Aerodinamica Degli Aeromotori_parte2

of 50
-
Upload
federico-borrelli -
Category
Documents
-
view
223 -
download
0
Transcript of Aerodinamica Degli Aeromotori_parte2
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
1/50
Parte II
Aerodinamica del rotore
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
2/50
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
3/50
Capitolo 5
Il rotore in hovering
5.1 Teoria impulsiva per il rotore in hovering
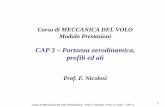
Una condizione di funzionamento fondamentale del rotore e il cosiddetto ho-vering che consiste essenzialmente in un rotore in grado di generare trazionementre e investito da una corrente di velocita asintotica nulla. Questa condi-zione e perfettamente equivalente al funzionamento di unelica a punto fisso.Limportanza dellhovering per un rotore e tale che esso puo essere consideratola caratteristica che lo identifica e contraddistingue: il rotore e quella macchinaa fluido in grado di generare una forza di sostentazione (in genere verticale)anche quando la velocita relativa della corrente fluida e nulla.
Le teorie impulsive illustrate nel Capitolo 1 sono state derivate nellipotesidi flusso quasi unidimensionale e trascurabilita della contrazione della scia. Inmaniera analoga alla teoria quasi-unidimensionale dellugello in cui le condizionidi ristagno sono caratterizzate da una sezione del tubo di flusso di area infinita,le teorie impulsive possono essere estese al rotore in hovering (o applicate ancheper lelica a punto fisso) considerando V = 0 e la sezione del tubo di flusso
allinfinito a monte di area infinita. Sul rotore, ancora una volta schematizzatocome un disco attuatore, e presente uninduzione media (in questo caso tutta lavelocita) pari a w, mentre allinfinito a valle essa e pari a 2w se consideriamoil rotore infinitamente lontano dal suolo (ipotizziamo cioe trascurabile leffettosuolo).
E possibile descrivere con le teorie impulsive anche la condizione di funzio-namento del rotore in salita, caratterizzata, nelle nostre convenzioni da V > 0(cfr. figure 5.1 e 5.2), mentre una piu attenta analisi, come vedremo, e richiestaper la descrizione del funzionamento del rotore in discesa. Indicando con whlinduzione sul disco del rotore in hovering, le relazioni (1.11) e (1.12) diventano
T = 2w2hA, P = 2w3
hA; (5.1)
oppure, in termini adimensionali:
Tc = 22
i , Qc =T
3
2
c2
; (5.2)
dove i = wh/(R).
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
4/50
50 Il rotore in hovering
w
w2
T
h
h
Figura 5.1: Il rotore in hovering nel modello della teoria impulsiva.
In generale, sia in hovering che in salita, il rotore e caratterizzato da un rap-porto di funzionamento molto prossimo a 0 per cui 1. Inoltre, nel paragrafo2.6, abbiamo visto che unelica ottima, per rapporti di funzionamento molto pic-coli, e caratterizzata da fattori di interferenza rotazionali a 0; questo implicache un rotore progettato correttamente, in hovering puo essere descritto effica-
cemente dalla teoria impulsiva semplice e lintroduzione della teoria impulsivagenerale non si rende necessaria.
5.2 Teoria dellelemento di pala per il rotore in
hovering
Per quanto detto nel precedente paragrafo, si considerano valide le seguentiipotesi:
1. 1,
2. a = 0.
Particolarizziamo quindi a questo caso la teoria generale dellelemento di paladescritta nel paragrafo 2.3. La prima delle relazioni (2.16) diventa
1 cl cd = cl
1 E
, (5.3)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
5/50
5.2 Teoria dellelemento di pala per il rotore in hovering 51
T
V8
V8 +w
V8 + 2w
h
h
Figura 5.2: Il rotore in salita nel modello della teoria impulsiva.
con E lefficienza aerodinamica dellelemento di pala. Se lelemento lavora, comee auspicabile, in condizioni di alta efficienza, 1E 1 per cui
1 cl = cl( ), (5.4)con il calettamento misurato rispetto alla retta di portanza nulla del profilo.
Unaltra semplificazione importante si ottiene imponendo lipotesi 2 nellarelazione (2.19):
Ve =r(1 a)
cos r; (5.5)
per cui, uguagliando la prima delle (2.18) alla (1.22) si ottiene
N c
2r(r)2cl
V + w
r
= 4(V + w)w, (5.6)
relazione in cui si e posto (V + w)/(r).Ponendo = V/(R), i = w/(R) e = N c/(R) si ottiene (
/r + i/r):
2i + + cl 8i
r cl
8
r = 0, (5.7)
equazione di secondo grado nellinduzione i di cui si sceglie la radice positiva.Nel caso di rotore in hovering o in salita (lenta) e possibile ottenere lindu-
zione assiale sullelica in forma esplicita.E quindi possibile ricavare le prestazioni del rotore mediante ununica tabella
come nellesempio di tabella (5.1).
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
6/50
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
7/50
5.3 Il rotore ideale 53
5.3 Il rotore ideale
Nellipotesi di trascurabilita dellinduzione rotazionale e gia stata trovata nelparagrafo (1.3) una condizione di ottimo in base alla teoria impulsiva: w(r) =costante, che ci consente di definire il rotore in grado di minimizzare la potenzaindotta.
La relazione (5.6) per V = 0 si scrive:
N c
22rcl
w
r
= 4w2. (5.14)
Imponendo w costante ed essendo cl(r) praticamente costante, una possibilecondizione di ottimo si ottiene per c(r) = costante e r = costante, cioe conun rotore di forma in pianta rettangolare ed una distribuzione di calettamentoiperbolica:
(r) =tr
. (5.15)
Questo rotore, che minimizza con una forma in pianta molto semplice, la potenzaindotta in hovering viene detto rotore ideale.
Langolo di inflow diventa = t/r con t = i.
Lepressione del coefficiente di spinta per il rotore ideale e:
Tc =1
2
1
0
cl r2dr =
4cl(t t). (5.16)
Tenendo conto delle (5.2) e della (5.16) si ottiene invece la seguente espressionedel coefficiente di potenza:
Qc =
8cd +
T3/2c
2, (5.17)
dove con cd si e indicato il coefficiente di resistenza medio lungo il raggio dellapala.
5.4 Il rotore ottimo
Il rotore ideale e stato ottenuto richiedendo la minimizzazione della potenza in-dotta e non di tutta la potenza, per cui probabilmente e ottenibile una macchinapiu efficiente se si richiede che anche le perdite parassite siano minime.
Questo risultato si ottiene imponendo nella (5.14) che non solo w(r) =costante ma anche che langolo effettivo dellelemento di pala (r) = opt siacostante con r e tale da minimizzare le perdite viscose.
E facile verificare con la relazione (5.14) che questo risultato e ottenibileanche se non e piu possibile con una pala rettangolare ma e necessario che:
cl(r) = costante , c(r) =ctr
, (r) = opt +tr
. (5.18)
Il rotore caratterizzato da questa geometria viene detto rotore ottimo inhovering.
Le espressioni dei coefficienti di spinta e potenza diventano in questo caso
Tc =t4
cl (5.19)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
8/50
54 Il rotore in hovering
e
Qc =t6
cd +T3/2c
2. (5.20)
Un confronto tra la (5.20) e la (5.17) non e immediato. Introducendo una soliditaequivalente del rotore ottimo definita attraverso la relazione
Tc =12
1
0
cl r2 dr =
ecl2
1
0
r2dr, (5.21)
si ottiene (tenendo conto che il confronto di questa con la (5.20) porta a t =2
3e):
Qc =ecd
9+
T3/2c
2, (5.22)
cioe un rotore ottimo di solidita equivalente pari alla solidita di un corrispon-dente rotore ideale ha una potenza parassita inferiore dello 11%.
Si noti comunque che c(r) per r 0 per cui esistono dei limiti praticicostruttivi di un rotore ottimo.
5.5 Il rotore reale
Nelle realizzazioni pratiche, in genere, si preferisce utilizzare una piu semplicedistribuzione di calettamento, per cui, a parte i limiti teorici dellespressione(5.2) la potenza indotta del rotore risulta maggiore di un fattore k; nel caso didistribuzione di calettamento lineare con r si ha che k 1.13. 1.15. Se siindica con una solidita media del rotore (da non confondere con la soliditaequivalente e del rotore ottimo) e possibile scrivere, per un rotore reale:
Qc =cd
8+ k
T3/2c
2(5.23)
La curva Qc(Tc) viene detta polare in hovering del rotore. Nella Figura 5.3 sonoconfrontate le polari in hovering per un rotore ideale, rotore ottimo e rotorereale con distribuzione lineare del calettamento. Sovente in letteratura le polari
in hovering vengono espresse in termini di Qc/ = qc eTc
= tc; si noti come
tc e qc rappresentino i coefficienti di spinta e potenza in cui si e utilizzata comesuperficie di riferimento la supeficie effettiva del rotore Ar = N cR.
5.6 La cifra di merito
Essendo V = 0 la definizione di rendimento dellelica ( = T V/P) non puo,chiaramente essere applicata al rotore in hovering. In questo caso la valutazionedelle prestazioni di un dato rotore e agevolata introducendo la cifra di merito:
F M =Pimin
P=
T3/2c /
2
Qc, (5.24)
dove con Pimin si e indica sono la risultare indotta minima possibile. Chiara-mente maggiore e F M, migliori le caratteristiche del rotore.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
9/50
5.6 La cifra di merito 55
T
Q
c
c
0
.0002
.0004
.0006
.0008
0.001
0 0.002 0.004 0.006 0.008 0.
