fv; la sua direzione è la stessa del moto, ma il verso è opposto ed il modulo èproporzionale alla velo ità; vale quindi
Fv = −βv = −γηv , (11.27)ove η è il oe iente di vis osità e γ dipende dalla forma del orpo. Per un orpo sferi o di raggior vale la sempli e relazione
γ = 6πr , (11.28)nota ome legge di Stokes5.Si onsideri il aso di un orpo di massa m he si muova sotto l'azione di una forza ostante F , ome per esempio la forza peso, in un liquido vis oso. L'equazione fondamentale della dinami a(3.12) in questo aso si s riveF − βv = ma . (11.29)Poi hé la forza d'attrito vis oso dipende dalla velo ità, la soluzione generale di questa equazione e ladeterminazione della legge oraria del moto del orpo ri hiedono la onos enza del al olo integrale5Sir George Gabriel Stokes (18191903), si o inglese.
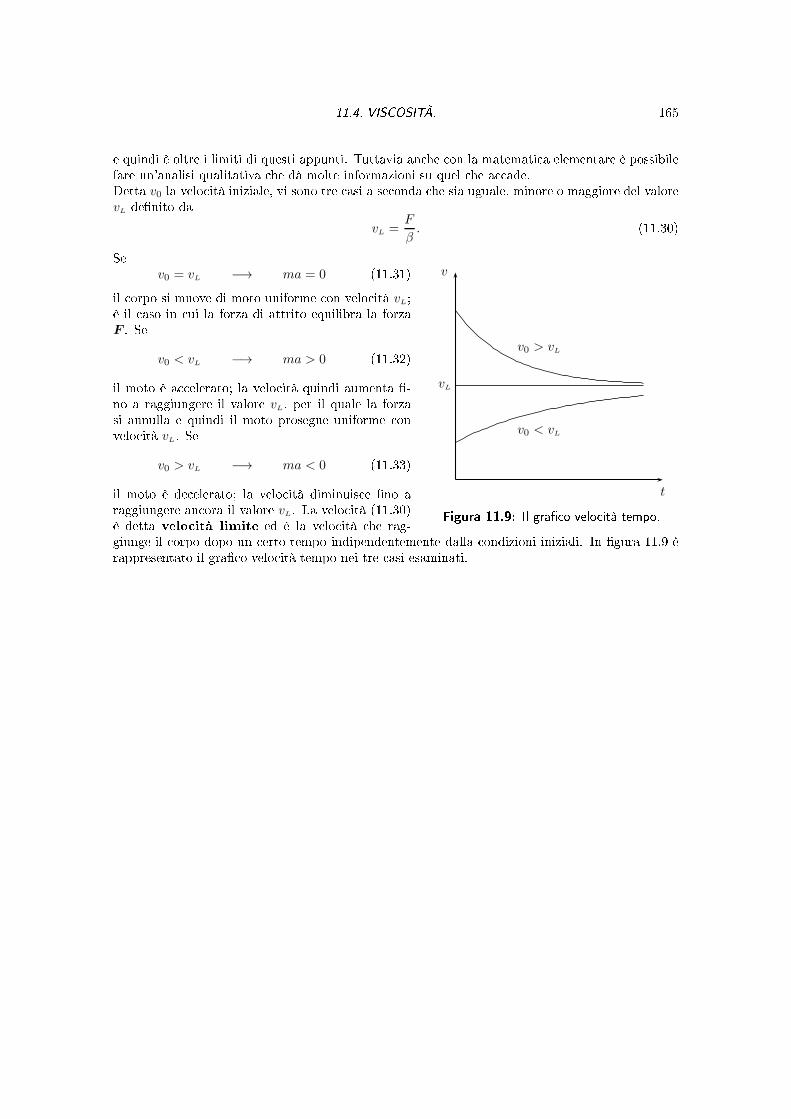
11.4. VISCOSITÀ. 165e quindi è oltre i limiti di questi appunti. Tuttavia an he on la matemati a elementare è possibilefare un'analisi qualitativa he dà molte informazioni su quel he a ade.Detta v0 la velo ità iniziale, vi sono tre asi a se onda he sia uguale, minore o maggiore del valorevL denito da
vL =F
β. (11.30)
t
v
vL
v0 > vL
v0 < vL
Figura 11.9: Il gra o velo ità tempo.
