2 11500-CHAPITRE-5 5.qxd:11500-CHAPITRE-5 5.qxd 13-11 … · 5.1 Generalità Una partenza-motore...
38
96 5 - Partenze-motore 5 capitolo Partenze-motore Presentazione: - Funzioni necessarie alla realizzazione di una partenza-motore - Tabella di scelta delle funzioni delle partenze-motore e dei relativi prodotti
-
Upload
trinhthien -
Category
Documents
-
view
215 -
download
0
Transcript of 2 11500-CHAPITRE-5 5.qxd:11500-CHAPITRE-5 5.qxd 13-11 … · 5.1 Generalità Una partenza-motore...
96
5 - Partenze-motore
5capitoloPartenze-motorePresentazione:- Funzioni necessarie alla realizzazione
di una partenza-motore- Tabella di scelta delle funzioni
delle partenze-motore e dei relativi prodotti
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 96
5. Partenze-motoreSommario
97
1
2
3
4
5
6
7
8
9
10
11
12
M
Schneider Electric
b 5.1 Generalità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 98
b 5.2 Le funzioni base delle partenze-motore . . . . . . . . . . . . . . . . . pagina 98
b 5.3 Una funzione complementare: la comunicazione. . . . . . . . . . pagina 101
b 5.4 Partenze-motore e coordinamento . . . . . . . . . . . . . . . . . . . . . pagina 102
b 5.5 I variatori di velocità. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 105
b 5.6 Composizione, componenti degli avviatori
e variatori elettronici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 110
b 5.7 Variatore-regolatore per motore a corrente continua . . . . . . pagina 114
b 5.8 Convertitore di frequenza per motore asincrono . . . . . . . . . . pagina 116
b 5.9 Variatore di tensione per motore asincrono . . . . . . . . . . . . . . pagina 123
b 5.10 Moto-variatori sincroni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 125
b 5.11 Moto-variatori passo-passo . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 126
b 5.12 Le funzioni complementari dei variatori di velocità . . . . . . . . pagina 127
b 5.13 I variatori di velocità e il bilancio energetico. . . . . . . . . . . . . . pagina 129
b 5.14 I variatori di velocità e il risparmio energetico
e di manutenzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . pagina 131
b 5.15 Tabella di scelta delle partenze-motore. . . . . . . . . . . . . . . . . . pagina 132
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 97
5.1 Generalità
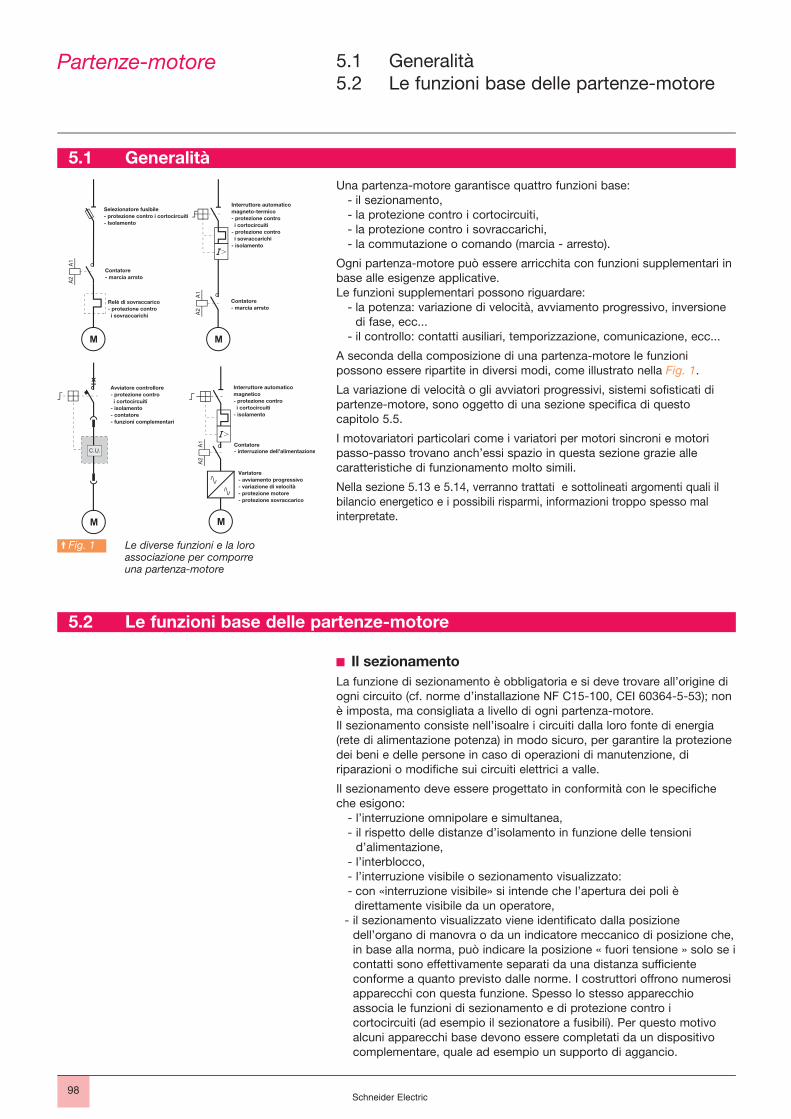
Una partenza-motore garantisce quattro funzioni base:- il sezionamento,- la protezione contro i cortocircuiti,- la protezione contro i sovraccarichi,- la commutazione o comando (marcia - arresto).
Ogni partenza-motore può essere arricchita con funzioni supplementari inbase alle esigenze applicative. Le funzioni supplementari possono riguardare:
- la potenza: variazione di velocità, avviamento progressivo, inversionedi fase, ecc...
- il controllo: contatti ausiliari, temporizzazione, comunicazione, ecc...
A seconda della composizione di una partenza-motore le funzionipossono essere ripartite in diversi modi, come illustrato nella Fig. 1.
La variazione di velocità o gli avviatori progressivi, sistemi sofisticati dipartenze-motore, sono oggetto di una sezione specifica di questocapitolo 5.5.
I motovariatori particolari come i variatori per motori sincroni e motoripasso-passo trovano anch’essi spazio in questa sezione grazie allecaratteristiche di funzionamento molto simili.
Nella sezione 5.13 e 5.14, verranno trattati e sottolineati argomenti quali ilbilancio energetico e i possibili risparmi, informazioni troppo spesso malinterpretate.
5.2 Le funzioni base delle partenze-motore
b Il sezionamento La funzione di sezionamento è obbligatoria e si deve trovare all’origine diogni circuito (cf. norme d’installazione NF C15-100, CEI 60364-5-53); nonè imposta, ma consigliata a livello di ogni partenza-motore.Il sezionamento consiste nell’isoalre i circuiti dalla loro fonte di energia(rete di alimentazione potenza) in modo sicuro, per garantire la protezionedei beni e delle persone in caso di operazioni di manutenzione, diriparazioni o modifiche sui circuiti elettrici a valle.
Il sezionamento deve essere progettato in conformità con le specificheche esigono:
- l’interruzione omnipolare e simultanea, - il rispetto delle distanze d’isolamento in funzione delle tensioni
d’alimentazione,- l’interblocco,- l’interruzione visibile o sezionamento visualizzato:- con «interruzione visibile» si intende che l’apertura dei poli è
direttamente visibile da un operatore,- il sezionamento visualizzato viene identificato dalla posizione
dell’organo di manovra o da un indicatore meccanico di posizione che,in base alla norma, può indicare la posizione « fuori tensione » solo se icontatti sono effettivamente separati da una distanza sufficienteconforme a quanto previsto dalle norme. I costruttori offrono numerosiapparecchi con questa funzione. Spesso lo stesso apparecchioassocia le funzioni di sezionamento e di protezione contro icortocircuiti (ad esempio il sezionatore a fusibili). Per questo motivoalcuni apparecchi base devono essere completati da un dispositivocomplementare, quale ad esempio un supporto di aggancio.
98Schneider Electric
A Fig. 1 Le diverse funzioni e la loroassociazione per comporreuna partenza-motore
5.1 Generalità5.2 Le funzioni base delle partenze-motore
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 98
Un sezionatore è destinato ad isolare un circuito e non ha potere d’interruzione né potere di chiusura. Viene sempre comandato a vuoto.
Un interruttore offre, oltre alla capacità di sezionamento, quella di poter stabilire,sopportare ed interrompere delle correnti (norme IEC 947-3).
b La protezionev La protezione contro i cortocircuiti (C capitolo 4 Avviamento e
protezione dei motori)Questa funzione richiede il rilevamento delle sovracorrenti consecutive aicortocircuiti (generalmente superiori a 10 volte la corrente nominale) el’apertura del circuito in difetto. Viene realizzata da fusibili o da interruttori automatici magnetici.
v La protezione contro i sovraccarichi (C capitolo 4 Avviamento eprotezione dei motori)
Questa funzione richiede il rilevamento delle sovracorrenti consecutive aisovraccarichi (Ir < I sovraccarichi < Im) e l’apertura del circuito in difetto.Viene realizzata da dispositivi elettromeccanici o elettronici (relè disovraccarico) associati ad un organo d’interruzione (interruttoreautomatico o contattore) o integrati agli avviatori o variatori di velocitàelettronici. Protegge anche la linea del motore contro i sovraccarichitermici.
v Protezioni associate agli avviatori e ai variatori di velocitàelettronici
L’avviamento diretto sulla rete di distribuzione dei motori asincroni è lasoluzione più utilizzata, più economica e spesso più conveniente per unagran varietà di macchine. Tuttavia questa soluzione si rivela talvolta nonadatta ad alcune applicazioni, o addirittura non compatibile con ilfunzionamento desiderato a livello della macchina (spunto di correnteall’avviamento, impulsi meccanici durante gli avviamenti, impossibilità dicontrollare l’accelerazione e la decelerazione, impossibilità di far variare lavelocità, ecc...).
Gli avviatori e i variatori di velocità elettronici (C Fig. 2) permettono dieliminare questi inconvenienti, ma le protezioni convenzionali descritteprecedentemente non sono efficaci con questi apparecchi che modulanol’energia elettrica fornita al motore.
I variatori di velocità e gli avviatori elettronici hanno quindi delle protezioniintegrate. I variatori moderni garantiscono generalmente la protezione disovraccarico dei motori e la protezione dei motori stessi. A partire dalla misura della corrente e da un’informazione sulla velocità, un microprocessore calcola l’aumento di temperatura del motore efornisce un segnale d’allarme o di sgancio in caso di riscaldamentoeccessivo.
Inoltre le informazioni elaborate dalla protezione termica integrata nelvariatore possono essere scambiate con un controllore programmabile oun supervisore mediante il collegamento di comunicazione di cui sonodotati i variatori e gli avviatori più evoluti.
La variazione di velocità è oggetto del paragrafo 5.5 di questo capitolo.
b La commutazione o comandov La funzione di comando Con « comandare », è necessario comprendere il concetto di chiudere(stabilire) e aprire (interrompere) un circuito elettrico in carico. La funzione di comando viene realizzata dagli interruttori, dagli interruttoriautomatici magneto-termici, dagli avviatori e dai variatori di velocità. Il contattore è tuttavia il prodotto più utilizzato per realizzare questafunzione poiché permette il comando a distanza (telecomando). Per i motori, questo dispositivo di comando deve consentire un elevatonumero di manovre (durata elettrica) ed essere conforme alle norme CEI60947-4-1.
99
5
Schneider Electric
A Fig. 2 Variatore di velocità(ATV61 - ATV71 - Schneider Electric)
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:39 Pagina 99
In base a queste norme i costruttori devono precisare le seguenticaratteristiche relative al prodotto:
• Circuito di comando- tipo di corrente di comando, oltre alla frequenza in caso di corrente
alternata,- tensione nominale dei circuiti di comando (Uc) o tensione
d’alimentazione di comando (Us).
• Circuito di potenza- tensione nominale d’impiego (Ue): si esprime generalmente mediante
la tensione tra fasi. Determina l’impiego dei circuiti ai quali fannoriferimento i poteri di chiusura e d’interruzione, il tipo di servizio e lecaratteristiche di avviamento,
- corrente nominale d’impiego (Ie) o potenza nominale d’impiego:questa caratteristica viene definita dal costruttore a seconda dellecondizioni d’impiego specificate e prende in considerazione inparticolare la tensione nominale d’impiego e la corrente termicaconvenzionale (Ith corrispondente al valore massimo della corrente diprova). In caso di materiale per il comando diretto di un unico motore,l’indicazione di una corrente nominale d’impiego può essere sostituitao completata con quella della potenza nominale massima disponibile.
In alcuni casi queste informazioni possono essere completate: - dal servizio nominale, con indicazione della classe di servizio
intermittente, se prevista. Le classi definiscono diversi cicli di manovre,- dai poteri nominali di chiusura e/o di interruzione. Sono i valori massimi
di corrente, fissati dal costruttore, che un materiale può stabilire(chiusura) o interrompere (interruzione) in modo soddisfacente e incondizioni specifiche. I poteri nominali di chiusura e di interruzione nonsono obbligatoriamente specificati dal costruttore, ma la norma esige deivalori minimi per ciascuna categoria d’impiego.
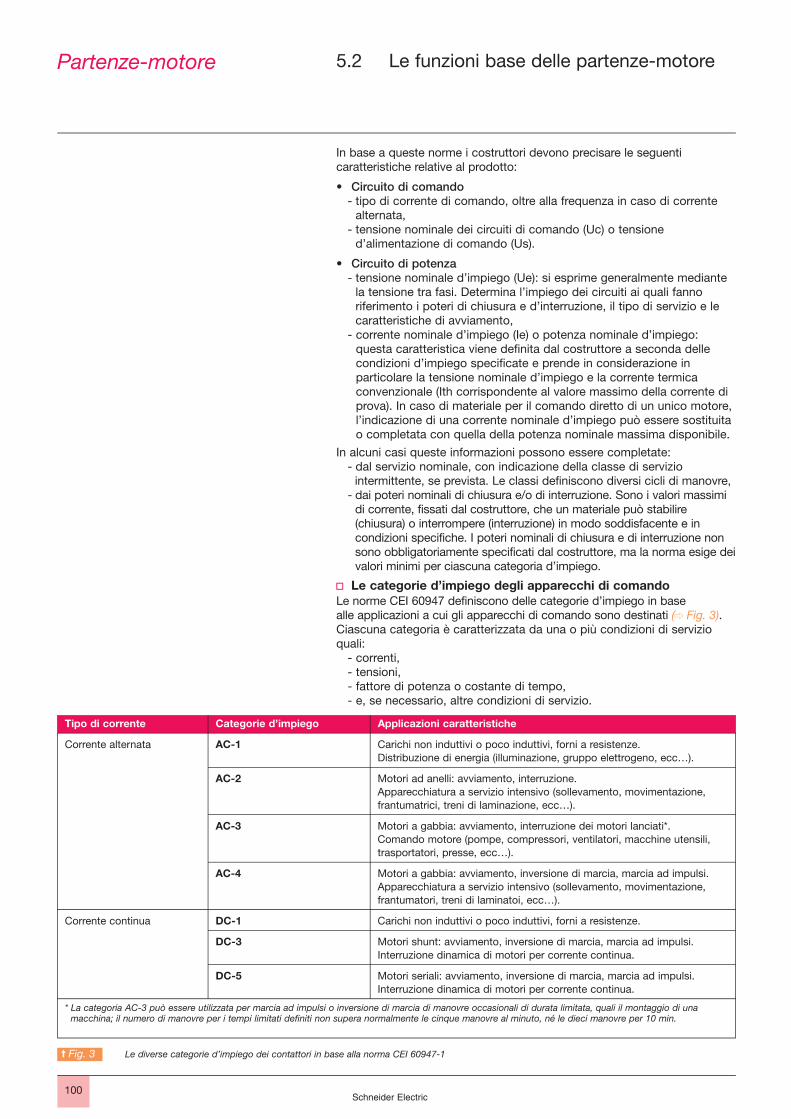
v Le categorie d’impiego degli apparecchi di comandoLe norme CEI 60947 definiscono delle categorie d’impiego in basealle applicazioni a cui gli apparecchi di comando sono destinati (C Fig. 3).Ciascuna categoria è caratterizzata da una o più condizioni di servizioquali:
- correnti, - tensioni, - fattore di potenza o costante di tempo,- e, se necessario, altre condizioni di servizio.
100Schneider Electric
Tipo di corrente Categorie d’impiego Applicazioni caratteristiche
Corrente alternata AC-1 Carichi non induttivi o poco induttivi, forni a resistenze.Distribuzione di energia (illuminazione, gruppo elettrogeno, ecc…).
AC-2 Motori ad anelli: avviamento, interruzione.Apparecchiatura a servizio intensivo (sollevamento, movimentazione,frantumatrici, treni di laminazione, ecc…).
AC-3 Motori a gabbia: avviamento, interruzione dei motori lanciati*.Comando motore (pompe, compressori, ventilatori, macchine utensili,trasportatori, presse, ecc…).
AC-4 Motori a gabbia: avviamento, inversione di marcia, marcia ad impulsi.Apparecchiatura a servizio intensivo (sollevamento, movimentazione,frantumatori, treni di laminatoi, ecc…).
Corrente continua DC-1 Carichi non induttivi o poco induttivi, forni a resistenze.
DC-3 Motori shunt: avviamento, inversione di marcia, marcia ad impulsi.Interruzione dinamica di motori per corrente continua.
DC-5 Motori seriali: avviamento, inversione di marcia, marcia ad impulsi.Interruzione dinamica di motori per corrente continua.
* La categoria AC-3 può essere utilizzata per marcia ad impulsi o inversione di marcia di manovre occasionali di durata limitata, quali il montaggio di unamacchina; il numero di manovre per i tempi limitati definiti non supera normalmente le cinque manovre al minuto, né le dieci manovre per 10 min.
A Fig. 3 Le diverse categorie d’impiego dei contattori in base alla norma CEI 60947-1
5.2 Le funzioni base delle partenze-motorePartenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 100
Ad esempio vengono prese in considerazione:- le condizioni di definizione e interruzione di corrente, - il tipo di apparecchio controllato (motore a gabbia, motore ad anelli,
resistenza),- le condizioni in cui vengono effettuate le chiusure e le aperture
(motore lanciato, motore bloccato, in corso di avviamento, frenatura incontrocorrente, ecc...).
v Scegliere un contattoreLe categorie d’impiego definite dalla norma consentono una primaselezione di un prodotto in grado di rispondere alle esigenze applicative a cui è destinato il motore. Tuttavia è necessario tenere conto anche dialtre caratteristiche che esulano da quanto stabilito dalla norma. Tra questi, ad esempio, i fattori esterni all’applicazione: condizioniclimatiche (temperatura, umidità), situazione geografica (altitudine,vicinanza del mare), ecc...
In alcune situazioni, l’affidabilità dell’apparecchiatura può essere unfattore critico, in particolar modo quando la manutenzione è difficile. La durata elettrica (durata dei contatti) degli apparecchi (contattore) èquindi una caratteristica importante.
Sarà quindi necessario disporre di cataloghi completi e precisi per verificare che il prodotto offra tutte le caratteristiche richieste.
5.3 Una funzione complementare: la comunicazione
b La comunicazione: una funzione diventata essenziale Nei processi e nei sistemi di produzione industriali, la funzione dicomunicazione consente di controllare, interrogare e comandare adistanza le apparecchiature e le macchine di un impianto di produzione.
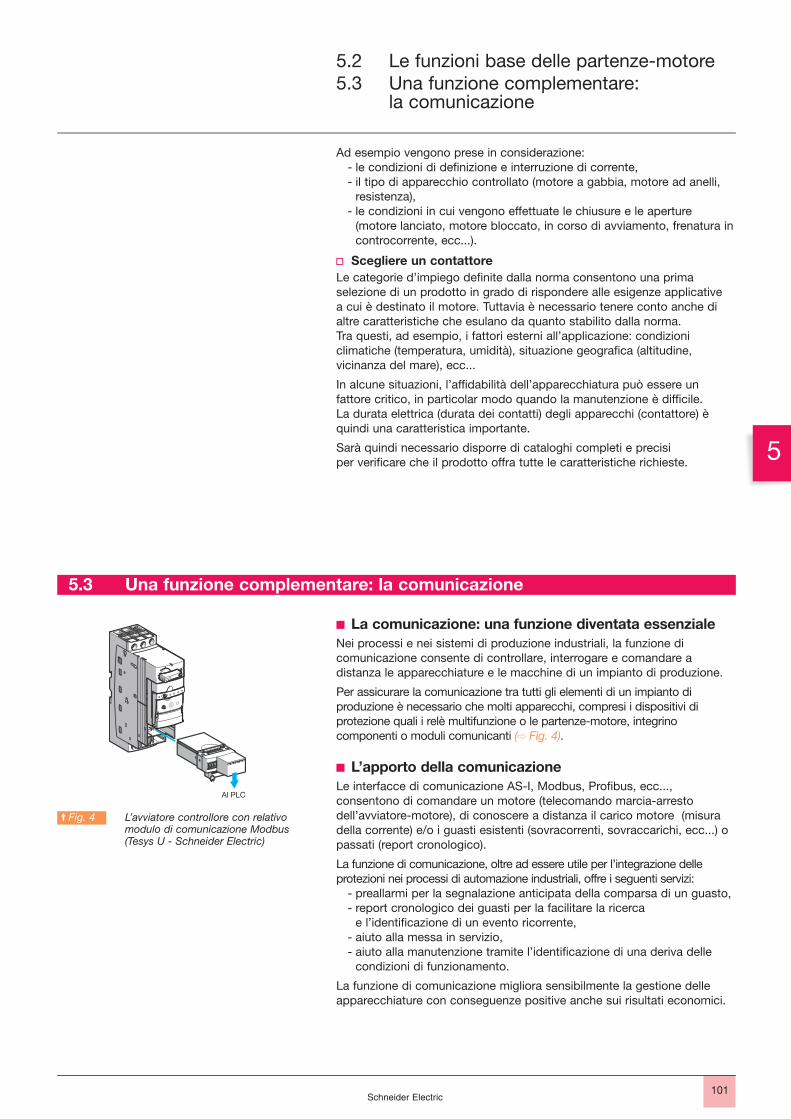
Per assicurare la comunicazione tra tutti gli elementi di un impianto diproduzione è necessario che molti apparecchi, compresi i dispositivi diprotezione quali i relè multifunzione o le partenze-motore, integrinocomponenti o moduli comunicanti (C Fig. 4).
b L’apporto della comunicazioneLe interfacce di comunicazione AS-I, Modbus, Profibus, ecc...,consentono di comandare un motore (telecomando marcia-arrestodell’avviatore-motore), di conoscere a distanza il carico motore (misuradella corrente) e/o i guasti esistenti (sovracorrenti, sovraccarichi, ecc...) opassati (report cronologico).
