
------- ANALISI 2 --------
392
Coordinate polari Il sistema delle coordinate cartesiane è uno dei possibili sistemi per individuare la posizione di un punto del piano, relativamente ad un punto fisso O, mediante una coppia ordinata di numeri. Un altro sistema è quello delle coordinate polari. Un riferimento polare è individuato da: 1.un punto O detto polo o origine; 2.una semiretta orientata x per O, detta asse polare; 3.un'unità di misura per i segmenti. Ad ogni coppia (ordinata) di numeri ) , ( θ ρ corrisponde uno ed un solo punto P del piano. Il , viceversa non è vero. Alla coppia ) , ( θ ρ corrisponde il punto P: a. la cui distanza da O, misurata con la prefissata unità di misura, è ρ : OP = ρ ; b. che giace sulla semiretta di origine O, che forma con l'asse polare un a ngolo θ, orientato nel verso antiorario e misurato in radianti. (vedi figu ra 1 e 2). Viceversa un punto P può venire descritto come ( ) π θ ρ k 2 , + dove k è un intero positivo qualsiasi, incluso lo zero. In particolare le coordinate polari del polo possono essere date come ( ) θ , 0 con θ arbitrario. Il numero ρ strettamente positivo è detto raggio vettore di P, mentre l'angolo θ , che è determinato a meno di multipli di 2π, è detto anomalia di P. Il punto P ( ) θ ρ , − appartiene alla semiretta opposta alla semiretta di anomalia θ ovvero ( ) θ ρ , − e ( ) π θ ρ + , sono le coordinate dello stesso punto. Pertanto un punto P può essere descritto come ( ) π θ ρ k 2 , ± o ( ) ( ) π θ ρ 1 2 , + ± − k vedi esempio successivo. Osservazioni 1. Tutti i punti del piano si ottengono prendendo il valore principale dell'anomalia, cioè facendo variare ϑ da zero incluso a π 2 escluso. Però la limitazione π ϑ 2 0 ≤ ≤ conduce a discontinui tà per i punti dell'asse polare: se un punto P si muove su un arco di curva che attraversi l'asse polare in un punto M, la sua anomalia tenderebbe a zero ovvero a π 2 a seconda che P si avvicini ad M da una parte o dall'altra. Per questo si preferisce definire l'anomali a a meno di multipli di π 2 . 2. Il luogo dei punti che hanno un dato raggio vettore: a = ρ , è la circonferenza di centro O e raggio a . 3. Il luogo dei punti che hanno una data anomalia ( ) 0 ϑ ϑ = è la semiretta per O che forma l'angolo 0 ϑ con l'asse polare, mentre la semiretta opposta è il luogo dei punti la cui anomalia è π ϑ + 0 . Esempio
-
Upload
michele-scipioni -
Category
Documents
-
view
245 -
download
1
Transcript of ------- ANALISI 2 --------
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 1/391
Coordinate polari
Il sistema delle coordinate cartesiane è uno dei possibili sistemi per individuare la posizione di un
punto del piano, relativamente ad un punto fisso O, mediante una coppia ordinata di numeri. Un altro
sistema è quello delle coordinate polari. Un riferimento polare è individuato da:
1.un punto O detto polo o origine;2.una semiretta orientata x per O, detta asse polare;3.un'unità di misura per i segmenti.
Ad ogni coppia (ordinata) di numeri ),( θ ρ corrisponde uno ed un solo punto P del piano. Il ,
viceversa non è vero.
Alla coppia ),( θ ρ corrisponde il punto P:
a. la cui distanza da O, misurata con la prefissata unità di misura, è ρ : OP= ρ ;
b. che giace sulla semiretta di origine O, che forma con l'asse polare un angolo θ, orientato
nel verso antiorario e misurato in radianti. (vedi figura 1 e 2).
Viceversa un punto P può venire descritto come ( )π θ ρ k 2, + dove k è un intero positivo qualsiasi,
incluso lo zero.
In particolare le coordinate polari del polo possono essere date come ( )θ ,0 con θ arbitrario. Il
numero ρ strettamente positivo è detto raggio vettore di P, mentre l'angolo θ , che è
determinato a meno di multipli di 2π, è detto anomalia di P.
Il punto P ( )θ ρ ,− appartiene alla semiretta opposta alla semiretta di anomalia θ ovvero ( )θ ρ ,− e( )π θ ρ +, sono le coordinate dello stesso punto. Pertanto un punto P può essere descritto come( )π θ ρ k 2, ± o ( )( )π θ ρ 12, +±− k vedi esempio successivo.
Osservazioni
1. Tutti i punti del piano si ottengono prendendo il valore principale dell'anomalia, cioè facendovariare ϑ da zero incluso a π 2 escluso. Però la limitazione π ϑ 20 ≤≤ conduce a discontinuitàper i punti dell'asse polare: se un punto P si muove su un arco di curva che attraversi l'assepolare in un punto M, la sua anomalia tenderebbe a zero ovvero a π 2 a seconda che P siavvicini ad M da una parte o dall'altra. Per questo si preferisce definire l'anomalia a meno dimultipli di π 2 .
2. Il luogo dei punti che hanno un dato raggio vettore: a= ρ , è la circonferenza di centro O eraggio a .
3. Il luogo dei punti che hanno una data anomalia ( )0ϑ ϑ = è la semiretta per O che forma
l'angolo 0ϑ con l'asse polare, mentre la semiretta opposta è il luogo dei punti la cui
anomalia è π ϑ +0 .
Esempio

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 2/391
Il punto P
4,1π
ha le seguenti rappresentazioni:
P
4,1π
P
− π
4
7,1
P
− π
4
5,1 P
−− π
4
3,1
π
4
5,1
− π
4
3,1
Queste rappresentazioni e tutte le altre si possono riassumere nelle due formule
± π
π k 2
4,1
±− π k 2
4
5,1 k = 0, 1, 2…
Cambiamento di variabile

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 3/391
Un riferimento cartesiano ortogonale ed un riferimento polare si dicono associati se:
1. l’origine dell’un coincide con il polo dell’altro;
2. il semiasse positivo dell’asse x coincide con il semiasse polare;
3. l’unità di misura per i segmenti è la stessa per i due riferimenti.
Nelle condizioni precedenti ogni punto P del piano, distinto da O, ha due coordinate polari ( )0, ρ e
due coordinate cartesiane ( ) y x, . Le formule di passaggio dalle coordinate polari a quelle cartesiane
sono date da
θ ρ cos= x e θ ρ sin= y
Le formule inverse,che esprimono le coordinate polari in funzione delle coordinate cartesiane, sono
date da
22
y x += ρ
22cos
y x
x
+
=θ 22
sin y x
y
+
=θ x
y=θ tan
queste ultime individuano univocamente l’anomalia θ.
Esempi di curve in coordinate polari
La curva, la cui equazione in coordinate polari è ( )ϑ ρ f = o ( ) 0, =ϑ ρ F , consiste di tutti i punti
distinti ( )ϑ ρ , che soddisfano l’equazione. Sussistono i seguenti criteri di simmetria. Ecco alcuni
esempi di curve in coordinate polari,i cui grafici sono mostrati in figura.
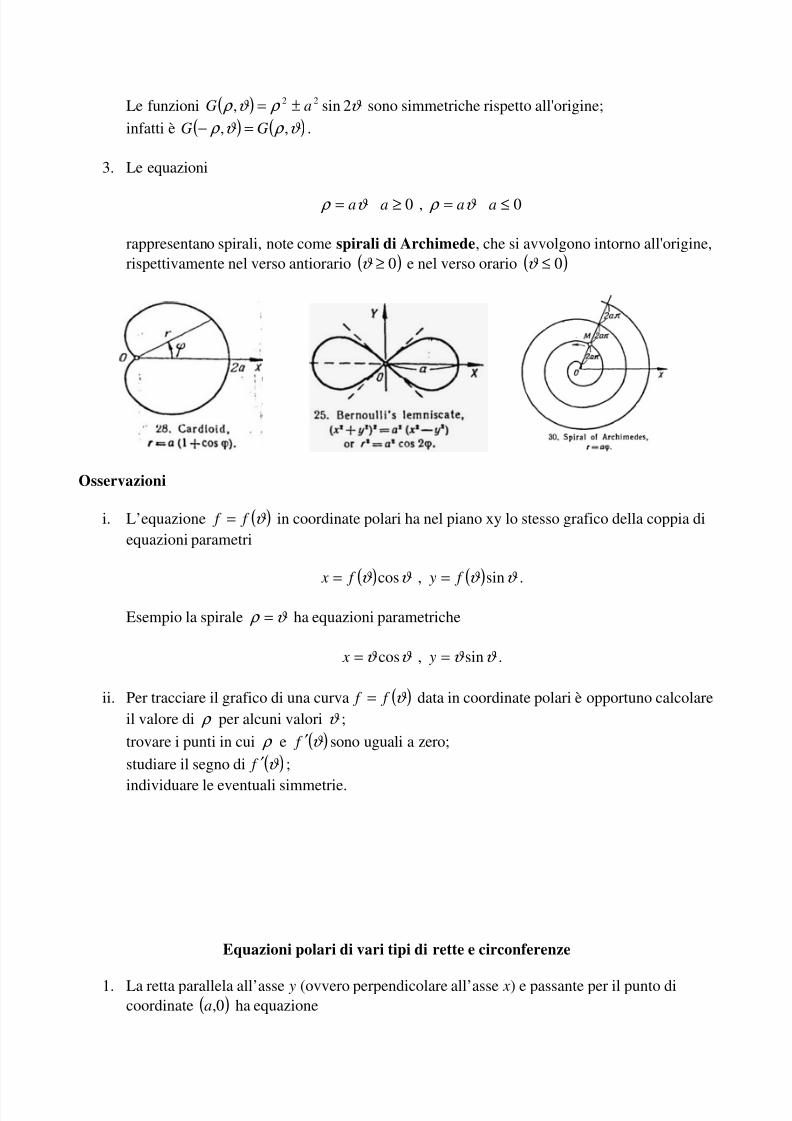
1. Le curve le cui equazioni in coordinate polari sono:
( )ϑ ρ cos1+= a , ( )ϑ ρ cos1−= a
( )ϑ ρ sin1+= a , ( )ϑ ρ sin1−= a
Dove π ϑ 20 ≤≤ vengono dette cardioidi, in quanto il loro grafico ha la forma di cuore.
Le funzioni ( ) ( )ϑ ϑ cos1±= a f e ( ) ( )ϑ ϑ sin1±= ag sono rispettivamente simmetriche
rispetto all'asse x e all'asse y. Infatti risulta ( ) ( )ϑ ϑ f f =− e ( ) ( )ϑ ϑ π gg =−
2. Le equazioni
ϑ ρ 2cos22 a= , ϑ ρ 2cos22 a−=
ϑ ρ 2sin22 a= , ϑ ρ 2sin22 a−=
rappresentano curve a forma di eliche centrate nell'origine chiamate lemniscate.
Si osserva che le funzioni ( ) ϑ ϑ 2cos2
a f ±= sono simmetriche rispetto all'asse x e all'asse y.Infatti ( ) ( )ϑ ϑ π f f =− .
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 4/391
Le funzioni ( ) ϑ ρ ϑ ρ 2sin, 22 aG ±= sono simmetriche rispetto all'origine;
infatti è ( ) ( )ϑ ρ ϑ ρ ,, GG =− .
3. Le equazioni
ϑ ρ a= 0≥a , ϑ ρ a= 0≤a
rappresentano spirali, note come spirali di Archimede, che si avvolgono intorno all'origine,
rispettivamente nel verso antiorario ( )0≥ϑ e nel verso orario ( )0≤ϑ
Osservazioni
i. L’equazione ( )ϑ f f = in coordinate polari ha nel piano xy lo stesso grafico della coppia di
equazioni parametri
( ) ϑ ϑ cos f x = , ( ) ϑ ϑ sin f y = .
Esempio la spirale ϑ ρ = ha equazioni parametriche
ϑ ϑ cos= x , ϑ ϑ sin= y .
ii. Per tracciare il grafico di una curva ( )ϑ f f = data in coordinate polari è opportuno calcolare
il valore di ρ per alcuni valori ϑ ;
trovare i punti in cui ρ e ( )ϑ f ′ sono uguali a zero;
studiare il segno di ( )ϑ f ′ ;
individuare le eventuali simmetrie.
Equazioni polari di vari tipi di rette e circonferenze
1. La retta parallela all’asse y (ovvero perpendicolare all’asse x) e passante per il punto dicoordinate ( )0,a ha equazione
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 5/391
a x =
per esprimere questa equazione in coordinate polari sostituiamo θ ρ cos= x ;
ciò da
a=θ ρ cos ovveroθ
ρ cos
a=
2. La retta parallela all’asse x (ovvero perpendicolare all’asse y) e passante per il punto di
coordinate ( )b,0 ha equazione
b y =
per esprimere questa equazione in coordinate polari sostituiamo θ ρ sin= y ;
ciò da
b=θ ρ sin ovveroθ
ρ sin
b=
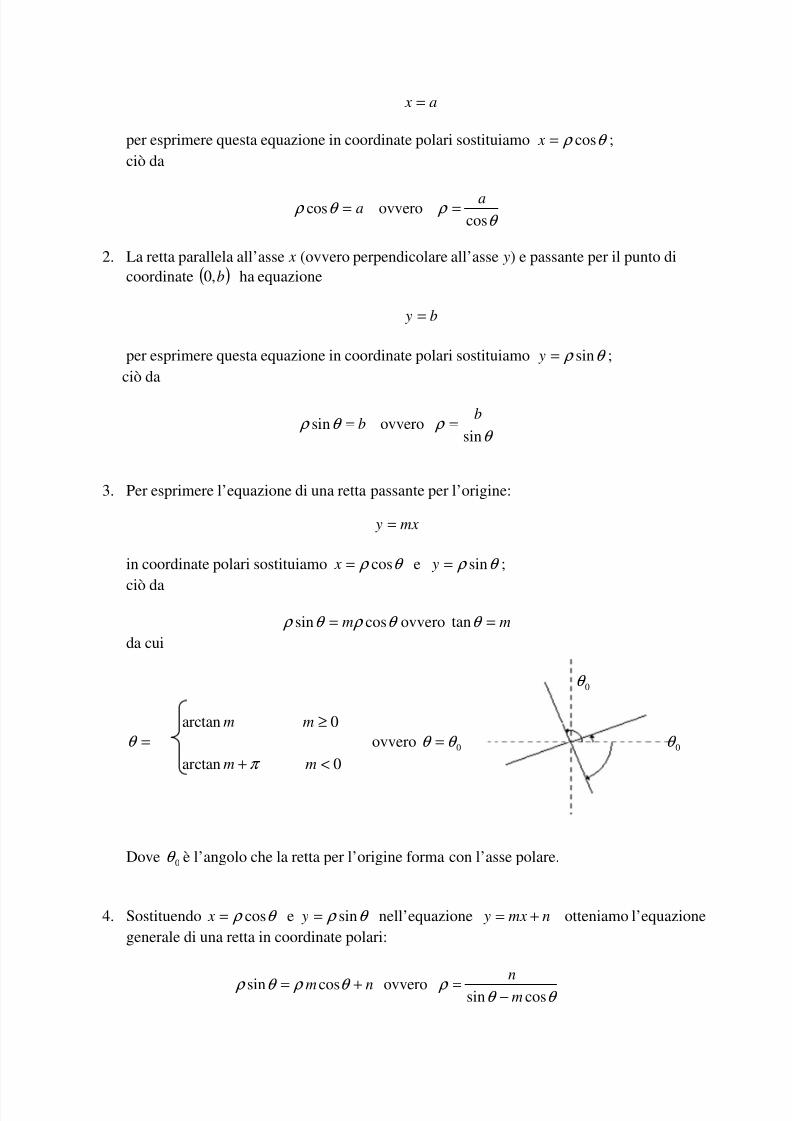
3. Per esprimere l’equazione di una retta passante per l’origine:
mx y =
in coordinate polari sostituiamo θ ρ cos= x e θ ρ sin= y ;
ciò da
θ ρ θ ρ cossin m= ovvero m=θ tan
da cui
0θ
marctan 0≥m
=θ ovvero 0θ θ = 0θ
π +marctan 0<m
Dove 0θ è l’angolo che la retta per l’origine forma con l’asse polare.
4. Sostituendo θ ρ cos= x e θ ρ sin= y nell’equazione nmx y += otteniamo l’equazione
generale di una retta in coordinate polari:
nm += θ ρ θ ρ cossin ovveroθ θ
ρ cossin m
n−
=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 6/391
5. Sostituendo θ ρ cos= x e θ ρ sin= y nelle equazioni delle seguenti circonferenze:
i ) ax y x 222=+ 0>a
ii ) ax y x 222−=+ “
iii ) ay y x 222=+ “
iv ) ay y x 222−=+ “
si ottengono le corrispondenti equazioni in coordinate polari:
i ) θ ρ cos2a= 0>a
ii ) θ ρ cos2a−= “
iii ) θ ρ sin2a= “
iv ) θ ρ sin2a−= “
Ovviamente l’equazione in coordinate polari della circonferenza 222 a y x =+ è
a= ρ 0>a
Osservazione
L’equazione ( )θ ρ f = in coordinate polari ha nel piano xy lo stesso grafico della curva di
equazioni parametriche
( ) θ θ cos f x = ( ) θ θ sin f y =
Per esempio la spirale 0= ρ ha equazioni parametriche
θ θ cos= x θ θ sin= y
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 7/391
1
Numeri complessi
Si dice numero complesso z un’espressione della forma
y j x z +=
(detta forma algebrica del numero complesso z) dove x e y sono numeri reali chiamati
rispettivamente parte reale e parte immaginaria del numero complesso e si indicano con:
zImy , zRe == x
j è il simbolo dell’unità immaginaria che soddisfa la condizione
( j )2
= 1
Il numero complesso
y j-xz =
è il coniugato di
y jx += z
Due numeri complessi
y jx e y jx 222111 +=+= z z
sono uguali se e solo se 1x = 2x e y1 = y2 ovvero se e solo se
Rez1 = Rez2 e Imz1 = Imz2
Pertanto un numero complesso z è uguale al suo complesso coniugato z se e solo se z è
un numero reale.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 8/391
2
Un numero complesso y j x z += è rappresentato nel piano XOY da un punto P di
coordinate (x,y) o da un vettore la cui origine si trova nel punto O(0,0), il cui estremo nel
punto P(x,y).
La lunghezza ρ del vettore (P-0) è chiamata modulo del numero complesso e si indicacon z :
22 z y x +== ρ
Da cui
.zIm ;zRe z y z x ≤=≤=
L’angolo θ che il vettore (P-0) forma con la direzione positiva dell’asse X è chiamato
argomento del numero complesso e si indica con θ = Arg z ; l’argomento di un numero
complesso è determinato in modo non univoco, cioè a meno di multipli interi di 2π :
Arg z = arg z + 2k π ,...2,1,0 ±±=k
dove arg z è il valore principale di Arg z definito dalle condizioni:
π π zarg ≤<−
tali che:
arg z =
0y0,xse
2
0y0,xse 2
0y0,xse arctan
0y0,xse arctan
0xse arctan
<=−
>=
<<+−
≥<+
>
π
π
π
π
x
y
x
y
x y

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 9/391
3
valgono le sguenti condizioni
2222 yx
x
z
x z)cos(Arg ,
yx
y
z
y z)sin(Arg ,
x
y z)Argtan(
+
==
+
===
Due numeri complessi z1 e z2 sono uguali se e solo se hanno lo stesso modulo e se i
loro argomenti sono uguali oppure differiscono per multipli interi di 2π :
2,...1,0,k 2k zArgzArg ,zz 2121 ±±=+== π
Siano dati due numeri complessi y jx e y jx 222111 +=+= z z
La somma dei due numeri complessi dati è il numero complesso
);y(y j)x(x 212121 +++=+ z z
La differenza dei due numeri complessi dati è il numero complesso
);y(y j)x-(x 212121 −+=− z z
il prodotto dei due numeri complessi dati è il numero complesso
);yxy(x j)yy-x(x 1221212121 ++= z z
da cui
2222 zz ==+= y x z z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 10/391
4
Si dice quoziente della divisione del numero complesso z1 per un numero complesso
z2 ≠ 0 un numero complesso z tale che l’equazione z1 = z1z sia soddisfatta; vale la
formula
2
2
21
22
21
2
1
z
z
z
z z
z
z
z
z==
In particolare è
2
z
z
z
z1==
z z
La parte reale Rez e quella immaginaria Imz del numero complesso z si esprimono
mediante i numeri complessi coniugati nel modo seguente:
Rez = ,2
z z +Imz = j
j
z z z z
22
−=
−
Non è difficile dimostrare che
2
1
2
121212121
z
z ,z ,
z
z z z z z z z z =
=+=+
Dimostriamo che 2121 z z z z =
Infatti è
2
2
2
1221121212121
2
21 ))(())(())(( z z z z z z z z z z z z z z z z ====
Poiché i moduli sono non negativi, il risultato segue prendendo le radici quadrate di ambo i
membri.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 11/391
5
Dimostriamo ora la disuguaglianza triangolare:
2121 z z z z +≤+
Abbiamo
( )2
2121
2
2
2
1
21
2
2
2
121
2
2
2
12121
2
2
2
1
2121221121212121
2
21
2
2zzRe2)(
)())(()()(
z z z z z z
z z z z z z z z z z z z
z z z z z z z z z z z z z z z z z z
+=++
=++≤++=+++
=+++=++=++=+
Il risultato precedente può essere esteso, per induzione, per dimostrare che
...... 11 nn z z z z ++≤++
Se nella disuguaglianza si sostituisce z1 con z1 - z2 si ottiene
2211 z z z z+−≤
da cui 2121 z z z z −≥−
Ogni numero complesso y j x z += 0)(z ≠ ammette la rappresentazione trigonometrica
zArg ,z dove ) jsin(cos z 21 ==+= θ ρ θ θ ρ
Supponiamo che i due numeri complessi z1 e z2 siano dati in forma trigonometrica:
) jsin(cos z ,) jsin(cos z 222111 θ θ ρ θ θ ρ +=+=
Allora
)]sin()cos([zi)z 21212121 θ θ θ θ ρ ρ +++= j

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 12/391
6
Cioè moltiplicando due numeri complessi i loro moduli si moltiplicano e gli argomenti si
sommano:
;zArgArg)Arg( , 21212121+== z z z z z z z
)]sin()cos([z
z ii) 2121
2
1
2
1 θ θ θ θ ρ
ρ −+−= j
da cui
21
2
1
2
1
2
1 zArg-Argz
zArg ,
z
z z
z
z=
=
L’elevazione di un numero complesso
) jsincos( z θ θ ρ +=
Alla potenza n-esima è data dalla formula
])(n jsin)(n[cos zn θ θ ρ +=n
Cioè
2,...1,0,k k 2nArg Arg , ±±=+== π z z z z n
n
n
Segue dalla formula di Moivre
)(n jsin)(ncos) jsin(cos θ θ θ θ +=+n
da cui
)(n jsin-)(ncos) jsin-(cos) jsin(cos θ θ θ θ θ θ ==+− nn

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 13/391
7
Se definiamoθ je come segue
θ θ θ jsincos += je
da quanto precede si deduce che ogni numero complesso 0z ≠ può essere scritto in forma
esponenziale
zArg e z dove === θ ρ ρ θ je z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 14/391
8
Radici n-esime
Sia z un numero complesso diverso da 0 :
zArg e z dove === θ ρ ρ θ je z
Allora le n soluzioni dell’equazione
z=n
w
Sono per definizione le radici n-esime del numero complesso z.
Se scriviamo w in forma esponenziale :
wArg e w dove === α α r rew
j
l’equazione precedente diventa
θ α ρ j jn ee =nr
da cui
2,...1,0,k n
2k e ±±=
+==
π θ
α ρ
nr
Dove si è tenuto presente che due numeri complessi sono uguali se e solo se i loro moduli
sono uguali )(rn ρ = e i loro argomenti differiscono per multipli interi di 2π
2,...).1,0,k 2( ±±==− π θ α k n

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 15/391
9
Quindi tutte le radici n-esime di θ ρ je z = sono date da
2,...1,0,k w
2
k ±±==
+
n
k j
n e
π θ
ρ
Poiché l’equazione precedente, per k = m + n da lo stesso risultato di k = m, basta
prendere n valori consecutivi di k per ottenere le n differenti radici n-esime ; per
comodità si sceglie k = 0, 1,…, n-1 .
I punti corrispondenti ai valori di n z , costituiscono i vertici di un poligono regolare di n
lati inscritto in una circonferenza di raggio nr ρ = con centro nell’origine delle coordinate.
La radice n-esima di un numero reale a possiede anche n valori distinti, di cui neesistono due, uno o nessun valore reale a seconda della parità/disparità del numero n e
del segno di a.
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 16/391
10
funzioni di una variabile complessa
Limiti e continuità
Indicata con jy x z += una variabile complessa, abbiamo visto che i suoi valori si
rappresentano con i punti P(x,y) in un piano dove sia stato fissato un sistema di assi
cartesiani ortogonali x,y (piano complesso). Sia dato su tale piano un aperto (limitato o
meno) ed esiste una legge, che faccia corrispondere ad ogni punto z di un numero
complesso w . Diremo allora che w è una funzione dalla variabile complessa z definita su
e scriveremo
)( z f w = Ω∈ z
Resta inteso che, almeno per ora, ad ogni Ω∈ z corrisponde uno ed un solo valore w ,
cioè che la funzione sia ad un sol valore o, come anche si dice, monodroma.
Successivamente parleremo anche di funzioni a più valori o polidrome.
È evidente che una funzione )( z f w = equivale ad una funzione complessa delle due
variabili reali x e y ; perciò in luogo di )( z f w = scriveremo anche ),( y x f w = .
Posto poi w = u + j v con u e v reali, la funzione )( z f w =
può identificarsi con la seguente coppia ordinata di funzioni reali delle due variabili x e y :
u=u(x,y) ; v=v(x,y)
dove u(x,y) = Re f(z) e v(x,y) = Im f(z).
Il concetto di limite per una funzione )( z f w = discende immediatamente dal considerare
w come una funzione delle due variabili reali x e y . Pertanto se z0 è un punto di
accumulazione di diremo che:
jB A L z f z z
+==→
)(lim0
quando, comunque si prefissi ε > 0, esiste in corrispondenza ad esso un numero
0)( >= ε δ δ tale che, per tutti i punti z di per i quali sia verificata la relazione
δ <−< 00 z z , risulti
.)( ε <− L z f
Per quanto riguarda il concetto di continuità, )( z f è continua nel punto z0 di quindi si ha:
);()(lim 00
z f z f z z
=→

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 17/391
11
dire che )( z f è continua in significa che lo è in ogni punto di .
In altre parole, una funzione )( z f definita in un aperto è continua se per ogni Ω∈0 z e
per ogni numero ε > 0 si può trovare un numero 0),( 0 >= zε δ δ tale che per tutti i punti z
di che verificano la relazione δ <− 0 z z , vale la disuguaglianza
.)()( 0 ε <− z f z f
Non è difficile verificare che una funzione di una variabile complessa
),(),()( y xv j y xu z f += Ω∈ z
è continua in z0 = x 0 + jy 0 Ω∈ , se e solo se le funzioni u(x,y) e v(x,y) siano continue nel
punto (x 0 ,y 0 ).
Infine dati i limiti
A z f z z
=→
)(lim0
; B zg z z
=→
)(lim0
risulta
[ ] B A zg z f z z ±=±→ )()(lim0
AB zg z f z z
=→
)()(lim0
B
A
zg
z f
z z=
→ )(
)(lim
0
0≠ B
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 18/391
12
Il piano complesso dotato di punto all'infinito (sfera complessa)
Sia f(z) una funzione definita in un dato aperto connesso Ω . Se Ω è illimitato
si presenta in modo naturale la questione di studiare il comportamento di f(z)quando il punto z, variando in Ω si allontana indefinitamente . Per un tale
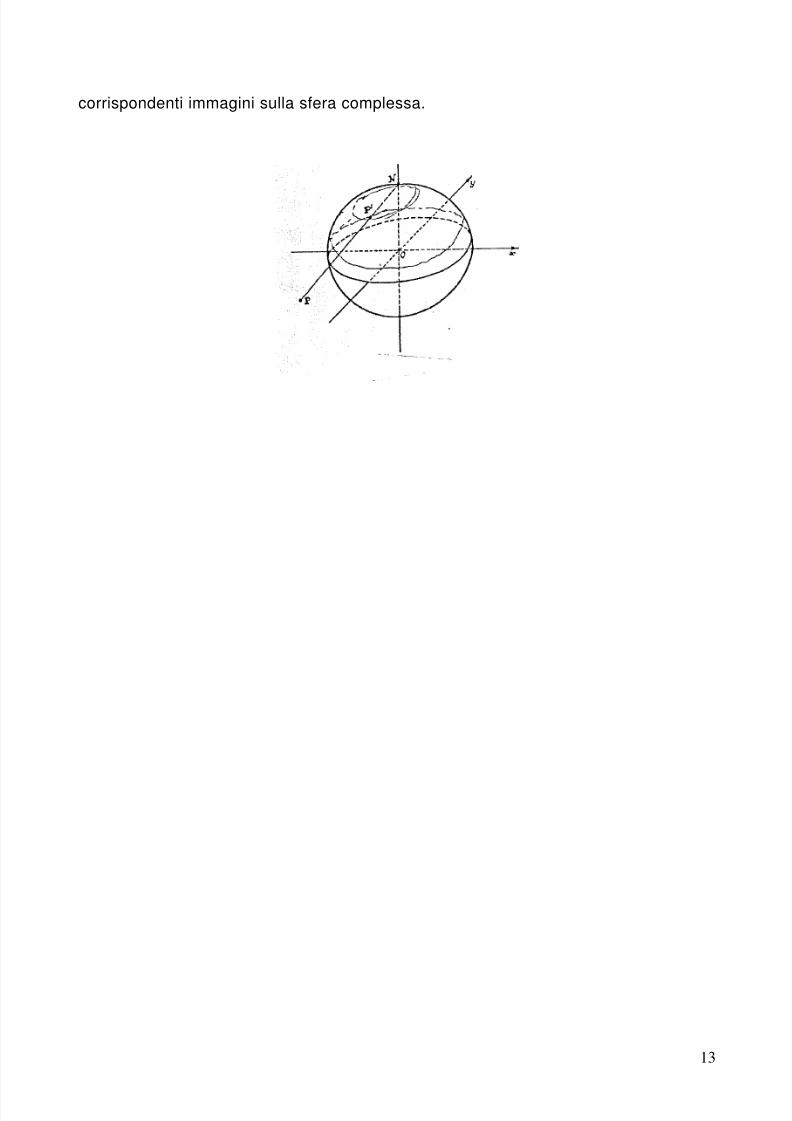
studio consideriamo la sfera che ha centro nell'origine O e raggio 1 e diciamo N
il punto in cui essa interseca il semiasse positivo u. Se P è un punto qualsiasi
del piano ( x,y ), la retta per N e P incontra ulteriormente la sfera in uno ed un
solo punto P' diverso da N.
Viceversa , preso un punto P' della sfera diverso da N , la retta NP' incontra il
piano ( x,y ) in uno ed un solo punto P. Nasce così una corrispondenza biunivocafra i punti P de l piano ( x,y ) ed i punti P' della sfera , con un'unica eccezione : il
punto N della sfera non ha una corrispondente sul piano ( x,y ).
Ne deriva , pensando P come immagine di un numero complesso z , che la totalità
dei numeri complessi può anche essere rappresentata dai punti della sfera
predetta privata del punto N.
Allo scopo di eliminare quest'eccezione, possiamo osservare che ai punti P' della
sfera vicinissimi a N corrispondono punti P del piano molto lontani dall'origine ,cioè numeri complessi z di modulo grandissimo ; da quest'osservazione risulta
ovviamente l'opportunità di far corrispondere al punto N della sfera il valore ∞
della variabile complessa z.
Perciò d'ora in poi penseremo aggiunto al piano complesso un unico punto all'infinito
da pensarsi come immagine di ∞= z ; per questa sfera si usa il termine sfera
complessa.
In tale rappresentazione il numero∞=
z ha come immagine il punto N ed ogni calottasferica ( aperta ) contenente N è per definizione un intorno circolare di ∞= z
Passando al piano complesso , a tale calotta corrisponde ranerto_costituito dai punti
esterni da un cerchio, pertanto nel piano complesso un intorno circolare di ∞= z è
l'aperto costituito dai punti esterni ad un qualsiasi cerchio.
Questi intorni circolari di ∞= z , considerati nel piano complessi senza punto
all'infinito, sono campi non semplicemente connessi;considerati invece nel piano
complesso con punto all'infinito risultano essere semplicemente connessi( come gliintorni circolari di qualsiasi altro punto ). Ci si convince subito di ciò pensando alle
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 19/391
13
corrispondenti immagini sulla sfera complessa.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 20/391
14
)2sin()2cos(sincos π π k y jk y y j y +++=+
jk z z ee π 2+=
)sin(cos y j yeeeeewx jy x jy x z
+====+
1= ze 1−=
ze
1 Funzione Esponenziale
La funzione esponenziale complessa è definita dall’equazione
da cui tenuto presente che:
segue che:
così che la funzione esponenziale z
e è periodica ed ha periodo 2π j; in altre parole ogni
valore che la funzione z
e può assumere è assunto nella striscia infinita -π < y ≤ π o in
qualsiasi altra striscia ottenibile da questa per traslazione parallela.
Da quanto precede segue che le soluzioni delle equazioni:
sono rispettivamente: j1)(2k ze j2k z π π +== ,....2,1,0 ±±=k
2 Funzioni trigonometriche
Le definizioni di seno e coseno sono estese al piano complesso nel modo seguente:
Essendo
segue che:
,...2,1,0 ±±=k
2cos
2sin
jz jz jz jz ee z
j
ee z
−−+
=−
=
x y j x yee j
zy jx y jx cossinhsincosh)(
2
1sin +=−=
+−−
x y y x y x z 222222 sinsinhcoshsinsinhcossin +=+=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 21/391
15
1sincos
22=+
z z
212121 sincoscossin)sin( z z z z z z ±=±
z z z 22 sincos2cos −= z z z cossin22sin =
π π k z jk jze zjz
=⇔=⇔=⇔= 2210sin 2
Dalla relazione precedente si evince che la funzione sin z non è limitata a meno che z non
sia reale. Analogamente si deduce che cos z non è limitata. Non è difficile dimostrare le
identità fondamentali:
(1)
(2)
(3)
Tutte le identità elementari della trigonometria valgono anche per le funzioni
trigonometriche di una variabile complessa e si deducono algebricamente dalle relazioni
(1), (2) e (3) precedenti.
Per esempio ponendo z z z == 21 nella (2) e (3) si ottengono rispettivamente le identità:
Si osservi che:
dove k = 0, ±1, ±2,….
212121 sinsincoscos)cos( z z z z z z m=±
2)12()12(210cos 2 π π +=⇔+=⇔−=⇔= k z jk jze z jz

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 22/391
16
2sinh
z z ee z
−−
=
z jz jz z coscosh,coscosh ==
1sinhcosh22
=− z z
212121 sinhsinhcoshcosh)cosh( z z z z z z ±=±
212121 sinhcoshcoshsinh)sinh( z z z z z z ±=±
z z z z z z coshsinh22coshsinhcosh2cosh 22=+=
2
12coshsinh
2 −
=
z
z
jk zk jz jz z π π −=⇔=⇔=⇔= 0sin0sinh
jk z z; jk z z π π
=⇔=+=⇔= 0sinh2
)12(0cosh
3 Funzioni iperboliche
Le funzioni iperboliche di una variabile complessa sono definite allo stesso modo come
per le variabili reali:
Si verifica facilmente che:
e che valgono le seguenti identità
In particolare è:
Da cui:
Si osservi che:
Da cui, tenendo presente che k= 0, ±1, ±2,…., si evince che:
2cosh
z z ee z
−+
=
z j jz jz z sinsinh,sinsinh =−=
2
12cosh
cosh2 +
=
z
z
jk zk jz jz z2
)12(2
)12(0cos0coshπ π
+−=⇔+=⇔=⇔=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 23/391
17
we z zw =⇔= Ln
uer =
4 Funzione logaritmo
Se z è un numero complesso diverso da zero, il logaritmo complesso di z è il numero
complesso w che soddisfa la relazione:
Sia w = u+jv e scriviamo z in forma trigonometrica:ϑ j
re z = dove ϑ=arg z ∈(-π; π] e
r =| z |
Allora:
Da se e solo se zr u lnln == segue che:
Pertanto la funzione
è una funzione ad infiniti valori. In altre parole:
supponiamo di partire da un punto z≠0 per il quale | z |=r e ϑ=arg z ∈(-π; π] , allora
Dopo aver compiuto nel verso positivo (antiorario) un giro completo intorno all’origine,
ritornando in z risulta | z |=r e ϑ=arg z +2π per cui
Dopo k giri intorno all’origine si ha:
,...2,1,02e ±±=+==⇔=⇔==+ k k ver eereee z u jvu j jvuw π ϑ ϑ
)2(||ln π ϑ k j zwe zw
++=⇔= ,...2,1,0 ±±=k
)2(||lnLn π ϑ k j z zw ++== ],(arg π π ϑ −∈= z
z z j z z lnarg||lnLn =+=
).2(arg||lnLn π ++= z j z z
).2(arg||lnLn π k z j z z ++=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 24/391
18
Poiché gli infiniti valori di si ottengono compiendo giri successivi intorno all’origine si
dice che z = 0 è un punto di diramazione e che ognuna delle infinite funzioni (ad un solo
valore)
è un ramo di .
Il ramo corrispondente a z z lnLn = cioè
è detto ramo principale.
Esempio.
Sono valide le relazioni:
5 Funzione Potenza
Se z e w sono due numeri complessi qualsiasi con w ≠0, chiamiamo valore principale delle
potenze zw , il numero univocamente determinato dall’equazione:
zln
)2(||ln π ϑ k j zw ++= zarg=ϑ ,...2,1,0 ±±=k
zw Ln=
ϑ j z z z +== ||lnlnLn ],(arg π π ϑ −∈= z
( ) ( ) ( )
( ) π
π π π π
π π
π π
π π
j
k jk j
j j j j
k k jk j j j Ln
=−
+=++=−
=+=
±±=+=++=
1ln
221ln1ln
22||lnln
,...2,1,0)22
()22
(||ln
21
2
1
2121 LnLn)(LnLn)( z z z
z Lne z z z z Ln −=+=
w z z ew ln=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 25/391
19
dove ln w è il valore principale di Ln w . Scegliendo altri valori di Ln w si ottengono altri
valori della potenza, che sono tutti contenuti nella formula
In particolare denota infiniti numeri reali:
la cui parte principale è 2 -
e
π
6 Funzione k zw =
Per semplicità limitiamo le nostre considerazioni alla funzione
zw = Scrivendo z in forma trigonometrica: ϑ j
er z = zr = zarg=ϑ si ottiene
2
ϑ jer w = π ϑ 20 <≤
Se a partire dal punto z si compie un giro completo in senso antiorario attorno all’origine
alla fine del giro si ottiene
( )wer er er w
j j j≠−===
++
222
)2(
1
ϑ ϑ π ϑ π
Se si compie un giro completo in senso antiorario attorno all’origine una seconda volta,
alla fine del secondo giro otteniamo i valore iniziale
( )wer er er w
j j j=−===
++
222
)4(2
2
ϑ ϑ π ϑ π
.
Pertanto il punto z = 0 è un punto di diramazione della funzione zw = e poiché dopo due
giri completi si ritrova il primo valore ( dopo di che il ciclo si ripete ), ne consegue che
zw = è una funzione a due valori e i rami corrispondenti sono
w z jk w z z eew Ln)2(ln==
+ π
j j
)22
()22
()2(ln
π π
π π
π k jk j j
jk j j j eee j+−+
+===
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 26/391
20
2
ϑ j
er w = π 20 <≤
che corrisponde al ramo principale e
)(2
π ϑ +
=j
er w π 20 <≤ oppure 2 j
er w
ϑ
−= π ϑ π 42 <≤ .
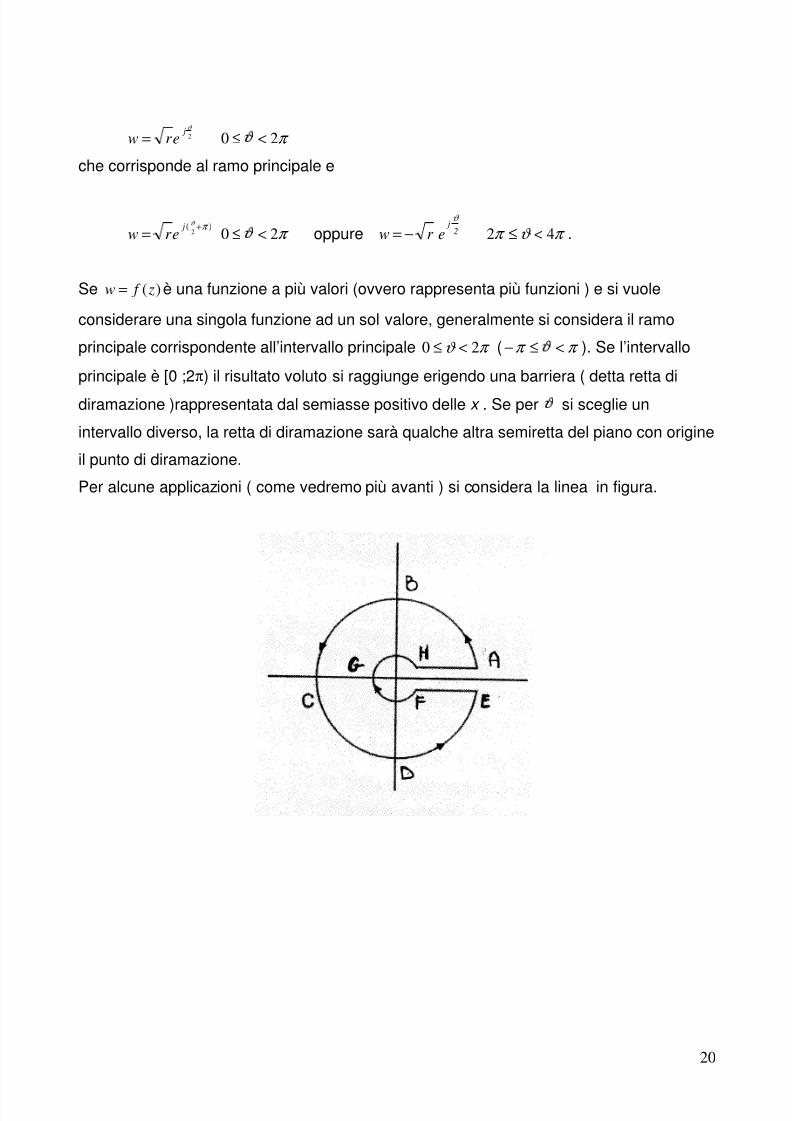
Se )( z f w = è una funzione a più valori (ovvero rappresenta più funzioni ) e si vuole
considerare una singola funzione ad un sol valore, generalmente si considera il ramo
principale corrispondente all’intervallo principale π ϑ 20 <≤ ( π π <≤− ). Se l’intervallo
principale è [0 ;2π) il risultato voluto si raggiunge erigendo una barriera ( detta retta di
diramazione )rappresentata dal semiasse positivo delle x . Se per si sceglie un
intervallo diverso, la retta di diramazione sarà qualche altra semiretta del piano con origine
il punto di diramazione.
Per alcune applicazioni ( come vedremo più avanti ) si considera la linea in figura.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 27/391
21
Derivazione Complessa
Sia )( z f w = una funzione ad un sol valore della variabile complessa z , definita in un
dominio D (aperto connesso) del piano complesso. Per definire il concetto di derivata di
una tale funzione utilizzeremo la stessa definizione che si dà per le funzioni reali di unavariabile reale, definite in intervalli.
Sia z un punto fissato in D e y j x z ∆+∆=∆ un incremento di z tale che z z ∆+ stia
ancora in D . Consideriamo il rapporto incrementale:
( ) ( ) ( ) ( )( ) y j x
y xv y y x xv j y xu y y x xu
z
z f z z f
∆+∆
−∆+∆++−∆+∆+=
∆
−∆+ ,,,,)()(
ed il suo limite per 0→∆ z oppure per ( ) ( )0,0, →∆∆ y x .
Se tale limite esiste (indipendentemente dal modo in cui 0→∆ z ), diremo che f è
derivabile nel punto z ed assumeremo il valore di tale limite, che sarà indicato con )(' z f ,
come la derivata di f nel punto z . È ovvio che
0
000
00
)()(
lim
)()(
lim)('0 z z
z f z f
z
z f z z f
z f z z z −
−
=∆
−∆+
= →→∆ .
Osserviamo subito che ogni funzione derivabile in un punto z è ivi continua. Infatti da
z z
z f z z f z f z z f ∆
∆
−∆+=−∆+
)()()()(
segue che
00)(')()(lim0
=⋅=−∆+→∆
z f z f z z f z
Supponiamo che f sia derivabile in D (cioè in tutti i punti di D ); allora ad ogni D z ∈ resta
associato il valore della derivata )(' z f e questa è ovviamente una nuova funzione (ad un
sol valore) definita in D .
Per la derivata sono usate anche le notazioni:
)( z Df , )(' z f ,dz
df

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 28/391
22
Le derivate di ordine superiore si definiscono ovviamente nello stesso modo, per esempio
è
z
z f z z f z f
z ∆
−∆+=
→∆
)(')('lim)(''
0.
Sottolineiamo il fatto che l’esistenza del limite
z
z f z z f
z ∆
−∆+
→∆
)()(lim
0
non dipende dal modo con cui 0→∆ z , pertanto se risulta:
z
z f z z f
z
z f z z f
y x
y x ∆
−∆+≠
∆
−∆+
=∆
→∆
→∆
=∆
)()(lim
)()(lim
00
00
allora si deve concludere che f non è derivabile in z .
Esempi.
Sia n z z f =)( dove n è un intero positivo; allora:1)(' −
=nnz z f C∈∀ z .
Infatti risulta
123221 ......)()( −−−−−
+++++=−
−=
−
− nnnnnnn
a za zaaz za z
a z
a z
a f z f
da cui, passando al limite per a z → , si ottiene
1)(' −=
nnaa f .C a /∈∀
Sia 22)( y x z z f +== e .000 jy x z += Essendo
)]()[()()(
)()(002
0
2
0
2
0
2
0
22
0
0 y y j x x y y x x
y x y x
z z
z f z f −−−
−+−
+−+=
−
−
segue che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 29/391
23
2
0
2
0
0
0
0 )()(lim
0
0 y x
y j
z z
z f z f
y y x x
+
−=−
−
→
=
00 ≠ z
2
0
2
0
0
0
0 )()(lim
0
0
y x
x
z z
z f z f
x x
y y +
=−
−
→
=
00 ≠ z
Poiché i limiti precedenti sono diversi, per quanto osservato in precedenza, si evince che
la funzione z z f =)( non è derivabile in .0−/C
Infine, osservato che nel caso in cui è 00 = z , risulta
x
x
z
z f
x x y 0
00
lim)(
lim→
→
=
=
possiamo concludere che la funzione z z f =)( non è derivabile in .C /
Analogamente si dimostra che la funzione z z f =)( non è derivabile in .C /
Procedendo come nel caso delle funzioni reali si dimostra che nei punti in cui f e g sono
entrambi derivabili risulta:
a) '')'( g f g f +=+ ;
b) '')'( fgg f fg += ;
c) 2 ''g
fgg f g f
−=
′
ovviamente la c) vale solo nei punti in cui è g (z )≠0.
Se f è derivabile in a e g è derivabile in f(a), allora h(z)=g[f(z)] è derivabile in a e risulta:
)()(' adz
dw
dw
dgah = dove w = f(z).
Inoltre si dimostra che:
z zdz
d cossin = ; senz z
dz
d −=cos ; z z ee
dz
d =
e così via.
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 30/391
UNIVERSITA’ POLITECNICA DELLE MARCHE
FACOLTA’ di INGEGNERIA
DIPARTIMENTO di SCIENZE MATEMATICHE
ANALISI II – CALCOLO DIFFERENZIALE
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 31/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
DERIVATE PARZIALI
1. DEFINIZIONE
Le derivate parziali prime di una funzione rispetto alle variabili x e y sono le funzioni
e date da
),( y x f
),(1 y x f D ),(2 y x f D
),(1 y x f D =h
y x f yh x f
h
),(),(lim
0
−+→
),(2 y x f D =k
y x f k y x f
k
),(),(lim
0
−+→
a condizione che tali limiti esistano.
Si osservi che è proprio la derivata prima di considerata come funzione solo di x,interpretando y come un parametro costante.
),(1 y x f D ),( y x f
In modo analogo la funzione è la derivata prima di considerata come funzionesolo di y, cioè con x tenuto fisso.
),(2 y x f D ),( y x f
Gli indici “1” e “2” usati per la notazione delle derivate parziali specificano la “prima” variabile e la“seconda” variabile di f .
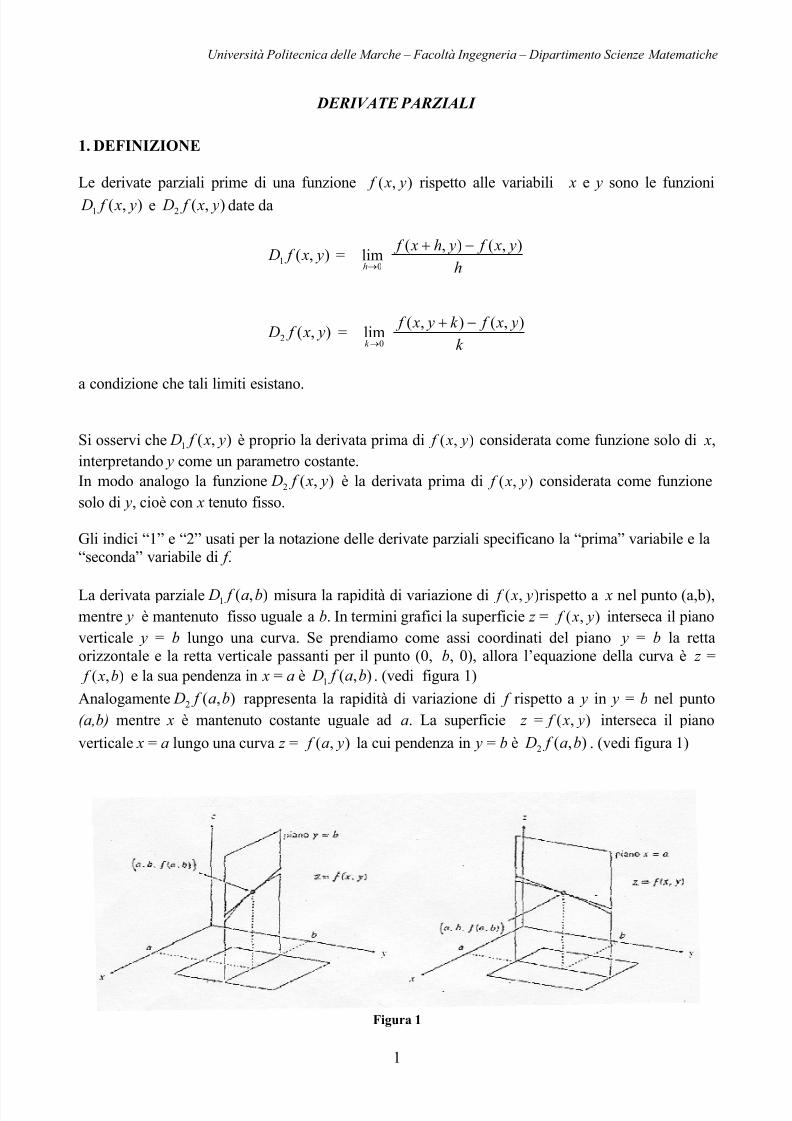
La derivata parziale misura la rapidità di variazione di rispetto a x nel punto (a,b),mentre y è mantenuto fisso uguale a b. In termini grafici la superficie z = interseca il pianoverticale y = b lungo una curva. Se prendiamo come assi coordinati del piano y = b la rettaorizzontale e la retta verticale passanti per il punto (0, b, 0), allora l’equazione della curva è z =
e la sua pendenza in x = a è . (vedi figura 1)
),(1 ba f D ),( y x f
),( y x f
),( b x f ),(1 ba f D
Analogamente rappresenta la rapidità di variazione di f rispetto a y in y = b nel punto(a,b) mentre x è mantenuto costante uguale ad a. La superficie z = interseca il piano
verticale x = a lungo una curva z = la cui pendenza in y = b è . (vedi figura 1)
),(2 ba f D
),( y x f
),( ya f ),(2 ba f D
Figura 1
1

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 32/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Notazioni delle derivate parziali prime
Per indicare le derivate parziali prime di z = si possono usare varie notazioni:),( y x f
x
z
∂
∂=
∂
∂= f ),( y x f x ( x, y) = ),(1 y x f D
y
z
∂
∂=
y∂
∂),( y x f = f y ( x, y) = ),(2 y x f D
Il simbolo “ x z ∂∂ ” si legge “derivata parziale di z rispetto a x. ”
I valori delle derivate parziali in un punto particolare (a, b) sono indicati in modo simile:
),( ba x
z
∂
∂=
),(
),(ba
y x f x
⎟ ⎠
⎞⎜⎝
⎛ ∂
∂= f x (a, b) = ),(1 ba f D
),( ba y
z
∂
∂=
),(
),(ba
y x f y ⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂= f y (a, b) = ),(2 ba f D
Tutte le regole standard di derivazione delle somme, prodotti, reciproci e quozienti di funzioni diuna variabile continuano a valere per le derivate parziali.
Esempio 1.1
Se: y x y x y x z sin)ln( 22223 +++=
Allora :
y x y x
x y x
x
z sin2
23
2222 +
++=
∂
∂
y x y x
y y x y
z
cos2
22
223
+++=∂
∂
2

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 33/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Esempio 1.2
Determinare ∂z/∂x e ∂z/∂y dove .)sin( 34 xy x z = Svolgimento:
).cos(30)sin()cos(3
)()sin()][sin()]sin([
);sin(4)cos()()sin()][sin()]sin([
3253324
433434
33334433434
xy y x xy xy xy x
x y
xy xy y
x xy x y y
z
xy x xy y x x x
xy xy x
x xy x x x
z
=⋅+
=∂
∂+
∂
∂=
∂
∂=
∂
∂
+=∂
∂+
∂
∂=
∂
∂=
∂
∂
Esempio 1.3Supponiamo che un punto Q si muova lungo l’intersezione della sfera con il
piano x = 2. A che velocità sta variando z rispetto a y quando il punto si trova nella posizione
P(2,1,2)?
9zyx 222 =++
Figura 2
Svolgimento:
Dato che la coordinata z del punto P(2,1,2) è positiva, questo punto giace sulla semisfera superiore:22 yx1z −−= ,
e dunque per ogni valore fissato di x, la rapidità di variazione di z rispetto a y sulla semisferasuperiore è:
.yx9
y])yx9[(
yy
z22
2/122
−−−=−−
∂
∂=
∂
∂
In particolare, se x = 2 (vedi figura 2), allora dall’equazione appena trovata segue che la rapidità divariazione di z rispetto a y nel punto P è:
.2/1y
z
)1,2(
−=∂
∂
Il successivo esempio mostra che l’esistenza delle derivate parziali non implica la continuità.
3

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 34/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Esempio 1.4
La funzione
( )( ) ( )
( ) (⎪⎪
⎩
⎪⎪⎨
⎧
=
≠+=
0,0,0
0,0,,
22
y x
y x y x
xy
y x f
)
)
è discontinua in , ma ha derivate parziali in( 0,0 ( )0,0 ; queste derivate sono ( ) 00,0 = x f e
. La discontinuità è nota; i valori delle derivate parziali nel punto si ottengono
utilizzando la definizione ed osservando che
( ) 00,0 = y f ( 0,0 )
( ) ( ) ( ) ( ) 00,0,0,00,00, =−=− y
f y f x
f x f
4

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 35/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
2. DERIVATE PARZIALI DI ORDINE SUPERIORE AL PRIMO
Dal momento che le derivate parziali xf ∂∂ e yf ∂∂ sono funzioni delle variabili x e y, ognuna diesse può avere derivate parziali. Ciò dà origine a quattro possibili derivate parziali seconde di f ,che sono così definite:
• derivate parziali seconde pure, rispetto a x o a y,
);,(),(
);,(),(
222
2
112
2
y x f D y x f y
z
y y
z
y x f D y x f x
z
x x
z
yy
xx
==∂
∂
∂
∂=
∂
∂
==∂
∂
∂
∂=
∂
∂
• derivate parziali seconde miste, rispetto a x e y,
);,(),(
);,(),(
12
2
21
2
y x f D y x f x
z
y y x
z
y x f D y x f y
z
x y x
z
xy
yx
==∂
∂
∂
∂=
∂∂
∂
==∂
∂
∂
∂=
∂∂
∂
Si osservi che indica che si deve derivare prima rispetto ad y oppure rispetto alla
seconda variabile e dopo rispetto a x oppure rispetto alla prima variabile. indica l’ordine
di derivazione opposto.
f D f yx 21=
f D f xy 12=
Analogamente, se , allora:),,( z y x f w =
),,(),,( 2212
3
z y x f D z y x f y
w
y x y x
w yyx ==
∂
∂
∂
∂
∂
∂=
∂∂
∂
Esempio 2.1
Tenuto conto dell’esempio 1.1 si ha:
;cos2)(
46
;cos2)(
46
2222
2
2222
2
y x y x
xy y x f
y x
z
y x y x
xy y x f
x y
z
yx
xy
++
−==∂∂
∂
++
−==∂∂
∂
Nell’esempio precedente si constata che le due derivate parziali miste rispetto alle stesse variabili,ma in ordine diverso, sono uguali. Questo risultato non è fortuito, ma si verifica tutte le volte che lederivate parziali implicate sono continue. Il teorema seguente enuncia in modo preciso questa
importante proprietà, più precisamente fornisce una condizione sufficiente per l’uguaglianza dellederivate parziali miste.
5

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 36/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
TEOREMA 2.1
Sia f un campo scalare tale che le derivate parziali f D f D f D f D 211221 ,,,
esistono in un aperto Ω del piano xy. Se (a, b) è un punto di Ω in cui e sono continue
allora
f D12 f D21
( ) ( )ba f Dba f D ,, 2112 = .
L’esempio che segue mostra che se una funzione ( ) y x f , a valori reali ha le due derivate parzialimiste
y
f
x f D
∂
∂
∂
∂=12 e
x
f
y f D
∂
∂
∂
∂=21
queste non sono necessariamente uguali.
Esempio 2.2 Per la funzione
( )22
22
, y x
y x xy y x f
+
−= ( ) ( )0,0, ≠ y x e ( ) 00,0 = f
risulta e . Infatti è( ) 10,021 = f D ( ) 10,012 −= f D
( )( ) ( )
h
f Dh f D f D
h
0,00,lim0,0 22
021
−=
→
essendo( ) hh f D =0,2 e ( ) 00,02 = f D
segue che ; analogamente si ha( ) 10,021 = f D ( ) 10,012 −= f D .
Nell’esempio ora considerato, per il teorema precedente, entrambe le derivate parziali miste e
non sono continue nell’origine.
f D12
f D21
Si osservi che:
222
2
22
22
1
)(
4),(
y x
xy xy
y x
y x y y x f D
++
+
−= )0,0(),( ≠ y x
0)0,0(1 = f D )0,0(),( = y x
Scambiando x con y in –D1 f(x,y) si ottiene:
))(
4(),(
222
2
22
22
2 y x
yx xy
y x
x y x y x f D
++
+
−−=
))(
4),( 222
2
22
22
2 y x
yx xy
y x
y x x y x f D +−+
−= )0,0(),( ≠ y x
6

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 37/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
0)0,0(2 = f D )0,0(),( = y x
1lim
)0,0(),0(
lim)0,0(0
11
012 −=−=
−
=→
→ k
k
k
f Dk f D
f Dh
h
1lim)0,0()0,(
lim)0,0(
0
22
021 ==
−=
→
→ h
h
k
f Dh f D f D
h
h
Per derivazioni successive, possiamo ottenere derivate parziali terze oppure derivate parziali diordine superiore. Alcune possibilità sono:
;,2
2
3
2
2
3
3
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂∂
∂
∂
∂=
∂∂
∂⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂
∂
∂
∂=
∂
∂
x y
f
y x y
f
x
f
x x
f
.,2
3
22
4
2
2
2
3
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂∂
∂
∂
∂=
∂∂
∂⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂
∂
∂
∂=
∂∂
∂
x y
f
y x y
f
x
f
y x y
f
Derivate parziali di ordine superiore al primo possono essere denotate in modo più compatto tramite
la notazione con pedice. Ad esempio:
( ) ( ) .2
y x x f f y x
f
y x y
f =
∂
∂=⎟
⎠
⎞⎜⎝
⎛ ∂
∂
∂
∂=
∂∂
∂
Solitamente le parentesi si omettono e si scrive semplicemente:
.2
xy f x y
f =
∂∂
∂
Notare che nella notazione “∂” la sequenza delle differenziazioni è ottenuta leggendo da destraverso sinistra, mentre nella notazione con pedice essa è da sinistra verso destra. Ulteriori esempisono:
.,,22
4
2
3
2
2
x y
f f
y x
f f
x
f f xxyy yyx xx ∂∂
∂=
∂∂
∂=
∂
∂=
7

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 38/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 39/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
4. DEFINIZIONE
In ogni punto dove le derivate parziali prime della funzione esistono, il vettore
gradiente è definito mediante la relazione
),( y x ),( y x f
),( y x f ∇
),( y x f ∇ = grad ),(),( 1 y x f y x f = i ( ) y x f ,2+ j
Ricordiamo che i e j indicano i vettori unitari della base standard che collegano l’originerispettivamente con i punti (1,0) e (0,1). Il simbolo ∇ chiamato del o nabla, è un operatore
differenziale vettoriale:
=∇ i x∂
∂+ j
y∂
∂
Possiamo applicare questo operatore a una funzione scrivendo l’operatore alla sinistra della
funzione. Il risultato è il gradiente della funzione
),( y x f
=⎟⎟ ⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂
∂=∇ ),(),( y x f
y x y x f ji ( ) ( ) ji y x f y x f ,, 21 +
4.1 PROPRIETA’ DEL GRADIENTE
Siano f e g campi scalari differenziabili in un aperto connesso D, allora:
22112211 )()1 f f f d f d ∇+∇=+∇ α α
f g g f fg ∇+∇=∇ )()2
f f n f nn ∇=∇ −1)()()3
2)()4
g
g f f g
g
f ∇−∇=∇ 0≠ g
9

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 40/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
1. DIFFERENZIABILITA’ DI FUNZIONI DI DUE VARIABILI
Ricordiamo che una funzione f di una variabile è detta differenziabile i se esiste la sua derivata
in o, in altre parole, se il limite0 x
0 x
( )( ) ( )
x
x f x x f x f
Δ
−Δ+= 00
0 lim' (1)
esiste. Una funzione f che è differenziabile in un punto gode di due importanti proprietà:0 x
i) è continua in ;( ) x f 0 x
ii) la curva ha una retta tangente non verticale in .( ) x f y = 0 x
Il nostro obiettivo primario in questo paragrafo è di estendere la nozione di differenziabilità a
funzioni di due variabili in modo che quando ( ) y x f , sia differenziabile in ( )00 , y x risulti:
i) continua in ;( y x f , )
)( )00 , y x
ii) la superficie abbia un piano tangente non verticale in( y x f z ,= ( )00 , y x (vedi figura 1; la
definizione di piano tangente sarà data in seguito).
Sarebbe ragionevole supporre che una funzione f di due variabili dovrebbe poter esseredifferenziabile in se è ivi continua e se le due derivate parziali e( 00 , y x ) ( )00 , y x f x ( )00 , y x f y
esistono. Sfortunatamente, queste condizioni non sono sufficienti per la differenziabilità, in quantoci sono funzioni che in un dato punto sono continue e che hanno derivate parziali ma non sonodifferenziabili.Per pervenire ad una definizione appropriata di differenziabilità per funzioni di due variabili, sarà diaiuto riesaminare il concetto di differenziabilità per funzioni di una variabile. Assumendo, per ilmomento, che f sia una funzione di una variabile differenziabile in 0 x x = , la (1) può essere riscritta
come:
( ) x
f x f
x Δ
Δ=
→Δ 00 lim'
(2)
o, ugualmente, come:
10

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 41/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) 0'lim 00
=⎥⎦
⎤⎢⎣
⎡−
Δ
Δ→Δ
x f x
f
x
(3)
dove
( ) ( )00 x f x x f f −Δ+=Δ
Se adesso definiamo ε come
( )0' x f x
f −
Δ
Δ=ε
(4)allora da questa formula segue che
( ) x x x f f Δε+Δ=Δ 0'(5)
dove ε è funzione di . Utilizzando la (4), il limite nella (3) può essere riscritto come: xΔ
0lim0
=ε→Δ x
(6)Le formule (5) e (6) conducono alla seguente definizione alternativa di differenziabilità per funzionidi una variabile.
DEFINIZIONE 1.1
Una funzione f di una variabile è detta differenziabile in se esiste un numero tale che0 x ( )0' x f yΔ
ovvero possa essere scritto nella forma f Δ
Δ ( ) x x x f f Δε+Δ= 0'
(7)dove ε è una funzione di xΔ tale che per 0→ε 0→Δ x .
Questa definizione di differenziabilità fornisce le basi per estendere la nozione di differenziabilità afunzioni di due o più variabili. Una interpretazione geometrica di quanto detto nella (7) è fornitadalla figura seguente:
Figura 3
11

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 42/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Il termine rappresenta la variazione in altezza di un punto che si muove lungo il grafico di f
quando l’ascissa x varia da a ; il termine
f Δ
0 x x x Δ+0 ( ) x x f Δ0' rappresenta la variazione in altezza
di un punto che si muove lungo la retta tangente nel punto ( )( )00 , x f x quando l’ascissa x varia da
a ; infine, il termine rappresenta la differenza tra0 x x x Δ+0 ε xΔ Δ f ed . È evidente
dalla figura che . Tuttavia, la (7) asserisce anche che
( ) x x f Δ0'
ε 0→Δ x 0→ε per come si evincedalla (6). Se f è una funzione di x e y allora il simbolo
0→Δ xΔ f , chiamato incremento di f , denota il
cambio di valore di che risulta quando( y x f , ) ( ) y x, varia da una posizione iniziale ad una
nuova posizione ( ; di conseguenza:
( 00 , y x )) x y x x Δ+Δ+ 00 ,
Δ f ( ) ( )0000 ,, y x f y y x x f −Δ+Δ+=
(8)
(vedi figura 3). Se si usa una variabile dipendente ( ) y x f z ,= , allora potremo scrivere z piuttostoche f .
ΔΔ
Figura 4
Con riferimento alla definizione 1.1, possiamo adesso definire la differenziabilità per funzioni indue variabili.
DEFINIZIONE 1.2
Una funzione f in due variabili è detta differenziabile in ( )00 , y x se ed( )00 , y x f x ( )00 , y x f y
esistono e f può essere scritto nella forma:Δ
( ) ( ) y x y y x f x y x f f y x Δ+Δ+Δ+Δ=Δ 210000 ,, ε ε (9)
dove ed sono funzioni di e tali che1ε 2ε xΔ yΔ 01 →ε e 02 →ε per ( ) ( 0,0, →Δ )Δ y x .
Una funzione è detta differenziabile su una regione R del piano xy se è differenziabile in ogni
punto di R. Una funzione che è differenziabile sull’intero piano xy è detta ovunque differenziabileo semplicemente differenziabile. Non è difficile verificare che la definizione precedente èequivalente alla seguente:
12

