
Appunti del Corso di Analisi Matematica I - mat.uniroma1.it · Appunti del Corso di Analisi...
172
Universit´ a La Sapienza a. a. 2009-2010 Appunti del Corso di Analisi Matematica I L.Lamberti Ultima revisione 14 giugno 2010
-
Upload
nguyentuyen -
Category
Documents
-
view
226 -
download
10
Transcript of Appunti del Corso di Analisi Matematica I - mat.uniroma1.it · Appunti del Corso di Analisi...
Universita La Sapienza
a. a. 2009-2010
Appunti del Corsodi
Analisi Matematica I
L.Lamberti
Ultima revisione 14 giugno 2010

Indice
Capitolo 1. I numeri reali 31. Introduzione 32. Definizione assiomatica 33. Importanza dell’estremo superiore 5
Capitolo 2. La costruzione di R 71. Le successioni di Cauchy 72. Lo spazio quoziente 83. Struttura algebrica su C 84. Struttura d’ordine 105. Densita dei razionali 106. La continuita 11
Capitolo 3. Spazi metrici 151. Insiemi numerabili 152. La metrica 16
Capitolo 4. La compattezza 171. I punti di accumulazione 172. Insiemi connessi 196. Insiemi compatti 19
Capitolo 5. Successioni 251. Introduzione 252. Proprieta algebriche 253. La convergenza in R2 264. Sottosuccessioni 265. Successioni di Cauchy 266. Successioni monotone 277. Limiti inferiore e superiore 27
Capitolo 6. Serie numeriche 311. Introduzione 312. Alcuni esempi 343. I criteri di convergenza assoluta 354. Il numero e di Nepero 36
1
2 INDICE
5. Sommatoria per parti 37
Capitolo 7. Serie prodotto 41
Capitolo 8. Riordinamenti 471. Introduzione 472. Il caso assolutamente convergente 493. Il teorema di Riemann Dini 51
Capitolo 9. Funzioni continue 551. Funzioni continue su compatti 552. Funzioni inverse 563. La continuita uniforme 574. Il teorema di continuita uniforme 585. Applicazioni 606. Il teorema di esistenza degli zeri 627. Funzioni monotone 64
Capitolo 10. Integrali impropri di funzioni di una variabile 671. Le funzioni continue 672. Integrali impropri 683. Integrali su intervalli limitati 684. Integrali impropri di funzioni positive 725. L’indipendenza dalla successione 726. Intervalli illimitati 73
Capitolo 11. Successioni di funzioni 791. Primi esempi 792. Convergenza puntuale 80
Capitolo 12. La convergenza uniforme 851. Il tubo 852. Test di convergenza uniforme per le serie 90
Capitolo 13. Importanza della convergenza uniforme 931. Convergenza uniforme e continuita 932. Convergenza uniforme e integrabilita 953. Convergenza uniforme e derivabilita 96
Capitolo 14. Serie di potenze 991. Introduzione 992. Serie derivata 1013. Conosciamo altre serie 1024. Le serie di Taylor 1035. Moltiplicazione di serie di potenze 108

INDICE 3
6. Divisione fra due serie di potenze 109
Capitolo 15. Equazioni lineari di primo ordine 1111. Il caso omogeneo 1112. Il caso non omogeneo 1123. Il problema di Cauchy generale 1134. Il caso dei coefficienti costanti 1145. La linearita 1146. Riassumendo 1157. Alcuni problemi 116
Capitolo 16. Equazioni lineari di secondo ordine 1171. Costruzione di soluzioni 1172. Il problema di Cauchy 1193. Il teorema di unicita 1204. L’integrale generale 1215. Un’interpretazione delle soluzioni 1226. Il caso non omogeneo 1227. La struttura delle soluzioni 1238. Costruzione di una soluzione 1239. Casi particolari 124
Capitolo 17. Equazioni generale di primo ordine 1291. Un’equivalenza 1292. Generalita e utilita 1303. Due problemi di Cauchy 1314. La stima di Gronwall 1325. Il teorema d’unicita 134
Capitolo 18. Il teorema d’esistenza per il problema di Cauchy 1371. Il Teorema d’esistenza 1372. La successione 1383. La convergenza 1414. La funzione limite 142
Capitolo 19. Le equazioni autonome 1431. Introduzione 1432. Un approccio formale 1433. La teoria qualitativa 1454. Equazioni a variabili separabili 1475. Cambiare variabile 1476. Equazioni in forma omogenea 1487. Primitive di ordine superiore 149
4 INDICE
Capitolo 20. A cosa servono le serie di potenze ? 1511. Introduzione 1512. Un’equazione differenziale semplicissima 1513. Un’equazione lineare del second’ordine 1524. La serie binomiale 156
Capitolo 21. Serie di Fourier 1591. Introduzione 1592. L’approssimazione in media quadratica 1593. La forma complessa 1624. Risultati di approssimazione 1625. Il teorema fondamentale 1656. Serie di Fourier 1667. Applicazioni 1688. Completezza 169
CAPITOLO 1
I numeri reali
1. Introduzione
La convivenza, la familiarita, la fiducia nei numeri reali risale moltoaddietro, all’inizio di ogni insegnamento matematico o piu in generalescientifico.La certezza di poter lavorare con tali numeri, il nome
reali
li classifica quasi come realta metafisica, e molto piu solida di quellariposta, ad esempio, nei numeri razionali.Le cose stanno invece diversamente: i numeri reali corrispondono piua esigenze legittimamente avvertite da molti che a oggetti reali, cioe,piu o meno razionalmente certi.Le esigenze avvertite, oltre quelle ovvie dell’aritmetica e dell’ordina-mento maggiore-minore, sono sostanzialmente riconducibili a due (equi-valenti):
• una coppia di classi contigue di numeri razionali deve ammet-tere elementi separatori• un insieme di numeri razionali superiormente limitato deve
ammettere estremo superiore.
La risposta
i numeri reali soddisfano tali esigenze
viene costruita per due strade:
• una prima assiomatica,• una seconda costruttiva.
2. Definizione assiomatica
Definizione 2.1. I numeri reali sono un (l’unico)
• campo• ordinato• archimedeo• completo.
5

6 1. I NUMERI REALI
Cosa sia un campo e spiegato in algebra (somma, prodotto, distribu-tivita del prodotto sulla somma, tutto come avviene nel campo Q deinumeri razionali).Le classi resto modulo p con p numero primo offrono esempi di campi,cioe insiemi su cui le operazioni di somma e di prodotto operano conrelazioni analoghe a quelle incontrate sui numeri razionali.
Cosa voglia dire ordinato corrisponde al significato naturale riconosciu-to ad esempio sui numeri interi
x < y → ∀z : x+ z < y + z, ...
Cosa voglia dire archimedeo1 corrisponde all’idea che
0 < x < y → ∃n : nx > y
Cosa vuol dire completo:
• intersezione non vuota per intervalli incapsulati,• esistenza dell’estremo superiore per insiemi limitati.
Osservazione 2.2. Esempio di campo ordinato non archimedeo:L’insieme delle funzioni razionali
r(x) =P (x)
Q(x)
dotato dell’ordinaria somma e prodotto, costituisce un campo. Cam-biando segno a numeratore e denominatore possiamo sempre ridurciad avere il coefficiente del monomio di grado maggiore a denominatorepositivo.Dichiariamo
r(x) =pmx
m + ...+ p0qnxn + ...+ q0
> 0
positivo se pm > 0. Diremo quindi che
f(x) > g(x) ⇔ f(x)− g(x) > 0
1Un ordinamento archimedeo e, sostanzialmente un ordinamento democratico:non e archimedea ad esempio la stratificazione in caste di parte della popolazioneindiana nella quale la volonta di un numero comunque grande di paria non prevalesulla volonta di un elemento di una casta superiore

3. IMPORTANZA DELL’ESTREMO SUPERIORE 7
Rispetto a questo ordinamento riesce
0 <1
x< 1,
ma∀n ∈ N :
n
x< 1
infatti
1− n
x=x− nx
> 0
in quanto il coefficiente del monomio piu alto x a numeratore e 1,positivo. Il campo delle funzioni razionali con l’ordinamento scelto e
• un campo ordinato,• non archimedeo.
3. Importanza dell’estremo superiore
L’assioma d’esistenza dell’estremo superiore per ogni insieme superior-mente limitato produce risultati molto importanti
• la illimitatezza superiore dei naturali,• il valere di conseguenza della proprieta archimedea,• la densita dei razionali.
Proposizione 3.1. L’assioma dell’estremo superiore implica che l’in-sieme dei numeri naturali non e limitato superiormente.
Dimostrazione. Sia y > 0 supponiamo per assurdo che
∀n ∈ N : n < y
allora l’insieme N avrebbe un estremo superiore Λ. Tenuto conto che
Λ− 1 < Λ
dovrebbe esistere n0 ∈ N tale che
Λ− 1 < n0 ⇔ Λ < 1 + n0 ∈ NL’ultima proprieta contraddice il fatto che
∀n ∈ N n ≤ Λ
�
Corollario 3.2. L’insieme dei naturali illimitato superiormente impli-ca la proprieta archimedea.
Dimostrazione. Siano 0 < x < y: se per assurdo riuscisse
∀n ∈ N : nx < y → n <y
xovvero i naturali riuscirebbero limitati superiormente. �
8 1. I NUMERI REALI
Proposizione 3.3. La proprieta dell’estremo superiore implica la den-sita dei razionali.
Dimostrazione. Siano x < y allora esistono n,m ∈ N tali che
n(y − x) > 1, m− 1 < nx < m
Ne segue
nx < m < nx+ 1 < ny → nx < m < ny → x <m
n< y
�

CAPITOLO 2
La costruzione di R
1. Le successioni di Cauchy
Definizione 1.1. Una successione {an} di numeri razionali si dice diCauchy, C, se per ogni razionale positivo ε esiste una soglia intera nεtale che
∀n,m ≥ nε : |an − am| ≤ ε
Esempio 1.2.
• La successione {1, 2, 3, 4, 5, ...} non e di Cauchy.• La successione {17, 13,−25, 2, 2, 2, 2, 2, 2, ...} e di Cauchy.• Tutte le successioni convergenti sono di Cauchy.• La successione
{1., 1.4, 1.41, 1.414, 1.4142, 1.41421, 1.414214, 1.4142136, 1.41421356, 1.414213562, ....}
delle approssimazioni decimali di√
2 e di Cauchy ma non econvergente (naturalmente nell’ambito dei numeri razionali).
Ad ogni numero razionale si possono associare tutte le successioni diCauchy che convergono ad esso: ad esempio al numero r = 7 si possonoassociare le successioni di Cauchy
{7, 7, 7, 7, 7, ....}, {6.9, 6.99, 6.999, 6.9999, ....}, ecc.
Proposizione 1.3. Le successioni di Cauchy C sono tutte necessaria-mente limitate.
Dimostrazione. Scelto ε = 1 sia n1 la soglia corrispondente:allora
∀n ≥ n1 : |an − an1| ≤ 1 → |an| ≤ 1 + |an1 |di conseguenza, posto
M = max{|a1|, |a2|, ..., |an1|+ 1}riesce
∀n : |an| ≤M
�
9

10 2. LA COSTRUZIONE DI R
1.1. Sottosuccessioni.
Proposizione 1.4. Sia {an} ∈ C: se una sottosuccessione{ank} ⊂ {an} converge a ` allora anche {an} converge a `.
Osservazione 1.5. Si noti che questo risultato non e affatto vero persuccessioni che non siano di Cauchy: nella successione
{1, −1, 1, −1, 1, ...}sono contenute le due sottosuccessioni
{1, 1, 1, ...} e {−1, −1, −1, ...}convergenti una a 1 e l’altra a −1, senza che l’intera successione (chenon e di Cauchy) converga.
2. Lo spazio quoziente
Indicato con I ⊂ C l’insieme delle successioni di Cauchy che hannolimite zero la relazione
{an} ∼ {bn} ↔ {an − bn} ∈ I
costituisce una relazione d’equivalenza su C.
Definizione 2.1. Lo spazio quoziente di C rispetto alla relazione ∼determinata da I si dice insieme R dei numeri reali.
La classe d’equivalenza determinata dalla successione di Cauchy {an}si indica con [{an}] come pure con
{an}+ I
3. Struttura algebrica su C
Corollario 3.1. Somma, differenza, prodotto di due successioni di C eancora una successione di C.
Proposizione 3.2. Somma, differenza, prodotto di due classi d’equiv-alenza [{an}] e [{bn}] sono definite da [{an ± bn}] e [{an.bn}].
E naturale riconoscere
• alla classe [{1}] il ruolo di 1 cioe di unita, elemento neutrorelativo alla moltiplicazione,• alla classe [{0}] = I il ruolo di 0 cioe di zero, elemento neutro
relativo alla somma.
Definizione 3.3. Gli elementi [{r}] si dicono numeri reali razionali o,semplicemente razionali.

3. STRUTTURA ALGEBRICA SU C 11
Osservazione 3.4. C’e differenza tra il numero razionale r, la suc-cessione di Cauchy costante {r, r, r, ...} e il numero reale razionale[{r}]: quest’ultimo infatti e una classe d’equivalenza. il numero realerazionale [{7}] e infatti
• la successione {7, 7, 7, ...}• la successione {−5, 3, 10, 7, 7, 7, 7, ...}• la successione {6, 6.9, 7.1, 6.99, 7.01, ...}• ecc.
Proposizione 3.5. Se {an} e una successione di C che non convergea 0, cioe se {an} /∈ I allora esiste δ > 0 tale che
∀m > Mδ am > δ oppure am < −δ
Dimostrazione. Deve riuscire
inf |an| = δ > 0
infatti se il loro estremo inferiore fosse 0 dovrebbe esistere una sotto-successione {ank
} infinitesima.Ma allora tutta la successione {an} dovrebbe essere infinitesima con-trariamente all’ipotesi {an} /∈ I.Quindi i termini an della successione devono cadere nelle due semirette(−∞,−δ)∪(δ,+∞): dovendo stringersi fra loro finiranno per dover ap-partenere, dopo un certo indice n0 tutti ad una sola delle due semirette.
�
Proposizione 3.6. Se [{an}] 6= [{0}] allora esiste [{bn}] tale che
[{an}] . [{bn}] = [{1}]
Dimostrazione. Possiamo supporre, eventualmente riferendosi aduna successione di Cauchy equivalente a quella assegnata, che riesca∀n : |an| > δ: allora
• si possono considerare i reciproci bn =1
an• essi, dal momento che {an} e una successione di Cauchy, co-
stituiscono anch’essi una successione di Cauchy
|bn − bm| =|am − an||an||am|
≤ 1
δ2|am − an|
• ovviamente [{an}] . [{bn}] = [{1}].�

12 2. LA COSTRUZIONE DI R
4. Struttura d’ordine
Definizione 4.1. Due numeri reali [{an}], [{bn}] si dicono l’uno mi-nore dell’altro
[{an}] < [{bn}]se e solo se esistono δ ∈ Q positivo ed n0 ∈ N tali che
∀n ≥ n0 : an + δ ≤ bn
E naturalmente possibile modificare i primi n0 termini delle due suc-cessioni di Cauchy {an}, {bn} approdando a due nuove successioni{a∗n}, {b∗n} equivalenti alle precedenti per le quali valga la disuguaglian-za
∀n : a∗n + δ ≤ b∗n
Osservazione 4.2. L’ordinamento indicato e totale, nel senso che co-munque si prendano due elementi [{an}], [{bn}] ∈ R succede sempreuna, e una sola delle tre possibilita:
[{an}] = [{bn}] oppure [{an}] < [{bn}] oppure [{an}] > [{bn}]
Infatti la successione di Cauchy {an − bn} puo
• appartenere ad I, e allora [{an}], = [{bn}]• oppure non appartenere ad I.
Nella seconda possibilita la precedente Proposizione 3.6 implica l’e-sistenza di δ > 0 e di n0 tale che
∀n ≥ n0 : an − bn > δ oppure an − bn < −δ
ovvero
[{an}] > [{bn}] oppure [{an}] < [{bn}]
Corollario 4.3. Siano u e v due razionali con u < v, allora lo stessoordinamento
[{u}] < [{v}]si ritrova tra i rispettivi numeri reali razionali.
5. Densita dei razionali
Lemma 5.1. Siano [{an}] < [{bn}] allora esiste un numero razionaler tale che il numero reale razionale [{r}] verifichi le condizioni
[{an}] < [{r}] < [{bn}]

6. LA CONTINUITA 13
Dimostrazione. Scegliamo rappresentanti delle due classi {an} <{bn} in modo che
∀n : bn − an > δ > 0
e scegliamo la soglia N tale che dopo di essa riesca
∀m |am − aN | ≤δ
4, |bm − bN | ≤
δ
4Posto
r = aN +δ
2riesce
∀n > N : an < r < bn
Infatti (occorre provare le due disuguaglianze)
an < r : aN +δ
2− an ≥
δ
2− |an − aN | ≥
δ
4
e analogamente
r < bn : bn − aN −δ
2= bn − an + an − aN −
δ
2≥ δ − δ
4− δ
2=δ
4
A questo punto e evidente che il numero reale razionale [{aN +δ
2}] e
compreso tra i due numeri reali assegnati. �
6. La continuita
Teorema 6.1. R soddisfa la proprieta dell’estremo superiore.
Dimostrazione. Sia A ⊂ R un insieme non vuoto e limitatosuperiormente: sia [{M}] un maggiorante razionale.Sia r0 ∈ Q tale che il numero reale razionale verifichi [{r0}] < α perqualche α ∈ A.Consideriamo i razionali
r0, r0 + 1, r0 + 2, ....
essi prima o poi raggiungono e superano M , quindi prima o poi diven-tano maggioranti di A.Indichiamo con r1 = r0 +k il primo (il piu basso) di tali numeri che siaun maggiorante di A.Consideriamo a questo punto i razionali
r1 − 1, r1 − 1 +1
10, r1 − 1 +
2
10, ..., r1 − 1 +
9
10, r1
Indichiamo con r2 ≤ r1 il primo (il piu basso) di tali numeri che sia unmaggiorante di A.

14 2. LA COSTRUZIONE DI R
Iterando il procedimento ci troviamo a considerare la successione ra-zionale {rk}: proveremo che
1: {rk} e una successione di Cauchy (quindi la classe [{rk}] adessa associata rappresenta un numero reale)
2: se α ∈ A riesce α ≤ [{rk}]3: se β < [{rk}] allora β non e un maggiorante di A.
Prima questione
E la piu semplice:
• tutti gli rk con k ≥ 0 cadono tra r0 − 1 ed r0, quindi distanofra loro meno di 1 ,• tutti gli rk con k ≥ 1 cadono tra r1− 0.1 ed r1, quindi distano
fra loro meno di 0.1,• tutti gli rk con k ≥ 2 cadono tra r2−0.01 ed r2, quindi distano
fra loro meno di 0.01,• ecc.
Quindi la successione {rk} e una successione di Cauchy, quindi la suaclasse
λ = [{rk}]rappresenta un numero reale.
Seconda questione
Da come sono scelti i singoli numeri razionali rk0 tutte i numeri realirazionali
λk0 = [{rk0}]da essi determinati sono maggioranti di A.Se, per assurdo, esistesse α = [{an}] ∈ A, tale che
λ < α
riuscirebbe
∀k0 : λ < α ≤ λk0
da cui
∀k0 : α− λ < λk0 − λ = [{ 1
10k0}]
fenomeno che impedisce che
α− λ > 0
Terza questione
6. LA CONTINUITA 15
Per come sono costruiti gli rk i numeri reali razionali
[{rk0 −1
10k0}]
non sono maggioranti di A. Se β < λ esiste certamente k0 tale che
β < [{rk0 −1
10k0}] < λ
A questo punto se [{rk0−1
10k0}] non e un maggiorante di A non lo puo
a maggior ragione esserlo neanche β �
Il numero reale λ precedentemente costruito rappresenta il sup A: risul-ta cioe provato che il campo ordinato R soddisfa l’assioma dell’estremosuperiore.


CAPITOLO 3
Spazi metrici
1. Insiemi numerabili
1.1. I numeri cardinali. L’equivalenza tra insiemi che si possonoporre in corrispondenza biunivoca: la cardinalita.
Definizione 1.1. Un insieme E si dice numerabile se e in corrispon-denza biunivoca con N insieme dei numeri naturali o con un sottoin-sieme di esso.
Gli elementi di un insieme numerabile si esauriscono in un insieme finitoo una successione.
Proposizione 1.2. (corollario pag.28) I numeri razionali costituisconoun insieme numerabile.
1.2. La notazione decimale. Per ogni x > 0 sia
n0 = maxn∈N{n < x}
Per ogni k sia nk il massimo
nk = maxn∈N
{n0 +
n1
10+ ...+
n
10k< x
}Si riconosce facilmente che
∀k : nk ≤ 9
Indicati con
xk =k∑i=0
ni10i
= n0, n1n2...nk
riescex = sup xk
Osservazione 1.3. La stessa costruzione precedente riferita alla base10 puo essere fatta riferendosi ad altre basi, ad esempio alla base 2.In tal caso invece di successioni decimali di cifre 0, 1, 2, ..., 9 si incon-trano successioni di cifre 0, 1 solamente.
Proposizione 1.4. (2.14, pag.28) I numeri reali costituiscono un in-sieme non numerabile.
17

18 3. SPAZI METRICI
2. La metrica
Definizione 2.1. (definizione 2.15, pag. 29) Una funzione
d : S × S → R+
si dice una distanza se
• d(x, y) = 0⇔ x = y• d(x, y) = d(y, x)• d(x, z) ≤ d(x, y) + d(y, z)
Esempio 2.2. (esempio 2.16, pag. 29) Sia S = R2, indichiamo i suoipunti con le coordinate cartesiane P = (x1, y1), Q = (x2, y2)
d(P,Q) =√
(x2 − x1)2 + (y2 − y1)2
2.1. Piccolo GLOSSARIO. (def. 2.18, pag.30)
• Intorno di un punto.• Punto di accumulazione• Punto isolato• Insieme chiuso• Punto interno• Insieme aperto• Complementare• Insieme perfetto• Insieme limitato• Insieme denso.
Teorema 2.3. (2.20, pag.31) Se P e un punto di accumulazione allorain ogni suo intorno cadono infiniti punti di E.
Teorema 2.4. (2.24, pag.32)
• unione di infiniti aperti• intersezione di infiniti chiusi• intersezione di un numero finito di aperti• unione di un numero finito di chiusi.

CAPITOLO 4
La compattezza
1. I punti di accumulazione
Teorema 1.1. Se E ⊂ R2 e chiuso e limitato allora ogni insiemeinfinito contenuto in E ammette punti di accumulazione appartenentia E
Teorema 1.2. (2.20, pag.31) Se P e un punto di accumulazione allorain ogni suo intorno cadono infiniti punti di E.
Definizione 1.3. Assegnato un insieme A e indicato con D(A) l’in-sieme dei suoi punti di accumulazione, l’insieme
A = A ∪ D(A)
si dice chiusura di A.
1.1. La metrica discreta. Sia
d(P,Q) =
{1 se P 6= Q0 se P = Q
• quali insiemi sono aperti ?• quali sono chiusi ?• quali sono limitati ?• dato A chi e A ?
Teorema 1.4 (Bolzano - Weierstrass). (2.42, pag. 38) Ogni sottoin-sieme E infinito e limitato di R ammette punti di accumulazione.
Osservazione 1.5. E facile dimostrare come la tesi del Teorema diBolzano Weierstrass cada se
• l’insieme E non e limitato (Esempio E = 1, 2, 3, ... i naturali)• l’insieme E non e infinito (Gli insiemi finiti non hanno punti
di accumulazione)• si lavorasse su sottoinsiemi dei soli razionali (la successione
degli approssimanti {1, 1.4, 1.41, ...} di√
2 non ha punti diaccumulazione in Q).
Proposizione 1.6 (Bolzano - Weierstrass). Ogni sottoinsieme E in-finito e limitato di R2 ammette punti di accumulazione.
19

20 4. LA COMPATTEZZA
Dimostrazione. Riesca
E ⊂ [a0, b0]× [c0, d0]
Indichiamo con Ex ⊂ [a0, b0] l’insieme delle ascisse dei punti di E eindichiamo con Ey ⊂ [c0, d0] l’insieme delle ordinate dei punti di E1.Applicando il precedente Teorema di Bolzano Weierstrass a Ex ricono-sciamo che D(Ex) 6= ∅: sia λ un punto di accumulazione di Ex e sia{xn} ⊂ Ex una successione tale che
limn→∞
xn = λ
Sia {y1, y2, , ...} ⊂ Ey la successione delle ordinate dei punti di E lecui ascisse formavano la precedente successione convergente {xn}.Per il precedente Teorema di Bolzano Weierstrass l’insieme {y1, y2, , ...}ha punti di accumulazione: sia µ uno di essi e sia
{yn1 , yn2 , ....} ⊂ {y1, y2, , ...}una successione tale che
limk→∞
ynk= µ
La successione{(xnk
, ynk)} ⊂ E
e convergente a (λ, µ) che, pertanto riesce punto di accumulazione diE e pertanto prova che D(E) 6= ∅. �
Teorema 1.7. Ogni successione {Pn} ⊂ E, insieme chiuso e limitatodi Rn ammette una sottosuccessione {Pnk
} convergente ad un punto diE.
Dimostrazione. Supponiamo che E sia un insieme chiuso e limi-tato e supponiamo che {xn} sia una successione di punti di E.Se {xn} assume solo un numero finito di valori, almeno un valoresara assunto infinite volte. Questo significa che esiste una succes-sione estratta {xnk
} che risulta costante e quindi convergente al valorecostante.Se i valori assunti da {xn} sono infiniti, tenuto conto che E e limitatoanche l’insieme dei valori assunti da {xn} ‘e limitato.Il teorema di Bolzano e Weierstrass ci dice allora che esiste un puntox che ‘e punto di accumulazione dell’insieme dei valori {xn}.Questo significa che ogni intorno di x contiene almeno un valore assuntoda {xn}. Per ogni intero positivo k consideriamo l’intorno di x di raggio1/k: tale intorno contiene almeno un valore xnk
con nk > nk−1.
1E facile riconoscere che almeno uno dei due insiemi Ex ed Ey ha infinitielementi: nel seguito, per semplicita supponiamo che siano infiniti entrambi.

6. INSIEMI COMPATTI 21
Pertanto la successione estratta {xnk} converge a x.
Tenuto conto che E ‘e un insieme chiuso riesce
limk→∞
xnk= x ∈ E
Viceversa se E ‘e compatto fosse non limitato, per ogni intero positivon, esisterebbe una successione {xn} ∈ E che soddisfa |xn| > n. e chequindi non pu‘o avere alcuna sottosuccessione convergente.Infine se E non fosse chiuso, esisterebbe una successione {xn} di el-ementi di E che converge ad un elemento x /∈ E Ogni sottosucces-sione di questa successione convergerebbe allo stesso elemento che nonappartiene ad E e pertanto E non sarebbe compatto. �
Teorema 1.8. Se E ⊂ R2 e chiuso e limitato allora ogni insiemeinfinito contenuto in E ammette punti di accumulazione appartenentia E
Definizione 1.9. Un sottinsieme E di uno spazio metrico si dice com-patto se ogni successione {Pn} di punti di E ammette una successioneestratta {Pnk
} convergente ad un punto di E.
2. Insiemi connessi
Definizione 2.1. Due insieme A e B si dicono separati se
A ∩B = A ∩B = ∅
Definizione 2.2. Un insieme si dice connesso se non e unione di dueinsiemi separati e non vuoti.
Osservazione 2.3. Due insiemi A e B possono essere disgiunti
A ∩B = ∅senza essere separati....La disgiunzione e un fatto insiemistico: la separazione coinvolge anchei punti di accumulazione, cioe coinvolge la metrica.
Teorema 2.4. Gli insiemi connessi di R sono tutti e soli gli intervalli.
6. Insiemi compatti
Definizione 6.1. Un insieme E contenuto in uno spazio metrico Ssi dice compatto se e solo se ogni successione {Pn} ⊂ E possiedesottosuccessioni convergenti a punti di E.
Dal teorema di Bolzano-Weierstrass discende
Proposizione 6.2. Ogni sottoinsieme limitato e chiuso di Rn e com-patto.