Sev0 = vL −→ ma = 0 (11.31)il orpo si muove di moto uniforme on velo ità vL;è il aso in ui la forza di attrito equilibra la forza
F . Sev0 < vL −→ ma > 0 (11.32)il moto è a elerato; la velo ità quindi aumenta -no a raggiungere il valore vL, per il quale la forzasi annulla e quindi il moto prosegue uniforme onvelo ità vL. Sev0 > vL −→ ma < 0 (11.33)il moto è de elerato; la velo ità diminuis e no araggiungere an ora il valore vL. La velo ità (11.30)è detta velo ità limite ed è la velo ità he rag-giunge il orpo dopo un erto tempo indipendentemente dalla ondizioni iniziali. In gura 11.9 èrappresentato il gra o velo ità tempo nei tre asi esaminati.

166

Parte IVAppendi i.
167

Appendi e AUnità di misura e ostanti si he.In questa appendi e si riunis ono, per omodità di onsultazione, le unità di misura fondamentalie si elen ano le prin ipali grandezze si he utilizzate nel testo, fornendone le unità di misura.A.1 Grandezze fondamentali.Si riassumono qui le grandezze si he del Sistema internazionale e le loro unità di misura.Grandezza si a Simbolo dellagrandezza Nome dell'unità Simbolodell'unitàtempo t se ondo slunghezza l metro mmassa m hilogrammo kgtemperatura T kelvin Kintensità di orrente i ampere Aquantità di sostanza n mole molintensità luminosa I andela cd
168
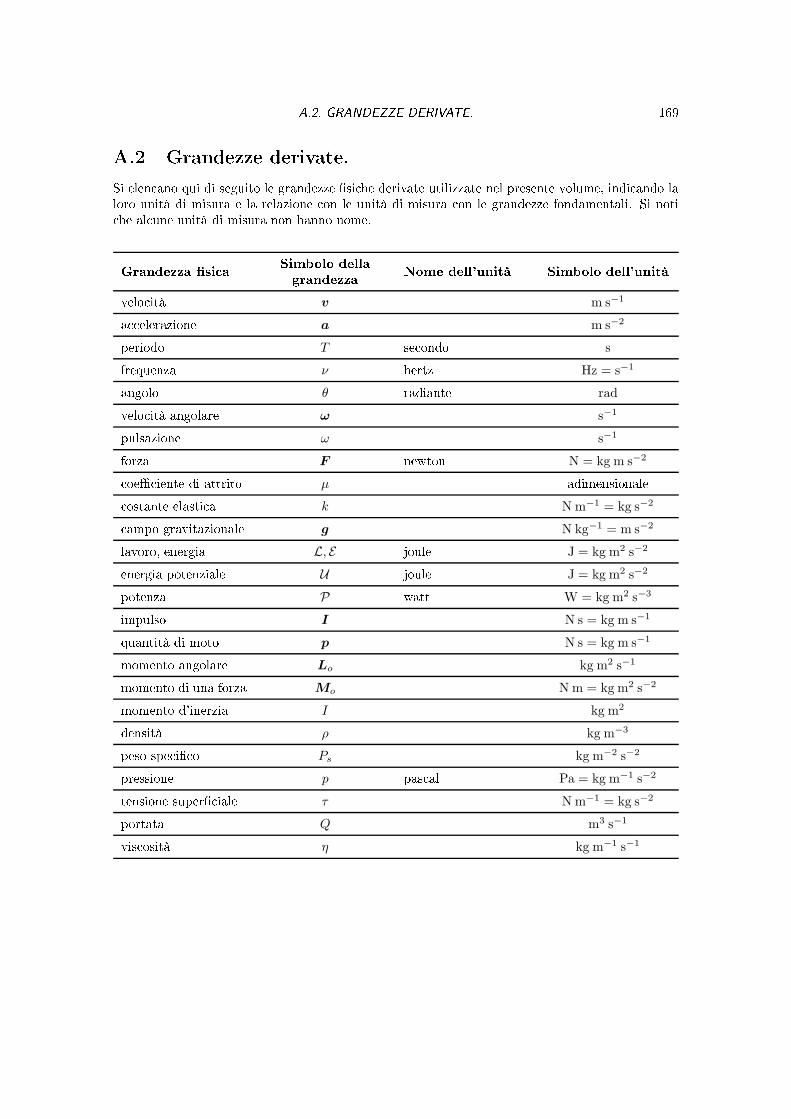