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 43/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
DEFINIZIONE 1.3
Si dice che la funzione è differenziabile nel punto se),( y x f ),( ba
0),(),(),(),(lim22)0,0(),(
=+
⋅−⋅−−++→ k h
ba f k ba f hba f k bha f y x
k h(9’)
Non è difficile dimostrare che la (9) implica la (9’) dove a = , b = , h = e k =0 x 0 y xΔ 0 yΔ
Se nella (9’) poniamo
),(),(),(),(),(
22 k hwk h
ba f k ba f hba f k bha f y x
=+
⋅−⋅−−++
dalla definizione precedente si evince:Se una funzione è differenziabile nel punto interno al suo dominio allora),( y x f ),( ba
22),(),(),(),(),( k hk hwba f k ba f hba f k bha f y x ++⋅+⋅=−++ (9’’)
dove
(2222),( k hok hk hw +⋅=+ per ;)0,0(),( →k h
Per dimostrare che la (9’) implica la (9), si osservi che
k hk k h
k k hwh
k h
hk hwk hk hw 212222
22 ),(),(),( ε ε +=⎟⎟
⎠
⎞⎜⎜⎝
⎛
++
⎟⎟
⎠
⎞⎜⎜⎝
⎛
+=+
dove
222
221 ),(),(
k h
k k hwe
k h
hk hw
+=
+= ε ε
sono due funzioni di h e k che tendono a zero per .)0,0(),( →k h
OSSERVAZIONE.Prima di procedere oltre, è bene notare che per funzioni di una variabile i termini “è differenziabile”e “ha una derivata” sono sinonimi. Tuttavia, per funzioni in due variabili, la differenziabilitàrichiede più della semplice esistenza delle derivate parziali e della continuità. Per esempio la
funzione xy y x f =),( nel punto (0,0) è continua, ha derivate parziali ( ) ( ) 00,00,0 == y x f f ,
tuttavia non è differenziabile in (0,0). Infatti è
13
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 44/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
2222
)0,0()0,0()0,0(),(
k h
hk
k h
k f h f f k h f y x
+=
+
−−−
e il
22)0,0(),(lim
k hhk
k h +→
non esiste.
2. RELAZIONI TRA DIFFERENZIABILITA’ E CONTINUITA’
In precedenza, ci eravamo posti due obiettivi per la nostra definizione di differenziabilità.Volevamo che una funzione differenziabile in ( )00 , y x fosse anche continua in , e volevamo
che il suo grafico avesse un piano tangente non verticale in
( 00 , y x )
( )00 , y x . Il prossimo teorema mostrache l’ipotesi di continuità è soddisfatta; l’esistenza di un piano tangente non verticale saràdimostrata più avanti.
TEOREMA 2.1
Se f è differenziabile in ( , allora f è continua in)00 , y x ( )00 , y x .
Dimostrazione.Dobbiamo dimostrare che
( ) ( )00),(),(
,,lim00
y x f y x f y x y x
=→
il quale, ponendo x x x Δ+= 0 ed y y y Δ+= 0 , equivale a:
( ) ( )0000)0,0(),(
,,lim y x f y y x x f y x
=Δ+Δ+→ΔΔ
ovvero a
( ) ( ) 0lim,,lim )0,0(),(0000)0,0(),( =Δ=−Δ+Δ+ →ΔΔ→ΔΔ f y x f y y x x f y x y x
Essendo f per ipotesi differenziabile in ( )00 , y x , dalla (9) segue che:
y x y y x f x y x f f y x y x y x
Δε+Δε+Δ+Δ=Δ→ΔΔ→ΔΔ
210000)0,0(),()0,0(),(
),(),(limlim
da cui l’asserto.
Il prossimo teorema, la cui dimostrazione è omessa, fornisce delle semplici condizioni sotto cui unafunzione in due variabili è differenziabile in un punto.
14
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 45/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
TEOREMA 2.2
Se f ha derivate parziali prime in ogni punto di una regione circolare centrata in ( , e se
queste derivate parziali sono continue in
)00 , y x
( )00 , y x , allora f è differenziabile in ( ) 00 , y x .
3. DERIVAZIONE DI FUNZIONI COMPOSTE
Se y è una funzione differenziabile di una variabile x ed x è una funzione differenziabile di unavariabile t , allora la regole di derivazione di funzioni composte afferma che:
dt
dx
dx
dy
dt
dy= .
Adesso estenderemo questa regola di derivazione a funzioni di due variabili.Supponiamo che z sia una funzione di due variabili x ed y, diciamo
( ) y x f z ,= (10)
e supponiamo che x ed y siano rispettivamente funzioni di una sola variabile t :
( )t x x = , ( )t y y = .
Sostituendo queste funzioni nella (10), otteniamo la relazione
( ) ( )( )t yt x f z ,=
che esprime z come una funzione della sola variabile t . Sussiste il seguente
TEOREMA 3.1 (derivazione di funzioni composte).
Se e sono derivabili in t, e se( )t x x = ( )t y y = ( ) y x f z ,= è differenziabile nel punto ( ) ( )( )t yt x , ,
allora è derivabile in t, e( ) ( )( t yt x f z ,= )
dt dy
y z
dt dx
x z
dt dz
∂∂+∂∂= .
(11)
Nel caso particolare in cui ed y è una funzione derivabile della variabile x, la formula(11) conduce al risultato:
( y x F z ,= )
dx
dy
y
F
x
F
dx
dy
y
F
dx
dx
x
F
dx
dz
∂
∂+
∂
∂=
∂
∂+
∂
∂=
Si osservi che altre notazioni possibili sono
15

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 46/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) ( ).''
;
;
t y f t x f dt
df
dt
dy
y
f
dt
dx
x
f
dt
df
dt
dy f
dt
dx f
dt
dz
y x
y x
+=
∂
∂+
∂
∂=
+=
ma è possibile costruire anche altre svariate scritture.
Nel teorema 3.1 le variabili x e y sono ognuna funzione di singola variabile t . Adesso consideriamoil caso in cui x e y sono funzioni di due variabili. Poniamo
( ) y x f z ,=
(12)e supponiamo che x ed y siano funzioni di u e v, diciamo
( ),,vu x x = ( ).,vu y y =
Sostituendo queste funzioni di u e v nella (12), otteniamo la relazione
( ) ( )( )vu yvu x f z ,,,=
che esprime z come una funzione delle due variabili u e v. In questo caso sussiste il
TEOREMA 3.2 (regola di derivazione a catena).
Se e hanno derivate parziali prime nel punto( vu x x ,= ) )( vu y y ,= ( )vu, , e se ( ) y x f z ,= e
differenziabile nel punto ( ) ( )( )vu yvu x ,,, , allora ( ) ( )( )vu yvu x f z ,,,= ha derivate parziali prime in
date da:( vu, )
u
y
y
z
u
x
x
z
u
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂e .
v
y
y
z
v
x
x
z
v
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂
16

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 47/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
4. DIFFERENZIALI TOTALI
4.1 PIANI TANGENTI
Ricordiamo che C è una curva parametrica liscia nello spazio tridimensionale allora la retta tangente
a C nel punto è la retta che attraversa lungo il vettore unitario tangente a C in (figura 4).Il concetto di piano tangente è basato su questa definizione. Il seguente teorema stabilisce lecondizioni che assicurano l’esistenza di un piano tangente e fornisce il metodo per trovare le sueequazioni.
0 P 0 P 0 P
Figura 5
TEOREMA 4.1.1
Sia un punto sulla superficie( 0000 ,, z y x P ) ( ) y x f z ,= . Se ( ) y x f , è differenziabile in ( )00 , y x ,
allora la superficie ha un piano tangente in di equazione0 P
( )( ) ( )( ) ( ) 0,, 0000000 =−−−+− z z y y y x f x x y x f y x (13)
Dimostrazione.
Per provare l’esistenza del piano tangente in , dobbiamo dimostrare che tutte la curve lisce sulla
superficie che passano per hanno rette tangenti giacenti sullo stesso piano.
Lo faremo mostrando che curve hanno un vettore tangente unitario in normale al vettore
0 P
( y x f z ,= ) 0 P
0 P
( ) ( ) 1,,,, 0000 −= y x f y x f n y x (14)
Queste rette saranno sicuramente tutte tangenti in alle suddette curve e giacenti sul piano che
passa per e adn normale. Inoltre, dalla (14) segue che l’equazione normale al punto di questo
piano è la (13). Premesso ciò, completiamo la dimostrazione. Sia C una curva liscia giacente sullasuperficie passante per
0 P
0 P
( y x f z ,= ) ( )0000 ,, z y x P . Si assuma, inoltre, che C abbia equazioni
parametriche
( ) s x x = ; ( ) s y y = ; ( ) s z z = ;
17

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 48/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
dove s è il parametro lunghezza d’arco e ( )0000 ,, z y x P è il punto su C che corrisponde al valore
. Quindi, , , e0 s s = ( )00 s x x = ( )00 s y y = ( )00 s z z = . Siccome C giace sulla superficie ( ) y x f z ,= ,
ogni punto deve soddisfare questa equazione per ogni s, quindi( ) ( ) ( )( s z s y s x ,, )( ) ( )( ) s y s x f z ,=
per ogni s.Se deriviamo entrambi i membri di questa equazione e applichiamo il teorema derivazione funzionicomposte con s al posto di t , otteniamo
;ds
dy
y
f
ds
dx
x
f
ds
dz
∂
∂+
∂
∂=
oppure
0=−∂∂+∂∂ dsdz
dsdy
y f
dsdx
x f
La parte sinistra di questa equazione può essere riscritta come un prodotto scalare:
0,,1,, =⋅−∂
∂
∂
∂
ds
dz
ds
dy
ds
dx
y
f
x
f
oppure
( ) ( ) ( ) ( ) ( ) 0',','1,,,, =⋅− s z s y s x y x f y x f y x
In particolare, se abbiamo0 s s =
( ) ( ) ( ) ( ) ( ) 0',','1,,,, 0000000 =⋅− s z s y s x y x f y x f y x (15)
Ma il secondo vettore nel prodotto è il vettore unitario tangente a C nel punto , quindi
dalla (15) il vettore unitario tangente a C in è perpendicolare al vettore
( )0000 ,, z y x P
0 P
( ) ( ) 1,,,, 0000 −= y x f y x f n y x
che completa la dimostrazione.Se è differenziabile in ( , allora il vettore( y x f , ) )00 , y x
( ) ( ) 1,,,, 0000 −= y x f y x f n y x (16)
è detto vettore normale alla superficie ( ) y x f z ,= in ( )0000 ,, z y x P , e la retta passante per
parallela a n è detta retta normale alla superficie in (figura 5). Le equazioni parametriche della
retta normale sono:
0 P
0 P
18

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 49/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( )
( )
;
;,
;,
0
000
000
t z z
y x f y y
y x f x x
y
x
−=
+=
+=
Figura 6
Esempio 4.1.1 Trovare l’equazione del piano tangente e della retta normale alla superficie nel punto
.
y x z 2=
( )4,1,2 Soluzione.
Dato che , segue che( ) y x y x f 2, =
( ) xy y x f x 2, = e ( ) 2, x y x f y = .
Quindi per e ,2= x 1= y
( ) 41,2 = x f e ( ) 41,2 = y f
quindi, il vettore normale alla superficie in ( )4,1,2 è
n = i +( )1,2 x f ( )1,2 y f j – k = 4i + 4 j – k
Perciò, il piano tangente ha equazione
( ) ( ) ( ) 041424 =−−−+− z y x o 844 =−+ z y x
e la retta normale ha equazioni
t x 42 += , t y 41+= , t z −= 4 .
19

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 50/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
ATTENZIONE. Nel paragrafo precedente abbiamo posto due condizioni per la definizione di differenziabilità di unafunzione di due variabili nel punto( y x f , ) ( ) f y x −00 , deve essere continua in ( e la
superficie non deve avere tangenti verticali in
)
)00 , y x
( y x f z ,= ( )00 , y x . Il teorema 2.1 afferma che la
differenziabilità implica la continuità e ora il teorema 4.1.1 mostra che la differenziabilità implical’esistenza di un piano tangente non verticale. Il piano tangente dato dalla (13) è non verticale
perché la terza componente del vettore normale n nella (14) è diversa da 0.
5. DIFFERENZIALI
Ricordiamo che se ( ) x f y = è una funzione di una variabile, allora il differenziale
( )dx x f dy 0'=
rappresenta la variazione di y lungo la retta tangente in ( )00 , y x prodotta da una variazione dx della
variabile x e
( ) ( )00 x f x x f y −Δ+=Δ
rappresenta la variazione in y lungo la curva ( ) x f y = prodotta da una variazione xΔ della
variabile x. Analogamente, se è una funzione di due variabili, definiremo dz come la
variazione in z lungo il piano tangente in
( y x f z ,= )
( )000 ,, z y x alla superficie ( y x f z , )= prodotta dallevariazioni dx e dy rispettivamente delle variabili x e y. In questo caso
( ) ( )0000 ,, y x f y y x x f z −Δ+Δ+=Δ
rappresenta la variazione in z lungo la superficie dovuta alle variazioni xΔ e rispettivamentedelle variabili x e y.
yΔ
Per ricavare una formula per dz , sia un punto fissato sulla superficie . Se f
è differenziabile in ( allora la superficie ha un piano tangente in dato dall’equazione
( 0000 ,, z y x P ) ))
( y x f z ,=
00 , y x 0 P
( )( ) ( )( ) ( ) 0,, 0000000 =−−−+− z z y y y x f x x y x f y x
o
( ) ( )dy y x f dx y x f z z y x 00000 ,, ++= (17)
Dalla (17) segue che il piano tangente ha altezza quando0 z 0 x x = , 0 y y = ed ha altezza
( ) ( )dy y x f dx y x f z y x 00000 ,, ++ (18)
quando , . Quindi, la variazione dz nell’altezza del piano tangente, siccome
varia da a
dx x x += 0 dy y y += 0
( y x, ) ( )00 , y x ( )dy ydx x ++ 00 , , è ottenuta sottraendo all’espressione (18). Risulta0 z
20
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 51/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) ( )dy y x f dx y x f dz y x 0000 ,, +=
Questa quantità è chiamata differenziale totale di z in ( )00 , y x . Spesso e sono omessi, cioè0 x 0 y
( ) ( )dy y x f dx y x f dz y x ,, += (19)
Di solito, in questa formula, dx e dy sono viste come variabili e x e y come costanti. La (19) puòessere anche scritta usando df al posto di dz . Se ( ) y x f z ,= è differenziabile nel punto ( , alloral’incremento può essere scritto come
) y x, z Δ
( ) ( ) y x y y x f x y x f z y x Δε+Δε+Δ+Δ=Δ 21,, (20)
dove , , per 01 →ε 02 →ε ( ) ( )0,0, →ΔΔ y x . Nel caso in cui dx x =Δ e dy y =Δ , dalla (19) e dalla
(20) segue che
y xdz z Δε+Δε+=Δ 21 .
Geometricamente, questa approssimazione ci dice che la variazione di z lungo il la superficie e lavariazione di z lungo il piano tangente sono approssimativamente uguali per edx x =Δ dy y =Δ
piccoli.
Esempio 5.1
Sia . Trovare dz .23
4 y x z = Soluzione.
Essendo , segue che( ) 234, y x y x f =
( ) 2212, y x y x f x = e ( ) y x y x f y38, =
quindi
ydy xdx y xdz 322 812 +=
Esempio 5.2
Sia ( ) 22, y x y x f += .
Usa un differenziale totale per approssimare la variazione di ( ) y x f , per ( che varia dal
punto al punto .
))
y x,
( 4,3 ( )98.3,04.3
Soluzione.
Approssimeremo (variazione di f ) con f Δ
21

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 52/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) ( ) dy y x
ydx
y x
xdy y x f dx y x f df y x 2222
,,+
++
=+=
Siccome , , ,3=
x 4=
y 04.0=
dx 02.0−=
dy otteniamo
( ) ( )
( ) ( ) 008.002.05
404.0
5
3
02.0169
404.0
169
3
=−=
−+
++
=≈Δ df f
Si osservi (usare una calcolatrice) che il vero valore di f Δ con cinque cifre decimali dopo lavirgola è
( ) ( ) 00819.04398.304.3 2222 ≈+−+=Δ z
Esempio 5.3
Il raggio di cilindro circolare è misurato con un errore del 2% circa, e l’altezza è misurata con
un errore del 4% circa. Approssimare la massima percentuale di errore possibile nel volume
V calcolato da queste misurazioni.
Soluzione.
Siano r , h, V il raggio, l’altezza e il volume del cilindro e siano r Δ , hΔ , gli errori di questequantità. Dai dati forniti risulta che
V Δ
02.0≤Δ
r
r e 04.0≤
Δ
h
h
Vogliamo trovare il massimo valore possibile diV
V Δ. Siccome il volume del cilindro è
segue dalla (19) chehr V ⋅⋅π= 2
dhr dr hr dh
h
V dr
r
V dV ⋅⋅π+⋅⋅⋅π⋅=
∂
∂+
∂
∂= 22
Se scegliamo e possiamo usare l’approssimazioner dr Δ= hdh Δ=
dV V ≈Δ eV
dV
V
V ≈
Δ
ma
h
dh
r
dr
hr
dhr dr r h
V
V +=
⋅⋅π⋅⋅π+⋅⋅⋅π⋅=Δ 2
22
2
22

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 53/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
quindi dalla disuguaglianza triangolare
( ) ( ) 08.004.002.0222 =+≤+≤+=h
dh
r
dr
h
dh
r
dr
V
dV
perciò, la percentuale massima di errore in V è circa 8%.
23
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 54/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
5. DERIVATE DIREZIONALI
Le derivate parziali prime e forniscono la rapidità di variazione di in
misurata rispettivamente nella direzione positiva dell’asse x e in quella dell’asse y. Se vogliamoconoscere quanto rapidamente varia in quando il punto si muove nel dominio di f in qualche altra direzione, abbiamo bisogno del concetto, più generale, di derivata direzionale.Possiamo sempre specificare la direzione considerata mediante un vettore non nullo di lunghezzaqualsiasi, tuttavia è più conveniente usare un vettore unitario.
),( ba f x ),( ba f y ),( y x f ),( ba
),( y x f ),( ba ),( y x
DEFINIZIONE 5.1
Sia un vettore unitario, ossia . La derivata direzionale di innella direzione di u è la rapidità di variazione di rispetto alla distanza misurata nel
punto lungo una retta di direzioneu nel piano xy. Questa derivata direzionale è data da
jiu 21 uu += 122
21 =+ uu ),( y x f
),( ba ),( y x f
),( ba
h
ba f hubhua f ba f D
ohu
),(),(lim),( 21 −++
=+→
Se poniamo allora la derivata direzionale è data anche da),()( 21 tubtua f t g ++=
)0('),( g ba f Du =
se la derivata al secondo membro esiste.
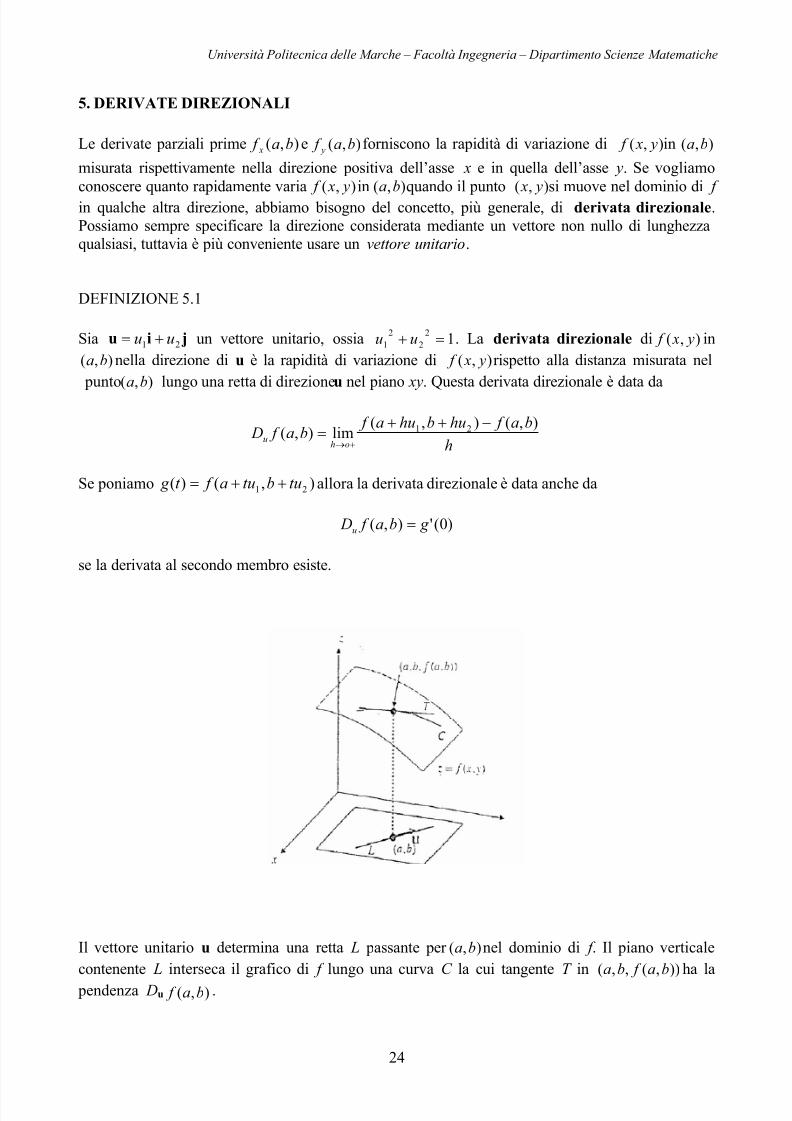
Il vettore unitario u determina una retta L passante per nel dominio di f . Il piano verticalecontenente L interseca il grafico di f lungo una curva C la cui tangente T in ha la
pendenza D
),( ba
)),(,,( ba f ba
u ),( ba f .
24

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 55/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Si osservi che le derivate direzionali in direzioni parallele agli assi coordinati sono date direttamentedalle derivate parziali prime:
Di ,),(),( ba f ba f x= D j ),(),( ba f ba f y=
D-i ),(),( ba f ba f x−= e D- j ),(),( ba f ba f y−= .
Il teorema seguente mostra come il gradiente di una funzione differenziabile permetta di calcolarequalunque derivata direzionale.
TEOREMA 5.2 (derivata direzionale e gradiente)
Se f è differenziabile in e),( ba jiu 21 uu += è un vettore unitario, allora la derivata direzionale di f in nella direzione diu è data da),( ba
Du ),( ba f = u ( )ba f ,∇⋅
Dimostrazione.
Per la regola di derivazione delle funzioni composte si ha
Du ),( ba f 0
21 ),(=
⎟ ⎠
⎞⎜⎝
⎛ ++=t
tubtua f dt
d ),(),( 2211 ba f uba f u +=
Se f è una funzione differenziabile, la formula della derivata direzionale
( ) ( ) ( ) 21 ,,, u y x f u y x f y x f D y xu +=
può essere espressa come un prodotto scalare scrivendo
( ) ( ) ( ) ) ( ) ji ji 21,,, uu y x f y x f y x f D y xu +⋅+=
dove il primo vettore nel prodotto è il gradiente di f mentre il secondo è u. Pertanto la formula precedente per la derivata direzionale può essere riscritta nella seguente forma compatta.
( ) ( ) u⋅∇= y x f y x f Du ,,
In altre parole, se f è una funzione differenziabile il prodotto scalare tra il gradiente di f e un vettoreunitario u fornisce la derivata direzionale, nella direzione di u.Già sappiamo che l’esistenza delle derivate parziali di una funzione in un punto non implica cheessa sia continua nel punto e ancora meno che sia differenziabile. La stessa cosa può dirsi riguardoalle derivate direzionali. L’esempio che segue mostra che una funzione può avere derivatadirezionale in ogni direzione in un punto dato e ugualmente non essere continua in quel punto.
25

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 56/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Esempio 5.1
Trovare il gradiente di nel punto( ) y x y x f 23, = ( )2,1 e usarlo per calcolare la derivata
direzionale di f nel medesimo punto nella direzione del vettore ji 43 +=v .
Svolgimento.
Da
( ) ( ) ( ) ji ji236,,, x xy y x f y x f y x f y x +=+=∇
si evince che di f in è( )2,1
( ) ji 3122,1 +=∇ f
Poiché il vettore unitario nella direzione di v è
( ) ji jiv
vu
5
4
5
343
5
1+=+==
segue che
( ) ( )
5
482,12,1 =⋅∇= u f f Du
Esempio 5.2
Siano
⎪⎩
⎪⎨
⎧
+
=24
2
0
),(
y x
y x y x f e
)0,0(),(
)0,0(),(
≠
=
y x
y x
jiu 21ˆ uu +=
Allora
Du )0,0( f =( ) 2
21
22
41
22
22
13
0
21
0
1lim
)0,0(),(lim
u
u
uuhh
uuh
hh
f huhu f
hh=
+=
−+→+→
02 ≠u
Se allora e02 =u iu =ˆ
Di 0)0,0()0,0( =∂
∂= f
x f
Quindi la funzione data ha nel punto (0,0) derivata direzionale in ogni direzione ma (come giàvisto) non è continua in (0,0). Si osservi che in questo caso è 0)0,0( =∇ f e quindi risulta
26

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 57/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
)0,0( f ∇ ≠⋅u Du f (0,0).6. PROPRIETA’ DEL GRADIENTE
La lunghezza e la direzione del vettore gradiente f ∇ forniscono importanti informazioniriguardanti la funzione f .
TEOREMA 6.1
Sia f una funzione di due variabili e differenziabile in ( )00 , y x .
a) Se , allora tutte le derivate direzionali di f in( ) 0, 00 =∇ y x f ( )00 , y x sono nulle;
b) Se , allora tra tutte le possibili derivate direzionali di f in ( , quella
nella direzione del è quella con il valore più grande. Il valore di questa derivata
è
( ) 0, 00 ≠∇ y x f ))
00 , y x
( 00 , y x f ∇
( ) 00 , y x f ∇ ;
c) Se , allora tra tutte le possibili derivate direzionali di f in ( , quella
nella direzione opposta al è quella con il valore più piccolo. Il valore di questa
derivata è
( ) 0, 00 ≠∇ y x f ))
00 , y x
( 00 , y x f ∇
( ) 00 , y x f ∇− .
Dimostrazione.
a) se , allora per ogni scelta diu abbiamo( ) 0, 00 =∇ y x f
( ) ( ) 00,, 0000 =⋅=⋅∇= uu y x f y x f Du ;
b) e c) si assuma ( ) 0, 00 ≠∇ y x f e sia θ l’angolo tra ( )00 , y x f ∇ e un vettore unitario
arbitrario u. Dalla definizione
( ) ( ) ( ) θ∇=⋅∇= cos,,, 000000 uu y x f y x f y x f Du
da cui se 1=u
( ) ( ) θ∇= cos,, 0000 y x f y x f Du
Così, il massimo valore di ( )00 , y x f Du è ( ) 00 , y x f ∇ . Questo accade quando 1cos =θ , o
quando u ha la stessa direzione di ( )00 , y x f ∇ (cioè θ =0). Il minimo valore di ( )00 , y x f Du
è ( ) 00 , y x f ∇ che si ottiene quando 1cos −=θ , cioè quando u e sono in
direzioni opposte (cioè θ =π ).
( 00 , y x f ∇ )
27

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 58/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Esempio 6.1
Per la funzione , trovare il minimo valore della derivata direzionale in( ) ye x y x f 2, = ( )0,2− , e
fornire un vettore unitario nella direzione in cui si ha il massimo valore.
Soluzione.
Siccome
( ) ( ) ( ) ji ji y y
y x e x xe y x f y x f y x f 200 2,,, +=+=∇
Il gradiente di f in è( )0,2−
( ) ji 440,2 +−=−∇ f
Dal teorema 6.1, il valore massimo della derivata direzionale è
( ) ( ) 2432440,2 22 ==+−=−∇ f
Un vettore unitario in questa direzione è
( )( )
( ) ji ji 2
1
2
144
24
1
0,2
0,2+−=+−=
−∇
−∇
f
f
7. UNA INTERPRETAZIONE DI DuT(x, y)
Supponiamo che un osservatore si stia muovendo sul piano xy e che in ogni punto del piano il
valore della temperatura sia dato da . Inoltre supponiamo che nell’istante in cui l’osservatore
passa per ( si stia muovendo nella direzione del vettore w con velocità v di modulo k.
),( y x
( y xT , ))00 , y x
Se poniamo
w
w
u = e uv ˆk = allora
i) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡⋅∇=
distanzadiunitàu,, 0000u
T diunità y xT y xT D
fornisce la rapidità di variazione della temperatura percepita dall’osservatore, misurata in unità di T per unità di distanza sul piano xy;
28

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 59/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
ii)
( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⋅∇=⋅∇=
tempodiunità
Tdiunità
distanzadiunità
Tdiunità
tempodiunità
distanzadiunitàu,v,, 000000v y xT k y xT y xT D
fornisce la rapidità di variazione della temperatura percepita dall’osservatore, misurata in unità di T
per unità di tempo.
Osservazione
Se f è di classe C (2) allora la derivata direzionale seconda è data da:
( ) ( ) yy xy yx xx y x f f f f f f D f D f D D 21221121uuuu uuuuuuuuu +++=+=⋅∇=
Da cui
( ) yy xy xx f f f f D D2
2212
1uu uuu2u ++= .
Sia z = f ( x, y,) un campo scalare differenziabile in un aperto Ω del piano xy. Indichiamo con C lacurva di livello f ( x, y,) = c. Sia ( )ooo y x P ,≡ un punto di C e supponiamo che C sia descritta
parametricamente dall’equazione vettoriale di classe C (1) :
( ) ( ) ( ) jirr t yt xt +== t ∈ [a, b]
e che dove a<
t ( ) 00
P t =ro <
b. Procedendo come nel caso delle funzioni di tre variabili (vedi
parag. 8) si evince che:in ogni punto di una curva di livello C il vettore f ∇ è normale a C ; in particolare in t = t o , risulta
( )[ ]⋅∇ 0t f r ( ) 00 =t 'r .
la curva di livello che passa per P 0 ha in P 0 vettore tangente perpendicolare al vettore ( )0 P f ∇ . Sia
C una curva liscia di equazioni . Se( )t rr = ( )t T denota il vettore unitario tangente a C in ( )t r allora
il prodotto scalare è per definizione la derivata direzionale di f nella direzione di C e
spesso si indica con
( )[ ] Tr ˆ⋅∇ t f
s f ∂∂ . Il valore di
T⋅∇=∂
∂ f
s
f
dipende dalla rappresentazione parametrica scelta per C . Infatti il verso di percorrenza e quindi ilverso di dipende dalla scelta della rappresentazione parametrica. Se C è una curva di livelloallora la derivata di f lungo C è nulla ed è massima lungo la direzione normale a C .
T
TEOREMA 6.2 (del valormedio)
29

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 60/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Se una funzione di classe( y x f z ,= ) ( )Ω)1(C dove Ω è un aperto, allora
( ) ( ) ( ) ( )k bha f k k bha f hba f k bha f θ θ θ θ ++∂+++∂+=++ ,,,, 21
dove( )
. Sono gli estremi di un segmento contenuto in Ω. (
k bhaeba ++ ,,)
Dimostrazione.Incominciamo ad osservare che le equazioni parametriche
tha x += thb y += [ ]1,0∈t
descrivono il segmento di estremi e( ba, ) ( )., k bha ++
Pertanto se scegliamo h e k tali che allora il segmento suddetto sta nel disco con centroin (a,b), di raggio r e contenuto in Ω.
222 r k h <+
Sia . Essendo f differenziabile inΩ
, il teorema di derivazione dellefunzioni composte ci dice che g è derivabile e che( ) ( ) [ 1,0, ∈++= t tk btha f t g ]
( ) ( ) ( )tk btha f k tk btha f ht g ++∂+++∂= ,,' 21 [ ]1,0∈t
Da cui, per il teorema del valor medio per le funzioni di una variabile, si ottiene
( ) ( ) ( )θ '01 g g g =− per qualche ( )1,0∈θ
ovvero
( ) ( ) ( )θ '01 g g g += .
Essendo
( ) ( ) ( ) ( )ba f g k bha f g ,0,1 =++=
segue che
( ) ( ) ( ) ( )k bha f k k bha f hba f k bha f θ θ θ θ ++∂+++∂+=++ ,,,, 21
Ovvero l’asserto.
COROLLARIO
Nelle ipotesi del teorema precedente:se in tutti di un segmento δ contenuto in Ω, allora f è costante su δ. Infatti, se( ) 0, =∇ y x f ( )ba, è
un estremo del segmento δ e è un generico punto di δ, dal teorema precedente (tenuto
presente che le derivate parziali sono uguali a zero su δ) segue che
( k bha ++ , )( ) ( ba f k bha f ,, =+ )+ .
TEOREMA 6.3
30

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 61/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Sia f una funzione differenziabile in un aperto connesso Ω. Se in Ω risulta allora f è
costante in Ω. Inoltre se due campi scalari f e g, differenziabili in Ω , hanno lo stesso gradiente
allora f e g differiscono per una costante arbitraria.
0=∇ f
Quindi nelle ipotesi suddette
g f ∇=∇ se solo se f-g=k
dove k è una costante arbitraria.
Da quanto precede:
se in un disco D di centro e raggio r allora f è costante in D.0=∇ f ( ba, ) Infatti, se scegliamo h e k tali che allora il punto222 r k h <+ ( )k bha ++ , denota un punto ( ) y x,
del disco D e poiché le derivate parziali sono uguali a zero in D e quindi sul segmento di estremi
e ( si evince che:( )ba, ) y x,
( ) ( )ba f y x f ,, = ( ) D y x ∈∀ ,
9.1 FORMULE DI TAYLOR DELL’ORDINE 2
Se è di classe in un intorno di un punto( y x f , ) )2(C ( )ba, allora esiste un numero θ con 0 < θ < 1tale che, per h e k sufficientemente piccoli in valore assoluto, risulta
( ) ( ) ( ) ( )+++=++ ba f k ba f hba f k bha f y x ,,,,
( ) ( ) ( )[ ]k bha f k k bha f k hk bha f h yy xy xx θ θ θ θ θ θ ++⋅+++⋅⋅⋅++++ ,,2,21 22
infatti posto ( ) ( )tk btha f t g ++= , [ ]1,0∈t per la formula di Taylor di ordine n=2
( ) ( ) ( )( )!2
'''0
θ θ
g t g g t g ++= dove 0 < θ < 1.
Da cui tenuto presente che:
( ) ( ) ( )( ) ( ) ( ) ( ) (
( ) ( ) ( )tk btha f k tk btha f k htk btha f h
tk btha f k htk btha f k tk btha f k htk btha f ht g tk btha f k tk btha f ht g
yy xy xx
xy yy yx xx
y x
++++++++=
=+++++++++++= )+++++=
,,2,
,,,,'',,'
22
22
si evince l’asserto.
31

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 62/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 63/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Quindi, come per le funzioni di una e due variabili, una funzione di tre variabili è continua in un punto se è differenziabile in quel punto.
Esempio 8.1.1
Supporre che
z y xw 23= , , ,2t x = 3t y = 4t z =
Usare il teorema di derivazione funzioni composte per trovare dt dw .
Soluzione.
Dal teorema della “derivazione delle funzioni composte”,
( ) ( ) ( )
( )( ) ( )( ) ( )( ) 1531221314
3232322
1643223
43223
t t t t t t t
t y xt yz xt z y x
dt
dz
z
w
dt
dy
y
w
dt
dx
x
w
dt
dw
=++=
=++=
=
∂
∂+
∂
∂+
∂
∂=
NOTA BENE.La differenza più significativa tra funzioni di 2 e di 3 variabili è geometrica. Per una funzione di 2variabili l’equazione ( y x f z , )= può essere rappresentata come una superficie in uno spazio
tridimensionale. Sebbene, per funzioni di tre variabili, rappresentate con un grafico ( ) z y x f w ,,= è
impossibile, perché sono richieste 4 dimensioni (una per ogni variabile), questo non è un problema,significa semplicemente che dobbiamo fare affidamento più sulla formula analitica che sullageometrica.
9. DERIVATE DIREZIONALI
Per definire una derivata direzionale in un punto ( )000 ,, z y x per una funzione f di tre variabili,
useremo un vettore unitario 321 ,, uuu=u per designare le direzioni, e sia l la retta passante per
e parallela ad u. Questa retta può essere parametrizzata come( 000 ,, z y x )
10 su x x += , 20 su y y += , 30 su z z += ,
dove s è il parametro di lunghezza d’arco riferito al punto ( )0000 ,, z y x P = e direzione positiva nella
direzione di u. All’incrementare di s, il punto ( ) z y x P ,,0 = si muove nella direzione di u lungo l ,
ed il valore di ( ) z y x f w ,,= varia con s. Come per funzioni di 2 variabili, definiamo
il tasso istantaneo di variazione di w rispetto a s in( 000 ,, z y x f Du ) ( )000 ,, z y x . Procedendo come
nel paragrafo precedente si arriva alla seguente definizione.
33

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 64/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
DEFINIZIONE 9.1
Se f è differenziabile in ( )000 ,, z y x e se 321 ,, uuu=u è un vettore unitario, allora la derivata di f in ( nella direzione di u è definita da)000 ,, z y x
( ) ( ) ( ) ( ) 300020001000000 ,,,,,,,, u z y x f u z y x f u z y x f z y x f D z y xu ++=
(1)La definizione di gradiente di una funzione di tre variabili è
( ) ( ) ( ) ( ) 300020001000 ,,,,,,,, u z y x f u z y x f u z y x f z y x f z y x ++=∇
(2)
che è identica alla definizione precedente eccetto per il terzo addendo. Segue dalla (1) e dalla (2)che
( ) ( ) u,,,, ⋅∇= z y x f z y x f Du
analoga alla definizione già vista. Considerando ciò si dimostra la seguente estensione del teorema6.1.
TEOREMA 9.2
Sia f una funzione di tre variabili differenziabile in ( )000 ,, z y x .
a) Se ( ) 0,, 000 =∇ z y x f , allora tutte le derivate direzionali di f in ( )000 ,, z y x sono nulle;
b) Se ( ) 0,, 000 ≠∇ z y x f , allora tra tutte le possibili derivate direzionali di f in
quella nella direzione del è quella con il valore più grande. Il valore di
questa derivata è
( )000 ,, z y x ,
( 000 ,, z y x f ∇ )
( ) 000 ,, z y x f ∇ ;
c) Se ( ) 0,, 000 ≠∇ z y x f , allora tra tutte le possibili derivate direzionali di f in
quella nella direzione opposta al
( )000 ,, z y x ,
( )000 ,, z y x f ∇ è quella con il valore più piccolo. Il valore
di questa derivata è ( ) 000 ,, z y x f ∇− .
Esempio 9.1
Trovare la derivata direzionale di nel punto nella direzione
del vettore , e trovare il massimo tasso di incremento di f in P.
( ) z yz y x z y x f +−= 32,, ( 0,2,1 − P )k ji 22 −+=v
Soluzione.
Siccome
( ) xy z y x f x 2,, = , ( ) 32,, z x z y x f y −= , ( ) y z z y x f z 231,, −=
segue che
34

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 65/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) ( ) ( )
( ) k ji
k ji
++−=−∇
+−+−+=∇
40,2,1
132,, 232
f
yz z x xy z y x f
Un vettore unitario nella direzione di v è
( ) k jik jiv
vu
3
2
3
1
3
222
9
1−+=−+==
da cui
( ) ( ) -3u =⋅−∇=− 0,2,10,2,1 f f Du
il massimo tasso di incremento di f è
( ) ( ) 231140,2,1 222 =++−=−∇ f .
Esempio 9.2
Sia f(x,y,z) = ln r dove k z j yi xr ++= . Allora 222 z y xr ++= e
f(x,y,z) = ( )222ln2
1 z y x ++ .
Essendo
222 z y x
x
x
f
++=
∂
∂
222 z y x
y
y
f
++=
∂
∂
222 z y x
z
z
f
++=
∂
∂
segue che
( )r
r
z y x
z y xr =
++
++=∇
222ln
k ji
Il nostro nuovo obiettivo è quello di stabilire una relazione geometrica tra le superfici di livello e
il gradiente di una funzione f di tre variabili.A questo proposito sia u = f ( x, y, z ) un campo scalare differenziabile in un aperto Ω dello spaziotridimensionale. Indichiamo con S la superficie di livello f ( x, y, z ) = c. Sia un punto
di S e C una curva regolare che sta su S e che passa per P
( oooo z y x P ,, )
o. Supponiamo che C sia decritta parametricamente dalla equazione vettoriale
( ) ( ) ( ) ( )k jirr t z t yt xt ++== t ∈ [a, b]
e che dove a< t ( ) 00 P t =r o < b. Ovviamente è
= f [ x(t ), y(t ), z (t )] = c t ∈ [a, b] .( )[ t f r ]
35

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 66/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Se poniamo g (t ) = ( )[ ]t f r t ∈ [a, b]
la regola di derivazione delle funzioni composte ci fornisce
( ) ( )[ ]⋅∇= t f t g r' ( )t 'r t ∈ [a, b] .
Poichè g è costante su [a, b], abbiamo ( ) 0' =t g su [a, b]. In particolare per t = t o , risulta
( )[ ]⋅∇ 0t f r ( ) 0' 0 =t r
In altre parole il vettore f ∇ in P 0 è perpendicolare al vettore ( )0' t r . Quindi le curve che stanno sulla
superficie S e passano per P 0 hanno in P 0 vettore tangente perpendicolare al vettore . Questivettori tangenti determinano un piano e ( )0 P f ∇( )0 P f ∇ è normale a questo piano. Questo piano è detto
piano tangente in P 0 alla superficie di livello S e consiste di tutti i punti P dello spazio soddisfacentil’equazione
( ) ( ) 000 =∇− ⋅ P f P P
Ovvero
( ) ( ) ( ) ( ) ( ) ( ) 0000000 =−+−+− z z P f y y P f x x P f z y x .
Esempio 9.3
Trovare l’equazione del piano tangente all’ellissoide nel punto ( )184 222 =++ z y x 1,2,1 − .
Soluzione.
Ponendo , allora l’equazione data ha la forma , che puòessere vista come l’equazione di una superficie di livello per F .
( ) 222 4,, z y x z y x F ++= ( ) 18,, = z y x F
Quindi, il vettore ( 1,2,1 )−∇ F è normale all’ellissoide nel punto ( )1,2,1 − .Per trovare questo vettore scriviamo
( )
( ) k ji
k jik ji
21621,2,1
282,,
−+=−∇
++=∂
∂+
∂
∂+
∂
∂=∇
F
z y x z
F
y
F
x
F z y x F
Usando questa normale e il punto , otteniamo l’equazione del piano tangente( 1,2,1 − )
( ) ( ) ( ) 01221612 =+−−+− z y x
o
188 =−+ z y x .
36

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 67/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
10. DIFFERENZIALE TOTALE
Se , allora definiamo l’incremento( z y x f w ,,= ) wΔ come
( ) ( ) z y x f z z y yw x f w ,,,, −Δ+Δ+Δ+=Δ
e definiamo differenziale totale comedw
( ) ( ) ( )dz z y x f dy z y x f dx z y x f dw z y x ,,,,,, ++=
dove , , , dx, dy e dz rappresentano le variazioni dei valori di x, y e z . xΔ yΔ z Δ
L’incremento rappresenta la variazione del valore diwΔ ( ) z y x f w ,,= quando x, y e z varianorispettivamente di una quantità , e xΔ yΔ z Δ .
Tuttavia, per funzioni di tre variabili, il differenziale totale non ha un’interpretazionegeometrica naturale. dw
Se poniamo
xdx Δ= , ydy Δ= , z dz Δ=
e se e differenziabile in , allora segue dalla definizione 8.1.1 che( z y x f w ,,= ) )( z y x ,,
z y xdww Δε+Δε+Δε+=Δ 321
(3)
dove , ,01 →ε 02 →ε 03 →ε per ( ) ( )0,0,0,, →ΔΔΔ z y x . Quindi, quando , e xΔ yΔ z Δ sono
piccoli, dalla (3) segue che
dww ≅Δ
Esempio 10.1
La lunghezza, la larghezza e l’altezza di un parallelepipedo sono state misurate con un errore
del 5% circa. Trovare un limite superiore della percentuale massima di errore possibile che
risulta se queste quantità sono usate per calcolare la diagonale del parallelepipedo.
Soluzione.
Siano x, y, z e D rispettivamente la vera lunghezza, larghezza, altezza e diagonale del parallelepipedo; e siano xΔ , , e yΔ z Δ DΔ gli errori di queste quantità. Sappiamo che
05.0≤Δ
x
x, 05.0≤
Δ
y
y, 05.0≤
Δ
z
z
Vogliamo stimared
d Δ. Siccome la diagonale D è collegata alla lunghezza, larghezza e altezza da
222 z y x D ++=
37

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 68/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
segue che
dz z y x
z dy
z y x
ydx
z y x
x
dz z
Ddy
y
Ddx
x
DdD
222222222 +++
+++
++=
=∂
∂+
∂
∂+
∂
∂=
Se scegliamo , , , allora possiamo approssimaredx x =Δ dy y =Δ dz z =Δ DdD D D ≈Δ . Ma,
dz z y x
z dy
z y x
ydx
z y x
x
D
dD222222222 ++
+++
+++
=
o
z
dz
z y x
z
y
dy
z y x
y
x
dx
z y x
x
D
dD222
2
222
2
222
2
+++
+++
++=
Quindi,
( ) ( ) ( )
05.0
05.005.005.0222
2
222
2
222
2
222
2
222
2
222
2
222
2
222
2
222
2
=
=++
+++
+++
≤
+++
+++
++≤
+++
+++
++=
z y x
z
z y x
y
z y x
x
z dz
z y x z
ydy
z y x y
xdx
z y x x
z
dz
z y x
z
y
dy
z y x
y
x
dx
z y x
x
D
dD
Perciò la massima percentuale di errore di D è di circa il 5%.
38

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 69/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
11. FUNZIONI IMPLICITE
TEOREMA 11.1 (di Dini in R3)
Sia A un aperto di R3 e sia F una funzione di classe C 1(A). Se in ( ) A,, 0000 ∈= z y x P risulta
( ) 0P0 = F e ( ) 0P0 ≠∇ F
allora esiste un intorno di nel quale l’insieme degli zeri di F è il grafico di una funzione.0 P
In particolare se ( ) 0P0 ≠∇ F ( ) 0P0 ≠⇒ z F , allora esistono un intorno U di ed un intorno V
di tali che
( 00 , y x )
0 z
( ) ( ) V,!U, ∈=∃∈∀ y x f z y x per cui risulta ( )( ) 0,,, = y x f y x F
Inoltre ( )UC1∈ f e
z
y
z
x
F
F
y
f
F
F
x
f
−=∂
∂−=∂
∂,
Dimostrazione.
Per fissare le idee supponiamo , pertanto, per il teorema della permanenza del segno
esiste un intorno R di :
( ) 0P0 > z F
0 P
AVWR ⊂×= dove [ ] [ ] [ h z h z y y x x ]+−=+−×+−= 000000 ,Ve,,W δ δ δ δ
nel quale risulta ( ) .0,, > z y x F z
Allora per ogni ( fissato in W, l’applicazione) y x,
( ) [ ]h z h z z y x F z +−=∈→ 00 ,zV,,
è strettamente crescente in V, in particolare è strettamente crescente l’applicazione
( ) ( ) [ ]h z h z z g z y x F z +−=∈=→ 0000 ,zV,, .
Essendo , da quanto precede, segue che è( ) 00 = z g
( ) 00 <− h z g e ( ) 00 >+ h z g ovvero( ) 0,, 000 <− h z y x F e ( ) 0,, 000 >+ h z y x F .
Tenuto presente che le funzioni ( )h z y x F −0,, e ( )h z y x F +0,, sono continue in W e diverse da
zero in , da quanto precede e dal teorema della permanenza del segno segue che esiste un
intorno U di : U
( 00 , y x )( )00 , y x [ ] [ ] W,, 0000 ⊂+−×+−= k yk yk xk x nel quale risulta
( 0,, 0 ) <− h z y x F e ( ) 0,, 0 >+ h z y x F .
39

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 70/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Ne consegue che in corrispondenza di ( ) y x, fissato in , la funzioneWU ⊂ ( ) ( )u y x F u ,,=ϕ è
continua e strettamente crescente in [ ]h z h z +−= 00 ,V , inoltre agli estremi dell’intervallo V
assume valor idi segno opposto:
( ) ( ) ( ) ( )0,,e0,,
0000>+=+<−=− h z y x F h z h z y x F h z ϕ
pertanto per il teorema di Bolzano
( ) ( ) ( ) ( )( ) 0,,,,,zchetaleV,! ===∈=∃ y x f y x F z y x F y x f z .
In altre parole l’insieme degli zeri della restrizione di F all’intorno U×V è il grafico di una funzione.( ) y x f z ,=
Per dimostrare che la funzione , precedentemente definita, è continua in U, si osservi che( y x f , )( ) ( ) ( )( ) ( )( ) .0,,,,,,U,eU, 111111 ==⇒∈∈ y x f y x F y x f y x F y x y x
Tenuto presente che per il teorema del valor medio esiste *P = ( )( )η ζ η ζ ,,, f interno al segmento di
estremi P e( )( ) y x f y x ,,,= ( )( )11111 ,,,P y x f y x= tale che
( ) ( ) ( *PPP 1 F F F ⟨∇=− , ⟩− 1PP
si deduce che
( ) ( ) ( ) ( )( ) 0,,*P*P*P 1111 =−+−+− y x f y x f F y y F x x F z y x .
Da cui essendo (giustificare!)
( ) ( ) 1111 ,, y y F Min
F Max x x
F Min
F Max y x f y x f
z
y
z
x −+−≤−
si deduce che è continua in e quindi in U.( y x f , ) )( 11 , y x
Infine, preso P ( )( )11 ,,, y x f y x= , da *P F ⟨∇ , ⟩− 1PP =0 si ottiene
( ) ( )
( )*P
*P,,
1
111
z
x
F
F
x x
y x f y x f −=
−
−
da cui osservato che
111 P*PPP →⇒→⇒→ x x
e che le funzioni e sono continue,si evince che x F z F
( ) ( ) ( )
( )1
1
1
111
P
P,,lim
1 z
x
x x F
F
x x
y x f y x f −=
−
−→
ovvero( ) ( )111 P,
z
x
F
F y x
x
f −=
∂
∂.
40

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 71/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Analogamente si dimostra che
( ) ( )111 P, z
y
F
F y x
y
f −=
∂
∂.
Si osservi che le derivate parziali di f , ammessa l’esistenza, si deducono applicando il teorema diderivazione composta all’equazione ( )( 0,,, ) = y x f y x F , ovvero dalle relazioni
0=∂
∂+
f F F z x e 0=
∂
∂+
y
f F F z y .
Inoltre si osservi chea) se , allora esistono un intorno U di( ) ( ) 00P 00 ≠⇒≠∇ P F F y ( )00 , z x ed un intorno V di
tali che0 y
( ) ( ) V,!U, ∈=∃∈∀ z x f y z x per cui risulta ( )( ) 0,,, = z z x f x F
f è di classe C1(U) e le derivate parziali di f , ammessa l’esistenza, si deducono applicando ilteorema di derivazione composta all’equazione ( )( ) 0,,, = z z x f x F , ovvero dalle relazioni
0=∂
∂+
x
f F F y x e 0=
∂
∂+
z
f F F y z
b) se , allora esistono un intorno U di( ) ( ) 00P 00 ≠⇒≠∇ P F F x ( )00 , z y ed un intorno V di
tali che
0 x
( ) ( ) V,!U, ∈=∃∈∀ z y f x z y per cui risulta ( )( ) 0,,, = z y z y f F
f è di classe C1(U) e le derivate parziali di f , ammessa l’esistenza, si deducono applicando ilteorema di derivazione composta all’equazione ( )( ) 0,,, = z y z y f F , ovvero dalle relazioni
0=∂
∂+
y
f F F x y e 0=
∂
∂+
z
f F F x z .
Si osservi che se F è di classe C2(U) allora f è di classe C2(U) inoltre risulta
( )( ) ( )[ ] x x z z x z x z z x
z
F F F F F F F F x
f 22
32
2
21
+−−=∂
∂
( )( ) ( )[ ] y y z z y z y z z y
z
F F F F F F F F y
f 22
32
2
21
+−−=∂
∂.
Analogamente si dimostra il seguente
TEOREMA 11.2 (di Dini in R2)
41

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 72/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Sia A un aperto di R2
e sia F una funzione di classe C 1(A). Se in ( ) A,P 000 ∈= y x risulta
( ) 0P0 = F e ( ) 0P0 ≠∇ F
allora esiste un intorno di nel quale l’insieme degli zeri di F è il grafico di una funzione.0 P
In particolare se ( ) 0P0 ≠∇ F ( ) 0P0 ≠⇒ y F , allora esistono un intorno U di ed un intorno V di
tali che
0 x
0 y
( ) V!U ∈=∃∈∀ x f y x per cui risulta ( )( ) 0, = x f x F .
Inoltre C ∈ f 1(U) e
( )( )( )P
P
y
x
F
F x f −=′ dove ( )( ).,P x f x=
La derivata di f , si deduce applicando il teorema di derivazione composta all’equazione, ovvero dalla relazione( )( ) 0, = x f x F
( ) ( ) ( ) 0PP =′+ x f F F y x .
Se ( ) 0P0 ≠∇ F ( ) 0P0 ≠⇒ x F , allora esistono un intorno U di ed un intorno V di tali che0 y 0 x
( ) V!U ∈=∃∈∀ y f x y per cui risulta ( )( ) 0, = y x f F .
Inoltre C∈ f 1(U) e la derivata di f , ammessa l’esistenza, si deduce applicando il teorema di
derivazione composta all’equazione ( )( ) 0, = x f x F , ovvero alla relazione
( ) ( ) ( ) 0PP =+′ y x F y f F .
Un’applicazione importante del teorema di Dini per le funzioni implicite, è quella relativa allaricerca di condizioni sufficienti affinché un sistema di equazioni qualsiasi definisca (in un intorno diun punto che lo soddisfa) alcune incognite che in esso compaiono in funzione delle altre. Per fissarele idee consideriamo il caso più semplice cioè quello di un sistema della forma
( )( )⎩
⎨⎧
=
=
0,,
0,,
z y xG
z y x F
TEOREMA 11.3
Siano A un aperto di R3 , F e G due funzioni di classe C
1(A). Se in ( ) A.,P 0000 ∈= z y x risulta
( ) ( ) 0P,0P 00 == G F
e
( ) ( )( )( )
( )( )
( )( )
0,
,,
,
,,
,
,PP ≠⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂
∂
∂
∂
∂=∇∧∇
y x
G F
x z
G F
z y
G F G F
Allora esiste un intorno di nel quale l’insieme degli zeri comuni di F e G è la traiettoria
descritta da una curva regolare. In particolare se la condizione
0P( ) ( ) 0PP 00 ≠∇∧∇ F F implica
42

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 73/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( )( )
( ) ( )( ) ( )
( )( ) 0PPGP
PP
,
,0
0z0
00≠−==
∂
∂ y z z y
y
z yG F G F
G
F F
z y
G F
allora esiste una curva regolare α ( ) ( ) ( )( ) x z x y x x ,,= , definita in un intorno di tale che0 x
( ) ( )( 0,, ) = x z x y x F e ( ) ( )( ) 0,, = x z x y xG .
Dimostrazione.Osservato che
)( ) ( ) 0P0P 00 ≠⇒≠− z y z z y F G F G F oppure ( ) 0P0 ≠ z G ,
è lecito supporre ( ) 0P0 ≠ z F .
Essendo e( ) 0P0 = F ( ) 0P0 ≠ z F , per il teorema di Dini, esiste un intorno di 0P
AVU ⊂× dove [ ] [ ]δ δ δ δ +−×+−= 0000 ,,U y y x x e [ ]h z h z +−= 00 ,V
tali che
( ) ( ) V,!U, ∈=∃∈∀ y x f z y x per cui risulta ( )( ) 0,,, = y x f y x F .
Inoltre F è di classe C1(U) ed in particolare è
( )( )
( )0
000 P
P,
z
y
F
F y x
y
f −=
∂
∂
Sia ( ) ( )( ) ( ) U,,,,, ∈∀= y x y x f y xG y x g .Essendo
( ) ( )( ) ( ) 0P,,,, 0000000 === G y x f y xG y x g
( )( )
( )( ) 0PP
1, 0
000 ≠−−= y z z y
z
y G F G F F
y x g
segue che la funzione ( ) y x g , soddisfa le ipotesi del teorema di Dini, pertanto esiste un intorno U’
di : U’( )00 , y x [ ] [ U,',' 0000 ⊂]+−×+−= k yk y x x δ δ tale che per ogni [ ]',' 00 δ δ +−∈ x x x esiste
un unico valore di ( ) [ k yk y x y y ]+−∈= 00 , per il quale, posto ( ) ( )( ) x y x f x z ,= , risulta
( )( ) ( ) ( )( ) 0,,, == x z x y xG x y x g .
Inoltre y è di classe C1. Quindi nei punti della curva regolare
α ( ) ( ) ( )( ) [ ]k xk x x x z x y x x +−∈= 00 ,,,
risulta( ) ( )( ) 0,, = x z x y x F e ( ) ( )( ) 0,, = x z x y xG .
Ovviamente il vettore
43

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 74/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
( ) ( )( )( )
( )( )
( )( ) ⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂
∂
∂
∂
∂
∂=∇∧∇
y x
G F
x z
G F
z y
G F G F
,
,,
,
,,
,
,PP
è tangente ad α in P( ) x ( ) ( )( ).,, x z x y x= Pertanto
( )( )
( )( )
( )( ) y x
G F z z
x z
G F y y
x y
G F x x
,
,
,
,
,
,000
∂
∂ −=
∂
∂ −=
∂
∂ −
è l’equazione della retta tangente alla curva α ( ) x in ( ) ( )( ) ( )0000000 ,,,,P z y x x z x y x == ;
( )( )
( )( )( )
( )( )( )
( ) 0,
,
,
,
,
,000 =−
∂
∂+−
∂
∂+−
∂
∂ z z
y x
G F y y
x z
G F x x
z y
G F
è l’equazione del piano normale alla curva α ( ) x in ( ) ( )( ) ( )0000000
,,,,P z y x x z x y x == cioè del
piano normale alla retta tangente ad α in( ) x 0P .
Si osservi che la derivata e , ammessa l’esistenza, si deducono applicando il teorema diderivazione delle funzioni composte alle equazioni
( ) x y′ ( ) x z ′
( ) ( )( ) 0,, = x z x y x F e ( ) ( )( ) 0,, = x z x y xG
ovvero risolvendo il sistema
0=′+′+ z F y F F z y x
.0=′+′+ z G y F G z y x
Inoltre si osservi che:a) se la condizione ( ) ( ) 0PP 00 ≠∇∧∇ G F implica
( )( )
( ) 0,
,≠−=
∂
∂ z x x z G F G F
x z
G F
allora esiste una curva regolare β ( ) ( ) ( )( ) y z y y x y ,,= , definita in un intorno di , tale che0 y
( ) ( )( ) 0,, = y z y y x F e ( ) ( )( ) .0,, = y z y y xG
b) se la condizione ( ) ( ) 0PP 00 ≠∇∧∇ G F implica
( )( )
( ) 0,
,≠−=
∂
∂ x y y x G F G F
y x
G F
allora esiste una curva regolare γ ( ) ( ) ( )( ) z z y z x z ,,= , definita in un intorno di , tale che0 z
( ) ( )( ) 0,, = z z y z x F e ( ) ( )( ) .0,, = z z y z xG
44

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 75/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
TEOREMA 11.4 (delle funzioni implicite): un caso particolare
Consideriamo il sistema (di due equazioni e quattro incognite)
⎩⎨⎧
=
=
0),,,(
0),,,(
vu y xG
vu y x F (1)
Dove le funzioni F e G sono definite in un aperto Ω CIR 4 che include il punto per il
quale
),,,( 0000 vu y x
F = 0 e G = 0.),,,( 0000 vu y x ),,,( 0000 vu y x
Se F e G sono di classe C
(1)
in un intorno del punto e se nel punto risulta ),,,( 0000 vu y x),,,( 0000 vu y x
0),(
),(≠
∂
∂
y x
G F (2)
allora nel suddetto intorno esiste un intorno di nel quale il sistema (1) può essere
risolto rispetto ad x e y.
),,,( 0000 vu y x
Le funzioni e soluzioni del sistema (1), in un opportuno intorno di
sono di classe C),( vu x x = ),( vu y y =
),( 00 vu(1) e risulta (vedi osservazione seguente)
),(
),(),(
),(
y x
G F
yu
G F
u
x
∂
∂∂
∂
−=∂
∂
),(
),(),(
),(
y x
G F
u x
G F
u
y
∂
∂∂
∂
−=∂
∂
(3)
),(),(
),(
),(
y xG F
yv
G F
v
x
∂∂
∂
∂
−=∂
∂
),(),(
),(
),(
y xG F
v x
G F
v
y
∂∂
∂
∂
−=∂
∂
Osservazione Nelle espressioni precedenti il denominatore è lo jacobiano di F e G rispetto alle variabilidipendenti x e y; il numeratore è lo jacobiano che si ottiene da quello del denominatore sostituendola variabile indipendente che si deriva con la variabile rispetto alla quale si sta derivando.
Derivando il sistema (1) rispetto ad u e v, supponendo ),( vu x x = e ),( vu y y = , si evince
),( ),(),( ),(),( ),(vu y x
y xG F
vuG F
∂∂∂∂=∂∂ da cui ),( ),(),( ),(),( ),( y xG F
vuG F
vu y x
∂∂∂∂=∂∂ (4)
45
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 76/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Se si suppone che il sistema (1) sia risolvibile rispetto ad u e v in funzione di x e y allora
),(
),(
),(
),(
),(
),(
vu
G F
y x
G F
y x
vu
∂
∂
∂
∂=
∂
∂. (*)
In particolare se il sistema
⎩⎨⎧
=
=
),(
),(
vu y y
vu x xovvero
⎩⎨⎧
=−=
=−=
0),(),,,(
0),(),,,(
vu y yvu y xG
vu x xvu y x F
è risolvibile rispetto ad u e v in funzione di x e y, allora tenuto presente che
110
01
),(
),(==
∂
∂
y x
G F e
),(
),(
),(
),(
vu
y x
vu
G F
∂
∂=
∂
∂
dalla (*) si evince
),(
),(1
),(
),(
vu
y x y x
vu
∂
∂=
∂
∂quindi 1
),(
),(
),(
),(=
∂
∂
∂
∂
vu
y x
y x
vu
Osservazione
Derivando il sistema (1) rispetto ad u e v (variabili indipendenti) si ha:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂
∂−=
∂
∂
∂
∂+
∂
∂
∂
∂
∂
∂−=
∂
∂
∂
∂+
∂
∂
∂
∂
u
G
u
y
y
G
u
x
x
G
u
F
u
y
y
F
u
x
x
F
⇒⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
y
G
x
G
y
F
x
F
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
∂
∂−
∂
∂−
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂
u
G
u
F
u
y
u
x
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∂
∂−=
∂
∂
∂
∂+
∂
∂
∂
∂
∂
∂−=
∂
∂
∂
∂+
∂
∂
∂
∂
v
G
v
y
y
G
v
x
x
G
v
F
v
y
y
F
v
x
x
F
⇒ ⎟⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎜⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
y
G
x
G
y
F
x
F
⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
∂
∂−
∂
∂−
=⎟⎟⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎜⎜
⎝
⎛
∂
∂
∂
∂
v
G
v
F
v
y
v
x
da cui
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
y
G
x
G
y
F
x
F
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
−=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂
∂
∂
∂
∂
v
G
u
G
v
F
u
F
v
y
v
x
u
y
u
x
L’equazione matriciale precedente, passando ai determinanti, definisce la (4).
46

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 77/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
Si osservi che le (3) si ottengono risolvendo i sistemi precedenti con la regola di Kramer.
12. TRASFORMAZIONI INVERTIBILI DA IN2ℜ 2ℜ
Siano e( ) yG z = ( ) x F y = due applicazioni da in dove2ℜ 2ℜ ( )21 , z z z = , econ
( )21 , y y y =( 21 , x x x = )
( )
( )⎪⎩
⎪⎨⎧
=
=
2122
2111
,
,
y y g z
y y g z e
( )
( )⎪⎩
⎪⎨⎧
=
=
2122
2111
,
,
x x f y
x x f y.
Supponiamo che ( ) ( ) G Dom y y F Dom x x ∈⇒∈ 2121 ,, e che F e G siano di classe . Allora
ovvero
)1(C
( )[ x F G z = ]
( ) ( )[ ]
( ) ( )[ ]⎪⎩
⎪⎨⎧
=
=
21221122
21221111
,,,
,,,
x x f x x f g z
x x f x x f g z
e il teorema di derivazione delle funzioni composte fornisce le relazioni
1
2
2
1
1
1
1
1
1
1
x
y
y
g
x
y
y
g
x
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂;
2
2
2
1
2
1
1
1
2
1
x
y
y
g
x
y
y
g
x
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂;
1
2
2
2
1
1
1
2
1
2
x
y
y
g
x
y
y
g
x
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂;
2
2
2
2
2
1
1
2
2
2
x
y
y
g
x
y
y
g
x
z
∂
∂
∂
∂+
∂
∂
∂
∂=
∂
∂.
Le relazioni precedenti sono equivalenti all’equazione matriciale
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂∂
∂
∂
∂
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂∂
∂
∂
∂
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂∂
∂
∂
∂
2
2
1
2
2
1
1
1
2
2
1
2
2
1
1
1
2
2
1
2
2
1
1
1
x
y
x
y
x
y
x
y
y
g
y
g
y
g
y
g
x
z
x
z
x
z
x
z
da cui, tenuto presente che è ( ) 1211 , z y y g = e ( ) 2212 , z y y g = , si ottiene
( )( )
( )( )
( )( )21
21
21
21
21
21
,
,
,
,
,
,
x x
y y
y y
z z
x x
z z
∂
∂
∂
∂=
∂
∂.
Se F è invertibile e G l’inversa di F allora ( )[ ] x x F G z == cioè
⎪⎩
⎪
⎨
⎧
=
=
22
11
x z
x z
47

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 78/391
Università Politecnica delle Marche – Facoltà Ingegneria – Dipartimento Scienze Matematiche
allora
⎟⎟ ⎠ ⎞
⎜⎜⎝ ⎛ =
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂
∂
∂
∂∂
∂
∂
∂
1001
2
2
1
2
2
1
1
1
x
z
x
z x
z
x
z
e ( )( )
1,,
21
21 =∂∂
x x
z z
In questo caso risulta
( )( )
( )( )
( )( )
( )( )21
21
21
21
21
21
21
21
,
,
,
,
,
,
,
,1
x x
y y
y y
x x
x x
y y
y y
z z
∂
∂
∂
∂=
∂
∂
∂
∂=
da cui( )( ) ( )
( )21
2121
21
,
,1
,
,
x x
y y y y
x x
∂
∂=
∂
∂.
Si dimostra che il non annullarsi del determinante
( )( )21
21
,
,
x x
y y
∂
∂
è condizione necessaria e sufficiente per garantire l’invertibilità del sistema
( )
( )⎪⎩
⎪⎨⎧
=
=
2122
2111
,
,
x x f y
x x f y
48
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 79/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 80/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 81/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 82/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 83/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 84/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 85/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 86/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 87/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 88/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 89/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 90/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 91/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 92/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 93/391
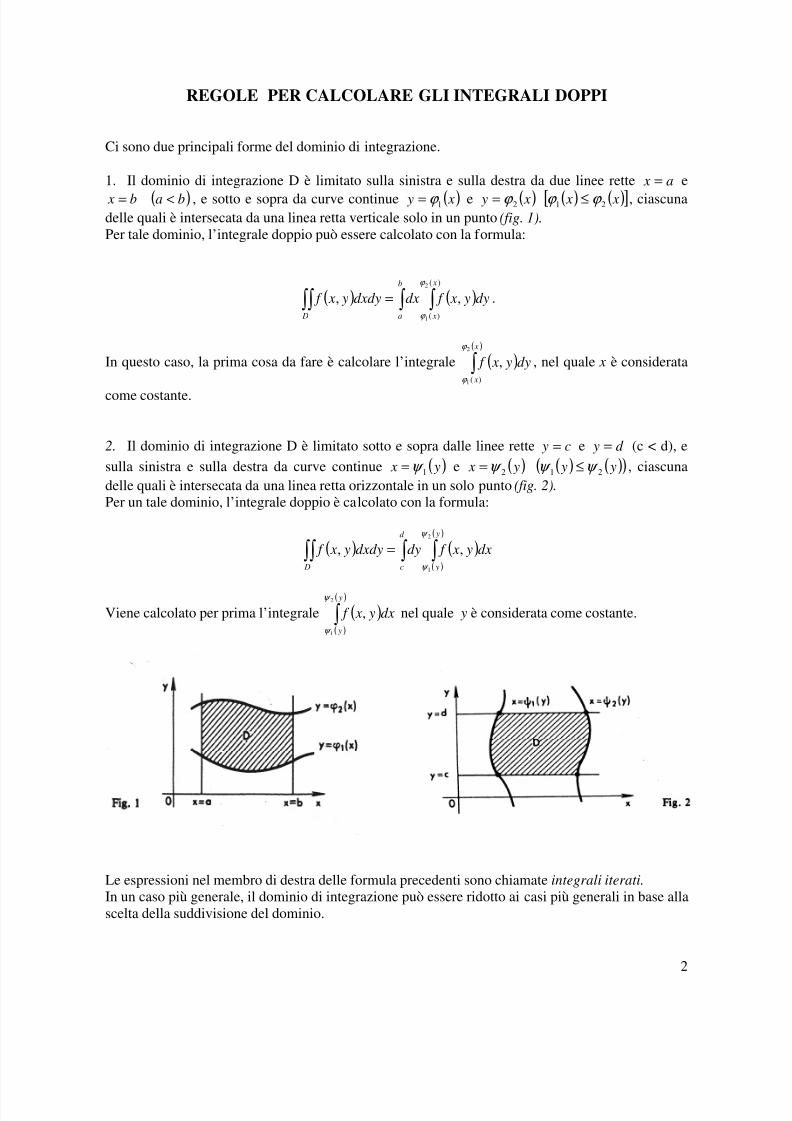
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 94/391
2
REGOLE PER CALCOLARE GLI INTEGRALI DOPPI
Ci sono due principali forme del dominio di integrazione.
1. Il dominio di integrazione D è limitato sulla sinistra e sulla destra da due linee rette a x = e
b x = ( )ba < , e sotto e sopra da curve continue ( ) x y 1ϕ = e ( ) x y 2ϕ = ( ) ( )[ ] x x 21 ϕ ϕ ≤ , ciascunadelle quali è intersecata da una linea retta verticale solo in un punto (fig. 1).
Per tale dominio, l’integrale doppio può essere calcolato con la formula:
( ) ( )∫∫ ∫ ∫ = D
x
x
b
a
dy y x f dxdxdy y x f
)(
)(
2
1
,,
ϕ
ϕ
.
In questo caso, la prima cosa da fare è calcolare l’integrale ( )( )
∫ x
x
dy y x f 2
1 )(
,
ϕ
ϕ
, nel quale x è considerata
come costante.
2. Il dominio di integrazione D è limitato sotto e sopra dalle linee rette c y = e d y = (c < d), e
sulla sinistra e sulla destra da curve continue ( ) y x 1ψ = e ( ) y x 2ψ = ( ) ( )( ) y y 21 ψ ψ ≤ , ciascuna
delle quali è intersecata da una linea retta orizzontale in un solo punto (fig. 2).
Per un tale dominio, l’integrale doppio è calcolato con la formula:
( ) ( )( )
( )
∫∫ ∫ ∫ = D
y
y
d
c
dx y x f dydxdy y x f 2
1
,,
ψ
ψ
Viene calcolato per prima l’integrale ( )( )
( )
∫ y
y
dx y x f 2
1
,
ψ
ψ
nel quale y è considerata come costante.
Le espressioni nel membro di destra delle formula precedenti sono chiamate integrali iterati.
In un caso più generale, il dominio di integrazione può essere ridotto ai casi più generali in base alla
scelta della suddivisione del dominio.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 95/391
3
ESEMPIO 1
Calcolare ∫∫ D
ydxdy x ln , se il dominio D è il rettangolo 40 ≤≤ x , e y ≤≤1 .
Soluzione
∫∫ D
ydxdy x ln = [ ] ( )∫ ∫ =+−⋅=−⋅
=
4
0 1
1
4
0
2
.818ln2
ln
ee
ee y y y x
ydy xdx
ESEMPIO 2
Calcolare ( )∫∫ + D
dxdy y x 22 sincos , se il dominio D è il quadrato 40 π ≤≤ x , 40 π ≤≤ y .
Soluzione
( )∫∫ + D
dxdy y x22
sincos = ( )∫ ∫ ∫ =
−+=+
4
0
4
0
4
0
2
4
0
222sin
4
1
2cossincos
π π π π
dx y y
x ydy y xdx
∫ =
−+
+=
−+
+=
−+=
4
0
24
0
2.
1644
1
82
1
484
1
82sin
2
1
84
1
8cos
4
π π π π π π π π π π π
x x xdx x
ESEMPIO 3
Calcolare I = ( )∫ ∫ −2
1
2
2
x
x
dy y xdx
Soluzione
I = ∫ ∫ =
−−=
+−−=
−
2
1
2
1
354
2
1
22432.9.0
2
1
10
1
2
1
2
12
2
12
2
12
2
x x xdx x x x xdx y xy
x
x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 96/391
4
ESEMPIO 4
Calcolare ( ) ,∫∫ − D
dxdy y x se il dominio D è limitato dalle curve 22 x y −= , 12 −= x y .
Soluzione
Costruiamo il dominio D. La prima curva è una parabola, con vertice nel punto (0;2), simmetrica
rispetto all’asse y. La seconda curva è una linea retta. Risolvendo parallelamente le equazioni2
2 x y −= e 12 −= x y , troviamo le coordinate dei punti d’intersezione: A (-3; -7), B (1, 1) (fig. 3).
Il dominio di integrazione è del primo tipo:
( )∫∫ − D
dxdy y x =
( )∫ ∫ ∫ ∫ −
−
− − −
−
−
=
+−++−−+−−=
−=−=
1
3
2
12
1
3
1
3
22423
2
12
2
2 2
2
1222
2
1222
2
1 x
x
x
x
dx x x x x x x x xdx y xydy y xdx
∫ − −
⋅=
−++−−=
−++−−=
1
3
1
3
2345234
15
44
2
3
2
1
3
2
4
1
10
1
2
32
2
1 x x x x xdx x x x x
ESEMPIO 5
Calcolare ∫∫ + D
dxdy y x )2( , se il dominio D è limitato dalle linee rette y = x, y = 2x, x = 2, x = 3.
Soluzione
[ ]∫∫ ∫ ∫ ∫ ∫ ∫ ⋅===−−+=+=+=+ D
x
x
x
xxdx xdx x x x xdx y xydy y xdxdxdy y x
3
2
2 3
2
3
2
3
2
3
2
322222224
3
19
3
44)42()2()2(

