5. IL SOLIDO ELASTICO ED I TEOREMI ENERGETICI · F. Angotti , A. Borri - Lezioni di scienza delle...
53
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 1 F. Angotti , A. Borri - Lezioni di scienza delle costruzioni. 5. IL SOLIDO ELASTICO ED I TEOREMI ENERGETICI 5.1 INTRODUZIONE Da quanto discusso fino ad ora si comprende che il problema matematico tipico della meccanica dei solidi è così impostato: DATI: V = Volume occupato dal solido b j = forze di volume assegnate in V Condizioni al contorno: $ f j forze assegnate sulla porzione di superficie ∂ ′ V $ u j spostamenti assegnati sulla porzione di superficie ∂ ′′ V TROVARE in ogni punto di V ( , , ) x x x 1 2 3 i campi di spostamenti, deformazioni e tensioni: u u x x x x x x x x x j j ij ij ij ij = = = ( , , ) ( , , ) ( , , ) 1 2 3 1 2 3 1 2 3 ε ε σ σ (5.1) che siano soluzione del seguente problema al contorno: Equilibrio ' in ˆ in 0 , V f n V b j i j i j i j i ∂ = = + σ σ (5.2)
Transcript of 5. IL SOLIDO ELASTICO ED I TEOREMI ENERGETICI · F. Angotti , A. Borri - Lezioni di scienza delle...
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 1
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
5. IL SOLIDO ELASTICO ED I TEOREMI ENERGETICI
5.1 INTRODUZIONE
Da quanto discusso fino ad ora si comprende che il problema matematico tipico della meccanica dei solidi è così impostato:
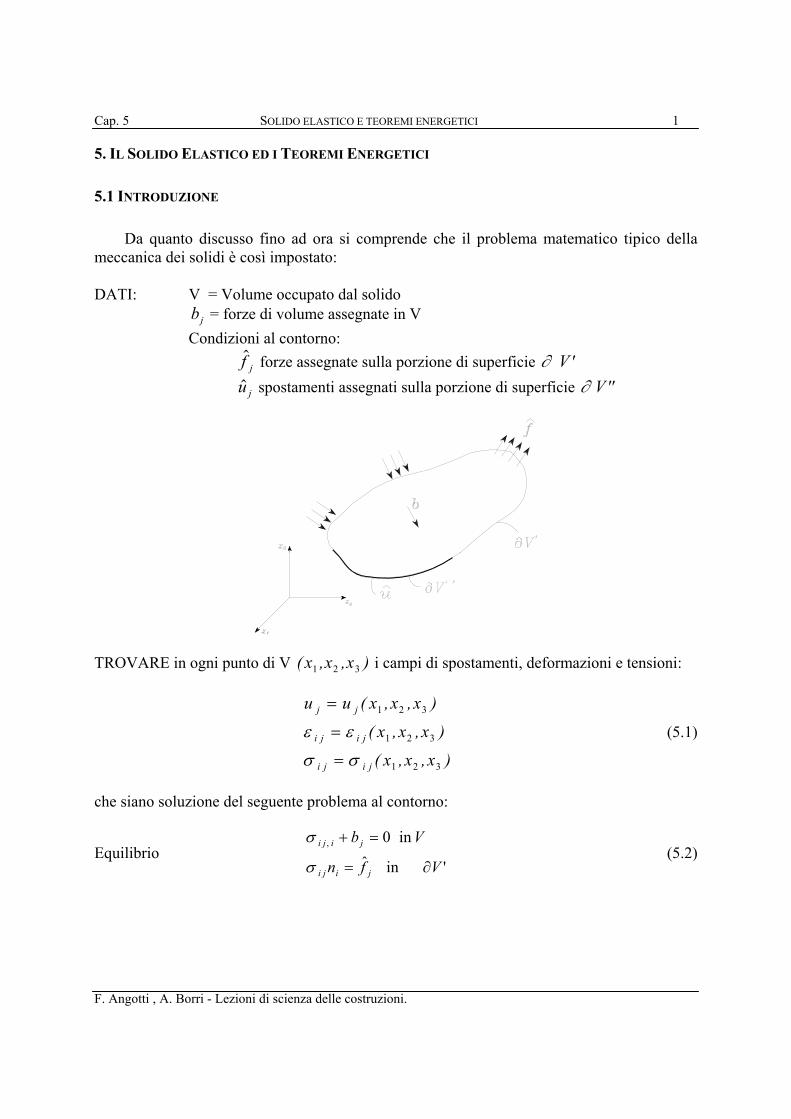
DATI: V = Volume occupato dal solido
bj = forze di volume assegnate in V Condizioni al contorno: $f j forze assegnate sulla porzione di superficie ∂ ′V $u j spostamenti assegnati sulla porzione di superficie ∂ ′′V
TROVARE in ogni punto di V ( , , )x x x1 2 3 i campi di spostamenti, deformazioni e tensioni:
u u x x x
x x x
x x x
j j
i j i j
i j i j
=
=
=
( , , )
( , , )
( , , )
1 2 3
1 2 3
1 2 3
ε ε
σ σ
(5.1)
che siano soluzione del seguente problema al contorno:
Equilibrio 'inˆ
in 0,
Vfn
Vb
jiji
jiji
∂=
=+
σ
σ (5.2)
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 2
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Congruenza ( )
Vuu
Vuu
ii
ijjiji
′′=
+=
∂
ε
suˆ
in 21
,, (5.3)
Come si vede, a fronte di 9 equazioni differenziali alle derivate parziali, occorre determinare le 15 funzioni incognite (5.1). In alcuni casi particolari il numero delle funzioni incognite da determinare si riduce tanto da consentire la risoluzione del problema (5.2),(5.3). Si tratta dei problemi così detti staticamente determinati, mutuando il linguaggio della statica dei corpi rigidi. In generale però il problema non si può risolvere se non si tiene conto della particolare natura materiale del solido.
In altri termini, mentre le equazioni (5.2) e (5.3) valgono in ogni continuo a prescindere dal particolare materiale di cui è costituito, per poter risolvere problemi concreti occorre descrivere il comportamento dei singoli materiali attraverso opportune relazioni che siano in grado di individuare le particolari classi di processi che ciascuno di essi è in grado di compiere.
Tali relazioni prendono il nome di equazioni costitutive e, nella formulazione più semplice, legano il tensore della tensione con quello della deformazione :
( ) ( )3,2,1k,h,j,ihkijij == εσσ (5.4)
Le (5.4), che in generale sono non-lineari, rappresentano la più generale relazione per descrivere il comportamento di un materiale elastico, il quale è perciò caratterizzato dalla proprietà che la generica componente di tensione σ ij è determinata dal valore che assumono tutte le componenti εhk di deformazione.
Si noti che per un materiale elastico non ha alcuna influenza la storia deformativa subita dal materiale prima che esso venga sottoposto alla nostra osservazione.
Particolare importanza riveste per le applicazioni nell’ingegneria il caso in cui le equazioni costitutive (5.4) siano lineari, ossia quando sia possibile scrivere le (5.4) nella forma:
[ ]εσ C= (5.5)
essendo C una applicazione lineare che trasforma lo spazio dei tensori ε in quello dei tensori σ ossia, lo spazio dei tensori del secondo ordine in se stesso ; C è quindi un tensore del 4° ordine. La (5.5), se passiamo dalla notazione assoluta, alle componenti con riferimento ad una base ortonormale [ ]e e e1 2 3, , , diviene:
σ εij ijhk hkC= (5.6)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 3
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
La (5.6) è una generalizzazione della famosa legge di R. Hooke il quale nel 1676 diede il primo contributo in tema di equazioni costitutive. Egli condensò le sue esperienze sulle molle di orologi nella relazione di proporzionalità (ut tensio sic vis):
εσ EkuF == ossia
Questa relazione, che oggi può apparire del tutto scontata, ha avuto una notevole importanza metodologica in quanto dimostrò la possibilità di misurare la forza, ossia la tensione, attraverso misure di spostamenti, ossia di deformazioni. Inoltre provò l’invarianza della legge costitutiva rispetto al sistema di riferimento.
La (5.6) descrive pertanto il comportamento di un materiale elastico lineare, e deve la sua estesa fortuna alla circostanza che quasi tutti i materiali da costruzione, se poco sollecitati, sono riconducibili ad essa. Essa tuttavia è pur sempre la descrizione di un materiale ideale che non esiste a rigore in natura ed in tal senso sarebbe più corretto parlare di stato elastico anziché di solido elastico o di materiale elastico.
5.2 IL SOLIDO ELASTICO LINEARE
Abbiamo visto nel precedente paragrafo che il solido o, per meglio dire, lo stato elastico lineare, è descritto dalla relazione di proporzionalità, generalizzazione della legge di Hooke,
( )3,2,1,,, == khjiC hkijhkij εσ (5.7)
in cui Cijhk sono le componenti, in un riferimento ortonormale, di un tensore del 4° ordine, detto tensore d’elasticità.
Sviluppando la (5.7) con riferimento ad es. ad una particolare componente di ijσ , si
ottiene:
σ ε ε ε
ε ε ε
ε ε ε
23 2311 11 2312 12 2313 13
2321 21 2322 22 2323 23
2331 31 2332 32 2333 33
= + + +
+ + + +
+ + +
C C C
C C C
C C C