Figura 5.3: Coefficiente di potenza in hovering in funzione del coefficiente dispinta; cd = 0.01, = 0.1. - : rotore reale (k = 1.13); : rotore ideale; : rotore ottimo.
Lutilizzo della cifra di merito nel confronto di piu rotori richiede pero qual-che cautela. Due parametri molto importanti nel dimensionamento sono il diskloading (T /A) ed il power loading (T /P); questi due parametri sono dimensio-nali e, chiaramente, a parita di spinta T, maggiore e T /P migliore e lefficienza
della macchina. Dalla definizione di F M(5.24) e dalle (5.1) si ricava:
F M =12
T
P
T
A, (5.25)
cioe nel piano
T/A,T/P
i rotori di pari F M sono individuati da una iper-
bole. E facile verificare disegnando in questo piano due curve con differente F Mche aumentare F M porta ad un aumento di T /P solo se T /A e fissato; quindi lacifra di merito consente di confrontare le prestazioni di due rotori solo a parita
di T /A.Nel caso di un rotore reale la dipendenza di F M da Tc e nota se e nota la
polare in hovering:
F M =
T3/2
c2
8cd + k
T3/2c2
, (5.26)
vedi figura 5.4.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
10/50
56 Il rotore in hovering
Figura 5.4: Cifra di merito in funzione del coefficiente di spinta (Leishman,
2000).
F M chiaramente aumenta con Tc in quanto le perdite parassite diminuisco-no in proporzione rispetto a quelle indotte. Fissato Tc e possibile miglioraresignificatamente F M agendo su e cd.
Laumento di efficienza al diminuire del cd degli elementi di pala e ovvio, unpo meno che F M migliori al diminuire di 1. Anche per questa ragione neirotori reali degli elicotteri in genere la solidita e bassa ( 0.1).
Si nota pero che, indicando con cl il coefficiente di portanza medio lungo lapala e la solidita media dalla (5.9) si ottiene
cl = 6Tc
, (5.27)
cioe, tenendo conto che cl 6.28, langolo di attacco medio e dato da Tc/,per cui diminuire comporta, fissato Tc, un aumento dellangolo di attaccoeffettivo degli elementi di pala; quindi lo stallo del rotore limita , non solo, mala sicurezza della macchina richiede anche di salvaguardare un certo marginerispetto allo stallo.
Sostituendo nella (5.26) Tc =cl
6si ottiene:
F M =
1
63/2
2
c3/2l
cd
1
81/2+
k
63/2
2
cl3/2
cd
. (5.28)
Questa relazione mostra che per massimizzare F M e necessario massimizza-re c3l /c
2
d, condizione che aiuta ad individuare langolo dattacco in cui devefunzionare il rotore in hovering.
1Laumento di FM e comunque facilmente spiegabile tenendo conto che, a parita di A unadiminuzione di implica una diminuzione dellarea bagnata del rotore
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
11/50
5.7 Velocita di salita 57
Nella realta landamento di F M(Tc) si scosta leggermente da quello indicatoin figura 5.4 per i valori grandi di Tc. Infatti F M non auementa indefinitamentecon Tc, ma puo anche diminuire leggermente, perche il cd tende ad aumentarecon Tc (aumenta ).
Nella pratica, con le attuali tecnologie, un rotore dalle buone prestazioni inhovering e caratterizzato da F M
0.7
0.8.
Come gia detto, F M da solo non e in grado di identificare le prestazioni inhovering del rotore. Dallespressione della polare in hovering (5.23) si ottiene
P =cd
8 3R5 +
12
T3/2R
, (5.29)
da cui si evince che la potenza indotta e indipendente da e che puo essereminimizzata, fissato il peso del velivolo e quindi T, facendo aumentare R, ne con-seguono le grandi dimensioni dei rotori principali degli elicotteri. Un aumentodi R non comporta un aumento delle perdite parassite se contemporaneamentesi fa diminuire . Ad ogni modo non puo essere troppo piccolo perche:
1) come vedremo e necessaria una sufficiente energia cinetica delle pale per
consentire il funzionamento in autorotazione;2) larticolazione del rotore, necessaria per il volo traslato, porta a conicita
troppo elevate in hovering se e troppo piccola e quindi ad un degradodelle prestazioni;
3) il dimensionamento del rotore richiede anche lanalisi in volo traslato.
5.7 Velocita di salita
Si assume che il rotore abbia velocita di salita assiale pari a Vc ed un relativorapporto di avanzamento = Vc/(R).
Per un dato rotore, la teoria dellelemento di pala ci consente di, assegnato
, determinare Tc, oppure viceversa, assegnato Tc determinare .E comunque possibile ottenere unespressione semplificata.Si assuma che la spinta T sia fissata e, per semplicita di analisi, w(r) =
costante. Indicando con i pedici h e c rispettivamente le condizioni di hoveringe salita, dalla teoria impulsiva si ottiene (h = wh(R)):
( + c)c = 2
h, (5.30)
da cui
c = 2
+ h
2c
42h+ 1. (5.31)
Poiche nella pratica /h 1:
c h 2
, (5.32)
cioe linduzione in hovering e maggiore di quella in salita a parita di spinta erisulta che la potenza dissipata in hovering e maggiore di quella dissipata insalita.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
12/50
58 Il rotore in hovering
dD
dL
Ve
r
V8+w
Figura 5.5: Elemento di pala in condizione di autorotazione.
Se si trascura, date le basse velocita Vc la resistenza della fusoliera delleli-cottero, la potenza in salita e data, come in hovering, dal contributo parassitae indotto. Per un dato rotore ad un fissato Tc, corrisponde uno stesso angolo diattacco medio e quindi lo stesso cd per cui la potenza parassita e praticamentela stessa per cui, indicando con Qc = Qcc Qch:
Qc = Tc + Tcc Tch Tc + Tc
h 2
Tch Tc
2. (5.33)
5.8 Autorotazione
Lautorotazione e una condizione di funzionamento del rotore in cui viene fornitaspinta a potenza nulla. Per la conservazione dellenergia, una condizione diquesto tipo e possibile solo se il rotore sta perdendo energia potenziale, cioe indiscesa.
Si consideri un elemento di pala in discesa assiale, la condizione di autorota-zione dellelemento di pala e data da dP = (dD cos dL sin ) R = 0. (vedifigura 5.5). Indicando con E lefficienza aerodinamica dellelemento di pala ilpunto di autorotazione e caratterizzato da
= + ; tan =1
E. (5.34)
Noto landamento di 1/E al variare di , questa condizione e identificabile
con una costruzione grafica, come illustrato in figura 5.6 (in cui si e assuntotan ). D e il punto di tangenza di una retta inclinata a 450 con la curva1/E. Lautorotazione e ottenibile solo per valori di < D ed, in genere perciascun sono possibili 2 condizioni di autorotazione indentificate dai punti Ae E, per i quali e facile verificare che le condizioni di autorotazione (5.5) sonosoddisfatte. La condizione di autorotazione e pero stabile in A ed instabile in
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
13/50
5.9 Curve di funzionamento in salita e discesa 59
E
Figura 5.6: Diagramma per descrivere le condizioni di autorotazione di unelemento di pala (Leishman, 2000).
E. Si consideri infatti una perturbazione della condizione A, ad esempio unaraffica ascendente fa aumentare ad un valore B e conseguentemente langolodattacco. La risposta della forza aerodinamica sara un valore 1E < B per cuila nuova forza aerodinamica portera ad un aumento di ed una conseguente
diminuzione di : il sistema tende a ritornare nelle condizioni iniziali. Allostesso modo si vede che il sistema in E risponde ad una perturbazione conlallontanamento ulteriore da E.
Quella illustrata fino ad ora e la condizione di autorotazione di un elemento dipala; nel caso di un rotore in autorotazione, solo per un elemento sara verificatala condizione descritta in figura 5.5. Tenendo conto che allaumentare di rdiminuisce langolo dattacco dellelemento, in generale si avra che gli elementipiu vicini e mozzo saranno in stallo, poi si avranno elementi di pala per cuidP < 0 ed infine nella parte piu esterna della pala si avra dP > 0 pero con
P =
R0
dP = 0.
5.9 Curve di funzionamento in salita e discesaLa teoria impulsiva semplice e in grado di descrivere il funzionamento di unrotore non solo in salita e hovering, ma anche per una parte delle condizionidi discesa. Il funzionamento in discesa (per congruenza delle convenzioni suisegni di velocita e forze in discesa e V < 0) e caratterizzato da V e w di verso
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
14/50
60 Il rotore in hovering
opposto. Fintanto che |V| > |2w| la teoria impulsiva e in grado di descrivere lacondizione di discesa: in questo caso ci si trova nel regime di mulinello frenantegia studiato nel capitolo 2.
Si nota pero che in discesa la scia e al di sopra e non ad di sotto del rotore(vedi figura 5.7); inoltre la teoria impulsiva non e piu applicabile quando V +2w = 0, infatti in queste condizioni nella scia a valle il flusso medio e nullo,
cade lipotesi di unidimensionalita. In queste condizioni la scia e fortementeinstazionaria e turbolenta e la sezione del tubo di flusso non e chiaramenteidentificabile.
Questa condizione V+2w = 0 identifica linizio del regime di funzionamentodi scia turbolenta. Facendo ulteriormente diminuire |V| la scia turbolenta siavvicina al rotore. Per V+w = 0, il flusso di massa attraverso il rotore e nullo.In queste condizioni e ancora ottenibile una spinta T ma il lavoro nellunita ditempo che questa forza compie Pi = T(V+ w) = 0; si e ottenuta la condizionedi funzionamento detta di autorotazione ideale in cui il rotore sta funzionandoda paracadute.