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 97/391
5
ESEMPIO 6
Cambiare l’ordine di integrazione nell’integrale ( )∫ ∫ −
−
−−
1
1
1
1
2
2
,
x
x
dy y x f dx
Soluzione
Il dominio di integrazione è limitato dalle curve x = -1, x = 1, y = 22 1,1 x y x −=−− (fig. 4).
Cambiamo l’ordine di integrazione e rappresentiamo il dominio dato in due sottodomini (del
secondo tipo): 1 D , limitato sulla sinistra e sulla destra dai rami della parabola y x −±= 1
)10( ≤≤ y e 2 D limitato dagli archi di circonferenza2
1 y x −±= ( )01 ≤≤− y .
∫ ∫ ∫ ∫ ∫ ∫ −
−
−− −
−
−−
−
−−
+=1
1
1
1
0
1
1
1
1
0
1
1
2
2
2
2
),(),(),(
x
x
y
y
y
y
dx y x f dydx y x f dydy y x f dx .
CAMBIAMENTO DI VARIABILI NEGLI INTEGRALI DOPPI
Integrali doppi in coordinate polari. La trasformazione degli integrali doppi da coordinate
rettangolari x,y a coordinate polari ϑ ρ , connesse dalle relazioni ϑ ρ cos= x , ϑ ρ sin= y , può
essere eseguita tramite la formula:
∫∫ ∫∫ = D D
d d f dxdy y x f ϑ ρ ρ ϑ ρ ϑ ρ )sin,cos(),( .
Se il dominio di integrazione D è limitato da due raggi ,ϑ = β ϑ = ( ), β < che partono
dall’origine, e due curve )(1 ϑ ρ ρ = e )(2 ϑ ρ ρ = , dove )(1 ϑ ρ e )(2 ϑ ρ sono funzioni a valore
singolo per β ϑ ≤≤ e )()( 21 ϑ ρ ϑ ρ ≤ , allora l’integrale doppio può essere calcolato con la
formula:
∫ ∫ ∫∫ = β
α
ϑ ρ
ϑ ρ
ρ ρ ϑ ρ ϑ ϑ ρ ρ ϑ ρ )(
)(
2
1
),(),( d F d d d F D
,
dove )sin,cos(),( ϑ ρ ϑ ρ ϑ ρ f F = , l’integrale ∫ )(
)(
2
1
),(
ϑ ρ
ϑ ρ
ρ ρ ϑ ρ d F nel quale ϑ è considerata costante
essendo il primo a essere calcolato.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 98/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 99/391
7
dA
P
R
v + dv
v
u + du
uQ
x
y
Per esprimere l’elemento d’area dA = dxdv in termini dell’elemento d’area dudv del piano uv si
procede come segue.
Per ogni valore di u fissato, ad esempio u = c, le equazioni:
x = x(u,v) y = y(u,v)
definiscono una curva parametrica (con v come parametro) nel piano xy. Questa curva è chiamatau-curva corrispondente al valore u = c. Analogamente per v fissato le equazioni definiscono una
curva parametrica (con parametro u) chiamata v-curva. Consideriamo l’elemento d’aria infinitesimo
delimitato dalle u-curve corrispondenti ai valori vicini u e u + du e dalle v-curve corrispondenti ai
valori vicini v e v + dv.
Si dimostra che una regione rettangolare di area dudv nel piano uv è trasformata in un
parallelogramma curvilineo la cui area è approssimativamente zero.
( )( ) dudvvu
y xdxdydA ,
,
∂
∂== (1)
L’errore di questa approssimazione diventa trascurabile in confronto a dA quando du e dv tendono a
zero.
Si dimostra che la (1) resta valida anche se la trasformazione non è iniettiva o se il determinante siannulla sull’insieme di misura nulla.
Esercizio
Utilizzare un cambiamento di variabili appropriato per determinare l’area del disco ellittico E dato
da
12
2
2
2
≤+b
y
a
x
Soluzione
A seguito della trasformazione x = au, t = bv, il disco ellittico E è l’immagine del disco circolare D
dato da 122 ≤+ vu . Supponendo a>0 e b>0, abbiamo

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 100/391
8
x
y
a
x
y
a b
( )
( ) b
adudv
vu
y xdxdy
0
0
,
,=
∂
∂= abdudvdudv =
Pertanto l’area di E è data da
×== ∫∫ ∫∫ ababdudvdxdy D E
1 (area di D) abπ =
Negli esempi che seguono è data la frontiera del dominio D e l’integrale doppio
∫∫ = Ddxdy y x f I ),(
è espresso mediante la formula di riduzione in coordinate polari.
ESEMPIO 7
D è l’area della circonferenza 2 x + 2
y = 2a
I = ∫ π
ϑ 2
0
d ρ ρ ϑ ρ ϑ ρ d f
a
)sin,cos(0
∫
ESEMPIO 8
D è l’area della corona circolare specificata dalle circonferenze:
2 x + 2
y = 2a e 2
x + 2 y = 2
b dove ba pp0
I = ∫ π
ϑ 2
0
d ∫ b
a
d f ρ ρ ϑ ρ ϑ ρ )sin,cos(

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 101/391
9
x
y
2a 4a
x
y
x
y
2rr
ESEMPIO 9
D è l’area della circonferenza di equazione 2 x + 2
y = ax4
I = ∫ −
2
2
π
π
ϑ d
∫
ϑ
ρ ρ ϑ ρ ϑ ρ cos4
0
)sin,cos(
a
d f
ESEMPIO 10
D è l’area del cerchio di equazione 2 x + 2
y = y x 22 +
I = ∫ −
43
4
π
π
ϑ d ∫ + )sin(cos2
0
)sin,cos(
ϑ ϑ
ρ ρ ϑ ρ ϑ ρ d f
La condizione che l’angolo ϑ ε
−
4
3,
4
π π deriva
dal fatto che la retta di equazione y = -x è tangente al
cerchio nel punto ( )0,0
ESEMPIO 11
D è l’area esterna alla circonferenza 1γ ed interna alla circonferenza 2γ
rispettivamente di equazioni:
1γ :222
r y x =+ e :2γ rx y x 222 =+
Risolvendo il sistema fra le due equazioni precedenti si trovano i punti
comuni alle due circonferenze:
3
2,
2
r r e
− 3
2,
2
r r
da cui si evince che33
π ϑ
π ≤≤− pertanto:
I = ∫ −
3
3
π
π
ϑ d ∫ ϑ
ρ ρ ϑ ρ ϑ ρ cos2
)sin,cos(
r
r
d f
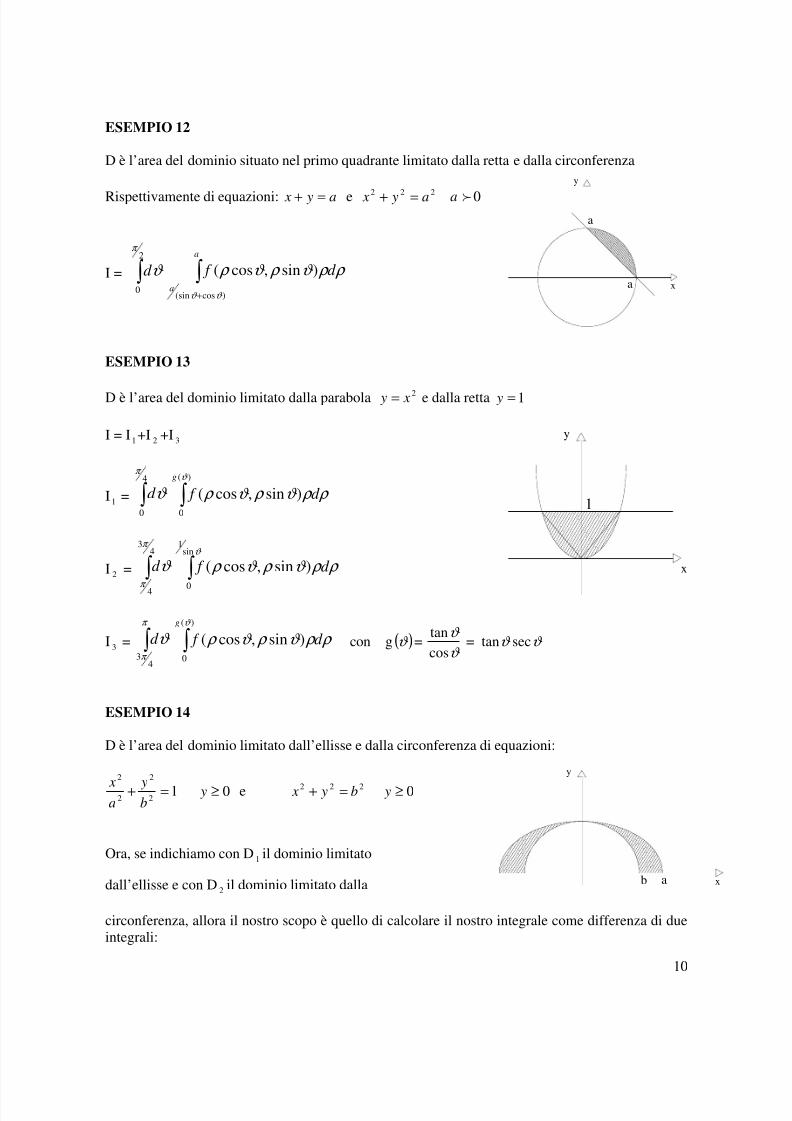
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 102/391
10
x
y
1
x
y
a
a
x
y
ab
ESEMPIO 12
D è l’area del dominio situato nel primo quadrante limitato dalla retta e dalla circonferenza
Rispettivamente di equazioni: a y x =+ e 222 a y x =+ a f 0
I = ∫ 2
0
π
ϑ d ∫ +
a
a
d f
)cos(sin
)sin,cos(
ϑ ϑ
ρ ρ ϑ ρ ϑ ρ
ESEMPIO 13
D è l’area del dominio limitato dalla parabola 2 x y = e dalla retta 1= y
I = I1+I 2 +I 3
I 1 = ∫ 4
0
π
ϑ d ∫ )(
0
)sin,cos(
ϑ
ρ ρ ϑ ρ ϑ ρ g
d f
I 2 = ∫ 4
3
4
π
π
ϑ d ∫ ϑ
ρ ρ ϑ ρ ϑ ρ sin
1
0
)sin,cos( d f
I 3 = ∫ π
π
ϑ
43
d ∫ )(
0
)sin,cos(
ϑ
ρ ρ ϑ ρ ϑ ρ g
d f con g ( )ϑ =ϑ
ϑ
cos
tan= tanϑ secϑ
ESEMPIO 14
D è l’area del dominio limitato dall’ellisse e dalla circonferenza di equazioni:
12
2
2
2
=+b y
a x 0≥ y e 222 b y x =+ 0≥ y
Ora, se indichiamo con D 1 il dominio limitato
dall’ellisse e con D 2 il dominio limitato dalla
circonferenza, allora il nostro scopo è quello di calcolare il nostro integrale come differenza di due
integrali:
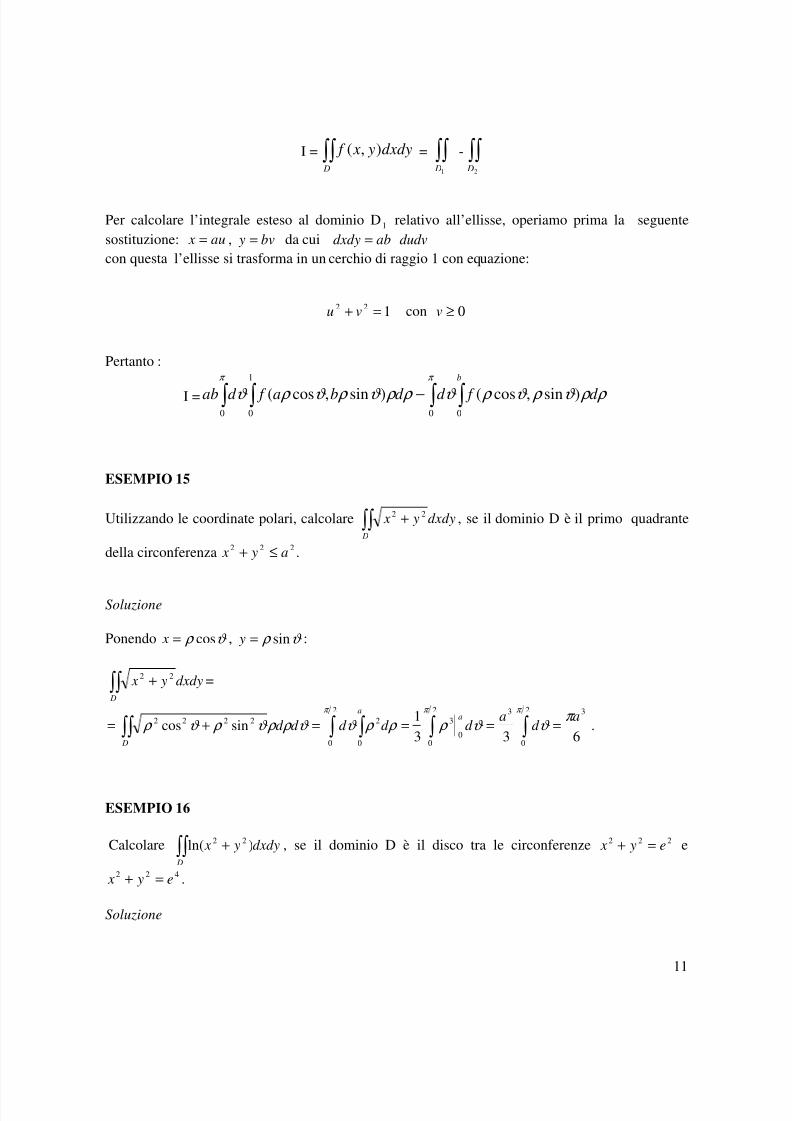
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 103/391
11
I = ∫∫ D
dxdy y x f ),( = ∫∫ 1 D
- ∫∫ 2 D
Per calcolare l’integrale esteso al dominio D 1 relativo all’ellisse, operiamo prima la seguente
sostituzione: au x = , bv y = da cui abdxdy = dudv
con questa l’ellisse si trasforma in un cerchio di raggio 1 con equazione:
122 =+ vu con 0≥v
Pertanto :
I = ∫ ∫ ∫ ∫ −
1
0 000
)sin,cos()sin,cos(
b
d f d d ba f d ab ρ ρ ϑ ρ ϑ ρ ϑ ρ ρ ϑ ρ ϑ ρ ϑ
π π
ESEMPIO 15
Utilizzando le coordinate polari, calcolare ∫∫ + D
dxdy y x22
, se il dominio D è il primo quadrante
della circonferenza .222
a y x ≤+
Soluzione
Ponendo ϑ ρ cos= x , ϑ ρ sin= y :
∫∫ + D
dxdy y x22
=
∫ ∫ ∫ ∫ ∫∫ ====+=2
0 0
2
0
2
0
33
0
322222
633
1sincos
π π π π
ϑ ϑ ρ ρ ρ ϑ ϑ ρ ρ ϑ ρ ϑ ρ a
a
D
ad
ad d d d d .
ESEMPIO 16
Calcolare dxdy y x D
∫∫ + )ln(22 , se il dominio D è il disco tra le circonferenze 222
e y x =+ e
422e y x =+ .
Soluzione

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 104/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 105/391
13
CALCOLO DI AREE DI FIGURE PIANE
L’area di una figura piana limitata dal dominio D può essere trovata con la formula:
∫∫ =
D
dxdyS .
Se il dominio D è specificato dalle disuguaglianze b xa ≤≤ , )()( 21 x y x ϕ ϕ ≤≤ , allora
∫ ∫ =)(
)(
2
1
.
x
x
b
a
dydxS
ϕ
ϕ
Se il dominio D in coordinate polari è specificato dalle disuguaglianze β ϑ ≤≤ ,
)()( ϑ β ϑ ϕ f ≤≤ , allora
∫∫ ∫ ∫ == D
f
d d d d S
)(
)(
ϑ
ϑ ϕ
β
α ρ ρ ϑ ϑ ρ ρ .
ESEMPIO 18
Calcolare l’area della figura limitata dalle curve2
4 y y x −= , 6=+ y x .
Soluzione
Risolvendo il sistema di equazioni 24 y y x −= e 6=+ y x , troviamo le coordinate dei punti di
intersezione delle curve date (disegnare il grafico). Come risultato si ha A(4;2), B(3;3), e, di
conseguenza,
∫ ∫ ∫ ∫ ∫∫ =
−+−=−+−====
−
−
−
−
3
2
3
2
3
2
3
2
2324
6
4
66
16
2
5
3
1)65(
2
2
y y ydy y ydy xdxdydxdySy y
y
y y
y D
(unità di superficie)
ESEMPIO 19
Calcolare l’area della figura limitata dalle circonferenze 1= ρ , ϑ ρ cos)32(= (al di fuori della
circonferenza 1= ρ ) (fig. 8).
Soluzione
Troviamo le coordinate del punto A; abbiamo ,cos)32(1 ϑ = ,23cos =ϑ 6π ϑ = (quindi
A(1; 6π )).
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 106/391
14
∫∫ ∫ ∫ ∫ ∫ ∫ =
−+=
−=
===
D
d d d d d d d S
ϑ π π π ϑ π
ϑ ϑ ϑ ϑ ϑ ρ ρ ρ ϑ ϑ ρ ρ cos)32(
1
6
0
6
0
2
2
0
cos)32(
1
2
6
0
12cos3
2
3
21cos
3
4
2
122
[ ]∫ −=
−=−=−=
6
0
6
0 )33(18
1
63sin
3
12sin
3
1)12cos2(
3
1π
π π
π π ϑ ϑ ϑ ϑ d (unità di superficie).
ESEMPIO 20
Trovare l’area limitata dalla lemniscala xya y x2222
2)( =+ .
Soluzione
Ponendo ϑ ρ cos= x , ϑ ρ sin= y , trasformiamo l’equazione della curva in coordinate polari. Il
risultato è ϑ ϑ ϑ ρ 2sincossin2222
aa == . E’ evidente che il cambiamento nell’angolo polare ϑ
da 0 a 4π è associato con il quarto di area desiderata:
∫∫ ∫ ∫ ∫ ∫ =−===== D
aa
aad ad d d d d S
4
0
2sin
0
4
0
24
0
22
4
0
2sin
0
2.|2cos2sin2244
π ϑ π π
π ϑ
ϑ ϑ ϑ ϑ ρ ρ ρ ϑ ϑ ρ ρ
ESEMPIO 21
Trovare l’area della figura limitata dalle curve axy y x =+ 33 (l’area della curva)(fig. 9).
Soluzione
Trasformiamo l’equazione data in coordinate polari: ϑ ϑ ρ ϑ ϑ ρ cossin)cos(sin2333
a=+ , cioè
).cos(sincossin33 ϑ ϑ ϑ ϑ ρ += a L’asse di simmetria della curva è il raggio 4π ϑ = , pertanto:
∫∫ ∫ ∫ ∫ ∫ +
=+
=+
=== D
a
d ad ad d d d S
4
0
)cos(sincossin
0
4
0
236
422
4
0
233
222
33
)tan1(cos
costan
)cos(sin
cossin22
π ϑ ϑ ϑ ϑ π π
ϑ ϑ ϑ
ϑ ϑ ϑ
ϑ ϑ
ϑ ϑ ρ ρ ϑ ϑ ρ ρ
∫ ∫ =
+−=
+
+=
+=
4
0
24
0
4
0
3
2
23
32
23
22
.6)tan1(3)tan1(
)tan1(
3)tan1(
)(tantan3
3
π π π
ϑ ϑ
ϑ
ϑ
ϑ ϑ aad ad a

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 107/391
15
CALCOLO DEL VOLUME DI UN CORPO
Il volume di un corpo cilindrico limitato sopra da una superficie continua ),,( y x f z = sotto dal
piano z=0 e di lato da una superficie cilindrica retta incidente un dominio D del piano xOy , può
essere calcolato tramite la formula
.),( dxdy y x f V D
∫∫ =
ESEMPIO 22
Trovare il volume di un corpo limitato dalle superfici ,12
x y += x z 3= , ,5= y 0= z e posto nel
primo quadrante.
Soluzione
Il corpo è limitato in alto dal piano x z 3= , lateralmente dal cilindro parabolico 21 x y += e dal
piano 5= y . Pertanto è un corpo cilindrico. Il dominio D è limitato dalla parabola 21 x y += e dalle
linee rette 5= y e 0= x . Così si ha:
[ ]∫∫ ∫ ∫ ∫ ∫ =
−=−=⋅=== +
+ D
x
x
x xdx x xdx y xdy xdx xdxdyV
2
0
2
0
2
0
42
2
0
35
1
5
1
124
123)4(3333 2
2
(unità di volume).
ESEMPIO 23
Calcolare il volume di un corpo limitato dalle superfici 221 y x z −−= , x y = , 3 x y = , 0= z e
posto nel primo quadrante.
Soluzione
Il corpo dato è limitato sopra dal paraboloide22
1 y x z −−= . Il dominio di integrazione è un settore
circolare limitato da un arco della circonferenza 122 =+ y x , il quale è la linea di intersezione del
paraboloide con il piano 0= z , e le linee rette x y = e 3 x y = . Di conseguenza,
∫∫ −−= D
dxdy y xV )1(22
Poiché il dominio di integrazione è una parte della circonferenza e l’integrando dipende da22
y x + ,
è utile passare alle coordinate polari. In queste coordinate, l’equazione della circonferenza
122 =+ y x assume la forma 1= ρ , l’integrando è uguale a
21 ρ − , e gli estremi di integrazione

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 108/391
16
possono essere determinati dalle equazioni delle linee rette: 1tan 11 == ϑ k , cioè 41 π ϑ = ;
3tan 22 == ϑ k , cioè 32 π ϑ = . Così abbiamo:
∫∫ ∫ ∫ ∫ ∫ ==
−=−=−=
D
d d d d d d V
3
4
3
4
3
4
1
0
42
1
0
32
484
1
4
1
2
1)()1(
π
π
π
π
π
π
π ϑ ϑ ρ ρ ρ ρ ρ ϑ ϑ ρ ρ ρ (unità di volume).
ESEMPIO 24
Trovare il volume del corpo limitato dalle superfici 222a y x =+ , .222
a z x =+
Soluzione
Consideriamo l’ottava parte del corpo dato (fig. 10):
∫∫ ∫ ∫ =−=−=−
D
a xa
dydx xadxdy xaV 0 0
2222
22
8
1
3
0
32
0
22
3
2
3
1)( a x xadx xa
aa
=
−=−= ∫
Quindi, 3163
aV = .
APPLICAZIONI DEGLI INTEGRALI DOPPI
Se una lamina occupa il dominio D del piano xOy e ha una superficie di densità variabile
),( y xγ γ = , allora la massa M della lamina è espressa dall’integrale doppio
∫∫ = D
dxdy y x M .),(γ
Il momenti statici della lamina rispetto agli assi Ox e Oy possono essere trovati tramite le formule
∫∫ = D
xdxdy y x y M ,),(γ ∫∫ =
D
ydxdy y x x M .),(γ
Nel caso della omogeneità della lamina γ è costante.
Le coordinate del centro di gravità della lamina possono essere trovate con le formule
, M
M x
y=
M
M y x= ,

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 109/391
17
dove M è la massa della lamina e x M , y M sono i suoi momenti statici rispetto agli assi coordinati.
Nel caso di omogeneità della lamina, le formule assumono la forma
,S
xdxdy
xD
∫∫ = ,S
ydxdy
yD
∫∫ =
dove S è l’area del dominio D.
I momenti di inerzia della lamina rispetto agli assi Ox e Oy sono calcolati tramite le formule
∫∫ = D
x dxdy y x y I ,),(2γ ∫∫ =
D
y dxdy y x x I ),(2γ ,
e il momento di inerzia rispetto all’origine tramite la formula
y
D
x I I dxdy y x y x I +=+= ∫∫ ),()( 220 γ .
Ponendo 1),( = y xγ in queste formule, possiamo ottenere le formule per calcolare i momenti
geometrici di inerzia di una figura piana.
ESEMPIO 25
Trovare le coordinate del centro di gravità della figura limitata dalle curve 442 += x y ,
422 +−= x y (fig. 14).
Soluzione
Poiché la figura è simmetrica rispetto all’asse x, si ha .0= y Rimane da trovare x .
Troviamo l’area della figura data:
∫∫ ∫ ∫ ∫ −
−
=
−−
−===
D
y
y
dy y y
dxdydxdyS
2
0
2)4(
4)4(
2
0
222
2 4
4
2
422

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 110/391
18
∫ =
−=
−=
2
0
2
0
32
812
16
4
332 y ydy
y.
Segue che:
∫ ∫ ∫ ∫ ∫∫ −
−
=
+−=
−−−=⋅==
2
0
2)4(
4)4(
2
0
2
0
422222
2
2 16
3
2
338
1)4(16
1)4(4
1
8
128
1
8
1y
y D
dy y ydy y y xdxdy xdxdy x
.5
2
80
3
23
8
12
0
53
=
+−=
y y y
ESEMPIO 26
Trovare le coordinate del centro di gravità della figura limitata dall’ellisse 1925
22
=+y x
e da una sua
corda 135 =+
y x
.
Soluzione
Troviamo l’area del segmento:
∫∫ ∫ ∫ ∫ −
−
−=
+−−===
D
x
x
dx x xdydxdxdyS
225)53(
)51(3
5
0
2
5
0
).2(4
15
5
3325
5
3π
Abbiamo poi:
∫∫ ∫ ∫ ∫ −
−
=
−−−
−=
−==
D
x
x
dx x
x x xdy xdx xdxdyS
x
5
0
25)53(
)51(3
5
0
2
2
51325
5
3
)2(15
4
)2(15
41
π π
)2(3
1025
2
7525
)2(15
4
52
3)25(
3
2
2
1
5
3
)2(15
45
0
32232
−=
+−
−=
+−−⋅⋅−
−=
π π π
x x x ;
∫∫ ∫ ∫ ∫
−
−=
−−−⋅−=−==
D
x
xdx
x x ydydx ydxdyS y
225)53(
)51(3
5
0
2
2
5
0519)25(25
9
2
1
)2(15
4
)2(15
41
π π
.2
2
3
125
2
125
)2(125
12
3
1
2
5
)2(125
12)5(
25)2(15
2925
0
325
0
2
−=
−
−=
−
−==−
⋅−
⋅⋅= ∫ π π π π
x x
dx x x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 111/391
19
y
x
θ
ESEMPIO 27
Calcolare il momento di inerzia rispetto all’origine della figura limitata dalle curve 1=+b
y
a
x,
0= x , 0= y .
Soluzione
Il momento d’inerzia rispetto all’origine è
∫∫ ∫ ∫ ∫ ∫ − −
=
−+−=
+=+=+=
D
a xaab a a xaab
dx xaa
b xa x
a
bdx y y xdy y xdxdxdy y x I
0
))((
0 0 0
3
3
32
))((
0
322222
0 )(3
1)(
3
1)()(
.12
)()(
4
1
3
1
43
1 22
0
4
3
343 baab
xaa
b x
a
bbx
a
+=
−⋅⋅−−
ESEMPIO 28
Calcolare il momento d’inerzia della figura limitata dalla cardioide )cos1( ϑ ρ += a ,
rispetto all’asse x.
Soluzione
Passando alle coordinate polari nella formula ∫∫ = D
x dxdy y I 2 , otteniamo:
∫∫ ∫ ∫ ∫ +
+ ==== D
a
a x d d d d d I
π ϑ π
ϑ ϑ ρ ϑ ρ ρ ϑ ϑ ϑ ρ ϑρ ρ 2
0
)cos1(
0
2
0
)cos1(0
423222 |41sinsinsin
∫ ∫ =++++=+=π π
π ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ ϑ 2
0
2
0
443224424.
32
21)coscos4cos6cos41(sin
4
1)cos1(sin
4
1ad ad a
ESEMPIO 29
Sia
A= (x, y) : x²+y²≤1; x²+y²≥1
T= ( ρ ,ϑ ) :ϑ ϑ cossin
1
+ ≤ ρ ≤1; 0≤ϑ ≤π /2
Calcolare :
1) ∫∫ A
xdxdy
Soluzione

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 112/391
20
y
x
( )
( ) ( ) 6
1
tan1
1
cos
11
3
1
cossin
cos1
3
1
cossin
11cos
3
1coscos
2
0322
2
03
2
0
3
2
0
1
cossin
1
2
=
+−=
+−=
=
+−===
∫ ∫
∫ ∫ ∫ ∫∫ ∫∫ +
ϑ ϑ ϑ
ϑ ϑ ϑ
ϑ
ϑ ϑ ϑ
ϑ ρ ρ ϑ ϑ θϑ ρ ρ ρ
π π
π π
ϑ ϑ
d d
d d d d d xdxdyT A
2) ∫∫ A
dxdy y2
Soluzione
( )
( ) ( ) 12
1
16cot1
1
3
1
4
1
16cot1
1
sin
1
4
1
2
2cos1
4
1
cossin
11sin
4
1sinsin
2
0
3
2
0
42
2
0
2
0
2
0
42
2
1
cossin
1
32222
−=
+−+=
+−
−=
=
+−===
∫ ∫
∫ ∫ ∫ ∫∫ ∫∫ +
π
ϑ
π ϑ
ϑ ϑ ϑ
ϑ
ϑ ϑ ϑ
ϑ ρ ρ ϑ ϑ ϑ ρ ϑρ ρ
π π π
π π
ϑ ϑ
gd
gd
d d d d d dxdy yT A
3) ∫∫ A
dxdy x2
Soluzione
12
1
16
2 −=∫∫ π
A
dxdy x
ESEMPIO 30
Sia A= (x, y) : x²+y²-4≤0; x²+y²-4x≥0, y≥
T= ( ρ ,ϑ ) : 2cosϑ ≤ ρ ≤4cosϑ , 0≤ϑ ≤π /2
Calcolare : ∫∫ A
dxdy x
y2
Soluzione

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 113/391
21
y
x
A2
x
y
1
1
A
( )
π
π
ϑ
ϑ
ϑ ϑ
ϑ ϑ ϑ ϑ ϑ ϑ
ϑ ρ ρ ϑ
ϑ
ϑ
π π
π π π ϑ
ϑ
6
7
26
14
2
4cos1
12
56
2sin12
56
cossin3
56cos864
cos
sin
3
1
cos
sin
2
0
2
0
2
2
0
2
0
222
0
32cos4
cos2
222
=
=
−
==
==−==
∫ ∫
∫ ∫ ∫ ∫ ∫∫
d d
d d d d dxdy x
y
T
ESEMPIO 31
Sia A = (x, y) : x²+ y²-4y≤0; x≥0
T = ( ρ ,ϑ ) : 0≤ ρ ≤4sinϑ , 0≤ϑ ≤π /2
Calcolare : ∫∫ A
xdxdy
Soluzione
( )∫∫ ∫ ∫ ∫ ∫∫ =
====
T A
d d d d xdxdy2
0
2
0
2
0
43
sin4
0
22
3
16
4
sin
3
64sin64cos
3
1coscos
π π
π ϑ
ϑ ϑ ϑ ϑ ρ ρ ϑ ϑ ρ ϑρ
ESEMPIO 32
Calcolare
dove:
Vediamo che:
∫∫ + A y x
dxdy22
( ) ,1:, ≥+= y x y x A 122 ≤+ y x 1
cossin
1≤≤
+ ρ
θ θ 20
π θ ≤≤
θ θ θ
π θ θ θ
θ ρ
π π
d d d d y x
dxdy
T A∫ ∫∫ ∫ ∫∫ +
−=
+−==
+
2
0
2
022 cossin
12cossin
11
12
tan22
tan
1
2cos
1
2sin
2cos
2cos
2sin2
1
cossin
1
2222 −−
⋅−=
−+
=+ θ θ θ θ θ θ θ θ θ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 114/391
22
1
u
/4
x
y
4
1
2
Quindi sostituendo:
∫ −−
1
0
2 12t t
dt =
( )∫ −−
1
0
221t
dt =
21
21ln
2
1
2
1
+−
−−⋅⋅
t
t
1
0
=
−
+−⋅
12
21ln
22
1
ESEMPIO 33
Calcolare
dove:
Ponendo x = µ e y = υ /2, si ha:
ESEMPIO 34
Calcolare
∫∫ ∫ ∫ +
−+=
−−+=
−−
⋅⋅+=+ A
t t
dt d
y x
dxdy1
0
2
2
022
22 12
12ln
2
1
2122
21
2tan2
2tan
1
2cos
1
2
12
2
π π θ
θ θ θ
π π
∫∫ D
dxdy x
y
( ) ,044,22 ≤−+= x y x y x D x y
2
1≥
2
1cossin2cos16
2
1tan
4
1 2
4
2
4
2 ==⋅⋅=
∫ ∫
π
π
π
π
θ θ θ θ θ θ d d
θ ρ υ θ ρ µ sincos* == e
∫∫ A
dy ydx
( )( )
( )
≥≤+==∂
∂ µ υ µ υ µ υ µ δ
υ µ ee
y x4|,
2
1
,
, 22
*tan4
1
2
1
2
4
2
cos4
0
=== ∫ ∫ ∫∫ ∫∫ π
π
θ
ρ ρ θ θ υ µ µ
υ d d d d dxdy
x
y
S D

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 115/391
23
x
y
32
2
x
y
3
B
2
1
x
y
2
2
2B
dove
Se A1 denota la restrizione di A al primo quadrante, risulta:
dove:
B 1 = ( )
≥≥≤+ 0;0;1
49:,
22
y x y x
y x
( ) 0;0;4:,22
2 ≥≥≤+= y x y x y x B
Per il calcolo dell’integrale su 1 B poniamo x = 3µ e y = 2 υ; avremo:
u
µ
Quindi:
( )
≥≥+≤+= 0;4;1
49
:,22
22
y y x y x
y x A
∫∫ ∫∫ ∫∫ ∫∫ −==
211
222 B B A A
dy ydxdy ydxdy ydxdy ydx
( )( )
( ) 4cos4sin12
12,
,2
20
2
0
1
0
2
111
=−==
==∂
∂=
∫ ∫
∫∫ ∫∫ ∫∫
π
π
θ ρ ρ θ θ
µ υ υ υ µ υ
d d
d d d d y x
y xdy ydx
T T B
( )3
8cos
3
8sin 2
0
2
0
2
0
2
2
=−== ∫ ∫ ∫∫ π
π
θ ρ ρ θ θ d d dy ydx
B
3
8
3
168 =−=∫∫
A
dy ydx

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 116/391
24
ϑ cos3592 =− t
3
ESEMPIO 35
∫∫ 1
2
A
dxdy x = ∫∫ −1
2
E
dxdy x ∫∫ 1
2
C
dxdy x = Ponendo x = 2u ; y = v allora
∫∫ ∫∫ −1 1
228T C
dxdy xdudvu = 7 ∫∫ 1
2
C
dxdy x = ∫ 2
0
2cos4
7π
ϑ ϑ d = π 16
7 ∫∫ ⇒
A
dxdy x2
= π 4
7
∫∫ 1 A
ydxdy = ∫ 1
2 sinT
d d ϑ ρ ϑ ρ = ∫ 2
03
1π
( )ϑ
ϑ ρ ϑ ϑ d
−
+
⋅8
sincos4
636sin
23
22=
=( ) 3
8
cos59
sin636
3
1232
2
0
−−
⋅∫ ϑ ϑ
ϑ π
d =( ) 3
8
cos59
sin72
2
02
32
−−
∫ π
ϑ ϑ
ϑ d =
=( )
ϑ ϑ
ϑ π
d 232
2
0 cos59
sin72
−∫ =
( )∫
−
1
02
3259
72
t
dt
e ponendo t = cos 2π = 0 ⇒ 1cos
02cos
=
=
ϑ
π
Essendo
( )∫
− 23
259 t
dt =
5
3 ϑ ϑ
ϑ d ∫ 3cos27
cos=
= ϑ tan59
1=
59
1 t
3
5
259
3
t −=
2599 t
t
−
segue che
( )ϑ
ϑ
ϑ π
d 232
2
0 cos59
sin72
−∫ =
1
02598
t
t
−= 4
Quindi
∫∫ A
ydxdy = 2 ∫∫ 1 A
ydxdy = 2
−
3
84 =
3
8
ϑ sin35 =t
ϑ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 117/391
25
1 2
1
C1 A1 E1
1
2
21
ESEMPIO 36
Calcolare ∫∫ A
dxdy x2A = ( )
≤+≥+ 14
;1:,2
222
y x
y x y x
∫∫ A
dxdy x2
= 4 ∫∫ 1
2
A
dxdy x dove A1 è la restrizione di A al primo quadrante
∫∫ 1
2
A
dxdy x = ∫ 2
0
2cos
π
ϑ ( )
∫ ϑ ρ
ϑ ρ ρ 1
3 d d = ( )ϑ ρ 2 =ϑ ϑ 22 sincos
4
+=
=4
1∫
2
0
2cos
π
ϑ ( )( ) ϑ ϑ ρ d 14 − =
4
1
( )∫ −+
2
0
222
2
16sin4cos
cos16π
π
ϑ ϑ
ϑ =
= 2 ( )∫ −
+
2
0222 16tan41
1
cos
2π
π ϑ
ϑ ϑ d
= e ponendo t =ϑ tan2
= 2( )∫
+∞
−+0
22 161
π
t
dt
Dal seguente
∫ +dt
t 21
1=
( )∫ +
++ 222
1
2
1 t
t t
t
t =
( )∫ +
−++
+dt
t
t
t
t 22
2
21
112
1=
=( )∫ ∫
+−
++
+dt
t dt
t t
t 2222
1
12
1
12
1
segue che
( )∫ +∞
+0
221 t
dt =
+∞
++ 0
2arctan
2
1
12
1t
t
t =
4
π

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 118/391
26
Quindi
4 ∫∫ 1
2
A
dxdy x = 4
−
162
π π = π
4
7
ESERCIZIO (Un integrale molto importante)
Mostrare che
dxex
∫ +∞
∞−
− 2
= π
SOLUZIONE:
L’integrale improprio converge e il suo valore (ovviamente) non dipende da quale simbolo si usa
per la variabile d’integrazione. Pertanto possiamo esprimere il quadrato dell’integrale come
prodotto di due integrali identici, ma con le loro variabili d’integrazione indicate in modo diverso.
Possiamo poi interpretare questo prodotto come un integrale doppio e integrarlo in coordinate
polari:
2
2
∫
+∞
∞−
− dxe x = ∫ +∞
∞−
−dxe
x2
∫ +∞
∞−
−dye
y2
=( )
∫∫ ℜ
+−
2
22 dA y xe =
= ρ ρ ϑ ρ π
d ed
R
R
∫ ∫ −
∞→ 0
2
0
2
lim = R
R
e0
2
2
1lim2
− −
∞→
ρ π = π
Dove si è tenuto presente che in coordinate polari, tutti i punti del piano si ottengono prendendo il
valore principale dell’anomalia, cioè facendo variare ϑ da 0 ( oppure - π ) incluso, a 2π
(oppureπ ) escluso, e facendo variare ρ tra 0 e + ∞ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 119/391
27
INTEGRALI TRIPLI
Supponiamo che la funzione ),,( z y x f sia definita nel dominio T chiuso e limitato. Suddividiamo il
dominio T arbitrariamente in n sottodomini nT T T ,...2,1 con diametrind d d ,..., 21 e volumi
nV V V ∆∆∆ ,..,, 21 . Prendiamo arbitrariamente un punto ),,( k k k k P ζ η ξ in ciascun sottodominio emoltiplichiamo il valore della funzione nel punto
k P con il volume del sottodominio.
La somma integrale per la funzione ),,( z y x f sul dominio T è la somma della forma
∑=
∆n
k
k k k k V f 1
.),,( ζ η ξ
L’integrale triplo della funzione ),,( z y x f sul dominio T è il limite della somma integrale sotto la
condizione che il più grande diametro dei sottodomini tende a zero:
∑∫∫∫ =
→∆=
n
k
k k k k
T d
V f dV z y x f k 1
0max.),,(lim),,( ζ η ξ
Per una funzione continua in un dominio T questo limite esiste e non dipende dal modo in cui è
suddiviso il dominio T nei sottodomini o sulla scelta dei punti k P (teorema dell’esistenza di un
integrale triplo).
Se ),,( z y x f >0 nel dominio T, allora l’integrale triplo ∫∫∫ T
dV z y x f ),,( è la massa del corpo che
riempie il dominio T e possiede una densità variabile ),,( z y x f =γ (interpretazione fisica
dell’integrale triplo).
Le principali proprietà degli integrali tripli sono simili a quelle degli integrali doppi.
In coordinate cartesiane l’integrale triplo è usualmente scritto come
∫∫∫ T
dxdydz z y x f ),,( .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 120/391
28
Integrali tripli in coordinate cartesiane
Come gli integrali doppi, anche gli integrali tripli si riducono ad integrali ordinari mediante formule
di riduzione. Per gli integrali tripli in coordinate cartesiane esistono una formula d’integrazione per
strati e una per fili.
a) La formula d’integrazione per strati è:
( ) ( )( )
dydx z y x f dzdzdydx z y x f zC
b
aC
∫∫ ∫ ∫∫∫ = ,,,,
Questa formula si applica quando il solido
viene segato mediante piani z = coste quando ogni z = k seghi C secondo un dominio piano Z C .
b) La formula d’integrazione per fili è:
( ) ( )( )
( )
dz z y x f dydxdzdydx z y x f
y x
y x DC
∫ ∫∫ ∫∫∫ =,
,
,,,,
β
α
Questa formula si applica quando il solido viene segato mediante
rette parallele all’asse Z e C è normale rispetto a queste parallele.
A volte il solido C si presta all’applicazione delle due formule
indifferentemente.
Nei casi non si può applicare né l’una né l’altra si spezza opportunamente il campo C.
ESEMPIO 37
Calcolare il momento d’interzia relativo all’asse z del cono rotondo di raggio di base a e altezza h
Supponiamo che il vertice del cono coincida con l’origine degli assi.
Ricaviamoci l’equazione della superficie conica:
siccome è una superficie di rotazione, ricaviamo prima l’equazione del meridiano (in questo caso
una retta sul piano xz):

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 121/391
29
xa
h z =
Avvalendoci di un artificio noto dalla Geometria, al posti di x sostituiamo22
y x + e quadriamo.
Si ottiene:
( )22
2
22
y xa
h z += equazione del cono.
Il momento d’inerzia rispetto all’asse z è dato da:
( ) dzdydx y x M ∫∫∫ += 22
Calcoliamo per fili:
( ) ( ) dydx y xa
hh y xdzdydx y x M
C
h
y xa
hC
+−+=+= ∫∫ ∫ ∫∫
+
222222
22
Il campo C è una circonferenza di raggio a . Passiamo ora alle coordinate polari:
ϕ ρ cos= x
ϕ ρ sen y =
Si ha allora:
had a
hhd d d
a
hh M
a
C
4
0
3
2
0
2
10
1π ρ ρ ρ ϕ ϕ ρ ρ ρ ρ
π
=
−=
−= ∫ ∫ ∫∫ .
ESEMPIO 38
Calcolare l’integrale triplo dove1
2
22
+
+=
z
y x f ed il solido è individuato da
222 y x z += ;
( )222
4 y x z += ; h z ≤≤0 .
Calcoliamo l’integrale per strati. Passando in coordinate cilindriche avremo:
ρ ρ θ ρ θ ρ π
d d z
dzd d
z
dz I
z
z
hh
C Z
∫ ∫ ∫ ∫ ∫∫ +=
+=
2
1
3
0
2
0
2
0
3
211
Per la sezione generica Z C è:
ρ = z ,22
4
1 z= ρ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 122/391
30
Fatta questa considerazione l’integrale diventa:
∫ +=
h
dz z
z I
0
2
4
132
15π
quindi la soluzione è:
+−= harctghh I
3
3
1
32
15π .
ESEMPIO 39
Determinare il volume del solido delimitato dalle superfici di equazioni:
=−+
=++
022
2222
yr y x
r z y x
≥
≥
≥
0
0
0
z
y
x
Calcoliamo il volume, risolvendo l’integrale triplo per “fili”:
∫∫∫ ∫∫ ∫ ∫∫ −−
−−===C
y xr
C
dydx y xr dzdydxdzdydxV
222
0
222
Il dominio C è il semicerchio base del cilindro (v. figura). Passando in coordinate polari:
θ ρ
θ ρ
sen y
x
=
= cos
si avrà:ù
−=+
−=−=−= ∫ ∫ ∫∫ 3
2
2391
23
3332
0
sin
0
2222 π π ρ ρ ρ ϕ θ ρ ρ ρ
π ϕ
r r r d r d d d r V
r
C
.
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 123/391
31
ESEMPIO 40
Calcolare:
( )∫∫∫ +++C
dzdydx z y x 4321log
Dove il dominio C è dato da:
≤≤
≤≤
≤≤
≡
c z
b y
a x
C
0
0
0
Il dominio d’integrazione è un parallelepipedo, quindi potremmo
utilizzare indifferentemente sia la formula d’integrazione per strati
sia quela per fili.
Utilizziamo quella per fili:
( ) ( )∫∫∫ ∫ ∫ ∫ +++=+++=C
c a b
dy z y xdxdzdzdydx z y x I 0 0 0
4321log4321log
Per risolvere l’integrale poniamo:
t z y x =+++ 4321
per cui:
∫ ∫ ∫ ∫ ∫ +++
++++
+++==
c a zb x
z x
c a
dx z x
zb xbdzdt t dxdz I
0 0
4321
421 0 0421
4321log3
3
1log
3
1
Per procedere oltre conviene porre:
z x
zb xu
421
4321
++
+++=
Sostituendo:
( ) zbu x 4112
3−−−= ; dubdx
2
3=
l’integrale diventa:
∫ ∫ ∫ ++
+++
+
++ +++++++
++++++
++++
−=
c za
zba
z
zb
c
dz zazbzabb za
zbbzaza z
zaz za
abbdubudzb
0
421
4321
41
431 0
2
2
2
2
1681263821
163128241log
168821
6
2
3
2
3log

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 124/391
32
Per il resto non ci dovrebbe essere nessuna difficoltà nel proseguire alla risoluzione dell’integrale.
ESEMPIO 41
Calcolare l’integrale:
I = dzdydx yC
∫∫∫ 2
dove C è il volume della parte di cilindro rotondo di equazione 222r y x =+
con2
r yr ≤≤− e h z ≤≤0 .
Integriamo per strati e si ha:
dydx ydz I C
h
∫∫ ∫ =
2
0
dove C è la proiezione del solido sul piano x,y.
L’integrale dydx yC
∫∫ 2
si può calcolare in coordinate polari spezzando opportunamente il dominio.
Si ha:
44232
48
338
32
3r r d d sendydx y
C C
−+== ∫∫ ∫∫
π
θ ρ θ ρ
L’integrale proposto vale:
hr I 4
32
3
6
1
−=
ESEMPIO 42
Calcolare dzdydx x D
∫∫∫ esteso al primo ottante e delimitato dai piano 0= z e 2= z e dalle superfici
cilindriche:
=−+
=+
02
122
22
y y x
y x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 125/391
33
La superficie cilindrica 0222 =−+ y y x si proietta sul piano xy nella circonferenza di centro
( )1,0C e raggio 1, mentre la 122 =+ y x si proietta nella circonferenza con centro nell’origine e
raggio unitario.
Eseguiamo l’integrazione per fili:
∫ ∫∫ ∫∫∫ ==2
0
dzdydx xdzdydx x I C D
dove C è la sezione del cilindroide con il piano . xy Sviluppando i calcoli si ottiene:
12
5= I .
ESEMPIO 43
Calcolare ∫∫∫ D
dzdydx x esteso ad una regione D del primo ottante definita dalle equazioni:
≤
+≤≤
=
1
022
2
y
y x z
x y
Conviene eseguire l’integrazione “per fili”. Si pensi di inscrivere il solido in un cilindroide avente
generatrici parallele all’asse z e limitato superiormente dalla22
y x z += e inferiormente dalla
0= z .
Cioè:
Fig. a)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 126/391
34
∫ ∫∫ ∫∫∫ +
===
22
0
y x
C D
dzdydx xdzdydx x I
dove C è la sezione normale del cilindroide, come si può vedere nella fig. b).
Fig. b)
Sviluppando i calcoli:
( )24
523
0
22
22
=+=+== ∫∫ ∫∫ ∫ ∫∫ ∫∫ +
dydx x ydydx xdydx y x xdzdydx x I C C
x
C C
y
.
ESEMPIO 44
Determinare le coordinate del baricentro del segmento sferico ad una base di altezza 5=h , limitato
dalla superficie sferica 64
222
=++ z y x e avente come asse di simmetria l’asse z.
Nel caso in esame è 0==GG y x .
Incominciamo a calcolare l’integrale che va a numeratore nell’espressione di G z :
∫∫ ∫ ∫∫∫ −
== dydxdz zdzdydx z I
r
hr
1
L’integrale doppio ∫∫ dydx rappresenta l’area di una sezione generica della sfera con un piano
= z cost, e cioè:
( ) ( )22264 z zr dydx −=−=∫∫ π π
Quindi:
( ) π π 4
302564
8
3
2
1 =−= ∫ dz z z I
L’integrale 2 I che sta a denominatore nell’espressione diG z rappresenta il volume del segmento
sferico, quindi:
( ) π π 3
47564
8
3
2
2 =−= ∫ dz z I
In definitiva:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 127/391
35
76
363
475
3
4
3025
2
1 =⋅==π
π I
I zG .
ESEMPIO 45
Calcolare il momento d’inerzia rispetto all’asse di un tronco di cono avente le seguenti dimensioni:
altezza h = 2 cm
raggio maggiore a = 3 cm
raggio minore b = 2 cm
Il momento d’inerzia è dato da:
∫ = dzdydx z I 2
Integrando per strati otteniamo:
(1) ∫ ∫ ∫
==h
C Z
dydx zdzdzdydx z I 0
22
ove Z C è una sezione del tronco di cono col piano z = cost.
Ma nell’integrale (1) possiamo spostare la z nella prima parte, ottenendo:
(2) ∫ ∫ h
C Z
dydxdz z0
2
La seconda parte della (2) non è che l’area del cerchio Z C . Supponiamo di tagliare il cono con un
piano passante per z ottenendo un trapezio OCBG in cui GB = b, OC = a, FE = ρ (raggio di Z
C ).
Abbassiamo per B la perpendicolare a OC: avremo due triangoli rettangoli simili BDE e BAC dai
quali si ricava:
AB
AC
BD
DE = ; ma è
=
−=
−=
−=
h AB
ba AC
zh BD
b DE ρ
quindi:
h
ba
zh
b −=
−
− ρ
da cui ricaviamo:
zh
baa
−−= ρ
Dunque, essendo l’area di Z C uguale a2 ρ π , sarà pure:
2
−−= z
h
baaC Z π
e, sostituendo nella (2) otterremo:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 128/391
36
( ) ( ) 323322
2
05
1
2
1
3hbahbaahadz z z
h
baa I
h
−+−−=⋅
−−= ∫ π π
π π .
Ponendo in luogo di a, b, h i loro valori, otterremo:
35,44= I .
ESEMPIO 46
Trovare il momento d’inerzia rispetto a yz del solido delimitato dalle disuguaglianze:
≤≤
−≥
≤+
a z
xa y
a y x
0
22
Si sa dalla Meccanica che il momento d’inerzia rispetto a yz è dato da:
Fig. 1
dzdydx xV
∫∫∫ =Ι 2
essendo V il solido individuato dalle disuguaglianze.
E’ comodo eseguire l’integrale triplo per strati; una generica sezione con un piano parallelo a xy è
quella indicata in figura.
L’integrale si calcola nel modo seguente:
( )∫ ∫∫ ∫∫∫ ==Ιa
zC V
dydx xdzdzdydx x0
22
Calcoliamo separatamente l’integrale doppio, questo si calcola facilmente in coordinate polari.
Le formule di passaggio sono:
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 129/391
37
=
=
ϑ
ϑ ρ
sen y
x cos
Fig. 2
Sostituendo si ha:
===== ∫ ∫ ∫∫ ∫∫ ∫∫ =
+=
=
=
ρ ϑ ρ ϑ ϑ ρ ϑ ρ ϑ ρ ρ ϑ ρ ρ
ϑ ϑ ρ
π ϑ
ϑ
d d d d d d dydx x I
a
sen
aC C C
cos
232
0
23222coscoscos
( )∫ ∫
=
=
=
= +−=
2
0
4
242
0
24
cos4cos
4cos
π ϑ
ϑ
π ϑ
ϑ
ϑ ϑ ϑ
ϑ ϑ ϑ d sen
ad a .
Calcoliamo separatamente i due integrali:
16cos
44
cos42
0
242
0
24
1
π ϑ ϑ ϑ
ϑ
π ϑ
ϑ
π ϑ
ϑ
ad
ad
a I === ∫ ∫
=
=
=
=
.
( ) ( )ϑ
ϑ ϑ
ϑ ϑ
ϑ ϑ
ϑ
π ϑ
ϑ
π ϑ
ϑ
d sen
ad
sen
a I ∫ ∫
=
=
=
= +=
+=
2
0
4
242
0
4
24
2cos
cos
4cos4
cos.
Ricordando che:
2
12coscos
2 −=
ϑ ϑ
Sostituendo e contemporaneamente sviluppando il denominatore, si ha:
( )ϑ
ϑ ϑ
ϑ ϑ
ϑ ϑ ϑ ϑ
ϑ
π ϑ
ϑ
π ϑ
ϑ
d sensen
ad
sensen
a I ∫ ∫
=
=
=
=++
−=
++
−
⋅=
2
0
2
42
0
222
4
22221
12cos
8cos2cos
12cos
42
Ricordando che:
ϑ
ϑ ϑ
ϑ
ϑ ϑ
2
2
21
12cos,
1
22
tg
tg
tg
tgsen
+
−=
+=
sostituendo si ottiene:
ϑ ϑ ϑ ϑ ϑ
ϑ ϑ ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ π ϑ
ϑ
π ϑ
ϑ
d tgtgtgtg
tgtgad
tg
tg
tg
tg
tg
tg
a I ∫ ∫
=
=
=
=++++
−−=
++
++
−+
−
=2
0
234
2442
0
2
2
2
2
2
4
21464
22
8
1
22
1
21
11
1
8.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 130/391
38
Poniamo:
t tg =ϑ .
Sarà di conseguenza:
dt t d t arctg 21
1
, +== ϑ ϑ .Sostituendo si ottiene:
( ) ( )dt
t t t t
t adt
t t t t t
t t a I ∫ ∫
∞∞
++++
−=
+⋅++++
−−=
0
234
24
0
2234
244
21464
2
811464
22
8.
Scomponiamo il denominatore in modo da poter risolvere l’integrale con la regola di Hermitte:
( )423411464 +=++++ t t t t t
( )∫ ∞
+
−=
0
4
24
21
2
8dt
t
t a I .
Consideriamo solo l’integrale a meno di8
4a
:
( ) ( )( )1lg
11
2'
3
2
4
2
2 +++
++=
+
−= ∫ t D
t
C t Bt Adt
t
t I
Derivando ambo i membri:
( ) ( ) 11
33322
1
24
22
4
2
++
+
−−−+++=
+
−
t
D
t
C t Bt A Bt Bt At A
t
t .
Eliminando i denominatori si ha:
( ) ( ) ( ) ( ) ( ) DC B D B At A Dt t Dt DC B B B At t At +−++−+−+=++−+−++−=− 332231332223322
Per il principio d’identità dei polinomi deve essere:
=+−
=+−
−=−
=
03
0322
23
0
DC B
D B A
A D
D

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 131/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 132/391
40
48
43
12161216
55
0
55442 aaaa
dzaa
dzdydx x
a
V
−=−=
−==Ι ∫ ∫∫∫
π π π
Il momento d’inerzia richiesto vale :
( )
48
435 −
=Ιπ a
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 133/391
41
Integrali tripli in coordinate cilindriche
Si dimostra che nel passaggio da integrali tripli in coordinate cartesiane a coordinate curvilinee in
genere sussiste la relazione:
dwdvduwvu
z y xwvu f dzdydx z y x f
T T
∫ ∫ ∫ ∫ ∫ ∫ ∂
∂=
),,(
),,(),,(),,(
in cui è stato posto:
w
z
w
y
w
xv
z
v
y
v
xu
z
u
y
u
x
wvu
z y x
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
=∂
∂
),,(
),,(
Le formule di passaggio dalle coordinate cartesiane alle coordinate cilindriche sono:
Il termine Jacobiano vale:
ϑ ϑ ϑ ϑ
ϑ ϑ
ϑ ρ =−=
∂
∂
100
0cos
0cos
),,(
),,(sen
sen
z
z y x
La formula di trasformazione da utilizzare è:
dzd d z f dzdydx z y x f
T T
ϑ ρ ρ ϑ ρ ∫ ∫ ∫ ∫ ∫ ∫ = ),,(),,(
In coordinate cilindriche si opera come in coordinate cartesiane osservando che il solido deve essere
normale rispetto al riferimento cilindrico. Anche in coordinate cilindriche sussistono formule
analoghe a quella per strati e per fili delle coordinate cartesiane:
∫ ∫∫ ∫ ∫ ∫ =),(
),(
),,(),,(ϑ ρ
ϑ ρ α
ϑ ρ ϑ ρ ϑ ρ ϑ ρ B
D
T
z f d d dzd d z f
=
=
=
z z
sen y
x
ϑ ρ
ϑ ρ cos

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 134/391
42
ESEMPIO 47
Calcolare l’integrale:
∫∫∫ =T
dzdydx xyz I
Dove T è il volume compreso tra il cilindro di equazione y2+z
2-2cz = 0 e il piano 1
2=+
c
z
h
xcon
x≥0.
Facendo il seguente cambiamento di variabili:
=
==
θ ρ
θ ρ
sen z
y
x x
cos
e integrando per fili si ha:
∫∫ ∫ −
= D
c
senhh
dx xd d sen I 2
0
cos3
θ ρ
θ ρ θ θ ρ
Dove D è la proiezione del solido sul piano y,z descritta da 0≤θ≤π ,0 ≤ρ≤2csenθ.Procedendo,si ha:
15)
41(cos
2
42
2
223
2ch
c
sen
c
send d sen
h I
T
=+−= ∫∫ θ ρ θ ρ
θ ρ θ θ ρ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 135/391
43
ESEMPIO 48
Calcolare l’integrale:
∫∫∫ +=
T
dzdydx y x
z I
22
Dove T è il volume compreso tra la sfera x2
+ y2
+ z2
= a2
e i coni z2
= x2+ y
2, z
2= 4(x
2+y
2) con
z≥0.
Conviene spezzare il campo in due parti e integrare per fili. Passando in coordinate cilindriche si
ottiene:
75
51222532
0
5
0
222
22
2
0
2
5
222
22
−=+== ∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫
+
+
+
+
adz zd d dz zd d dzd d I T
a
y
y
a
a
y
y
π ρ θ ρ θ θ ρ π ρ
ρ
π ρ
ρ
ESEMPIO 49
Calcolare l’integrale:
∫∫∫ =T
dzdydxsenx yz I
Dove T è il volume del cono x2
= y2
+ z2
con 0≤x≤h , y≥0 , z≥0.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 136/391
44
Con il cambiamento seguente:
=
=
=
θ ρ
θ ρ
sen z
y
x x
cos
si ottiene:
dxd d senxsen I T
θ ρ θ θ ρ cos3
∫∫∫ =
Integriamo per fili:
∫ ∫∫ =h
D
dxsenxd d sen I ρ
θ ρ θ θ ρ cos3
Dove D è la proiezione del solido sul piano z,y che viene descritta con 0 ≤ θ ≤ ,2
π 0 ≤ ρ ≤ h.
Procedendo,si ha:
+−−++−== ∫ ∫ ∫ 6cosh66cosh3cosh
42
1cos
234
32
0 0
senhhhsenhhh
dxsenxd d sen I hh
ρ
π
ρ ρ θ θ θ
ESEMPIO 50
Calcolare l’integrale:
dzdydx y x I T
)(22 += ∫∫∫
dove T è il volume compreso tra il paraboloide z = 1 – (x2
+ y2) e il cono (z – 1)
2= x
2+ y
2, con
h ≥ z ≥ 0 .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 137/391
45
Passando in coordinate cilindriche si ha:
dzd d I θ ρ ρ ∫ = 3
e integrando per strati:
π π ρ ρ θ π
15
14
4
)1(
4
)1(2
1
0
1
10
2
0
423 −=
−−
−== ∫ ∫ ∫ ∫
−
−
dz z z
d d dz I z
z
h
.
ESEMPIO 51
In una sfera di centro C(0;0;0) e raggio R viene scavato un foro cilindrico rotondo di asse x e
raggio a.
Trovare il volume della parte di sfera rimanente.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 138/391
46
Si può trovare il volume V del cilindro più il volume delle due calottine integrando per fili e
facendo il seguente cambiamento di variabili:
=
=
=
θ ρ
θ ρ
sen z
y
x x
cos
Quindi si ha:
322)(
3
4)22(
)22(
2
0 0
a Rdxd d dxd d V R
RT
a
−=== ∫ ∫∫∫ ∫ ∫ −
−−
π ρ ρ θ θ ρ ρ ρ
ρ
π
.
ESEMPIO 52
Calcolare l’integrale:
∫∫∫ +=
T z
dz I
2
dove T è il cilindro di equazione: x2
+ y2
– 2ay = 0 con 0 ≤ z ≤ h .
Passando in coordinate cilindriche si ha:
2log2
22 0
2
0
2
0
2 had d
z
dz
z
dz I
h sena
T ∫ ∫ ∫ ∫∫∫ =
+=
+=
π θ
π ρ ρ θ .
ESEMPIO 53
Calcolare l’integrale:
dzdydx x
yz I
T ∫∫∫ =
dove T è il volume compreso fra il cilindro x2
+ y2
= 4, il paraboloide z = x2
+ y2
+ 2 e il primo
x – y = 0 limitatamente al 1° ottante.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 139/391
47
Passando in coordinate cilindriche e integrando per fili si ha:
θ ρ θ ρ ρ θ θ ρ ρ ρ
d d tgdz ztgd d I D D
22)2(
2
122
0
+== ∫∫ ∫ ∫∫ +
dove D è la proiezione del solido sul piano x , y , che viene descritta con
40
π θ ≤≤ , 20 ≤≤ ρ .
Quindi:
2
2log
3
104)2(
2
1 224
0
2
0
=+= ∫ ∫ ρ ρ ρ θ θ
π
d d tg I .
ESEMPIO 54
Calcolare l’integrale:
dzdydx z x I T
∫∫∫ += )(
dove T è il volume compreso tra i coni di equazione y2
= x2
+ z2
, (y – 4a)2
= x2
+ z2
con
x ≥ 0 , z ≥ 0.
Col seguente cambiamento di variabili:
=
=
=
θ ρ
θ ρ
sen z
x
y y
cos

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 140/391
48
avremo:
dyd d sen I T
θ ρ θ θ ρ )(cos2 += ∫∫∫
Integrando per fili:
dyd d sen I a
D∫ ∫∫
+
+=4
)(cos2
ρ
ρ
θ ρ θ θ ρ
dove D è la proiezione del solido sul piano x , z che viene descritta con 60 π θ ≤≤ , 0 ≤ ρ ≤ 2° .
procedendo nei calcoli:
42
3
64)(cos4
2
0
2
ad d sena I a
o
=+= ∫ ∫ ρ ρ θ θ θ
π
.
ESEMPIO 55
Calcolare l’integrale:
dzdydx z I T
∫∫∫ =
dove T è il volume compreso tra la sfera x2
+ y2
+ z2
= 4a2
e i piani z = 0 , z = a.
Passando in coordinate cilindriche si ha:
dzd d z I T
θ ρ ρ ∫∫∫ =
Ovvero integrando per strati:
4
0
2
0
224
0 4
7ad d dz z I
a za
π ρ ρ θ π
∫ ∫ ∫ −
== .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 141/391
49
ESEMPIO 56
Mediante l’uso degli integrali tripli calcolare il volume del solido compreso tra il cilindro di
equazione x2
+ y2
= 4 tra i piani z = 0 e z = 3 e il cono di equazione 4 z2
= 9(x2
+ y2) .
Calcolando l’integrale per strati avremo:
dydxdzV zc
S ∫ ∫∫ =3
0
e passando in coordinate cilindriche:
∫ ∫ ∫ ==3
0
2
0
2
3
2
8π
π ρ ρ z
d dzV S
D’altra parte come verificare si può tener presente che
VS = Vcilindro – Vcono = 12 π – 4 π = 8 π .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 142/391
50
Integrali tripli in coordinate polari
Le formule di passaggio dalle coordinate cartesiane alle coordinate polari nello spazio sono:
=
=
=
ϑ ρ
ϕ ϑ ρ
ϕ ϑ ρ
cos
cos
z
sensen y
sen x
Il determinante Jacobiano è:
Tenendo presente la formula di passaggio da coordinate cartesiane a curvilinee,nel caso in esame si
deduce:
.),,(),,(2 ϑ ϕ ρ ϑ ϑ ϑ ϕ ρ d d d senF dzdydx z y x f
T T ∫∫∫ ∫∫∫ =
.cos
)cos()coscoscos(cos
coscoscos
0cos
coscos
),,(
),,(
23222
22222222
ϑ ρ ϑ ρ ϑ ϑ ρ
ϕ ϑ ρ ϕ ϑ ρ ϑ ρ ϕ ϑ ϑ ρ ϕ ϑ ϑ ρ ϑ
ϑ ρ ϕ ϑ ρ ϕ ϑ ρ
ϕ ϑ ρ ϕ ϑ ρϑρ ϕ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 143/391
51
ESEMPIO 57
Trovare le coordinate del baricentro del solido limitato dal cono rotondo di semiapertura 6π e dalla
calotta sferica con centro nel vertice del cono e raggio 2.
Siccome l’asse z è asse di simmetria è: xG=0,yG=0,mentre:
∫∫∫
∫∫∫ =
T
T
d d d sen
d d d sen zG
θ ϕ ρ θ ρ
θ ϕ ρ θ ρ θ ρ
2
2cos
dove T è il volume della calotta.Calcoliamo separatamente i due integrali:
π ρ ρ θ θ θ ϕ θ ϕ ρ θ θ ρ π
π
==° ∫ ∫ ∫ ∫∫∫ 2
0
6
0
2
0
33coscos1 d d send d d d sen
T
).3
38
3
16(2
2
0
6
0
2
0
22 −==° ∫ ∫ ∫ ∫∫∫ π ρ ρ θ θ ϕ θ ϕ ρ θ ρ π
π
d d send d d d senT
Quindi sostituendo in zG si ottiene:
3816
3
−=G z .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 144/391
52
ESEMPIO 58
Calcolare l’integrale:
∫∫∫ T
dzdydx y
dove T è il volume compreso tra la semisfera x2+y
2+z
2= a
2, z≥0 e i piani y = 0 , y = x tgα,
limitatamente al 1° ottante.
Passando alle coordinate polari si ha:
)1(cos16
43223
2
0 0 0
+−=== ∫ ∫ ∫ ∫∫∫ α π
ρ ρ ϕ ϕ θ θ ϕ ρ θ ϕ θ ρ
π
α ad d send send d d sensen I
a
T
.
ESEMPIO 59
Calcolare l’integrale:
dzdydx y x I T
)(22 += ∫∫∫
dove T è il volume compreso tra le sfere di equazioni x2
+ y2
+ z2
= 4a2
, x2
+ y2
+ z2
- 2az = 0, con
z≥0.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 145/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 146/391
54
ESEMPIO 61
In una sfera di raggio R viene ricavata una cavità avente forma di cono rotondo di vertice O, asse
z e semiapertura t.
Trovare il volume della parte di sfera rimanente.
Conviene rappresentare uno spaccato del solido con il piano yz.
Essendo il solido in questione a simmetria sferica,conviene introdurre le coordinate polari nellospazio:
L’integrale di volume diventa:
.cos3
4sinsin
3222
0 0
t Rd d d d d d dzdydxV t
t
R
T T
π ρ ρ θ θ ϕ θ ϕ ρ θ ρ π π
==== ∫ ∫ ∫ ∫∫∫ ∫∫∫ −
ESEMPIO 62
Determinare il volume del solido racchiuso dalla superficie:
14
4
2
2
2
2
=++c
z
b
y
a
x
Con un opportuno artificio si possono rendere le cose molto facili.Basta effettuare un cambio di
variabili:
,
=
=
=
wc z
bv y
au x
w
abc J
2=
L’equazione della superficie diventa:
u2
+ v2
+ w2
= 1
e il solido si trasforma in una sfera di raggio 1. L’integrale di volume diventa:
=
=
=
θ ρ
θ ϕ ρ
θ ϕ ρ
cos
sinsin
sincos
z
y
x
.2 ∫∫∫ ∫∫∫ =
T T w
dwdvduabcdzdydx