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 4
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Essendo un tensore del 4° ordine, le componenti Ci j h k di C sono 3 814 = . Le componenti effettivamente distinte si riducono però a 36 per la simmetria di σ ed ε che, come è noto, presentano ciascuno solo sei componenti distinte.
I coefficienti Ci j h k non dipendono dalla deformazione ma, eventualmente, dalla
posizione della particella materiale. Quando ciò accade si parlerà di materiali eterogenei. Quando viceversa le Ci j h k non dipendono dal punto diremo che il materiale è omogeneo, le componenti Ci j h k sono quindi in tal caso delle costanti per tutto il corpo.
Anche il comportamento più semplice, ossia quello elastico lineare, implica quindi la
conoscenza di ben 36 costanti materiali che sono evidentemente difficili da valutare soprattutto quando si pensi che ciò può esser fatto solo sperimentalmente.
Il numero di tali costanti tuttavia si riduce quando il materiale presenta particolari proprietà di simmetria nella risposta, ossia delle simmetrie nel suo comportamento. Questa eventualità, che si verifica nella maggior parte dei casi di interesse tecnico (5.1), verrà analizzata in maniera più approfondita nel paragrafo seguente.
5.2.1 Proprietà di simmetria nella risposta di un materiale
Al fine di descrivere eventuali simmetrie nella risposta di un materiale si vuole ora studiare (Fig.5.1) quello che accade nell’intorno infinitesimo di un punto individuato dal vettore posizione x nel riferimento cartesiano ( )O x x x, , ,1 2 3 .
Si supponga di applicare un campo di spostamenti ( )u y in un punto y a distanza infinitesima da x . Si consideri poi il punto y* individuato da:
( ) ( )y* x Q y x− = − (5.8)
essendo Q un tensore ortogonale, ed il campo di spostamenti ( )u y* * legato ad ( )u y dallo
stesso tensore ortogonale Q :
( ) ( )u y Q u y* * = (5.9)
(5.1) Accade spesso in pratica di poter considerare l’ipotesi di comportamenti simmetrici viste le proprietà di simmetria della natura cristallina del materiale e la possibilità di modificare, attraverso una lavorazione dall’avanzato rilievo tecnologico, il comportamento dei materiali stessi nelle varie direzioni.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 5
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fig. 5.1
In sostanza, il vettore ( )y* x− e il campo di spostamenti ( )u y* * non sono altro che il
vettore ( )y x− ed il campo di spostamenti ( )u x , ruotati di Q . In generale la risposta del materiale nel punto x è diversa nelle due direzioni considerate; se però il materiale presenta delle simmetrie potremmo avere la stessa risposta.
È facile verificare, ricordando la regola di derivazione delle funzioni composte, che:
TQuQQuQyuQu ∇=∇=∇∇=∇ −1* (5.10)
in cui ∇ denota il gradiente. Se nella (5.10) consideriamo solo la parte simmetrica, che come è noto coincide con il tensore delle deformazioni, si perviene a :
ε ε* = Q Q T (5.11)
Resta così provato che ε ed ε ∗ descrivono la stessa deformazione in x . Ora se Q è una trasformazione di simmetria per il materiale (ossia se il materiale
presenta la stessa risposta nelle due direzioni) si può affermare che [ ]σ ε= C e [ ]σ ∗ ε ∗= C rappresentano lo stesso stato di tensione e quindi deve valere la
σ σ* = Q Q T (5.12)
da cui:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 6
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
[ ] [ ]C Q C Qε ε* = T
e quindi:
[ ] [ ]C Q Q Q C Qε εT T= (5.13)
che rappresenta quindi la condizione necessaria affinché Q sia una trasformazione di simmetria.
Si può dimostrare che le trasformazioni di simmetria costituiscono un gruppo G e che se Q ∈G allora anche Q − ∈1 G ; inoltre il prodotto di due trasformazioni di simmetria è ancora una trasformazione di simmetria (quindi il tensore I , di componentiδ ij in un riferimento ortonormale verifica la condizione I ∈G ).
Indicando con O il gruppo dei tensori ortogonali si parla di solido elastico lineare isotropo se G O≡ : questo corrisponde al massimo grado di simmetria in quanto per ogni trasformazione ortogonale (per ogni rotazione) è valida la (5.13) e quindi il comportamento del materiale è lo stesso per qualsiasi direzione (5.2) ; nel caso in cui questo non sia verificato il materiale si dice anisotropo.
Il gruppo G presenta infiniti sottogruppi ma è stato dimostrato (Coleman & Noll) che 12
sottogruppi propri sono in grado di descrivere tutti i materiali che presentano simmetrie e che 11 di questi descrivono tutte le classi di cristalli note.
Hanno un grande rilievo particolari classi di materiali anisotropi:
• i materiali elastico lineari trasversalmente isotropi per i quali la relazione (5.13) è
valida quando Q appartiene al sottogruppo proprio ( )I R, eϕ che è generato dal
tensore unitario I e da una rotazione di un angolo ϕ attorno ad una direzione e;
• i materiali elastico lineari ortotropi per i quali la relazione (5.13) è valida quando Q appartiene al sottogruppo proprio ( )R R Ri j k
π π π, , che è generato delle riflessioni
rispetto a tre piani ortogonali di normali i, j, k. Passando dalle condizioni di assenza di simmetria, alla ortotropia, alla isotropia
trasversale per arrivare alla isotropia il numero delle costanti indipendenti necessarie a descrivere il comportamento elastico lineare si riduce rispettivamente da 36 a 9, a 5 per finire a 2.
(5.2) Si pensi di poter isolare dei provini intorno al medesimo punto ma prendendo materiale secondo direzioni diverse: effettuando ad esempio una prova di trazione si otterrebbero, in campo elastico, i medesimi diagrammi tensione - deformazione su tutti i provini prelevati.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 7
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
5.2.2 Il solido elastico lineare isotropo
Si può dimostrare che per un solido elastico lineare isotropo valgono le seguenti 3 proprietà:
a) ad una dilatazione uniforme corrisponde uno stato di tensione sferico :
[ ] [ ]ε = ⇒ = = ⇒ =e e K e K eI C C I I Iε σ3 3
b) ad una deformazione che sia uno scorrimento puro corrisponde uno stato di tensione tangenziale puro (sono nulle le tensioni normali):
[ ] εµσεµεεε
εεεε
ε 220
00
2313
3212
3121
=⇒=⇒
= C
c) ad una deformazione deviatorica (a traccia nulla)(5.3) corrisponde uno stato di tensione anch’esso deviatorico:
[ ]ε ε ε ε ε σ ε0= = ⇒ = ⇒ =o o o ocon t r 0 2 2C µ µ
Si dimostra che le tre proprietà sopra evidenziate sono anche condizioni necessarie e sufficienti affinché il solido elastico lineare sia isotropo.
Infatti, basandosi sulle stesse tre proprietà è ora possibile dimostrare che un solido
elastico lineare è isotropo se e solo se il suo legame costitutivo è espresso dalla:
[ ]σ ε µε λ ε= = +C I2 t r (5.14)
che viene anche indicata come equazione di Lamé (1852) e dove il numero delle componenti del tensore di elasticità che definiscono il comportamento del materiale si è ridotto alle sole due λ µe (prima e seconda costante di Lamé).
Per dimostrare la sufficienza della (5.14) si può scrivere per ogni tensore ortogonale Q :
[ ]Q C Q Q Q Q I Qε ε εT T T= +2 µ λ tr
(5.3) Ad esempio le deformazioni a volume costante.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 8
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
ma, se si osserva che(5.4):
( ) ( ) ( ) ( )t r = t r t r t rQ Q Q Q I
Q Q
ε ε ε ε
1
T T
TI
= =
=
si ha:
[ ] ( ) [ ]Q C Q Q Q Q Q I C Q Qε ε ε εT T T T= + =2 µ λ tr
che è la condizione di isotropia di un materiale (5.14) stante l’arbitrarietà di Q . La (5.14) rappresenta anche la condizione necessaria, infatti, scomponendo il tensore ε
nelle due parti sferica e deviatorica, si ha:
ε ε ε= +13
tr I o
da cui, ricordando le proprietà a) e c) viste in precedenza, deriva che:
[ ] ( ) [ ] ( ) =+=+
= oo 2tr
31kK3tr
31 εµεεεε ICICC
( ) ( ) ( )III εµεµεεµε tr322tr
312tr
−+=
−+= KK
e, se si pone:
−= µλ
32K
si ha:
[ ]C Iε ε ε= +2 µ λ tr
che conclude la dimostrazione. L’equazione costitutiva (5.14) può anche essere invertita per esprimere ε in funzione di
σ . Infatti da essa si ottiene immediatamente:
(5.4) la prima uguaglianza è possibile in quanto, date due matrici A e B, vale la: tr (A B) = tr (B A)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 9
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
( )ε σ ε= −1
2 µλ tr I
e da questa, considerando che:
( )tr tr tr tr σ ε ε ε= + = +2 3 2 3µ λ µ λ
si ottiene la relazione inversa cercata:
ε σ σ= −+
12 2 3µ
λµ λ
tr I (5.15)
dove si assume µ µ λ≠ + ≠0 2 3 0e .
5.2.3 Significato fisico delle principali costanti elastiche
a) Si è visto che, se lo stato di deformazione in un punto è uno scorrimento puro:
εε
εi j =
0 00 0
0 0 0
12
21 ,
il corrispondente stato di tensione è di tipo tangenziale puro:
στ
τi j =
0 00 0
0 0 0
con τ espressa da:
τ µ ε µ γ= =2 12 12
dove γ 12 è lo scorrimento (dilatazione angolare) e µ prende, per il significato che così assume, il nome di modulo di elasticità tangenziale ed ha le dimensioni di una tensione. Nella letteratura tecnica tale modulo è indicato con G.
b) Se invece lo stato di deformazione in un punto è una dilatazione uniforme :
ε = e I

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 10
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
lo stato di tensione corrispondente è di tipo idrostatico IekK3s = in cui è facile vedere che:
λµ 323 +=K
dove k prende il nome di modulo di elasticità cubica ed ha le dimensioni di una tensione. c) Si consideri ora lo stato di tensione monoassiale:
σσ
i j =
11 0 00 0 00 0 0
Utilizzando le equazioni costitutive nella forma (5.15) è immediato verificare che le uniche componenti di deformazione non nulle sono:
( )
εµ
σ λµ λ
σµ
µ λ λµ λ
σ µ λµ µ λ
σ11 11 11 11 111
2 2 31
22 3
2 3 2 3= −
+
=
+ −+
=
++
(a)
( )
ε εµ
λµ λ
σ λµ µ λ
σ22 33 11 111
20
2 3 2 2 3= = −
+
= −
+
(b)
Se si introduce il modulo di elasticità normale, o modulo di Young E, dato da:
( )
E =+
+µ µ λ
µ λ2 3
(5.16)
l’equazione (a) diventa:
ε σ11 111
=E
che esprime la dilatazione lineare nella direzione i longitudinale in pieno accordo con la legge di Hooke σ ε11 11= E . La costante E, che ha le dimensioni di una tensione, deve essere positiva (E > 0) perché a trazioni (tensioni positive) corrispondano allungamenti.
Si definisce infine il coefficiente di Poisson o coefficiente di dilatazione trasversale
mediante:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 11
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
( )
νεε
εε
λµ λ
= − = − =+
2 2
11
33
11 2 (5.17)
in cui l’ultima uguaglianza è una immediata conseguenza delle (b) e da cui discende:
ε ε νε ν σ22 33 11 11= = − = −E
e quindi il tensore della deformazione corrispondente allo statodi tensione monoassiale in esame si riduce a :
ε
σ
νσ
νσ
i j
E
E
E
= −
−
11
11
11
0 0
0 0
0 0
È facile provare che, in termini delle costanti E, ν, la (5.15) diviene :
( )[ ]ε ν σ ν δσi j i j i jEI= + −1 1 (5.18)
con σσ tr =I . Lo stato di tensione monoassiale considerato è quello che si determina in ogni punto di
un’asta rettilinea soggetta a forza normale di trazione. Il caso sperimentale di riferimento potrebbe essere il seguente (Fig. 5.2): un’asta di lunghezza l, in seguito all’applicazione di una forza normale N nella direzione dell’asse x1 si deforma variando la sua lunghezza di ∆ l ; l’area di base, inizialmente di superficie A, subisce una variazione ∆ A :