Per valori ancora piu piccoli di |V| si ha che il flusso medio attraverso ilrotore e diretto verso il basso, il campo di moto e caratterizzato da vortici anelloin cui il flusso scende attraverso la pala e risale allesterno. (regime di vorticiad anello, vedi figura 5.7).
Si consideri una condizione di funzionamento in salita e si assuma fissata laspinta; dalla teoria impulsiva
2(V + w)Aw = 2w2
hA, (5.35)
da cui, introducendo V = V/wh e w = w/wh; (V + w) w = 1 per cui
w = V2
+
V2
2+ 1. (5.36)
Analogamente, indicando con P = T(V+ w) la potenza coinvolta (T w e la
potenza indotta) e definendo P = P/Ph si ottiene
P = V + w (5.37)
Le funzioni (5.36) e (5.37) sono illustrate nelle figure 5.8 e 5.9 e vengono dettecurve di funzionamento del rotore; in salita sono curve universali.
Analogamanete, la condizione di discesa a mulinello frenante e caratterizzatada 2(V + w)A(V V 2w) = 2w2hA per cui (V + w)w = 1 e quindi
w = V2
V2
2 1, (5.38)
Con la scelta della radice obbligata dal soddisfacimento della relazion V+2w 0.La potenza e sempre data da P = V + w dove pero adesso w e data dalla
(5.38).Queste curve di funzionamento universali sono ancora proposte in figura 5.8
e 5.9.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
15/50
5.10 Effetto suolo in hovering 61
La funzione (5.37) non ammette radici reali per 2 < V < 0 che e propriolintervallo in cui la teoria impulsiva non e valida.
In questo intervallo, non avendo nessuna teoria a disposizione le curve difunzionamento di un rotore possono essere determinate solo sperimentalmente.In questo caso e possibile ottenere una definizione di w ponendo per definizione
P = T(V + w) + Pp, (5.39)
dove Pp e la potenza passita esprimibile come Pp =cd
83R3A. Essendo
T(V + w) = T(V + w)wh =T3/2c
2(V + w)
3R3 A, (5.40)
si ottiene
Qc =T3/2c
2(V + w) +
cd8
. (5.41)
Conoscendo la geometria del rotore () e laerodinamica delle pale (cd) e mi-surando Qc e Tc al variare di V con la (5.40) e possibile ottenere le curve difunzionamento sperimentali.
Ovviamente non si otterra piu un comportamento universale, ma le discre-panze tra queste curve sono abbastanza piccole, vedi ancora le figure 5.8 e 5.9.Inoltre, sorprendentemente, per un lungo tratto queste sono molto vicine a quel-le (tratteggiate) ottenute per V < 0 utilizzando le formule (5.35) e (5.36) validein salita!
Chiaramente in hovering si ottengono valori di w e P maggiori di 1 in quantogli esperimenti tengono conto delle perdite di estremita e di quelle dovute allanon costanza di w lungo la pala. Si nota inoltre che lautorotazione reale siindividua nel regime di scia turbolenta.
5.10 Effetto suolo in hovering
Le prestazioni del rotore sono influenzate in modo significativo dalla presenzadel suolo o di un altro ostacolo che costringono lo sviluppo della scia.
Lesperienza mostra che in condizioni di effetto suolo la spinta aumenta aparita di potenza, o, equivalentemente, la potenza diminuisce a parita di spinta.
Una spiegazione definitiva di questo effetto non e stata ancora data. Unaprima interpretazione puo essere ottenuta considerando che, fissata linduzionee quindi la potenza, il suolo costringe la scia a curvarsi in modo simmetrico alsuo asse. La curvatura delle linee di corrente comporta un gradiente normale dipressione, per cui la pressione media a valle del rotore risulta maggiore e portaad un aumento della spinta.
Un altro modello, che ha anche portato a risultati quantitativi, consiste nellostudiare il sistema vorticoso della scia ed utilizzare il metodo delle immagini per
imporre la condizione al contorno di velocita normale nulla al suolo.Il sistema vorticoso immagine induce sul rotore una componente di velocitaindotta di verso opposto per cui a parita di spinta, linduzione totale sul rotorediminuisce portando ad una diminuzione della potenza indotta.
Unespressione analitica del rapporto delle spinte con e senza effetto suolo(a potenza costante) basata su correlazioni sperimentali e data da
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
16/50
62 Il rotore in hovering
T
T=
1
1 R4z
2 , (5.42)dove z indica la distanza dal suolo del rotore. Questa relazione indica cheleffetto suolo in hovering diventa trascurabile per z 2R.
Per quanto riguarda la potenza, poiche possiamo vedere leffetto suolo comeun aumento di spinta a parita di potenza indotta, allora Tc = Tc da cui
=
TcTc
=TT
= KG, (5.43)
e quindi a parita di spinta
PcPc
=TcTc
= KG. (5.44)
Oppure, tenendo conto che leffetto e sostanzialmente sulla potenza indotta2
P = PP + KGPi . (5.45)
5.11 Esercizi
1. Assegnati i parametri fondamentali del rotore di un rotore di elicottero,
determinare spinta e potenza con la teoria impulsiva.
2. Determinare con la teoria dellelemento di pala la polare in hovering di un
rotore assegnato.
3. Confrontare la polare in hovering di un rotore determinata con la teo-
ria dellelemento di pala con le polari ideale e ottima di un rotore
equivalente. Stimare il valore del parametro K.
2In realta leffetto suolo porta anche ad una leggera riduzione della potenza parassita acausa della diminuzione dellangolo dattacco dellelemento di pala a parita di spinta.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
17/50
5.11 Esercizi 63
Figura 5.7: Regimi di funzionamento del rotore in discesa (Leishman, 2000).
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
18/50
64 Il rotore in hovering
Figura 5.8: Velocita indotta in funzione delle velocita di salita o discesa(Leishman, 2000).
Figura 5.9: Potenza richiesta in funzione della velocita di salita o discesa(Leishman, 2000).
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
19/50
Capitolo 6
Il rotore rigido in volo
traslato
6.1 Teoria impulsiva per le eliche in flusso non
assiale
Glauert ipotizzo la possibilita di estendere la teoria impulsiva semplice ancheal caso di eliche in flusso non assiale, ma per questa teoria che, daltra parteha dimostrato un ottimo accordo con levidenza sperimentale, non esiste, atuttoggi, una rigorosa derivazione matematica.
Si supponga quindi che la corrente asintotica V formi un angolo dattacco con il piano dellelica ( = 900 equivalente a condizioni di flusso assiale).
Glauert fa le seguenti assunzioni:
1. in corrispondenza dellelica si ha una velocita indotta w che e normale alpiano del disco;
2. allinfinito a valle essa diventa 2w;
3. la spinta che si ottiene, diretta secondo lasse dellelica e pari a
T = 2 m w, (6.1)
dove la portata m = V
A, e ottenuta con il vettore velocita V dato dallasomma vettoriale
V
= V
+ w. (6.2)
La potenza indotta e data quindi da
Pi =1
2m
V2fin V2in
, (6.3)
con V2
fin =
V sin + 2w2
+
2w cos 2
e V2
in = V2
, per cui
Pi =1
2V
A
V + 2w sin
2+
2w cos 2 V2
=
= 2V
Aw(w + V sin ) = T V
n,
(6.4)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
20/50
66 Il rotore rigido in volo traslato
dove V
n e la componente della velocita V
normale al piano dellelica.Anche se la relazione (6.1) e formalmente identica alla relazione (1.11), essa
e sostanzialmente diversa in quanto nella (6.1) m non e la portata daria cheattraversa il disco attuatore, ma e significativamente maggiore.
In condizioni di flusso assiale o a punto fisso (hovering) le relazioni (6.1) e(6.4) restituiscono i risultati della teoria impulsiva classica.
Si applichino i risultati della teoria dellala ellittica ad unellisse di eccen-tricita 0 (cioe un cerchio), con V 0 e posta ad incidenza = 00; siha:
i wV
=CLAR
CL = AR wV
, (6.5)
dove i e langolo di incidenza indotta e w la velocita indotta perpendicolare aV. Si nota che il modello dellala ellittica applicata al cerchio e equivalente aquello di disco attuatore, entrambi caratterizzati da una velocia indotta w eduna forza (portanza o spinta) ad essa parallela e opposta.
Utilizzando la (6.5) e la definizione di coefficiente di portanza di unala siottiene per lala circolare, nelle ipotesi di validita della teoria dellala ellittica
L = CL 12
V2A = 2VAw. (6.6)
Essendo, per V 0, V V abbiamo ottenuto che la teoria impulsiva per leeliche in flusso non assiale e in accordo con la teoria dellala ellittica applicata
ad un cerchio posto a incidenza nulla e velocit a asintotica moto elevata.
6.1.1 Funzionamento a spinta costante
Tenendo conto che V2
=
V sin + w2
+
V cos 2
e applicando la (6.1)si ottiene
T2
(2A)2= w2
V sin + w
2+
V cos 2
. (6.7)
In caso di elica a punto fisso o hovering a parita di spinta si ha:T2
(2A)2= w4h. (6.8)
Uguagliando le relazioni (6.7) e (6.8) e definendo, come nel capitolo precedenteV = V/wh e w = w/wh si ottengono le curve di funzionamento per le elichein flusso non assiale al variare dellangolo dattacco:
Vw sin + w
2
2+ V2
w2 cos2 = 1. (6.9)
Queste curve sono diagrammate in 6.1.Adimensionalizzando la potenza indotta rispetto alla potenza indotta in
hovering a parita di spinta (Pi = Pi/Pih), si ottiene
Pi = V. sin + w, (6.10)
vedi figura 6.2.Si noti che le relazioni (6.9) e (6.10) per = 900 coincidono con le curve di
funzionamento del rotore in salita assiale.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
21/50
6.2 Il rotore in volo traslato 67
a = 90
a = 30
a = 30
a = 0
u
V8
Figura 6.1: Curve di funzionamento w(V) a spinta costante per eliche il flussonon assiale.