22 4. LA COMPATTEZZA
Si riconosce anche
Proposizione 6.3. Ogni compatto E di Rn e chiuso e limitato.
Dimostrazione. Supponiamo di riferirci al caso R2 .La tesi si riconosce per assurdo:α): limitatezza
• se E non fosse limitato allora, per ogni n si potrebbe trovarealmeno un punto Pn /∈ I(O, n), avendo indicato con I(O, n) ilcerchio di centro l’origine e raggio n,• i punti di tale successione, come pure quelli di ogni sottosuc-
cessione, costituiscono un insieme illimitato,• quindi non possono rappresentare una successione convergente.
β): chiusura
• se E non fosse chiuso allora ci sarebbe almeno un punto Q0 diaccumulazione per E che non appartiene ad E,• presa quindi una successione {Pn} ⊂ E convergente a Q0,• riuscirebbe, contrariamente all’ipotesi di compattezza, che an-
che ogni sottosuccessione la {Pnk} dovendo convergere a Q0 /∈
E non e convergente in E.
�
Le due precedenti Proposizioni 6.2 e 6.3 implicano il seguente
Teorema 6.4. I compatti di Rn sono tutti e soli gli insiemi chiusi elimitati.
6.1. I ricoprimenti.
Teorema 6.5. Sia E ⊂ S compatto e sia {An} una famiglia di insiemiaperti tali che
E ⊂∞⋃n=0
An
allora esiste un numero (finito) n0 tale che
E ⊂n0⋃n=0
An
Dimostrazione. La dimostrazione si conduce anche in questo ca-so per assurdo:indichiamo con
B1 = A1, B2 = A1 ∪ A2, B3 = A1 ∪ A2 ∪ A3, ...Bm =m⋃n=0
An
6. INSIEMI COMPATTI 23
Se
∀m : E * Bmallora potremmo costruire una successione {Pm} ⊂ E prendendo
∀m : Pm /∈ BmTale successione non potrebbe avere sottosuccessioni convergenti: seinfatti esistesse
limk→∞
Pnk= Q0 ∈ E
allora dovrebbe esistere n0 tale che Q0 ∈ An0 ⊂ Bn0 e, tenuto conto chegli An sono per ipotesi aperti dovrebbe esistere un intorno circolare diQ0
I(Q0, ρ) ⊂ An0 ⊂ Bn0
ma allora i punti Pnkdovrebbero definitivamente cadere dentro Bn0 ,
contrariamente alla loro costruzione.Pertanto non deve essere possibile costruire una successione che veri-fichi la
∀m : Pm * Bmimpossibilita che equivale a dire che da un certo n0 non ci sono piupunti di E fuori di Bn0 .L’ultima affermazione equivale a dire che
E ⊆ Bn0
che e esattamente la tesi del teorema.�
Teorema 6.6. Sia E un compatto di Rn e siano {Cn} ⊂ E insiemichiusi tali che
∀m :m⋂n=1
Cn 6= ∅
allora riesce anche∞⋂n=1
Cn 6= ∅
Dimostrazione. Si tengano presenti i due seguenti risultati:
• F chiuso equivale a C(F ) aperto.•
C(∞⋂n=1
Fn) =∞⋃n=1
C(Fn)

24 4. LA COMPATTEZZA
Pertanto se, per assurdo, riuscisse∞⋂n=1
Cn = ∅
allora riuscirebbe
C
(∞⋂n=1
Cn
)= Rn
ovvero
Rn =∞⋃n=1
C(Cn)
cioe gli aperti
C(Cn)
costituirebbero un ricoprimento di Rn e quindi anche di E.Tenuto conto che E e compatto il precedente teorema garantirebbe che
E ⊆n0⋃n=1
C(Cn)
ma allora, passando di nuovo al complementare,
C(E) ⊇ C
(n0⋃n=1
C(Cn)
)=
n0⋂n=1
Cn = ∅
da cuin0⋂n=1
Cn = ∅
contrariamente all’ipotesi che tutte le intersezioni finite siano non vuote.�
6.2. La proprieta degli intervalli incapsulati.
Proposizione 6.7. Siano In = [an, bn] ⊂ R una successione di inter-valli incapsulati e non vuoti tali che
I1 ⊇ I2 ⊇ I3 ⊇ ....
allora l’intersezione∞⋂n=1
In 6= ∅
Dimostrazione. Basta ricordare che
• il primo intervallo I1 = [a1, b1] in quanto insieme chiuso elimitato e compatto,

6. INSIEMI COMPATTI 25
• allora basta applicare alla successione di chiusi {I2, I3, ...} ⊂ I1il teorema sull’intersezione di chiusi per ottenere la tesi.
�


CAPITOLO 5
Successioni
1. Introduzione
Definizione 1.1. Una successione {pn} ∈ X e una funzione
p : N → X
L’uso corrente indica i valori p(n) con la grafia pn.
Teorema 1.2. Sia {pn} una successione di uno spazio metrico X
• convergenza: la notazione limn→∞
pn = q significa
∀ε > 0 ∃n0 : n ≥ n0 → d(pn, q) ≤ ε
avendo indicato con d la distanza assegnata sullo spazio X,• unicita del limite,• limitatezza delle successioni convergenti,• se q e punto di accumulazione di E allora esistono successioni{pn} ∈ E convergenti a q.
Dimostrazione. I vari punti elencati sono ben noti per le suc-cessioni di numeri reali, sono anche noti per le successioni di numericomplessi.E interessante riconoscere che si tratta di proprieta definibili e riscon-trabili in ogni spazio metrico.L’unicita del limite in particolare dipende dalla proprieta
∀p 6= q ∃ρ > 0 → I(p, ρ) ∩ I(q, ρ) = ∅�
2. Proprieta algebriche
Teorema 2.1. Siano {sn} e {tn} due successioni di numeri reali ocomplessi, convergenti rispettivamente a s e a t allora
• limn→∞
(sn + tn) = limn→∞
sn + limn→∞
tn
• limn→∞
(sn . tn) = limn→∞
sn . limn→∞
tn
• limn→∞
(sn/tn) = limn→∞
sn/ limn→∞
tn con l’ovvia esclusione delle di-
visioni per 0.
27

28 5. SUCCESSIONI
3. La convergenza in R2
Lo spazio R2 e spesso indicato anche come R×R, notazione che ricordail seguente risultato
Teorema 3.1. La successione {pn} = {(xn, yn)} ∈ R2 converge aq = (ξ, η) se e solo se
limn→∞
xn = ξ, limn→∞
yn = η
4. Sottosuccessioni
Teorema 4.1. Ogni successione limitata in R o in R2 possiede infinitesottosuccessioni convergenti.
Proposizione 4.2. Tutte le sottosuccessioni di una successione con-vergente a q sono convergenti a q.
Definizione 4.3. Ciascun punto q che sia limite di una sottosucces-sione {xnk
} ⊂ {xn} si dice punto limite della successione {xn}.
5. Successioni di Cauchy
Una successione {pn} ∈ X con X spazio metrico, si dice di Cauchy se
∀ε > 0 ∃nε : ∀n,m ≥ nε d(pn, pm) ≤ ε
Teorema 5.1. Le successioni di Cauchy sono limitate.
Teorema 5.2. Le successioni convergenti in uno spazio metrico sono(necessariamente) successioni di Cauchy.
Proposizione 5.3. Se una sottosuccessione {pnk} ⊂ {pn} di una suc-
cessione di Cauchy converge a q allora tutta la successione {pn} con-verge a q.
Teorema 5.4. Una successione di Cauchy di numeri reali e conver-gente.
Dimostrazione. Sia {pnk} ⊂ {pn} una sottosuccessione conver-
gente (applicazione del teorema di Bolzano-Weierstrass)
limk→∞
pnk= q
allora, per la precedente Proposizione 5.3, riesce anche
limk→∞
pn = q
�
Proposizione 5.5. Una successione di Cauchy {pn} ∈ Rk e conver-gente.

7. LIMITI INFERIORE E SUPERIORE 29
Proposizione 5.6. Una successione di Cauchy {pn} di numeri com-plessi e convergente.
6. Successioni monotone
Per le successioni di numeri reali, e solo per esse, si puo avere il requisitodella
monotonia
cioe il fenomeno che tutti i termini della successione verifichino laproprieta
xn ≤ xn+1
oppure tutti i termini della successione verifichino la opposta proprieta
xn ≥ xn+1
Nel primo caso, xn ≤ xn+1, si parla di successioni crescenti, nelsecondo xn ≥ xn+1, di successioni decrescenti.
Osservazione 6.1. Esistono sottili raffinatezze (raramente utili) chedistinguono tra
xn ≤ xn+1 e xn < xn+1
dichiarando le prime
successioni crescenti o crescenti in senso lato o debole
e dichiarando le altre, quelle con il < , crescenti in senso stretto.Analoghe raffinatezze distinguono tra successioni decrescenti e decre-scenti in senso stretto.La non proponibilita di successioni monotone di punti del piano o dinumeri complessi deriva naturalmente dalla mancanza di ordinamentonel piano, nei complessi e in generale in ogni Rn.
Teorema 6.2. Una successione monotona {xn} converge se e solo see limitata: in particolare riesce{
limn→∞
xn = supxn crescenti
limn→∞
xn = inf xn decrescenti
7. Limiti inferiore e superiore
I termini xn di una successione di numeri reali convergente al limi-te ` hanno la proprieta di appartenere definitivamente, cioe per nsufficientemente alto, all’intervallo
[`− ε, `+ ε]
Questo fenomeno naturalmente non accade per successioni non conver-genti.

30 5. SUCCESSIONI
In alternativa per una successione non convergente si possono cercareintervalli
[a, b]
che abbiano proprieta analoghe, cioe tale che i termini della successionefiniscano definitivamente dentro di essi.Una risposta molto semplice, almeno per una successione limitata e laseguente: posto
λ = inf .xn, Λ = sup .xn
riesce∀n xn ∈ [λ, Λ]
A questo punto il problema puo essere raffinato chiedendo quale sial’intervallo....
piu piccolo
nel quale finiscano definitivamente i termini della successione.E chiaro che posto riesce
λ1 = infn>1
xn, Λ1 = supn>1
xn
riesce∀n > 1 xn ∈ [λ1, Λ1]
come pure, postoλ2 = inf
n>2xn, Λ2 = sup
n>2xn
riesce∀n > 2 xn ∈ [λ2, Λ2]
ecc.Tenuto conto che
λ ≤ λ1 ≤ λ2 ≤ ... ≤ Λ2 ≤ Λ1 ≤ Λ
posto`′ = lim
n→∞λn = supλn, `′′ = lim
n→∞Λn = inf Λn
l’intervallo[`′, `′′]
sembra interessante ai fini del problema posto.Scelto ε > 0 esiste certamente un nε tale che
`′ − ε < λnε ≤ Λnε < `′′ + ε
Tenuto conto che
∀n ≥ nε : xn ∈ [λnε , Λnε ]
si riconosce che

7. LIMITI INFERIORE E SUPERIORE 31
∀ε > 0 ∃nε : ∀n > nε xn ∈ [`′ − ε, `′′ + ε]
Definizione 7.1. Sia {xn} una successione reale e limitata, indicaticon
λn = infk≥n
xk, Λn = supk≥n
xk
i numeri
`′ = limn→∞
λn = supλn, `′′ = limn→∞
Λn = inf Λn
si dicono rispettivamente limite inferiore e limite superiore della suc-cessione {xn}.
Osservazione 7.2. I numeri λn e Λn precedentemente introdotti nelcaso di una successione limitata si considerano anche relativamente asuccessioni non limitate:
• se {xn} e illimitata inferiormente tutti i λn saranno −∞,• se {xn} e illimitata superiormente tutti i Λn saranno +∞,
Il limite inferiore di una successione illimitata inferiormente e per-tanto −∞, mentre il limite superiore di una successione illimitatasuperiormente e +∞.
Le proprieta dei due limiti inferiore e superiore possono riassumersi nelseguente
Teorema 7.3. Indicati con `′ ed `′′ il limite inferiore e il limite supe-riore della successione {xn}
•∀ε > 0 ∃nε tale che ∀n ≥ nε `
′ − ε ≤ xn ≤ `′′ + ε
•∀σ > 0 @nσ : n ≥ nσ xn ∈ [`′ + σ, `′′ − σ]
Corollario 7.4. La successione {xn} e convergente se e solo se il limiteinferiore coincide con il limite superiore.


CAPITOLO 6
Serie numeriche
1. Introduzione
Assegnata la successione di numeri complessi {a1, a2, a3, ....} si consi-dera con il nome di serie numerica
∞∑k=1
ak
la nuova successione {sn} definita come
s1 = a1, s2 = a1 + a2, s3 = a1 + a2 + a3, ... sn =n∑k=1
ak
che prende il nome di successione delle somme parziali o delle ridottedella serie assegnata.
Definizione 1.1. Si dice che la serie∞∑k=1
ak e convergente se e solo se
la successione {sn} ad essa associata e convergente. Se limn→∞
sn = S
allora si pone∞∑k=1
ak = S
Il criterio di convergenza di Cauchy applicato alla {sn}∀ε > 0 ∃nε : ∀n,m ≥ nε |sn − sm| ≤ ε
implica, tenuto conto che
|sn − sm| =
∣∣∣∣∣m∑
k=n+1
ak
∣∣∣∣∣il seguente
Teorema 1.2. La serie∞∑k=1
ak e convergente se e solo se
∀ε > 0 ∃nε : ∀n,m ≥ nε
∣∣∣∣∣m∑
k=n+1
ak
∣∣∣∣∣ ≤ ε
33
34 6. SERIE NUMERICHE
Corollario 1.3. Condizione necessaria a che la serie∞∑k=1
ak converga
e che riesca limn→∞
an = 0
Dimostrazione. Basta applicare il precedente teorema alla sceltam = n+ 1 �
Esempio 1.4. La serie∞∑k=1
1/k non e convergente e fornisce un im-
portante esempio di una serie i cui termini siano infinitesimi senzache questo basti alla convergenza della serie (Ovvero la non sufficienzadella condizione espressa nel precedente Corollario)
1.1. La convergenza assoluta.
Definizione 1.5. Una serie a termini complessi∞∑k=1
ak tale che la se-
rie dei valori assoluti∞∑k=1
|ak| sia convergente prende il nome di serie
assolutamente convergente.
Teorema 1.6. Se la serie∞∑k=1
|ak| converge allora converge anche la
serie∞∑k=1
ak .
Dimostrazione. Perche la serie∞∑k=1
ak converga occorre e basta
che sia soddisfatta la condizione del precedente Teorema 1.2.Tenuto conto che per la proprieta triangolare
|an+1 + an+2 + ...+ am| ≤ ||an+1|+ |an+2|+ ...+ |am||
si riconosce che dall’ipotesi di convergenza della∞∑k=1
|ak| si ricavi che la
∞∑k=1
ak soddisfa la condizione di convergenza del Teorema 1.2. �
1.2. Le serie a termini reali positivi.Le serie a termini reali positivi producono successioni di somme parzialimonotone crescenti
sn =n∑k=1
ak ≤n+1∑k=1
ak = sn+1
Poiche le successioni monotone crescenti limitate superiormente sonoconvergenti le serie a termini positivi vengono naturalmente studiate

1. INTRODUZIONE 35
per confronto
Teorema 1.7. Siano∞∑k=1
ak e∞∑k=1
bk due serie a termini reali positivi i
cui termini verifichino la relazione
∀k ak ≤ bk
allora
• se la serie maggiorante,∞∑k=1
bk, converge, converge anche la
minorante∞∑k=1
ak,
• se la serie minorante∞∑k=1
ak diverge, diverge anche la serie
maggiorante,∞∑k=1
bk.
Dimostrazione. Il risultato deriva semplicemente dal fatto cheindicate con {An} e con {Bn} le ridotte delle due serie
∀k ak ≤ bk → ∀n An ≤ Bn
per cui se converge, e quindi si mantiene limitata, la {Bn} si mantienelimitata, e di conseguenza converge, anche la {An}.Analogamente se non converge, e quindi non e limitata, la {An} alloranon e limitata, e quindi non converge, neanche la {Bn}. �
Proposizione 1.8. I termini della serie∞∑k=1
ak soddisfino le disugua-
glianze
∀k |ak| ≤ dk
Se la serie a termini reali positivi∞∑k=1
dk e convergente allora e conver-
gente anche la∞∑k=1
ak.
Dimostrazione. Il risultato deriva dal precedente Teorema 1.7
dal quale si deduce intanto che la serie∞∑k=1
|ak| e convergente.
La convergenza allora della serie a termini complessi∞∑k=1
ak deriva dalla
sua assoluta convergenza, Teorema 1.6. �

36 6. SERIE NUMERICHE
2. Alcuni esempi
2.1. Le serie geometriche.Si dicono serie geometriche quelle i cui addendi sono le successivepotenze di una stessa base ρ 6= 1:
∞∑k=0
ρk → sn =1− ρn+1
1− ρ
E facile riconoscere che le serie geometriche con −1 < ρ < 1 convergono S =1
1− ρ|ρ| ≥ 1 non convergono
2.2. Le serie armoniche generalizzate. Si dicono serie armonichegeneralizzate quelle i cui addendi sono le potenze dei reciproci degliinteri:
∞∑k=0
1
kp
E facile riconoscere che le serie armoniche generalizzate con p ≤ 0 nonsono convergenti (i termini non costituiscono una successione infinite-sima).I casi p > 0 si valutano servendosi della seguente proposizione:
Proposizione 2.1. Siano a1 ≥ a2 ≥ a3 ≥ ... ≥ 0 le due serie∞∑k=1
ak,∞∑k=1
2k a2k
convergono o non convergono entrambe insieme.
Dimostrazione. Si tratta di serie a termini positivi: quindi la loroconvergenza o meno equivale alla limitatezza delle rispettive sommeparziali.Dette sn e tn rispettivamente le due successioni delle somme parziali siha,
s2n = a1 + (a2 + a3) + (a4 + a5 + a6 + a7)... ≤ a1 + 2a2 + 4a4 + ... = tn−1
s2n = a1+a2+(a3+a4)+(a5+a6+a7+a8)... ≥1
2a1+a2+2a4+... =
1
2tn−1
Le due disuguaglianze riconoscono che i termini delle due successionidi somme parziali si maggiorano una con l’altra: quindi se e limitatauna e limitata anche l’altra. �

3. I CRITERI DI CONVERGENZA ASSOLUTA 37
La precedente proposizione puo essere applicata allo studio delle seriearmoniche generalizzate
∞∑k=0
1
kp
∞∑k=0
2k1
2kp=∞∑k=0
(1
2p−1
)kriconoscendo quindi
• che convergono se p > 1• che non convergono se p ≤ 1
3. I criteri di convergenza assoluta
Teorema 3.1. Assegnata la serie∞∑k=1
ak a termini complessi, posto
`′′ = lim sup n√|an|
• se `′′ < 1 la serie converge,• se `′′ > 1 la serie non converge,• se `′′ = 1 il test non decide, nel senso che la serie puo essere
convergente come essere non convergente.
Dimostrazione. Sia, primo caso, `′′ < 1: allora scelto `′′ < ρ < 1esiste un indice nρ tale che
∀n ≥ nρ : n√|an| ≤ ρ → |an| ≤ ρn
da cui, per confronto con la serie convergente∞∑k=1
ρk, si riconosce che la
∞∑k=1
ak e assolutamente convergente, quindi convergente.
Sia, secondo caso, `′′ > 1: allora scelto 1 < ρ < `′′ esistono infiniti|ank| ≥ ρnk ≥ 1 quindi la successione {an} non e infinitesima, quindi la
serie non puo convergere.
Sia, terzo caso, `′′ = 1: per rispondere basta fornire due esempi, unodi una serie convergente e uno di una non convergente.
∞∑k=1
1
k2convergente
∞∑k=1
1
knon convergente
In entrambi i casi riesce
limn→∞
n
√1
n2= lim
n→∞n
√1
n= 1

38 6. SERIE NUMERICHE
�
Teorema 3.2. Assegnata la serie∞∑k=1
ak a termini complessi, posto
`′′ = lim sup|an+1||an|
• se `′′ < 1 la serie converge,• se `′′ > 1 la serie non converge,• se `′′ = 1 il test non decide, nel senso che la serie puo essere
convergente come essere non convergente.
Dimostrazione. La dimostrazione e analoga al precedente. �
4. Il numero e di Nepero
e ∼ 2, 718281828459...
Ai modesti o vanitosi,ai violenti o timorosi
do, cantando gaio ritmo,logaritmo....
Giorgio Rabbeno
E facile riconoscere, per confronto, che la serie a termini positivi,∞∑k=0
1
k!
e convergente: la sua somma rappresenta il celebre numero
e = 2.71...
di Nepero.
Esempio 4.1.∞∑k=0
1
k!= lim
n→∞
(1 +
1
n
)nProposizione 4.2. Il numero di Nepero e irrazionale.
Dimostrazione.
0 < e− sn =∞∑
k=n+1
1
k!<
1
(n+ 1)!
{1 +
1
n+ 1+
(1
n+ 1
)2
+ ...
}da cui, valutando la serie geometrica comparsa a secondo membro
1 +1
n+ 1+
(1
n+ 1
)2
+ ... =1
1− 1
n+ 1
=n+ 1
n

5. SOMMATORIA PER PARTI 39
si ottiene
∀n : 0 < e− sn <1
nn!Se ora, per assurdo, fosse
e =p
q, q > 1
avremmo, scelto n = q
0 <p
q− sq <
1
q q!→ q!
(p
q− sq
)<
1
q
Tenuto presente che
q!
(p
q− sq
)e un numero intero (il fattore q! annulla tutti i denominatori...) tro-veremmo un numero intero positivo minore di 1, cosa impossibile.Quindi e non puo essere razionale. �
5. Sommatoria per parti
La convergenza, o meno, di una serie∞∑k=1
ak bk
i cui termini siano i prodotti di due successioni {ak} e {bk} puo essere,ragionevolmente ricavata da proprieta possedute dalle due successioni.
Esempio 5.1. Ad esempio se ∀k : ak = 0 allora la serie∞∑k=1
ak bk
converge qualunque siano i {bk} !
Ad esempio se ∀k : ak = c allora la serie∞∑k=1
ak bk converge se e solo
se la serie∞∑k=1
bk e convergente !
ecc. ecc.
Teorema 5.2 (Abel). Consideriamo la serie∞∑k=1
ak bk e supponiamo
che
b1 ≥ b2 ≥ b3...., limn→∞
bn = 0, An =n∑k=1
ak, |An| ≤M
allora la serie e convergente.

40 6. SERIE NUMERICHE
Dimostrazione. Posto
An =n∑k=1
ak → an = An − An−1
e quindiq∑
k=p
ak bk =
q∑k=p
(Ak − Ak−1) bk =
q∑k=p
Akbk −q−1∑
k=p−1
Akbk+1 =
q−1∑k=p
Akbk + Aqbq −q−1∑k=p
Akbk+1 − Ap−1bp =
q−1∑k=p
Ak (bk − bk+1) + Aqbq − Ap−1bp
pertanto, tenuto conto che bk − bk+1 ≥ 0,∣∣∣∣∣q∑
k=p
ak bk
∣∣∣∣∣ ≤∣∣∣∣∣q−1∑k=p
Ak (bk − bk+1)
∣∣∣∣∣+ (|Aq|+ |Ap−1|) bp ≤
M
(q−1∑k=p
(bk − bk+1) + 2bp
)= M ((bp − bq) + 2bp) ≤ 3Mbp
Tenuto conto delle ipotesi
b1 ≥ b2 ≥ b3...., limn→∞
bn = 0
scelto comunque ε > 0 sia nε tale che
3Mbnε ≤ ε
allora
∀p, q ≥ nε :
∣∣∣∣∣q∑
k=p
ak bk
∣∣∣∣∣ ≤ ε
che e la nota condizione di convergenza per la serie∞∑k=1
ak bk.
�

5. SOMMATORIA PER PARTI 41
5.1. Applicazioni. Il caso di applicazione piu frequente del prece-dente Teorema 5.2 si incontra nelle cosiddette
serie a termini di segno alterno∞∑k=1
(−1)kbk, b1 ≥ b2 ≥ b3.... ≥ 0, limn→∞
bn = 0
Infatti in questo caso si ha
ak = (−1)k, An =n∑k=1
ak, |An| ≤M = 1
Esempio 5.3. La serie∞∑k=1
(−1)k
k
e convergente.E importante osservare che la serie precedente non e assolutamenteconvergente: infatti la serie dei moduli diviene esattamente la seriearmonica generalizzata relativa a p = 1 che e noto essere non conver-gente.
5.2. Le somme delle serie a termini di segno alterno.
S2n+1 = S2n−1 − b2n + b2n+1 ≤ S2n−1
S2n+2 = S2n + b2n+1 − b2n+2 ≥ S2n
S2n+1 − S2n = b2n+1
In altri termini
• la sottosuccessione delle somme parziali dispari e decrescente,• la sottosuccessione delle somme parziali pari e crescente,• detta S la somma della serie riesce
S2n ≤ S ≤ S2n+1
Ne segue quindi che
|S − Sk| ≤ bk
Il risultato indicato e particolarmente pregiato dal punto di vista nu-merico: infatti calcolata una somma parziale Sk si puo riconoscerel’intervallo al quale appartiene certamente la somma S della serie
S ∈ [Sk − bk, Sk + bk]
intervallo che, tenuto conto che limk→∞
bk = 0, ha ampiezza via via piu
piccola...!

42 6. SERIE NUMERICHE
Esempio 5.4. Si voglia conoscere con la precisione di 0.01 la somma
della serie∞∑k=1
(−1)k 1k.
Si tratta di decidere l’attendibilita ai fini della domanda posta dellevarie somme parziali Sn che possiamo calcolare.Tenuto presente che l’errore che intercorre tra una Sn e la sommaS della serie e inferiore al termine bn si capisce che la somma S100
fornisce l’approssimazione richiesta.Infatti
|S − S100| ≤ b100 =1
100= 0.01
CAPITOLO 7
Serie prodotto
Assegnate due serie convergenti∞∑k=0
ak = A,∞∑k=0
bk = B
vogliamo occuparci di dare senso alla frase
serie prodotto
con la pretesa che tale serie prodotto converga e abbia somma il prodot-to AB delle somme delle due serie fattori.L’idea che la serie
∞∑k=0
ak bk
semplicemente costruita dai prodotti dei termini corrispondenti soddisfile pretese cade immediatamente: infatti neanche per somme finite
(a0 + a1 + a2) (b0 + b1 + b2) 6= a0b0 + a1b1 + a2b2
esiste infatti un discreto numero di prodotti misti a0b1, a0b2, ... cheverrebbero trascurati.L’idea suggerita invece dalla moltiplicazione di due polinomi e piuadatta: siano infatti
P (x) = a0 + a1x+ a2x2, Q(x) = b0 + b1x+ b2x
2
riesce
P (x)Q(x) = a0b0 + (a0b1 + a1b0)x+ (a0b2 + a1b1 + a2b0)x2
ovvero
P (x)Q(x) = c0 + c1x+ c2x2
c0 = a0b0c1 = a0b1 + a1b0c2 = a0b2 + a1b1 + a2b0
Definizione 1.5. Assegnate due serie∑∞
k=0 ak,∑∞
k=0 bk si dice loroserie prodotto la serie
∑∞k=0 ck con
ck =k∑j=0
aj bk−j, K = 0, 1, 2, ....
43

44 7. SERIE PRODOTTO
Corollario 1.6. Nel caso di somme finite, cioe serie i cui termini sonotutti nulli da un certo posto in poi, riesce
∞∑k=0
ak
∞∑k=0
bk =∞∑k=0
ck
Teorema 1.7. Siano∞∑k=0
ak = A,
∞∑k=0
bk = B
due serie convergenti, la prima∞∑k=0
ak sia assolutamente convergente.
Allora la serie prodotto∞∑k=0
ck e convergente e la sua somma e il prodotto
AB delle somme delle due serie fattori.
Dimostrazione. Indichiamo con
Cn =n∑k=0
ck
le somme parziali della serie prodotto
Cn = a0b0+(a0b1+a1b0)+(a0b2+a1b1+a2b0)+...+(a0bn+a1bn−1+...+anb0)
Riordinando i termini si ha anche
Cn = a0(b0 + b1 + ...+ bn) + a1(b0 + b1 + ...+ bn−1 + ...+ anb0
Indicate con
Bn =n∑k=0
bk, An =n∑k=0
ak
le somme parziali della∞∑k=0
bk si ha quindi
Cn = a0Bn + a1Bn−1 + a2Bn−2 + ...+ anB0
Indicate inoltre conβn = B −Bn
le differenze tra le ridotte Bn e il loro limite B riesce anche
Cn = a0(B − βn) + a1(B − βn−1) + a2(B − βn−2) + ...+ an(B − β0) =
= B(a0 + a1 + ...+ an)− γn = BAn − γnavendo indicato con
γn = a0βn + a1βn−1 + ...+ anβ0

7. SERIE PRODOTTO 45
Per ottenere che limn→∞
Cn = AB occorre quindi riconoscere che riesca
limn→∞
γn = 0.
Tenuto presente che
• limn→∞
βn = 0,
• e quindi scelto ε > 0 ∃N tale che ∀n ≥ N : |βn| ≤ ε,•∑∞
k=0 |ak| = M
si ha, spezzando il gruppo di addendi che costituiscono γn i due gruppi
• quelli relativi ai βh con indici h ∈ [0, N ],• quelli relativi ai βh con indici h ∈ [N + 1, n]
si ha
∀n ≥ N : |γn| ≤
∣∣∣∣∣N∑h=0
an−hβh
∣∣∣∣∣+
∣∣∣∣∣n∑
h=N+1
βh an−h
∣∣∣∣∣ ≤≤
∣∣∣∣∣N∑h=0
an−hβh
∣∣∣∣∣+ ε∞∑h=0
|ah| ≤
∣∣∣∣∣N∑h=0
an−hβh
∣∣∣∣∣+ εM
Tenuto presente che
• la successione {am} che produce una serie convergente e nec-essariamente infinitesima,• che l’addendo
∑Nh=0 an−hβh e una combinazione lineare di un
numero finito N + 1 di infinitesimi
an, an−1, ...., an−N
con N dipendente solo da ε
riesce
limn→∞
N∑h=0
an−hβh = 0
e pertanto
lim sup |γn| ≤M ε
Pertanto
limn→∞
Cn = AB
�
1.3. La funzione esponenziale. Consideriamo la serie prodottodelle due serie (uguali e assolutamente convergenti)
∞∑k=0
1
k!,
∞∑k=0
1
k!