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 12
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fig. 5.2
Si possono quindi determinare sperimentalmente le grandezze:
σ ε11 11= =NA
ll
; ∆
e quindi ottenere il valore di E mediante:
E = =σε
ϕ11
11
tg
E’ immediato trovare anche una relazione tra E, µ, ν . Si consideri infatti, partendo dalla (5.16), il rapporto :
Eµ
µ λµ λ
µ λµ λ
λµ λ
λµ λ
=++
=++
++
= ++
2 3 2 2 2
da cui, ricordando l’espressione (5.17), si giunge immediatamente a:
E
21
µν= + (5.19)
che è la relazione cercata. Delle cinque costanti elastiche che si sono definite ( K, λ, µ = G, E, ν ) E e ν sono quelle
di più facile determinazione sperimentale per cui verranno più spesso utilizzate nel seguito. Nella tabella seguente vengono indicati i valori di E e ν per alcuni materiali.
E ν Calcestruzzi 25 - 40 kN/mm2 0.10 – 0.15
Acciaio 206 kN/mm2 0.30
Alluminio 70 kN/mm2 0.36
Rame 120 kN/mm2 0.35
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 13
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
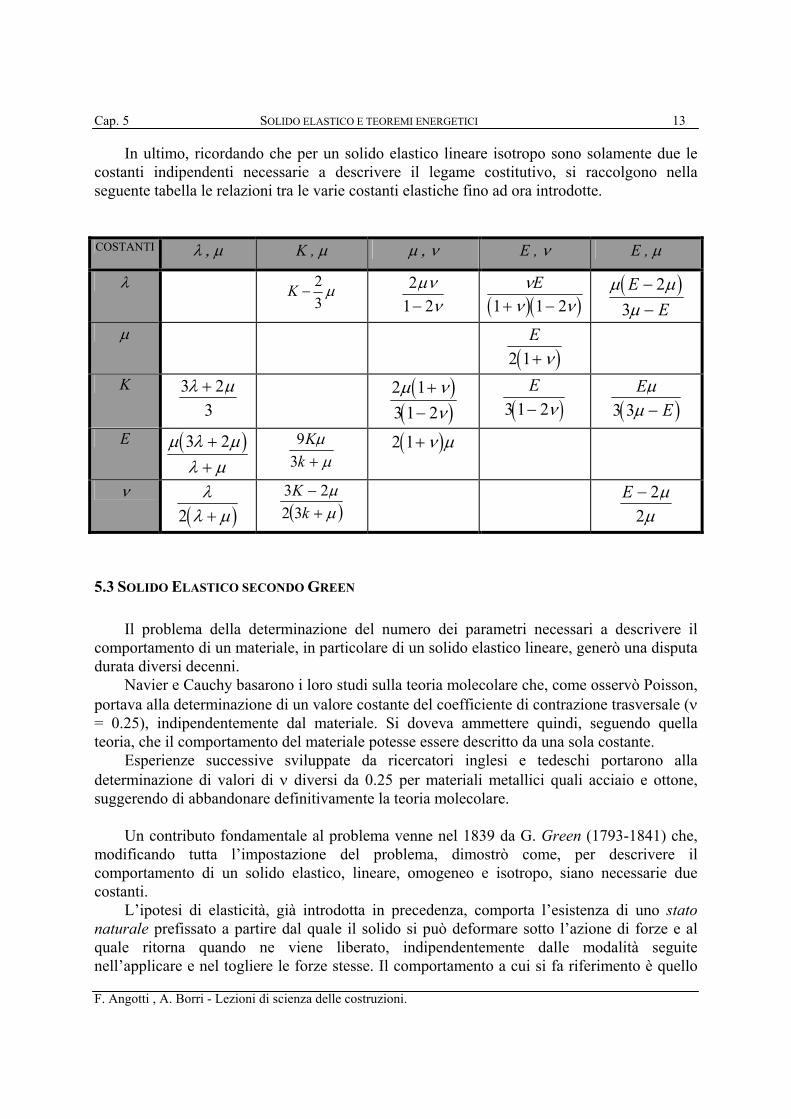
In ultimo, ricordando che per un solido elastico lineare isotropo sono solamente due le costanti indipendenti necessarie a descrivere il legame costitutivo, si raccolgono nella seguente tabella le relazioni tra le varie costanti elastiche fino ad ora introdotte.
COSTANTI λ , µ K , µ µ , ν E , ν E , µ
λ µ32
−K 21 2
µνν−
( )( )
νν ν
E1 1 2+ −
( )µ µµE
E−−
23
µ
( )E
2 1+ ν
K 3 23
λ µ+
( )( )
2 13 1 2µ ν
ν+
− ( )
E3 1 2− ν
( )
EE
µµ3 3 −
E ( )µ λ µλ µ3 2+
+ µ
µ+k
K39 ( )2 1+ ν µ
ν
( )λ
λ µ2 + ( )µ
µ+
−k
K32
23 E − 22
µµ
5.3 SOLIDO ELASTICO SECONDO GREEN
Il problema della determinazione del numero dei parametri necessari a descrivere il comportamento di un materiale, in particolare di un solido elastico lineare, generò una disputa durata diversi decenni.
Navier e Cauchy basarono i loro studi sulla teoria molecolare che, come osservò Poisson, portava alla determinazione di un valore costante del coefficiente di contrazione trasversale (ν = 0.25), indipendentemente dal materiale. Si doveva ammettere quindi, seguendo quella teoria, che il comportamento del materiale potesse essere descritto da una sola costante.
Esperienze successive sviluppate da ricercatori inglesi e tedeschi portarono alla determinazione di valori di ν diversi da 0.25 per materiali metallici quali acciaio e ottone, suggerendo di abbandonare definitivamente la teoria molecolare.
Un contributo fondamentale al problema venne nel 1839 da G. Green (1793-1841) che,
modificando tutta l’impostazione del problema, dimostrò come, per descrivere il comportamento di un solido elastico, lineare, omogeneo e isotropo, siano necessarie due costanti.
L’ipotesi di elasticità, già introdotta in precedenza, comporta l’esistenza di uno stato naturale prefissato a partire dal quale il solido si può deformare sotto l’azione di forze e al quale ritorna quando ne viene liberato, indipendentemente dalle modalità seguite nell’applicare e nel togliere le forze stesse. Il comportamento a cui si fa riferimento è quello

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 14
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
tipico di sistemi a trasformazioni completamente reversibili per i quali l’energia spesa nella deformazione viene integralmente restituita in accordo con il principio di conservazione dell’energia.
Partendo da questa ipotesi, i concetti generali sull’energia potenziale, già introdotti in quel periodo da Laplace, portarono Green ad ammettere l’esistenza di una funzione di stato dipendente solo dagli estremi della trasformazione e non dal percorso seguito. Le proprietà meccaniche di un materiale elastico possono quindi essere descritte da uno scalare Φ, chiamato energia potenziale elastica per unità di volume, ovvero densità di energia di deformazione, funzione solo delle grandezze che definiscono lo stato naturale e da quelle che determinano la deformazione.
5.3.1 Energia potenziale elastica
Sia sε una curva parametrica nello spazio delle deformazioni ε i j che descriva la “storia” della deformazione nell’intorno infinitesimo di un punto P del continuo e che si possa esprimere analiticamente mediante:
( )ε ε α α α αi j i j= ≤ ≤; 0 1 (a)
essendo α il parametro e con ( ) ( )ε α ε αij ijA B0 1= =e .
Possiamo dire che la curva (a) rappresenta un processo di deformazione che ha inizio in A e termina in B (v. figura). Supponiamo che la linea di deformazione sε sia continua e regolare, eventualmente a tratti, e che ad essa corrisponda, nello spazio delle tensioni, il processo tensionale
10);()( ααααεασ ≤≤= hkijhkij C

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 15
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Ne consegue che il lavoro (interno) di deformazione compiuto, per unità di volume, lungo sε si può esprimere mediante:
( )ϕ σεα
αε α
αs
dd
di ji j= ∫
0
1 (5.20)
In generale, senza ipotesi sulla natura del solido, il valore di ( )ϕ εs dipende dal percorso seguito fra gli estremi A e B. L’ipotesi di elasticità, come già accennato, portò Green ad ammettere l’esistenza di una funzione potenziale per l’energia di deformazione elastica, o anche densità di energia, ( )Φ ε i j , per modo che l’incremento di lavoro è dato proprio dal
differenziale totale della ( )Φ ε i j
( )d di j i j i jΦ ε σ ε = (5.21)
dalla quale, per l’indipendenza delle d i jε , si ricava la
σ ∂∂ εi j
i j
=Φ
(5.22)
dove, nella derivazione, ( )Φ ε i j deve essere considerata funzione delle nove componenti
della deformazione senza tenere conto della simmetria di ε i j . La (5.22) è la relazione cercata che lega tensioni e deformazioni e cioè l’equazione costitutiva del materiale.
Si mostra facilmente che, utilizzando la funzione densità di energia sopra definita, il lavoro di deformazione è indipendente dal percorso seguito nella deformazione ed è solo funzione degli estremi della trasformazione. Esprimendo la tensione nei termini della (5.22) si ha infatti
( ) ( )[ ] ( )[ ] ( )[ ]ϕ ∂∂ ε
εα
α ε α ε α ε αε α
α
α
αs
dd
d di j
i ji j i j i j= = = −∫ ∫
Φ Φ Φ Φ0
1
0
1
1 0 (5.23)
Se si considera il seguente sviluppo
( )d d di j i j i j i j i j i jσ ε σ ε ε σ = + (5.24)
si può affermare che il termine ε σ i j i jd , essendo la differenza di due differenziali,
rappresenta il differenziale totale di una funzione ( )$Φ σ i j detta energia potenziale elastica

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 16
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
complementare o densità di energia complementare, introdotta per la prima volta da Castigliano nel 1875. Dalla
( )d di j i j i j$Φ σ ε σ= (5.25)
con l’ipotesi di indipendenza delle nove componenti d i jσ , si ottiene
ε∂∂σ
i j
i j
=$Φ
(5.26)
che rappresenta l’inversione delle (5.22).
5.3.2 Esistenza di una densità di energia potenziale elastica
Si è già avuto modo di vedere che lo stato elastico lineare è descritto dalla relazione (5.7):
σ εi j i jkl klC=
in cui Ci jkl è il tensore d’elasticità. Si dimostra ora che le seguenti tre proposizioni sono equivalenti:
a) il lavoro che si compie in un processo di deformazione descritto da una curva chiusa sε è nullo.
b) il tensore di elasticità C è simmetrico (5.5).
c) la densità di energia è espressa dalla
Φ ( )ε ε εi j i jkl i j k lC= 12
(5.27)
se si assume come stato naturale quello a deformazione nulla e che, in questo stato, ci sia
assenza di tensioni, ossia le autotensioni siano nulle.
• a) ⇒ b)
(5.5) Il tensore C è simmetrico se: A C [B] = B C [A] ossia se A C B B C Aij ijkl kl kl klij ij=
qualunque siano i tensori doppi simmetrici A e B. In componenti quindi C è simmetrico se C Cijkl klij=

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 17
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Il lavoro nullo lungo una curva chiusa sε implica che il tensore di elasticità C è simmetrico
cioè ( )ϕ εs C Coi jkl kl i j= ⇒ =0 :
Si considerino due tensori simmetrici qualunque A e B e la curva chiusa:
( )ε α α α πi j i j i jA sin B= − + ≤ ≤cos 1 0 2
si ha allora che:
σ α αi j i j k l k l i j k l k lC A sin C B= − +(cos )1
Considerato anche che:
dd
sin A Bi ji j i j
εα
α α= − + cos
segue che la funzione integranda (5.20) ha la seguente espressione:
σεα
α α α αi ji j
i j i j k l kl i j i j k l k l
dd
sin sin A C A sin A C B= − − +( cos ) 2
+ − +(cos cos ) cos2 α α α αB C A sin B C Bi j i j k l k l i j i j k l k l
Integrando e introducendo l’ipotesi a) ( )ϕ εso = 0 , si ha:
( )ϕ σεα
α π πε
πs
dd
d B C A A C Boi j
i ji j i j k l k l i j i j k l k l= = − =∫0
20
da cui discende:
A C B B C Ai j i j k l k l i j i j k l k l=
che per l’arbitrarietà di Aij e Bij dimostra la simmetria di C.
• b) ⇒ c)
Se il tensore di elasticità C è simmetrico allora la densità di energia è espressa dalla (5.27):