6.1.2 Funzionamento a potenza costante
Se si confronta una condizione di funzionamento generica con quella in hoveringad uguale potenza si ottiene
1 = T(V sin + w)/Thwh; (6.11)
per cui, definito T = T /Th, si ha
T =
V sin + w1
, (6.12)
Sostituendo nella (6.7) la (6.12) e tenendo conto che w2h = Th/(2A) si ottengonole curve di funzionamento a potenza costante
Vw sin + w22
+ V2
w2 cos2
V sin + w
= 1; (6.13)
Le relazioni (6.13) e (6.12) diagrammate rispettivamente nelle figure 6.3 e 6.4consentono di analizzare la spinta di una data elica (o rotore) nota la potenzadisponibile.
6.2 Il rotore in volo traslato
I parametri che caratterizzano il funzionamento in volo traslato sono
=V cos
R, =
V sin + w
R= tan + i. (6.14)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
22/50
68 Il rotore rigido in volo traslato
a = 0
a = 10
a = 20
a = 30
a = 40
a = 50
a = 60
a = 70
a = 80
a = 90
Pi
V8
Figura 6.2: Curve Pi(V) a spinta costante per eliche in flusso non assiale.
e vengono rispettivamente chiamati rapporto di avanzamento e rapporto diingresso. Il rapporto di ingresso indotto i e dato da, utilizzando la relazione(6.7):
i =Tc
2
2 + 2, (6.15)
per cui la curva di funzionamento a spinta costante e data anche da
= tan + Tc
2
2 + 2, (6.16)
Per : i Tc/(2). Questa assunzione corrisponde ad aver simulato ildisco attuatore come unala ellittica. Si puo verificare che questa approsimazionee buona per /h 1.5 che corrisponde, in genere, a 0.1. Il funzionamentodel rotore in volo traslato si divide quindi in due regimi:
1. < 0.1, regime di transizione in cui la scia non e piu assiale, ma la suaestensione verticale e ancora significativa
2. > 0.1, regime ad alta velocita, caratterizzato dal funzionamento concarico ellittico in cui la scia e praticamente piana.
Langolo che la scia forma con lasse del rotore e determinata con buonaapprossimazione della teoria impulsiva ed e dato da = arctan(/). Il regimedi transizione e in genere caratterizzato da = 00 600.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
23/50
6.3 Potenza parassita in volo traslato 69
a = 0
a = 60
a = 70
a = 80
a = 90
V8
w
Figura 6.3: Curve di funzionamento w(V) a potenza costante per eliche influsso non assiale.
6.3 Potenza parassita in volo traslato
In volo traslato la velocita che investe lelemento di pala dipende dalla posizionedella pala stessa. Si indica con , angolo di azimut, langolo che lasse la palaforma con la velocita di traslazione proiettata sul piano di rotazione (V cos ovedi figura 6.5). A una data stazione lungo il raggio r, la velocita che investe le-lemento di pala nel piano di rotazione e data da una componente perpendicolareal raggio ed da una parallela, date rispettivamente da
UT = r + V cos sin , UR = V cos cos . (6.17)
La resistenza aerodinamica che agisce sullelemento di pala, dD = Cd1
2U2Tdr,
comporta una potenza istantanea assorbita dalla pala per effetto delle forzeparassite di natura viscosa dPp = dDUT che, integrata lungo la pala, da lapotenza istantanea assorbita dalle forze viscose. Conviene fare riferimento alvalore medio che si ottiene durante una rotazione; tenendo conto del numero dipale N si ottiene:
P0 =N
2
2
0
R0
Cd1
2
r + V cos sin
3drd. (6.18)
Integrando ed adimensionalizzando la potenza si ottiene (si e introdotto un
coefficiente di resitenza medio Cd)
Pc0 =Cd
8(1 + 32). (6.19)
Si nota che Cd/8 e il coefficiente di potenza parassita in hovering, per cuiquesta relazione mette in evidenza che in volo traslato la potenza parassita e
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
24/50
70 Il rotore rigido in volo traslato
a = 0
a = 10
a = 20
a = 30
a = 40a = 50a = 60a = 70a = 80
a = 90
V8
T
Figura 6.4: Curve di funzionamento T(V) a potenza costante per eliche influsso non assiale.
data dalla potenza parassita in hovering piu unaltra aliquota proporzionale a2.
Nellespressione (6.19) si e trascurato il contributo dovuto allo scorrimentodel flusso lungo la pala (V cos cos ). Per tenere conto di questo effetto edelle altre approssimazioni insite nella (6.19) si e soliti sostituire il fattore 3della (6.19) con un coefficiente K 4 5, un tipico valore suggerito e K = 4.7,Stepniewski & Keys (1984).
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
25/50
6.4 Stima della potenza necessaria al volo traslato livellato 71
V cos sin
V c os cosa
y
8
8
y
y
a
a
y
W
V cos8
x
Figura 6.5: Velocita che investe un elemento di pala in volo traslato.
6.4 Stima della potenza necessaria al volo tra-
slato livellato
La potenza necessaria al volo traslato livellato di un elicottero e data da
P = Pi + Pp + Pfus , (6.20)
dove
1. Pi e la potenza indotta assorbita dal rotore;
2. Pp e la potenza parassita assorbita dal rotore;3. Pfus e la potenza parassita assorbita dalla fusoliera, dal mozzo, dal car-
rello, etc.
Note le caratteristiche fondamentali di un elicottero e possibile ottenere unarapida stima della potenza al variare di V.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
26/50
72 Il rotore rigido in volo traslato
Si assume = 00, ipotesi sufficientemente valida in prima approssimazione.
6.4.1 Potenza indotta.
Dallespressione della potenza indotta per eliche in flusso non assiale (6.4) siricava:
Pi = T(V sin + w) = T w. (6.21)
Daltra parte in volo livellato uniforme T W (W e il peso dell elicottero),per cui e necessario solo determinare w.
Per V = 0 (hovering) w e Pi sono gia state calcolate; infatti dalla (5.1) siottiene
wh =
W
2A; Pih =
W3
2A. (6.22)
Per V = 0 e V 0 (o meglio V w) si puo considerare V V, quindi,per le (6.1) e (6.21):
Pi W2
2AV; (6.23)
da cui si evince che, per velocita V elevate la potenza indotta diminuisceiperbolicamente con V. Si nota che questa espressione e valida quando i Tc/(2), cioe siamo nel regime gia definito di alta velocita.
Per bassi valori di V la (6.23) non e piu valida (prevede addirittura Pi = per V = 0) ed il calcolo della potenza indotta richiede lutilizzo della piucompleta relazione (6.4).
6.4.2 Potenza parassita del rotore.
Per il calcolo della potenza parassita assorbita dal rotore possiamo utilizzare larelazione (6.4) determinata nel paragrafo precedente:
Pp
=Cd
8AR2R2 + KV2, (6.24)
con K = 4.7.Si nota che la potenza parassita del rotore cresce con il quadrato della
velocita e parte da un valore finito a V = 0.
6.5 Potenza parassita della fusoliera.
La potenza assorbita dalla cellula e data dal lavoro compiuto, nellunita ditempo, dalla resistenza dellelicottero (eccetto il rotore):
Pfus = f1
2V
3, (6.25)
dove il fattore f, che ha le dimensioni di un superficie, viene denominato areabagnata equivalente.
f dipende dallo sforzo fatto, in fase progettuale, nel sagomare aerodina-micamente la fusoliera ed il mozzo dellelicottero; un valore tipico e f /A 0.007.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
27/50
6.6 La zona di flusso inverso. 73
Componente f /A %fusoliera 0.00210 30gondole motore 0.00042 6mozzo 0.00245 35mozzo rotore di coda 0.00028 4carrello principale 0.00042 6
carrello di coda 0.00028 4piano di coda orizzontale 0.00007 1piano di coda verticale 0.00007 1interferenza rotore/fusoliera 0.00047 7sistema di scarico 0.00021 3altro 0.00021 3totale 0.00700 100
Tabella 6.1: Tipico breakdown della resistenza della fusoliera di un elicottero.
Un calcolo approssimato di f e ottenibile sommando la resistenza dei singoli
componenti dellelicottero:f =
n
CDnSn, (6.26)
dove CDn e il coefficiente di resistenza del componente n-esimo e Sn larea diriferimento utilizzata nella sua definizione.
Un tipico breakdown della potenza assorbita dalla fusoliera e proposto intabella (6.1). Si noti che questo contributo di potenza cresce con il cubo di Ved e nullo a V = 0.
La somma di questi tre contributi fornisce la potenza necessaria al volotraslato al variare di V.
In un ampio intervallo delle velocita V, la potenza necessaria al volo trasla-to e inferiore a quella in hovering; questo e dovuto al fatto che, in volo traslato,
vengono trattate portate daria molto piu elevate, per cui, per ottenere la spintanecessaria sono necessarie minori accelerazioni del flusso daria.