46 7. SERIE PRODOTTO
Riesce, per definizione,
c0 = 1 .1 = 1c1 = 1 .1 + 1 .1 = 2
c2 = 1 12!
+ 1 .1 + 12!
= 42!
c3 = 1 13!
+ 1 . 12!
+ 12!.1 + 1
3!= 8
3!
e, in generale,
cn =n∑j=0
1
j!
1
(n− j)!=
1
n!
n∑j=0
n!
j!(n− j)!=
1
n!
n∑j=0
(n
j
)da cui tenuto conto che
n∑j=0
(n
j
)= (1 + 1)n = 2n
si ha
cn =2n
n!In base al teorema dimostrato sulle serie prodotto riesce quindi
∞∑n=0
2n
n!= e2
Quanto riconosciuto sopra puo estendersi fino a riconoscere proprietacaratteristiche delle funzioni esponenziali.Consideriamo, per ogni a ∈ R la serie
∞∑n=0
an
n!
E facile riconoscere, servendosi ad esempio del criterio del rapporto,che si tratta di serie assolutamente convergente, quindi convergente.Indichiamo con
S(a) =∞∑n=0
an
n!
la somma.Scelti due qualsiasi valori a, b ∈ R consideriamo la serie prodotto delledue
∞∑n=0
an
n!,
∞∑n=0
bn
n!
i termini della serie prodotto sono

7. SERIE PRODOTTO 47
cn =n∑j=0
ajj!bn−j(n− j)! =1
n!
n∑j=0
n! aj bn−j
j!(n− j)!=
=1
n!
n∑j=0
(n
j
)aj bn−j =
(a+ b)n
n!
Pertanto∞∑n=0
(a+ b)n
n!
e convergente ed ha come somma il prodotto delle somme delle dueserie fattori, quindi
S(a+ b) = S(a) . S(b)
1.4. Alcune proprieta.
• S(1) = e• S(2) = e2
• S(a+ b) = S(a)S(b)• ∀a : S(a) 6= 0• ∀a : S(−a) = 1
S(a)
La somma S(a) precedentemente introdotta si chiama
funzione esponenziale
1.5. Il caso complesso. Le serie∞∑n=0
an
n!
possono essere considerate anche in relazione a valori a complessi: esseinfatti sono assolutamente convergenti
∞∑n=0
∣∣∣∣ann!
∣∣∣∣ =∞∑n=0
|a|n
n!
e quindi convergenti.
Osservazione 1.8. La funzione S(a) precedentemente introdotta ha ilnome classico di
funzione esponenziale
ed e indicata con i simboli
ea, Exp(a)


CAPITOLO 8
Riordinamenti
1. Introduzione
La serie a termini di segno alterno
(1) 1− 1
2+
1
3− 1
4+ ....
e convergente: la sua somma e nota, vale log(2).Essa fornisce l’esempio fondamentale concernente la perdita, nell’am-bito delle serie, della proprieta commutativa della somma.E infatti possibile riconoscere, abbastanza facilmente, che ordinamen-ti diversi degli addendi della serie (1) producano serie convergenti asomme diverse.
Indicati con
an =(−1)n+1
n, n = 1, 2, 3, ...
gli addendi della (1) indichiamo con {bk} la successione{b2n =
1
2an,
b2n−1 = 0
E chiaro che posto
Am =m∑n=1
an, B2m =2m∑n=1
bn
riesce
B2m =1
2Am
quindi dette A e B le somme delle due serie si ha
B =1
2A
Posto cn = an + bn riesce
C =∞∑n=1
cn =3
2A
49

50 8. RIORDINAMENTI
Ma c2n−1 = a2n−1
c2n = a2n +1
2an =
{an se n pari0 se n dispari
ovvero gli unici ck 6= 0 sono quelli di indice dispari e quelli pari conindice multiplo di 4:
c2n−1 =1
2n− 1
c4n = − 1
2nSi riconosce quindi come, al variare di n, gli addendi cn producano glistessi addendi che producevano gli an: tutt’al piu con un
riordinamento
Infatti se indichiamo i primi 20 termini ak si ha{1,−1
2,1
3,−1
4,1
5,−1
6,1
7,−1
8,1
9,− 1
10,
1
11,− 1
12,
1
13,− 1
14,
1
15,− 1
16,
1
17,− 1
18,
1
19,− 1
20
}mentre i primi 20 termini ck sono{
1, 0,1
3,−1
2,1
5, 0,
1
7,−1
4,1
9, 0,
1
11,−1
6,
1
13, 0,
1
15,−1
8,
1
17, 0,
1
19,− 1
10
}Quindi, se il riordinamento non incidesse, in altri termini se per leserie convergenti valesse la proprieta commutativa della somma, alloradovrebbe riuscire
∞∑n=1
cn = A
invece... dalla cn = an + bn si ha∞∑n=1
cn =∞∑n=1
(an + bn) = A+1
2A =
3
2A 6= A
Esempio 1.1. Assegnato il numero dispari p riordiniamo la succes-sione dei naturali allineando pacchetti ordinati di p − 1 numeri pariseguiti ogni volta da un numero dispari.Indichiamo con {an} la nuova successione:
an =
{2[n/p]− 1, se n ≡ 0 mod p2n− 2 [n/p]] se n 6= 0 mod p
avendo indicato con [n/p] la parte intera del quoziente.La costruzione della {an} puo essere ottenuta con Mathematica al modoseguente

2. IL CASO ASSOLUTAMENTE CONVERGENTE 51
a[n_]:= If[Mod[n,p]==0, 2 Floor[n/p] - 1, 2n - 2 Floor[n/p]]
Ad esempio, scelto p = 5 il comando
Table[a[n],{n,1,40}]
produce la seguente sequenza
2, 4, 6, 8, 1, 10, 12, 14, 16, 3, 18, 20, 22, 24, 5, 26, 28, 30, 32, 7, 34, 36,38, 40, 9, 42, 44, 46, 48, 11, 50, 52, 54, 56, 13, 58, 60, 62, 64, 15
Riordinando con questo procedimento la serie 1 produce, ad esempiouna nuova serie i cui primi 30 termini sono i seguenti
−12,−1
4,−1
6,−1
8, 1,− 1
10,− 1
12,− 1
14,− 1
16, 13,
− 118,− 1
20,− 1
22,− 1
24, 15,− 1
26,− 1
28,− 1
30,− 1
32, 17,
− 134,− 1
36,− 1
38,− 1
40, 19,− 1
42,− 1
44,− 1
46,− 1
48, 111
2. Il caso assolutamente convergente
Lemma 2.1. Per una serie a termini positivi vale la proprieta com-mutativa: se {ank
} e un riordinamento della successione {an} allora
∞∑n=1
an =∞∑k=1
ank
intendendo con cio che se la serie∑∞
n=1 an converge allora convergeanche la
∑∞k=1 ank
e ha la stessa somma.Se non converge la prima, non converge neanche la seconda.
Dimostrazione. Indicate con {Am} e con {Bm} rispettivamentele successioni crescenti delle somme parziali della prima e della secondaserie riesce
• limm→∞
Am = sup{Am}, limm→∞
Bm = sup{Bm}• ∀m ∃n : Am ≤ Bn
• ∀n ∃m : Bm ≤ An
Ne segue pertanto che
sup{Am} = sup{Bn} → limm→∞
Am = limm→∞
Bm
�

52 8. RIORDINAMENTI
Proposizione 2.2. Per una serie∑∞
k=0 ak assolutamente convergentevale la proprieta commutativa: se {ank
} e un riordinamento della suc-cessione {an} allora
∞∑n=1
an =∞∑k=1
ank
Dimostrazione. Introdotte le funzioni parte positiva e parte neg-ativa
[x]+ =|x|+ x
2, [x]− =
|x| − x2
riesce
|[x]+| ≤ |x| |[x]−| ≤ |x|
pertanto, se la serie∑∞
k=0 ak e assolutamente convergente allora le dueserie a termini positivi
∞∑k=0
[ak]+,∞∑k=0
[ak]−
sono entrambe assolutamente convergenti. Posto
Am =m∑k=0
ak, Pm =m∑k=0
[ak]+, Qm =m∑k=0
[ak]−
riesce Am = Pm −Qm
E quindi dette
A, P, Q
rispettivamente le somme delle tre serie si ha A = P −QQualunque sia il riordinamento
∞∑k=0
ank
che si applichi alla serie continuera a valere per esso la corrispondenterelazione
Am = Pm −QmE quindi dette A, P , Q rispettivamente le somme delle tre serie si haA = P −Q ne deriva che
A = A
�

3. IL TEOREMA DI RIEMANN DINI 53
3. Il teorema di Riemann Dini
3.1. La favola dell’onesto commerciante, della bilancia e dei tanti pesetti.Un onesto commerciante possiede una bilancia a due piatti corredata di una fila moltolunga di pesi, via via piu piccoli, rossi e blu, da usare con lo strano criterio di caricare irossi sempre e solo sul piatto di sinistra e i blu su quello di destra.L’onesto commerciante si fa un obbligo di pesare la merce in vendita con assoluta preci-sione, pesandola con grande attenzione sulla sua bilancia a due piatti.Posta la merce da pesare sul piatto di destra la bilancia si squilibra: piatto destro giu,piatto sinistro su !Per eseguire la pesata, cioe per riequilibrare i piatti, l’onesto commerciante pone sul piattodi sinistra uno dopo l’altro i pesi rossi della fila che possiede: ne mette fino a che il piattodestro va su e quello di sinistra giu.A questo punto comincia a caricare il piatto di sinistra con i pesi blu della fila: ne mettefino a che il piatto sinistro va su e quello di destra giu.Di questo passo prosegue, caricando ogni volta il piatto piu in alto fino a farlo diventareil piu basso.Ogni volta la differenza dei pesi di un piatto rispetto a quelli dell’altro approssima il pesodella merce: l’errore e, ogni volta minore dell’ultimo pesetto aggiunto per invertire lareciproca posizione dei due piatti.
Se la lunga fila di pesi disponibili contiene pesi via via piu piccoli si capisce che le approssi-
mazioni del peso della merce ottenute saranno sempre migliori, e l’onesto commerciante
si sentira giustamente con la coscienza a posto.
3.2. Le serie convergenti semplicemente. Sia∞∑k=1
ak una serie
convergente semplicemente, cioe non convergente assolutamente,∞∑k=1
|ak| = +∞
allora dall’uguaglianza
∞∑k=1
ak =∞∑k=1
[ak]+ −∞∑k=1
[ak]−
si riconosce chelimk→∞
ak = 0
limn→∞
∑nk=1[ak]+ = +∞
limn→∞
∑nk=1[ak]− = +∞
Se infatti una delle due somme parziali a secondo membro, Pn o Qn
convergesse allora, dalla relazione
An = Pn −Qn
si dedurrebbe che converge anche l’altra e, quindi, che la serie∞∑k=1
ak
sarebbe, contrariamente all’ipotesi, convergente assolutamente.

54 8. RIORDINAMENTI
3.3. Il teorema.
Teorema 3.1. Sia∑∞
k=1 ak una serie convergente ma non convergenteassolutamente, allora comunque si scelga un numero reale S esiste unriordinamento {ank
} della successione {an} tale che riesca
∞∑k=1
ank= S
Dimostrazione. Supponiamo di aver scelto S ≥ 0: il caso S < 0
si tratta ugualmente riferendosi al caso della serie∞∑k=1
(−ak) e alla scelta
del valore −S.Indichiamo con {pk} e con {qk} le due successioni dei soli termini akpositivi e dei soli termini ah negativi, ordinati con lo stesso ordine concui comparivano originalmente: tenuto conto che
Pm =m∑k=1
pk, Qm =m∑k=1
qk
divergono entrambe esistera un primo m1 rispetto al quale riesce
S ≤ Pm1
Valutiamo la differenza
|Pm1 − S| ≤ |Pm1 − Pm1−1| ≤ pm1
Prepariamo pertanto il riordinamento della {ak} ponendo ai primi m1
posti i primi m1 termini positivi
p1, p2, ..., pm1
Consideriamo ora il primo m2 tale che
Pm1 −Qm2 ≤ S
Valutiamo la differenza
|S − (Pm1 −Qm2) | ≤ |qm2|
Proseguiamo pertanto il riordinamento della {ak} ponendo ai successivim2 posti i termini, negativi, che compongono Qm2
p1, p2, ..., pm1 − q1, −q2, −...− qm2
Consideriamo ora le somme
P 1m =
m∑k=m1+1
pk

3. IL TEOREMA DI RIEMANN DINI 55
esse differiscono dalle precedenti Pm perche non includono i primi m1
addendi: tuttavia se divergevano le Pm non possono che divergere anchequeste P 1
m.Sia pertanto m3 il primo indice tale che
Pm1 −Qm2 + P 1m3≥ S
Valutiamo la differenza
|Pm1 −Qm2 + P 1m3− S| ≤ |pm3|
Proseguiamo pertanto il riordinamento della {ak} ponendo ai successivim3 posti i termini, positivi, che compongono P 1
m3
p1, p2, ..., pm1 − q1, −q2, −...− qm2 , pm1+1, pm1+2, ..., pm3
Di blocchetto positivo in blocchetto negativo e viceversa si riordinanotutti i termini {ak}: tale riordinamento produce una serie
∞∑k=1
ank
della quale conosciamo alcune somme parziali
Sm1 , Sm1+m2 , Sm1+m2+m3 , ...
Esse verificano le seguenti disuguaglianze
S ≤ Sm1
Sm1+m2 ≤ S ≤ Sm1+m2+m3
Sm1+m2+m3 ≤ S ≤ Sm1+m2+m3+m4
......... ..........
Inoltre per ogni k esistono
ν =n∑j=1
mj, µ =n+1∑j=1
mj
tali che la somma parziale Sk sia compresa tra Sν ed Sµ tenuto presenteche anche S si trova tra Sν ed Sµ riesce
|S − Sk| ≤ |Sν − S|+ |S − Sµ| ≤ max{|aµ|, |aν |}
Tenuto conto che la successione {aµ}, sottosuccessione della succes-sione infinitesima {an} e necessariamente infinitesima anch’essa risultaprovato che
limk→∞
Sk = S
56 8. RIORDINAMENTI
ovvero che il riordinamento realizzato determina una nuova serie con-vergente e con somma il numero S per altro arbitrario scelto inizial-mente. �

CAPITOLO 9
Funzioni continue
1. Funzioni continue su compatti
Teorema 1.1. Sia
f : X → Y
continua, sia K ⊂ X compatto in X, allora l’immagine f(K) e uncompatto di Y .
Dimostrazione. Per riconoscere che f(K) e un compatto occorrericonoscere che ogni successione
{yn} ⊂ f(K)
ammette sottosuccessioni convergenti in f(K).Dire che yn ∈ f(K) vuol dire
yn = f(xn), xn ∈ K
Consideriamo pertanto la successione
{xn} ⊂ K
Per l’ipotesi che K sia compatto in X la successione {xn} ammettesottosuccessioni {xnk
} convergenti in K
limk→∞
xnk= ξ ∈ K
Ma allora per l’ipotesi che f sia continua riesce
limk→∞
f(xnk) = lim
k→∞ynk
= f(ξ) ∈ f(K)
Si e pertanto trovata una sottosuccessione
{ynk} ⊂ {yn}
convergente in f(K). �
Proposizione 1.2. Sia
f : X → Rn
continua, sia K ⊂ X compatto in X, allora l’immagine f(K) e uninsieme chiuso e limitato in Rn.
57

58 9. FUNZIONI CONTINUE
Proposizione 1.3. Siaf : X → R
continua, sia K ⊂ X compatto in X, allora l’immagine f(K) ammettemassimo e minimo.
Domande:
• Esiste una funzione continua e biunivoca da [0, 1] ⊂ R a tuttoR ?• Esiste una funzione continua e biunivoca da (0, 1) ⊂ R a tuttoR ?• Esiste una funzione continua e biunivoca da tutto R a (0, 1) ?
Per rispondere alla prima domanda si tenga conto del Teorema 1.1, perrispondere alle altre due si tengano presenti le due funzioni
tan(x), arctan(x)
2. Funzioni inverse
Teorema 2.1. Siaf : X → Y
continua, sia K ⊂ X compatto in X, e sia biunivoca: allora la funzioneinversa e continua anch’essa.
Dimostrazione. Indichiamo con f−1 la funzione inversa
f−1 : Y 7→ X
Naturalmente l’inversa di f−1 e la f stessa. Per riconoscere che f−1 econtinua occorre provare che per ogni aperto V ⊂ X la sua contrim-magine rispetto a f−1 sia un aperto in Y : tenuto conto che l’inversa dif−1 e la f stessa occorre pertanto provare che
∀V ⊂ X, aperto f(V ) sia aperto in Y
Consideriamo il complementare di V in X
C(V )
esso e, in quanto sottoinsieme chiuso di un compatto, compatto an-ch’esso.Allora, tenuto conto del teorema precedente
f (C(V ))
e compatto in Y , quindi e chiuso in Y .Tenuto conto che in virtu della biunivocita
f (C(V )) = C (f(V ))

3. LA CONTINUITA UNIFORME 59
si riconosce che C (f(V )) e chiuso e, quindi,
C (C (f(V ))) = f(V )
e aperto. �
Esempio 2.2. Sia E = [−1, 0] ∪ (1, 2] e sia f : E ⊂ R → R definitacome segue
f(x) =
{x+ 1 se x ∈ [−1, 0]x se x ∈ (1, 2]
si tratta di una funzione continua, crescente, quindi biunivoca.L’inversa f−1 : [−1, 2] ⊂ R→ R e definita
f−1(y) =
{y − 1 se y ∈ [0, 1]y se y ∈ (1, 2]
non e continua nel punto y = 1.Si noti che la funzione f assegnata non era definita su un compatto,cioe su un insieme chiuso e limitato: E infatti non e chiuso, manca ilpunto x = 1, estremo dell’intervallo (1, 2].
2.1. Continuita dell’inversa. Nel caso di
f : [a, b] ⊂ R→ [m,M ] ⊂ Rcontinua e invertibile e facile riconoscere la continuita dell’inversa:
• sia y0 = f(x0) ovvero x0 = f−1(y0) e sia ε > 0 assegnato,• consideriamo il compatto K = [a, b] ∩ C ((x0 − ε, x0 + ε))• l’immagine f(K) e un compatto, yo /∈ f(K)• esiste pertanto δ > 0 tale che
(y0 − δ, y0 + δ) ∩ f(K) = ∅Pertanto
∀y ∈ (y0 − δ, y0 + δ) ∩ [m,M ] → f−1(y) ∈ (x0 − ε, x0 + ε)
che e la relazione di continuita di f−1 nel punto y0.
3. La continuita uniforme
Sia f : X → Y continua: questo significa che scelto ε > 0 una tantum,in corrispondenza ad ogni punto p ∈ X esiste una distanza di sicurezzaδP tale che
x ∈ I(p, δP ) → f(x) ∈ I(f(p), ε)
La dipendenza della distanza di sicurezza δP dal punto P e del tuttoevidente pensando al caso di funzioni f : R→ R, e al loro grafico
• nei tratti in cui il grafico e molto pendente la distanza disicurezza δP dovra essere particolarmente piccola,

60 9. FUNZIONI CONTINUE
• nei tratti in cui il grafico e quasi orizzontale la distanza disicurezza δP sara assai piu generosa...
Il titolo
continuita uniforme
si riferisce all’esistenza, o meno, di una distanza di sicurezza δ validaper tutti i punti di X1.
Esempio 3.1. La funzione f : R → R, f(x) = x2 non e uniforme-mente continua: infatti presi due punti x1 e x2 riesce
|f(x1)− f(x2)| = |x21 − x22| = |x1 + x2|.|x1 − x2|
relazione che mette in evidenza come per ottenere che
|f(x1)− f(x2)| ≤ ε
occorre che
|x1 − x2| ≤ε
|x1 + x2|e pertanto piu ci si riferisce a punti x1 e x2 grandi piu per ottenere che|f(x1)− f(x2)| ≤ ε occorrera prenderli vicini.In altri termini manca una distanza di sicurezza δP buona ovunque.
Esempio 3.2. La funzione f : R → R, f(x) = sin(x) e uniforme-mente continua:
4. Il teorema di continuita uniforme
Teorema 4.1. Sia X compatto: ogni f : X → Y continua e (anche,di conseguenza, necessariamente, ecc. ) uniformemente continua.
Dimostrazione. Il risultato puo essere dimostrato
per assurdo
ammettendo cioe che esista un ε > 0 in relazione al quale non esistaalcun δε positivo che garantisca l’implicazione
dX(x1, x2) ≤ δε → dY (f(x1), f(x2)) ≤ ε
1La favoletta del cardiopatico e del suo medico. Un signore sofferente di cuorenon deve esporsi a eccessive variazioni di altitudine: egli, che giustamente non vuolerinunciare a fare belle passeggiate, chiede al suo medico quanti chilometri possa fareogni giorno. La risposta, giusta, del medico e: � Dipende da dove lei abita: serisiede a Reggio Emilia puo camminare quanto le pare, se invece abita a Bolzanonon deve allontanarsi da casa di piu di 500 metri, se abita a Cortina... beh lesuggerirei di non uscire di casa! �

4. IL TEOREMA DI CONTINUITA UNIFORME 61
Negare l’esistenza di un tale δε > 0 equivale ad ammettere che
∀n ∈ N ∃ξn, ηn ∈ X :
dX(ξn, ηn) ≤ 1
n
dY (f(ξn), f(ηn)) ≥ ε
A questo punto la compattezza di X e la continuita di f conducono auna contraddizione: infatti
• essendo X compatto la successione {ξn} ammette una sotto-successione {ξnk
} convergente
limk→∞
ξnk= ` ∈ X
• essendo dX(ξn, ηn) ≤ 1
nallora anche la sottosuccessione {ηnk
}e convergente allo stesso limite `• essendo f continua riesce quindi
limk→∞
f(ξnk) = f(`), lim
k→∞f(ηnk
) = f(`)
e quindilimk→∞
dY (f(ξnk), f(ηnk
)) = 0
L’ultimo risultato contraddice la condizione dY (f(ξn), f(ηn)) ≥ ε ammes-sa per tutti i punti delle due successioni {ξn} e {ηn}.Quindi l’ammissione fatta per assurdo conduce a una contraddizione:pertanto non e vera !Quindi e vero che....
.... ∀ε > 0 esiste un δε positivo che garantisce l’implicazione
dX(x1, x2) ≤ δε → dY (f(x1), f(x2)) ≤ ε
�
Proposizione 4.2. Sia f : X → Y uniformemente continua: se{xn} ⊂ X e una successione di Cauchy allora la successione trasfor-mata yn = {f(xn)} e una successione di Cauchy in Y .
Dimostrazione. Essendo f uniformemente continua ∀ε > 0 ∃ δεtale che
dX(a, b) ≤ δε → dY (f(a), f(b)) ≤ ε
ma allora
dX(xp, xq) ≤ δε → dY (yp, yq) = dY (f(xp), f(xq)) ≤ ε
Tenuto presente che la {xn} ⊂ X e, per ipotesi, una successione diCauchy esistera νε tale che
∀p, q ≥ νε → dX(xp, xq) ≤ δε

62 9. FUNZIONI CONTINUE
e quindi
∀p, q ≥ νε → dY (f(xp), f(xq)) ≤ ε
�
Osservazione 4.3. Al di fuori del caso di funzioni uniformementecontinue non e piu vero che l’immagine di una successione di Cauchytramite una funzione continua sia ancora una successione di Cauchy:basta pensare alla funzione continua
f : (0, 1)→ R f(x) =1
x
Si consideri ad esempio la successione di Cauchy{xn =
1
n
}f(xn) = n
5. Applicazioni
5.1. Il limite sulla frontiera. Sia f : (a, b) ⊂ R→ R, continuaall’interno di (a, b): un problema importante e riconoscere se esistano,o meno i limiti agli estremi
limx→a+
f(x) limx→b−
f(x)
Tenuto conto che
∃ limx→x0
f(x) = ` ⇔ ∀{ξn} → x0 limn→∞
f(ξn) = `
e tenuto conto che una successione a valori reali e convergente se e solose e di Cauchy si riconosce il seguente
Lemma 5.1. Sia f : E ⊂ R→ R, sia x0 ∈ D(E), x0 /∈ E: esiste
limx→x0
f(x) = `
se e solo se
∀ε > 0 ∃ δε > 0
tale che se
x1, x2 ∈ E, |x1 − x0| ≤ δε, |x2 − x0| ≤ δε
riesca
|f(x1)− f(x2)| ≤ ε
Ne segue pertanto la
Proposizione 5.2. Sia f : (a, b) ⊂ R→ R, uniformemente continua,allora esistono i due limiti agli estremi.

5. APPLICAZIONI 63
Indicati con A e B i due limiti
limx→a+
f(x) = A limx→b−
f(x) = B
chiamiamo F (x) la funzione
F (x) =
A se x = a,
f(x) se a < x < b
B se x = b,
La funzione F (x) ora definita e continua sull’intervallo chiuso [a, b] ecoincide all’interno con la f(x): essa si dice pertanto
prolungamento per continuita della f a [a, b] chiuso.
Tenuto conto del precedente teorema 4.1 si puo riconoscere la seguente
Proposizione 5.3. Una f : (a, b) ⊂ R → R e prolungabile in unafunzione continua sulla chiusura [a, b] se e solo se e uniformementecontinua in (a, b).
Risultato che puo essere espresso in forma piu generale al modo seguente
Teorema 5.4. Una f : E ⊂ R → R e prolungabile in una funzionecontinua sulla chiusura E se e solo se e uniformemente continua in E.
5.2. La funzione esponenziale. Scelta una base a > 1 e corret-tamente definita la funzione
f : Q→ R,m
n→ a
mn
il suo prolungamento nella celebrata funzione esponenziale di base a
ax
e null’altro che l’applicazione piu importante del precedente Teorema5.4Infatti la proprieta formale delle potenze implica, per ogni x e y razio-nali,
ay − ax = ax(ay−x − 1
)→ |ay − ax| = ax
∣∣ay−x − 1∣∣
Pertanto supponendo, ad esempio, x, y ∈ [0, 1]∩Q, posto δ = y− x, siha
|ay − ax| ≤ ax∣∣aδ − 1
∣∣ ≤ a∣∣aδ − 1
∣∣E evidente quindi che se proviamo che
(2) limδ→0
aδ = 1

64 9. FUNZIONI CONTINUE
se ne deduce che per ogni ε > 0 esiste δε tale che
∀|δ| ≤ δε : a∣∣aδ − 1
∣∣ ≤ ε
ovvero∀x, y : |x− y| ≤ δε → |ay − ax| ≤ ε
che significa che la funzione esponenziale e uniformemente continua equindi prolungabile, per continuita da Q a R.Per provare la (2) ci serviamo della nota disuguaglianza
∀x > 0, (1 + x)n ≥ 1 + nx
che implica(1 +
a− 1
n
)n≥ 1 + n
a− 1
n= a → a
1n ≤ 1 +
a− 1
n
Ne segue pertanto
limn→∞
a1n = 1
Ne segue quindi, per ogni razionale
δ =m
n, m < n
1 ≤ amn ≤ a
1n → 1
Il caso di δ → 0− equivale a quello precedente tenuto conto che
a−δ =1
aδ
6. Il teorema di esistenza degli zeri
6.1. Insiemi connessi.
Ricordiamo alcune definizioni (cfr. RUDIN, pag.40):
Definizione 6.1. Due insiemi A, B si dicono separati se
A ∩B = ∅ e A ∩B = ∅
Definizione 6.2. Un insieme E si dice connesso se non e unione didue insiemi separati e non vuoti.
In R gli insiemi connessi sono tutti e soli gli intervalli (aperti, semia-perti, limitati, non limitati,...): essi sono anche tutti convessi.In Rn gli insiemi convessi sono connessi, ma esistono anche insiemiconnessi non convessi (si pensi ad una corona circolare, a un ferro dicavallo, ecc.)

6. IL TEOREMA DI ESISTENZA DEGLI ZERI 65
6.2. Immagini di connessi.
Teorema 6.3. Sia f : X → Y continua e sia E ⊆ X connesso: alloraf(E) ⊆ Y e connesso.
Dimostrazione. Supponiamo, per assurdo, che f(E) non sia con-nesso, cioe
f(E) = A ∪Bcon A, B separati: A ∩B = ∅ e A ∩B = ∅.Posto
G = E ∩ f−1(A), H = E ∩ f−1(B)
si ha E, G non vuoti e
E = G ∪H
Riconosciamo adesso che i due insiemi G, H soddisferebbero alle duecondizioni
(3) G ∩H = ∅ e G ∩H = ∅Cominciamo a provare la prima delle (3): Tenuto conto che
A ⊆ A
riesce:
• f−1(A) e chiuso perche f e continua,• G ⊆ f−1(A)• e, quindi, G ⊆ f−1(A).
Le osservazioni precedenti implicano che G∩H = ∅: infatti se esistessex0 ∈ G ∩H allora
f(x0) ∈ A, f(x0) ∈ Be quindi
f(x0) ∈ A ∩Bcontrariamente all’ipotesi A ∩B = ∅.Proviamo la seconda delle (3)Il procedimento e del tutto analogo al precedente.Tenuto conto che
B ⊆ B
riesce:
• f−1(B) e chiuso perche f e continua,• H ⊆ f−1(B)• e, quindi, H ⊆ f−1(B).

66 9. FUNZIONI CONTINUE
Le osservazioni precedenti implicano che H ∩G = ∅: infatti se esistessex1 ∈ H ∩G allora
f(x1) ∈ B, f(x1) ∈ Ae quindi
f(x!) ∈ B ∩ Acontrariamente all’ipotesi B∩A = ∅. Quindi l’ammissione fatta per as-surdo che f(E) non sia connesso e da respingere, quindi risulta provatoche f(E) e necessariamente connesso. �
6.3. Applicazioni.
Tenuto presente che i connessi di R sono intervalli (cfr. RUDIN, Teo-rema 2.47, pag. 40) si deducono dal precedente Teorema 6.3 i seguentirisultati
•
Proposizione 6.4 (Teorema d’esistenza degli zeri). Sia
f : [a, b]→ R
continua, se f(a)f(b) < 0 allora esiste ξ ∈ (a, b) in cui riescef(ξ) = 0.•
Proposizione 6.5 (Teorema dei valori intermedi). Sia
f : I ⊆ R→ R
continua con I connesso (cioe un intervallo): siano a, b ∈ I∀k ∈ [f(a), f(b)] ∃ξ ∈ [a, b] tale che f(ξ) = k
7. Funzioni monotone
Ci occupiamo in questo paragrafo esclusivamente di funzioni f : (a, b) ⊆R→ R.
7.1. Punti di discontinuita.
Definizione 7.1. Limite sinistro e limite destro in un punto
f(x−) = limn→∞
f(tn) tn → x, tn < x
f(x+) = limn→∞
f(tn) tn → x, x < tn
essendo tali limiti indipendenti dalle successioni {tn} scelte.

7. FUNZIONI MONOTONE 67
Definizione 7.2. Il punto x si dice punto di discontinuita di primaspecie, o semplice, se
∃f(x−), ∃f(x+), f(x−) 6= f(x+)
Si dice punto di discontinuita di seconda specie se uno almeno dei duelimiti sinistro o destro manca.
Teorema 7.3. Le funzioni monotone f : (a, b) ⊆ R→ R• hanno, all’interno dell’intervallo in cui sono definite, solo di-
scontinuita di prima specie,• l’insieme dei punti di discontinuita e finito o numerabile.
Dimostrazione. Supponiamo f monotona crescente allora riesce,necessariamente,
f(x−) = supt∈(a,x)
f(t), f(x+) = inft∈(x,b)
f(t)
Sia E l’insieme dei punti di discontinuita: se x ∈ E allora riesce
f(x−) < f(x+)
associamo quindi ad ogni punto x ∈ E un numero razionale r(x) taleche
f(x−) < r(x) < f(x+)
Se x1, x2 ∈ E, x1 6= x2 allora essendo f monotona riesce r(x1) 6= r(x2).La corrispondenza produce quindi un’applicazione r : E → r(E) ⊆ Q.Considerato che Q e numerabile, tale sara anche r(E) e quindi E. �
Esempio 7.4. Si possono costruire funzioni monotone crescenti, li-mitate, con insieme di discontinuita E assegnato (naturalmente conE finito o numerabile). Se E := {x1 < x2 < ... < xm} allora bastascegliere m+ 1 valori c1 < c2 < .... < cm+1 e costruire la funzione f(x)
f(x) =
c1 x ∈ (a, x1]c2 x ∈ (x1, x2]... ................cm+1 x ∈ (xm, b)
Se E e una successione
E := {x1 < x2 < x3 < .... < xn < ....}
basta procurarsi una successione di numeri positivi an tali che∞∑n=1
an <∞

68 9. FUNZIONI CONTINUE
e definire
f(x) =∑xn<x
an
essendo la somma estesa a tutti gli indici n in corrispondenza ai qualiriesce xn < xLa funzione f(x) e certamente crescente: piu e grande x piu numerosisono gli addendi positivi da sommare, ed e discontinua in tutti e solii punti di E, traversando i quali si incontra un ulteriore addendo dasommare.