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 18
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Dalle equazioni costitutive per lo stato elastico lineare si ha :
σ ε σ εi j i jkl kl kl kl i j i jC C= =
da cui per l’ipotesi di simmetria di C, si ottiene:
∂ σ∂ ε
∂ σ∂ ε
i j
kl
kl
i j
=
e, in virtù delle (5.22):
∂
∂ ε ∂ ε∂
∂ ε ∂ ε
2 2Φ Φ
i j k li jkl kl i j
k l i j
C C= = =
Questa relazione, per il teorema di Schwartz, garantisce la continuità delle derivate parziali miste di ( )Φ ε i j ; ci sono quindi le condizioni per lo sviluppo in serie di Mac-Laurin
della funzione ( )Φ ε i j che, arrestato ai termini del 2° ordine, fornisce :
Φ ΦΦ Φ
( ) ( )ε∂
∂ εε
∂∂ ε ∂ ε
ε εi ji j
i ji j k l
i j k l= + +0 12
0
2
0
doveΦ ( )0 è l’energia potenziale elastica per ε i j = 0 mentre il termine:
∂
∂ εε σ
Φ
i ji j i j
o
0
=
rappresenta lo stato di tensione in assenza di deformazione e prende il nome di autotensione. Nell’ipotesi di assenza di autotensioni, σ i j
o = 0 , la densità di energia è quindi espressa dalla (5.27):
Φ ( )ε ε εi j i jkl i j k lC=12
a meno di una costante additiva, inessenziale Φ ( )0 , che può supporsi nulla. Si noti che a noi interessano le derivate di Φ ( )ε i j .
• c) ⇒ a)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 19
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Se la densità di energia esiste ed in particolare è espressa dalla (5.27) allora il lavoro lungo una curva chiusa sε è nullo.
La dimostrazione di questa asserzione è banale se si utilizza l’espressione (5.23) per il calcolo del lavoro.
Un solido elastico lineare per cui valga l’ipotesi di Green si dice solido iperelastico o di
Green altrimenti viene detto solido di Cauchy. Nel solido iperelastico la simmetria del tensore di elasticità C porta alla riduzione del numero delle costanti necessarie a descrivere la legge costitutiva del materiale: le costanti elastiche effettivamente indipendenti (distinte) passano da 36 a 21 (5.6) .
Se C è invertibile e si pone K C= −1 si può scrivere:
ε σi j i jkl klK=
dove K è ancora un tensore simmetrico e quindi si può definire la densità di energia complementare:
$ ( )Φ σ σ σi j i jkl i j k lK=12
(5.28)
Attraverso delle semplici sostituzioni si può dimostrare che:
( )$ ( )Φ Φσ ε σ εi j i j i j i j= = 12
(5.29)
infatti è:
$ ( ) ( )Φ Φσ σ σ σ ε ε ε εi j i jkl i j k l i j i j i jkl k l i j i jK C= = = =12
12
12
Se, ad esempio, si riconsidera la prova di trazione del § 5.2.3 la densità di energia è :
( )Φ ε σ εi j = 12 11 11
che è rappresentata dall’area colorata in figura 5.3:
(5.6) In una matrice simmetrica di ordine n le componenti distinte sono: n (n+1)/2.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 20
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fig. 5.3
5.3.3 Isotropia ed iperelasticità
Si è visto che il legame costitutivo di un solido elastico lineare isotropo è espresso dalla (5.14) che, scritta in componenti, da luogo a:
σ ε µ ε λ δεi j ijkl kl i j i jC I= = +2 (5.30)
dove I trε = ε rappresenta l’invariante primo del tensore della deformazione. Si può ora dimostrare che il tensore d’elasticità presente nella (5.30) è simmetrico, ossia
che il solido elastico lineare isotropo è iperelastico. Infatti con riferimento ad una generica coppia di tensori doppi simmetrici A e B si ha:
[ ]C B = +2 µ λ δB Ii j B i j
e quindi:
[ ]A C B = + =2 µ λ δA B I Ai j i j B i j i j
[ ]= + = + =2 2µ λ µ λ δA B I I B A I Bi j i j A B i j i j A ij ij B C A (5.31)
che dimostra la simmetria di C data l’arbitrarietà dei tensori doppi simmetrici A e B (v. nota (5.5) al punto 5.3.2).
E’ facile ora calcolare la densità di energia potenziale elastica mediante la (5.27):
Φ ( )
( )
ε ε ε σ ε
µ ε λ δ ε µ ε ε λε ε
i j ijkl ij kl ij ij
i j i j i j i j i j
C
I I
= = =
= + = +
12
12
12
2 12
2 (5.32)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 21
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
5.3.4 Iperelasticità e disuguaglianze a priori sulle costanti elastiche
La forma quadratica per l’energia potenziale elastica espressa dalla (5.27) deve essere definita positiva in quanto rappresenta l’energia necessaria per deformare il solido.
Sfruttando questa proprietà è possibile dedurre alcune limitazioni sulle costanti elastiche. Infatti la densità di energia di deformazione Φ scritta nel caso isotropo e facendo uso della scomposizione di ε ij nella parte deviatorica ed in quella sferica :
ε ε δεi j i j i jI= +o 13
dà luogo alla seguente espressione:
[ ][ ]Φ = + = + + + =µ ε ε λ µ ε δ ε δ λε ε ε εi j i j i j i j i j i jI I I I12
13
13
12
2 2o o
= + + + + = ++
>µ ε ε µ λ µ ε ε µ λε ε εi j i j i j i jI I Io o o o0 0
93 1
22 3
602 2 2
che deve risultare positiva per qualunqueε i j ≠ 0. Pertanto se assumiamo 0ijji εε = la
precedente disequazione diventa:
Φ = > ⇒ >µ ε ε µi j i j 0 0 (a)
mentre, se si considera una dilatazione uniforme, si ha:
Φ =+
> ⇒ + >2 3
60 2 3 02µ λ
µ λεI (b)
Riconsiderando poi lo stato di tensione monoassiale (prova di trazione) del punto 5.2.3, la densità di energia vale:
( )Φ ε σ ε εi j E= =12
1211 11 11
2
da cui si ritrova la condizione:
E > 0 (c)
Ricordando ora le espressioni di E e ν in funzione di µ e λ:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 22
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
( )
( )E =
++
=+
µ µ λµ λ
ν λµ λ
2 32
e osservando che:
1 2 12 32
− =+
+ =++
νµ
µ λν
µ λµ λ
,( )
e che perciò si può scrivere:
E E
21
2 31 2
µν
µ λν= +
+= −,
in virtù delle (a), (b) e (c) risulta che devono essere verificate le limitazioni:
0)21(0)1( >−>+ νν
ossia
− < <1 12
ν (5.33)
che rappresentano i limiti teorici per il coefficiente di Poisson ν. Se si ricorda però il tensore della deformazione:
εε
νενε
i j = −−
11
11
11
0 00 00 0
corrispondente allo stato di tensione monoassiale (prova di trazione) del punto 5.2.3,
σσ
i j =
11 0 00 0 00 0 0
si osserva che almeno nei materiali da costruzione risulta:
ε νε
ε νε11 11
11 11
0 0
0 0
> ⇒ − <
< ⇒ − >

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 23
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
da cui si deduce, per il coefficiente di Poisson ν , il limite inferiore, fisicamente accettabile, ν > 0.
I limiti pratici di ν risultano perciò:
5.00 <<ν (5.34)
Si osserva infine che il valore limite ν = 0.5 non può essere raggiunto. In tal caso infatti non sarebbe possibile invertire la (5.18).
5.4 IL PROBLEMA DELL’EQUILIBRIO ELASTICO LINEARE
Con riferimento al solido elastico-lineare che inizialmente occupa il volume V siano dati:
− il tensore elasticità C
− le forze di volume ( )b b x=
− le forze di superficie $f su ∂ ′V
− gli spostamenti di superficie $u su ∂ ′′V
x1
x3
b
V
∂V’’
∂V’
x2O
f
x
∂ ∂′ ′′V e V sono parti complementari della superficie ∂V che racchiude il volume V.
La soluzione del problema dell’equilibrio elastico consiste nel determinare, in corrispondenza dei dati assegnati, per ogni punto x di V, lo spostamento u, la deformazione ε , la tensione σ tali che risultino soddisfatte le seguenti equazioni:
• Equazioni di congruenza
( ) Vuu ijjiji in 21
,, +=ε (5.35)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 24
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
• Equazioni costitutive
jijiji I2 δλεµσ ε+= (5.36)
• Equazioni indefinite di equilibrio (Cauchy)
Vb jiji in 0, =+σ (5.37)
• Condizioni al contorno:
Vfn jiji ′= ∂σ su ˆ (5.38)
Vuu ii ′′= ∂su ˆ (5.39)
Si tratta quindi di risolvere un problema al contorno di tipo lineare misto, dacché le equazioni sono lineari e le condizioni al contorno riguardano sia le forze sia gli spostamenti. Risultano poi interessanti i due casi particolari, ∂ ∂V V= ′ e ∂ ∂V V= ′′ , in cui rispettivamente il problema è ricondotto alle sole forze (non sono assegnati gli spostamenti) ed ai soli spostamenti (non sono assegnate le forze); nei prossimi due paragrafi esprimeremo le equazioni date rispettivamente in termini di sole componenti di spostamento e di sole tensioni.
Si noti che le forze di volume ( )b b x= e le forze di superficie ( )$ $f f x= sono assegnate sulla configurazione iniziale V del solido, mentre l’equilibrio sotto queste forze è raggiunto nella configurazione deformata. Poiché però gli spostamenti sono, per ipotesi, piccoli, l’errore che si introduce con questa approssimazione è da ritenersi trascurabile.
Del resto, a proposito delle equazioni costitutive :
kllkjiji C εσ =
si deve a rigore sottolineare una certa inconsistenza. Infatti nella definizione del tensore di deformazione ε i j è stato assunto che le componenti di spostamento ui sono funzioni delle
coordinate ( )x x x1 2 3, , del solido nella configurazione iniziale indeformata. Viceversa nella definizione del tensore degli sforzi σ i j si è fatto riferimento alla
configurazione equilibrata e quindi alle coordinate ( )′ ′ ′x x x1 2 3, , del solido nella configurazione deformata.
Naturalmente se gli spostamenti ui e le derivate ui j, sono piccoli allora i valori
( )σ i j x x x′ ′ ′1 2 3, , e ( )σ i j x x x1 2 3, , differiscono di una quantità trascurabile.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 25
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Per avere un’idea della approssimazione operata si può osservare che, posto:
′ = +x x uh h h
si ha:
k
h
h
ji
k
ji
k
h
h
jihk
h
ji
k
hhk
h
ji
k
h
h
ji
k
ji
xu
xxxu
xxxu
xxx
xx ∂∂
∂∂σ
∂∂σ
∂∂
∂∂σ
δ∂∂σ
∂∂
δ∂∂σ
∂∂
∂∂σ
∂∂σ
′+
′=
′+
′=
+
′=
′⋅
′=
e perciò, l’approssimazione:
∂σ∂
∂σ∂
i j
k
i j
hx x=
′
significa ritenere trascurabili le derivate dello spostamento rispetto all’unità.
5.4.1 Il problema elastostatico in termini di spostamenti
Per giungere alle equazioni del problema elastico in termini di spostamenti ui , si
sostituisce alla tensione, nell’equazione indefinita di equilibrio (5.37), la sua espressione proveniente dall’equazione costitutiva (5.36), si ottiene così:
2 0µ ε λ δεi j i i i j jI b, ,+ + =
sfruttando anche l’equazione di congruenza e notando che :
kkkkkkkk uuuI ,,, )(21
=+== εε
si ottiene:
µ µ λ δu u u bi j i j i i k k i i j j, , ,+ + + = 0
Osservando che
u uk k i i j k k j, ,δ =
u u ui j i i i j k k j, , ,= =
e che inoltre

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 26
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
u uj ii j, = ∇2
essendo ∇2 l’operatore di Laplace, si ottiene la formulazione del problema elastostatico in termini di soli spostamenti:
µ λ µ∇ + + + =2 0u u bj i i j j( ) , (5.40)
Le tre equazioni così ottenute sono note come equazioni di Navier (Louis Marie Henri ) (1827).
Alle equazioni di Navier occorre associare le corrispondenti condizioni al contorno costituite solo dalle (5.39), nel caso di ∂ ∂V V= ′′ , oppure da queste insieme alle
( )µ λ ∂u u n u n f su Vi j j i i k k j j, , ,$+ + = ′ (5.41)
nel caso più generale del problema misto. Integrando il sistema di equazioni differenziali si arriva alla soluzione in termini di
spostamenti ( )u u xi i j= dai quali è facile ottenere sia il tensore della deformazione che quello della tensione.
Derivando le (5.40) rispetto alla variabile x j si ottiene:
µ λ µu u bj i i j i i j j j j, , ,( )+ + + = 0
e quindi
( ) ( ), , , ,λ µ λ µ ε+ + = ⇒ + + =2 0 2 0u b I bi i j j j j j j j j
in quanto u u Ij i i j i i j j j j, , ,= = ε . Proseguendo, si può scrivere
( ) ,λ µ ε+ ∇ + =2 02 I b j j (5.42)
che, ove risulti bj j, = 0 ed ammettendo ( )λ µ+ ≠2 0, diventa
∇ =2 0I ε (5.43a)
e, se si ricorda che I Iσ εµ λ= +( )2 3 , anche:
∇ =2 0Iσ (5.43b)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 27
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Resta così provato che gli invarianti I Iε σe quando b tj = cos , sono funzioni armoniche.
5.4.2 Il problema elastostatico in termini di tensioni
Si parte dalle equazioni esplicite di congruenza:
ε ε ε εi j h k h k i j ih jk jk ih, , , ,+ = + (a)
per arrivare, in modo concettualmente analogo a quanto visto nel paragrafo precedente, alle equazioni del problema elastostatico in termini di sole componenti di tensione.
Sostituendo infatti nelle (a) alle deformazioni la loro espressione data dall’equazione di legame nella forma (5.18):
( )[ ]ε ν σ ν δ ν σ νν
δσ σi j i j i j i j i jEI
EI= + − =
+
−+
1 1 11
si ottengono le seguenti equazioni:
σ νν
δ σ νν
δσ σi j h k h k ij h k i j i j h kI I, , , ,−+
+ −+
=1 1
= −+
+ −+
σ νν
δ σ νν
δσ σi h j k j k i h j k i h i h j kI I, , , ,1 1
Come già osservato, di tali 81 equazioni solamente 6 sono indipendenti. Un modo per ottenerle consiste nel contrarre la prima coppia di indici (ponendo i = j ) pervenendo così, dopo avere ordinato i termini, a:
( )σ σ σ σ νν
δ δ δ δσ σ σ σi i h k h k i i i h i k i k i h h k i i i i h k i k i h i h i kI I I I, , , , , , , ,+ − − =+
+ − −1
o anche:
( )I I Ih k h k i h i k i k i h h k h kσ σ σσ σ σ νν
δ, , , ,+ ∇ − − =+
+ ∇2 2
1 (5.44)
avendo utilizzato le seguenti uguaglianze:
σ δ δ δσ σ σ σ σ σi i h k h k h k i i h k i k i h i h i k h kI I I I I I, , , , , , ,; ;= = = =3