A.2. GRANDEZZE DERIVATE. 169A.2 Grandezze derivate.Si elen ano qui di seguito le grandezze si he derivate utilizzate nel presente volume, indi ando laloro unità di misura e la relazione on le unità di misura on le grandezze fondamentali. Si noti he al une unità di misura non hanno nome.Grandezza si a Simbolo dellagrandezza Nome dell'unità Simbolo dell'unitàvelo ità v m s−1a elerazione a m s−2periodo T se ondo sfrequenza ν hertz Hz = s−1angolo θ radiante radvelo ità angolare ω s−1pulsazione ω s−1forza F newton N = kg m s−2 oe iente di attrito µ adimensionale ostante elasti a k Nm−1 = kg s−2 ampo gravitazionale g N kg−1 = m s−2lavoro, energia L, E joule J = kg m2 s−2energia potenziale U joule J = kg m2 s−2potenza P watt W = kg m2 s−3impulso I N s = kg m s−1quantità di moto p N s = kg m s−1momento angolare Lo kg m2 s−1momento di una forza Mo Nm = kg m2 s−2momento d'inerzia I kg m2densità ρ kg m−3peso spe i o Ps kg m−2 s−2pressione p pas al Pa = kg m−1 s−2tensione super iale τ Nm−1 = kg s−2portata Q m3 s−1vis osità η kg m−1 s−1

170 A. UNITÀ DI MISURA E COSTANTI FISICHE.A.3 Pressi per multipli e sottomultipli.Si elen ano qui di seguito i nomi e simboli dei pressi da aggiungere al simbolo di un'unità dimisura per formare le unità multiple e sottomultiple.Presso Simbolo Nome Potenza didie itera T bilione 1012giga G miliardo 109mega M milione 106 hilo k mille 103etto h ento 102de a da die i 101de i d de imo 10−1 enti c entesimo 10−2milli m millesimo 10−3mi ro µ milionesimo 10−6nano n miliardesimo 10−9pi o p bilionesimo 10−12A.4 Al une ostanti si he.Si elen ano qui di seguito le ostanti si he itate nel testo.Costante Simbolo e valorea elerazione di gravità g = 9.80665m s−2 ostante di gravitazione universale G = 6.67428(67) · 10−11m3 kg−1 s−2massa della Terra M⊕ = 5.9722(6) · 1024 kgraggio medio equatoriale della Terra R⊕ = 6.378137 · 106mmassa del Sole M⊙ = 1.9884(2) · 1030 kg
