Alcune Istruzioni per la gestione dell’I/O (Classe 7)
13
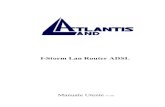
Alcune Istruzioni per la gestione dell’I/O (Classe 7) TIP O CO DICE O PERANDI C N Z V P I C O M M E N TO 0 INs dev,D 0 ------ Ildato contenuto nel bufferdeldevice dev è trasferito nella destinazione D 0. dev ->d0 1 O U Ts S ,dev ------ Ildato sorgente S viene trasferito nel bufferdeldevice dev. S ->dev 2 S TA R T dev ------ V iene azzerato ilflip- flop S TA TU S deldev e viene avviata l'operazione. 3 JR dev,D 1 ------ S e S TA TU S =1 salta alla destinazione D 1 4 JN R dev,D 1 ------ S e S TA TU S =0 salta alla destinazione D 1 Per la destinazione D0 sono ammessi tutti i tipi di indirizzamento tranne quello immediato. Per la destinazione D1 sono ammessi tutti i tipi di indirizzamento tranne quello con registro e immediato.
description
Alcune Istruzioni per la gestione dell’I/O (Classe 7). Per la destinazione D0 sono ammessi tutti i tipi di indirizzamento tranne quello immediato. Per la destinazione D1 sono ammessi tutti i tipi di indirizzamento tranne quello con registro e immediato. Formato delle istruzioni di I/O. - PowerPoint PPT Presentation
Transcript of Alcune Istruzioni per la gestione dell’I/O (Classe 7)

Alcune Istruzioni per la gestione dell’I/O (Classe 7)
TIPO CODICE OPERANDI C N Z V P I COMMENTO0 INs dev, D0 - - - - - - Il dato contenuto nel
buffer del device dev è trasferito nella
destinazione D0. dev ->d0
1 OUTs S,dev - - - - - - Il dato sorgente S viene trasferito nel
buffer del device dev.S->dev
2 START dev - - - - - - Viene azzerato il flip-flop STATUS del dev e
viene avviata l'operazione.
3 JR dev, D1 - - - - - - Se STATUS=1 salta alla destinazione D1
4 JNR dev, D1 - - - - - - Se STATUS=0 salta alla destinazione D1
Per la destinazione D0 sono ammessi tutti i tipi di indirizzamento tranne quello immediato.Per la destinazione D1 sono ammessi tutti i tipi di indirizzamento tranne quello con registro e immediato.

Formato delle istruzioni di I/O
TIPO k I/O s ----- ----- MODO DEST
CLASSE
31 29 28 24 23 16 15 14 13 12 11 9 8 6 5 3 2 0
Per l’operando dev sono ammessi solo due modi di indirizzamento: diretto con registro ed assoluto. Per la codifica di questo campo sono usati i campi I/O e k.
Il campo I/O può assumere solo due valori:• 01 => indica che il contenuto di k è l’indirizzo del device• 10 => indica che l’indirizzo del device è contenuto nel registro generale specificato dai primi 3 bit del campo k
Poichè i campi modo sorgente e sorgente sono inutilizzati, la sorgente S viene specificata nei campi modo destinazione e destinazione.
111

I/O ABI/O DBI/O CB
SELECTREG
I/O RD START
STARTD O.C.
READY
SCOSCA
R Q
S Q
STATUS
PD32
I/O programmato – INTERFACCIA di INPUTPROTOCOLLO DI HANDSHAKING IMPLEMENTATO A SOFTWARE
STARTDEVCOMPLETE
“0”
WAIT

Programma assembler (input)
Aspetta1: JNR DeviceIN, Aspetta1
START DeviceIN
Aspetta2: JNR DeviceIN, Aspetta2
INB DeviceIN, R0

I/O ABI/O DBI/O CB
DEC
SELECT
REG
STARTI/O WR
STARTD O.C.
READY
SCOSCA
R Q
S Q
STATUS
PD32
STARTDEVCOMPLETE
I/O programmato- INTERFACCIA di OUTPUTPROTOCOLLO DI HANDSHAKING IMPLEMENTATO A SOFTWARE

Programma assembler (output)
Aspetta1: JNR DeviceOUT, Aspetta 1
OUT R0, DeviceOUT
START DeviceOUT
Aspetta2: JNR DeviceOUT, Aspetta2