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 28
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fin qui si è tenuto conto delle equazioni di congruenza e di quelle costitutive; ora è facile controllare che le (5.44) possono essere ulteriormente semplificate utilizzando le equazioni di equilibrio scritte per le coppie di indici i,h ed i,k come qui di seguito riportate:
σ σi h i h i k i kb b, ,+ = + =0 0
Queste derivate rispettivamente rispetto a k ed h, si traducono nelle:
σ σi h i k h k i k i h k hb b, , , ,= − = −
che, sostituite nelle (5.44) e poi riordinando, portano alle:
( )I b b I Ihk h k h k k h h k h kσ σ σσ νν
δ, , , ,+ ∇ + + =+
+ ∇2 2
1
∇
+−+−=
++∇ hkhkkhkhkh IbbI δ
νν
νσ σσ
2,,,
2
111 (5.45)
Ricordando poi:
)32/(III)32(I 22 λµλµ σεεσ +∇=∇⇒+=
e che, per la (5.42) si può scrivere :
( ) ,λ µ λ µµ λε σ+ ∇ =
++
∇ = −2 22 3
2 2I I b j j
da cui:
∇ = −+
+2 2 3
2I b j jσ
µ λλ µ ,
e quindi, ricordando le relazioni tra costanti elastiche, con facili passaggi si trova:
ν
νλ
µ λµ λ
λ µλ
λ µν
νσ1 2 32 3
2 2 12
+∇ = −
++
+= −
+= −
−I b b bj j j j j j, , ,

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 29
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Sostituendo quest’ultimo risultato nella (5.45) si ottengono le equazioni di Beltrami, Donati, Michell (5.7):
∇ ++
= − + +−
2 11 1
σν
νν
δσh k h k h k k h j j h kI b b b, , , , (5.46)
nella loro forma generale e che, nel caso particolare di forze di volume costanti, si semplificano nelle :
∇ ++
=2 11
0σν σh k h kI , (5.47)
Le equazioni (5.47) sono quelle che verranno maggiormente utilizzate in quanto le forze di volume, quando non sono costanti o assumibili tali, in molti casi possono essere considerate come forze di superficie. La liceità di questa assunzione, che il rigore analitico vorrebbe negata, è però dimostrata dalle applicazioni tecniche.
Le (5.46) scritte per esteso divengono:
( )
( )
( )
∇ ++
= − +−
+ +
∇ ++
= − +−
+ +
∇ ++
= − +−
+ +
∇ ++
= −
211 11 1 1 1 1 2 2 3 3
222 22 2 2 1 1 2 2 3 3
233 33 3 3 1 1 2 2 3 3
212 12 1
11
21
11
21
11
21
11
σν
νν
σν
νν
σν
νν
σν
σ
σ
σ
σ
I b b b b
I b b b b
I b b b b
I b
, , , , ,
, , , , ,
, , , , ,
, ,( )
( )
( )
2 2 1
223 23 2 3 3 2
213 13 1 3 3 1
11
11
+
∇ ++
= − +
∇ ++
= − +
b
I b b
I b b
,
, , ,
, , ,
σν
σν
σ
σ
Per determinare lo stato di tensione in un corpo elastico occorre pertanto risolvere il sistema di equazioni (5.46) soggette alle condizioni al contorno (5.38).
(5.7) Queste equazioni furono ottenute da Beltrami (1892) nel caso bj = 0 e da Donati (1894) e Michell (1900) nel caso generale. Esse sono note come equazioni di Beltrami-Michell, sebbene Donati le abbia scoperte sei anni prima di Michell.
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 30
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
5.5 I TEOREMI CLASSICI DELLA ELASTICITÀ LINEARE
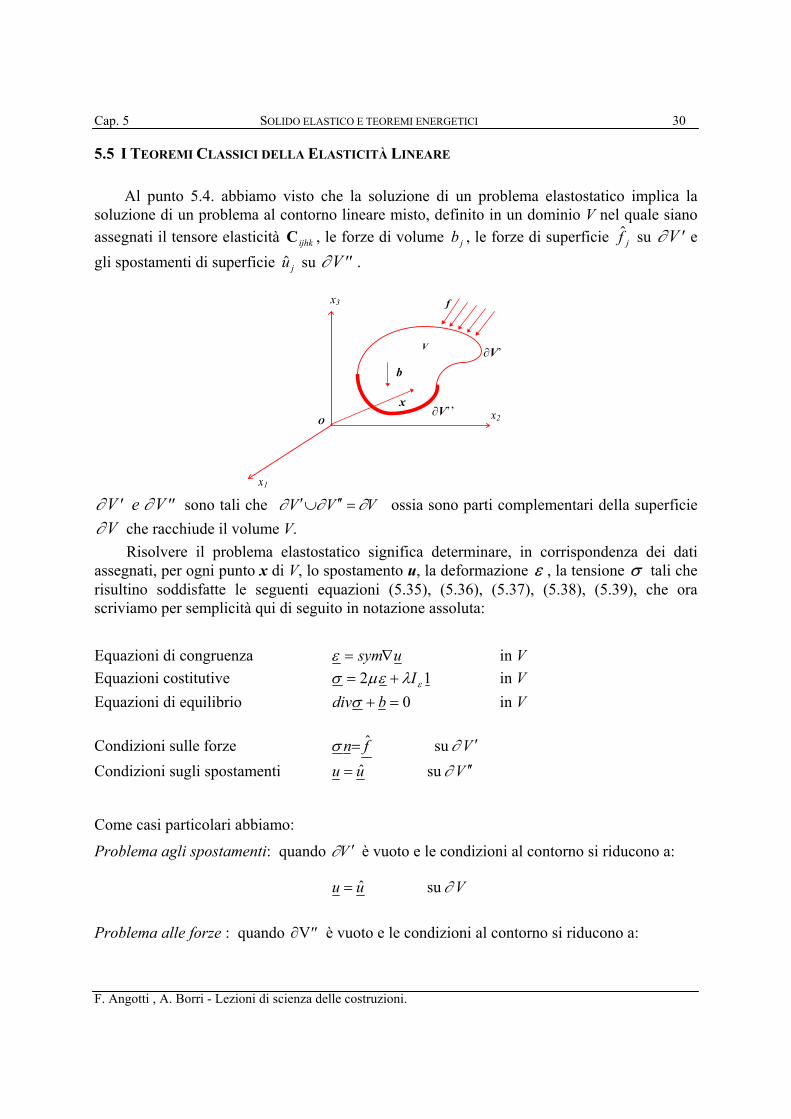
Al punto 5.4. abbiamo visto che la soluzione di un problema elastostatico implica la soluzione di un problema al contorno lineare misto, definito in un dominio V nel quale siano assegnati il tensore elasticità C ijhk , le forze di volume bj , le forze di superficie $f j su ∂ ′V e gli spostamenti di superficie $u j su ∂ ′′V .
x1
x3
b
V
∂V’’
∂V’
x2O
f
x
∂ ∂′ ′′V e V sono tali che VVV ∂∂∂ =′′∪′ ossia sono parti complementari della superficie ∂V che racchiude il volume V. Risolvere il problema elastostatico significa determinare, in corrispondenza dei dati assegnati, per ogni punto x di V, lo spostamento u, la deformazione ε , la tensione σ tali che risultino soddisfatte le seguenti equazioni (5.35), (5.36), (5.37), (5.38), (5.39), che ora scriviamo per semplicità qui di seguito in notazione assoluta:
Equazioni di congruenza usym∇=ε in V Equazioni costitutive 12 ελεµσ I+= in V Equazioni di equilibrio 0=+ bdivσ in V Condizioni sulle forze Vfn ′= ∂σ su ˆ Condizioni sugli spostamenti Vuu ′′= ∂su ˆ
Come casi particolari abbiamo:
Problema agli spostamenti: quando V ′∂ è vuoto e le condizioni al contorno si riducono a:
Vuu ∂su ˆ=
Problema alle forze : quando ∂ ′′V è vuoto e le condizioni al contorno si riducono a:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 31
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Vfn ∂σ su ˆ=
Per il problema così impostato è possibile dimostrare alcune proprietà generali delle soluzioni, senza che ciò richieda la preventiva soluzione delle equazioni. Si tratta di:
1) Principio di sovrapposizione degli effetti
2) Teorema di Clapeyron (o del lavoro di deformazione)
3) Teorema di unicità (o teorema di Kirchhoff)
4) Teorema di Betti (o principio di reciprocità)
5) Teorema di Maxwell.
5.5.1 Principio di sovrapposizione degli effetti
Diciamo che un campo di spostamenti, deformazioni e tensioni [ ]ui ij ij, ,ε σ definiti in V costituiscono uno stato elastico se, oltre ad essere sufficientemente regolari (ammissibili), soddisfano le equazioni:
( )ε
σ ε
σ
i j i j j i
i j i j k l k l
i j i j
u u
C in V
b
= +
=
+ =
12
0
, ,
,
inoltre:
f su Vj i j i= σ α ∂
Come si vede allo stato elastico [ ]ui ij ij, ,ε σ così definito restano associate le forze di
volume bj e le forze f j agenti su tutta la superficie che racchiude V. Si può quindi dire che
[ ]b fj j, sono le forze esterne associate allo stato elastico [ ]ui ij ij, ,ε σ definito in V. Il principio di sovrapposizione degli effetti, ovverosia il principio di sovrapposizione
degli stati elastici, può essere dimostrato(5.8) considerando due distinti stati elastici e le corrispondenti forze esterne :
(5.8) Notare che quando, come in questo caso, qualche asserzione viene dimostrata cessa di essere un principio ed assume più propriamente la dizione di “teorema”.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 32
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
{ } { }{ } { }u b f
u b f
, , ,
, , ,
ε σ
ε σ1 1 1 1 1
se α βe sono due scalari, allora:
{ }α β α β α βu u+ + +1 1 1, ε ε , σ σ
è uno stato elastico a cui corrispondono le forze esterne { }α β α βb b f f+ +1 1,
come si verifica facilmente attraverso la sostituzione delle grandezze nelle equazioni di equilibrio, congruenza e legame.
E’ importante notare che il principio di sovrapposizione degli effetti non è applicabile a qualsiasi grandezza; occorre fare attenzione, ad esempio, nel ricorrervi quando si opera con l’energia di deformazione. Infatti, ricordando l’espressione (5.27) della densità di energia elastica, possiamo definire l’energia elastica totale posseduta dal corpo che occupa il volume V mediante
{ } ∫∫ =Φ=V
khjikhjiV
jiji dVCdVU εεεε21][ (5.48)
Se ora la deformazione jiε è ottenuta come somma di due deformazioni jiji εε ~+ , talchè si possa porre jijiji εεε ~+= , il lavoro di deformazione alla fine risulta
{ } =++=+ ∫V
khkhjijikhjijiji dVCU )~()~(21~ εεεεεε
++= ∫∫V
khjikhjiV
khjikhji dVCdVC εεεε ~~21
21
+ +∫ ∫12
12C dV C dVi j h k i j h k
Vi j h k i j h k
V
~ ~ε ε ε ε
che, sfruttando la simmetria del tensore C , diventa:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 33
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
{ } [ ] [ ] ∫++=+V
khjikhjijijijiji dVCUUU εεεεεε ~~~ (5.49)
La relazione così trovata prova che per l’energia elastica { }ijU ε non vale la sovrapposizione degli effetti.
Se si raddoppia la deformazione non è detto quindi che raddoppi anche l’energia di deformazione: occorre tenere conto del “termine di accoppiamento tra i due stati di deformazione” che è proprio l’integrale che compare nella (5.49).
Esiste solo un caso in cui vale il principio di sovrapposizione degli effetti per l’energia elastica e cioè quello in cui gli stati di deformazione sono tra loro energeticamente ortogonali come accade, ad esempio, quando i due tensori della deformazione sono uno deviatorico e l’altro sferico. In tal caso infatti il termine di accoppiamento è nullo.
In conclusione possiamo enunciare il principio di sovrapposizione degli effetti nel
seguente modo: applicando contemporaneamente ad uno corpo elastico lineare più sistemi di forze, si producono spostamenti, deformazioni e tensioni uguali alla somma di quelle prodotte separatamente da ciascun sistema di forze o anche, in altre parole, ad una combinazione lineare di stati elastici si associa una combinazione lineare delle corrispondenti forze.
5.5.2 Teorema di Clapeyron (o del lavoro di deformazione)
Abbiamo visto che il lavoro interno per unità di volume ( )ϕ εs , che abbiamo chiamato
lavoro specifico, in un processo di deformazione ( )ε ε αi j i j= con α α α0 1≤ ≤ , è dato dalla (5.20):
( )ϕ σεα
αε α
αs
dd
di ji j= ∫
0
1
Partendo da questa espressione è facile esprimere il lavoro di deformazione Ld che si compie quando il solido di volume V viene sottoposto ad un processo di deformazione conseguente all’applicazione di forze esterne [ ]b fj j, mediante:
( )L s dVdV
= ∫ϕ ε
Ammettendo l’esistenza di una densità di energia di deformazione ( )Φ ε i j , possiamo
scrivere (5.23):
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 34
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
( ) ( )[ ]L dVd i j i jV
= −∫ Φ Φε ε1 0
essendo ( ) ( )ε ε α ε ε αi j i j i j i j1
10
0= =, .
Supponendo ora che il processo di deformazione abbia inizio in ε i j0 0= (stato
indeformato) e si concluda quando ε εi j i j1 = (deformazione finale) e che sia ( )Φ 0 0= , la
precedente espressione del lavoro di deformazione Ld diviene:
( ) { }L dV C dV dV Ud i jV
i j k l i j k lV
i j i jV
i j= = = =∫ ∫ ∫Φ ε ε ε σ ε ε12
12
(a)
In queste uguaglianze si è fatto uso delle (5.48) e (5.30). Ld rappresenta quindi il lavoro necessario per deformare un solido elastico dallo stato
naturale ( )ε σi j i j0 0 0= = ad un certo stato finale individuato dal tensore di deformazione
ε i j . Questo lavoro è ovviamente compiuto dalle forze esterne [ ]b fj j, applicate al solido. Avendo implicitamente supposto che il processo di deformazione a cui è sottoposto il
solido è puramente meccanico, ossia che tutto il lavoro delle forze esterne Lf si trasformi in energia di deformazione, possiamo scrivere il bilancio energetico:
L Lf d= b)
Questo bilancio presuppone che le forze esterne siano applicate “staticamente” ossia in maniera tale che si possano escludere effetti dinamici che, a causa degli inevitabili smorzamenti, provocherebbero una dissipazione di energia.
Consideriamo ora un corpo elastico che occupi il volume V , in equilibrio sotto le b fj j, . Siano ui ij ij, ,ε σ gli spostamenti, le deformazioni e le tensioni corrispondenti alla soluzione dell’equilibrio elastico. Proprio con riferimento al sistema di forze e tensioni certamente equilibrato:
jijj fb σ,,
ed al sistema di spostamenti e deformazioni certamente congruente:
ijiu ε,
si scrive l’equazione dei lavori virtuali:
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 35
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
b u dV f u dA dVj jV
j jV
i j i jV
∫ ∫ ∫+ =∂
σ ε
Il secondo membro esprime, per la a), il doppio del lavoro di deformazione Ld , e per la b) possiamo scrivere:
+=== ∫∫∫
Vjj
Vjj
Vjijidf dAufdVubdVLL
∂
εσ21
21
essendo Lf il lavoro delle forze esterne. Risulta così immediata l’enunciazione del teorema di Clapeyron (Paolo Emilio) (1852):
L b u dV f u dAf j jV
j jV
= +
∫ ∫12 ∂
(5.50)
“il lavoro compiuto dal sistema di forze applicate ad un corpo elastico lineare è uguale alla metà del lavoro che le forze stesse compirebbero se agissero fin dall’inizio con la loro intensità finale”.
È ovvio che il risultato acquisito è riferito ai solidi elastici dotati di energia di deformazione (solidi iperelastici).
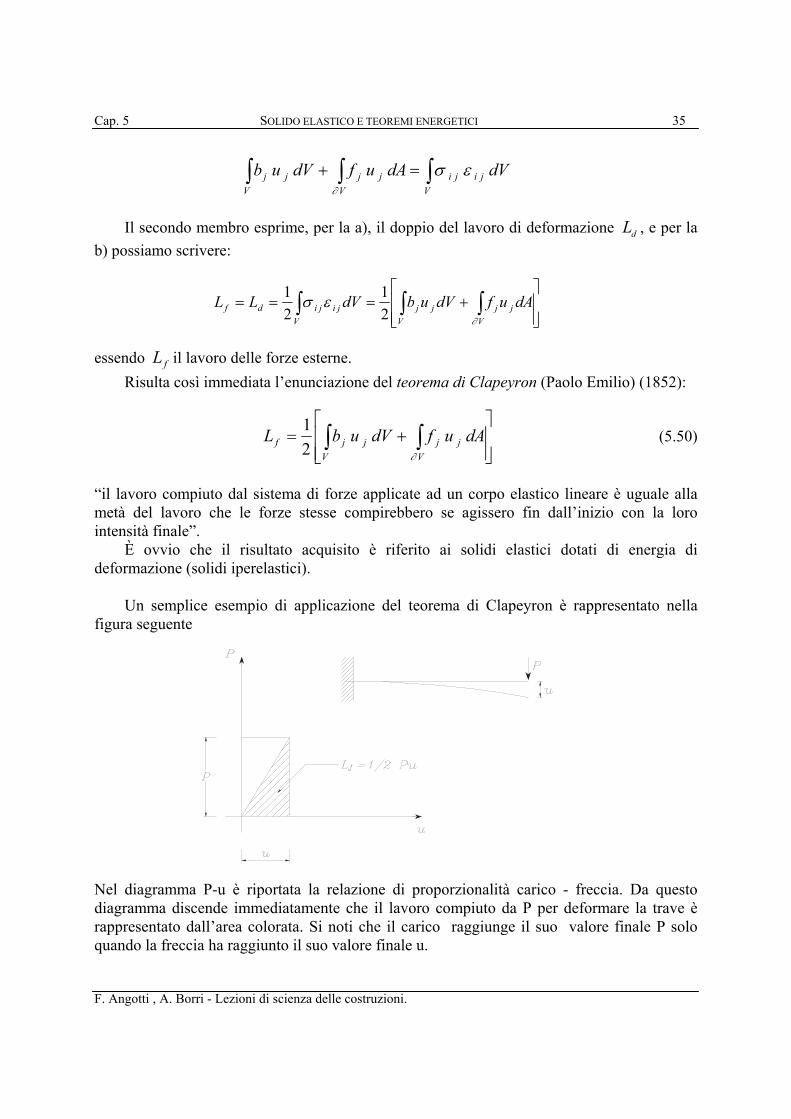
Un semplice esempio di applicazione del teorema di Clapeyron è rappresentato nella
figura seguente
Nel diagramma P-u è riportata la relazione di proporzionalità carico - freccia. Da questo diagramma discende immediatamente che il lavoro compiuto da P per deformare la trave è rappresentato dall’area colorata. Si noti che il carico raggiunge il suo valore finale P solo quando la freccia ha raggiunto il suo valore finale u.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 36
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
5.5.3 Teorema di Kirchhoff (o teorema di unicità) (1859)
La dimostrazione di questo teorema viene condotta per assurdo. Supponiamo infatti che alle medesime forze esterne b fj j, $ assegnate rispettivamente in V e su ∂ ′′V ed ai medesimi vincoli cinematici $u j assegnati su ∂ ′V corrispondano due distinte soluzioni.
[ , , ] [ , , ]u u1 1 1 2 2 2ε σ ε σ
allora le funzioni:
u u u= −
= −
= −
1 2
1 2
1 2
ε ε ε
σ σ σ
a)
differenza tra le due soluzioni , per il principio di sovrapposizione degli effetti, devono essere la soluzione corrispondente a dati omogenei, ossia:
$
$
u 0
f 0b 0
= ′
= ′′=
su V
su Vin V
∂
∂ b)
Il teorema di Clapeyron (5.50), applicato alla soluzione differenza a) e b) fornisce:
[ ] 0210 ===⇒= ∫
Vkhjikhjijidf dVCULL εεε
e cioè si annulla il lavoro di deformazione: l’unico caso che permette tale circostanza, essendo la densità di energia per ipotesi, una funzione quadratica definita positiva, è la condizione ε i j = 0 , vale a dire:
ε ε ε ε ε= − = ⇒ =1 2 1 20
da cui discende immediatamente:
21 σσ =

