Appunti Innocenti
368
1 Meccanica del veicolo di Carlo innocenti Informazioni preliminari è un insegnamento da nove crediti 9 h per credito fa 81 h, sono previste 9 h a settimana mentre dovrebbero essere in media circa sette questo è perché nella seconda parte del semestre io avrò un altro insegnamento concentrato quindi con molte ore a settimana e quindi mi è più comodo fare più ore a settimana con voi nella prima parte del semestre per farne poi meno dopo quindi ci vedremo adesso per 9 h alla settimana, nella seconda parte del semestre 7-2 = 5 h a settimana. Poi ci saranno eventualmente ore da recuperare perché vengono perse per vari motivi insomma c'è sempre qualche ora persa, alla fine ho intenzione di fare né più né meno di 81 h. Il programma dell'insegnamento è quello della vecchia Meccanica del Veicolo per il corso di laurea specialistica più qualche nozione di Dinamica del Veicolo. Dinamica del veicolo come sapete non c'è più nella laurea magistrale. Per veicolo intenderò quasi sempre autoveicolo veicolo a quattro ruote (automobile) non proprio sempre ma quasi sempre parlerò di autoveicolo. Renderò disponibile sul sito Web entro la settimana materiale didattico integrativo che sono poi le copie dei lucidi che vi mostrerò. Sul sito Web dell'insegnamento c'è la lista dei testi consigliati che sono disponibili quasi tutti in biblioteca io consiglio sicuramente la loro consultazione non necessariamente il loro acquisto. L'esame è orale gli appelli verranno fissati in settimana, orientativamente saranno fissati il primo a metà giugno e il secondo a metà luglio. Il giorno dell'appello è semplicemente il giorno dell'appello e per qualcuno di voi anche il giorno dell'esame perché non riuscirò certo a esaminare tutti gli iscritti il giorno dell'appello quindi nei giorni successivi verranno fissati gli esami che non riescono a essere effettuati il primo giorno, io propongo un calendario stilato rispettando l'ordine di iscrizione alla lista. C’è sempre qualcuno che non riesce iscriversi o per problemi oggettivi di collegamento in Internet o perché si ricorda tardi di iscriversi ecc., basta presentarsi il giorno dell'appello solo che c'è un piccolo inconveniente di inserimento nel calendario d'esame che viene quindi deciso da me. Uno può essere benissimo al primo giorno, il giorno stesso dell'appello, anche se uno mi fa presente i suoi problemi di iscrizione può essere il giorno stesso o può essere un qualsiasi altro giorno. Quindi io vi propongo il calendario d'esame poi voi vi potete scambiare di posto a coppie lo dite a me e vi scambiate di posto liberamente. Vi proporrò alcuni esercizi da svolgere a casa autonomamente quasi sempre accennerò al procedimento risolutivo per affrontare questi esercizi, potrete controllare la correttezza del risultato spedendomi una richiesta di verifica vi è e-mail e mettete nell'oggetto la sigla: MdV Io con cadenza settimanale almeno una volta alla settimana rispondo a tutte le richieste di questo tipo. L'orario di ricevimento è attualmente il mercoledì dalle 16 alle 18 e il giovedì dalle 17 alle 18. Non dovreste avere lezione in questi due giorni a queste ore. 2 Meccanica del veicolo di cosa tratta: tratta dei sottosistemi di un veicolo escluso il motore, anche se poi vi parlerò dell'oscillazione torsionale dall'albero a gomito, torsionale del motore o anche di altri alberi. Quindi si parte salvo le prime lezioni che riguardano la determinazione dei gradi di libertà di veicoli su superfici piane o questioni sostanzialmente di cinematica. Verranno presi in considerazione i cambi di velocità, i carichi, la determinazione dei rapporti di trasmissione, i sincronizzatori per l'innesto dei vari rapporti, poi altri componenti della trasmissione tipo il differenziale, il ripartitore di coppia. Giunti viscosi hanno varie applicazioni, giunti omocinetici o quasi omocinetici. Qualcosa sull'impianto frenante. Qualcosa sulle velocità critiche torsionali degli alberi presenti nelle trasmissioni in generale quindi anche negli autoveicoli. Meccanismi di sospensioni, come affrontare l'analisi cinematica e statica anche. Poi come gli accennavo prima oscillazioni torsionale di alberi di trasmissione e di alberi motore. Compensazione delle forze d'inerzia. Per determinare i carichi che sollecitano agli organi della trasmissione di un autoveicolo occorre essere in grado di affrontare l'analisi dinamica e del veicolo nel moto rettilineo e nel moto anche accelerato e decelerato quindi si vedrà già in settimana un'analisi dinamica elementare di un autoveicolo in rettilineo. La Dinamica del Veicolo per la quale saranno disponibili circa 20 o 25 h di lezione sarà quella propriamente detta del moto curvo. Quindi per quanto riguarda la dinamica propriamente detta vedremo alcuni casi elementari, i principali sono: moto curvo a regime di un autoveicolo, determinazione d'esempio dell'angolo di sterzatura delle ruote direttrici nota la velocità e il raggio di curvatura della traiettoria del baricentro, determinazione degli angoli di deriva dei pneumatici anteriori e posteriori eccetera. Poi sicuramente un altro argomento importante è l'analisi di stabilità a comandi bloccati di un autoveicolo con ruote direttrici non sterzate. Poi vedremo cosa ci sta. Questi sono i due argomenti principali …un po’ di chiacchiere, da non sottovalutare! Non ci sarà nessuna prova intermedia, l'esame sarà solo finale, a parte il fatto che quest’anno ho poco tempo anche gli anni prossimi quando avrò più tempo l'esame sarà solo finale e lo sforzo di memorizzazione che dovete fare è utile ai fini dell'apprendimento della materia. Attenzione non fraintendetemi la materia non va memorizzata. Un po' di sforzo mnemonico bisogna comunque compierlo, la materia va capita, quasi tutte le cose che dico in riferimento ai veicoli, agli autoveicoli usano gli autoveicoli e i veicoli per parlare di meccanica, quindi per parlare di questioni ben più generali applicabili in tanti altri contesti, cercate di capire i concetti, naturalmente le cose vanno capite e meditate e non caricate in memoria per poco tempo per poi scaricarle, secondo me, durante una prova intermedia. Prove intermedie che per inciso utilizzate nel precedente ordinamento hanno dato almeno con me risultati poco soddisfacenti quindi proprio non le faccio più le prove intermedie, pochi studenti in percentuale riuscivano a ottenere risultati positivi durante la prova intermedia così da poter alleggerire la prova finale. Quanti di voi si sono laureati non in questo Ateneo? bene grazie, direi poco meno di metà circa un terzo.
description
appunti del corso di meccanica del veicolo unimore
Transcript of Appunti Innocenti
-
1
Meccanica del veicolo di
Carlo innocenti Informazioni preliminari un insegnamento da nove crediti 9 h per credito fa 81 h, sono previste 9 h a settimana mentre dovrebbero essere in media circa sette questo perch nella seconda parte del semestre io avr un altro insegnamento concentrato quindi con molte ore a settimana e quindi mi pi comodo fare pi ore a settimana con voi nella prima parte del semestre per farne poi meno dopo quindi ci vedremo adesso per 9 h alla settimana, nella seconda parte del semestre 7-2 = 5 h a settimana. Poi ci saranno eventualmente ore da recuperare perch vengono perse per vari motivi insomma c' sempre qualche ora persa, alla fine ho intenzione di fare n pi n meno di 81 h. Il programma dell'insegnamento quello della vecchia Meccanica del Veicolo per il corso di laurea specialistica pi qualche nozione di Dinamica del Veicolo. Dinamica del veicolo come sapete non c' pi nella laurea magistrale. Per veicolo intender quasi sempre autoveicolo veicolo a quattro ruote (automobile) non proprio sempre ma quasi sempre parler di autoveicolo. Render disponibile sul sito Web entro la settimana materiale didattico integrativo che sono poi le copie dei lucidi che vi mostrer. Sul sito Web dell'insegnamento c' la lista dei testi consigliati che sono disponibili quasi tutti in biblioteca io consiglio sicuramente la loro consultazione non necessariamente il loro acquisto. L'esame orale gli appelli verranno fissati in settimana, orientativamente saranno fissati il primo a met giugno e il secondo a met luglio. Il giorno dell'appello semplicemente il giorno dell'appello e per qualcuno di voi anche il giorno dell'esame perch non riuscir certo a esaminare tutti gli iscritti il giorno dell'appello quindi nei giorni successivi verranno fissati gli esami che non riescono a essere effettuati il primo giorno, io propongo un calendario stilato rispettando l'ordine di iscrizione alla lista. C sempre qualcuno che non riesce iscriversi o per problemi oggettivi di collegamento in Internet o perch si ricorda tardi di iscriversi ecc., basta presentarsi il giorno dell'appello solo che c' un piccolo inconveniente di inserimento nel calendario d'esame che viene quindi deciso da me. Uno pu essere benissimo al primo giorno, il giorno stesso dell'appello, anche se uno mi fa presente i suoi problemi di iscrizione pu essere il giorno stesso o pu essere un qualsiasi altro giorno. Quindi io vi propongo il calendario d'esame poi voi vi potete scambiare di posto a coppie lo dite a me e vi scambiate di posto liberamente. Vi proporr alcuni esercizi da svolgere a casa autonomamente quasi sempre accenner al procedimento risolutivo per affrontare questi esercizi, potrete controllare la correttezza del risultato spedendomi una richiesta di verifica vi e-mail e mettete nell'oggetto la sigla: MdV Io con cadenza settimanale almeno una volta alla settimana rispondo a tutte le richieste di questo tipo. L'orario di ricevimento attualmente il mercoled dalle 16 alle 18 e il gioved dalle 17 alle 18. Non dovreste avere lezione in questi due giorni a queste ore.
2
Meccanica del veicolo di cosa tratta: tratta dei sottosistemi di un veicolo escluso il motore, anche se poi vi parler dell'oscillazione torsionale dall'albero a gomito, torsionale del motore o anche di altri alberi. Quindi si parte salvo le prime lezioni che riguardano la determinazione dei gradi di libert di veicoli su superfici piane o questioni sostanzialmente di cinematica. Verranno presi in considerazione i cambi di velocit, i carichi, la determinazione dei rapporti di trasmissione, i sincronizzatori per l'innesto dei vari rapporti, poi altri componenti della trasmissione tipo il differenziale, il ripartitore di coppia. Giunti viscosi hanno varie applicazioni, giunti omocinetici o quasi omocinetici. Qualcosa sull'impianto frenante. Qualcosa sulle velocit critiche torsionali degli alberi presenti nelle trasmissioni in generale quindi anche negli autoveicoli. Meccanismi di sospensioni, come affrontare l'analisi cinematica e statica anche. Poi come gli accennavo prima oscillazioni torsionale di alberi di trasmissione e di alberi motore. Compensazione delle forze d'inerzia. Per determinare i carichi che sollecitano agli organi della trasmissione di un autoveicolo occorre essere in grado di affrontare l'analisi dinamica e del veicolo nel moto rettilineo e nel moto anche accelerato e decelerato quindi si vedr gi in settimana un'analisi dinamica elementare di un autoveicolo in rettilineo. La Dinamica del Veicolo per la quale saranno disponibili circa 20 o 25 h di lezione sar quella propriamente detta del moto curvo. Quindi per quanto riguarda la dinamica propriamente detta vedremo alcuni casi elementari, i principali sono: moto curvo a regime di un autoveicolo, determinazione d'esempio dell'angolo di sterzatura delle ruote direttrici nota la velocit e il raggio di curvatura della traiettoria del baricentro, determinazione degli angoli di deriva dei pneumatici anteriori e posteriori eccetera. Poi sicuramente un altro argomento importante l'analisi di stabilit a comandi bloccati di un autoveicolo con ruote direttrici non sterzate. Poi vedremo cosa ci sta. Questi sono i due argomenti principali un po di chiacchiere, da non sottovalutare! Non ci sar nessuna prova intermedia, l'esame sar solo finale, a parte il fatto che questanno ho poco tempo anche gli anni prossimi quando avr pi tempo l'esame sar solo finale e lo sforzo di memorizzazione che dovete fare utile ai fini dell'apprendimento della materia. Attenzione non fraintendetemi la materia non va memorizzata. Un po' di sforzo mnemonico bisogna comunque compierlo, la materia va capita, quasi tutte le cose che dico in riferimento ai veicoli, agli autoveicoli usano gli autoveicoli e i veicoli per parlare di meccanica, quindi per parlare di questioni ben pi generali applicabili in tanti altri contesti, cercate di capire i concetti, naturalmente le cose vanno capite e meditate e non caricate in memoria per poco tempo per poi scaricarle, secondo me, durante una prova intermedia. Prove intermedie che per inciso utilizzate nel precedente ordinamento hanno dato almeno con me risultati poco soddisfacenti quindi proprio non le faccio pi le prove intermedie, pochi studenti in percentuale riuscivano a ottenere risultati positivi durante la prova intermedia cos da poter alleggerire la prova finale. Quanti di voi si sono laureati non in questo Ateneo? bene grazie, direi poco meno di met circa un terzo.