La funzione di comunicazione, oltre ad essere utile per l’integrazione delleprotezioni nei processi di automazione industriali, offre i seguenti servizi:
- preallarmi per la segnalazione anticipata della comparsa di un guasto,- report cronologico dei guasti per la facilitare la ricerca
e l’identificazione di un evento ricorrente,- aiuto alla messa in servizio,- aiuto alla manutenzione tramite l’identificazione di una deriva delle
condizioni di funzionamento.
La funzione di comunicazione migliora sensibilmente la gestione delleapparecchiature con conseguenze positive anche sui risultati economici.
101
5
Schneider Electric
A Fig. 4 L’avviatore controllore con relativomodulo di comunicazione Modbus(Tesys U - Schneider Electric)
5.2 Le funzioni base delle partenze-motore5.3 Una funzione complementare:
la comunicazione
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 15:01 Pagina 101
5.4 Partenze-motore e coordinamento
b Le soluzioni partenze-motoreCome già detto all’inizio del capitolo le principali funzioni che una partenza-motore deve assicurare (sezionamento, comando e protezione contro icortocircuiti e i sovraccarichi), possono essere realizzate da diversi apparecchi.
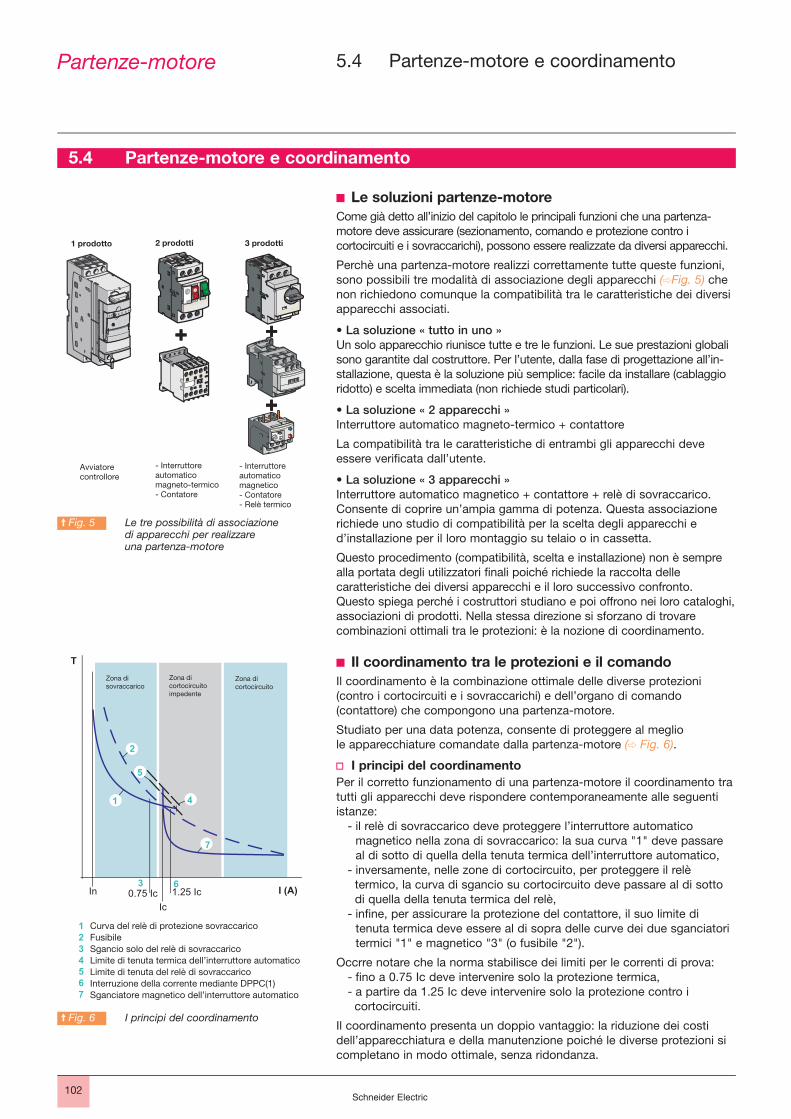
Perchè una partenza-motore realizzi correttamente tutte queste funzioni,sono possibili tre modalità di associazione degli apparecchi (CFig. 5) chenon richiedono comunque la compatibilità tra le caratteristiche dei diversiapparecchi associati.
• La soluzione « tutto in uno »Un solo apparecchio riunisce tutte e tre le funzioni. Le sue prestazioni globalisono garantite dal costruttore. Per l’utente, dalla fase di progettazione all’in-stallazione, questa è la soluzione più semplice: facile da installare (cablaggioridotto) e scelta immediata (non richiede studi particolari).
• La soluzione « 2 apparecchi »Interruttore automatico magneto-termico + contattore
La compatibilità tra le caratteristiche di entrambi gli apparecchi deveessere verificata dall’utente.
• La soluzione « 3 apparecchi »Interruttore automatico magnetico + contattore + relè di sovraccarico.Consente di coprire un’ampia gamma di potenza. Questa associazionerichiede uno studio di compatibilità per la scelta degli apparecchi ed’installazione per il loro montaggio su telaio o in cassetta.
Questo procedimento (compatibilità, scelta e installazione) non è semprealla portata degli utilizzatori finali poiché richiede la raccolta dellecaratteristiche dei diversi apparecchi e il loro successivo confronto. Questo spiega perché i costruttori studiano e poi offrono nei loro cataloghi,associazioni di prodotti. Nella stessa direzione si sforzano di trovarecombinazioni ottimali tra le protezioni: è la nozione di coordinamento.
b Il coordinamento tra le protezioni e il comando Il coordinamento è la combinazione ottimale delle diverse protezioni(contro i cortocircuiti e i sovraccarichi) e dell’organo di comando(contattore) che compongono una partenza-motore.
Studiato per una data potenza, consente di proteggere al meglio le apparecchiature comandate dalla partenza-motore (C Fig. 6).
v I principi del coordinamentoPer il corretto funzionamento di una partenza-motore il coordinamento tratutti gli apparecchi deve rispondere contemporaneamente alle seguentiistanze:
- il relè di sovraccarico deve proteggere l’interruttore automaticomagnetico nella zona di sovraccarico: la sua curva "1" deve passareal di sotto di quella della tenuta termica dell’interruttore automatico,
- inversamente, nelle zone di cortocircuito, per proteggere il relètermico, la curva di sgancio su cortocircuito deve passare al di sotto di quella della tenuta termica del relè,
- infine, per assicurare la protezione del contattore, il suo limite ditenuta termica deve essere al di sopra delle curve dei due sganciatoritermici "1" e magnetico "3" (o fusibile "2").
Occrre notare che la norma stabilisce dei limiti per le correnti di prova:- fino a 0.75 Ic deve intervenire solo la protezione termica,- a partire da 1.25 Ic deve intervenire solo la protezione contro i
cortocircuiti.
Il coordinamento presenta un doppio vantaggio: la riduzione dei costidell’apparecchiatura e della manutenzione poiché le diverse protezioni sicompletano in modo ottimale, senza ridondanza.
102Schneider Electric
A Fig. 5 Le tre possibilità di associazionedi apparecchi per realizzare una partenza-motore
A Fig. 6 I principi del coordinamento
5.4 Partenze-motore e coordinamentoPartenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 102
v Coordinamenti tipo 1 e tipo 2La norma CEI 60947-4-1 definisce due tipi di coordinamento (tipo 1 e tipo 2)
• Coordinamento tipo 1: è la soluzione standard, la più utilizzata. In condizioni di cortocircuito, il materiale non deve risultare pericoloso per le persone e gli impianti. In seguito alla scomparsa del cortocircuito,può non essere in grado di funzionare senza riparazione o sostituzione di pezzi.
• Coordinamento tipo 2: è la soluzione per prestazioni elevate. In condizioni di corto-circuito, il materiale non deve risultare pericolosoper le persone e gli impianti. In seguito alla scomparsa del cortocircuitonon deve presentare nessun deterioramento e nessuna deregolazione. È ammesso solo il rischio di saldatura, ma in questo caso il costruttoredeve indicare le misure da adottare per la sepoarazione dei contatti.
• In base alla Norma IEC 947-6-2 esiste un’ulteriore soluzione perprestazioni elevatissime definita « Coordinamento totale ». In caso dicortocircuito sugli apparecchi che compongono la partenza non èammesso alcun guasto, né rischio di saldatura. Il materiale non deverisultare pericoloso per le persone e gli impianti e in seguito deve esserein grado di funzionare. Il riavviamento della partenza-motore deve poteressere immediato.
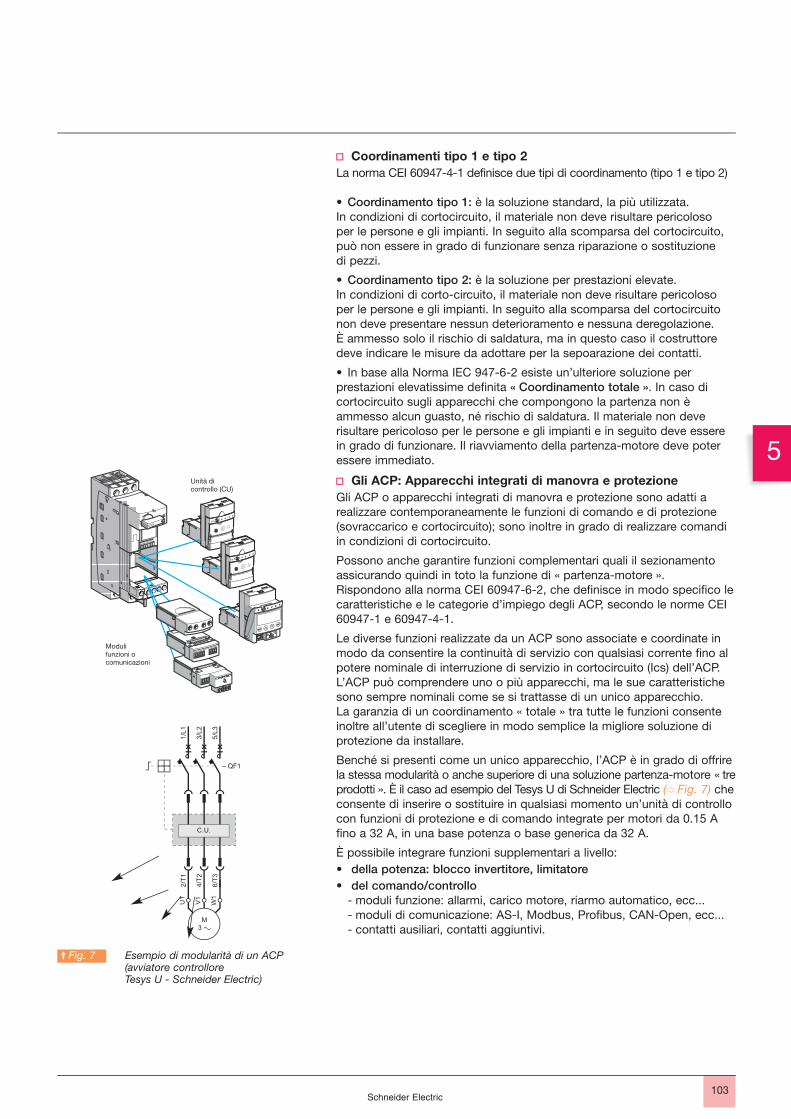
v Gli ACP: Apparecchi integrati di manovra e protezioneGli ACP o apparecchi integrati di manovra e protezione sono adatti arealizzare contemporaneamente le funzioni di comando e di protezione(sovraccarico e cortocircuito); sono inoltre in grado di realizzare comandiin condizioni di cortocircuito.
Possono anche garantire funzioni complementari quali il sezionamentoassicurando quindi in toto la funzione di « partenza-motore ». Rispondono alla norma CEI 60947-6-2, che definisce in modo specifico lecaratteristiche e le categorie d’impiego degli ACP, secondo le norme CEI60947-1 e 60947-4-1.
Le diverse funzioni realizzate da un ACP sono associate e coordinate inmodo da consentire la continuità di servizio con qualsiasi corrente fino alpotere nominale di interruzione di servizio in cortocircuito (Ics) dell’ACP.L’ACP può comprendere uno o più apparecchi, ma le sue caratteristichesono sempre nominali come se si trattasse di un unico apparecchio. La garanzia di un coordinamento « totale » tra tutte le funzioni consenteinoltre all’utente di scegliere in modo semplice la migliore soluzione diprotezione da installare.
Benché si presenti come un unico apparecchio, l’ACP è in grado di offrirela stessa modularità o anche superiore di una soluzione partenza-motore « treprodotti ». È il caso ad esempio del Tesys U di Schneider Electric (C Fig. 7) checonsente di inserire o sostituire in qualsiasi momento un’unità di controllocon funzioni di protezione e di comando integrate per motori da 0.15 Afino a 32 A, in una base potenza o base generica da 32 A.
È possibile integrare funzioni supplementari a livello:• della potenza: blocco invertitore, limitatore• del comando/controllo
- moduli funzione: allarmi, carico motore, riarmo automatico, ecc...- moduli di comunicazione: AS-I, Modbus, Profibus, CAN-Open, ecc...- contatti ausiliari, contatti aggiuntivi.
103
5
Schneider Electric
A Fig. 7 Esempio di modularità di un ACP(avviatore controlloreTesys U - Schneider Electric)
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:40 Pagina 103

Questo sistema offre inoltre funzioni di comunicazione evolute (C Fig. 8).
v Quale coordinamento scegliere?La scelta del tipo di coordinamento dipende dai parametri di utilizzo.
La scelta deve essere effetuata in funzione delle esigenze dell’utente e diun’ottimizzazione dei costi dell’impianto:
• Tipo 1Scelta accettabile quando non è necessaria la continuità di servizio equando è possibile riavviare in seguito alla sostituzione degli elementi guasti.In questo caso è necessario che il servizio di manutenzione sia efficace(disponibile e competente). Il vantaggio è nel costo ridotto dell’apparecchiatura.
• Tipo 2Scelta da effettuare quando è richiesta la continuità di servizio.In questo caso il servizio di manutenzione può essere ridotto.
• « Coordinamento totale »Scelta da effettuare quando è necessario il riavviamento immediato delmotore. Non richiede alcun servizio di manutenzione. Le soluzioni di coordinamento proposte nei cataloghi dei costruttorisemplificano la scelta dell’utente e assicurano la conformità del prodottoalle norme.
b La selettivitàIn un impianto elettrico i ricevitori sono collegati ai generatori attraversouna serie di dispositivi di sezionamento, protezione e comando.
Se lo studio di selettività non è realizzato correttamente, un guastoelettrico può provocare l’intervento di più dispositivi di protezione. Un solo guasto può provocare ad esempio la messa fuori tensione di unaparte più o meno grande dell’impianto con gravi conseguenze quali lamancata distribuzione di enegia elettrica alle partenze sane.
Per evitare questi tipi di problemi (C Fig. 9) lo scopo della selettività è discollegare dalla rete la partenza o il motore in difetto, e solo quello,mantenendo sotto tensione la maggior parte possibile di apparecchiaturedell’impianto. La selettività consente quindi di garantire sicurezza e continuitàdi servizio, facilitando inoltre la localizzazione del guasto.
Per garantire una continuità di servizio ottimale è necessario utilizzaredispositivi di protezione coordinati tra loro. A questo scopo vengonoutilizzate diverse tecniche che consentono di ottenere una selettività che
104Schneider Electric
Funzioni di comunicazione disponibili: Unità di controllo:Standard Evolutive Multifunzione
Stati dell’avviatore (pronto, in marcia, in difetto)
Allarmi (sovracorrenti, ecc...)
Allarme termico
Riarmo a distanza mediante bus
Indicazione del carico motore
Differenziazione dei guasti
Configurazione e consultazione delle funzioni di protezione
Funzione « report cronologico »
Funzione « controllo »
Comandi di Marcia e di Arresto
Informazioni trasmesse dal bus (Modbus) e funzioni realizzate
A Fig. 8 Le funzioni di comunicazione del Tesys U
A Fig. 9 Principio della selettività: in caso diguasto, si apre solo D2
5.4 Partenze-motore e coordinamentoPartenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 104
potrà essere totale, se garantita per tutti i valori della corrente di guasto,fino al valore massimo disponibile nell’installazione, oppure parziale nelcaso contrario.
v Le diverse tecniche di selettivitàEsistono diversi tipi di selettività:
• amperometrica: risulta dalla differenza tra le soglie degli interruttoriposti in serie sull’impianto.
• cronometrica: consiste nel temporizzare differentemente (di alcunedecina o centinaia di millisecondi) l’intervento dell’interruttore automaticoa monte, o nell’utilizzare le caratteristiche normali di funzionamento legateai calibri degli apparecchi. Quindi è possibile garantire la selettività tra duerelè di sovraccarico rispettando la condizione Ir1 > 1,6. Ir2 (con r1 amonte di r2).
• Sellim o energetica: consiste nell’installare a monte di un interruttorerapido, un interruttore ultralimitatore equipaggiato con uno sganciatorespecifico la cui particolarità è quella di aprire per il tempo necessario alfunzionamento dell’interruttore automatico a valle e poi si richiude.
• logica: consiste in un trasferimento dell’informazione di superamento disoglia tra gli sganciatori degli interruttori dei diversi livelli delladistribuzione radiale, lasciando la possibilità di apertura all’interruttoreautomatico più a valle.
Per maggiori dettagli consultare il Dossier Tecnico Schneider-Electricn°167.
v La selettività nei processiPer le apparecchiature di comando processi (linee di produzione, unitàproduttive chimiche, ecc...), le tecniche di selettività più utilizzate tra lepartenze-motore e la distribuzione elettrica che alimenta i processi sonogeneralmente la selettività amperometrica e la la selettività cronometrica.Nella maggior parte dei casi la selettività è garantita dal potere limitatore oultralimitatore delle partenze-motore.
5.5 I variatori di velocitàQuesta parte descrive in dettaglio tutti gli aspetti della variazione di velocità. Alcune tecnologie molto specifiche quali ad esempio ciclo-convertitori, cascata subsincrona, convertitore per motore sincrono o asincrono non sono trattate. L’impiego di questi variatori è molto specificoed è proprio di settori e mercati particolari. Ad essi sono dedicate operespecializzate. Il lettore interessato troverà una descrizione esauriente nelleopere, Funzionamento Elettrico a velocità variabile, Bonal (Jean) e Séguier(Guy), Ed. Tec e Utilizzo industriale dei motori a corrente alternata, Bonal(Jean), Ed. Tec e Doc.La variazione di velocità per motori a corrente continua, sostituita in granparte dalla variazione di velocità con converitori di frequenza vienecomunque trattata, poiché riteniamo importante comprendere il principio difunzionamento per affrontare facilmente alcune specificità e caratteristichedella variazione di velocità nel suo insieme.
b Storia e notev StoriaPer avviare i motori elettrici e controllarne la velocità gli avviatorireostatici, i variatori meccanici e i gruppi Ward Leonard in particolare sonostate le prime soluzioni utilizzate. Gli avviatori e i variatori elettronici si sono quindi imposti nel settoreindustriale come soluzione moderna, economica, affidabile che nonrichiede manutenzione.
105
5
Schneider Electric
5.4 Partenze-motore e coordinamento5.5 I variatori di velocità
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:53 Pagina 105
Un variatore o un avviatore elettronico è un convertitore di energia con ilruolo di modulare l'energia elettrica fornita al motore.
Gli avviatori elettronici sono destinati esclusivamente ai motori asincroni.Fanno parte della famiglia dei variatori di tensione.
I variatori di velocità garantiscono una messa in velocità e unadecelerazione progressive, consentono un adattamento preciso dellavelocità alle condizioni di utilizzo. I variatori di velocità sono del tiporaddrizzatore controllato per alimentare i motori a corrente continua; ivariatori per motori a corrente alternata sono convertitori di frequenza.
Storicamente, il variatore elettronico per motore a corrente continua è stato la prima soluzione offerta. I progressi dell’elettronica di potenza edella microelettronica hanno permesso la realizzazione di convertitori difrequenza affidabili ed economici. I convertitori di frequenza moderniconsentono di alimentare i motori asincroni standard con prestazionianaloghe ai migliori variatori di velocità a corrente continua. Alcunicostruttori propongono anche motori asincroni con variatori di velocitàelettronici integrati in un’apposita cassetta terminale; questa soluzioneviene proposta per degli insiemi di potenza ridotta (qualche kW).
Nelle ultime pagine di questo capitolo vengono citate le recenti evoluzionidei variatori di velocità e la future tendenze presso i costruttori.
Queste eleganti evoluzioni ampliano notevolmente l’offerta e le possibilitàdei variatori.
v Note: le principali funzioni degli avviatori e dei variatori divelocità elettronici
• Accelerazione controllataLa messa in velocità del motore è controllata mediante una rampadi accelerazione lineare o a « S ». Questa rampa generalmente èregolabile e consente, di conseguenza, di scegliere il tempo di messa invelocità adatto all’applicazione.
• Variazione di velocitàUn variatore di velocità può non essere allo stesso tempo anche unregolatore. In questo caso, è un sistema rudimentale che possiedeun comando elaborato a partire dalle grandezze elettriche del motorecon amplificazione di potenza, ma non anello di reazione.Viene detto « ad anello aperto ».