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 37
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Per quanto attiene agli spostamenti, è noto che essi sono determinati a meno di eventuali moti rigidi del solido ; ovverosia alla deformazione ε ε1 2= corrisponderà il campo di spostamenti:
u u1 20= + u
essendo u0 un campo di spostamenti rigidi ( )ε 0 0= . Se il solido è sufficientemente
vincolato su ∂ ′V in maniera tale da impedire moti rigidi, avremo u0 0= e quindi:
u u1 2=
Resta così provata l’unicità della soluzione del problema misto elastostatico.
5.5.4 Teorema di Betti (o teorema di reciprocità)
Sia [ , , ]′ ′ ′u j i j i jε σ la soluzione del problema elastostatico, in un solido iperelastico di
volume V, corrispondente al sistema di forze equilibrate [ , ]′ ′f bj j e [ , , ]′′ ′′ ′′u j i j i jε σ quella
relativa a [ , ]′′ ′′f bj j anch’esse equilibrate. Il principio dei lavori virtuali scritto associando al primo sistema di forze e tensioni il sistema di spostamenti e deformazioni del secondo è:
′ ′′ + ′ ′′ = ′ ′′∫ ∫ ∫b u dV f u dA dVj jV
j jV
i j i jV∂
σ ε a)
mentre se si associa al secondo sistema di forze e tensioni il sistema di spostamenti e deformazioni del primo si ha
′′ ′ + ′′ ′ = ′′ ′∫ ∫ ∫b u dV f u dA dVj jV
j jV
i j i jV∂
σ ε b)
entrambi validi in quanto i due sistemi di forze e i due di spostamento rispettano equilibrio e congruenza per essere soluzioni del problema elastostatico.
La simmetria del tensore C assicura che
[ ] [ ]′ ′′ = ′ ′′ = ′ ′′ = ′′ ′σ ε ε ε ε ε σ εi j i j i j i jC C
e quindi sono uguali i secondi membri da a) e b) e per conseguenza dovranno esserlo anche i primi:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 38
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
′ ′′ + ′ ′′ = ′′ ′ + ′′ ′∫ ∫ ∫ ∫b u dV f u dA b u dV f u dAj jV
j jV
j jV
j jV∂ ∂
(5.51)
Questa equazione esprime il teorema di Betti (1872), noto anche come I° Teorema di Reciprocità per cui il lavoro che un sistema di forze equilibrate (a) compie per effetto degli spostamenti causati da un secondo sistema di forze anch’esse equilibrate (b), coincide con il lavoro del sistema di forze (b) per effetto degli spostamenti dovuti al sistema di forze (a), cioè:
L La b b a=
I due termini della (5.51) prendono anche il nome di lavoro mutuo (o indiretto). Se supponiamo di applicare il sistema di forze (b) quando il solido ha già raggiunto
l’equilibrio sotto il sistema di forze (a), è evidente che il lavoro delle forze (a) è proprio espresso dal primo membro della (5.51) in quanto queste hanno già raggiunto la loro intensità finale quando si producono gli spostamenti corrispondenti al secondo sistema di forze. Si può quindi enunciare il teorema di Betti nel seguente modo : “il lavoro eseguito dalle forze (a) durante l’applicazione delle forze (b) è uguale al lavoro che le forze (b) compiono durante l’applicazione delle forze (a)”.
Vale la pena di annotare che le deformazioni prodotte dalle forze esterne si sovrappongono a quelle eventuali proprie dello stato naturale (coazioni) senza ricevere alcuna influenza e pertanto il teorema di Betti mantiene la sua validità anche in presenza di coazioni.
5.5.5 Teorema di Maxwell
Nel caso particolare in cui i due sistemi di forze (a) e (b) considerati nel paragrafo precedente sono ridotti a due sole forze concentrate F a e Fb applicate rispettivamente nei punti A e B, il teorema di Betti si riduce a:
aBbbAa uFuF =
in cui con u Ab e u B a si sono indicati rispettivamente lo spostamento di A prodotto da Fb
lungo la direzione di F a e lo spostamento di B prodotto da F a lungo la direzione di Fb (Fig. 5.4).