CAPITOLO 10
Integrali impropri di funzioni di una variabile
1. Le funzioni continue
Consideriamo nel seguito una delle piu importanti applicazioni del teo-rema di uniforme continuita delle funzioni continue su intervalli chiusie limitati: la loro integrabilita.Ricordiamo che l’integrabilita secondo Riemann su intervallo chiusoe limitato [a, b] e riconoscibile elementarmente per due sole classi difunzioni:
• quelle lipschitziane,• quelle monotone e limitate.
Teorema 1.1. Sia f : E ⊆ R → R continua, allora f e integrabilesecondo Riemann in ogni intervallo chiuso e limitato [a, b] ⊆ E.
Dimostrazione. Essendo f continua in E e quindi anche in [a, b],f e, di conseguenza, uniformemente continua in [a, b].Scelto ε > 0 esiste pertanto un δε > 0 tale che se la massima ampiezzadegli intervallini della decomposizione
a = x0 < x1 < x2 < ... < xn−1 < xn = b
verifica la disuguaglianza
maxi|xi+1 − xi| ≤ δε
allora riesce
∀i : supt∈[xi+1,xi]
f(t)− inft∈[xi+1,xi]
f(t) ≤ ε
Indicate pertanto con S+ e con S− le somme di Riemann di f relativea tale decomposizione riesce
S+ − S− ≤ ε (b− a)
da cui l’integrabilita. �
69
70 10. INTEGRALI IMPROPRI DI FUNZIONI DI UNA VARIABILE
2. Integrali impropri
Il titolo di integrale improprio 1 si riferisce a integrali quali∫ 1
0
sin
(1
x
)dx,
∫ 1
0
1√xdx,
∫ ∞0
e−xdx,
∫ ∞1
sin(x)
x2dx
riferiti a
• funzioni non continue agli estremi di intervalli,• funzioni integrande non limitate,• intervalli di integrazione non chiusi e limitati.
Ricordiamo il seguente risultato fondamentale per l’integrazione di fun-zioni f(x) continue su intervalli chiusi e limitati:
Teorema 2.1. Sia f continua nell’intervallo chiuso e limitato [a, b],siano {an} e {bn} due successioni contenute in [a, b] e convergentirispettivamente ad a e b allora
(4) limn→∞
∫ bn
an
f(x)dx =
∫ b
a
f(x)dx
La proprieta indicata viene assunta come algoritmo di definizione del-l’integrale nei casi impropri precedentemente elencati: perche non definire∫ 1
0
sin(1
x) dx,
come
lima→0
∫ 1
a
sin(1
x) dx,
una volta riconosciuta l’esistenza di tale limite...?
3. Integrali su intervalli limitati
3.1. Funzioni continue e limitate.
Teorema 3.1. Sia f(x) continua sull’intervallo aperto (a, b) e sia li-mitata in modulo: allora comunque si scelgano due successioni {an} e{bn} contenute in (a, b) e convergenti rispettivamente ad a e a b esisteil
(5) limn→∞
∫ bn
an
f(x) dx
1Vol. I, §3.15, pag, 301

3. INTEGRALI SU INTERVALLI LIMITATI 71
il cui valore viene poi assunto come definizione di∫ b
a
f(x) dx
Dimostrazione. Sia |f(x)| ≤M, posto
In =
∫ bn
an
f(x)dx
verifichiamo l’esistenza del limite :
limn→∞
In
tramite il criterio di convergenza di Cauchy, valido per ogni successionenumerica.Riesce
|In − Im| ≤M (|an − am|+ |bn − bm|)Tenuto conto che {an} e {bn} sono successioni convergenti, i due modulia secondo membro saranno infinitesimi.Quindi infinitesimo riesce anche |In− Im| e quindi, verificato il criteriodi convergenza, se ne deduce l’esistenza del limite (5). �
Esempio 3.2. Il teorema precedente garantisce l’esistenza dell’integraleimproprio di sin(1/x) sull’intervallo (0, π/2), come pure ovviamente suqualunque altro intervallo [0, A].Consideriamo, per altra via, l’integrale improprio∫ π/2
0
sin(1
x)dx = lim
a→0
∫ π/2
a
sin(1
x)dx
Tenuto conto che, 0 < a < π/2,∫ π/2
a
sin(1
x)dx =
∫ π/2
a
x2(
cos(1
x)
)′dx
si ha ∫ π/2
a
sin(1
x)dx = x2 cos(
1
x)
∣∣∣∣π/2a
− 2
∫ π/2
a
x cos(1
x)dx
I due termini a secondo membro hanno limite per a→ 0:
• il primo perche esiste, ovviamente, lima→0
a2 cos( 1a) = 0
• il secondo perche la funzione integranda e prolungabile percontinuita in tutto l’intervallo chiuso [0, π/2]
E quindi riconosciuta l’esistenza del limite
lima→0
∫ π/2
a
sin(1
x)dx
72 10. INTEGRALI IMPROPRI DI FUNZIONI DI UNA VARIABILE
purtroppo, non e altrettanto semplice conoscerne il valore !
3.2. Numero finito di discontinuita. Il precedente Teorema(3.1) copre anche il caso di alcuni punti di discontinuita interni al-l’intervallo di integrazione quali nel caso, vedi Figura 1 ,ad esempiodi ∫ 10
0
sin(1
sin(x)) dx
Figura 1.∫ 10
0sin( 1
sin(x)) dx
3.3. Funzioni continue in (a, b) non limitate. La questione 2
si riferisce al secondo esempio ∫ 1
0
1√xdx
La costruzione degli integrali In e la stessa del caso precedente: nonaltrettanto la loro convergenza che, dipende dall’ordine di infinito chela funzione f presenta in uno o in entrambi gli estremi.
Teorema 3.3. Sia f continua in (a, b], a escluso e b incluso, e riesca
|f(x)| ≤M1
|x− a|α, α < 1
allora esiste il limite
(6) limt→a
∫ b
t
f(x)dx
2Dire che f(x) continua in (a, b) aperto non e limitata equivale a dire che divergein modulo in uno o in entrambi gli estremi.
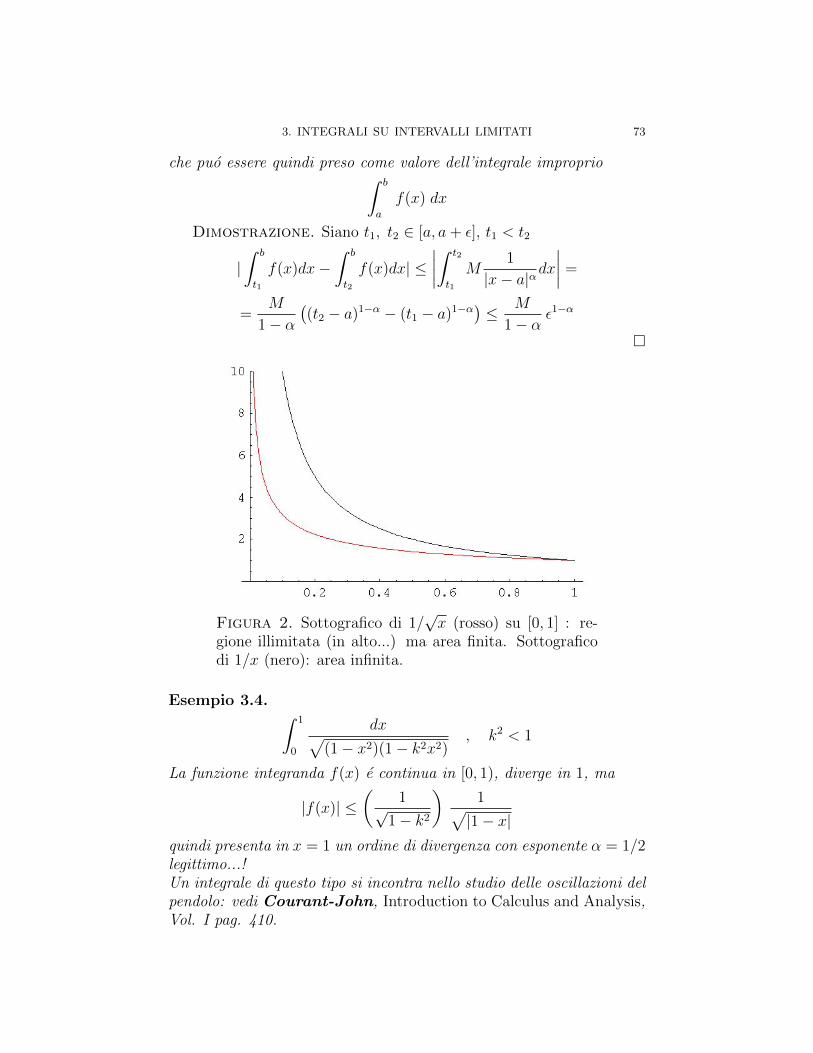
3. INTEGRALI SU INTERVALLI LIMITATI 73
che puo essere quindi preso come valore dell’integrale improprio∫ b
a
f(x) dx
Dimostrazione. Siano t1, t2 ∈ [a, a+ ε], t1 < t2
|∫ b
t1
f(x)dx−∫ b
t2
f(x)dx| ≤∣∣∣∣∫ t2
t1
M1
|x− a|αdx
∣∣∣∣ =
=M
1− α((t2 − a)1−α − (t1 − a)1−α
)≤ M
1− αε1−α
�
Figura 2. Sottografico di 1/√x (rosso) su [0, 1] : re-
gione illimitata (in alto...) ma area finita. Sottograficodi 1/x (nero): area infinita.
Esempio 3.4. ∫ 1
0
dx√(1− x2)(1− k2x2)
, k2 < 1
La funzione integranda f(x) e continua in [0, 1), diverge in 1, ma
|f(x)| ≤(
1√1− k2
)1√|1− x|
quindi presenta in x = 1 un ordine di divergenza con esponente α = 1/2legittimo...!Un integrale di questo tipo si incontra nello studio delle oscillazioni delpendolo: vedi Courant-John, Introduction to Calculus and Analysis,Vol. I pag. 410.

74 10. INTEGRALI IMPROPRI DI FUNZIONI DI UNA VARIABILE
4. Integrali impropri di funzioni positive
Proposizione 4.1. Sia
f : (a, b] ⊆ R→ Rpositiva, f(x) ≥ 0: riesce
limc→a
∫ b
c
f(x)dx = supc∈(a,b]
∫ b
c
f(x)dx
4.1. Teoremi di confronto.
Teorema 4.2. Siano f e g due funzioni positive, continue in (a, b], etali che
f(x) ≤ g(x)
allora
• se esiste l’integrale improprio di g allora esiste anche quello dif ,• se non esiste l’integrale improprio di f allora non esiste neanche
quello di g.
4.2. Convergenza assoluta.
Proposizione 4.3. Sia f continue in (a, b], se esiste l’integrale impro-prio di |f | allora esiste anche quello di f .
Dimostrazione. Indicate con f+ ed f− la parte positiva e la partenegativa di f riesce
f(x) = f+(x)− f−(x), |f+(x)| ≤ |f(x)|, |f−(x)| ≤ |f(x)|Pertanto in base al precedente Teorema di confronto esistono gli inte-grali impropri sia di f+ che di f− e, quindi, per linearita anche quellodi f . �
5. L’indipendenza dalla successione
I precedenti integrali impropri sono stati definiti come limiti di altri in-tegrali: e importante riconoscere che i valori cosı assunti non dipendanotuttavia dalla successione scelta nel calcolo.Supponiamo per esempio che qualcuno parlasse dell’integrale improprio∫ +∞
0
sin(x)dx
dichiarando che esso vale 0 in base al seguente ragionamento:
• la successione di punti xk = 2kπ tende a +∞
6. INTERVALLI ILLIMITATI 75
• gli integrali ∫ xk
0
sin(x)dx = 0
• quindi∫ +∞
0
sin(x)dx = limk→+∞
∫ xk
0
sin(x)dx = 0
L’errore consiste nel fatto che occorre, per parlare di integrale impro-prio, poter riconoscere che
qualsiasi successione xk → +∞si prenda esista il limite degli integrali∫ xk
0
sin(x)dx
e tale limite sia sempre lo stesso, cioe non cambi cambiando successione.Nel caso precedente se si scegliesse invece xk = (2k + 1)π successioneancora divergente a +∞ si otterrebbero integrali∫ xk
0
sin(x)dx = 1
che porterebbero, con lo stesso diritto alla dichiarazione∫ +∞
0
sin(x)dx = 1
I teoremi dimostrati garantiscono condizioni sufficienti a tale indipen-denza del limite dalla successione scelta per eseguire i calcoli.
6. Intervalli illimitati
Funzioni continue da integrare su intervalli infiniti (semirette o tuttol’asse reale): stesso procedimento basato sui casi precedenti, si inte-gra su una successione di intervalli leciti e si assume come integraleimproprio il loro limite.
Teorema 6.1 (Criterio sufficiente di convergenza). Sia f(x) continuanell’intervallo illimitato (a,+∞) e infinitesima per x → ∞ con unordine di infinitesimo α > 1
limx→+∞
f(x)
1/xα= lim
x→+∞f(x)xα = 0
allora esiste il limite
limt→+∞
∫ t
a
f(x) dx

76 10. INTEGRALI IMPROPRI DI FUNZIONI DI UNA VARIABILE
e tale valore viene assunto come integrale improprio∫ +∞
a
f(x) dx
La dimostrazione e analoga a quella dei casi precedenti.
Esempio 6.2. Il sottografico di
f(x) =1
1 + x2
ha area finita, π. Infatti∫ +∞
−∞
1
1 + x2dx = lim
a→−∞, b→+∞
∫ b
a
1
1 + x2dx =
= lima→−∞, b→+∞
(arctan(b)− arctan(a)) = π
Esempio 6.3. Il sottografico di
f(x) = e−x2
,
la campana di Gauss, ha area finita, valore√π.
Figura 3. In rosso 1/(1 + x2), in nero, sotto, e−x2
Esempi tratti dalle Note di Analisi Matematica I, Capitolo 3.
6. INTERVALLI ILLIMITATI 77
• Assegnata
f(x) =1
x| log(x)|α, x ∈ (0, +∞)/{1}
indicare in quali intervalli esiste l’integrale∫ baf(x)dx e per
quali α. (Cap. 3, pag.7)• Assegnata la funzione
R(x) =p(x)
q(x)
essendo p(x) e q(x) due polinomi, indicare in quali intervalli
esiste l’integrale∫ baR(x)dx
• Indipendenza del valore da attribuire ad un integrale impropriodalla successione usata per invadere l’intervallo di integrazione:il caso di ∫ 1
−1
1
xdx
(Cap. 3 pag. 8)• Esistenza dell’integrale improprio (Cap. 3 pag. 12)∫ 1
0
1√(1− x2)(1− k2x2)
dx k2 < 1
• La funzione gamma: (Cap. 3 pag.14)
Γ(x) =
∫ +∞
0
e−y yx−1 dx x > 0
esistenza dell’integrale improprio, Γ(x+ 1) = xΓ(x),
Γ(n+ 1) = n!
• Esempio di f(x) lineare a tratti per la quale esiste l’integraleimproprio su [0,+∞) mentre per il modulo |f(x)| l’integraleimproprio diverge. (Cap. 3 pag. 16)• Sia
0 ≤ f(x) ↓ 0
una funzione non negativa, decrescente e infinitesima: riconoscereche esiste l’integrale improprio (Cap. 3 pag. 18)∫ +∞
0
f(x) sin(x) dx
• il caso dell’integrale improprio (Cap. 3 pag.10)∫ +∞
1
cos(x)
xdx

78 10. INTEGRALI IMPROPRI DI FUNZIONI DI UNA VARIABILE
• Gli integrali di Fresnel (Cap. 3, pag. 18)∫ +∞
0
sin(x2) dx
• Una generalizzazione: per quali α esiste l’integrale improprio∫ +∞
0
sin(xα) dx
Proposizione 6.4. Sia f(x) una funzione continua, non negativa,decrescente e infinitesima: esiste l’integrale improprio∫ +∞
0
f(x) sin(x) dx
Dimostrazione. L’esistenza dell’integrale improprio corrispondeall’esistenza del limite
(7) limL→+∞
∫ L
0
f(x) sin(x) dx
Suddividiamo l’intervallo [0, L] in parti
[0, π] ∪ [π, 2π] ∪ [2π, 3π] ∪ ... ∪ [(nL − 1)π, nLπ] ∪ [nLπ, L]
l’ultima delle quali lunga meno di π, cioe
nL = [L/π] , L→ +∞ → nL → +∞Posto
ak =
∫ kπ
(k−1)πf(x) sin(x) dx
riesce
(8)
∫ L
0
f(x) sin(x) dx =
nL∑k=1
ak +
∫ L
nLπ
f(x) sin(x) dx
Tenuto conto che la funzione integranda ha segno costante in ciascunodegli intervallini [kπ, (k+1)π] si riconosce che i termini ak si presentanoa segni alterni
a1 ≥ 0, a2 ≤ 0, a3 ≥ 0, ....
Tenuto conto inoltre che f(x) e decrescente e infinitesima si riconosceche
|ak| ≥ |ak+1|, limk→+∞
ak = 0
Quindi la serie∞∑k=1
ak
6. INTERVALLI ILLIMITATI 79
e convergente per il criterio di Leibnitz, cioe esiste
limL→∞
nL∑k=1
ak
Esiste del resto anche il limite dell’integrale
∫ L
nLπ
f(x) sin(x) dx: infatti∣∣∣∣∫ L
nLπ
f(x) sin(x) dx
∣∣∣∣ ≤ f (nLπ) π → 0
essendo f(x) infinitesima per x→∞.Dalla (8) segue pertanto l’esistenza del limite (7), cioe l’esistenza del-l’integrale improprio ∫ +∞
0
f(x) sin(x) dx
�


CAPITOLO 11
Successioni di funzioni
1. Primi esempi
• 1, x, x2, x3, ...., xn, ...., x ∈ [0, 2]• e−x, e−2x, e−3x, ..., e−nx, ...., x ∈ [−1, 1]•
fn(x) =1
(n+ 1)2 + x2, n = 1, 2, 3, ..., x ∈ R
•
fn(x) = sin(x), n = 1, 2, 3, ..., x ∈ [0, 2π]
•fn(x) = n2, n = 1, 2, 3, ..., x ∈ [0, 1]
I termini di una successione di funzioni {fn(x)} sono funzioni dipen-denti
• da un parametro n a valori interi, che rappresenta l’indicedell’elemento,• da una variabile x.
1.1. Serie di funzioni.Analogamente alle successioni di funzioni si possono considerare le
serie di funzioni
Cosı ad esempio la serie∞∑n=0
xn
equivale a considerare la successione di funzioni
sm(x) =m∑n=0
xn
81

82 11. SUCCESSIONI DI FUNZIONI
1.2. Usare i grafici.Assegnare una funzione f : [a, b] ⊆ R→ R equivale ad assegnare il suografico nel piano cartesiano (x, y).Assegnare una successione di funzioni equivale quindi ad assegnare unasuccessione di grafici: un album da disegno con infinite pagine
• nella prima pagina c’e il grafico della prima funzione dellasuccessione, la f1(x),• nella seconda c’e il grafico della seconda funzione della succes-
sione, la f2(x),• ecc,
Con mezzi piu moderni l’album puo essere sostituito con una pellico-la cinematografica, la prima pagina diventa il primo fotogramma, laseconda pagina il secondo, ecc.
Osservazione 1.1. Questa√x− 1,
√x− 2,
√x− 3, .....
√x− n, ....
non e una successione di funzioni: infatti non c’e alcun punto x0 nelquale possano essere calcolate tutte.Per poter calcolare la prima occorre che x0 ≥ 1, per poter calcolareanche la seconda occorre, in piu che riesca anche x0 ≥ 2, ecc.
2. Convergenza puntuale
Assegnata la successione di funzioni
{fn(x)}, x ∈ [a, b], n = 1, 2, 3, ...
ad essa risultano associate, per ogni scelta di x0 ∈ [a, b] le successioninumeriche
{fn(x0)}, n = 1, 2, 3, ...
Scelte di x0 diversi conducono a successioni numeriche {fn(x0)} diverse:
• per alcuni x0 tali successioni possono risultare convergenti,• per altri x0 tali successioni possono risultare non convergenti.
Esempio 2.1. Sia fn(x) = xn, x ∈ [0, 2]:
• scelto x0 = 0 la successione numerica diventa {0, 0, 0, ..., 0, ...},convergente a ` = 0,• sia x0 = 1/3 la successione numerica diventa {1/3, 1/32, 1/33, ..., 1/3n, ...},
convergente a ` = 0,• sia x0 = 1 la successione numerica diventa {1, 1, 1, ..., 1, ...},
convergente a ` = 1,• sia x0 = 2 la successione numerica diventa {2, 22, 23, ..., 2n, ...},
non convergente.

2. CONVERGENZA PUNTUALE 83
Definizione 2.2. Una successione {fn(x)} assegnata per x ∈ [a, b] sidice convergente puntualmente in [a, b] alla funzione f(x) se per ognix0 ∈ [a, b] la successione numerica associata {fn(x0)} converge al valoref(x0).Il legame tra le fn(x) e la funzione limite f(x) si indica, come per tuttigli altri limiti, con la notazione
limn→∞
fn(x) = f(x)
Una questione importante e la seguente: quali delle proprieta possedutedalle fn(x) si conservano nella f(x) ?
Proposizione 2.3. Riesca ∀x ∈ [a, b] : limn→∞
fn(x) = f(x) allora:
• se le fn(x) sono non negative sara non negativa anche f(x),• se le fn(x) sono non decrescenti sara non decrescente anchef(x),• se le fn(x) sono convesse sara convessa anche la f(x).
Dimostrazione.
• ∀x0 ∈ [a, b] : fn(x0) ≥ o → limn→∞
fn(x0) = f(x0) ≥ 0
• ∀x1 < x2 ∈ [a, b] fn(x2)− fn(x1) ≥ 0 →→ lim
n→∞[fn(x2)− fn(x1)] = [f(x2)− f(x1)] ≥ 0
• la convessita significa che
∀n, ∀λ ∈ [0, 1] : fn(λx1 + (1− λ)x2) ≤ λfn(x1) + (1− λ)fn(x2)
passando al limite membro a membro, e tenuto conto che simantengono le disuguaglianze, si ha
∀λ ∈ [0, 1] : f(λx1 + (1− λ)x2) ≤ λf(x1) + (1− λ)f(x2)
�
2.1. Esempi di proprieta che si possono perdere.
• la limitatezza: le funzioni fn(x) che compongono la successionepossono essere ciascuna limitata e, tuttavia, ammettere unlimite puntuale non limitato:
x ∈ (0, 1] : fn(x) =1
x+1
n
limn→∞
fn(x) =1
x
x > 0 : fn(x) =
{n2x se x ∈ [0, 1/n)1
xse x ≥ 1/n

84 11. SUCCESSIONI DI FUNZIONI
• continuita:
limn→∞
xn = f(x) =
{0 se x ∈ [0, 1)1 se x = 1
Pur essendo le funzioni della successione continue in [0, 1] lafunzione f(x) loro limite non lo e.• integrabilita: e noto come la funzione di Dirichlet d(x)
d(x) =
{1 se x ∈ Q0 se x /∈ Q
non sia integrabile in [0, 1]. Consideriamo la successione r1, r2, r3, ...dei razionali di [0, 1] e consideriamo le funzioni
fn(x) =
{1 se x ∈ {r1, r2, ..., rn}0 se x /∈ {r1, r2, ..., rn}
E chiaro che le fn(x) hanno un numero finito di punti di dis-continuita e quindi sono integrabili in [0, 1], ed e anche chiaroche riesce
limn→∞
fn(x) = d(x)
• passaggio al limite sotto il segno di integrale:
limn→∞
∫ b
a
fn(x)dx =
∫ b
a
limn→∞
fn(x)dx ?
in altri termini e (sempre) possibile scambiare le due oper-
azioni, il passaggio al limite e il calcolo dell’integrale ? E chiaroche no: basta pensare alla situazione in Figura 7 a pag.30 delCap.4 delle Note.• la derivabilita: il limite puntuale di una famiglia di funzioni
derivabili puo essere non derivabile.Si consideri, ad esempio il grafico in Figura 1 due rette,
una orizzontale, y = 0 e una inclinata a 45o, raccordate da unarco di circonferenza.
La bonta del raccordo fa riconoscere nel disegno il graficodi una funzione derivabile: considerando tuttavia una succes-sione di tali grafici con raccordi circolari sempre piu piccoli siriconosce una successione di funzioni i cui grafici tendono aquello rappresentato dalle due semirette. Grafico con angolo,quindi grafico di una funzione non derivabile !
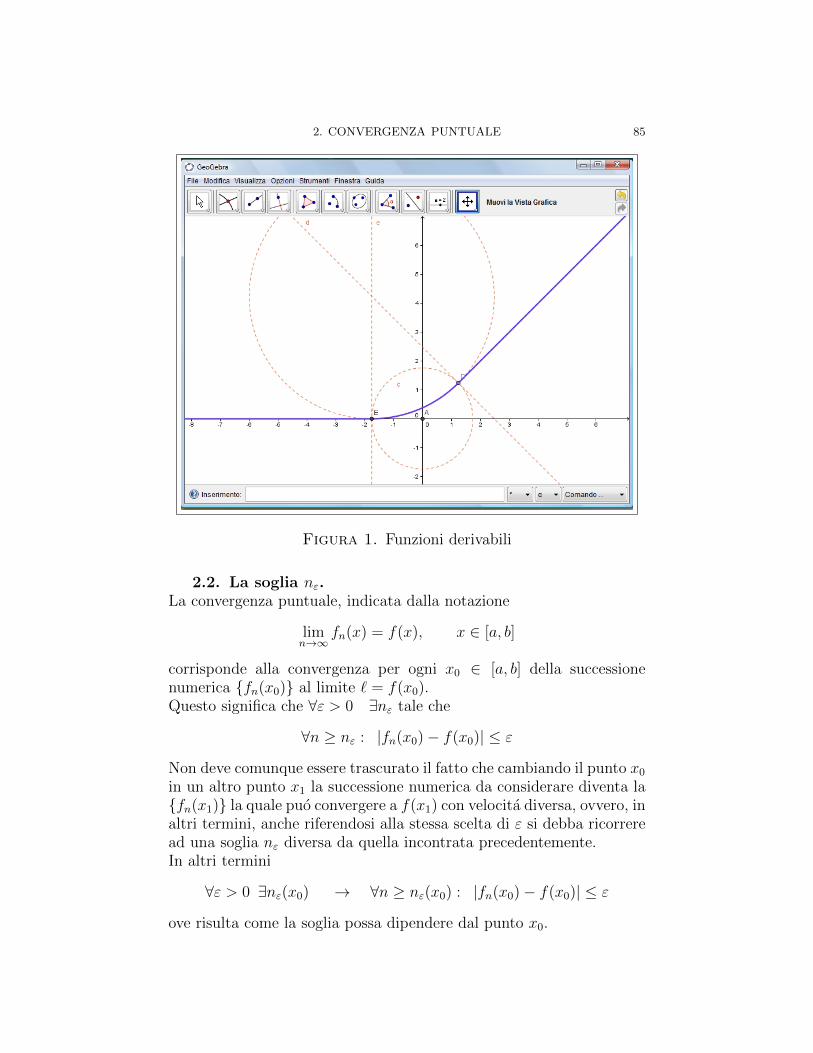
2. CONVERGENZA PUNTUALE 85
Figura 1. Funzioni derivabili
2.2. La soglia nε.La convergenza puntuale, indicata dalla notazione
limn→∞
fn(x) = f(x), x ∈ [a, b]
corrisponde alla convergenza per ogni x0 ∈ [a, b] della successionenumerica {fn(x0)} al limite ` = f(x0).Questo significa che ∀ε > 0 ∃nε tale che
∀n ≥ nε : |fn(x0)− f(x0)| ≤ ε
Non deve comunque essere trascurato il fatto che cambiando il punto x0in un altro punto x1 la successione numerica da considerare diventa la{fn(x1)} la quale puo convergere a f(x1) con velocita diversa, ovvero, inaltri termini, anche riferendosi alla stessa scelta di ε si debba ricorreread una soglia nε diversa da quella incontrata precedentemente.In altri termini
∀ε > 0 ∃nε(x0) → ∀n ≥ nε(x0) : |fn(x0)− f(x0)| ≤ ε
ove risulta come la soglia possa dipendere dal punto x0.

86 11. SUCCESSIONI DI FUNZIONI
Dipendendo dal punto puo accadere che
supx∈[a,b]
nε(x0) = +∞
Esempio 2.4. Consideriamo la successione {xn}, x ∈ [0, 1), riesce
limn→∞
xn = 0 ∀x ∈ [0, 1)
Scelto ε > 0 per ottenere che riesca
|xn0 | ≤ ε
occorre che
n log(x0) ≤ log(ε) ⇔ n ≥ | log(ε)|| log(x0)|
cioe
nε(x0) ≥| log(ε)|| log(x0)|
Esempio 2.5. Puo naturalmente accadere in altri casi, diversamentedall’esempio precedente, che si possa trovare, scelto ε, una soglia nεadatta a tutti i punti x0 dell’intervallo.Consideriamo, ad esempio, la successione
fn(x) =xn
nx ∈ [0, 1]
anche per essa riescelimn→∞
fn(x) = 0
ma, fissato ε > 0 per ottenere che
|fn(x0)| ≤ ε
basta prendere, qualunque sia x0 ∈ [0, 1],
nε ≥1
ε
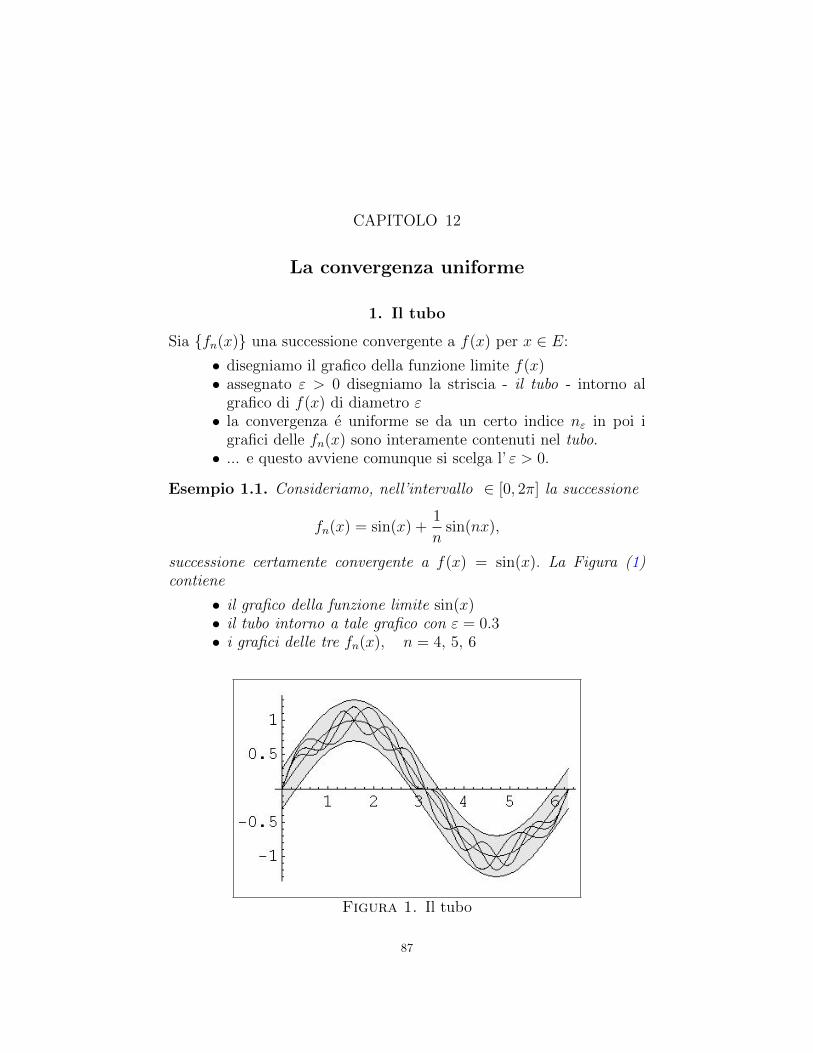
CAPITOLO 12
La convergenza uniforme
1. Il tubo
Sia {fn(x)} una successione convergente a f(x) per x ∈ E:
• disegniamo il grafico della funzione limite f(x)• assegnato ε > 0 disegniamo la striscia - il tubo - intorno al
grafico di f(x) di diametro ε• la convergenza e uniforme se da un certo indice nε in poi i
grafici delle fn(x) sono interamente contenuti nel tubo.• ... e questo avviene comunque si scelga l’ ε > 0.
Esempio 1.1. Consideriamo, nell’intervallo ∈ [0, 2π] la successione
fn(x) = sin(x) +1
nsin(nx),
successione certamente convergente a f(x) = sin(x). La Figura (1)contiene
• il grafico della funzione limite sin(x)• il tubo intorno a tale grafico con ε = 0.3• i grafici delle tre fn(x), n = 4, 5, 6
Figura 1. Il tubo
87

88 12. LA CONVERGENZA UNIFORME
Si vede come i grafici delle f4(x), f5(x), f6(x) siano ben contenuti den-tro il tubo.Naturalmente se avessimo scelto un tubo piu sottile, un tubetto..., avrem-mo forse dovuto attendere un po’ di piu per riconoscere che i graficidelle fn(x) finissero interamente dentro tale tubetto !
Esempio 1.2. Consideriamo nell’intervallo |x| < 1 la successione
fn(x) = xn
successione convergente a f(x) = 0, naturalmente questo non accadenei due estremi.La Figura (2) seguente mostra il tubo realizzato intorno alla funzionelimite e di spessore ε = 0.1 : sono anche riportati i grafici dellefunzioni della successione x4, x7, x12, x15 che, visibilmente non sonointeramente contenuti nel tubo....
Figura 2. I grafici non finiscono interamente nel tubo...!
Il motivo e evidente: i grafici delle xn per x = 1 devono prendere ilvalore 1, quindi i loro grafici devono avere un tratto in salita che li portia raggiungere tale quota, tratto in salita che fuoriesce, naturalmente,dal tubo disegnato.
Definizione 1.3 (Convergenza uniforme). La successione {fn(x)} con-verge per x ∈ E uniformemente alla funzione f(x) se per ogni ε > 0esiste una stessa unica soglia nε valida per tutti i punti x0 ∈ E: cioetale che
|fn(x0)− f(x0)| < ε ∀x0 ∈ E, ∀n > nε
La parola
uniforme