La velocità del motore è definita da una grandezza d'ingresso (tensioneo corrente) chiamata impostazione o riferimento. Per un valore datodell'impostazione, questa velocità può variare in funzione dei disturbi(variazioni della tensione di alimentazione, del carico, della temperatura).
La gamma di velocità si esprime in funzione della velocità nominale.
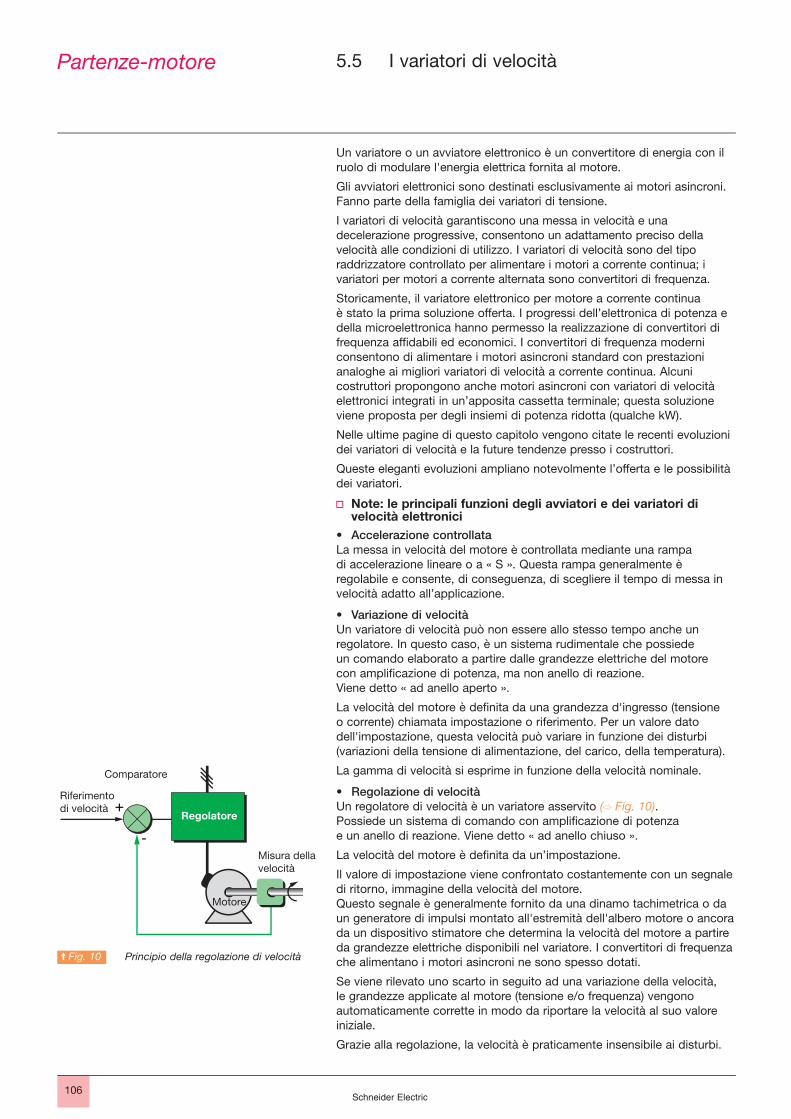
• Regolazione di velocitàUn regolatore di velocità è un variatore asservito (C Fig. 10).Possiede un sistema di comando con amplificazione di potenzae un anello di reazione. Viene detto « ad anello chiuso ».
La velocità del motore è definita da un’impostazione.
Il valore di impostazione viene confrontato costantemente con un segnaledi ritorno, immagine della velocità del motore. Questo segnale è generalmente fornito da una dinamo tachimetrica o daun generatore di impulsi montato all'estremità dell'albero motore o ancorada un dispositivo stimatore che determina la velocità del motore a partireda grandezze elettriche disponibili nel variatore. I convertitori di frequenzache alimentano i motori asincroni ne sono spesso dotati.
Se viene rilevato uno scarto in seguito ad una variazione della velocità,le grandezze applicate al motore (tensione e/o frequenza) vengonoautomaticamente corrette in modo da riportare la velocità al suo valoreiniziale.
Grazie alla regolazione, la velocità è praticamente insensibile ai disturbi.
106Schneider Electric
A Fig. 10 Principio della regolazione di velocità
5.5 I variatori di velocitàPartenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 106
La precisione di un regolatore è generalmente espressa in % del valorenominale della grandezza da regolare.
• Decelerazione controllataQuando un motore viene messo fuori tensione, la sua decelerazione è dovutaunicamente alla coppia resistente della macchina (decelerazione naturale).
Gli avviatori e variatori elettronici consentono di controllare ladecelerazione mediante una rampa lineare o a « S », solitamenteindipendente dalla rampa di accelerazione.
La rampa può essere regolata in modo da ottenere un tempo di passaggiodella velocità in regime stabilito ad una velocità intermedia o nulla:
- se la decelerazione desiderata è più rapida della decelerazione naturale, ilmotore deve sviluppare una coppia resistente che si aggiunge alla coppiaresistente della macchina; si parla quindi di frenatura elettrica che puòessere effettuata mediante rinvio di energia alla rete di alimentazione omediante dissipazione in una resistenza di frenatura,
- se la decelerazione desiderata è più lenta rispetto alla decelerazionenaturale, il motore deve sviluppare una coppia motore superiore allacoppia resistente della macchina e continuare ad azionare il caricofino all’arresto.
• Inversione del senso di marciaL’inversione della tensione d’alimentazione (variatori per motore a correntecontinua) o l’inversione dell’ordine delle fasi d’alimentazione del motoreviene realizzata automaticanmente, mediante inversione dell’impostazioneall’ingresso, mediante un ordine logico su un morsetto o medianteun’informazione trasmessa da una rete seriale. La maggior parte deivariatori attuali per motori alternati consente questa funzione di base.
• Frenatura di arrestoQuesto tipo di frenatura consiste nell’arrestare un motore senzacontrollare la rampa di rallentamento. Per gli avviatori e variatori divelocità per motori asincroni, questa funzione viene realizzata in modoeconomico mediante iniezione di corrente continua nel motore con unfunzionamento particolare dello stadio di potenza. Tutta l’energiameccanica viene dissipata nel rotore della macchina e, di conseguenza, lafrenatura non può che essere intermittente. Su un variatore per motore acorrente continua, questa funzione verrà garantita collegando unaresistenza ai morsetti dell’indotto.
• Protezioni integrateI variatori moderni garantiscono generalmente la protezione termica deimotori e la loro propria protezione. A partire dalla misura della corrente eda un’informazione sulla velocità (se la ventilazione del motore dipendedalla sua velocità di rotazione), un microprocessore calcola l'aumento ditemperatura del motore e fornisce un segnale di allarme o di blocco incaso di riscaldamento eccessivo.
I variatori, e in particolare i convertitori di frequenza, sono d'altra partespesso dotati di protezioni contro:
- i cortocircuiti tra fasi e tra fase e terra,- le sovratensioni e le cadute di tensione, - gli squilibri di fase,- la marcia in monofase.
b I principali modi di funzionamento e i principali tipi di variatorielettronici
Nei seguenti paragrafi verranno descritti i principi fondamentali.
v I principali modi di funzionamentoI variatori di velocità possono, a seconda del convertitore elettronico, far funzionare un motore in un unico senso di rotazione, nel qual casosaranno chiamati « unidirezionali », oppure comandare entrambi i sensi dirotazione, e allora verranno chiamati « bidirezionali ».
107
5
Schneider Electric
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 107
I variatori possono essere « reversibili » quando possono recuperarel’energia del motore funzionante in generatore (modo frenatura).
La reversibilità è ottenuta mediante un rinvio di energia sulla rete (ponted’ingresso reversibile) oppure dissipando l’energia recuperata in unaresistenza con un chopper di frenatura.
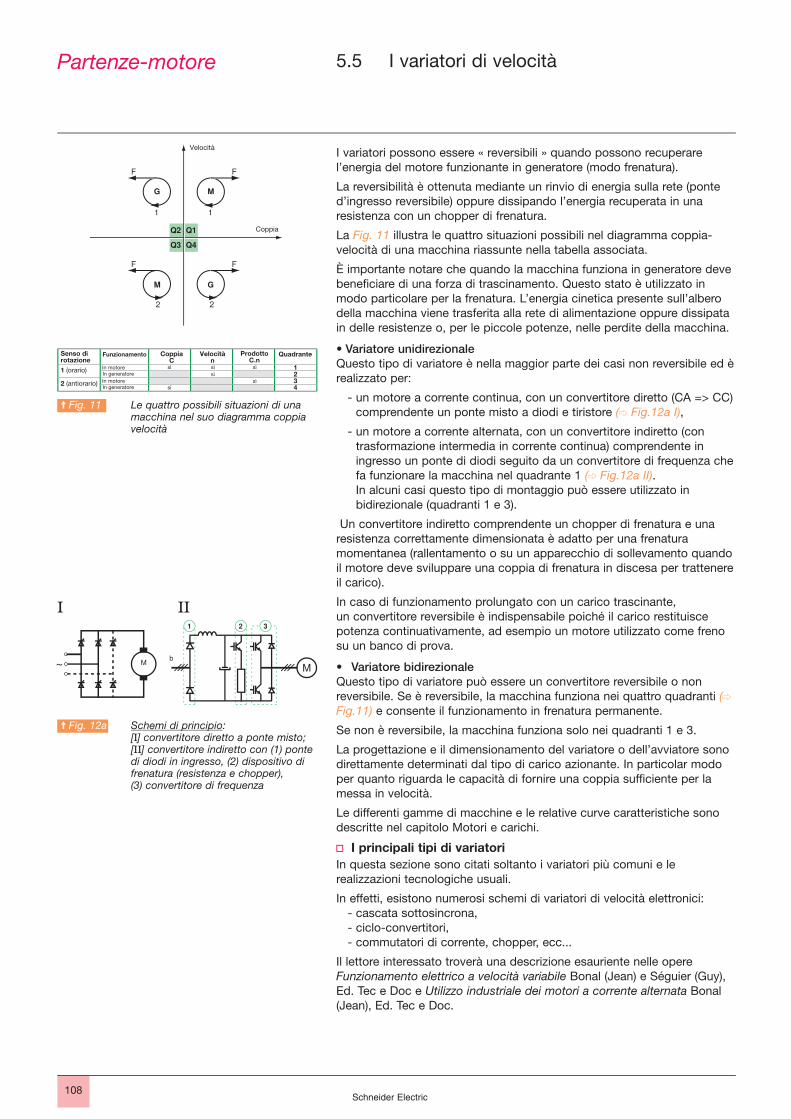
La Fig. 11 illustra le quattro situazioni possibili nel diagramma coppia-velocità di una macchina riassunte nella tabella associata.
È importante notare che quando la macchina funziona in generatore devebeneficiare di una forza di trascinamento. Questo stato è utilizzato inmodo particolare per la frenatura. L’energia cinetica presente sull’alberodella macchina viene trasferita alla rete di alimentazione oppure dissipatain delle resistenze o, per le piccole potenze, nelle perdite della macchina.
• Variatore unidirezionaleQuesto tipo di variatore è nella maggior parte dei casi non reversibile ed èrealizzato per:
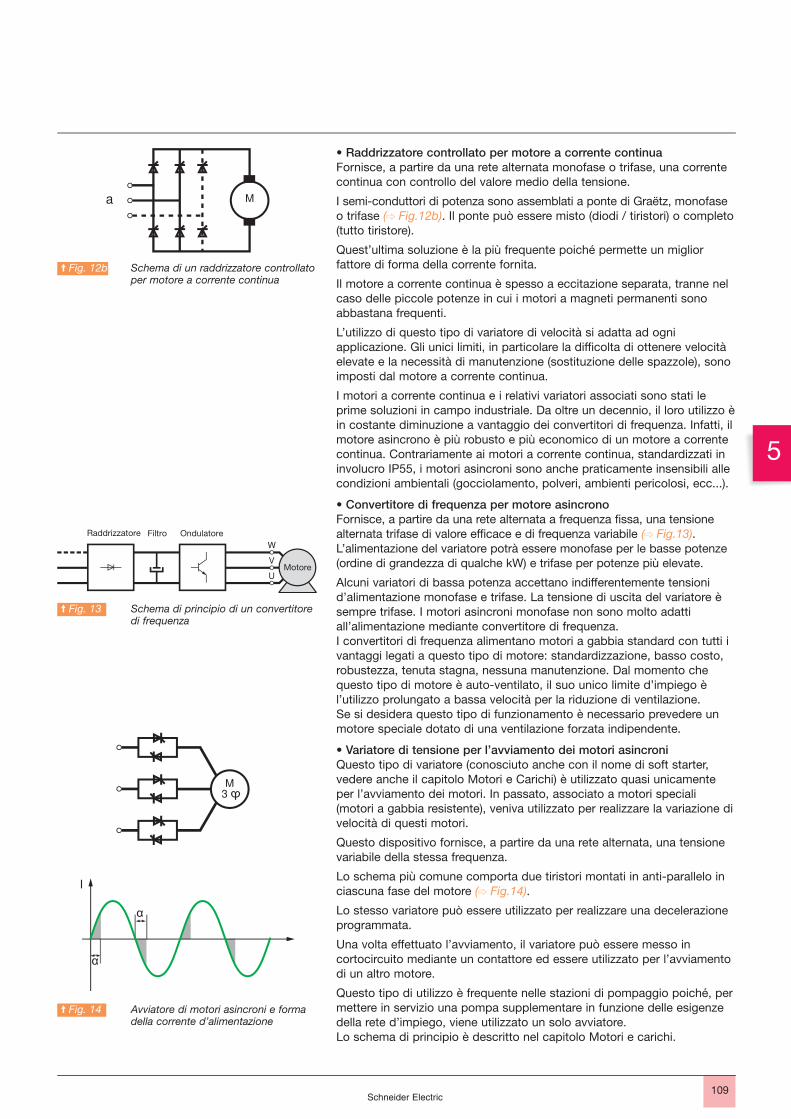
- un motore a corrente continua, con un convertitore diretto (CA => CC)comprendente un ponte misto a diodi e tiristore (C Fig.12a I),
- un motore a corrente alternata, con un convertitore indiretto (contrasformazione intermedia in corrente continua) comprendente iningresso un ponte di diodi seguito da un convertitore di frequenza chefa funzionare la macchina nel quadrante 1 (C Fig.12a II). In alcuni casi questo tipo di montaggio può essere utilizzato inbidirezionale (quadranti 1 e 3).
Un convertitore indiretto comprendente un chopper di frenatura e unaresistenza correttamente dimensionata è adatto per una frenaturamomentanea (rallentamento o su un apparecchio di sollevamento quandoil motore deve sviluppare una coppia di frenatura in discesa per trattenereil carico).
In caso di funzionamento prolungato con un carico trascinante, un convertitore reversibile è indispensabile poiché il carico restituiscepotenza continuativamente, ad esempio un motore utilizzato come frenosu un banco di prova.
• Variatore bidirezionaleQuesto tipo di variatore può essere un convertitore reversibile o nonreversibile. Se è reversibile, la macchina funziona nei quattro quadranti (CFig.11) e consente il funzionamento in frenatura permanente.
Se non è reversibile, la macchina funziona solo nei quadranti 1 e 3.
La progettazione e il dimensionamento del variatore o dell’avviatore sonodirettamente determinati dal tipo di carico azionante. In particolar modoper quanto riguarda le capacità di fornire una coppia sufficiente per lamessa in velocità.
Le differenti gamme di macchine e le relative curve caratteristiche sonodescritte nel capitolo Motori e carichi.
v I principali tipi di variatoriIn questa sezione sono citati soltanto i variatori più comuni e lerealizzazioni tecnologiche usuali.
In effetti, esistono numerosi schemi di variatori di velocità elettronici:- cascata sottosincrona,- ciclo-convertitori, - commutatori di corrente, chopper, ecc...
Il lettore interessato troverà una descrizione esauriente nelle opereFunzionamento elettrico a velocità variabile Bonal (Jean) e Séguier (Guy),Ed. Tec e Doc e Utilizzo industriale dei motori a corrente alternata Bonal(Jean), Ed. Tec e Doc.
108Schneider Electric
A Fig. 11 LLe quattro possibili situazioni di unamacchina nel suo diagramma coppiavelocità
A Fig. 12a LSchemi di principio:[I] convertitore diretto a ponte misto;[II] convertitore indiretto con (1) pontedi diodi in ingresso, (2) dispositivo difrenatura (resistenza e chopper),(3) convertitore di frequenza
5.5 I variatori di velocitàPartenze-motore
I II
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 108
• Raddrizzatore controllato per motore a corrente continuaFornisce, a partire da una rete alternata monofase o trifase, una correntecontinua con controllo del valore medio della tensione.
I semi-conduttori di potenza sono assemblati a ponte di Graëtz, monofaseo trifase (C Fig.12b). Il ponte può essere misto (diodi / tiristori) o completo(tutto tiristore).
Quest’ultima soluzione è la più frequente poiché permette un migliorfattore di forma della corrente fornita.
Il motore a corrente continua è spesso a eccitazione separata, tranne nelcaso delle piccole potenze in cui i motori a magneti permanenti sonoabbastana frequenti.
L’utilizzo di questo tipo di variatore di velocità si adatta ad ogniapplicazione. Gli unici limiti, in particolare la difficolta di ottenere velocitàelevate e la necessità di manutenzione (sostituzione delle spazzole), sonoimposti dal motore a corrente continua.
I motori a corrente continua e i relativi variatori associati sono stati leprime soluzioni in campo industriale. Da oltre un decennio, il loro utilizzo èin costante diminuzione a vantaggio dei convertitori di frequenza. Infatti, ilmotore asincrono è più robusto e più economico di un motore a correntecontinua. Contrariamente ai motori a corrente continua, standardizzati ininvolucro IP55, i motori asincroni sono anche praticamente insensibili allecondizioni ambientali (gocciolamento, polveri, ambienti pericolosi, ecc...).
• Convertitore di frequenza per motore asincronoFornisce, a partire da una rete alternata a frequenza fissa, una tensionealternata trifase di valore efficace e di frequenza variabile (C Fig.13).L’alimentazione del variatore potrà essere monofase per le basse potenze(ordine di grandezza di qualche kW) e trifase per potenze più elevate.
Alcuni variatori di bassa potenza accettano indifferentemente tensionid’alimentazione monofase e trifase. La tensione di uscita del variatore èsempre trifase. I motori asincroni monofase non sono molto adattiall’alimentazione mediante convertitore di frequenza. I convertitori di frequenza alimentano motori a gabbia standard con tutti ivantaggi legati a questo tipo di motore: standardizzazione, basso costo,robustezza, tenuta stagna, nessuna manutenzione. Dal momento chequesto tipo di motore è auto-ventilato, il suo unico limite d’impiego èl’utilizzo prolungato a bassa velocità per la riduzione di ventilazione. Se si desidera questo tipo di funzionamento è necessario prevedere unmotore speciale dotato di una ventilazione forzata indipendente.
• Variatore di tensione per l’avviamento dei motori asincroniQuesto tipo di variatore (conosciuto anche con il nome di soft starter,vedere anche il capitolo Motori e Carichi) è utilizzato quasi unicamenteper l’avviamento dei motori. In passato, associato a motori speciali(motori a gabbia resistente), veniva utilizzato per realizzare la variazione divelocità di questi motori.
Questo dispositivo fornisce, a partire da una rete alternata, una tensionevariabile della stessa frequenza.
Lo schema più comune comporta due tiristori montati in anti-parallelo inciascuna fase del motore (C Fig.14).
Lo stesso variatore può essere utilizzato per realizzare una decelerazioneprogrammata.
Una volta effettuato l’avviamento, il variatore può essere messo incortocircuito mediante un contattore ed essere utilizzato per l’avviamentodi un altro motore.
Questo tipo di utilizzo è frequente nelle stazioni di pompaggio poiché, permettere in servizio una pompa supplementare in funzione delle esigenzedella rete d’impiego, viene utilizzato un solo avviatore. Lo schema di principio è descritto nel capitolo Motori e carichi.
109
5
Schneider Electric
A Fig. 12b LSchema di un raddrizzatore controllatoper motore a corrente continua
A Fig. 13 LSchema di principio di un convertitoredi frequenza
A Fig. 14 LAvviatore di motori asincroni e formadella corrente d’alimentazione
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 109
5.6 Composizione, componenti degli avviatori e variatori elettronici
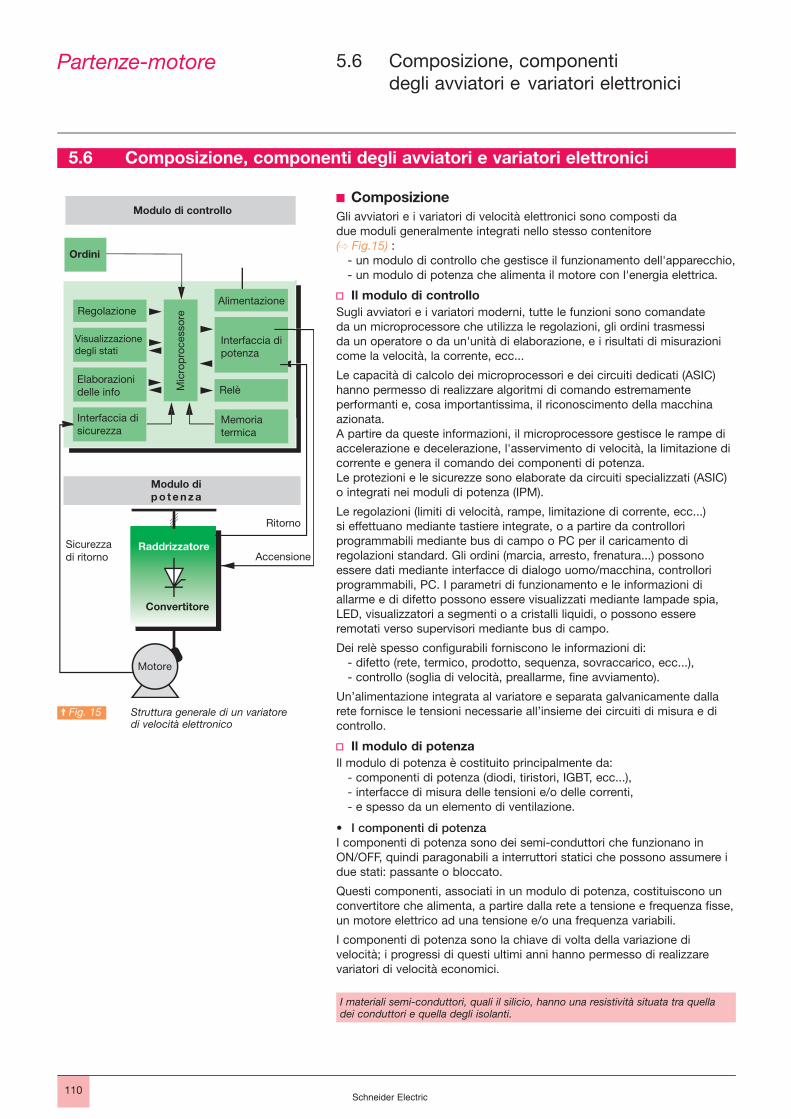
b ComposizioneGli avviatori e i variatori di velocità elettronici sono composti dadue moduli generalmente integrati nello stesso contenitore(C Fig.15) :
- un modulo di controllo che gestisce il funzionamento dell'apparecchio,- un modulo di potenza che alimenta il motore con l'energia elettrica.
v Il modulo di controlloSugli avviatori e i variatori moderni, tutte le funzioni sono comandateda un microprocessore che utilizza le regolazioni, gli ordini trasmessida un operatore o da un'unità di elaborazione, e i risultati di misurazionicome la velocità, la corrente, ecc...