-
3
Soprattutto chi viene dall'esterno, ma anche gli altri, invitato a interrompermi quando non capisce qualcosa a cui magari faccio cenno senza spiegare niente ad esempio questioni di statica elementare che io do per note ma magari a chi viene da fuori note non sono, oppure sempre questioni elementari di cinematica tipo il centro di istantanea rotazione. Comunque le cose che utilizzer sono questioni che intervengono in determinati argomenti che anche io spiegher queste cose e voi non le avete fresche, non le avete chiare siete invitati a ripassarvele perch poi all'esame contano di pi in negativo le cose semplici che non si sanno piuttosto che le cose difficili sofisticate che non si sanno del tutto. L'esame consiste in quattro domande, le domande possono comportare risposte lunghe a secondo dell'argomento o risposte brevi, non tutte le quattro domande richiedono risposte lunghe, si prende un punteggio per ogni domanda a prescindere dalla difficolt, capiteranno due domande complesse e due pi semplici alla fine io faccio la media aritmetica e quello il voto per io faccio la media dei voti sufficienti, se non si sa rispondere ad una delle quattro domande non che io consideri zero nella media, l'esame termina l se uno si ritira, se uno vuole un voto prende un voto insufficiente che non risulta dalla media. Questo il mio invito a studiare tutto il programma non alcune parti si ed altre no. Bisogna capire qualcosa di tutti gli argomenti, la prima occasione per capire di argomenti durante la lezione quindi cercate di capire se non il 100% almeno il nocciolo di quello che si dice, la parte pi importante durante le ore di lezione. Poi cercate di rimanere in pari con lo studio. Non difficilissimo secondo me rimanere in pari, non che questo insegnamento sia una sequenza di argomenti, una successione di argomenti tale che basta non capirne uno tutti quelli che vengono dopo quello non riescono ad essere capiti, no, ci sono diversi argomenti ogni tanto diversi sotto argomenti. Quindi quando termino un capitolo e ne inizio un altro, inizio per cos dire davvero quindi non costruisco su quanto ho detto fino a quel momento. Tuttavia cercate di rimanere in pari lo stesso. Quante ore di lezione avete a settimana voi? non sono poche. 30 adesso, per caleranno di quattro come vi dicevo nella seconda parte del semestre.
4
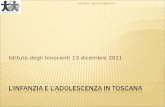
Vincoli di mobilit del contatto ruota suolo Inizio con il primo argomento che riguarda i vincoli di mobilit del contatto ruota suolo e anche la determinazione del numero di gradi di libert di semplici veicoli dotati di ruote. Inizier col considerare una sola ruota senza l'annesso veicolo. Una ruota sottile, circolare, rigida, sottile. Un disco quindi appoggiato ad una superficie piana orizzontale. Un disco che viene mantenuto in piedi, che non si pu inclinare lateralmente. Quanti gradi di libert ha questo disco? Il che significa chiedersi, in quanti modi pu abbandonare la posizione di corpo rigido (questo disco un corpo rigido) la posizione di corpo rigido corrente, quella che ha in un certo istante. Una seconda domanda forse pi semplice pu essere, quanti sono i parametri tra loro indipendenti che necessario specificare per definire la posizione di una ruota sottile appoggiata a un piano orizzontale, il piano orizzontale lo indico con poi esiste il piano in cui giace la ruota che potrei chiamarlo 1,
1 sempre perpendicolare a per ipotesi quindi s gi che 1 perpendicolare a . Ma dove sta la ruota? Guardo il piano dall'alto, istituisco sul piano un sistema di riferimento O, X, Y e questa una porzione di piano , guardando tutto dall'alto la ruota la vedo di taglio, la ruota un segmento. Un segmento lungo quanto il diametro della ruota e vedr sovrapposti l'uno all'altro il centro della ruota C e il punto di contatto tra ruota e suolo P, il punto medio di questo segmento indifferentemente C o P, lo indico con P tanto coincidono in questa rappresentazione. Allora per definire dove si trova la ruota si pu partire specificando la posizione del punto di contatto tra ruota e suolo la coordinata X del punto P e la coordinata Y del punto P. Poi bisognerebbe conoscere la giacitura del piano medio della ruota, l'angolo , perch a parit di punto a terra la ruota pu stare lungo direzioni diverse (qui o qui ecc.). X, Y, , sono i tre parametri che per non definiscono la posizione della ruota. La ruota un corpo rigido, ad esempio supponiamo di individuare sulla ruota una direzione radiale di riferimento, ad esempio in questa zona c' la valvola per gonfiare il pneumatico o qualcosa del genere, allora a parit di punto a terra e a parit di giacitura del piano medio della ruota la valvola pu trovarsi vicino al suolo o da un'altra parte quindi serve anche un altro parametro ad esempio l'angolo per individuare la posizione di corpo rigido della ruota. Con quei quattro parametri la posizione della ruota rimane definita, non ne servono altri.
Y
O X
P
la rotazione su questasse non possibile
rotazione possibile
3RU]LRQHGHOSLDQRYLVWDGDOODOWR
-
5
Se aveste due corpi rigidi delimitati da due superfici a contatto in un punto P e se uno di questi corpi fosse il telaio, fosse fisso, e l'altro potesse muoversi rimanendo in contatto col telaio in un punto, quanti gradi di libert avrebbe questo corpo mobile? Ne avrebbe cinque, che sono i 6 gradi di libert di un corpo rigido nello spazio meno un grado di libert tolto dal contatto di quelle due superfici in un punto.
Supponiamo che questa ruota sia appoggiata a un piano liscio, nel senso di perfettamente lubrificato (una superficie ghiacciata) questa ruota un corpo rigido e dovrebbe avere 5 gradi di libert in base a questo ragionamento, in realt noi vediamo che variando indipendentemente uno dall'altro questi quattro parametri la ruota sembra avere solo 4 gradi di libert. Perch questo? Perch la ruota viene tenuta dritta, cio col suo piano medio ortogonale al piano d'appoggio da mezzi esterni o per ipotesi, in generale se non pensassimo a questo ulteriore vincolo, a questa condizione, la ruota avrebbe 5 gradi di libert come questo corpo rigido (1) rispetto a questo telaio (0) e occorrerebbe anche specificare un angolo di questo tipo che definisca l'inclinazione laterale del piano medio della ruota, occorrerebbe specificare un quinto parametro. La situazione sembra essere sotto controllo, per inciso quali sono i 5 gradi di libert del corpo uno rispetto al telaio zero, il punto P pu spostarsi localmente in direzione tangente parallelamente al piano tangente alle due superfici in una direzione o in un'altra ortogonale o meno comunque non coincidente con la precedente, due spostamenti infinitesimi in due direzioni che non siano coincidenti. Poi una rotazione infinitesima, per attorno a un asse passante da P e parallelo al piano tangente, attorno a un asse perpendicolare al precedente sempre parallelo al piano tangente e attorno alla normale, rotazione infinitesima per cos dire di prillamento di uno rispetto a zero attorno a un asse passante per P e diretto come la normale alle due superfici in P. Questi cinque movimenti infinitesimi tra loro indipendenti corrispondono ai 5 gradi di libert che ha uno rispetto a zero. Qui potremo fare la stessa cosa salvo l'impossibilit di assistere alla rotazione della ruota attorno a questasse passante per P, il punto di contatto, e giacente nel piano tangente, giacente in perch per ipotesi questa ruota non pu coricarsi lateralmente, per questa rotazione possibile, quest'altra rotazione possibile (il moto di prillamento), la traslazione di questa ruota possibile, c' ghiaccio la ruota pu strisciare, in questa direzione la ruota pu strisciare, quindi 4 gradi di libert. Allora localmente la ruota, questa ruota pu abbandonare la sua posizione corrente in infiniti alla quattro modi diversi. Posso scegliere ad arbitrio dx, dy, d e d i differenziali di questi quattro parametri, quindi infinito elevato al numero di questi differenziali mi da il numero di possibilit a disposizione per abbandonare la configurazione corrente, non solo il numero di questi parametri individua la dimensione dello spazio delle configurazioni che un modo complicato per dire che servono quattro parametri per specificare la configurazione di questo semplice sistema, per specificare la posizione di corpo rigido di questa ruota rispetto al telaio che il suolo. Adesso per suppongo che il piano non sia una lastra di ghiaccio ma sia asfalto cemento quello che volete. La ruota premuta contro il suolo da una certa forza, la sua forza peso o un'altra forza (non importante) e suppongo della ruota non possa strisciare sul suolo. Non posso avere ad esempio traslazione della ruota in questa direzione, non posso avere traslazione della ruota in questa
P
1
0
6
direzione, posso avere la rotazione d, posso avere la rotazione d, cio questa direzione radiale di riferimento pu variare la sua inclinazione rispetto alla verticale a patto di consentire alla ruota di avanzare o di arretrare, cio non posso far slittare la ruota sul suolo ruotando la attorno al suo asse fermo tenendo il punto di contatto con il suolo P. Se l'angolo aumenta di d, e la ruota rotola cio si muove senza strisciare e rispetto al suolo allora il punto P si porta in P e la distanza di P da P vale R (il raggio della ruota) per d (PP = R*d)
Guardo il punto dall'alto, quel punto P, questa la giacitura del piano medio della ruota, questo un angolo P s porta in P e quindi se non cambia, se rimane costante avr: dx = R*d*cos dy = R*d*sen Se cambia, cambia di poco di una quantit infinitesima e P anzich essere su questa retta si trover leggermente a sinistra o leggermente a destra ma la vera distanza di P da questa retta avr un valore infinitesimo del secondo ordine, cio infinitesimo di ordine superiore alla lunghezza di questo segmento. Se non variasse P ad esempio potrebbe andare da questa posizione a quest'altra o quest'altra qui. (illustra sul disegno, P lungo la direzione parallela a X). Magari varia perch, la traiettoria del punto di contatto rispetto al suolo una traiettoria circolare GLUDJJLRTXLQGLORVSRVWDPHQWRVXELWRGDOSXQWRGLFRQWDWWRSHUXQRVVHUYDWRUHVROLGDOHFROVXRORvale R*d in ogni caso, anzich prendere un segmento rettilineo lungo R*d prendo un arco di FLUFRQIHUHQ]DGLUDJJLROXQJR5G e vedete che quando il punto P si spostato in P cambiata la giacitura del piano medio della ruota sono passato da uguale a zero ad + d.
ds
P
P
giacitura di P
-
7
Se questo lasse X del sistema di riferimento solidale col suolo parallelo alla giacitura del piano 1 quando il punto di contatto P ed diverso da zero, pari a una quantit infinitesima d, ho esagerato le cose, questo angolo infinitesimo, perch questo angolo qui tra l'orizzontale e la normale a questa direzione radiale uguale all'angolo che c' tra la perpendicolare al orizzontale cio alla verticale e la direzione radiale, quell'angolo qui d, infinitesimo perch: in radianti d uguale all'arco diviso il raggio (d = R*dKDXQYDORUHILQLWRSXUH5DXQYDORUHILQLWRHG una quantit infinitesima. Quanto vale la distanza di P da questa retta, cio quanto vale lo sbandamento laterale di P, una quantit infinitesima del primo ordine o del secondo ordine? Questa distanza si potrebbe calcolare, la chiamo u, che uguale alla differenza tra le due quote.