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 147/391
55
Passando alle coordinate polari dello spazio:
=
=
=
θ ρ
ϕ θ ρ
ϕ θ ρ
cos
sinsin
cossin
w
v
u
si ha:
abcd d d abc
w
dwdvduabcV
T
π ρ ρ ρ θ θ
θ ϕ
π π
5
8
cos
sin
22
2
0 0
1
0
=== ∫ ∫ ∫ ∫∫∫
Nella sostituzione w z = non si tiene conto che z può anche assumere valori negativi,per cui
l’integrale θ θ
θ π
d ∫ 0 cos
sinassumerebbe valori immaginari per θ=π.
Per ovviare a questo inconveniente basterà calcolare l’integrale fra 0 e2
π e moltiplicare per 2 il
risultato ottenuto. Avremo:
θ θ
θ θ
θ
θ π
π
d d ∫ ∫ =2
00 cos
sin2
cos
sin.
ESEMPIO 63
Determinare il volume del solido compreso tra le superfici di equazioni:
Il solido è racchiuso tra 2 coni aventi vertice nell’origine degli assi e da una sfera con centronell’origine;sarà meglio dare una sezione della figura col piano yz.
≥
=++
+=
+=
0
)(3
)(3
1
2222
222
222
z
r z y x
y x z
y x z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 148/391
56
Conviene passare alle coordinate polari dello spazio:
=
=
=
θ ρ
ϕ θ ρ
ϕ θ ρ
cos
sinsin
cossin
z
y
x
Si ottiene quindi:
)13(3
1sinsin
3222
0
3
6
0
−==== ∫ ∫ ∫ ∫∫∫ ∫∫∫ r d d d d d d dzdydxV r
T T
π ρ ρ θ θ ϕ θ ϕ ρ θ ρ π
π
π
ESEMPIO 64
Calcolare il volume del solido limitato dalle superfici di equazioni:
=
+=
0
22
z
y x z,
=
=2
2
y x
x y
Si tratta dell’intersezione tra due cilindri parabolici con le generatrici parallele all’asse z ,
limitata dal piano z = 0 e dal paraboloide rotondo z = 22 y x + .
Questo solido si proietta sul piano xy nella regione limitata dalle due parabole 2 x y = e 2
y x =
(vedi figura).Calcoliamo l’ integrale triplo per “fili” :
∫∫∫ ∫∫ ∫ +
===T
y x
dzdydxdzdydxV
22
0
Risolviamo l’ integrale doppio per verticali :
( )35
6
3
1
3
11
02
1
0
64222 =
−−+=+= ∫ ∫ ∫ dx x x x x x xdy y xdxV
x
x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 149/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 150/391
58
ESEMPIO 66
Calcolare l’ integrale:
( ) dzdydx y xT
∫∫∫ + 22
dove T è il campo delimitato da:
=
=++
a y
a z y x2222
4
Passiamo in coordinate polari:
==
=
θ ρ ϕ θ ρ
ϕ θ ρ
cossinsin
cossin
z y
x
L’ integrale proposto diventa:
( )5
22222
35
27sincos
ad d d dzdydx y x
T T
==+ ∫∫∫ ∫∫∫ θ ϕ ρ θ ρ ϕ ρ
ESEMPIO 67
Calcolare il volume del solido compreso nel primo ottante fra i cilindri:
Il volume richiesto è:
=+
−=
1
1
22
2
y x
y z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 151/391
59
( )∫∫ ∫∫ ∫ ∫∫ −
−===
21
0
21
y
dydx ydzdydxdzdydxV
Conviene passare alle coordinate polari:
( ) ( ) π θ ρ ρ θ ρ ∫∫ ∫∫ =−=−=16
3sin11
222d d dydx yV
ESEMPIO 68
Trovare il momento d’ inerzia, rispetto all’asse z, del solido compreso tra le sfere di raggi a e b
(a < b), con centro nell’ origine, considerando la parte al di sopra del piano xy.
Il momento d’ inerzia è dato da:
( )∫∫∫ +=T
dzdydx y x I 22
Trattandosi di un solido delimitato da superficie sferiche, ci conviene operare in coordinate polari,
ponendo:
=
=
=
θ ρ
θ ϕ ρ
θ ϕ ρ
cos
cossin
sincos
z
Y
x
, θ ϕ ρ θ ρ d d d J sin2=
La funzione integrando si modifica in:
( ) θ ρ ϕ θ ϕ θ ρ 222222222sinsinsincossin =+=+ y x
e, quindi:
∫∫∫ ==T
d d d L15
8sin
34 π θ ϕ ρ θ ρ
Ipotizziamo che il dominio di integrazione T è specificato dalle disuguaglianze 21 x x x ≤≤ ,
),()( 21 x y y x y ≤≤ ),(),( 21 y x z z y x z ≤≤ , dove ),(),,(),(),( 2121 y x z y x z x y x y sono funzioni
continue. Allora l’integrale triplo della funzione ),,( z y x f estesa al dominio T può essere calcolato
con la formula
∫∫∫ ∫ ∫ ∫ =T
y x z
y x z
x y
x y
x
x
dz z y x f dydxdxdydz z y x f
),(
),(
)(
)(
2
1
2
1
2
1
.),,(),,(

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 152/391
60
Se, nel calcolo di un integrale triplo, è necessario passare dalle variabili x,y,z alle nuove variabili
u,v,w connesse con x,y,z dalle relazioni ),,( wvu x x = , ),,(),,,( wvu z zwvu y y == , dove le funzioni
),,( wvu x x = , ),,(),,,( wvu z zwvu y y == , continue insieme alle loro derivate prime parziali,
stabiliscono una corrispondenza biunivoca, continua in entrambe le direzioni, tra i punti del
dominio T dello spazio Oxyz e i punti dello stesso dominio T ′ dello spazio Ouvw , e il Jacobiano J
del dominio T non si annulla
0≠
∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂∂
∂
∂
∂
∂
∂
=
w
z
v
z
u
zw
y
v
y
u
yw
x
v
x
u
x
J ,
allora si usa la formula [ ] .),,(),,,(),,,(),,( dudvdw J wvu zwvu ywvu x f dxdydz z y x f T T
⋅= ∫∫∫ ∫∫∫
In particolare, passando dalle coordinate cartesiane x,y,z alle coordinate cilindriche z,,ϕ ρ
(Fig.15), connesse con x,y,z dalle relazioni
),,20,0(,sin,cos +∞≤≤−∞≤≤+∞≤≤=== z z z y x π ϕ ρ ϕ ρ ϕ ρ
la trasformazione jacobiana ρ B J = , e la formula di trasformazione di un integrale triplo in
coordinate cilindriche ha la forma
∫∫∫ T
dxdydz z y x f ),,( = ∫∫∫ T
dzd d z f .),sin,cos( ϕ ρ ρ ϕ ρ ϕ ρ
Passando dalle coordinate cartesiane x,y,z alle coordinate sferiche ϑ ϕ ρ ,, (Fig.16), connesse conx,y,z dalle relazioni
),0,20,0(cos,sinsin,cossin π ϑ π ϕ ρ ϑ ρ ϕ ϑ ρ ϕ ϑ ρ ≤≤≤≤+∞≤≤=== z y x
La trasformazione jacobiana ϑ ρ sin2= J , e la formula di trasformazione di un integrale triplo in
coordinate sferiche ha la forma
∫∫∫ T
dxdydz z y x f ),,( = ∫∫∫ T
d d d f ϑ ϕ ρ ϑ ρ ϑ ρ ϕ ϑ ρ ϕ ϑ ρ sin)cos,sinsin,cossin(2
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 153/391
61
ESEMPIO 69
Calcolare ,∫∫∫ =T
zdxdydz I dove il dominio T è specificato dalle disuguaglianze
.10,2,21022
y x z x y x x −−≤≤≤≤≤≤
Soluzione
∫ ∫ ∫ ∫ ∫ ∫ ∫ ∫ =
−−=−−===
−−−−
x
x
x
x
y x x
x
y x x
x
dx y yx ydy y xdxdy zdx zdzdydx I
2 21
0
2
3222
21
0
1
0
21
0
2
21
0
221
03
1
2
1)1(
2
1
2
122
22
∫ ∫ =
⋅−=
−=
−=++−−−=
21
0
21
0
21
0
4233333.
192
7
16
1
6
5
8
1
2
1
6
5
2
1
2
1
3
10
2
1)
3
1
3
822(
2
1 x xdx x xdx x x x x x x
ESEMPIO 70
Calcolare ∫∫∫ =T
dxdydz x I 2
, se T è la sfera .2222
R z y x ≤++
Soluzione
Passiamo alle coordinate sferiche. Nel dominio T le coordinate ϑ ϕ ρ ,, varia come segue:
π ϑ π ϕ ρ ≤≤≤≤≤≤ 0,20,0 R . Di conseguenza,
∫∫∫ ∫ ∫ ∫ ∫ =
+⋅
===T
R
d Rd d d d d d I
π π π π
ϕ ϕ ϑ ϑ ρ ρ ϕ ϕ ϑ ϑ ϑ ϕ ρ ϕ ϑ ρ 0
2
0 0 0
2
0
3
5
423234 2sin21sin
25cossincossin
∫ =−=π
π ϑ ϑ
π
0
52
5
.15
4)(cos)1(cos
5
Rd
R
ESEMPIO 71
Calcolare ,22
∫∫∫ +T
dxdydz y x z se il dominio T è limitato dal cilindro x y x 222 =+ e dai piani
a z z y === ,0,0 .
Soluzione
Passiamo alle coordinate cilindriche. In queste coordinate l’equazione del cilindro assume la forma
,cos2sincos2222 ϕ ρ ϕ ρ ϕ ρ =+ o ,cos2)sin(cos
222 ϕ ρ ϕ ϕ ρ =+ cioè ϕ ρ cos2= .
Di conseguenza nel dominio T le coordinate z,,ϕ ρ variano come segue:
.0,20,cos20 a z ≤≤≤≤≤≤ π ϕ ϕ ρ Pertanto

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 154/391
62
∫ =
−=⋅−=
2
0
2
2
0
3222.
9
8sin
3
1sin
3
4)(sin)sin1(
3
4π π
ϕ ϕ ϕ ϕ aad a
∫ ∫ ∫ ∫ ∫ ∫∫∫ ∫ ∫∫∫ ====⋅=+ϕ π ϕ π π
ϕ ϕ ρ ρ ϕ ρ ρ ϕ ϕ ρ ρ ρ cos2
0 0
2
0
cos2
0
2
0
32222
2
0
22cos
3
4
2
1a
T T
d ad d a zdzd d dzd d zdxdydz y x z
ESEMPIO 72
Calcolare ,)(22
∫∫∫ +T
dxdydz y x se il dominio T è la metà superiore della sfera .2222
r z y x ≤++
Soluzione
Usiamo le coordinate sferiche; le nuove variabili variano nel seguente modo:
20,20,0 π ϑ π ϕ ρ ≤≤≤≤≤≤ r . Pertanto si ha:
∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫∫∫ =−===+T
r r
T
d d d d d d d d dxdydz y x0
2
0
2
0 0
2
0
24343422)(cos)1(cos2sinsin)(
π π π
ϑ ϑ ρ ρ π ϕ ϑ ϑ ρ ρ ϑ ϕ ρ ϑ ρ
∫ =
−=
r
r d 0
5
2
0
34.
15
4coscos
3
12 π ϑ ϑ ρ ρ π
π
APPLICAZIONI DEGLI INTEGRALI TRIPLI
Il volume di un corpo occupante il dominio T è determinato dalla formula
∫∫∫ =T
dxdydzV .
Se la densità del corpo è una quantità variabile, cioè ),,,( z y xγ γ = allora la massa del corpo,
occupante il dominio T, è determinata dalla formula
∫∫∫ =T
dxdydz z y x M .),,(γ
Le coordinate del centro di gravità del corpo sono specificate dalle formule
∫∫∫ ∫∫∫ ∫∫∫ ===T T T
zdxdydz M
z ydxdydz M
y xdxdydz M
x .1
,1
,1
γ γ γ
Per 1=γ , abbiamo

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 155/391
63
∫∫∫ ∫∫∫ ∫∫∫ ===T T T
zdxdydzV
z ydxdydzV
y xdxdydzV
x1
,1
,1
( z y x ,, sono le coordinate del centro di gravità).
I momenti di inerzia (geometrici) rispetto agli assi coordinati sono uguali, rispettivamente, a
∫∫∫ ∫∫∫ ∫∫∫ +=+=+=T T T
z y x dxdydz y x I dxdydz x z I dxdydz z y I .)(,)(,)(222222
ESEMPIO 73
Calcolare il volume del corpo limitato dalle superfici
h z y xhz =+= ,22 (Fig.17).
Soluzione
Il corpo dato è limitato sotto dal paraboloide ,)(22
h y x z += e sopra dal piano h z = , e si proietta
sul cerchio222
h y x ≤+ del piano xOy .
Usiamo le coordinate cilindriche tramite le quali l’equazione del paraboloide assume la forma
h z2 ρ = . Il volume del corpo è uguale a
∫∫∫ ∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫ =
−=
−====
T T
h h hh
h
d h
hd h
hd dzd d dzd d dxdydzV 0
2
0 0
2
0 0
4222
0422
π π
ρ
π
ϕ ρ ρ ρ ρ ρ ϕ ρ ρ ϕ ϕ ρ ρ
.242
32
0
33h
d hh π
ϕ π
∫ =
−=
ESEMPIO 74
Trovare le coordinate del centro di gravità del corpo prismatico limitato dai piani
.32,3,1,0,0 =+==== z x y y z x
Soluzione
Troviamo il volume del corpo in questione:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 156/391
64
∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫ =
−=−=
−===
−
T
x
x xdx xdy x
dxdzdydxdxdydzV
3
0
3
1
3
0
3
0
2
2)3(
0
3
1
3
0
.2
9
2
13)3(
2
3
Allora abbiamo:
∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫ =
−=−=
−===
−
T
x
x xdx x xdy x
xdxdzdy xdx xdxdydz x ;13
1
2
3
9
2)3(
9
2
2
3
9
2
9
2
9
23
0
3
0
32
3
0
3
1
2)3(
0
3
1
3
0
∫∫∫ ∫ ∫ ∫ ∫ ∫ ∫ =
−=−=−===
−
T
x x
xdx xdy x ydxdz ydydx ydxdydz y
3
1
3
1
3
0
23
0
3
0
2)3(
0
3
0
;22
39
4)3(
9
4)3(
9
1
9
2
9
2
∫ ∫ ∫ ∫ ∫ ∫∫∫ −
=
−−=−===
2)3(
0
3
0
33
1
3
0
23
0
3
0
.21
3)3(
181
8)3(
92
92
92
x
T
xdydx x zdzdydx zdxdydz z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 157/391
1
Funzioni a valori vettoriali
Definizione 1. Un’ applicazione definita su un insieme di numeri reali il cui codominio è un
insieme di nℜ è per definizione una funzione a valori vettoriali.
Se F denota una funzione a valori vettoriali allora ( )t F è un vettore che ha n componenti e si scrive
( ) ( ) ( ) ( )( )t f t f t f t f n,...,, 21= .
Così ogni funzione F a valori vettoriali dà origine a n funzioni n f f f ,...,, 21 a valori reali i cui
valori
nel punto t sono le componenti di ( )t F .
Nel seguito il dominio di F sarà un intervallo che può essere anche infinito.
Definizione 2. Sia F una funzione a valori vettoriali definita su un intervallo I. Si dice che F è
continua in I a∈ e si scrive
( ) ( )aF t F at
=→
lim ovvero ( ) ( ) 0lim =−→
aF t F at
se per ogni 0>ε è possibile trovare un numero positivo ( )a,ε δ δ = tale che
( ) ( ) ε <− aF t F ogni qualvolta che I t ∈ e δ <− at
dove denota la norma euclidea in nℜ :
22
1 ... nuuu ++= ( )nuuu ,...,1=
Pertanto
( ) ( )aF t F at
=→
lim se e solo se ( ) ( ) 0lim =−→
aF t F at
Non è difficile dimostrare che
( ) ( )aF t F at
=→
lim se e solo se ( ) ( )a f t f ii
at
=→
lim ni ,...,1=
Si dice che F è continua in I quando F è continua in ogni punto di I. Da quanto precede: una
funzione a valori vettoriali è continua se e solo se è continua ogni sua componente.
Analogamente: una funzione a valori vettoriali F è derivabile o integrabile su un intervallo I se ogni
componente di F ha la corrispondente proprietà sullo stesso intervallo.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 158/391
2
Se F è derivabile per t = a allora
( )( ) ( )
at
aF t F aF
at −
−=′
→lim se e solo se
( ) ( )( ) 0lim =′−
−
−
→aF
at
aF t F
at
e
( ) ( )( ) 0lim =′−
−
−
→aF
at
aF t F
at se e solo se
( ) ( )( )a f
at
a f t f i
i
at ′=
−
−
→lim ni ,...,2,1=
Ovviamente
( ) ( )( )
( ) ( )h
aF haF aF
at
aF t F
hat
−+=′=
−
−
→→ 0limlim
Definizione 3. Un’ applicazione F a valori vettoriali definita e continua in un intervallo chiuso e
limitato [a,b] è per definizione una curva o un arco di curva.
L’immagine di una curva è detta sostegno di F oppure la traiettoria descritta da F da F(a) a F(b); le
equazioni
( )t f x 11 = , ( )t f x 22 = , ( )t f xnn = [ ]bat ,∈
sono dette le equazioni parametriche della curva.
Ovviamente lungo una curva γ sono possibili due orientazioni. L’equazione della curva ( )t F F =
determina una delle due possibili orientazioni: quella corrispondente alla direzione lungo la quale il
parametro è crescente.In altre parole l’equazione ( )t F F = [ ]bat ,∈ induce sulla curva l’orientazione dal punto ( )aF al
punto ( )bF .
Se F ha derivata F ′ continua in ( )ba, e se 0)(' ≠t F in ( )ba, allora la curva è detta liscia o
regolare.
Una curva F si dice regolare a tratti se esiste una suddivisione finita di [a,b]:
bt t t t a n =<<<<= ....210
tale che F risulti regolare in ogni intervallo aperto
( ) ( ) ( )nn
t t t t t t ,,...,,,, 12110 −
Se risulta ( ) ( )bF aF = la curva si dice chiusa;
Se risulta ( ) ( )21 t F t F ≠ per ogni ( )bat t ,, 21 ∈ con 21 t t ≠ allora la curva si dice semplice.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 159/391
3
Curve piane. Una funzione F a valori vettoriali, definita e continua su un intervallo [ ]ba, il cui
condominio è un insieme di2ℜ è per definizione una curva piana. Se
( ) ( ) ( )( )t f t f t F 21 ,= [ ]bat ,∈
allora le equazioni
( )t f x 1= , ( )t f y 2= [ ]bat ,∈
sono dette equazioni parametriche della curva e la variabile t è detta parametro della curva.
Generalmente le equazioni parametriche di una curva piana vengono indicate con
( )t x x = , ( )t y y = [ ]bat ,∈
e la corrispondente funzione vettoriale con il vettore
r = r(t) = x(t)i + y(t) j [ ]bat ,∈
detto vettore posizione in quanto:
il grafico di una curva γ può essere pensato come la traiettoria descritta da un punto materiale in
movimento la cui posizione all’istante t è individuata dal vettore r ( )t . Nell’ intervallo di tempo da t
a t t ∆+ la particella si muove dalla posizione r ( )t alla posizione r ( )t t ∆+ e
( )
( )
( )t
t t
t
t
∆
−∆+=
∆
∆ rrr
è la sua velocità media. Se quando 0→∆t la velocità media ammette limite allora si dice che r ( )t
è differenziabile e tale limite è detto velocità (istantanea) della particella al tempo t . Il vettore
velocità è indicato con v ( )t . La direzione di questo vettore velocità è tangente alla curva γ nel
punto r ( )t e punta nella direzione del moto. Il modulo (la norma euclidea) del vettore velocità:
( ) ( )tv=t v , è chiamato velocità scalare. Il vettore che si ottiene derivando il vettore velocità è
detto vettore accelerazione e si indica con ( )t a :
( )( )
dt
t d t
va =

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 160/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 161/391
5
Se )( xt t = è la funzione inversa della funzione ( )t x x = , nel suddetto intorno risulta
[ ] )()( x f xt y y ==
Da cui usando il teorema di derivazione composta, si ottiene
'
'
x
y
dt dxdt
dy
dx
dt
dt
dy
dx
dy===
/
1
In altre parole, la traiettoria descritta dalla curva α, (nel suddetto intorno di c), è il grafico di una
funzione di classe C 1
.
Se poi la curva è di classe C 2
risulta
32
2
)(
1'
''''''
''
'
x
x y x y
x x
y
dt
d
dx
dt
dx
dy
dt
d
dx
yd −=
=
=
2. Cicloide
La curva F = F(t) di equazioni parametriche
)cos1()),sin(( t a yt t a x −=−= [ ] 0,2,0 >∈ at π
è per definizione un arco di cicloide. Essendo
( ) 02
sin2 ≠=′t
at F in ( )π 2,0
segue che F è una curva regolare in ( )π 2,0 .
Da
( ) ( ) 0cos1 >−=′ t at x in ( )π 2,0
segue che la funzione ( )t x x = è invertibile in ( )π 2,0 . Se ( ) xt t = [ ]a x π 2,0∈ è la corrispondente
inversa, allora la traiettoria descritta da F è il grafico della funzione
]2,0[)(cos1()]([)( a x xt a xt yt y y π ∈−===
la cui derivata è
( ))2,0(
cos1
sin
)(a x
t
t
t x
t y
dx
dt
dt
dy
dx
dyπ ∈
−=
′
′==

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 162/391
6
Agli estremi dell’intervallo [ ]aπ 2,0 risulta
−−
→→
−−
→→
→≅−⇒→−∞=−
=
→⇒→+∞=−
=
−
++
02
)cos(12cos1
sinlimlim
0)sin(2cos1
sinlimlim
2
22
00
t t t t
t dxdy
t t t
t
dx
dy
xa x
x x
π
π
π π
Per rappresentare graficamente la funzione ( ) x f x = si osservi che risulta
( N.B. aa xt a xt π π π π π π 2:2:;0:0: →⇔→→⇔→ )
( ) 0>′ x y in ( )π a,0 ; ( ) 0<′ x y in ( )π π aa 2,
E
0)cos1(
11
)( 222
2
<−
−=−
=
=
t a x x
x y x y
dx
dt
dx
dy
dt
d
dx
yd ''
''''''
in ( )aπ 2,0 .
Pertanto il grafico dell’arco di cicloide è
πa 2πa

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 163/391
7
2. Asteroide
La curva φ di equazioni parametriche
[ ]π 2,0sin,cos 33 ∈== t t a yt a x
dove 0>a , è per definizione un asteroide.
Essendo ( ) ( ) ( )0,20 a== π ϕ ϕ la curva è chiusa; essendo ( )a,02
=
π ϕ segue che φ descrive la
corrispondente traiettoria nel verso antiorario.
Da
( ) π π π π
ϕ 2,2
3,,
2,00cossin3 ===′ t t t at
segue che φ è una curva regolare a tratti: φ è regolare negli intervalli
π π π π π
π π 2,
2
3,
2
3,,,
2,
2,0
.
Osservato che
( )
<−=′
2,00cossin3 2 π
int t at x
segue che la funzione t a x3
cos= è invertibile in
2,0
π .
Sia ( ) xt t = la funzione inversa di t a x3
cos= , definita ovviamente in [ ]a,0 ,
allora
[ ] [ ]a x xt a x y y ,0)(sin)( 3 ∈==
è la funzione il cui grafico coincide con la traiettoria descritta da ϕ quando t varia da 0 a 2
π .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 164/391
8
Essendo
∈−=
′
′==
2,0tan
π t t
x
y
dx
dt
dt
dy
dx
dy
segue che ( ) x y y = è decrescente in ( )a,0 .
Inoltre da
0sincos3
1)( 432
2
>=−=
=
t t a x x y x y
dxdt
dxdy
dt d
dx yd
'
''''''
segue che la funzione è convessa.
Infine da
( )
( ) 0tanlimlim
tanlimlim
0
2
0
=−=′
−∞=−=′
+−
−+
→→
→→
t x y
t x y
t a x
t x π
si evince che il grafico della funzione ( ) x y in [ ]a,0 ovvero della curva ( )t ϕ in
2,0
π è quello in
figura
Per dedurre l’equazione cartesiana della curva si osservi che da
t a
yt
a
xsincos
3
1
3
1
=
=
Segue323232 a y x =+
da cui si evince che la curva è simmetrica rispetto agli cartesiani. Pertanto il suo grafico è

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 165/391
9
Curve sghembe. Una funzione F a valori vettoriali, definita e continua su un intervallo [ ]ba, il cui
codominio è un insieme dello spazio tridimensionale3ℜ è per definizione una curva sghemba. Se
( ) ( ) ( ) ( )( ) [ ]bat t f t f t f t F ,,, 321 ∈=
allora le equazioni
[ ]bat t f zt f yt f x ,)(,)(,)( 321 ∈===
sono dette equazioni parametriche della curva e la variabile t è detta parametro della curva.
Generalmente le equazioni parametriche di una curva sghemba vengono indicate con
[ ]bat t z zt y yt x x ,)(,)(,)( ∈===
e la corrispondente funzione vettoriale con il vettore
[ ]bat t zt yt xt ,)()()()( ∈++== k jirr
detto vettore posizione.
Curve equivalenti e cambiamento di parametro
Sia γ una curva specificata dalla funzione vettoriale
( ) [ ]bat t F F ,∈= .
Sia t = u (r) una funzione a valori reali definita su un intervallo [ ]d c, con derivata u′ sempre
diversa da zero e tale che il codominio di u sia [ ]ba, . In altre parole:
[ ] [ ] ( )τ τ ut d cbat =∈∃∈∀ :,!,
Allora la funzione vettoriale definita dall’equazione
( ) ( )[ ] [ ]d cuF G ,∈= τ τ τ
ha lo stesso grafico di F. Due funzioni vettoriali F e G che si trovano tra loro in questa relazione si
dicono equivalenti. Si dice altresì che la funzione ( )τ ut = definisce un cambiamento di parametro.
Si osservi che:
1. se ( )τ u′ è sempre positiva su [ ]d c, allora F e G percorrono γ nella stessa direzione;
2.
se ( )τ u′ è sempre negativa su [ ]d c, allora F e G percorrono γ in direzioni opposte.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 166/391
10
In altre parole il cambiamento di parametro ( )τ ut = conserva l’orientamento nel primo caso
( )( )0>′ τ u , e lo inverte nel secondo caso ( )( )0<′ τ u .
Poiché lungo una curva sono possibili due orientazioni ne consegue che qualunque
parametrizzazione di una curva determina una delle due possibili orientazioni:quella corrispondente
alla direzione lungo la quale il parametro è crescente.
Esempio. L’equazione cartesiana del segmento di estremi (a, b) e (c, d) :
( ) [ ]d cccd
abbt ,∈−
−
−−= τ τ
costituisce un esempio di cambiamento di parametro che inverte i verso della curvaγ .
Infatti quando τ varia da c a d ( )d c →:τ il parametro t varia da b ad a ( )ab →:τ .
Lunghezza d'arco ( ascissa curvilinea )
Sia γ una curva specificata dall’equazione vettoriale
( ) ( ) ( ) ( ) [ ]bat t zt yt xt ,∈++== k jirr
Se ( )t r ha derivata ( )t v continua e non nulla in [ ]ba, , ovvero se la curva γ è liscia ( regolare )
allora la lunghezza della curva γ è data da
[ ] ( ) ( )∫∫ ==b
a
b
a
dt t dt t L vvγ
ovvero
( ) ( ) ( ) ( )∫ ++=b
a
dt z y x L222
&&&γ
In particolare la lunghezza di una curva piana di equazione ( ) x f y = dove f è una funzione di classe
[ ]( )baC ,1 , è data da
( )[ ]∫ ′+b
a
dx x f 2
1
Infatti usando x come parametro, risulta
( ) ( ) [ ]ba x x f x x ,∈+= jir
Se ( )t s indica la lunghezza di quella parte di γ che corrisponde ai valori del parametro in [ ]t a, ,
dove bt a ≤≤ , allora la funzione
( ) ( )∫=t
a
d vt s τ τ detta lunghezza d’arco o ascissa curvilinea, è derivabile e
( ) ( ) ( ) ( ) dt z y xdt dt
d dt t vds
222 ′+′+′===r
è detto elemento di lunghezza d’arco.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 167/391
11
Ne consegue che:
[ ] ∫=γ
γ ds L
Osservazione
Sia ( ) [ ]bat t F F ,∈= una curva regolare a tratti e sia
bt t t a n =<<<= ...10
una partizione di [ ]ba, tale che la restrizione di F su [ ] nit t ii ,...,1,1 =− , sia un arco di curva
regolare. Indichiamo con γ la traiettoria descritta da α su [ ]ba, e con iγ quella corrispondente
all’intervallo [ ] nit t ii ,...,1,1 =− .
Allora
∑ ∫∫=
=n
ii
dsds1 γ γ
poiché l'integrale (come sarà dimostrato nel paragrafo successivo)
nids
i
,...,2,1=∫γ
è indipendente dalla rappresentazione parametrica che descrive iγ ne consegue che per il calcolo
degli integrali precedenti possiamo considerare per ogni iγ la rappresentazione parametrica più
conveniente.
Un modo naturale di parametrizzare una curva liscia γ è quello di considerare come parametro la
lunghezza d’arco s misurata da qualche punto particolare di γ detto punto iniziale. Più
precisamente: supponiamo che una curva regolare sia specificata in funzione di un parametro
arbitrario t dall’equazione ( ) [ ]bat t ,∈= rr . Supponiamo inoltre che la lunghezza d’arco abbia
come punto iniziale ( ) [ ]bat t P ,000 ∈= r . Allora se la lunghezza misurata lungo la curva γ da 0P al
punto generico ( )τ r=P , data da
( ) ( ) τ τ τ τ
d vd d d t ss
t
t
t
t ∫∫ ===
00
r
può essere calcolata esplicitamente e se l’equazione ( )t ss = può essere risolta esplicitamente
rispetto a t, ( )st t = , allora la curva può essere riparametrizzata mediante la lunghezza d’arco
sostituendo ( )st t = nella parametrizzazione originale ottenendo
( )[ ] ( )sst ** rrr ==
dove s varia in un intervallo di lunghezza L essendo L la lunghezza della curva considerata.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 168/391
12
Più precisamente [ ]21, L Ls∈ dove
( ) ( ) τ τ τ τ d v Ld v L
t
t
t
a
∫∫ ==
0
0
21
In particolare se il punto iniziale coincide con il primo estremo dell’intervallo in cui varia t cioè se èat =0 allora [ ] Ls ,0∈ . Da
( ) ( )∫==t
t
d vt ss
0
τ τ
segue che qualunque sia il parametro risulta
( )t vdt
ds=
pertanto se il parametro è la lunghezza d’arco s, risulta ( ) 1=sv .
In altre parole:
una curva ( ) ( )[ ]st s rrr == ** parametrizzata in funzione della lunghezza d'arco s è percorsa con
velocità unitaria. Infatti
( ) ( )1
1*1*==⇒==
t vdt
d
ds
d
t vdt
d
ds
dt
dt
d
ds
d rrrrr
Esempi.
Calcolare la lunghezza dell’arco delle seguenti curve:
1. arco di circonferenza:
( ) ( ) ϑ ≤≤== t t a yt a x 0sin,cos
2. arco di cicloide:
( )( ) ( )( ) π 20cos1,sin ≤≤−=−= t t a yt t a x
3. primo anello dell'elica circolare:
( ) ( ) π 20,sin,cos ≤≤=== t bt zt a yt a x
4. dell'asteroide
( ) ( ) π 20,sin,cos 33 ≤≤== t t a yt a x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 169/391
13
Abbiamo
i )
ϑ ϑ ϑ
ad a L == ∫0
da cui: la lunghezza s di un arco di circonferenza di raggio ρ con angolo al centro ϑ è dato
da ρϑ =s
ii )
adt t
adt t
a L 82
sin22
sin2
2
0
2
0
=
=
= ∫ ∫
π π
dove si è tenuto conto del fatto che π ≤≤2
0t
quando π 20 ≤≤ t .
iii )
222
0
22 2 badt ba L +=+= ∫ π π
iv ) essendo
( ) ( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( ) ( ) ( )( )t t t t a
t t at t y xds
22222
2222222
sincoscossin9
sincos3cossin3
+=
=+=′+′=
segue
( ) ( ) a
a
dt t t a L 62
3
4cossin3
2
0=
== ∫
π
Per calcolare la lunghezza di una curva γ specificata dall’equazione polare ( ) 21, ϑ ϑ ϑ ϑ ρ ρ ≤≤=
osservato che le equazioni parametriche della curva γ rispetto al parametro sono:
( ) ( ) ( ) ( ) 21sincos ϑ ϑ ϑ ϑ ϑ ρ ϑ ϑ ρ ≤≤== y x
derivando le equazioni precedenti rispetto a ϑ , si ottiene:
( ) ( )
( ) ( ) ϑ ϑ ρ ϑ ϑ ρ ϑ
ϑ ϑ ρ ϑ ϑ ρ ϑ
cossin
sincos
+′=
−′=
d
dy
d
dx
da cui
( )22
22
ρ ρ
ϑ ϑ
′+=
+
d
dy
d
dxdove ( )ϑ ρ ρ = e ( )ϑ ρ ρ ′=′
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 170/391
14
Quindi
( )∫ ′+=π
ϑ ρ ρ 2
0
22d L .
Esempio
Calcolare la lunghezza della cardioide ( ) π ϑ ϑ ρ 20,sin1 ≤≤+= a
Essendo ϑ ρ cosa=′ , abbiamo
∫∫−
+=+=
2
2
2
0
sin122sin22
π
π
π
ϑ ϑ ϑ ϑ d ad a L
da cui, essendo
∫∫−−
+=+
2
2
2
2
sin122sin22
π
π
π
π
ϑ ϑ ϑ ϑ d ad
Segue che è L = 8a.
Esempio
Riparametrizzare l’arco di cicloide γ
( ) ( ) π 20cos1sin ≤≤−=−= t t a yt t a x
rispetto al parametro d’arco s con punto iniziale ( )0,0 .
A tale scopo calcoliamo
( ) ( ) ∫∫ ===t t
d ad vt ss00
2sin2 τ τ τ τ
da cui
2cos44
t aas −= da cui
a
st
41
2cos −=
Ora riscriviamo l’equazione precedente rispetto a t.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 171/391
15
Osservato che π 20 ≤≤ t implica π ≤≤ 20 t , abbiamo
−=
a
sar t
41cos2 ovviamente π ≤
−≤
a
sar
41cos0
Si osservi che da as 80 ≤≤ segue che 14
11 ≤−≤−as .
Essendo2
2
41
2cos
2
cos1
−==
−
a
st t
da quando precede, si evince
i ) 14
1212
cos2cos 2 −
−=−=
a
st t .
ii )
−
−−=
−==
a
s
a
st t t t t
41
4112
2cos
2cos12
2cos
2sin2sin
21221
2
quindi
asa
sa
a
sa y
a
s
a
sa
a
sar a x
804
11214
121
41
4112
41cos2
22
212
≤≤
−−=
+
−−=
−
−−−
−=
Oppure da:
( )
−==
a
sar st t
41cos2
segue che
14
124
114
1
41cossin
41coscos
41cos2coscos
41
4112
41
41coscos12
41coscos
41cossin2
41cos2sinsin
222
22
2
2
−
−=
−−−
−=
=
−−
−=
−=
−
−−=
−
−−=
=
−
−=
−=
a
s
a
s
a
s
a
sar
a
sar
a
sar t
a
s
a
s
a
s
a
sar
a
sar
a
sar
a
sar t

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 172/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 173/391
17
Integrali curvilinei per campi scalari
Sia ( )t F F = una curva regolare definita in [ ]ba, e sia f un campo scalare definito e limitato in un
aperto Ω dello spazio tridimensionale che contiene il grafico γ di F.
L’integrale curvilineo di f lungo γ è definito dalla uguaglianza
( )[ ] ( )( )dt t F t F f ds f b
a
′= ∫∫γ
ogni qualvolta che l’integrale indicato a destra esiste, per esempio se f è continua su γ .
Sia ( ) [ ]d cGG ,∈= τ τ una curva equivalente ad F , allora
( )[ ] ( )( ) ( ) ( )( )∫∫ ′=′
b
a
d
c
dt t F t f d GG f τ τ τ
ovvero: l’integrale curvilineo di un campo scalare lungo γ è invariante rispetto alla
rappresentazione parametrica che descrive γ (e quindi rispetto al verso di percorrenza).
Per dimostrare ciò, incominciamo ad osservare che se ( )τ ut = è un cambiamento di parametro tale
che ( ) ( )[ ]t uF G =τ
Allora
( )[ ] ( )( ) ( )[ ]( ) ( )[ ]( ) ( )( )
( )
∫ ∫−
−
′′=′
b
a
bu
au
d uuF uF f dt t F t F f
1
1
τ τ τ τ
Per giustificare l’ultima uguaglianza precedente si osservi che:
i. se ( ) 0<′ r u allora ( ) ( ) ( ) ( )r ur ucbud au 111 ,, −===′−−
e
( ) ( )[ ] ( ) ( )[ ] ( )τ τ τ τ τ uuF uuF G ′′−=′′=′
ii. se ( ) 0>′ r u allora ( ) ( ) ( ) ( )r ur ud bucau 111 ,, ==′=− e
( ) ( )[ ] ( ) ( )[ ] ( )τ τ τ τ τ uuF uuF G ′=′′=′
Osservazione
Sia ( ) [ ]bat t F F ,∈= una curva regolare a tratti e sia
bt t t a n =<<<= ...10
una partizione di [ ]ba, tale che la restrizione di F su [ ] nit t ii ,...,1,1 =−
, sia un arco di curva
regolare.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 174/391
18
Indichiamo con γ la traiettoria descritta da F su [ ]ba, e con iγ quella corrispondente all’intervallo
[ ]iit t ,1−
. Allora
∑ ∫∫=
=
n
ii
ds f ds f 1 γ γ
poiché
∫ =
i
nids f γ
,...,2,1
è indipendente dalla rappresentazione parametrica che descrive iγ ne consegue che per il calcolo
degli integrali precedenti possiamo considerare per ogni iγ la rappresentazione parametrica più
conveniente.
1. Calcolare ( )ds y x∫ −
γ
, dove γ è un tratto di linea tra ( )0,0 A e ( )3,4 B .
Svolgimento. L’equazione della retta AB è ( ) x y 43= . Troviamo 43=′ y e
conseguentemente
( )2
5
32
5
16
5
16
91
4
34
0
2
4
0
4
0
===+
−=− ∫∫∫ xdx xdx x xds y x
γ
Se pensiamo una curva γ (piana e sghemba) come a un filo di un materiale di densità
lineare variabile ( ) z y x f ,, dove ( ) z y x f ,, è una massa per unità di lunghezza
nel punto ( ) z y x ,, di γ allora:
la massa totale M del filo è data dall'integrale curvilineo o di linea( )∫=
γ
ds z y x f M ,,
Il baricentro del filo è definito come il punto le cui coordinate ( ) z y x ,, sono definite
dalle equazioni
( ) ( ) ( )ds z y x f z z M ds z y x f y y M ds z y x f x x M ∫∫∫ ===
γ γ γ
,,;,,;,,
Il momento di inerzia del filo rispetto ad un asse r è
( ) ( )∫=
γ
γ ds z y x f r pd I ,,,2
Dove ( )r Pd , è la distanza del punto ( ) γ ∈≡ z y xP ,, dall'asse r .
In particolare i momenti d'inerzia rispetto agli assi coordinati sono definiti dalle relazioni
( ) ( ) ( ) ( ) ( ) ( )ds z y x f y x I ds z y x f z x I ds z y x f z y I z y x ∫∫∫ +=+=+=
γ γ γ
,,;,,;,, 222222 .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 175/391
19
Un filo di densità costante è detto omogeneo, in questo caso il baricentro si dice anche centroide;
in questo caso risulta
∫ ∫ ∫===
γ γ γ
dx z L
zdx y ydx x L
x1
;;1
dove ∫=
γ
dx L .
2. Trovare la massa M dell’arco di curva ( )103,2, 32≤≤=== t t zt yt x , la cui densità
lineare varia per y2=γ .
Svolgimento. Abbiamo
∫ ∫
∫ ∫
++
+=++=
=′+′+′==
1
0
2
1
0
2
242
1
0
222
2
1
4
3
2
1
2
11
2
t d t dt t t t
dt z y xt ds y M γ
da cui ponendo vt =+ 2
12 si ottiene
∫ ∫ +=++
1
0
23
21
2242
2
11 dvbvdt t t t dove
4
32=b
Essendo ( vedi figura )
==+∫ ∫ ϑ ϑ ϑ
d bb
dubv2
22
coscos
=
++= ϑ
ϑ ϑ
ϑ tan
cos
1lntan
cos
1
2
2b
ϑ
ϑ tan
22
bv
bv
=
+
+++
+=
b
vbv
b
v
b
bvb22222
ln2
ϑ cos22bvb +=
segue che
( )
++−=
+++
+=++∫ 3
332ln133
3
2
16
3
2ln
222
11
23
21
1
0
2222242 vbv
b
vbvbdt t t t

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 176/391
20
3. Trovare le coordinate del centro di gravità dell’arco del cicloide
π ≤≤−=−= t t t yt t x 0cos,sin
Svolgimento. Le coordinate del centro di gravità dell’arco omogeneo della curva γ possonoessere calcolate con la formula
∫∫ ==
γ γ
ds ys
yds xs
x1
,1
dove s è la lunghezza dell’arco. Abbiamo
( )∫ ∫∫ 4=−==+−=′+′=
π π π π
0 0 0
22
0
22
2cos4
2sinsincos1
t dt
t dt t t dt y xs .
Poi
( )
3
8
3
44
2
1
2sin
3
4
2sin4
2cos2
2
1
sin2
sin2
sin2
1
2sin2sin
4
1
4
1
0
3
0 0
=
+=
++−=
=
−=−== ∫ ∫ ∫
π
γ
π π
t t t t
dt t t t
t dt t
t t ds x x
( )
3
4
2cos
2cos
3
1
2cos2
2
1
cos2
sin2
sin21
2sin2cos1
41
41
0
3
0 0
=
−+−=
=
−=−== ∫ ∫∫
π
π π
γ
t t t
dt t t t dt t t ds y y
4 . Trovare le coordinate ( ) y x, del baricentro dell’arco della circonferenza 222 a y x =+ posto
nel primo quadrante, cioè della curva λ di equazioni parametriche
20sin,cos π ≤≤== t t a yt a x
Svolgimento. Poiché la curva γ della quale vogliamo trovare il baricentro ha un asse di
simmetria (la bisettrice del 1° quadrante) risulta
∫==
γ
ds x L
x y1
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 177/391
21
Essendo
∫∫
∫∫
==
===
=+=
2
0
22
2
0
22
cos
2
π
γ
π
γ
π
adt t ads x
adt ads L
dt adt y xds
segue che
a x yπ
2==
Quindi il baricentro di un quarto di circonferenza si trova sull’asse di simmetria e la sua
distanza dal centro della circonferenza èπ
a22
5. Calcolare il momento di Inerzia di una circonferenza di raggio a rispetto ad un diametro
fisso.
Svolgimento. Supponendo il diametro fisso sull’asse x risulta:
∫ ∫ ====
π π
π π
2
0
3
3
2
2
0
22 22
sin aa
dt at ads y I x
6. Trovare le coordinate ( ) y x, del baricentro di un arco di circonferenza di raggio a e angolo
al centro θ 2 .
Svolgimento. Fissiamo il riferimento in modo che l’asse x coincida con l’asse di simmetria
dell’arco della circonferenza considerata. Allora 0= y e
θ
θ
θ
θ
θ θ
θ
θ
γ
sin
2
sin2
sin2cos2cos
2
0
22
a
a
a x
adt t adt at ads x x L
==
==== ∫ ∫∫−
Cosi il baricentro si trova sull’asse di simmetria, alla distanzaθ
θ sinadal centro della
circonferenza.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 178/391
22
7. Calcolare il baricentro dell'arco (asteroide)
20sin,cos 33 π
≤≤== t t a yt a x
Svolgimento. Risulta y x = e
∫ ∫ ===
2
0
2
0
3
5
2
cossin3cos
11
π π
adt t t at a Lds x L x
Infatti
( ) ( ) ( )( ) t t at t t t a
t t at t a y xds
22222222
2222222
cossin9sincoscossin9
sincos3cossin3
=+=
=+=+=
e at adt t t ads L2
3sin
2
13cossin3
2
0
2
2
0
==== ∫ ∫π
γ
π
8. Sia γ la curva di equazioni parametriche
[ ]0,0,sin,cos t t t zt t yt t x ∈===
Calcolare i ) [ ]γ L ; ii ) z .
Svolgimento.
Essendo 1,cossin,sincos=+==
zt t t yt t t x&&&
Abbiamo ( ) 222222 t z y xds +=++= &&& .
Allora procedendo come nell’esempio 2 si ottiene
i ) [ ]
00
0
22
0
2
22
2ln
2
2
22
t t
t t t t dt t L
+
+−
+=+= ∫γ
22 t + θ θ
θ d dt t 2cos
2tan2=
θ cos22 2
0t +=
ii ) ( )[ ]222
3
12
232
0
0
20
−+=+= ∫ t dt t t L z
t
.
θ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 179/391
23
9. Un filo omogeneo è disposto lungo l’arco di cicloide
( ) ( ) [ ] 02,0cos1,sin >∈−=−= at t a yt t a x π
Determinare il momento d’inerzia rispetto all’asse x e le coordinate ( ) y x, del baricentro.
(Si supponga la densità lineare uguale a 1).
i. ( )∫ ∫ +−==
γ
π 2
0
22222 cos1 dt y xt ads y I x
Essendo2
sin4 2222 t a y x =+ e tenuto conto che
2sin
2sin
t t = con [ ]π 2,0∈t , si ha
( )
3
2
0
32
2
23
2
0
2
0
22323
15
256
1516
2sin
2cos18
2sin
2sin8
2sincos12
aa
dt t t
a
dt t t
adt t
t a I x
∫
∫ ∫
==
−=
=
=−=
π
π π
ii. E' a x π = ;
( )
==
+−=
−=
==−==
∫
∫ ∫∫
aaat t
adt t t
a
dt t t
adt t
at ads y y L
3
48
3
48
2cos
3
2
2cos24
2sin
2cos14
2sin
2sin4
2sin2cos1
32
0
2
0
3222
2
0
2
0
22
π π
π π
γ
da cui a y3
4= . Quindi
aaG
3
4,π .
10. Calcolare la massa m, le coordinate ( ) z y x ,, del baricentro G, i momenti d'inerzia rispetto
agli assi coordinati di un singolo anello di una molla avente la forma di un'elica di equazione
[ ]π 2,0,sin,cos ∈=== t bt zt a yt a x
se la densità nel punto ( ) z y x ,, della molla è 222 z y x ++ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 180/391
24
Svolgimento.
E'
( ) ( ) ( )∫ ∫
++=++=++=
γ
π π
π 2
0
3
222222222222
3
22 babadt bat bads z y xm
( ) ( )
( )222
22
0
22222
2
0
22222222
43
6coscos
cos1
ba
abdt t t bt a
m
baa
dt bat bat mads z y x x
m x
π
π
γ
π
+=+
+=
=++=++=
∫
∫ ∫
( ) ( )∫ ∫ −=++
=++=
γ
π
π 2
0
22222
222 sinsin1
xdt t t bt am
baads z y x y
m y
N.B. Se ( ) ( ) ∫∫−
=⇒=+
2
20
T
T
T
x f T x f .
( ) ( ) ( )∫ ∫
+
+=+
+=++=
γ
π
π
π π 2
0
222
232322
22222
43
231
ba
babdt t bt a
m
babds z y x z
m z
( )( ) ( )( )
( )∫
∫ ∫
+++=
=+++=+++=
π
γ
π
2
0
4422222222422
2
0
2222222222222
sinsin
sin
dt t bt bat t bat aba
dt t bat bt abads z y x z y I x
( ) ( )∫∫
∫∫
====
−==
π π
π π
π π π π
π π
2
0
5543
2
0
2
2
0
22
2
0
2
5
322
5
1
3
82
3
1
23
4sinsin
dt t dt t
dt t t dt t
+
+++=
+
−++=
54322422
54322422
5
32
24
5
32
24
π π
π π
π π
π π
bbaaba I
bbaaba I
y
x
( )( ) ( )∫ ∫
++==++=+++=
γ
π
π π 2
0
232222222222222222
3
82 babaamadt t babaads z y x y x I
z

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 181/391
25
11. Un filo disposto lungo la circonferenza 222 a y x =+ . Se la densità lineare nel punto ( ) y x,
è y x + , determinare la massa M e il momento d'inerzia rispetto ad un diametro.
Svolgimento. Essendo le equazioni parametriche della circonferenza C
[ ]π 2,0sin,cos ∈== t t a yt a x
si ha
i ) ( ) ( )∫ ∫ ∫ =+=++=+=
γ
π π 2
0
2
0
222 sincossincos dt t t adt y xt at ads y x M
( ) ( ) ( ) ( )∫ ∫ ∫ ∫ −++−+−++=
2
0 2
23 2
23
2222 sincossincossincossincos
π π
π
π
π
π
π
dt t t adt t t adt t t adt t t a
Da cui 28a M = .
ii ) L’equazione di un generico diametro è 0=− mx y . Pertanto se P è un punto di γ :
( )t at aP sin,cos e denota il diametro si ha
( ) ( ) ( )t H m
at t mt mt
m
a
m
t mat ar Pd
2
2222
2
22
2
2
1cossin2cossin
11
cossin,
+=−+
+=
+
−=
Posto ( ) ( )t t mt mt t H cossin2cossin 222−+=
segue che
( )( ) ( ) ( )
( )( ) ( )( )
+−==+
+=
=++
=+=
∫ ∫
∫ ∫2
0
2
23
2
4
2
0
2
22
cossin...cossin1
cossin
1
,
π π
π
γ
π
dt t t t H dt t t t H m
a
dt at t at H
m
ads y xr Pd I r
Essendo ( ) ( )∫ =+
−+= t B
t mt t m
t dt t t H
3
cos
3
2
3
sinsin
3
sincos
332
3
( ) ( )t At mt mt t dt t t H =−−+−=∫3323
sin3
23
cos3
coscossin
segue che
( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ]
( ) 22
2
4
2
23
230
2
2
02
4
4141
1
amm
a
t Bt At Bt At Bt At Bt Am
a I
r
=++
=
=+++−−+++
=π
π
π
π π
π
Quindi il momento richiesto non dipende dal diametro.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 182/391
26
Integrale di linea
Supponiamo che le funzioni P( x, y) e Q( x, y) siano continue sui punti dell’arco AB della curva liscia
C specificata dall'equazione ( ) b xa x y ≤≤= ϕ .
Consideriamo la somma integrale
( ) ( )[ ]∑=
∆+∆
n
k
k k k k k k yQ xP1
,, η ξ η ξ
Dove k x∆ e k y∆ sono le proiezioni dell’arco elementare sugli assi.
L’integrale di linea del secondo tipo
( ) ( )dy y xQdx y xP ,, + sull’arco orientato AB è il limite della somma integrale sotto la condizione
che il 0max→∆
k x e il 0max→∆
k y .
( ) ( ) ( ) ( )[ ]∫ ∑=→∆
→∆
∆+∆=+
AB
n
k
k k k k k k
y x
yQ xPdy y xQdx y xP
k
k 10max0max
,,lim,, η ξ η ξ
Proprietà principali dell’integrale di linea del secondo tipo
1° Un integrale di linea del secondo tipo cambia segno cambiando la direzione d’integrazione:
∫ ∫ +−=+
BA AB
dyQdxPdyQdxP
2° ∫ ∫ ∫+=+
AB AB AB
dyQdxPdyQdxP
Le altre proprietà sono analoghe a quelle dell’integrale del primo tipo.
Un integrale di linea del secondo tipo può essere calcolato con la formula
( ) ( ) ( )[ ] ( ) ( )[ ] ∫ ∫ ′+=+
C
b
a
dx x xQ x x xPdy y xQdx y xP ϕ ϕ ϕ ,,,,
Se la curva C è specificata dalle equazioni parametriche x = x(t) ,y = y(t) dove ,bt a ≤≤ allora
abbiamo
∫ ∫ ′+′=+
C
b
a
dt t yt yt xQt xt yt xPdy y xQdx y xP )()](),([)()](),([),(),(

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 183/391
27
Una formula analoga è vera anche per il calcolo di un integrale di linea del secondo tipo lungo C: se
la curva è specificata dalle equazioni )(),(,)( t z zt y yt x x === dove ,bt a ≤≤ allora
∫ =++
C
dz z y x Rdy z y xQdx z y xP ),,(),,(),,(
= dt t zt zt yt x Rt yt zt yt xQt xt zt yt xP
b
a
)()](),(),([)()](),(),([)()](),(),([ ′+′+′∫
Quanto segue costituisce una interpretazione meccanica dell’integrale precedente.
Sia C una curva liscia dello spazio tridimensionale descritta dall’equazione vettoriale
[ ]bat t zt yt xt ,ˆ)(ˆ)(ˆ)()( ∈++== k jirr (1)
Se riparametrizziamo la curva C in funzione della lunghezza dell’arco s, allora da
)]([)( st s rrr ==
si evince poiché t = t(s) è l'inversa di s = s(t) , segue che )(1
1
t dt
ds
ds
dt
ν ==
)(
)(
)(
1
t
t
t dt
d
ds
dt
ds
d
ds
d
r
rrrr===
ν
da cui il vettore tangente della curva )(srr = è un vettore unitario che si indica con )(ˆ sT :
ds
d s
rT =)(ˆ (2)
Premesso ciò, supponiamo che
k jiFrF ˆ),,(ˆ),,(ˆ),,(),,()( 321 z y xF z y xF z y xF z y x ++==
sia un campo vettoriale continuo in un aperto Ω che contiene C.
Il lavoro W fatto dalla forza F durante lo spostamento di un corpo lungo C , nella direzione del
moto, è dato da
∫∫ ⋅=⋅=
C C
d dsW rFTF ˆ
Si osservi che TF ˆ⋅ dipende dall’orientazione di T e quindi dalla parametrizzazione di C.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 184/391
28
Essendo
k jir ˆˆˆ dzdydxd ++=
segue
∫ ∫ ++=⋅
C C
dz z y xF dy z y xF dx z y xF d ),,(),,(),,( 321rF (3)
Questo integrale (che è un integrale di linea della componente tangente di F lungo C) dipende
dell’orientazione di C, nel senso che se )()( τ ssrr == et descrivono C nel verso opposto, allora
∫ ∫ ⋅−=⋅
C C
d d sFrF
Se C è una curva chiusa, l’integrale di linea della componente tangente F lungo C è chiamato
circuitazione di F lungo C. Il fatto che la curva sia chiusa è indicato spesso da un piccolo cerchio
scritto sopra il segno d’integrale: l’espressione
∫ ⋅
C
d sF
denota quindi la circuitazione di F lungo la curva chiusa C.
Per il calcolo di questi integrali, per indagare che la curva chiusa è percorsa nel senso antiorario
scriveremo ∫+
C
.
Oppure ∫ ∫− +
−=
C C
per indicare che il percorso della curva è quello orario.
Nel caso di un arco liscio di equazione
x=x(t), y=y(t) ,bt a ≤≤
è
∫ =++
C
dz z y xF dy z y xF dx z y xF ),,(),,(),,( 321
[ ] [ ] [ ]∫
++=
b
a
dt dt
dzt zt yt x
dt
dyt zt yt x
dt
dxt zt yt x )(,)(,)()(,)(,)()(,)(,)( 321 FFF
Se C è una curva liscia a pezzi: nC C C ∪∪= .....1 l’integrale precedente è la somma degli integrali
di linea sui vari archi lisci niC i ,......,1= che costituiscono C:
∫C
= ∑i=1
n
∫Ci

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 185/391
29
1. Calcolare xdx ydy y xC
22−∫ se 2 / 0sin,cos π ≤≤== t t yt x
Svolgimento. Essendo dt t
t dydt
t
t dx
sin2
cos,
cos2
sin=−=
abbiamo ∫∫ =
+=−
2 /
0
22
4cos2
sincossin
sin2
cossincos
π π
dt t
t t t
t
t t t dx x ydy y x
c
Domini Connessi
Definizione 1. Un dominio D è connesso se per ogni coppia di punti A e B di tale dominio D, esiste
una curva regolare a tratti, avente come estremi i punti A e B, interamente contenuta in D.
Definizione 2. Nel piano,un dominio connesso D è detto semplicemente connesso se l’interno di
ogni curva chiusa, e regolare a tratti, appartenente a tale dominio D giace in D; in altre parole, se
comunque si prenda una curva chiusa e regolare a tratti, questa è la frontiera di un insieme limitato
contenuto in D.
Definizione3. Nello spazio tridimensionale un dominio D semplicemente connesso è caratterizzato
dalle seguenti condizioni:
i ) Qualunque curva chiusa e regolare a tratti di D è la frontiera di una superficie che giace
interamente in D.
ii ) Se C 1 e C
2 sono due curve di D aventi gli stessi estremi allora, C 2 (oppure C
1 ) può essere
deformata in modo continuo in C 1 (oppure C
2 ), rimanendo in D durante il processo di
deformazione.
Nel piano, un dominio semplice connesso D non può avere buchi, nemmeno buchi costituiti da un
solo punto. Ad esempio, il dominio della funzione22
1
y x +non è semplicemente connesso poiché
l’origine non gli appartiene. (L’origine è un”buco”di quel dominio.) Nello spazio tridimensionale,
un dominio semplicemente connesso può avere dei buchi. L’insieme di tutti i punti di 3ℜ esclusa
l’origine è semplicemente connesso, come pure lo è l’esterno di una palla. Ma l’insieme di tutti i
punti di3
ℜ soddisfacenti 022f y x + non è semplicemente connesso. E neppure lo è l’interno di
una ciambella chiamato in geometria toro.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 186/391
30
Funzione Potenziale e Campi Conservativi
Sia
k jiFF ˆ),,(ˆ),,(ˆ),,(),,( 321 z y xF z y xF z y xF z y x ++==
un campo vettoriale di classe )()1(ΩC dove denota un aperto connesso (dominio).
Definizione. Se per qualche funzione ),,( z y xΦ=Φ definita in , risulta Φ∇=F allora si dice che
F è un campo vettoriale conservativo in e la funzione Φ è detta potenziale scalare di F.
Si osservi che F è conservativo in un dominio Ω se e solo
Ω∈∀Φ∇= ),,(),,(),,( z y x z y x z y xF
il potenzialeΦ non può avere neanche un punto singolare in .
Sia c una costante arbitraria, osservato che
i ) [ ] Φ∇=+Φ∇ c
ii ) [ ] 0),,(),,( =Ψ−Φ∇ z y x z y x per ogni Ω∈),,( z y x (aperto connesso) implica
Ω=Ψ−Φ suc z y x z y x ),,(),,( ;
si evince quanto segue:
due funzioni potenziali di un campo vettoriale conservativo definito su un aperto connesso
differiscono per una costante.
In altre parole le funzioni potenziali non sono determinate in modo univoco: si può sempre
aggiungere una costante.
Una condizione necessaria che deve essere soddisfatta affinché un campo vettoriale in3
ℜ (oppure
in2
ℜ ) sia conservativo è che sia irrotazionale. In altre parole:
se 0==×∇Φ∇= FrotFF allora
Per dimostrarlo si osservi che l’equazione Φ∇=F ovvero
k jik ji ˆˆˆˆ),,(ˆ),,(ˆ),,( 121 z y x
z y xF z y xF z y xF ∂
Φ∂+
∂
Φ∂+
∂
Φ∂=++
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 187/391
31
implica le tre equazioni scalari
321 ;; F z
F y
F x
=∂
Φ∂=
∂
Φ∂=
∂
Φ∂
da cui, dovendo essere uguali le derivate parziali miste di Φ in quanto F è di classe)1(
C , si ottiene
0
0
0
22
12
22
31
22
23
=∂∂
Φ∂−
∂∂
Φ∂=
∂
∂−
∂
∂
=∂∂
Φ∂−
∂∂
Φ∂=
∂
∂−
∂
∂
=∂∂
Φ∂−
∂∂
Φ∂=
∂
∂−
∂
∂
x y y x y
F
x
F
z x x z x
F
z
F
y z z y z
F
y
F
In seguito dimostreremo che la condizione precedente è anche sufficiente nel caso in cui F è
definito in un aperto semplicemente connesso.
Particolari domini semplicemente connessi sono i domini stellati rispetto ad un punto:
un dominio si dice stellato rispetto ad un suo punto P0 se per ogni punto P del dominio, il segmento
di estremi P e P0 sta tutto nel dominio.
In questo sussiste il teorema successivo.
Per non confondere le coordinate (x,y,z) del punto P con gli assi coordinati indichiamo questi con
(u,v,w). Premesso ciò ricordiamo che l'equazione vettoriale di estremi P0 (x0,y0,z0) e P (x,y,z) è
k jir ˆˆˆ)()( 00 wvuPPt Pt ++=−+=
dove
)(),(),( 00000 z zw y yt y x xt xu −+−+=−+= ν
In particolare se P0 coincide con l'origine risulta
[ ] ( )11,0ˆˆˆ)0()( ∈++=−= t tztytxPt t k jir
da cui le equazioni parametriche del segmento i cui estremi sono l'origine e P(x,y,z) sono
[ ] ( )21,0,, ∈=== t tzwtyvtxu

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 188/391
32
Teorema. Se F è un campo conservativo irrotazionale liscio in un dominio stellato rispetto
ad un punto Ω∈0P allora Φ∇=F per qualche funzione potenziale Φ definita in , ovvero F
è conservativo.
Dimostrazione.
Senza perdere di generalità possiamo supporre che P0 sia l'origine.
Consideriamo la funzione ( ) z y x ,,=Φ definita dall'uguaglianza seguente
Ω∈⋅==Φ ∫ ),,()(),,( z y xdt
dr F z y x
C
dove C è il segmento di estremi l'origine e P, le cui equazioni parametriche sono date dalla (2).
Pertanto
( ) [ ] ( )∫ ++=Φ
1
0
321 3),,(),,(),,(,, dt wvu zF wvu yF wvu xF z y x
Dimostriamo che
( )4),,,(),,,(),,,( 321 z y xF z
z y xF y
z y xF x
=∂
Φ∂=
∂
Φ∂=
∂
Φ∂
A tale scopo deriviamo la (3) rispetto ad x ottenendo:
( )∫
∫
∫
===
=∂
∂+
∂
∂+
∂
∂+=
=+∂
∂++
∂
∂++
∂
∂+=
∂
Φ∂
1
0
1
1
011
1
0
3211
1
0
3211
,,),,()],,([
)]([
)(
z y xF tztytxtF dt zvutF dt
d
dt zu
F y
u
F x
u
F t F
dt zu
F y
u
F x
u
F F
x
Analogamente si ha
( ) ( ) z y xF z
e z y xF y
,,,, 32 =∂
Φ∂=
∂
Φ∂
il che completa la dimostrazione.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 189/391
33
Esempi:
1. Il campo vettoriale
)0,0(),(ˆ2ˆ2),(
2222≠
++
+= y x
y x
y
y x
x y x jiF
(definito in un aperto connesso) è irrotazionale in quanto
2222
22
y x
x
y y x
y
x +∂
∂=
+∂
∂
pertanto potrebbe essere conservativo.
Per stabilire se il campo vettoriale dato è conservativo poniamo
22222);2)
y x y
yii
y x x
xi
+=
∂Φ∂
+=
∂Φ∂ .
Integrando la i ) rispetto a x otteniamo
).()ln(),( 22 yc y x y x ++=Φ
Si osservi che la costante di integrazione è una costante rispetto a x ovvero è una funzione della solavariabile y, che abbiamo indicato con c(y). Se deriviamo ambo i membri dell’equazione precedente
rispetto a y otteniamo
( ) yc y x
y
y′+
+=
∂
Φ∂22
2
Confrontando l’equazione precedente con la ii ) troviamo che ( ) 0=′ yc da cui ( ) k yc = (costante).
Quindi, a meno di una costante additiva, la funzione
)ln(),( 22 y x y x +=Φ
è una funzione potenziale del campo vettoriale F.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 190/391
34
2. Il campo vettoriale
)0,0(),(ˆˆ),(2222
≠+
++
−= y x y x
x
y x
y y x jiF
il cui dominio è un aperto connesso, è irrotazionale in quanto
2222 y x
y
y y x
x
x +∂
∂−=
+∂
∂.
Se esiste una funzione potenziale Φ che genera il campo, deve necessariamente essere
2222 );) y x
x
yii y x
y
xi+=∂
Φ∂
+−=∂
Φ∂.
Integrando i ) rispetto a x otteniamo
( ) 0),( ≠+
−=Φ y yc
y
x y x arctan
da cui, derivando ambo i membri rispetto a y , otteniamo
)(22
yc y x
x
y′+
+=
∂
Φ∂
Confrontando l’espressione precedente con la ii ) troviamo 0)( =′ yc da cui k yc =)( Quindi,a meno
di una costante additiva,la funzione
0),( ≠
=Φ y
y
x y x arctan
non è una funzione potenziale di F in quanto il suo dominio non coincide con quello del campo.
Il campo vettoriale considerato è conservativo nel semipiano 0> y e nel semipiano .0< y

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 191/391
35
3. Sia
( ) ( )k jiF ˆ1cosˆsinˆsin3,, 332+++= z y x z x z y x z y x
Essendo
0=×∇= FFrot
e dato che il dominio di F è tutto lo spazio tridimensionale che è semplicemente connesso, ne
consegue che F è conservativo.
Se Φ è una funzione potenziale per F, deve necessariamente essere
.1cos);sin);sin3) 332+=
∂
Φ∂=
∂
Φ∂=
∂
∂ z y x
ziii z x
yii z y x
x
F i i
Integrando, per esempio, la i ) rispetto a x si ottiene
a ) ( ) z yc z y x z y x ,sin),,( 3+=Φ
dove ( ) z yc , è una costante rispetto a x. Derivando la a ) rispetto ad y si ha
y
c z x
y ∂
∂+=
∂
Φ∂sin3
e per confronto con la ii ) si deduce che ),( x yc non dipende da y.
Se poniamo )(),( zg z yc =
b ) )(sin),,( 3 zg z y x z y x +=Φ
Infine, derivando la b ) rispetto a z e per confronto con la iii ) , si ottiene 1)( =′ zg e quindi (a meno
di una costante additiva) è
.sin),,( 3 z z y x z y x +=Φ
4. Sia ea 0>
k jiF ˆ)ln(ˆ))cos(2(ˆ))cos(2(),,( 222 a ya y x y xa y x xy z y x z z+++++++=
Poiché il dominio F è semplicemente connesso e F è irrotazionale ne consegue che F è
conservativo. Per determinare una funzione potenzialeΦ procediamo come nell’esempio
precedente.Abbiamo
a ya
x
iii y x y xa
x
ii y x xy
x
i z z ln);)cos(2);)cos(2) 222=
∂
Φ∂+++=
∂
Φ∂++=
∂
Φ∂

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 192/391
36
Integrando la iii ) rispetto a z otteniamo
a ) ),(),,( y xc ya z y x z+=Φ
Derivando la a ) rispetto a y e per confronto con la ii ) si ha
)cos(2 22 y x y xa y
ca z z
+++=∂
∂+
da cui
).()sin(),( 22 xg y x yx y xc +++=
Sostituendo ),( y xc nella a ) otteniamo
b ) ( ) ).(sin),,( 22 xg y x yx ya z y x z++++=Φ
Infine, derivando la b ) rispetto ad x e per confronto con la i ) otteniamo g(x)-k (costante) e quindi,
a meno di una costante additiva,
.sin),,( 22 y x yx ya z y x z+++=Φ
5. Il campo vettoriale
01ˆ1
2ˆ1
2),( 22
2222≠−+
−++
−+= y x
y x
y
y x
x y x jiF
è conservativo in quanto
),(),( y x y x Φ∇=F dove ( ) 011ln, 2222≠++++=Φ y x y x y x
più precisamente è
1
1
)1ln(
)1ln(),(
22
22
2
22
1
22
<+
>+
++−−
+−+=Φ
y x
y x
c y x
c y x y x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 193/391
37
6. Stabilire se il campo vettoriale
k jiF ˆsinˆ2sinˆcos21),,( 2 y y z
x z y x ++
+=
è conservativo. In caso affermativo determinare una funzione potenziale.
Svolgimento. Essendo il dominio di F semplicemente connesso (in quanto F è definito in 3ℜ ) ed
essendo 0=×∇= FFrot , segue che F è conservativo (cioè esiste una funzione Φ che soddisfa
l’equazione Φ∇=F ). Per determinare una funzione potenziale ),,( z y xΦ=Φ procedendo come
negli esempi precedenti si ha
i ) ),(sinsin 22 y xc y z y y
+=Φ⇒=∂
Φ∂
ii ) )(),(cossin22sin xc y xc y
c y y z y z =⇒
∂
∂+=
Da i ) e ii ) segue che )(sin 2 xc y z +=Φ
iii ) ∫+
=⇒′=+
dx x
xc xc x cos2
1)()(
cos2
1
Per risolvere l’integrale precedente si osservi che
.2
sin2
cos2
sin2
cos22
2cos2cos2 2222 x x x x x x −+
+=+=+
ovvero
+=+=+
2tan3
2cos
2sin
2cos3cos2 2222 x x x x
x
Allora, sostituendo t x
=2
tan , si ottiene
c xt t
dt t
dx x x
dx x
+
===
=+
=
+
=+
∫∫ ∫
2tan
3
1arctan
3
2
33arctan
3
2
3
12
2tan3
2cos
1
cos2
12
22