Le capacità di calcolo dei microprocessori e dei circuiti dedicati (ASIC)hanno permesso di realizzare algoritmi di comando estremamenteperformanti e, cosa importantissima, il riconoscimento della macchinaazionata. A partire da queste informazioni, il microprocessore gestisce le rampe diaccelerazione e decelerazione, l'asservimento di velocità, la limitazione dicorrente e genera il comando dei componenti di potenza. Le protezioni e le sicurezze sono elaborate da circuiti specializzati (ASIC)o integrati nei moduli di potenza (IPM).
Le regolazioni (limiti di velocità, rampe, limitazione di corrente, ecc...) si effettuano mediante tastiere integrate, o a partire da controlloriprogrammabili mediante bus di campo o PC per il caricamento diregolazioni standard. Gli ordini (marcia, arresto, frenatura...) possonoessere dati mediante interfacce di dialogo uomo/macchina, controlloriprogrammabili, PC. I parametri di funzionamento e le informazioni diallarme e di difetto possono essere visualizzati mediante lampade spia,LED, visualizzatori a segmenti o a cristalli liquidi, o possono essereremotati verso supervisori mediante bus di campo.
Dei relè spesso configurabili forniscono le informazioni di:- difetto (rete, termico, prodotto, sequenza, sovraccarico, ecc...), - controllo (soglia di velocità, preallarme, fine avviamento).
Un’alimentazione integrata al variatore e separata galvanicamente dallarete fornisce le tensioni necessarie all’insieme dei circuiti di misura e dicontrollo.
v Il modulo di potenzaIl modulo di potenza è costituito principalmente da:
- componenti di potenza (diodi, tiristori, IGBT, ecc...),- interfacce di misura delle tensioni e/o delle correnti,- e spesso da un elemento di ventilazione.
• I componenti di potenzaI componenti di potenza sono dei semi-conduttori che funzionano inON/OFF, quindi paragonabili a interruttori statici che possono assumere idue stati: passante o bloccato.
Questi componenti, associati in un modulo di potenza, costituiscono unconvertitore che alimenta, a partire dalla rete a tensione e frequenza fisse,un motore elettrico ad una tensione e/o una frequenza variabili.
I componenti di potenza sono la chiave di volta della variazione divelocità; i progressi di questi ultimi anni hanno permesso di realizzarevariatori di velocità economici.
I materiali semi-conduttori, quali il silicio, hanno una resistività situata tra quelladei conduttori e quella degli isolanti.
110Schneider Electric
A Fig. 15 LStruttura generale di un variatore di velocità elettronico
5.6 Composizione, componenti degli avviatori e variatori elettronici
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 110
I loro atomi hanno 4 elettroni periferici. Ciascun atomo si associa con 4atomi vicini per formare una struttura stabile a 8 elettroni.
Un semi-conduttore di tipo P si ottiene incorporando al silicio puro unaproporzione ridotta di un corpo con atomi a 3 elettroni periferici.Mancherà quindi un elettrone per formare una struttura a 8 elettroni e siavrà quindi un’eccedenza di cariche positive.
Un semi-conduttore di tipo N si ottiene incorporando un corpo con atomia 5 elettroni periferici. Si avrà quindi un’eccedenza di elettroni, ovveroun’eccedenza di cariche negative.
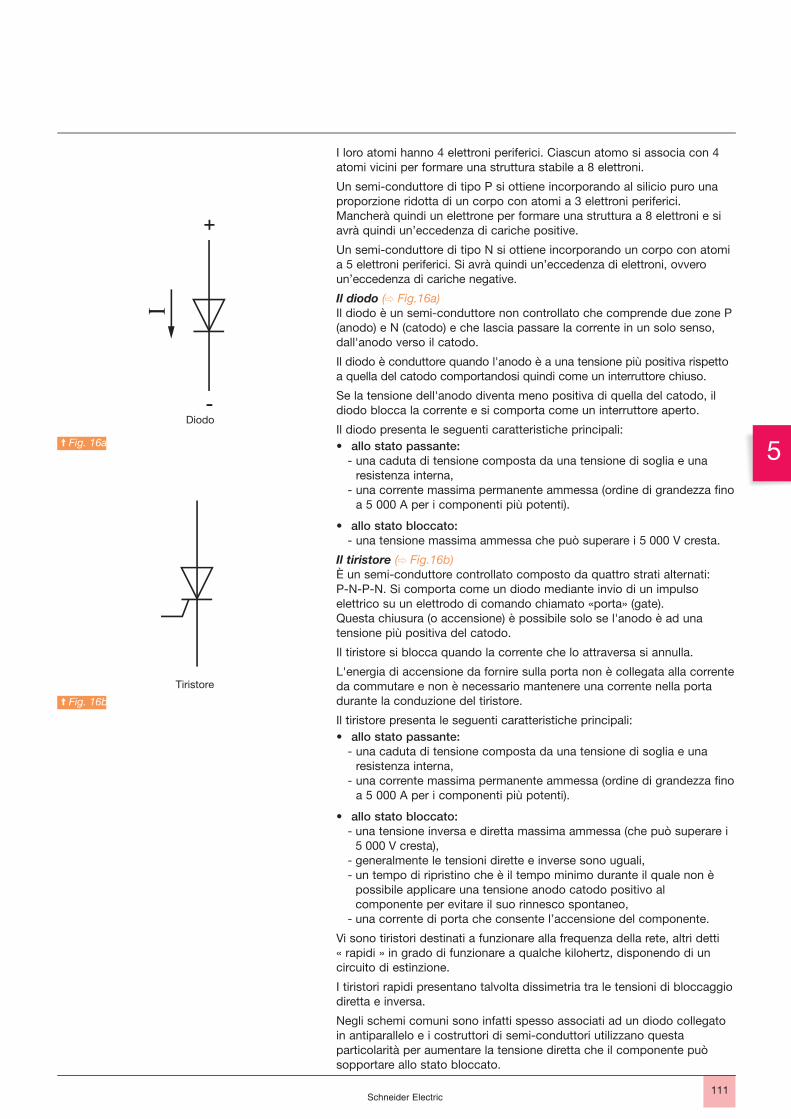
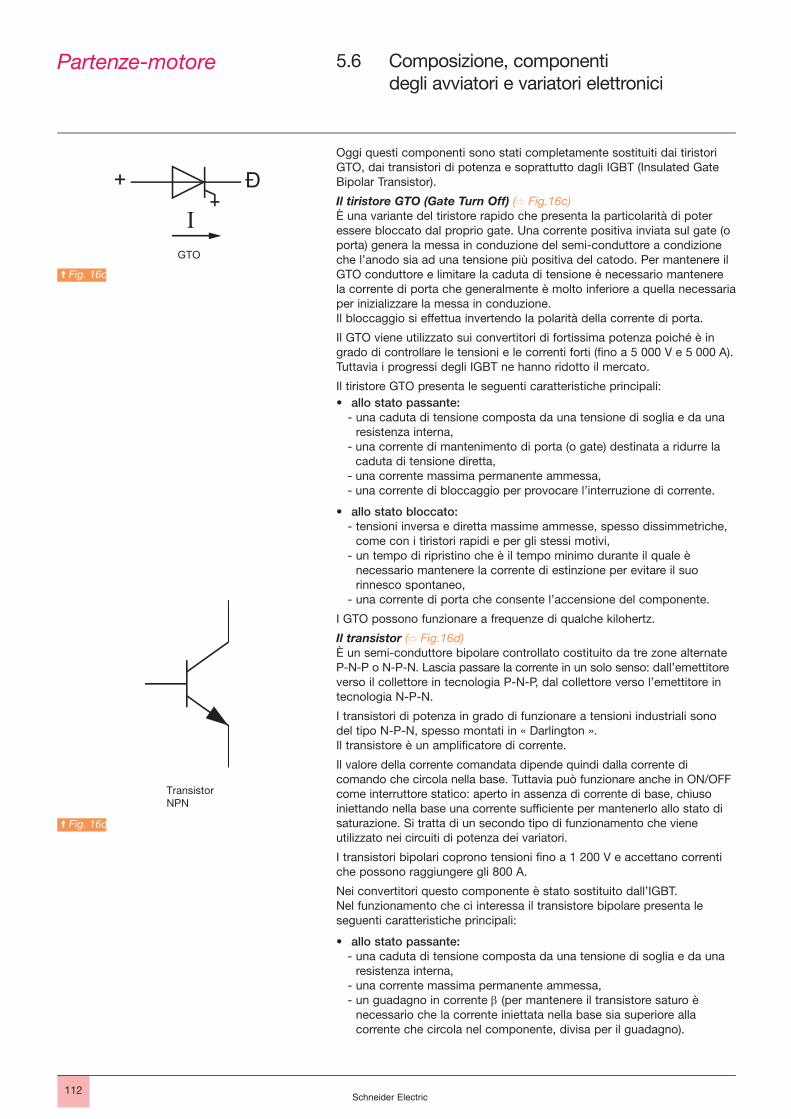
Il diodo (C Fig.16a)Il diodo è un semi-conduttore non controllato che comprende due zone P(anodo) e N (catodo) e che lascia passare la corrente in un solo senso,dall'anodo verso il catodo.
Il diodo è conduttore quando l'anodo è a una tensione più positiva rispettoa quella del catodo comportandosi quindi come un interruttore chiuso.
Se la tensione dell'anodo diventa meno positiva di quella del catodo, ildiodo blocca la corrente e si comporta come un interruttore aperto.
Il diodo presenta le seguenti caratteristiche principali:• allo stato passante:
- una caduta di tensione composta da una tensione di soglia e unaresistenza interna,
- una corrente massima permanente ammessa (ordine di grandezza finoa 5 000 A per i componenti più potenti).
• allo stato bloccato:- una tensione massima ammessa che può superare i 5 000 V cresta.
Il tiristore (C Fig.16b)È un semi-conduttore controllato composto da quattro strati alternati:P-N-P-N. Si comporta come un diodo mediante invio di un impulsoelettrico su un elettrodo di comando chiamato «porta» (gate). Questa chiusura (o accensione) è possibile solo se l'anodo è ad unatensione più positiva del catodo.
Il tiristore si blocca quando la corrente che lo attraversa si annulla.
L'energia di accensione da fornire sulla porta non è collegata alla correnteda commutare e non è necessario mantenere una corrente nella portadurante la conduzione del tiristore.
Il tiristore presenta le seguenti caratteristiche principali:• allo stato passante:
- una caduta di tensione composta da una tensione di soglia e unaresistenza interna,
- una corrente massima permanente ammessa (ordine di grandezza finoa 5 000 A per i componenti più potenti).
• allo stato bloccato:- una tensione inversa e diretta massima ammessa (che può superare i
5 000 V cresta),- generalmente le tensioni dirette e inverse sono uguali,- un tempo di ripristino che è il tempo minimo durante il quale non è
possibile applicare una tensione anodo catodo positivo alcomponente per evitare il suo rinnesco spontaneo,
- una corrente di porta che consente l’accensione del componente.
Vi sono tiristori destinati a funzionare alla frequenza della rete, altri detti« rapidi » in grado di funzionare a qualche kilohertz, disponendo di uncircuito di estinzione.
I tiristori rapidi presentano talvolta dissimetria tra le tensioni di bloccaggiodiretta e inversa.
Negli schemi comuni sono infatti spesso associati ad un diodo collegatoin antiparallelo e i costruttori di semi-conduttori utilizzano questaparticolarità per aumentare la tensione diretta che il componente puòsopportare allo stato bloccato.
111
5
Schneider Electric
A Fig. 16a L
A Fig. 16b L
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 111
Oggi questi componenti sono stati completamente sostituiti dai tiristoriGTO, dai transistori di potenza e soprattutto dagli IGBT (Insulated GateBipolar Transistor).
Il tiristore GTO (Gate Turn Off) (C Fig.16c)È una variante del tiristore rapido che presenta la particolarità di poteressere bloccato dal proprio gate. Una corrente positiva inviata sul gate (oporta) genera la messa in conduzione del semi-conduttore a condizioneche l’anodo sia ad una tensione più positiva del catodo. Per mantenere ilGTO conduttore e limitare la caduta di tensione è necessario mantenerela corrente di porta che generalmente è molto inferiore a quella necessariaper inizializzare la messa in conduzione. Il bloccaggio si effettua invertendo la polarità della corrente di porta.
Il GTO viene utilizzato sui convertitori di fortissima potenza poiché è ingrado di controllare le tensioni e le correnti forti (fino a 5 000 V e 5 000 A).Tuttavia i progressi degli IGBT ne hanno ridotto il mercato.
Il tiristore GTO presenta le seguenti caratteristiche principali:• allo stato passante:
- una caduta di tensione composta da una tensione di soglia e da unaresistenza interna,
- una corrente di mantenimento di porta (o gate) destinata a ridurre lacaduta di tensione diretta,
- una corrente massima permanente ammessa,- una corrente di bloccaggio per provocare l’interruzione di corrente.
• allo stato bloccato:- tensioni inversa e diretta massime ammesse, spesso dissimmetriche,
come con i tiristori rapidi e per gli stessi motivi,- un tempo di ripristino che è il tempo minimo durante il quale è
necessario mantenere la corrente di estinzione per evitare il suorinnesco spontaneo,
- una corrente di porta che consente l’accensione del componente.
I GTO possono funzionare a frequenze di qualche kilohertz.
Il transistor (C Fig.16d)È un semi-conduttore bipolare controllato costituito da tre zone alternateP-N-P o N-P-N. Lascia passare la corrente in un solo senso: dall’emettitoreverso il collettore in tecnologia P-N-P, dal collettore verso l’emettitore intecnologia N-P-N.
I transistori di potenza in grado di funzionare a tensioni industriali sonodel tipo N-P-N, spesso montati in « Darlington ». Il transistore è un amplificatore di corrente.
Il valore della corrente comandata dipende quindi dalla corrente dicomando che circola nella base. Tuttavia può funzionare anche in ON/OFFcome interruttore statico: aperto in assenza di corrente di base, chiusoiniettando nella base una corrente sufficiente per mantenerlo allo stato disaturazione. Si tratta di un secondo tipo di funzionamento che vieneutilizzato nei circuiti di potenza dei variatori.
I transistori bipolari coprono tensioni fino a 1 200 V e accettano correntiche possono raggiungere gli 800 A.
Nei convertitori questo componente è stato sostituito dall’IGBT.Nel funzionamento che ci interessa il transistore bipolare presenta leseguenti caratteristiche principali:
• allo stato passante:- una caduta di tensione composta da una tensione di soglia e da una
resistenza interna,- una corrente massima permanente ammessa,- un guadagno in corrente β (per mantenere il transistore saturo è
necessario che la corrente iniettata nella base sia superiore allacorrente che circola nel componente, divisa per il guadagno).
112Schneider Electric
5.6 Composizione, componenti degli avviatori e variatori elettronici
Partenze-motore
A Fig. 16c L
A Fig. 16d L
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 112
• allo stato bloccato:- una tensione diretta massima ammessa.
I transistori di potenza utilizzati in variazione di velocità possono funzio-nare a frequenze di qualche kilohertz.
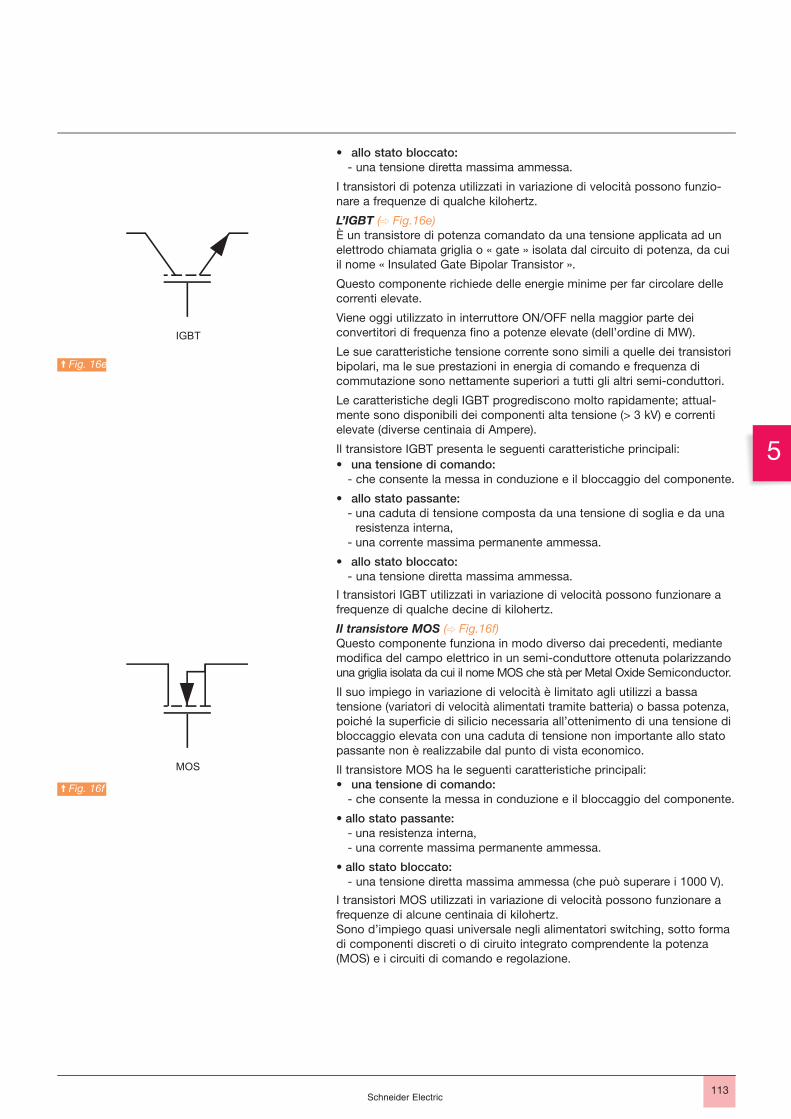
L’IGBT (C Fig.16e)È un transistore di potenza comandato da una tensione applicata ad unelettrodo chiamata griglia o « gate » isolata dal circuito di potenza, da cuiil nome « Insulated Gate Bipolar Transistor ».
Questo componente richiede delle energie minime per far circolare dellecorrenti elevate.
Viene oggi utilizzato in interruttore ON/OFF nella maggior parte deiconvertitori di frequenza fino a potenze elevate (dell’ordine di MW).
Le sue caratteristiche tensione corrente sono simili a quelle dei transistoribipolari, ma le sue prestazioni in energia di comando e frequenza dicommutazione sono nettamente superiori a tutti gli altri semi-conduttori.
Le caratteristiche degli IGBT progrediscono molto rapidamente; attual-mente sono disponibili dei componenti alta tensione (> 3 kV) e correntielevate (diverse centinaia di Ampere).
Il transistore IGBT presenta le seguenti caratteristiche principali:• una tensione di comando:
- che consente la messa in conduzione e il bloccaggio del componente.
• allo stato passante:- una caduta di tensione composta da una tensione di soglia e da una
resistenza interna,- una corrente massima permanente ammessa.
• allo stato bloccato:- una tensione diretta massima ammessa.
I transistori IGBT utilizzati in variazione di velocità possono funzionare afrequenze di qualche decine di kilohertz.
Il transistore MOS (C Fig.16f)Questo componente funziona in modo diverso dai precedenti, mediantemodifica del campo elettrico in un semi-conduttore ottenuta polarizzandouna griglia isolata da cui il nome MOS che stà per Metal Oxide Semiconductor.
Il suo impiego in variazione di velocità è limitato agli utilizzi a bassatensione (variatori di velocità alimentati tramite batteria) o bassa potenza,poiché la superficie di silicio necessaria all’ottenimento di una tensione dibloccaggio elevata con una caduta di tensione non importante allo statopassante non è realizzabile dal punto di vista economico.
Il transistore MOS ha le seguenti caratteristiche principali:• una tensione di comando:
- che consente la messa in conduzione e il bloccaggio del componente.
• allo stato passante:- una resistenza interna,- una corrente massima permanente ammessa.
• allo stato bloccato:- una tensione diretta massima ammessa (che può superare i 1000 V).
I transistori MOS utilizzati in variazione di velocità possono funzionare afrequenze di alcune centinaia di kilohertz. Sono d’impiego quasi universale negli alimentatori switching, sotto formadi componenti discreti o di ciruito integrato comprendente la potenza(MOS) e i circuiti di comando e regolazione.