R*d lo potrei chiamare ds spostamento nel punto di contatto Lo sbandamento a destra o sinistra di P rispetto alla traccia del piano 1 della posizione iniziale della ruota, questa quota qui, dell'ordine di ds2 mentre questa quota ds, dell'ordine di ds un infinitesimo del primo ordine, lo sbandamento un infinitesimo del secondo ordine quindi queste relazioni (A) (dx = R*d*cos e dy = R*d*sen) al primo ordine sono corrette anche se varia, naturalmente mentre varia di una quantit infinitesima varier di una quantit infinitesma. Solo se varia di una quantit infinitesima lo sbandamento laterale infinitesimo del secondo ordine inverso perch lo sbandamento laterale potrebbe anche essere in altri casi infinitesimo del primo ordine inverso. Vediamo subito alcuni di questi casi, punto di contatto P, ruota vista dall'alto, giacitura nel piano medio della ruota.
(P)
X
G
G
u
5G
ds
5G
infinitesimo P
P
8
Si dice vario di /2 sterzo la ruota e poi aumento di d e quindi P va a finire in P lo sbandamento trasversale laterale ds infinitesimo del primo ordine, c' stata una variazione finita di non infinitesima, le variazioni di questi parametri cambiano simultaneamente al variare del tempo, mentre la ruota sta rotolando, quando la ruota rotola (= theta punto) avr un certo valore diverso da zero, una componente della velocit angolare assoluta della ruota. Allora se nell'intervallo di tempo dt varia di d e a questo d corrisponde un ds infinitesimo, nello stesso intervallo di tempo variato di una quantit finita, /2 in questo caso. Se il punto di contatto tra ruota e suolo potesse andare da qui a qui (da P a P) allora si dovrebbe avere una componente di velocit angolare della ruota infinita che potete vedere come rapporto tra la variazione finita dell'angolo (/2) e l'intervallo di tempo dt infinitesimo, una quantit finita diviso una quantit infinitesima (una quantit dt che dovrete far tendere a zero). Quindi queste manovre non si possono fare e lo sbandamento laterale rimane del secondo ordine rispetto all'avanzamento del punto a terra in direzione parallela alla giacitura iniziale del piano medio della ruota. Valgono queste due relazioni (A) quindi, che significa che non possibile scegliere ad arbitrio dx, dy, d, d perch se li scelgo ad arbitrio cio a caso, queste due relazioni non sono soddisfatte, vuol dire che la ruota non si mossa rotolando sul suolo ma si mossa strisciando, violando qualche vincolo di puro rotolamento. Il numero di gradi di libert che ha la ruota uguale al numero di questi differenziali che posso scegliere ad arbitrio, cosa posso scegliere ad arbitrio? d, d e automaticamente dato d rimangono definiti dx e dy. Quindi scegliendo d e d riesco a passare dalla configurazione iniziale definita da x y alla nuova configurazione definita da x+dx, y+dy, +d, +d con d e d scelti ad arbitrio. Riesco ad abbandonare la configurazione corrente in infinito alla due modi diversi tante quante sono le scelte di questi due parametri tra loro indipendenti, posso sceglierne uno indipendentemente dall'altro come pare a me, ho infinite possibilit per uno e infinite per l'altro quindi infinito alla due. Quindi il numero di gradi di libert che ha questa ruota rotolante sul piano e impossibilitata a coricarsi lateralmente due, la dimensione dello spazio delle configurazioni, il numero di parametri che necessario specificare per definire la posizione di corpo rigido della ruota rispetto al suolo rimane pari a quattro. Il vincolo di puro rotolamento, cio queste due condizioni, incidono sul moto della ruota mentre la ruota abbandona la configurazione corrente, ma non si fanno sentire al finito, non mi trovo due relazioni finite del tipo ad esempio: X = F1(1, ) Y = F2(1, ) non esistono queste due relazioni, non ne esiste nemmeno una del tipo (B) F(x, y, , ) = 0 i vincoli di puro rotolamento sono aggirabili con manovre di estensione finita, se le manovre sono piccole, infinitesime, per spostamenti piccoli e infinitesimi queste due relazioni si fanno sentire. Ad esempio guardiamo la ruota dall'alto, punto di contatto P, si pu andare in P con uno spostamento piccolo della ruota? No, non posso far strisciare la ruota lateralmente, violerei il contatto di puro rotolamento, per da l a l (P a P) si pu andare con una manovra finita per esempio rotazione finita di /2 cammino di una quantit infinitesima ds, altra rotazione finita - /2, con una manovra finita vedete che riesco a passare tra i due punti ma non con spostamenti infinitesimi oppure potrei prenderla ruota e far
P
P
ds
-
9
percorrere al punto a terra una traiettoria a largo raggio di lunghezza opportuna pari a multiplo di lunghezza di circonferenza della ruota, un multiplo di 2R per ritornare quasi al punto di partenza ma non esattamente e quindi in P, di nuovo una manovra finita.
Allora quanti gradi di libert ha quella ruota? Ne ha due, mentre la dimensione dello spazio delle configurazioni quattro. Siamo proprio sicuri che non esista un legame di questo tipo (tipo una funzione) o un legame al finito tra qualcuno di questi quattro parametri? Riscrivo le relazioni: dx = R*d*cos dy = R*d*sen potrei moltiplicare la prima relazione per il sen e la seconda per il cos sen *dx = R*d*cos*sen cos *dy = R*d*sen*cos sottraggo la seconda relazione dalla prima sen *dx - cos *dy = 0 (1) e ottengo quest'equazione che non contiene pi d ma sicuramente deve essere soddisfatta perch una conseguenza di relazioni ideali. Questa relazione, se esistesse un legame di questo tipo (B) tra i quattro parametri potrebbe derivare dalla differenziazione di questo legame finito, suppongo che esista un legame di questo tipo in particolare qui ci sono solamente tre dei quattro parametri, suppongo che esista una funzione (2) F(x, y, ) = 0 una dipendenza al finito tra questi tre parametri, allora questa relazione (1) si potrebbe derivare dalla differenziazione di questa equazione (2), potrebbe essere il risultato di questa operazione:
e allora sen corrisponderebbe a F/x, -cos a F/y e 0 a F/ Facciamo un caso semplice dato da una relazione del tipo x2y + 2x + ysen = 0 inventata. differenzio questa relazione: (2xy + 2)dx + (x2 + sen)dy + ycosd = 0 se la prima relazione vera anche questa lo poich il primo termine tra parentesi la derivata parziale del primo membro rispetto a x e cos via. Adesso posso mischiare le carte ad esempio, moltiplico tutto per x: x*(2xy + 2)dx + x*(x2 + sen)dy + x*y*cosd = 0
P
P
Ruota vista dallalto
10
questa relazione ancora vera per il primo termine non pi la derivata parziale del primo membro della prima equazione rispetto a x. Allora io non conosco F, come se conoscessi una relazione di questo tipo: (3)
questa qui la mia relazione sicuramente vera ma non posso dire adesso che il primo termine sia la derivata parziale di una F che non conosco rispetto ad x, perch qualcuno potrebbe aver moltiplicato la derivata parziale per un fattore che non conosco, l il fattore era x, qui il fattore non lo conosco, pu essere una funzione di x, di y e di . = (x, y, ). La relazione (3) corrisponde alla (2) con e F che non conosco. I termini tra parentesi corrispondono a: sen, cos e 0. Vado alla ricerca di ed F soprattutto mi interessa F, vedere se esiste una tale funzione, se esistesse la posizione della ruota non sarebbe definita da quattro parametri tra loro indipendenti ma solamente da tra ad esempio: x e y, una conseguenza dei primi due e poi c' che non compare in questa relazione. Scrivo: sen = F/x -cos = F/y 0 = F/ anche avendo posto 1/ al posto in sostituzione a la sostanza non cambia: sen non corrisponde alla derivata parziale rispetto ad x, ecc. ci pu esser di mezzo un fattore comune che moltiplicato per sen mi d la derivata parziale. Allora la derivata di F/x rispetto a y dovrebbe essere uguale a F/y rispetto a x non solo, da derivata di F/x rispetto a deve essere uguale alla derivata di F/ rispetto a x. Si pu scambiare l'ordine di derivazione. Scrivo: 2F/(x) = 0 tenendo conto delle relazioni precedenti, ma 2F/(x) ottenibile anche derivando sen rispetto ad , quindi posso scrivere: /*sen + cos = 0 analogamente da derivata seconda di F ottenuta dallaltra coppia di relazioni deve essere uguale 2F/(y) = 0 -/*cos + sen = 0 Ho quindi ottenuto due equazioni, che posso interpretare come due equazioni lineari con incognite / e , che scritte in forma matriciale diventano: [sen cos] (/) [-cos sen] ( ) = 0 quello l un sistema lineare omogeneo in due incognite, la matrice dei coefficienti ha determinante pari a: sen2 + cos2 = 1, non singolare, esiste solo la soluzione ovvia, queste due relazioni sono soddisfatte solo per:
-
11
/ = 0 e soprattutto la cosa pi interessante per = 0 cio solamente se si moltiplica l'equazione sendx cosdy = 0 per = 0 si ottiene un cosiddetto differenziale esatto (C) sendx cosdy = 0 Partendo da una F, differenziando si ottiene un differenziale esatto, un differenziale esatto che vero cio rispetta questa scrittura lo si ottiene solamente moltiplicando questa scrittura per = 0. Con = 0 si ottiene 0dx 0dy = 0, qualcosa sempre soddisfatto da un dx e un dy ho perso traccia della presenza della F perch non esiste una F al finito uguagliata a 0 che differenziata dia anche introducendo un diverso da 0 una relazione di questo tipo (C). In soldoni le due condizioni: dx = R*d*cos dy = R*d*sen esprimono due vincoli cosiddetti anolonomi, il che significa non interi, non esiste la versione al finito di queste due relazioni che legano quantit infinitesime, i vincoli anolonomi si fanno sentire solo nel piccolo, solo per piccole variazioni di configurazione, sono aggirabili come vi dicevo prima con grandi manovre. Questi vincoli anolonomi per una ruota, vincoli di puro rotolamento per una ruota non inclinata lateralmente appoggiata a un piano orizzontale sono in numero di due. Posso scegliere due parametri tra loro indipendenti per abbandonare la configurazione corrente, localmente la ruota ha due gradi di libert, al finito la ruota ne ha due pi gli altri due che derivano dalla possibilit di aggirare al finito i vincoli di mobilit, questi vincoli di puro rotolamento, questi vincoli anolonomi. La ruota al finito non ha 4 gradi di libert, al finito cosa significa aver 4 gradi di libert, i gradi di libert meglio vederli come l'esponente da dare all'infinito per dare il numero di possibilit a disposizione per abbandonare la configurazione corrente, 4 il numero di parametri che servono per dare la posizione della ruota rispetto al suolo, quattro la dimensione dello spazio delle configurazioni di questo semplice sistema costituito da una ruota ha appoggiato al suolo. Passo a una ruota adesso che pu anche inclinarsi lateralmente, devo definire la posizione di corpo rigido della ruota, e l'inclinazione in un verso e nell'altro del piano medio della ruota 1 rispetto al piano perpendicolare, al piano d'appoggio e contenente la retta di intersezione tra il piano 1 e il piano , devo introdurre un'ulteriore parametro che potrei chiamare beta (), ecco che al finito la posizione di corpo rigido di quella ruota definita da cinque parametri, come succedeva per quei due corpi rigidi (quella specie di sassi) che si toccavano in un punto, un sasso era fisso l'altro era mobile e vincolato a rimanere a contatto con il sasso fisso in un punto. Quanti erano i parametri tra loro indipendenti e sufficienti per determinare la posizione del sasso mobile rispetto quello fisso? Cinque, e sono cinque anche qui, la ruota un particolare sasso, per se la ruota non pu strisciare rispetto al piano d'appoggio allora bisogna rispettare sempre questi due vincoli scalari di puro rotolamento. Che cosa adesso questa retta? questa retta rappresenta dell'intersezione del piano medio di contatto della ruota con il suolo, ma non cambia niente rispetto prima, lo sbandamento laterale del punto di contatto ancora infinitesimo di ordine superiore rispetto a ds e mentre il punto di contatto avanza approssimativamente in questa direzione il coricamento della ruota potrebbe anche variare, ma non cambia niente per quanto riguarda la struttura di questa relazione, valgono ancora.