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 194/391
38
Quindi, a meno di una costante additiva, è
( ) y z x
z y x 2sin2
tan3
1arctan
3
2,, +
=Φ
Teorema. Sia Φ un campo scalare di classe ( ) ( )Ω1C dove è un aperto connesso dello spazio
tridimensionale. Per ogni coppia di punti A e B connessi da una curva γ contenuta in , regolare a
tratti é specificata dall’equazione vettoriale ( ) bt at ≤≤= rr , si ha
( )[ ] ( )[ ] ( ) ( )∫ Φ−Φ=Φ−Φ=⋅Φ∇
γ
A Babd rrr
Dimostrazione. Siano A e B due punti qualsiasi in e congiungiamoli tramite una curva γ
contenuta in , regolare a tratti e di equazione ( ) bt at ≤≤= rr . Supponiamo inizialmente che
γ sia regolare in [a, b]. Allora l’integrale curvilineo del Φ∇ da A a B lungo γ è dato da
( )[ ] ( )∫ ∫ ′⋅Φ∇=⋅Φ∇
γ
b
a
dt t t d rrr .
Se poniamo ( ) ( )[ ]t t g rΦ= , per la regola di derivazione delle funzioni composte, si ha
( ) ( )[ ] ( ) bt at r t t g ≤≤′⋅Φ∇=′ r
Essendo Φ∇ continuo su eγ regolare, segue che ( )t g′ è continua in ( )ba, . Perciò
( ) ( ) ( ) ( )[ ] ( )[ ] ( ) ( )∫ ∫ Φ−Φ=Φ−Φ=−=′=⋅Φ∇
b
a
b
a
A Babagbgdt t gd rrr
Ciò dimostra il teorema ma nel caso in cui γ è regolare.
Se γ è regolare a tratti, dividiamo l’intervallo [ ]ba, in un numero finito n, di sotto - intervalli:
[ ] bt at nk t t I nk k k ====−
;,...,2,1, 01

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 195/391
39
in ognuno dei quali k γ ( la restrizione di γ a k I ) sia regolare. Se applichiamo il risultato appena
dimostrato ad ogni k γ , otteniamo
( ) ( )[ ]
( ) ( )[ ] ( ) ( )[ ] ( ) ( )[ ]
( ) ( ) ( ) ( ) ( ) ( ) A Bagbgt gt g
t gt gt gt gt gt g
t gt gd d
n
nn
n
k
n
k
k k
k
Φ+Φ=−=−=
=−++−+−=
=−=⋅Φ∇=⋅Φ∇
−
= =
−∫ ∑ ∫ ∑
0
11201
1 1
1
...
γ γ
rr
Da quanto precede si evincono le condizioni necessarie e sufficienti affinché un campo vettoriale
sia un gradiente.
Sia F un campo vettoriale ( continuo ) su un aperto connesso contenuto in 3ℜ . Le seguenti
affermazioni sono equivalenti:
i) F è il gradiente di qualche funzione potenziale Φ definita in ( Φ∇=F in ).
ii) L’integrale curvilineo di F è indipendente dalla traiettoria in .
iii) L’integrale curvilineo di F lungo ogni curva chiusa regolare a tratti è uguale a zero
∫ =⋅C
d 0rF per qualunque curva chiusa C liscia e continua a pezzi contenuta in D.
Pertanto se l’integrale curvilineo di F lungo una sola curva chiusa è diverso da zero, certamente F
non è un gradiente.
Se il campo vettoriale F è conservativo in un aperto connesso D, se C è una curva regolare a tratti
contenuta in D i cui estremi sono un punto A (a,b,c) fissato in D e un punto arbitrario P (x,y,z),
allora il valore dell'integrale di linea
∫⋅
C
d rF non dipende dalla curva DC ⊂ ma dal punto P e si
dimostra che la funzione
( ) ∫ ⋅=Φ
C
d z y x rF,,
è un potenziale per F ovvero che F=Φ∇
Pertanto, quando è possibile, si può costruire una funzione potenziale Φ integrando lungo la

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 196/391
40
spezzata costituita dai segmenti i cui estremi sono
( ) ( ) ( ) ( ) z y xPc y x Acb x Acba A ,,;,,;,,;,, ′′
dove:
i) Il segmento AA' è parallelo all'asse x e può essere specificato dall’equazione
( ) [ ] xaucbuu ,ˆˆˆ ∈++= k jir
ii) Il segmento A'A'' è parallelo all'asse y e può essere specificato dall’equazione
( ) [ ] ybvcv xv ,ˆˆˆ ∈++= k jir
iii) Il segmento A''P è parallelo all'asse z e può essere specificato dall'equazione
( ) [ ] zcww y xw ,ˆˆˆ ∈++= k jir
In altre parole è
( ) ( ) ( ) ( )
( ) ( ) ( )∫ ∫ ∫
∫ ∫ ∫
++=
=++=Φ
x
a
y
b
z
c
x
a
y
b
z
c
dt t y xF dt ct xF dt cbt F
dww y xF dvcv xF ducbuF z y x
,,,,,,
,,,,,,,,
321
321
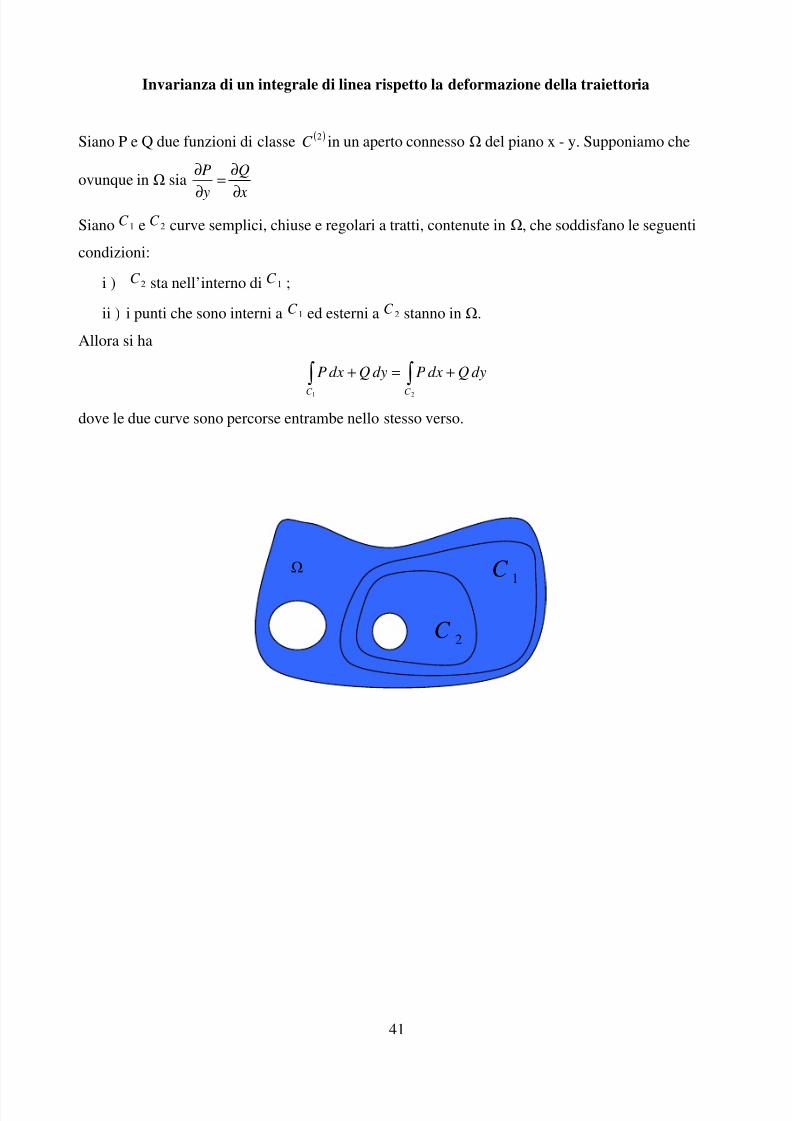
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 197/391
41
Invarianza di un integrale di linea rispetto la deformazione della traiettoria
Siano P e Q due funzioni di classe ( )2C in un aperto connesso del piano x - y. Supponiamo che
ovunque in sia
x
Q
y
P
∂
∂=
∂
∂
Siano C 1 e C
2 curve semplici, chiuse e regolari a tratti, contenute in , che soddisfano le seguenti
condizioni:
i ) C 2 sta nell’interno di C
1 ;
ii ) i punti che sono interni a C 1 ed esterni a C
2 stanno in .
Allora si ha
∫ ∫ +=+
1 2C C
dyQdxPdyQdxP
dove le due curve sono percorse entrambe nello stesso verso.
1
C
2C

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 198/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 199/391
43
Esempi vari
Esempio. Verificare che il campo vettoriale F dato è conservativo e determinare la corrispondente
funzione potenziale.
( )k jiF ˆ
11
1lncosˆsin
1ˆcos),,( 2
1
1
+−
++
+−= +
+
z z x y x y
z x y x z y x z
z
z
Essendo
0ˆˆˆ 123123 =
∂
∂−
∂
∂+
∂
∂−
∂
∂+
∂
∂−
∂
∂=×∇ k ji
y
F
x
F
x
F
z
F
z
F
y
F F
segue F conservativo: 1,0:),,( −≠>∀Φ∇= z x z y xF
osservazioni:
( )
( ) ( )
+−
+−=
+
−+−=
∂
∂ ++
2
1
2
12
1
1
1
lnsin
1
11lnsin
z z
x y x
z
z x x y
z
F z z
( )( )
=
++
+−
++=
∂
∂+
y x z
x
z z
x y x z
x
F z
cos1
11
1
1
lnsin1
1
2
23
x x y z z
x x y z z lncos1
1
1
1lncos =
++
+−
( ) ( ) ( ) z yc z yc y
c
y z
x
y y x y x x
z z
,,sin1,,cos 21
1
1
=⇒∂
∂+
+=Φ
⇒=
∂
Φ∂+
( )( )
( )( ) c zc zc
z z
x y x
z z
x y x z z
=⇒′+
+−
+−=
+−
+−
++
222
1
2
1 )(1
1
1
lncos
1
1
1
lncos
Pertanto
( ) c y z
x z y x
z
++
==Φ
+
cos1
,,1
12.(6.4) Calcolare il lavoro del campo di forza ( ) ( ) ( )k jiF ˆ23ˆ4sin2ˆcos 232++−++= xz x y z x y
quando una particella si muove lungo la curva [ ]1,013;21;arctan ∈−=−== t t zt yt x .
i) ( ) ( ) ( )[ ] ( )[ ]( ) ( )[ ] dt t t t t t
t t t ∫
+−+−−−+−
++−=
1
0
2
2
3232arcsin13324212
1
113arcsincos21I
Essendo
1 ϑ sin=t
( )t t arcsincos1cos2
=+=ϑ
ϑ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 200/391
44
( ) ( )
( ) ( )∫∫
∫
−−−=−
=−=
−+=+
=
1
02
31
0
2
1
0 1
1
1134arcsin139
3
1
3
83
3
2
2
141arcsincos21
dt t
t dt t t
dt t t
π
4 4 34 4 21
Segue che
( ) π π π 4156483
82
3
16442
3
2
2
1
3
1+=++++−=++−
−−+= I .
ii ) ( ) z y x z x y z y x 24sin,, 32+−+=ΦΦ∇=F
( ) ( ) π π π
4156491,1,02,1,2
+=−−+=−Φ−
−Φ= L
13.(6.4)
( ) ( )[ ] ( ) ( )[ ]
( ) ( ) ( ) ( )
2
13
2
54
sin2sin54sin2
13cos1sin2
1
0
1
0
1
0
1
0
2
1
0
2
−=−−=
=−++−=
=−+−++−
∫∫ ∫
∫
dt t t t t dt t dt t t
dt t t t t t t t
π π π
π π π
8. Determinare il lavoro fatto dal campo di forza
( ) ( ) ( )k jiF ˆˆˆ y z z x y x −+−++=
quando un corpo si muove da ( )1,0,1 − A a ( )3,2,0 − B lungo una qualsiasi curva liscia o
liscia a tratti i) lungo la retta che passa per A e B
( ) ( ) [ ]1,0∈−+= t A Bt At r
t zt yt x 41,2,1+−=−=−=
( ) ( ) ( )[ ] ( )∫ ∫ =−=−=+−+−−−−=
1
0
1
02
199
2
3793761452231 dt t dt t t t L
zy
x
A
1
-1

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 201/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 202/391
46
Calcolare
∫ ∫+
+−=⋅
C C y x
dy xdx yd
22rF
dove
i ) 222: r y xC =+ percorsa nel verso antiorario una sola volta.
ii ) C è un rettangolo di vertici ( ) ( ) ( ) ( )1,1,1,1,1,1,1,1 −−−− .
iii ) C è il rettangolo di vertici ( ) ( ) ( ) ( )babababa 2,,,,2,,, −− con a e b positivi.
iv ) C è la frontiera del dominio: 041 22≥≤+≤ y y x .
Svolgimento.
i ) Una rappresentazione parametrica di C è: t a yt a x sin,cos == con [ ]π 2,0∈t .
Allora
( )( ) ( )( )∫∫ =
+−−=
+
+−π
π 2
0
2222
coscossinsindt
a
t at at at a
y x
dy xdx y
C
ii ) =+++=+
+−=⋅ ∫∫ ∫ ∫∫∫
4321
22
C C C C C C y x
dy xdx yd rF
∫ ∫∫∫∫− −−−−
=+
=+
−++
−++
++
=
1
1
1
1
22
1
1
2
1
1
2
1
1
22
18
1111π
t dt
t dt
t dt
t dt
t dt
111,:1 ≤≤−−== t yt xC
111,:2 ≤≤−== t xt yC
111,:3 ≤≤−==− t yt xC
111,:4 ≤≤−−==− t xt yC
C 2
C 3
C
4
C 4
-1 1
1
-1

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 203/391
47
iii)
at ab yt xC ≤≤−== ,:1
bt ba xt yC 2,:2 ≤≤==
at ab yt xC ≤≤−==− 2,:3
bt ba xt yC 2,:4 ≤≤−==−
02
22
22
arctan2
arctan2arctanarctan2
2arctan2arctan
2arctan2arctan2
4422
4
22 2
0
2
0
22222222222222
=+−=
++
+−=
=+
−+=
=+
++
++
−=
+
−−
+
−−
++
+
−
∫ ∫ ∫ ∫ ∫ ∫ ∫− −
π π
b
a
a
b
a
b
b
a
b
a
b
a
a
b
b
a
bt
dt b
at
dt a
at
dt b
at
dt a
bt
dt b
at
dt a
bt
dt ba
a
b
b
a
a
b
b
a b
b
a
x
yarctan=α
α tan x y = y xarctan= β
β tan y x =
iii ) 0000
2
1
1
2 0
22=++−⇒
+
+−
∫∫∫ ∫∫−
−−
π π
dt dt dt dt y x
dy xdx ya
a
Confrontare con ( ) 0ˆˆ222
=⇒++
= F jiF rot y x y x
0222 |:
=⋅∫=a y xC
d rF
β α
C 1
C 2
C 3
C 4
b
2b
-a a

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 204/391
48
10. ( ) ( )k jiF ˆ2ˆˆ 2 zbx x zaxy ++++=
è conservativo se e solo se 0=×∇= FFrot ovvero se e solo se b = 1 e a = 2.
Infatti
03113 =∂−∂ F F se b = 1
01221 =∂−∂ F F se a = 2.
Pertanto è
( ) ( ) Φ∇=++++= k jiF ˆ2ˆˆ2 2 z x x z xy
se
i ) 2 x y
=∂
Φ∂
ii ) ( ) ( ) x
c xy z xc y x z y x z xy
x ∂
∂+=
Φ∂
Φ∂⇒+=Φ⇒+=
∂
Φ∂2,,,2 2
iii ) z x z
2+=∂
Φ∂
( ) ( ) zc zx z xc x
c xy z xy +=⇒
∂
∂+=+ ,22
pertanto
( ) ( ) zc xz y x z y x 1
2,, ++=Φ
( ) ( )( ) k z zc z
z
zc
z
zc x z x +=⇒=
∂
∂⇒
∂
∂+=+
2
121 22
( ) k z xz y x z y x +++=Φ22,,
( ) ( ) 8190,1,13,0,0 =−=Φ−Φ
11. Calcolare
( ) ( )( )
( )
∫ +++=
3;2
1;1
33 dy x ydx y x I .
Svolgimento. L’integrale dato è indipendente dal contorno di integrazione in quanto

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 205/391
49
( ) ( ) 33;33 =+∂
∂=
∂
∂=+
∂
∂=
∂
∂ x y
x x
Q y x
y y
P
e quindi x
Q
y
P
∂
∂=
∂
∂( sull’intero piano XY ).
Come percorso di integrazione scegliamo la linea poligonale nella quale i segmenti sono paralleliagli assi coordinati. Sul primo segmento abbiamo 210,1 ≤≤== xdy y , sul secondo
310,2 ≤≤== ydx x
Conseguentemente,
( ) ( )∫ ∫ =−−++−−+=
++
+=+++=
2
1
2
1
22
2
1206
2
118
2
93
2
1626
23
263 y
y x
xdy ydx x I .
12. Trovare la primitiva U , della forma differenziale [ ] dye xdx x ydU y )1()1ln( −++++=
Svolgimento. Abbiamo 1;1);1ln( =∂
∂≡
∂
∂−+=++=
x
Q
y
Qe xQ x yP y .
Assumendo 0,0 00 == y x e che il contorno K è una linea poligonale OMN ( Fig. 1 ).
Fig. 1
( ) ( ) ( )∫∫ =−+++=
y
y
x
dye xdx x y xU
00
11ln,
( ) ( )[ ] ( ) ( ) C e y xy x x xe y xy x x x x y y++−++−++=−++++−+= 11ln11ln1ln

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 206/391
50
13. ( ) ( )k jiF ˆ1cosˆsinˆsin3,, 332+++= z y x z x z y x z y x
Svolgimento. Essendo
0=×∇=⋅∇ FF in Φ∃⇒ℜ3 tale che Φ⋅∇=F
i )
( ) z yc z y x z y x x ,sinsin3
32+=Φ⇒=
∂
Φ∂
ii ) ( ) ( ) zc z yc y
c z y x z y x =⇒
∂
∂+= ,sinsin 33
Da i ) e ii )( ) zc z y x +=Φ⇒ sin3
iii ) ( ) z zc zc z y x z y x =⇒′+=+ )(sin1cos 33
Quindi
( ) z z y x z y x +=Φ sin,, 3
Oppure se ( )0,0,00P allora
( ) ( ) ( ) ( )dww y xF dvv xF duuF z y x
z y x
∫∫∫ ++=Φ
0
3
0
2
0
1 ,,0,,0,0,,,
poiché i primi due integrali sono uguali a 0 si ha
( ) ( ) ( ) z z y xww y xdww y x z y x z z
+=+=+=Φ ∫ sinsin1cos,, 3
0
3
0
3
14. ( ) [ ] ( )[ ] 0;ˆlnˆcos2ˆ)cos(2,, 222>+++++++= aa ya y x y xa y x xy z y x z z k jiF
Svolgimento.
Da 0=×∇=⋅∇ FF in Φ∃⇒ℜ3 tale che ,Φ⋅∇=F dove
( ) ( ) ( )∫∫∫ =++=Φ
z y x
dww y xF dvv xF duuF z y x0
3
0
2
0
1 ,,0,,0,0,),,(
( )( ) ∫∫∫ =+++++=
z
w
y x
dwaa ydv y xv xduu00
22
0
)ln(cos21cos
( ) ( )2222 sin1sin)sin(sin y x ya y xa y x y x y x y x z z+++=−+−++++=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 207/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 208/391
52
Esempi
1. ( )
∂
Ψ∂Φ+
∂
Ψ∂Φ+
∂
Ψ∂Φ×∇=
∂
Ψ∂+
∂
Ψ∂+
∂
Ψ∂Φ×∇=Ψ∇Φ×∇ k jik ji ˆˆˆˆˆˆ
z y x z y x
z y x
z y x
∂
Ψ∂Φ
∂
Ψ∂Φ
∂
Ψ∂Φ
∂
∂
∂
∂
∂
∂
k ji ˆˆˆ
k ji ˆˆˆ
∂
Ψ∂Φ
∂
∂−
∂
Ψ∂Φ
∂
∂+
∂
Ψ∂Φ
∂
∂−
∂
Ψ∂Φ
∂
∂+
∂
Ψ∂Φ
∂
∂−
∂
Ψ∂Φ
∂
∂
x y y x z x x z y z z y
k
j
i
ˆ
ˆ
ˆ
0
2
0
2
0
2
0
2
0
2
0
2
∂∂
Ψ∂Φ−
∂
Ψ∂
∂
Φ∂−
∂∂
Ψ∂Φ+
∂
Ψ∂
∂
Φ∂+
+
∂∂
Ψ∂Φ−
∂
Ψ∂
∂
Φ∂−
∂∂
Ψ∂Φ+
∂
Ψ∂
∂
Φ∂+
+
∂∂
Ψ∂Φ−
∂
Ψ∂
∂
Φ∂−
∂∂
Ψ∂Φ+
∂
Ψ∂
∂
Φ∂
==
==
==
321321
321321
321321
x y x y y x y x
x z z x z x x z
z y y z z y z y
Ψ∇×Φ∇=
∂
Ψ∂
∂
Φ∂−
∂
Ψ∂
∂
Φ∂+
∂
Ψ∂
∂
Φ∂−
∂
Ψ∂
∂
Φ∂+
∂
Ψ∂
∂
Φ∂−
∂
Ψ∂
∂
Φ∂k ji ˆˆˆ
x y y x z x x z y z z y
2. ( ) =
∂
Ψ∂Φ+
∂
Ψ∂Φ+
∂
Ψ∂Φ⋅∇=Ψ∇Φ⋅∇ k ji ˆˆˆ
z y x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 209/391
53
Ψ∇Φ+Ψ∇⋅Φ∇=
∂
Ψ∂Φ
∂
∂+
∂
Ψ∂Φ
∂
∂+
∂
Ψ∂Φ
∂
∂=
2
z z y y x x
3. ( ) ( ) ( ) ( ) =−+−+−⋅∇=×⋅∇ k jiGF ˆˆˆ122131132332 GF GF GF GF GF GF
=∂
∂−
∂
∂−
∂
∂+
∂
∂+
+∂
∂−
∂
∂−
∂
∂+
∂
∂+
+∂
∂−
∂
∂−
∂
∂+
∂
∂=
z
GF G
z
F
z
GF G
z
F
y
GF G
y
F
y
GF G
y
F
x
GF G
x
F
x
GF G
x
F
121
2212
1
313
1131
3
232
3323
2
( ) ( )GFFG ×∇−×∇⋅=
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
+
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−
∂
∂−=
y
F
x
F G
x
F
z
F G
z
F
y
F G
yG
xGF
xG
zGF
zG
yGF
123
312
231
123
312
231
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 210/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 211/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 212/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 213/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 214/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 215/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 216/391
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 217/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 218/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 219/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 220/391
1
SUPERFICI
Definizione.
Sia T la chiusura di un aperto connesso limitato 2 A R⊂ la cui frontiera A∂ è una curva semplice,chiusa, regolare a tratti. Una applicazione vettoriale:
r: ,3 RT → ir ),()( vu xu,v = + j),( vu y + k),( vu z (u,v) T ∈
che ha le seguenti proprietà:
1- r è continua su T2- r è iniettiva in A
è per definizione una superficie parametrica in 3 R e si dice che le equazioni
);,( vu x x = );,( vu y y = ),( vu z z = (u,v) T ∈
costituiscono una rappresentazione parametrica della superficie. Se in ( ) Avu ∈00 , esistono i vettori
k jir
ru
z
u
y
u
x
uu
∂
∂+
∂
∂+
∂
∂=
∂
∂=
k jirrv z
v y
v x
vv
∂∂+
∂∂+
∂∂=
∂∂=
si dicono regolari quei punti ( )00 ,vu in cuiu
r ev
r risultino continui e
0k jirr ≠∂
∂+
∂
∂+
∂
∂=×
),(
),(
),(
),(
),(
),(
vu
y x
vu
x z
vu
z yvu
diversamente i punti si dicono singolari.
Pertanto se )(1 AC ∈r , 0rr ≠× vu in A, la superficie è detta liscia o regolare. Se una superficie S è
liscia allora per ogni punto 0( , )o
u v A∈ le curve ),( 0 vur e ),( 0vur su S sono curve regolari e nel
loro punto di intersezione 0 0 0 0( , , )P x y z = ),( 00 vur S∈ i rispettivi vettori tangenti ( )vuv
,0∂
∂re non
( )0,vuv
r
∂
∂sono paralleli. Il vettore
( ) ( )0000 ,, vuu
vuv
n∂
∂×
∂
∂=
rr
è un vettore normale alla superficie S in 0P , inoltre il piano passante per 0 0 0 0( , , )P x y z = ),( 00 vur
S∈ e ortogonale al vettore n , è per definizione il piano tangente a S in 0P la cui equazione è :
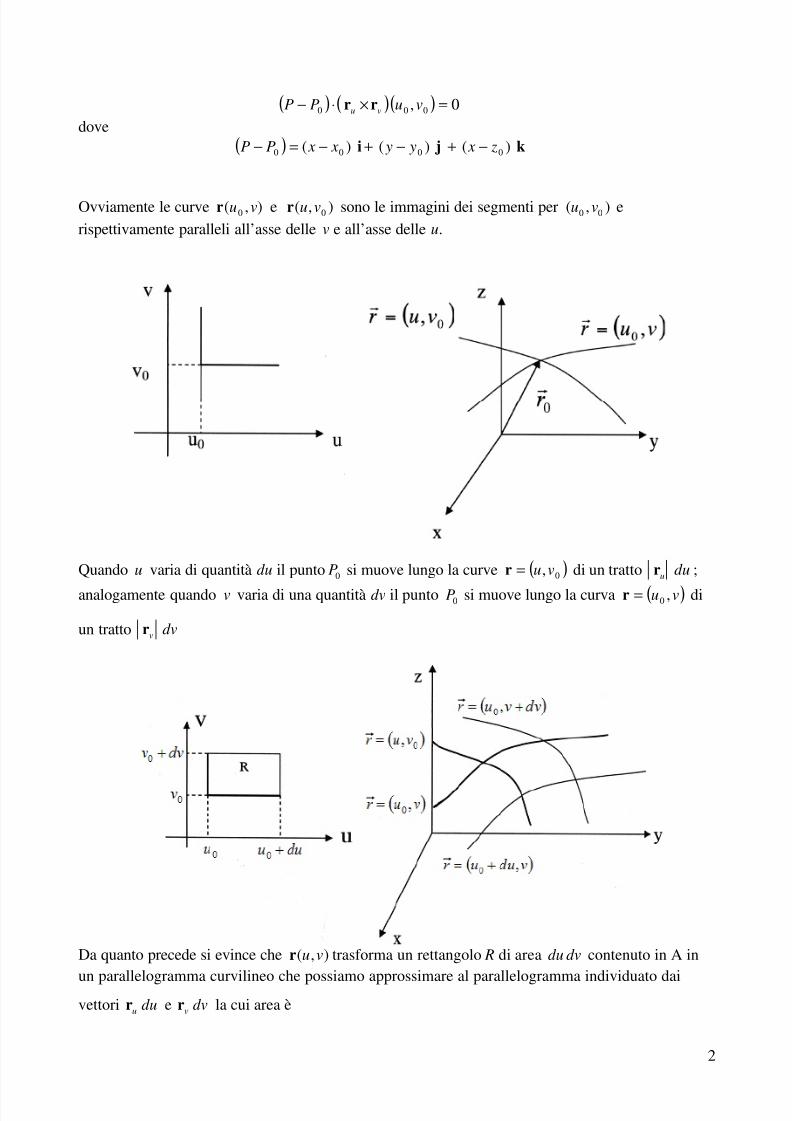
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 221/391
2
( ) ( )( ) 0, 000 =×⋅− vuPPvu
rr dove
( ) )( 00 x xPP −=− i + )( 0 y y − j + )( 0 z x − k
Ovviamente le curve ),( 0 vur e ),( 0vur sono le immagini dei segmenti per 0 0( , )u v e
rispettivamente paralleli all’asse delle v e all’asse delle u.
Quando u varia di quantità du il punto 0P si muove lungo la curve ( )0,vu=r di un tratto duu
r ;
analogamente quando v varia di una quantità dv il punto 0P si muove lungo la curva ( )vu ,0=r di
un tratto dvv
r
Da quanto precede si evince che ),( vur trasforma un rettangolo R di area dvdu contenuto in A in
un parallelogramma curvilineo che possiamo approssimare al parallelogramma individuato daivettori du
ur e dv
vr la cui area è
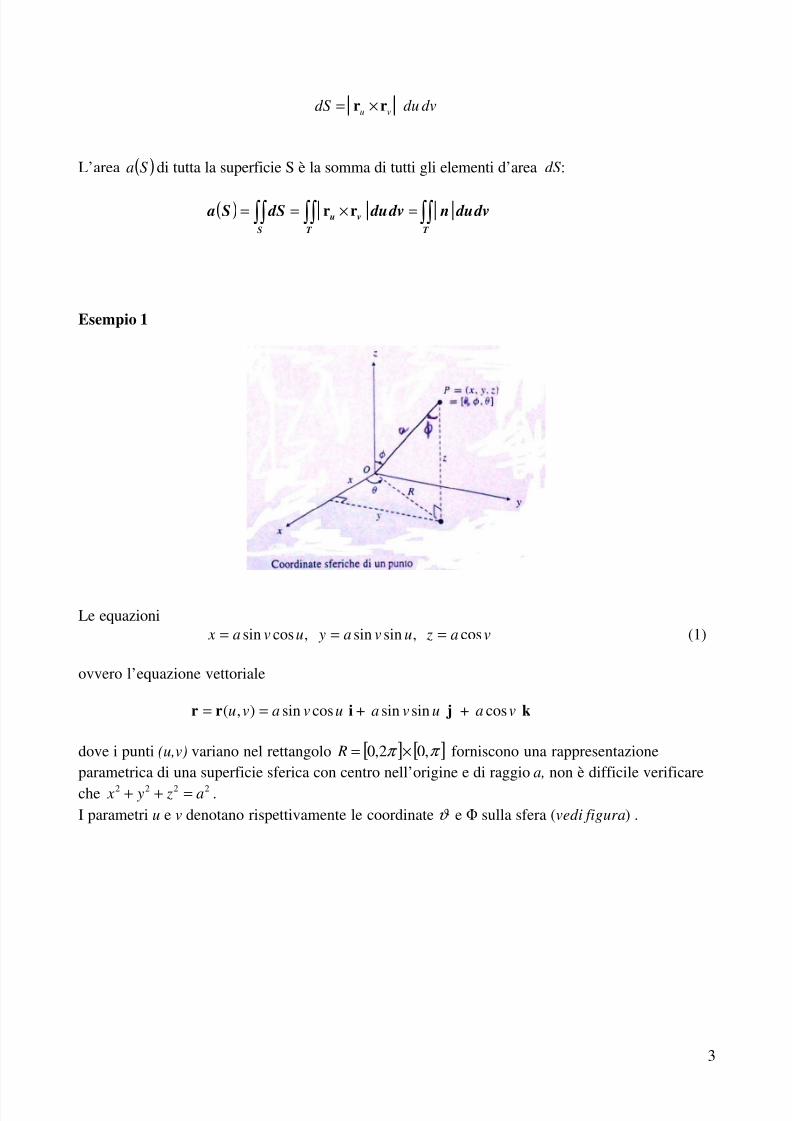
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 222/391
3
vudS rr ×= dvdu
L’area ( )Sa di tutta la superficie S è la somma di tutti gli elementi d’area dS:
( ) ∫∫∫∫∫∫ =×==T T
vu
S
dv du n dv du dSS a rr
Esempio 1
Le equazioni,cossin uva x = ,sinsin uva y = va z cos= (1)
ovvero l’equazione vettoriale
irr uvavu cossin),( == + uva sinsin j + va cos k
dove i punti (u,v) variano nel rettangolo [ ] [ ]π π ,02,0 ×= R forniscono una rappresentazioneparametrica di una superficie sferica con centro nell’origine e di raggio a, non è difficile verificare
che 2 2 2 2 x y z a+ + = .I parametri u e v denotano rispettivamente le coordinate ϑ e Φ sulla sfera (vedi figura) .
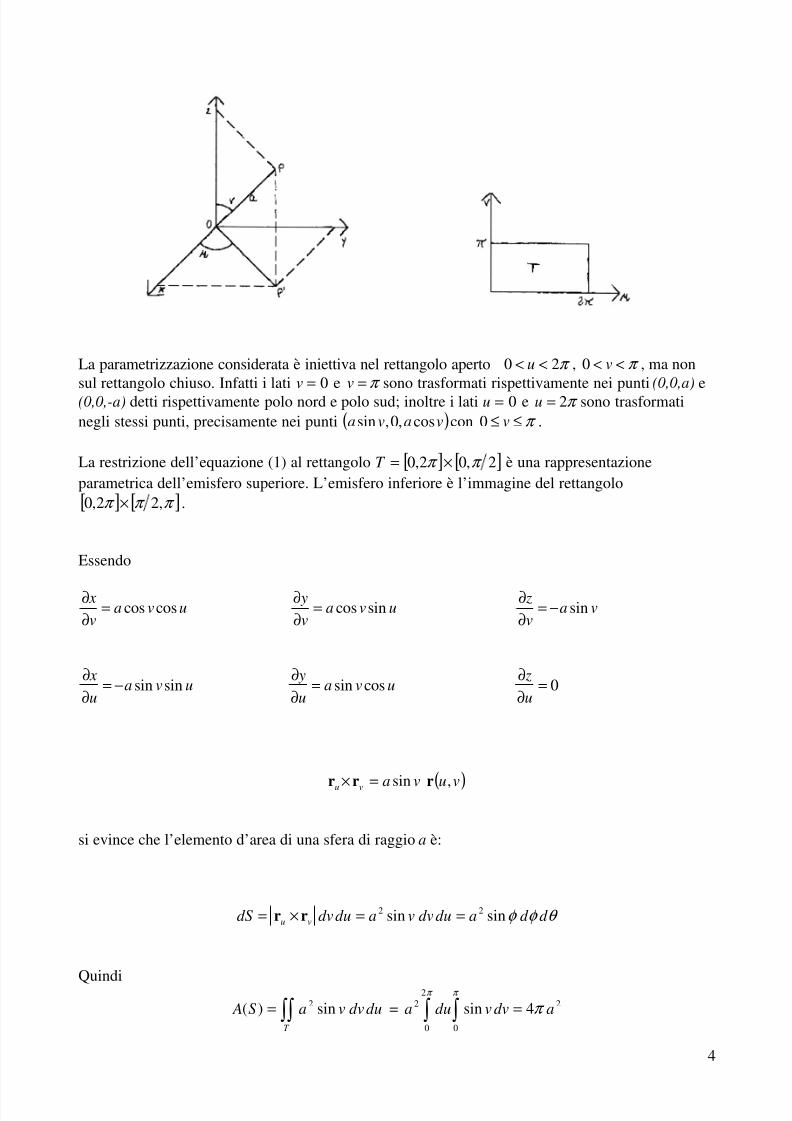
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 223/391
4
La parametrizzazione considerata è iniettiva nel rettangolo aperto 0 2u π < < , 0 v π < < , ma nonsul rettangolo chiuso. Infatti i lati 0v = e v π = sono trasformati rispettivamente nei punti (0,0,a) e(0,0,-a) detti rispettivamente polo nord e polo sud; inoltre i lati 0=u e 2u π = sono trasformatinegli stessi punti, precisamente nei punti ( )vava cos,0,sin con 0 v π ≤ ≤ .
La restrizione dell’equazione (1) al rettangolo [ ] [ ]2,02,0 π π ×=T è una rappresentazioneparametrica dell’emisfero superiore. L’emisfero inferiore è l’immagine del rettangolo[ ] [ ]π π π ,22,0 × .
Essendo
cos cos x
a v uv
∂=
∂cos sin
ya v u
v
∂=
∂sin
za v
v
∂= −
∂
sin sin x
a v uu
∂= −
∂sin cos
ya v u
u
∂=
∂0=
∂
∂
u
z
( )vuvavu ,sin rrr =×
si evince che l’elemento d’area di una sfera di raggio a è:
θ φ φ d d adudvvadudvdS vu sinsin 22 ==×= rr
QuindidudvvaS A
T
sin)( 2∫∫= = ∫∫ =
π π
π 0
22
0
2 4sin advvdua

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 224/391
5
Esempio 2
CONO CIRCOLARE RETTO
Con riferimento alla figura seguente è:
20,cos,sin,sin',
π α α α α <<==== ahar vOPvOP
Pertanto le equazioni parametriche di un cono circolare retto con angolo al centro α 2 e di apotemaa sono:
α α α cos,sinsin,cossin v zuv yuv x === (1)
La corrispondente equazione vettoriale è:
( ) k jir α α α cossinsincossin, vuvuvvu ++= dove π 20 ≤≤ u e av ≤≤0 ;
Essendo
k jirr α α α α α 2sinsincossincoscossin vuvuvvu −+=×
e quindi
0sin ≠=× α vvurr
sui punti interni di T si evince che la superficie conica considerata è regolare.Elevando al quadrato le equazioni (1) si ottengono le equazioni:
α 2222 sinv y x =+ α 222 cosv z =

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 225/391
6
da cui, essendoh
r =α tan , si ottiene:
22
222
zh
r y x =+ dove α arctan=
h
r . (2)
La (2) è l’equazione cartesiana del cono circolare retto di altezza h e raggio base r il cui angolo al
centro è α 2 dove
=
h
r arctanα .
Riassumendo quanto precede 2222 y x zb += è l’equazione di un cono circolare retto con vertice in0 e di angolo al centro α 2 con barctan=α .
Infine si osservi che l’equazione (2) risolta rispetto a z ha due soluzioni:
22 y xr h z += e 22 y x
r h z +−=
In altre parole l’equazione (2) è l’equazione cartesiana di due coni simmetrici rispetto al piano xy , icui vertici coincidono con l’origine del riferimento cartesiano.Infine
( ) r aaadudvvSa
a
π α π α
π
=== ∫ ∫ sinsin)(0
2
0
Esempio 3
Sia ),,( y x f z = T y x ∈),( Se poniamo , x u y v= = allora ( , ) z f u v= .Se f è di classe 1C (A) allora
l’equazione vettoriale
r(u,v)= u i + v j + f(u,v) k , ( , )u v T ∈
rappresenta sempre una superficie parametrica regolare il cui dominio T è la proiezione biunivocadella superficie sul piano xy. Infatti essendo
kir
u
f
u ∂
∂+=
∂
∂ k j
r
v
f
v ∂
∂+=
∂
∂

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 226/391
7
risulta
k ji
k ji
rr +∂
∂−
∂
∂−=
∂
∂∂
∂=×
v
f
u
f
v
f u
f
vu
10
01
Poiché la terza componente del vettore vurr × è 1, il suo modulo non è mai nullo.
Quindi il grafico di una funzione ( , ) z f x y= che risulta di classe (1)C nei punti interni al suo
dominio T è sempre una superficie regolare. In questo caso l’equazione del piano tangente nelpunto ( )00 ,, z y xo dove ( )000 , y x f z = è
( ) ( )( ) ( )( )00000000 ,,, y y y x f x x y x f y x f z y x −+−+= ;
l’area della superficie è:
dydx y
f
x
f dvduSa
T T
vu ∫∫∫∫
∂
∂+
∂
∂+=×=
22
1||)( rr
In particolare se 222 y xa z −−= allora
( ) 2
2222 adydx
y xa
aSa
T
π =−−
= ∫∫ dove 222: a y xT ≤+ .
Se la superficie S giace su un piano parallelo al piano xy (cioè sul piano z = costante) allora:
( ) ( )T adydxSaT
== ∫∫
dove T è la proiezione della superficie S sul piano xy .
Se la superficie S di equazione ( , ) z f x y= è una superficie piana che giace su un piano che formaun angolo γ con il piano xy , allora l’angolo che il vettore n normale alla superficie forma con ilversore k è uguale a γ , pertanto è:
1=⋅ kn e γ cosnkn =⋅

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 227/391
8
da cui
i) ycos
1=n
kn
n
⋅= yii cos
1)
Utilizzando la i) e tenendo presente che γ è costante si ottiene:
( ) ( )T adydxdydxSaT T
γ γ γ cos
1
cos
1
cos
1=== ∫∫∫∫
ovvero
( ) ( ) cosa T a S γ = .
L’equazione precedente è nota come principio del coseno delle aree:
Se una superficie S giacente su un piano è proiettata ortogonalmente su un insieme T che giace suun piano che forma un angolo γ con il piano che contiene la superficie allora ( )a T è γ cos voltel’area di S.
La i) e la ii) sono valide anche nel caso in cui S è una superficie regolare che ha una proiezionebiunivoca T sul piano xy. In questo caso l’angolo γ , che il vettore n normale alla superficie,forma
con il versore k ,varia da punto a punto. Utilizzando ii) risulta
( ) dydxSaT
∫∫ ⋅=
kn
n
Ovviamente
( ) dzdySaT ∫∫ ⋅= in
n
( ) dzdxSaT ∫∫ ⋅= jn
n
sono valide nel caso in cui una superficie regolare S ha una proiezione biunivoca T rispettivamentesul piano yz e sul piano xz.
Da quanto precede, segue che se una equazione del tipo ( , , ) 0F x y z = definisce implicitamente z infunzione di (x,y), ovvero una superficie regolare S che si proietta biunivocamente in una regione T del piano xy, allora :
dydxF
F Sa
T z
∫∫∇
=)(

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 228/391
9
Osservazioni
1. La relazione precedente può essere dedotta anche nel modo seguente. Nelle ipotesi suddetterisulta per il teorema delle funzioni implicite:
x
z
F z
x F
∂= −
∂
z
y
F
F
y
z−=
∂
∂
pertanto
( ) ( ) ( )
( )
dydx
F
F F F dydx
F
F
F
F dydx
y
z
x
zdS
z
y x z
z
y
z
x
2
2222222
11++
=
+
+=
∂
∂+
∂
∂+=
e quindi
( ) dydxF
F Sa
T z
∫∫∇
=
2. Nel caso in cui la superficie S è specificata dall’equazione ( , ) z f x y= per calcolare l’area si puòutilizzare la forma implicita in quanto ( , ) z f x y= può essere scritta come ( , , ) ( , ) 0F x y z z f x y= − =
RIASSUMENDO
- Forma parametrica:
Se ( )vu,rr = allora dvduSa
T
vu∫∫ ×= rr)( ( , )u v T ∈
- Forma cartesiana
Se ),( y x f z = allora ( ) ( ) dydx f f SaT
y x∫∫ ++= 221()( T y x ∈),(
- Forma implicita
Se 0),,( = z y xF allora dydxF
F Sa
T z
∫∫∇
=)( T y x ∈),(
valida nel caso in cui la proiezione della superficie sul piano xy sia biunivoca.
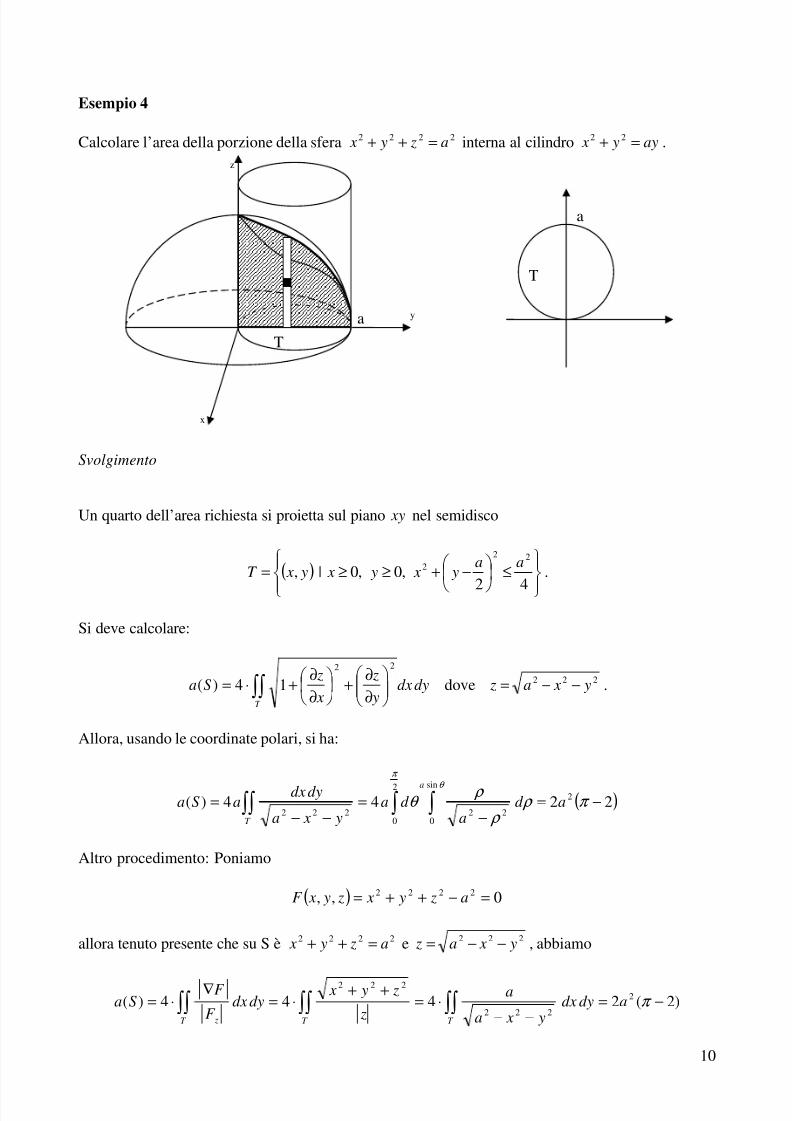
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 229/391
10
a
T
Esempio 4
Calcolare l’area della porzione della sfera 2222 a z y x =++ interna al cilindro ay y x =+ 22 .
Svolgimento
Un quarto dell’area richiesta si proietta sul piano xy nel semidisco
( )
≤
−+≥≥=
42
,0,0|,22
2 aa y x y x y xT .
Si deve calcolare:
dydx y
z
x
zSa
T
∫∫
∂
∂+
∂
∂+⋅=
22
14)( dove 222 y xa z −−= .
Allora, usando le coordinate polari, si ha:
( )2244)( 2sin
022
2
0222
−=−
=−−
= ∫∫∫∫ π ρ ρ
ρ θ
θ
π
ad a
d a y xa
dydxaSa
a
T
Altro procedimento: Poniamo
( ) 0,, 2222 =−++= a z y x z y xF
allora tenuto presente che su S è 2222 a z y x =++ e 222 y xa z −−= , abbiamo
∫∫ ∫∫∫∫ −=−−
⋅=++
⋅=∇
⋅=T T T z
adydx y xa
a
z
z y xdydx
F
F Sa )2(2444)( 2
222
222
π
x
z
y
T
a

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 230/391
11
Esempio 5
1. Calcolare l’area della superficie conica 222 y x z += che si trova tra i piani 0= z e32 =+ x z .
Svolgimento
La frontiera del dominio T sul quale si proietta la superficie S della quale si vuole calcolarel’area è data dall’ intersezione della superficie conica con quella del piano:
=+
+=
32
222
x z
y x z
−=
−=+
2
4
)3( 222
x z
x y x
134
)1( 22
=++ y x
Se poniamo 0),,( 222 =−+= z y x z y xF allora k ji z y xF 222 −+=∇ .Quindi
dydx z
z y xdydx
F
F Sa
T T
∫∫∫∫++
=∇
=2
2)(
222
2
da cui tenuto presente che su S è 222 y x z += ovvero 22 y x z += , si ottiene
π π 62)32(22)( === ∫∫T
dydxSa
-3
3/2
S
1
z
x
3
-1
T

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 231/391
12
Esempio 6
Calcolare l’area della parte della sfera 2222 a z y x =++ interna al cilindro ellittico 2222 a y x =+ .
Svolgimento
Un ottavo dell’area richiesta si proietta sul piano xy nella parte T dell’ ellisse che sta nel primoquadrante del piano xy.Pertanto
∫∫
∂
∂+
∂
∂+=
T
dydx y
z
x
zSa
22
18)( dove 222 y xa z −−= .
Posto2
)(22
ya yb
−= si ha
22
0
)(
0
22
0
)(
0222222
24
8arcsin8
88)(
aady ya
xa
y xa
dxdya
y xa
dydxaSa
a yb
a yb
T
π π
==−
=
=−−
=−−
=
∫
∫ ∫∫∫
Esempio 7
Calcoliamo l’area della superficie ( )221 y x
a z += che sta sopra la lemniscata θ ρ 2cos4 22
a= .
Svolgimento
Un quarto dell’area richiesta si proietta sul piano xy nella parte T della lemniscata corrispondente a
4
0π
θ ≤≤ e ( )θ θ ρ ba
=≤≤ 2cos
4
0 .
Usando le coordinate polari si ha
( ) ( )
( )
( )[ ] ( )
( )
−=−+=
=+=+=
=++=
∂
∂+
∂
∂+=
∫
∫∫ ∫
∫∫∫∫
43
5
3122cos1
3
430
14
4
44
14
222 / 3
4 /
0
2
0
2 / 3224 /
0
224 /
0 0
222
22
π π θ θ
θ ρ ρ ρ ρ θ
π
θ π π θ
aad
a
d ad ad a
dydxa y xa
dydx y
z
x
zSa
bb
T T
dove si è tenuto presente che θ θ 2cos22cos1 =+ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 232/391
13
Esempio 8
Calcolare l’area della superficie sferica 4222 =++ z y x che sta sopra la cardioide θ ρ cos1−= .
Svolgimento
L’area richiesta è due volte l’area della parte della superficie 224 y x z −−= la cui proiezione sul
piano xy è il dominio T delimitato da θ ρ cos1−= con π θ ≤≤0 .Pertanto:
∫∫∫∫−−
=
∂
∂+
∂
∂+=
T T y x
dydxdydx
y
z
x
zSa
22
22
4412)(
da cui, passando a coordinate polari, si ottiene
+−=
−−=
−= ∫∫∫ ∫
−
θ θ θ
π θ θ
π ρ ρ
ρ θ
π π π θ
d d d d Sa2
cos2
sin182
sin184
4)(0
2
0
4
0
cos1
02
Ponendo
Sostituendo usen =
2
θ si ottiene
( )12ln2122
cos2
sin11
0
2
0
2 ++=+=+ ∫∫ duud θ θ θ
π
Quindi
])12ln(2[8)( +−−= π Sa .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 233/391
14
Elemento d’area di una superficie cilindrica
L’elemento d’area dS di una superficie cilindrica S data in coordinate cilindriche dall’equazione
)(ϑ r r = 10 ϑ ϑ ≤ ≤
è dzdsdS = dove ds è l’elemento di lunghezza d’arco della curva di equazioni parametriche
( )cos x r ϑ ϑ = ( ) sin y r ϑ ϑ = 10 ϑ ϑ ≤ ≤
in altre parole èe quindi θ d r r ds
22&+= dove )(ϑ r r ′=&
Se il cilindro ha la base sul piano z = 0 e il “coperchio” su una superficie liscia di equazione( , ) 0 z f x y= > allora
0 ( ) ( ( ) cos( ), ( ) sin( )) z z f r r ϑ ϑ ϑ ϑ ϑ ≤ ≤ = quindi
ϑ ϑ ϑ
ϑ ϑ θ
d r r zdzd r r Sa
z
22)(
0 00
2211
)()( && +=+= ∫ ∫∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 234/391
15
Esempio 9
Determinare l’area di quella parte della superficie cilindrica di equazione 2 2 2 x y ay+ =
i) interna alla sfera di equazione 2 2 2 24 x y z a+ + = ii) esterna al cono di equazione 2 2 2 z x y= +
Svolgimento
i) Ovviamente un quarto dell’area richiesta S si trova nel primo ottante. Pertanto osservato chel’equazione del cilindro in coordinate cilindriche è
2 sina ρ ϑ = 0 ϑ π ≤ ≤ ,
e che il coperchio superiore giace sull’emisfero 2 2 24 z a x y= − − si evince che
2 24 2 | cos | z a a ρ ϑ = − = 0 ϑ π ≤ ≤
e quindi
∫∫ ==+=2
0
22
0
222 16cos16cos24)(π π
ϑ ϑ ϑ ρ ρ ϑ ad ad aSa &
ii) Come in i) osservato che il coperchio superiore giace sulla superficie 2 2 z x y= + segue che
( ) 2 sin z aϑ ρ ϑ = = 0 ϑ π ≤ ≤
da cui
/ 22
0
( ) 4 2 sin 2 16a S a a d a
π
ϑ ϑ = ⋅ =∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 235/391
16
Esempio 10
Determinare l’area di quella parte di superficie cilindrica 222a z x =+ interna alla superficie
cilindrica .222 a z y =+
Svolgimento
L’equazione del cilindro 222a z x =+ in coordinate cilindriche è a ρ = . Pertanto è
dyad dS ϑ =
Osservato che il coperchio destro giace sulla superficie di equazione:
2 2 2 2 2sin | cos | ( ) y a z a a a yϑ ϑ ϑ = − = − = =
e che un ottavo dell’area richiesta si trova nel primo ottante, si evince che
/ 2 cos / 22 2
0 0 0
( ) 8 8 cos 8a
a S a d dy a d a
π ϑ π
ϑ ϑ ϑ = = =∫ ∫ ∫ .
Esempio 11
Calcolare l’area del cilindro verticale di equazione2
sin2cos1 2 θ θ ρ =−= interna alla sfera
4222 =++ z y x .
Svolgimento

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 236/391
17
L’area richiesta è quattro volte l’area della superficie cilindrica che sta nel primo e nel terzo ottante
il cui coperchio è la superficie: 224 y x z −−=
Pertanto
( ) θ ρ ρ θ
π
d zSa ∫ +=0
224)( &
dove
( ) ( )2
sin4cos12sincos1 22222 θ θ θ θ ρ ρ =−=+−=+ &
2sin1
2cos2
2sin444)( 242 θ θ θ
ρ θ +=−=−= z .
Quindi
( )1223
32
2sin1
2cos
2sin16)(
0
2 −=+= ∫π
θ θ θ θ
d Sa
Osservazione
Se una rappresentazione parametrica ),( vurr = di una superficie è biunivoca anche sulla frontieradel suo dominio T , allora r trasforma la frontiera di T in una curva semplice chiusa liscia a tratti,detto contorno della superficie parametrica. Se r è biunivoca solo su una parte della frontiera diT , il contorno della superficie può essere ottenuto solo da una parte del contorno di T . Nel casodegli emisferi la circonferenza 222 a y x =+ , che corrisponde al lato 2 / π =v del rettangolo è ilcontorno sia dell’emisfero superiore sia dell’emisfero inferiore. L’ intera superficie sferica è priva
di contorno in quanto biunivoca solo sui punti interni al rettangolo. Una superficie di contorno èdetta superficie chiusa. Come nel caso di una curva, la parametrizzazione di una superficie non èunica.
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 237/391
18
L’emisfero superiore può essere parametrizzata nel modo seguente:
u x = , v y = , 222vua z −−= T vu ∈),(
dove T è il disco
222
avu ≤+ .Si osservi che per questa rappresentazione ogni punto sull’equatore è un punto singolare. Se unnumero finito di superfici lisce sono unite, a coppie, lungo una parte o la totalità del loro contorno,la superficie così ottenuta è detta superficie liscia a pezzi.Esempi di superficie lisce a pezzi sono i parallelepipedi. Un parallelepipedo è una superficie chiusa,in quanto non esistono due lati non uniti fra loro che costituiscono un contorno.
Se per esempio, eliminiamo la faccia superiore del parallelepipedoconsiderato, le rimanenti cinque facce formano la superficie di una scatolasenza coperchio. I lati in alto delle quattro facce laterali costituiscono ora il
contorno di questa superficie (liscia a pezzi).
Siano3: ℜ→ Ar ),(),( vuvu r→
3: ℜ→ BR ),(),( t st s R→
due superfici regolari equivalenti e sia
A B →:G di classe )(1 BC t.c. ( )),(),,(),( t sV t sU t s →
[ ] ( )),(),,(),(),( t sV t sU t st s rGrR ==
In altre parole),( t sR è l’equazione parametrica della superficie che si ottiene dall’equazione parametrica
( )vu,rr = mediante il combinamento di parametri
),( t sU u = Bt s ∈),( e )(1 BC U ∈
),( t sV v = Bt s ∈),( e )(1
BC V ∈ .
Allora
( )( )
( )t s
V U vut s ,
,
∂
∂∧=∧ rrRR e
( )
( )t s
V U vut s ,
,
∂
∂∧=∧ rrRR
Inoltre
Se ∫∫ ∃⇒∃)()( B A
dSF dS f rr
e ∫∫ =)()( B A
dS f dSF rr
dove )],(),,(([)],([ t sV t sU r f t s RF = .
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 238/391
19
INTEGRALI DI SUPERFICIE DI CAMPI VETTORIALI:
FLUSSO
Superfici Orientate
Una superficie liscia S è orientabile se in ogni P∈ S esiste un campo vettoriale unitario n (P)continuo e normale a S. Una superficie S orientabile deve avere due lati. Il lato al di fuori del qualepunta N è detto lato positivo.Una superficie orientata S induce una orientazione su ogni curva C ∈ ∂S. Il verso positivo di C èquello lungo il quale un osservatore, in piedi sul lato positivo della superficie, percorrendo C vede Salla sua sinistra.
Osservazione
Il concetto di orientabilità si può applicare solo alle superfici lisce. Tuttavia non sempre le superficilisce sono orientabili. Inoltre spesso le superfici non sono lisce ma possono essere l’unione di piùsuperfici lisce orientabili.
FlussoIn fisica, il significato originario di flusso è quello di quantità di un fluido che passa, nell’unità ditempo, attraverso una superficie. Tale definizione è legittimata dal fatto che se una superficie èattraversata da un fluido di densità unitaria, allora sapendo che la densità è la massa per unità divolume, segue che la massa del fluido che, nell’unità di tempo, passa attraverso la superficie ènumericamente uguale al volume del fluido che passa attraverso la superficie nell’unità di tempo.Supponiamo che σ sia una superficie orientata con un versore normale n e che un fluido di
densità unitaria fluisca attraverso σ nella direzione di n .Inoltre supponiamo che il fluido sia stazionario, ovvero: in ogni istante la velocità della particelladel fluido che occupa la posizione (x,y,z) rimane la stessa.La velocità del fluido che supponiamo funzione della posizione e non del tempo sia descritta dalcampo (di velocità):
F(x,y,z) = 1F (x,y,z) i + 2F (x,y,z) + 3F (x,y,z) k
Per determinare la massa Φ del fluido che passa attraverso una superficie orientata σ nelladirezione dell’orientazione n suddividiamo σ in n parti
nσ σ σ ,....,, 21 con aree rispettivamente
nSSS ∆∆∆ ,...,, 21 .
Se le parti sono piccole e se ),,( ***k k k
z y x è un punto qualunque della k-esima partek σ ,è ragionevole
affermare che la velocità è costante e uguale a F ),,( ***k k k z y x in ogni
k σ .
La componente della velocità del fluido attraverso la superficiek σ ovvero:
F ),,( ***k k k
z y x ⋅ n ),,( ***k k k
z y x (1)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 239/391
20
rappresenta la distanza percorsa, nell’unità di tempo, dalla sezione del flusso inizialmente su k σ . In
altre parole la sezione del flusso che inizialmente si trova su k σ , nell’unità di tempo si muoverà
spaziando un cilindro di area base k S∆ e di altezza (1).
Pertanto
k k k k k k k z y x z y x S,,ˆ,, ****** ∆⋅ nF (2)
rappresenta il volume di questo cilindro.Così il volume del fluido passante attraverso σ nell’unità di tempo può essere approssimata comesegue:
( ) ( ) k k k k k k k
n
k
z y x z y x S,,ˆ,, ******
1
∆⋅≈Φ ∑=
nF
Se aumentiamo n in modo tale che le parti della superficie tendono a zero, è plausibile che gli errorinelle approssimazioni tendono a zero e il volume di Φ è:
( ) ( ) k k k k k k k
n
k n
z y x z y x S,,ˆ,, ******
1lim ∆⋅=Φ ∑
=∞→
nF
che può essere espressa tramite l’integrale di superficie:
( ) ( ) S,,ˆ,, d z y x z y x nF ⋅=Φ ∫∫ (3)
La quantità Φ definita da questo integrale rappresenta il flusso di F attraverso σ , ovvero la massadel flusso passante attraverso σ nell’unità di tempo.
Osservazione
Quando si deve calcolare il flusso di un campo vettoriale F attraverso una superficie liscia σ èopportuno tenere presente quanto segue:
i) Per una superficie σ definita dall’equazione ),( y x f z = è
( ) ( ) 1ˆ
22++
−−−±=
y x
y x
f f
f f k jin e ( ) ( ) dydx f f dS y x 122
++=
da cui
) dydx f f dS y x
k jin −−−±=ˆ . (4)
Analogamente, se la superficie è definita da una equazione della forma ),( z xg y = oppure
),( z yh x = risulta( ) dydxggdS
x xk jin −−−±=ˆ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 240/391
21
oppure
) dydzhhdS z y
k jin −−±=ˆ
ii) Per una superficie definita implicitamente da un’equazione della forma ( ) 0,, = z y xF e con unaproiezione biunivoca su una regione T del piano xy, è
F
F
∇
∇±=n e dydx
F
F dS
∇±=
da cui
dydx
F
F dS
z
∇±=n . (5)
Naturalmente valgono formule simili alle precedenti per le superfici che hanno una proiezionebiunivoca T sui piani coordinati yz e xz; non è difficile verificare che allora risultarispettivamente
dzdyF
F dS
x
∇±=n e dzdx
F
F dS
y
∇±=n .
iii) Per una superficie σ definita parametricamente dall’equazione vettoriale ( )vu,rr = è
vu
vu
rr
rrn
×
×±=ˆ e dvduvu rrn ×±=ˆ
da cui
( ) dvdudSvu
rrn ×±=ˆ . (6)
Ovviamente, comunque venga assegnata la superficie, in (4), (5) e (6), il segno deve essere scelto inmodo da assegnare a σ l’orientazione desiderato.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 241/391
22
Esempio 1
Determinare il flusso del campo vettoriale
F = m3r
rr = x i + y + z k
Uscente dalla superficie sfericaσ con centro nell’origine e di raggio a.
Svolgimento
Dobbiamo calcolare
∫∫σ
F ⋅ dSn
dove n è la normale unitaria esterna alla sfera σ ,ovvero
n =r
r.
Se usiamo le coordinate sferiche in ogni punto della sfera è
r = r (θ,Φ) = a sinΦ cosθ i + a sinΦ sinθ j + a cosΦk
dove 0 ≤ Φ ≤ π , 0 ≤ θ ≤ 2π;
F =3
a
mr (θ,Φ) e n =
a
1r (θ,Φ) .
Infine osservato che
dS = Φ× Φ d d θ θ rr = a² sinΦ Φd d θ
si evince che
∫∫σ
F ⋅ n dS = m ΦΦ∫ ∫ d d
π π
θ
2
0 0
sin = 4πm.
Infatti è
F ⋅ n = m 3r
r
r
r
= 2r
m
= 2a
m
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 242/391
23
Esempio 2
Calcolare il flusso totale di F = x i + y j + z k
Uscente dalla superficie cilindrica x² + y² ≤ a² -h ≤ z ≤ h.
Svolgimento
La superficie σ è costituita dai due dischi della base e del coperchio:
1σ : z = -h x² + y² ≤ a², 2σ : z = h x² + y² ≤ a²
e dalla superficie laterale
Lσ : x² + y² = a² -h ≤ z ≤ h.
Il flusso totale di F uscente dalla superficie σ è la somma del flusso di F uscente dalla base 1σ , dal
coperchio 2σ e dalla superficie laterale Lσ del cilindro.È opportuno usare le coordinate cilindriche.
Sulla base è n = -k, pertanto
∫∫1σ
F ⋅ dSn = ∫∫1σ
-z dS
Poiché sulla base è z = -h abbiamo che
∫∫1σ
F ⋅ dSn = h∫1σ
dS = hπa².
Analogamente, essendo sul coperchio n = k e z = h, si ottiene
∫∫2σ
F ⋅ n dS = ∫∫2σ
z dS = h∫∫2σ
dS = hπa².
Sulla superficie laterale del cilindro Lσ la normale esterna non dipende da z, è
n = cosθ i + sinθ .
Inoltre su Lσ èF = a cosθ i + a sinθ j + z k
Pertanto su Lσ è F ⋅ n =a. Infine osservato che l’elemento d’area della superficie laterale delcilindro è
dS= dz ds = a dθ dz
si evince che (*)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 243/391
24
∫∫ Lσ
F ⋅ n dS = a² ∫π 2
0
θ d ∫−
h
h
dz = 4πa²h.
Quindi
∫∫σ F ⋅ n dS = 6πa²h.
(*) Osservazione
∫∫ Lσ
F ⋅ n dS = ∫∫ Lσ
a dS = a (Area di Lσ ) = a (2πa2h) = 4πa²h.
Esempio 3
Calcolare il flusso del campo vettoriale
k jiFF z x y xy z y x 232),,( ++==
uscente dal cilindro ellittico S di equazione
12
2
2
2
=+ b
y
a
x
10 ≤≤ z
Svolgimento
Il flusso richiesto è la soma del flusso uscente dalla superficie laterale LS del cilindro, dalla base B
sul piano xy e dal coperchio sul piano 1= z . Calcoliamo il flusso uscente da LS , le cui equazioniparametriche sono
z zb ya x === ,sin,cos θ θ
dove π θ 20 ≤≤ e 10 ≤≤ z . Essendo su LS
k jiF θ θ θ θ 223322 cossincossin a zbab ++= ;
θ θ
θ θ
θ
θ
2222 sincos
sincosˆ
ab
ab
z
z
+
+=
×
×=
ji
rr
rrn
oppure
kT
kTn
×
×=ˆ dove iT cossin ba +−= θ ;

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 244/391
25
dzd badzdsdS θ θ θ cossin 222 +==
si ha
π θ θ
π
31
0
2
0
2
S
sinSˆL
abdzd abd ==⋅
∫∫∫∫nF .
Il flusso del coperchio C è
∫∫∫∫∫∫ ==⋅T
2
C
2
C
S dydx xdydx z xd kF
dove si è tenuto conto che su C è 1= z e che la proiezione di C sul piano xy è l’insieme
( )
≤+= 1, 2
2
2
2
b
y
a
x
y xT .
Ponendo vb yua x == , e usando le coordinate polari si ottiene che
∫ ∫∫∫∫∫ ===π
π ρ ρ θ θ
2
0
1
0
3323
D
23
T
2
4cos bad d badvduubadydx z x
dove D è il disco 122 ≤+ vu .
Infine osservato che sulla base è kn −=ˆ e 0= z si evince che il flusso uscente da B è zero. Quindiil flusso totale uscente sa S è
+=⋅∫∫ 4
ˆ2
2 ababdS
S
π nF .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 245/391
26
Esempio 4
Calcolare il flusso del campo vettoriale di F = y i + z k uscente dalla frontieraσ del cono
0 ≤ z ≤ 1-22
y x +
Svolgimento
Indichiamo con Lσ la superficie laterale del cono z =1 - 22 y x + e con T il disco x² + y² ≤ 1.
Allora
∫∫σ
F ⋅ n dS = ∫∫ Lσ
F ⋅ n dS + ∫∫T
F ⋅ n dS
dove
n = 22
y x
x
+i +
22 y x
y
+ j + k su
Lσ n = - k su T .
Essendo su Lσ
F = y i +
+−22
1 y x k
abbiamo (tenuto presente che Lσ si proietta su T)
∫∫σ
F ⋅ n dS = dydx y x y x
xy
T
∫∫
+−+
+
22
221 - ∫∫
T
z dydx .
Osservato che, per motivi di simmetria, è
∫∫T
22 y x
xy
+dydx = 0
e che su T è z = 0, utilizzando le coordinate polari, si ottiene
∫∫σ
F ⋅ n dS = ∫∫T +− 221 y x dydx = ∫
π 2
0dθ ∫ −
1
0)1( ρ ρ dρ = 3
π .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 246/391
27
Teorema della Divergenza (di Gauss)
Sia D un dominio tridimensionale regolare, la cui frontiera D∂ è una superficie chiusa S orientata
con campo normale unitario n uscente da D.
Se
F(x,y,z) = 1F (x,y,z) i + 2F (x,y,z) j + 3F (x,y,z) k
è un campo vettoriale liscio definito su D, allora
∫∫∫∫∫ ⋅=⋅∇S D
dSdV nFF ˆ
Dimostrazione
Incominciamo a calcolare il flusso di un campo vettoriale
=F 3F (x,y,z) k
parallelo all’ asse z uscente da una superficie orientabile chiusa S liscia a pezzi che è il contorno di
un dominio D z-semplice .
Poiché D è z-semplice , tale dominio è compreso tra i grafici di due funzioni ),( y x f z = e
),( y xg z = definite su una regione connessa e limitata R del piano xy. Se supponiamo
f ( x, y ) ≤ g ( x, y ) allora
R y x D z y x ∈⇔∈ ),(),,( e ),(),( y xg z y x f ≤≤
g
f
R
Supposto f e g di classe )(1 RC , la superficie S consiste di una parte inferiore S1, di una parte
superiore S2 definite rispettivamente dalle equazioni ),( y x f z = e ),( y xg z = ed