113
5
Schneider Electric
A Fig. 16f L
A Fig. 16e L
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 113
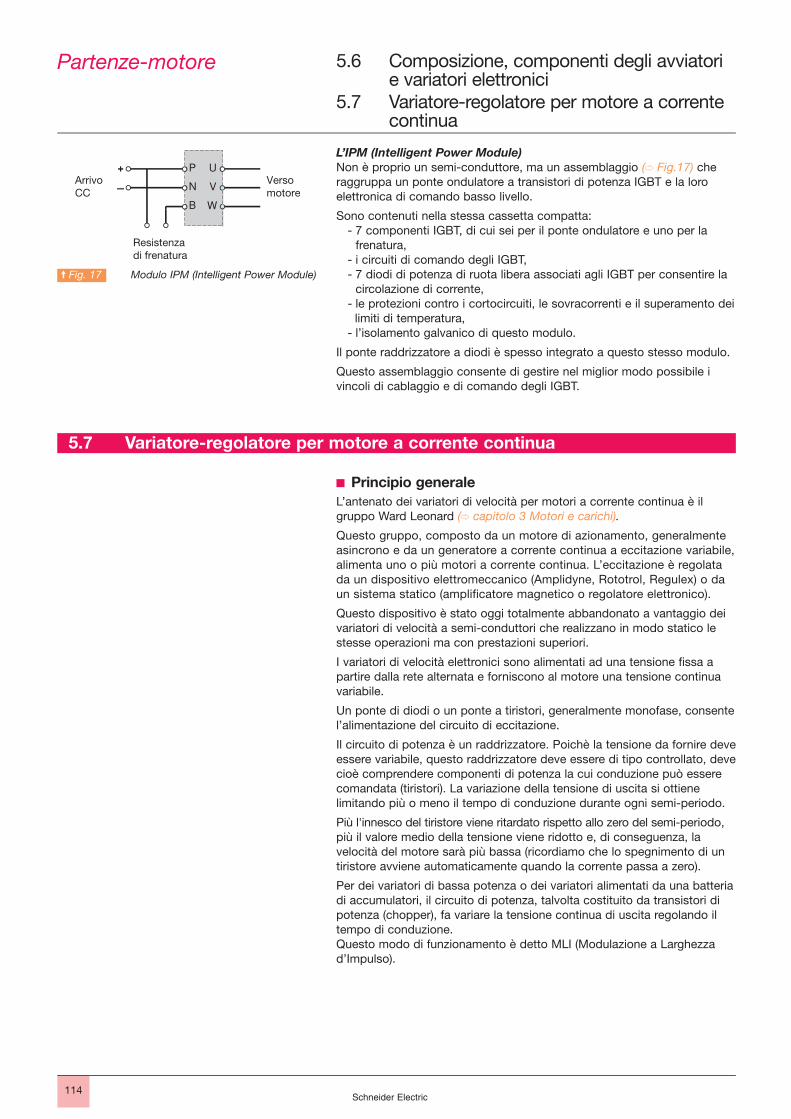
L’IPM (Intelligent Power Module)Non è proprio un semi-conduttore, ma un assemblaggio (C Fig.17) cheraggruppa un ponte ondulatore a transistori di potenza IGBT e la loroelettronica di comando basso livello.
Sono contenuti nella stessa cassetta compatta:- 7 componenti IGBT, di cui sei per il ponte ondulatore e uno per la
frenatura,- i circuiti di comando degli IGBT,- 7 diodi di potenza di ruota libera associati agli IGBT per consentire la
circolazione di corrente,- le protezioni contro i cortocircuiti, le sovracorrenti e il superamento dei
limiti di temperatura,- l’isolamento galvanico di questo modulo.
Il ponte raddrizzatore a diodi è spesso integrato a questo stesso modulo.
Questo assemblaggio consente di gestire nel miglior modo possibile ivincoli di cablaggio e di comando degli IGBT.
5.7 Variatore-regolatore per motore a corrente continua
b Principio generaleL’antenato dei variatori di velocità per motori a corrente continua è ilgruppo Ward Leonard (C capitolo 3 Motori e carichi).
Questo gruppo, composto da un motore di azionamento, generalmenteasincrono e da un generatore a corrente continua a eccitazione variabile,alimenta uno o più motori a corrente continua. L’eccitazione è regolatada un dispositivo elettromeccanico (Amplidyne, Rototrol, Regulex) o daun sistema statico (amplificatore magnetico o regolatore elettronico).
Questo dispositivo è stato oggi totalmente abbandonato a vantaggio deivariatori di velocità a semi-conduttori che realizzano in modo statico lestesse operazioni ma con prestazioni superiori.
I variatori di velocità elettronici sono alimentati ad una tensione fissa apartire dalla rete alternata e forniscono al motore una tensione continuavariabile.
Un ponte di diodi o un ponte a tiristori, generalmente monofase, consentel’alimentazione del circuito di eccitazione.
Il circuito di potenza è un raddrizzatore. Poichè la tensione da fornire deveessere variabile, questo raddrizzatore deve essere di tipo controllato, devecioè comprendere componenti di potenza la cui conduzione può esserecomandata (tiristori). La variazione della tensione di uscita si ottienelimitando più o meno il tempo di conduzione durante ogni semi-periodo.
Più l'innesco del tiristore viene ritardato rispetto allo zero del semi-periodo,più il valore medio della tensione viene ridotto e, di conseguenza, lavelocità del motore sarà più bassa (ricordiamo che lo spegnimento di untiristore avviene automaticamente quando la corrente passa a zero).
Per dei variatori di bassa potenza o dei variatori alimentati da una batteriadi accumulatori, il circuito di potenza, talvolta costituito da transistori dipotenza (chopper), fa variare la tensione continua di uscita regolando iltempo di conduzione. Questo modo di funzionamento è detto MLI (Modulazione a Larghezzad’Impulso).
114Schneider Electric
A Fig. 17 LModulo IPM (Intelligent Power Module)
5.6 Composizione, componenti degli avviatorie variatori elettronici
5.7 Variatore-regolatore per motore a correntecontinua
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 114
b RegolazioneLa regolazione consiste nel mantenere con precisione la velocitàal valore impostato nonostante i disturbi (variazione della coppia resistente,della tensione di alimentazione, della tempertaura).Comunque, in fase di accelerazione o in caso di sovraccarico, l'intensitàdella corrente non deve raggiungere un valore tale da danneggiare ilmotore o il dispositivo di alimentazione.
Un anello di regolazione interno al variatore mantiene la corrente ad un valore accettabile. Questo limite è accessibile per consentire la regolazione in funzione delle caratteristiche del motore. La velocità è fissata da un segnale, analogico o digitale, trasmessotramite un bus di campo o da un altro dispositivo che fornisce unatensione immagine della velocità desiderata.
Il riferimento può essere fisso o variare durante il ciclo di funzionamentodella macchina azionata.
Delle rampe di accelerazione e di decelerazione regolabili applicano inmodo progressivo la tensione di riferimento corrispondente alla velocitàdesiderata. L’evoluzione di questa rampa può seguire tutte le forme volute.
La regolazione delle rampe definisce la durata dell’accelerazione e delrallentamento.
Ad anello chiuso la velocità reale viene misurata permanentemente da unadinamo tachimetrica o da un generatore di impulsi (C capitolo 6Acquisizioni di dati) e confrontata con il riferimento. Se viene rilevato unoscarto, l'elettronica di controllo realizza una correzione della velocità. La gamma di velocità si estende da alcuni giri al minuto fino alla velocitàmassima. All’interno di questa gamma di variazione, si ottiene facilmenteuna precisione superiore all’1 % in regolazione analogica e superiore a1 / 1 000 in regolazione digitale. Accumulando tutte le variazioni possibili(vuoto/carico, variazione di tensione, di temperatura, ecc...), la regolazionepuò anche essere effettuata a partire dalla misura della tensione delmotore tenendo conto della corrente che lo attraversa.
Le prestazioni sono in questo caso nettamente inferiori, sia nella gammadi velocità che nella precisione (qualche % tra marcia a vuoto e marcia incarico).
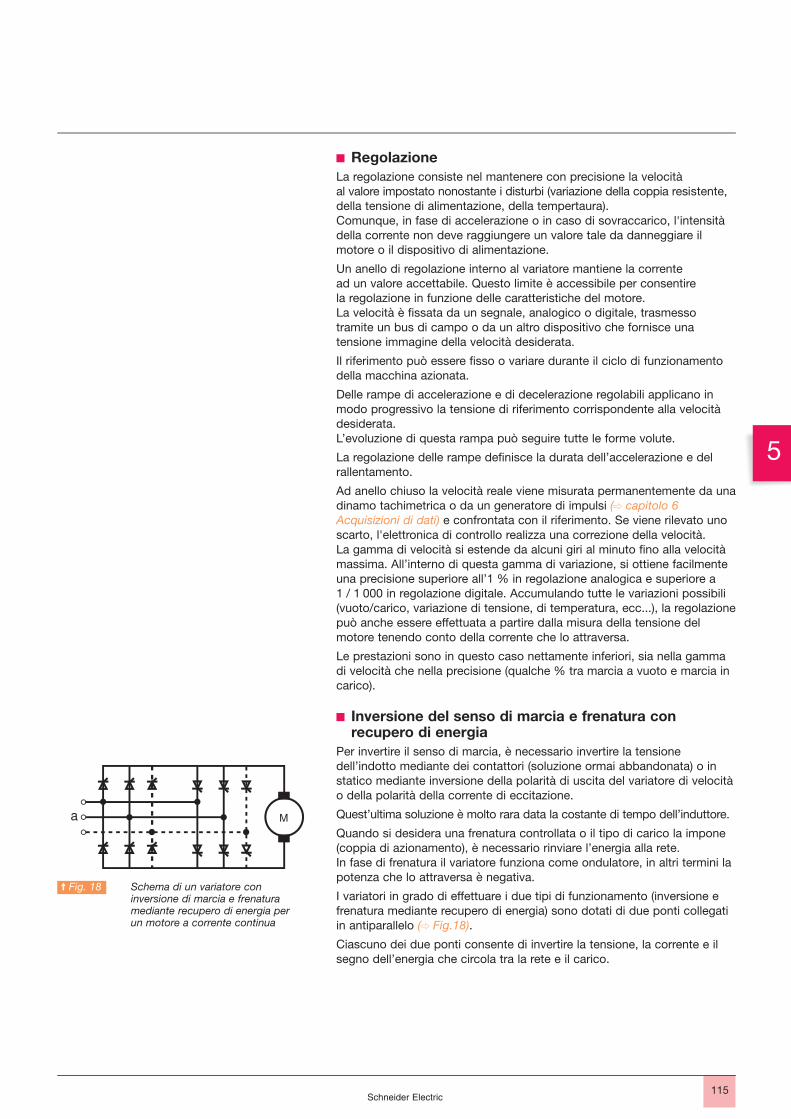
b Inversione del senso di marcia e frenatura conrecupero di energia
Per invertire il senso di marcia, è necessario invertire la tensionedell’indotto mediante dei contattori (soluzione ormai abbandonata) o instatico mediante inversione della polarità di uscita del variatore di velocitào della polarità della corrente di eccitazione.
Quest’ultima soluzione è molto rara data la costante di tempo dell’induttore.
Quando si desidera una frenatura controllata o il tipo di carico la impone(coppia di azionamento), è necessario rinviare l’energia alla rete. In fase di frenatura il variatore funziona come ondulatore, in altri termini lapotenza che lo attraversa è negativa.
I variatori in grado di effettuare i due tipi di funzionamento (inversione efrenatura mediante recupero di energia) sono dotati di due ponti collegatiin antiparallelo (C Fig.18).
Ciascuno dei due ponti consente di invertire la tensione, la corrente e ilsegno dell’energia che circola tra la rete e il carico.
115
5
Schneider Electric
A Fig. 18 LSchema di un variatore con inversione di marcia e frenatura mediante recupero di energia per un motore a corrente continua
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 115
b Modi di funzionamento possibili Il tipo di carico viene trattato in modo più dettagliato nel capitolo 3Motori e carichi. Per quanto riguarda il funzionamento del motore acorrente continua, verrà trattato il funzionamento « a coppia costante » e ilfunzionamento a « potenza costante ».
v Funzionamento detto a « coppia costante »Ad eccitazione costante, la velocità del motore dipende dalla tensioneapplicata all’indotto del motore. La variazione di velocità è possibiledall’arresto fino alla tensione nominale del motore scelta in funzione dellatensione alternata d’alimentazione.
La coppia motore è proporzionale alla corrente d’indotto e la coppianominale della macchina può essere ottenuta in modo continuo a tutte levelocità.
v Funzionamento detto a « potenza costante »Quando la macchina è alimentata alla sua tensione nominale è ancorapossibile aumentare la sua velocità riducendo la corrente di eccitazione. Il variatore di velocità deve, in questo caso, comprendere un ponteraddrizzatore controllato che alimenta il circuito di eccitazione. La tensione d’indotto rimane allora fissa e uguale alla tensione nominale e lacorrente di eccitazione viene regolata per ottenere la velocità desiderata.
La potenza viene espressa con la formula:P = E . IoveE rappresenta la tensione di alimentazione,I rappresenta la corrente d’indotto.
La potenza, per una data corrente d’indotto, è quindi costante sull’interagamma di velocità, ma la velocità massima viene limitata da dueparametri:
- il limite meccanico legato all’indotto e in particolare la forza centrifuga massima supportabile dal collettore,
- le possibilità di commutazione della macchina, generalmente piùlimitative.
Il costruttore del motore deve quindi effettuare la scelta più corretta,soprattutto in funzione della gamma di velocità a potenza costante.
5.8 Convertitore di frequenza per motore asincrono
Il variatore di velocità per motore asincrono riprende gli stessi principibase del variatore per motore a corrente continua. La comparsa sul mercato di variatori di velocità economici per motoriasincroni è abbastanza recente. In Francia Schneider Electric è stata unadelle aziende pioniere del settore. L’evoluzione delle tecnologie hapermesso la realizzazione di variatori economici, affidabili e performanti.
b Principio generaleIl convertitore di frequenza, alimentato a tensione e frequenza fissedalla rete, garantisce al motore, in funzione delle esigenze di velocità,la sua alimentazione a corrente alternata con tensione e frequenza variabili.
Per alimentare correttamente un motore asincrono a coppia costante,qualsiasi sia la velocità, è necessario mantenere il flusso costante;perché questo si verifichi occorre che la tensione e la frequenza evolvanosimultaneamente e nelle stesse proporzioni.
116Schneider Electric
5.7 Variatore-regolatore per motore acorrente continua
5.8 Convertitore di frequenza per motoreasincrono
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:40 Pagina 116
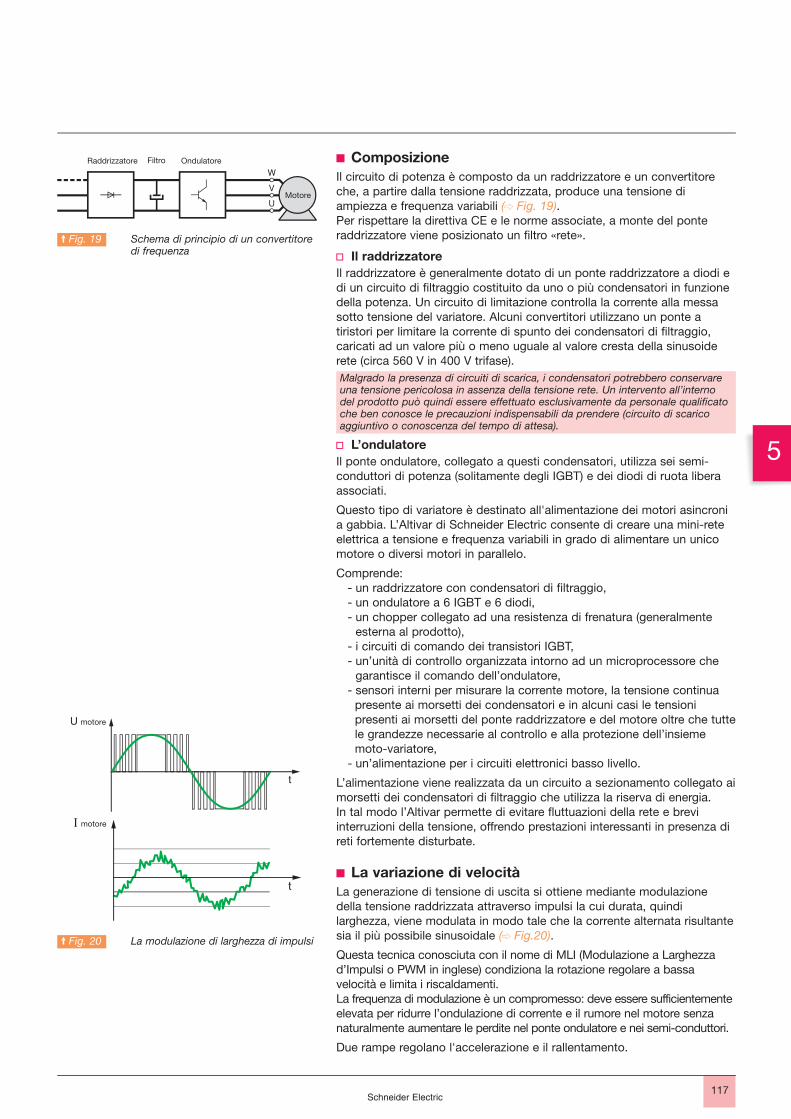
b ComposizioneIl circuito di potenza è composto da un raddrizzatore e un convertitoreche, a partire dalla tensione raddrizzata, produce una tensione diampiezza e frequenza variabili (C Fig. 19). Per rispettare la direttiva CE e le norme associate, a monte del ponteraddrizzatore viene posizionato un filtro «rete».
v Il raddrizzatoreIl raddrizzatore è generalmente dotato di un ponte raddrizzatore a diodi edi un circuito di filtraggio costituito da uno o più condensatori in funzionedella potenza. Un circuito di limitazione controlla la corrente alla messasotto tensione del variatore. Alcuni convertitori utilizzano un ponte atiristori per limitare la corrente di spunto dei condensatori di filtraggio,caricati ad un valore più o meno uguale al valore cresta della sinusoiderete (circa 560 V in 400 V trifase).Malgrado la presenza di circuiti di scarica, i condensatori potrebbero conservareuna tensione pericolosa in assenza della tensione rete. Un intervento all’internodel prodotto può quindi essere effettuato esclusivamente da personale qualificatoche ben conosce le precauzioni indispensabili da prendere (circuito di scaricoaggiuntivo o conoscenza del tempo di attesa).
v L’ondulatoreIl ponte ondulatore, collegato a questi condensatori, utilizza sei semi-conduttori di potenza (solitamente degli IGBT) e dei diodi di ruota liberaassociati.
Questo tipo di variatore è destinato all'alimentazione dei motori asincronia gabbia. L’Altivar di Schneider Electric consente di creare una mini-reteelettrica a tensione e frequenza variabili in grado di alimentare un unicomotore o diversi motori in parallelo.
Comprende: - un raddrizzatore con condensatori di filtraggio, - un ondulatore a 6 IGBT e 6 diodi,- un chopper collegato ad una resistenza di frenatura (generalmente
esterna al prodotto),- i circuiti di comando dei transistori IGBT,- un’unità di controllo organizzata intorno ad un microprocessore che
garantisce il comando dell’ondulatore,- sensori interni per misurare la corrente motore, la tensione continua
presente ai morsetti dei condensatori e in alcuni casi le tensioni presenti ai morsetti del ponte raddrizzatore e del motore oltre che tuttele grandezze necessarie al controllo e alla protezione dell’insieme moto-variatore,
- un’alimentazione per i circuiti elettronici basso livello.
L’alimentazione viene realizzata da un circuito a sezionamento collegato aimorsetti dei condensatori di filtraggio che utilizza la riserva di energia. In tal modo l’Altivar permette di evitare fluttuazioni della rete e breviinterruzioni della tensione, offrendo prestazioni interessanti in presenza direti fortemente disturbate.
b La variazione di velocitàLa generazione di tensione di uscita si ottiene mediante modulazionedella tensione raddrizzata attraverso impulsi la cui durata, quindilarghezza, viene modulata in modo tale che la corrente alternata risultantesia il più possibile sinusoidale (C Fig.20).
Questa tecnica conosciuta con il nome di MLI (Modulazione a Larghezzad’Impulsi o PWM in inglese) condiziona la rotazione regolare a bassavelocità e limita i riscaldamenti. La frequenza di modulazione è un compromesso: deve essere sufficientementeelevata per ridurre l’ondulazione di corrente e il rumore nel motore senzanaturalmente aumentare le perdite nel ponte ondulatore e nei semi-conduttori.
Due rampe regolano l'accelerazione e il rallentamento.
117
5
Schneider Electric
A Fig. 19 LSchema di principio di un convertitoredi frequenza
A Fig. 20 LLa modulazione di larghezza di impulsi
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:40 Pagina 117
b Le protezioni integrateIl variatore è autoprotetto e a sua volta protegge il motore contro iriscaldamenti eccessivi, bloccandosi fino al ripristino di una temperaturaaccettabile.
Lo stesso vale per tutti i disturbi o le anomalie che possono alterare ilfunzionamento dell’insieme, quali sovratensioni, sottotensioni, assenze difase in ingresso o uscita.
Alcuni modelli di variatore integrano in un unico modulo IPM (IntelligentPower Module) il raddrizzatore, l’ondulatore, il chopper, il comando e leprotezioni contro i cortocircuiti.
b Legge di comando del motore asincronoI variatori di velocità per motori asincroni di prima generazione utilizzavano ilcomando scalare o V/Hz, che dal punto di vista economico rappresentaval’unica possibilità realizzabile. La comparsa dei microprocessori con leloro notevoli potenze di calcolo ha permesso il passaggio al controllovettoriale, molto più performante. I costruttori di variatori propongonooggi sulla maggior parte dei loro prodotti il controllo scalare, il controllovettoriale senza sensore e, su alcuni modelli il controllo vettoriale consensore.
v Funzionamento in U/fIn questo tipo di funzionamento il riferimento velocità impone unafrequenza all’ondulatore e di conseguenza al motore, determinando lavelocità di rotazione. La tensione d’alimentazione è in relazione direttacon la frequenza. Questo funzionamento viene spesso chiamatofunzionamento a U/f costante o funzionamento scalare.