12
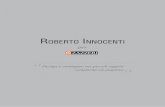
Adesso il numero di parametri che necessario specificare al finito cinque, la configurazione corrente pu essere abbandonata in infinito alla tre modi, posso scegliere d, dHG ad esempio. Automaticamente dx e dy derivano da questa relazione, quindi 3 gradi di libert della ruota, al finito non si fanno sentire i due vincoli anolonomi quindi il numero di parametri, cio la dimensione dello spazio delle configurazioni di questa ruota coricabile lateralmente tre pi due uguale cinque, i conti tornano. Quanti gradi di libert ha una bicicletta con le ruote costrette a non strisciare sul suolo, sul piano d'appoggio? Considero una bicicletta semplificata, composta da pochi membri quali: la ruota anteriore, la ruota posteriore, la forcella anteriore o manubrio che lo stesso membro, il telaio della bicicletta. Non c' altro, non ci sono i pedali, non c' il campanello, non c' la catena ecc.
Il telaio il piano d'appoggio indicato con Quanti gradi di libert alla bicicletta? Si potrebbe utilizzare la formula di GRUBLER per la determinazione del numero di gradi di libert di un meccanismo spaziale, il numero di gradi di libert uguale a sei per il numero complessivo di membri compreso il telaio meno uno, meno cinque C1 L = 6*(m 1) 5C1 4C2 3C3 2C4 C5 Cosa C1? il numero di coppie cinematiche che lasciano 1 grado di libert al moto relativo tra due membri che collegano, ad esempio una coppia rotoidale (ne ho tre) lascia 1 grado di libert al moto relativo rispetto al piano, rispetto al telaio la ruota posteriore, il membro uno pu assumere infinito alla uno configurazioni e cos via. Quindi il numero di vincoli scalari introdotto da una coppia rotoidale o da una coppia prismatica o da una coppia elicoidale pari a cinque. Poi a volte, ma questo non il caso a cui st per accennarvi, questo calcolo da un risultato errato perch il numero di gradi di libert, pari al numero di gradi di libert che avrebbero tutti i membri escluso il telaio qualora fossero liberi di muoversi nello spazio meno il numero di vincoli introdotti dai collegamenti tra i vari membri, potenzialmente mobili quindi i collegamenti tra i membri potenzialmente mobili o anche collegamenti tra i membri potenzialmente mobili e il telaio il numero di gradi di libert residuo complessivo che ha il meccanismo.
3 4
2 1
5 (telaio)
P
P rappresenta il piano medio di contatto col suolo
-
13
Vi dicevo questo modo di procedere non sempre da risultato soddisfacente perch a volte si contano come vincoli indipendenti dei vincoli che indipendenti non sono, due vincoli che dicono la stessa cosa. In questo caso non ci sono problemi, come si fa questo calcolo? L (numero di gradi di libert) uguale a 6 per il numero di membri mobili quindi (m 1) in questo caso quattro membri, 5 compreso il telaio (m valrebbe cinque, m 1 = 4), meno cinque per il numero di coppie cinematiche che lasciano 1 grado di libert, ho coppie rotoidali (C1 vale tre) e poi ci sono anche questi contatti tra le ruote e il piano d'appoggio, pensiamo a come vincolata una ruota al suolo, quanti gradi di libert alla ruota? una ruota che pu coricarsi lateralmente quella della bicicletta? sicuramente. I gradi di libert sono come nel caso precedente, posso abbandonare la configurazione corrente in infinito alla tre modi. Quindi questo contatto toglie 3 gradi di libert e ne lascia tre, C3 vale due, quali sono i 3 gradi di libert lasciati? Si possono controllare in qualsiasi istante, cosa pu fare la ruota anteriore? Pu coricarsi lateralmente quindi una rotazione infinitesima attorno ad un asse individuato dall'intersezione del piano medio della ruota con il suolo, poi una componente di rotazione di prillamento, quindi questo qui (sull'asse di d)
e poi c' d una componente di rotazione di questo tipo associata obbligatoriamente a uno spostamento del punto di contatto, perch se c' un d di questo tipo (in quel punto) la ruota avanza, per d ci pu essere. Tutto qui, come avere in sostanza, pensatela cos per velocizzare ragionamenti come avere ai fini del calcolo dei gradi di libert una coppia sferica che non sar proprio sferica perch il punto di contatto si sposta, quindi per il calcolo di L come avere una coppia sferica. Quindi questo contatto di puro rotolamento introduce 3 gradi di vincolo e lascia 3 gradi di libert (- 3*2), L = 6*4 5*3 3*2 = 3 soddisfacente questo risultato? Quali possono essere i 3 gradi di libert? Pensate di avere le bicicletta appoggiata in un altro modo al suolo anche coricata lateralmente e cos via, cosa pu fare la bicicletta? Avanzare, a manubrio bloccato, e a pendenza in direzione laterale bloccata, poi si pu ruotare il manubrio, quindi c' un altro grado di libert di avanzamento, poi indipendentemente dall'avanzamento che idealmente possiamo far subire alla bicicletta possiamo far ruotare il manubrio di un piccolo angolo, poi a parit di avanzamento a parit di rotazione del manubrio possiamo scegliere come variare l'inclinazione laterale della bicicletta. I 3 gradi di libert possono essere visti cos, altri io non ne vedo. Quanti sono i parametri che occorre specificare per definire la posizione della bicicletta? Cosa significa definire la posizione della bicicletta? Significa conoscere la posizione di ogni membro della bicicletta, in base ragionamenti di prima questo numero dovrebbe essere pari a tre pi due parametri per ogni punto di contatto ruota suolo, 3 quindi + 2*2, N = 7
d
G G
14
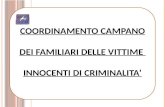
Vediamo se N pu essere uguale a sette, c' il piano d'appoggio , scelgo la posizione di corpo rigido della ruota posteriore con il punto di contatto qui, la direzione radiale di riferimento inclinata dell'angolo che voglio rispetto al segmento che va dal centro ruota al punto di contatto, quindi la giacitura cio inclinazione della ruota come mi pare. Quanti sono i parametri che ho specificato? Posso fare il conto dall'inizio, ma mi sa che siano 5, due coordinate per questo punto (il punto di contatto della ruota), la direzione di questa retta (la giacitura) nel piano, l'angolo , l'inclinazione della ruota, langolo radiale , uguale cinque. Cinque parametri servono per definire la posizione di corpo rigido della ruota posteriore rispetto a un osservatore solidale col suolo. Poi monto il telaio, ma il telaio lo monto idealmente sulla ruota in modo che le bicicletta rimanga con la ruota anteriore sollevata dal suolo, poi col telaio cos disposto monto la forcella anteriore e scelgo di quanto sterzare il manubrio rispetto al telaio, scelgo un parametro. Un parametro nuovo. Poi monto la ruota anteriore con la bici impennata, monto la ruota anteriore sulla forcella decidendo se mettere la valvola del pneumatico anteriore in una qualsiasi posizione, scelgo la posizione che ha la ruota anteriore rispetto alla forcella, la scelgo come mi pare, un parametro. Adesso tenendo bloccati questi cinque parametri cio tenendo fissa la ruota posteriore rispetto al suolo, tenendo fisso questo parametro del manubrio rispetto al telaio, tenendo frenata la ruota anteriore, tenendola ferma rispetto alla forcella abbasso telaio, manubrio, ruota anteriore in modo da far appoggiare anche la ruota anteriore al suolo. Questo angolo di rotazione dipende dalla posizione di montaggio che avevo scelto, ma indipendentemente dalla posizione di montaggio che avevo scelto la posizione finale della bicicletta sempre la stessa, posso aver montato tutto questo a bici pi o meno impennata ma alla fine vado sempre a sbattere con la ruota anteriore nello stesso punto del suolo. Non devo scegliere altri parametri, ne dovete scegliere solo sette. Allo stesso modo potete calcolare il numero di gradi di libert e il numero di parametri al finito cio la dimensione dello spazio delle configurazioni per una bicicletta appoggiata col manubrio a una parete verticale. Per inciso come possono essere lette queste due relazioni? Le possiamo vedere anche cos, i due vincoli anolonomi di puro rotolamento corrispondono a dire che non ci sia strisciamento in direzione longitudinale e non ci sia strisciamento in direzione trasversale, cio se il punto di contatto si sposta di R*d sulla ruota rispetto a un osservatore solidale con una ruota, quindi se il punto di contatto va da qui a qui (un punto allaltro) questo angolo d e lo spostamento in direzione longitudinale diciamo in questa direzione del punto di contatto per un osservatore solidale con la ruota vale R*d, il punto di contatto si sposta di R*d anche per un osservatore solidale col suolo. Quindi assenza di strisciamento in direzione longitudinale, una prima condizione, altra
3 4
2
1
-
15
condizione il punto di contatto non si sposta ortogonalmente al piano medio per un osservatore solidale con la ruota e non si sposta neanche per un osservatore solidale col suolo.
P.s. mia domanda sulla formula di grubler, m = numero dei numero de i membri compreso il telaio, si intende il suolo, il telaio il suolo, 5 il piano . (m 1) il numero di membri mobili, 6 * il numero di membri mobili. Non sempre questo vero, nel caso dei meccanismi piani L = 3*(m 1) 2C1 C2 per un quadrilatero articolato m vale quattro quindi: 3*3 2*4 (il numero di coppie che lasciano 1 grado di libert, C1 vale 4) = 1
(m 1) il numero di membri mobili, sarebbe meglio dire (m 1) il numero di membri escluso il telaio perch in alcuni casi, le costruisco un esempio ad hoc, (una struttura formata da pi membri) quanti membri ci sono? Sei compreso il telaio, L = 3*(6 1) 2*7 = 1 (m 1) = 5, che non in numero di membri mobili perch quando si muove qualcosa si muovono le tre macrostrutture ma cinque e quattro non si muoveranno mai rispetto al telaio, quella l una struttura un triangolo rigido, quindi non correttissimo dire che (m 1) numero di membri mobili, brevemente si dice cos, per sta a significare che il numero di membri in aggiunta al telaio.
Altra domanda prillamento della ruota posteriore della bicicletta Se penso a una bicicletta visto dall'alto (bicicletta semplificata) consideri la ruota anteriore sterzata di 90, cosa fa questa bicicletta? il punto di contatto della ruota posteriore quando la bici si muove rimane fermo rispetto al suolo, (questa, la bici vista dall'alto) la bici devo evitare di farla cadere lateralmente, la bicicletta ha la ruota anteriore che rotola sul suolo, il punto a terra descrive una traiettoria circolare centrata nel punto di contatto della ruota posteriore. Qui tutto moto di prillamento, ma il moto di prillamento si ha anche quando la bici avanza normalmente a meno che
5
4 3
2
1
R
d Rd 0
0
16
la bicicletta non vada sempre diritta, se cambia la giacitura (non cambiando l'inclinazione della bici). Se tengo sotto osservazione lungo una strada pianeggiante la retta di intersezione del piano medio della ruota posteriore con il suolo, prima quella retta l indipendentemente dall'inclinazione laterale poi in un altra posizione poi in un altra ancora perch la bici avanza serpeggiando, la componente di rotazione della ruota in direzione ortogonale al piano il moto di prillamento, la componente di rotazione di prillamento della ruota, se questa retta non cambia mai, se la ruota va dritta il moto di prillamento non c'. Se la retta si sposta tra le due posizioni c' da chiedersi come ci andiamo dalle due posizioni senza moto di prillamento, e senza far strisciare la ruota, io non me lo immagino. Per passare tra le due posizioni serve un moto di prillamento prima orario e poi antiorario, si ha comunque questo moto.