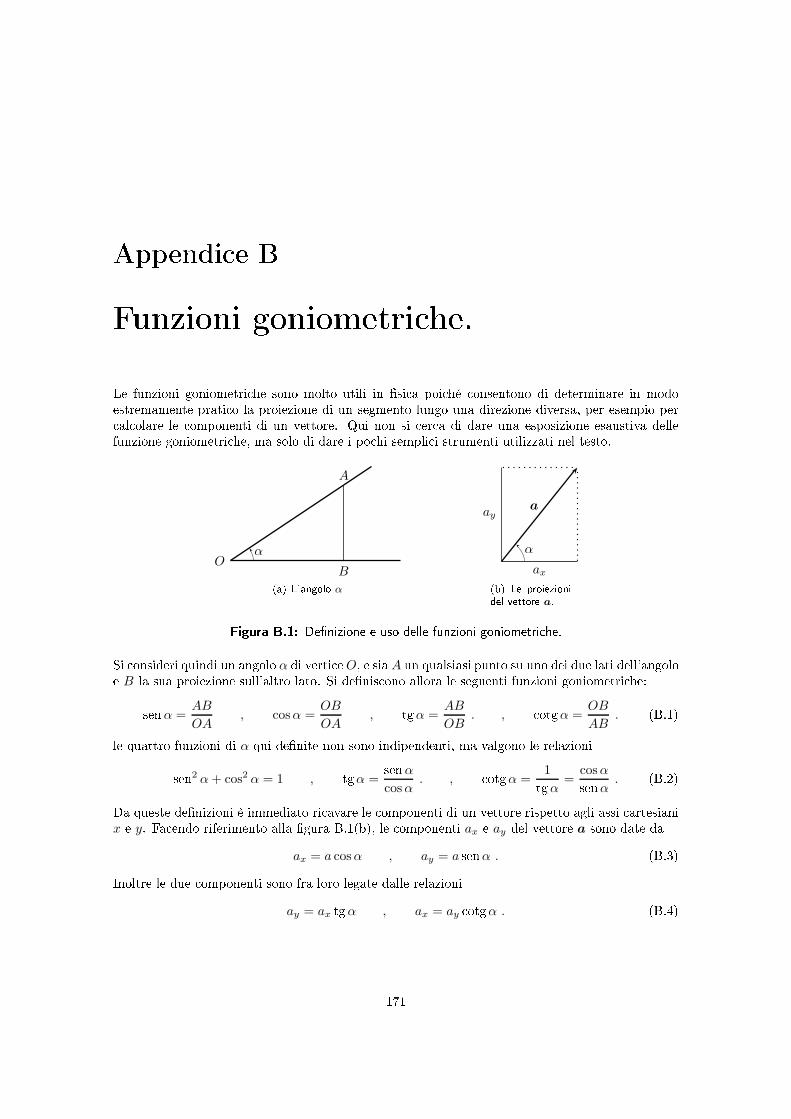
Appendi e BFunzioni goniometri he.Le funzioni goniometri he sono molto utili in si a poi hé onsentono di determinare in modoestremamente prati o la proiezione di un segmento lungo una direzione diversa, per esempio per al olare le omponenti di un vettore. Qui non si er a di dare una esposizione esaustiva dellefunzione goniometri he, ma solo di dare i po hi sempli i strumenti utilizzati nel testo.α
O
A
B(a) L'angolo α
α
aay
ax(b) Le proiezionidel vettore a.Figura B.1: Denizione e uso delle funzioni goniometri he.Si onsideri quindi un angolo α di verti eO, e sia A un qualsiasi punto su uno dei due lati dell'angoloe B la sua proiezione sull'altro lato. Si denis ono allora le seguenti funzioni goniometri he:senα =AB
OA, cosα =
OB
OA, tgα =
AB
OB. , otgα =
OB
AB. (B.1)le quattro funzioni di α qui denite non sono indipendenti, ma valgono le relazionisen2 α+ cos2 α = 1 , tgα =
senαcosα
. , otgα =1tgα =
cosαsenα . (B.2)Da queste denizioni è immediato ri avare le omponenti di un vettore rispetto agli assi artesianix e y. Fa endo riferimento alla gura B.1(b), le omponenti ax e ay del vettore a sono date da
ax = a cosα , ay = a senα . (B.3)Inoltre le due omponenti sono fra loro legate dalle relazioniay = ax tgα , ax = ay otgα . (B.4)
171

172 B. FUNZIONI GONIOMETRICHE.α se
nα
cosα
tgα
cotgα
P
α
y
Figura B.2: La ir onferenza goniome-tri a.