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 247/391
28
eventualmente da una parte S3 del cilindro verticale che passa per la frontiera di R .
Calcoliamo
dSS
nF ˆ∫∫ ⋅
dove n è il campo normale unitario di S uscente da D . Essendo sulla superficie laterale S3 ⋅k n = 0 risulta
dSS
nF ˆ∫∫ ⋅ = ∫∫ ⋅
2S
F n dS + ∫∫ ⋅
1S
F n dS
Poiché su S2 è :
⋅k n dydxdydx y
f
x
f dS =
+
∂
∂−
∂
∂−⋅= k jik
mentre su S1 è :
⋅k n dydxdydx y
f
x
f dS −=
−
∂
∂+
∂
∂⋅= k jik
risulta :
[ ] [ ]∫∫ ∫∫∫∫∫∫=−=⋅=⋅
R RSS dydx y x f y xF dydx y xg y xF dS z y xF dS )),(,,()),(,,(ˆ
),,(ˆ
333
nknF
dzdydx z
F dydx
z
F
D R
y xg
y x f
∫∫∫∫∫ ∫ ∂
∂=
∂
∂= 3
),(
),(
3
E’ evidente ora che se D è x-semplice possiamo usare lo stesso tipo di ragionamento per dimostrare
l’identità
dzdydx x
F dSF
S D
∫∫ ∫∫∫ ∂
∂=⋅ 1
1ˆ
ni
mentre se D è un dominio y-semplice l’identità è
dzdydx y
F dSF
DS
∫∫∫∫∫ ∂
∂=⋅ 2
2ˆ
n j
Pertanto se D è un solido x-y-z semplice, la cui frontiera S è una superficie chiusa, orientabile e
liscia a pezzi e se
k ji ),,(),,(),,(),,( 321 z y xF z y xF z y xF z y x ++=
))))
è un campo vettoriale di classe )(1 DC allora
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 248/391
29
dzdydx z
F
y
F
x
F
D
∂
∂+
∂
∂+
∂
∂∫∫∫ 321 = dSF F F
S
nk ji ˆ)( 321 ⋅++∫∫
ovvero
dV div D
F
∫∫∫ = ∫∫ ⋅S
F dSn
Ora supponiamo che D sia l’unione di due domini D1 e D2 x-y-z semplici che non si sovrappongono
e che la frontiera S viene divisa in S1 e S2 dalle superficie S*
che taglia D in D1 e D2 . Ovviamente S*
è parte del contorno sia di D1 che di D2 . Poiché il teorema vale per entrambi i domini D1 e D2
abbiamo:
dSdV D SS
∫∫∫ ∫∫∗∪
⋅=⋅∇
1 1
1nFF
∫∫∫ ∫∫∪
⋅=⋅∇
2*
2
2ˆ
D SS
dSdV nFF
da cui
∫∫∫ ∫∫∫ ∫∫∫ =⋅∇+⋅∇=⋅∇ D D D
dV dV dV
1 2
FFF
= dSdSdSdS
SSS S
∫∫∫∫∫∫ ∫∫ ⋅+⋅+⋅+⋅*
21*
ˆˆˆˆ211 nFnFnFnF
Poiché le normali esterne 2n e 1n , rispettivamente dei domini D1 e D2 puntano in direzioni opposte
sui due lati di S
*
, i contributi provenienti da S
*
si elidono, pertanto risulta
dSdSdSdV SS D S
∫∫∫∫∫∫∫ ∫∫ ⋅=⋅+⋅=⋅∇ nFnFnFF ˆˆˆ21
21
Iterando il procedimento precedentemente si evince la validità del teorema al caso in cui D è
regolare ovvero è l’unione finita di domini x-y-z semplici che non si sovrappongono.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 249/391
30
Vale il seguente
Teorema. Siano: )(r B una sfera solida di raggio r e con centro in 0P ; S la frontiera di )(r B ; n la
normale unitaria esterna di S; )(r B il volume di )(r B . Allora
)()(ˆ)(
1lim 0
0Pgrad dS
r BS
r FnF =⋅∫∫→
.
Dimostrazione.
Dobbiamo dimostrare che dato 0>ε esiste ( ) 0>= ε δ δ tale che
( ) ε ϕ <⋅− ∫∫S
dSr B
P nF ˆ)(
10 per ogni δ << r 0 .
Dove ( ) )()( Pgrad P F=ϕ . Poiché ϕ è continua in 0P , in corrispondenza di 0>ε esiste una sfera
);( 0 δ P B tale che
( ) ( )2
0
ε ϕ ϕ <− PP per ogni );( 0 δ P BP∈ .
Se scriviamo
( ) ( ) ( ) ( )[ ]00 PPPP ϕ ϕ ϕ ϕ −−=
ed integriamo questa equazione su una sfera ),( 0 r P B dove δ << r 0 , abbiamo
( ) ( ) ( ) ( )[ ] dV PPdV Pr BPr B r B
0
)( )(
0 )( ϕ ϕ ϕ −−⋅∇= ∫∫∫ ∫∫∫F .
Da cui se applichiamo il teorema della divergenza al primo integrale del secondo membro,
otteniamo
( ) ε ε
ϕ <≤⋅− ∫∫ )(2)(
1ˆ
)(
10 r B
r BdS
r BP
S
nF per ogni δ << r 0 .
La formula dimostrata nel teorema precedente cioè
( ) ∫∫ ⋅=⋅∇→
Sr
dSr B
P nFF ˆ)(
1lim
0
in precedenza in alcuni testi di analisi vettoriale è presa come definizione di divergenza e fornisce la
seguente interpretazione fisica della divergenza.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 250/391
31
Supponiamo che F rappresenti il vettore densità di flusso di una corrente stazionaria. Allora come
già visto, l’integrale superficiale
∫∫ ⋅S
dSnF ˆ
misura la massa totale di fluido che scorre attraverso S nell’unità di tempo nella direzione di n ;il rapporto
∫∫ ⋅S
dSr B
nF ˆ)(
1
misura la massa per unità di volume che scorre attraverso δ nell’unità di tempo e nella direzione di
n . Poiché il limite per r → 0 del rapporto precedente è la divergenza di F in P, segue che:
la divergenza di F in un punto P può essere interpretata come la rapidità di variazione della massa
per unità di volume e per unità di tempo in P.
Osservazioni importanti
Dal teorema di Gauss segue
1. Il flusso uscente da una superficie S ( orientabile e liscia a pezzi ) , di un campo vettoriale
costante è uguale a 0
2. Qualunque sia la superficie chiusa S ( orientabile e liscia a pezzi ), è
dSS
∫∫ ⋅×∇ nF ˆ)( = dS D
∫∫∫ ×∇⋅∇ F = 0
Ovvero
dSrot S
nF ˆ⋅∫∫
= 0
UNA APPLICAZIONE DEL TEOREMA DELLA DIVERGENZA
Sia D un dominio regolare la cui frontiera è la superficie S. Se F è un campo vettoriale liscio, φ è
un campo scalare liscio e c è un vettore costante arbitrario, allora applicando il teorema divergenza
a cF x e cφ , si ottengono rispettivamente le seguenti relazioni vettoriali:
i) dSdV S D
nFF ˆ×−=×∇ ∫∫∫∫∫
ii) .ˆ dSdV S D
nφ φ ∫∫∫∫∫ −=∇

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 251/391
32
Osservazione
Formalmente la i) si ottiene da
dSdV S D
nFF ˆ⋅−=⋅∇ ∫∫∫∫∫
Sostituendo · con × e ponendo il segno meno al 2° membro;
la ii) sostituendo F con φ .
Il teorema della divergenza applicato a cF x da
( ) ( ) ( )[ ] ( )dV dV dV x DS D
FcFccFcF ×∇⋅=⋅×∇−⋅×∇−=×∇ ∫∫∫∫∫∫∫∫
( ) ( ) ( ) ( )dSdSdSdV x DSSS
nFcnFcnFcncF ˆˆˆˆ ×⋅−=×⋅−=⋅×−=⋅ ∫∫∫∫∫∫∫∫∫
segue che
( ) ( ) 0ˆ =⋅
×+×∇ ∫∫∫∫∫ cnFF dSdV
S D
da cui, data l’arbitrarietà di c , si evince che
( ) ( )dSdV S D
nFF ˆ×−=×∇ ∫∫∫∫∫ .
Esempio 1
Verificare il teorema di Gauss nel caso in cui D è il dominio la cui frontiera σ è il tetraedro
delimitato dai piani coordinati e dal piano
1=++c
z
b
y
a
xa > 0, b > 0, c > 0;
e
F = ∇Ф dove Ф = Ф(x,y,z) = xy + z².
Svolgimento
Dobbiamo dimostrare che
∫∫σ
F ⋅ dSn = ∫∫∫ D
∇ ⋅F dS

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 252/391
33
dove n denota la normale unitaria esterna a σ . Ovviamente σ è costituita da 1σ , 2σ , 3σ , 4σ dove:
1σ è quella parte del piano di equazione
z = c(1-
b
y
a
x− ) (x,y) ∈ T
essendo T il triangolo di vertici (0,0,0), (a,0,0), (0,b,0);
2σ è il triangolo di vertici (0,0,0), (0,b,0), (0,0,c);
3σ è il triangolo di vertici (0,0,0), (a,0,0), (0,0,c);
4σ è il triangolo di vertici (0,0,0), (a,0,0), (0,b,0).
Poiché su 1σ è
dydxb
c
a
cdS
++= k jin
F =∇Ф = y i + x + 2c
+−
b
y
a
x1 k
si ha
∫∫∫∫ +=
+
−+
−=⋅
T
bac
dydxc yb
c
a
c x
a
c
b
cdS
2)(6
222
ˆ
1
nFσ
Analogamente
6)(
2
22
cbdzdy ydS −=−=⋅ ∫∫∫∫σ σ
iF
6)(
2
33
cadzdx xdS −=−=⋅ ∫∫∫∫
σ σ
jF
00)(
44
∫∫∫∫ ==−⋅σ σ
dSdSkF
Quindi
( )[ ]36
ˆ 222 abcbaba
cdS =−−+=⋅∫∫
σ
nF .
Infine abbiamo
∫∫∫ D
∇ ⋅F dV = ∫∫∫ D
2 dV = 2(volume del tetraedro) = 23
1
2
abc =
3
abc
Oppure integrando per fili
∫∫∫ D
dV = c∫∫T
dydxb
y
a
x
+−1 = c
−−
662
ababab=
6
abc.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 253/391
34
Esempio 2
Verificare il teorema di Gauss nel caso in cui
F = ( y + xz ) i + ( y + yz ) j - ( 2x + z² ) k ,
e
D =(x,y,z) : x² + y² + z² ≤ a² , x ≥ 0, y ≥ 0, z ≥ 0.
Svolgimento
Dobbiamo dimostrare che
∫∫∫ D∇ ⋅F dV = ∫∫σ
F ⋅ n dS
dove σ è la frontiera del dominio D e n denota la normale unitaria esterna alla superficie σ. La
superficie σ consta di quattro parti:
1σ = (x,y,z) : x² + y² + z² = a² , x ≥ 0, y ≥ 0 e z ≥ 0 ;
2σ = (x,y) : x² + y² ≤ a² , x ≥ 0, y ≥ 0
3σ = (y,z) : y² + z² ≤ a² , y ≥ 0, z ≥ 0
4
σ = (x,z) : x² + z² ≤ a² , x ≥ 0, z ≥ 0 .
Su 1σ è z =222
y xa −− (x,y) ∈ T = 2σ , pertanto
dydx z
y
z
xdydx
y
z
x
zdS
++=
+
∂
∂−
∂
∂−= k jik jin
e
∫∫1σ
F ⋅ n dS = ∫∫
++
−−
+
T
dydx x -a² ) - y² x² ( y xa
y xy22
222
2
.
Passando a coordinate polari abbiamo
∫∫1σ
F ⋅ n dS = ∫
−+
2
02
2cos1cossin
π θ
θ θ ρ ρ
ρ ρ d
a
a
220
2
−∫ +
+ ∫2
0
π
dθ ( )∫ −−a
d a0
23 22 ρ ρ ρ ∫2
0
cos
π
θ θ d ∫a
d 0
2 ρ ρ =3
12
3a
−
π
Su 2σ è z = 0 e n = -k , pertanto abbiamo

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 254/391
35
∫∫2σ
F ⋅ n dS = 2 ∫∫2σ
x dx dy.
Passando a coordinate polari si ha
∫∫2σ
F ⋅ n dS = 2 θ θ π
d ∫2
0
cos ∫a
d 0
2 ρ ρ =3
2 3a
Analogamente tenuto presente che su 3σ è x = 0 e n = - i si ottiene
∫∫3σ
F ⋅ n dS = - ∫∫3σ
y dz dy = -3
3a
Su 4σ è y = 0 e n = - j , pertanto
∫∫4σ
F ⋅ n dS = ∫∫4σ
0 dS = 0.
Quindi
∫∫σ
F ⋅ n dS =33
23
12
33
3
aaa −+
−π =
2π
3
3
a .
Infine
∫∫∫ D
∇ ⋅F dV = ∫∫∫ D
dV =8
1(volume della sfera) =
8
1
3
4π a³ =
2
π
3
3a
Oppure utilizzando le coordinate sferiche si ha :
∫∫∫ D
dV = ∫2
0
π
dθ θ
π
d ∫ Φ
2
0
sin ∫a
d 0
2 ρ ρ =2
π 1
3
3a=
2
π
3
3a.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 255/391
36
Esempio 3
Verificare il teorema di Gauss nel caso in cui:
( ) 2222:,, a z y x z y x D ≤++=
i) F = F ( ) k ji z y x z y x 42,, +−=
ii) F = F ( ) ( ) k ji 2223 33,, x z y yz x z y x +++=
Svolgimento
E’ opportuno usare le coordinate sferiche:
φ ρ ϑ φ ρ ϑ φ ρ cos,cossin,cossin === z y x
dove a≤≤≤≤≤≤ ρ π φ π ϑ 0,0,20 .
Sul contorno σ del dominio D, ovvero sulla sfera di raggio a con centro nell’origine, vale:
dove n indica la normale unitaria esterna a σ.
Inoltre l’elemento di volume, in coordinate sferiche, è:
Premesso ciò, bisogna dimostrare che:
∫∫∫ ⋅∇ D
F ∫∫=σ
dV F dSn⋅
i) Risulta
∫∫∫ ⋅∇ D
F ∫∫∫ ⋅== D
dV dV π 3
433
3a
∫∫σ
F ∫∫=⋅σ
dSn F ( )∫∫ =+−=⋅σ
dS z y x
a
dS
a
222 421r
k jirr
r
rn z y x
ad d adSa ++=====
ˆ,sin, 2 φ ϑ φ ρ
ρ ϑ φ φ ρ d d d dV sin2=

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 256/391
37
( )∫ ∫ =+−=π π
φ φ φ ϑ φ ϑ φ ϑ 2
0 0
222223 sincos4sinsin2cossin d d a
∫ ∫=
+−=+−−=
π π
π π φ φ φ π φ φ φ π 0 0
332323 43
16
3
4sincos8sin)cos1( aad ad a
ii) Risulta
⋅∇∫∫∫ D
F ( )∫∫∫ ∫ ∫ ∫ ==++= D
a
ad d d dV z y x
π π
π ρ ρ φ φ ϑ 2
0 0 0
54222
5
12sin33
∫∫σ
F ∫∫=⋅σ
dSn F ( )∫∫ ++=⋅σ
dS z x z y xa
dSa
2224 61r
Osservato che il terzo degli integrali superficiali precedenti è nullo in virtù della simmetria, segue
che
∫∫σ
F ( )∫∫ ∫ ∫ +=+=⋅σ
π π
φ φ φ ϑ ϑ 2
0 0
445224 sinsincos61
ˆ d d adS z y xa
dSn
π φ φ φ φ ϑ ϑ π π
52
2
0
225
5
12sinsinsin6 ad scod a
o
=+ ∫ ∫
Infatti risulta
∫ ∫∫ =
+++=
+=
π π π
π ϑ ϑ
ϑ ϑ ϑ
ϑ ϑ 0
2
0
22
0
4
4
3
2
4cos12cos21
4
1
2
2cos1cos d d d
( )∫ ∫ =+−=π π
φ φ φ φ φ φ φ 0 0
424
15
16sincoscos21sinsin d d
( )∫ ∫ =−=π π
φ φ φ φ φ φ φ φ 0 0
2222
15
4sincoscos1sincossin d d
∫ =
π
π ϑ ϑ
2
0
2sin d

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 257/391
38
Esempio 4
Verificare il teorema di Gauss nel caso in cui è
F ( ) ( ) k ji )sin( ye z xz y yz x x−+−++=
( ) :,,
= z y x D 2222 4a z y x ≤++
≤+ 222 a y x
Svolgimento
Dobbiamo verificare che
⋅∇∫∫∫ D
F ∫∫=σ
dV F dSn⋅
La superficie σ ovvero la frontiera di D consiste di una parte cilindrica 1σ e di una parte
sferica2σ . Pertanto
∫∫σ
F =⋅ dSn ∫∫1σ
F 1ˆ dSn⋅ + ∫∫
1σ
F 2ˆ dSn⋅
Dove: 1n è la normale unitaria al cilindro verticale
222 a y x =+ 3a z ≤ ;
x y
y
O
2222 4a z y x =++
222a y x =+
a3a2

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 258/391
39
2n è la normale unitaria esterna alla sfera
2222 4a z y x =++ .
Usando le coordinate cilindriche, sulla superficie laterale della parte cilindrica è
F 1n⋅ = F =
+−⋅ ji ϑ ϑ sincos
= a zaa zaa −=
++
+− ϑ ϑ ϑ ϑ ϑ ϑ sincossincossincos
Quindi
∫∫1σ
F 11ˆ dSn⋅ = ∫∫ −=−
1
41
σ
π dSa 33a
Usando le coordinate sferiche, sulla parte sferica è
ϑ φ cossin2a x = ϑ φ sinsin2a y = φ cos2a z =
dove
π ϑ 20 ≤≤ π π
φ π
66≤≤ ,
pertanto
∫∫1σ
F 2ˆ dSn⋅ = ∫∫
22
1
σ a
F =⋅ 2dSr ∫∫ =
π
π
π
π φ φ ϑ 6
5
6
32
2
0
316sin42 ad ad a

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 259/391
40
Quindi
∫∫σ
F dSn⋅ 312 3π a=
Infine, tenuto presente che l’elemento di volume in coordinate sferiche è
ρ ϑ φ φ ρ d d d dV sin2=
Abbiamo
⋅∇∫∫∫ D
F =dV π ρ ρ φ φ ϑ
φ
π
π
π 3
2
sin
22
6
2
0
312sin63 ad d d dV
a
a D
== ∫∫∫∫∫∫
Osservazione
L’equazione del cilindro222
a y x =+ in coordinate sferiche è
( ) 22222 sincossin ϑ ϑ ϑ φ ρ =+ ovvero222 sin a=φ ρ
da cuiφ
ρ sin
a=
a
a 2a

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 260/391
41
Esempio 5
Un dominio conico D con vertice in (0,0,b) e asse lungo l’asse z ha come base un disco T di raggio
a sul piano xy. Determinare il flusso di:
F ( ) ( ) ( ) k ji 133322 ++−+++= z x y y x y x
che attraversa la frontiera σ della parte conica del dominio D ovvero la superficie σ di equazione:
22 y xa
bb z +−= b > 0
Soluzione
Utilizzando il teorema di Gauss abbiamo:
∫∫σ
F dSn⋅ = ⋅∇∫∫∫ D
F −dV ∫∫T
F dSn⋅
Ora calcoliamo i due integrali alla destra della relazione precedente:
⋅∇∫∫∫ D
F =dV ( )[ ] ( )∫∫∫ ∫∫∫ ++=++ D D
dV y xbadV y x 22222 33
232 π
Essendo:
( ) ( )∫∫∫∫∫
+−+=+
T D
dydx y xabb y xdV y x 222222
Utilizzando le coordinate polari si ottiene:
( )10
14
0
2
2
0
22 bad
ad bdV y x
a
D
π ρ ρ
ρ ρ ϑ
π
=
−=+ ∫∫∫∫∫
Oppure se indichiamo con c(z) il disco:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 261/391
42
( )2
2
222 zb
b
a y x −≤+ b z ≤≤0
Si ha:
( ) ( )( )
∫∫∫ ∫ ∫∫∫∫∫−
==+=+ D
b zb
b
a
b
zc
bad d dzdydx y xdzdV y x
0
4
0
3
2
00)(
2222
10
π ρ ρ ϑ
π
Pertanto:
⋅∇∫∫∫ D
F =dV .
10
3
3
2 42 π π baba +
Ora tenuto presente che su T è z=0, abbiamo:
∫∫T
F =⋅ dSn ∫∫T
F ( ) ( ) 21 adydxdydx zdST T
π −=−=+−=−⋅ ∫∫∫∫k
Quindi:
∫∫σ
F dSn⋅ 242
10
3
3
2aabba π π π ++=
METODO DIRETTO
Su σ abbiamo:
F ( ) ( ) k ji
+−++−+++= 223322 13 y x
a
bb x y y x y x
e
Pertanto:
dydx y
z
x
zdS
+
∂
∂−
∂
∂−= k jin

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 262/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 263/391
44
Esempio 6
Sia σ quella parte della superficie cilindrica di equazione 122 =+ z y che si trova nel 1 ° ottante
compresa tra i piani x = 0 e x = 1.
Calcolare il flusso del campo vettoriale
F k ji y x xz −−= 23
uscente da σ
Svolgimento
E’ opportuno utilizzare le coordinate cilindriche; allora l’equazione di σ è 1= ρ 10 ≤≤ x .
La superficie σ interseca il piano yz nella curva C di equazioni parametriche
ϑ cos= y , sin= z 2
0π
ϑ ≤≤
pertanto risulta ϑ d dS = . Essendo sulla superficie laterale del cilindro
dxd dS ϑ = , F ,cossin3 2 k ji ϑ ϑ −−= x x n k j ϑ ϑ sincos +=
Segue che su σ è
F dSn⋅ ( ) dxd x ϑ ϑ ϑ ϑ sincoscos −−=
quindi
∫∫σ
F dSn⋅ ( )∫∫ −=+−=1
0
2
0
1sincoscos dx xd ϑ ϑ ϑ ϑ
π
.
Oppure
se indichiamo con D il solido così definito:
( )
≤≤≥≥≤+= 10,0,0,1:,, 22 x z y z y z y x D
per il Teorema di Gauss risulta
∫∫σ
F dSn⋅ = ⋅∇∫∫∫ D
F −dV ∫∫1σ
F ( ) d k− −1σ ∫∫2σ
F ( ) d i− −2σ ∫∫3σ
F ( ) d j− −3σ ∫∫4σ
F ( ) d i 4σ
dove il significato di iσ 4,3,2,1=i è ovvio.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 264/391
45
Essendo
∫∫1σ
F ( )k−⋅ ∫∫∫∫ ===1
0
1
0
12
1
1
dy ydxdydx ydSσ
∫∫2σ
F ( )i−⋅ ∫∫ =−=
2
03 2
2
σ
dzdx xzdS su 2σ è 0= z
∫∫3σ
F ( ) j−⋅ ∫∫∫∫ ===1
0
1
0
32
1
3
dx xdzdzdx xdSσ
∫∫4σ
F i⋅ ∫ ∫∫∫ ===2
0
1
0
322
416
3sin33
4
π
σ
π ρ ρ ϑ ϑ d d dzdx zdS
⋅∇∫∫∫ D
F dV ( )
∫∫∫∫∫∫ == xC D
dydz zdxdV z 2
1
0
2 33
dove C(x) denota il disco 0,0,122 ≥≥≤+ y z y z
pertanto
⋅∇∫∫∫ D
F dV ∫ ∫∫ ==2
0
1
0
32
1
016
3sin3
π
π ρ ρ ϑ ϑ d d dx
quindi
∫∫σ
F dSn⋅ 116
3
2
1
2
1
16
3−=−−−= π π

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 265/391
46
Esempio 7
Verificare il teorema di Gauss nel caso in cui
( ) ( ) 0,4,, 2222 ≥≤−++= zaa z y x z y x D
( ) ( ) ( ( ) k jiFF x ye z y x z y x x +++++++== 32,, 222 2
.
Svolgimento
La frontiera del dominio D è costituita da quella parte S della superficie sferica che sta sul piano
y x :
( ) 04
2222
≥=−++ zaa z y x
E dal disco T : 0,3 222 =≤+ za y x . Quindi dobbiamo verificare che
( ) ∫∫∫∫∫∫∫∧
⋅+−⋅=⋅∇ST D
dS N dAdv FkFF
A tale scopo calcoliamo separatamente i tre integrali dell’uguaglianza precedente.
i) Poiché D è simmetrico rispetto ai piani 0= x e 0= y , risulta
( ) 022 =+=⋅∇ ∫∫∫∫∫∫ dzdydx y xdv D D
F
ii) ( ) ( ) ∫∫∫∫∫∫ −=−=+−=−⋅T T T
adydxdydx xdS2933 π kF
iii) Per calcolare
dSS
∫∫∧
⋅NF
Facciamo il seguente cambiamento di variabili
ua z y y x x +=== ,
e poniamo ( ) ( )u y xua y x ,,,, GF =+ . Allora il valore del flusso dato dall’integrale
precedente è uguale al flusso, del campo vettoriale G , uscente da quella parte della sfera di
equazione
auau y x −≥=++ 2222 4

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 266/391
47
Ovvero che sta sul piano au −= (vedi figura).
Per il calcolo di
( ) ∫∫∫∫ ∫∫ =++⋅=⋅∧
SS S
dSa
dSu y xGa
dS2
3
2
1k jiNF
Dove si è tenuto conto delle simmetrie gia menzionate, usiamo le coordinate sferiche. A talescopo, tenuto presente che
62
3cos
π α α =⇒=
Si evince che π π π
φ 3
2
620 =+≤≤ .
Quindi
2
3
2
0
2
2
0
9cossin43 ad ad dSS
π φ φ φ ϑ
π π
==⋅ ∫∫∫∫∧
NF
Il che completa quanto volevamo verificare.
z
y
a
u
a−
a3
α y
x
x
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 267/391
2
TEOREMA DI GREEN
Le formule
( ), D C
f dx dy f x y dy
x
∂=
∂∫∫ ∫ [1]
( ), D C
f dx dy f x y dx
y
∂− =
∂∫∫ ∫ [2]
note come formule di Green sono due relazioni semplici ma molto importanti fra gli integrali estesi
ad un dominio piano e gli integrali estesi alla frontiera del medesimo.
Nelle suddette formule f è di classe( ) ( )1
C D ; C è il contorno orientato del dominio D considerato
come una superficie con orientazione data da $ =n k . Pertanto C è orientato positivamente se quando
si percorre C secondo il suo orientamento il dominio D si trova alla sua sinistra.
Per dimostrare la validità delle formule [1] e [2] supponiamo che in un primo momento che il do-
minio D sia y-semplice ovvero che sia delimitato dalle due rette verticali x a= , y b= e dai grafici
C 1 e C 2 delle funzioni rispettivamente di equazioni
( )1 y xϕ = e ( )2 y xϕ = con a x b≤ ≤ e ( ) ( )1 2 x xϕ ϕ ≤ .
Dove 1ϕ e 2ϕ si suppongono continue con le loro derivate prime.
Premesso che nelle suddette ipotesi risulta
( )( )
( ) ( ) ( ) ( ) ( ) ( )( )
( )2 2
1 1
' '
2 2 1 1, , , , x x
x x x
d f x y dy f x y dy f x x x f x x xdx
ϕ ϕ
ϕ ϕ ϕ ϕ ϕ ϕ = + − ∫ ∫
Si ottiene
1) ( )( )
( )2
1
,b x
xa x
D
f dx dy dx f x y dy
x
ϕ
ϕ
∂= =
∂∫∫ ∫ ∫
( )( )
( )( ) ( ) ( ) ( )
2
1
' '
2 2 1 1, , ,b x
a x
d f x y dy f x x x f x x x dx
dx
ϕ
ϕ ϕ ϕ ϕ ϕ
= − + =
∫ ∫
( )( )
( )
( )( )
( )
( )( ) ( ) ( )( ) ( )
2 2
1 1
' '
1 1 2 2, , , ,
b a b b
b a a a f b y dy f a y dy f x x x dx f x x x dx
ϕ ϕ
ϕ ϕ ϕ ϕ ϕ ϕ = − + − =∫ ∫ ∫ ∫
( ) ( ) ( ) ( ) ( )3 4 1 2
, , , , ,C C C C C
f x y dy f x y dy f x y dx f x y dx f x y dy= + + + =∫ ∫ ∫ ∫ ∫
Negli integrali curvilinei precedenti C 3 e C 4 denotano i segmenti delle rette x b= e x a= che ap-
partengono alla frontiera C del dominio D
2) ( )( )
( )( ) ( )( ) ( )
2
12 1, , , ,
b x b
ya x a
D C
f dx dy dx f x y dy f x x f x x dx f x y dx
y
ϕ
ϕ ϕ ϕ
∂= = − =
∂∫∫ ∫ ∫ ∫ ∫
Nel caso in cui il dominio D è x-semplice si hanno forme analoghe, e la dimostrazione (con le op-
portune modifiche) è la stessa.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 268/391
3
Passiamo ora la caso generale:
Sia D un dominio con frontiere C regolare a tratti e che possiede la proprietà seguente: la sua chiu-
sura può essere suddivisa, da rette parallele agli assi coordinati x e y in numero finito di sottodomini
Dk ciascuno dei quali è un dominio y-semplice, x-semplice o entrambi (i domini rettangolari).
( ),
k k k k D D C
f f dx dy dx dy f x y dy x x
∂ ∂= =∂ ∂∑ ∑∫∫ ∫∫ ∫
La frontiera generale per tutti i domini Dk è composta da C e da un numero finito di segmenti, cia-
scuno dei quali appartiene a D ed è comune a due domini vicini. Pertanto ogni segmento è percorso
due volte in direzioni opposte, perciò gli integrali curvilinei corrispondenti a questi percorsi si com-
pensano mutuamente e resta solo l’integrale esteso C . Pertanto
( ) ( ), ,
k k C C
f x y dy f x y dy=∑ ∫ ∫
e la dimostrazione è completa.
Dalle formule di Green segue il Teorema di Green.
Teorema di Green
Siano C , C 1, …, C n n curve semplici, chiuse, lisce a pezzi con le seguenti proprietà:
1) Le curve non hanno punti comuni;
2) Le curve C 1, …, C n stanno all’interno di C ;
3) La curva C i sta nell’esterno della curva C j, i j∀ ≠ dove 1, 2,...,i n= , 1, 2,..., j n= .
Sia R la regione costituita dall’unione di C con quella parte dell’interno di C che non è interna a C 1,
C 2, …, C n. Sia ( ) ( )1 2, ,F x y F x y= +F i j un campo vettoriale liscio in un aperto Ω contenente R,
allora
( ) ( ) ( ) ( )2 11 2 1 2
1
, , , ,
k
n
k R C C
F F dx dy F x y dx F x y dy F x y dx F x y dy
x y =
∂ ∂− = + − +
∂ ∂ ∑∫∫ ∫ ∫
Fig. 1
In particolare se R è una regione limitata semplicemente connessa e C è la sua frontiera allora

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 269/391
4
( )
( ) ( )
−⋅×∇
⋅×∇
=⋅
∫∫
∫∫
∫
R
R
C
dAk F
dAk F
r d F
ˆ
ˆ
r
r
r
r
( ) ( )2 11 2
, , R C
F F dx dy F x y dx F x y dy
x y
∂ ∂− = +
∂ ∂ ∫∫ ∫
In questa formula si deve considerare R come una superficie orientata con normale k.
Se R è una regione connessa chiusa e limitata del piano xy il suo contorno C è costituito da più cur-ve chiuse semplici, lisce a pezzi, e che sono orientate positivamente. In particolare se R è un domi-
nio semplicemente connesso, allora C sarà orientata nel verso orario; se R ha dei buchi in tal caso il
contorno dei buchi sarà orientato nel verso orario. (vedi figura)
Comunque se indichiamo con T la tangente unitaria a C e con N ˆ la normale unitaria a C che punta
all’esterno di R, a causa dell’orientamento di C questi settori devono soddisfare l’equazione
vettoriale k T N ˆˆˆ ×= .
Pertanto se C è parametrizzata per mezzo della lunghezza d’arco, allora
jds
dyi
ds
dxT
ds
r d ˆˆˆ +==
r
jds
dxi
ds
dy
ds
dy
ds
dx
k ji
k T N ˆˆ
100
0
ˆˆˆ
ˆˆˆ −=
=×=
e risulta
( ) ( ) N jF iF ds
dxF ds
dyF ds
dyF ds
dxF T F ˆˆˆˆ 121221 ⋅−=
−−+=+=⋅
r
La forma vettoriale della formula precedente, ovvero
Se C è orientata positivamente (1)
Se C è orientata negativamente (2)
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 270/391
5
(1) (2)
corrisponde al teorema di Stokes nel piano (vedi paragrafo successivo).
Esempio N°1
Con l’ausilio delle formule di Green, calcolare
( )2 2 2 21 3 1 x y x y
D
I ye y e dx dy+ − + −
= +∫∫
dove D è quella parte del disco 2 2 1 x y+ ≤ che sta nel 1° quadrante.
Svolgimento
Osservato che
( )2 2 2 2 2 2 2 2 2 21 3 1 1 2 1 2 11 12 2
2 2
x y x y x y x y x y ye y e ye y ye y e
dy
+ − + − + − + − + −∂+ = + =
Utilizziamo la formula
( ), D C
f dx dy f x y dx
y
∂= −
∂∫∫ ∫ .
Allora
( )1 1
,2 2
D C
f I dx dy f x y dx
y
∂= = −
∂∫∫ ∫ ( )
2 22 1,
x y f x y y e + −
=
dove C è costituita dagli archi
1 : , 0C x t y= = 0 1t ≤ ≤
2: cos , sinC x t y t = = 0
2t
π ≤ ≤
3: 0,C x y t = = 0 1t ≤ ≤
Poiché su C 1 è ( ),0 0 f t = e che su C 3 è 0dx = , si ha:
( ) ( ) ( )2
2 22 2
0 0
2, , sin sin 1 cos sin3
C C
f x y dx f x y dx t t dt t t dt π π
= = − = − − = −∫ ∫ ∫ ∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 271/391
6
quindi 1 3 I = . Per verificare l’esattezza del risultato ottenuto calcoliamo l’integrale doppio. Risulta
( ) ( )2
2 21 1 12 1 2
0 0 0
1 1 1 1 11 1
2 2 2 3 3
x x y
I dx y e dy x dx y
−+ −∂
= = − = − = ∂
∫ ∫ ∫
Un’applicazione del teorema di Green
L’integrale doppio che dà l’area a(R) di una regione piana R si può esprimere nella forma:
dxdy y
P
x
Qdxdy Ra
R R
)()(∂
∂−
∂
∂== ∫∫ ∫∫
dove P=P(x,y) e Q=Q(x,y) sono tali che
1=∂∂−
∂∂
yP
xQ
Per esempio se nella formula che specifica il teorema di Green prendiamo F=x j abbiamo:
∫∫ ∫=
R C
xdydxdy
pertanto se Q=x e P=0 si ottiene
∫=
C
xdy Ra )(
Se prendiamo F=-y j abbiamo:
∫∫ ∫−=
R C
ydxdxdy
pertanto se Q=0 e P=-y si ottiene
∫−=
C
ydx Ra )(
Infine, da quanto precede, si evince anche la formula
∫ +−=
C
xdy ydx Ra2
1)( .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 272/391
7
Esempio N°2
Applicare il teorema di Green per calcolare l’integrale
2
C
I y dx x dy= +∫
dove C è la curva di equazioni parametriche
32 cos x t = , 32sin y t = 0 2t π ≤ ≤
Svolgimento
Per il teorema di Green è
( )21 2
C D D
I y dx x dy y dx dy dx dy= + = − =∫ ∫∫ ∫∫
in quanto, per simmetria è
0 D
y dx dy =∫∫ .
Risulta
32 2 sin 23
0 0 04 4 2 sin
t
D
dx dy dx dy t dx= =∫∫ ∫ ∫ ∫
da cui, tenuto presente che3
2 cos x t = e 0 2t π ≤ ≤ , si ha
( )2
4 2
0
24 sin 1 sin D
dx dy t t dt π
= −
∫∫ ∫.
Utilizzando la formula di ricorrenza (che si deduce integrando per parti)
12cos sin 1
sin sink
k k t t k t dt t dt
k k
−
−−= − +∫ ∫
si ottiene che
24
0
3sin
16t dt
π
π =∫ ,2
6
0
5sin
32t dt
π
π =∫
quindi
2 3 5 324
16 32 4C
I y dx x dy π π
= + = − =
∫ .
Oppure
( )2
2 2 24 2 2 2 2 2
0 0 0
sin 2sin cos sin sin cos sin
4
t t t dt t t t dt t dt
π π π
= = =∫ ∫ ∫
( )2 2
2
0 0
1 1 1 cos 41 cos 2 sin 2
8 8 2 32
t t t dt dt
π π π −= − = =∫ ∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 273/391
8
TEOREMA DI STOKES
Il teorema di Stokes costituisce una generalizzazione del teorema di Green relativa a superfici dello
spazio tridimensionale non necessariamente piane.
Sia S una superficie orientata dello spazio tridimensionale, liscia a pezzi, avente campo normale
unitario $n il cui contorno C consiste di una o più curve chiuse, continue a pezzi con orientazione
ereditata da S. Se F è un campo vettoriale liscio, definito su un insieme aperto contenente S, allora:
$ dS C
dS∇ × ⋅ = ⋅∫∫ ∫F n F r
Stabiliremo la validità della formula per una superficie liscia S che abbia una proiezione normale
biunivoca sul piano xy e che il campo della sua normale unitaria punti verso l’alto. Pertanto su S, z è
una funzione di classe1
C , definita per (x,y) appartenente a una regione R del piano xy : z = f
(x,y).
I contorni C di S e C *
di R sono entrambi orientati in senso antiorario, guardando dall’alto lungo
l’asse z.In questo caso è:
$f f
dS dx dy
x y
∂ ∂= −
∂ ∂
n i - j + k
Pertanto:
$ 3 32 1 2 1
S R
F F F F F F z zdS dA
y z x z x y x y
∂ ∂∂ ∂ ∂ ∂∂ ∂ ∇ × ⋅ = − − + − − + −
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∫∫ ∫∫F n
Poiché z è una funzione di x e y,su C abbiamo
.dyy
zdx
x
zdz
∂
∂+
∂
∂=
Quindi: ( ) ( ) ( )1 2 3d , , , , , ,C C
z zF x y z dx F x y z dy F x y z dx dy
x y∗
∂ ∂⋅ = + + + =
∂ ∂ ∫ ∫F r
1 3 2 3( , , ) ( , , ) ( , , ) ( , , )C
z zF x y z F x y z dx F x y z F x y z dy
x y∗
∂ ∂ + + +
∂ ∂ ∫ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 274/391
9
Applicando ora il teorema di Green nel piano xy e ricordando che z è funzione di x e y otteniamo:
2 3 1 3d ( , , ) ( , , ) ( , , ) ( , , )S R
z zF x y z F x y z F x y z F x y z dA
x y y x
∂ ∂ ∂ ∂ ⋅ = + − + =
∂ ∂ ∂ ∂ ∫ ∫∫F r
∫∫=
∂∂
∂−
∂
∂
∂
∂
∂
∂−
∂
∂
∂
∂−
∂
∂
∂
∂−
∂
∂−
∂∂
∂+
∂
∂
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂=
R
dA x y
zF
x
z
y
z
z
F
x
z
y
F
y
z
z
F
y
F
y x
zF
y
z
x
z
z
F
y
z
x
F
x
z
z
F
x
F 2
3
3311
2
3
3322
3 32 1 2 1
R
F F F F F F z zdA
y z x z x y x y
∂ ∂∂ ∂ ∂ ∂∂ ∂ = − − + − − + − =
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∫∫
$
S
dS= ∇ × ⋅∫∫ F n
La dimostrazione è così completata.
OSSERVAZIONE Se 0∇ × =F in un dominio D dotato della proprietà che ogni curva chiusa sem-
plice e liscia a pezzi contenuta in D, allora il teorema di Stokes assicura che d 0S
⋅ =∫ F r per qualun-
que curva C di questo tipo, per cui F deve essere conservativo. Un dominio semplicemente connes-
so D ha effettivamente la proprietà appena specificata: una curva chiusa C di un dominio semplice-
mente connesso D è la frontiera di una superficie di D.
Come per il teorema della divergenza, l’importanza maggiore del teorema di Stokes risiede
nell’essere uno strumento teorico. Tuttavia esso permette di semplificare il calcolo di integrali di
circuitazione come illustrato dai seguenti esempi.
ESEMPIO N° 1
Calcolare dC
⋅∫ F r dove 3 3 3 y x z+ −F = - i j k , e C è la curva d’intersezione del cilindro 2 2 1 x y+ =
e del piano 2 2 3 x y z+ + = , orientata in modo da avere una proiezione con orientamento antiorario
sul piano xy .
Svolgimento
C è il contorno orientato di un disco ellittico D che si trova nel piano 2x + 2y + z = 3 e che ha il di-
sco circolare R: x2
+ y2
≤ 1 come proiezione sul piano xy. Su S abbiamo
$ ( )2 2dS dx dy= +n i + j k ,

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 275/391
10
inoltre
( )2 23 x y∇ × +F = k
Quindi per il teorema di Stokes
$
1
2 2 2
0
3d 3( ) 2 3
2C S R
dS x y dx dy d π
π ρ ρ ρ ⋅ = ∇ × ⋅ = + = =∫ ∫∫ ∫∫ ∫F r F n
ESEMPIO N° 2
Calcolare dC
⋅∫ F r , dove:
( ) 2 x x ye x e z= + + +F i j k
C: 1 cos x t = + 1 sin y t = + 1 sin cos z t t = − − t [ ]0,2π ∈
Svolgimento
i) Per il teorema di Stokes è
$dC S
F ds⋅ = ∇ × ⋅∫ ∫∫F r n
Dove S è la parte del piano di equazione 3 z x y= − − interna al cilindro di equazione: 1 cos x t = + ,
1 sin y t = + [ ]0,t r π ∈ .
Pertanto essendo
$
( )dS dx dy= + +n i j k e ∇ × =F k
Si evince che
$dC S T
F ds dx dy π ⋅ = ∇ × ⋅ = =∫ ∫∫ ∫∫F r n
Dove T è la proiezione di S sul piano xy ovvero ( ) ( ) ( ) 2 2
, : 1 1 1 x y x y− + − ≤
ii) Osservato che ( )2
1
x x ye e z x x= + + + = +F i j k j F j e che 1F è conservativo, segue che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 276/391
11
( )2
1
0
d d 1 cos cosC C C
x dy t t dt
π
π ⋅ = ⋅ + = + =∫ ∫ ∫ ∫F r F r
iii) 2
d ( ) x x
C C
ye dx x e dy z dz⋅ = + + +∫ ∫F r
( ) ( )2
cos cos
0
1 sin sin 1 cos cost t e t e t t ee t
π
− + + + + +∫ [ ] 2
1 (sin cos ) (sin cos )t t t t dt − − − =
2 22
cos cos 2 cos
00 0
sin cos|t t t ee e e t dt e e t dt
π π π
π π − + + =∫ ∫
In quanto
2
cos
0
cost e t
π
∫ sindt t = ∫+
π π
2
0
2cos2
0
cos sin| t eet t
2
cos
0
sint
dt e t
π
= ∫ dt
( ) ( )2
2
0
1 sin cos sin cos 0t t t t dt
π
− + − = ∫ .
ESEMPIO N° 3
Disegnare la curva ( ): sin sin 2C t t t = +r i j 0 2t π ≤ ≤ e calcolare
dC
⋅∫ F r dove 2 3 x y ye x e= +F i j
Svolgimento
Da sin x t = e sin2 y t = 2sin cost t = segue sin , / 2 cos x t y x t = = . Da cui 2 2 2 / 4 1 x y x+ =
Ovvero 22 1 y x x= − − 22 1 y x x= −
I cui grafici sono rispettivamente:
C
-1 1 -1 1
1 R 2 R⇒

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 277/391
12
Dunque C è la frontiera di una regione R unione di due regioni 1 R e 2 R . Osservato che
( )0 0,0 ,t = → 1
,1 ,4 2
t π
= →
( )1,02
t π
= → 3 1
, 14 2
t π
= → −
,
( )0,0 ,t π = →
5 1,1 ,
4 2t π
= → −
( )
31, 0 ,
2t π = → −
( )2 0,0t π = →
Si evince che la frontiera di 1 R è percorsa a partire da (0,0) nel verso positivo (antiorario), le fron-
tiere di 2 R è percorsa nel verso negativo (orario).
Allora su 1 R è $ =n k , su 2 R è $ = −n k
Poiché 1 R e 2 R sono simmetriche rispetto all’asse y e
( )223 y x
rot x e e= ∇ × = −F F k
è pari in x, abbiamo
$ $
1 2 R R
dS dS∇ × ⋅ = − ∇ × ⋅∫∫ ∫∫F n F n
Quindi
1 2
d 0C R R R
dS⋅ = ∇ × ⋅ = + =∫ ∫∫ ∫∫ ∫∫F r F n
ESEMPIO N° 4
Se C è il contorno orientato positivamente di una regione piana R avente area A e centroide ( ), x y ,
interpretare geometricamente l’integrale di linea
dC
⋅∫ F r dove: a) 2 x=F j ; b) xy=F j ; c) 2 3 y xy= +F i j .
Svolgimento
Per il teorema di Stokes (essendo R una regione piana) ho
2 1dC R
F F dA
x y
∂ ∂⋅ = −
∂ ∂ ∫ ∫∫F r
Allora
a) d 2 2
C R
x dA Ax⋅ = =∫ ∫∫F r
b) dC R
x dA Ax⋅ = − = −∫ ∫∫F r

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 278/391
13
c) ( )d 3 2C R
y y dA Ay⋅ = − =∫ ∫∫F r
ESEMPIO N° 5
Calcolare
( )C
xy dx yz dy zx dz+ +∫
lungo il contorno del triangolo con vertici (1,0,0), (0,1,0), (0,0,1), orientato in senso orario guardan-
dolo dal punto(1,1,1).
Svolgimento
C giace sul piano 1 z x y= − − ed è il contorno di quella parte S del piano la cui proiezione sul piano
xy è il dominio limitato T che ha come frontiera il triangolo con vertici (1,0), (0,1) e (0,0). Ovvia-
mente
dC C
xy dx yz dy zx dz+ + = ⋅∫ ∫ F r
dove xy yz zx= + +F i j k .
Per il teorema di Stokes è
$d
C S
dS⋅ = ∇ × ⋅∫ ∫∫F r F n
Essendo
y z x∇ × = − −F i j k , $ ( )1
3= − + +n i j k e 3dS dx dy= e tenuto presente che su S è
1 x y z+ + = , si ha
$ ( )1 1
23S S T
dS x y z dS dx dy∇ × ⋅ = + + = =∫∫ ∫∫ ∫∫F n
Quindi1
2C
xy dx yz dy zx dz+ + =∫
ESEMPIO N° 6
Calcolare
2
( )C y dx x dy z dz− +
∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 279/391
14
Lungo la curva C d’intersezione delle superfici cilindriche 2 z y= e 2 2 4 x y+ = ; la curva è orientata
in senso antiorario vista dall’alto lungo l’asse z.
Svolgimento
La curva C è il contorno di quella parte S della superficie cilindrica 2 z y= la cui proiezione T sul
piano xy è il disco 2 2 4 x y+ ≤ . Ovviamente
2d
C C
y dx x dy z dz− + = ⋅∫ ∫ F r
dove 2 y x z= − +F i j k
Per il teorema di Stokes è
$dC S
dS⋅ = ∇ × ⋅∫ ∫∫F r F n
essendo
2∇ × = −F k , $ ( )1
25
y= − +n j k e 5dS dx dy=
risulta
$ ( )2
d 2 2 45C S S T
dS dS dx dy π −
⋅ = ∇ × ⋅ = = − = −∫ ∫∫ ∫∫ ∫∫F r F n :
quindi
2
8C
y dx x dy z dz π − + = −∫ .
ESEMPIO N° 7
Calcolare
$
S
dS∇ × ⋅∫∫ F n
Dove S è la semisfera 2 2 2 2 x y z a+ + = con normale esterna crescente e
( )2 23 2 y xz x y= − + −F i j k
Svolgimento
Il contorno C di S ovvero la circonferenza 2 2 2 x y a+ = e anche il contorno del disco
2 2 2
:T x y a+ ≤ e 0 z = . Allora

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 280/391
15
$ dT C T
dS dA∇ × ⋅ = ⋅ = ∇ × ⋅∫∫ ∫ ∫∫F n F r F k
essendo ( ) 3 3 z∇ × ⋅ = − −F k e 0 z = su T segue che
23
T T
dA dx dy aπ ∇ × ⋅ = = −∫∫ ∫∫F k .
ESEMPIO 8
Calcolare
$
S
dS∇ × ⋅∫∫ F n
Dove S è la superficie ( )22 2 2 1 6, x y z+ + − = 0 z ≥ , $n è la normale esterna (rispetto all’origine) su
S, e
( )2 2 23 3
cosz x y z
xz y z x e xyz e+ +
= − + +F i j k
Svolgimento
Il contorno C di S ovvero 2 2 4 x y+ = è anche il contorno del disco 2 2: 4T x y+ ≤ e 0 z = .
Allora
$ dS C S
dS F dA∇ × ⋅ = ⋅ = ∇× ⋅∫∫ ∫ ∫∫F n r F k
Essendo
2 23 3 cos z x e y z∇ × ⋅ = +F k e 0 z = su T segue che
( )2 23
S T
dA x y dx dy∇ × ⋅ = +∫∫ ∫∫F k
Da cui, usando le coordinate polari, si ha
$2 2 3
0 0
3 24S
dS d d π
σ ρ ρ π ∇ × ⋅ = =∫∫ ∫ ∫F n
ESEMPIO N° 9
Sia C la curva
( )2 2
1 4 16
2 3
x y
x y z
− + =
+ + =
orientata in senso antiorario quando guardata dall’alto dall’asse z. Sia

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 281/391
16
( ) ( ) ( )2 2 2sin 2 2 z y x xy z xz yz= + + + + + +F i j k .
calcolare
dC
⋅∫ F r
Svolgimento
C è la frontiera, orientata nel verso antiorario, del disco ellittico S che sta sul piano 2 3 x y z+ + = ,
ovvero sul piano 2 3 z x y= − − + . S ha normale unitaria
$ ( )1
26
= + +n i j k
Essendo
( )2 1 z z∇ × = − +F i j
Si ha
$( )5 2
d6C S S
zdS dS
−⋅ = ∇ × ⋅ =∫ ∫∫ ∫∫F r F n F
Osservato che S ha una proiezione biunivoca su T :( )
2 21
116 4
x y−
+ ≤ la cui area è 4 2 8π π ⋅ ⋅ =
segue che
( ) ( )1
d 5 3 2 2 6 13 10 56C T T
x y dx dy x y dx dy⋅ = − − − = − − ∫ ∫∫ ∫∫F r
Osservato che le coordinate del centroide di T sono 1 x = e 0 y = , si evince che
0T
y dx dy =∫∫ 1T
x dx dy =∫∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 282/391
17
quindi
( ) ( ) ( )d 13 10 13 area di T 10 area di TC T
x dx dy x⋅ = − = −∫ ∫∫F r
ESEMPIO N° 10
Mediante il teorema di Stokes dimostrare che
23C
y dx z dy x dz aπ + + =∫
Dove C è l’ intersezione, orientata convenientemente, delle superfici:
2 2 2 2 x y z a+ + = e 0. x y z+ + =
Svolgimento
Il cerchio C, intersezione della sfera 2 2 2 2 x y z a+ + = con il piano 0 x y z+ + = , è la frontiera del
disco D che sta sul piano 0 x y z+ + = .
Osservando che
( ) d dC C C
y dx z dy x dz y z x+ + = + + ⋅ = ⋅∫ ∫ ∫i j k r F r
(ovviamente è y z x= + +F i j k ) per il teorema di Stokes risulta:
$ ( ) $dC D D
dS dS⋅ = ∇ × ⋅ = − + + ⋅
∫ ∫∫ ∫∫F r F n i j k n
Essendo su D (che sta sul piano di equazione z x y= − − )
$ ( )1
3= ± + +n i j k
segue che
2d 3 3
C D
dS aπ ⋅ = =∫ ∫∫F r

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 283/391
18
Si è tenuto conto del fatto che l’integrale al secondo membro è l’area del disco D. Ignorando ciò si
può procedere come segue. Poiché
( )
2 2 22 2 2 2 2 2 2
0
x y z a x y z a
z x y x y z
+ + = + + = ⇒
= − ++ + =
Segue che il disco D si proietta sul piano xy nel dominio T la cui frontiera è la conica di equazione
2 2 22 2 2 x y xy a+ + = (3)
Ricordando (vedi rotazione di assi coordinati) che un’ equazione del tipo
2 2 0 0 Ax Bxy Cy Dx Ey F B+ + + + + = ≠ (4)
in un sistema di coordinate u,v ottenuto rotando (intorno all’origine) gli assi x,y di un angolo θ tale
che
A - Bcotg 2 =
Bθ
assume la forma
2 2 0au cv du ev f + + + + =
ottenuta sostituendo le equazioni della rotazione degli assi:
cos sin
sin cos
x u v
y u v
θ θ
θ θ
= −
= +
nell’equazione (2) ne consegue che le equazioni (vedi Osservazione*)
1( )
2
1( )
2
x u v
y u v
= −
= +
trasformano l’ equazione (1) nell’equazione
( )
2 2
2 21
3
u vaa
+ =

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 284/391
19
ovvero in una ellisse di area .3
aaπ
Quindi
∫∫ ∫∫ ===
T T
aa
dxdydS2
2
3
3
33 π π
(*) Osservazione. Nel caso dell’ equazione
2 2 22 2 2 x xy y a+ + =
è cotg 2 =2
π θ quindi =
4
π θ .
y
y
x x
u
u
v
v
P
θ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 285/391
1
TRASFORMATA DI LAPLACE
1. Introduzione.
In questo capitolo studieremo un operatore integrale noto come la trasformata di Laplace.
Prima di descrivere tale operatore integrale premettiamo alcune definizioni.
Una funzione F si dice continua a tratti in [a,b] se è definita e continua in [a,b], ad
eccezione, al più, di un numero finito di punti
x x . . . x0 1 n= < < < =a b
in cui esistono finiti i limiti
elim ( ) ( )
x x
i
i
F x F x
→
++
= lim ( ) ( )
x x
i
i
F x F x
→
−−
=
Ovviamente in x = a ed in x = b hanno senso soltanto F(a+) e F(b-) rispettivamente.
In questo senso una funzione continua a tratti in [a,b] è continua in ciascuno degli intervalli
. Per di più, indipendentemente dal fatto che F sia definita o meno nei punti
ed la si può ivi ridefinire in modo da renderla continua in
(x xi i, +1) xi
xi +1 [ ]x xi i, +1 .
Una funzione F si dice regolare a tratti se è continua a tratti ed ha derivata F’ continua a
tratti, in [ ; in altre parole se esiste una suddivisione finita di [a , b] :]a b,
a x . . . x1 n= < < < =x b0
in corrispondenza della quale F risulti di classe C in1 ( )x xi i, +1 , inoltre esistono finiti i
limiti , , ,( )F xi+ ( )F xi +
−1 ( )F xi' + ( )F xi' +
−1 .
Se F è continua in [ ed ha derivata F’ continua a tratti in]a b, [ ]a b, , diremo che F è
continua e regolare a tratti.
Premesso ciò, ricordiamo che se F è una funzione continua a tratti in [a,b] con
discontinuità in
x x . . . x0 1 n= < < < =a b
allora F è integrabile su [a , b] e
∫ b
a=dt(t)F' lim
h 0→ + ⎥⎦⎤
⎢⎣⎡ +++ ∫ ∫ ∫
−
+
−
+
−
+
h b
hx
hx
hx
hx
ha n
1
0
0
dtF(t) ...dtF(t) dtF(t)
inoltre valgono i seguenti teoremi:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 286/391
2
TEOREMA 1.1.
Sia F una funzione continua su [a , b] e derivabile in (a , b). Se è continua in (a, b) e
integrabile su [a , b] allora:
F'
.∫ b
aF(a)-F(b)=(t)dtF'
Dimostrazione. Sia
∫ =x
a(t)dtF'(x) f [ ]∀ ∈x a,b .
Essendo continua su [a , b], derivabile in (a , b) con f f ' = F' , segue che la funzione
continua su [a , b] è costante su (a , b) e quindi, per continuità, su [a, b]. f − F
In particolare è
F (b) - f (b) = F (a) - (a) f
da cui, essendo (a) = 0, si evince l’asserto: f
.∫ b
a(t)dtF'=(a)=F(a)-F(b) f
TEOREMA 1.2.
Sia F una funzione continua e regolare a tratti su [a , b], allora
∫ b
a F(a)-F(b)=(t)dtF'
Dimostrazione. Supponiamo che F non sia derivabile nei punti
a = x o < x 1 < ... < x n = b
allora per definizione è
∫ ∑ ∫ b
a
1-n
1=i
x
x
i
1-i
(t)dtF' =(t)dtF'
da cui, tenuto presente che per il teorema precedente è
∫ −
i
1i
x
x1-ii )xF(-)xF(=dt(t)F'
si evince che
[ ] F(a).-F(b))xF()xF(=dt(t)F' b
a
1-n
1=i
1-ii =−∫ ∑

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 287/391
3
TEOREMA 1.3.
Se F e G sono due funzioni continue e regolari a tratti in [a , b] allora vale la formula di
integrazione per parti
dtG(t)(t)F' -(t)G'F(t)=dt(t)G'F(t)
b
a
b
a
b
a∫ ∫
Dimostrazione.
Ovviamente la funzione FG è continua e regolare a tratti in [a , b], pertanto ad eccezione di
un numero finito di punti è
( )F(t) G(t) F(t) G'(t) + F'(t) G(t)'=
da cui, tenuto presente, il teorema precedente e che la funzione e sono
integrabili, si evince l’asserto.
FG' F'G
In questo contesto saremo interessati a funzioni continue a tratti su ogni intervallo finito[0 , b] per ogni b > 0, per brevità diremo che tali funzioni sono continue a tratti su [0 , +∞).
Saremo interessati anche a funzioni continue e regolari a tratti cioè con derivata continua a
tratti su [0 , +∞).
TEOREMA 1.4.
Sia F(t) una funzione continua a tratti su [0,+∞]. Se l’integrale improprio
∫ ∞+ −
0)(0 dt t F e
t s
converge, allora la funzione
v(t) = duuF et
t s )(0
0∫ −
è limitata su [0,+ ).∞
Dimostrazione.
Per ipotesi esiste finito il limite di v(t) per t +→ ∞ . Sia
.limt →+∞
∫ ∞+ − ==
0
0 )()()( 0 s f duuF et vus
L’asserto segue osservando che:
i) esiste t0 >0 tale che
v(t) 1 f(s )0≤ + >0;∀ ≥t t 0
ii) essendo v(t) continua su [0, t0 ] esiste k > 0 tale che
v(t) k ≤ ∀ ∈t t [ , ]0 0 .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 288/391
4
2. Funzioni di ordine esponenziale
DEFINIZIONE 2.1.
Una funzione F è di ordine esponenziale su [0 , +∞) se esistono due costanti C > 0 ed
α > 0 tali che
F(t) C tt≤ ∀eα 0≥
In particolare le funzioni limitate sono di ordine esponenziale in quanto
F(t) C t≤ ∀ ≥ 0 implica F(t) C t .t≤ ∀ ≥e 0
Sono di ordine esponenziale anche le funzioni per le quali risulta
F(t) C t≤ eα per qualche α e C > 0< 0
Infatti tali funzioni sono limitate su [0 , ∞):
.0t CCF(t) t ≥∀≤≤ α e
Osservazioni.
Sia F una funzione continua a tratti su [0 , +∞) :
1. Se per qualche C > 0 e α > 0 risulta:
t CF(t) α e≤ 0tt 0 >>∀
allora F è di ordine esponenziale su [0 , ∞). Infatti dalla relazione precedente e da
[ ] F(t) sup F(t) , t 0 , t M M e0t≤ ∈ = ≤
segue che
F(t) k t 0a t≤ ∀e ≥
dove k = max (C , M) ed a = max ( , 1)α .
2. Se per qualche α > 0 è
limF(t)
t +t→ ∞
=eα
0
allora F è di ordine esponenziale.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 289/391
5
Segue dalla 1 ; infatti esiste tale che:t0
F(t) t > t > 0t0≤ ∀eα .
Pertanto le funzioni , sono funzioni continue di ordine esponenziale su
[0,+∞).
t t cos,sin,t1, n
3. Se
limF(t)
t +
t→ ∞= ∞ ∀ ∈ℜ
eα α
allora F non è di ordine esponenziale.
Da cui le funzioni e non sono di ordine esponenziale.et t t lnt2
e t =
4. Se F è di ordine esponenziale su [0 , +∞), allora
∫ t
0duF(u) =G(t)
è di ordine esponenziale su [0 , +∞). Infatti per qualche C > 0 e α > 0 è
( ) . C
1C
=duCduF(u) G(t) ttt
0
ut
0
α α α
α α eee <−≤≤ ∫ ∫
5. Sia F una funzione continua e regolare a tratti in [0 , +∞) la cui derivata è di ordineF'esponenziale:
t C(t)F' α e≤
per qualche C > 0 e α > 0. Allora F è di ordine esponenziale.
Infatti da
-C F'(t) Ct te e
α α ≤ ≤segue che
- C du F(t) - F(0) C du
u
0
tu
0
t
e e
α α
∫ ∫ ≤ ≤da cui
t C
F(0)-F(t) α
α e≤
e, quindi,
F(t) k t > 0t≤ ∀eα
dove k = F(0)C
+α
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 290/391
6
6. Se F è di ordine esponenziale su [0 , +∞) allora:
limt
-s t F(t) = 0→+∞
e
definitivamente rispetto ad s.
3. Definizione di trasformata di Laplace.
Definizione 3.1.
Sia f una funzione definita su [0,+∞) e consideriamo l’ integrale improprio dipendente dal
parametro s ∈ ℜ
( ) ( )dttf lim =dttf b
0
ts
bdef
+
0
ts ∫ ∫ −
∞→
∞ −ee
quando f è sufficientemente regolare, l’ integrale precedente converge per determinati
valori di s, in tal caso definisce una funzione detta Trasformata di Laplace di f ,
che si indica anche con L .
)s(F
f(t)
Non è difficile verificare che:
L 1 0>s s
1 dt
+
0
ts- == ∫ ∞
e
L t 0>s s
1 dtt 2
+
0
ts-
== ∫ ∞
e
L tn 0>s 1,2,...=n s
n! dtt
1+n
+
0
nts- == ∫ ∞
e
L sen ωt s
dttsin22
+
0
ts-
ω ω
+== ∫
∞e
L cos ωt s
sdttcos
22
+
0
ts-
ω ω
+== ∫
∞e
L eat a>s a-s
1dt
+
0
tats- == ∫ ∞
ee
Teorema 3.1
Sia f(t) una funzione continua a tratti. Se l’integrale improprio
∫ ∞+ −
0)( dt t f e st
converge per s = s0 , allora converge anche per s > s0.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 291/391
7
Dimostrazione.
Da
∫ ∫
−−−− =b b
t st ssst dt t f eedt t f e0 0
)()()( 00
integrando per parti si ottiene
∫ ∫ −−−−− −+=
b bt ssbssst
dt t vessebvdt t f e0 0
)(
0
)()()()()( 00
dove v(t) è la funzione definita nel teorema 1.4. Essendo
e v t Mes s t s s t− − − −≤( ) ( )( )0 0 0t,v(t)supM >=
si evince che l’integrale improprio
∫ ∞+ −−
0
)()(0 dt t ve
t ss
converge per ogni s > s0. Infine osservato che
0)(lim)( 0 =−−
+∞→
bss
bebv ∀ >s s0
segue che
∫ ∫ ∞+ −−−
+∞→−=
bt ssst
bdt t vessdt t f e
0 0
)(
0 )()()(lim 0
0ss >∀
cioè l’asserto.
Possiamo dire che se una funzione f(t) continua a tratti è L-trasformabile (cioè esiste
L f(t) ) la corrispondente trasformata di Laplace risulta definita in un intervallo del tipo
dove h, eventualmente uguale a(h,+∞) − ∞ , è completamente determinato dalla funzione
f(t).
Tale numero h è detto ascissa di convergenza se:
( )dt t f e st ∫ +∞ −
0
⎩⎨⎧
>∀
<∀
hsconverge
hsdiverge
Il seguente teorema fornisce una condizione sufficiente per l’esistenza della trasformata di
Laplace.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 292/391
8
TEOREMA 3.2.
Se F è una funzione continua a tratti di ordine esponenziale, esiste un a ∈ ℜ tale che:
∫ ∞+
0
ts- dtf(t)e
converge per ogni s > a in altre parole esiste L [ f(t)]=F(s); inoltre risulta
F(s) = 0 .lims +→ ∞
Dimostrazione.
Per ipotesi esistono due costanti C > 0 e α > 0 , tali che
t Cf(t) α e≤
pertanto è
( )t-s-t-s Cf(t)
α ee ≤ .
Da cui, tenuto presente che
( ) α α
α >s
s
1dt
0
t-s- ∀−
=∫ ∞+
e
si evince l’asserto.
Si osservi che l’insieme delle funzioni che ammettono la trasformata di Laplace è più
grande dell’insieme delle funzioni continue a tratti di ordine esponenziale su [0 , +∞).
Infatti la funzionet
1 ammette trasformata di Laplace anche se non è di ordine
esponenziale:
L ( ) . 0>s
s=xsd
s
2dt
t
1 +
0
xs-+
0
ts-2 π
∫ ∫ ∞∞
==⎭⎬⎫
⎩⎨⎧
ee
t

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 293/391
9
4. Proprietà della trasformata di Laplace.
I seguenti teoremi mostrano che per il calcolo della trasformata di Laplace di una datafunzione esistono metodi più facili di quello suggerito dalla definizione.
Teorema 4.1.
Se esiste la trasformata di Laplace delle funzioni f e g allora per ogni a e b ∈ ℜ esiste latrasformata di Laplace della funzione a f +b g e risulta:
L = aL [ + bL [ ] bg+af ]f [ ]g .
In altre parole, l’operatore L è lineare.
Esempi.
1. L [ ] = L [ ] =cos (t + a) cos(t) cos(a) - sin(t) sin(a) ( )1
1 + ss cos(a) - sin(a)2
2. L [ = L ]sin t3 3
4sin(t) -
1
4sin(3t)
⎡⎣⎢
⎤⎦⎥
=3
4 1 9
1
s-
1
4
9
s2 2+ +
3. L [ = L ]cos3
t3
4t) +
1
43t)cos( cos(
⎡⎣⎢
⎤⎦⎥
=3
4 1 9
1
s+
1
4
s
s2 2+ +.
4. L [sinh at]= L 22
11
2
1
2 as
a
asas
ee at at
−=⎟
⎠
⎞⎜⎝
⎛ +
−−
=⎥⎦
⎤⎢⎣
⎡ − −
5. . L [cosh at]= L 22
11
2
1
2 as
a
asas
eeat at
+=⎟
⎠
⎞⎜⎝
⎛ +
−−
=⎥⎦
⎤⎢⎣
⎡ + −
Si osservi che è
sin (3t) = 3sin t - 4sin3 t . cos (3t) = -3cos t + 4cos3 t .
Teorema 4.2.
Se esiste la trasformata di Laplace di f: L [ ] )s(f F = allora, per ogni a∈ℜ, risulta
L [ ] ( )a-sF(t)ta f e = .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 294/391
10
Dimostrazione.
L )t(f eat = .)()()(0
)(
0asF dt t f edt t f ee
t asat st −== ∫ ∫ +∞ −−+∞ −
Il risultato espresso dalla (3-1) è noto come “il primo teorema del ritardo”, e può esserescritto in termini di trasformata inversa come
L -1
[ ] )t(f e)as(F as=−
Dove ovviamente è f(t)= L -1
[ ].)s(F
Esempi :
1. Dato che L
[1] =s
1, si ha
L
[ eat ] =as −
1; L [ e
-at ] =as +
1
2. Dato che L
[ tn ] =1
!+n
s
n, si ha
L
[ eat tn] =1)(
!+− nas
n; L
[e-at tn] =1)(
!++ nas
n
3. Dato che L [ sin ωt] =22 ω +s
e L [ cos ωt ] =22 ω +s
s, si ha
L [ eat sin ωt] =
22)( ω +− as; L [ e
-at sin ωt] =22)( ω
ω
++ as
L [ eat cos ωt] =22)( ω +−
−as
as; L [ e-at cos ωt] =
22)( ω +++
as
as
Prima di formulare il prossimo teorema premettiamo la definizione di funzione gradino
unitario u(t-a) definita dalla seguente relazione :
⎩⎨⎧
=a)-u(t
0 t ≤ a
1 t > a
dove, per il nostro scopo, supporremo a > 0. Questa funzione ci permette di scrivere la
funzione