La potenza disponibile e, in genere, costante con V, ma diminuisce al-laumentare della quota, per cui, quando le due curve (potenza necessaria edisponibile) diventano tangenti a V = 0 si ottiene la quota di tangenza inhovering, oltre la quale lelicottero non e in grado di volare a V = 0. La quo-ta di tangenza in volo traslato si ottiene invece quando la curva della potenzadisponibile diventa tangente alla curva della potenza necessaria nel suo puntodi minimo.
6.6 La zona di flusso inverso.
Un altro fenomeno, collegato al volo traslato e la formazione di una zona lungola pala in cui la velocita effettiva e negativa.
Questo luogo di punti e identificato dallequazione UT = 0:
r + sin = 0. (6.27)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
28/50
74 Il rotore rigido in volo traslato
E facile verificare che questa equazione descrive, in coordinate adimensionaliuna circonferenza con centro nel punto (r =
2, = 2700) e raggio /2.
Per bassi valori del rapporto di avanzamento, questa zona e confinata neipressi del mozzo e quindi ha scarsi effetti snelle prestazioni del rotore che, invece,vengono influenzate sempre di piu allaumentare di .
6.7 Effetto suolo in volo traslato.
In volo traslato leffetto suolo diminuisce rapidamente allaumentare di V cos .Lesperienza mostra che esso diventa trascurabile per V cos 2wh oppure,approssimativamente, per 0.10.
Questo e facilmente spiegabile tenendo conto che la scia interagisce sempredi meno (e piu lontano dallelicottero) allaumentare di V cos .
Un espressione approssimata del rapporto delle spinte con e senza effettosuolo, Johnson (1980), p.147 e data da
T
T= 1/
1 k1
R4z
21 + 2
. (6.28)
Il coefficiente k1 puo essere scelto un prima approssimazione pari a 1, oppure,per tenere conto del carico della pala k1 = Cl/(4Tc).
La (6.28) e sufficientemente accurata per z/R 0.5
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
29/50
6.8 Esercizi 75
6.8 Esercizi
1. Assegnati, la spintaT la quota (), il raggio dellelica e langolo dattacco,data V determinare w e Pi utilizzando le curve di funzionamento per leeliche in flusso non assiale.
2. Assegnati la potenza Pi, la quota (), il raggio dellelica e langolo dat-tacco, data V determinare w e T utilizzando le curve di funzionamentoper le eliche in flusso non assiale.
3. Assegnati i paramentri e le grandezze fondamentali di un elicottero stimare
la potenza necessaria al volo per = 0.1, 0.2, 0.3, 0.4, 0.5.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
30/50
76 Il rotore rigido in volo traslato
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
31/50
Capitolo 7
Il rotore articolato
7.1 Necessita del rotore articolato
Nel capitolo precedente e stato messo in luce che, in volo traslato, la pala cheavanza (00 < < 1800) vede una corrente a velocita maggiore della pala chearretra; questo fatto comporta chiaramente che la pressione dinamica e, quindi,le forze aerodinamiche variano ciclicamente durante la rotazione della pala, conun massimo ed un minimo, rispettivamente nelle fasi di avanzamento e arretra-mento. La portanza, in particolare, genera un momento, rispetto al mozzo, chevaria ciclicamente. Questo fenomeno e dannoso per due motivi fondamentali:
1. la coppia variabile generata dalla portanza, trasmessa attraverso il mozzoalla fusoliera genera una rotazione intorno allasse di rollio che pregiudicale caratteristiche di qualita di volo dellelicottero;
2. i rotori degli elicotteri sono caratterizzati da elevato raggio e bassa soliditache comportano elevati momenti flettenti alla radice; un momento flettenteche varia ciclicamente. complica ulteriormente la progettazione strutturale
del mozzo.
La soluzione classica adottata per risolvere questi problemi consiste nellinserirenel mozzo una cerniera (e quindi unarticolazione) che lascia la pala libera diruotare sotto lazione della portanza (nel piano che contiene lasse del rotore ela pala stessa). In questo modo il momento dovuto alla portanza non viene piutrasmesso al resto della struttura eliminando cos il rollio della macchina e lasollecitazione strutturale ciclica del mozzo.
Questo moto della pala viene detto di flappeggio e la cerniera intorno allaquale avviene la rotazione viene detta cerniera di flappeggio; la posizione dellapala rispetto al piano del rotore e individuata dallangolo di flappeggio .
Il piano di flappeggio, (che contiene la pala durante il flappeggio stesso) ruotacon velocita angolare intorno allasse del rotore per cui il moto di flappeggio
avviene in un riferimento non inerziale.Se indichiamo con Vr la velocita, rispetto a questo riferimento, di un ele-mento di pala di massa dm posto a distanza r dal mozzo (Vr e dovuta solo almoto di flappeggio) nasce una forza di Coriolis data da dFCor = 2dm Vr,dove il vettore ha intensita pari a ed e diretto come lasse di rotazionedel rotore. dFCor e perpendicolare al piano di flappeggio e si oppone al moto
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
32/50
78 Il rotore articolato
(a) (b)
W
W
z
m
b
Figura 7.1: Definizione degli angoli di flappeggio (a) e arretramento (b) della
pala.
di rotazione principale della pala (quello cioe con velocita ) quando la palasale (in avanzamento). Nasce cos un nuovo momento ciclico, che, anche se dientita inferiore, puo portare allo stesso tipo di inconvenienti che hanno richiestolintroduzione della cerniera di flappeggio. Per le stesse ragioni qundi, viene in-trodotta una cerniera di arretramento che lascia la pala libera di arretrare sottolazione delle forze di Coriolis; il moto (nel piano di rotazione principale delrotore) viene detto moto di arretramento e langolo che individua la posizionedella pala in questo moto e detto angolo di arretramento. (vedi figura 7.1)
La presenza del moto di flappeggio e arretramento non pu o non avere in-fluenza sulle prestazioni del rotore che, infatti, dipendono fondamentalmente
dalla velocita relativa tra pala e flusso daria.La presenza delle cerniere di flappeggio e arretramento rende notevolmen-te complessa e difficile la progettazione e realizzazione del mozzo del rotore,ulteriormente complicato, come vedremo, dalla presenza dei meccanismi di va-riazione del passo ciclico e collettivo per consentire il controllo dellelicottero.Il mozzo del rotore diventa quindi una delle parti fondamentali e piu complessedellelicottero, vedi figura 7.2.
Il rotore articolato con cerniere di flappeggio e arretramento e con dispositivoa cuscinetti per il controllo del passo cliclico e collettivo costituisce la soluzioneclassica adottata nel mozzo degli elicotteri. Esistono pero diverse soluzioni al-ternative; basti pensare alla soluzione limite mozzo senza cerniere in cui il motodi flappeggio e arretramento viene ottenuto mediante la costruzione di una pala
flessibile.
7.2 Passo ciclico e collettivo
La forza aerodinamica varia notevolmente se cambia langolo dattacco a cuilavora lelemento di pala; per cui un sistema conveniente per il controllo del-
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
33/50
7.2 Passo ciclico e collettivo 79
Figura 7.2: Il mozzo dellelicottero AH-64 (Leishman (2000)).
lelicottero consiste nel consentire al pilota di variare langolo di calettamento(il passo) della pala. Questo sistema risulta ulteriormente vantaggioso perchei momenti che si debbono contrastare per la variazione del passo (i momentiaerodinamici) sono piccoli, addirittura nulli se si utilizza un profilo simmetricoincernierato a 1/4 della corda.
Per controllare il volo di un elicottero non e necessario solo far variare ilmodulo della spinta ma anche la sua direzione in quanto la componente orizzon-tale della spinta puo essere usata a scopi propulsivi (contrastare la resistenzaaerodinamica di tutto lelicottero). E evidente pero che ruotare il mozzo per far
ruotare la spinta non e il sistema piu semplice e conveniente.Indichiamo con il termine piano del mozzo il piano perpendicolare allasse
meccanico (albero) del rotore. E possibile cambiare la direzione della spintadando la possibilita di variare il passo della pala ciclicamente durante una rota-zione. Infatti se il passo varia ciclicamente rispetto al piano del mozzo, esisteraun piano rispetto al quale il passo non varia (questo risultato e esattamentevalido se la variazione ciclica del passo e di sola prima armonica), la direzionedella spinta sara sostanzialmente normale a questo piano, detto piano senzapasso ciclico.
Il meccanismo di variazione ciclica del passo, comandato dal pilota, consistein una piastra collegata allalbero in grado di inclinarsi rispetto allalbero stesso.Questa piastra pero non ruota; su di essa e appoggiata, tramite cuscinetti, una
ralla che ruota solidale con le pale del rotore, collegata ad esse attraverso unsistema di leve, che fanno variare lincidenza della pala.
Se, invece di inclinarsi, la piastra viene alzata o abbassata: essa trasmetteuna rotazione identica a tutte le pale e permette quindi di variare non ciclicamen-te ma collettivamente il passo delle pale, cioe si garantisce, oltre alla variazionedel passo ciclico, la possibilita di variare il passo collettivo, (vedi figura 7.3). La
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
34/50
80 Il rotore articolato
(a) (b)
Figura 7.3: Schema di funzionamento del sistema di controllo del passo ciclico.(a): mozzo rotante; (b): sistema con ralla (Gessow & Myers (1952)).
figura 7.4 illustra schematicamente il sistema di controllo dellelicottero (si notila particolare cerniera di flappeggio rappresentata ad altalena, teeter-hub, clas-sica soluzione utilizzata negli elicotteri Bell a 2 pale). Il piano individuato dallapiastra piano senza passo ciclico viene definito piano di controllo. In generalepiano di controllo e piano senza passo ciclico sono diversi a causa del possibilemoto accoppiato flappeggio-variazione del passo.