Le funzioni goniometri he qui introdotte possono esse-re assai onvenientemente rappresentate sul piano arte-siano utilizzando una ir onferenza, detta goniometri a,avente il entro nell'origine degli assi e raggio unitario.L'angolo positivo α viene rappresentato on il verti e nel-l'origine, un lato oin idente on il semiasse positivo delleas isse e l'altro lato ruotato in senso antiorario, riservan-do la rotazione oraria per gli angoli negativi.In questo modo il valore in radianti di α è rappresentatodalla lunghezza dell'ar o sotteso sulla ir onferenza.Il seno e il oseno di α sono rappresentati dalle oordi-nate del punto P , intersezione del lato mobile dell'angolo on la ir onferenza. Vale quindiP (cosα, senα) (B.5)Inoltre la tangente e la otangente di α sono rappresentatidai segmenti tangenti alla ir onferenza rispettivamentenei punti di oordinate (1, 0) e (0, 1) ompresi fra la ir onferenza e il lato mobile di α.Uno dei vantaggi della rappresentazione delle funzioni goniometri he sulla ir onferenza è la esten-sione della loro denizione ad angoli qualunque.Dalla gura e da quanto detto, si vede inoltre he, per α a uto, vale la disuguaglianzasenα < α < tgα (B.6)Inoltre per angoli pi oli, ioè per α ≃ 0 vale l'approssimazionesenα ≃ tgα ≃ α (B.7)Si fornis e una tabella di orrispondenza fra le misure di al uni angoli in gradi e in radianti e ivalori orrispondenti delle funzioni goniometri he.gradi radianti sen cos tg otg
0 0 0 1 0 ∄
30π
6
1
2
√3
2
√3
3
√3
45π
4
√2
2
√2
21 1
60π
3
√3
2
1
2
√3
√3
3
90π
21 0 ∄ 0
180 π 0 -1 0 ∄
2703
2π -1 0 ∄ 0
360 2π 0 1 0 ∄
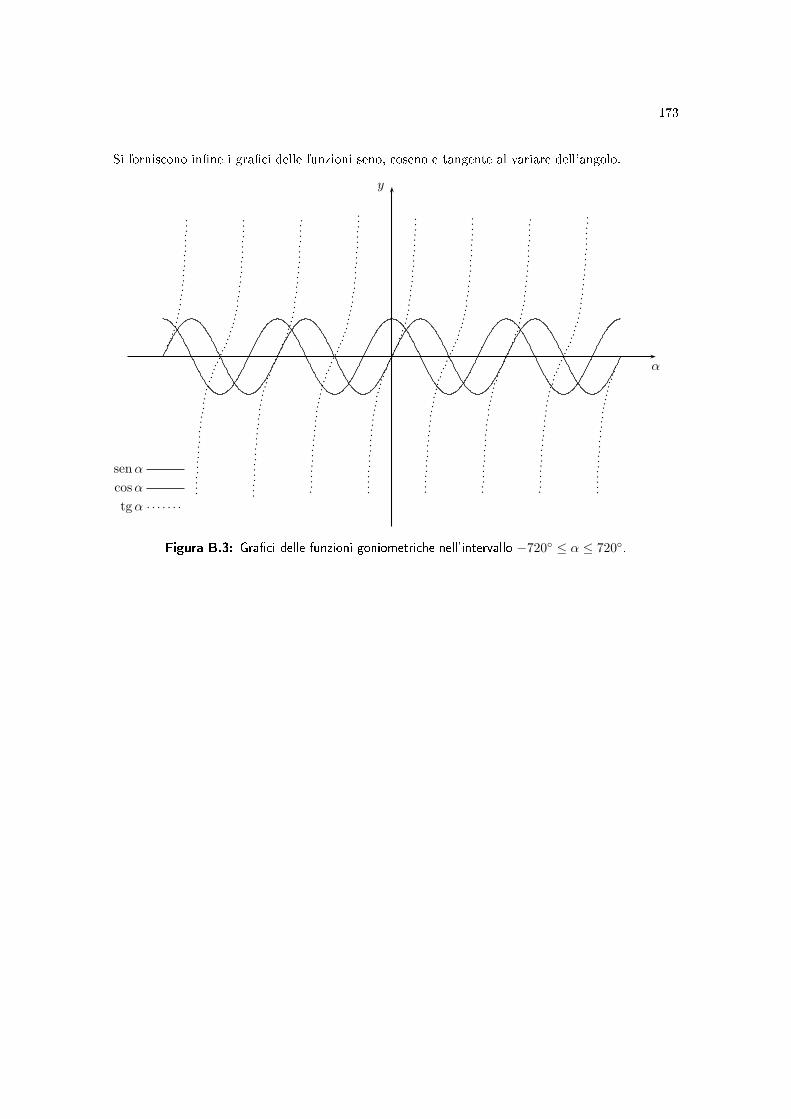
173Si fornis ono inne i gra i delle funzioni seno, oseno e tangente al variare dell'angolo.