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 295/391
11
⎩⎨⎧
=g(t)0 t ≤ a
f(t-a) t >a
nel modo seguente:
g(t) = u(t-a) f(t-a).
In altre parole la funzione g(t) definita precedentemente descrive la funzione ottenuta
traslando f(t) di a unità sulla destra e che vale zero in [0 , a].
Il prossimo teorema noto come “secondo teorema del ritardo” fornisce una formula per
la trasformata di Laplace di tali funzioni.
Teorema 4.3.
Sia f(t) una funzione continua a tratti di ordine esponenziale su [0 , +∞). Allora:
L L [ ] sa-a)-f(ta)-u(t e= [ ]f(t)
Dimostrazione.
L
( ) ( )[ ]at f at u −− ∫ +∞ − −−=
0)()( dt at f at ue st ∫
+∞ − −=a
st dt at f e )(
L asst asat s
edt t f eedt t f e−+∞ −−+∞ +− === ∫ ∫ 00
)( )()( [ ] )(sF e f as−=
In particolare è
L [ ] s1a)-u(t sa-e= .
Il fattore nelle precedenti formule, per ragioni fisiche, è detto fattore di ritardo.e- a s
Esempi :
Determinare la trasformata di Laplace delle seguenti funzioni.
1. Funzione di Heaviside traslata di a:
L [ ] sa-
s
1a)-u(t e=
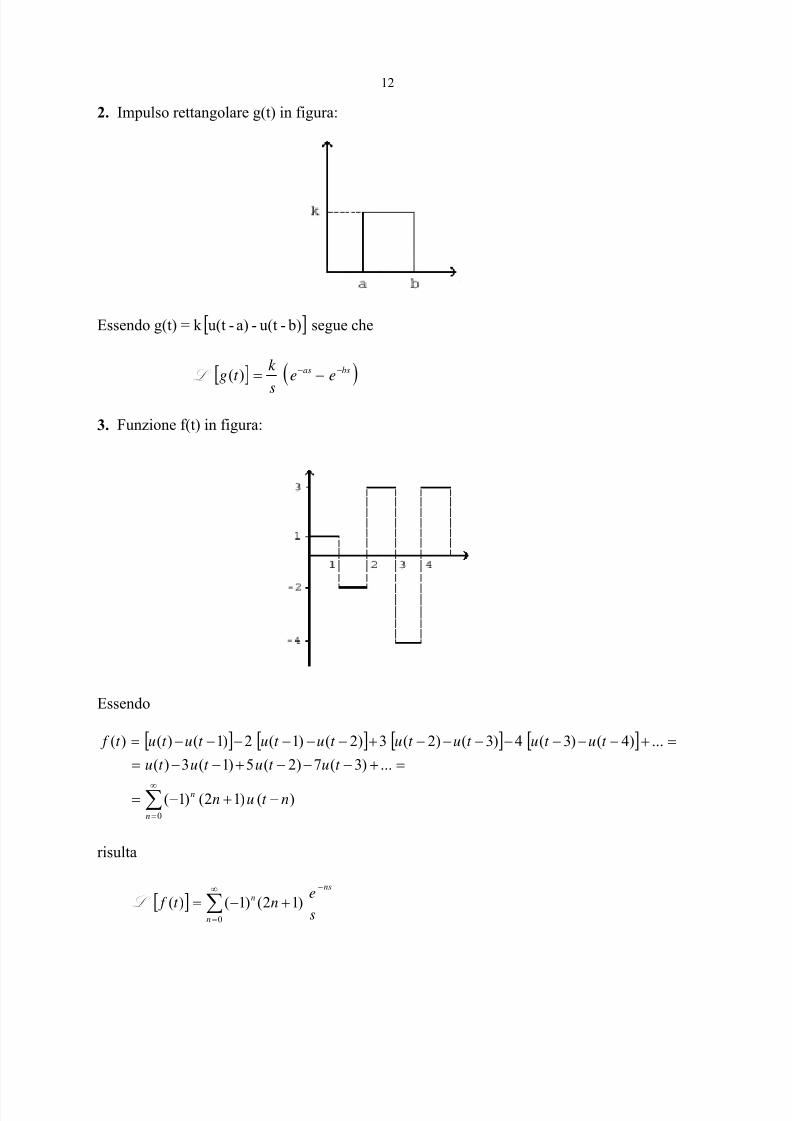
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 296/391
12
2. Impulso rettangolare g(t) in figura:
Essendo g(t) = k [ ] segue che b)-u(t-a)-u(t
L [ ] ( )bsasee
s
k t g
−− −=)(
3. Funzione f(t) in figura:
Essendo
[ ] [ ] [ ] [ ]
∑∞
=
−+−=
=+−−−+−−=
=+−−−−−−−+−−−−−−=
0
)()12()1(
...)3(7)2(5)1(3)(
...)4()3(4)3()2(3)2()1(2)1()()(
n
nnt un
t ut ut ut u
t ut ut ut ut ut ut ut ut f
risulta
L [ ]ns
n
n
s
ent f
−∞
=
+−= ∑ )12()1()(0

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 297/391
13
4. )()( at uet f t −=
Da )()( at ueet f at a −= − segue che
L [ ]11
)()1(
−=
−=−
−−−
s
e
s
eeat ue
saasat
5. )()( at ut t f −=
Da segue che)()()()( at uaat uat t f −+−−=
L [ ] saase
s
ae
sat ut
−− +=−2
1)(
Esempi :
Nota L [ determinare=)(sF ])(t f =)(t f L -1 [ ])(sF
1. ;)(2
3
s
esF
s−
= )3()3()( −−= t t ut f
2. ;)(22
ws
esF
ds
+=
−
)(sin1
)()( d t ww
d t ut f −−=
3. ;2
2
3
3
)2()3(65)(
2 ⎟ ⎠
⎞⎜⎝
⎛ +
−+
=++
=++
= −−−
sse
ss
se
ss
essF dsds
ds
)(2)(3 23()()( d t d t eed t ut f
−−−− −−=
4. ;4)2(84
)(22 +−
=+−
=−−
s
e
ss
esF
dsds
)()( d t ut f −=
)(2sin2
1)()( )(2
d t ed t ut f d t −−= −
Teorema 4.4
Sia f continua su e supponiamo che f ’ sia una funzione continua a tratti e di ordine
esponenziale su [ . Allora
( ∞,0 ))∞,0
L
[f ‘] = s
L [f] - f(0
+) (3-7)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 298/391
14
Dove f(0+) = lim per t che tende a 0+ di f(t).
Più generalmente, se , ,…… sono continue per t>0, e se f f ′ ( )1−n f
( )n f è continua a tratti
di ordine esponenziale su [ , allora)∞,0
L [ ]=s f ′′ 2 L
[ ] - (0+) - f sf f ′ (0+) (3-8)
…………………………….
L
[ ]= L ( )n
f n
s
[ ] - (0+) - ………- f 1−n
s f ( )1−n
f ( 0+) (3-9)
Dimostrazione.
Per stabilire la (3-7) integriamo per parti
L
[ ] ( ) .)()(')('000 ∫ ∫ +∞ −+∞−+∞ − +== dt t f est f edt t f et f st st st
Per completare la dimostrazione dobbiamo dimostrare che
( ) )0(0
++∞− −= f t f est .
A tale scopo osserviamo che essendo f di ordine esponenziale
0)( →−t f e st quando +∞→t
ogni volta che s è sufficientemente grande. Pertanto
( ) )0()]([lim00
+−
→
+∞− −=−= f t f et f e st
t
st
dove si è tenuto conto del fatto che f in t=0 deve avere un salto qualora non fosse ivi
continua.
Teorema 4.5.
Sia f una funzione continua a tratti, di ordine esponenziale su [0 , +∞). Allora
i) L s
1du(u)
t
0=⎥⎦
⎤⎢⎣⎡∫ f L [ ] )s(
s
1F f = .
ii) L 2
t
0
u
0 s
1dudv(v) =⎥⎦
⎤⎢⎣⎡∫ ∫ f L [ ] )s(
s
12
F f = .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 299/391
15
Esempio :
Essendo
L [ ]( )
e
s
2 t sin (3t) =
− +
3
2 92
segue che
L e2 ut
2sin (3u) dus
3
(s - 2)
0
1
9∫ ⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
=+
L e2 vut
2 2sin (3v) dvs
3
(s - 2).
00
1
9∫ ∫ ⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
=+
Dimostrazione.
Poniamo
∫ =t
0(u)du(t) f h
ovviamente è h(0)=0. Integrando per parti otteniamo
L ( ) ∫ ∫ ∫ ∞+ −∞+−∞+ − +−==⎥⎦
⎤⎢⎣⎡
0000)(11)()( dt t f e
st he
sdt t heduu f st st st t
st he
s
st
t
1)(
1lim +⎥⎦
⎤⎢⎣
⎡−= −
+∞→ L [ ] (t) f
Poiché h(t) è di ordine esponenziale, il limite precedente tende a zero ammesso che s sia
sufficientemente grande, quindi la i).
Analogamente si dimostra che
L s
1(u)du
t
a=⎥⎦
⎤⎢⎣⎡∫ f L [ ] .(t)dt
s
1(t)
a
0∫ − f f
Per il calcolo delle trasformate inverse la i) ci fornisce
L -1
∫ =⎥⎦
⎤⎢⎣
⎡ t
duu f sF s 0
)()(1
dove f (u)= L -1
[ ])s(F
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 300/391
16
Per calcolare
L -1
⎥
⎦
⎤⎢
⎣
⎡)(
12
sF s
è opportuno procedere come segue:
Prima si calcola
L -1
[F(s)] = f (t) ;
Successivamente si calcola:
L -1
∫ =⎥⎦
⎤⎢⎣
⎡ t
duu f sF s 0
)()(1
= g(t) ;
infine si calcola
L -1
⎥⎦
⎤⎢⎣
⎡)(
12
sF s
= L -1
⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜⎝
⎛ )(
11sF
ss= .∫
t
duug0
)(
Ovviamente, per calcolare
L -1
⎥⎦
⎤⎢⎣
⎡)(
1sF
sn
basta iterare il procedimento precedente.
Esempio:
Calcolare
L -1
⎥⎦
⎤⎢⎣
⎡+ 2
112
ss
essendo
L -1
⎥⎦
⎤⎢⎣
⎡+ 2
1
s=
t e
2−
segue che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 301/391
17
L -1
⎥⎦
⎤⎢⎣
⎡+ 2
11
ss= =due
t u∫ −
0
2 ( )t e
212
1 −−
quindi
L -1
⎥⎦
⎤⎢⎣
⎡+ 2
112
ss= L
-1
⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜⎝
⎛ + 2
111
sss= ( )u
t
e2
01
2
1 −−∫ du = ( )⎥⎦⎤
⎢⎣
⎡ −+ − 12
1
2
1 2t et .
Teorema : 4.6
Sia f una funzione continua a tratti di ordine esponenziale su [0 ,+∞). Allora
i) L [ ] )s(s
f(t)t F d
d −= ; ii) L [ ] )s(
s)1(f(t)t
n
nnn
F d
d −= .
Dimostrazione.
Essendo f di ordine esponenziale su [0 ,+∞), per qualche C > 0 esiste
h = . 0t Cf(t):inf t ≥∀≤ℜ∈ β β e
Sia k ∈ (h , α), allora essendo α-k ≤ s-k per ogni s > k .
si evince che
e F(t) M M t 0s t (s k) t ( k) t− − − − −≤ ≤ ∀e e α ≥
da cui
∫ ∫ ∞+ −−∞+ − ≤
0
tk)(
b
ts dtetMdtf(t)et α .
Essendo
t e dt e1
( - k)
b
( - k)( k) t
b
-( -k) b2
− −+ ∞
∫ = +⎛
⎝ ⎜
⎞
⎠⎟α α
α α
segue che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 302/391
18
[ ] =dtf(t)t=dtf(t)s u0
ts-
0
ts ∫ ∫ ∞+∞+ −− ee
∂
∂ L [ ]f(t)t
da cui, per il teorema di derivazione sotto il segno, si evince che
[ ]dtf(t)s
=dtf(t)ds
d
0
ts
0
ts- ∫ ∫ ∞+ −∞+
ee∂
∂
e, quindi, la i). Per induzione su n si evince la ii).
Per il calcolo delle trasformate inverse ci fornisce L -1 [ ] )()(' t f t sF =−
dove L =)(t f -1 [ ] )(sF
Esempi :
Calcoliamo la trasformata inversa di Laplace =)(t f L -1 [ ])(s f delle seguenti:
i)( )
;)(222
ws
ssF
+ii) ⎟
⎠
⎞⎜⎝
⎛ =2
2arctan)(
ssF
i) Osservato che
=⎟ ⎠
⎞⎜⎝
⎛ +
−=22
1
2
1)(
wsds
d sF L [ ] )(t gt
dove
L =)(t g-1 wt
wwssin
2
11
2
122
=⎥⎦
⎤⎢⎣
⎡+
si evince
L =)(t f -1 [ ] 0sin
2)( wt
w
t sF =
ii) Risulta
( ) ( )( )=
++−
+−=
++−+=
−+=
+=−
22
1
22
1
2222
4
42
4
4
4)('
22222224ssssssss
s
ss
s
s
ssF
( ) ( ) 11
1
11
12 ++
−+−
=ss

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 303/391
19
Da cui, tenuto presente che L =− )(' sF [ ])(t f t , si evince quanto segue
( ) t eet et et f t t t t t sinsinsin)( −− −=−=
quindi
L -1 [ ] t t t
t f sF sinhsin2
)()( ==
Teorema 4.7.
Sia f di ordine esponenziale e periodica con periodo T, allora
L [ ]sT sT
T st
ee
dt t f e f −−
−
−=
−= ∫
1
1
1
)(0
L ( )[ ])()()( T t ut ut f −−
in quanto
L [ ] ∫ −−−
=T
sT
sT dt t f e
et f
0
)(1
1)(
dove
[ ]∫ ∫ +∞
−− −−=00
)()()()( dt T t ut ut f edt t f esT
T
sT
ovvero
=∫ −T
sT dt t f e0
)( L [ ][ ])()()( T t ut ut f −−
RESTRIZIONE DI f(t) su [0,T] Dimostrazione.
L [ ] .......dt)t(f edt)t(f edt)t(f edt)t(f ef T3
T2
stT2
T
stT
0
st
0
st +++== ∫ ∫ ∫ ∫ −−−∞+ −
Tenuto presente che
∫ ∫ −
+=a b
0
b
adt)at(gdt)t(g
segue che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 304/391
20
.....................................
dt)t(f eedt)T2t(f edt)t(f e
dt)t(f eedt)Tt(f edt)t(f e
T
0
stsT2T
0
)T2t(sT3
T2
st
T
0
stsTT
0
)Tt(sT2
T
st
∫ ∫ ∫
∫ ∫ ∫ −−+−−
−−+−−
=+=
=+=
quindi
L [ ] ( ) ( )[ ]∫ ∫ +∞
−−
−−− −−−
=+++=0
0
2 )()()(1
1)(....1 dt T t ut ut f e
edt t f eee f sT
sT
T st sT sT
ovvero l’asserto.
Funzioni periodiche : 0)()( ≥=+ t t f T t f
Esempi :
1. Onda quadra
(T = 2)
Sia f(t) la funzione in figura, sia
[ ] )2()1()1()()()()()(0 −+−−−−=−−= t ut ut ut uT t ut ut f t f
allora
L [ ] ( )22
0 11
21
)( sss
ess
e
s
e
st f
−−−
−=+−=
quindi
L [ ] ( )2
1
1
111
1
1
1)(
2
2
sth
se
e
se
set f
s
ss
s=
+−
=−−
= −
−−
−
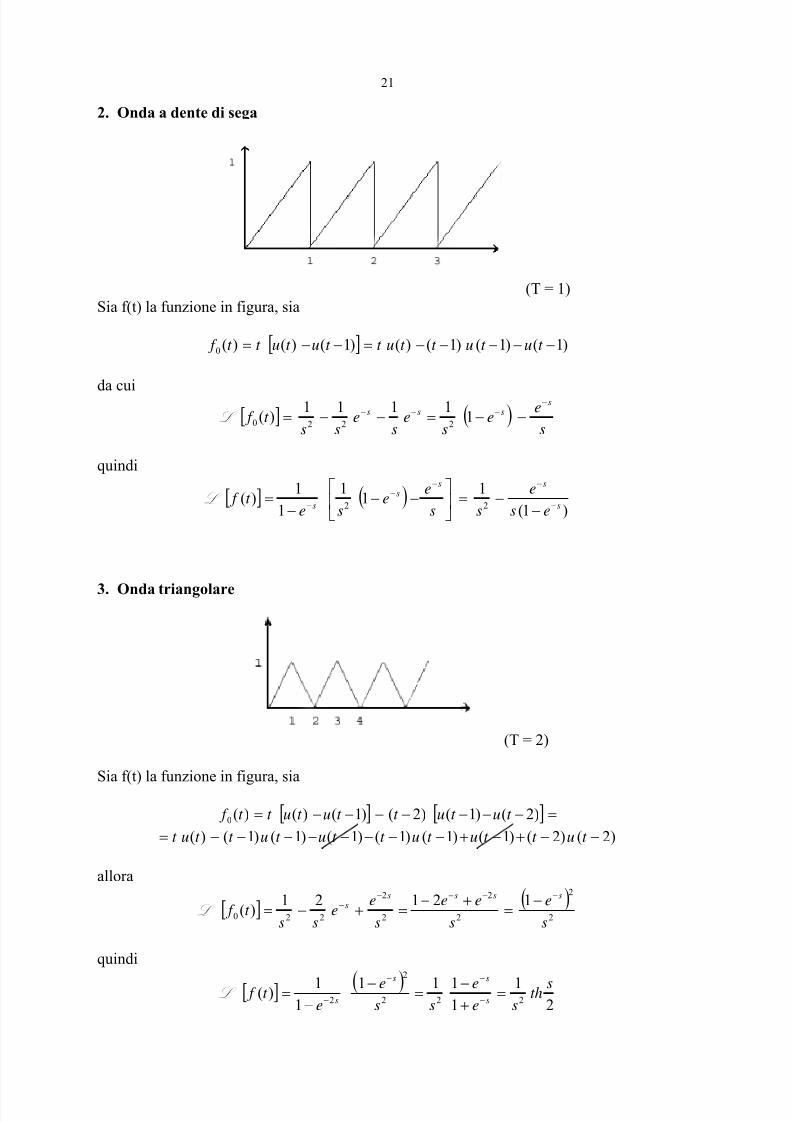
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 305/391
21
2. Onda a dente di sega
(T = 1)
Sia f(t) la funzione in figura, sia
[ ] )1()1()1()()1()()(0 −−−−−=−−= t ut ut t ut t ut ut t f
da cui
L [ ] ( )s
ee
se
se
sst f
ssss
−−−− −−=−−= 1
1111)(
2220
quindi
L [ ] ( ))1(
11
1
1
1)(
22 s
sss
s es
e
ss
ee
set f −
−−−
− −−=⎥
⎦
⎤⎢⎣
⎡−−
−=
3. Onda triangolare
(T = 2)
Sia f(t) la funzione in figura, sia
[ ] [ ] =−−−−−−−= )2()1()2()1()()(0 t ut ut t ut ut t f
)2()2()1()1()1()1()1()1()( −−+−+−−−−−−−−= t ut t ut ut t ut ut t ut
allora
L [ ] ( )2
2
2
2
2
2
220
12121)(
s
e
s
ee
s
ee
sst f
sssss
−−−−− −
=+−
=+−=
quindi
L [ ] ( )2
11111
11)(
222
2
2sth
see
sse
et f
s
ss
s=
+−=−
−= −
−−−

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 306/391
22
5. Convoluzione.
Siano f e g due funzioni continue a tratti su [0 ,+∞) e nulle su (-∞, o).
La convoluzione di f e g si indica con f ∗g ed è definita dalla seguente relazione:
.∫ ∗t
0dug(u)u)-f(t=(t)g)(f
E’ facile verificare che la convoluzione è commutativa e distributiva:
i) ; ii) f g=gf ∗∗ Hf gf =H)+g(f ∗+∗∗
dove anche H è una funzione continua a tratti su [0 ,+∞).
Inoltre è associativa:
iii) .H)(gf =Hg)(f ∗∗∗∗
infatti è
( ) ( ) ( ) ( ) ( ) ( )∫ ∫ ∫ =∗∗∗u-t
0
t
0
t
0dvduvgv-u-tf uH duuHu-tgf =H(t)g)(f
e
( ) ( )( )
( ) ( ) ( )∫ ∫
∫ =∗∗∗
v
0
t
0
t
0
dudvuHu-vg v-tf =
dvvHgv-tf =H)(t)g(f
da cui, scambiando l’ordine di integrazione si ottiene
( )
( ) .H(t)g)(f =dudvg(v)u)-v-f(t uH=
=dudvv)-f(tu-vgH(u)=H)(t)g(f
t
0
ut
0
t
u
t
0
∫ ∫
∫ ∫ −
∗∗
∗∗
Le proprietà i), ii) ed iii) giustificano la terminologia secondo la quale f ∗g è detto prodottodi convoluzione. Vale il seguente
Teorema di convoluzione :
Siano f e g due funzioni continue a tratti di ordine esponenziale su [0 ,+∞). Allora
L L [ ] L [ ]g∗f =f [ ]g
ovvero
L [ ] g(s).f(s)=dug(u)u)f(tt
0∫ −

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 307/391
23
Dimostrazione.
Per definizione è
L [ ]
∫ ∫ ∫∫
∞+=∗
0
t
0 A
ts-ts- dudtg(u)u)-f(t=dudtg(u)u)-f(tgf ee
dove A = (t , u): 0 t , 0 u t≤ < ∞ ≤ ≤ .
Poiché l’insieme precedente può essere descritto come segue
A = (t , u): u t , 0 u t≤ < ∞ ≤ < .
Scambiando l’ordine di integrazione si ottiene
L [ ] ==∗ ∫ ∫ ∫ ∫ ∞+ ∞ ∞ ∞
dtf(t)dug(u)=dtu)-f(tdug(u)gf 0 0
+
0
+
0
u)+(ts-ts-
ee
=f(s)g(s)=dtf(t)dug(u)0
+
0
ts-us-∫ ∫ ∞+ ∞
= ee
L [ ] ==∗ ∫ ∫ ∫ ∫ ∞+ ∞ ∞ ∞
0 0
+
0
+
0
u)+(ts-ts- dtf(t)dug(u)=dtu)-f(tdug(u)gf ee
=f(s)g(s)=dtf(t)dug(u) 0
+
0
ts-us-∫ ∫ ∞+ ∞
= ee L [f]L [g]
Da cui
L [ ] g(t)f(t)f(s)g(s)1 ∗=−
Si osservi che
1*1 = 1*1*1 = (1*1)*1 =;110
t du
t
=⋅∫ ∫ =t
t duu
0
2
;2
1*1*1*1 = (1*1*1)*1 = ;!32
3
0
2t
du
ut
=∫
Iterando il procedimento (per induzione)
1*1* … *1 =!n
t n
n+1 volte.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 308/391
24
Esempi
1. Calcolare l’antitrasformata di Laplace delle seguenti funzioni
i) f ( ))
s = 1(s2 + 4 2 ii) f ( )
)s = s
(s2 +1 2 iii) f ( ))
s = s(s
2
2 +1 2
I) Essendo
L sin2t2
1
4s
12
1 =⎥⎦
⎤⎢⎣
⎡+
−
dal teorema di convoluzione si evince che
=F(t) L =⎥⎦
⎤
⎢⎣
⎡
+
−
22
1
)4(s
1L =
⎥⎦
⎤
⎢⎣
⎡
+⋅
+
−
)4(s
1
)4(s
1
22
1L ∗
⎥⎦
⎤
⎢⎣
⎡
+
−
)4(s
1
2
1L
⎥⎦
⎤
⎢⎣
⎡
+
−
)4(s
1
2
1
cioè
F(t) =1
4sin 2(t - u)sin 2u du
0
t
∫
da cui
F(t) =1
8[cos 2(t - 2u) - cos 2t]du =
sin 2t - 2tcos 2t
160
t
∫
ii) Essendo
L tcos1s
s2
1 =⎥⎦
⎤⎢⎣
⎡+
− e L sint1s
12
1 =⎥⎦
⎤⎢⎣
⎡+
−
dal teorema della convoluzione si evince che
=F(t) L =⎥⎦
⎤⎢⎣
⎡
+−
22
1
)1(s
sL =⎥
⎦
⎤⎢⎣
⎡
+⋅
+−
)1(s
1
)1(s
s22
1L ∗⎥
⎦
⎤⎢⎣
⎡
+−
)1(s
s2
1L ⎥
⎦
⎤⎢⎣
⎡
+−
)1(s
12
1
cioè
∫ t
0
duusinu)-cos(t=F(t)
da cui
t t
t
sin2
1=t)]du-sin(2u+sint[
2
1=F(t)
0
∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 309/391
25
iii) Da
s
(s s (s
2
2 2 2+=
+−
+1
1
1
1
12 2) )
e dalla linearità di L segue che1
=F(t) L =⎥⎦
⎤⎢⎣
⎡
+−
22
21
)1(s
sL −⎥⎦
⎤⎢⎣
⎡+
−
1s
12
1L -sint
)1(s
122
1 =⎥⎦
⎤⎢⎣
⎡
+−
L ⎥⎦
⎤⎢⎣
⎡
+−
22
1
)1(s
1
da cui, essendo per il teorema di convoluzione
∫ ∫ ∫ ∫ +∞+∞
=0000
bb
L =⎥⎦⎤⎢
⎣⎡
+−
22
1
)1(s1 L =⎥
⎦⎤⎢
⎣⎡
+⋅
+−
)1(s1
)1(s1
22
1L ∗⎥
⎦⎤⎢
⎣⎡
+−
)1(s1
2
1L ⎥
⎦⎤⎢
⎣⎡
+−
)1(s1
2
1
si evince che
∫ t
02
tcost+tsin=duusinu)-sin(t-tsin=F(t)
Funzione delta di Dirac
Consideriamo la funzione (impulso unitario di durata h)
=)(t hδ
⎪⎪
⎩
⎪⎪
⎨
⎧
<<
><
ht h
t et
01
000
il cui grafico è

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 310/391
26
Essa rappresenta una quantità che agisce nell’intervallo (0,h) dove il suo valore è costante
1/h; il suo effetto totale è uguale a
11
)(0
==
∫ ∫
+∞
∞−
h
h dt
h
dt t δ
Ora supponiamo che ; è chiaro che la famiglia di funzioni0→h )(t h
δ diverge, ma noi
introduciamo una funzione convenzionale )(t δ come il limite di questa famiglia:
)(lim)(0
t t h
hδ δ
→=
La funzione )(t δ è detta funzione impulso di ordine zero o funzione impulsiva di Dirac
o più semplicemente delta di Dirac. Risulta
=)(t δ ⎪⎩
⎪⎨
⎧
=∞+
≠
0
00
t
t
e malgrado tutto si suppone verificare che la relazione
1)(lim)(0
== ∫ ∫ +∞
∞−
+∞
∞−→
dt t dt t h
hδ δ
La funzione )(t δ rappresenta un processo limite ben definito che si incontra spesso in
fisica: una quantità infinitamente grande che agisce in un intervallo infinitamente piccolo,
il cui effetto totale è uguale all’unità. Conviene considerare la trasformata di Laplace della
funzione )(t δ come il limite per della trasformata della funzione0→h
[ ])()(1
)( ht ut uh
t h −−=δ
ovvero
L [ ]0
lim)(→
=h
t δ L [ ])(t hδ
segue che
L [ ] 1)( =t δ
La relazione precedente può essere dedotta anche nel modo seguente. Poniamo

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 311/391
27
== ∫ t
hhdt t t u
0
)()( δ
[ ]
⎪
⎪
⎩
⎪⎪
⎨
⎧
>
∈
ht
ht t h
1
,01
)(t uh
Si vede che, quando , , pertanto0→h )()( t ut uh →
)()(0
t udt t
t
=∫ δ
Allora )(')( t ut =δ e
L [ ] =)(t δ L [ ] st u =)(' L [ ] 11
)0()( =⋅=−s
sut u
Qui è
0)0(lim)0(0
==→ h
huu
Sia una funzione continua su [)(t f )+∞,0 , allora per il teorema della media abbiamo
)0()()(0
f dt t t f =∫ +∞
δ
(se la funzione è discontinua per )(t f 0=t , allora )0()0( += f f ).
Da quanto precede si evince (ancora una volta) che
L [ ] 1)()(0
== ∫ +∞
− dt t et st δ δ
Per la proprietà del ritardo è
L [ ] aseat −=− )(δ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 312/391
28
Analogamente a quanto precede risulta
)()()(0
a f dt at t f =−
∫
+∞
δ
dove )( at −δ è la traslata di )(t δ , a > 0 e è continua su f [ )∞,0 . Ovviamente
=− )( at δ ⎪⎩
⎪⎨
⎧
=∞+
≠
at
at 0
In modo analogo si definiscono le funzioni impulso di ordine superiore. Consideriamo la
funzione
[ ])2()(2)(1
)(2
)1(ht uht ut u
ht h −+−−=δ
il cui grafico è
=)()1(
t hδ
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<<−
<<
altrove
ht hh
ht h
0
21
0
1
2
2
allora il suo “limite” per è per definizione la funzione impulso di ordine uno:0→h
)()(lim 1)1(
0t t h
hδ δ =→
Così come la funzione )(t δ , la trasformata di Laplace della funzione )(1 t δ è, per
definizione, il limite per della trasformata di Laplace della funzione :0→h )()1(
t hδ
L [ ]0
1 lim)(→
=h
t δ L [ ] ( )220
)1(1
1lim)( hs
hh e
hst
−
→−=δ
da cui
L [ ] st =)(1δ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 313/391
29
Sia una funzione che abbia derivata di ordine n+1 generalmente continua e di ordine
esponenziale che soddisfa alle condizioni iniziali k = 0,1…n+1. Allora
f
)0()0()( =k f
L [ ] nn st f =)()(L [ ])(t f
Poiché la trasformata di Laplace della funzione )(t δ è 1 : L [ ] 1)( =t δ , per quanto
precede, “è lecito” supporre
nn ss = L [ ] =)(t δ L [ ] =)()(t nδ L [ ])(t
nδ
in altre parole è lecito definire sn come la trasformata di Laplace della funzione impulso di
ordine n, ovvero della derivata di ordine n+1 della funzione di Heaviside.)(t u
Applicazioni:
1. Dimostriamo che:
( 1 )t senduut J u J t
∫ =−0
00 )()(
A tale scopo, se poniamo:
t senduut J u J t ht
∫ =−=0
00 )()()(
dalla definizione di convoluzione si evince che
)()()( 00 t J t J t h ∗=
Allora per il teorema della convoluzione, è
L [h(t)] = L [Jo(t)] · L [Jo(t)]
Da cui essendo
L ( )[ ]1
1
20
+=
st J
Segue che
L ( )[ ]1
12 +
=s
t h
Antitrasformando l’equazione precedente si ottiene la (1).

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 314/391
30
2. Funzione Beta
La funzione beta è definita come segue:
m > 0, n > 0( ) ( ) duuunm
nm
11
0
1
1,
−−
∫ −= β
Se poniamo
( ) ( ) duut ut hn
m11
0
1−
−∫ −=
Dalla definizione di convoluzione si evince che
( ) 11 −− ∗= nmt t t h
Prendendo la trasformata di Laplace di entrambi i membri per il teorema di convoluzione si
ha:
L =L ( )[ t h ] 1−mt · L
1−nt
Ovvero
L =( )[ ]t h( ) ( )
nms
n
s
m Γ⋅
Γ
Da cui, antitrasformando, si ottiene:
=( )[ ]t h( ) ( )( )
1−+⋅+Γ
ΓΓ nmt
nm
nm
In particolare è:
=( )[ ]1h( ) ( )( )nm
nm
+ΓΓΓ
quindi
( ) ( )( ) ( )( )nm
nmnmduuu
mn
+Γ
ΓΓ==− −
−
∫ ,1 111
0 β

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 315/391
31
1. Equazioni integrali di Volterra
Si dice equazione integrale un’equazione che contiene la funzione incognita sotto il segno
di integrale. Se la funzione incognita y(t) entra nell’equazione in modo lineare, l’equazione
integrale è detta lineare.
Un equazione integrale del tipo
( ) ( ) ( ) ( )dx x y xt k t f t yt
a∫ += ,
è detta equazione integrale lineare di Volterra di seconda specie.
Se la funzione incognita y(t)figura solo sotto il segno di integrale, ovvero un’equazione del
tipo:
( ) ( ) (t f dx x y xt k t
a=∫ , )
]
è detta equazione integrale lineare di Volterra di prima specie .Nelle equazioni precedenti
le funzioni K(t,x) e f(t) sono assegnate; la funzione K(t,x) si chiama nucleo dell’equazione .
Le equazioni del tipo
( 1 )( ) ( ) ( ) ( )dx x y xt k t f t yt
a∫ −+=
dove il nucleo K(t-x) dipende dalla differenza degli argomenti, appartengono ad un
importante classe di equazioni di Volterra che vengono chiamate equazioni integrali di tipo
convoluzionale e possono essere scritte nella forma:
( ) ( ) ( ) ( )t yt k t f t y ∗+=
Prendendo le trasformate di Laplace di entrambi i membri, ammesso che f(t) e K(t)siano
trasformabili si ha:
L = L ( )[ t y ( )[ ]t f + L L ( )[ t k ] ( )[ ]t y
Ovvero
( ) ( ) ( ) ( )sY sK sF sY +=
da cui
( )( )
( )sK
sF sY
−=
1
Quindi antitrasformando l’equazione precedente si ottiene la soluzione dell’equazione
integrale ( 1 ).

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 316/391
32
Esempi:
Per risolvere l’equazione integrale
( ) ( ) ( )∫ −+=
t
duut J t yt t y 0 1
scriviamo l’equazione integrale nella forma
( ) ( ) ( )t J t yt t y 1∗+=
Allora prendendo la trasformata di Laplace e usando il teorema di Convoluzione, abbiamo
( ) ( ) ⎟⎟ ⎠
⎞⎜⎜⎝
⎛
+−+=
11
1
22s
ssY
ssY
dove si è tenuto conto che
L ( )[ ]1
11
1
22
2
1
+−=
+
−+=
s
s
s
sst J
Risolvendo l’equazione precedente otteniamo:
( )1
11
1
23
22
3+
+=+=
ss
ss
ssY
ovvero
( )1
11
1
11
232 ++
+=
sssssY
Antitrasformando l’equazione precedente risulta
( ) ( )( )
( ) ( ) ( ) ( ) ( )∫ ∫ ∫ ∫ ∫ ∫ +⋅−+=−
+=t t t t t t
duu J u
duu J ut duu J t
duu J duu J ut
duu J t y0 0
0
2
000
2
000
0 0
2
022!2
da cui, essendo ( ) ( )[ u J udu
d u J u 10 ⋅=⋅ ], segue che
( ) ( )[ ] ( )t J t duu J udud duu J u
t t
10
10
0 ⋅=⋅=⋅ ∫ ∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 317/391
33
( ) ( )[ ] ( ) ( )∫ ∫ ∫ ⋅−⋅=⋅⋅=⋅t t t
duu J ut J t duu J udu
d uduu J u
011
2
01
00
( ) ( ) ( ) ( ) ( )∫ ∫ −⋅+=′⋅+⋅=t t
duu J t J t t J t duu J ut J t 0
0012
0012
quindi
( ) ( ) ( ) ( ) ( )∫ +−+=t
t J t
t J t
duu J t t y0
01
2
0
2
221
2
1
Per risolvere l’equazione integrale
( ) ( ) sent et duut u yut t −⋅=−⋅∫
−
0cos
scriviamo l’equazione integrale nella forma:
( )( ) sent et t t yt t −⋅=∗⋅ −cos
Allora prendendo la trasformata di Laplace e usando il teorema di Convoluzione, abbiamo
( )
( ) ( ) 1
1
1
1
1
1
12222
+
−
+
=
+
=
+
′−ssss
ssY
da cui
( )( ) ( ) ( ) ssss
s
sss
ssY
1
1
11
1
1
1
1222
2
−+
++
=−+
+=′−
ovvero
( )( ) ( ) sssss
sY 11
111
11
122 −
++
+−
+=′−
antitrasformando l’equazione precedente abbiamo
( ) t t
ut t et dueuet et yt −−−− ⋅−=−⋅+⋅−=⋅ ∫ 21
0
da cui
( ) t et y
−−= 2

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 318/391
34
RISOLUZIONE DI E.D. TRAMITE LA TRASFORMATA DI LAPLACE
Vedremo ora come si determina la soluzione di un’equazione differenziale lineare a
coefficienti costanti con l’ausilio della trasformata di Laplace.
E’ naturale domandarsi: già si conoscono metodi per risolvere tali equazioni, perché allora
trovare un altro metodo?
La risposta è che quando si procede con i metodi standard si cerca prima la soluzione
generale, successivamente si devono fare ulteriori calcoli per determinare i valori che le
costanti arbitrarie devono assumere affinché la soluzione soddisfi le condizioni iniziali
assegnate.
Il metodo della trasformata di Laplace semplifica notevolmente tali difficoltà in quanto dà
direttamente la trasformata di Laplace della soluzione del problema di Cauchy. Utilizzando
poi una tavola di corrispondenza tra F(t) e L [F(t)] si ottiene la soluzione richiesta.
Esempi
1. Determinare la soluzione del problema di Cauchy
y' '-y'-6y = 3t t - 12 + y(0)=-1 y'(0) = 6
Applicando la trasformata di Laplace all’equazione precedente si ottiene un’equazione
algebrica la cui incognita è L [y]:
6)-s-(s2L [ ]
s
1
s
1
s
6+s-7y
23−+m
da cuiL ⎟
⎠
⎞⎜⎝
⎛ −++s
1
s
1
s
6
6-s-s
1
6-s-s
s-7=[y]
2322
dove il secondo membro è la trasformata di Laplace del problema di Cauchy assegnato.
Pertanto tale soluzione è:
=y L ⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜⎝
⎛ −++−
s
1
s
1
s
6
6-s-s
1
6-s-s
s-72322
1
Infine dalla linearità di L e da1−
L =⎥⎦
⎤⎢⎣
⎡−
6-s-s
s-72
1L
t t ee
231
5
9
5
4
2+s
1
5
9
3-s
1
5
4 −− −=⎥⎦
⎤⎢⎣
⎡ −
L =⎥⎦
⎤⎢⎣
⎡−
6-s-s
12
1L ( )t t
ee231
5
1
2+s
1
3-s
1
5
1 −− −=⎥⎦
⎤⎢⎣
⎡⎟
⎠
⎞⎜⎝
⎛ −
L ( ) ⎟⎟ ⎠ ⎞⎜⎜
⎝ ⎛ −+=−=⎥⎦⎤⎢⎣⎡ ⋅
−
−−
∫ 65
2351du
51
6-s-s1
s1
23
0
232
1
t t t
uu eeee

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 319/391
35
L ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −+=⎥⎦
⎤⎢⎣
⎡ −−− ∫ 36
5+t
6
5
495
1
6
5
235
1
6-s-s
1
s
1 23
0
23
22
1t t
t uu ee
duee
L ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+=⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+=⎥⎦⎤
⎢⎣⎡ −−
− ∫ 216
35-t
36
5+t
12
5
8275
1
36
5+u
6
5
495
1
6-s-s
1
s
1 223
0
23
23
1t t t uu ee
duee
si evince che
( )y =1
5t24 9
1
23 2
e et t − −
2.
y''+4y'+4y = t2e
t 2 ,y(0) = 0 y'(0) = 0
L L s=(t)]F'[ F(0)-[F(t)]
s L L L 4s+(0)y'-(t)][y' 4+4y(0)-[y(t)]( )3
2+s
2=[y(t)]
2s L L L
4s+(0)y'-sy(0)-[y(t)]
00
4+4y(0)-[y(t)]
0321 ( )3
2+s
2=[y(t)]
4)+4s+(s2L
( )32+s
2=[y(t)]
L ( ) ( )55
2+s
!4
!4
2
2+s
2=[y(t)] =
y(t) =1
12
t4e
t 2
3.
y' '+4y = sin2t ,y(0) = 10 y'(0) = 0
s L L 4+(t)][y'4s
2=[y(t)]
2 +
2s L 4s
2=4[y(t)]+10s-[y(t)]
2 +

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 320/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 321/391
1
UNIVERSITA’ POLITECNICA DELLE MARCHE
FACOLTA’ DI INGEGNERIA
Serie di Fourier

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 322/391
2
Introduzione
Alcune notazioni e terminologie
Sia E un insieme lineare, se a ciascuno degli elementi E x ∈ si fa corrispondere il numero x
soddisfacente alle tre proprietà seguenti:
1. 0≥ x ; 0= x se e solo se θ = x dove θ è l’elemento nullo dell’insieme lineare E.
2. x xα α ⋅ = ⋅ per E x ∈ e per ogni numero α (reale o complesso a seconda che E sia
reale o complesso).
3. y x y x +≤+ qualunque siano , E x y ∈ ; si dice che E è uno spazio normato e il numero x si chiama norma dell’elemento x .
La (3) si chiama disuguaglianza triangolare ed implica la (4).
4. y x y x −≥− in particolare y x y x −≥− .
In uno spazio normato E si può definire la nozione di limite:
lim lim 0n nn n
x x se e solo se x x→∞ →∞
= − =
Dalla disuguaglianza (4): x x x xnn −≤− si evince che
lim 0 limn nn n
x x x x→∞ →∞
− = ⇒ =
Inoltre: se la successione di elementi E xn ∈ converge ad un elemento E x ∈ , essa soddisfa la
condizione di Cauchy secondo la quale
Nmn, se x chetale)N(N 0, n ><−=∃>∀ ε ε ε m x
L’inverso, in generale, non è vero; esistono spazi lineari normati in cui si possono trovaresuccessioni di elementi che soddisfano la condizione di Cauchy, ma non convergono a nessunelemento di E.Uno spazio lineare normato E, per definizione, si dice completo se ogni successione di elementi
E xn ∈ e soddisfacente la condizione di Cauchy converge ad un elemento E x ∈ .
Uno spazio lineare completo si dice anche spazio di Banach.L’insieme dei numeri reali è uno spazio di Banach con x x = .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 323/391
3
1. Indicheremo con C ( , )a b lo spazio lineare normato delle funzioni continue sull’intervallochiuso [ , ]a b con norma
)(max),(
x f f b xabaC ≤≤
= (1)
C* è lo spazio lineare normato delle funzioni continue sull’asse reale, periodiche di periodo π 2ed aventi norma
C* 0 2 2max ( ) max ( )
x a x a f f x f x
π π ≤ ≤ ≤ ≤ +
= = (2)
dove a è un numero reale qualsiasi.Ovviamente la restrizione di C* f ∈ sull’intervallo [0,2 ]π appartiene a C (0,2 )π ; il viceversanon vale in quanto C* f ∈ implica )2()0( π f f = .Una funzione C (0, 2 ) f π ∈ soddisfacente la condizione )2()0( π f f = , dopo un
prolungamento periodico di periodo π 2 , si trasforma in una funzione di C* .
2. Sia Ω un intervallo aperto, eventualmente non limitato.Indichiamo con L ' L '( )= Ω l’insieme delle funzioni reali o complesse assolutamente integrabili(in senso improprio) in Ω .Se si suppone che le funzioni siano integrabili nel senso di Lebesgue, tale insieme si indica conL( )Ω .Le proprietà che otterremo per le funzioni L ' f ∈ sono valide, con piccole modifiche, anche perle funzioni L f ∈ .
Il simbolo L '(L) f ∈ significa che L ' f ∈ o L f ∈ .La norma di L '(L) f ∈ è definita come segue
( ) L
f f x dxΩ
= ∫ (3)
Se f è una funzione complessa: )()()( x jv xu x f += , allora
2 2( ) ( ) ( ) L
f f x dx u x v x dxΩ Ω
= = +∫ ∫
L’elemento nullo è una qualsiasi funzione )( xθ θ = per la quale
( ) 0 x dxθ Ω
=∫
Pertanto in L '(L) due funzioni f e g che non sono identicamente uguali in Ω vengonoconsiderate equivalenti se differiscono di )( xθ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 324/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 325/391
5
La successione di funzione 2 2L ' (L )n
f ∈ converge a f , in Ω , nel senso della media quadraticase l’integrale a secondo membro tende a zero.
Osservazioni
1. Se 2 2L' (L ) f ∈ e Ω è limitato risulta 2L ' ( ) L '( )Ω ⊂ Ω .Infatti si dimostra che
12
1 22( ) ( ) f x dx f x dxΩ Ω
≤ Ω
∫ ∫
dove Ω denota la lunghezza dell’intervallo di integrazione.
Per esempio se ]1,0[=Ω allora
1L'( )
xα
∈ Ω se 1<α ; 2
1L ' ( )
xα
∈ Ω se 122
1<⇒< α α
Se 12
1<≤ α allora α 21 ≤ e quindi 2
1L ' ( )
xα
∉ Ω mentre1
L '( ) x
α ∈ Ω .
Se2
1>α allora 2
1L ' (1, )
xα
∈ +∞ mentre1
L '(1, ) x
α ∈ +∞ solo se 1>α :
23 4
1L ' (1, )
x∈ +∞ ; 3 4
1L '(1, )
x∉ +∞
2. Si dimostra che 2L ' ( )Ω non è completo ( 2L ( )Ω è completo).

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 326/391
6
Serie di Fourier
Questo capitolo è dedicato allo studio dello sviluppo in serie di Fourier, l'esposizione della teoriasarà concisa ma sufficiente per le applicazioni a molti problemi della fisica matematica.
La ragione per cui la teoria di Fourier relativa allo sviluppo in serie di funzioni trigonometriche èmolto importante nella pratica è che certi tipi di funzioni discontinue che non possono esseresviluppate in serie di potenze possono essere sviluppate in serie di Fourier.Inoltre tale serie è divenuta uno strumento indispensabile per l’analisi di una vasta classe diproblemi (fisici ed ingegneristici) relativi a fenomeni vibratori e periodici.
Serie di Fourier (L’ ESSENZIALE)
Assegnato un segnale x(t) di periodo T, il segnale definito nel seguente modo
)(t x 22
T t
T <<−
)(0 =t x
02
T )( ,
2>−< t x
T t
è detto “segnale base”. Si osservi che
( ) t22
)()( T/2)(-T/2,0 χ =
−−
+−=
T t u
T t ut xt x
Un segnale periodico x(t), di periodo T si può esprimere come somma di traslate del“segnale base” :
.)()( 0
∑
+∞
∞−
−=nT t xt x
Se T è il periodo di )(t x , sono periodici di )(t x anche i multipli interi di T : 2T, 3T, … , nT, … .Il più piccolo numero positivo T per cui )()( T t xt x −= è detto periodo fondamentale o lunghezzad’onda.
Se T indica il periodo fondamentale, f =T
1è detta frequenza fondamentale
( misurata in periodi ( cicli ) = Hz ) f T
22
π π
ω == è la frequenza angolare
( pulsazioni al sec.) secrad .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 327/391
7
La serie di FOURIER per )(t x E’ DEFINITA DALLA RELAZIONE
∑∞
=
++≈
1
0 sincos 2
)(k
k k l
t k b
l
t k a
at x
π π
dove
.sin)(1
;cos)(1
;)(1
0
dt
l
t k t x
l
b
dt l
t k t x
la
dt t xl
a
l
l
k
l
l
k
l
l
π
π
∫
∫
∫
−
−
−
=
=
=
Se nelle espressioni precedenti si pone 2T l = , risulta
T
2
T
2
π ω ω
π π === t k t k
l
t k
Pertanto
( )
∑
∞
=
++≈1
0 sin cos 2
)(k
k k t k bt k aa
t x ω ω
tdt k t xT
btdt k t xT
a
T
T
k
T
T
k ω ω ∫∫−−
==
2
2
2
2
sin)(2
;cos)(2
oppure
tdt k t xT
btdt k t xT
a
T
k
T
k ω ω ∫∫ ==00
sin)(2
;cos)(2

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 328/391
8
La forma complessa della serie di Fourier è data da
2T
2 ,
2c ,
2c ,)( k
00 f
jbaaect x k k t jk
k π π
ω ω ==
−==≈ ∑
+∞
∞−
ovviamente
( ) dt et xT
dt t k jt k t xT
T
t jk
T
T
∫∫−
−
−
=
−=
2T
2
2
2
k )(1
sincos)(2
2
1c ω ω ω
Se π 2=T è 1= , quindi
)(2
1
2c ,2c ,)( k
0
0 dt et x
jbaa
ect x
jkt k k jkt
k
−
+
−
+∞
∞− ∫∑=
−==≈
π
π π
RIASSUMENDOUn generico segnale periodico )(t x , reale e complesso, è uguale alla somma di infiniti segnali
esponenziali complessi )(t xk con
...,2,1,0 )( ±±== k ect x t jk
k k ω
Detti COMPONENTI ARMONICHE o ARMONICHE ELEMENTARI DEL SEGNALEPERIODICO )(t x le cui frequenze sono multipli interi della frequenza fondamentale :1 T
kf T
k f k ==1
Si osservi che le funzioni
sincos t k jt k e t jk ω ω ω +=
Sono periodiche di periodo f k
T k k k
11
1
21
2===
ω
π
ω
π
Se esprimiamo i coefficienti delle componenti armoniche (armoniche elementari) in coordinatepolari, si ottiene
π ϕ ϕ
ϕ
±=−=+=
=−
k
k k
k
k k k k k
j
k k
a
b
a
bbac
ecc k
arctan tan2
1
22

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 329/391
9
Se 0=k a si hak
k k
b
b−=ϕ sin da cui
0se 2
0se 2
>−=
<=
k k
k k
b
b
π ϕ
π ϕ
Quindi
)( )( k t k j
k ect xϕ ω −
+∞
∞−
∑≈
da cui
)(cos)cos(2)(Re2)()( 22k k k k k t k bat k ct xt xt x ϕ ω ϕ ω −+=−==+
Analoghe considerazioni sono valide per le armoniche elementari
t k bt k at x k k ω ω sincos)( +=
Infatti si ha
)cos(sincos)(2222
22k k
k k
k
k k
k k k k t k At k
ba
bt k
ba
abat x ϕ ω ω ω −=
++
++=
dove
22k22k22 sin ,cos ,
k k
k
k k
k k k k
bab
baaba A
+=
+=+= ϕ ϕ
da cui
π ϕ ϕ ±==
k
k k
k
k k
a
b
a
barctan quindie tan
Se si pone
22k22k cos ,sink k
k
k k
k
ba
b
ba
a
+=
+= ϕ ϕ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 330/391
10
si ottiene
).(sin)( k t k t x ϕ ω +=
Infine si osservi che la posizione precedente relativa a ksinϕ e kcosϕ sono suggerite dal fatto che
.1
2
22
2
22=
++
+ k k
k
k k
k
ba
b
ba
a
Le armoniche elementari con l’indicazione esplicita della frequenza si ottengonosostituendo con f π 2 .È utile rappresentare un segnale complesso
( )[ ]ϕ π += ft j At x 2exp)(
come un vettore che ruota intorno all’origine nel piano complesso, con velocità angolare costante:
sec
rad 2
.
ω π ϑ == f
ϕ è detta fase iniziale, rappresenta l’angolo che il vettore forma con l’asse reale al tempo t = 0.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 331/391
11
Le espressioni
dt)(T
1P edt)()(
T
0
2T
0
2
∫∫ == t xt xt x
Sono rispettivamente dette energia e potenza del segnale )(t x calcolate sul periodo T.Nel caso di un’armonica elementare espressa in forma complessa si ha
2
k
0
2
k
0
2
k
2
k
2cccc)( T dt dt eet x
T T
t jk t jk ==== ∫∫
ω ω
da cui2
kcP =
Nel casa di un’armonica elementare
t k bt k at x k k ω ω sincos)( +=
si ha
( )T badt t k bt k at x k k
T
k k
22
0
22
2
1sincos)( +=+= ∫ ω ω
e ( )22
2
1k k baP += .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 332/391
12
Cominceremo il nostro studio con i concetti di base relativi alle definizioni di alcune proprietà dellefunzioni a valori reali.
1. Funzioni continue a tratti
Definiamo il limite sinistro di una funzione ad una sola variabile ( ) f x in 0 x come il limite finito di
)( x f se esiste, per x che tende a 0 x da sinistra, ed è denotato da )( 0−
x f :
0 00( ) lim ( )
h f x f x h
−
→= − con 0>h (1.1)
Analogamente, il limite destro è definito come
0 00( ) lim ( )h f x f x h
+
→= + con 0>h (1.2)
(Questo è mostrato in Fig. 1).Notiamo che se ( ) f x è continua in 0 x , allora
0 0 0( ) ( ) ( ) f x f x f x− += =
Così, per esempio, la funzione (in Fig. 2)
2
0 1
( ) 11 2
2
x x
f x x x
≤ <
= − < ≤
ha il limite sinistro (1 ) 1 f −
= e ha il limite destro1
(1 )2
f +
= .
L’ampiezza del salto (discontinuità di prima specie) che accade in 1 x = è:
( ) ( )1
1 12
f f − +
− =

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 333/391
13
Fig. 1
Fig. 2
Fig. 3
Una funzione di una sola variabile ( ) f x è detta continua a tratti (piecewise continuous ) in unintervallo [ , ]a b se esiste un numero finito di punti 1 2 ...
na x x x b= < < < = tale che la ( ) f x sia

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 334/391
14
continua nel intervallo 1 j j x x x
+< < e i limiti unilaterali ( ) j f x
+ e 1( ) j f x−
+esistono per ogni
1, 2,3, , 1 j n= −K .Una funzione continua a tratti è mostrata nella Fig. 3.Le funzioni come 1 x e sin (1 ) x non sono continue a tratti nell'intervallo chiuso [0,1] perché il
limite unilaterale (0 ) f +
non esiste in ambo i casi.Se f è continua a tratti in un intervallo [ , ]a b , allora è necessariamente limitata ed integrabile su[ , ]a b .È facile verificare che il prodotto di due funzioni continue a tratti è una funzione continua a trattisull’intervallo comune.Definiamo la derivata sinistra della funzione ( ) f x in 0 x come:
0 00 0
( ) ( )'( ) lim
h
f x f x h f x
h
−
−
→
− −= (1.3)
e la derivata destra della funzione ( ) f x in 0 x come
0 00
0
( ) ( )'( ) lim
h
f x h f x f x
h
+
+
→
+ −= (1.4)
dove h è un incremento positivo .È chiaro che se f ha la derivata '( ) f x in 0 x , allora la derivata sinistra e destra esistono e hanno il
valore 0'( ) f x . L'opposto non è vero.
Per esempio, la funzione
0( )
cos 0
x x f x
x x
≤=
≥
possiede la derivata sinistra e destra in 0 x = , i cui valori sono rispettivamente 1 e 0, anche se '(0) f non esiste.Se f è continua a tratti in un intervallo [ , ]a b e se in più, la derivata prima ' f è continua in ognuno
degli intervalli 1 j j x x x+
< < , ed i limiti '( ) j f x+ e '( ) j f x
− esistono, allora f è detta liscia a tratti
(piecewise smooth); se, in più, la derivata seconda '' f è continua in ognuno degli intervalli
1 j j x x x
+< < , ed i limiti ''( ) j f x
+ e ''( ) j f x− esistono, allora f è detta molto liscia a tratti.
2. Funzioni pari e dispari
Una funzione ( ) f x è detta pari (even) se, per ogni x ,
( ) ( ) f x f x− = (2.1)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 335/391
15
È detta dispari (odd) se, per ogni x ,
( ) ( ) f x f x− = − (2.2)
In altre parole, una funzione pari ha il grafico simmetrico rispetto all’asse y, una funzione dispari ha
il grafico simmetrico rispetto all'origine (Fig. 4).
Fig. 4
Funzione pari Funzione dispari
Per esempio, 2 x e cos x sono funzioni pari mentre x e sin x sono funzioni dispari.
Comunque, qualunque funzione può essere scritta come la somma di una funzione pari e dispari:
[ ] [ ] 0
1 1( ) ( ) ( ) ( ) ( ) ( ) ( )
2 2
e f x f x f x f x f x f x f x= + − + − − = +(2.3)
Dove e f e 0 f denotano rispettivamente funzioni pari e dispari.
Per esempio, la funzione xe non è ne pari e ne dispari dal momento che ( ) x f x e−
− = , ma può essere
scritta come
cosh sinh2 2
x x x x x e e e e
e x x− −
+ −= + = +
Un’applicazione dove la proprietà di simmetria delle funzioni pari e dispari è importante è quellarelativa al calcolo degli integrali.Se ( ) f x è una funzione integrabile su [ , ]a a− allora:
0
( ) 2 ( )a a
a
f x dx f x dx−
=∫ ∫ quando ( ) f x è pari (2.4)
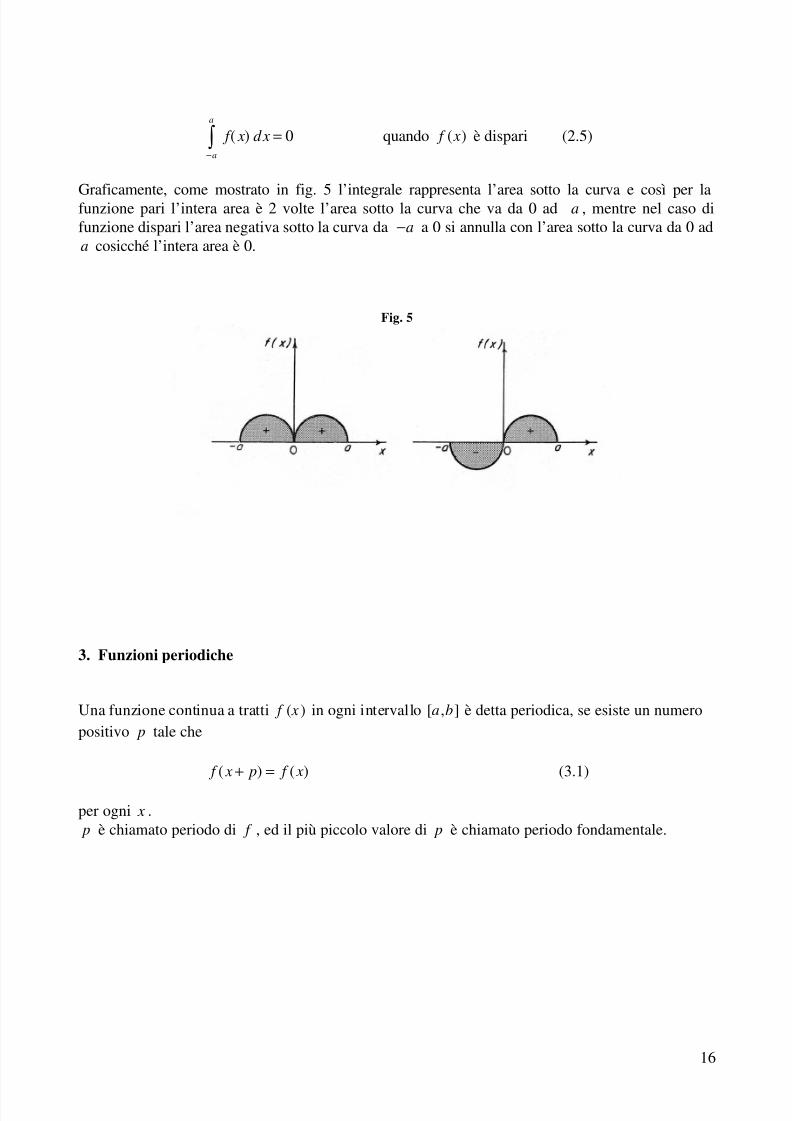
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 336/391
16
( ) 0a
a
f x dx−
=∫ quando ( ) f x è dispari (2.5)
Graficamente, come mostrato in fig. 5 l’integrale rappresenta l’area sotto la curva e così per lafunzione pari l’intera area è 2 volte l’area sotto la curva che va da 0 ad a , mentre nel caso difunzione dispari l’area negativa sotto la curva da a− a 0 si annulla con l’area sotto la curva da 0 ada cosicché l’intera area è 0.
Fig. 5
3. Funzioni periodiche
Una funzione continua a tratti ( ) f x in ogni intervallo [ , ]a b è detta periodica, se esiste un numeropositivo p tale che
( ) ( ) f x p f x+ = (3.1)
per ogni x . p è chiamato periodo di f , ed il più piccolo valore di p è chiamato periodo fondamentale.
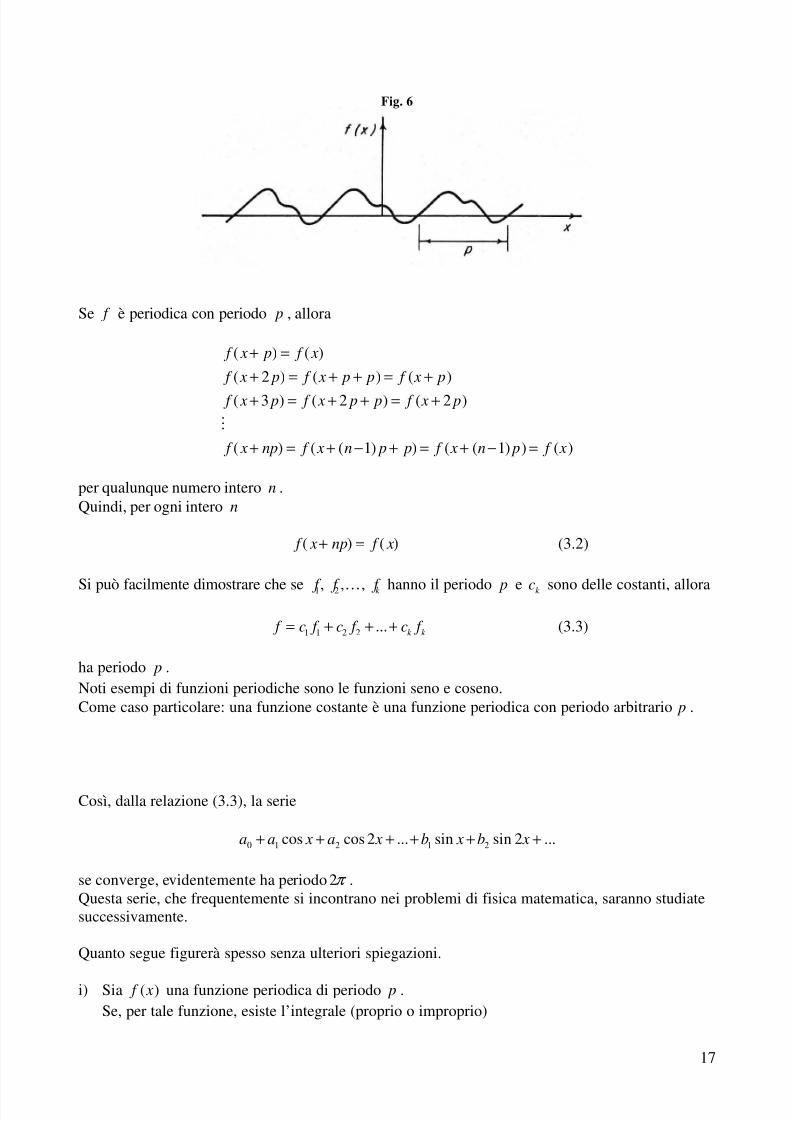
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 337/391
17
Fig. 6
Se f è periodica con periodo p , allora
( ) ( )
( 2 ) ( ) ( )
( 3 ) ( 2 ) ( 2 )
( ) ( ( 1) ) ( ( 1) ) ( )
f x p f x
f x p f x p p f x p
f x p f x p p f x p
f x np f x n p p f x n p f x
+ =
+ = + + = +
+ = + + = +
+ = + − + = + − =
M
per qualunque numero intero n .Quindi, per ogni intero n
( ) ( ) f x np f x+ = (3.2)
Si può facilmente dimostrare che se 1 2, , , k f f f K hanno il periodo p e k c sono delle costanti, allora
1 1 2 2 ... k k f c f c f c f = + + + (3.3)
ha periodo p .Noti esempi di funzioni periodiche sono le funzioni seno e coseno.Come caso particolare: una funzione costante è una funzione periodica con periodo arbitrario p .
Così, dalla relazione (3.3), la serie
0 1 2 1 2cos cos 2 ... sin sin 2 ...a a x a x b x b x+ + + + + +
se converge, evidentemente ha periodo 2π .Questa serie, che frequentemente si incontrano nei problemi di fisica matematica, saranno studiatesuccessivamente.
Quanto segue figurerà spesso senza ulteriori spiegazioni.
i) Sia ( ) f x una funzione periodica di periodo p .Se, per tale funzione, esiste l’integrale (proprio o improprio)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 338/391
18
0
( ) p
f x dx∫
allora per ogni numero reale a
0
( ) ( )a p p
a
f x dx f x dx
+
=∫ ∫
Ovviamente si ha
0 0
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
a p p a p p a p
a a p a p
p pa
a
f x dx f x dx f x dx f x dx f x p dx
f x dx f x dx f x dx
+ + +
= + = + − =
= + =
∫ ∫ ∫ ∫ ∫
∫ ∫ ∫
ii) 0 0
( ) ( ) p p
f t x dt f t dt − =∫ ∫
dove x è un qualsiasi numero reale.Usando la i) abbiamo:
0 0
( ) ( ) ( ) p x p p
x
f t x dt f t dt f t dt
− +
−
− = =∫ ∫ ∫
4. Ortogonalità
Una successione di funzioni ( )n xφ è detta ortogonale rispetto alla funzione peso
( )q x sull'intervallo [ , ]a b se
( ) ( ) ( ) 0b
m n
a
x x q x dx m nφ φ = ≠∫ (4.1)
Se poi m n= , abbiamo
12
2|| ( ) ||b
n n
a
x q dxφ φ
= ∫ (4.2)
La quale è stata chiamata norma del sistema ortogonale nφ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 339/391
19
Un sistema ortonormale 1 2, , ,n
φ φ φ K dove n può essere finito o infinito, che soddisfi la relazione
0( ) ( ) ( )
1
b
m n
a
se m n x x q x dx
se m nφ φ
≠=
=∫ = Sm,n (4.3)
è detto ortonormale in [ , ]a b .(Dove il simbolo Sm,n , è detto Delta di Kroneker).È evidente che un sistema ortonormale può essere ottenuto da un sistema ortogonale dividendo ognifunzione per la sua norma in [ , ]a b .
Esempio 4.2.La successione di funzioni
1,cos ,sin , ,cos ,sin , x x nx nxK K
forma un sistema ortogonale nell’intervallo [ , ]π π − poiché
0sin sin
se m nmx nx dx
se m n
π
π π
−
≠=
=∫
sin cos 0 ,mx nx dx m n
π
π −
= ∀∫ (4.4)
0cos cos
se m nmx nx dx
se m n
π
π π −
≠=
=∫
per m ed n interi positivi.Per normalizzare questo sistema, dobbiamo dividere gli elementi del sistema ortogonale originaleper la sua norma.Quindi
1 cos sin cos sin, , , , , ,
2
x x nx nx
π π π π π K K
forma un sistema ortonormale.Una delle più importanti proprietà di un sistema ortogonale è che ognuno è linearmenteindipendente.Ovviamente la stessa proprietà è valida anche per sistemi ortonormali.
5. Serie di Fourier
Noi già abbiamo visto che le funzioni
1, cos ,sin , cos 2 ,sin 2 , x x x xK
sono mutuamente ortogonali nell'intervallo[ , ]π π − e che sono linearmente indipendenti.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 340/391
20
Formiamo una serie che formalmente rappresenti la ( ) f x .Quindi scriviamo
)sincos(2
)(1
0 kxbkxaa
x f k
k
k ++= ∑∞
=
(5.1)
dove il simbolo indica che i coefficienti 0 , k a a e k b dipendono in qualche maniera da f .La serie può essere convergente oppure no.Sia ( ) f x una funzione definita ed integrabile secondo Riemann sull'intervallo[ , ]π π − .Consideriamo la somma parziale n-esima
0
1
( ) ( cos sin )2n k k
k
as x a kx b kx
∞
=
= + +∑ (5.2)
e proponiamoci di determinare i coefficienti 0 , k a a e k b in modo che ( )ns x rappresenti la miglioreapprossimazione della ( ) f x su [ , ]π π − nel senso della media quadratica.A tale scopo cerchiamo di minimizzare l’integrale
20( , , ) [ ( ) ( )]k k n I a a b f x s x dx
π
π −
= −∫ (5.3)
Una condizione necessaria affinché 0 , k a a e k b minimizzino il funzionale I è che le derivateparziali prime di I rispetto a questi coefficienti si annullino.Così, sostituendo l’equazione (5.2) in (5.3) e derivando rispetto ai coefficienti
0,
k
a a ek
b otteniamo:
0
10
( cos sin )2
n
j j
j
a I a jx b jx dx
a
π
π =−
∂= − − +
∂ ∑∫ (5.4)
0
1
2 ( ) ( cos sin ) cos2
n
j j
jk
a I f x a jx b jx kx dx
a
π
π =−
∂= − − − +
∂ ∑∫ (5.5)
0
1
2 ( ) ( cos sin ) sin2
n
j j
jk
a I f x a jx b jx kx dx
b
π
π =−
∂= − − − +
∂ ∑∫ (5.6)
Usando la relazione di ortogonalità della funzione trigonometriche (4.4) e notando che
cos sin 0mx dx mx dx
π π
π π − −
= =∫ ∫ (5.7)
dove m e n sono numeri interi positivi, le equazioni (5.4), (5.5) e (5.6) diventano

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 341/391
21
00
( ) I
a f x dxa
π
π
π −
∂= −
∂∫ (5.8)
2 2 ( ) cosk
k
I a f x kx dx
a
π
π
π −
∂= −
∂∫ (5.9)
2 2 ( )sink
k
I b f x kx dx
b
π
π
π −
∂= −
∂∫ (5.10)
Poiché questi si devono annullare per avere un valore di estremo, si evince che deve essere
0
1( )a f x dx
π
π π
−
= ∫ (5.11)
1( ) cosk a f x kx dx
π
π π
−
= ∫ (5.12)
1( ) sink b f x kx dx
π
π π
−
= ∫ (5.13)
Si osservi che 0a è un caso particolare di k a .Dalle equazioni (5.8), (5.9) e (5.10) segue che
2
20
I
aπ
∂=
∂(5.14)
2 2
2 2 2k k
I I
a bπ
∂ ∂= =
∂ ∂ (5.15)
Da cui le derivate miste del secondo ordine e tutte le derivate di ordine superiore si annullano.Consideriamo la matrice Hessiana associata al funzionale 0( , , )k k I a a b :
0 0
( ) 0 2 0
0 0 2
H I
π
π
π
=
(5.16)
Essendo gli autovalori della matrice ( ) H I positivi 1 2 3( , 2 )λ π λ λ π = = = si evince che la matrice
( ) H I è definita positiva, quindi il funzionale 0( , , )k k
I a a b assume un valore minimo quando i
coefficienti 0 ,k
a a ek
b vengono dati rispettivamente dalle equazioni 5.11-5.13.
Questi sono chiamati coefficienti di Fourier di ( ) f x e la serie in (5.1) è detta serie di Fourier di( ) f x .
Si osservi che la possibilità di rappresentare una data funzione ( ) f x in serie di Fourier non implicache la serie converga a ( ) f x .Le funzioni
01 1 2 2, cos sin , cos 2 sin 2 ,
2
aa x b x a x b x+ + K