Se non viene effettuata nessuna compensazione, la velocità reale varia con ilcarico e in questo modo la gamma di funzionamento e le prestazioni vengonolimitate. Una compensazione sommaria può essere utilizzata per tener contodell’impedenza interna del motore e limitare la caduta di velocità in carico.
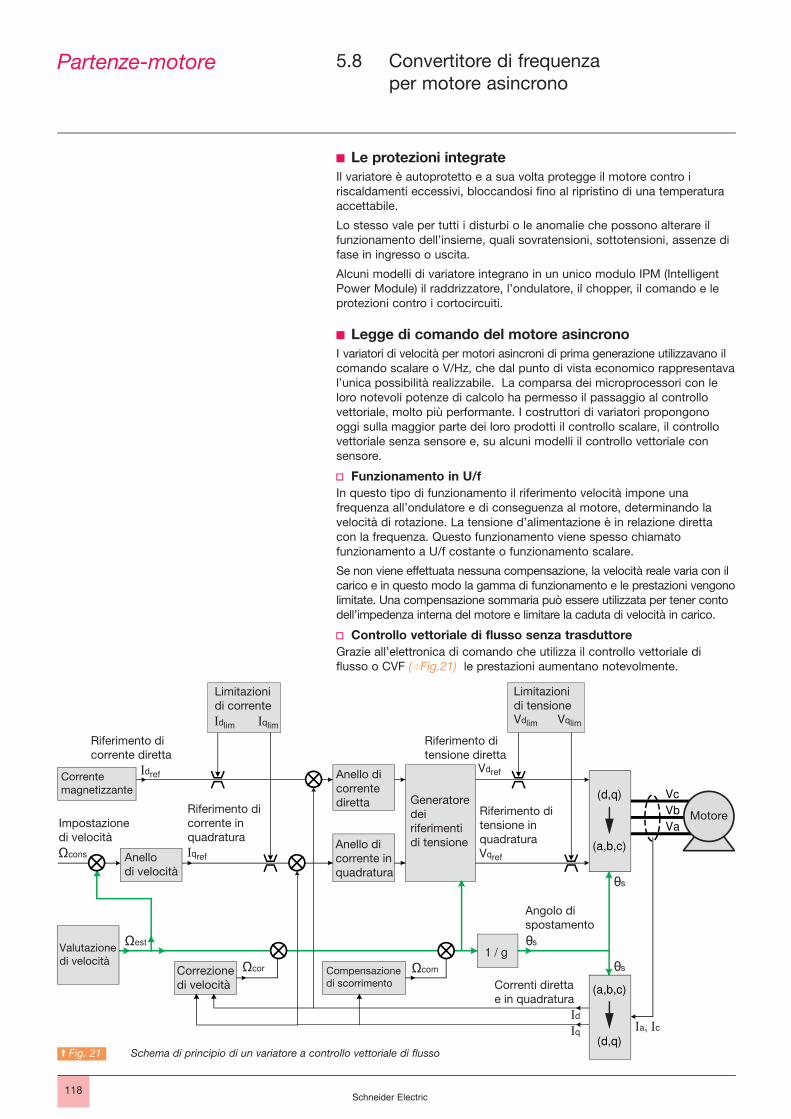
v Controllo vettoriale di flusso senza trasduttoreGrazie all’elettronica di comando che utilizza il controllo vettoriale diflusso o CVF (CFig.21) le prestazioni aumentano notevolmente.
118Schneider Electric
5.8 Convertitore di frequenza per motore asincrono
Partenze-motore
A Fig. 21 LSchema di principio di un variatore a controllo vettoriale di flusso
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 118
Quasi tutti i variatori moderni integrano questa funzione di base. Nella maggior parte delle applicazioni, l’impostazione o la valutazione deiparametri della macchina consente di fare a meno del sensore di velocità.In questo caso un motore standard può essere utilizzato con la limitazioneusuale del funzionamento prolungato a bassa velocità.
Il variatore elabora le informazioni a partire dalle grandezze misurate aimorsetti della macchina (tensione e corrente).
Questo modo di controllo offre prestazioni accettabili senza aumentare icosti.
Per ottenere tali prestazioni è necessario conoscere alcuni parametri dellamacchina.
Alla messa in servizio l’operatore deve inserire nei parametri diregolazione del variatore le caratteristiche indicate sulla targa motore: UNS: tensione nominale motore,FRS: frequenza nominale statore,NCR: corrente nominale statore,NSP: velocità nominale,COS: coseno motore.
Queste sigle vengono utilizzate dai variatori Altivar di Schneider Electric.
A partire da questi valori il variatore calcola le caratteristiche del rotore:Lm, Tr. (Lm: induttanza magnetizzante, Tr: momento della coppia).
Alla messa sotto tensione un variatore con controllo vettoriale di flussosenza sensore (tipo ATV71 di Schneider Electric) esegue un’autoregolazioneche gli consente di determinare i parametri statorici Rs, Lf. Questa misura può essere effettuata con motore collegato alla meccanica.
La durata varia in funzione della potenza motore (da 1 a 10 s).
Questi valori vengono memorizzati e consentono al prodotto di elaborarele leggi di comando.
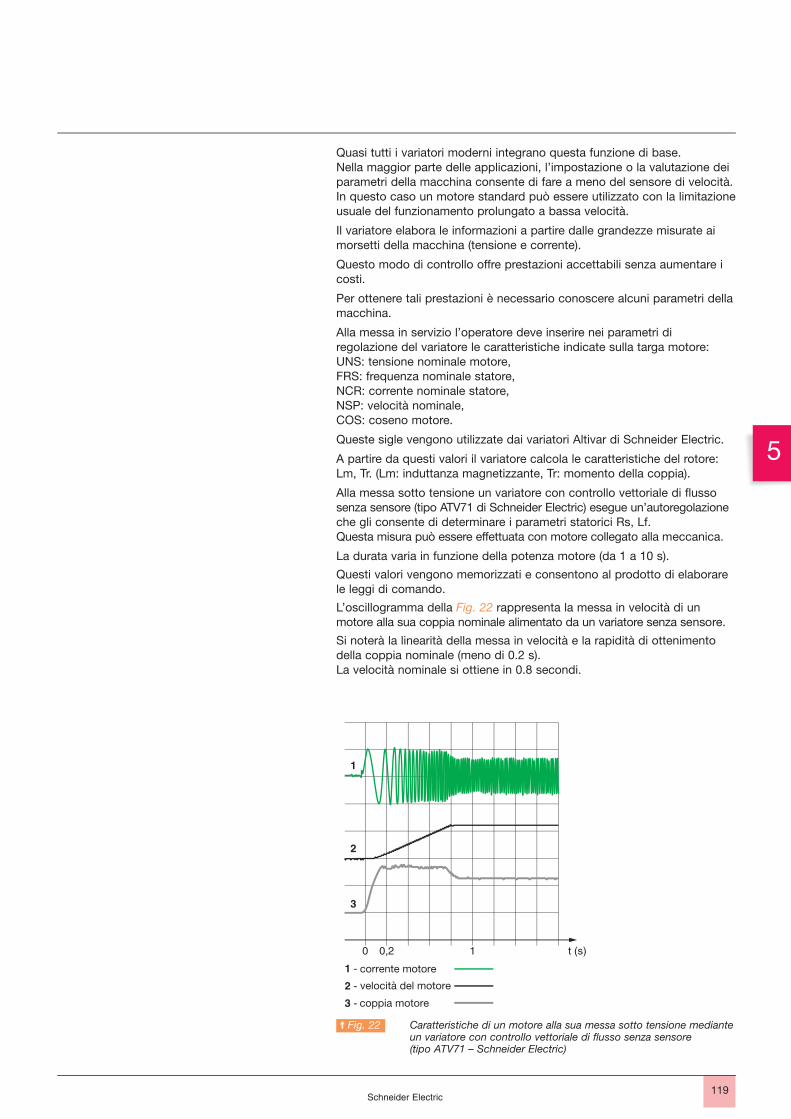
L’oscillogramma della Fig. 22 rappresenta la messa in velocità di unmotore alla sua coppia nominale alimentato da un variatore senza sensore.
Si noterà la linearità della messa in velocità e la rapidità di ottenimentodella coppia nominale (meno di 0.2 s).La velocità nominale si ottiene in 0.8 secondi.
119
5
Schneider Electric
A Fig. 22 LCaratteristiche di un motore alla sua messa sotto tensione medianteun variatore con controllo vettoriale di flusso senza sensore (tipo ATV71 – Schneider Electric)
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:41 Pagina 119
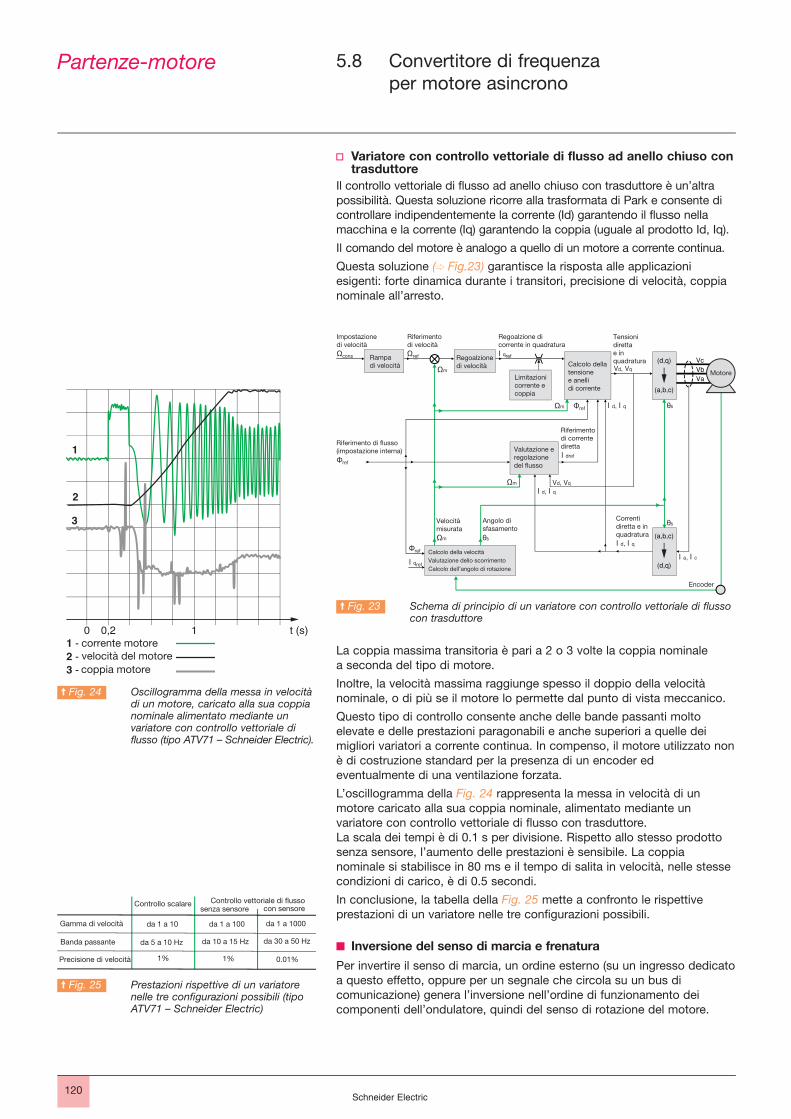
v Variatore con controllo vettoriale di flusso ad anello chiuso contrasduttore
Il controllo vettoriale di flusso ad anello chiuso con trasduttore è un’altrapossibilità. Questa soluzione ricorre alla trasformata di Park e consente dicontrollare indipendentemente la corrente (Id) garantendo il flusso nellamacchina e la corrente (Iq) garantendo la coppia (uguale al prodotto Id, Iq).
Il comando del motore è analogo a quello di un motore a corrente continua.
Questa soluzione (C Fig.23) garantisce la risposta alle applicazioniesigenti: forte dinamica durante i transitori, precisione di velocità, coppianominale all’arresto.
La coppia massima transitoria è pari a 2 o 3 volte la coppia nominalea seconda del tipo di motore.
Inoltre, la velocità massima raggiunge spesso il doppio della velocitànominale, o di più se il motore lo permette dal punto di vista meccanico.
Questo tipo di controllo consente anche delle bande passanti moltoelevate e delle prestazioni paragonabili e anche superiori a quelle deimigliori variatori a corrente continua. In compenso, il motore utilizzato nonè di costruzione standard per la presenza di un encoder edeventualmente di una ventilazione forzata.
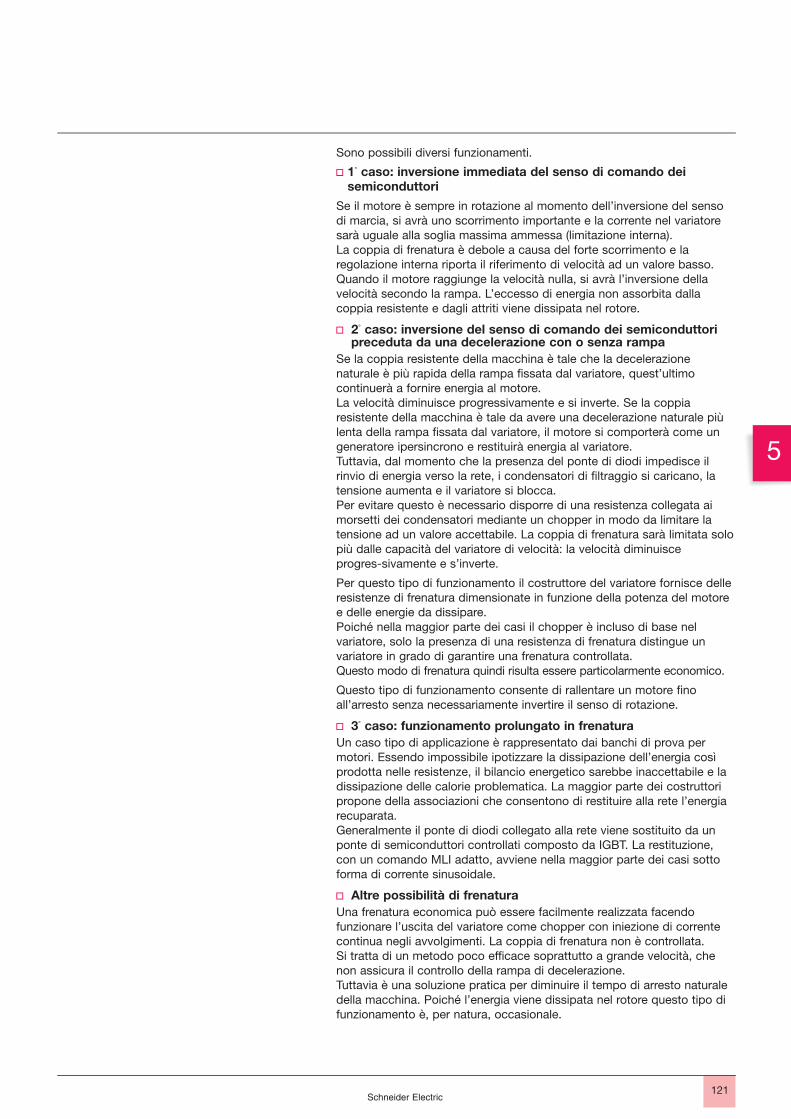
L’oscillogramma della Fig. 24 rappresenta la messa in velocità di unmotore caricato alla sua coppia nominale, alimentato mediante unvariatore con controllo vettoriale di flusso con trasduttore. La scala dei tempi è di 0.1 s per divisione. Rispetto allo stesso prodottosenza sensore, l’aumento delle prestazioni è sensibile. La coppianominale si stabilisce in 80 ms e il tempo di salita in velocità, nelle stessecondizioni di carico, è di 0.5 secondi.
In conclusione, la tabella della Fig. 25 mette a confronto le rispettiveprestazioni di un variatore nelle tre configurazioni possibili.
b Inversione del senso di marcia e frenatura
Per invertire il senso di marcia, un ordine esterno (su un ingresso dedicatoa questo effetto, oppure per un segnale che circola su un bus dicomunicazione) genera l’inversione nell’ordine di funzionamento deicomponenti dell’ondulatore, quindi del senso di rotazione del motore.
120Schneider Electric
5.8 Convertitore di frequenza per motore asincrono
Partenze-motore
A Fig. 24 LOscillogramma della messa in velocitàdi un motore, caricato alla sua coppianominale alimentato mediante unvariatore con controllo vettoriale diflusso (tipo ATV71 – Schneider Electric).
A Fig. 25 LPrestazioni rispettive di un variatorenelle tre configurazioni possibili (tipoATV71 – Schneider Electric)
A Fig. 23 LSchema di principio di un variatore con controllo vettoriale di flussocon trasduttore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:41 Pagina 120
Sono possibili diversi funzionamenti.
v 1° caso: inversione immediata del senso di comando deisemiconduttori
Se il motore è sempre in rotazione al momento dell’inversione del sensodi marcia, si avrà uno scorrimento importante e la corrente nel variatoresarà uguale alla soglia massima ammessa (limitazione interna). La coppia di frenatura è debole a causa del forte scorrimento e laregolazione interna riporta il riferimento di velocità ad un valore basso.Quando il motore raggiunge la velocità nulla, si avrà l’inversione dellavelocità secondo la rampa. L’eccesso di energia non assorbita dallacoppia resistente e dagli attriti viene dissipata nel rotore.
v 2° caso: inversione del senso di comando dei semiconduttoripreceduta da una decelerazione con o senza rampa
Se la coppia resistente della macchina è tale che la decelerazionenaturale è più rapida della rampa fissata dal variatore, quest’ultimocontinuerà a fornire energia al motore. La velocità diminuisce progressivamente e si inverte. Se la coppiaresistente della macchina è tale da avere una decelerazione naturale piùlenta della rampa fissata dal variatore, il motore si comporterà come ungeneratore ipersincrono e restituirà energia al variatore. Tuttavia, dal momento che la presenza del ponte di diodi impedisce ilrinvio di energia verso la rete, i condensatori di filtraggio si caricano, latensione aumenta e il variatore si blocca. Per evitare questo è necessario disporre di una resistenza collegata aimorsetti dei condensatori mediante un chopper in modo da limitare latensione ad un valore accettabile. La coppia di frenatura sarà limitata solopiù dalle capacità del variatore di velocità: la velocità diminuisce progres-sivamente e s’inverte.
Per questo tipo di funzionamento il costruttore del variatore fornisce delleresistenze di frenatura dimensionate in funzione della potenza del motoree delle energie da dissipare. Poiché nella maggior parte dei casi il chopper è incluso di base nelvariatore, solo la presenza di una resistenza di frenatura distingue unvariatore in grado di garantire una frenatura controllata. Questo modo di frenatura quindi risulta essere particolarmente economico.
Questo tipo di funzionamento consente di rallentare un motore finoall’arresto senza necessariamente invertire il senso di rotazione.
v 3° caso: funzionamento prolungato in frenaturaUn caso tipo di applicazione è rappresentato dai banchi di prova permotori. Essendo impossibile ipotizzare la dissipazione dell’energia cosìprodotta nelle resistenze, il bilancio energetico sarebbe inaccettabile e ladissipazione delle calorie problematica. La maggior parte dei costruttoripropone della associazioni che consentono di restituire alla rete l’energiarecuparata. Generalmente il ponte di diodi collegato alla rete viene sostituito da unponte di semiconduttori controllati composto da IGBT. La restituzione, con un comando MLI adatto, avviene nella maggior parte dei casi sottoforma di corrente sinusoidale.
v Altre possibilità di frenaturaUna frenatura economica può essere facilmente realizzata facendofunzionare l’uscita del variatore come chopper con iniezione di correntecontinua negli avvolgimenti. La coppia di frenatura non è controllata. Si tratta di un metodo poco efficace soprattutto a grande velocità, chenon assicura il controllo della rampa di decelerazione. Tuttavia è una soluzione pratica per diminuire il tempo di arresto naturaledella macchina. Poiché l’energia viene dissipata nel rotore questo tipo difunzionamento è, per natura, occasionale.