α
y
senα
cosα
tgα Figura B.3: Gra i delle funzioni goniometri he nell'intervallo −720 ≤ α ≤ 720.

Appendi e CCoordinate polari.In molti problemi è omodo utilizzare per la des rizione del moto piano di un punto materia-le oordinate diverse da quelle artesiane. Si illustra qui l'uso delle oordinate polari (r, θ)introdotte nella sezione 2.7. Queste sono denite a partire da un asse orientato di riferimentoed un'origine O he si trovi su di esso. In questo modo il vettore posizione OP è individuatodal suo modulo r e dall'angolo θ formato da OP e l'asse di riferimento ome in gura C.1.θ
O
r
P
ρζ
Figura C.1: Le oordinate polarinel piano.Se ome asse di riferimento si s eglie l'asse delle as isse, omein gura 2.25, è possibile determinare fa ilmente la relazionefra oordinate polari e artesiane:
x = r cos θ
y = r sen θ
r =√
x2 + y2
θ = ar tg yx.
(C.1)È assai istruttivo il al olo delle omponenti della velo ità edell'a elerazione in oordinate polari. Innanzi tutto è ne- essario ssare dei versori. Sia ρ il versore he punta nelladirezione di OP e ζ quello perpendi olare a ρ, ome in guraC.1. In questo modo lo spostamento ∆OP = P1P2 del puntodalla posizione P1 alla posizione P2 viene rappresentato neitermini seguenti.∆θ
θO
P1
P2
ρ1ζ1
ρ2
ζ2
r∆θ
∆r
rFigura C.2: Lo spostamento in oordinate polari.
Lo spostamento∆OP per orso nel pi olo intervallo di tempo∆t ha una omponente lungo ρ he viene indi ata on ∆r euna omponente lungo ζ pari a r∆θ ome rappresentato ingura C.2. Si può pertanto s rivere
∆OP = ∆rρ+ r∆θζ . (C.2)Per trovare la velo ità istantanea o orre dividere per ∆t epoi far tendere ∆t a zero; quindi∆OP
∆t=
∆r
∆tρ+ r
∆θ
∆tζ (C.3)e, inne, se ∆t→ 0 si ottiene
v = rρ+ rθζ . (C.4)174

175Ri onos endo he θ, è la velo ità angolare ω le omponentidella velo ità rispetto alle oordinate polari possono essere s ritte nella forma:vr = r , vθ = rω . (C.5)Per quel he riguarda l'a elerazione si osservi he nello spostarsi il punto da P1 a P2 non ambianosolo le omponenti del vettore velo ità, ma an he i versori. Quindi:
a = v = rρ+ r ˙ρ+ rωζ + rωζ + rω˙ζ . (C.6)Si tratta quindi di determinare ˙ρ e ˙
ζ; si tratta ioè di determinare la rapidità di variazione di unversore rotante: Per farlo onviene onsiderare un moto ir olare uniforme ome quello rappresen-tato in gura 2.20. In questo aso lo spostamento non ha omponenti in direzione radiale e per lavelo ità vale la relazione (2.114), he qui si può ris rivere nella forma˙rρ = ω × (rρ) (C.7)ma r è ostante, quindi la pre edente diventar ˙ρ = rω × ρ (C.8)e quindi nalmente
˙ρ = ω × ρ = ωζ , (C.9)ove si è tenuto onto del fatto he ζ è perpendi olare si a ω he a ρ. Similmente si ottiene:˙ζ = ω × ζ = −ωρ . (C.10)Quindi in denitiva:
a = rρ+ rωζ + rωζ + rωζ − rω2ρ =
= (r − rω2)ρ+ (2rω + rω)ζ .(C.11)Le omponenti dell'a elerazione in oordinate polari sono quindi