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 39
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fig. 5.4
Assumendo 1== ba FF ed indicando con α e β le direzioni di F a e Fb si ha allora
u uAb B a= (5.52)
che rappresenta il teorema di Maxwell (1864): "lo spostamento di un punto A, valutato in una direzione arbitraria α , provocato da una forza unitaria agente in un punto B secondo una qualsiasi direzione β , è uguale allo spostamento di B, valutato nella direzione β , provocato da una forza unitaria agente in A secondo la direzione α ".
Applicando il teorema di Maxwell ad una trave in cui A e B siano due punti qualsiasi del suo asse (Fig. 5.4) ed α e β coincidono con j versore dell’asse y, si ha :
u u u uAb B a C a A c= =;
Nella fig. 5.5 sono indicati gli assi della trave nella configurazione iniziale rettilinea e nella configurazione deformata, nota come linea elastica.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 40
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Fig. 5.5
E’ quindi immediata conseguenza che gli spostamenti prodotti da una forza unitaria viaggiante ( )F Fb c= =1 1, ,..... sulla trave in una determinata sezione A, si possono leggere direttamente sulla linea elastica prodotta dalla Fa = 1, ossia da una forza unitaria applicata proprio nella sezione A.
Per tale motivo la linea elastica in a) coincide con la linea di influenza(5.9) dello spostamento uA .
E’ facile dimostrare che il teorema di Maxwell continua a valere se si considerano coppie
e rotazioni in luogo di forze e spostamenti.
5.6 PRINCIPI VARIAZIONALI 5.6.1 Principio di stazionarietà per l’energia potenziale
In questo e nel successivo punto si vuole caratterizzare, con due classici principi di minimo, la soluzione dei problemi di equilibrio elastico lineare impostati nel punto 5.4. in forma differenziale. Si tratta del principio della minima energia potenziale e della minima energia complementare. Attraverso di essi si apre la strada per la ricerca di soluzioni numeriche dei problemi al contorno misti dell’elastostatica.
Incominciamo col dimostrare due principi di stazionarietà. Sia dato un solido elastico lineare con tensore elasticità C simmetrico ed assegnate:
− le forze di volume ( )b b x= nel volume V,
(5.9) Se la trave è percorsa da un carico concentrato unitario verticale, si chiama linea di influenza di un determinato effetto (ad es. lo spostamento verticale) un diagramma tale che la sua ordinata letta sotto le varie posizioni del carico misuri il valore dell’effetto provocato dal carico unitario viaggiante.
Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 41
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
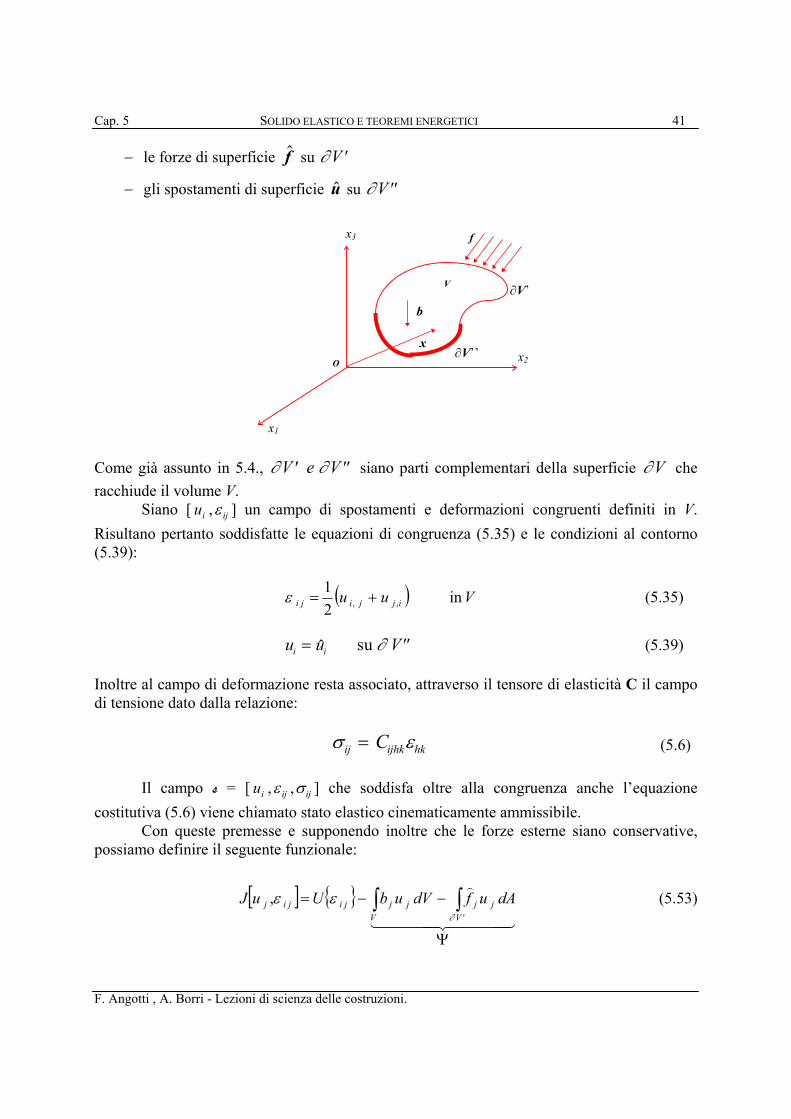
− le forze di superficie $f su ∂ ′V
− gli spostamenti di superficie $u su ∂ ′′V
x1
x3
b
V
∂V’’
∂V’
x2O
f
x
Come già assunto in 5.4., ∂ ∂′ ′′V e V siano parti complementari della superficie ∂ V che racchiude il volume V.
Siano [ ui ,ε ij ] un campo di spostamenti e deformazioni congruenti definiti in V. Risultano pertanto soddisfatte le equazioni di congruenza (5.35) e le condizioni al contorno (5.39):
( ) Vuu ijjiji in 21
,, +=ε (5.35)
u u Vi i= ′′$ su ∂ (5.39)
Inoltre al campo di deformazione resta associato, attraverso il tensore di elasticità C il campo di tensione dato dalla relazione:
σ εij ijhk hkC= (5.6) Il campo s = [ ui ,ε ij ,σij ] che soddisfa oltre alla congruenza anche l’equazione
costitutiva (5.6) viene chiamato stato elastico cinematicamente ammissibile. Con queste premesse e supponendo inoltre che le forze esterne siano conservative,
possiamo definire il seguente funzionale:
[ ] { }4444 34444 21
)
Ψ
−−= ∫∫'
,V
jjV
jjjijij dAufdVubUuJ∂
εε (5.53)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 42
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
dove { }U ijε e Ψ sono rispettivamente l’energia di deformazione ed il potenziale dei
carichi(5.10). Il funzionale [ ]J ui ij,ε prende il nome di “energia potenziale” e, come si evince dalla
definizione (5.53), è espresso come somma dell’energia di deformazione e del potenziale delle forze esterne, supposte conservative.
La variazione prima di [ ]J ui ij,ε può essere espressa mediante :
[ ] [ ] [ ]δ ε δ ε δε εJ u J u u J uj i j j i i j i j j i j, , ,= + + − (5.54)
dove δui e δε ij sono variazioni del campo congruente [ ui ,ε ij ] sul quale è definito il funzionale J e perciò geometricamente ammissibili nel senso che sono soddisfatte le relazioni:
( ) Vuu ijjiji in 21
,, δδδε += (a)
δ δ ∂u u Vi i= = ′′$ 0 su (b) Sviluppando l’espressione di δ J si ottiene:
[ ] { } ( ) ( ) −+−+−+= ∫∫'
,V
jjjV
jjjjijijij dAuufdVuubUuJ∂
δδδεεεδ)
{ } ∫∫ ++−'V
jjV
jjji dAufdVubU∂
ε)
(5.55)
In virtù della (5.49), per un solido elastico lineare di Green, si può scrivere:
{ } { } { }U U U C dVij ij ij ij ijhk hk ijV
ε δε ε δε ε δε+ = + + ∫
(5.10) Anziché al funzionale J ci si può riferire alla “energia potenziale totale” :
[ ] { }EC u U b u dV f u dA f u dAj i j i j j jV
j jV
j jV
, ε ε∂ ∂
= − − −∫ ∫ ∫)
1 24444 34444
)
1 24 342 1
Infatti per la (b) è immediato verificare che δ δE JC = .

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 43
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
e, assumendo di poter trascurare il termine { }U ijδ ε , in quanto infinitesimo del secondo ordine e, posto:
σ εi j i j hk hkjC=
si perviene a:
{ } { }U U dVi j i j i j i j i j
V
ε δ ε ε σ δε+ = + ∫
Sostituendo l’espressione così ottenuta nella (5.55), sviluppando e semplificando le operazioni ivi contenute si giunge a:
[ ] ∫∫∫ −−='
,V
jjV
jjV
jijijij dAufdVubdVuJ∂
δδδεσεδ)
(5.56)
Appare così evidente che la condizione di stazionarietà per l’energia potenziale [ ]J ui ij,ε :
[ ]δ εJ u j i j, = 0 (5.57)
coincide con il principio dei lavori virtuali:
∫∫∫ +='V
jjV
jjV
jiji dAufdVubdV∂
δδδεσ)
scritto per il campo di spostamenti e deformazioni δui , δε ij , che, per le ipotesi fatte è certamente congruente. Segue pertanto che dovrà risultare verificato l’equilibrio, ossia:
Vb jiji in 0, =+σ
Vfn jiji ′= ∂σ su ˆ

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 44
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Si può quindi affermare che nella classe delle funzioni congruenti (5.35) e (5.39) il funzionale energia potenziale [ ]J ui ij,ε risulta stazionario in corrispondenza della soluzione
(primo principio di stazionarietà)(5.11).
5.6.2 Principio di stazionarietà per l’energia complementare
Il ragionamento seguito fino a questo punto a partire dalla definizione del funzionale J per un campo di spostamenti e deformazioni congruente, può, parallelamente, condursi per un funzionale K definito su campi di forze e tensioni equilibrati.
Sia dato un solido elastico lineare con tensore elasticità C simmetrico ed assegnate:
− le forze di volume ( )b b x= nel volume V,
− le forze di superficie $f su ∂ ′V
− gli spostamenti di superficie $u su ∂ ′′V
Siano [σ ij , bi ,)f j ] un campo forze e tensioni equilibrato per modo che risultano
soddisfatte le equazioni di equilibrio (5.37) e le condizioni al contorno (5.38): Vb jiji in 0, =+σ (a)
Vfn jiji ′= ∂σ su ˆ (b)
Possiamo definire il funzionale “energia complementare” :
[ ] { } ∫−=''
,V
jjjikjji dAufUfK∂
σσ ) (5.58)
dove le fj date da
σ i j i jn f= su∂ ′′V (c)
sono le reazioni vincolari (5.12). (5.11) Questo risultato notevole si dimostra anche per un solido elastico non lineare (5.12) Anziché al funzionale K (5.58) ci si può riferire alla “energia complementare totale” :
[ ] { }E f U f u dA bu dV f u dAK i j j k i j j jV
i i i iσ σ∂
, = − − −∫ ∫∫) )
1
Infatti per le (c) e (d) è immediato verificare che δ δE KK =