1. IL TUBO 89
o meglio, uniforme rispetto ad x, significa che il tipo di convergenzaosservato per le successioni numeriche {fn(x0)} ottenute per ogni sceltadi x0 ∈ [a, b] non varia, e appunto uniforme, rispetto al variare di x0:assegnato ε > 0 esiste una soglia nε tale che se n ≥ nε sono soddisfattele disuguaglianze
|fn(x)− f(x)| ≤ ε
qualunque sia il punto x ∈ [a, b] scelto.
Proposizione 1.4. Sia
∀x ∈ [a, b] : limn→∞
fn(x) = f(x)
La convergenza e anche uniforme se e solo se
limn→∞
supx∈[a,b]
|fn(x)− f(x)| = 0
Dimostrazione. Supponiamo che riesca
limn→∞
supx∈[a,b]
|fn(x)− f(x)| = 0
allora ∀ε > 0 ∃nε tale che
∀n ≥ nε : supx∈[a,b]
|fn(x)− f(x)| ≤ ε
disuguaglianza che implica
∀n ≥ nε : |fn(x)− f(x)| ≤ ε
per ogni x ∈ [a, b], cioe la convergenza uniforme.
Viceversa, supponiamo che la successione {fn(x)} converga uniforme-mente a f(x) in [a, b]: allora ∀ε > 0 esiste nε tale che se n ≥ nε siha
∀x ∈ [a, b] : |fn(x)− f(x)| ≤ ε
disuguaglianza che implica che, per n ≥ nε riesce
supx∈[a,b]
|fn(x)− f(x)| ≤ ε
cioe
limn→∞
supx∈[a,b]
|fn(x)− f(x)| = 0
�
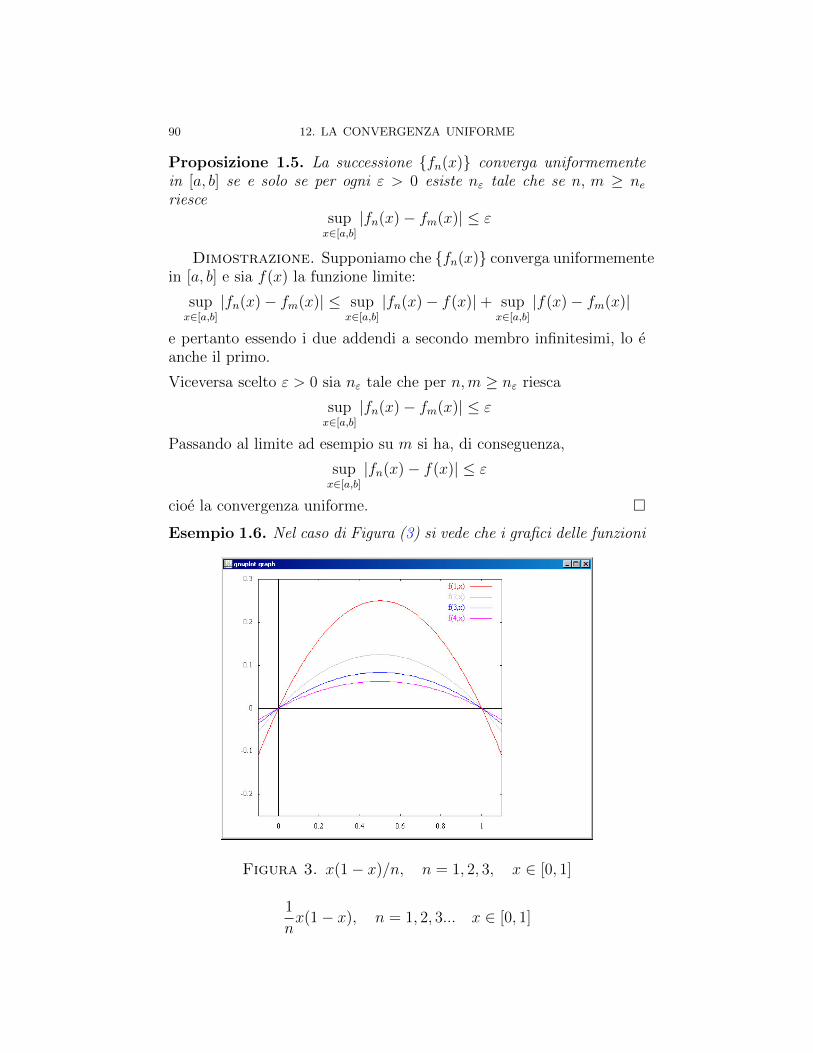
90 12. LA CONVERGENZA UNIFORME
Proposizione 1.5. La successione {fn(x)} converga uniformementein [a, b] se e solo se per ogni ε > 0 esiste nε tale che se n, m ≥ neriesce
supx∈[a,b]
|fn(x)− fm(x)| ≤ ε
Dimostrazione. Supponiamo che {fn(x)} converga uniformementein [a, b] e sia f(x) la funzione limite:
supx∈[a,b]
|fn(x)− fm(x)| ≤ supx∈[a,b]
|fn(x)− f(x)|+ supx∈[a,b]
|f(x)− fm(x)|
e pertanto essendo i due addendi a secondo membro infinitesimi, lo eanche il primo.
Viceversa scelto ε > 0 sia nε tale che per n,m ≥ nε riesca
supx∈[a,b]
|fn(x)− fm(x)| ≤ ε
Passando al limite ad esempio su m si ha, di conseguenza,
supx∈[a,b]
|fn(x)− f(x)| ≤ ε
cioe la convergenza uniforme. �
Esempio 1.6. Nel caso di Figura (3) si vede che i grafici delle funzioni
Figura 3. x(1− x)/n, n = 1, 2, 3, x ∈ [0, 1]
1
nx(1− x), n = 1, 2, 3... x ∈ [0, 1]
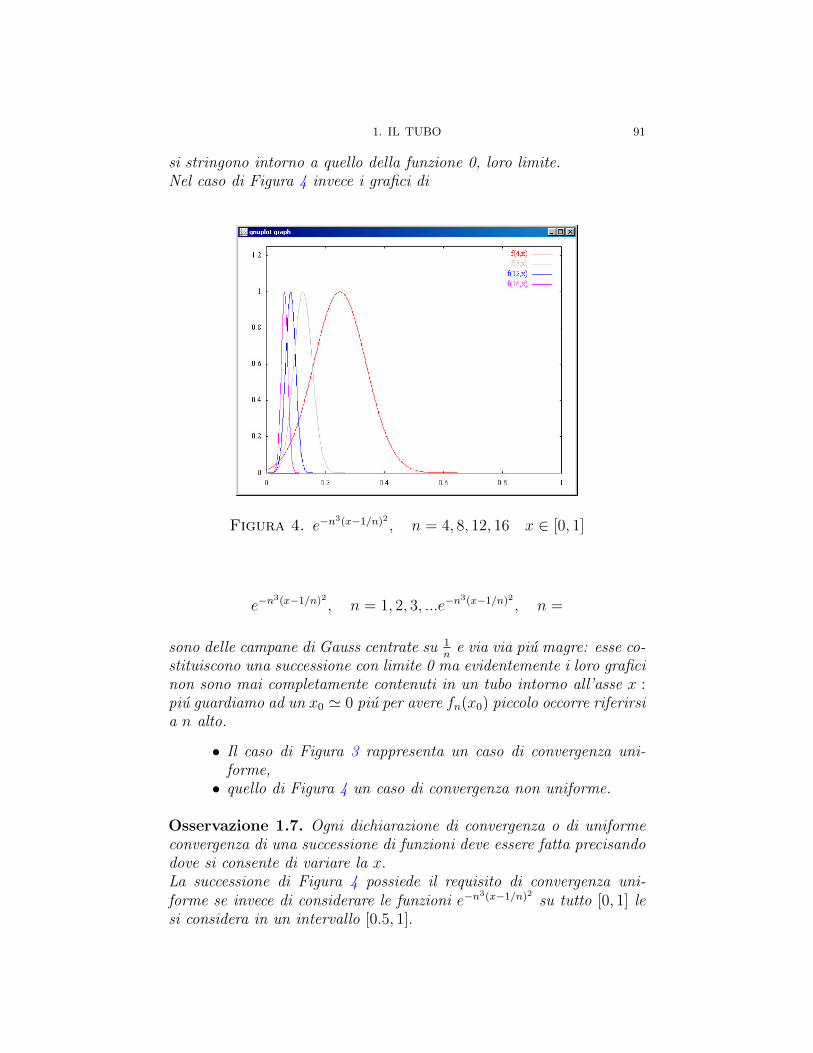
1. IL TUBO 91
si stringono intorno a quello della funzione 0, loro limite.Nel caso di Figura 4 invece i grafici di
Figura 4. e−n3(x−1/n)2 , n = 4, 8, 12, 16 x ∈ [0, 1]
e−n3(x−1/n)2 , n = 1, 2, 3, ...e−n
3(x−1/n)2 , n =
sono delle campane di Gauss centrate su 1n
e via via piu magre: esse co-stituiscono una successione con limite 0 ma evidentemente i loro graficinon sono mai completamente contenuti in un tubo intorno all’asse x :piu guardiamo ad un x0 ' 0 piu per avere fn(x0) piccolo occorre riferirsia n alto.
• Il caso di Figura 3 rappresenta un caso di convergenza uni-forme,• quello di Figura 4 un caso di convergenza non uniforme.
Osservazione 1.7. Ogni dichiarazione di convergenza o di uniformeconvergenza di una successione di funzioni deve essere fatta precisandodove si consente di variare la x.La successione di Figura 4 possiede il requisito di convergenza uni-forme se invece di considerare le funzioni e−n
3(x−1/n)2 su tutto [0, 1] lesi considera in un intervallo [0.5, 1].

92 12. LA CONVERGENZA UNIFORME
2. Test di convergenza uniforme per le serie
Definizione 2.1. Una serie di funzioni
∞∑k=0
gk(x)
si dice uniformemente convergente per x ∈ E se e tale la successionedelle sue somme parziali
Sn(x) =n∑k=0
gk(x)
Teorema 2.2 (Condizione sufficiente). La serie∞∑k=0
gk(x) e uniforme-
mente convergente per x ∈ E se e possibile maggiorare|gk(x)| ≤ ck, ∀x ∈ E, ∀k essendo
∑∞k=0 ck convergente.
La condizione sufficiente del teorema si chiama condizione di Weier-strass o condizione di convergenza totale.
Dimostrazione. Sia S(x) la somma della serie: dette Sn(x) lesomme parziali riesce
|S(x)− Sn(x)| = limm→∞
|Sm(x)− Sn(x)| = limm→∞
∣∣∣∣∣m∑n+1
gk(x)
∣∣∣∣∣Tenuto conto che
|gk(x)| ≤ ck →
∣∣∣∣∣m∑n+1
gk(x)
∣∣∣∣∣ ≤m∑n+1
ck
e che la serie∑∞
k=0 ck e convergente per ipotesi, per ogni ε > 0 esistenε ∈ N tale che
n > nε →m∑n+1
ck ≤ ε
Ne segue pertanto che, ∀x ∈ E
n > nε → |S(x)− Sn(x)| ≤ ε
ovvero la convergenza uniforme della successione Sn(x) delle sommeparziali. �

2. TEST DI CONVERGENZA UNIFORME PER LE SERIE 93
2.1. Il test per le successioni. Per decidere se la successione{fn(x)} converga o meno uniformemente basta esaminare se convergeo meno uniformemente la serie associata
f0 + {f1(x)− f0(x)}+ {f2(x)− f1(x)}+ ...
Pertanto, servendosi del criterio precedente,
Teorema 2.3. La successione {fn(x)} converge uniformemente se
|fn+1(x)− fn(x)| ≤ cn
essendo convergente la serie∑cn.
Esempio 2.4. Sperimentiamo il teorema precedente sulla successionexn per 0 ≤ x < 1: la serie associata ha, tenuto conto del modulo, iseguenti termini ∣∣xn+1 − xn
∣∣ = xn(1− x)
I termini da maggiorare hanno i seguenti grafici, Figura (5), in cor-rispondenza ad n = 4, ..., 8
Figura 5. I termini della serie associata
I massimi raggiunti in Figura (5) si possono anche calcolare facilmente(xn+1 − xn
)′= 0 → x =
n
n+ 1
massimi che pertanto valgono
1
n+ 1
1
(1 + 1n)n' 1
e
1
n+ 1
Gli ultimi termini costituiscono una maggiorazione non ulteriormentescontabile dei termini della serie associata, e si tratta di maggiorazioniche non corrispondono ad una serie convergente (somigliano molto allaserie armonica...)

94 12. LA CONVERGENZA UNIFORME
Non c’e da stupirsi che la successione xn per 0 ≤ x < 1 non siauniformemente convergente...!
2.2. Un teorema di Dini.Il nome di Ulisse Dini e legato ad importanti risultati d’Analisi Mate-matica, che gli sono riconosciuti a livello internazionale: fra tali risultatila seguente condizione di convergenza uniforme
Teorema 2.5. Sia {fn(x)} una successione di funzioni continue nel-l’intervallo chiuso e limitato I = [a, b] tali che
• fn(x) ≤ fn+1(x), ∀x ∈ I• limn→∞
fn(x) = f(x), ∀x ∈ Icon f(x) continua in I,
allora {fn(x)} converge uniformemente ad f(x) in I.
Il risultato, pur apparendo quasi evidente, e, invece nella sua genera-lita assai profondo: la sua dimostrazione non e opportuna in un corsoiniziale.In altri termini il teorema di Dini permette di riconoscere che l’esempiodelle funzioni
fn(x) = e−n3(x−1/n)2
illustrate in Figura 4, successione di funzioni convergente alla funzionecontinua f(x) = 0 su I = [0, 1] non uniformemente e un esempio base.La convergenza non uniforme di successioni {fn(x)} di funzioni conti-nue ad una funzione f(x) continua in un intervallo chiuso e limitato[a, b] si incontra solo in presenza di successioni di tipo non monotono.

CAPITOLO 13
Importanza della convergenza uniforme
1. Convergenza uniforme e continuita
E stato riconosciuto nell’esempio
{1, x, x2, x3, ..., xn, ...}che una successione di funzioni continue puo convergere in un intervallo[0, 1] ad una funzione
f(x) =
{0 se x ∈ [0, 1)1 se x = 1
non continua.Per le successioni che convergano uniformemente tuttavia incidenti deltipo precedente non possono verificarsi: sussiste infatti il seguente
Teorema 1.1. La successione {fn(x)} di funzioni continue nell’inter-vallo [a, b] converga uniformemente: allora la funzione limite e (neces-sariamente) continua.
Dimostrazione. Per riconoscere che f(x) sia continua occorrepoter riconoscere che la differenza |f(x1)− f(x2)| sia piccola quando econvenientemente piccola la distanza |x1 − x2|.Scritta f(x) come
f(x) = fn(x) + (f(x)− fn(x))
si ha{fn(x1)− supx |fn(x)− f(x)| ≤ f(x1) ≤ fn(x1) + supx |fn(x)− f(x)|fn(x2)− supx |fn(x)− f(x)| ≤ f(x2) ≤ fn(x2) + supx |fn(x)− f(x)|
da cui, posto µn = supx |fn(x)− f(x)|,{fn(x1)− µn ≤ f(x1) ≤ fn(x1) + µn−fn(x2)− µn ≤ −f(x2) ≤ −fn(x2) + µn
Sommando membro a membro,
fn(x1)− fn(x2)− 2µn ≤ f(x1)− f(x2) ≤ fn(x1)− fn(x2) + 2µn
ovvero
−|fn(x1)− fn(x2)| − 2µn ≤ f(x1)− f(x2) ≤ |fn(x1)− fn(x2)|+ 2µn
95

96 13. IMPORTANZA DELLA CONVERGENZA UNIFORME
cioe
|f(x1)− f(x2)| ≤ |fn(x1)− fn(x2)|+ 2µn
Scelto n0 tale che 2µn0 < ε/2 riesce
(9) |f(x1)− f(x2)| ≤ |fn0(x1)− fn0(x2)|+ε
2
da cui indicato con δε la distanza tra due punti tale che
|x1 − x2| ≤ δε → |fn0(x1)− fn0(x2)| ≤ε
2
riesce, di conseguenza della (9),
|x1 − x2| ≤ δε → |f(x1)− f(x2)| ≤ ε
�
1.1. L’invertibilita di due limiti. Il precedente teorema 1.1 sul-la continuita del limite f(x) di una successione uniformemente conver-gente {fn(x)} di funzioni continue puo essere letto in modo alternativocome la seguente
Proposizione 1.2. La successione {fn(x)} di funzioni continue con-verga uniformemente a f(x) per x ∈ [a, b], sia {ξk} ⊂ [a, b] una succes-sione convergente, allora
limk→∞
(limn→∞
fn(ξk))
= limn→∞
(limk→∞
fn(ξk))
cioe i due limiti permutano.
Dimostrazione.Per quanto concerne il primo membro, riesce
limn→∞
fn(ξk) = f(ξk)
e tenuto conto della continuita della f garantita dal precedente Teorema1.1,
limk→∞
(limn→∞
fn(ξk))
= limk→∞
f(ξk) = f( limk→∞
ξk)
Per quanto concerne il secondo membro si ha, tenuto conto della con-tinuita delle fn(x),
limk→∞
fn(ξk) = fn( limk→∞
ξk)
e quindi
limn→∞
(limk→∞
fn(ξk))
= limn→∞
fn( limk→∞
ξk) = f( limk→∞
ξk)
da cui la tesi. �

2. CONVERGENZA UNIFORME E INTEGRABILITA 97
Esempio 1.3. Sulla nota successione {1, x, x2, x3, ....} convergente (nonuniformemente) per x ∈ [0, 1], scelta una successione {ξk} convergentea 1 riesce
limk→∞
(limn→∞
ξnk
)= 0
limn→∞
(limk→∞
ξnk
)= 1
... i due limiti non permutano !
2. Convergenza uniforme e integrabilita
Teorema 2.1. La successione {fn(x)} di funzioni continue convergauniformemente a f(x) per x ∈ [a, b], allora riesce
limn→∞
∫ b
a
fn(x)dx =
∫ b
a
f(x)dx
Dimostrazione. Tenuto conto del precedente Teorema 1.1 la fun-zione limite f(x) e continua, quindi e integrabile su [a, b].Per dimostrare la tesi, posto µn = sup
x∈[a,b]|fn(x)− f(x)|, si ha
∣∣∣∣∫ b
a
fn(x)dx−∫ b
a
f(x)dx
∣∣∣∣ ≤ ∫ b
a
|fn(x)− f(x)|dx = µn(b− a)
Tenuto conto che la convergenza uniforme implica
limn→∞
µn = 0
si ha di conseguenza
limn→∞
∣∣∣∣∫ b
a
fn(x)dx−∫ b
a
f(x)dx
∣∣∣∣ = 0
cioe la tesi del teorema.�
Corollario 2.2. La tesi del precedente Teorema 2.1 puo essere ampli-ata, sotto le stesse ipotesi, al seguente
limn→∞
∫ β
α
fn(x)dx =
∫ β
α
f(x)dx
per ogni a ≤ α ≤ β ≤ b.
98 13. IMPORTANZA DELLA CONVERGENZA UNIFORME
2.1. Un’applicazione.
Consideriamo la serie∞∑k=0
xk, x ∈ [0, ρ], ρ < 1
tenuto presente che soddisfa il test di convergenza uniforme di Weier-strass
∀x ∈ [0, ρ] : |xk| ≤ ρk,∞∑k=0
ρk <∞
riconosciamo che la serie assegnata converge uniformemente, cioe lasuccessione delle somme parziali
Sn(x) =n∑k=0
xk
converge uniformemente per x ∈ [0, ρ] alla somma
S(x) =1
1− xRiesce pertanto, ∀x ∈ [0, ρ]∫ x
0
S(t)dt = limn→∞
∫ x
0
Sn(t)dt → log(1− x) = limn→∞
n∑k=0
xk+1
k + 1
ovvero, per ogni 0 ≤ ρ < 1 si ha
∀x ∈ [0, ρ] : log(1− x) =∞∑k=0
xk+1
k + 1
3. Convergenza uniforme e derivabilita
Teorema 3.1. La successione {fn(x)} di funzioni continue e derivabilicon derivate continue converga a f(x) per x ∈ [a, b], supponiamo inoltre che la successione delle derivate {f ′n(x)} converga uniformementeper x ∈ [a, b]: allora la funzione f(x) riesce continua e derivabile conderivata continua e riesce
f ′(x) = limn→∞
f ′n(x)
Dimostrazione. Servendosi del Teorema di Torricelli abbiamo
(10) fn(x) = fn(a) +
∫ x
a
f ′n(t)dt
Tenuto conto che se la successione {f ′n(x)} converge uniformemente perx ∈ [a, b] allora converge uniformemente anche in ogni subintervallo di

3. CONVERGENZA UNIFORME E DERIVABILITA 99
[a, b], passando al limite membro a membro nella (10) si ha, detta g(t)la funzione limite delle f ′n(t),
(11) f(x) = f(a) +
∫ x
a
g(t)dt
L’uguaglianza (11) implica, ancora per il Teorema di Torricelli,
f ′(x) = g(x)
�
3.1. Un’applicazione.
Consideriamo la serie
(12)∞∑k=0
xk, x ∈ [0, ρ], ρ < 1
e consideriamo la serie costituita dalle derivate
(13)∞∑k=0
kxk−1, x ∈ [0, ρ], ρ < 1
Tenuto presente che
∀x ∈ [0, ρ] : |kxk−1| ≤ kρk−1
e che la serie∞∑k=0
kρk−1
e convergente, si riconosce, per il criterio di Weierstrass che la serie(13) e uniformemente convergente.Dette Sn(x) le somme parziali della serie iniziale (12) e con S ′n(x) lesomme parziali della serie derivata (13) riesce
∀x ∈ [0, ρ] : limSn(x) =1
1− x, limS ′n(x) =
(1
1− x
)′=
1
(1− x)2
Si ha quindi l’espressione esplicita del limite delle S ′n(x) cioe la formulaesplicita per la somma della serie (13)
∀x ∈ [0, ρ], ρ < 1 :∞∑k=0
kxk−1 =1
(1− x)2

CAPITOLO 14
Serie di potenze
1. Introduzione
Una serie di potenze e∞∑k=0
ak(x− x0)k
con a0, a1, a2, ... numeri reali (o complessi) assegnati.La piu nota serie di potenze e la serie geometrica
∞∑k=0
xk
o, piu in generale,∞∑k=0
(x− x0)k
con x0 un valore assegnato.La convergenza in un punto ξ di una serie di potenze si riconosce esam-inando se in quel punto c’e convergenza assoluta: quindi la condizionesufficiente piu pratica e quella offerta dal criterio del rapporto
lim supk→∞
|ak+1||ξ − x0|k+1
|ak||ξ − x0|k= |ξ − x0| lim sup
k→∞
|ak+1||ak|
< 1
Sussiste pertanto il seguente
Teorema 1.1. La serie di potenze∞∑k=0
ak(x− x0)k
converge assolutamente in ogni punto ξ tale che |ξ − x0|ρ < 1 avendoindicato con
ρ = lim supk→∞
|ak+1||ak|
Il numero 1/ρ prende il nome di raggio di convergenza della serie: siintende naturalmente ∞ nel caso in cui riesce ρ = 0.
101

102 14. SERIE DI POTENZE
La condizione |ξ − x0|ρ < 1 individua un intervallo aperto di centrox0: gli estremi di tale intervallo (ove esso non sia l’intero R, cosa cheaccade se ρ = 0), cioe i punti |ξ − x0|ρ = 1 possono essere punti in cuila serie converge o analogamente punti in cui la serie non converge.E interessante notare la seguente
Proposizione 1.2. Se la serie di potenze∞∑k=0
ak(x− x0)k
converge nel punto c allora converge assolutamente in tutti i punti ξtali che
|ξ − x0| < |c− x0|
Dimostrazione. Se la serie converge in c allora riesce
limk→∞|ak(c− x0)k| = 0 → ∃M > 0 : ∀k : |ak(c− x0)k| ≤M
da cui
∀k : |ak| ≤M
|c− x0|kSe |ξ − x0| < |c− x0| si ha quindi∣∣|ak(ξ − x0)k∣∣ ≤M
(|ξ − x0||c− x0|
)kda cui, per confronto con la serie geometrica di ragione minore di 1 equindi convergente
∞∑k=0
(|ξ − x0||c− x0|
)ksi ricava la convergenza della
∞∑k=0
|ak(ξ − x0)k|
�
Esempio 1.3. Consideriamo la serie∞∑k=0
xk
1 + k
riesce
ρ = lim supk→∞
1
k + 21
k + 1
= limk→∞
k + 1
k + 2= 1

2. SERIE DERIVATA 103
Pertanto la serie converge assolutamente nell’intervallo
(−1, 1)
Per quanto riguarda gli estremi:
• per ξ = 1 la serie diventa∞∑k=0
1
1 + k
e non e convergente,• per ξ = −1 la serie diventa
∞∑k=0
(−1)k
1 + k
ed e convergente.
Particolarmente importante e il seguente
Teorema 1.4. Ogni serie di potenze converge uniformemente in ogniintervallo chiuso interno all’intervallo di convergenza.
Dimostrazione. E infatti evidente che se x appartiene ad unintervallo
[a, b] ⊂ (x0 − ρ, x0 + ρ)
allora la serie soddisfa in [a, b] il test di convergenza uniforme di Weier-strass:
|ak(x− x0)k| ≤ |ak||b− x0|k
�
2. Serie derivata
Assegnata la serie di potenze∞∑k=0
ak(x− x0)k
la serie∞∑k=0
akk(x− x0)k−1
formata con le derivate degli addendi e ancora una serie di potenze eha, naturalmente, il nome di serie derivata.
Teorema 2.1. Una serie di potenze e la sua serie derivata conver-gono nello stesso intervallo aperto, ovvero hanno lo stesso raggio diconvergenza.

104 14. SERIE DI POTENZE
Dimostrazione. Il raggio di convergenza di una serie di potenze∞∑n=0
αk(x− x0)k si calcola tramite il limite superiore
ρ = lim sup|αk+1||αk|
Basta quindi applicare tale procedimento alle due serie∞∑k=0
ak(x− x0)k
e∞∑k=0
akk(x− x0)k−1 per riconoscere che viene lo stesso valore, ovvero,
che le due serie hanno (prescindendo dagli estremi) lo stesso intervallodi convergenza. �
3. Conosciamo altre serie
Le serie di potenze e le loro serie derivate convergono hanno lo stessointervallo di convergenza: inoltre le due serie, quella originale e quelladerivata convergono uniformemente in ogni intervallo limitato internoal comune intervallo di convergenza.
I tre teoremi osservati relativamente alla convergenza uniforme, con-tinuita, integrabilita, derivabilita del limite consentono pertanto di ri-cavare derivando e/o integrando anche piu volte, nuove (interessanti)formule di sommazione di serie di potenze:
3.1. Serie geometrica.
∀x ∈ (−1, 1) :
(1
1− x
)[m]
=∞∑k=0
(xk)[m]
da cui, ad esempio,
1
(1− x)2=
∞∑k=0
kxk−1
2
(1− x)3=
∞∑k=0
k(k − 1)xk−2
3!
(1− x)4=
∞∑k=0
k(k − 1)(k − 2)xk−3

4. LE SERIE DI TAYLOR 105
4. Le serie di Taylor
Il teorema detto della formula di Taylor 1 consiste nell’espressione, quasiesplicita, fornita per la differenza R(x) che intercorre tra i valori f(x)di una funzione indefinitamente derivabile in un intervallo [a, b] e ipolinomi ad essa associati
Tn(x) = f(x0) + f ′(x0)(x− x0) +1
2f ′′(x0)(x− x0)2 + ....
1
n!(x− x0)n
tale differenza, detta resto di Lagrange e la seguente:
(14) R(x) =1
(n+ 1)!f [n+1](ξ)(x− x0)n+1
nella quale il punto ξ e un conveniente punto dell’intervallo tra x0 edx.
Il valore della (14) non e solo numerico
|f(x)− Tn(x)| ≤ 1
(n+ 1)!
∣∣f [n+1](ξ)∣∣ |x− x0|n+1
come appare in prima lettura: l’espressione del resto di Lagrange con-sente di riconoscere la convergenza e il valore della somma per numeroseserie di potenze2.
4.1. Il caso di sin(x). Scelto x0 = 0 i polinomi di Taylor associatia sin(x) sono
T2n+1(x) = x− x3
3!+x5
5!+ ....+ (−1)n
x2n+1
(2n+ 1)!Consideriamo ora la serie di potenze
∞∑k=0
(−1)kx2k+1
(2k + 1)!
• il suo intervallo di convergenza e tutto R• le sue somme parziali
Sm(x) =m∑k=0
(−1)kx2k+1
(2k + 1)!
coincidono con i polinomi T2m+1(x) di Taylor associati a sin(x)• riesce pertanto
sin(x)− Sm(x) =1
(2m+ 2)!sin[2m+2](ξ)(x− x0)2m+2
1Brook Taylor, 1685-1731, e indicato da Courant come Newton’s pupil2http://en.wikipedia.org/wiki/Taylor_series

106 14. SERIE DI POTENZE
Tenuto presente che
∀m : | sin[2m+2](ξ)| ≤ 1
si ha
|sin(x)− Sm(x)| = |x− x0)|2m+2
(2m+ 2)!
da cui:
•
∀x : limm→∞
m∑k=0
(−1)kx2k+1
(2k + 1)!= sin(x)
• la convergenza della serie e uniforme in ogni intervallo limitato,infatti
x ∈ [a, b] → |sin(x)− Sm(x)| = b2m+2
(2m+ 2)!
da cui, tenuto conto che
limm→∞
b2m+2
(2m+ 2)!= 0
si riconosce che, scelto l’intervallo [a, b] e scelto ε > 0 esistemε tale che
∀m ≥ mε; supx∈[a,b]
|sin(x)− Sm(x)| ≤ ε
4.2. Il caso di cos(x). Il caso di cos(x) e del tutto analogo: mapuo essere trattato anche piu rapidamente ricordando che, trattandosidi serie di potenze,
sin(x) =∞∑k=0
(−1)kx2k+1
(2k + 1)!→ (sin(x))′ =
∞∑k=0
((−1)k
x2k+1
(2k + 1)!
)′in quanto sia la serie originale che quella derivata convergono uniforme-mente per x ∈ [a, b].Ne deriva quindi
cos(x) =∞∑k=0
(−1)kx2k
(2k)!
4. LE SERIE DI TAYLOR 107
4.3. Serie goniometriche diverse.
Dalla espressione
∀x : limm→∞
m∑k=0
(−1)kx2k+1
(2k + 1)!= sin(x)
seguono, ad esempio,
∀x : limm→∞
m∑k=0
(−1)kx2(2k+1)
(2k + 1)!= sin(x2)
∀x : limm→∞
m∑k=0
(−1)kx3(2k+1)
(2k + 1)!= sin(x3)
4.4. Il caso di log(1− x). Dalla serie geometrica si deduce
∀t ∈ (−1, 1) :1
1− t=∞∑k=0
tk →
→ ∀x ∈ (−1, 1) :
∫ x
0
1
1− tdt =
∞∑k=0
∫ x
0
tkdt
da cui
− log(1− x) =∞∑k=0
xk+1
k + 1
ovvero, cambiando segno,
∀x ∈ (−1, 1) : log(1 + x) =∞∑k=0
(−1)kxk+1
k + 1
4.5. Il caso di arctan(x). Dalla serie geometrica
∀t ∈ (−1, 1) :1
1 + t2=∞∑k=0
(−t2)k →
→ ∀x ∈ (−1, 1) :
∫ x
0
1
1 + t2dt =
∞∑k=0
∫ x
0
(−t2)kdt
Da cui
→ ∀x ∈ (−1, 1) : arctan(x) =∞∑k=0
(−1)kx2k+1
2k + 1
Si noti che da quanto detto nulla puo dirsi relativamente a valori|x| > 1.