ar = r − rω2 , aθ = 2rω + rω . (C.12)
Bibliograa[1 Ar himede. Opere. UTET, Torino, 1974.[2 Aristotele. Fisi a. Laterza, Bari, 2004.[3 Coperni o Ni olò. De revolutionibus orbium aelestium. Einaudi, Milano, 1975.[4 Coperni o Ni olò. Opere. UTET, Torino, 1979.[5 Eu lide. Tutte le opere. Bompiani, Milano, 2007.[6 Galilei Galileo. Dialogo sopra i due massimi sistemi del mondo tolemai o e operni ano.Einaudi, Torino, 1970.[7 Galilei Galileo. Dis orsi e dimostrazioni matemati he. Einaudi, Torino, 1990.[8 Galilei Galileo. Opere, volume I. UTET, Torino, 2005.[9 Goldstein Herbert. Me ani a lassi a. Zani helli, Bologna, 2005.[10 Hofstadter Douglas Ri hard. Gödel, Es her, Ba h: un'Eterna Ghirlanda Brillante.Adelphi, Milano, 2007.[11 Ma h Ernst. La me ani a nel suo sviluppo stori o- riti o. Boringhieri, Torino, 1977.[12 Newton Isaa . Prin ipi Matemati i della losoa naturale. UTET, Torino, 1997.[13 Russo Lu io. La rivoluzione dimenti ata. Feltrinelli, Torino, 2001.[14 Tolomeo Claudio. Ptolemy's Almagest. Prin eton University Press, Prin eton, 1998.
176

Indi e analiti oQuesto indi e analiti o ompleta l'indi e sommario presentato all'inizio senza ripeterlo. Si trattadi due insiemi a intersezione nulla.Ångstromunità di misura della lunghezza, 143Ångstrom, 143nA elerazione, 12angolare, 29 entripeta, 27di gravità, 14istantanea, 16Afelio, 66Altezza ineti a, 162piezometri a, 162Ampiezza, 31Angolo di ontatto, 154Apollonio di Perga, 65nAr himede, 129n, 149151Aristar o di Samo, 64nAristotele, 39n, 149Assi prin ipali d'inerzia, 113, 125Atmosfera, 145Attritodinami o oe iente di, 51stati o oe iente di, 50 ono di, 50volvente, 120 oe iente di, 121Atwood, 54nBar, 145Bernoulli, 161nBilan ia di torsione, 72
Brahe, 65nBu o nero, 86Cavendish, 72nCentrodi forza, 90di gravità, 98Chasles, 111nChilogrammo, 5Cinemati a, 6Coe ienti d'inerzia, 125Conservazione dell'energia me ani a, 116Coordinate polari, 174Coperni o, 65nCoppia di forze, 89, 139Coriolis, 56nforza di, 56, 60Costantedi gravitazione universale, 68elasti a, 52Denizione operativa, 3Distanza, 8E litti a, 63Energia ineti a, 78potenzialedella forza elasti a, 81della forza gravitazionale, 81della forza peso, 81super iale, 153Equante, 65Equazione di ontinuità, 160177
178 INDICE ANALITICOEquilibrio, 59indierente, 59, 139instabile, 59, 139stabile, 59, 139Eratostene, 72Eu lide, 58nEuler, 126nFaraday, 71nFase iniziale, 31Forzaapparente, 56 entrifuga, 56elasti a, 52esterna, 94impulsiva, 86interna, 94motri e, 140resistente, 140Fou ault, 62nFrequenza, 27Ful ro, 140Galilei, 3n, 8, 36, 39, 46, 65, 129, 151Gittata, 26Gra o spazio-tempo, 9Grandezza si a, 2additiva, 43adimensionale, 5ma ros opi a, 144s alare, 18vettoriale, 18Grandezze si he omogenee, 5Guldin, 138nHertz, 27nunità di misura della frequenza, 27Huygens, 114nInterazione a distanza, 71Ippar o di Ni ea, 128nIso ronismo, 55Joule, 74nunità di misura dell'energia, 74Jurin, 156nKönig, 98nKepler, 65nLapla e, 155n