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 45
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
La variazione prima di [ ]K fij iσ , può essere espressa mediante:
[ ] [ ] [ ]δ σ σ δσ δ σK f K f f K fij i ij ij i i ij i, , ,= + + −
dove [δσ δij if, ] sono variazioni del campo equilibrato [σ ij , bi ,)f j ] sul quale è definito il
funzionale K e perciò staticamente ammissibili, ovvero equilibrate nel senso che sono soddisfatte le relazioni:
δ (σ ij ),i = 0 in V (δ bi = 0 ) (d)
δ fi = δ)f j = 0 su ∂ ′′V (e)
È facile provare che, sviluppando l’espressione di δ K si perviene a:
[ ] { } [ ] =−Φ=−= ∫∫∫''''
,V
jjV
jiV
jjjikjji dAufdVdAufUfK∂∂
δσδδσδσδ )))
∫∫∫∫ −=−Φ
='''' V
jjV
jijiV
jjV ji
dAufdVdAufdV∂∂
δδσεδσ∂
∂ )))
Appare così evidente che la condizione di stazionarietà per l’energia complementare
[ ]K fij iσ , :
[ ]δ σK fi j j, = 0 (f)
coincide con il principio dei lavori virtuali:
0''
=− ∫∫V
jjV
jiji dAufdV∂
δδσε )
scritto per il campo di forze e tensioni [δσ δij if, ] che, per le ipotesi fatte, è certamente equilibrato. Segue pertanto che dovrà risultare verificata la congruenza, ossia:
( ) Vuu ijjiji in 21
,, +=ε

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 46
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
u u Vi i= ′′$ su ∂
Si può quindi affermare che “nella classe delle forze e tensioni equilibrate il funzionale K risulta stazionario in corrispondenza della soluzione”.
5.7. PRINCIPI DI MINIMO 5.7.1. Principio della minima energia potenziale
Abbiamo visto che in corrispondenza di uno stato elastico [ ijijiu σε ,, ] è possibile definire il funzionale energia potenziale: [ ]ijjuJ ε, = { }ijU ε - ∫
Vjj dVub - dAuf
Vjj∫
∂ '
ˆ (5.53)
purché lo stato α = [ ijijiu σε ,, ] sia cinematicamente ammissibile. Supporremo poi che il tensore di elasticità ijhkC oltre ad essere simmetrico sia anche definito positivo.
Detto A l'insieme di tutti gli stati cinematicamente ammissibili si può dimostrare il seguente teorema: Principio della minima energia potenziale – Se α ∈ A è soluzione del problema misto enunciato in (5.4), allora:
[ ]αJ = min
ovverosia:
[ ]αJ < [ ]°αJ per ∀ α °∈ A dove l'uguaglianza vale solo se α = α ° a meno di moti rigidi. Dimostrazione: Per lo stato cinematicamente ammissibile α ’ = α ° - α è immediato verificare che:
)(21
,,0
ijjiijijij uu ′+′=−=′ εεε in V (a)
hkijhkijijij C εσσσ ′=−=′ 0 (b)
ouuu iii =−=′ )) su ∂ V” (c)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 47
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Inoltre in virtù della (5.49) si può scrivere :
{ }0ijU ε = { }ijijU εε +′ = { }ijU ε ′ + { }ijU ε + ∫ ′
Vhkijhkij dVC εε
e quindi
{ }0ijU ε - { }ijU ε = { }ijU ε ′ + ∫ ′
Vijij dVεσ
e di conseguenza, per il funzionale energia potenziale (5.53) si può parimenti scrivere
[ ]°αJ - [ ]αJ = { }ijU ε ′ + ∫ ′V
ijij dVεσ - ∫ ′V
ii dVub - dAufV
ii∫∂
′'
ˆ (d)
Per le (a) e (c) i campi [ ijiu ε ′′, ] sono congruenti, mentre, se ijσ è soluzione del problema
misto formerà insieme con bi ed if)
un sistema di forze e tensioni equilibrate; risulta in tal
caso verificata l'equazione dei lavori virtuali per i campi [ ijiu ε ′′, ] e [ ijσ , bi , if)
] :
∫ ′V
ijij dVεσ = ∫ ′V
ii dVub - dAufV
ii∫∂
′'
ˆ (e)
la (d) di conseguenza si riduce a:
[ ]°αJ - [ ]αJ = { }ijU ε ′ = ∫ ′′V
hkijijhk dVC εε21 > 0 (f)
dove la disuguaglianza segue immediatamente dall'ipotesi che il tensore di elasticità Cijhk sia definito positivo. Dalla (f) segue immediatamente che
[ ] [ ]oJJ αα ≤ ossi a [ ]αJ = min
dove l'uguaglianza vale solo quando ijε ′ = 0. Possiamo dire che di tutti gli spostamenti iu che soddisfano le assegnate condizioni al contorno quelli che soddisfano anche le equazioni di equilibrio implicano un minimo assoluto per l'energia potenziale; in altre parole possiamo anche dire che la differenza
[ ]ijjuJ ε, = { }ijU ε - ∫V
ii dVub - dAufV
ii∫∂ '
ˆ

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 48
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
tra l'energia di deformazione ed il lavoro fatto dalle forze esterne (di volume e di superficie) assegnate assume, in corrispondenza della soluzione, il valore più piccolo di quello associato ad un qualunque stato cinematicamente ammissibile. Come corollario del principio di minimo ora dimostrato scende il teorema di unicità già dimostrato al punto 5.5.3.(Teorema di Kirchhoff). Infatti, se α 1 e α 2 sono due soluzioni, il principio ci assicura che:
[ ]1αJ < [ ]2αJ e [ ]1αJ > [ ]2αJ
di conseguenza dovrà risultare:
[ ]1αJ = [ ]2αJ
potendo così concludere che α 1 e α 2 differiscono al più per un moto rigido.
5.7.2 Principio della Minima Energia Complementare
Si dimostra ora un teorema di minimo basato sui campi di tensione staticamente ammissibili, ossia i campi ijσ che soddisfano l’equilibrio e le equazioni ai limiti:
Vb jiji in 0, =+σ
Vfn jiji ′= ∂σ su ˆ
Sia A l’insieme di tutti i campi di tensione staticamente ammissibili e definiamo su A il
funzionale “energia complementare” :
[ ] { } ∫−=''V
jiijjikji dAunUK∂
σσσ ) (5.58)
già introdotto nel 5.6.2. Si può dimostrare il seguente teorema. Principio della minima energia complementare - Se ijσ ∈ A è un campo di tensione soluzione del problema misto enunciato in 5.4., allora:
[ ] [ ] [ ] AKKK ijijijji ∈°∀°≤= σσσσ perossiamin
dove l’uguaglianza vale solo se ijij °= σσ .
Dimostrazione.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 49
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Sia [ ijijiu σε ,, ] la soluzione del problema misto e sia ijσ~ un qualsiasi campo di tensione appartenente ad A . È immediato verificare che, per il campo:
ijijij σσσ −°=′
risulta :
0, =′ ijiσ in V (a)
0=′ iji nσ su ∂ ′V (b)
fniji ′=′σ su ∂ ′′V (c) È facile provare che anche per l’energia elastica complementare, la cui densità è stata definita con la (5.28):
{ } dVKU hlijijhlV
ijK σσσ ∫=21 (5.59)
sussiste la relazione analoga alla (5.49):
{ } { } { } ∫ ′+′=−°V
ijijijKijKijK dVUUU εσσσσ (5.60)
e, di conseguenza:
{ } { } { } ∫∫′
′−′+′=−°V
jiijV
ijijijKijij dAundVUKK∂
σεσσσσ ˆ (d)
Poiché il campo [ jij f ′′ ,σ ], in virtù delle (a) e (c) è equilibrato, mentre il campo di spostamenti e deformazioni iu ed ijε in quanto supposti effettivi sono certamente congruenti, risulta verificata l’equazione dei lavori virtuali: ∫ ∫
′
′=′V V
jiijijij dAundV∂
σεσ ˆ (e)
per cui la (d) si riduce a:
{ } { } { } 021
≥′′=′=−° ∫V
hkijijhkijKijij dVKUKK σσσσσ (5.61)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 50
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
dove la disuguaglianza segue dall’ipotesi che l’inverso del tensore di elasticità ijhkK sia definito positivo. Dalla (5.61) segue immediatamente che:
{ } { } { } minossia =≥° ijijij KKK σσσ , dove l’uguaglianza vale solo quando 0=′ijσ ossia quando ijij σσ =° . (c.v.d.)
Possiamo quindi dire che di tutti i campi ijσ staticamente ammissibili, quello che risolve il problema elastostatico misto rende minima la differenza tra l’energia elastica complementare ed il lavoro compiuto dalle reazioni vincolari per gli spostamenti assegnati.
Nel caso in cui gli spostamenti iu imposti su V ′∂ sono nulli (vincoli perfetti),
l’espressione del funzionale “energia complementare” (5.58) si riduce a:
[ ] { }jikji UK σσ =
e di conseguenza il principio della minima energia complementare equivale ad un priuncipio di minimo per l’energia elastica complementare (5.59), ovvero, ricordando la (5.29), dell’energia potenziale elastica { }UC i jε . Sotto questa forma esso prende il nome di
Teorema di Menabrea e si può enunciare nel seguente modo: tra tutti i campi ijσ staticamente ammissibili, quello che risolve il problema misto, in presenza di vincoli perfetti ( iu = 0 su ∂ ′V ), rende minima l’energia elastica complementare. 5.7.3 Teorema di Castigliano
Se applichiamo i risultati ottenuti nei due paragrafi precedenti al caso in cui le forze esterne si riducano a sole forze concentrate Pk (caso tipico delle travi), il funzionale [ ]jiiuJ ε, (5.53) diviene:
[ ] { } kk
n
kjijii uPUuJ ∑
=
−=1
, εε (5.62)

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 51
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
Se inoltre è possibile esprimere la (5.62) in termini di soli spostamenti, ossia se è
possibile porre:
[ ] { } kk
n
kkk uPuUuJ ∑
=
−=1
(5.63)
il primo principio di stazionarietà (5.57) diviene:
011
=− ∑∑==
kk
n
kk
k
n
k
uPuuU δδ
∂∂ (5.64)
che si può anche scrivere:
∂∂
δUu
P uk
k
K
n
k−
=
=∑
1
0
Per l’arbitrarietà di δ u k (purché congruenti) devono risultare nulli tutti i coefficienti, e pertanto deve essere:
∂∂
Uu
P i ni
i= = 1 2, , ..., (5.65)
che rappresenta il primo teorema di Castigliano.
Sempre con riferimento al caso in cui le forze esterne si riducano a sole forze concentrate
Pk il funzionale energia complementare [ ]jiK σ (5.58) diviene:

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 52
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
[ ] { } kk
n
kjikji uPUK ∑
=
−=1
σσ (5.66)
da cui, se è possibile esprimere { }U k i jσ in funzione dei soli carichi applicati, si perviene a:
[ ] { } kk
n
kiki uPPUPK ∑
=
−=1
(5.67)
e, da questa, per il secondo principio di stazionarietà [v. 5.6.2. (f)], si perviene a:
00111
=
−⇒=− ∑∑∑
===
n
hhh
h
kkk
n
ki
i
kn
iPu
PUPuP
PU δ
∂∂δδ
∂∂ (5.68)
In questo caso l‘arbitrarietà di δ Ph , purché equilibrato, porta alla condizione:
∂∂UP
u i nk
ii= = 1 2, , ..., (5.69)
che esprime il secondo teorema di Castigliano (o teorema di Castigliano)(5.13) . L‘utilità di questi due teoremi può essere evidenziata facendo ricorso a un esempio molto
semplice ma che può essere facilmente esteso a casi più complessi. Si consideri una molla di costante elastica k per cui sia valida l’equazione costitutiva:
P = k u
dove u è lo spostamento provocato dall’applicazione del carico concentrato P.
Per il teorema di Clapeyron, l’energia di deformazione in termini di spostamenti u vale:
(5.13) I due teoremi sono ancora validi se, in luogo di spostamenti e forze, si considerano rotazioni e momenti.

Cap. 5 SOLIDO ELASTICO E TEOREMI ENERGETICI 53
F. Angotti , A. Borri - Lezioni di scienza delle costruzioni.
{ } 2
21
21 ukuPuU ==
ed in termini di forze P vale:
{ }k
PuPPU k
2
21
21
==
Dal primo teorema di Castigliano si trova immediatamente che:
PkuuU
==∂∂
Dal secondo teorema di Castigliano si trova immediatamente che:
ukP
PU k ==
∂∂
Infine può essere interessante notare l’analogia tra il primo ed il secondo teorema di Castigliano e le espressioni (5.22) e (5.26), rispettivamente, delle tensioni e delle deformazioni in termini di energia di deformazione e di energia complementare di deformazione:
ji
jiji
ji σ∂
∂εε∂
∂σ Φ=
Φ=
)