108 14. SERIE DI POTENZE
4.6. La serie binomiale. 3
La formula del binomio di Newton
(1 + x)n =n∑k=0
(n
k
)xk
suggerisce
• di considerare anche il caso di esponenti s non interi,• di definire (
s
k
)=s(s− 1)...(s− k + 1)
k!
• di considerare, per ogni s ∈ R la serie di potenze∞∑k=0
(s
k
)xk
Il criterio del rapporto∣∣( sk+1
)xk+1
∣∣∣∣(sk
)xk∣∣ =
|s− k|k + 1
→ |x|
permette di riconoscere che l’intervallo di convergenza e (−1, 1). Postoquindi
∀x ∈ (−1, 1) : f(x) =∞∑k=0
(s
k
)xk
riesce (eseguire i conti, non ovvi, per la seconda affermazione)
f(0) = 1f ′(x)(1 + x)− sf(x) = 0
ovvero, dividendo membro a membro per (1 + x)s+1
(1 + x)−sf ′(x)− s(1 + x)−s−1f(x) = 0
Tenuto conto che l’espressione a primo membro rappresenta la derivatadi un prodotto si ha (
(1 + x)−sf(x))′
= 0
e quindi(1 + x)−sf(x) = c
Da cui, calcolando l’espressione nel punto x = 0 si ricava 1 = c da cui
f(x) = (1 + x)s
3http://en.wikipedia.org/wiki/Binomial_series

4. LE SERIE DI TAYLOR 109
ovvero
∀x ∈ (−1, 1) : (1 + x)s =∞∑k=0
(s
k
)xk
4.7. Applicazioni della serie binomiale. La liberta di sceltadell’esponente s consente numerosi casi particolari importanti:
s = −1 :1
1 + x= 1− x+ x2 − x3 + ....
.... la vecchia serie geometrica.
s =1
2:√
1 + x = 1 +1
2x− 1
8x2 +
1
16x3 + ....
Da cui, ad esempio
√16 + x = 4
√1 +
x
16= 4
{1 +
1
2
x
16− 1
8
( x16
)2+
1
16
( x16
)3+ ....
}4.8. La stima dell’errore. Tenuto conto che per le serie a termini
di segno alterno
S =∞∑k=0
(−1)kak
con addendi in modulo ak decrescenti e infinitesimi riesce, dette Sm lesomme parziali
|S − Sm| ≤ am+1
si puo riconoscere, ad esempio per la serie binomiale, che per 0 < s < 1si presenta a segni alterni, maggiorazioni quali la seguente
|√
1 + x−m∑k=0
(1/2
k
)xk| ≤
∣∣∣∣(1/2
k
)xk∣∣∣∣
Ad esempio, pensando ad m = 2 ed x = 0.234∣∣∣∣√1.234−(
1 +1
20.234− 1
80.2342
)∣∣∣∣ ≤ 1
160.2343
ovvero ∣∣∣√1.234− 1, 1101555∣∣∣ ≤ 0, 0008008065
ovvero ancora
1, 1093546935 ≤√
1.234 ≤ 1, 1109563065
il vero valore calcolato con la calcolatrice di Windows e√
1.234 = 1, 1108555261599052782559729112721
che effettivamente appartiene all’intervallo prima individuato.

110 14. SERIE DI POTENZE
5. Moltiplicazione di serie di potenze
Siano, per ogni x ∈ (c− ρ, c+ ρ)
f(x) =
(∞∑n=0
an(x− c)n), g(x) =
(∞∑n=0
bn(x− c)n)
Tenuto conto della regola del prodotto di due serie assolutamente con-vergenti riesce
f(x)g(x) =∞∑n=0
(n∑i=0
aibn−i
)(x− c)n.
Esempio 5.1. Siano per x ∈ (−1, 1)
1
1− x=∞∑k=0
xk,1
1 + x=∞∑k=0
(−1)kxk
Riesce
1
1− x1
1 + x=
(∞∑k=0
xk
)(∞∑k=0
(−1)kxk
)=
=∞∑n=0
(n∑k=0
(−1)k
)xn
Tenuto conto chen∑k=0
(−1)k =
{0 se n dispari1 se n pari
riesce
1
1− x1
1 + x= 1 + x2 + x4 + ... =
∞∑n=0
x2n
formula del tutto credibile dal momento che
1
1− x1
1 + x=
1
1− x2=∞∑k=0
(x2)k
Esempio 5.2. Consideriamo il prodotto sin(x) cos(x): indicati con ske ck i coefficienti delle due rispettive serie di potenze riesce
sin(x) cos(x) =∞∑n=0
(n∑k=0
sn−kck
)xn =

6. DIVISIONE FRA DUE SERIE DI POTENZE 111
si puo verificare, anche aiutandosi con un computer, che la serie prodot-to ottenuta corrisponda a quella, attesa, di
1
2sin(2x)
6. Divisione fra due serie di potenze
Osserviamo che:
f(x)
g(x)=
∑∞n=0 an(x− c)n∑∞n=0 bn(x− c)n
=∞∑n=0
dn(x− c)n
f(x) =
(∞∑n=0
bn(x− c)n)(
∞∑n=0
dn(x− c)n)
e quindi uguagliare i coefficienti in modo da soddisfare per ogni n ilsistema (triangolare)
an =n∑k=0
bn−kdk n = 0, 1, 2, ...
nelle incognite dk.
Esempio 6.1. Assegnata la funzione f(x) = 1 + x2 + x4 determinarela serie di potenze
g(x) =∞∑k=0
gkxk =
1
f(x)
ovvero tali che
g(x)f(x) = 1
Tenuto conto che i soli coefficienti fk non nulli sono
f0 = 1, f2 = 1, f4 = 1
occorre che
g0 = 1g0 + g1 = 0g2 + g0 = 0g3 + g1 = 0g4 + g2 + g0 = 0g5 + g3 + g1 = 0g6 + g4 + g2 = 0.......g2n + g2n−2 + g2n−4 = 0.....
→
g0 = 1g1 = 0g2 = −1g3 = 0g4 = 0g5 = 0g6 = 1.......g2n + g2n−2 + g2n−4 = 0.....

112 14. SERIE DI POTENZE
Le precedenti relazioni implicano che la successione dei coefficienti {g0, g1, g2, ...}sia ottenuta ripetendo successivamente la sequenza
{1, 0, −1, 0, 0, 0}e pertanto la serie sia
g(x) = 1− x2 + x6 − x8 + x12 − x14....ovvero
g(x) =∞∑k=0
(1− x2)x6k

CAPITOLO 15
Equazioni lineari di primo ordine
Si chiamano equazioni lineari di primo ordine le seguenti
y′ + a(x) y = b(x)
con a(x) e b(x) funzioni continue, definite (almeno1) in uno stessointervallo I = [α, β].Il caso piu semplice e ovviamente quello a coefficienti a(x) e b(x)costanti.
1. Il caso omogeneo
Il caso y′ + a(x) y = 0, b(x) = 0, si chiama caso omogeneo.
Sia A(x) una primitiva di a(x) allora, considerato che
∀x ∈ [α, β] : eA(x) 6= 0
riesce
y′(x) + a(x)y(x) = 0 ⇔ eA(x) y′(x) + a(x) eA(x) y(x) = 0
ovvero, riconoscendo nei due addendi la derivata del prodotto eA(x) y(x)si ha (
eA(x) y(x))′
= 0 ⇔ ∀x ∈ [α, β] : eA(x) y(x) = k
da cui, necessariamente
y(x) = k e−A(x)
Viceversa ogni funzione
∀c ∈ R : c e−A(x)
con A(x) primitiva di a(x) e soluzione dell’equazione.
1 Naturalmente possono essere definite ciascuna in un intervallo diverso ma,per poterle considerare insieme, occorre che tali intervalli includano una parte [α, β]comune.
113

114 15. EQUAZIONI LINEARI DI PRIMO ORDINE
1.1. Il problema di Cauchy.Si attribuisce questo nome al seguente problema:
Scelto x0 ∈ [α, β] e scelto y0 ∈ R determinare unafunzione y(x) continua e derivabile in [α, β] tale che{
y′(x) + a(x)y(x) = 0y(x0) = y0
per ogni x ∈ [α, β]
Riconosciuto che le funzioni y(x) continue e derivabili che soddisfanol’equazione differenziale assegnata sono tutte e sole le
k e−A(x)
si riconosce che il problema di Cauchy assegnato ha una ed una solasoluzione: quella relativa al coefficiente k tale che
k e−A(x0) = y0 ⇔ k = eA(x0)y0
2. Il caso non omogeneo
Consideriamo l’equazione non omogenea, detta anche equazione com-pleta,
y′ + a(x) y = b(x)
Tenuto presente che e−A(x) 6= 0 ogni funzione y(x) puo essere scrittanella forma
y(x) =y(x)
e−A(x)e−A(x) = u(x) e−A(x)
cerchiamo pertanto soluzioni dell’equazione differenziale completa sottola forma
(15) y = u(x) e−A(x)
essendo al solito A(x) una primitiva di a(x)Sostituendo la (15) nell’equazione completa deve riuscire(
u′(x) e−A(x) − a(x)u(x) e−A(x))
+ a(x)u(x) e−A(x) = b(x)
ovvero semplificando e ricavando u′(x) si ha
u′(x) = b(x)eA(x)
formula che indica che i fattori u(x) adatti sono le primitive di b(x)eA(x)
cioe, scelto ad esempio come estremo inferiore di integrazione α,
u(x) =
∫ x
α
b(s)eA(s) ds+ k.
3. IL PROBLEMA DI CAUCHY GENERALE 115
Le soluzioni dell’equazione completa sono pertanto
(16) y(x) = e−A(x)∫ x
α
b(s)eA(s) ds + k e−A(x)
formula che, se b = 0 include quella gia osservata per il caso omogeneo.
3. Il problema di Cauchy generale
Si attribuisce questo nome al seguente problema, che generalizza adequazioni non omogenee il precedente:
Scelto x0 ∈ [α, β] e scelto y0 ∈ R determinare unafunzione y(x) continua e derivabile in [α, β] tale che{
y′(x) + a(x)y(x) = b(x)y(x0) = y0
per ogni x ∈ [α, β]
Riconosciuto che le funzioni y(x) continue e derivabili che soddisfanol’equazione differenziale assegnata sono tutte e sole le
y(x) = e−A(x)∫ x
α
b(s)eA(s) ds + k e−A(x)
si riconosce che il problema di Cauchy assegnato ha una ed una solasoluzione: quella relativa al coefficiente k tale che
e−A(x0)∫ x0
α
b(s)eA(s) ds+ k e−A(x0) = y0 ⇔ k = eA(x0)y0−∫ x0
α
b(s)eA(s) ds
3.1. Una formula esplicita. La soluzione del problema di Cauchy{y′(x) + a(x)y(x) = b(x)y(x0) = y0
si scrive in modo esplicito particolarmente elegante se le due primi-tive di a(x) e di b(x)eA(x) sono scelte nulle in x0 cioe sono calcolateprendendo come estremo inferiore d’integrazione x0 stesso
A(x) =
∫ x
x0
a(t)dt
Riesce allora
(17) y(x) = e−A(x){y0 +
∫ x
x0
b(t)eA(t)dt
}

116 15. EQUAZIONI LINEARI DI PRIMO ORDINE
4. Il caso dei coefficienti costanti
Nel caso a(x) = a, costante, e x0 = 0 riesce ovviamente
A(x) = ax
e pertanto la (17) si riduce a
y(x) = e−ax{y0 +
∫ x
0
b(t)eatdt
}= e−axy0 + e−ax
∫ x
x0
b(t)eatdt
Nell’ulteriore caso b(x) = b, costante, riesce
y(x) = e−ax(y0 −
b
a
)+b
a
La soluzione costante
y(x) =b
aprende il nome di soluzione d’equilibrio.
5. La linearita
Il caso omogeneo:
La famiglia delle soluzioni y(x) delle equazioni differenziali omogenee
y′(x) + a(x)y(x) = 0, b(x) ≡ 0
costituiscono uno spazio vettoriale: se y1(x) e y2(x) sono soluzionidell’equazione allora ogni loro combinazione lineare
c1y1(x) + c2y2(x)
e ancora soluzione dell’equazione.Lo spazio vettoriale delle soluzioni ha dimensione 1: cioe tutte lesoluzioni
y(x) = ke−A(x)
sono multiple di una stessa, la e−A(x).
Il caso non omogeneo:
La famiglia delle soluzioni y(x) dell’equazione differenziale non omoge-nea
y′(x) + a(x)y(x) = b(x)
6. RIASSUMENDO 117
non e uno spazio vettoriale, nel senso che se y1(x) e y2(x) sono soluzionidell’equazione non omogenea non e vero che le loro combinazioni linearisiano ancora soluzioni.Si riconosce tuttavia che se y1(x) e y2(x) sono soluzioni dell’equazionenon omogenea la loro differenza
y1(x)− y2(x)
e soluzione dell’equazione omogenea y′(x) + a(x)y(x) = 0 e, vice-versa se y1 e soluzione dell’equazione non omogenea e y0 e soluzionedell’omogenea allora
y1(x) + y0(x)
e soluzione dell’equazione non omogenea.In altri termini la famiglia delle soluzioni y(x) dell’equazione differen-ziale non omogenea
y′(x) + a(x)y(x) = b(x)
e formata dalle somme di una (anche particolare) soluzione della nonomogenea e di una qualsiasi soluzione dell’omogenea.
6. Riassumendo
La soluzione del problema di Cauchy
(18)
{y′ + a(x) y = b(x)y(x0) = y0
e
(19) y(x) = e−
∫ xx0
a(s) ds
{y0 +
∫ x
x0
e∫ sx0
a(τ) dτb(s) ds
}
Le soluzioni dell’equazione completa y′+ a(x) y = b(x) sono compostedi due addendi
• la famiglia delle soluzioni dell’equazione omogenea associatac e−
∫a(t)dt, ∀c ∈ R
• una qualsiasi soluzione y(x) dell’equazione completa.
Esempio 6.1. Sia y′ + 2y = 3 allora la famiglia delle soluzioni dell’o-mogenea e c e−2x, una soluzione dell’equazione completa e y(x) = 3/2 :quindi la famiglia delle soluzioni dell’equazione completa e
y(x) = 3/2 + c e−2x

118 15. EQUAZIONI LINEARI DI PRIMO ORDINE
7. Alcuni problemi
Supponiamo in questo paragrafo che i due coefficienti a(x) e b(x) sianocontinui in tutto R, come accade, ad esempio nel caso particolaredei coefficienti costanti: esploriamo alcune proprieta delle soluzionidell’equazione differenziale y′ + a(x)y = b(x)
Caso omogeneo: b(x) ≡ 0
Le soluzioni y(x) = ke−A(x) sono o la soluzione nulla, nel caso k = 0 osempre non nulle essendo e−A(x) 6= 0.Pertanto tali soluzioni hanno segno costante (anche se a(x) cambia piuvolte segno).Due soluzioni y1(x) ed y2(x) dell’equazione omogenea che coincidanoin un punto y1(ξ) = y2(ξ) coincidono in ogni altro punto.Se a(x) ha segno costante allora le soluzioni dell’omogenea sono mono-tone.Se a(x) e limitata non e detto che le soluzioni y(x) dell’equazione sianolimitate.Se a(x) e periodica non e detto che le soluzioni y(x) dell’equazione sianoperiodiche: lo sono se a(x) ha media nulla, cioe se detto T il periodoriesce ∫ T
0
a(x)dx = 0
Caso non omogeneo: b(x) 6= 0
Consideriamo, nel caso dei coefficienti costanti, la soluzione del proble-ma di Cauchy relativo a x0 = 0:
y(x) = e−ax(y0 −
b
a
)+b
asi riconosce che se a > 0 riesce, qualsiasi sia y0
limx→+∞
y(x) =b
a
circostanza che esprime come tutte le diverse soluzioni dei problemidi Cauchy, se a > 0 tendano, al tendere di x → +∞ alla soluzioned’equilibrio.

CAPITOLO 16
Equazioni lineari di secondo ordine
1. Costruzione di soluzioni
Consideriamo le equazioni differenziali lineari omogenee di secondoordine
(20) y′′(x) + ay′(x) + by(x) = 0
con a e b costanti.Si possono cercare funzioni soluzioni della forma
y(x) = eλx
Sostituendo nell’equazione si deve ottenere
(λ2 + aλ+ b)eλx = 0
da cui si riconosce, tenuto conto che eλx 6= 0, come i fattori λ adattisiano tutti e soli quelli che verificano l’equazione algebrica di secondogrado
p(λ) = λ2 + aλ+ b = 0
detta equazione caratteristica associata all’equazione (20).
E ben noto che un’equazione di secondo grado puo produrre
• due radici reali distinte,• una sola radice reale,• due radici distinte complesse coniugate.
1◦ due radici reali distinte:
Siano esse λ1, λ2 le due funzioni
eλ1x, eλ2x
sono soluzioni della (20) e, per linearita, sono anche soluzioni tutte leloro combinazioni lineari
(21) y(x) = c1eλ1x + c2e
λ2x
E del tutto evidente che, essendo λ1 6= λ2 le due funzioni proposte nonsono proporzionali
eλ1x 6= keλ2x
119

120 16. EQUAZIONI LINEARI DI SECONDO ORDINE
quindi la combinazione lineare proposta (21) dipende effettivamente dadue parametri indipendenti.
2◦ una sola radice reale:
Sia µ l’unica radice reale dell’equazione caratteristica: la funzioney1(x) = eµx e soluzione della (20).Tenuto conto inoltre che, nel caso di una sola radice si ha, in corrispon-denza ad essa
(22) p(µ) = 0, p′(µ) = 0
si riconosce che anche la funzione y2(x) = x eµx e soluzione dell’e-quazione.Infatti, calcolate le due derivate,
y′2(x) = eµx + µxeµx
y′′2(x) = 2µeµx + µ2xeµx
sostituendo nella (20) si ha, a conti fatti, tenuto conto della (22)
(xp(µ) + p′(µ)) eµx = 0
Quindi anche nel caso di una sola radice reale si dispone di due solu-zioni diverse dell’equazione (20) e quindi, per linearita, di tutte le lorocombinazioni lineari
(23) y(x) = c1eµx + c2xe
µx
E del tutto evidente che le due funzioni proposte non sono proporzionali
eµx 6= kxeµx
quindi la combinazione lineare proposta (23) dipende effettivamente dadue parametri indipendenti.
1◦ due radici complesse coniugate:
Siano λ1 = α + iβ, λ2 = α − iβ le due radici complesse coniugate: ledue funzioni complesse
e(α+iβ)x, e(α+iβ)x
soddisfano la (20).Tenuto presente che
e(α+iβ)x = eαx cos(βx) + ieαx sin(βx)e(α−iβ)x = eαx cos(βx)− ieαx sin(βx)
separando la parte reale dalla parte immaginaria si ha quindi, per laprima delle due funzioni complesse proposte,
(eαx cos(βx))′′ + a (eαx cos(βx))′ + b (eαx cos(βx)) +

2. IL PROBLEMA DI CAUCHY 121
i{
(eαx sin(βx))′′ + a (eαx sin(βx))′ + b (eαx sin(βx))}
= 0
Analoga espressione si ottiene sostituendo nella (20) la seconda fun-zione complessa.Si riconosce quindi, in entrambi i casi che le due funzioni reali
y1(x) = eαx cos(βx), y2(x) = eαx sin(βx)
soddisfano, insieme a tutte le loro combinazioni lineari
(24) y(x) = eαx {c1 cos(βx) + c2 sin(βx)}
E del tutto evidente che le due funzioni proposte non sono proporzionali
eαx cos(βx) 6= keαx sin(βx)
quindi la combinazione lineare proposta (24) dipende effettivamente dadue parametri indipendenti.Riassumendo: Qualunque siano i coefficienti a e b, e quindi qualunquesiano le radici dell’equazione caratteristica, siamo in grado di costruiredue soluzioni diverse, cioe non proporzionali, della (20).
2. Il problema di Cauchy
Analogamente a quanto osservato per le equazioni di primo ordine siconsidera, relativamente alle equazioni del secondo ordine, il seguente
Problema di Cauchy:Assegnato x0 e scelti due valori y0 e y1 deter-
minare una soluzione del sistema y′′(x) + ay′(x) + b(y(x) = 0y(x0) = y0y′(x0) = y1
La disponibilita delle famiglie di soluzioni precedentemente costrui-te e dipendenti da due parametri consente naturalmente di costruiresoluzioni del problema di Cauchy.Infatti per costruire una soluzione che soddisfi le due condizioni inizialiy(x0) = y0, y
′(x0) = y1 ci si riduce a risolvere il sistema lineare nelleincognite c1, c2: {
c1y1(x0) + c2y2(x0) = y0c1y′1(x0) + c2y
′2(x0) = y1
essendo y1(x) e y2(x) le due diverse funzioni precedentemente costruitea seconda del tipo di radici dell’equazione caratteristica.E facile verificare che i sistemi lineari da risolvere come indicato so-pra hanno tutti, qualunque sia il punto x0 scelto, il determinante deicoefficienti diverso da zero.

122 16. EQUAZIONI LINEARI DI SECONDO ORDINE
3. Il teorema di unicita
Teorema 3.1. Il problema di Cauchy ha una sola soluzione
Dimostrazione. Supponiamo per assurdo che esistano due solu-zioni ϕ(x), ψ(x) : dimostrare la tesi del teorema equivale a dimostrareche la differenza
y(x) = ϕ(x)− ψ(x)
e identicamente nulla.La differenza y(x) soddisfa le seguenti condizioni y′′(x) + ay′(x) + b(y(x) = 0
y(x0) = 0y′(x0) = 0
PostoF (x) = y′2(x) + y2(x)
riesce
F ′(x) =1
2{y′(x)y′′(x) + y(x)y′(x)}
Tenuto conto che y(x) verifica l’equazione differenziale si ha
y′′(x) = −ay′(x)− by(x)
da cui
F ′(x) =1
2{−y′(x)(ay′(x) + by(x)) + y(x)y′(x)} =
= −a2y′2(x) +
(1− b)2
y′(x)y(x)
Tenuto conto che la nota disuguaglianza 2|αβ| ≤ α2 + β2 implica
|y′(x)y(x)| ≤ 1
2
(y′2(x) + y2(x)
)si ha, posto M =
|a|2
+|1− b|
4,
−MF (x) ≤ F ′(x) ≤MF (x)
ovvero {F ′(x) +MF (x) ≥ 0,F ′(x)−MF (x) ≤ 0
→{ (
F (x)eMx)′ ≥ 0,(
F (x)e−Mx)′ ≤ 0
La prima condizione,(F (x)eMx
)′ ≥ 0, implica che F (x)eMx e crescente,quindi tenuto conto che in x0 e nulla riesce
∀x ≤ x0 : F (x) ≤ 0

4. L’INTEGRALE GENERALE 123
circostanza che implica, essendo F (x) come somma di quadrati mainegativa,
∀x ≤ x0 : F (x) = 0
La seconda condizione,(F (x)e−Mx
)′ ≤ 0, implica che F (x)eMx e de-crescente, quindi tenuto conto che in x0 e nulla riesce
∀x ≥ x0 : F (x) ≤ 0
circostanza che implica, essendo F (x) come somma di quadrati mainegativa,
∀x ≥ x0 : F (x) = 0
Riconosciuto quindi che F (x) = y′2(x) + y2(x) ≡ 0 se ne ricava che
y2(x) ≡ 0, y(x) ≡ 0
�
4. L’integrale generale
Il precedente teorema di unicita, 3.1, consente di riconoscere che leespressioni dipendenti da due parametri precedentemente fornite comefamiglie di soluzioni dell’equazione differenziale (20) rappresentano ef-fettivamente tutte le soluzioni della (20).Sia infatti g(x) una soluzione della (20): indichiamo con
g(0) = A, g′(0) = B
i valori di g e della sua derivata in x0 = 0Abbiamo osservato come sia possibile, risolvendo un sistema linearenelle incognite c1 e c2 determinare una soluzione y(x) del problema diCauchy y′′(x) + ay′(x) + b(y(x) = 0
y(0) = Ay′(0) = B
pescandola in una delle famiglie (21) , (23) o (24).Del resto il teorema di unicita 3.1 riconosce che c’e una sola funzioneche soddisfi tale problema: quindi non resta che riconoscere che
g(x) = y(x)
ovvero che anche g appartiene ad una delle famiglie (21) , (23) o (24).

124 16. EQUAZIONI LINEARI DI SECONDO ORDINE
5. Un’interpretazione delle soluzioni
Consideriamo, formalmente, l’espressione
y′′(x) + ay′(x) + by(x) =(D2 + aD + b
)y(x)
avendo indicato con D l’operatore di derivazione.Le radici λ1 e λ2 del polinomio caratteristico, distinte o coincidenti,
p(λ) = λ2 + aλ+ b
forniscono la fattorizzazione
p(λ) = (λ− λ1)(λ− λ2)e quindi, in analogia,
D2 + aD + b = (D − λ1)(D − λ2)Pertanto l’equazione y′′(x) + ay′(x) + by(x) = 0 equivale a
(D − λ1)(D − λ2)y(x) = 0
Le sue soluzioni y(x) sono pertanto, se λ1 6= λ2, tali che{y′(x)− λ2y(x) = w(x)w′(x)− λ1w(x) = 0
→{w(x) = k eλ1x
y(x) = c1eλ1x + c2e
λ2x
Mentre se λ1 = λ2 = µ riesce{y′(x)− µy(x) = w(x)w′(x)− µw(x) = 0
→{w(x) = k eµx
y(x) = c1eµx + c2xe
µx
esattamente come era stato riconosciuto precedentemente, per altravia.
6. Il caso non omogeneo
Le equazioni lineari di secondo ordine non omogenee
(D − λ1)(D − λ2)y(x) = f(x)
equivalenti a {y′(x)− λ2y(x) = w(x)w′(x)− λ1w(x) = f(x)
si trattano agevolmente rifacendosi alla teoria posseduta per quelle diprimo ordine.
Esempio 6.1.
y′′(x)− 5y′(x) + 6y(x) = ex → (D − 3)(D − 2)y(x) = ex
equivale a

8. COSTRUZIONE DI UNA SOLUZIONE 125
{y′(x)− 2y(x) = w(x)w′(x)− 3w(x) = ex
La seconda equazione implica
w(x) = ce3x − 1
2ex
e, sostituendo nella prima si ottiene
y′(x)− 2y(x) = ce3x − 1
2ex
da cui l’espressione delle soluzioni
y(x) = c1e2x + c2e
3x +1
3ex
7. La struttura delle soluzioni
Teorema 7.1. Le soluzioni dell’equazione
y′′(x) + ay′(x) + by(x) = f(x)
si rappresentano tutte come somma y(x) = y0(x)+y(x) di due addendi
• il primo addendo rappresenta una qualsiasi soluzione dell’e-quazione differenziale omogenea y′′(x) + ay′(x) + by(x) = 0,• il secondo addendo rappresenta una soluzione (comunque scelta)
dell’equazione non omogenea.
Dimostrazione. Siano infatti y(x) e y(x) due soluzioni dell’e-quazione non omogenea: la differenza
y0(x) = y(x)− y(x)
e, ovviamente soluzione dell’omogenea.Quindi riesce
y(x) = y0(x) + y(x)
�
8. Costruzione di una soluzione
Teorema 8.1. Indicata con Y (x) la soluzione del problema di Cauchy y′′(x) + ay′(x) + by(x) = 0y(0) = 0y′(0) = 1
la funzione
y(x) =
∫ x
0
Y (x− s)f(s)ds

126 16. EQUAZIONI LINEARI DI SECONDO ORDINE
e soluzione dell’equazione non omogenea
y′′(x) + ay′(x) + by(x) = f(x)
Dimostrazione. Consideriamo le derivate prima e seconda dellafunzione y(x) calcolate derivando sotto il segno di integrale
y′(x) =
∫ x
0
Y ′(x− s)f(s)ds, y′′(x) = f(x) +
∫ x
0
Y ′′(x− s)f(s)ds
avendo tenuto conto che Y (0) = 0, Y ′(0) = 1. Riesce pertanto
y′′(x) + ay′(x) + by(x) =
= f(x) +
∫ x
0
(Y ′′(x− s) + aY ′(x− s) + bY (x− s)) f(s)ds = f(x)
�
Esempio 8.2. Determinare tutte le soluzioni dell’equazione
y′′(x) + y(x) = f(x)
La soluzione del problema di Cauchy y′′(x) + y(x) = 0y(0) = 0y′(0) = 1
eY (x) = sin(x)
pertanto riesce
y(x) =
∫ x
0
sin(x− s)f(s)ds
Tenuto conto che le soluzioni y0(x) dell’omogenea sono c1 cos(x) +c2 sin(x) tutte le soluzioni dell’equazione non omogenea assegnata sono
y(x) = c1 cos(x) + c2 sin(x) +
∫ x
0
sin(x− s)f(s)ds
9. Casi particolari
Soluzioni particolari dell’equazione non omogenea
y′′(x) + ay′(x) + by(x) = f(x)
possono essere ottenute direttamente nel caso di particolari terminif(x):
f(x) polinomio
E possibile, nel caso che f(x) sia un polinomio, determinare una solu-zione y(x) anch’essa polinomio.

9. CASI PARTICOLARI 127
Essa potra essere cercata tramite un polinomio di grado maggioreo uguale al grado di f(x) e a coefficienti incogniti da determinaresostituendolo nell’equazione e imponendo l’uguaglianza monomio permonomio.
Esempio 9.1.
y′′(x)− 5y′(x) + 6y(x) = 1 + 2x+ 3x2
Cerchiamoy(x) = a+ bx+ cx2
Sostituendo nell’equazione si ha
2c− 5(b+ 2cx) + 6(a+ bx+ cx2) = 1 + 2x+ 3x2
che corrisponde a
2c− 5b+ 6a = 1−10c+ 6b = 26c = 3
→
a =35
36
b =7
6
c =1
2
da cui
y(x) =35
36+
7
6x+
1
2x2
e quindi, tutte le soluzioni dell’equazione non omogenea assegnata sono
y(x) = c1e3x + c2e
2x +35
36+
7
6x+
1
2x2
f(x) esponenziale
Siaf(x) = e(α+iβ)x = eαx (cos(βx) + i sin(βx))
e ragionevole cercare una soluzione della forma analoga
y(x) = Ce(α+iβ)x
Sostituendo nell’equazione, raccolto a fattore comune e semplificato ilfattore esponenziale, si ha
C(α + iβ)2 + a(α + iβ) + b
)= 1 → Cp(α + iβ) = 1
da cui, se
p(α + iβ) 6= 0 → C =1
p(α + iβ)

128 16. EQUAZIONI LINEARI DI SECONDO ORDINE
Nel caso in cui p(α + iβ) = 0 si trovano ancora soluzioni nella forma,piu complessa,
y(x) = Cxe(α+iβ)x
f(x) esponenziale per polinomio
Siaf(x) = e(α+iβ)xP (x)
e ragionevole cercare una soluzione della forma analoga
y(x) = e(α+iβ)xQ(x)
con Q(x) polinomio di grado maggiore o uguale a quello di P (x)
Esempio 9.2. Sia
y′′(x) + 4y(x) = x cos(x)
riscritto il termine noto come
f(x) = xeix + e−ix
2cerchiamo una soluzione della forma
y(x) = (Ax+B)eix + (Cx+D)e−ix
Calcoliamo le derivate
y′(x) = Aeix + i(Ax+B)eix + Ce−ix − i(Cx+D)e−ix
y′′(x) = 2iAeix − (Ax+B)eix − 2iCe−ix − (Cx+D)e−ix
Sostituendo si ottiene
2iAeix − 2iCe−ix + 3{
(Ax+B)eix + (Cx+D)e−ix}
= xeix + e−ix
2
da cui, uguagliando i coefficienti di eix e di e−ix si ha
2iA+ 3(Ax+B) =x
2−2iC + 3(Cx+D) =
x
2
→
A =1
6
B =−i9
C =1
6
D =i
9Da cui
y(x) =1
3x cos(x) +
2
9sin(x)
Tutte le soluzioni dell’equazione sono pertanto
y(x) = c1 cos(2x) + c2 sin(2x) +1
3x cos(x) +
2
9sin(x)
9. CASI PARTICOLARI 129
9.1. Riassumendo.Se il termine f(x) a secondo membro dell’equazione e:
• un polinomio (anche una costante) y(x) si rappresenta con unpolinomio di grado maggiore o uguale a quello di f(x),• una funzione goniometrica sin(ωx) o cos(ωx) y(x) si rappre-
senta con una combinazione lineare A sin(ωx) +B cos(ωx)• un esponenziale reale eαx y(x) si rappresenta con P (x)eαx
essendo P (x) un polinomio di grado maggiore o uguale a zero.• un polinomio per un esponenziale oppure un polinomio per
una funzione goniometrica, y(x) si rappresenta con un poli-nomio per la stessa esponenziale ovvero un polinomio per unacombinazione lineare delle due funzioni goniometriche.