121
5
Schneider Electric
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 121
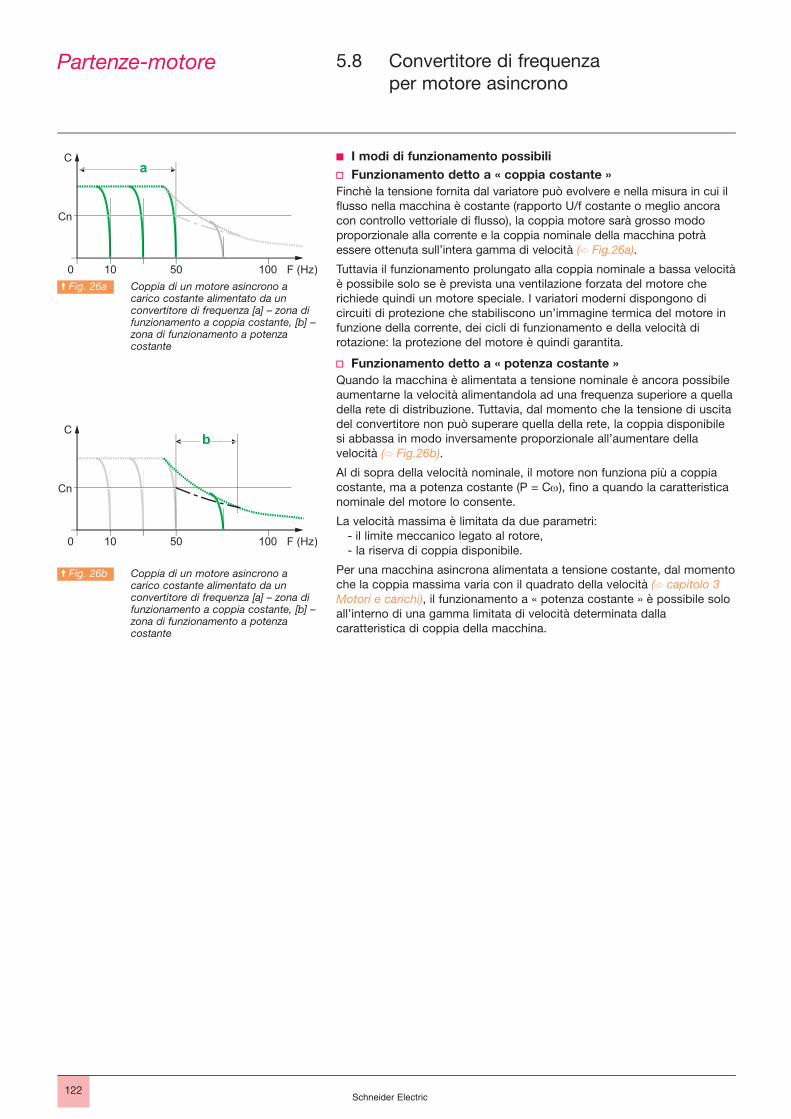
b I modi di funzionamento possibiliv Funzionamento detto a « coppia costante »Finchè la tensione fornita dal variatore può evolvere e nella misura in cui ilflusso nella macchina è costante (rapporto U/f costante o meglio ancoracon controllo vettoriale di flusso), la coppia motore sarà grosso modoproporzionale alla corrente e la coppia nominale della macchina potràessere ottenuta sull’intera gamma di velocità (C Fig.26a).
Tuttavia il funzionamento prolungato alla coppia nominale a bassa velocitàè possibile solo se è prevista una ventilazione forzata del motore cherichiede quindi un motore speciale. I variatori moderni dispongono dicircuiti di protezione che stabiliscono un’immagine termica del motore infunzione della corrente, dei cicli di funzionamento e della velocità dirotazione: la protezione del motore è quindi garantita.
v Funzionamento detto a « potenza costante »Quando la macchina è alimentata a tensione nominale è ancora possibileaumentarne la velocità alimentandola ad una frequenza superiore a quelladella rete di distribuzione. Tuttavia, dal momento che la tensione di uscitadel convertitore non può superare quella della rete, la coppia disponibilesi abbassa in modo inversamente proporzionale all’aumentare dellavelocità (C Fig.26b).
Al di sopra della velocità nominale, il motore non funziona più a coppiacostante, ma a potenza costante (P = Cω), fino a quando la caratteristicanominale del motore lo consente.
La velocità massima è limitata da due parametri:- il limite meccanico legato al rotore,- la riserva di coppia disponibile.
Per una macchina asincrona alimentata a tensione costante, dal momentoche la coppia massima varia con il quadrato della velocità (C capitolo 3Motori e carichi), il funzionamento a « potenza costante » è possibile soloall’interno di una gamma limitata di velocità determinata dallacaratteristica di coppia della macchina.
122Schneider Electric
5.8 Convertitore di frequenza per motore asincrono
Partenze-motore
A Fig. 26a LCoppia di un motore asincrono acarico costante alimentato da unconvertitore di frequenza [a] – zona difunzionamento a coppia costante, [b] –zona di funzionamento a potenzacostante
A Fig. 26b LCoppia di un motore asincrono acarico costante alimentato da unconvertitore di frequenza [a] – zona difunzionamento a coppia costante, [b] –zona di funzionamento a potenzacostante
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 122
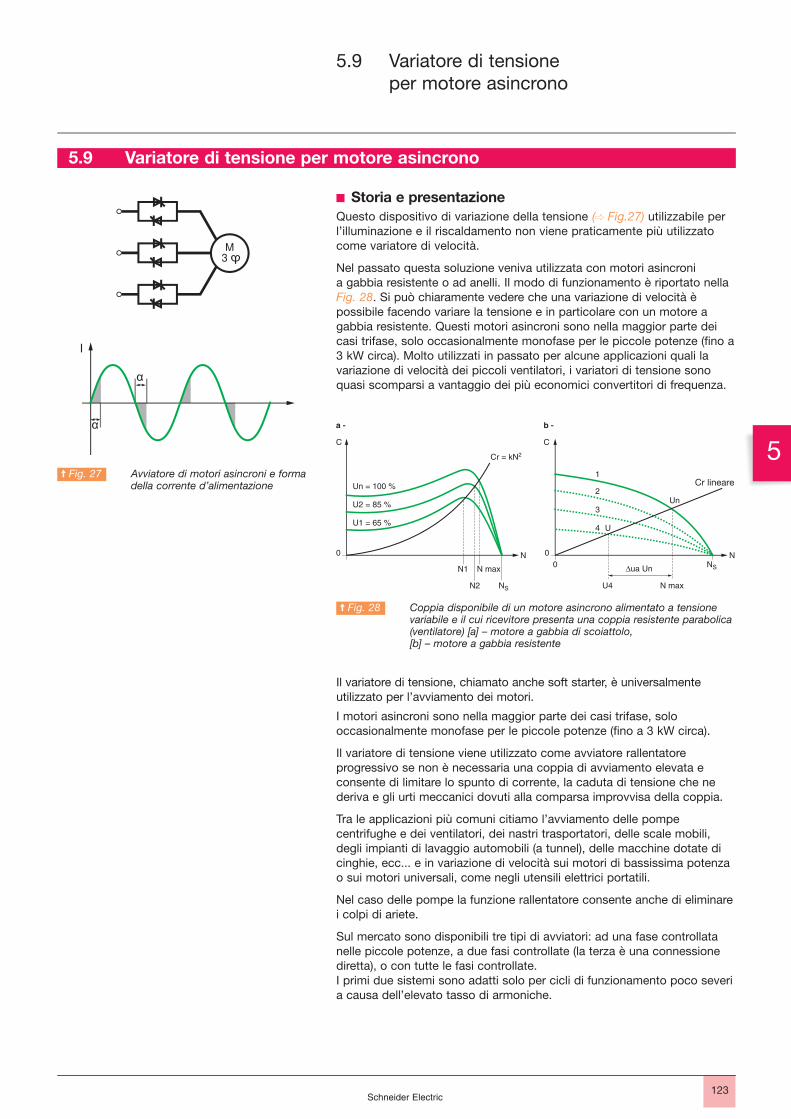
5.9 Variatore di tensione per motore asincrono
b Storia e presentazioneQuesto dispositivo di variazione della tensione (C Fig.27) utilizzabile perl’illuminazione e il riscaldamento non viene praticamente più utilizzatocome variatore di velocità.
Nel passato questa soluzione veniva utilizzata con motori asincroni a gabbia resistente o ad anelli. Il modo di funzionamento è riportato nellaFig. 28. Si può chiaramente vedere che una variazione di velocità èpossibile facendo variare la tensione e in particolare con un motore agabbia resistente. Questi motori asincroni sono nella maggior parte deicasi trifase, solo occasionalmente monofase per le piccole potenze (fino a3 kW circa). Molto utilizzati in passato per alcune applicazioni quali lavariazione di velocità dei piccoli ventilatori, i variatori di tensione sonoquasi scomparsi a vantaggio dei più economici convertitori di frequenza.
Il variatore di tensione, chiamato anche soft starter, è universalmenteutilizzato per l’avviamento dei motori.
I motori asincroni sono nella maggior parte dei casi trifase, solooccasionalmente monofase per le piccole potenze (fino a 3 kW circa).
Il variatore di tensione viene utilizzato come avviatore rallentatoreprogressivo se non è necessaria una coppia di avviamento elevata econsente di limitare lo spunto di corrente, la caduta di tensione che nederiva e gli urti meccanici dovuti alla comparsa improvvisa della coppia.
Tra le applicazioni più comuni citiamo l’avviamento delle pompecentrifughe e dei ventilatori, dei nastri trasportatori, delle scale mobili, degli impianti di lavaggio automobili (a tunnel), delle macchine dotate dicinghie, ecc... e in variazione di velocità sui motori di bassissima potenzao sui motori universali, come negli utensili elettrici portatili.
Nel caso delle pompe la funzione rallentatore consente anche di eliminarei colpi di ariete.
Sul mercato sono disponibili tre tipi di avviatori: ad una fase controllatanelle piccole potenze, a due fasi controllate (la terza è una connessionediretta), o con tutte le fasi controllate. I primi due sistemi sono adatti solo per cicli di funzionamento poco severia causa dell’elevato tasso di armoniche.
123
5
Schneider Electric
5.9 Variatore di tensione per motore asincrono
A Fig. 27 LAvviatore di motori asincroni e formadella corrente d’alimentazione
A Fig. 28 LCoppia disponibile di un motore asincrono alimentato a tensionevariabile e il cui ricevitore presenta una coppia resistente parabolica(ventilatore) [a] – motore a gabbia di scoiattolo,[b] – motore a gabbia resistente
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 123
b Principio generale
Il gruppo di potenza comprende per ciascuna fase 2 tiristori montati inantiparallelo (C Fig. 28).
La variazione di tensione si ottiene facendo variare il tempo di conduzionedei tiristori nel corso di ogni semi-periodo. Più l'istante di innesco vieneritardato, più il valore della tensione risultante sarà basso.
L'innesco dei tiristori è gestito da un microprocesssore che garantisceanche le seguenti funzioni:
- controllo delle rampe di aumento tensione e di diminuzione tensioneregolabili; la rampa di decelerazione potrà essere seguita solo se iltempo di decelerazione naturale del sistema azionato è più lungo,
- limitazione di corrente regolabile,- sovracoppia all’avviamento,- comando di frenatura con iniezione di corrente continua,- protezione del variatore contro i sovraccarichi,- protezione del motore contro i riscaldamenti dovuti ai sovraccarichi o
agli avviamenti troppo frequenti,- rilevamento squilibri o assenze di fase, difetti tiristori.
Un’unità di regolazione dei diversi parametri di funzionamento offre unvalido aiuto alla messa in servizio, all'impiego e alla manutenzione.
Alcuni variatori di tensione come l’Altistart (Schneider Electric) possonocomandare l’avviamento e il rallentamento
- di un solo motore,- di più motori simultaneamente, entro i limiti del suo calibro,- di più motori in successione mediante commutazione.
In regime stabilito, ogni motore viene alimentato direttamente dallarete attraverso un contattore.
Solo l’Altistart dispone di un dispositivo brevettato che consente unastima della coppia motore permettendo di effettuare accelerazioni edecelerazioni lineari e, se necessario, di limitare la coppia motore.
b Inversione del senso di marcia e frenaturaL’inversione del senso di marcia si effettua mediante inversione delle fasid’ingresso dell’avviatore. La frenatura si effettua quindi in contro correntee tutta l’energia viene dissipata nel rotore della macchina.Il funzionamento è quindi per natura intermittente.
b Frenatura di rallentamento mediante iniezione dicorrente continua
Una frenatura economica è facilmente realizzabile facendo funzionarel’uscita dell’avviatore come raddrizzatore iniettando una corrente continuanegli avvolgimenti.La coppia di frenatura non è controllata e la frenatura è poco efficace,soprattutto a grande velocità. Di conseguenza la rampa di decelerazionenon è controllata. Si tratta di una soluzione pratica per diminuire il tempodi arresto naturale della macchina.
Poichè l’energia viene dissipata nel rotore questo modo di funzionamentoè occasionale.
124Schneider Electric
5.9 Variatore di tensione per motore asincrono
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:41 Pagina 124
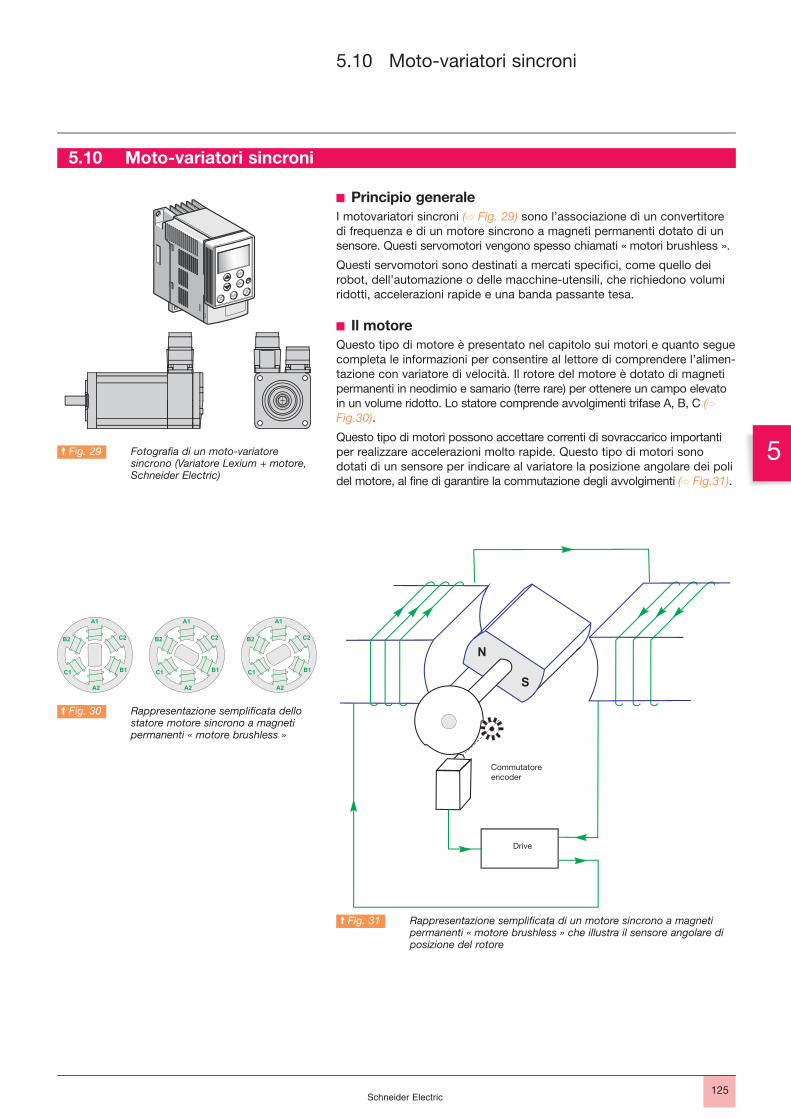
5.10 Moto-variatori sincroni
b Principio generaleI motovariatori sincroni (C Fig. 29) sono l’associazione di un convertitoredi frequenza e di un motore sincrono a magneti permanenti dotato di unsensore. Questi servomotori vengono spesso chiamati « motori brushless ».
Questi servomotori sono destinati a mercati specifici, come quello deirobot, dell’automazione o delle macchine-utensili, che richiedono volumiridotti, accelerazioni rapide e una banda passante tesa.
b Il motoreQuesto tipo di motore è presentato nel capitolo sui motori e quanto seguecompleta le informazioni per consentire al lettore di comprendere l’alimen-tazione con variatore di velocità. Il rotore del motore è dotato di magnetipermanenti in neodimio e samario (terre rare) per ottenere un campo elevatoin un volume ridotto. Lo statore comprende avvolgimenti trifase A, B, C (CFig.30).
Questo tipo di motori possono accettare correnti di sovraccarico importantiper realizzare accelerazioni molto rapide. Questo tipo di motori sonodotati di un sensore per indicare al variatore la posizione angolare dei polidel motore, al fine di garantire la commutazione degli avvolgimenti (C Fig.31).
125
5
Schneider Electric
5.10 Moto-variatori sincroni
A Fig. 30 LRappresentazione semplificata dellostatore motore sincrono a magnetipermanenti « motore brushless »
A Fig. 29 LFotografia di un moto-variatoresincrono (Variatore Lexium + motore,Schneider Electric)
A Fig. 31 LRappresentazione semplificata di un motore sincrono a magnetipermanenti « motore brushless » che illustra il sensore angolare diposizione del rotore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:54 Pagina 125
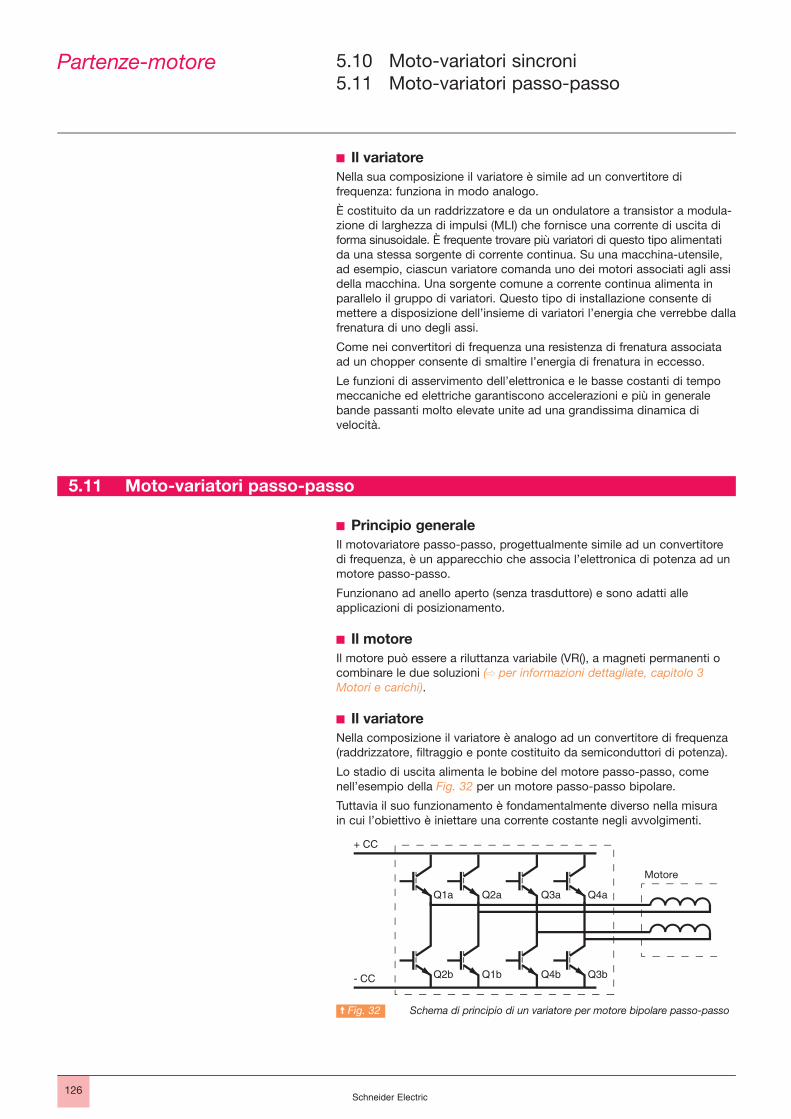
b Il variatoreNella sua composizione il variatore è simile ad un convertitore difrequenza: funziona in modo analogo.
È costituito da un raddrizzatore e da un ondulatore a transistor a modula-zione di larghezza di impulsi (MLI) che fornisce una corrente di uscita diforma sinusoidale. È frequente trovare più variatori di questo tipo alimentatida una stessa sorgente di corrente continua. Su una macchina-utensile,ad esempio, ciascun variatore comanda uno dei motori associati agli assidella macchina. Una sorgente comune a corrente continua alimenta inparallelo il gruppo di variatori. Questo tipo di installazione consente dimettere a disposizione dell’insieme di variatori l’energia che verrebbe dallafrenatura di uno degli assi.
Come nei convertitori di frequenza una resistenza di frenatura associataad un chopper consente di smaltire l’energia di frenatura in eccesso.
Le funzioni di asservimento dell’elettronica e le basse costanti di tempomeccaniche ed elettriche garantiscono accelerazioni e più in generalebande passanti molto elevate unite ad una grandissima dinamica divelocità.
5.11 Moto-variatori passo-passo
b Principio generaleIl motovariatore passo-passo, progettualmente simile ad un convertitoredi frequenza, è un apparecchio che associa l’elettronica di potenza ad unmotore passo-passo.
Funzionano ad anello aperto (senza trasduttore) e sono adatti alleapplicazioni di posizionamento.
b Il motoreIl motore può essere a riluttanza variabile (VR(), a magneti permanenti ocombinare le due soluzioni (C per informazioni dettagliate, capitolo 3Motori e carichi).
b Il variatoreNella composizione il variatore è analogo ad un convertitore di frequenza(raddrizzatore, filtraggio e ponte costituito da semiconduttori di potenza).
Lo stadio di uscita alimenta le bobine del motore passo-passo, comenell’esempio della Fig. 32 per un motore passo-passo bipolare.
Tuttavia il suo funzionamento è fondamentalmente diverso nella misurain cui l’obiettivo è iniettare una corrente costante negli avvolgimenti.