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 342/391
22
Che figurano al secondo membro della formula (5.1) e verificano le condizioni (5.11)-(5.13) sidicono termini della serie di Fourier per la funzioni f (armoniche di f ).L’insieme dei coefficienti di Fourier di una funzione f si chiama spettro.
Osservazione 1
I coefficienti di Fourier (5.11), (5.12) e (5.13) possono essere ottenuti in un modo diverso.Supponiamo che la funzione ( ) f x di periodo 2π sia sviluppabile in serie di Fourier
0
1
( ) ( cos sin )2 k k
k
a f x a kx b kx
∞
=
= + +∑ (5.17)
Se supponiamo che la serie sia integrabile termine a termine (per fissare le idee supponiamo che laconvergenza della serie sia uniforme), allora
00
1
( ) ( cos sin )2
n
k k
k
a f x dx a kx b kx dx a
π π
π π
π =− −
= + + =
∑∫ ∫
da cui
0 ( )a f x dx
π
π −
= ∫ (5.18)
Se moltiplichiamo ambo i termini dell’equazione (5.17) con cos nx e integriamo da aπ π − ,otteniamo
0
1
( )cos ( cos sin ) cos2
n
k k k
k
a f x nx dx a kx b kx nx dx a
π π
π π
π =− −
= + + =
∑∫ ∫
ovvero
1 ( ) cosk a f x kx dxπ
π π
−
= ∫ (5.19)
In un modo simile troviamo che
1( ) sink b f x kx dx
π
π π
−
= ∫ (5.20)
I coefficienti 0 , k a a e k b che sono stati trovati sono precisamente gli stessi ottenuti prima.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 343/391
23
Osservazione 2
Numerosi processi vibratori in fisica e in discipline tecniche sono descritti mediante funzioniperiodiche, di periodo (fondamentale) T ; allora t è il tempo, ( ) y f t = è l’ordinata di un punto
oscillante.Se f è un polinomio trigonometrico, si dice che: il processo vibratorio ( ) y f t = si scinde inprocessi elementari, ossia in oscillazioni armoniche:
0 0
1 1
( ) ( cos sin ) cos( )2 2
n n
k k k k
k k
a a f t a k t b k t A k t ω ω ω ϕ
= =
= + + = + −∑ ∑
dove 2 2k k k A a b= + e le k ϕ sono definite dalle equazioni
sin , cos 0 2k k k k k b aϕ ϕ ϕ π = = ≤ ≤
Il parametro2
T
π ω = viene detto pulsazione e si misura in radianti al secondo; la frequenza
1
2 f
T
ω
π = = si misura in periodi (cicli) al secondo o Hertz (Hz).
L’armonica
cos( )k k A k t ω ϕ −
ha ampiezzak
A , fase inizialek
ϕ e frequenza k volte la frequenza fondamentale 1T
.
6. Convergenza in media della serie di Fourier. Completezza.
Sia ( ) f x una funzione continua a tratti e periodica con periodo 2π .E’ ovvio che
[ ]2
( ) ( ) 0n f x s x dx
π
π −
− ≥∫ (6.1)
dove
0
1( ) ( cos sin )2
n
n k k
k
as x a kx b kx=
= + +∑

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 344/391
24
Sviluppando il quadrato si ottiene
[ ] [ ] [ ]∫ ∫ ∫∫− − −
+−=−
π
π
π
π
π
π
π
π
dx xsdx xs x f dx x f dx x x f nn
22
-
2n )()()(2)()(s)(
Ma, dalle definizioni dei coefficienti di Fourier (5.11), (5.12) e (5.13) e le relazioni di ortogonalità(4.4) relative alle successione trigonometrica dell’esempio (4.2) si evince
( ) ( )∑∫ ∑∫=− =−
++=
++=
n
k
k k
n
k
k k n baa
dxkxbkxaa
x f dx xs x f 1
2220
1
0
2sincos
2)()()( π
π π
π
π
π
(6.2)
e
2 22 2 20 0
1 1
( ) ( cos sin ) ( )2 2
n n
n k k k k k k
a as x dx a kx b kx dx a b
π π
π π
π π
= =− −
= + + = + +
∑ ∑∫ ∫ (6.3)
di conseguenza
[ ]2
2 2 2 20
1
( ) ( ) ( ) ( ) 02
n
n k k
k
a f x s x dx f x dx a b
π π
π π
π π
=− −
− = − + + ≥
∑∫ ∫ (6.4)
Allora segue che
22 2 20
1
1( ) ( )
2
n
k k
k
aa b f x dx
π
π π = −
+ + ≤∑ ∫ (6.5)
per tutti i valori di n.
Poiché il membro a destra dell’equazione (6.5) è indipendente da n, otteniamo
22 2 20
1
1( ) ( )
2k k
k
aa b f x dx
π
π π
∞
= −
+ + ≤∑ ∫ (6.6)
nota come disuguaglianza di Parseval.La serie (a termini positivi)
22 20
1
( )2 k k
k
aa b
∞
=
+ +∑ (6.7)
essendo crescente e limitata superiormente, è convergente.La condizione necessaria per la convergenza della serie (6.7) è che
lim 0 e lim 0k k k k
a b→∞ →∞
= = (6.8)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 345/391
25
Si dimostra che la serie di Fourier converga in media quadratica a ( ) f x , cioè
( )∫ ∑− =
∞→=
++−
π
π
0sincos2
)(lim2
1
0 dxkxbkxaa
x f n
k
k k n
(6.9)
Poichè la serie di Fourier converge in media quadratica a ( ) f x , dalla (6.4) segue che
( ) ∫∑−=
=++
π
π π
dx x f baa n
k
k k )(1
22
1
2220 (6.10)
L’uguaglianza precedente è nota come identità di Parseval.
Inoltre, se la relazione (6.9) è vera, in quanto l’insieme delle funzioni trigonometriche
1, cos , sin , cos 2 , sin 2 ,... x x x x è detto completo in ),('
2 π π − L . (vedi appendice)
7. Serie di coseno e seno
Sia ( ) f x una funzione pari definita nell'intervallo [ ],π π − .
Siccome cos kx è una funzione pari, e sin kx è una funzione dispari, la funzione ( ) cos f x kx è unafunzione pari e la funzione ( ) sin f x kx è una funzione dispari.Così, tenuto conto delle equazioni (2.4) e (2.5) troviamo che i coefficienti di Fourier della ( ) f x sono:
0
1 2( )cos ( )cos 0,1,2,....
1( ) sin 0 0,1,2,....
k
k
a f x kx dx f x kx dx k
b f x kx dx k
π π
π
π
π
π π
π
−
−
= = =
= = =
∫ ∫
∫(7.1)
Allora la serie di Fourier di una funzione pari può essere scritta come
kxaa
x f k
k cos2
)(1
0 ∑∞
=
+= (7.2)
dove i coefficienti k a sono dati dalla formula (7.1).
In maniera simile, se ( ) f x è una funzione dispari, la funzione ( )cos f x kxè una funzione dispari ela funzione ( )sin f x kx è una funzione pari, pertanto, i coefficienti di Fourier di ( ) f x , in questocaso sono:
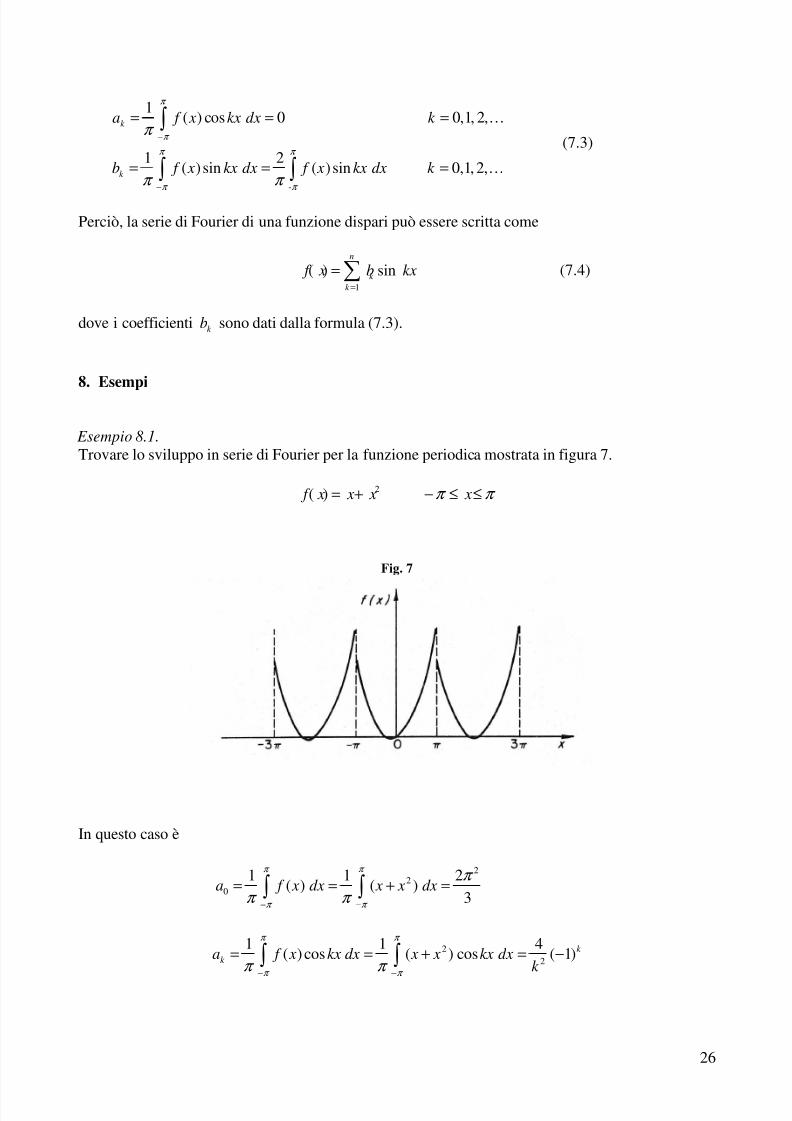
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 346/391
26
-
1( ) cos 0 0,1, 2,
1 2( )sin ( )sin 0,1, 2,
k
k
a f x kx dx k
b f x kx dx f x kx dx k
π
π
π π
π π
π
π π
−
−
= = =
= = =
∫
∫ ∫
K
K
(7.3)
Perciò, la serie di Fourier di una funzione dispari può essere scritta come
1
( ) sinn
k
k
f x b kx=
= ∑ (7.4)
dove i coefficienti k b sono dati dalla formula (7.3).
8. Esempi
Esempio 8.1.
Trovare lo sviluppo in serie di Fourier per la funzione periodica mostrata in figura 7.
2( ) f x x x xπ π = + − ≤ ≤
Fig. 7
In questo caso è
22
0
1 1 2( ) ( )
3a f x dx x x dx
π π
π π
π
π π − −
= = + =∫ ∫
22
1 1 4( )cos ( ) cos ( 1)k
k a f x kx dx x x kx dxk
π π
π π π π
− −
= = + = −∫ ∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 347/391
27
21 1 2( )sin ( ) sin ( 1)k
k b f x kx dx x x kx dxk
π π
π π π π
− −
= = + = − −∫ ∫
Quindi lo sviluppo in serie di Fourier per f è
2 2
21
4 2( ) ( 1) cos ( 1) sin 4cos 2sin cos 2 sin 2
3 3k k
k
f x kx kx x x x xk k
π π ∞
=
= + − − − = − + + − −∑ K
Le prime due somme parziali sono
2
1
2
2
4cos 2sin3
4cos 2sin cos 2 sin 23
s x x
s x x x x
π
π
= − +
= − + + −
Queste sono rappresentate in figura 8.
Fig. 8
Si vede che i primi termini forniscono già una buona approssimazione di f nell’intervallo xπ π − ≤ ≤ .
L’approssimazione migliora con il numero dei termini presi per una x fissata in xπ π − ≤ ≤ , manon per x π = ± .I comportamenti delle approssimazioni nei punti di discontinuità saranno discussi successivamente.
Esempio 8.2.
Consideriamo la funzione periodica mostrata in figura 9.
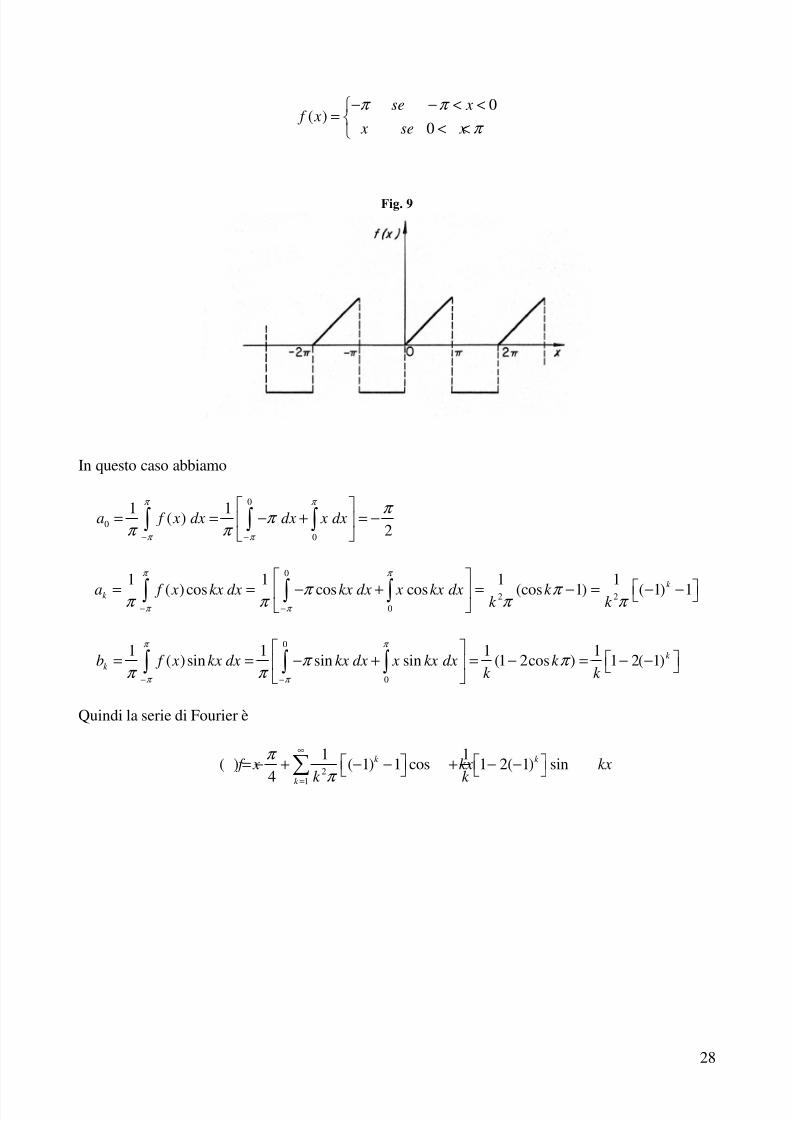
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 348/391
28
0( )
0
se x f x
x se x
π π
π
− − < <=
< <
Fig. 9
In questo caso abbiamo
0
0
0
1 1( )
2a f x dx dx x dx
π π
π π
π π
π π − −
= = − + = −
∫ ∫ ∫
0
2 20
1 1 1 1( )cos cos cos (cos 1) ( 1) 1
k
k a f x kx dx kx dx x kx dx k k k
π π
π π π π π π π π
− −
= = − + = − = − − ∫ ∫ ∫
0
0
1 1 1 1( )sin sin sin (1 2cos ) 1 2( 1)k
k b f x kx dx kx dx x kx dx k k k
π π
π π
π π π π
− −
= = − + = − = − −
∫ ∫ ∫
Quindi la serie di Fourier è
2
1
1 1( ) ( 1) 1 cos 1 2( 1) sin
4k k
k
f x kx kxk k
π
π
∞
=
= − + − − + − − ∑
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 349/391
29
Esempio 8.3.
Consideriamo la funzione ( ) f x x= nell’intervallo xπ π − ≤ ≤ , in figura 10.
Fig. 10
In questo caso è
0
1 1( ) 0a f x dx xdx
π π
π π π π
− −
= = =∫ ∫
1 1( )cos cos 0 1, 2,3,k a f x kx dx x kx dx con k
π π
π π π π − −
= = = =
∫ ∫K
11 1 2( )sin sin ( 1) 1,2,3,k
k b f x kx dx x kx dx con k k
π π
π π π π
+
− −
= = = − =∫ ∫ K
Allora
1
1
sin( ) 2 ( 1)k
k
kx f x
k
∞+
=
= −∑
Esempio 8.4.
Calcoliamo la serie di Fourier della funzione, detta onda quadra, mostrata in figura 11.
1 0
( ) 1 0
se x
f x se x
π
π
− − < <
= + < <

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 350/391
30
Fig. 11
In questo caso f è una funzione dispari così che 0 per 0,1,2,3,k
a k = = K e
0 0
2 2 2( ) sin sin 1 ( 1) 1,2,3,k
k b f x kx dx kx dx con k k
π π
π π π = = = − − = ∫ ∫ K
Così [ ]2 2 10 e 4 (2 1)k k b b k π −
= = − .
Quindi la serie di Fourier della funzione ( ) f x è
1
4 sin(2 1)( )
(2 1)k
k x f x
k π
∞
=
−=
−∑
Esempio 8.5
Sviluppiamo sin x in serie di Fourier. Visto che sin x è una funzione pari come mostrato in figura
12, 0 per 1,2,k
b k = = K e
Fig. 12

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 351/391
31
[ ]
0 0
20
2 2( ) cos sin cos
2 1 ( 1)1sin(1 ) sin(1 ) per 0,2,3,
(1 )
k
k
a f x kx dx x kx dx
k x k x dx k k
π π
π
π π
π π
= = =
+ − = + + − = =
−
∫ ∫
∫ K
Per 1k = , 1
0
2sin cos 0a x x dx
π
π = =∫ .
Allora la serie di Fourier di ( ) f x è
21
2 4 cos 2( )
(1 4 )k
kx f x
k π π
∞
=
= +−
∑
In un paragrafo precedente abbiamo definito la funzione ( ) f x nell’intervallo ( , )π π − ed assunto( ) f x periodica con periodo 2π nell’intero intervallo ( , )−∞ ∞ .
In pratica, frequentemente incontriamo problemi in cui una funzione è definita solamentenell’intervallo ( , )π π − .In questo caso estendiamo la funzione periodicamente con periodo 2π, come in figura 13.
Fig. 13
In questo modo possiamo rappresentare la funzione ( ) f x con lo sviluppo in serie di Fourier,sebbene siamo interessati solamente all’intervallo ( , )π π − .
Se una funzione f è definita solo nell’intervallo (0, )π , possiamo estenderla in due modi.Il primo è l’estensione pari di f , denotata e definita da (vedi figura 14)
( ) se 0( )
( ) se 0e
f x xF x
f x x
π
π
< <=
− − < <
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 352/391
32
Fig. 14
mentre il secondo è l’espansione dispari di f , denotata e definita da (vedi figura 15)
( ) se 0
( ) ( ) se 0o
f x x
F x f x x
π
π
< <
= − − − < <
Fig. 15
Visto che )( xF e e )(0 xF sono rispettivamente funzioni pari e dispari con periodo 2π , gli sviluppi
in serie di Fourier di )( xF e e )(0 xF sono
0
1
( ) ( cos )2e k
k
aF x a kx
∞
=
= + ∑ dove0
2( ) cosk a f x kx dx
π
π = ∫
e
01
( ) ( sin )k
k
F x b kx
∞
=
= ∑ dove0
2 ( ) sink b f x kx dx
π
π = ∫

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 353/391
33
9. Serie di Fourier complessa
È conveniente qualche volta rappresentare lo sviluppo in serie di Fourier di una funzione ( ) f x in
forma complessa.Questo sviluppo può essere dedotto facilmente sostituendo nella serie di Fourier
0
1
( ) ( cos sin )2 k k
k
a f x a kx b kx
∞
=
= + +∑
le formule
2cos e
2sin
jx jx jx jxee
x j
ee x
−−+
=−
=
Si ottiene
( )∑
∑
∑
∞
=
−
−
∞
=
−
∞
=
−−
++=
=
++
−+=
=
−+
++=
10
1
0
1
0
222
222)(
k
jkx
k
jkx
k
k
jkxk k jkxk k
k
jkx jkx
k
jkx jkx
k
ececc
e jba
e jbaa
j
eeb
eea
a x f
dove
[ ]
[ ]
00
1( )
2 2
1 1( )(cos sin ) ( )
2 2 2
1 1( )(cos sin ) ( )
2 2 2
jkxk k k
jkxk k k
ac f x dx
a jbc f x kx j kx dx f x e dx
a jbc f x kx j kx dx f x e dx
π
π
π π
π π
π π
π π
π
π π
π π
−
−
− −
−
− −
= =
−= = − =
+= = + =
∫
∫ ∫
∫ ∫
Quindi lo sviluppo in serie di Fourier in forma complessa è
( ) jkx
k
k
f x c e xπ π ∞
=−∞
= − < <∑ (9.1)
dove
1( )
2 jkx
k c f x e dx
π
π π
−
−
= ∫ (9.2)

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 354/391
34
È importante notare che se f è una funzione reale, allora ek k
a b sono anch’essi reali e i numeri
ek k
c c−
benché siano in generale complessi sono reciprocamente coniugati:
k k c c−
=
Viceversa, la coniugazione complessa a due a due di ek k c c−
implica, semplicemente, che i
coefficienti di Fourier ek k
a b della funzione f siano reali, e se ciò ha luogo per tutti i 0,1,k = K
la funzione f diventa anch’essa reale.Evidentemente, l’n-esima somma della serie di Fourier di f
0
1
( ) ( cos sin )2n k k
k
as x a kx b kx
∞
=
= + +∑
può essere scritta nella forma
( )n
jkx
n k
k n
s x c e=−
= ∑
Se, per un dato valore x esiste il limite
limn
jkx
k n
k n
c e→∞
=−
∑
si dice che la serie converge nel senso del valore principale.Se, per un dato valore di x , esiste il limite
,lim
n jkx
k n m
k m
c e→∞
=−
∑
si dice che la serie converge (in questo caso em n crescono indefinitamente l’unoindipendentemente dall’altro).
Le funzioni complesse
10, 1, 2,
2 jkx
e k π
= ± ± K (9.3)
formano un sistema ortonormale in [0,2 ]π in quanto
hk se 0
hk se 1
2121
2
0
≠
===
∫− δ
π π
π
dxee jhx jkx

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 355/391
35
Poiché le funzioni cos e sin ( 0,1,2, )kx kx k = K formano un sistema completo in C* e quindi in
2L *, della stessa proprietà gode anche il sistema ( 0, 1, 2, ) jkxe k = ± ± K in quanto
2
kcos e
2
ksin jkx jkx jkx jkx
ee x
j
ee x
−−+
=−
=
I numerik c definiti dalla (9.2) sono i coefficienti di Fourier relativi alle funzioni jkx
e .
In virtù della completezza del sistema (9.3) in 2L *, per ogni funzione 2L * f ∈ si verifica
l’uguaglianza di Parseval:
22 2
0
1( )
2 k
k
f x dx c
π
π
∞
=−∞
= ∑∫
Esempio 9.1.Determiniamo lo sviluppo in serie di Fourier per ( ) f x in forma complessa con
( ) x f x e xπ π = − < <
Abbiamo
2
1 1 (1 )( 1)( ) sinh
2 2 (1 )
k jkx x jkx
k
jk c f x e dx e e dx
k
π π
π π
π π π π
− −
− −
+ −= = =
+∫ ∫
Pertanto la serie di Fourier richiesta è
2
(1 )( 1)( ) sinh
(1 )
k jkx
k
jk f x e
k π
π
∞
=−∞
+ −=
+∑
Esempio 9.2Determinare lo sviluppo in serie di Fourier per l’onda quadra in forma complessa.
I coefficienti della serie di Fourier in forma complessa (vedi esempio 8.4) sono:
( )( )
π k j jbaa
k
k k
11
2
1c 0c k00
−−−=−===
Pertanto lo sviluppo in serie di Fourier in forma esponenziale, per l’onda quadra è:
( ) 0k
11)( ≠
−−=
∑
+∞
∞−
jkx
k
ek
j x f
π

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 356/391
36
10. Cambio di intervallo
Precedentemente ci siamo interessati alle funzioni definite nell’intervallo [ , ]π π − .In alcune applicazioni comunque questo intervallo è restrittivo, e l’intervallo d’interesse potrebbe
essere arbitrario, diciamo [ , ]a b .Se introduciamo una nuova variabile t con la trasformazione
( ) ( )
2 2
b a b a x t
π
+ −= + (10.1)
allora l’intervallo a x b≤ ≤ diviene t π π − ≤ ≤ e la funzione
( ) ( )( )
2 2
b a b a f t F t
π
+ − + ≡
ovviamente ha periodo 2π .Sviluppando questa funzione in serie di Fourier, otteniamo
0
1
( ) ( cos sin )2 k k
k
aF t a kt b kt
∞
=
= + +∑ (10.2)
dove
1
( )cos 0,2,3,
1( )sin 1,2,3,
k
k
a F t kt dt k
b F t kt dt k
π
π
π
π
π
π
−
−
= =
= =
∫
∫
K
K
Cambiando t in x , troviamo lo sviluppo per ( ) f x in [ , ]a b
0
1
(2 ) (2 )( ) cos sin
2 ( ) ( )k k
k
a k x b a k x b a f x a b
b a b a
π π ∞
=
− − − −= + +
− − ∑ (10.3)
dove
2 (2 )( ) cos
( )
b
k
a
k x b aa f x dx
b a b a
π − −=
− − ∫ (10.4)
2 (2 )( ) sin
( )
b
k
a
k x b ab f x dx
b a b a
π − −=
− − ∫ (10.5)
per ogni k .
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 357/391
37
Qualche volta è conveniente prendere l’intervallo nel quale la funzione f è definita come [ , ]l l− .Segue dal risultato appena ottenuto che ponendo ea l b l= − = , lo sviluppo per f in [ , ]l l− ,prende la forma
0
1( ) cos sin2 k k
k
a k x k x
f x a bl l
π π ∞
=
= + + ∑ (10.6)
dove
1( ) cos
l
k
l
k xa f x dx
l l
π
−
=
∫ (10.7)
1( ) sin
l
k
l
k xb f x dx
l l
π
−
=
∫ (10.8)
per ogni k Se f è una funzione pari di periodo 2l , dall’equazione 10.6 possiamo facilmente determinare che
0
1
( ) cos2 k
k
a k x f x a
l
π ∞
=
= + ∑ (10.9)
dove
02 ( ) cos
l
k k xa f x dxl l
π = ∫ (10.10)
per ogni k .Se f è una funzione dispari di periodo 2l , dall’equazione 10.6 lo sviluppo per f è
1
( ) sink
k
k x f x b
l
π ∞
=
= ∑ (10.11)
dove
0
2( ) sin
l
k
k xb f x dx
l l
π =
∫ (10.12)
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 358/391
38
Esempio 10.1.Consideriamo la funzione periodica dispari f
( ) 2 2 f x x x= − < <
come mostrato in figura 16.
Fig. 16
Qui 2l = .Visto che f è dispari, 0
k a = , e
2
0 0
2 2 4( )sin sin ( 1) 1,2,3,2 2
l
k k
k x k xb f x dx x dx per k
l l k
π π
π
= = = − − = ∫ ∫ K
Quindi, la serie di Fourier di f è
1
1
4( ) ( 1) sin
2k
k
k x f x
k
π
π
∞+
=
= −
∑

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 359/391
39
Esempio 10.2.È data la funzione
11 0
2
( ) 10 12
se x
f xse x
< <
= < <
In questo caso il periodo è 2 2 o 1l l= = .Sviluppiamo f come mostrato in figura 17.
Fig. 17
Visto che lo sviluppo è pari, abbiamo 0k b = e
1
0
0 0
2 2( ) ( ) 1
1
l
a f x dx f x dxl
= = =∫ ∫
[ ]1
0 0
2 2 2( )cos ( )cos sin
1 2
l
k
k x k a f x dx f x k x dx
l l k
π π π
π
= = =
∫ ∫
Quindi
1
1
1 2( ) ( 1) cos(2 1)
2 (2 1)k
k
f x k xk π
π ∞
−
=
= + − −
− ∑
La funzione data (così come quella dell’esempio 8.4) è detta onda quadra.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 360/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 361/391
41
Sommando l'identità trigonometrica
1 1
2sin cos sin sin2 2 2ka k k a
α
α
= + − +
da 1 ak k n= = , otteniamo
1
1 3 1 12sin cos sin sin sin sin sin
2 2 2 2 2 2 2
1sin
2
n
k
ka n n
n
α α α α α α
α
=
+ = + − + + + − −
= +
∑ K
(11.2)
Poi usando la (11.2) nella (11.1) otteniamo
1 sin( 1/ 2)( )( ) ( )
2sin2
n
n t xs x f t dt
t x
π
π π
−
+ − =
−
∫ (11.3)
Introducendo una nuova variabile s t x= − abbiamo
1 sin( 1/ 2)( ) ( )
2sin2
x
n
x
n ss x f s x ds
s
π
π π
−
− −
+ = +
∫ (11.4)
Ora, se ( ) f x è continua a tratti e periodica con periodo 2π , allora anche ( )ns x è periodica con
periodo 2π .Così
1 sin( 1/ 2)( ) ( )
2sin2
n
n ss x f s x ds
s
π
π π
−
+ = +
∫ (11.5)
La (11.5) è nota come formula di Dirichlet per ns .
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 362/391
42
Il nucleo
sin( 1/ 2)
2sin2
n s
s
+
(11.6)
è detto nucleo di Dirichlet, che è periodico con periodo 2π ed inoltre
1
1 sin( 1/ 2) 1 1cos 1
22sin2
n
k
n sds kx ds
s
π π
π π π π =− −
+ = + =
∑∫ ∫ (11.7)
LEMMA 11.1 (Riemann-Lebesgue Lemma).
Se ( )g x è continua a tratti sull'intervallo[ , ]a b , allora
lim ( )sin 0b
a
g x x dxλ
λ →∞
=∫ (11.8)
TEOREMA 11.1 (Teorema di Convergenza Puntuale).
Se ( ) f x è liscia a tratti e periodica con periodo 2π in [ , ]π π − , per qualsiasi x
0
1
1( cos sin ) ( ) ( )
2 2k k
k
aa kx b kx f x f x
∞+ −
=
+ + = + ∑ (11.9)
dove
1 ( ) cos
1( )sin
k
k
a f x kx dx
b f x kx dx
π
π
π
π
π
π
−
−
=
=
∫
∫
per k = 0, 1, 2, …
8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 363/391
43
APPENDICE
Sia H un insieme lineare complesso
,H , e , H ∈∀∈∀∈+ ψ ϕ β α βψ αϕ C
Per prodotto scalare su H si intende un’applicazione che ad ogni coppia di elementi ψ ϕ e
appartenenti ad H fa corrispondere il numero complesso ψ ϕ , , che soddisfa le seguenti proprietà:
1) ;,, ψ ϕ ψ ϕ =
2) ;,,, 22112211 ψ ϕ α ψ ϕ α ψ ϕ α ϕ α +=+
3) ϑ ϕ ψ ϕ ψ ϕ sesoloese 0, , 0, ==≥
Con ϑ elemento nullo di H.
Dalla 1) e 2) si evince che
ψ ϕ β βψ ϕ ψ ϕ α ψ αϕ ,, ii) ,, i) ==
Non è difficile dimostrare che l’applicazione su H così definita
ϕ ϕ ϕ , →
è una norma ( la norma definita dal prodotto scalare ). Si dimostra che
ovvero
ψ ϕ ψ ϕ , ≤
21
21
,,, ψ ψ ϕ ϕ ψ ϕ ≤

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 364/391
44
Esempio 1.Indichiamo con C[a,b] l’insieme lineare delle funzioni continue
].,[ )()()( 21 bat t jxt xt x ∈+=
Non è difficile verificare che l’applicazione definita nel seguente modo
dt t yt xt yt x
b
a
)()()(),( ∫=
è un prodotto scalare su C[a,b]; inoltre
.)()()(),( )
)()()()()(),( )
21
0
221
0
2
22
≤
===
∫∫
∫∫
bb
b
a
b
a
dt t ydt t xt yt xii
t xdt t xdt t xt xt xt xi
Un insieme (finito o infinito) di elementi di H:
H .....,,....,, 21 ∈k k ϕ ϕ ϕ ϕ
è detto ortogonale se per hk ≠ risulta
0, =hk ϕ ϕ
Se gli elementi di un insieme ortogonale hanno norma unitaria:
....2,1,k 1, === k k k ϕ ϕ ϕ
si dice che l’insieme è ortonormale.
Si ha la seguente definizione:
Definizione 1. Un insieme (finito o infinito)
....,, 21 ϕ ϕ
di elementi di H si dice ortonormale se
≠
===
kh 0
kh 1,
hk hk δ ϕ ϕ
hk δ è detto Delta di Kronecker.
Non è difficile verificare che: Ogni insieme ortonormale (in particolare ortonormale) è linearmenteindipendente.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 365/391
45
Ovviamente se un insieme
....,, 21 ϕ ϕ
di elementi di H è ortogonale ( ),hkcon0, ≠=hk ϕ ϕ l’insieme
....., ,2
2
1
1
ϕ
ϕ
ϕ
ϕ
è ortonormale.
Esempio 2.
Gli insiemi
...2,1,k kt,sinkt,cos 1, =
e
= ...2,1,k ktsin
,ktcos
,2
1
π π π
sono rispettivamente, ortogonale ed ortonormale in [ ].,π π −C
Esempio 3.
L’insieme ...2,1,0,k ±±==jkt
k eψ è ortogonale in [ ].,π π −C Infatti risulta
dt t hk k dt edt ee t hk j jkt jkt hk )(cos2,0
)( −=== ∫∫∫ −
−
−
−
π π
π
π
π
ψ ψ
da cui
=
≠=
hk 2
hk 0,
π ψ ψ hk
ovviamente l’insieme ...2,1,0,kcon2
1±±==
jkt
k eπ
ϕ è ortonormale.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 366/391

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 367/391
47
In particolare, se f =ϕ si ha
f f f f k
k
k ,,,1
=∑∞
=
ϕ ϕ
ovvero
∑∞
=
=1
22,
k
k f f ϕ
Esempio 4. L’applicazione che ad ogni coppia di elementi ( )Ω'2L di eψ ϕ fa corrispondere il
numero complesso
dx x x∫Ω
= )()(, ψ ϕ ψ ϕ
dove l’integrale è inteso nel senso di Riemann, integrale improprio assolutamente convergente, è unprodotto scalare su ( )Ω
'2L .
Definizione. Se
[ ] 0)()(,2
1
221
'
2
→
−=−−=−
∫Ωdx x f x f f f f f f f nnn
Ln
si dice che n f converge ad f in media quadratica in ( )Ω'2 L .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 368/391
48
Se H∈ f è un elemento qualsiasi, la serie
∑∞
=
≈1
,k
k k f f ϕ ϕ
è, per definizione, la serie di Fourier di f rispetto al sistema ortonormale ; ....,, 21 ϕ ϕ in numeri
k k f a ϕ ,=
sono detti coefficienti di Fourier.
Se il sistema è ortogonale allora la serie di Fourier di f e i corrispondenti coefficienti di Fourier siscrivono rispettivamente nel modo seguente
k
k
k k k
k k
f a f f ϕ ϕ
ϕ ϕ ϕ
,1
,1
21
2 =≈ ∑∞
=
Assegnato un elemento H∈ f , poniamoci il seguente problema:
fra tutti i numeri possibili N α α α ...,,, 21 , determinare quelli per i quali il funzionale
( ) ∑=
−= N
k
k k N f 1
21 ...,,,F ϕ α α α α
sia minimo.
Dimostriamo che i numeri N α α α ...,,, 21 , per i quali la norma
∑=
− N
k
k k f
1
ϕ α
sia minima, sono i coefficienti di Fourier di f . In altre parole si ha
∑∑==
−≤−
N
k
k k
N
k
k k f f f 11
, ϕ α ϕ ϕ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 369/391
49
per ogni N-pla di numeri ( ) N α α α ...,,, 21 . Infatti si ha
=+−−=−−=− ∑ ∑∑∑∑∑∑N N
iiii
N
ii
N
ii
N
ii
N
ii
N
ii f f f f f f f 1 11111
2
1
,,,,, ϕ α ϕ α ϕ α ϕ α ϕ α ϕ α ϕ α
[ ]∑ −+−=
N
iiiiii f f f 1
2,, α α ϕ α ϕ α
si osservi che essendo kh 0, ==hk ϕ ϕ è
.........,.... 1122112211 N N N N N N α α α α ϕ α ϕ α ϕ α ϕ α ϕ α ϕ α ++=++++++
Pertanto
[ ]=+−−+−=− ∑∑N
iiiiiiiiii
N
ii f f f f f f f f 1
22
1
,,,,,, ϕ ϕ ϕ ϕ α α ϕ α ϕ α ϕ α
( ) ( )[ ] =−−+−−= ∑∑N
i
N
iiiiii f f f f f 1
2
1
2,,,, ϕ ϕ α ϕ α ϕ α
( )( ) =−−−−= ∑∑N
iii
N
ii f f f f 1
2
1
2,,, ϕ α ϕ ϕ α
∑∑∑ −≥−−+=
N
i
N
i
N
ii f f f f f 1
22
1
2
1
22,,, ϕ ϕ ϕ α
RIASSUMENDO, risulta
∑∑ −≥− N
i
N
ii f f f 1
222
1
,ϕ ϕ α
inoltre è
21
1
22
1
,min0
−=−≤ ∑∑
N
i
N
ii f f f i
ϕ ϕ α α
se e solo se ii f ϕ α ,= cioè se e solo se le N)....,,1( =iiα sono i coefficienti di Fourier di f .
Da quanto precede, si evince che
2
1
2, f f
N
i ≤∑ ϕ
da cui:

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 370/391
50
la serie composta dai quadrati dei moduli dei coefficienti di Fourier dell’elemento H∈ f èconvergente e verifica la seguente disuguaglianza
( ) ( )∑∞
=
=≤1
22,,
k
k f f f f ϕ
nota come disuguaglianza di Parseval per ∈ .
Definizione. Un sistema ....,, 21 α α di elementi di H si dice completo in H se per H∈ f e 0>∀ ε si
possono trovare N numeri N α α α ...,,, 21 tali che
ε ϕ α <− ∑ N
k k f 1
Enunciamo un importante teorema:Teorema. Affinchè un sistema ortonormale di elementi ....,, 21 α α sia completo in H è necessario esufficiente che sia soddisfatta una delle seguenti condizioni:
)i La serie di Fourier di un elemento qualsiasi H∈ f converge a f nella metrica di H;
)ii Per ogni elemento H∈ f si verifica l’uguaglianza di Parseval
.,,1
22
∑∞
=
==k
k f f f f ϕ
Si osservi che la )i implica la )ii , vedi conseguenze del lemma.
Completiamo questa parte introducendo una definizione ed enunciando un importante teoremarelativo ad essa.
Definizione. Un sistema ortonormale è chiuso se, per H ∈
ψ , si verifica che
H).dinullo(elemento ...)1,2,(k 0, ϑ ψ ϕ ψ =⇒==k
Esempio. Un sistema ortonormale completo è chiuso. Infatti sia H∈ f , se il sistema ....,, 21 α α ècompleto in H allora, per il teorema precedente è
∑∞
=
=1
22,
k
k f f ϕ
da cui se risulta ϑ ϕ ==== f f f k
ovvero 0 segue ...2,1,kper0,2
.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 371/391
51
Teorema. Se H è uno spazio lineare completo con prodotto scalare, ossia è uno spazio di Hilbert,allora dalla chiusura del sistema ortonormale ....,, 21 α α ne segue la completezza.In altre parole:In uno spazio di Hilbert un sistema ortonormale è chiuso se e solo se è completo.

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 372/391
52
Proprietà della trasformata di Fourier
1.Linearità della trasformata di Fourier. Se ( ) ( )ω ω GeF sono le trasformate di Fourier delle
funzioni ( ) ( )t get f rispettivamente, per qualsiasi costante β α e , la funzione )()( ω β ω α GF + è la
trasformata di Fourier della funzione )()( t gt f β α + . Quindi la trasformata di Fourier è un
operatore lineare. Indicando questo operatore con ℑ , si scrive
)()( ω F t f → ℑ oppure [ ] )(ω F f =ℑ .
2. Se ( )ω F è la trasformata di Fourier di una data funzione ( )t f assolutamente integrabile su tutto
l’asse numerico, allora
i) ( )ω F è continua in (-∞, +∞);
ii) ( )ω F tende a zero per +∞→ω :
( ) 0lim =∞→
ω ω
F ;
iii) ( )ω F è limitata:
( ) +∞<<∞−≤ ω ω , M F .
Dimostrazione
i) La funzione t je
ω − ( )t f è, ovviamente, continua in ω , perciò tenuto presente (vedi osservazione
1) che
( ) ( )ω ω F dt t f e
u
t j=∫
+∞
∞−
− [ ]ba,∈ω
su ogni intervallo chiuso [ ]ba, , si evince che ( )ω F è continua su ogni intervallo chiuso dell’asse
reale e quindi è continua per ogni ω .
ii) Essendo per ipotesi
( ) ∞+<∫+∞
∞−
dt t f
segue che fissato arbitrariamente ε > 0, possiamo fissare A > 0 tale che

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 373/391
53
( ) ( )3ε
<+ ∫∫+∞−
∞−
dt t f dt t f A
A
quindi (per la disuguaglianza triangolare) è
( ) ( )3ε ω ω
+≤ ∫∫+
−
−
+∞
∞−
−dt t f edt t f e
A
A
t jt j.
Per completare la dimostrazione, dimostriamo che risulta
( ) ω ε ω arispettomentedefinitivadt t f e
A
A
t j
32
<∫+
−
−
In virtù dell’integrabilità di [ ] A Ain f ,−
, possiamo fissare una suddivisione [ ] A AdiT ,−
, per
esempio
( ) 1110 <−=<<<=−=−k k n t t At t t AT K
in corrispondenza della quale la funzione
( )( ) ( )
==
=∈==
−
nk t t
nk t t t t f M t f
k
k k k
T ,...,1,00
,...,2,1,;sup 1
soddisfa la disuguaglianza
( )[ ]3
)(0ε
<−≤ ∫−
dt t f t f
A
A
T
D’altra parte essendo
ω
ω ω 2)(
11 1
∑∫∑∫=
−
=−
−≤=
−
n
k
k
t
t
t jn
k
k T
A
A
t j M dt e M dt t f e
k
k
si evince che
[ ] ε ω
ε ω ω
3
22
3)()()()(
1
<+≤+−= ∑∫∫=−
−
−
−n
k
k T T
A
A
t j
A
A
t j M dt t f t f t f edt t f e
se

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 374/391
54
ω > ∑=
n
k
k M 1
6ε
.
il che comporta la dimostrazione della ii).
iii) segue facilmente da
( ) M dt t f F =≤ ∫+∞
∞−
)(ω -∞ < ω < +∞
3. Sia ( )t f una funzione definita e derivabile m volte su (-∞,+∞): ( ).,)(+∞∞−∈
m D f
Se si suppone che ( )t f e ( )( ) mk t f k ,...,2,1= siano assolutamente integrabili su (-∞,+∞) e che ( )t f
e ( )( ) 1,...,2,1 −= mk t f k tendono a zero per +∞→t , allora
( )[ ] ( ) [ ] mk f j f k k ,,2,1 K=ℑ=ℑ ω
Dimostrazione. Per semplicità supponiamo 1=k . Integrando per parti si ottiene
( ) dt t f e jt f edt t f e t jt jt j )()(' ∫∫−
−
−
−
−
−+=
η
η
ω
η
η
ω
η
η
ω ω
da cui passando al limite per ∞→η e tenuto presente che
,
si evince che
[ ] [ ] f j f ℑ=ℑ )(' ω .
Da cui
[ ] ( )[ ] [ ] f j f j f k k k ℑ==ℑ=ℑ
− )(...........)( 1)( ω ω
Osservazione 3. In virtù della ii) della proprietà 2, la trasformata di Fourier di ( )k f tende a zero per
+∞→ω , pertanto dalla proprietà precedente, segue che
( ) 0lim)(lim == −+∞→+∞→
k k F F
ω ω ω ω
ω ω
0)(lim)(lim =−=+∞→
−
+∞→η η η ω
η
η ω
η f e f e j j

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 375/391
55
ovvero
+∞→=−
ω ω ω )()(k
oF .
Quindi se
mk dt t f k ,,2,1,0)()(
K=+∞<∫+∞
∞−
e
allora, per qualche costante c > 0, si ha
k cF
−+≤ )1()( ω ω - ∞ < ω < +∞.
Infatti da ( ) 0→k
F ω ω quando +∞→ω , segue che
( ) ( ) ,,,1,001
k hcone per F F k
h
hk K=+∞→→=
− ω ω ω ω
ω ω
da cui
( )( ) +∞→→+ ω ω ω per F k 01 .
Pertanto, in corrispondenza di 1=ε esiste 0>a tale che
( ) ( ) a per F k
><+ ω ω ω 11 .
Poiché per a≤ω la funzione ( )( ) k F ω ω +1 è limitata, per qualche 0> M risulta
( ) ( ) a per M F k
≤<+ ω ω ω 1 .
Se ( ) M c ,1min= si ha
( ) ( ) +∞<<∞−<+ ω ω ω cF k 1
ovvero
1,,2,1,00)(lim )(−==
+∞→mk t f
k
t K

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 376/391
56
( )( )
+∞<<∞−+
< ω ω
ω k
cF
1
4. Supponiamo che per qualche intero positivo m la funzione )()1( t f t m
+ sia assolutamente
integrabile su (-∞, +∞):
∞+<+∫+∞
∞−
dt t f t m )()1( (1)
Allora la trasformata di Fourier di ( )t f ovvero
∫+∞
∞−
−= dt t f eF
t j )()( ω ω
è derivabile m volte e risulta
dt t f edt t f ed
d F
t j
k
k t j
k
k k
∫ ∫+∞
∞−
+∞
∞−
−−
∂
∂== ))(()()()( ω ω
ω ω ω (2)
ovvero
[ ])()()()()()(t f t jdt t f t e jF
k k k t jk k ℑ−=−= ∫
+∞
∞−
− ω ω (3)
con k = 1,2,…,m
Ovviamente la condizione (1) è verificata se le funzioni f, t f,…, t k
f sono assolutamente
integrabili. E’ vero anche il viceversa.
In particolare:
Se [ ] ( )ℜ∈ℑ∈∀+∞−∞∈∞C f allora N k Lt f t k ),()( 1
Dimostrazione. Dalla disuguaglianza
( ) )()( t f t t f ek t j
k
k
≤∂
∂ − ω
ω
(vera per ogni k) e dalla (1) segue, per il criterio di Weierstrass, che l’integrale a destra
nella (2) converge uniformemente rispetto ad [ ]ba,∈ω (per ogni intervallo chiuso [ ]ba, ).In virtù del teorema di derivazione sotto il segno, si evince la veridicità della (2) ovvero della (3).
Si osservi che dalla (3) segue che
( ) ( ) ( )[ ] mk t f jt f t k k k ,,2,1 K=ℑ=ℑ

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 377/391
57
Nell’osservazione 3 è stato evidenziato che l’uguaglianza
[ ] ( ) [ ] f j f k k
ℑ=ℑ ω )(
implica
[ ] [ ] +∞→→ℑ=ℑ
−ω
ω 0)(k
k f
f .
Pertanto, più l’ordine di derivabilità di f su L1 è grande, più la decrescenza della
corrispondente trasformata di Fourier è rapida. Dalla proprietà 4 si evince che la proposizione
duale è ugualmente vera: più la decrescenza di f all’infinito è rapida, più la corrispondente
trasformata di Fourier è liscia.
Da quanto precede si evince che quando si passa da una funzione f alla corrispondente trasformata
di Fourier ( )ω F , le proprietà di derivabilità e di decrescenza all’infinito della funzione f si
scambiano.
5. Se ''', f e f f sono assolutamente integrabili in (-∞, +∞):
( )( ) 2,1,0=∞+<∫+∞
∞−
k dt t f k
e se ', f f tendono a zero per ∞→t :
1,00)(lim )(==
+∞→k t f
k
t
allora, per ogni funzione g assolutamente integrabile in (-∞, +∞) si ha
∫∫+∞
∞−
∗
+∞
∞−
∗= ω ω ω
π d GF dt t gt f )()(
2
1)()( (4)
dove ( ) [ ] ( ) [ ] ( )ω ω ω ∗∗ℑ=ℑ= Get ggG f F )(,, denotano rispettivamente il complesso coniugato
di ( ) ( )ω Get g .
L’uguaglianza (4) è nota come equazione di Plancherel. In particolare se ( ) ( )t f t g = si ha

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 378/391
58
∫∫+∞
∞−
+∞
∞−
= ω ω π
d F dt t f 22
)(21
)( (5)
la (5) è nota come identità di Parseval.
Dimostrazione. Per ogni ( )+∞∞−∈ ,t abbiamo
ω ω π
ω d F et f
t j )(21
)( ∫+∞
∞−
=
Moltiplicando ambo i membri dell’uguaglianza precedente per )(t g ∗ e integrando rispetto a t tra
λ λ +− e si ottiene
( )
)6()()(21
)(21
)()(21
)()(
ω ω π
ω ω π
ω ω π
λ
λ
ω
λ
λ
ω
λ
λ
λ
λ
ω
d dt t geF
d dt t geF
dt d F et gdt t gt f
t j
t j
t j
∫ ∫
∫∫
∫ ∫ ∫
∞+
∞−
∗
−
−
−
∗
∞+
∞−
− −
+∞
∞−
∗∗
=
=
=
=
=
dove [ ] ∗ denota il complesso coniugato dell’espressione in parentesi; il cambio dell’ordine
d’integrazione è lecito in quanto l’integrale
ω ω ω d F e
t j )(∫+∞
∞−
converge per il criterio di Weierstrass, uniformemente e assolutamente rispetto a ( )+∞∞−∈ ,t .
Infatti in virtù delle ipotesi fatte su ''', f e f f (vedi osservazione 3) risulta
( ) 21)(
−
+≤ ω ω cF -∞ < ω <+∞
( ) ( )2
12
1
1
022 =
+=
+∫∫
+∞+∞
∞− ω
ω ω
ω
d d .
In virtù della disuguaglianza

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 379/391
59
( ) dt t gdt t geF j
∫∫∞+
∞−
−
∗
−
−+≤
)(1)()(
2ω ω
λ
λ
ω
l’integrale alla destra della (6) converge, per il criterio di Weierstrass, uniformemente rispetto a
( )+∞∞−∈ ,λ , pertanto
∫∫ ∫∫ ∫+∞
∞−
∗
∗+∞
∞−
+∞
∞−
−
∗+∞
∞− −
−
∞→=
=
ω ω ω ω ω ω ω ω
λ
λ
ω
λ d F Gd F dt t ged F dt t ge t jt j )()()()()()(lim
Infine passando al limite per +∞→λ nella (6), si ottiene la (4).
6. Traslazione nel tempo: Se ( ) ( )[ ]t f F ℑ=ω allora
( )[ ] ( )[ ]t f et t f t j
o ℑ=−ℑ− 0ω .
Esempio. Sia T un numero reale assegnato, allora
i) ( ) ( )[ ] ( )[ ] ( )[ ] ω ω
ω ω
2sin
222
2
T et I et I T t ut u
T T j
T
jT T
−−=ℑ=−ℑ=−−ℑ
ii) Sia
( )
+−
−=
220π π
π π t I t I t x
allora
( ) ( )[ ] 02
sin2
2sin222
0 ≠
−=ℑ
−=
−
ω π
ω ω
π ω ω π
π ω
π ω
jt I ee X j j
da cui
( )
( ) ( ) 0lim0
02
sin4
00
0
20
==
≠−=
→ω
ω ω π
ω ω
ω X X
j X
iii) Sia( ) ( ) ( ) ( ) ( )1111 2220 −+−−=−= t I t I t t I t t x

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 380/391
60
allora
( ) ( )[ ] ( )[ ] ( )[ ]
( ) ( ) .2lim0
0sin2sin2cos2
sin2
00
0
2
2220
==
≠
+
−=
+ℑ=ℑ+ℑ=
→
−
−−−−
ω
ω ω ω ω
ω ω ω
ω ω ω
ω
ω
ω
ω ω ω ω
X X
je
et I d
d jet I et I t e X
j
j j j j
iv) Sia
( )
++
+
+−
−+
−
−=
+−
−=
42
1
44
242
1
44
2
4
2
4
2
22
2222
0
π π π
π
π π π
π
π
π
π
π
π π
π π π π
t I t I t
t I t I t t I t t I t t x
allora
( ) ( ) ( )
( ) ( ) .2
lim0
01
2cos14
2sin
2
4sin24cos4sin24sin4
2
2
00
0
2
2
44
2
440
π ω
ω πω
π ω
π ω ω
π
ω π ω
π ω π ω ω ω
π ω π
ω π ω
ω
π
π ω
π ω
π
π ω
π ω
==
≠
−−=
+
=
ℑ
++
ℑ
−=
→
−
−
X X
d d
t I ee
t I d
d jee X
j j j j
7. Traslazione in frequenza: Se ( ) ( )[ ]t f F ℑ=ω allora
)()( 00 ω ω ω
−=ℑ F t f et j .
Esempi
i) [ ] ( )12
sin1
2)( −
−=ℑ ω
ω
T t I e T
t j
ii) [ ] ( )1
2
sin
1
2)( +
+
=ℑ− ω
ω
T t I e T
t j

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 381/391
61
iii) [ ] ( )
+
+−−
−=
−ℑ=ℑ
−
)1(2
sin1
11
2sin
111
)(2
sin)( ω ω
ω ω
T T
jt I
j
eet t I T
t jt j
T .
In particolare per π 2=T :
( )[ ]( )
+
+−
−
−=ℑ
1
)1(sin
1
1sin1sin2
ω
ω π
ω
ω π π
jt t I .
Se la trasformata di Fourier è pensata come la risposta in frequenza del segnale ( )t x , le proprietà di
traslazione ci dicono che:
una traslazione nei tempi comporta una moltiplicazione per un’esponenziale complesso nelle
frequenze:
( )[ ] ( ) f X et t xt f j 02
0π −
=−ℑ .
Dualmente una traslazione in frequenza comporta una moltiplicazione per un esponenziale
complesso nei tempi:
( )[ ] ( ) t f jet x f f X 02
01 π
=−ℑ− .
8. Scalatura: L’operazione di scalatura consiste nel moltiplicare la variabile t per un numero reale
a. Il segnale ( )at x risulta dilatato per a < 1, contratto per a > 1.
Se risulta a < 0 il segnale oltre a essere dilatato è anche ribaltato nel tempo.
Inoltre la contrazione dell’asse dei tempi corrisponde a una dilatazione dell’asse delle frequenze e
viceversa, in quanto
( )[ ]
=ℑ
a
f X
aat x
1
In particolare è
( )[ ] ( ) f X t x −=−ℑ .
Infatti nel caso in cui è a < 0 si ha
( )[ ] ( ) ( ) ( )
====ℑ ∫∫∫
+∞
∞−
−∞−
∞+
−+∞
∞−
−
a
f X
ad xe
aa
d xedt at xeat x a
f ja
f jt f j 11 22
2 τ τ τ
τ τ π τ π
π

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 382/391
62
Nel caso in cui a > 0 si ha
( )[ ] ( )
=
==ℑ ∫
+∞
∞−
−
a
f X
aa
f X
aa
d xeat x a
f j 112 τ
τ τ π
Esempio
Utilizzeremo la proprietà di scalatura per determinare la trasformata di Fourier del segnale
( ) 02
exp 2
2
>
−= σ
σ
t t x
noto come segnale gaussiano. A tale scopo riscriviamo il segnale nel modo seguente
( ) ( )2
22
2
21
2exp
2
πσ πσ π π
==
−=
−acone
t t x
at
Da cui, tenuto presente che
[ ] 22 f t ee
π π −−=ℑ
applicando la proprietà di scalatura si ottiene( )[ ]
2
2 1
−
−=ℑ
a
f
at e
ae
π π
quindi
2222
2
22 2 f
t
eeσ π σ π σ −
−
=
ℑ .
9. Dualità. Dal fatto che le definizioni di trasformata e antitrasformata di Fourier differiscono per
un segno all’esponente sotto il segno d’integrale, si evince che
( )[ ] ( ) ( )[ ] ( ) f xt X f X t x −=ℑ⇒=ℑ
oppure
( )[ ] ( ) ( )[ ] ( )ω π ω −=ℑ⇒=ℑ f t F F t f 2 .
Infatti scambiando t con ω in

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 383/391
63
( ) ( ) ω ω π
ω d F et f
t j
∫+∞
∞−
=21
si ottiene
( ) ( ) dt t F e f t j
∫
+∞
∞−
=ω
π ω
2
1
da cui
( ) ( ) ( )[ ]t F dt t F e f t j
ℑ==− ∫+∞
∞−
−
π π ω ω
21
21
ovvero l’asserto.
Esempio.
i) Essendo
( )ω
ω sin21
2 =
ℑ t I
segue che
( ) ( ) ( ) ( )[ ]1121
2sin
22 −−+==−=
ℑ ω ω π ω π ω π uu I I
t
t .
ii) Calcolare la trasformata di Fourier del segnale
( )t
t t x
π
π sin= .
Ricordando che
( )( ) ( )[ ]t I f X
f
T f T ℑ==
π
π sin
e quindi
( )( )[ ]t I
f
f 1
sinℑ=
π
π
dalla proprietà di dualità si evince che
( ) ( )
−−
+==−=
ℑ
21
21sin
11 f u f u f I f I t
t
π
π .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 384/391
64
In altre parole la trasformata di Fourier del segnale ( )t
t t x
π
π sin= è l’impulso rettangolare unitario
nell’intervallo di frequenza che va da21
21
=−= f a f .
10. convoluzione
Applichiamo il teorema di convoluzione alle funzioni
( ) ( ) ( ) ( ) t jt jet gt eet f t
ω ω ϕ ϕ −−== 21 .
In virtù del fatto che la convoluzione di queste funzioni vale
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )t gt f eduut gu f edueut geu f t t t jt jut ju j ** 21ω ω ω ω ϕ ϕ −
+∞
∞−
−−−
+∞
∞−
− =−=−= ∫∫
l’uguaglianza
( ) ( ) ( ) ( ) dt t dt t dt t t ∫∫∫+∞
∞−
+∞
∞−
+∞
∞−
=∗ 2121 ϕ ϕ ϕ ϕ
fornisce
( ) ( )( ) ( ) ( )∫∫∫+∞
∞−
−
+∞
∞−
−
+∞
∞−
−= dt t gedt t f edt t gt f e
t jt jt j ω ω ω *
ovvero( ) ( )[ ] ( )[ ] ( )[ ]t gt f t gt f ℑℑ=∗ℑ .
In altre parole: la trasformata di Fourier della convoluzione di due funzioni ( ) ( )t get f (dove
( ) ( )t get f soddisfano le ipotesi del teorema di convoluzione) è uguale al prodotto delle rispettive
trasformate di Fourier.
11. Prodotto. Se ( ) ( )[ ] ( ) ( )[ ]t gGet f F ℑ=ℑ= ω ω allora
( ) ( )[ ] ( ) ( )ω ω π
GF t gt f ∗=ℑ2
1
ovvero
( ) ( )[ ] ( ) ( ) duuGuF t gt f −=ℑ ∫+∞
∞−
ω π 21
Infatti, per il teorema di convoluzione e per la proprietà di dualità, risulta
( ) ( )[ ] ( )[ ] ( )[ ] ( ) ( )ω π ω π g f t Gt F t Gt F 22* =−ℑ−ℑ=−−ℑ .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 385/391
65
Da cui, applicando la proprietà di dualità, si ottiene
( ) ( ) ( ) ( )ω ω π π GF t gt f ∗=ℑ 24 2
da cui l’asserto.
Osservazione
Quando un segnale ( )t x viene moltiplicato per un altro segnale ( )t y si dice che uno dei due segnali
modula l’ampiezza dell’altro. Inoltre se
( ) ( )[ ] ( ) ( )[ ]t y f Y et x f X ℑ=ℑ=
allora, procedendo come sopra, abbiamo
( ) ( )[ ] ( ) ( ) ( ) ( ) η η η d Y f X f Y f X t yt x ∫+∞
∞−
−==ℑ *
a parole: La trasformata del prodotto di due segnali è data dalla convoluzione delle loro trasformate
(intese come risposte in frequenza).
Questa proprietà viene spesso indicata come proprietà di modulazione della trasformata di
Fourier.
Se poniamo ( ) ( ) ( )t yt xt z = , ponendo 0= f in
( ) ( ) ( ) ( ) η η η π d Y f X f Z edt t ze f Z
t f j
∫∫+∞
∞−
+∞
∞−
−−==
2)(
si ottiene
( ) ( ) ( ) ( ) η η η d Y X dt t yt x ∫∫+∞
∞−
+∞
∞−
−=
Da cui, tenuto presente che
( )[ ] ( ) f Y t y −=ℑ **
si ottiene
( ) ( ) ( ) ( ) η η η d Y X dt t yt x ** ∫∫+∞
∞−
+∞
∞−
=
in particolare se ( ) ( )t yt x = si ha

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 386/391
66
( ) ( ) df f X dt t x ∫∫+∞
∞−
+∞
∞−
=22
La relazione precedente, ovvero l’ identità di Parseval ci dice che:
L’energia del segnale ( )t x può essere calcolata integrando, indifferentemente, l’energia per unità
di tempo o l’energia per unità di frequenza.
Per questo motivo ( )2
f X viene detto densità spettrale di energia del segnale ( )t x .
12. Se la successione n f di funzioni assolutamente integrabili in ( )+∞∞− , converge alla funzione
f assolutamente integrabile in ( )+∞∞− , , nel senso che
( ) ( ) ∞→→−∫+∞
∞−
ndt t f t f n 0
allora la successione delle loro trasformate di Fourier
( ) ( )[ ]t f F nn ℑ=ω
converge uniformemente su tutta la retta reale alla trasformata di Fourier ( ) ( )t f diF ω cioè
( ) ( ) +∞<<∞− → ω ω ω F F un .
Dimostrazione. Segue immediatamente dall’evidente disuguaglianza
( ) ( ) ( ) ( ) dt t f t f F F nn ∫
+∞
∞−
−≤− ω ω .
Altri esempi
4. Sia 0>k e
( )
<−
=
>
=
−
0
00
0
t e
t
t e
t f t k
t k
allora
( )[ ] 02
22 → +
−=ℑ−∞→ω ω
ω
k jt f
Infatti, essendo ( )t f dispari ( ) ( )t f t f è =−− , si ha
( )[ ] ( )∫ ∫+∞
∞−
+∞
−−
+−=−==ℑ
022
2sin2ω
ω ω ω
k jdt t e jdt t f et f
t k t j .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 387/391
67
Inoltre risulta
( ) ∫ ∫∞+
∞−
∞+
−
−
<−
=
>
=+
=
+−=
02222
0
00
0sin22
21
t e
t
t e
d k
t d
k jet f
t k
t k
t j ω ω
ω ω
π ω
ω
ω
π
ω
In virtù dell’identità di Parseval si ottiene
( ) 4
1
0222
2 π ω
ω
ω
k d
k ∫
+∞
=+
.
Infatti è
( )
k
dt edt t f t k 1
2
0
22==∫ ∫
+∞
∞−
+∞
−
quindi
( )( ) k
d k
d F 14
21
022
22
=+
= ∫∫+∞+∞
∞−
ω ω
ω
π ω ω
π .
Si osservi che
( ) ( ) k k j j jk F s jd k
1
4
1
4Re2
22222
2
===+∫
+∞
∞−π π ω ω
ω
π
Dove
( )( )
( )( ) k jk d
d k j
k d
d jk F s
k jk j 41
limlimRe 222
2
22
2
=+
=
−
+=
→→ ω
ω
ω ω
ω
ω
ω ω ω .
5. Sia ( ) 0>=−
k et f t k .
Allora
[ ] 22
2ω +
=ℑ−
k
k e
t k .
Infatti
[ ] 220
2cos2
ω ω ω
+===ℑ ∫∫
+∞
−
+∞
∞−
−−−
k
k dt t edt eee
t k t k t jt k .
Inoltre risulta
∫∫+∞+∞
∞−
−
+=
+=
02222 cos
2221
ω ω ω π
ω ω π
ω d t
k
k d
k
k ee
t jt k

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 388/391
68
da cui
( ) 0,2
cos
0
22 >+∞∞−∈=+
−
+∞
∫ k et ek
d k
t t k π ω
ω
ω .
Segue che
( )∫+∞
>=+0
322 04
k k k
d π
ω
ω .
Si osservi che
( )( ) 3222 2
Re2k
k jF s jk
d π π
ω
ω ==
+∫
+∞
∞−
( )( ) 32 8
21limRe
k jk jd
d k js
k j+=
+=
→ ω ω ω
6. Sia
( )
>
<−
=
10
11 2
t
t t
t f
allora
( )[ ] ( ) ( ) ( ) ( ) =
+−=−===ℑ ∫∫∫
+∞
∞−
−
1
0
21
0
2 sin2sin
12cos12 dt t t t
t dt t t dt t f eF t f t j ω
ω ω
ω ω ω ω
( )ω ω ω ω ω
ω
ω ω
ω
ω cossin
4sin1cos43
1
0
1
0
−=
+−=
t t t .
Inoltre da
( ) ( ) ( )∫∫+∞+∞
∞−
−==
03 cossin
cos421
ω ω ω ω ω
ω
π ω ω
π
ω d
t d F et f
t j
segue che
π π
ω ω
ω
ω ω
16
3
4
3
42cos
cossin
03 ==
−∫
+∞
d
Infine l’identità di Parseval fornisce la relazione seguente
( ) ( )∫∫+∞ −
=−
06
21
0
2 sincos2812 ω ω
ω ω ω π
d dt t

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 389/391
69
da cui
( )15
sincos
06
2π
ω ω
ω ω ω =
−∫
+∞
d .
TRASFORMATA DI FOURIER DI SEGNALI DISCRETI
Quando all’ingresso di un sistema discreto si applica la sequenza di esponenziali complessi
( ) T n f j
n enT x xπ 2
==
la risposta (l’uscita) n y del sistema è data dalla somma di convoluzione tra il segnale
d’ingresso n x e la risposta all’impulso nh :
( )∑+∞
−∞=
−=∗=
k
k nT f j
k unn ehh x yπ 2
da cui
( ) ∑+∞
−∞=
−==
k
k T f j
k
T n f j
n ehenT y yπ π 22
a parole: La risposta del sistema è data dal prodotto del segnale d’ingresso per il numero
complesso
( ) ∑+∞
−∞=
−=
k
k T f j
k eh f H π 2
Da cui: L’uscita è un esponenziale complesso con la stessa frequenza f dell’ingresso ma con fase
iniziale ϕ ed ampiezza A differente; è
( )ϕ π ϕ +== nT f j j
nne Ae A x y
2
Al variare di f tra ∞+∞− e , la funzione complessa
( ) ∑+∞
−∞=
−=
n
nT f j
n eh f H π 2
che caratterizza il sistema nel dominio delle frequenze prende il nome di trasformata di Fourier
della sequenzan
h .

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 390/391
70
In generale
( ) ∑+∞
−∞=
−=
n
nT f j
n e x f X π 2
prende il nome di trasformata di Fourier della sequenza ( )nT x xn = .
La trasformata di Fourier di un segnale discreto è una funzione continua e periodica di periodo T 1
in f . Inoltre ha la stessa forma dello sviluppo in serie di Fourier del segnale continuo ( ) f X
periodico e di periodo T 1 in f . Pertanto i campioni n x della sequenza non sono altro che i
coefficienti di Fourier definiti dalla relazione
( )∫−
=
T
T
nT f j
n df e f X T x
21
21
2π
La relazione precedente è detta trasformata inversa di Fourier oppure antitrasformata di Fourier
di una sequenza, essa esprime la sequenza in funzione della sua trasformata.
Proprietà
1. Valore nell’origine.
i) La trasformata in 0= f è uguale alla somma dei campioni della sequenza:
( ) ∑+∞
−∞=
=n
n x X 0
ii) Il valore del campione in 0=n , cioè 0 x è dato dal prodotto di T per l’integrale della trasformata
calcolata su un periodo :
( )∫−
=
T
T
df f X T x
21
21
0
2. Traslazione.
i) [ ] ( ) f X e xnT f j
nn0
0
2π −
−=ℑ
ii) ( ) ( )0
2 0
f f X n xe
nT f j
−=ℑ
π

8/8/2019 ------- ANALISI 2 --------
http://slidepdf.com/reader/full/-analisi-2- 391/391
i) Una traslazione nei tempi comporta una moltiplicazione per un esponenziale complesso nelle
frequenze.
ii) Una traslazione nelle frequenze comporta una moltiplicazione per un esponenziale complesso
nei tempi.
3. Modulazione.
La trasformata del prodotto di due sequenze nnn y x z = è data dalla convoluzione, calcolata su un
solo periodo, delle trasformate ( ) ( ) f Y e f X :
( ) ( ) ( )
∫−
−=
T
T
d f Y X T f Z
21
21
ϕ ϕ ϕ
Infatti, si ha
[ ] ( )( ) ( )
∫∑∑ ∑ ∫
−
+∞
−∞=
−−∞+
−∞=
∞+
−∞= −
−−=
===ℑ
T
T
n
nT f j
n
n n
T
T
nT f j
n
nT jnT f j
nnnn
d e y X T e yd e X T e y x y x
21
21
221
21
222 ϕ ϕ ϕ ϕ
ϕ π
π ϕ π π
( ) ( )∫−
−=
T
T
d f Y X T
21
21
ϕ ϕ ϕ
L’espressione
( ) ( ) ( )∫−
−=
T
T
d f Y X T f Z
21
21
ϕ ϕ ϕ
è detta convoluzione circolare o periodica e sarà indicata con il simbolo ⊗ :
( ) ( ) ( ) f Y f X f Z ⊗= .
4. Densità spettrale di energia.Se ( ) [ ]n x f X ℑ= allora l’energia della sequenza n x si può calcolare sia sommando i quadrati dei
moduli dei campioni della sequenza sia moltiplicando per T l’integrale del quadrato del modulo


