CAPITOLO 17
Equazioni generale di primo ordine
Consideriamo equazioni differenziali di primo ordine di forma generale:in luogo della espressione lineare y′ = −a(t)y + b(t) consideriamo, asecondo membro, un’espressione
y′ = f(t, y)
dove f(x, y) rappresenta un’espressione in x e y anche molto generale(un polinomio in x e y, una funzione razionale ancora in x e y, ecc),espressione che pensiamo definita per (t, y) ∈ [a, b]× [c, d]Consideriamo, anche in questo caso generale il problema di Cauchy
(25)
{y′ = f(t, y)y(t0) = y0
che consiste, come negli esempi precedenti, scelto x0 ∈ [α, β], nelladeterminazione di una funzione y(x)
• continua e derivabile per x ∈ [α, β]• a valori y(t) ∈ [c, d]• tale che ∀t ∈ [α, β] : y′(t) = f [t, y(t)],• y(t0) = y0
1. Un’equivalenza
Il problema di Cauchy (25) equivale al seguente altro problema di natu-ra integrale:Trovare una funzione y(t) continua1 in un intorno (t0−α, t0 +β) di t0tale che
(26) y(t) = y0 +
∫ t
t0
f [τ, y(τ)]dτ t ∈ (t0 − α, t0 + β)
Infatti:
• se y(t) soddisfa (25) allora, integrando membro a membro su[t0, t] si perviene alla (26),
1Tale funzione riesce necessariamente, teorema di Torricelli, anche derivabile
131

132 17. EQUAZIONI GENERALE DI PRIMO ORDINE
• viceversa se y(t) soddisfa la (26) riesce y(t0) = y0 e, derivando,come insegna il teorema di Torricelli o teorema fondamentaledel calcolo, si ha
y′(t) = f [t, y(t)]
ovvero il sistema (25)
Osservazione 1.1. Stabilire l’equivalenza di due problemi consente ditrovare la soluzione di uno risolvendo l’altro: quale in effetti dei dueproblemi (25) o (26) sia piu facile e soggettivo sostenerlo.
Osservazione 1.2. Supponiamo di saper risolvere il problema (25) ol’equivalente problema (26) in un certo intervallo (t0 − α, t0 + β). Siat1 ∈ (t0 − α, t0 + β) : da cosa dipende il valore y(t1) della soluzione nelpunto t1 ?
• dai dati del problema stesso– la funzione f(t, y)– il tempo t0 iniziale– il valore y0 iniziale
• dai valori della funzione stessa y(t) in tutti i tempi di (t0, t1)
Infatti se pensate alla formulazione (26) avete
y(t1) = y0 +
∫ t1
t0
f [τ, y(τ)]dτ
dove l’integrale a secondo membro dipende, tramite la funzione f daivalori della stessa y in tutti i tempi τ ∈ (t0, t1) precedenti.In altri termini la soluzione al tempo t1 dipende dalla storia dellasoluzione nel precedente periodo (t0, t1).
2. Generalita e utilita
La proposta di occuparsi di equazioni differenziali di forma y′ = f(x, y)assai generale puo indurre a sottostimare il caso lineare
y′ = −a(x)y + b(x)
ritenendolo poco piu che un esercizio scolastico.Non e esattamente cosı: la capacita di fornire tutte le soluzioni dell’e-quazione lineari costituisce un notevole risultato.E vero anzi che una tecnica importante e quella di trovare trasfor-mazioni che riconducano equazioni non lineari a tale comoda forma.Un esempio importante e rappresentato dalle equazioni di Bernouilli:
y′ = −a(x)y + b(x)ym

3. DUE PROBLEMI DI CAUCHY 133
che, dividendo membro a membro per ym si ha
y′y−m = −a(x)y1−m + b(x)
ovvero, moltiplicando per (1−m)
(1−m)y′y−m = −(1−m)a(x)y1−m + (1−m)b(x)
Indicata conz = y1−m
si riconosce l’equazione lineare
z′ = −(1−m)a(x)z + (1−m)b(x)
Dalla famiglia ben nota delle soluzioni z di quest’ultima si risale, conun’estrazione di radice, alle soluzioni y dell’equazione originaria diBernouilli.
3. Due problemi di Cauchy
Consideriamo i due problemi di Cauchy
(27)
{y′ = f(t, y)y(t0) = y1
{y′ = f(t, y)y(t0) = y2
che si traducono nelle due equazioni integrali equivalenti
u(t) = y1 +∫ tt0f(τ, u(τ)) dτ
v(t) = y2 +∫ tt0f(τ, v(τ)) dτ
avendo indicato con u(t) e v(t) loro soluzioni: sottraendo membro amembro si ottiene
u(t)− v(t) = y1 − y2 +
∫ t
t0
[f(τ, u(τ))− f(τ, v(τ))] dτ
da cui, passando ai moduli,
(28) |u(t)− v(t)| ≤ |y1 − y2|+∣∣∣∣∫ t
t0
|f(τ, u(τ))− f(τ, v(τ))| dτ∣∣∣∣
Se la funzione f e lipschitziana rispetto alla seconda variabile si ha
|f(t, A)− f(t, B)| ≤ L|A−B|e quindi dalla (28) segue
(29) |u(t)− v(t)| ≤ |y1 − y2|+ L
∣∣∣∣∫ t
t0
|u(τ)− v(τ)| dτ∣∣∣∣
DOMANDA: Cosa possiamo aspettarci dalla diseguaglianza (29) intermini di grandezza della differenza |u(t)− v(t)| ?

134 17. EQUAZIONI GENERALE DI PRIMO ORDINE
4. La stima di Gronwall
Lemma 4.1 (Gronwall). Sia ϕ(t) una funzione non negativa tale che
ϕ(t) ≤ c+ L
∣∣∣∣∫ t
0
ϕ(τ)dτ
∣∣∣∣ , ∀ |t| < δ
con c ed L non negative: riesce allora
ϕ(t) ≤ c eL|t| ∀ |t| < δ
Dimostrazione. Indichiamo con
Φ(t) =
∫ t
0
ϕ(τ)dτ → Φ′(t) = ϕ(t)
da cui, tenuto conto dell’ipotesi, ϕ(t) ≤ c+ L |Φ(t)| si ha
(30) Φ′(t) ≤ c+ L |Φ(t)|
Caso t > 0
Si ha Φ(t) ≥ 0 e quindi, dalla (30),
Φ′(t)−LΦ(t) ≤ c → Φ′(t) e−Lt−Le−Lt Φ(t) ≤ c e−Lt →(Φ(t) e−L t
)′ ≤ c e−L t
Integrando su [0, t], t > 0, tenuto conto che Φ(0) = 0 si ha
Φ(t) e−L t ≤ c
L(1− e−L t) → Φ(t) ≤ c
L(eL t − 1)
Sostituendo la maggiorazione ottenuta nella disuguaglianza in ipotesisi ha
ϕ(t) ≤ c+ Lc
L(eL t − 1) → ϕ(t) ≤ c+ c(eL t − 1) = c eL t
da cui la tesiϕ(t) ≤ c eL|t|
Caso t < 0
Si ha Φ(t) ≤ 0, |Φ(t)| = −Φ(t) e quindi, dalla (30),
Φ′(t) + LΦ(t) ≤ c → Φ′(t) eLt + LeLt Φ(t) ≤ c eLt
da cui, come precedentemente,(Φ(t) eLt
)′ ≤ c eLt
Integrando su [0, t], t < 0 la disuguaglianza si rovescia∫ t
0
(Φ(s) eLs
)′ds ≥ c
∫ t
0
eLs ds

4. LA STIMA DI GRONWALL 135
da cui
Φ(t) eLt ≥ c
L
(eLt − 1
)ovvero, tenuto conto che Φ(t) = −|Φ(t)| si ha
−|Φ(t) eLt| ≥ c
L
(eLt − 1
)ovvero, moltiplicando per −1 membro a membro
|Φ(t) eLt| ≤ c
L
(1− eLt
)→ |Φ(t)| ≤ c
L
(e−Lt − 1
)ovvero ancora
|Φ(t)| ≤ c
L
(eL|t| − 1
)dalla quale segue ancora
ϕ(t) ≤ c+ Lc
L
(eL|t| − 1
)= c eL|t|
�
Applicando il Lemma di Gronwall al caso della (29) si ricava
|u(t)− v(t)| ≤ |y1 − y2| eL|t−t0|
che fornisce una stima di quanto le due funzioni u(t) e v(t), soluzionidei due problemi di Cauchy (27) possano differire fra loro.Naturalmente la presenza del fattore eL|t−t0|, tanto piu grande quantopiu si prende t lontano da t0, rende tale stima tanto piu irrilevantequanto piu si prende t lontano da t0!
Osservazione 4.2. Pensate ad una disuguaglianza (30) con c = 0
|ϕ(t)| ≤ L
∫ t
0
|ϕ(τ)|dτ, ∀t > 0
Il Lemma dimostrato riconosce che l’unica funzione che possa verificareuna tale disuguaglianza e... la funzione nulla !
4.1. Un’applicazione.Consideriamo i due seguenti (tutt’altro che facili) problemi di Cauchy y′ = cos(t2) sin(y)
y(0) = y1
,
y′ = cos(t2) sin(y)
y(0) = y2

136 17. EQUAZIONI GENERALE DI PRIMO ORDINE
riferiti alla stessa equazione differenziale. Supponiamo di voler stimarequanto possano differire tra loro due soluzioni u(t) e v(t) dei due pro-blemi.Consideriamo le (26) soddisfatte da u(t) e v(t)
u(t) = y1 +
∫ t
0
cos(τ 2) sin(u(τ))dτ, v(t) = y2 +
∫ t
0
cos(τ 2) sin(v(τ))dτ
Sottraendo membro a membro si ha
u(t)− v(t) = y1 − y2 +
∫ t
0
cos(τ 2)[sin(u(τ))− sin(v(τ))]dτ,
e quindi
(31) |u(t)− v(t)| ≤ |y1 − y2|+∣∣∣∣∫ t
0
|u(τ)− v(τ)|dτ∣∣∣∣ ,
avendo tenuto conto che
| cos(τ 2)| ≤ 1, |[sin(u(τ))− sin(v(τ))]| ≤ |u(τ)− v(τ)|
Applicando alla (31) il Lemma di Gronwall si ottiene
|u(t)− v(t)| ≤ |y1 − y2| e|t|
da cui, se ad esempio le due funzioni riuscissero definite per t ∈ [0, 1]la risposta
maxt∈[0,1]
|u(t)− v(t)| ≤ e |y1 − y2|
Risultato interessante, ottenuto quasi gratis: si pensi infatti alla atrocedifficolta di conoscere esplicitamente le funzioni u(t) e v(t).
5. Il teorema d’unicita
Il Lemma di Gronwall permette di riconoscere l’unicita2 della soluzionedel problema di Cauchy
(32) y′ = f(t, y), y(0) = y0
riferito ad una f(t, y) lipschitziana rispetto ad y:
|f(t, A)− f(t, B)| ≤ L|A−B|.
2Non dimentichiamo che non abbiamo ancora provato alcun teoremad’esistenza...

5. IL TEOREMA D’UNICITA 137
Siano infatti, per assurdo y1(x) ed y2(x) due soluzioni dello stesso pro-blema (32), riesce allora, trascrivendolo nella forma integrale e sot-traendo membro a membro,
y1(t)− y2(t) =
∫ t
0
{f [τ, y1(τ)]− f [τ, y2(τ)]} dτ →
→ |y1(t)− y2(t)| ≤ L
∫ t
0
|y1(τ)− y2(τ)|dτ
avendo fatto uso della lipschitzianita per stimare la differenzaf [τ, y1(τ)]− f [τ, y2(τ)].Il Lemma di Gronwall applicato alla disuguaglianza
|y1(t)− y2(t)| ≤ L
∫ t
0
|y1(τ)− y2(τ)|dτ
implica, naturalmente, essendo la costante c nulla, |y1(t) − y2(t)| = 0ovvero
y1(t) = y2(t)
Quindi non ci possono essere due funzioni y1(t) e y2(t) diverse chesoddisfino lo stesso problema (32).Problemi di Cauchy relativi a punti iniziali t0 6= 0 si trattano in mododel tutto analogo, approdando allo stesso risultato di unicita.
Osservazione 5.1. La lipschitzianita della funzione f e stata determi-nante nel conto precedente che tramite la disuguaglianza di Gronwallha portato al Teorema di unicita.Si conoscono esempi, neanche molto complessi che portano il nome diG.Peano, in cui, a fronte di funzioni f non lip il relativo problema diCauchy ha piu soluzioni3.Stiamo pur tranquilli che se f ∈ C1 allora e (localmente) anche lip evale il teorema di unicita.Il capostipite degli esempi di problemi di Cauchy che non godono delteorema di unicita, esempio dovuto a G.Peano, e il seguente:{
y′ =√|y|
y(0) = 0
per il quale si riconoscono le due soluzioni seguenti
u(t) ≡ 0, v(t) =
t2
4se t ≥ 0
−t24
se t < 0
3Stampacchia, Equazioni differenziali ordinarie in Rn, Cap.3

138 17. EQUAZIONI GENERALE DI PRIMO ORDINE
Osservazione 5.2. L’esempio precedente di non unicita dovuto a Peanoavrebbe potuto essere osservato da qualunque studente di primo anno inbase alla seguente fondamentale osservazione: consideriamo la funzione
y(t) = t3
Si tratta di una funzione nulla per t = 0, diversa dalla funzione nulla,invertibile
t = y13
Si hay′(t) = 3 t2 ⇔ y′ = 3y
23
Ovvero la funzione y = t3 e soluzione non nulla del problema di Cauchy{y′ = 3y
23
y(0) = 0
problema che pertanto si trova ad avere la soluzione nulla e la soluzioney = t3.Costruzioni analoghe si possono ottenere partendo da funzioni y =t5, y = t7, . . .Si noti che si arriva sempre ad equazioni differenziali del tipo
y′ = γyα
con α < 1.Si ricordi sempre che le potenze yα di esponente α < 1 non sonolipschitziane in un intorno dell’origine ! (Si pensi al grafico di
√x)

CAPITOLO 18
Il teorema d’esistenza per il problema di Cauchy
1. Il Teorema d’esistenza
Supponiamo che:
• la funzione f(x, y) sia di classe C1(P ), continua con le duederivate parziali prime continue in
P = {(x, y)| |x| < a, |y| < b}
•
|f(x, y)| ≤M, |fy(x, y)| ≤M1 ∀ (x, y) ∈ P
•M a < b, M1 a < 1
condizioni queste ultime che possono richiedere di ridurre l’ampiez-za a con un’altra piu piccola.
Teorema 1.1. Sotto le ipotesi precedenti su P e su f(x, y) il problemadi Cauchy:
(1)
{y′ = f(x, y)y(0) = 0
ammette una e una sola soluzione y(x) definita per |x| < a e a valori|y(x)| < b, continua e derivabile.
Osservazione 1.2. L’unicita della soluzione e stata riconosciuta prece-dentemente tramite il Lemma di Gronwall.
Osservazione 1.3. Trattiamo il problema di Cauchy (1) solo nel casoparticolare x0 = 0 e y0 = 0: gli altri casi sono sostanzialmente analoghie ad essi si adatta lo stesso algoritmo proposto.
L’esistenza della soluzione della (1) potrebbe essere stabilita con strate-gie diverse:
• una potrebbe essere quella di un ragionamento logico che provila necessita dell’esistenza della soluzione pena l’incorrere incontraddizioni,
139

140 18. IL TEOREMA D’ESISTENZA PER IL PROBLEMA DI CAUCHY
• un’altra potrebbe essere quella di trovare esplicitamente talesoluzione pescandola in opportune famiglie di funzioni (strate-gia che e stata seguita in riferimento alle equazioni lineari diprimo ordine e a numerose equazioni differenziali particolari),• un’altra strategia puo essere quella di mostrare un
algoritmo universale,
naturalmente teorico, che costruisca la soluzione stessa.
Seguiremo questa ultima strategia tenendo ben presente l’equivalenzatra problema di Cauchy e equazione integrale
y(x) = y0 +
∫ x
x0
f(t, y(t)) dt
che, nel caso scelto
x0 = y0 = 0
conduce all’equazione integrale
y(x) =
∫ x
0
f(t, y(t)) dt
Il teorema d’esistenza puo essere suddiviso in :
• costruzione di una successione y1(x), y2(x)...., yn(x), ... oppor-tuna di funzioni,
– continue per |x| < a,– nulle nell’origine,– a valori |yn(x)| < b;
• riconoscimento che tale successione e convergente, uniforme-mente;• riconoscimento che il limite y(x) di tale successione e la solu-
zione del problema (1).
2. La successione
Costruiamo la successione di funzioni:la prima sia, per definizione, la seguente
y0(x) = 0
La seconda
y1(x) =
∫ x
0
f(t, y0(t))dt =
∫ x
0
f(t, 0)dt
y1(x) e definita, correttamente ∀|x| < a e continua e, per tali x prendevalori
|y1(x)| ≤∫ x
0
|f(t, 0)|dt ≤M.a < b

2. LA SUCCESSIONE 141
Il fatto che per |x| < a riesca |y1(x)| < b autorizza a considerare la fun-zione composta f(x, y1(x)) e costruire la seguente successiva funzione
y2(x) =
∫ x
0
f(t, y1(t))dt
sulla quale si possono riconoscere le stesse proprieta
• e definita correttamente ∀|x| < a• e continua• prende valori
|y2(x)| ≤∫ x
0
|f(t, y1(t))|dt ≤M.a < b
Si capisce quindi la liceita di considerare la successione di funzioni
(2) yn+1(x) =
∫ x
0
f(t, yn(t))dt
definita ricorsivamente
• continue per |x| < a ,• nulle per x = 0• a valori |yn(x)| < b.
La successione (2) prende il nome di
successione delle approssimazioni successive1.
2.1. Un primo esempio: Consideriamo la costruzione precedenteriferita al problema di Cauchy{
y′ = y − x,y(0) = 0
La prima funzione e
y0(x) = 0
La seconda e
y1(x) =
∫ x
0
{y0(t)− t} dt → y1(x) =−x2
2
La terza e
y2(x) =
∫ x
0
{y1(t)− t} dt → y2(x) =−x2
2− x3
6
1Si tratta di una successione ricorsiva ( con memoria 1 ): noto un termine sicostruisce il successivo.

142 18. IL TEOREMA D’ESISTENZA PER IL PROBLEMA DI CAUCHY
La quarta e
y3(x) =
∫ x
0
{y2(t)− t} dt → y3(x) =−x2
2− x3
6− x4
24
Andando oltre e facile riconoscere le
yn(x) = −n+1∑k=2
xk
k!= 1 + x−
n+1∑k=0
xk
k!
somme parziali della serie di 1 + x− ex.
2.2. Un secondo esempio: Consideriamo la costruzione prece-dente riferita al problema di Cauchy per l’equazione logistica{
y′ = y(1− y),y(0) = 1
2,
come si riconosce stiamo studiando un problema di Cauchy gia piugenerale. . . y0 = 1/2 : tanto aiuta a riconoscere la generalita del metodo.La prima funzione e (naturalmente. . . )
y0(x) =1
2
La seconda e
y1(x) =1
2+
∫ x
0
y0(t)(1−y0(t))dt → y1(x) =1
2+
∫ x
0
1
4dt =
1
2+
1
4x
La terza e
y2(x) =1
2+
∫ x
0
y1(t)(1− y1(t))dt →
y2(x) =1
2+
∫ x
0
(1
4− 1
16t2)dt =
1
2+x
4− x3
48
Andando un po’ oltre si ricava
y3(x) =1
2+x
4− x3
48+
x5
480− x7
16128
e cosı via proseguendo...

3. LA CONVERGENZA 143
3. La convergenza
Le funzioni della successione delle approssimazioni successive si
... stringono tra loro...
|yn+1(x)− yn(x)| ≤∫ x
0
|f(t, yn(t))− f(t, yn−1(t))|dt ≤
≤M1.|x|.max|t|<a|yn(t)− yn−1(t)|
disuguaglianza ottenuta applicando il teorema di Lagrange alla dif-ferenza
|f(t, yn(t))− f(t, yn−1(t))| = |fy(t, η)||yn(t)− yn−1(t)|tenuto conto che |fy(t, η)| ≤M1
Ne segue
max|x|<a|yn+1(x)− yn(x)| ≤M1.amax
|x|<a|yn(x)− yn−1(x)|
Indicato conδ = max
|x|<a|y1(x)− y0(x)|
riesce pertanto
(3)
max|x|<a|y2(x)− y1(x)| ≤M1.aδ
max|x|<a|y3(x)− y2(x)| ≤M1.amax
|x|<a|y2(x)− y1(x)| ≤ (M1.a)2δ
....max|x|<a|yn+1(x)− yn(x)| ≤ (M1.a)nδ
Tenuto conto che a e stato scelto cosı piccolo che
M1.a < 1
allora la serie
(4) y1(x) +∞∑n=1
(yn+1(x)− yn(x))
riesce maggiorata in modulo dalla serie geometrica convergente
b+ δ
∞∑n=1
(M1.a)n
Quindi:
• la serie (4) e uniformemente convergente,• la successione delle sue ridotte e esattamente la (2 )• la successione (2 ) converge uniformemente .

144 18. IL TEOREMA D’ESISTENZA PER IL PROBLEMA DI CAUCHY
4. La funzione limite
Si capisce che, tenuto conto che la successione definita dalle relazioni(2) converge uniformemente ad una funzione y(x), passando al limitenelle (2) si ottiene
y(x) =
∫ x
0
f(t, y(t))dt →{y(0) = 0,y′(x) = f(x, y(x))
Il Teorema d’esistenza per il problema di Cauchy particolare{y′ = f(x, y)y(0) = 0
si riconosce valido, con semplici modifiche ortografiche nella dimostrazione,anche per il problema, generale, seguente{
y′ = f(x, y)y(x0) = y0

CAPITOLO 19
Le equazioni autonome
1. Introduzione
Le equazioni differenziali
(5) y′ = f(y)
f ∈ C1(I), I intervallo dell’asse reale, spesso coincidente con tutto R,si dicono autonome.La differenza con il caso generale y′ = f(t, y) consiste nel fatto chela funzione a secondo membro nelle equazioni autonome non dipendadalla variabile t. 1
2. Un approccio formale
Scritta l’equazione (5) con la notazione
dy
dt= f(y) ⇔ dy
f(y)= dt
si ottiene integrando
(6)
∫1
f(y)dy =
∫dt → F (y) = t+ c
essendo F (y) una primitiva di 1/f(y).Ogni funzione y(t) dedotta dalla (6)
F [y(t)]− t+ c = 0
ha come derivata
y′(t) =1
F ′[y]= f(y)
e quindi risolve l’equazione (5).Riassumendo: soluzioni della (5) si producono con due passaggi
• un’integrazione∫
1f(y)
dy
• una esplicitazione
1Casi di equazioni differenziali y′ = f(t, y) in cui il secondo membro non dipen-da da y sono. . . assai piu facili, si tratta del problema della primitiva: y(t) =
c+∫ t
0f(ξ)dξ
145

146 19. LE EQUAZIONI AUTONOME
se entrambe le operazioni sono andate a buon fine abbiamo costruitouna soluzione dell’equazione differenziale (5).
2.1. Un approccio piu preciso. Consideriamo il problema diCauchy
(7)
{y′ = f(y)y(t0) = y0
Se f(y0) = 0 la funzione y(t) ≡ y0, costante, risolve sia l’equazione chela condizione iniziale assegnata, quindi risolve il problema (7).Se f(y0) 6= 0 allora in un intorno di y0 riesce ancora f(y) 6= 0 e quindisi puo considerare la funzione reciproca
1
f(y)
e la primitiva
F (y) =
∫ y
y0
1
f(s)ds
che vale 0 in y0L’equazione
F (y)− (t− t0) = 0
• e soddisfatta da (t0, y0)• in tale punto riesce
fy(y0) =1
f(y0)6= 0
• quindi l’equazione definisce implicitamente una funzione y(t)tale che
y(t0) = y0, y′(t) = f(y(t))
• la funzione y(t) e pertanto soluzione del problema (7).
2.2. Lo schema mnemonico. La soluzione del problema di Cauchy(7) si esprime con la formula∫ y
y0
1
f(s)ds =
∫ t
t0
ds ⇒ F (y)− F (y0) = t− t0
sulla quale resta poi il problema di trovare l’inversa della funzione F (y).

3. LA TEORIA QUALITATIVA 147
2.3. Lemma sulle traslazioni. Sia y′ = f(y) un’equazione dif-ferenziale autonoma e sia y(t) una sua soluzione, una funzione cioe cheverifica la relazione
y′(t) = f [y(t)] t ∈ ILe funzioni ottenute da y(t) per traslazione, ad esempio y(t − 1) oy(t− 13), ecc. soddisfano ancora 2 l’equazione
y′(t) = f [y(t)] → y′(t+ h) = f [y(t+ h)]
Osservazione 2.1. Un contresempio: pensate all’equazione non au-tonoma y′ = 2 t y le sue soluzioni sono y(t) = c et
2. La funzione traslata
η(t) = y(t+ 1) = c e(t+1)2
non soddisfa affatto l’equazione. Infatti
η′(t) = 2(t+ 1) η(t) 6= 2t η(t)
Se y(t) e la soluzione del problema di Cauchy
(8)
{y′ = f(y)y(0) = x0
allora la funzione y(t− t0) e la soluzione del problema di Cauchy
(9)
{y′ = f(y)y(t0) = x0
Osservazione 2.2. La funzione sin(t) e soluzione dell’equazione au-
tonoma y′ =√
1− y2 (provare per credere) allora anche cos(t) e solu-zione di quell’equazione......infatti cos(t) = sin(t+ π/2) !
3. La teoria qualitativa
Il titolo teoria qualitativa si riferisce alle diverse proprieta qualitative(monotonia, limitatezza, positivita, ecc.) che si possono riconoscere allesoluzioni di un’equazione differenziale senza conoscerle esplicitamente.
3.1. Monotonia. Se y′ = f(y) e la funzione f(y) ha segno costanteallora anche y′ avra segno costante, y(t) sara cioe strettamente mono-tona.
3.2. Le soluzioni d’equilibrio. Ogni valore c per il quale riescaf(c) = 0 produce una funzione y ≡ c costante che soddisfa l’equazioney′ = f(y).Le soluzioni costanti prendono, naturalmente il nome di
soluzioni d’equilibrio.
2negli intervalli in cui sono definite...