Altro veicolo a due ruote (introduzione) Rimorchio a due ruote con un timone e un piedino, guardando tutto dall'alto (questo il suolo), il cosiddetto carrello appendice o carrello, due ruote coassiali, sta in piedi a differenza della bicicletta, rimane fermo, per il suo studio presenta qualche difficolt in pi rispetto a quello della bicicletta.
Dallalto
-
17
Deriva senza prillamento, = angolo di deriva, si pu avere deriva senza prillamento se da una posizione A si arriva ad una posizione B con una traslazione rigida con strisciamento
A
B
-
Lezione 2 02/03/2010
Rimorchio a due ruote
Rimorchio a due ruote con timone dotato di piedino, si appoggia sul suolo.
C differenza tra il rimorchio e la bicicletta??
Dal punto di vista della formula di Gruber, c una gran differenza tra rimorchio e bicicletta??
Entrambi hanno due ruote, ma la bicicletta a contatto con il suolo in due punti, mentre il rimorchio appoggiato in tre punti. La bicicletta aveva localmente tre gradi di libert. Si pensi per un attimo ad una bicicletta dotata di piedino, o a una bicicletta che a contatto con il telaio del meccanismo, cio con il suolo o con qualcosa solidale con il suolo; quindi una bicicletta appoggiata ad un punto del manubrio ad una parete verticale o ad una parete qualsiasi, quanti gradi di libert potrebbe avere?? Pensate a come si modifica la formula di gruber, il contatto in un punto, tra manubrio e telaio riduce di uno il numero dei gradi di libert, quindi i gdl di una bicicletta appoggiata ad una parete dovrebbero essere due. E quale altra differenza c tra il rimorchio a due ruote e la bicicletta?? Il rimorchio non snodato, il telaio del rimorchio un membro solo con il timone, mentre il telaio dellla bicicletta composto da due membri, telaio propriamete detto pi la forcella anteriore con annesso manubrio, quindi, da un certo punto di vista, il rimorchio una bicicletta appoggiata ad una parete con il manubrio bloccato. La bicicletta appoggiata alla parete, quindi al posto di tre gradi di libert, due gradi di libert; bloccato il manubrio, si toglie un ulteriore grado di libert e dovrebbe rimanere un solo grado di libet per questa bicicletta, ma anche per il rimorchio a due ruote.
Andiamo a vedere se le cose stanno veramente cos:
Le ruote del rimorchio sono accoppiate in modo rotoidale con il telaio del rimorchio,essendo un meccanismo spaziale, andiamo a vedere i gradi di libert con la formula di gruber:
l = 6(4-1) 5*2 - 3*2 1*1 = 1 gdl
Le coppie rotoidali sono due, e lasciano un grado di libert, i contatti di puro rotolamento tra ruote e suolo che lasciano tre gradi di libert sono due, e, un contatto tra piedino del timone e suolo che
lascia cinque gradi di libert perch ci pu essere anche strisciamento.Otteniamo 1gdl come previsto dalla bicicletta opportunamente modificata.
Ma vero che questi rimorchi a due ruote hanno 1 gdl?? NO,generalmente hanno due gradi di libet, pensate di avere il rimorchio in una certa posizione, considerate il punto estremo del timone, si pu decidere in genere di spostare questo estremo lungo questa direzione longitudinale, o lungo questa direzione trasversale, o in qualunque altra direzione. Si pu abbandonare la posizione lungo una qualsiasi direzione, generalmente il rimorchio funzione cos, trascinato da una motrice che compie una traettoria scelta dal guidatore del veicolo, e il rimorchio si adegua, in particolare pensando che il punto del timone appartenga al punto del gancio di traino. Quindi, da un punto di vista questo sistema a due gradi di libert, mentre dal punto di vista della formula di gruber ne ha uno. Questo calcolo non cambia neanche alterando la geometria del sistema, anche per questi tipi di rimorchio con il timone strano(fig.sopra) o anche per un rimorchio con le ruote montate a caso.
Se considero in particolare il rimorchio con le ruote storte, questo ha un solo grado di libert, se si pensa al punto di contatto tra la ruota e il suolo fermo, quel punto si sposta rispetto alla ruota (1)
-
quando il rimorchio si muove ,si sposta il punto di contatto rispetto al suolo (0), quando la ruota si muove, ma non si sposta per un osservatore solidale con il cassone (3), si potrebbe pensare di saldare la sponda del cassone una specie di puntatore metallico che indica il punto a terra (cos che quel punto non si sposta rispetto al cassone), idealmente, lestremo di questa freccia proprio il punto a terra. Si compie idealmente questa operazione anche per laltra sponda del cassone con la ruota del lato sinistro (2). La velocit del punto A valutata rispetto al suolo(0), pensato appartenente al membro (3) diretta come la retta allintersezione tra piano medio della ruota (1) e piano di appoggio (0) , questo punto del cassone non pu avere direzione di velocit ortogonale al piano medio della ruota, dal momento che la ruota potrebbe non avere piano medio verticale, non ci pu essere una componente di velocit del cassone diretta in questa direzione ortogonale, perch altrimenti la ruota striscerebbe sul suolo, e cos non rispetterei il vincolo di puro rotolamento , quindi la velocit di questo punto A pensato appartenente al membro (3) rispetto al suolo diretta come in figura. Analogamente la velocit di B del membo (3) rispetto al suolo (0) diretta come in figura, cio come la retta allintersezione tra piano medio della ruota (2) e piano di appoggio (0).
Guardando tutto dallalto, facile rendersi conto che il moto del membro (3), un moto piano, questo accade sicuramente se il suolo piano.
C un punto del membro (3) che ha velocit nulla rispetto al suolo (0)?? Ovvero, dove si trova il C30??(centro di istantanea rotazione del membro (3) rispetto a (0) )
Si trova mandando le perpendicolari al vettore velocit di un qualsiasi punto del membro (3), essendo nota la dir della elocit del punto A e B,mando le due perpendicolari dalle due direzioni dei vettori velocit(non noti in intensit e verso ma solo in direzione), il punto di intersezione delle due perpendicolari il C30. Questo un punto ben definito del cassone, e del suolo.
Cosa fa questo cassone?? Pu ruotare soltanto attorno allasse perpendicolare al foglio e passante per C30. Il sistema ha un solo grado di libert, quindi ha ragione la formula di gruber.
Cosa succede ad un rimorchio avente gli assi delle ruote paralleli??
Sono parallele le linee di intersezione dei piani medi delle due ruote rispetto al suolo; ma dove si trova il C30??
Disegnando le rette ortogonali alle direzioni delle velocit di A e B , il C30 deve stare su entrambe queste due rette che sono a loro volta parallelle tra di loro che si incontrano allinfinito, ovvero, il centro di istantanea rotazione infinitesimamente distante dal cassone. Cosa fa il cassone rispetto al suolo??? Il cassone trasla in direzione o in direzione , questo un rimorchio che v sempre dritto. Per trainare questo rimochio lungo un percorso curvo, occorre far strisciare le ruote, chiaramente alposto del piedino ci sar contatto tra gancio di traino e timone. Per far curvare questo rimorchio bisogna far curvare le ruote. Se le ruote non possono strisciare per ipotesi, allora questo rimorchio v sempre dritto.(mentre quello di prima gira in-tondo)
Nei rimorchi standard deve dunque accadere qulcosa in particolare, se si hanno due gradi di libert, le ruote devono essere montate bene, devono essere coassiali, potrebbero anche essere camberate, la cosa importante che le rette di intersezione dei piani medi con il suolo orizzontale piano, siano rette parallele ma non solo, se rispetto solo questa condizione potrei avere un rimorchio come quello che v solo dritto, ma deve anche accadere che i due punti che, noto uno dei due punti di contatto, ad esempio A, mandando la retta perpendicolare alla direzione della velocit di A, si deve ottenere una retta su cui si trova anche altro punto di contatto B. Dove st il C30 nel rimorchi standard??
Dovrebbe essere determinabile come visto prima, tracciando le perpendicolari alle direzioni note di A e B, deve stare su entrambe le rette (che sono coincidenti), ma diversamente da prima che avevo due rette distinte, ora non le ho, devo intersecare una retta con s stessa. Tutti i punti di una retta appartengono anche allaltra retta dal momento che sono coincdenti quinidi i punti di intersezione
-
sono tanti quanti sono i punti di questa retta, quindi ogni punto di questa retta un possibile C30 , che rimane indeterminato.
Nei meccanismi piani, i centri di istantanea rotazione rimango indeterminati quando:
Non c niente che si pu muovere, una rotazione nulla pu avvenire attorno ad un punto o ad un asse qualsiasi.
Il meccanismo ha pi di un grado di libert
Questo caso del rimorchio prorpio del secondo tipo, si hanno 2 gradi di libert, un caso particolare ottenuto grazie ad una geometria particolare, non prevista dalla formula di gruber. Quindi cosa pu accadere se il rimorchio deve seguire una motrice che avanza rettilinea???
Si ottiene che il C30 star su quela retta allinfinito.
Se il gancio della motrice descrive una traettoria circolare che ha un certo raggio,(moto curvo a regime) il C30 star sempre sulla retta perpendicolare alle direzioni delle due velocit di A e B (che soo parallele) ma da un altra parte, quindi il rimorchio non vincolato a ruotare attorno ad un asse fisso al finito o allinfinito, quindi a traslare.
Cerchiamo di comprendere meglio come una particolare geometria determini questo risultato,cosa accaduto avendo reso coassiali le due ruote???
Se prendiamo in considerazione la ruota di destra e poniamo il puntatore ideale che indica il punto a terra della ruota di destra; se la ruota di destra rotola sul suolo senza strisciare, la velocit del punto A, sar diretta come in figura, non presente componenete di velocit del punto A nella direzione ortogonale. E proprio il vincolo di puro rotolamento tra ruota e suolo che ci assicura che questa componente di velocit del punto A nulla, una delle due condizioni scalari di puro rotolamento, assenza di strisciamento in direzione trasversale, e laltra sarebbe quella di assenza di strisciamento tra ruota e suolo ma in direzione longitudinale, ci significa che lavanzamento del punto a terra deve essere accompagnato dalla corretta rotazione della ruota. Ora st considerando solo una delle due condizioni di puro rotolamento, quella che dice che non ci pu essere strisciamento in direzione trasversale.(quindi la componente ortogonale della velocit di A non c). Dallaltra parte, nellaltra ruota, il punto a terra determinato in B, e anche questa ruota ha due condizioni scalari di puro rotolamento, assenza di strisciamento in direzione longitudinale e trasversale rispetto al suolo. C da dire, che questa seconda condizione superflua, perch, se penso al segmento AB ideale, solidale al cassone, di lunghezza costante pari alla distanza tra i due estremi A e B. Se si pensa ad uno spostamento infinitesimo del punto A valutato rispetto al suolo, pu avvenire solo in direzione ortogonale al segmento AB perch assnte lo strisciamento tra suolo e ruota in direzione laterale, quindi se, la velocit di A diretta come in figura, ortogonale al segmento AB, automaticamente, la velocit del punto B non pu avere una componente parallela al segmento AB, altrimenti questo segmento varierebbe la sua lunghezza.
-
Uno dei due vincoli di puro rotolamento da una parte dice al segmento AB di spostarsi, ma questo in definitiva il cassone(membro 3), gli viene detto di spostersi, ma con velocit di A perpendicolare ad AB. Uno dei due vincoli di puro rotolamento dalaltra parte, dice al segmento AB di spostarsi nello stesso modo, gli dice che deve essere assente la componente di velocit parallela al segmento AB di B, ma questa automaticamente assente questa componente se non presente la medesima componente nel punto A; quindi uno dei due vincoli di puro rotolamento una ripetizione di uno dei due vincoli di puro rotolamento dellaltra ruota, sono uno la ripetizione dellaltro, in questo caso particolare con questa geometria particolare.
La formula di gruber come nasce??
Nasce pensando che il telaio sempre fermo, e che inizialente, accanto al telaio ci sono gli altri membri del meccanismo tra di loro scollegati, svincolati anche al telaio. Ciascuno di questi membri ha 6 gdl, l = 6(m-1).il numero dei membri sono m-1, e poi si considerano i vincoli introdotti dalle varie coppie cinematiche -5 gradi di libert per ogni coppia cinematicaecc..ecc Se durante questa operazione di introduzione di vincoli, introduco un vincolo che gi era presente, non tolgo un grado di libert, e inizio a sbagliare il calcolo. Se ripeto un vincolo perch magari la geometria del sistema particolare,non tolgo un grado di libert.