Se si considera un moto di flappeggio di prima armonica lestremita dellapala descrive esattamente una circonferenza che definisce quindi un piano dettopiano di non flappeggio in quanto un osservatore solidale a questo piano vedela pala non flappeggiare. Il moto della pala puo quindi essere descritto rispettoad uno qualsiasi di questi piani:
1. piano dellorizzontale terrestre,
2. piano del mozzo,
3. piano di controllo,
4. piano senza passo ciclico,
5. piano di non flappeggio.
Al variare del tipo di problema puo risultare conveniente riferirsi ad unpiano piuttosto che ad un altro. In particolare risulta conveniente studiare ilmoto di flappeggio rispetto al piano di controllo. Infatti questo coincide conil piano senza passo ciclico in assenza di moto accoppiato flappeggio-variazionedel passo. Inoltre il piano di controllo risulta conveniente rispetto allorizzontale
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
35/50
7.3 La dinamica della pala 81
Figura 7.4: Schema del sistema di controllo dellelicottero (Gessow & Myers(1952)).
o al piano del mozzo perche il passo e costante e quindi abbiamo una variabilein meno nellanalisi delle prestazioni.
Una strada alternativa potrebbe essere riferire la dinamica della pala al pianodi non flappeggio e considerare come variabile fondamentale il passo mentre ilflappeggio risulta, ovviamente, nullo.
7.3 La dinamica della pala
Nello studio che si propone si faranno le seguenti ipotesi:
1. rotazione della pala a velocita costante ( = cost);
2. V costante e poco inclinata rispetto al piano di controllo;
3. angolo di flappeggio massimo piccolo;
4. arretramento nullo ( = 0);
5. eccentricita del flappeggio nulla, si pone cioe la cerniera di flappeggiosullasse del rotore.
La dinamica della pala e quindi nota una volta determinata la legge (t) (t e iltempo). Per lipotesi 1, e equivalente conoscere la legge () in quanto = t.Se si sviluppa in serie di Fourier rispetto si ottiene:
= 0 +
n=1
nc cos
n
+ ns sin
n
, (7.1)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
36/50
82 Il rotore articolato
dove
0 =1
2
2
0
d;
nc =1
2
0
cos nd;ns =
1
2
0
sin
n
d.
(7.2)
0, nc e ns vengono chiamati coefficienti di flappeggio. nc e ns sono tra-scurabili 0 per n ; ne consegue che, per studiare le prestazioni del roto-re e sufficiente considerare solo la prima armonica (non e cos nellacustica onellanalisi vibrazionale del rotore) per cui assumere
0 + 1c cos + 1s sin . (7.3)
La dinamica della pala intorno alla cerniera di flappeggio dipende dalle forzeaerodinamiche e dalle forze inerziali che agiscono su di essa; lequazione del motodella pala si ottiene imponendo lequilibrio dei momenti intorno alla cerniera di
flappeggio
Mi = 0.Si consideri una pala nel suo moto di rotazione intorno allasse di controllo
(normale al piano di controllo) e di flappeggio.Su un elemento di pala di massa dm posto a distanza r dalla cerniera di
flappeggio agiscono le seguenti forze.
1. La forza aerodinamica (sostanzialmente portanza) dovuta ad un angolodattacco dellelemento di pala e = , dove e il passo alla stazione r e langolo di inflow del flusso; nel sistema dinamico in analisi questa forzacostituisce la forzante esterna. Il momento totale rispetto alla cerniera(ML > 0 per convenzione) si ottiene integrando il momento elementarelungo la pala.
2. La forza aerodinamica dovuta allangolo dattacco causato dal moto rela-tivo dellelemento di pala Vr = r ( = d/dt). Langolo dattacco chegenera la forza e proporzionale a e, per > 0 (la pala sale), e negativo,per cui la forza aerodinamica che si genera e uno smorzamento in quantoM = k con k > 0.
3. La forza dinerzia dmr che genera un momento totale pari a M = r2dm = I dove I e il momento dinerzia della pala nel piano diflappeggio rispetto alla cerniera di flappeggio.
4. La forza centrifuga dFc = 2r cos dm che genera un momento tota-le M =
2r2 cos sin dm I2, che costituisce una forza di
natura elastica.
5. La forza peso g dm che genera un momento totale MW = gr cos dm grdm ed e quindi indipendente da per piccoli; e un terminecostante che puo essere aggiunto alla forzante esterna.
6. La forza di Coriolis dFcor = 2 Vrdm che genera un momento totalenullo nel piano di flappeggio.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
37/50
7.4 Interpretazione fisica dei coefficienti di flappeggio 83
Lequilibrio dei momenti porta quindi allequazione della dinamica della pala
I+ k+ I2 = ML MW. (7.4)
Questa equazione differenziale lineare del secondo ordine a coefficienti costantie ben nota e studiata.
In particolare si genera un moto di prima armonica se la forzante e di primaarmonica. La frequenza fondamentale della forzante esterna e chiaramente ,mentre la frequenza naturale del sistema e data da n =
I2/I = per cui,
il sistema lavora in risonanza per la forzante di prima armonica.
Esistono due proprieta fondamentali dei sistemi in risonanza:
1. le forze dinerzia sono equilibrate da quelle elastiche I = ke (ke e lacostante elastica, nel nostro caso ke = I
2);
2. la forzante esterna e in anticipo di fase di 900 rispetto allo spostamentogeneralizzato .
7.4 Interpretazione fisica dei coefficienti di flap-
peggio
La linearita dellequazione (7.4) consente lapplicazione del principio di sovrap-posizione degli effetti, per cui ad ogni armonica individuata da un coefficientedi flappeggio e associabile la forzante esterna causa di quel moto.
7.4.1 = 0
Questa soluzione si ottiene se la forzante esterna e costante con , cioe in hove-ring, o e quindi langolo che la pala forma con il piano di controllo in hovering;
la pala e in equilibrio sotto lazione della forzante aerodinamica, forza centrifugae forza peso (ed ovviamente della reazione vincolare della cerniera). In prati-ca 0 viene detto conicita della pala. 0 non puo essere troppo grande percheporterebbe ad un degrado delle prestazioni del rotore (per 900 larea delrotore tende a 0). Si nota che, allaumentare della massa della pala, la forzacentrifuga aumenta e, per Fc , 0 0.
7.4.2 = 1c cos
1C individua langolo di flappeggio per = 00 ( = 1C) e per = 180
0 ( =1C) e viene detto coefficiente di flappeggio longitudinale.
Essendo, in pratica 1C < 0, il flappeggio longitudinale e massimo per =
1800
. Poiche il sistema lavora in risonanza, la forzante causa di questo moto ein anticipo di fase di 900, cioe e massima a = 900, Questa forzante non puoche essere lincremento di portanza dovuta allaumento della pressione dinamicain volo traslato che e appunto massima per = 900.
Si nota che, la causa di questo moto di flappeggio e solo aerodinamica,1C = 0 anche per una pala di massa infinita.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
38/50
84 Il rotore articolato
Y = 180Y = 0
b
b
b
m b
msin
sin
m
m
0 0
0
0
W W
b
b1s
1s
(a) (b)
Figura 7.5: Interpretazione fisica del flappeggio laterale.
7.4.3 = 1s sin
In modo analogo al caso precedente si verifica che 1s identifica langolo diflappeggio a = 900 ed ad = 2700 e viene quindi definito coefficiente diflappeggio laterale. Anche 1s < 0, per cui la forzante che genera il flappeggiolaterale e massima a = 1800.
La genesi di questa forzante puo essere facilmente compresa con lausiliodella figura 7.5. In volo traslato la presenza della conicit a fa si che a = 1800
una componente V sin 0 incrementi langolo dattacco effettivo a cui lavoralelemento di pala mentre, al contrario, lo riduce a = 00. Questa variazione diangolo dattacco genera quindi una variazione di portanza, massima e positiva
a = 1800
, minima e negativa a = 00
, che e appunto la forzante esternasfasata di 900 causa del flappeggio laterale.
Si nota che la forzante e solo di natura aerodinamica ma poiche 0 0 permasse infinite, il flappeggio laterale dipende indirettamente dalle forze dinerzia.
Infine si nota che per distribuzioni di massa infinite: = 1c cos , ilflappeggio non scompare e diventa puro flappeggio longitudinale.
7.5 La velocita effettiva sullelemento di pala
In volo traslato la velocita effettiva sullelemento di pala e data dalla composi-
zione di diversi moti.La velocita sara adimensionalizzata rispetto a R, uR e la componente ra-diale (positiva se uscente), uT la componente tangenziale nel piano di controllo(positiva se diretta verso il bordo di attacco dellelemento di pala), uP e la com-ponente perpendicolare al piano di controllo (positiva se diretta verso il basso).Si ha che
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
39/50
7.6 Le forze aerodinamiche sul rotore 85
(a) (b)
T
H
V
H
T
V
Y Y
cos a8
8
a
Figura 7.6: Schema delle forze aerodinamiche sul rotore.
uR = cos , uT = r + sin , uP = + r
+ cos , (7.5)
in cui si e assunto 1.Langolo dattacco effettivo a cui lavora lelemento di pala e dato da
e = , (7.6)dove = arctan(uP/uT).
In questa trattazione si assumera che linduzione sul rotore e uniforme (i =cos t, = cos t) ed ottenibile dalla teoria impulsiva per eliche in flusso non assialeformule, (6.1) e (6.2). Questa ipotesi costituisce una notevole approssimazionein quanto in volo traslato i vortici liberi vengono convetti a valle ed in particolarenella fase di transizione ( < 0.1), il campo indotto sul disco del rotore diventa
fortemente variabile. Comunque si assumera nel seguito
i =Tc
2
2 + 2, = tan +
Tc
2
2 + 2. (7.7)
Nellipotesi di angoli e piccoli che faremo in questa trattazione si ha cheVe ruT e e uP/uT.