126Schneider Electric
5.10 Moto-variatori sincroni5.11 Moto-variatori passo-passo
Partenze-motore
A Fig. 32 LSchema di principio di un variatore per motore bipolare passo-passo
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:55 Pagina 126
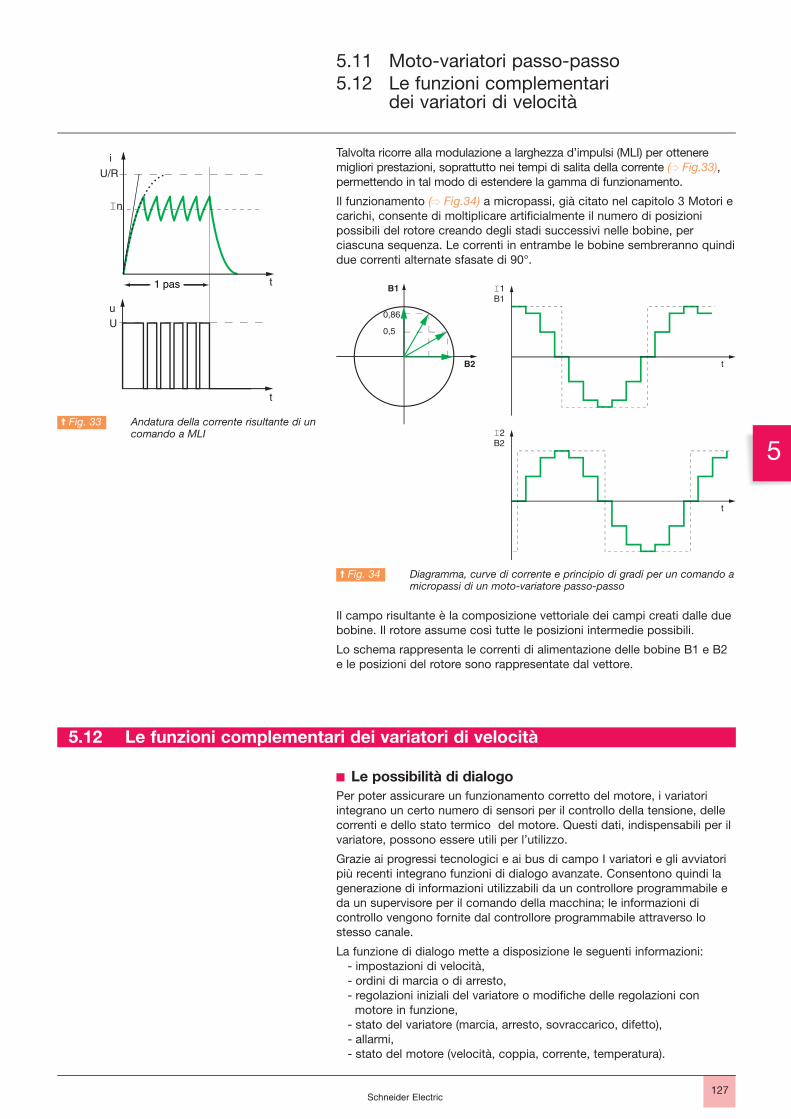
Talvolta ricorre alla modulazione a larghezza d’impulsi (MLI) per otteneremigliori prestazioni, soprattutto nei tempi di salita della corrente (C Fig.33),permettendo in tal modo di estendere la gamma di funzionamento.
Il funzionamento (C Fig.34) a micropassi, già citato nel capitolo 3 Motori ecarichi, consente di moltiplicare artificialmente il numero di posizionipossibili del rotore creando degli stadi successivi nelle bobine, perciascuna sequenza. Le correnti in entrambe le bobine sembreranno quindidue correnti alternate sfasate di 90°.
Il campo risultante è la composizione vettoriale dei campi creati dalle duebobine. Il rotore assume così tutte le posizioni intermedie possibili.
Lo schema rappresenta le correnti di alimentazione delle bobine B1 e B2e le posizioni del rotore sono rappresentate dal vettore.
5.12 Le funzioni complementari dei variatori di velocità
b Le possibilità di dialogoPer poter assicurare un funzionamento corretto del motore, i variatoriintegrano un certo numero di sensori per il controllo della tensione, dellecorrenti e dello stato termico del motore. Questi dati, indispensabili per ilvariatore, possono essere utili per l’utilizzo.
Grazie ai progressi tecnologici e ai bus di campo I variatori e gli avviatoripiù recenti integrano funzioni di dialogo avanzate. Consentono quindi lagenerazione di informazioni utilizzabili da un controllore programmabile eda un supervisore per il comando della macchina; le informazioni dicontrollo vengono fornite dal controllore programmabile attraverso lostesso canale.
La funzione di dialogo mette a disposizione le seguenti informazioni:- impostazioni di velocità,- ordini di marcia o di arresto,- regolazioni iniziali del variatore o modifiche delle regolazioni con
motore in funzione,- stato del variatore (marcia, arresto, sovraccarico, difetto),- allarmi,- stato del motore (velocità, coppia, corrente, temperatura).
127
5
Schneider Electric
5.11 Moto-variatori passo-passo5.12 Le funzioni complementari
dei variatori di velocità
A Fig. 33 LAndatura della corrente risultante di uncomando a MLI
A Fig. 34 LDiagramma, curve di corrente e principio di gradi per un comando amicropassi di un moto-variatore passo-passo
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 127
Le funzioni di dialogo vengono utilizzate anche in collegamento con un PCper semplificare le regolazioni all’avviamento (telecaricamento) o perl’archiviazione delle regolazioni iniziali.
b Le funzioni integratePer assicurare un gran numero di applicazioni i variatori dispongono didiversi parametri di regolazione quali:
- i tempi delle rampe di accelerazione e di decelerazione,- la forma delle rampe (lineari, a S, a U o configurabili),- le commutazioni di rampe che permettono di ottenere due rampe di
accelerazione o di decelerazione per consentire ad esempio unaccostamento in dolcezza,
- la riduzione della coppia massima comandata da un ingresso logico oda un’impostazione,
- la marcia passo-passo,- la gestione del comando di un freno per le applicazioni di sollevamento,- la scelta di velocità preselezionate,- la presenza di ingressi sommatori che consentono di sommare le
impostazioni di velocità,- la commutazione dei riferimenti presenti all’ingresso del variatore,- la presenza di un regolatore PI per gli asservimenti semplici (velocità o
portata ad esempio),- l’arresto automatico in seguito ad un’interruzione rete che permette la
frenatura del motore,- il recupero automatico con ricerca della velocità del motore per una
ripresa al volo,- la protezione termica del motore a partire da un’immagine generata
nel variatore,- la possibilità di collegamento di sonde PTC integrate al motore,- l’occultazione di frequenza di risonanza della macchina (la velocità
critica viene occultata in modo che il funzionamento permanente a quella frequenza sia reso impossibile),
- il blocco temporizzato a bassa velocità nelle applicazioni dipompaggio in cui il fluido partecipa alla lubrificazione della pompa edevita il grippaggio.
Sui modelli più sofisticati di variatori quali l’ATV61 - ATV71 di Schneider Electric queste funzioni sono spesso funzioni base.
b Le schede opzionaliPer le applicazioni più complesse i costruttori offrono delle schedeopzionali che consentono di realizzare funzioni specifiche, quali adesempio il controllo vettoriale di flusso con sensore, oppure schedededicate ad una funzione specifica.
Sono ad esempio disponibili: - schede « commutazione di pompe » per realizzare in modo economico
una stazione di pompaggio con un solo variatore che alimenta in successione più motori,
- schede « multimotori »,- schede « multiparametri» che consentono la commutazione
automatica dei parametri predefiniti nel variatore,- schede personalizzate sviluppate su specifica richiesta del Cliente.
Alcuni costruttori propongono anche delle schede controllore integrate alvariatore per le applicazioni semplici. L’operatore dispone quindi diistruzioni di programmazione e di I/O per la realizzazione di piccoli sistemidi automazione che non giustificano la presenza di un controlloreprogrammabile.
128Schneider Electric
5.12 Le funzioni complementari dei variatori di velocità
Partenze-motore
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:42 Pagina 128
5.13 I variatori di velocità e il bilancio energetico
b Fattore di sfasamentov NotaIl fattore di sfasamento o coseno ϕ è il coseno dell’angolo di sfasamentodella corrente rispetto alla tensione. Il fattore di sfasamento ha significatosolo per tensioni e correnti sinusoidali della stessa frequenza. Se la corrente prelevata alla sorgente presenta delle armoniche, comeaccade per la maggior parte dei variatori di velocità, il fattore di potenzasarà per definizione lo sfasamento della fondamentale (o prima armonica)della corrente rispetto alla fondamentale della tensione d’alimentazione.
v 1° caso: il circuito d’ingresso composto da semiconduttoricomandati tipo tiristore (es. variatore per motore a corrente continua)Il fattore di sfasamento è all’incirca uguale al coseno dell’angolo di ritardoall’innesco. In altri termini se la tensione di uscita è bassa (bassa velocità),il coseno ϕ è basso. Se la tensione di uscita è elevata (velocità elevata) ilcoseno ϕ si avvicina all’unità.
Il coseno ϕ diventa negativo se il variatore restituisce energia alla rete nelcaso di variatore reversibile.
v 2° caso: ponte di diodi composto da diodi (es. convertitore difrequenza per motore asincrono)La componente fondamentale della corrente è quasi in fase con latensione d’alimentazione e il coseno ϕ è vicino a 1.
v 3° caso: circuito d’ingresso composto da semiconduttoricomandati tipo IGBTQuesta soluzione viene utilizzata per prelevare corrente sinusoidale. Con un comando MLI appropriato, il coseno ϕ è pari o vicino a 1.
Un convertitore di frequenza associato ad un motore asincrono ha un migliorfattore di sfasamento rispetto al motore stesso. Infatti il ponte di diodi di cuigeneralmente è dotato questo tipo di convertitore ha un fattore di sfasamentovicino a 1. Sono i condensatori di filtraggio integrati nel variatore che fungono da« riserva » di energia reattiva.
b Fattore di potenzav NotaIl fattore di potenza è il rapporto tra la potenza apparente S e la potenzaattiva P.
Fp = P/S
La potenza attiva P è il prodotto della tensione fondamentale per lacorrente fondamentale e il coseno ϕ
P = U x I x coseno ϕ
La potenza apparente S è uguale al prodotto del valore efficace dellatensione per il valore efficace della corrente. Se la tensione e la correntesono deformate sarà necessario effettuare la somma quadratica dei valoriefficaci di ciascun ordine.
Se l’impedenza della rete è bassa (come si verifica generalmente), la tensione d’alimentazione sarà vicina alla sinusoide. In compenso lacorrente assorbita dai semiconduttori è ricca in armoniche, tanto più riccaquanto più bassa sarà l’impedenza della rete.
Il valore efficace della corrente viene espresso con la seguente formula:Ieff = (I1_ + I2_+ I3_+ …… In_) 0.5
E la potenza apparente S con: S= Veff x Ieffoppure: S = V x Ieff
129
5
Schneider Electric
5.13 I variatori di velocità e il bilancio energetico
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 129
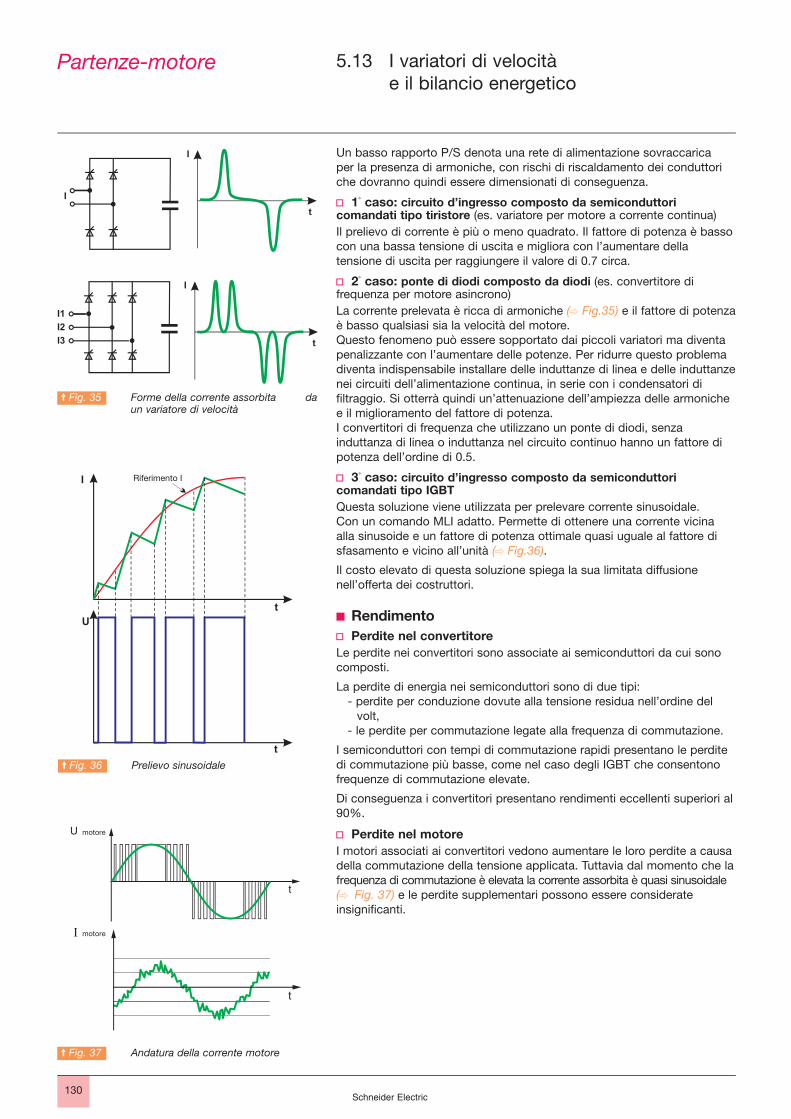
5.13 I variatori di velocità e il bilancio energetico
Partenze-motore
Un basso rapporto P/S denota una rete di alimentazione sovraccarica per la presenza di armoniche, con rischi di riscaldamento dei conduttoriche dovranno quindi essere dimensionati di conseguenza.
v 1° caso: circuito d’ingresso composto da semiconduttoricomandati tipo tiristore (es. variatore per motore a corrente continua)Il prelievo di corrente è più o meno quadrato. Il fattore di potenza è bassocon una bassa tensione di uscita e migliora con l’aumentare dellatensione di uscita per raggiungere il valore di 0.7 circa.
v 2° caso: ponte di diodi composto da diodi (es. convertitore difrequenza per motore asincrono)La corrente prelevata è ricca di armoniche (C Fig.35) e il fattore di potenzaè basso qualsiasi sia la velocità del motore. Questo fenomeno può essere sopportato dai piccoli variatori ma diventapenalizzante con l’aumentare delle potenze. Per ridurre questo problemadiventa indispensabile installare delle induttanze di linea e delle induttanzenei circuiti dell’alimentazione continua, in serie con i condensatori difiltraggio. Si otterrà quindi un’attenuazione dell’ampiezza delle armonichee il miglioramento del fattore di potenza. I convertitori di frequenza che utilizzano un ponte di diodi, senzainduttanza di linea o induttanza nel circuito continuo hanno un fattore dipotenza dell’ordine di 0.5.
v 3° caso: circuito d’ingresso composto da semiconduttoricomandati tipo IGBTQuesta soluzione viene utilizzata per prelevare corrente sinusoidale. Con un comando MLI adatto. Permette di ottenere una corrente vicinaalla sinusoide e un fattore di potenza ottimale quasi uguale al fattore disfasamento e vicino all’unità (C Fig.36).
Il costo elevato di questa soluzione spiega la sua limitata diffusionenell’offerta dei costruttori.
b Rendimentov Perdite nel convertitoreLe perdite nei convertitori sono associate ai semiconduttori da cui sonocomposti.
La perdite di energia nei semiconduttori sono di due tipi:- perdite per conduzione dovute alla tensione residua nell’ordine del
volt,- le perdite per commutazione legate alla frequenza di commutazione.
I semiconduttori con tempi di commutazione rapidi presentano le perditedi commutazione più basse, come nel caso degli IGBT che consentonofrequenze di commutazione elevate.
Di conseguenza i convertitori presentano rendimenti eccellenti superiori al90%.
v Perdite nel motoreI motori associati ai convertitori vedono aumentare le loro perdite a causadella commutazione della tensione applicata. Tuttavia dal momento che lafrequenza di commutazione è elevata la corrente assorbita è quasi sinusoidale(C Fig. 37) e le perdite supplementari possono essere considerateinsignificanti.
130Schneider Electric
A Fig. 36 LPrelievo sinusoidale
A Fig. 37 LAndatura della corrente motore
A Fig. 35 LForme della corrente assorbita daun variatore di velocità
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 130
5.14 I variatori di velocità e il risparmio energetico e di manutenzione
5.14 I variatori di velocità e il risparmio energetico e di manutenzione
b Scelta del motoreI convertitori di frequenza possono alimentare motori standard senzaparticolari precauzioni, se non il declassamento a bassa velocità nel casodi motori autoventilati.
Tuttavia sarà sempre preferibile scegliere il motore con il migliorrendimento e il più alto cos ϕ.
Per le basse potenze un motovariatore sincrono può essere una sceltaintelligente per il rendimento superiore di questa associazione. La differenza del prezzo di acquisto viene infatti rapidamente ammortizzata.
b Tipo di caricoI convertitori di frequenza sono la soluzione migliore per la regolazione diportata delle pompe e dei ventilatori in ragione della caratteristica dicoppia di questi carichi (C capitolo 3 Motori e carichi).
L’utilizzo di variatori di velocità, per funzionamenti ON/OFF o sistemi diregolazione che utilizzano valvole, saracinesche o alette, permette unrisparmio energetico notevole.
La documentazione dei costruttori fornisce esempi di calcolo di risparmioenergetico che consentono di valutare il ritorno sull’investimento. Questorisparmio può essere valutato solo conoscendo perfettamentel’applicazione; gli specialisti dei costruttori sono in grado di guidarel’utente nella scelta.
b Riduzione delle operazioni di manutenzioneI convertitori di frequenza e gli avviatori elettronici (C capitolo 4Avviamento dei motori) effettuano un avviamento progressivo che elimina ilimiti meccanici imposti alla macchina che può in questo modo essereottimizzata direttamente in fase di progettazione.
Nei comandi multimotore (ad es. una stazione di pompaggio) la gestioneappropriata dei motori permette di equilibrare le ore di funzionamento diciascun motore e di aumentare la disponibilità e la durata dell’installazione.
b ConclusioneDal momento che la scelta di un variatore di velocità è profondamentelegata al tipo di carico azionato e alle prestazioni desiderate, la ricerca ela definizione di un variatore devono passare attraverso l’analisi delleesigenze funzionali dell’apparecchioe e quindi delle prestazioni richiesteper il motore stesso.
Nella documentazione dei produttori di variatori di velocità vengonoanche indicati parametri quali coppia costante, coppia variabile, potenzacostante, controllo vettoriale di flusso, variatore reversibile, ecc...
Queste indicazioni caratterizzano tutti i dati necessari per una correttascelta del variatore più adatto.
Una scelta non corretta del variatore può portare ad un funzionamentodeludente.
Allo stesso modo occorre tener conto della gamma di velocità desiderataper una corretta scelta dell’associazione motore/variatore.
Si consiglia di rivolgersi ai servizi di assistenza specializzati dei costruttoricon tutti i dati necessari a selezionare il variatore che possa garantire ilmiglior rapporto prezzo/prestazioni.
131
5
Schneider Electric
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 131
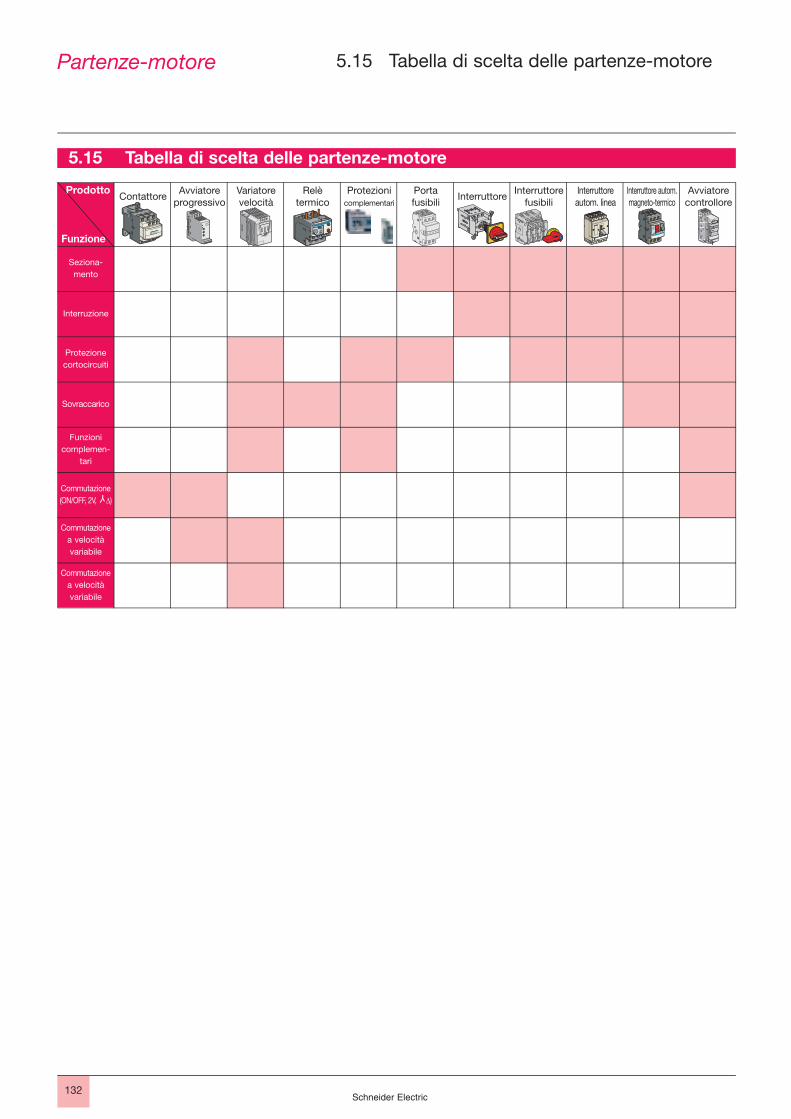
5.15 Tabella di scelta delle partenze-motorePartenze-motore
5.15 Tabella di scelta delle partenze-motore
132Schneider Electric
Avviatore Variatore Relè Protezioni Porta Interruttore Interruttore Interruttore autom. AvviatoreContattore Interruttore
progressivo velocità termico complementari fusibili fusibili autom. linea magneto-termico controlloreProdotto
Funzione
Seziona-mento
Interruzione
Protezionecortocircuiti
Sovraccarico
Funzionicomplemen-
tari
Commutazione(ON/OFF, 2V, Δ)
Commutazionea velocitàvariabile
Commutazionea velocitàvariabile
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 13-11-2009 16:55 Pagina 132

133
5
Schneider Electric
2_11500-CHAPITRE-5_5.qxd:11500-CHAPITRE-5_5.qxd 19-11-2009 14:57 Pagina 133