Suppongo di intodurre un vincolo semplice con lintenzione di togliere un solo grado di libert ma capta che quel vincolo che introduco sia una ripetizione di vincoli gi presenti, quindi dovrei fare matematicamente:
l 1 = 6(m-1) 5C1 4C2 - ..-1
non voglio che l cali di 1, perch l , ripetendo un vincolo non cambia quindi metto un -1 anche dallaltra parte per mantenere l inalterato. Introducendo un vincolo ripetuto, succede che introduco una iperstaticit.
Caso semplice della trave nel piano incernierata ad un estremo ed appoggiata allaltro estremo, il sistema staticamente determinato(il meccanismo una struttura in questo caso), il numero di gdl uguale a zero. Se introduco un altro carrello, il numero di gradi di libert non cambia per il sistema diventa staticamente indeterminato, iperstatico. La somma di questi -1 che aggiungo al primo membro, d il numero di iperstaticit.
Quindi:
l i = 6(m 1) 5C1 4C2 3C3 - 2C4 - 1C5
calcolo comunque in modo uguale il secondo membro, mentre il risultato da interpretare al primo membro perch non ho l , ma l- i . Se conoscessi i potrei risalire al numero di gdl; la formula di gruber generlizzata in questo modo d il numero di gdl meno il numero di iperstaticit (ripetizioni di vicolo). Si tratta di volta in volta di ragionare sul significato di l i , che ha sempre un valore numerico be definito, ma non si sa quanto vale i si potrebbe comunque intuire come in questo caso. Ci si deve aiutare con le informazioni disponibili, se l i = 1, con questo ragionamento si intuisce che l = 2 e i = 1.
In definitiva i rimorchi standard hanno 2 gdl e 1 iperstaticit.
Se carico il rimorchio con una forza laterale F(tipo figura) non si in grado, con le equazioni della statica, di trovare le reazioni del suolo sulle ruote. Qual la componente trasversale del suoo sulla ruota (2) e quella sulla ruota (1)?? Le equazioni della statica non bastano, c una iperstaticit; non detto che la componente di reazione sia F/2, potrebbe valere F/3, F/4ed esserci ancora equilibrio,
-
sapere quante sono le iperstaticit da informazioni utili sulla difficolt del problema della determinazione delle reazioni.
Per un rimorchi strampalato si hanno 1 gdl e zero iperstaticit.
Quanti sono i parametri necessari ad individuare la configurazione del sistema, cio la posizione di corpo rigido di ogni membro??
Al finito non si fanno sentire i vincoli anolonomi, abbiamo 1 gdl, scompaiono al finito due condizioni anolonome per ogni contatto ruota-suolo. La dimensione dello spazio delle configurazioni di questo sistema dovrebbe essere 5 (1 + 2*2 ). Guardiamo il tutto dallalto,il rimorchio st in una posizione individuata dalle due cooordinate valutate rispetto ad un sistema di riferimento solidale con il suolo dellestremo del timone, pi unangolo che individua la direzione del timone, ho cos la poszione di corpo rigido del cassone. Essendo che il cassone si muove di moto piano, bastano 3 parametri per individuare la sua posizione nel piano. Gli altri due parametri servono per individuare mediante due angoli , leposizioni angolari di ciascuna delle due ruote rispetto al cassone. Sapendo dove st il cassone rispetto al suolo, le ruote rispetto al cassone, so dove so trovano le ruote rispetto al suolo. Nel caso di geomatria particolare le cose non cambiano a livello di risultato finale. Tre parametri per individuare la posizione di corpo rigido del cassone pi dua parametri aggiuntivi per individuare e definire la posizione di corpo rigido relativa di ciascuna delle due ruote rispetto al cassone. Questo risultato si pu raggiungere anche con loperazione 1 gdl + 2*2(condizioni di puro rotolamento) ; ora dovrei partire da due gradi di libert (2 gdl) poi tolgo i vincoli di puro rotolamento che non si fanno sentire al finito, cio due vincoli di puro rotolamento per la ruota di destra ed uno solo per la ruota di sinistra, perch laltro vincolo una ripetizione di questi due, quindi non lo devo considerare. Quindi il conto risulta essere: 5 = 1 + 2 + 2
Triciclo
Considero per il triciclo, come per il rimorchio, privo di sospensioni.
Le due ruote posteriori sono coassiali,( potrebbero essere di diametri diversi) deve accadere che le due rette intersezione dei piani medi delle ruote con il suolo devono essere parallele, ed inoltre, la congiungente dei punti a terra tra le due ruote e il suolo deve essere una retta ortogonale a ciascuna delle due rette dei piani medi delle ruote. Allanteriore vi un membro (4)(manubrio o forcella), incernierato al pianale del triciclo. Contando i gradi di libert del meccanismo con gruber :
l i = 6 (6 1) (5 * 4) (3 * 3) = 1
Il numero di coppie rotoidali che lasciano 1 gdl sono 4 perch ho i due accoppiamenti tra le ruote posteriori e il telaio, un altro tra la ruota anteriore e il manubrio, e lultimo tra il manubrio e il telaio. Ci sono inoltre tre contatti tra ruote e suolo. l i = 1
Guardando la disposizione particolare delle ruote posteriori mi accorgo che: i = 1 , una delle due condizioni di puro rotolamento dalla parte di sinistra una ripetizione di uno dei due contatti della parte di destra. l = 2
Quali sono questi due gradi di libert???
A manubrio bloccato( membro (4) bloccato rispetto a (5)), il triciclo pu andare avanti e indietro, in rettilineo o in curva.
Si ha la possibilit di ruotare il manubrio
Quanti sono i parametri tra di loro indipendenti necessari per individuare la configurazione del sistema???
-
Potrei partire dai 2 gdl e togliere i vincoli, le condizioni scalari di puro rotolamento che al finito sono aggirabili. Togliendo i vincoli, aggiungo i gradi di libert, che sono due per la ruota (3), due per la ruota (2) e uno per la ruota (1). Quindi considero 5 vincoli tra di loro indipendenti che non si fanno sentire al finito, linsieme dello spazio delle configurazioni : n = 2 + 5 = 7 .
Per un osservatore solidale con il suolo servono:
Tre parametri per individuare la posizione di corpo rigido del pianale(5) Un angolo per individuare la posizione di corpo rigido del membro (4) rispetto al (5) Un angolo per definire la posizione della ruota (3) rispetto al membro (4), quindi conosco
indirettamente la posizione di (3) rispetto al suolo Un angolo per la ruota (2) Un angolo per la ruota (1)
Servono quindi 7 parametri. Se si cambiassero per esempio le posizioni delle due ruote posteriori in maniera casuale, n non cambia(n = 7), ma l cambia ed da determinare(esercizio).
Sterzatura cinematica autoveicoli
CINEMATICA: Rispetto delle condizioni di puro rotolamento tra ruote e suolo, senza strisciamento. Solo le ruote sottili, lamellari, infinitesimamente sottili, possono sterzare facendole rotolare su una superficie piana, facendo percorrere al punto di contatto ruota suolo una curva piana arbitraria. Se la ruota larga( un cilindro), rotola rempre in avanti o in dietro senza mai sterzare, v sempre dritta. Se la ruota la scegliessi conica curverebbe sempre.
Considero un autoveicolo privo di sospensioni dallalto:
Il veicolo ha un piano di simmetria, che la retta tratteggiata; la careggiata anteriore potrebbe essere diversa da quella posteriore. In rettilineo tutte le ruote non sarebbero sterzate, sarebbero disposte parallelamente al piano di simmetria. Il passo b la distanza tra i punti a terra(punto medio ruota) delle ruote posteriori con quelle anteriori. Suppongo che i porta-mozzi delle ruote anteriori, durante la sterzatura, possono oscillare attorno ad assi verticali passanti per il punto a WHUUD/HUXRWHDQWHULRULVDUDQQRVWHU]DWHGHLGXHDQJROLULVSHWWLYDPHQWH1 H2.
Che legame c tra 1 H2??Come devono essere tra di loro??
Si cerca il centro di istantanea rotazione tra telaio(pianale) del veicolo e suolo. St sicuramente sulla retta ortogonale alla direzione del piano medio delle ruote posteriori, che essendo parallele, coincide(retta ortogonale alla direzione della veloci delunoa erra delle ruote posteriori). Scegliendo DUELWUDULDPHQWH1 , introduco un puntatore ideale, solidale con il veicolo, che indica il punto a terra della ruota anteriore sinistra, quel punto solidale al pianale del veicolo e la velocit di quel punto valutata rispetto al suolo un vettore diretto parallelamente alla direzione di sterzatura della ruota.
-
Il cdr tra pianale del veicolo e il suolo si trova sulla perpendicolare mandata dal punto a terra di questa ruota anteriore, ma deve anche stare sulla retta ortogonale alla dir della velocit delle ruote posteriori, il centro di istantanea rotazione il punto di intersezioe delle due rette. Scegliere 1 VLJQLILFDVFHJOLHUHLOFGUVXOODVVHGHOOHUXRWHSRVWHULRUL1 = 0 significa avere cdr00, il pianale trasla). Se 1 un valore costante, il pianale ruota di corpo rigido attorno allasse fisso passante per &6HVLVFHJOLH1 2 si avrebbe che il pianale non sa se dar ragione alla ruota di sinistra e ruotare attorno a C o a ruotare attorno al nuovo punto dando ragione alla ruota di destra. Siccome per ipotesi non si deve avere strisciamento, deve dar ragione ad entrambe le ruote. Se voglio dunque mantenere la posizione di C, si dovr sterzare la ruota di destra in modo tale che il suo piano medio sia ortogonale alla retta che congiunge il punto a terra della ruota di destra con C. Si deve FHUFDUHXQOHJDPHWUD1 H2. Chiamo per adesso con a la careggiata anteriore, mentre b VHPSUHLOSDVVRGHOYHLFROR6FHOWR1 , si considera sempre la retta perpendicolare al piano medio della ruota posteriore (coincidente per entrambe le ruote posteriori) e la retta perpendicolare al SLDQRPHGLRGHOODUXRWDDQWHULRUHVLQLVWUDVLGHWHUPLQD2 in modo tale da ottenere il medesimo C , mandando la retta da C verso il punto a terra della ruota anteriore destra; la perpendicolare atale retta la direzione di sterzatura della ruota di destra, cio il piano medio della medesima ruota. Si chiama con R il raggio di curvatura della traettoria del punto medio dellassale posteriore, cio la distanza del punto medio dellassale posteriore da C. Si considera prima il triangolo rettangolo con vertici i due punti a terra delle ruote di sinistra e C, si pu scrivere:
Se poi si considera il triangolo rettangolo con vertici i due punti a terra delle ruote di destra e C, si pu scrivere la relazione:
1RWR5VLSRVVRQRULFDYDUH1 H2 GDOOHGXHUHOD]LRQLRSSXUHQRWR1 si pu ricavare R dalla prima equazione, e noto R, si pu ricavare poi 2 dalla seconda equazione. Si cerca per una UHOD]LRQHFKHPLSHUPHWWHGLUFDYDUH2 HVVHQGRQRWR1 e viceversa, senza passare da R. Si scrive il reciproco della tangente per entrambe le equazioni, poi si elimina R sottraendo la prima equazione dalla seconda:
La relazione ottenuta la condizione di sterzatura cinematica, o condizione di ACKERMANN . Non di fondamentale importanza il rispetto di questa condizione negli autoveicoli, perch le ruote degli autoveicoli non sono sottili, non sono rigide, ci possono essere degli strisciamenti a bassa
-
velocit tra pneumatici e suolo. Se per si ha a che fare con veicoli lenti, con marcia in deriva delle ruote su angoli molto piccoli ,curve strette, e se il veicolo molto pesante e dotato di ruote con pneumatici (muletti) allora conviene rispettare questa codizione altrimenti le ruote si usurano velocemente e la gomma rimane in terra. Se poi il suolo uno sterrato o una superficie ghiaiata, e non rispettano la condizione di Ackermann, scalzano la ghiaia e lasciano segni per terra.