Latitudine, 60Lavoro, 115della forza elasti a, 76della forza gravitazionale, 77della forza peso, 76Leggedi omposizione delle velo ità, 36di onservazione della portata, 160di gravitazione universale, 67di Jurin, 156di Pas al, 147di Stokes, 164si a, 2fondamentale della dinami a, 44Legge oraria, 7del moto ir olare uniforme, 28del moto rettilineo uniforme, 9del moto uniformemente a elerato, 13del moto vario, 11Linea di usso, 158Liquido perfetto, 144, 158Luna, 63Lunghezza ridotta, 122Ma hina di Atwood, 54Ma hina sempli e, 49, 140Ma h, 42n, 156nMagnus, 163nMassa ridotta, 100Maxwell, 71nMetro, 4Millibar, 145Modello, 2Molla ideale, 52Momentoassiale, 115prin ipale d'inerzia, 113Momento di una forza, 90Motoperiodi o, 27uniforme, 8Newton, 46n, 66, 71, 156n, 164unità di misura della forza, 44Pappo, 138nParaboloide di rotazione, 157Parametro d'urto, 104Paran o, 54
INDICE ANALITICO 179Pas al, 144nunità di misura della pressione, 144Perielio, 66Periodo, 27Peso, 47spe i o, 144Pianeti, 63Pi ole os illazioni, 55Pitagora, 18nteorema di, 18Platone, 64nPoisson, 126nPosizione relativa, 35Potenza, 115Pre essionedegli equinozi, 128del momento angolare, 118della velo ità angolare, 128Pressione normale, 145Prin ipiod'inerzia, 45dei vasi omuni anti, 147di indipendenza degli spostamenti simul-tanei, 36di relatività, 58di sovrapposizione, 44Pulsazione, 31Punto di vista euleriano, 158Punto materiale, 6Radiante, 27Reazione vin olare, 47Relazioni di Poisson, 126Reti olo ristallino, 143Retrogradazione, 63Satelliti geostazionari, 70Se ondo, 4Simpli io, 64nSistema operni ano, 65di riferimentodel laboratorio, 108non inerziale, 45internazionale, 3isolato, 42materiale, 94tolemai o, 65Sole, 63
Sommatoria, 95nSpinta di Ar himede, 149Spostamento, 7angolare, 27Steiner, 114nStella polare, 63Stevin, 147nStokes, 164Super ie s abra, 49Tempodi aduta, 15di salita, 16Tensione, 51Tensione super iale, 143Teoremadegli assi paralleli, 114del entro di massa, 97, 110del momento angolare, 90del viriale, 86dell'energia ineti a, 116dell'impulso, 87di Chasles, 111di Huygens-Steiner, 122di König, 98di Pappo-Guldino, 138Tolomeo, 65nTorr, 149Torri elli, 148n, 162Traiettoria, 7Tubo di usso, 158Unità di misura, 4Urtoanelasti o, 104 entrale, 104 ompletamente anelasti o, 106elasti o, 104obliquo, 104Velo itàangolare, 28areolare, 66d'impatto, 15del moto uniforme, 8di fuga, 85istantanea, 10legge della, 11media, 10

180 INDICE ANALITICOrelativa, 35Venturi, 163nVersori, 20Vettoriappli ato, 88 omponenti, 18dierenza, 19modulo, 18nullo, 19prodottoper uno s alare, 19s alare, 20vettoriale, 21relazione triangolare, 19somma, 19metodo del parallelogramma, 19metodo punta- oda, 19Vis osità, 143, 158Watt, 77nunità di misura della potenza, 77Young, 155nZenone, 39n