148 19. LE EQUAZIONI AUTONOME
3.3. Disuguaglianze. Supponiamo che f(y), definita ad esempioper ogni y, si annulli nei punti
c1, c2, ..., cn
e in nessun altro.Allora f(y) ha segno costante in ciascuno degli n + 1 intervalli deter-minati da quegli n valori.La soluzione del problema di Cauchy{
y′ = f(y)y(t0) = x0
e
• se x0 = ck : y(t) ≡ ck• se ck−1 < x0 < ck riesce y(t) ∈ (ck−1, ck)• se nell’intervallo (ck−1, ck) la f e positiva allora la soluzioney(t) sara crescente, viceversa nell’altro caso.
3.4. Flessi. Dove si trovano i flessi del grafico delle soluzioni delleequazioni autonome y′ = f(y) ?
y′′ = f ′(y).y′ = f ′(y)f(y) : ⇒ y′′ = 0⇔ f ′(y) = 0
Perche non consideriamo anche il caso f(y) = 0 ?
3.5. Un primo esempio: y’ = a y. Si tratta dell’equazione au-tonoma piu semplice 3 che consideriamo naturalmente per a 6= 0.Rileggiamo su di essa i risultati qualitativi introdotti sopra:
• abbiamo una sola soluzione costante, la y = 0, le altre sonomonotone.• una soluzione, diversa da quella identicamente nulla, ha segno
costante: infatti per il teorema di unicita il suo grafico nonpuo intersecare quello della y ≡ 0• sono crescenti se il valore iniziale x0 e tale che a.x0 > 0, sono
decrescenti nell’altro caso a.x0 < 0.• Non hanno flessi: f(y) = a y, f ′(y) = a 6= 0
3.6. Un secondo esempio: la logistica. Si tratta dell’equazione
(10) y′ = y(1− y)
• due soluzioni d’equilibrio y = 0, y = 1• i grafici delle altre soluzioni, tutte funzioni monotone sono
– decrescenti se maggiori di 1– crescenti se comprese tra 0 e 1
3studiata nel modulo di Derivate e Integrali

5. CAMBIARE VARIABILE 149
– decrescenti se minori di 0.• i flessi si possono avere solo se (y(1− y))′ = 1 − 2y = 0: si
trovano tutti e soli alla quota y = 1/2.
4. Equazioni a variabili separabili
Quanto esposto per le equazioni
y′ = f(y)
si estende4 facilmente alle equazioni
y′ = f(y)g(x)
La tecnica, formale, con la quale si costruiscono soluzioni del problema
(11)
{y′ = g(x)f(y)y(x0) = y0
e la seguente
dy
f(y)= g(x) dx : ⇒
∫ y
y0
1
f(s)ds =
∫ x
x0
g(s) ds
al calcolo dei due integrali deve seguire la possibilita di esplicitare ycome funzione di x.
Esempio 4.1. y′(x) =1 + x
x.
y
y − 1y(1) = 2
L’equazione integrale cui si riduce e la seguente∫ y
2
z − 1
zdz =
∫ x
1
1 + t
tdt →
→ y−2−log(y)+log(2) = log(x)+x−1 → y−log(y) = log(x)+x+1−log(2)
5. Cambiare variabile
Siay′ = f(x+ y)
il cambio di variabile z = y + x, ⇒ z′ = y′ + 1 traduce l’equazioneassegnata nella forma
z′ = f(z) + 1
equazione autonoma...Trovata la z(x) poi si puo tornare indietro essendo y(x) = z(x)− x
4Courant John, Introduction to Calculus and Analysis, Springer Vol.II, pag.679

150 19. LE EQUAZIONI AUTONOME
Esempio 5.1. Consideriamo l’equazione y′ = y + x, posto z = y + xsi ha y′ = z′ − 1 e quindi
z′ − 1 = z, → z(x) = c ex − 1
donde
y(x) + x = z(x) = c ex − 1 → y(x) = c ex − 1− x
Osservazione 5.2. Il caso y′ = f(ax+by+c) e naturalmente la stessacosa, sotto un’apparente maggiore generalita...
6. Equazioni in forma omogenea
(12) y′ = f(yx
)La manipolazione cambio di variabile
y = z x : ⇒ y′ = z + x z′ ⇒ z′ =f(z)− z
x
porta la (12) alla forma di un’equazione a variabili separabili5.
Osservazione 6.1. Il titolo Equazioni in forma omogenea non deveessere confuso con quello di Equazioni lineari omogenee, usato piufrequentemente.
6.1. Equazioni riducibili a omogenee.
y′ = f(ax+ by + c
a′x+ b′y + c′)
Se fosse stato c = c′ = 0 allora l’equazione sarebbe stata omogenea:nel caso che ci interessa consideriamo le due nuove variabili
x1 = x+ h, y1 = y + k
Riesce ovviamentedy1dx1
=dy
dxe quindi, sostituendo
dy1dx1
= f(ax1 + by1 + c− ah− bka′x1 + b′y1 + c′ − a′h− b′k
)
Se ora si fossero scelti h e k in modo che...{−ah− bk = 0
c′ − a′h− b′k = 0. . .
5Courant John, Introduction to Calculus and Analysis, Springer Vol.II, pag.679
7. PRIMITIVE DI ORDINE SUPERIORE 151
7. Primitive di ordine superiore
Consideriamo equazioni della forma
(13) y[n] = f(x),
esiste una formula molto semplice per trovare, ovviamente tramite in-tegrazioni, una funzione che soddisfi la (13), una funzione che potremodire una primitiva n-esima di f(x).L’idea naif che poiche per trovare una primitiva di f(x) si deve eseguireun’integrazione ∫
f(x)dx
per trovare una primitiva di ordine 2 si debbano fare due integrazioni,ecc. e, appunto, un’idea naif.Si puo fare una sola integrazione, la seguente
(14) y(x) =1
(n− 1)!
∫ x
0
(x− t)n−1 f(t) dt
La verifica che tale funzione sia una primitiva n−esima si ottiene derivan-do e derivando
y′(x) =1
(n− 2)!
∫ x
0
(x− t)n−2 f(t) dt
y′′(x) =1
(n− 3)!
∫ x
0
(x− t)n−3 f(t) dt
fino alla derivata (n− 1)-esima
y[n−1](x) =
∫ x
0
f(t) dt, → y[n](x) = f(x)
Naturalmente le soluzioni della (13) sono tutte le funzioni
c0 + c1x+ c2x2 + ...+ cn−1x
n−1 +1
(n− 1)!
∫ x
0
(x− t)n−1 f(t) dt
Si riconosce quindi il seguente
Teorema 7.1. La funzione
y(x) =1
(n− 1)!
∫ x
x0
(x− t)n−1 f(t) dt
soddisfa il problema di Cauchy
y[n](x) = f(x), y(x0) = 0, y′(x0) = 0, . . . y[n−1](x0) = 0

152 19. LE EQUAZIONI AUTONOME
7.1. Il resto della formula di Taylor. Detto R(x) il resto diordine n tra la funzione f(x) e il polinomio di Taylor di grado n− 1 adessa associato nel punto x0
R(x) = f(x)−{f(x0) + f ′(x0)(x− x0) + · · ·+ 1
(n− 1)!f [n−1](x0)(x− x0)[n−1]
}si ha
R(x0) = 0R′(x0) = 0. . .R[n−1](x0) = 0R[n](x) = f [n](x)
Riesce quindi, tenuto conto del precedente Teorema 7.1
R(x) =1
(n− 1)!
∫ x
0
(x− t)n−1 f [n](t) dt
La formula di Taylor pertanto puo essere scritta con la nuova espres-sione del resto
f(x) = f(x0) + f ′(x0)(x− x0) + · · ·+ 1
(n− 1)!f [n−1](x0)(x− x0)[n−1]+
+1
(n− 1)!
∫ x
0
(x− t)n−1 f [n](t) dt

CAPITOLO 20
A cosa servono le serie di potenze ?
1. Introduzione
La serie geometrica
1 + x+ x2 + x3 + ...
rappresenta la funzione
1
1− x∀x ∈ (−1, 1).
Solo un ingenuo puo ritenere utile, interessante o vantaggioso un talesforzo per rappresentare una funzione razionale tanto semplice.Quindi la serie geometrica e le serie di potenze in generale devono sod-disfare qualche altra esigenza.
Le serie di potenze sono un algoritmo tramite il quale costruire funzioniche soddisfino a requisiti particolari, quasi sempre equazioni differen-ziali.Il procedimento che si segue e generalmente fatto di due passi
• si costruisce formalmente una serie di potenze prendendo i suoicoefficienti in modo da soddisfare l’equazione differenziale,• si controlla che tale scelta dei coefficienti determini una serie
convergente, che si possa quindi parlare della funzione da essadefinita.
2. Un’equazione differenziale semplicissima
Trovare una soluzione dell’equazione differenziale
y′ = y
• Costruzione formale di una serie di potenze che soddisfi quellaequazione
∞∑k=0
k ak xk−1 =
∞∑k=0
ak xk
ovvero
a1 + 2 a2 x+ 3 a3 x2 + ... = a0 + a1 x + a2 x
2 + a3 x3 + ....
153

154 20. A COSA SERVONO LE SERIE DI POTENZE ?
ovvero ancora, uguagliando a primo e a secondo membro icoefficienti delle stesse potenze di x
a1 = a0, 2a2 = a1, 3a3 = a2, ..., kak = ak−1
relazioni che corrispondono, a conti fatti a prendere
a1 = a0, a2 =a02, a3 =
a03!, ak =
a0k!, ....
• La serie di potenze formalmente costruita e pertanto
a0
∞∑k=0
xk
k!
essa converge ?
Se la risposta e SI allora abbiamo costruito una funzione che soddisfal’equazione differenziale assegnata 1 !
3. Un’equazione lineare del second’ordine
La seguente equazione differenziale 2
(15) y′′ − x y = 0
lineare del second’ordine, a coefficienti non costanti non ha soluzioniparticolarmente semplici: proviamo a costruire una soluzione, in unintorno I dell’origine, sotto forma di serie di potenze
y =∞∑k=0
ak xk
Derivando e sostituendo formalmente nella (15) si ha
∞∑k=0
k (k − 1) ak xk−2 −
∞∑k=0
ak xk+1 = 0, ∀x ∈ I
ovvero
2 .1 .a2 + 3 .2 .a3 x+ 4 .3 .a4 x2 + · · · − a0 x− a1 x2 − a2 x3 · · · = 0
1La liberta rimasta nella scelta di a0 corrisponde alla possibilita di soddisfare,insieme all’equazione differenziale, una condizione iniziale: ad esempio se volessimoy(0) = 17 basterebbe scegliere a0 = 17
2cfr. SMIRNOV, Cours de Mathematiques superieures, MIR (1975) Vol. II,Cap. II, Esempio II.2.2

3. UN’EQUAZIONE LINEARE DEL SECOND’ORDINE 155
da cui, annullando i coefficienti di ciascuna potenza di x si ha
2 .1 .a2 = 03 .2 .a3 = a04 .3 .a4 = a1. . . . . .k (k − 1) ak = ak−3. . . . . .
La condizione a2 = 0 e il legame che lega ogni termine ak a quello ak−3permette di riconoscere il necessario annullamento non solo di a2 maanche di a5, a8, a11, . . .Tutti gli altri coefficienti dipendono dai valori dati ai primi due a0 ea1.Prendiamo, in prima scelta a0 = 1, a1 = 0 ne segue
a0 = 1a1 = 0a2 = 0a3 = 1
2.3a4 = 0a5 = 0a6 = 1
2.3.5.6a7 = 0a8 = 0a9 = 1
2.3.5.6.8.9. . . = . . .
Calcoliamo con Mathematica qualche coefficiente in piu
a3 = 16
= 0.166667
a6 = 1180
= 0.00555556
a9 = 112960
= 0.0000771605
a12 = 11710720
= 5.84549 10−7
a15 = 1359251200
= 2.78357 10−9
a18 = 1109930867200
= 9.09663 10−12
a21 = 146170964224000
= 2.16586 10−14
a24 = 125486372251648000
= 3.92367 10−17
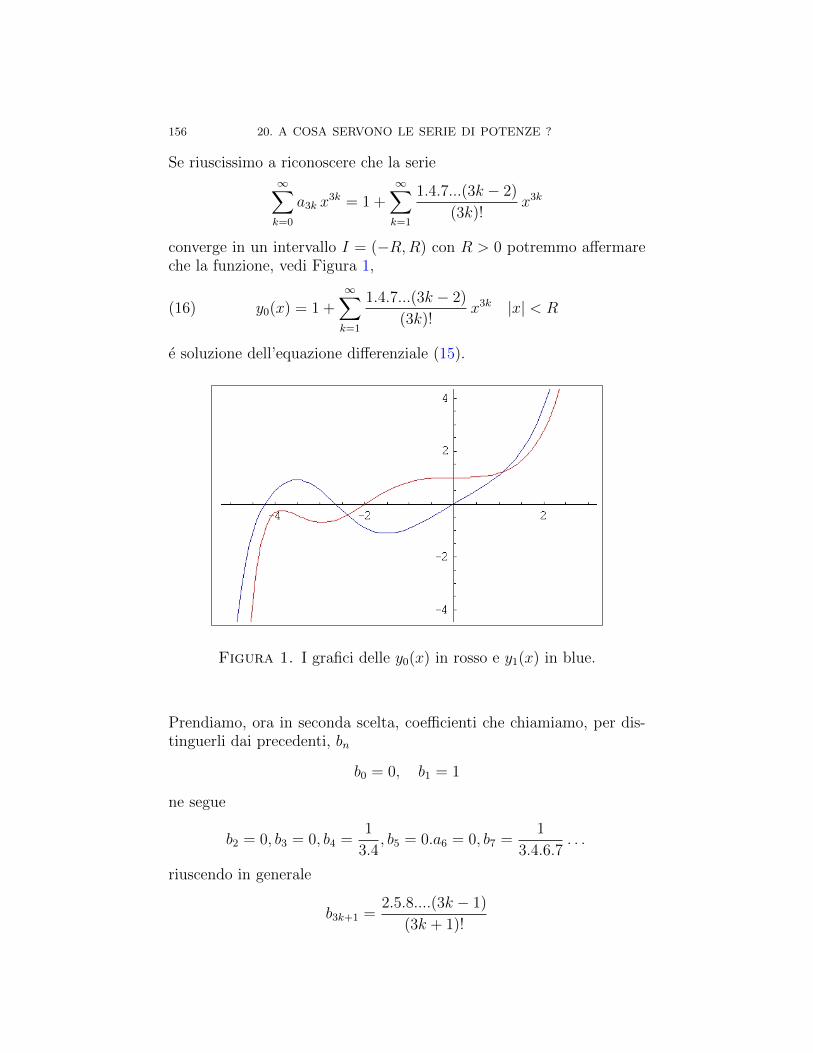
156 20. A COSA SERVONO LE SERIE DI POTENZE ?
Se riuscissimo a riconoscere che la serie∞∑k=0
a3k x3k = 1 +
∞∑k=1
1.4.7...(3k − 2)
(3k)!x3k
converge in un intervallo I = (−R,R) con R > 0 potremmo affermareche la funzione, vedi Figura 1,
(16) y0(x) = 1 +∞∑k=1
1.4.7...(3k − 2)
(3k)!x3k |x| < R
e soluzione dell’equazione differenziale (15).
Figura 1. I grafici delle y0(x) in rosso e y1(x) in blue.
Prendiamo, ora in seconda scelta, coefficienti che chiamiamo, per dis-tinguerli dai precedenti, bn
b0 = 0, b1 = 1
ne segue
b2 = 0, b3 = 0, b4 =1
3.4, b5 = 0.a6 = 0, b7 =
1
3.4.6.7. . .
riuscendo in generale
b3k+1 =2.5.8....(3k − 1)
(3k + 1)!

3. UN’EQUAZIONE LINEARE DEL SECOND’ORDINE 157
b1 = 1 = 1.
b4 = 112
= 0.0833333
b7 = 1504
= 0.00198413
b10 = 145360
= 0.0000220459
b13 = 17076160
= 1.4132 10−7
b16 = 11698278400
= 5.88832 10−10
La funzione da essi definita mediante la serie e quindi
(17) y1(x) = x+∞∑k=1
2.5.8....(3k − 1)
(3k + 1)!x3k+1
il suo grafico e riportato, in blue, ancora in Figura 1.
3.1. Un risultato fondamentale.L’algoritmo con cui a fronte dell’equazione differenziale y′′ − xy = 0abbiamo costruito le due serie di potenze (16) e (17), si puo adattaread equazioni anche piu generali
y′′ + P (x) y′ +Q(x) y = 0
essendo P (x) e Q(x) polinomi assegnati.Si possono costruire due serie di potenze e si puo dimostrare che il lorointervallo di convergenza e. . .
tutto l’asse reale !
Osservazione 3.1. Le due soluzioni y0(x) e y1(x) trovate come sommedi serie di potenze per l’equazione y′′ − xy = 0 sono linearmente in-dipendenti (basta eseguire il test d’indipendenza nell’origine...) e quindiproducono, con le loro combinazioni lineari
Ay0(x) +B y1(x)
tutte le soluzioni dell’equazione omogenea.Notate, guardando i grafici di Figura 1, come i grafici delle due funzionisi intersechino ma non siano mai tangenti nei punti di intersezione(teorema d’unicita. . . ).

158 20. A COSA SERVONO LE SERIE DI POTENZE ?
4. La serie binomiale
Tra le serie offerte dalla formula di Taylor e una delle piu importantie utili: ne vedremo ora una costruzione alternativa ottenuta pensandoalla risoluzione di un’equazione differenziale (cfr. Vol. I pag. 547)
f(x) = (1 + x)α, ⇒ (1 + x)f ′(x) = α f(x)
Cerchiamo una serie di potenze che soddisfi l’equazione
(18) (1 + x) y′ = α y
sia
y =∞∑k=0
ckxk = c0 + c1x+ c2x
2 + c3x3 + ...
la serie: sostituendo nell’equazione (18) si ha
(1 + x)∞∑k=0
kckxk−1 = α
∞∑k=0
ckxk
da cui
c1+2c2x+3c3x2+...+c1x+2c2x
2+3c3x3+...−αc0−αc1x−αc2x2... = 0
Raccogliendo i coefficienti della stessa potenza di x si ottiene
c1 − α c0 = 02c2 + c1 − αc1 = 03c3 + 2c2 − αc3 = 0
ovveroc1 = α c0c2 = α−1
2c1
c3 = α−23c2
Scelto, ad esempio c0 = 1 si hanno i seguenti valori
ck =α− k + 1
kck−1, ⇒ ck =
∏k−1h=0(α− h)
k!=
(α
k
)Riassumendo: una serie di potenze (formale) che soddisfi l’equazione(18) e la seguente
∞∑k=0
(α
k
)xk
Qual’e il suo raggio di convergenza ?Con il criterio del rapporto si cerca
λ = limk→∞
|(αk+1
)|
|(αk
)|
= limk→∞
|α− k|k + 1
= 1

4. LA SERIE BINOMIALE 159
Quindi la serie
(19)∞∑k=0
(α
k
)xk
ha raggio di convergenza R = 1.Quindi la somma
f(x) =∞∑k=0
(α
k
)xk
• e definita in (−1, 1)• e continua• e derivabile f ′(x) =
∑∞k=0 k
(αk
)xk−1
• soddisfa, in (−1, 1) l’equazione differenziale (18),• riesce f(0) = 1
Quindi
f(x) =∞∑k=0
(α
k
)xk
soddisfa il problema di Cauchy{(1 + x)y′(x) = α y(x)y(0) = 1
Tenuto conto che anche la funzione (1 + x)α soddisfa tale problema ilteorema di unicita implica che
(1 + x)α =∞∑k=0
(α
k
)xk
4.1. Se α = n ∈ N: Nel caso α intero positivo la serie (19) siriduce a un polinomio...Il raggio di convergenza e naturalmente infinito.

CAPITOLO 21
Serie di Fourier
1. Introduzione
Le funzioni somme di funzioni trigonometriche
1, sin(x), cos(x), sin(2x), cos(2x), ....ecc.
P (x) =1
2a0 + a1 cos(x) + b1 sin(x) + ...+ bn sin(x)
si dicono polinomi trigonometrici : esse rappresentano espressioni ovvi-amente periodiche
∀K ∈ Z : P (x) = P (x+ 2kπ)
Il piu alto coefficiente n delle funzioni goniometriche che costituisconoun polinomio trigonometrico si dice grado del polinomio.
I grafici dei polinomi trigonometrici sono, oltre a quelli ben noti dellesingole funzioni trigonometriche ak cos(kx) o bk sin(kx), molti vari, tan-to da far pensare che con polinomi trigonometrici si possano approssi-mare moltissime funzioni diverse, cioe funzioni con grafici anche moltolontani dalle ordinarie sinusoidi.
Si possono sperimentare tali diversita con la tavola grafica all’indirizzohttp://www.mat.uniroma1.it/people/lamberti/analisi_mat/pdf/
fourier1.html: si provi, ad esempio, il grafico del polinomio
P (x) = 2 sin(x) + sin(2x) +2
3sin(3x)
e lo si confronti con quello della funzione f(x) = π − x
2. L’approssimazione in media quadratica
Consideriamo il seguente problema:
Assegnata in [0, 2π] una funzione continua determinareil polinomio trigonometrico P (x) di grado n tale cheriesca minimo l’integrale∫ 2π
0
(f(x)− P (x))2 dx
161

162 21. SERIE DI FOURIER
Consideriamo, per semplicita il caso n = 1: gli altri possibili valori sirisolvono in modo sostanzialmente analogo.I polinomi di grado n = 1 sono
P (x) =a02
+ a1 cos(x) + b1 sin(x)
Quindi∫ 2π
0
(f(x)− P (x))2 dx =
∫ 2π
0
f 2(x) dx+2
∫ 2π
0
f(x)P (x) dx+
∫ 2π
0
P 2(x) dx
Tenuto presente che∫ 2π
0
cos(x)dx =
∫ 2π
0
sin(x)dx = 0
e che∫ 2π
0
cos2(x) dx = π,
∫ 2π
0
sin2(x) dx = π,
∫ 2π
0
cos(x) sin(x) dx = 0
si ha ∫ 2π
0
P 2(x) dx =
(1
2a20 + a21 + b21
)π
e pertanto la quantita da minimizzare si riduce a∫ 2π
0
f 2(x) dx+1
2
(a20 + a21 + b21
)−
−a0∫ 2π
0
f(x)dx− 2a1
∫ 2π
0
f(x) cos(x)dx− 2b1
∫ 2π
0
f(x) sin(x)dx
ovvero ∫ 2π
0
f 2(x) dx+
(1
2a20π − a0
∫ 2π
0
f(x)dx
)+
+
(a21π − 2a1
∫ 2π
0
f(x) cos(x)dx
)+
+
(b21π − 2b1
∫ 2π
0
f(x) sin(x)dx
)I tre addendi in parentesi tonde sono minimi, come si riconosce sem-plicemente annullando la derivata prima, se i coefficienti a0, a1, b1 sono
2. L’APPROSSIMAZIONE IN MEDIA QUADRATICA 163
rispettivamente
a0 =1
π
∫ 2π
0
f(x)dx
a1 =1
π
∫ 2π
0
f(x) cos(x)dx
b1 =1
π
∫ 2π
0
f(x) sin(x)dx
Il polinomio trigonometrico di grado n = 1 da essi determinato e quindiquello che meglio approssima in media quadratica la funzione f(x)nell’intervallo [0, 2π].Il problema generale, cioe relativo a scelte n > 1 si tratta in modo deltutto analogo: i coefficienti in questo caso da 3 diventano 2n+ 1 :detto
Pn(x) =1
2a0 +
n∑k=1
(ak cos(kx) + bk sin(kx))
il polinomio cercato, la scelta ottimale dei polinomi per i quali l’inte-grale ∫ 2π
0
(f(x)− P (x))2 dx
riesce minimo non cambia.I coefficienti che minimizzano tale integrale sono, qualunque sia n, iseguenti
ak =1
π
∫ 2π
0
f(x) cos(kx)dx, bk =1
π
∫ 2π
0
f(x) sin(kx)dx, k ∈ [0, n]
2.1. Una congettura. Indichiamo, per ogni n, con Pn(x) il poli-nomio trigonometrico di grado ≤ n che rende minimo l’integrale∫ 2π
0
(f(x)− P (x))2 dx
rispetto a qualunque altro polinomio trigonometrico di grado n: alcrescere di n
• la successione {Pn(x)} converge ?• riesce lim
n→∞= f(x) ?
La congettura e che le due precedenti domande abbiano risposta af-fermativa.... quasi in relazione a qualunque scelta di f(x), anche noncontinua !

164 21. SERIE DI FOURIER
3. La forma complessa
Ricordando le espressioni di Eulero
cos(x) =eix + e−ix
2, sin(x) =
eix − e−ix
2i
ogni polinomio trigonometrico di grado n puo tradursi come un poli-nomio negli esponenziali complessi
e−inx, e−i(n−1)x, ..., e−ix, 1, eix, ...ei(n−1)x, einx
e, naturalmente viceversa.
1
2a0 +
n∑k=1
(akcos(kx) + bk sin(kx)) =n∑
k=−n
cneikx
il legame tra i coefficienti ak, bk e quelli ck e quello ovvio dedotto dalleformule di Eulero.
ak + ibk = ck, ak − ibk = c−k
Le espressioni
ak =1
π
∫ 2π
0
f(x) cos(kx)dx, bk =1
π
∫ 2π
0
f(x) sin(kx)dx, k ∈ [0, n]
si traducono quindi nella (unica) forma
ck =1
2π
∫ 2π
0
f(x)e−ikxdx, ∀k ∈ Z
Il calcolo si fa piu agevolmente nella forma degli esponenziali complessi:quindi d’ora in poi penseremo a polinomi sempre e solo espressi dasomme di esponenziali complessi.
4. Risultati di approssimazione
Le funzioni f(x) di cui ci occupiamo saranno definite in [0, 2π] e pro-lungate a tutto R come funzioni periodiche.Quindi pensando, ad esempio, alla funzione f(x) = x2 penseremo difatto alla funzione periodica di Figura 1
Definizione 4.1. Sia f(x) integrabile in [0, 2π] i numeri complessi
f(n) =1
2π
∫ 2π
0
f(x)e−inxdx, n = 0,±1, ±2, ...
si dicono coefficienti di Fourier della f(x). Se f(x) e reale allora riesce
f(−m) = f(m)
4. RISULTATI DI APPROSSIMAZIONE 165
Figura 1. L’estensione periodica di x2 da [0, 2π) a tutto R
Lemma 4.2. Sia
f(x) =+N∑
n=−N
cneinx
funzione reale, riesce
∀n ∈ [−N,N ] : cn = f(n)
e+N∑
n=−N
|f(n)|2 =1
2π
∫ 2π
0
|f(x)|2dx
Dimostrazione. Moltiplicando membro a membro per e−imx siottiene
1
2πf(x)e−imx =
1
2π
+N∑n=−N
cnei(n−m)x
da cui tenuto conto che
(20)
∫ 2π
0
ei(n−m)x dx =
{2π se n = m2π se n 6= m

166 21. SERIE DI FOURIER
integrando su [0, 2π] si ottiene
f(m) =1
2π
+N∑n=−N
cn
∫ 2π
0
ei(n−m)x dx = cm
Consideriamo il prodotto
f(x)f(x) =
(+N∑
n=−N
cneinx
)(+N∑
m=−N
cmei−mx
)integrando su [0, 2π] si ottiene∫ 2π
0
|f(x)|2 dx =+N∑
n,m=−N
cncm
∫ 2π
0
ei(n−m)x dx
da cui tenuto presente la (20) si ha∫ 2π
0
|f(x)|2 dx =+N∑
n=−N
|cn|22π
e quindi la tesi
+N∑n=−N
|f(n)|2 =1
2π
∫ 2π
0
|f(x)|2dx
�
Proposizione 4.3. Sia f(x) reale e continua in [0, 2π] allora riesce
+∞∑n=−∞
|f(n)|2 ≤ 1
2π
∫ 2π
0
|f(x)|2dx
Dimostrazione. Consideriamo l’integrale∫ 2π
0
∣∣∣∣∣f(x)−+N∑
n=−N
f(n)einx
∣∣∣∣∣2
dx ≥ 0
Sviluppando il quadrato, tenuta presente la∫ 2π
0
ei(n−m)x dx =
{2π se n = m2π se n 6= m
si ha∫ 2π
0
|f(x)|2 dx − 2+N∑
n=−N
f(n)f(−n) 2π ++N∑
n=−N
f(n)f(−n) 2π ≥ 0

5. IL TEOREMA FONDAMENTALE 167
ovvero, tenuto presente che, essendo f(x) reale riesce
f(−n) = f(n)∫ 2π
0
|f(x)|2 dx − 2π+N∑
n=−N
∣∣∣f(n)∣∣∣2 ≥ 0
da cui la tesi stante l’arbitrarieta di N . �
Ne segue l’importante risultato
Proposizione 4.4. Sia f(x) reale e continua in [0, 2π], allora riesce
limn→±∞
f(n) = 0
Dimostrazione. Riesce+∞∑
n=−∞
|f(n)|2 ≤ 1
2π
∫ 2π
0
|f(x)|2dx
da cui il carattere infinitesimo
limn→±∞
|f(n)|2 = 0 → limn→±∞
f(n) = 0
�
5. Il teorema fondamentale
Teorema 5.1. Sia f(x) periodica di periodo 2π, continua e derivabilein y0: riesce
+∞∑n=−∞
f(n)einy0 = f(y0)
Dimostrazione. Fissato y0 consideriamo la funzione di x
g(x) =
f(x+ y0)− f(y0)
ei(x+y0) − eiy0se x 6= 0
f ′(y0)
eiy0se x = 0
La funzione g(x) costruita e periodica e continua.Esprimiamo ora f(x+ y0) tramite la g(x):
f(x+ y0) = f(y0) + ei(x+y0)g(x)− eiy0g(x)
da cui
f(x+ y0) e−inx = f(y0) e
−inx + eiy0(g(x) e−i(n−1)x − g(x) e−inx
)

168 21. SERIE DI FOURIER
Integrando rispetto ad x ∈ [0, 2π] si ha pertanto, con le notazioni usuali,
1
2π
∫ 2π
0
f(x+y0) e−inx dx = f(y0)
1
2π
∫ 2π
0
e−inx dx+eiy0 (g(n− 1) − g(n) )
Tenuto conto che
1
2π
∫ 2π
0
f(x+ y0) e−inx dx =
1
2π
∫ 2π
0
f(x) e−in(x+y0) dx = f(n)e−iny0
e che
1
2π
∫ 2π
0
e−inx dx =
{1 se n = 00 se n 6= 0
sommando per n ∈ [−N,N ] si ottiene
+N∑n=−N
f(n)e−iny0 = f(y0) + e−iny0+N∑
n=−N
(g(n− 1) − g(n) )
ovvero, osservato il carattere telescopico della sommatoria a secondomembro,
+N∑n=−N
f(n)e−iny0 = f(y0) + e−iny0 (g(−N − 1) − g(N) )
Tenuto presente che essendo g(x) una funzione continua i suoi coeffi-cienti di Fourier sono infinitesimi riesce
limN→∞
+N∑n=−N
f(n)e−iny0 = f(y0)
�
6. Serie di Fourier
Assegnata la funzione f(x) integrabile in [0, 2π]
• si possono determinare i suoi coefficienti di Fourier
f(n) =1
2π
∫ 2π
0
f(x)e−inx dx, n = 0,±1,±2, ...
• si puo considerare la serie
+∞∑n=−∞
f(n)einx

6. SERIE DI FOURIER 169
La convergenza, uniforme o meno, della serie determinata dipende dal
carattere infinitesimo dei coefficienti f(n) impiegati.
E interessante riconoscere come i coefficienti f(n) abbiano ordine diinfinitesimo collegato alla regolarita della f(x).Abbiamo riconosciuto, vedi Proposizione 4.4, che la sola continuita dif(x) implica
limn→±∞
f(n) = 0
Proposizione 6.1. Sia f(x) periodica, continua e derivabile con deriva-ta continua in R allora i suoi coefficienti di Fourier sono infinitesimidi ordine superiore a 1/n.
Dimostrazione. Consideriamo i coefficienti di Fourier della f ′(x)
2πf ′(n) =
∫ 2π
0
f ′(x)e−inxdx = f(x)e−inx∣∣2π0
+ in
∫ 2π
0
f(x)e−inxdx
da cui, tenuto conto che la periodicita implica
f(x)e−inx∣∣2π0
= f(2π)e−in2π − f(0)e−in0 = 0
si ha
2πf ′(n) = in2πf(n) → f(n) = − inf ′(n)
Tenuto conto che, per la continuita di f ′(x) riesce
limn→±∞
f ′(n) = 0
si ha
f(n) = o
(1
n
)�
Quanto osservato nella precedente Proposizione puo essere generaliz-zato come segue
Proposizione 6.2. Sia f(x) periodica, continua e derivabile con derivatecontinue fino all’ordine m ≥ 1 in R allora i suoi coefficienti di Fouriersono infinitesimi di ordine superiore a 1/nm.

170 21. SERIE DI FOURIER
7. Applicazioni
Consideriamo gli sviluppi di Fourier delle funzioni
f(x) = x, g(x) = x2, c(x) = x3
Scegliamo di lavorare sull’intervallo [−π, π].
f(x) = x
f(0) =1
2π
∫ π
−πxdx = 0,
f(n) =1
2π
∫ π
−πxe−inx dx =
=1
2π
(π(e−inπ + einπ)
−in+
1
in
∫ π
−πe−inx dx
)= −cos(nπ)
in
∞∑n=−∞
f(n)einx = −∞∑
n=−∞
cos(nπ)
ineinx =
= −+∞∑n=1
cos(nπ)
in
(einx − e−inx
)=
+∞∑n=1
(−1)n+1 sin(nx)
n
I risultati teorici precedenti permettono di riconoscere che la serie
sin(x)− 1
2sin(2x) +
1
3sin(3x)− 1
4sin(4x) + ....
converge in ogni punto x(−π, π) alla funzione f(x) = x.
E evidente che tale convergenza ad f(x) = x non puo valere in almenouno dei due estremi perche la serie, formata di funzioni periodiche nullenei due estremi, produce nei due estremi la stessa somma - lo zero -mentre la funzione f(x) prende in tali estremi valori diversi ed entrambidiversi da zero.
s(x) = x2
s(0) =1
2π
∫ π
−πx2dx =
π2
3,
s(n) =1
2π
∫ π
−πx2e−inx dx =
2(−1)n
n2
Da cui∞∑
n=−∞
s(n)einx =∞∑
n=−∞
2(−1)n
n2einx =

8. COMPLETEZZA 171
=π2
3+
+∞∑n=1
4(−1)n
n2cos(nx)
c(x) = x3
Riesce ovviamente c(0) = 0.
Il calcolo dei coefficienti di Fourier c(n) in questo caso, come del restonel caso di ogni altra potenza intera xm puo essere condotto servendosidel legame
F (n) =1
inF ′(n)
tra i coefficienti F (n) di una funzione e quelli F ′(n) della derivata.Riesce pertanto
c(n) =1
inc′(n) = 3
1
in
2(−1)n
n2
da cui
x3 = 6+∞∑n=1
(−1)n
n3sin(nx)
8. Completezza
La capacita di esprimere ogni funzione f(x) ∈ C1(R), periodica diperiodo 2π come somma della sua serie di Fourier permette di enunciarela seguente
Proposizione 8.1. Sia f(x) ∈ C1(R), periodica di periodo 2π, allorase
∀n ∈ Z :
∫ 2π
0
f(x)einx dx = 0
allora f(x) e identicamente nulla.
In altri termini enunciando le proprieta
∀n ∈ Z :
∫ 2π
0
f(x)einx dx = 0
come
ortogonalita di f(x) alle einx
la proposizione afferma che l’unica funzione periodica e regolare, ortog-onale a tutte le einx e la funzione identicamente nulla.


