Difficilmente lasse attorno al quale oscillano i porta-mozzi (o le ruote) a freni anteriori bloccati il punto a terra . Tale asse detto anche asse di king-pin. Questi assi di rotazione sono sempre considerati perpendicolari al suolo in questi casi piani.
Quando la ruota gira, in realt il porta-mozzo che ruota attorno al proprio asse di king-pin e porta la ruota nella posizione sterzata. A ruota sterzata si individua la retta intersezione piano medio della ruota con il suolo, e la normale al vettore velocit mandata per il punto a terra quella di figura. 4XHVWDUHWWDFRUULVSRQGHDOODUHWWDGHOFDVRSUHFHGHQWHWDOHUHWWDQHOFDVRSUHFHGHQWHSHURJQL1 passava per il punto a terra della ruota di sinistra, e tale punto era IHUPRDOYDULDUHGL1 , fermo rispetto al pianale. In questo caso, il punto a terra si sposta rispetto al pianale e descrive una trettoria circolare, un arco di circonferenza. In ogni caso, la normale al vettore velocit una retta che passa dalla traccia dellasse di king-pin; quindi al posto della careggiata data dalla distanza tra i punti a terra, si prende la distanza tra i due assi di king-pin di rotazione dei due mozzi-ruota.
Si cerca un modo per un veicolo a quattro ruote standard di rispetare la condizione di Ackermann. Si adotta il meccanismo di BOURLET.
Determinati in due assi di king.pin delle due ruote, essi sono a distanza tale da definire la careggiata a e incernierati al telaio del meccanismo di bourlet, il braccetto inclinato di : 0). Questo lasse di una asola di larghezza costante nella quale inserito un perno, o rullo incernierato a sua volta ad unasta che perpendicolare asse longitudinale del veicolo,unasta che parallela agli assi delle ruote sterzanti quando queste ruote sterzanti non sono sterzate. Questa asta DFFRSSLDWDSULVPDWLFDPHQWHDOWHODLRGHOYHLFROR6LGLPRVWUDFKHVFHJOLHQGRRSSRUWXQDPHQWH0 si ULHVFHDVRGGLVIDUHODFRQGL]LRQHGLDFNHUPDQQFRQTXHVWRPHFFDQLVPR/DVFHOWDGL0 non arbitraria, occorre determinarla. Rispetto alla configurazione del meccanismo relativa a ruote non sterzate, per sterzare devo spostare lasta verso sinistra o destra. Suppongo di spostarla verso sinistra di una quantit X VLGHYRQRGHWHUPLQDUH1 e 2 in funzione dello spostamento X per soddisfare la codizione di Ackermann. Un parametro geometrico di questo meccanismo C , cio la distanza tra lasta trasversale dallasse delle ruote anteriori non sterzate.
x Per X = 0 ho un certo triangolo rettangolo per la ruota di sinistra:
x Quando mi sposto di X lasta, il triangolo della ruota di sinistra si modifica , il cateto verticale rimane sempre c che fisso, il cateto orizzontale si accorcia di X. 1 langolo di cui ruotato nel piano lasse dellasola, ma se lasse dellasola ruota attorno a quel punto
-
GHOODQJROR1DQFKHODVVHGHOODUXRWDUXRWDDWWRUQRDTXHOSXQWRGLXQDQJROR1, che langolo di sterzatura della ruota di sinistra.
x Il triangolo della ruota di destra, si avr che il cateto superiore si allunga di una quantit x :
Per brevit di calcolo si chiama : Si pu scrivere:
Avendo ricavato:
Sommo membro a membro le due relazioni sfruttando la scrittura semplificata per eliminare il SDUDPHWUR;SHUOHJDUHGLUHWWDPHQWHWUDGLORUR1 H2.
Razionalizzando:
Svolgendo i calcoli:
Il fattore ( 1 + t02) sicuramente diverso da zero, quindi nella ricerca della soluzione del meccanismo di Bourlet posso escluderlo dallequazione.
Dividendo tutto per t1t2 si ottiene:
-
La relazione trovata la condizione di Bourlet:
La condizione di Ackerman invece:
La condizione di Bourlet soddisfa la condizione di Ackerman quando:
Condizione da ottenere con il meccanismo di Bourlet, per soddisfare la condizione di Ackermann, 0 dipende dundue dal rapporto a/b(che caratteristico per ogni autoveicolo).Per ricordarsi questa relazione si pu costruire un rettangolo con il lato verticale lungo come il passo b e il lato orizzontale lungo come la distanza tra gli assi di king-pin cio a,poisi ribalta questo rettangolo di 180 rispetto al lato superiore(retta trateggiata) del rettangolo lungo a. Considerando il punto medio del lato superiore del rettangolo superiore e lo congiungo con i punti dei due assi di king-pin, questi due segmenti ottenuti sono gli assi delle due asole del meccanismo di Bourlet a ruote non sterzate, langolo trovato sar 0, per verifica:
E un meccaniso che dimostra che possibile soddisfare la condizione di Ackermann, ma non facile da rendere robusto e pulito. La barra trasversale potrebbe terminare con due perni solidali alla barra scorrevole rispetto al pianale , ma avremmo attrito tra asta dotata di perni e porta-mozzi durante la sterzatura, allora si possono montare delle rotelle con dei cuscinetti a rulli ottenedo un
piccolo miglioramento ma con linconveniente del contatto localizzato tra rotella ed asola(di un certo sperrore),contatto non distribuito su una superficie ma localizzato sui punti di un segmento(idealmente), necessit di consentire rotolamento della rotella rispetto allasola, quindi dovremmo avere lasola pi larga del diametro della rotella, altrimenti, la rotella striscia sullasola, quindi ci deve essere un minimo di gioco, il ch si traduce in una piccola imprecisione di sterzatura. Lasola anche da tenere pulita da agenti che possono eraderla, anche i cuscinetti vanno tenuti pouliti, ma difficile. E per questo che preferibile avere delle coppie rotoidali e si adottano soluzioni approssimate(a casi piani) che per non soddisfano la condizione di Ackermann. Una di queste soluzoni apprssimate del tipo Jeantaud:
Lasta rigida incernierata in due punti, i due porta-mozzi, in qualche modo si fa ruotare un portamozzo il quale fa ruotare anche il portamozzo di destra. Unaltra configurazione pu essere quella di Panhard:
Lasta in questo caso disposta anteriormente.
Per far sterzare cinematicamente due ruote di un atoveicolo nel rispetto della condizione di Ackermann ci sarebbe una soluzione semplice che consiste nellavere un assale rigido anteriore, con ruote posteriori non sterzanti, facendo ruotare lassale rigido anteriore attorno allasse di rotazione centrale. Questa soluzione non adottata perch si dovrebbero avere ampie zone a disposizione per accogliere le ruote durante la sterzatura.
-
Per veicoli con quattro ruote sterzanti,a due assi, si sceglie come retta dove far stare il C, la retta trateggiata posta a met del passo, cio a met tra i due assali. Caso pi complicato ma con dei vantaggi notevoli soprattutto sei il veicolo molto lungo nelle curve strette.
Un veicolo che ruota a sinistra in modo standard, pu rasentare il cordolo interno di un vicolo stretto e con piccoloraggio di curvatura, con la rua parte posteriore e rasentare il cordolo esterno con la parte anteriore. Dato il raggio di curvatura del cordolo interno e dato il veicolo, ne consegue il raggio di curvatura del cordolo esterno. Lo stesso veicolo a quattro ruote sterzanti, pu in curva bandire il cordolo interno con il punto medio della fiancata interna .
Veicolo a tre assi ( sei ruote) con 4 ruote sterzanti,si applicano pi volte le condizioni di sterzatura FLQHPDWLFDDYHQGRVFHOWRLOGLXQDUXRWDHWURYDQGRJOLDOWULGLFRQVHJXenza.
-
MECCANICA DEL VEICOLO a.a 2009/2010: Lezione del 3/03/2010
STERZATURA CINEMATICA DEI RIMORCHI
Cosa sono i rimorchi? Ne abbiamo gi visto uno, quello a 2 ruote. Esistono anche dei rimorchi pi complessi ma molte volte un rimorchio complesso ottenuto collegando tra loro due rimorchi semplici. Ad esempio, un rimorchio a 4 ruote, lasciamo perdere le sospensioni, pu avere un assale fisso cio con ruote non sterzanti, poi un assale sterzante (un membro rigido oscillante rispetto al pianale del rimorchio attorno a questasse) e queste sono le due ruote. A questo assale collegato il
timone dellintero rimorchio; allora, questo qui il primo rimorchio [rosso] ( un primo rimorchio elementare) e tutto questo [blu] il secondo rimorchio elementare. Il punto [f][le parentesi [] indicheranno che il nome solo indicativo, per spiegare il disegno, e non stato definito dal professore] lo si pu vedere come lestremo anteriore del timone del secondo rimorchio elementare. Quindi per sapere come questo rimorchio a quattro ruote segue la motrice (la motrice avr un gancio che descrive una traiettoria nota, tratteggiata in figura) basta scoprire come questo punto del primo rimorchio (punto A) si muove nel piano, cio qual la traiettoria di questo punto. Nota la traiettoria di questo punto si ricondotti a studiare un problema dello stesso tipo: nota la traiettoria di un punto di un rimorchio a due ruote, come trovare la traiettoria di questo punto e di qualsiasi altro punto di un rimorchio a due ruote. Pertanto, io considero solo un rimorchio a due ruote; ho un sistema di riferimento fisso, cio solidale con il suolo e guardo tutto dallalto: sono le due ruote del rimorchio ben piazzate, cio coassiali. Potrebbero anche essere anche diverse di diametro le ruote ma vale la condizione di cui ho parlato ieri cio, la congiungente dei punti a terra deve essere perpendicolare alle rette di intersezione dei piani medi delle ruote con il suolo. Quindi questo qui potrebbe essere un assale rigido, un membro a cui sono incernierate le ruote e poi questo membro potrebbe avere unappendice (una sorta di timone strano) e questo qui il punto (P) di cui nota la
traiettoria rispetto al suolo. Questo qui il centro della cerniera interposta tra motrice e rimorchio; si sa come si muove la motrice, si sa come si muove quindi ogni punto della motrice, anche questo punto qui (punto che chiamo P). Proietto P sul segmento che ieri ho chiamato AB, sul segmento che in questa proiezione congiunge i due punti a terra del rimorchio. Quindi proietto P su AB ed ottengo un punto che chiamo Q. In genere Q sta a met strada tra A e B ma non indispensabile che ci accada. La distanza di P da Q una caratteristica geometrica del rimorchio, nota e vale a. In un certo istante so dove si trova la motrice, so dove si trova il punto P, non so dove si trova il punto Q. So per adesso, almeno che il punto Q deve stare su di una circonferenza di raggio a centrata in P. 0DGRYH"1RQORVR6HFRQRVFHVVLTXHVWRDQJRORLQILJXUD YDOHFLUFDHG positivo), se conoscessi langolo che il vettore P-Q forma con la direzione dellasse x del sistema di riferimento fisso, saprei individuare Q sullarco di circonferenza di cui ho parlato prima, ma Q un punto del rimorchio, P un punto del rimorchio. Se conosco dove sta nel piano il segmento PQ, so dove si trova lintero rimorchio. Suppongo di sapere, di conRVFHUHLOYDORUHGLLQXQFHUWRLVWDQWH4XLQGLLQXQFHUWRLVWDQWHROWUHODSRVL]LRQHGHOSXQWR3FRQRVFRDQFKHLO YDORUHGL3RL3VLVSRVWDQHOpiano lungo la traiettoria nota [tratteggiata] e si sposta di una quantit nota; il vettore spostamento del punto P lo chiamo dP ed un dato del problema.