7.6 Le forze aerodinamiche sul rotore
La spinta T e la componente della forza aerodinamica totale perpendicolare alpiano di controllo (positiva verso lalto), la resistenza H del rotore e la com-ponente che giace sul piano di controllo ed e allineata con la proiezione su di
esso di V, Y e la forza laterale che giace sul piano di controllo ed ha verso taleche la terna H , Y, T sia levogira (7.6). Per ottenere queste forze totali occorreconsiderare le forze che agiscono sullelemento di pala Fx, Fr, Fz, dove Fx e lacomponente della forza aerodinamnica che giace nel piano di controllo ed e per-pendicolare alla pala, Fz e perpendicolare a Fx e giacente nel piano dellelementodi pala, Fr e la componente radiale sul piano di controllo (7.7):
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
40/50
86 Il rotore articolato
dL
F
dD
z
Fxut
up
q
j
a
Fz
Fr
W
b
(a) (b)
Figura 7.7: Forze aerodinamiche agenti su un elemento di pala, per un rotorein volo traslato.
Fx =dL
drsin +
dD
drcos ,
Fz =dL
drcos dD
drsin ,
Fr = Fz sin
(7.8)
e dL/dr e dD/dr date da
dL
dr= Cl
1
2V
2
ec,
dD
dr= Cd
1
2V
2
ec, (7.9)
con V2e = 2R2(u2T + u
2
P). La spinta, la resistenza, la forza laterale e la coppiaistantanea che agiscono su una pala sono quindi
T
=
R0
Fzdr
cos ,
H
=
R0
Fx sin + Fr cos
dr,
Y
=
R
0
Fx cos + Fr sin
dr,
Q
=
R0
rFxdr
cos .
(7.10)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
41/50
7.6 Le forze aerodinamiche sul rotore 87
Infine le forze totali medie si ottengono mediando le forze istantanee duranteuna rotazione della pala e moltiplicando per il numero di pale:
T =N
2
2
0
R0
Fz cos drd,
H =N
2
2
0
R0
Fx sin + Fr cos
drd,
Y =N
2
2
0
R0
Fx cos + Fr sin
drd,
Q =N
2
2
0
R
0
rFx cos drd.
(7.11)
Delle formule piu semplici si ottengono nellipotesi di angoli piccoli ed elementodi pala che lavora nella parte lineare della curva di portanza. Infatti, in questecondizioni cos 1, sin , uP/uT, Ve RuT, Fz dL/dr, Fx dL/dr + dD/dr, Cl = Cl( uP/uT), con il calettamento misurato rispettoalla retta di portanza nulla.
In forma adimensionale, la forza che agisce sullelemento di pala ha compo-nenti
FzClc
2R2=
1
2u2Te =
1
2
u2T uPuT
,
Fx
Clc2
R2
= u2Te2
+Cd
2Cl = 1
2uPuT u
2
P+ Cd2Cl
u2T,
FrClc
2R2= Fz
Clc2R2
.
(7.12)Se si ipotizza, come nella maggior parte dei rotori, che la corda e quindi la
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
42/50
88 Il rotore articolato
solidita sono costanti lungo la pala, si ottiene
TcCl
=1
2
2
0
1
0
1
2
u2T uPuT
drd,
HcCl
=1
2
2
0
1
0
sin
1
2
uPuT u2P
+
Cd2Cl
u2T
cos
1
2
u2T uPuT
drd,
YcCl
=1
2
2
0
1
0
cos
1
2
uPuT u2P
+
Cd
2Clu2T
sin
1
2
u2T uPuT
drd,
QcCl
= 12
20
10
r
12
uPuT u2P
+ Cd
2Clu2T
drd.
(7.13)
Risulta conveniente dividere Hc, Yc, Qc nei contributi di profilo o parassitiHcO , YcO , QcO , associati cioe allazione della resistenza aerodinamica dellele-mento di pala, e nei contributi indotti Hci , Yci, Qci , associati allazione dellaportanza. Essi sono dati da
HcO =
2
2
0
1
0
Cd2
sin u2Tdrd,
YcO
=
220
10
Cd
2cos u2
Tdrd,
QcO =
2
2
0
1
0
Cd2
ru2Tdrd,
Hci =Cl
2
1
2
2
0
1
0
uT uP
uP sin uTcos
drd,
Yci =Cl
2
1
2
2
0
1
0
uT uP
uP cos uTsin
drd,
Qci =Cl
2
1
2
2
0
1
0
ruPuT u2Pdrd.
(7.14)Assumendo, oltre alla forma in pianta rettangolare, che il calettamento siaespresso dalla classica legge lineare (r) = 0 + rtn gli integrali possono essererisolti analiticamente abbastanza agevolmente.
Per quanto riguarda Tc, conviene effettuare prima lintegrazione in d.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
43/50
7.6 Le forze aerodinamiche sul rotore 89
Si nota che2
0
r2
d
d+ r
d
dsin + rcos
d =
2
0
d
d
r2+ rsin
d = 0.
(7.15)Inoltre, per un moto di flappeggio di prima armonica:
12
2
0
uPuTd =1
2
2
0
+ r d
d+ cos
r + sin
d = r. (7.16)
Quindi
Tc =Cl
2
1
0
0 + rtw
r2 +
2
2
r
dr. (7.17)
Risolvendo anche questo integrale si ottiene
2TcCl
=03
1 +
3
22
+tw
4
1 + 2
2. (7.18)
Questa relazione mostra limportante risultato che la spinta non dipende daicoefficienti di flappeggio se e riferita al piano di controllo e nellipotesi di 1.
In modo analogo si procede per il calcolo degli altri coefficienti, tenendoanche conto delle relazioni
uP sin uTcos = sin + r dd
sin rcos ,
uP cos + uTsin = cos + rd
dcos + rsin + .
(7.19)
Per i termini indotti si ottiene (Qci verra discusso in seguito):
2HciCl
= 0
1
31c +
1
2
+ tw
1
41c +
1
4
+ 34
1c + 16
01s + 14
20 + 21c
,
(7.20)
2YciCl
= 0
3
40 +
1
31s
1 +
3
22
+ tw
1
20 +
1
41s
1 + 2
34
1s + 01c
1
6 2
3
20 1
41c1s
(7.21)Per quanto riguarda i coefficienti di profilo, considerando il coefficiente di resi-stenza del profilo costante lungo la pala e pari a Cd si ha
Hc0 =
Cd4 ,
Yc0 = 0,
Qc0 =Cd
8(1 + 2).
(7.22)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
44/50
90 Il rotore articolato
Si nota che Qco + Hco =Cd
8( 1 + 32) = Pco cos come ottenuto nella (6.19).
7.7 La potenza in volo traslato
Anche in volo traslato la relazione tra coppia e potenza e data da
P = Q, (7.23)
per cuiPc = Qc. (7.24)
Questa relazione e valida solo per coppia e potenza totali, in quanto abbiamogia visto che Pc0 = QcO . In questo paragrafo analizziamo piu in dettaglio i varicomponenti della potenza e della coppia in volo traslato.
Il coefficiente di coppia istantaneo che agisce sulla singola pala ha la compo-nente indotta data da (Cz =
dLdr
/(2R2R)) :
Qci = 1
0
Czrdr. (7.25)
Analogamente il coefficiente di resistenza istantaneo indotto della pala e
Hci =
1
0
( sin cos )Czdr. (7.26)
Si ottiene quindi
Qci + H
ci =
1
0
uPuT
r + uPuT
sin cos
Czdr
=
1
0
uPuT
(r + sin ) cos
Czdr
=
1
0
(uP cos ) Czdr
=
1
0
+ r
Czdr.
(7.27)
Lequazione della dinamica della pala puo essere scritta come
+ 2 =
1
0
r Czdr, (7.28)
dove = 2R5/I. Utilizzando questa relazione si ottiene
1
2
2
0
1
0
rCzdr d =1
2
2
0
1
0
rCzdr
d =
1
2
2
0
+ 2
d =
1
2
2
0
2
d
d
2 + 22
d = 0.
(7.29)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
45/50
7.8 Calcolo dei coefficienti di flappeggio 91
Risulta allora
Qci + Hci =N
2
2
0
1
0
Czdr = Tc. (7.30)
Il coefficiente di potenza puo essere quindi espresso come
Pc = Qc = Qci + Qc0 + Hci + Hc0
Hc
= Tc + Qc0 + Hc0 Hc(7.31)
e quindi, essendo Qci = Qc Qco e Hci = Hc Hco : Qci = Tc Hci .Le equazioni di equilibrio del moto di un elicottero in volo traslato, orizzon-
tale uniforme a piccolo angolo dattacco sono:
T W, Tsin = Dfus + H; (7.32)per cui
(Dfus + H)/T. (7.33)Essendo:
= i + = i + Dfus
W
+ Hc
Tc
, (7.34)
si ottiene, in definitiva:
Pc = Qc = iTc + Dfus
WTc + Qc0 + Hc0 ; (7.35)
cioe il coefficiente di potenza e dato dalla somma del coefficiente di potenzaindotta Pci = iTc, dal coefficiente di potenza assorbito dalla resistenza della
fusoliera Pcfus = DfusW Tc e dal coefficiente di potenza parassita del rotore
Pc0 = Qc0 + Hc0 .Si nota che anche in questa espressione non compaiono i coefficienti di flap-
peggio: la potenza e ottenibile ipotizzando il rotore rigido e si ottengono risultatiidentici a quelli discussi nel paragrafo 6.4.