I/O programmatoMODALITA’ BUSY WAITING
…MOVL #100, R0 ; numero di dati da acquisireMOVL #DATI, R1 ; ind.dell’area di memoriaJSR IN_AD1…IN_AD1: PUSH R0; salv. registri usati
PUSH R1PUSH R2
IN_1: JNR AD1, IN_1 ; attende che AD1 sia prontoIN_2: START AD1 ;avvia l’acquisizione di un datoIN_3: JNR AD1, IN_3 ; attende che il dato sia stato prodotto
INW AD1, R2 ; prelievo del dato e….MOVW R2, (R1)+ ; … suo trasferimento in memoriaSUBL #1, R0 ; decremento del contatoreJNZ IN_2 ; acquisizione di un altro dato se non si è azzerato
; il contatorePOP R2 ; ripristino dei registri usatiPOP R1 ;POP R0 ;RET ; ritorno al programma chiamante

Polling(verifica circolare se ogni DEVICE è pronto ad interagire)
I/O ABI/O DBI/O CB
PD32
DEV 1 DEV 2 DEV 3 DEV 4

Polling(acquisisce 100 dati da 4 dispositivi)
…MOVL #100, R0 ; numero di dati da acquisireMOVL #DATI, R1 ; ind.dell’area di memoriaJSR IN_AD1…IN_AD1: PUSH R0 ; salv. registri usati
PUSH R1PUSH R2
POLL1: JR AD1, IN_1 ; attende che AD1 sia prontoPOLL2: JR AD2, IN_2POLL3: JR AD3, IN_3POLL4: JR AD4, IN_4
JMP POLL1…IN_i: START ADi ; avvia l’acquisizione di un datoWAIT: JNR ADi, WAIT ; attende che il dato sia stato prodotto
INW ADi, R2 ; prelievo del dato e….MOVW R2, (R1)+ ; … suo trasferimento in memoriaSUBL #1, R0 ; decremento del contatoreJZ EXITJMP POLL_i+1 ; continua a interrogare le altre periferiche
EXIT: POP R2 ; ripristino dei registri usatiPOP R1 ;POP R0 ;RET ; ritorno al programma chiamante

Esercizio
Una stanza e’ monitorata da 4 sensori di temperatura, i quali sono pilotati da un PD32. Quest’ultimo controlla costantemente che il valor medio della temperatura rilevata nella stanza sia compreso tra i valori [Tmin-Tmax]. Nel caso in cui il valor medio della temperatura non cada in tale intervallo, il microprocessore inviera’ un segnale di allarme su un’apposita periferica, detta ALARM. Il segnale d’allarme utilizzato e’ il valore 1 codificato con 8 bit. Se la temperatura ritorna all’interno dell’intervallo [Tmin-Tmax], la CPU invia sulla periferica ALARM il valore 0.
I sensori ritornano la temperatura misurata come un numero intero ad 8 bit, usando i decimi di gradi Celsius come unita’ di misura.
Scrivere il codice assembly per il controllo dei sensori di temperatura e della periferica di allarme.

Macchina a stati finiti
T_media in[Tmin-Tmax]
T_media fuori da[Tmin-Tmax]
newTemp,T_media NON in [Tmin-Tmax] /Alarm_ON
Legenda per le transizioni:
Input, Condizione / Output
newTemp,T_media in [Tmin-Tmax] /Alarm_OFF
newTemp,T_media NON in [Tmin-Tmax]/
-
newTemp,T_media in [Tmin-Tmax] /
-

Diagramma di flussoT_media=Ts1=Ts2=Ts3=Ts4=
= (Tmin+Tmax)/2Stato=IN_RANGE
dev iready?
controlla dev.succ
Polling
NO
SI
Ricalcola media: T_media=T_media+(new_T_si-old_T_si)/4
T_mediain_range?
SIStato =IN
SI
Stato =OUT
SI
OUTPUT:ALARM OFF
NO
OUTPUT:ALARM ON
Input da dev_i: new_T_si
NO
Stato=IN Stato=OUT
NO

Il codice
VEDI FILE POLLING.ASM SUL SITO…http://www.dis.uniroma1.it/~ciciani/DIDATTICA/CALCOLATORI-II/polling.asm