0LFKLHGRTXDQWRYDOHG"3HUFK se conosco, se riesco a calcolare la variazione infinitesima dGHOODQJRORFRQRVFRLOQXRYRYDORUHGHOODQJRORTXDQGR3VLVDU spostato in P. Ci sar P e il vettore dp e quindi P andr in P ed GLYHQWHU (cio G%HQHSHUULVROYHUHTXHVWRSUREOHPDSHUWURYDUHGVFULYRLOYHWWRUH3-Q in questo modo
Poi differenzio questa relazione. Il differenziale del primo membro :
Quello del secondo membro (a costante):
Quindi
Da qui esplicito dQ
-
x dP sar del tipo:
x GQRQORconosco e dQ quindi non lo posso, per il momento, calcolare.
Mi serve qualche altra informazione, qualche altra equazione. Riconsidero il problema e scopro che se le ruote del rimorchio rotolano sul suolo, il centro di istantanea rotazione tra telaio del rimorchio e suolo si trova su questa retta [retta *], da qualche parte. Non so esattamente dove ma sta su questa retta; e quindi la velocit di un qualsiasi punto del rimorchio ortogonale alla congiungente, allora la velocit del punto H del timone del rimorchio ortogonale alla congiungente C con H (C = centro di istantanea rotazione). Per C non so dove si trova e quindi la velocit di H com diretta? Non lo so e dipende dalla posizione di C. Le cose sono diverse per i punti di questa retta qui [retta *]. Ad esempio come diretta la velocit di Q? La velocit di Q ortogonale alla congiungente QC. QC dove sta? Qui sopra, qui sotto, non lo so. Comunque la congiungente QC un segmento che giace su questa retta [*] e la velocit del punto Q ortogonale a questa retta. Quindi la velocit del punto Q diretta alla stessa direzione del segmento QP. Questo angolo qui [segnato con un quadratino] di 90; ho proiettato P su questa retta per ottenere Q. Quindi dQ comunque parallelo al vettore P-Q.
Se come caso particolare C cadesse in Q (per adesso non lo so) allora CQ non sarebbe un segmento, non avrebbe una direzione a cui far riferimento. Per in questo caso, dQ (la velocit di Q per lo spostamento infinitesimo del punto Q in un intervallo infinitesimo di tempo dt) sarebbe uguale a 0 ed il vettore nullo parallelo a qualsiasi vettore. Se C cadesse qui [punto Q], dQ sarebbe uguale a 0 ed il rimorchio starebbe ruotando attorno a questasse [passante per Q e parallelo a Z] ( un caso particolare che adesso non importa). Andiamo avanti con questa relazione: dQ deve essere parallelo, comunque parallelo, a P-Q. Le mie equazioni ancora non lo sanno, non ho ancora imposto che dQ sia parallelo a P-Q. Impongo adesso come? Proviamo a scrivere cos:
Prodotto vettoriale tra quei due vettori uguale a zero. Significa imporre che quei due vettori siano paralleli. C un piccolo problema; questi due vettori sono vettori a due componenti ed il prodotto vettoriale tra vettori a due componenti non definito. Problema superabile. Aggiungiamo la terza componente, quella lungo lasse z, a questi due vettori. La terza componente nulla. Il problema lo considero comunque piano (pu essere anche che il gancio fosse ad una quota diversa dallasse delle ruote del rimorchio), proietto comunque prima tutto sul piano xy, quindi P-Q diventa un segmento giacente sul piano xy, quindi la terza componente di P-Q nulla. dQ un vettore parallelo al piano xy ed ha la terza componente nota. Quindi, penso adesso a questa equazione come scritta sfruttando due vettori, uno finito ed uno infinitesimo, a tre componenti la cui terza componente nulla. Sono due vettori paralleli al piano xy. Il prodotto vettoriale tra due vettori so adesso come calcolarlo e deve essere uguale al vettore nullo. Questo qui [], questo zero un vettore. Se io partissi da due vettori paralleli al piano xy e li moltiplicassi tra loro vettorialmente otterrei il vettore nullo? No, se scelgo a caso i due vettori paralleli al piano xy. Non ottengo il vettore nullo. Ottengo comunque un vettore parallelo allasse z di questo sistema di riferimento. Ottengo un vettore con due componenti nulle, le prime due componenti nulle sempre. Solo quando
il vettore dQ, parallelo comunque al piano xy, parallelo al vettore P-Q, parallelo dallinizio al piano xy, ottengo che anche la terza componente di questo prodotto nulla. In sostanza questo zero qui equivale al vettore nullo
e questa equazione vettoriale
equivale a tre equazioni scalari, le prime due delle quali sono sempre soddisfatte (son del tipo 0=0). E la terza equazione scalare che potrebbe non essere soddisfatta ed soddisfatta quando dQ parallelo a P-Q. Linformazione utile associata alla terza equazione scalare di questa condizione vettoriale. Vado a selezionare linformazione utile per non tirarmi dietro delle identit e come la seleziono? Moltiplico tutto questo, scalarmente, per k, il versore dellasse z (il vettore (0,0,1)).
E questa qui diventa una condizione scalare che vado a riscrivere sottoforma di determinante simbolico.
La prima riga contiene le componenti del versore k, la seconda contiene le componenti del vettore dQ (che saranno: , la seconda componente e la terza componente, che qui [Eq.3] non vedo perch il vettore aveva ancora due componenti, uguale a zero). Terza riga del determinante simbolico contiene P-Q. Posso dividere lultima riga per la costante non nulla a, poi sviluppo il determinante secondo gli elementi o della prima riga o dellultima colonna;
Il determinante di questa matrice 3x3 uguale al determinante di questa matrice 2x2.
Determinante che eguaglio ancora a zero.
E infine
-
4XHVWDHTXD]LRQHIRUQLVFHODULVSRVWDDOODGRPDQGDFKHLRKRSRVWRDOOLQL]LRTXDQWRYDOHGSHUXQcerto spostamento dP del punto P. Qui dentro nota la posizione iniziale del rimorchio (noto noto lo spostamento del punto P (dPx e dPy VRQRQRWL HGDTXLPL ULFDYRG. Mi diventa nota la posizione del rimorchio allinizio dellintervallo infinitesimo successivo e cos posso andare avanti ad integrare.
Se preferite, considerate la posizione di P funzione di un parametro s che pu essere unascissa curvilinea o pu essere un altro parametro, quindi P(s) unequazione parametrica di una curva nel piano. Conoscete la funzione vettoriale dello scalare s e quindi
Integrate TXHVWD HTXD]LRQHGLIIHUHQ]LDOH H RWWHQHWH V 3HURJQLSRVL]LRQHGHO YHLFROR WUDLQDQWHquindi per ogni posizione del punto P, avete anche la posizione del rimorchio. Naturalmente occorre integrare quellequazione e tener conto della condizione iniziale.
Vediamo subito un caso particolare, per mettere alla prova questa equazione, per verificarne la correttezza. Come traiettoria del punto P scelgo una curva molto semplice, una retta, anzi una semiretta.
Il punto P parte dallorigine del sistema di riferimento fisso e percorre lasse x. E il rimorchio dove sta? Il rimorchio potrebbe essere qui [posizione in figura], queste son le ruote, questo il timone lungo a, c il punto Q e questo 0 (iOYDORUHLQL]LDOHGHOODQJROR.Chiamo:
e dPy vale zero in questo caso:
Pertanto avr
e
W
,QWHJUR LGXHPHPEULGLTXHVWDHTXD]LRQHYDULHU tra 0 ed e x varier da x0 (cio 0, parto da zero) a .
Lintegrale
dovrebbe avere un aspetto a voi noto. E uguale a
dove la derivata rispetto della
.
Quindi
Log logaritmo naturale, spero non ci siano ambiguit; forse voi siete abituati a scriverlo ln ma il logaritmo in base 10 di impiego raro. Il 90% dei casi in cui vedete un logaritmo un logaritmo naturale.
Allora, al primo membro avr:
Lascio perdere adesso il segno sopra, non c pi ambiguit di simboli, il valore di questangolo che corrisponde al valore corrente di x che non chiamo pi x segnato.
E soddisfacente questa relazione? Cosa capita quando x aumenta, aumenta, aumenta, fino allinfinito? Cosa far questo rimorchio? Si piazzer a cavallo dellasse x HGRYUHEEH WHQGHUH Dzero. E in effetti per x che tende allinfinito, questa quantit [
] va a zero quindi WHQGHD]HUR
Ma chi lo dice che il punto P debba procedere verso destra? Potrebbe spostarsi verso sinistra e allora, x tenderebbe a meno infinito; dopo un po x diventa molto grande in valore assoluto ma negativo. Per x che tende a meno infinito, questo esponenziale tende a infinito, una quantit infinita. La tangente di un angolo, e quellangolo WHQGHDLQILQLWR
-
Quindi
Anche questo soddisfacente. Disegno gli assi x e y; cosa far da qui il rimorchio?Il punto Q descriver una traiettoria di questo tipo
e dopo un p il punto Q si porter praticamente sovrapposto allasse x e il punto P sar qui e il resto del rimorchio sar qui. Langolo che il vettore P-Q forma con lasse x sar praticamente paULDVuol dire che quellequazione va bene anche per questo caso.
Che cosa capita se facciamo percorrere al punto P una traiettoria circolare di raggio R? Facciamo percorrere quella traiettoria tante volte. Ad esempio partiamo da qui [*], con il rimorchio messo in questa posizione; dopo un po il rimorchio, come la motrice, sar animato (come moto di corpo rigido), il rimorchio ruoter attorno a questasse [passante per O]. E quello che ci si aspetta.
Il punto P andr qui [punto P sul disegno] e qui il punto Q. Il centro di istantanea rotazione tra rimorchio e suolo coincide, deve coincidere, con il punto O a regime. Dopo un po il punto P si trova in moto su questa circonferenza. E ragionevole che le cose debbano andare cos. Questa equazione compatibile con quella situazione l, a regime? Facciamo un controllo. Allora,
$EELDPR FKLDPDWR FRQ TXHVWDQJROR, questo segmento lungo R ed il timone del rimorchio OXQJRDPLQXVFROR3HUTXHOJHQHULFRYDORUHGLTXDQWRYDOHODQJROR" /DQJROR questangolo qui, langolo che il vettore P-Q forma con lasse x (nel caso di figura circa 100/110). uguale D SL questangolino qui (). Questo langolo tra due segmenti ma anche langolo tra le perpendicolari a quei due segmenti: considero la perpendicolare a questo segmento [PQ] che questo e la perpendicolare al segmento verticale che lorizzontale. Questo angolino qui [] DQFKHTXL4XLQGL SL questangolo qui che potrei chiamare SKL
Ma quanto vale ? YDOHDVXDYROWDPHQRTXHVWDQJRORTXL [*], che un angolo di un triangolo rettangolo, che potrei scrivere come larco il cui seno a (che conosco) diviso R (che conosco).
Vado a sostituire
Riordinando
Il seno del primo membro uguale al seno del secondo membro. Il seno di pi qualcosa uguale al coseno del qualcosa.
Ho trovato questa relazione basandomi su ci che mi attendo del comportamento a regime del rimorchio in questo caso particolare. Questa condizione compatibile con lequazione differenziale del moto del rimorchio? Andiamo a vedere. Quanto vale dP? Quanto valgono dPx e dPy? Allora, dP differenziando la prima relazione (Eq.1) uguale a
Vado a sostituire:
-
A regime quanto YDOH G LQ IXQ]LRQH GL G" 6H LO YHLFROR WUDLQDQWH UXRWD GHOODQJROR G DWWRUQRallasse di traccia o, la stessa cosa fa anche il veicolo trainante; dXJXDOHDGDUHJLPH
Quindi semplifico e mi ritrovo
E me lo ritrovo per questa strada, quel risultato l [Eq.22]. Quindi quellequazione l sembra proprio essere corretta, stata controllata in due casi, in due casi e mezzo, insomma. Chi vuole, per esercizio, integri quellequazione[Eq.10] in questo caso, cio partendo ad esempio con il punto P con una posizione individuDWDGDXJXDOHD]HURHFRQ5QRWR FRQFKHKDXQYDORUHJHQHULFRo. E un po un esercizio di analisi matematica, lintegrazione di quella equazione in questo caso. Si riesce a fare aQDOLWLFDPHQWH H LQL]LDOPHQWH DYUHWH FKH QRQ