7.8 Calcolo dei coefficienti di flappeggio
Lequazione della dinamica del flappeggio puo essere scritta come
I+ I2 =
R0
Fzr dr, (7.36)
oppure in termini adimensionali, tenendo conto che
R0
Fzr dr = Cl2R4c
1
0
1
2( )u2Tr dr, (7.37)
si ottiened2d2
+ =
1
0
12
(u2T uPuT)r dr = MF. (7.38)
= ClR4c/I e detto numero di Lock e misura limportanza relativa tra le
forze aerodinamiche e dinerzia agenti sulla pala. Tipicamente, per un rotorearticolato = 8 10, per un rotore senza cerniere = 5 7.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
46/50
92 Il rotore articolato
Per ottenere un moto di flappeggio di prima armonica anche le forzante deveessere di prima armonica; si ottiene quindi 1
u2T 0
r2 +2
2
+ tw
r3 + r
2
2
+
2r0 + 2r2tw
sin ,
uPuT r + r21s + ro + 2 1s4 cos + r21c + 2 1c4 sin ,(7.39)
relazioni che sono state ottenute tenendo conto chesin2 x cos2 xdx =
sin x cos x
4
sin2 x 1
2
+
x
8(7.40)
per cui sin cos2 sin /4 e sin2 cos cos /4 nellapprossimazione diforzante di sola prima armonica.
Effettuando lintegrazione in r si ha
MF MFo + MF1c cos + MF1s sin , (7.41)dove:
MFo =08 (1 +
2
) +tw21
5 +2
6 6
MF1c = 12
0
3+
1s4
1 +
2
2
MF1s =1
30 +
1
4tw +
1c8
1
2
2
4.
(7.42)
Essendod2
d2+ = 0, (7.43)
si ha che lequazione (7.38) e risolta se e soltanto se
0 = MFo, MF1c = 0, MF1s = 0, (7.44)per cui
0 =
08
(1 + 2) +tw10
1 +
5
62
6
,
1c = 2
4
30 + tw
1 2
2
,
1s = 43
0
1 + 2
2
.
(7.45)
1Si ricorda che data, una funzione f() periodica di periodo 2, lo sviluppo in serie di
Fourier e dato da f() = fo+
n=1
fcn cos(n)+fsn sin(n) con fo =1
2
2
0
f()d, fcn =
1
2
0
f() cos(n)d, fsn =1
2
0
f() sin(n)d.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
47/50
7.9 Rateo di salita 93
T
G
V H
W
D
x
x
fus
a
8
a
Figura 7.8: Schema delle forze agenti su un elicottero in salita di un angolo X
Lanalisi di queste relazioni consente di ritrovare i risultati anticipati nel
paragrafo 7.4, cioe che in hovering = 0, che per distribuzione di masseinfinite ( 0)0 = 1s = 0 mentre 1c = 0.
Si ritrova il risultato che 0 e 1s dipendono dalla distribuzione delle masse(cioe dipendono dal numero di Lock) al contrario 1c.
7.9 Rateo di salita
LEquazione dellequilibrio di un elicottero in salita di un angolo X sono:
T cos + Hsin = Wcos X
T sin
Hcos
Wsin
X Dfus = 0.
(7.46)
Da queste relazioni e possibile ricavare langolo X. Nellipotesi di angoli piccoliW = T per cui:
sin X= sin HT
cos DfusT
. (7.47)
Indicando con c = V sin X/(R), il rateo di salita, si ottiene
c = tan HcTc
12Tc
f
A
3
cos3 . (7.48)
Il rateo si salita puo essere legato direttamente al coefficiente di potenza notandoche, nellipotesi di angoli piccoli ed in virtu delle (7.46):
sin =HcTc + sin X+
DfusW , (7.49)
per cui la (7.34) diventa
= i + c + +HcTc
+ + Dfus
W, (7.50)
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
48/50
94 Il rotore articolato
ottenendo, tramite la (7.31)
Pc = iTc + cTc + Dfus
WTc + Pc0 , (7.51)
con i Tc/(2) per > 0, 1 (vedi paragrafo 6.2)
7.10 Procedura per il calcolo delle prestazioni
del rotore
7.10.1 Funzionamento normale
E nota la geometria del rotore, insieme con le prestazioni aerodinamiche delprofilo della pala, e inoltre noto R, e la resistenza della fusoliera (f), il pesodellelicottero W ed il numero di Lock del rotore .
Il calcolo puo essere effettuato iterativamente assumendo inizialmente =00.
1. Si assegna la velocita V, per cui e noto = V cos /(R).
2. Dallequilibrio T = W si calcola Tc = W/(2R2A).
3. i Tc/(2) = tan + i. Nelle successive interazioni si potrausare i = Tc/(2
2 + 2).
4. La relazione (7.18) consente il calcolo di 0, il passo collettivo.
5. Noto il rateo di salita c, si puo calcolare con la (7.51) il coefficiente dipotenza; oppure dato Pc si puo calcolare c.
6. Le relazioni (7.45) consentono il calcolo dei coefficienti di flappeggio 0, 1c, 1s.
7. E quindi possibile calcolare la resistenza del rotore e la forza laterale con
le (7.20), (7.21), (7.22).8. Si ricalcola dalle (7.7) e si ..... il procedimento.
7.10.2 Autorotazione
In questo caso lincognita fondamentale e . Per determinare le prestazioni inautorotazione si puo procedere seguendo i seguenti passi.
1. Si assegna .
2. Dalla (7.31), ponendo Pc = 0 si ottiene una relazione 0 = 0(); sonoquindi note le relazioni Tc = Tc(), Hc = Hc() ed anche = () (dalla(7.7)).
3. Si assegna c e quindi (dalla (7.51) con, ovviamente, Pc = 0) si possonocalcolare i e .
4. Si possono ora calcolare tutti i coefficienti di forza, in particolare Tc.
5. Dallequilibrio Tc2R2A = W e possibile calcolare .
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
49/50
7.11 Ricapitolazione delle assunzioni effettuate 95
6. Si calcola (7.7) e quindi V.
Se le prestazioni vengono calcolate per una matrice di condizioni di volo, risultamolto piu conveniente, lavorare in modo inverso, assegnando e determinandole altre grandezze.
7.11 Ricapitolazione delle assunzioni effettuate
1. Si e utilizzata la teoria dellelemento di pala limitata nella sua applicabilitain prossimita delle estremita delle pale.
2. Il moto sulla pala si e assunto di puro flappeggio con variazione del passociclico e collettivo. I gradi di liberta associati con larretramento e con levariazioni elastiche del passo sono importanti per lo studio di vibrazioni,carichi ed aeroelasticita, ma, in genere possono essere trascurati nellanalisidelle prestazioni e nel controllo.
3. Considerazioni simili possono essere fatte per le armoniche superiori delflappeggio che sono state trascurate. In genere nc e ns sono di ordine
n
/n2
(n 2).4. E stata trascurata la presenza della zona di flusso inverso, (approsimazione
valida in genere fino a 0.5).5. Si e assunto linduzione i costante sia lungo la pala che al variare di .
Lipotesi e tanto piu valida quanto maggiore e , ma in genere porta aduna previsione approssimativa del flappeggio laterale.
6. Si e assunta forma in pianta del rotore rettangolare e variazione del calet-tamento lineare (sono comunque classiche scelte progettative).
7. Si e trascurata leccentricita della cerniera di flappeggio.
8. Si e trascurato leffetto della comprimibilta.
9. Si e assunto Cl = cost con ed e, non si e tenuto conto del possibilestallo del profilo della pala.
7.12 Lo stallo del rotore
Determinate le prestazioni di un rotore in assegnate condizioni di Tc e , epossibile determinare la mappa dellangolo di attacco e = e(r, ) a cui lavoralelemento di pala durante la rotazione della pala. Nellipotesi di angoli piccoli:
e = uPuT
, (7.52)
quindi, per una data legge di calettamento (che tende a far diminuire e versolestremita della pala), langolo dattacco dellelemento di pala dipende da uP eda uT.
uT e dato da 2 contributi, uno proporzionale al raggio che quindi porta adun aumento di e verso lestremita della pala, ed uno che dipende da sin cheporta ad aumenti o diminuzioni di e in dipendenza del segno di uP.
-
8/9/2019 Aerodinamica Degli Aeromotori_parte2
50/50
96 Il rotore articolato
In definitiva leffetto piu significativo su e e dato da uP ed in particolaredal termine r che comporta i valori piu elevati e per 2700 e r 1:
e2700
= (r) +1cr/
r , (7.53)
Si nota che e2700
cresce allaumentare di ; questa caratteristica comporta
limportante risultato che lo stallo della pala limita la velocita massima di volodellelicottero al contrario dei velivoli ad ala fissa in cui lo stallo limita la velocit aminima.
Prendendo come riferimento gli angoli di stallo bidimensionali degli elementidi pala e quindi possibile determinare un sentiero di stallo al variare di Tc e,soprattutto, .
Quando la zona stallata e troppo estesa la condizione di volo non e piu man-tenibile; (la pala entra ed esce dallo stallo ad elevate frequenze) pregiudicandole qualita di volo, con, inoltre uninevitabile decadimento delle prestazioni delrotore in termini di Tc e Pc.
Un sentiero di stallo determinato in base alle caratteristiche di portanzastatiche dei profili del rotore soffre di approssimazioni addirittura maggioridel caso dellala fissa a causa del complesso fenomeno dello stallo dinamico.
7.13 Stallo dinamico